Prozessoren fur mobile und¨ eingebettete Systeme II: Die ...
49
EMES: Eigenschaften mobiler und eingebetteter Systeme 00 1 0 1 1 1 1 0 1 0 0 1 0 01 11 0 1 0 0 1 0 1 0 1 0 1 1 0 0 0 1 0 1 1 1 1 0 10 0 1 0 0 1 11 0 1 0 0 1 0 1 0 1 0 11 0 0 0 1 0 1 1 1 1 0 10 0 1 0 01 11 0 1 0 0 1 0 1 0 1 0 11 0 0 0 1 0 1 1 1 1 0 10 0 1 0 01 11 0 1 0 0 1 0 1 0 1 0 1 1 0 0 0 1 0 1 1 1 1 0 10 0 1 0 0 1 11 0 1 0 0 1 0 10 1 0 11 0 0 0 1 0 1 1 1 1 0 10 0 1 0 01 11 0 1 0 0 1 0 1 0 1 0 11 0 0 0 1 0 11 1 1 0 10 0 1 0 0 111 0 1 0 0 1 0 1 0 1 0 1 1 0 00101111010010011101001010101 Prozessoren f ¨ ur mobile und eingebettete Systeme II: Die AVR-Architektur Dr. Felix Salfner, Dr. Siegmar Sommer Wintersemester 2009/2010
Transcript of Prozessoren fur mobile und¨ eingebettete Systeme II: Die ...

EMES: Eigenschaften mobiler und eingebetteter Systeme
00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101
Prozessoren fur mobile undeingebettete Systeme II:
Die AVR-Architektur
Dr. Felix Salfner, Dr. Siegmar Sommer
Wintersemester 2009/2010

00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101Die AVR-Architektur
• Warum AVR (in dieser VL)?
– Angesiedelt im extremen Low-Cost-Bereich
– Interessante Controller-Familie mit hoher Skalierbarkeit
– Systematisch entwickelte Architektur
• Quellen fur diese VL:
– Online verfugbare Dokumente von Atmel: http://www.atmel.com
– Code- und Schaltungsbeispiele mit freundlicher Genehmigung von
http://www.mikrocontroller.net
1 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK

00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101 Was ist AVR?
• Eine RISC-Architektur
– Entwickelt in den 90ern von Alf Egil Bogen und Vegard Wollan am
Norwegian Institute of Technology
– Weiterentwickelt bei einer Tochterfirma von Atmel, die von den
beiden Entwicklern gegrundet wurde
• Eine Familie von Mikrocontrollern der Firma Atmel
– Basieren auf dem (weitgehend) gleichen Kern
– Unterschiedliche Speichergroßen
– Unterschiedliche I/O-Peripherie
• Herkunft und Bedeutung des Namen AVR sind nicht komplett bekannt
— Geruchte:
– Advanced Virtual RISC
– Alf Vegard RISC
2 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK

00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101Parameter im Uberblick
• Harvard-Architektur
• RISC-Design (mit Einschrankungen)
• Load/Store
• 8 Bit Verarbeitungsbreite
• Wortadressierung (16 Bit)
• 32 Register (in den Speicher abgebildet auf 0x00 bis 0x1F)
• 2-Adress-Maschine
• 130 Instruktionen (ATmega)
• 16 Bit Befehlsformat, wenige Instruktionen brauchen 32 Bit
• Fast alle Instruktionen in einem Zyklus bei bis zu 20 MHz Takt
• Orthogonaler Befehlssatz
3 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK
00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101Architektur I (Beispiel: AT90S8414)
4 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK

00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
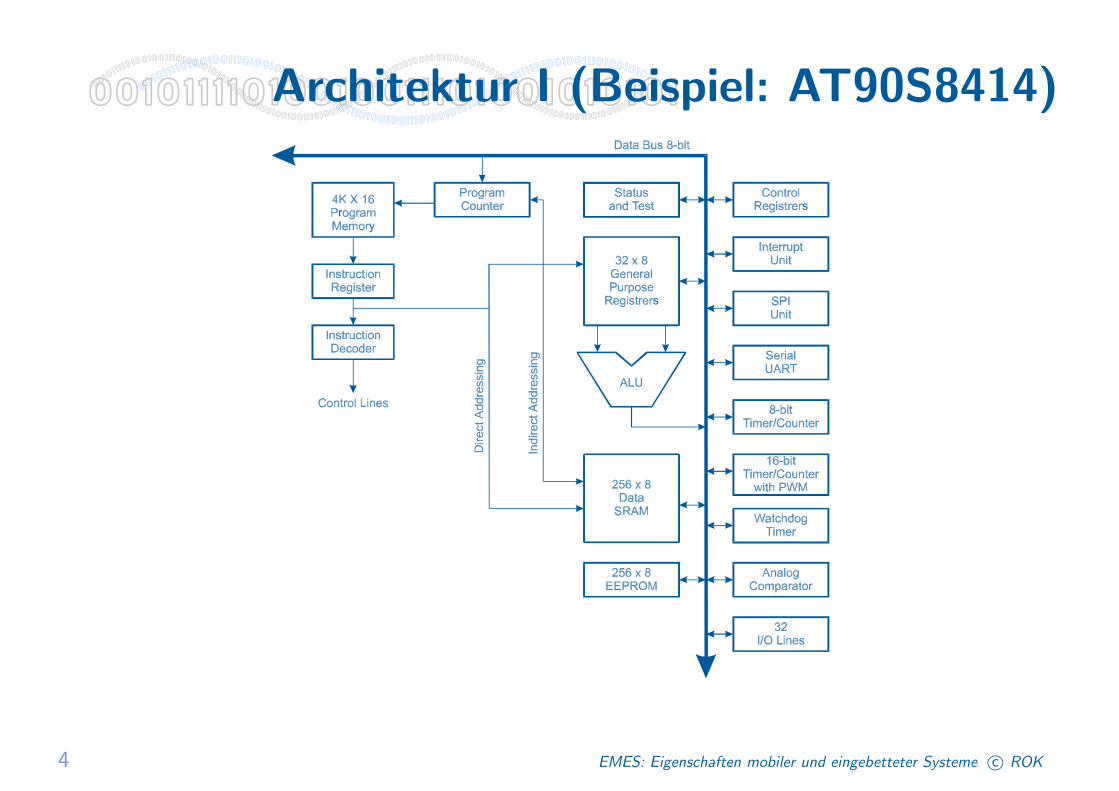
10101011000101111010010011101001010101Architektur II (Beispiel: ATmega 8)
INTERNALOSCILLATOR
OSCILLATOR
W ATCHDOGTIMER
MCU CTRL.& TIMING
OSCILLATOR
TIMERS/COUNTERS
INTERRUPTUNIT
STACKPOINTER
EEPROM
SRAM
STATUSREGISTER
USART
PROGRAMCOUNTER
PROGRAMFLASH
INSTRUCTIONREGISTER
INSTRUCTIONDECODER
PROGRAMMINGLOGIC SPI
ADCINTERFACE
COMP.INTERFACE
PORTC DRIVERS/BUFFERS
PORTC DIGITAL INTERFACE
GENERALPURPOSEREGISTERS
X
Y
Z
ALU
+-
PORTB DRIVERS/BUFFERS
PORTB DIGITAL INTERFACE
PORTD DIGITAL INTERFACE
PORTD DRIVERS/BUFFERS
XTAL1
XTAL2
CONTROLLINES
VCC
GND
MUX &ADC
AGND
AREF
PC0 - PC6 PB0 - PB7
PD0 - PD7
AVR CPU
TWI
RESET
5 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK

00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101 Architektur III
• 32 Register (nachste Folie)
• Programmspeicher: 1 bis 256 KByte Flashspeicher auf dem Chip
Adressierbar: bis 8 MByte durch 22 Bit-Programmzahler
• Datenspeicher:
– 0 bis 8 KByte SRAM auf dem Chip
– 0 bis 4 KByte EEPROM auf dem Chip
• ALU:
– Registerbasierte Operationen in einem Zyklus
– Keinen direkten Zugriff auf Speicher
– Multiplikation optional (ATmega)
– Keine Division
• Keine Pipeline
6 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK

00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101Architektur IV: Register und I/O
• R0-R31 als General Purpose Register mit einigen Ausnahmen:
– Benutzung der letzten 6 Register als 16-Bit Speicherpointer:
∗ X-Pointer: R26 und R27
∗ Y-Pointer: R28 und R29
∗ Z-Pointer: R30 und R31
– Befehle mit immediate Werten (6 Bit breit) konnen nur R16 bis
R31 nutzen
– add und sub auf 16-Bit-Worten sind nur mit R24-R31 moglich
• Breite Vielfalt an I/O integrierbar:
– 64 I/O-Ports (jeweils 8 Bit) direkt ansprechbar
– 192 weitere I/O-Ports uber Daten-Adressierung
7 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK

00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101 Befehlssatz I
• Orientiert an C als Hochsprache
• Compilerentwicklung noch vor Ende der Architekturentwicklung be-
gonnen
• Architektur in engem Kontakt zu Compilerbauern optimiert
– Adressierungsarten
– 3 Speicherpointer statt 2
– Direkte Adressierung statt seitenorientierter direkter Adressierung
– Subtraktionsbefehl statt Addition fur Immediate
– Nichtzerstorende Vergleichsoperation fur lange Operanden
• “Skip” Operationen — bedingte Ausfuhrung ahnlich ARM fur einige
Befehle
• Viele Befehle zur Manipulation von Bits
8 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK
00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101 Befehlssatz II
• Befehle zur Flußsteuerung
• Logische Befehle
• Befehle zur Bit-Manipulation
• Arithmetische Befehle
• Load/Store-Befehle
• Verschiedenes
9 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK

00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101Befehlsformate und Adressierungsarten I
• Register direkt mit einem Register
OP
Registersatz
dst
00415
31
rdst
• Register direkt mit zwei Registern SRC und DST
Registersatz
dst
00415
31
RsrcOP Rdst
src
9 5
10 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK

00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101
Befehlsformate und AdressierungsartenII
• Direkte I/O-Adressierung
0015
OP
I/O Speicher
63
5Rsrc/Rdst Port
• Direkte Daten-Adressierung
Daten AdresseRsrc/RdstOP
15 0
Datenspeicher16192031
11 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK

00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101
Befehlsformate und AdressierungsartenIII
• Indirekte Datenadressierung
DatenspeicherY oder Z − Register
015
• Indirekte Datenadressierung mit Offset
OP qRsrc/Rdst
Datenspeicher
+
Y oder Z − Register015
051015 6
12 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK

00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101
Befehlsformate und AdressierungsartenIV
• Indirekte Datenadressierung mit Pra-Dekrement
• Indirekte Datenadressierung mit Post-Inkrement
• Konstante Adressierung auf dem Programmspeicher
• Programmspeicher mit Post-Inkrement
• Direkte Programmspeicher-Adressierung bei JMP und CALL (22 Bit)
• Indirekte Programmspeicher-Adressierung bei IJMP und ICALL (16
Bit)
• Relative Programmspeicher-Adressierung bei RJMP und RCALL (12
Bit)
13 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK
00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101 I/O-Ports
• Architektur erlaubt 256 I/O Ports, davon 64 direkt ansprechbar
• Modellabhangige Nutzung der Ports fur z.B.:
– Digitale I/O-Ports (jeder Pin entspricht einem Bit)
Umschaltbar in der Datenrichtung
– AD-Wandler mit 8 oder 10 Bit Auflosung
– RS232-Schnittstellen
– TWI (two wire interface)
– PWM-Ausgange (Pulsweitenmodulation)
– Realtime-Zahler
– Watchdog
– Analog Comparator
– Anbindung externen Speichers
– ISP (in system programming)
14 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK

00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101Implementationen I
Atmel Corporation: Mehrere Baureihen
• AT90****
– Erste Serie, nicht mehr fur neue Designs empfohlen
• tinyAVR (ATtiny11 bis ATtiny45)
– Fur einfachste Anforderungen mit geringen Kosten
– Extrem kleine Bauform (ab 8 Pins)
• megaAVR (ATmega8 bis ATmega256)
– Kosteneffektive MCUs mit sehr vielen I/O-Pins
– Viel Speicher
– Flexible I/O-Moglichkeiten
– JTAG zur Programmierung
15 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK

00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101Implementationen II
• LCD AVR (ATmega169, ATmega329, ATmega3290)
– Optimiert fur direkte Anbindung eines LCD-Displays und einer
Tastatur
• CAN AVR (AT90CAN128, AT90CAN64, AT90CAN32)
– Integrierter V2.0A/V2.0B CAN-Controller mit 15 Nachrichtenob-
jekten
– Optimierte Interrupt-Behandlung
16 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK

00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101Beispiel: ATmega8 I
• 8 KB Flash, 512 Byte EEPROM, 1 KB SRAM
• 2 8-Bit-Zahler/Zeitgeber
• 1 16-Bit-Zahler/Zeitgeber
• Echtzeitzahler mit eigenem Oszillator
• 3 PWM-Kanale
• 6 oder 8 AD-Wandler mit 10 Bit Auflosung
• Byteorientiertes TWI
17 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK

00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101Beispiel: ATmega8 II
• Programmierbarer Watchdog mit eigenem Oszillator
• Analog Comparator
• 5 Energiespar-Modi
• 23 programmierbare I/O-Leitungen
• 28- oder 32-poliges Gehause
• bis zu 8 MHz bei 2.7-5.5V (ATmega8L) oder 16 MHz be 4.5-5.5V
(ATmega8)
• Stromverbrauch bei 4 MHz und 25 Grad C:
– Aktiv: 3.6 mA
– Idle: 1.0 mA
– Power-down: 0.0005 mA
18 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK

00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101Anwendung: Hardware I
• Gut geeignet fur nichtindustrielle Bastelprojekte:
– DIL-Gehause (bis ATmega32)
– Minimale Außenbeschaltung
– Einfach zu bauende Programmierschnittstellen
– Frei verfugbare Entwicklungstools
• Benotigt:
– Stromversorgung
– Reset-Beschaltung
– Optional Takt, falls kein interner Oszillator oder falls hohere Anfor-
derungen an zeitliche Auflosung
19 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK

00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101Anwendung: Hardware II
Generelle Schaltung (am Beispiel des AT90S4433):
20 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK

00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101Anwendung: Hardware III
Anbindung von einfachen I/O-Komponenten:
LED: Taster:
21 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK

00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101Anwendung: Software
• Programmierung des chipinternen Flash uber ISP (in system program-
ming) mittels eines einfachen Parallel-Port-Adapters
• Frei verfugbare Software von Atmel zur Assembler-Programmierung:
AVR-Studio
• Kommerzielle Compiler fur Basic, C und weitere
• Opensource-Tools fur Assembler und C frei verfugbar
– avr-gcc fur Unix und Win32/Cygwin
– binutils (inklusive Assembler)
– Programmiertools fur den Download auf die MCU
22 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK

00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101Code-Beispiel: I/O mit C (avr-gcc)
#include <avr/io.h>
int main(void){
DDRB = 0xff; // Port B als AusgangDDRD = 0; // Port D als Eingang
for (;;) {PORTB = PIND;
}}
23 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK

00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101Code-Beispiel I/O mit Assembler
.include "4433def.inc" ;bzw. m8def.inc
ldi r16, 0xFFout DDRB, r16 ;Port B durch Ausgabe von 0xFF ins
;Richtungsregister DDRB als Ausgangldi r16, 0x00out DDRD, r16 ;Port D durch Ausgabe von 0x00 ins
;Richtungsregister DDRD als Eingangloop:in r16, PIND ;an Port D anliegende Werte (Taster)
;nach r16 einlesenout PORTB, r16 ;Inhalt von r16 an Port B ausgebenrjmp loop ;Sprung zu "loop:" -> Endlosschleife
24 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK

00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101 Eigene Projekte
• Kostengunstige Hardware bei hoher Leistung und einfacher Aufbau
erlauben auch komplexe Anwendungen mit vertretbarem Aufwand
(“Bastelprojekte”)
– Propeller-Clock und Verwandte
– Embedded Webserver
– CAN-Schaltungen
– Haus-Automatisierung
– und viele weitere (siehe Google)
25 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK

00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101Projekte auf AVR-Basis I
26 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK

00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101Projekte auf AVR-Basis I
27 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK

00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101Projekte auf AVR-Basis II
28 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK

00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101Projekte auf AVR-Basis II
29 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK
00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101
Projekte auf AVR-Basis III - AVRWebserver
30 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK

00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101AVR Webserver Projekt - Checkliste
• Hardware
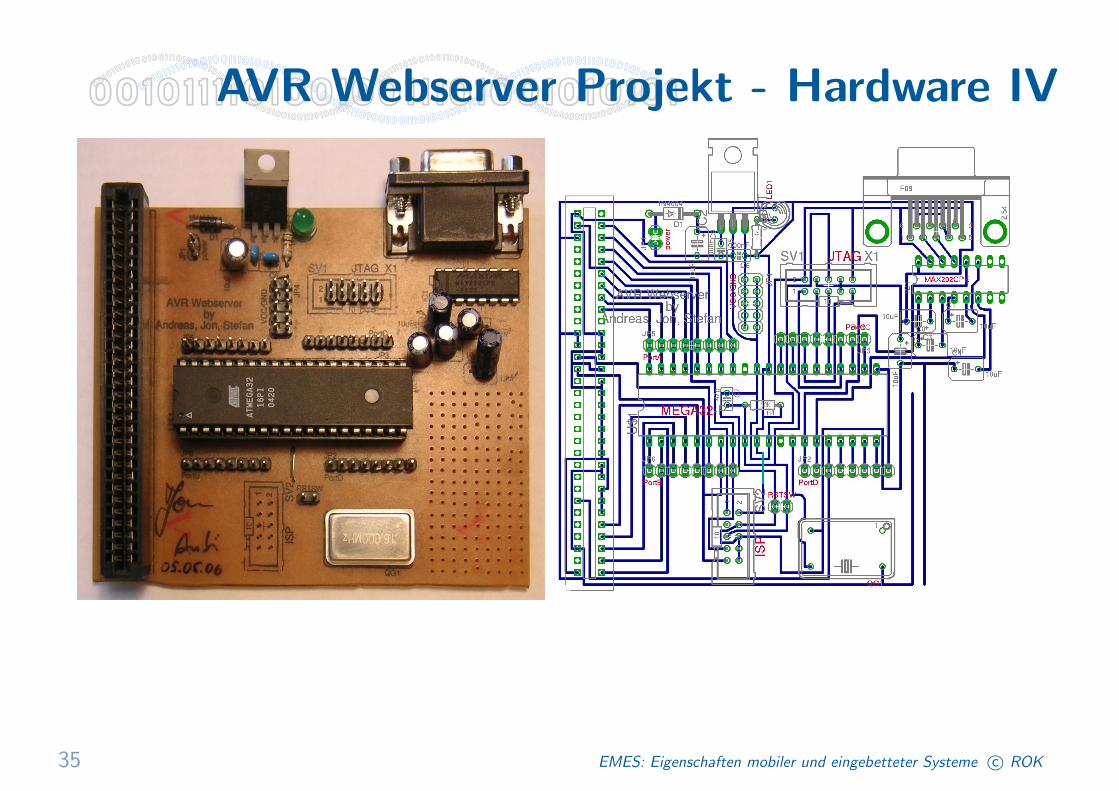
– Mikrocontroller fur Webserver (ATmega32)
– NIC fur Netzzugang (RTL8029)
– Schnittstelle fur Debugging
– Stromversorgung etc ...
31 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK

00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101AVR Webserver Projekt - Hardware I
32 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK

00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101AVR Webserver Projekt - Hardware II
33 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK

00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101AVR Webserver Projekt - Hardware III
34 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK
00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101AVR Webserver Projekt - Hardware IV
35 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK

00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101AVR Webserver Projekt - Checkliste
• Software
– HTTP
– TCP
– IP
– ARP
– Treiber fur NIC
36 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK

00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101TCP/IP Stack vs. Realitat
• wohin mit...
– Betriebsystem?
– Anwendungsdaten?
– Programmstack?
37 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK

00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101TCP/IP Stack – Probleme
• AVR besitzt noch kein Betriebsystem
– keine Speicherverwaltung
– kein Multitasking
– kein Multithreading
– keine Hardwareabstraktion
• Extrem wenig freier Speicher fur Anwendungsprogramme
38 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK

00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101TCP/IP Stack – Losungsansatz
• Im Entwicklungsprozess muss der Bedarf der einzelnen Speicherberei-
che klar definiert sein
• Eigene Abstraktion der Netzwerkhardware
• Eigenes Speichermanagement fur Netzwerkfunktionalitat
– dynamisch verwalteter Speicherbereich
– optimiert fur Pufferspeicher (FIFO)
– automatisches Defragmentieren freien Speichers
– automatisches Reservieren neuer Ressourcen
– kooperatives Speichermodell
39 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK

00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101AVR Webserver - Dynamischer Speicher
40 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK

00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101Deterministischer Speicherbedarf I
• Programmspeicher
– Compiler gibt Grosse vor
– Code-Optimierung vs. Code-Grosse
– Einschrankung der Funktionalitat vs. Standardkonformitat
• Arbeitsspeicher
– Verbrauch stark abhangig vom Programmablauf
– Statische Variablen, Heap, Stack
• Stack vs. Heap
– Paketpuffer befinden sich im Heap
– Begrenzung der Paketpuffer schafft mehr Platz fur den Stack
41 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK

00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101Deterministischer Speicherbedarf II
• Wie begrenzen wir den Bedarf des Stacks?
• Codewiederholung statt Bundelung in Funktionen
– spart Arbeitsspeicher auf Kosten des Programmspeichers
• Minimale Interruptroutinen
• Dispatcher fur Funktionsaufrufe
– Wissen uber alle moglichen Systemzustande ermoglicht einen de-
terministischen Programmfluss
– halt Aufruftiefe gering
– garantiert maximale Aufruftiefe
42 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK

00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101AVR Webserver - Dispatcher
43 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK
00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101
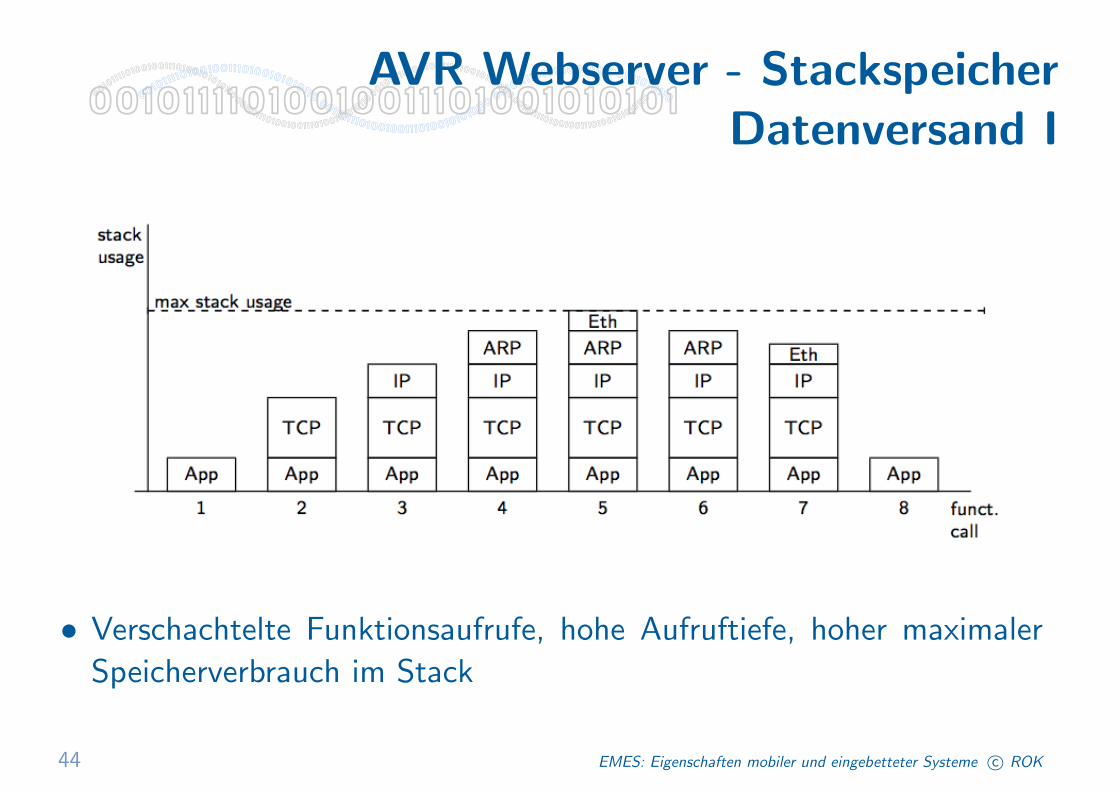
AVR Webserver - StackspeicherDatenversand I
• Verschachtelte Funktionsaufrufe, hohe Aufruftiefe, hoher maximaler
Speicherverbrauch im Stack
44 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK

00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101
AVR Webserver - StackspeicherDatenversand II
• Wissen uber Programmfluss macht Funktionsaufrufe unnotig, mini-
male Aufruftiefe, minimaler maximaler Speicherverbrauch im Stack
45 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK

00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101
AVR Webserver - StackspeicherDatenversand III
• Optimierte Aufruftiefe, minimaler maximaler Speicherverbrauch im
Stack, minimaler Programmspeicherverbrauch
46 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK

00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101Resourcen fur eigene Projekte
• In dieser Vorlesung
– AVR Pong - http://heim.ifi.uio.no/haakoh/avr/
– Propelleruhr - http://home.foni.net/˜akniesel/
– AVR Webserver - http://andreas-dittrich.eu , http://jonkowal.de
bzw Email an [email protected]
• Einstiegspunkt fur tiefergehendes Wissen (beispielsweise):
www.mikrocontroller.net
47 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK

00101
1110100100111010010101011000
101111
0100100111010010101011000101
11101001001110100101010110
00101111010010011101001010
10110
00101111
010010011101001010101100010111101001001110100
101010110 0010111101001001110100
10101011000101111010010011101001010101Bauteile besorgen v2.0
48 EMES: Eigenschaften mobiler und eingebetteter Systeme c© ROK