ntt-west.co.jp - ブロードバンドルータユニット 取扱説明書...技術基準適合認証品 ブロードバンドルータユニット 取扱説明書 このたびは、ネットコミュニティシステム

PROFIBUS-DP取扱説明書 第 9 版
ACON
PCON
DCON
SCON
C/CG/CA/CB/CGBC/CG/CA/CFACB/CFB/CGB/CGFBCA/CB/CGBCA/CAL/CGAL/CB/CGB


PROFIBUS-DP
【重要】
• この取扱説明書は、本製品専用に書かれたオリジナルの説明書です。
• この取扱説明書に記載されている以外の運用はできません。記載されている以外の運用をした結果につきましては、一切の責任を負いかねますのでご了承ください。
• この取扱説明書に記載されている事柄は、製品の改良にともない予告なく変更させて頂く場合があります。
• この取扱説明書の内容について、ご不審やお気付きの点などがありましたら、「アイエイアイお客様センターエイト」もしくは最寄りの当社営業所までお問合せください。
• この取扱説明書の全部または一部を無断で使用・複製する事はできません。
• 本文中における会社名、商品名は、各社の商標または登録商標です。
お使いになる前に
この度は、当社の製品をお買い上げ頂き、ありがとうございます。
この取扱説明書は本製品の取扱い方法や構造、保守等について解説しており、安全にお使い頂く為
に必要な情報を記載しています。
本製品をお使いになる前に必ずお読み頂き、十分理解した上で安全にお使い頂きますよう、お願い
致します。
製品に同梱の DVD には、当社製品の取扱説明書が収録されています。
製品のご使用につきましては、該当する取扱説明書の必要部分をプリントアウトするか、またはパ
ソコンで表示してご利用ください。
お読みになった後も取扱説明書は、本製品を取り扱われる方が、必要な時にすぐ読むことができる
ように保管してください。
注意 :以下の機能については、別冊の取扱説明書に記載されています。
取扱説明書名称 /概要 管理番号
1PROFIBUS-DP 取扱説明書 XSEL、TT、ASEL、PSEL、SSEL、SCON-C、RCS-C、
E-Con を使用する場合は、こちらをご覧ください。
MJ0153

PROFIBUS-DP

PROFIBUS-DP
コントローラ型式ごとの取扱説明書構成と本書について
ACON-CB/CGB ACON-CA ACON-C/CG DCON-CB/CGB DCON-CA
PCON-CB/CFB/CGB/CGFB PCON-CA/CFAPCON-C/CG
SCON-CB/CGB SCON-CASCON-CAL/CGAL
運転パターン
・リモート I/O 制御運転 PROFIBUS(本書) MJ0258 ・直接数値指定運転
ACON-CB/CGB MJ0343 基本仕様および機能 DCON-CB/CGB MJ0343
ACON-CA、DCON-CA MJ0326 ACON-C/CG MJ0176
ティーチングツール
・パソコン対応ソフト パソコン対応ソフト MJ0155 ・ティーチング BOX
(ⅰ)TB-01 タッチパネルティーチング MJ0324
運転パターン
・リモート I/O 制御運転
・直接数値指定運転PCON-CB/CFB/CGB/CGFB MJ0342
基本仕様および機能 PCON-CA/CFA MJ0289 PCON-C/CG MJ0170 ティーチングツール
・パソコン対応ソフト パソコン対応ソフト MJ0155 ・ティーチング BOX
(ⅰ)TB-01 タッチパネルティーチング MJ0324
運転パターン
・リモート I/O 制御運転
・直接数値指定運転SCON-CB/CGB MJ0340
基本仕様および機能 SCON-CB(サーボプレス仕様) MJ0345 SCON-CA/CAL/CGAL MJ0243
ティーチングツール
・パソコン対応ソフト パソコン対応ソフト MJ0155 ・ティーチング BOX
(ⅰ)TB-01 タッチパネルティーチング MJ0324
PROFIBUS(本書) MJ0258
PROFIBUS(本書) MJ0258
PROFIBUS-DP
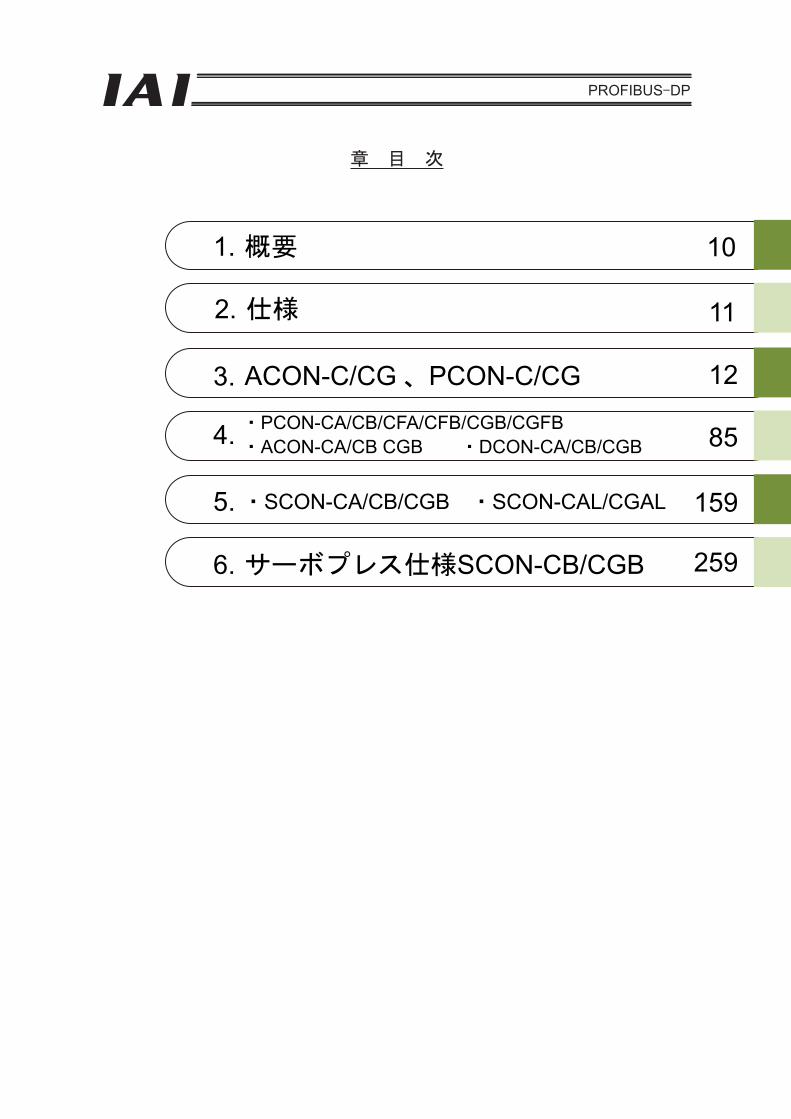
章 目 次
1. 概要
ACON-C/CG 、PCON-C/CG
4.
5.
6.
サーボプレス仕様SCON-CB/CGB
・SCON-CA/CB/CGB ・SCON-CAL/CGAL
・PCON-CA/CB/CFA/CFB/CGB/CGFB ・ACON-CA/CB CGB ・DCON-CA/CB/CGB
3.
10
11
12
85
159
259
2. 仕様

PROFIBUS-DP
1. 概要
ACON-C/CG 、PCON-C/CG
4.
5.
6.
サーボプレス仕様SCON-CB/CGB
・SCON-CA/CB/CGB ・SCON-CAL/CGAL
・PCON-CA/CB/CFA/CFB/CGB/CGFB ・ACON-CA/CB CGB ・DCON-CA/CB/CGB
3.
10
11
12
85
159
259
2. 仕様
目次
安全ガイド……………………………………………………………… 1取扱い上の注意………………………………………………………… 9
1. 概要 ………………………………………………………………… 10
2. 仕様 ………………………………………………………………… 112.1 インタフェース仕様 …………………………………………… 11
3. ACON-C/CG、PCON-C/CG ………………………………… 123.1 動作モードと機能 ……………………………………………… 123.2 型式 ……………………………………………………………… 153.3 PROFIBUS-DP(スレーブ局)の設定 ……………………… 163.4 マスタ局との交信 ……………………………………………… 19
3.4.1 各動作モードと PLC アドレスの対応 …………………………………… 193.4.2 リモートⅠ /O モード(占有バイト数:2) …………………………… 223.4.3 ポジション/簡易直値モード(占有バイト数:8) …………………… 283.4.4 ハーフ直値モード(占有バイト数:16) ………………………………… 333.4.5 フル直値モード(占有バイト数:32) …………………………………… 403.4.6 リモートⅠ /O モード 2(占有バイト数:12) ………………………… 493.4.7 入出力信号の制御と機能 ………………………………………………… 53
3.5 入出力信号のタイミング ……………………………………… 693.6 運転 ……………………………………………………………… 703.7 PROFIBUS-DP 関連パラメータ ……………………………… 783.8 トラブルシューティング ……………………………………… 83
3.8.1 ステータス LED の表示 …………………………………………………… 833.8.2 アラーム内容と原因・対策 ……………………………………………… 83
3.9 CE マーキング …………………………………………………… 84
4. ACON-CA/CB/CGB、PCON-CA/CB/CFA/CFB/CGB/CGFB、DCON-CA/CB/CGB ……………………………………………… 85
4.1 動作モードと機能 ……………………………………………… 854.2 型式 ……………………………………………………………… 884.3 PROFIBUS-DP(スレーブ局)の設定 ……………………… 894.4 マスタ局との交信 ……………………………………………… 92
4.4.1 各動作モードと PLC アドレスの対応 …………………………………… 924.4.2 リモートⅠ /O モード(占有バイト数:2) …………………………… 954.4.3 ポジション/簡易直値モード(占有バイト数:8) …………………… 994.4.4 ハーフ直値モード(占有バイト数:16) ……………………………… 104

PROFIBUS-DP
4.4.5 フル直値モード(占有バイト数:32) ………………………………… 1114.4.6 リモートⅠ /O モード 2(占有バイト数:12) ……………………… 1224.4.7 入出力信号の制御と機能 ……………………………………………… 126
4.5 入出力信号のタイミング …………………………………… 1434.6 運転 …………………………………………………………… 1444.7 PROFIBUS-DP 関連パラメータ …………………………… 1524.8 トラブルシューティング …………………………………… 157
4.8.1 ステータス LED の表示 ………………………………………………… 1574.8.2 アラーム内容と原因・対策 …………………………………………… 157
4.9 CE マーキング ………………………………………………… 158
5. SCON-CA/CB/CGB/CAL/CGAL …………………………… 1595.1 動作モードと機能 …………………………………………… 1595.2 型式 …………………………………………………………… 1635.3 PROFIBUS-DP(スレーブ局)の設定 …………………… 1645.4 マスタ局との交信 …………………………………………… 167
5.4.1 各動作モードと PLC アドレスの対応 ………………………………… 1675.4.2 リモートⅠ /O モード(占有バイト数:2) ………………………… 1725.4.3 ポジション/簡易直値モード(占有バイト数:8) ………………… 1775.4.4 ハーフ直値モード(占有バイト数:16) ……………………………… 1825.4.5 フル直値モード(占有バイト数:32) ………………………………… 1895.4.6 リモートⅠ /O モード 2(占有バイト数:12) ……………………… 2005.4.7 ポジション/簡易直値モード 2(占有バイト数:8) ……………… 2045.4.8 ハーフ直値モード 2(占有バイト数:16) …………………………… 2095.4.9 リモートⅠ /O モード 3(占有バイト数:12) ……………………… 2165.4.10 ハーフ直値モード 3(占有バイト数:16) ………………………… 2205.4.11 入出力信号の制御と機能 ……………………………………………… 227
5.5 入出力信号のタイミング …………………………………… 2445.6 運転 …………………………………………………………… 2455.7 PROFIBUS-DP 関連パラメータ …………………………… 2535.8 トラブルシューティング …………………………………… 258
5.8.1 ステータス LED の表示 ………………………………………………… 2585.8.2 アラーム内容と原因・対策 …………………………………………… 258
6. サーボプレス仕様 SCON-CB/CGB ………………………… 2596.1 動作モードと機能 …………………………………………… 2596.2 型式 …………………………………………………………… 2606.3 PROFIBUS-DP( スレーブ局 )の設定 ……………………… 2616.4 マスタ局との交信 …………………………………………… 264
6.4.1 各動作モードと PLC 入出力エリアの対応 …………………………… 264

PROFIBUS-DP
6.4.2 リモート I/O モード (占有バイト数:2) …………………………… 2656.4.3 フル機能モード (占有バイト数:16) ………………………………… 2676.4.4 入出力信号の制御と機能 ……………………………………………… 277
6.5 入出力信号のタイミング …………………………………… 2866.6 運転 …………………………………………………………… 2876.7 PROFIBUS-DP 関連パラメータ …………………………… 2936.8 トラブルシューティング …………………………………… 298
7. 変更履歴 ………………………………………………………… 299

PROFIBUS-DP

1
PROFIBUS-DP
安全ガイド
安全ガイドは、製品を正しくお使い頂き、危険や財産の損害を未然に防止するために書かれたもの です。製品のお取扱い前に必ずお読みください。
これに基づいて国際規格 ISO/IEC で階層別に各種規格が構築されています。
産業用ロボットの安全規格は以下のとおりです。
タイプ C 規格 (個別安全規格 ) ISO10218(マニピュレーティング
産業ロボット -安全性 )
JIS B 8433 (産業用マニピュレーティング
ロボット -安全性 )
産業用ロボットに関する法令および規格
機械装置の安全方策としては、国際工業規格 ISO/DIS12100「機械類の安全性」において、一般論と
して次の 4 つを規定しています。
安全方策 本質安全設計
安全防護 ・・・・・・・・・・・・・ 安全柵など
追加安全方策 ・・・・・・・・・ 非常停止装置など
使用上の情報 ・・・・・・・・・ 危険表示・警告、取扱説明書
また産業用ロボット の安全に関する国内法は、次のように定められています。
労働安全衛生法 第 59 条
危険または有害な業務に従事する労働者に対する特別教育の実施が義務付けられています。
労働安全衛生規則
第 36 条 ・・・・・・・・ 特別教育を必要とする業務
第 31 号 (教示等 ) ・・・・・・・・産業用ロボット (該当除外あり )の教示作業等について
第 32 号 (検査等 ) ・・・・・・・・産業用ロボット ( 該当除外あり ) の検査、修理、調整作業等
について
第 150 条 ・・・・・・・ 産業用ロボットの使用者の取るべき措置

2
PROFIBUS-DP
作業エリア 作業状態 駆動源のしゃ断 措 置 規 定
可動範囲外 自動運転中 しない運転開始の合図 104 条
柵、囲いの設置等 150 条の 4
可動範囲内
教示等の
作業時
する
(運転停止含む )作業中である旨の表示等 150 条の 3
しない
作業規定の作成 150 条の 3直ちに運転を停止できる措置 150 条の 3作業中である旨の表示等 150 条の 3特別教育の実施 36 条 31 号
作業開始前の点検等 151 条
検査等の
作業時
する運転を停止して行う 150 条の 5作業中である旨の表示等 150 条の 5
しない
(やむをえず運転中
に行う場合 )
作業規定の作成 150 条の 5直ちに運転停止できる措置 150 条の 5作業中である旨の表示等 150 条の 5特別教育の実施
(清掃・給油作業を除く )36 条 32 号
労働安全衛生規則の産業用ロボットに対する要求事項

3
PROFIBUS-DP
労働省告知第 51 号および労働省労働基準局長通達 ( 基発第 340 号 ) により、以下の内容に該当するも
のは、産業用ロボットから除外されます。
(1) 単軸ロボットでモータワット数が 80W 以下の製品
(2) 多軸組合せロボットで X・Y・Z 軸が 300mm 以内、かつ回転部が存在する場合はその先端を含
めた最大可動範囲が 300mm 立方以内の場合 (3) 多関節ロボットで可動半径および Z 軸が 300mm 以内の製品
当社カタログ掲載製品のうち産業用ロボットの該当機種は以下のとおりです。
1. 単軸ロボシリンダ
RCS2/RCS2CR-SS8 、RCS3/RCS3CR/RCS3P/RCS3PCR でストローク 300mm を超えるもの
2. 単軸ロボット
次の機種でストローク 300mm を超え、かつモータ容量 80W を超えるもの
ISA/ISB/ISPA/ISPB,SSPA,ISDA/ISDB/ISPDA/ISPDB,SSPDA,ISWA/ISPWA,IF,FS,NS3. リニアサーボアクチュエータ
ストローク 300mm を超える全機種
4. 直交ロボット
1 ~ 3 項の機種のいずれかを 1 軸でも使用するもの
5. IX スカラロボット
アーム長 300mm を超える全機種
(IX-NNN1205/1505/1805/2515、NNW2515、NNC1205/1505/1805/2515 を除く全機種)
当社の産業用ロボット該当機種
4
PROFIBUS-DP
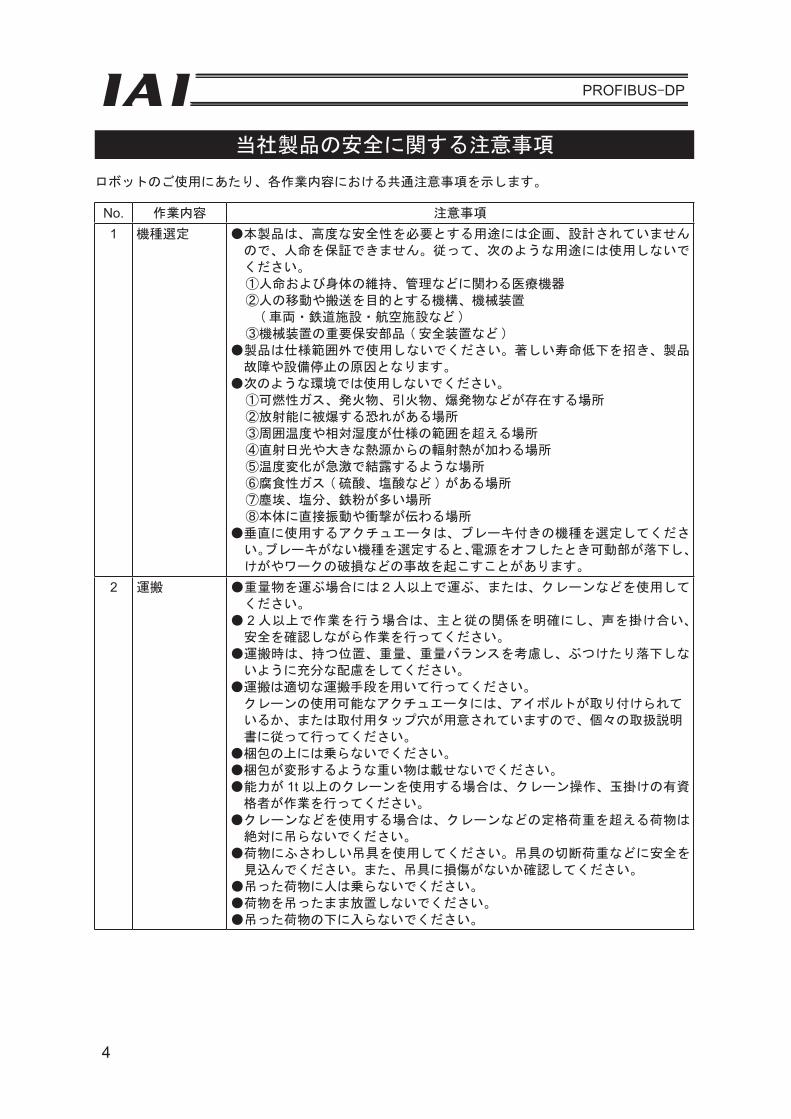
ロボットのご使用にあたり、各作業内容における共通注意事項を示します。
当社製品の安全に関する注意事項
No. 作業内容 注意事項
1 機種選定 本製品は、高度な安全性を必要とする用途には企画、設計されていません
ので、人命を保証できません。従って、次のような用途には使用しないで
ください。
①人命および身体の維持、管理などに関わる医療機器
② 人の移動や搬送を目的とする機構、機械装置
(車両・鉄道施設・航空施設など )
③機械装置の重要保安部品 (安全装置など )
製品は仕様範囲外で使用しないでください。著しい寿命低下を招き、製品
故障や設備停止の原因となります。
次のような環境では使用しないでください。
①可燃性ガス、発火物、引火物、爆発物などが存在する場所
②放射能に被爆する恐れがある場所
③周囲温度や相対湿度が仕様の範囲を超える場所
④直射日光や大きな熱源からの輻射熱が加わる場所
⑤温度変化が急激で結露するような場所
⑥腐食性ガス (硫酸、塩酸など )がある場所
⑦塵埃、塩分、鉄粉が多い場所
⑧本体に直接振動や衝撃が伝わる場所
垂直に使用するアクチュエータは、ブレーキ付きの機種を選定してくださ
い。ブレーキがない機種を選定すると、電源をオフしたとき可動部が落下し、
けがやワークの破損などの事故を起こすことがあります。
2 運搬 重量物を運ぶ場合には2人以上で運ぶ、または、クレーンなどを使用して
ください。
2 人以上で作業を行う場合は、主と従の関係を明確にし、声を掛け合い、
安全を確認しながら作業を行ってください。
運搬時は、持つ位置、重量、重量バランスを考慮し、ぶつけたり落下しな
いように充分な配慮をしてください。
運搬は適切な運搬手段を用いて行ってください。 クレーンの使用可能なアクチュエータには、アイボルトが取り付けられて
いるか、または取付用タップ穴が用意されていますので、個々の取扱説明
書に従って行ってください。
梱包の上には乗らないでください。
梱包が変形するような重い物は載せないでください。
能力が 1t 以上のクレーンを使用する場合は、クレーン操作、玉掛けの有資
格者が作業を行ってください。
クレーンなどを使用する場合は、クレーンなどの定格荷重を超える荷物は
絶対に吊らないでください。
荷物にふさわしい吊具を使用してください。吊具の切断荷重などに安全を
見込んでください。また、吊具に損傷がないか確認してください。
吊った荷物に人は乗らないでください。
荷物を吊ったまま放置しないでください。
吊った荷物の下に入らないでください。

5
PROFIBUS-DP
No. 作業内容 注意事項
3 保管・保存 保管・保存環境は設置環境に準じますが、特に結露の発生がないように配
慮してください。
地震などの天災により、製品の転倒、落下がおきないように考慮して保管
してください。
4 据付け・
立ち上げ
(1)ロボット本体・コントローラ等の設置
製品 ( ワークを含む ) は、必ず確実な保持、固定を行ってください。製品
の転倒、落下、異常動作等によって破損およびけがをする恐れがあります。
また、地震などの天災による転倒や落下にも備えてください。
製品の上に乗ったり、物を置いたりしないでください。転倒事故、物の落
下によるけがや製品破損、製品の機能喪失・性能低下・寿命低下などの原
因となります。
次のような場所で使用する場合は、遮蔽対策を十分行ってください。
①電気的なノイズが発生する場所
②強い電界や磁界が生じる場所
③電源線や動力線が近傍を通る場所
④水、油、薬品の飛沫がかかる場所
(2)ケーブル配線 アクチュエータ~コントローラ間のケーブルやティーチングツールなどの
ケーブルは当社の純正部品を使用してください。 ケーブルに傷をつけたり、無理に曲げたり、引っ張ったり、巻きつけたり、挟み込んだり、重いものを載せたりしないでください。漏電や導通不良による火災、感電、異常動作の原因になります。
製品の配線は、電源をオフして誤配線がないように行ってください。 直流電源 (+24V)を配線する時は、+/-の極性に注意してください。 接続を誤ると火災、製品故障、異常動作の恐れがあります。 ケーブルコネクタの接続は、抜け・ゆるみのないように確実に行ってください。火災、感電、製品の異常動作の原因になります。
製品のケーブルの長さを延長または短縮するために、ケーブルの切断再接続は行わないでください。火災、製品の異常動作の原因になります。
(3)接地 接地は、感電防止、静電気帯電の防止、耐ノイズ性能の向上および不要な電
磁放射の抑制には必ず行わなければなりません。 コントローラのAC電源ケーブルのアース端子および制御盤のアースプレートは、必ず線径 0.5mm2(AWG20 相当)以上のより線で接地工事をしてください。保安接地は、負荷に応じた線径が必要です。規格(電気設備技術基準)に基づいた配線を行ってください。
接地は D 種(旧第三種、接地抵抗 100 Ω以下)接地工事を施工してください。

6
PROFIBUS-DP
No. 作業内容 注意事項
4 据付け・
立ち上げ
(4)安全対策 2 人以上で作業を行う場合は、主と従の関係を明確にし、声を掛け合い、安
全を確認しながら作業を行ってください。 製品の動作中または動作できる状態の時は、ロボットの可動範囲に立ち入ることができないような安全対策 (安全防護柵など )を施してください。 動作中のロボットに接触すると死亡または重傷を負うことがあります。
運転中の非常事態に対し、直ちに停止することができるように非常停止回路を必ず設けてください。
電源投入だけで起動しないよう安全対策を施してください。製品が急に起動し、けがや製品破損の原因になる恐れがあります。
非常停止解除や停電後の復旧だけで起動しないよう、安全対策を施してください。人身事故、装置の破損などの原因となります。
据付・調整などの作業を行う場合は、「作業中、電源投入禁止 」などの表示をしてください。不意の電源投入により感電やけがの恐れがあります。
停電時や非常停止時にワークなどが落下しないような対策を施してください。
必要に応じて保護手袋、保護めがね、安全靴を着用して安全を確保してください。
製品の開口部に指や物を入れないでください。けが、感電、製品破損、火災などの原因になります。
垂直に設置しているアクチュエータのブレーキを解除する時は、自重で落下して手を挟んだり、ワークなどを損傷しないようにしてください。
5 教示 2 人以上で作業を行う場合は、主と従の関係を明確にし、声を掛け合い、安全を確認しながら作業を行ってください。
教示作業はできる限り安全防護柵外から行ってください。やむをえず安全防護柵内で作業する時は、「作業規定 」を作成して作業者への徹底を図ってください。
安全防護柵内で作業する時は、作業者は手元非常停止スイッチを携帯し、異常発生時にはいつでも動作停止できるようにしてください。
安全防護柵内で作業する時は、作業者以外に監視人をおいて、異常発生時にはいつでも動作停止できるようにしてください。また第三者が不用意にスイッチ類を操作することのないよう監視してください。
見やすい位置に「作業中」である旨の表示をしてください。 垂直に設置しているアクチュエータのブレーキを解除する時は、自重で落下して手を挟んだり、ワークなどを損傷しないようにしてください。
※安全防護柵・・・安全防護柵がない場合は、可動範囲を示します。
6 確認運転 2 人以上で作業を行う場合は、主と従の関係を明確にし、声を掛け合い、
安全を確認しながら作業を行ってください。
教示およびプログラミング後は、1 ステップずつ確認運転をしてから自動
運転に移ってください。
安全防護柵内で確認運転をする時は、教示作業と同様にあらかじめ決めら
れた作業手順で作業を行ってください。
プログラム動作確認は、必ずセーフティ速度で行ってください。プログラ
ムミスなどによる予期せぬ動作で事故をまねく恐れがあります。
通電中に端子台や各種設定スイッチに触れないでください。感電や異常動
作の恐れがあります。

7
PROFIBUS-DP
No. 作業内容 注意事項
7 自動運転 自動運転を開始する前、あるいは停止後の再起動の際には、安全防護柵内
に人がいないことを確認してください。
自動運転を開始する前には、関連周辺機器がすべて自動運転に入ることの
できる状態にあり、異常表示がないことを確認してください。
自動運転の開始操作は、必ず安全防護柵外から行うようにしてください。
製品に異常な発熱、発煙、異臭、異音が生じた場合は、直ちに停止して電
源スイッチをオフしてください。火災や製品破損の恐れがあります。
停電した時は電源スイッチをオフしてください。停電復旧時に製品が突然
動作し、けがや製品破損の原因になることがあります。
8 保守・点検 2 人以上で作業を行う場合は、主と従の関係を明確にし、声を掛け合い、
安全を確認しながら作業を行ってください。
作業はできる限り安全防護柵外から行ってください。やむをえず安全防護
柵内で作業する時は、「 作業規定 」 を作成して作業者への徹底を図ってく
ださい。
安全防護柵内で作業を行う場合は、原則として電源スイッチをオフしてく
ださい。
安全防護柵内で作業する時は、作業者は手元非常停止スイッチを携帯し、
異常発生時にはいつでも動作停止できるようにしてください。
安全防護柵内で作業する時は、作業者以外に監視人をおいて、異常発生時
にはいつでも動作停止できるようにしてください。また第三者が不用意に
スイッチ類を操作することのないよう監視してください。
見やすい位置に 「作業中 」である旨の表示をしてください。
ガイド用およびボールネジ用グリースは、各機種の取扱説明書により適切
なグリースを使用してください。
絶縁耐圧試験は行わないでください。製品の破損の原因になることがあり
ます。
垂直に設置しているアクチュエータのブレーキを解除する時は、自重で落
下して手を挟んだり、ワークなどを損傷しないようにしてください。
サーボオフすると、スライダーやロッドが停止位置からずれることがあり
ます。不要動作による、けがや損傷をしない様にしてください。
カバーや取り外したねじ等は紛失しないよう注意し、保守・点検完了後は
必ず元の状態に戻して使用してください。 不完全な取り付けは製品破損やけがの原因となります。
※安全防護柵・・・安全防護柵がない場合は、可動範囲を示します。
9 改造・分解 お客様の独自の判断に基づく改造、分解組立て、指定外の保守部品の使用
は行わないでください。
10 廃棄 製品が使用不能、または不要になって廃棄する場合は、産業廃棄物として
適切な廃棄処理をしてください。
廃棄のためアクチュエータを取り外す場合は、落下等に考慮し、ねじの取
り外しを行ってください。
製品の廃棄時は、火中に投じないでください。製品が破裂したり、有毒ガ
スが発生する恐れがあります。
11 その他 ペースメーカなどの医療機器を装着された方は、影響を受ける場合があり
ますので、本製品および配線には近づかないようにしてください。
海外規格への対応は、海外規格対応マニュアルを確認してください。
アクチュエータおよびコントローラの取扱は、それぞれの専用取扱説明書
に従い、安全に取り扱ってください。

8
PROFIBUS-DP
注意表示について
各機種の取扱説明書には、安全事項を以下のように 「 危険 」「 警告 」「 注意 」「 お願い 」 にランク分け
して表示しています。
レベル 危害・損害の程度 シンボル
危険取扱いを誤ると、死亡または重傷に至る危険が差し迫って 生じると想定される場合
危険
警告 取扱いを誤ると、死亡または重傷に至る可能性が想定される場合 警告
注意 取扱いを誤ると、傷害または物的損害の可能性が想定される場合 注意
お願い傷害の可能性はないが、本製品を適切に使用するために 守っていただきたい内容
お願い
9
PROFIBUS-DP
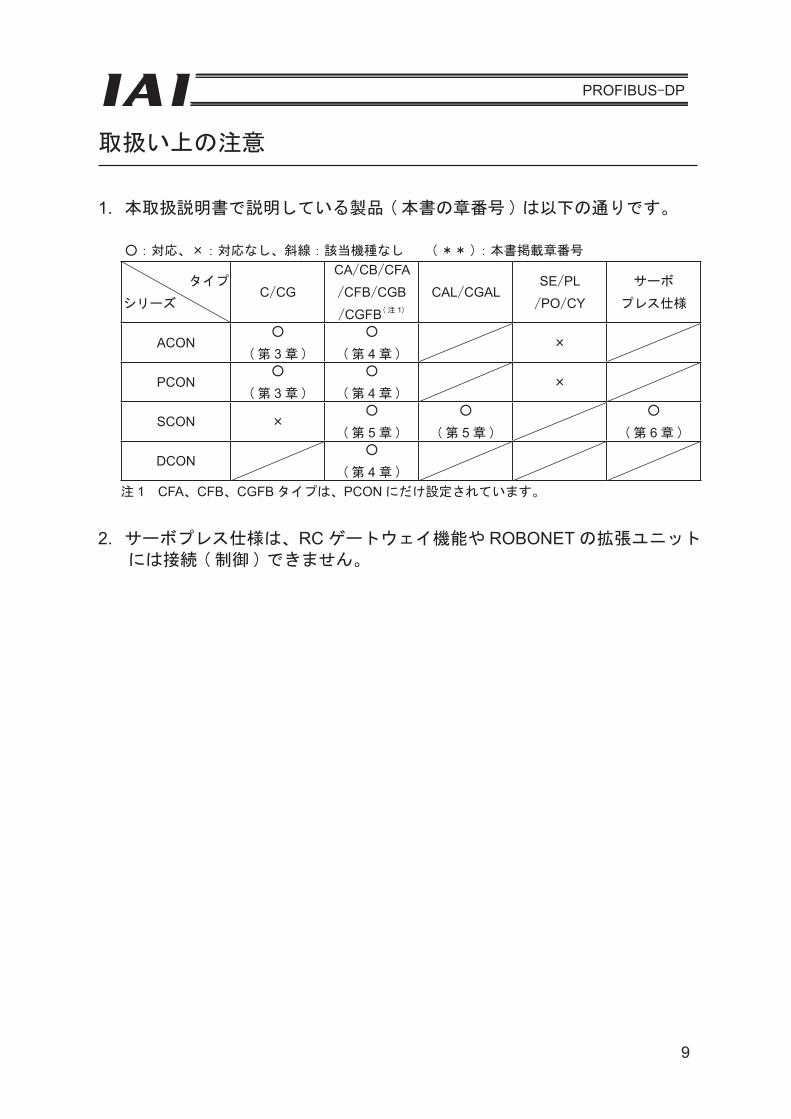
取扱い上の注意
1. 本取扱説明書で説明している製品 (本書の章番号 )は以下の通りです。
:対応、×:対応なし、斜線:該当機種なし (** ):本書掲載章番号
タイプ
シリーズC/CG
CA/CB/CFA/CFB/CGB/CGFB(注 1)
CAL/CGALSE/PL/PO/CY
サーボ
プレス仕様
ACON
(第 3 章 )
(第 4 章 )×
PCON
(第 3 章 )
(第 4 章 )×
SCON ×
(第 5 章 )
(第 5 章 )
(第 6 章 )
DCON
(第 4 章 )
注 1 CFA、CFB、CGFB タイプは、PCON にだけ設定されています。
2. サーボプレス仕様は、RC ゲートウェイ機能や ROBONET の拡張ユニットには接続 (制御 )できません。

PROFIBUS-DP
10
1.
概
要
ProfiBus-DP
2
2. 仕様
2.1 インターフェース仕様下表にProfiBus-DPインターフェース部の仕様一覧を示します。
項 目 仕 様 備 考通信プロファイル ProfiBus-DP通信方式 ハイブリッド方式 マスター/スレーブ方式と
トークンパッシングの採用接続局数 32局/セグメント リピータにより126局まで可能通信データ長 最大244バイト/フレーム物理プロファイル RS485 *RS485が一般的です
*IP20では9ピンDsubを推奨通信速度(Kbps) 9.6/19.2/93.75/187.5/500 ※1
1500/3000/6000/12000伝送距離 総ネットワーク最大 通信速度 ケーブル種別
100m 12,000/6,000/3,000kbps タイプAケーブル200m 1,500kbps400m 500kbps1000m 187.5kbps1200m 9.6/19.2/93.75 kbps
トポロジー バス/ツリー/スターケーブル 1対ツイストペアー タイプAケーブル
シールドケーブル
※1 ProfiBus-DPネットワーク通信速度はコンフィグレータ(※2)によるProfiBus-DPネットワーク設定でのみ行われます。
※2 ProfiBus-DPコンフィグレータはマスターユニット推奨のコンフィグレータをご使用願います。
ProfiBus-DPスレーブモジュールの通信速度はこのコンフィグレータにより設定される為、個々のスレーブ局における通信速度は設定出来ません。
1. 概要
オープンフィールドネットワークである PROFIBUS-DP はマシン/ライン制御レベルの制御と情
報が混在した多ビット系のマルチベンダネットワークです。
X-SEL、TT、RCS-C、E-Con、SCON(C タイプを除く )、ASEL、PSEL、SSEL、ACON、
PCON および DCON の各コントローラ(以下、IAI コントローラまたは各コントローラ)はこの
PROFIBUS-DP に接続することによって省配線によるシステム構築が可能です。
※ PROFIBUS-DP の詳細な説明はマスタユニットの搭載されるプログラマブルコントローラ(以
下 PLC)の取扱説明書をご参照ください。本取扱説明書は各コントローラの取扱説明書と合わ
せてご利用ください。
また、本取扱説明書で可能と表現されている以外の使い方はできません。
PROFIBUS-DP
X-SEL C o n
E -R
C S
C
-
TT
S S E L
A C O N
P C O N
A S E L
P S E L
/O
CPU
PLC
PCON
SCON
C
-
SCONC
DCON
各コントローラは PROFIBUS-DP 上ではスレーブ局として扱われ、I/O データの交信が可能です。
本取扱説明書は、ACON、PCON、SCON(C タイプを除く )、および DCON について記載して
います。

PROFIBUS-DP
2.
仕
様
11
ProfiBus-DP
2
2. 仕様
2.1 インターフェース仕様下表にProfiBus-DPインターフェース部の仕様一覧を示します。
項 目 仕 様 備 考通信プロファイル ProfiBus-DP通信方式 ハイブリッド方式 マスター/スレーブ方式と
トークンパッシングの採用接続局数 32局/セグメント リピータにより126局まで可能通信データ長 最大244バイト/フレーム物理プロファイル RS485 *RS485が一般的です
*IP20では9ピンDsubを推奨通信速度(Kbps) 9.6/19.2/93.75/187.5/500 ※1
1500/3000/6000/12000伝送距離 総ネットワーク最大 通信速度 ケーブル種別
100m 12,000/6,000/3,000kbps タイプAケーブル200m 1,500kbps400m 500kbps1000m 187.5kbps1200m 9.6/19.2/93.75 kbps
トポロジー バス/ツリー/スターケーブル 1対ツイストペアー タイプAケーブル
シールドケーブル
※1 ProfiBus-DPネットワーク通信速度はコンフィグレータ(※2)によるProfiBus-DPネットワーク設定でのみ行われます。
※2 ProfiBus-DPコンフィグレータはマスターユニット推奨のコンフィグレータをご使用願います。
ProfiBus-DPスレーブモジュールの通信速度はこのコンフィグレータにより設定される為、個々のスレーブ局における通信速度は設定出来ません。
2. 仕様
2.1 インタフェース仕様
下表に PROFIBUS-DP インタフェース部の仕様一覧を示します。
PROFIBUS-DP
※ 1 PROFIBUS-DP ネットワーク通信速度はコンフィグレータ(※2)による PROFIBUS-DP ネッ
トワーク設定だけで行われます。
※ 2 PROFIBUS-DP コンフィグレータはマスタユニット推奨のコンフィグレータをご使用願いま
す。
PROFIBUS-DP スレーブモジュールの通信速度はこのコンフィグレータにより設定される為、
個々のスレーブ局における通信速度は設定出来ません。
* RS485 が一般的です
* IP20 では 9 ピン Dsub を推奨
マスタ / スレーブ方式と
トークンバッシングの採用
1 対ツイストペア
シールドケーブル
トポロジ

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
12
ProfiBus-DP
67
7. ACON、PCON
7.1 動作モードと機能ProfiBus-DP対応のACONおよびPCONは次の5つの動作モードから選択して運転することができます。
動作モードと主要機能
(※1)位置データ以外のポジションデータはポジションNo.を指定して運転を行います。
①リモートⅠ/Oモード:PIO(24V入出力)による運転をProfiBus-DP通信によって行う方式です。
占有バイト数:2バイト(1ワード)
主要機能リモートⅠ/O ポジション/ ハーフ直値 フル直値 リモートⅠ/Oモード 簡易直値モード モード モード モード2
占有バイト数 2 8 16 32 12
位置データ指定運転 × (※1) ×
速度・加速度× × ×
直接指定
押付け動作
現在位置読取り ×
現在速度読取り × ×
ポジションNo.指定運転 × ×
完了ポジションNo.読取り × ×
最大ポジション512 768 使用しない 使用しない 512
テーブル数
ProfiBus-DP未対応 のACON、PCON
ProfiBus-DP対応の ACON、PCON
PLC PLC
フラット ケーブル
PIOで接続の場合
通信ケーブル
ProfiBus-DPで接続の場合
3. ACON-C/CG、PCON-C/CG3.1 動作モードと機能
PROFIBUS-DP 対応の ACON および PCON は次の 5 つの動作モードから選択して運転することが
できます。
①リモートⅠ /O モード: PIO(24V入出力)による運転をPROFIBUS-DP通信によって行う方式です。
占有バイト数:2 バイト(1 ワード)
PROFIBUS-DP 未対応PROFIBUS-DP 対応の
PROFIBUS-DP で接続の場合

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
13
ProfiBus-DP
67
7. ACON、PCON
7.1 動作モードと機能ProfiBus-DP対応のACONおよびPCONは次の5つの動作モードから選択して運転することができます。
動作モードと主要機能
(※1)位置データ以外のポジションデータはポジションNo.を指定して運転を行います。
①リモートⅠ/Oモード:PIO(24V入出力)による運転をProfiBus-DP通信によって行う方式です。
占有バイト数:2バイト(1ワード)
主要機能リモートⅠ/O ポジション/ ハーフ直値 フル直値 リモートⅠ/Oモード 簡易直値モード モード モード モード2
占有バイト数 2 8 16 32 12
位置データ指定運転 × (※1) ×
速度・加速度× × ×
直接指定
押付け動作
現在位置読取り ×
現在速度読取り × ×
ポジションNo.指定運転 × ×
完了ポジションNo.読取り × ×
最大ポジション512 768 使用しない 使用しない 512
テーブル数
ProfiBus-DP未対応 のACON、PCON
ProfiBus-DP対応の ACON、PCON
PLC PLC
フラット ケーブル
PIOで接続の場合
通信ケーブル
ProfiBus-DPで接続の場合
ProfiBus-DP
68
②ポジション/簡易直値モード: ポジションNo.を指定して運転する方式です。
制御信号の切換えで目標位置を直接数値で指定するか、ポジションデータに登録した値を使用するか選択できます。
速度、加減速度、位置決め幅等はあらかじめ登録したポジションデータの値を使用します。設定可能なポジションデータの数は最大768点です。
占有バイト数:8バイト(4ワード)
目標位置:100.00mm + ポジションNo.0
PLC
ProfiBus-DP対応 のACON、PCON
アクチュエータ
③ハーフ直値モード:目標位置以外に速度、加減速度、押付電流値を直接数値で指定する運転方式です。
占有バイト数:16バイト(8ワード)
目標位置:100.00mm 位置決め幅:0.10mm 速度指定:100.0mm/s 加減速度:0.30G 押付け電流値:50%
ProfiBus-DP対応 のACON、PCON
アクチュエータ
PLC
100.00mm 0.10mm
100.0mm/s 0.30G
50%
PROFIBUS-DP対応のPCON-CA/CFA
PLC
PROFIBUS-DP 対応
PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
14
ProfiBus-DP
69
⑤リモートⅠ/Oモード2 :PIO(24V入出力)による運転をProfiBus-DP通信によって行う方式です。
①の機能に現在位置と指令電流値読取り機能を追加したものです。
占有バイト数:12バイト(6ワード)
ProfiBus-DP未対応 のACON、PCON
フラット ケーブル
PIOで接続の場合
PLC
通信 ケーブル
ProfiBus-DPで接続の場合
PLC
ProfiBus-DP対応の ACON、PCON
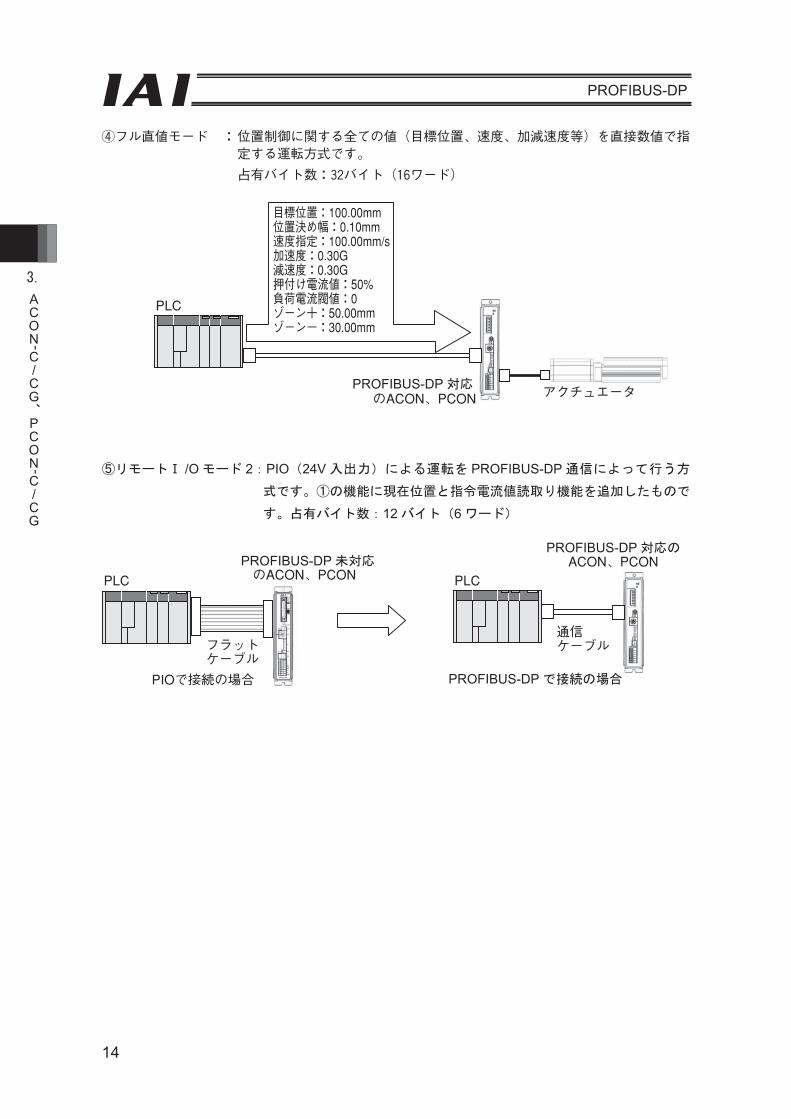
④フル直値モード :位置制御に関する全ての値(目標位置、速度、加減速度等)を直接数値で指定する運転方式です。
占有バイト数:32バイト(16ワード)
目標位置:100.00mm 位置決め幅:0.10mm 速度指定:100.00mm/s 加速度:0.30G 減速度:0.30G 押付け電流値:50% 負荷電流閥値:0 ゾーン+:50.00mm ゾーン-:30.00mm
アクチュエータ ProfiBus-DP対応 のACON、PCON
PLC
PROFIBUS-DP 未対応PROFIBUS-DP 対応の
PROFIBUS-DP で接続の場合
PROFIBUS-DP 対応
⑤リモートⅠ /O モード 2: PIO(24V 入出力)による運転を PROFIBUS-DP 通信によって行う方
式です。①の機能に現在位置と指令電流値読取り機能を追加したもので
す。占有バイト数:12 バイト(6 ワード)

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
15
ProfiBus-DP
69
⑤リモートⅠ/Oモード2 :PIO(24V入出力)による運転をProfiBus-DP通信によって行う方式です。
①の機能に現在位置と指令電流値読取り機能を追加したものです。
占有バイト数:12バイト(6ワード)
ProfiBus-DP未対応 のACON、PCON
フラット ケーブル
PIOで接続の場合
PLC
通信 ケーブル
ProfiBus-DPで接続の場合
PLC
ProfiBus-DP対応の ACON、PCON
④フル直値モード :位置制御に関する全ての値(目標位置、速度、加減速度等)を直接数値で指定する運転方式です。
占有バイト数:32バイト(16ワード)
目標位置:100.00mm 位置決め幅:0.10mm 速度指定:100.00mm/s 加速度:0.30G 減速度:0.30G 押付け電流値:50% 負荷電流閥値:0 ゾーン+:50.00mm ゾーン-:30.00mm
アクチュエータ ProfiBus-DP対応 のACON、PCON
PLC
ProfiBus-DP
70
7.2 型式ProfiBus-DP対応のACONおよびPCONの型式は各々以下のように表されています。
ACON-C/CG--PR-PCON-C/CG--PR-
シリーズ名の印字
ACON
PCON
前面パネルの色
ACON:ダークブルー
PCON:ダークグリーン
3.2 型式
PROFIBUS-DP 対応の ACON および PCON の型式は各々以下のように表されています。

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
16
ProfiBus-DP
71
7.3 ProfiBus-DP(スレーブ局)の設定
(1)各部の名称
ProfiBus-DPに関連する各部の名称を示します。
(2) ProfiBus-DP通信コネクタインタフェース仕様
ProfiBus-DP standard EN50170推奨品である9ピンfemale D-subコネクタです。
コネクタ
状態表示LED
ステータスLED
ProfiBus-DP通信コネクタ
SV ALM
1
STATUS
0
Pin No. Description Contents
3 B-Line RxD・TxD(プラス側通信ライン)
4 RTS 送信要求
5 GND シグナルグランド(絶縁)
6 +5V +5V出力(絶縁)
8 A-Line /RxD・/TxD(マイナス側信号ライン)
Housing Shield ケーブルシールド(筐体と接続)
(注1)1,2,7,9ピンは未使用(配線は不要です)
(注2)ケーブル側コネクタは付属しません。
3.3 PROFIBUS-DP(スレーブ局)の設定
(1)各部の名称
PROFIBUS-DP に関連する各部の名称を示します。
(2)PROFIBUS-DP 通信コネクタインタフェース仕様
PROFIBUS-DP standard EN50170 推奨品である 9 ピン female D-sub コネクタです。
PROFIBUS-DP 通信コネクタ

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
17
ProfiBus-DP
71
7.3 ProfiBus-DP(スレーブ局)の設定
(1)各部の名称
ProfiBus-DPに関連する各部の名称を示します。
(2) ProfiBus-DP通信コネクタインタフェース仕様
ProfiBus-DP standard EN50170推奨品である9ピンfemale D-subコネクタです。
コネクタ
状態表示LED
ステータスLED
ProfiBus-DP通信コネクタ
SV ALM
1
STATUS
0
Pin No. Description Contents
3 B-Line RxD・TxD(プラス側通信ライン)
4 RTS 送信要求
5 GND シグナルグランド(絶縁)
6 +5V +5V出力(絶縁)
8 A-Line /RxD・/TxD(マイナス側信号ライン)
Housing Shield ケーブルシールド(筐体と接続)
(注1)1,2,7,9ピンは未使用(配線は不要です)
(注2)ケーブル側コネクタは付属しません。
ProfiBus-DP
72
(3)バス終端処理
ネットワークの終端に接続した場合は、終端抵抗を下図のようにProfiBus-DP通信コネクタに接続するか、または終端抵抗付きコネクタを使用してください。
終端抵抗付きコネクタ例:SUBCON-PLUS-PROFIB/AX/SC(フェニックスコンタクト)
終端抵抗の接続
(4)動作モードの選択(設定)動作モードはパラメータで設定します。
コントローラ前面のモード切替SWをMANU側にし、RC用パソコン対応ソフト(V6.00.05.00以降)でパラメータNo.84“FMOD:フィールドバス動作モード”を設定してください。(7.7パラメータ参照)
※これ以外の値を入力すると入力値過大エラーとなります。
(5)ノードアドレスの設定
ノードアドレスはパラメータで設定します。
RC用パソコン対応ソフトでパラメータNo.85“NADR:フィールドバスノードアドレス”を設定してください。
(7.7パラメータ参照)
設定可能範囲:0~125(出荷時は1に設定されています。)
(注1)ノードアドレスの重複設定にご注意ください。(注2)ProfiBus-DPのノードアドレスの設定は、マスタ局を必ず0として設定しますのでスレーブ局
は1~125まで設定することができます。
設定値 動作モード 占有バイト数
0(出荷時設定) リモートⅠ/Oモード 2
1 ポジション/簡易直値モード 8
2 ハーフ直値モード 16
3 フル直値モード 32
4 リモートⅠ/Oモード2 12
9
6
5
1
5GNDA-Line 390Ω,1/4W
220Ω,1/4W ネットワーク 配線
390Ω,1/4WB-Line
+5V3
1
9
8
6
ボード側 メスコネクタ
ネットワーク側 オスコネクタ (反挿入側より)
}
ネットワークの終端に接続した場合は、終端抵抗を下図のように PROFIBUS-DP 通信コネクタに
接続するか、または終端抵抗付きコネクタを使用してください。
(注 1)ノードアドレスの重複設定にご注意ください。
(注 2) PROFIBUS-DP のノードアドレスの設定は、マスタ局を必ず 0 として設定しますのでスレー
ブ局は 1 ~ 125 まで設定することができます。
(3.7 PROFIBUS-DP 関連パラメータ参照)
でパラメータ No.84“FMOD : フィールドバス動作モード”を設定してください。(3.7 PROFIBUS-DP 関連参照 )
(3.7 関連参照 )

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
18
ProfiBus-DP
73
(6)ステータスLEDの表示
コントローラ前面に設けられた2つのLEDによってボードの動作状態やネットワークの状態を知ることができます。
LED 色 表示状態 表示内容(表示の意味)
点灯 フィールドバスからオンライン状態で正常に通信中です。緑
STATUS1 点滅 フィールドバスからオフライン状態になっています。
橙 点滅 通信エラーが発生しています。
点灯 正常動作中です。緑
STATUS0 点滅 動作準備を行っています。
橙 点灯 動作準備中に通信系ハードウェア異常を検出しました。
(注1)パラメータの設定後はコントローラの電源再投入を行い、コントローラ前面のモード切替SWをAUTO側に戻してください。MANU側のままの場合PLCによる運転はできません。
(注2)通信速度はマスタ局に合せて自動設定されますので、設定の必要はありません。
ProfiBus-DP
73
(6)ステータスLEDの表示
コントローラ前面に設けられた2つのLEDによってボードの動作状態やネットワークの状態を知ることができます。
LED 色 表示状態 表示内容(表示の意味)
点灯 フィールドバスからオンライン状態で正常に通信中です。緑
STATUS1 点滅 フィールドバスからオフライン状態になっています。
橙 点滅 通信エラーが発生しています。
点灯 正常動作中です。緑
STATUS0 点滅 動作準備を行っています。
橙 点灯 動作準備中に通信系ハードウェア異常を検出しました。
(注1)パラメータの設定後はコントローラの電源再投入を行い、コントローラ前面のモード切替SWをAUTO側に戻してください。MANU側のままの場合PLCによる運転はできません。
(注2)通信速度はマスタ局に合せて自動設定されますので、設定の必要はありません。
:点灯、×:消灯、:点滅
LED 色 表示状態 表示内容(表示の意味)
STATUS1
緑 フィールドバスからオンライン状態で正常に通信中です。
フィールドバスからオフライン状態になっています。
橙 通信エラーが発生しています。
× オフライン / 電源無し
STATUS0
緑 正常動作中です。
動作準備を行っています。
橙 動作準備中に通信系ハードウェア異常を検出しました。
× 未初期化 / 電源無し

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
19
ProfiBus-DP
73
(6)ステータスLEDの表示
コントローラ前面に設けられた2つのLEDによってボードの動作状態やネットワークの状態を知ることができます。
LED 色 表示状態 表示内容(表示の意味)
点灯 フィールドバスからオンライン状態で正常に通信中です。緑
STATUS1 点滅 フィールドバスからオフライン状態になっています。
橙 点滅 通信エラーが発生しています。
点灯 正常動作中です。緑
STATUS0 点滅 動作準備を行っています。
橙 点灯 動作準備中に通信系ハードウェア異常を検出しました。
(注1)パラメータの設定後はコントローラの電源再投入を行い、コントローラ前面のモード切替SWをAUTO側に戻してください。MANU側のままの場合PLCによる運転はできません。
(注2)通信速度はマスタ局に合せて自動設定されますので、設定の必要はありません。
ProfiBus-DP
73
(6)ステータスLEDの表示
コントローラ前面に設けられた2つのLEDによってボードの動作状態やネットワークの状態を知ることができます。
LED 色 表示状態 表示内容(表示の意味)
点灯 フィールドバスからオンライン状態で正常に通信中です。緑
STATUS1 点滅 フィールドバスからオフライン状態になっています。
橙 点滅 通信エラーが発生しています。
点灯 正常動作中です。緑
STATUS0 点滅 動作準備を行っています。
橙 点灯 動作準備中に通信系ハードウェア異常を検出しました。
(注1)パラメータの設定後はコントローラの電源再投入を行い、コントローラ前面のモード切替SWをAUTO側に戻してください。MANU側のままの場合PLCによる運転はできません。
(注2)通信速度はマスタ局に合せて自動設定されますので、設定の必要はありません。
ProfiBus-DP
74
7.4 マスタ局との交信
7.4.1 各動作モードとPLCアドレスの対応各動作モードのアドレス割付を次に示します。・PLC出力→ACONまたはPCONの入力(※nは各軸の出力先頭アドレスです。)
占有領域
ACONまたはPCONのDIおよび入力データレジスタリモート ポジション/ ハーフ直値
フル直値モードリモート
Ⅰ/Oモード 簡易直値モード モード Ⅰ/Oモード2占有バイト数:2 占有バイト数:8 占有バイト数:16 占有バイト数:32 占有バイト数:12
n ポート番号0~15目標位置 目標位置 目標位置
ポート番号0~15n+1n+2 指定ポジション番号
位置決め幅 位置決め幅n+3 制御信号 占有領域n+4 速度
速度指定n+5 加減速度n+6 押付け電流制限値
ゾーン境界値+n+7 制御信号n+8
ゾーン境界値-n+9n+10 加速度n+11 減速度n+12 押付け電流制限値
n+13ACON 占有領域PCON 負荷電流閾値
n+14 制御信号1n+15 制御信号2
(注) は動作モードの設定により占有される領域です。
他の目的に使用できません。またアドレスの重複使用にご注意ください。
PLC出力アドレス
(ワードアドレス)
3.4 マスタ局との交信
3.4.1 各動作モードと PLC アドレスの対応

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
20
ProfiBus-DP
75
・ACONまたはPCON出力→PLC入力側(※nは各軸の入力先頭アドレスです。)
占有領域
ACONまたはPCON側DOおよび出力データレジスタリモート ポジション/ ハーフ直値
フル直値モードリモート
Ⅰ/Oモード 簡易直値モード モード Ⅰ/Oモード2占有バイト数:2 占有バイト数:8 占有バイト数:16 占有バイト数:32 占有バイト数:12
n ポート番号0~15現在位置 現在位置 現在位置
ポート番号0~15n+1 占有領域
n+2完了ポジション番号(簡易アラームID) 指令電流 指令電流 現在位置
n+3 状態信号n+4
現在速度 現在速度 指令電流n+5n+6 アラームコード アラームコードn+7 状態信号n+8n+9n+10
占有領域n+11n+12n+13n+14n+15 状態信号
(注) は動作モードの設定により占有される領域です。
他の目的に使用できません。またアドレスの重複使用にご注意ください。
PLC入力アドレス
(ワードアドレス)
完了ポジション No.

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
21
ProfiBus-DP
75
・ACONまたはPCON出力→PLC入力側(※nは各軸の入力先頭アドレスです。)
占有領域
ACONまたはPCON側DOおよび出力データレジスタリモート ポジション/ ハーフ直値
フル直値モードリモート
Ⅰ/Oモード 簡易直値モード モード Ⅰ/Oモード2占有バイト数:2 占有バイト数:8 占有バイト数:16 占有バイト数:32 占有バイト数:12
n ポート番号0~15現在位置 現在位置 現在位置
ポート番号0~15n+1 占有領域
n+2完了ポジション番号(簡易アラームID) 指令電流 指令電流 現在位置
n+3 状態信号n+4
現在速度 現在速度 指令電流n+5n+6 アラームコード アラームコードn+7 状態信号n+8n+9n+10
占有領域n+11n+12n+13n+14n+15 状態信号
(注) は動作モードの設定により占有される領域です。
他の目的に使用できません。またアドレスの重複使用にご注意ください。
PLC入力アドレス
(ワードアドレス)
ProfiBus-DP
76
参考:PLCのアドレス割付表記規則例…富士電機の場合PLCのアドレス割付表記規則を次に示します。
接頭辞 %IX …入力用ビットアドレス(1ビットごとのアドレス)%IW …入力用ワードアドレス(1ワードごとのアドレス)%QX …出力用ビットアドレス(1ビットごとのアドレス)%QW …出力用ワードアドレス(1ワードごとのアドレス)
バス局番ProfiBus-DPマスターユニットが、PLCユニット内で何番目に設置されているユニットかを表しています。
ワードアドレスマスター局に割り付けられたACONまたはPCONのDI、DOおよび入出力データレジスタをワード毎に順番に並べたアドレスです。
ビットアドレスワードアドレスに割り付けられたACONまたはPCONのDI、DOおよび入出力データレジスタをビット毎に順番に並べたアドレスです。
接頭辞 バス局番 ワードアドレス ビットアドレス
ProfiB
us-DP
CPU電
源
マスター局
局番1 局番2 … PR
OFIBU
S-DP
PROFIBUS-DP マスターユニットが、PLC ユニット内で何番目に設置されているユニットかを表
しています。

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
22
ProfiBus-DP
77
7.4.2 リモートⅠ/Oモード(占有バイト数:2)PIO(24V入出力)を使用した場合と同様にポジションNo.を指定して運転するモードです。
RC用パソコン対応ソフトまたはティーチングボックスからポジションデータを設定してください。
運転可能なポジション数は、パラメータNo.25“PIOパターン”の設定によります。
以下に各PIOパターンのⅠ/O仕様を示します。(詳細はコントローラ本体の取扱説明書参照)
本モードで制御可能なロボシリンダの有効な主要機能は次の表の通りです。
パラメータNo.25の設定値 動作モード Ⅰ/O仕様0 位置決めモード 位置決め点数64点、ゾーン出力2点1 教示モード 位置決め点数64点、ゾーン出力1点
位置決めおよびジョグ運転が可能現在位置を指定ポジションに書込み可能
2 256点モード 位置決め点数256点、ゾーン出力1点3 512点モード 位置決め点数512点、ゾーン出力無し4 電磁弁モード1 位置決め点数7点、ゾーン出力2点
ポジションNo.毎の直接運転指令が可能位置決め完了信号はポジションNo.毎に出力
5 電磁弁モード2 位置決め点数3点、ゾーン出力2点前進/後退/中間位置指令により運転位置決め完了信号は前進端/後退端/中間位置の個別出力
PIOパターンロボシリンダ 0: 1: 2: 3: 4: 5:の機能 位置決め 教示 256点 512点 電磁弁 電磁弁
モード モード モード モード モード1 モード2
原点復帰動作 ×位置決め動作 速度・加減速度設定 ピッチ送り(インチング) 押付け動作 ×移動中の速度変更 異なった加速度、
減速度での動作一時停止 (※1)ゾーン信号出力 × PIOパターン選択
(パラメータで設定)
:動作可、×:動作不可
(※1)パラメータNo.27“移動指令種別”を0に設定した場合に可能です。
移動指令をOFFにすることによって一時停止が可能です。
PIO0 1 2 3 4 5
256 512
1
PIO
1 No.27“ ” 0OFF
3.4.2 リモートⅠ /O モード(占有バイト数:2)

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
23
ProfiBus-DP
77
7.4.2 リモートⅠ/Oモード(占有バイト数:2)PIO(24V入出力)を使用した場合と同様にポジションNo.を指定して運転するモードです。
RC用パソコン対応ソフトまたはティーチングボックスからポジションデータを設定してください。
運転可能なポジション数は、パラメータNo.25“PIOパターン”の設定によります。
以下に各PIOパターンのⅠ/O仕様を示します。(詳細はコントローラ本体の取扱説明書参照)
本モードで制御可能なロボシリンダの有効な主要機能は次の表の通りです。
パラメータNo.25の設定値 動作モード Ⅰ/O仕様0 位置決めモード 位置決め点数64点、ゾーン出力2点1 教示モード 位置決め点数64点、ゾーン出力1点
位置決めおよびジョグ運転が可能現在位置を指定ポジションに書込み可能
2 256点モード 位置決め点数256点、ゾーン出力1点3 512点モード 位置決め点数512点、ゾーン出力無し4 電磁弁モード1 位置決め点数7点、ゾーン出力2点
ポジションNo.毎の直接運転指令が可能位置決め完了信号はポジションNo.毎に出力
5 電磁弁モード2 位置決め点数3点、ゾーン出力2点前進/後退/中間位置指令により運転位置決め完了信号は前進端/後退端/中間位置の個別出力
PIOパターンロボシリンダ 0: 1: 2: 3: 4: 5:の機能 位置決め 教示 256点 512点 電磁弁 電磁弁
モード モード モード モード モード1 モード2
原点復帰動作 ×位置決め動作 速度・加減速度設定 ピッチ送り(インチング) 押付け動作 ×移動中の速度変更 異なった加速度、
減速度での動作一時停止 (※1)ゾーン信号出力 × PIOパターン選択
(パラメータで設定)
:動作可、×:動作不可
(※1)パラメータNo.27“移動指令種別”を0に設定した場合に可能です。
移動指令をOFFにすることによって一時停止が可能です。
ProfiBus-DP
78
(1)PLCアドレス構成(※nは各軸の入出力先頭アドレスです。)
アドレスの重複使用にご注意ください。
(2)軸毎の入出力信号割付
各軸の入出力信号は、入出力アドレスの各1ワード(2バイト)で構成されます。
PLCからビット単位のON/OFF信号で制御します。
パラメータ ACONまたはPCON側 PLC側出力 ACONまたはPCON側 PLC側入力No.84 DI(ポート番号) アドレス DO(ポート番号) アドレス0 0~15 n 0~15 n
15
14
13
12
11
10
9 8 7 6 5 4 3 2 1 0
Fn+0 E D C B A 9 8 7 6 5 4 3 2 1 0
PLC出力(※nは各軸の出力先頭アドレスです。)
コントローラ 入力ポート 番号
1ワード=2バイト=16ビット
15
14
13
12
11
10
9 8 7 6 5 4 3 2 1 0
Fn+0 E D C B A 9 8 7 6 5 4 3 2 1 0
PLC入力(※nは各軸の入力先頭アドレスです。)
アドレス
アドレス
コントローラ 出力ポート 番号
1ワード=2バイト=16ビット

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
24
ProfiBus-DP
79
(3)入出力信号割付
パラメータNo.25の設定によりコントローラの入出力ポートの信号内容が変わります。
(詳細はコントローラ本体の取扱説明書参照)
ACON
*は正常時ON信号です。“使用できません”と表記されている信号は制御していません。(ON/OFFは不定です)
パラメータNo.25の設定位置決めモード 教示モード 256点モード
0 1 2
区分 ポート 信号名称 記号 信号名称 記号 信号名称 記号番号01234567
PLC出力→ 8ACON入力 9
101112
13
141501234567
ACON出力 8→PLC入力 9
10
11
12131415
PC1PC2
指令ポジション番号PC4PC8PC16PC32
使用できません
ブレーキ強制解除 BKRL運転モード RMOD原点復帰 HOME一時停止 *STP
位置決めスタート CSTR
リセット RESサーボON指令 SON
PM1PM2
完了ポジション番号PM4PM8PM16PM32
移動中信号 MOVEゾーン1 ZONE1
ポジションゾーン PZONE運転モード状態 RMDS原点復帰完了 HEND
位置決め完了信号 PEND
運転準備完了 SV非常停止 *EMGSアラーム *ALM
使用できません
PC1PC2
指令ポジション番号PC4PC8PC16PC32
教示モード指令 MODEジョグ/インチング切替 JISL+ジョグ JOG+-ジョグ JOG-運転モード RMOD原点復帰 HOME一時停止 *STP
位置決めスタート/CSTR/ポジションデータPWRT取込み指令
リセット RESサーボON指令 SON
PM1PM2
完了ポジション番号PM4PM8PM16PM32
移動中信号 MOVE教示モード信号 MODESポジションゾーン PZONE運転モード状態 RMDS原点復帰完了 HEND位置決め完了信号/
PEND/ポジションデータWEND取込み完了
運転準備完了 SV非常停止 *EMGSアラーム *ALM
使用できません
PC1PC2PC4
指令ポジション番号PC8PC16PC32PC64PC128
使用できません ブレーキ強制解除 BKRL運転モード RMOD原点復帰 HOME一時停止 *STP
位置決めスタート CSTR
リセット RESサーボON指令 SON
PM1PM2PM4
完了ポジション番号PM8PM16PM32PM64PM128
ポジションゾーン PZONE運転モード状態 RMDS原点復帰完了 HEND
位置決め完了信号 PEND
運転準備完了 SV非常停止 *EMGSアラーム *ALM
使用できません ON
ON OFF
No.25256
210
01234567
PLC 8ACON 9
101112
13
141501234567
ACON 8PLC 9
10
11
12131415
PC1PC2PC4PC8
PC16PC32
BKRLRMODHOME
STP
CSTR
RESSONPM1PM2PM4PM8
PM16PM32MOVEZONE1PZONERMDSHEND
PEND
SVEMGSALM
PC1PC2PC4PC8
PC16PC32MODEJISL
JOGJOGRMODHOME
STP
CSTRPWRT
RESSONPM1PM2PM4PM8
PM16PM32MOVEMODESPZONERMDSHEND
PENDWEND
SVEMGSALM
PC1PC2PC4PC8
PC16PC32PC64PC128
BKRLRMODHOME
STP
CSTR
RESSONPM1PM2PM4PM8
PM16PM32PM64PM128PZONERMDSHEND
PEND
SVEMGSALM
No.
ON
No.
1
No.
ON
No.
No.
ON
No.

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
25
ProfiBus-DP
79
(3)入出力信号割付
パラメータNo.25の設定によりコントローラの入出力ポートの信号内容が変わります。
(詳細はコントローラ本体の取扱説明書参照)
ACON
*は正常時ON信号です。“使用できません”と表記されている信号は制御していません。(ON/OFFは不定です)
パラメータNo.25の設定位置決めモード 教示モード 256点モード
0 1 2
区分 ポート 信号名称 記号 信号名称 記号 信号名称 記号番号01234567
PLC出力→ 8ACON入力 9
101112
13
141501234567
ACON出力 8→PLC入力 9
10
11
12131415
PC1PC2
指令ポジション番号PC4PC8PC16PC32
使用できません
ブレーキ強制解除 BKRL運転モード RMOD原点復帰 HOME一時停止 *STP
位置決めスタート CSTR
リセット RESサーボON指令 SON
PM1PM2
完了ポジション番号PM4PM8PM16PM32
移動中信号 MOVEゾーン1 ZONE1
ポジションゾーン PZONE運転モード状態 RMDS原点復帰完了 HEND
位置決め完了信号 PEND
運転準備完了 SV非常停止 *EMGSアラーム *ALM
使用できません
PC1PC2
指令ポジション番号PC4PC8PC16PC32
教示モード指令 MODEジョグ/インチング切替 JISL+ジョグ JOG+-ジョグ JOG-運転モード RMOD原点復帰 HOME一時停止 *STP
位置決めスタート/CSTR/ポジションデータPWRT取込み指令
リセット RESサーボON指令 SON
PM1PM2
完了ポジション番号PM4PM8PM16PM32
移動中信号 MOVE教示モード信号 MODESポジションゾーン PZONE運転モード状態 RMDS原点復帰完了 HEND位置決め完了信号/
PEND/ポジションデータWEND取込み完了
運転準備完了 SV非常停止 *EMGSアラーム *ALM
使用できません
PC1PC2PC4
指令ポジション番号PC8PC16PC32PC64PC128
使用できません ブレーキ強制解除 BKRL運転モード RMOD原点復帰 HOME一時停止 *STP
位置決めスタート CSTR
リセット RESサーボON指令 SON
PM1PM2PM4
完了ポジション番号PM8PM16PM32PM64PM128
ポジションゾーン PZONE運転モード状態 RMDS原点復帰完了 HEND
位置決め完了信号 PEND
運転準備完了 SV非常停止 *EMGSアラーム *ALM
使用できません
ProfiBus-DP
80
ACON
*は正常時ON信号です。“使用できません”と表記されている信号は制御していません。(ON/OFFは不定です)
パラメータNo.25の設定512点モード 電磁弁モード1 電磁弁モード2
3 4 5
区分 ポート 信号名称 記号 信号名称 記号 信号名称 記号番号0123456
PLC出力→ 7ACON入力 8
91011121314150123456
ACON出力 7→PLC入力 8
9101112131415
PC1PC2PC4PC8
指令ポジション番号 PC16PC32PC64PC128PC256
ブレーキ強制解除 BKRL運転モード RMOD原点復帰 HOME一時停止 *STP
位置決めスタート CSTRリセット RES
サーボON指令 SONPM1PM2PM4PM8
完了ポジション番号 PM16PM32PM64PM128PM256
運転モード状態 RMDS原点復帰完了 HEND位置決め完了信号 PEND運転準備完了 SV非常停止 *EMGSアラーム *ALM
使用できません
スタートポジション0 ST0スタートポジション1 ST1スタートポジション2 ST2スタートポジション3 ST3スタートポジション4 ST4スタートポジション5 ST5スタートポジション6 ST6
使用できません
ブレーキ強制解除 BKRL運転モード RMOD原点復帰 HOME一時停止 *STP
使用できません リセット RES
サーボON指令 SONポジション完了0 PE0ポジション完了1 PE1ポジション完了2 PE2ポジション完了3 PE3ポジション完了4 PE4ポジション完了5 PE5ポジション完了6 PE6ゾーン1 ZONE1
ポジションゾーン PZONE運転モード状態 RMDS原点復帰完了 HEND位置決め完了信号 PEND運転準備完了 SV非常停止 *EMGSアラーム *ALM
使用できません
スタートポジション0 ST0スタートポジション1 ST1スタートポジション2 ST2
使用できません
ブレーキ強制解除 BKRL運転モード RMOD
使用できません
リセット RES
サーボON指令 SON後退端移動指令0 LS0後退端移動指令1 LS1後退端移動指令2 LS2
使用できません
ゾーン1 ZONE1ポジションゾーン PZONE運転モード状態 RMDS原点復帰完了 HEND使用できません 運転準備完了 SV非常停止 *EMGSアラーム *ALM
使用できません
ONON OFF
No.25512 1 2
543
0123456
PLC 7ACON 8
91011121314150123456
ACON 7PLC 8
9101112131415
PC1PC2PC4PC8
PC16PC32PC64
PC128PC256BKRLRMODHOME
STPCSTRRESSONPM1PM2PM4PM8
PM16PM32PM64PM128PM256RMDSHENDPEND
SVEMGS
ST0ST1ST2ST3ST4ST5ST6
BKRLRMODHOME
STP
RESSONPE0PE1PE2PE3PE4PE5PE6
ZONE1PZONERMDSHENDPEND
SVEMGSALM
ST0ST1ST2
BKRLRMOD
RESSONLS0LS1LS2
ZONE1PZONERMDSHEND
SVEMGSALM
No.
ON
No.
012
ON012
1
0123456
ON0123456
1
ALM

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
26
ProfiBus-DP
81
PCON
*は正常時ON信号です。“使用できません”と表記されている信号は制御していません。(ON/OFFは不定です)
パラメータNo.25の設定位置決めモード 教示モード 256点モード
0 1 2
区分 ポート 信号名称 記号 信号名称 記号 信号名称 記号番号01234567
PLC出力→ 8PCON入力 9
101112
13
141501234567
PCON出力8
→PLC入力910
11
121314
15
PC1PC2
指令ポジション番号PC4PC8PC16PC32
使用できません
ブレーキ強制解除 BKRL運転モード RMOD原点復帰 HOME一時停止 *STP
位置決めスタート CSTR
リセット RESサーボON指令 SON
PM1PM2
完了ポジション番号PM4PM8PM16PM32
移動中信号 MOVEゾーン1 ZONE1
ポジションゾーン PZONE運転モード状態 RMDS原点復帰完了 HEND
位置決め完了信号 PEND
運転準備完了 SV非常停止 *EMGSアラーム *ALM
負荷出力判定/ LOAD/トルクレベル TRQS
PC1PC2
指令ポジション番号PC4PC8PC16PC32
教示モード指令 MODEジョグ/インチング切替 JISL+ジョグ JOG+-ジョグ JOG-運転モード RMOD原点復帰 HOME一時停止 *STP
位置決めスタート/CSTR/ポジションデータPWRT取込み指令
リセット RESサーボON指令 SON
PM1PM2
完了ポジション番号PM4PM8PM16PM32
移動中信号 MOVE教示モード信号 MODESポジションゾーン PZONE運転モード状態 RMDS原点復帰完了 HEND位置決め完了信号/
PEND/ポジションデータWEND取込み完了
運転準備完了 SV非常停止 *EMGSアラーム *ALM
使用できません
PC1PC2PC4
指令ポジション番号PC8PC16PC32PC64PC128
使用できません ブレーキ強制解除 BKRL運転モード RMOD原点復帰 HOME一時停止 *STP
位置決めスタート CSTR
リセット RESサーボON指令 SON
PM1PM2PM4
完了ポジション番号PM8PM16PM32PM64PM128
ポジションゾーン PZONE運転モード状態 RMDS原点復帰完了 HEND
位置決め完了信号 PEND
運転準備完了 SV非常停止 *EMGSアラーム *ALM
負荷出力判定/ LOAD/トルクレベル TRQS
ONON OFF
No.25256
210
01234567
PLC 8PCON 9
101112
13
141501234567
PCON8
PLC9
10
11
121314
15
PC1PC2PC4PC8
PC16PC32
BKRLRMODHOME
STP
CSTR
RESSONPM1PM2PM4PM8
PM16PM32MOVEZONE1PZONERMDSHEND
PEND
SVEMGSALM
LOADTRQS
ON
PC1PC2PC4PC8PC16PC32PC64PC128
BKRLRMODHOME
STP
CSTR
RESSONPM1PM2PM4PM8
PM16PM32PM64PM128PZONERMDSHEND
PEND
SVEMGSALM
LOADTRQS
No.
ON
No.
1
No.
ON
No.
PC1PC2PC4PC8
PC16PC32MODEJISL
JOGJOGRMODHOME
STP
CSTRPWRT
RESSONPM1PM2PM4PM8
PM16PM32MOVEMODESPZONERMDSHEND
PENDWEND
SVEMGS
No.
No.
ALM

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
27
ProfiBus-DP
81
PCON
*は正常時ON信号です。“使用できません”と表記されている信号は制御していません。(ON/OFFは不定です)
パラメータNo.25の設定位置決めモード 教示モード 256点モード
0 1 2
区分 ポート 信号名称 記号 信号名称 記号 信号名称 記号番号01234567
PLC出力→ 8PCON入力 9
101112
13
141501234567
PCON出力8
→PLC入力910
11
121314
15
PC1PC2
指令ポジション番号PC4PC8PC16PC32
使用できません
ブレーキ強制解除 BKRL運転モード RMOD原点復帰 HOME一時停止 *STP
位置決めスタート CSTR
リセット RESサーボON指令 SON
PM1PM2
完了ポジション番号PM4PM8PM16PM32
移動中信号 MOVEゾーン1 ZONE1
ポジションゾーン PZONE運転モード状態 RMDS原点復帰完了 HEND
位置決め完了信号 PEND
運転準備完了 SV非常停止 *EMGSアラーム *ALM
負荷出力判定/ LOAD/トルクレベル TRQS
PC1PC2
指令ポジション番号PC4PC8PC16PC32
教示モード指令 MODEジョグ/インチング切替 JISL+ジョグ JOG+-ジョグ JOG-運転モード RMOD原点復帰 HOME一時停止 *STP
位置決めスタート/CSTR/ポジションデータPWRT取込み指令
リセット RESサーボON指令 SON
PM1PM2
完了ポジション番号PM4PM8PM16PM32
移動中信号 MOVE教示モード信号 MODESポジションゾーン PZONE運転モード状態 RMDS原点復帰完了 HEND位置決め完了信号/
PEND/ポジションデータWEND取込み完了
運転準備完了 SV非常停止 *EMGSアラーム *ALM
使用できません
PC1PC2PC4
指令ポジション番号PC8PC16PC32PC64PC128
使用できません ブレーキ強制解除 BKRL運転モード RMOD原点復帰 HOME一時停止 *STP
位置決めスタート CSTR
リセット RESサーボON指令 SON
PM1PM2PM4
完了ポジション番号PM8PM16PM32PM64PM128
ポジションゾーン PZONE運転モード状態 RMDS原点復帰完了 HEND
位置決め完了信号 PEND
運転準備完了 SV非常停止 *EMGSアラーム *ALM
負荷出力判定/ LOAD/トルクレベル TRQS
ProfiBus-DP
82
PCON
*は正常時ON信号です。“使用できません”と表記されている信号は制御していません。(ON/OFFは不定です)
パラメータNo.25の設定512点モード 電磁弁モード1 電磁弁モード2
3 4 5
区分 ポート 信号名称 記号 信号名称 記号 信号名称 記号番号0123456
PLC出力→ 7PCON入力 8
91011121314150123456
PCON出力7
→PLC入力891011121314
15
PC1PC2PC4PC8
指令ポジション番号 PC16PC32PC64PC128PC256
ブレーキ強制解除 BKRL運転モード RMOD原点復帰 HOME一時停止 *STP
位置決めスタート CSTRリセット RES
サーボON指令 SONPM1PM2PM4PM8
完了ポジション番号 PM16PM32PM64PM128PM256
運転モード状態 RMDS原点復帰完了 HEND位置決め完了信号 PEND運転準備完了 SV非常停止 *EMGSアラーム *ALM
負荷出力判定/ LOAD/トルクレベル TRQS
スタートポジション0 ST0スタートポジション1 ST1スタートポジション2 ST2スタートポジション3 ST3スタートポジション4 ST4スタートポジション5 ST5スタートポジション6 ST6
使用できません
ブレーキ強制解除 BKRL運転モード RMOD原点復帰 HOME一時停止 *STP
使用できません リセット RES
サーボON指令 SONポジション完了0 PE0ポジション完了1 PE1ポジション完了2 PE2ポジション完了3 PE3ポジション完了4 PE4ポジション完了5 PE5ポジション完了6 PE6ゾーン1 ZONE1
ポジションゾーン PZONE運転モード状態 RMDS原点復帰完了 HEND位置決め完了信号 PEND運転準備完了 SV非常停止 *EMGSアラーム *ALM
負荷出力判定/ LOAD/トルクレベル TRQS
スタートポジション0 ST0スタートポジション1 ST1スタートポジション2 ST2
使用できません
ブレーキ強制解除 BKRL運転モード RMOD
使用できません
リセット RES
サーボON指令 SON後退端移動指令0 LS0後退端移動指令1 LS1後退端移動指令2 LS2
使用できません
ゾーン1 ZONE1ポジションゾーン PZONE運転モード状態 RMDS原点復帰完了 HEND使用できません 運転準備完了 SV非常停止 *EMGSアラーム *ALM
使用できません
ONON OFF
No.25512 1 2
543
0123456
PLC 7PCON 8
91011121314150123456
PCON7
PLC891011121314
15
PC1PC2PC4PC8
PC16PC32PC64
PC128PC256BKRLRMODHOME
STPCSTRRESSONPM1PM2PM4PM8
PM16PM32PM64PM128PM256RMDSHENDPEND
SVEMGSALM
LOADTRQS
ST0ST1ST2ST3ST4ST5ST6
BKRLRMODHOME
STP
RESSONPE0PE1PE2PE3PE4PE5PE6
ZONE1PZONERMDSHENDPEND
SVEMGSALM
LOADTRQS
012
ON012
1
No.
ON
No.
ST0ST1ST2
BKRLRMOD
RESSONLS0LS1LS2
ZONE1PZONERMDSHEND
SVEMGSALM
0123456
ON0123456
1

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
28
ProfiBus-DP
83
7.4.3 ポジション/簡易直値モード(占有バイト数:8)ポジションNo.を指定して運転する方式です。制御信号(PMOD信号)の切換えで目標位置を直接数値で指定するか、ポジションデータに登録した値を使用するか選択できます。
目標位置以外の速度、加減速度、位置決め幅等はコントローラ内のポジションテーブルの値が使用されます。コントローラ本体の取扱説明書を参照してポジションデータを設定してください。
設定可能なポジションデータの数は最大768点です。
本モードで制御可能なロボシリンダの有効な主要機能は次の表の通りです。
:直接制御
ロボシリンダの機能 :間接制御 備考
×:無効
原点復帰動作
位置決め動作
速度・加減速度設定
ピッチ送り(インチング)
押付け動作 ポジションデータの
移動中の速度変更 設定が必要です。
異なった加速度、
減速度での動作
一時停止
ゾーン信号出力 ゾーンの設定は
パラメータに行います。
PIOパターン選択 ×
(1)PLCアドレス構成(※nは各軸の入出力先頭アドレスです。)
(注)アドレスの重複使用にご注意ください。
パラメータ ACONまたはPCON側 PLC側出力 ACONまたはPCON側 PLC側入力No.84 入力レジスタ アドレス 出力レジスタ アドレス1
目標位置n+0
現在位置n+0
n+1 n+1
指定ポジション番号 n+2完了ポジション番号
n+2(簡易アラームコード)
制御信号 n+3 状態信号 n+3
3.4.3 ポジション/簡易直値モード(占有バイト数:8)
指令ポジション No.完全ポジション No.

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
29
ProfiBus-DP
83
7.4.3 ポジション/簡易直値モード(占有バイト数:8)ポジションNo.を指定して運転する方式です。制御信号(PMOD信号)の切換えで目標位置を直接数値で指定するか、ポジションデータに登録した値を使用するか選択できます。
目標位置以外の速度、加減速度、位置決め幅等はコントローラ内のポジションテーブルの値が使用されます。コントローラ本体の取扱説明書を参照してポジションデータを設定してください。
設定可能なポジションデータの数は最大768点です。
本モードで制御可能なロボシリンダの有効な主要機能は次の表の通りです。
:直接制御
ロボシリンダの機能 :間接制御 備考
×:無効
原点復帰動作
位置決め動作
速度・加減速度設定
ピッチ送り(インチング)
押付け動作 ポジションデータの
移動中の速度変更 設定が必要です。
異なった加速度、
減速度での動作
一時停止
ゾーン信号出力 ゾーンの設定は
パラメータに行います。
PIOパターン選択 ×
(1)PLCアドレス構成(※nは各軸の入出力先頭アドレスです。)
(注)アドレスの重複使用にご注意ください。
パラメータ ACONまたはPCON側 PLC側出力 ACONまたはPCON側 PLC側入力No.84 入力レジスタ アドレス 出力レジスタ アドレス1
目標位置n+0
現在位置n+0
n+1 n+1
指定ポジション番号 n+2完了ポジション番号
n+2(簡易アラームコード)
制御信号 n+3 状態信号 n+3
ProfiBus-DP
84
(2)軸毎の入出力信号割付
各軸の入出力信号は、入出力アドレスの各4ワード(8バイト)で構成されます。
制御信号および状態信号はビット単位のON/OFF信号です。
目標位置および現在位置は2ワード(32ビット)のバイナリデータで、PLCでは-999999~+999999(単位:0.01mm)の数値が扱えますが、位置データは当該アクチュエータのソフトストロークの範囲内(0~有効ストローク長)で設定してください。
指定ポジション番号および完了ポジション番号は1ワード(16ビット)のバイナリデータで、PLCでは0~767までの数値が扱えますが、パソコンソフトまたはティーチングBOXであらかじめ運転条件を設定したポジション番号を指定してください。
b15n+0 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
PLC出力 アドレス(※nは各軸の出力先頭アドレスです。)
目標位置が負数の場合は、2の補数で表されます。
目標位置 (上位ワード)
1ワード=2バイト=16ビット
目標位置 (下位ワード)
PC512
PC256
PC128
PC64
PC32
PC16
PC8
PC4
PC2
PC1
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指定ポジション 番号
BKRL
RMOD
PMOD
MODE
PWRT
JOG+
JOG-
JVEL
JISL
SON
RES
STP
HOME
CSTR
制御信号
PLC では 0 ~ 767 までの数値が扱えますが、パソコンソフトなどのティーチングツールであらかじ
め運転条件を設定したポジション No. を指定してください。
No.No.
No.

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
30
ProfiBus-DP
85
b15n+0 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
PLC入力 アドレス(※nは各軸の入力先頭アドレスです。)
現在位置が負数の場合は、2の補数で表されます。
現在位置 (上位ワード)
1ワード=2バイト=16ビット
現在位置 (下位ワード)
PM512
PM256
PM128
PM64
PM32
PM16
PM8
PM4
PM2
PM1
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
完了ポジション 番号
EMGS
PWR
ZONE1
ZONE2
PZONE
MODES
WEND
RMDS
PSFL
SV
ALM
MOVE
HEND
PEND
状態信号
ZON
E2
ZON
E1
No.

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
31
ProfiBus-DP
85
b15n+0 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
PLC入力 アドレス(※nは各軸の入力先頭アドレスです。)
現在位置が負数の場合は、2の補数で表されます。
現在位置 (上位ワード)
1ワード=2バイト=16ビット
現在位置 (下位ワード)
PM512
PM256
PM128
PM64
PM32
PM16
PM8
PM4
PM2
PM1
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
完了ポジション 番号
EMGS
PWR
ZONE1
ZONE2
PZONE
MODES
WEND
RMDS
PSFL
SV
ALM
MOVE
HEND
PEND
状態信号
ProfiBus-DP
86
(3)入出力信号割付(※表中のONの表記は該当のビットが“1”を表し、OFFは“0”を表します)信号種別 ビット 記号 内容 詳細
目標位置32ビット
7.6(1)データ
指定16ビット PC1~ 7.6(1)ポジションデータ PC512番号
b15 BKRL 7.4.7(18)b14 RMOD 7.4.7(19)b13
b12
b11 PMOD 7.4.7(20)
b10 MODE 7.4.7(16)
b9 PWRT 7.4.7(17)
b8 JOG+ 7.4.7(13)制御信号 b7 JOG- 7.4.7(13)
b6 JVEL 7.4.7(14)
b5 JISL 7.4.7(15)
b4 SON 7.4.7(5)b3 RES 7.4.7(4)b2 STP 7.4.7(11)b1 HOME 7.4.7(6)b0 CSTR 7.4.7(7)
PLC出力
32ビット符号付整数目標位置を絶対座標上の位置で指定してください。単位は0.01mmで指定可能範囲は、-999999~999999となります。(例)+25.40mmなら2540と指定します。パラメータのソフトリミットの内側(0.2mm)を超えた値を入力するとソフトリミットの内側(0.2mm)までの移動に制限されます。※16進数で入力する場合、負数は2の補数で入力してください。16ビット整数運転にはパソコン対応ソフトまたはティーチングBOXであらかじめ運転条件を設定したポジションデータが必要です。本レジスタでデータを入力したポジション番号を指定してください。指定可能範囲は0~767となります。範囲外の値の指定、未設定のポジション番号の指定はスタート信号をONした際にアラームとなります。ブレーキ強制解除:ONでブレーキ解除運転モード:OFF でAUTOモード、ONでMANUモード
使用できません
ポジション/簡易直値切替:OFFでポジションモード、ONで簡易直値モード教示モード指令:OFF で通常モード、ONで教示モードポジションデータ取り込み指令:ONでポジションデータ取込み+ジョグ:ONで反原点方向移動-ジョグ:ONで原点方向移動ジョグ速度/インチング距離切替え:OFF でパラメータNo.26“ジョグ速度”、パラメータNo.48“インチング距離”ONでパラメータNo.47“ジョグ速度2”、パラメータNo.49“インチング距離2”の設定値を使用する。ジョグ/インチング切替え:OFFでジョグ動作、ONでインチング動作サーボON指令:ONでサーボONリセット:ONでリセット実行一時停止:ONで一時停止指令原点復帰:ONで原点復帰指令位置決めスタート:ONで移動指令
3.6 (1)
3.4.7(18)3.4.7(19)
3.4.7(20)
3.4.7(16)
3.6 (1)
3.4.7(17)
3.4.7(13)
3.4.7(14)
3.4.7(15)
3.4.7 (4)3.4.7(11)3.4.7 (6)3.4.7 (7)
3.4.7 (5)
3.4.7(13)
運転にはパソコン対応ソフトなどのティーチ
ングツールであらかじめ運転条件を設定した
ポジションデータが必要です。
本レジスタでデータを入力したポジション
No. を指定してください。
No.
No.
PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
32
ProfiBus-DP
87
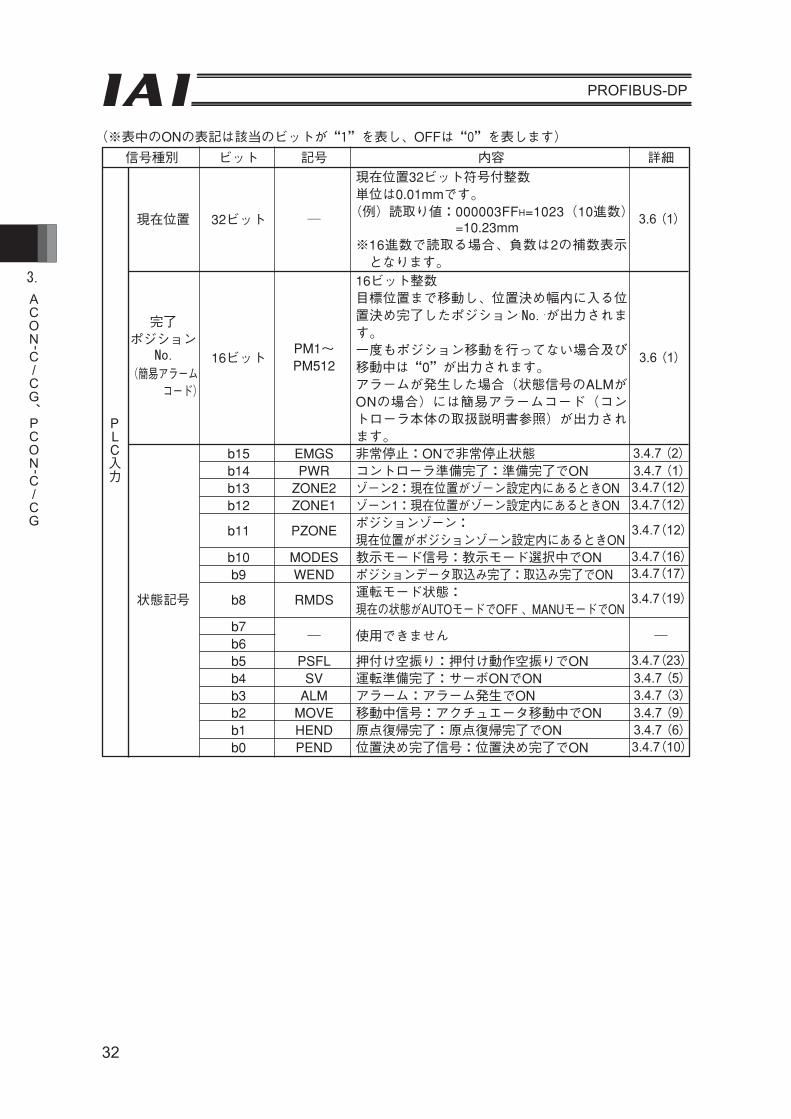
(※表中のONの表記は該当のビットが“1”を表し、OFFは“0”を表します)
信号種別 ビット 記号 内容 詳細
現在位置 32ビット 7.6(1)
完了ポジション
16ビットPM1~
7.6(1)番号PM512(簡易アラーム
コード)
b15 EMGS 7.4.7(2)b14 PWR 7.4.7(1)b13 ZONE2 7.4.7(12)b12 ZONE1 7.4.7(12)
b11 PZONE 7.4.7(12)
b10 MODES 7.4.7(16)b9 WEND 7.4.7(17)
状態記号 b8 RMDS 7.4.7(19)
b7 b6
b5 PSFL 7.4.7(23)b4 SV 7.4.7(5)b3 ALM 7.4.7(3)b2 MOVE 7.4.7(9)b1 HEND 7.4.7(6)b0 PEND 7.4.7(10)
PLC入力
現在位置32ビット符号付整数単位は0.01mmです。(例)読取り値:000003FFH=1023(10進数)
=10.23mm※16進数で読取る場合、負数は2の補数表示となります。16ビット整数目標位置まで移動し、位置決め幅内に入る位置決め完了したポジション番号が出力されます。一度もポジション移動を行ってない場合及び移動中は“0”が出力されます。アラームが発生した場合(状態信号のALMがONの場合)には簡易アラームコード(コントローラ本体の取扱説明書参照)が出力されます。非常停止:ONで非常停止状態コントローラ準備完了:準備完了でONゾーン2:現在位置がゾーン設定内にあるときONゾーン1:現在位置がゾーン設定内にあるときONポジションゾーン:現在位置がポジションゾーン設定内にあるときON教示モード信号:教示モード選択中でONポジションデータ取込み完了:取込み完了でON運転モード状態:現在の状態がAUTOモードでOFF 、MANUモードでON
使用できません
押付け空振り:押付け動作空振りでON運転準備完了:サーボONでONアラーム:アラーム発生でON移動中信号:アクチュエータ移動中でON原点復帰完了:原点復帰完了でON位置決め完了信号:位置決め完了でON
3.4.7(12)3.4.7(12)
3.6 (1)
3.4.7(12)
3.4.7(17)
3.4.7(19)
3.4.7(23)
3.4.7 (3)3.4.7 (9)3.4.7 (6)3.4.7(10)
3.4.7 (5)
3.4.7(16)
3.4.7 (2)3.4.7 (1)
3.6 (1)No.
No.

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
33
ProfiBus-DP
87
(※表中のONの表記は該当のビットが“1”を表し、OFFは“0”を表します)
信号種別 ビット 記号 内容 詳細
現在位置 32ビット 7.6(1)
完了ポジション
16ビットPM1~
7.6(1)番号PM512(簡易アラーム
コード)
b15 EMGS 7.4.7(2)b14 PWR 7.4.7(1)b13 ZONE2 7.4.7(12)b12 ZONE1 7.4.7(12)
b11 PZONE 7.4.7(12)
b10 MODES 7.4.7(16)b9 WEND 7.4.7(17)
状態記号 b8 RMDS 7.4.7(19)
b7 b6
b5 PSFL 7.4.7(23)b4 SV 7.4.7(5)b3 ALM 7.4.7(3)b2 MOVE 7.4.7(9)b1 HEND 7.4.7(6)b0 PEND 7.4.7(10)
PLC入力
現在位置32ビット符号付整数単位は0.01mmです。(例)読取り値:000003FFH=1023(10進数)
=10.23mm※16進数で読取る場合、負数は2の補数表示となります。16ビット整数目標位置まで移動し、位置決め幅内に入る位置決め完了したポジション番号が出力されます。一度もポジション移動を行ってない場合及び移動中は“0”が出力されます。アラームが発生した場合(状態信号のALMがONの場合)には簡易アラームコード(コントローラ本体の取扱説明書参照)が出力されます。非常停止:ONで非常停止状態コントローラ準備完了:準備完了でONゾーン2:現在位置がゾーン設定内にあるときONゾーン1:現在位置がゾーン設定内にあるときONポジションゾーン:現在位置がポジションゾーン設定内にあるときON教示モード信号:教示モード選択中でONポジションデータ取込み完了:取込み完了でON運転モード状態:現在の状態がAUTOモードでOFF 、MANUモードでON
使用できません
押付け空振り:押付け動作空振りでON運転準備完了:サーボONでONアラーム:アラーム発生でON移動中信号:アクチュエータ移動中でON原点復帰完了:原点復帰完了でON位置決め完了信号:位置決め完了でON
ProfiBus-DP
88
7.4.4 ハーフ直値モード(占有バイト数:16)PLCから目標位置、位置決め幅、速度、加減速度、押付電流値を直接数値で指定する運転方式です。
入出力アドレスに各値を設定してください。ゾーン機能を使用する場合にはパラメータNo.1,2,23,24に設定してください。
本モードで制御可能なロボシリンダの有効な主要機能は次の表の通りです。
:直接制御
ロボシリンダの機能 :間接制御 備考
×:無効
原点復帰動作
位置決め動作
速度・加減速度設定
ピッチ送り(インチング)
押付け動作
移動中の速度変更
異なった加速度、×
減速度での動作
一時停止
ゾーン信号出力 パラメータに設定が必要です。
PIOパターン選択 ×
(1)PLCアドレス構成(※nは各軸の入出力先頭アドレスです。)
(注)アドレスの重複使用にご注意ください。
パラメータ ACONまたはPCON側 PLC側出力 ACONまたはPCON側 PLC側入力No.84 入力レジスタ アドレス 出力レジスタ アドレス
2目標位置
n+0現在位置
n+0n+1 n+1
位置決め幅n+2
指令電流n+2
n+3 n+3速度 n+4
現在速度n+4
加減速度 n+5 n+5押付け電流制限値 n+6 アラームコード n+6
制御信号 n+7 状態信号 n+7
3.4.4 ハーフ直値モード(占有バイト数:16)
2

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
34
ProfiBus-DP
89
(2)軸毎の入出力信号割付
各軸の入出力信号は、入出力アドレスの各8ワード(16バイト)で構成されます。
制御信号および状態信号はビット単位のON/OFF信号です。
目標位置および現在位置は2ワード(32ビット)のバイナリデータで、PLCでは-999999~+999999(単位:0.01mm)の数値が扱えますが、位置データは当該アクチュエータのソフトストロークの範囲内(0~有効ストローク長)で設定してください。
位置決め幅を設定してください。位置決め幅は2ワード(32ビット)のバイナリデータで、PLCでは1~+999999 (単位:0.01mm)の数値が扱えます。
指定速度は1ワード(16ビット)のバイナリデータで、PLCでは0~+65535 (単位:1.0mm/sec)の数値が扱えますが、当該アクチュエータの最大速度を超えない値に設定してください。
加減速度は1ワード(16ビット)のバイナリデータで、PLCでは1~300(単位:0.01G)の数値が扱えますが、当該アクチュエータの最大加速度および最大減速度を超えない値に設定してください。
押付け電流制限値は1ワード(16ビット)のバイナリデータで、PLCでは0(0%)~255(100%)の数値が扱えますが、当該アクチュエータの押付け電流制限値の指定可能範囲内(アクチュエータのカタログまたは取扱説明書参照)で設定してください。
指令電流は2ワード(32ビット)のバイナリデータ(単位:1mA)です。
現在速度は2ワード(32ビット)のバイナリデータ(単位:0.01mm/sec)です。
正数:反原点方向へ移動中、負数:原点方向へ移動中。
アラームコードは1ワード(16ビット)のバイナリデータです。
設定値
押付け電流制限値 0% 50% 100%
0 128 255
速度は 1 ワード(16 ビット)のバイナリデータで、PLC では 0 ~+ 65535 (単位:1.0mm/sec)の数値が扱えますが、当該アクチュエータの最大速度を超えない値に設定してください。

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
35
ProfiBus-DP
89
(2)軸毎の入出力信号割付
各軸の入出力信号は、入出力アドレスの各8ワード(16バイト)で構成されます。
制御信号および状態信号はビット単位のON/OFF信号です。
目標位置および現在位置は2ワード(32ビット)のバイナリデータで、PLCでは-999999~+999999(単位:0.01mm)の数値が扱えますが、位置データは当該アクチュエータのソフトストロークの範囲内(0~有効ストローク長)で設定してください。
位置決め幅を設定してください。位置決め幅は2ワード(32ビット)のバイナリデータで、PLCでは1~+999999 (単位:0.01mm)の数値が扱えます。
指定速度は1ワード(16ビット)のバイナリデータで、PLCでは0~+65535 (単位:1.0mm/sec)の数値が扱えますが、当該アクチュエータの最大速度を超えない値に設定してください。
加減速度は1ワード(16ビット)のバイナリデータで、PLCでは1~300(単位:0.01G)の数値が扱えますが、当該アクチュエータの最大加速度および最大減速度を超えない値に設定してください。
押付け電流制限値は1ワード(16ビット)のバイナリデータで、PLCでは0(0%)~255(100%)の数値が扱えますが、当該アクチュエータの押付け電流制限値の指定可能範囲内(アクチュエータのカタログまたは取扱説明書参照)で設定してください。
指令電流は2ワード(32ビット)のバイナリデータ(単位:1mA)です。
現在速度は2ワード(32ビット)のバイナリデータ(単位:0.01mm/sec)です。
正数:反原点方向へ移動中、負数:原点方向へ移動中。
アラームコードは1ワード(16ビット)のバイナリデータです。
設定値
押付け電流制限値 0% 50% 100%
0 128 255
ProfiBus-DP
90
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
目標位置 (下位ワード)
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
位置決め幅 (上位ワード)
524,288
262,144
131,072
65,536
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
位置決め幅 (下位ワード)
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
b15n+4 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
速度
256
128
64
32
16
8 4 2 1b15n+5 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
加減速度
128
64
32
16
8 4 2 1
b15n+6 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
押付け電流 制限値
BKRL
RMOD
DIR
PUSH
JOG+
JOG-
JVEL
JISL
SON
RES
STP
HOME
DSTR
b15n+7 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
制御信号
b15n+0 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
目標位置 (上位ワード)
1ワード=2バイト=16ビット
目標位置が負数の場合は、2の補数で表されます。
PLC出力
アドレス(※nは各軸の出力先頭アドレスです。)
PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
36
ProfiBus-DP
91
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在位置 (下位ワード)
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指令電流 (上位ワード)
524,288
262,144
131,072
65,536
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指令電流 (下位ワード)
b15n+4 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在速度 (上位ワード)
b15n+5 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在速度 (下位ワード)
b15n+6 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
アラーム コード
EMGS
PWR
ZONE2
ZONE1
RMDS
PSFL
SV
ALM
MOVE
HEND
PEND
b15n+7 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
状態信号
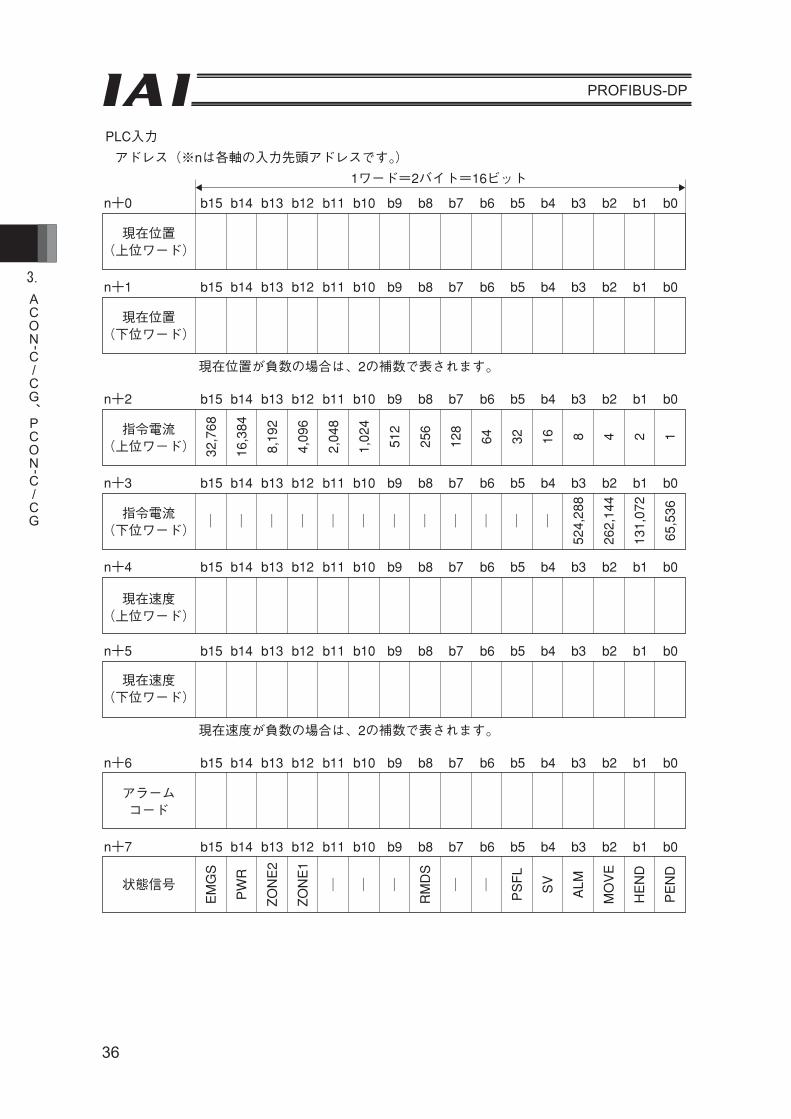
b15n+0 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在位置 (上位ワード)
1ワード=2バイト=16ビット
現在位置が負数の場合は、2の補数で表されます。
現在速度が負数の場合は、2の補数で表されます。
PLC入力
アドレス(※nは各軸の入力先頭アドレスです。)

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
37
ProfiBus-DP
91
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在位置 (下位ワード)
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指令電流 (上位ワード)
524,288
262,144
131,072
65,536
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指令電流 (下位ワード)
b15n+4 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在速度 (上位ワード)
b15n+5 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在速度 (下位ワード)
b15n+6 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
アラーム コード
EMGS
PWR
ZONE2
ZONE1
RMDS
PSFL
SV
ALM
MOVE
HEND
PEND
b15n+7 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
状態信号
b15n+0 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在位置 (上位ワード)
1ワード=2バイト=16ビット
現在位置が負数の場合は、2の補数で表されます。
現在速度が負数の場合は、2の補数で表されます。
PLC入力
アドレス(※nは各軸の入力先頭アドレスです。)(3)入出力信号割付(※表中のONの表記は該当のビットが“1”を表し、OFFは“0”を表します)
信号種別 ビット 記号 内容 詳細
目標位置32ビット
3.6(2)データ
位置決め幅32ビット
)2(6.3データ
16ビット速度
データ 3.6(2)
16ビット加減速度
データ 3.6(2)
PLC出力
32ビット符号付整数
目標位置を絶対座標上の位置で指定してくだ
さい。
単位は0.01mmで指定可能範囲は、-999999~999999となります。(例)+25.41mmなら2541と指定します。
パラメータのソフトリミットの内側(0.2mm)
を超えた値を入力するとソフトリミットの内
側(0.2mm)までの移動に制限されます。
※16進数で入力する場合、負数は2の補数で
入力してください。
32ビット整数
単位は0.01mmで指定可能範囲は1~999999です。
(例)25.40mmなら2540と指定します。
本レジスタは動作種別により2種類の意味が
あります。
①位置決め動作の場合、目標位置からどの程
度の範囲で位置決め完了とみなすかの許容
範囲となります。
②押付け動作時は押付け幅の値となります。
通常動作か押付け動作かの指定は、制御信号のPUSHで設定してください。
16ビット整数
移動時の速度を指定してください。
単位は1.0mm/secで指定可能範囲は、0~65535となります。
(例)254.0mm/secなら254と指定します。最大速度以上の値で移動指令を行うとアラー
ムとなります。
16ビット整数
移動時の加減速度を指定してください。(加
速度と減速度は同じ値となります。)
単位は0.01Gで指定可能範囲は1~300です。
(例)0.30Gなら30と指定します。
0または最大加速度,最大減速度を超えた値
で移動指令を行うとアラームとなります。
0を指定すると移動中であれば減速停止、停止中であれば、その場で停止したままとなります。
PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
38
ProfiBus-DP
93
信号種別 ビット 記号 内容 詳細
押付け電流 16ビット制限値 データ
7.6(2)
b15 BKRL 7.4.7(18)b14 RMOD 7.4.7(19)
b13 DIR 7.4.7(22)
b12 PUSH 7.4.7(21)b11b10 b9b8 JOG+ 7.4.7(13)b7 JOG- 7.4.7(13)
制御信号
b6 JVEL 7.4.7(14)
b5 JISL 7.4.7(15)
b4 SON 7.4.7(5)b3 RES 7.4.7(4)b2 STP 7.4.7(11)b1 HOME 7.4.7(6)b0 DSTR 7.4.7(8)
PLC出力
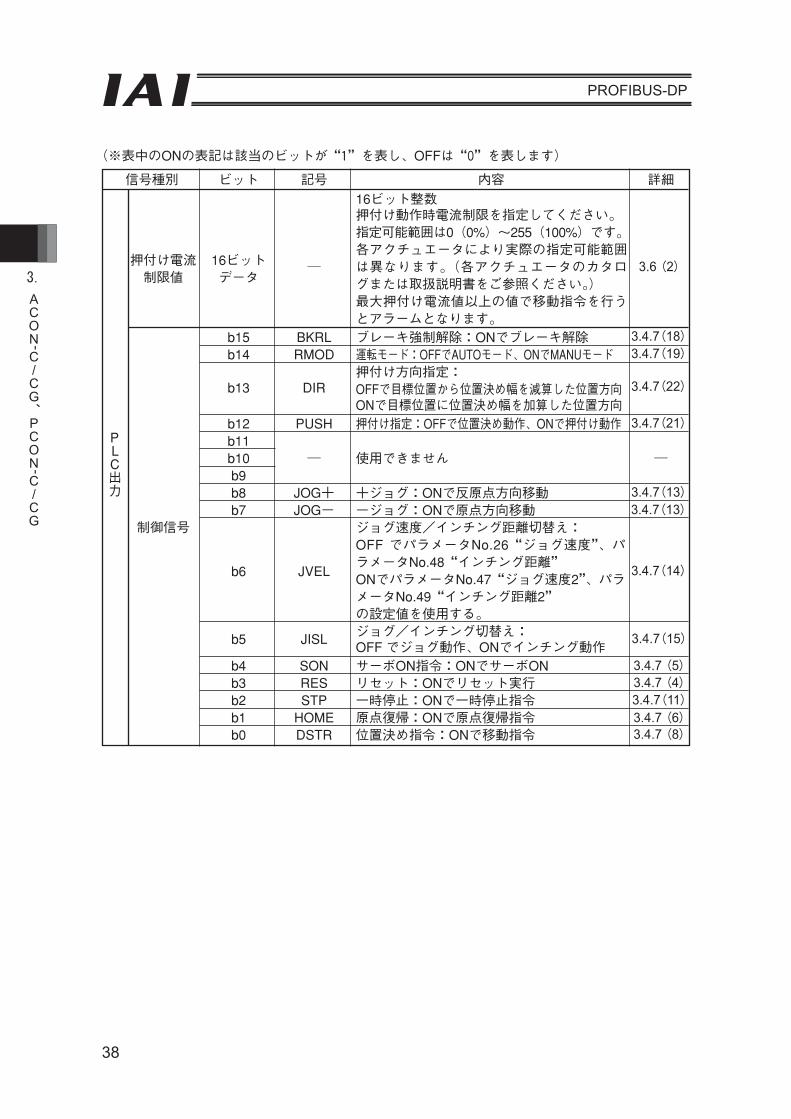
16ビット整数押付け動作時電流制限を指定してください。指定可能範囲は0(0%)~255(100%)です。各アクチュエータにより実際の指定可能範囲は異なります。(各アクチュエータのカタログまたは取扱説明書をご参照ください。)最大押付け電流値以上の値で移動指令を行うとアラームとなります。ブレーキ強制解除:ONでブレーキ解除運転モード:OFFでAUTOモード、ONでMANUモード押付け方向指定:OFFで目標位置から位置決め幅を減算した位置方向ONで目標位置に位置決め幅を加算した位置方向押付け指定:OFFで位置決め動作、ONで押付け動作
使用できません
+ジョグ:ONで反原点方向移動-ジョグ:ONで原点方向移動ジョグ速度/インチング距離切替え:OFF でパラメータNo.26“ジョグ速度”、パラメータNo.48“インチング距離”ONでパラメータNo.47“ジョグ速度2”、パラメータNo.49“インチング距離2”の設定値を使用する。ジョグ/インチング切替え:OFF でジョグ動作、ONでインチング動作サーボON指令:ONでサーボONリセット:ONでリセット実行一時停止:ONで一時停止指令原点復帰:ONで原点復帰指令位置決め指令:ONで移動指令
(※表中のONの表記は該当のビットが“1”を表し、OFFは“0”を表します)
3.4.7(19)
3.4.7(22)
3.4.7(21)
3.4.7(13)
3.4.7(14)
3.4.7(15)
3.4.7 (4)3.4.7(11)3.4.7 (6)3.4.7 (8)
3.4.7 (5)
3.4.7(13)
3.4.7(18)
3.6 (2)

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
39
ProfiBus-DP
93
信号種別 ビット 記号 内容 詳細
押付け電流 16ビット制限値 データ
7.6(2)
b15 BKRL 7.4.7(18)b14 RMOD 7.4.7(19)
b13 DIR 7.4.7(22)
b12 PUSH 7.4.7(21)b11b10 b9b8 JOG+ 7.4.7(13)b7 JOG- 7.4.7(13)
制御信号
b6 JVEL 7.4.7(14)
b5 JISL 7.4.7(15)
b4 SON 7.4.7(5)b3 RES 7.4.7(4)b2 STP 7.4.7(11)b1 HOME 7.4.7(6)b0 DSTR 7.4.7(8)
PLC出力
16ビット整数押付け動作時電流制限を指定してください。指定可能範囲は0(0%)~255(100%)です。各アクチュエータにより実際の指定可能範囲は異なります。(各アクチュエータのカタログまたは取扱説明書をご参照ください。)最大押付け電流値以上の値で移動指令を行うとアラームとなります。ブレーキ強制解除:ONでブレーキ解除運転モード:OFFでAUTOモード、ONでMANUモード押付け方向指定:OFFで目標位置から位置決め幅を減算した位置方向ONで目標位置に位置決め幅を加算した位置方向押付け指定:OFFで位置決め動作、ONで押付け動作
使用できません
+ジョグ:ONで反原点方向移動-ジョグ:ONで原点方向移動ジョグ速度/インチング距離切替え:OFF でパラメータNo.26“ジョグ速度”、パラメータNo.48“インチング距離”ONでパラメータNo.47“ジョグ速度2”、パラメータNo.49“インチング距離2”の設定値を使用する。ジョグ/インチング切替え:OFF でジョグ動作、ONでインチング動作サーボON指令:ONでサーボONリセット:ONでリセット実行一時停止:ONで一時停止指令原点復帰:ONで原点復帰指令位置決め指令:ONで移動指令
(※表中のONの表記は該当のビットが“1”を表し、OFFは“0”を表します)
ProfiBus-DP
94
(※表中のONの表記は該当のビットが“1”を表し、OFFは“0”を表します)
信号種別 ビット 記号 内容 詳細
現在位置32ビット
7.6(2)データ
指令電流32ビット
7.6(2)データ
32ビット現在速度データ
7.6(2)
アラーム 16ビット 7.6(2)コード データ
b15 EMGS 7.4.7(2)b14 PWR 7.4.7(1)b13 ZONE2 7.4.7(12)b12 ZONE1 7.4.7(12)b11b10 b9
b8 RMDS 7.4.7(19)状態信号b7
b6b5 PSFL 7.4.7(23)b4 SV 7.4.7(5)b3 ALM 7.4.7(3)b2 MOVE 7.4.7(9)b1 HEND 7.4.7(6)b0 PEND 7.4.7(10)
PLC入力
32ビット符号付整数単位は0.01mmです。(例)読取り値:000003FFH=1023(10進数)
=10.23mm※16進数で読取る場合、負数は2の補数表示となります。32ビット整数現在指令している電流値を示します。単位はmAです。(例)読取り値:000003FFH=1023(10進数)
=1023mA32ビット符号付整数現在速度を示します。正数:反原点方向へ移動中負数:原点方向へ移動中単位は0.01mm/secです。(例)読取り値:000003FFH=1023(10進数)
=10.23mm/sec※16進数で読取る場合、負数は2の補数表示となります。16ビット整数アラームが発生した場合にはアラームコードが出力されます。アラームが発生していない場合は0Hです。アラームの詳細内容はコントローラの取扱説明書をご参照してください。非常停止:ONで非常停止状態コントローラ準備完了:準備完了でONゾーン2:現在位置がゾーン設定内にあるときONゾーン1:現在位置がゾーン設定内にあるときON
使用できません
運転モード状態:現在の状態がAUTOモードでOFF 、MANUモードでON
使用できません
押付け空振り:押付け動作空振りでON運転準備完了:サーボONでONアラーム:アラーム発生でON移動中信号:アクチュエータ移動中でON原点復帰完了:原点復帰完了でON位置決め完了信号:位置決め完了でON
3.6 (2)
3.4.7(12)
3.4.7(19)
3.4.7(23)
3.4.7 (3)3.4.7 (9)3.4.7 (6)3.4.7(10)
3.4.7 (5)
3.4.7(12)
3.6 (2)
3.4.7 (2)3.4.7 (1)
3.6 (2)
3.6 (2)

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
40
ProfiBus-DP
95
7.4.5 フル直値モード(占有バイト数:32)PLCから位置制御に関する全ての値(目標位置、速度等)を直接数値で指定する運転方式です。
入出力アドレスに各値を設定してください。
本モードで制御可能なロボシリンダの有効な主要機能は次の表の通りです。
ロボシリンダの機能:直接制御×:無効
原点復帰動作 位置決め動作 速度・加減速度設定 ピッチ送り(インチング) 押付け動作 移動中の速度変更 異なった加速度、 減速度での動作一時停止 ゾーン信号出力 PIOパターン選択 ×
(1)PLCアドレス構成(※nは各軸の入出力先頭アドレスです。)
パラメータ ACONまたはPCON入力側 PLC側出力 ACONまたはPCON出力側 PLC側入力No.84 レジスタ アドレス レジスタ アドレス3
目標位置n+0
現在位置n+0
n+1 n+1
位置決め幅n+2
指令電流n+2
n+3 n+3
速度n+4
現在速度n+4
n+5 n+5
ゾーン境界値+n+6 アラームコード n+6n+7 n+7
ゾーン境界値- n+8 n+8n+9 n+9
加速度 n+10 n+10減速度 n+11 占有領域 n+11
押付け電流制限値 n+12 n+12占有領域
n+13 n+13負荷電流閾値制御信号1 n+14 n+14制御信号2 n+15 状態信号 n+15
ACONPCON
占有領域(注) は他の目的に使用できません。
またアドレスの重複使用にご注意ください。
3.4.5 フル直値モード(占有バイト数:32)
3

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
41
ProfiBus-DP
95
7.4.5 フル直値モード(占有バイト数:32)PLCから位置制御に関する全ての値(目標位置、速度等)を直接数値で指定する運転方式です。
入出力アドレスに各値を設定してください。
本モードで制御可能なロボシリンダの有効な主要機能は次の表の通りです。
ロボシリンダの機能:直接制御×:無効
原点復帰動作 位置決め動作 速度・加減速度設定 ピッチ送り(インチング) 押付け動作 移動中の速度変更 異なった加速度、 減速度での動作一時停止 ゾーン信号出力 PIOパターン選択 ×
(1)PLCアドレス構成(※nは各軸の入出力先頭アドレスです。)
パラメータ ACONまたはPCON入力側 PLC側出力 ACONまたはPCON出力側 PLC側入力No.84 レジスタ アドレス レジスタ アドレス3
目標位置n+0
現在位置n+0
n+1 n+1
位置決め幅n+2
指令電流n+2
n+3 n+3
速度n+4
現在速度n+4
n+5 n+5
ゾーン境界値+n+6 アラームコード n+6n+7 n+7
ゾーン境界値- n+8 n+8n+9 n+9
加速度 n+10 n+10減速度 n+11 占有領域 n+11
押付け電流制限値 n+12 n+12占有領域
n+13 n+13負荷電流閾値制御信号1 n+14 n+14制御信号2 n+15 状態信号 n+15
ACONPCON
占有領域(注) は他の目的に使用できません。
またアドレスの重複使用にご注意ください。
ProfiBus-DP
96
(2)軸毎の入出力信号割付
各軸の入出力信号は、入出力アドレスの各16ワード(32バイト)で構成されます。
制御信号1、制御信号2および状態信号はビット単位のON/OFF信号です。
目標位置および現在位置は2ワード(32ビット)のバイナリデータで、PLCでは-999999~+999999 (単位:0.01mm)の数値が扱えますが、位置データは当該アクチュエータのソフトストロークの範囲内(0~有効ストローク長)で設定してください。
位置決め幅を設定してください。位置決め幅は2ワード(32ビット)のバイナリデータで、PLCでは1~+999999 (単位:0.01mm)の数値が扱えます。
速度は2ワード(32ビット)のバイナリデータで、PLCでは0~+999999 (単位:0.01mm/sec)の数値が扱えますが、当該アクチュエータの最大速度を超えない値に設定してください。
加速度および減速度は1ワード(16ビット)のバイナリデータで、PLCでは1~300(単位:0.01G)の数値が扱えますが、当該アクチュエータの最大加速度および最大減速度を超えない値に設定してください。
押付け電流制限値は1ワード(16ビット)のバイナリデータで、PLCでは0(0%)~255(100%)の数値が扱えますが、当該アクチュエータの押付け電流制限値の指定可能範囲内(アクチュエータのカタログまたは取扱説明書参照)で設定してください。
負荷電流閾値を設定してください。負荷電流閾値は1ワード(16ビット)のバイナリデータで、PLCでは0(0%)~255(100%)の数値が扱えます。(押付け電流制限値の図(上図)参照)
ゾーン境界値+、ゾーン境界値-は2ワード(32ビット)のバイナリデータで、PLCでは-999999~+999999 (単位:0.01mm)の数値が扱えますが、ゾーン境界値+よりゾーン境界値-を小さな値に設定してください。
指令電流は2ワード(32ビット)のバイナリデータ(単位:1mA)です。
現在速度は2ワード(32ビット)のバイナリデータ(単位:0.01mm/sec)です。
正数:反原点方向へ移動中、負数:原点方向へ移動中。
アラームコードは1ワード(16ビット)のバイナリデータです。
設定値
押付け電流制限値 0% 50% 100%
0 127 255

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
42
ProfiBus-DP
97
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
目標位置 (下位ワード)
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
位置決め幅 (上位ワード)
524,288
262,144
131,072
65,536
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
位置決め幅 (下位ワード)
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
b15n+4 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
速度 (上位ワード)
524,288
262,144
131,072
65,536
b15n+5 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
速度 (下位ワード)
b15n+6 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
ゾーン境界値+ (上位ワード)
b15n+7 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
ゾーン境界値+ (下位ワード)
b15n+0 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
目標位置 (上位ワード)
1ワード=2バイト=16ビット
目標位置が負数の場合は、2の補数で表されます。
ゾーン境界値+が負数の場合は、2の補数で表されます。
PLC出力
アドレス(※nは各軸の出力先頭アドレスです。)

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
43
ProfiBus-DP
97
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
目標位置 (下位ワード)
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
位置決め幅 (上位ワード)
524,288
262,144
131,072
65,536
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
位置決め幅 (下位ワード)
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
b15n+4 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
速度 (上位ワード)
524,288
262,144
131,072
65,536
b15n+5 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
速度 (下位ワード)
b15n+6 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
ゾーン境界値+ (上位ワード)
b15n+7 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
ゾーン境界値+ (下位ワード)
b15n+0 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
目標位置 (上位ワード)
1ワード=2バイト=16ビット
目標位置が負数の場合は、2の補数で表されます。
ゾーン境界値+が負数の場合は、2の補数で表されます。
PLC出力
アドレス(※nは各軸の出力先頭アドレスです。)
b15n 9 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
256
128
64
32
16
8 4 2 1
b15n 10 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
256
128
64
32
16
8 4 2 1
b15n 11 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
128
64
32
16
8 4 2 1
b15n 12 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
128
64
32
16
8 4 2 1
b15n 13 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
3
1
ASO
1
ASO
0 2
INC
DIR
PUSH
b15n 14 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
1
BKR
L
RM
OD
JOG
JOG
JVEL
JISL
SON
RES
STP
HO
ME
DST
R
b15n 15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
2
b15n 8 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
1 2 16
2
n
ACON PCON ACON PCON

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
44
ProfiBus-DP
99
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在位置 (下位ワード)
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指令電流 (上位ワード)
524,288
262,144
131,072
65,536
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指令電流 (下位ワード)
b15n+4 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在速度 (上位ワード)
b15n+5 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在速度 (下位ワード)
EMGS
PWR
ZONE2
ZONE1
PZONE
(※1)
RMDS
GHMS
PUSH
PSFL
SV
ALM
MOVE
HEND
PEND
b15n+15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
状態信号
b15n+6 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
アラームコード
b15 n+7~n+14 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
使用できません
b15n+0 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在位置 (上位ワード)
1ワード=2バイト=16ビット
現在位置が負数の場合は、2の補数で表されます。
現在速度が負数の場合は、2の補数で表されます。
PLC入力アドレス(※nは各軸の入力先頭アドレスです。)
(※1)n+15のb10およびb9の信号割付
記号コントローラ ACON PCONb10 LOADb9 TRQS

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
45
ProfiBus-DP
99
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在位置 (下位ワード)
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指令電流 (上位ワード)
524,288
262,144
131,072
65,536
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指令電流 (下位ワード)
b15n+4 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在速度 (上位ワード)
b15n+5 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在速度 (下位ワード)
EMGS
PWR
ZONE2
ZONE1
PZONE
(※1)
RMDS
GHMS
PUSH
PSFL
SV
ALM
MOVE
HEND
PEND
b15n+15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
状態信号
b15n+6 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
アラームコード
b15 n+7~n+14 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
使用できません
b15n+0 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在位置 (上位ワード)
1ワード=2バイト=16ビット
現在位置が負数の場合は、2の補数で表されます。
現在速度が負数の場合は、2の補数で表されます。
PLC入力アドレス(※nは各軸の入力先頭アドレスです。)
(※1)n+15のb10およびb9の信号割付
記号コントローラ ACON PCONb10 LOADb9 TRQS
(3)入出力信号割付(※表中のONの表記は該当のビットが“1”を表し、OFFは“0”を表します)
アドレス ビット 記号 機能 詳細
32ビット目標位置
データ 3.6(3)
32ビット位置決め幅
データ 3.6(3)
32ビット速度
データ 3.6(3)
ゾーン
境界値+ 32ビット)3(6.3
/ゾーン データ
境界値-
PLC出力
32ビット符号付整数目標位置を絶対座標上の位置で指定してくだ
さい。
単位は0.01mmで指定可能範囲は、-999999~999999となります。
(例)+25.41mmなら2541と指定します。
パラメータのソフトリミットの内側(0.2mm)
を超えた値を入力するとソフトリミットの内
側(0.2mm)までの移動に制限されます。
※16進数で入力する場合、負数は2の補数で
入力してください。
32ビット整数単位は0.01mmで指定可能範囲は1~999999です。
(例)25.40mmなら2540と指定します。
本レジスタは動作種別により2種類の意味が
あります。
①位置決め動作の場合、目標位置からどの程
度の範囲で位置決め完了とみなすかの許容
範囲となります。
②押付け動作時は押付け幅の値となります。
通常動作か押付け動作かの指定は、制御信
号のPUSHで設定してください。
32ビット整数移動時の速度を指定してください。
単位0.01mm/secで指定可能範囲は、0~999999となります。
(例)25.41mm/secなら2541と指定します。
最大速度以上の値で移動指令を行うとアラー
ムとなります。
32ビット符号付整数パラメータで指定されるゾーン境界とは別に、
原点復帰後に有効なゾーン信号を出力します。
現在位置がこの±境界値の内側にあるときは、
状態信号のPZONEがONとなります。
(例)+25.40mmなら2540と指定します。
指定単位は0.01mmで、指定範囲は-999999~999999 となります。
ゾーン境界値+>ゾーン境界値の関係を満た
す値を入力してください。
当機能を使用しない場合は、±を同じ値にして
ください。
※16進数で入力する場合、負数は2の補数で入
力してください。
0を指定すると移動中であれば減速停止、停止中であれば、その場で停止したままとなります。

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
46
アドレス ビット 記号 機能 詳細
PLC出力
加速度16 ビットデータ
16 ビット整数移動時の加速度および減速度を指定してください。単位は 0.01Gで指定可能範囲は 1~ 300です。(例)0.30G なら 30 と指定します。0 または最大加速度,最大減速度を超えた値で移動指令を行うとアラームとなります。
3.6 (3)減速度
16 ビットデータ
押付け電流制限値
16 ビットデータ
16 ビット整数押付け動作時電流制限を指定してください。指定可能範囲は 0(0%)~ 255(100%)です。各アクチュエータにより実際の指定可能範囲は異なります。(各アクチュエータのカタログまたは取扱説明書をご参照ください。)最大押付け電流値以上の値で移動指令を行うとアラームとなります。
3.6 (3)
負荷電流閾値
16 ビットデータ
16 ビット整数負荷電流が設定値を超えたか超えないか判定を行う場合、電流のしきい値を本レジスタで指定してください。指定可能範囲は 0(0%)~ 255(100%)です。判定を行わない場合は 0 を入力してください。
3.6 (3)
制御信号 1
b15
使用できません
b14b13b12b11
b10
ACON
使用できません
PCON
SMOD 停止制御モード:ON で停止時サーボ制御 3.4.7 (28)
b9 ASO1 停止モード 1
待機時の停止モードを選択
ASO1 ASO0 機能
OFF OFF 無効(常にサーボ ON)
OFF ON パラメータNo.36の設定時間でサーボ OFF
ON OFF パラメータNo.37の設定時間でサーボ OFF
ON ON パラメータNo.38の設定時間でサーボ OFF
3.4.7 (30)
b8 ASO0 停止モード 0
b7 ACON
MOD1加減速モード
MOD1 MOD0 機能
OFF OFF 台形パターン
OFF ON S 字モーション
ON OFF 一次遅れフィルタ
3.4.7 (29)b6 MOD0
b7 PCON
使用できません b6b5
使用できません b4
b3 INC インクリメンタル指定:OFF で絶対位置指令、ON で相対位置指令
3.4.7 (24)
(※表中の ON の表記は該当のビットが“1”を表し、OFF は“0”を表します)

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
47
ProfiBus-DP
102
アドレス ビット 記号 機能 詳細
b2 DIR 7.4.7(22)
制御信号1b1 PUSH 7.4.7(21)
b0 b15 BKRL 7.4.7(18)
b14 RMOD 7.4.7(19)
b13b12b11 b10b9b8 JOG+ 7.4.7(13)b7 JOG- 7.4.7(13)
制御信号2
b6 JVEL 7.4.7(14)
b5 JISL 7.4.7(15)
b4 SON 7.4.7(5)b3 RES 7.4.7(4)b2 STP 7.4.7(11)b1 HOME 7.4.7(6)b0 DSTR 7.4.7(8)
PLC出力
押付け方向指定:OFFで目標位置から位置決め幅を減算した位置方向ONで目標位置に位置決め幅を加算した位置方向押付け指定:OFFで位置決め動作、ONで押付け動作使用できませんブレーキ強制解除:ONでブレーキ解除運転モード:OFFでAUTOモード、ONでMANUモード
使用できません
+ジョグ:ONで反原点方向移動-ジョグ:ONで原点方向移動ジョグ速度/インチング距離切替え:OFFでパラメータNo.26“ジョグ速度”、パラメータNo.48“インチング距離”ONでパラメータNo.47“ジョグ速度2”、パラメータNo.49“インチング距離2”の設定値を使用する。ジョグ/インチング切替え:OFFでジョグ動作、ONでインチング動作サーボON指令:ONでサーボONリセット:ONでリセット実行一時停止:ONで一時停止指令原点復帰:ONで原点復帰指令位置決めスタート:ONで移動指令
(※表中のONの表記は該当のビットが“1”を表し、OFFは“0”を表します)
3.4.7(13)
3.4.7(14)
3.4.7(15)
3.4.7 (4)3.4.7(11)3.4.7 (6)3.4.7 (8)
3.4.7 (5)
3.4.7(13)
3.4.7(21)
3.4.7(22)
3.4.7(18)
3.4.7(19)

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
48
ProfiBus-DP
103
(※表中のONの表記は該当のビットが“1”を表し、OFFは“0”を表します)
信号種別 ビット 信号名 内容 詳細
現在位置32ビット
7.6(3)データ
指令電流32ビット
7.6(3)データ
現在速度32ビット
7.6(3)データ
アラーム 16ビット 7.6(3)コード データ
b15 EMGS 7.4.7(2)b14 PWR 7.4.7(1)b13 ZONE2 7.4.7(12)b12 ZONE1 7.4.7(12)
b11 PZONE 7.4.7(12)
ACON
b10 PCON LOAD 7.4.7(26)
ACON
状態信号 b9 PCON TROS 7.4.7(27)
b8 RMDS 7.4.7(19)
b7 GHMS 7.4.7(6)b6 PUSHS 7.4.7(25)b5 PSFL 7.4.7(23)b4 SV 7.4.7(5)b3 ALM 7.4.7(3)b2 MOVE 7.4.7(9)b1 HEND 7.4.7(6)b0 PEND 7.4.7(10)
PLC入力
32ビット符号付整数単位は0.01mmです。(例)読取り値:000003FFH=1023(10進数)
=10.23mm※16進数で読取る場合、負数は2の補数表示となります。32ビット整数現在指令している電流値を示します。単位はmAです。(例)読取り値:000003FFH=1023(10進数)
=1023mA32ビット符号付整数現在速度を示します。正数:反原点方向へ移動中負数:原点方向へ移動中単位は0.01mm/secです。(例)読取り値:000003FFH=1023(10進数)
=10.23mm/sec※16進数で読取る場合、負数は2の補数表示となります。16ビット整数アラームが発生した場合にはアラームコードが出力されます。アラームが発生していない場合は0です。アラームの詳細内容はコントローラの取扱説明書をご参照してください。非常停止:ONで非常停止状態コントローラ準備完了:準備完了でONゾーン2:現在位置がゾーン設定内にあるときONゾーン1:現在位置がゾーン設定内にあるときONポジションゾーン:現在位置がポジションゾーン設定内にあるときON使用できません(ON/OFFは不定です)負荷出力判定:ONで到達、OFFで未達(詳細はコントローラ本体の取扱説明書参照)使用できません(ON/OFFは不定です)トルクレベル:ONで到達、OFFで未達(詳細はコントローラ本体の取扱説明書参照)運転モード状態:現在の状態がAUTOモードでOFF 、MANUモードでON原点復帰中:原点復帰中でON押付け動作中:押付け動作中でON押付け空振り:押付け動作空振りでON運転準備完了:サーボONでONアラーム:アラーム発生でON移動中信号:アクチュエータ移動中でON原点復帰完了:原点復帰完了でON位置決め完了信号:位置決め完了でON
3.4.7(27)
3.4.7(19)
3.4.7(23)
3.4.7 (3)3.4.7 (9)3.4.7 (6)3.4.7(10)
3.4.7 (5)
3.4.7(26)
3.4.7(12)3.4.7(12)
3.4.7(12)
3.6 (3)
3.6 (3)
3.6 (3)
3.6 (3)
3.4.7(25)3.4.7 (6)
3.4.7 (1)3.4.7 (2)
TRQS
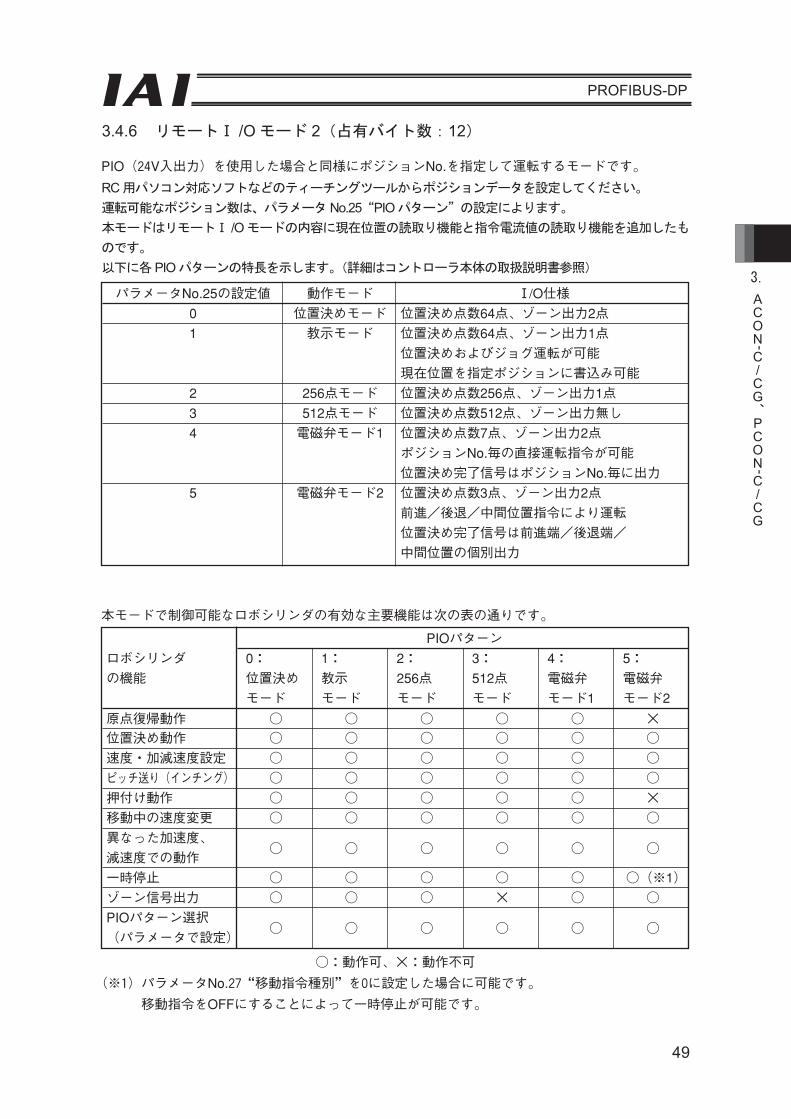
PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
49
ProfiBus-DP
103
(※表中のONの表記は該当のビットが“1”を表し、OFFは“0”を表します)
信号種別 ビット 信号名 内容 詳細
現在位置32ビット
7.6(3)データ
指令電流32ビット
7.6(3)データ
現在速度32ビット
7.6(3)データ
アラーム 16ビット 7.6(3)コード データ
b15 EMGS 7.4.7(2)b14 PWR 7.4.7(1)b13 ZONE2 7.4.7(12)b12 ZONE1 7.4.7(12)
b11 PZONE 7.4.7(12)
ACON
b10 PCON LOAD 7.4.7(26)
ACON
状態信号 b9 PCON TROS 7.4.7(27)
b8 RMDS 7.4.7(19)
b7 GHMS 7.4.7(6)b6 PUSHS 7.4.7(25)b5 PSFL 7.4.7(23)b4 SV 7.4.7(5)b3 ALM 7.4.7(3)b2 MOVE 7.4.7(9)b1 HEND 7.4.7(6)b0 PEND 7.4.7(10)
PLC入力
32ビット符号付整数単位は0.01mmです。(例)読取り値:000003FFH=1023(10進数)
=10.23mm※16進数で読取る場合、負数は2の補数表示となります。32ビット整数現在指令している電流値を示します。単位はmAです。(例)読取り値:000003FFH=1023(10進数)
=1023mA32ビット符号付整数現在速度を示します。正数:反原点方向へ移動中負数:原点方向へ移動中単位は0.01mm/secです。(例)読取り値:000003FFH=1023(10進数)
=10.23mm/sec※16進数で読取る場合、負数は2の補数表示となります。16ビット整数アラームが発生した場合にはアラームコードが出力されます。アラームが発生していない場合は0です。アラームの詳細内容はコントローラの取扱説明書をご参照してください。非常停止:ONで非常停止状態コントローラ準備完了:準備完了でONゾーン2:現在位置がゾーン設定内にあるときONゾーン1:現在位置がゾーン設定内にあるときONポジションゾーン:現在位置がポジションゾーン設定内にあるときON使用できません(ON/OFFは不定です)負荷出力判定:ONで到達、OFFで未達(詳細はコントローラ本体の取扱説明書参照)使用できません(ON/OFFは不定です)トルクレベル:ONで到達、OFFで未達(詳細はコントローラ本体の取扱説明書参照)運転モード状態:現在の状態がAUTOモードでOFF 、MANUモードでON原点復帰中:原点復帰中でON押付け動作中:押付け動作中でON押付け空振り:押付け動作空振りでON運転準備完了:サーボONでONアラーム:アラーム発生でON移動中信号:アクチュエータ移動中でON原点復帰完了:原点復帰完了でON位置決め完了信号:位置決め完了でON
ProfiBus-DP
104
7.4.6 リモートⅠ/Oモード2(占有バイト数:12)PIO(24V入出力)を使用した場合と同様にポジションNo.を指定して運転するモードです。
RC用パソコン対応ソフトまたはティーチングボックスからポジションデータを設定してください。
運転可能なポジション数は、パラメータNo.25“PIOパターン”の設定によります。
本モードはリモートⅠ/Oモードの内容に現在位置の読取り機能と指令電流値の読取り機能を追加したものです。
以下に各PIOパターンの特長を示します。(詳細はコントローラ本体の取扱説明書参照)
本モードで制御可能なロボシリンダの有効な主要機能は次の表の通りです。
パラメータNo.25の設定値 動作モード Ⅰ/O仕様0 位置決めモード 位置決め点数64点、ゾーン出力2点1 教示モード 位置決め点数64点、ゾーン出力1点
位置決めおよびジョグ運転が可能現在位置を指定ポジションに書込み可能
2 256点モード 位置決め点数256点、ゾーン出力1点3 512点モード 位置決め点数512点、ゾーン出力無し4 電磁弁モード1 位置決め点数7点、ゾーン出力2点
ポジションNo.毎の直接運転指令が可能位置決め完了信号はポジションNo.毎に出力
5 電磁弁モード2 位置決め点数3点、ゾーン出力2点前進/後退/中間位置指令により運転位置決め完了信号は前進端/後退端/中間位置の個別出力
PIOパターンロボシリンダ 0: 1: 2: 3: 4: 5:の機能 位置決め 教示 256点 512点 電磁弁 電磁弁
モード モード モード モード モード1 モード2
原点復帰動作 ×位置決め動作 速度・加減速度設定 ピッチ送り(インチング) 押付け動作 ×移動中の速度変更 異なった加速度、
減速度での動作一時停止 (※1)ゾーン信号出力 × PIOパターン選択
(パラメータで設定)
:動作可、×:動作不可
(※1)パラメータNo.27“移動指令種別”を0に設定した場合に可能です。
移動指令をOFFにすることによって一時停止が可能です。
RC用パソコン対応ソフトなどのティーチングツールからポジションデータを設定してください。
運転可能なポジション数は、パラメータNo.25“PIOパターン”の設定によります。
本モードはリモートⅠ /Oモードの内容に現在位置の読取り機能と指令電流値の読取り機能を追加したも
のです。
以下に各PIOパターンの特長を示します。(詳細はコントローラ本体の取扱説明書参照)
3.4.6 リモートⅠ /O モード 2(占有バイト数:12)

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
50
ProfiBus-DP
105
(1)PLCアドレス構成(※nは各軸の入出力先頭アドレスです。)
(2)軸毎の入出力信号割付
各軸の入出力信号は、入出力アドレスの各6ワード(12バイト)で構成されます。
ポート番号で制御するアドレスはビット単位のON/OFF信号で制御します。
現在位置は2ワード(32ビット)のバイナリデータ(単位:0.01mm)です。
指令電流は2ワード(32ビット)のバイナリデータ(単位:1mA)です。
パラメータ ACONまたはPCON側 PLC側出力 ACONまたはPCON側 PLC側入力No.84 DIおよび入力レジスタ アドレス DOおよび出力レジスタ アドレス
4 ポート番号0~15 n+0 ポート番号0~15 n+0n+1 占有領域 n+1n+2
現在位置n+2
占有領域 n+3 n+3n+4
指令電流n+4
n+5 n+5
15
14
13
12
11
10
9 8 7 6 5 4 3 2 1 0
Fn+0 E D C B A 9 8 7 6 5 4 3 2 1 0
PLC出力(※nは各軸の出力先頭アドレスです。)
コントローラ 入力ポート 番号
1ワード=2バイト=16ビット アドレス
占有領域(注) は他の目的に使用できません。
またアドレスの重複使用にご注意ください。
4

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
51
ProfiBus-DP
105
(1)PLCアドレス構成(※nは各軸の入出力先頭アドレスです。)
(2)軸毎の入出力信号割付
各軸の入出力信号は、入出力アドレスの各6ワード(12バイト)で構成されます。
ポート番号で制御するアドレスはビット単位のON/OFF信号で制御します。
現在位置は2ワード(32ビット)のバイナリデータ(単位:0.01mm)です。
指令電流は2ワード(32ビット)のバイナリデータ(単位:1mA)です。
パラメータ ACONまたはPCON側 PLC側出力 ACONまたはPCON側 PLC側入力No.84 DIおよび入力レジスタ アドレス DOおよび出力レジスタ アドレス
4 ポート番号0~15 n+0 ポート番号0~15 n+0n+1 占有領域 n+1n+2
現在位置n+2
占有領域 n+3 n+3n+4
指令電流n+4
n+5 n+5
15
14
13
12
11
10
9 8 7 6 5 4 3 2 1 0
Fn+0 E D C B A 9 8 7 6 5 4 3 2 1 0
PLC出力(※nは各軸の出力先頭アドレスです。)
コントローラ 入力ポート 番号
1ワード=2バイト=16ビット アドレス
占有領域(注) は他の目的に使用できません。
またアドレスの重複使用にご注意ください。
ProfiBus-DP
106
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
使用できません
15
14
13
12
11
10
9 8 7
6 5 4 3 2 1 0
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
-
-
-
-
-
-
-
-
-
-
-
-
524,288
262,144
131,072
65,536
Fn+0アドレス
E D C B A 9 8 7 6 5 4 3 2 1 0
コントローラ 出力ポート番号
1ワード=2バイト=16ビット
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在位置 (上位ワード)
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在位置 (下位ワード)
b15n+4 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指令電流 (上位ワード)
b15n+5 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指令電流 (下位ワード)
現在位置が負数の場合は、2の補数で表されます。
PLC入力(※nは各軸の入力先頭アドレスです。)

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
52
ProfiBus-DP
107
(3)入出力信号割付
各PIOパターンの信号割付は、7.4.2 (3) リモートⅠ/Oモード入出力信号割付けをご参照してください。
指令電流、現在位置の読取り機能の信号割付を次に示します。
信号種別 ビット 信号名 内容 詳細
現在位置32ビット
データ
指令電流32ビット
データ
PLC入力
32ビット符号付整数単位は0.01mmです。(例)読取り値:000003FFH=1023(10進数)
=10.23mm※16進数で読取る場合、負数は2の補数表示となります。32ビット整数現在指令している電流値を示します。単位は1mAです。(例)読取り値:000003FFH=1023(10進数)
=1023mA
3.4.2

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
53
ProfiBus-DP
107
(3)入出力信号割付
各PIOパターンの信号割付は、7.4.2 (3) リモートⅠ/Oモード入出力信号割付けをご参照してください。
指令電流、現在位置の読取り機能の信号割付を次に示します。
信号種別 ビット 信号名 内容 詳細
現在位置32ビット
データ
指令電流32ビット
データ
PLC入力
32ビット符号付整数単位は0.01mmです。(例)読取り値:000003FFH=1023(10進数)
=10.23mm※16進数で読取る場合、負数は2の補数表示となります。32ビット整数現在指令している電流値を示します。単位は1mAです。(例)読取り値:000003FFH=1023(10進数)
=1023mA
ProfiBus-DP
108
7.4.7 入出力信号の制御と機能※ONの表記はビット信号の“1”を表し、OFFは“0”を表します。
ポジション/簡易直値モード、ハーフ直値モードおよびフル直値モードに使用される入出力信号の制御と機能を以下に示します。リモートⅠ/OモードおよびリモートⅠ/Oモード2の入出力信号については、コントローラ本体の取扱説明書をご参照ください。
(1)コントローラ準備完了(PWR) PLC入力信号
電源投入後、コントローラが制御可能になるとONになります。
機能
アラームの状態やサーボの状態等にかかわらず、電源投入後、コントローラの初期化が正常に終了し、制御が可能になるとONになります。
アラーム状態にあっても、コントローラが制御可能状態であればONになります。
(2)非常停止(EMGS) PLC入力信号
コントローラが非常停止状態になるとONになります。
機能
非常停止状態(モータ駆動電源が遮断状態)になるとONになります。非常停止状態が解除されればOFFになります。
(3)アラーム(ALM) PLC入力信号
コントローラの保護回路(機能)が異常を検出するとONになります。
機能
異常を検出して保護回路(機能)が動作した時にONになる信号です。
アラームの原因が解除され、リセット(RES)信号をONにすると動作解除レベルのアラームの場合はOFFになります。(コールドスタートレベルのアラームの場合は電源の再投入が必要です)
アラームを検出すると、コントローラ前面の状態表示LED(7.3(6)参照)が赤色点灯します。
(4)リセット(RES) PLC出力信号
この信号は2つの機能を持っており、コントローラのアラームのリセットおよび一時停止中の残移動量をキャンセルすることができます。
機能
①アラームが発生中に、アラームの原因を取り除いた後、この信号をOFFからONにするとアラーム(ALM)信号をリセットすることができます。(コールドスタートレベルのアラームの場合は電源の再投入が必要です)
②一時停止中にこの信号をOFFからONにすると、残りの移動量をキャンセルすることができます。
3.4.7 入出力信号の制御と機能
3.3

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
54
ProfiBus-DP
109
(5)サーボON指令 (SON) PLC出力信号
運転準備完了 (SV) PLC入力信号
SON信号をONにするとサーボONとなります。
サーボONするとコントローラ前面の状態表示LED(7.3(6)参照)が緑色点灯します。
SV信号は、このLEDと同期しています。
機能
SON信号によりコントローラのサーボON/OFFが可能です。
SV信号がONの間、コントローラはサーボON状態となり運転が可能となります。
SON信号とSV信号の関係は次のとおりです。
SON (PLC→ACON、PCON)
SV
(ACON、PCON→PLC)
3.3

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
55
ProfiBus-DP
109
(5)サーボON指令 (SON) PLC出力信号
運転準備完了 (SV) PLC入力信号
SON信号をONにするとサーボONとなります。
サーボONするとコントローラ前面の状態表示LED(7.3(6)参照)が緑色点灯します。
SV信号は、このLEDと同期しています。
機能
SON信号によりコントローラのサーボON/OFFが可能です。
SV信号がONの間、コントローラはサーボON状態となり運転が可能となります。
SON信号とSV信号の関係は次のとおりです。
SON (PLC→ACON、PCON)
SV
(ACON、PCON→PLC)
ProfiBus-DP
110
(6)原点復帰 (HOME) PLC出力信号
原点復帰完了(HEND) PLC入力信号
原点復帰中 (GHMS) PLC入力信号
HOME信号をONすると、この指令は立上り(ONエッジ)で処理され、自動で原点復帰動作が行われます。原点復帰中はGHMS信号がONとなります。
原点復帰を完了するとHEND信号がONとなり、GHMS信号がOFFとなります。
HEND信号がONになったらHOME信号をOFFにしてください。HEND信号は一旦ONになると電源がOFFされるか、再度のHOME信号が入力されるまでOFFとなりません。
原点復帰完了後もHOME信号をONすると原点復帰を行うことができます。
HOME (PLC→ACON、PCON)
GHMS (ACON、PCON→PLC)
HEND (ACON、PCON→PLC)
PEND (ACON、PCON→PLC)
MOVE
(ACON、PCON→PLC)
アクチュエータ動作
メカエンド 原点位置で停止
Q注意:リモートⅠ/Oモード、リモートⅠ/Oモード2およびポジション/簡易直値モードでは、電源投入時に原点復帰を行わずにポジションへの位置決め指令をした場合、電源投入後の最初の1回に限り自動的に原点復帰を行った後、位置決めを実行します。ハーフ直値モードおよびフル直値モードでは、電源投入時に原点復帰を行わずにポジションへの位置決め指令をした場合、「エラーコード83 ALARM HOME ABS(原点復帰未完了状態での絶対位置移動指令)」のアラーム(動作解除レベル)となりますので、ご注意ください。

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
56
ProfiBus-DP
111
(7)位置決めスタート(CSTR):ポジション/簡易直値モードで使用 PLC出力信号
この指令は立上り(ONエッジ)で処理され、指定されたポジション番号の目標位置またはPLCの目標位置(※)で設定した位置に位置決めします。
指定されたポジション番号の目標位置を使用するか、PLCの目標位置(※)の設定を使用するかは制御信号のb11:ポジション/簡易直値切替(PMOD)信号によります。
・PMOD=OFF :指定したポジション番号内の目標位置データを使用
・PMOD=ON :PLCの目標位置(※)の設定値を使用
(※)7.4.1参照
電源投入後、一度も原点復帰動作を行っていない状態(HEND信号がOFF の状態)でこの指令を行った場合は、自動的に原点復帰動作を実行した後に目標位置に位置決めします。
本信号は位置決め完了信号(PEND)信号がOFFになったことを確認してOFFにしてください。
(8)位置決め指令(DSTR):ハーフ直値モードおよびフル直値モードで使用 PLC出力信号
この指令は立上り(ONエッジ)で処理され、PLCの目標位置(※)に入力されている目標位置に位置決めします。電源投入後、一度も原点復帰動作を行っていない状態(HEND信号がOFFの状態)でこの指令を行うとアラーム(動作解除レベル)となります。
本信号は位置決め完了(PEND)信号がOFFになったことを確認してOFFにしてください。
(※)7.4.1参照
(9)移動中信号(MOVE) PLC入力信号
本信号はアクチュエータのスライダまたはロッドが移動中にONになります。(原点復帰動作、押付け動作およびジョグ動作も含みます)
位置決め完了後、原点復帰完了後、押付け動作完了後または一時停止中にOFFとなります。
目標位置 (PLC→ACON、PCON)
CSTR
(PLC→ACON、PCON)
PEND (ACON、PCON→PLC)
目標位置 (PLC→ACON、PCON)
DSTR
(PLC→ACON、PCON)
PEND (ACON、PCON→PLC)
3.4.1 参照
3.4.1 参照
この指令は立上り (ON エッジ) で処理され、 指定されたポジション No. の目標位置または
PLC の目標位置で設定した位置に位置決めします。
指定されたポジション No. の目標位置を使用するか、 PLC の目標位置の設定を使用するかは制御
信号の b11 : ポジション/簡易直値切替 (PMOD) 信号によります。
・ PMOD = OFF : 指定したポジション No. 内の目標位置データを使用
・PMOD = ON : PLC の目標位置の設定値を使用
この指令は立上り(ON エッジ)で処理され、PLC の目標位置に入力されている目標位置に位置決
めします。電源投入後、一度も原点復帰動作を行っていない状態(HEND 信号が OFF の状態)で
この指令を行うとアラーム(動作解除レベル)となります。

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
57
ProfiBus-DP
111
(7)位置決めスタート(CSTR):ポジション/簡易直値モードで使用 PLC出力信号
この指令は立上り(ONエッジ)で処理され、指定されたポジション番号の目標位置またはPLCの目標位置(※)で設定した位置に位置決めします。
指定されたポジション番号の目標位置を使用するか、PLCの目標位置(※)の設定を使用するかは制御信号のb11:ポジション/簡易直値切替(PMOD)信号によります。
・PMOD=OFF :指定したポジション番号内の目標位置データを使用
・PMOD=ON :PLCの目標位置(※)の設定値を使用
(※)7.4.1参照
電源投入後、一度も原点復帰動作を行っていない状態(HEND信号がOFF の状態)でこの指令を行った場合は、自動的に原点復帰動作を実行した後に目標位置に位置決めします。
本信号は位置決め完了信号(PEND)信号がOFFになったことを確認してOFFにしてください。
(8)位置決め指令(DSTR):ハーフ直値モードおよびフル直値モードで使用 PLC出力信号
この指令は立上り(ONエッジ)で処理され、PLCの目標位置(※)に入力されている目標位置に位置決めします。電源投入後、一度も原点復帰動作を行っていない状態(HEND信号がOFFの状態)でこの指令を行うとアラーム(動作解除レベル)となります。
本信号は位置決め完了(PEND)信号がOFFになったことを確認してOFFにしてください。
(※)7.4.1参照
(9)移動中信号(MOVE) PLC入力信号
本信号はアクチュエータのスライダまたはロッドが移動中にONになります。(原点復帰動作、押付け動作およびジョグ動作も含みます)
位置決め完了後、原点復帰完了後、押付け動作完了後または一時停止中にOFFとなります。
目標位置 (PLC→ACON、PCON)
CSTR
(PLC→ACON、PCON)
PEND (ACON、PCON→PLC)
目標位置 (PLC→ACON、PCON)
DSTR
(PLC→ACON、PCON)
PEND (ACON、PCON→PLC)
ProfiBus-DP
112
(10)位置決め完了信号(PEND) PLC入力信号本信号は目標位置まで移動して、位置決め幅内に到達した場合および押付けが完了した場合にONになります。
サーボOFFからサーボONとなった時、その場を目標位置として位置決めが行われます。従って本信号はONとなり、その後原点復帰(HOME)信号、位置決めスタート(CSTR)信号または位置決め指令(DSTR)信号による位置決め動作の開始でOFFとなります。
(11)一時停止(STP) PLC出力信号
本信号をONにすると軸移動が減速停止します。OFFにすると軸移動が再開されます。
動作再開時の加速度および停止時の減速度は、ポジション/簡易直値モードでは指定ポジション番号(※)で設定しているポジション番号の加減速度の値となり、ハーフ直値モードでは加減速度(※)の値となります。
フル直値モードでは加速度(※)および減速度(※)の値となります。
(※)7.4.1参照
目標位置
位置決め完了信号が ONするタイミング
移動距離
速度
位置決め幅
時間
Q注意:目標位置に停止している時にサーボOFF状態や非常停止状態になると、PEND信号は一旦OFF になります。次に再度サーボON状態に復帰した時、位置決め幅以内であればONに戻ります。またCSTR信号またはDSTR信号がONのままでは位置決め完了してもPEND信号は、ONになりません。
3.4.1 参照
号(※)で設定しているポジション No. の加減速度の値となり、ハーフ直値モードでは加減速度(※)
の値となります。

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
58
ProfiBus-DP
113
(12)ゾーン1 (ZONE1) PLC入力信号
ゾーン2 (ZONE2) PLC入力信号
ポジションゾーン(PZONE) PLC入力信号
アクチュエータの現在位置が設定した領域の範囲内にある場合はONになり、範囲外にある場合はOFFになります。
①ゾーン1、ゾーン2
ゾーンの設定はユーザパラメータで設定します。
ZONE1信号はパラメータNo.1“ゾーン境界1+側”および2“ゾーン境界1-側”で設定します。
ZONE2信号はパラメータNo.23“ゾーン境界2+側”および24“ゾーン境界2-側”で設定します。
ZONE1信号およびZONE2信号は原点復帰完了後に有効となり、その後はサーボOFF中でも有効です。
②ポジションゾーン
ゾーンの設定はポジションテーブル、またはPLCで設定します。
ポジション/簡易直値モードの場合はPZONE信号をポジションテーブルで設定します。
フル直値モードの場合はPZONE信号をゾーン境界値(7.4.1参照)で設定します。
(※)ハーフ直値モードはPZONE信号はありません。
PZONE信号は原点復帰完了後の移動指令で有効となり、その後はサーボOFF中でも有効です。
+方向
ゾーン設定+側 ゾーン設定-側 原点
ゾーン信号
アクチュエータ動作
3

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
59
ProfiBus-DP
113
(12)ゾーン1 (ZONE1) PLC入力信号
ゾーン2 (ZONE2) PLC入力信号
ポジションゾーン(PZONE) PLC入力信号
アクチュエータの現在位置が設定した領域の範囲内にある場合はONになり、範囲外にある場合はOFFになります。
①ゾーン1、ゾーン2
ゾーンの設定はユーザパラメータで設定します。
ZONE1信号はパラメータNo.1“ゾーン境界1+側”および2“ゾーン境界1-側”で設定します。
ZONE2信号はパラメータNo.23“ゾーン境界2+側”および24“ゾーン境界2-側”で設定します。
ZONE1信号およびZONE2信号は原点復帰完了後に有効となり、その後はサーボOFF中でも有効です。
②ポジションゾーン
ゾーンの設定はポジションテーブル、またはPLCで設定します。
ポジション/簡易直値モードの場合はPZONE信号をポジションテーブルで設定します。
フル直値モードの場合はPZONE信号をゾーン境界値(7.4.1参照)で設定します。
(※)ハーフ直値モードはPZONE信号はありません。
PZONE信号は原点復帰完了後の移動指令で有効となり、その後はサーボOFF中でも有効です。
+方向
ゾーン設定+側 ゾーン設定-側 原点
ゾーン信号
アクチュエータ動作
ProfiBus-DP
114
(13)+ジョグ(JOG+) PLC出力信号
-ジョグ(JOG-) PLC出力信号
ジョグ動作またはインチング動作での起動指令です。
+指令の時は反原点方向への動作で、-指令の時は原点方向への動作です。
①ジョグ動作
ジョグ動作は、ジョグ/インチング切替え(JISL)信号がOFFの時に動作可能です。
JOG+がONの間は反原点方向へ動作を行い、OFFになると減速停止します。
JOG-がONの間は原点方向への動作を行い、OFFになると減速停止します。
動作は次のパラメータの設定値で行います。
・速度は、ジョグ速度/インチング距離切替え(JVEL)信号で指定されたパラメータの値で動作します。
JVEL信号=OFFの場合は、パラメータNo.26“PIOジョグ速度”の値で動作します。
JVEL信号=ONの場合は、パラメータNo.47“PIOジョグ速度2”の値で動作します。
・加減速度は、定格加減速度(アクチュエータ依存)で動作します。
・JOG+とJOG-信号が両方共にONになると減速停止します。
②インチング動作
インチング動作は、JISL信号がONの時に動作可能です。
1回のON入力により、インチング距離分の移動を行います。
JOG+がONで反原点方向へ動作を行い、JOG-がONで原点方向への動作を行います。
動作は次のパラメータの設定値で行います。
・速度は、JVEL信号で指定されたパラメータの値で動作します。
JVEL信号=OFFの場合は、パラメータNo.26“PIOジョグ速度”の値で動作します。
JVEL信号=ONの場合は、パラメータNo.47“PIOジョグ速度2”の値で動作します。
・移動距離は、JVEL信号で指定されたパラメータの値で動作します。
JVEL信号=OFFの場合は、パラメータNo.48“PIOインチング距離”の値で動作します。
JVEL信号=ONの場合は、パラメータNo.49“PIOインチング距離2”の値で動作します。
・加減速度は、定格加減速度(アクチュエータ依存)で動作します。
通常動作中は、+ジョグ信号、-ジョグ信号をONしても通常動作を続けます。(ジョグ信号は無視されます)
一時停止中は、+ジョグ信号、-ジョグ信号をONしても動作しません。
(注)原点復帰完了前はソフトウェアストロークリミットが無効のため、メカエンドに衝突する危険がありま
すのでご注意ください。

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
60
ProfiBus-DP
115
(14)ジョグ速度/インチング距離切換え(JVEL) PLC出力信号
ジョグ動作が選択されている時のジョグ速度またはインチング動作が選択されている時のインチング距離を指定するパラメータの切換え信号です。
次のような関係になります。
(15)ジョグ/インチング切替え(JISL) PLC出力信号
ジョグ動作とインチング動作の切替信号です。
JISL=OFF:ジョグ動作
JISL=ON:インチング動作
JISL信号が、ジョグ移動中にON(インチング)に切り替わった場合、減速停止しインチング機能となります。
JISL信号が、インチング移動中にOFF(ジョグ)に切り替わった場合、移動完了後にジョグ機能となります。
JISL信号とジョグ速度/インチング距離切替え(JVEL)信号のON/OFFの関係は以下の表の様になります。
JVEL信号 ジョグ動作:JISL=OFF インチング動作:JISL=ON
OFF パラメータNo.26“ジョグ速度”パラメータNo.26“ジョグ速度”
パラメータNo.48“インチング距離”
ON パラメータNo.47“ジョグ速度2”パラメータNo.47“ジョグ速度2”
パラメータNo.49“インチング距離2”
ジョグ動作 インチング動作
JISL OFF ON
速度 パラメータNo.26“ジョグ速度” パラメータNo.26“ジョグ速度”
JVEL=OFF 移動距離 - パラメータNo.48“インチング距離”
加減速度 定格値(アクチュエータ依存) 定格値(アクチュエータ依存)
速度 パラメータNo.47“ジョグ速度2” パラメータNo.47“ジョグ速度2”
JVEL=ON 移動距離 - パラメータNo.49“インチング距離2”
加減速度 定格値(アクチュエータ依存) 定格値(アクチュエータ依存)
動作 JOG+/JOG-がONの時JOG+/JOG-の立上り(ONエッ
ジ)を検出した時
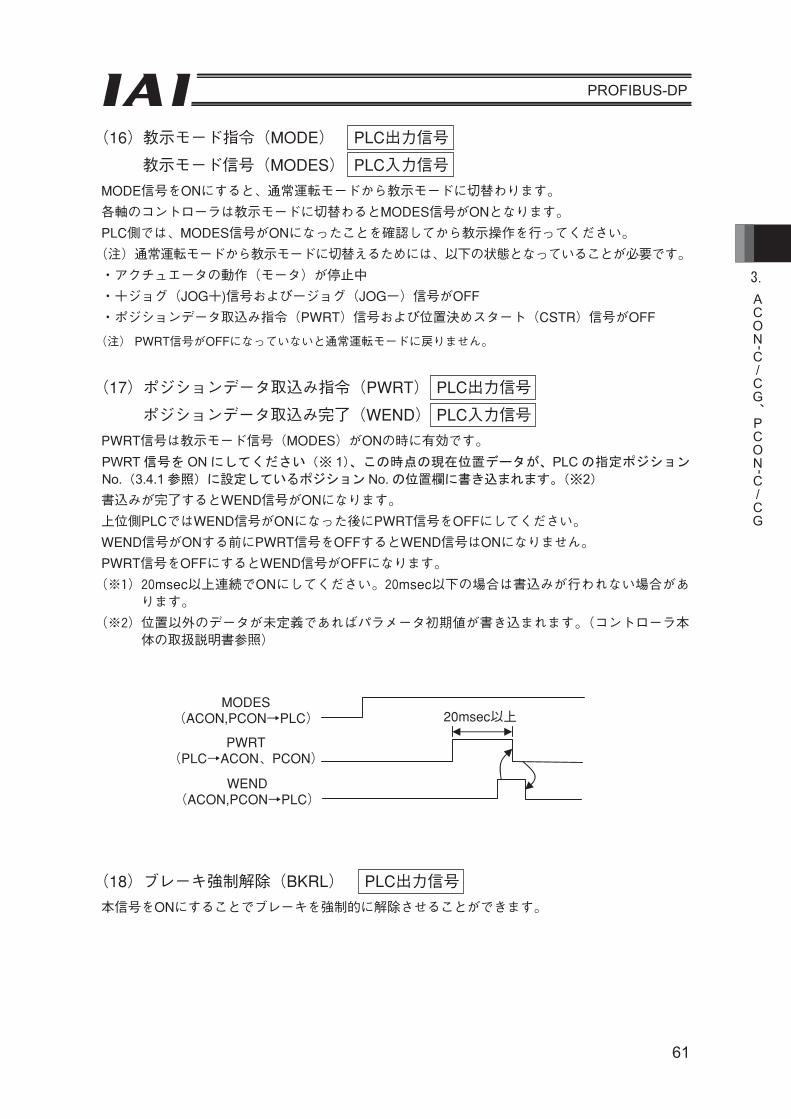
PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
61
ProfiBus-DP
115
(14)ジョグ速度/インチング距離切換え(JVEL) PLC出力信号
ジョグ動作が選択されている時のジョグ速度またはインチング動作が選択されている時のインチング距離を指定するパラメータの切換え信号です。
次のような関係になります。
(15)ジョグ/インチング切替え(JISL) PLC出力信号
ジョグ動作とインチング動作の切替信号です。
JISL=OFF:ジョグ動作
JISL=ON:インチング動作
JISL信号が、ジョグ移動中にON(インチング)に切り替わった場合、減速停止しインチング機能となります。
JISL信号が、インチング移動中にOFF(ジョグ)に切り替わった場合、移動完了後にジョグ機能となります。
JISL信号とジョグ速度/インチング距離切替え(JVEL)信号のON/OFFの関係は以下の表の様になります。
JVEL信号 ジョグ動作:JISL=OFF インチング動作:JISL=ON
OFF パラメータNo.26“ジョグ速度”パラメータNo.26“ジョグ速度”
パラメータNo.48“インチング距離”
ON パラメータNo.47“ジョグ速度2”パラメータNo.47“ジョグ速度2”
パラメータNo.49“インチング距離2”
ジョグ動作 インチング動作
JISL OFF ON
速度 パラメータNo.26“ジョグ速度” パラメータNo.26“ジョグ速度”
JVEL=OFF 移動距離 - パラメータNo.48“インチング距離”
加減速度 定格値(アクチュエータ依存) 定格値(アクチュエータ依存)
速度 パラメータNo.47“ジョグ速度2” パラメータNo.47“ジョグ速度2”
JVEL=ON 移動距離 - パラメータNo.49“インチング距離2”
加減速度 定格値(アクチュエータ依存) 定格値(アクチュエータ依存)
動作 JOG+/JOG-がONの時JOG+/JOG-の立上り(ONエッ
ジ)を検出した時
ProfiBus-DP
116
(16)教示モード指令(MODE) PLC出力信号
教示モード信号(MODES) PLC入力信号
MODE信号をONにすると、通常運転モードから教示モードに切替わります。
各軸のコントローラは教示モードに切替わるとMODES信号がONとなります。
PLC側では、MODES信号がONになったことを確認してから教示操作を行ってください。
(注)通常運転モードから教示モードに切替えるためには、以下の状態となっていることが必要です。
・アクチュエータの動作(モータ)が停止中
・+ジョグ(JOG+)信号および-ジョグ(JOG-)信号がOFF
・ポジションデータ取込み指令(PWRT)信号および位置決めスタート(CSTR)信号がOFF
(注) PWRT信号がOFFになっていないと通常運転モードに戻りません。
(17)ポジションデータ取込み指令(PWRT) PLC出力信号
ポジションデータ取込み完了(WEND) PLC入力信号
PWRT信号は教示モード信号(MODES)がONの時に有効です。
PWRT信号をONにしてください(※1)、この時点の現在位置データが、PLCの指定ポジション番号(7.4.1参照)に設定しているポジション番号の位置欄に書き込まれます。(※2)
書込みが完了するとWEND信号がONになります。
上位側PLCではWEND信号がONになった後にPWRT信号をOFFにしてください。
WEND信号がONする前にPWRT信号をOFFするとWEND信号はONになりません。
PWRT信号をOFFにするとWEND信号がOFFになります。
(※1)20msec以上連続でONにしてください。20msec以下の場合は書込みが行われない場合があります。
(※2)位置以外のデータが未定義であればパラメータ初期値が書き込まれます。(コントローラ本体の取扱説明書参照)
(18)ブレーキ強制解除(BKRL) PLC出力信号
本信号をONにすることでブレーキを強制的に解除させることができます。
MODES (ACON,PCON→PLC)
PWRT (PLC→ACON、PCON)
WEND (ACON,PCON→PLC)
20msec以上
PWRT 信号を ON にしてください(※ 1)、この時点の現在位置データが、PLC の指定ポジション
No.(3.4.1 参照)に設定しているポジション No. の位置欄に書き込まれます。(※2)

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
62
ProfiBus-DP
117
(19)運転モード(RMOD) PLC出力信号
運転モード状態(RMDS) PLC入力信号
RMOD信号とコントローラ前面のMODEスイッチにより次の様に運転モードが選択されます。
また現在AUTO/MANUのどちらに設定されているかRMDS信号で確認することができます。
次にRMOD信号とMODEスイッチの組合せによる運転モードを示します。
(注)MANUモードではPLCから運転を行うことはできません。
(20)ポジション/簡易直値切替(PMOD) PLC出力信号
移動時の目標位置をコントローラのポジションテーブルに登録されている値を使用するか、PLCの目標位置(※)で指定されている値を使用するかを切替えます。
PMOD=OFF:ポジションテーブル使用
PMOD=ON :PLCの目標位置(※)の値使用
(※)7.4.1参照
(21)押付け指定(PUSH) PLC出力信号
本信号をONにしてから移動指令を行うと押付け動作となります。
本信号をOFFに設定すると通常位置決め動作となります。
(本信号の設定タイミングは、7.6運転の(2)ハーフ直値モードでの運転参照)
(22)押付け方向指定(DIR) PLC出力信号
押付けを行う方向を指定します。
本信号をOFFにすると目標位置から位置決め幅を減算した値に向かって、押付けを行います。
本信号をONにすると目標位置に位置決め幅を加算した値に向かって、押付けを行います。
通常位置決め動作の場合は、本信号は無効になります。
(本信号の設定タイミングは、7.6運転の(2)ハーフ直値モードでの運転参照)
コントローラMODE コントローラMODE
スイッチがAUTO側 スイッチがMANU側
RMOD信号がOFF AUTOモード MANUモード
(AUTOモード指定) (RMDS=OFF) (RMDS=ON)
RMOD信号がON MANUモード MANUモード
(MANUモード指定) (RMDS=ON) (RMDS=ON)
速度
目標位置 DIR=OFFの時 DIR=ONの時
移動距離
位置決め幅 位置決め幅 位置決め幅
3.6 運転の
3.6 運転の
3.4.1 参照
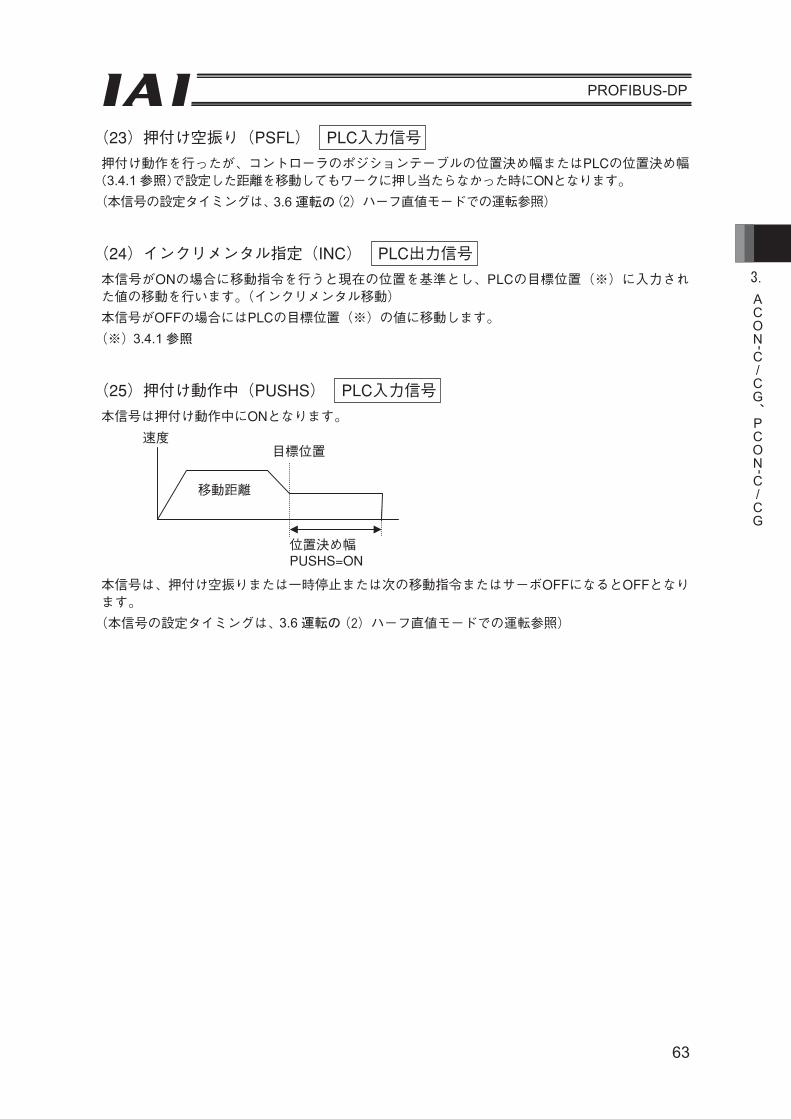
PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
63
ProfiBus-DP
117
(19)運転モード(RMOD) PLC出力信号
運転モード状態(RMDS) PLC入力信号
RMOD信号とコントローラ前面のMODEスイッチにより次の様に運転モードが選択されます。
また現在AUTO/MANUのどちらに設定されているかRMDS信号で確認することができます。
次にRMOD信号とMODEスイッチの組合せによる運転モードを示します。
(注)MANUモードではPLCから運転を行うことはできません。
(20)ポジション/簡易直値切替(PMOD) PLC出力信号
移動時の目標位置をコントローラのポジションテーブルに登録されている値を使用するか、PLCの目標位置(※)で指定されている値を使用するかを切替えます。
PMOD=OFF:ポジションテーブル使用
PMOD=ON :PLCの目標位置(※)の値使用
(※)7.4.1参照
(21)押付け指定(PUSH) PLC出力信号
本信号をONにしてから移動指令を行うと押付け動作となります。
本信号をOFFに設定すると通常位置決め動作となります。
(本信号の設定タイミングは、7.6運転の(2)ハーフ直値モードでの運転参照)
(22)押付け方向指定(DIR) PLC出力信号
押付けを行う方向を指定します。
本信号をOFFにすると目標位置から位置決め幅を減算した値に向かって、押付けを行います。
本信号をONにすると目標位置に位置決め幅を加算した値に向かって、押付けを行います。
通常位置決め動作の場合は、本信号は無効になります。
(本信号の設定タイミングは、7.6運転の(2)ハーフ直値モードでの運転参照)
コントローラMODE コントローラMODE
スイッチがAUTO側 スイッチがMANU側
RMOD信号がOFF AUTOモード MANUモード
(AUTOモード指定) (RMDS=OFF) (RMDS=ON)
RMOD信号がON MANUモード MANUモード
(MANUモード指定) (RMDS=ON) (RMDS=ON)
速度
目標位置 DIR=OFFの時 DIR=ONの時
移動距離
位置決め幅 位置決め幅 位置決め幅
ProfiBus-DP
118
(23)押付け空振り(PSFL) PLC入力信号
押付け動作を行ったが、コントローラのポジションテーブルの位置決め幅またはPLCの位置決め幅(7.4.1参照)で設定した距離を移動してもワークに押し当たらなかった時にONとなります。
(本信号の設定タイミングは、7.6運転の(2)ハーフ直値モードでの運転参照)
(24)インクリメンタル指定(INC) PLC出力信号
本信号がONの場合に移動指令を行うと現在の位置を基準とし、PLCの目標位置(※)に入力された値の移動を行います。(インクリメンタル移動)
本信号がOFFの場合にはPLCの目標位置(※)の値に移動します。
(※)7.4.1参照
(25)押付け動作中(PUSHS) PLC入力信号
本信号は押付け動作中にONとなります。
本信号は、押付け空振りまたは一時停止または次の移動指令またはサーボOFFになるとOFFとなります。
(本信号の設定タイミングは、7.6運転の(2)ハーフ直値モードでの運転参照)
速度 目標位置
移動距離
位置決め幅 PUSHS=ON
3.6 運転の
3.6 運転の
(3.4.1 参照)
3.4.1 参照

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
64
ProfiBus-DP
119
(26)負荷出力判定(LOAD) PLC入力信号 PCON専用機能
本信号は押付け動作の場合だけ有効です。
圧入用途で使用するには、押付け動作中に設定した負荷閾値に達したかを知る必要があります。
負荷閾値と検定幅範囲はPLCで設定し、検定幅範囲内で指令トルク(モータ電流)が閾値を超えた時、本信号はONします。
本信号は、指令トルクが合計された一定時間、閾値を超えたかで判断を行います。
この処理手順は押し付け判定と同じです。負荷出力の判定時間はパラメータNo.50“負荷出力判定時間”で任意に変更することが可能です。
本信号は次の移動指令を受けるまで保持されます。
・押付け速度はパラメータNo.34“押付け速度”で設定します。
出荷時はアクチュエータ特性により個別設定されています。
ワークの材質、形状などを考慮して適切な速度を指定してください。
・パラメータNo.50“負荷出力判定時間”を設定します。
・パラメータNo.51“トルク検定範囲”を0[有効]に設定します。
・閾値検定幅はPLCのゾーン境界値+、ゾーン境界値-(※)で設定します。
・閾値はPLCの負荷電流閾値(※)で設定します。
・位置決め幅は、PLCの位置決め幅(※)で設定します。
ワークの機械的バラつきを考慮して最後方の位置より少し長めに設定してください。
詳細は、コントローラ本体の取扱説明書を参照願います。
(※)7.4.1参照
Q警告:・目標位置の手前でワークに押し当たるとサーボ異常になります。目標位置とワークの位置関係に充分注意してください。・アクチュエータは、電流制限値で決定される停止時押付け電流でワークを押し続けています。停止している状態ではありませんので、この時の取扱いには充分気をつけてください。
トルク検定範囲内で指令トルクが閾値 を超えたら本信号がONする位置
ワークに押し当たり、押付け完了と判断して 位置決め完了信号がONする位置
速度
移動距離
目標位置
検定幅
位置決め幅(最大押し込み量)
3.4.1 参照
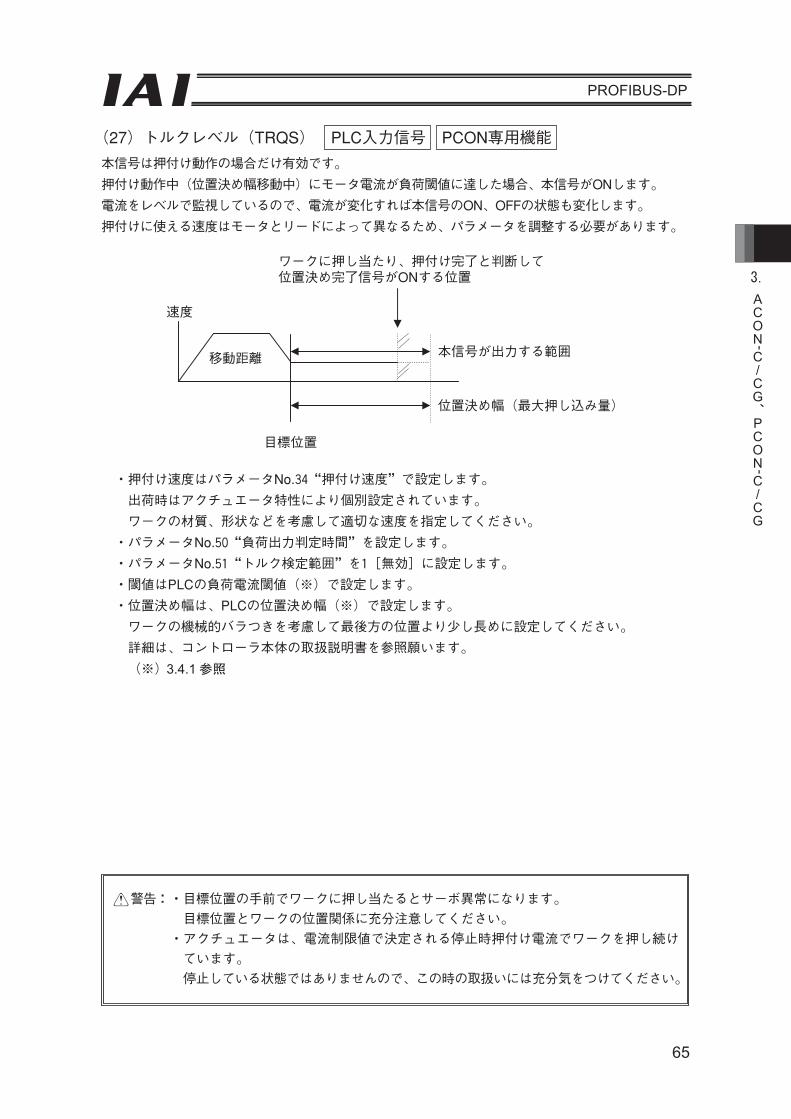
PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
65
ProfiBus-DP
119
(26)負荷出力判定(LOAD) PLC入力信号 PCON専用機能
本信号は押付け動作の場合だけ有効です。
圧入用途で使用するには、押付け動作中に設定した負荷閾値に達したかを知る必要があります。
負荷閾値と検定幅範囲はPLCで設定し、検定幅範囲内で指令トルク(モータ電流)が閾値を超えた時、本信号はONします。
本信号は、指令トルクが合計された一定時間、閾値を超えたかで判断を行います。
この処理手順は押し付け判定と同じです。負荷出力の判定時間はパラメータNo.50“負荷出力判定時間”で任意に変更することが可能です。
本信号は次の移動指令を受けるまで保持されます。
・押付け速度はパラメータNo.34“押付け速度”で設定します。
出荷時はアクチュエータ特性により個別設定されています。
ワークの材質、形状などを考慮して適切な速度を指定してください。
・パラメータNo.50“負荷出力判定時間”を設定します。
・パラメータNo.51“トルク検定範囲”を0[有効]に設定します。
・閾値検定幅はPLCのゾーン境界値+、ゾーン境界値-(※)で設定します。
・閾値はPLCの負荷電流閾値(※)で設定します。
・位置決め幅は、PLCの位置決め幅(※)で設定します。
ワークの機械的バラつきを考慮して最後方の位置より少し長めに設定してください。
詳細は、コントローラ本体の取扱説明書を参照願います。
(※)7.4.1参照
Q警告:・目標位置の手前でワークに押し当たるとサーボ異常になります。目標位置とワークの位置関係に充分注意してください。・アクチュエータは、電流制限値で決定される停止時押付け電流でワークを押し続けています。停止している状態ではありませんので、この時の取扱いには充分気をつけてください。
トルク検定範囲内で指令トルクが閾値 を超えたら本信号がONする位置
ワークに押し当たり、押付け完了と判断して 位置決め完了信号がONする位置
速度
移動距離
目標位置
検定幅
位置決め幅(最大押し込み量)
ProfiBus-DP
120
(27)トルクレベル(TRQS) PLC入力信号 PCON専用機能
本信号は押付け動作の場合だけ有効です。
押付け動作中(位置決め幅移動中)にモータ電流が負荷閾値に達した場合、本信号がONします。
電流をレベルで監視しているので、電流が変化すれば本信号のON、OFFの状態も変化します。
押付けに使える速度はモータとリードによって異なるため、パラメータを調整する必要があります。
・押付け速度はパラメータNo.34“押付け速度”で設定します。
出荷時はアクチュエータ特性により個別設定されています。
ワークの材質、形状などを考慮して適切な速度を指定してください。
・パラメータNo.50“負荷出力判定時間”を設定します。
・パラメータNo.51“トルク検定範囲”を1[無効]に設定します。
・閾値はPLCの負荷電流閾値(※)で設定します。
・位置決め幅は、PLCの位置決め幅(※)で設定します。
ワークの機械的バラつきを考慮して最後方の位置より少し長めに設定してください。
詳細は、コントローラ本体の取扱説明書を参照願います。
(※)7.4.1参照
Q警告:・目標位置の手前でワークに押し当たるとサーボ異常になります。目標位置とワークの位置関係に充分注意してください。・アクチュエータは、電流制限値で決定される停止時押付け電流でワークを押し続けています。停止している状態ではありませんので、この時の取扱いには充分気をつけてください。
ワークに押し当たり、押付け完了と判断して 位置決め完了信号がONする位置
本信号が出力する範囲
位置決め幅(最大押し込み量)
目標位置
移動距離
速度
3.4.1 参照

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
66
ProfiBus-DP
121
(28)停止制御モード(SMOD) PLC出力信号 PCON専用機能
パルスモータの一般的特徴としてACサーボモータに比べて停止時の保持電流が大きいことが上げられます。このため、待機位置での停止時間が長い場合には省エネルギ対策の一環として停止時の電力消費量を低減する方法を用意しています。
SMOD=ON :待機中はフルサーボ制御方式を使用する
SMOD=OFF :待機中
・フルサーボ制御方式
パルスモータをサーボ制御することにより保持電流を低減することができます。
アクチュエータ機種や負荷条件等により低減度合いは異なりますが、保持電流はおよそ1/2~1/4程度になります。
実際の保持電流は、パソコン対応ソフトの電流モニタ画面で確認することができます。
(注)外力が加わるような状況や停止位置によっては微振動や異音が発生する可能性があります。
装置全体で支障がないことを確認してご使用ください。
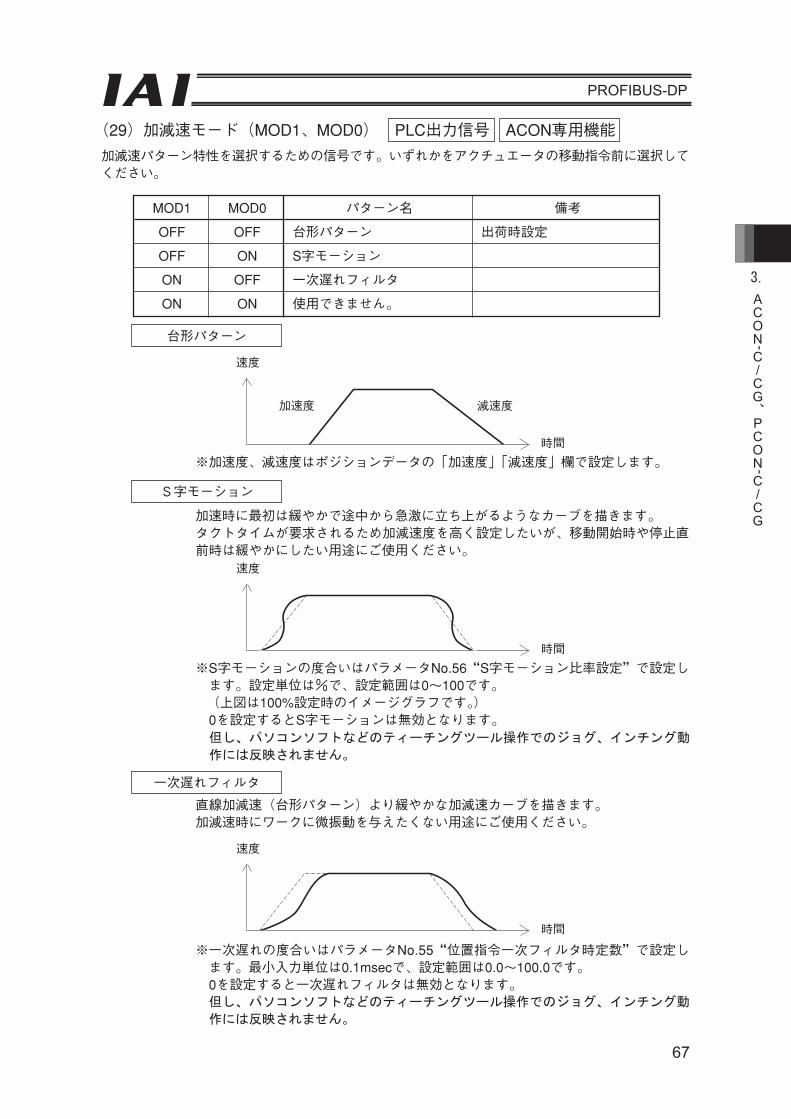
PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
67
ProfiBus-DP
121
(28)停止制御モード(SMOD) PLC出力信号 PCON専用機能
パルスモータの一般的特徴としてACサーボモータに比べて停止時の保持電流が大きいことが上げられます。このため、待機位置での停止時間が長い場合には省エネルギ対策の一環として停止時の電力消費量を低減する方法を用意しています。
SMOD=ON :待機中はフルサーボ制御方式を使用する
SMOD=OFF :待機中
・フルサーボ制御方式
パルスモータをサーボ制御することにより保持電流を低減することができます。
アクチュエータ機種や負荷条件等により低減度合いは異なりますが、保持電流はおよそ1/2~1/4程度になります。
実際の保持電流は、パソコン対応ソフトの電流モニタ画面で確認することができます。
(注)外力が加わるような状況や停止位置によっては微振動や異音が発生する可能性があります。
装置全体で支障がないことを確認してご使用ください。
ProfiBus-DP
122
(29)加減速モード(MOD1、MOD0) PLC出力信号 ACON専用機能
加減速パターン特性を選択するための信号です。いずれかをアクチュエータの移動指令前に選択してください。
MOD1 MOD0 パターン名 備考
OFF OFF 台形パターン 出荷時設定
OFF ON S字モーション
ON OFF 一次遅れフィルタ
ON ON 使用できません。
加速度
速度
減速度
時間
※加速度、減速度はポジションデータの「加速度」「減速度」欄で設定します。
直線加減速(台形パターン)より緩やかな加減速カーブを描きます。加減速時にワークに微振動を与えたくない用途にご使用ください。
台形パターン
速度
時間
一次遅れフィルタ
※一次遅れの度合いはパラメータNo.55“位置指令一次フィルタ時定数”で設定します。最小入力単位は0.1msecで、設定範囲は0.0~100.0です。0を設定すると一次遅れフィルタは無効となります。但し、パソコンやティーチングボックス操作でのジョグ、インチング動作には反映されません。
加速時に最初は緩やかで途中から急激に立ち上がるようなカーブを描きます。タクトタイムが要求されるため加減速度を高く設定したいが、移動開始時や停止直前時は緩やかにしたい用途にご使用ください。
※S字モーションの度合いはパラメータNo.56“S字モーション比率設定”で設定します。設定単位は%で、設定範囲は0~100です。(上図は100%設定時のイメージグラフです。)0を設定するとS字モーションは無効となります。但し、パソコンやティーチングボックス操作でのジョグ、インチング動作には反映されません。
速度
時間
S字モーション
但し、パソコンソフトなどのティーチングツール操作でのジョグ、インチング動
作には反映されません。
但し、パソコンソフトなどのティーチングツール操作でのジョグ、インチング動
作には反映されません。

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
68
30 ASO1 ASO0 PLC
OFF
ASO1 ASO0 OFF OFF
OFF ON OFFT No.36
ON OFF OFFT No.37
ON ON OFFT No.38
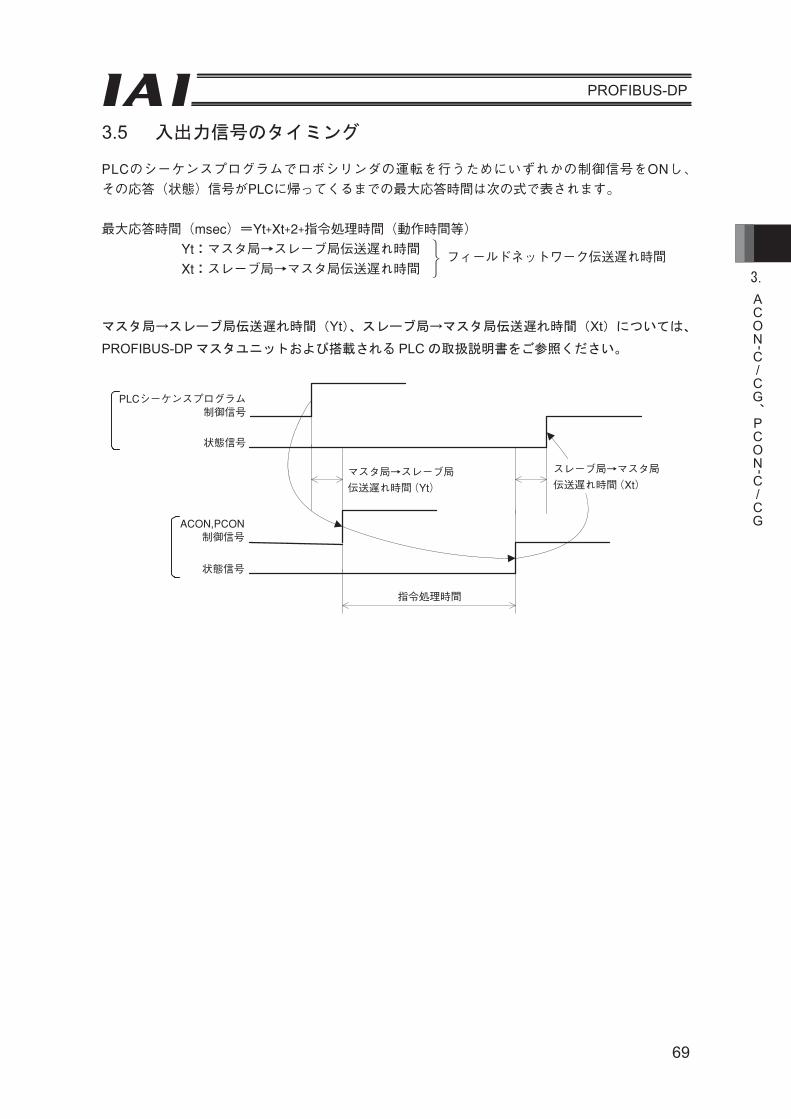
PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
69
ProfiBus-DP
123
7.5 入出力信号のタイミングPLCのシーケンスプログラムでロボシリンダの運転を行うためにいずれかの制御信号をONし、その応答(状態)信号がPLCに帰ってくるまでの最大応答時間は次の式で表されます。
最大応答時間(msec)=Yt+Xt+2+指令処理時間(動作時間等)Yt:マスタ局→スレーブ局伝送遅れ時間 フィールドネットワーク伝送遅れ時間Xt:スレーブ局→マスタ局伝送遅れ時間
マスタ局→スレーブ局伝送遅れ時間(Yt)、スレーブ局→マスタ局伝送遅れ時間(Xt)については、ProfiBus-DPマスタユニットおよび搭載されるPLCの取扱説明書をご参照ください。
PLCシーケンスプログラム 制御信号
状態信号
ACON,PCON 制御信号
状態信号
マスタ局→スレーブ局 伝送遅れ時間(Yt)
スレーブ局→マスタ局 伝送遅れ時間(Xt)
指令処理時間
12
3
3.5 入出力信号のタイミング
マスタ局→スレーブ局伝送遅れ時間(Yt)、スレーブ局→マスタ局伝送遅れ時間(Xt)については、
PROFIBUS-DP マスタユニットおよび搭載される PLC の取扱説明書をご参照ください。

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
70
ProfiBus-DP
124
7.6 運転次にポジション/簡易直値モード、ハーフ直値モードおよびフル直値モードの基本動作例のタイミングを示します。
リモートⅠ/OモードおよびリモートⅠ/Oモード2についてはコントローラの取扱説明書をご参照ください。
(リモートⅠ/Oモード2の現在位置、現在速度の読取りは適宜PLCから読取ってください。)
(1)ポジション/簡易直値モードでの運転
PLCの目標位置に位置データを書込み、速度、加減速度、位置決め幅、押付け電流制限値等はポジションテーブルで指定して運転します。
動作例(通常位置決め動作)
(準備)目標位置以外のポジションデータ(速度、加減速度、位置決め幅等)をポジションテーブルに設定します。
ポジション/簡易直値切替(PMOD)信号をONします。
①目標位置データを出力アドレスn、n+1の目標位置(※)に設定します。
②速度、加減速度等を設定したポジション番号を出力アドレスn+2の指定ポジション番号(※)に設定します。
③位置決め完了(PEND)信号がONになっているまたは、移動中信号(MOVE)がOFFの状態で、位置決めスタート(CSTR)信号をONにします。
①、②で設定したデータはCSTR信号の立上りエッジでコントローラに読み込まれます。
④CSTR信号がONになった後、tpdf後にPENDがOFFします。
⑤PEND信号がOFF またはMOVE信号がONになったことを確認してからCSTR信号をOFFにします。目標位置(※)の値はCSTR信号をOFFにするまで変更しないでください。
⑥PEND信号がOFFになるのと同時にMOVE信号がONになります。
⑦入力アドレスn、n+1の現在位置データ(※)は常時更新されています。残移動量がポジションデータで設定された位置決め幅の範囲内になると、CSTR信号がOFFの場合にPEND信号がONになり、完了ポジション番号が入力アドレスn+2の完了ポジション番号(※)に出力されます。
従って、位置決め完了時の完了ポジション番号(※)の読み取りは、PEND信号がONになり適当な時間(残移動量移動時間)をおいてから確認してください。
また現在位置データは停止中でも振動等により多少変化することがあります。
⑧移動中に目標位置データを変更することが可能です。
目標位置を変更するには、目標位置データの変更を行ってPLCのスキャンタイム以上経過してからCSTR信号をONにします。
CSTR信号はPLCのスキャンタイム以上経過してから値を変更してください。
動作例(押付け動作)
押付け動作は(準備)の段階でポジションデータの押付け欄に電流制限値を設定します。
押付け欄に値を設定したポジション番号に位置決めを行うと押付け動作となります。
(※)7.4.1参照
3.6 運転
3.4.1 参照
②速度、加減速度等を設定したポジション No. を出力アドレス n + 2 の指定ポジション番号(※)
に設定します。
なり、完了ポジション No. が入力アドレス n + 2 の完了ポジション No.(※)に出力されます。
従って、位置決め完了時の完了ポジション No.(※)の読み取りは、PEND 信号が ON になり適
当な時間(残移動量移動時間)をおいてから確認してください。
押付け欄に値を設定したポジション No. に位置決めを行うと押付け動作となります。

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
71
ProfiBus-DP
124
7.6 運転次にポジション/簡易直値モード、ハーフ直値モードおよびフル直値モードの基本動作例のタイミングを示します。
リモートⅠ/OモードおよびリモートⅠ/Oモード2についてはコントローラの取扱説明書をご参照ください。
(リモートⅠ/Oモード2の現在位置、現在速度の読取りは適宜PLCから読取ってください。)
(1)ポジション/簡易直値モードでの運転
PLCの目標位置に位置データを書込み、速度、加減速度、位置決め幅、押付け電流制限値等はポジションテーブルで指定して運転します。
動作例(通常位置決め動作)
(準備)目標位置以外のポジションデータ(速度、加減速度、位置決め幅等)をポジションテーブルに設定します。
ポジション/簡易直値切替(PMOD)信号をONします。
①目標位置データを出力アドレスn、n+1の目標位置(※)に設定します。
②速度、加減速度等を設定したポジション番号を出力アドレスn+2の指定ポジション番号(※)に設定します。
③位置決め完了(PEND)信号がONになっているまたは、移動中信号(MOVE)がOFFの状態で、位置決めスタート(CSTR)信号をONにします。
①、②で設定したデータはCSTR信号の立上りエッジでコントローラに読み込まれます。
④CSTR信号がONになった後、tpdf後にPENDがOFFします。
⑤PEND信号がOFF またはMOVE信号がONになったことを確認してからCSTR信号をOFFにします。目標位置(※)の値はCSTR信号をOFFにするまで変更しないでください。
⑥PEND信号がOFFになるのと同時にMOVE信号がONになります。
⑦入力アドレスn、n+1の現在位置データ(※)は常時更新されています。残移動量がポジションデータで設定された位置決め幅の範囲内になると、CSTR信号がOFFの場合にPEND信号がONになり、完了ポジション番号が入力アドレスn+2の完了ポジション番号(※)に出力されます。
従って、位置決め完了時の完了ポジション番号(※)の読み取りは、PEND信号がONになり適当な時間(残移動量移動時間)をおいてから確認してください。
また現在位置データは停止中でも振動等により多少変化することがあります。
⑧移動中に目標位置データを変更することが可能です。
目標位置を変更するには、目標位置データの変更を行ってPLCのスキャンタイム以上経過してからCSTR信号をONにします。
CSTR信号はPLCのスキャンタイム以上経過してから値を変更してください。
動作例(押付け動作)
押付け動作は(準備)の段階でポジションデータの押付け欄に電流制限値を設定します。
押付け欄に値を設定したポジション番号に位置決めを行うと押付け動作となります。
(※)7.4.1参照
ProfiBus-DP
125
位置決めスタート CSTR
(PLC→ACON,PCON)
位置決め完了 PEND
(ACON,PCON→PLC)
現在位置 (ACON,PCON→PLC)
移動中 MOVE
(ACON,PCON→PLC)
アクチュエータ移動
p1
n1 n2
n2 n3
tdpf
位置決め幅
T1
④ ⑤
⑥
※
※
指定ポジション番号 (PLC→ACON,PCON)
目標位置データ 設定値
(PLC→ACON,PCON) n1 n2 n3
①
②
③
⑦ ⑦
※T1:上位コントローラのスキャンタイムを考慮し、T1≧0msとなるようにしてください。
※Yt+Xt≦tdpf≦Yt+Xt+2(msec)
指定ポジション No.

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
72
ProfiBus-DP
126
(2)ハーフ直値モードでの運転
PLCの目標位置、位置決め幅、指定速度、加減速度および押付け電流制限指定にデータを指定して運転します。
動作例(押付け動作)
①目標位置データを出力アドレスn、n+1の目標位置(※)に設定します。
②位置決め幅データを出力アドレスn+2、n+3の位置決め幅(※)に設定します。
③速度データを出力アドレスn+4の速度(※)に設定します。
④加減速度データを出力アドレスn+5の加減速度(※)に設定します。
⑤押付け電流制限データを出力アドレスn+6の押付け電流制限値(※)に設定します。
⑥押付け指定(PUSH)信号をONにします。
⑦押付け方向指定(DIR)信号で押付け方向を指定します。(7.4.7(22)参照)
⑧位置決め完了(PEND)信号がONになっているまたは、移動中信号(MOVE)がOFFの状態で、位置決め指令(DSTR)信号をONにします。
①~⑤で設定したデータはDSTR信号の立上りエッジでコントローラに読み込まれます。
⑨DSTR信号がONになった後、tpdf後にPENDがOFFします。
⑩PEND信号がOFF またはMOVE信号がONになったことを確認してからDSTR信号をOFFにします。①~⑤で設定した値はDSTR信号をOFFにするまで変更しないでください。
⑪PEND信号がOFFになるのと同時にMOVE信号がONになります。
⑫入力アドレスn、n+1の現在位置データ(※)は常時更新されています。
⑬PEND信号はDSTR信号がOFFで、モータの電流が⑤で設定した電流制限値に達するとONになります。(押付け完了)
②で設定した位置決め幅に達しても、モータの電流が⑤で設定した電流制限値に到達しない場合は、押付け空振り(PSFL)信号がONになります。この場合、PEND信号はONになりません。(押付け空振り)
⑭PEND信号またはPSFL信号がONとなった後、PUSH信号をOFFにします。
動作例(通常位置決め動作)
通常位置決め動作は、⑥の信号をOFFに設定します。
残移動量がポジションデータで設定された位置決め幅の範囲内になると、DSTR信号がOFFの場合にPEND信号がONになります。
(※) 7.4.1参照
ProfiBus-DP
127
目標位置データ 設定値
(PLC→ACON,PCON)
位置決め幅データ 設定値
(PLC→ACON,PCON)
速度データ 設定値
(PLC→ACON,PCON)
加減速度データ 設定値
(PLC→ACON,PCON)
押付け電流制限値 設定値
(PLC→ACON,PCON)
押付け指定 PUSH
(PLC→ACON,PCON)
押付け方向指定 DIR
(PLC→ACON,PCON)
位置決め指令 DSTR
(PLC→ACON,PCON)
位置決め完了/押付け空振り PEND/PSFL
(ACON,PCON→PLC)
現在位置 (ACON,PCON→PLC)
移動中 MOVE
(ACON,PCON→PLC)
アクチュエータ動作 (押付け)
アクチュエータ動作 (通常位置決め)
1
2
3
4
n1 n2
v1 v2
m1 m2
t1 t2
※T1:上位コントローラのスキャンタイムを考慮し、 T1≧ 0msとなるようにしてください ※Yt+Xt≦ tdpf≦Yt+Xt+2(msec)
⑤
⑥
7
9 0
wq
⑭
e
s1 s2
n1
※tdpf
※T1
n2+(v2)
位置決め幅
押付け
⑧
3.4.1 参照
3.4.7

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
73
ProfiBus-DP
126
(2)ハーフ直値モードでの運転
PLCの目標位置、位置決め幅、指定速度、加減速度および押付け電流制限指定にデータを指定して運転します。
動作例(押付け動作)
①目標位置データを出力アドレスn、n+1の目標位置(※)に設定します。
②位置決め幅データを出力アドレスn+2、n+3の位置決め幅(※)に設定します。
③速度データを出力アドレスn+4の速度(※)に設定します。
④加減速度データを出力アドレスn+5の加減速度(※)に設定します。
⑤押付け電流制限データを出力アドレスn+6の押付け電流制限値(※)に設定します。
⑥押付け指定(PUSH)信号をONにします。
⑦押付け方向指定(DIR)信号で押付け方向を指定します。(7.4.7(22)参照)
⑧位置決め完了(PEND)信号がONになっているまたは、移動中信号(MOVE)がOFFの状態で、位置決め指令(DSTR)信号をONにします。
①~⑤で設定したデータはDSTR信号の立上りエッジでコントローラに読み込まれます。
⑨DSTR信号がONになった後、tpdf後にPENDがOFFします。
⑩PEND信号がOFF またはMOVE信号がONになったことを確認してからDSTR信号をOFFにします。①~⑤で設定した値はDSTR信号をOFFにするまで変更しないでください。
⑪PEND信号がOFFになるのと同時にMOVE信号がONになります。
⑫入力アドレスn、n+1の現在位置データ(※)は常時更新されています。
⑬PEND信号はDSTR信号がOFFで、モータの電流が⑤で設定した電流制限値に達するとONになります。(押付け完了)
②で設定した位置決め幅に達しても、モータの電流が⑤で設定した電流制限値に到達しない場合は、押付け空振り(PSFL)信号がONになります。この場合、PEND信号はONになりません。(押付け空振り)
⑭PEND信号またはPSFL信号がONとなった後、PUSH信号をOFFにします。
動作例(通常位置決め動作)
通常位置決め動作は、⑥の信号をOFFに設定します。
残移動量がポジションデータで設定された位置決め幅の範囲内になると、DSTR信号がOFFの場合にPEND信号がONになります。
(※) 7.4.1参照
ProfiBus-DP
127
目標位置データ 設定値
(PLC→ACON,PCON)
位置決め幅データ 設定値
(PLC→ACON,PCON)
速度データ 設定値
(PLC→ACON,PCON)
加減速度データ 設定値
(PLC→ACON,PCON)
押付け電流制限値 設定値
(PLC→ACON,PCON)
押付け指定 PUSH
(PLC→ACON,PCON)
押付け方向指定 DIR
(PLC→ACON,PCON)
位置決め指令 DSTR
(PLC→ACON,PCON)
位置決め完了/押付け空振り PEND/PSFL
(ACON,PCON→PLC)
現在位置 (ACON,PCON→PLC)
移動中 MOVE
(ACON,PCON→PLC)
アクチュエータ動作 (押付け)
アクチュエータ動作 (通常位置決め)
1
2
3
4
n1 n2
v1 v2
m1 m2
t1 t2
※T1:上位コントローラのスキャンタイムを考慮し、 T1≧ 0msとなるようにしてください ※Yt+Xt≦ tdpf≦Yt+Xt+2(msec)
⑤
⑥
7
9 0
wq
⑭
e
s1 s2
n1
※tdpf
※T1
n2+(v2)
位置決め幅
押付け
⑧
PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
74
ProfiBus-DP
128
(3)フル直値モードでの運転
PLCの目標位置、位置決め幅等位置決めに必要な条件をPLCより全て指定して運転します。
動作例(押付け動作)
①目標位置データを出力アドレスn、n+1の目標位置(※)に設定します。
②位置決め幅データを出力アドレスn+2、n+3の位置決め幅(※)に設定します。
③速度データを出力アドレスn+4、n+5の速度(※)に設定します。
④ポジションゾーン出力の境界値データを出力アドレスn+6~n+9のゾーン境界値+、ゾーン境界値-(※)に設定します。
⑤加速度データを出力アドレスn+10の加速度(※)に設定します。
⑥減速度データを出力アドレスn+11の減速度(※)に設定します。
⑦押付け電流制限値データを出力アドレスn+12の押付け電流制限値(※)に設定します。
⑧負荷電流閾値データを出力アドレスn+13の負荷電流閾値(※)に設定します。
⑨押付け指定(PUSH)信号をONにします。
⑩押付け方向指定(DIR)信号で押付け方向を指定します。(7.4.7(22)参照)⑪位置決め完了(PEND)信号がONになっているまたは、移動中信号(MOVE)がOFFの状態で、位置決め指令(DSTR)信号をONにします。
①~⑧で設定したデータはDSTR信号の立上りエッジでコントローラに読み込まれます。
⑫DSTR信号がONになった後、tpdf後にPENDがOFFします。
⑬PEND信号がOFFまたはMOVE信号がONになったことを確認してからDSTR信号をOFFにします。①~⑧で設定した値はDSTR信号をOFFにするまで変更しないでください。
⑭PEND信号がOFFになるのと同時にMOVE信号がONになります。
⑮入力アドレスn、n+1の現在位置データ(※)は常時更新されています。
⑯PEND信号はDSTR信号がOFFで、モータの電流が⑦で設定した電流制限値に達するとONになります。(押付け完了)
②で設定した位置決め幅に達しても、モータの電流が⑦で設定した電流制限値に到達しない場合は、押付け空振り(PSFL)信号がONになります。この場合、PEND信号はONになりません。(押付け空振り)
⑰PEND信号またはPSFL信号がONとなった後、PUSH信号をOFFにします。
動作例(通常位置決め動作)
通常位置決め動作は、⑨の信号をOFFに設定します。
残移動量がポジションデータで設定された位置決め幅の範囲内になると、DSTR信号がOFF の場合にPEND信号がONになります。
(※) 7.4.1参照3.4.1 参照
3.4.7

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
75
ProfiBus-DP
128
(3)フル直値モードでの運転
PLCの目標位置、位置決め幅等位置決めに必要な条件をPLCより全て指定して運転します。
動作例(押付け動作)
①目標位置データを出力アドレスn、n+1の目標位置(※)に設定します。
②位置決め幅データを出力アドレスn+2、n+3の位置決め幅(※)に設定します。
③速度データを出力アドレスn+4、n+5の速度(※)に設定します。
④ポジションゾーン出力の境界値データを出力アドレスn+6~n+9のゾーン境界値+、ゾーン境界値-(※)に設定します。
⑤加速度データを出力アドレスn+10の加速度(※)に設定します。
⑥減速度データを出力アドレスn+11の減速度(※)に設定します。
⑦押付け電流制限値データを出力アドレスn+12の押付け電流制限値(※)に設定します。
⑧負荷電流閾値データを出力アドレスn+13の負荷電流閾値(※)に設定します。
⑨押付け指定(PUSH)信号をONにします。
⑩押付け方向指定(DIR)信号で押付け方向を指定します。(7.4.7(22)参照)⑪位置決め完了(PEND)信号がONになっているまたは、移動中信号(MOVE)がOFFの状態で、位置決め指令(DSTR)信号をONにします。
①~⑧で設定したデータはDSTR信号の立上りエッジでコントローラに読み込まれます。
⑫DSTR信号がONになった後、tpdf後にPENDがOFFします。
⑬PEND信号がOFFまたはMOVE信号がONになったことを確認してからDSTR信号をOFFにします。①~⑧で設定した値はDSTR信号をOFFにするまで変更しないでください。
⑭PEND信号がOFFになるのと同時にMOVE信号がONになります。
⑮入力アドレスn、n+1の現在位置データ(※)は常時更新されています。
⑯PEND信号はDSTR信号がOFFで、モータの電流が⑦で設定した電流制限値に達するとONになります。(押付け完了)
②で設定した位置決め幅に達しても、モータの電流が⑦で設定した電流制限値に到達しない場合は、押付け空振り(PSFL)信号がONになります。この場合、PEND信号はONになりません。(押付け空振り)
⑰PEND信号またはPSFL信号がONとなった後、PUSH信号をOFFにします。
動作例(通常位置決め動作)
通常位置決め動作は、⑨の信号をOFFに設定します。
残移動量がポジションデータで設定された位置決め幅の範囲内になると、DSTR信号がOFF の場合にPEND信号がONになります。
(※) 7.4.1参照
ProfiBus-DP
129
目標位置データ 設定値
(PLC→ACON,PCON)
位置決め幅データ 設定値
(PLC→ACON,PCON)
速度データ 設定値
(PLC→ACON,PCON)
ポジションゾーン境界値データ 設定値
(PLC→ACON,PCON)
加速度データ 設定値
(PLC→ACON,PCON)
1
2
3
4
減速度データ 設定値
(PLC→ACON,PCON)
押付け電流制限値データ 設定値
(PLC→ACON,PCON)
負荷電流闘値データ 設定値
(PLC→ACON,PCON)
n1 n2
v1 v2
m1 m2
Q1 Q2
⑤
t1 t2
⑥
l1 l2
⑦
o1 o2
⑧
p1 p2
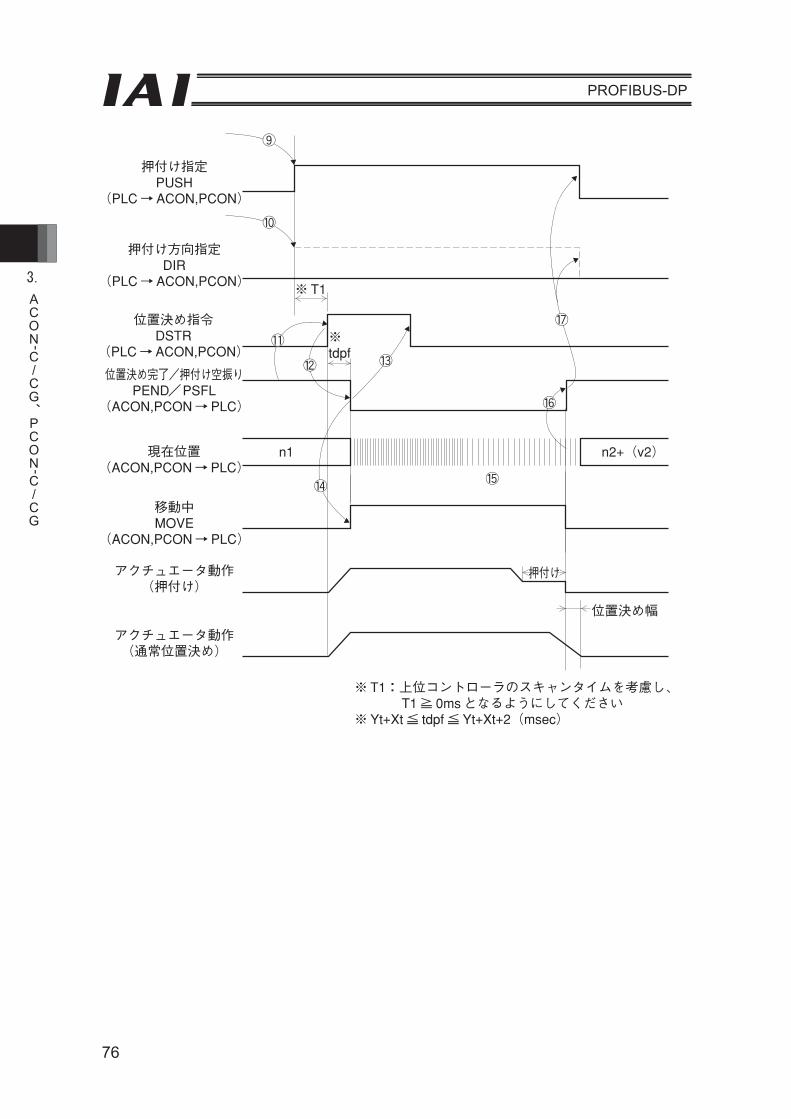
PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
76
ProfiBus-DP
130
押付け指定 PUSH
(PLC→ACON,PCON)
押付け方向指定 DIR
(PLC→ACON,PCON)
位置決め指令 DSTR
(PLC→ACON,PCON)
位置決め完了/押付け空振り PEND/PSFL
(ACON,PCON→PLC)
現在位置 (ACON,PCON→PLC)
移動中 MOVE
(ACON,PCON→PLC)
アクチュエータ動作 (押付け)
アクチュエータ動作 (通常位置決め)
※T1:上位コントローラのスキャンタイムを考慮し、 T1≧ 0msとなるようにしてください ※Yt+Xt≦ tdpf≦Yt+Xt+2(msec)
⑨
⑩
⑫ ⑬
⑮ ⑭
⑰
⑯
n1
※tdpf
※ T1
n2+(v2)
位置決め幅
押付け
⑪

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
77
ProfiBus-DP
130
押付け指定 PUSH
(PLC→ACON,PCON)
押付け方向指定 DIR
(PLC→ACON,PCON)
位置決め指令 DSTR
(PLC→ACON,PCON)
位置決め完了/押付け空振り PEND/PSFL
(ACON,PCON→PLC)
現在位置 (ACON,PCON→PLC)
移動中 MOVE
(ACON,PCON→PLC)
アクチュエータ動作 (押付け)
アクチュエータ動作 (通常位置決め)
※T1:上位コントローラのスキャンタイムを考慮し、 T1≧ 0msとなるようにしてください ※Yt+Xt≦ tdpf≦Yt+Xt+2(msec)
⑨
⑩
⑫ ⑬
⑮ ⑭
⑰
⑯
n1
※tdpf
※ T1
n2+(v2)
位置決め幅
押付け
⑪
(4)移動中のデータ変更
ハーフ直値モード、フル直値モードは移動中に目標位置データ、加減速データ、速度データ、位置
決め幅、押付時電流制限値の中で PLC で設定している値を変更することが可能です。データ変更
を行った後、位置決め指令(DSTR)を tdpf 以上“ON”にします。
また、DSTR を“OFF”にした後、次の DSTR を“ON”にするまでの時間は twcsON + twcsOFF以上開けていてください。
下図に速度・加減速度を変更した例を示します。
注意 :1. 速度の設定がされていない場合、または設定が 0 の場合は停止したままとなり、アラームに
はなりません。
2. 移動中に、速度設定を 0 に変更した場合は減速停止し、アラームにはなりません。
3. 移動中に、加減速度/速度データだけを変更する場合でも目標位置データの設定が必要です。
4. 移動中に、目標位置だけを変更する場合でも、加減速度・速度データの設定が必要です。
PLC→ACON,PCON
DSTR PLG→ACON,PCON
PEND ACON,PCON→PLC
MOVE ACON,PCON→PLC
n1
n3
n2
n2 n3
twcsON
tdpf
twcsONtwcsOFF
twcsON Yt Xt 2 msectwcsOFF Yt Xt 2 msec
Yt Xt tpdf Yt Xt 2 msec

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
78
ProfiBus-DP
132
7.7 ProfiBus-DP関連パラメータProfiBus-DPに関連するパラメータはNo.84~No.85およびNo.90です。
区分:C:外部インターフェースの関連
フィールドバス動作モード(No.84 FMOD)パラメータNo.84に動作モードを0~4で指定します。
フィールドバスノードアドレス(No.85 NADR)パラメータNo.85にリモート局の局番号を指定します。
設定範囲 0~125 (出荷時は1に設定されています。)
フィールドバス通信速度(No.86 FBRS)通信速度はマスタ局に自動追従となりますので、設定の必要はありません。
No. 区分 シンボル 名称 工場出荷時の初期値
1
83
84 C FMOD フィールドバス動作モード 0
85 C NADR フィールドバスノードアドレス 1
86 C FBRS フィールドバス通信速度 0
87 C NTYP ネットワークタイプ 3
90 C FMIO フィールドバス入出力フォーマット 3
パラメータNo.1~No.83まではコントローラの取扱説明書をご参照してください。
~
パラメータNo.84モード名 占有バイト数 内容設定値
0(出荷時設定) リモートⅠ/O 2モード
1 ポジション/ 8簡易直値モード
2 ハーフ直値モード 16
3 フル直値モード 32
4 リモート 12Ⅰ/Oモード2
PIO(24V入出力)による運転をProfiBus-DPによって行います。目標位置を直接数値で指定するか、ポジションデータの値で運転できます。その他の運転に必要な値はポジションデータに設定します。目標位置以外に速度、加減速度、押付け電流値を直接数値で指定して運転を行います。位置制御に関する全ての値を直接数値で指定して運転を行います。リモートⅠ/Oモードの機能に現在位置と現在速度読取り機能を追加したものです。
0
3.7 PROFIBUS-DP 関連パラメータ
PROFIBUS-DP に関連するパラメータは No.84 ~ No.87 および No.90 です。
区分:C:外部インタフェースの関連
PIO(24V 入出力)による運転をPROFIBUS-DP によって行います。
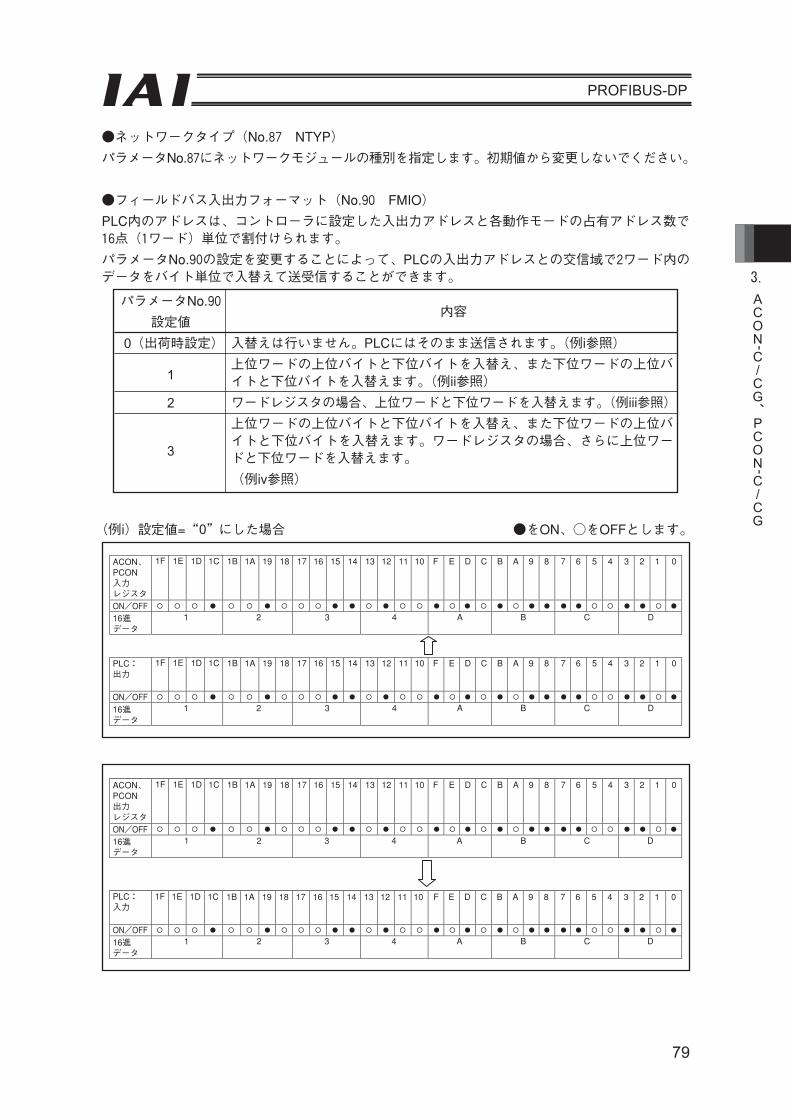
PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
79
ProfiBus-DP
132
7.7 ProfiBus-DP関連パラメータProfiBus-DPに関連するパラメータはNo.84~No.85およびNo.90です。
区分:C:外部インターフェースの関連
フィールドバス動作モード(No.84 FMOD)パラメータNo.84に動作モードを0~4で指定します。
フィールドバスノードアドレス(No.85 NADR)パラメータNo.85にリモート局の局番号を指定します。
設定範囲 0~125 (出荷時は1に設定されています。)
フィールドバス通信速度(No.86 FBRS)通信速度はマスタ局に自動追従となりますので、設定の必要はありません。
No. 区分 シンボル 名称 工場出荷時の初期値
1
83
84 C FMOD フィールドバス動作モード 0
85 C NADR フィールドバスノードアドレス 1
86 C FBRS フィールドバス通信速度 0
87 C NTYP ネットワークタイプ 3
90 C FMIO フィールドバス入出力フォーマット 3
パラメータNo.1~No.83まではコントローラの取扱説明書をご参照してください。
~
パラメータNo.84モード名 占有バイト数 内容設定値
0(出荷時設定) リモートⅠ/O 2モード
1 ポジション/ 8簡易直値モード
2 ハーフ直値モード 16
3 フル直値モード 32
4 リモート 12Ⅰ/Oモード2
PIO(24V入出力)による運転をProfiBus-DPによって行います。目標位置を直接数値で指定するか、ポジションデータの値で運転できます。その他の運転に必要な値はポジションデータに設定します。目標位置以外に速度、加減速度、押付け電流値を直接数値で指定して運転を行います。位置制御に関する全ての値を直接数値で指定して運転を行います。リモートⅠ/Oモードの機能に現在位置と現在速度読取り機能を追加したものです。
ProfiBus-DP
133
ネットワークタイプ(No.87 NTYP)
パラメータNo.87にネットワークモジュールの種別を指定します。初期値から変更しないでください。
フィールドバス入出力フォーマット(No.90 FMIO)
PLC内のアドレスは、コントローラに設定した入出力アドレスと各動作モードの占有アドレス数で16点(1ワード)単位で割付けられます。
パラメータNo.90の設定を変更することによって、PLCの入出力アドレスとの交信域で2ワード内のデータをバイト単位で入替えて送受信することができます。
(例i)設定値=“3”にした場合 をON、をOFFとします。
パラメータNo.90内容
設定値
3(出荷時設定) 入替えは行いません。PLCにはそのまま送信されます。(例i参照)
2上位ワードの上位バイトと下位バイトを入替え、また下位ワードの上位バイトと下位バイトを入替えます。(例ii参照)
1 ワードレジスタの場合、上位ワードと下位ワードを入替えます。(例iii参照)
上位ワードの上位バイトと下位バイトを入替え、また下位ワードの上位バイトと下位バイトを入替えます。ワードレジスタの場合、さらに上位ワードと下位ワードを入替えます。
(例iv参照)
ACON、 PCON 入力 レジスタ
16進 データ
ON/OFF
PLC: 出力
16進 データ
ON/OFF
1 2 3 4 A B C D
1 2 3 4 A B C D
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
ACON、 PCON 出力 レジスタ
16進 データ
ON/OFF1 2 3 4 A B C D
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
PLC: 入力
16進 データ
ON/OFF1 2 3 4 A B C D
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
0
0
1
2
3
“0”

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
80
ProfiBus-DP
134
(例ii)設定値=“2”にした場合 をON、をOFFとします。
ACON、 PCON 入力 レジスタ
16進 データ
ON/OFF
PLC: 出力
16進 データ
ON/OFF
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
3 4 1 2 C D A B
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
1 2 3 4 A B C D
ACON、 PCON 出力 レジスタ
16進 データ
ON/OFF3 4 1 2 C D A B
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
PLC: 入力
16進 データ
ON/OFF
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
1 2 3 4 A B C D
“1”
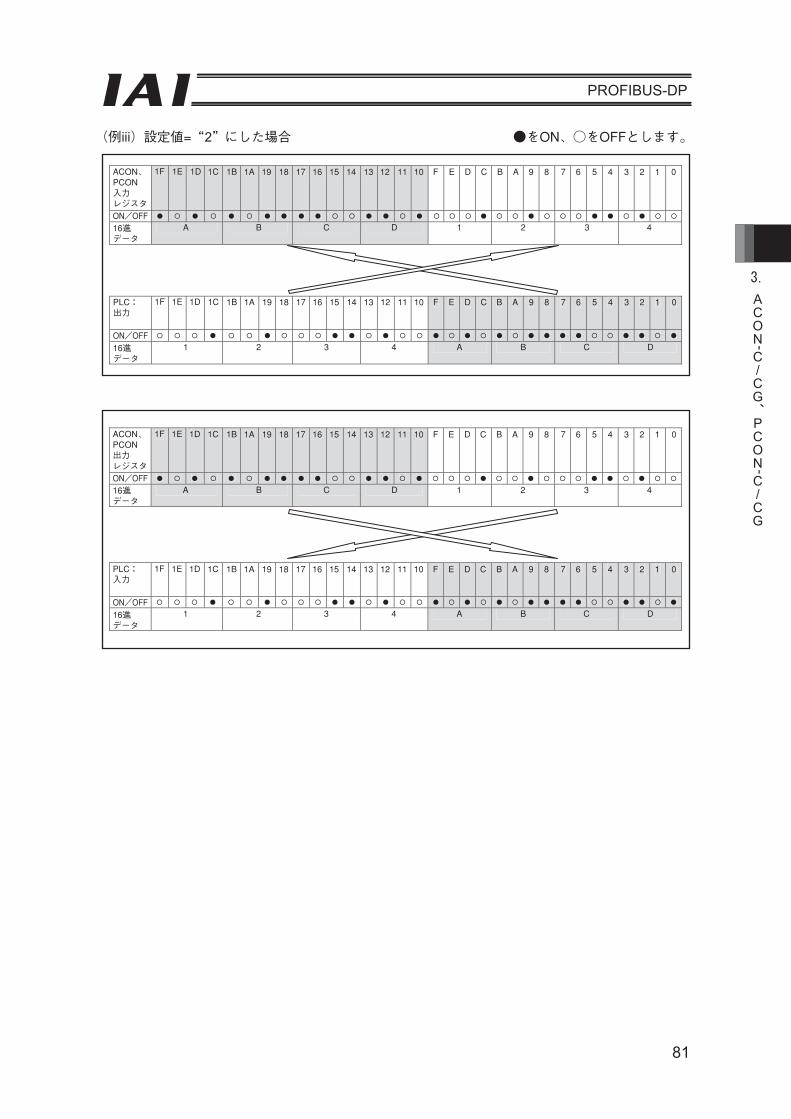
PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
81
ProfiBus-DP
134
(例ii)設定値=“2”にした場合 をON、をOFFとします。
ACON、 PCON 入力 レジスタ
16進 データ
ON/OFF
PLC: 出力
16進 データ
ON/OFF
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
3 4 1 2 C D A B
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
1 2 3 4 A B C D
ACON、 PCON 出力 レジスタ
16進 データ
ON/OFF3 4 1 2 C D A B
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
PLC: 入力
16進 データ
ON/OFF
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
1 2 3 4 A B C D
ProfiBus-DP
135
(例iii)設定値=“1”にした場合 をON、をOFFとします。
ACON、 PCON 入力 レジスタ
16進 データ
ON/OFF
PLC: 出力
16進 データ
ON/OFF1 2 3 4 A B C D
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
A B C D 1 2 3 4
PLC: 入力
16進 データ
ON/OFF1 2 3 4 A B C D
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
ACON、 PCON 出力 レジスタ
16進 データ
ON/OFF
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
A B C D 1 2 3 4
“2”
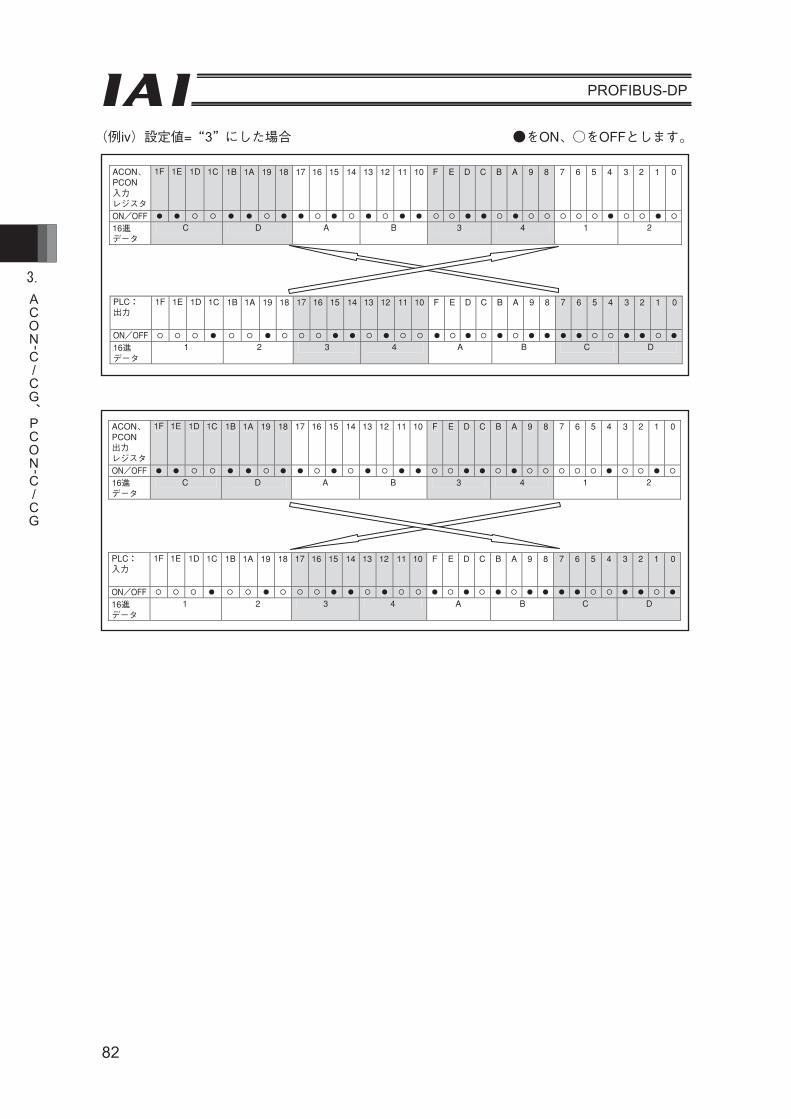
PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
82
ProfiBus-DP
136
(例iv)設定値=“0”にした場合 をON、をOFFとします。
ACON、 PCON 入力 レジスタ
16進 データ
ON/OFF
PLC: 出力
16進 データ
ON/OFF
C D A B 3 4 1 2
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
1 2 3 4 A B C D
PLC: 入力
16進 データ
ON/OFF
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
1 2 3 4 A B C D
ACON、 PCON 出力 レジスタ
16進 データ
ON/OFF
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
C D A B 3 4 1 2
“3”

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
83
ProfiBus-DP
136
(例iv)設定値=“0”にした場合 をON、をOFFとします。
ACON、 PCON 入力 レジスタ
16進 データ
ON/OFF
PLC: 出力
16進 データ
ON/OFF
C D A B 3 4 1 2
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
1 2 3 4 A B C D
PLC: 入力
16進 データ
ON/OFF
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
1 2 3 4 A B C D
ACON、 PCON 出力 レジスタ
16進 データ
ON/OFF
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
C D A B 3 4 1 2
ProfiBus-DP
137
7.8 トラブルシューティング
7.8.1 ステータスLEDの表示ステータスLED(STATUS0/1)点灯パターンでProfiBus-DPモジュールの動作状態やネットワークの状態を示します。
トラブルが発生した場合にはステータスLEDの点灯パターンで現在の状態を確認します。
以下にステータスLEDの点灯パターンによる通信状態表示を示します。
7.8.2 アラーム内容と原因・対策アラーム発生時、リモートⅠ/Oモード、リモートⅠ/Oモード2では完了ポジション番号(PM1~PM8の4ビット)が簡易アラームコードを示します。
ポジション/簡易直値モードでは入力アドレス:n+2に簡易アラームコードが出力されます。
ハーフ直値モード、フル直値モードでは入力アドレス:n+6にアラームコードが出力されます。
①PLCのモニタ機能等でアラームコードを確認するか、RC用パソコン対応ソフトまたはティーチングボックスを接続してステータスモニタで確認してください。
②読み取ったアラームコードからコントローラの取扱説明書のアラーム内容一覧を検索します。
③該当のアラームコードの記述に従い対処してください。
次のアラームコードについては下表に従い対処してください。
(※1) ID→簡易アラームコード
(※2) RES→アラームリセット可/不可 :アラームリセット可/×:アラームリセット不可
コード エラー名称ID RES
原因/対策(※1)(※2)
0F2 フィールドバス 05 × 原因:フィールドバスモジュールの異常が検出されたモジュール異常 対策:パラメータを確認してください。
フィールドバスモジュール原因:モジュールが検出できなかった場合
0F3未検出エラー
04 × 対策:電源を再投入してください。解消されない場合は弊社までご連絡ください。
LED 色 表示状態 表示内容(表示の意味)
点灯 フィールドバスからオンライン状態で正常に通信中です。緑
STATUS1 点滅 フィールドバスからオフライン状態になっています。
橙 点滅 通信エラーが発生しています。
点灯 正常動作中です。緑
STATUS0 点滅 動作準備を行っています。
橙 点灯 動作準備中に通信系ハードウェア異常を検出しました。
PLC のモニタ機能等でアラームコードを確認するか、RC 用パソコン対応ソフトなどのティーチ
ングツールを接続してステータスモニタで確認してください。
:点灯、×:消灯、:点滅
LED 色 表示状態 表示内容(表示の意味)
STATUS1緑
フィールドバスからオンライン状態で正常に通信中です。
フィールドバスからオフライン状態になっています。
橙 通信エラーが発生しています。
STATUS0緑
正常動作中です。
動作準備を行っています。
橙 動作準備中に通信系ハードウェア異常を検出しました。
3.8.2 アラーム内容と原因・対策
3.8 トラブルシューティング
3.8.1 ステータス LED の表示
ステータス LED(STATUS0 / 1)点灯パターンで PROFIBUS-DP モジュールの動作状態やネット
ワークの状態を示します。
トラブルが発生した場合にはステータス LED の点灯パターンで現在の状態を確認します。
以下にステータス LED の点灯パターンによる通信状態表示を示します。
No.

PROFIBUS-DP
3.
ACON-
C/CG、PCON-
C/CG
84
3.9 CE マーキング
CE マーキングの対応が必要な場合は、別冊の海外規格対応マニュアル (MJ0287)に従ってください。

85
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
4. ACON-CA/CB/CGB、PCON-CA/CB/CFA/CFB/CGB/CGFB、DCON-CA/CB/CGB
4.1 動作モードと機能
PROFIBUS-DP 対応の ACON、PCON、DCON(以下 IAI コントローラ)は次の 5 つの動作モー
ドから選択して運転することができます。
動作モードと主要機能
主要機能リモートⅠ/O ポジション/ ハーフ直値 フル直値 リモートⅠ/O
モード 簡易直値モード モード モード モード2
占有バイト数 2 8 16 32 12
位置データ指定運転 × (※1) ×
速度・加速度× × ×
直接指定
押付け動作
現在位置読取り ×
現在速度読取り × ×
ポジションNo.指定運転 × ×
完了ポジションNo.読取り × ×
最大ポジション512 768 使用しない 使用しない 512
テーブル数
PROFIBUS-DP未対応の ACON、PCON、DCON
PROFIBUS-DP対応の ACON、PCON、DCON
CLPCLP
フラット ケーブル
PIOで接続の場合
通信ケーブル
PROFIBUS-DPで接続の場合
×
①リモートⅠ /O モード: PIO(24V入出力)による運転をPROFIBUS-DP通信によって行う方式です。
占有バイト数:2 バイト(1 ワード)
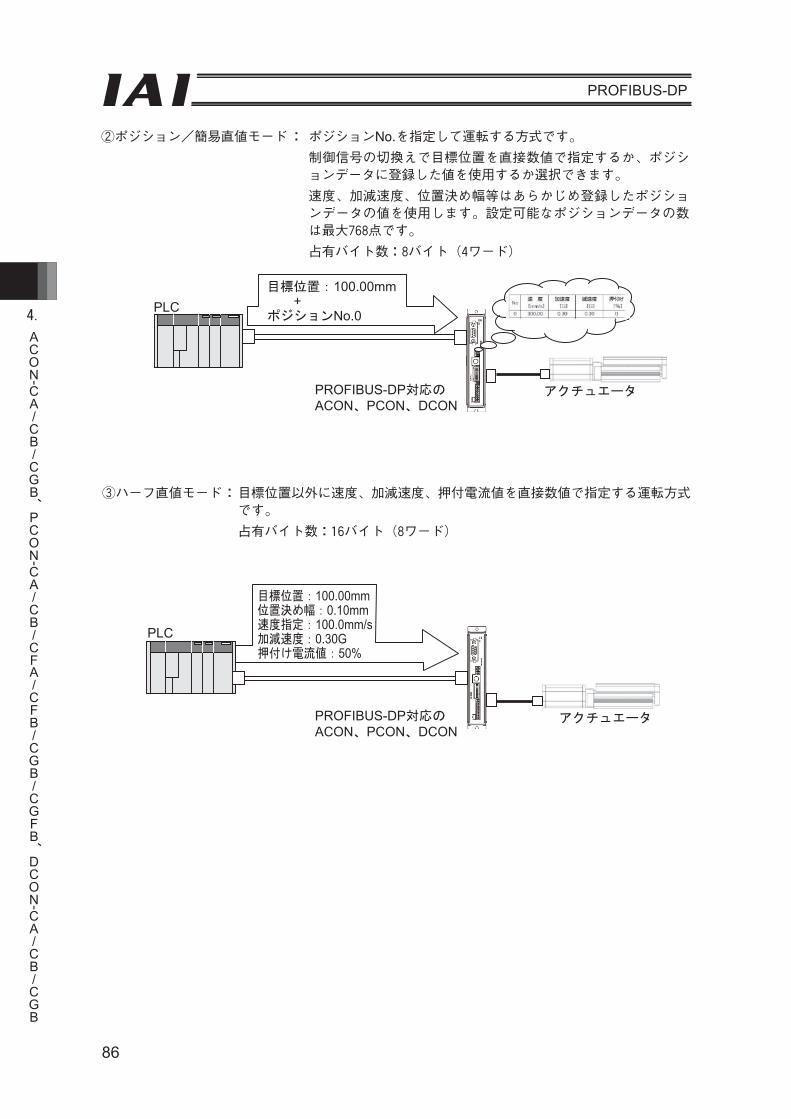
86
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
68
②ポジション/簡易直値モード: ポジションNo.を指定して運転する方式です。
制御信号の切換えで目標位置を直接数値で指定するか、ポジションデータに登録した値を使用するか選択できます。
速度、加減速度、位置決め幅等はあらかじめ登録したポジションデータの値を使用します。設定可能なポジションデータの数は最大768点です。
占有バイト数:8バイト(4ワード)
目標位置:100.00mm + ポジションNo.0
PLC
ProfiBus-DP対応 のACON、PCON
アクチュエータ
③ハーフ直値モード:目標位置以外に速度、加減速度、押付電流値を直接数値で指定する運転方式です。
占有バイト数:16バイト(8ワード)
目標位置:100.00mm 位置決め幅:0.10mm 速度指定:100.0mm/s 加減速度:0.30G 押付け電流値:50%
ProfiBus-DP対応 のACON、PCON
アクチュエータ
PLC 100.00mm 0.10mm
100.0mm/s 0.30G
50%
PROFIBUS-DPACON PCON DCON
PLC
ProfiBus-DP
68
②ポジション/簡易直値モード: ポジションNo.を指定して運転する方式です。
制御信号の切換えで目標位置を直接数値で指定するか、ポジションデータに登録した値を使用するか選択できます。
速度、加減速度、位置決め幅等はあらかじめ登録したポジションデータの値を使用します。設定可能なポジションデータの数は最大768点です。
占有バイト数:8バイト(4ワード)
目標位置:100.00mm + ポジションNo.0
PLC
ProfiBus-DP対応 のACON、PCON
アクチュエータ
③ハーフ直値モード:目標位置以外に速度、加減速度、押付電流値を直接数値で指定する運転方式です。
占有バイト数:16バイト(8ワード)
目標位置:100.00mm 位置決め幅:0.10mm 速度指定:100.0mm/s 加減速度:0.30G 押付け電流値:50%
ProfiBus-DP対応 のACON、PCON
アクチュエータ
PLC
100.00mm +
No.0PLC
PROFIBUS-DPACON PCON DCON

87
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
PROFIBUS-DP未対の ACON、PCON、DCON
フラット ケーブル
PIOで接続の場合
PLC
通信 ケーブル
PROFIBUS-DPで接続の場合
PLC
PROFIBUS-DP対応の ACON、PCON、DCON
④フル直値モード :位置制御に関する全ての値(目標位置、速度、加減速度等)を直接数値で指
定する運転方式です。
目標位置:100.00mm 位置決め幅:0.10mm 速度指定:100.00mm/s 加速度:0.30G 減速度:0.30G 押付け電流値:50% 負荷電流閥値:0 ゾーン+:50.00mm ゾーン-:30.00mm
アクチュエータ PROFIBUS-DP対応の ACON、PCON、DCON
PLC
ProfiBus-DP
68
②ポジション/簡易直値モード: ポジションNo.を指定して運転する方式です。
制御信号の切換えで目標位置を直接数値で指定するか、ポジションデータに登録した値を使用するか選択できます。
速度、加減速度、位置決め幅等はあらかじめ登録したポジションデータの値を使用します。設定可能なポジションデータの数は最大768点です。
占有バイト数:8バイト(4ワード)
目標位置:100.00mm + ポジションNo.0
PLC
ProfiBus-DP対応 のACON、PCON
アクチュエータ
③ハーフ直値モード:目標位置以外に速度、加減速度、押付電流値を直接数値で指定する運転方式です。
占有バイト数:16バイト(8ワード)
目標位置:100.00mm 位置決め幅:0.10mm 速度指定:100.0mm/s 加減速度:0.30G 押付け電流値:50%
ProfiBus-DP対応 のACON、PCON
アクチュエータ
PLC
ProfiBus-DP
68
②ポジション/簡易直値モード: ポジションNo.を指定して運転する方式です。
制御信号の切換えで目標位置を直接数値で指定するか、ポジションデータに登録した値を使用するか選択できます。
速度、加減速度、位置決め幅等はあらかじめ登録したポジションデータの値を使用します。設定可能なポジションデータの数は最大768点です。
占有バイト数:8バイト(4ワード)
目標位置:100.00mm + ポジションNo.0
PLC
ProfiBus-DP対応 のACON、PCON
アクチュエータ
③ハーフ直値モード:目標位置以外に速度、加減速度、押付電流値を直接数値で指定する運転方式です。
占有バイト数:16バイト(8ワード)
目標位置:100.00mm 位置決め幅:0.10mm 速度指定:100.0mm/s 加減速度:0.30G 押付け電流値:50%
ProfiBus-DP対応 のACON、PCON
アクチュエータ
PLC
⑤リモートⅠ /O モード 2: PIO(24V 入出力)による運転を PROFIBUS-DP 通信によって行う方
式です。①の機能に現在位置と指令電流値読取り機能を追加したもので
す。占有バイト数:12 バイト(6 ワード)

88
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ACON PCON DCON
ACON-CA/CB PCON-CA/CB/CGB PCON-CFA/CFB/CGFB DCON-CA/CB
4.2 型式
PROFIBUS-DP 対応の IAI コントローラの型式は各々以下のように表されています。
ACON-CA/CB- -PR- PCON-CA/CB/CGB- -PR- PCON-CFA/CFB/CGFB- -PR- DCON-CA/CB- -PR-

89
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
71
7.3 ProfiBus-DP(スレーブ局)の設定
(1)各部の名称
ProfiBus-DPに関連する各部の名称を示します。
(2) ProfiBus-DP通信コネクタインタフェース仕様
ProfiBus-DP standard EN50170推奨品である9ピンfemale D-subコネクタです。
コネクタ
状態表示LED
ステータスLED
ProfiBus-DP通信コネクタ
SV ALM
1
STATUS
0
Pin No. Description Contents
3 B-Line RxD・TxD(プラス側通信ライン)
4 RTS 送信要求
5 GND シグナルグランド(絶縁)
6 +5V +5V出力(絶縁)
8 A-Line /RxD・/TxD(マイナス側信号ライン)
Housing Shield ケーブルシールド(筐体と接続)
(注1)1,2,7,9ピンは未使用(配線は不要です)
(注2)ケーブル側コネクタは付属しません。
4.3 PROFIBUS-DP(スレーブ局)の設定
(1)各部の名称
PROFIBUS-DP に関連する各部の名称を示します。
(2)PROFIBUS-DP 通信コネクタインタフェース仕様
PROFIBUS-DP standard EN50170 推奨品である 9 ピン female D-sub コネクタです。
SV/ALM LED
NS
MSLED
PROFIBUSD

90
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
72
(3)バス終端処理
ネットワークの終端に接続した場合は、終端抵抗を下図のようにProfiBus-DP通信コネクタに接続するか、または終端抵抗付きコネクタを使用してください。
終端抵抗付きコネクタ例:SUBCON-PLUS-PROFIB/AX/SC(フェニックスコンタクト)
終端抵抗の接続
(4)動作モードの選択(設定)動作モードはパラメータで設定します。
コントローラ前面のモード切替SWをMANU側にし、RC用パソコン対応ソフト(V6.00.05.00以降)でパラメータNo.84“FMOD:フィールドバス動作モード”を設定してください。(7.7パラメータ参照)
※これ以外の値を入力すると入力値過大エラーとなります。
(5)ノードアドレスの設定
ノードアドレスはパラメータで設定します。
RC用パソコン対応ソフトでパラメータNo.85“NADR:フィールドバスノードアドレス”を設定してください。
(7.7パラメータ参照)
設定可能範囲:0~125(出荷時は1に設定されています。)
(注1)ノードアドレスの重複設定にご注意ください。(注2)ProfiBus-DPのノードアドレスの設定は、マスタ局を必ず0として設定しますのでスレーブ局
は1~125まで設定することができます。
設定値 動作モード 占有バイト数
0(出荷時設定) リモートⅠ/Oモード 2
1 ポジション/簡易直値モード 8
2 ハーフ直値モード 16
3 フル直値モード 32
4 リモートⅠ/Oモード2 12
9
6
5
1
5GNDA-Line 390Ω,1/4W
220Ω,1/4W ネットワーク 配線
390Ω,1/4WB-Line
+5V3
1
9
8
6
ボード側 メスコネクタ
ネットワーク側 オスコネクタ (反挿入側より)
}
ネットワークの終端に接続した場合は、終端抵抗を下図のように PROFIBUS-DP 通信コネクタに
接続するか、または終端抵抗付きコネクタを使用してください。
(注 1)ノードアドレスの重複設定にご注意ください。
(注 2) PROFIBUS-DP のノードアドレスの設定は、マスタ局を必ず 0 として設定しますのでスレー
ブ局は 1 ~ 125 まで設定することができます。
(4.7 PROFIBUS-DP 関連パラメータ参照)
動作モードはパラメータで設定します。
コントローラ前面のモード切替 SW を MANU 側にし、RC 用パソコン対応ソフト (注 ) でパラメータ
No.84“FMOD:フィールドバス動作モード”を設定してください。[4.7 PROFIBUS-DP 関連参照 ]
注 対応バージョンは、RC パソコン対応ソフト取扱説明書を参照してください。
(4.7 関連参照 )

91
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
73
(6)ステータスLEDの表示
コントローラ前面に設けられた2つのLEDによってボードの動作状態やネットワークの状態を知ることができます。
LED 色 表示状態 表示内容(表示の意味)
点灯 フィールドバスからオンライン状態で正常に通信中です。緑
STATUS1 点滅 フィールドバスからオフライン状態になっています。
橙 点滅 通信エラーが発生しています。
点灯 正常動作中です。緑
STATUS0 点滅 動作準備を行っています。
橙 点灯 動作準備中に通信系ハードウェア異常を検出しました。
(注1)パラメータの設定後はコントローラの電源再投入を行い、コントローラ前面のモード切替SWをAUTO側に戻してください。MANU側のままの場合PLCによる運転はできません。
(注2)通信速度はマスタ局に合せて自動設定されますので、設定の必要はありません。
ProfiBus-DP
73
(6)ステータスLEDの表示
コントローラ前面に設けられた2つのLEDによってボードの動作状態やネットワークの状態を知ることができます。
LED 色 表示状態 表示内容(表示の意味)
点灯 フィールドバスからオンライン状態で正常に通信中です。緑
STATUS1 点滅 フィールドバスからオフライン状態になっています。
橙 点滅 通信エラーが発生しています。
点灯 正常動作中です。緑
STATUS0 点滅 動作準備を行っています。
橙 点灯 動作準備中に通信系ハードウェア異常を検出しました。
(注1)パラメータの設定後はコントローラの電源再投入を行い、コントローラ前面のモード切替SWをAUTO側に戻してください。MANU側のままの場合PLCによる運転はできません。
(注2)通信速度はマスタ局に合せて自動設定されますので、設定の必要はありません。
: 点灯、×:消灯、:点滅
LED 色 表示状態 表示内容(表示の意味)
STATUS1
緑 フィールドバスからオンライン状態で正常に通信中です。
フィールドバスからオフライン状態になっています。
橙 通信エラーが発生しています。
× オフライン / 電源無し
STATUS0
緑 正常動作中です。
動作準備を行っています。
橙 動作準備中に通信系ハードウェア異常を検出しました。
× 未初期化 / 電源無し
ProfiBus-DP
72
(3)バス終端処理
ネットワークの終端に接続した場合は、終端抵抗を下図のようにProfiBus-DP通信コネクタに接続するか、または終端抵抗付きコネクタを使用してください。
終端抵抗付きコネクタ例:SUBCON-PLUS-PROFIB/AX/SC(フェニックスコンタクト)
終端抵抗の接続
(4)動作モードの選択(設定)動作モードはパラメータで設定します。
コントローラ前面のモード切替SWをMANU側にし、RC用パソコン対応ソフト(V6.00.05.00以降)でパラメータNo.84“FMOD:フィールドバス動作モード”を設定してください。(7.7パラメータ参照)
※これ以外の値を入力すると入力値過大エラーとなります。
(5)ノードアドレスの設定
ノードアドレスはパラメータで設定します。
RC用パソコン対応ソフトでパラメータNo.85“NADR:フィールドバスノードアドレス”を設定してください。
(7.7パラメータ参照)
設定可能範囲:0~125(出荷時は1に設定されています。)
(注1)ノードアドレスの重複設定にご注意ください。(注2)ProfiBus-DPのノードアドレスの設定は、マスタ局を必ず0として設定しますのでスレーブ局
は1~125まで設定することができます。
設定値 動作モード 占有バイト数
0(出荷時設定) リモートⅠ/Oモード 2
1 ポジション/簡易直値モード 8
2 ハーフ直値モード 16
3 フル直値モード 32
4 リモートⅠ/Oモード2 12
9
6
5
1
5GNDA-Line 390Ω,1/4W
220Ω,1/4W ネットワーク 配線
390Ω,1/4WB-Line
+5V3
1
9
8
6
ボード側 メスコネクタ
ネットワーク側 オスコネクタ (反挿入側より)
}

92
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
74
7.4 マスタ局との交信
7.4.1 各動作モードとPLCアドレスの対応各動作モードのアドレス割付を次に示します。・PLC出力→ACONまたはPCONの入力(※nは各軸の出力先頭アドレスです。)
占有領域
ACONまたはPCONのDIおよび入力データレジスタリモート ポジション/ ハーフ直値
フル直値モードリモート
Ⅰ/Oモード 簡易直値モード モード Ⅰ/Oモード2占有バイト数:2 占有バイト数:8 占有バイト数:16 占有バイト数:32 占有バイト数:12
n ポート番号0~15目標位置 目標位置 目標位置
ポート番号0~15n+1n+2 指定ポジション番号
位置決め幅 位置決め幅n+3 制御信号 占有領域n+4 速度
速度指定n+5 加減速度n+6 押付け電流制限値
ゾーン境界値+n+7 制御信号n+8
ゾーン境界値-n+9n+10 加速度n+11 減速度n+12 押付け電流制限値
n+13ACON 占有領域PCON 負荷電流閾値
n+14 制御信号1n+15 制御信号2
(注) は動作モードの設定により占有される領域です。
他の目的に使用できません。またアドレスの重複使用にご注意ください。
PLC出力アドレス
(ワードアドレス)
ACON PCON DCON DI
/O /O 22 8 16 32 12
n 0 15 0 15n 1n 2 No.n 3n 4n 5n 6n 7n 8n 9
n 10n 11n 12
n 14 1n 15 2
PLC
n 13
4.4 マスタ局との交信
4.4.1 各動作モードと PLC アドレスの対応
PLC 出力→ IAI コントローラ(※ n は各軸の先頭レジスタアドレスです。)

93
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
IAI →PLC n
ACON PCON DCON DO
/O /O 22 8 16 32 12
n 0 15 0 15n 1
n 2No.ID
n 3n 4n 5n 6n 7n 8n 9n 10n 11n 12n 13n 14n 15 2
PLC
1
ProfiBus-DP
74
7.4 マスタ局との交信
7.4.1 各動作モードとPLCアドレスの対応各動作モードのアドレス割付を次に示します。・PLC出力→ACONまたはPCONの入力(※nは各軸の出力先頭アドレスです。)
占有領域
ACONまたはPCONのDIおよび入力データレジスタリモート ポジション/ ハーフ直値
フル直値モードリモート
Ⅰ/Oモード 簡易直値モード モード Ⅰ/Oモード2占有バイト数:2 占有バイト数:8 占有バイト数:16 占有バイト数:32 占有バイト数:12
n ポート番号0~15目標位置 目標位置 目標位置
ポート番号0~15n+1n+2 指定ポジション番号
位置決め幅 位置決め幅n+3 制御信号 占有領域n+4 速度
速度指定n+5 加減速度n+6 押付け電流制限値
ゾーン境界値+n+7 制御信号n+8
ゾーン境界値-n+9n+10 加速度n+11 減速度n+12 押付け電流制限値
n+13ACON 占有領域PCON 負荷電流閾値
n+14 制御信号1n+15 制御信号2
(注) は動作モードの設定により占有される領域です。
他の目的に使用できません。またアドレスの重複使用にご注意ください。
PLC出力アドレス
(ワードアドレス)
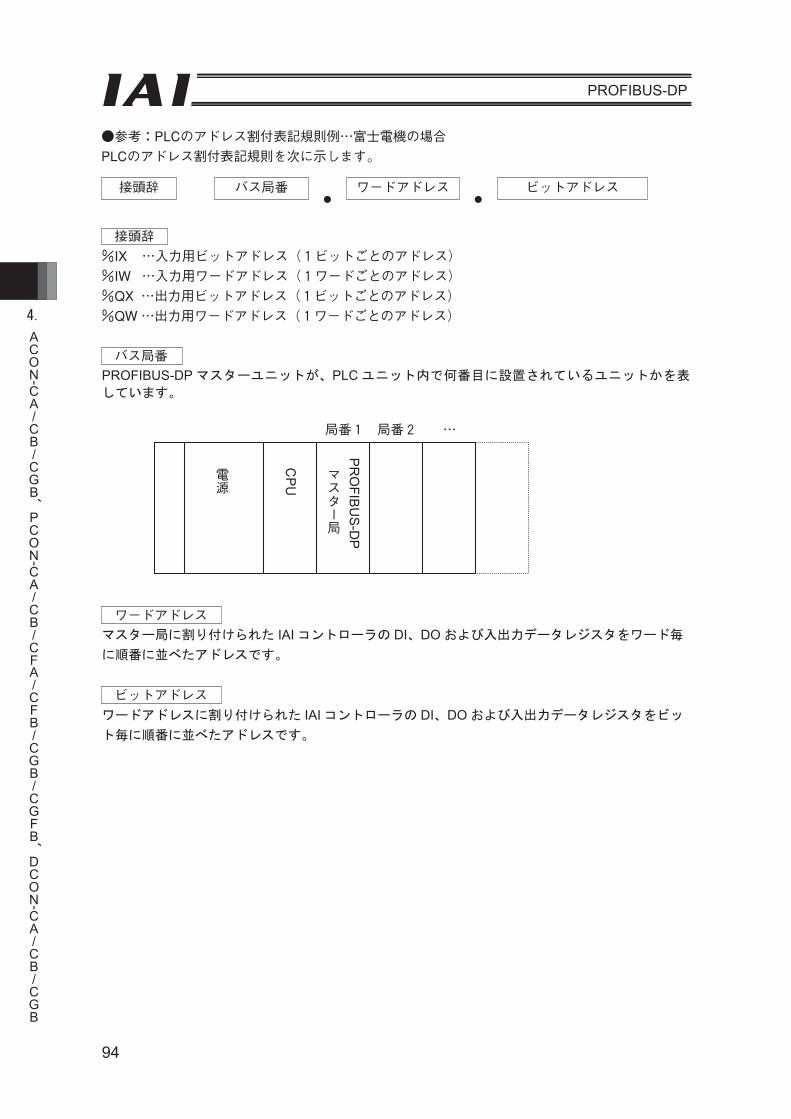
94
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
76
参考:PLCのアドレス割付表記規則例…富士電機の場合PLCのアドレス割付表記規則を次に示します。
接頭辞 %IX …入力用ビットアドレス(1ビットごとのアドレス)%IW …入力用ワードアドレス(1ワードごとのアドレス)%QX …出力用ビットアドレス(1ビットごとのアドレス)%QW …出力用ワードアドレス(1ワードごとのアドレス)
バス局番ProfiBus-DPマスターユニットが、PLCユニット内で何番目に設置されているユニットかを表しています。
ワードアドレスマスター局に割り付けられたACONまたはPCONのDI、DOおよび入出力データレジスタをワード毎に順番に並べたアドレスです。
ビットアドレスワードアドレスに割り付けられたACONまたはPCONのDI、DOおよび入出力データレジスタをビット毎に順番に並べたアドレスです。
接頭辞 バス局番 ワードアドレス ビットアドレス
ProfiB
us-DP
CPU電
源
マスター局
局番1 局番2 …
マスター局に割り付けられた IAI コントローラの DI、DO および入出力データレジスタをワード毎
に順番に並べたアドレスです。
ワードアドレスに割り付けられた IAI コントローラの DI、DO および入出力データレジスタをビッ
ト毎に順番に並べたアドレスです。
PRO
FIBUS-D
P
PROFIBUS-DP マスターユニットが、PLC ユニット内で何番目に設置されているユニットかを表
しています。

95
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
77
7.4.2 リモートⅠ/Oモード(占有バイト数:2)PIO(24V入出力)を使用した場合と同様にポジションNo.を指定して運転するモードです。
RC用パソコン対応ソフトまたはティーチングボックスからポジションデータを設定してください。
運転可能なポジション数は、パラメータNo.25“PIOパターン”の設定によります。
以下に各PIOパターンのⅠ/O仕様を示します。(詳細はコントローラ本体の取扱説明書参照)
本モードで制御可能なロボシリンダの有効な主要機能は次の表の通りです。
パラメータNo.25の設定値 動作モード Ⅰ/O仕様0 位置決めモード 位置決め点数64点、ゾーン出力2点1 教示モード 位置決め点数64点、ゾーン出力1点
位置決めおよびジョグ運転が可能現在位置を指定ポジションに書込み可能
2 256点モード 位置決め点数256点、ゾーン出力1点3 512点モード 位置決め点数512点、ゾーン出力無し4 電磁弁モード1 位置決め点数7点、ゾーン出力2点
ポジションNo.毎の直接運転指令が可能位置決め完了信号はポジションNo.毎に出力
5 電磁弁モード2 位置決め点数3点、ゾーン出力2点前進/後退/中間位置指令により運転位置決め完了信号は前進端/後退端/中間位置の個別出力
PIOパターンロボシリンダ 0: 1: 2: 3: 4: 5:の機能 位置決め 教示 256点 512点 電磁弁 電磁弁
モード モード モード モード モード1 モード2
原点復帰動作 ×位置決め動作 速度・加減速度設定 ピッチ送り(インチング) 押付け動作 ×移動中の速度変更 異なった加速度、
減速度での動作一時停止 (※1)ゾーン信号出力 × PIOパターン選択
(パラメータで設定)
:動作可、×:動作不可
(※1)パラメータNo.27“移動指令種別”を0に設定した場合に可能です。
移動指令をOFFにすることによって一時停止が可能です。
PIO0 1 2 3 4 5
256 512
1
PIO
1 No.27“ ” 0OFF
ProfiBus-DP
76
参考:PLCのアドレス割付表記規則例…富士電機の場合PLCのアドレス割付表記規則を次に示します。
接頭辞 %IX …入力用ビットアドレス(1ビットごとのアドレス)%IW …入力用ワードアドレス(1ワードごとのアドレス)%QX …出力用ビットアドレス(1ビットごとのアドレス)%QW …出力用ワードアドレス(1ワードごとのアドレス)
バス局番ProfiBus-DPマスターユニットが、PLCユニット内で何番目に設置されているユニットかを表しています。
ワードアドレスマスター局に割り付けられたACONまたはPCONのDI、DOおよび入出力データレジスタをワード毎に順番に並べたアドレスです。
ビットアドレスワードアドレスに割り付けられたACONまたはPCONのDI、DOおよび入出力データレジスタをビット毎に順番に並べたアドレスです。
接頭辞 バス局番 ワードアドレス ビットアドレス
ProfiB
us-DP
CPU電
源
マスター局
局番1 局番2 …
4.4.2 リモートⅠ /O モード(占有バイト数:2)

96
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
78
(1)PLCアドレス構成(※nは各軸の入出力先頭アドレスです。)
アドレスの重複使用にご注意ください。
(2)軸毎の入出力信号割付
各軸の入出力信号は、入出力アドレスの各1ワード(2バイト)で構成されます。
PLCからビット単位のON/OFF信号で制御します。
パラメータ ACONまたはPCON側 PLC側出力 ACONまたはPCON側 PLC側入力No.84 DI(ポート番号) アドレス DO(ポート番号) アドレス0 0~15 n 0~15 n
15
14
13
12
11
10
9 8 7 6 5 4 3 2 1 0
Fn+0 E D C B A 9 8 7 6 5 4 3 2 1 0
PLC出力(※nは各軸の出力先頭アドレスです。)
コントローラ 入力ポート 番号
1ワード=2バイト=16ビット
15
14
13
12
11
10
9 8 7 6 5 4 3 2 1 0
Fn+0 E D C B A 9 8 7 6 5 4 3 2 1 0
PLC入力(※nは各軸の入力先頭アドレスです。)
アドレス
アドレス
コントローラ 出力ポート 番号
1ワード=2バイト=16ビット
IAI コントローラ側
DI(ポート番号)
IAI コントローラ側
DO(ポート番号)

97
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
79
(3)入出力信号割付
パラメータNo.25の設定によりコントローラの入出力ポートの信号内容が変わります。
(詳細はコントローラ本体の取扱説明書参照)
ACON
*は正常時ON信号です。“使用できません”と表記されている信号は制御していません。(ON/OFFは不定です)
パラメータNo.25の設定位置決めモード 教示モード 256点モード
0 1 2
区分 ポート 信号名称 記号 信号名称 記号 信号名称 記号番号01234567
PLC出力→ 8ACON入力 9
101112
13
141501234567
ACON出力 8→PLC入力 9
10
11
12131415
PC1PC2
指令ポジション番号PC4PC8PC16PC32
使用できません
ブレーキ強制解除 BKRL運転モード RMOD原点復帰 HOME一時停止 *STP
位置決めスタート CSTR
リセット RESサーボON指令 SON
PM1PM2
完了ポジション番号PM4PM8PM16PM32
移動中信号 MOVEゾーン1 ZONE1
ポジションゾーン PZONE運転モード状態 RMDS原点復帰完了 HEND
位置決め完了信号 PEND
運転準備完了 SV非常停止 *EMGSアラーム *ALM
使用できません
PC1PC2
指令ポジション番号PC4PC8PC16PC32
教示モード指令 MODEジョグ/インチング切替 JISL+ジョグ JOG+-ジョグ JOG-運転モード RMOD原点復帰 HOME一時停止 *STP
位置決めスタート/CSTR/ポジションデータPWRT取込み指令
リセット RESサーボON指令 SON
PM1PM2
完了ポジション番号PM4PM8PM16PM32
移動中信号 MOVE教示モード信号 MODESポジションゾーン PZONE運転モード状態 RMDS原点復帰完了 HEND位置決め完了信号/
PEND/ポジションデータWEND取込み完了
運転準備完了 SV非常停止 *EMGSアラーム *ALM
使用できません
PC1PC2PC4
指令ポジション番号PC8PC16PC32PC64PC128
使用できません ブレーキ強制解除 BKRL運転モード RMOD原点復帰 HOME一時停止 *STP
位置決めスタート CSTR
リセット RESサーボON指令 SON
PM1PM2PM4
完了ポジション番号PM8PM16PM32PM64PM128
ポジションゾーン PZONE運転モード状態 RMDS原点復帰完了 HEND
位置決め完了信号 PEND
運転準備完了 SV非常停止 *EMGSアラーム *ALM
使用できません
ONON OFF
No.25256
210
01234567PLC
ACONPCONDCON
89
101112
13
141501234567ACON
PCONDCON
PLC
8
910
11
121314
15
PC1PC2PC4PC8
PC16PC32
BKRLRMODHOME
STP
CSTR
RESSONPM1PM2PM4PM8
PM16PM32MOVEZONE1PZONE/ZONE2RMDSHEND
PEND
SVEMGSALM
LOAD/TRQS/
ON
PC1PC2PC4PC8PC16PC32PC64PC128
BKRLRMODHOME
STP
CSTR
RESSONPM1PM2PM4PM8
PM16PM32PM64PM128PZONE/ZONE1RMDSHEND
PEND
SVEMGSALM
LOAD/
No.
ON
No.
1
/ 2
No.
ON
No.
1
PC1PC2PC4PC8PC16PC32MODEJISL
JOGJOGRMODHOME
STP
CSTRPWRT
RESSONPM1PM2PM4PM8
PM16PM32MOVEMODESPZONE/ZONE1RMDSHEND
PENDWEND
SVEMGS
No.
No.
1
ALMLTRQS/
ALMLALML
ALM
1
*は正常時 ON 信号です。“使用できません”と表記されている信号は制御していません。(ON/OFF は不定です )注 1 ACON、DCON の場合、信号が以下に替わります。
ACON:* BALM(バッテリアラーム ) / * ALML(軽故障ステータス ) DCON:* ALML(軽故障ステータス )
ProfiBus-DP
78
(1)PLCアドレス構成(※nは各軸の入出力先頭アドレスです。)
アドレスの重複使用にご注意ください。
(2)軸毎の入出力信号割付
各軸の入出力信号は、入出力アドレスの各1ワード(2バイト)で構成されます。
PLCからビット単位のON/OFF信号で制御します。
パラメータ ACONまたはPCON側 PLC側出力 ACONまたはPCON側 PLC側入力No.84 DI(ポート番号) アドレス DO(ポート番号) アドレス0 0~15 n 0~15 n
15
14
13
12
11
10
9 8 7 6 5 4 3 2 1 0
Fn+0 E D C B A 9 8 7 6 5 4 3 2 1 0
PLC出力(※nは各軸の出力先頭アドレスです。)
コントローラ 入力ポート 番号
1ワード=2バイト=16ビット
15
14
13
12
11
10
9 8 7 6 5 4 3 2 1 0
Fn+0 E D C B A 9 8 7 6 5 4 3 2 1 0
PLC入力(※nは各軸の入力先頭アドレスです。)
アドレス
アドレス
コントローラ 出力ポート 番号
1ワード=2バイト=16ビット
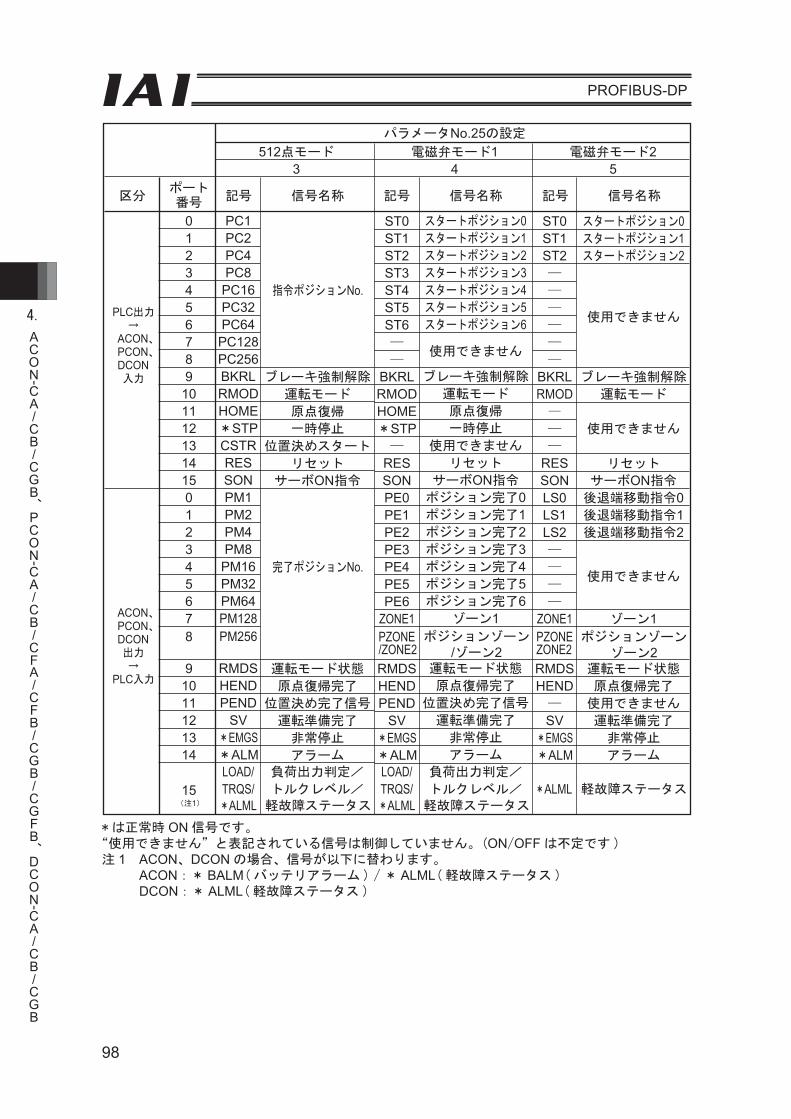
98
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ONON OFF
No.25512 1 2
543
0123456789101112131415012345678
91011121314
15
PC1PC2PC4PC8
PC16PC32PC64
PC128PC256BKRLRMODHOME
STPCSTRRESSONPM1PM2PM4PM8
PM16PM32PM64PM128PM256
RMDSHENDPEND
SVEMGSALM
ST0ST1ST2ST3ST4ST5ST6
BKRLRMODHOME
STP
RESSONPE0PE1PE2PE3PE4PE5PE6
ZONE1PZONE/ZONE2RMDSHENDPEND
SVEMGSALM
012
ON012
1
2
No.
ON
No.
ST0ST1ST2
BKRLRMOD
RESSONLS0LS1LS2
ZONE1PZONEZONE2RMDSHEND
SVEMGSALM
0123456
ON0123456
1
/ 2
LOAD/TRQS/
LOAD/
ALMLTRQS/
ALMLALML
PLC
ACONPCONDCON
ACONPCONDCON
PLC
1
*は正常時 ON 信号です。“使用できません”と表記されている信号は制御していません。(ON/OFF は不定です )注 1 ACON、DCON の場合、信号が以下に替わります。
ACON:* BALM(バッテリアラーム ) / * ALML(軽故障ステータス ) DCON:* ALML(軽故障ステータス )

99
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
83
7.4.3 ポジション/簡易直値モード(占有バイト数:8)ポジションNo.を指定して運転する方式です。制御信号(PMOD信号)の切換えで目標位置を直接数値で指定するか、ポジションデータに登録した値を使用するか選択できます。
目標位置以外の速度、加減速度、位置決め幅等はコントローラ内のポジションテーブルの値が使用されます。コントローラ本体の取扱説明書を参照してポジションデータを設定してください。
設定可能なポジションデータの数は最大768点です。
本モードで制御可能なロボシリンダの有効な主要機能は次の表の通りです。
:直接制御
ロボシリンダの機能 :間接制御 備考
×:無効
原点復帰動作
位置決め動作
速度・加減速度設定
ピッチ送り(インチング)
押付け動作 ポジションデータの
移動中の速度変更 設定が必要です。
異なった加速度、
減速度での動作
一時停止
ゾーン信号出力 ゾーンの設定は
パラメータに行います。
PIOパターン選択 ×
(1)PLCアドレス構成(※nは各軸の入出力先頭アドレスです。)
(注)アドレスの重複使用にご注意ください。
パラメータ ACONまたはPCON側 PLC側出力 ACONまたはPCON側 PLC側入力No.84 入力レジスタ アドレス 出力レジスタ アドレス1
目標位置n+0
現在位置n+0
n+1 n+1
指定ポジション番号 n+2完了ポジション番号
n+2(簡易アラームコード)
制御信号 n+3 状態信号 n+3
4.4.3 ポジション/簡易直値モード(占有バイト数:8)
指令ポジション No.完全ポジション No.
IAI コントローラ側 IAI コントローラ側

100
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
84
(2)軸毎の入出力信号割付
各軸の入出力信号は、入出力アドレスの各4ワード(8バイト)で構成されます。
制御信号および状態信号はビット単位のON/OFF信号です。
目標位置および現在位置は2ワード(32ビット)のバイナリデータで、PLCでは-999999~+999999(単位:0.01mm)の数値が扱えますが、位置データは当該アクチュエータのソフトストロークの範囲内(0~有効ストローク長)で設定してください。
指定ポジション番号および完了ポジション番号は1ワード(16ビット)のバイナリデータで、PLCでは0~767までの数値が扱えますが、パソコンソフトまたはティーチングBOXであらかじめ運転条件を設定したポジション番号を指定してください。
b15n+0 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
PLC出力 アドレス(※nは各軸の出力先頭アドレスです。)
目標位置が負数の場合は、2の補数で表されます。
目標位置 (上位ワード)
1ワード=2バイト=16ビット
目標位置 (下位ワード)
PC512
PC256
PC128
PC64
PC32
PC16
PC8
PC4
PC2
PC1
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指定ポジション 番号
BKRL
RMOD
PMOD
MODE
PWRT
JOG+
JOG-
JVEL
JISL
SON
RES
STP
HOME
CSTR
制御信号
PLC では 0 ~ 767 までの数値が扱えますが、パソコンソフトなどのティーチングツールであらかじ
め運転条件を設定したポジション No. を指定してください。
No.No.
No.
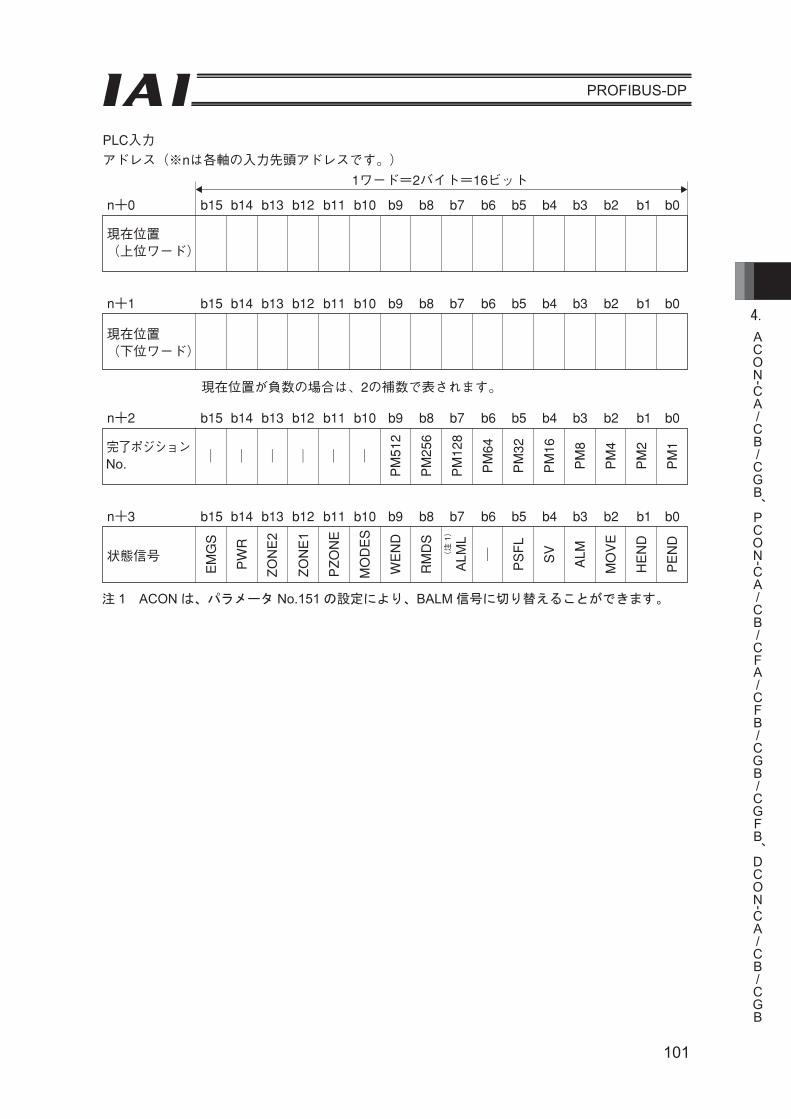
101
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
84
(2)軸毎の入出力信号割付
各軸の入出力信号は、入出力アドレスの各4ワード(8バイト)で構成されます。
制御信号および状態信号はビット単位のON/OFF信号です。
目標位置および現在位置は2ワード(32ビット)のバイナリデータで、PLCでは-999999~+999999(単位:0.01mm)の数値が扱えますが、位置データは当該アクチュエータのソフトストロークの範囲内(0~有効ストローク長)で設定してください。
指定ポジション番号および完了ポジション番号は1ワード(16ビット)のバイナリデータで、PLCでは0~767までの数値が扱えますが、パソコンソフトまたはティーチングBOXであらかじめ運転条件を設定したポジション番号を指定してください。
b15n+0 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
PLC出力 アドレス(※nは各軸の出力先頭アドレスです。)
目標位置が負数の場合は、2の補数で表されます。
目標位置 (上位ワード)
1ワード=2バイト=16ビット
目標位置 (下位ワード)
PC512
PC256
PC128
PC64
PC32
PC16
PC8
PC4
PC2
PC1
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指定ポジション 番号
BKRL
RMOD
PMOD
MODE
PWRT
JOG+
JOG-
JVEL
JISL
SON
RES
STP
HOME
CSTR
制御信号
ProfiBus-DP
85
b15n+0 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
PLC入力 アドレス(※nは各軸の入力先頭アドレスです。)
現在位置が負数の場合は、2の補数で表されます。
現在位置 (上位ワード)
1ワード=2バイト=16ビット
現在位置 (下位ワード)
PM512
PM256
PM128
PM64
PM32
PM16
PM8
PM4
PM2
PM1
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
完了ポジション 番号
EMGS
PWR
ZONE1
ZONE2
PZONE
MODES
WEND
RMDS
PSFL
SV
ALM
MOVE
HEND
PEND
状態信号 (注
1)
注 1 ACON は、パラメータ No.151 の設定により、BALM 信号に切り替えることができます。
No.AL
ML
ZON
E2
ZON
E1

102
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
86
(3)入出力信号割付(※表中のONの表記は該当のビットが“1”を表し、OFFは“0”を表します)信号種別 ビット 記号 内容 詳細
目標位置32ビット
7.6(1)データ
指定16ビット PC1~ 7.6(1)ポジションデータ PC512番号
b15 BKRL 7.4.7(18)b14 RMOD 7.4.7(19)b13
b12
b11 PMOD 7.4.7(20)
b10 MODE 7.4.7(16)
b9 PWRT 7.4.7(17)
b8 JOG+ 7.4.7(13)制御信号 b7 JOG- 7.4.7(13)
b6 JVEL 7.4.7(14)
b5 JISL 7.4.7(15)
b4 SON 7.4.7(5)b3 RES 7.4.7(4)b2 STP 7.4.7(11)b1 HOME 7.4.7(6)b0 CSTR 7.4.7(7)
PLC出力
32ビット符号付整数目標位置を絶対座標上の位置で指定してください。単位は0.01mmで指定可能範囲は、-999999~999999となります。(例)+25.40mmなら2540と指定します。パラメータのソフトリミットの内側(0.2mm)を超えた値を入力するとソフトリミットの内側(0.2mm)までの移動に制限されます。※16進数で入力する場合、負数は2の補数で入力してください。16ビット整数運転にはパソコン対応ソフトまたはティーチングBOXであらかじめ運転条件を設定したポジションデータが必要です。本レジスタでデータを入力したポジション番号を指定してください。指定可能範囲は0~767となります。範囲外の値の指定、未設定のポジション番号の指定はスタート信号をONした際にアラームとなります。ブレーキ強制解除:ONでブレーキ解除運転モード:OFF でAUTOモード、ONでMANUモード
使用できません
ポジション/簡易直値切替:OFFでポジションモード、ONで簡易直値モード教示モード指令:OFF で通常モード、ONで教示モードポジションデータ取り込み指令:ONでポジションデータ取込み+ジョグ:ONで反原点方向移動-ジョグ:ONで原点方向移動ジョグ速度/インチング距離切替え:OFF でパラメータNo.26“ジョグ速度”、パラメータNo.48“インチング距離”ONでパラメータNo.47“ジョグ速度2”、パラメータNo.49“インチング距離2”の設定値を使用する。ジョグ/インチング切替え:OFFでジョグ動作、ONでインチング動作サーボON指令:ONでサーボONリセット:ONでリセット実行一時停止:ONで一時停止指令原点復帰:ONで原点復帰指令位置決めスタート:ONで移動指令
4.6 (1)
4.4.7(18)4.4.7(19)
4.4.7(20)
4.4.7(16)
4.6 (1)
4.4.7(17)
4.4.7(13)
4.4.7(14)
4.4.7(15)
4.4.7 (4)4.4.7(11)4.4.7 (6)4.4.7 (7)
4.4.7 (5)
4.4.7(13)
運転にはパソコン対応ソフトなどのティーチ
ングツールであらかじめ運転条件を設定した
ポジションデータが必要です。
本レジスタでデータを入力したポジション
No. を指定してください。
No.
No.

103
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
32 4.6 1
16PM1
4.6 1No.PM512
b15 EMGS 4.4.7 2b14 PWR 4.4.7 1b13 ZONE2 4.4.7 12b12 ZONE1 4.4.7 12
b11 PZONE 4.4.7 12
b10 MODES 4.4.7 16b9 WEND 4.4.7 17
b8 RMDS 4.4.7 19
b7
PLC
320.01mm
000003FFH=1023 10=10.23mm
16 2
16
No.
0ALM
ON
ONON
2 ON1 ON
ONON
ON
AUTO OFF MANU ON
b6b5 PSFL 4.4.7 23b4 SV 4.4.7 5b3 ALM 4.4.7 3b2 MOVE 4.4.7 9b1 HEND 4.4.7 6b0 PEND 4.4.7 10
ONON ON
ONON
ONON
ON ALM LED
4.4.7 31ALML
BALMACON No.151 1
ON4.4.7 32
ProfiBus-DP
86
(3)入出力信号割付(※表中のONの表記は該当のビットが“1”を表し、OFFは“0”を表します)信号種別 ビット 記号 内容 詳細
目標位置32ビット
7.6(1)データ
指定16ビット PC1~ 7.6(1)ポジションデータ PC512番号
b15 BKRL 7.4.7(18)b14 RMOD 7.4.7(19)b13
b12
b11 PMOD 7.4.7(20)
b10 MODE 7.4.7(16)
b9 PWRT 7.4.7(17)
b8 JOG+ 7.4.7(13)制御信号 b7 JOG- 7.4.7(13)
b6 JVEL 7.4.7(14)
b5 JISL 7.4.7(15)
b4 SON 7.4.7(5)b3 RES 7.4.7(4)b2 STP 7.4.7(11)b1 HOME 7.4.7(6)b0 CSTR 7.4.7(7)
PLC出力
32ビット符号付整数目標位置を絶対座標上の位置で指定してください。単位は0.01mmで指定可能範囲は、-999999~999999となります。(例)+25.40mmなら2540と指定します。パラメータのソフトリミットの内側(0.2mm)を超えた値を入力するとソフトリミットの内側(0.2mm)までの移動に制限されます。※16進数で入力する場合、負数は2の補数で入力してください。16ビット整数運転にはパソコン対応ソフトまたはティーチングBOXであらかじめ運転条件を設定したポジションデータが必要です。本レジスタでデータを入力したポジション番号を指定してください。指定可能範囲は0~767となります。範囲外の値の指定、未設定のポジション番号の指定はスタート信号をONした際にアラームとなります。ブレーキ強制解除:ONでブレーキ解除運転モード:OFF でAUTOモード、ONでMANUモード
使用できません
ポジション/簡易直値切替:OFFでポジションモード、ONで簡易直値モード教示モード指令:OFF で通常モード、ONで教示モードポジションデータ取り込み指令:ONでポジションデータ取込み+ジョグ:ONで反原点方向移動-ジョグ:ONで原点方向移動ジョグ速度/インチング距離切替え:OFF でパラメータNo.26“ジョグ速度”、パラメータNo.48“インチング距離”ONでパラメータNo.47“ジョグ速度2”、パラメータNo.49“インチング距離2”の設定値を使用する。ジョグ/インチング切替え:OFFでジョグ動作、ONでインチング動作サーボON指令:ONでサーボONリセット:ONでリセット実行一時停止:ONで一時停止指令原点復帰:ONで原点復帰指令位置決めスタート:ONで移動指令
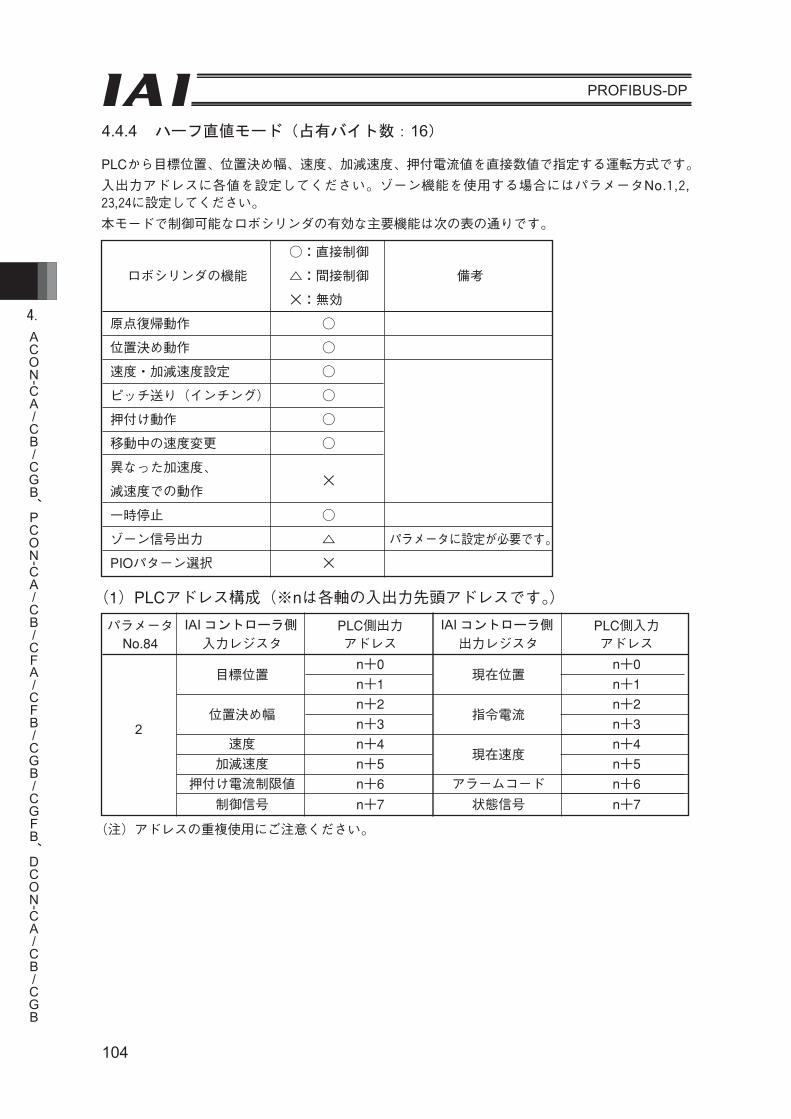
104
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
88
7.4.4 ハーフ直値モード(占有バイト数:16)PLCから目標位置、位置決め幅、速度、加減速度、押付電流値を直接数値で指定する運転方式です。
入出力アドレスに各値を設定してください。ゾーン機能を使用する場合にはパラメータNo.1,2,23,24に設定してください。
本モードで制御可能なロボシリンダの有効な主要機能は次の表の通りです。
:直接制御
ロボシリンダの機能 :間接制御 備考
×:無効
原点復帰動作
位置決め動作
速度・加減速度設定
ピッチ送り(インチング)
押付け動作
移動中の速度変更
異なった加速度、×
減速度での動作
一時停止
ゾーン信号出力 パラメータに設定が必要です。
PIOパターン選択 ×
(1)PLCアドレス構成(※nは各軸の入出力先頭アドレスです。)
(注)アドレスの重複使用にご注意ください。
パラメータ ACONまたはPCON側 PLC側出力 ACONまたはPCON側 PLC側入力No.84 入力レジスタ アドレス 出力レジスタ アドレス
2目標位置
n+0現在位置
n+0n+1 n+1
位置決め幅n+2
指令電流n+2
n+3 n+3速度 n+4
現在速度n+4
加減速度 n+5 n+5押付け電流制限値 n+6 アラームコード n+6
制御信号 n+7 状態信号 n+7
IAI コントローラ側 IAI コントローラ側
4.4.4 ハーフ直値モード(占有バイト数:16)
2
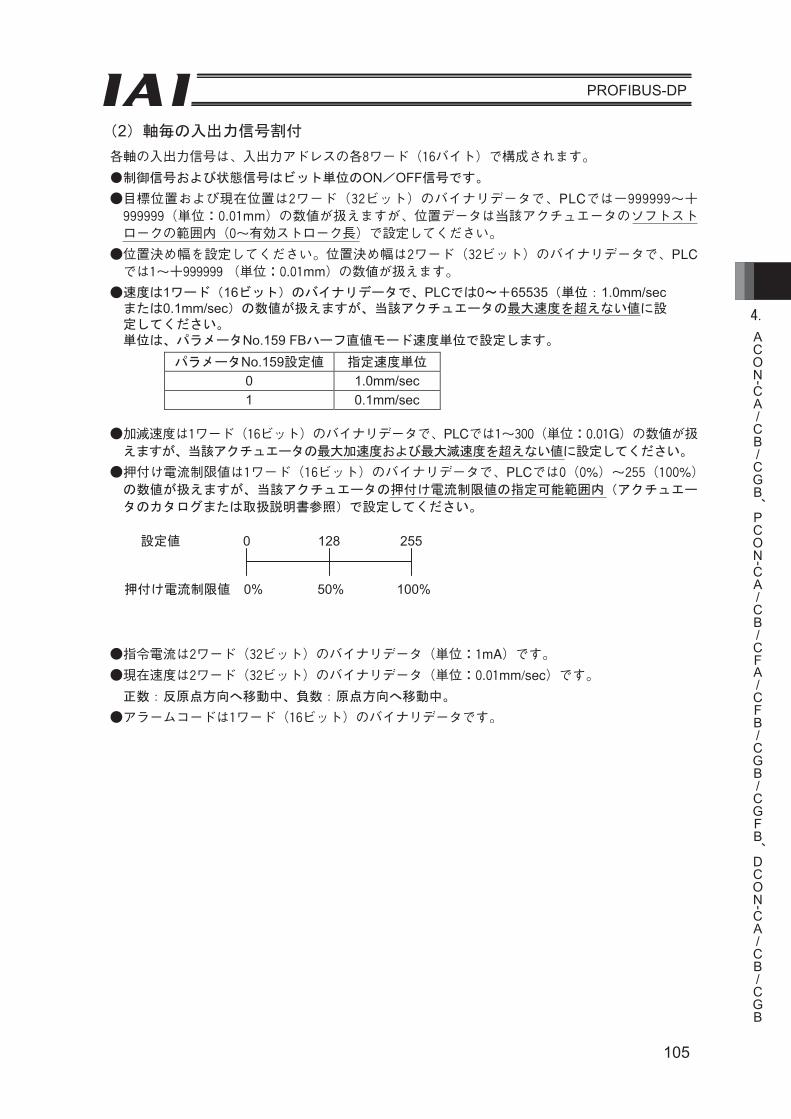
105
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
2
ON OFF
1 16 PLC 0 65535 1.0mm/sec0.1mm/sec
No.159 FB
0% 50% 100%
0 128 255
No.1590 1.0mm/sec1 0.1mm/sec
ProfiBus-DP
88
7.4.4 ハーフ直値モード(占有バイト数:16)PLCから目標位置、位置決め幅、速度、加減速度、押付電流値を直接数値で指定する運転方式です。
入出力アドレスに各値を設定してください。ゾーン機能を使用する場合にはパラメータNo.1,2,23,24に設定してください。
本モードで制御可能なロボシリンダの有効な主要機能は次の表の通りです。
:直接制御
ロボシリンダの機能 :間接制御 備考
×:無効
原点復帰動作
位置決め動作
速度・加減速度設定
ピッチ送り(インチング)
押付け動作
移動中の速度変更
異なった加速度、×
減速度での動作
一時停止
ゾーン信号出力 パラメータに設定が必要です。
PIOパターン選択 ×
(1)PLCアドレス構成(※nは各軸の入出力先頭アドレスです。)
(注)アドレスの重複使用にご注意ください。
パラメータ ACONまたはPCON側 PLC側出力 ACONまたはPCON側 PLC側入力No.84 入力レジスタ アドレス 出力レジスタ アドレス
2目標位置
n+0現在位置
n+0n+1 n+1
位置決め幅n+2
指令電流n+2
n+3 n+3速度 n+4
現在速度n+4
加減速度 n+5 n+5押付け電流制限値 n+6 アラームコード n+6
制御信号 n+7 状態信号 n+7

106
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
90
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
目標位置 (下位ワード)
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
位置決め幅 (上位ワード)
524,288
262,144
131,072
65,536
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
位置決め幅 (下位ワード)
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
b15n+4 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
速度
256
128
64
32
16
8 4 2 1b15n+5 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
加減速度
128
64
32
16
8 4 2 1
b15n+6 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
押付け電流 制限値
BKRL
RMOD
DIR
PUSH
JOG+
JOG-
JVEL
JISL
SON
RES
STP
HOME
DSTR
b15n+7 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
制御信号
b15n+0 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
目標位置 (上位ワード)
1ワード=2バイト=16ビット
目標位置が負数の場合は、2の補数で表されます。
PLC出力
アドレス(※nは各軸の出力先頭アドレスです。)

107
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
90
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
目標位置 (下位ワード)
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
位置決め幅 (上位ワード)
524,288
262,144
131,072
65,536
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
位置決め幅 (下位ワード)
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
b15n+4 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
速度
256
128
64
32
16
8 4 2 1
b15n+5 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
加減速度
128
64
32
16
8 4 2 1
b15n+6 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
押付け電流 制限値
BKRL
RMOD
DIR
PUSH
JOG+
JOG-
JVEL
JISL
SON
RES
STP
HOME
DSTR
b15n+7 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
制御信号
b15n+0 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
目標位置 (上位ワード)
1ワード=2バイト=16ビット
目標位置が負数の場合は、2の補数で表されます。
PLC出力
アドレス(※nは各軸の出力先頭アドレスです。)
ProfiBus-DP
91
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在位置 (下位ワード)
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指令電流 (上位ワード)
524,288
262,144
131,072
65,536
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指令電流 (下位ワード)
b15n+4 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在速度 (上位ワード)
b15n+5 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在速度 (下位ワード)
b15n+6 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
アラーム コード
EMGS
PWR
ZONE2
ZONE1
RMDS
PSFL
SV
ALM
MOVE
HEND
PEND
b15n+7 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
状態信号
b15n+0 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在位置 (上位ワード)
1ワード=2バイト=16ビット
現在位置が負数の場合は、2の補数で表されます。
現在速度が負数の場合は、2の補数で表されます。
PLC入力
アドレス(※nは各軸の入力先頭アドレスです。)
(注
1)
注 1 ACON は、パラメータ No.151 の設定により、BALM 信号に切り替えることができます。
ALM
L

108
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
3 ON 1 OFF 0
324.6 2
3226.4
16 4.6 2
16 4.6 2
PLC
32
0.01mm 999999999999
25.41mm 25410.2mm
0.2mm16 2
320.01mm 1 999999
25.40mm 25402
PUSH16
1.0mm/sec 0.1mm/sec0 65535
0
No.159 FB
254.0mm/sec 254
16
0.01G 1 3000.30G 30
0
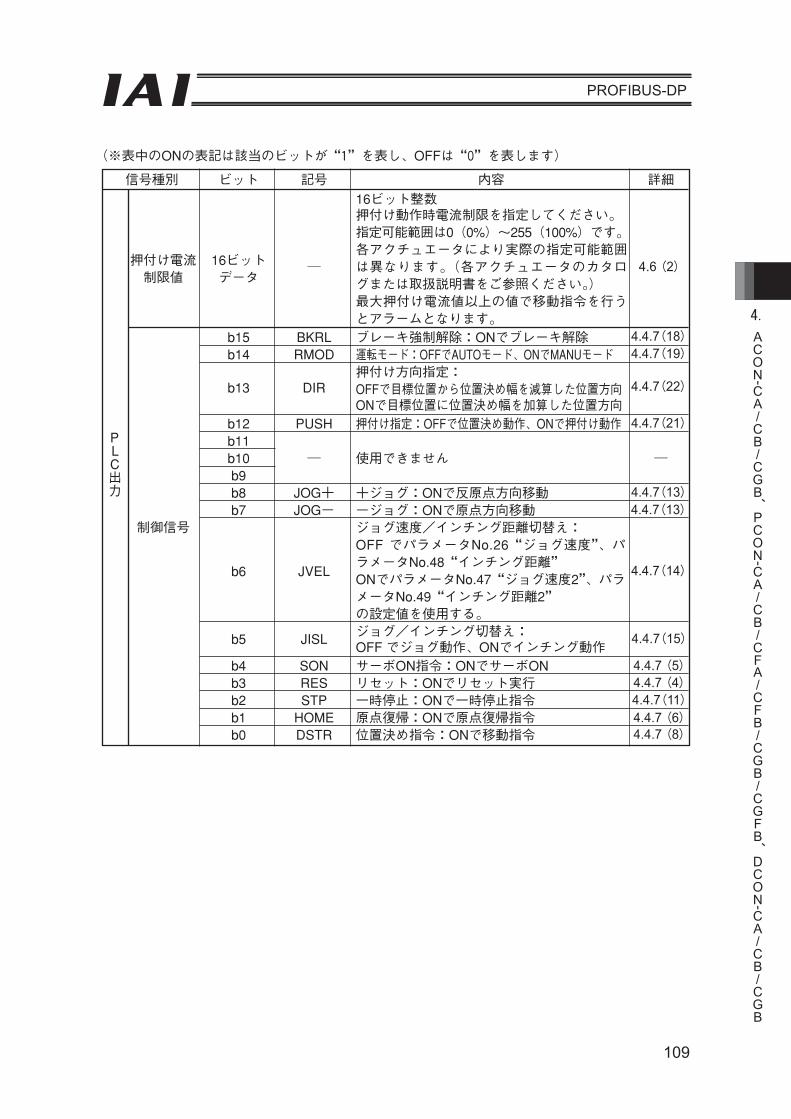
109
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
93
信号種別 ビット 記号 内容 詳細
押付け電流 16ビット制限値 データ
7.6(2)
b15 BKRL 7.4.7(18)b14 RMOD 7.4.7(19)
b13 DIR 7.4.7(22)
b12 PUSH 7.4.7(21)b11b10 b9b8 JOG+ 7.4.7(13)b7 JOG- 7.4.7(13)
制御信号
b6 JVEL 7.4.7(14)
b5 JISL 7.4.7(15)
b4 SON 7.4.7(5)b3 RES 7.4.7(4)b2 STP 7.4.7(11)b1 HOME 7.4.7(6)b0 DSTR 7.4.7(8)
PLC出力
16ビット整数押付け動作時電流制限を指定してください。指定可能範囲は0(0%)~255(100%)です。各アクチュエータにより実際の指定可能範囲は異なります。(各アクチュエータのカタログまたは取扱説明書をご参照ください。)最大押付け電流値以上の値で移動指令を行うとアラームとなります。ブレーキ強制解除:ONでブレーキ解除運転モード:OFFでAUTOモード、ONでMANUモード押付け方向指定:OFFで目標位置から位置決め幅を減算した位置方向ONで目標位置に位置決め幅を加算した位置方向押付け指定:OFFで位置決め動作、ONで押付け動作
使用できません
+ジョグ:ONで反原点方向移動-ジョグ:ONで原点方向移動ジョグ速度/インチング距離切替え:OFF でパラメータNo.26“ジョグ速度”、パラメータNo.48“インチング距離”ONでパラメータNo.47“ジョグ速度2”、パラメータNo.49“インチング距離2”の設定値を使用する。ジョグ/インチング切替え:OFF でジョグ動作、ONでインチング動作サーボON指令:ONでサーボONリセット:ONでリセット実行一時停止:ONで一時停止指令原点復帰:ONで原点復帰指令位置決め指令:ONで移動指令
(※表中のONの表記は該当のビットが“1”を表し、OFFは“0”を表します)
4.4.7(19)
4.4.7(22)
4.4.7(21)
4.4.7(13)
4.4.7(14)
4.4.7(15)
4.4.7 (4)4.4.7(11)4.4.7 (6)4.4.7 (8)
4.4.7 (5)
4.4.7(13)
4.4.7(18)
4.6 (2)

110
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
324.6 2
324.6 2
32 4.6 2
1626.4
b15 EMGS 4.4.7 2b14 PWR 4.4.7 1b13 ZONE2 4.4.7 12b12 ZONE1 4.4.7 12b11b10b9
b8 RMDS 4.4.7 19
b6b5 PSFL 4.4.7 23b4 SV 4.4.7 5b3 ALM 4.4.7 3b2 MOVE 4.4.7 9b1 HEND 4.4.7 6b0 PEND 4.4.7 10
PLC
320.01mm
000003FFH=1023 10=10.23mm
16 2
32
mA000003FFH=1023 10=1023mA
32
0.01mm/sec000003FFH=1023 10=10.23mm/sec
16 2
16
0H
ONON
2 ON1 ON
AUTOOFF MANU ON
ONON ON
ONON
ONON
ALML ON ALM LED
4.4.7 31
b7
BALMACON No.151 1
ON4.4.7 32

111
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
95
7.4.5 フル直値モード(占有バイト数:32)PLCから位置制御に関する全ての値(目標位置、速度等)を直接数値で指定する運転方式です。
入出力アドレスに各値を設定してください。
本モードで制御可能なロボシリンダの有効な主要機能は次の表の通りです。
ロボシリンダの機能:直接制御×:無効
原点復帰動作 位置決め動作 速度・加減速度設定 ピッチ送り(インチング) 押付け動作 移動中の速度変更 異なった加速度、 減速度での動作一時停止 ゾーン信号出力 PIOパターン選択 ×
(1)PLCアドレス構成(※nは各軸の入出力先頭アドレスです。)
パラメータ ACONまたはPCON入力側 PLC側出力 ACONまたはPCON出力側 PLC側入力No.84 レジスタ アドレス レジスタ アドレス3
目標位置n+0
現在位置n+0
n+1 n+1
位置決め幅n+2
指令電流n+2
n+3 n+3
速度n+4
現在速度n+4
n+5 n+5
ゾーン境界値+n+6 アラームコード n+6n+7 n+7
ゾーン境界値- n+8 n+8n+9 n+9
加速度 n+10 n+10減速度 n+11 占有領域 n+11
押付け電流制限値 n+12 n+12占有領域
n+13 n+13負荷電流閾値制御信号1 n+14 n+14制御信号2 n+15 状態信号 n+15
ACONPCON
占有領域(注) は他の目的に使用できません。
またアドレスの重複使用にご注意ください。
1 PLC nIAI PLC IAI PLC
No.843 n 0 n 0
n 1 n 1n 2 n 2n 3 n 3n 4 n 4n 5 n 5n 6 n 6n 7 n 7
8n8nn 9 n 9n 10 n 10n 11 n 11n 12 n 12
31n31n1 n 14 n 142 n 15 2 n 15
1
4.4.5 フル直値モード(占有バイト数:32)

112
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
96
(2)軸毎の入出力信号割付
各軸の入出力信号は、入出力アドレスの各16ワード(32バイト)で構成されます。
制御信号1、制御信号2および状態信号はビット単位のON/OFF信号です。
目標位置および現在位置は2ワード(32ビット)のバイナリデータで、PLCでは-999999~+999999 (単位:0.01mm)の数値が扱えますが、位置データは当該アクチュエータのソフトストロークの範囲内(0~有効ストローク長)で設定してください。
位置決め幅を設定してください。位置決め幅は2ワード(32ビット)のバイナリデータで、PLCでは1~+999999 (単位:0.01mm)の数値が扱えます。
速度は2ワード(32ビット)のバイナリデータで、PLCでは0~+999999 (単位:0.01mm/sec)の数値が扱えますが、当該アクチュエータの最大速度を超えない値に設定してください。
加速度および減速度は1ワード(16ビット)のバイナリデータで、PLCでは1~300(単位:0.01G)の数値が扱えますが、当該アクチュエータの最大加速度および最大減速度を超えない値に設定してください。
押付け電流制限値は1ワード(16ビット)のバイナリデータで、PLCでは0(0%)~255(100%)の数値が扱えますが、当該アクチュエータの押付け電流制限値の指定可能範囲内(アクチュエータのカタログまたは取扱説明書参照)で設定してください。
負荷電流閾値を設定してください。負荷電流閾値は1ワード(16ビット)のバイナリデータで、PLCでは0(0%)~255(100%)の数値が扱えます。(押付け電流制限値の図(上図)参照)
ゾーン境界値+、ゾーン境界値-は2ワード(32ビット)のバイナリデータで、PLCでは-999999~+999999 (単位:0.01mm)の数値が扱えますが、ゾーン境界値+よりゾーン境界値-を小さな値に設定してください。
指令電流は2ワード(32ビット)のバイナリデータ(単位:1mA)です。
現在速度は2ワード(32ビット)のバイナリデータ(単位:0.01mm/sec)です。
正数:反原点方向へ移動中、負数:原点方向へ移動中。
アラームコードは1ワード(16ビット)のバイナリデータです。
設定値
押付け電流制限値 0% 50% 100%
0 127 255
通算移動回数は 2 ワード(32 ビット)のバイナリデータ(単位:回)です。
通算走行距離は 2 ワード(32 ビット)のバイナリデータ(単位:m)です。

113
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
97
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
目標位置 (下位ワード)
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
位置決め幅 (上位ワード)
524,288
262,144
131,072
65,536
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
位置決め幅 (下位ワード)
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
b15n+4 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
速度 (上位ワード)
524,288
262,144
131,072
65,536
b15n+5 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
速度 (下位ワード)
b15n+6 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
ゾーン境界値+ (上位ワード)
b15n+7 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
ゾーン境界値+ (下位ワード)
b15n+0 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
目標位置 (上位ワード)
1ワード=2バイト=16ビット
目標位置が負数の場合は、2の補数で表されます。
ゾーン境界値+が負数の場合は、2の補数で表されます。
PLC出力
アドレス(※nは各軸の出力先頭アドレスです。)
ProfiBus-DP
96
(2)軸毎の入出力信号割付
各軸の入出力信号は、入出力アドレスの各16ワード(32バイト)で構成されます。
制御信号1、制御信号2および状態信号はビット単位のON/OFF信号です。
目標位置および現在位置は2ワード(32ビット)のバイナリデータで、PLCでは-999999~+999999 (単位:0.01mm)の数値が扱えますが、位置データは当該アクチュエータのソフトストロークの範囲内(0~有効ストローク長)で設定してください。
位置決め幅を設定してください。位置決め幅は2ワード(32ビット)のバイナリデータで、PLCでは1~+999999 (単位:0.01mm)の数値が扱えます。
速度は2ワード(32ビット)のバイナリデータで、PLCでは0~+999999 (単位:0.01mm/sec)の数値が扱えますが、当該アクチュエータの最大速度を超えない値に設定してください。
加速度および減速度は1ワード(16ビット)のバイナリデータで、PLCでは1~300(単位:0.01G)の数値が扱えますが、当該アクチュエータの最大加速度および最大減速度を超えない値に設定してください。
押付け電流制限値は1ワード(16ビット)のバイナリデータで、PLCでは0(0%)~255(100%)の数値が扱えますが、当該アクチュエータの押付け電流制限値の指定可能範囲内(アクチュエータのカタログまたは取扱説明書参照)で設定してください。
負荷電流閾値を設定してください。負荷電流閾値は1ワード(16ビット)のバイナリデータで、PLCでは0(0%)~255(100%)の数値が扱えます。(押付け電流制限値の図(上図)参照)
ゾーン境界値+、ゾーン境界値-は2ワード(32ビット)のバイナリデータで、PLCでは-999999~+999999 (単位:0.01mm)の数値が扱えますが、ゾーン境界値+よりゾーン境界値-を小さな値に設定してください。
指令電流は2ワード(32ビット)のバイナリデータ(単位:1mA)です。
現在速度は2ワード(32ビット)のバイナリデータ(単位:0.01mm/sec)です。
正数:反原点方向へ移動中、負数:原点方向へ移動中。
アラームコードは1ワード(16ビット)のバイナリデータです。
設定値
押付け電流制限値 0% 50% 100%
0 127 255

114
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
b15n 9 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
256
128
64
32
16
8 4 2 1
b15n 10 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
256
128
64
32
16
8 4 2 1
b15n 11 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
128
64
32
16
8 4 2 1
b15n 12 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
128
64
32
16
8 4 2 1
b15n 13 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
AS
O1
AS
O0
MO
D1
INC
DIR
PU
SH
b15n 14 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
1
BK
RL
RM
OD
JOG
JOG
JVE
L
JIS
L
SO
N
RE
S
STP
HO
ME
DS
TR
b15n 15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
2
b15n 8 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
1 2 16
2
n
MO
D2
1
2N
TC1 2
NTC
0 1S
MO
D 2G
SL1
2G
SL0
注 1 PCON だけ使用できます。注 2 ACON だけ使用できます。

115
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
b15n 1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
32,7
68
16,3
84
8,19
2
4,09
6
2,04
8
1,02
4
512
256
128
64
32
16
8 4 2 1
b15n 2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
524,
288
262,
144
131,
072
65,5
36
b15n 3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15n 4 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15n 5 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15n 6 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15 n 7 n 9 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15n 0 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
1 2 16
2
2
PLCn

116
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
32,7
68
16,3
84
8,19
2
4,09
6
2,04
8
1,02
4
512
256
128
64
32
16
8 4 2 1
524,
288
262,
144
131,
072
65,5
36
32,7
68
16,3
84
8,19
2
4,09
6
2,04
8
1,02
4
512
256
128
64
32
16
8 4 2 1
524,
288
262,
144
131,
072
65,5
36
EM
GS
PW
R
ZON
E2
ZON
E1
PZO
NE
RM
DS
GH
MS
PU
SH
PS
FL
SV
ALM
MO
VE
HE
ND
PE
ND
b15n 10 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15n 11 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15n 12 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15n 13 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15n 14 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
1
b15n 15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
2
1 2 16
PLCn
2A
LML
1TR
QS1
LOA
D
注 1 PCON だけ使用できます。注 2 ACON は、パラメータ No.151 の設定により、BALM 信号に切り替えることができます。

117
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
(3)入出力信号割付(※表中のONの表記は該当のビットが“1”を表し、OFFは“0”を表します)
アドレス ビット 記号 機能 詳細
32ビット目標位置
データ 4.6(3)
32ビット位置決め幅
データ 4.6(3)
32ビット速度
データ 4.6(3)
ゾーン
境界値+ 32ビット)3(6.4
/ゾーン データ
境界値-
PLC出力
32ビット符号付整数目標位置を絶対座標上の位置で指定してくだ
さい。
単位は0.01mmで指定可能範囲は、-999999~999999となります。
(例)+25.41mmなら2541と指定します。
パラメータのソフトリミットの内側(0.2mm)
を超えた値を入力するとソフトリミットの内
側(0.2mm)までの移動に制限されます。
※16進数で入力する場合、負数は2の補数で
入力してください。
32ビット整数単位は0.01mmで指定可能範囲は1~999999です。
(例)25.40mmなら2540と指定します。
本レジスタは動作種別により2種類の意味が
あります。
①位置決め動作の場合、目標位置からどの程
度の範囲で位置決め完了とみなすかの許容
範囲となります。
②押付け動作時は押付け幅の値となります。
通常動作か押付け動作かの指定は、制御信
号のPUSHで設定してください。
32ビット整数移動時の速度を指定してください。
単位0.01mm/secで指定可能範囲は、0~999999となります。
(例)25.41mm/secなら2541と指定します。
最大速度以上の値で移動指令を行うとアラー
ムとなります。
32ビット符号付整数パラメータで指定されるゾーン境界とは別に、
原点復帰後に有効なゾーン信号を出力します。
現在位置がこの±境界値の内側にあるときは、
状態信号のPZONEがONとなります。
(例)+25.40mmなら2540と指定します。
指定単位は0.01mmで、指定範囲は-999999~999999 となります。
ゾーン境界値+>ゾーン境界値の関係を満た
す値を入力してください。
当機能を使用しない場合は、±を同じ値にして
ください。
※16進数で入力する場合、負数は2の補数で入
力してください。
0を指定すると移動中であれば減速停止、停止中であれば、その場で停止したままとなります。
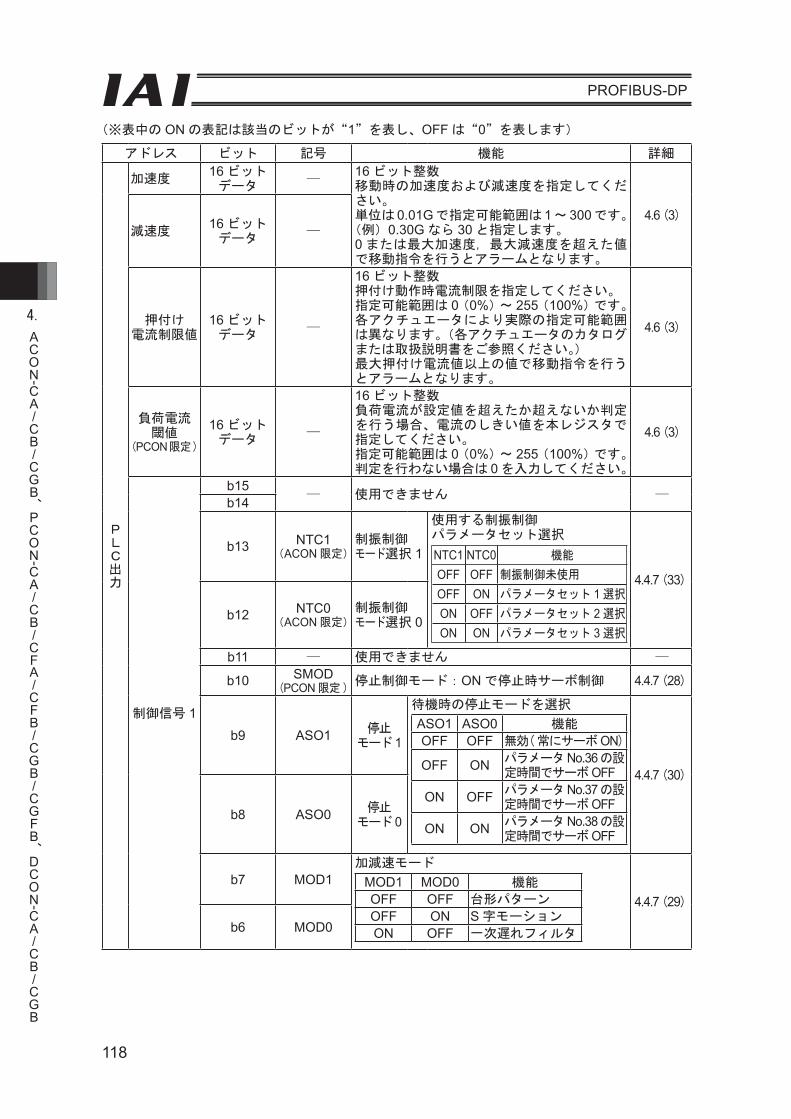
118
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
アドレス ビット 記号 機能 詳細
PLC出力
加速度16 ビットデータ
16 ビット整数移動時の加速度および減速度を指定してください。単位は 0.01Gで指定可能範囲は 1~ 300です。(例)0.30G なら 30 と指定します。0 または最大加速度,最大減速度を超えた値で移動指令を行うとアラームとなります。
4.6 (3)減速度
16 ビットデータ
押付け電流制限値
16 ビットデータ
16 ビット整数押付け動作時電流制限を指定してください。指定可能範囲は 0(0%)~ 255(100%)です。各アクチュエータにより実際の指定可能範囲は異なります。(各アクチュエータのカタログまたは取扱説明書をご参照ください。)最大押付け電流値以上の値で移動指令を行うとアラームとなります。
4.6 (3)
負荷電流閾値
(PCON限定)
16 ビットデータ
16 ビット整数負荷電流が設定値を超えたか超えないか判定を行う場合、電流のしきい値を本レジスタで指定してください。指定可能範囲は 0(0%)~ 255(100%)です。判定を行わない場合は 0 を入力してください。
4.6 (3)
制御信号 1
b15 使用できません b14
b13 NTC1(ACON 限定)
制振制御モード選択 1
使用する制振制御パラメータセット選択
NTC1 NTC0 機能
OFF OFF 制振制御未使用
OFF ON パラメータセット 1 選択
ON OFF パラメータセット 2 選択
ON ON パラメータセット 3 選択
4.4.7 (33)
b12 NTC0(ACON 限定)
制振制御モード選択 0
b11 使用できません
b10 SMOD(PCON 限定 )
停止制御モード:ON で停止時サーボ制御 4.4.7 (28)
b9 ASO1 停止モード 1
待機時の停止モードを選択
ASO1 ASO0 機能
OFF OFF 無効(常にサーボ ON)
OFF ON パラメータNo.36の設定時間でサーボ OFF
ON OFF パラメータNo.37の設定時間でサーボ OFF
ON ON パラメータNo.38の設定時間でサーボ OFF
4.4.7 (30)
b8 ASO0 停止モード 0
b7 MOD1加減速モード
MOD1 MOD0 機能
OFF OFF 台形パターン
OFF ON S 字モーション
ON OFF 一次遅れフィルタ
4.4.7 (29)
b6 MOD0
(※表中の ON の表記は該当のビットが“1”を表し、OFF は“0”を表します)

119
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
(※表中の ON の表記は該当のビットが“1”を表し、OFF は“0”を表します)
アドレス ビット 記号 機能 詳細
P LC出力
制御信号 1
b5 GSL1(ACON 限定 )
サーボゲインパラメータセット選択 1
サーボゲイン切替えのパラメータセット選択
GSL1 GSL0 機能
OFF OFF パラメータセット 0 選択
OFF ON パラメータセット 1 選択
ON OFF パラメータセット 2 選択
ON ON パラメータセット 3 選択
4.4.7(34)
b4 GSL0(ACON 限定 )
サーボゲインパラメータセット選択 0
b3 INC インクリメンタル指定:OFF で絶対位置指令、ON で相対位置指令 4.4.7(24)
b2 DIR
押付け方向指定:OFF で目標位置から位置決め幅を減算した位置方向ON で目標位置に位置決め幅を加算した位置方向
3.4.7(22)
b1 PUSH 押付け指定:OFF で位置決め動作、ON で押付け動作
3.4.7(21)
b0 使用できません
制御信号 2
b15 BKRL ブレーキ強制解除:ON でブレーキ解除 4.4.7(18)
b14 RMOD 運転モード:OFF で AUTO モード、ON で MANU モード
4.4.7(19)
b13
使用できません
b12b11b10b9b8 JOG+ +ジョグ:ON で反原点方向移動 4.4.7(13)b7 JOG- -ジョグ:ON で原点方向移動 4.4.7(13)
b6 JVEL
ジョグ速度 / インチング距離切替え:OFF でパラメータ No.26“ジョグ速度”、パラメータ No.48“インチング距離”ON でパラメータ No.47“ジョグ速度 2”、パラメータ No.49“インチング距離 2”の設定値を使用する。
4.4.7(14)
b5 JISL ジョグ / インチング切替え:OFF でジョグ動作、ON でインチング動作
4.4.7(15)
b4 SON サーボ ON 指令:ON でサーボ ON 4.4.7(5)b3 RES リセット:ON でリセット実行 4.4.7(4)b2 STP 一時停止:ON で一時停止指令 4.4.7(11)b1 HOME 原点復帰:ON で原点復帰指令 4.4.7(6)b0 DSTR 位置決めスタート:ON で移動指令 4.4.7(8)

120
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
(※表中の ON の表記は該当のビットが“1”を表し、OFF は“0”を表します)
信号種別 ビット 信号名 内容 詳細
PLC入力
現在位置32 ビット
データ
32 ビット符号付整数単位は 0.01mm です。(例)読取り値: 000003FFH=1023(10 進数)
=10.23mm※ 16 進数で読取る場合、負数は 2 の補数表
示となります。
4.6(3)
指令電流32 ビット
データ
32 ビット整数現在指令している電流値を示します。単位は mA です。(例)読取り値: 000003FFH=1023(10 進数)
=1023mA
4.6(3)
現在速度32 ビット
データ
32 ビット符号付整数現在速度を示します。正数:反原点方向へ移動中負数:原点方向へ移動中単位は 0.01mm/sec です。(例)読取り値: 000003FFH=1023(10 進数)
=10.23mm/sec※ 16 進数で読取る場合、負数は 2 の補数表
示となります。
4.6(3)
アラーム
コード
16 ビット
データ
16 ビット整数アラームが発生した場合にはアラームコードが出力されます。アラームが発生していない場合は 0 です。アラームの詳細内容はコントローラの取扱説明書をご参照してください。
4.6(3)
通算移動回数32 ビットデータ
32 ビット整数単位は回です。
通算走行距離32 ビットデータ
32 ビット整数単位は m です。
状態信号 1
b15
使用できません
b14b13b12b11b10b9b8b7b6b5b4b3b2b1
b0
ALML軽故障ステータス:継続動作可能な軽度のアラーム ( 移動回数閾値オーバ等 )が発生で ON注 軽故障では ALM LED は点灯しません。
4.7.7(31)
BALM ACON でパラメータ No.151 を 1 に設定した
場合アブソリュートバッテリ電圧低下警告:電圧低下で ON
4.7.7(32)

121
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
b15 EMGS 4.4.7 2b14 PWR 4.4.7 1b13 ZONE2 4.4.7 12b12 ZONE1 4.4.7 12
b11 PZONE 4.4.7 12
b10 LOAD 4.4.7 26
2 TRQS 4.4.7 27
b8 RMDS 4.4.7 19
b7 GHMS 4.4.7 6b6 PUSHS 4.4.7 25b5 PSFL 4.4.7 23b4 SV 4.4.7 5b3 ALM 4.4.7 3b2 MOVE 4.4.7 9b1 HEND 4.4.7 6b0 PEND 4.4.7 10
PLC
ONON
2 ON1 ON
ON
ON OFF
ON OFF
AUTO OFF MANU ONON
ONON
ON ONON
ONON
ON
b9
1
1
注 1 PCON だけ使用できます。

122
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
104
7.4.6 リモートⅠ/Oモード2(占有バイト数:12)PIO(24V入出力)を使用した場合と同様にポジションNo.を指定して運転するモードです。
RC用パソコン対応ソフトまたはティーチングボックスからポジションデータを設定してください。
運転可能なポジション数は、パラメータNo.25“PIOパターン”の設定によります。
本モードはリモートⅠ/Oモードの内容に現在位置の読取り機能と指令電流値の読取り機能を追加したものです。
以下に各PIOパターンの特長を示します。(詳細はコントローラ本体の取扱説明書参照)
本モードで制御可能なロボシリンダの有効な主要機能は次の表の通りです。
パラメータNo.25の設定値 動作モード Ⅰ/O仕様0 位置決めモード 位置決め点数64点、ゾーン出力2点1 教示モード 位置決め点数64点、ゾーン出力1点
位置決めおよびジョグ運転が可能現在位置を指定ポジションに書込み可能
2 256点モード 位置決め点数256点、ゾーン出力1点3 512点モード 位置決め点数512点、ゾーン出力無し4 電磁弁モード1 位置決め点数7点、ゾーン出力2点
ポジションNo.毎の直接運転指令が可能位置決め完了信号はポジションNo.毎に出力
5 電磁弁モード2 位置決め点数3点、ゾーン出力2点前進/後退/中間位置指令により運転位置決め完了信号は前進端/後退端/中間位置の個別出力
PIOパターンロボシリンダ 0: 1: 2: 3: 4: 5:の機能 位置決め 教示 256点 512点 電磁弁 電磁弁
モード モード モード モード モード1 モード2
原点復帰動作 ×位置決め動作 速度・加減速度設定 ピッチ送り(インチング) 押付け動作 ×移動中の速度変更 異なった加速度、
減速度での動作一時停止 (※1)ゾーン信号出力 × PIOパターン選択
(パラメータで設定)
:動作可、×:動作不可
(※1)パラメータNo.27“移動指令種別”を0に設定した場合に可能です。
移動指令をOFFにすることによって一時停止が可能です。
RC用パソコン対応ソフトなどのティーチングツールからポジションデータを設定してください。
運転可能なポジション数は、パラメータNo.25“PIOパターン”の設定によります。
本モードはリモートⅠ /Oモードの内容に現在位置の読取り機能と指令電流値の読取り機能を追加したも
のです。
以下に各PIOパターンの特長を示します。(詳細はコントローラ本体の取扱説明書参照)
PIO0 1 2 3 4 5
256 512
1
PIO
1 No.27“ ” 0OFF
4.4.6 リモートⅠ /O モード 2(占有バイト数:12)

123
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
105
(1)PLCアドレス構成(※nは各軸の入出力先頭アドレスです。)
(2)軸毎の入出力信号割付
各軸の入出力信号は、入出力アドレスの各6ワード(12バイト)で構成されます。
ポート番号で制御するアドレスはビット単位のON/OFF信号で制御します。
現在位置は2ワード(32ビット)のバイナリデータ(単位:0.01mm)です。
指令電流は2ワード(32ビット)のバイナリデータ(単位:1mA)です。
パラメータ ACONまたはPCON側 PLC側出力 ACONまたはPCON側 PLC側入力No.84 DIおよび入力レジスタ アドレス DOおよび出力レジスタ アドレス
4 ポート番号0~15 n+0 ポート番号0~15 n+0n+1 占有領域 n+1n+2
現在位置n+2
占有領域 n+3 n+3n+4
指令電流n+4
n+5 n+5
15
14
13
12
11
10
9 8 7 6 5 4 3 2 1 0
Fn+0 E D C B A 9 8 7 6 5 4 3 2 1 0
PLC出力(※nは各軸の出力先頭アドレスです。)
コントローラ 入力ポート 番号
1ワード=2バイト=16ビット アドレス
占有領域(注) は他の目的に使用できません。
またアドレスの重複使用にご注意ください。
4
IAI コントローラ側 IAI コントローラ側
ProfiBus-DP
104
7.4.6 リモートⅠ/Oモード2(占有バイト数:12)PIO(24V入出力)を使用した場合と同様にポジションNo.を指定して運転するモードです。
RC用パソコン対応ソフトまたはティーチングボックスからポジションデータを設定してください。
運転可能なポジション数は、パラメータNo.25“PIOパターン”の設定によります。
本モードはリモートⅠ/Oモードの内容に現在位置の読取り機能と指令電流値の読取り機能を追加したものです。
以下に各PIOパターンの特長を示します。(詳細はコントローラ本体の取扱説明書参照)
本モードで制御可能なロボシリンダの有効な主要機能は次の表の通りです。
パラメータNo.25の設定値 動作モード Ⅰ/O仕様0 位置決めモード 位置決め点数64点、ゾーン出力2点1 教示モード 位置決め点数64点、ゾーン出力1点
位置決めおよびジョグ運転が可能現在位置を指定ポジションに書込み可能
2 256点モード 位置決め点数256点、ゾーン出力1点3 512点モード 位置決め点数512点、ゾーン出力無し4 電磁弁モード1 位置決め点数7点、ゾーン出力2点
ポジションNo.毎の直接運転指令が可能位置決め完了信号はポジションNo.毎に出力
5 電磁弁モード2 位置決め点数3点、ゾーン出力2点前進/後退/中間位置指令により運転位置決め完了信号は前進端/後退端/中間位置の個別出力
PIOパターンロボシリンダ 0: 1: 2: 3: 4: 5:の機能 位置決め 教示 256点 512点 電磁弁 電磁弁
モード モード モード モード モード1 モード2
原点復帰動作 ×位置決め動作 速度・加減速度設定 ピッチ送り(インチング) 押付け動作 ×移動中の速度変更 異なった加速度、
減速度での動作一時停止 (※1)ゾーン信号出力 × PIOパターン選択
(パラメータで設定)
:動作可、×:動作不可
(※1)パラメータNo.27“移動指令種別”を0に設定した場合に可能です。
移動指令をOFFにすることによって一時停止が可能です。
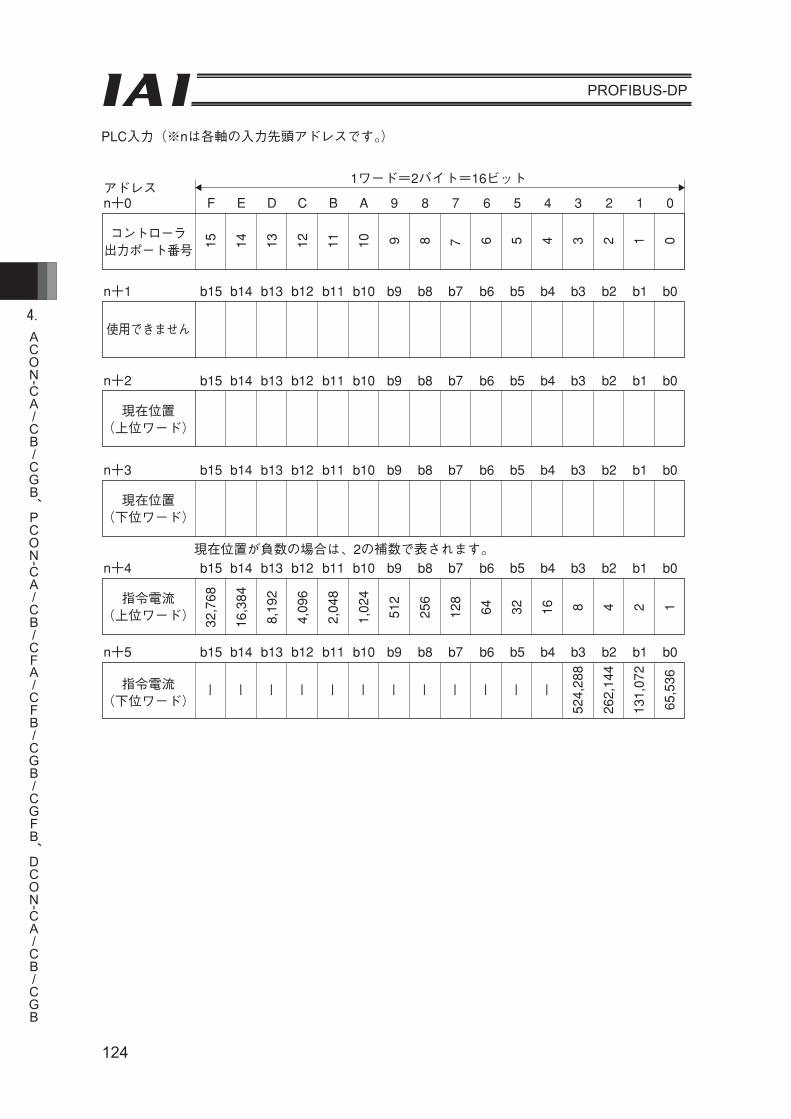
124
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
106
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
使用できません
15
14
13
12
11
10
9 8 7
6 5 4 3 2 1 0
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
-
-
-
-
-
-
-
-
-
-
-
-
524,288
262,144
131,072
65,536
Fn+0アドレス
E D C B A 9 8 7 6 5 4 3 2 1 0
コントローラ 出力ポート番号
1ワード=2バイト=16ビット
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在位置 (上位ワード)
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在位置 (下位ワード)
b15n+4 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指令電流 (上位ワード)
b15n+5 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指令電流 (下位ワード)
現在位置が負数の場合は、2の補数で表されます。
PLC入力(※nは各軸の入力先頭アドレスです。)

125
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
107
(3)入出力信号割付
各PIOパターンの信号割付は、7.4.2 (3) リモートⅠ/Oモード入出力信号割付けをご参照してください。
指令電流、現在位置の読取り機能の信号割付を次に示します。
信号種別 ビット 信号名 内容 詳細
現在位置32ビット
データ
指令電流32ビット
データ
PLC入力
32ビット符号付整数単位は0.01mmです。(例)読取り値:000003FFH=1023(10進数)
=10.23mm※16進数で読取る場合、負数は2の補数表示となります。32ビット整数現在指令している電流値を示します。単位は1mAです。(例)読取り値:000003FFH=1023(10進数)
=1023mA
ProfiBus-DP
106
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
使用できません
15
14
13
12
11
10
9 8 7
6 5 4 3 2 1 0
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
-
-
-
-
-
-
-
-
-
-
-
-
524,288
262,144
131,072
65,536
Fn+0アドレス
E D C B A 9 8 7 6 5 4 3 2 1 0
コントローラ 出力ポート番号
1ワード=2バイト=16ビット
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在位置 (上位ワード)
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在位置 (下位ワード)
b15n+4 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指令電流 (上位ワード)
b15n+5 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指令電流 (下位ワード)
現在位置が負数の場合は、2の補数で表されます。
PLC入力(※nは各軸の入力先頭アドレスです。)
4.4.2

126
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
108
7.4.7 入出力信号の制御と機能※ONの表記はビット信号の“1”を表し、OFFは“0”を表します。
ポジション/簡易直値モード、ハーフ直値モードおよびフル直値モードに使用される入出力信号の制御と機能を以下に示します。リモートⅠ/OモードおよびリモートⅠ/Oモード2の入出力信号については、コントローラ本体の取扱説明書をご参照ください。
(1)コントローラ準備完了(PWR) PLC入力信号
電源投入後、コントローラが制御可能になるとONになります。
機能
アラームの状態やサーボの状態等にかかわらず、電源投入後、コントローラの初期化が正常に終了し、制御が可能になるとONになります。
アラーム状態にあっても、コントローラが制御可能状態であればONになります。
(2)非常停止(EMGS) PLC入力信号
コントローラが非常停止状態になるとONになります。
機能
非常停止状態(モータ駆動電源が遮断状態)になるとONになります。非常停止状態が解除されればOFFになります。
(3)アラーム(ALM) PLC入力信号
コントローラの保護回路(機能)が異常を検出するとONになります。
機能
異常を検出して保護回路(機能)が動作した時にONになる信号です。
アラームの原因が解除され、リセット(RES)信号をONにすると動作解除レベルのアラームの場合はOFFになります。(コールドスタートレベルのアラームの場合は電源の再投入が必要です)
アラームを検出すると、コントローラ前面の状態表示LED(7.3(6)参照)が赤色点灯します。
(4)リセット(RES) PLC出力信号
この信号は2つの機能を持っており、コントローラのアラームのリセットおよび一時停止中の残移動量をキャンセルすることができます。
機能
①アラームが発生中に、アラームの原因を取り除いた後、この信号をOFFからONにするとアラーム(ALM)信号をリセットすることができます。(コールドスタートレベルのアラームの場合は電源の再投入が必要です)
②一時停止中にこの信号をOFFからONにすると、残りの移動量をキャンセルすることができます。
4.4.7 入出力信号の制御と機能
4.3

127
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
109
(5)サーボON指令 (SON) PLC出力信号
運転準備完了 (SV) PLC入力信号
SON信号をONにするとサーボONとなります。
サーボONするとコントローラ前面の状態表示LED(7.3(6)参照)が緑色点灯します。
SV信号は、このLEDと同期しています。
機能
SON信号によりコントローラのサーボON/OFFが可能です。
SV信号がONの間、コントローラはサーボON状態となり運転が可能となります。
SON信号とSV信号の関係は次のとおりです。
SON (PLC→ACON、PCON)
SV
(ACON、PCON→PLC)
(PLC → IAI コントローラ )
(IAI コントローラ→ PLC)
ProfiBus-DP
108
7.4.7 入出力信号の制御と機能※ONの表記はビット信号の“1”を表し、OFFは“0”を表します。
ポジション/簡易直値モード、ハーフ直値モードおよびフル直値モードに使用される入出力信号の制御と機能を以下に示します。リモートⅠ/OモードおよびリモートⅠ/Oモード2の入出力信号については、コントローラ本体の取扱説明書をご参照ください。
(1)コントローラ準備完了(PWR) PLC入力信号
電源投入後、コントローラが制御可能になるとONになります。
機能
アラームの状態やサーボの状態等にかかわらず、電源投入後、コントローラの初期化が正常に終了し、制御が可能になるとONになります。
アラーム状態にあっても、コントローラが制御可能状態であればONになります。
(2)非常停止(EMGS) PLC入力信号
コントローラが非常停止状態になるとONになります。
機能
非常停止状態(モータ駆動電源が遮断状態)になるとONになります。非常停止状態が解除されればOFFになります。
(3)アラーム(ALM) PLC入力信号
コントローラの保護回路(機能)が異常を検出するとONになります。
機能
異常を検出して保護回路(機能)が動作した時にONになる信号です。
アラームの原因が解除され、リセット(RES)信号をONにすると動作解除レベルのアラームの場合はOFFになります。(コールドスタートレベルのアラームの場合は電源の再投入が必要です)
アラームを検出すると、コントローラ前面の状態表示LED(7.3(6)参照)が赤色点灯します。
(4)リセット(RES) PLC出力信号
この信号は2つの機能を持っており、コントローラのアラームのリセットおよび一時停止中の残移動量をキャンセルすることができます。
機能
①アラームが発生中に、アラームの原因を取り除いた後、この信号をOFFからONにするとアラーム(ALM)信号をリセットすることができます。(コールドスタートレベルのアラームの場合は電源の再投入が必要です)
②一時停止中にこの信号をOFFからONにすると、残りの移動量をキャンセルすることができます。
4.3

128
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
110
(6)原点復帰 (HOME) PLC出力信号
原点復帰完了(HEND) PLC入力信号
原点復帰中 (GHMS) PLC入力信号
HOME信号をONすると、この指令は立上り(ONエッジ)で処理され、自動で原点復帰動作が行われます。原点復帰中はGHMS信号がONとなります。
原点復帰を完了するとHEND信号がONとなり、GHMS信号がOFFとなります。
HEND信号がONになったらHOME信号をOFFにしてください。HEND信号は一旦ONになると電源がOFFされるか、再度のHOME信号が入力されるまでOFFとなりません。
原点復帰完了後もHOME信号をONすると原点復帰を行うことができます。
HOME (PLC→ACON、PCON)
GHMS (ACON、PCON→PLC)
HEND (ACON、PCON→PLC)
PEND (ACON、PCON→PLC)
MOVE
(ACON、PCON→PLC)
アクチュエータ動作
メカエンド 原点位置で停止
Q注意:リモートⅠ/Oモード、リモートⅠ/Oモード2およびポジション/簡易直値モードでは、電源投入時に原点復帰を行わずにポジションへの位置決め指令をした場合、電源投入後の最初の1回に限り自動的に原点復帰を行った後、位置決めを実行します。ハーフ直値モードおよびフル直値モードでは、電源投入時に原点復帰を行わずにポジションへの位置決め指令をした場合、「エラーコード83 ALARM HOME ABS(原点復帰未完了状態での絶対位置移動指令)」のアラーム(動作解除レベル)となりますので、ご注意ください。
(PLC → IAI コントローラ )
(IAI コントローラ→ PLC)
(IAI コントローラ→ PLC)
(IAI コントローラ→ PLC)
(IAI コントローラ→ PLC)
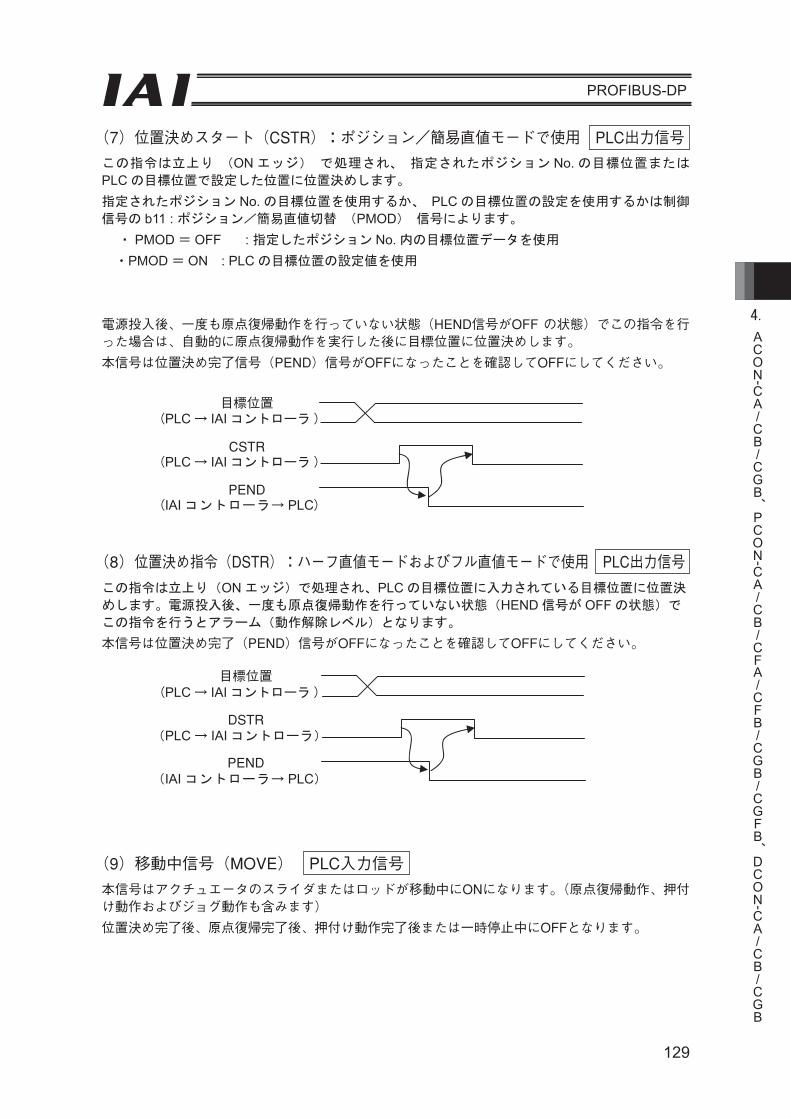
129
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
110
(6)原点復帰 (HOME) PLC出力信号
原点復帰完了(HEND) PLC入力信号
原点復帰中 (GHMS) PLC入力信号
HOME信号をONすると、この指令は立上り(ONエッジ)で処理され、自動で原点復帰動作が行われます。原点復帰中はGHMS信号がONとなります。
原点復帰を完了するとHEND信号がONとなり、GHMS信号がOFFとなります。
HEND信号がONになったらHOME信号をOFFにしてください。HEND信号は一旦ONになると電源がOFFされるか、再度のHOME信号が入力されるまでOFFとなりません。
原点復帰完了後もHOME信号をONすると原点復帰を行うことができます。
HOME (PLC→ACON、PCON)
GHMS (ACON、PCON→PLC)
HEND (ACON、PCON→PLC)
PEND (ACON、PCON→PLC)
MOVE
(ACON、PCON→PLC)
アクチュエータ動作
メカエンド 原点位置で停止
Q注意:リモートⅠ/Oモード、リモートⅠ/Oモード2およびポジション/簡易直値モードでは、電源投入時に原点復帰を行わずにポジションへの位置決め指令をした場合、電源投入後の最初の1回に限り自動的に原点復帰を行った後、位置決めを実行します。ハーフ直値モードおよびフル直値モードでは、電源投入時に原点復帰を行わずにポジションへの位置決め指令をした場合、「エラーコード83 ALARM HOME ABS(原点復帰未完了状態での絶対位置移動指令)」のアラーム(動作解除レベル)となりますので、ご注意ください。
ProfiBus-DP
111
(7)位置決めスタート(CSTR):ポジション/簡易直値モードで使用 PLC出力信号
この指令は立上り(ONエッジ)で処理され、指定されたポジション番号の目標位置またはPLCの目標位置(※)で設定した位置に位置決めします。
指定されたポジション番号の目標位置を使用するか、PLCの目標位置(※)の設定を使用するかは制御信号のb11:ポジション/簡易直値切替(PMOD)信号によります。
・PMOD=OFF :指定したポジション番号内の目標位置データを使用
・PMOD=ON :PLCの目標位置(※)の設定値を使用
(※)7.4.1参照
電源投入後、一度も原点復帰動作を行っていない状態(HEND信号がOFF の状態)でこの指令を行った場合は、自動的に原点復帰動作を実行した後に目標位置に位置決めします。
本信号は位置決め完了信号(PEND)信号がOFFになったことを確認してOFFにしてください。
(8)位置決め指令(DSTR):ハーフ直値モードおよびフル直値モードで使用 PLC出力信号
この指令は立上り(ONエッジ)で処理され、PLCの目標位置(※)に入力されている目標位置に位置決めします。電源投入後、一度も原点復帰動作を行っていない状態(HEND信号がOFFの状態)でこの指令を行うとアラーム(動作解除レベル)となります。
本信号は位置決め完了(PEND)信号がOFFになったことを確認してOFFにしてください。
(※)7.4.1参照
(9)移動中信号(MOVE) PLC入力信号
本信号はアクチュエータのスライダまたはロッドが移動中にONになります。(原点復帰動作、押付け動作およびジョグ動作も含みます)
位置決め完了後、原点復帰完了後、押付け動作完了後または一時停止中にOFFとなります。
目標位置 (PLC→ACON、PCON)
CSTR
(PLC→ACON、PCON)
PEND (ACON、PCON→PLC)
目標位置 (PLC→ACON、PCON)
DSTR
(PLC→ACON、PCON)
PEND (ACON、PCON→PLC)
(PLC → IAI コントローラ )
(PLC → IAI コントローラ )
(PLC → IAI コントローラ)
(PLC → IAI コントローラ )
(IAI コントローラ→ PLC)
(IAI コントローラ→ PLC)
3.4.1 参照
3.4.1 参照
この指令は立上り (ON エッジ) で処理され、 指定されたポジション No. の目標位置または
PLC の目標位置で設定した位置に位置決めします。
指定されたポジション No. の目標位置を使用するか、 PLC の目標位置の設定を使用するかは制御
信号の b11 : ポジション/簡易直値切替 (PMOD) 信号によります。
・ PMOD = OFF : 指定したポジション No. 内の目標位置データを使用
・PMOD = ON : PLC の目標位置の設定値を使用
この指令は立上り(ON エッジ)で処理され、PLC の目標位置に入力されている目標位置に位置決
めします。電源投入後、一度も原点復帰動作を行っていない状態(HEND 信号が OFF の状態)で
この指令を行うとアラーム(動作解除レベル)となります。

130
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
112
(10)位置決め完了信号(PEND) PLC入力信号本信号は目標位置まで移動して、位置決め幅内に到達した場合および押付けが完了した場合にONになります。
サーボOFFからサーボONとなった時、その場を目標位置として位置決めが行われます。従って本信号はONとなり、その後原点復帰(HOME)信号、位置決めスタート(CSTR)信号または位置決め指令(DSTR)信号による位置決め動作の開始でOFFとなります。
(11)一時停止(STP) PLC出力信号
本信号をONにすると軸移動が減速停止します。OFFにすると軸移動が再開されます。
動作再開時の加速度および停止時の減速度は、ポジション/簡易直値モードでは指定ポジション番号(※)で設定しているポジション番号の加減速度の値となり、ハーフ直値モードでは加減速度(※)の値となります。
フル直値モードでは加速度(※)および減速度(※)の値となります。
(※)7.4.1参照
目標位置
位置決め完了信号が ONするタイミング
移動距離
速度
位置決め幅
時間
Q注意:目標位置に停止している時にサーボOFF状態や非常停止状態になると、PEND信号は一旦OFF になります。次に再度サーボON状態に復帰した時、位置決め幅以内であればONに戻ります。またCSTR信号またはDSTR信号がONのままでは位置決め完了してもPEND信号は、ONになりません。
4.4.1 参照
号(※)で設定しているポジション No. の加減速度の値となり、ハーフ直値モードでは加減速度(※)
の値となります。

131
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
113
(12)ゾーン1 (ZONE1) PLC入力信号
ゾーン2 (ZONE2) PLC入力信号
ポジションゾーン(PZONE) PLC入力信号
アクチュエータの現在位置が設定した領域の範囲内にある場合はONになり、範囲外にある場合はOFFになります。
①ゾーン1、ゾーン2
ゾーンの設定はユーザパラメータで設定します。
ZONE1信号はパラメータNo.1“ゾーン境界1+側”および2“ゾーン境界1-側”で設定します。
ZONE2信号はパラメータNo.23“ゾーン境界2+側”および24“ゾーン境界2-側”で設定します。
ZONE1信号およびZONE2信号は原点復帰完了後に有効となり、その後はサーボOFF中でも有効です。
②ポジションゾーン
ゾーンの設定はポジションテーブル、またはPLCで設定します。
ポジション/簡易直値モードの場合はPZONE信号をポジションテーブルで設定します。
フル直値モードの場合はPZONE信号をゾーン境界値(7.4.1参照)で設定します。
(※)ハーフ直値モードはPZONE信号はありません。
PZONE信号は原点復帰完了後の移動指令で有効となり、その後はサーボOFF中でも有効です。
+方向
ゾーン設定+側 ゾーン設定-側 原点
ゾーン信号
アクチュエータ動作
ProfiBus-DP
112
(10)位置決め完了信号(PEND) PLC入力信号本信号は目標位置まで移動して、位置決め幅内に到達した場合および押付けが完了した場合にONになります。
サーボOFFからサーボONとなった時、その場を目標位置として位置決めが行われます。従って本信号はONとなり、その後原点復帰(HOME)信号、位置決めスタート(CSTR)信号または位置決め指令(DSTR)信号による位置決め動作の開始でOFFとなります。
(11)一時停止(STP) PLC出力信号
本信号をONにすると軸移動が減速停止します。OFFにすると軸移動が再開されます。
動作再開時の加速度および停止時の減速度は、ポジション/簡易直値モードでは指定ポジション番号(※)で設定しているポジション番号の加減速度の値となり、ハーフ直値モードでは加減速度(※)の値となります。
フル直値モードでは加速度(※)および減速度(※)の値となります。
(※)7.4.1参照
目標位置
位置決め完了信号が ONするタイミング
移動距離
速度
位置決め幅
時間
Q注意:目標位置に停止している時にサーボOFF状態や非常停止状態になると、PEND信号は一旦OFF になります。次に再度サーボON状態に復帰した時、位置決め幅以内であればONに戻ります。またCSTR信号またはDSTR信号がONのままでは位置決め完了してもPEND信号は、ONになりません。
4.4.1

132
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
114
(13)+ジョグ(JOG+) PLC出力信号
-ジョグ(JOG-) PLC出力信号
ジョグ動作またはインチング動作での起動指令です。
+指令の時は反原点方向への動作で、-指令の時は原点方向への動作です。
①ジョグ動作
ジョグ動作は、ジョグ/インチング切替え(JISL)信号がOFFの時に動作可能です。
JOG+がONの間は反原点方向へ動作を行い、OFFになると減速停止します。
JOG-がONの間は原点方向への動作を行い、OFFになると減速停止します。
動作は次のパラメータの設定値で行います。
・速度は、ジョグ速度/インチング距離切替え(JVEL)信号で指定されたパラメータの値で動作します。
JVEL信号=OFFの場合は、パラメータNo.26“PIOジョグ速度”の値で動作します。
JVEL信号=ONの場合は、パラメータNo.47“PIOジョグ速度2”の値で動作します。
・加減速度は、定格加減速度(アクチュエータ依存)で動作します。
・JOG+とJOG-信号が両方共にONになると減速停止します。
②インチング動作
インチング動作は、JISL信号がONの時に動作可能です。
1回のON入力により、インチング距離分の移動を行います。
JOG+がONで反原点方向へ動作を行い、JOG-がONで原点方向への動作を行います。
動作は次のパラメータの設定値で行います。
・速度は、JVEL信号で指定されたパラメータの値で動作します。
JVEL信号=OFFの場合は、パラメータNo.26“PIOジョグ速度”の値で動作します。
JVEL信号=ONの場合は、パラメータNo.47“PIOジョグ速度2”の値で動作します。
・移動距離は、JVEL信号で指定されたパラメータの値で動作します。
JVEL信号=OFFの場合は、パラメータNo.48“PIOインチング距離”の値で動作します。
JVEL信号=ONの場合は、パラメータNo.49“PIOインチング距離2”の値で動作します。
・加減速度は、定格加減速度(アクチュエータ依存)で動作します。
通常動作中は、+ジョグ信号、-ジョグ信号をONしても通常動作を続けます。(ジョグ信号は無視されます)
一時停止中は、+ジョグ信号、-ジョグ信号をONしても動作しません。
(注)原点復帰完了前はソフトウェアストロークリミットが無効のため、メカエンドに衝突する危険がありま
すのでご注意ください。

133
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
115
(14)ジョグ速度/インチング距離切換え(JVEL) PLC出力信号
ジョグ動作が選択されている時のジョグ速度またはインチング動作が選択されている時のインチング距離を指定するパラメータの切換え信号です。
次のような関係になります。
(15)ジョグ/インチング切替え(JISL) PLC出力信号
ジョグ動作とインチング動作の切替信号です。
JISL=OFF:ジョグ動作
JISL=ON:インチング動作
JISL信号が、ジョグ移動中にON(インチング)に切り替わった場合、減速停止しインチング機能となります。
JISL信号が、インチング移動中にOFF(ジョグ)に切り替わった場合、移動完了後にジョグ機能となります。
JISL信号とジョグ速度/インチング距離切替え(JVEL)信号のON/OFFの関係は以下の表の様になります。
JVEL信号 ジョグ動作:JISL=OFF インチング動作:JISL=ON
OFF パラメータNo.26“ジョグ速度”パラメータNo.26“ジョグ速度”
パラメータNo.48“インチング距離”
ON パラメータNo.47“ジョグ速度2”パラメータNo.47“ジョグ速度2”
パラメータNo.49“インチング距離2”
ジョグ動作 インチング動作
JISL OFF ON
速度 パラメータNo.26“ジョグ速度” パラメータNo.26“ジョグ速度”
JVEL=OFF 移動距離 - パラメータNo.48“インチング距離”
加減速度 定格値(アクチュエータ依存) 定格値(アクチュエータ依存)
速度 パラメータNo.47“ジョグ速度2” パラメータNo.47“ジョグ速度2”
JVEL=ON 移動距離 - パラメータNo.49“インチング距離2”
加減速度 定格値(アクチュエータ依存) 定格値(アクチュエータ依存)
動作 JOG+/JOG-がONの時JOG+/JOG-の立上り(ONエッ
ジ)を検出した時
ProfiBus-DP
114
(13)+ジョグ(JOG+) PLC出力信号
-ジョグ(JOG-) PLC出力信号
ジョグ動作またはインチング動作での起動指令です。
+指令の時は反原点方向への動作で、-指令の時は原点方向への動作です。
①ジョグ動作
ジョグ動作は、ジョグ/インチング切替え(JISL)信号がOFFの時に動作可能です。
JOG+がONの間は反原点方向へ動作を行い、OFFになると減速停止します。
JOG-がONの間は原点方向への動作を行い、OFFになると減速停止します。
動作は次のパラメータの設定値で行います。
・速度は、ジョグ速度/インチング距離切替え(JVEL)信号で指定されたパラメータの値で動作します。
JVEL信号=OFFの場合は、パラメータNo.26“PIOジョグ速度”の値で動作します。
JVEL信号=ONの場合は、パラメータNo.47“PIOジョグ速度2”の値で動作します。
・加減速度は、定格加減速度(アクチュエータ依存)で動作します。
・JOG+とJOG-信号が両方共にONになると減速停止します。
②インチング動作
インチング動作は、JISL信号がONの時に動作可能です。
1回のON入力により、インチング距離分の移動を行います。
JOG+がONで反原点方向へ動作を行い、JOG-がONで原点方向への動作を行います。
動作は次のパラメータの設定値で行います。
・速度は、JVEL信号で指定されたパラメータの値で動作します。
JVEL信号=OFFの場合は、パラメータNo.26“PIOジョグ速度”の値で動作します。
JVEL信号=ONの場合は、パラメータNo.47“PIOジョグ速度2”の値で動作します。
・移動距離は、JVEL信号で指定されたパラメータの値で動作します。
JVEL信号=OFFの場合は、パラメータNo.48“PIOインチング距離”の値で動作します。
JVEL信号=ONの場合は、パラメータNo.49“PIOインチング距離2”の値で動作します。
・加減速度は、定格加減速度(アクチュエータ依存)で動作します。
通常動作中は、+ジョグ信号、-ジョグ信号をONしても通常動作を続けます。(ジョグ信号は無視されます)
一時停止中は、+ジョグ信号、-ジョグ信号をONしても動作しません。
(注)原点復帰完了前はソフトウェアストロークリミットが無効のため、メカエンドに衝突する危険がありま
すのでご注意ください。

134
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
116
(16)教示モード指令(MODE) PLC出力信号
教示モード信号(MODES) PLC入力信号
MODE信号をONにすると、通常運転モードから教示モードに切替わります。
各軸のコントローラは教示モードに切替わるとMODES信号がONとなります。
PLC側では、MODES信号がONになったことを確認してから教示操作を行ってください。
(注)通常運転モードから教示モードに切替えるためには、以下の状態となっていることが必要です。
・アクチュエータの動作(モータ)が停止中
・+ジョグ(JOG+)信号および-ジョグ(JOG-)信号がOFF
・ポジションデータ取込み指令(PWRT)信号および位置決めスタート(CSTR)信号がOFF
(注) PWRT信号がOFFになっていないと通常運転モードに戻りません。
(17)ポジションデータ取込み指令(PWRT) PLC出力信号
ポジションデータ取込み完了(WEND) PLC入力信号
PWRT信号は教示モード信号(MODES)がONの時に有効です。
PWRT信号をONにしてください(※1)、この時点の現在位置データが、PLCの指定ポジション番号(7.4.1参照)に設定しているポジション番号の位置欄に書き込まれます。(※2)
書込みが完了するとWEND信号がONになります。
上位側PLCではWEND信号がONになった後にPWRT信号をOFFにしてください。
WEND信号がONする前にPWRT信号をOFFするとWEND信号はONになりません。
PWRT信号をOFFにするとWEND信号がOFFになります。
(※1)20msec以上連続でONにしてください。20msec以下の場合は書込みが行われない場合があります。
(※2)位置以外のデータが未定義であればパラメータ初期値が書き込まれます。(コントローラ本体の取扱説明書参照)
(18)ブレーキ強制解除(BKRL) PLC出力信号
本信号をONにすることでブレーキを強制的に解除させることができます。
MODES (ACON,PCON→PLC)
PWRT (PLC→ACON、PCON)
WEND (ACON,PCON→PLC)
20msec以上
PWRT 信号を ON にしてください(※ 1)、この時点の現在位置データが、PLC の指定ポジション
No.(4.4.1 参照)に設定しているポジション No. の位置欄に書き込まれます。(※2)
(PLC → IAI コントローラ )
(IAI コントローラ→ PLC)
(IAI コントローラ→ PLC)

135
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
117
(19)運転モード(RMOD) PLC出力信号
運転モード状態(RMDS) PLC入力信号
RMOD信号とコントローラ前面のMODEスイッチにより次の様に運転モードが選択されます。
また現在AUTO/MANUのどちらに設定されているかRMDS信号で確認することができます。
次にRMOD信号とMODEスイッチの組合せによる運転モードを示します。
(注)MANUモードではPLCから運転を行うことはできません。
(20)ポジション/簡易直値切替(PMOD) PLC出力信号
移動時の目標位置をコントローラのポジションテーブルに登録されている値を使用するか、PLCの目標位置(※)で指定されている値を使用するかを切替えます。
PMOD=OFF:ポジションテーブル使用
PMOD=ON :PLCの目標位置(※)の値使用
(※)7.4.1参照
(21)押付け指定(PUSH) PLC出力信号
本信号をONにしてから移動指令を行うと押付け動作となります。
本信号をOFFに設定すると通常位置決め動作となります。
(本信号の設定タイミングは、7.6運転の(2)ハーフ直値モードでの運転参照)
(22)押付け方向指定(DIR) PLC出力信号
押付けを行う方向を指定します。
本信号をOFFにすると目標位置から位置決め幅を減算した値に向かって、押付けを行います。
本信号をONにすると目標位置に位置決め幅を加算した値に向かって、押付けを行います。
通常位置決め動作の場合は、本信号は無効になります。
(本信号の設定タイミングは、7.6運転の(2)ハーフ直値モードでの運転参照)
コントローラMODE コントローラMODE
スイッチがAUTO側 スイッチがMANU側
RMOD信号がOFF AUTOモード MANUモード
(AUTOモード指定) (RMDS=OFF) (RMDS=ON)
RMOD信号がON MANUモード MANUモード
(MANUモード指定) (RMDS=ON) (RMDS=ON)
速度
目標位置 DIR=OFFの時 DIR=ONの時
移動距離
位置決め幅 位置決め幅 位置決め幅
4.6 運転の
4.6 運転の
4.4.1 参照
ProfiBus-DP
116
(16)教示モード指令(MODE) PLC出力信号
教示モード信号(MODES) PLC入力信号
MODE信号をONにすると、通常運転モードから教示モードに切替わります。
各軸のコントローラは教示モードに切替わるとMODES信号がONとなります。
PLC側では、MODES信号がONになったことを確認してから教示操作を行ってください。
(注)通常運転モードから教示モードに切替えるためには、以下の状態となっていることが必要です。
・アクチュエータの動作(モータ)が停止中
・+ジョグ(JOG+)信号および-ジョグ(JOG-)信号がOFF
・ポジションデータ取込み指令(PWRT)信号および位置決めスタート(CSTR)信号がOFF
(注) PWRT信号がOFFになっていないと通常運転モードに戻りません。
(17)ポジションデータ取込み指令(PWRT) PLC出力信号
ポジションデータ取込み完了(WEND) PLC入力信号
PWRT信号は教示モード信号(MODES)がONの時に有効です。
PWRT信号をONにしてください(※1)、この時点の現在位置データが、PLCの指定ポジション番号(7.4.1参照)に設定しているポジション番号の位置欄に書き込まれます。(※2)
書込みが完了するとWEND信号がONになります。
上位側PLCではWEND信号がONになった後にPWRT信号をOFFにしてください。
WEND信号がONする前にPWRT信号をOFFするとWEND信号はONになりません。
PWRT信号をOFFにするとWEND信号がOFFになります。
(※1)20msec以上連続でONにしてください。20msec以下の場合は書込みが行われない場合があります。
(※2)位置以外のデータが未定義であればパラメータ初期値が書き込まれます。(コントローラ本体の取扱説明書参照)
(18)ブレーキ強制解除(BKRL) PLC出力信号
本信号をONにすることでブレーキを強制的に解除させることができます。
MODES (ACON,PCON→PLC)
PWRT (PLC→ACON、PCON)
WEND (ACON,PCON→PLC)
20msec以上

136
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
118
(23)押付け空振り(PSFL) PLC入力信号
押付け動作を行ったが、コントローラのポジションテーブルの位置決め幅またはPLCの位置決め幅(7.4.1参照)で設定した距離を移動してもワークに押し当たらなかった時にONとなります。
(本信号の設定タイミングは、7.6運転の(2)ハーフ直値モードでの運転参照)
(24)インクリメンタル指定(INC) PLC出力信号
本信号がONの場合に移動指令を行うと現在の位置を基準とし、PLCの目標位置(※)に入力された値の移動を行います。(インクリメンタル移動)
本信号がOFFの場合にはPLCの目標位置(※)の値に移動します。
(※)7.4.1参照
(25)押付け動作中(PUSHS) PLC入力信号
本信号は押付け動作中にONとなります。
本信号は、押付け空振りまたは一時停止または次の移動指令またはサーボOFFになるとOFFとなります。
(本信号の設定タイミングは、7.6運転の(2)ハーフ直値モードでの運転参照)
速度 目標位置
移動距離
位置決め幅 PUSHS=ON
ProfiBus-DP
119
(26)負荷出力判定(LOAD) PLC入力信号 PCON専用機能
本信号は押付け動作の場合だけ有効です。
圧入用途で使用するには、押付け動作中に設定した負荷閾値に達したかを知る必要があります。
負荷閾値と検定幅範囲はPLCで設定し、検定幅範囲内で指令トルク(モータ電流)が閾値を超えた時、本信号はONします。
本信号は、指令トルクが合計された一定時間、閾値を超えたかで判断を行います。
この処理手順は押し付け判定と同じです。負荷出力の判定時間はパラメータNo.50“負荷出力判定時間”で任意に変更することが可能です。
本信号は次の移動指令を受けるまで保持されます。
・押付け速度はパラメータNo.34“押付け速度”で設定します。
出荷時はアクチュエータ特性により個別設定されています。
ワークの材質、形状などを考慮して適切な速度を指定してください。
・パラメータNo.50“負荷出力判定時間”を設定します。
・パラメータNo.51“トルク検定範囲”を0[有効]に設定します。
・閾値検定幅はPLCのゾーン境界値+、ゾーン境界値-(※)で設定します。
・閾値はPLCの負荷電流閾値(※)で設定します。
・位置決め幅は、PLCの位置決め幅(※)で設定します。
ワークの機械的バラつきを考慮して最後方の位置より少し長めに設定してください。
詳細は、コントローラ本体の取扱説明書を参照願います。
(※)7.4.1参照
Q警告:・目標位置の手前でワークに押し当たるとサーボ異常になります。目標位置とワークの位置関係に充分注意してください。・アクチュエータは、電流制限値で決定される停止時押付け電流でワークを押し続けています。停止している状態ではありませんので、この時の取扱いには充分気をつけてください。
トルク検定範囲内で指令トルクが閾値 を超えたら本信号がONする位置
ワークに押し当たり、押付け完了と判断して 位置決め完了信号がONする位置
速度
移動距離
目標位置
検定幅
位置決め幅(最大押し込み量)
4.6 運転の
4.6 運転の
(4.4.1 参照)
4.4.1 参照
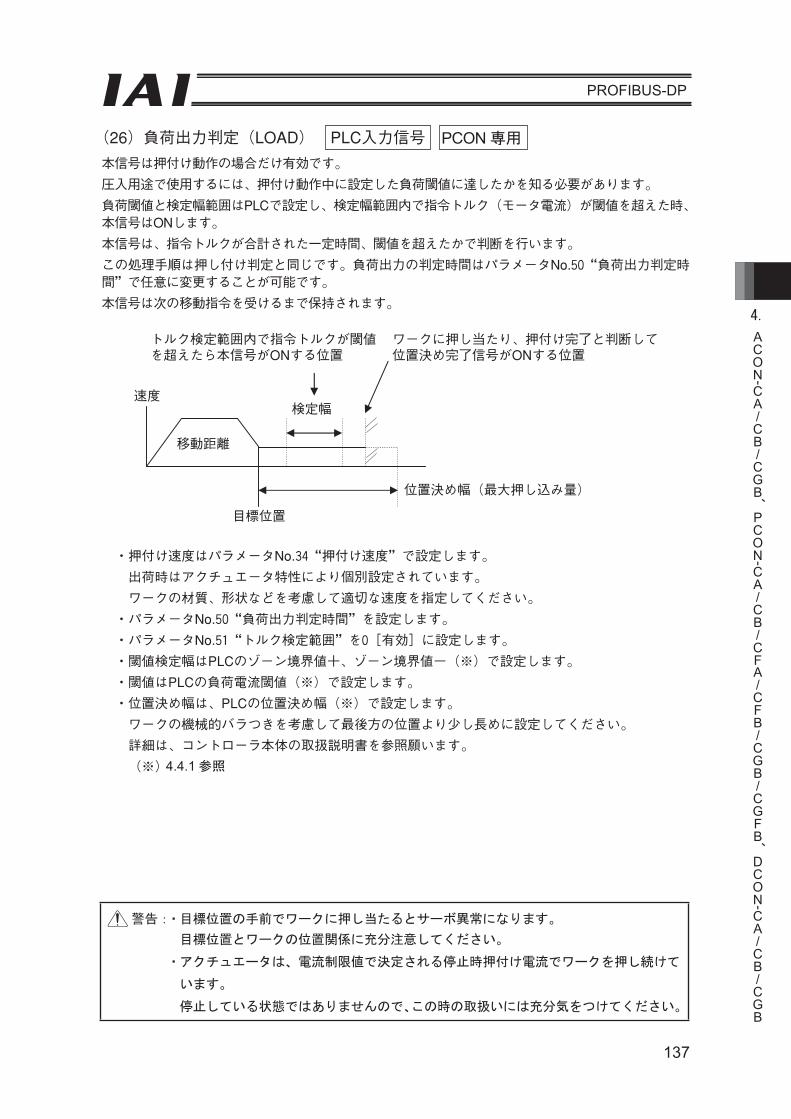
137
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
118
(23)押付け空振り(PSFL) PLC入力信号
押付け動作を行ったが、コントローラのポジションテーブルの位置決め幅またはPLCの位置決め幅(7.4.1参照)で設定した距離を移動してもワークに押し当たらなかった時にONとなります。
(本信号の設定タイミングは、7.6運転の(2)ハーフ直値モードでの運転参照)
(24)インクリメンタル指定(INC) PLC出力信号
本信号がONの場合に移動指令を行うと現在の位置を基準とし、PLCの目標位置(※)に入力された値の移動を行います。(インクリメンタル移動)
本信号がOFFの場合にはPLCの目標位置(※)の値に移動します。
(※)7.4.1参照
(25)押付け動作中(PUSHS) PLC入力信号
本信号は押付け動作中にONとなります。
本信号は、押付け空振りまたは一時停止または次の移動指令またはサーボOFFになるとOFFとなります。
(本信号の設定タイミングは、7.6運転の(2)ハーフ直値モードでの運転参照)
速度 目標位置
移動距離
位置決め幅 PUSHS=ON
警告: ・ 目標位置の手前でワークに押し当たるとサーボ異常になります。 目標位置とワークの位置関係に充分注意してください。
・ アクチュエータは、電流制限値で決定される停止時押付け電流でワークを押し続けて
います。 停止している状態ではありませんので、この時の取扱いには充分気をつけてください。
ProfiBus-DP
119
(26)負荷出力判定(LOAD) PLC入力信号 PCON専用機能
本信号は押付け動作の場合だけ有効です。
圧入用途で使用するには、押付け動作中に設定した負荷閾値に達したかを知る必要があります。
負荷閾値と検定幅範囲はPLCで設定し、検定幅範囲内で指令トルク(モータ電流)が閾値を超えた時、本信号はONします。
本信号は、指令トルクが合計された一定時間、閾値を超えたかで判断を行います。
この処理手順は押し付け判定と同じです。負荷出力の判定時間はパラメータNo.50“負荷出力判定時間”で任意に変更することが可能です。
本信号は次の移動指令を受けるまで保持されます。
・押付け速度はパラメータNo.34“押付け速度”で設定します。
出荷時はアクチュエータ特性により個別設定されています。
ワークの材質、形状などを考慮して適切な速度を指定してください。
・パラメータNo.50“負荷出力判定時間”を設定します。
・パラメータNo.51“トルク検定範囲”を0[有効]に設定します。
・閾値検定幅はPLCのゾーン境界値+、ゾーン境界値-(※)で設定します。
・閾値はPLCの負荷電流閾値(※)で設定します。
・位置決め幅は、PLCの位置決め幅(※)で設定します。
ワークの機械的バラつきを考慮して最後方の位置より少し長めに設定してください。
詳細は、コントローラ本体の取扱説明書を参照願います。
(※)7.4.1参照
Q警告:・目標位置の手前でワークに押し当たるとサーボ異常になります。目標位置とワークの位置関係に充分注意してください。・アクチュエータは、電流制限値で決定される停止時押付け電流でワークを押し続けています。停止している状態ではありませんので、この時の取扱いには充分気をつけてください。
トルク検定範囲内で指令トルクが閾値 を超えたら本信号がONする位置
ワークに押し当たり、押付け完了と判断して 位置決め完了信号がONする位置
速度
移動距離
目標位置
検定幅
位置決め幅(最大押し込み量)
PCON 専用
4.4.1 参照

138
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
121
(28)停止制御モード(SMOD) PLC出力信号 PCON専用機能
パルスモータの一般的特徴としてACサーボモータに比べて停止時の保持電流が大きいことが上げられます。このため、待機位置での停止時間が長い場合には省エネルギ対策の一環として停止時の電力消費量を低減する方法を用意しています。
SMOD=ON :待機中はフルサーボ制御方式を使用する
SMOD=OFF :待機中
・フルサーボ制御方式
パルスモータをサーボ制御することにより保持電流を低減することができます。
アクチュエータ機種や負荷条件等により低減度合いは異なりますが、保持電流はおよそ1/2~1/4程度になります。
実際の保持電流は、パソコン対応ソフトの電流モニタ画面で確認することができます。
(注)外力が加わるような状況や停止位置によっては微振動や異音が発生する可能性があります。
装置全体で支障がないことを確認してご使用ください。
ProfiBus-DP
120
(27)トルクレベル(TRQS) PLC入力信号 PCON専用機能
本信号は押付け動作の場合だけ有効です。
押付け動作中(位置決め幅移動中)にモータ電流が負荷閾値に達した場合、本信号がONします。
電流をレベルで監視しているので、電流が変化すれば本信号のON、OFFの状態も変化します。
押付けに使える速度はモータとリードによって異なるため、パラメータを調整する必要があります。
・押付け速度はパラメータNo.34“押付け速度”で設定します。
出荷時はアクチュエータ特性により個別設定されています。
ワークの材質、形状などを考慮して適切な速度を指定してください。
・パラメータNo.50“負荷出力判定時間”を設定します。
・パラメータNo.51“トルク検定範囲”を1[無効]に設定します。
・閾値はPLCの負荷電流閾値(※)で設定します。
・位置決め幅は、PLCの位置決め幅(※)で設定します。
ワークの機械的バラつきを考慮して最後方の位置より少し長めに設定してください。
詳細は、コントローラ本体の取扱説明書を参照願います。
(※)7.4.1参照
Q警告:・目標位置の手前でワークに押し当たるとサーボ異常になります。目標位置とワークの位置関係に充分注意してください。・アクチュエータは、電流制限値で決定される停止時押付け電流でワークを押し続けています。停止している状態ではありませんので、この時の取扱いには充分気をつけてください。
ワークに押し当たり、押付け完了と判断して 位置決め完了信号がONする位置
本信号が出力する範囲
位置決め幅(最大押し込み量)
目標位置
移動距離
速度
警告: ・ 目標位置の手前でワークに押し当たるとサーボ異常になります。 目標位置とワークの位置関係に充分注意してください。
・ アクチュエータは、電流制限値で決定される停止時押付け電流でワークを押し続けて
います。 停止している状態ではありませんので、この時の取扱いには充分気をつけてください。
4.4.1 参照
PCON 専用

139
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
121
(28)停止制御モード(SMOD) PLC出力信号 PCON専用機能
パルスモータの一般的特徴としてACサーボモータに比べて停止時の保持電流が大きいことが上げられます。このため、待機位置での停止時間が長い場合には省エネルギ対策の一環として停止時の電力消費量を低減する方法を用意しています。
SMOD=ON :待機中はフルサーボ制御方式を使用する
SMOD=OFF :待機中
・フルサーボ制御方式
パルスモータをサーボ制御することにより保持電流を低減することができます。
アクチュエータ機種や負荷条件等により低減度合いは異なりますが、保持電流はおよそ1/2~1/4程度になります。
実際の保持電流は、パソコン対応ソフトの電流モニタ画面で確認することができます。
(注)外力が加わるような状況や停止位置によっては微振動や異音が発生する可能性があります。
装置全体で支障がないことを確認してご使用ください。
ProfiBus-DP
120
(27)トルクレベル(TRQS) PLC入力信号 PCON専用機能
本信号は押付け動作の場合だけ有効です。
押付け動作中(位置決め幅移動中)にモータ電流が負荷閾値に達した場合、本信号がONします。
電流をレベルで監視しているので、電流が変化すれば本信号のON、OFFの状態も変化します。
押付けに使える速度はモータとリードによって異なるため、パラメータを調整する必要があります。
・押付け速度はパラメータNo.34“押付け速度”で設定します。
出荷時はアクチュエータ特性により個別設定されています。
ワークの材質、形状などを考慮して適切な速度を指定してください。
・パラメータNo.50“負荷出力判定時間”を設定します。
・パラメータNo.51“トルク検定範囲”を1[無効]に設定します。
・閾値はPLCの負荷電流閾値(※)で設定します。
・位置決め幅は、PLCの位置決め幅(※)で設定します。
ワークの機械的バラつきを考慮して最後方の位置より少し長めに設定してください。
詳細は、コントローラ本体の取扱説明書を参照願います。
(※)7.4.1参照
Q警告:・目標位置の手前でワークに押し当たるとサーボ異常になります。目標位置とワークの位置関係に充分注意してください。・アクチュエータは、電流制限値で決定される停止時押付け電流でワークを押し続けています。停止している状態ではありませんので、この時の取扱いには充分気をつけてください。
ワークに押し当たり、押付け完了と判断して 位置決め完了信号がONする位置
本信号が出力する範囲
位置決め幅(最大押し込み量)
目標位置
移動距離
速度
PCON 専用
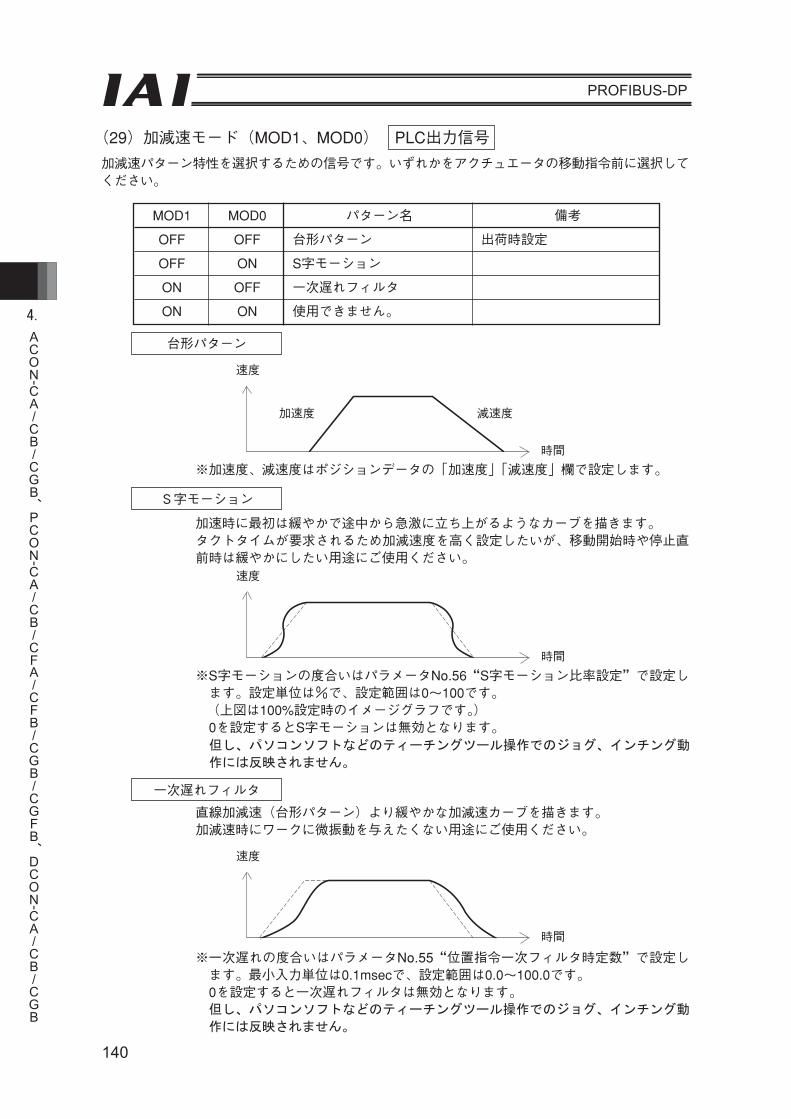
140
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
122
(29)加減速モード(MOD1、MOD0) PLC出力信号 ACON専用機能
加減速パターン特性を選択するための信号です。いずれかをアクチュエータの移動指令前に選択してください。
MOD1 MOD0 パターン名 備考
OFF OFF 台形パターン 出荷時設定
OFF ON S字モーション
ON OFF 一次遅れフィルタ
ON ON 使用できません。
加速度
速度
減速度
時間
※加速度、減速度はポジションデータの「加速度」「減速度」欄で設定します。
直線加減速(台形パターン)より緩やかな加減速カーブを描きます。加減速時にワークに微振動を与えたくない用途にご使用ください。
台形パターン
速度
時間
一次遅れフィルタ
※一次遅れの度合いはパラメータNo.55“位置指令一次フィルタ時定数”で設定します。最小入力単位は0.1msecで、設定範囲は0.0~100.0です。0を設定すると一次遅れフィルタは無効となります。但し、パソコンやティーチングボックス操作でのジョグ、インチング動作には反映されません。
加速時に最初は緩やかで途中から急激に立ち上がるようなカーブを描きます。タクトタイムが要求されるため加減速度を高く設定したいが、移動開始時や停止直前時は緩やかにしたい用途にご使用ください。
※S字モーションの度合いはパラメータNo.56“S字モーション比率設定”で設定します。設定単位は%で、設定範囲は0~100です。(上図は100%設定時のイメージグラフです。)0を設定するとS字モーションは無効となります。但し、パソコンやティーチングボックス操作でのジョグ、インチング動作には反映されません。
速度
時間
S字モーション
但し、パソコンソフトなどのティーチングツール操作でのジョグ、インチング動
作には反映されません。
但し、パソコンソフトなどのティーチングツール操作でのジョグ、インチング動
作には反映されません。

141
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
122
(29)加減速モード(MOD1、MOD0) PLC出力信号 ACON専用機能
加減速パターン特性を選択するための信号です。いずれかをアクチュエータの移動指令前に選択してください。
MOD1 MOD0 パターン名 備考
OFF OFF 台形パターン 出荷時設定
OFF ON S字モーション
ON OFF 一次遅れフィルタ
ON ON 使用できません。
加速度
速度
減速度
時間
※加速度、減速度はポジションデータの「加速度」「減速度」欄で設定します。
直線加減速(台形パターン)より緩やかな加減速カーブを描きます。加減速時にワークに微振動を与えたくない用途にご使用ください。
台形パターン
速度
時間
一次遅れフィルタ
※一次遅れの度合いはパラメータNo.55“位置指令一次フィルタ時定数”で設定します。最小入力単位は0.1msecで、設定範囲は0.0~100.0です。0を設定すると一次遅れフィルタは無効となります。但し、パソコンやティーチングボックス操作でのジョグ、インチング動作には反映されません。
加速時に最初は緩やかで途中から急激に立ち上がるようなカーブを描きます。タクトタイムが要求されるため加減速度を高く設定したいが、移動開始時や停止直前時は緩やかにしたい用途にご使用ください。
※S字モーションの度合いはパラメータNo.56“S字モーション比率設定”で設定します。設定単位は%で、設定範囲は0~100です。(上図は100%設定時のイメージグラフです。)0を設定するとS字モーションは無効となります。但し、パソコンやティーチングボックス操作でのジョグ、インチング動作には反映されません。
速度
時間
S字モーション
31 ALML PLC 1
ALM_LED
(32) アブソリュートバッテリ電圧低下警告 (BALM)
シリアルアブソ仕様で、アブソリュートバッテリ電圧正常時、または、インクリメンタル仕様の
場合には OFF になります。
アブソリュートバッテリ電圧が 3.1V まで低下すると本信号は ON します。そのまま使用を続け、
2.5V まで低下すると、コントローラは位置情報を保持できなくなります。
(アブソリュート仕様で本信号が ON したら、速やかにバッテリを交換してください。)
PLC 入力信号 ACON 専用
30 ASO1 ASO0 PLC
OFF
ASO1 ASO0 OFF OFF
OFF ON OFFT No.36
ON OFF OFFT No.37
ON ON OFFT No.38

142
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
(33) 制振制御モード選択 0、1 (NTC0, NTC1) PLC 出力信号 ACON 専用
制振制御機能は、当社アクチュエータによって引き起こされる負荷の振動を抑制します。
振動数を測定し、パラメータセットに設定します(最大 3 種)。設定されたパラメータセットの中
から 1 種類を本信号の組合せで選択して使用します。
詳細はコントローラ本体の取扱説明書を参照してください。
NTC1 NTC0 機能 備考
OFF OFF 制振制御を使用しない 出荷時設定
OFF ON パラメータセット 1 選択
ON OFF パラメータセット 2 選択
ON ON パラメータセット 3 選択
入力タイミング
下図に NTC1・NTC0 信号入力タイミングを表示します。
注意 : 移動指令 (DSTR) 認識時に NTC0・NTC1 信号状態を取り込む為、移動中に NTC0・NTC1 信号を ON・OFF 行っても無視されます。
NTC0
NTC1
DSTRT1※
T1 0sm
あらかじめサーボゲインパラメータ(6 個)を 4 セット登録しておくことで、ポジション移動ごと
に選択したセットで運転可能です。
詳細はコントローラ本体の取扱説明書を参照願います。
GSL1 GSL0 機能 備考
OFF OFF パラメータセット 0 選択 出荷時設定
OFF ON パラメータセット 1 選択
ON OFF パラメータセット 2 選択
ON ON パラメータセット 3 選択
(34) サーボゲインパラメータセット選択 (GSL0, GSL1) PLC 出力信号
ACON 専用

143
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
123
7.5 入出力信号のタイミングPLCのシーケンスプログラムでロボシリンダの運転を行うためにいずれかの制御信号をONし、その応答(状態)信号がPLCに帰ってくるまでの最大応答時間は次の式で表されます。
最大応答時間(msec)=Yt+Xt+2+指令処理時間(動作時間等)Yt:マスタ局→スレーブ局伝送遅れ時間 フィールドネットワーク伝送遅れ時間Xt:スレーブ局→マスタ局伝送遅れ時間
マスタ局→スレーブ局伝送遅れ時間(Yt)、スレーブ局→マスタ局伝送遅れ時間(Xt)については、ProfiBus-DPマスタユニットおよび搭載されるPLCの取扱説明書をご参照ください。
PLCシーケンスプログラム 制御信号
状態信号
ACON,PCON 制御信号
状態信号
マスタ局→スレーブ局 伝送遅れ時間(Yt)
スレーブ局→マスタ局 伝送遅れ時間(Xt)
指令処理時間
12
3
PCON, ACON, DCON
4.5 入出力信号のタイミング
マスタ局→スレーブ局伝送遅れ時間(Yt)、スレーブ局→マスタ局伝送遅れ時間(Xt)については、
PROFIBUS-DP マスタユニットおよび搭載される PLC の取扱説明書をご参照ください。

144
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
124
7.6 運転次にポジション/簡易直値モード、ハーフ直値モードおよびフル直値モードの基本動作例のタイミングを示します。
リモートⅠ/OモードおよびリモートⅠ/Oモード2についてはコントローラの取扱説明書をご参照ください。
(リモートⅠ/Oモード2の現在位置、現在速度の読取りは適宜PLCから読取ってください。)
(1)ポジション/簡易直値モードでの運転
PLCの目標位置に位置データを書込み、速度、加減速度、位置決め幅、押付け電流制限値等はポジションテーブルで指定して運転します。
動作例(通常位置決め動作)
(準備)目標位置以外のポジションデータ(速度、加減速度、位置決め幅等)をポジションテーブルに設定します。
ポジション/簡易直値切替(PMOD)信号をONします。
①目標位置データを出力アドレスn、n+1の目標位置(※)に設定します。
②速度、加減速度等を設定したポジション番号を出力アドレスn+2の指定ポジション番号(※)に設定します。
③位置決め完了(PEND)信号がONになっているまたは、移動中信号(MOVE)がOFFの状態で、位置決めスタート(CSTR)信号をONにします。
①、②で設定したデータはCSTR信号の立上りエッジでコントローラに読み込まれます。
④CSTR信号がONになった後、tpdf後にPENDがOFFします。
⑤PEND信号がOFF またはMOVE信号がONになったことを確認してからCSTR信号をOFFにします。目標位置(※)の値はCSTR信号をOFFにするまで変更しないでください。
⑥PEND信号がOFFになるのと同時にMOVE信号がONになります。
⑦入力アドレスn、n+1の現在位置データ(※)は常時更新されています。残移動量がポジションデータで設定された位置決め幅の範囲内になると、CSTR信号がOFFの場合にPEND信号がONになり、完了ポジション番号が入力アドレスn+2の完了ポジション番号(※)に出力されます。
従って、位置決め完了時の完了ポジション番号(※)の読み取りは、PEND信号がONになり適当な時間(残移動量移動時間)をおいてから確認してください。
また現在位置データは停止中でも振動等により多少変化することがあります。
⑧移動中に目標位置データを変更することが可能です。
目標位置を変更するには、目標位置データの変更を行ってPLCのスキャンタイム以上経過してからCSTR信号をONにします。
CSTR信号はPLCのスキャンタイム以上経過してから値を変更してください。
動作例(押付け動作)
押付け動作は(準備)の段階でポジションデータの押付け欄に電流制限値を設定します。
押付け欄に値を設定したポジション番号に位置決めを行うと押付け動作となります。
(※)7.4.1参照
取扱説明書を参照くだ
さい。
4.6 運転
4.4.1 参照
②速度、加減速度等を設定したポジション No. を出力アドレス n + 2 の指定ポジション番号(※)
に設定します。
なり、完了ポジション No. が入力アドレス n + 2 の完了ポジション No.(※)に出力されます。
従って、位置決め完了時の完了ポジション No.(※)の読み取りは、PEND 信号が ON になり適
当な時間(残移動量移動時間)をおいてから確認してください。
押付け欄に値を設定したポジション No. に位置決めを行うと押付け動作となります。

145
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
位置決めスタート CSTR
位置決め完了 PEND
現在位置
移動中 MOVE
アクチュエータ移動
p1
n1 n2
n2 n3
tdpf
位置決め幅
T1
④ ⑤
⑥
※
※
目標位置データ 設定値 n1 n2 n3
①
②
③
⑦ ⑦
指定ポジション No.
(PCON, ACON, DCON → PLC)
(PCON, ACON, DCON → PLC)
(PCON, ACON, DCON → PLC)
(PLC → PCON, ACON, DCON)
(PLC → PCON, ACON, DCON)
(PLC → PCON, ACON, DCON)
※ T1:上位コントローラのスキャンタイムを考慮し、
T1 ≧ 0ms となるようにしてください。
※ Yt+Xt ≦ tdpf ≦ Yt+Xt+2(msec)
ProfiBus-DP
124
7.6 運転次にポジション/簡易直値モード、ハーフ直値モードおよびフル直値モードの基本動作例のタイミングを示します。
リモートⅠ/OモードおよびリモートⅠ/Oモード2についてはコントローラの取扱説明書をご参照ください。
(リモートⅠ/Oモード2の現在位置、現在速度の読取りは適宜PLCから読取ってください。)
(1)ポジション/簡易直値モードでの運転
PLCの目標位置に位置データを書込み、速度、加減速度、位置決め幅、押付け電流制限値等はポジションテーブルで指定して運転します。
動作例(通常位置決め動作)
(準備)目標位置以外のポジションデータ(速度、加減速度、位置決め幅等)をポジションテーブルに設定します。
ポジション/簡易直値切替(PMOD)信号をONします。
①目標位置データを出力アドレスn、n+1の目標位置(※)に設定します。
②速度、加減速度等を設定したポジション番号を出力アドレスn+2の指定ポジション番号(※)に設定します。
③位置決め完了(PEND)信号がONになっているまたは、移動中信号(MOVE)がOFFの状態で、位置決めスタート(CSTR)信号をONにします。
①、②で設定したデータはCSTR信号の立上りエッジでコントローラに読み込まれます。
④CSTR信号がONになった後、tpdf後にPENDがOFFします。
⑤PEND信号がOFF またはMOVE信号がONになったことを確認してからCSTR信号をOFFにします。目標位置(※)の値はCSTR信号をOFFにするまで変更しないでください。
⑥PEND信号がOFFになるのと同時にMOVE信号がONになります。
⑦入力アドレスn、n+1の現在位置データ(※)は常時更新されています。残移動量がポジションデータで設定された位置決め幅の範囲内になると、CSTR信号がOFFの場合にPEND信号がONになり、完了ポジション番号が入力アドレスn+2の完了ポジション番号(※)に出力されます。
従って、位置決め完了時の完了ポジション番号(※)の読み取りは、PEND信号がONになり適当な時間(残移動量移動時間)をおいてから確認してください。
また現在位置データは停止中でも振動等により多少変化することがあります。
⑧移動中に目標位置データを変更することが可能です。
目標位置を変更するには、目標位置データの変更を行ってPLCのスキャンタイム以上経過してからCSTR信号をONにします。
CSTR信号はPLCのスキャンタイム以上経過してから値を変更してください。
動作例(押付け動作)
押付け動作は(準備)の段階でポジションデータの押付け欄に電流制限値を設定します。
押付け欄に値を設定したポジション番号に位置決めを行うと押付け動作となります。
(※)7.4.1参照

146
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
126
(2)ハーフ直値モードでの運転
PLCの目標位置、位置決め幅、指定速度、加減速度および押付け電流制限指定にデータを指定して運転します。
動作例(押付け動作)
①目標位置データを出力アドレスn、n+1の目標位置(※)に設定します。
②位置決め幅データを出力アドレスn+2、n+3の位置決め幅(※)に設定します。
③速度データを出力アドレスn+4の速度(※)に設定します。
④加減速度データを出力アドレスn+5の加減速度(※)に設定します。
⑤押付け電流制限データを出力アドレスn+6の押付け電流制限値(※)に設定します。
⑥押付け指定(PUSH)信号をONにします。
⑦押付け方向指定(DIR)信号で押付け方向を指定します。(7.4.7(22)参照)
⑧位置決め完了(PEND)信号がONになっているまたは、移動中信号(MOVE)がOFFの状態で、位置決め指令(DSTR)信号をONにします。
①~⑤で設定したデータはDSTR信号の立上りエッジでコントローラに読み込まれます。
⑨DSTR信号がONになった後、tpdf後にPENDがOFFします。
⑩PEND信号がOFF またはMOVE信号がONになったことを確認してからDSTR信号をOFFにします。①~⑤で設定した値はDSTR信号をOFFにするまで変更しないでください。
⑪PEND信号がOFFになるのと同時にMOVE信号がONになります。
⑫入力アドレスn、n+1の現在位置データ(※)は常時更新されています。
⑬PEND信号はDSTR信号がOFFで、モータの電流が⑤で設定した電流制限値に達するとONになります。(押付け完了)
②で設定した位置決め幅に達しても、モータの電流が⑤で設定した電流制限値に到達しない場合は、押付け空振り(PSFL)信号がONになります。この場合、PEND信号はONになりません。(押付け空振り)
⑭PEND信号またはPSFL信号がONとなった後、PUSH信号をOFFにします。
動作例(通常位置決め動作)
通常位置決め動作は、⑥の信号をOFFに設定します。
残移動量がポジションデータで設定された位置決め幅の範囲内になると、DSTR信号がOFFの場合にPEND信号がONになります。
(※) 7.4.1参照4.4.1 参照
4.4.7

147
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
目標位置データ 設定値
位置決め幅データ 設定値
速度データ 設定値
加減速度データ 設定値
押付け電流制限値 設定値
押付け指定 PUSH
押付け方向指定 DIR
位置決め指令 DSTR
位置決め完了/押付け空振りPEND/PSFL
現在位置
移動中 MOVE
アクチュエータ動作 (押付け)
アクチュエータ動作 (通常位置決め)
①
②
③
④
n1 n2
v1 v2
m1 m2
t1 t2
⑤
⑥
⑦
⑨ ⑩
⑫⑪
⑭
⑬
s1 s2
n1
※tdpf
※ T1
n2+(v2)
位置決め幅
押付け
⑧
(PCON, ACON, DCON → PLC)
(PCON, ACON, DCON → PLC)
(PLC → PCON, ACON, DCON)
(PLC → PCON, ACON, DCON)
(PLC → PCON, ACON, DCON)
(PLC → PCON, ACON, DCON)
(PLC → PCON, ACON, DCON)
(PLC → PCON, ACON, DCON)
(PLC → PCON, ACON, DCON)
(PLC → PCON, ACON, DCON)
(PCON, ACON, DCON → PLC)
※ T1:上位コントローラのスキャンタイムを考慮し、
T1 ≧ 0ms となるようにしてください。
※ Yt+Xt ≦ tdpf ≦ Yt+Xt+2(msec)
ProfiBus-DP
126
(2)ハーフ直値モードでの運転
PLCの目標位置、位置決め幅、指定速度、加減速度および押付け電流制限指定にデータを指定して運転します。
動作例(押付け動作)
①目標位置データを出力アドレスn、n+1の目標位置(※)に設定します。
②位置決め幅データを出力アドレスn+2、n+3の位置決め幅(※)に設定します。
③速度データを出力アドレスn+4の速度(※)に設定します。
④加減速度データを出力アドレスn+5の加減速度(※)に設定します。
⑤押付け電流制限データを出力アドレスn+6の押付け電流制限値(※)に設定します。
⑥押付け指定(PUSH)信号をONにします。
⑦押付け方向指定(DIR)信号で押付け方向を指定します。(7.4.7(22)参照)
⑧位置決め完了(PEND)信号がONになっているまたは、移動中信号(MOVE)がOFFの状態で、位置決め指令(DSTR)信号をONにします。
①~⑤で設定したデータはDSTR信号の立上りエッジでコントローラに読み込まれます。
⑨DSTR信号がONになった後、tpdf後にPENDがOFFします。
⑩PEND信号がOFF またはMOVE信号がONになったことを確認してからDSTR信号をOFFにします。①~⑤で設定した値はDSTR信号をOFFにするまで変更しないでください。
⑪PEND信号がOFFになるのと同時にMOVE信号がONになります。
⑫入力アドレスn、n+1の現在位置データ(※)は常時更新されています。
⑬PEND信号はDSTR信号がOFFで、モータの電流が⑤で設定した電流制限値に達するとONになります。(押付け完了)
②で設定した位置決め幅に達しても、モータの電流が⑤で設定した電流制限値に到達しない場合は、押付け空振り(PSFL)信号がONになります。この場合、PEND信号はONになりません。(押付け空振り)
⑭PEND信号またはPSFL信号がONとなった後、PUSH信号をOFFにします。
動作例(通常位置決め動作)
通常位置決め動作は、⑥の信号をOFFに設定します。
残移動量がポジションデータで設定された位置決め幅の範囲内になると、DSTR信号がOFFの場合にPEND信号がONになります。
(※) 7.4.1参照

148
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
128
(3)フル直値モードでの運転
PLCの目標位置、位置決め幅等位置決めに必要な条件をPLCより全て指定して運転します。
動作例(押付け動作)
①目標位置データを出力アドレスn、n+1の目標位置(※)に設定します。
②位置決め幅データを出力アドレスn+2、n+3の位置決め幅(※)に設定します。
③速度データを出力アドレスn+4、n+5の速度(※)に設定します。
④ポジションゾーン出力の境界値データを出力アドレスn+6~n+9のゾーン境界値+、ゾーン境界値-(※)に設定します。
⑤加速度データを出力アドレスn+10の加速度(※)に設定します。
⑥減速度データを出力アドレスn+11の減速度(※)に設定します。
⑦押付け電流制限値データを出力アドレスn+12の押付け電流制限値(※)に設定します。
⑧負荷電流閾値データを出力アドレスn+13の負荷電流閾値(※)に設定します。
⑨押付け指定(PUSH)信号をONにします。
⑩押付け方向指定(DIR)信号で押付け方向を指定します。(7.4.7(22)参照)⑪位置決め完了(PEND)信号がONになっているまたは、移動中信号(MOVE)がOFFの状態で、位置決め指令(DSTR)信号をONにします。
①~⑧で設定したデータはDSTR信号の立上りエッジでコントローラに読み込まれます。
⑫DSTR信号がONになった後、tpdf後にPENDがOFFします。
⑬PEND信号がOFFまたはMOVE信号がONになったことを確認してからDSTR信号をOFFにします。①~⑧で設定した値はDSTR信号をOFFにするまで変更しないでください。
⑭PEND信号がOFFになるのと同時にMOVE信号がONになります。
⑮入力アドレスn、n+1の現在位置データ(※)は常時更新されています。
⑯PEND信号はDSTR信号がOFFで、モータの電流が⑦で設定した電流制限値に達するとONになります。(押付け完了)
②で設定した位置決め幅に達しても、モータの電流が⑦で設定した電流制限値に到達しない場合は、押付け空振り(PSFL)信号がONになります。この場合、PEND信号はONになりません。(押付け空振り)
⑰PEND信号またはPSFL信号がONとなった後、PUSH信号をOFFにします。
動作例(通常位置決め動作)
通常位置決め動作は、⑨の信号をOFFに設定します。
残移動量がポジションデータで設定された位置決め幅の範囲内になると、DSTR信号がOFF の場合にPEND信号がONになります。
(※) 7.4.1参照4.4.1 参照
4.4.7
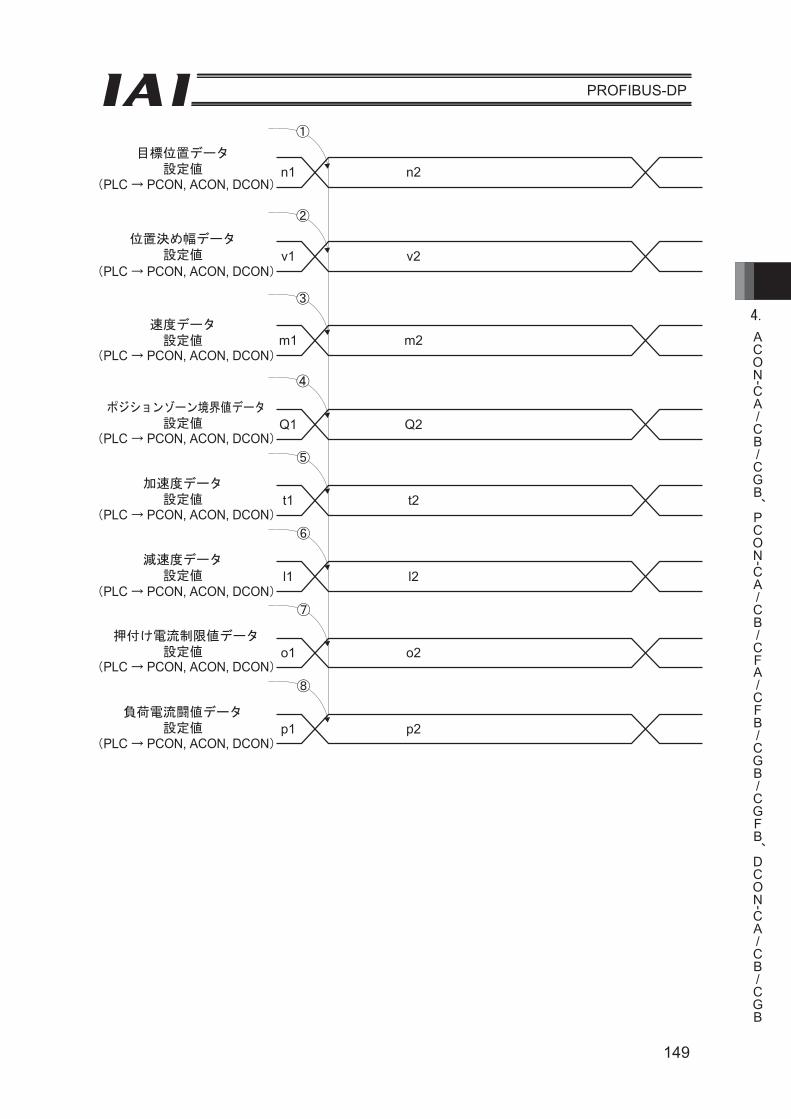
149
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
目標位置データ 設定値
位置決め幅データ 設定値
速度データ 設定値
ポジションゾーン境界値データ設定値
加速度データ 設定値
①
②
③
④
減速度データ 設定値
押付け電流制限値データ設定値
負荷電流闘値データ 設定値
n1 n2
v1 v2
m1 m2
Q1 Q2
⑤
t1 t2
⑥
l1 l2
⑦
o1 o2
⑧
p1 p2
(PLC → PCON, ACON, DCON)
(PLC → PCON, ACON, DCON)
(PLC → PCON, ACON, DCON)
(PLC → PCON, ACON, DCON)
(PLC → PCON, ACON, DCON)
(PLC → PCON, ACON, DCON)
(PLC → PCON, ACON, DCON)
(PLC → PCON, ACON, DCON)
ProfiBus-DP
128
(3)フル直値モードでの運転
PLCの目標位置、位置決め幅等位置決めに必要な条件をPLCより全て指定して運転します。
動作例(押付け動作)
①目標位置データを出力アドレスn、n+1の目標位置(※)に設定します。
②位置決め幅データを出力アドレスn+2、n+3の位置決め幅(※)に設定します。
③速度データを出力アドレスn+4、n+5の速度(※)に設定します。
④ポジションゾーン出力の境界値データを出力アドレスn+6~n+9のゾーン境界値+、ゾーン境界値-(※)に設定します。
⑤加速度データを出力アドレスn+10の加速度(※)に設定します。
⑥減速度データを出力アドレスn+11の減速度(※)に設定します。
⑦押付け電流制限値データを出力アドレスn+12の押付け電流制限値(※)に設定します。
⑧負荷電流閾値データを出力アドレスn+13の負荷電流閾値(※)に設定します。
⑨押付け指定(PUSH)信号をONにします。
⑩押付け方向指定(DIR)信号で押付け方向を指定します。(7.4.7(22)参照)⑪位置決め完了(PEND)信号がONになっているまたは、移動中信号(MOVE)がOFFの状態で、位置決め指令(DSTR)信号をONにします。
①~⑧で設定したデータはDSTR信号の立上りエッジでコントローラに読み込まれます。
⑫DSTR信号がONになった後、tpdf後にPENDがOFFします。
⑬PEND信号がOFFまたはMOVE信号がONになったことを確認してからDSTR信号をOFFにします。①~⑧で設定した値はDSTR信号をOFFにするまで変更しないでください。
⑭PEND信号がOFFになるのと同時にMOVE信号がONになります。
⑮入力アドレスn、n+1の現在位置データ(※)は常時更新されています。
⑯PEND信号はDSTR信号がOFFで、モータの電流が⑦で設定した電流制限値に達するとONになります。(押付け完了)
②で設定した位置決め幅に達しても、モータの電流が⑦で設定した電流制限値に到達しない場合は、押付け空振り(PSFL)信号がONになります。この場合、PEND信号はONになりません。(押付け空振り)
⑰PEND信号またはPSFL信号がONとなった後、PUSH信号をOFFにします。
動作例(通常位置決め動作)
通常位置決め動作は、⑨の信号をOFFに設定します。
残移動量がポジションデータで設定された位置決め幅の範囲内になると、DSTR信号がOFF の場合にPEND信号がONになります。
(※) 7.4.1参照

150
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
押付け指定 PUSH
押付け方向指定 DIR
位置決め指令 DSTR
位置決め完了/押付け空振りPEND/PSFL
現在位置
移動中 MOVE
アクチュエータ動作 (押付け)
アクチュエータ動作 (通常位置決め)
⑨
⑩
⑫ ⑬
⑮ ⑭
⑰
⑯
n1
※tdpf
※ T1
n2+(v2)
位置決め幅
押付け
⑪
(PCON, ACON, DCON → PLC)
(PCON, ACON, DCON → PLC)
※ T1:上位コントローラのスキャンタイムを考慮し、
T1 ≧ 0ms となるようにしてください。
※ Yt+Xt ≦ tdpf ≦ Yt+Xt+2(msec)
(PLC → PCON, ACON, DCON)
(PLC → PCON, ACON, DCON)
(PLC → PCON, ACON, DCON)
(PCON, ACON, DCON → PLC)
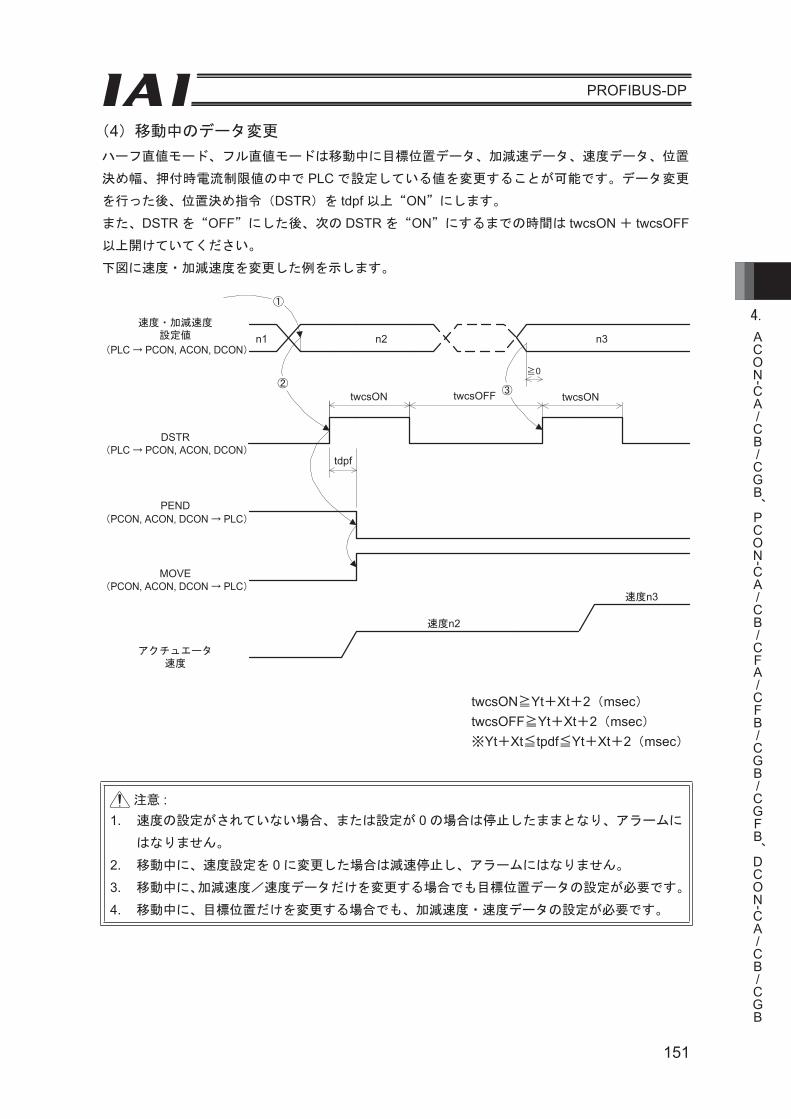
151
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
(4)移動中のデータ変更
ハーフ直値モード、フル直値モードは移動中に目標位置データ、加減速データ、速度データ、位置
決め幅、押付時電流制限値の中で PLC で設定している値を変更することが可能です。データ変更
を行った後、位置決め指令(DSTR)を tdpf 以上“ON”にします。
また、DSTR を“OFF”にした後、次の DSTR を“ON”にするまでの時間は twcsON + twcsOFF以上開けていてください。
下図に速度・加減速度を変更した例を示します。
注意 :1. 速度の設定がされていない場合、または設定が 0 の場合は停止したままとなり、アラームに
はなりません。
2. 移動中に、速度設定を 0 に変更した場合は減速停止し、アラームにはなりません。
3. 移動中に、加減速度/速度データだけを変更する場合でも目標位置データの設定が必要です。
4. 移動中に、目標位置だけを変更する場合でも、加減速度・速度データの設定が必要です。
≧0
速度・加減速度 設定値
DSTR
PEND
MOVE
アクチュエータ 速度
n1
速度n3
速度n2
3n2n
twcsON
tdpf
twcsONtwcsOFF
①
② ③
twcsON≧Yt+Xt+2(msec)twcsOFF≧Yt+Xt+2(msec)※Yt+Xt≦tpdf≦Yt+Xt+2(msec)
(PCON, ACON, DCON → PLC)
(PLC → PCON, ACON, DCON)
(PLC → PCON, ACON, DCON)
(PCON, ACON, DCON → PLC)

152
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
132
7.7 ProfiBus-DP関連パラメータProfiBus-DPに関連するパラメータはNo.84~No.85およびNo.90です。
区分:C:外部インターフェースの関連
フィールドバス動作モード(No.84 FMOD)パラメータNo.84に動作モードを0~4で指定します。
フィールドバスノードアドレス(No.85 NADR)パラメータNo.85にリモート局の局番号を指定します。
設定範囲 0~125 (出荷時は1に設定されています。)
フィールドバス通信速度(No.86 FBRS)通信速度はマスタ局に自動追従となりますので、設定の必要はありません。
No. 区分 シンボル 名称 工場出荷時の初期値
1
83
84 C FMOD フィールドバス動作モード 0
85 C NADR フィールドバスノードアドレス 1
86 C FBRS フィールドバス通信速度 0
87 C NTYP ネットワークタイプ 3
90 C FMIO フィールドバス入出力フォーマット 3
パラメータNo.1~No.83まではコントローラの取扱説明書をご参照してください。
~
パラメータNo.84モード名 占有バイト数 内容設定値
0(出荷時設定) リモートⅠ/O 2モード
1 ポジション/ 8簡易直値モード
2 ハーフ直値モード 16
3 フル直値モード 32
4 リモート 12Ⅰ/Oモード2
PIO(24V入出力)による運転をProfiBus-DPによって行います。目標位置を直接数値で指定するか、ポジションデータの値で運転できます。その他の運転に必要な値はポジションデータに設定します。目標位置以外に速度、加減速度、押付け電流値を直接数値で指定して運転を行います。位置制御に関する全ての値を直接数値で指定して運転を行います。リモートⅠ/Oモードの機能に現在位置と現在速度読取り機能を追加したものです。
ProfiBus-DP
132
7.7 ProfiBus-DP関連パラメータProfiBus-DPに関連するパラメータはNo.84~No.85およびNo.90です。
区分:C:外部インターフェースの関連
フィールドバス動作モード(No.84 FMOD)パラメータNo.84に動作モードを0~4で指定します。
フィールドバスノードアドレス(No.85 NADR)パラメータNo.85にリモート局の局番号を指定します。
設定範囲 0~125 (出荷時は1に設定されています。)
フィールドバス通信速度(No.86 FBRS)通信速度はマスタ局に自動追従となりますので、設定の必要はありません。
No. 区分 シンボル 名称 工場出荷時の初期値
1
83
84 C FMOD フィールドバス動作モード 0
85 C NADR フィールドバスノードアドレス 1
86 C FBRS フィールドバス通信速度 0
87 C NTYP ネットワークタイプ 3
90 C FMIO フィールドバス入出力フォーマット 3
パラメータNo.1~No.83まではコントローラの取扱説明書をご参照してください。
~
パラメータNo.84モード名 占有バイト数 内容設定値
0(出荷時設定) リモートⅠ/O 2モード
1 ポジション/ 8簡易直値モード
2 ハーフ直値モード 16
3 フル直値モード 32
4 リモート 12Ⅰ/Oモード2
PIO(24V入出力)による運転をProfiBus-DPによって行います。目標位置を直接数値で指定するか、ポジションデータの値で運転できます。その他の運転に必要な値はポジションデータに設定します。目標位置以外に速度、加減速度、押付け電流値を直接数値で指定して運転を行います。位置制御に関する全ての値を直接数値で指定して運転を行います。リモートⅠ/Oモードの機能に現在位置と現在速度読取り機能を追加したものです。
No.
159 FBVS FB
4.7 PROFIBUS-DP 関連パラメータ
PROFIBUS-DP に関連するパラメータは、No.84 ~ No.87、No.90、および No.159 です。
区分:C:外部インタフェースの関連
PIO(24V 入出力)による運転を
PROFIBUS-DP によって行います。
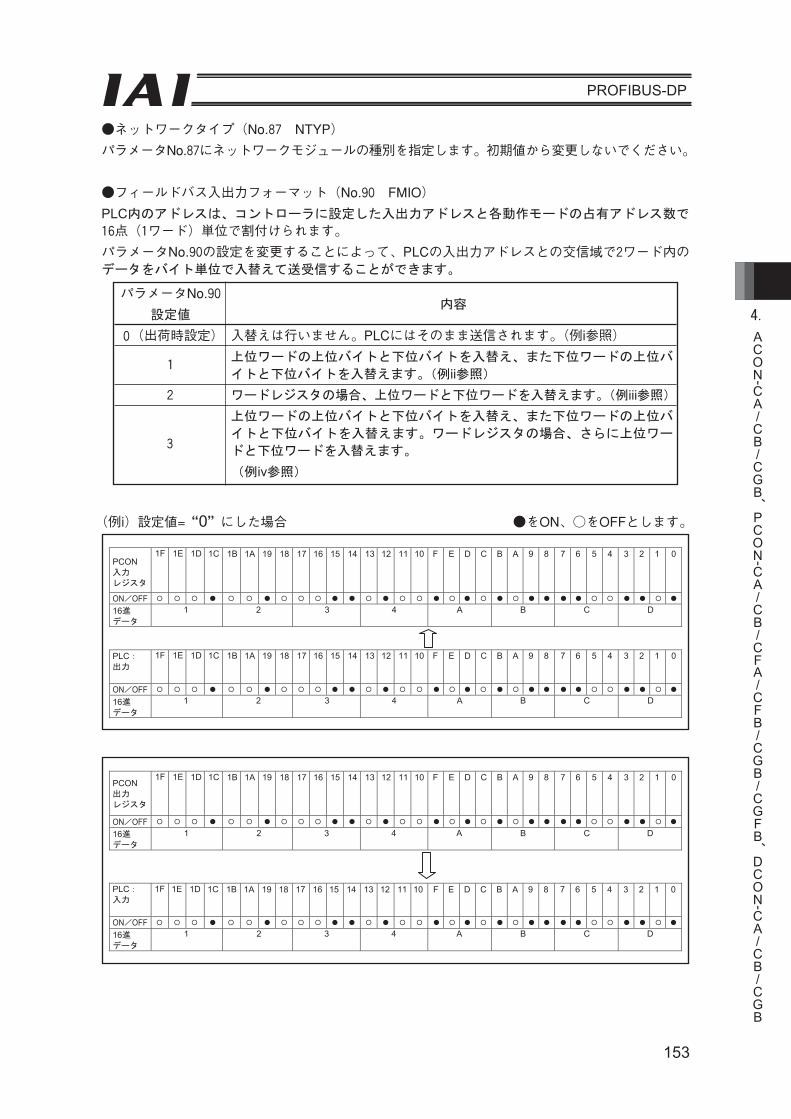
153
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
PLC内のアドレスは、コントローラに設定した入出力アドレスと各動作モードの占有アドレス数で
データをバイト単位で入替えて送受信することができます。
内容設定値
上位ワードの上位バイトと下位バイトを入替え、また下位ワードの上位バ
イトと下位バイトを入替えます。(例ii参照)
ワードレジスタの場合、上位ワードと下位ワードを入替えます。(例iii参照)
上位ワードの上位バイトと下位バイトを入替え、また下位ワードの上位バ
イトと下位バイトを入替えます。ワードレジスタの場合、さらに上位ワー
ドと下位ワードを入替えます。
(例iv参照)
PCON 入力 レジスタ
16進 データ
ON/OFF
PLC: 出力
16進 データ
ON/OFF
1 2 3 4 A B C D
1 2 3 4 A B C D
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
PCON 出力 レジスタ
16進 データ
ON/OFF1 2 3 4 A B C D
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
PLC: 入力
16進 データ
ON/OFF1 2 3 4 A B C D
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
0
ProfiBus-DP
132
7.7 ProfiBus-DP関連パラメータProfiBus-DPに関連するパラメータはNo.84~No.85およびNo.90です。
区分:C:外部インターフェースの関連
フィールドバス動作モード(No.84 FMOD)パラメータNo.84に動作モードを0~4で指定します。
フィールドバスノードアドレス(No.85 NADR)パラメータNo.85にリモート局の局番号を指定します。
設定範囲 0~125 (出荷時は1に設定されています。)
フィールドバス通信速度(No.86 FBRS)通信速度はマスタ局に自動追従となりますので、設定の必要はありません。
No. 区分 シンボル 名称 工場出荷時の初期値
1
83
84 C FMOD フィールドバス動作モード 0
85 C NADR フィールドバスノードアドレス 1
86 C FBRS フィールドバス通信速度 0
87 C NTYP ネットワークタイプ 3
90 C FMIO フィールドバス入出力フォーマット 3
パラメータNo.1~No.83まではコントローラの取扱説明書をご参照してください。
~
パラメータNo.84モード名 占有バイト数 内容設定値
0(出荷時設定) リモートⅠ/O 2モード
1 ポジション/ 8簡易直値モード
2 ハーフ直値モード 16
3 フル直値モード 32
4 リモート 12Ⅰ/Oモード2
PIO(24V入出力)による運転をProfiBus-DPによって行います。目標位置を直接数値で指定するか、ポジションデータの値で運転できます。その他の運転に必要な値はポジションデータに設定します。目標位置以外に速度、加減速度、押付け電流値を直接数値で指定して運転を行います。位置制御に関する全ての値を直接数値で指定して運転を行います。リモートⅠ/Oモードの機能に現在位置と現在速度読取り機能を追加したものです。
ProfiBus-DP
132
7.7 ProfiBus-DP関連パラメータProfiBus-DPに関連するパラメータはNo.84~No.85およびNo.90です。
区分:C:外部インターフェースの関連
フィールドバス動作モード(No.84 FMOD)パラメータNo.84に動作モードを0~4で指定します。
フィールドバスノードアドレス(No.85 NADR)パラメータNo.85にリモート局の局番号を指定します。
設定範囲 0~125 (出荷時は1に設定されています。)
フィールドバス通信速度(No.86 FBRS)通信速度はマスタ局に自動追従となりますので、設定の必要はありません。
No. 区分 シンボル 名称 工場出荷時の初期値
1
83
84 C FMOD フィールドバス動作モード 0
85 C NADR フィールドバスノードアドレス 1
86 C FBRS フィールドバス通信速度 0
87 C NTYP ネットワークタイプ 3
90 C FMIO フィールドバス入出力フォーマット 3
パラメータNo.1~No.83まではコントローラの取扱説明書をご参照してください。
~
パラメータNo.84モード名 占有バイト数 内容設定値
0(出荷時設定) リモートⅠ/O 2モード
1 ポジション/ 8簡易直値モード
2 ハーフ直値モード 16
3 フル直値モード 32
4 リモート 12Ⅰ/Oモード2
PIO(24V入出力)による運転をProfiBus-DPによって行います。目標位置を直接数値で指定するか、ポジションデータの値で運転できます。その他の運転に必要な値はポジションデータに設定します。目標位置以外に速度、加減速度、押付け電流値を直接数値で指定して運転を行います。位置制御に関する全ての値を直接数値で指定して運転を行います。リモートⅠ/Oモードの機能に現在位置と現在速度読取り機能を追加したものです。
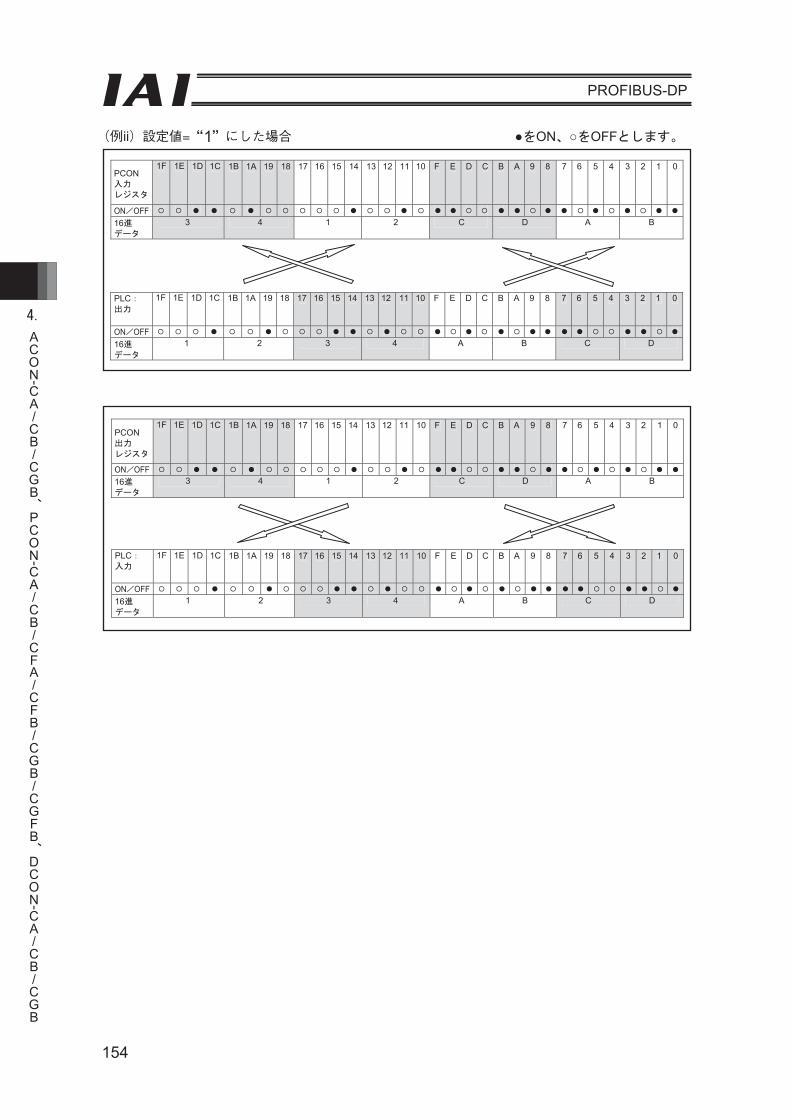
154
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
をON、をOFFとします。
PCON 入力 レジスタ
16進 データ
ON/OFF
PLC: 出力
16進 データ
ON/OFF
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
3 4 1 2 C D A B
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
1 2 3 4 A B C D
PCON 出力 レジスタ
16進 データ
ON/OFF3 4 1 2 C D A B
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
PLC: 入力
16進 データ
ON/OFF
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
1 2 3 4 A B C D
1

155
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
をON、をOFFとします。
PCON 入力 レジスタ
16進 データ
ON/OFF
PLC: 出力
16進 データ
ON/OFF1 2 3 4 A B C D
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
A B C D 1 2 3 4
PLC: 入力
16進 データ
ON/OFF1 2 3 4 A B C D
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
PCON 出力 レジスタ
16進 データ
ON/OFF
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
A B C D 1 2 3 4
2
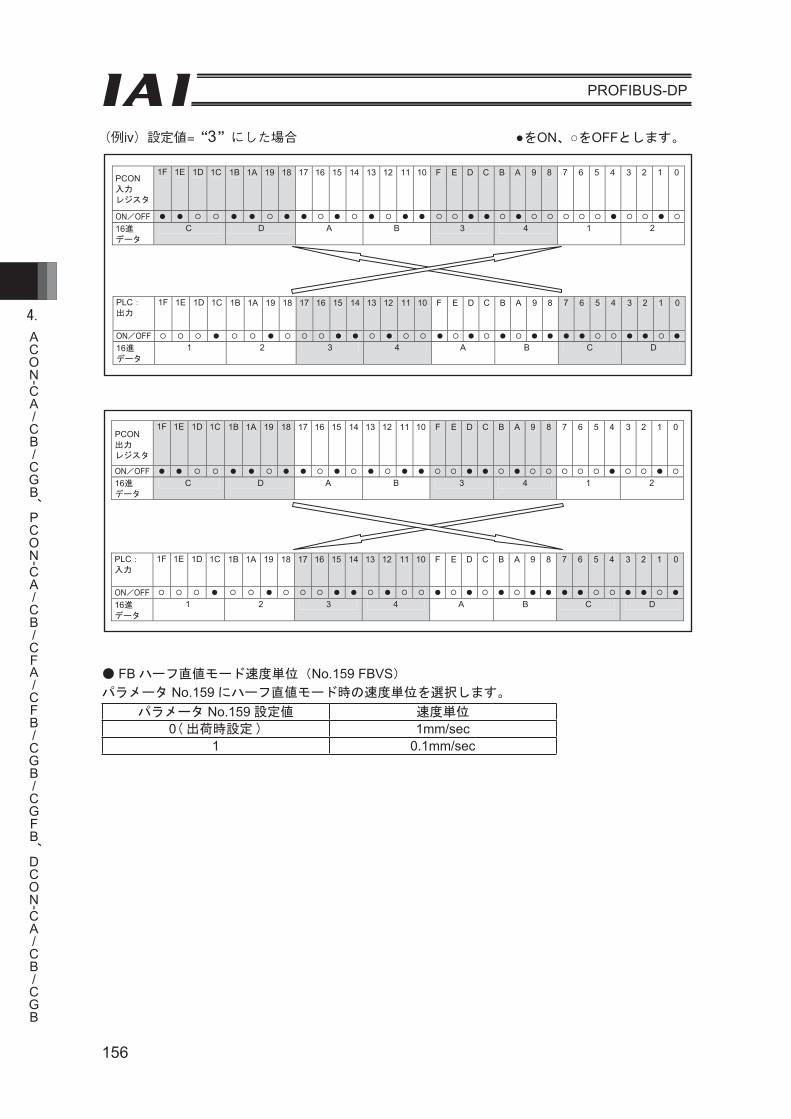
156
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
FB ハーフ直値モード速度単位(No.159 FBVS)パラメータ No.159 にハーフ直値モード時の速度単位を選択します。
パラメータ No.159 設定値 速度単位
0(出荷時設定 ) 1mm/sec1 0.1mm/sec
をON、をOFFとします。
PCON 入力 レジスタ
16進 データ
ON/OFF
PLC: 出力
16進 データ
ON/OFF
C D A B 3 4 1 2
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
1 2 3 4 A B C D
PLC: 入力
16進 データ
ON/OFF
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
1 2 3 4 A B C D
PCON 出力 レジスタ
16進 データ
ON/OFF
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
C D A B 3 4 1 2
3

157
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
ProfiBus-DP
137
7.8 トラブルシューティング
7.8.1 ステータスLEDの表示ステータスLED(STATUS0/1)点灯パターンでProfiBus-DPモジュールの動作状態やネットワークの状態を示します。
トラブルが発生した場合にはステータスLEDの点灯パターンで現在の状態を確認します。
以下にステータスLEDの点灯パターンによる通信状態表示を示します。
7.8.2 アラーム内容と原因・対策アラーム発生時、リモートⅠ/Oモード、リモートⅠ/Oモード2では完了ポジション番号(PM1~PM8の4ビット)が簡易アラームコードを示します。
ポジション/簡易直値モードでは入力アドレス:n+2に簡易アラームコードが出力されます。
ハーフ直値モード、フル直値モードでは入力アドレス:n+6にアラームコードが出力されます。
①PLCのモニタ機能等でアラームコードを確認するか、RC用パソコン対応ソフトまたはティーチングボックスを接続してステータスモニタで確認してください。
②読み取ったアラームコードからコントローラの取扱説明書のアラーム内容一覧を検索します。
③該当のアラームコードの記述に従い対処してください。
次のアラームコードについては下表に従い対処してください。
(※1) ID→簡易アラームコード
(※2) RES→アラームリセット可/不可 :アラームリセット可/×:アラームリセット不可
コード エラー名称ID RES
原因/対策(※1)(※2)
0F2 フィールドバス 05 × 原因:フィールドバスモジュールの異常が検出されたモジュール異常 対策:パラメータを確認してください。
フィールドバスモジュール原因:モジュールが検出できなかった場合
0F3未検出エラー
04 × 対策:電源を再投入してください。解消されない場合は弊社までご連絡ください。
LED 色 表示状態 表示内容(表示の意味)
点灯 フィールドバスからオンライン状態で正常に通信中です。緑
STATUS1 点滅 フィールドバスからオフライン状態になっています。
橙 点滅 通信エラーが発生しています。
点灯 正常動作中です。緑
STATUS0 点滅 動作準備を行っています。
橙 点灯 動作準備中に通信系ハードウェア異常を検出しました。
PLC のモニタ機能等でアラームコードを確認するか、RC 用パソコン対応ソフトなどのティーチ
ングツールを接続してステータスモニタで確認してください。
LED
STATUS1
STATUS0
4.8.2 アラーム内容と原因・対策
4.8 トラブルシューティング
4.8.1 ステータス LED の表示
ステータス LED(STATUS0 / 1)点灯パターンで PROFIBUS-DP モジュールの動作状態やネット
ワークの状態を示します。
トラブルが発生した場合にはステータス LED の点灯パターンで現在の状態を確認します。
以下にステータス LED の点灯パターンによる通信状態表示を示します。
No.

158
PROFIBUS-DP
4.
ACON-
CA/CB/CGB、PCON-
CA/CB/CFA/CFB/CGB/CGFB、DCON-
CA/CB/CGB
4.9 CE マーキング
CE マーキングの対応が必要な場合は、別冊の海外規格対応マニュアル (MJ0287)に従ってください。

159
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
5. SCON-CA/CB/CGB/CAL/CGAL5.1 動作モードと機能
PROFIBUS 対応の SCON-CA/CB タイプは下表の全動作モード、および CAL タイプは下表の網掛
けのモード以外から選択して運転することができます。
動作モードと主要機能
PROFIBUS-DPSCON-CA/CB/CAL
PROFIBUS-DPSCON-CA/CB/CAL
PIO PROFIBUS-DP
(※ 1)位置データ以外のポジションデータはポジション No. を指定して運転を行います。
(※ 2)PIO パターンを 6 または 7 に設定した時に使用できます。
①リモートⅠ /O モード: PIO(24V入出力)による運転をPROFIBUS-DP通信によって行う方式です。
占有バイト数:2 バイト(1 ワード)
主要機能
リモート
I/Oモード
ポジション /簡易直値
モード
ハーフ直値
モード
フル直値
モード
リモート
I/Oモード 2
ポジション /簡易直値
モード 2
ハーフ
直値
モード 2
リモート
I/Oモード 3
ハーフ
直値
モード 3
占有バイト数 2 8 16 32 12 8 16 12 16
位置データ
指定運転× (※ 1) × (※ 1) ×
速度・加速度
直接指定× × × × ×
押付け動作
現在位置読取り ×
現在速度読取り × × × × ×
ポジション No.指定運転
× × × ×
完了ポジション No.読取り
× × × ×
最大ポジション
テーブル数512 768 使用しない 使用しない 512 768 使用しない 512 使用しない
力制御 (※ 2) × × (※ 2) ×
制振制御 × ×
サーボゲイン
切替 ×

160
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
69
⑤リモートⅠ/Oモード2 :PIO(24V入出力)による運転をProfiBus-DP通信によって行う方式です。
①の機能に現在位置と指令電流値読取り機能を追加したものです。
占有バイト数:12バイト(6ワード)
ProfiBus-DP未対応 のACON、PCON
フラット ケーブル
PIOで接続の場合
PLC
通信 ケーブル
ProfiBus-DPで接続の場合
PLC
ProfiBus-DP対応の ACON、PCON
④フル直値モード :位置制御に関する全ての値(目標位置、速度、加減速度等)を直接数値で指定する運転方式です。
占有バイト数:32バイト(16ワード)
目標位置:100.00mm 位置決め幅:0.10mm 速度指定:100.00mm/s 加速度:0.30G 減速度:0.30G 押付け電流値:50% 負荷電流閥値:0 ゾーン+:50.00mm ゾーン-:30.00mm
アクチュエータ ProfiBus-DP対応 のACON、PCON
PLC
ProfiBus-DP
68
②ポジション/簡易直値モード: ポジションNo.を指定して運転する方式です。
制御信号の切換えで目標位置を直接数値で指定するか、ポジションデータに登録した値を使用するか選択できます。
速度、加減速度、位置決め幅等はあらかじめ登録したポジションデータの値を使用します。設定可能なポジションデータの数は最大768点です。
占有バイト数:8バイト(4ワード)
目標位置:100.00mm + ポジションNo.0
PLC
ProfiBus-DP対応 のACON、PCON
アクチュエータ
③ハーフ直値モード:目標位置以外に速度、加減速度、押付電流値を直接数値で指定する運転方式です。
占有バイト数:16バイト(8ワード)
目標位置:100.00mm 位置決め幅:0.10mm 速度指定:100.0mm/s 加減速度:0.30G 押付け電流値:50%
ProfiBus-DP対応 のACON、PCON
アクチュエータ
PLC
PROFIBUS-DPSCON-CA/CB/CAL
PROFIBUS-DPSCON-CA/CB/CAL

161
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
69
⑤リモートⅠ/Oモード2 :PIO(24V入出力)による運転をProfiBus-DP通信によって行う方式です。
①の機能に現在位置と指令電流値読取り機能を追加したものです。
占有バイト数:12バイト(6ワード)
ProfiBus-DP未対応 のACON、PCON
フラット ケーブル
PIOで接続の場合
PLC
通信 ケーブル
ProfiBus-DPで接続の場合
PLC
ProfiBus-DP対応の ACON、PCON
④フル直値モード :位置制御に関する全ての値(目標位置、速度、加減速度等)を直接数値で指定する運転方式です。
占有バイト数:32バイト(16ワード)
目標位置:100.00mm 位置決め幅:0.10mm 速度指定:100.00mm/s 加速度:0.30G 減速度:0.30G 押付け電流値:50% 負荷電流閥値:0 ゾーン+:50.00mm ゾーン-:30.00mm
アクチュエータ ProfiBus-DP対応 のACON、PCON
PLC
ProfiBus-DP
68
②ポジション/簡易直値モード: ポジションNo.を指定して運転する方式です。
制御信号の切換えで目標位置を直接数値で指定するか、ポジションデータに登録した値を使用するか選択できます。
速度、加減速度、位置決め幅等はあらかじめ登録したポジションデータの値を使用します。設定可能なポジションデータの数は最大768点です。
占有バイト数:8バイト(4ワード)
目標位置:100.00mm + ポジションNo.0
PLC
ProfiBus-DP対応 のACON、PCON
アクチュエータ
③ハーフ直値モード:目標位置以外に速度、加減速度、押付電流値を直接数値で指定する運転方式です。
占有バイト数:16バイト(8ワード)
目標位置:100.00mm 位置決め幅:0.10mm 速度指定:100.0mm/s 加減速度:0.30G 押付け電流値:50%
ProfiBus-DP対応 のACON、PCON
アクチュエータ
PLC
⑥ポジション/簡易直値モード 2: ポジション No. を指定して運転する方式です。
(CAL タイプ未対応 ) ②の教示、ゾーン機能の替わりに力制御機能を搭載したモード
です。
占有バイト数:8 バイト(4 ワード)
⑤リモートⅠ /O モード 2: PIO(24V 入出力)による運転を PROFIBUS-DP 通信によって行う方
式です。①の機能に現在位置と指令電流値読取り機能を追加したもの
です。
占有バイト数:12 バイト(6 ワード)
PROFIBUS-DPSCON-CA/CB/CAL
PROFIBUS-DPSCON-CA/CB
PROFIBUS-DPSCON-CA/CB/CAL
PROFIBUS-DPSCON-CA/CB/CAL
PIO PROFIBUS-DP

162
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
⑦ハーフ直値モード 2: 目標位置以外に速度、加減速度、押付電流値を直接数値で指定する運転方
(CAL タイプ未対応 ) 式です。
③の機能である指令電流読取りの替わりに、ロードセルデータの読取りを
行えます。また力制御機能に対応しています。
占有バイト数:16 バイト(8 ワード)
⑧リモートⅠ /O モード 3: PIO(24V 入出力)による運転を PROFIBUS-DP によって行う方式です。
① (CAL タイプ未対応 ) の機能に現在位置とロードセルデータの読取り
機能を追加したモードです。
占有バイト数:12 バイト(6 ワード)
⑨ハーフ直値モード 3: 目標位置以外に速度、加減速度、押付電流値を直接数値で指定する運転方
式です。
③のジョブ機能の替わりに、制振制御機能に対応したモードです。
占有バイト数:16 バイト(8 ワード)
PROFIBUS-DPSCON-CA/CB
PROFIBUS-DPSCON-CA/CB
PIO PROFIBUS-DP
PROFIBUS-DPSCON-CA/CB
PROFIBUS-DPSCON-CA/CB/CAL

163
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
5.2 型式
PROFIBUS-DP 対応の SCON-CA/CB/CAL の型式は以下のように表されています
SCON-CA/CB- -PR- SCON-CAL- -PR-

164
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
72
(3)バス終端処理
ネットワークの終端に接続した場合は、終端抵抗を下図のようにProfiBus-DP通信コネクタに接続するか、または終端抵抗付きコネクタを使用してください。
終端抵抗付きコネクタ例:SUBCON-PLUS-PROFIB/AX/SC(フェニックスコンタクト)
終端抵抗の接続
(4)動作モードの選択(設定)動作モードはパラメータで設定します。
コントローラ前面のモード切替SWをMANU側にし、RC用パソコン対応ソフト(V6.00.05.00以降)でパラメータNo.84“FMOD:フィールドバス動作モード”を設定してください。(7.7パラメータ参照)
※これ以外の値を入力すると入力値過大エラーとなります。
(5)ノードアドレスの設定
ノードアドレスはパラメータで設定します。
RC用パソコン対応ソフトでパラメータNo.85“NADR:フィールドバスノードアドレス”を設定してください。
(7.7パラメータ参照)
設定可能範囲:0~125(出荷時は1に設定されています。)
(注1)ノードアドレスの重複設定にご注意ください。(注2)ProfiBus-DPのノードアドレスの設定は、マスタ局を必ず0として設定しますのでスレーブ局
は1~125まで設定することができます。
設定値 動作モード 占有バイト数
0(出荷時設定) リモートⅠ/Oモード 2
1 ポジション/簡易直値モード 8
2 ハーフ直値モード 16
3 フル直値モード 32
4 リモートⅠ/Oモード2 12
9
6
5
1
5GNDA-Line 390Ω,1/4W
220Ω,1/4W ネットワーク 配線
390Ω,1/4WB-Line
+5V3
1
9
8
6
ボード側 メスコネクタ
ネットワーク側 オスコネクタ (反挿入側より)
}
ProfiBus-DP
71
7.3 ProfiBus-DP(スレーブ局)の設定
(1)各部の名称
ProfiBus-DPに関連する各部の名称を示します。
(2) ProfiBus-DP通信コネクタインタフェース仕様
ProfiBus-DP standard EN50170推奨品である9ピンfemale D-subコネクタです。
コネクタ
状態表示LED
ステータスLED
ProfiBus-DP通信コネクタ
SV ALM
1
STATUS
0
Pin No. Description Contents
3 B-Line RxD・TxD(プラス側通信ライン)
4 RTS 送信要求
5 GND シグナルグランド(絶縁)
6 +5V +5V出力(絶縁)
8 A-Line /RxD・/TxD(マイナス側信号ライン)
Housing Shield ケーブルシールド(筐体と接続)
(注1)1,2,7,9ピンは未使用(配線は不要です)
(注2)ケーブル側コネクタは付属しません。
NSステータスLED
PROFIBUS-DP通信コネクタ
ステータスLED
PROFIBUS-DP通信コネクタ
MS
STATUS
5.3 PROFIBUS-DP(スレーブ局)の設定
(1)各部の名称
PROFIBUS-DP に関連する各部の名称を示します。
SCON-CA/CB SCON-CAL
(2)PROFIBUS-DP 通信コネクタインタフェース仕様
PROFIBUS-DP standard EN50170 推奨品である 9 ピン female D-sub コネクタです。

165
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
72
(3)バス終端処理
ネットワークの終端に接続した場合は、終端抵抗を下図のようにProfiBus-DP通信コネクタに接続するか、または終端抵抗付きコネクタを使用してください。
終端抵抗付きコネクタ例:SUBCON-PLUS-PROFIB/AX/SC(フェニックスコンタクト)
終端抵抗の接続
(4)動作モードの選択(設定)動作モードはパラメータで設定します。
コントローラ前面のモード切替SWをMANU側にし、RC用パソコン対応ソフト(V6.00.05.00以降)でパラメータNo.84“FMOD:フィールドバス動作モード”を設定してください。(7.7パラメータ参照)
※これ以外の値を入力すると入力値過大エラーとなります。
(5)ノードアドレスの設定
ノードアドレスはパラメータで設定します。
RC用パソコン対応ソフトでパラメータNo.85“NADR:フィールドバスノードアドレス”を設定してください。
(7.7パラメータ参照)
設定可能範囲:0~125(出荷時は1に設定されています。)
(注1)ノードアドレスの重複設定にご注意ください。(注2)ProfiBus-DPのノードアドレスの設定は、マスタ局を必ず0として設定しますのでスレーブ局
は1~125まで設定することができます。
設定値 動作モード 占有バイト数
0(出荷時設定) リモートⅠ/Oモード 2
1 ポジション/簡易直値モード 8
2 ハーフ直値モード 16
3 フル直値モード 32
4 リモートⅠ/Oモード2 12
9
6
5
1
5GNDA-Line 390Ω,1/4W
220Ω,1/4W ネットワーク 配線
390Ω,1/4WB-Line
+5V3
1
9
8
6
ボード側 メスコネクタ
ネットワーク側 オスコネクタ (反挿入側より)
}
設定値 動作モード 占有バイト数
0(出荷時設定) リモートⅠ /O モード 21 ポジション/簡易直値モード 82 ハーフ直値モード 163 フル直値モード 324 リモートⅠ /O モード 2 125 ポジション/簡易直値モード 2 86 ハーフ直値モード 3 167 リモートⅠ /O モード 3 128 ハーフ直値モード 3 16
※これ以外の値を入力すると入力値過大エラーとなります。
網掛けのモードは、SCON-CAL では選択できません。
ProfiBus-DP
71
7.3 ProfiBus-DP(スレーブ局)の設定
(1)各部の名称
ProfiBus-DPに関連する各部の名称を示します。
(2) ProfiBus-DP通信コネクタインタフェース仕様
ProfiBus-DP standard EN50170推奨品である9ピンfemale D-subコネクタです。
コネクタ
状態表示LED
ステータスLED
ProfiBus-DP通信コネクタ
SV ALM
1
STATUS
0
Pin No. Description Contents
3 B-Line RxD・TxD(プラス側通信ライン)
4 RTS 送信要求
5 GND シグナルグランド(絶縁)
6 +5V +5V出力(絶縁)
8 A-Line /RxD・/TxD(マイナス側信号ライン)
Housing Shield ケーブルシールド(筐体と接続)
(注1)1,2,7,9ピンは未使用(配線は不要です)
(注2)ケーブル側コネクタは付属しません。
動作モードはパラメータで設定します。
コントローラ前面のモード切替 SW を MANU 側にし、RC 用パソコン対応ソフト(V8.00.00.00 以降)
でパラメータ No.84“FMOD:フィールドバス動作モード”を設定してください。
(5.7 PROFIBUS-DP 関連パラメータ参照)
(5.7 PROFIBUS-DP 関連パラメータ参照)
ネットワークの終端に接続した場合は、終端抵抗を下図のように PROFIBUS-DP 通信コネクタに
接続するか、または終端抵抗付きコネクタを使用してください。
(注 1) ノードアドレスの重複設定にご注意ください。
(注 2) PROFIBUS-DP のノードアドレスの設定は、マスタ局を必ず 0 として設定しますのでスレー
ブ局は 1 ~ 125 まで設定することができます。

166
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
73
(6)ステータスLEDの表示
コントローラ前面に設けられた2つのLEDによってボードの動作状態やネットワークの状態を知ることができます。
LED 色 表示状態 表示内容(表示の意味)
点灯 フィールドバスからオンライン状態で正常に通信中です。緑
STATUS1 点滅 フィールドバスからオフライン状態になっています。
橙 点滅 通信エラーが発生しています。
点灯 正常動作中です。緑
STATUS0 点滅 動作準備を行っています。
橙 点灯 動作準備中に通信系ハードウェア異常を検出しました。
(注1)パラメータの設定後はコントローラの電源再投入を行い、コントローラ前面のモード切替SWをAUTO側に戻してください。MANU側のままの場合PLCによる運転はできません。
(注2)通信速度はマスタ局に合せて自動設定されますので、設定の必要はありません。
ProfiBus-DP
73
(6)ステータスLEDの表示
コントローラ前面に設けられた2つのLEDによってボードの動作状態やネットワークの状態を知ることができます。
LED 色 表示状態 表示内容(表示の意味)
点灯 フィールドバスからオンライン状態で正常に通信中です。緑
STATUS1 点滅 フィールドバスからオフライン状態になっています。
橙 点滅 通信エラーが発生しています。
点灯 正常動作中です。緑
STATUS0 点滅 動作準備を行っています。
橙 点灯 動作準備中に通信系ハードウェア異常を検出しました。
(注1)パラメータの設定後はコントローラの電源再投入を行い、コントローラ前面のモード切替SWをAUTO側に戻してください。MANU側のままの場合PLCによる運転はできません。
(注2)通信速度はマスタ局に合せて自動設定されますので、設定の必要はありません。
:点灯、×:消灯、:点滅
LED 色 表示状態 表示内容(表示の意味)
•STATUS1•NS
緑 フィールドバスからオンライン状態で正常に通信中です。
フィールドバスからオフライン状態になっています。
橙 通信エラーが発生しています。
× オフライン / 電源無し
•STATUS0•MS
緑 正常動作中です。
動作準備を行っています。
橙 動作準備中に通信系ハードウェア異常を検出しました。
× 未初期化 / 電源無し

167
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
73
(6)ステータスLEDの表示
コントローラ前面に設けられた2つのLEDによってボードの動作状態やネットワークの状態を知ることができます。
LED 色 表示状態 表示内容(表示の意味)
点灯 フィールドバスからオンライン状態で正常に通信中です。緑
STATUS1 点滅 フィールドバスからオフライン状態になっています。
橙 点滅 通信エラーが発生しています。
点灯 正常動作中です。緑
STATUS0 点滅 動作準備を行っています。
橙 点灯 動作準備中に通信系ハードウェア異常を検出しました。
(注1)パラメータの設定後はコントローラの電源再投入を行い、コントローラ前面のモード切替SWをAUTO側に戻してください。MANU側のままの場合PLCによる運転はできません。
(注2)通信速度はマスタ局に合せて自動設定されますので、設定の必要はありません。
ProfiBus-DP
73
(6)ステータスLEDの表示
コントローラ前面に設けられた2つのLEDによってボードの動作状態やネットワークの状態を知ることができます。
LED 色 表示状態 表示内容(表示の意味)
点灯 フィールドバスからオンライン状態で正常に通信中です。緑
STATUS1 点滅 フィールドバスからオフライン状態になっています。
橙 点滅 通信エラーが発生しています。
点灯 正常動作中です。緑
STATUS0 点滅 動作準備を行っています。
橙 点灯 動作準備中に通信系ハードウェア異常を検出しました。
(注1)パラメータの設定後はコントローラの電源再投入を行い、コントローラ前面のモード切替SWをAUTO側に戻してください。MANU側のままの場合PLCによる運転はできません。
(注2)通信速度はマスタ局に合せて自動設定されますので、設定の必要はありません。
PLC 出力
アドレス
(ワードアドレス )
SCON-CA/CB/CAL の DI および入力データレジスタ
リモート
Ⅰ /O モード
ポジション/
簡易直値モード
ハーフ直値
モードフル直値モード
リモート
Ⅰ /O モード 2占有バイト数:2 占有バイト数:8 占有バイト数:16 占有バイト数:32 占有バイト数:12
n ポート番号 0 ~ 15目標位置 目標位置 目標位置
ポート番号 0 ~ 15n + 1
占有領域
n + 2 指定ポジション No.位置決め幅 位置決め幅
n + 3 制御信号
n + 4 速度速度指定
n + 5 加減速度
n + 6 押付け電流制限値ゾーン境界値+
n + 7 制御信号
n + 8ゾーン境界値-
n + 9n + 10 加速度
n + 11 減速度
n + 12 押付け電流制限値
n + 13 負荷電流閾値
n + 14 制御信号 1n + 15 制御信号 2
(注) 占有領域 は動作モードの設定により占有される領域です。
他の目的に使用できません。またアドレスの重複使用にご注意ください。
5.4 マスタ局との交信
5.4.1 各動作モードと PLC アドレスの対応
各動作モードのアドレス割付を次に示します。
・PLC 出力→ SCON-CA/CB/CAL の入力(※n は各軸の入力先頭アドレスです。)

168
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
・PLC 出力→ SCON-CA/CB/CAL の入力(※n は各軸のノードアドレスです。)
PLC 出力
アドレス
(ワードアドレス )
SCON-CA/CB/CAL の DI および入力データレジスタ
ポジション/
簡易直値モード 2ハーフ直値
モード 2リモート
Ⅰ /O モード 3ハーフ直値
モード 3占有バイト数:8 占有バイト数:16 占有バイト数:12 占有バイト数:16
n目標位置 目標位置
ポート番号 0 ~ 15目標位置
n + 1
占有領域
n + 2 指定ポジション No.位置決め幅 位置決め幅
n + 3 制御信号
n + 4 速度 速度
n + 5 加減速度 加減速度
n + 6 押付け電流制限値 押付け電流制限値
n + 7 制御信号 制御信号
n + 8n + 9n + 10n + 11n + 12n + 13n + 14n + 15
(注) 占有領域 は動作モードの設定により占有される領域です。
他の目的に使用できません。またアドレスの重複使用にご注意ください。
(注)ポジション / 簡易直値モード 2、ハーフ直値モード 2、リモート I/O モード 3 は、
SCON-CAL では選択できません。

169
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
PLC 入力
アドレス
(ワードアドレス )
SCON-CA/CB/CAL 側 DO および出力データレジスタ
リモート
Ⅰ /O モード
ポジション/
簡易直値モード
ハーフ直値
モードフル直値モード
リモート
Ⅰ /O モード 2占有バイト数:2 占有バイト数:8 占有バイト数:16 占有バイト数:32 占有バイト数:12
n ポート番号 0 ~ 15現在位置 現在位置 現在位置
ポート番号 0 ~ 15n + 1 占有領域
n + 2完了ポジション No.(簡易アラーム ID) 指令電流 指令電流 現在位置
n + 3 状態信号
n + 4現在速度 現在速度 指令電流
n + 5n + 6 アラームコード アラームコード
n + 7 状態信号 占有領域
n + 8現在荷重
n + 9n + 10
通算移動回数n + 11n + 12
通算走行距離n + 13n + 14 状態信号 1n + 15 状態信号 2
(注) 占有領域 は動作モードの設定により占有される領域です。
他の目的に使用できません。またアドレスの重複使用にご注意ください。
・SCON-CA/CB/CAL 出力→ PLC 入力側(※n は各軸の入力先頭アドレスです。)

170
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
76
参考:PLCのアドレス割付表記規則例…富士電機の場合PLCのアドレス割付表記規則を次に示します。
接頭辞 %IX …入力用ビットアドレス(1ビットごとのアドレス)%IW …入力用ワードアドレス(1ワードごとのアドレス)%QX …出力用ビットアドレス(1ビットごとのアドレス)%QW …出力用ワードアドレス(1ワードごとのアドレス)
バス局番ProfiBus-DPマスターユニットが、PLCユニット内で何番目に設置されているユニットかを表しています。
ワードアドレスマスター局に割り付けられたACONまたはPCONのDI、DOおよび入出力データレジスタをワード毎に順番に並べたアドレスです。
ビットアドレスワードアドレスに割り付けられたACONまたはPCONのDI、DOおよび入出力データレジスタをビット毎に順番に並べたアドレスです。
接頭辞 バス局番 ワードアドレス ビットアドレス
ProfiB
us-DP
CPU電
源
マスター局
局番1 局番2 …
PLC 入力
アドレス
(ワードアドレス )
SCON-CA/CB/CAL 側 DO および出力データレジスタ
ポジション/
簡易直値モード 2ハーフ直値
モード 2リモート
Ⅰ /O モード 3ハーフ直値
モード 3占有チャネル数:8 占有チャネル数:16 占有チャネル数:12 占有チャネル数:16
n現在位置 現在位置
ポート番号 0 ~ 15現在位置
n + 1 占有領域
n + 2完了ポジション No.(簡易アラーム ID) 現在荷重 現在位置 指令電流
n + 3 状態信号
n + 4現在速度 現在荷重 現在速度
n + 5n + 6 アラームコード アラームコード
n + 7 状態信号 状態信号
n + 8n + 9n + 10n + 11n + 12n + 13n + 14n + 15
(注) 占有領域 は動作モードの設定により占有される領域です。
他の目的に使用できません。またノードアドレスの重複使用にご注意ください。
(注)ポジション / 簡易直値モード 2、ハーフ直値モード 2、リモート I/O モード 3 は、
SCON-CAL では選択できません。
・SCON-CA/CB/CAL 出力→ PLC 入力側(※n は各軸のノードアドレスです。)

171
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
76
参考:PLCのアドレス割付表記規則例…富士電機の場合PLCのアドレス割付表記規則を次に示します。
接頭辞 %IX …入力用ビットアドレス(1ビットごとのアドレス)%IW …入力用ワードアドレス(1ワードごとのアドレス)%QX …出力用ビットアドレス(1ビットごとのアドレス)%QW …出力用ワードアドレス(1ワードごとのアドレス)
バス局番ProfiBus-DPマスターユニットが、PLCユニット内で何番目に設置されているユニットかを表しています。
ワードアドレスマスター局に割り付けられたACONまたはPCONのDI、DOおよび入出力データレジスタをワード毎に順番に並べたアドレスです。
ビットアドレスワードアドレスに割り付けられたACONまたはPCONのDI、DOおよび入出力データレジスタをビット毎に順番に並べたアドレスです。
接頭辞 バス局番 ワードアドレス ビットアドレス
ProfiB
us-DP
CPU電
源
マスター局
局番1 局番2 …
ワードアドレス
マスター局に割り付けられた SCON-CA/CB/CAL の DI、DO および入出力データレジスタを ワード毎に順番に並べたアドレスです。
ビットアドレス
ワードアドレスに割り付けられた SCON-CA/CB/CAL の DI、DO および入出力データレジスタを ビット毎に順番に並べたアドレスです。
PROFIBUS-DP マスターユニットが、PLC ユニット内で何番目に設置されているユニットかを表
しています。
PRO
FIBUS-D
P
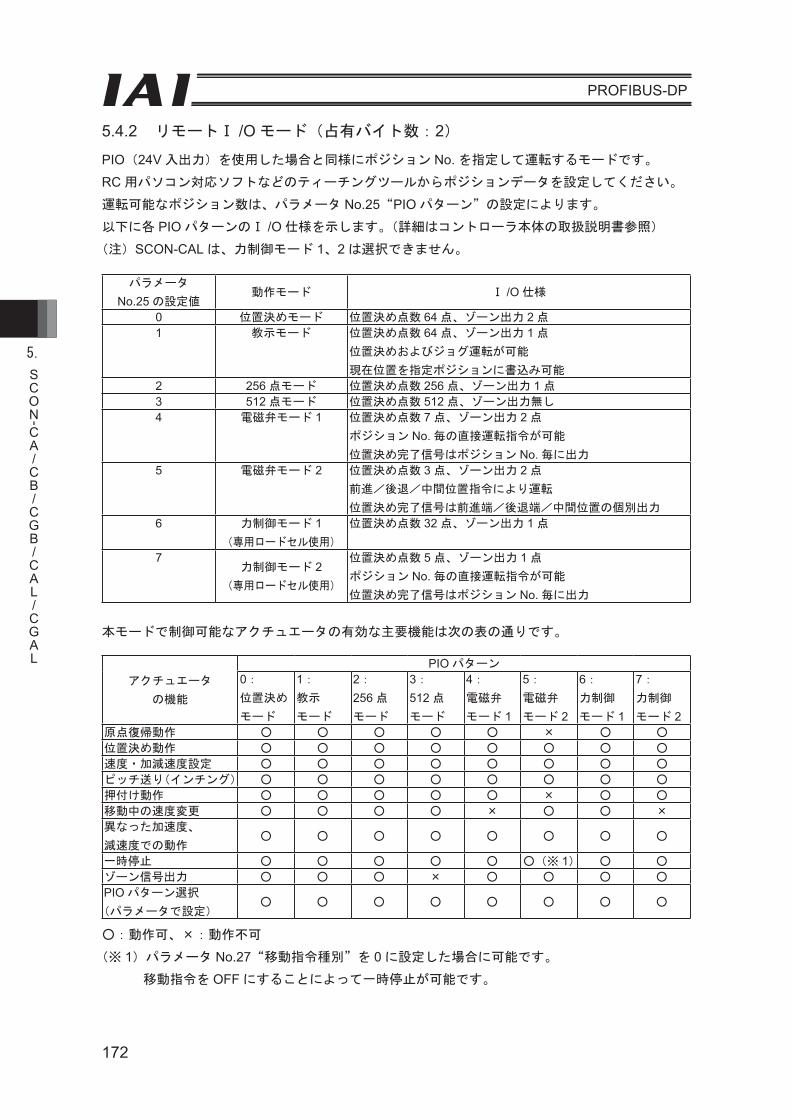
172
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
78
(1)PLCアドレス構成(※nは各軸の入出力先頭アドレスです。)
アドレスの重複使用にご注意ください。
(2)軸毎の入出力信号割付
各軸の入出力信号は、入出力アドレスの各1ワード(2バイト)で構成されます。
PLCからビット単位のON/OFF信号で制御します。
パラメータ ACONまたはPCON側 PLC側出力 ACONまたはPCON側 PLC側入力No.84 DI(ポート番号) アドレス DO(ポート番号) アドレス0 0~15 n 0~15 n
15
14
13
12
11
10
9 8 7 6 5 4 3 2 1 0
Fn+0 E D C B A 9 8 7 6 5 4 3 2 1 0
PLC出力(※nは各軸の出力先頭アドレスです。)
コントローラ 入力ポート 番号
1ワード=2バイト=16ビット
15
14
13
12
11
10
9 8 7 6 5 4 3 2 1 0
Fn+0 E D C B A 9 8 7 6 5 4 3 2 1 0
PLC入力(※nは各軸の入力先頭アドレスです。)
アドレス
アドレス
コントローラ 出力ポート 番号
1ワード=2バイト=16ビット
パラメータ
No.25 の設定値動作モード Ⅰ /O 仕様
0 位置決めモード 位置決め点数 64 点、ゾーン出力 2 点
1 教示モード 位置決め点数 64 点、ゾーン出力 1 点
位置決めおよびジョグ運転が可能
現在位置を指定ポジションに書込み可能
2 256 点モード 位置決め点数 256 点、ゾーン出力 1 点
3 512 点モード 位置決め点数 512 点、ゾーン出力無し
4 電磁弁モード 1 位置決め点数 7 点、ゾーン出力 2 点
ポジション No. 毎の直接運転指令が可能
位置決め完了信号はポジション No. 毎に出力
5 電磁弁モード 2 位置決め点数 3 点、ゾーン出力 2 点
前進/後退/中間位置指令により運転
位置決め完了信号は前進端/後退端/中間位置の個別出力
6 力制御モード 1(専用ロードセル使用)
位置決め点数 32 点、ゾーン出力 1 点
7力制御モード 2
(専用ロードセル使用)
位置決め点数 5 点、ゾーン出力 1 点
ポジション No. 毎の直接運転指令が可能
位置決め完了信号はポジション No. 毎に出力
アクチュエータ
の機能
PIO パターン
0:位置決め
モード
1:教示
モード
2:256 点
モード
3:512 点
モード
4:電磁弁
モード 1
5:電磁弁
モード 2
6:力制御
モード 1
7:力制御
モード 2原点復帰動作 ×
位置決め動作
速度・加減速度設定
ピッチ送り(インチング)
押付け動作 ×
移動中の速度変更 × ×
異なった加速度、
減速度での動作
一時停止 (※ 1)
ゾーン信号出力 ×
PIO パターン選択
(パラメータで設定)
本モードで制御可能なアクチュエータの有効な主要機能は次の表の通りです。
:動作可、×:動作不可
(※ 1) パラメータ No.27“移動指令種別”を 0 に設定した場合に可能です。
移動指令を OFF にすることによって一時停止が可能です。
5.4.2 リモートⅠ /O モード(占有バイト数:2)
PIO(24V 入出力)を使用した場合と同様にポジション No. を指定して運転するモードです。
RC 用パソコン対応ソフトなどのティーチングツールからポジションデータを設定してください。
運転可能なポジション数は、パラメータ No.25“PIO パターン”の設定によります。
以下に各 PIO パターンのⅠ /O 仕様を示します。(詳細はコントローラ本体の取扱説明書参照)
(注)SCON-CAL は、力制御モード 1、2 は選択できません。

173
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
78
(1)PLCアドレス構成(※nは各軸の入出力先頭アドレスです。)
アドレスの重複使用にご注意ください。
(2)軸毎の入出力信号割付
各軸の入出力信号は、入出力アドレスの各1ワード(2バイト)で構成されます。
PLCからビット単位のON/OFF信号で制御します。
パラメータ ACONまたはPCON側 PLC側出力 ACONまたはPCON側 PLC側入力No.84 DI(ポート番号) アドレス DO(ポート番号) アドレス0 0~15 n 0~15 n
15
14
13
12
11
10
9 8 7 6 5 4 3 2 1 0
Fn+0 E D C B A 9 8 7 6 5 4 3 2 1 0
PLC出力(※nは各軸の出力先頭アドレスです。)
コントローラ 入力ポート 番号
1ワード=2バイト=16ビット
15
14
13
12
11
10
9 8 7 6 5 4 3 2 1 0
Fn+0 E D C B A 9 8 7 6 5 4 3 2 1 0
PLC入力(※nは各軸の入力先頭アドレスです。)
アドレス
アドレス
コントローラ 出力ポート 番号
1ワード=2バイト=16ビット
SCON-CA/CB/CAL 側 SCON-CA/CB/CAL 側

174
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
79
(3)入出力信号割付
パラメータNo.25の設定によりコントローラの入出力ポートの信号内容が変わります。
(詳細はコントローラ本体の取扱説明書参照)
ACON
*は正常時ON信号です。“使用できません”と表記されている信号は制御していません。(ON/OFFは不定です)
パラメータNo.25の設定位置決めモード 教示モード 256点モード
0 1 2
区分 ポート 信号名称 記号 信号名称 記号 信号名称 記号番号01234567
PLC出力→ 8ACON入力 9
101112
13
141501234567
ACON出力 8→PLC入力 9
10
11
12131415
PC1PC2
指令ポジション番号PC4PC8PC16PC32
使用できません
ブレーキ強制解除 BKRL運転モード RMOD原点復帰 HOME一時停止 *STP
位置決めスタート CSTR
リセット RESサーボON指令 SON
PM1PM2
完了ポジション番号PM4PM8PM16PM32
移動中信号 MOVEゾーン1 ZONE1
ポジションゾーン PZONE運転モード状態 RMDS原点復帰完了 HEND
位置決め完了信号 PEND
運転準備完了 SV非常停止 *EMGSアラーム *ALM
使用できません
PC1PC2
指令ポジション番号PC4PC8PC16PC32
教示モード指令 MODEジョグ/インチング切替 JISL+ジョグ JOG+-ジョグ JOG-運転モード RMOD原点復帰 HOME一時停止 *STP
位置決めスタート/CSTR/ポジションデータPWRT取込み指令
リセット RESサーボON指令 SON
PM1PM2
完了ポジション番号PM4PM8PM16PM32
移動中信号 MOVE教示モード信号 MODESポジションゾーン PZONE運転モード状態 RMDS原点復帰完了 HEND位置決め完了信号/
PEND/ポジションデータWEND取込み完了
運転準備完了 SV非常停止 *EMGSアラーム *ALM
使用できません
PC1PC2PC4
指令ポジション番号PC8PC16PC32PC64PC128
使用できません ブレーキ強制解除 BKRL運転モード RMOD原点復帰 HOME一時停止 *STP
位置決めスタート CSTR
リセット RESサーボON指令 SON
PM1PM2PM4
完了ポジション番号PM8PM16PM32PM64PM128
ポジションゾーン PZONE運転モード状態 RMDS原点復帰完了 HEND
位置決め完了信号 PEND
運転準備完了 SV非常停止 *EMGSアラーム *ALM
使用できません ONON OFF
No.25256
210
01234567PLC
SCON-CA/CB/CAL
89
101112
13
141501234567SCON-CA
/CB/CAL
PLC8
910
11
12131415
PC1PC2PC4PC8
PC16PC32
BKRLRMODHOME
STP
CSTR
RESSONPM1PM2PM4PM8
PM16PM32MOVEZONE1PZONE/ZONE2RMDSHEND
PEND
SVEMGSALM
PC1PC2PC4PC8
PC16PC32MODEJISL
JOGJOGRMODHOME
STP
CSTRPWRT
RESSONPM1PM2PM4PM8
PM16PM32MOVEMODESPZONE/ZONE1RMDSHEND
PENDWEND
SVEMGSALM
PC1PC2PC4PC8PC16PC32PC64PC128
BKRLRMODHOME
STP
CSTR
RESSONPM1PM2PM4PM8
PM16PM32PM64PM128
PZONE/ZONE1RMDSHEND
PEND
SVEMGSALM
BALM
No.
ON
No.
1
2
BALM
No.
ON
No.
1
BALM
No.
ON
No.
1
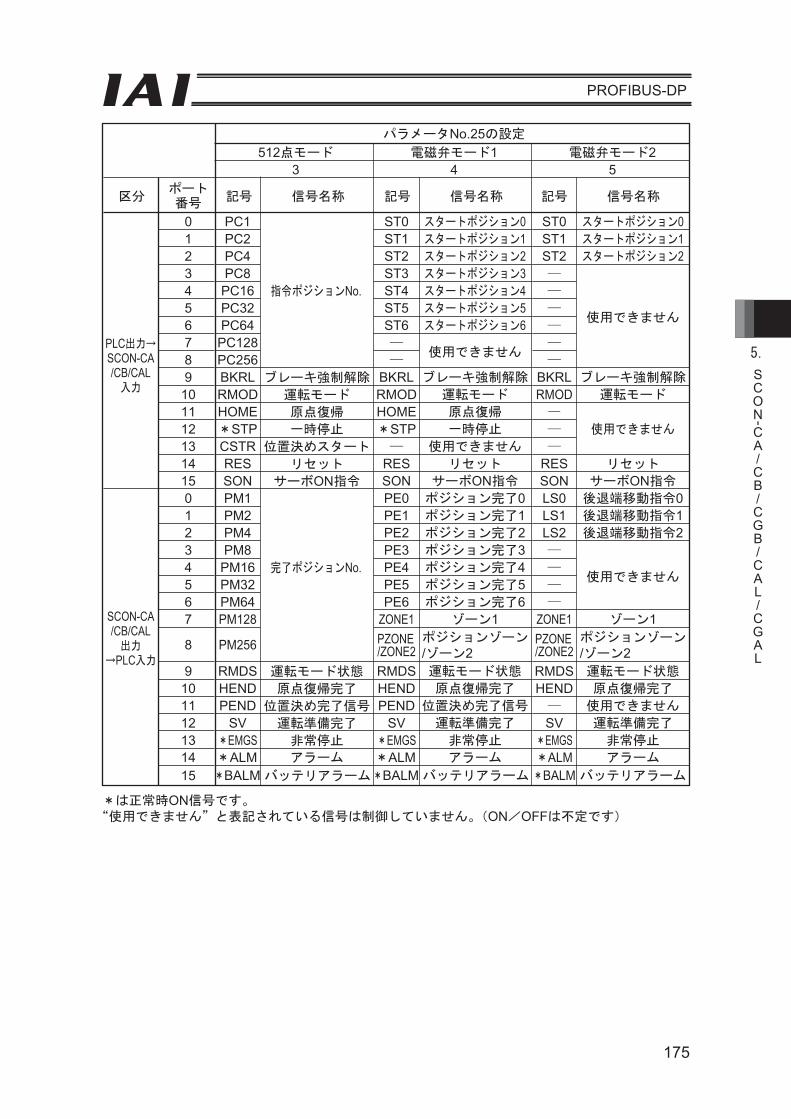
175
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ONON OFF
No.25512 1 2
543
012345678910111213141501234567
8
9101112131415
PC1PC2PC4PC8
PC16PC32PC64
PC128PC256BKRLRMODHOME
STPCSTRRESSONPM1PM2PM4PM8
PM16PM32PM64PM128
PM256
RMDSHENDPEND
SVEMGS
ST0ST1ST2ST3ST4ST5ST6
BKRLRMODHOME
STP
RESSONPE0PE1PE2PE3PE4PE5PE6
ZONE1PZONE/ZONE2RMDSHENDPEND
SVEMGSALM
ST0ST1ST2
BKRLRMOD
RESSONLS0LS1LS2
ZONE1PZONE/ZONE2RMDSHEND
SVEMGSALM
PLCSCON-CA/CB/CAL
SCON-CA/CB/CAL
PLC
BALM
No.
ON
No.
BALM
0123456
ON0123456
1
/ 2
BALM
012
ON012
1
/ 2
ALM
ProfiBus-DP
79
(3)入出力信号割付
パラメータNo.25の設定によりコントローラの入出力ポートの信号内容が変わります。
(詳細はコントローラ本体の取扱説明書参照)
ACON
*は正常時ON信号です。“使用できません”と表記されている信号は制御していません。(ON/OFFは不定です)
パラメータNo.25の設定位置決めモード 教示モード 256点モード
0 1 2
区分 ポート 信号名称 記号 信号名称 記号 信号名称 記号番号01234567
PLC出力→ 8ACON入力 9
101112
13
141501234567
ACON出力 8→PLC入力 9
10
11
12131415
PC1PC2
指令ポジション番号PC4PC8PC16PC32
使用できません
ブレーキ強制解除 BKRL運転モード RMOD原点復帰 HOME一時停止 *STP
位置決めスタート CSTR
リセット RESサーボON指令 SON
PM1PM2
完了ポジション番号PM4PM8PM16PM32
移動中信号 MOVEゾーン1 ZONE1
ポジションゾーン PZONE運転モード状態 RMDS原点復帰完了 HEND
位置決め完了信号 PEND
運転準備完了 SV非常停止 *EMGSアラーム *ALM
使用できません
PC1PC2
指令ポジション番号PC4PC8PC16PC32
教示モード指令 MODEジョグ/インチング切替 JISL+ジョグ JOG+-ジョグ JOG-運転モード RMOD原点復帰 HOME一時停止 *STP
位置決めスタート/CSTR/ポジションデータPWRT取込み指令
リセット RESサーボON指令 SON
PM1PM2
完了ポジション番号PM4PM8PM16PM32
移動中信号 MOVE教示モード信号 MODESポジションゾーン PZONE運転モード状態 RMDS原点復帰完了 HEND位置決め完了信号/
PEND/ポジションデータWEND取込み完了
運転準備完了 SV非常停止 *EMGSアラーム *ALM
使用できません
PC1PC2PC4
指令ポジション番号PC8PC16PC32PC64PC128
使用できません ブレーキ強制解除 BKRL運転モード RMOD原点復帰 HOME一時停止 *STP
位置決めスタート CSTR
リセット RESサーボON指令 SON
PM1PM2PM4
完了ポジション番号PM8PM16PM32PM64PM128
ポジションゾーン PZONE運転モード状態 RMDS原点復帰完了 HEND
位置決め完了信号 PEND
運転準備完了 SV非常停止 *EMGSアラーム *ALM
使用できません
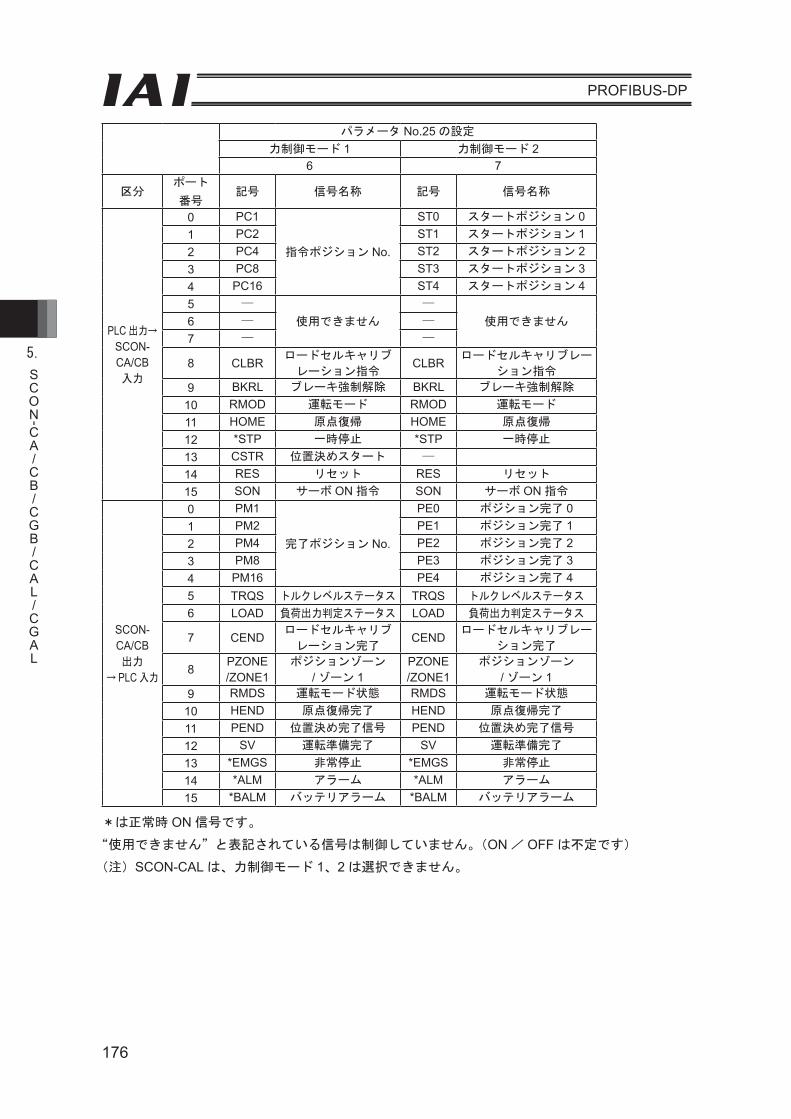
176
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
83
7.4.3 ポジション/簡易直値モード(占有バイト数:8)ポジションNo.を指定して運転する方式です。制御信号(PMOD信号)の切換えで目標位置を直接数値で指定するか、ポジションデータに登録した値を使用するか選択できます。
目標位置以外の速度、加減速度、位置決め幅等はコントローラ内のポジションテーブルの値が使用されます。コントローラ本体の取扱説明書を参照してポジションデータを設定してください。
設定可能なポジションデータの数は最大768点です。
本モードで制御可能なロボシリンダの有効な主要機能は次の表の通りです。
:直接制御
ロボシリンダの機能 :間接制御 備考
×:無効
原点復帰動作
位置決め動作
速度・加減速度設定
ピッチ送り(インチング)
押付け動作 ポジションデータの
移動中の速度変更 設定が必要です。
異なった加速度、
減速度での動作
一時停止
ゾーン信号出力 ゾーンの設定は
パラメータに行います。
PIOパターン選択 ×
(1)PLCアドレス構成(※nは各軸の入出力先頭アドレスです。)
(注)アドレスの重複使用にご注意ください。
パラメータ ACONまたはPCON側 PLC側出力 ACONまたはPCON側 PLC側入力No.84 入力レジスタ アドレス 出力レジスタ アドレス1
目標位置n+0
現在位置n+0
n+1 n+1
指定ポジション番号 n+2完了ポジション番号
n+2(簡易アラームコード)
制御信号 n+3 状態信号 n+3*は正常時 ON 信号です。
“使用できません”と表記されている信号は制御していません。(ON / OFF は不定です)
(注)SCON-CAL は、力制御モード 1、2 は選択できません。
パラメータ No.25 の設定
力制御モード 1 力制御モード 26 7
区分ポート
番号記号 信号名称 記号 信号名称
PLC 出力→
SCON-CA/CB入力
0 PC1
指令ポジション No.
ST0 スタートポジション 01 PC2 ST1 スタートポジション 12 PC4 ST2 スタートポジション 23 PC8 ST3 スタートポジション 34 PC16 ST4 スタートポジション 45
使用できません
使用できません6
7
8 CLBR ロードセルキャリブ
レーション指令CLBR ロードセルキャリブレー
ション指令
9 BKRL ブレーキ強制解除 BKRL ブレーキ強制解除
10 RMOD 運転モード RMOD 運転モード
11 HOME 原点復帰 HOME 原点復帰
12 *STP 一時停止 *STP 一時停止
13 CSTR 位置決めスタート
14 RES リセット RES リセット
15 SON サーボ ON 指令 SON サーボ ON 指令
SCON-CA/CB出力
→ PLC 入力
0 PM1
完了ポジション No.
PE0 ポジション完了 01 PM2 PE1 ポジション完了 12 PM4 PE2 ポジション完了 23 PM8 PE3 ポジション完了 34 PM16 PE4 ポジション完了 45 TRQS トルクレベルステータス TRQS トルクレベルステータス
6 LOAD 負荷出力判定ステータス LOAD 負荷出力判定ステータス
7 CEND ロードセルキャリブ
レーション完了CEND ロードセルキャリブレー
ション完了
8 PZONE/ZONE1
ポジションゾーン
/ ゾーン 1PZONE/ZONE1
ポジションゾーン
/ ゾーン 19 RMDS 運転モード状態 RMDS 運転モード状態
10 HEND 原点復帰完了 HEND 原点復帰完了
11 PEND 位置決め完了信号 PEND 位置決め完了信号
12 SV 運転準備完了 SV 運転準備完了
13 *EMGS 非常停止 *EMGS 非常停止
14 *ALM アラーム *ALM アラーム
15 *BALM バッテリアラーム *BALM バッテリアラーム

177
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
83
7.4.3 ポジション/簡易直値モード(占有バイト数:8)ポジションNo.を指定して運転する方式です。制御信号(PMOD信号)の切換えで目標位置を直接数値で指定するか、ポジションデータに登録した値を使用するか選択できます。
目標位置以外の速度、加減速度、位置決め幅等はコントローラ内のポジションテーブルの値が使用されます。コントローラ本体の取扱説明書を参照してポジションデータを設定してください。
設定可能なポジションデータの数は最大768点です。
本モードで制御可能なロボシリンダの有効な主要機能は次の表の通りです。
:直接制御
ロボシリンダの機能 :間接制御 備考
×:無効
原点復帰動作
位置決め動作
速度・加減速度設定
ピッチ送り(インチング)
押付け動作 ポジションデータの
移動中の速度変更 設定が必要です。
異なった加速度、
減速度での動作
一時停止
ゾーン信号出力 ゾーンの設定は
パラメータに行います。
PIOパターン選択 ×
(1)PLCアドレス構成(※nは各軸の入出力先頭アドレスです。)
(注)アドレスの重複使用にご注意ください。
パラメータ ACONまたはPCON側 PLC側出力 ACONまたはPCON側 PLC側入力No.84 入力レジスタ アドレス 出力レジスタ アドレス1
目標位置n+0
現在位置n+0
n+1 n+1
指定ポジション番号 n+2完了ポジション番号
n+2(簡易アラームコード)
制御信号 n+3 状態信号 n+3
1
SCON-CA/CB/CAL 側 SCON-CA/CB/CAL 側
ゾーンの設定はポジションデータ、またはパラメータに行います。
5.4.3 ポジション/簡易直値モード(占有バイト数:8)
アクチュエータの機能
ポジション No. を指定して運転する方式です。制御信号(PMOD 信号)の切換えで目標位置を直
接数値で指定するか、ポジションデータに登録した値を使用するか選択できます。
目標位置以外の速度、加減速度、位置決め幅等はコントローラ内のポジションテーブルの値が使用
されます。コントローラ本体の取扱説明書を参照してポジションデータを設定してください。
設定可能なポジションデータの数は最大 768 点です。
本モードで制御可能なアクチュエータの有効な主要機能は次の表の通りです。
指令ポジション No.完了ポジション No.

178
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
85
b15n+0 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
PLC入力 アドレス(※nは各軸の入力先頭アドレスです。)
現在位置が負数の場合は、2の補数で表されます。
現在位置 (上位ワード)
1ワード=2バイト=16ビット
現在位置 (下位ワード)
PM512
PM256
PM128
PM64
PM32
PM16
PM8
PM4
PM2
PM1
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
完了ポジション 番号
EMGS
PWR
ZONE1
ZONE2
PZONE
MODES
WEND
RMDS
PSFL
SV
ALM
MOVE
HEND
PEND
状態信号
ProfiBus-DP
84
(2)軸毎の入出力信号割付
各軸の入出力信号は、入出力アドレスの各4ワード(8バイト)で構成されます。
制御信号および状態信号はビット単位のON/OFF信号です。
目標位置および現在位置は2ワード(32ビット)のバイナリデータで、PLCでは-999999~+999999(単位:0.01mm)の数値が扱えますが、位置データは当該アクチュエータのソフトストロークの範囲内(0~有効ストローク長)で設定してください。
指定ポジション番号および完了ポジション番号は1ワード(16ビット)のバイナリデータで、PLCでは0~767までの数値が扱えますが、パソコンソフトまたはティーチングBOXであらかじめ運転条件を設定したポジション番号を指定してください。
b15n+0 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
PLC出力 アドレス(※nは各軸の出力先頭アドレスです。)
目標位置が負数の場合は、2の補数で表されます。
目標位置 (上位ワード)
1ワード=2バイト=16ビット
目標位置 (下位ワード)
PC512
PC256
PC128
PC64
PC32
PC16
PC8
PC4
PC2
PC1
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指定ポジション 番号
BKRL
RMOD
PMOD
MODE
PWRT
JOG+
JOG-
JVEL
JISL
SON
RES
STP
HOME
CSTR
制御信号
No.
(2)軸毎の入出力信号割付
各軸の入出力信号は、入出力アドレスの各 4 ワード(8 バイト)で構成されます。
制御信号および状態信号はビット単位の ON / OFF 信号です。
目標位置および現在位置は 2 ワード(32 ビット)のバイナリデータで、PLC では- 999999 ~
+ 999999(単位:0.01mm(DD モータ以外 )、0.001°(DD モータ ))の数値が扱えますが、位置デー
タは当該アクチュエータのソフトストロークの範囲内(0 ~有効ストローク長)で設定してくだ
さい。
指定ポジション No. および完了ポジション No. は 1 ワード(16 ビット)のバイナリデータで、
PLC では 0 ~ 767 までの数値が扱えますが、パソコンソフトなどのティーチングツールであら
かじめ運転条件を設定したポジション No. を指定してください。

179
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
85
b15n+0 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
PLC入力 アドレス(※nは各軸の入力先頭アドレスです。)
現在位置が負数の場合は、2の補数で表されます。
現在位置 (上位ワード)
1ワード=2バイト=16ビット
現在位置 (下位ワード)
PM512
PM256
PM128
PM64
PM32
PM16
PM8
PM4
PM2
PM1
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
完了ポジション 番号
EMGS
PWR
ZONE1
ZONE2
PZONE
MODES
WEND
RMDS
PSFL
SV
ALM
MOVE
HEND
PEND
状態信号
ZON
E1
ZON
E2
BALM
No.
ProfiBus-DP
84
(2)軸毎の入出力信号割付
各軸の入出力信号は、入出力アドレスの各4ワード(8バイト)で構成されます。
制御信号および状態信号はビット単位のON/OFF信号です。
目標位置および現在位置は2ワード(32ビット)のバイナリデータで、PLCでは-999999~+999999(単位:0.01mm)の数値が扱えますが、位置データは当該アクチュエータのソフトストロークの範囲内(0~有効ストローク長)で設定してください。
指定ポジション番号および完了ポジション番号は1ワード(16ビット)のバイナリデータで、PLCでは0~767までの数値が扱えますが、パソコンソフトまたはティーチングBOXであらかじめ運転条件を設定したポジション番号を指定してください。
b15n+0 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
PLC出力 アドレス(※nは各軸の出力先頭アドレスです。)
目標位置が負数の場合は、2の補数で表されます。
目標位置 (上位ワード)
1ワード=2バイト=16ビット
目標位置 (下位ワード)
PC512
PC256
PC128
PC64
PC32
PC16
PC8
PC4
PC2
PC1
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指定ポジション 番号
BKRL
RMOD
PMOD
MODE
PWRT
JOG+
JOG-
JVEL
JISL
SON
RES
STP
HOME
CSTR
制御信号

180
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
(3) 入出力信号割付(※表中の ON の表記は該当のビットが“1”を表し、OFF は“0”を表します)
信号種別 ビット 記号 内容 詳細
目標位置 32 ビット データ
32 ビット符号付整数 目標位置を絶対座標上の位置で指定してください。 単位は 0.01mm(DD モータ以外)、0.001(DD モータ)で指定可能範囲は、-999999~999999 となります。 (例) +25.40mm なら 2540 と指定します。 パラメータのソフトリミットの内側(0.2mm)を超えた値を入力するとソフトリミットの内側(0.2mm)までの移動に制限されます。 ※16 進数で入力する場合、負数は 2 の補数で入力してください。
5.6 (1)
指定 ポジション
No.
16 ビット データ
PC1~PC512
16 ビット整数 運転にはパソコン対応ソフトなどのティーチングツールであらかじめ運転条件を設定したポジションデータが必要です。 本レジスタでデータを入力したポジション No.を指定してください。 指定可能範囲は 0~767 となります。 範囲外の値の指定、未設定のポジション No.の指定はスタート信号を ON した際にアラームとなります。
5.6 (1)
b15 BKRL ブレーキ強制解除:ON でブレーキ解除 5.4.11(18)b14 RMOD 運転モード:OFF で AUTO モード、ON で MANU モード 5.4.11(19)b13 b12
使用できません
b11 PMOD ポジション/簡易直値切替: OFF でポジションモード、ON で簡易直値モード 5.4.11(20)
b10 MODE 教示モード指令: OFF で通常モード、ON で教示モード 5.4.11(16)
b9 PWRT ポジションデータ取り込み指令: ON でポジションデータ取込み 5.4.11(17)
b8 JOG+ +ジョグ:ON で反原点方向移動 5.4.11(13)b7 JOG- -ジョグ:ON で原点方向移動 5.4.11(13)
b6 JVEL
ジョグ速度/インチング距離切替え: OFF でパラメータ No.26“ジョグ速度”、パラメータ No.48“インチング距離” ON でパラメータ No.47“ジョグ速度 2”、パラメータ No.49“インチング距離 2” の設定値を使用する。
5.4.11(14)
b5 JISL ジョグ/インチング切替え: OFF でジョグ動作、ON でインチング動作 5.4.11(15)
b4 SON サーボ ON 指令:ON でサーボ ON 5.4.11(5)b3 RES リセット:ON でリセット実行 5.4.11(4)b2 STP 一時停止:ON で一時停止指令 5.4.11(11)b1 HOME 原点復帰:ON で原点復帰指令 5.4.11(6)
PLC出力
制御番号
b0 CSTR 位置決めスタート:ON で移動指令 5.4.11(7)

181
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
(※表中の ON の表記は該当のビットが“1”を表し、OFF は“0”を表します)
信号種別 ビット 記号 内容 詳細
現在位置 32 ビット
現在位置 32 ビット符号付整数単位は 0.01mm(DD モータ以外)、0.001(DD モータ)です。(例) 読取り値:000003FFH=1023(10 進数)
=10.23mm ※16 進数で読取る場合、負数は 2 の補数表示とな
ります。
5.6 (1)
完了ポジション
No.(簡易アラーム
コード)
16 ビットPM1~PM512
16 ビット整数目標位置まで移動し、位置決め幅内に入る位置決め完了したポジション No.が出力されます。一度もポジション移動を行ってない場合及び移動中は“0”が出力されます。アラームが発生した場合(状態信号の ALM が ONの場合)には簡易アラームコード(コントローラ本体の取扱説明書参照)が出力されます。
5.6 (1)
b15 EMGS 非常停止:ON で非常停止状態 5.4.11(2)b14 PWR コントローラ準備完了:準備完了で ON 5.4.11(1)b13 ZONE2 ゾーン 2:現在位置がゾーン設定内にあるとき ON 5.4.11(12)b12 ZONE1 ゾーン 1:現在位置がゾーン設定内にあるとき ON 5.4.11(12)
b11 PZONE ポジションゾーン:現在位置がポジションゾーン設定内にあるとき ON 5.4.11(12)
b10 MODES 教示モード信号:教示モード選択中で ON 5.4.11(16)b9 WEND ポジションデータ取込み完了:取込み完了で ON 5.4.11(17)
b8 RMDS 運転モード状態:現在の状態が AUTO モードで OFF 、MANU モードで ON 5.4.11(19)
b7 BALM アブソリュートバッテリ電圧低下警告:電圧低下で ON 5.4.11(28)
b6 使用できません
b5 PSFL 押付け空振り:押付け動作空振りで ON 5.4.11(23)b4 SV 運転準備完了:サーボ ON で ON 5.4.11(5)b3 ALM アラーム:アラーム発生で ON 5.4.11(3)b2 MOVE 移動中信号:アクチュエータ移動中で ON 5.4.11(9)b1 HEND 原点復帰完了:原点復帰完了で ON 5.4.11(6)
PLC入力
状態記号
b0 PEND 位置決め完了信号:位置決め完了で ON 5.4.11(10)

182
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
88
7.4.4 ハーフ直値モード(占有バイト数:16)PLCから目標位置、位置決め幅、速度、加減速度、押付電流値を直接数値で指定する運転方式です。
入出力アドレスに各値を設定してください。ゾーン機能を使用する場合にはパラメータNo.1,2,23,24に設定してください。
本モードで制御可能なロボシリンダの有効な主要機能は次の表の通りです。
:直接制御
ロボシリンダの機能 :間接制御 備考
×:無効
原点復帰動作
位置決め動作
速度・加減速度設定
ピッチ送り(インチング)
押付け動作
移動中の速度変更
異なった加速度、×
減速度での動作
一時停止
ゾーン信号出力 パラメータに設定が必要です。
PIOパターン選択 ×
(1)PLCアドレス構成(※nは各軸の入出力先頭アドレスです。)
(注)アドレスの重複使用にご注意ください。
パラメータ ACONまたはPCON側 PLC側出力 ACONまたはPCON側 PLC側入力No.84 入力レジスタ アドレス 出力レジスタ アドレス
2目標位置
n+0現在位置
n+0n+1 n+1
位置決め幅n+2
指令電流n+2
n+3 n+3速度 n+4
現在速度n+4
加減速度 n+5 n+5押付け電流制限値 n+6 アラームコード n+6
制御信号 n+7 状態信号 n+7
SCON-CA/CB/CAL 側 SCON-CA/CB/CAL 側
2
5.4.4 ハーフ直値モード(占有バイト数:16)
PLC から目標位置、位置決め幅、速度、加減速度、押付電流値を直接数値で指定する運転方式
です。入出力アドレスに各値を設定してください。ゾーン機能を使用する場合にはパラメータ
No.1,2,23,24 に設定してください。
本モードで制御可能なアクチュエータの有効な主要機能は次の表の通りです。
アクチュエータの機能
183
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
速度は 1 ワード(16 ビット)のバイナリデータで、PLC では 0 ~+ 65535 (単位:1.0mm/sec または、0.1mm/sec)の数値が扱えますが、当該アクチュエータの最大速度を超えない値に設定
してください。 単位は、パラメータ No.159 FB ハーフ直値モード速度単位で設定します。
パラメータ No.159 設定値 速度単位
0 1.0mm/sec1 0.1mm/sec
ProfiBus-DP
89
(2)軸毎の入出力信号割付
各軸の入出力信号は、入出力アドレスの各8ワード(16バイト)で構成されます。
制御信号および状態信号はビット単位のON/OFF信号です。
目標位置および現在位置は2ワード(32ビット)のバイナリデータで、PLCでは-999999~+999999(単位:0.01mm)の数値が扱えますが、位置データは当該アクチュエータのソフトストロークの範囲内(0~有効ストローク長)で設定してください。
位置決め幅を設定してください。位置決め幅は2ワード(32ビット)のバイナリデータで、PLCでは1~+999999 (単位:0.01mm)の数値が扱えます。
指定速度は1ワード(16ビット)のバイナリデータで、PLCでは0~+65535 (単位:1.0mm/sec)の数値が扱えますが、当該アクチュエータの最大速度を超えない値に設定してください。
加減速度は1ワード(16ビット)のバイナリデータで、PLCでは1~300(単位:0.01G)の数値が扱えますが、当該アクチュエータの最大加速度および最大減速度を超えない値に設定してください。
押付け電流制限値は1ワード(16ビット)のバイナリデータで、PLCでは0(0%)~255(100%)の数値が扱えますが、当該アクチュエータの押付け電流制限値の指定可能範囲内(アクチュエータのカタログまたは取扱説明書参照)で設定してください。
指令電流は2ワード(32ビット)のバイナリデータ(単位:1mA)です。
現在速度は2ワード(32ビット)のバイナリデータ(単位:0.01mm/sec)です。
正数:反原点方向へ移動中、負数:原点方向へ移動中。
アラームコードは1ワード(16ビット)のバイナリデータです。
設定値
押付け電流制限値 0% 50% 100%
0 128 255
(2) 軸毎の入出力信号割付
各軸の入出力信号は、入出力アドレスの各 8 ワード (16 バイト )で構成されます。
制御信号および状態信号はビット単位の ON/OFF 信号です。
目標位置および現在位置は 2 ワード (32 ビット )のバイナリデータで、PLC では- 999999 ~+
999999( 単位:0.01mm(DD モータ以外 )、0.001°(DD モータ ))の数値が扱えますが、位置デー
タは当該アクチュエータのソフトストロークの範囲内 (0 ~有効ストローク長 ) で設定してくだ
さい。
位置決め幅を設定してください。位置決め幅は 2 ワード (32 ビット ) のバイナリデータで、PLCでは 1 ~+ 999999( 単位:0.01mm(DD モータ以外 )、0.001°(DD モータ ))の数値が扱えます。
ProfiBus-DP
88
7.4.4 ハーフ直値モード(占有バイト数:16)PLCから目標位置、位置決め幅、速度、加減速度、押付電流値を直接数値で指定する運転方式です。
入出力アドレスに各値を設定してください。ゾーン機能を使用する場合にはパラメータNo.1,2,23,24に設定してください。
本モードで制御可能なロボシリンダの有効な主要機能は次の表の通りです。
:直接制御
ロボシリンダの機能 :間接制御 備考
×:無効
原点復帰動作
位置決め動作
速度・加減速度設定
ピッチ送り(インチング)
押付け動作
移動中の速度変更
異なった加速度、×
減速度での動作
一時停止
ゾーン信号出力 パラメータに設定が必要です。
PIOパターン選択 ×
(1)PLCアドレス構成(※nは各軸の入出力先頭アドレスです。)
(注)アドレスの重複使用にご注意ください。
パラメータ ACONまたはPCON側 PLC側出力 ACONまたはPCON側 PLC側入力No.84 入力レジスタ アドレス 出力レジスタ アドレス
2目標位置
n+0現在位置
n+0n+1 n+1
位置決め幅n+2
指令電流n+2
n+3 n+3速度 n+4
現在速度n+4
加減速度 n+5 n+5押付け電流制限値 n+6 アラームコード n+6
制御信号 n+7 状態信号 n+7
ProfiBus-DP
89
(2)軸毎の入出力信号割付
各軸の入出力信号は、入出力アドレスの各8ワード(16バイト)で構成されます。
制御信号および状態信号はビット単位のON/OFF信号です。
目標位置および現在位置は2ワード(32ビット)のバイナリデータで、PLCでは-999999~+999999(単位:0.01mm)の数値が扱えますが、位置データは当該アクチュエータのソフトストロークの範囲内(0~有効ストローク長)で設定してください。
位置決め幅を設定してください。位置決め幅は2ワード(32ビット)のバイナリデータで、PLCでは1~+999999 (単位:0.01mm)の数値が扱えます。
指定速度は1ワード(16ビット)のバイナリデータで、PLCでは0~+65535 (単位:1.0mm/sec)の数値が扱えますが、当該アクチュエータの最大速度を超えない値に設定してください。
加減速度は1ワード(16ビット)のバイナリデータで、PLCでは1~300(単位:0.01G)の数値が扱えますが、当該アクチュエータの最大加速度および最大減速度を超えない値に設定してください。
押付け電流制限値は1ワード(16ビット)のバイナリデータで、PLCでは0(0%)~255(100%)の数値が扱えますが、当該アクチュエータの押付け電流制限値の指定可能範囲内(アクチュエータのカタログまたは取扱説明書参照)で設定してください。
指令電流は2ワード(32ビット)のバイナリデータ(単位:1mA)です。
現在速度は2ワード(32ビット)のバイナリデータ(単位:0.01mm/sec)です。
正数:反原点方向へ移動中、負数:原点方向へ移動中。
アラームコードは1ワード(16ビット)のバイナリデータです。
設定値
押付け電流制限値 0% 50% 100%
0 128 255
510(200%)
設定値 0 128 255 510
押付け電流制限値 0% 50% 100% 200%
999
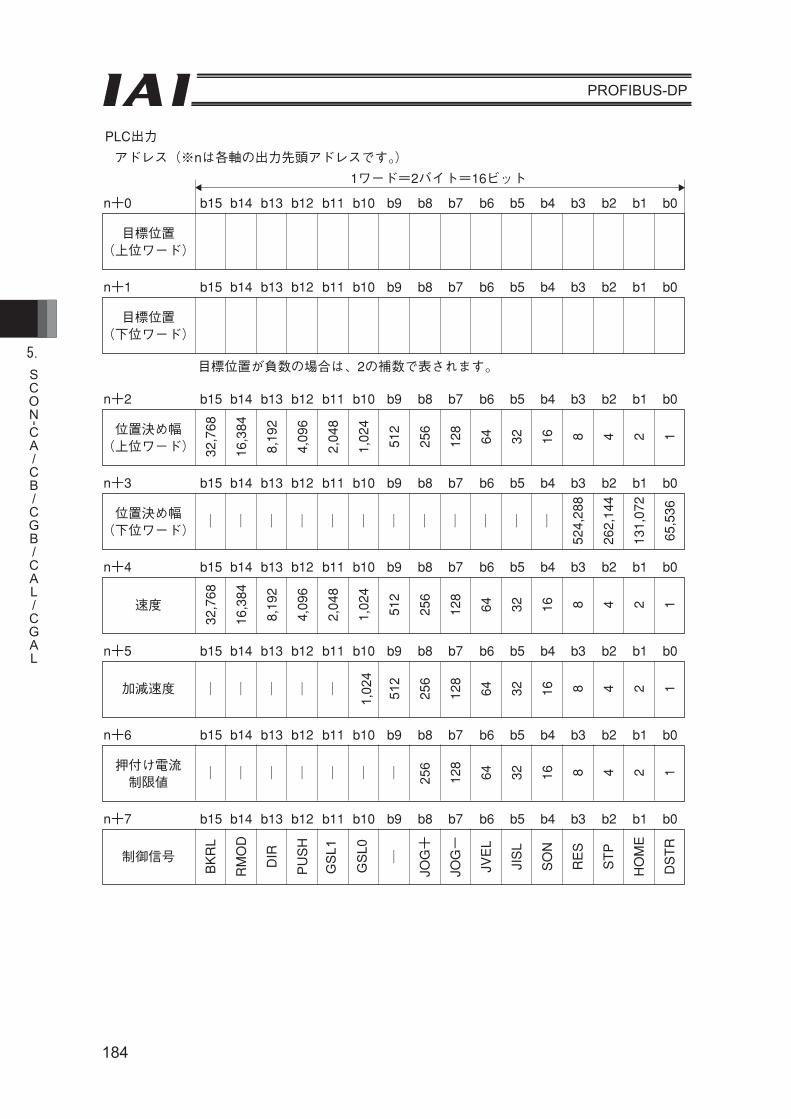
184
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
91
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在位置 (下位ワード)
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指令電流 (上位ワード)
524,288
262,144
131,072
65,536
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指令電流 (下位ワード)
b15n+4 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在速度 (上位ワード)
b15n+5 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在速度 (下位ワード)
b15n+6 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
アラーム コード
EMGS
PWR
ZONE2
ZONE1
RMDS
PSFL
SV
ALM
MOVE
HEND
PEND
b15n+7 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
状態信号
b15n+0 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在位置 (上位ワード)
1ワード=2バイト=16ビット
現在位置が負数の場合は、2の補数で表されます。
現在速度が負数の場合は、2の補数で表されます。
PLC入力
アドレス(※nは各軸の入力先頭アドレスです。)
ProfiBus-DP
90
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
目標位置 (下位ワード)
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
位置決め幅 (上位ワード)
524,288
262,144
131,072
65,536
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
位置決め幅 (下位ワード)
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
b15n+4 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
速度
256
128
64
32
16
8 4 2 1b15n+5 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
加減速度
128
64
32
16
8 4 2 1
b15n+6 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
押付け電流 制限値
BKRL
RMOD
DIR
PUSH
JOG+
JOG-
JVEL
JISL
SON
RES
STP
HOME
DSTR
b15n+7 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
制御信号
b15n+0 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
目標位置 (上位ワード)
1ワード=2バイト=16ビット
目標位置が負数の場合は、2の補数で表されます。
PLC出力
アドレス(※nは各軸の出力先頭アドレスです。)
256
GSL
1
GSL
0
512
1,02
4

185
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
91
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在位置 (下位ワード)
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指令電流 (上位ワード)
524,288
262,144
131,072
65,536
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指令電流 (下位ワード)
b15n+4 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在速度 (上位ワード)
b15n+5 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在速度 (下位ワード)
b15n+6 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
アラーム コード
EMGS
PWR
ZONE2
ZONE1
RMDS
PSFL
SV
ALM
MOVE
HEND
PEND
b15n+7 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
状態信号
b15n+0 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在位置 (上位ワード)
1ワード=2バイト=16ビット
現在位置が負数の場合は、2の補数で表されます。
現在速度が負数の場合は、2の補数で表されます。
PLC入力
アドレス(※nは各軸の入力先頭アドレスです。)
BALM
ProfiBus-DP
90
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
目標位置 (下位ワード)
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
位置決め幅 (上位ワード)
524,288
262,144
131,072
65,536
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
位置決め幅 (下位ワード)
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
b15n+4 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
速度
256
128
64
32
16
8 4 2 1
b15n+5 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
加減速度
128
64
32
16
8 4 2 1
b15n+6 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
押付け電流 制限値
BKRL
RMOD
DIR
PUSH
JOG+
JOG-
JVEL
JISL
SON
RES
STP
HOME
DSTR
b15n+7 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
制御信号
b15n+0 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
目標位置 (上位ワード)
1ワード=2バイト=16ビット
目標位置が負数の場合は、2の補数で表されます。
PLC出力
アドレス(※nは各軸の出力先頭アドレスです。)

186
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
92
(3)入出力信号割付(※表中のONの表記は該当のビットが“1”を表し、OFFは“0”を表します)信号種別 ビット 記号 内容 詳細
目標位置32ビット
7.6(2)データ
位置決め幅32ビット
7.6(2)データ
16ビット速度データ
7.6(2)
16ビット加減速度データ
7.6(2)
PLC出力
32ビット符号付整数目標位置を絶対座標上の位置で指定してください。単位は0.01mmで指定可能範囲は、-999999~999999となります。(例)+25.41mmなら2541と指定します。パラメータのソフトリミットの内側(0.2mm)を超えた値を入力するとソフトリミットの内側(0.2mm)までの移動に制限されます。※16進数で入力する場合、負数は2の補数で入力してください。32ビット整数単位は0.01mmで指定可能範囲は1~999999です。(例)25.40mmなら2540と指定します。本レジスタは動作種別により2種類の意味があります。①位置決め動作の場合、目標位置からどの程度の範囲で位置決め完了とみなすかの許容範囲となります。②押付け動作時は押付け幅の値となります。通常動作か押付け動作かの指定は、制御信号のPUSHで設定してください。16ビット整数移動時の速度を指定してください。単位は1.0mm/secで指定可能範囲は、0~65535となります。(例)254.0mm/secなら254と指定します。最大速度以上の値で移動指令を行うとアラームとなります。16ビット整数移動時の加減速度を指定してください。(加速度と減速度は同じ値となります。)単位は0.01Gで指定可能範囲は1~300です。(例)0.30Gなら30と指定します。0または最大加速度,最大減速度を超えた値で移動指令を行うとアラームとなります。
(3) 入出力信号割付(※表中の ON の表記は該当のビットが“1”を表し、OFF は“0”を表します)
信号種別 ビット 記号 内容 詳細
PLC出力
目標位置32 ビット
データ
32 ビット符号付整数
目標位置を絶対座標上の位置で指定してくだ
さい。
単位は 0.01mm(DD モータ以外 )、0.001°(DDモータ ) で指定可能範囲は、- 999999 ~
999999 となります。
(例)+ 25.41mm なら 2541 と指定します。
パラメータのソフトリミットの内側(0.2mm)
を超えた値を入力するとソフトリミットの内
側(0.2mm)までの移動に制限されます。
※ 16 進数で入力する場合、負数は 2 の補数で
入力してください。
5.6(2)
位置決め幅32 ビット
データ
32 ビット整数
単位は 0.01mm(DD モータ以外 )、0.001°(DDモータ )で指定可能範囲は、1 ~ 999999 です。
(例)25.40mm なら 2540 と指定します。
本レジスタは動作種別により 2 種類の意味が
あります。
①位置決め動作の場合、目標位置からどの程
度の範囲で位置決め完了とみなすかの許容
範囲となります。
②押付け動作時は押付け幅の値となります。
通常動作か押付け動作かの指定は、制御信
号の PUSH で設定してください。
5.6(2)
速度16 ビット
データ
16 ビット整数
移動時の速度を指定してください。
単位は 1.0mm/sec または、0.1mm/sec で指定。
設定可能範囲は、0 ~ 65535 となります。
0 を指定すると移動中であれば減速停止、停止
中であれば、その場で停止したままとなります。
単位の切り替えは、パラメータ No.159 FB ハー
フ直値モード速度単位で行います。
(例)単位が 1.0mm/sec の場合
254.0mm/sec なら 254 と指定します。
最大速度以上の値で移動指令を行うとアラー
ムとなります。
5.6(2)
加減速度16 ビット
データ
16 ビット整数
移動時の加減速度を指定してください。(加速
度と減速度は同じ値となります。)
単位は 0.01G で指定可能範囲は 1 ~ 999 です。
(例)0.30G なら 30 と指定します。
0 または最大加速度,最大減速度を超えた値
で移動指令を行うとアラームとなります。
5.6(2)

187
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
92
(3)入出力信号割付(※表中のONの表記は該当のビットが“1”を表し、OFFは“0”を表します)信号種別 ビット 記号 内容 詳細
目標位置32ビット
7.6(2)データ
位置決め幅32ビット
7.6(2)データ
16ビット速度データ
7.6(2)
16ビット加減速度データ
7.6(2)
PLC出力
32ビット符号付整数目標位置を絶対座標上の位置で指定してください。単位は0.01mmで指定可能範囲は、-999999~999999となります。(例)+25.41mmなら2541と指定します。パラメータのソフトリミットの内側(0.2mm)を超えた値を入力するとソフトリミットの内側(0.2mm)までの移動に制限されます。※16進数で入力する場合、負数は2の補数で入力してください。32ビット整数単位は0.01mmで指定可能範囲は1~999999です。(例)25.40mmなら2540と指定します。本レジスタは動作種別により2種類の意味があります。①位置決め動作の場合、目標位置からどの程度の範囲で位置決め完了とみなすかの許容範囲となります。②押付け動作時は押付け幅の値となります。通常動作か押付け動作かの指定は、制御信号のPUSHで設定してください。16ビット整数移動時の速度を指定してください。単位は1.0mm/secで指定可能範囲は、0~65535となります。(例)254.0mm/secなら254と指定します。最大速度以上の値で移動指令を行うとアラームとなります。16ビット整数移動時の加減速度を指定してください。(加速度と減速度は同じ値となります。)単位は0.01Gで指定可能範囲は1~300です。(例)0.30Gなら30と指定します。0または最大加速度,最大減速度を超えた値で移動指令を行うとアラームとなります。
アドレス ビット 記号 機能 詳細
PLC出力
押付け電流
制限値
16 ビット
データ
16 ビット整数押付け動作時電流制限を指定し
てください。
指定可能範囲は 0(0%)~ 510(200%)で
す。各アクチュエータにより実際の指定可能
範囲は異なります。(各アクチュエータのカ
タログまたは取扱説明書をご参照ください。)
最大押付け電流値以上の値で移動指令を行う
とアラームとなります。
5.6 (2)
制御信号
b15 BKRL ブレーキ強制解除:ON でブレーキ解除 5.4.11(18)b14 RMOD 運転モード:OFFでAUTOモード、ONでMANUモード 5.4.11(19)
b13 DIR押付け方向指定:
OFFで目標位置から位置決め幅を減算した位置方向
ONで目標位置に位置決め幅を加算した位置方向
5.4.11(22)
b12 PUSH 押付け指定:OFFで位置決め動作、ONで押付け動作 5.4.11(21)
b11 GSL1サーボゲインパラ
メータセット選択1
使用するサーボゲインパラメータ
セット選択
GSL1 GSL0 機能
OFF OFF パラメータセット0 選択
OFF ON パラメータセット1選択
ON OFF パラメータセット2 選択
ON ON パラメータセット3 選択
5.4.11(33)
b10 GSL0サーボゲインパラ
メータセット選択 0
b9 使用できません
b8 JOG+ +ジョグ:ON で反原点方向移動 5.4.11(13)b7 JOG- -ジョグ:ON で原点方向移動 5.4.11(13)
b6 JVEL
ジョグ速度/インチング距離切替え:
OFF でパラメータNo.26“ジョグ速度”、パラメータ
No.48“インチング距離”
ONでパラメータNo.47“ジョグ速度 2”、パラメータ
No.49“インチング距離 2”の設定値を使用する。
5.4.11(14)
b5 JISLジョグ/インチング切替え:
OFF でジョグ動作、ON でインチング動作5.4.11(15)
b4 SON サーボ ON 指令:ON でサーボ ON 5.4.11 (5)b3 RES リセット:ON でリセット実行 5.4.11 (4)b2 STP 一時停止:ON で一時停止指令 5.4.11(11)b1 HOME 原点復帰:ON で原点復帰指令 5.4.11 (6)b0 DSTR 位置決め指令:ON で移動指令 5.4.11 (8)
(※表中の ON の表記は該当のビットが“1”を表し、OFF は“0”を表します)

188
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
95
7.4.5 フル直値モード(占有バイト数:32)PLCから位置制御に関する全ての値(目標位置、速度等)を直接数値で指定する運転方式です。
入出力アドレスに各値を設定してください。
本モードで制御可能なロボシリンダの有効な主要機能は次の表の通りです。
ロボシリンダの機能:直接制御×:無効
原点復帰動作 位置決め動作 速度・加減速度設定 ピッチ送り(インチング) 押付け動作 移動中の速度変更 異なった加速度、 減速度での動作一時停止 ゾーン信号出力 PIOパターン選択 ×
(1)PLCアドレス構成(※nは各軸の入出力先頭アドレスです。)
パラメータ ACONまたはPCON入力側 PLC側出力 ACONまたはPCON出力側 PLC側入力No.84 レジスタ アドレス レジスタ アドレス3
目標位置n+0
現在位置n+0
n+1 n+1
位置決め幅n+2
指令電流n+2
n+3 n+3
速度n+4
現在速度n+4
n+5 n+5
ゾーン境界値+n+6 アラームコード n+6n+7 n+7
ゾーン境界値- n+8 n+8n+9 n+9
加速度 n+10 n+10減速度 n+11 占有領域 n+11
押付け電流制限値 n+12 n+12占有領域
n+13 n+13負荷電流閾値制御信号1 n+14 n+14制御信号2 n+15 状態信号 n+15
ACONPCON
占有領域(注) は他の目的に使用できません。
またアドレスの重複使用にご注意ください。
(※表中の ON の表記は該当のビットが“1”を表し、OFF は“0”を表します)
信号種別 ビット 記号 内容 詳細
現在位置 32 ビット データ
32 ビット符号付整数 単位は 0.01mm(DD モータ以外)、0.001(DD モー
タ)です。 (例) 読取り値:000003FFH=1023(10 進数)
=10.23mm ※16 進数で読取る場合、負数は 2 の補数表示とな
ります
5.6 (2)
指令電流 32 ビット データ
32 ビット整数 現在指令している電流値を示します。 単位は mA です。 (例) 読取り値:000003FFH=1023(10 進数)
=1023mA
5.6 (2)
現在速度 32 ビット データ
32 ビット符号付整数 現在速度を示します。 正数:反原点方向へ移動中 負数:原点方向へ移動中 単位は 0.01mm/sec です。 (例) 読取り値:000003FFH=1023(10 進数)
=10.23mm/sec ※16 進数で読取る場合、負数は 2 の補数表示とな
ります。
5.6 (2)
アラーム
コード 16 ビット データ
16 ビット整数 アラームが発生した場合にはアラームコードが出
力されます。 アラームが発生していない場合は 0Hです。 アラームの詳細内容はコントローラの取扱説明書
をご参照してください。
5.6 (2)
b15 EMGS 非常停止:ON で非常停止状態 5.4.11(2)b14 PWR コントローラ準備完了:準備完了で ON 5.4.11(1)b13 ZONE2 ゾーン 2:現在位置がゾーン設定内にあるとき ON 5.4.11(12)b12 ZONE1 ゾーン 1:現在位置がゾーン設定内にあるとき ON 5.4.11(12)b11 b10 b9
使用できません
b8 RMDS 運転モード状態: 現在の状態が AUTO モードで OFF 、MANU モードで ON 5.4.11(19)
b7 BALM アブソリュートバッテリ電圧低下警告:電圧低下で ON 5.4.11(28)b6 使用できません b5 PSFL 押付け空振り:押付け動作空振りで ON 5.4.11(23)b4 SV 運転準備完了:サーボ ON で ON 5.4.11(5)b3 ALM アラーム:アラーム発生で ON 5.4.11(3)b2 MOVE 移動中信号:アクチュエータ移動中で ON 5.4.11(9)b1 HEND 原点復帰完了:原点復帰完了で ON 5.4.11(6)
PLC入力
状態信号
b0 PEND 位置決め完了信号:位置決め完了で ON 5.4.11(10)

189
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
95
7.4.5 フル直値モード(占有バイト数:32)PLCから位置制御に関する全ての値(目標位置、速度等)を直接数値で指定する運転方式です。
入出力アドレスに各値を設定してください。
本モードで制御可能なロボシリンダの有効な主要機能は次の表の通りです。
ロボシリンダの機能:直接制御×:無効
原点復帰動作 位置決め動作 速度・加減速度設定 ピッチ送り(インチング) 押付け動作 移動中の速度変更 異なった加速度、 減速度での動作一時停止 ゾーン信号出力 PIOパターン選択 ×
(1)PLCアドレス構成(※nは各軸の入出力先頭アドレスです。)
パラメータ ACONまたはPCON入力側 PLC側出力 ACONまたはPCON出力側 PLC側入力No.84 レジスタ アドレス レジスタ アドレス3
目標位置n+0
現在位置n+0
n+1 n+1
位置決め幅n+2
指令電流n+2
n+3 n+3
速度n+4
現在速度n+4
n+5 n+5
ゾーン境界値+n+6 アラームコード n+6n+7 n+7
ゾーン境界値- n+8 n+8n+9 n+9
加速度 n+10 n+10減速度 n+11 占有領域 n+11
押付け電流制限値 n+12 n+12占有領域
n+13 n+13負荷電流閾値制御信号1 n+14 n+14制御信号2 n+15 状態信号 n+15
ACONPCON
占有領域(注) は他の目的に使用できません。
またアドレスの重複使用にご注意ください。
パラメータ
No.84SCON-CA/CB/CAL入力側レジスタ
PLC 側出力
アドレス
SCON-CA/CB/CAL出力側レジスタ
PLC 側入力
アドレス
3
目標位置n + 0
現在位置n + 0
n + 1 n + 1
位置決め幅n + 2
指令電流n + 2
n + 3 n + 3
速度n + 4
現在速度n + 4
n + 5 n + 5
ゾーン境界値 + n + 6 アラームコード n + 6n + 7 占有領域 n + 7
ゾーン境界値-n + 8
現在荷重n + 8
n + 9 n + 9加速度 n + 10
通算移動回数n + 10
減速度 n + 11 n + 11押付け電流制限値 n + 12
通算走行距離n + 12
負荷電流閾値 n + 13 n + 13制御信号 1 n + 14 状態信号 1 n + 14制御信号 2 n + 15 状態信号 2 n + 15
(注) 占有領域 は他の目的に使用できません。
またアドレスの重複使用にご注意ください。
アクチュエータの機能
5.4.5 フル直値モード(占有バイト数:32)PLC から位置制御に関する全ての値(目標位置、速度等)を直接数値で指定する運転方式です。
入出力アドレスに各値を設定してください。
本モードで制御可能なアクチュエータの有効な主要機能は次の表の通りです。

190
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
97
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
目標位置 (下位ワード)
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
位置決め幅 (上位ワード)
524,288
262,144
131,072
65,536
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
位置決め幅 (下位ワード)
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
b15n+4 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
速度 (上位ワード)
524,288
262,144
131,072
65,536
b15n+5 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
速度 (下位ワード)
b15n+6 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
ゾーン境界値+ (上位ワード)
b15n+7 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
ゾーン境界値+ (下位ワード)
b15n+0 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
目標位置 (上位ワード)
1ワード=2バイト=16ビット
目標位置が負数の場合は、2の補数で表されます。
ゾーン境界値+が負数の場合は、2の補数で表されます。
PLC出力
アドレス(※nは各軸の出力先頭アドレスです。)
(2) 軸毎の入出力信号割付
各軸の入出力信号は、入出力アドレスの各 16 ワード (32 バイト )で構成されます。
制御信号 1、制御信号 2 および状態信号はビット単位の ON/OFF 信号です。
目標位置および現在位置は 2 ワード (32 ビット )のバイナリデータで、PLC では- 999999 ~+
999999( 単位:0.01mm(DD モータ以外 )、0.001°(DD モータ ))の数値が扱えますが、位置デー
タは当該アクチュエータのソフトストロークの範囲内 (0 ~有効ストローク長 ) で設定してくだ
さい。
位置決め幅を設定してください。位置決め幅は 2 ワード (32 ビット ) のバイナリデータで、PLCでは 1 ~+ 999999( 単位:0.01mm(DD モータ以外 )、0.001°(DD モータ ))の数値が扱えます。
ProfiBus-DP
96
(2)軸毎の入出力信号割付
各軸の入出力信号は、入出力アドレスの各16ワード(32バイト)で構成されます。
制御信号1、制御信号2および状態信号はビット単位のON/OFF信号です。
目標位置および現在位置は2ワード(32ビット)のバイナリデータで、PLCでは-999999~+999999 (単位:0.01mm)の数値が扱えますが、位置データは当該アクチュエータのソフトストロークの範囲内(0~有効ストローク長)で設定してください。
位置決め幅を設定してください。位置決め幅は2ワード(32ビット)のバイナリデータで、PLCでは1~+999999 (単位:0.01mm)の数値が扱えます。
速度は2ワード(32ビット)のバイナリデータで、PLCでは0~+999999 (単位:0.01mm/sec)の数値が扱えますが、当該アクチュエータの最大速度を超えない値に設定してください。
加速度および減速度は1ワード(16ビット)のバイナリデータで、PLCでは1~300(単位:0.01G)の数値が扱えますが、当該アクチュエータの最大加速度および最大減速度を超えない値に設定してください。
押付け電流制限値は1ワード(16ビット)のバイナリデータで、PLCでは0(0%)~255(100%)の数値が扱えますが、当該アクチュエータの押付け電流制限値の指定可能範囲内(アクチュエータのカタログまたは取扱説明書参照)で設定してください。
負荷電流閾値を設定してください。負荷電流閾値は1ワード(16ビット)のバイナリデータで、PLCでは0(0%)~255(100%)の数値が扱えます。(押付け電流制限値の図(上図)参照)
ゾーン境界値+、ゾーン境界値-は2ワード(32ビット)のバイナリデータで、PLCでは-999999~+999999 (単位:0.01mm)の数値が扱えますが、ゾーン境界値+よりゾーン境界値-を小さな値に設定してください。
指令電流は2ワード(32ビット)のバイナリデータ(単位:1mA)です。
現在速度は2ワード(32ビット)のバイナリデータ(単位:0.01mm/sec)です。
正数:反原点方向へ移動中、負数:原点方向へ移動中。
アラームコードは1ワード(16ビット)のバイナリデータです。
設定値
押付け電流制限値 0% 50% 100%
0 127 255
510(200%)
設定値 0 128 255 510
押付け電流制限値 0% 50% 100% 200%
510(200%)
現在荷重は 2 ワード(32 ビット)のバイナリデータ(単位:0.01N)です。
通算移動回数は 2 ワード (32 ビット )のバイナリデータ (単位:回 )です。
通算走行距離は 2 ワード (32 ビット )のバイナリデータ (単位:m) です。
ゾーン境界値+、ゾーン境界値-は 2 ワード (32 ビット ) のバイナリデータで、PLC では-
999999 ~+ 999999( 単位:0.01mm(DD モータ以外 )、0.001°(DD モータ ))の数値が扱えます
が、ゾーン境界値+よりゾーン境界値-を小さな値に設定してください。
999

191
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
97
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
目標位置 (下位ワード)
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
位置決め幅 (上位ワード)
524,288
262,144
131,072
65,536
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
位置決め幅 (下位ワード)
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
b15n+4 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
速度 (上位ワード)
524,288
262,144
131,072
65,536
b15n+5 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
速度 (下位ワード)
b15n+6 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
ゾーン境界値+ (上位ワード)
b15n+7 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
ゾーン境界値+ (下位ワード)
b15n+0 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
目標位置 (上位ワード)
1ワード=2バイト=16ビット
目標位置が負数の場合は、2の補数で表されます。
ゾーン境界値+が負数の場合は、2の補数で表されます。
PLC出力
アドレス(※nは各軸の出力先頭アドレスです。)
ProfiBus-DP
96
(2)軸毎の入出力信号割付
各軸の入出力信号は、入出力アドレスの各16ワード(32バイト)で構成されます。
制御信号1、制御信号2および状態信号はビット単位のON/OFF信号です。
目標位置および現在位置は2ワード(32ビット)のバイナリデータで、PLCでは-999999~+999999 (単位:0.01mm)の数値が扱えますが、位置データは当該アクチュエータのソフトストロークの範囲内(0~有効ストローク長)で設定してください。
位置決め幅を設定してください。位置決め幅は2ワード(32ビット)のバイナリデータで、PLCでは1~+999999 (単位:0.01mm)の数値が扱えます。
速度は2ワード(32ビット)のバイナリデータで、PLCでは0~+999999 (単位:0.01mm/sec)の数値が扱えますが、当該アクチュエータの最大速度を超えない値に設定してください。
加速度および減速度は1ワード(16ビット)のバイナリデータで、PLCでは1~300(単位:0.01G)の数値が扱えますが、当該アクチュエータの最大加速度および最大減速度を超えない値に設定してください。
押付け電流制限値は1ワード(16ビット)のバイナリデータで、PLCでは0(0%)~255(100%)の数値が扱えますが、当該アクチュエータの押付け電流制限値の指定可能範囲内(アクチュエータのカタログまたは取扱説明書参照)で設定してください。
負荷電流閾値を設定してください。負荷電流閾値は1ワード(16ビット)のバイナリデータで、PLCでは0(0%)~255(100%)の数値が扱えます。(押付け電流制限値の図(上図)参照)
ゾーン境界値+、ゾーン境界値-は2ワード(32ビット)のバイナリデータで、PLCでは-999999~+999999 (単位:0.01mm)の数値が扱えますが、ゾーン境界値+よりゾーン境界値-を小さな値に設定してください。
指令電流は2ワード(32ビット)のバイナリデータ(単位:1mA)です。
現在速度は2ワード(32ビット)のバイナリデータ(単位:0.01mm/sec)です。
正数:反原点方向へ移動中、負数:原点方向へ移動中。
アラームコードは1ワード(16ビット)のバイナリデータです。
設定値
押付け電流制限値 0% 50% 100%
0 127 255
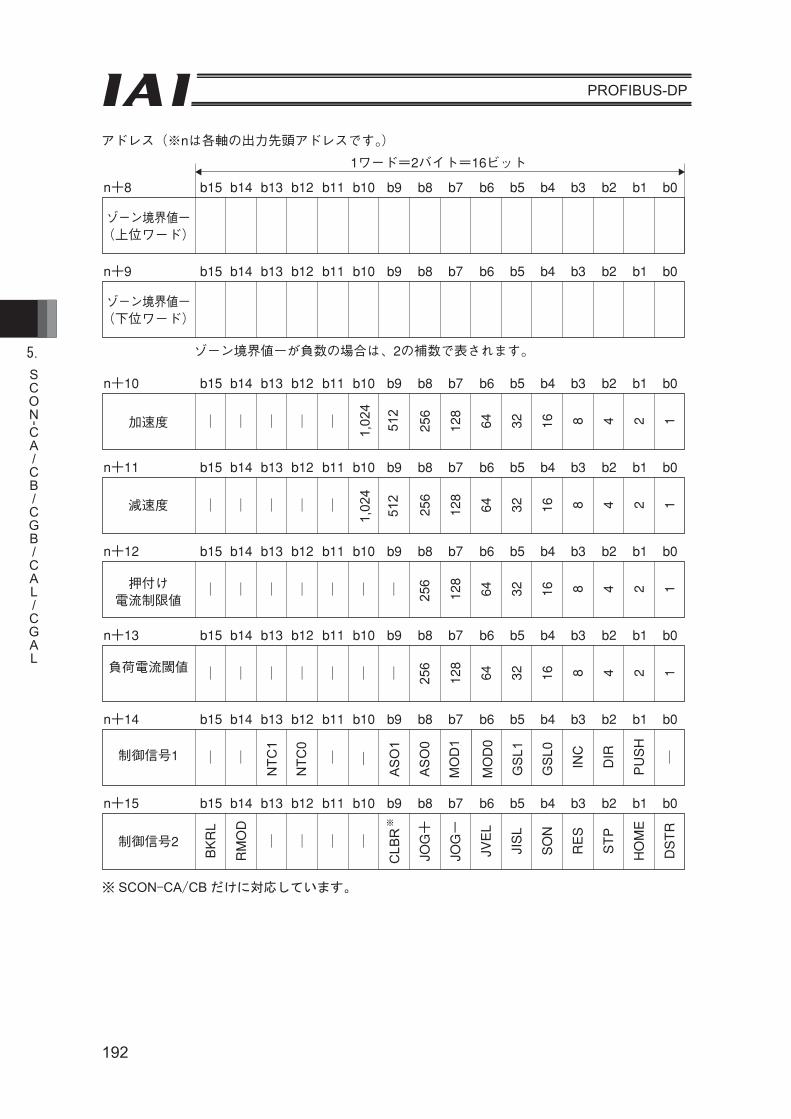
192
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
99
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在位置 (下位ワード)
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指令電流 (上位ワード)
524,288
262,144
131,072
65,536
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指令電流 (下位ワード)
b15n+4 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在速度 (上位ワード)
b15n+5 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在速度 (下位ワード)
EMGS
PWR
ZONE2
ZONE1
PZONE
(※1)
RMDS
GHMS
PUSH
PSFL
SV
ALM
MOVE
HEND
PEND
b15n+15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
状態信号
b15n+6 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
アラームコード
b15 n+7~n+14 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
使用できません
b15n+0 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在位置 (上位ワード)
1ワード=2バイト=16ビット
現在位置が負数の場合は、2の補数で表されます。
現在速度が負数の場合は、2の補数で表されます。
PLC入力アドレス(※nは各軸の入力先頭アドレスです。)
(※1)n+15のb10およびb9の信号割付
記号コントローラ ACON PCONb10 LOADb9 TRQS
ProfiBus-DP
98
b15n+9 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
ゾーン境界値- (下位ワード)
256
128
64
32
16
8 4 2 1
b15n+10 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
加速度
256
128
64
32
16
8 4 2 1
b15n+11 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
減速度
128
64
32
16
8 4 2 1
b15n+12 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
押付け 電流制限値
128
64
32
16
8 4 2 1
b15n+13 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
負荷電流閾値 (※3)
(※1)
(※2)
INC
DIR
PUSH
b15n+14 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
制御信号1
BKRL
RMOD
JOG+
JOG-
JVEL
JISL
SON
RES
STP
HOME
DSTR
b15n+15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
制御信号2
b15n+8 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
ゾーン境界値- (上位ワード)
1ワード=2バイト=16ビット
ゾーン境界値-が負数の場合は、2の補数で表されます。
アドレス(※nは各軸の出力先頭アドレスです。)
(※1)n+14のb10の信号割付
(※3)PCON専用機能です。ACONでは使用できません。
記号
コントローラ ACON PCON
b10 SMOD
(※2)n+14のb7およびb6の信号割付
記号
コントローラ ACON PCON
b7 MOD1
b6 MOD0
512
1,02
4
512
1,02
4
※ SCON-CA/CB だけに対応しています。
CLB
R※
NTC
1
NTC
0
ASO
1
GSL
1
GSL
0
256
256
MO
D0
MO
D1
ASO
0

193
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
99
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在位置 (下位ワード)
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指令電流 (上位ワード)
524,288
262,144
131,072
65,536
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指令電流 (下位ワード)
b15n+4 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在速度 (上位ワード)
b15n+5 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在速度 (下位ワード)
EMGS
PWR
ZONE2
ZONE1
PZONE
(※1)
RMDS
GHMS
PUSH
PSFL
SV
ALM
MOVE
HEND
PEND
b15n+15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
状態信号
b15n+6 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
アラームコード
b15 n+7~n+14 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
使用できません
b15n+0 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在位置 (上位ワード)
1ワード=2バイト=16ビット
現在位置が負数の場合は、2の補数で表されます。
現在速度が負数の場合は、2の補数で表されます。
PLC入力アドレス(※nは各軸の入力先頭アドレスです。)
(※1)n+15のb10およびb9の信号割付
記号コントローラ ACON PCONb10 LOADb9 TRQS
ProfiBus-DP
98
b15n+9 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
ゾーン境界値- (下位ワード)
256
128
64
32
16
8 4 2 1
b15n+10 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
加速度
256
128
64
32
16
8 4 2 1
b15n+11 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
減速度
128
64
32
16
8 4 2 1
b15n+12 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
押付け 電流制限値
128
64
32
16
8 4 2 1
b15n+13 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
負荷電流閾値 (※3)
(※1)
(※2)
INC
DIR
PUSH
b15n+14 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
制御信号1
BKRL
RMOD
JOG+
JOG-
JVEL
JISL
SON
RES
STP
HOME
DSTR
b15n+15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
制御信号2
b15n+8 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
ゾーン境界値- (上位ワード)
1ワード=2バイト=16ビット
ゾーン境界値-が負数の場合は、2の補数で表されます。
アドレス(※nは各軸の出力先頭アドレスです。)
(※1)n+14のb10の信号割付
(※3)PCON専用機能です。ACONでは使用できません。
記号
コントローラ ACON PCON
b10 SMOD
(※2)n+14のb7およびb6の信号割付
記号
コントローラ ACON PCON
b7 MOD1
b6 MOD0

194
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
n + 7 b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
使用できません
n + 8 b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0現在荷重
(下位ワード)
(SCON-CA/CB 限定 )
n + 9 b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0現在荷重
(上位ワード)
(SCON-CA/CB 限定 )
現在荷重が負数の場合は、2 の補数で表されます。
n + 10 b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
通算移動回数
(下位ワード ) 32,7
68
16,3
84
8,19
2
4,09
6
2,04
8
1,02
4
512
256
128
64 32 16 8 4 2 1
n + 11 b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
通算移動回数
(上位ワード )
524,
288
262,
144
131,
072
65,5
36
n + 12 b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
通算走行距離
(下位ワード ) 32,7
68
16,3
84
8,19
2
4,09
6
2,04
8
1,02
4
512
256
128
64 32 16 8 4 2 1
n + 13 b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
通算走行距離
(上位ワード )
524,
288
262,
144
131,
072
65,5
36
n + 14 b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
状態信号 1
CEN
D
※
BALM
n + 15 b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
状態信号 2
EMG
S
PWR
ZON
E2
ZON
E1
PZO
NE
LOAD
TRQ
S
RM
DS
GH
MS
PUSH
S
PSFL
SV ALM
MO
VE
HEN
D
PEN
D
※ SCON-CA/CB だけに対応しています。

195
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
(3) 入出力信号割付(※表中の ON の表記は該当のビットが“1”を表し、OFF は“0”を表します) アドレス ビット 記号 機能 詳細
目標位置 32 ビット データ
32 ビット符号付整数 目標位置を絶対座標上の位置で指定してください。 単位は 0.01mm(DD モータ以外)、0.001(DD モータ)で指定可能範囲は、-999999~999999 となります。 (例) +25.41mm なら 2541 と指定します。 パラメータのソフトリミットの内側(0.2mm)を超えた値を入力するとソフトリミットの内側(0.2mm)までの移動に制限されます。 ※16 進数で入力する場合、負数は 2 の補数で入力してください。
5.6 (3)
位置決め幅 32 ビット データ
32 ビット整数 単位は 0.01mm(DD モータ以外)、0.001(DD モータ)で指定可能範囲は、1~999999 です。 (例) 25.40mm なら 2540 と指定します。 本レジスタは動作種別により 2 種類の意味があります。 ①位置決め動作の場合、目標位置からどの程度の範囲で位置決め完了とみなすかの許容範囲となります。
②押付け動作時は押付け幅の値となります。通常動作か押付け動作かの指定は制御信号の PUSHで設定してください。
5.6 (3)
速度 32 ビット データ
32 ビット整数 移動時の速度を指定してください。 単位 0.01mm/sec で指定可能範囲は、0~999999となります。 0 を指定すると移動中であれば減速停止、停止中であれば、その場で停止したままとなります。 (例) 25.41mm/sec なら 2541 と指定します。最大速度以上の値で移動指令を行うとアラームとなります。
5.6 (3)
PLC出力
ゾーン 境界値+ /ゾーン 境界値
32 ビット データ
32 ビット符号付整数 パラメータで指定されるゾーン境界とは別に、原点復帰後に有効なゾーン信号を出力します。 現在位置がこの±境界値の内側にあるときは、状態信号の PZONE が ON となります。 (例) +25.40mm なら 2540 と指定します。 指定単位は 0.01mm(DD モータ以外)、0.001(DDモータ)で、指定範囲は-999999~999999 となります。 ゾーン境界値+>ゾーン境界値の関係を満たす値を入力してください。 当機能を使用しない場合は、±を同じ値にしてください。 ※16 進数で入力する場合、負数は 2 の補数で入力してください。
5.6 (3)

196
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
102
アドレス ビット 記号 機能 詳細
b2 DIR 7.4.7(22)
制御信号1b1 PUSH 7.4.7(21)
b0 b15 BKRL 7.4.7(18)
b14 RMOD 7.4.7(19)
b13b12b11 b10b9b8 JOG+ 7.4.7(13)b7 JOG- 7.4.7(13)
制御信号2
b6 JVEL 7.4.7(14)
b5 JISL 7.4.7(15)
b4 SON 7.4.7(5)b3 RES 7.4.7(4)b2 STP 7.4.7(11)b1 HOME 7.4.7(6)b0 DSTR 7.4.7(8)
PLC出力
押付け方向指定:OFFで目標位置から位置決め幅を減算した位置方向ONで目標位置に位置決め幅を加算した位置方向押付け指定:OFFで位置決め動作、ONで押付け動作使用できませんブレーキ強制解除:ONでブレーキ解除運転モード:OFFでAUTOモード、ONでMANUモード
使用できません
+ジョグ:ONで反原点方向移動-ジョグ:ONで原点方向移動ジョグ速度/インチング距離切替え:OFFでパラメータNo.26“ジョグ速度”、パラメータNo.48“インチング距離”ONでパラメータNo.47“ジョグ速度2”、パラメータNo.49“インチング距離2”の設定値を使用する。ジョグ/インチング切替え:OFFでジョグ動作、ONでインチング動作サーボON指令:ONでサーボONリセット:ONでリセット実行一時停止:ONで一時停止指令原点復帰:ONで原点復帰指令位置決めスタート:ONで移動指令
(※表中のONの表記は該当のビットが“1”を表し、OFFは“0”を表します)アドレス ビット 記号 機能 詳細
PLC出力
加速度16 ビット
データ
16 ビット整数移動時の加速度および減速度を指定してください。単位は 0.01G で指定可能範囲は 1 ~ 999 です。
(例)0.30G なら 30 と指定します。0 または最大加速度,最大減速度を超えた値で移動指令を行うとアラームとなります。
5.6(3)
減速度16 ビット
データ
押付け
電流制限値
16 ビット
データ
16 ビット整数押付け動作時電流制限を指定してください。指定可能範囲は 0(0%)~ 510(200%)です。各アクチュエータにより実際の指定可能範囲は異なります。(各アクチュエータのカタログまたは取扱説明書をご参照ください。)最大押付け電流値以上の値で移動指令を行うとアラームとなります。
5.6(3)
負荷電流
閾値
16 ビット
データ
16 ビット整数負荷電流が設定値を超えたか超えないか判定を行う場合、電流のしきい値を本レジスタで指定してください。指定可能範囲は 0(0%)~ 510(200%)です。判定を行わない場合は 0 を入力してください。
5.6(3)
制御信号 1
b15 使用できません
b14
b13 NTC1制振制御
モード選択 1
使用する制振制御
パラメータセット選択
NTC1 NTC0 機能
OFF OFF 制振制御未使用
OFF ON パラメータセット1選択
ON OFF パラメータセット2 選択
ON ON パラメータセット3 選択
5.4.11(29)
b12 NTC0制振制御
モード選択 0
b11 使用できません
b10
b9 ASO1 停止モード 1
待機時の停止モードを選択
ASO1 ASO0 機能
OFF OFF 無効(常にサーボ ON)
OFF ON パラメータNo.36の設定時間でサーボ OFF
ON OFF パラメータNo.37の設定時間でサーボ OFF
ON ON パラメータNo.38の設定時間でサーボ OFF
5.4.11(31)
b8 ASO0 停止モード 0
b7 MOD1 加減速モード: OFF,OFF で台形パターン OFF,ON で S 字モーション ON,OFF で一次遅れフィルタ
5.4.11(30)b6 MOD0
b5 GSL1サーボゲインパラ
メータセット選択1
サーボゲイン切替えのパラメータ
セット選択
GSL1 GSL0 機能
OFF OFF パラメータセット0 選択
OFF ON パラメータセット1選択
ON OFF パラメータセット2 選択
ON ON パラメータセット3 選択
5.4.11(33)
b4 GSL0サーボゲインパラ
メータセット選択 0
b3 INC インクリメンタル指定:OFF で絶対位置指令、
ON で相対位置指令5.4.11(24)
(※表中の ON の表記は該当のビットが“1”を表し、OFF は“0”を表します)
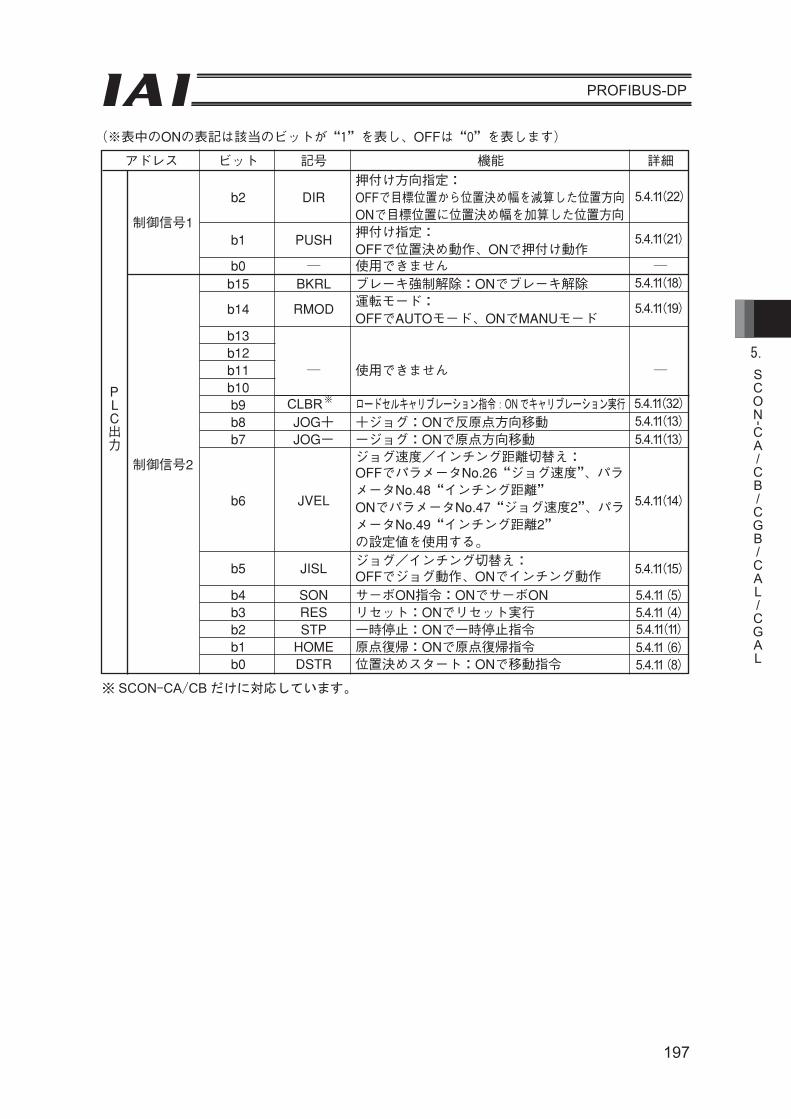
197
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
102
アドレス ビット 記号 機能 詳細
b2 DIR 7.4.7(22)
制御信号1b1 PUSH 7.4.7(21)
b0 b15 BKRL 7.4.7(18)
b14 RMOD 7.4.7(19)
b13b12b11 b10b9b8 JOG+ 7.4.7(13)b7 JOG- 7.4.7(13)
制御信号2
b6 JVEL 7.4.7(14)
b5 JISL 7.4.7(15)
b4 SON 7.4.7(5)b3 RES 7.4.7(4)b2 STP 7.4.7(11)b1 HOME 7.4.7(6)b0 DSTR 7.4.7(8)
PLC出力
押付け方向指定:OFFで目標位置から位置決め幅を減算した位置方向ONで目標位置に位置決め幅を加算した位置方向押付け指定:OFFで位置決め動作、ONで押付け動作使用できませんブレーキ強制解除:ONでブレーキ解除運転モード:OFFでAUTOモード、ONでMANUモード
使用できません
+ジョグ:ONで反原点方向移動-ジョグ:ONで原点方向移動ジョグ速度/インチング距離切替え:OFFでパラメータNo.26“ジョグ速度”、パラメータNo.48“インチング距離”ONでパラメータNo.47“ジョグ速度2”、パラメータNo.49“インチング距離2”の設定値を使用する。ジョグ/インチング切替え:OFFでジョグ動作、ONでインチング動作サーボON指令:ONでサーボONリセット:ONでリセット実行一時停止:ONで一時停止指令原点復帰:ONで原点復帰指令位置決めスタート:ONで移動指令
(※表中のONの表記は該当のビットが“1”を表し、OFFは“0”を表します)
5.4.11(22)
5.4.11(21)
5.4.11(18)
5.4.11(19)
5.4.11(13)5.4.11(13)
5.4.11(14)
5.4.11(15)
5.4.11 (5)5.4.11 (4)5.4.11(11)5.4.11 (6)5.4.11 (8)
5.4.11(32)CLBR ※ ロードセルキャリブレーション指令:ON でキャリブレーション実行
※ SCON-CA/CB だけに対応しています。

198
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
信号種別 ビット 信号名 内容 詳細
PLC入力
現在位置32 ビット
データ
32 ビット符号付整数
単位は 0.01mm(DD モータ以外 )、0.001°(DDモータ )です。
(例)読取り値: 000003FFH=1023(10 進数)
=10.23mm※ 16 進数で読取る場合、負数は 2 の補数表示
となります。
5.6(3)
指令電流32 ビット
データ
32 ビット整数
現在指令している電流値を示します。
単位は mA です。
(例)読取り値: 000003FFH=1023(10 進数)
=1023mA
5.6(3)
現在速度32 ビット
データ
32 ビット符号付整数
現在速度を示します。
正数:反原点方向へ移動中
負数:原点方向へ移動中
単位は 0.01mm/sec です。
(例)読取り値: 000003FFH=1023(10 進数)
=10.23mm/sec※ 16 進数で読取る場合、負数は 2 の補数表示
となります。
5.6(3)
アラーム
コード
16 ビット
データ
16 ビット整数
アラームが発生した場合にはアラームコード
が出力されます。
アラームが発生していない場合は 0 です。
アラームの詳細内容はコントローラの取扱説
明書をご参照してください。
5.6(3)
現在荷重
(SCON-CA/CB限定機能 )
32 ビット
データ
32 ビット符号付整数
現在のロードセルの測定値を示します。
単位は 0.01N です。
※ 16 進数で読取る場合、負数は 2 の補数表示
となります。
5.6(3)
通算移動回数32 ビット
データ
32 ビット整数
単位は回です。
通算走行距離32 ビット
データ
32 ビット整数
単位は m です。
(※表中の ON の表記は該当のビットが“1”を表し、OFF は“0”を表します)
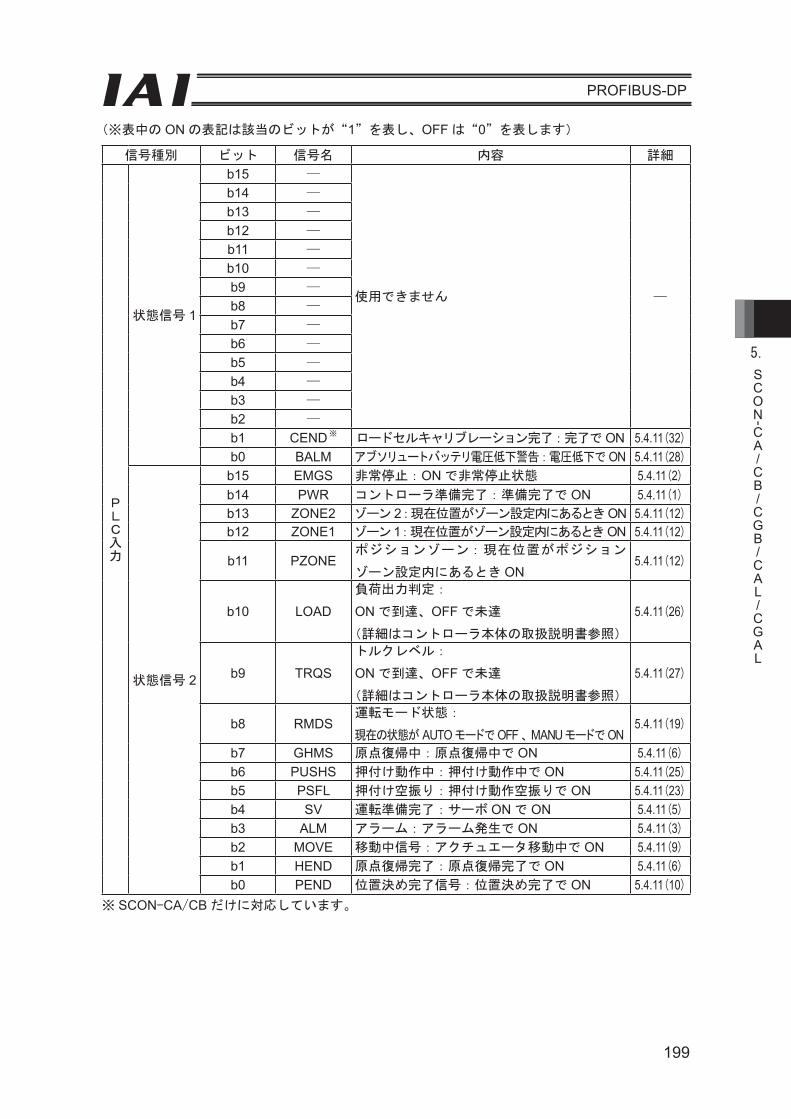
199
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
(※表中の ON の表記は該当のビットが“1”を表し、OFF は“0”を表します)
信号種別 ビット 信号名 内容 詳細
PLC入力
状態信号 1
b15
使用できません
b14
b13
b12
b11
b10
b9
b8
b7
b6
b5
b4
b3
b2
b1 CEND ※ ロードセルキャリブレーション完了:完了で ON 5.4.11(32)b0 BALM アブソリュートバッテリ電圧低下警告:電圧低下で ON 5.4.11(28)
状態信号 2
b15 EMGS 非常停止:ON で非常停止状態 5.4.11(2)b14 PWR コントローラ準備完了:準備完了で ON 5.4.11(1)b13 ZONE2 ゾーン 2:現在位置がゾーン設定内にあるときON 5.4.11(12)b12 ZONE1 ゾーン1:現在位置がゾーン設定内にあるときON 5.4.11(12)
b11 PZONEポジションゾーン:現在位置がポジション
ゾーン設定内にあるとき ON5.4.11(12)
b10 LOAD負荷出力判定:
ON で到達、OFF で未達
(詳細はコントローラ本体の取扱説明書参照)
5.4.11(26)
b9 TRQSトルクレベル:
ON で到達、OFF で未達
(詳細はコントローラ本体の取扱説明書参照)
5.4.11(27)
b8 RMDS運転モード状態:
現在の状態が AUTOモードでOFF 、MANUモードでON5.4.11(19)
b7 GHMS 原点復帰中:原点復帰中で ON 5.4.11(6)b6 PUSHS 押付け動作中:押付け動作中で ON 5.4.11(25)b5 PSFL 押付け空振り:押付け動作空振りで ON 5.4.11(23)b4 SV 運転準備完了:サーボ ON で ON 5.4.11(5)b3 ALM アラーム:アラーム発生で ON 5.4.11(3)b2 MOVE 移動中信号:アクチュエータ移動中で ON 5.4.11(9)b1 HEND 原点復帰完了:原点復帰完了で ON 5.4.11(6)b0 PEND 位置決め完了信号:位置決め完了で ON 5.4.11(10)
※ SCON-CA/CB だけに対応しています。
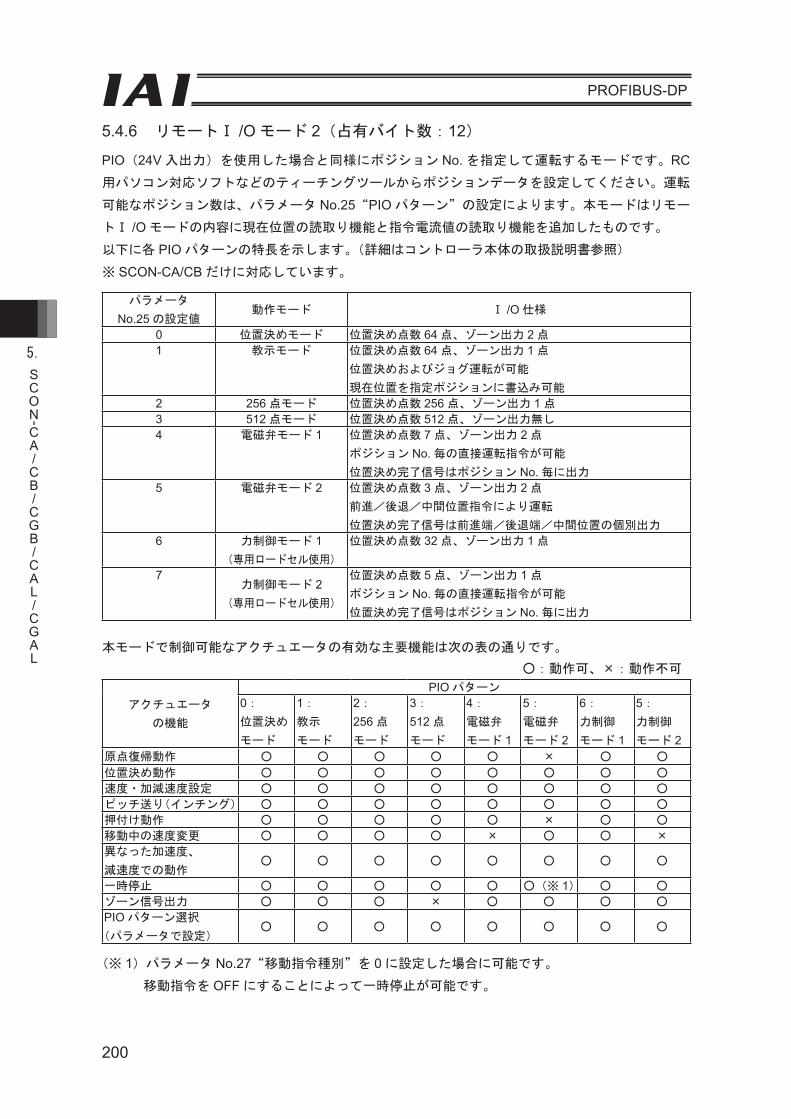
200
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
105
(1)PLCアドレス構成(※nは各軸の入出力先頭アドレスです。)
(2)軸毎の入出力信号割付
各軸の入出力信号は、入出力アドレスの各6ワード(12バイト)で構成されます。
ポート番号で制御するアドレスはビット単位のON/OFF信号で制御します。
現在位置は2ワード(32ビット)のバイナリデータ(単位:0.01mm)です。
指令電流は2ワード(32ビット)のバイナリデータ(単位:1mA)です。
パラメータ ACONまたはPCON側 PLC側出力 ACONまたはPCON側 PLC側入力No.84 DIおよび入力レジスタ アドレス DOおよび出力レジスタ アドレス
4 ポート番号0~15 n+0 ポート番号0~15 n+0n+1 占有領域 n+1n+2
現在位置n+2
占有領域 n+3 n+3n+4
指令電流n+4
n+5 n+5
15
14
13
12
11
10
9 8 7 6 5 4 3 2 1 0
Fn+0 E D C B A 9 8 7 6 5 4 3 2 1 0
PLC出力(※nは各軸の出力先頭アドレスです。)
コントローラ 入力ポート 番号
1ワード=2バイト=16ビット アドレス
占有領域(注) は他の目的に使用できません。
またアドレスの重複使用にご注意ください。
5.4.6 リモートⅠ /O モード 2(占有バイト数:12)
PIO(24V 入出力)を使用した場合と同様にポジション No. を指定して運転するモードです。RC用パソコン対応ソフトなどのティーチングツールからポジションデータを設定してください。運転
可能なポジション数は、パラメータ No.25“PIO パターン”の設定によります。本モードはリモー
トⅠ /O モードの内容に現在位置の読取り機能と指令電流値の読取り機能を追加したものです。
以下に各 PIO パターンの特長を示します。(詳細はコントローラ本体の取扱説明書参照)
※ SCON-CA/CB だけに対応しています。
パラメータ
No.25 の設定値動作モード Ⅰ /O 仕様
0 位置決めモード 位置決め点数 64 点、ゾーン出力 2 点
1 教示モード 位置決め点数 64 点、ゾーン出力 1 点
位置決めおよびジョグ運転が可能
現在位置を指定ポジションに書込み可能
2 256 点モード 位置決め点数 256 点、ゾーン出力 1 点
3 512 点モード 位置決め点数 512 点、ゾーン出力無し
4 電磁弁モード 1 位置決め点数 7 点、ゾーン出力 2 点
ポジション No. 毎の直接運転指令が可能
位置決め完了信号はポジション No. 毎に出力
5 電磁弁モード 2 位置決め点数 3 点、ゾーン出力 2 点
前進/後退/中間位置指令により運転
位置決め完了信号は前進端/後退端/中間位置の個別出力
6 力制御モード 1(専用ロードセル使用)
位置決め点数 32 点、ゾーン出力 1 点
7力制御モード 2
(専用ロードセル使用)
位置決め点数 5 点、ゾーン出力 1 点
ポジション No. 毎の直接運転指令が可能
位置決め完了信号はポジション No. 毎に出力
:動作可、×:動作不可
アクチュエータ
の機能
PIO パターン
0:位置決め
モード
1:教示
モード
2:256 点
モード
3:512 点
モード
4:電磁弁
モード 1
5:電磁弁
モード 2
6:力制御
モード 1
5:力制御
モード 2原点復帰動作 ×
位置決め動作
速度・加減速度設定
ピッチ送り(インチング)
押付け動作 ×
移動中の速度変更 × ×
異なった加速度、
減速度での動作
一時停止 (※ 1)
ゾーン信号出力 ×
PIO パターン選択
(パラメータで設定)
本モードで制御可能なアクチュエータの有効な主要機能は次の表の通りです。
(※ 1) パラメータ No.27“移動指令種別”を 0 に設定した場合に可能です。
移動指令を OFF にすることによって一時停止が可能です。
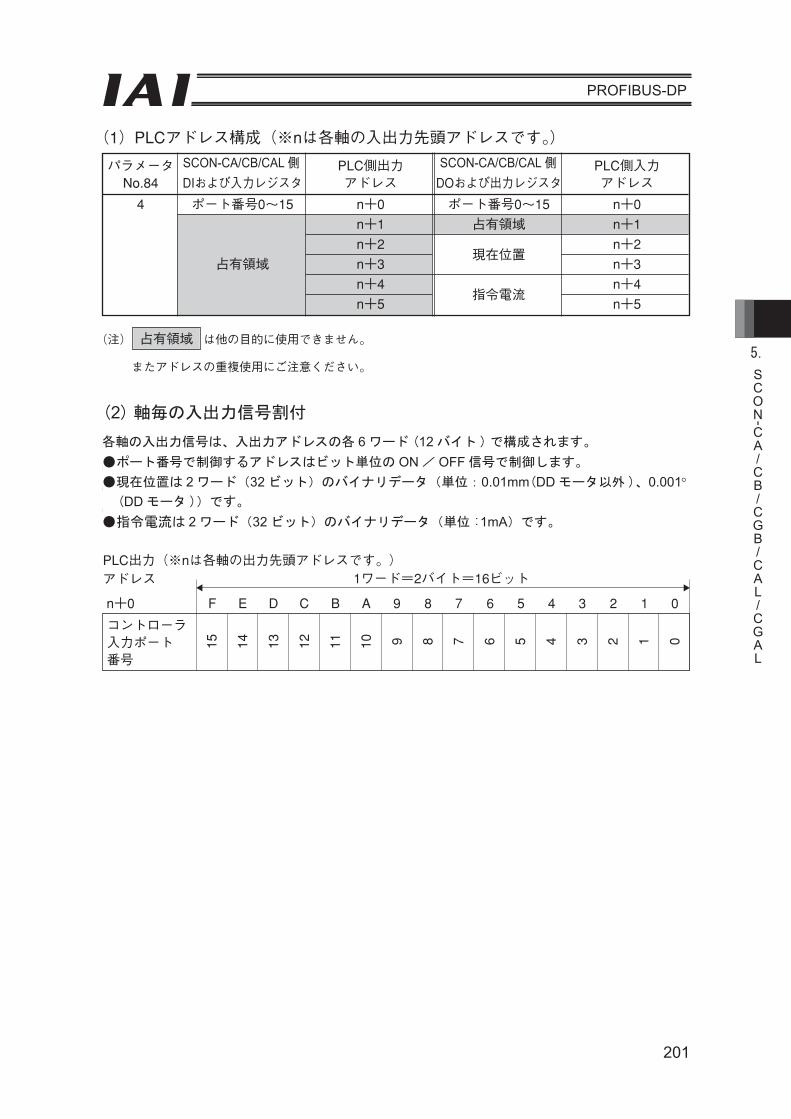
201
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
105
(1)PLCアドレス構成(※nは各軸の入出力先頭アドレスです。)
(2)軸毎の入出力信号割付
各軸の入出力信号は、入出力アドレスの各6ワード(12バイト)で構成されます。
ポート番号で制御するアドレスはビット単位のON/OFF信号で制御します。
現在位置は2ワード(32ビット)のバイナリデータ(単位:0.01mm)です。
指令電流は2ワード(32ビット)のバイナリデータ(単位:1mA)です。
パラメータ ACONまたはPCON側 PLC側出力 ACONまたはPCON側 PLC側入力No.84 DIおよび入力レジスタ アドレス DOおよび出力レジスタ アドレス
4 ポート番号0~15 n+0 ポート番号0~15 n+0n+1 占有領域 n+1n+2
現在位置n+2
占有領域 n+3 n+3n+4
指令電流n+4
n+5 n+5
15
14
13
12
11
10
9 8 7 6 5 4 3 2 1 0
Fn+0 E D C B A 9 8 7 6 5 4 3 2 1 0
PLC出力(※nは各軸の出力先頭アドレスです。)
コントローラ 入力ポート 番号
1ワード=2バイト=16ビット アドレス
占有領域(注) は他の目的に使用できません。
またアドレスの重複使用にご注意ください。
(2) 軸毎の入出力信号割付
各軸の入出力信号は、入出力アドレスの各 6 ワード (12 バイト )で構成されます。
ポート番号で制御するアドレスはビット単位の ON / OFF 信号で制御します。
現在位置は 2 ワード(32 ビット)のバイナリデータ(単位:0.01mm(DD モータ以外 )、0.001° (DD モータ ))です。
指令電流は 2 ワード(32 ビット)のバイナリデータ(単位 :1mA)です。
SCON-CA/CB/CAL 側 SCON-CA/CB/CAL 側
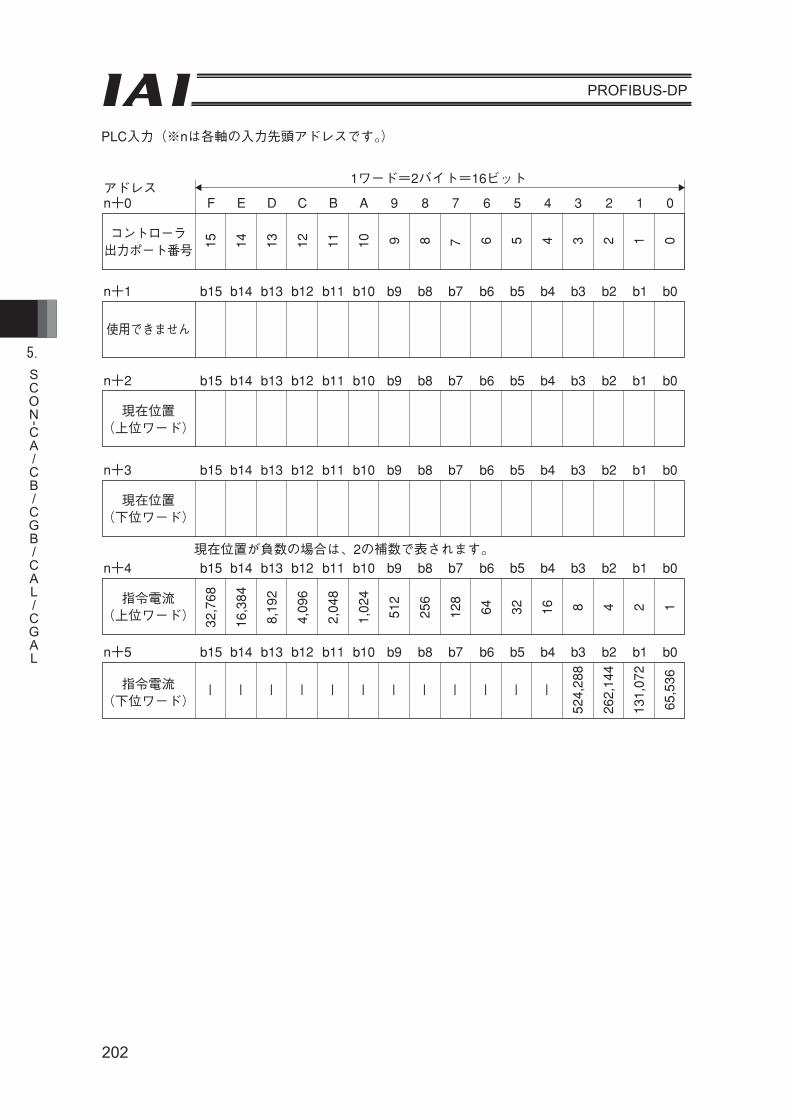
202
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
106
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
使用できません
15
14
13
12
11
10
9 8 7
6 5 4 3 2 1 0
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
-
-
-
-
-
-
-
-
-
-
-
-
524,288
262,144
131,072
65,536
Fn+0アドレス
E D C B A 9 8 7 6 5 4 3 2 1 0
コントローラ 出力ポート番号
1ワード=2バイト=16ビット
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在位置 (上位ワード)
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在位置 (下位ワード)
b15n+4 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指令電流 (上位ワード)
b15n+5 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指令電流 (下位ワード)
現在位置が負数の場合は、2の補数で表されます。
PLC入力(※nは各軸の入力先頭アドレスです。)

203
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
106
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
使用できません
15
14
13
12
11
10
9 8 7
6 5 4 3 2 1 0
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
-
-
-
-
-
-
-
-
-
-
-
-
524,288
262,144
131,072
65,536
Fn+0アドレス
E D C B A 9 8 7 6 5 4 3 2 1 0
コントローラ 出力ポート番号
1ワード=2バイト=16ビット
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在位置 (上位ワード)
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在位置 (下位ワード)
b15n+4 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指令電流 (上位ワード)
b15n+5 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指令電流 (下位ワード)
現在位置が負数の場合は、2の補数で表されます。
PLC入力(※nは各軸の入力先頭アドレスです。) (3) 入出力信号割付 各 PIO パターンの信号割付は、5.4.2 (3) リモート I/O モード入出力信号割付けをご参照してくだ
さい。 指令電流、現在位置の読取り機能の信号割付を次に示します。
信号種別 ビット 信号名 内容 詳細
現在位置 32 ビット データ
32 ビット符号付整数 単位は 0.01mm(DD モータ以外)、0.001(DDモータ)です。 (例)読取り値: 000003FFH=1023(10 進数)
=10.23mm ※16 進数で読取る場合、負数は 2 の補数表示
となります。
PLC入
力
指令電流 32 ビット データ
32 ビット整数 現在指令している電流値を示します。 単位は 1mA です。 (例)読取り値:000003FFH=1023(10 進数)
=10.23mA

204
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
DeviceNet
85
7.7.3 ポジション/簡易直値モード(占有チャネル数4CH)ポジションNo.を指定して運転する方式です。制御信号(PMOD信号)の切換えで目標位置を直接数値で指定するか、ポジションデータに登録した値を使用するか選択できます。
目標位置以外の速度、加減速度、位置決め幅等はコントローラ内のポジションテーブルの値が使用されます。コントローラ本体の取扱説明書を参照してポジションデータを設定してください。
設定可能なポジションデータの数は最大768点です。
本モードで制御可能なロボシリンダの有効な主要機能は次の表の通りです。
:直接制御
ロボシリンダの機能 :間接制御 備考
×:無効
原点復帰動作
位置決め動作
速度・加減速度設定
ピッチ送り(インチング)
押付け動作 ポジションデータの
移動中の速度変更 設定が必要です。
異なった加速度、
減速度での動作
一時停止
ゾーン信号出力 ゾーンの設定は
パラメータに行います。
PIOパターン選択 ×
(1)PLCチャネル構成(※nは各軸のノードアドレスです。)パラメータ ACONまたはPCON側 PLC側 ACONまたはPCON側 PLC側No.84 入力レジスタ 出力CH 出力レジスタ 入力CH
目標位置n+0
現在位置n+0
n+1 n+11
指定ポジション番号 n+2完了ポジション番号
n+2(簡易アラームコード)
制御信号 n+3 状態信号 n+3
(注)ノードアドレスの重複使用にご注意ください。
アクチュエータの機能
PLC 側
出力アドレス
PLC 側
入力アドレス
(1)PLC アドレス構成(※ n は各軸の入出力先頭アドレスです。)
(注)アドレスの重複使用にご注意ください。
5.4.7 ポジション/簡易直値モード 2(占有バイト数:8)
(注)本モードは、SCON-CA/CB だけに対応しています。
本モードは、力制御(ロードセル値のフィードバック押付け)を使用し、かつポジション No. を指
定して運転する方式です。制御信号(PMOD 信号)の切換えで目標位置を直接数値で指定するか、
ポジションデータに登録した値を使用するか選択できます。
目標位置以外の速度、加減速度、位置決め幅等はコントローラ内のポジションテーブルの値が使用
されます。コントローラ本体の取扱説明書を参照してポジションデータを設定してください。設定
可能なポジションデータの数は最大 768 点です。
本モードで制御可能なアクチュエータの有効な主要機能は次の表の通りです。
SCON-CA/CB 側 SCON-CA/CB 側
ゾーンの設定はポジションデータ、またはパラメータに行います。
指定ポジション No.完了ポジション No.5

205
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
DeviceNet
86
(2)軸毎の入出力信号割付各軸の入出力信号は、入出力エリアの各4ワード(4チャネル=4CH)で構成されます。
制御信号および状態信号はビット単位のON/OFF信号です。
目標位置および現在位置は2ワード(32ビット)のバイナリデータで、PLCでは-999999~+999999(単位:0.01mm)の数値が扱えますが、位置データは当該アクチュエータのソフトストロークの範囲内(0~有効ストローク長)で設定してください。
指定ポジション番号および完了ポジション番号は1ワード(16ビット)のバイナリデータで、PLCでは0~767までの数値が扱えますが、パソコンソフトまたはティーチングBOXであらかじめ運転条件を設定したポジション番号を指定してください。
b15n+0 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
PLC出力 チャネル(※nは各軸のノードアドレスです。)
目標位置が負数の場合は、2の補数で表されます。
目標位置 (下位ワード)
1ワード(1CH)=16ビット
目標位置 (上位ワード)
PC512
PC256
PC128
PC64
PC32
PC16
PC8
PC4
PC2
PC1
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指定ポジション 番号
BKRL
RMOD
PMOD
MODE
PWRT
JOG+
JOG-
JVEL
JISL
SON
RES
STP
HOME
CSTR
制御信号
CLB
R
(2)軸毎の入出力信号割付
各軸の入出力信号は、入出力エリアの各 4 ワード(8 バイト)で構成されます。
制御信号および状態信号はビット単位の ON / OFF 信号です。
目標位置および現在位置は 2 ワード(32 ビット)のバイナリデータで、PLC では- 999999 ~+
999999(単位:0.01mm(DD モータ以外 )、0.001°(DD モータ ))の数値が扱えますが、位置デー
タは当該アクチュエータのソフトストロークの範囲内(0 ~有効ストローク長)で設定してくだ
さい。
指定ポジション No. および完了ポジション No. は 1 ワード(16 ビット)のバイナリデータで、
PLC では 0 ~ 767 までの数値が扱えますが、パソコンソフトなどのティーチングツールであらか
じめ運転条件を設定したポジション No. を指定してください。
PLC 出力
アドレス(※ n は各軸の出力先頭アドレスです。)
1 ワード= 2 バイト= 16 ビット
目標位置
(上位ワード)
目標位置
(下位ワード)
No.
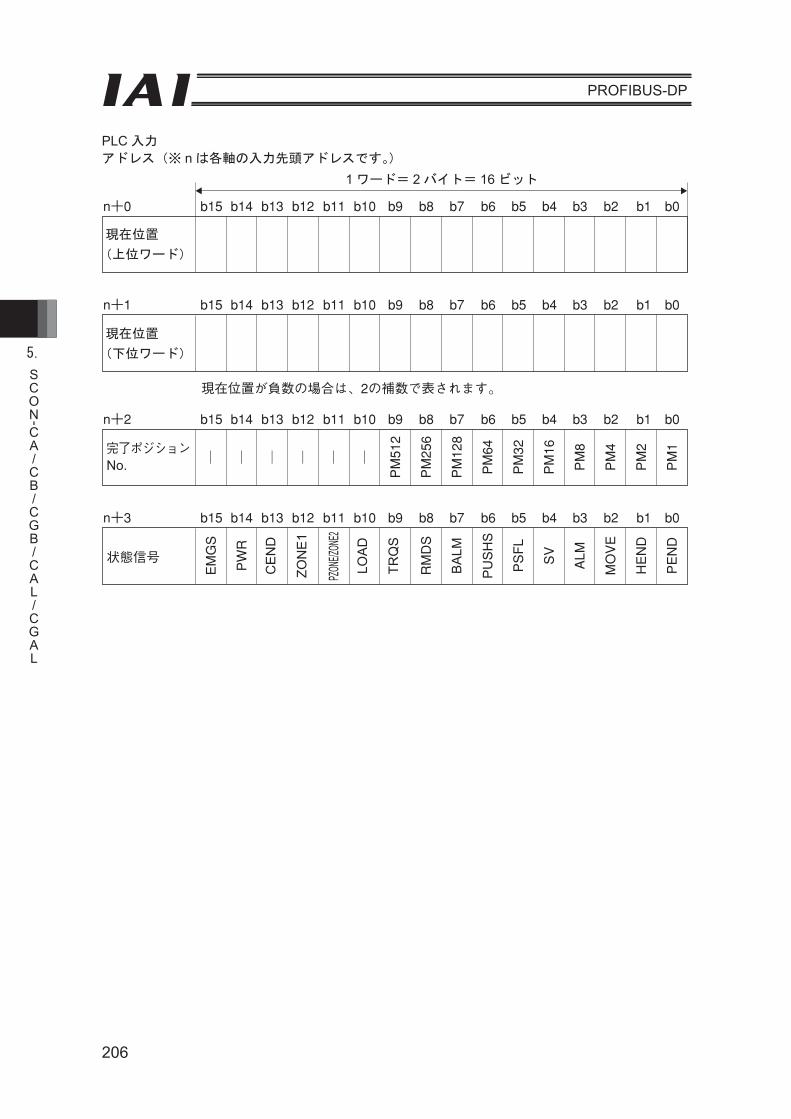
206
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
DeviceNet
87
b15n+0 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
PLC入力 チャネル(※nは各軸のノードアドレスです。)
現在位置が負数の場合は、2の補数で表されます。
現在位置 (下位ワード)
1ワード(1CH)=16ビット
現在位置 (上位ワード)
PM512
PM256
PM128
PM64
PM32
PM16
PM8
PM4
PM2
PM1
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
完了ポジション 番号
EMGS
PWR
ZONE1
ZONE2
PZONE
MODES
WEND
RMDS
PSFL
SV
ALM
MOVE
HEND
PEND
状態信号
現在位置
(上位ワード)
現在位置
(下位ワード)
PLC 入力
アドレス(※ n は各軸の入力先頭アドレスです。)
No.
PZONE
/ZONE
2
ZON
E1
CEN
D
TRQ
S
LOAD
PUSH
S
BALM
1 ワード= 2 バイト= 16 ビット

207
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
(3) 入出力信号割付(※表中の ON の表記は該当のビットが“1”を表し、OFF は“0”を表します)
信号種別 ビット 記号 内容 詳細
目標位置 32 ビット データ
32 ビット符号付整数 目標位置を絶対座標上の位置で指定してください。 単位は 0.01mm(DD モータ以外)、0.001(DD モータ)で指定可能範囲は、-999999~999999 となります。 (例) +25.40mm なら 2540 と指定します。 パラメータのソフトリミットの内側(0.2mm)を超えた値を入力するとソフトリミットの内側(0.2mm)までの移動に制限されます。 ※16 進数で入力する場合、負数は 2 の補数で入力してください。
5.9 (1)
指定 ポジション
No.
16 ビット データ
PC1~PC512
16 ビット整数 運転にはパソコン対応ソフトなどのティーチングツールであらかじめ運転条件を設定したポジションデータが必要です。 本レジスタでデータを入力したポジション No.を指定してください。 指定可能範囲は 0~767 となります。 範囲外の値の指定、未設定のポジション No.の指定はスタート信号を ON した際にアラームとなります。
5.9 (1)
b15 BKRL ブレーキ強制解除:ON でブレーキ解除 5.4.11(18)b14 RMOD 運転モード:OFF で AUTO モード、ON で MANU モード 5.4.11(19)b13 b12
使用できません
b11 ポジション/簡易直値切替: OFF でポジションモード、ON で簡易直値モード 5.4.11(20)
b10 使用できません
b9 CLBR ロードセルキャリブレーション指令: ON でキャリブレーション実行 5.4.11(32)
b8 JOG+ +ジョグ:ON で反原点方向移動 5.4.11(13)b7 JOG- -ジョグ:ON で原点方向移動 5.4.11(13)
b6 JVEL
ジョグ速度/インチング距離切替え: OFF でパラメータ No.26“ジョグ速度”、パラメータ No.48“インチング距離” ON でパラメータ No.47“ジョグ速度 2”、パラメータ No.49“インチング距離 2” の設定値を使用する。
5.4.11(14)
b5 JISL ジョグ/インチング切替え: OFF でジョグ動作、ON でインチング動作 5.4.11(15)
b4 SON サーボ ON 指令:ON でサーボ ON 5.4.11(5)b3 RES リセット:ON でリセット実行 5.4.11(4)b2 STP 一時停止:ON で一時停止指令 5.4.11(11)b1 HOME 原点復帰:ON で原点復帰指令 5.4.11(6)
PLC出力
制御番号
b0 CSTR 位置決めスタート:ON で移動指令 5.4.11(7)

208
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
アドレス ビット 記号 機能 詳細
PLC入力
現在位置 32 ビット
現在位置 32 ビット符号付整数
単位は 0.01mm(DD モータ以外 )、0.001°(DDモータ )です。
(例)読取り値: 000003FFH=1023(10 進数)
=10.23mm※ 16 進数で読取る場合、負数は 2 の補数表示
となります。
5.9 (1)
完了
ポジション
No.(簡易アラーム
コード)
16 ビット
データ
PM1~PM512
16 ビット整数
目標位置まで移動し、位置決め幅内に入る位
置決め完了したポジション No. が出力されま
す。
一度もポジション移動を行ってない場合及び
移動中は“0”が出力されます。
アラームが発生した場合(状態信号の ALMが ON の場合)には簡易アラームコード(コ
ントローラ本体の取扱説明書参照)が出力さ
れます。
5.9 (1)
制御信号
b15 EMGS 非常停止:ON で非常停止状態 5.4.11 (2)b14 PWR コントローラ準備完了:準備完了で ON 5.4.11 (1)b13 CEND ロードセルキャリブレーション完了:完了で ON 5.4.11(32)b12 ZONE1 ゾーン1:現在位置がゾーン設定内にあるときON 5.4.11(12)
b11 PZONE /ZONE 2
パラメータNo.149でPZONEとZONE2を切り替
えします。
No.149=0 ポジションゾーン:
現在位置がポジションゾーン設定内にあるとき
ONNo.149=1 ゾーン 2:現在位置がゾーン設定内にあるときON
5.4.11(12)
b10 LOAD負荷出力判定:ON で到達、OFF で未達
(詳細はコントローラ本体の取扱説明書参照)5.4.11(26)
b9 TRQSトルクレベル:ON で到達、OFF で未達
(詳細はコントローラ本体の取扱説明書参照)5.4.11(27)
b8 RMDS +ジョグ:ON で反原点方向移動 5.4.11(19)b7 BALM アブソリュートバッテリ電圧低下警告:電圧低下でON 5.4.11(28)b6 PUSHS 押付け動作中:押付け動作中で ON 5.4.11(23)
b5 PSFLジョグ/インチング切替え:
OFF でジョグ動作、ON でインチング動作5.4.11(23)
b4 SV サーボ ON 指令:ON でサーボ ON 5.4.11 (5)b3 ALM リセット:ON でリセット実行 5.4.11 (3)b2 MOVE 一時停止:ON で一時停止指令 5.4.11 (9)b1 HEND 原点復帰:ON で原点復帰指令 5.4.11 (6)b0 PEND 位置決め指令:ON で移動指令 5.4.11(10)
(※表中の ON の表記は該当のビットが“1”を表し、OFF は“0”を表します)
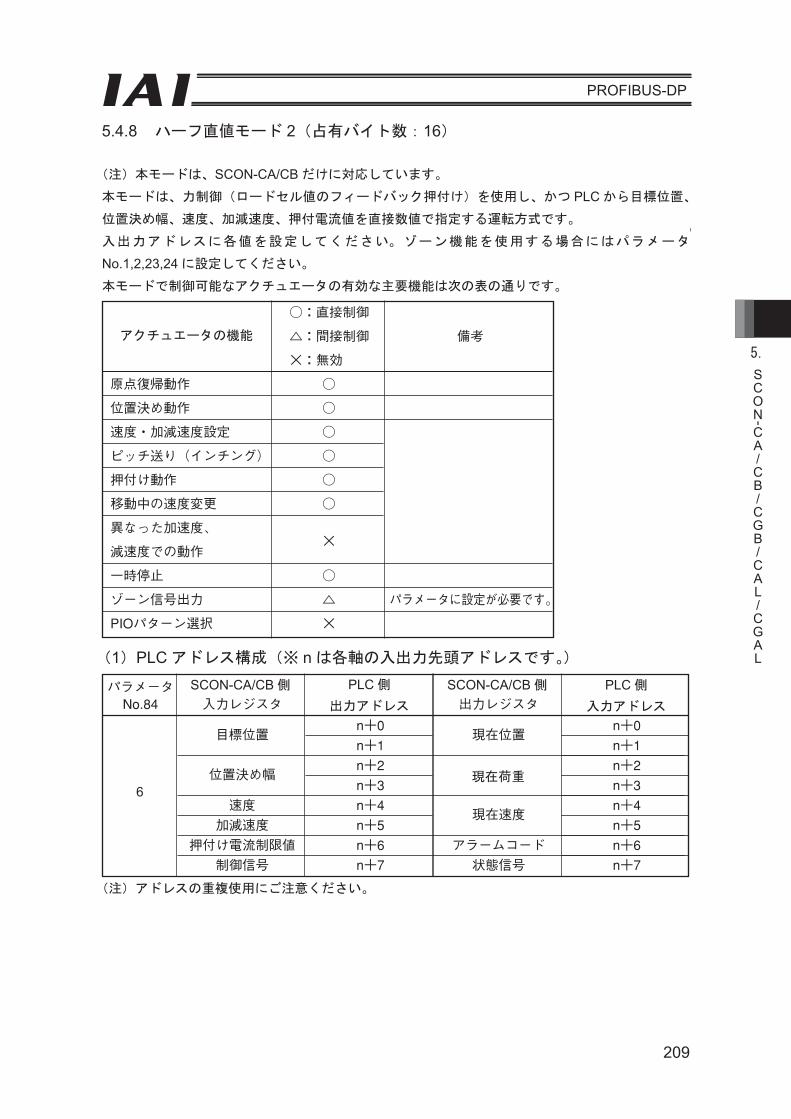
209
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
DeviceNet
90
7.7.4 ハーフ直値モード(占有チャネル数8CH)PLCから目標位置、位置決め幅、速度、加減速度、押付電流値を直接数値で指定する運転方式です。
入出力エリアに各値を設定してください。ゾーン機能を使用する場合にはパラメータNo.1,2,23,24に設定してください。
本モードで制御可能なロボシリンダの有効な主要機能は次の表の通りです。
:直接制御
ロボシリンダの機能 :間接制御 備考
×:無効
原点復帰動作
位置決め動作
速度・加減速度設定
ピッチ送り(インチング)
押付け動作
移動中の速度変更
異なった加速度、×
減速度での動作
一時停止
ゾーン信号出力 パラメータに設定が必要です。
PIOパターン選択 ×
(1)PLCチャネル構成(※nは各軸のノードアドレスです。)
(注)ノードアドレスの重複使用にご注意ください。
パラメータ ACONまたはPCON側 PLC側 ACONまたはPCON側 PLC側No.84 入力レジスタ 出力CH 出力レジスタ 入力CH
2目標位置
n+0現在位置
n+0n+1 n+1
位置決め幅n+2
指令電流n+2
n+3 n+3速度 n+4
現在速度n+4
加減速度 n+5 n+5押付け電流制限値 n+6 アラームコード n+6制御信号 n+7 状態信号 n+7
2
5.4.8 ハーフ直値モード 2(占有バイト数:16)
(注)本モードは、SCON-CA/CB だけに対応しています。
本モードは、力制御(ロードセル値のフィードバック押付け)を使用し、かつ PLC から目標位置、
位置決め幅、速度、加減速度、押付電流値を直接数値で指定する運転方式です。
入出力アドレスに各値を設定してください。ゾーン機能を使用する場合にはパラメータ
No.1,2,23,24 に設定してください。
本モードで制御可能なアクチュエータの有効な主要機能は次の表の通りです。
SCON-CA/CB 側 SCON-CA/CB 側
現在荷重
アクチュエータの機能
PLC 側
出力アドレス
PLC 側
入力アドレス
(1)PLC アドレス構成(※ n は各軸の入出力先頭アドレスです。)
(注)アドレスの重複使用にご注意ください。
6

210
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
DeviceNet
91
(2)軸毎の入出力信号割付各軸の入出力信号は、入出力エリアの各8ワード(8チャネル=8CH)で構成されます。
制御信号および状態信号はビット単位のON/OFF信号です。
目標位置および現在位置は2ワード(32ビット)のバイナリデータで、PLCでは-999999~+999999(単位:0.01mm)の数値が扱えますが、位置データは当該アクチュエータのソフトストロークの範囲内(0~有効ストローク長)で設定してください。
位置決め幅を設定してください。位置決め幅は2ワード(32ビット)のバイナリデータで、PLCでは1~+999999 (単位:0.01mm)の数値が扱えます。
指定速度は1ワード(16ビット)のバイナリデータで、PLCでは0~+65535 (単位:1.0mm/sec)の数値が扱えますが、当該アクチュエータの最大速度を超えない値に設定してください。
加減速度は1ワード(16ビット)のバイナリデータで、PLCでは1~300(単位:0.01G)の数値が扱えますが、当該アクチュエータの最大加速度および最大減速度を超えない値に設定してください。
押付け電流制限値は1ワード(16ビット)のバイナリデータで、PLCでは0(0%)~255(100%)の数値が扱えますが、当該アクチュエータの押付け電流制限値の指定可能範囲内(アクチュエータのカタログまたは取扱説明書参照)で設定してください。
指令電流は2ワード(32ビット)のバイナリデータ(単位:1mA)です。
現在速度は2ワード(32ビット)のバイナリデータ(単位:0.01mm/sec)です。
アラームコードは1ワード(16ビット)のバイナリデータです。
設定値
押付け電流制限値 0% 50% 100%
0 128 255
(2) 軸毎の入出力信号割付
各軸の入出力信号は、入出力エリアの各 8 ワード(16 バイト)で構成されます。
制御信号および状態信号はビット単位の ON/OFF 信号です。
目標位置および現在位置は 2 ワード (32 ビット )のバイナリデータで、PLC では- 999999 ~+
999999( 単位:0.01mm(DD モータ以外 )、0.001°(DD モータ ))の数値が扱えますが、位置デー
タは当該アクチュエータのソフトストロークの範囲内 (0 ~有効ストローク長 ) で設定してくだ
さい。
位置決め幅を設定してください。位置決め幅は 2 ワード (32 ビット ) のバイナリデータで、PLCでは 1 ~+ 999999( 単位:0.01mm(DD モータ以外 )、0.001°(DD モータ ))の数値が扱えます。
510(200%)
設定値 0 128 255 510
押付け電流制限値 0% 50% 100% 200%
現在荷重は 2 ワード(32 ビット)のバイナリデータ(単位:0.01N)です。
現在速度は 2 ワード(32 ビット)のバイナリデータ(単位:0.01mm/sec)です。
アラームコードは 1 ワード(16 ビット)のバイナリデータです。
速度は 1 ワード (16 ビット )のバイナリデータで、PLC では 0 ~+ 65535( 単位:1.0mm/sec または、0.1mm/sec)の数値が扱えますが、当該アクチュエータの最大速度を超えない値に設定
してください。 単位は、パラメータ No.159 FB ハーフ直値モード速度単位で設定します。
パラメータ No.159 設定値 速度単位
0 1.0mm/sec1 0.1mm/sec
999

211
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
DeviceNet
92
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
目標位置 (上位ワード)
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
位置決め幅 (下位ワード)
524,288
262,144
131,072
65,536
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
位置決め幅 (上位ワード)
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
b15n+4 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
速度
256
128
64
32
16
8 4 2 1b15n+5 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
加減速度
128
64
32
16
8 4 2 1
b15n+6 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
押付け電流 制限値
BKRL
RMOD
DIR
PUSH
JOG+
JOG-
JVEL
JISL
SON
RES
STP
HOME
DSTR
b15n+7 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
制御信号
b15n+0 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
目標位置 (下位ワード)
1ワード(1CH)=16ビット
目標位置が負数の場合は、2の補数で表されます。
PLC出力
チャネル(※nは各軸のノードアドレスです。)
CLB
R
256
目標位置
(上位ワード)
目標位置
(下位ワード)
PLC 出力
アドレス(※ n は各軸の出力先頭アドレスです。)
1 ワード= 2 バイト= 16 ビット
位置決め幅
(上位ワード)
位置決め幅
(下位ワード)
512
1,02
4

212
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
DeviceNet
93
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在位置 (上位ワード)
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指令電流 (下位ワード)
524,288
262,144
131,072
65,536
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指令電流 (上位ワード)
b15n+4 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在速度 (下位ワード)
b15n+5 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在速度 (上位ワード)
b15n+6 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
アラーム コード
EMGS
PWR
ZONE2
ZONE1
RMDS
PSFL
SV
ALM
MOVE
HEND
PEND
b15n+7 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
状態信号
b15n+0 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在位置 (下位ワード)
1ワード(1CH)=16ビット
現在位置が負数の場合は、2の補数で表されます。
現在速度が負数の場合は、2の補数で表されます。
PLC入力
チャネル(※nは各軸のノードアドレスです。)
DeviceNet
93
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在位置 (上位ワード)
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指令電流 (下位ワード)
524,288
262,144
131,072
65,536
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指令電流 (上位ワード)
b15n+4 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在速度 (下位ワード)
b15n+5 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在速度 (上位ワード)
b15n+6 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
アラーム コード
EMGS
PWR
ZONE2
ZONE1
RMDS
PSFL
SV
ALM
MOVE
HEND
PEND
b15n+7 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
状態信号
b15n+0 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在位置 (下位ワード)
1ワード(1CH)=16ビット
現在位置が負数の場合は、2の補数で表されます。
現在速度が負数の場合は、2の補数で表されます。
PLC入力
チャネル(※nは各軸のノードアドレスです。)
CEN
D
現在荷重
(下位ワード)
現在荷重
(上位ワード)
現在荷重が負数の場合は、2 の補数で表されます。
PUSH
S
BALM
現在位置
(上位ワード)
現在位置
(下位ワード)
PLC 入力
アドレス(※ n は各軸の入力先頭アドレスです。)
1 ワード= 2 バイト= 16 ビット
位置決め幅
(上位ワード)
位置決め幅
(下位ワード)

213
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
(3) 入出力信号割付 (※表中の ON の表記は該当ビットが“1”を表し、OFF は“0”を表します )
信号種別 ビット 記号 内容 詳細
PLC出
力
目標位置32 ビット
データ-
32 ビット符号付整数
目標位置を絶対座標上の位置で指定してくださ
い。
単位は 0.01mm(DD モータ以外 )、0.001°(DDモータ ) で指定可能範囲は、- 999999 ~ 999999 となります。
(例)+ 25.41mm なら 2541 と指定します。
パラメータのソフトリミットの内側(0.2mm)
を超えた値を入力するとソフトリミットの内側
(0.2mm)までの移動に制限されます。
※ 16 進数で入力する場合、負数は 2 の補数で
入力してください。
5.9 (2)
位置決め幅32 ビット
データ-
32 ビット整数
単位は 0.01mm(DD モータ以外 )、0.001°(DDモータ )で指定可能範囲は、1 ~ 999999 です。
(例)25.40mm なら 2540 と指定します。
本レジスタは動作種別により 2 種類の意味が
あります。
①位置決め動作の場合、目標位置からどの程度
の範囲で位置決め完了とみなすかの許容範
囲となります。
②押付け動作時は押付け幅の値となります。通
常動作か押付け動作かの指定は、制御信号
の PUSH で設定してください。
5.9 (2)
速度16 ビット
データ-
16 ビット整数
移動時の速度を指定してください。
単位は 1.0mm/sec または、0.1mm/sec で指定。
設定可能範囲は、0 ~ 65535 となります。
0 を指定すると移動中であれば減速停止、停止
中であれば、その場で停止したままとなります。
単位の切り替えは、パラメータ No.159 FB ハー
フ直値モード速度単位で行います。
(例)単位が 1.0mm/sec の場合
254.0mm/sec なら 254 と指定します。
最大速度以上の値で移動指令を行うとアラーム
となります。
5.9 (2)
加減速度16 ビット
データ-
16 ビット整数
移動時の加減速度を指定してください。(加速
度と減速度は同じ値となります。)
単位は 0.01G で指定可能範囲は 1 ~ 999 です。
(例)0.30G なら 30 と指定します。
0 または最大加速度,最大減速度を超えた値で
移動指令を行うとアラームとなります。
5.9 (2)

214
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
DeviceNet
95
信号種別 ビット 記号 内容 詳細
押付け電流 16ビット制限値 データ
7.9(2)
b15 BKRL 7.7.7(18)b14 RMOD 7.7.7(19)
b13 DIR 7.7.7(22)
b12 PUSH 7.7.7(21)b11b10 b9b8 JOG+ 7.7.7(13)b7 JOG- 7.7.7(13)
制御信号
b6 JVEL 7.7.7(14)
b5 JISL 7.7.7(15)
b4 SON 7.7.7(5)b3 RES 7.7.7(4)b2 STP 7.7.7(11)b1 HOME 7.7.7(6)b0 DSTR 7.7.7(8)
PLC出力
16ビット整数押付け動作時電流制限を指定してください。指定可能範囲は0(0%)~255(100%)です。各アクチュエータにより実際の指定可能範囲は異なります。(各アクチュエータのカタログまたは取扱説明書をご参照ください。)最大押付け電流値以上の値で移動指令を行うとアラームとなります。ブレーキ強制解除:ONでブレーキ解除運転モード:OFFでAUTOモード、ONでMANUモード押付け方向指定:OFFで目標位置から位置決め幅を減算した位置方向ONで目標位置に位置決め幅を加算した位置方向押付け指定:OFFで位置決め動作、ONで押付け動作
使用できません
+ジョグ:ONで反原点方向移動-ジョグ:ONで原点方向移動ジョグ速度/インチング距離切替え:OFF でパラメータNo.26“ジョグ速度”、パラメータNo.48“インチング距離”ONでパラメータNo.47“ジョグ速度2”、パラメータNo.49“インチング距離2”の設定値を使用する。ジョグ/インチング切替え:OFF でジョグ動作、ONでインチング動作サーボON指令:ONでサーボONリセット:ONでリセット実行一時停止:ONで一時停止指令原点復帰:ONで原点復帰指令位置決め指令:ONで移動指令
(※表中のONの表記は該当のビットが“1”を表し、OFFは“0”を表します)
5.9 (2)
5.4.11(18)5.4.11(19)
5.4.11(22)
5.4.11(21)
5.4.11(32)5.4.11(13)5.4.11(13)
5.4.11(14)
5.4.11(15)
5.4.11 (5)5.4.11 (4)5.4.11(11)5.4.11 (6)5.4.11 (8)
ロードセルキャリブレーション指令:ONでキャリブレーション実行
使用できません
CLBR
510(200%)

215
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
(※表中の ON の表記は該当のビットが“1”を表し、OFF は“0”を表します)
信号種別 ビット 記号 内容 詳細
PLC入力
現在位置 32 ビット データ
32 ビット符号付整数 単位は 0.01mm(DD モータ以外)、0.001(DD モー
タ)です。 (例) 読取り値:000003FFH=1023(10 進数)
=10.23mm ※16 進数で読取る場合、負数は 2 の補数表示とな
ります。
5.9 (2)
現在荷重 32 ビット データ
32 ビット符号付整数 現在のロードセルの測定値を示します。 単位は 0.01N です。 ※16 進数で読取る場合、負数は 2 の補数表示とな
ります。
5.9 (3)
現在速度 32 ビット データ
32 ビット符号付整数 現在速度を示します。 正数:反原点方向へ移動中 負数:原点方向へ移動中 単位は 0.01mm/sec です。 (例) 読取り値:000003FFH=1023(10 進数)
=10.23mm/sec ※16 進数で読取る場合、負数は 2 の補数表示とな
ります。
5.9 (2)
アラーム
コード 16 ビット データ
16 ビット整数 アラームが発生した場合にはアラームコードが出
力されます。 アラームが発生していない場合は 0Hです。 アラームの詳細内容はコントローラの取扱説明書
をご参照してください。
5.9 (2)
状態信号
b15 EMGS 非常停止:ON で非常停止状態 5.4.11(2)b14 PWR コントローラ準備完了:準備完了で ON 5.4.11(1)b13 ZONE2 ゾーン 2:現在位置がゾーン設定内にあるとき ON 5.4.11(12)b12 ZONE1 ゾーン 1:現在位置がゾーン設定内にあるとき ON 5.4.11(12)b11
使用できません b10 b9 CEND ロードセルキャリブレーション完了:完了で ON 5.4.11(32)
b8 RMDS 運転モード状態: 現在の状態が AUTO モードで OFF 、MANU モードで ON 5.4.11(19)
b7 BALM アブソリュートバッテリ電圧低下警告:電圧低下で ON 5.4.11(28)b6 PUSHS 押付け動作中:ON で押付け動作中 5.4.11(23)b5 PSFL 押付け空振り:押付け動作空振りで ON 5.4.11(23)b4 SV 運転準備完了:サーボ ON で ON 5.4.11(5)b3 ALM アラーム:アラーム発生で ON 5.4.11(3)b2 MOVE 移動中信号:アクチュエータ移動中で ON 5.4.11(9)b1 HEND 原点復帰完了:原点復帰完了で ON 5.4.11(6)b0 PEND 位置決め完了信号:位置決め完了で ON 5.4.11(10)

216
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
5.4.9 リモートⅠ /O モード 3(占有バイト数:12)
(注)本モードは、SCON-CA/CB だけに対応しています。
本モードは、力制御(ロードセル値のフィードバック押付け)を使用し、かつ PIO(24V 入出力)
を使用した場合と同様にポジション No. を指定して運転するモードです。
RC 用パソコン対応ソフトなどのティーチングツールからポジションデータを設定してください。
運転可能なポジション数は、パラメータ No.25“PIO パターン”の設定によります。
本モードはリモートⅠ /O モードの内容に現在位置の読取り機能と現在荷重の読取り機能を追加し
たものです。
以下に各 PIO パターンの特長を示します。(詳細はコントローラ本体の取扱説明書参照)
パラメータ
No.25 の設定値動作モード Ⅰ /O 仕様
0 位置決めモード 位置決め点数 64 点、ゾーン出力 2 点
1 教示モード 位置決め点数 64 点、ゾーン出力 1 点
位置決めおよびジョグ運転が可能
現在位置を指定ポジションに書込み可能
2 256 点モード 位置決め点数 256 点、ゾーン出力 1 点
3 512 点モード 位置決め点数 512 点、ゾーン出力無し
4 電磁弁モード 1 位置決め点数 7 点、ゾーン出力 2 点
ポジション No. 毎の直接運転指令が可能
位置決め完了信号はポジション No. 毎に出力
5 電磁弁モード 2 位置決め点数 3 点、ゾーン出力 2 点
前進/後退/中間位置指令により運転
位置決め完了信号は前進端/後退端/中間位置の個別出力
6 力制御モード 1(専用ロードセル使用)
位置決め点数 32 点、ゾーン出力 1 点
7力制御モード 2
(専用ロードセル使用)
位置決め点数 5 点、ゾーン出力 1 点
ポジション No. 毎の直接運転指令が可能
位置決め完了信号はポジション No. 毎に出力
:動作可、×:動作不可
アクチュエータ
の機能
PIO パターン
0:位置決め
モード
1:教示
モード
2:256 点
モード
3:512 点
モード
4:電磁弁
モード 1
5:電磁弁
モード 2
6:力制御
モード 1
7:力制御
モード 2原点復帰動作 ×
位置決め動作
速度・加減速度設定
ピッチ送り(インチング)
押付け動作 ×
移動中の速度変更 × ×
異なった加速度、
減速度での動作
一時停止 (※ 1)
ゾーン信号出力 ×
PIO パターン選択
(パラメータで設定)
本モードで制御可能なアクチュエータの有効な主要機能は次の表の通りです。
(※ 1) パラメータ No.27“移動指令種別”を 0 に設定した場合に可能です。
移動指令を OFF にすることによって一時停止が可能です。

217
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
DeviceNet
107
(1)PLCチャネル構成(※nは各軸のノードアドレスです。)
(2)軸毎の入出力信号割付各軸の入出力信号は、入出力エリアの各6ワード(6チャネル=6CH)で構成されます。
ポート番号で制御するチャネルはビット単位のON/OFF信号で制御します。
現在位置は2ワード(32ビット)のバイナリデータ(単位:0.01mm)です。
指令電流は2ワード(32ビット)のバイナリデータ(単位:1mA)です。
15
14
13
12
11
10
9 8 7 6 5 4 3 2 1 0
Fn+0 E D C B A 9 8 7 6 5 4 3 2 1 0
PLC出力(※nは各軸のノードアドレスです。)
コントローラ 入力ポート 番号
1ワード(1CH)=16ビット チャネル
占有領域(注) は他の目的に使用できません。
またノードアドレスの重複使用にご注意ください。
パラメータ ACONまたはPCON側 PLC側 ACONまたはPCON側 PLC側No.84 DIおよび入力レジスタ 出力CH DOおよび出力レジスタ 入力CH
4 ポート番号0~15 n+0 ポート番号0~15 n+0n+1 占有領域 n+1n+2
現在位置n+2
占有領域 n+3 n+3n+4
指令電流n+4
n+5 n+5
SCON-CA/CB 側 SCON-CA/CB 側
現在荷重
(2)軸毎の入出力信号割付
各軸の入出力信号は、入出力エリアの各 6 ワード(12 バイト)で構成されます。
ポート番号で制御するチャネルはビット単位の ON / OFF 信号で制御します。
現在位置は 2 ワード(32 ビット)のバイナリデータ(単位:0.01mm(DD モータ以外 )、
0.001°(DD モータ ))です。
現在荷重は 2 ワード(32 ビット)のバイナリデータ(単位:0.01N)です。
PLC 側
出力アドレス
PLC 側
入力アドレス
(1)PLC アドレス構成(※ n は各軸の入出力先頭アドレスです。)
またアドレスの重複使用にご注意ください。
PLC 出力(※ n は各軸の出力先頭アドレスです。)
アドレス
1 ワード= 2 バイト= 16 ビット
7
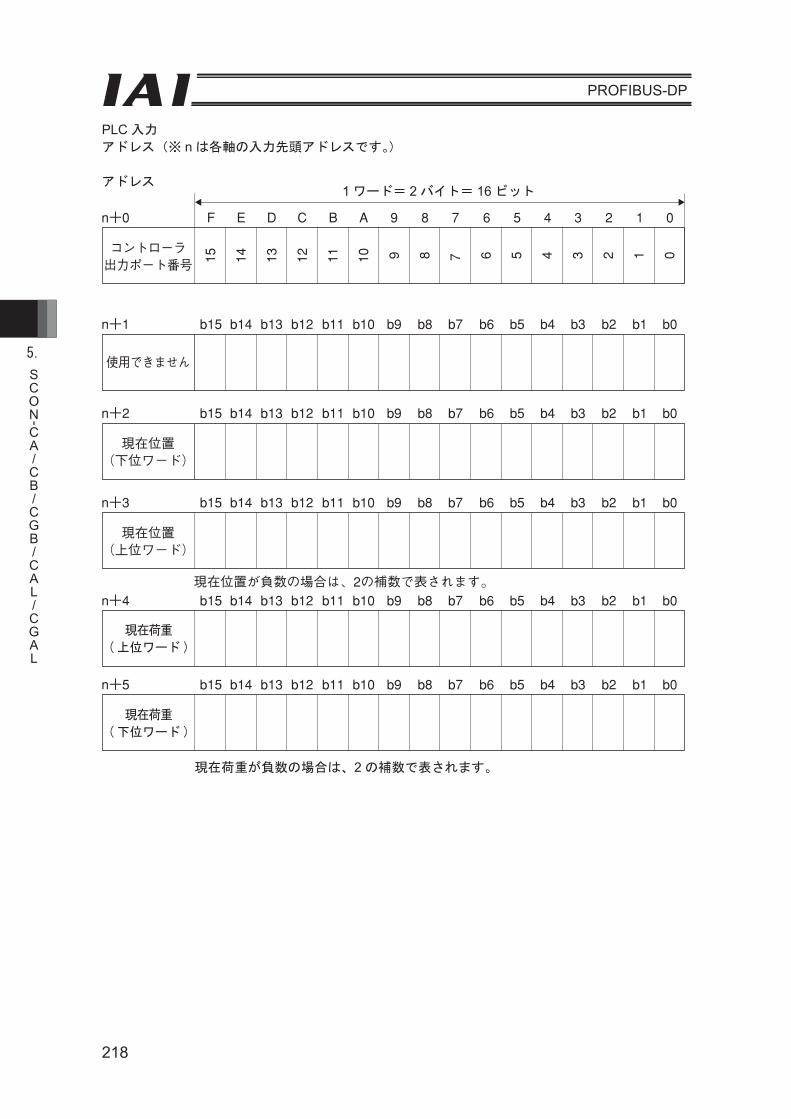
218
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
DeviceNet
108
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
使用できません
15
14
13
12
11
10
9 8 7
6 5 4 3 2 1 0
Fn+0
チャネル
E D C B A 9 8 7 6 5 4 3 2 1 0
コントローラ 出力ポート番号
1ワード(1CH)=16ビット
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在位置 (下位ワード)
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在位置 (上位ワード)
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
b15n+4 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指令電流 (下位ワード)
524,288
262,144
131,072
65,536
b15n+5 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指令電流 (上位ワード)
現在位置が負数の場合は、2の補数で表されます。
PLC入力(※nは各軸のノードアドレスです。)
現在荷重が負数の場合は、2 の補数で表されます。
現在荷重
(上位ワード )
現在荷重
(下位ワード )
PLC 入力
アドレス(※ n は各軸の入力先頭アドレスです。)
アドレス1 ワード= 2 バイト= 16 ビット
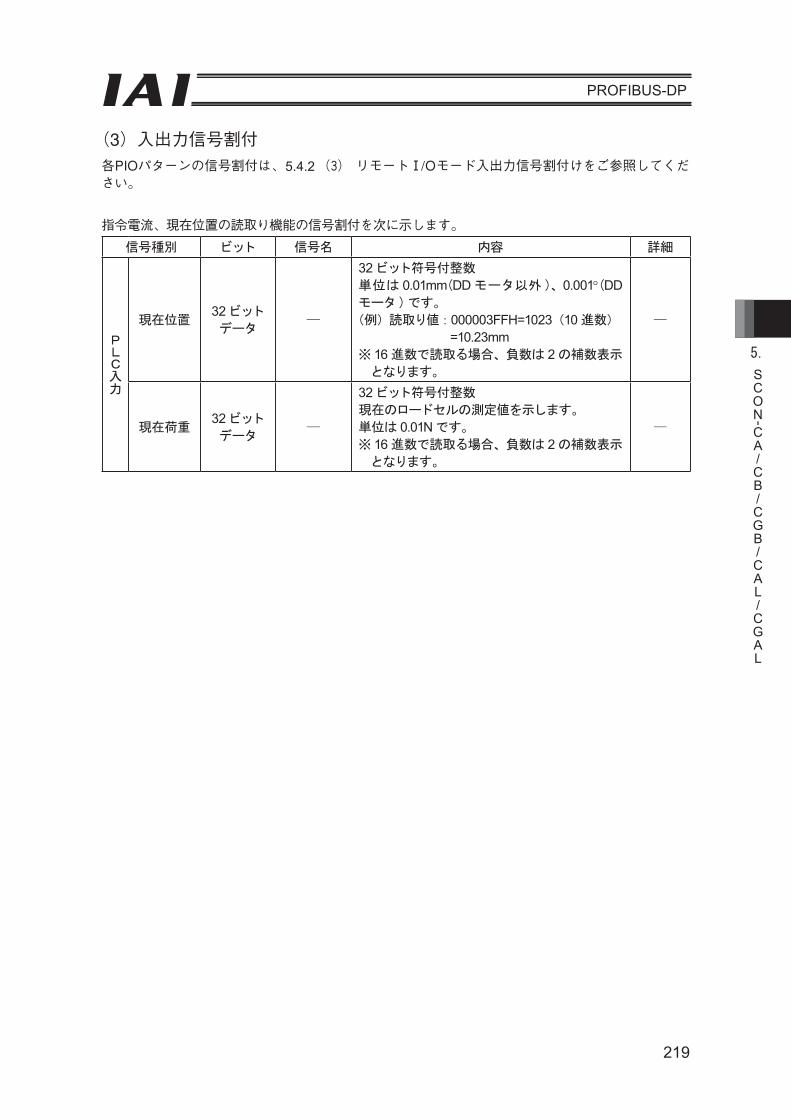
219
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
DeviceNet
109
(3)入出力信号割付各PIOパターンの信号割付は、7.7.2 (3) リモートⅠ/Oモード入出力信号割付けをご参照してください。
指令電流、現在位置の読取り機能の信号割付を次に示します。
信号種別 ビット 信号名 内容 詳細
現在位置32ビット
データ
指令電流32ビット
データ
PLC入力
32ビット符号付整数単位は0.01mmです。(例)読取り値:000003FFH=1023(10進数)
=10.23mm※16進数で読取る場合、負数は2の補数表示となります。32ビット整数現在指令している電流値を示します。単位は1mAです。(例)読取り値:000003FFH=1023(10進数)
=1023mA
5.4.2
信号種別 ビット 信号名 内容 詳細
PLC入力
現在位置32ビット
データ
32ビット符号付整数
単位は 0.01mm(DD モータ以外 )、0.001°(DDモータ )です。
(例)読取り値:000003FFH=1023(10 進数)
=10.23mm※ 16 進数で読取る場合、負数は 2 の補数表示
となります。
現在荷重32ビット
データ
32ビット符号付整数
現在のロードセルの測定値を示します。
単位は 0.01N です。
※ 16 進数で読取る場合、負数は 2 の補数表示
となります。
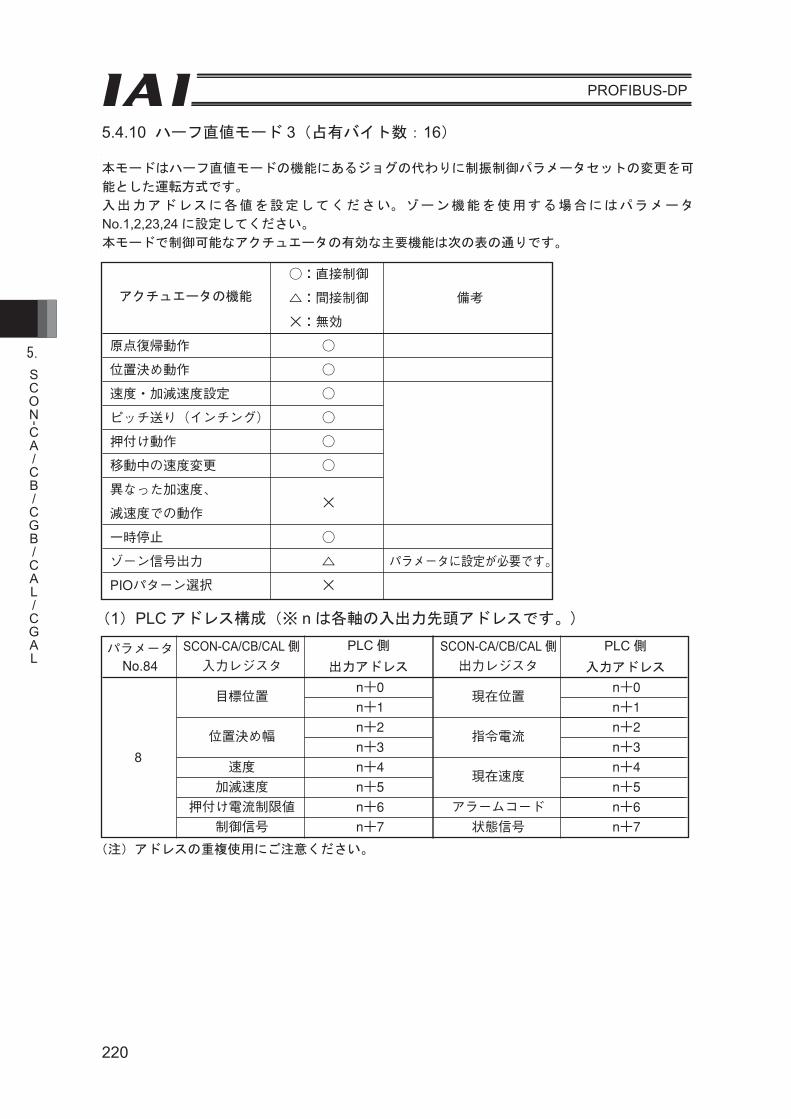
220
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
DeviceNet
90
7.7.4 ハーフ直値モード(占有チャネル数8CH)PLCから目標位置、位置決め幅、速度、加減速度、押付電流値を直接数値で指定する運転方式です。
入出力エリアに各値を設定してください。ゾーン機能を使用する場合にはパラメータNo.1,2,23,24に設定してください。
本モードで制御可能なロボシリンダの有効な主要機能は次の表の通りです。
:直接制御
ロボシリンダの機能 :間接制御 備考
×:無効
原点復帰動作
位置決め動作
速度・加減速度設定
ピッチ送り(インチング)
押付け動作
移動中の速度変更
異なった加速度、×
減速度での動作
一時停止
ゾーン信号出力 パラメータに設定が必要です。
PIOパターン選択 ×
(1)PLCチャネル構成(※nは各軸のノードアドレスです。)
(注)ノードアドレスの重複使用にご注意ください。
パラメータ ACONまたはPCON側 PLC側 ACONまたはPCON側 PLC側No.84 入力レジスタ 出力CH 出力レジスタ 入力CH
2目標位置
n+0現在位置
n+0n+1 n+1
位置決め幅n+2
指令電流n+2
n+3 n+3速度 n+4
現在速度n+4
加減速度 n+5 n+5押付け電流制限値 n+6 アラームコード n+6制御信号 n+7 状態信号 n+7
SCON-CA/CB/CAL 側 SCON-CA/CB/CAL 側
5.4.10 ハーフ直値モード 3(占有バイト数:16)
本モードはハーフ直値モードの機能にあるジョグの代わりに制振制御パラメータセットの変更を可
能とした運転方式です。
入出力アドレスに各値を設定してください。ゾーン機能を使用する場合にはパラメータ
No.1,2,23,24 に設定してください。
本モードで制御可能なアクチュエータの有効な主要機能は次の表の通りです。
アクチュエータの機能
PLC 側
出力アドレス
PLC 側
入力アドレス
(1)PLC アドレス構成(※ n は各軸の入出力先頭アドレスです。)
(注)アドレスの重複使用にご注意ください。
8

221
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
DeviceNet
91
(2)軸毎の入出力信号割付各軸の入出力信号は、入出力エリアの各8ワード(8チャネル=8CH)で構成されます。
制御信号および状態信号はビット単位のON/OFF信号です。
目標位置および現在位置は2ワード(32ビット)のバイナリデータで、PLCでは-999999~+999999(単位:0.01mm)の数値が扱えますが、位置データは当該アクチュエータのソフトストロークの範囲内(0~有効ストローク長)で設定してください。
位置決め幅を設定してください。位置決め幅は2ワード(32ビット)のバイナリデータで、PLCでは1~+999999 (単位:0.01mm)の数値が扱えます。
指定速度は1ワード(16ビット)のバイナリデータで、PLCでは0~+65535 (単位:1.0mm/sec)の数値が扱えますが、当該アクチュエータの最大速度を超えない値に設定してください。
加減速度は1ワード(16ビット)のバイナリデータで、PLCでは1~300(単位:0.01G)の数値が扱えますが、当該アクチュエータの最大加速度および最大減速度を超えない値に設定してください。
押付け電流制限値は1ワード(16ビット)のバイナリデータで、PLCでは0(0%)~255(100%)の数値が扱えますが、当該アクチュエータの押付け電流制限値の指定可能範囲内(アクチュエータのカタログまたは取扱説明書参照)で設定してください。
指令電流は2ワード(32ビット)のバイナリデータ(単位:1mA)です。
現在速度は2ワード(32ビット)のバイナリデータ(単位:0.01mm/sec)です。
アラームコードは1ワード(16ビット)のバイナリデータです。
設定値
押付け電流制限値 0% 50% 100%
0 128 255
(2) 軸毎の入出力信号割付
各軸の入出力信号は、入出力エリアの各 8 ワード(16 バイト)で構成されます。
制御信号および状態信号はビット単位の ON/OFF 信号です。
目標位置および現在位置は 2 ワード (32 ビット )のバイナリデータで、PLC では- 999999 ~+
999999( 単位:0.01mm(DD モータ以外 )、0.001°(DD モータ ))の数値が扱えますが、位置デー
タは当該アクチュエータのソフトストロークの範囲内 (0 ~有効ストローク長 ) で設定してくだ
さい。
位置決め幅を設定してください。位置決め幅は 2 ワード (32 ビット ) のバイナリデータで、PLCでは 1 ~+ 999999( 単位:0.01mm(DD モータ以外 )、0.001°(DD モータ ))の数値が扱えます。
999
510(200%)
設定値 0 128 255 510
押付け電流制限値 0% 50% 100% 200%
速度は 1 ワード (16 ビット )のバイナリデータで、PLC では 0 ~+ 65535( 単位:1.0mm/sec または、0.1mm/sec)の数値が扱えますが、当該アクチュエータの最大速度を超えない値に設定
してください。 単位は、パラメータ No.159 FB ハーフ直値モード速度単位で設定します。
パラメータ No.159 設定値 速度単位
0 1.0mm/sec1 0.1mm/sec

222
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
DeviceNet
93
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在位置 (上位ワード)
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指令電流 (下位ワード)
524,288
262,144
131,072
65,536
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指令電流 (上位ワード)
b15n+4 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在速度 (下位ワード)
b15n+5 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在速度 (上位ワード)
b15n+6 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
アラーム コード
EMGS
PWR
ZONE2
ZONE1
RMDS
PSFL
SV
ALM
MOVE
HEND
PEND
b15n+7 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
状態信号
b15n+0 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在位置 (下位ワード)
1ワード(1CH)=16ビット
現在位置が負数の場合は、2の補数で表されます。
現在速度が負数の場合は、2の補数で表されます。
PLC入力
チャネル(※nは各軸のノードアドレスです。)
DeviceNet
92
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
目標位置 (上位ワード)
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
位置決め幅 (下位ワード)
524,288
262,144
131,072
65,536
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
位置決め幅 (上位ワード)
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
b15n+4 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
速度
256
128
64
32
16
8 4 2 1b15n+5 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
加減速度
128
64
32
16
8 4 2 1
b15n+6 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
押付け電流 制限値
BKRL
RMOD
DIR
PUSH
JOG+
JOG-
JVEL
JISL
SON
RES
STP
HOME
DSTR
b15n+7 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
制御信号
b15n+0 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
目標位置 (下位ワード)
1ワード(1CH)=16ビット
目標位置が負数の場合は、2の補数で表されます。
PLC出力
チャネル(※nは各軸のノードアドレスです。)
512
1,02
4
NTC
0
MO
D0
GSL
0
MO
D1
NTC
1
256
GSL
1
目標位置
(上位ワード)
目標位置
(下位ワード)
PLC 出力
アドレス(※ n は各軸の出力先頭アドレスです。)
1 ワード= 2 バイト= 16 ビット
位置決め幅
(上位ワード)
位置決め幅
(下位ワード)

223
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
DeviceNet
93
b15n+1 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在位置 (上位ワード)
32,768
16,384
8,192
4,096
2,048
1,024
512
256
128
64
32
16
8 4 2 1
b15n+2 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指令電流 (下位ワード)
524,288
262,144
131,072
65,536
b15n+3 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
指令電流 (上位ワード)
b15n+4 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在速度 (下位ワード)
b15n+5 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在速度 (上位ワード)
b15n+6 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
アラーム コード
EMGS
PWR
ZONE2
ZONE1
RMDS
PSFL
SV
ALM
MOVE
HEND
PEND
b15n+7 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
状態信号
b15n+0 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
現在位置 (下位ワード)
1ワード(1CH)=16ビット
現在位置が負数の場合は、2の補数で表されます。
現在速度が負数の場合は、2の補数で表されます。
PLC入力
チャネル(※nは各軸のノードアドレスです。)
BALM
現在位置
(上位ワード)
現在位置
(下位ワード)
PLC 入力
アドレス(※ n は各軸の入力先頭アドレスです。)
1 ワード= 2 バイト= 16 ビット
指令電流
(上位ワード)
指令電流
(下位ワード)
現在速度
(上位ワード)
現在速度
(下位ワード)

224
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
信号種別 ビット 記号 内容 詳細
PLC出
力
目標位置32 ビット
データ-
32 ビット符号付整数
目標位置を絶対座標上の位置で指定してくださ
い。
単位は 0.01mm(DD モータ以外 )、0.001°(DDモータ ) で指定可能範囲は、- 999999 ~
999999 となります。
(例)+ 25.41mm なら 2541 と指定します。
パラメータのソフトリミットの内側(0.2mm)
を超えた値を入力するとソフトリミットの内側
(0.2mm)までの移動に制限されます。
※ 16 進数で入力する場合、負数は 2 の補数で
入力してください。
5.9 (2)
位置決め幅32 ビット
データ-
32 ビット整数
単位は 0.01mm(DD モータ以外 )、0.001°(DDモータ )で指定可能範囲は、1 ~ 999999 です。
(例)25.40mm なら 2540 と指定します。
本レジスタは動作種別により 2 種類の意味が
あります。
①位置決め動作の場合、目標位置からどの程度
の範囲で位置決め完了とみなすかの許容範
囲となります。
②押付け動作時は押付け幅の値となります。通
常動作か押付け動作かの指定は、制御信号
の PUSH で設定してください。
5.9 (2)
速度16 ビット
データ-
16 ビット整数
移動時の速度を指定してください。
単位は 1.0mm/sec または、0.1mm/sec で指定。
設定可能範囲は、0 ~ 65535 となります。
0 を指定すると移動中であれば減速停止、停止
中であれば、その場で停止したままとなります。
単位の切り替えは、パラメータ No.159 FB ハー
フ直値モード速度単位で行います。
(例)単位が 1.0mm/sec の場合
254.0mm/sec なら 254 と指定します。
最大速度以上の値で移動指令を行うとアラーム
となります。
5.9 (2)
加減速度16 ビット
データ-
16 ビット整数
移動時の加減速度を指定してください。(加速
度と減速度は同じ値となります。)
単位は 0.01G で指定可能範囲は 1 ~ 999 です。
(例)0.30G なら 30 と指定します。
0 または最大加速度,最大減速度を超えた値で
移動指令を行うとアラームとなります。
5.9 (2)
(3) 入出力信号割付 (※表中の ON の表記は該当ビットが“1”を表し、OFF は“0”を表します )

225
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
信号種別 ビット 記号 内容 詳細
PLC出力
押付け電流
制限値16 ビット
16 ビット整数
押付け動作時電流制限を指定してください。
指定可能範囲は 0(0%)~ 510(200%)です。
各アクチュエータにより実際の指定可能範囲
は異なります。(各アクチュエータのカタログ
または取扱説明書をご参照ください。)
最大押付け電流値以上の値で移動指令を行う
とアラームとなります。
5.9 (2)
制御信号
b15 BKRL ブレーキ強制解除:ON でブレーキ解除 5.4.11(18)b14 RMOD 運転モード:OFFでAUTOモード、ONでMANUモード 5.4.11(19)
b13 DIR押付け方向指定:
OFFで目標位置から位置決め幅を減算した位置方向
ONで目標位置に位置決め幅を加算した位置方向
5.4.11(22)
b12 PUSH 押付け指定:OFFで位置決め動作、ONで押付け動作 5.4.11(21)
b11 GSL1 サーボゲインパラ
メータセット選択 1
使用するサーボゲイン
パラメータセット選択
GSL1 GSL0 機能
OFF OFF パラメータセット0 選択
OFF ON パラメータセット1選択
ON OFF パラメータセット2 選択
ON ON パラメータセット3 選択
5.4.11(33)
b10 GSL0 サーボゲインパラ
メータセット選択 0
b9 NTC1 制振制御
モード選択 1
使用する制振制御
パラメータセット選択
NTC1 NTC0 機能
OFF OFF 制振制御未使用
OFF ON パラメータセット1選択
ON OFF パラメータセット2 選択
ON ON パラメータセット3 選択
5.4.11(29)
b8 NTC0 制振制御
モード選択 0
b7 MOD1 加減速モード:OFF、OFFで台形パターン
OFF、ONでS字モーション
ON、OFFで一次遅れフィルタ
5.4.11(30)b6 MOD0b5 使用できません
b4 SON サーボ ON 指令:ON でサーボ ON 5.4.11 (5)b3 REF リセット:ON でリセット実行 5.4.11 (4)b2 STP 一時停止:ON で一時停止指令 5.4.11(11)b1 HOME 原点復帰:ON で原点復帰指令 5.4.11 (6)b0 DSTR 位置決め指令:ON で移動指令 5.4.11 (8)
(※表中の ON の表記は該当のビットが“1”を表し、OFF は“0”を表します)

226
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
108
7.4.7 入出力信号の制御と機能※ONの表記はビット信号の“1”を表し、OFFは“0”を表します。
ポジション/簡易直値モード、ハーフ直値モードおよびフル直値モードに使用される入出力信号の制御と機能を以下に示します。リモートⅠ/OモードおよびリモートⅠ/Oモード2の入出力信号については、コントローラ本体の取扱説明書をご参照ください。
(1)コントローラ準備完了(PWR) PLC入力信号
電源投入後、コントローラが制御可能になるとONになります。
機能
アラームの状態やサーボの状態等にかかわらず、電源投入後、コントローラの初期化が正常に終了し、制御が可能になるとONになります。
アラーム状態にあっても、コントローラが制御可能状態であればONになります。
(2)非常停止(EMGS) PLC入力信号
コントローラが非常停止状態になるとONになります。
機能
非常停止状態(モータ駆動電源が遮断状態)になるとONになります。非常停止状態が解除されればOFFになります。
(3)アラーム(ALM) PLC入力信号
コントローラの保護回路(機能)が異常を検出するとONになります。
機能
異常を検出して保護回路(機能)が動作した時にONになる信号です。
アラームの原因が解除され、リセット(RES)信号をONにすると動作解除レベルのアラームの場合はOFFになります。(コールドスタートレベルのアラームの場合は電源の再投入が必要です)
アラームを検出すると、コントローラ前面の状態表示LED(7.3(6)参照)が赤色点灯します。
(4)リセット(RES) PLC出力信号
この信号は2つの機能を持っており、コントローラのアラームのリセットおよび一時停止中の残移動量をキャンセルすることができます。
機能
①アラームが発生中に、アラームの原因を取り除いた後、この信号をOFFからONにするとアラーム(ALM)信号をリセットすることができます。(コールドスタートレベルのアラームの場合は電源の再投入が必要です)
②一時停止中にこの信号をOFFからONにすると、残りの移動量をキャンセルすることができます。
(※表中の ON の表記は該当のビットが“1”を表し、OFF は“0”を表します)
信号種別 ビット 記号 内容 詳細
現在位置 32 ビット データ
32 ビット符号付整数 単位は 0.01mm(DD モータ以外)、0.001(DD モー
タ)です。 (例) 読取り値:000003FFH=1023(10 進数)
=10.23mm ※16 進数で読取る場合、負数は 2 の補数表示とな
ります
5.9 (2)
指令電流 32 ビット データ
32 ビット整数 現在指令している電流値を示します。 単位は mA です。 (例) 読取り値:000003FFH=1023(10 進数)
=1023mA
5.9 (2)
現在速度 32 ビット データ
32 ビット符号付整数 現在速度を示します。 正数:反原点方向へ移動中 負数:原点方向へ移動中 単位は 0.01mm/sec です。 (例) 読取り値:000003FFH=1023(10 進数)
=10.23mm/sec ※16 進数で読取る場合、負数は 2 の補数表示とな
ります。
5.9 (2)
アラーム
コード 16 ビット データ
16 ビット整数 アラームが発生した場合にはアラームコードが出
力されます。 アラームが発生していない場合は 0Hです。 アラームの詳細内容はコントローラの取扱説明書
をご参照してください。
5.9 (2)
b15 EMGS 非常停止:ON で非常停止状態 5.4.11(2)b14 PWR コントローラ準備完了:準備完了で ON 5.4.11(1)b13 ZONE2 ゾーン 2:現在位置がゾーン設定内にあるとき ON 5.4.11(12)b12 ZONE1 ゾーン 1:現在位置がゾーン設定内にあるとき ON 5.4.11(12)b11 b10 b9
使用できません
b8 RMDS 運転モード状態: 現在の状態が AUTO モードで OFF 、MANU モードで ON 5.4.11(19)
b7 BALM アブソリュートバッテリ電圧低下警告:電圧低下で ON 5.4.11(28)b6 使用できません b5 PSFL 押付け空振り:押付け動作空振りで ON 5.4.11(23)b4 SV 運転準備完了:サーボ ON で ON 5.4.11(5)b3 ALM アラーム:アラーム発生で ON 5.4.11(3)b2 MOVE 移動中信号:アクチュエータ移動中で ON 5.4.11(9)b1 HEND 原点復帰完了:原点復帰完了で ON 5.4.11(6)
PLC入力
状態信号
b0 PEND 位置決め完了信号:位置決め完了で ON 5.4.11(10)
227
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
108
7.4.7 入出力信号の制御と機能※ONの表記はビット信号の“1”を表し、OFFは“0”を表します。
ポジション/簡易直値モード、ハーフ直値モードおよびフル直値モードに使用される入出力信号の制御と機能を以下に示します。リモートⅠ/OモードおよびリモートⅠ/Oモード2の入出力信号については、コントローラ本体の取扱説明書をご参照ください。
(1)コントローラ準備完了(PWR) PLC入力信号
電源投入後、コントローラが制御可能になるとONになります。
機能
アラームの状態やサーボの状態等にかかわらず、電源投入後、コントローラの初期化が正常に終了し、制御が可能になるとONになります。
アラーム状態にあっても、コントローラが制御可能状態であればONになります。
(2)非常停止(EMGS) PLC入力信号
コントローラが非常停止状態になるとONになります。
機能
非常停止状態(モータ駆動電源が遮断状態)になるとONになります。非常停止状態が解除されればOFFになります。
(3)アラーム(ALM) PLC入力信号
コントローラの保護回路(機能)が異常を検出するとONになります。
機能
異常を検出して保護回路(機能)が動作した時にONになる信号です。
アラームの原因が解除され、リセット(RES)信号をONにすると動作解除レベルのアラームの場合はOFFになります。(コールドスタートレベルのアラームの場合は電源の再投入が必要です)
アラームを検出すると、コントローラ前面の状態表示LED(7.3(6)参照)が赤色点灯します。
(4)リセット(RES) PLC出力信号
この信号は2つの機能を持っており、コントローラのアラームのリセットおよび一時停止中の残移動量をキャンセルすることができます。
機能
①アラームが発生中に、アラームの原因を取り除いた後、この信号をOFFからONにするとアラーム(ALM)信号をリセットすることができます。(コールドスタートレベルのアラームの場合は電源の再投入が必要です)
②一時停止中にこの信号をOFFからONにすると、残りの移動量をキャンセルすることができます。
5.4.11 入出力信号の制御と機能
5.3
※ ON の表記はビット信号の“1”を表し、OFF は“0”を表します。
ポジション/簡易直値モード 1、2、ハーフ直値モード 1~3 およびフル直値モードに使用される入
出力信号の制御と機能を以下に示します。リモートⅠ /O モード 1 ~ 3 の入出力信号については、
コントローラ本体の取扱説明書をご参照ください。

228
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
110
(6)原点復帰 (HOME) PLC出力信号
原点復帰完了(HEND) PLC入力信号
原点復帰中 (GHMS) PLC入力信号
HOME信号をONすると、この指令は立上り(ONエッジ)で処理され、自動で原点復帰動作が行われます。原点復帰中はGHMS信号がONとなります。
原点復帰を完了するとHEND信号がONとなり、GHMS信号がOFFとなります。
HEND信号がONになったらHOME信号をOFFにしてください。HEND信号は一旦ONになると電源がOFFされるか、再度のHOME信号が入力されるまでOFFとなりません。
原点復帰完了後もHOME信号をONすると原点復帰を行うことができます。
HOME (PLC→ACON、PCON)
GHMS (ACON、PCON→PLC)
HEND (ACON、PCON→PLC)
PEND (ACON、PCON→PLC)
MOVE
(ACON、PCON→PLC)
アクチュエータ動作
メカエンド 原点位置で停止
Q注意:リモートⅠ/Oモード、リモートⅠ/Oモード2およびポジション/簡易直値モードでは、電源投入時に原点復帰を行わずにポジションへの位置決め指令をした場合、電源投入後の最初の1回に限り自動的に原点復帰を行った後、位置決めを実行します。ハーフ直値モードおよびフル直値モードでは、電源投入時に原点復帰を行わずにポジションへの位置決め指令をした場合、「エラーコード83 ALARM HOME ABS(原点復帰未完了状態での絶対位置移動指令)」のアラーム(動作解除レベル)となりますので、ご注意ください。
ProfiBus-DP
109
(5)サーボON指令 (SON) PLC出力信号
運転準備完了 (SV) PLC入力信号
SON信号をONにするとサーボONとなります。
サーボONするとコントローラ前面の状態表示LED(7.3(6)参照)が緑色点灯します。
SV信号は、このLEDと同期しています。
機能
SON信号によりコントローラのサーボON/OFFが可能です。
SV信号がONの間、コントローラはサーボON状態となり運転が可能となります。
SON信号とSV信号の関係は次のとおりです。
SON (PLC→ACON、PCON)
SV
(ACON、PCON→PLC)
5.3
(PLC → SCON-CA/CB/CAL)
(SCON-CA/CB/CAL → PLC)
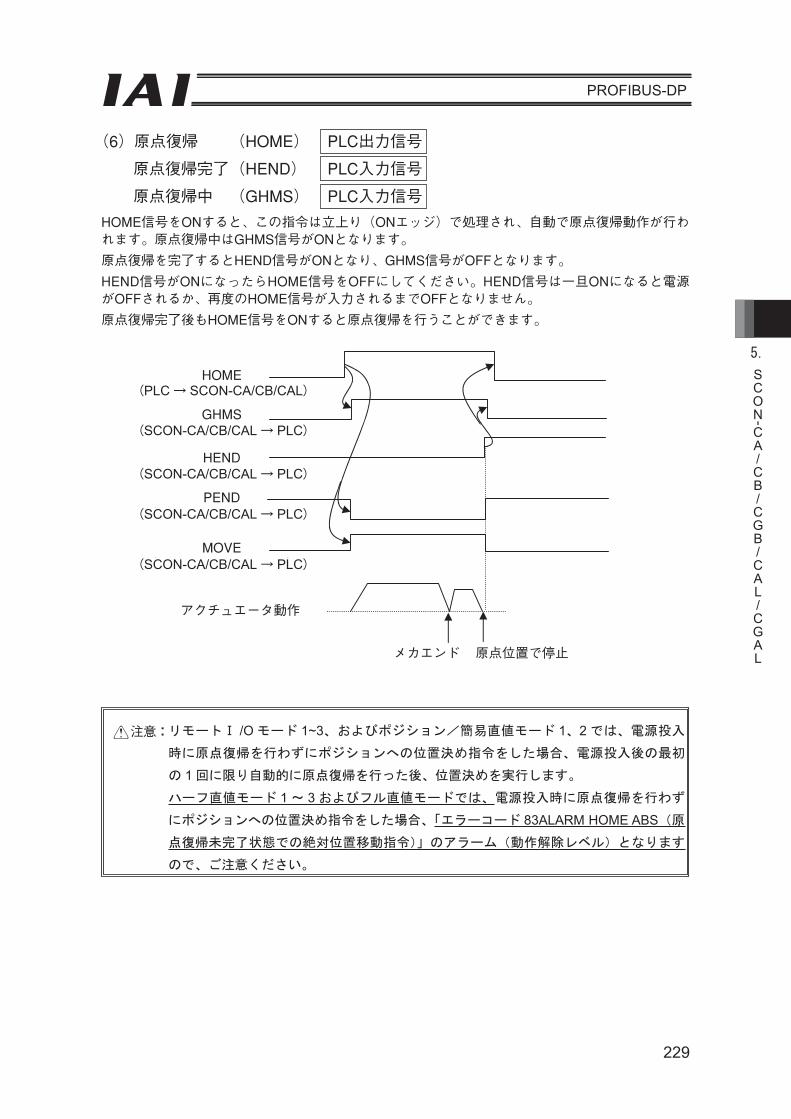
229
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
110
(6)原点復帰 (HOME) PLC出力信号
原点復帰完了(HEND) PLC入力信号
原点復帰中 (GHMS) PLC入力信号
HOME信号をONすると、この指令は立上り(ONエッジ)で処理され、自動で原点復帰動作が行われます。原点復帰中はGHMS信号がONとなります。
原点復帰を完了するとHEND信号がONとなり、GHMS信号がOFFとなります。
HEND信号がONになったらHOME信号をOFFにしてください。HEND信号は一旦ONになると電源がOFFされるか、再度のHOME信号が入力されるまでOFFとなりません。
原点復帰完了後もHOME信号をONすると原点復帰を行うことができます。
HOME (PLC→ACON、PCON)
GHMS (ACON、PCON→PLC)
HEND (ACON、PCON→PLC)
PEND (ACON、PCON→PLC)
MOVE
(ACON、PCON→PLC)
アクチュエータ動作
メカエンド 原点位置で停止
Q注意:リモートⅠ/Oモード、リモートⅠ/Oモード2およびポジション/簡易直値モードでは、電源投入時に原点復帰を行わずにポジションへの位置決め指令をした場合、電源投入後の最初の1回に限り自動的に原点復帰を行った後、位置決めを実行します。ハーフ直値モードおよびフル直値モードでは、電源投入時に原点復帰を行わずにポジションへの位置決め指令をした場合、「エラーコード83 ALARM HOME ABS(原点復帰未完了状態での絶対位置移動指令)」のアラーム(動作解除レベル)となりますので、ご注意ください。
ProfiBus-DP
109
(5)サーボON指令 (SON) PLC出力信号
運転準備完了 (SV) PLC入力信号
SON信号をONにするとサーボONとなります。
サーボONするとコントローラ前面の状態表示LED(7.3(6)参照)が緑色点灯します。
SV信号は、このLEDと同期しています。
機能
SON信号によりコントローラのサーボON/OFFが可能です。
SV信号がONの間、コントローラはサーボON状態となり運転が可能となります。
SON信号とSV信号の関係は次のとおりです。
SON (PLC→ACON、PCON)
SV
(ACON、PCON→PLC)
(PLC → SCON-CA/CB/CAL)
(SCON-CA/CB/CAL → PLC)
(SCON-CA/CB/CAL → PLC)
(SCON-CA/CB/CAL → PLC)
(SCON-CA/CB/CAL → PLC)
リモートⅠ /O モード 1~3、およびポジション/簡易直値モード 1、2 では、電源投入
時に原点復帰を行わずにポジションへの位置決め指令をした場合、電源投入後の最初
の 1 回に限り自動的に原点復帰を行った後、位置決めを実行します。
ハーフ直値モード 1 ~ 3 およびフル直値モードでは、電源投入時に原点復帰を行わず
にポジションへの位置決め指令をした場合、「エラーコード 83ALARM HOME ABS(原
点復帰未完了状態での絶対位置移動指令)」のアラーム(動作解除レベル)となります
ので、ご注意ください。
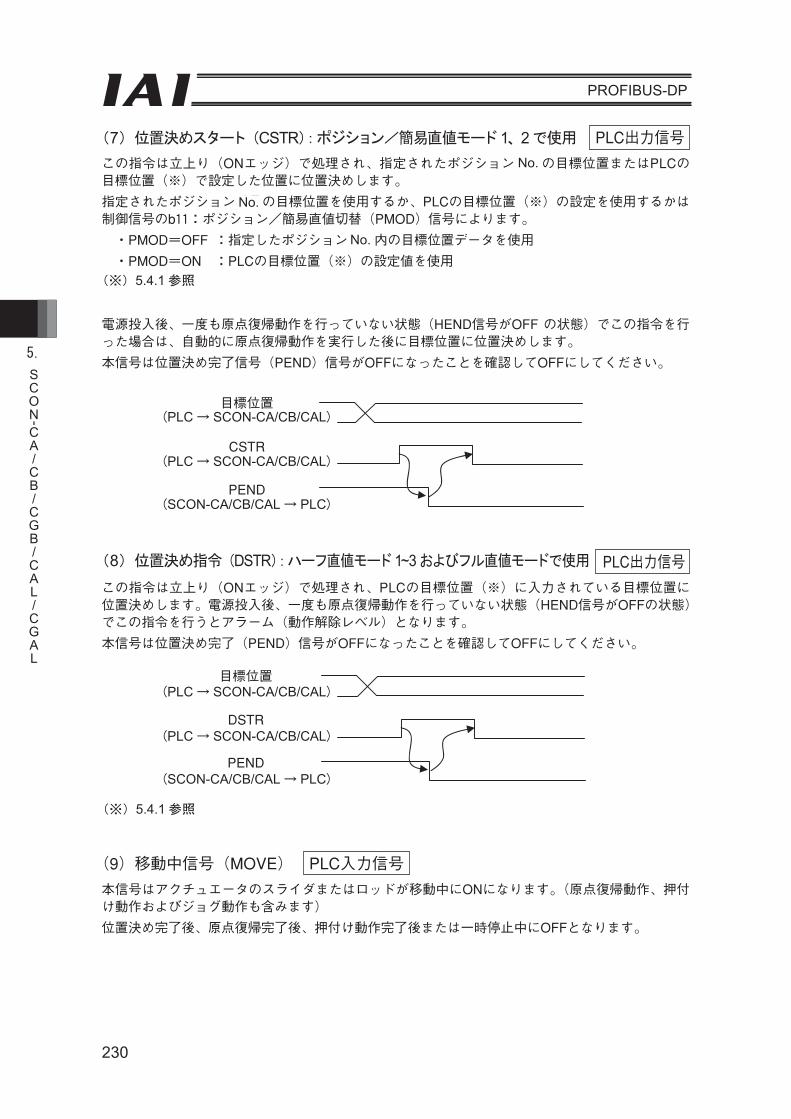
230
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
112
(10)位置決め完了信号(PEND) PLC入力信号本信号は目標位置まで移動して、位置決め幅内に到達した場合および押付けが完了した場合にONになります。
サーボOFFからサーボONとなった時、その場を目標位置として位置決めが行われます。従って本信号はONとなり、その後原点復帰(HOME)信号、位置決めスタート(CSTR)信号または位置決め指令(DSTR)信号による位置決め動作の開始でOFFとなります。
(11)一時停止(STP) PLC出力信号
本信号をONにすると軸移動が減速停止します。OFFにすると軸移動が再開されます。
動作再開時の加速度および停止時の減速度は、ポジション/簡易直値モードでは指定ポジション番号(※)で設定しているポジション番号の加減速度の値となり、ハーフ直値モードでは加減速度(※)の値となります。
フル直値モードでは加速度(※)および減速度(※)の値となります。
(※)7.4.1参照
目標位置
位置決め完了信号が ONするタイミング
移動距離
速度
位置決め幅
時間
Q注意:目標位置に停止している時にサーボOFF状態や非常停止状態になると、PEND信号は一旦OFF になります。次に再度サーボON状態に復帰した時、位置決め幅以内であればONに戻ります。またCSTR信号またはDSTR信号がONのままでは位置決め完了してもPEND信号は、ONになりません。
ProfiBus-DP
111
(7)位置決めスタート(CSTR):ポジション/簡易直値モードで使用 PLC出力信号
この指令は立上り(ONエッジ)で処理され、指定されたポジション番号の目標位置またはPLCの目標位置(※)で設定した位置に位置決めします。
指定されたポジション番号の目標位置を使用するか、PLCの目標位置(※)の設定を使用するかは制御信号のb11:ポジション/簡易直値切替(PMOD)信号によります。
・PMOD=OFF :指定したポジション番号内の目標位置データを使用
・PMOD=ON :PLCの目標位置(※)の設定値を使用
(※)7.4.1参照
電源投入後、一度も原点復帰動作を行っていない状態(HEND信号がOFF の状態)でこの指令を行った場合は、自動的に原点復帰動作を実行した後に目標位置に位置決めします。
本信号は位置決め完了信号(PEND)信号がOFFになったことを確認してOFFにしてください。
(8)位置決め指令(DSTR):ハーフ直値モードおよびフル直値モードで使用 PLC出力信号
この指令は立上り(ONエッジ)で処理され、PLCの目標位置(※)に入力されている目標位置に位置決めします。電源投入後、一度も原点復帰動作を行っていない状態(HEND信号がOFFの状態)でこの指令を行うとアラーム(動作解除レベル)となります。
本信号は位置決め完了(PEND)信号がOFFになったことを確認してOFFにしてください。
(※)7.4.1参照
(9)移動中信号(MOVE) PLC入力信号
本信号はアクチュエータのスライダまたはロッドが移動中にONになります。(原点復帰動作、押付け動作およびジョグ動作も含みます)
位置決め完了後、原点復帰完了後、押付け動作完了後または一時停止中にOFFとなります。
目標位置 (PLC→ACON、PCON)
CSTR
(PLC→ACON、PCON)
PEND (ACON、PCON→PLC)
目標位置 (PLC→ACON、PCON)
DSTR
(PLC→ACON、PCON)
PEND (ACON、PCON→PLC)
(PLC → SCON-CA/CB/CAL)
(SCON-CA/CB/CAL → PLC)
(PLC → SCON-CA/CB/CAL)
(PLC → SCON-CA/CB/CAL)
(SCON-CA/CB/CAL → PLC)
(PLC → SCON-CA/CB/CAL)
(7)位置決めスタート(CSTR):ポジション/簡易直値モード1、2で使用
(8)位置決め指令(DSTR):ハーフ直値モード1~3およびフル直値モードで使用
(※)5.4.1 参照
(※)5.4.1 参照
No.
No.
No.
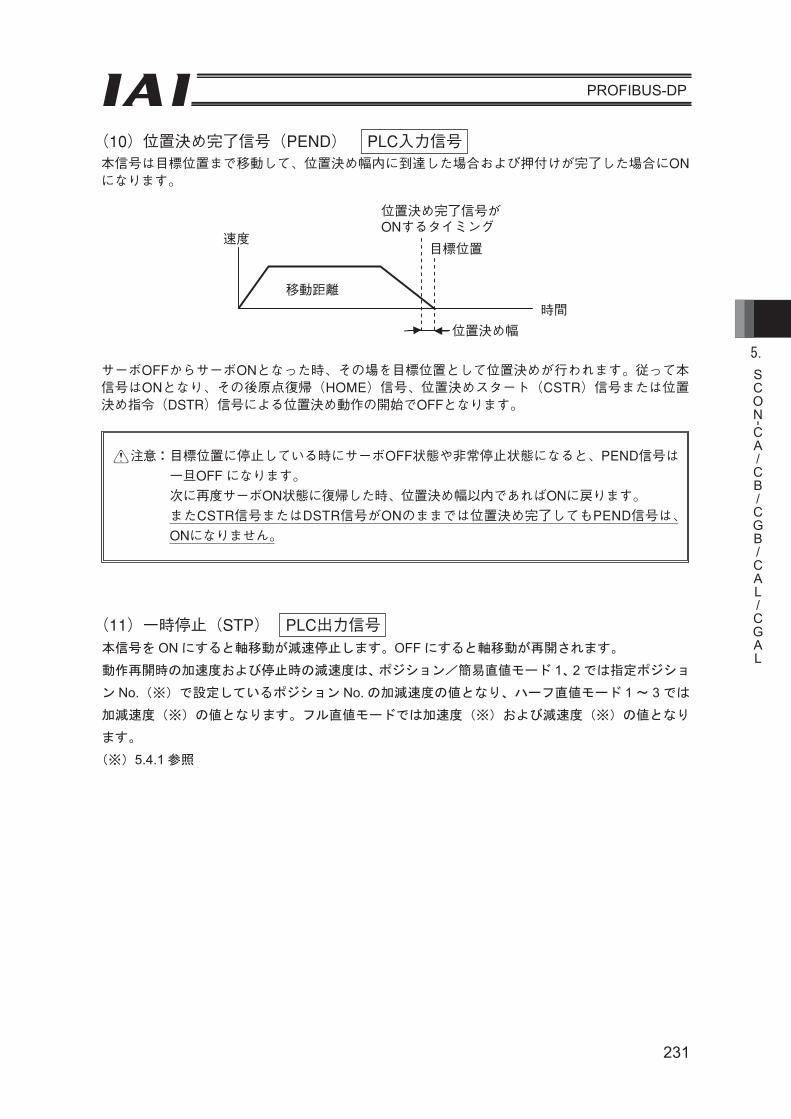
231
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
112
(10)位置決め完了信号(PEND) PLC入力信号本信号は目標位置まで移動して、位置決め幅内に到達した場合および押付けが完了した場合にONになります。
サーボOFFからサーボONとなった時、その場を目標位置として位置決めが行われます。従って本信号はONとなり、その後原点復帰(HOME)信号、位置決めスタート(CSTR)信号または位置決め指令(DSTR)信号による位置決め動作の開始でOFFとなります。
(11)一時停止(STP) PLC出力信号
本信号をONにすると軸移動が減速停止します。OFFにすると軸移動が再開されます。
動作再開時の加速度および停止時の減速度は、ポジション/簡易直値モードでは指定ポジション番号(※)で設定しているポジション番号の加減速度の値となり、ハーフ直値モードでは加減速度(※)の値となります。
フル直値モードでは加速度(※)および減速度(※)の値となります。
(※)7.4.1参照
目標位置
位置決め完了信号が ONするタイミング
移動距離
速度
位置決め幅
時間
Q注意:目標位置に停止している時にサーボOFF状態や非常停止状態になると、PEND信号は一旦OFF になります。次に再度サーボON状態に復帰した時、位置決め幅以内であればONに戻ります。またCSTR信号またはDSTR信号がONのままでは位置決め完了してもPEND信号は、ONになりません。
ProfiBus-DP
111
(7)位置決めスタート(CSTR):ポジション/簡易直値モードで使用 PLC出力信号
この指令は立上り(ONエッジ)で処理され、指定されたポジション番号の目標位置またはPLCの目標位置(※)で設定した位置に位置決めします。
指定されたポジション番号の目標位置を使用するか、PLCの目標位置(※)の設定を使用するかは制御信号のb11:ポジション/簡易直値切替(PMOD)信号によります。
・PMOD=OFF :指定したポジション番号内の目標位置データを使用
・PMOD=ON :PLCの目標位置(※)の設定値を使用
(※)7.4.1参照
電源投入後、一度も原点復帰動作を行っていない状態(HEND信号がOFF の状態)でこの指令を行った場合は、自動的に原点復帰動作を実行した後に目標位置に位置決めします。
本信号は位置決め完了信号(PEND)信号がOFFになったことを確認してOFFにしてください。
(8)位置決め指令(DSTR):ハーフ直値モードおよびフル直値モードで使用 PLC出力信号
この指令は立上り(ONエッジ)で処理され、PLCの目標位置(※)に入力されている目標位置に位置決めします。電源投入後、一度も原点復帰動作を行っていない状態(HEND信号がOFFの状態)でこの指令を行うとアラーム(動作解除レベル)となります。
本信号は位置決め完了(PEND)信号がOFFになったことを確認してOFFにしてください。
(※)7.4.1参照
(9)移動中信号(MOVE) PLC入力信号
本信号はアクチュエータのスライダまたはロッドが移動中にONになります。(原点復帰動作、押付け動作およびジョグ動作も含みます)
位置決め完了後、原点復帰完了後、押付け動作完了後または一時停止中にOFFとなります。
目標位置 (PLC→ACON、PCON)
CSTR
(PLC→ACON、PCON)
PEND (ACON、PCON→PLC)
目標位置 (PLC→ACON、PCON)
DSTR
(PLC→ACON、PCON)
PEND (ACON、PCON→PLC)
本信号を ON にすると軸移動が減速停止します。OFF にすると軸移動が再開されます。
動作再開時の加速度および停止時の減速度は、ポジション/簡易直値モード 1、2 では指定ポジショ
ン No.(※)で設定しているポジション No. の加減速度の値となり、ハーフ直値モード 1 ~ 3 では
加減速度(※)の値となります。フル直値モードでは加速度(※)および減速度(※)の値となり
ます。
(※)5.4.1 参照
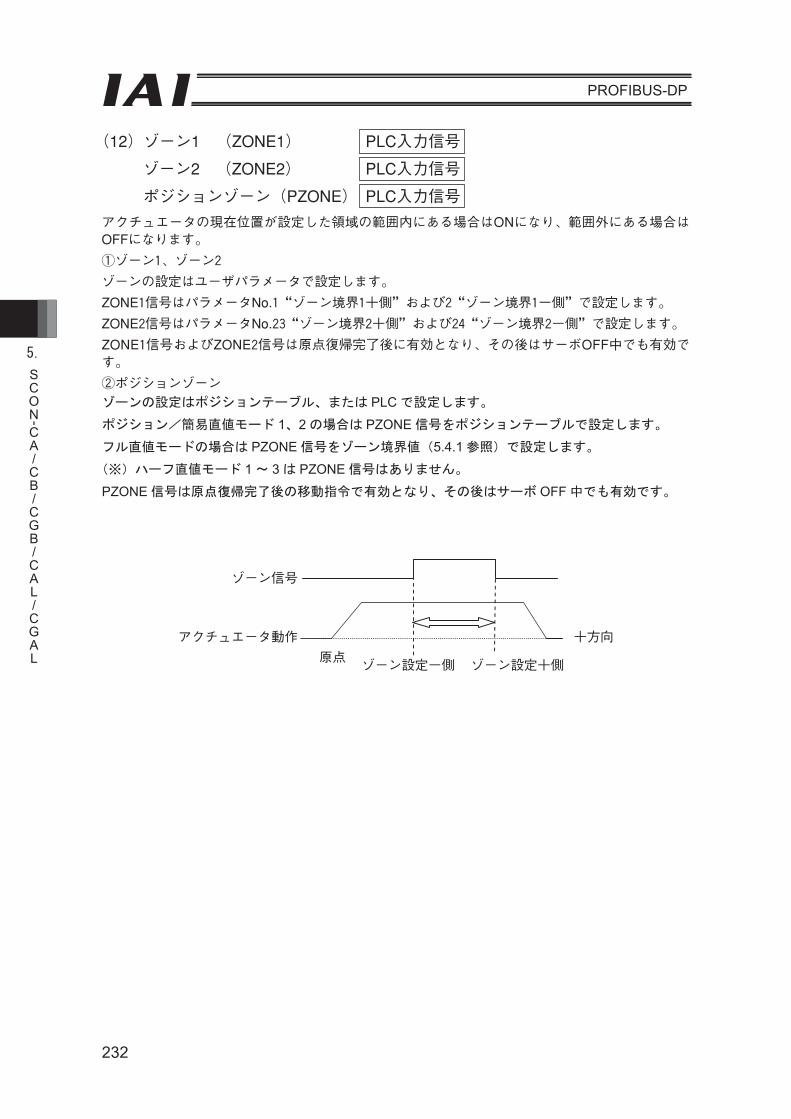
232
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
114
(13)+ジョグ(JOG+) PLC出力信号
-ジョグ(JOG-) PLC出力信号
ジョグ動作またはインチング動作での起動指令です。
+指令の時は反原点方向への動作で、-指令の時は原点方向への動作です。
①ジョグ動作
ジョグ動作は、ジョグ/インチング切替え(JISL)信号がOFFの時に動作可能です。
JOG+がONの間は反原点方向へ動作を行い、OFFになると減速停止します。
JOG-がONの間は原点方向への動作を行い、OFFになると減速停止します。
動作は次のパラメータの設定値で行います。
・速度は、ジョグ速度/インチング距離切替え(JVEL)信号で指定されたパラメータの値で動作します。
JVEL信号=OFFの場合は、パラメータNo.26“PIOジョグ速度”の値で動作します。
JVEL信号=ONの場合は、パラメータNo.47“PIOジョグ速度2”の値で動作します。
・加減速度は、定格加減速度(アクチュエータ依存)で動作します。
・JOG+とJOG-信号が両方共にONになると減速停止します。
②インチング動作
インチング動作は、JISL信号がONの時に動作可能です。
1回のON入力により、インチング距離分の移動を行います。
JOG+がONで反原点方向へ動作を行い、JOG-がONで原点方向への動作を行います。
動作は次のパラメータの設定値で行います。
・速度は、JVEL信号で指定されたパラメータの値で動作します。
JVEL信号=OFFの場合は、パラメータNo.26“PIOジョグ速度”の値で動作します。
JVEL信号=ONの場合は、パラメータNo.47“PIOジョグ速度2”の値で動作します。
・移動距離は、JVEL信号で指定されたパラメータの値で動作します。
JVEL信号=OFFの場合は、パラメータNo.48“PIOインチング距離”の値で動作します。
JVEL信号=ONの場合は、パラメータNo.49“PIOインチング距離2”の値で動作します。
・加減速度は、定格加減速度(アクチュエータ依存)で動作します。
通常動作中は、+ジョグ信号、-ジョグ信号をONしても通常動作を続けます。(ジョグ信号は無視されます)
一時停止中は、+ジョグ信号、-ジョグ信号をONしても動作しません。
(注)原点復帰完了前はソフトウェアストロークリミットが無効のため、メカエンドに衝突する危険がありま
すのでご注意ください。
ProfiBus-DP
113
(12)ゾーン1 (ZONE1) PLC入力信号
ゾーン2 (ZONE2) PLC入力信号
ポジションゾーン(PZONE) PLC入力信号
アクチュエータの現在位置が設定した領域の範囲内にある場合はONになり、範囲外にある場合はOFFになります。
①ゾーン1、ゾーン2
ゾーンの設定はユーザパラメータで設定します。
ZONE1信号はパラメータNo.1“ゾーン境界1+側”および2“ゾーン境界1-側”で設定します。
ZONE2信号はパラメータNo.23“ゾーン境界2+側”および24“ゾーン境界2-側”で設定します。
ZONE1信号およびZONE2信号は原点復帰完了後に有効となり、その後はサーボOFF中でも有効です。
②ポジションゾーン
ゾーンの設定はポジションテーブル、またはPLCで設定します。
ポジション/簡易直値モードの場合はPZONE信号をポジションテーブルで設定します。
フル直値モードの場合はPZONE信号をゾーン境界値(7.4.1参照)で設定します。
(※)ハーフ直値モードはPZONE信号はありません。
PZONE信号は原点復帰完了後の移動指令で有効となり、その後はサーボOFF中でも有効です。
+方向
ゾーン設定+側 ゾーン設定-側 原点
ゾーン信号
アクチュエータ動作
ゾーンの設定はポジションテーブル、または PLC で設定します。
ポジション/簡易直値モード 1、2 の場合は PZONE 信号をポジションテーブルで設定します。
フル直値モードの場合は PZONE 信号をゾーン境界値(5.4.1 参照)で設定します。
(※)ハーフ直値モード 1 ~ 3 は PZONE 信号はありません。
PZONE 信号は原点復帰完了後の移動指令で有効となり、その後はサーボ OFF 中でも有効です。

233
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
114
(13)+ジョグ(JOG+) PLC出力信号
-ジョグ(JOG-) PLC出力信号
ジョグ動作またはインチング動作での起動指令です。
+指令の時は反原点方向への動作で、-指令の時は原点方向への動作です。
①ジョグ動作
ジョグ動作は、ジョグ/インチング切替え(JISL)信号がOFFの時に動作可能です。
JOG+がONの間は反原点方向へ動作を行い、OFFになると減速停止します。
JOG-がONの間は原点方向への動作を行い、OFFになると減速停止します。
動作は次のパラメータの設定値で行います。
・速度は、ジョグ速度/インチング距離切替え(JVEL)信号で指定されたパラメータの値で動作します。
JVEL信号=OFFの場合は、パラメータNo.26“PIOジョグ速度”の値で動作します。
JVEL信号=ONの場合は、パラメータNo.47“PIOジョグ速度2”の値で動作します。
・加減速度は、定格加減速度(アクチュエータ依存)で動作します。
・JOG+とJOG-信号が両方共にONになると減速停止します。
②インチング動作
インチング動作は、JISL信号がONの時に動作可能です。
1回のON入力により、インチング距離分の移動を行います。
JOG+がONで反原点方向へ動作を行い、JOG-がONで原点方向への動作を行います。
動作は次のパラメータの設定値で行います。
・速度は、JVEL信号で指定されたパラメータの値で動作します。
JVEL信号=OFFの場合は、パラメータNo.26“PIOジョグ速度”の値で動作します。
JVEL信号=ONの場合は、パラメータNo.47“PIOジョグ速度2”の値で動作します。
・移動距離は、JVEL信号で指定されたパラメータの値で動作します。
JVEL信号=OFFの場合は、パラメータNo.48“PIOインチング距離”の値で動作します。
JVEL信号=ONの場合は、パラメータNo.49“PIOインチング距離2”の値で動作します。
・加減速度は、定格加減速度(アクチュエータ依存)で動作します。
通常動作中は、+ジョグ信号、-ジョグ信号をONしても通常動作を続けます。(ジョグ信号は無視されます)
一時停止中は、+ジョグ信号、-ジョグ信号をONしても動作しません。
(注)原点復帰完了前はソフトウェアストロークリミットが無効のため、メカエンドに衝突する危険がありま
すのでご注意ください。
ProfiBus-DP
113
(12)ゾーン1 (ZONE1) PLC入力信号
ゾーン2 (ZONE2) PLC入力信号
ポジションゾーン(PZONE) PLC入力信号
アクチュエータの現在位置が設定した領域の範囲内にある場合はONになり、範囲外にある場合はOFFになります。
①ゾーン1、ゾーン2
ゾーンの設定はユーザパラメータで設定します。
ZONE1信号はパラメータNo.1“ゾーン境界1+側”および2“ゾーン境界1-側”で設定します。
ZONE2信号はパラメータNo.23“ゾーン境界2+側”および24“ゾーン境界2-側”で設定します。
ZONE1信号およびZONE2信号は原点復帰完了後に有効となり、その後はサーボOFF中でも有効です。
②ポジションゾーン
ゾーンの設定はポジションテーブル、またはPLCで設定します。
ポジション/簡易直値モードの場合はPZONE信号をポジションテーブルで設定します。
フル直値モードの場合はPZONE信号をゾーン境界値(7.4.1参照)で設定します。
(※)ハーフ直値モードはPZONE信号はありません。
PZONE信号は原点復帰完了後の移動指令で有効となり、その後はサーボOFF中でも有効です。
+方向
ゾーン設定+側 ゾーン設定-側 原点
ゾーン信号
アクチュエータ動作

234
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
116
(16)教示モード指令(MODE) PLC出力信号
教示モード信号(MODES) PLC入力信号
MODE信号をONにすると、通常運転モードから教示モードに切替わります。
各軸のコントローラは教示モードに切替わるとMODES信号がONとなります。
PLC側では、MODES信号がONになったことを確認してから教示操作を行ってください。
(注)通常運転モードから教示モードに切替えるためには、以下の状態となっていることが必要です。
・アクチュエータの動作(モータ)が停止中
・+ジョグ(JOG+)信号および-ジョグ(JOG-)信号がOFF
・ポジションデータ取込み指令(PWRT)信号および位置決めスタート(CSTR)信号がOFF
(注) PWRT信号がOFFになっていないと通常運転モードに戻りません。
(17)ポジションデータ取込み指令(PWRT) PLC出力信号
ポジションデータ取込み完了(WEND) PLC入力信号
PWRT信号は教示モード信号(MODES)がONの時に有効です。
PWRT信号をONにしてください(※1)、この時点の現在位置データが、PLCの指定ポジション番号(7.4.1参照)に設定しているポジション番号の位置欄に書き込まれます。(※2)
書込みが完了するとWEND信号がONになります。
上位側PLCではWEND信号がONになった後にPWRT信号をOFFにしてください。
WEND信号がONする前にPWRT信号をOFFするとWEND信号はONになりません。
PWRT信号をOFFにするとWEND信号がOFFになります。
(※1)20msec以上連続でONにしてください。20msec以下の場合は書込みが行われない場合があります。
(※2)位置以外のデータが未定義であればパラメータ初期値が書き込まれます。(コントローラ本体の取扱説明書参照)
(18)ブレーキ強制解除(BKRL) PLC出力信号
本信号をONにすることでブレーキを強制的に解除させることができます。
MODES (ACON,PCON→PLC)
PWRT (PLC→ACON、PCON)
WEND (ACON,PCON→PLC)
20msec以上
ProfiBus-DP
115
(14)ジョグ速度/インチング距離切換え(JVEL) PLC出力信号
ジョグ動作が選択されている時のジョグ速度またはインチング動作が選択されている時のインチング距離を指定するパラメータの切換え信号です。
次のような関係になります。
(15)ジョグ/インチング切替え(JISL) PLC出力信号
ジョグ動作とインチング動作の切替信号です。
JISL=OFF:ジョグ動作
JISL=ON:インチング動作
JISL信号が、ジョグ移動中にON(インチング)に切り替わった場合、減速停止しインチング機能となります。
JISL信号が、インチング移動中にOFF(ジョグ)に切り替わった場合、移動完了後にジョグ機能となります。
JISL信号とジョグ速度/インチング距離切替え(JVEL)信号のON/OFFの関係は以下の表の様になります。
JVEL信号 ジョグ動作:JISL=OFF インチング動作:JISL=ON
OFF パラメータNo.26“ジョグ速度”パラメータNo.26“ジョグ速度”
パラメータNo.48“インチング距離”
ON パラメータNo.47“ジョグ速度2”パラメータNo.47“ジョグ速度2”
パラメータNo.49“インチング距離2”
ジョグ動作 インチング動作
JISL OFF ON
速度 パラメータNo.26“ジョグ速度” パラメータNo.26“ジョグ速度”
JVEL=OFF 移動距離 - パラメータNo.48“インチング距離”
加減速度 定格値(アクチュエータ依存) 定格値(アクチュエータ依存)
速度 パラメータNo.47“ジョグ速度2” パラメータNo.47“ジョグ速度2”
JVEL=ON 移動距離 - パラメータNo.49“インチング距離2”
加減速度 定格値(アクチュエータ依存) 定格値(アクチュエータ依存)
動作 JOG+/JOG-がONの時JOG+/JOG-の立上り(ONエッ
ジ)を検出した時

235
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
116
(16)教示モード指令(MODE) PLC出力信号
教示モード信号(MODES) PLC入力信号
MODE信号をONにすると、通常運転モードから教示モードに切替わります。
各軸のコントローラは教示モードに切替わるとMODES信号がONとなります。
PLC側では、MODES信号がONになったことを確認してから教示操作を行ってください。
(注)通常運転モードから教示モードに切替えるためには、以下の状態となっていることが必要です。
・アクチュエータの動作(モータ)が停止中
・+ジョグ(JOG+)信号および-ジョグ(JOG-)信号がOFF
・ポジションデータ取込み指令(PWRT)信号および位置決めスタート(CSTR)信号がOFF
(注) PWRT信号がOFFになっていないと通常運転モードに戻りません。
(17)ポジションデータ取込み指令(PWRT) PLC出力信号
ポジションデータ取込み完了(WEND) PLC入力信号
PWRT信号は教示モード信号(MODES)がONの時に有効です。
PWRT信号をONにしてください(※1)、この時点の現在位置データが、PLCの指定ポジション番号(7.4.1参照)に設定しているポジション番号の位置欄に書き込まれます。(※2)
書込みが完了するとWEND信号がONになります。
上位側PLCではWEND信号がONになった後にPWRT信号をOFFにしてください。
WEND信号がONする前にPWRT信号をOFFするとWEND信号はONになりません。
PWRT信号をOFFにするとWEND信号がOFFになります。
(※1)20msec以上連続でONにしてください。20msec以下の場合は書込みが行われない場合があります。
(※2)位置以外のデータが未定義であればパラメータ初期値が書き込まれます。(コントローラ本体の取扱説明書参照)
(18)ブレーキ強制解除(BKRL) PLC出力信号
本信号をONにすることでブレーキを強制的に解除させることができます。
MODES (ACON,PCON→PLC)
PWRT (PLC→ACON、PCON)
WEND (ACON,PCON→PLC)
20msec以上
ProfiBus-DP
115
(14)ジョグ速度/インチング距離切換え(JVEL) PLC出力信号
ジョグ動作が選択されている時のジョグ速度またはインチング動作が選択されている時のインチング距離を指定するパラメータの切換え信号です。
次のような関係になります。
(15)ジョグ/インチング切替え(JISL) PLC出力信号
ジョグ動作とインチング動作の切替信号です。
JISL=OFF:ジョグ動作
JISL=ON:インチング動作
JISL信号が、ジョグ移動中にON(インチング)に切り替わった場合、減速停止しインチング機能となります。
JISL信号が、インチング移動中にOFF(ジョグ)に切り替わった場合、移動完了後にジョグ機能となります。
JISL信号とジョグ速度/インチング距離切替え(JVEL)信号のON/OFFの関係は以下の表の様になります。
JVEL信号 ジョグ動作:JISL=OFF インチング動作:JISL=ON
OFF パラメータNo.26“ジョグ速度”パラメータNo.26“ジョグ速度”
パラメータNo.48“インチング距離”
ON パラメータNo.47“ジョグ速度2”パラメータNo.47“ジョグ速度2”
パラメータNo.49“インチング距離2”
ジョグ動作 インチング動作
JISL OFF ON
速度 パラメータNo.26“ジョグ速度” パラメータNo.26“ジョグ速度”
JVEL=OFF 移動距離 - パラメータNo.48“インチング距離”
加減速度 定格値(アクチュエータ依存) 定格値(アクチュエータ依存)
速度 パラメータNo.47“ジョグ速度2” パラメータNo.47“ジョグ速度2”
JVEL=ON 移動距離 - パラメータNo.49“インチング距離2”
加減速度 定格値(アクチュエータ依存) 定格値(アクチュエータ依存)
動作 JOG+/JOG-がONの時JOG+/JOG-の立上り(ONエッ
ジ)を検出した時
(SCON-CA/CB/CAL → PLC)
(SCON-CA/CB/CAL → PLC)
(PLC → SCON-CA/CB/CAL)
PWRT 信号は教示モード信号(MODES)が ON の時に有効です。
PWRT 信号を ON にしてください(※ 1)、この時点の現在位置データが、PLC の指定ポジション
No.(5.4.1 参照)に設定しているポジション No. の位置欄に書き込まれます。(※2)書込みが完了すると WEND 信号が ON になります。

236
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
118
(23)押付け空振り(PSFL) PLC入力信号
押付け動作を行ったが、コントローラのポジションテーブルの位置決め幅またはPLCの位置決め幅(7.4.1参照)で設定した距離を移動してもワークに押し当たらなかった時にONとなります。
(本信号の設定タイミングは、7.6運転の(2)ハーフ直値モードでの運転参照)
(24)インクリメンタル指定(INC) PLC出力信号
本信号がONの場合に移動指令を行うと現在の位置を基準とし、PLCの目標位置(※)に入力された値の移動を行います。(インクリメンタル移動)
本信号がOFFの場合にはPLCの目標位置(※)の値に移動します。
(※)7.4.1参照
(25)押付け動作中(PUSHS) PLC入力信号
本信号は押付け動作中にONとなります。
本信号は、押付け空振りまたは一時停止または次の移動指令またはサーボOFFになるとOFFとなります。
(本信号の設定タイミングは、7.6運転の(2)ハーフ直値モードでの運転参照)
速度 目標位置
移動距離
位置決め幅 PUSHS=ON
ProfiBus-DP
117
(19)運転モード(RMOD) PLC出力信号
運転モード状態(RMDS) PLC入力信号
RMOD信号とコントローラ前面のMODEスイッチにより次の様に運転モードが選択されます。
また現在AUTO/MANUのどちらに設定されているかRMDS信号で確認することができます。
次にRMOD信号とMODEスイッチの組合せによる運転モードを示します。
(注)MANUモードではPLCから運転を行うことはできません。
(20)ポジション/簡易直値切替(PMOD) PLC出力信号
移動時の目標位置をコントローラのポジションテーブルに登録されている値を使用するか、PLCの目標位置(※)で指定されている値を使用するかを切替えます。
PMOD=OFF:ポジションテーブル使用
PMOD=ON :PLCの目標位置(※)の値使用
(※)7.4.1参照
(21)押付け指定(PUSH) PLC出力信号
本信号をONにしてから移動指令を行うと押付け動作となります。
本信号をOFFに設定すると通常位置決め動作となります。
(本信号の設定タイミングは、7.6運転の(2)ハーフ直値モードでの運転参照)
(22)押付け方向指定(DIR) PLC出力信号
押付けを行う方向を指定します。
本信号をOFFにすると目標位置から位置決め幅を減算した値に向かって、押付けを行います。
本信号をONにすると目標位置に位置決め幅を加算した値に向かって、押付けを行います。
通常位置決め動作の場合は、本信号は無効になります。
(本信号の設定タイミングは、7.6運転の(2)ハーフ直値モードでの運転参照)
コントローラMODE コントローラMODE
スイッチがAUTO側 スイッチがMANU側
RMOD信号がOFF AUTOモード MANUモード
(AUTOモード指定) (RMDS=OFF) (RMDS=ON)
RMOD信号がON MANUモード MANUモード
(MANUモード指定) (RMDS=ON) (RMDS=ON)
速度
目標位置 DIR=OFFの時 DIR=ONの時
移動距離
位置決め幅 位置決め幅 位置決め幅
(本信号の設定タイミングは、5.6 運転の(2)ハーフ直値モード 1 ~ 3 での運転参照)
(本信号の設定タイミングは、5.6 運転の(2)ハーフ直値モード 1 ~ 3 での運転参照)
(※)5.4.1 参照

237
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
118
(23)押付け空振り(PSFL) PLC入力信号
押付け動作を行ったが、コントローラのポジションテーブルの位置決め幅またはPLCの位置決め幅(7.4.1参照)で設定した距離を移動してもワークに押し当たらなかった時にONとなります。
(本信号の設定タイミングは、7.6運転の(2)ハーフ直値モードでの運転参照)
(24)インクリメンタル指定(INC) PLC出力信号
本信号がONの場合に移動指令を行うと現在の位置を基準とし、PLCの目標位置(※)に入力された値の移動を行います。(インクリメンタル移動)
本信号がOFFの場合にはPLCの目標位置(※)の値に移動します。
(※)7.4.1参照
(25)押付け動作中(PUSHS) PLC入力信号
本信号は押付け動作中にONとなります。
本信号は、押付け空振りまたは一時停止または次の移動指令またはサーボOFFになるとOFFとなります。
(本信号の設定タイミングは、7.6運転の(2)ハーフ直値モードでの運転参照)
速度 目標位置
移動距離
位置決め幅 PUSHS=ON
ProfiBus-DP
117
(19)運転モード(RMOD) PLC出力信号
運転モード状態(RMDS) PLC入力信号
RMOD信号とコントローラ前面のMODEスイッチにより次の様に運転モードが選択されます。
また現在AUTO/MANUのどちらに設定されているかRMDS信号で確認することができます。
次にRMOD信号とMODEスイッチの組合せによる運転モードを示します。
(注)MANUモードではPLCから運転を行うことはできません。
(20)ポジション/簡易直値切替(PMOD) PLC出力信号
移動時の目標位置をコントローラのポジションテーブルに登録されている値を使用するか、PLCの目標位置(※)で指定されている値を使用するかを切替えます。
PMOD=OFF:ポジションテーブル使用
PMOD=ON :PLCの目標位置(※)の値使用
(※)7.4.1参照
(21)押付け指定(PUSH) PLC出力信号
本信号をONにしてから移動指令を行うと押付け動作となります。
本信号をOFFに設定すると通常位置決め動作となります。
(本信号の設定タイミングは、7.6運転の(2)ハーフ直値モードでの運転参照)
(22)押付け方向指定(DIR) PLC出力信号
押付けを行う方向を指定します。
本信号をOFFにすると目標位置から位置決め幅を減算した値に向かって、押付けを行います。
本信号をONにすると目標位置に位置決め幅を加算した値に向かって、押付けを行います。
通常位置決め動作の場合は、本信号は無効になります。
(本信号の設定タイミングは、7.6運転の(2)ハーフ直値モードでの運転参照)
コントローラMODE コントローラMODE
スイッチがAUTO側 スイッチがMANU側
RMOD信号がOFF AUTOモード MANUモード
(AUTOモード指定) (RMDS=OFF) (RMDS=ON)
RMOD信号がON MANUモード MANUモード
(MANUモード指定) (RMDS=ON) (RMDS=ON)
速度
目標位置 DIR=OFFの時 DIR=ONの時
移動距離
位置決め幅 位置決め幅 位置決め幅
(本信号の設定タイミングは、5.6 運転の(2)ハーフ直値モード 1 ~ 3 での運転参照)
(本信号の設定タイミングは、4.6 運転の(2)ハーフ直値モード 1 ~ 3 での運転参照)
(※)5.4.1 参照
押付け動作を行ったが、コントローラのポジションテーブルの位置決め幅または PLC の位置決め
幅(5.4.1 参照)で設定した距離を移動してもワークに押し当たらなかった時に ON となります。
(本信号の設定タイミングは、5.6 運転の(2)ハーフ直値モードでの運転参照)
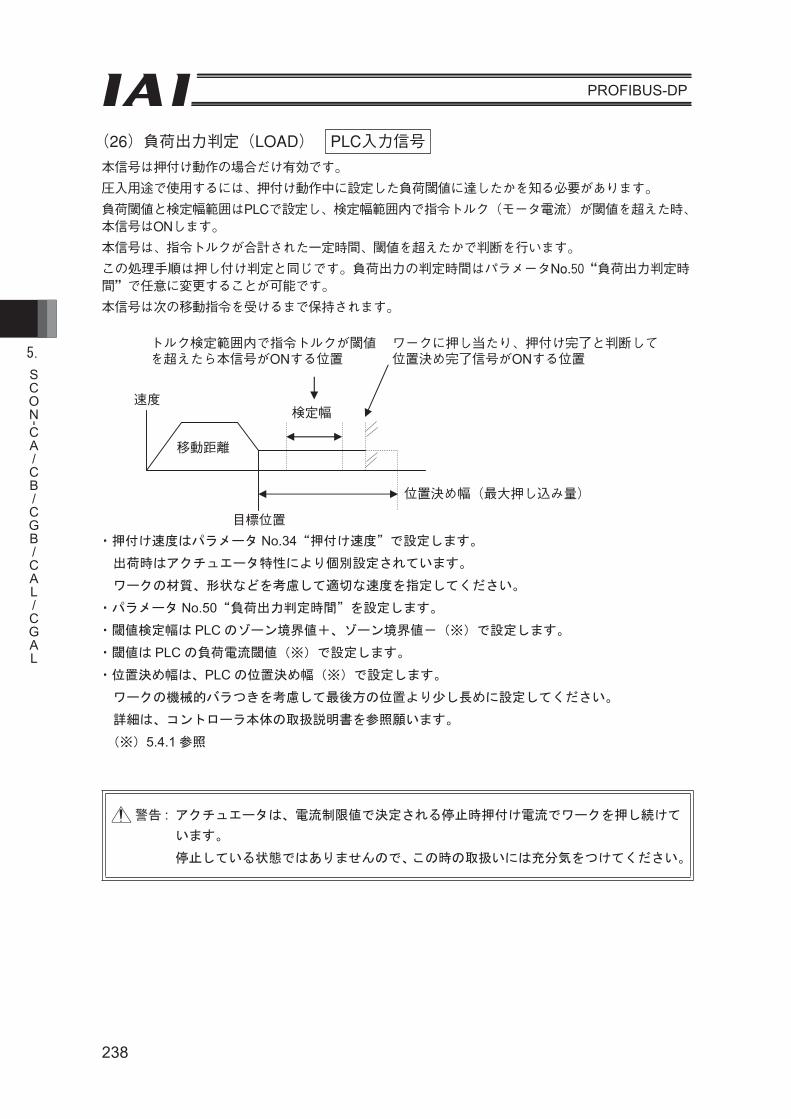
238
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
120
(27)トルクレベル(TRQS) PLC入力信号 PCON専用機能
本信号は押付け動作の場合だけ有効です。
押付け動作中(位置決め幅移動中)にモータ電流が負荷閾値に達した場合、本信号がONします。
電流をレベルで監視しているので、電流が変化すれば本信号のON、OFFの状態も変化します。
押付けに使える速度はモータとリードによって異なるため、パラメータを調整する必要があります。
・押付け速度はパラメータNo.34“押付け速度”で設定します。
出荷時はアクチュエータ特性により個別設定されています。
ワークの材質、形状などを考慮して適切な速度を指定してください。
・パラメータNo.50“負荷出力判定時間”を設定します。
・パラメータNo.51“トルク検定範囲”を1[無効]に設定します。
・閾値はPLCの負荷電流閾値(※)で設定します。
・位置決め幅は、PLCの位置決め幅(※)で設定します。
ワークの機械的バラつきを考慮して最後方の位置より少し長めに設定してください。
詳細は、コントローラ本体の取扱説明書を参照願います。
(※)7.4.1参照
Q警告:・目標位置の手前でワークに押し当たるとサーボ異常になります。目標位置とワークの位置関係に充分注意してください。・アクチュエータは、電流制限値で決定される停止時押付け電流でワークを押し続けています。停止している状態ではありませんので、この時の取扱いには充分気をつけてください。
ワークに押し当たり、押付け完了と判断して 位置決め完了信号がONする位置
本信号が出力する範囲
位置決め幅(最大押し込み量)
目標位置
移動距離
速度
ProfiBus-DP
119
(26)負荷出力判定(LOAD) PLC入力信号 PCON専用機能
本信号は押付け動作の場合だけ有効です。
圧入用途で使用するには、押付け動作中に設定した負荷閾値に達したかを知る必要があります。
負荷閾値と検定幅範囲はPLCで設定し、検定幅範囲内で指令トルク(モータ電流)が閾値を超えた時、本信号はONします。
本信号は、指令トルクが合計された一定時間、閾値を超えたかで判断を行います。
この処理手順は押し付け判定と同じです。負荷出力の判定時間はパラメータNo.50“負荷出力判定時間”で任意に変更することが可能です。
本信号は次の移動指令を受けるまで保持されます。
・押付け速度はパラメータNo.34“押付け速度”で設定します。
出荷時はアクチュエータ特性により個別設定されています。
ワークの材質、形状などを考慮して適切な速度を指定してください。
・パラメータNo.50“負荷出力判定時間”を設定します。
・パラメータNo.51“トルク検定範囲”を0[有効]に設定します。
・閾値検定幅はPLCのゾーン境界値+、ゾーン境界値-(※)で設定します。
・閾値はPLCの負荷電流閾値(※)で設定します。
・位置決め幅は、PLCの位置決め幅(※)で設定します。
ワークの機械的バラつきを考慮して最後方の位置より少し長めに設定してください。
詳細は、コントローラ本体の取扱説明書を参照願います。
(※)7.4.1参照
Q警告:・目標位置の手前でワークに押し当たるとサーボ異常になります。目標位置とワークの位置関係に充分注意してください。・アクチュエータは、電流制限値で決定される停止時押付け電流でワークを押し続けています。停止している状態ではありませんので、この時の取扱いには充分気をつけてください。
トルク検定範囲内で指令トルクが閾値 を超えたら本信号がONする位置
ワークに押し当たり、押付け完了と判断して 位置決め完了信号がONする位置
速度
移動距離
目標位置
検定幅
位置決め幅(最大押し込み量)
警告 : アクチュエータは、電流制限値で決定される停止時押付け電流でワークを押し続けて
います。 停止している状態ではありませんので、この時の取扱いには充分気をつけてください。
・押付け速度はパラメータ No.34“押付け速度”で設定します。
出荷時はアクチュエータ特性により個別設定されています。
ワークの材質、形状などを考慮して適切な速度を指定してください。
・パラメータ No.50“負荷出力判定時間”を設定します。
・閾値検定幅は PLC のゾーン境界値+、ゾーン境界値-(※)で設定します。
・閾値は PLC の負荷電流閾値(※)で設定します。
・位置決め幅は、PLC の位置決め幅(※)で設定します。
ワークの機械的バラつきを考慮して最後方の位置より少し長めに設定してください。
詳細は、コントローラ本体の取扱説明書を参照願います。
(※)5.4.1 参照

239
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
120
(27)トルクレベル(TRQS) PLC入力信号 PCON専用機能
本信号は押付け動作の場合だけ有効です。
押付け動作中(位置決め幅移動中)にモータ電流が負荷閾値に達した場合、本信号がONします。
電流をレベルで監視しているので、電流が変化すれば本信号のON、OFFの状態も変化します。
押付けに使える速度はモータとリードによって異なるため、パラメータを調整する必要があります。
・押付け速度はパラメータNo.34“押付け速度”で設定します。
出荷時はアクチュエータ特性により個別設定されています。
ワークの材質、形状などを考慮して適切な速度を指定してください。
・パラメータNo.50“負荷出力判定時間”を設定します。
・パラメータNo.51“トルク検定範囲”を1[無効]に設定します。
・閾値はPLCの負荷電流閾値(※)で設定します。
・位置決め幅は、PLCの位置決め幅(※)で設定します。
ワークの機械的バラつきを考慮して最後方の位置より少し長めに設定してください。
詳細は、コントローラ本体の取扱説明書を参照願います。
(※)7.4.1参照
Q警告:・目標位置の手前でワークに押し当たるとサーボ異常になります。目標位置とワークの位置関係に充分注意してください。・アクチュエータは、電流制限値で決定される停止時押付け電流でワークを押し続けています。停止している状態ではありませんので、この時の取扱いには充分気をつけてください。
ワークに押し当たり、押付け完了と判断して 位置決め完了信号がONする位置
本信号が出力する範囲
位置決め幅(最大押し込み量)
目標位置
移動距離
速度
ProfiBus-DP
119
(26)負荷出力判定(LOAD) PLC入力信号 PCON専用機能
本信号は押付け動作の場合だけ有効です。
圧入用途で使用するには、押付け動作中に設定した負荷閾値に達したかを知る必要があります。
負荷閾値と検定幅範囲はPLCで設定し、検定幅範囲内で指令トルク(モータ電流)が閾値を超えた時、本信号はONします。
本信号は、指令トルクが合計された一定時間、閾値を超えたかで判断を行います。
この処理手順は押し付け判定と同じです。負荷出力の判定時間はパラメータNo.50“負荷出力判定時間”で任意に変更することが可能です。
本信号は次の移動指令を受けるまで保持されます。
・押付け速度はパラメータNo.34“押付け速度”で設定します。
出荷時はアクチュエータ特性により個別設定されています。
ワークの材質、形状などを考慮して適切な速度を指定してください。
・パラメータNo.50“負荷出力判定時間”を設定します。
・パラメータNo.51“トルク検定範囲”を0[有効]に設定します。
・閾値検定幅はPLCのゾーン境界値+、ゾーン境界値-(※)で設定します。
・閾値はPLCの負荷電流閾値(※)で設定します。
・位置決め幅は、PLCの位置決め幅(※)で設定します。
ワークの機械的バラつきを考慮して最後方の位置より少し長めに設定してください。
詳細は、コントローラ本体の取扱説明書を参照願います。
(※)7.4.1参照
Q警告:・目標位置の手前でワークに押し当たるとサーボ異常になります。目標位置とワークの位置関係に充分注意してください。・アクチュエータは、電流制限値で決定される停止時押付け電流でワークを押し続けています。停止している状態ではありませんので、この時の取扱いには充分気をつけてください。
トルク検定範囲内で指令トルクが閾値 を超えたら本信号がONする位置
ワークに押し当たり、押付け完了と判断して 位置決め完了信号がONする位置
速度
移動距離
目標位置
検定幅
位置決め幅(最大押し込み量)
警告 : アクチュエータは、電流制限値で決定される停止時押付け電流でワークを押し続けて
います。 停止している状態ではありませんので、この時の取扱いには充分気をつけてください。
・押付け速度はパラメータ No.34“押付け速度”で設定します。
出荷時はアクチュエータ特性により個別設定されています。
ワークの材質、形状などを考慮して適切な速度を指定してください。
・パラメータ No.50“負荷出力判定時間”を設定します。
・閾値は PLC の負荷電流閾値(※)で設定します。
・位置決め幅は、PLC の位置決め幅(※)で設定します。
ワークの機械的バラつきを考慮して最後方の位置より少し長めに設定してください。
詳細は、コントローラ本体の取扱説明書を参照願います。
(※)5.4.1 参照

240
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
アブソリュート仕様で、アブソリュートバッテリ電圧正常時、または、インクリメンタル仕様の場
合には OFF になります。
アブソリュートバッテリ電圧が3.1Vまで低下すると本信号はONします。そのまま使用を続け、2.5Vまで低下すると、コントローラは位置情報を保持できなくなります。
(アブソリュート仕様で本信号が ON したら、速やかにバッテリを交換してください。)
(28) アブソリュートバッテリ電圧低下警告 (BALM) PLC 入力信号
(29) 制振制御モード選択 0、1 (NTC0, NTC1) PLC 出力信号
制振制御機能は、当社アクチュエータによって引き起こされる負荷の振動を抑制します。
振動数を測定し、パラメータセットに設定します(最大 3 種)。設定されたパラメータセットの中
から 1 種類を本信号の組合せで選択して使用します。
詳細はコントローラ本体の取扱説明書を参照してください。
NTC1 NTC0 機能 備考
OFF OFF 制振制御を使用しない 出荷時設定
OFF ON パラメータセット 1 選択
ON OFF パラメータセット 2 選択
ON ON パラメータセット 3 選択
入力タイミング
下図に NTC1・NTC0 信号入力タイミングを表示します。
注意 : 移動指令 (DSTR) 認識時に NTC0・NTC1 信号状態を取り込む為、移動中に NTC0・NTC1 信号を ON・OFF 行っても無視されます。
NTC0
NTC1
DSTRT1※
T1 0sm

241
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
122
(29)加減速モード(MOD1、MOD0) PLC出力信号 ACON専用機能
加減速パターン特性を選択するための信号です。いずれかをアクチュエータの移動指令前に選択してください。
MOD1 MOD0 パターン名 備考
OFF OFF 台形パターン 出荷時設定
OFF ON S字モーション
ON OFF 一次遅れフィルタ
ON ON 使用できません。
加速度
速度
減速度
時間
※加速度、減速度はポジションデータの「加速度」「減速度」欄で設定します。
直線加減速(台形パターン)より緩やかな加減速カーブを描きます。加減速時にワークに微振動を与えたくない用途にご使用ください。
台形パターン
速度
時間
一次遅れフィルタ
※一次遅れの度合いはパラメータNo.55“位置指令一次フィルタ時定数”で設定します。最小入力単位は0.1msecで、設定範囲は0.0~100.0です。0を設定すると一次遅れフィルタは無効となります。但し、パソコンやティーチングボックス操作でのジョグ、インチング動作には反映されません。
加速時に最初は緩やかで途中から急激に立ち上がるようなカーブを描きます。タクトタイムが要求されるため加減速度を高く設定したいが、移動開始時や停止直前時は緩やかにしたい用途にご使用ください。
※S字モーションの度合いはパラメータNo.56“S字モーション比率設定”で設定します。設定単位は%で、設定範囲は0~100です。(上図は100%設定時のイメージグラフです。)0を設定するとS字モーションは無効となります。但し、パソコンやティーチングボックス操作でのジョグ、インチング動作には反映されません。
速度
時間
S字モーション
但し、パソコンソフトなどのティーチングツール操作でのジョグ、インチング動
作には反映されません。
但し、パソコンソフトなどのティーチングツール操作でのジョグ、インチング動
作には反映されません。
(30) 加減速モード(MOD1、MOD0) PLC 出力信号

242
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
位置決め完了し、次のポジションへ移動するまでの待機時の停止モードを選択します。
停止時間が長い場合、自動的にサーボ OFF して電力消費量を低減します。
詳細はコントローラ本体の取扱説明書を参照願います。
ASO1 ASO0 停止モード 備考
OFF OFF 無効 (出荷時設定)
OFF ON自動サーボ OFF 方式
T はパラメータ No.36 が有効
ON OFF自動サーボ OFF 方式
T はパラメータ No.37 が有効
ON ON自動サーボ OFF 方式
T はパラメータ No.38 が有効
ロードセルは工場出荷時、無負荷の状態を 0N とするよう設定していますが、負荷を取り付けた状
態を基準 (0N) としたい場合などには、キャリブレーションを行ってください。
その他にも必要な場合(再調整、点検等)、状況に応じて実施してください。
① 運転を停止してください(軸動作中、押付け中、一時停止中はキャリブレーションできずに
0E1: ロードセルキャリブレーション異常アラームとなります)。
② ロードセルキャリブレーション信号 (CLBR)を 20ms 以上連続 ON してください。
③ キャリブレーションが完了するとキャリブレーション完了信号 (CEND) が ON しますので、そ
の後 CLBR 信号を OFF してください。
キャリブレーションが正常に終了しなかった場合、0E1: ロードセルキャリブレーション異常ア
ラームとなります。
(31) 停止モード選択 (ASO1, ASO0) PLC 出力信号
(32) ロードセルキャリブレーション指令 (CLBR) PLC 出力信号
ロードセルキャリブレーション完了 (CEND) PLC 入力信号
OFFLED
T OFF
ON
T
注意 :CLBR 信号が ON 状態では、通常運転指令は受け付けられません。

243
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
あらかじめサーボゲインパラメータ(6 個)を 4 セット登録しておくことで、ポジション移動ごと
に選択したセットで運転可能です。
詳細はコントローラ本体の取扱説明書を参照願います。
GSL1 GSL0 機能 備考
OFF OFF パラメータセット 0 選択 出荷時設定
OFF ON パラメータセット 1 選択
ON OFF パラメータセット 2 選択
ON ON パラメータセット 3 選択
(33) サーボゲインパラメータセット選択 (GSL0, GSL1) PLC 出力信号
※ 1 この間に CLBR を OFF した場合は、入力認識前のためキャリブレーション処理を行いません。
※ 2 この間に CLBR を OFF した場合、アラームとなります。
CEND ONCLBR OFF
CEND ONCLBR OFF CEND OFF
CEND
CLBR
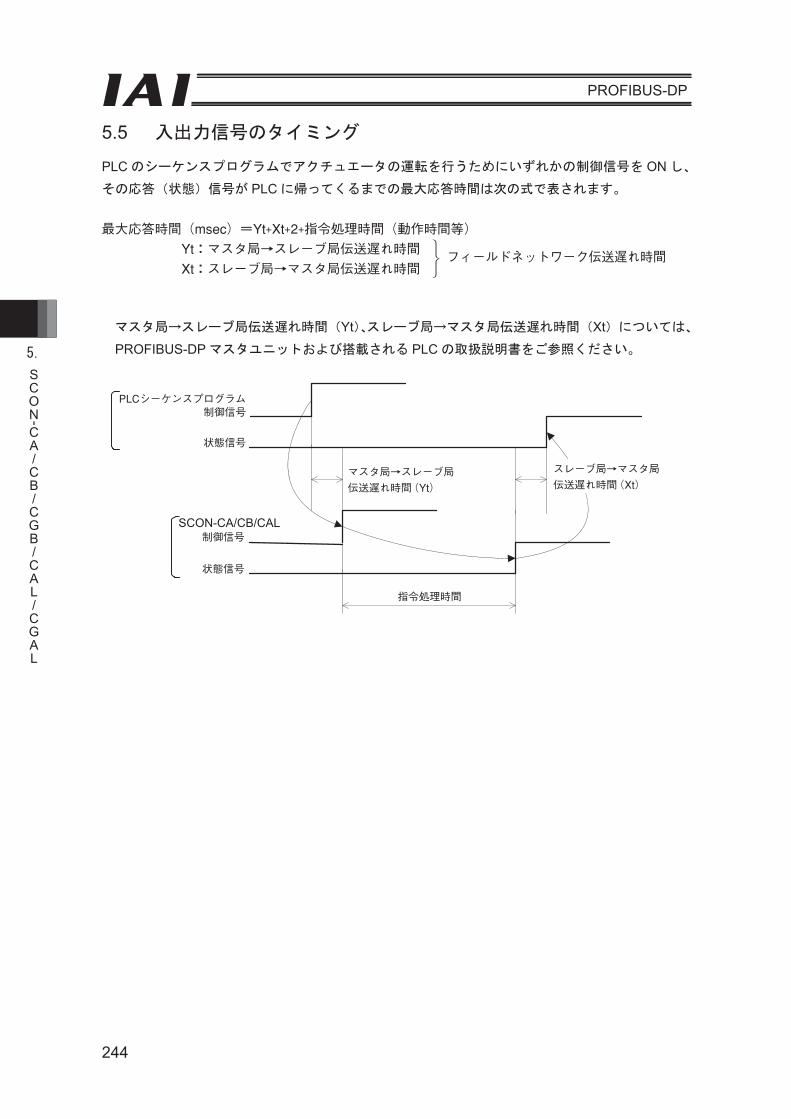
244
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
124
7.6 運転次にポジション/簡易直値モード、ハーフ直値モードおよびフル直値モードの基本動作例のタイミングを示します。
リモートⅠ/OモードおよびリモートⅠ/Oモード2についてはコントローラの取扱説明書をご参照ください。
(リモートⅠ/Oモード2の現在位置、現在速度の読取りは適宜PLCから読取ってください。)
(1)ポジション/簡易直値モードでの運転
PLCの目標位置に位置データを書込み、速度、加減速度、位置決め幅、押付け電流制限値等はポジションテーブルで指定して運転します。
動作例(通常位置決め動作)
(準備)目標位置以外のポジションデータ(速度、加減速度、位置決め幅等)をポジションテーブルに設定します。
ポジション/簡易直値切替(PMOD)信号をONします。
①目標位置データを出力アドレスn、n+1の目標位置(※)に設定します。
②速度、加減速度等を設定したポジション番号を出力アドレスn+2の指定ポジション番号(※)に設定します。
③位置決め完了(PEND)信号がONになっているまたは、移動中信号(MOVE)がOFFの状態で、位置決めスタート(CSTR)信号をONにします。
①、②で設定したデータはCSTR信号の立上りエッジでコントローラに読み込まれます。
④CSTR信号がONになった後、tpdf後にPENDがOFFします。
⑤PEND信号がOFF またはMOVE信号がONになったことを確認してからCSTR信号をOFFにします。目標位置(※)の値はCSTR信号をOFFにするまで変更しないでください。
⑥PEND信号がOFFになるのと同時にMOVE信号がONになります。
⑦入力アドレスn、n+1の現在位置データ(※)は常時更新されています。残移動量がポジションデータで設定された位置決め幅の範囲内になると、CSTR信号がOFFの場合にPEND信号がONになり、完了ポジション番号が入力アドレスn+2の完了ポジション番号(※)に出力されます。
従って、位置決め完了時の完了ポジション番号(※)の読み取りは、PEND信号がONになり適当な時間(残移動量移動時間)をおいてから確認してください。
また現在位置データは停止中でも振動等により多少変化することがあります。
⑧移動中に目標位置データを変更することが可能です。
目標位置を変更するには、目標位置データの変更を行ってPLCのスキャンタイム以上経過してからCSTR信号をONにします。
CSTR信号はPLCのスキャンタイム以上経過してから値を変更してください。
動作例(押付け動作)
押付け動作は(準備)の段階でポジションデータの押付け欄に電流制限値を設定します。
押付け欄に値を設定したポジション番号に位置決めを行うと押付け動作となります。
(※)7.4.1参照
ProfiBus-DP
123
7.5 入出力信号のタイミングPLCのシーケンスプログラムでロボシリンダの運転を行うためにいずれかの制御信号をONし、その応答(状態)信号がPLCに帰ってくるまでの最大応答時間は次の式で表されます。
最大応答時間(msec)=Yt+Xt+2+指令処理時間(動作時間等)Yt:マスタ局→スレーブ局伝送遅れ時間 フィールドネットワーク伝送遅れ時間Xt:スレーブ局→マスタ局伝送遅れ時間
マスタ局→スレーブ局伝送遅れ時間(Yt)、スレーブ局→マスタ局伝送遅れ時間(Xt)については、ProfiBus-DPマスタユニットおよび搭載されるPLCの取扱説明書をご参照ください。
PLCシーケンスプログラム 制御信号
状態信号
ACON,PCON 制御信号
状態信号
マスタ局→スレーブ局 伝送遅れ時間(Yt)
スレーブ局→マスタ局 伝送遅れ時間(Xt)
指令処理時間
12
3
5.5 入出力信号のタイミング
SCON-CA/CB/CAL
マスタ局→スレーブ局伝送遅れ時間(Yt)、スレーブ局→マスタ局伝送遅れ時間(Xt)については、
PROFIBUS-DP マスタユニットおよび搭載される PLC の取扱説明書をご参照ください。
PLC のシーケンスプログラムでアクチュエータの運転を行うためにいずれかの制御信号を ON し、
その応答(状態)信号が PLC に帰ってくるまでの最大応答時間は次の式で表されます。

245
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
124
7.6 運転次にポジション/簡易直値モード、ハーフ直値モードおよびフル直値モードの基本動作例のタイミングを示します。
リモートⅠ/OモードおよびリモートⅠ/Oモード2についてはコントローラの取扱説明書をご参照ください。
(リモートⅠ/Oモード2の現在位置、現在速度の読取りは適宜PLCから読取ってください。)
(1)ポジション/簡易直値モードでの運転
PLCの目標位置に位置データを書込み、速度、加減速度、位置決め幅、押付け電流制限値等はポジションテーブルで指定して運転します。
動作例(通常位置決め動作)
(準備)目標位置以外のポジションデータ(速度、加減速度、位置決め幅等)をポジションテーブルに設定します。
ポジション/簡易直値切替(PMOD)信号をONします。
①目標位置データを出力アドレスn、n+1の目標位置(※)に設定します。
②速度、加減速度等を設定したポジション番号を出力アドレスn+2の指定ポジション番号(※)に設定します。
③位置決め完了(PEND)信号がONになっているまたは、移動中信号(MOVE)がOFFの状態で、位置決めスタート(CSTR)信号をONにします。
①、②で設定したデータはCSTR信号の立上りエッジでコントローラに読み込まれます。
④CSTR信号がONになった後、tpdf後にPENDがOFFします。
⑤PEND信号がOFF またはMOVE信号がONになったことを確認してからCSTR信号をOFFにします。目標位置(※)の値はCSTR信号をOFFにするまで変更しないでください。
⑥PEND信号がOFFになるのと同時にMOVE信号がONになります。
⑦入力アドレスn、n+1の現在位置データ(※)は常時更新されています。残移動量がポジションデータで設定された位置決め幅の範囲内になると、CSTR信号がOFFの場合にPEND信号がONになり、完了ポジション番号が入力アドレスn+2の完了ポジション番号(※)に出力されます。
従って、位置決め完了時の完了ポジション番号(※)の読み取りは、PEND信号がONになり適当な時間(残移動量移動時間)をおいてから確認してください。
また現在位置データは停止中でも振動等により多少変化することがあります。
⑧移動中に目標位置データを変更することが可能です。
目標位置を変更するには、目標位置データの変更を行ってPLCのスキャンタイム以上経過してからCSTR信号をONにします。
CSTR信号はPLCのスキャンタイム以上経過してから値を変更してください。
動作例(押付け動作)
押付け動作は(準備)の段階でポジションデータの押付け欄に電流制限値を設定します。
押付け欄に値を設定したポジション番号に位置決めを行うと押付け動作となります。
(※)7.4.1参照
ProfiBus-DP
123
7.5 入出力信号のタイミングPLCのシーケンスプログラムでロボシリンダの運転を行うためにいずれかの制御信号をONし、その応答(状態)信号がPLCに帰ってくるまでの最大応答時間は次の式で表されます。
最大応答時間(msec)=Yt+Xt+2+指令処理時間(動作時間等)Yt:マスタ局→スレーブ局伝送遅れ時間 フィールドネットワーク伝送遅れ時間Xt:スレーブ局→マスタ局伝送遅れ時間
マスタ局→スレーブ局伝送遅れ時間(Yt)、スレーブ局→マスタ局伝送遅れ時間(Xt)については、ProfiBus-DPマスタユニットおよび搭載されるPLCの取扱説明書をご参照ください。
PLCシーケンスプログラム 制御信号
状態信号
ACON,PCON 制御信号
状態信号
マスタ局→スレーブ局 伝送遅れ時間(Yt)
スレーブ局→マスタ局 伝送遅れ時間(Xt)
指令処理時間
12
3
5.6 運転
次にポジション/簡易直値モード 1, 2、ハーフ直値モード 1 ~ 3 およびフル直値モードの基本動作
例のタイミングを示します。
リモートⅠ /O モード 1 ~ 3 についてはコントローラの取扱説明書をご参照ください。
(リモートⅠ /O モード 2, 3 の現在位置、指令電流または現在荷重の読取りは適宜 PLC から読取っ
てください。)
(1)ポジション/簡易直値モード 1, 2 での運転
(※)5.4.1 参照
No.No.
No.
No.
No. No.

246
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
126
(2)ハーフ直値モードでの運転
PLCの目標位置、位置決め幅、指定速度、加減速度および押付け電流制限指定にデータを指定して運転します。
動作例(押付け動作)
①目標位置データを出力アドレスn、n+1の目標位置(※)に設定します。
②位置決め幅データを出力アドレスn+2、n+3の位置決め幅(※)に設定します。
③速度データを出力アドレスn+4の速度(※)に設定します。
④加減速度データを出力アドレスn+5の加減速度(※)に設定します。
⑤押付け電流制限データを出力アドレスn+6の押付け電流制限値(※)に設定します。
⑥押付け指定(PUSH)信号をONにします。
⑦押付け方向指定(DIR)信号で押付け方向を指定します。(7.4.7(22)参照)
⑧位置決め完了(PEND)信号がONになっているまたは、移動中信号(MOVE)がOFFの状態で、位置決め指令(DSTR)信号をONにします。
①~⑤で設定したデータはDSTR信号の立上りエッジでコントローラに読み込まれます。
⑨DSTR信号がONになった後、tpdf後にPENDがOFFします。
⑩PEND信号がOFF またはMOVE信号がONになったことを確認してからDSTR信号をOFFにします。①~⑤で設定した値はDSTR信号をOFFにするまで変更しないでください。
⑪PEND信号がOFFになるのと同時にMOVE信号がONになります。
⑫入力アドレスn、n+1の現在位置データ(※)は常時更新されています。
⑬PEND信号はDSTR信号がOFFで、モータの電流が⑤で設定した電流制限値に達するとONになります。(押付け完了)
②で設定した位置決め幅に達しても、モータの電流が⑤で設定した電流制限値に到達しない場合は、押付け空振り(PSFL)信号がONになります。この場合、PEND信号はONになりません。(押付け空振り)
⑭PEND信号またはPSFL信号がONとなった後、PUSH信号をOFFにします。
動作例(通常位置決め動作)
通常位置決め動作は、⑥の信号をOFFに設定します。
残移動量がポジションデータで設定された位置決め幅の範囲内になると、DSTR信号がOFFの場合にPEND信号がONになります。
(※) 7.4.1参照
※ T1: 上位コントローラのスキャンタイムを考慮
し、T1 ≧ 0ms となるようにしてください。
※ Yt+Xt ≦ tdpf ≦ Yt+Xt+3(msec)
CSTR
PLC ACON,PCON
PEND
ACON,PCON PLC
ACON,PCON PLC
MOVE
ACON,PCON PLC
p1
2n1n
3n2n
tdpf
T1
PLC ACON,PCON
PLC ACON,PCON n1 3n2n
(PLC → SCON-CA/CB/CAL)
(SCON-CA/CB/CAL → PLC)
(PLC → SCON-CA/CB/CAL)
(PLC → SCON-CA/CB/CAL)
(SCON-CA/CB/CAL → PLC)
(SCON-CA/CB/CAL → PLC)
アクチュエータ動作
(通常位置決め)
押掛け空振り
(PSEL)
押掛け動作中
(PUSHS)
アクチュエータ動作
(押付け)
指定ポジション No.
247
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
126
(2)ハーフ直値モードでの運転
PLCの目標位置、位置決め幅、指定速度、加減速度および押付け電流制限指定にデータを指定して運転します。
動作例(押付け動作)
①目標位置データを出力アドレスn、n+1の目標位置(※)に設定します。
②位置決め幅データを出力アドレスn+2、n+3の位置決め幅(※)に設定します。
③速度データを出力アドレスn+4の速度(※)に設定します。
④加減速度データを出力アドレスn+5の加減速度(※)に設定します。
⑤押付け電流制限データを出力アドレスn+6の押付け電流制限値(※)に設定します。
⑥押付け指定(PUSH)信号をONにします。
⑦押付け方向指定(DIR)信号で押付け方向を指定します。(7.4.7(22)参照)
⑧位置決め完了(PEND)信号がONになっているまたは、移動中信号(MOVE)がOFFの状態で、位置決め指令(DSTR)信号をONにします。
①~⑤で設定したデータはDSTR信号の立上りエッジでコントローラに読み込まれます。
⑨DSTR信号がONになった後、tpdf後にPENDがOFFします。
⑩PEND信号がOFF またはMOVE信号がONになったことを確認してからDSTR信号をOFFにします。①~⑤で設定した値はDSTR信号をOFFにするまで変更しないでください。
⑪PEND信号がOFFになるのと同時にMOVE信号がONになります。
⑫入力アドレスn、n+1の現在位置データ(※)は常時更新されています。
⑬PEND信号はDSTR信号がOFFで、モータの電流が⑤で設定した電流制限値に達するとONになります。(押付け完了)
②で設定した位置決め幅に達しても、モータの電流が⑤で設定した電流制限値に到達しない場合は、押付け空振り(PSFL)信号がONになります。この場合、PEND信号はONになりません。(押付け空振り)
⑭PEND信号またはPSFL信号がONとなった後、PUSH信号をOFFにします。
動作例(通常位置決め動作)
通常位置決め動作は、⑥の信号をOFFに設定します。
残移動量がポジションデータで設定された位置決め幅の範囲内になると、DSTR信号がOFFの場合にPEND信号がONになります。
(※) 7.4.1参照
(2)ハーフ直値モード 1 ~ 3 での運転
5.4.7
(※)5.4.1 参照

248
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
128
(3)フル直値モードでの運転
PLCの目標位置、位置決め幅等位置決めに必要な条件をPLCより全て指定して運転します。
動作例(押付け動作)
①目標位置データを出力アドレスn、n+1の目標位置(※)に設定します。
②位置決め幅データを出力アドレスn+2、n+3の位置決め幅(※)に設定します。
③速度データを出力アドレスn+4、n+5の速度(※)に設定します。
④ポジションゾーン出力の境界値データを出力アドレスn+6~n+9のゾーン境界値+、ゾーン境界値-(※)に設定します。
⑤加速度データを出力アドレスn+10の加速度(※)に設定します。
⑥減速度データを出力アドレスn+11の減速度(※)に設定します。
⑦押付け電流制限値データを出力アドレスn+12の押付け電流制限値(※)に設定します。
⑧負荷電流閾値データを出力アドレスn+13の負荷電流閾値(※)に設定します。
⑨押付け指定(PUSH)信号をONにします。
⑩押付け方向指定(DIR)信号で押付け方向を指定します。(7.4.7(22)参照)⑪位置決め完了(PEND)信号がONになっているまたは、移動中信号(MOVE)がOFFの状態で、位置決め指令(DSTR)信号をONにします。
①~⑧で設定したデータはDSTR信号の立上りエッジでコントローラに読み込まれます。
⑫DSTR信号がONになった後、tpdf後にPENDがOFFします。
⑬PEND信号がOFFまたはMOVE信号がONになったことを確認してからDSTR信号をOFFにします。①~⑧で設定した値はDSTR信号をOFFにするまで変更しないでください。
⑭PEND信号がOFFになるのと同時にMOVE信号がONになります。
⑮入力アドレスn、n+1の現在位置データ(※)は常時更新されています。
⑯PEND信号はDSTR信号がOFFで、モータの電流が⑦で設定した電流制限値に達するとONになります。(押付け完了)
②で設定した位置決め幅に達しても、モータの電流が⑦で設定した電流制限値に到達しない場合は、押付け空振り(PSFL)信号がONになります。この場合、PEND信号はONになりません。(押付け空振り)
⑰PEND信号またはPSFL信号がONとなった後、PUSH信号をOFFにします。
動作例(通常位置決め動作)
通常位置決め動作は、⑨の信号をOFFに設定します。
残移動量がポジションデータで設定された位置決め幅の範囲内になると、DSTR信号がOFF の場合にPEND信号がONになります。
(※) 7.4.1参照
ProfiBus-DP
127
目標位置データ 設定値
(PLC→ACON,PCON)
位置決め幅データ 設定値
(PLC→ACON,PCON)
速度データ 設定値
(PLC→ACON,PCON)
加減速度データ 設定値
(PLC→ACON,PCON)
押付け電流制限値 設定値
(PLC→ACON,PCON)
押付け指定 PUSH
(PLC→ACON,PCON)
押付け方向指定 DIR
(PLC→ACON,PCON)
位置決め指令 DSTR
(PLC→ACON,PCON)
位置決め完了/押付け空振り PEND/PSFL
(ACON,PCON→PLC)
現在位置 (ACON,PCON→PLC)
移動中 MOVE
(ACON,PCON→PLC)
アクチュエータ動作 (押付け)
アクチュエータ動作 (通常位置決め)
1
2
3
4
n1 n2
v1 v2
m1 m2
t1 t2
※T1:上位コントローラのスキャンタイムを考慮し、 T1≧ 0msとなるようにしてください ※Yt+Xt≦ tdpf≦Yt+Xt+2(msec)
⑤
⑥
7
9 0
wq
⑭
e
s1 s2
n1
※tdpf
※T1
n2+(v2)
位置決め幅
押付け
⑧
(SCON-CA/CB/CAL → PLC)
(PLC → SCON-CA/CB/CAL)
(SCON-CA/CB/CAL → PLC)
(SCON-CA/CB/CAL → PLC)
(PLC → SCON-CA/CB/CAL)
(PLC → SCON-CA/CB/CAL)
(PLC → SCON-CA/CB/CAL)
(PLC → SCON-CA/CB/CAL)
(PLC → SCON-CA/CB/CAL)
(PLC → SCON-CA/CB/CAL)
(PLC → SCON-CA/CB/CAL)

249
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
128
(3)フル直値モードでの運転
PLCの目標位置、位置決め幅等位置決めに必要な条件をPLCより全て指定して運転します。
動作例(押付け動作)
①目標位置データを出力アドレスn、n+1の目標位置(※)に設定します。
②位置決め幅データを出力アドレスn+2、n+3の位置決め幅(※)に設定します。
③速度データを出力アドレスn+4、n+5の速度(※)に設定します。
④ポジションゾーン出力の境界値データを出力アドレスn+6~n+9のゾーン境界値+、ゾーン境界値-(※)に設定します。
⑤加速度データを出力アドレスn+10の加速度(※)に設定します。
⑥減速度データを出力アドレスn+11の減速度(※)に設定します。
⑦押付け電流制限値データを出力アドレスn+12の押付け電流制限値(※)に設定します。
⑧負荷電流閾値データを出力アドレスn+13の負荷電流閾値(※)に設定します。
⑨押付け指定(PUSH)信号をONにします。
⑩押付け方向指定(DIR)信号で押付け方向を指定します。(7.4.7(22)参照)⑪位置決め完了(PEND)信号がONになっているまたは、移動中信号(MOVE)がOFFの状態で、位置決め指令(DSTR)信号をONにします。
①~⑧で設定したデータはDSTR信号の立上りエッジでコントローラに読み込まれます。
⑫DSTR信号がONになった後、tpdf後にPENDがOFFします。
⑬PEND信号がOFFまたはMOVE信号がONになったことを確認してからDSTR信号をOFFにします。①~⑧で設定した値はDSTR信号をOFFにするまで変更しないでください。
⑭PEND信号がOFFになるのと同時にMOVE信号がONになります。
⑮入力アドレスn、n+1の現在位置データ(※)は常時更新されています。
⑯PEND信号はDSTR信号がOFFで、モータの電流が⑦で設定した電流制限値に達するとONになります。(押付け完了)
②で設定した位置決め幅に達しても、モータの電流が⑦で設定した電流制限値に到達しない場合は、押付け空振り(PSFL)信号がONになります。この場合、PEND信号はONになりません。(押付け空振り)
⑰PEND信号またはPSFL信号がONとなった後、PUSH信号をOFFにします。
動作例(通常位置決め動作)
通常位置決め動作は、⑨の信号をOFFに設定します。
残移動量がポジションデータで設定された位置決め幅の範囲内になると、DSTR信号がOFF の場合にPEND信号がONになります。
(※) 7.4.1参照
5.4.7
(※)5.4.1 参照
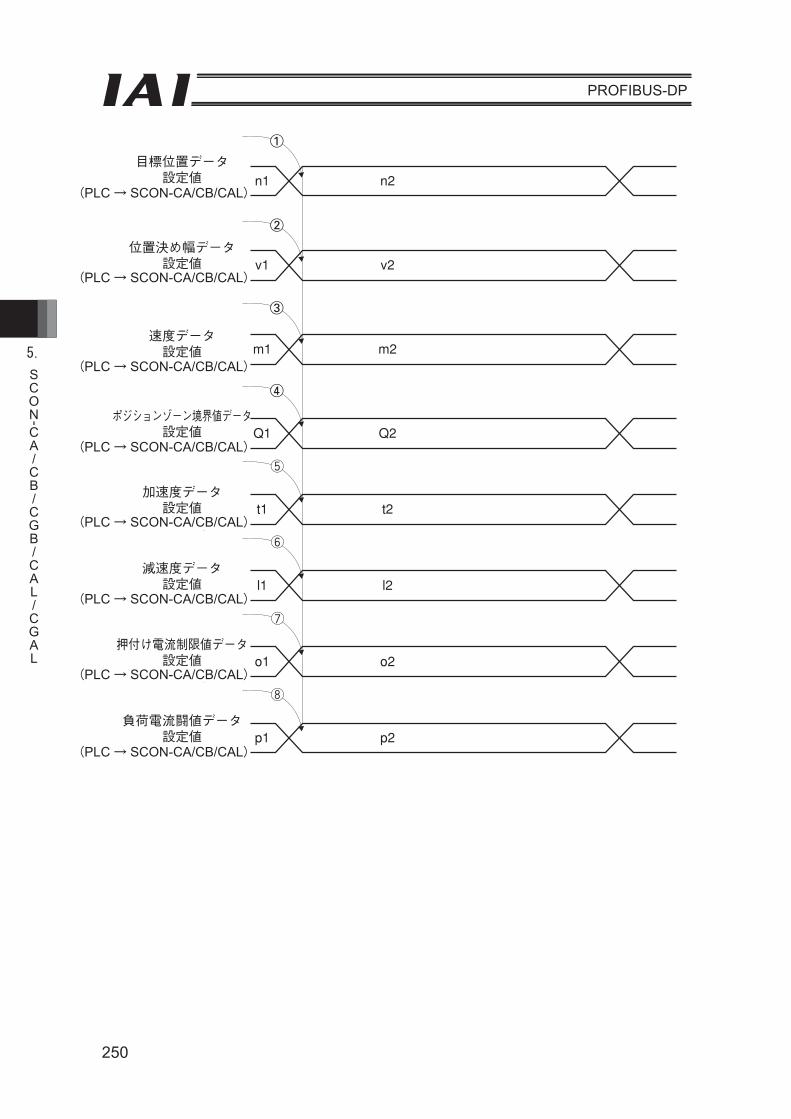
250
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
130
押付け指定 PUSH
(PLC→ACON,PCON)
押付け方向指定 DIR
(PLC→ACON,PCON)
位置決め指令 DSTR
(PLC→ACON,PCON)
位置決め完了/押付け空振り PEND/PSFL
(ACON,PCON→PLC)
現在位置 (ACON,PCON→PLC)
移動中 MOVE
(ACON,PCON→PLC)
アクチュエータ動作 (押付け)
アクチュエータ動作 (通常位置決め)
※T1:上位コントローラのスキャンタイムを考慮し、 T1≧ 0msとなるようにしてください ※Yt+Xt≦ tdpf≦Yt+Xt+2(msec)
⑨
⑩
⑫ ⑬
⑮ ⑭
⑰
⑯
n1
※tdpf
※ T1
n2+(v2)
位置決め幅
押付け
⑪
ProfiBus-DP
129
目標位置データ 設定値
(PLC→ACON,PCON)
位置決め幅データ 設定値
(PLC→ACON,PCON)
速度データ 設定値
(PLC→ACON,PCON)
ポジションゾーン境界値データ 設定値
(PLC→ACON,PCON)
加速度データ 設定値
(PLC→ACON,PCON)
1
2
3
4
減速度データ 設定値
(PLC→ACON,PCON)
押付け電流制限値データ 設定値
(PLC→ACON,PCON)
負荷電流闘値データ 設定値
(PLC→ACON,PCON)
n1 n2
v1 v2
m1 m2
Q1 Q2
⑤
t1 t2
⑥
l1 l2
⑦
o1 o2
⑧
p1 p2
(PLC → SCON-CA/CB/CAL)
(PLC → SCON-CA/CB/CAL)
(PLC → SCON-CA/CB/CAL)
(PLC → SCON-CA/CB/CAL)
(PLC → SCON-CA/CB/CAL)
(PLC → SCON-CA/CB/CAL)
(PLC → SCON-CA/CB/CAL)
(PLC → SCON-CA/CB/CAL)

251
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
130
押付け指定 PUSH
(PLC→ACON,PCON)
押付け方向指定 DIR
(PLC→ACON,PCON)
位置決め指令 DSTR
(PLC→ACON,PCON)
位置決め完了/押付け空振り PEND/PSFL
(ACON,PCON→PLC)
現在位置 (ACON,PCON→PLC)
移動中 MOVE
(ACON,PCON→PLC)
アクチュエータ動作 (押付け)
アクチュエータ動作 (通常位置決め)
※T1:上位コントローラのスキャンタイムを考慮し、 T1≧ 0msとなるようにしてください ※Yt+Xt≦ tdpf≦Yt+Xt+2(msec)
⑨
⑩
⑫ ⑬
⑮ ⑭
⑰
⑯
n1
※tdpf
※ T1
n2+(v2)
位置決め幅
押付け
⑪
(SCON-CA/CB/CAL → PLC)
(PLC → SCON-CA/CB/CAL)
(PLC → SCON-CA/CB/CAL)
(PLC → SCON-CA/CB/CAL)
(SCON-CA/CB/CAL → PLC)
(SCON-CA/CB/CAL → PLC)

252
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
132
7.7 ProfiBus-DP関連パラメータProfiBus-DPに関連するパラメータはNo.84~No.85およびNo.90です。
区分:C:外部インターフェースの関連
フィールドバス動作モード(No.84 FMOD)パラメータNo.84に動作モードを0~4で指定します。
フィールドバスノードアドレス(No.85 NADR)パラメータNo.85にリモート局の局番号を指定します。
設定範囲 0~125 (出荷時は1に設定されています。)
フィールドバス通信速度(No.86 FBRS)通信速度はマスタ局に自動追従となりますので、設定の必要はありません。
No. 区分 シンボル 名称 工場出荷時の初期値
1
83
84 C FMOD フィールドバス動作モード 0
85 C NADR フィールドバスノードアドレス 1
86 C FBRS フィールドバス通信速度 0
87 C NTYP ネットワークタイプ 3
90 C FMIO フィールドバス入出力フォーマット 3
パラメータNo.1~No.83まではコントローラの取扱説明書をご参照してください。
~
パラメータNo.84モード名 占有バイト数 内容設定値
0(出荷時設定) リモートⅠ/O 2モード
1 ポジション/ 8簡易直値モード
2 ハーフ直値モード 16
3 フル直値モード 32
4 リモート 12Ⅰ/Oモード2
PIO(24V入出力)による運転をProfiBus-DPによって行います。目標位置を直接数値で指定するか、ポジションデータの値で運転できます。その他の運転に必要な値はポジションデータに設定します。目標位置以外に速度、加減速度、押付け電流値を直接数値で指定して運転を行います。位置制御に関する全ての値を直接数値で指定して運転を行います。リモートⅠ/Oモードの機能に現在位置と現在速度読取り機能を追加したものです。
ProfiBus-DP
131
≧0
速度・加減速度 設定値
(PLC→ACON,PCON)
DSTR (PLG→ACON,PCON)
PEND (ACON,PCON→PLC)
MOVE (ACON,PCON→PLC)
アクチュエータ 速度
n1
速度n3
速度n2
n2 n3
twcsON
tdpf
twcsONtwcsOFF
①
② ③
twcsON≧Yt+Xt+2(msec)twcsOFF≧Yt+Xt+2(msec)※Yt+Xt≦tpdf≦Yt+Xt+2(msec)
(4)移動中のデータ変更
ハーフ直値モード、フル直値モードは移動中に目標位置データ、加減速データ、速度データ、位置決め幅、押付時電流制限値の中でPLCで設定している値を変更することが可能です。データ変更を行った後、位置決め指令(DSTR)をtdpf以上“ON”にします。また、DSTRを“OFF”にした後、次のDSTRを“ON”にするまでの時間はtwcsON+twcsOFF以上開けていてください。下図に速度・加減速度を変更した例を示します。
注 意1. 速度の設定がされていない場合、または設定が0の場合は停止したままとなり、アラームにはなりません。
2. 移動中に、速度設定を0に変更した場合は減速停止し、アラームにはなりません。
3. 移動中に、加減速度/速度データだけを変更する場合でも目標位置データの設定が必要です。
4. 移動中に、目標位置だけを変更する場合でも、加減速度・速度データの設定が必要です。
ハーフ直値モード 1 ~ 3、フル直値モードは移動中に目標位置データ、加減速データ、速度データ、
位置決め幅、押付時電流制限値の中で PLC で設定している値を変更することが可能です。データ
変更を行った後、位置決め指令(DSTR)を tdpf 以上“ON”にします。
また、DSTR を“OFF”にした後、次の DSTR を“ON”にするまでの時間は twcsON + twcsOFF以上開けていてください。
下図に速度・加減速度を変更した例を示します。
注意 :1. 速度の設定がされていない場合、または設定が 0 の場合は停止したままとなり、アラームに
はなりません。
2. 移動中に、速度設定を 0 に変更した場合は減速停止し、アラームにはなりません。
3. 移動中に、加減速度/速度データだけを変更する場合でも目標位置データの設定が必要です。
4. 移動中に、目標位置だけを変更する場合でも、加減速度・速度データの設定が必要です。
DSTR
PEND
MOVE
n1
n3
n2
n2 n3
twcsON
tdpf
twcsONtwcsOFF
twcsON Yt Xt 2 msectwcsOFF Yt Xt 2 msec
Yt Xt tpdf Yt Xt 2 msec
PLC→SCON-CA/CB/CAL
PLC→SCON-CA/CB/CAL
SCON-CA/CB/CAL→PLC
SCON-CA/CB/CAL→PLC

253
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
132
7.7 ProfiBus-DP関連パラメータProfiBus-DPに関連するパラメータはNo.84~No.85およびNo.90です。
区分:C:外部インターフェースの関連
フィールドバス動作モード(No.84 FMOD)パラメータNo.84に動作モードを0~4で指定します。
フィールドバスノードアドレス(No.85 NADR)パラメータNo.85にリモート局の局番号を指定します。
設定範囲 0~125 (出荷時は1に設定されています。)
フィールドバス通信速度(No.86 FBRS)通信速度はマスタ局に自動追従となりますので、設定の必要はありません。
No. 区分 シンボル 名称 工場出荷時の初期値
1
83
84 C FMOD フィールドバス動作モード 0
85 C NADR フィールドバスノードアドレス 1
86 C FBRS フィールドバス通信速度 0
87 C NTYP ネットワークタイプ 3
90 C FMIO フィールドバス入出力フォーマット 3
パラメータNo.1~No.83まではコントローラの取扱説明書をご参照してください。
~
パラメータNo.84モード名 占有バイト数 内容設定値
0(出荷時設定) リモートⅠ/O 2モード
1 ポジション/ 8簡易直値モード
2 ハーフ直値モード 16
3 フル直値モード 32
4 リモート 12Ⅰ/Oモード2
PIO(24V入出力)による運転をProfiBus-DPによって行います。目標位置を直接数値で指定するか、ポジションデータの値で運転できます。その他の運転に必要な値はポジションデータに設定します。目標位置以外に速度、加減速度、押付け電流値を直接数値で指定して運転を行います。位置制御に関する全ての値を直接数値で指定して運転を行います。リモートⅠ/Oモードの機能に現在位置と現在速度読取り機能を追加したものです。
パラメータ No.84 に動作モードを 0~8 で指定します。
No.
159 0
0
030
1
FBVS FB
ProfiBus-DP
131
≧0
速度・加減速度 設定値
(PLC→ACON,PCON)
DSTR (PLG→ACON,PCON)
PEND (ACON,PCON→PLC)
MOVE (ACON,PCON→PLC)
アクチュエータ 速度
n1
速度n3
速度n2
n2 n3
twcsON
tdpf
twcsONtwcsOFF
①
② ③
twcsON≧Yt+Xt+2(msec)twcsOFF≧Yt+Xt+2(msec)※Yt+Xt≦tpdf≦Yt+Xt+2(msec)
(4)移動中のデータ変更
ハーフ直値モード、フル直値モードは移動中に目標位置データ、加減速データ、速度データ、位置決め幅、押付時電流制限値の中でPLCで設定している値を変更することが可能です。データ変更を行った後、位置決め指令(DSTR)をtdpf以上“ON”にします。また、DSTRを“OFF”にした後、次のDSTRを“ON”にするまでの時間はtwcsON+twcsOFF以上開けていてください。下図に速度・加減速度を変更した例を示します。
注 意1. 速度の設定がされていない場合、または設定が0の場合は停止したままとなり、アラームにはなりません。
2. 移動中に、速度設定を0に変更した場合は減速停止し、アラームにはなりません。
3. 移動中に、加減速度/速度データだけを変更する場合でも目標位置データの設定が必要です。
4. 移動中に、目標位置だけを変更する場合でも、加減速度・速度データの設定が必要です。
5.7 PROFIBUS-DP 関連パラメータ
フィールドバスノードアドレス(No.85NADR)
パラメータ No.85 にリモート局の局番号を指定します。
設定範囲 0 ~ 125(出荷時は 1 に設定されています。)
フィールドバス通信速度(No.86FBRS)通信速度はマスタ局に自動追従となりますので、設定の必要はありません。
パラメータ No.84設定値
モード名 占有バイト数 内容
0(出荷時設定)リモートⅠ /Oモード
2 PIO(24V 入出力 )による運転を
PROFIBUS-DP によって行います。
1 ポジション/
簡易直値モード8
目標位置を直接数値で指定するか、ポジ
ションデータの値で運転できます。その
他の運転に必要な値はポジションデータ
に設定します。
2 ハーフ直値モード 16目標位置以外に速度、加減速度、押付け
電流値を直接数値で指定して運転を行い
ます。
3 フル直値モード 32 位置制御に関する全ての値を直接数値で
指定して運転を行います。
4 リモート
Ⅰ /O モード 2 12 リモートⅠ /O モードの機能に現在位置と
現在速度読取り機能を追加したものです。
5 ポジション/
簡易直値モード 2 8 ポジション/簡易直値モードで力制御を
行う場合に設定します。
6 ハーフ直値モード 2 16 ハーフ直値モードで力制御を行う場合に設
定します。
7 リモート
Ⅰ /O モード 3 12 リモートⅠ /O モード 2 で力制御を行う
場合に設定します。
8 ハーフ直値モード 3 16ハーフ直値モードで、サーボゲイン切替や
制振制御パラメータ切替えを行う場合に設
定します。
(注 )SCON-CAL は、5 ~ 7 の動作モードには対応していません。
PROFIBUS-DP に関連するパラメータは No.84 ~ No.87、No.90、および No.159 です。
区分:C:外部インタフェースの関連

254
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
134
(例ii)設定値=“2”にした場合 をON、をOFFとします。
ACON、 PCON 入力 レジスタ
16進 データ
ON/OFF
PLC: 出力
16進 データ
ON/OFF
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
3 4 1 2 C D A B
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
1 2 3 4 A B C D
ACON、 PCON 出力 レジスタ
16進 データ
ON/OFF3 4 1 2 C D A B
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
PLC: 入力
16進 データ
ON/OFF
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
1 2 3 4 A B C D
ProfiBus-DP
133
ネットワークタイプ(No.87 NTYP)
パラメータNo.87にネットワークモジュールの種別を指定します。初期値から変更しないでください。
フィールドバス入出力フォーマット(No.90 FMIO)
PLC内のアドレスは、コントローラに設定した入出力アドレスと各動作モードの占有アドレス数で16点(1ワード)単位で割付けられます。
パラメータNo.90の設定を変更することによって、PLCの入出力アドレスとの交信域で2ワード内のデータをバイト単位で入替えて送受信することができます。
(例i)設定値=“3”にした場合 をON、をOFFとします。
パラメータNo.90内容
設定値
3(出荷時設定) 入替えは行いません。PLCにはそのまま送信されます。(例i参照)
2上位ワードの上位バイトと下位バイトを入替え、また下位ワードの上位バイトと下位バイトを入替えます。(例ii参照)
1 ワードレジスタの場合、上位ワードと下位ワードを入替えます。(例iii参照)
上位ワードの上位バイトと下位バイトを入替え、また下位ワードの上位バイトと下位バイトを入替えます。ワードレジスタの場合、さらに上位ワードと下位ワードを入替えます。
(例iv参照)
ACON、 PCON 入力 レジスタ
16進 データ
ON/OFF
PLC: 出力
16進 データ
ON/OFF
1 2 3 4 A B C D
1 2 3 4 A B C D
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
ACON、 PCON 出力 レジスタ
16進 データ
ON/OFF1 2 3 4 A B C D
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
PLC: 入力
16進 データ
ON/OFF1 2 3 4 A B C D
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
0
0
1
2
3
“0”
SCON入力
レジスタ
SCON出力
レジスタ
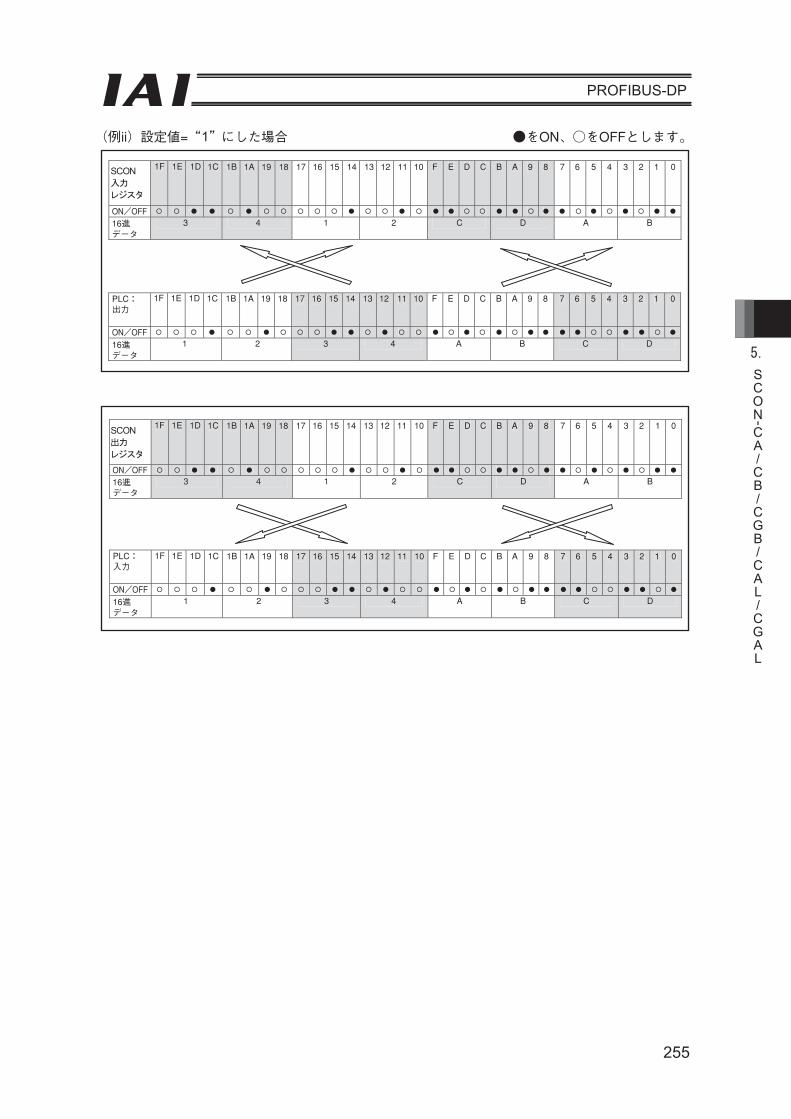
255
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
134
(例ii)設定値=“2”にした場合 をON、をOFFとします。
ACON、 PCON 入力 レジスタ
16進 データ
ON/OFF
PLC: 出力
16進 データ
ON/OFF
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
3 4 1 2 C D A B
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
1 2 3 4 A B C D
ACON、 PCON 出力 レジスタ
16進 データ
ON/OFF3 4 1 2 C D A B
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
PLC: 入力
16進 データ
ON/OFF
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
1 2 3 4 A B C D
SCON入力
レジスタ
SCON出力
レジスタ
“1”
ProfiBus-DP
133
ネットワークタイプ(No.87 NTYP)
パラメータNo.87にネットワークモジュールの種別を指定します。初期値から変更しないでください。
フィールドバス入出力フォーマット(No.90 FMIO)
PLC内のアドレスは、コントローラに設定した入出力アドレスと各動作モードの占有アドレス数で16点(1ワード)単位で割付けられます。
パラメータNo.90の設定を変更することによって、PLCの入出力アドレスとの交信域で2ワード内のデータをバイト単位で入替えて送受信することができます。
(例i)設定値=“3”にした場合 をON、をOFFとします。
パラメータNo.90内容
設定値
3(出荷時設定) 入替えは行いません。PLCにはそのまま送信されます。(例i参照)
2上位ワードの上位バイトと下位バイトを入替え、また下位ワードの上位バイトと下位バイトを入替えます。(例ii参照)
1 ワードレジスタの場合、上位ワードと下位ワードを入替えます。(例iii参照)
上位ワードの上位バイトと下位バイトを入替え、また下位ワードの上位バイトと下位バイトを入替えます。ワードレジスタの場合、さらに上位ワードと下位ワードを入替えます。
(例iv参照)
ACON、 PCON 入力 レジスタ
16進 データ
ON/OFF
PLC: 出力
16進 データ
ON/OFF
1 2 3 4 A B C D
1 2 3 4 A B C D
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
ACON、 PCON 出力 レジスタ
16進 データ
ON/OFF1 2 3 4 A B C D
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
PLC: 入力
16進 データ
ON/OFF1 2 3 4 A B C D
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
0
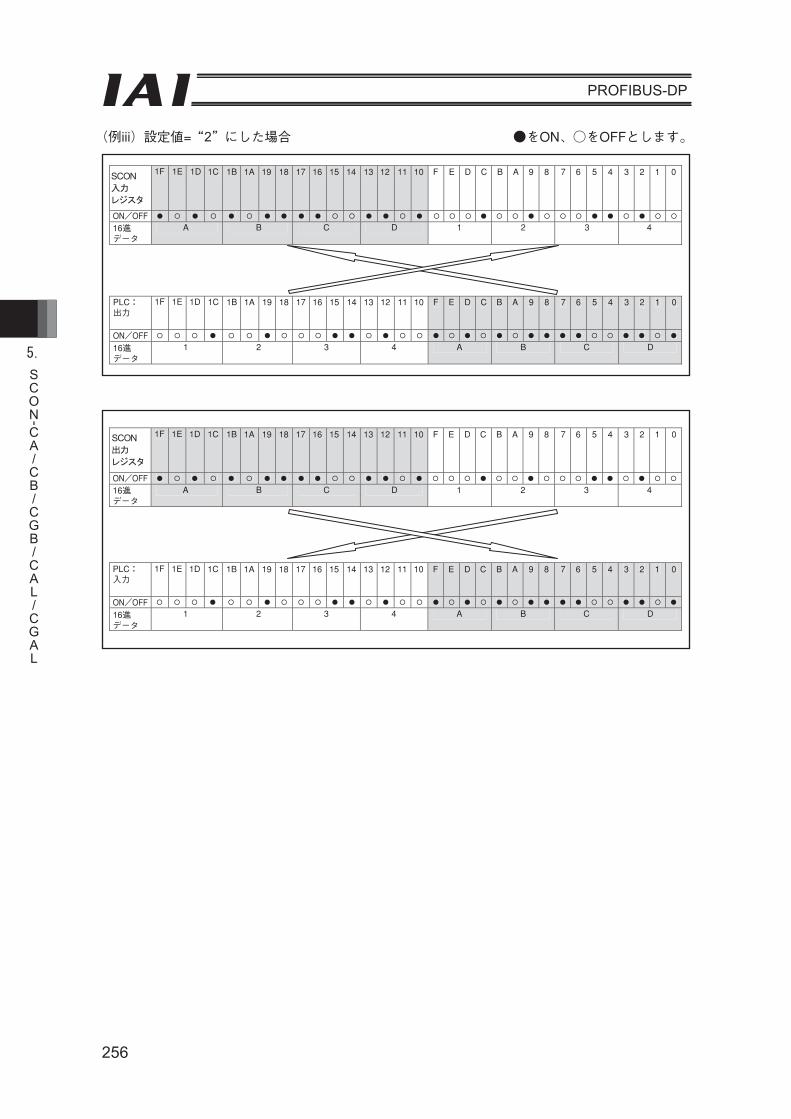
256
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
136
(例iv)設定値=“0”にした場合 をON、をOFFとします。
ACON、 PCON 入力 レジスタ
16進 データ
ON/OFF
PLC: 出力
16進 データ
ON/OFF
C D A B 3 4 1 2
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
1 2 3 4 A B C D
PLC: 入力
16進 データ
ON/OFF
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
1 2 3 4 A B C D
ACON、 PCON 出力 レジスタ
16進 データ
ON/OFF
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
C D A B 3 4 1 2
ProfiBus-DP
135
(例iii)設定値=“1”にした場合 をON、をOFFとします。
ACON、 PCON 入力 レジスタ
16進 データ
ON/OFF
PLC: 出力
16進 データ
ON/OFF1 2 3 4 A B C D
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
A B C D 1 2 3 4
PLC: 入力
16進 データ
ON/OFF1 2 3 4 A B C D
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
ACON、 PCON 出力 レジスタ
16進 データ
ON/OFF
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
A B C D 1 2 3 4
SCON入力
レジスタ
SCON出力
レジスタ
“2”

257
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
136
(例iv)設定値=“0”にした場合 をON、をOFFとします。
ACON、 PCON 入力 レジスタ
16進 データ
ON/OFF
PLC: 出力
16進 データ
ON/OFF
C D A B 3 4 1 2
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
1 2 3 4 A B C D
PLC: 入力
16進 データ
ON/OFF
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
1 2 3 4 A B C D
ACON、 PCON 出力 レジスタ
16進 データ
ON/OFF
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
C D A B 3 4 1 2
SCON入力
レジスタ
SCON出力
レジスタ
“3”
FB ハーフ直値モード速度単位 (No.159 FBVS)パラメータ No.159 にハーフ直値モード時の速度単位を選択します。
パラメータ No.159 設定値 速度単位
0(出荷時設定 ) 1.0mm/sec1 0.1mm/sec
ProfiBus-DP
135
(例iii)設定値=“1”にした場合 をON、をOFFとします。
ACON、 PCON 入力 レジスタ
16進 データ
ON/OFF
PLC: 出力
16進 データ
ON/OFF1 2 3 4 A B C D
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
A B C D 1 2 3 4
PLC: 入力
16進 データ
ON/OFF1 2 3 4 A B C D
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
ACON、 PCON 出力 レジスタ
16進 データ
ON/OFF
1F 1E 1D 1C 1B 1A 19 18 17 16 15 14 13 12 11 10 F E D C B A 9 8 7 6 5 4 3 2 1 0
A B C D 1 2 3 4

258
PROFIBUS-DP
5.
SCON-
CA/CB/CGB/CAL/CGAL
ProfiBus-DP
137
7.8 トラブルシューティング
7.8.1 ステータスLEDの表示ステータスLED(STATUS0/1)点灯パターンでProfiBus-DPモジュールの動作状態やネットワークの状態を示します。
トラブルが発生した場合にはステータスLEDの点灯パターンで現在の状態を確認します。
以下にステータスLEDの点灯パターンによる通信状態表示を示します。
7.8.2 アラーム内容と原因・対策アラーム発生時、リモートⅠ/Oモード、リモートⅠ/Oモード2では完了ポジション番号(PM1~PM8の4ビット)が簡易アラームコードを示します。
ポジション/簡易直値モードでは入力アドレス:n+2に簡易アラームコードが出力されます。
ハーフ直値モード、フル直値モードでは入力アドレス:n+6にアラームコードが出力されます。
①PLCのモニタ機能等でアラームコードを確認するか、RC用パソコン対応ソフトまたはティーチングボックスを接続してステータスモニタで確認してください。
②読み取ったアラームコードからコントローラの取扱説明書のアラーム内容一覧を検索します。
③該当のアラームコードの記述に従い対処してください。
次のアラームコードについては下表に従い対処してください。
(※1) ID→簡易アラームコード
(※2) RES→アラームリセット可/不可 :アラームリセット可/×:アラームリセット不可
コード エラー名称ID RES
原因/対策(※1)(※2)
0F2 フィールドバス 05 × 原因:フィールドバスモジュールの異常が検出されたモジュール異常 対策:パラメータを確認してください。
フィールドバスモジュール原因:モジュールが検出できなかった場合
0F3未検出エラー
04 × 対策:電源を再投入してください。解消されない場合は弊社までご連絡ください。
LED 色 表示状態 表示内容(表示の意味)
点灯 フィールドバスからオンライン状態で正常に通信中です。緑
STATUS1 点滅 フィールドバスからオフライン状態になっています。
橙 点滅 通信エラーが発生しています。
点灯 正常動作中です。緑
STATUS0 点滅 動作準備を行っています。
橙 点灯 動作準備中に通信系ハードウェア異常を検出しました。
:点灯、:点滅
LED 色 表示状態 表示内容(表示の意味)
•STATUS1•NS
緑 フィールドバスからオンライン状態で正常に通信中です。
フィールドバスからオフライン状態になっています。
橙 通信エラーが発生しています。
•STATUS0•MS
緑 正常動作中です。
動作準備を行っています。
橙 動作準備中に通信系ハードウェア異常を検出しました。
ProfiBus-DP
137
7.8 トラブルシューティング
7.8.1 ステータスLEDの表示ステータスLED(STATUS0/1)点灯パターンでProfiBus-DPモジュールの動作状態やネットワークの状態を示します。
トラブルが発生した場合にはステータスLEDの点灯パターンで現在の状態を確認します。
以下にステータスLEDの点灯パターンによる通信状態表示を示します。
7.8.2 アラーム内容と原因・対策アラーム発生時、リモートⅠ/Oモード、リモートⅠ/Oモード2では完了ポジション番号(PM1~PM8の4ビット)が簡易アラームコードを示します。
ポジション/簡易直値モードでは入力アドレス:n+2に簡易アラームコードが出力されます。
ハーフ直値モード、フル直値モードでは入力アドレス:n+6にアラームコードが出力されます。
①PLCのモニタ機能等でアラームコードを確認するか、RC用パソコン対応ソフトまたはティーチングボックスを接続してステータスモニタで確認してください。
②読み取ったアラームコードからコントローラの取扱説明書のアラーム内容一覧を検索します。
③該当のアラームコードの記述に従い対処してください。
次のアラームコードについては下表に従い対処してください。
(※1) ID→簡易アラームコード
(※2) RES→アラームリセット可/不可 :アラームリセット可/×:アラームリセット不可
コード エラー名称ID RES
原因/対策(※1)(※2)
0F2 フィールドバス 05 × 原因:フィールドバスモジュールの異常が検出されたモジュール異常 対策:パラメータを確認してください。
フィールドバスモジュール原因:モジュールが検出できなかった場合
0F3未検出エラー
04 × 対策:電源を再投入してください。解消されない場合は弊社までご連絡ください。
LED 色 表示状態 表示内容(表示の意味)
点灯 フィールドバスからオンライン状態で正常に通信中です。緑
STATUS1 点滅 フィールドバスからオフライン状態になっています。
橙 点滅 通信エラーが発生しています。
点灯 正常動作中です。緑
STATUS0 点滅 動作準備を行っています。
橙 点灯 動作準備中に通信系ハードウェア異常を検出しました。
5.8 トラブルシューティング
5.8.1 ステータス LED の表示
ステータス LED(STATUS0 / 1)点灯パターンで PROFIBUS-DP モジュールの動作状態やネット
ワークの状態を示します。
トラブルが発生した場合にはステータス LED の点灯パターンで現在の状態を確認します。
以下にステータス LED の点灯パターンによる通信状態表示を示します。
アラーム発生時、リモートⅠ /O モード 1 ~ 3 では完了ポジション No.(PM1 ~ PM8 の 4 ビット)
が簡易アラームコードを示します。
ポジション/簡易直値モード 1, 2 では入力アドレス:n + 2 に簡易アラームコードが出力されます。
ハーフ直値モード 1 ~ 3、フル直値モードでは入力アドレス:n + 6 にアラームコードが出力されます。
① PLC のモニタ機能等でアラームコードを確認するか、RC 用パソコン対応ソフトなどのティーチ
ングツールを接続してステータスモニタで確認してください。
② 読み取ったアラームコードからコントローラの取扱説明書のアラーム内容一覧を検索します。
③ 該当のアラームコードの記述に従い対処してください。次のアラームコードについては下表に従
い対処してください。
5.8.2 アラーム内容と原因・対策

259
PROFIBUS-DP
6.
サーボプレス仕様
SCON-
CB/CGB
ProfiBus-DP
137
7.8 トラブルシューティング
7.8.1 ステータスLEDの表示ステータスLED(STATUS0/1)点灯パターンでProfiBus-DPモジュールの動作状態やネットワークの状態を示します。
トラブルが発生した場合にはステータスLEDの点灯パターンで現在の状態を確認します。
以下にステータスLEDの点灯パターンによる通信状態表示を示します。
7.8.2 アラーム内容と原因・対策アラーム発生時、リモートⅠ/Oモード、リモートⅠ/Oモード2では完了ポジション番号(PM1~PM8の4ビット)が簡易アラームコードを示します。
ポジション/簡易直値モードでは入力アドレス:n+2に簡易アラームコードが出力されます。
ハーフ直値モード、フル直値モードでは入力アドレス:n+6にアラームコードが出力されます。
①PLCのモニタ機能等でアラームコードを確認するか、RC用パソコン対応ソフトまたはティーチングボックスを接続してステータスモニタで確認してください。
②読み取ったアラームコードからコントローラの取扱説明書のアラーム内容一覧を検索します。
③該当のアラームコードの記述に従い対処してください。
次のアラームコードについては下表に従い対処してください。
(※1) ID→簡易アラームコード
(※2) RES→アラームリセット可/不可 :アラームリセット可/×:アラームリセット不可
コード エラー名称ID RES
原因/対策(※1)(※2)
0F2 フィールドバス 05 × 原因:フィールドバスモジュールの異常が検出されたモジュール異常 対策:パラメータを確認してください。
フィールドバスモジュール原因:モジュールが検出できなかった場合
0F3未検出エラー
04 × 対策:電源を再投入してください。解消されない場合は弊社までご連絡ください。
LED 色 表示状態 表示内容(表示の意味)
点灯 フィールドバスからオンライン状態で正常に通信中です。緑
STATUS1 点滅 フィールドバスからオフライン状態になっています。
橙 点滅 通信エラーが発生しています。
点灯 正常動作中です。緑
STATUS0 点滅 動作準備を行っています。
橙 点灯 動作準備中に通信系ハードウェア異常を検出しました。
ProfiBus-DP
137
7.8 トラブルシューティング
7.8.1 ステータスLEDの表示ステータスLED(STATUS0/1)点灯パターンでProfiBus-DPモジュールの動作状態やネットワークの状態を示します。
トラブルが発生した場合にはステータスLEDの点灯パターンで現在の状態を確認します。
以下にステータスLEDの点灯パターンによる通信状態表示を示します。
7.8.2 アラーム内容と原因・対策アラーム発生時、リモートⅠ/Oモード、リモートⅠ/Oモード2では完了ポジション番号(PM1~PM8の4ビット)が簡易アラームコードを示します。
ポジション/簡易直値モードでは入力アドレス:n+2に簡易アラームコードが出力されます。
ハーフ直値モード、フル直値モードでは入力アドレス:n+6にアラームコードが出力されます。
①PLCのモニタ機能等でアラームコードを確認するか、RC用パソコン対応ソフトまたはティーチングボックスを接続してステータスモニタで確認してください。
②読み取ったアラームコードからコントローラの取扱説明書のアラーム内容一覧を検索します。
③該当のアラームコードの記述に従い対処してください。
次のアラームコードについては下表に従い対処してください。
(※1) ID→簡易アラームコード
(※2) RES→アラームリセット可/不可 :アラームリセット可/×:アラームリセット不可
コード エラー名称ID RES
原因/対策(※1)(※2)
0F2 フィールドバス 05 × 原因:フィールドバスモジュールの異常が検出されたモジュール異常 対策:パラメータを確認してください。
フィールドバスモジュール原因:モジュールが検出できなかった場合
0F3未検出エラー
04 × 対策:電源を再投入してください。解消されない場合は弊社までご連絡ください。
LED 色 表示状態 表示内容(表示の意味)
点灯 フィールドバスからオンライン状態で正常に通信中です。緑
STATUS1 点滅 フィールドバスからオフライン状態になっています。
橙 点滅 通信エラーが発生しています。
点灯 正常動作中です。緑
STATUS0 点滅 動作準備を行っています。
橙 点灯 動作準備中に通信系ハードウェア異常を検出しました。
6. サーボプレス仕様 SCON-CB/CGB注意 CB と CGB タイプは、同機能のため本取説は CB タイプに統一表記しています。
6.1 動作モードと機能
PROFIBUS-DP 対応の SCON-CB タイプは次の動作モードから選択して運転することができます。
動作モードと主要機能
主要機能 リモート I/O モード フル機能モード
占有バイト数 2 32位置データ指定運転 ×
速度・加減速度直接指定 ×
現在位置読取り ×
現在速度読取り ×
プログラム No. 指定運転
判定結果読取り
現在荷重データ読取り ×
過負荷レベルモニタ ×
サーボゲイン切替 ( ※ 1) ( ※ 1)
(※ 1)サーボゲインは、1 つのプレスプログラムに 1 つのサーボゲインを登録できます。
①リモート I/O モード:PIO(24V 入出力 )による運転を PROFIBUS-DP 通信によって行う方式です。
占有バイト数:2 バイト (1 ワード )
PLC PLC
PROFIBUS-DP 未対応の
SCON-CBPROFIBUS-DP 対応の
SCON-CB
通信ケーブルフラットケーブル
PROFIBUS-DP で接続の場合PIO で接続の場合
②フル機能モード:プレスプログラムの起動、判定結果読取り等のサーボプレス用機能に加え、直
接数値による移動、現在荷重データ読取りなどの全機能をサポートする方式で
す。
占有バイト数:32 バイト (16 ワード )
PLC
PROFIBUS-DP 対応の
SCON-CB
アクチュエータ
指令プログラムNo.:1
現在荷重データ:10.0N 現在速度:10mm/s 判定結果:OK

260
PROFIBUS-DP
6.
サーボプレス仕様
SCON-
CB/CGB
6.2 型式
PROFIBUS-DP 対応のサーボプレス仕様 SCON-CB の型式は各々以下のように表されています。
SCON-CB- F-PR-
~ 750W モータ用 3000 ~ 3300W モータ用
(下図は 400W 以下タイプ )

261
PROFIBUS-DP
6.
サーボプレス仕様
SCON-
CB/CGB
6.3 PROFIBUS-DP( スレーブ局 )の設定
(1) 各部の名称
PROFIBUS-DP に関連する各部の名称を示します。
SCON-CB
STATUS1
0 ステータス LED
PROFIBUS-DP通信コネクタ
(2) PROFIBUS-DP 通信コネクタインタフェース仕様
PROFIBUS-DP standard EN50170 推奨品である 9 ピン Female D-sub コネクタです。
コネクタ
Pin No. Description Contents3 B-Line RxD・TxD(プラス側通信ライン )
4 RTS 送信要求
5 GND シグナルグランド (絶縁 )
6 +5V +5V 出力 (絶縁 )
8 A-Line /RxD・/TxD(マイナス側通信ライン )
Housing Shield ケーブルシールド (筐体と接続 )
(注 1) 1、2、7、9 ピンは未使用 (配線は不要です )
(注 2) ケーブル側コネクタは付属しません。

262
PROFIBUS-DP
6.
サーボプレス仕様
SCON-
CB/CGB
(3) バス終端処理
ネットワークの終端に接続した場合は、終端抵抗を下図のように PROFIBUS-DP 通信コネクタに
接続するか、または終端抵抗付きコネクタを使用してください。
終端抵抗付きコネクタ例:SUBCON-PLUS-PROFIB/AX/SC(フェニックスコンタクト )
終端抵抗の接続
ボード側メスコネクタ
9
6
5
1
9
86
5
31
GNDA-Line
B-Line+5V
390Ω,1/4W220Ω,1/4W390Ω,1/4W
ネットワーク配線
ネットワーク側オスコネクタ
(反挿入側より )
(4) 動作モードの選択
パラメータ No.84“FMOD:フィールドバス動作モード”を設定してください。
[6.7 PROFIBUS-DP 関連パラメータ参照 ]
設定値 動作モード 占有バイト数
0(出荷時設定 ) リモート I/O モード 21 フル機能モード 32
※これ以外の値を入力すると入力値過大エラーとなります。
(5) ノードアドレスの設定
パラメータ No.85“NADR:フィールドバスノードアドレス”を設定してください。
[6.7 PROFIBUS-DP 関連パラメータ参照 ]
設定可能範囲:0 ~ 125(出荷時は、1 に設定されています。)
(注 1) ノードアドレスの重複設定にご注意ください。
(注 2) PROFIBUS-DP のノードアドレスの設定は、マスタ局を必ず 0 として設定しますのでスレー
ブ局は 1 ~ 125 まで設定することができます。

263
PROFIBUS-DP
6.
サーボプレス仕様
SCON-
CB/CGB
(6) ステータス LED の表示
コントローラ前面に設けられた 2 つの LED によってボードの動作状態やネットワークの状態を知
ることができます。
:点灯、×:消灯、:点滅
LED 色 表示状態 表示内容 (表示の意味 )
STATUS1緑
フィールドバスからオンライン状態で正常に通信中です。
フィールドバスからオフライン状態になっています。
橙 通信エラーが発生しています。
- × オフライン /電源供給無し
STATUS0緑
正常動作中です
動作準備を行っています。
橙 動作準備中に通信系ハードウェア異常を検出しました。
- × 未初期化 /電源無し
(注 1) パラメータの設定後は、コントローラの電源再投入を行い、コントローラ前面のモード
切替 SW を AUTO 側に戻してください。
MANU 側のままの場合、PLC による運転はできません。
(注 2) 通信速度はマスタ局に合せて自動設定されますので、設定の必要はありません。

264
PROFIBUS-DP
6.
サーボプレス仕様
SCON-
CB/CGB
6.4 マスタ局との交信
6.4.1 各動作モードと PLC 入出力エリアの対応
各動作モードのチャネル割付を次に示します。
PLC 出力 →SCON-CB の入力 (※ n は各軸のノードアドレスです。)
PLC 出力エリア
(ワード )
SCON-CB の DI および入力データレジスタリモート I/O モード フル機能モード
占有バイト数:2 占有バイト数:32n ポート番号 0 ~ 15
目標位置n + 1n + 2
位置決め幅n + 3n + 4
速度指定n + 5n + 6
占有領域n + 7n + 8n + 9n + 10 加速度
n + 11 減速度
n + 12 占有領域
n + 13 負荷電流閾値
n + 14 制御信号 1n + 15 制御信号 2
SCON-CB 出力 →PLC 入力側 (※ n は各軸のバイトアドレスです。)
PLC 入力エリア
(ワード )
SCON-CB 側 DO および出力データレジスタリモート I/O モード フル機能モード
占有バイト数:2 占有バイト数:32n ポート番号 0 ~ 15
現在位置n + 1n + 2
フィードバック電流n + 3n + 4
現在速度n + 5n + 6
現在荷重データn + 7n + 8
占有領域n + 9n + 10 プログラムアラームコード
n + 11 アラームコード
n + 12 過負荷レベルモニタ
n + 13 実行中プログラム
n + 14 状態信号 1n + 15 状態信号 2
(注 ) 占有領域 は動作モードの設定により占有される領域です。
他の目的に使用できません。またノードアドレスの重複使用にご注意ください。

265
PROFIBUS-DP
6.
サーボプレス仕様
SCON-
CB/CGB
6.4.2 リモート I/O モード (占有バイト数:2)
PIO(実際の24V入出力)の代わりにフィールドバス通信で各 I/O信号をON/OFFして運転するモー
ドです。
RC 用パソコン対応ソフトでプレスプログラムを作成してください。
本モードで制御可能なロボシリンダの有効な主要機能は次の表の通りです。
動作モードと主要機能
主要機能 :直接制御× :無効
位置データ指定運転 ×
速度・加減速度直接指定 ×
現在位置読取り ×
現在速度読取り ×
プログラム No. 指定運転
判定結果読取り
現在荷重データ読取り ×
過負荷レベルモニタ ×
サーボゲイン切替 (※ 1)
(※ 1)サーボゲインは、1 つのプレスプログラムに 1 つのサーボゲインを登録できます。
(1) PLC アドレス構成 (※ n は各軸のノードアドレスです。)
パラメータNo.84
SCON-CB 側入力レジスタ
PLC 側出力アドレス
SCON-CB 側出力レジスタ
PLC 側入力アドレス
0 0 ~ 15 n 0 ~ 15 n

266
PROFIBUS-DP
6.
サーボプレス仕様
SCON-
CB/CGB
(2) 軸毎の入出力信号割付
各軸の入出力信号は、入出力アドレスの各 1 ワード (1 ワード= 2 バイト )で構成されます。
各アドレスはビット単位の ON / OFF 信号で制御します。
PLC 出力
アドレス (※ n は各軸のノードアドレスです。)
n+0、n+1
1 ワード=2 バイト=16 ビット
n+0
1 ワード=2バイト=16 ビット
PLC 入力
アドレス (※ n は各軸のノードアドレスです。)
n+0
1 ワード=2バイト=16 ビット
(3) 入出力信号割付 [詳細はコントローラ本体の取扱説明書参照 ]
区分ポート
番号記号 信号名称 区分
ポート
番号記号 信号名称
PLC 出力→
SCON-CB入力
0 PC1
指令プログラム No.
SCON-CB出力
→ PLC 入力
0 PCMP プログラム正常終了
1 PC2 1 PRUN プログラム実行中
2 PC4 2 PORG プログラム原点位置
3 PC8 3 APRC アプローチ動作中
4 PC16 4 SERC 探り動作中
5 PC32 5 PRSS 加圧動作中
6 PSTR プログラムスタート 6 PSTP 加圧停止中
7 PHOM プログラム原点移動 7 MPHM プログラム原点移動中
8 ENMV 軸移動許可 8 JDOK 判定 OK
9 FPST プログラム強制終了 9 JDNG 判定 NG
10 CLBRロードセルキャリブ
レーション指令10 CEND
ロードセルキャリブ
レーション完了
11 BKRL ブレーキ強制解除 11 RMDS 運転モードステータス
12 RMOD 運転モード切替 12 HEND 原点復帰完了
13 HOME 原点復帰 13 SV サーボ ON ステータス
14 RES リセット 14 * ALM アラーム
15 SON サーボ ON 指令 15 * ALML 軽故障アラーム
*は正常時 ON 信号です。

267
PROFIBUS-DP
6.
サーボプレス仕様
SCON-
CB/CGB
6.4.3 フル機能モード (占有バイト数:32)
サーボプレス機能の全機能をフィールドバス通信で行うモード運転方式です。入出力エリアに各値
を設定してください。
本モードで制御可能なロボシリンダの有効な主要機能は次の表の通りです。
動作モードと主要機能
主要機能 : 直接制御× : 無効
位置データ指定運転
速度・加減速度直接指定
現在位置読取り
現在速度読取り
プログラム No. 指定運転
判定結果読取り
現在荷重データ読取り
過負荷レベルモニタ
サーボゲイン切替 ( ※ 1)
(※ 1)サーボゲインは、1 つのプレスプログラムに 1 つのサーボゲインを登録できます。
(1) PLC アドレス構成 (※ n は各軸のノードアドレスです。)
パラメータ
No.84SCON-CB 側
入力側レジスタ
PLC 側
出力アドレス
SCON-CB 側
出力側レジスタ
PLC 側
入力アドレス
1
目標位置n + 0
現在位置n + 0
n + 1 n + 1
位置決め幅n + 2
フィードバック電流n + 2
n + 3 n + 3
速度n + 4
現在速度n + 4
n + 5 n + 5
占有領域n + 6 現在荷重
データ
n + 6n + 7 n + 7
占有領域n + 8
占有領域n + 8
n + 9 n + 9
加速度 n + 10プログラム
アラームコードn + 10
減速度 n + 11 アラームコード n + 11占有領域 n + 12 過負荷レベルモニタ n + 12
指令プログラム No. n + 13 実行中プログラム No. n + 13制御信号 1 n + 14 状態信号 1 n + 14制御信号 2 n + 15 状態信号 2 n + 15
(注 ) 占有領域 は他の目的に使用できません。 またノードアドレスの重複使用にご注意ください。

268
PROFIBUS-DP
6.
サーボプレス仕様
SCON-
CB/CGB
(2) 軸毎の入出力信号割付
各軸の入出力信号は、入出力エリアの各 16 ワード (16 ワード =32 バイト )で構成されます。
制御信号 1、2 および状態信号 1、2 はビット単位の ON / OFF 信号です。
目標位置および現在位置は 2 ワード (32 ビット ) のバイナリデータで、PLC では- 999999 ~
+ 999999( 単位:0.001mm) の数値が扱えますが、位置データは当該アクチュエータのソフト
ストロークの範囲内 (0 ~有効ストローク長 )で設定してください。
位置決め幅は2ワード(32ビット)のバイナリデータで、PLCでは1~+999999(単位:0.001mm)
の数値が扱えます。
速度は 2 ワード (32 ビット ) のバイナリデータで、PLC では 0 ~+ 999999( 単位:0.01mm/
sec)の数値が扱えますが、当該アクチュエータの最大速度を超えない値に設定してください。
加速度および減速度は1ワード(16ビット)のバイナリデータで、PLCでは1~999(単位:0.01G)
の数値が扱えますが、当該アクチュエータの最大加速度および最大減速度を超えない値に設定し
てください。
指令プログラム No. は 1 ワード (16 ビット )のバイナリデータで、PLC では 0 ~ 63 の数値が扱
えます。
フィードバック電流は 2 ワード (32 ビット )のバイナリデータ (単位:0.1%)です。
現在速度は 2 ワード (32 ビット )のバイナリデータ (単位:0.01mm/sec) です。
アラームコード、プログラムアラームコードは 1 ワード (16 ビット )のバイナリデータです。
現在荷重データは 2 ワード (32 ビット )のバイナリデータ (単位:0.01N)です。
過負荷レベルモニタは 1 ワード (16 ビット )のバイナリデータ (単位:%)です。
実行中プログラム No. は 1 ワード (16 ビット )のバイナリデータです。
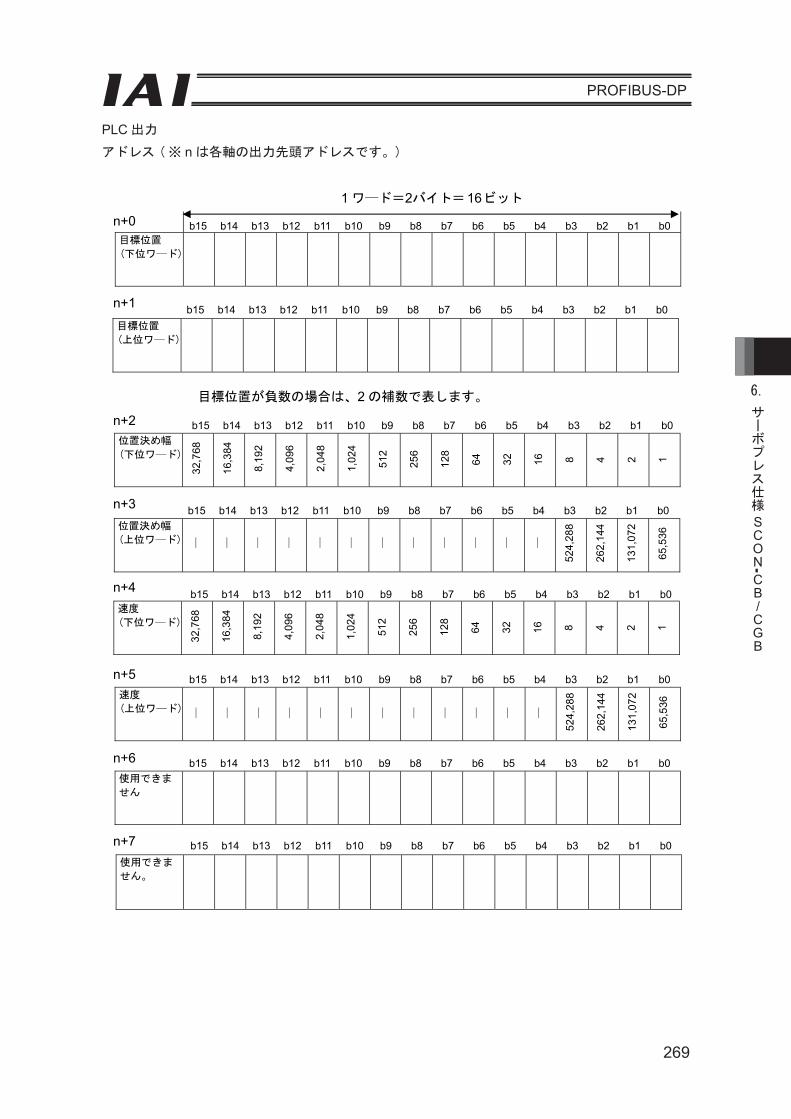
269
PROFIBUS-DP
6.
サーボプレス仕様
SCON-
CB/CGB
PLC 出力 アドレス (※ n は各軸の出力先頭アドレスです。)
目標位置が負数の場合は、2 の補数で表します。
n+0
1 ワド=2バイト=16ビット
n+1
n+2
n+3
n+4
n+5
n+6
n+7
位置決め幅 (下位ワド)
32,7
68
16,3
84
8,19
2
4,09
6
2,04
8
1,02
4
512
256
128
64
32
16
8 4 2 1
目標位置 (下位ワド)
目標位置 (上位ワド)
位置決め幅 (上位ワド)
524,
288
262,
144
131,
072
65,5
36
速度 (下位ワド)
32,7
68
16,3
84
8,19
2
4,09
6
2,04
8
1,02
4
512
256
128
64
32
16
8 4 2 1
速度 (上位ワド)
524,
288
262,
144
131,
072
65,5
36
使用できま
せん
使用できま
せん。
b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0

270
PROFIBUS-DP
6.
サーボプレス仕様
SCON-
CB/CGB
アドレス (※ n は各軸の出力先頭アドレスです。)
n+8
1 ワード= =16 ビット
n+9
n+10
n+11
n+12
n+13
n+14
n+15
加速度
1,02
4
512
256
128
64
32
16
8 4 2 1
使用できま
せん
使用できま
せん
減速度
1,02
4
512
256
128
64
32
16
8 4 2 1
使用できま
せん
指令プログラ
ムNo.
PC32
PC16
PC8
PC4
PC2
PC1
制御信号 1
制御信号 2
DST
R
JOG
JOG+
JVEL
JISL
SSTP
FPST
ENM
V
PHO
M
PSTR
BKR
L
RM
OD
CLB
R
RES
HO
ME
SON
b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
2バイト
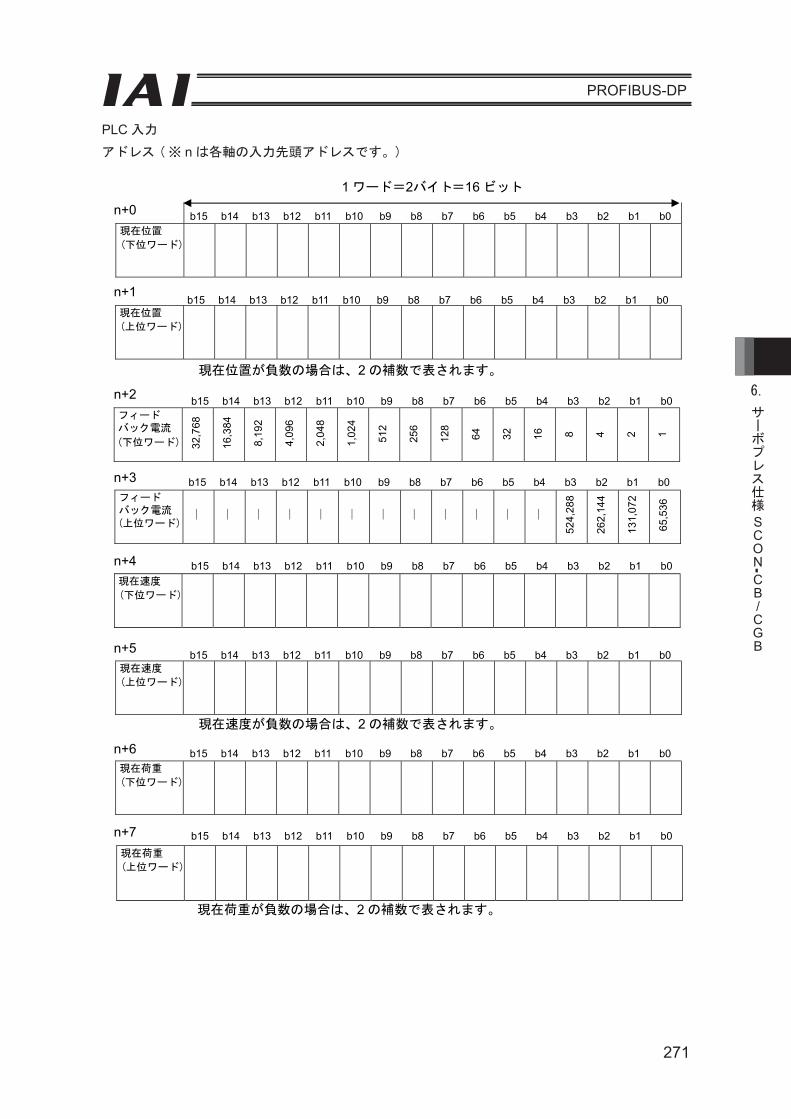
271
PROFIBUS-DP
6.
サーボプレス仕様
SCON-
CB/CGB
PLC 入力
アドレス (※ n は各軸の入力先頭アドレスです。)
現在位置が負数の場合は、2 の補数で表されます。
現在速度が負数の場合は、2 の補数で表されます。
現在荷重が負数の場合は、2 の補数で表されます。
n+0
1 ワード=2バイト=16 ビット
n+1
n+2
n+3
n+4
n+5
n+6
n+7
フィードバック電流 (下位ワード) 32
,768
16,3
84
8,19
2
4,09
6
2,04
8
1,02
4
512
256
128
64
32
16
8 4 2 1
現在位置 (下位ワード)
現在位置 (上位ワード)
フィードバック電流 (上位ワード)
524,
288
262,
144
131,
072
65,5
36
現在速度 (下位ワード)
現在速度 (上位ワード)
現在荷重 (下位ワード)
現在荷重 (上位ワード)
b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0

272
PROFIBUS-DP
6.
サーボプレス仕様
SCON-
CB/CGB
アドレス (※ n は各軸の入力先頭アドレスです。)
n+8
1 ワード=2バイト=16 ビット
n+9
n+10
n+11
n+12
n+13
n+14
n+15
プログラム
アラームコード
使用できま
せん
使用できま
せん
アラーム
コード
過負荷レベル
モニタ
PC64
PC32
PC16
PC8
PC4
PC2
PC1
実行中プロ
グラムNo.
PC32
PC16
PC8
PC4
PC2
PC1
状態信号 1
JDN
G
JDO
K
LJN
G
LJO
K
PJN
G
PJO
K
WAI
T
RTR
N
DC
MP
PSTP
PRSS
SER
C
APR
C
状態信号 2
EMG
S
ALM
ALM
L
PALM
MPH
M
POR
G
PRU
N
PCM
P
ZON
E2
ZON
E1
PEN
D
RM
DS
CEN
D
HEN
D
SV
b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
b15 b14 b13 b12 b11 b10 b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
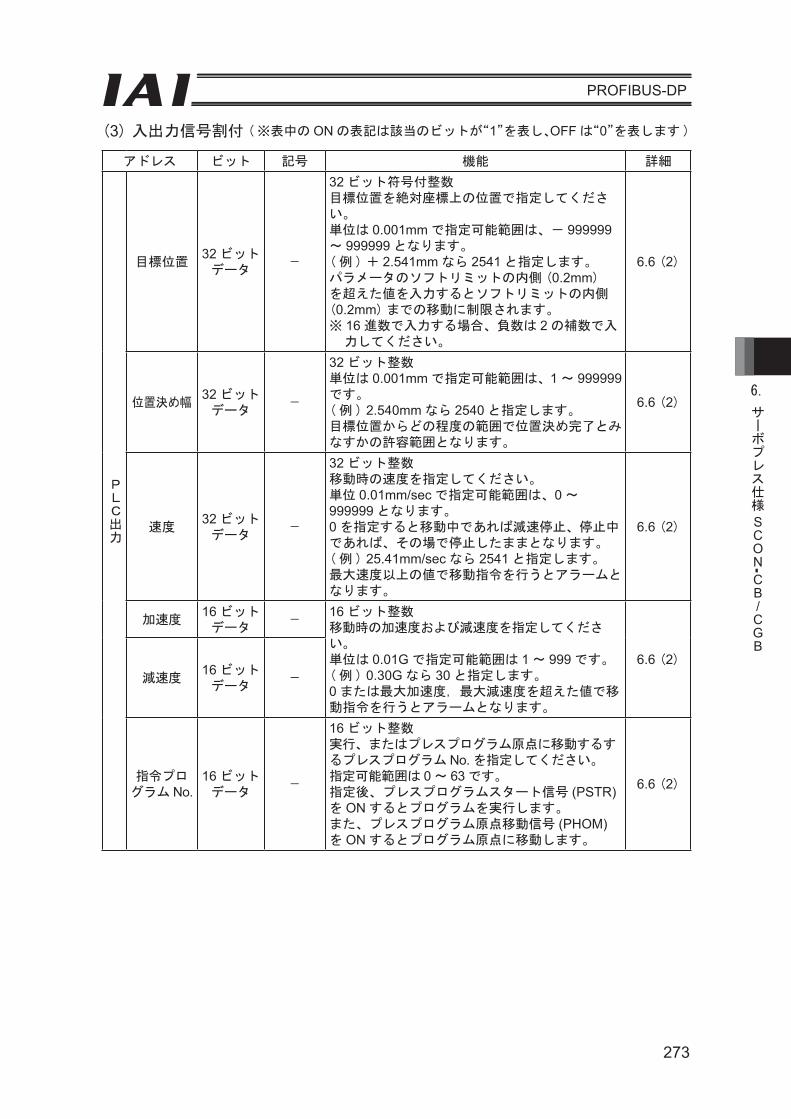
273
PROFIBUS-DP
6.
サーボプレス仕様
SCON-
CB/CGB
(3) 入出力信号割付 (※表中の ON の表記は該当のビットが“1”を表し、OFF は“0”を表します )
アドレス ビット 記号 機能 詳細
PLC出力
目標位置32 ビットデータ
ー
32 ビット符号付整数目標位置を絶対座標上の位置で指定してください。単位は 0.001mm で指定可能範囲は、- 999999~ 999999 となります。(例 ) + 2.541mm なら 2541 と指定します。パラメータのソフトリミットの内側 (0.2mm)を超えた値を入力するとソフトリミットの内側(0.2mm)までの移動に制限されます。※ 16 進数で入力する場合、負数は 2 の補数で入
力してください。
6.6 (2)
位置決め幅32 ビットデータ
ー
32 ビット整数単位は 0.001mm で指定可能範囲は、1 ~ 999999です。(例 ) 2.540mm なら 2540 と指定します。目標位置からどの程度の範囲で位置決め完了とみなすかの許容範囲となります。
6.6 (2)
速度32 ビットデータ
ー
32 ビット整数移動時の速度を指定してください。単位 0.01mm/sec で指定可能範囲は、0 ~999999 となります。0 を指定すると移動中であれば減速停止、停止中であれば、その場で停止したままとなります。(例 ) 25.41mm/sec なら 2541 と指定します。最大速度以上の値で移動指令を行うとアラームとなります。
6.6 (2)
加速度16 ビットデータ
ー16 ビット整数移動時の加速度および減速度を指定してください。単位は 0.01G で指定可能範囲は 1 ~ 999 です。(例 ) 0.30G なら 30 と指定します。0 または最大加速度,最大減速度を超えた値で移動指令を行うとアラームとなります。
6.6 (2)減速度
16 ビットデータ
ー
指令プログラム No.
16 ビットデータ
ー
16 ビット整数実行、またはプレスプログラム原点に移動するするプレスプログラム No. を指定してください。指定可能範囲は 0 ~ 63 です。指定後、プレスプログラムスタート信号 (PSTR)を ON するとプログラムを実行します。また、プレスプログラム原点移動信号 (PHOM)を ON するとプログラム原点に移動します。
6.6 (2)

274
PROFIBUS-DP
6.
サーボプレス仕様
SCON-
CB/CGB
(※表中の ON の表記は該当のビットが“1”を表し、OFF は“0”を表します )
アドレス ビット 記号 機能 詳細
PLC出力
制御信号 1
b15
― 使用できません ―
b14b13b12b11b10b9b8b7b6b5b4b3b2b1b0
制御信号 2
b15 DSTR 位置決めスタート:ON で移動指令 6.4.4(15)b14 JOG- -ジョグ:ON で原点方向移動 6.4.4(14)b13 JOG+ +ジョグ:ON で反原点方向移動 6.4.4(14)
b12 JVEL
ジョグ速度/インチング距離切替え:OFF でパラメータ No.26“ジョグ速度”、パラメータ No.48“インチング距離”ON でパラメータ No.47“ジョグ速度 2”、パラメータ No.49“インチング距離 2”の設定値を使用する。
6.4.4(13)
b11 JISL ジョグ/インチング切替え:OFF でジョグ動作、ON でインチング動作
6.4.4(12)
b10 SSTP探り停止:探りステージ完了時、本ビットが ON していると探りステージ完了位置で停止
6.4.4(11)
b9 FPST プログラム強制停止:ON で実行中のプレスプログラムが停止
6.4.4(10)
b8 ENMV 軸動作許可:ON で軸動作許可 6.4.4(9)b7 PHOM プログラム原点移動 6.4.4(8)b6 PSTR プログラムスタート 6.4.4(7)b5 BKRL ブレーキ強制解除:ON でブレーキ解除 6.4.4(6)
b4 RMOD 運転モード:OFF で AUTO モード、ON で MANU モード
6.4.4(5)
b3 CLBR ロードセルキャリブレーション指令:ON でキャリブレーション実行
6.4.4(4)
b2 RES リセット:ON でリセット実行 6.4.4(3)b1 HOME 原点復帰:ON で原点復帰指令 6.4.4(2)b0 SON サーボ ON 指令:ON でサーボ ON 6.4.4(1)
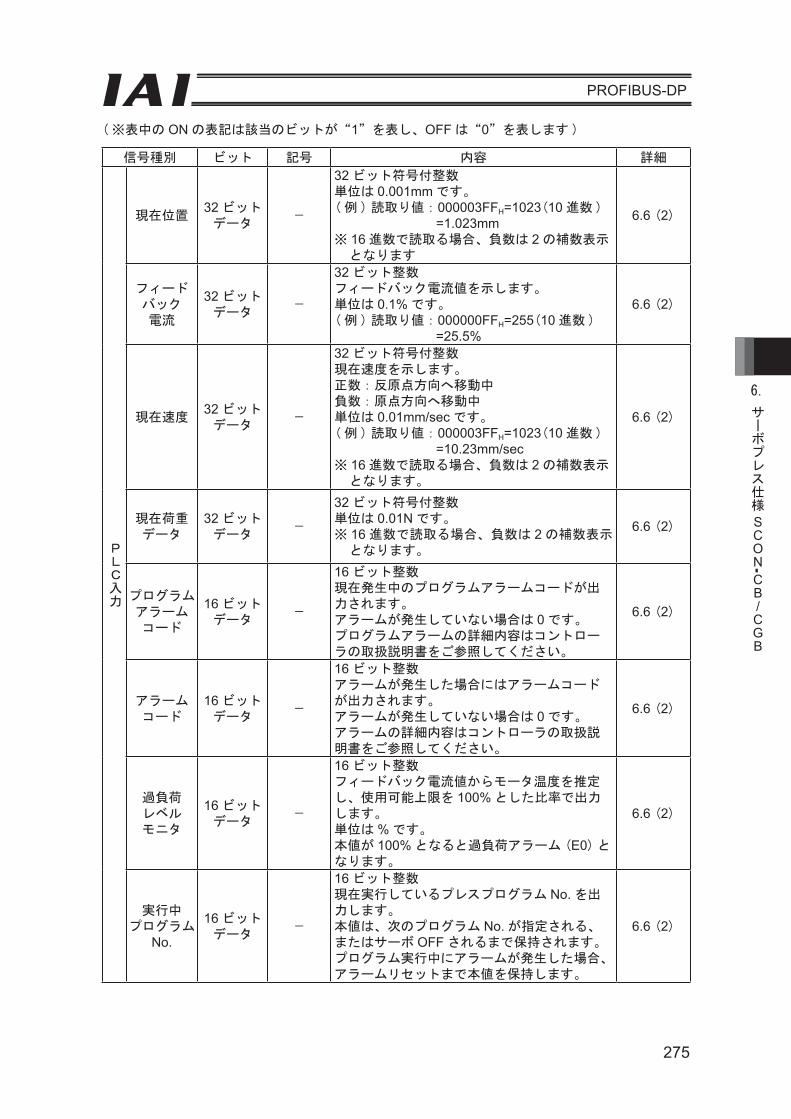
275
PROFIBUS-DP
6.
サーボプレス仕様
SCON-
CB/CGB
(※表中の ON の表記は該当のビットが“1”を表し、OFF は“0”を表します )
信号種別 ビット 記号 内容 詳細
PLC入力
現在位置32 ビットデータ
ー
32 ビット符号付整数単位は 0.001mm です。(例 ) 読取り値:000003FFH=1023(10 進数 )
=1.023mm※ 16 進数で読取る場合、負数は 2 の補数表示
となります
6.6 (2)
フィードバック電流
32 ビットデータ
ー
32 ビット整数フィードバック電流値を示します。単位は 0.1% です。(例 ) 読取り値:000000FFH=255(10 進数 )
=25.5%
6.6 (2)
現在速度32 ビットデータ
ー
32 ビット符号付整数現在速度を示します。正数:反原点方向へ移動中負数:原点方向へ移動中単位は 0.01mm/sec です。(例 ) 読取り値:000003FFH=1023(10 進数 )
=10.23mm/sec※ 16 進数で読取る場合、負数は 2 の補数表示
となります。
6.6 (2)
現在荷重データ
32 ビットデータ
ー
32 ビット符号付整数単位は 0.01N です。※ 16 進数で読取る場合、負数は 2 の補数表示
となります。
6.6 (2)
プログラムアラームコード
16 ビットデータ
ー
16 ビット整数現在発生中のプログラムアラームコードが出力されます。アラームが発生していない場合は 0 です。プログラムアラームの詳細内容はコントローラの取扱説明書をご参照してください。
6.6 (2)
アラームコード
16 ビットデータ
ー
16 ビット整数アラームが発生した場合にはアラームコードが出力されます。アラームが発生していない場合は 0 です。アラームの詳細内容はコントローラの取扱説明書をご参照してください。
6.6 (2)
過負荷レベルモニタ
16 ビットデータ
ー
16 ビット整数フィードバック電流値からモータ温度を推定し、使用可能上限を 100% とした比率で出力します。単位は % です。本値が 100% となると過負荷アラーム (E0)となります。
6.6 (2)
実行中プログラム
No.
16 ビットデータ
ー
16 ビット整数現在実行しているプレスプログラム No. を出力します。本値は、次のプログラム No. が指定される、またはサーボ OFF されるまで保持されます。プログラム実行中にアラームが発生した場合、アラームリセットまで本値を保持します。
6.6 (2)
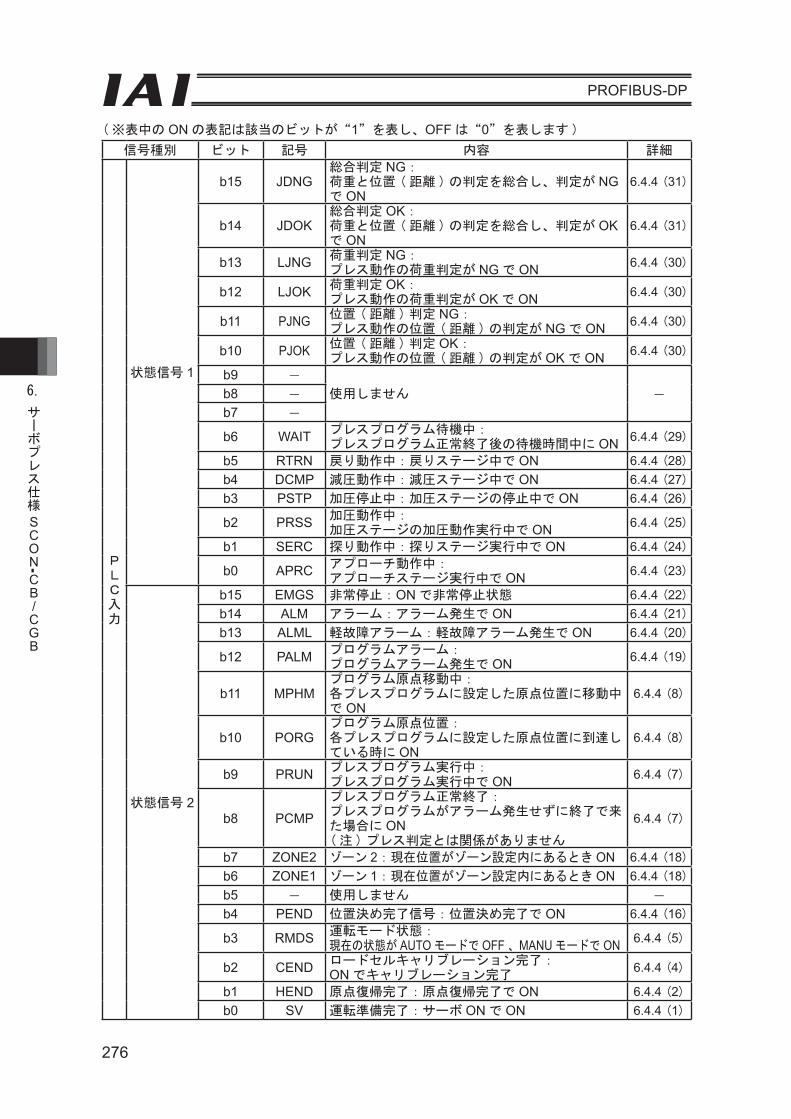
276
PROFIBUS-DP
6.
サーボプレス仕様
SCON-
CB/CGB
(※表中の ON の表記は該当のビットが“1”を表し、OFF は“0”を表します )
信号種別 ビット 記号 内容 詳細
PLC入力
状態信号 1
b15 JDNG総合判定 NG:荷重と位置 (距離 )の判定を総合し、判定が NGで ON
6.4.4 (31)
b14 JDOK総合判定 OK:荷重と位置 (距離 )の判定を総合し、判定が OKで ON
6.4.4 (31)
b13 LJNG 荷重判定 NG:プレス動作の荷重判定が NG で ON 6.4.4 (30)
b12 LJOK 荷重判定 OK:プレス動作の荷重判定が OK で ON 6.4.4 (30)
b11 PJNG 位置 (距離 )判定 NG:プレス動作の位置 (距離 )の判定が NG で ON 6.4.4 (30)
b10 PJOK 位置 (距離 )判定 OK:プレス動作の位置 (距離 )の判定が OK で ON 6.4.4 (30)
b9 ―
使用しません ―b8 ―
b7 ―
b6 WAIT プレスプログラム待機中:プレスプログラム正常終了後の待機時間中に ON 6.4.4 (29)
b5 RTRN 戻り動作中:戻りステージ中で ON 6.4.4 (28)b4 DCMP 減圧動作中:減圧ステージ中で ON 6.4.4 (27)b3 PSTP 加圧停止中:加圧ステージの停止中で ON 6.4.4 (26)
b2 PRSS 加圧動作中:加圧ステージの加圧動作実行中で ON 6.4.4 (25)
b1 SERC 探り動作中:探りステージ実行中で ON 6.4.4 (24)
b0 APRC アプローチ動作中:アプローチステージ実行中で ON 6.4.4 (23)
状態信号 2
b15 EMGS 非常停止:ON で非常停止状態 6.4.4 (22)b14 ALM アラーム:アラーム発生で ON 6.4.4 (21)b13 ALML 軽故障アラーム:軽故障アラーム発生で ON 6.4.4 (20)
b12 PALM プログラムアラーム:プログラムアラーム発生で ON 6.4.4 (19)
b11 MPHMプログラム原点移動中:各プレスプログラムに設定した原点位置に移動中で ON
6.4.4 (8)
b10 PORGプログラム原点位置:各プレスプログラムに設定した原点位置に到達している時に ON
6.4.4 (8)
b9 PRUN プレスプログラム実行中:プレスプログラム実行中で ON 6.4.4 (7)
b8 PCMPプレスプログラム正常終了:プレスプログラムがアラーム発生せずに終了で来た場合に ON(注 )プレス判定とは関係がありません
6.4.4 (7)
b7 ZONE2 ゾーン 2:現在位置がゾーン設定内にあるとき ON 6.4.4 (18)b6 ZONE1 ゾーン 1:現在位置がゾーン設定内にあるとき ON 6.4.4 (18)b5 ― 使用しません ―
b4 PEND 位置決め完了信号:位置決め完了で ON 6.4.4 (16)
b3 RMDS 運転モード状態:現在の状態が AUTO モードで OFF 、MANU モードで ON 6.4.4 (5)
b2 CEND ロードセルキャリブレーション完了:ON でキャリブレーション完了
6.4.4 (4)
b1 HEND 原点復帰完了:原点復帰完了で ON 6.4.4 (2)b0 SV 運転準備完了:サーボ ON で ON 6.4.4 (1)

277
PROFIBUS-DP
6.
サーボプレス仕様
SCON-
CB/CGB
6.4.4 入出力信号の制御と機能
※ ON の表記はビット信号の“1”を表し、OFF は“0”を表します。
フル機能モードに使用される入出力信号の制御と機能を以下に示します。リモート I/O モードの
入出力信号については、サーボプレス用コントローラ本体の取扱説明書をご参照ください。
(1) サーボ ON 指令 (SON) PLC 出力信号
運転準備完了 (SV) PLC 入力信号
SON 信号を ON にするとサーボ ON となります。
サーボ ON するとコントローラ前面の状態表示 LED(5.3 PROFIBUS-DP インタフェース参照 ) が
緑色点灯します。
SV 信号は、この LED と同期しています。
機能
SON 信号によりコントローラのサーボ ON / OFF が可能です。
SV 信号が ON の間、コントローラはサーボ ON 状態となり運転が可能となります。
SON 信号と SV 信号の関係は次のとおりです。
(2) 原点復帰 (HOME) PLC 出力信号
原点復帰完了 (HEND) PLC 入力信号
HOME 信号を ON すると、この指令は立上り (ON エッジ ) で処理され、自動で原点復帰動作が
行われます。原点復帰を完了すると HEND 信号が ON となります。
HEND 信号が ON になったら HOME 信号を OFF にしてください。HEND 信号は一旦 ON にな
ると電源が OFF されるか、再度の HOME 信号が入力されるまで OFF となりません。
原点復帰完了後も HOME 信号を ON すると原点復帰を行うことができます。
(PLC→SCON)
(SCON→PLC)
(SCON→PLC)
HOME
HEND
PEND
注意: リモート I/O モードでは、原点復帰を行わずに移動指令を実施した場合、電源投入後
の最初の 1 回に限り自動的に原点復帰を行った後、移動を実行します。
フル機能モードでは、電源投入時に原点復帰を行わずに移動指令を実施した場合、 「エラーコード 83 ALARM HOME ABS(原点復帰未完了状態での絶対位置移動指令 )」
のアラーム (動作解除レベル )となります。

278
PROFIBUS-DP
6.
サーボプレス仕様
SCON-
CB/CGB
(3) リセット (RES) PLC 出力信号
この信号は 2 つの機能を持っており、コントローラのアラームのリセットおよび一時停止中の残移
動量をキャンセルすることができます。
機能
① アラームが発生中に、アラームの原因を取り除いた後、この信号を OFF から ON にするとアラー
ム (ALM) 信号をリセットすることができます。( コールドスタートレベルのアラームの場合は
電源の再投入が必要です )
② 一時停止中にこの信号を OFF から ON にすると、残りの移動量をキャンセルすることができま
す。
(4)ロードセルキャリブレーション指令 (CLBR) PLC 出力信号
ロードセルキャリブレーション完了 (CEND) PLC 入力信号
ロードセルは工場出荷時、無負荷の状態を 0N とするよう設定していますが、負荷を取付けた状態
を基準 (0N)としたい場合などには、キャリブレーションを行ってください。
その他にも必要な場合 (再調整、点検等 )、状況に応じて実施してください。
① 運転を停止してください ( 軸動作中、押付け中、一時停止中はキャリブレーションできずに
0E1:ロードセルキャリブレーション異常アラームとなります )。
② ロードセルキャリブレーション信号 (CLBR)を 20ms 以上連続 ON してください。
③ キャリブレーションが完了するとキャリブレーション完了信号 (CEND) が ON しますので、そ
の後 CLBR 信号を OFF してください。
キャリブレーションが正常に終了しなかった場合、0E1:ロードセルキャリブレーション異常
アラームとなります。
注意: CLBR 信号が ON 状態では、通常運転指令は受け付けられません。
CLBR
CEND
入力認識
連続 20ms※1
キャリブレーション処理正常完了で CEND が ON します。
CLBR が OFF の場合、CEND は常時 OFF となります。
CEND の ON 確認後に CLBR を OFF してください。
キャリブレーション時間※2
※ 1 この間に CLBR を OFF した場合は、入力認識前のためキャリブレーション処理を行いません。
※ 2 この間に CLBR を OFF した場合、アラームとなります。

279
PROFIBUS-DP
6.
サーボプレス仕様
SCON-
CB/CGB
(5) 運転モード (RMOD) PLC 出力信号
運転モード状態 (RMDS) PLC 入力信号
RMOD 信号とコントローラ前面の MODE スイッチにより次の様に運転モードが選択されます。
また現在 AUTO / MANU のどちらに設定されているか RMDS 信号で確認することができます。
次に RMOD 信号と MODE スイッチの組合せによる運転モードを示します。
コントローラ MODEスイッチが AUTO 側
コントローラ MODEスイッチが MANU 側
RMOD 信号が OFF(AUTO モード指定 )
AUTO モード
(RMDS=OFF)MANU モード
(RMDS=ON)
RMOD 信号が ON(MANU モード指定 )
MANU モード
(RMDS=ON)
MANU モード
(RMDS=ON)
(注 ) MANU モードでは PLC から運転を行うことはできません。
(6) ブレーキ強制解除 (BKRL) PLC 出力信号
本信号を ON にすることでサーボ OFF 時、ブレーキを強制的に解除させることができます。
(7) プレスプログラムスタート (PSTR) PLC 出力信号
プレスプログラム実行中 (PRUN) PLC 入力信号
プレスプログラム正常終了 (PCMP) PLC 入力信号
PSTR 信号は立上り (ON エッジ ) で処理され、PLC の指令プログラム No. レジスタに入力されて
いるプログラム No. のプレスプログラムを実行します。
アラーム発生が無く、正常にプログラムが終了し、待機ステージに遷移した時、PCMP 信号が ONします。PCMP信号は、次のプログラム起動、移動指令、またはサーボOFFされるまで保持されます。
また、PCMP 信号はプレスプログラム原点移動完了時は、ON しません。
PSTR 信号はプログラム実行中 (PRUN)信号が ON になったことを確認して OFF にしてください。
指令プログラムNo. (PLC→SCON)
PSTR (PLC→SCON)
PRUN (SCON→PLC)
プログラム正常終了
PCMP (SCON→PLC)
待機時間

280
PROFIBUS-DP
6.
サーボプレス仕様
SCON-
CB/CGB
(8) プレスプログラム原点移動 (PHOM) PLC 出力信号
プレスプログラム原点移動中 (MPHM) PLC 入力信号
プレスプログラム原点位置 (PORG) PLC 入力信号
PHOM 信号を ON すると、この指令は立上り (ON エッジ ) で処理され、PLC の指令プログラム
No. レジスタに入力されているプログラム No. の原点位置に移動が行われます。移動中は MPHM信号が ON します。原点位置への移動を完了すると PORG 信号が ON となります。
PORG 信号が ON になったら PHOM 信号を OFF にしてください。
原点移動時の速度はパラメータ No.8 速度初期値、また加減速度はパラメータ No.9 加減速度初
期値の設定が使用されます。
プレスプログラム原点位置
指令プログラムNo.(PLC→SCON)
PHOM (PLC→SCON)
MPHM(SCON→PLC)
PORG (PLC→SCON)
アクチュエータ動作
注意: プレスプログラムが実行中にプレスプログラム原点移動信号を入力するとプログラム
アラームとなります。
(9)軸移動許可 (ENMV) PLC 出力信号
本信号が ON している間、軸の動作、プログラムの実行を許可します。
本信号が ON → OFF となった場合でもサーボ OFF にはなりません。
本信号を ON → OFF し、実行していた軸移動およびプログラムを停止させた場合、再び本信号
を OFF → ON にしても停止した軸移動およびプログラムは再開しません。
(10) プログラム強制停止 (FPST) PLC 出力信号
FPST 信号が ON で、実行中のプレスプログラムを停止します。
停止後、プレスプログラム原点に戻る、またはその場で停止をパラメータ No.179 プレスプログ
ラム強制停止時戻り動作の設定で選択できます。
原点戻り時の速度はパラメータ No.8 速度初期値、また加減速度はパラメータ No.9 加減速度初
期値の設定が使用されます。
本信号は、プレスプログラム原点移動中に入力されても無効となります。

281
PROFIBUS-DP
6.
サーボプレス仕様
SCON-
CB/CGB
(11) 探り停止 (SSTP) PLC 出力信号
探りステージが完了時、SSTP 信号が ON していると探りステージ終了位置でアクチュエータを停
止し、プレスプログラムも停止します。サーボ ON は継続されます。
プログラム停止後、SSTP 信号を OFF に戻してもプレスプログラムは、再開されません。
(12) ジョグ/インチング切替え (JISL) PLC 出力信号
ジョグ動作とインチング動作の切替信号です。
JISL=OFF:ジョグ動作
JISL=ON :インチング動作
JISL 信号が、ジョグ移動中に ON( インチング ) に切り替わった場合、減速停止しインチング機能
となります。
JISL 信号が、インチング移動中に OFF(ジョグ )に切り替わった場合、移動完了後にジョグ機能と
なります。
JISL 信号とジョグ速度/インチング距離切替え (JVEL) 信号の ON / OFF の関係は以下の表の様
になります。
ジョグ動作 インチング動作
JISL OFF ON
JVEL=OFF
速度 パラメータ No.26“ジョグ速度” パラメータ No.26“ジョグ速度”
移動距離 - パラメータ No.48“インチング距離”
加減速度 定格値 (アクチュエータ依存 ) 定格値 (アクチュエータ依存 )
JVEL=ON
速度 パラメータ No.47“ジョグ速度 2” パラメータ No.47“ジョグ速度 2”移動距離 - パラメータ No.49“インチング距離 2”加減速度 定格値 (アクチュエータ依存 ) 定格値 (アクチュエータ依存 )
動作 JOG +/ JOG -が ON の時JOG +/ JOG -の立上り (ON エッジ )
を検出した時
(13) ジョグ速度/インチング距離切換え (JVEL) PLC 出力信号
ジョグ動作が選択されている時のジョグ速度またはインチング動作が選択されている時のインチン
グ距離を指定するパラメータの切換え信号です。
次のような関係になります。
JVEL 信号 ジョグ動作:JISL=OFF インチング動作:JISL=ON
OFF パラメータ No.26“ジョグ速度”パラメータ No.26“ジョグ速度”
パラメータ No.48“インチング距離”
ON パラメータ No.47“ジョグ速度 2”パラメータ No.47“ジョグ速度 2”パラメータ No.49“インチング距離 2”

282
PROFIBUS-DP
6.
サーボプレス仕様
SCON-
CB/CGB
(14) +ジョグ (JOG + ) PLC 出力信号
-ジョグ (JOG - ) PLC 出力信号
ジョグ動作またはインチング動作での起動指令です。
+指令の時は反原点方向への動作で、-指令の時は原点方向への動作です。
① ジョグ動作
ジョグ動作は、ジョグ/インチング切替え (JISL)信号が OFF の時に動作可能です。
JOG +が ON の間は反原点方向へ動作を行い、OFF になると減速停止します。
JOG -が ON の間は原点方向への動作を行い、OFF になると減速停止します。
動作は次のパラメータの設定値で行います。
• 速度は、ジョグ速度/インチング距離切替え (JVEL) 信号で指定されたパラメータの値で動
作します。
JVEL 信号 =OFF の場合は、パラメータ No.26“PIO ジョグ速度”の値で動作します。
JVEL 信号 =ON の場合は、パラメータ No.47“PIO ジョグ速度 2”の値で動作します。
• 加減速度は、定格加減速度 (アクチュエータ依存 )で動作します。
• JOG +と JOG -信号が両方共に ON になると減速停止します。
② インチング動作
インチング動作は、JISL 信号が ON の時に動作可能です。
1 回の ON 入力により、インチング距離分の移動を行います。
JOG +が ON で反原点方向へ動作を行い、JOG -が ON で原点方向への動作を行います。
動作は次のパラメータの設定値で行います。
• 速度は、JVEL 信号で指定されたパラメータの値で動作します。
JVEL 信号 =OFF の場合は、パラメータ No.26“PIO ジョグ速度”の値で動作します。
JVEL 信号 =ON の場合は、パラメータ No.47“PIO ジョグ速度 2”の値で動作します。
• 移動距離は、JVEL 信号で指定されたパラメータの値で動作します。
JVEL 信号 =OFF の場合は、パラメータ No.48“PIO インチング距離”の値で動作します。
JVEL 信号 =ON の場合は、パラメータ No.49“PIO インチング距離 2”の値で動作します。
• 加減速度は、定格加減速度 (アクチュエータ依存 )で動作します。
通常動作中は、+ジョグ信号、-ジョグ信号を ON しても通常動作を続けます。( ジョグ信号
は無視されます )
一時停止中は、+ジョグ信号、-ジョグ信号を ON しても動作しません。
(注 ) 原点復帰完了前はソフトウェアストロークリミットが無効のため、メカエンドに衝突する
危険がありますのでご注意ください。
(15) 位置決め指令 (DSTR) PLC 出力信号
この指令は立上り (ON エッジ ) で処理され、PLC の目標位置レジスタに入力されている目標位置
に位置決めします。電源投入後、一度も原点復帰動作を行っていない状態 (HEND 信号が OFF の
状態 )でこの指令を行うとアラーム (動作解除レベル )となります。
本信号は位置決め完了 (PEND)信号が OFF になったことを確認して OFF にしてください。
(PLC→SCON)DSTR
PEND(SCON→PLC)
(PLC→SCON)
目標位置

283
PROFIBUS-DP
6.
サーボプレス仕様
SCON-
CB/CGB
(16) 位置決め完了信号 (PEND) PLC 入力信号
本信号は目標位置レジスタに入力されている位置まで移動して、位置決め幅レジスタに入力されて
いる幅内に到達した場合に ON になります。
速度
移動距離
時間
位置決め幅
目標位置
位置決め完了信号がONするタイミング
サーボ OFF からサーボ ON となった時、その場を目標位置として位置決めが行われます。従って
本信号は ON となり、その後原点復帰 (HOME) 信号、位置決め指令 (DSTR) 信号による位置決め
動作の開始で OFF となります。
注意: 目標位置に停止している時にサーボ OFF 状態や非常停止状態になると、PEND 信号
は一旦 OFF になります。 次に再度サーボ ON 状態に復帰した時、位置決め幅以内であれば ON に戻ります。 また DSTR 信号が ON のままでは位置決め完了しても PEND 信号は、ON になりませ
ん。
(17) ゾーン 1(ZONE1) PLC 入力信号
ゾーン 2(ZONE2) PLC 入力信号
アクチュエータの現在位置が設定した領域の範囲内にある場合は ON になり、範囲外にある場合は
OFF になります。
ゾーンの設定はユーザパラメータで設定します。
ZONE1 信号はパラメータ No.1“ゾーン境界 1 +側”および 2“ゾーン境界 1 -側”で設定します。
ZONE2 信号はパラメータ No.23“ゾーン境界 2 +側”および 24“ゾーン境界 2 -側”で設定します。
ZONE1 信号および ZONE2 信号は原点復帰完了後に有効となり、その後はサーボ OFF 中でも有効
です。
ゾーン信号
ゾーン設定-側 ゾーン設定+側
+方向
原点
アクチュエータ動作

284
PROFIBUS-DP
6.
サーボプレス仕様
SCON-
CB/CGB
(18) プログラムアラーム (PALM) PLC 入力信号
プレスプログラムのアラームを検出すると ON になります。
リセット (RES)信号を ON にすると動作解除レベルのアラームの場合は OFF になります。(アラー
ムの原因が解除されていないと再度プレスプログラム実行でアラームとなります )
(19) 軽故障ステータス (ALML) PLC 入力信号
メッセージレベル (継続動作可能な軽度のアラーム )が発生した場合、1 になります。
本信号は、コントローラ前面パネルの ALM_LED と連動はしていません。
[アラームの詳細は、サーボプレス用 SCON コントローラ取扱説明書を参照 ]
(20) アラーム (ALM) PLC 入力信号
コントローラの保護回路 (機能 )が異常を検出すると ON になります。
機能
異常を検出して保護回路 (機能 )が動作した時に ON になる信号です。
アラームの原因が解除され、リセット (RES) 信号を ON にすると動作解除レベルのアラームの場
合は OFF になります。(コールドスタートレベルのアラームの場合は電源の再投入が必要です )
アラームを検出すると、コントローラ前面の状態表示 LED が赤色点灯します。
(21) 非常停止 (EMGS) PLC 入力信号
非常停止状態になると ON になります。
機能
非常停止状態 ( モータ駆動電源がしゃ断状態 ) になると ON になります。非常停止状態が解除され
れば OFF になります。
(22) アプローチ動作中 (APRC) PLC 入力信号
プレスプログラムのアプローチステージ中に ON となります。
(23) 探り動作中 (SERC) PLC 入力信号
プレスプログラムの探りステージ中に ON となります。
(24) 加圧動作中 (PRSS) PLC 入力信号
プレスプログラムの加圧ステージの加圧中に ON となります。
(25) 加圧停止中 (PSTP) PLC 入力信号
プレスプログラムの加圧ステージの加圧後の停止時に ON となります。

285
PROFIBUS-DP
6.
サーボプレス仕様
SCON-
CB/CGB
(26) 減圧動作中 (DCMP) PLC 入力信号
プレスプログラムの減圧ステージ中に ON となります。
(27) 戻り動作中 (RTRN) PLC 入力信号
プレスプログラムの戻りステージ中に ON となります。
(28) プレスプログラム待機中 (WAIT) PLC 入力信号
プレスプログラム正常終了後の待機時間中に ON となります。
(29) 位置 (距離 )判定 OK (PJOK) PLC 入力信号
位置 (距離 )判定 NG (PJNG) PLC 入力信号
荷重判定 OK (LJOK) PLC 入力信号
荷重判定 NG (LJNG) PLC 入力信号
プレスプログラムの判定に設定した位置 ( 距離 ) 範囲が、加圧動作完了時に守られている場合、
PJOK 信号が ON、守られていない場合、PJNG 信号が ON となります。
プレスプログラムの判定に設定した荷重の範囲が、加圧動作完了時に守られている場合、LJOK 信
号が ON、守られていない場合、LJNG 信号が ON となります。
荷重
判定範囲
位置判定範囲
荷重
位置
荷重、位置の
両方を判定する場合
(合格範囲)
荷重だけを
判定する場合
( )
荷重だけを
判定する場合
(合格範囲)
位置だけを
判定する場合
(合格範囲)
位置だけを
判定する場合
(合格範囲)
合格範囲
(30) 総合判定 OK (JDOK) PLC 入力信号
総合判定 NG (JDNG) PLC 入力信号
位置 ( 距離 ) 判定および荷重判定から総合判定を行い、OK の場合 JDOK 信号が ON、NG の場合
JDNG 信号が ON となります。

286
PROFIBUS-DP
6.
サーボプレス仕様
SCON-
CB/CGB
6.5 入出力信号のタイミング
PLC のシーケンスプログラムでアクチュエータの運転を行うためにいずれかの制御信号を ON し、
その応答 (状態 )信号が PLC に帰ってくるまでの最大応答時間は次の式で表されます。
最大応答時間 (msec)= Yt+Xt+3+ 指令処理時間 (動作時間等 )
Yt:マスタ局→スレーブ伝送遅れ時間
Xt:スレーブ→マスタ局伝送遅れ時間
マスタ局→スレーブ伝送遅れ時間 (Yt)、スレーブ→マスタ局伝送遅れ時間 (Xt) については、
PROFIBUS-DP マスタユニットおよび搭載される PLC の取扱説明書をご参照ください。
フィールドネットワーク伝送遅れ時間

287
PROFIBUS-DP
6.
サーボプレス仕様
SCON-
CB/CGB
6.6 運転
基本動作例のタイミングを示します。
(1) リモート I/O モードの運転
サーボ ON、原点復帰、ロードセルキャリブレーションが完了した状態から、1 つのプレスプログ
ラムを実行する場合の動作例を示します。
動作例
① 軸移動許可信号 (ENMV)を ON(動作可 )します。
② プレスプログラム番号 (PC1 ~ PC32)を指定します。
③ プレスプログラム原点移動信号 (PHOM) を ON します。原点移動中は、プレスプログラム原点
移動中信号 (MPHM) が ON します。原点移動が完了するとプレスプログラム原点信号 (PORG)
が ON します。
④ プレスプログラムスタート信号 (PSTR) を ON し、プレスプログラムを実行します。
プレスプログラム実行中※は、プレスプログラム動作中信号 (PRUN)が ON します。
※プログラムスタート→戻りステージの完了後、待機時間経過まで
⑤ プレスプログラムの各ステージを実行中は、各ステージ実行中信号が ON します。
・アプローチステージ実行中= アプローチ動作中信号 (APRC)
・探りステージ実行中= 探り動作中信号 (SERC)
・加圧ステージ (加圧 )実行中= 加圧動作中 (APRC)
・加圧ステージ (停止 )実行中= 加圧停止中 (PSTP)⑥ 加圧停止時 (PSTP ON)、判定を行います。
結果は、判定 OK 信号 (JDOK)、判定 NG 信号 (JDNG)で出力します。
⑦ 減圧、戻りの各ステージを実行完了するとプレスプログラム正常終了信号 (PCMP)をONします。
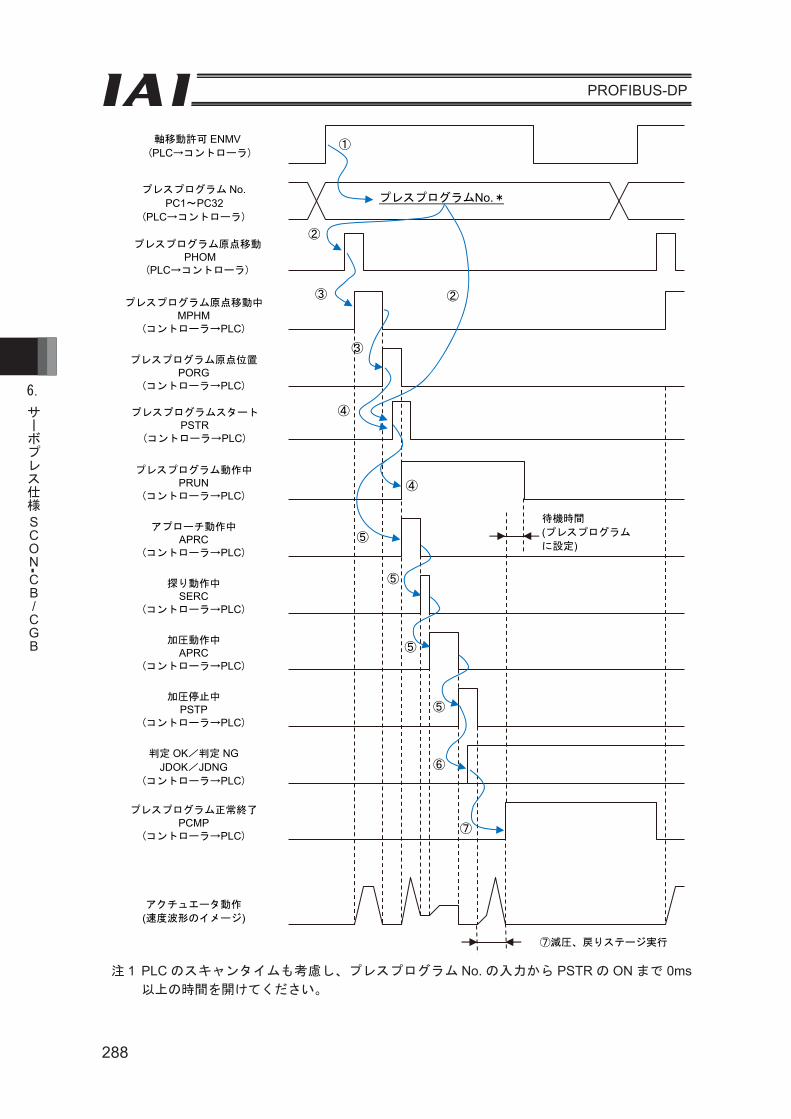
288
PROFIBUS-DP
6.
サーボプレス仕様
SCON-
CB/CGB
プレスプログラム No. PC1~PC32
(PLC→コントローラ)
プレスプログラムスタートPSTR
(コントローラ→PLC)
プレスプログラム原点移動PHOM
(PLC→コントローラ)
プレスプログラム原点移動中MPHM
(コントローラ→PLC)
プレスプログラムNo.*
プレスプログラム原点位置PORG
(コントローラ→PLC)
プレスプログラム動作中PRUN
(コントローラ→PLC)
アプローチ動作中APRC
(コントローラ→PLC)
探り動作中SERC
(コントローラ→PLC)
加圧動作中APRC
(コントローラ→PLC)
加圧停止中PSTP
(コントローラ→PLC)
判定 OK/判定 NG JDOK/JDNG
(コントローラ→PLC)
プレスプログラム正常終了PCMP
(コントローラ→PLC)
アクチュエータ動作
(速度波形のイメージ)
⑦減圧、戻りステージ実行
待機時間
(プレスプログラム
に設定)
①
②
③ ②
④
③
④
⑥
⑤
⑤
⑤
⑤
⑦
軸移動許可 ENMV (PLC→コントローラ)
注 1 PLC のスキャンタイムも考慮し、プレスプログラム No. の入力から PSTR の ON まで 0ms以上の時間を開けてください。

289
PROFIBUS-DP
6.
サーボプレス仕様
SCON-
CB/CGB
(2)フル機能モードの運転
サーボ ON、原点復帰、ロードセルキャリブレーションが完了した状態から、〔1〕1 つのプレスプ
ログラムを実行する場合と〔2〕目標位置へ直接数値指定移動する場合の動作例を示します。
〔1〕1つのプレスプログラムを実行する動作例
① 軸移動許可信号 (ENMV)を ON(動作可 )します。
② 実行するプレスプログラム番号を指令プログラム No. レジスタに設定します。
③ プレスプログラム原点移動信号 (PHOM) を ON します。原点移動中は、プレスプログラム原点
移動中信号 (MPHM) が ON します。原点移動が完了するとプレスプログラム原点信号 (PORG)
が ON します。
④ プレスプログラムスタート信号 (PSTR) を ON し、プレスプログラムを実行します。
プレスプログラム実行中※は、プレスプログラム動作中信号 (PRUN)が ON します。
※プログラムスタート→戻りステージの完了後、待機時間経過まで
⑤ プレスプログラムの各ステージを実行中は、各ステージ実行中信号が ON します。
・アプローチステージ実行中= アプローチ動作中信号 (APRC)
・探りステージ実行中= 探り動作中信号 (SERC)
・加圧ステージ (加圧 )実行中= 加圧動作中 (APRC)
・加圧ステージ (停止 )実行中= 加圧停止中 (PSTP)⑥ 加圧停止時 (PSTP ON)、判定を行います。
位置 (距離 )の判定結果は、判定 OK 信号 (PJOK)、判定 NG 信号 (PJNG)で出力します。
荷重の判定結果は、判定 OK 信号 (LJOK)、判定 NG 信号 (LJNG)で出力します。
総合判定結果は、判定 OK 信号 (JDOK)、判定 NG 信号 (JDNG)で出力します。
⑦ プレスプログラムの各ステージを実行中は、各ステージ実行中信号が ON します。
・減圧ステージ実行中= 減圧動作中信号 (DCMP) ・戻りステージ実行中= 戻り動作中信号 (RTRN)
⑧ 減圧、戻りの各ステージを実行完了するとプレスプログラム正常終了信号 (PCMP) を ON し、
プレスプログラムに設定した待機時間の間動作を停止し、プレスプログラム待機中信号 (WAIT)を ON します。次のプレスプログラムを実行する場合、待機時間経過後に指令を行ってください。
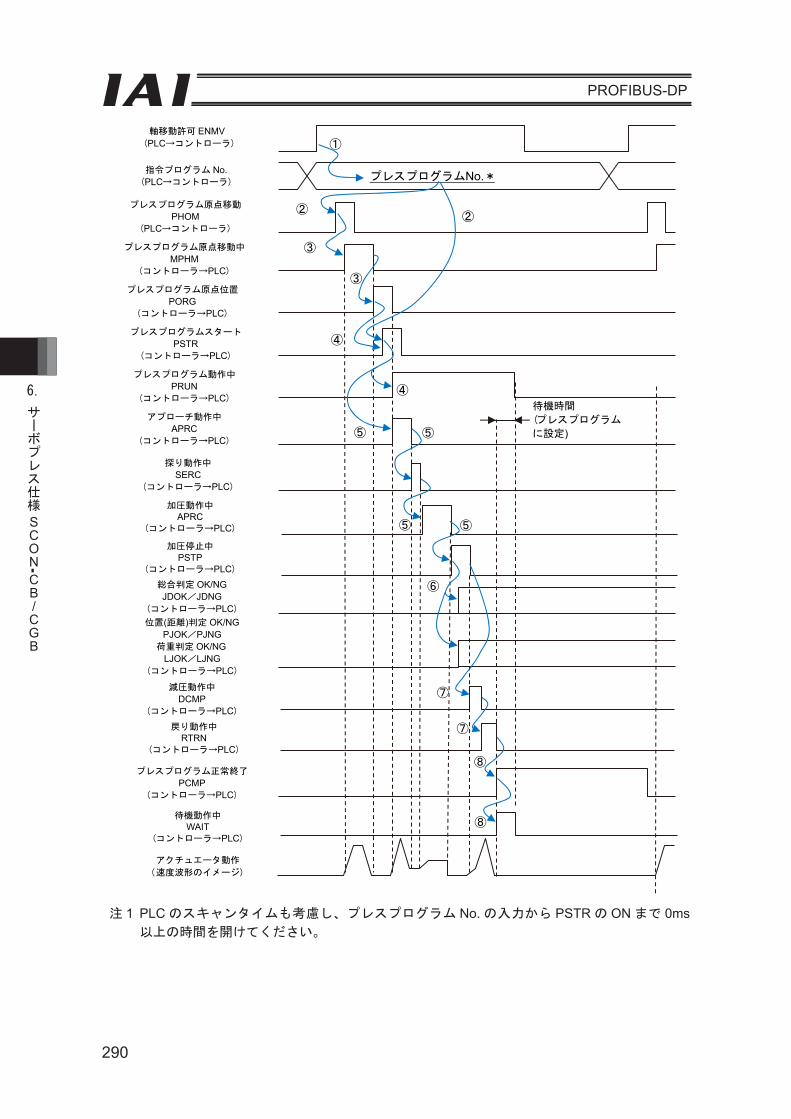
290
PROFIBUS-DP
6.
サーボプレス仕様
SCON-
CB/CGB
指令プログラム No. (PLC→コントローラ)
プレスプログラムスタート
PSTR (コントローラ→PLC)
プレスプログラム原点移動
PHOM (PLC→コントローラ)
プレスプログラム原点移動中
MPHM (コントローラ→PLC)
プレスプログラムNo.*
プレスプログラム原点位置
PORG (コントローラ→PLC)
プレスプログラム動作中
PRUN (コントローラ→PLC)
アプローチ動作中
APRC (コントローラ→PLC)
探り動作中
SERC (コントローラ→PLC)
加圧動作中APRC
(コントローラ→PLC)
加圧停止中PSTP
(コントローラ→PLC)
総合判定 OK/NG JDOK/JDNG
(コントローラ→PLC)
プレスプログラム正常終了
PCMP (コントローラ→PLC)
アクチュエータ動作
(速度波形のイメージ)
待機時間
(プレスプログラム
に設定)
①
②
③
②
④
③
④
⑥
⑤
⑤ ⑤
⑤
⑦
軸移動許可 ENMV (PLC→コントローラ)
位置(距離)判定 OK/NG PJOK/PJNG
荷重判定 OK/NG LJOK/LJNG
(コントローラ→PLC)
減圧動作中
DCMP (コントローラ→PLC)
戻り動作中RTRN
(コントローラ→PLC)
待機動作中WAIT
(コントローラ→PLC)
⑧
⑦
⑧
注 1 PLC のスキャンタイムも考慮し、プレスプログラム No. の入力から PSTR の ON まで 0ms以上の時間を開けてください。

291
PROFIBUS-DP
6.
サーボプレス仕様
SCON-
CB/CGB
〔2〕目標位置へ直接数値指定移動する場合の動作例
① 軸移動許可信号 (ENMV)を ON します。
② 目標位置データを目標位置レジスタに設定します。
③ 位置決め幅データを位置決め幅レジスタに設定します。
④ 速度データを速度レジスタに設定します。
⑤ 加速度、減速度データを加速度レジスタ、減速度レジスタに設定します。
⑥ 位置決め完了信号 (PEND)が ON になっている状態で位置決め指令信号 (DSTR)を ON します。
②~⑤で設定したデータは、DSTR 信号の立ち上がりエッジでコントローラに読込まれます。
⑦ DSTR 信号が ON になった後、tpdf 後に PEND 信号が OFF します。
⑧ PEND 信号が OFF になったことを確認してから DSTR 信号を OFF します。各レジスタの値は、
DSTR 信号を OFF するまで変更しないでください。
⑨ PEND 信号は、DSTR 信号が OFF で③で設定した位置決め幅に達したら ON となります。

292
PROFIBUS-DP
6.
サーボプレス仕様
SCON-
CB/CGB
目標位置データ
(PLC→コントローラ)
加速度データ
(PLC→コントローラ)
位置決め幅データ
(PLC→コントローラ)
速度データ
(PLC→コントローラ)
位置決め完了PEND
(コントローラ→PLC)
減速度データ
(PLC→コントローラ)
位置決め指令DSTR
(PLC→コントローラ)
現在位置
(コントローラ→PLC)
アクチュエータ動作
(速度波形のイメージ)
軸移動許可 ENMV (PLC→コントローラ)
※T1
※tpdf
①
②
③
④
⑤
⑥
⑤
⑦
⑧
⑨
位置決め幅
※ T1 ≧ 0ms となるようにしてください。
※ Yt+Xt ≦ tdpf ≦ Yt+Xt+3(msec)6.5 入出力信号のタイミング参照
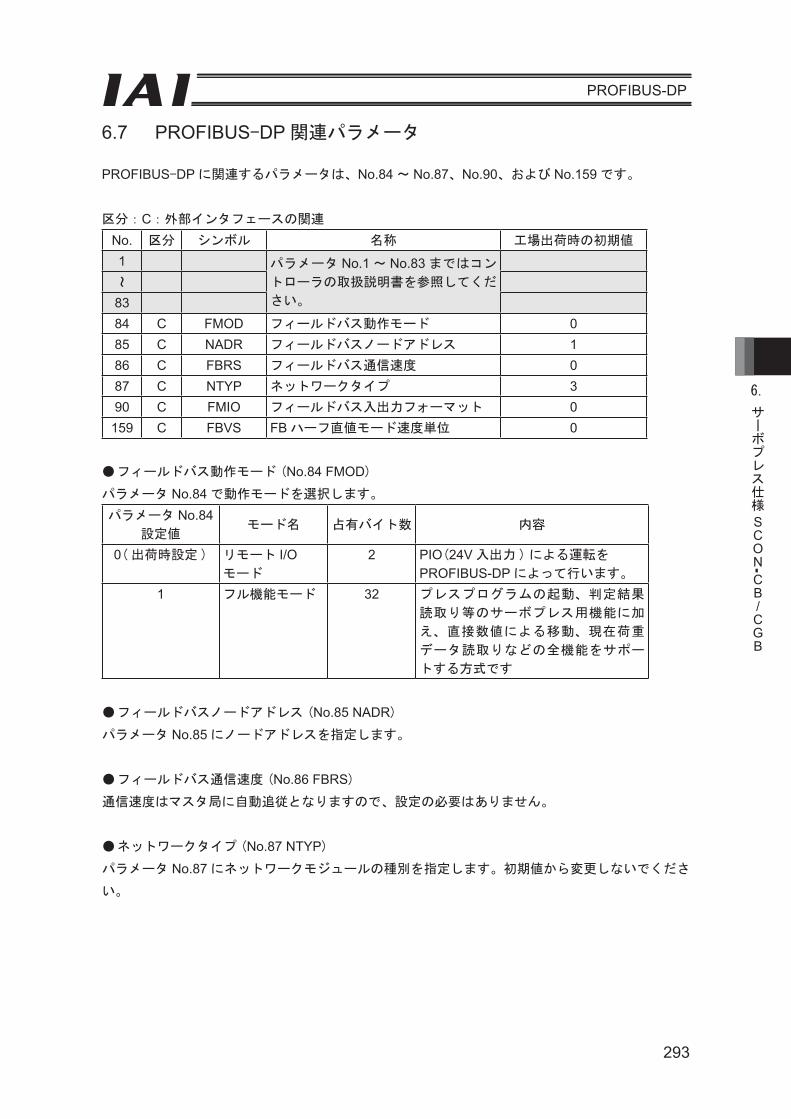
293
PROFIBUS-DP
6.
サーボプレス仕様
SCON-
CB/CGB
6.7 PROFIBUS-DP 関連パラメータ
PROFIBUS-DP に関連するパラメータは、No.84 ~ No.87、No.90、および No.159 です。
区分:C:外部インタフェースの関連
No. 区分 シンボル 名称 工場出荷時の初期値
1 パラメータ No.1 ~ No.83 まではコン
トローラの取扱説明書を参照してくだ
さい。
~
8384 C FMOD フィールドバス動作モード 085 C NADR フィールドバスノードアドレス 186 C FBRS フィールドバス通信速度 087 C NTYP ネットワークタイプ 390 C FMIO フィールドバス入出力フォーマット 0159 C FBVS FB ハーフ直値モード速度単位 0
フィールドバス動作モード (No.84 FMOD)
パラメータ No.84 で動作モードを選択します。
パラメータ No.84設定値
モード名 占有バイト数 内容
0(出荷時設定 ) リモート I/Oモード
2 PIO(24V 入出力 )による運転を
PROFIBUS-DP によって行います。
1 フル機能モード 32 プレスプログラムの起動、判定結果
読取り等のサーボプレス用機能に加
え、直接数値による移動、現在荷重
データ読取りなどの全機能をサポー
トする方式です
フィールドバスノードアドレス (No.85 NADR)
パラメータ No.85 にノードアドレスを指定します。
フィールドバス通信速度 (No.86 FBRS)通信速度はマスタ局に自動追従となりますので、設定の必要はありません。
ネットワークタイプ (No.87 NTYP)パラメータ No.87 にネットワークモジュールの種別を指定します。初期値から変更しないでくださ
い。

294
PROFIBUS-DP
6.
サーボプレス仕様
SCON-
CB/CGB
フィールドバス入出力フォーマット (No.90 FMIO)
PLC 内のアドレスは、コントローラに設定したノードアドレスと各動作モードの占有 CH 数で 16点 (1 ワード )単位で割付けられます。
パラメータ No.90 の設定を変更することによって、PLC の入出力エリアとの交信域で 2 ワード内
のデータをバイト単位で入替えて送受信することができます。
パラメータ No.90設定値
内容
0(出荷時設定 ) 入替えは行いません。PLC にはそのまま送信されます。(例 i 参照 )
1上位ワードの上位バイトと下位バイトを入替え、また下位ワードの上位バイ
トと下位バイトを入替えます。(例 ii 参照 )
2ワードレジスタの場合、上位ワードと下位ワードを入替えます。
(例 iii 参照 )
3上位ワードの上位バイトと下位バイトを入替え、また下位ワードの上位バイ
トと下位バイトを入替えます。ワードレジスタの場合、さらに上位ワードと
下位ワードを入替えます。(例 iv 参照 )

295
PROFIBUS-DP
6.
サーボプレス仕様
SCON-
CB/CGB

296
PROFIBUS-DP
6.
サーボプレス仕様
SCON-
CB/CGB

297
PROFIBUS-DP
6.
サーボプレス仕様
SCON-
CB/CGB
FB ハーフ直値モード速度単位 (No.159 FBVS)
パラメータ No.159 にハーフ直値モード時の速度単位を選択します。
パラメータ No.159 設定値 速度単位
0(出荷時設定 ) 1.0mm/sec1 0.1mm/sec

298
PROFIBUS-DP
6.
サーボプレス仕様
SCON-
CB/CGB
6.8 トラブルシューティング
アラーム内容と原因・対策
アラーム発生時、リモート I/O モードではアラーム信号 (ALM)、または軽故障アラーム信号 (ALML)が負論理で出力されます。
フル機能モードでは、プレスプログラムアラームコードレジスタ、およびアラームコードレジスタ
にアラームコードが出力されます。
① PLC のモニタ機能等でアラームコードを確認するか、RC パソコン対応ソフトなどのティーチ
ングツールを接続してステータスモニタで確認してください。
② 読み取ったアラームコードからコントローラの取扱説明書のアラーム内容一覧を検索します。
③ 該当のアラームコードの記述に従い対処してください。 次のアラームコードについては下表に従い対処してください。
コード エラー名称ID
(※ 1)RES(※ 2)
原因/対策
094プレスプログラムアラーム
検出02
原因 : プレスプログラム実行時、アラームが発生
したことを示す。
対策 : 後述のプレスプログラムアラーム一覧を参
照し、対処を行ってください。[ コントロー
ラ取扱説明書 プログラムアラーム参照 ]
0AD プレスプログラムデータ異常 06
原因 : コントローラ起動時、プログラム起動指令
時、およびプログラム原点移動指令時にプ
ログラムのチェックを行い、異常があった。
対策 : 詳細コードにプログラム番号が格納されて
いるので、該当プログラムの設定を確認し
てください。
0F2フィールドバスモジュール
異常05 ×
原因: フィールドバスモジュールの異常が検
出された
対策: パラメータを確認してください。
0F3フィールドバスモジュール
未検出エラー04 ×
原因: モジュールが検出できなかった場合
対策: 電源を再投入してください。解消され
ない場合は当社までご連絡ください。
0FD 拡張デバイス異常 05 ×
原因 : 荷重データアナログ出力用部品の異常
( 注 ) パラメータ No.180 DAC 出力を無効に
設定した場合はエラーを検出しません )
対策 : アナログ出力用の配線を確認してください。
配線に異常がない場合は、当社までご連絡
ください。
(※ 1) ID →簡易アラームコード
(※ 2) RES →アラームリセット可/不可 :アラームリセット可/×:アラームリセット不可
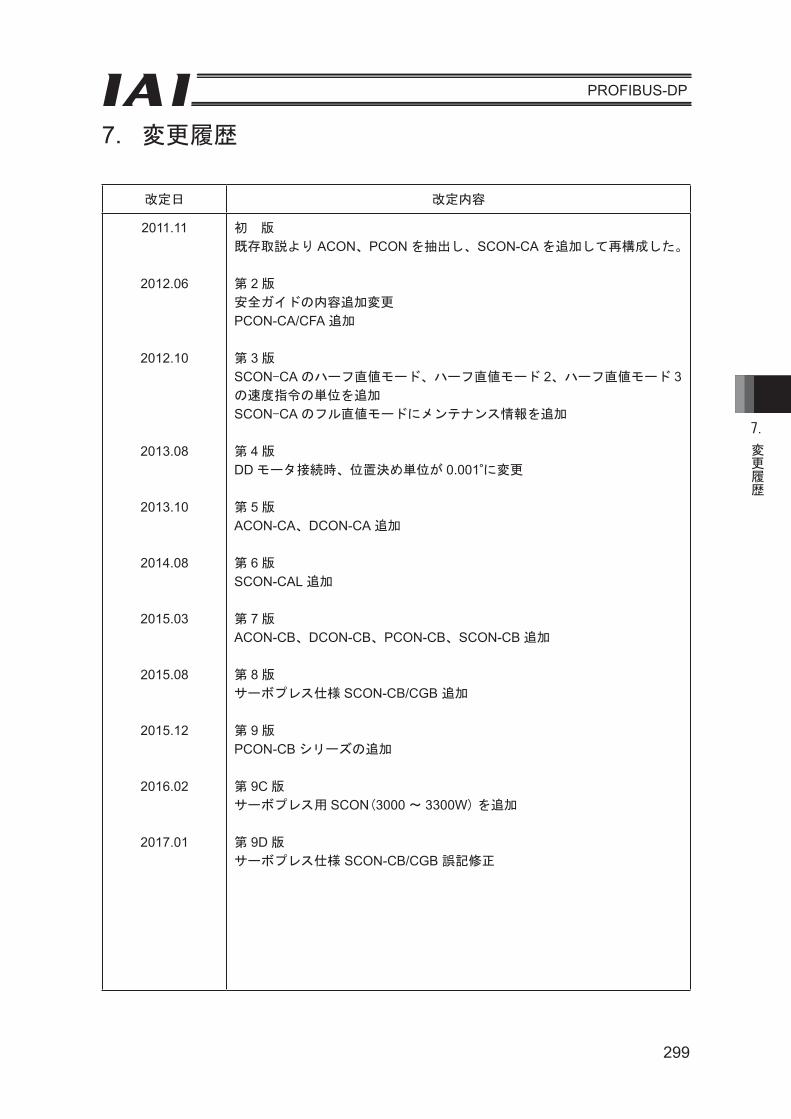
299
PROFIBUS-DP
7.
変更履歴
7. 変更履歴
改定日 改定内容
2011.11
2012.06
2012.10
2013.08
2013.10
2014.08
2015.03
2015.08
2015.12
2016.02
2017.01
初 版
既存取説より ACON、PCON を抽出し、SCON-CA を追加して再構成した。
第 2 版
安全ガイドの内容追加変更
PCON-CA/CFA 追加
第 3 版
SCON-CA のハーフ直値モード、ハーフ直値モード 2、ハーフ直値モード 3の速度指令の単位を追加
SCON-CA のフル直値モードにメンテナンス情報を追加
第 4 版
DD モータ接続時、位置決め単位が 0.001°に変更
第 5 版
ACON-CA、DCON-CA 追加
第 6 版
SCON-CAL 追加
第 7 版
ACON-CB、DCON-CB、PCON-CB、SCON-CB 追加
第 8 版
サーボプレス仕様 SCON-CB/CGB 追加
第 9 版
PCON-CB シリーズの追加
第 9C 版
サーボプレス用 SCON(3000 ~ 3300W)を追加
第 9D 版
サーボプレス仕様 SCON-CB/CGB 誤記修正



管理番号:MJ0258-9D (2017 年 1月)
Copyright © 2017. Jan. IAI Corporation. All rights reserved.17.01.000
852-463-450XAF5015-463-450LET1-775羽尾区水清市岡静県岡静3010-424場工・社本 9
東京営業所 105-0014 東京都港区芝 3-24-7 芝エクセージビルディング 4F TEL 03-5419-1601 FAX 03-3455-5707
60XAF1711-7546-60LETF4ルビSST島堂3-5-2地新崎根曽区北市阪大2000-035所業営阪大 -6457-1185
名古屋営業所 962-250XAF1392-962-250LETF8ルビ宮若屋古名21-82-5栄区中市屋古名8000-064 -2933
26-910XAF0079-326-910LETF7ルビ12エリク7-6町田長市岡盛県手岩2600-020所業営岡盛 3-9701
仙台営業所 980-0802 宮城県仙台市青葉区二日町 14-15アミ・グランデ二日町 4F TEL 022-723-2031 FAX 022-723-2032
8520XAF0238-13-8520LETF2ルビイザンセ71-5-3歳千市岡長県潟新2800-049所業営潟新 -31-8321
宇都宮営業所 321-0953 栃木県宇都宮市東宿郷 5-1-16ルーセントビル 3F TEL 028-614-3651 FAX 028-614-3653
熊谷営業所 360-0847 埼玉県熊谷市籠原南 1 丁目 312番地あかりビル 5F TEL 048-530-6555 FAX 048-530-6556
茨城営業所 300-1207 茨城県牛久市ひたち野東 5-3-2 ひたち野うしく池田ビル 2F TEL 029-830-8312 FAX 029-830-8313
0XAF1889-225-240LETF2ルビNESOB2-41-3町崎柴市川立都京東3200-091所業営摩多 42-522-9882
厚木営業所 243-0014 神奈川県厚木市旭町 1-10-6 シャンロック石井ビル 3F TEL 046-226-7131 FAX 046-226-7133
3620XAF0173-04-3620LET104ルビトーネモーハ349立島市本松県野長2580-093所業営野長 -40-3715
2-550XAF6262-032-550LETF3ルビトサミ1-21-2内の丸市府甲県梨山1300-004所業営府甲 30-2636
852-463-450XAF3926-463-450LET1-775羽尾区水清市岡静県岡静3010-424所業営岡静 9
浜松営業所 430-0936 静岡県浜松市中区大工町 125 セキスイハイム鴨江小路ビルディング 7F TEL 053-459-1780 FAX 053-458-1318
650XAF8881-17-6650LETF3ルビ祥東二第2-9-1町城安河三市城安県知愛6500-644所業営田豊 6-71-1877
-670XAF6113-432-670LETF2棟Aルビ清西23-1-3念西市沢金県川石4200-029所業営沢金 234-3107
328-396-570XAF1128-396-570LET21町代向田竹区見伏市都京府都京8148-216所業営都京 3
兵庫営業所 673-0898 兵庫県明石市樽屋町 8番 34 号大同生命明石ビル 8F TEL 078-913-6333 FAX 078-913-6339
2-508-680LET101.DLBTOOR-OTOMO411-113野中下区北市山岡3790-007所業営山岡 611 FAX 086-244-6767
-280XAF0571-235-280LETF5ルビ町川本宝日9-1-2町川本区中市島広2080-037所業営島広 532-1751
0XAF2658-689-980LETF112トスレーォフ22-9-4味樽市山松県媛愛5090-097所業営山松 89-986-8563
福岡営業所 812-0013 福岡市博多区博多駅東 3-13-21 エフビル WING 7F TEL 092-415-4466 FAX 092-415-4467
大分出張所 870-0823 大分県大分市東大道 1-11-1 タンネンバウム Ⅲ 2F TEL 097-543-7745 FAX 097-543-7746
90XAF0125-683-690LETF1ルビ山幸33-83-1水神区央中市本熊県本熊4590-268所業営本熊 6-386-5112
お問い合せ先
アイエイアイお客様センター エイト(受付時間)月~金 24 時間(月 7:00AM~金 翌朝 7:00AM)
土、日、祝日 8:00AM~5:00PM(年末年始を除く)
フ リ ーダイヤル 0800-888-0088 FAX: 0800-888-0099 (通話料無料)
ホームページアドレス http://www.iai-robot.co.jp
IAI America Inc. Head Office: 2690 W, 237th Street Torrance, CA 90505
TEL (310) 891-6015 FAX (310) 891-0815 Chicago Office: 110 East State Parkway, Schaumburg, IL 60173
TEL (847) 908-1400 FAX (847) 908-1399 Atlanta Office: 1220 Kennestone Circle Suite 108 Marietta, GA 30066
TEL (678) 354-9470 FAX (678) 354-9471 website : www.intelligentactuator.com
IAI Industrieroboter GmbH Ober der Röth 4, D-65824 Schwalbach am Taunus, Germany
TEL 06196-88950 FAX 06196-889524
IAI(Shanghai)Co.,Ltd. SHANGHAI JIAHUA BUSINESS CENTER A8-303, 808, Hongqiao Rd. Shanghai 200030, China
TEL 021-6448-4753 FAX 021-6448-3992 website : www.iai-robot.com
IAI Robot (Thailand) Co.,LTD 825 PhairojKijja Tower 12th Floor, Bangna-Trad RD., Bangna, Bangna, Bangkok 10260, Thailand
TEL +66-2-361-4458 FAX +66-2-361-4456
製品改良のため、記載内容の一部を予告なしに変更することがあります。