RoboAssistent: Intuitives Programmieren von · PDF fileDipl.Ing. Günter Schreiber 3 DLR...
19
26.01.2005 Günter Schreiber RoboAssistent: Intuitives Programmieren von Fügevorgängen
Transcript of RoboAssistent: Intuitives Programmieren von · PDF fileDipl.Ing. Günter Schreiber 3 DLR...
26.01.2005
Günter Schreiber
RoboAssistent: Intuitives Programmieren
von Fügevorgängen
Dipl.Ing. Günter Schreiber 2
DLR
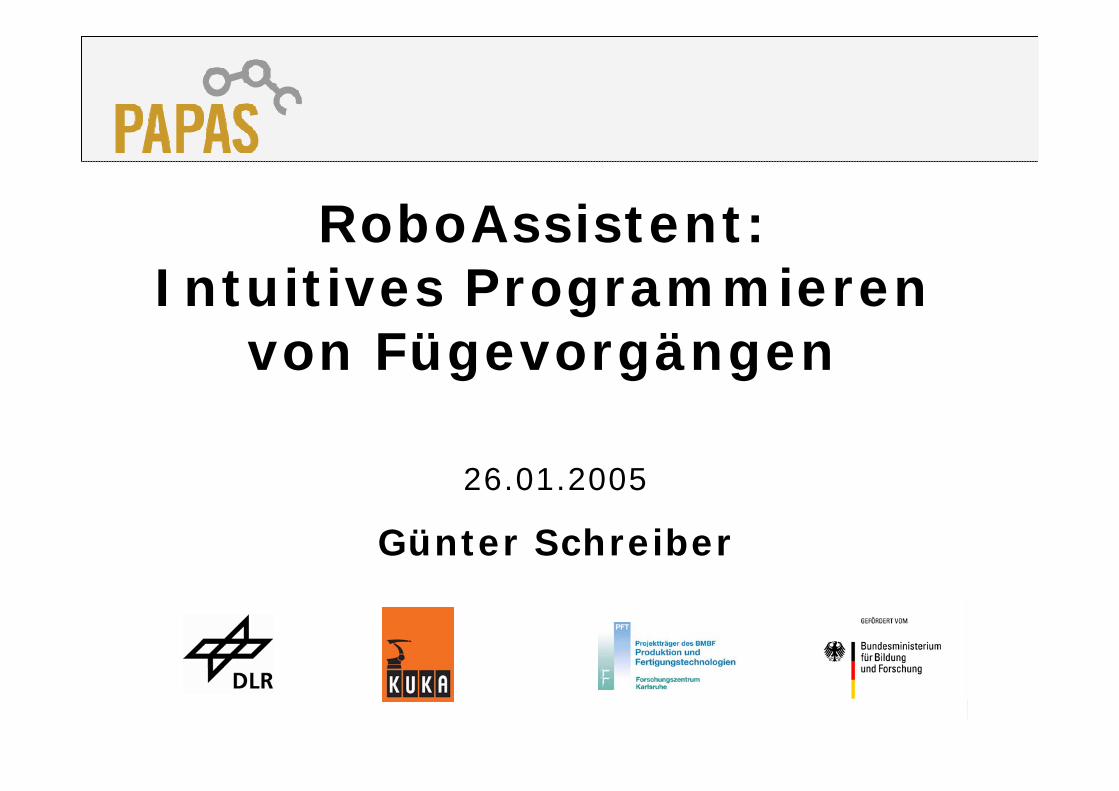
Entwurfstechnologien für Plug & Play
Kommunikation
Neue RobotersystemeProduktinnovationen
Anwendungen
Kart. Steuerung KukaBasissteuerung DLR
H ochgeschw indigkeitsbus (z.B . Firew ire, E thernet)
Steuerung R egler A ntriebe
2 .. 10 m s 0.2 .. 2 m s0.1 .. 1 m s
H ochgeschw indigkeitsbus (z.B . Firew ire, E thernet)
Steuerung R egler A ntriebe
2 .. 10 m s 0.2 .. 2 m s0.1 .. 1 m s
Sensoren / Peripherie
Steuerung Industrieroboter
Plug-And-Play Antriebs- und Steuerungskonzepte für die
Produktion von morgen
Dipl.Ing. Günter Schreiber 3
DLR
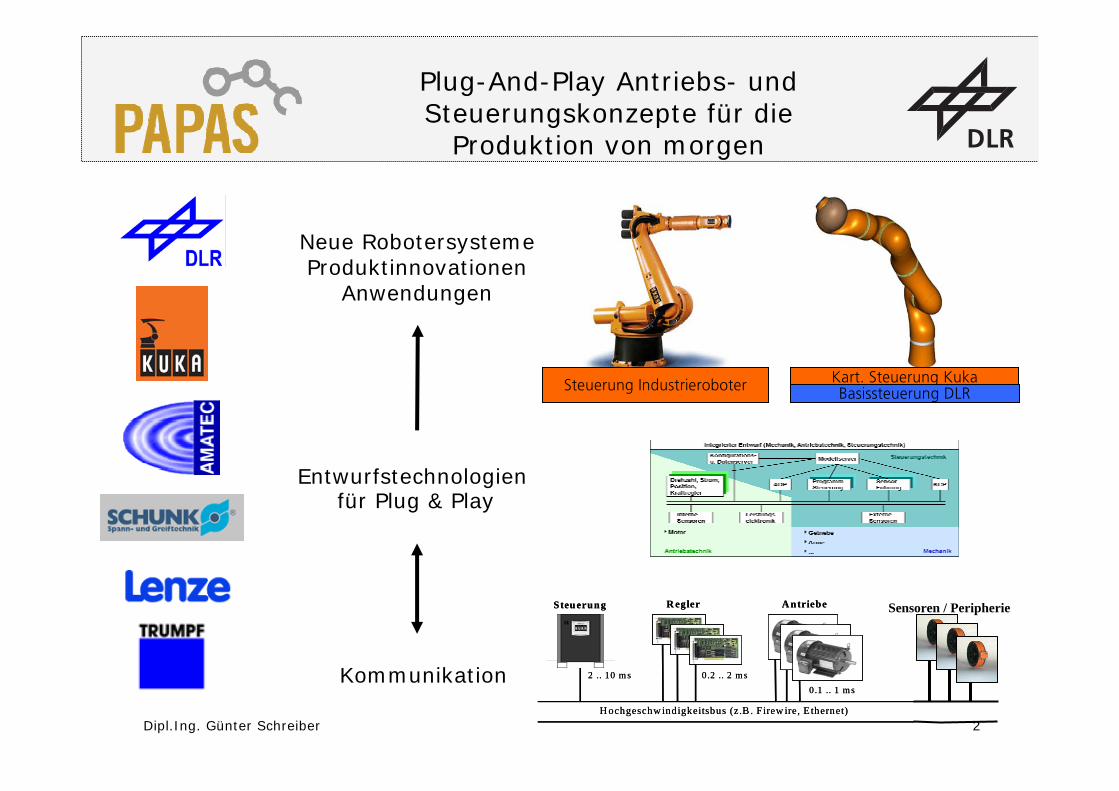
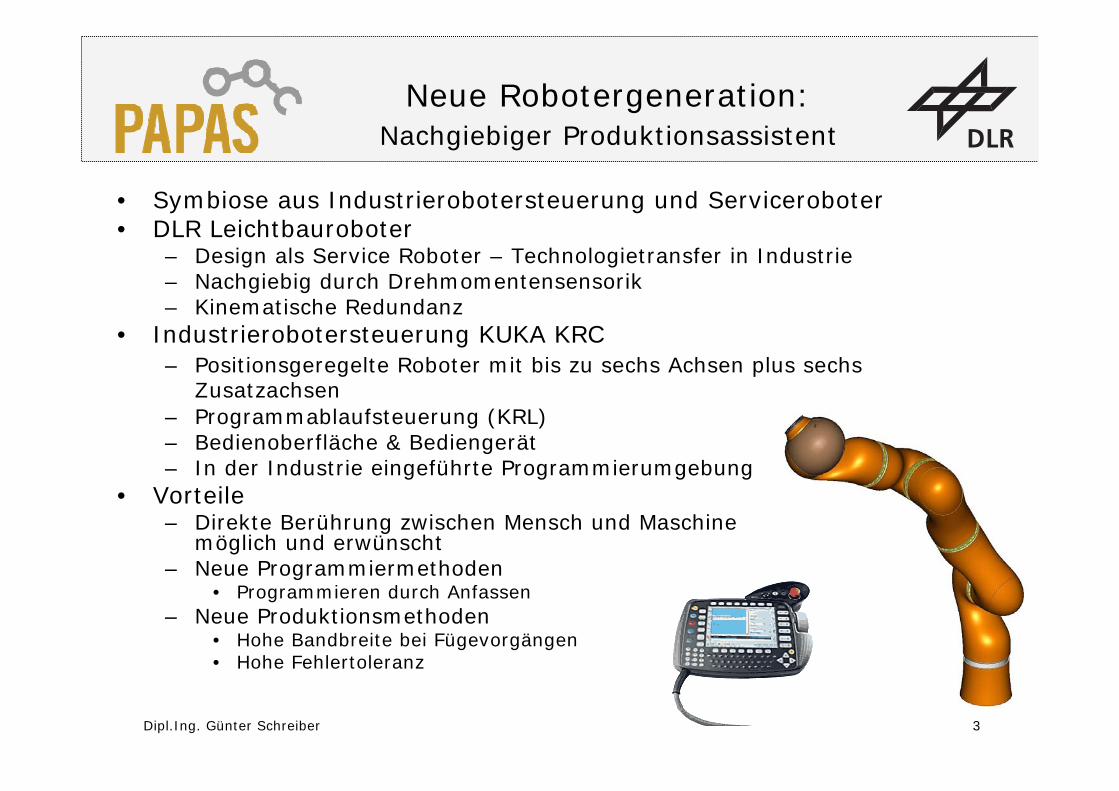
Neue Robotergeneration: Nachgiebiger Produktionsassistent
• Symbiose aus Industrierobotersteuerung und Serviceroboter• DLR Leichtbauroboter
– Design als Service Roboter – Technologietransfer in Industrie– Nachgiebig durch Drehmomentensensorik– Kinematische Redundanz
• Industrierobotersteuerung KUKA KRC– Positionsgeregelte Roboter mit bis zu sechs Achsen plus sechs
Zusatzachsen– Programmablaufsteuerung (KRL)– Bedienoberfläche & Bediengerät– In der Industrie eingeführte Programmierumgebung
• Vorteile– Direkte Berührung zwischen Mensch und Maschine
möglich und erwünscht – Neue Programmiermethoden
• Programmieren durch Anfassen– Neue Produktionsmethoden
• Hohe Bandbreite bei Fügevorgängen• Hohe Fehlertoleranz

Dipl.Ing. Günter Schreiber 4
DLR
Neue Programmiermethoden durch Nachgiebigkeit
Dipl.Ing. Günter Schreiber 5
DLR
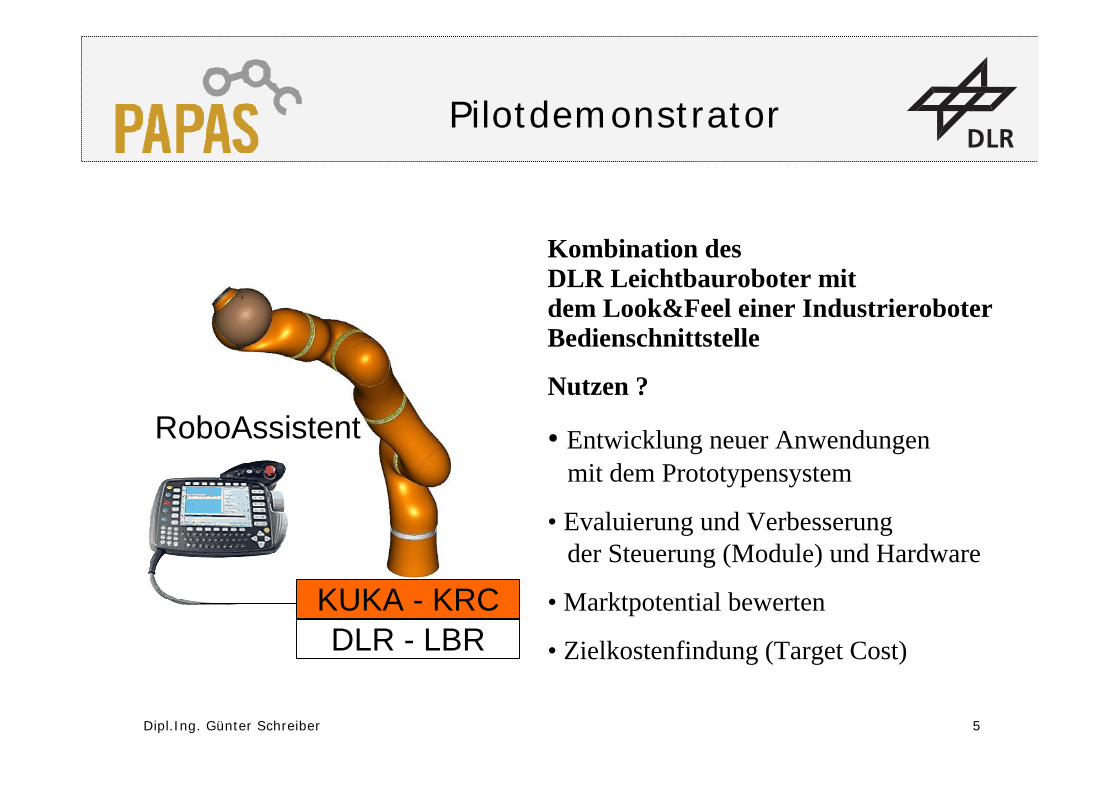
Kombination des DLR Leichtbauroboter mit dem Look&Feel einer Industrieroboter Bedienschnittstelle
Nutzen ?
• Entwicklung neuer Anwendungenmit dem Prototypensystem
• Evaluierung und Verbesserungder Steuerung (Module) und Hardware
• Marktpotential bewerten
• Zielkostenfindung (Target Cost)
RoboAssistent
KUKA - KRCDLR - LBR
Pilotdemonstrator

Dipl.Ing. Günter Schreiber 6
DLR
Industrierobotersteuerung KUKA KRC
• Positionsgeregelte Roboter mit bis zu sechs Achsen plus sechs Zusatzachsen
• Programmablaufsteuerung (KRL)• Bedienoberfläche & Bediengerät
• In der Industrie eingeführte Programmierumgebung
Dipl.Ing. Günter Schreiber 7
DLR
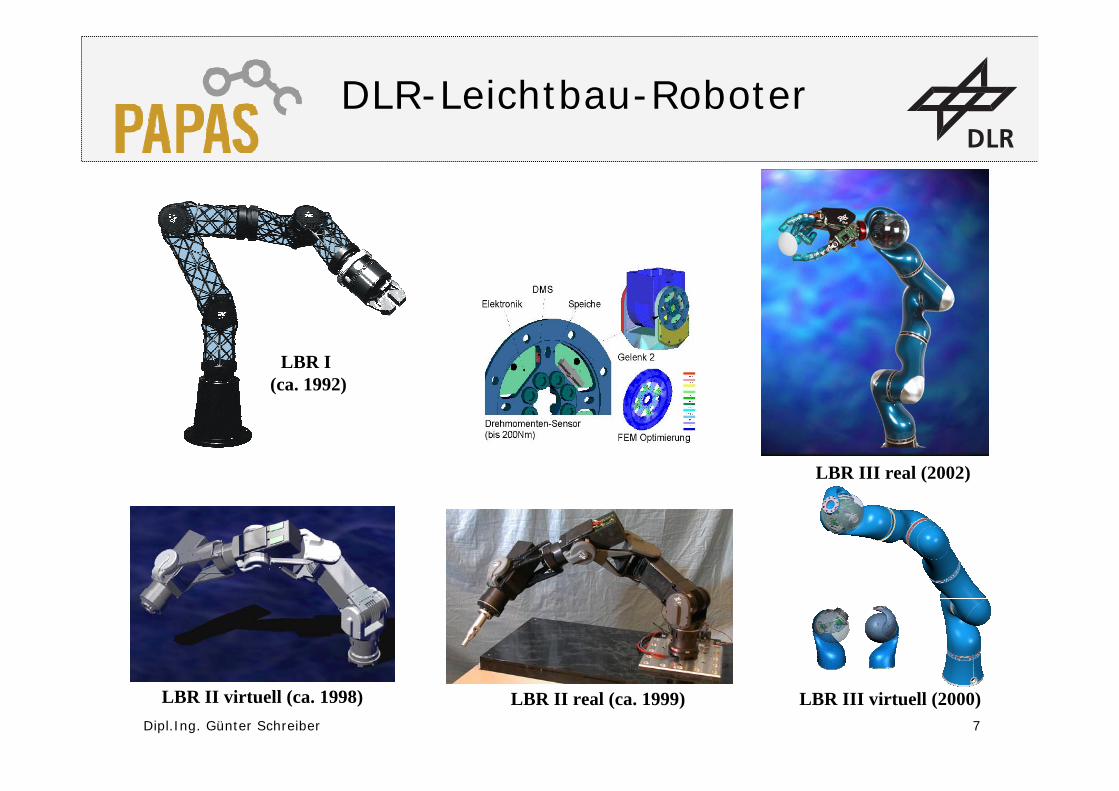
LBR I (ca. 1992)
LBR II real (ca. 1999)
LBR III real (2002)
LBR II virtuell (ca. 1998) LBR III virtuell (2000)
DLR-Leichtbau-Roboter
Dipl.Ing. Günter Schreiber 8
DLR
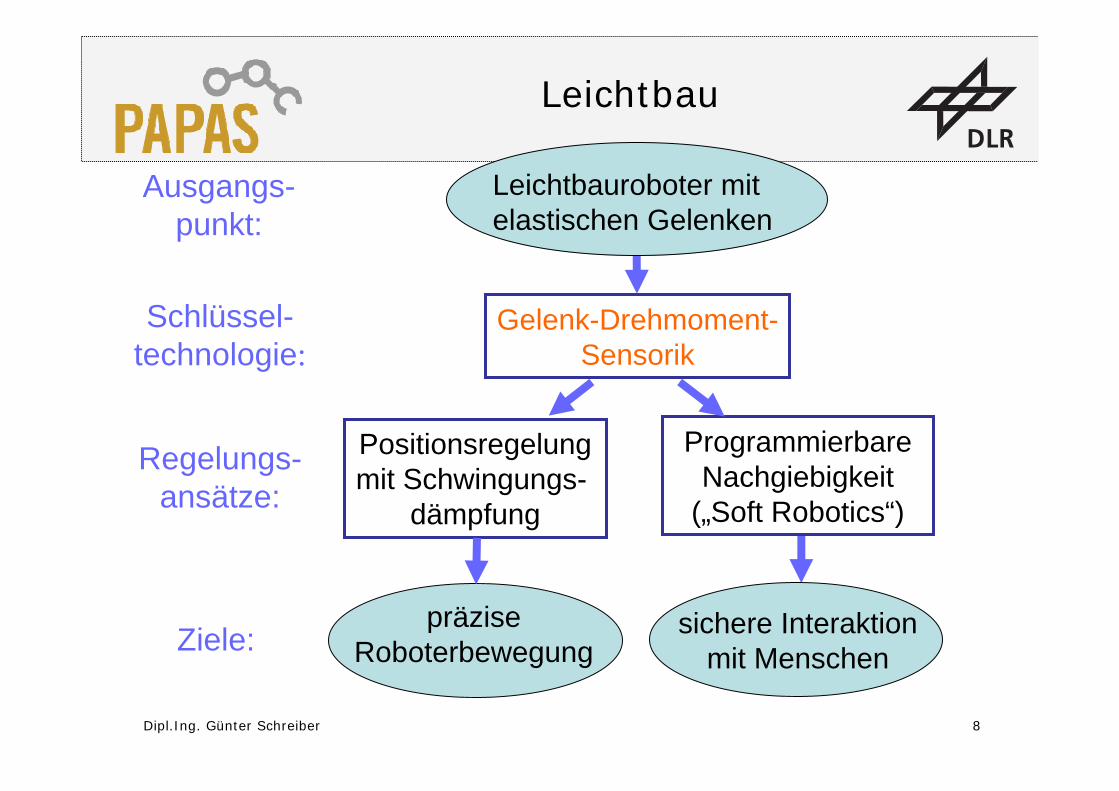
Leichtbau
Ziele:
Schlüssel-technologie:
Ausgangs-punkt:
Regelungs-ansätze:
ProgrammierbareNachgiebigkeit
(„Soft Robotics“)
präziseRoboterbewegung
sichere Interaktion mit Menschen
Gelenk-Drehmoment-Sensorik
Positionsregelungmit Schwingungs-
dämpfung
Leichtbauroboter mitelastischen Gelenken
Dipl.Ing. Günter Schreiber 9
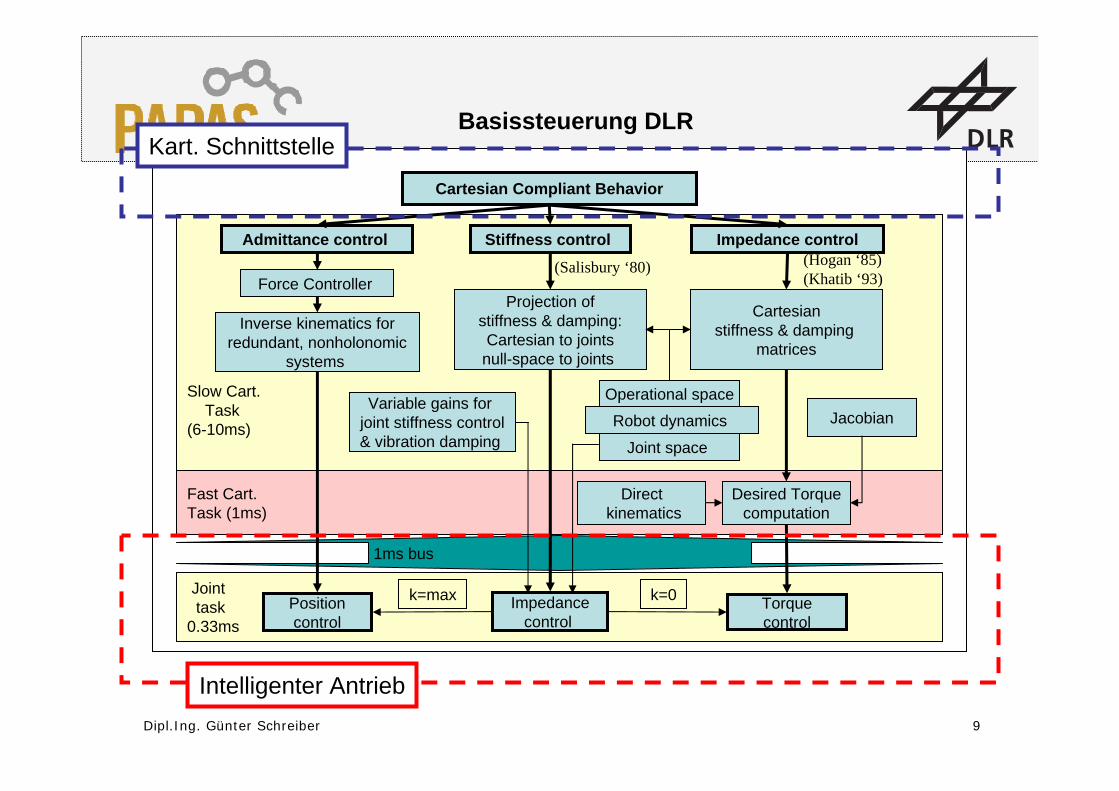
DLRBasissteuerung DLR
Jointtask
0.33ms
Slow Cart. Task
(6-10ms)
Fast Cart. Task (1ms)
Cartesian Compliant Behavior
Impedance controlStiffness controlAdmittance control
Force Controller
Inverse kinematics forredundant, nonholonomic
systems
Projection ofstiffness & damping:Cartesian to joints
null-space to joints
Cartesianstiffness & damping
matrices
Variable gains for joint stiffness control& vibration damping
Robot dynamics
Joint space
Operational space
Desired Torquecomputation
Positioncontrol
Torquecontrol
Impedancecontrol
1ms bus
Directkinematics
Jacobian
k=max k=0
Intelligenter Antrieb
Kart. Schnittstelle
(Salisbury ‘80) (Hogan ‘85)(Khatib ‘93)
Dipl.Ing. Günter Schreiber 10
DLR
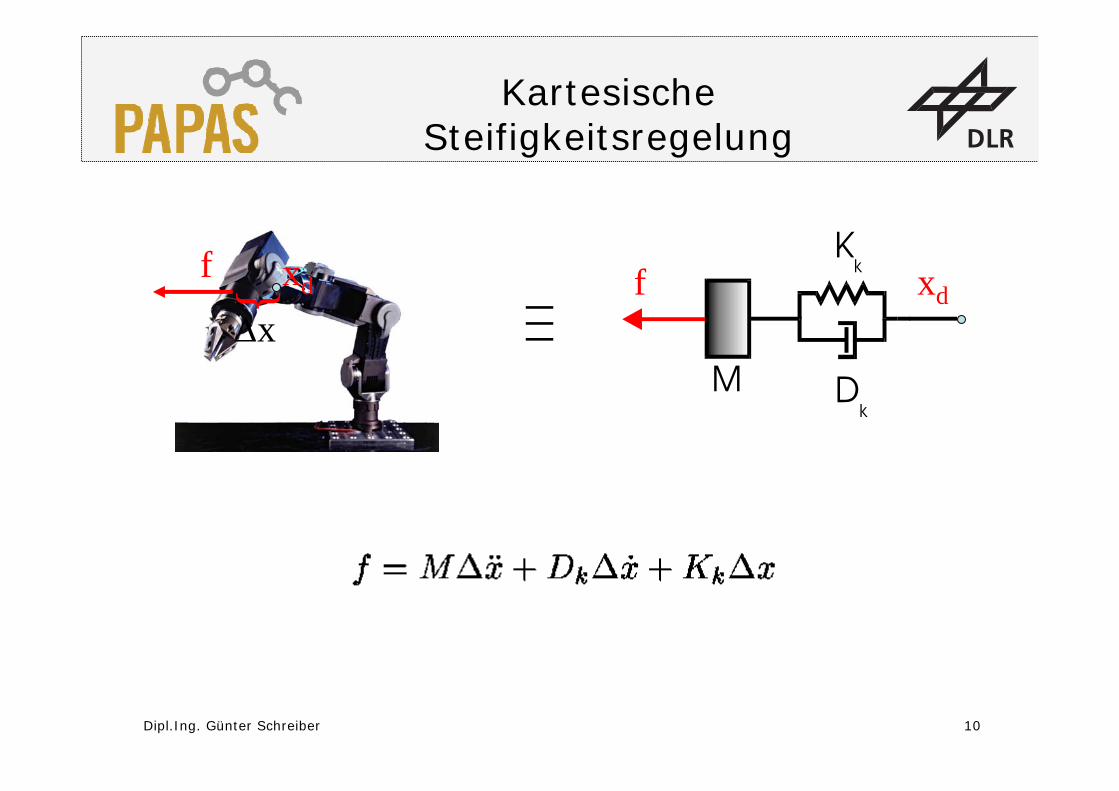
Kartesische Steifigkeitsregelung
f
∆x
{ xd ___f xd
Kk
Dk
M
Dipl.Ing. Günter Schreiber 11
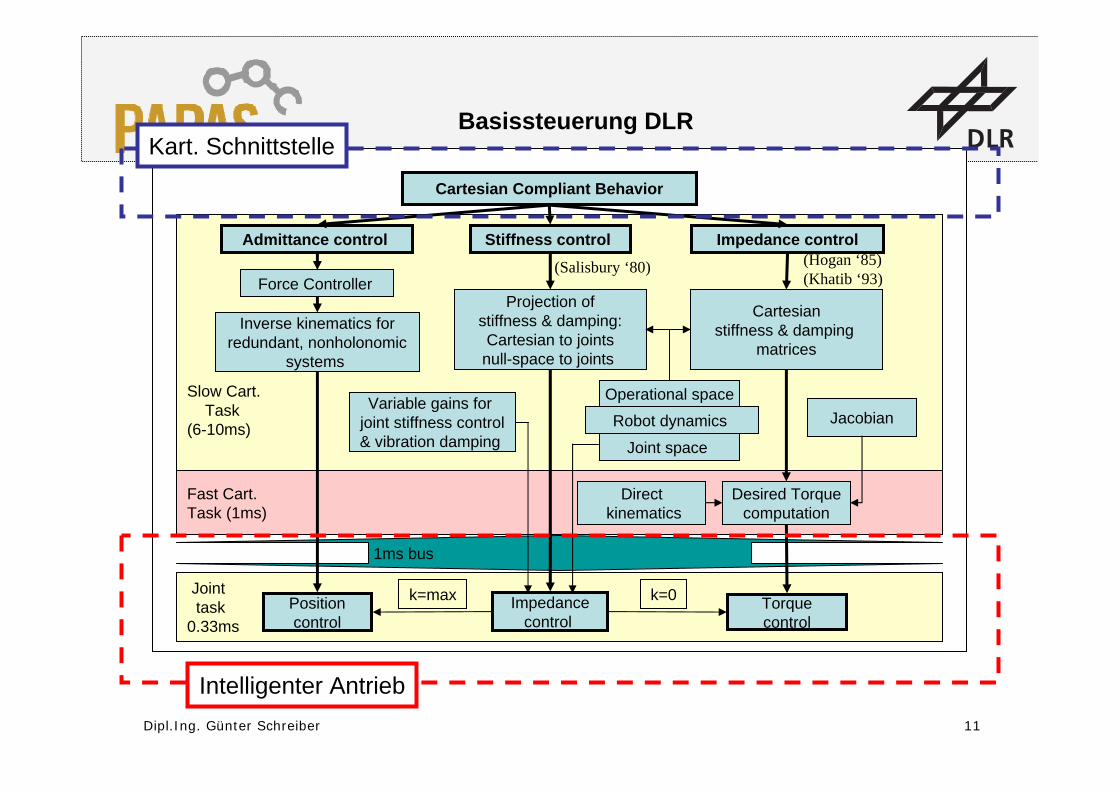
DLRBasissteuerung DLR
Jointtask
0.33ms
Slow Cart. Task
(6-10ms)
Fast Cart. Task (1ms)
Cartesian Compliant Behavior
Impedance controlStiffness controlAdmittance control
Force Controller
Inverse kinematics forredundant, nonholonomic
systems
Projection ofstiffness & damping:Cartesian to joints
null-space to joints
Cartesianstiffness & damping
matrices
Variable gains for joint stiffness control& vibration damping
Robot dynamics
Joint space
Operational space
Desired Torquecomputation
Positioncontrol
Torquecontrol
Impedancecontrol
1ms bus
Directkinematics
Jacobian
k=max k=0
Intelligenter Antrieb
Kart. Schnittstelle
(Salisbury ‘80) (Hogan ‘85)(Khatib ‘93)

Dipl.Ing. Günter Schreiber 12
DLR
Inverse Kinematik für kinematisch redundante Roboter
Dipl.Ing. Günter Schreiber 13
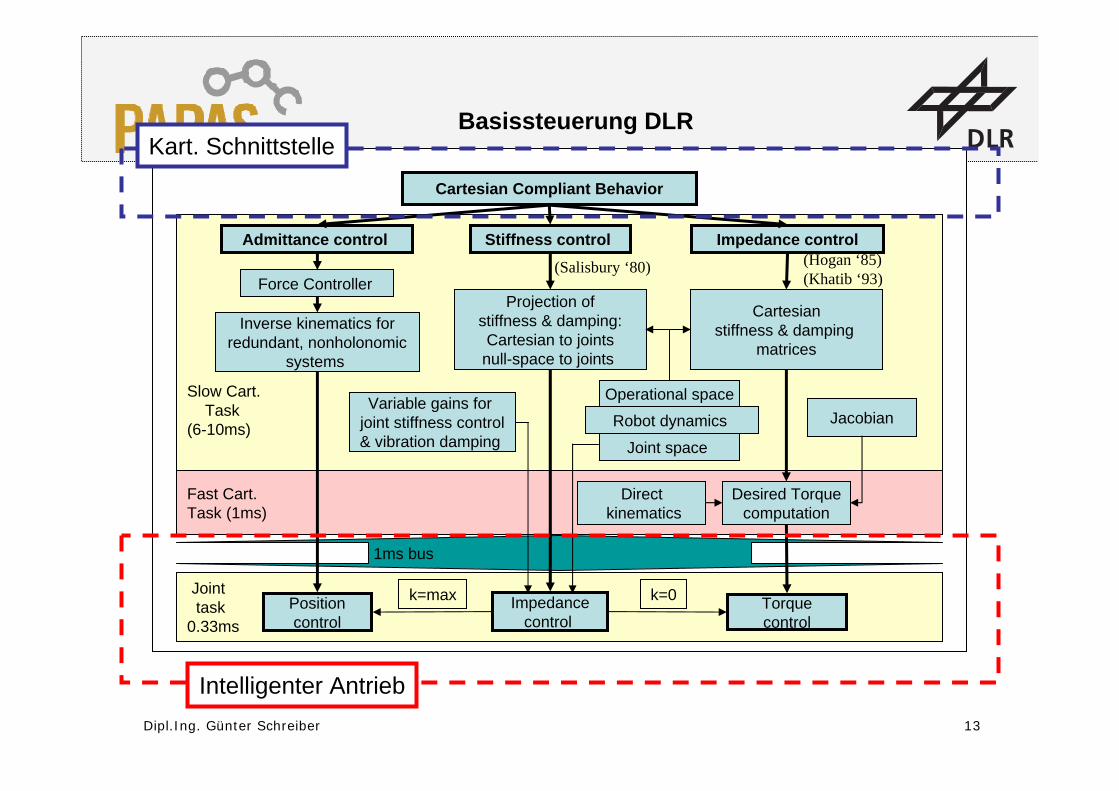
DLRBasissteuerung DLR
Jointtask
0.33ms
Slow Cart. Task
(6-10ms)
Fast Cart. Task (1ms)
Cartesian Compliant Behavior
Impedance controlStiffness controlAdmittance control
Force Controller
Inverse kinematics forredundant, nonholonomic
systems
Projection ofstiffness & damping:Cartesian to joints
null-space to joints
Cartesianstiffness & damping
matrices
Variable gains for joint stiffness control& vibration damping
Robot dynamics
Joint space
Operational space
Desired Torquecomputation
Positioncontrol
Torquecontrol
Impedancecontrol
1ms bus
Directkinematics
Jacobian
k=max k=0
Intelligenter Antrieb
Kart. Schnittstelle
(Salisbury ‘80) (Hogan ‘85)(Khatib ‘93)
Dipl.Ing. Günter Schreiber 14
DLR
Unterschiede zu bisherigen Industrierobotern
• Nachgiebigkeit – Neu: Gelenke dürfen Abweichung zur kommandierten &
geplanten Position aufgrund von Kontaktsituationen aufweisenDAMIT: Roboter befindet sich nicht an kommandierter Position
– Annahmen aufgrund der bisherig ausschließlich genutzten Positionsregelung nicht mehr gültig
– Rückpositionierung– Schleppfehlerüberwachung (-> Sicherheit)
• Kinematische Redundanz – bisherige Robotergenerationen besitzen eindeutige
Beziehungen zwischen kartesischer und Gelenkwinkel „Welt“
Dipl.Ing. Günter Schreiber 15
DLRSicherheit
• Ablagen von geplanter Bahn möglich – bisherige Schleppfehlerüberwachung verliert ihre zentrale
Bedeutung
• Beim „Teachen“ direkter Kontakt zwischen Mensch
und Roboter
• Zustimmungsschalter, Bedienteile sollten zusätzlich
am Roboter verfügbar sein (Ergonomie & Sicherheit)
• Not-Aus
Dipl.Ing. Günter Schreiber 16
DLR
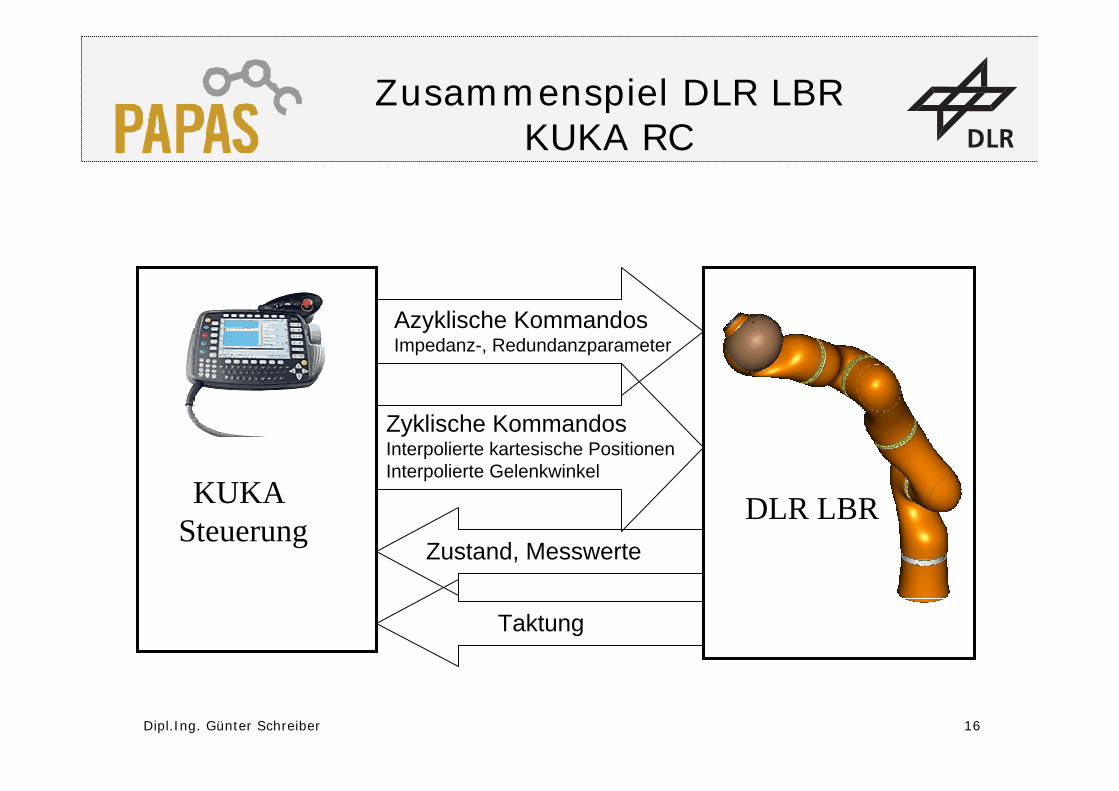
Zusammenspiel DLR LBR KUKA RC
KUKA Steuerung
DLR LBR
Azyklische KommandosImpedanz-, Redundanzparameter
Zyklische KommandosInterpolierte kartesische PositionenInterpolierte Gelenkwinkel
Zustand, Messwerte
Taktung

Dipl.Ing. Günter Schreiber 17
DLR
Neue Robotersysteme, Produktinnovationen, Anwendungen

Dipl.Ing. Günter Schreiber 18
DLRAutomatica 2004
Dipl.Ing. Günter Schreiber 19
DLRAusblick
• Wichtiger Schritt: Service Roboter müssen die Forschungslabors verlassen
• Technologie-Demonstrator für
ausgewählte Systempartner
und Endanwender
• Fernziel: Produktions-Assistent