
Preiswerte Energiegewinnung - Polynomiale … · Diskretisiere die Gleichung auf einem N-Punkt...
166
Preiswerte Energiegewinnung - Polynomiale Eigenwertprobleme Dominik Löchel Betreuer: M. Hochbruck und M. Tokar Graduiertenkolleg „Dynamik heißer Plasmen“ Mathematisches Institut Heinrich-Heine-Universität Düsseldorf Kompaktseminar Juli 2009
Transcript of Preiswerte Energiegewinnung - Polynomiale … · Diskretisiere die Gleichung auf einem N-Punkt...
Preiswerte Energiegewinnung - PolynomialeEigenwertprobleme
Dominik Löchel
Betreuer: M. Hochbruck und M. Tokar
Graduiertenkolleg „Dynamik heißer Plasmen“
Mathematisches InstitutHeinrich-Heine-Universität Düsseldorf
Kompaktseminar Juli 2009
Gliederung
Physikalischer Hintergrund
Numerische Methoden
Energiegewinnung in der Zukunft
Energiegewinnung in der Zukunft
I Fossile Brennstoffe: gehen zu Neige, Treibhauseffekt
I Wasserkraftwerke: nicht weiter ausbaubar
I Solarkraftwerke: möglich, aber zu teuer
I Kernspaltungskraftwerk: radioaktiver Verseuchung, Uran begrenzt
I Fusionskraftwerk: preiswert, aber noch nicht realisierbar
Energiegewinnung in der Zukunft
Energiegewinnung in der Zukunft
I Fossile Brennstoffe: gehen zu Neige, Treibhauseffekt
I Wasserkraftwerke: nicht weiter ausbaubar
I Solarkraftwerke: möglich, aber zu teuer
I Kernspaltungskraftwerk: radioaktiver Verseuchung, Uran begrenzt
I Fusionskraftwerk: preiswert, aber noch nicht realisierbar
Energiegewinnung in der Zukunft
Energiegewinnung in der Zukunft
I Fossile Brennstoffe: gehen zu Neige, Treibhauseffekt
I Wasserkraftwerke: nicht weiter ausbaubar
I Solarkraftwerke: möglich, aber zu teuer
I Kernspaltungskraftwerk: radioaktiver Verseuchung, Uran begrenzt
I Fusionskraftwerk: preiswert, aber noch nicht realisierbar
Energiegewinnung in der Zukunft
Energiegewinnung in der Zukunft
I Fossile Brennstoffe: gehen zu Neige, Treibhauseffekt
I Wasserkraftwerke: nicht weiter ausbaubar
I Solarkraftwerke: möglich, aber zu teuer
I Kernspaltungskraftwerk: radioaktiver Verseuchung, Uran begrenzt
I Fusionskraftwerk: preiswert, aber noch nicht realisierbar
Energiegewinnung in der Zukunft
Energiegewinnung in der Zukunft
I Fossile Brennstoffe: gehen zu Neige, Treibhauseffekt
I Wasserkraftwerke: nicht weiter ausbaubar
I Solarkraftwerke: möglich, aber zu teuer
I Kernspaltungskraftwerk: radioaktiver Verseuchung, Uran begrenzt
I Fusionskraftwerk: preiswert, aber noch nicht realisierbar
Energiegewinnung in der Zukunft
Energiegewinnung in der Zukunft
I Fossile Brennstoffe: gehen zu Neige, Treibhauseffekt
I Wasserkraftwerke: nicht weiter ausbaubar
I Solarkraftwerke: möglich, aber zu teuer
I Kernspaltungskraftwerk: radioaktiver Verseuchung, Uran begrenzt
I Fusionskraftwerk: preiswert, aber noch nicht realisierbar
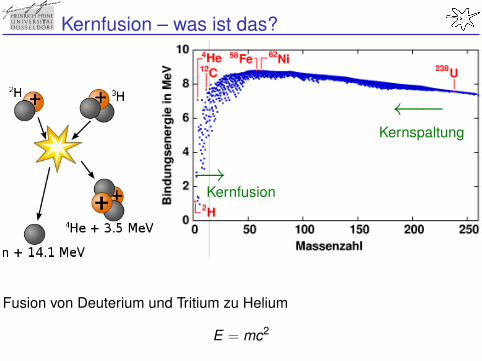
Kernfusion – was ist das?
Kernfusion→
Kernspaltung←−
Fusion von Deuterium und Tritium zu Helium
E = mc2
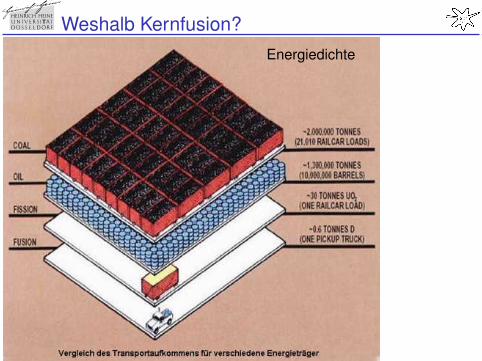
Weshalb Kernfusion?Energiedichte
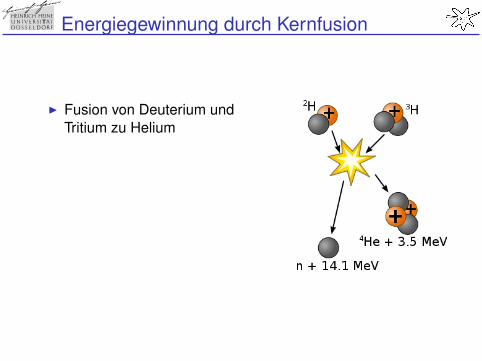
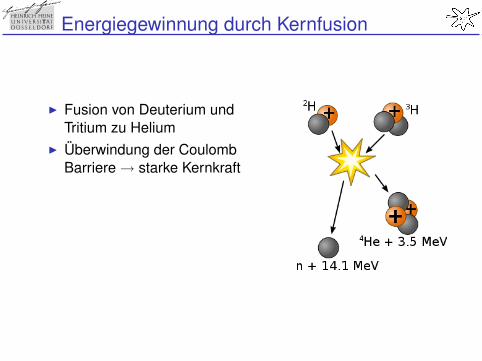
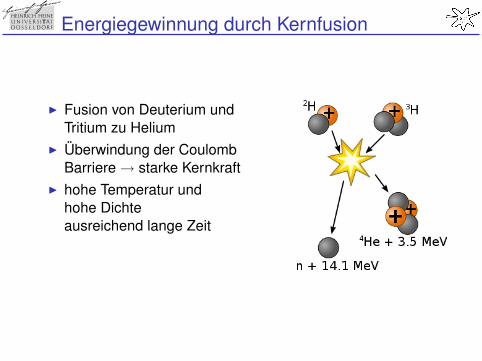
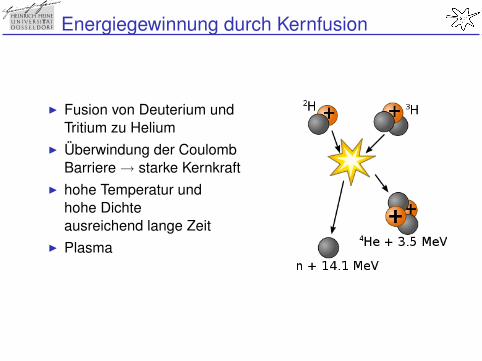
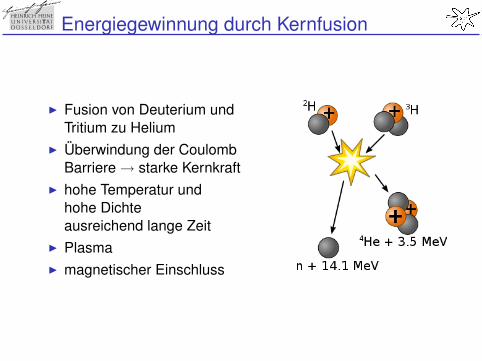
Energiegewinnung durch Kernfusion
I Fusion von Deuterium undTritium zu Helium
I Überwindung der CoulombBarriere→ starke Kernkraft
I hohe Temperatur undhohe Dichteausreichend lange Zeit
I PlasmaI magnetischer Einschluss
Energiegewinnung durch Kernfusion
I Fusion von Deuterium undTritium zu Helium
I Überwindung der CoulombBarriere→ starke Kernkraft
I hohe Temperatur undhohe Dichteausreichend lange Zeit
I PlasmaI magnetischer Einschluss
Energiegewinnung durch Kernfusion
I Fusion von Deuterium undTritium zu Helium
I Überwindung der CoulombBarriere→ starke Kernkraft
I hohe Temperatur undhohe Dichteausreichend lange Zeit
I PlasmaI magnetischer Einschluss
Energiegewinnung durch Kernfusion
I Fusion von Deuterium undTritium zu Helium
I Überwindung der CoulombBarriere→ starke Kernkraft
I hohe Temperatur undhohe Dichteausreichend lange Zeit
I Plasma
I magnetischer Einschluss
Energiegewinnung durch Kernfusion
I Fusion von Deuterium undTritium zu Helium
I Überwindung der CoulombBarriere→ starke Kernkraft
I hohe Temperatur undhohe Dichteausreichend lange Zeit
I PlasmaI magnetischer Einschluss

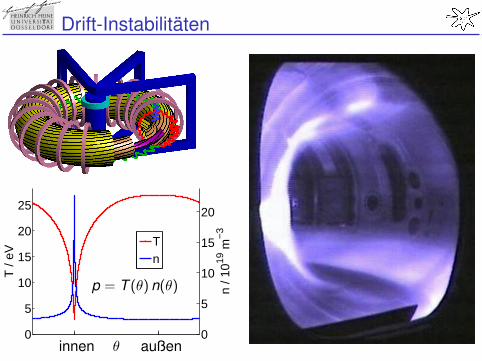
TEXTOR im Forschungszentrum Jülich
Tokamak Experiment for Technology Oriented Research
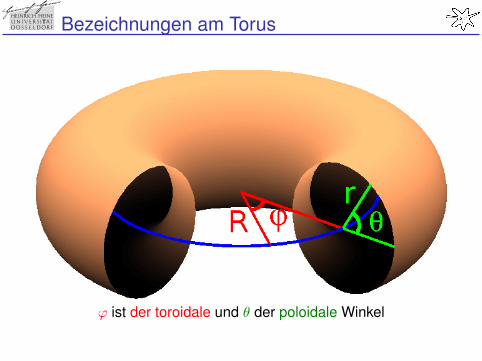
Bezeichnungen am Torus
ϕ ist der toroidale und θ der poloidale Winkel
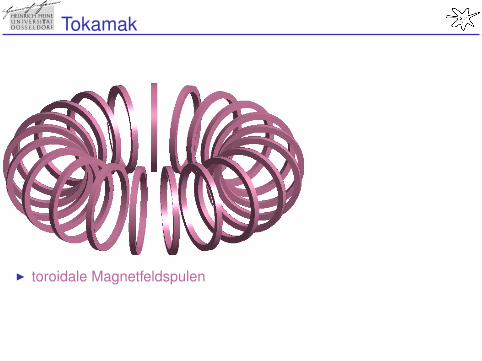
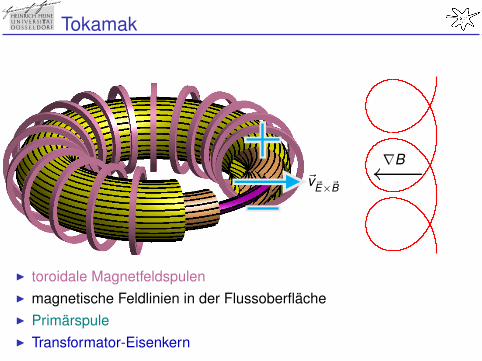
Tokamak
I toroidale Magnetfeldspulen
I magnetische Feldlinien in der FlussoberflächeI PrimärspuleI Transformator-Eisenkern
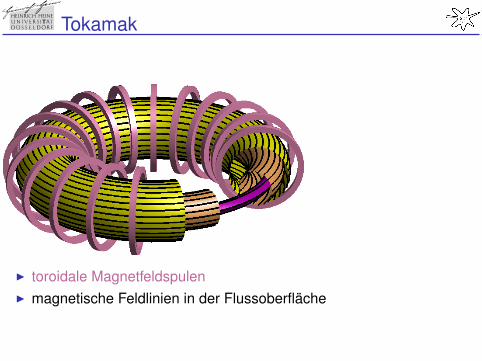
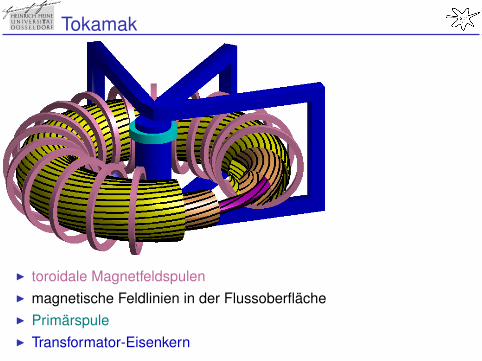
Tokamak
I toroidale MagnetfeldspulenI magnetische Feldlinien in der Flussoberfläche
I PrimärspuleI Transformator-Eisenkern
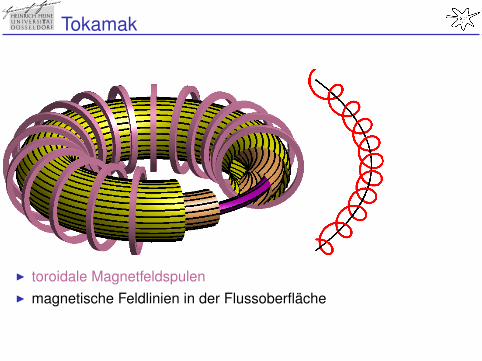
Tokamak
I toroidale MagnetfeldspulenI magnetische Feldlinien in der Flussoberfläche
I PrimärspuleI Transformator-Eisenkern
Tokamak
~v~E×~B←−∇B
I toroidale MagnetfeldspulenI magnetische Feldlinien in der FlussoberflächeI PrimärspuleI Transformator-Eisenkern
Tokamak
I toroidale MagnetfeldspulenI magnetische Feldlinien in der FlussoberflächeI PrimärspuleI Transformator-Eisenkern
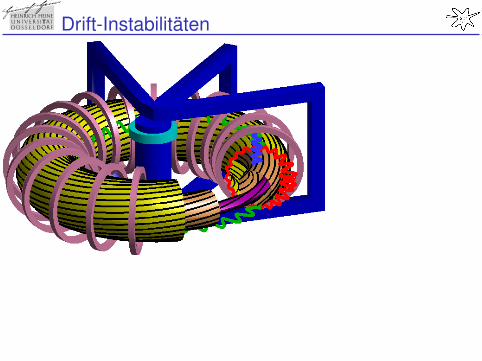
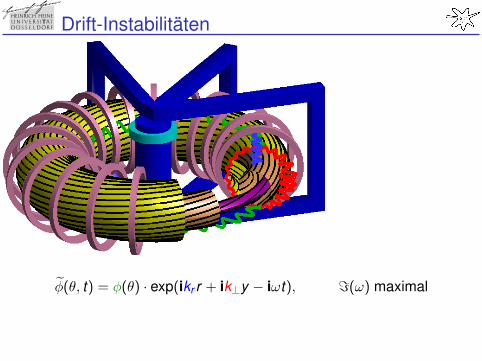
Drift-Instabilitäten
Drift-Instabilitäten
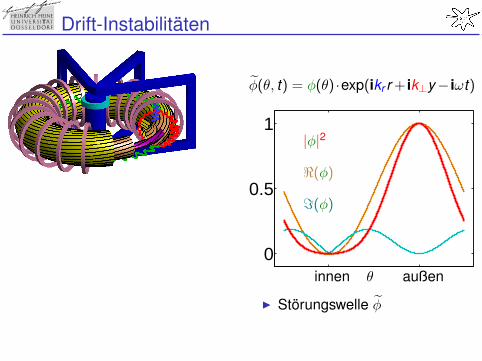
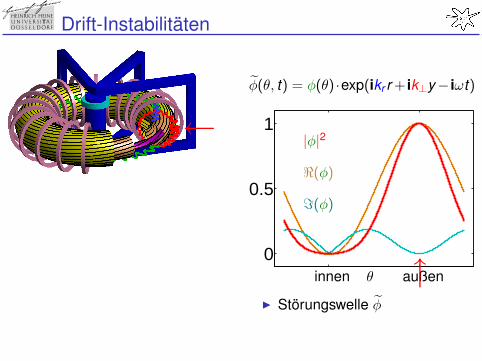
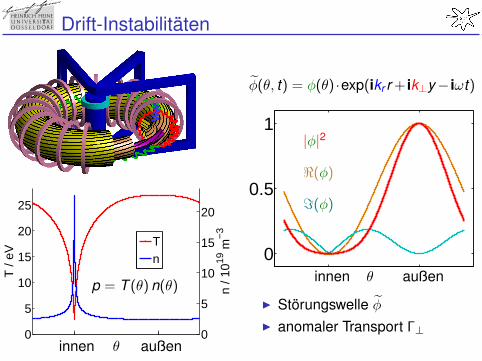
φ(θ, t) = φ(θ) · exp(ikr r + ik⊥y − iωt), =(ω) maximal
Drift-Instabilitäten
φ(θ, t) = φ(θ) ·exp(ikr r + ik⊥y− iωt)
0
0.5
1|φ|2
<(φ)
=(φ)
innen θ außen
I Störungswelle φ
I anomaler Transport Γ⊥
Drift-Instabilitäten
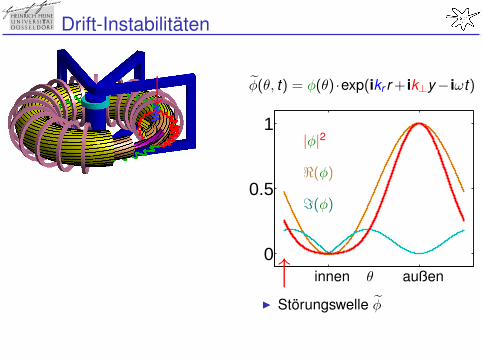
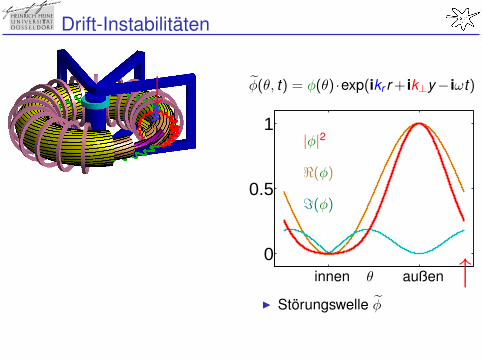
↓ φ(θ, t) = φ(θ) ·exp(ikr r + ik⊥y− iωt)
0
0.5
1|φ|2
<(φ)
=(φ)
innen θ außen↑I Störungswelle φ
I anomaler Transport Γ⊥
Drift-Instabilitäten
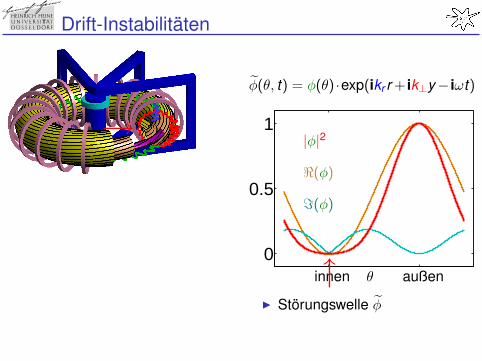
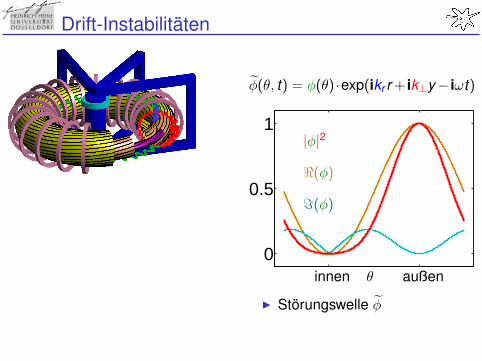
→φ(θ, t) = φ(θ) ·exp(ikr r + ik⊥y− iωt)
0
0.5
1|φ|2
<(φ)
=(φ)
innen θ außen↑I Störungswelle φ
I anomaler Transport Γ⊥
Drift-Instabilitäten
↑
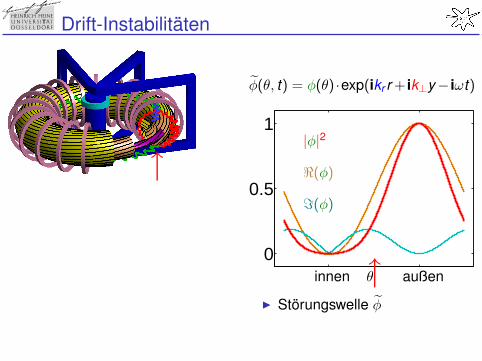
φ(θ, t) = φ(θ) ·exp(ikr r + ik⊥y− iωt)
0
0.5
1|φ|2
<(φ)
=(φ)
innen θ außen↑I Störungswelle φ
I anomaler Transport Γ⊥
Drift-Instabilitäten
←φ(θ, t) = φ(θ) ·exp(ikr r + ik⊥y− iωt)
0
0.5
1|φ|2
<(φ)
=(φ)
innen θ außen↑I Störungswelle φ
I anomaler Transport Γ⊥
Drift-Instabilitäten
↓ φ(θ, t) = φ(θ) ·exp(ikr r + ik⊥y− iωt)
0
0.5
1|φ|2
<(φ)
=(φ)
innen θ außen ↑I Störungswelle φ
I anomaler Transport Γ⊥
Drift-Instabilitäten
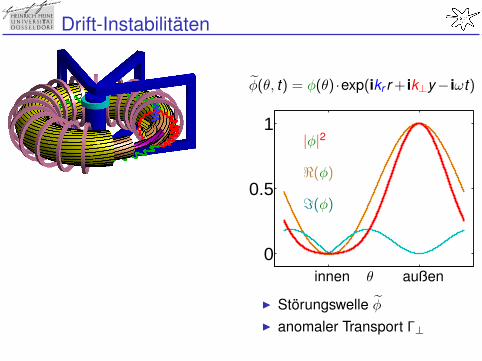
φ(θ, t) = φ(θ) ·exp(ikr r + ik⊥y− iωt)
0
0.5
1|φ|2
<(φ)
=(φ)
innen θ außen
I Störungswelle φ
I anomaler Transport Γ⊥
Drift-Instabilitäten
φ(θ, t) = φ(θ) ·exp(ikr r + ik⊥y− iωt)
0
0.5
1|φ|2
<(φ)
=(φ)
innen θ außen
I Störungswelle φI anomaler Transport Γ⊥
Drift-Instabilitäten
0
5
10
15
20
25
T /
eV
0
5
10
15
20n
/ 1019
m−
3
Tn
p = T (θ) n(θ)
innen θ außen
φ(θ, t) = φ(θ) ·exp(ikr r + ik⊥y− iωt)
0
0.5
1|φ|2
<(φ)
=(φ)
innen θ außen
I Störungswelle φI anomaler Transport Γ⊥
Drift-Instabilitäten
0
5
10
15
20
25
T /
eV
0
5
10
15
20n
/ 1019
m−
3
Tn
p = T (θ) n(θ)
innen θ außen
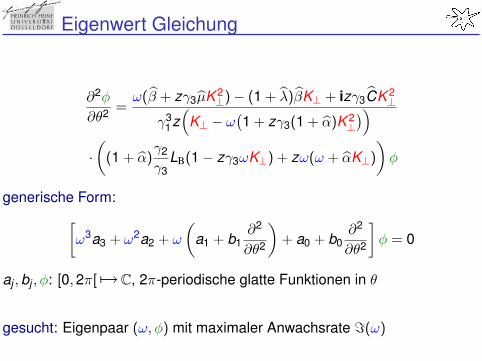
Eigenwert Gleichung
∂2φ
∂θ2 =ω(β + zγ3µK 2
⊥)− (1 + λ)βK⊥ + izγ3CK 2⊥
γ31z
(K⊥ − ω
(1 + zγ3(1 + α)K 2
⊥))
·(
(1 + α)γ2
γ3LB(1− zγ3ωK⊥) + zω(ω + αK⊥)
)φ
generische Form:[ω3a3 + ω2a2 + ω
(a1 + b1
∂2
∂θ2
)+ a0 + b0
∂2
∂θ2
]φ = 0
aj ,bj , φ: [0,2π[ 7→C, 2π-periodische glatte Funktionen in θ
gesucht: Eigenpaar (ω, φ) mit maximaler Anwachsrate =(ω)
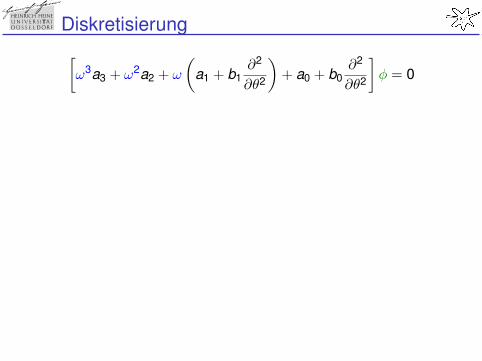
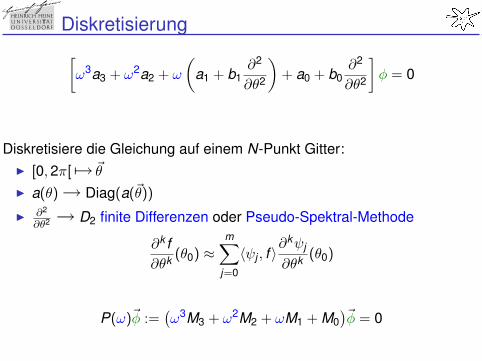
Diskretisierung[ω3a3 + ω2a2 + ω
(a1 + b1
∂2
∂θ2
)+ a0 + b0
∂2
∂θ2
]φ = 0
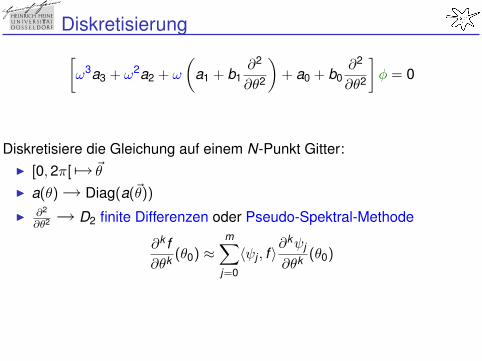
Diskretisiere die Gleichung auf einem N-Punkt Gitter:I [0,2π[ 7→ ~θ
I a(θ)→ Diag(a(~θ))
I ∂2
∂θ2 → D2 finite Differenzen oder Pseudo-Spektral-Methode
∂k f∂θk (θ0) ≈
m∑j=0
〈ψj , f 〉∂kψj
∂θk (θ0)
P(ω)~φ :=(ω3M3 + ω2M2 + ωM1 + M0
)~φ = 0
Diskretisierung[ω3a3 + ω2a2 + ω
(a1 + b1
∂2
∂θ2
)+ a0 + b0
∂2
∂θ2
]φ = 0
Diskretisiere die Gleichung auf einem N-Punkt Gitter:
I [0,2π[ 7→ ~θ
I a(θ)→ Diag(a(~θ))
I ∂2
∂θ2 → D2 finite Differenzen oder Pseudo-Spektral-Methode
∂k f∂θk (θ0) ≈
m∑j=0
〈ψj , f 〉∂kψj
∂θk (θ0)
P(ω)~φ :=(ω3M3 + ω2M2 + ωM1 + M0
)~φ = 0
Diskretisierung[ω3a3 + ω2a2 + ω
(a1 + b1
∂2
∂θ2
)+ a0 + b0
∂2
∂θ2
]φ = 0
Diskretisiere die Gleichung auf einem N-Punkt Gitter:I [0,2π[ 7→ ~θ
I a(θ)→ Diag(a(~θ))
I ∂2
∂θ2 → D2 finite Differenzen oder Pseudo-Spektral-Methode
∂k f∂θk (θ0) ≈
m∑j=0
〈ψj , f 〉∂kψj
∂θk (θ0)
P(ω)~φ :=(ω3M3 + ω2M2 + ωM1 + M0
)~φ = 0
Diskretisierung[ω3a3 + ω2a2 + ω
(a1 + b1
∂2
∂θ2
)+ a0 + b0
∂2
∂θ2
]φ = 0
Diskretisiere die Gleichung auf einem N-Punkt Gitter:I [0,2π[ 7→ ~θ
I a(θ)→ Diag(a(~θ))
I ∂2
∂θ2 → D2 finite Differenzen oder Pseudo-Spektral-Methode
∂k f∂θk (θ0) ≈
m∑j=0
〈ψj , f 〉∂kψj
∂θk (θ0)
P(ω)~φ :=(ω3M3 + ω2M2 + ωM1 + M0
)~φ = 0
Diskretisierung[ω3a3 + ω2a2 + ω
(a1 + b1
∂2
∂θ2
)+ a0 + b0
∂2
∂θ2
]φ = 0
Diskretisiere die Gleichung auf einem N-Punkt Gitter:I [0,2π[ 7→ ~θ
I a(θ)→ Diag(a(~θ))
I ∂2
∂θ2 → D2 finite Differenzen oder Pseudo-Spektral-Methode
∂k f∂θk (θ0) ≈
m∑j=0
〈ψj , f 〉∂kψj
∂θk (θ0)
P(ω)~φ :=(ω3M3 + ω2M2 + ωM1 + M0
)~φ = 0
Diskretisierung[ω3a3 + ω2a2 + ω
(a1 + b1
∂2
∂θ2
)+ a0 + b0
∂2
∂θ2
]φ = 0
Diskretisiere die Gleichung auf einem N-Punkt Gitter:I [0,2π[ 7→ ~θ
I a(θ)→ Diag(a(~θ))
I ∂2
∂θ2 → D2 finite Differenzen oder Pseudo-Spektral-Methode
∂k f∂θk (θ0) ≈
m∑j=0
〈ψj , f 〉∂kψj
∂θk (θ0)
P(ω)~φ :=(ω3M3 + ω2M2 + ωM1 + M0
)~φ = 0
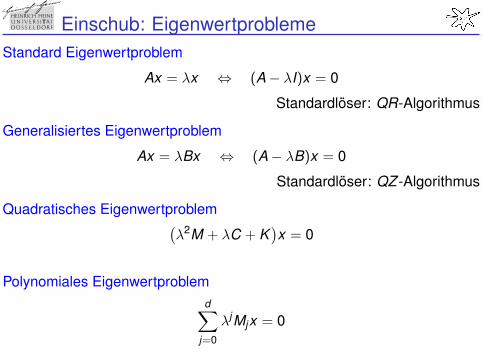
Einschub: EigenwertproblemeStandard Eigenwertproblem
Ax = λx ⇔ (A− λI)x = 0
Standardlöser: QR-Algorithmus
Generalisiertes Eigenwertproblem
Ax = λBx ⇔ (A− λB)x = 0
Standardlöser: QZ -Algorithmus
Quadratisches Eigenwertproblem(λ2M + λC + K
)x = 0
Polynomiales Eigenwertproblemd∑
j=0
λjMjx = 0
Einschub: EigenwertproblemeStandard Eigenwertproblem
Ax = λx ⇔ (A− λI)x = 0
Standardlöser: QR-Algorithmus
Generalisiertes Eigenwertproblem
Ax = λBx ⇔ (A− λB)x = 0
Standardlöser: QZ -Algorithmus
Quadratisches Eigenwertproblem(λ2M + λC + K
)x = 0
Polynomiales Eigenwertproblemd∑
j=0
λjMjx = 0
Einschub: EigenwertproblemeStandard Eigenwertproblem
Ax = λx ⇔ (A− λI)x = 0
Standardlöser: QR-Algorithmus
Generalisiertes Eigenwertproblem
Ax = λBx ⇔ (A− λB)x = 0
Standardlöser: QZ -Algorithmus
Quadratisches Eigenwertproblem(λ2M + λC + K
)x = 0
Polynomiales Eigenwertproblemd∑
j=0
λjMjx = 0
Einschub: EigenwertproblemeStandard Eigenwertproblem
Ax = λx ⇔ (A− λI)x = 0
Standardlöser: QR-Algorithmus
Generalisiertes Eigenwertproblem
Ax = λBx ⇔ (A− λB)x = 0
Standardlöser: QZ -Algorithmus
Quadratisches Eigenwertproblem(λ2M + λC + K
)x = 0
Polynomiales Eigenwertproblemd∑
j=0
λjMjx = 0
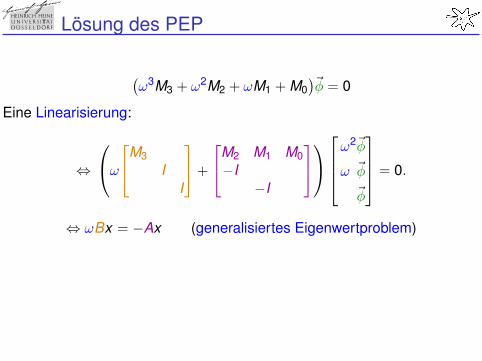
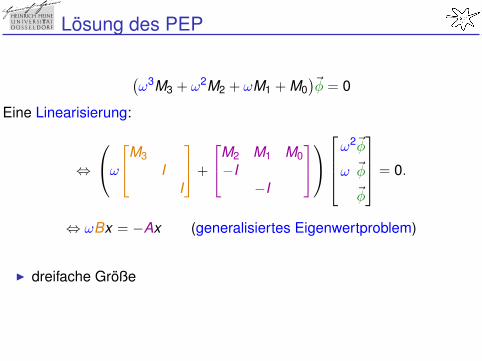
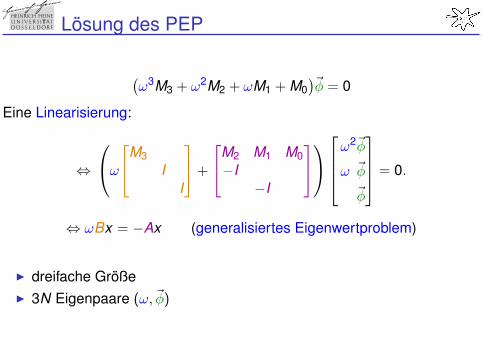
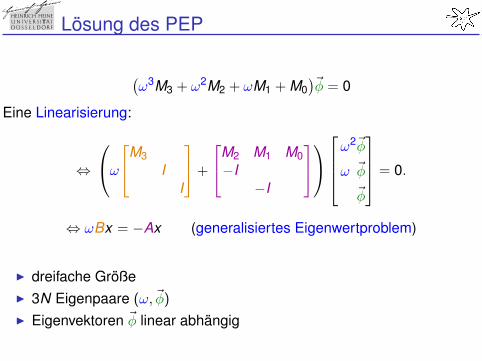
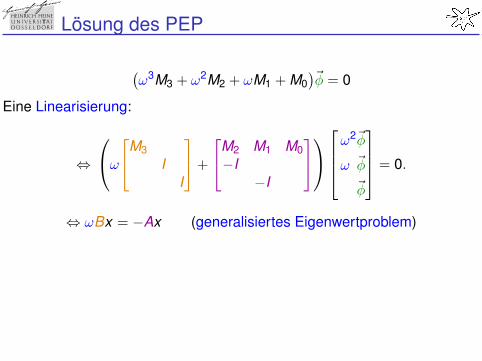
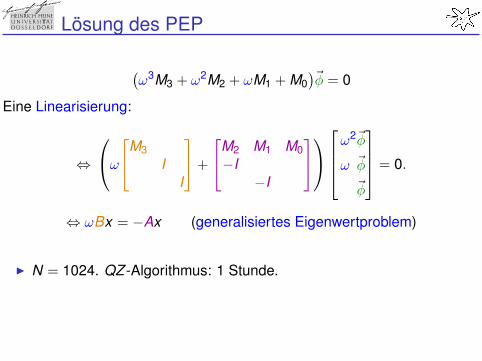
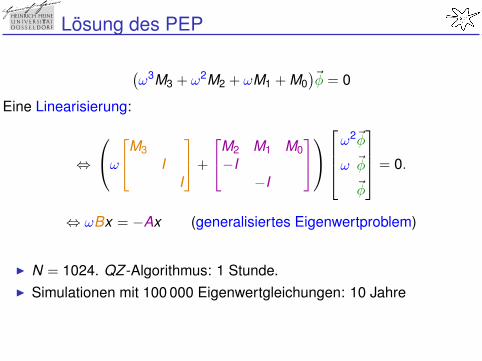
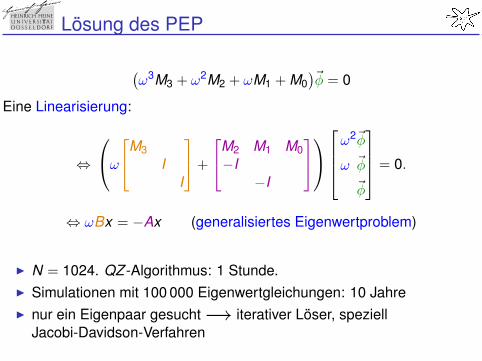
Lösung des PEP
(ω3M3 + ω2M2 + ωM1 + M0
)~φ = 0
Eine Linearisierung:
⇔
ωM3
II
+
M2 M1 M0−I
−I
ω2~φ
ω ~φ
~φ
= 0.
⇔ ωBx = −Ax (generalisiertes Eigenwertproblem)
I dreifache GrößeI 3N Eigenpaare (ω,~φ)
I Eigenvektoren ~φ linear abhängig
Lösung des PEP
(ω3M3 + ω2M2 + ωM1 + M0
)~φ = 0
Eine Linearisierung:
⇔
ωM3
II
+
M2 M1 M0−I
−I
ω2~φ
ω ~φ
~φ
= 0.
⇔ ωBx = −Ax (generalisiertes Eigenwertproblem)
I dreifache Größe
I 3N Eigenpaare (ω,~φ)
I Eigenvektoren ~φ linear abhängig
Lösung des PEP
(ω3M3 + ω2M2 + ωM1 + M0
)~φ = 0
Eine Linearisierung:
⇔
ωM3
II
+
M2 M1 M0−I
−I
ω2~φ
ω ~φ
~φ
= 0.
⇔ ωBx = −Ax (generalisiertes Eigenwertproblem)
I dreifache GrößeI 3N Eigenpaare (ω,~φ)
I Eigenvektoren ~φ linear abhängig
Lösung des PEP
(ω3M3 + ω2M2 + ωM1 + M0
)~φ = 0
Eine Linearisierung:
⇔
ωM3
II
+
M2 M1 M0−I
−I
ω2~φ
ω ~φ
~φ
= 0.
⇔ ωBx = −Ax (generalisiertes Eigenwertproblem)
I dreifache GrößeI 3N Eigenpaare (ω,~φ)
I Eigenvektoren ~φ linear abhängig
allgemeine Eigenschaften PEP
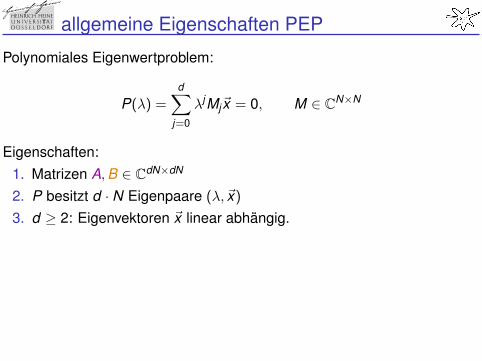
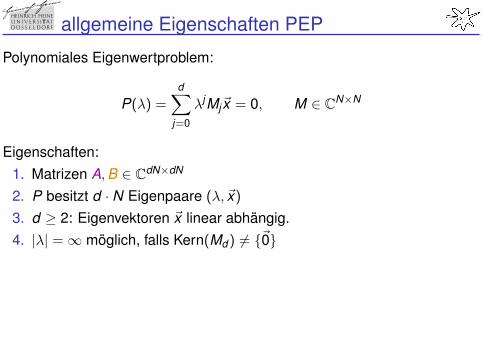
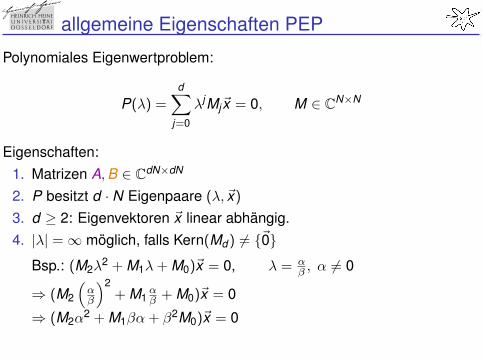
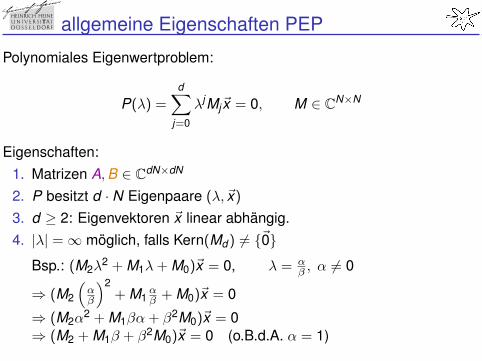
Polynomiales Eigenwertproblem:
P(λ) =d∑
j=0
λjMj~x = 0, M ∈ CN×N
Eigenschaften:
1. Matrizen A,B ∈ CdN×dN
2. P besitzt d · N Eigenpaare (λ,~x)
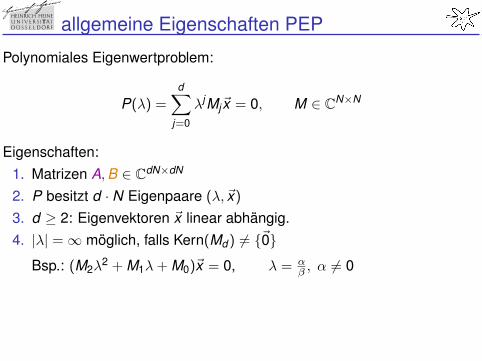
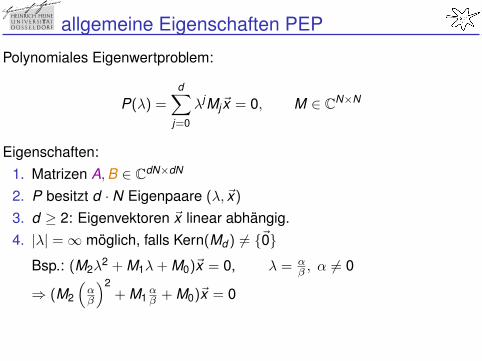
3. d ≥ 2: Eigenvektoren ~x linear abhängig.4. |λ| =∞ möglich, falls Kern(Md) 6= {~0}
Bsp.: (M2λ2 + M1λ+ M0)~x = 0, λ = α
β , α 6= 0
⇒ (M2
(αβ
)2+ M1
αβ + M0)~x = 0
⇒ (M2α2 + M1βα+ β2M0)~x = 0
⇒ (M2 + M1β + β2M0)~x = 0 (o.B.d.A. α = 1)
allgemeine Eigenschaften PEP
Polynomiales Eigenwertproblem:
P(λ) =d∑
j=0
λjMj~x = 0, M ∈ CN×N
Eigenschaften:1. Matrizen A,B ∈ CdN×dN
2. P besitzt d · N Eigenpaare (λ,~x)
3. d ≥ 2: Eigenvektoren ~x linear abhängig.4. |λ| =∞ möglich, falls Kern(Md) 6= {~0}
Bsp.: (M2λ2 + M1λ+ M0)~x = 0, λ = α
β , α 6= 0
⇒ (M2
(αβ
)2+ M1
αβ + M0)~x = 0
⇒ (M2α2 + M1βα+ β2M0)~x = 0
⇒ (M2 + M1β + β2M0)~x = 0 (o.B.d.A. α = 1)
allgemeine Eigenschaften PEP
Polynomiales Eigenwertproblem:
P(λ) =d∑
j=0
λjMj~x = 0, M ∈ CN×N
Eigenschaften:1. Matrizen A,B ∈ CdN×dN
2. P besitzt d · N Eigenpaare (λ,~x)
3. d ≥ 2: Eigenvektoren ~x linear abhängig.4. |λ| =∞ möglich, falls Kern(Md) 6= {~0}
Bsp.: (M2λ2 + M1λ+ M0)~x = 0, λ = α
β , α 6= 0
⇒ (M2
(αβ
)2+ M1
αβ + M0)~x = 0
⇒ (M2α2 + M1βα+ β2M0)~x = 0
⇒ (M2 + M1β + β2M0)~x = 0 (o.B.d.A. α = 1)
allgemeine Eigenschaften PEP
Polynomiales Eigenwertproblem:
P(λ) =d∑
j=0
λjMj~x = 0, M ∈ CN×N
Eigenschaften:1. Matrizen A,B ∈ CdN×dN
2. P besitzt d · N Eigenpaare (λ,~x)
3. d ≥ 2: Eigenvektoren ~x linear abhängig.
4. |λ| =∞ möglich, falls Kern(Md) 6= {~0}
Bsp.: (M2λ2 + M1λ+ M0)~x = 0, λ = α
β , α 6= 0
⇒ (M2
(αβ
)2+ M1
αβ + M0)~x = 0
⇒ (M2α2 + M1βα+ β2M0)~x = 0
⇒ (M2 + M1β + β2M0)~x = 0 (o.B.d.A. α = 1)
allgemeine Eigenschaften PEP
Polynomiales Eigenwertproblem:
P(λ) =d∑
j=0
λjMj~x = 0, M ∈ CN×N
Eigenschaften:1. Matrizen A,B ∈ CdN×dN
2. P besitzt d · N Eigenpaare (λ,~x)
3. d ≥ 2: Eigenvektoren ~x linear abhängig.4. |λ| =∞ möglich, falls Kern(Md) 6= {~0}
Bsp.: (M2λ2 + M1λ+ M0)~x = 0, λ = α
β , α 6= 0
⇒ (M2
(αβ
)2+ M1
αβ + M0)~x = 0
⇒ (M2α2 + M1βα+ β2M0)~x = 0
⇒ (M2 + M1β + β2M0)~x = 0 (o.B.d.A. α = 1)
allgemeine Eigenschaften PEP
Polynomiales Eigenwertproblem:
P(λ) =d∑
j=0
λjMj~x = 0, M ∈ CN×N
Eigenschaften:1. Matrizen A,B ∈ CdN×dN
2. P besitzt d · N Eigenpaare (λ,~x)
3. d ≥ 2: Eigenvektoren ~x linear abhängig.4. |λ| =∞ möglich, falls Kern(Md) 6= {~0}
Bsp.: (M2λ2 + M1λ+ M0)~x = 0, λ = α
β , α 6= 0
⇒ (M2
(αβ
)2+ M1
αβ + M0)~x = 0
⇒ (M2α2 + M1βα+ β2M0)~x = 0
⇒ (M2 + M1β + β2M0)~x = 0 (o.B.d.A. α = 1)
allgemeine Eigenschaften PEP
Polynomiales Eigenwertproblem:
P(λ) =d∑
j=0
λjMj~x = 0, M ∈ CN×N
Eigenschaften:1. Matrizen A,B ∈ CdN×dN
2. P besitzt d · N Eigenpaare (λ,~x)
3. d ≥ 2: Eigenvektoren ~x linear abhängig.4. |λ| =∞ möglich, falls Kern(Md) 6= {~0}
Bsp.: (M2λ2 + M1λ+ M0)~x = 0, λ = α
β , α 6= 0
⇒ (M2
(αβ
)2+ M1
αβ + M0)~x = 0
⇒ (M2α2 + M1βα+ β2M0)~x = 0
⇒ (M2 + M1β + β2M0)~x = 0 (o.B.d.A. α = 1)
allgemeine Eigenschaften PEP
Polynomiales Eigenwertproblem:
P(λ) =d∑
j=0
λjMj~x = 0, M ∈ CN×N
Eigenschaften:1. Matrizen A,B ∈ CdN×dN
2. P besitzt d · N Eigenpaare (λ,~x)
3. d ≥ 2: Eigenvektoren ~x linear abhängig.4. |λ| =∞ möglich, falls Kern(Md) 6= {~0}
Bsp.: (M2λ2 + M1λ+ M0)~x = 0, λ = α
β , α 6= 0
⇒ (M2
(αβ
)2+ M1
αβ + M0)~x = 0
⇒ (M2α2 + M1βα+ β2M0)~x = 0
⇒ (M2 + M1β + β2M0)~x = 0 (o.B.d.A. α = 1)
allgemeine Eigenschaften PEP
Polynomiales Eigenwertproblem:
P(λ) =d∑
j=0
λjMj~x = 0, M ∈ CN×N
Eigenschaften:1. Matrizen A,B ∈ CdN×dN
2. P besitzt d · N Eigenpaare (λ,~x)
3. d ≥ 2: Eigenvektoren ~x linear abhängig.4. |λ| =∞ möglich, falls Kern(Md) 6= {~0}
Bsp.: (M2λ2 + M1λ+ M0)~x = 0, λ = α
β , α 6= 0
⇒ (M2
(αβ
)2+ M1
αβ + M0)~x = 0
⇒ (M2α2 + M1βα+ β2M0)~x = 0
⇒ (M2 + M1β + β2M0)~x = 0 (o.B.d.A. α = 1)
Lösung des PEP
(ω3M3 + ω2M2 + ωM1 + M0
)~φ = 0
Eine Linearisierung:
⇔
ωM3
II
+
M2 M1 M0−I
−I
ω2~φ
ω ~φ
~φ
= 0.
⇔ ωBx = −Ax (generalisiertes Eigenwertproblem)
I N = 1024. QZ -Algorithmus: 1 Stunde.I Simulationen mit 100 000 Eigenwertgleichungen: 10 JahreI nur ein Eigenpaar gesucht→ iterativer Löser, speziell
Jacobi-Davidson-Verfahren
Lösung des PEP
(ω3M3 + ω2M2 + ωM1 + M0
)~φ = 0
Eine Linearisierung:
⇔
ωM3
II
+
M2 M1 M0−I
−I
ω2~φ
ω ~φ
~φ
= 0.
⇔ ωBx = −Ax (generalisiertes Eigenwertproblem)
I N = 1024. QZ -Algorithmus: 1 Stunde.
I Simulationen mit 100 000 Eigenwertgleichungen: 10 JahreI nur ein Eigenpaar gesucht→ iterativer Löser, speziell
Jacobi-Davidson-Verfahren
Lösung des PEP
(ω3M3 + ω2M2 + ωM1 + M0
)~φ = 0
Eine Linearisierung:
⇔
ωM3
II
+
M2 M1 M0−I
−I
ω2~φ
ω ~φ
~φ
= 0.
⇔ ωBx = −Ax (generalisiertes Eigenwertproblem)
I N = 1024. QZ -Algorithmus: 1 Stunde.I Simulationen mit 100 000 Eigenwertgleichungen: 10 Jahre
I nur ein Eigenpaar gesucht→ iterativer Löser, speziellJacobi-Davidson-Verfahren
Lösung des PEP
(ω3M3 + ω2M2 + ωM1 + M0
)~φ = 0
Eine Linearisierung:
⇔
ωM3
II
+
M2 M1 M0−I
−I
ω2~φ
ω ~φ
~φ
= 0.
⇔ ωBx = −Ax (generalisiertes Eigenwertproblem)
I N = 1024. QZ -Algorithmus: 1 Stunde.I Simulationen mit 100 000 Eigenwertgleichungen: 10 JahreI nur ein Eigenpaar gesucht→ iterativer Löser, speziell
Jacobi-Davidson-Verfahren
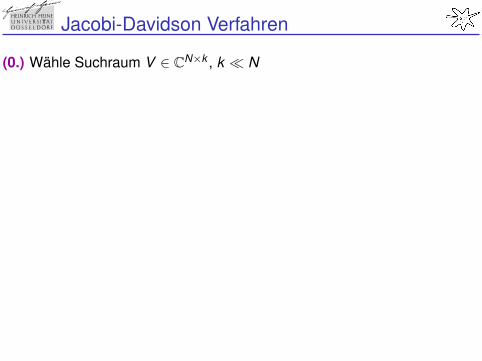
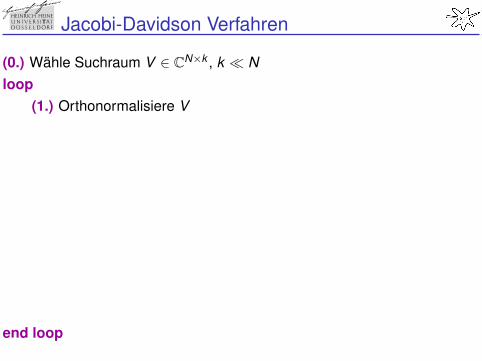
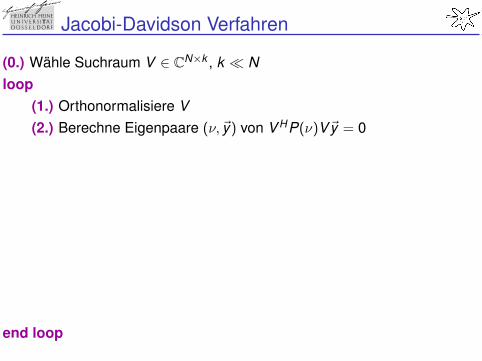
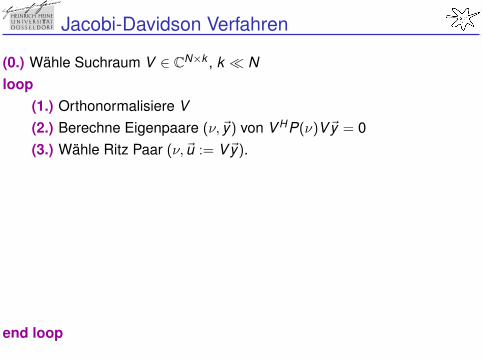
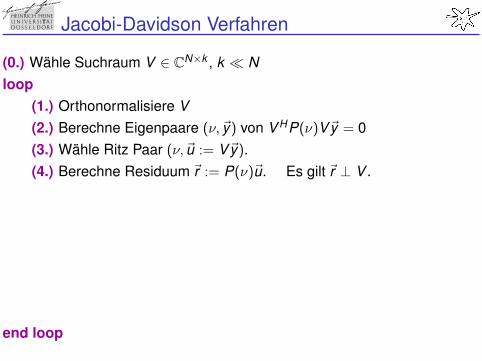
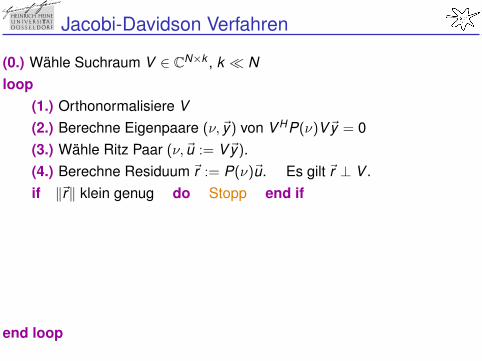
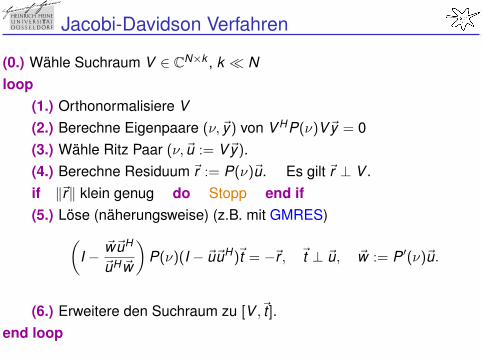
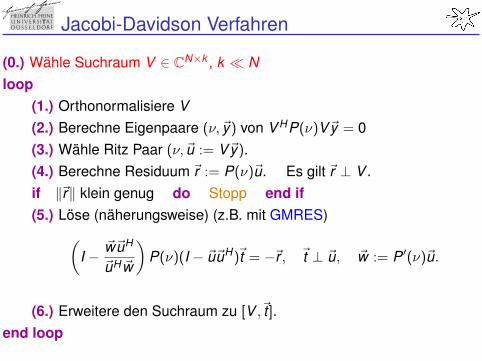
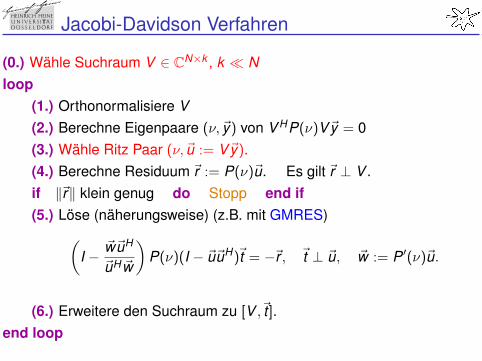
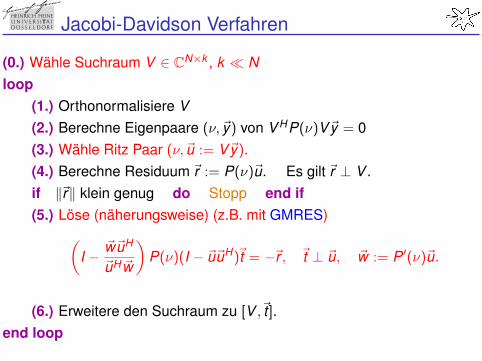
Jacobi-Davidson Verfahren
(0.) Wähle Suchraum V ∈ CN×k , k � N
loop(1.) Orthonormalisiere V(2.) Berechne Eigenpaare (ν, ~y) von V HP(ν)V~y = 0(3.) Wähle Ritz Paar (ν, ~u := V~y).(4.) Berechne Residuum ~r := P(ν)~u. Es gilt ~r ⊥ V .if ‖~r‖ klein genug do Stopp end if(5.) Löse (näherungsweise) (z.B. mit GMRES)(
I −~w~uH
~uH ~w
)P(ν)(I − ~u~uH)~t = −~r , ~t ⊥ ~u, ~w := P ′(ν)~u.
(6.) Erweitere den Suchraum zu [V ,~t ].end loop
Jacobi-Davidson Verfahren
(0.) Wähle Suchraum V ∈ CN×k , k � Nloop
(1.) Orthonormalisiere V
(2.) Berechne Eigenpaare (ν, ~y) von V HP(ν)V~y = 0(3.) Wähle Ritz Paar (ν, ~u := V~y).(4.) Berechne Residuum ~r := P(ν)~u. Es gilt ~r ⊥ V .if ‖~r‖ klein genug do Stopp end if(5.) Löse (näherungsweise) (z.B. mit GMRES)(
I −~w~uH
~uH ~w
)P(ν)(I − ~u~uH)~t = −~r , ~t ⊥ ~u, ~w := P ′(ν)~u.
(6.) Erweitere den Suchraum zu [V ,~t ].
end loop
Jacobi-Davidson Verfahren
(0.) Wähle Suchraum V ∈ CN×k , k � Nloop
(1.) Orthonormalisiere V(2.) Berechne Eigenpaare (ν, ~y) von V HP(ν)V~y = 0
(3.) Wähle Ritz Paar (ν, ~u := V~y).(4.) Berechne Residuum ~r := P(ν)~u. Es gilt ~r ⊥ V .if ‖~r‖ klein genug do Stopp end if(5.) Löse (näherungsweise) (z.B. mit GMRES)(
I −~w~uH
~uH ~w
)P(ν)(I − ~u~uH)~t = −~r , ~t ⊥ ~u, ~w := P ′(ν)~u.
(6.) Erweitere den Suchraum zu [V ,~t ].
end loop
Jacobi-Davidson Verfahren
(0.) Wähle Suchraum V ∈ CN×k , k � Nloop
(1.) Orthonormalisiere V(2.) Berechne Eigenpaare (ν, ~y) von V HP(ν)V~y = 0(3.) Wähle Ritz Paar (ν, ~u := V~y).
(4.) Berechne Residuum ~r := P(ν)~u. Es gilt ~r ⊥ V .if ‖~r‖ klein genug do Stopp end if(5.) Löse (näherungsweise) (z.B. mit GMRES)(
I −~w~uH
~uH ~w
)P(ν)(I − ~u~uH)~t = −~r , ~t ⊥ ~u, ~w := P ′(ν)~u.
(6.) Erweitere den Suchraum zu [V ,~t ].
end loop
Jacobi-Davidson Verfahren
(0.) Wähle Suchraum V ∈ CN×k , k � Nloop
(1.) Orthonormalisiere V(2.) Berechne Eigenpaare (ν, ~y) von V HP(ν)V~y = 0(3.) Wähle Ritz Paar (ν, ~u := V~y).(4.) Berechne Residuum ~r := P(ν)~u. Es gilt ~r ⊥ V .
if ‖~r‖ klein genug do Stopp end if(5.) Löse (näherungsweise) (z.B. mit GMRES)(
I −~w~uH
~uH ~w
)P(ν)(I − ~u~uH)~t = −~r , ~t ⊥ ~u, ~w := P ′(ν)~u.
(6.) Erweitere den Suchraum zu [V ,~t ].
end loop
Jacobi-Davidson Verfahren
(0.) Wähle Suchraum V ∈ CN×k , k � Nloop
(1.) Orthonormalisiere V(2.) Berechne Eigenpaare (ν, ~y) von V HP(ν)V~y = 0(3.) Wähle Ritz Paar (ν, ~u := V~y).(4.) Berechne Residuum ~r := P(ν)~u. Es gilt ~r ⊥ V .if ‖~r‖ klein genug do Stopp end if
(5.) Löse (näherungsweise) (z.B. mit GMRES)(I −
~w~uH
~uH ~w
)P(ν)(I − ~u~uH)~t = −~r , ~t ⊥ ~u, ~w := P ′(ν)~u.
(6.) Erweitere den Suchraum zu [V ,~t ].
end loop
Jacobi-Davidson Verfahren
(0.) Wähle Suchraum V ∈ CN×k , k � Nloop
(1.) Orthonormalisiere V(2.) Berechne Eigenpaare (ν, ~y) von V HP(ν)V~y = 0(3.) Wähle Ritz Paar (ν, ~u := V~y).(4.) Berechne Residuum ~r := P(ν)~u. Es gilt ~r ⊥ V .if ‖~r‖ klein genug do Stopp end if(5.) Löse (näherungsweise) (z.B. mit GMRES)(
I −~w~uH
~uH ~w
)P(ν)(I − ~u~uH)~t = −~r , ~t ⊥ ~u, ~w := P ′(ν)~u.
(6.) Erweitere den Suchraum zu [V ,~t ].end loop
Jacobi-Davidson Verfahren
(0.) Wähle Suchraum V ∈ CN×k , k � Nloop
(1.) Orthonormalisiere V(2.) Berechne Eigenpaare (ν, ~y) von V HP(ν)V~y = 0(3.) Wähle Ritz Paar (ν, ~u := V~y).(4.) Berechne Residuum ~r := P(ν)~u. Es gilt ~r ⊥ V .if ‖~r‖ klein genug do Stopp end if(5.) Löse (näherungsweise) (z.B. mit GMRES)(
I −~w~uH
~uH ~w
)P(ν)(I − ~u~uH)~t = −~r , ~t ⊥ ~u, ~w := P ′(ν)~u.
(6.) Erweitere den Suchraum zu [V ,~t ].end loop
Jacobi-Davidson Verfahren
(0.) Wähle Suchraum V ∈ CN×k , k � Nloop
(1.) Orthonormalisiere V(2.) Berechne Eigenpaare (ν, ~y) von V HP(ν)V~y = 0(3.) Wähle Ritz Paar (ν, ~u := V~y).(4.) Berechne Residuum ~r := P(ν)~u. Es gilt ~r ⊥ V .if ‖~r‖ klein genug do Stopp end if(5.) Löse (näherungsweise) (z.B. mit GMRES)(
I −~w~uH
~uH ~w
)P(ν)(I − ~u~uH)~t = −~r , ~t ⊥ ~u, ~w := P ′(ν)~u.
(6.) Erweitere den Suchraum zu [V ,~t ].end loop
Jacobi-Davidson Verfahren
(0.) Wähle Suchraum V ∈ CN×k , k � Nloop
(1.) Orthonormalisiere V(2.) Berechne Eigenpaare (ν, ~y) von V HP(ν)V~y = 0(3.) Wähle Ritz Paar (ν, ~u := V~y).(4.) Berechne Residuum ~r := P(ν)~u. Es gilt ~r ⊥ V .if ‖~r‖ klein genug do Stopp end if(5.) Löse (näherungsweise) (z.B. mit GMRES)(
I −~w~uH
~uH ~w
)P(ν)(I − ~u~uH)~t = −~r , ~t ⊥ ~u, ~w := P ′(ν)~u.
(6.) Erweitere den Suchraum zu [V ,~t ].end loop
Jacobi-Davidson Verfahren(5.) Berechne (näherungsweise)(
I −~w~uH
~uH ~w
)P(ν)(I − ~u~uH)~t = −~r , ~t ⊥ ~u
Ausgehend von (ν, ~u) einen Newton-Schritt
F (λ,~x) :=
(P(λ)~x~xH~x − 1
)= 0.
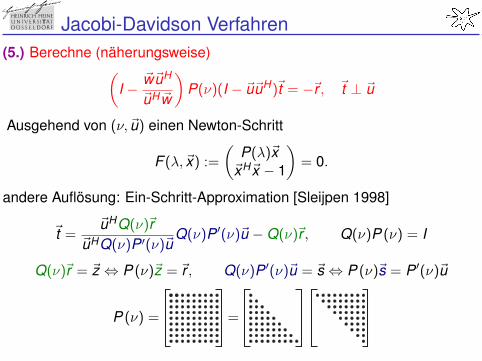
andere Auflösung: Ein-Schritt-Approximation [Sleijpen 1998]
Jacobi-Davidson Verfahren(5.) Berechne (näherungsweise)(
I −~w~uH
~uH ~w
)P(ν)(I − ~u~uH)~t = −~r , ~t ⊥ ~u
Ausgehend von (ν, ~u) einen Newton-Schritt
F (λ,~x) :=
(P(λ)~x~xH~x − 1
)= 0.
andere Auflösung: Ein-Schritt-Approximation [Sleijpen 1998]
Jacobi-Davidson Verfahren(5.) Berechne (näherungsweise)(
I −~w~uH
~uH ~w
)P(ν)(I − ~u~uH)~t = −~r , ~t ⊥ ~u
Ausgehend von (ν, ~u) einen Newton-Schritt
F (λ,~x) :=
(P(λ)~x~xH~x − 1
)= 0.
andere Auflösung: Ein-Schritt-Approximation [Sleijpen 1998]
~t =~uHQ(ν)~r
~uHQ(ν)P ′(ν)~uQ(ν)P ′(ν)~u −Q(ν)~r , Q(ν)P (ν) = I
Q(ν)~r = ~z ⇔ P (ν)~z = ~r , Q(ν)P ′(ν)~u = ~s ⇔ P (ν)~s = P ′(ν)~u
P (ν) = =
Jacobi-Davidson Verfahren(5.) Berechne (näherungsweise)(
I −~w~uH
~uH ~w
)P(ν)(I − ~u~uH)~t = −~r , ~t ⊥ ~u
Ausgehend von (ν, ~u) einen Newton-Schritt
F (λ,~x) :=
(P(λ)~x~xH~x − 1
)= 0.
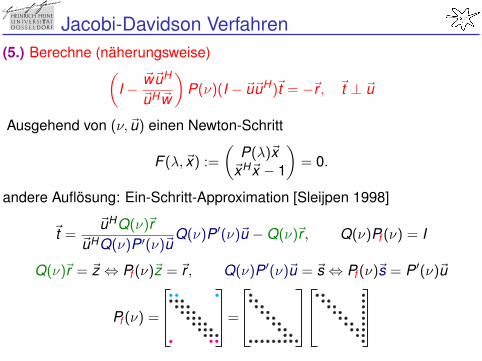
andere Auflösung: Ein-Schritt-Approximation [Sleijpen 1998]
~t =~uHQ(ν)~r
~uHQ(ν)P ′(ν)~uQ(ν)P ′(ν)~u −Q(ν)~r , Q(ν)Pf (ν) = I
Q(ν)~r = ~z ⇔ Pf (ν)~z = ~r , Q(ν)P ′(ν)~u = ~s ⇔ Pf (ν)~s = P ′(ν)~u
Pf (ν) = =
Jacobi-Davidson Verfahren
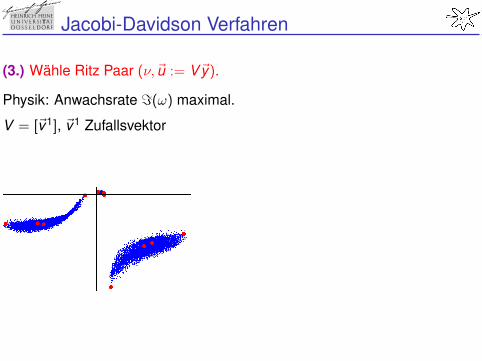
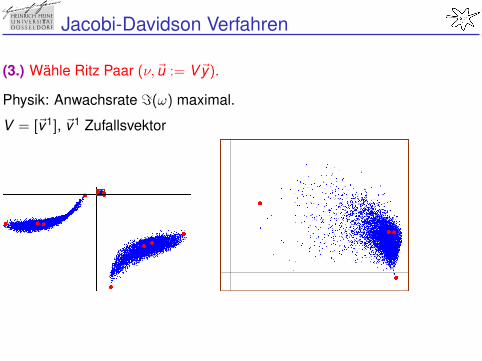
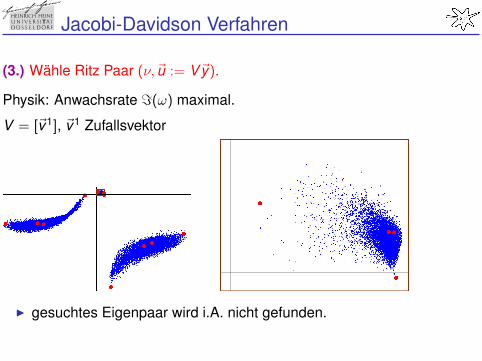
(3.) Wähle Ritz Paar (ν, ~u := V~y).
Physik: Anwachsrate =(ω) maximal.
V = [~v1], ~v1 Zufallsvektor
I gesuchtes Eigenpaar wird i.A. nicht gefunden.
Jacobi-Davidson Verfahren
(3.) Wähle Ritz Paar (ν, ~u := V~y).
Physik: Anwachsrate =(ω) maximal.
V = [~v1], ~v1 Zufallsvektor
I gesuchtes Eigenpaar wird i.A. nicht gefunden.
Jacobi-Davidson Verfahren
(3.) Wähle Ritz Paar (ν, ~u := V~y).
Physik: Anwachsrate =(ω) maximal.
V = [~v1], ~v1 Zufallsvektor
I gesuchtes Eigenpaar wird i.A. nicht gefunden.
Jacobi-Davidson Verfahren
(0.) Wähle Suchraum V ∈ CN×k , k � N
Möglichkeiten:I Zufallsvektor→Wahl des richtigen Ritzpaares fraglichI V =
(exp(ij~θ)
)j=−m,...,m→ solange ~φ entsprechend glatt
Idee: Approximation an ~φ verschaffen.Umsetzung: Rechnung auf gröberem GitterVorteil:
I gröbstes Gitter (z.B. N = 8) QZ , Eigenpaar auswählen.I hohe Genauigkeit durch Pseudo-Spektral-Methode oder optimierte
Gitterpositionen.I Eigenpaar auf nächst feinerem Gitter mit Jacobi-Davidson verbessern.I Wahl des Ritzpaares anhand der Ähnlichkeit zur Approximation.
Jacobi-Davidson Verfahren
(0.) Wähle Suchraum V ∈ CN×k , k � N
Möglichkeiten:I Zufallsvektor→Wahl des richtigen Ritzpaares fraglichI V =
(exp(ij~θ)
)j=−m,...,m→ solange ~φ entsprechend glatt
Idee: Approximation an ~φ verschaffen.
Umsetzung: Rechnung auf gröberem GitterVorteil:
I gröbstes Gitter (z.B. N = 8) QZ , Eigenpaar auswählen.I hohe Genauigkeit durch Pseudo-Spektral-Methode oder optimierte
Gitterpositionen.I Eigenpaar auf nächst feinerem Gitter mit Jacobi-Davidson verbessern.I Wahl des Ritzpaares anhand der Ähnlichkeit zur Approximation.
Jacobi-Davidson Verfahren
(0.) Wähle Suchraum V ∈ CN×k , k � N
Möglichkeiten:I Zufallsvektor→Wahl des richtigen Ritzpaares fraglichI V =
(exp(ij~θ)
)j=−m,...,m→ solange ~φ entsprechend glatt
Idee: Approximation an ~φ verschaffen.Umsetzung: Rechnung auf gröberem Gitter
Vorteil:I gröbstes Gitter (z.B. N = 8) QZ , Eigenpaar auswählen.I hohe Genauigkeit durch Pseudo-Spektral-Methode oder optimierte
Gitterpositionen.I Eigenpaar auf nächst feinerem Gitter mit Jacobi-Davidson verbessern.I Wahl des Ritzpaares anhand der Ähnlichkeit zur Approximation.
Jacobi-Davidson Verfahren
(0.) Wähle Suchraum V ∈ CN×k , k � N
Möglichkeiten:I Zufallsvektor→Wahl des richtigen Ritzpaares fraglichI V =
(exp(ij~θ)
)j=−m,...,m→ solange ~φ entsprechend glatt
Idee: Approximation an ~φ verschaffen.Umsetzung: Rechnung auf gröberem GitterVorteil:
I gröbstes Gitter (z.B. N = 8) QZ , Eigenpaar auswählen.
I hohe Genauigkeit durch Pseudo-Spektral-Methode oder optimierteGitterpositionen.
I Eigenpaar auf nächst feinerem Gitter mit Jacobi-Davidson verbessern.I Wahl des Ritzpaares anhand der Ähnlichkeit zur Approximation.
Jacobi-Davidson Verfahren
(0.) Wähle Suchraum V ∈ CN×k , k � N
Möglichkeiten:I Zufallsvektor→Wahl des richtigen Ritzpaares fraglichI V =
(exp(ij~θ)
)j=−m,...,m→ solange ~φ entsprechend glatt
Idee: Approximation an ~φ verschaffen.Umsetzung: Rechnung auf gröberem GitterVorteil:
I gröbstes Gitter (z.B. N = 8) QZ , Eigenpaar auswählen.I hohe Genauigkeit durch Pseudo-Spektral-Methode oder optimierte
Gitterpositionen.
I Eigenpaar auf nächst feinerem Gitter mit Jacobi-Davidson verbessern.I Wahl des Ritzpaares anhand der Ähnlichkeit zur Approximation.
Jacobi-Davidson Verfahren
(0.) Wähle Suchraum V ∈ CN×k , k � N
Möglichkeiten:I Zufallsvektor→Wahl des richtigen Ritzpaares fraglichI V =
(exp(ij~θ)
)j=−m,...,m→ solange ~φ entsprechend glatt
Idee: Approximation an ~φ verschaffen.Umsetzung: Rechnung auf gröberem GitterVorteil:
I gröbstes Gitter (z.B. N = 8) QZ , Eigenpaar auswählen.I hohe Genauigkeit durch Pseudo-Spektral-Methode oder optimierte
Gitterpositionen.I Eigenpaar auf nächst feinerem Gitter mit Jacobi-Davidson verbessern.
I Wahl des Ritzpaares anhand der Ähnlichkeit zur Approximation.
Jacobi-Davidson Verfahren
(0.) Wähle Suchraum V ∈ CN×k , k � N
Möglichkeiten:I Zufallsvektor→Wahl des richtigen Ritzpaares fraglichI V =
(exp(ij~θ)
)j=−m,...,m→ solange ~φ entsprechend glatt
Idee: Approximation an ~φ verschaffen.Umsetzung: Rechnung auf gröberem GitterVorteil:
I gröbstes Gitter (z.B. N = 8) QZ , Eigenpaar auswählen.I hohe Genauigkeit durch Pseudo-Spektral-Methode oder optimierte
Gitterpositionen.I Eigenpaar auf nächst feinerem Gitter mit Jacobi-Davidson verbessern.I Wahl des Ritzpaares anhand der Ähnlichkeit zur Approximation.
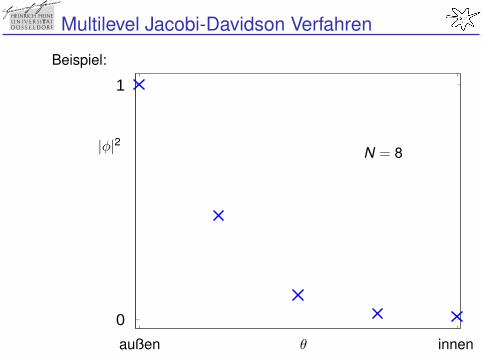
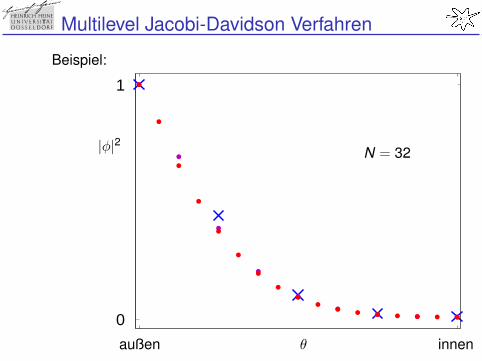
Multilevel Jacobi-Davidson Verfahren
Beispiel:
0
1
|φ|2 N = 8
außen θ innen
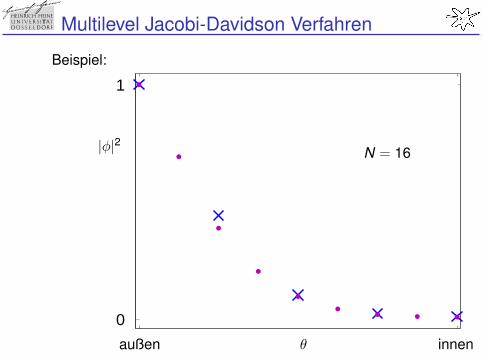
Multilevel Jacobi-Davidson Verfahren
Beispiel:
0
1
|φ|2 N = 16
außen θ innen
Multilevel Jacobi-Davidson Verfahren
Beispiel:
0
1
|φ|2 N = 32
außen θ innen
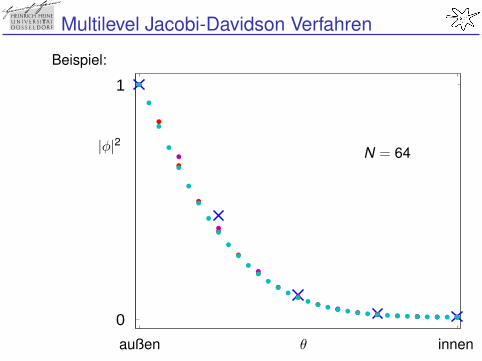
Multilevel Jacobi-Davidson Verfahren
Beispiel:
0
1
|φ|2 N = 64
außen θ innen
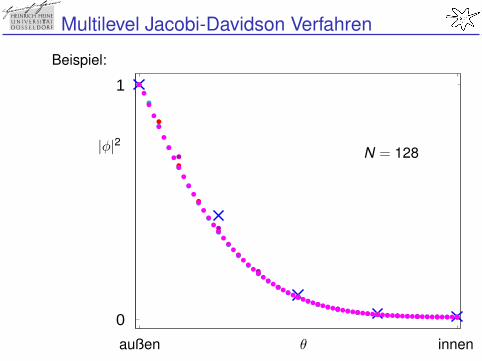
Multilevel Jacobi-Davidson Verfahren
Beispiel:
0
1
|φ|2 N = 128
außen θ innen
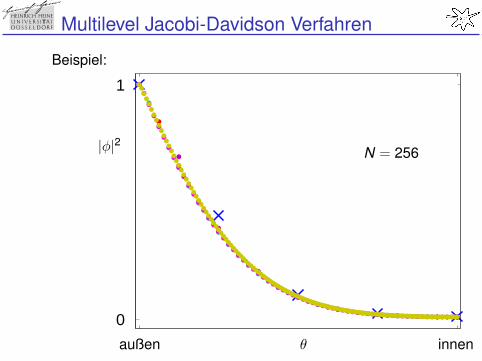
Multilevel Jacobi-Davidson Verfahren
Beispiel:
0
1
|φ|2 N = 256
außen θ innen
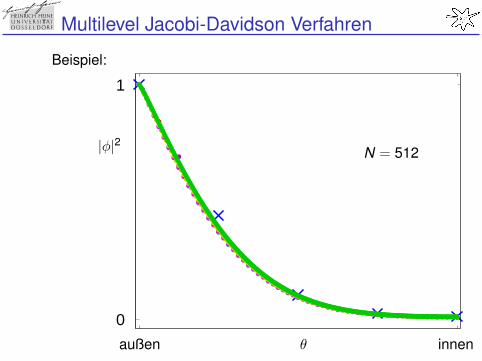
Multilevel Jacobi-Davidson Verfahren
Beispiel:
0
1
|φ|2 N = 512
außen θ innen
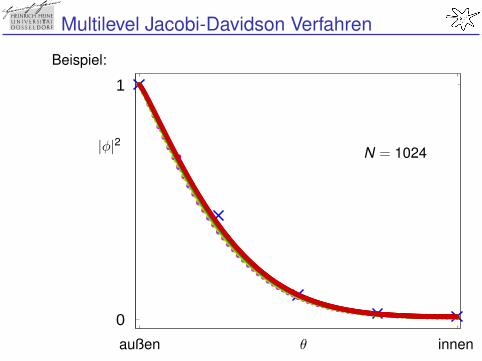
Multilevel Jacobi-Davidson Verfahren
Beispiel:
0
1
|φ|2 N = 1024
außen θ innen
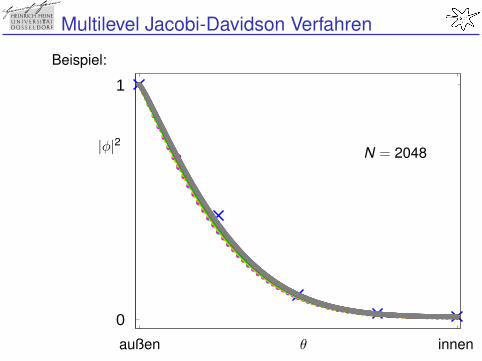
Multilevel Jacobi-Davidson Verfahren
Beispiel:
0
1
|φ|2 N = 2048
außen θ innen
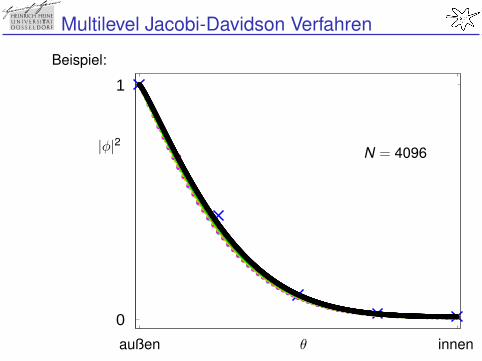
Multilevel Jacobi-Davidson Verfahren
Beispiel:
0
1
|φ|2 N = 4096
außen θ innen
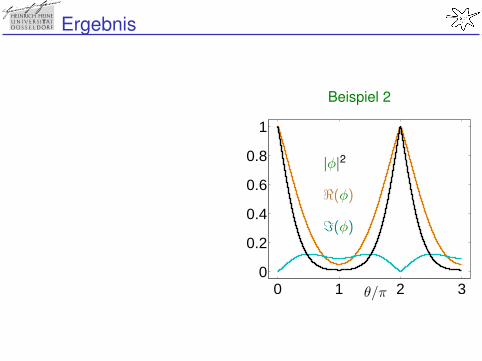
Ergebnis
Beispiel 1
0 1 2 30
0.2
0.4
0.6
0.8
1
|φ|2
<(φ)
=(φ)
θ/π
Beispiel 2
0 1 2 30
0.2
0.4
0.6
0.8
1
|φ|2
<(φ)
=(φ)
θ/π
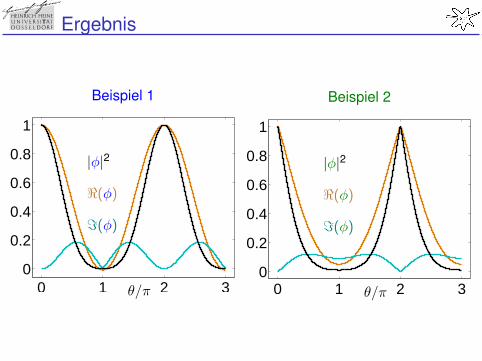
Ergebnis
Beispiel 1
0 1 2 30
0.2
0.4
0.6
0.8
1
|φ|2
<(φ)
=(φ)
θ/π
Beispiel 2
0 1 2 30
0.2
0.4
0.6
0.8
1
|φ|2
<(φ)
=(φ)
θ/π
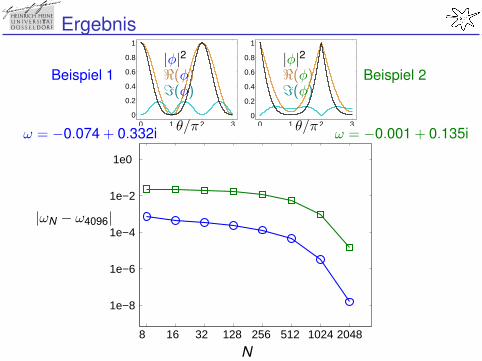
Ergebnis
Beispiel 1
0 1 2 30
0.2
0.4
0.6
0.8
1
|φ|2<(φ)=(φ)
θ/πω = −0.074 + 0.332i
0 1 2 30
0.2
0.4
0.6
0.8
1
|φ|2<(φ)=(φ)
θ/πω = −0.001 + 0.135i
Beispiel 2
8 16 32 128 256 512 1024 2048
1e−8
1e−6
1e−4
1e−2
1e0
|ωN − ω4096|
N
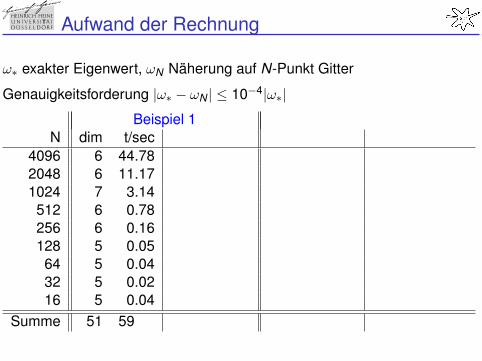
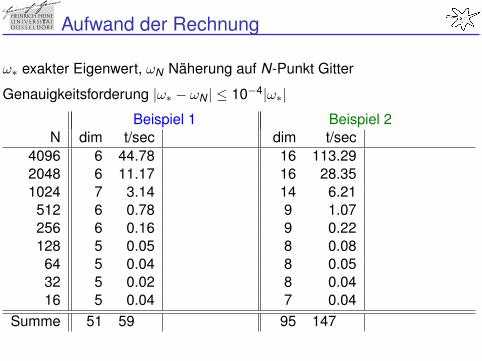
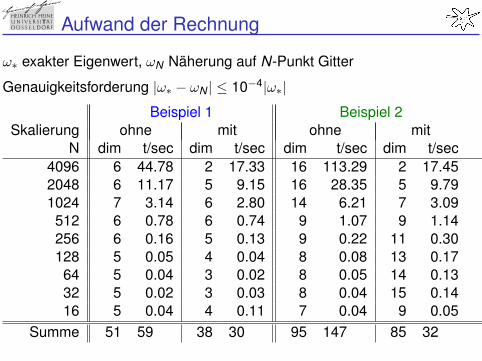
Aufwand der Rechnung
ω∗ exakter Eigenwert, ωN Näherung auf N-Punkt Gitter
Genauigkeitsforderung |ω∗ − ωN | ≤ 10−4|ω∗|
Beispiel 1
Beispiel 2
N dim t/sec
dim t/sec
4096 6 44.78
16 113.29
2048 6 11.17
16 28.35
1024 7 3.14
14 6.21
512 6 0.78
9 1.07
256 6 0.16
9 0.22
128 5 0.05
8 0.08
64 5 0.04
8 0.05
32 5 0.02
8 0.04
16 5 0.04
7 0.04
Summe 51 59
95 147
Aufwand der Rechnung
ω∗ exakter Eigenwert, ωN Näherung auf N-Punkt Gitter
Genauigkeitsforderung |ω∗ − ωN | ≤ 10−4|ω∗|
Beispiel 1 Beispiel 2N dim t/sec dim t/sec
4096 6 44.78 16 113.292048 6 11.17 16 28.351024 7 3.14 14 6.21
512 6 0.78 9 1.07256 6 0.16 9 0.22128 5 0.05 8 0.08
64 5 0.04 8 0.0532 5 0.02 8 0.0416 5 0.04 7 0.04
Summe 51 59 95 147
Skalierung
I Eigenwert skalieren
P(λ) = P(αω), α fest, ω skalierter Eigenwert
I löse SP(λ)~x = 0, S = Diag(~s), sj 6= 0 ∀jI optimale Skalierung zur Berechnung von (~φl , ω, ~φr ):
löse SlP(λ)Sr~y = 0, ~x = Sr~y , Sl = Diag(|~φl |), Sr = Diag(|~φr |)
I Sl , Sr durch Prolongation der Grobgitterlösung
I ~φl kann aus (ω,~φr ) bestimmt werden.
Skalierung
I Eigenwert skalieren
P(λ) = P(αω), α fest, ω skalierter Eigenwert
Auswirkung auf die LinearisierungλM3
II
+
M2 M1 M0−I
−I
λ2~φ
λ ~φ
~φ
= 0
ωα3M3
II
+
α2M2 αM1 M0−I
−I
ω2~φ
ω ~φ
~φ
= 0
I löse SP(λ)~x = 0, S = Diag(~s), sj 6= 0 ∀jI optimale Skalierung zur Berechnung von (~φl , ω, ~φr ):
löse SlP(λ)Sr~y = 0, ~x = Sr~y , Sl = Diag(|~φl |), Sr = Diag(|~φr |)
I Sl , Sr durch Prolongation der Grobgitterlösung
I ~φl kann aus (ω,~φr ) bestimmt werden.
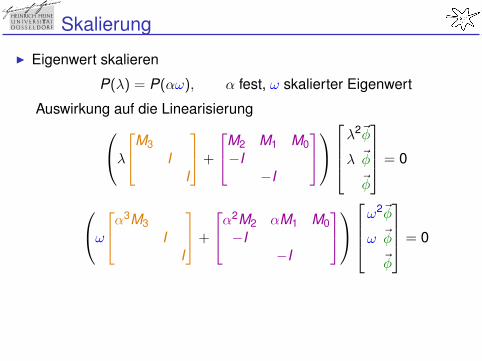
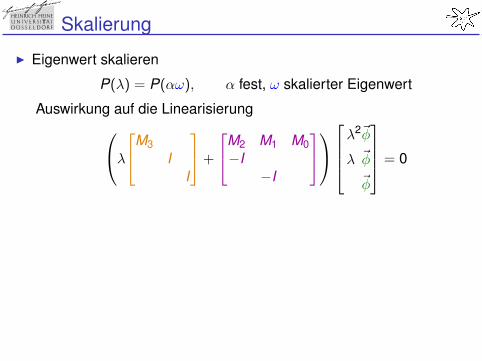
Skalierung
I Eigenwert skalieren
P(λ) = P(αω), α fest, ω skalierter Eigenwert
Auswirkung auf die LinearisierungλM3
II
+
M2 M1 M0−I
−I
λ2~φ
λ ~φ
~φ
= 0
ωα3M3
II
+
α2M2 αM1 M0−I
−I
ω2~φ
ω ~φ
~φ
= 0
I löse SP(λ)~x = 0, S = Diag(~s), sj 6= 0 ∀jI optimale Skalierung zur Berechnung von (~φl , ω, ~φr ):
löse SlP(λ)Sr~y = 0, ~x = Sr~y , Sl = Diag(|~φl |), Sr = Diag(|~φr |)
I Sl , Sr durch Prolongation der Grobgitterlösung
I ~φl kann aus (ω,~φr ) bestimmt werden.
Skalierung
I Eigenwert skalieren
P(λ) = P(αω), α fest, ω skalierter Eigenwert
I löse SP(λ)~x = 0, S = Diag(~s), sj 6= 0 ∀j
I optimale Skalierung zur Berechnung von (~φl , ω, ~φr ):
löse SlP(λ)Sr~y = 0, ~x = Sr~y , Sl = Diag(|~φl |), Sr = Diag(|~φr |)
I Sl , Sr durch Prolongation der Grobgitterlösung
I ~φl kann aus (ω,~φr ) bestimmt werden.
Skalierung
I Eigenwert skalieren
P(λ) = P(αω), α fest, ω skalierter Eigenwert
I löse SP(λ)~x = 0, S = Diag(~s), sj 6= 0 ∀jr := P(λ)x ⇒ Sr = SP(λ)x
I optimale Skalierung zur Berechnung von (~φl , ω, ~φr ):
löse SlP(λ)Sr~y = 0, ~x = Sr~y , Sl = Diag(|~φl |), Sr = Diag(|~φr |)
I Sl , Sr durch Prolongation der Grobgitterlösung
I ~φl kann aus (ω,~φr ) bestimmt werden.
Skalierung
I Eigenwert skalieren
P(λ) = P(αω), α fest, ω skalierter Eigenwert
I löse SP(λ)~x = 0, S = Diag(~s), sj 6= 0 ∀jI optimale Skalierung zur Berechnung von (~φl , ω, ~φr ):
löse SlP(λ)Sr~y = 0, ~x = Sr~y , Sl = Diag(|~φl |), Sr = Diag(|~φr |)
I Sl , Sr durch Prolongation der Grobgitterlösung
I ~φl kann aus (ω,~φr ) bestimmt werden.
Skalierung
I Eigenwert skalieren
P(λ) = P(αω), α fest, ω skalierter Eigenwert
I löse SP(λ)~x = 0, S = Diag(~s), sj 6= 0 ∀jI optimale Skalierung zur Berechnung von (~φl , ω, ~φr ):
löse SlP(λ)Sr~y = 0, ~x = Sr~y , Sl = Diag(|~φl |), Sr = Diag(|~φr |)I Sl , Sr durch Prolongation der Grobgitterlösung
I ~φl kann aus (ω,~φr ) bestimmt werden.
Skalierung
I Eigenwert skalieren
P(λ) = P(αω), α fest, ω skalierter Eigenwert
I löse SP(λ)~x = 0, S = Diag(~s), sj 6= 0 ∀jI optimale Skalierung zur Berechnung von (~φl , ω, ~φr ):
löse SlP(λ)Sr~y = 0, ~x = Sr~y , Sl = Diag(|~φl |), Sr = Diag(|~φr |)I Sl , Sr durch Prolongation der Grobgitterlösung
I ~φl kann aus (ω,~φr ) bestimmt werden.
Skalierung
I Eigenwert skalieren
P(λ) = P(αω), α fest, ω skalierter Eigenwert
I löse SP(λ)~x = 0, S = Diag(~s), sj 6= 0 ∀jI optimale Skalierung zur Berechnung von (~φl , ω, ~φr ):
löse SlP(λ)Sr~y = 0, ~x = Sr~y , Sl = Diag(|~φl |), Sr = Diag(|~φr |)I Sl , Sr durch Prolongation der Grobgitterlösung
I ~φl kann aus (ω,~φr ) bestimmt werden.
∂2φ
∂θ2 =ω(β + zγ3µK 2
⊥)− (1 + λ)βK⊥ + izγ3CK 2⊥
γ31z
(K⊥ − ω
(1 + zγ3(1 + α)K 2
⊥))
·(
(1 + α)γ2
γ3LB(1− zγ3ωK⊥) + zω(ω + αK⊥)
)φ
Skalierung
I Eigenwert skalieren
P(λ) = P(αω), α fest, ω skalierter Eigenwert
I löse SP(λ)~x = 0, S = Diag(~s), sj 6= 0 ∀jI optimale Skalierung zur Berechnung von (~φl , ω, ~φr ):
löse SlP(λ)Sr~y = 0, ~x = Sr~y , Sl = Diag(|~φl |), Sr = Diag(|~φr |)I Sl , Sr durch Prolongation der Grobgitterlösung
I ~φl kann aus (ω,~φr ) bestimmt werden.
∂2φ
∂θ2 =Zähler(ω)
Nenner(ω)φ
Skalierung
I Eigenwert skalieren
P(λ) = P(αω), α fest, ω skalierter Eigenwert
I löse SP(λ)~x = 0, S = Diag(~s), sj 6= 0 ∀jI optimale Skalierung zur Berechnung von (~φl , ω, ~φr ):
löse SlP(λ)Sr~y = 0, ~x = Sr~y , Sl = Diag(|~φl |), Sr = Diag(|~φr |)I Sl , Sr durch Prolongation der Grobgitterlösung
I ~φl kann aus (ω,~φr ) bestimmt werden.
Nenner(ω)∂2φ
∂θ2 = Zähler(ω)φ
Skalierung
I Eigenwert skalieren
P(λ) = P(αω), α fest, ω skalierter Eigenwert
I löse SP(λ)~x = 0, S = Diag(~s), sj 6= 0 ∀jI optimale Skalierung zur Berechnung von (~φl , ω, ~φr ):
löse SlP(λ)Sr~y = 0, ~x = Sr~y , Sl = Diag(|~φl |), Sr = Diag(|~φr |)I Sl , Sr durch Prolongation der Grobgitterlösung
I ~φl kann aus (ω,~φr ) bestimmt werden.
Nenner(ω)∂2φ
∂θ2 = Zähler(ω)φ
~φl = Diag(Nenner(ω)
)−1~φr
Skalierung
I Eigenwert skalieren
P(λ) = P(αω), α fest, ω skalierter Eigenwert
I löse SP(λ)~x = 0, S = Diag(~s), sj 6= 0 ∀jI optimale Skalierung zur Berechnung von (~φl , ω, ~φr ):
löse SlP(λ)Sr~y = 0, ~x = Sr~y , Sl = Diag(|~φl |), Sr = Diag(|~φr |)I Sl , Sr durch Prolongation der Grobgitterlösung
I ~φl kann aus (ω,~φr ) bestimmt werden.
Nenner(ω)∂2φ
∂θ2 = Zähler(ω)φ
~φl = Diag(Nenner(ω)
)−1~φr
V := S−1r~φr
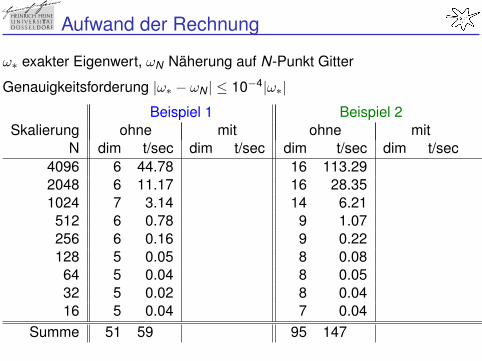
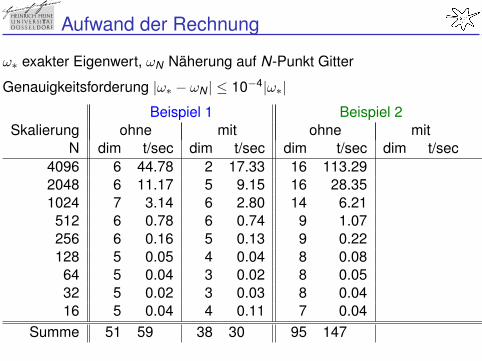
Aufwand der Rechnung
ω∗ exakter Eigenwert, ωN Näherung auf N-Punkt Gitter
Genauigkeitsforderung |ω∗ − ωN | ≤ 10−4|ω∗|
Beispiel 1 Beispiel 2Skalierung ohne mit ohne mit
N dim t/sec dim t/sec dim t/sec dim t/sec4096 6 44.78
2 17.33
16 113.29
2 17.45
2048 6 11.17
5 9.15
16 28.35
5 9.79
1024 7 3.14
6 2.80
14 6.21
7 3.09
512 6 0.78
6 0.74
9 1.07
9 1.14
256 6 0.16
5 0.13
9 0.22
11 0.30
128 5 0.05
4 0.04
8 0.08
13 0.17
64 5 0.04
3 0.02
8 0.05
14 0.13
32 5 0.02
3 0.03
8 0.04
15 0.14
16 5 0.04
4 0.11
7 0.04
9 0.05
Summe 51 59
38 30
95 147
85 32
Aufwand der Rechnung
ω∗ exakter Eigenwert, ωN Näherung auf N-Punkt Gitter
Genauigkeitsforderung |ω∗ − ωN | ≤ 10−4|ω∗|
Beispiel 1 Beispiel 2Skalierung ohne mit ohne mit
N dim t/sec dim t/sec dim t/sec dim t/sec4096 6 44.78 2 17.33 16 113.29
2 17.45
2048 6 11.17 5 9.15 16 28.35
5 9.79
1024 7 3.14 6 2.80 14 6.21
7 3.09
512 6 0.78 6 0.74 9 1.07
9 1.14
256 6 0.16 5 0.13 9 0.22
11 0.30
128 5 0.05 4 0.04 8 0.08
13 0.17
64 5 0.04 3 0.02 8 0.05
14 0.13
32 5 0.02 3 0.03 8 0.04
15 0.14
16 5 0.04 4 0.11 7 0.04
9 0.05
Summe 51 59 38 30 95 147
85 32
Aufwand der Rechnung
ω∗ exakter Eigenwert, ωN Näherung auf N-Punkt Gitter
Genauigkeitsforderung |ω∗ − ωN | ≤ 10−4|ω∗|
Beispiel 1 Beispiel 2Skalierung ohne mit ohne mit
N dim t/sec dim t/sec dim t/sec dim t/sec4096 6 44.78 2 17.33 16 113.29 2 17.452048 6 11.17 5 9.15 16 28.35 5 9.791024 7 3.14 6 2.80 14 6.21 7 3.09
512 6 0.78 6 0.74 9 1.07 9 1.14256 6 0.16 5 0.13 9 0.22 11 0.30128 5 0.05 4 0.04 8 0.08 13 0.17
64 5 0.04 3 0.02 8 0.05 14 0.1332 5 0.02 3 0.03 8 0.04 15 0.1416 5 0.04 4 0.11 7 0.04 9 0.05
Summe 51 59 38 30 95 147 85 32
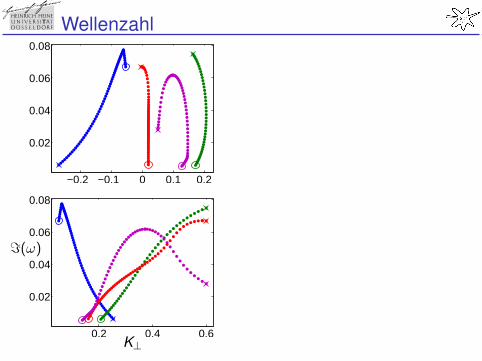
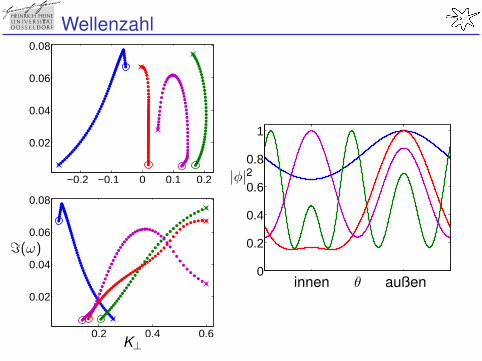
Wellenzahl
Wellenzahl K⊥
∂2φ
∂θ2 =ω(β + zγ3µK 2
⊥)− (1 + λ)βK⊥ + izγ3CK 2⊥
γ31z
(K⊥ − ω
(1 + zγ3(1 + α)K 2
⊥))
·(
(1 + α)γ2
γ3LB(1− zγ3ωK⊥) + zω(ω + αK⊥)
)φ
Γ⊥ =
∫IC(T ,p,K⊥)
=(ω(K⊥))3
|ω(K⊥)|2|φ(K⊥)|2 dK⊥
I Diskrete Repräsentation des Wellenzahl-Intervalls.I Definiere Moden (ω(K⊥), φ(K⊥))
I Verfolgen der Moden und Auffinden der maximalen Anwachsrate
Wellenzahl
Wellenzahl K⊥
∂2φ
∂θ2 =ω(β + zγ3µK 2
⊥)− (1 + λ)βK⊥ + izγ3CK 2⊥
γ31z
(K⊥ − ω
(1 + zγ3(1 + α)K 2
⊥))
·(
(1 + α)γ2
γ3LB(1− zγ3ωK⊥) + zω(ω + αK⊥)
)φ
Γ⊥ =
∫IC(T ,p,K⊥)
=(ω(K⊥))3
|ω(K⊥)|2|φ(K⊥)|2 dK⊥
I Diskrete Repräsentation des Wellenzahl-Intervalls.I Definiere Moden (ω(K⊥), φ(K⊥))
I Verfolgen der Moden und Auffinden der maximalen Anwachsrate
Wellenzahl
Wellenzahl K⊥
∂2φ
∂θ2 =ω(β + zγ3µK 2
⊥)− (1 + λ)βK⊥ + izγ3CK 2⊥
γ31z
(K⊥ − ω
(1 + zγ3(1 + α)K 2
⊥))
·(
(1 + α)γ2
γ3LB(1− zγ3ωK⊥) + zω(ω + αK⊥)
)φ
Γ⊥ =
∫IC(T ,p,K⊥)
=(ω(K⊥))3
|ω(K⊥)|2|φ(K⊥)|2 dK⊥
I Diskrete Repräsentation des Wellenzahl-Intervalls.
I Definiere Moden (ω(K⊥), φ(K⊥))
I Verfolgen der Moden und Auffinden der maximalen Anwachsrate
Wellenzahl
Wellenzahl K⊥
∂2φ
∂θ2 =ω(β + zγ3µK 2
⊥)− (1 + λ)βK⊥ + izγ3CK 2⊥
γ31z
(K⊥ − ω
(1 + zγ3(1 + α)K 2
⊥))
·(
(1 + α)γ2
γ3LB(1− zγ3ωK⊥) + zω(ω + αK⊥)
)φ
Γ⊥ =
∫IC(T ,p,K⊥)
=(ω(K⊥))3
|ω(K⊥)|2|φ(K⊥)|2 dK⊥
I Diskrete Repräsentation des Wellenzahl-Intervalls.I Definiere Moden (ω(K⊥), φ(K⊥))
I Verfolgen der Moden und Auffinden der maximalen Anwachsrate
Wellenzahl
Wellenzahl K⊥
∂2φ
∂θ2 =ω(β + zγ3µK 2
⊥)− (1 + λ)βK⊥ + izγ3CK 2⊥
γ31z
(K⊥ − ω
(1 + zγ3(1 + α)K 2
⊥))
·(
(1 + α)γ2
γ3LB(1− zγ3ωK⊥) + zω(ω + αK⊥)
)φ
Γ⊥ =
∫IC(T ,p,K⊥)
=(ω(K⊥))3
|ω(K⊥)|2|φ(K⊥)|2 dK⊥
I Diskrete Repräsentation des Wellenzahl-Intervalls.I Definiere Moden (ω(K⊥), φ(K⊥))
I Verfolgen der Moden und Auffinden der maximalen Anwachsrate
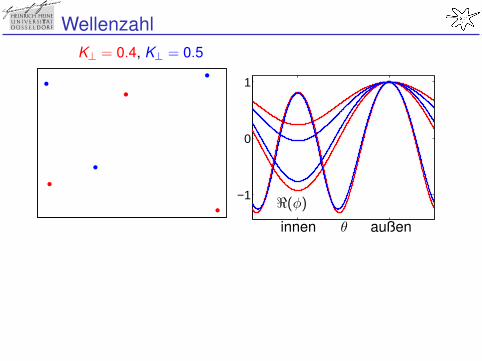
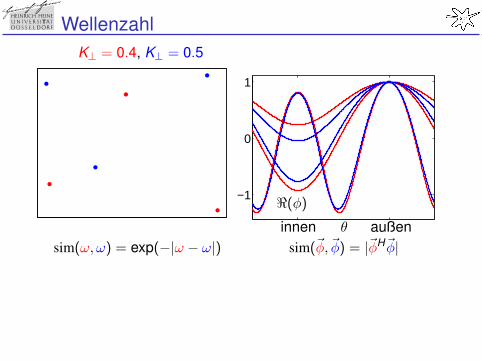
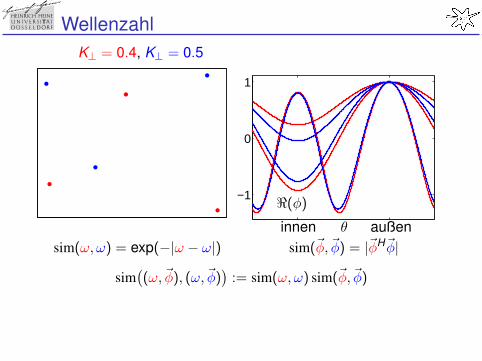
WellenzahlK⊥ = 0.4, K⊥ = 0.5
−1
0
1
<(φ)
innen θ außen
WellenzahlK⊥ = 0.4, K⊥ = 0.5
−1
0
1
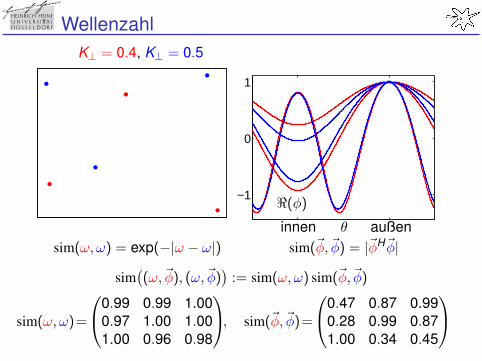
<(φ)
innen θ außensim(ω, ω) = exp(−|ω − ω|) sim(~φ, ~φ) = |~φH~φ|
WellenzahlK⊥ = 0.4, K⊥ = 0.5
−1
0
1
<(φ)
innen θ außensim(ω, ω) = exp(−|ω − ω|) sim(~φ, ~φ) = |~φH~φ|
sim((ω,~φ), (ω,~φ)
):= sim(ω, ω) sim(~φ, ~φ)
WellenzahlK⊥ = 0.4, K⊥ = 0.5
−1
0
1
<(φ)
innen θ außensim(ω, ω) = exp(−|ω − ω|) sim(~φ, ~φ) = |~φH~φ|
sim((ω,~φ), (ω,~φ)
):= sim(ω, ω) sim(~φ, ~φ)
sim(ω, ω)=
0.99 0.99 1.000.97 1.00 1.001.00 0.96 0.98
, sim(~φ, ~φ)=
0.47 0.87 0.990.28 0.99 0.871.00 0.34 0.45
WellenzahlK⊥ = 0.4, K⊥ = 0.5
−1
0
1
<(φ)
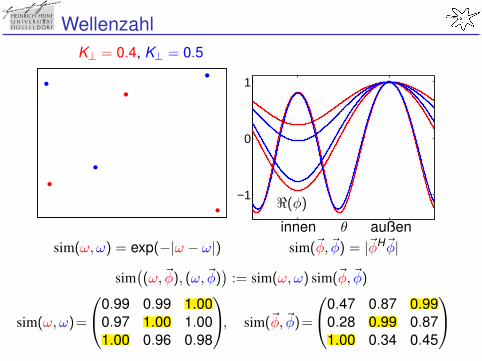
innen θ außensim(ω, ω) = exp(−|ω − ω|) sim(~φ, ~φ) = |~φH~φ|
sim((ω,~φ), (ω,~φ)
):= sim(ω, ω) sim(~φ, ~φ)
sim(ω, ω)=
0.99 0.99 1.000.97 1.00 1.001.00 0.96 0.98
, sim(~φ, ~φ)=
0.47 0.87 0.990.28 0.99 0.871.00 0.34 0.45
WellenzahlK⊥ = 0.4, K⊥ = 0.5
−1
0
1
<(φ)
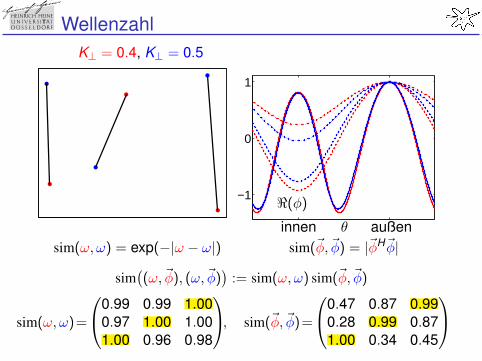
innen θ außensim(ω, ω) = exp(−|ω − ω|) sim(~φ, ~φ) = |~φH~φ|
sim((ω,~φ), (ω,~φ)
):= sim(ω, ω) sim(~φ, ~φ)
sim(ω, ω)=
0.99 0.99 1.000.97 1.00 1.001.00 0.96 0.98
, sim(~φ, ~φ)=
0.47 0.87 0.990.28 0.99 0.871.00 0.34 0.45

Wellenzahl
−0.2 −0.1 0 0.1 0.2
0.02
0.04
0.06
0.08
Wellenzahl
−0.2 −0.1 0 0.1 0.2
0.02
0.04
0.06
0.08
0.2 0.4 0.6
0.02
0.04
0.06
0.08
K⊥
=(ω)
Wellenzahl
−0.2 −0.1 0 0.1 0.2
0.02
0.04
0.06
0.08
0.2 0.4 0.6
0.02
0.04
0.06
0.08
K⊥
=(ω)
0
0.2
0.4
0.6
0.8
1
|φ|2
innen θ außen
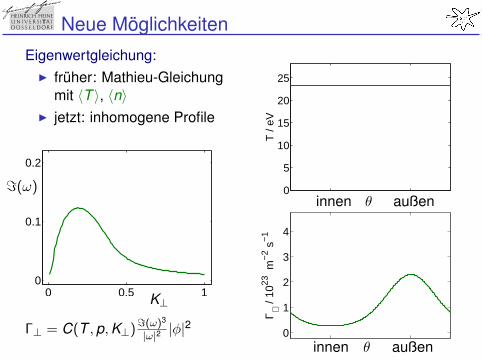
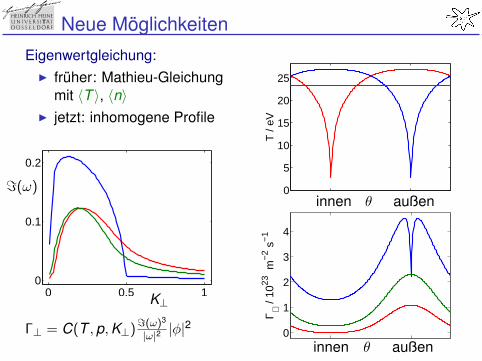
Neue MöglichkeitenEigenwertgleichung:
I früher: Mathieu-Gleichungmit 〈T 〉, 〈n〉
I jetzt: inhomogene Profile
0 0.5 10
0.1
0.2
=(ω)
K⊥
Γ⊥ = C(T ,p,K⊥)=(ω)3
|ω|2 |φ|2
0
5
10
15
20
25
T /
eV
innen θ außen
0
1
2
3
4
Γ ⊥ /
1023
m−
2 s−
1
innen θ außen
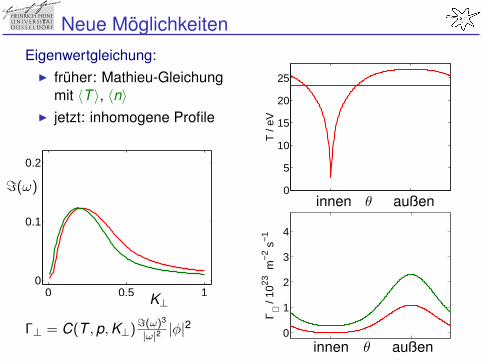
Neue MöglichkeitenEigenwertgleichung:
I früher: Mathieu-Gleichungmit 〈T 〉, 〈n〉
I jetzt: inhomogene Profile
0 0.5 10
0.1
0.2
=(ω)
K⊥
Γ⊥ = C(T ,p,K⊥)=(ω)3
|ω|2 |φ|2
0
5
10
15
20
25
T /
eV
innen θ außen
0
1
2
3
4
Γ ⊥ /
1023
m−
2 s−
1
innen θ außen
Neue MöglichkeitenEigenwertgleichung:
I früher: Mathieu-Gleichungmit 〈T 〉, 〈n〉
I jetzt: inhomogene Profile
0 0.5 10
0.1
0.2
=(ω)
K⊥
Γ⊥ = C(T ,p,K⊥)=(ω)3
|ω|2 |φ|2
0
5
10
15
20
25
T /
eV
innen θ außen
0
1
2
3
4
Γ ⊥ /
1023
m−
2 s−
1
innen θ außen
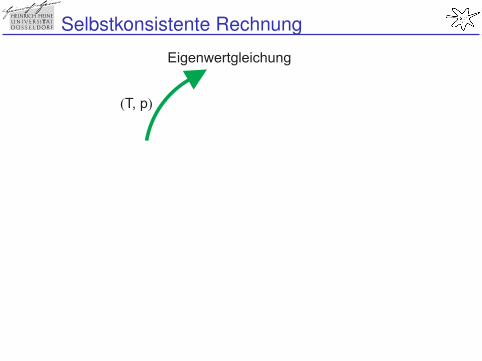
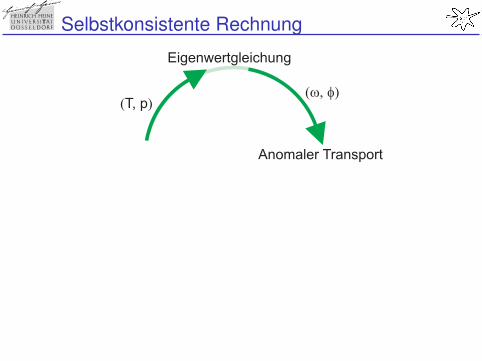
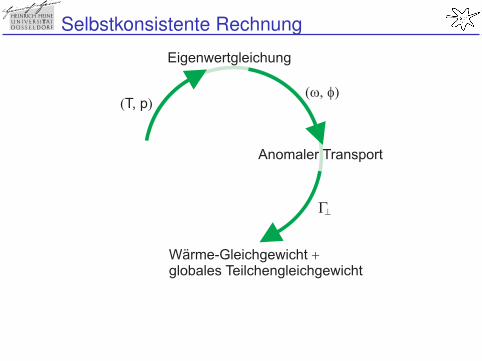
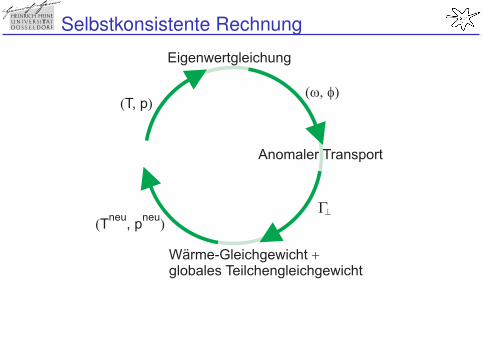
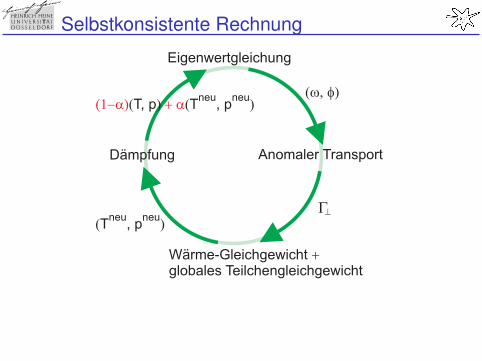
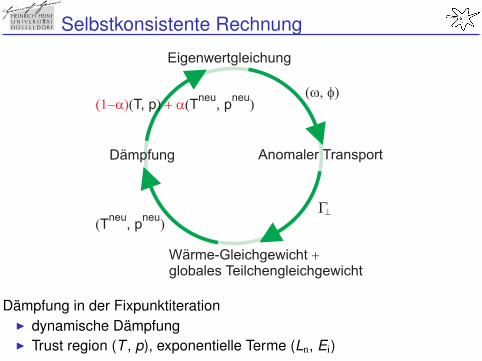
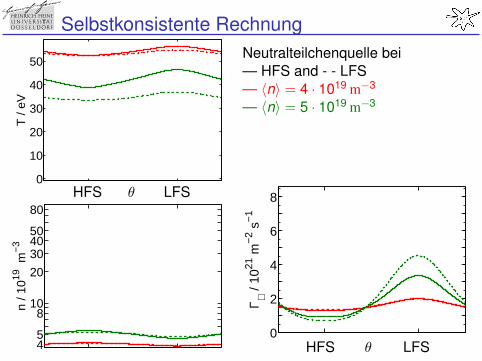
Selbstkonsistente Rechnung
I dynamische DämpfungI Trust region (T , p), exponentielle Terme (Ln, Ei)
Selbstkonsistente Rechnung
I dynamische DämpfungI Trust region (T , p), exponentielle Terme (Ln, Ei)
Selbstkonsistente Rechnung
I dynamische DämpfungI Trust region (T , p), exponentielle Terme (Ln, Ei)
Selbstkonsistente Rechnung
I dynamische DämpfungI Trust region (T , p), exponentielle Terme (Ln, Ei)
Selbstkonsistente Rechnung
I dynamische DämpfungI Trust region (T , p), exponentielle Terme (Ln, Ei)
Selbstkonsistente Rechnung
Dämpfung in der FixpunktiterationI dynamische DämpfungI Trust region (T , p), exponentielle Terme (Ln, Ei)

Selbstkonsistente RechnungSimulation
〈n〉/1019 m−3 3 4 5 6 7
TemperaturprofilIterationen 220 282 36 97 549Iterationen mit Eigen-wertberechnung
19 20 8 17 38
Eigenwertgleichungen 1881 1980 792 1683 3762dimV N = 32 1.62 2.00 2.00 2.84 3.00
N = 64 1.25 1.81 2.00 2.00 3.00N = 128 1.00 1.04 1.44 2.00 3.00N = 256 1.00 1.00 1.00 1.00 3.00N = 512 1.00 1.00 1.00 1.00 3.00N = 1024 1.00 1.00 1.00 1.00 3.00
Dauer / Minuten 2:42 3:10 1:16 2:55 16:58
Selbstkonsistente Rechnung
0
10
20
30
40
50
T /
eV
HFS θ LFS
45
810
20
304050
80
n / 1
019 m
−3
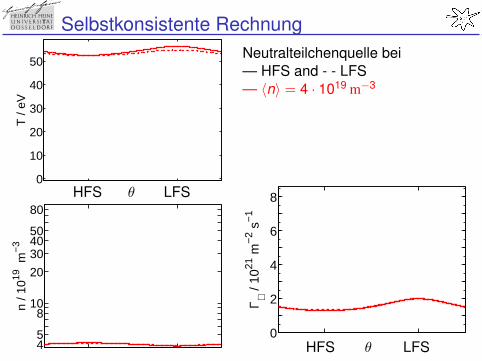
Neutralteilchenquelle bei— HFS and - - LFS— 〈n〉 = 4 · 1019 m−3
0
2
4
6
8
Γ ⊥ /
1021
m−
2 s−
1
HFS θ LFS
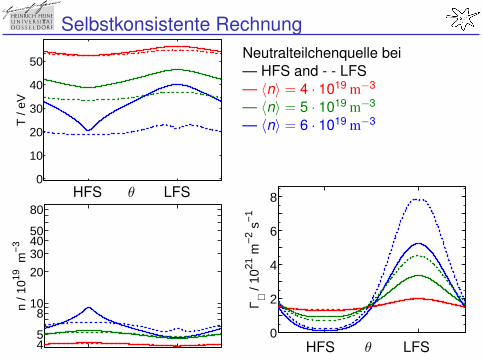
Selbstkonsistente Rechnung
0
10
20
30
40
50
T /
eV
HFS θ LFS
45
810
20
304050
80
n / 1
019 m
−3
Neutralteilchenquelle bei— HFS and - - LFS— 〈n〉 = 4 · 1019 m−3
— 〈n〉 = 5 · 1019 m−3
0
2
4
6
8
Γ ⊥ /
1021
m−
2 s−
1
HFS θ LFS
Selbstkonsistente Rechnung
0
10
20
30
40
50
T /
eV
HFS θ LFS
45
810
20
304050
80
n / 1
019 m
−3
Neutralteilchenquelle bei— HFS and - - LFS— 〈n〉 = 4 · 1019 m−3
— 〈n〉 = 5 · 1019 m−3
— 〈n〉 = 6 · 1019 m−3
0
2
4
6
8
Γ ⊥ /
1021
m−
2 s−
1
HFS θ LFS
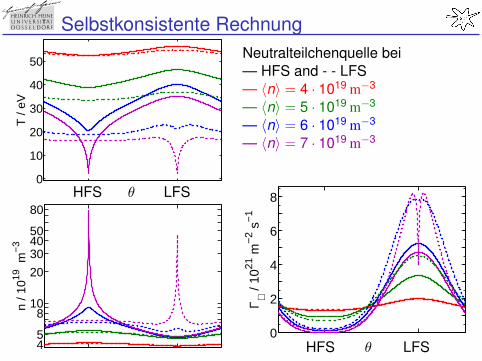
Selbstkonsistente Rechnung
0
10
20
30
40
50
T /
eV
HFS θ LFS
45
810
20
304050
80
n / 1
019 m
−3
Neutralteilchenquelle bei— HFS and - - LFS— 〈n〉 = 4 · 1019 m−3
— 〈n〉 = 5 · 1019 m−3
— 〈n〉 = 6 · 1019 m−3
— 〈n〉 = 7 · 1019 m−3
0
2
4
6
8
Γ ⊥ /
1021
m−
2 s−
1
HFS θ LFS
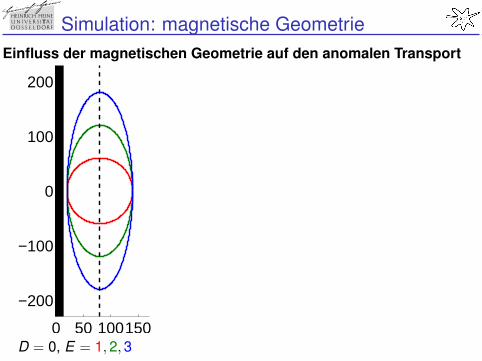
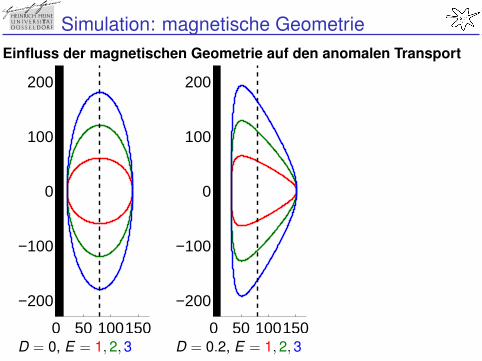
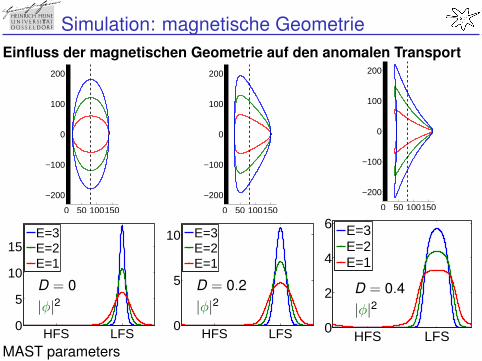
Simulation: magnetische GeometrieEinfluss der magnetischen Geometrie auf den anomalen Transport
0 50 100150
−200
−100
0
100
200
D = 0, E = 1,2,3
0 50 100150
−200
−100
0
100
200
D = 0.2, E = 1,2,30 50 100150
−200
−100
0
100
200
D = 0.4, E = 1,2,3
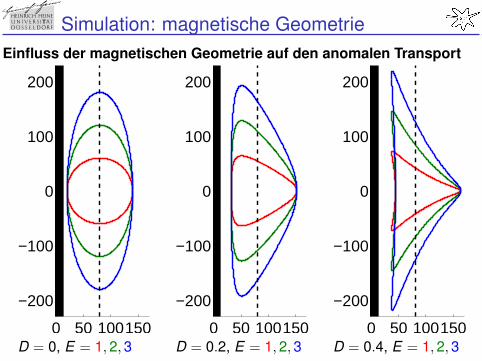
Simulation: magnetische GeometrieEinfluss der magnetischen Geometrie auf den anomalen Transport
0 50 100150
−200
−100
0
100
200
D = 0, E = 1,2,30 50 100150
−200
−100
0
100
200
D = 0.2, E = 1,2,3
0 50 100150
−200
−100
0
100
200
D = 0.4, E = 1,2,3
Simulation: magnetische GeometrieEinfluss der magnetischen Geometrie auf den anomalen Transport
0 50 100150
−200
−100
0
100
200
D = 0, E = 1,2,30 50 100150
−200
−100
0
100
200
D = 0.2, E = 1,2,30 50 100150
−200
−100
0
100
200
D = 0.4, E = 1,2,3
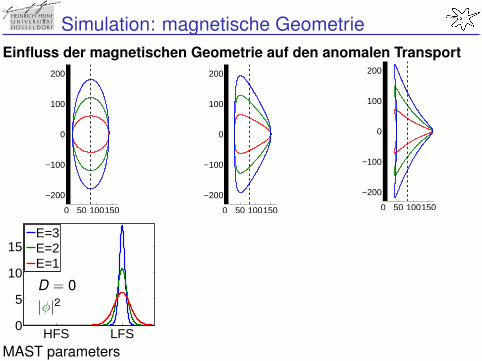
Simulation: magnetische GeometrieEinfluss der magnetischen Geometrie auf den anomalen Transport
0 50 100150
−200
−100
0
100
200
HFS LFS0
5
10
15
E=3E=2E=1
D = 0|φ|2
0 50 100150
−200
−100
0
100
200
HFS LFS0
5
10
E=3E=2E=1
D = 0.2|φ|2
0 50 100150
−200
−100
0
100
200
HFS LFS0
2
4
6
E=3E=2E=1
D = 0.4|φ|2
MAST parameters
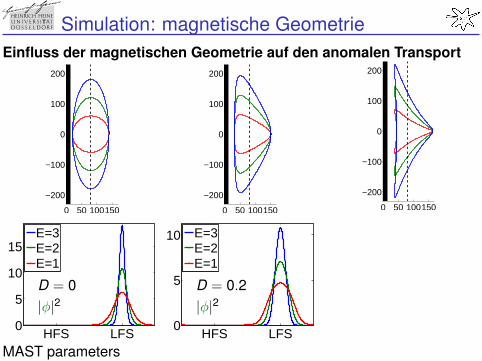
Simulation: magnetische GeometrieEinfluss der magnetischen Geometrie auf den anomalen Transport
0 50 100150
−200
−100
0
100
200
HFS LFS0
5
10
15
E=3E=2E=1
D = 0|φ|2
0 50 100150
−200
−100
0
100
200
HFS LFS0
5
10
E=3E=2E=1
D = 0.2|φ|2
0 50 100150
−200
−100
0
100
200
HFS LFS0
2
4
6
E=3E=2E=1
D = 0.4|φ|2
MAST parameters
Simulation: magnetische GeometrieEinfluss der magnetischen Geometrie auf den anomalen Transport
0 50 100150
−200
−100
0
100
200
HFS LFS0
5
10
15
E=3E=2E=1
D = 0|φ|2
0 50 100150
−200
−100
0
100
200
HFS LFS0
5
10
E=3E=2E=1
D = 0.2|φ|2
0 50 100150
−200
−100
0
100
200
HFS LFS0
2
4
6
E=3E=2E=1
D = 0.4|φ|2
MAST parameters
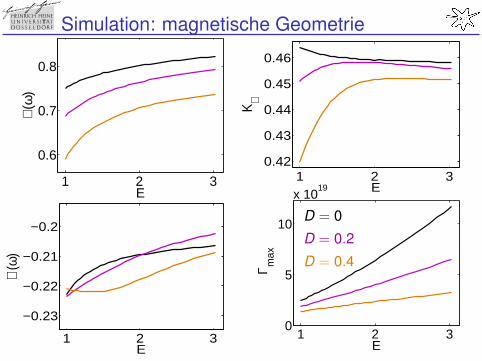
Simulation: magnetische Geometrie
1 2 3
0.6
0.7
0.8
ℑ(ω
)
E
1 2 3
−0.23
−0.22
−0.21
−0.2
ℜ(ω
)
E
1 2 30.42
0.43
0.44
0.45
0.46
E
K⊥
1 2 30
5
10
x 1019
E
Γm
ax
D = 0
D = 0.2
D = 0.4
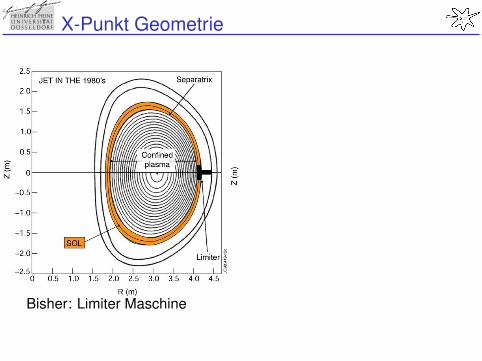
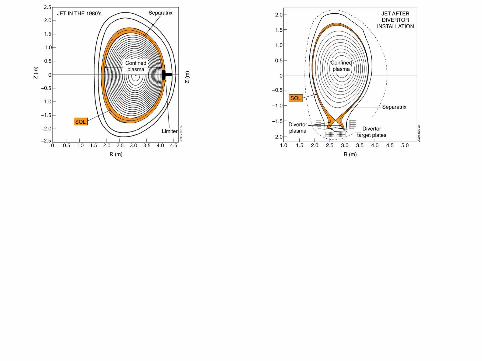
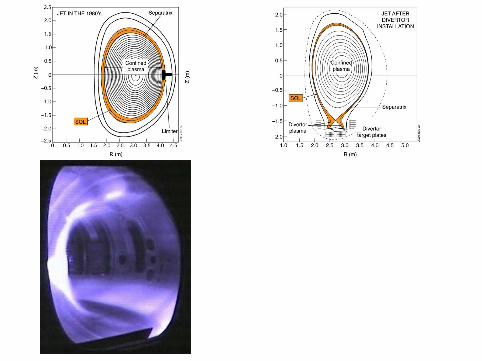
X-Punkt Geometrie
Bisher: Limiter Maschine
Besser: Divertor Maschine
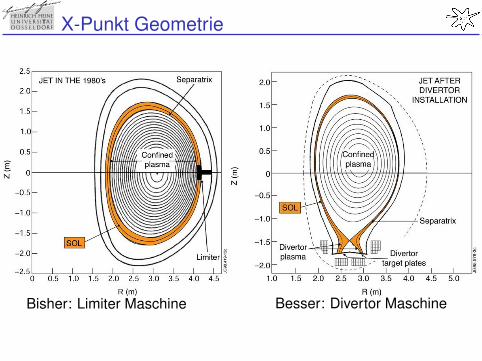
X-Punkt Geometrie
Bisher: Limiter Maschine Besser: Divertor Maschine

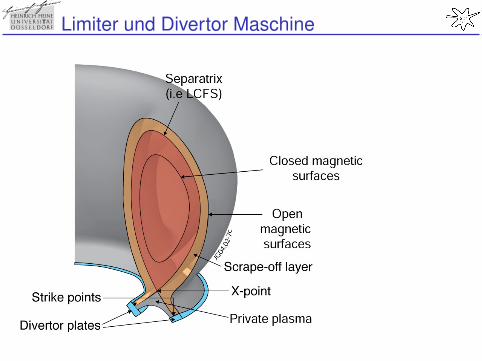
Limiter und Divertor Maschine
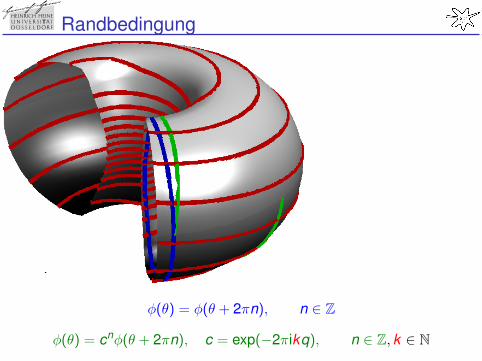
Randbedingung
φ(θ) = φ(θ + 2πn), n ∈ Z
φ(θ) = cnφ(θ + 2πn), c = exp(−2πikq), n ∈ Z, k ∈ N
φ(θ) = φ(θ + 2πn), n ∈ Z
φ(θ) = cnφ(θ + 2πn), c = exp(−2πikq), n ∈ Z, k ∈ N
Irrationale q:
Torus Koordinaten
0 0.5 1 1.5 2−1
−0.5
0
0.5
1
|φ|2
<(φ)
=(φ)
θ/π
Magnetfeld Koordinaten
0 0.5 1 1.5 2−1
−0.5
0
0.5
1|φ|2
<(φ)
=(φ)
θ/π
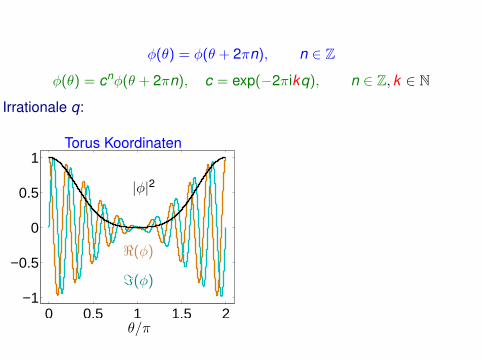
φ(θ) = φ(θ + 2πn), n ∈ Z
φ(θ) = cnφ(θ + 2πn), c = exp(−2πikq), n ∈ Z, k ∈ N
Irrationale q:
Torus Koordinaten
0 0.5 1 1.5 2−1
−0.5
0
0.5
1
|φ|2
<(φ)
=(φ)
θ/π
Magnetfeld Koordinaten
0 0.5 1 1.5 2−1
−0.5
0
0.5
1|φ|2
<(φ)
=(φ)
θ/π
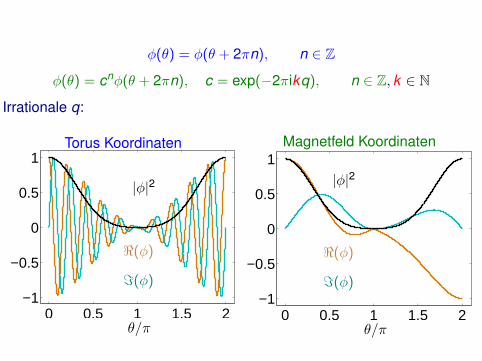
φ(θ) = φ(θ + 2πn), n ∈ Z
φ(θ) = cnφ(θ + 2πn), c = exp(−2πikq), n ∈ Z, k ∈ N
Irrationale q:
Torus Koordinaten
0 0.5 1 1.5 2−1
−0.5
0
0.5
1
|φ|2
<(φ)
=(φ)
θ/π
Magnetfeld Koordinaten
0 0.5 1 1.5 2−1
−0.5
0
0.5
1|φ|2
<(φ)
=(φ)
θ/π
φ(θ) = φ(θ + 2πn), n ∈ Z
φ(θ) = cnφ(θ + 2πn), c = exp(−2πikq), n ∈ Z, k ∈ N
Irrationale q:
Torus Koordinaten
0 0.5 1 1.5 2−1
−0.5
0
0.5
1
|φ|2
<(φ)
=(φ)
θ/π
Magnetfeld Koordinaten
0 0.5 1 1.5 2−1
−0.5
0
0.5
1|φ|2
<(φ)
=(φ)
θ/π
Zusammenfassung
I multilevel Jacobi-Davidson Eigenwertlöser• Approximation des Suchraumes auf grobem Gitter• Korrekturgleichung über preiswerte LR-Zerlegung• Verbesserung der Kondition durch Skalierung SlP(λ)Sr
I Verfolgen der Eigenmoden (Wellenzahl)
I selbstkonsistente Rechnung: Fixpunktiteration mitproblemangepasster Dämpfung
I physikalisches Modell bedarf der Erweiterung
I Auswirkung der magnetischen Geometrie auf den Verlust
I Ausblick: X-Punkt-Geometrie in der divertor Maschine
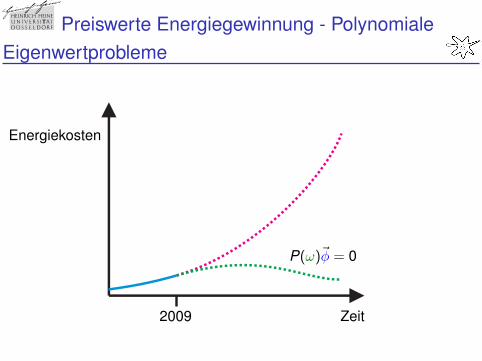
Preiswerte Energiegewinnung - PolynomialeEigenwertprobleme
Energiekosten
2009 Zeit
P(ω)~φ = 0











![Flur 26 Hst Freiligrathplatz - Düsseldorf€¦ · 15 I 13 I 18 16 17 II I I I 14 12 II 10 II I I 4a II I 6 II 8 II 8 II 10 II I I-I-I-I I I I I I I I I I I /LOLHQWKDOVWUD H B8 'DQ]LJHU](https://static.fdokument.com/doc/165x107/6061ca6ec0f4fb4c5004df74/flur-26-hst-freiligrathplatz-dsseldorf-15-i-13-i-18-16-17-ii-i-i-i-14-12-ii.jpg)

