Repetitorium Technische Mechanik III - IDS · PDF fileRepetitorium Technische Mechanik III...
29
Repetitorium Technische Mechanik III Version 3.1, 09.02.2010 Dr.-Ing. L. Panning Institut für Dynamik und Schwingungen Gottfried Wilhelm Leibniz Universität Hannover Dieses Repetitorium soll helfen, • klassische Aufgabentypen aus der Technischen Mechanik zu beherrschen, • häufig auftretende Fehler zu vermeiden und • anhand durchgerechneter Beispiele verschiedene Lösungswege beurteilen zu können. Dieses Repetitorium soll nicht • als Probeklausur interpretiert werden, • den Anspruch auf eine vollständige Abdeckung des Lehrstoffes erheben und • als Hinweis auf den Klausurinhalt verstanden werden! Ziel ist es, eine Sammlung charakteristischer Fragestellungen mit entsprechenden Lösungswegen be- reitzustellen. Einige ausgewählte Aufgaben werden dann beispielhaft während des Repetitoriums durchgerechnet und diskutiert. Dank an die wissenschaftlichen MitarbeiterInnen des IKM und IDS für die tatkräftige Unterstützung! Bei Anregungen oder Korrekturen bitte kurze E-Mail an [email protected]. Dr.-Ing. Lars Panning
Transcript of Repetitorium Technische Mechanik III - IDS · PDF fileRepetitorium Technische Mechanik III...

Repetitorium
Technische Mechanik III
Version 3.1, 09.02.2010
Dr.-Ing. L. Panning
Institut für Dynamik und Schwingungen
Gottfried Wilhelm Leibniz Universität Hannover
Dieses Repetitorium soll helfen,
• klassische Aufgabentypen aus der Technischen Mechanik zu beherrschen,
• häufig auftretende Fehler zu vermeiden und
• anhand durchgerechneter Beispiele verschiedene Lösungswege beurteilen zu können.
Dieses Repetitorium soll nicht
• als Probeklausur interpretiert werden,
• den Anspruch auf eine vollständige Abdeckung des Lehrstoffes erheben und
• als Hinweis auf den Klausurinhalt verstanden werden!
Ziel ist es, eine Sammlung charakteristischer Fragestellungen mit entsprechenden Lösungswegen be-reitzustellen. Einige ausgewählte Aufgaben werden dann beispielhaft während des Repetitoriumsdurchgerechnet und diskutiert.
Dank an die wissenschaftlichen MitarbeiterInnen des IKM und IDS für die tatkräftige Unterstützung!
Bei Anregungen oder Korrekturen bitte kurze E-Mail an [email protected].
Dr.-Ing. Lars Panning

Gottfried Wilhelm Leibniz Universität HannoverRepetitorium Technische Mechanik III
Frühjahr 2010Seite 1/28
Musterlösungen (ohne Gewähr)
Frage 1
Ein Fahrzeug fährt zum Zeitpunkt t = 0 aus der Ruhe heraus an, s(t = 0) = 0, v(t = 0) = 0.
Vervollständigen Sie die kinematischen Diagramme qualitativ und geben Sie an, um welchen Funk-tionstyp es sich handelt (Konstante, Gerade usw.)!
Gegeben: Beschleunigung a(t).
vt()
Zeit t
at()
Konstante
Konstante
Zeit t
Gerade
st()
Zeit t
Frühjahr 2010 Repetitorium Technische Mechanik III 15.02.2010

Gottfried Wilhelm Leibniz Universität HannoverRepetitorium Technische Mechanik III
Frühjahr 2010Seite 2/28
Musterlösungen (ohne Gewähr)
Lösung
vt()
st()
Zeit t
Zeit t
quadratische
Parabel
kubische
Parabel
quadratische
Parabel
at()
Konstante
Konstante
Zeit t
Gerade
Gerade
Gerade
quadratische
Parabel
Tipps und Tricks
Lösung am schnellsten durch ’grafisches’ Integrieren, Rechnung meist nicht notwendig!
Zusammenhänge v(t) = s(t) und a(t) = v(t) überprüfen!
Eckwerte und Kurventyp angeben, wenn gefragt - sauber zeichnen, sodass qualitative Verläufegut erkennbar sind!
Frühjahr 2010 Repetitorium Technische Mechanik III 15.02.2010

Gottfried Wilhelm Leibniz Universität HannoverRepetitorium Technische Mechanik III
Frühjahr 2010Seite 3/28
Musterlösungen (ohne Gewähr)
Frage 2
Ein Basketball wird unter einem Winkel vonα = 45 über eine Länge ` in einen Korb in derHöhe 2a über der Abwurfhöhe a geworfen.
a) Wie muss die Abwurfgeschwindigkeit v0 ge-wählt werden, damit der Ball in den Korb fällt?
b) Wie groß muss in diesem Fall die Höhe H derHalle mindestens sein, sodass der Ball die Deckegerade nicht berührt?
Gegeben: α = 45, `, a = `/8, g.
v0 = H ≥
g
a
H
2a
v0
Lösung
Wurfbewegung:z = −1
2gt2 + v0t sinα + a (Vertikalbewegung); x = v0t cosα (Horizontalbewegung)
a) Elimination der Zeit (mit a = `/8, sinα = cosα =1
2
√2):
`!
=1
2
√2v0t
∗ → t∗ =√
2`
v0
3a!
= −1
2gt∗2 +
1
2
√2v0t
∗ + a = −g `2
v20
+v0`
v0
+ a→ v0 =
√4
3g`
b) maximale Höhe bei z = 0 = v0 sinα− gt∗∗ → t∗∗ =1
2
√2v0
g
zmax = z(t∗∗) = −1
2gt∗∗2 +
1
2
√2v0t
∗∗ + a = −1
4
v20
g+
1
2
v20
g+ a =
1
4
v20
g+ a =
11
24`→ H ≥ 11
24`
Tipps und Tricks
Aufgabentypen dieser Art führen häufig auf die recht einfachen Gleichungen zum schiefen Wurf,die entsprechend umgestellt werden müssen bzw. aus denen die Zeit eliminiert werden muss!
Frühjahr 2010 Repetitorium Technische Mechanik III 15.02.2010

Gottfried Wilhelm Leibniz Universität HannoverRepetitorium Technische Mechanik III
Frühjahr 2010Seite 4/28
Musterlösungen (ohne Gewähr)
Frage 3
Eine Kugel (Radius r, MasseM) hängt in horizon-taler Lage an einem Stab (Länge `, Masse m). DasSystem wird aus der Ruhelage stoßfrei losgelassen.
a) Geben Sie das Massenträgheitsmoment J (O)ges des
Systems bezüglich des Punktes O an!
b) Wie groß ist die maximal auftretende Winkel-geschwindigkeit ωmax = ϕmax?
Gegeben: r, ` = 3r, m, M =5
2m, g.
J (O)ges = ωmax =
g
M
rmO
Lösung
a) J (O)ges =
1
3m`2︸ ︷︷ ︸Stab
+
2
5Mr2 + M(`+ r)2︸ ︷︷ ︸
Steiner−Anteil
︸ ︷︷ ︸
Kugel
= 3mr2 + (1 + 40)mr2
= 44mr2
b) System ist konservativ → Energieerhaltungssatz:T1 + U1 = T2 + U2
T1 = 0, U1 = 0 (System zu Beginn in Ruhe, Nullniveau im Lagerpunkt), T2 =1
2J (O)
ges ϕ2
→ T2 = −U2 = −[−(mg
`
2+Mg(`+ r)
)sinϕ
]→ Tmax = mg
`
2+Mg(`+ r) =
(3
2+ 10
)mgr =
23
2mgr, denn Umin bei sinϕ = 1→ ϕ =
π
2
→ ωmax =
√2Tmax
J(O)ges
=
√23
44
g
r
Frühjahr 2010 Repetitorium Technische Mechanik III 15.02.2010
Gottfried Wilhelm Leibniz Universität HannoverRepetitorium Technische Mechanik III
Frühjahr 2010Seite 5/28
Musterlösungen (ohne Gewähr)
Tipps und Tricks
Wenn nicht r ` gegeben ist bzw. die Masse nicht als Punktmasse bezeichnet wird, dann istr im Steiner-Anteil für das Massenträgheitsmoment der Kugel zu berücksichtigen!
Das Massenträgheitsmoment einer Kugel ist nicht identisch mit dem eines Zylinders (Aufga-benstellung genau lesen)!
Energieerhaltungssatz: kinetische Energie maximal, wenn potentielle Energie minimal → ωmax
wird hier im ’tiefsten Punkt’ erreicht!
Schwerepotential U = mgz ’nach oben’ positiv zählen (Koordinate z entgegen der Richtungder Erdbeschleunigung g)!
Auf den angegebenen Winkel achten! Hier zählt ϕ gegenüber der Horizontalen, daher tauchtim Schwerepotential sinϕ auf.
Frühjahr 2010 Repetitorium Technische Mechanik III 15.02.2010

Gottfried Wilhelm Leibniz Universität HannoverRepetitorium Technische Mechanik III
Frühjahr 2010Seite 6/28
Musterlösungen (ohne Gewähr)
Frage 4
Gegeben ist der skizzierte Mechanismus aus vier Stäben. Stab©4 wird mit konstanter Winkelge-schwindigkeit ω4 angetrieben.
a) Skizzieren Sie die Lage der Momentanpole aller Stäbe!
b) Wie groß ist der Betrag |~vA| der Geschwindigkeit des Punktes A?
Gegeben: `, ω4.
A
1
4
4
3
D
C
B
2
E F
|~vA| =
Frühjahr 2010 Repetitorium Technische Mechanik III 15.02.2010

Gottfried Wilhelm Leibniz Universität HannoverRepetitorium Technische Mechanik III
Frühjahr 2010Seite 7/28
Musterlösungen (ohne Gewähr)
Lösung
A
B
C
D
E F
1
2
3
4
4Q3 Q4
Q1
1vA
vB vC vD
a) Festlager sind Momentanpole für ©3 und ©4 . Richtungen von ~vC und ~vD liegen damit fest→ Richtungen parallel, Momentanpol für ©2 nicht konstruierbar → Q2 liegt im Unendlichen→ reine Translation von©2 → alle Geschwindigkeiten nach Betrag und Richtung identisch →|~vB| = |~vD| = ω4
√2`. Konstruktion von Q1 aus Senkrechten zu ~vB und ~vA.
b) ω1 =|~vB|√
2`=|~vA|`→ |~vA| = ω4`
(konsistent mit Richtung in der Skizze:©1 und©4 drehen in entgegengesetzter Richtung!)
Tipps und Tricks
Festlager sind Fixpunkte und damit Momentanpol des im Lager befestigten Bauteils!
An Loslagern treten nur Geschwindigkeiten in der Richtung senkrecht zur Zwangsbedingungauf → Momentanpol auf Senkrechter zur möglichen Bewegungsrichtung im Loslager!
In Gelenken besitzen die dort miteinander verbundenen Bauteile gleiche Geschwindigkeiten!Vorsicht bei Schiebehülsen o.ä., die eine Relativbewegung in einer Richtung zulassen. Hiergelten identische Geschwindigkeiten dann nur für die Richtung, in der beide Bauteile nichtrelativ zueinander beweglich sind!
Frühjahr 2010 Repetitorium Technische Mechanik III 15.02.2010

Gottfried Wilhelm Leibniz Universität HannoverRepetitorium Technische Mechanik III
Frühjahr 2010Seite 8/28
Musterlösungen (ohne Gewähr)
Frage 5
Ein Stab rotiert mit konstanter Winkelgeschwin-digkeit Ω um den Punkt O. Er trägt an seinemEnde eine Kreisscheibe (Radius r, Mittelpunkt M),die schlupffrei in ihrem Berührpunkt P in einemHohlzylinder (Radius R) abrollt.
Kreuzen Sie an, ob die folgenden Aussagen richtigoder falsch sind!
Gegeben: r, R, R > r, Ω.
richtig falsch
a) Der Punkt P ist der Momentanpol der Kreisscheibe.
b) Der Betrag der Geschwindigkeit von M ist |~vM| = Ω(R− r).
c) Der Mittelpunkt M erfährt keine Beschleunigung.
d) Der Betrag der Winkelgeschwindigkeit der Kreisscheibe ist|~ω| = R− r
rΩ.
e) Der Punkt P erfährt keine Beschleunigung.
r
R
P
M
O
Frühjahr 2010 Repetitorium Technische Mechanik III 15.02.2010

Gottfried Wilhelm Leibniz Universität HannoverRepetitorium Technische Mechanik III
Frühjahr 2010Seite 9/28
Musterlösungen (ohne Gewähr)
Lösung
a) Richtig, denn: kein Schlupf (Rutschen) im Punkt P → keine Relativgeschwindigkeit (Rollbedin-gung erfüllt). Da der Hohlzylinder fix im Raum ist und damit alle Punkte die GeschwindigkeitNull besitzen, muss auch P momentan in Ruhe sein (Momentanpol).
b) Richtig, denn M bewegt sich auf einer Kreisbahn mit dem Radius R− r.
c) Falsch, denn: M bewegt sich mit konstanter Bahngeschwindigkeit auf einer gekrümmtenBahn (hier: Kreisbahn). Es muss also eine Normalbeschleunigung wirken. ~aM = ~Ω× (~Ω× ~rOM),~Ω = [0 0 Ω]T, ~rOM = [(R− r) 0 0]T → ~aM =
[−(R− r)Ω2 0 0]T → Betrag der Zentripetalbe-
schleunigung |~aM| = (R− r)Ω2.
d) Richtig, denn P ist Momentanpol, dann muss |~vM| = ωr = Ω(R− r) sein, vgl. b).
e) Falsch, denn: P ist Momentanpol. Wäre auch die Beschleunigung Null, müsste P ein Fixpunkt sein,da sich seine Geschwindigkeit nicht ändern würde. Richtig ist: ω = 0→ ~aP = ~aM + ~ω × (~ω × ~rMP).
~aM =[−(R− r)Ω2 0 0
]T, ~ω = [0 0 − ω]T, ~rMP = [r 0 0]T, → |~aP| = R
(1− R
r
)Ω2 (in Rich-
tung des Stabes zum Lagerpunkt O).
Frühjahr 2010 Repetitorium Technische Mechanik III 15.02.2010

Gottfried Wilhelm Leibniz Universität HannoverRepetitorium Technische Mechanik III
Frühjahr 2010Seite 10/28
Musterlösungen (ohne Gewähr)
Aufgabe 6
Der skizzierte Mechanismus besteht aus drei ge-lenkig miteinander verbundenen Stäben. Stab©1wird durch die konstante Winkelgeschwindigkeitω1 angetrieben.Bestimmen Sie für die gezeichnete Lage, in derStab©2 und©3 senkrecht aufeinander stehen,
a) die Koordinaten des Momentanpols Q2
des Stabes ©2 im eingezeichneten x-y-Koordinatensystem,
b) die Beträge der Winkelgeschwindigkeiten ω2
und ω3 sowie
c) die Beträge der Winkelbeschleunigungen ω2
und ω3 der Stäbe©2 und©3 !
Gegeben: a, α = 60, ω1.
a2a
2a
12
3
x
y
A
B
C
Lösung
a2a
2a
1 2
3
Q2
3a
x
y
A
B
C
2aA
B
2a
B
C
von A nach B
von C nach B
√3a
√12a
vA
vB
aω21
aω21
2aω2
2aω22
2aω23
2aω3
Frühjahr 2010 Repetitorium Technische Mechanik III 15.02.2010

Gottfried Wilhelm Leibniz Universität HannoverRepetitorium Technische Mechanik III
Frühjahr 2010Seite 11/28
Musterlösungen (ohne Gewähr)
a) xQ2 = 0; yQ2 = −3a
b) |~vA| = aω1 = 4aω2 → ω2 =1
4ω1
|~vB| =√
12aω2 = 2aω3 → ω3 =√
3ω2 =
√3
4ω1 (Drehrichtung entgegen ω1 und ω2!)
c) ~aB = ~aA + ~ω2 × ~rAB + ~ω2 × (~ω2 × ~rAB)!
= ~ω3 × ~rCB + ~ω3 × (~ω3 × ~rCB)
Jetzt entscheidend, in welchem Koordinatensystem diese Größen angeschrieben werden. Hier wirddas eingezeichnete ξ-η-System gewählt, da viele Größen in diesem Koordinatensystem besonderseinfach sind:
~aB = aω21
1
2
−1
2
√3
0
+
0
0
ω2
× 2a
0
0
+
0
0
ω2
× 0
0
ω2
× 2a
0
0
=
0
0
−ω3
× 0
−2a
0
+
0
0
−ω3
× 0
0
−ω3
× 0
−2a
0
Nur ξ- und η-Komponente relevant (ebenes Problem!):aB,ξ =
a
2ω2
1 − 2aω22 = −2aω3 → ω3 = −1
4ω2
1 + ω22 = − 3
16ω2
1
aB,η = −1
2
√3aω2
1 + 2aω2 = 2aω23 → ω2 = ω2
3 +1
4
√3ω2
1 =1
16(3 + 4
√3)ω2
1
Tipps und Tricks
Die Winkelbeschleunigungen lassen sich nicht über die einfachen Beziehungen aus den Ab-ständen der Punkte A und B zu den Momentanpolen bestimmen! Momentanpole sindGeschwindigkeits- und keine Beschleunigungspole, d.h. die Beschleunigung eines Momentan-pols ist im Allgemeinen nicht Null!
Winkelbeschleunigungen lassen sich zumeist nicht so einfach erkennen wie die entsprechendenWinkelgeschwindigkeiten (allgemein: Überlagerung von Führungs-, Coriolis- und Relativbe-schleunigung, hier: grafische Konstruktion noch recht gut möglich, da nur Führungsbeschleu-nigung vorhanden)!
Bei vektorieller Schreibweise zur Berechnung des Kreuzproduktes ist auf die korrekte Wahl derVorzeichen zu achten! Die Winkelgeschwindigkeiten werden definitionsgemäß in einem Rechts-handsystem positiv gezählt, hier also um eine aus der Zeichenebene herauszeigende ζ-Achse,die mit der ξ- und η-Achse in der Reihenfolge ξ, η, ζ ein Rechtshandsystem ergibt.
Frühjahr 2010 Repetitorium Technische Mechanik III 15.02.2010

Gottfried Wilhelm Leibniz Universität HannoverRepetitorium Technische Mechanik III
Frühjahr 2010Seite 12/28
Musterlösungen (ohne Gewähr)
Insbesondere für Kreuzprodukte Koordinatensystem geschickt wählen! Alle Vektoren müssenkonsistent in einem Koordinatensystem angegeben werden!
Zwei oder mehrere Körper, die in einem Gelenk miteinander verbunden sind, haben in diesemPunkt identische translatorische Geschwindigkeiten und Beschleunigungen!
Frühjahr 2010 Repetitorium Technische Mechanik III 15.02.2010

Gottfried Wilhelm Leibniz Universität HannoverRepetitorium Technische Mechanik III
Frühjahr 2010Seite 13/28
Musterlösungen (ohne Gewähr)
Aufgabe 7
Ein Zylinder (Radius r, Masse m) wird aus derRuhelage ©1 stoßfrei losgelassen und rollt ohnezu rutschen die skizzierte Bahn entlang, die bei©2 vertikal ausläuft und in der Höhe a endet.
Welche Höhe h erreicht der Zylinder in seinem Um-kehrpunkt©3 ?
Gegeben: a, r, m, g.
g
3a
1
2
r3
m
h
a
Lösung
System ist konservativ → Energieerhaltungssatz:
T2 + U2 = T1 + U1
T1 = 0, U1 = 3mga, U2 = mga, T2 =1
2mv2
2︸ ︷︷ ︸Ttrans
+1
2J (C)ω2
2︸ ︷︷ ︸Trot
=1
2J (Q)ω2
2 =3
4mr2ω2
2
Rollbedingung v2 = rω2, Massenträgheitsmoment J (C) =1
2mr2
T2 =1
2
(mr2ω2
2 +1
2mr2ω2
2
)=
3
4mr2ω2
2 = T1 + U1 − U2 = 2mga→ ω2 =
√8ga
3r2
T3 + U3 = T2 + U2
Die Rotationsenergie Trot bleibt in©3 erhalten (es wirken von©2 nach©3 keine Momente auf denZylinder, die den Drall und damit die Drehgeschwindigkeit ändern (ω3 = ω2)!):
T3 =1
2· 1
2mr2ω2
3 =2
3mga, T2 = 2mga, U2 = mga
U3 = mgh = T2 + U2 − T3 = 2mga+mga− 2
3mga =
7
3mga→ h =
7
3a
Tipps und Tricks
Die ursprüngliche Höhe 3a kann nicht mehr erreicht werden, da die Masse auch in ihremUmkehrpunkt aufgrund der anhaltenden Rotation (Rollbedingung am Ende der Bahn!) nochkinetische Energie besitzt! Die Höhe h muss daher entsprechend kleiner sein als 3a.
Die maximale Höhe h = 3a würde erreicht, wenn die Rollbedingung bis zum Ende erfüllt wäre,d.h. der Zylinder die Bahn nicht verlässt, sondern auch im senkrechten Teil weiterhin Kontaktzur Bahn hat. Wird der senkrechte Teil der Bahn verkürzt, vermindert sich auch die maximalerreichbare Höhe h.
Die Höhe h kann, ausgehend von der Position©2 , auch mit den Gleichungen des senkrechtenWurfs ermittelt werden!
Frühjahr 2010 Repetitorium Technische Mechanik III 15.02.2010

Gottfried Wilhelm Leibniz Universität HannoverRepetitorium Technische Mechanik III
Frühjahr 2010Seite 14/28
Musterlösungen (ohne Gewähr)
Aufgabe 8
Eine Punktmassem gleitet unter dem Winkel α ei-ne reibungsbehaftete (Gleitreibkoeffizient µ) schie-fe Ebene hinauf. Die Punktmasse besitzt in derHöhe h1 die Geschwindigkeit v1.
Welche maximale Höhe h2 erreicht die Masse?
Gegeben: α, h1, v1, m, µ, g.
gx
mv
1
h1
h2
Lösung
zurückgelegter Weg in x-Richtung: s =h2 − h1
sinα
Alternative I: ArbeitssatzT2 + U2 = T1 + U1 +W n.k.
12
T1 =1
2mv2
1, U1 = mgh1, T2 = 0 (Umkehrpunkt!), U2 = mgh2
W n.k.12 = −FRs = −µFNs (Reibkraft der Bewegung entgegengerichtet → W n.k.
12 negativ!)FN = mg cosα (aus Statik: kein Abheben von der schiefen Ebene!)
W n.k.12 = U2 − U1 − T1 = mg(h2 − h1)− 1
2mv2
1 = −µmg cosαh2 − h1
sinα
→ (h2 − h1)(
1 +µ
tanα
)mg =
1
2mv2
1 → h2 = h1 +v2
1
2(1 + µ
tanα
)g
Alternative II: ImpulssatzImpulssatz x-Richtung: mx = −mg sinα− FR = −mg sinα− µFN
Impulssatz senkrecht zur Ebene (Statik, s.o.): 0 = −mg cosα + FN → FN = mg cosα
oben eingesetzt und integriert (t = 0: x = 0, x = v1):→ x = − (sinα + µ cosα) g
→ x = − (sinα + µ cosα) gt+ v1
→ x = −1
2(sinα + µ cosα) gt2 + v1t
Umkehrpunkt:x∗ = v∗ !
= 0 = − (sinα + µ cosα) gt∗ + v1 → t∗ =v1
g (sinα + µ cosα)
x∗ = s = −1
2(sinα + µ cosα) gt∗2 + v1t
∗ =v2
1
2 (sinα + µ cosα) g
h2 = h1 + s sinα = h1 +v2
1
2(1 + µ
tanα
)g
Frühjahr 2010 Repetitorium Technische Mechanik III 15.02.2010

Gottfried Wilhelm Leibniz Universität HannoverRepetitorium Technische Mechanik III
Frühjahr 2010Seite 15/28
Musterlösungen (ohne Gewähr)
Tipps und Tricks
Kein konservatives System (Reibung!) → Arbeits- statt Energieerhaltungssatz!
Bei der Betrachtung von zwei verschiedenen Zuständen ist der Arbeitssatz (bei konservativenSystemen: Energieerhaltungssatz) häufig die schnellere Variante!
Die Wahl des Koordinatensystems ist beliebig. Hier bietet sich die eingezeichnete Richtung an.Auch die Horizontale und Vertikale können für x und y gewählt werden. Dann muss allerdingsdie Kopplung über den Winkel α berücksichtigt werden. Wichtig ist für die Gültigkeit vonImpuls- und Drallsatz nur, dass es sich um ein (beliebig orientiertes) Inertialsystem handelt!
Da m als Punktmasse angenommen wurde, sind ihre Abmessungen vernachlässigbar. Für diepotentielle Energie aufgrund des Schwerepotentials ist grundsätzlich die Lage des Schwerpunk-tes entscheidend!
Dissipative Kräfte (Reibung, Dämpferkräfte) vermindern die Gesamtenergie vom Zustand 1zum Zustand 2 (W n.k.
12 < 0). Äußere Kräfte (Fremderregung) können die Gesamtenergie erhöhen(W n.k.
12 > 0) (Vorzeichenkontrolle)!
Wenn Gleitrichtung bekannt, Reibkraft FR gleich vorzeichenrichtig annehmen (Bewegungsrich-tung entgegengesetzt)!
Die Beziehung FR = µFN gilt nur für den Gleitzustand (FR ist dann eine eingeprägte Kraft).Für den Haftfall gilt dagegen |FR| ≤ µ0FN (FR ist dann eine Reaktionskraft) mit dem Haft-reibkoeffizienten µ0!
Frühjahr 2010 Repetitorium Technische Mechanik III 15.02.2010

Gottfried Wilhelm Leibniz Universität HannoverRepetitorium Technische Mechanik III
Frühjahr 2010Seite 16/28
Musterlösungen (ohne Gewähr)
Aufgabe 9
Ein Kegel rotiert wie skizziert um die gezeichneteDrehachse (Massenträgheitsmoment JK). Er trägtzusätzlich in zwei Nuten unter einem Winkel α imAbstand R von der Drehachse reibungsfrei zweiPunktmassen m. Ein Motor bringt an der Dreh-achse das Moment M(t) auf. Das System ist zumZeitpunkt t = 0 in Ruhe.
Nach welcher Zeit t∗ beginnen die Punktmassen,sich von dem Kegel zu lösen?
Gegeben: R, α = 30, m, JK, M(t) = M0(t/T )2,M0, T , g.
M
JK
m
g
m
R R
Lösung
Gesamtes Massenträgheitsmoment:J = JK + 2mR2 (gültig, bis die Punktmassen gerade beginnen, sich nach außen zu bewegen.)
Drallsatz in integraler Form:
L(t = t∗)− L(t = 0) = J(ϕ∗ −>0
ϕ0) =
t=t∗∫t=0
M(t)dt =M0
T 2
t=t∗∫t=0
t2dt =M0
T 2
[1
3t3]t∗
0
=M0t
∗3
3T 2
→ ϕ∗ =M0t
∗3
3T 2J
m
g
R
mgF2
F1
r
Impulssatz Punktmasse in vertikaler Richtung (Kräftegleichgewicht):0 = F2 sinα + F1 cosα−mg (1)
Impulssatz Punktmasse in radialer Richtung:mr = F2 cosα−F1 sinα mit r = −Rϕ2 (Zentripetalbeschleunigung aufgrund der Kreisbewegung)(2)
Frühjahr 2010 Repetitorium Technische Mechanik III 15.02.2010

Gottfried Wilhelm Leibniz Universität HannoverRepetitorium Technische Mechanik III
Frühjahr 2010Seite 17/28
Musterlösungen (ohne Gewähr)
Wenn die Punktmassen beginnen, sich zu lösen, gilt gerade F2 = 0
aus (1): F ∗1 =mg
cosα
in (2) eingesetzt: −mRϕ∗2 = −mg tanα = −m√
3
3g → ϕ∗ =
√√3
3
g
R=M0t
∗3
3T 2J
→ t∗ =3
√√3√
3g
R· T
2(JK + 2mR2)
M0
Tipps und Tricks
Wenn sich zwei Körper in einem Punkt gerade voneinander lösen, werden die Kontaktkräfte indiesem Punkt gerade zu Null!
Wenn die Kräfte nach ihrer Richtung schon bekannt sind bzw. eine Bindung nur in einer Rich-tung Kräfte übertragen kann, dann sollten bzw. müssen diese Kräfte auch im Freikörperbild inder korrekten Richtung angetragen werden. Hier liegen die Punktmassen nur auf den Flächender Nuten auf, es können keine ’Zugkräfte’ übertragen werden (einseitige Bindung)!
Plausibilitätskontrolle: M0 ↑→ t∗ ↓; JK,m ↑→ t∗ ↑; T ↑→ t∗ ↑; der Einfluss von R ist nichtsofort ersichtlich, da zum einen das gesamte Massenträgheitsmoment J steigt und damit t∗
steigt, andererseits nimmt die Zentripetalbeschleunigung mit größerem R zu, was zu kleineremt∗ führt.
Einheitenkontrolle: [t∗] =3
√√m
s2 m· s2 kg m2
Nm= 3
√√m
s2 m· s2 kg m2
kg ms2
m= s
Frühjahr 2010 Repetitorium Technische Mechanik III 15.02.2010
Gottfried Wilhelm Leibniz Universität HannoverRepetitorium Technische Mechanik III
Frühjahr 2010Seite 18/28
Musterlösungen (ohne Gewähr)
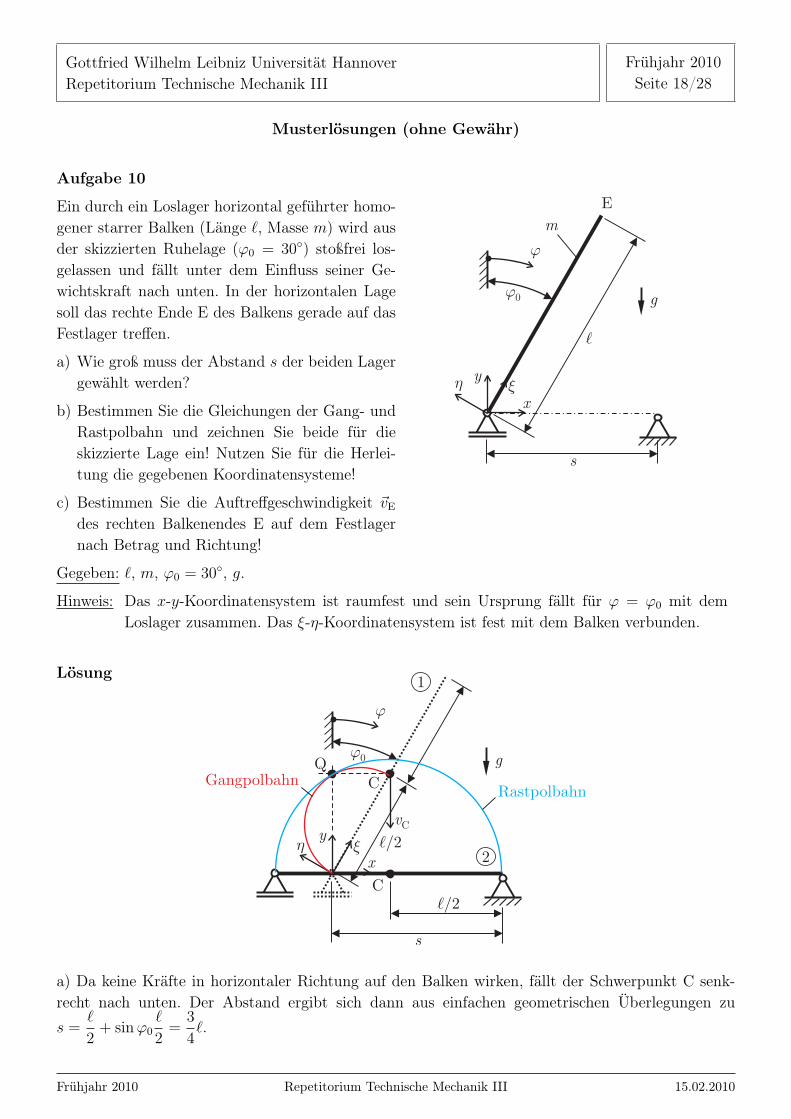
Aufgabe 10
Ein durch ein Loslager horizontal geführter homo-gener starrer Balken (Länge `, Masse m) wird ausder skizzierten Ruhelage (ϕ0 = 30) stoßfrei los-gelassen und fällt unter dem Einfluss seiner Ge-wichtskraft nach unten. In der horizontalen Lagesoll das rechte Ende E des Balkens gerade auf dasFestlager treffen.
a) Wie groß muss der Abstand s der beiden Lagergewählt werden?
b) Bestimmen Sie die Gleichungen der Gang- undRastpolbahn und zeichnen Sie beide für dieskizzierte Lage ein! Nutzen Sie für die Herlei-tung die gegebenen Koordinatensysteme!
c) Bestimmen Sie die Auftreffgeschwindigkeit ~vE
des rechten Balkenendes E auf dem Festlagernach Betrag und Richtung!
Gegeben: `, m, ϕ0 = 30, g.
Hinweis: Das x-y-Koordinatensystem ist raumfest und sein Ursprung fällt für ϕ = ϕ0 mit demLoslager zusammen. Das ξ-η-Koordinatensystem ist fest mit dem Balken verbunden.
g
s
m
x
y
0
E
Lösung
g
s
C
C
1
2
vC
/2
/2
0
x
y
Q
RastpolbahnGangpolbahn
a) Da keine Kräfte in horizontaler Richtung auf den Balken wirken, fällt der Schwerpunkt C senk-recht nach unten. Der Abstand ergibt sich dann aus einfachen geometrischen Überlegungen zus =
`
2+ sinϕ0
`
2=
3
4`.
Frühjahr 2010 Repetitorium Technische Mechanik III 15.02.2010

Gottfried Wilhelm Leibniz Universität HannoverRepetitorium Technische Mechanik III
Frühjahr 2010Seite 19/28
Musterlösungen (ohne Gewähr)
b)
Rastpolbahn:
xQ =`
2(sinϕ0 − sinϕ) =
`
2
(1
2− sinϕ
), yQ =
`
2cosϕ
sin2 ϕ =
(1
2− 2
`xQ
)2
, cos2 ϕ =
(2
`yQ
)2
→ sin2 ϕ+ cos2 ϕ = 1 =
(1
2− 2
`xQ
)2
+
(2
`yQ
)2
→(`
4− xQ
)2
+ y2Q =
(`
2
)2
→ Kreis mit Radius r =`
2und Mittelpunkt M
(`
4, 0
)Gangpolbahn:ξQ = yQ cosϕ =
`
2cos2 ϕ→ cos2 ϕ =
2ξQ`
;
ηQ = yQ sinϕ =`
2cosϕ sinϕ =
`
2cosϕ
√1− cos2 ϕ
→ η2Q =
(`
2
)2
cos2 ϕ(1− cos2 ϕ) =
(`
2
)22ξQ`
(1− 2ξQ
`
)=ξQ`
2− ξ2
Q = −[(
ξQ − `
4
)2
−(`
4
)2]
→(ξQ − `
4
)2
+ η2Q =
(`
4
)2
→ Kreis mit Radius r =`
4und Mittelpunkt M
(`
4, 0
)c)
In der horizontalen Lage fällt der Momentanpol in das Loslager→ reine Rotation um den Lagerpunkt!
System ist konservativ → Energieerhaltungssatz:
T2 + U2 = T1 + U1, T1 = 0, U1 = mg`
2cosϕ0 =
1
4
√3mg`, U2 = 0
T2 =1
2· 1
3m`2ω2
2 = U1 − U2 =1
4
√3mg`→ ω2 =
√3
2
√3g
`
In der horizontalen Position haben alle Punkte des Balkens nur vertikale Geschwindigkeitskompo-
nenten. Das rechte Ende des Balkens trifft also mit |~vE| = `ω2 =
√3
2
√3g` auf dem Festlager auf
(vertikal nach unten).
Tipps und Tricks
Wirken in einer Richtung auf einen Körper keine äußeren Kräfte, so bleibt der Impuls in dieserRichtung erhalten! Hier ist der Impuls zu Beginn Null, d.h. die Schwerpunktgeschwindigkeit inx-Richtung muss auch Null bleiben, da in dieser Richtung aufgrund des Loslagers keine Kräftewirken!
Frühjahr 2010 Repetitorium Technische Mechanik III 15.02.2010
Gottfried Wilhelm Leibniz Universität HannoverRepetitorium Technische Mechanik III
Frühjahr 2010Seite 20/28
Musterlösungen (ohne Gewähr)
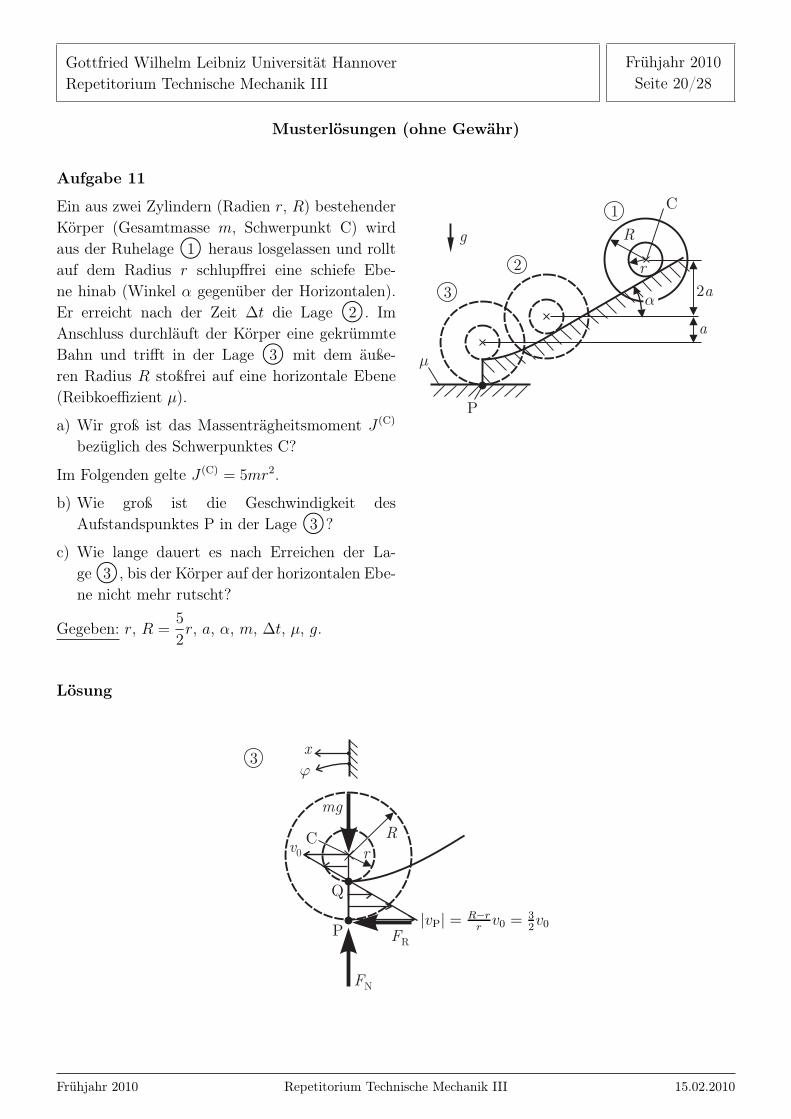
Aufgabe 11
Ein aus zwei Zylindern (Radien r, R) bestehenderKörper (Gesamtmasse m, Schwerpunkt C) wirdaus der Ruhelage©1 heraus losgelassen und rolltauf dem Radius r schlupffrei eine schiefe Ebe-ne hinab (Winkel α gegenüber der Horizontalen).Er erreicht nach der Zeit ∆t die Lage ©2 . ImAnschluss durchläuft der Körper eine gekrümmteBahn und trifft in der Lage ©3 mit dem äuße-ren Radius R stoßfrei auf eine horizontale Ebene(Reibkoeffizient µ).
a) Wir groß ist das Massenträgheitsmoment J (C)
bezüglich des Schwerpunktes C?
Im Folgenden gelte J (C) = 5mr2.
b) Wie groß ist die Geschwindigkeit desAufstandspunktes P in der Lage©3 ?
c) Wie lange dauert es nach Erreichen der La-ge©3 , bis der Körper auf der horizontalen Ebe-ne nicht mehr rutscht?
Gegeben: r, R =5
2r, a, α, m, ∆t, µ, g.
g
2a
1
2 r
R
3
a
C
P
Lösung
3
P
Q
v0 r
R
FR
FN
mg
C
x
|vP| = R−rr
v0 = 32v0
Frühjahr 2010 Repetitorium Technische Mechanik III 15.02.2010

Gottfried Wilhelm Leibniz Universität HannoverRepetitorium Technische Mechanik III
Frühjahr 2010Seite 21/28
Musterlösungen (ohne Gewähr)
a) Drallsatz um den Aufstandspunkt (Momentanpol Q): J (Q)ϕ = mgr sinα
Kinematik für reines Rollen: ϕ =ξ
rmit ξ als Koordinate in Richtung der schiefen Ebene (abwärts
gerichtet).
ϕ =ξ
r=mgr sinα
J (Q)→ ξ(∆t) =
1
2
mgr2 sinα
J (Q)(∆t)2 !
=2a
sinα→ J (Q) =
mgr2 sin2 α(∆t)2
4a
J (C) = J (Q) −mr2 = mr2
(g sin2 α(∆t)2
4a− 1
)b) J (C) = 5mr2, J (Q) = 5mr2 +mr2 = 6mr2
Energieerhaltungssatz: T2 +U2 = T1 +U1; T1 = 0; U1−U2 = 3mga; T2 =1
2J (Q)ϕ2 = 3mr2
(xC
r
)2
T2 = U1 − U2 → xC = v0 =√ga (Schwerpunktgeschwindigkeit in der Lage©3 )
ϕ0 =v0
r=
√ga
r
xP = v0 −Rϕ0 =
(1− R
r
)√ga = −3
2
√ga (negativ im Sinne der Koordinate x, wenn R > r)
c) P ist ’zu schnell’, um die Rollbedingung zu erfüllen, daher tritt in P unmittelbar nach Verlassender gekrümmten Bahn Gleitreibung mit der Reibkraft FR = µFN = µmg auf.Drallsatz: J (C)ϕ = −FRR→ ϕ = −FRR
J (C)t+ ϕ0
Impulssatz: mxC = FR → xC =FR
mt+ v0
Für Zeitpunkt t = t∗ soll wieder Rollbedingung gelten (jetzt mit Radius R!):
xC = Rϕ→ FR
mt∗ + v0 = ϕ0R− FRR
2
J (C)t∗
→ t∗ =ϕ0R− v0
µmg(
1m
+ R2
5mr2
) =
(√gaR
r−√ga) · 5r2
µg(5r2 +R2)
=5
µ
√a
g
(Rr− 1
5 + R2
r2
)=
5
µ
√a
g
( 32
5 + 254
)=
2
3µ
√a
g
Tipps und Tricks
Die auf eine Masse m aufgrund des Schwerepotentials wirkende Hangabtriebskraft auf einerschiefen Ebene ist F = mg sinα mit dem Winkel α zwischen der schiefen Ebene und derHorizontalen!
Bei Anwendung der Rollbedingung auf den Rollradius achten!
Das Massenträgheitsmoment ist immer am kleinsten bezüglich des Schwerpunktes C!
Frühjahr 2010 Repetitorium Technische Mechanik III 15.02.2010

Gottfried Wilhelm Leibniz Universität HannoverRepetitorium Technische Mechanik III
Frühjahr 2010Seite 22/28
Musterlösungen (ohne Gewähr)
Aufgabe 12
Ein Zylinder (Radius R, Masse m) soll unter denEinfluss seiner Gewichtskraft ohne zu rutschen eineschiefe Ebene (Winkel α gegenüber der Horizonta-len) hinabrollen. Er wird aus der Ruhelage herauslosgelassen. Zwischen Ebene und Zylinder herrschtReibung (Reibkoeffizient µ).
Wir groß darf der Winkel α maximal sein, damitzwischen Ebene und Zylinder kein Rutschen auf-tritt?
Gegeben: R, m, µ = 1/3, g.
Hinweis: Haft- und Gleitreibkoeffizient sollenidentisch sein.
gR
C
m
Lösung
Impulssatz hangabwärts: mx = mg sinα− FR
Impulssatz senkrecht zur Hangrichtung (kein Abheben des Zylinders!):my
!= 0 = mg cosα− FN → FN = mg cosα
Drallsatz um den Aufstandspunkt: J (Q)ϕ = mgR sinα mit J (Q) =3
2mR2
Kinematik (Erfüllung der Rollbedingung): x = Rϕ→ x = Rϕ
→ 3
2mR2 x
R=mgR sinα→ x =
2
3g sinα
→ m2
3g sinα = mg sinα− FR → FR =
1
3mg sinα
Für die Haftreibkraft muss |FR| ≤ µFN gelten:
→ 1
3mg sinα ≤ µmg cosα→ tanα ≤ 3µ = 1→ α ≤ 45
Tipps und Tricks
Auf der schiefen Ebene muss Reibung vorhanden sein, da es sonst kein beschleunigendes Mo-ment gibt! Der Körper würde bei µ = 0 aufgrund der Hangabtriebskraft translatorisch nachunten rutschen. Kein Rutschen bzw. Rollen heißt also nicht reibungsfrei, sondern nur, dass dieHaftreibkraft ausreichend groß ist, um eine Relativbewegung im Aufstandspunkt zu verhindern!
Frühjahr 2010 Repetitorium Technische Mechanik III 15.02.2010

Gottfried Wilhelm Leibniz Universität HannoverRepetitorium Technische Mechanik III
Frühjahr 2010Seite 23/28
Musterlösungen (ohne Gewähr)
Aufgabe 13
Ein Brett (Masse m) wird wie skizziert zwischenzwei Rollen (jeweils Radius R, MasseM) gehalten.Jede Rolle wird durch das skizzierte zeitabhängigeAntriebsmoment MA(t) angetrieben. Das Systembefindet sich für t = 0 in Ruhe.
Wir groß ist die Geschwindigkeit v∗ des Bretteszum Zeitpunkt T?
Gegeben: R, m, M , MA(t), M0, T .
Hinweis: Zwischen Rollen und Brett tritt keinSchlupf auf.
M tA( )
M
M
m
x
M t( )
t
M0
T
M tA( )
R
R
Lösung
M
m
x
F( )t
F( )t
F( )t
untere Rolle (obere analog)
M tA( )
R
Alternative I: Impuls- und DrallsatzImpulssatz Brett: mx = 2F
Drallsatz Rolle:1
2MR2ϕ = MA −RF → F =
1
R
(MA − 1
2MR2ϕ
)Kinematik: ϕ =
x
R→ ϕ =
x
R→ F =
MA
R− 1
2Mx
→ mx = 2MA
R−Mx→ x =
2MA
R(M +m)
→ x(t = T )−:0
x(t = 0) =2
R(M +m)
T∫0
MA(t)dt
︸ ︷︷ ︸12M0T
=M0T
R(M +m)= v∗
Alternative II: ArbeitssatzT2 + U2 = T1 + U1 +W n.k.
12
Frühjahr 2010 Repetitorium Technische Mechanik III 15.02.2010

Gottfried Wilhelm Leibniz Universität HannoverRepetitorium Technische Mechanik III
Frühjahr 2010Seite 24/28
Musterlösungen (ohne Gewähr)
T1 = 0, U1 = 0, U2 = 0, T2 =1
2mx2 + 2
(1
2· 1
2MR2ϕ2
)=
1
2(M +m)x2
W n.k.12 = 2
T∫0
MA(t)ϕ(t)︸ ︷︷ ︸Leistung des Antriebsmomentes
dt
Ableiten ergibt Leistungsbilanz:
2MA(t)x/R
ϕ = (M +m)x x→ x =2MA
R(M +m)(siehe oben)
Tipps und Tricks
Grafische Integration geht häufig sehr viel schneller als die rechnerische, insbesondere bei li-nearen Funktionen (Flächeninhalt unter der Kurve)!
Eingeprägte Kräfte bzw. Momente lassen sich nicht aus einem Potential herleiten und sinddamit den nicht-konservativen Kräfte zuzurechen. Sie ändern den Energiehaushalt des Systems!
Frühjahr 2010 Repetitorium Technische Mechanik III 15.02.2010

Gottfried Wilhelm Leibniz Universität HannoverRepetitorium Technische Mechanik III
Frühjahr 2010Seite 25/28
Musterlösungen (ohne Gewähr)
Aufgabe 14
Eine Kugel (Masse m) stößt mit der Geschwindigkeit v0 gegen einen Quader©1 (Masse m, Stoßziffere = 1). Dieser gleitet zunächst reibungsfrei auf einer Ebene und rutscht anschließend auf ein Brett©2(Länge `, MasseM), das auf masselosen Rädern abrollen kann. Zwischen dem Brett und dem Quadertritt Reibung auf (Reibkoeffizient µ). Beide sind vor dem Stoß in Ruhe.
m
M
1
2
gmv0
reibungsfrei
a) Wie groß ist die gemeinsame Geschwindigkeit v∗ von Brett und Quader, wenn der Quader aufdem Brett nicht mehr rutscht?
b) Welche Länge ` muss das Brett haben, damit der Quader gerade am rechten Ende des Bretteszum Liegen kommt?
Gegeben: v0, m, M , µ, e = 1, g.
Hinweis: Betrachten Sie den Quader als Punktmasse.
Lösung
Stoßgesetz (Großbuchstaben nach dem Stoß, Kleinbuchstaben vor dem Stoß):
e = −V1 − V0
v1 − v0
= 1; v1 = 0→ V0 = V1 − v0
Impulssatz für Stoßvorgang: mv0 = mV0 +mV1 = mV1 −mv0 +mV1 → V1 = v0
(oder direkt aus Formelsammlung, da gerader, zentraler Stoß)
a) Impulssatz für©1 : mx1 = −FR = −µFN = −µmg → x1 = −µgt+ v0
Impulssatz für©2 : Mx2 = FR = µFN = µmg → x2 = µm
Mgt
Forderung x1 = x2 = v∗ → −µgt∗ + v0 = µm
Mgt∗ → t∗ =
v0
µg(1 + m
M
) → v∗ =m
M +mv0
oder direkt Impulssatz für Gesamtsystem aus Quader und Brett (keine äußeren Kräfte!):mV1 = mv0 = (M +m)v∗ → v∗ =
m
M +mv0
Frühjahr 2010 Repetitorium Technische Mechanik III 15.02.2010

Gottfried Wilhelm Leibniz Universität HannoverRepetitorium Technische Mechanik III
Frühjahr 2010Seite 26/28
Musterlösungen (ohne Gewähr)
b) Alternative I: ImpulssatzLänge des Brettes ` !
= x∗1 − x∗2 (Relativweg zwischen Quader und Brett)x∗1 = −1
2µgt∗2 + v0t
∗
x∗2 =1
2µm
Mgt∗2
→ ` = x∗1 − x∗2 = −1
2µgt∗2 + v0t
∗ − 1
2µm
Mgt∗2
Mit t∗ =v0
µg(1 + m
M
) → ` =1
2µg
M
M +mv2
0
Alternative II: ArbeitssatzT2 + U2 = T1 + U1 +W n.k.
12
T1 =1
2mV 2
1 =1
2mv2
0; U1 = U2 = 0; T2 =1
2(M +m)v∗2; W n.k.
12 = −FR` = −µFN` = −µmg`
→ W n.k.12 = T2 − T1 → −µmg` =
1
2(M +m)
(m
M +mv0
)2
− 1
2mv2
0
=1
2
(m2
M +m−m
)v2
0 = −1
2
Mm
M +mv2
0
→ ` =1
2µmg
Mm
M +mv2
0 =1
2µg
M
M +mv2
0
Tipps und Tricks
Formeln aus der Formelsammlung für geraden, zentralen Stoß nur anwenden, wenn dies auch ei-ner ist (hier möglich, da Stoßnormale durch Schwerpunkte und relative Auftreffgeschwindigkeitin genau dieser Richtung)!
Frühjahr 2010 Repetitorium Technische Mechanik III 15.02.2010

Gottfried Wilhelm Leibniz Universität HannoverRepetitorium Technische Mechanik III
Frühjahr 2010Seite 27/28
Musterlösungen (ohne Gewähr)
Aufgabe 15
Eine Kugel©1 (Massem) stößt mit der Geschwin-digkeit v0 gegen einen homogenen Stab©2 (Län-ge `, Masse m, Stoßziffer e). Der Stab©2 ist überein Gelenk B mit einem identischen Stab©3 ver-bunden, der in A drehbar gelagert ist. Beide Stäbesind zunächst in Ruhe.
a) Wie muss der Abstand s gewählt werden, damitder Stab©2 unmittelbar nach dem Stoß einereine Translationsbewegung ausführt?
b) Wie groß ist in diesem Fall seine translatorischeGeschwindigkeit V2 nach dem Stoß?
Gegeben: `, v0, m, e.
1
2
m
v0
A
B
m
g
m
s
3
Lösung
Freikörperbild für den Stoßvorgang:
A
B
s
2
3
x
C2
P1
F F
BhBh
Bv
Bv
Stoßvorgang: vor dem Stoß: Kleinbuchstaben; nach dem Stoß: Großbuchstaben
Drallsatz (integrale Form) um Schwerpunkt für©2 : J (C2)(
Φ2 − ϕ2
)=`
2Bh +
(`
2− s)F (1)
Impulssatz (integrale Form) für©2 : m (VC2 − vC2) = F − Bh (2)
Drallsatz (integrale Form) um Lager A für©3 :1
3m`2
(Φ3 − ϕ3
)= `Bh (3)
Impulssatz (integrale Form) für©1 : m (V1 − v1) = −F (4)
Stoßgesetz: e = −VP − V1
vP − v1
(5)
Kinematik: VB = Φ3` (6)
Frühjahr 2010 Repetitorium Technische Mechanik III 15.02.2010

Gottfried Wilhelm Leibniz Universität HannoverRepetitorium Technische Mechanik III
Frühjahr 2010Seite 28/28
Musterlösungen (ohne Gewähr)
Anfangsbedingungen: vC2 = vP = 0, ϕ2 = ϕ3 = 0 (7)Forderung: Φ2 = 0→ VB = VC2 = VP = V2 (8)(alle Punkte von©2 besitzen identische Geschwindigkeiten!)
→ 6 Gleichungen, 6 Unbekannte: Bh, F , V1, V2, Φ3, s. → geschicktes Auflösen!
a) (6), (7), (8) in (3): Bh =1
3mV2 (9)
(7) in (2): F = Bh +mV2 =4
3mV2 (10)
(7), (8), (9), (10) in (1):
0 =`
2· 1
3mV2 +
(`
2− s)
4
3mV2 → s =
5
8` (P liegt also oberhalb von C2) (11)
b) (7), (8) in (5): V1 = V2 − ev1 (12)(10), (12) in (4): V2 =
3
7(e+ 1)v1 (13)
Tipps und Tricks
Für Stoßvorgänge ist häufig die integrale Form von Impuls- und Drallsatz hilfreich. Eine Stoß-kraft und ein hieraus resultierendes -moment werden dann zu den integralen Größen Kraft-bzw. Momentenstoß (durch ˜(..) gekennzeichnet)!
Die Sätze für den geraden, zentralen Stoß sind hier nicht anwendbar, da Stoß nicht zentral!
Es lässt sich hier für©2 auch der Drallsatz um B nutzen, dann fällt Bh im Drallsatz heraus,aber das Integral des Kreuzproduktes ~rBC2×m~aB verschwindet nicht! In integraler Form ergibtt+∫t−
aB(t)dt = V2 über der Stoßzeit tS = t+ − t−. Der Drallsatz um B liefert nach Ausrechnen
des Kreuzproduktes m`
2V2 = (`− s)F , was mit Gl. (10) auf die gleiche Lösung für s führt.
Frühjahr 2010 Repetitorium Technische Mechanik III 15.02.2010