QUICK REFERENCE - 212.113.105.12212.113.105.12/library/KEB/F4_LIFT/00f4l1bk301.pdf · Klemme...
60
1/2004 00.F4.L1B-K301 KEB COMBIVERT F4-F Lift Aufzugstechnik Version 3.0 (Lift-Servo) Lift Technology KURZANLEITUNG QUICK REFERENCE
Transcript of QUICK REFERENCE - 212.113.105.12212.113.105.12/library/KEB/F4_LIFT/00f4l1bk301.pdf · Klemme...

1/2004
00.F
4.L1
B-K
301
KEB COMBIVERT F4-F Lift Aufzugstechnik
Version 3.0 (Lift-Servo) Lift Technology
K U R Z A N L E I T U N GQUICK REFERENCE

Diese Betriebsanleitung– ist gültig für den Frequenzumrichter KEB COMBIVERT F4-F Lift Version 3.0– muß jedem Anwender zugänglich gemacht werden
Vor jeglichen Arbeiten muß sich der Anwender mit dem Gerätvertraut machen. Darunter fällt insbesondere die Kenntnis undBeachtung der Sicherheits- und Warnhinweise. Lesen Sie des-halb unbedingt die "Technische Dokumentation Teil 1".
This manual– is valid for frequency inverter KEB COMBIVERT F4-F Lift Version 3.0– must be made available to every user
Before working with this unit you must familiarize yourself with it.Pay special attention to the safety and warning guides. Make sureto read ‘Technical Documentation Part 1’.
D Seite D-3 . . . D-30
GB Page GB-3 . . . GB-30

D-3
1. Ein- / Ausgänge ................................................................................................. 41.1 Klemmleiste X2 - Steuerklemmen (bei Geräten > G-Gehäuse) ................................41.2 Klemmleiste X3 - I/O-Expander (bei Geräten > G-Gehäuse) ....................................51.3 Klemmleiste X2 - Steuerklemmen (D- und E-Gehäuse) ............................................6
2. Anschluß ............................................................................................................ 72.1 Anschlußvorschlag für KEB-Liftumrichter bei Geräten > G-Gehäuse ....................72.2 Anschlußvorschlag für KEB-Liftumrichter im D- und E-Gehäuse ...........................82.3 Anschluß X4 .................................................................................................................92.3.1 Anschluß Inkrementalgeber ...........................................................................................92.3.2 Anschluß SIN/COS Geber .............................................................................................92.3.3 Anschluß Resolver .........................................................................................................92.3.4 Anschluß Hiperface-Geber ..........................................................................................102.3.5 Anschluß UVW-Geber .................................................................................................102.4 Anschluß X5 - Inkrementalgebernachbildung .........................................................10
3. Bedienung über Tastatur (nur möglich mit Interface- und Digitaloperator) ...................................... 113.1 Menüstruktur .............................................................................................................. 113.2 Bedienung ................................................................................................................... 11
4. Inbetriebnahmeanleitungen............................................................................ 134.1 Inbetriebnahme einer Asynchronmaschine mit Getriebe ......................................134.2 Inbetriebnahme einer getriebelosen permanentmagneterregten Synchronmaschine154.3 Inbetriebnahme einer getriebelosen Asynchronmaschine ....................................184.4 Inbetriebnahme einer permanentmagneterregten Synchronmaschine mit Getriebe 20
5. Anzeigeparameter ........................................................................................... 22
6. Parameterlisten ............................................................................................... 266.1 LF-Parameter ..............................................................................................................266.2 dr-Parameter ..............................................................................................................286.3 EC-Parameter .............................................................................................................296.4 An-Parameter .............................................................................................................296.5 ru-Parameter ..............................................................................................................306.6 In-Parameter ...............................................................................................................30
Inhaltsverzeichnis

D-4
Klemme Funktion
1 Reglerfreigabe
2 Reset digitale Eingänge:
3 Fahrtrichtung vorwärts Störspannungsfestigkeit: 2 kV
4 Fahrtrichtung rückwärts logisch 1: ± 12…30 V
5 Regelverfahren Interner Eingangswiderstand: ca. 2 kOhm
6 Türantrieb aktiv PNP-Logik
7 Türantrieb Sollwertvorgabe
8 digitales Ausgangssignal: Geschwindigkeits- siehe Kapitel 4.4Abweichung, Warnung
9 digitales Ausgangssignal: Hauptschützansteuerung invertiert siehe Kapitel 4.4
10 + 18 V Spannungsausgang +18V (+/- 20%); max. 20 mA! Bei Anschluß einer externen Spannung
11 Masse für X2.10 und digitale Ein-/Ausgänge an Klemme X2.23 ist UX2.10 ≈≈≈≈≈ UX2.23 !
12 +10 V Referenzspannung+10V (+/- 3%); max. 6 mA
13 Masse für analoge Ein-/Ausgänge
14 Spannungsdifferenzeingang -10V ... +10Vanaloge Sollwertvorgabe Auflösung:12 Bit Ri = 40 kOhm
15 (siehe Parameter LF.2 und An-Parameter) Glättungszeit: 2 ms / Verarbeitungszeit: 1...3 ms
16 analoge Vorgabe des Vorsteuermomentes Spannungsdifferenzeingang -10V ... +10V(siehe Parameter LF.30, LF.67 und Auflösung:12 Bit Ri = 40 kOhm
17 An-Parameter) Glättungszeit: 2 ms / Verarbeitungszeit: 1...3 ms
18 Analogausgang Solldrehzahl -10V…+10V / Auflösung: 8 Bit Ri = 100 Ohmbedingt kurzschlußfest ( <1 min )
19 Analogausgang Istdrehzahl 0...10V ^ 0...LF.20
2030 VDC / 0,01 ... 1 A
21 Relais Schaltschranklüftersteuerung (LF.66)siehe Kapitel 6.1
22
23 externe Versorgungsspannung + 24 ... + 30 V externer Spannungseingangfür Digitalausgänge auf Klemmleiste X2
1.1 Klemmleiste X2 Steuerklemmen (bei Geräten > G-Gehäuse)
Ein- / Ausgänge
1. Ein- / Ausgänge

D-5
1.2 Klemmleiste X3 I/O-Expander (bei Geräten > G-Gehäuse)
Klemme Funktion
1 digit. Eingangssignal: Schützkontrolle (s. Kapitel 4.6) max. Spannungsfestigkeit gegen Erde: 100 V
2 Sollwertvorgabe Nachregulieren: VB
digitale Eingänge für Sollwertaktivierung
3 Sollwertvorgabe Positionieren: VE
! gilt nur bei LF.2 = 2 !
4 Sollwertvorgabe Nenngeschwindigkeit: VN
max. Spannungsfestigkeit gegen Erde: 100 V5 Sollwertvorgabe Inspektionsgeschwindigkeit: V
I
6 Sollwertvorgabe Zwischengeschwindigkeit 1: V1
Klemmenbelegung bei binärcodierter
7 Sollwertvorgabe Zwischengeschwindigkeit 2: V2
Sollwertauswahl siehe LF.2
8 Option ! nicht beschalten !
9 + 24 ... + 30 V externer Spannungseingangexterne Versorgungsspannung
10 für Relaisausgänge auf Klemmleiste X3
11Masse für X3.9 / X3.10
12
13 Signal: Ready / Übergeschwindigkeit ≈ UX3.9 / X3.10 / 500 mA siehe Kapitel 4.4
14 Signal: Schaltfrequenz-Warnung ≈ UX3.9 / X3.10
/ 500 mA siehe Kapitel 4.4
15Relaiskontakt: Bremsansteuerung 30 V DC / 0,01 ... 1 A siehe Kapitel 4.4
16
17 Signal: Verzögerungskontrolle ≈ UX3.9 / X3.10
/ 500 mA siehe Kapitel 4.4
18Relaiskontakt: Einfahrgeschwindigkeit 30 V DC / 0,01 ... 1 A siehe Kapitel 4.4
19
20Relaiskontakt: Hauptschützansteuerung 30 V DC / 0,01 ... 1 A siehe Kapitel 4.4
21
22 Signal: UZK - Überwachung ≈ UX3.9 / X3.10 / 500 mA siehe Kapitel 4.4
23 Signal: Motortemperatur-Warnung ≈ UX3.9 / X3.10
/ 500 mA siehe Kapitel 4.4
Ein- / Ausgänge

D-6
Klemme Funktion
1 Reglerfreigabe
2 Reset digitale Eingänge:
3 Fahrtrichtung vorwärts Störspannungsfestigkeit: 2 kV
4 Fahrtrichtung rückwärts logisch 1: ± 12…30 V
5 Interner Eingangswiderstand: ca. 2 kOhm
6 binärcodierte Sollwertvorgabe (siehe Parameter LF.02) PNP-Logik
7
8 digitales Ausgangssignal: Bremsansteuerung 14...30 V / max. 20mA (pro Ausgang)
9 digitales Ausgangssignal: Hauptschützansteuerung PNP-Logik
10 + 18 V Spannungsausgang +18V (+/- 20%) ; max. 20 mA! Bei Anschluß einer externen Spannung
11 Masse für X2.10 und digitale Ein-/Ausgänge an Klemme X2.23 ist UX2.10 ≈≈≈≈≈ UX2.23 !
12 +10 V Referenzspannung+10V (+/- 3%) ; max. 6 mA
13 Masse für analoge Ein-/Ausgänge
14 Spannungsdifferenzeingang -10V ... +10Vanaloge Sollwertvorgabe (siehe Parameter LF.2 Auflösung:12 Bit Ri = 40 kOhm
15 und An-Parameter) Glättungszeit: 2 ms / Verarbeitungszeit: 1...3 ms
16 Spannungsdifferenzeingang -10V ... +10Vanaloge Vorgabe des Vorsteuermomentes Auflösung:12 Bit Ri = 40 kOhm
17 (siehe Parameter LF.30,LF.67 und An-Parameter) Glättungszeit: 2 ms / Verarbeitungszeit: 1...3 ms
18 Analogausgang Solldrehzahl -10V…+10V / Auflösung: 8 Bit Ri = 100 Ohmbedingt kurzschlußfest ( <1 min )
19 Analogausgang Istdrehzahl 0...10V ^ 0...LF.20
2030 VDC / 0,01 ... 1 A
21 Relais: Ready / Übergeschwindigkeitsiehe Ausgangssignal-Beschreibung
22
23 externe Versorgungsspannung + 24 ... + 30 V externer Spannungseingangfür Digitalausgänge
1.3 Klemmleiste X2 Steuerklemmen (D- und E-Gehäuse)
Ein- / Ausgänge

D-7
Anschluß
2.1 Anschlußvorschlag für KEB-Liftumrichter bei Geräten > G-Gehäuse
����
X2.1
X2.2
X2.3
X2.4
X2.5
X2.6
X2.7
X3.1
X3.2
X3.3
X3.4
X3.5
X3.6
X3.7
X3.9
X3.10
X2.23
X3.15
X3.16
X3.18
X3.19
X3.20
X3.21
X2.20
X2.21
X2.22
X3.13
X3.14
X3.17
X3.22
X3.23
X2.8
X2.9
X2.11
X3.11
X3.12
Bremswiderstand
+PA(++) PB
PEUV
W
PEL1L2L3
NHF-Filter
NETZ
K1K2
Geber
X4
zur Aufzug-Strg.
OH
OHϑ Motor-
PTC ϑ
Geber X4 (15pol.)
X5 (9pol.)
KEB F4-FLift V. 3.0A
KBRBremsan-steuerung
+24V
Schaltschwelle fürfrühöffnende Türen
zur Aufzug-Strg.
Haupt-schützanstrg.
K11
+24V
+24V
KLüfter
+24V
Kühlkörper-temp.level
KReadyReady
Schaltfrequenz-Warnung zur Aufzug-Strg.
Verzögerungskontrolle
UZK-Überwachung
Motortemp.-Warnung
Geschwindigkeitsab-weichung, WarnungHauptschützan-steuerung invertiert
zur Aufzug-Strg.
zur Aufzug-Strg.
zur Aufzug-Strg.
X3.1
Masse GND
*
*
*
*
Fahrtrichtung vorwärts
Fahrtrichtung rückwärts
Reglerfreigabe
K12
AUFZUG-STEUERUNG
K11 K1 K2RST
Regelverfahren
Nebenantrieb aktiv
Nebenantr. Sollwertvorgabe
Schützkontrolle
KBR K1 K2
+24V
X2.9Nachregulieren, VB
Einfahrgeschwindigkeit, VE
Nenngeschwindigkeit, VN
Inspektionsgeschwindigk., VI
Zwischengeschwindigk. 1, V1
Zwischengeschwindigk. 2, V2
+24V
+24V
+24V
Zum Abschalten derReglerfreigabe müssen dieHilfskontakte beider Haupt-schütze oder ein hinter demSicherheitskreis liegendesRelais (K12) verwendet wer-den.
* Alle vom Umrichter angesteuerten 24 V Relaismüssen mit Dioden schutzbeschaltet werden.
2. Anschluß

D-8
2.2 Anschlußvorschlag für KEB-Liftumrichter im D- und im E-Gehäuse
Anschluß
����
X2.1
X2.2
X2.3
X2.4
X2.5
X2.6
X2.7
X2.23
X2.8
X2.9
X2.20
X2.21
X2.22
X2.11
Bremswiderstand
PA PB
PEUVW
PEL1L2L3
NHF-Filter
NETZ
K1K2
Geber
X4
zur Aufzug-Strg.
OH
OHϑ Motor-
PTC ϑ
Geber X4 (15pol.)
X5 (9pol.)
KEB F4-FLift
KBRBremsan-steuerung
Haupt-schützanstrg.
K11
+24V
Masse GND
*
*Fahrtrichtung vorwärts
Fahrtrichtung rückwärts
Reglerfreigabe
K12
AUFZUG-STEUERUNG
K11 K1 K2RST
Sollwertanwahl binärcodiert
Sollwertanwahl binärcodiert
Sollwertanwahl binärcodiert
+24V
Zum Abschalten derReglerfreigabe müssen dieHilfskontakte beider Haupt-schütze oder ein hinter demSicherheitskreis liegendesRelais (K12) verwendet wer-den.
KReady
*
* Alle vom Umrichter angesteuerten 24 V Relaismüssen mit Dioden schutzbeschaltet werden.
X2.5 X2.6 X2.7V = 0 0 0 0
VB 1 0 0VE 0 1 0VN 1 1 0VI 0 0 1V1 1 0 1V2 0 1 1nTür 1 1 1

D-9
12345678910
1112131415
An die 15-polige Sub-D-Buchse wird der Drehzahlgeber des Motorsangeschlossen.
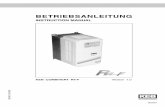
2.3 Anschluß X4
Der Stecker darf nur bei aus-geschaltetem Frequenzum-richter und ausgeschalte-ter Versorgungsspannunggezogen / gesteckt werden !
Anschluß
2.3.1AnschlußInkrementalgeber
PIN-Nr. Signal PIN-Nr. Signal1 - 9 B +2 - 10 -3 A - 11 + 15 V4 B - 12 + 5 V5 - 13 GND6 - 14 N -7 - 15 N+8 A + Gehäuse Schirm
Geber 1
12345678910
1112131415
PIN-Nr. Signal PIN-Nr. Signal1 C - 9 B +2 D - 103 A - 114 B - 12 + 5 V5 13 GND6 C + 14 R -7 D + 15 R +8 A + Gehäuse Schirm
2.3.2AnschlußSIN/COS Geber
Der Stecker darf nur bei aus-geschaltetem Frequenzum-richter und ausgeschalte-ter Versorgungsspannunggezogen / gesteckt werden !
12345678910
1112131415
PIN-Nr. Signal PIN-Nr. Signal1 9 COS2 10 SIN_REF3 SIN_LO 114 COS_LO 125 SIN_REF_LO 136 147 158 SIN Gehäuse Schirm
Der Stecker darf nur bei ausgeschaltetem Frequenzumrichterund ausgeschalteter Versorgungsspannung gezogen / gestecktwerden !
2.3.3Anschluß Resolver

D-10
12345
6789
PIN-Nr. Signal Bedeutung1 A + Signal Kanal A2 B + Signal Kanal B3 reserviert4 + 5 V Spannungsausgang5 + 24 V externe Versorgungsspg.6 A- Signal Kanal A invertiert7 B- Signal Kanal B invertiert8 reserviert9 GND externe Masse
Gehäuse Abschirmung
2.4 Anschluß X5Inkrementalgeber-nachbildung
Die 9-polige Sub-D-Buchse dient als Inkrementalgeberausgang. DieSignale werden entsprechend den Signalen amInkrementalgebereingang X4 in RS422-Spezifikationen ausgegeben.
Geber 2
Anschluß
PIN-Nr. Signal PIN-Nr. Signal1 9 SIN+2 10 12 V3 REF_COS 114 REF_SIN 125 13 GND6 14 DATA-7 15 DATA+8 COS+ Gehäuse Schirm
2.3.4AnschlußHiperface-Geber
PIN-Nr. Signal PIN-Nr. Signal1 U- 9 B+2 V- 10 W+3 A- 11 15 V4 B- 12 5 V5 W- 13 GND6 U+ 14 N-7 V+ 15 N+8 A+ Gehäuse Schirm
2.3.5Anschluß UVW-Geber
Der Stecker darf nur bei ausgeschaltetem Frequenzumrichterund ausgeschalteter Versorgungsspannung gezogen / gestecktwerden !
Der Stecker darf nur bei ausgeschaltetem Frequenzumrichterund ausgeschalteter Versorgungsspannung gezogen / gestecktwerden !

D-11
ENTER
F/R START
STOP
FUNC.
SPEED
ENTER
F/R
START
STOP
FUNC.
SPEED
ENTER
F/R
wechseln zwischenParametergruppe und
Parameternummer
Bedienung
3. Bedienung überTastatur
Nur möglich mit: - Interface-Operator (00.F4.010-1009) oder- Digital-Operator (00.F4.010-2009)
3.1 Menüstruktur Der Umrichter verfügt über Parameter (Einstell- und Anzeigewerte),die in folgende Parametergruppen aufgeteilt sind:
LF-Parameter
Liftparameter
dr-Parameter
„drive“ =Motordaten
EC-Parameter
„Encoder“ =Drehzahlgeber-Einstellungen
An-Parameter
Analogparameter
In-Parameter
Informations-parameter
ru-Parameter
„run“ =Messwertanzeigen
3.2 Bedienung Um die Parametergruppen ändern zu können, muss der blinkendePunkt hinter den Buchstaben leuchten. Dieser wird mittels der „Enter“-Taste verschoben.
Mit den Tasten
gewünschteParametergruppe
anwählen
Mit den Tasten
entsprechendeParameternummer
anwählen
START
STOP
START
STOP
Wählen Sie die Parametergruppe mit der „Start“-Taste (Pfeil-rauf) bzw.„Stop“-Taste (Pfeil-runter) aus. Betätigen Sie erneut „Enter“, um zuden Parameternummern zu wechseln.Mit den Pfeil-Tasten werden die Parameternummern ausgewählt.

D-12
Bedienung
START
STOP
FUNC.
SPEED
START
STOP
FUNC.
SPEED
ENTER
F/R
START
STOP
FUNC.
SPEED
ENTER
F/R
AnzeigeParameter-
nummer
AnzeigeParameterwert
Erhöhen / Verringerndes Parameterwertes
Zwischen Parameternummer und Parameterwert wird mit der„Funktions“-Taste gewechselt. Zur Veränderung der Parameterwertemuss zunächst ein gültiges Passwort in LF.0 eingegeben werden.
Die Parameterwerte werden mit den Pfeil-Tasten geändert.
Verändern Sie Werte grundsätzlich nur, wenn der Lift steht (also dieReglerfreigabe nicht angesteuert wird).Speichern Sie veränderte Werte grundsätzlich mit der „Enter“-Taste.Der eingstellte Parameterwert wird übernommen (Punkt erlischt).
ENTER
F/RBeispiel:
Übernahme/Speichern
Nach Einstellung von Parameter EC.7 muss der Umrichterzusätzlich aus- und wieder eingeschaltet werden! Nach Einschaltender Netzspannung zeigt der Umrichter den Parameterwert von LF.99an.
Tritt während des Betriebes eine Störung auf, wird die aktuelleAnzeige mit der Fehlermeldung überschrieben. Die Fehlermeldungwird durch ENTER zurückgesetzt.
FehlerENTER
F/R
Durch ENTER wird nur die Fehlermeldung in der Anzeige zurückge-setzt. In der Statusanzeige (LF.99) wird der anliegende Fehler weiter-hin angezeigt. Um den Fehler selbst zurückzusetzen, muß erst dieUrsache behoben werden und ein Reset an Kl. X2.2 oder ein Kaltstarterfolgen.
ACHTUNG !

D-13
Inbetriebnahmeanleitungen
4.1 Inbetriebnahme einerAsynchronmaschinemit Getriebe
4. Inbetriebnahme-anleitungen
Für die Inbetriebnahme des KEB COMBIVERT F4-F Lift Version 3.0mit einer getriebebehafteten Asynchronmaschine empfiehlt sich fol-gende Vorgehensweise:Stellen Sie die Parameter in aufsteigender Reihenfolge ein, weildadurch teilweise Voreinstellungen des Gerätes veranlaßt werden.Beginnen Sie mit den Aufzugsdaten (LF-Parameter). Speichern Siedie eingestellten Daten durch Betätigen der “Entertaste” ab.
LF.00: Passwort eingeben (440)LF.02: Art der Sollwert-/Drehrichtungsvorgabe eingeben
1 = binärcodierte Sollwertvorgabe2 = eingangscodierte Sollwertvorgabe3 = analoge Sollwertvorgabe 0...+10V4 = analoge Sollwertvorgabe -10...+10V
LF.04: Prüfen, ob der Wert “0” (Asynchronmaschine) eingestellt ist
LF.20: Anlagengeschwindigkeit in m/s eingebenLF.21: Treibscheibendurchmesser in mm eingeben, notfalls nachmessenLF.22: Getriebeuntersetzung eingeben, notfalls auszählenLF.23: Seilaufhängung eingeben (1 für 1:1, 2 für 2:1 etc.)LF.24: Zuladung (Tragkraft, Nutzlast) der Kabine in kg eingeben
LF.30: Regelverfahren wählen (0 = ohne Rückführung, 2 = mit Rück-führung)
LF.40: Nachreguliergeschwindigkeit in m/s eingebenLF.41: Einfahrgeschwindigkeit in m/s eingebenLF.42: Nenngeschwindigkeit in m/s eingebenLF.43: Inspektionsgeschwindigkeiten in m/s eingeben
dr.00: Motornennleistung in kW eingeben (1 kW = 1,36 PS)dr.01: Motornenndrehzahl in min-1 eingeben (nicht Synchrondrehzahl)dr.02: Motornennstrom in A eingebendr.03: Motornennfrequenz in Hz eingebendr.04: cos phi des Motors eingebendr.12: Motornennspannung in V eingeben (falls der einzustellende
Wert bereits eingegeben ist, unbedingt den Wert mit ENTERbestätigen)
EC.01: Geberstrichzahl (Pulszahl) eingeben
Mit Rückholsteuerung (Inspektionsfahrt) prüfen, ob der Aufzug fährt.Bei Fehlermeldung “E.EnC” Geberspurtausch mit EC.2=1 durchfüh-ren. Danach meldet der Umrichter evtl. “E.OS”. Fehlermeldung durchAus- und wieder Einschalten zurücksetzen.

D-14
Inbetriebnahmeanleitungen
Soll der Motor ohne Geber gefahren werden, muß LF.30=0 eingestelltwerden.
Kann hiermit die Last nicht gehoben werden, LF.37(Drehmomentanhebung) erhöhen.
Bei Fehlermeldung “E.OL2” LF.38=0 einstellen (8kHz Schaltfrequenz).
Bei falscher Fahrtrichtung (auf und ab vertauscht) Fahrtrichtungsumkehrdurch LF.05=1 aktivieren.
Das Fahrverhalten kann mit folgenden Parametern optimiert werden:LF.50 Anfahrruck in m/s3
LF.51 Beschleunigung in m/s2
LF.52 Verzögerungsruck in m/s3
LF.53 Verzögerung in m/s2
LF.54 Anhalteruck in m/s3
Durch Erhöhen der Werte werden die Rampen steiler, bzw. Ruckwertehärter.
Wenn die Kabine beim Bremse öffnen zurückrollt, LF.33 in 500erSchritten erhöhen.
Fährt der Aufzug zu Beginn der Fahrt gegen die Bremse, weil dieBremse nicht schnell genug öffnet, LF.70 (Bremsenöffnungszeit in s)erhöhen.
Ist nach dem Anhalten die Bremse noch nicht geschlossen wenn derUmrichter die Modulation abschaltet, kann die Bremseneinfallzeit mitLF.79 erhöht werden.
Erreicht der Aufzug bei der “leer-abwärts-Fahrt” nicht dieNenngeschwindigkeit (Anzeige LF.90), hilft folgende Vorgehensweise:- cos phi (dr.04) auf 0.9 stellen- Feldschwächedrehzahl (dr.19) auf 2/3 der Synchrondrehzahl (ca.
1000min-1 bei 4-poligen Motoren; ca. 680min-1 bei 6-poligen Motoren)- Motornenndrehzahl (dr.01) in 20er Schritten verringern, bis die
Nenngeschwindigkeit bei Abwärtsfahrt gefahren wird.
Optimierung:

D-15
4.2 Inbetriebnahme einerg e t r i e b e l o s e npermanentmagnet-erregten Synchron-maschine
Für die Inbetriebnahme des KEB COMBIVERT F4-F Lift Version 3.0mit einer getriebelosen Synchronmaschine empfiehlt sich folgendeVorgehensweise:
Stellen Sie die Parameter in aufsteigender Reihenfolge ein, weildadurch teilweise Voreinstellungen des Gerätes veranlaßt werden.Beginnen Sie mit der Auswahl des Motors und der Auflösung unddem Einstellen der Aufzugsdaten (LF-Parameter). Speichern Sie dieeingestellten Daten durch Betätigen der “Entertaste” ab.
Wird eine Synchronmaschine mit Hiperface-Geber verwendet (Um-richter Art.-Nr. xx.F4.Fxx-xi5x), werden die Motor-, Geber- und Regler-daten automatisch beim ersten Einschalten vom Geber zum Umrich-ter übertragen. Dafür muß der Geber allerdings mit den Daten vorein-gestellt sein. Bitte beim Motorenhersteller erfragen, ob dies gesche-hen ist. Sind die Daten im Geber gespeichert, müssen die gesamten“dr”- und “EC”- Parameter, sowie LF.30 – LF.36 nicht mehr in denUmrichter eingegeben werden.
LF.00: Passwort eingeben (440)LF.02: Art der Sollwert-/Drehrichtungsvorgabe eingeben
1 = binärcodierte Sollwertvorgabe2 = eingangscodierte Sollwertvorgabe3 = analoge Sollwertvorgabe 0...+10V4 = analoge Sollwertvorgabe -10...+10V
LF.04: Wert “1” einstellenLF.06: Wert “1” einstellen
LF.20: Anlagengeschwindigkeit in m/s eingebenLF.21: Treibscheibendurchmesser in mm eingeben, notfalls nachmessenLF.22: Getriebeuntersetzung 1 eingebenLF.23: Seilaufhängung eingeben (1 für 1:1, 2 für 2:1 etc.)LF.24: Zuladung (Tragkraft, Nutzlast) der Kabine in kg eingeben
LF.31 bis LF.33:Drehzahlreglerdaten eingeben. (Erfahrungswerte ver-wenden oder Einstellung bei KEB erfragen.)
LF.40: Nachreguliergeschwindigkeit in m/s eingebenLF.41: Einfahrgeschwindigkeit in m/s eingebenLF.42: Nenngeschwindigkeit in m/s eingebenLF.43: Inspektionsgeschwindigkeiten in m/s eingeben
Inbetriebnahmeanleitungen

D-16
dr.00: Motornennleistung in kW eingebendr.01: Motornenndrehzahl in min-1 eingebendr.02: Motornennstrom in A eingebendr.03: Motornennfrequenz in Hz eingebendr.09: Motornennmoment in Nm eingebendr.17: EMK Spannungskonstante in V/1000 min-1 eingeben
(Falls nur die Motornennspannung bekannt ist, kann die EMKnach folgender Formel berechnet werden: UEMK = UN / nN x1000 min-1)
dr.41: Wicklungswiderstand in Ohm eingebendr.42: Wicklungsinduktivität in mH eingeben
EC.01: Geberstrichzahl (Pulszahl) eingeben
EC.04: Lageabgleich durch Eingabe von Wert „1“ durchführen undFahrkommando geben. Fahrkommando wegnehmen, wennWert „5“ angezeigt wird. Dabei darauf achten, daß die Maschi-ne unbelastet ist, d.h. die Seile dürfen nicht auf der Treibscheibeaufliegen.Ist der Abgleich erfolgreich abgeschlossen, wird der Wert „7“angezeigt.Tritt während des Abgleichs der Fehler “E.EnC” oder “E.OS”auf oder wird der Abgleich nicht automatisch beendet, mußgeprüft werden, ob die Motorleitungen UVW Umrichter auchUVW Motor entsprechen.Ist der Lagewert bekannt, kann dieser auch direkt als Hexa-dezimalwert in EC.07 eingegeben werden.
Nach dem Lageabgleich Motor ohne Seile mit Rückholsteuerungdrehen lassen. Tritt dabei die Fehlermeldung “E.EnC” oder“E.OS” auf, prüfen, ob die Motorleitungen UVW Umrichter auchUVW Motor entsprechen und ggf. tauschen. Werden dieMotorleitungen getauscht, muß der Lageabgleich erneutdurchgeführt werden.
LF.36: Maximales Drehmoment in Nm des Motors überprüfen undggf. anpassen.(Achtung: Wird dieser Parameter bei Synchronmaschinen zuhoch eingestellt und die Maschine dauerhaft überlastet, führtdies zur Entmagnetisierung der Permanentmagnete und derMotor wird zerstört!)
Mit Rückholsteuerung (Inspektionsfahrt) prüfen, ob der Aufzug fährt.
Inbetriebnahmeanleitungen

D-17
Inbetriebnahmeanleitungen
Bei Fehlermeldung “E.OL2” LF.38=0 einstellen (8kHz Schaltfrequenz).
Bei falscher Fahrtrichtung (auf und ab vertauscht) Fahrtrichtungsum-kehr durch LF.05=1 aktivieren.
Das Fahrverhalten kann mit folgenden Parametern optimiert werden:LF.50 Anfahrruck in m/s3
LF.51 Beschleunigung in m/s2
LF.52 Verzögerungsruck in m/s3
LF.53 Verzögerung in m/s2
LF.54 Anhalteruck in m/s3
Durch Erhöhen der Werte werden die Rampen steiler, bzw. Ruckwertehärter.
Wenn die Kabine beim Bremse öffnen zurückrollt, LF.33 in 500er Schrit-ten erhöhen.
Fährt der Aufzug zu Beginn der Fahrt gegen die Bremse, weil dieBremse nicht schnell genug öffnet, LF.70 (Bremsenöffnungszeit in s)erhöhen.
Ist nach dem Anhalten die Bremse noch nicht geschlossen, wenn derUmrichter die Modulation abschaltet, kann die Bremseneinfallzeit mitLF.79 erhöht werden.
Optimierung:

D-18
Inbetriebnahmeanleitungen
4.3 Inbetriebnahme einerg e t r i e b e l o s e nAsynchronmaschine
Für die Inbetriebnahme des KEB COMBIVERT F4-F Lift Version 3.0mit einer getriebelosen Asynchronmaschine empfiehlt sich folgendeVorgehensweise:
Stellen Sie die Parameter in aufsteigender Reihenfolge ein, weildadurch teilweise Voreinstellungen des Gerätes veranlaßt werden.Beginnen Sie mit der Auswahl der Auflösung und dem Einstellen derAufzugsdaten (LF-Parameter). Speichern Sie die eingestellten Datendurch Betätigen der “Entertaste” ab.
LF.00: Passwort eingeben (440)LF.02: Art der Sollwert-/Drehrichtungsvorgabe eingeben
1 = binärcodierte Sollwertvorgabe2 = eingangscodierte Sollwertvorgabe3 = analoge Sollwertvorgabe 0...+10V4 = analoge Sollwertvorgabe -10...+10V
LF.04: Prüfen, ob Wert “0” eingestellt istLF.06: Wert “1” einstellen
LF.20: Anlagengeschwindigkeit in m/s eingebenLF.21: Treibscheibendurchmesser in mm eingeben, notfalls nachmessenLF.22: Getriebeuntersetzung 1 eingebenLF.23: Seilaufhängung eingeben (1 für 1:1, 2 für 2:1 etc.)LF.24: Zuladung (Tragkraft, Nutzlast) der Kabine in kg eingeben
LF.30: Regelverfahren wählen (0=ohne Rückführung, 2=mit Rückfüh-rung, 3=mit Drehmomentvorsteuerung)
LF.31 bis LF.33:Drehzahlreglerdaten eingeben. (Erfahrungswerte ver-wenden oder Einstellung bei KEB erfragen)
LF.40: Nachreguliergeschwindigkeit in m/s eingebenLF.41: Einfahrgeschwindigkeit in m/s eingebenLF.42: Nenngeschwindigkeit in m/s eingebenLF.43: Inspektionsgeschwindigkeiten in m/s eingeben
LF.54: Aufgrund hoher Massenträgheit, Anhalteruck möglichst kleineinstellen (ca. 0,3m/s3)
dr.00: Motornennleistung in kW eingeben (1 kW = 1,36 PS)dr.01: Motornenndrehzahl in min-1 eingeben (nicht Synchrondrehzahl)dr.02: Motornennstrom in A eingebendr.03: Motornennfrequenz in Hz eingebendr.04: cos phi des Motors eingebendr.12: Motornennspannung in V eingeben (falls der einzustellende
Wert bereits eingegeben ist, unbedingt den Wert mit ENTERbestätigen)

D-19
EC.01: Geberstrichzahl (Pulszahl) eingeben
LF.36: Maximales Drehmoment in Nm des Motors überprüfen undggf. anpassen
Mit Rückholsteuerung (Inspektionsfahrt) prüfen, ob der Aufzug fährt.Bei Fehlermeldung “E.EnC” Geberspurtausch mit EC.2=1 durchfüh-ren. Danach meldet der Umrichter evtl. “E.OS”. Fehlermeldung durchAus- und wieder Einschalten zurücksetzen.
Inbetriebnahmeanleitungen
Soll der Motor ohne Geber gefahren werden, muß LF.30 = 0 einge-stellt werden. Kann hiermit die Last nicht gehoben werden, LF.37(Drehmomentenanhebung) erhöhen.
Bei Fehlermeldung “E.OL2” LF.38=0 einstellen (8kHz Schaltfrequenz).
Bei falscher Fahrtrichtung (auf und ab vertauscht) Fahrtrichtungsum-kehr durch LF.05=1 aktivieren.
Das Fahrverhalten kann mit folgenden Parametern optimiert werden:LF.50 Anfahrruck in m/s3
LF.51 Beschleunigung in m/s2
LF.52 Verzögerungsruck in m/s3
LF.53 Verzögerung in m/s2
LF.54 Anhalteruck in m/s3
Durch Erhöhen der Werte werden die Rampen steiler, bzw. Ruckwertehärter.
Wenn die Kabine beim Bremse öffnen zurückrollt, LF.33 in 500erSchritten erhöhen.
Fährt der Aufzug zu Beginn der Fahrt gegen die Bremse, weil dieBremse nicht schnell genug öffnet, LF.70 (Bremsenöffnungszeit in s)erhöhen.
Ist nach dem Anhalten die Bremse noch nicht geschlossen wenn derUmrichter die Modulation abschaltet, kann die Bremseneinfallzeit mitLF.79 erhöht werden.
Erreicht der Aufzug bei der “leer-abwärts-Fahrt” nicht dieNenngeschwindigkeit (Anzeige LF.90), hilft folgende Vorgehensweise:- cos phi (dr.04) auf 0.9 stellen- Feldschwächedrehzahl (dr.19) auf 2/3 der Synchrondrehzahl (ca.
1000min-1 bei 4-poligen Motoren; ca. 680min-1 bei 6-poligen Motoren)- Motornenndrehzahl (dr.01) in 20er Schritten verringern, bis die
Nenngeschwindigkeit bei Abwärtsfahrt gefahren wird.
Optimierung:

D-20
Inbetriebnahmeanleitungen
4.4 Inbetriebnahme einerpermanentmagnet-erregten Synchron-maschine mit Getriebe
Für die Inbetriebnahme des KEB COMBIVERT F4-F Lift Version 3.0mit einer getriebebehafteten Synchronmaschine empfiehlt sich fol-gende Vorgehensweise:Stellen Sie die Parameter in aufsteigender Reihenfolge ein, weildadurch teilweise Voreinstellungen des Gerätes veranlaßt werden.Beginnen Sie mit der Auswahl des Motors und der Auflösung unddem Einstellen der Aufzugsdaten (LF-Parameter). Speichern Sie dieeingestellten Daten durch Betätigen der “Entertaste” ab.
LF.00: Passwort eingeben (440)LF.02: Art der Sollwert-/Drehrichtungsvorgabe eingeben
1 = binärcodierte Sollwertvorgabe2 = eingangscodierte Sollwertvorgabe3 = analoge Sollwertvorgabe 0...+10V4 = analoge Sollwertvorgabe -10...+10V
LF.04: Wert “1” einstellenLF.20: Anlagengeschwindigkeit in m/s eingebenLF.21: Treibscheibendurchmesser in mm eingeben, notfalls nachmessenLF.22: Getriebeuntersetzung eingeben, notfalls auszählenLF.23: Seilaufhängung eingeben (1 für 1:1, 2 für 2:1 etc.)LF.24: Zuladung (Tragkraft, Nutzlast) der Kabine in kg eingeben
LF.31 bis LF.33:Drehzahlreglerdaten eingeben. (Erfahrungswerte ver-wenden oder Einstellung bei KEB erfragen.)
LF.40: Nachreguliergeschwindigkeit in m/s eingebenLF.41: Einfahrgeschwindigkeit in m/s eingebenLF.42: Nenngeschwindigkeit in m/s eingebenLF.43: Inspektionsgeschwindigkeiten in m/s eingeben
dr.01: Motornenndrehzahl in min-1 eingebendr.02: Motornennstrom in A eingebendr.03: Motornennfrequenz in Hz eingebendr.09: Motornennmoment in Nm eingebendr.17: EMK Spannungskonstante in V/1000 min-1 eingeben (Falls nur
die Motornennspannung bekannt ist, kann die EMK nach fol-gender Formel berechnet werden: U
EMK = U
N / n
N x 1000 min-1)
dr.41: Wicklungswiderstand in Ohm eingebendr.42: Wicklungsinduktivität in mH eingeben
EC.01: Geberstrichzahl (Pulszahl) eingeben. (Parameter muß bei Ver-wendung eines Resolvers nicht verändert werden).
EC.04: Lageabgleich durch Eingabe von Wert „1“ durchführen undFahrkommando geben. Fahrkommando wegnehmen, wennWert „5“ angezeigt wird. Dabei darauf achten, daß die Ma-schine unbelastet ist, d.h. die Seile dürfen nicht auf der Treib-scheibe aufliegen. Ist der Abgleich erfolgreich abgeschlossen,wird der Wert „7“ angezeigt.

D-21
Inbetriebnahmeanleitungen
Optimierung:
Tritt während des Abgleichs der Fehler “E.EnC” oder “E.OS”auf oder wird der Abgleich nicht automatisch beendet, mußgeprüft werden, ob die Motorleitungen UVW Umrichter auchUVW Motor entsprechen.Ist der Lagewert bekannt, kann dieser auch direkt als Hexa-dezimalwert in EC.07 eingegeben werden.
Nach dem Lageabgleich Motor ohne Seile mit Rückholsteuerungdrehen lassen. Tritt dabei die Fehlermeldung “E.EnC” oder“E.OS” auf, prüfen, ob die Motorleitungen UVW Umrichter auchUVW Motor entsprechen und ggf. tauschen. Werden dieMotorleitungen getauscht, muß der Lageabgleich erneutdurchgeführt werden.
LF.36: Maximales Drehmoment des Motors überprüfen und ggf. an-passen. (Achtung: Wird dieser Parameter bei Synchronma-schinen zu hoch eingestellt und die Maschine dauerhaft über-lastet, führt dies zur Entmagnetisierung derPermanentmagnete und der Motor wird zerstört!)
Mit Rückholstuerung (Inspektionsfahrt) prüfen, ob der Aufzug fährt.
Bei Fehlermeldung “E.OL2” LF.38=0 einstellen (8kHz Schaltfrequenz).
Bei falscher Fahrtrichtung (auf und ab vertauscht) Fahrtrichtungsum-kehr durch LF.05=1 aktivieren.
Das Fahrverhalten kann mit folgenden Parametern optimiert werden:LF.50 Anfahrruck in m/s3
LF.51 Beschleunigung in m/s2
LF.52 Verzögerungsruck in m/s3
LF.53 Verzögerung in m/s2
LF.54 Anhalteruck in m/s3
Durch Erhöhen der Werte werden die Rampen steiler, bzw. Ruckwertehärter.
Wenn die Kabine beim Bremse öffnen zurückrollt, LF.33 in 500er Schrit-ten erhöhen.
Fährt der Aufzug zu Beginn der Fahrt gegen die Bremse, weil dieBremse nicht schnell genug öffnet, LF.70 (Bremsenöffnungszeit in s)erhöhen.
Ist nach dem Anhalten die Bremse noch nicht geschlossen, wenn derUmrichter die Modulation abschaltet, kann die Bremseneinfallzeit mitLF.79 erhöht werden.

D-22
Anzeige Wertig- Funktion Ausgangs-
Combivis keit > G D + E klemme
O1 1 digitales X2.8
Ausgangssignal:
Bremsansteuerung
O2 2 digitales X2.9
Ausgangssignal:
Hauptschütz- Hauptschütz-
ansteuerung invertiert ansteuerung
O3 4 Relais Relais betriebsbereit X2.20/X2.22
Schaltschranklüfter Sammelstörung
Übergeschwindigkeit
X2-Ausgangsklemmenstatus
Klemmleiste X2 (obere Klemmenreihe)Ob von der Umrichtersteuerung die Ausgänge gesetzt werden, kannmit dem Ausgangsklemmenstatus leicht geprüft werden. Die Digital-ausgänge haben eine gewisse Wertigkeit. Werden mehrere Ausgän-ge gleichzeitig gesetzt, so wird die Summe angezeigt.
Wertetabelle:
Anzeigeparameter
Anzeige Wertig- Funktion Eingangs-
Combivis keit > G D + E klemme
ST 1 Reglerfreigabe X2.1
RST 2 Reset X2.2
F 4 Fahrtrichtung vorwärts X2.3
R 8 Fahrtrichtung rückwärts X2.4
I1 16 Regelverfahren X2.5
I2 32 Türantrieb aktiv Sollwertanwahl X2.6
I3 64 Türantr. Sollwertvorgabe binärcodiert X2.7
Klemmleiste X2 (obere Klemmenreihe)Ob die Eingangssignale bis in die Umrichtersteuerung gelangen, kannmit dem Eingangsklemmenstatus leicht kontrolliert werden. Jeder Ein-gang (Ausgang) hat eine bestimmte Wertigkeit. Sind mehrere Ein-gänge belegt, wird die Summe angezeigt.
Wertetabelle:
X2-Eingangsklemmenstatus
Beispiel: Eingang Reglerfreigabe (X2.1) und Fahrtrichtung vorwärts(X2.3) werden mit 24V angesteuert.
Anzeigewert: 1+4 = 5
5. Anzeigeparameter

D-23
Klemmleiste ist bei Geräten im D- und E-Gehäuse nicht vorhanden!
Klemmleiste X3 (untere Klemmenreihe)Funktionsbeschreibung siehe Parameter LF.82.
Wertetabelle:X3-Eingangsklemmen-
statusAnzeige Wertig- Funktion Eingangs-
Combivis keit klemmeI5 1 Eingangssignal: Schützkontrolle X3.1I6 2 Sollwert Nachregulieren: V
BX3.2
I7 4 Sollwert Positionieren: VE
X3.3I8 8 Sollwert Nenngeschwindigkeit: V
NX3.4
I9 16 Sollwert Inspektionsschwind.: VI
X3.5I10 32 Sollwert Zwischengeschwind. 1: V
1X3.6
I11 64 Sollwert Zwischengeschwind. 2: V2
X3.7
Anzeigeparameter
Klemmleiste X3 (untere Klemmenreihe)Funktionsbeschreibung siehe LF.83.
Wertetabelle:
Klemmleiste ist bei Geräten im D- und E-Gehäuse nicht vorhanden!
X3-Ausgangsklemmen-status
Anzeige Wertig- Funktion Ausgangs-Combivis keit klemme
O5 1 Signal: Ready Übergeschwindigkeit X3.13O7 4 Relaiskontakt: Bremsansteuerung X3.15/X3.16O8 8 Signal: Schaltfrequenz-Warnung X3.14O9 16 Signal: Verzögerungskontrolle X3.17
O10 32 Relaiskontakt: Einfahrgeschwind. X3.18/X3.19O12 128 Relaiskontakt: Hauptschützanstrg. X3.20/X3.21O14 1024 Signal: UZK-Überwachung X3.22O15 4096 Signal: Motortemperatur-Warnung X3.23

D-24
Gesamtweg
Anzeige des gesamten Fahrweges in cm einer Fahrt vom Öffnen biszum Einfallen der Bremse.
Anzeige BedeutungStOP Keine Sollwertauswahl.S.Co Sollwertanwahl ohne Schützkontrolle.S.IO Sollwertanwahl ohne Reglerfreigabe.S.nC Ausgangsseitig fließt kein Strom, die Verdrahtung
zwischen Umrichter und Motor ist zu überprüfen.run Die Anfahrprozedur ist durchlaufen.
Der Parameter zeigt Meldungen, die den Startvorgang und den lau-fenden Betrieb betreffen.
Weitere Meldungen siehe auch Parameter LF.99.
Fehlerstatus imStartvorgang
Angewählter Sollwert
AktuelleUmrichterauslastung
Aktuelle Solldrehzahl
Anzeigeparameter
Aktuelle Istdrehzahl
Aktuelle Geschwindigkeit
Einfahrweg
Anzeigewert: 0 1 2 3 4 5 6 7
Geschwindigkeit: V=0 VB
VE
VN
VI
V1
V2
V=0
Anzeige der aktuellen Umrichterauslastung in %.
Der Wert zeigt die aktuelle Solldrehzahl in min-1, berechnet aus denAnlagendaten.
Der Wert zeigt die tatsächliche Drehzahl in min-1, nur bei angeschlos-senem Drehzahlgeber.
Anzeige der aktuellen Geschwindigkeit des Aufzuges in m/s. Nur beiangeschlossenem Drehzahlgeber!
Anzeige des Einfahrweges in cm nach einer abgeschlossenen Fahrt.

D-25
Anzeige BedeutungnoP No Operation; Kl. X2.1 (Reglerfreigabe) ist nicht belegt.LS Low speed; Reglerfreigabe ist gesetzt, keine Dreh-
richtung ausgewählt, Modulation aus.Facc Forward acceleration; Beschleunigungsphase vorwärts.Fcon Forward constant running; Konstantfahrt, vorwärts.Fdec Forward deceleration; Verzögerungsphase vorwärts.racc Reverse acceleration; Beschleunigungsphase rückwärts.rcon Reverse constant running; Konstantfahrt rückwärts.rdec Reverse deceleration; Verzögerungsphase rückwärts.bbl Base-block-time; Endstufen sind gesperrt für 3s (immer
wenn die Reglerfreigabe abgeschaltet wird oder wennein Umrichterfehler auftritt).
a) Laufmeldungen
Umrichterstatus
Anzeigeparameter
Anzeige BedeutungE.buS Error, bus, Serielle Kommunikation gestörtE.dOH Error, drive-overheat, Motorüberhitzung und Vorwarnzeit
ist abgelaufenE.dSP Error, digital signal processor, Fehler am SignalprozessorE.PrF Error, prohibited rotation forward, Softwareendschalter-
fehler (Bei Solldrehrichtung vorwärts ist der Software-endschalter vorwärts inaktiv)
E.Prr Error, prohibited rotation reverse, Softwareendschalter-fehler (Bei Solldrehrichtung rückwärts ist der Software-endschalter rückwärts inaktiv)
E.hyb Error, hybrid, Fehler an der Drehimpulsgeber EingangskarteE.EnC Error, encoder, Fehler bei Geberbruch od. -abriß (läßt
sich nur durch Power-On-Reset zurücksetzen)E.LSF Error, loadshuntfault, LadeshuntfehlerE.OC Error, overcurrent, Überstrom KurzzeitspitzenüberlastungE.OH Error, overheated, Überhitzung Inverter
E.OH2 Error, overheat 2, Elektronischer MotorschutzE.nOH Error, no overheat, Überhitzung liegt nicht mehr vor,
(E.OH, E.dOH u. E.OH2 können zurückgesetzt werden)E.OL Error, overload, Dauerüberlastung, Umrichter muß zum
Abkühlen am Netz bleiben, die Abkühlzeit hängt ab vonder vorherigen Überlastdauer
E.OL2 Error, overload, Überlastung des Umrichters beiAusgangsfrequenzen < 3 Hz
E.nOL Error, no overload, Abkühlphase ist beendet, Fehlerkann zurückgesetzt werden
E.OP Error, overpotential, Überspannung im Gleich-spannungszwischenkreis
E.OS Error, overspeed, Übergeschwindigkeit (läßt sich nurdurch Power-On-Reset zurücksetzen)
E.PuC Error, power unit code, ungültige LeistungsteilkennungE.SEt Error, set, Satzanwahlfehler, LF.02 überprüfenE.UP Error, underpotential, Unterspannung im Gleichspan-
nungszwischenkreisE.hSd Error, high Speed difference, große Geschwindigkeits-
abweichung, Vorzeichen von Soll- und Istwert prüfen.
b) Fehlermeldungen

D-26
Parameterlisten
6. Parameterlisten6.1 LF-Parameter
‘1 LF.06 = 1 Hochauflösung an‘2 LF.04 = 1 SSM
Gr. Nr. Name Adresse P E R Aufl. Untergrenze Obergrenze Defaultwert EinheitLF 00 Zugriffsberechtigung 3500 E 1 0 9999 -4 ---LF 01 Benutzerdefiniertes Passwort 3501 E 1 0 9999 440 ---LF 02 Art der Sollwert- / Drehrichtungsvorgabe 3502 E 1 1 4 1 ---LF 04 ASM/SSM-Auswahl 3504 E 1 0:ASM 1:SSM 0:ASM ---LF 05 Fahrtrichtungsumkehr 3505 1 0:off 1:on 0:off ---LF 06 Hochauflösung 3506 E 1 0:off 1:on 0:off ---LF 19 Zwischenkreis-Spannungskompensation 3513 E 1 150 501:off 400 VLF 20 max. Anlagengeschwindigkeit 3514 0,001 0,000 15,000 0 m/sLF 21 Treibscheibendurchmesser 3515 1 200 2000 600 mmLF 22 Getriebeuntersetzung 3516 0,01 1,00 99,99 30 ---LF 23 Seilaufhängung 3517 1 1 8 1 ---LF 24 Zuladung 3518 1 0 65535 0 kgLF 25 Türantrieb Momentenanhebung 3519 0,1 0,0 25,5 6 %LF 26 Türantrieb Nenndrehzahl 351A 1 100 6000 1440 1/minLF 27 Türantrieb Nennfrequenz 351B 1 20 100 50 HzLF 28 Türantrieb Nennspannung 351C 1 1 650 400 VLF 30 Regelverfahren 351E E 1 0 3 0 ---LF 31 KP Drehzahl 351F 1 1 65535 3000 ---LF 32 KI Drehzahl 3520 1 0 65535 1000 ---LF 33 KI Drehzahl-Offset 3521 1 0 65535 1000 ---LF 34 KP Strom 3522 1 1 65535 1500 ---LF 35 KI Strom 3523 1 0 65535 500 ---LF 36 Maximalmoment 3524 0,1 0 dr.10 2 * dr.9
1'1 1,5*dr.9 '2 NmLF 37 Drehmomentanhebung 3525 0,1 0,0 25,2 10 %LF 38 Schaltfrequenzänderung 3526 1 0 1 1 ---LF 40 Sollwert VB 3528 0,001 0,000 0,300 0 m/sLF 41 Sollwert VE 3529 0,001 0,000 0,300 0 m/sLF 42 Sollwert VN 352A 0,001 0,000 LF.20 0 m/sLF 43 Sollwert VI 352B 0,001 0,000 0,630 0 m/sLF 44 Sollwert V1 352C 0,001 0,000 LF.20 0 m/sLF 45 Sollwert V2 352D 0,001 0,000 LF.20 0 m/sLF 46 Türantrieb Solldrehzahl 352E 0,5 0 16000 0 1/min
0,1 '1 2000 '1LF 50 Anfahrruck 3532 0,01 0,10 9,99 0,60 m/s^3LF 51 Beschleunigung 3533 0,01 0,10 2,00 0,90 m/s^2LF 52 Verzögerungruck 3534 0,01 0,10 9,99 1,00 m/s^3LF 53 Verzögerung 3535 0,01 0,10 2,00 0,60 m/s^2LF 54 Anhalteruck 3536 0,01 0,01:off 9,99 0,01:off m/s^3LF 55 Anfahrruck VE 3537 0,01 0,10 9,99 0,60 m/s^3LF 56 Beschleunigung VE 3538 0,01 0,10 2,00 0,90 m/s^2LF 57 Schleppfehler-Mode 3539 1 0 2 1 ---LF 58 Schleppfehler-Level 353A 1 0 30 10 %LF 59 Auslösezeit Schleppfehler 353B 0,001 0,000 10,000 3,000 sLF 60 Schaltschwelle Bremsabschaltung 353C 0,001 0,000 0,010 0,005 m/sLF 61 Überwachung Übergeschwindigkeit 353D 0,001 0,000 18,000 1,1 * LF.42 m/sLF 62 Verzögerungskontrolle 353E 0,001 0,000 15,000 0,95 * LF.42 m/sLF 63 Überwachung Einfahrgeschwindigkeit 353F 0,001 0,000 0,300 0,250 m/s

D-27
Parameterlisten
‘1 LF.06 = 1 Hochauflösung an
Gr. Nr. Name Adresse P E R Aufl. Untergrenze Obergrenze Defaultwert EinheitLF 64 UZK-Überwachung 3540 1 0 800 0 VLF 65 E.dOH Verzögerungszeit 3541 1 0 3600 300 sLF 66 Kühlkörper-Temperaturlevel 3542 1 20 50 40 °CLF 67 Vorsteuermoment Verstärkung 3543 0,01 0,50 1,50 1,00 ---LF 68 Vorsteuermoment Offset 3544 0,1 -25,0 25,0 0,0 %LF 69 Vorsteuermoment Richtungsumkehr 3545 1 0:off 1:on 0:off ---LF 70 Bremsenöffnungszeit 3546 0,001 0,000 3,000 0,300 sLF 71 Einfahrwegoptimierung bei VN 3547 0,1 0,0 200,0 0,0 cmLF 72 Einfahrwegoptimierung bei V1 3548 0,1 0,0 200,0 0,0 cmLF 73 Einfahrwegoptimierung bei V2 3549 0,1 0,0 200,0 0,0 cmLF 74 Einfahrwegoptimierung bei VE 354A 1 0 300 0 mmLF 75 Spitzbogenfunktion 354B 1 0:off 1:on 0:off ---LF 76 Spitzbogenstatus 354C R --- --- --- --- ---LF 77 Bremsweg 354D E 0,001 0,000 5,000 0,000 mLF 78 Modulationsabschaltzeit 354E 0,001 0,000 3,000 0,100 sLF 79 Bremseneinfallzeit 354F 0,001 0,000 3,000 LF.70 sLF 80 Softwareversion 3550 R --- --- --- --- ---LF 81 Softwaredatum 3551 R --- --- --- --- ---LF 82 X2-Eingangs-Klemmenstatus 3552 R --- --- --- --- ---LF 83 X2-Ausgangs-Klemmenstatus 3553 R --- --- --- --- ---LF 84 X3-Eingangs-Klemmenstatus 3554 R --- --- --- --- ---LF 85 X3-Ausgangs-Klemmenstatus 3555 R --- --- --- --- ---LF 86 Angewählter Sollwert 3556 R --- --- --- --- ---LF 87 Aktuelle Auslastung 3557 R --- --- --- --- %LF 88 Aktuelle Solldrehzahl 3558 R 0,5 --- --- --- 1/min
0,1 '1LF 89 Aktuelle Istdrehzahl 3559 R 0,5 --- --- --- 1/min
0,1 '1LF 90 Aktuelle Geschwindigkeit 355A R --- --- --- --- m/sLF 92 Einfahrweg 355B R --- --- --- --- cmLF 93 Gesamtweg 355C R --- --- --- --- cmLF 98 Fehlerstaus im Startvorgang 3562 R --- --- --- --- ---LF 99 Umrichterstatus 3563 R --- --- --- --- ---

D-28
Parameterlisten
6.2 dr-Parameter Die dr-Parametergruppe beinhaltet die Motorparameter. Je nachdem,was für ein Motor ausgewählt worden ist (siehe LF.04), sind die dr-Parameter unterschiedlich belegt.
‘1 LF.06 = 1 Hochauflösung an‘2 Die Parameter dr.13-19 werden nach der Eingabe von dr.12 aus den Motordaten neu berechnet.
Die Parameter dr.20 u.21 werden wieder auf ihre Defaultwerte eingestellt.
LF.04 = 0:ASM
LF.04 = 1:SSM
‘1 LF.06 = 1 Hochauflösung an
Gr. Nr. Name Adresse P E R Aufl. Untergrenze Obergrenze Defaultwert Einheitdr 00 Motornennleistung 2400 E 0,01 0,00 160,00 4 kWdr 01 Motornenndrehzahl 2401 E 1 100 15000 1440 1/min
0,1 '1 10 '1 1500 '1dr 02 Motornennstrom 2402 E 0,1 0,1 1,1*IN.01 8 Adr 03 Motornennfrequenz 2403 E 1 20 800 50 Hz
0,1 '1 2 80dr 04 Motornenn-Leistungsfaktor 2404 E 0,01 0,05 1 0,86 ---dr 09 Motornennmoment 2409 R 0,1 --- --- --- Nm
1 '1dr 10 Max. Motormoment 240A R 0,1 --- --- --- Nm
1 '1dr 12 Motornennspannung 240C E 1 100 500 400 Vdr 13 Eckdrehzahl für max. Moment 240D E 0,5 200 6000 dr.12 1/min 0,1 '1 25 '1 750 '1 '2
dr 16 max. Moment bei dr.19 2410 E 0,1 0 dr.10 dr.12 Nm1 '1 '2
dr 19 Eckdrehzahl Feldschwächung 2413 E 0,5 200 6000 dr.12 1/min0,1 '1 25 '1 750 '1 '2
dr 20 Verstärkungsfaktor Feldschwächung 2414 E 0,01 0,10 2,00 1,20 ---'2
dr 21 Flußadaption 2415 E 1 25 250 100 '2 %
Gr. Nr. Name Adresse P E R Aufl. Untergrenze Obergrenze Defaultwert Einheitdr 00 Motornennleistung 2400 0,01 0,00 160,00 3,53 kWdr 01 Motornenndrehzahl 2401 E 1 100 15000 1500 1/min
0,1 '1 10 '1 1500 '1dr 02 Motornennstrom 2402 E 0,1 0,1 1,1*IN.01 7.5 Adr 03 Motornennfrequenz 2403 E 1 20 800 75 Hz
0,1 '1 2 80dr 07 Stillstandsdauerstrom 2407 E 0,1 0,1 1,1*IN.01 1,1* A
dr.02dr 09 Motornennmoment 2409 E 0,1 0,1 1000,0 7,5 Nm
1 '1 1 '1 10000 '1dr 10 Max. Motormoment 240A E 0,1 0,1 Inv. Inv. Nm
1 '1 1 '1 abhäng. abhäng.dr 17 E.M.K Spannungskonstante 2411 E 1 0 8000 0 V*min/
1000dr 41 Wicklungswiderstand Ruv 240D E 0,1 0,1 100,0 2,6 Ohmdr 42 Wicklungsinduktivität Luv 2410 E 0,1 0,1 100,0 29,7 mH

D-29
Parameterlisten
6.3 EC-Parameter
6.4 An-Parameter
Gr. Nr. Name Adresse P E R Aufl. Untergrenze Obergrenze Defaultwert EinheitEC 00 Geberschnittstelle 1 3800 R 1 ---EC 01 Strichzahl Geber 1 3801 E 1 256 10000 2500 IncEC 02 Spurtausch Geber 1 3802 1 0 : off 1 : on 0 : off ---EC 03 Geberpolpaare 3803 1 0 : off 1 : on 0 : off ---EC 04 Systemlage Abgleich 3804 1 0 7 0 ---EC 05 Taktfrequenz Geber 1 3805 E 0,01 5,00 10,00 8,00 kHzEC 06 Geber 1 Mode 3806 E 1 0 1 0 ---EC 07 Systemlage E 1 0 65535 19017 ---EC 08 Drehzahlabtastzeit Geber 1 3808 1 0 5 3 ---EC 09 Stromaufnahme Resolver 3809 E 0,1 -1:Auto 72,0 7,7 mAEC 10 Geberschnittstelle 2 380A R 1 --- --- --- ---EC 11 Strichzahl Geber 2 380B E 1 256 10000 2500 IncEC 17 Teiler Ink. Ausgang 3811 E 1 0 : off 1 : on 0 : off ---EC 20 Hiper-Typ 3814 R 1 ---EC 21 Hiper-Status 3815 R 1 ---EC 22 Hiperface Daten lesen 3816 1 0 1 0 ---EC 23 Hiperface Daten schreiben 3817 1 0 1 0 ---
Gr. Nr. Name Adresse P E R Aufl. Untergrenze Obergrenze Defaultwert EinheitAn 01 Störfilter Analogeingänge 2801 Tab 0 8 3 ---An 02 Nullpunkthysterese REF 1 2802 0,1 0,0 10,0 0,2 %An 03 REF 1 Verstärkung 2803 0,01 -20,00 20,00 1,00 ---An 04 REF 1 Offset X 2804 0,1 -100,0 100,0 0,0 %An 05 REF 1 Offset Y 2805 0,1 -100,0 100,0 0,0 %An 08 Nullpunkthysterese REF 2 2808 0,1 0,0 10,0 0,2 %An 09 REF 2 Verstärkung 2809 0,01 -20,00 20,00 1,00 ---An 10 REF 2 Offset X 280A 0,1 -100,0 100,0 0,0 %An 11 REF 2 Offset Y 280B 0,1 -100,0 100,0 0,0 %An 13 REF 2 Funktion 280D E 1 0 7 7 ---An 14 Analogausgang 1 Funktion 280E E 1 0 6 4 ---An 15 Analogausgang 1 Verstärkung 280F 0,01 -20,00 20,00 1,00 ---An 16 Analogausgang 1 Offset X 2810 0,1 -100,0 100,0 0,0 %An 18 Analogausgang 2 Funktion 2812 E 1 0 6 0 ---An 19 Analogausgang 2 Verstärkung 2813 0,01 -20,00 20,00 1,00 ---An 20 Analogausgang 2 Offset X 2814 0,1 -100,0 100,0 0,0 %

D-30
6.5 ru-Parameter
Parameterlisten
‘1 Hochauflösung an LF.06 = 1
Gr. Nr. Name Adresse P E R Aufl. Untergrenze Obergrenze Defaultwert Einheitru 00 Anzeige Umrichterstatus 2000 R Tabelle -ru 01 Anzeige Istdrehzahl 2001 R 0,5 --- --- --- 1/min
0,1 '1ru 02 Anzeige Istmoment 2002 R 0,1 --- --- --- Nm
1 '1ru 04 Anzeige Solldrehzahl 2004 R 0,5 --- --- --- 1/minru 05 Anzeige Sollmoment 2005 R 0,1 --- --- --- Nm
1 '1ru 08 Anzeige Spitzenauslastung 2008 0,1 --- --- --- %ru 09 Anzeige Scheinstrom 2009 R 0,1 --- --- --- Aru 10 Anzeige Wirkstrom 200A R 0,1 --- --- --- Aru 11 Anzeige Zwischenkreisspannung 200B R 1 --- --- --- Vru 12 Zwischenkreisspg. Spitzenwert 200C R 1 --- --- --- Vru 14 Eingangsklemmenstatus 200E R Tabelle --- --- ---ru 15 Ausgangsklemmenstatus 200F R Tabelle --- --- ---ru 18 Aktiver Parametersatz 2012 R Tabelle --- --- ---ru 20 Anzeige Solldrehzahl vor Rampe 2014 R 0,5 --- --- --- 1/min
0,1 '1ru 23 Ref2 Anzeige 2016 R 0,1 --- --- --- %ru 24 OL-Zähler 2018 R 1 --- --- --- -ru 25 Anzeige Scheinstrom-Spitzenwert 2019 R 0,1 --- --- --- Aru 29 Anzeige Kühlkörpertemperatur 201D R 1 --- --- --- °Cru 31 Betriebsstundenzähler 1 201F R 1 --- --- --- hru 32 Betriebsstundenzähler 2 2020 R 1 --- --- --- hru 50 Anzeige der Rückspeiseleistung 2032 R 1 --- --- --- kWh
Gr. Nr. Name Adresse P E R Aufl. Untergrenze Obergrenze Defaultwert EinheitIn 00 Invertertyp 2C00 Tabelle --- --- --- ---In 01 Inverternennstrom 2C01 0,1 --- --- --- AIn 06 Configfile-Nummer 2C06 R 1 --- --- ---In 07 Seriennummer Datum 2C07 1 0 65535 0 ---In 08 Seriennummer Zähler 2C08 1 0 65535 0 ---In 09 Seriennummer AB.-Nr HIGH 2C09 1 0 65535 0 ---In 10 Seriennummer AB.-Nr LOW 2C0A 1 0 65535 0 ---In 11 Kundennummer HIGH 2C0B 1 0 65535 0 ---In 12 Kundennummer LOW 2C0C 1 0 65535 0 ---In 40 Letzter Fehler 2C28 1 0 63 0 ---In 41 Fehlerzähler OC 2C29 1 0 255 0 ---In 42 Fehlerzähler OL 2C2A 1 0 255 0 ---In 43 Fehlerzähler OP 2C2B 1 0 255 0 ---In 44 Fehlerzähler OH 2C2C 1 0 255 0 ---In 45 Fehlerzähler WD 2C2D 1 0 255 0 ---In 54 Software ID DSP 2C36 R --- --- --- ---In 55 Software Datum DSP 2C37 R --- --- --- ---In 60 Letzter Fehler (t-1) 2C3C R 1 --- --- --- ---In 61 Letzter Fehler (t-2) 2C3D R 1 --- --- --- ---In 62 Letzter Fehler (t-3) 2C3E R 1 --- --- --- ---In 63 Letzter Fehler (t-4) 2C3F R 1 --- --- --- ---In 65 Bremswiderstand 2C41 0,1 0,1 100,0 12,0 Ohm
6.6 In-Parameter

GB-3
1. Inputs/Outputs ................................................................................................... 41.1 Terminal X2 - Control Terminals (units > G-housing) ...............................................41.2 Terminal X3 - I/O-Expander (units > G-housing) .......................................................51.5 Terminal X2 - Control Terminals (D- and E-housing) ................................................6
2. Connection......................................................................................................... 72.1 Example connection diagram for Lift Inverters > G-housing...................................72.2 Example connection diagram for Lift Inverters in D- and E-housing ......................82.3 Connection X4 ..............................................................................................................92.3.1 Connection Incremental Encoder ..................................................................................92.3.2 Connection SIN/COS Encoder ......................................................................................92.3.3 Connection Resolver .....................................................................................................92.3.4 Connection Hiperface Encoder ....................................................................................102.3.5 Connection UVW Encoder ...........................................................................................102.4 Connection X5 - Incremental Encoder Emulation ...................................................10
3. Operation via Keyboard (only possible with Interface-Operator and Digital Operator) .................... 113.1 Menue Structure ........................................................................................................ 113.2 Operation .................................................................................................................... 11
4. Start-Up Instructions ....................................................................................... 134.1 Commissioning of an Asychronous Machine with Gearbox..................................134.2 Commissioning of a Gearless Permanent Magnet Machine..................................... 154.3 Commissioning of a Gearless Asychronous Machine ...........................................184.4 Commissioning of a Permanent Magnet Machine with Gearbox .............................20
5. Display Parameter ........................................................................................... 22
6. Parameter Lists ............................................................................................... 266.1 LF-Parameter ..............................................................................................................266.2 dr-Parameter ..............................................................................................................286.3 EC-Parameter .............................................................................................................296.4 An-Parameter .............................................................................................................296.5 ru-Parameter ..............................................................................................................306.6 In-Parameter ...............................................................................................................30
Table of Contents

GB-4
Inputs / Outputs
1.1 Terminal X2 Control Terminals (units > G-housing)
1. Inputs / Outputs
Terminal Function
1 Control Release
2 Reset digital inputs:
3 Direction of travel forward noise immunity: 2 kV
4 Direction of travel reverse logic 1: ± 12…30 V
5 Control Mode internal input resistor: approx. 2 kOhm
6 Door drive active PNP-logic
7 Door drive setpoint input
8 Digital output signal: speed deviation, warning see chapter 3.4
9 Digital output signal: main contactor control inverted see chapter 3.4
10 + 18 V voltage output +18V (+/- 20%) ; max. 20 mA! When external voltage is connected to
11 Ground for X2.10 and digital inputs/outputs terminal X2.23 then UX2.10 ≈≈≈≈≈ UX2.23 !
12 +10 V reference voltage+10V (+/- 3%) ; max. 6 mA
13 Ground for analog inputs/outputs
14 Differential voltage input -10V ... +10VAnalog setpoint input resolution:12 Bit Ri = 40 kOhm
15 (see parameter LF.2 and An-parameter) Smoothing time: 2 ms / processing time: 1...3 ms
16 Analog input of the load measure for pretorque Differential voltage input -10V ... +10V(see parameter LF.30, LF.67 and resolution:12 Bit Ri = 40 kOhm
17 An-parameter) Smoothing time: 2 ms / processing time: 1...3 ms
18 Analog output set speed -10V…+10V / resolution: 8 Bit Ri = 100 Ohmconditional short-circuit proof ( <1 rpm)
19 Analog output actual speed 0...10V ^ 0...LF.20
2030 VDC / 0,01 ... 1 A
21 Relay output for cabinet fan control (LF.66)see chapter 6.1
22
23 External voltage supply + 24 ... + 30 V external voltage inputfor digital outputs on terminal strip X2

GB-5
Inputs / Outputs
1.2 Terminal X3 I/O-Expander (units > G-housing)
Terminal Function
1 Digital input signal: contactor control (see chapter 3.6) max. voltage endurance to ground: 100 V
2 Setpoint input correction-speed: VB digital inputs for setpoint activation
3 Setpoint input positioning speed: VE
! only valid with LF.2 = 2 !
4 Setpoint input rated speed: VN
max. voltage endurance to ground: 100 V5 Setpoint input inspection speed: VI
6 Setpoint input intermediate speed 1: V1
terminal assignment with binary coded
7 Setpoint input intermediate speed 2: V2
set value selection see LF.2
8 Option ! do not connect !
9 + 24 ... + 30 V external voltage inputExternal supply voltage
10 for relay outputs on terminal X3
11Ground for X3.9 / X3.10
12
13 Output signal: ready / overspeed ≈ UX3.9 / X3.10
/ 500 mA see chapter 3.4
14 Output signal: switching frequency warning ≈ UX3.9 / X3.10
/ 500 mA see chapter 3.4
15Output relay contact: braking control 30 V DC / 0,01 ... 1 A see chapter 3.4
16
17 Output signal: delay control ≈ UX3.9 / X3.10
/ 500 mA see chapter 3.4
18Output relay contact: running open doors 30 V DC / 0,01 ... 1 A see chapter 3.4
19
20Output relay contact: main contactor control 30 V DC / 0,01 ... 1 A see chapter 3.4
21
22 Output signal: DC monitoring ≈ UX3.9 / X3.10
/ 500 mA see chapter 3.4
23 Output signal: motor temperature warning ≈ UX3.9 / X3.10
/ 500 mA see chapter 3.4

GB-6
Inputs / Outputs
1.3 Terminal X2 Control Terminals (D- and E-housing)
Terminal Function
1 Control Release
2 Reset digital inputs:
3 Direction of travel forward noise immunity: 2 kV
4 Direction of travel reverse logic 1: ± 12…30 V
5 internal input resistor: approx. 2 kOhm
6 binary-coded setpoint setting (see parameter LF.02) PNP-logic
7
8 Digital output signal: braking control 14...30 V / max. 20mA (per output)
9 Digital output signal: main contactor control PNP-logic
10 + 18 V voltage output +18V (+/- 20%) ; max. 20 mA! When external voltage is connected to
11 Ground for X2.10 and digital inputs/outputs terminal X2.23 then UX2.10 ≈≈≈≈≈ UX2.23 !
12 +10 V reference voltage+10V (+/- 3%) ; max. 6 mA
13 Ground for analog inputs/outputs
14 Differential voltage input -10V ... +10VAnalog setpoint input resolution:12 Bit Ri = 40 kOhm
15 (see parameter LF.2 and An-parameter) Smoothing time: 2 ms / processing time: 1...3 ms
16 Analog input of the precontrol torque Differential voltage input -10V ... +10V(see parameter LF.30, LF.67 and resolution:12 Bit Ri = 40 kOhm
17 An-parameter) Smoothing time: 2 ms / processing time: 1...3 ms
18 Analog output set speed -10V…+10V / resolution: 8 Bit Ri = 100 Ohmconditional short-circuit proof ( <1 rpm)
19 Analog output actual speed 0...10V ^ 0...LF.20
2030 VDC / 0,01 ... 1 A
21 Relay: Ready / overspeedsee output signal description
22
23 External voltage supply + 24 ... + 30 V external voltage inputfor digital outputs

GB-7
Connection
2.1 Example connection diagram for Lift Inverters > G-housing
2. Connection
����
X2.1
X2.2
X2.3
X2.4
X2.5
X2.6
X2.7
X3.1
X3.2
X3.3
X3.4
X3.5
X3.6
X3.7
X3.9
X3.10
X2.23
X3.15
X3.16
X3.18
X3.19
X3.20
X3.21
X2.20
X2.21
X2.22
X3.13
X3.14
X3.17
X3.22
X3.23
X2.8
X2.9
X2.11
X3.11
X3.12
Braking resistor
+PA(++) PB
PEUV
W
PEL1L2L3
EMC-Filter
MAINS K1
K2
Encoder
X4
to the liftcontrol
OH
OHϑ Motor-
PTC ϑ
Encoder X4 (15-pole)
X5 (9-pole)
KEB F4-FLift V. 3.0A
KBRBrakingcontrol
+24V
Trigger level forrunning open doors
to the lift control
Main con-tactor control
K11
+24V
+24V
KFan
+24VKReadyReady
Operating frequency warning to the lift control
Deceleration control
DC-monitoring
Motor temp. warning
Speed diviation-WarningMain contactorcontrol inverted
to the lift control
to the lift control
to the lift control
X3.1
Ground GND
*
*
*
*
Direction of travel forward
Direction of travel reverse
Control release
K12
LIFT-CONTROL
K11 K1 K2RST
Control mode
Secondary drive active
Secondary drive setpoint input
Contactor control
KBR K1 K2
+24V
X2.9Correction speed, VB
Positioning speed, VE
Rated speed, VN
Inspection speed, VI
Intermediate speed 1, V1
Intermediate speed 2, V2
+24V
+24V
+24V
To switch off the controlrelease the auxiliarycontacts of both maincontactors or a relay (K12),behind the safety circuit,must be used.
* All 24 V relays controlled by the frequencyinverter must have diode are suppression.
Heat sinktempera-ture level

GB-8
2.2 Example connection diagram for Lift Inverters in D- and E-housing
Connection
����
X2.1
X2.2
X2.3
X2.4
X2.5
X2.6
X2.7
X2.23
X2.8
X2.9
X2.20
X2.21
X2.22
X2.11
Braking resistor
PA PB
PEUVW
PEL1L2L3
EMC-Filter
MAINS K1
K2
Encoder
X4
to the liftcontrol
OH
OHϑ Motor-
PTC ϑ
Encoder X4 (15-pole)
X5 (9-pole)
KEB F4-FLift
KBRBrakingcontrol
Main con-tactor control
K11
+24V
Ground GND
*
*Direction of travel forward
Direction of travel reverse
Control release
K12LIFT-CONTROL
K11 K1 K2RST
Setpoint selectionbinary-coded
Setpoint selectionbinary-coded
Setpoint selectionbinary-coded
+24V
To switch off the controlrelease the auxiliarycontacts of both maincontactors or a relay (K12),behind the safety circuit,must be used.
KReady
*
* All 24 V relays controlled by the frequencyinverter must have diode are suppression.
X2.5 X2.6 X2.7V = 0 0 0 0
VB
1 0 0V
E0 1 0
VN
1 1 0V
I0 0 1
V1
1 0 1V
20 1 1
nDoor
1 1 1

GB-9
12345678910
1112131415
The incremental encoder of the motor is connected to the 15-pole sub-D-socket.
2.3 Connection X4
The connector may onlybe connected /disconnected when theinverter and voltagesupply are shut off.
Connection
2.3.1ConnectionIncremental Encoder
PIN-No. Signal PIN-No. Signal1 - 9 B +2 - 10 -3 A - 11 + 15 V4 B - 12 + 5 V5 - 13 GND6 - 14 N -7 - 15 N+8 A + Housing Shield
Encoder 1
12345678910
1112131415
PIN-No. Signal PIN-No. Signal1 C - 9 B +2 D - 103 A - 114 B - 12 + 5 V5 13 GND6 C + 14 R -7 D + 15 R +8 A + Housing Shield
2.3.2ConnectionSIN/COS Encoder
The connector may onlybe connected /disconnected when theinverter and voltagesupply are shut off.
12345678910
1112131415
PIN-No. Signal PIN-No. Signal1 9 COS2 10 SIN_REF3 SIN_LO 114 COS_LO 125 SIN_REF_LO 136 147 158 SIN Housing Shield
The connector may only be connected / disconnected whenthe inverter and voltage supply are shut off.
2.3.3Connection Resolver

GB-10
12345
6789
PIN-No. Signal Meaning1 A + Signal Channel A2 B + Signal Channel B3 reserved4 + 5 V Voltage output5 + 24 V external voltage supply6 A- inverted signal channel A7 B- inverted signal channel B8 reserved9 GND external ground
Housing Shielding
2.4 Connection X5Incremental EncoderEmulation
The 9-pole sub-d-socket is used as an incremental encoder output.The signals are emitted corresponding to the signals on the incrementalencoder input X4 in RS422 specifications.
Encoder 2
Connection
PIN-No. Signal PIN-No. Signal1 9 SIN+2 10 12 V3 REF_COS 114 REF_SIN 125 13 GND6 14 DATA-7 15 DATA+8 COS+ Housing Shield
2.3.4ConnectionHiperface Encoder
PIN-No. Signal PIN-No. Signal1 U- 9 B+2 V- 10 W+3 A- 11 15 V4 B- 12 5 V5 W- 13 GND6 U+ 14 N-7 V+ 15 N+8 A+ Housing Shield
2.3.5Connection UVWEncoder
The connector may only be connected / disconnected whenthe inverter and voltage supply are shut off.
The connector may only be connected / disconnected when theinverter and voltage supply are shut off.

GB-11
ENTER
F/R START
STOP
FUNC.
SPEED
ENTER
F/R
START
STOP
FUNC.
SPEED
ENTER
F/R
Change betweenparameter group andparameter number
Operation
3. Operation viaKeyboard
Only possible with: - Interface-Operator (00.F4.010-1009) or- Digital-Operator (00.F4.010-2009)
3.1 Menue Structure The inverter has parameters (set values and displayed values), whichare divided up into the following parameter groups.
LF-Parameter
Lift parameters
dr-Parameter
„drive“ = Motordata
EC-Parameter
„Encoder“ =encoder
adjustments
An-Parameter
Analog parameters
In-Parameter
Informationparameters
ru-Parameter
„run“ = indicatedvalues
3.2 Operation To change the parameter groups, the flashing dot must be behind theletter. By pressing the „Enter“-key the flashing dot is shifted.
With the keys
select theParameter group
With the keys
select the respectiveParameter number
START
STOP
START
STOP
Select the parameter group with the „Start“-key (arrow upwards) or„Stop“-key (arrow downwards). Press „Enter“ key to change betweenparameter group and parameter numbers.The parameter numbers are selected with the arrow keys.

GB-12
Operation
START
STOP
FUNC.
SPEED
START
STOP
FUNC.
SPEED
ENTER
F/R
START
STOP
FUNC.
SPEED
ENTER
F/R
Displayparameter
number
Displayparameter value
Increase / decreasethe parameter value
Changes between parameter number and parameter value are donewith the „Function“-key. First a valid password must be entered in LF.0to change the parameter values.
The parameter values are changed with the arrow keys.
Do only change values when the lift is stoped (i.e. the control releaseis not active).Changed values must be stored with „Enter“. The adjusted parametervalue is accepted when the dot disappears.
ENTER
F/RExample:
Acceptance/storing
After adjustment of parameter EC.7 the inverter must be switchedoff and on! After the mains voltage is switched on, the inverter displaysthe parameter value of LF.99
If a malfunction occurs during operation, the actual display is overwrittenwith an error message. The error message can be reset by pressingthe ENTER key.
ErrorENTER
F/R
By pressing the ENTER key only the errror message in the display isreset. The present error is displayed further on in the status display(LF.99). First the cause must be removed to reset the error, and a resetat terminal X2.2 or power-on-reset must be done.
Attention !

GB-13
Start-Up Instructions
4.1 Commissioning ofan AsynchronousMachine with Gearbox
4. S t a r t - U pInstructions
The following procedure is recommended for the commissioning ofthe KEB COMBIVERT F4-F lift version 3.0 with asynchronous machineand gearbox:
Adjust the parameters in ascending sequence, as this initiates partialpresettings of the unit. Start with the lift data (LF-parameter). Savethe adjusted data by activating the „Enter key“.
LF.00: Enter password (440)LF.02: Enter setpoint setting/rotation setting
1 = Binary coded setpoint setting2 = Input coded setpoint setting3 = Analog setpoint setting 0...+10V4 = Analog setpoint setting -10...+10V
LF.04: Check, if the value „0“ is adjusted (asynchronous machine)
LF.20: Enter system speed in m/sLF.21: Enter the diameter of the traction sheave in mm, if necessary,
remeasureLF.22: Enter gear reduction, if necessary, countLF.23: Enter rope suspension (1 for 1:1, 2 for 2:1 etc.)LF.24: Enter nominal load (lifting capacity) of the cabine in kg
LF.30: Select control procedure (0 = without feedback, 2 = withfeedback)
LF.40: Enter correction speed in m/sLF.41: Enter crawl speed in m/sLF.42: Enter rated speed in m/sLF.43: Enter inspection speed in m/s
dr.00: Enter rated motor power in kW (1 kW = 1.36 PS)dr.01: Enter rated motor speed in rpm (not synchronous speed)dr.02: Enter rated motor current in Adr.03: Enter rated motor frequency in Hzdr.04: Enter cos phi of the motordr.12: Enter rated motor voltage in V (if the value to be adjusted is
already entered, it is essential to acknowledge the value withENTER)
EC.01: Enter encoder pulse number
With inspection speed check, whether the lift moves. In case of errormessage „E.EnC“ execute an encoder track change with EC.2=1.Reset the error message through switch off and switch on.

GB-14
Start-Up Instructions
LF.30=0 must be adjusted, if the motor shall be driven without encoder.
If the load cannot be lifted with this, increase LF.37 (torque increase).
In case of error message „E.OL2“ adjust LF.38=0 (8 kHz operatingfrequency).
In case of wrong travel direction (up and down exchanged) activatethe reversal of driving direction with LF.05=1.
The driving comfort can be optimized with the following parameters:LF.50 Starting jerk in m/s3
LF.51 Acceleration in m/s3
LF.52 Deceleration jerk in m/s3
LF.53 Deceleration in m/s3
LF.54 Stopping jerk in m/s3
The ramps becomes steeper by increasing the values, e.g. the jerkvalues becomes harder.
If the cabine rolls back when releasing the brake, increase LF.33 insteps of 500.
If the lift at the beginning of the drive runs against the brake, increaseLF.70 (brake release time) because the brake release is not fastenough.
The brake engage time can be increased with parameter LF.79, if thebrake is not closed after stopping when the inverter switches off themodulation.
If the lift does not reach the rated speed during ‘empty-downward-drive’ (display LF.90), do the following:- Set cos phi (dr.04) to 0.9- Decrease field weakening speed (dr.19) to approx. 2/3 of the
synchronous speed (approx. 1000 rpm with 4-pole motors; approx.680 rpm with 6-pole motors)
- decrease rated motor speed (dr.01) in steps of 20 until the ratedspeed is reached during a downward drive.
Optimization

GB-15
4.2 Commissioning of aGearless PermanentMagnet Machine
Start-Up Instructions
The following procedure is recommended for the commissioning of aKEB COMBIVERT F4-F lift version 3.0 with a gearless permanentmagnet machine:
Adjust the parameters in ascending sequence, as this initiates partialpresettings of the unit. Start with the selection of the motor and theresolution and adjustment of the lift data (LF-parameter). Save theadjusted data by activating the „ENTER key“.
When using a synchronous machine with Hiperface-encoder (inverterpart no. xx.F4.Fxx-xi5x), the motor, encoder and control data areautomatically transferred from the encoder to the inverter at the firstswitch on. However, the encoder must be preset with the data. Pleaseinquire at your motor manufacturer, whether this has been done. Ifthe data is stored in the encoder, the entire „dr“ and „EC“-parametersas well as LF.30 - LF.36 need not to be entered in the inverter anymore.
LF.00: Enter password (440)LF.02: Enter setpoint setting/rotation setting
1 = Binary coded setpoint setting2 = Input coded setpoint setting3 = Analog setpoint setting 0...+10V4 = Analog setpoint setting -10...+10V
LF.04: Adjust value “1”LF.06: Adjust value “1”
LF.20: Enter system speed in m/sLF.21: Enter the diameter of the traction sheave in mm, if necessary,
remeasureLF.22: Enter gear reduction 1LF.23: Enter rope suspension (1 for 1:1, 2 for 2:1 etc.)LF.24: Enter nominal load (lifting capacity) of the cabine in kg
LF.31 to LF.33: Enter speed controller data (Use pracmatical valuesor inquire about adjustment at KEB.)
LF.40: Enter correction speed in m/sLF.41: Enter crawl speed in m/sLF.42: Enter rated speed in m/sLF.43: Enter inspection speed in m/s

GB-16
dr.00: Enter rated motor power in kWdr.01: Enter rated motor speed in rpmdr.02: Enter rated motor current in Adr.03: Enter rated motor frequency in Hzdr.09: Enter rated motor torque in Nmdr.17: Enter EMK voltage constant in V/1000 rpm (if only the rated
motor voltage is known, EMK can be calculated according tofollowing formula: UEMK = UN / nN x 1000 rpm)
dr.41: Enter winding resistance in Ohmdr.42: Enter winding inductivity in mH
EC.01: Enter encoder pulse number
EC.04: Enter value „1“ to execute a position alignment and give adrive command. Cancel drive command, when value „5“ isdisplayed. In doing so make sure that the machine is unloaded,i.e. the ropes may not rest upon the traction sheave.If the position alignment is successful completed, value „7“ isdisplayed.If the error „E.EnC“ or E.OS“ occurs during the alignment or ifthe alignment is not automatically completed, it must bechecked, if the motor cables UVW inverter correspond to UVWmotor.If the position of the encoder is known the value can be ente-red directly as hexadecimal value in EC.07.
Let the motor rotate without ropes and with inspection speedafter the position alignment. If the error message „E.EnC“ or„E.OS“ occurs during the alignment, check if the motor cablesUVW inverter are correspond to UVW motor, if necessarychange. The position alignment must be done again if the motorcables are changed.
LF.36: Check the maximum torque in Nm of the motor and, ifnecessary, adjust it.(Attention: If this parameter is adjusted too high for synchronousmachines and if the machine is permanently overloaded, it willlead to demagnetization of the permanent magnets and thedestruction of the motor!)
With inspection speed check, whether the lift moves.
Start-Up Instructions

GB-17
Start-Up Instructions
In case of error message „E.OL2“ adjust LF.38=0 (8 kHz operatingfrequency).
In case of wrong travel direction (up and down exchanged) activatethe reversal of driving direction with LF.05=1.
The driving comfort can be optimized with the following parameters:LF.50 Starting jerk in m/s3
LF.51 Acceleration in m/s3
LF.52 Deceleration jerk in m/s3
LF.53 Deceleration in m/s3
LF.54 Stopping jerk in m/s3
The ramps become steeper by increasing the values, e.g. the jerkvalue becames harder.
If the cabine rolls back when releasing the brake, increase LF.33 insteps of 500.
If the lift at the beginning of the drive runs against the brake, increaseLF.70 (brake release time) because the brake release is not fastenough.
The brake engage time can be increased with parameter LF.79, if thebrake is not closed after stopping when the inverter switches off themodulation.
Optimization

GB-18
Start-Up Instructions
4.3 Commissioning of aG e a r l e s sA s y n c h r o n o u sMachine
The following procedure is recommended for the commissioning ofthe KEB COMBIVERT F4-F lift version 3.0 with a gearlessasynchronous machine with SinCos-encoder:
Adjust the parameters in ascending sequence, as this initiates partialpresettings of the unit. Start with the selection of the resolution andthe adjustment of the lift data (LF-parameter). Save the adjusted databy activating the „ENTER key.
LF.00: Enter password (440)LF.02: Enter setpoint setting/rotation setting
1 = Binary coded setpoint setting2 = Input coded setpoint setting3 = Analog setpoint setting 0...+10V4 = Analog setpoint setting -10...+10V
LF.04: Check, if value „0“ is adjustedLF.06: Adjust value „1“
LF.20: Enter system speed in m/sLF.21: Enter diameter of traction sheave in mm, if necessary,
remeasureLF.22: Enter gear reduction 1LF.23: Enter rope suspension (1 for 1:1, 2 for 2:1 etc.)LF.24: Enter nominal load (lifting capacity) of the cabine in kg
LF.30: Select control procedure (0=without feedback, 2=withfeedback, 3=with torque pre-control)
LF.31 to LF.33: Enter speed controller data (use pracmatical valuesor inquire about adjustment at KEB)
LF.40: Enter correction speed in m/sLF.41: Enter crawl speed in m/sLF.42: Enter rated speed in m/sLF.43: Enter inspection speed in m/s
LF.54: Due to the high mass moment of inertia, adjust the stoppingjerk as small as possible(ca. 0,3m/s3)
dr.00: Enter rated motor power in kW (1 kW = 1.36 PS)dr.01: Enter rated motor speed in rpm (not synchronous speed)dr.02: Enter rated motor current in Adr.03: Enter rated motor frequency in Hzdr.04: Enter cos phi of the motordr.12: Enter rated motor voltage in V (if the value to be adjusted is
already entered, it is essential to acknowledge the value withENTER)

GB-19
EC.01: Enter encoder pulse number
LF.36: Check the maximum torque in Nm of the motor and, ifnecessary, adjust it.
With inspection speed check, whether the lift moves. In case of errormessage „E.EnC“ execute an encoder track change with EC.2=1.Reset the error message through switch off and switch on.
Start-Up Instructions
LF.30=0 must be adjusted, if the motor shall be driven without encoder.If the load cannot be lifted with this, increase LF.37 (torque increase).
In case of error message „E.OL2“ adjust LF.38=0 (8 kHz operatingfrequency).
In case of wrong travel direction (up and down exchanged) activatethe reversal of driving direction with LF.05=1.
The driving comfort can be optimized with the following parameters:LF.50 Starting jerk in m/s3
LF.51 Acceleration in m/s3
LF.52 Deceleration jerk in m/s3
LF.53 Deceleration in m/s3
LF.54 Stopping jerk in m/s3
The ramps becomes steeper by increasing the values, e.g. the jerkvalues becomes harder.
If the cabine rolls back when releasing the brake, increase LF.33 insteps of 500.
If the lift at the beginning of the drive runs against the brake, increaseLF.70 (brake release time) because the brake release is not fastenough.
The brake engage time can be increased with parameter LF.79, if thebrake is not closed after stopping when the inverter switches off themodulation.
If the lift does not reach the rated speed during ‘empty-downward-drive’ (display LF.90), do the following:- Set cos phi (dr.04) to 0.9- Decrease field weakening speed (dr.19) to approx. 2/3 of the
synchronous speed (approx. 1000 rpm with 4-pole motors; approx.680 rpm with 6-pole motors)
- decrease rated motor speed (dr.01) in steps of 20 until the ratedspeed is reached during a downward drive.
Optimization

GB-20
Start-Up Instructions
4.4 Commissioning of aPermanent MagnetMachine with Gearbox
The following procedure is recommended for the commissioning ofthe KEB COMBIVERT F4-F lift version 3.0 with permanent magnetmachine and gearbox:Adjust the parameters in ascending sequence, as this initiates partialpresettings of the unit. Start with the selection of the motor and theresolution and adjustment of the lift data (LF-parameter). Save theadjusted data by activating the „Enter key“.
LF.00: Enter password (440)LF.02: Enter setpoint setting/rotation setting
1 = Binary coded setpoint setting2 = Input coded setpoint setting3 = Analog setpoint setting 0...+10V4 = Analog setpoint setting -10...+10V
LF.04: Adjust value „1“
LF.20: Enter system speed in m/sLF.21: Enter diameter of the traction sheave, if necessary, remeasureLF.22: Enter gear reduction, if necessary, countLF.23: Enter rope suspension (1 for 1:1, 2 for 2:1 etc.)LF.24: Enter additional load (lifting capacity, payload) of the cabine in kg
LF.31 to LF.33: Enter speed controller data (use pracmatical valuesor inquire about adjustment at KEB)
LF.40: Enter correction speed in m/sLF.41: Enter crawl speed in m/sLF.42: Enter rated speed in m/sLF.43: Enter inspection speed in m/s
dr.01: Enter rated motor speed in rpmdr.02: Enter rated motor current in Adr.03: Enter rated motor frequency in Hzdr.09: Enter rated motor torque in Nmdr.17: Enter EMK voltage constant in V/1000 rpm (if only the motor
voltage is known, EMK can be calculated according to followingformula: U
EMK = U
N / n
N x 1000 rpm)
dr.41: Enter winding resistance in Ohmdr.42: Enter winding inductivity in mH
EC.01: Enter encoder pulse number. (If a resolver is used, theparameter must not be changed).
EC.04: Enter value „1“ to execute a position alignment and give adrive command. Cancel drive command, when value „5“ isdisplayed. In doing so make sure that the machine is unloaded,i.e. the ropes may not rest upon the traction sheave.If the position alignment is successful completed, value „7“ isdisplayed.

GB-21
Start-Up Instructions
Optimization
If the error „E.EnC“ or E.OS“ occurs during the alignment or ifthe alignment is not automatically completed, it must bechecked, if the motor cables UVW inverter correspond to UVWmotor. If the position of the encoder is known the value can beentered directly as hexadecimal value in EC.07.
Let the motor rotate without ropes and with inspection speedafter the position alignment. If the error message „E.EnC“ or„E.OS“ occurs during the alignment, check if the motor cablesUVW inverter are correspond to UVW motor, if necessarychange. The position alignment must be done again if the motorcables are changed.
LF.36: Check the maximum torque in Nm of the motor and, ifnecessary, adjust it.(Attention: If this parameter is adjusted too high for synchronousmachines and if the machine is permanently overloaded, it willlead to demagnetization of the permanent magnets and thedestruction of the motor!)
With inspection speed check, whether the lift moves.
In case of error message „E.OL2“ adjust LF.38=0 (8 kHz operatingfrequency).
In case of wrong travel direction (up and down exchanged) activatethe reversal of driving direction with LF.05=1.
The driving comfort can be optimized with the following parameters:LF.50 Starting jerk in m/s3
LF.51 Acceleration in m/s3
LF.52 Deceleration jerk in m/s3
LF.53 Deceleration in m/s3
LF.54 Stopping jerk in m/s3
The ramps becomes steeper by increasing the values, e.g. the jerkvalues becomes harder.
If the cabine rolls back when releasing the brake, increase LF.33 insteps of 500.
If the lift at the beginning of the drive runs against the brake, increaseLF.70 (brake release time) because the brake release is not fastenough.
The brake engage time can be increased with parameter LF.79, if thebrake is not closed after stopping when the inverter switches off themodulation.

GB-22
X2 Output State
Terminal X2 (upper terminal)With the X.2 output state it can be easily checked, whether the outputswere set by the inverter control. Every digital output has a specificvalue. If several outputs are set at the same time, the sum of the valuesis shown.
Value table:
Display Parameter
Terminal X2 (upper terminal)With the X.2 input state it can be easily checked, whether the inputsignals reached the inverter control. Every input (output) has a specificvalue. If several inputs are set, the sum of the values is shown.
Value Table:
X2 Input State
Example: Input control release (X2.1) and direction forward (X2.3) aretriggered with 24V .
Display value: 1+4 = 5
5. Display Parameter
Display Valency Function Output
Combivis > G D + E terminal
O1 1 digital X2.8
output signal:
braking control
O2 2 digital X2.9
output signal:
main contactor main contactor
control inverted control
O3 4 relay relay ready-to-operate X2.20/X2.22
control cabinet fan collective fault
overspeed
Display Valency Function Input
Combivis > G D + E terminal
ST 1 control release X2.1
RST 2 Reset X2.2
F 4 direction of travel forward X2.3
R 8 direction of travel reverse X2.4
I1 16 control mode X2.5
I2 32 door drive active setpoint selection X2.6
I3 64 door drive setpoint setting binary-coded X2.7

GB-23
Terminal strip X3 (lower terminal)See parameter LF.82 for functional description.Value table:X3 Input State
Display Parameter
Terminal X3 (lower terminal)See parameter LF.83 for functional description.Value table:X3 Output State
Terminal strip is nonexistent at units in D- and E-housing!
Terminal strip is nonexistent at units in D- and E-housing!
Display Valency Function OutputCombivis terminal
O5 1 Signal: ready overspeed X3.13O7 4 Relay contact: braking control X3.15/X3.16O8 8 Signal: operating freq. warning X3.14O9 16 Signal: delay control X3.17
O10 32 Relay contact: running open doors X3.18/X3.19O12 128 Relay contact: main contactor ctrl. X3.20/X3.21O14 1024 Signal: DC-monitoring X3.22O15 4096 Signal: motor temperature warning X3.23
Display Valency Function InputCombivis terminal
I5 1 Input signal: contactor control X3.1I6 2 Set value correction speed: V
BX3.2
I7 4 Set value crawl speed: VE
X3.3I8 8 Set value rated speed: V
NX3.4
I9 16 Set value inspection speed: VI
X3.5I10 32 Set value 1st intermediate speed: V
1X3.6
I11 64 Set value 1st intermediate speed: V1
X3.7

GB-24
Display Parameter
Display Value: 0 1 2 3 4 5 6 7
Speed: V=0 VB
VE
VN
VI
V1
V2
V=0Actual Set Value
Actual Inverter Utilization
Display of the actual inverter utilization in %.
Actual Set Speed
The value shows the actual set speed in rpm, calculated from thesystem data.
Total Path
Display of the total path in cm, from releasing to applying the brake.
Display SignificanceStOP no setpoint selectionS.Co setpoint selection without contactor controlS.IO setpoint selection without control releaseS.nC no current flows on the output side, check the wiring
between motor and inverterrun starting procedure is completed
Error Status in StartingProcedure
Actual Speed
The value shows the real speed in rpm, only with connectedencoder.
Actual Car Speed
Display of the current speed in m/s; only with connected encoder.
Crawl Distance
Display of the positioning distance in cm, after a completed ride.
The parameter shows the fault indications that occur during the startingprocess and continuous operation.
See parameter LF.99 for more information about other fault indications.

GB-25
Display SignificancenoP No Operation; term. X2.1 (control release) is not assigned.LS Low speed; control release is set, no direction of rotation
selected, modulation off.Facc Forward acceleration; acceleration phase forward.Fcon Forward constant running; constant drive forward.Fdec Forward deceleration; deceleration phase forward.racc Reverse acceleration; acceleration phase reverse.rcon Reverse constant running; constant drive reverse.rdec Reverse deceleration; deceleration phase reverse.bbl Base-block-time; power modules are locked for 3s (always,
if control release is switched off or when an inverter erroroccurs) .
a) Running Messages
Inverter State
Display Parameter
Display SignificanceE.buS Error, bus, failure in serial communicationE.dOH Error, drive-overheat, motor overheats and prewarning
time has run outE.dSP Error, digital signal processor, error in signal processorE.PrF Error, prohibited rotation forward, error in the software
limit switch (when the set direction of rotation is forward,the software limit switch for forward is inactive)
E.Prr Error, prohibited rotation reverse, error in the softwarelimit switch (when the set direction of rotation is reverse,the software limit switch for reverse is inactive)
E.hyb Error, hybrid, error in the encoder input cardE.EnC Error, encoder, error in the encoder break (reset only
possible with Power-On-Reset)E.LSF Error, load shunt faultE.OC Error, overcurrent, overcurrent short-time peak overloadingE.OH Error, overheated, overheating of the inverter
E.OH2 Error, overheat 2, electronic motor protectionE.nOH Error, no overheat, overheating no longer preset, can be
reset (valid for malfunction E.OH or E.OH2)E.OL Error, overload, continuous overload, for cooling down
the inverter has to stay supplied with power, the coolingtime depends on the previous overload time
E.OL2 Error overload, overloading of the inverter at outputfrequency < 3 Hz
E.nOL Error, no overload, cooling time has run out, error can be resetE.OP Error, overpotential, overvoltage in the DC voltage circuitE.OS Error, overspeed, overspeed (can only be reset with
power-on-reset)E.PuC Error, power unit code, invalid power circuit recognitionE.SEt Error, set, set selection error, check LF.02E.UP Error, underpotential, undervoltage im DC voltage circuitE.hSd Error, high Speed difference, large speed deviation,
check the sign of set and actual speed
b) Error messages

GB-26
Parameter Lists
6. Parameter Lists6.1 LF-Parameter
‘1 LF.06 = 1 high-resolution on‘2 LF.04 = 1 SSM
Gr. No. Name Address P E R Resol. Lower Limit Upper Limit Default Value UnitLF 00 Password 3500 E 1 0 9999 -4 ---LF 01 User-defined password 3501 E 1 0 9999 440 ---LF 02 Steering / operating mode 3502 E 1 1 4 1 ---LF 04 ASM/SSM-selection 3504 E 1 0:ASM 1:SSM 0:ASM ---LF 05 Reversal of travel direction 3505 1 0:off 1:on 0:off ---LF 06 High-resolution 3506 E 1 0:off 1:on 0:off ---LF 19 DC voltage compensation 3513 E 1 150 501:off 400 VLF 20 Rated system speed 3514 0,001 0,000 15,000 0 m/sLF 21 Traction sheave diameter 3515 1 200 2000 600 mmLF 22 Gear reduction ratio 3516 0,01 1,00 99,99 30 ---LF 23 Catenary suspension 3517 1 1 8 1 ---LF 24 Load 3518 1 0 65535 0 kgLF 25 Torque increase of the door drive 3519 0,1 0,0 25,5 6 %LF 26 Rated speed of the door drive 351A 1 100 6000 1440 rpmLF 27 Rated frequency of the door drive 351B 1 20 100 50 HzLF 28 Rated voltage of the door drive 351C 1 1 650 400 VLF 30 Control method 351E E 1 0 3 0 ---LF 31 KP speed 351F 1 1 65535 3000 ---LF 32 KI speed 3520 1 0 65535 1000 ---LF 33 KI speed offset 3521 1 0 65535 1000 ---LF 34 KP current 3522 1 1 65535 1500 ---LF 35 KI current 3523 1 0 65535 500 ---LF 36 Maximum torque 3524 0,1 0 dr.10 2 * dr.9
1'1 1,5*dr.9 '2 NmLF 37 Torque increase 3525 0,1 0,0 25,2 10 %LF 38 Operating frequency change 3526 1 0 1 1 ---LF 40 Set value VB, correction speed 3528 0,001 0,000 0,300 0 m/sLF 41 Set value VE, crawl speed 3529 0,001 0,000 0,300 0 m/sLF 42 Set value VN, rated speed 352A 0,001 0,000 LF.20 0 m/sLF 43 Set value VI, inspection speed 352B 0,001 0,000 0,630 0 m/sLF 44 Set value V1, intermediate speed 1 352C 0,001 0,000 LF.20 0 m/sLF 45 Set value V2, intermediate speed 2 352D 0,001 0,000 LF.20 0 m/sLF 46 Set speed of door drive 352E 0,5 0 16000 0 rpm
0,1 '1 2000 '1LF 50 Starting jerk 3532 0,01 0,10 9,99 0,60 m/s^3LF 51 Acceleration 3533 0,01 0,10 2,00 0,90 m/s^2LF 52 Deceleration jerk 3534 0,01 0,10 9,99 1,00 m/s^3LF 53 Deceleration 3535 0,01 0,10 2,00 0,60 m/s^2LF 54 Stopping jerk 3536 0,01 0,01:off 9,99 0,01:off m/s^3LF 55 Starting jerk VE (crawl speed) 3537 0,01 0,10 9,99 0,60 m/s^3LF 56 Acceleration VE (crawl speed) 3538 0,01 0,10 2,00 0,90 m/s^2LF 57 Speed Deviation mode 3539 1 0 2 1 ---LF 58 Speed deviation level 353A 1 0 30 10 %LF 59 Speed diviation - release time 353B 0,001 0,000 10,000 3,000 sLF 60 Switching level brake disconnection 353C 0,001 0,000 0,010 0,005 m/sLF 61 Monitoring overspeed 353D 0,001 0,000 18,000 1,1 * LF.42 m/sLF 62 Deceleration check level 353E 0,001 0,000 15,000 0,95 * LF.42 m/sLF 63 Running open door level 353F 0,001 0,000 0,300 0,250 m/s

GB-27
Parameter Lists
‘1 LF.06 = 1 high-resolution on
Gr. No. Name Address P E R Resol. Lower Limit Upper Limit Default Value UnitLF 64 DC-voltage circuit control 3540 1 0 800 0 VLF 65 E.dOH deceleration time 3541 1 0 3600 300 sLF 66 Heat sink temperature level 3542 1 20 50 40 °CLF 67 Pretorque gain 3543 0,01 0,50 1,50 1,00 ---LF 68 Pretorque offset 3544 0,1 -25,0 25,0 0,0 %LF 69 Pretorque reversal of direction 3545 1 0:off 1:on 0:off ---LF 70 Brake release time 3546 0,001 0,000 3,000 0,300 sLF 71 Crawl path optimization rated speed VN 3547 0,1 0,0 200,0 0,0 cmLF 72 Crawl path optimization speed V1 3548 0,1 0,0 200,0 0,0 cmLF 73 Crawl path optimization speed V2 3549 0,1 0,0 200,0 0,0 cmLF 74 Crawl path optimization crawl speed VE 354A 1 0 300 0 mmLF 75 Ogive function 354B 1 0:off 1:on 0:off ---LF 76 Ogive status 354C R --- --- --- --- ---LF 77 Braking distance 354D E 0,001 0,000 5,000 0,000 mLF 78 Modulation Ramp Down Timer 354E 0,001 0,000 3,000 0,100 sLF 79 Brake engage time 354F 0,001 0,000 3,000 LF.70 sLF 80 Software version 3550 R --- --- --- --- ---LF 81 Software date 3551 R --- --- --- --- ---LF 82 X2 input state 3552 R --- --- --- --- ---LF 83 X2 output state 3553 R --- --- --- --- ---LF 84 X3 input state 3554 R --- --- --- --- ---LF 85 X3 output state 3555 R --- --- --- --- ---LF 86 Actual set value 3556 R --- --- --- --- ---LF 87 Actual inverter utilization 3557 R --- --- --- --- %LF 88 Actual set speed 3558 R 0,5 --- --- --- rpm
0,1 '1LF 89 Actual speed 3559 R 0,5 --- --- --- rpm
0,1 '1LF 90 Actual car speed 355A R --- --- --- --- m/sLF 92 Crawl distance 355B R --- --- --- --- cmLF 93 Total path 355C R --- --- --- --- cmLF 98 Error status in starting procedure 3562 R --- --- --- --- ---LF 99 Inverter state 3563 R --- --- --- --- ---

GB-28
Parameter Lists
6.2 dr-Parameter The dr-parameter group contains the motor parameters. Dependingon the selected motor (see LF.04), the dr-parameters are differentlyassigned.
‘1 LF.06 = 1 high-resolution on‘2 After the input of dr.12 the dr-parameters dr.13-19 are recalculated from the motor data.
The dr-parameter dr.20 and 21 are reset again to the default value.
LF.04 = 0:ASM
LF.04 = 1:SSM
‘1 LF.06 = 1 high-resolution on
Gr. No. Name Address P E R Resol. Lower Limit Upper Limit Default Value Unitdr 00 Rated motor power 2400 0,01 0,00 160,00 4 kWdr 01 Rated motor speed 2401 E 1 100 15000 1440 rpm
0,1 '1 10 '1 1500 '1dr 02 Rated motor current 2402 E 0,1 0,1 1,1*IN.01 8 Adr 03 Rated motor frequency 2403 E 1 20 800 50 Hz
0,1 '1 2 80dr 04 Rated motor power factor cos phi 2404 E 0,01 0,05 1 0,86 - - -dr 09 Rated motor torque 2409 R 0,1 - - - - - - - - - Nm
1 '1dr 10 Max. motor torque 240A R 0,1 - - - - - - - - - Nm
1 '1dr 12 Rated motor voltage 240C E 1 100 500 400 Vdr 13 Corner speed for max. torque 240D E 0,5 200 6000 dr.12 rpm
0,1 '1 25 '1 750 '1 '2dr 16 Max. torque at dr.19 2410 E 0,1 0 dr.10 dr.12 Nm
1 '1 '2dr 19 Corner speed field weakening 2413 E 0,5 200 6000 dr.12 rpm
0,1 '1 25 '1 750 '1 '2dr 20 Gain factor field wakening 2414 E 0,01 0,10 2,00 1,20 - - -
'2dr 21 Flux adaptation 2415 E 1 25 250 100 '2 %
Gr. No. Name Address P E R Resol. Lower Limit Upper Limit Default Value Unitdr 00 Rated motor power 2400 0,01 0,00 160,00 3,53 kWdr 01 Rated motor speed 2401 E 1 100 15000 1500 rpm
0,1 '1 10 '1 1500 '1dr 02 Rated motor current 2402 E 0,1 0,1 1,1*IN.01 7.5 Adr 03 Rated motor frequency 2403 E 1 20 800 75 Hz
0,1 '1 2 80dr 07 Static continuous current 2407 E 0,1 0,1 1,1*IN.01 1,1* A
dr.02dr 09 Rated motor torque 2409 E 0,1 0,1 1000,0 7,5 Nm
1 '1 1 '1 10000 '1dr 10 Max. motor torque 240A E 0,1 0,1 Inv. Inv. Nm
1 '1 1 '1 dependent depententdr 17 EMK voltage constant 2411 E 1 0 8000 0 V * rpm
1000dr 41 Winding resistance Ru-v 240D E 0,1 0,1 100,0 2,6 Ohmdr 42 Winding inductance Lu-v 2410 E 0,1 0,1 100,0 29,7 mH

GB-29
Parameter Lists
6.3 EC-Parameter
6.4 An-Parameter
Gr. No. Name Address P E R Resol. Lower Limit Upper Limit Default Value UnitAn 01 Noise filter analog inputs 2801 Tab 0 8 3 ---An 02 Zero point hysteresis REF 1 2802 0,1 0,0 10,0 0,2 %An 03 REF 1 gain 2803 0,01 -20,00 20,00 1,00 ---An 04 REF 1 Offset X 2804 0,1 -100,0 100,0 0,0 %An 05 REF 1 Offset Y 2805 0,1 -100,0 100,0 0,0 %An 08 Zero point hysteresis REF 2 2808 0,1 0,0 10,0 0,2 %An 09 REF 2 gain 2809 0,01 -20,00 20,00 1,00 ---An 10 REF 2 Offset X 280A 0,1 -100,0 100,0 0,0 %An 11 REF 2 Offset Y 280B 0,1 -100,0 100,0 0,0 %An 13 REF 2 Funktion 280D E 1 0 7 7 ---An 14 Analog output 1 function 280E E 1 0 6 4 ---An 15 Analog output 1 gain 280F 0,01 -20,00 20,00 1,00 ---An 16 Analog output 1 offset X 2810 0,1 -100,0 100,0 0,0 %An 18 Analog output 2 function 2812 E 1 0 6 0 ---An 19 Analog output 2 gain 2813 0,01 -20,00 20,00 1,00 ---An 20 Analog output 2 offset X 2814 0,1 -100,0 100,0 0,0 %
Gr. No. Name Address P E R Resol. Lower Limit Upper Limit Default Value UnitEC 00 Encoder interface 1 3800 R 1 ---EC 01 Pulse number encoder 1 3801 E 1 256 10000 2500 IncEC 02 Track change encoder 1 3802 1 0 : off 1 : on 0 : off ---EC 03 Encoder pole pairs 3803 1 0 : off 1 : on 0 : off ---EC 04 System position adjustment 3804 1 0 7 0 ---EC 05 Clock frequency encoder 1 3805 E 0,01 5,00 10,00 8,00 kHzEC 06 Encoder 1 mode 3806 E 1 0 1 0 ---EC 07 System position E 1 0 65535 19017 ---EC 08 Speed sampling time encoder 1 3808 1 0 5 3 ---EC 09 Current input resolver 3809 E 0,1 -1:Auto 72,0 7,7 mAEC 10 Encoder interface 2 380A R 1 --- --- --- ---EC 11 Pulse number encoder 2 380B E 1 256 10000 2500 IncEC 17 Divider incremental encoder output 3811 E 1 0 : off 1 : on 0 : off ---EC 20 Hiper-Type 3814 R 1 ---EC 21 Hiper-Status 3815 R 1 ---EC 22 Read Hiperface data 3816 1 0 1 0 ---EC 23 Write Hiperface data 3817 1 0 1 0 ---

GB-30
6.5 ru-Parameter
Parameter Lists
‘1 High-resolution at LF.06 = 1
6.6 In-Parameter
Gr. No. Name Address P E R Resol. Lower Limit Upper Limit Default Value Unitru 00 Display inverter status 2000 R Table -ru 01 Display actual speed 2001 R 0,5 --- --- --- rpm
0,1 '1ru 02 Actual torque display 2002 R 0,1 --- --- --- Nm
1 '1ru 04 Set speed display 2004 R 0,5 --- --- --- rpmru 05 Display setpoint torque 2005 R 0,1 --- --- --- Nm
1 '1ru 08 Peak inverter utilization 2008 0,1 --- --- --- %ru 09 Apparent current 2009 R 0,1 --- --- --- Aru 10 Active current 200A R 0,1 --- --- --- Aru 11 Actual DC voltage 200B R 1 --- --- --- Vru 12 Peak DC voltage 200C R 1 --- --- --- Vru 14 X2 Input terminal status 200E R Table --- --- ---ru 15 X2 Output terminal status 200F R Table --- --- ---ru 18 Actual parameter set 2012 R Table --- --- ---ru 20 Speed reference display 2014 R 0,5 --- --- --- rpm
0,1 '1ru 23 REF 2 display 2016 R 0,1 --- --- --- %ru 24 OL counter display 2018 R 1 --- --- --- -ru 25 Peak apparent current 2019 R 0,1 --- --- --- Aru 29 Heat sink temperature 201D R 1 --- --- --- °Cru 31 Power on counter 201F R 1 --- --- --- hru 32 Modulation on counter 2020 R 1 --- --- --- hru 50 Display of feeback power 2032 R 1 --- --- --- kWh
Gr. No. Name Address P E R Resol. Lower Limit Upper Limit Default Value UnitIn 00 Inverter type display 2C00 Table --- --- --- ---In 01 Rated inverter current 2C01 0,1 --- --- --- AIn 06 Configfile number 2C06 R 1 --- --- ---In 07 Serial number high 2C07 1 0 65535 0 ---In 08 Serial number low 2C08 1 0 65535 0 ---In 09 Serial number order no. high 2C09 1 0 65535 0 ---In 10 Serial number order no. low 2C0A 1 0 65535 0 ---In 11 Customer number HIGH 2C0B 1 0 65535 0 ---In 12 Customer number LOW 2C0C 1 0 65535 0 ---In 40 Last error 2C28 1 0 63 0 ---In 41 Error counter OC 2C29 1 0 255 0 ---In 42 Error counter OL 2C2A 1 0 255 0 ---In 43 Error counter OP 2C2B 1 0 255 0 ---In 44 Error counter OH 2C2C 1 0 255 0 ---In 45 Error counter WD 2C2D 1 0 255 0 ---In 54 Software ID version DSP 2C36 R --- --- --- ---In 55 Software date DSP 2C37 R --- --- --- ---In 60 Display Last error (t-1) 2C3C R 1 --- --- --- ---In 61 Display Last error (t-2) 2C3D R 1 --- --- --- ---In 62 Display Last error (t-3) 2C3E R 1 --- --- --- ---In 63 Display Last error (t-4) 2C3F R 1 --- --- --- ---In 65 Braking resistance 2C41 0,1 0,1 100,0 12,0 Ohm


© K
EB
00
.F4.
L1B
-K30
1 1
/200
4
Karl E. Brinkmann GmbHFörsterweg 36-38 • D-32683 Barntrup
fon: +49 5263 401-0 • fax: +49 5263 401-116net: www.keb.de • mail: [email protected]
KEB Antriebstechnik GmbH & Co. KGWildbacher Str. 5 • D–08289 Schneebergfon: +49 3772 67-0 • fax: +49 3772 67-281
mail: [email protected]
KEB Antriebstechnik Austria GmbHRitzstraße 8 • A-4614 Marchtrenk
fon: +43 7243 53586-0 • fax: +43 7243 53586-21Kostelni 32/1226 • CZ-370 04 Ceské Budejovicefon: +420 38 7319223 • fax: +420 38 7330697
mail: [email protected]
KEB AntriebstechnikHerenveld 2 • B-9500 Geraadsbergen
fon: +32 5443 7860 • fax: +32 5443 7898mail: [email protected]
KEB ChinaXianxia Road 299 • CHN-200051 Shanghai
fon: +86 21 62350922 • fax: +86 21 62350015net: www.keb-cn.com • mail: [email protected]
Société Française KEBZ.I. de la Croix St. Nicolas • 14, rue Gustave Eiffel
F-94510 LA QUEUE EN BRIEfon: +33 1 49620101 • fax: +33 1 45767495
mail: [email protected]
KEB (UK) Ltd.6 Chieftain Buisiness Park, Morris Close
Park Farm, Wellingborough GB-Northants, NN8 6 XFfon: +44 1933 402220 • fax: +44 1933 400724
net: www.keb-uk.co.uk • mail: [email protected]
KEB Italia S.r.l.Via Newton, 2 • I-20019 Settimo Milanese (Milano)
fon: +39 02 33500782 • fax: +39 02 33500790net: www.keb.it • mail: [email protected]
KEB - YAMAKYU Ltd.15–16, 2–Chome, Takanawa Minato-ku
J–Tokyo 108-0074fon: +81 33 445-8515 • fax: +81 33 445-8215
mail: [email protected]
KEB AntriebstechnikLeidsevaart 126 • NL–2013 HD Haarlem
fon: +31 23 5320049 • fax: +31 23 5322260mobil: +31 653964667
mail: [email protected]
KEB PortugalLugar de Salgueiros – Pavilhao A, Mouquim
P-4760 V. N. de Famalicaofon: +351 252 371318 • fax: +351 252 371320
mail: [email protected]
KEB Taiwan Ltd.1F, No.19-5, Shi Chou Rd., Tounan Town
R.O.C.-Yin-Lin Hsian / Taiwanfon: +886 5 5964242 • fax: +886 5 5964240
mail: [email protected]
KEB SverigeBox 265, Bergavägen 19
S-430 93 Hälsöfon: +46 31 961520 • fax: +46 31 961935
mail: [email protected]
KEBCO Inc.1335 Mendota Heights Road
USA-Mendota Heights, MN 55120fon: +1 651 4546162 • fax: +1 651 4546198
net: www.kebco.com • mail: [email protected]