PROGRAMME -...
32
June 30 - July 03, 2008 of the 11th International Conference on Information Fusion Cologne, Germany FGAN PROGRAMME
Transcript of PROGRAMME -...

June 30 - July 03, 2008
of the 11th International Conferenceon Information Fusion
Cologne, Germany
FGAN
PROGRAMME

ImpressumHerausgeber:Forschungsgesellschaft für Angewandte Naturwissenschaften e. V. (FGAN)Neuenahrer Straße 20, D-53343 Wachtberg, GermanyVertretungsberechtigte und V.i.S.d.P:Dr. rer. nat. Ralf Dornhaus, Vorsitzender des VorstandesProf. Dr.-Ing. Joachim Ender, StellvertreterRegistergericht: Amtsgericht BonnVereinsregisternummer: VR 2530Umsatzsteuer-Identifikationsnummer (UID): DE 123382350Druck:Druckerei Holtkamp, Hauptstraße 35, D-52159 Roetgen, GermanyGrafik+Design:Edgar Küpper, D-52152 Simmerath, Germany
In special partnership with
VDEConference ServicesStresemannallee 15
60596 Frankfurt am Main
Phone +49(0)69 6308-0Fax +49(0)69 96 31 52 13
E-Mail [email protected] Internet http://www.vde.com
Conference Secretariat
FGANIrene Meyer
Neuenahrer Straße 2053343 Wachtberg
Phone +49(0)228 9435-273Fax +49(0)228 9435-617
E-Mail [email protected] http://www.fgan.de

Index
3
Organising Committee ...............................................................................4
Technical Programme Committee ................................................................5
Welcome Message ....................................................................................6
Plenary Talks .............................................................................................8
Conference Site .........................................................................................9
Tutorials and Panel Discussions .................................................................10
Technical Programme ...............................................................................12
Social Programme ................................................................................... 26
General Information ................................................................................. 28
Sponsors................................................................................................. 29

Organising Committee
4
ADMINISTRATION CHAIRS
Joachim Biermann
[email protected], Germany
TECHNICAL PROGRAMME CHAIRS
Uwe D. Hanebeck
[email protected]ät Karlsruhe (TH)Karlsruhe, Germany
Martin Ulmke
[email protected], Germany
EXECUTIVE CHAIRS
Wolfgang Koch
[email protected], Germany
Peter Willett
[email protected] of ConnecticutStorrs, CT, USA
GENERAL CHAIR
Jürgen Grosche
[email protected], Germany
Peter Neu
[email protected] Conference ServicesFrankfurt, Germany
FINANCE CHAIR
Volker Schanz
[email protected] ITGFrankfurt, Germany
Roy Streit, Metron Inc. (Chair)Sten Andler, Skövde University, SwedenUwe D. Hanebeck, Universität Karlsruhe, GermanyMichael Heizmann, FgH-IITB, GermanyWolfgang Koch, FGAN-FKIE, GermanyJean-Pierre Le Cadre, IRISA, France
James Linas, State University of New York, USASimon Maskell, QinetiQ, UKFelix Opitz, EADS, Deutschlad GmbH, GermanyMark Oxley, AFIT, USAMartin Ulmke, FGAN-FKIE, GermanyPeter Willett, University of Connecticut, USA
BEST PAPER AWARD COMMITTEE
Technical Programme Committee
5
Aarabi, ParhamAbraham, DouglasAhrholdt, MalteAmditis, AngelosAndler, StenAppriou, AlainAreta, JavierArnborg, StefanAuger, AlainBaldacci, AlbertoBar-Shalom, YaakovBenameur, KaoutharBenferhat, SalemBerger, ChristianBerger, JeanBesnard, PhilippeBieker, TanjaBiermann, JoachimBlanding, WayneBlasch, ErikBlom, HenkBoers, YvoBostron, HenrikBoury-Brisset, Anne-ClaireBuford, JohnCapponi, AgostinoCarthel, CraigCoraluppi, StefanoCousins, DavidDas, SubrataDaun, MartinaDe Maio, Antoniode Theije, Pascalde Villers, YvesDebouk, RamiDezert, JeanDorion, EricDuflos, EmmanuelDunham, DarinEdwards, Mark
Efe, MuratEhlers, FrankErdinc, OzgurEvans, RobFlorea, Mihai CristianFoucher, SamuelFränken, DietrichFrey, ChristianGagnon, LangisGheta, IoanaGiannopoulos, EvangelosGregoire, EricGu, Irene Y. H.Gustafsson, FredrikHanebeck, UweHempel, ChristianHernandez, MarcelHinman, MichaelHong, Sung-MogJakobson, GabrielJiang, XiaoyiJohannson, RonnieJouan, AlexandreJousselme, Anne-LaureJungert, ErlandKadar, IvanKester, LeonKirubarajan, ThiaKoch, WolfgangKokar, MieczyslawKoller, JostKonieczny, SebastianKronham, ThomasKruse, RudolfKuc, RomanKuh, AnthonyKulpa, KrzysztofLa Cour, BrianLa Scala, BarbaraLambert, Dale
Lavery, JohnLe Cadre, Jean-PierreLee, GordonLewis, LundyLindgren, DavidLlinas, JamesLuettgen, MarkLuginbuhl, TodLynch, RobertMahler, RonaldMahmood, AsherMallick, MahendraMarano, StefanoMaskell, SimonMaupin, PatrickMeidow, JochenMihaylova, LyudmilaMolina, JoseMonney, Paul-AndreMontagner, JulienMontiel, IgnacioMori, ShozoMoshiri, BehzadMusicki, DarkoNicholson, DavidNikolov, StavriNiu, RuixinOlsen, Karl ErikOpitz, FelixOshman, YaakovOxenham, MartinOxley, MarkPannetier, BenjaminPetrovic, VladimirPerez, Ramon PinoRanchin, ThierryRao, NageswaraRatton, LaurentRistic, BrankoRogers, AlexRogova, Galina
Roy, JeanSadjadi, FiroozSalerno, JohnSalmond, DavidSander, JenniferSanton, EugeneScheunert, UllrichSchubert, JohanSemerdjiev, TzevtanSiciliano, BrunoSmith-Carroll, AmySong, Taek-LyulStone, LawrenceStreit, RoySuri, SubhashSvensson, PerSviestins, EgilsTartakovsky, AlexanderThomä, ReinerThorsen, StevenTischler, KarinTrouve, EmmanuelTupin, FlorenceUlmke, MartinValin, Pierrevan Laere, JoeriVanheeghe, PhilippeVarshney, PramodVeeravalli, VenugopalVerlinde, PatrickViswanathan, RamanarayananVo, Ba-NguWang, XuezhiWieneke, MonikaWillett, PeterYu, BinZiemke, Tom
Welcome Message
6
Wachtberg, Storrs, and Karlsruhe, June 2008
Welcome to the 11th International Conference of Information Fusion, FUSION 2008, welcome to the 10th Anniversary of ISIF and the successful series of ISIF conferences, which has evolved into the premier global platform for exchanging latest advances in our field of research and its countless applications. And welcome to Cologne as well, one of the oldest cities in Germany, situated in the very heart of Eu-rope and its historic Rhineland region. For more than 2000 years Cologne, the Roman
Colonia Claudia Ara Agrippinensium, has been a melting pot “fusing” people, languages, and cul-tures, creating a unique European metropolis. May Cologne’s spiritus loci, her visible witnesses of a grand culture, her modern liveliness and beautiful scenery along the River Rhine dominated by the fa-mous cathedral sheltering the Shrine of the Three Wise Men, create an atmosphere that will stimulate us to learn from each other. May it inspire us to discover new frontiers in one of the most fascinating and dynamically evolving branches of knowledge: Information Fusion.The Hyatt Regency Cologne is not only a conven-
iently situated conference site with a view on Co-logne’s impressive skyline, but also overlooks one of the “historic sites” of Fusion Science, the famous Hohenzollernbrücke. On this Rhine bridge, the German engineer Christian Daniel Hülsmeyer per-formed his legendary radar experiments in April 1904 – one of the very first examples of producing
situational awareness by exploiting information from artificial sensor devices. On the evening of the first conference day, the
Mayor of Cologne will receive the International Fu-sion Community in the historic town hall, built on the foundations of the Praetorium, the residence of the city‘s Roman governor (Tuesday, July 1, 18:30h). “One of us”, Richard Klemm, the well-known ra-dar scientist and classical pianist, will entertain us in these historic surroundings with some pieces taken from Carnaval by Robert Schumann, one of the great sons of the Rhineland, providing you a glimpse of the famous Rhine Valley Carnaval even in July.
The conference dinner on Wednesday, July 2, 19:00h, will be held on the flagship of the White Fleet on the Rhine, the MS RheinEnergie. As you dine and converse with your colleagues, you will cruise on the waves of the River Rhine. This very ship also served His Holiness Pope Benedict XVI when he visited Cologne in August 2005. In a little ceremony during the banquet, Roy Streit, Best Paper Award Chair, will announce which of the Best Paper Nominees will actually win the award.The conference chairs believe that an extraordi-
nary technical programme has been arranged, con-sisting of 274 oral presentations in up to 7 tracks, which were selected from 368 full draft papers sub-mitted from over 40 countries. In a peer-reviewing process, almost 1100 reviews were produced by the 162 members of the Technical Programme Com-mittee and have been evaluated by the conference © U. Ernser—Stadt Köln
© Günther Ventur—Stadt Köln 1998

Welcome Message
7
chairs. 13 tutorials will be given by internationally recognized experts providing excellent introductions into the information fusion methodology and its var-ious applications.We are grateful that the state of the art in our sci-
entific discipline and the general lines for potential future progress will be discussed in two panel discus-sions organized by Ivan Kadar and Chee-Yee Chong (Issues and Challenges in Distributed Tracking and Fusion with Applications to Real-World Problems in a Net-Centric World) and by Mitch Kokar and Gary J. Toth (Higher-Level Information Fusion: Challenges to the Academic Community). A record number of 22 special session proposals were received, from which 18 will actually take place. We particularly thank our special session organizers for their valu-able contribution to the conference programme.We have been fortunate to receive either technical
or financial support (and in many cases: both) from a number of sources. We would like to thank those who have provided us with a liasion to academia, government and industry: Professor Dr. Armin B. Cremers, University of Bonn (Academic Liaison), Ms. Marion Sielemann, German Ministry of Defence (Government Liaison), and Dr. Uwe Wacker, EADS Deutschland GmbH (Industry Liaison). FUSION 2008 is much indebted to their personal engage-ment, advice, help, and encouragement.The premier institutional partners of FUSION 2008
are ISIF, the International Information Fusion Soci-ety, the German Defence Research Establishment FGAN, the Information Technology Society ITG within the German Electrical Engineering Organiza-tion VDE, the German defence forces Bundeswehr,
the Technical University of Karlsruhe, the Karlsruhe Institute of Technology KIT, the Aerospace and Elec-tronic Systems Society AESS within the American In-stitution of Electrical and Electronics Engineers IEEE, and the British Institution of Engineering and Tech-nology IET.Many German and international industrial compa-
nies helped us to reduce the financial load: EADS Deutschland GmbH, IABG mbH, Thales Holding GmbH, SAAB AB, Schönhofer Sales and Enginee-ing GmbH, Atlas Elektronik GmbH, Rheinmetall AG, Rhode+Schwarz GmbH & Co. KG, MEDAV GmbH, Agilent Technologies Deutschland GmbH, Diehl Stif-tung & Co. KG, and MathWorks, Inc.Organizing a top-class conference such as FUSION
is a wonderful experience and, in fact, one of the last real adventures modern life can offer. It requires many heads, hearts, and hands to make it a success. We thank all members of the Technical Programme Committee for their hard reviewing work, Roy Streit (Metron Inc.) and the Best Paper Award Committee, Dr. Schanz and Mr. Neu and their colleagues from VDE Conference Services, and the colleagues from FGAN-FKIE who earned particular merits: Gereon Schüller (Conference Proceedings), Susanne Lange (Conference Homepage), Stefanie Woll (Promotion and Publishing), Jane Stannus (Editing Services), and last but not least, Irene Meyer (Conference Secretariat).In our view, the FUSION 2008 technical pro-
gramme clearly demonstrates on this 10th Anniver-sary of ISIF and the FUSION conferences that Infor-mation Fusion has actually evolved into a mature branch of Applied Science characterized by its own methodologies, technologies, and fields of applica-tion. We hope that the 11th International Conference on Information Fusion gives you as much pleasure as we had when preparing it for you.
On behalf of the Organising Committee
Wolfgang Koch, Fusion 2008 Executive Chair
© Köln-Düsseldorfer

Plenary Talks
8
Dieter FoxDieter Fox is Associate Professor and Director of the Robotics and State Estimation Lab in the Computer Science & Engineering Department at the University of Washington, Seattle. He obtained his Ph.D. from the University of Bonn, Germany. Before joining UW, he spent two years as a postdoctoral researcher at the CMU Robot Learning Lab.Dieter‘s current research focuses on probabilistic state estimation with ap-plications in robotics and activity recognition.Keynote lecture 1: Activity Recognition From Wearable SensorsTuesday, July 1, 09:00Abstract:Recent advances in wearable sensing and computing devices and in fast, probabilistic inference techniques make possible the fine-grained estimation of a person‘s activities over extended periods of time. In this talk I will show how dynamic Bayesian networks and conditional random fields can be used to estimate the location and activity of a person based on information such as GPS readings or WiFi signal strength. Our models use multiple levels of abstraction to bridge the gap between raw sensor measurements and high level information such as a user‘s mode of transportation, her current goal, and her significant places (e.g. home or work place). I will also present work on using RFID tags or a wearable multi-sensor system to estimate a person‘s fine-grained activities.This is joint work with Brian Ferris, Lin Liao, Don Patterson, Alvin Raj, Amar-nag Subramanya, Jeff Bilmes, Gaetano Borriello, and Henry Kautz.
Hugh F. Durrant-WhyteHugh Durrant-Whyte received the B.Sc. in Nuclear Engineering from the University of London, U.K., in 1983, and the M.S.E. and Ph.D. degrees, both in Systems Engineering, from the University of Pennsylvania, U.S.A., in 1985 and 1986, respectively. From 1987 to 1995, he was a Lecturer in Engineer-ing Science, the University of Oxford, U.K. From 1995 to 2002 he was Professor of Mechatronic Engineering at University of Sydney. In 2002 he was awarded an inaugural Australian Research Council (ARC) Federation Fellowship. He also now leads the ARC Centre of Excellence in Autonomous Systems. His research work focuses on autonomous vehicle navigation and decentralised data fusion methods. His work in applications includes auto-mation in cargo handling, mining, defence, and marine systems. He has published over 300 technical papers and has won numerous awards and prizes for his work. He is a Fellow of the Academy of Technical Sciences, a Fellow of the IEEE and an IEEE Robotics Society Distinguished Lecturer. Keynote lecture 2: Maximal Information Systems Wednesday, July 2, 09:00Abstract:Information provides a quantitative metric for describing the value of individ-ual systems components in autonomous systems tasks such as tracking, map-ping and navigation, search and exploration; tasks in which the objective is information gain in some form. An information model is an abstraction of system capabilities in an anonymous form which allows a priori reasoning on the system itself. By construction, information measures have properties of composability and additivity and thus provides a natural means of model-ling and describing large scale systems of systems. This talk will begin by describing how information measures arise naturally in autonomous tracking, mapping and navigation, search and exploration tasks. It is then demonstrated that the performance of individual sensors and platforms can be modelled using these information measures and that sys-tem-level performance metrics can be computed. These ideas are illustrated in a series of tasks involving mixed air and ground autonomous systems. These include flight-tests of cooperative UAVs engaged in tracking and navi-gation tasks, mixed UAV, ground vehicles and human operatives, engaged in mapping and picture compilation operations, and operations involving multi-platform search in constrained environments. In each, it is shown how information provides both a performance metric and design objective under-pinning large-scale systems of systems operation.
Henk A. P. BlomHenk Blom is principal scientist at National Aerospace Laboratory NLR in Amsterdam, The Netherlands. He holds a PhD from Delft University of Tech-nology on the thesis “Bayesian estimation for decision-directed stochastic control”, and has over twenty five years experience in stochastic modeling and analysis with application towards data fusion and safety risk in air traf-fic management. He is (co-)author of over 100 articles in scientific journals, books and conference proceedings, and of the volume “Stochastic Hybrid Systems, Theory and Safety Critical Systems”, Springer, 2006. Dr. Blom is Fellow, IEEE. Keynote lecture 3: Air Traffic Collision Risk Modelling, Analysis and Rare Event SimulationThursday, July 3, 09:00Abstract:Fault and event trees are the dominantly used safety risk models in air traf-fic. However, the combination of concurrent, dynamic and random effects cannot properly be captured by these classical techniques. In this lecture it will be explained how safety risk modeling and analysis can be formulated as a problem of estimation rare event probability of a large scale stochas-tic hybrid system. This formulation allows using stochastic hybrid modeling, analysis and particle system tools that have proven their power in multi-sen-sor multi-target data fusion. In addition to exploiting this similarity, the com-plementary challenge is to estimate rare events. The modeling and analysis approaches in handling this will be explained and illustrated for air traffic examples, and includes a benchmark versus fault/event trees.
Rabinder N. MadanRabinder N. Madan received the B.Sc. (Honours) and M.Sc. degrees in physics from St. Stephens Collegs of Delhi University in 1954 and 1956, and the A.M. and Ph.D. degrees in theoretical physics from Princeton University in 1964 and 1967, respectively.He has been on the Faculties of the University of California, Massachusetts and North Carolina, and has been a Visiting Professor at Stanford’s Linear Accelerator Center. There he investigated collision theory, perturbation theo-ry and variation-iteration phenomenon. From 1977-79 he was the Manager of Systems Analysis at the Bunker-Ramo Corporation. From 1979-84 he was a Senior Scientist in the Radar Systems Group at Hughes Aircraft Company.Since 1984 he has been at the Office of Naval Research as Program Man-ager of the Systems and Electromagnetic Theory. Early on, he identified is-sues and nurtured research in detection, estimation and tracking of multiple targets employing multiple and distributed sensors under communication constraints. In the communications area, he focused on the support of multi-user multi-hop scenarios, secure coded waveforms, scheduling, throughput and protocol analysis for integrated digital networks. In the area of phased array radars, sonar and passive arrays, he created programs emphasizing high resolution techniques, eigenstructure methods, vector sensor processing and implementations. He is currently especially interested in MIMO radar.He served as one of the Editors of “Mathematics in Signal Processing, a volume in Conference Series of the Institute of Mathematics and Its Applica-tions, and as an Associate Editor for a Special Issue of the IEEE Proceedings. He is a member of the American Physical Society, a Fellow of the Institute of Mathematics and Its Application, and a Fellow of the IEEE. In 2002, he was accorded a “Tribute”, a special day of presentations by colleagues honoring his name, as part of the 5th Annual ONR/GTRI Workshop on Target track-ing and Sensor Fusion. He received J.C. Bose Memorial Award in 1989 for the Best Paper in Science and Engineering. He is the editor-in-chief of the prestigious Journal of Franklin Institute.He is an accomplished actor, with roles in many plays staged by The Camel-ot Players. He is an accomplished and published cook. He also enjoys play-ing golf, tennis, and bridge. Plenary Talk: “Perspectives in Information Fusion”.July 2, 8:30The talk gives some historical perspective to the topic of Fusion, beginning with Benjamin Franklin and his “Madeira Society”, Condorcet’s “Democracy Models” in the late 18th Century, through Von Neumann, Chow and Bates & Granger in the 1950s and 60s, up to the explosion of interest in the sub-ject today at the sequence of FUSION conferences.
Conference Site
9
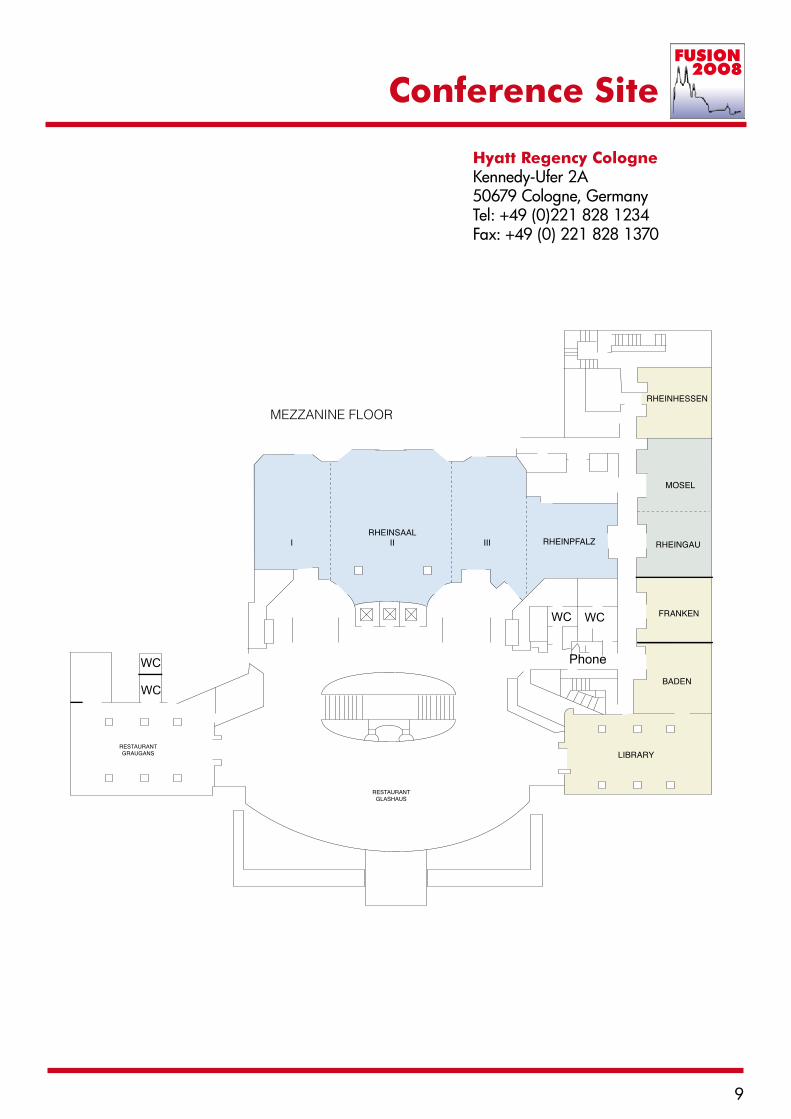
Hyatt Regency CologneKennedy-Ufer 2A50679 Cologne, GermanyTel: +49 (0)221 828 1234Fax: +49 (0) 221 828 1370
Technical Programme
10
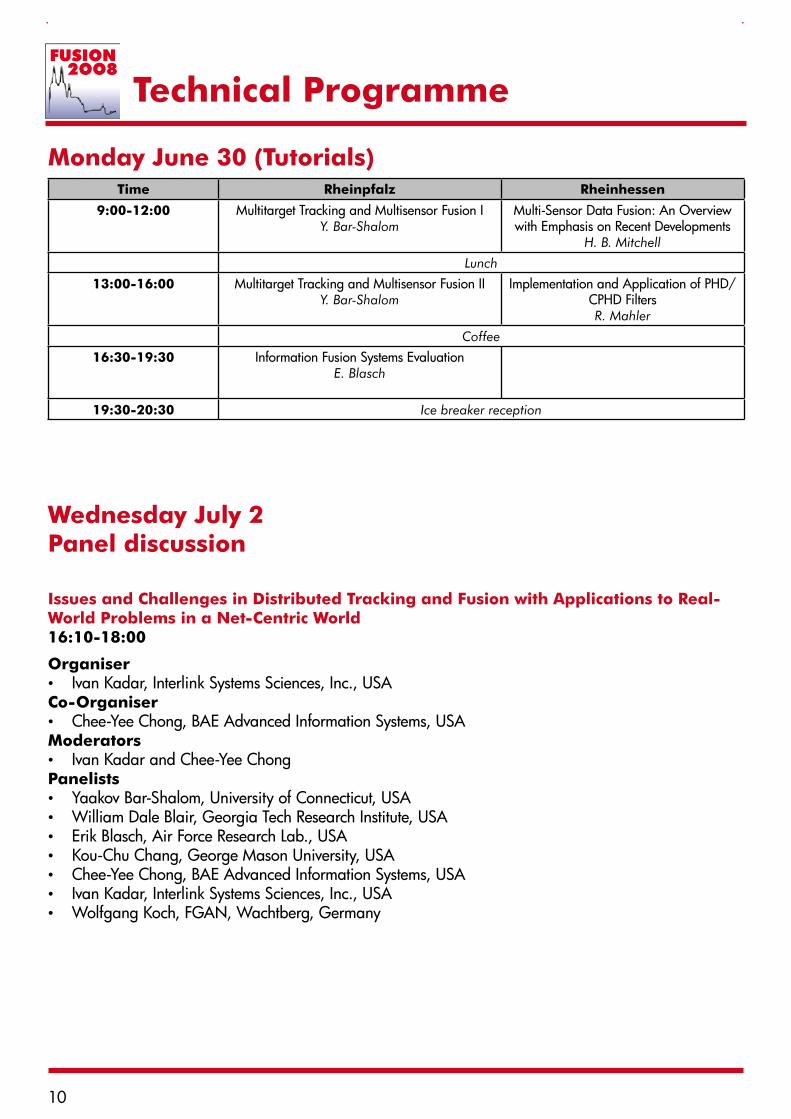
Time Rheinpfalz Rheinhessen Mosel Rheingau Franken
9:00-12:00 Multitarget Tracking and Multisensor Fusion IY. Bar-Shalom
Multi-Sensor Data Fusion: An Overview with Emphasis on Recent Developments
H. B. Mitchell
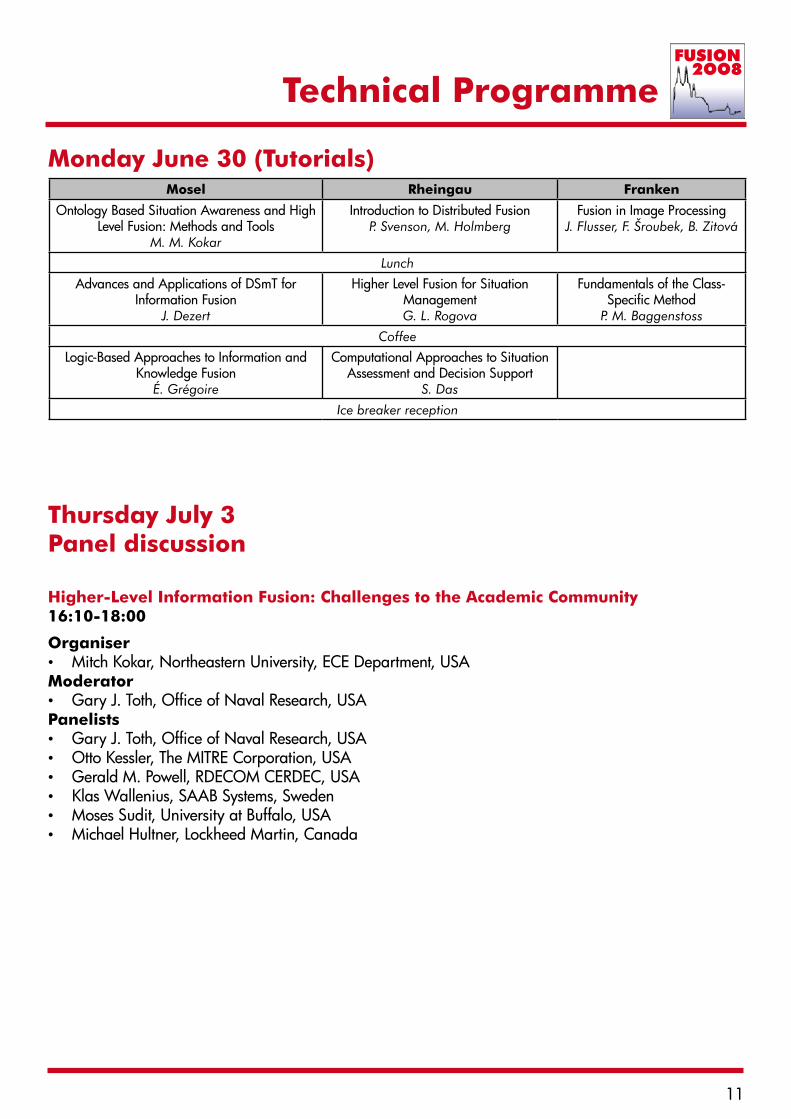
Ontology Based Situation Awareness and High Level Fusion: Methods and Tools
M. M. Kokar
Introduction to Distributed FusionP. Svenson, M. Holmberg
Fusion in Image ProcessingJ. Flusser, F. Šroubek, B. Zitová
Lunch Lunch
13:00-16:00 Multitarget Tracking and Multisensor Fusion IIY. Bar-Shalom
Implementation and Application of PHD/CPHD FiltersR. Mahler
Advances and Applications of DSmT for Information Fusion
J. Dezert
Higher Level Fusion for Situation ManagementG. L. Rogova
Fundamentals of the Class-Specific Method
P. M. Baggenstoss
Coffee Coffee
16:30-19:30 Information Fusion Systems EvaluationE. Blasch
Logic-Based Approaches to Information and Knowledge Fusion
É. Grégoire
Computational Approaches to Situation Assessment and Decision Support
S. Das
19:30-20:30 Ice breaker reception Ice breaker reception
Monday June 30 (Tutorials)
Issues and Challenges in Distributed Tracking and Fusion with Applications to Real-World Problems in a Net-Centric World16:10-18:00
OrganiserIvan Kadar, Interlink Systems Sciences, Inc., USA•
Co-OrganiserChee-Yee Chong, BAE Advanced Information Systems, USA•
ModeratorsIvan Kadar and Chee-Yee Chong•
PanelistsYaakov Bar-Shalom, University of Connecticut, USA •William Dale Blair, Georgia Tech Research Institute, USA •Erik Blasch, Air Force Research Lab., USA •Kou-Chu Chang, George Mason University, USA •Chee-Yee Chong, BAE Advanced Information Systems, USA •Ivan Kadar, Interlink Systems Sciences, Inc., USA•Wolfgang Koch, FGAN, Wachtberg, Germany•
Wednesday July 2Panel discussion
Technical Programme
11
Time Rheinpfalz Rheinhessen Mosel Rheingau Franken
9:00-12:00 Multitarget Tracking and Multisensor Fusion IY. Bar-Shalom
Multi-Sensor Data Fusion: An Overview with Emphasis on Recent Developments
H. B. Mitchell
Ontology Based Situation Awareness and High Level Fusion: Methods and Tools
M. M. Kokar
Introduction to Distributed FusionP. Svenson, M. Holmberg
Fusion in Image ProcessingJ. Flusser, F. Šroubek, B. Zitová
Lunch Lunch
13:00-16:00 Multitarget Tracking and Multisensor Fusion IIY. Bar-Shalom
Implementation and Application of PHD/CPHD FiltersR. Mahler
Advances and Applications of DSmT for Information Fusion
J. Dezert
Higher Level Fusion for Situation ManagementG. L. Rogova
Fundamentals of the Class-Specific Method
P. M. Baggenstoss
Coffee Coffee
16:30-19:30 Information Fusion Systems EvaluationE. Blasch
Logic-Based Approaches to Information and Knowledge Fusion
É. Grégoire
Computational Approaches to Situation Assessment and Decision Support
S. Das
19:30-20:30 Ice breaker reception Ice breaker reception
Monday June 30 (Tutorials)
Higher-Level Information Fusion: Challenges to the Academic Community16:10-18:00
OrganiserMitch Kokar, Northeastern University, ECE Department, USA•
ModeratorGary J. Toth, Office of Naval Research, USA•
PanelistsGary J. Toth, Office of Naval Research, USA•Otto Kessler, The MITRE Corporation, USA•Gerald M. Powell, RDECOM CERDEC, USA•Klas Wallenius, SAAB Systems, Sweden•Moses Sudit, University at Buffalo, USA•Michael Hultner, Lockheed Martin, Canada•
Thursday July 3Panel discussion
Technical Programme
12
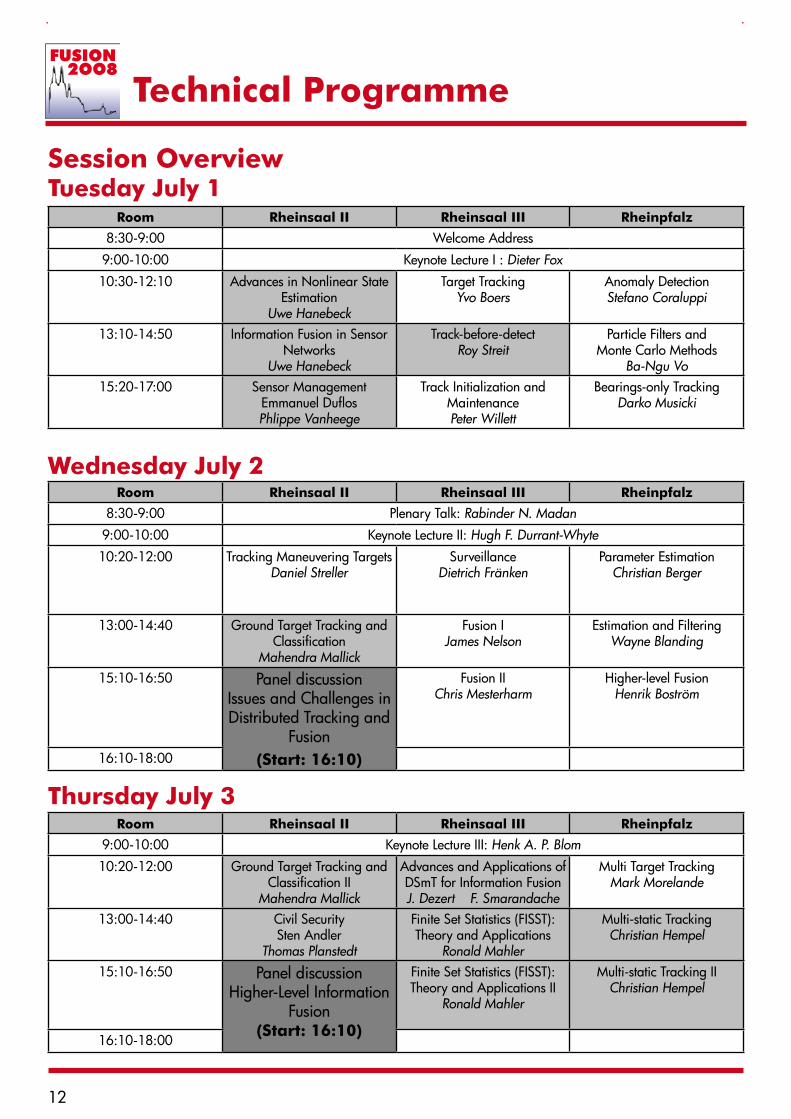
Room Rheinsaal II Rheinsaal III Rheinpfalz Franken Mosel Rheingau Rheinhessen
9:00-10:00 Keynote Lecture III: Henk A. P. Blom10:20-12:00 Ground Target Tracking and
Classification II Mahendra Mallick
Advances and Applications of DSmT for Information Fusion J. Dezert F. Smarandache
Multi Target Tracking Mark Morelande
Tracking with Sensor Networks Benjamin Pannetier
Applications II Frank Lorenz
OGC/ISO Web-Enabled GIS for Geospatial Data Fusion
Raffaele Grasso 13:00-14:40 Civil Security
Sten AndlerThomas Planstedt
Finite Set Statistics (FISST): Theory and Applications
Ronald Mahler
Multi-static Tracking Christian Hempel
Intrusion Detection Robert Lynch
Challenges of and Methods for Information Fusion of Soft Data
James Llinas John Lavery
Multisensor Data Fusion I Simon Maskell
Image Fusion Kai Juengling
15:10-16:50 Panel discussionHigher-Level Information
Fusion(Start: 16:10)
Finite Set Statistics (FISST): Theory and Applications II
Ronald Mahler
Multi-static Tracking II Christian Hempel
Image Segmentation and Analysis
Michael Heizmann
Challenges of and Methods for Information Fusion of Soft
Data II James Llinas John Lavery
Multisensor Data Fusion II David Salmond
16:10-18:00
Thursday July 3
Room Rheinsaal II Rheinsaal III Rheinpfalz Franken Mosel Rheingau Rheinhessen
8:30-9:00 Welcome Address9:00-10:00 Keynote Lecture I : Dieter Fox10:30-12:10 Advances in Nonlinear State
Estimation Uwe Hanebeck
Target Tracking Yvo Boers
Anomaly Detection Stefano Coraluppi
Sensor Networks Jost Koller
Localisation Bruno Demissie
Situation Sensing, Fusion and Management
Gabriel Jakobson, Lundy Lewis
Hard/Soft Information Fusion John Lavery James Llinas
13:10-14:50 Information Fusion in Sensor Networks
Uwe Hanebeck
Track-before-detect Roy Streit
Particle Filters and Monte Carlo Methods
Ba-Ngu Vo
Situation Awareness I Ronnie Johansson
Signal Processing Ulrich Nickel
Fusion Performance Evaluation Erik Blasch
Classification I Max Krueger
15:20-17:00 Sensor Management Emmanuel DuflosPhlippe Vanheege
Track Initialization and Maintenance Peter Willett
Bearings-only Tracking Darko Musicki
Situation Awareness II Maria Riveiro
Optimization Jean-Pierre Le Cadre
Fusion Performance Evaluation II Mark Oxley
Classification II Vincent Nimier
Tuesday July 1
Room Rheinsaal II Rheinsaal III Rheinpfalz Franken Mosel Rheingau Rheinhessen
8:30-9:00 Plenary Talk: Rabinder N. Madan9:00-10:00 Keynote Lecture II: Hugh F. Durrant-Whyte10:20-12:00 Tracking Maneuvering Targets
Daniel Streller Surveillance
Dietrich Fränken Parameter Estimation
Christian BergerCollaborating Mobile Sensors
Volker Schatz Belief Functions, Theory
Christophe Osswald Car-driver Assistance Systems
Ullrich Scheunert Distributed Inference
and Decision-Making in Multisensor Systems
Venugopal Veeravalli13:00-14:40 Ground Target Tracking and
Classification Mahendra Mallick
Fusion I James Nelson
Estimation and Filtering Wayne Blanding
Distributed Fusion Algorithms Fredrik Gustafsson
David Lindgren
Belief Functions, Applications Martin Oxenham
Fusion on Interacting Physical, Perceptual and Policy Levels
Jochen Meidow
Teams Klaus Wild
15:10-16:50 Panel discussionIssues and Challenges in Distributed Tracking and
Fusion
Fusion II Chris Mesterharm
Higher-level Fusion Henrik Boström
Distributed Fusion Algorithms II Fredrik Gustafsson
David Lindgren
Applications Peter Solbrig
Knowledge Modelling Kellyn Kruger
Distributed Inference and Decision-Making in Multisensor Systems II Alexander Tartakovsky
16:10-18:00 (Start: 16:10)
Wednesday July 2
Session Overview
Technical Programme
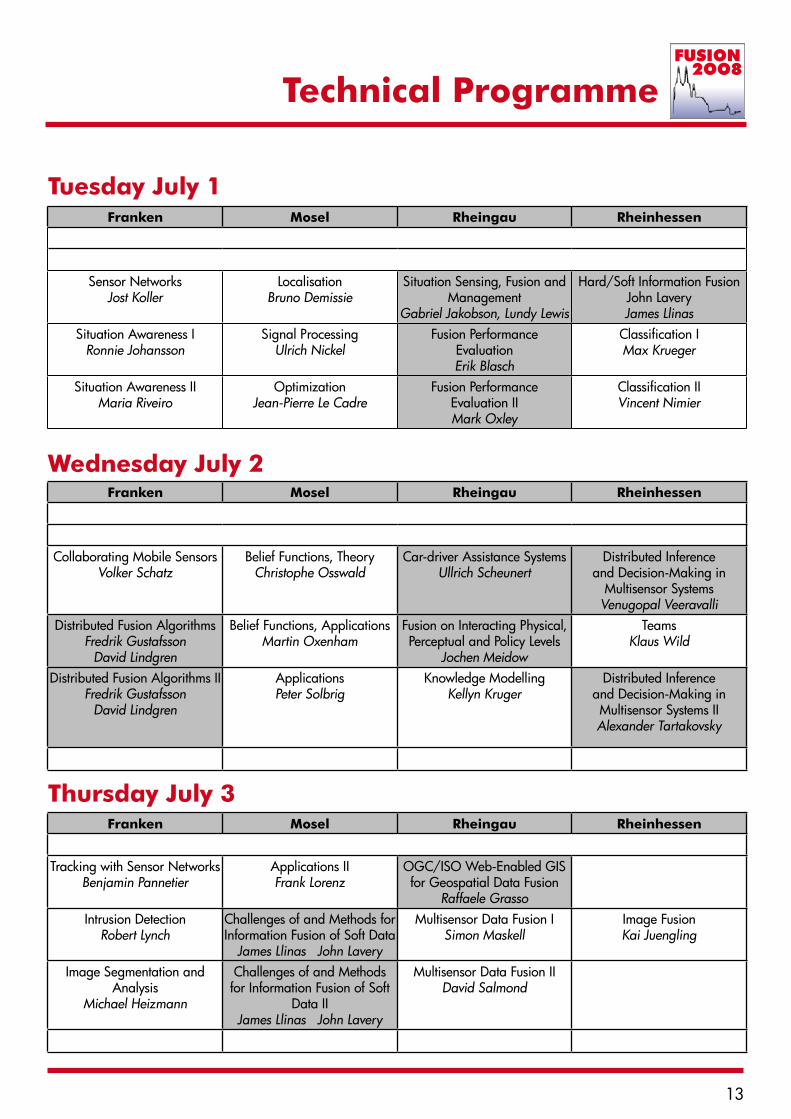
13
Room Rheinsaal II Rheinsaal III Rheinpfalz Franken Mosel Rheingau Rheinhessen
9:00-10:00 Keynote Lecture III: Henk A. P. Blom10:20-12:00 Ground Target Tracking and
Classification II Mahendra Mallick
Advances and Applications of DSmT for Information Fusion J. Dezert F. Smarandache
Multi Target Tracking Mark Morelande
Tracking with Sensor Networks Benjamin Pannetier
Applications II Frank Lorenz
OGC/ISO Web-Enabled GIS for Geospatial Data Fusion
Raffaele Grasso 13:00-14:40 Civil Security
Sten AndlerThomas Planstedt
Finite Set Statistics (FISST): Theory and Applications
Ronald Mahler
Multi-static Tracking Christian Hempel
Intrusion Detection Robert Lynch
Challenges of and Methods for Information Fusion of Soft Data
James Llinas John Lavery
Multisensor Data Fusion I Simon Maskell
Image Fusion Kai Juengling
15:10-16:50 Panel discussionHigher-Level Information
Fusion(Start: 16:10)
Finite Set Statistics (FISST): Theory and Applications II
Ronald Mahler
Multi-static Tracking II Christian Hempel
Image Segmentation and Analysis
Michael Heizmann
Challenges of and Methods for Information Fusion of Soft
Data II James Llinas John Lavery
Multisensor Data Fusion II David Salmond
16:10-18:00
Thursday July 3
Room Rheinsaal II Rheinsaal III Rheinpfalz Franken Mosel Rheingau Rheinhessen
8:30-9:00 Welcome Address9:00-10:00 Keynote Lecture I : Dieter Fox10:30-12:10 Advances in Nonlinear State
Estimation Uwe Hanebeck
Target Tracking Yvo Boers
Anomaly Detection Stefano Coraluppi
Sensor Networks Jost Koller
Localisation Bruno Demissie
Situation Sensing, Fusion and Management
Gabriel Jakobson, Lundy Lewis
Hard/Soft Information Fusion John Lavery James Llinas
13:10-14:50 Information Fusion in Sensor Networks
Uwe Hanebeck
Track-before-detect Roy Streit
Particle Filters and Monte Carlo Methods
Ba-Ngu Vo
Situation Awareness I Ronnie Johansson
Signal Processing Ulrich Nickel
Fusion Performance Evaluation Erik Blasch
Classification I Max Krueger
15:20-17:00 Sensor Management Emmanuel DuflosPhlippe Vanheege
Track Initialization and Maintenance Peter Willett
Bearings-only Tracking Darko Musicki
Situation Awareness II Maria Riveiro
Optimization Jean-Pierre Le Cadre
Fusion Performance Evaluation II Mark Oxley
Classification II Vincent Nimier
Tuesday July 1
Room Rheinsaal II Rheinsaal III Rheinpfalz Franken Mosel Rheingau Rheinhessen
8:30-9:00 Plenary Talk: Rabinder N. Madan9:00-10:00 Keynote Lecture II: Hugh F. Durrant-Whyte10:20-12:00 Tracking Maneuvering Targets
Daniel Streller Surveillance
Dietrich Fränken Parameter Estimation
Christian BergerCollaborating Mobile Sensors
Volker Schatz Belief Functions, Theory
Christophe Osswald Car-driver Assistance Systems
Ullrich Scheunert Distributed Inference
and Decision-Making in Multisensor Systems
Venugopal Veeravalli13:00-14:40 Ground Target Tracking and
Classification Mahendra Mallick
Fusion I James Nelson
Estimation and Filtering Wayne Blanding
Distributed Fusion Algorithms Fredrik Gustafsson
David Lindgren
Belief Functions, Applications Martin Oxenham
Fusion on Interacting Physical, Perceptual and Policy Levels
Jochen Meidow
Teams Klaus Wild
15:10-16:50 Panel discussionIssues and Challenges in Distributed Tracking and
Fusion
Fusion II Chris Mesterharm
Higher-level Fusion Henrik Boström
Distributed Fusion Algorithms II Fredrik Gustafsson
David Lindgren
Applications Peter Solbrig
Knowledge Modelling Kellyn Kruger
Distributed Inference and Decision-Making in Multisensor Systems II Alexander Tartakovsky
16:10-18:00 (Start: 16:10)
Wednesday July 2
Technical Programme
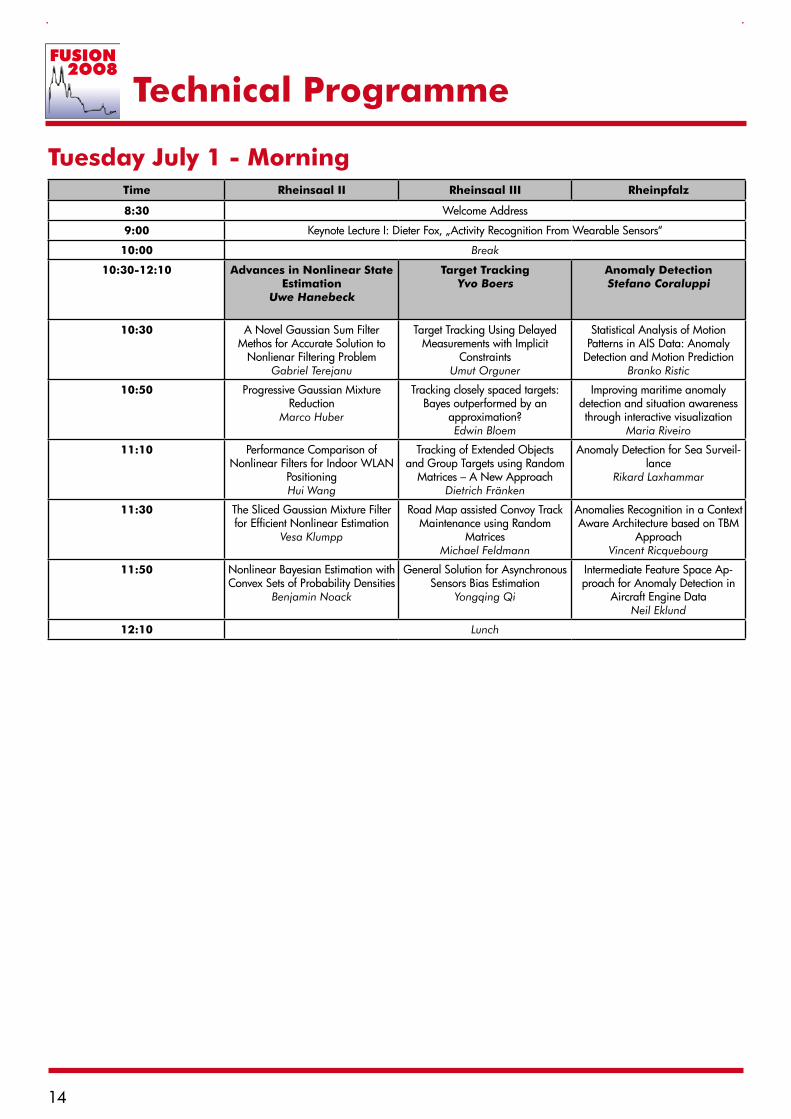
14
Time Rheinsaal II Rheinsaal III Rheinpfalz Franken Mosel Rheingau Rheinhessen
8:30 Welcome Address
9:00 Keynote Lecture I: Dieter Fox, „Activity Recognition From Wearable Sensors“
10:00 Break Break
10:30-12:10 Advances in Nonlinear State Estimation
Uwe Hanebeck
Target TrackingYvo Boers
Anomaly DetectionStefano Coraluppi
Sensor NetworksJost Koller
LocalisationBruno Demissie
Situation Sensing, Fusion and Management
Gabriel JakobsonLundy Lewis
Hard/Soft Information Fusion John Lavery James Llinas
10:30 A Novel Gaussian Sum Filter Methos for Accurate Solution to
Nonlienar Filtering Problem Gabriel Terejanu
Target Tracking Using Delayed Measurements with Implicit
Constraints Umut Orguner
Statistical Analysis of Motion Patterns in AIS Data: Anomaly
Detection and Motion Prediction Branko Ristic
Running Consensus in Wireless Sensor Networks
Paolo Braca
Localization Under Random Measurements with Application to
Radiation Sources Nageswara Rao
Discovery, Analysis, and Characteristics of Event Impacts
Robert Patton
The Identity Management Problem -- A Short Survey Leonidas Guibas
10:50 Progressive Gaussian Mixture Reduction
Marco Huber
Tracking closely spaced targets: Bayes outperformed by an
approximation? Edwin Bloem
Improving maritime anomaly detection and situation awareness through interactive visualization
Maria Riveiro
Online Drift Correction in Wireless Sensor Networks Using Spatio-
Temporal Modeling Maen Takruri
On Basic Properties of Localization Using Distance-Difference Measu-
rements Xiaochun Xu
Unifying multiple knowledge domains using the ARTMAP
information fusion system Arun Ravindran
A framework for dynamic hard/soft fusion
David Hall
11:10 Performance Comparison of Nonlinear Filters for Indoor WLAN
Positioning Hui Wang
Tracking of Extended Objects and Group Targets using Random
Matrices – A New Approach Dietrich Fränken
Anomaly Detection for Sea Surveil-lance
Rikard Laxhammar
Kernel-Based Learning of Decision Fusion in Wireless Sensor Networks
Gernot Fabeck
Localization of Multiple Sources with a Moving Array using
Subspace Data Fusion Marc Oispuu
Problems and Prospects for Formally Representing and Reasoning about
Enemy Courses of Action Brian Ulicny
High-Level Information Fusion and Mission Planning in Highly Anisotropic Threat Spaces
Mark Witkowski
11:30 The Sliced Gaussian Mixture Filter for Efficient Nonlinear Estimation
Vesa Klumpp
Road Map assisted Convoy Track Maintenance using Random
Matrices Michael Feldmann
Anomalies Recognition in a Context Aware Architecture based on TBM
Approach Vincent Ricquebourg
Agent-Based Sensor Coalition Formation
Robin Glinton
GNSS Bias Correction for localizati-on systems
Pierre Delmas
Insider Threat Detection Using Situation-Aware MAS
Lundy Lewis
Generation of a Fundamental Data Set for Hard/Soft Information Fusion
Marco Pravia
11:50 Nonlinear Bayesian Estimation with Convex Sets of Probability Densities
Benjamin Noack
General Solution for Asynchronous Sensors Bias Estimation
Yongqing Qi
Intermediate Feature Space Ap-proach for Anomaly Detection in
Aircraft Engine Data Neil Eklund
Minimum-Cost Sensor Coverage of Planar Regions
Nageswara Rao
An Optimal Local Map Registrati-on Technique for Wireless Sensor Network Localization Problems
Yifeng Zhou
Probabilistic Prediction of Vessel Motion at Multiple Spatial Scales for
Maritime Situation Awareness Bradley Rhodes
Abductive Inferencing for Integra-ting Information from Human and
Robotic Sources John Josephson
12:10 Lunch Lunch
Tuesday July 1 - Morning
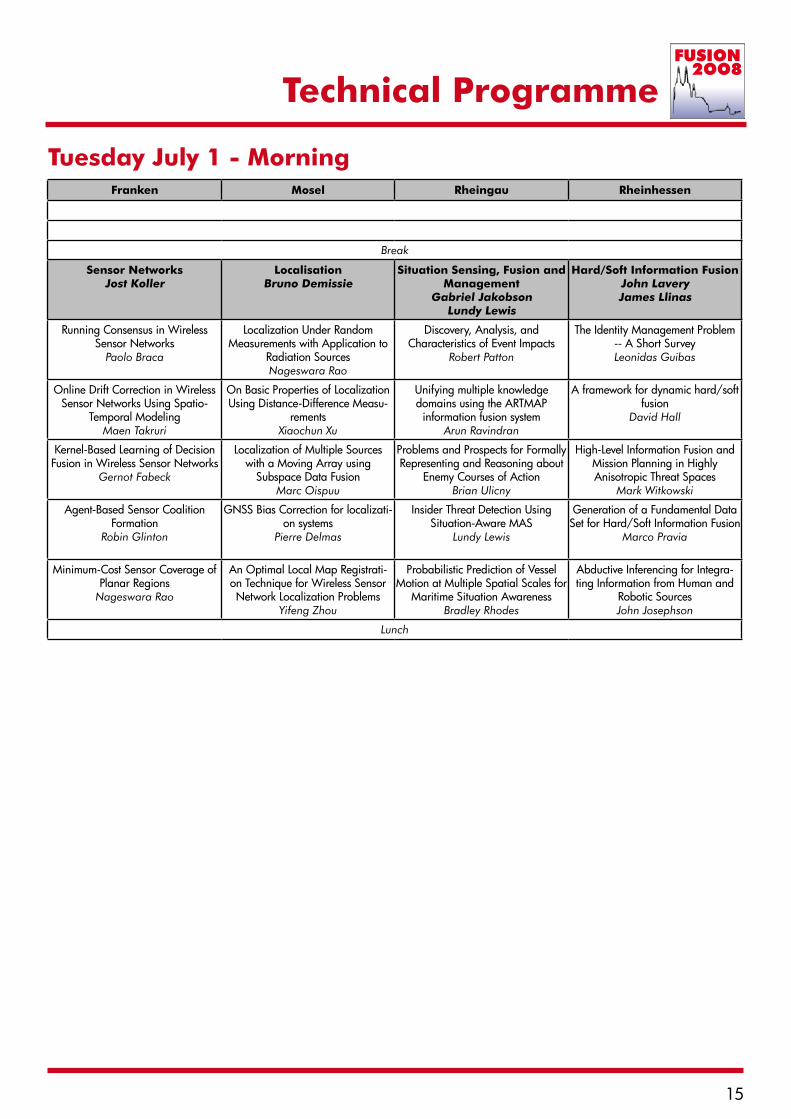
Technical Programme
15
Time Rheinsaal II Rheinsaal III Rheinpfalz Franken Mosel Rheingau Rheinhessen
8:30 Welcome Address
9:00 Keynote Lecture I: Dieter Fox, „Activity Recognition From Wearable Sensors“
10:00 Break Break
10:30-12:10 Advances in Nonlinear State Estimation
Uwe Hanebeck
Target TrackingYvo Boers
Anomaly DetectionStefano Coraluppi
Sensor NetworksJost Koller
LocalisationBruno Demissie
Situation Sensing, Fusion and Management
Gabriel JakobsonLundy Lewis
Hard/Soft Information Fusion John Lavery James Llinas
10:30 A Novel Gaussian Sum Filter Methos for Accurate Solution to
Nonlienar Filtering Problem Gabriel Terejanu
Target Tracking Using Delayed Measurements with Implicit
Constraints Umut Orguner
Statistical Analysis of Motion Patterns in AIS Data: Anomaly
Detection and Motion Prediction Branko Ristic
Running Consensus in Wireless Sensor Networks
Paolo Braca
Localization Under Random Measurements with Application to
Radiation Sources Nageswara Rao
Discovery, Analysis, and Characteristics of Event Impacts
Robert Patton
The Identity Management Problem -- A Short Survey Leonidas Guibas
10:50 Progressive Gaussian Mixture Reduction
Marco Huber
Tracking closely spaced targets: Bayes outperformed by an
approximation? Edwin Bloem
Improving maritime anomaly detection and situation awareness through interactive visualization
Maria Riveiro
Online Drift Correction in Wireless Sensor Networks Using Spatio-
Temporal Modeling Maen Takruri
On Basic Properties of Localization Using Distance-Difference Measu-
rements Xiaochun Xu
Unifying multiple knowledge domains using the ARTMAP
information fusion system Arun Ravindran
A framework for dynamic hard/soft fusion
David Hall
11:10 Performance Comparison of Nonlinear Filters for Indoor WLAN
Positioning Hui Wang
Tracking of Extended Objects and Group Targets using Random
Matrices – A New Approach Dietrich Fränken
Anomaly Detection for Sea Surveil-lance
Rikard Laxhammar
Kernel-Based Learning of Decision Fusion in Wireless Sensor Networks
Gernot Fabeck
Localization of Multiple Sources with a Moving Array using
Subspace Data Fusion Marc Oispuu
Problems and Prospects for Formally Representing and Reasoning about
Enemy Courses of Action Brian Ulicny
High-Level Information Fusion and Mission Planning in Highly Anisotropic Threat Spaces
Mark Witkowski
11:30 The Sliced Gaussian Mixture Filter for Efficient Nonlinear Estimation
Vesa Klumpp
Road Map assisted Convoy Track Maintenance using Random
Matrices Michael Feldmann
Anomalies Recognition in a Context Aware Architecture based on TBM
Approach Vincent Ricquebourg
Agent-Based Sensor Coalition Formation
Robin Glinton
GNSS Bias Correction for localizati-on systems
Pierre Delmas
Insider Threat Detection Using Situation-Aware MAS
Lundy Lewis
Generation of a Fundamental Data Set for Hard/Soft Information Fusion
Marco Pravia
11:50 Nonlinear Bayesian Estimation with Convex Sets of Probability Densities
Benjamin Noack
General Solution for Asynchronous Sensors Bias Estimation
Yongqing Qi
Intermediate Feature Space Ap-proach for Anomaly Detection in
Aircraft Engine Data Neil Eklund
Minimum-Cost Sensor Coverage of Planar Regions
Nageswara Rao
An Optimal Local Map Registrati-on Technique for Wireless Sensor Network Localization Problems
Yifeng Zhou
Probabilistic Prediction of Vessel Motion at Multiple Spatial Scales for
Maritime Situation Awareness Bradley Rhodes
Abductive Inferencing for Integra-ting Information from Human and
Robotic Sources John Josephson
12:10 Lunch Lunch
Tuesday July 1 - Morning
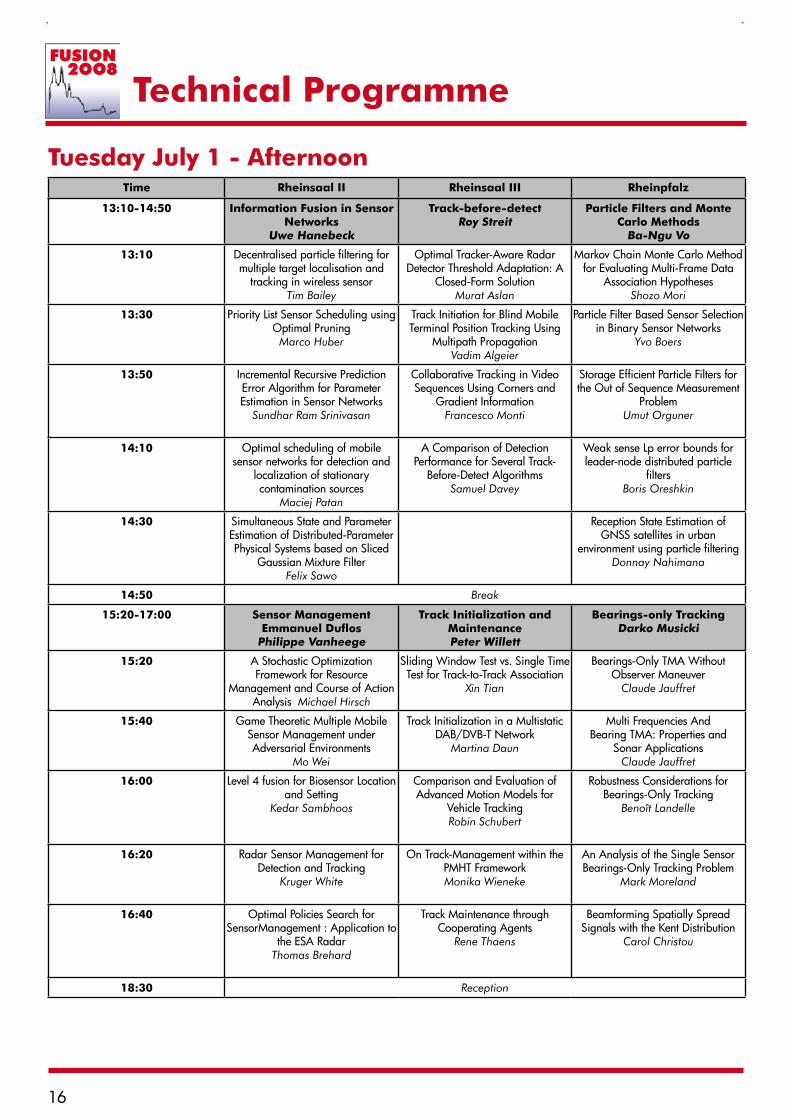
Technical Programme
16
Time Rheinsaal II Rheinsaal III Rheinpfalz Franken Mosel Rheingau Rheinhessen
13:10-14:50 Information Fusion in Sensor Networks
Uwe Hanebeck
Track-before-detect Roy Streit
Particle Filters and Monte Carlo Methods
Ba-Ngu Vo
Situation Awareness IRonnie Johansson
Signal ProcessingUlrich Nickel
Fusion Performance Evaluation Erik Blasch
Classification IMax Krüger
13:10 Decentralised particle filtering for multiple target localisation and
tracking in wireless sensor Tim Bailey
Optimal Tracker-Aware Radar Detector Threshold Adaptation: A
Closed-Form Solution Murat Aslan
Markov Chain Monte Carlo Method for Evaluating Multi-Frame Data
Association Hypotheses Shozo Mori
A user study of the Impact matrix, a fusion based decision support for
enhanced situation awareness Maria Nilsson
A new best fitting Gaussian performance measure for jump
Markov systems Mark Morelande
Optimality Self Online Monitoring (OSOM) for Performance Evaluation
and Adaptive Sensor Fusion Erik Blasch
Radar-camera fusion for object classification
Danil Prokhorov
13:30 Priority List Sensor Scheduling using Optimal Pruning
Marco Huber
Track Initiation for Blind Mobile Terminal Position Tracking Using
Multipath Propagation Vadim Algeier
Particle Filter Based Sensor Selection in Binary Sensor Networks
Yvo Boers
Creating shared situation awareness in a multi-platform sensor network
Miranda van Iersel
Signal Extraction Using Compressed Sensing for Passive Radar with
OFDM Signals Christian Berger
Comprehensive Evaluation of Decision Performance
X. Rong Li
2D Spatial Model Matching using HRR Multi-Radar data
Angie Fasoula
13:50 Incremental Recursive Prediction Error Algorithm for Parameter Estimation in Sensor Networks
Sundhar Ram Srinivasan
Collaborative Tracking in Video Sequences Using Corners and
Gradient Information Francesco Monti
Storage Efficient Particle Filters for the Out of Sequence Measurement
Problem Umut Orguner
Extending the scope of Situation Analysis
Anders Dahlborn
Ramp Sequence Analysis to Resolve Multi Target Scenarios for a
77-GHz FMCW Radar Sensor Klaus Pourvoyeur
Performance Evaluation of Distributed Compressed Wideband
Sensing for Cognitive Radio Networks Zhi Tian
Acoustic Information Fusion for Ground Vehicle Classification
Baofeng Guo
14:10 Optimal scheduling of mobile sensor networks for detection and
localization of stationary contamination sources
Maciej Patan
A Comparison of Detection Performance for Several Track-
Before-Detect Algorithms Samuel Davey
Weak sense Lp error bounds for leader-node distributed particle
filters Boris Oreshkin
Operator Situation Awareness Monitoring in the Cognisant
Control Room Simon Williams
Cued Passive Bearing Estimation in Distributed Sensor Data Fusion
Thomas Yudichak
Measuring Situation Assessment Performance through the Activities of
Interest Score John Salerno
Fuzzy Pattern Classification Tuning by Parameter Learning based on
Fusion Concept Rui Li
14:30 Simultaneous State and Parameter Estimation of Distributed-Parameter Physical Systems based on Sliced
Gaussian Mixture Filter Felix Sawo
Reception State Estimation of GNSS satellites in urban
environment using particle filtering Donnay Nahimana
Measuring Performance of Cyber Situation Awareness Systems
George Tadda
Classification support using confidence intervals Willem van Norden
14:50 Break Break
15:20-17:00 Sensor Management Emmanuel Duflos
Philippe Vanheege
Track Initialization and MaintenancePeter Willett
Bearings-only TrackingDarko Musicki
Situation Awareness IIMaria Riveiro
OptimizationJean-Pierre Le Cadre
Fusion Performance Evaluation II
Mark Oxley
Classification IIVincent Nimier
15:20 A Stochastic Optimization Framework for Resource
Management and Course of Action Analysis Michael Hirsch
Sliding Window Test vs. Single Time Test for Track-to-Track Association
Xin Tian
Bearings-Only TMA Without Observer Maneuver
Claude Jauffret
Hidden Markov Model as a Framework for Situational
Awareness Thyagaraju Damarla
PROLOG: A Multiagent Toolkit for Logistics Planning in Netcentric
Environments Subrata Das
Hyperspectral Imagery Throughput and Fusion Evaluation over
Compression and InterpolationJames Patrick
Classifier fusion for post-classification of textured images
Arnaud Martin
15:40 Game Theoretic Multiple Mobile Sensor Management under Adversarial Environments
Mo Wei
Track Initialization in a Multistatic DAB/DVB-T Network
Martina Daun
Multi Frequencies And Bearing TMA: Properties and
Sonar Applications Claude Jauffret
Uncertainty in the fusion of information from multiple diverse sources for situation awareness
Kellyn Kruger
Three Dimensional Object Tracking Based on Audiovisual Fusion Using
Particle Swarm Optimization Fakheredine Keyrouz
Image Quality Assessment for Performance Evaluation of
Image FusionErik Blasch
User-Oriented Bayesian Identification and Its Configuration
Max Krüger
16:00 Level 4 fusion for Biosensor Location and Setting
Kedar Sambhoos
Comparison and Evaluation of Advanced Motion Models for
Vehicle Tracking Robin Schubert
Robustness Considerations for Bearings-Only Tracking
Benoît Landelle
Situational Awareness in Jammed Environments Using Track
Association and Motion Recognition Maria Andersson
An Optimal Sequential Optimization Approach in Application to
Dynamic Weapon Allocation in Naval Warfare Dany Dionne
Robust Multi-Look HRR ATR Investigation through Decision-Level
Fusion EvaluationBart Kahler
On Evidential Combination Rules for Ensemble Classifiers
Henrik Boström
16:20 Radar Sensor Management for Detection and Tracking
Kruger White
On Track-Management within the PMHT Framework Monika Wieneke
An Analysis of the Single Sensor Bearings-Only Tracking Problem
Mark Moreland
Insider Abuse Comprehension through Capability Acquisition
Graphs Sunu Mathew
A common framework for multitar-get and cross-cueing optimization
Cécile Simonin
Performances of an ATR System via its ROC Manifold
Mark Oxley
Sound and Dynamics of Targets Fusion Technologies in Radar Target
Classification Guy Kouemou
16:40 Optimal Policies Search for SensorManagement : Application to
the ESA Radar Thomas Brehard
Track Maintenance through Cooperating Agents
Rene Thaens
Beamforming Spatially Spread Signals with the Kent Distribution
Carol Christou
Presenting nighttime imagery in daytime colours
Maarten Hogervorst
Source Term Estimation using Convex Optimization
Yang Cheng
Asynchronous Bayesian Algorithm for Object Classification:
Application to Pedestrian Detection in Urban Areas
Laurence Ngako Pangop
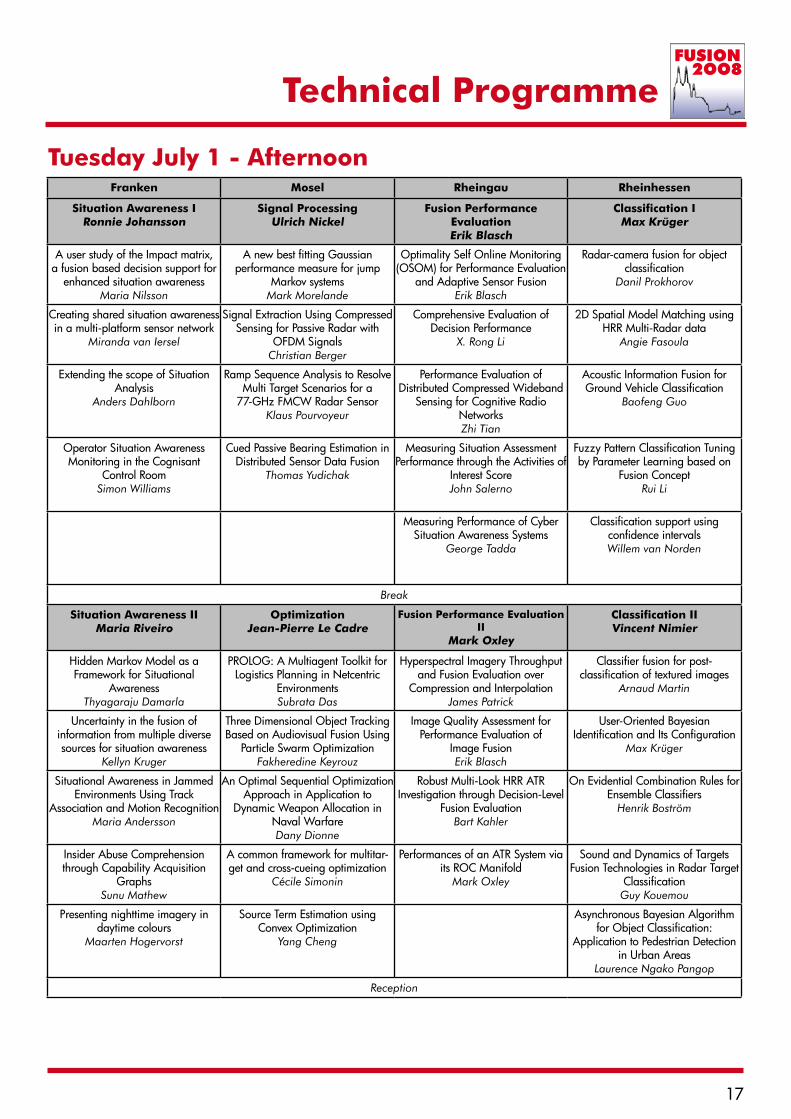
18:30 Reception Reception
Tuesday July 1 - Afternoon
Technical Programme
17
Time Rheinsaal II Rheinsaal III Rheinpfalz Franken Mosel Rheingau Rheinhessen
13:10-14:50 Information Fusion in Sensor Networks
Uwe Hanebeck
Track-before-detect Roy Streit
Particle Filters and Monte Carlo Methods
Ba-Ngu Vo
Situation Awareness IRonnie Johansson
Signal ProcessingUlrich Nickel
Fusion Performance Evaluation Erik Blasch
Classification IMax Krüger
13:10 Decentralised particle filtering for multiple target localisation and
tracking in wireless sensor Tim Bailey
Optimal Tracker-Aware Radar Detector Threshold Adaptation: A
Closed-Form Solution Murat Aslan
Markov Chain Monte Carlo Method for Evaluating Multi-Frame Data
Association Hypotheses Shozo Mori
A user study of the Impact matrix, a fusion based decision support for
enhanced situation awareness Maria Nilsson
A new best fitting Gaussian performance measure for jump
Markov systems Mark Morelande
Optimality Self Online Monitoring (OSOM) for Performance Evaluation
and Adaptive Sensor Fusion Erik Blasch
Radar-camera fusion for object classification
Danil Prokhorov
13:30 Priority List Sensor Scheduling using Optimal Pruning
Marco Huber
Track Initiation for Blind Mobile Terminal Position Tracking Using
Multipath Propagation Vadim Algeier
Particle Filter Based Sensor Selection in Binary Sensor Networks
Yvo Boers
Creating shared situation awareness in a multi-platform sensor network
Miranda van Iersel
Signal Extraction Using Compressed Sensing for Passive Radar with
OFDM Signals Christian Berger
Comprehensive Evaluation of Decision Performance
X. Rong Li
2D Spatial Model Matching using HRR Multi-Radar data
Angie Fasoula
13:50 Incremental Recursive Prediction Error Algorithm for Parameter Estimation in Sensor Networks
Sundhar Ram Srinivasan
Collaborative Tracking in Video Sequences Using Corners and
Gradient Information Francesco Monti
Storage Efficient Particle Filters for the Out of Sequence Measurement
Problem Umut Orguner
Extending the scope of Situation Analysis
Anders Dahlborn
Ramp Sequence Analysis to Resolve Multi Target Scenarios for a
77-GHz FMCW Radar Sensor Klaus Pourvoyeur
Performance Evaluation of Distributed Compressed Wideband
Sensing for Cognitive Radio Networks Zhi Tian
Acoustic Information Fusion for Ground Vehicle Classification
Baofeng Guo
14:10 Optimal scheduling of mobile sensor networks for detection and
localization of stationary contamination sources
Maciej Patan
A Comparison of Detection Performance for Several Track-
Before-Detect Algorithms Samuel Davey
Weak sense Lp error bounds for leader-node distributed particle
filters Boris Oreshkin
Operator Situation Awareness Monitoring in the Cognisant
Control Room Simon Williams
Cued Passive Bearing Estimation in Distributed Sensor Data Fusion
Thomas Yudichak
Measuring Situation Assessment Performance through the Activities of
Interest Score John Salerno
Fuzzy Pattern Classification Tuning by Parameter Learning based on
Fusion Concept Rui Li
14:30 Simultaneous State and Parameter Estimation of Distributed-Parameter Physical Systems based on Sliced
Gaussian Mixture Filter Felix Sawo
Reception State Estimation of GNSS satellites in urban
environment using particle filtering Donnay Nahimana
Measuring Performance of Cyber Situation Awareness Systems
George Tadda
Classification support using confidence intervals Willem van Norden
14:50 Break Break
15:20-17:00 Sensor Management Emmanuel Duflos
Philippe Vanheege
Track Initialization and MaintenancePeter Willett
Bearings-only TrackingDarko Musicki
Situation Awareness IIMaria Riveiro
OptimizationJean-Pierre Le Cadre
Fusion Performance Evaluation II
Mark Oxley
Classification IIVincent Nimier
15:20 A Stochastic Optimization Framework for Resource
Management and Course of Action Analysis Michael Hirsch
Sliding Window Test vs. Single Time Test for Track-to-Track Association
Xin Tian
Bearings-Only TMA Without Observer Maneuver
Claude Jauffret
Hidden Markov Model as a Framework for Situational
Awareness Thyagaraju Damarla
PROLOG: A Multiagent Toolkit for Logistics Planning in Netcentric
Environments Subrata Das
Hyperspectral Imagery Throughput and Fusion Evaluation over
Compression and InterpolationJames Patrick
Classifier fusion for post-classification of textured images
Arnaud Martin
15:40 Game Theoretic Multiple Mobile Sensor Management under Adversarial Environments
Mo Wei
Track Initialization in a Multistatic DAB/DVB-T Network
Martina Daun
Multi Frequencies And Bearing TMA: Properties and
Sonar Applications Claude Jauffret
Uncertainty in the fusion of information from multiple diverse sources for situation awareness
Kellyn Kruger
Three Dimensional Object Tracking Based on Audiovisual Fusion Using
Particle Swarm Optimization Fakheredine Keyrouz
Image Quality Assessment for Performance Evaluation of
Image FusionErik Blasch
User-Oriented Bayesian Identification and Its Configuration
Max Krüger
16:00 Level 4 fusion for Biosensor Location and Setting
Kedar Sambhoos
Comparison and Evaluation of Advanced Motion Models for
Vehicle Tracking Robin Schubert
Robustness Considerations for Bearings-Only Tracking
Benoît Landelle
Situational Awareness in Jammed Environments Using Track
Association and Motion Recognition Maria Andersson
An Optimal Sequential Optimization Approach in Application to
Dynamic Weapon Allocation in Naval Warfare Dany Dionne
Robust Multi-Look HRR ATR Investigation through Decision-Level
Fusion EvaluationBart Kahler
On Evidential Combination Rules for Ensemble Classifiers
Henrik Boström
16:20 Radar Sensor Management for Detection and Tracking
Kruger White
On Track-Management within the PMHT Framework Monika Wieneke
An Analysis of the Single Sensor Bearings-Only Tracking Problem
Mark Moreland
Insider Abuse Comprehension through Capability Acquisition
Graphs Sunu Mathew
A common framework for multitar-get and cross-cueing optimization
Cécile Simonin
Performances of an ATR System via its ROC Manifold
Mark Oxley
Sound and Dynamics of Targets Fusion Technologies in Radar Target
Classification Guy Kouemou
16:40 Optimal Policies Search for SensorManagement : Application to
the ESA Radar Thomas Brehard
Track Maintenance through Cooperating Agents
Rene Thaens
Beamforming Spatially Spread Signals with the Kent Distribution
Carol Christou
Presenting nighttime imagery in daytime colours
Maarten Hogervorst
Source Term Estimation using Convex Optimization
Yang Cheng
Asynchronous Bayesian Algorithm for Object Classification:
Application to Pedestrian Detection in Urban Areas
Laurence Ngako Pangop
18:30 Reception Reception
Tuesday July 1 - Afternoon
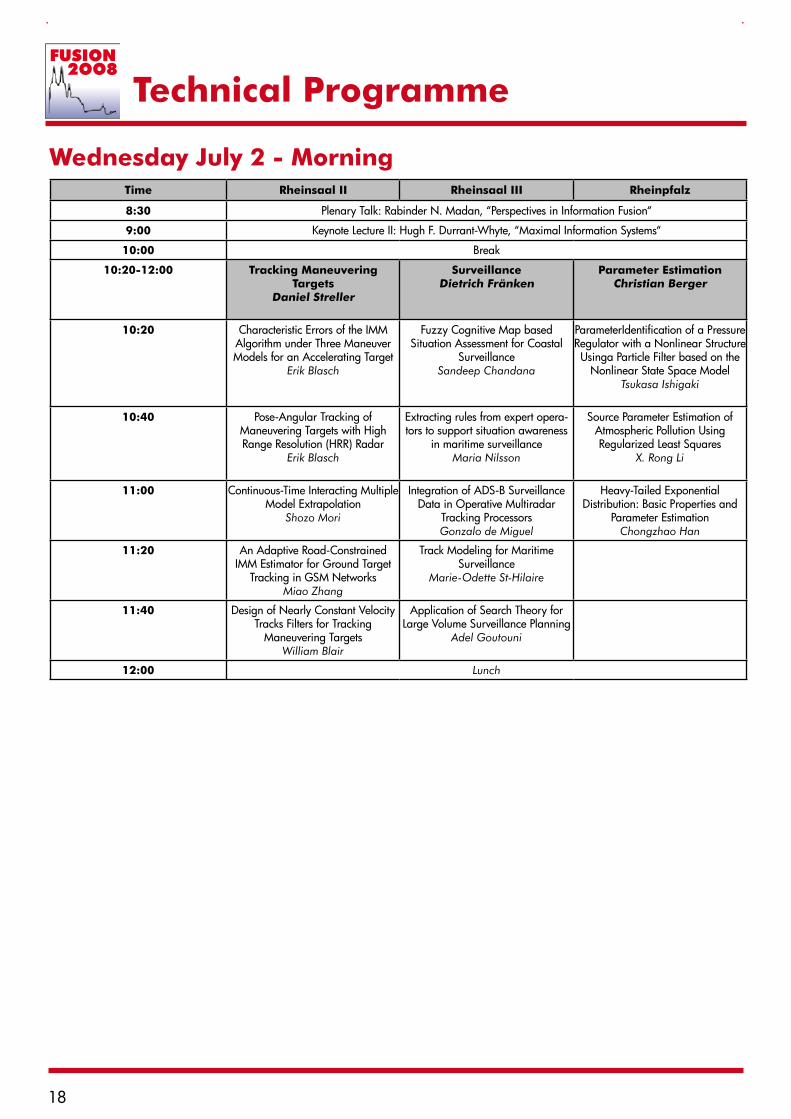
Technical Programme
18
Time Rheinsaal II Rheinsaal III Rheinpfalz Franken Mosel Rheingau Rheinhessen
8:30 Plenary Talk: Rabinder N. Madan, “Perspectives in Information Fusion“
9:00 Keynote Lecture II: Hugh F. Durrant-Whyte, “Maximal Information Systems“
10:00 Break Break
10:20-12:00 Tracking Maneuvering Targets
Daniel Streller
Surveillance Dietrich Fränken
Parameter Estimation Christian Berger
Collaborating Mobile Sensors Volker Schatz
Belief Functions, Theory Christophe Osswald
Car-driver Assistance Systems Ullrich Scheunert
Distributed Inference and Decision-Making in
Multisensor Systems Venugopal Veeravalli
10:20 Characteristic Errors of the IMM Algorithm under Three Maneuver Models for an Accelerating Target
Erik Blasch
Fuzzy Cognitive Map based Situation Assessment for Coastal
Surveillance Sandeep Chandana
ParameterIdentification of a Pressure Regulator with a Nonlinear Structure Usinga Particle Filter based on the
Nonlinear State Space Model Tsukasa Ishigaki
Mobility as a Fusion Enabler Thomas Pastore
The Effect of Finite Set Representations on the Evaluation of
Dempster's Rule of Combination Martin Oxenham
Track Based Multi Sensor Data Fusion for Collision Mitigation
Panagiotis Lytrivis
Optimal Stationary Binary Quantizer for Decentralized
Quickest Change Detection in Hidden Markov Models
Cheng-Der Fuh
10:40 Pose-Angular Tracking of Maneuvering Targets with High Range Resolution (HRR) Radar
Erik Blasch
Extracting rules from expert opera-tors to support situation awareness
in maritime surveillance Maria Nilsson
Source Parameter Estimation of Atmospheric Pollution Using Regularized Least Squares
X. Rong Li
Multi-Cluster Agent-Based Emitter Geolocation using Hough Transform
Data Fusion Alexander Mikhalev
Mathematical Structure and Formulas for the minC Combination
of Belief Functions Milan Daniel
Advanced multiple objects tracking by fusing radar and image sensor data - Application on a case study.
Fabio Tango
One shot schemes for decentralized quickest change detection
Olympia Hadjiliadis
11:00 Continuous-Time Interacting Multiple Model Extrapolation
Shozo Mori
Integration of ADS-B Surveillance Data in Operative Multiradar
Tracking Processors Gonzalo de Miguel
Heavy-Tailed Exponential Distribution: Basic Properties and
Parameter Estimation Chongzhao Han
A Mobile Network for Mobile Sensors
Paul Scerri
Combining system and user belief on classification using the DSmT
combination rule Willem van Norden
A Fusion Concept of Video and Communication Data for VRU
Recognition Basel Fardi
Quickest Changepoint Detection in Distributed Multisensor Systems
under Unknown Parameters Alexander Tartakovsky
11:20 An Adaptive Road-Constrained IMM Estimator for Ground Target
Tracking in GSM Networks Miao Zhang
Track Modeling for Maritime Surveillance
Marie-Odette St-Hilaire
Distributed data fusion: application to confidence management in
vehicular networks Véronique Cherfaoui
Refined classifier combination using belief functions
Benjamin Quost
Generalized Grid Framework for Multi Sensor Data Fusion
Ullrich Scheunert
11:40 Design of Nearly Constant Velocity Tracks Filters for Tracking
Maneuvering Targets William Blair
Application of Search Theory for Large Volume Surveillance Planning
Adel Goutouni
Data Fusion for Person Identification in People Tracking
Dirk Schulz
About belief function combination on real numbers and fusion based
on maximal coherent sets Olivier Colot
Online-Estimation of Road Map Elements using Spline Curves
Carsten Hasberg
12:00 Lunch Lunch
Wednesday July 2 - Morning
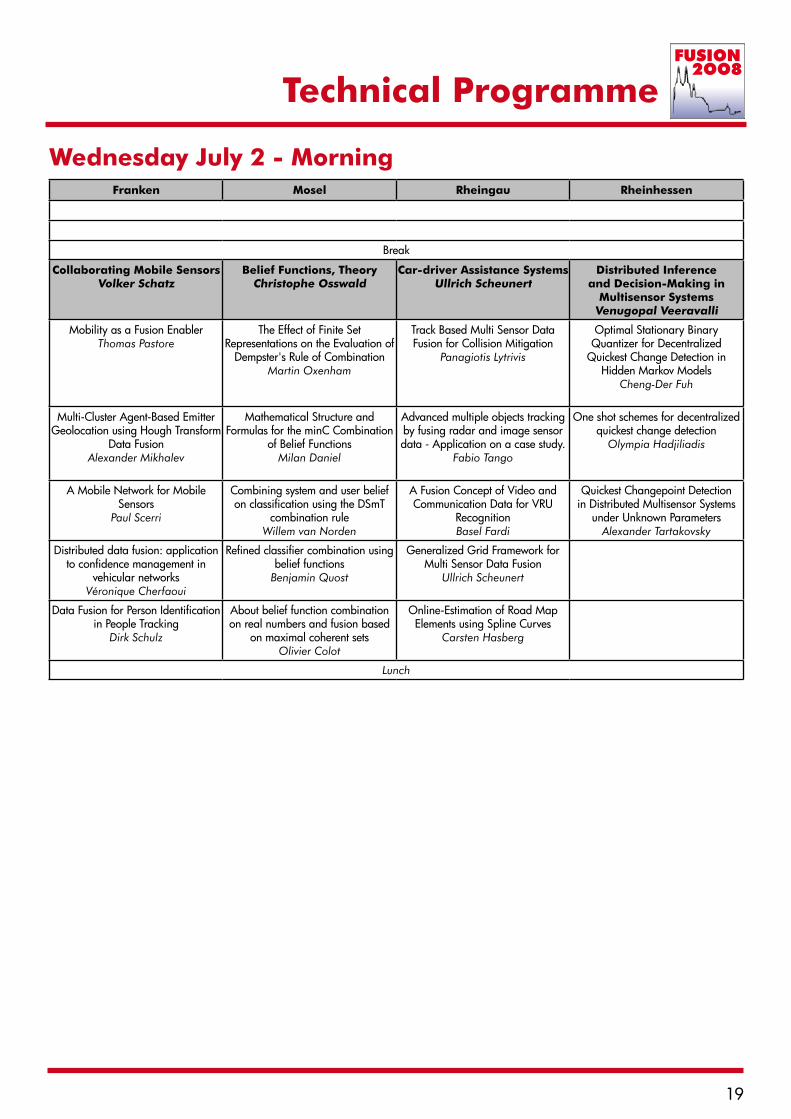
Technical Programme
19
Time Rheinsaal II Rheinsaal III Rheinpfalz Franken Mosel Rheingau Rheinhessen
8:30 Plenary Talk: Rabinder N. Madan, “Perspectives in Information Fusion“
9:00 Keynote Lecture II: Hugh F. Durrant-Whyte, “Maximal Information Systems“
10:00 Break Break
10:20-12:00 Tracking Maneuvering Targets
Daniel Streller
Surveillance Dietrich Fränken
Parameter Estimation Christian Berger
Collaborating Mobile Sensors Volker Schatz
Belief Functions, Theory Christophe Osswald
Car-driver Assistance Systems Ullrich Scheunert
Distributed Inference and Decision-Making in
Multisensor Systems Venugopal Veeravalli
10:20 Characteristic Errors of the IMM Algorithm under Three Maneuver Models for an Accelerating Target
Erik Blasch
Fuzzy Cognitive Map based Situation Assessment for Coastal
Surveillance Sandeep Chandana
ParameterIdentification of a Pressure Regulator with a Nonlinear Structure Usinga Particle Filter based on the
Nonlinear State Space Model Tsukasa Ishigaki
Mobility as a Fusion Enabler Thomas Pastore
The Effect of Finite Set Representations on the Evaluation of
Dempster's Rule of Combination Martin Oxenham
Track Based Multi Sensor Data Fusion for Collision Mitigation
Panagiotis Lytrivis
Optimal Stationary Binary Quantizer for Decentralized
Quickest Change Detection in Hidden Markov Models
Cheng-Der Fuh
10:40 Pose-Angular Tracking of Maneuvering Targets with High Range Resolution (HRR) Radar
Erik Blasch
Extracting rules from expert opera-tors to support situation awareness
in maritime surveillance Maria Nilsson
Source Parameter Estimation of Atmospheric Pollution Using Regularized Least Squares
X. Rong Li
Multi-Cluster Agent-Based Emitter Geolocation using Hough Transform
Data Fusion Alexander Mikhalev
Mathematical Structure and Formulas for the minC Combination
of Belief Functions Milan Daniel
Advanced multiple objects tracking by fusing radar and image sensor data - Application on a case study.
Fabio Tango
One shot schemes for decentralized quickest change detection
Olympia Hadjiliadis
11:00 Continuous-Time Interacting Multiple Model Extrapolation
Shozo Mori
Integration of ADS-B Surveillance Data in Operative Multiradar
Tracking Processors Gonzalo de Miguel
Heavy-Tailed Exponential Distribution: Basic Properties and
Parameter Estimation Chongzhao Han
A Mobile Network for Mobile Sensors
Paul Scerri
Combining system and user belief on classification using the DSmT
combination rule Willem van Norden
A Fusion Concept of Video and Communication Data for VRU
Recognition Basel Fardi
Quickest Changepoint Detection in Distributed Multisensor Systems
under Unknown Parameters Alexander Tartakovsky
11:20 An Adaptive Road-Constrained IMM Estimator for Ground Target
Tracking in GSM Networks Miao Zhang
Track Modeling for Maritime Surveillance
Marie-Odette St-Hilaire
Distributed data fusion: application to confidence management in
vehicular networks Véronique Cherfaoui
Refined classifier combination using belief functions
Benjamin Quost
Generalized Grid Framework for Multi Sensor Data Fusion
Ullrich Scheunert
11:40 Design of Nearly Constant Velocity Tracks Filters for Tracking
Maneuvering Targets William Blair
Application of Search Theory for Large Volume Surveillance Planning
Adel Goutouni
Data Fusion for Person Identification in People Tracking
Dirk Schulz
About belief function combination on real numbers and fusion based
on maximal coherent sets Olivier Colot
Online-Estimation of Road Map Elements using Spline Curves
Carsten Hasberg
12:00 Lunch Lunch
Wednesday July 2 - Morning
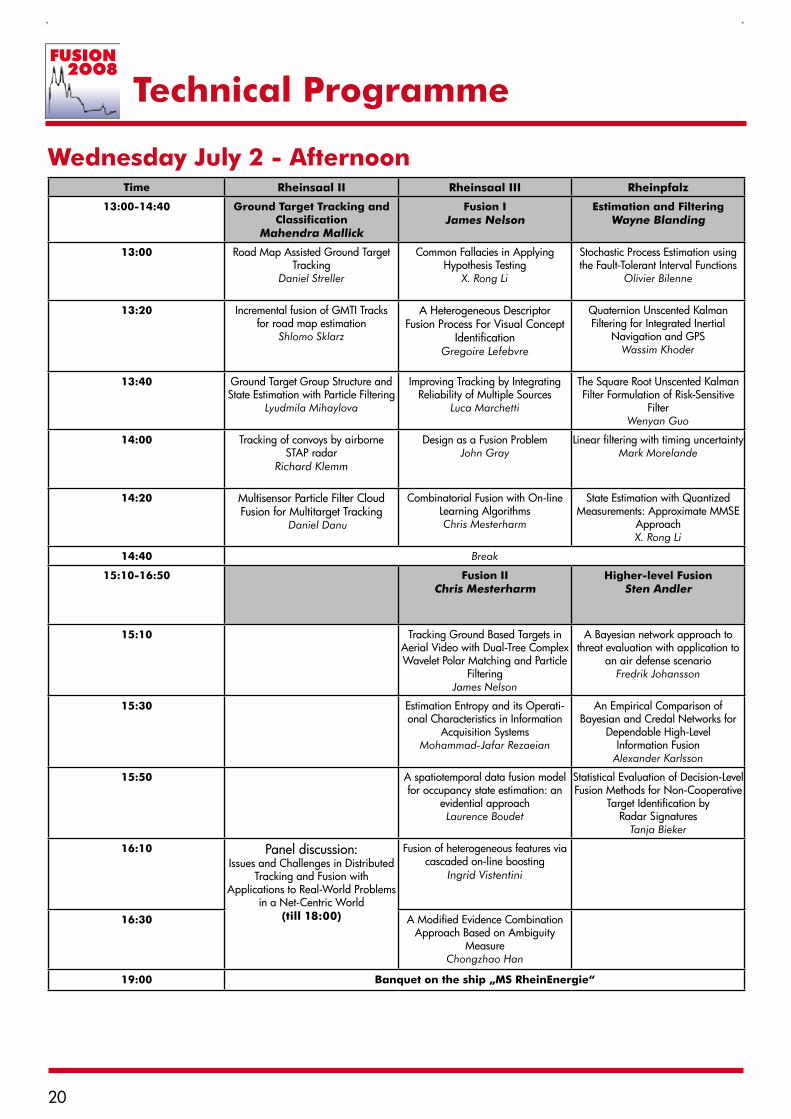
Technical Programme
20
Time Rheinsaal II Rheinsaal III Rheinpfalz Franken Mosel Rheingau Rheinhessen
13:00-14:40 Ground Target Tracking and Classification
Mahendra Mallick
Fusion I James Nelson
Estimation and Filtering Wayne Blanding
Distributed Fusion Algorithms Fredrik Gustafsson
Belief Functions, Applications Martin Oxenham
Fusion on Interacting Physical, Perceptual and Policy Levels
Jochen Meidow
Teams Klaus Wild
13:00 Road Map Assisted Ground Target Tracking
Daniel Streller
Common Fallacies in Applying Hypothesis Testing
X. Rong Li
Stochastic Process Estimation using the Fault-Tolerant Interval Functions
Olivier Bilenne
On Scalable Distributed Sensor Fusion
Kuochu Chang
Decision Support with Belief Functions Theory for Seabed Characterization
Arnaud Martin
Synchronised Data Acquisition for Sensor Data Fusion in Aerial
Surveying Volker Schatz
DyKnow Federations: Distributing and Merging Information Among UAVs
Fredrik Heintz
13:20 Incremental fusion of GMTI Tracks for road map estimation
Shlomo Sklarz
A Heterogeneous Descriptor Fusion Process For Visual Concept
Identification Gregoire Lefebvre
Quaternion Unscented Kalman Filtering for Integrated Inertial
Navigation and GPS Wassim Khoder
Modified Value Iteration Algorithm and Dynamic Element Matching based MDP for Distributed Data Fusion and Sensor Management
Dimitry Akselrod
Subjective Effects-Based Assessment Johan Schubert
Online Annotation of Airborne Surveillance and Reconnaissance
Videos Peter Solbrig
An Efficient Information Sharing Approach For Large Scale
Multi-agent Team Paul Scerri
13:40 Ground Target Group Structure and State Estimation with Particle Filtering
Lyudmila Mihaylova
Improving Tracking by Integrating Reliability of Multiple Sources
Luca Marchetti
The Square Root Unscented Kalman Filter Formulation of Risk-Sensitive
Filter Wenyan Guo
An Information Theoretic Approach to Verification of Modular Bayesian
Fusion Systems Patrick De Oude
Map matching algorithm using belief function theory
Ghalia Nassreddine
Fusion of perceptual processes for real-time object tracking
Kai Juengling
Sensor Data Fusion for Terrain Exploration by Collaborating Unmanned Ground Vehicles
Peter Nordin
14:00 Tracking of convoys by airborne STAP radar
Richard Klemm
Design as a Fusion Problem John Gray
Linear filtering with timing uncertainty Mark Morelande
Decreased Complexity and Increased Problem Specificity of
Bayesian Fusion by Local Approaches Jennifer Sander
Conflict measure for the discounting operation on belief functions
Arnaud Martin
Evidence Fusion Using the GESTALT-System
Eckart Michaelsen
Optimal Team Decision: a Cross-Entropic Coordination Approach
Fréderic Dambreville
14:20 Multisensor Particle Filter Cloud Fusion for Multitarget Tracking
Daniel Danu
Combinatorial Fusion with On-line Learning Algorithms Chris Mesterharm
State Estimation with Quantized Measurements: Approximate MMSE
Approach X. Rong Li
Distributed Control in Multi-Agent Systems: A Preliminary Model of
Autonomous MAV Swarms Fabio Ruini
Intelligence, Surveillance, and Reconnaissance Fusion for Coalition
Operations Tien Pham
Path Planning for Autonomous Information Collecting Vehicles
Paul Scerri
14:40 Break Break
15:10-16:50 Fusion II Chris Mesterharm
Higher-level Fusion Sten Andler
Distributed Fusion Algorithms II
Fredrik Gustafsson David Lindgren
Applications Peter Solbrig
Knowledge Modelling Kellyn Kruger
Distributed Inference and Decision-Making in Multisensor Systems II
Alexander Tartakovsky
15:10 Tracking Ground Based Targets in Aerial Video with Dual-Tree Complex Wavelet Polar Matching and Particle
Filtering James Nelson
A Bayesian network approach to threat evaluation with application to
an air defense scenario Fredrik Johansson
Estimation of Target Trajectories Based on Distributed Channel Energy
MeasurementsSora Choi
A Controlled Search for Radioactive Point Sources Branko Ristic
Adaptive Arbitration by Variant Counting on Commutative Bases with
Weights Giuseppe Primiero
Asymptotically optimum tests for decentralized sequential testing in
continuous timeGeorgios Fellouris
15:30 Estimation Entropy and its Operati-onal Characteristics in Information
Acquisition Systems Mohammad-Jafar Rezaeian
An Empirical Comparison of Bayesian and Credal Networks for
Dependable High-Level Information Fusion
Alexander Karlsson
Analysis of Distributed Fusion Alternatives in Coordinated Vision
AgentsFederico Castanedo
Combining multi-source information for crop monitoring Mahmoud El Hajj
Understanding Aviation Risk Andrew Rose
Quickest Detection of a Change Process Across a Sensor Array
Vasanthan Raghavan
15:50 A spatiotemporal data fusion model for occupancy state estimation: an
evidential approach Laurence Boudet
Statistical Evaluation of Decision-Level Fusion Methods for Non-Cooperative
Target Identification by Radar Signatures
Tanja Bieker
The Optimality of a Class of Distri-buted Estimation Fusion Algorithm
Zhansheng Duan
Neural Network based Data Fusion in Food Transportation System
Amir Jabbari
Natural Language Processing in Information Fusion Terminology
Management Elzbieta Dura
Dimensionally Distributed Learning: Models and Algorithm
Haipeng Zheng
16:10 Panel discussion:Issues and Challenges in Distributed
Tracking and Fusion with Applications to Real-World Problems
in a Net-Centric World(till 18:00)
Fusion of heterogeneous features via cascaded on-line boosting
Ingrid Vistentini
Optimal Distributed Estimation Fusion with Transformed Data
Zhansheng Duan
Applicationof Generalized Parti-al Volume Estimation for Mutual
Information basedRegistration of High Resolution SAR and Optical imagery
Sahil Suri
COALESCE: A probabilistic ontology-based scene understanding approach
Majid Zandipour
16:30 A Modified Evidence Combination Approach Based on Ambiguity
Measure Chongzhao Han
Integration of Thermal and Visible Imagery for Robust Foreground
Detection in Tele-immersive Spaces Peter Bajcsy
Probabilistic Ontologies for Knowledge Fusion Kathryn Laskey
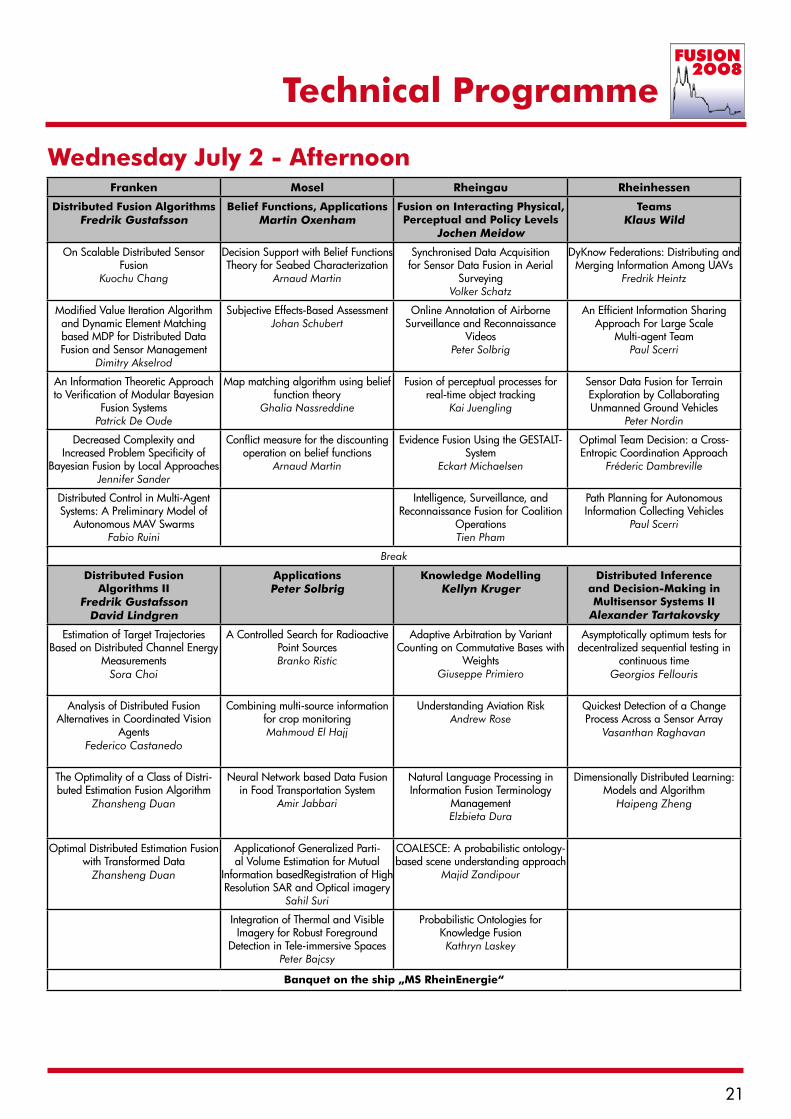
19:00 Banquet on the ship „MS RheinEnergie“ Banquet on the ship „MS RheinEnergie“
Wednesday July 2 - Afternoon
Technical Programme
21
Time Rheinsaal II Rheinsaal III Rheinpfalz Franken Mosel Rheingau Rheinhessen
13:00-14:40 Ground Target Tracking and Classification
Mahendra Mallick
Fusion I James Nelson
Estimation and Filtering Wayne Blanding
Distributed Fusion Algorithms Fredrik Gustafsson
Belief Functions, Applications Martin Oxenham
Fusion on Interacting Physical, Perceptual and Policy Levels
Jochen Meidow
Teams Klaus Wild
13:00 Road Map Assisted Ground Target Tracking
Daniel Streller
Common Fallacies in Applying Hypothesis Testing
X. Rong Li
Stochastic Process Estimation using the Fault-Tolerant Interval Functions
Olivier Bilenne
On Scalable Distributed Sensor Fusion
Kuochu Chang
Decision Support with Belief Functions Theory for Seabed Characterization
Arnaud Martin
Synchronised Data Acquisition for Sensor Data Fusion in Aerial
Surveying Volker Schatz
DyKnow Federations: Distributing and Merging Information Among UAVs
Fredrik Heintz
13:20 Incremental fusion of GMTI Tracks for road map estimation
Shlomo Sklarz
A Heterogeneous Descriptor Fusion Process For Visual Concept
Identification Gregoire Lefebvre
Quaternion Unscented Kalman Filtering for Integrated Inertial
Navigation and GPS Wassim Khoder
Modified Value Iteration Algorithm and Dynamic Element Matching based MDP for Distributed Data Fusion and Sensor Management
Dimitry Akselrod
Subjective Effects-Based Assessment Johan Schubert
Online Annotation of Airborne Surveillance and Reconnaissance
Videos Peter Solbrig
An Efficient Information Sharing Approach For Large Scale
Multi-agent Team Paul Scerri
13:40 Ground Target Group Structure and State Estimation with Particle Filtering
Lyudmila Mihaylova
Improving Tracking by Integrating Reliability of Multiple Sources
Luca Marchetti
The Square Root Unscented Kalman Filter Formulation of Risk-Sensitive
Filter Wenyan Guo
An Information Theoretic Approach to Verification of Modular Bayesian
Fusion Systems Patrick De Oude
Map matching algorithm using belief function theory
Ghalia Nassreddine
Fusion of perceptual processes for real-time object tracking
Kai Juengling
Sensor Data Fusion for Terrain Exploration by Collaborating Unmanned Ground Vehicles
Peter Nordin
14:00 Tracking of convoys by airborne STAP radar
Richard Klemm
Design as a Fusion Problem John Gray
Linear filtering with timing uncertainty Mark Morelande
Decreased Complexity and Increased Problem Specificity of
Bayesian Fusion by Local Approaches Jennifer Sander
Conflict measure for the discounting operation on belief functions
Arnaud Martin
Evidence Fusion Using the GESTALT-System
Eckart Michaelsen
Optimal Team Decision: a Cross-Entropic Coordination Approach
Fréderic Dambreville
14:20 Multisensor Particle Filter Cloud Fusion for Multitarget Tracking
Daniel Danu
Combinatorial Fusion with On-line Learning Algorithms Chris Mesterharm
State Estimation with Quantized Measurements: Approximate MMSE
Approach X. Rong Li
Distributed Control in Multi-Agent Systems: A Preliminary Model of
Autonomous MAV Swarms Fabio Ruini
Intelligence, Surveillance, and Reconnaissance Fusion for Coalition
Operations Tien Pham
Path Planning for Autonomous Information Collecting Vehicles
Paul Scerri
14:40 Break Break
15:10-16:50 Fusion II Chris Mesterharm
Higher-level Fusion Sten Andler
Distributed Fusion Algorithms II
Fredrik Gustafsson David Lindgren
Applications Peter Solbrig
Knowledge Modelling Kellyn Kruger
Distributed Inference and Decision-Making in Multisensor Systems II
Alexander Tartakovsky
15:10 Tracking Ground Based Targets in Aerial Video with Dual-Tree Complex Wavelet Polar Matching and Particle
Filtering James Nelson
A Bayesian network approach to threat evaluation with application to
an air defense scenario Fredrik Johansson
Estimation of Target Trajectories Based on Distributed Channel Energy
MeasurementsSora Choi
A Controlled Search for Radioactive Point Sources Branko Ristic
Adaptive Arbitration by Variant Counting on Commutative Bases with
Weights Giuseppe Primiero
Asymptotically optimum tests for decentralized sequential testing in
continuous timeGeorgios Fellouris
15:30 Estimation Entropy and its Operati-onal Characteristics in Information
Acquisition Systems Mohammad-Jafar Rezaeian
An Empirical Comparison of Bayesian and Credal Networks for
Dependable High-Level Information Fusion
Alexander Karlsson
Analysis of Distributed Fusion Alternatives in Coordinated Vision
AgentsFederico Castanedo
Combining multi-source information for crop monitoring Mahmoud El Hajj
Understanding Aviation Risk Andrew Rose
Quickest Detection of a Change Process Across a Sensor Array
Vasanthan Raghavan
15:50 A spatiotemporal data fusion model for occupancy state estimation: an
evidential approach Laurence Boudet
Statistical Evaluation of Decision-Level Fusion Methods for Non-Cooperative
Target Identification by Radar Signatures
Tanja Bieker
The Optimality of a Class of Distri-buted Estimation Fusion Algorithm
Zhansheng Duan
Neural Network based Data Fusion in Food Transportation System
Amir Jabbari
Natural Language Processing in Information Fusion Terminology
Management Elzbieta Dura
Dimensionally Distributed Learning: Models and Algorithm
Haipeng Zheng
16:10 Panel discussion:Issues and Challenges in Distributed
Tracking and Fusion with Applications to Real-World Problems
in a Net-Centric World(till 18:00)
Fusion of heterogeneous features via cascaded on-line boosting
Ingrid Vistentini
Optimal Distributed Estimation Fusion with Transformed Data
Zhansheng Duan
Applicationof Generalized Parti-al Volume Estimation for Mutual
Information basedRegistration of High Resolution SAR and Optical imagery
Sahil Suri
COALESCE: A probabilistic ontology-based scene understanding approach
Majid Zandipour
16:30 A Modified Evidence Combination Approach Based on Ambiguity
Measure Chongzhao Han
Integration of Thermal and Visible Imagery for Robust Foreground
Detection in Tele-immersive Spaces Peter Bajcsy
Probabilistic Ontologies for Knowledge Fusion Kathryn Laskey
19:00 Banquet on the ship „MS RheinEnergie“ Banquet on the ship „MS RheinEnergie“
Wednesday July 2 - Afternoon
Technical Programme
22
Time Rheinsaal II Rheinsaal III Rheinpfalz Franken Mosel Rheingau Rheinhessen
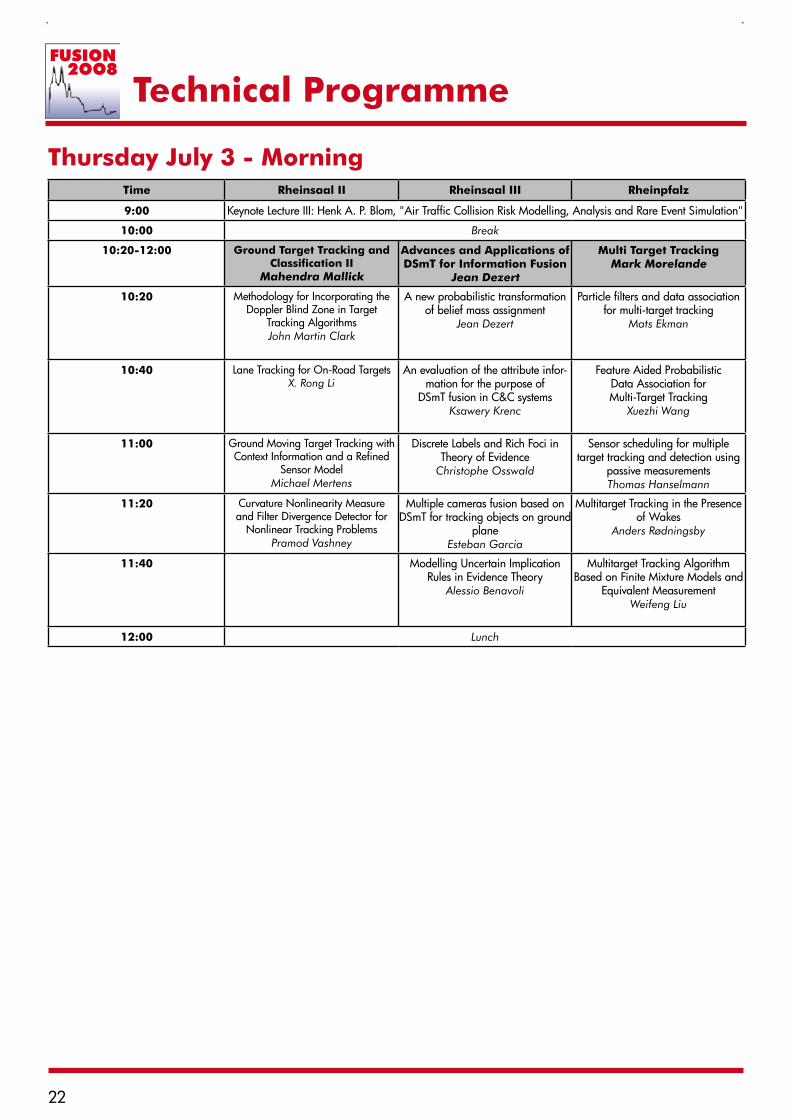
9:00 Keynote Lecture III: Henk A. P. Blom, "Air Traffic Collision Risk Modelling, Analysis and Rare Event Simulation"
10:00 Break Break
10:20-12:00 Ground Target Tracking and Classification II
Mahendra Mallick
Advances and Applications of DSmT for Information Fusion
Jean Dezert
Multi Target Tracking Mark Morelande
Tracking with Sensor Networks
Benjamin Pannetier
Applications II Frank Lorenz
OGC/ISO Web-Enabled GIS for Geospatial Data Fusion
Raffaele Grasso
10:20 Methodology for Incorporating the Doppler Blind Zone in Target
Tracking AlgorithmsJohn Martin Clark
A new probabilistic transformation of belief mass assignment
Jean Dezert
Particle filters and data association for multi-target tracking
Mats Ekman
Optimal Fusion Performance Modeling in Sensor Networks
Stefano Coraluppi
A Security Assistance System combining Person Tracking with
Chemical Attributes and Video Event Analysis
Peter Kaul
A Web Services Approach for the Development of a Multi-Sensor
Data Fusion System Mihai Cristian Florea
10:40 Lane Tracking for On-Road Targets X. Rong Li
An evaluation of the attribute infor-mation for the purpose of
DSmT fusion in C&C systems Ksawery Krenc
Feature Aided Probabilistic Data Association for Multi-Target Tracking
Xuezhi Wang
A Cooperative Game-Theoretic Measurement Allocation Algorithm
for Localization in Unattended Ground Sensor Networks
Farhad Ghassemi
Information Fusion in a TV program Recommendation System
Claire Laudy
Recombinant Cognition Synthesis - An Introduction Marco Solano
11:00 Ground Moving Target Tracking with Context Information and a Refined
Sensor ModelMichael Mertens
Discrete Labels and Rich Foci in Theory of Evidence
Christophe Osswald
Sensor scheduling for multiple target tracking and detection using
passive measurements Thomas Hanselmann
Target Trajectory Estimation within a Sensor Network Adrien Ickowicz
Forest Fire Growth Modelling with Geographical Information Fusion
Yves Dumond
Integrating Abstract State Machines and Interpreted Systems for Situation
Analysis Decision Support Design Roozbeh Farahbod
11:20 Curvature Nonlinearity Measure and Filter Divergence Detector for
Nonlinear Tracking ProblemsPramod Vashney
Multiple cameras fusion based on DSmT for tracking objects on ground
plane Esteban Garcia
Multitarget Tracking in the Presence of Wakes
Anders Rødningsby
Multi Scan Target Tracking with Finite Resolution Sensors
Darko Musicki
Continuous 3D Sensing for Navigation and SLAM in Cluttered
and Dynamic Environments Dirk Holz
11:40 Modelling Uncertain Implication Rules in Evidence Theory
Alessio Benavoli
Multitarget Tracking Algorithm Based on Finite Mixture Models and
Equivalent Measurement Weifeng Liu
Low-cost loosely-coupled GPS/ odometer fusion: a pattern
recognition aided approach Cheng Chen
A Framework for Multisensor Image Fusion using Graphics Hardware
Seunghun Yoo
12:00 Lunch Lunch
Thursday July 3 - Morning
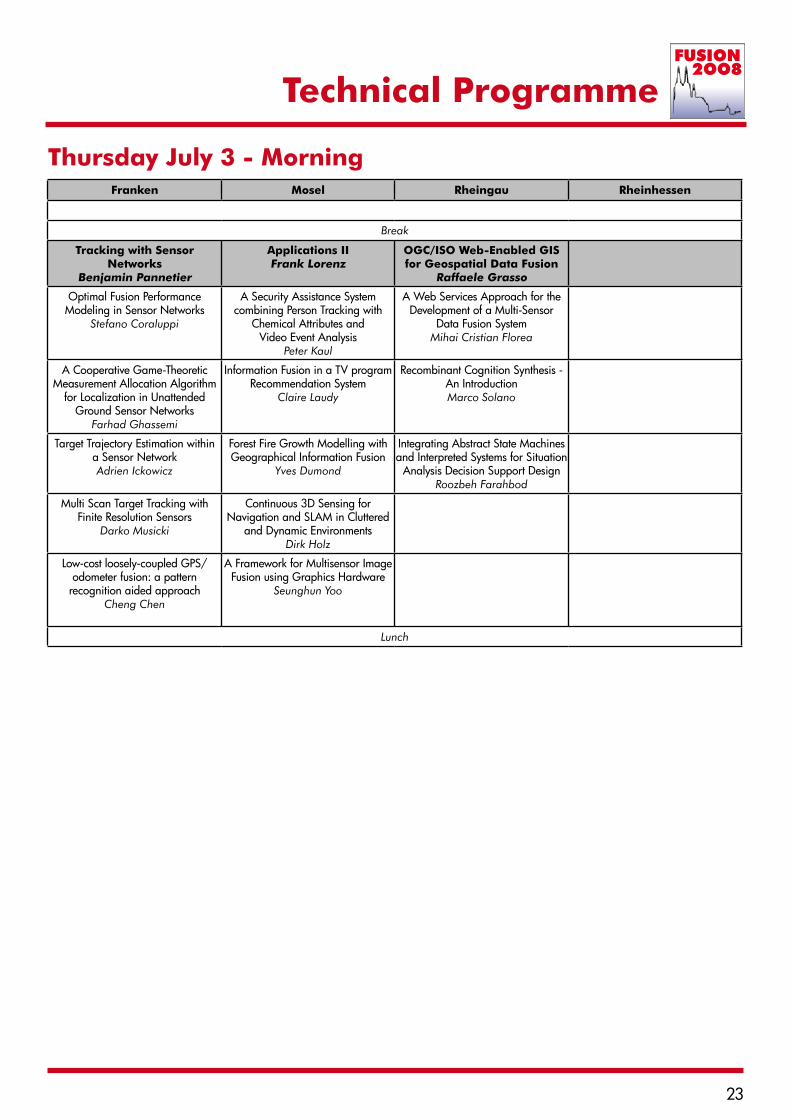
Technical Programme
23
Time Rheinsaal II Rheinsaal III Rheinpfalz Franken Mosel Rheingau Rheinhessen
9:00 Keynote Lecture III: Henk A. P. Blom, "Air Traffic Collision Risk Modelling, Analysis and Rare Event Simulation"
10:00 Break Break
10:20-12:00 Ground Target Tracking and Classification II
Mahendra Mallick
Advances and Applications of DSmT for Information Fusion
Jean Dezert
Multi Target Tracking Mark Morelande
Tracking with Sensor Networks
Benjamin Pannetier
Applications II Frank Lorenz
OGC/ISO Web-Enabled GIS for Geospatial Data Fusion
Raffaele Grasso
10:20 Methodology for Incorporating the Doppler Blind Zone in Target
Tracking AlgorithmsJohn Martin Clark
A new probabilistic transformation of belief mass assignment
Jean Dezert
Particle filters and data association for multi-target tracking
Mats Ekman
Optimal Fusion Performance Modeling in Sensor Networks
Stefano Coraluppi
A Security Assistance System combining Person Tracking with
Chemical Attributes and Video Event Analysis
Peter Kaul
A Web Services Approach for the Development of a Multi-Sensor
Data Fusion System Mihai Cristian Florea
10:40 Lane Tracking for On-Road Targets X. Rong Li
An evaluation of the attribute infor-mation for the purpose of
DSmT fusion in C&C systems Ksawery Krenc
Feature Aided Probabilistic Data Association for Multi-Target Tracking
Xuezhi Wang
A Cooperative Game-Theoretic Measurement Allocation Algorithm
for Localization in Unattended Ground Sensor Networks
Farhad Ghassemi
Information Fusion in a TV program Recommendation System
Claire Laudy
Recombinant Cognition Synthesis - An Introduction Marco Solano
11:00 Ground Moving Target Tracking with Context Information and a Refined
Sensor ModelMichael Mertens
Discrete Labels and Rich Foci in Theory of Evidence
Christophe Osswald
Sensor scheduling for multiple target tracking and detection using
passive measurements Thomas Hanselmann
Target Trajectory Estimation within a Sensor Network Adrien Ickowicz
Forest Fire Growth Modelling with Geographical Information Fusion
Yves Dumond
Integrating Abstract State Machines and Interpreted Systems for Situation
Analysis Decision Support Design Roozbeh Farahbod
11:20 Curvature Nonlinearity Measure and Filter Divergence Detector for
Nonlinear Tracking ProblemsPramod Vashney
Multiple cameras fusion based on DSmT for tracking objects on ground
plane Esteban Garcia
Multitarget Tracking in the Presence of Wakes
Anders Rødningsby
Multi Scan Target Tracking with Finite Resolution Sensors
Darko Musicki
Continuous 3D Sensing for Navigation and SLAM in Cluttered
and Dynamic Environments Dirk Holz
11:40 Modelling Uncertain Implication Rules in Evidence Theory
Alessio Benavoli
Multitarget Tracking Algorithm Based on Finite Mixture Models and
Equivalent Measurement Weifeng Liu
Low-cost loosely-coupled GPS/ odometer fusion: a pattern
recognition aided approach Cheng Chen
A Framework for Multisensor Image Fusion using Graphics Hardware
Seunghun Yoo
12:00 Lunch Lunch
Thursday July 3 - Morning
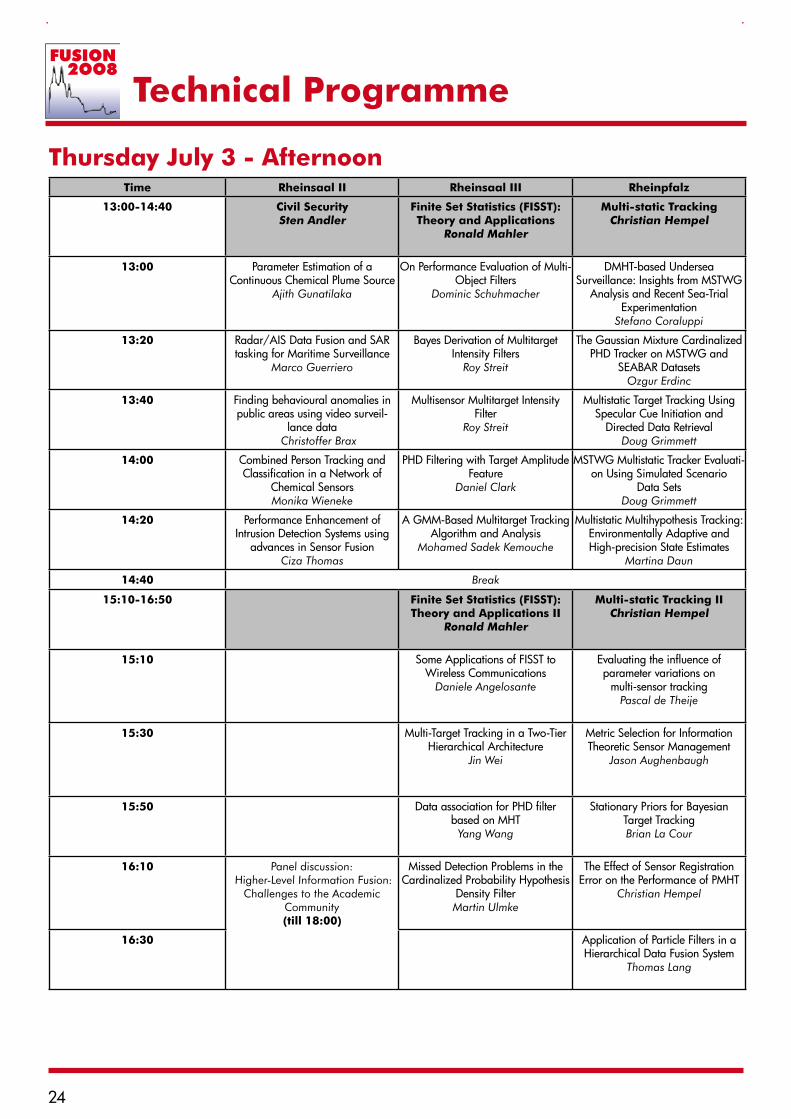
Technical Programme
24
Time Rheinsaal II Rheinsaal III Rheinpfalz Franken Mosel Rheingau Rheinhessen
13:00-14:40 Civil Security Sten Andler
Finite Set Statistics (FISST): Theory and Applications
Ronald Mahler
Multi-static Tracking Christian Hempel
Intrusion Detection Robert Lynch
Challenges of and Methods for Information Fusion of Soft
Data James Llinas
Multisensor Data Fusion I Simon Maskell
Image Fusion Kai Juengling
13:00 Parameter Estimation of a Continuous Chemical Plume Source
Ajith Gunatilaka
On Performance Evaluation of Multi-Object Filters
Dominic Schuhmacher
DMHT-based Undersea Surveillance: Insights from MSTWG
Analysis and Recent Sea-Trial Experimentation
Stefano Coraluppi
Modified Evidence theory for Performance Enhancement of Intrusion Detection Systems
Ciza Thomas
Context Selection For Linguistic Data Fusion
Nicholas Morizio
Automatic generation of 3D models from real multisensor data
Carmen Witte
A Context-Based Fusion Algorithm for Shape Retrieval Akrem El-ghazal
13:20 Radar/AIS Data Fusion and SAR tasking for Maritime Surveillance
Marco Guerriero
Bayes Derivation of Multitarget Intensity Filters
Roy Streit
The Gaussian Mixture Cardinalized PHD Tracker on MSTWG and
SEABAR Datasets Ozgur Erdinc
Real-time Fusion and Projection of Network Intrusion Activity
Shanchieh Yang
First-Principle Approach to Functio-nally Decomposing the JDL Fusion Model: Emphasis on Soft Target
Data Richard Antony
Multi-sensors data fusion using dynamic bayesian network for robo-
tised vehicle geo-localisation Cindy Cappelle
Optimal Contrast for Color Image Fusion using ICA bases Nikolaos Mitianoudis
13:40 Finding behavioural anomalies in public areas using video surveil-
lance data Christoffer Brax
Multisensor Multitarget Intensity Filter
Roy Streit
Multistatic Target Tracking Using Specular Cue Initiation and
Directed Data Retrieval Doug Grimmett
Improving the Detection of Unknown Computer Worms Activity using
Active Learning Robert Moskovitch
Graphical Methods for Real-Time Fusion and Estimation with Soft
Message Data Kedar Sambhoos
Artificial Immune Systems for Data Fusion: A Novel Biologically Inspired
Approach Adam Knowles
Bayesian Fusion of Multivariate Image Series to Obtain Depth
Information Ioana Gheta
14:00 Combined Person Tracking and Classification in a Network of
Chemical Sensors Monika Wieneke
PHD Filtering with Target Amplitude Feature
Daniel Clark
MSTWG Multistatic Tracker Evaluati-on Using Simulated Scenario
Data Sets Doug Grimmett
Evaluation of a Sentry System against Noisy Optimal Intrusions
Fréderic Dambreville
Perspectives on visualization and virtual world technologies
for multi-sensor data fusion David Hall
Multisensor Background Extraction and Updating for Moving Target
Detection Boban Bondzulic
A Self-Organizing Neural Model for Multimedia Information Fusion
Luong-Dong Nguyen
14:20 Performance Enhancement of Intrusion Detection Systems using
advances in Sensor Fusion Ciza Thomas
A GMM-Based Multitarget Tracking Algorithm and Analysis
Mohamed Sadek Kemouche
Multistatic Multihypothesis Tracking: Environmentally Adaptive and High-precision State Estimates
Martina Daun
An Extension of STANAG2022 for Information Scoring Jérôme Besombes
Multisensor Data Fusion for Prosthetic Control
Henry Zheng
Improved dynamic image fusion scheme for infrared and visible
sequence based on image fusion system Xiao Gang
14:40 Break Break
15:10-16:50 Finite Set Statistics (FISST): Theory and Applications II
Ronald Mahler
Multi-static Tracking II Christian Hempel
Image Segmentation and Analysis
Michael Heizmann
Challenges of and Methods for Information Fusion of Soft
Data II James Llinas
Multisensor Data Fusion II David Salmond
15:10 Some Applications of FISST to Wireless Communications
Daniele Angelosante
Evaluating the influence of parameter variations on
multi-sensor trackingPascal de Theije
Level Set Segmentation of Hyperspectral Images Using Joint
Spectral Edge and Signature Information
Radford Juang
Expression of Uncertainty in Linguistic DataAlain Auger
Geolocation using TDOA and FDOA Measurements
Darko Musicki
15:30 Multi-Target Tracking in a Two-Tier Hierarchical Architecture
Jin Wei
Metric Selection for Information Theoretic Sensor Management
Jason Aughenbaugh
Multi-Resolution Learning Vector Quantisation Based Automatic
Colour Clustering Andrew Payne
Situation and Context in Data Fusion and
Natural Language UnderstandingAlan Steinberg
FuSIA: Future Situation and Impact Awareness
Jared Holsopple
15:50 Data association for PHD filter based on MHT
Yang Wang
Stationary Priors for Bayesian Target TrackingBrian La Cour
Feature Fusion as a Practical Solution toward Noncooperative
Iris Recognition Nima Tajbakhsh
Fusion Challenges in Non- Traditional Warfare – The Road to
an Asymmetric Fusion ModelJames Snyder
Improving Position Accuracy by Combined Processing of Galileo
and GPS Satellite Signals Ulrich Engel
16:10 Panel discussion: Higher-Level Information Fusion:
Challenges to the Academic Community(till 18:00)
Missed Detection Problems in the Cardinalized Probability Hypothesis
Density FilterMartin Ulmke
The Effect of Sensor Registration Error on the Performance of PMHT
Christian Hempel
An Intelligent Decision Combiner Applied to Noncooperative
Iris Recognition Nima Tajbakhsh
Soft Data Issues in Fusion of Video SurveillanceGiovanni Ferrin
Target Tracking with Interactive Multiple Model in Geodetic Co-ordinate System for Naval Ships
Cooperative EngagementLi Duan
16:30 Application of Particle Filters in a Hierarchical Data Fusion System
Thomas Lang
Enhancing Graph Matching Tech-niques with Ontologies
Eric Little
Thursday July 3 - Afternoon
Technical Programme
25
Time Rheinsaal II Rheinsaal III Rheinpfalz Franken Mosel Rheingau Rheinhessen
13:00-14:40 Civil Security Sten Andler
Finite Set Statistics (FISST): Theory and Applications
Ronald Mahler
Multi-static Tracking Christian Hempel
Intrusion Detection Robert Lynch
Challenges of and Methods for Information Fusion of Soft
Data James Llinas
Multisensor Data Fusion I Simon Maskell
Image Fusion Kai Juengling
13:00 Parameter Estimation of a Continuous Chemical Plume Source
Ajith Gunatilaka
On Performance Evaluation of Multi-Object Filters
Dominic Schuhmacher
DMHT-based Undersea Surveillance: Insights from MSTWG
Analysis and Recent Sea-Trial Experimentation
Stefano Coraluppi
Modified Evidence theory for Performance Enhancement of Intrusion Detection Systems
Ciza Thomas
Context Selection For Linguistic Data Fusion
Nicholas Morizio
Automatic generation of 3D models from real multisensor data
Carmen Witte
A Context-Based Fusion Algorithm for Shape Retrieval Akrem El-ghazal
13:20 Radar/AIS Data Fusion and SAR tasking for Maritime Surveillance
Marco Guerriero
Bayes Derivation of Multitarget Intensity Filters
Roy Streit
The Gaussian Mixture Cardinalized PHD Tracker on MSTWG and
SEABAR Datasets Ozgur Erdinc
Real-time Fusion and Projection of Network Intrusion Activity
Shanchieh Yang
First-Principle Approach to Functio-nally Decomposing the JDL Fusion Model: Emphasis on Soft Target
Data Richard Antony
Multi-sensors data fusion using dynamic bayesian network for robo-
tised vehicle geo-localisation Cindy Cappelle
Optimal Contrast for Color Image Fusion using ICA bases Nikolaos Mitianoudis
13:40 Finding behavioural anomalies in public areas using video surveil-
lance data Christoffer Brax
Multisensor Multitarget Intensity Filter
Roy Streit
Multistatic Target Tracking Using Specular Cue Initiation and
Directed Data Retrieval Doug Grimmett
Improving the Detection of Unknown Computer Worms Activity using
Active Learning Robert Moskovitch
Graphical Methods for Real-Time Fusion and Estimation with Soft
Message Data Kedar Sambhoos
Artificial Immune Systems for Data Fusion: A Novel Biologically Inspired
Approach Adam Knowles
Bayesian Fusion of Multivariate Image Series to Obtain Depth
Information Ioana Gheta
14:00 Combined Person Tracking and Classification in a Network of
Chemical Sensors Monika Wieneke
PHD Filtering with Target Amplitude Feature
Daniel Clark
MSTWG Multistatic Tracker Evaluati-on Using Simulated Scenario
Data Sets Doug Grimmett
Evaluation of a Sentry System against Noisy Optimal Intrusions
Fréderic Dambreville
Perspectives on visualization and virtual world technologies
for multi-sensor data fusion David Hall
Multisensor Background Extraction and Updating for Moving Target
Detection Boban Bondzulic
A Self-Organizing Neural Model for Multimedia Information Fusion
Luong-Dong Nguyen
14:20 Performance Enhancement of Intrusion Detection Systems using
advances in Sensor Fusion Ciza Thomas
A GMM-Based Multitarget Tracking Algorithm and Analysis
Mohamed Sadek Kemouche
Multistatic Multihypothesis Tracking: Environmentally Adaptive and High-precision State Estimates
Martina Daun
An Extension of STANAG2022 for Information Scoring Jérôme Besombes
Multisensor Data Fusion for Prosthetic Control
Henry Zheng
Improved dynamic image fusion scheme for infrared and visible
sequence based on image fusion system Xiao Gang
14:40 Break Break
15:10-16:50 Finite Set Statistics (FISST): Theory and Applications II
Ronald Mahler
Multi-static Tracking II Christian Hempel
Image Segmentation and Analysis
Michael Heizmann
Challenges of and Methods for Information Fusion of Soft
Data II James Llinas
Multisensor Data Fusion II David Salmond
15:10 Some Applications of FISST to Wireless Communications
Daniele Angelosante
Evaluating the influence of parameter variations on
multi-sensor trackingPascal de Theije
Level Set Segmentation of Hyperspectral Images Using Joint
Spectral Edge and Signature Information
Radford Juang
Expression of Uncertainty in Linguistic DataAlain Auger
Geolocation using TDOA and FDOA Measurements
Darko Musicki
15:30 Multi-Target Tracking in a Two-Tier Hierarchical Architecture
Jin Wei
Metric Selection for Information Theoretic Sensor Management
Jason Aughenbaugh
Multi-Resolution Learning Vector Quantisation Based Automatic
Colour Clustering Andrew Payne
Situation and Context in Data Fusion and
Natural Language UnderstandingAlan Steinberg
FuSIA: Future Situation and Impact Awareness
Jared Holsopple
15:50 Data association for PHD filter based on MHT
Yang Wang
Stationary Priors for Bayesian Target TrackingBrian La Cour
Feature Fusion as a Practical Solution toward Noncooperative
Iris Recognition Nima Tajbakhsh
Fusion Challenges in Non- Traditional Warfare – The Road to
an Asymmetric Fusion ModelJames Snyder
Improving Position Accuracy by Combined Processing of Galileo
and GPS Satellite Signals Ulrich Engel
16:10 Panel discussion: Higher-Level Information Fusion:
Challenges to the Academic Community(till 18:00)
Missed Detection Problems in the Cardinalized Probability Hypothesis
Density FilterMartin Ulmke
The Effect of Sensor Registration Error on the Performance of PMHT
Christian Hempel
An Intelligent Decision Combiner Applied to Noncooperative
Iris Recognition Nima Tajbakhsh
Soft Data Issues in Fusion of Video SurveillanceGiovanni Ferrin
Target Tracking with Interactive Multiple Model in Geodetic Co-ordinate System for Naval Ships
Cooperative EngagementLi Duan
16:30 Application of Particle Filters in a Hierarchical Data Fusion System
Thomas Lang
Enhancing Graph Matching Tech-niques with Ontologies
Eric Little
Thursday July 3 - Afternoon
Social Programme
26
Ice Breaker ReceptionMonday June 30, 19:30-20:30, Hyatt Regency Cologne
Welcome ReceptionTuesday July 1, 18:30-20:30, Historic Town Hall, Cologne
Conference BanquetWednesday July 2, 19:00-23:00, aboard MS RheinEnergie
Guided Tours: OrganisationThe full-day tours into the neighbourhood of Cologne will have a very personal character and are or-•ganized by Dorothea Koch, Nancy Streit, Julia Laars, and Jane Stannus.Please register at the reception desk for the tours, which will start from the conference hotel. •The cost of transportation, entrance fees and cost for guided tours at the sites to be visited will be •shared among the participants (around €20-40, depending on participation).Lunch and coffee & cake have to be paid for individually in the restaurants. •
Guided Tour: TuesdayMaria Laach Abbey(in German: Abtei Maria Laach) is an ancient Benedictine abbey located in the Eifel hills, on the south-western shore of the Laacher See, a beautiful blue crater lake formed by a volcanic erup-tion around 10 000 years ago. A wonderful view of it can be had only a short walk away from the abbey parking area. Maria Laach was founded in 1093 by Heinrich II, Count Palatine of the Rhine, who had no children and so devoted what would have been a dowry to the construction of a mon-astery. The abbey is a true masterpiece of German Romanesque architecture. Among the many artistic jewels to be seen at Maria Laach are Heinrich II’s tomb, an Early Gothic monument covered in paintings of monks and abbots; the 16th-century frescoes of St. Benedict and St. Christopher; and of course the wonderful and unusual Paradise Portal, which was designed by the mason Laacher Samson-Meister or “Master of the Laach Samson” in the 13th century. Maria Laach is still in use as a monastery, where Benedictine monks live a life of prayer apart from the world, assembling five times a day in the church for the service (officium). Lunch will be in the historic cloister restaurant.
Burg Eltzis a medieval castle nestled in the hills above the Moselle River between Koblenz and Trier. It is still owned by descendants of the same family that lived there in the 12th cen-tury, 33 generations ago. Burg Eltz looks exactly like a fairy-tale castle, with its many turrets, tiny windows, and formidable ramparts. A cross section of eight hundred years of history is reflected in the layout and architecture of the rooms. All the architectural styles from the Romanesque to the early Baroque merge in Burg Eltz to form a symmetrical whole. Inside, weapons, ar-mour, wonderful paintings, and exquisite furniture are on show, making one of the most famous castles in Germany a true pleasure to explore. Coffee will be in the romantic castle garden. © Joachim Biermann
© Wolfgang Koch
Social Programme
27
Guided Tour: WednesdayA personal guided tour to Cologne, the Cathedral and the Romanesque churchesThe city of Cologne contains one of the most impressive cathedrals in Europe, which in its turn houses one of the greatest pilgrim attractions of the medieval world, namely the relics of the Three Wise Men, also known as the Three Kings. Cologne Cathedral is the largest Gothic cathedral in Northern Europe, and the largest free-hanging bell in the
world swings in its bell tower. Twelve Romanesque Churches can also be found in Cologne’s walled Old City. Severely damaged during the Second World War, they have been completely restored, and now stand witness to Co-logne’s rich early medieval heritage. Among them are the church to St. Gereon, a local martyr of Roman times, and the church to St. Ursula, who is the patron of Cologne, with her legendary 11 000 virgins. Many date back to Roman times; St. Gereon’s was once a Roman chapel, and St. Ursula’s is built on a Roman graveyard. Also the grand witnesses of the Roman Colonia Claudia Ara Agrippinensium will be part of the tour. We will have lunch and coffee in one of the beautiful historic restaurants in the old town.
Guided Tour: Thursday Brühl: the Baroque castles of Augustusburg and Falkenlust The palaces of Augustusburg and Falkenlust in Brühl were built by the Archbishop-Elector of Cologne, Clemens August of Bavaria, in the early 18th century. Magnificent specimens of Baroque architecture, the two palaces are connected by the lovely Schlosspark gardens that were in-spired by Louis XIV’s Versailles. Augustusburg is the main palace, while Falkenlust is more of a hunting lodge and was one of the Archbishop’s favourite summer residences. The two palaces, along with their charming Schlosspark, have been declared a UNESCO World Heritage site. Until recently, Augustusburg was used for state receptions by the German Federal President. We will have lunch and coffee in the old Orangerie of the residence.
Suggestion for a private tourBeethoven’s and Schumann’s BonnThis tour will give you a glimpse of the lives of two men who not only played a key role in the Rheinland’s cultural history, but also had a significant influence on the entire world of music: Beethoven and Schumann. Ludwig van Beethoven was born in Bonn, and lived there until his early twenties. The house where he grew up has now been turned into a museum containing many of his instruments and letters. There is also a monument to him on the city square. Robert Schumann, another great German composer, spent the last two years of his life in Bonn and died here. His grave is in the famous Alter Friedhof (Old Cemetery) in downtown Bonn, beside that of his wife Clara, who her-self was an internationally acclaimed concert pianist. His Carnaval seemed an appropriate selection for Dr. Klemm to play at the Welcome Ceremony of FUSION 2008. Information and advice will be provided on request at the registration desk. Perhaps, the thursday tour can be extended by a trip to Bonn.
© Inge Decker Stadt Köln 1997
© Inge Decker Stadt Köln 1995
Beethoven-Haus, StraßenansichtHouse of Beethoven, Street View
© Wolfgang Koch
General Information
28
MEETING SITEHyatt Regency CologneKennedy-Ufer 2A,50679 Cologne, Germany Tel: +49 (0)221 828 1234Fax: +49 (0)221 828 1370Email: [email protected]
Hyatt Regency Cologne is a luxurious Cologne hotel situated on the right bank of the Rhine River. The hotel is within walking distance of the city centre, the Kölnarena event hall, and the KölnMesse trade fair and exhibition centre. Spectacular views of the Rhine, the old town and Cologne‘s world-famous Cathe-dral (Kölner Dom). The hotel is just 15 minutes drive from Cologne Airport.
REGISTRATION AND SECRETARIAT DESKPhone: +49 (0) 221 8281 18 28Opening HoursSunday June 29: 18:00 to 20:00Monday June 30: 8:00 to 20:30Tuesday July 1 to Thursday July 3: 8:00 to 18:00
AT THIS DESK:Tutorial participants will obtain tutorial notes related to their registration.The certificate of attendance will be provided, upon request.
FEESRegular and student registration fee include:
Access to all the regular and special sessions•Conference kit•Three buffet luncheons•Two coffee breaks per day•Welcome reception at the Old Town Hall of Cologne•Conference Banquet aboard the event ship “MS RheinEnergie”•One copy of CD-ROM proceedings•Certificate of attendance•One year’s ISIF Membership•
Tutorial fee includes:Note(s) of the tutorial(s) you have registered for•Two coffee breaks•One buffet luncheon•
FACILITIESProjectors and video equipment connected to a local PC will be available in each conference room. Pres-entations must be saved in Power Point or PDF format. Note that there will be NO Macintosh computer or VHS video player on site. Lapel microphones and laser pointers will be available for all speakers.All presentations have to be checked in at the conference media centre in Room “Baden“; morning presentations before morning coffee break, afternoon presentations before lunch.

Sponsors
29

Sponsors
30
SCHÖNHOFERSSE SALES AND ENGINEERING GMBH
ATLAS ELEKTRONIKA joint company of ThyssenKrupp and EADS

Sponsors
31
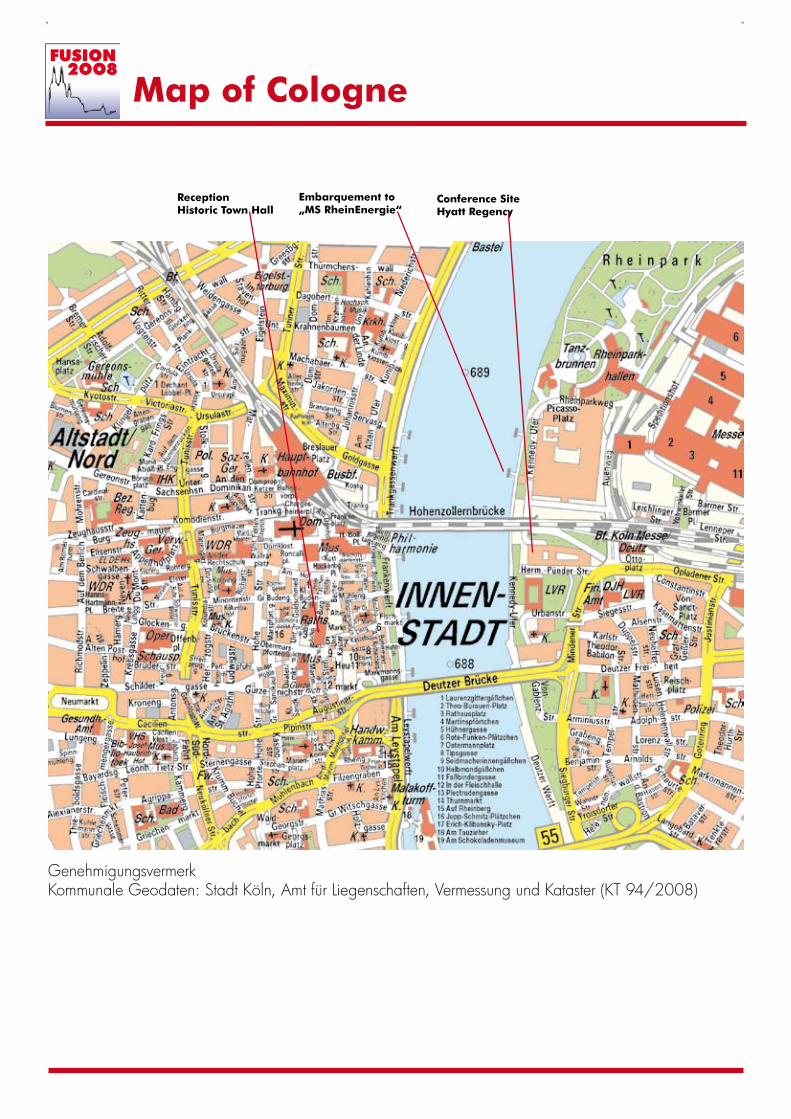
Map of Cologne
Genehmigungsvermerk Kommunale Geodaten: Stadt Köln, Amt für Liegenschaften, Vermessung und Kataster (KT 94/2008)
Conference Site Hyatt Regency
Embarquement to„MS RheinEnergie“
ReceptionHistoric Town Hall