RT2 EIT Skript Teil1 ZeitdiskreteRegelung V1.0
14
RT2, Teil 1, Zeitdiskrete Regelung – Prof. Dr. D. Zogg 31.01.2012 1/13 Regelungstechnik 2 für EIT Teil 1: Einführung in die zeitdiskrete Regelung Version 1.0 Prof. Dr. David Zogg Institut für Automation IA Hochschule für Technik Fachhochschule Nordwestschweiz Windisch, Januar 2012
Transcript of RT2 EIT Skript Teil1 ZeitdiskreteRegelung V1.0
5/17/2018 RT2 EIT Skript Teil1 ZeitdiskreteRegelung V1.0 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil1-zeitdiskreteregelung-v10 1/13
RT2, Teil 1, Zeitdiskrete Regelung – Prof. Dr. D. Zogg 31.01.2012 1/13
Regelungstechnik 2 für EITTeil 1: Einführung in die zeitdiskrete Regelung
Version 1.0
Prof. Dr. David Zogg
Institut für Automation IA
Hochschule für Technik
Fachhochschule Nordwestschweiz
Windisch, Januar 2012

5/17/2018 RT2 EIT Skript Teil1 ZeitdiskreteRegelung V1.0 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil1-zeitdiskreteregelung-v10 2/13
RT2, Teil 1, Zeitdiskrete Regelung – Prof. Dr. D. Zogg 31.01.2012 2/13
Dokumentenkontrolle
Änderungen
Version Datum Autoren Bemerkung
1.0 01.01.2012 David Zogg Erstellung
5/17/2018 RT2 EIT Skript Teil1 ZeitdiskreteRegelung V1.0 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil1-zeitdiskreteregelung-v10 3/13
RT2, Teil 1, Zeitdiskrete Regelung – Prof. Dr. D. Zogg 31.01.2012 3/13
1. Zweck 4 2. Referenzen 4 3. Symbolverzeichnis 4 4. Einführung 5 4.1. Lernziele 5 4.2. Praxisbeispiel „Kaffeemaschine“ 5 4.3. Programmierung der Regelstrecke in MATLAB 7 4.4. Der zeitkontinuierliche Regelkreis (Repetition) 8 4.5. Programmierung des Regelkreises in MATLAB/Simulink 9 4.6. Vom zeitkontinuierlichen zum zeitdiskreten Regelkreis 10 4.7. Programmierung des digitalen Regelkreises in Simulink 11 4.8. Zusammenfassung 13

5/17/2018 RT2 EIT Skript Teil1 ZeitdiskreteRegelung V1.0 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil1-zeitdiskreteregelung-v10 4/13
RT2, Teil 1, Zeitdiskrete Regelung – Prof. Dr. D. Zogg 31.01.2012 4/13
1. Zweck
Das vorliegende Skript dient als Grundlage für das Modul „Regelungstechnik 2“ (rt2) im6. Semester des Studiengangs Elektro- und Informationstechnik (EIT).
Im Modul „Regelungstechnik 1“ (rt1) des 5. Semesters wurde die Auslegung von zeitkon-tinuierlichen PID- und Zustandsreglern behandelt. Das vorliegende Modul „Regelungs-
technik 2“ (rt2) befasst sich nun mit der zeitdiskreten Darstellung.
Im vorliegenden ersten Teil wird der zeitkontinuierliche Regelkreis kurz repetiert undeine erste Einführung in die zeitdiskrete Regelung gegeben.
2. Referenzen
[ 1 ] H. Mann, H. Schiffelgen, R. Froriep: Einführung in die Regelungstechnik, 11. Auf-lage, Hanser Verlag, München 2009
[ 2 ] M. Reuter, S. Zacher: Regelungstechnik für Ingenieure, 12. Auflage, Vie- weg+Teubner Verlag, Wiesbaden 2008
[ 3 ] H. Gassmann: Theorie der Regelungstechnink, 2. Auflage, Verlag Harri Deutsch,Rapperswil/Frankfurt 2003
[ 4 ] H.P. Geering: Regelungstechnik, 3. Auflage, Springer Verlag, Zürich/Berlin 1994
3. Symbolverzeichnis
e RegelfehlerG Strecke (Übertragungsfunktion)
K Regler (Übertragungsfunktion)
K P Verstärkung P-Anteil
K I Verstärkung I-Anteil
K D Verstärkung D-Anteil
s Laplace-Operator
T N Nachstellzeit (I-Anteil)
T V Vorhaltezeit (D-Anteil)u Eingangsgrösse (Stellgrösse, Steuergrösse)
w Führungsgrösse (Sollwert)
x Zustandsgrösse
y Ausgangsgrösse (Messgrösse, Istwert)
5/17/2018 RT2 EIT Skript Teil1 ZeitdiskreteRegelung V1.0 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil1-zeitdiskreteregelung-v10 5/13
RT2, Teil 1, Zeitdiskrete Regelung – Prof. Dr. D. Zogg 31.01.2012 5/13
4. Einführung
4.1. Lernziele
Lernziel Taxonomiestufe (Bloom)
Repetition zeitkontinuierlicher PID-Regler Anwendung
Schritt vom zeitkontinuierlichen zum zeitdiskretenRegelkreis verstehen Verständnis
Zeitdiskreten Regler für Praxibeispiel in MATLABsimulieren können
Anwendung
4.2. Praxisbeispiel „Kaffeemaschine“
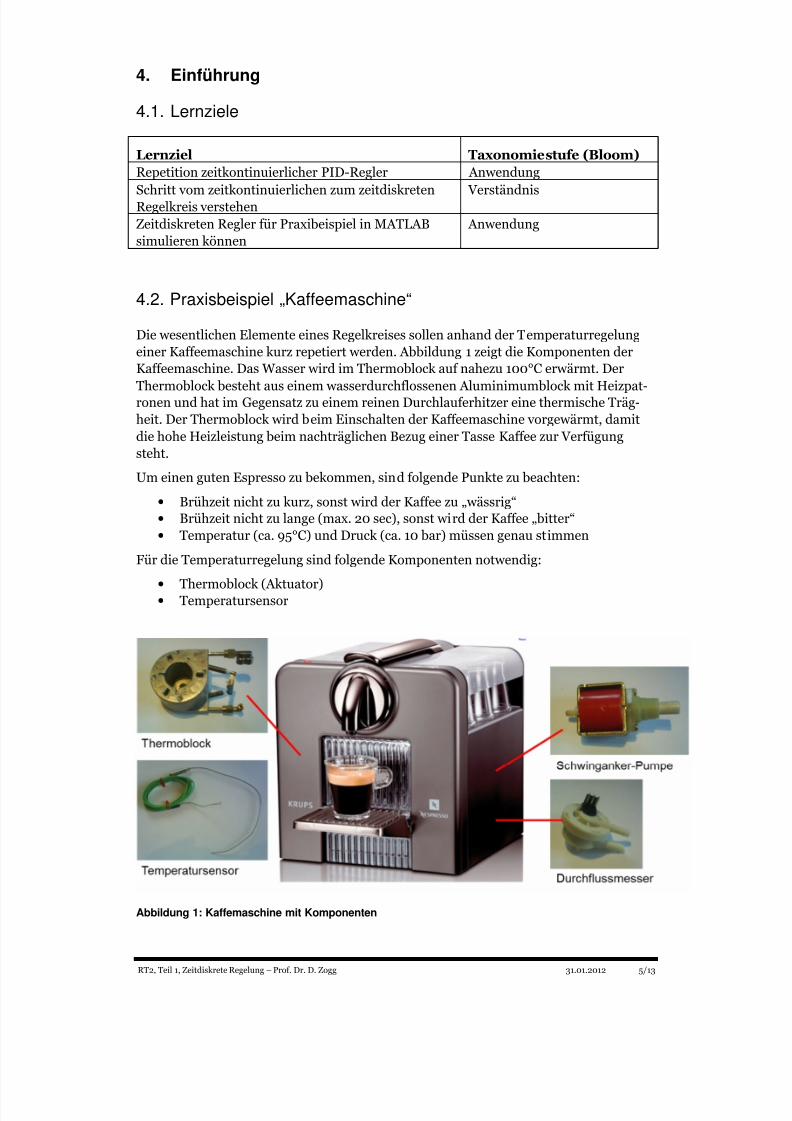
Die wesentlichen Elemente eines Regelkreises sollen anhand der Temperaturregelungeiner Kaffeemaschine kurz repetiert werden. Abbildung 1 zeigt die Komponenten derKaffeemaschine. Das Wasser wird im Thermoblock auf nahezu 100°C erwärmt. Der
Thermoblock besteht aus einem wasserdurchflossenen Aluminimumblock mit Heizpat-ronen und hat im Gegensatz zu einem reinen Durchlauferhitzer eine thermische Träg-heit. Der Thermoblock wird beim Einschalten der Kaffeemaschine vorgewärmt, damitdie hohe Heizleistung beim nachträglichen Bezug einer Tasse Kaffee zur Verfügungsteht.
Um einen guten Espresso zu bekommen, sind folgende Punkte zu beachten:
• Brühzeit nicht zu kurz, sonst wird der Kaffee zu „wässrig“• Brühzeit nicht zu lange (max. 20 sec), sonst wird der Kaffee „bitter“• Temperatur (ca. 95°C) und Druck (ca. 10 bar) müssen genau stimmen
Für die Temperaturregelung sind folgende Komponenten notwendig:
• Thermoblock (Aktuator)• Temperatursensor
Abbildung 1: Kaffemaschine mit Komponenten
5/17/2018 RT2 EIT Skript Teil1 ZeitdiskreteRegelung V1.0 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil1-zeitdiskreteregelung-v10 6/13
RT2, Teil 1, Zeitdiskrete Regelung – Prof. Dr. D. Zogg 31.01.2012 6/13
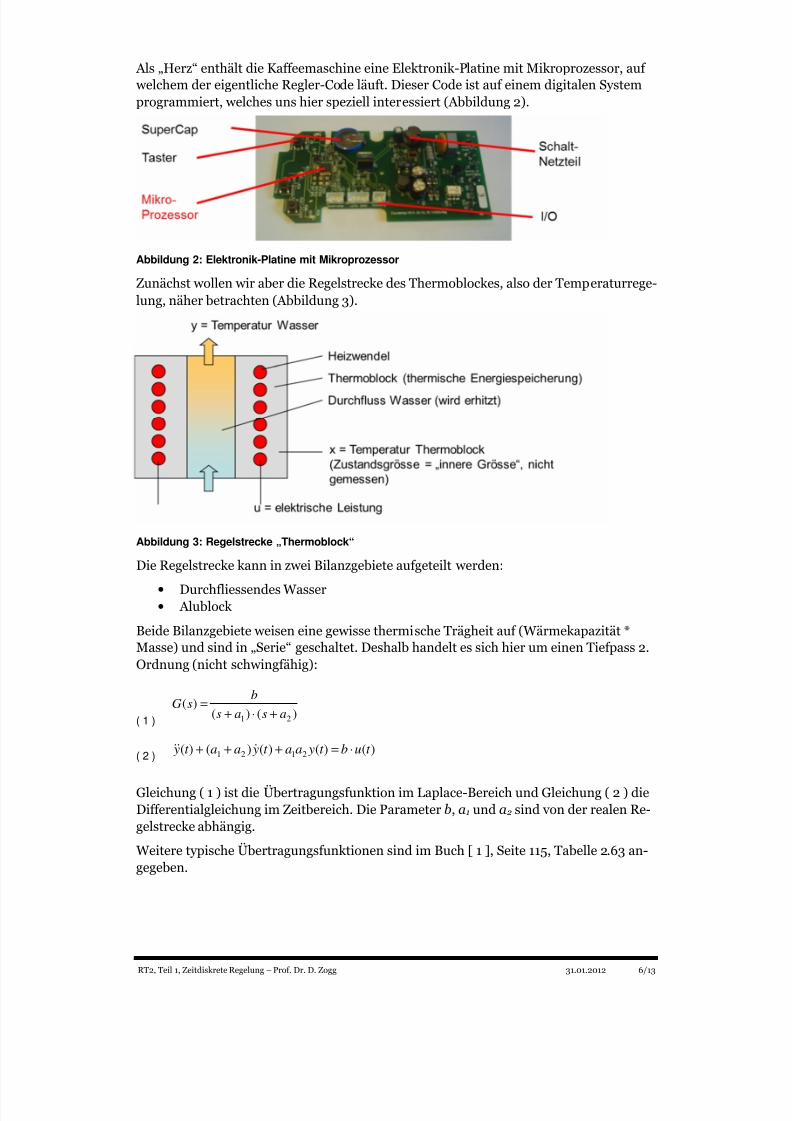
Als „Herz“ enthält die Kaffeemaschine eine Elektronik-Platine mit Mikroprozessor, auf welchem der eigentliche Regler-Code läuft. Dieser Code ist auf einem digitalen Systemprogrammiert, welches uns hier speziell interessiert (Abbildung 2).
Abbildung 2: Elektronik-Platine mit Mikroprozessor
Zunächst wollen wir aber die Regelstrecke des Thermoblockes, also der Temperaturrege-lung, näher betrachten (Abbildung 3).
Abbildung 3: Regelstrecke „Thermoblock“
Die Regelstrecke kann in zwei Bilanzgebiete aufgeteilt werden:
• Durchfliessendes Wasser• Alublock
Beide Bilanzgebiete weisen eine gewisse thermische Trägheit auf (Wärmekapazität *Masse) und sind in „Serie“ geschaltet. Deshalb handelt es sich hier um einen Tiefpass 2.Ordnung (nicht schwingfähig):
( 1 ))()(
)(21 asas
bsG
+⋅+
=
( 2 ))()()()()( 2121 t ubt yaat yaat y ⋅=+++ &&&
Gleichung ( 1 ) ist die Übertragungsfunktion im Laplace-Bereich und Gleichung ( 2 ) dieDifferentialgleichung im Zeitbereich. Die Parameter b, a1 und a2 sind von der realen Re-gelstrecke abhängig.
Weitere typische Übertragungsfunktionen sind im Buch [ 1 ], Seite 115, Tabelle 2.63 an-gegeben.
5/17/2018 RT2 EIT Skript Teil1 ZeitdiskreteRegelung V1.0 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil1-zeitdiskreteregelung-v10 7/13
RT2, Teil 1, Zeitdiskrete Regelung – Prof. Dr. D. Zogg 31.01.2012 7/13
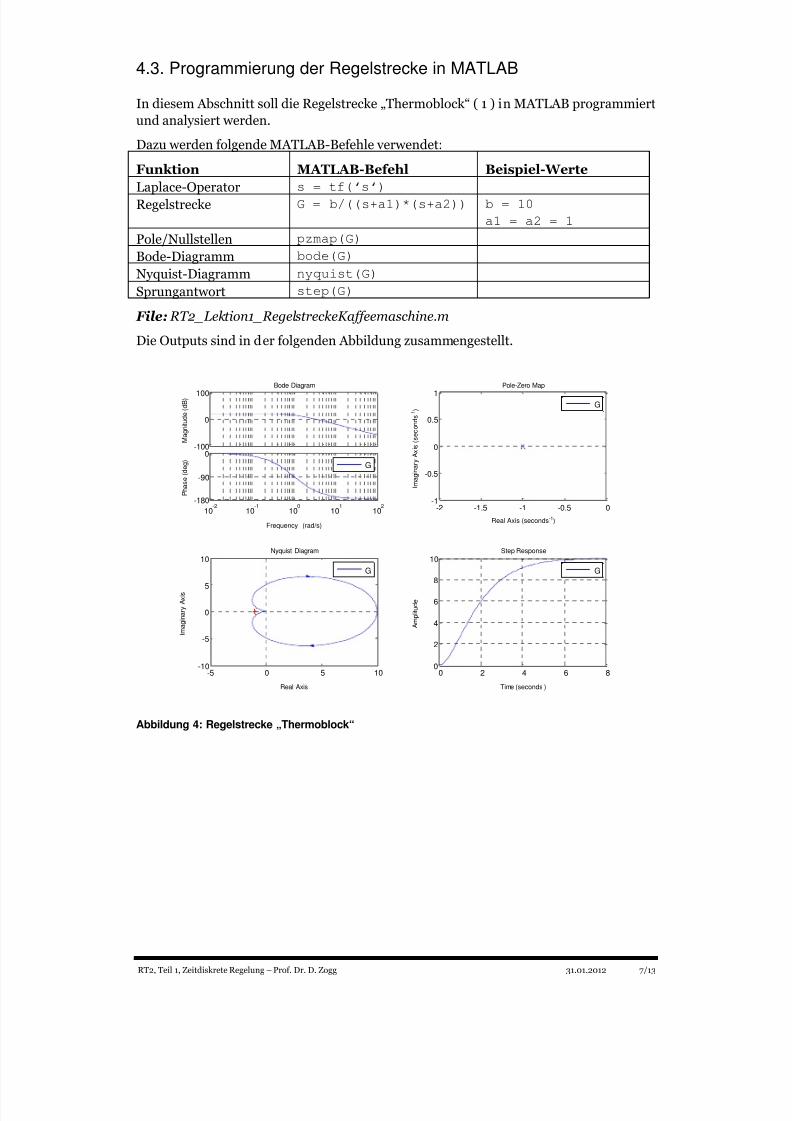
4.3. Programmierung der Regelstrecke in MATLAB
In diesem Abschnitt soll die Regelstrecke „Thermoblock“ ( 1 ) in MATLAB programmiertund analysiert werden.
Dazu werden folgende MATLAB-Befehle verwendet:
Funktion MATLAB-Befehl Beispiel-WerteLaplace-Operator s = tf(‘s‘)
Regelstrecke G = b/((s+a1)*(s+a2)) b = 10
a1 = a2 = 1 Pole/Nullstellen pzmap(G)
Bode-Diagramm bode(G)
Nyquist-Diagramm nyquist(G)
Sprungantwort step(G)
File: RT2_Lektion1_RegelstreckeKaffeemaschine.m
Die Outputs sind in der folgenden Abbildung zusammengestellt.
Abbildung 4: Regelstrecke „Thermoblock“
-2 -1.5 -1 -0.5 0-1
-0.5
0
0.5
1
Pole-Zero Map
Real Axis (seconds-1)
I m a g i n a r y A x i s ( s e c o n d s - 1 )
G
-100
0
100
M a g n i t u d e ( d B )
10-2
10-1
100
101
102
-180
-90
0
P h a s e ( d e g )
Bode Diagram
Frequency (rad/s)
G
-5 0 5 10-10
-5
0
5
10
Nyquist Diagram
Real Axis
I m a g i n a r y A x i s
G
0 2 4 6 80
2
4
6
8
10
Step Response
Time (seconds )
A m p l i t u d e
G

5/17/2018 RT2 EIT Skript Teil1 ZeitdiskreteRegelung V1.0 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil1-zeitdiskreteregelung-v10 8/13
RT2, Teil 1, Zeitdiskrete Regelung – Prof. Dr. D. Zogg 31.01.2012 8/13
4.4. Der zeitkontinuierliche Regelkreis (Repetition)
Wenn die Regelstrecke „Thermoblock“ ( 1 ) als G bezeichnet wird und der Temperatur-regler als K, beschreibt folgendes Signalflussbild den zeitkontinuierlichen Regelkreis.Dabei sind alle Signale zeitkontinuierlich (analog). Dazu gehören die Führungsgrösse w (Solltemperatur), der Regelfehler e (Temperaturabweichung), die Stellgrösse u (Heizleis-tung), und die Messgrösse y (Ist-Temperatur).
Abbildung 5: Zeitkontinuierlicher (analoger) Regelkreis
Der zeitkontinuierliche Regler K kann z.B. ein PID-Regler sein, welcher folgendeForm hat:
( 3 ) ∫ ⋅+⋅⋅+⋅=
dt
t deK dt t eK t eK t u D I p
)()()()(
mit den Verstärkungen K P für den P-Anteil, K I für den I-Anteil und K D für den D- Anteil. Laplace-transformiert gilt die Gleichung ( 4 ), welche mit der Definitionder Nachstellzeit T N und der Vorhaltezeit T V in ( 5 ) umgewandelt werden kann.
( 4 ) sK s
K K sK D
I p ⋅++=)(
I
P N
K
K T =
P
DV
K
K T =
( 5 )
)1
1()( sT sT
K sK V
N
p ⋅+
⋅
+=

5/17/2018 RT2 EIT Skript Teil1 ZeitdiskreteRegelung V1.0 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil1-zeitdiskreteregelung-v10 9/13
RT2, Teil 1, Zeitdiskrete Regelung – Prof. Dr. D. Zogg 31.01.2012 9/13
4.5. Programmierung des Regelkreises in MATLAB/Simulink
Der zeitkontinuierliche Regelkreis aus Abbildung 5 wird nun in MATLAB/Simulink pro-grammiert, was mit Stellgrössenbeschränkung und entsprechendes Skalierungen auf folgendes Simulink-Signalflussbild führt (die Stellgrössenbeschränkung ist ein wichtigerSchritt zur realitätsnahen Simulation!):
Abbildung 6: Analoger Regelkreis „Temperaturregelung Kaffeemaschine“ in Simulink
File: RT2_Lektion1_AnalogPID_Kaffeemaschine.mdl
Es wird der zeitkontinuierliche PID-Block aus der Simulink-Library verwendet:
Abbildung 7: Simulink-Block „PID Kontinuierlich“
Die Sprungantwort auf einen Sprung in der Führungsgrösse w um 50°C ist wie folgt:
Abbildung 8: Sprungantwort auf Führungsgrösse 0 50 (links), Stellgrösse u (rechts)
5/17/2018 RT2 EIT Skript Teil1 ZeitdiskreteRegelung V1.0 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil1-zeitdiskreteregelung-v10 10/13
RT2, Teil 1, Zeitdiskrete Regelung – Prof. Dr. D. Zogg 31.01.2012 10/13
Die Stellgrössenbeschränkung bei +50 Watt ist deutlich zu erkennen. Das Regelverhal-ten kann über P-, I- und D-Anteil optimiert werden.
Dies ist alles soweit nichts Neues. Nun folgt im nächsten Kapitel aber der Schritt in diedigitale Welt.
4.6. Vom zeitkontinuierlichen zum zeitdiskreten Regelkreis
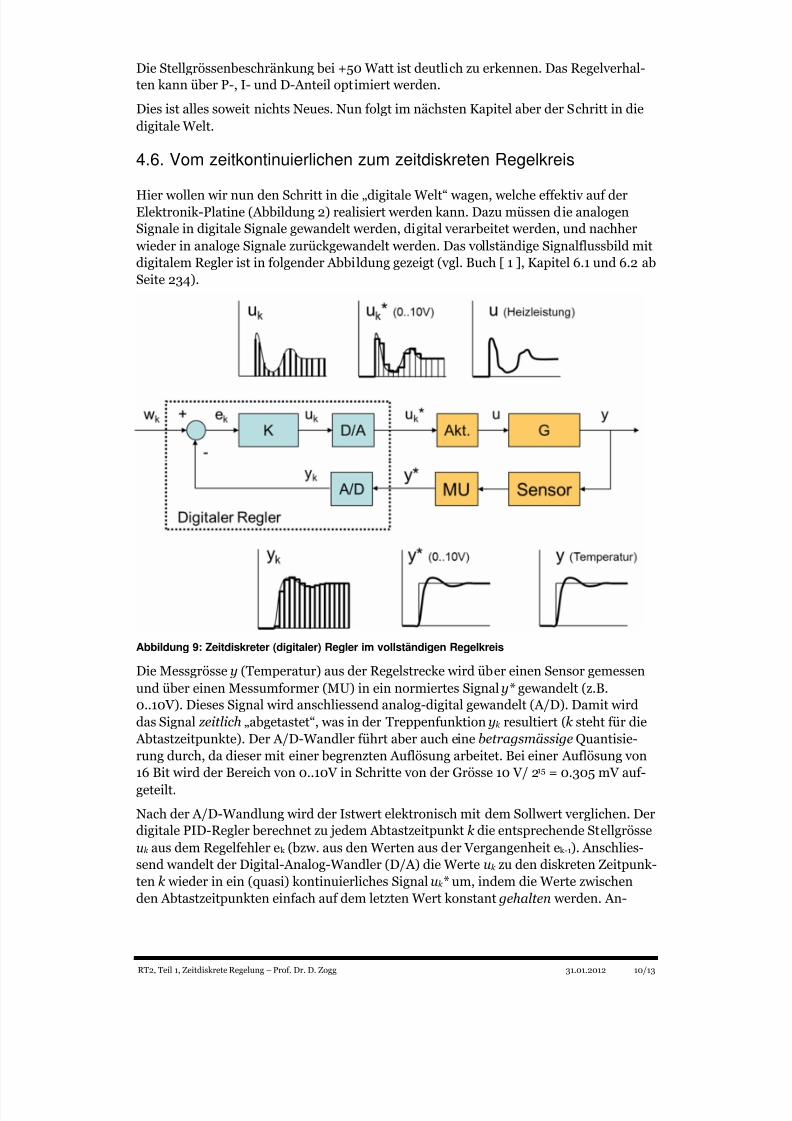
Hier wollen wir nun den Schritt in die „digitale Welt“ wagen, welche effektiv auf derElektronik-Platine (Abbildung 2) realisiert werden kann. Dazu müssen die analogenSignale in digitale Signale gewandelt werden, digital verarbeitet werden, und nachher wieder in analoge Signale zurückgewandelt werden. Das vollständige Signalflussbild mitdigitalem Regler ist in folgender Abbildung gezeigt (vgl. Buch [ 1 ], Kapitel 6.1 und 6.2 abSeite 234).
Abbildung 9: Zeitdiskreter (digitaler) Regler im vollständigen Regelkreis
Die Messgrösse y (Temperatur) aus der Regelstrecke wird über einen Sensor gemessenund über einen Messumformer (MU) in ein normiertes Signal y* gewandelt (z.B.0..10V). Dieses Signal wird anschliessend analog-digital gewandelt (A/D). Damit wirddas Signal zeitlich „abgetastet“, was in der Treppenfunktion yk resultiert (k steht für die Abtastzeitpunkte). Der A/D-Wandler führt aber auch eine betragsmässige Quantisie-rung durch, da dieser mit einer begrenzten Auflösung arbeitet. Bei einer Auflösung von16 Bit wird der Bereich von 0..10V in Schritte von der Grösse 10 V/ 215 = 0.305 mV auf-geteilt.
Nach der A/D-Wandlung wird der Istwert elektronisch mit dem Sollwert verglichen. Derdigitale PID-Regler berechnet zu jedem Abtastzeitpunkt k die entsprechende Stellgrösseuk aus dem Regelfehler ek (bzw. aus den Werten aus der Vergangenheit ek-1). Anschlies-send wandelt der Digital-Analog-Wandler (D/A) die Werte uk zu den diskreten Zeitpunk-ten k wieder in ein (quasi) kontinuierliches Signal uk* um, indem die Werte zwischenden Abtastzeitpunkten einfach auf dem letzten Wert konstant gehalten werden. An-

5/17/2018 RT2 EIT Skript Teil1 ZeitdiskreteRegelung V1.0 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil1-zeitdiskreteregelung-v10 11/13
RT2, Teil 1, Zeitdiskrete Regelung – Prof. Dr. D. Zogg 31.01.2012 11/13
schliessend wird die Treppenfunktion uk* durch den Aktuator wieder in ein analogesSignal „verschmiert“ (z.B. aufgrund der Trägheit der Heizung).
4.7. Programmierung des digitalen Regelkreises in Simulink
In einem weiteren Schritt soll nun das analoge Signalflussbild aus Abbildung 6 mit denElementen des digitalen Regelkreises ergänzt werden. Dazu wird der analoge PID-Reglerdurch einen entsprechenden digitalen PID-Reglerblock ersetzt. Zudem wird die Dyna-mik des Aktuators durch einen Tiefpass mit einer bestimmten Eckfrequenz (hier 50rad/sec) modelliert. Die Quantisierung im A/D-Wandler wird durch einen entsprechen-den Quantisierungsblock mit einer Schrittgrösse von 10/215 (16 bit) realisiert.
Abbildung 10: Digitaler Regelkreis „Temperaturregelung Kaffeemaschine“ in Simulink
File: RT2_Lektion1_DigiztalPID_Kaffeemaschine.mdl
Es wird der zeitdiskrete PID-Block aus der Simulink-Library verwendet:
Abbildung 11: Simulink-Block „Discrete PID Controller“ (MATLAB-Version 2011b)
Neben den eigentlichen Regelparametern P, I und D können hier zahlreiche weitere Ein-stellungen vorgenommen werden. Die wichtigsten sind:
• Sample time: Hier wählen wir zunächst eine schnelle Abtastzeit von 0.01 sec
5/17/2018 RT2 EIT Skript Teil1 ZeitdiskreteRegelung V1.0 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil1-zeitdiskreteregelung-v10 12/13
RT2, Teil 1, Zeitdiskrete Regelung – Prof. Dr. D. Zogg 31.01.2012 12/13
• Output saturation (Tab PID Advanced): Hier setzen wir die Stellgrössenbe-schränkung wie beim analogen Fall auf +/- 5 (also +/- 50 Watt)
Die Sprungantwort auf einen Sprung in der Führungsgrösse w um 50°C ist wie folgt:
Abbildung 12: „Digitale“ Sprungantwort auf Führungsgrösse 0 50 (links), Stellgrösse u (rechts)
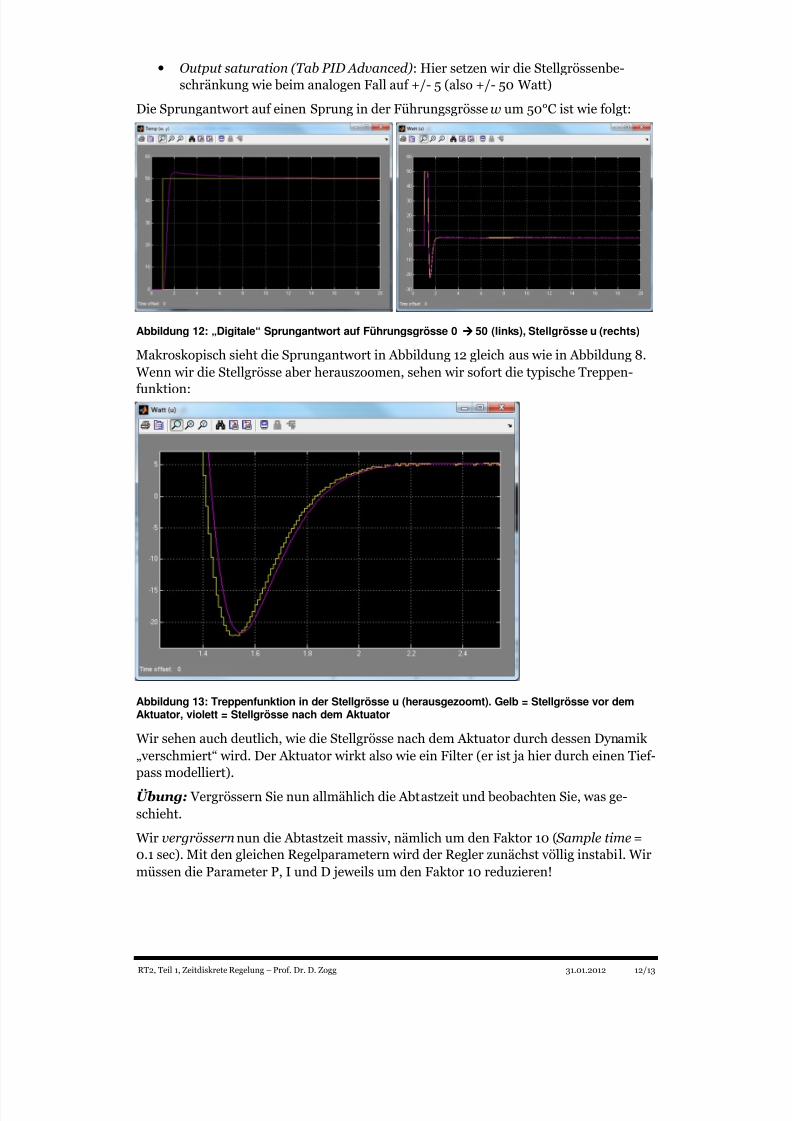
Makroskopisch sieht die Sprungantwort in Abbildung 12 gleich aus wie in Abbildung 8. Wenn wir die Stellgrösse aber herauszoomen, sehen wir sofort die typische Treppen-
funktion:
Abbildung 13: Treppenfunktion in der Stellgrösse u (herausgezoomt). Gelb = Stellgrösse vor demAktuator, violett = Stellgrösse nach dem Aktuator
Wir sehen auch deutlich, wie die Stellgrösse nach dem Aktuator durch dessen Dynamik „verschmiert“ wird. Der Aktuator wirkt also wie ein Filter (er ist ja hier durch einen Tief-pass modelliert).
Übung: Vergrössern Sie nun allmählich die Abtastzeit und beobachten Sie, was ge-schieht.
Wir vergrössern nun die Abtastzeit massiv, nämlich um den Faktor 10 ( Sample time =0.1 sec). Mit den gleichen Regelparametern wird der Regler zunächst völlig instabil. Wirmüssen die Parameter P, I und D jeweils um den Faktor 10 reduzieren!

5/17/2018 RT2 EIT Skript Teil1 ZeitdiskreteRegelung V1.0 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil1-zeitdiskreteregelung-v10 13/13
RT2, Teil 1, Zeitdiskrete Regelung – Prof. Dr. D. Zogg 31.01.2012 13/13
Auch dann haben wir immer noch instabiles Regelverhalten. Wir müssen nun die Integ-rationsmethode von „Forward Euler“ auf „Trapezoidal“ stellen. Erst jetzt haben wir eineeinigermassen „vernünftige“ Sprungantwort:
Abbildung 14: „Digitale“ Sprungantwort mit vergrösserter Abtastzeit (0.1 sec statt 0.01 sec)
Wir können nun mit den Reglerparametern P, I und D die Sprungantwort optimieren. Wir erreichen aber nicht mehr dieselbe Robustheit wie mit der kleinen Abtastzeit von0.01 sec!
Daraus lernen wir Folgendes:
• Das Vergrössern der Abtastzeit destabilisiert das System. Die Robustheit nimmtab.
• Die Regelparameter müssen angepasst werden, da offenbar die Abtastzeit einegrosse Rolle spielt. Bei einer Vergrösserung der Abtastzeit um den Faktor 10mussten wir die Regelparameter um den Faktor 10 verkleinern.
• Die Integrationsmethode hat offenbar einen grossen Einfluss, insbesondere beigrossen Abtastzeiten. Die Methode „Trapezoidal“ ist stabiler als „Forward Euler“.
Zunächst sind diese Erkenntnisse für uns rein phänomenologisch. Wir werden aber im weiteren Verlauf des Unterrichts die Gründe dafür kennenlernen.
4.8. Zusammenfassung
Gelerntes Lernziel erreicht?
Der zeitkontinuierliche PID-Regler wurde repetiertund verstanden.
☺☺☺
Der Schritt vom zeitkontinuierlichen zum zeitdiskreten Regel-kreis wurde prinzipiell verstanden: Es muss eine A/D- und D/A-Wandlung eingeführt werdenDas Signal wird «abgetastet» mit bestimmter «Abtastzeit»
☺☺☺
Wir haben den zeitdiskreten PID-Regler in MATLAB simuliert
Wir haben interessante Phänomene kennengelernt. Die Ro- bustheit nimmt offenbar ab.Natürlich möchten wir die Gründe erfahren.
☺
Ausblick
Verstehen, was «hinter» dem PID-Block in MATLAB stecktGleichungen des zeitdiskreten PID-Reglers kennenlernen Wie implementiert man so was in der Realität?