
Scara- Roboter E2C Serie -...
81
E2C Serie Rev. 1 EM027R932F Scara- Roboter MANIPULATOR HANDBUCH
Transcript of Scara- Roboter E2C Serie -...
E2C Serie
Rev. 1 EM027R932F
Scara- Roboter
MANIPULATOR HANDBUCH
MA
NIP
ULATO
R H
AN
DB
UC
H E
2C S
erie Rev. 1
E2C Rev.1 i
Scara-Roboter
E2C Serie Manipulatorarm Handbuch Rev. 1
Copyright 2002 SEIKO EPSON CORPORATION Alle Rechte vorbehalten.
ii E2C Rev.1
GARANTIE Das Robotersystem sowie alle Optionen werden vor Versand an den Kunden sehr strengen Qualitätskontrollen, Tests und Untersuchungen unterzogen, um sicher zu stellen, dass das System in einwandfreiem Zustand ist und unseren hohen Leistungsanforderungen genügt. Alle Schäden bzw. Fehlfunktionen, die trotz normaler Betriebsbedingungen und Handhabung entstanden sind, werden innerhalb der normalen Garantiezeit kostenlos repariert. (Bitte informieren Sie sich bei Ihrem regionalen EPSON-Vertrieb über die übliche Garantiezeit.) Für die Reparatur folgender Schäden muss der Kunde aufkommen (selbst wenn sie innerhalb der Garantiezeit auftreten): 1. Schäden oder Fehlfunktionen, die durch nachlässige Bedienung oder
Bedienvorgänge verursacht wurden, die nicht in diesem Handbuchbeschrieben sind.
2. Unerlaubte kundenseitige Modifikation oder Demontage. 3. Schäden oder Fehlfunktionen, die durch unerlaubte Einstellungen oder
Reparaturversuche verursacht wurden. 4. Durch Naturkatastrophen (wie z.B. Erdbeben, Wasserschäden etc.)
hervorgerufene Schäden.
Warnungen, Vorsichtsgebote, Nutzung:
1. Wird der Roboter oder mit ihm verbundene Ausrüstung außerhalb der dafürbestimmten Betriebsbedingungen und Produktspezifikationen betrieben,verfällt der Garantieanspruch.
2. Sollten Sie sich nicht an die in diesem Handbuch niedergelegten Warnungenund Vorsichtsgebote halten, müssen wir die Verantwortung für Fehlfunktionenund Unfälle ablehnen, selbst wenn sie zu Verletzungen oder Todesfolge führen.
3. Wir können nicht alle möglichen Gefahren und die daraus resultierendenKonsequenzen vorhersehen, weshalb dieses Handbuch den Nutzer nicht vorallen Gefahrmomenten warnen kann.
E2C Rev.1 iii
WARENZEICHEN
Microsoft ist ein eingetragenes Warenzeichen und Windows und das Windows-Logo sind eingetragene Warenzeichen der Microsoft Corporation. Andere Marken und Produktnamen sind Warenzeichen oder eingetragene Warenzeichen der jeweiligen Inhaber.
HINWEIS ¦ Kein Teil dieses Handbuches darf ohne Genehmigung vervielfältigt oder
reproduziert werden. ¦ Wir behalten uns vor, die in diesem Handbuch enthaltenen Informationen ohne
Vorankündigung zu ändern. ¦ Bitte benachrichtigen Sie uns, wenn Sie in diesem Handbuch Fehler finden
oder uns einen inhaltsbezogenen Kommentar übermitteln wollen.
Bitte wenden Sie sich mit Fragen bezüglich dieses Handbuches an:
E2C Serie Manipulatorarm Handbuch
SEIKO EPSON CORPORATION Factory Automation Systems Div.
TEL : 81-266-61-1802 FAX : 81-266-61-1846
iv E2C Rev.1
Vorwort Dieses Handbuch beinhaltet die nötigen Informationen für den richtigen Gebrauch des E2C Serie Manipulatorarms. Bitte lesen Sie dieses Handbuch und anderen in Beziehung stehende Handbücher sorgfältig, bevor Sie das Robotersystem installieren oder Kabel anschließen. Bewahren Sie dieses Handbuch jederzeit griffbereit auf.
Zusammensetzung des Steuerungssystems E2C Manipulatorarme können mit den folgenden Kombinationen aus Steuerungen und Software betrieben werden.
Die Betriebs-Methoden und Beschreibungen sind abhängig davon, welche Software Sie verwenden, unterschiedlich. Die folgenden Zeichen sind bei Bedarf neben dem entsprechenden Text eingefügt. Verwenden Sie die Beschreibungen, die Ihre verwendete Software betreffen.
Steuerung Zusammensetzung (Hardware)
Software
EPSON RC+
RC520 Steuerung mitDrive Unit SPEL CT
RC420 Steuerung EPSON
RC+
Für Details über die Befehle, sehen Sie bitte im Benutzerhandbuch oder in der "Online-Hilfe" nach.
Steuerung EIN/AUS schalten Wenn Sie die Anweisung "Die Steuerung EIN/AUS schalten" in diesem Handbuch sehen, schalten Sie alle Hardwarekomponenten EIN/AUS. Für die Zusammensetzung des Steuerungssystems lesen Sie die Tabelle oben.
Terminologieunterschiede entsprechend der Software Einige Ausdrücke sind entsprechend der Software unterschiedlich.
SPEL CT Für SPEL CT ist ein Koordinatenpunkt, der die Armposition beinhaltet, als"Position" definiert. Die Datei wird "Positionsdaten" genannt.
EPSON RC+
Für EPSON RC+ ist ein Koordinatenpunkt, der die Armposition beinhaltet, als"Punkt" definiert.Die Datei wird "Punktedatei" genannt.
E2C Rev.1 v
LIEFERANTEN Japan & Andere SEIKO EPSON CORPORATION Suwa Minami Plant
Factory Automation Systems Div. 1010 Fujimi, Fujimi-machi, Suwa-gun, Nagano, 399-0295 JAPAN
TEL : 81-266-61-1802 FAX : 81-266-61-1846 Nord- & Süd-Amerika EPSON AMERICA, INC.
Factory Automation/Robotics 18300 Central Avenue Carson, CA 90746
TEL : (562) 290-5900 FAX : (562) 290-5999 E-MAIL: [email protected] Europa EPSON DEUTSCHLAND GmbH
Factory Automation Division Zuelpicher Str. 6 D-40546 Düsseldorf
TEL : (++) 49 - 211 - 5603 391 (Vertriebsinnendienst)
FAX : (++) 49 - 211 - 5603 444 E-MAIL: [email protected] SERVICE-CENTER
vi E2C Rev.1
INHALTSVERZEICHNIS Einrichten und Betrieb 1. Sicherheitshinweise.........................................................................................................................1
1.1 Konventionen.............................................................................................................................1 1.2 Konstruktions-Sicherheit...........................................................................................................1 1.3 Für den Betrieb..........................................................................................................................2 1.4 Not-Aus......................................................................................................................................4 1.5 Manipulatorarm-Aufkleber .........................................................................................................6
2. Spezifikationen ................................................................................................................................7 2.1 Eigenschaften des E2 Serie-Manipulatorarmes.........................................................................7 2.2 Modellbezeichnung und Modellunterschiede.............................................................................8 2.3 Aufbau .....................................................................................................................................10
2.3.1 Tischplatte Standard-Modell: S Typ...................................................................................10 2.3.2 Tischplatte Reinraum-Modell: C Typ .................................................................................12 2.3.3 Mehrfach-Befestigung Standard-Modell: SM Typ ..............................................................14 2.3.4 Mehrfach-Befestigung Reinraum-Modell CM Typ..............................................................16
2.4 Spezifikationen ........................................................................................................................18 2.5 Wie man das Modell einstellt ...................................................................................................20
3. Umgebungen und Installation........................................................................................................21 3.1 Umgebungsbedingungen........................................................................................................21 3.2 Basis-Tisch ..............................................................................................................................22
3.3.1 Tischplatte.........................................................................................................................25 3.3.2 Mehrfach-Befestigung .......................................................................................................26
3.4 Auspacken und Installation ......................................................................................................27 3.4.1 Auspacken.........................................................................................................................27 3.4.2 Installationsvorgang: Tischplatte .......................................................................................28 3.4.3 Installationsvorgang: Mehrfach-Befestigung .....................................................................29
3.5 Die Kabel anschließen.............................................................................................................31 3.6 Benutzer-Kabel und Pneumatikschläuche ...............................................................................33 3.7 Standortwechsel und Lagerung ...............................................................................................35
3.7.1 Vorkehrungen für Standortwechsel und Lagerung ............................................................35 3.7.2 Den Standort der Tischplatten-Modelle wechseln .............................................................36 3.7.3 Den Standort der Mehrfach-Befestigungs-Modelle wechseln............................................38
4. Einstellung des Greifers ................................................................................................................40 4.1 Einen Greifer anbringen...........................................................................................................40 4.2 Kameras und Ventile anbringen...............................................................................................42 4.3 WEIGHT (Gewicht) und INERTIA (Trägheit) Einstellungen .....................................................44
4.3.1 WEIGHT (Gewicht) Einstellung .........................................................................................44 4.3.2 INERTIA (Trägheit) Einstellung .........................................................................................46
4.4 Vorkehrungen für die Auto-Beschleunigung/Verzögerung der 3.Achse ...................................51
E2C Rev.1 vii
5. Arbeitsbereich ............................................................................................................................... 52
5.1 Einstellung des Arbeitsbereiches durch den Pulse-Bereich (für alle Achsen).......................... 53 5.1.1 Max. Pulse-Bereich der 1. Achse...................................................................................... 54 5.1.2 Max. Pulse-Bereich der 2.Achse...................................................................................... 54 5.1.3 Max. Pulse-Bereich der 3.Achse...................................................................................... 55 5.1.4 Max. Pulse-Bereich der 4. Achse...................................................................................... 55
5.2 Arbeitsbereich-Einstellung durch mechanische Stopper ......................................................... 56 5.2.1 Einstellen der mechanischen Stopper der 1.Achse und 2.Achse...................................... 57 5.2.2 Einstellen des mechanischen Stoppers der 3.Achse ........................................................ 61
5.3 Einstellen des kartesischen (rechteckigen) Bereiches in der X-, Y-Koordinate ....................... 65 5.4 Standard Arbeitsbereich .......................................................................................................... 66
5.4.1 Tischplatte ....................................................................................................................... 67 5.4.2 Mehrfach-Befestigung....................................................................................................... 69

Einrichten und Betrieb
Dieses Kapitel beinhaltet Informationen über das Einrichten und den Betrieb des E2C Serie Manipulatorarms. Bitte lesen Sie diesen Kapitel gründlich, bevor Sie den Manipulatorarm einrichten und betreiben.

E2C Rev.1 1
1. Sicherheitshinweise
Bitte lesen Sie dieses Handbuch und anderen in Beziehung stehende Handbücher sorgfältig, bevor Sie das Robotersystem installieren oder Kabel anschließen. Bewahren Sie dieses Handbuch jederzeit griffbereit auf.
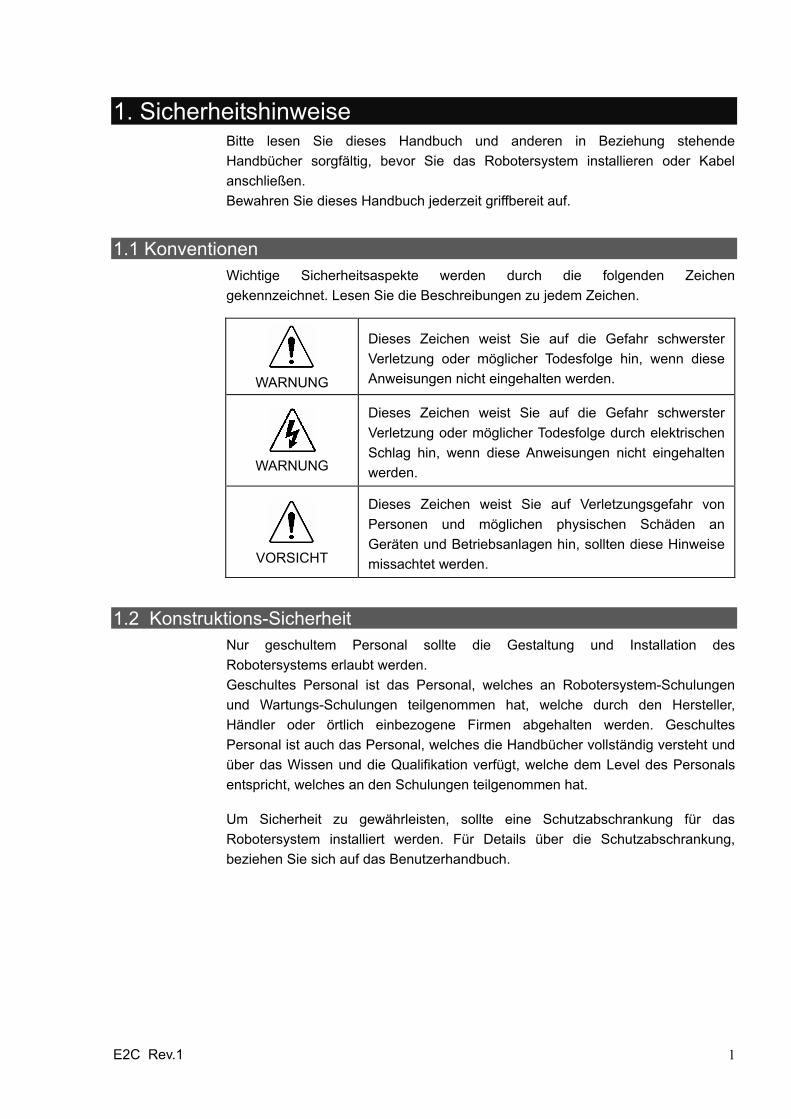
1.1 Konventionen Wichtige Sicherheitsaspekte werden durch die folgenden Zeichen gekennzeichnet. Lesen Sie die Beschreibungen zu jedem Zeichen.
WARNUNG
Dieses Zeichen weist Sie auf die Gefahr schwerster Verletzung oder möglicher Todesfolge hin, wenn diese Anweisungen nicht eingehalten werden.
WARNUNG
Dieses Zeichen weist Sie auf die Gefahr schwerster Verletzung oder möglicher Todesfolge durch elektrischen Schlag hin, wenn diese Anweisungen nicht eingehalten werden.
VORSICHT
Dieses Zeichen weist Sie auf Verletzungsgefahr von Personen und möglichen physischen Schäden an Geräten und Betriebsanlagen hin, sollten diese Hinweise missachtet werden.
1.2 Konstruktions-Sicherheit Nur geschultem Personal sollte die Gestaltung und Installation des Robotersystems erlaubt werden. Geschultes Personal ist das Personal, welches an Robotersystem-Schulungen und Wartungs-Schulungen teilgenommen hat, welche durch den Hersteller, Händler oder örtlich einbezogene Firmen abgehalten werden. Geschultes Personal ist auch das Personal, welches die Handbücher vollständig versteht und über das Wissen und die Qualifikation verfügt, welche dem Level des Personals entspricht, welches an den Schulungen teilgenommen hat. Um Sicherheit zu gewährleisten, sollte eine Schutzabschrankung für das Robotersystem installiert werden. Für Details über die Schutzabschrankung, beziehen Sie sich auf das Benutzerhandbuch.
Einrichten und Betrieb 1. Sicherheitshinweise
2 E2C Rev.1
WARNUNG
■ Personal, welches das Robotersystem mit diesem Produkt gestaltet und/oder konstruiert, muss das Kapitel Sicherheit im Benutzerhandbuch lesen, um die Sicherheitsanforderungen zu verstehen, bevor es das Robotersystem gestaltet oder konstruiert. Die Gestaltung und/oder Konstruktion des Robotersystems ohne die Sicherheitsanforderungen zu verstehen, ist extrem gefährlich. Daraus können ernste körperliche Verletzungen und/oder schweren Geräteschaden am Robotersystem folgen und ernste Sicherheitsprobleme verursacht werden.
■ Der Manipulatorarm und das Steuergerät müssen mit denUmgebungsbedingungen betrieben werden, die in deren Handbüchernbeschrieben werden. Dieses Produkt ist ausschließlich für den Gebrauch innormaler Innenraum-Umgebung entworfen und produziert worden. Die Verwendung des Produktes in einer Umgebung, die diese Bedingungenüberschreitet, kann nicht nur die Lebensdauer des Produktes verkürzen,sondern auch ernste Sicherheitsprobleme verursachen.
WARNUNG
■ Das Robotersystem muss innerhalb der Installations-Anforderungen verwendet werden, die in den Handbüchern beschrieben werden. Die Verwendung des Robotersystems außerhalb der Installations-Anforderungen kann nicht nur die Lebensdauer des Produktes verkürzen, sondern auch ernsteSicherheitsprobleme verursachen.
1.3 Für den Betrieb
WARNUNG
■ Bitte lesen Sie die Sicherheitsbezogenen Anforderungen im Kapitel Sicherheitdes Benutzerhandbuches, bevor Sie mit dem Robotersystem arbeiten. DerBetrieb des Robotersystem, ohne die Sicherheitsanforderungen zu verstehen,ist extrem gefährlich und kann zu schweren körperlichen Verletzungen und/oder schwerem Geräteschaden am Robotersystem führen.
■ Betreten Sie den Arbeitsbereich des Manipulatorarmes nicht und sehen Sienicht in den Arbeitsbereich hinein, während der Strom für das RobotersystemEINgeschaltet ist. Das Betreten des Arbeitsbereiches oder das Hineinsehen inden Arbeitsbereich während der Strom EINgeschaltet ist, ist extrem gefährlichund kann ernste Sicherheitsprobleme verursachen, da sich der Manipulatorarmbewegen kann, auch wenn es so aussieht, als wäre er angehalten.
■ Bevor Sie das Robotersystem betreiben, stellen Sie sicher, dass sich Niemandinnerhalb der Schutzabschrankung aufhält. Das Robotersystem kann imATTEND-Modus betrieben werden, auch wenn sich Jemand innerhalb derSchutzabschrankung aufhält.Die Bewegung des Manipulatorarmes findet immer begrenzten (niedrigeGeschwindigkeiten und Low Power) Status statt, um die Sicherheit desBedieners zu bewahren. Der Betrieb des Robotersystems während sichJemand innerhalb der Schutzabschrankung aufhält, ist jedoch extrem gefährlich und kann im Fall, dass der Manipulatorarm sich unerwartet bewegt, zu ernstenSicherheitsproblemen führen.
Einrichten und Betrieb 1. Sicherheitshinweise
E2C Rev.1 3
■ Drücken Sie den Not-Aus-Schalter, wann immer sich der Manipulatorarm
während des Robotersystem-Betriebes unnormal bewegt.
■ Um die Spannungsversorgung des Robotersystems abzustellen, ziehen Sie den Netzstecker aus der Steckdose. Stellen Sie sicher, dass das AC-Stromkabel mit einer Steckdose verbunden wird. Verbinden Sie es nicht direkt mit der Werksstromversorgung.
■ Bevor Sie einen Auswechselvorgang durchführen, schalten Sie das Steuergerät und das damit zusammenhängende Equipment AUS und trennen Sie dann den Netzstecker von der Spannungsversorgung.Das Ausführen eines Austauschvorganges bei eingeschalteter Spannung ist extrem gefährlich und kann zu einem elektrischen Schlag und/oder zur Fehlfunktion des Robotersystems führen.
WARNUNG
■ Die Motorensteckverbindungen dürfen nicht abgezogen oder eingesteckt werden, solange Spannung am Robotersystem anliegt. Das Einstecken oder Herausziehen der Motorsteckverbindungen bei anliegender Spannung ist extrem gefährlich und kann zu schweren körperlichen Verletzungen führen, da sich der Manipulatorarm unnormal bewegen kann. Es kann auch zu einem elektrischen Schlag und / oder zur Fehlfunktion des Robotersystems führen.
VORSICHT
■ Wann immer möglich, sollte nur eine Person das Robotersystem betreiben.Wenn es erforderlich ist, das Robotersystem mit mehr als einer Person zubetreiben, stellen Sie sicher, dass alle beteiligten Personen darüber miteinanderkommunizieren, was sie tun, und treffen Sie alle nötigen Sicherheitsvorkehrungen.
Einrichten und Betrieb 1. Sicherheitshinweise
4 E2C Rev.1
1.4 Not-Aus
Wenn sich der Manipulatorarm während des Betriebes unnormal bewegt, drücken Sie unverzüglich den Not-Aus-Schalter. Der Motorstrom wird ausgeschaltet, und die Manipulatorarmbewegung durch die Masseträgheit wird mit der generatorischen Bremse gestoppt. Vermeiden Sie es jedoch, den Not-Aus-Schalter unnötig zu drücken, während der Manipulatorarm normal arbeitet. Andernfalls kann der Manipulatorarm gegen die Peripheriegeräte schlagen, da sich die Bewegungsbahn während dem Anhalten des Robotersystems von der Bewegungsbahn im normalen Betrieb unterscheidet. Um das System während des normalen Betriebes in den Not-Aus-Modus zu versetzen, betätigen Sie den Not-Aus-Schalter, wenn sich der Manipulatorarm nicht bewegt. Lesen Sie im Steuerungs-Handbuch nach, wie der Not-Aus-Stromkreis zu verdrahten ist.
Einrichten und Betrieb 1. Sicherheitshinweise
E2C Rev.1 5
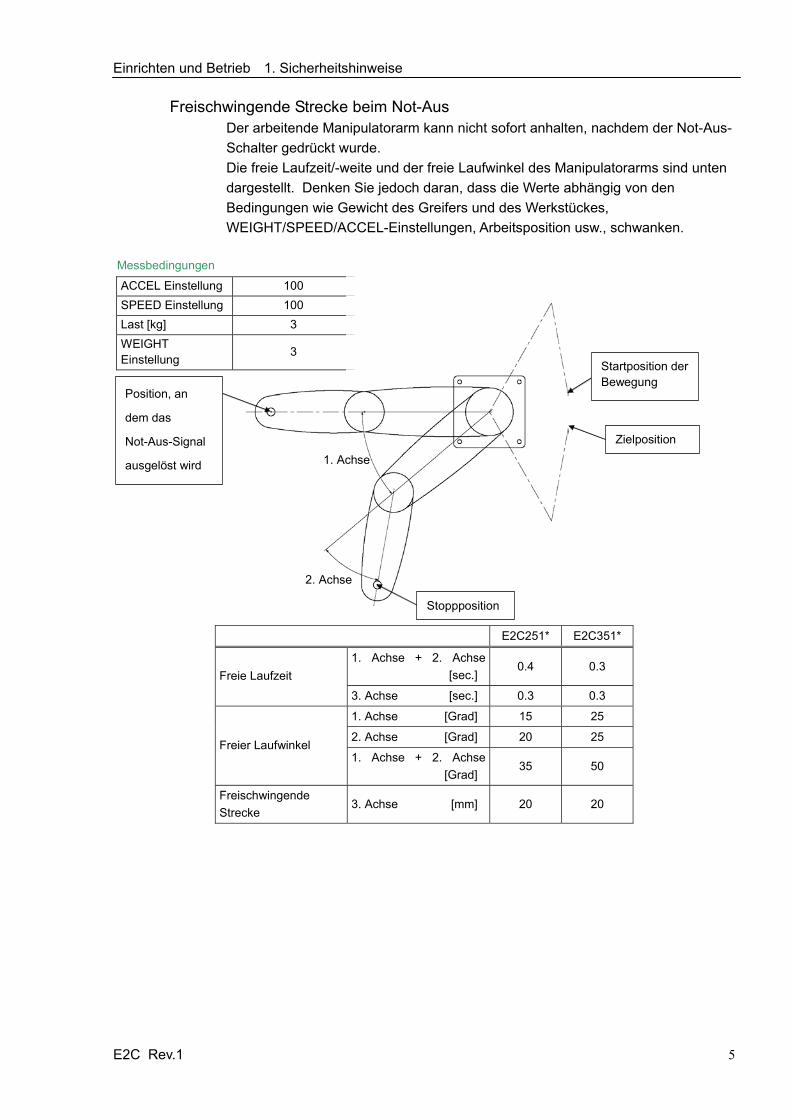
Freischwingende Strecke beim Not-Aus Der arbeitende Manipulatorarm kann nicht sofort anhalten, nachdem der Not-Aus-Schalter gedrückt wurde. Die freie Laufzeit/-weite und der freie Laufwinkel des Manipulatorarms sind unten dargestellt. Denken Sie jedoch daran, dass die Werte abhängig von den Bedingungen wie Gewicht des Greifers und des Werkstückes, WEIGHT/SPEED/ACCEL-Einstellungen, Arbeitsposition usw., schwanken.
Messbedingungen
ACCEL Einstellung 100 SPEED Einstellung 100 Last [kg] 3 WEIGHT Einstellung
3
1. Achse
Position, an
dem das
Not-Aus-Signal
ausgelöst wird
Startposition der Bewegung
Zielposition
Stoppposition
2. Achse
E2C251* E2C351*
1. Achse + 2. Achse [sec.] 0.4 0.3
Freie Laufzeit 3. Achse [sec.] 0.3 0.3
1. Achse [Grad] 15 25
2. Achse [Grad] 20 25 Freier Laufwinkel
1. Achse + 2. Achse [Grad] 35 50
Freischwingende Strecke 3. Achse [mm] 20 20
Einrichten und Betrieb 1. Sicherheitshinweise
6 E2C Rev.1
1.5 Manipulatorarm-Aufkleber
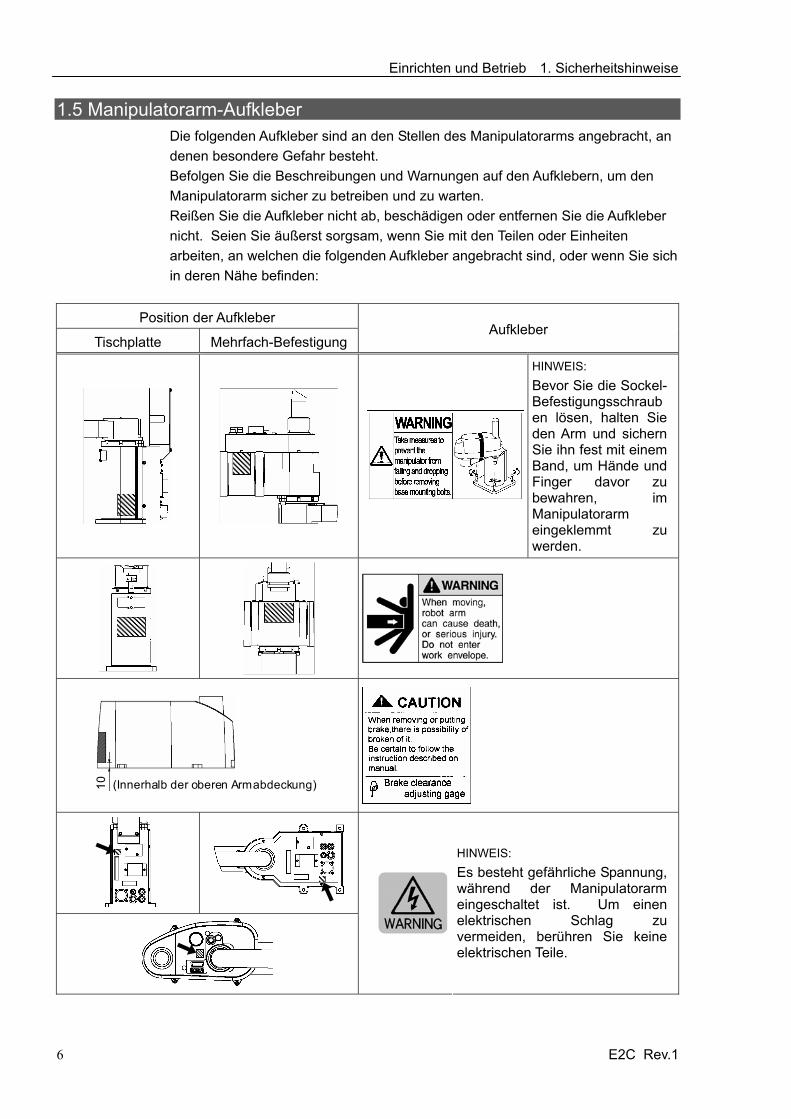
Die folgenden Aufkleber sind an den Stellen des Manipulatorarms angebracht, an denen besondere Gefahr besteht. Befolgen Sie die Beschreibungen und Warnungen auf den Aufklebern, um den Manipulatorarm sicher zu betreiben und zu warten. Reißen Sie die Aufkleber nicht ab, beschädigen oder entfernen Sie die Aufkleber nicht. Seien Sie äußerst sorgsam, wenn Sie mit den Teilen oder Einheiten arbeiten, an welchen die folgenden Aufkleber angebracht sind, oder wenn Sie sich in deren Nähe befinden:
Position der Aufkleber
Tischplatte Mehrfach-Befestigung Aufkleber
HINWEIS: Bevor Sie die Sockel-Befestigungsschrauben lösen, halten Sie den Arm und sichern Sie ihn fest mit einem Band, um Hände und Finger davor zu bewahren, im Manipulatorarm eingeklemmt zu werden.
10
(Innerhalb der oberen Armabdeckung)
HINWEIS: Es besteht gefährliche Spannung, während der Manipulatorarm eingeschaltet ist. Um einen elektrischen Schlag zu vermeiden, berühren Sie keine elektrischen Teile.
Einrichten und Betrieb 2. Spezifikationen
E2C Rev.1 7
2. Spezifikationen 2.1 Eigenschaften des E2 Serie-Manipulatorarmes
E2 Serie-Manipulatorarme wurden basierend auf der "E Serie" konstruiert und bieten hohe Leistung: hohe Geschwindigkeit; hohe Präzision; Platzeinsparung; und eine Verbesserung der Kostenleistung. Die Eigenschaften von E2 Serie-Manipulatorarmen sind folgende:
(1) Kompatibel zu E Serie-Manipulatorarmen - E2 Serie-Manipulatorarme sind in hohem Grade zu E Serie-
Manipulatorarmen kompatibel; der Installationsvorgang und die Montageabmessung des Greifers der E2 Serie sind vollständig kompatibel zu denen der E Serie.
- Die Haupt-Ersatzteile der E2 Serie-Manipulatorarme sind mit denen der E Serie gemeinsam; somit werden die Instandhaltungskosten reduziert.
(2) Platz sparen / Mehrfach-Befestigung - E2 Serie-Manipulatorarme sind kleiner geworden, da die Höhe des
Kabelschlauchs verringert wurde.
- Die Installation ist für Decke und Wand als Standard-Modell (Mehrfach-Befestigung) verfügbar.
(3) Für hohe Last verwendbar - Die hohe Last-Kapazität wurde verbessert, da das zulässige
Trägheitsmoment der U-Achse erhöht worden ist.
- Optimierte Laststeuerung macht den Betrieb mit hoher Last stabiler.
(4) Hochgeschwindigkeits-/Hochleistungs-Betrieb - Die Leistungsfähigkeit des Hochleistungs-Betriebes ist verbessert worden,
da die Leistung der Motoren erhöht worden ist.
- Die Zykluszeit ist verkürzt worden, da die Vibration geringer ist und die Arbeitsgeschwindigkeit höher ist.
Einrichten und Betrieb 2. Spezifikationen
8 E2C Rev.1
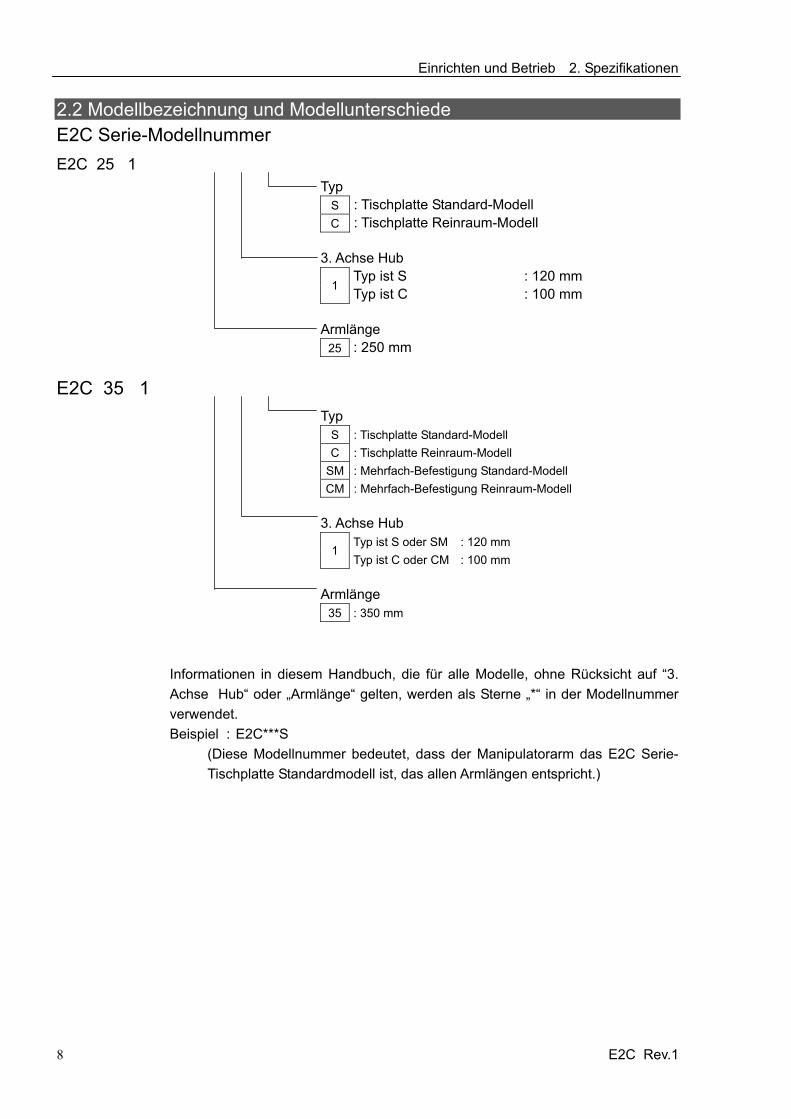
2.2 Modellbezeichnung und Modellunterschiede E2C Serie-Modellnummer E2C 25 1
Typ S : Tischplatte Standard-Modell C : Tischplatte Reinraum-Modell
3. Achse Hub
Typ ist S : 120 mm 1 Typ ist C : 100 mm
Armlänge
25 : 250 mm E2C 35 1
Typ S : Tischplatte Standard-Modell C : Tischplatte Reinraum-Modell
SM : Mehrfach-Befestigung Standard-Modell CM : Mehrfach-Befestigung Reinraum-Modell
3. Achse Hub
Typ ist S oder SM : 120 mm 1
Typ ist C oder CM : 100 mm
Armlänge 35 : 350 mm
Informationen in diesem Handbuch, die für alle Modelle, ohne Rücksicht auf “3. Achse Hub“ oder „Armlänge“ gelten, werden als Sterne „*“ in der Modellnummer verwendet. Beispiel : E2C***S
(Diese Modellnummer bedeutet, dass der Manipulatorarm das E2C Serie-Tischplatte Standardmodell ist, das allen Armlängen entspricht.)
Einrichten und Betrieb 2. Spezifikationen
E2C Rev.1 9
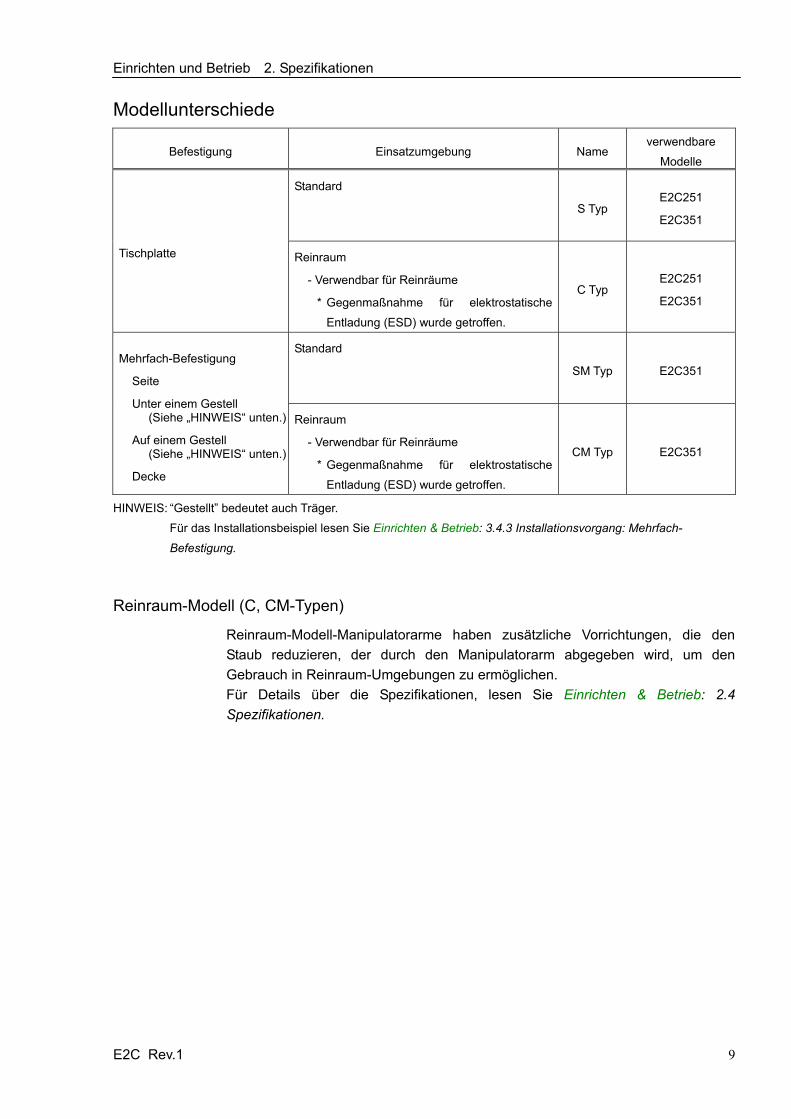
Modellunterschiede
Befestigung Einsatzumgebung Name verwendbare
Modelle
Standard
S Typ E2C251
E2C351
Tischplatte Reinraum
- Verwendbar für Reinräume
* Gegenmaßnahme für elektrostatische
Entladung (ESD) wurde getroffen.
C Typ E2C251
E2C351
Standard
SM Typ E2C351 Mehrfach-Befestigung
Seite
Unter einem Gestell (Siehe „HINWEIS“ unten.)
Auf einem Gestell (Siehe „HINWEIS“ unten.)
Decke
Reinraum
- Verwendbar für Reinräume
* Gegenmaßnahme für elektrostatische
Entladung (ESD) wurde getroffen.
CM Typ E2C351
HINWEIS: “Gestellt” bedeutet auch Träger.
Für das Installationsbeispiel lesen Sie Einrichten & Betrieb: 3.4.3 Installationsvorgang: Mehrfach-
Befestigung. Reinraum-Modell (C, CM-Typen)
Reinraum-Modell-Manipulatorarme haben zusätzliche Vorrichtungen, die den Staub reduzieren, der durch den Manipulatorarm abgegeben wird, um den Gebrauch in Reinraum-Umgebungen zu ermöglichen. Für Details über die Spezifikationen, lesen Sie Einrichten & Betrieb: 2.4 Spezifikationen.
Einrichten und Betrieb 2. Spezifikationen
10 E2C Rev.1
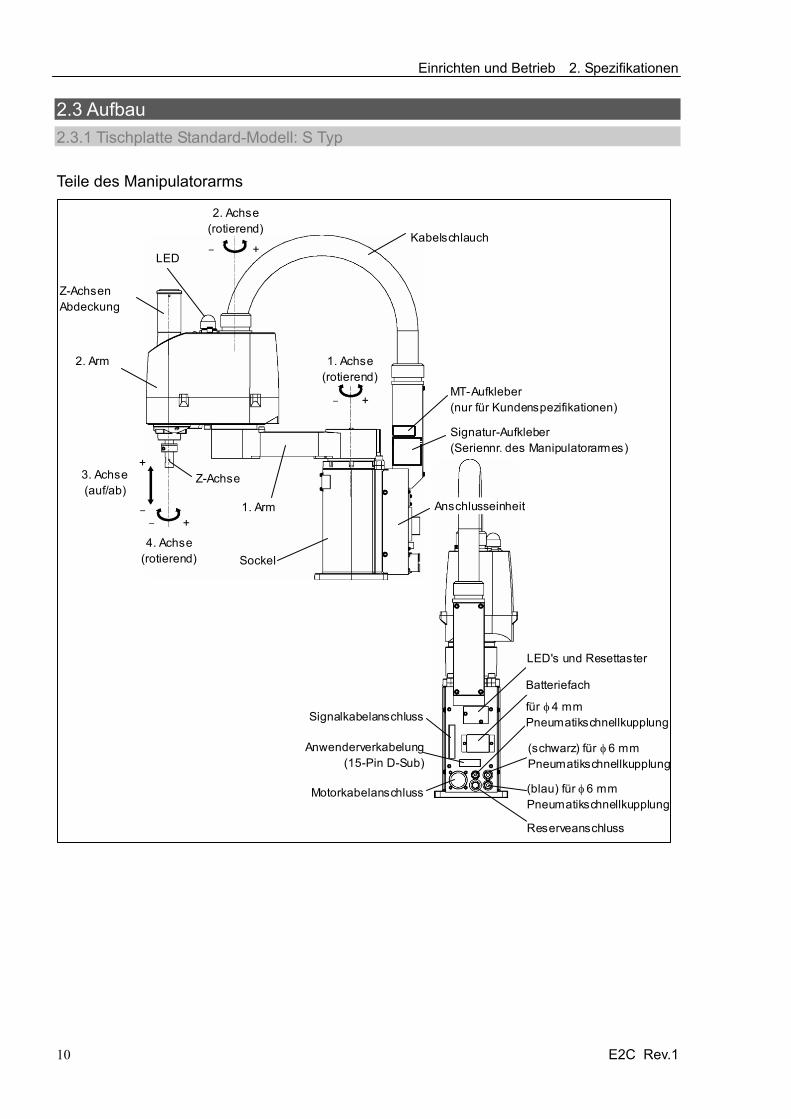
2.3 Aufbau 2.3.1 Tischplatte Standard-Modell: S Typ
Teile des Manipulatorarms
1. Achse (rotierend)
2. Achse (rotierend)
3. Achse (auf/ab)
4. Achse (rotierend)
1. Arm
2. Arm
Sockel
Kabelschlauch
Z-Achsen Abdeckung
Signatur-Aufkleber (Seriennr. des Manipulatorarmes)
Signalkabelanschluss
Motorkabelanschluss
Anwenderverkabelung(15-Pin D-Sub)
LED + -
+ -
+
-
Z-Achse
+ - MT-Aufkleber (nur für Kundenspezifikationen)
Anschlusseinheit
LED's und Resettaster
Batteriefach
für φ 4 mm Pneumatikschnellkupplung
(schwarz) für φ 6 mm Pneumatikschnellkupplung
(blau) für φ 6 mm Pneumatikschnellkupplung
Reserveanschluss
Einrichten und Betrieb 2. Spezifikationen
E2C Rev.1 11
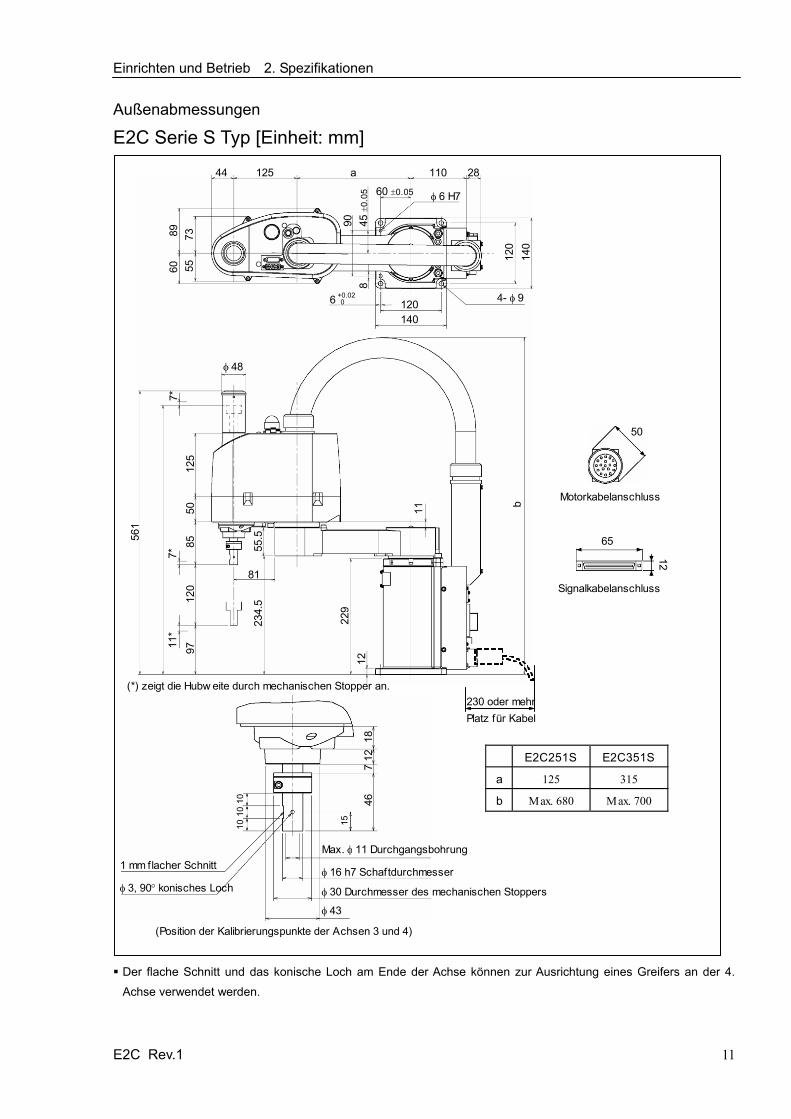
Außenabmessungen
E2C Serie S Typ [Einheit: mm]
(Position der Kalibrierungspunkte der Achsen 3 und 4)
E2C251S E2C351S
a 125 315
b Max. 680 Max. 700
Motorkabelanschluss
50
Signalkabelanschluss
65
12
44 125 a 110
φ 48
4- φ 9
89
73
120
561
234.
5
b
Max. φ 11 Durchgangsbohrung
10
46
7*
230 oder mehr Platz für Kabel
1 mm flacher Schnitt
φ 3, 90° konisches Loch
(*) zeigt die Hubw eite durch mechanischen Stopper an.
φ 16 h7 Schaftdurchmesser
φ 30 Durchmesser des mechanischen Stoppers
15
55
60
28
120 140
140
97
120
85
50
125
7*
11*
55.5
81
229
12
11
10 1
0
12 1
8 7
φ 43
90
45 ±
0.05
60 ±0.05 φ 6 H7
8
6 +0.02 0
Der flache Schnitt und das konische Loch am Ende der Achse können zur Ausrichtung eines Greifers an der 4.
Achse verwendet werden.
Einrichten und Betrieb 2. Spezifikationen
12 E2C Rev.1
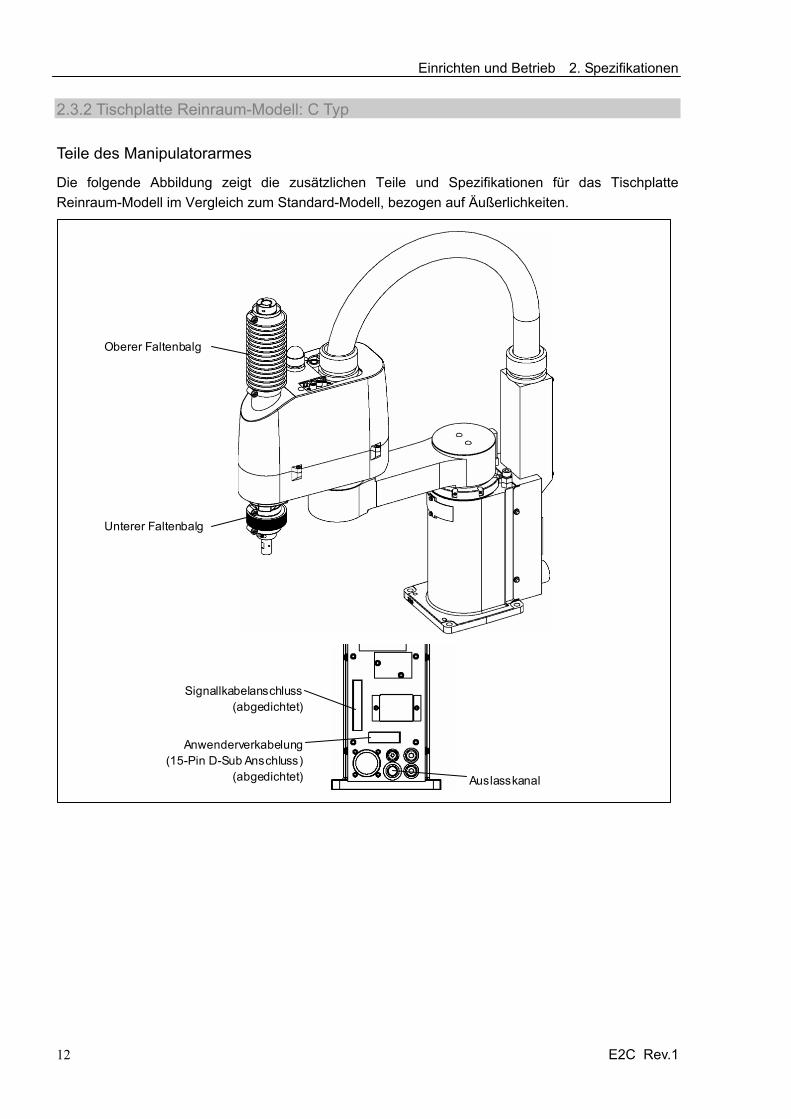
2.3.2 Tischplatte Reinraum-Modell: C Typ
Teile des Manipulatorarmes
Die folgende Abbildung zeigt die zusätzlichen Teile und Spezifikationen für das Tischplatte Reinraum-Modell im Vergleich zum Standard-Modell, bezogen auf Äußerlichkeiten.
Oberer Faltenbalg
Auslasskanal
Signallkabelanschluss (abgedichtet)
Anwenderverkabelung (15-Pin D-Sub Anschluss)
(abgedichtet)
Unterer Faltenbalg
Einrichten und Betrieb 2. Spezifikationen
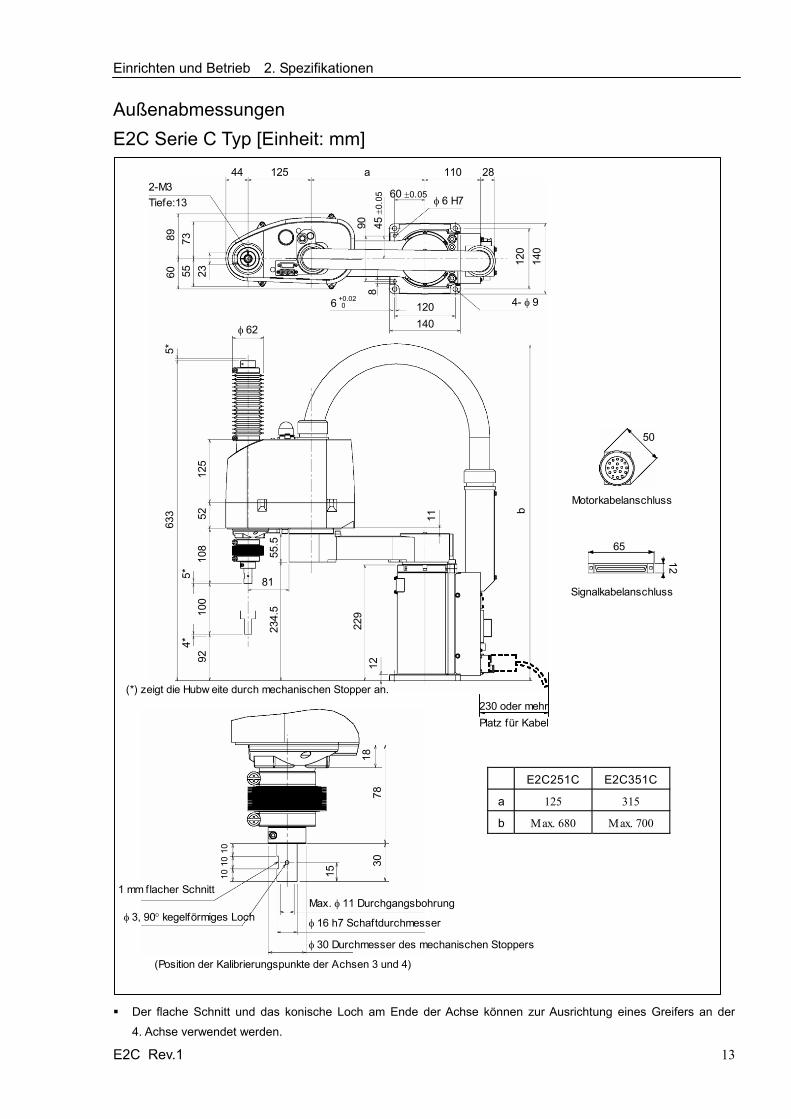
E2C Rev.1 13
Außenabmessungen E2C Serie C Typ [Einheit: mm]
(Position der Kalibrierungspunkte der Achsen 3 und 4)
E2C251C E2C351C
a 125 315
b Max. 680 Max. 700
Motorkabelanschluss
50
Signalkabelanschluss
65
12
44
4- φ 9
120
89
81
5*
633
234.
5 55
.5
229
12
b
230 oder mehr Platz für Kabel
(*) zeigt die Hubw eite durch mechanischen Stopper an.
Max. φ 11 Durchgangsbohrung
30
φ 3, 90° kegelförmiges Loch
1 mm flacher Schnitt
φ 16 h7 Schaftdurchmesser
φ 30 Durchmesser des mechanischen Stoppers
125 a 110 28
140
60
55
73
92
100
108
52
125
4*
5*
11
10
15
18
78
120 140
2-M3 Tiefe:13
90
45 ±
0.05
60 ±0.05 φ 6 H7
8
6 +0.02 0
φ 62
10 1
0
23
Der flache Schnitt und das konische Loch am Ende der Achse können zur Ausrichtung eines Greifers an der
4. Achse verwendet werden.
Einrichten und Betrieb 2. Spezifikationen
14 E2C Rev.1
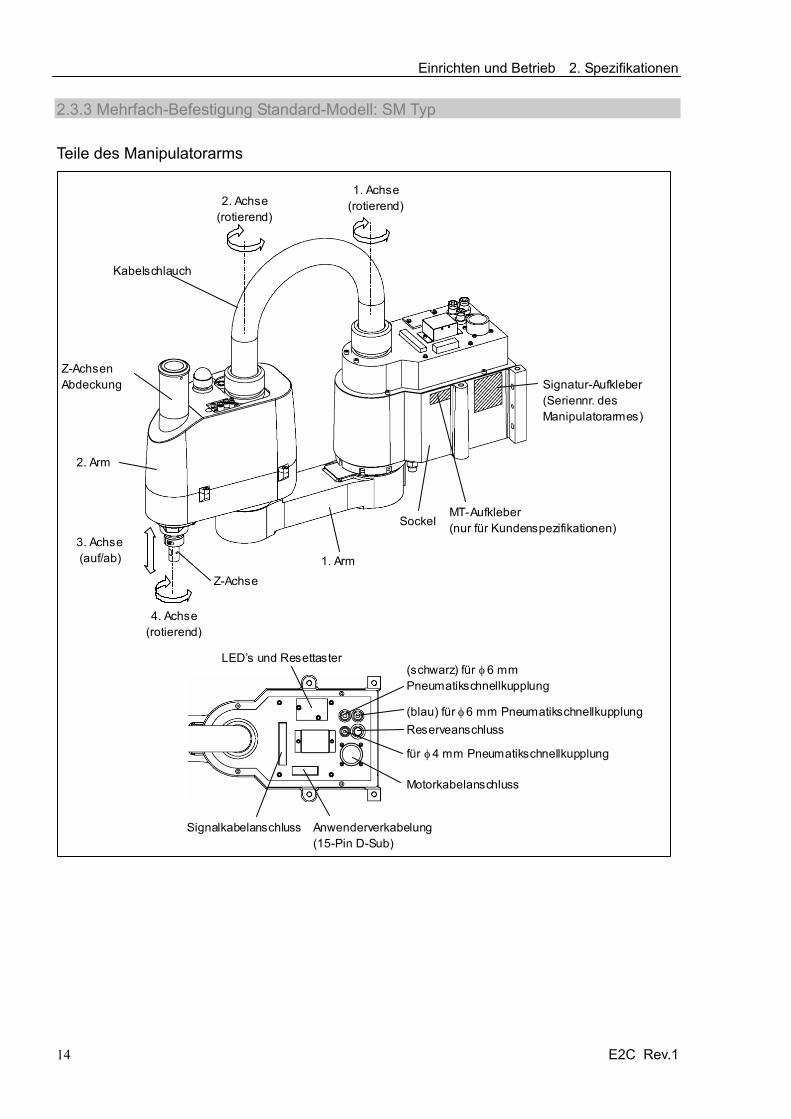
2.3.3 Mehrfach-Befestigung Standard-Modell: SM Typ
Teile des Manipulatorarms
MT-Aufkleber (nur für Kundenspezifikationen)
1. Achse (rotierend) 2. Achse
(rotierend)
3. Achse (auf/ab)
4. Achse (rotierend)
1. Arm
2. Arm
Sockel
Kabelschlauch
Z-Achsen Abdeckung
LED’s und Resettaster
Signatur-Aufkleber (Seriennr. des Manipulatorarmes)
(schwarz) für φ 6 mm Pneumatikschnellkupplung
für φ 4 mm Pneumatikschnellkupplung
Reserveanschluss
Signalkabelanschluss
Motorkabelanschluss
Anwenderverkabelung (15-Pin D-Sub)
(blau) für φ 6 mm Pneumatikschnellkupplung
Z-Achse
Einrichten und Betrieb 2. Spezifikationen
E2C Rev.1 15
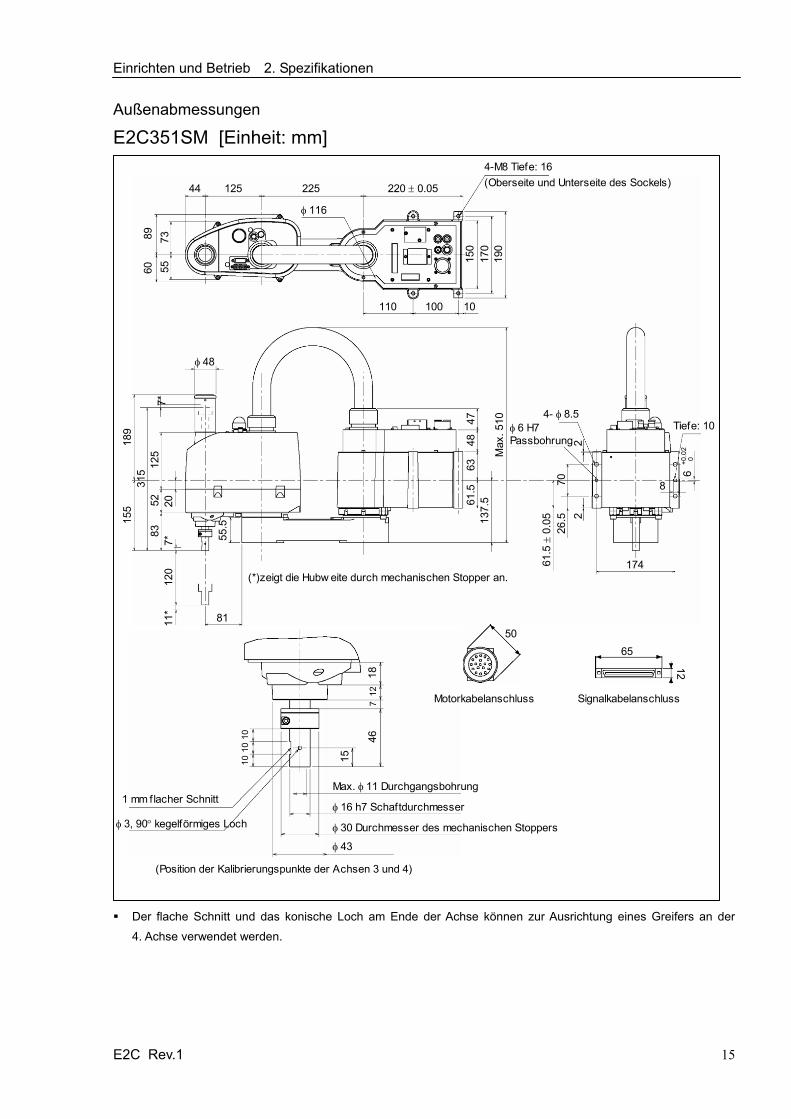
Außenabmessungen
E2C351SM [Einheit: mm]
(Position der Kalibrierungspunkte der Achsen 3 und 4)
Motorkabelanschluss
50
Signalkabelanschluss
65
12
φ 3, 90° kegelförmiges Loch
φ 6 H7 Passbohrung
4- φ 8.5
220 ± 0.05
89
170
11*
7*
315
φ 116
Max
. 510
Tiefe: 10
61.5
± 0
.05
174
8
6 +0
.02
0
(*)zeigt die Hubw eite durch mechanischen Stopper an.
1 mm flacher Schnitt
15
Max. φ 11 Durchgangsbohrung
φ 16 h7 Schaftdurchmesser
φ 30 Durchmesser des mechanischen Stoppers
225 125 44
60
55
73
190
110 100 10
φ 48
125
52
83
120
20
7*
81
137.
5 61.5
63
48
47
26.5
70
10
46
18
7 12
φ 43
150
4-M8 Tiefe: 16 (Oberseite und Unterseite des Sockels)
155
189
55.5
2 2
10 1
0
Der flache Schnitt und das konische Loch am Ende der Achse können zur Ausrichtung eines Greifers an der
4. Achse verwendet werden.
Einrichten und Betrieb 2. Spezifikationen
16 E2C Rev.1
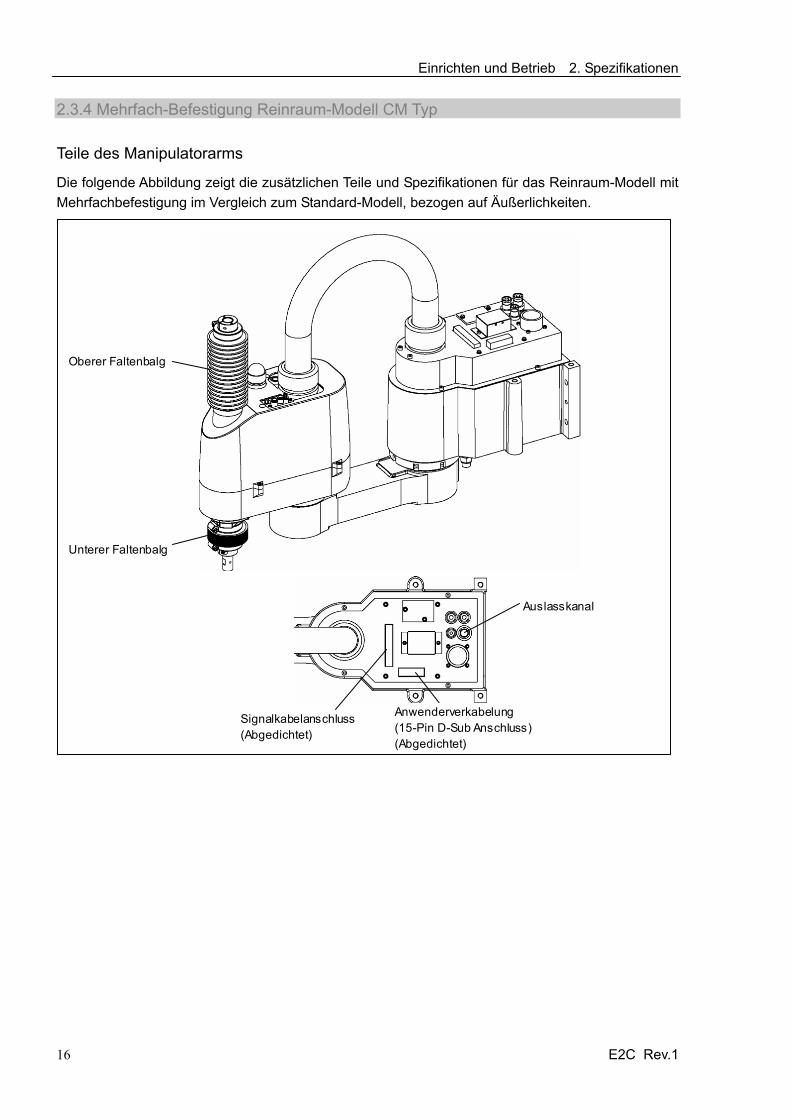
2.3.4 Mehrfach-Befestigung Reinraum-Modell CM Typ
Teile des Manipulatorarms
Die folgende Abbildung zeigt die zusätzlichen Teile und Spezifikationen für das Reinraum-Modell mit Mehrfachbefestigung im Vergleich zum Standard-Modell, bezogen auf Äußerlichkeiten.
Oberer Faltenbalg
Auslasskanal
Signalkabelanschluss (Abgedichtet)
Unterer Faltenbalg
Anwenderverkabelung (15-Pin D-Sub Anschluss) (Abgedichtet)
Einrichten und Betrieb 2. Spezifikationen
E2C Rev.1 17
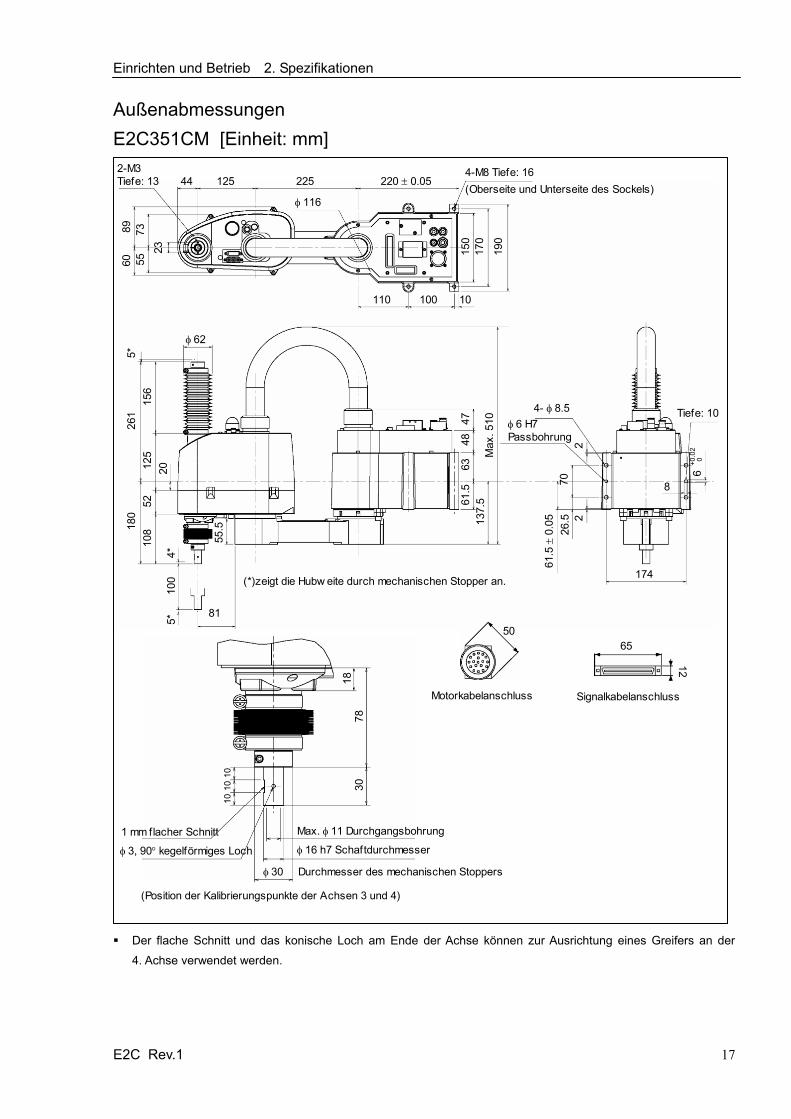
Außenabmessungen E2C351CM [Einheit: mm]
(Position der Kalibrierungspunkte der Achsen 3 und 4)
Motorkabelanschluss
50
Signalkabelanschluss
65
12 89
φ 3, 90° kegelförmiges Loch
φ 6 H7 Passbohrung
4- φ 8.5
44 220 ± 0.05
170
5*
4*
100
81
55.5
61.5
Max
. 510
Tiefe: 10
61.5
± 0
.05
70
174
8
6 +0
.02
0
(*)zeigt die Hubw eite durch mechanischen Stopper an.
1 mm flacher Schnitt
78
10
Max. φ 11 Durchgangsbohrung
φ 16 h7 Schaftdurchmesser
φ 30 Durchmesser des mechanischen Stoppers
137.
5
φ 116
18
125 225
60
55
73
190
110 100 10
180
108
52
125
156
20
63
48
47
26.5
30
2-M3 Tiefe: 13
4-M8 Tiefe: 16 (Oberseite und Unterseite des Sockels)
23
150
261
5* φ 62
2 2
10
10
Der flache Schnitt und das konische Loch am Ende der Achse können zur Ausrichtung eines Greifers an der
4. Achse verwendet werden.
Einrichten und Betrieb 2. Spezifikationen
18 E2C Rev.1
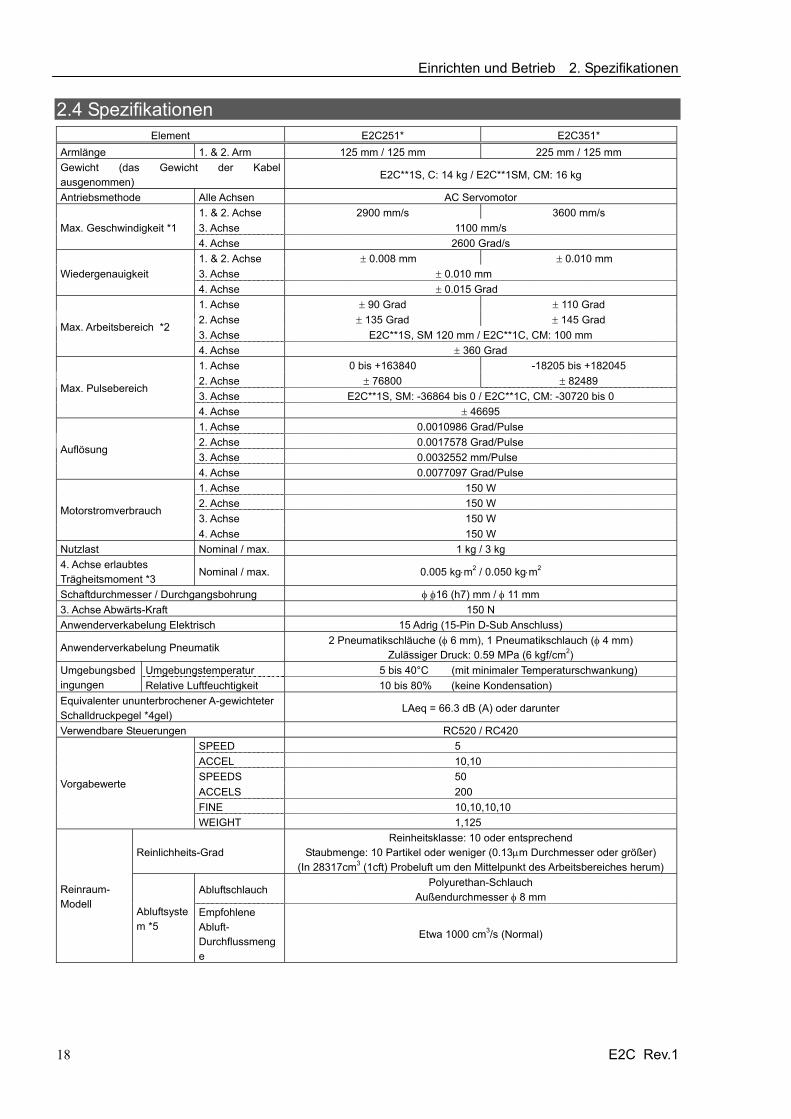
2.4 Spezifikationen
Element E2C251* E2C351* Armlänge 1. & 2. Arm 125 mm / 125 mm 225 mm / 125 mm Gewicht (das Gewicht der Kabel ausgenommen)
E2C**1S, C: 14 kg / E2C**1SM, CM: 16 kg
Antriebsmethode Alle Achsen AC Servomotor 1. & 2. Achse 2900 mm/s 3600 mm/s Max. Geschwindigkeit *1 3. Achse 1100 mm/s 4. Achse 2600 Grad/s 1. & 2. Achse ± 0.008 mm ± 0.010 mm Wiedergenauigkeit 3. Achse ± 0.010 mm 4. Achse ± 0.015 Grad 1. Achse ± 90 Grad ± 110 Grad
2. Achse ± 135 Grad ± 145 Grad Max. Arbeitsbereich *2
3. Achse E2C**1S, SM 120 mm / E2C**1C, CM: 100 mm 4. Achse ± 360 Grad 1. Achse 0 bis +163840 -18205 bis +182045
2. Achse ± 76800 ± 82489 Max. Pulsebereich
3. Achse E2C**1S, SM: -36864 bis 0 / E2C**1C, CM: -30720 bis 0 4. Achse ± 46695 1. Achse 0.0010986 Grad/Pulse
2. Achse 0.0017578 Grad/Pulse Auflösung
3. Achse 0.0032552 mm/Pulse 4. Achse 0.0077097 Grad/Pulse 1. Achse 150 W
2. Achse 150 W Motorstromverbrauch
3. Achse 150 W 4. Achse 150 W Nutzlast Nominal / max. 1 kg / 3 kg 4. Achse erlaubtes Trägheitsmoment *3
Nominal / max. 0.005 kg⋅m2 / 0.050 kg⋅m2
Schaftdurchmesser / Durchgangsbohrung φ φ16 (h7) mm / φ 11 mm 3. Achse Abwärts-Kraft 150 N Anwenderverkabelung Elektrisch 15 Adrig (15-Pin D-Sub Anschluss)
Anwenderverkabelung Pneumatik 2 Pneumatikschläuche (φ 6 mm), 1 Pneumatikschlauch (φ 4 mm)
Zulässiger Druck: 0.59 MPa (6 kgf/cm2) Umgebungstemperatur 5 bis 40°C (mit minimaler Temperaturschwankung) Umgebungsbed
ingungen Relative Luftfeuchtigkeit 10 bis 80% (keine Kondensation) Equivalenter ununterbrochener A-gewichteter Schalldruckpegel *4gel)
LAeq = 66.3 dB (A) oder darunter
Verwendbare Steuerungen RC520 / RC420 SPEED 5 ACCEL 10,10 SPEEDS 50 ACCELS 200 FINE 10,10,10,10
Vorgabewerte
WEIGHT 1,125
Reinlichheits-Grad Reinheitsklasse: 10 oder entsprechend
Staubmenge: 10 Partikel oder weniger (0.13µm Durchmesser oder größer) (In 28317cm3 (1cft) Probeluft um den Mittelpunkt des Arbeitsbereiches herum)
Abluftschlauch Polyurethan-Schlauch
Außendurchmesser φ 8 mm Reinraum-Modell
Abluftsystem *5
Empfohlene Abluft-Durchflussmenge
Etwa 1000 cm3/s (Normal)
Einrichten und Betrieb 2. Spezifikationen
E2C Rev.1 19
*1: Im Fall der PTP-Steuerung. Die maximale Geschwindigkeit beträgt 1120 mm/s auf horizontaler
Ebene bei CP-Steuerung.
*2: Der Arbeitsbereich einiger Modelle ist durch den kartesischen (rechteckigen) Bereich begrenzt. Für Details, lesen Sie Einrichten & Betrieb: 5.4 Standard Arbeitsbereich
*3: Im Fall, dass der Schwerpunkt im Mittelpunkt der 4. Achse liegt. Wenn der Schwerpunkt nicht im Mittelpunkt der 4. Achse liegt, stellen Sie den Parameter mit dem INERTIA-Befehl ein.
*4: Die Voraussetzungen des Manipulatorarmes zur Messung lauten wie folgt: Betriebsbedingungen: Unter Nennlast, 4-Achsen simultane Bewegung, maximale
Geschwindigkeit, maximale Beschleunigung und Leistung 50%. Messpunkt: An der Vorderseite des Manipulatorarmes, 1000 mm vom Arbeitsbereich
entfernt, 50 mm über der Installations-Oberfläche.
*5: - Das Abluftsystem im Reinraum-Modell Manipulatorarm saugt Luft aus dem Sockelinneren und dem Inneren der Armabdeckung. Ein Riss oder eine andere Öffnung in der Basiseinheit kann den Ausfall des negativen Luftdrucks im äußeren Teil des Armes verursachen, was zu einem erhöhten Staubaustritt führen kann. Entfernen Sie nicht die Wartungsabdeckung auf der Vorderseite des Sockels, die Acryl-Abdeckung auf der Rückseite des Sockels oder die Abdichtung an den Anschlüssen.
- Dichten Sie den Abluft-Ausgang und den Abluft-Schlauch mit Vinyl-Klebeband ab, so dass die Achse luftdicht ist. Wenn der Abluft-Durchfluss nicht ausreichend ist, kann der Staubpartikel-Austritt den angegebenen maximalen Grad überschreiten.
Einrichten und Betrieb 2. Spezifikationen
20 E2C Rev.1
2.5 Wie man das Modell einstellt
Ändern Sie die Einstellungen des Manipulatorarm-Modells nicht. Das Manipulatorarm-Modell für Ihr System wurde vor der Lieferung eingestellt. Es istnormalerweise nicht erforderlich, das Modell zu ändern. Wenn es jedoch nötig ist, das Modell zu ändern, stellen Sie es richtig ein. Ungenaue Einstellungen des Manipulatorarm-Modells können zu einem unnormalen oder zu einem Ausfall desManipulatorarm-Betriebes führen und / oder ernste Sicherheitsproblemeverursachen.
Wenn ein MT-Aufkleber auf der Rückseite eines Manipulatorarmes angebracht ist, verfügt der Manipulatorarm über kundenspezifische Besonderheiten. Wenn der Manipulatorarm über kundenspezifische Besonderheiten verfügt, kann das Verfahren, wie das Modell eingestellt wird, von der folgenden Beschreibung abweichen. Bitte wenden Sie sich mit der Nummer auf dem MT-Aufkleber an uns. Das Verfahren zur Einstellung der Manipulatorarm-Modell-Einstellungen hängt von der verwendeten Software ab. Lesen Sie das Kapitel Den Manipulatorarm einstellen im Benutzerhandbuch.
HINWEIS
Einrichten und Betrieb 3. Umgebungen und Installation
E2C Rev.1 21
3. Umgebungen und Installation 3.1 Umgebungsbedingungen
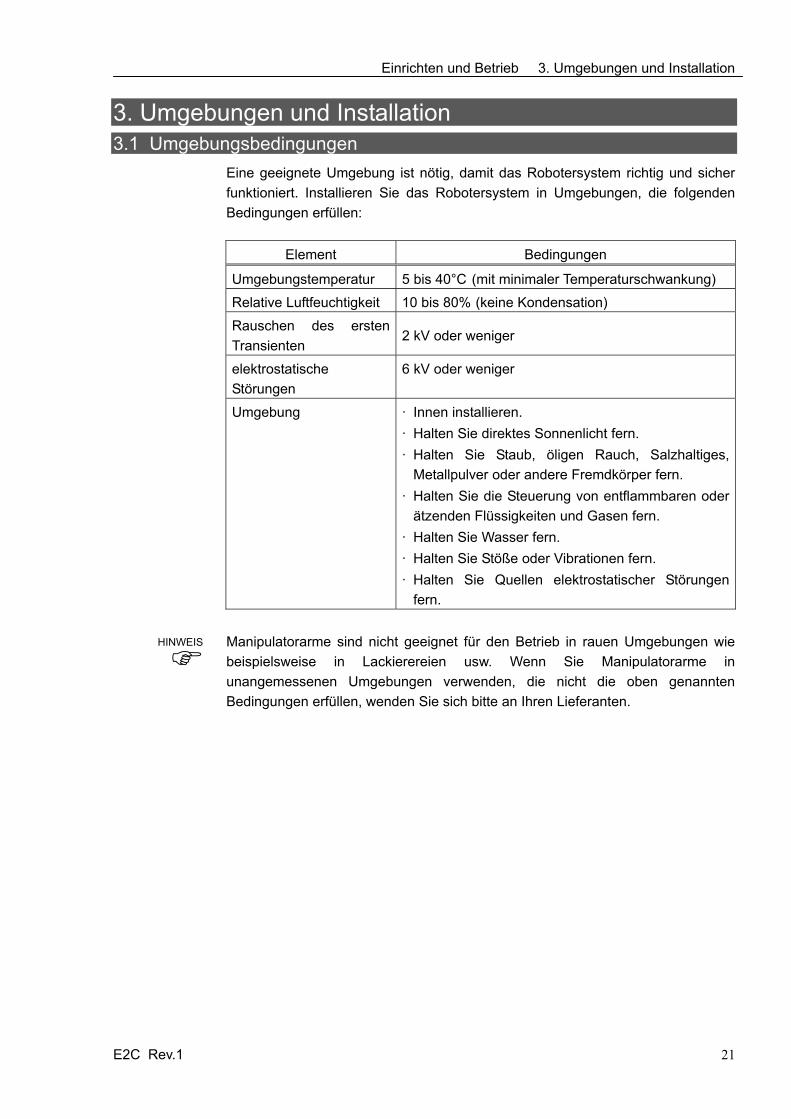
Eine geeignete Umgebung ist nötig, damit das Robotersystem richtig und sicher funktioniert. Installieren Sie das Robotersystem in Umgebungen, die folgenden Bedingungen erfüllen:
Element Bedingungen
Umgebungstemperatur 5 bis 40°C (mit minimaler Temperaturschwankung) Relative Luftfeuchtigkeit 10 bis 80% (keine Kondensation)
Rauschen des ersten Transienten
2 kV oder weniger
elektrostatische Störungen
6 kV oder weniger
Umgebung · Innen installieren. · Halten Sie direktes Sonnenlicht fern. · Halten Sie Staub, öligen Rauch, Salzhaltiges,
Metallpulver oder andere Fremdkörper fern. · Halten Sie die Steuerung von entflammbaren oder
ätzenden Flüssigkeiten und Gasen fern. · Halten Sie Wasser fern. · Halten Sie Stöße oder Vibrationen fern. · Halten Sie Quellen elektrostatischer Störungen
fern. Manipulatorarme sind nicht geeignet für den Betrieb in rauen Umgebungen wie beispielsweise in Lackierereien usw. Wenn Sie Manipulatorarme in unangemessenen Umgebungen verwenden, die nicht die oben genannten Bedingungen erfüllen, wenden Sie sich bitte an Ihren Lieferanten.
HINWEIS
Einrichten und Betrieb 3. Umgebungen und Installation
22 E2C Rev.1
3.2 Basis-Tisch
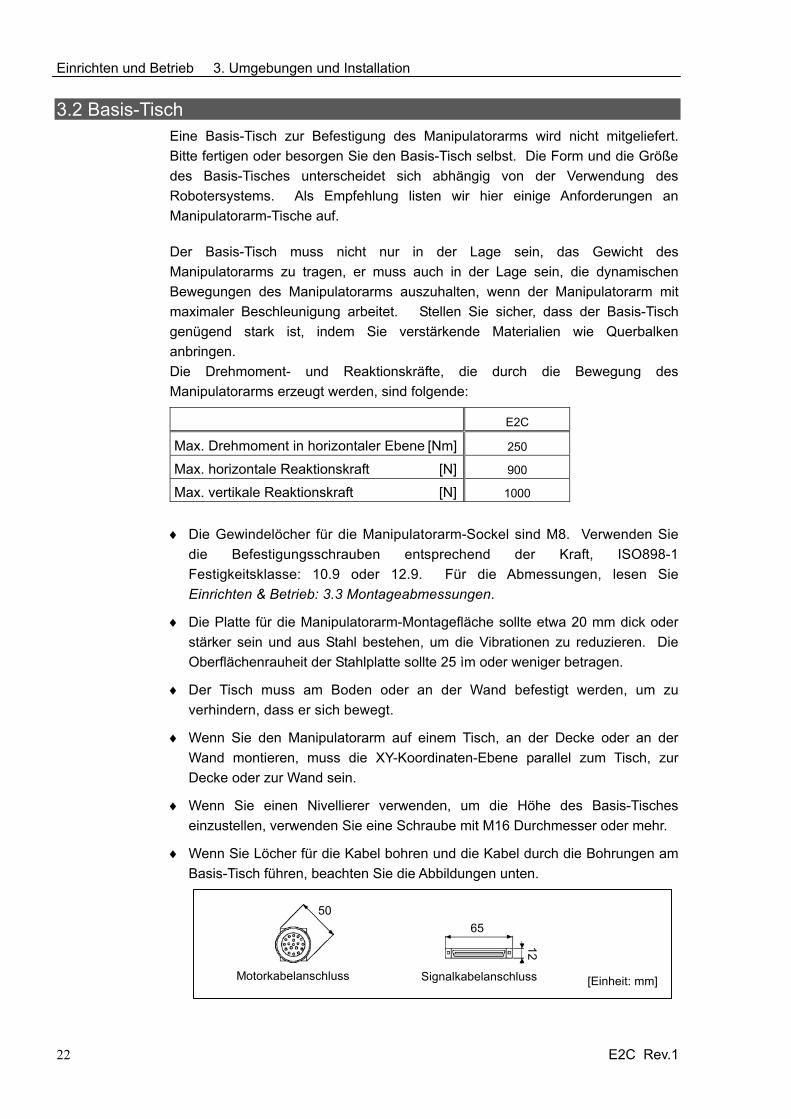
Eine Basis-Tisch zur Befestigung des Manipulatorarms wird nicht mitgeliefert. Bitte fertigen oder besorgen Sie den Basis-Tisch selbst. Die Form und die Größe des Basis-Tisches unterscheidet sich abhängig von der Verwendung des Robotersystems. Als Empfehlung listen wir hier einige Anforderungen an Manipulatorarm-Tische auf. Der Basis-Tisch muss nicht nur in der Lage sein, das Gewicht des Manipulatorarms zu tragen, er muss auch in der Lage sein, die dynamischen Bewegungen des Manipulatorarms auszuhalten, wenn der Manipulatorarm mit maximaler Beschleunigung arbeitet. Stellen Sie sicher, dass der Basis-Tisch genügend stark ist, indem Sie verstärkende Materialien wie Querbalken anbringen. Die Drehmoment- und Reaktionskräfte, die durch die Bewegung des Manipulatorarms erzeugt werden, sind folgende:
E2C
Max. Drehmoment in horizontaler Ebene [Nm] 250
Max. horizontale Reaktionskraft [N] 900
Max. vertikale Reaktionskraft [N] 1000
♦ Die Gewindelöcher für die Manipulatorarm-Sockel sind M8. Verwenden Sie
die Befestigungsschrauben entsprechend der Kraft, ISO898-1 Festigkeitsklasse: 10.9 oder 12.9. Für die Abmessungen, lesen Sie Einrichten & Betrieb: 3.3 Montageabmessungen.
♦ Die Platte für die Manipulatorarm-Montagefläche sollte etwa 20 mm dick oder stärker sein und aus Stahl bestehen, um die Vibrationen zu reduzieren. Die Oberflächenrauheit der Stahlplatte sollte 25 ìm oder weniger betragen.
♦ Der Tisch muss am Boden oder an der Wand befestigt werden, um zu verhindern, dass er sich bewegt.
♦ Wenn Sie den Manipulatorarm auf einem Tisch, an der Decke oder an der Wand montieren, muss die XY-Koordinaten-Ebene parallel zum Tisch, zur Decke oder zur Wand sein.
♦ Wenn Sie einen Nivellierer verwenden, um die Höhe des Basis-Tisches einzustellen, verwenden Sie eine Schraube mit M16 Durchmesser oder mehr.
♦ Wenn Sie Löcher für die Kabel bohren und die Kabel durch die Bohrungen am Basis-Tisch führen, beachten Sie die Abbildungen unten.
[Einheit: mm] Motorkabelanschluss
50
Signalkabelanschluss
65
12

Einrichten und Betrieb 3. Umgebungen und Installation
E2C Rev.1 23
Für Umgebungsbedingungen bezüglich des Platzes, wenn Sie die Steuerung auf den Basis-Tisch stellen, lesen Sie das Steuerungs-Handbuch.
WARNUNG
Um Sicherheit zu gewährleisten, muss eine Schutzabschrankung für das Robotersystem installiert werden. Für Details zur Schutzabschrankung, beziehen Sie sich auf das Benutzerhandbuch.
HINWEIS
Einrichten und Betrieb 3. Umgebungen und Installation
24 E2C Rev.1
3.3 Montageabmessungen
Der maximale Platz, der in den Abbildungen beschrieben ist, zeigt, dass der Radius des Greifers 44 mm oder weniger beträgt. Wenn der Radius des Greifers 44 mm überschreitet, definieren Sie den Radius als Abstand zur äußeren Kante des maximalen Raumes. Wenn eine montierte Kamera oder ein montiertes elektromagnetisches Ventil größer als der Arm sind, stellen Sie den maximalen Bereich so ein, dass der Raum, den sie erreichen können, eingerechnet ist.
Montage-Bereich Bitte beachten Sie, dass außer Platz für die Montage des Manipulatorarms, der Steuerung und der Peripheriegeräte auch folgenden Platz berücksichtigen.
♦ Platz zum Teachen
♦ Platz für Wartungsarbeiten und Inspektionen
♦ Platz für Kabel Der minimale Biegeradius des Motorkabels beträgt 130 mm. Wenn Sie das Kabel anschließen, halten Sie ausreichend Abstand zu Hindernissen. Lassen Sie zusätzlich genug Platz für andere Kabel, so dass sie nicht gewaltsam gebogen werden.
HINWEIS
HINWEIS
Einrichten und Betrieb 3. Umgebungen und Installation
E2C Rev.1 25
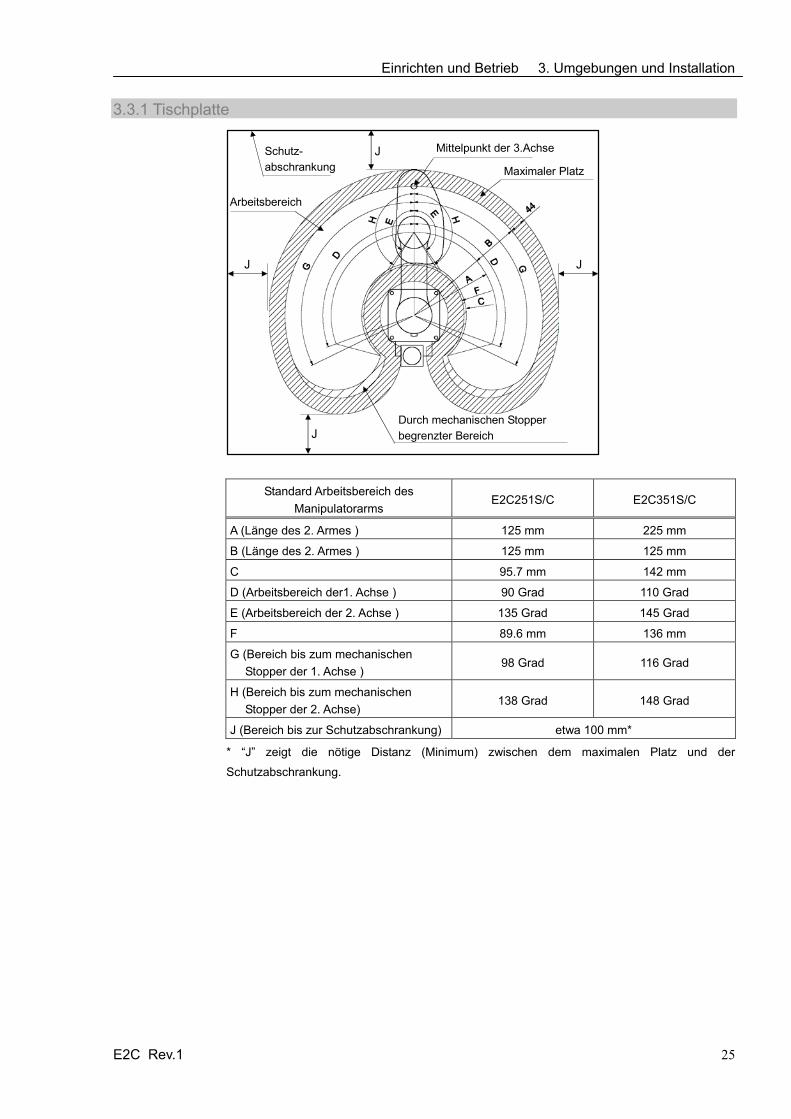
3.3.1 Tischplatte
J
J
J
Schutz- abschrankung
J
Maximaler Platz
Arbeitsbereich
Durch mechanischen Stopper begrenzter Bereich
Mittelpunkt der 3.Achse
Standard Arbeitsbereich des Manipulatorarms
E2C251S/C E2C351S/C
A (Länge des 2. Armes ) 125 mm 225 mm
B (Länge des 2. Armes ) 125 mm 125 mm
C 95.7 mm 142 mm
D (Arbeitsbereich der1. Achse ) 90 Grad 110 Grad
E (Arbeitsbereich der 2. Achse ) 135 Grad 145 Grad
F 89.6 mm 136 mm
G (Bereich bis zum mechanischen Stopper der 1. Achse )
98 Grad 116 Grad
H (Bereich bis zum mechanischen Stopper der 2. Achse)
138 Grad 148 Grad
J (Bereich bis zur Schutzabschrankung) etwa 100 mm*
* “J” zeigt die nötige Distanz (Minimum) zwischen dem maximalen Platz und der
Schutzabschrankung.
Einrichten und Betrieb 3. Umgebungen und Installation
26 E2C Rev.1
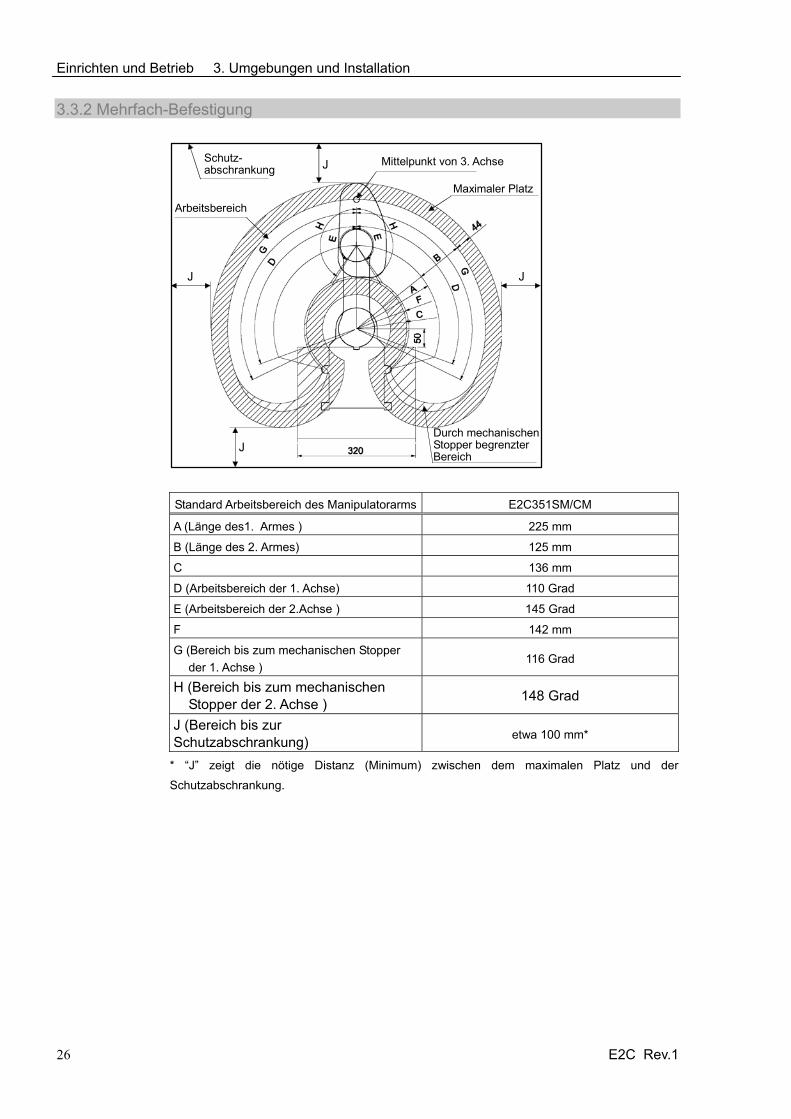
3.3.2 Mehrfach-Befestigung
J
J
J
Schutz-abschrankung
J
Maximaler Platz
Arbeitsbereich
Durch mechanischen Stopper begrenzter Bereich
Mittelpunkt von 3. Achse
Standard Arbeitsbereich des Manipulatorarms E2C351SM/CM
A (Länge des1. Armes ) 225 mm
B (Länge des 2. Armes) 125 mm
C 136 mm
D (Arbeitsbereich der 1. Achse) 110 Grad
E (Arbeitsbereich der 2.Achse ) 145 Grad
F 142 mm
G (Bereich bis zum mechanischen Stopper der 1. Achse )
116 Grad
H (Bereich bis zum mechanischen Stopper der 2. Achse ) 148 Grad
J (Bereich bis zur Schutzabschrankung) etwa 100 mm*
* “J” zeigt die nötige Distanz (Minimum) zwischen dem maximalen Platz und der
Schutzabschrankung.
Einrichten und Betrieb 3. Umgebungen und Installation
E2C Rev.1 27
3.4 Auspacken und Installation 3.4.1 Auspacken
Verwenden Sie einen Hub-Wagen oder Ähnliches, um den Manipulatorarm im selben Zustand zu transportieren, in dem er geliefert wurde. Beachten Sie Folgendes, wenn Sie den Manipulatorarm auspacken.
■ Wenn Sie die Schrauben entfernen, die den Manipulatorarm an der Transportsicherung befestigen, fällt der Manipulatorarm um. Passen Sie auf, dass Ihre Hände, Fingeroder Füße nicht hängen bleiben
■ Entfernen Sie den Kabelbinder, der den Arm sichert, nicht bevor Sie die Installation beendet haben. Ihre Hände können sich im Manipulatorarm verfangen, wenn der Kabelbinder entfernt wird, bevor die Installation beendet ist.
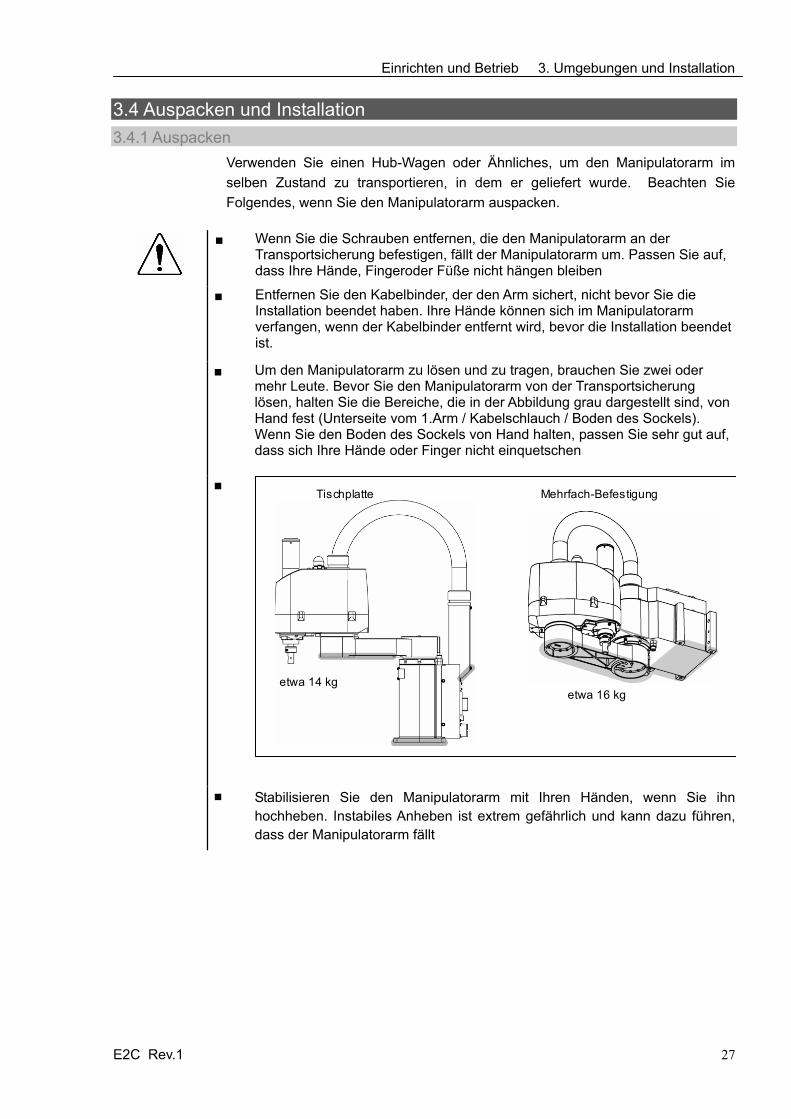
■ Um den Manipulatorarm zu lösen und zu tragen, brauchen Sie zwei oder mehr Leute. Bevor Sie den Manipulatorarm von der Transportsicherung lösen, halten Sie die Bereiche, die in der Abbildung grau dargestellt sind, von Hand fest (Unterseite vom 1.Arm / Kabelschlauch / Boden des Sockels). Wenn Sie den Boden des Sockels von Hand halten, passen Sie sehr gut auf, dass sich Ihre Hände oder Finger nicht einquetschen
■ Tischplatte
etwa 14 kg
Mehrfach-Befestigung
etwa 16 kg
■ Stabilisieren Sie den Manipulatorarm mit Ihren Händen, wenn Sie ihnhochheben. Instabiles Anheben ist extrem gefährlich und kann dazu führen,dass der Manipulatorarm fällt
Einrichten und Betrieb 3. Umgebungen und Installation
28 E2C Rev.1
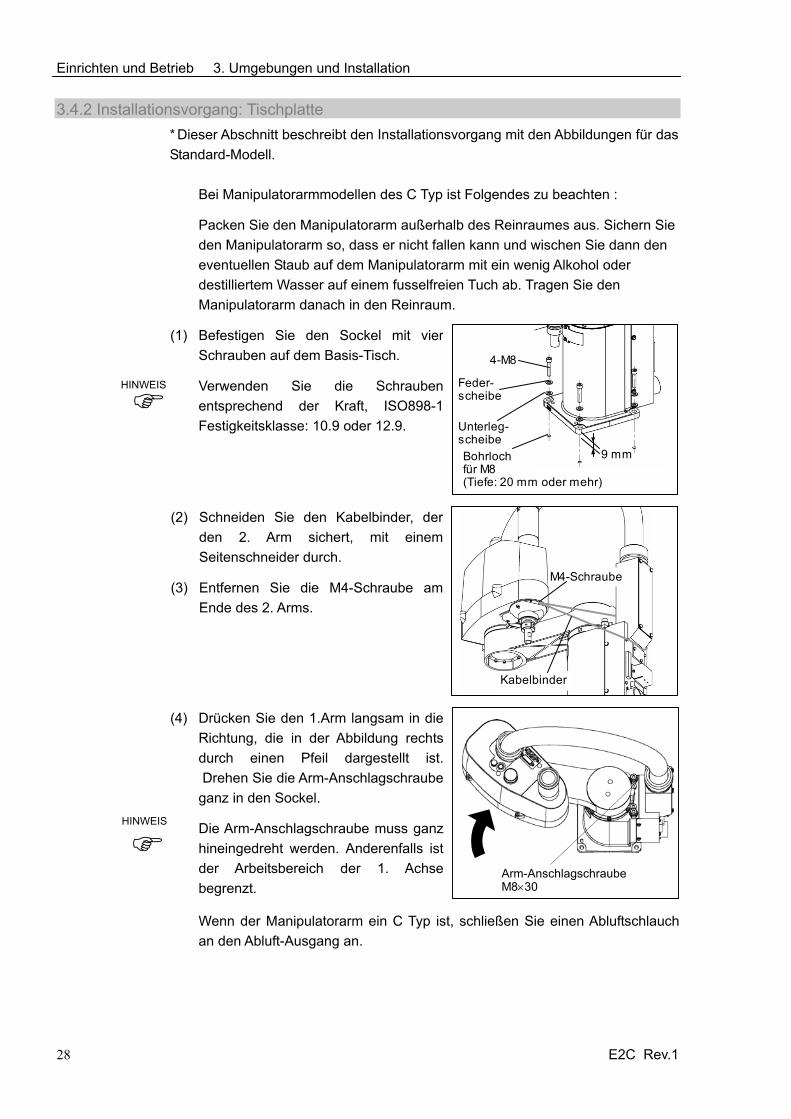
3.4.2 Installationsvorgang: Tischplatte
* Dieser Abschnitt beschreibt den Installationsvorgang mit den Abbildungen für das Standard-Modell.
Bei Manipulatorarmmodellen des C Typ ist Folgendes zu beachten :
Packen Sie den Manipulatorarm außerhalb des Reinraumes aus. Sichern Sie den Manipulatorarm so, dass er nicht fallen kann und wischen Sie dann den eventuellen Staub auf dem Manipulatorarm mit ein wenig Alkohol oder destilliertem Wasser auf einem fusselfreien Tuch ab. Tragen Sie den Manipulatorarm danach in den Reinraum.
(1) Befestigen Sie den Sockel mit vier Schrauben auf dem Basis-Tisch.
Verwenden Sie die Schraubenentsprechend der Kraft, ISO898-1 Festigkeitsklasse: 10.9 oder 12.9.
9 mm Bohrloch für M8 (Tiefe: 20 mm oder mehr)
4-M8
Feder- scheibe
Unterleg- scheibe
(2) Schneiden Sie den Kabelbinder, der den 2. Arm sichert, mit einem Seitenschneider durch.
(3) Entfernen Sie die M4-Schraube am Ende des 2. Arms.
Kabelbinder
M4-Schraube
(4)
Drücken Sie den 1.Arm langsam in dieRichtung, die in der Abbildung rechtsdurch einen Pfeil dargestellt ist. Drehen Sie die Arm-Anschlagschraube ganz in den Sockel.
Die Arm-Anschlagschraube muss ganzhineingedreht werden. Anderenfalls ist der Arbeitsbereich der 1. Achsebegrenzt.
Arm-Anschlagschraube M8×30
Wenn der Manipulatorarm ein C Typ ist, schließen Sie einen Abluftschlauch an den Abluft-Ausgang an.
HINWEIS
HINWEIS
Einrichten und Betrieb 3. Umgebungen und Installation
E2C Rev.1 29
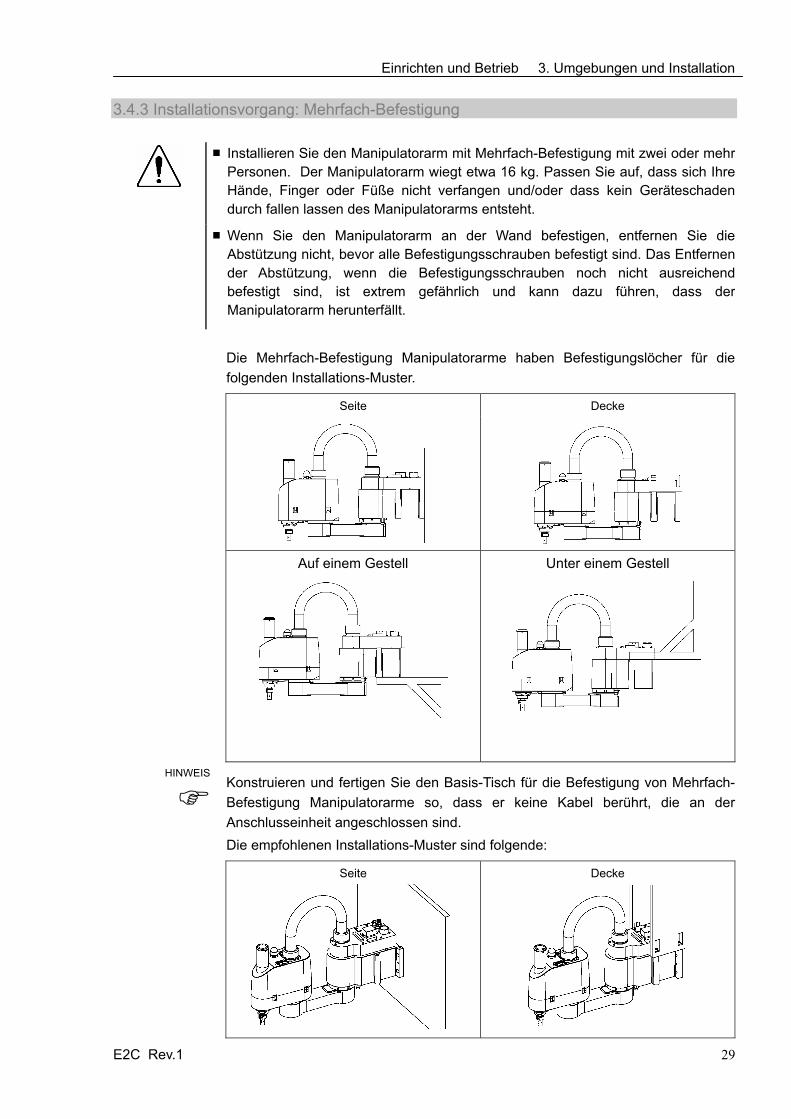
3.4.3 Installationsvorgang: Mehrfach-Befestigung
■ Installieren Sie den Manipulatorarm mit Mehrfach-Befestigung mit zwei oder mehr
Personen. Der Manipulatorarm wiegt etwa 16 kg. Passen Sie auf, dass sich IhreHände, Finger oder Füße nicht verfangen und/oder dass kein Geräteschadendurch fallen lassen des Manipulatorarms entsteht.
■ Wenn Sie den Manipulatorarm an der Wand befestigen, entfernen Sie dieAbstützung nicht, bevor alle Befestigungsschrauben befestigt sind. Das Entfernender Abstützung, wenn die Befestigungsschrauben noch nicht ausreichendbefestigt sind, ist extrem gefährlich und kann dazu führen, dass derManipulatorarm herunterfällt.
Die Mehrfach-Befestigung Manipulatorarme haben Befestigungslöcher für die folgenden Installations-Muster.
Seite Decke
Auf einem Gestell Unter einem Gestell
Konstruieren und fertigen Sie den Basis-Tisch für die Befestigung von Mehrfach-Befestigung Manipulatorarme so, dass er keine Kabel berührt, die an der Anschlusseinheit angeschlossen sind. Die empfohlenen Installations-Muster sind folgende:
Seite Decke
HINWEIS
Einrichten und Betrieb 3. Umgebungen und Installation
30 E2C Rev.1
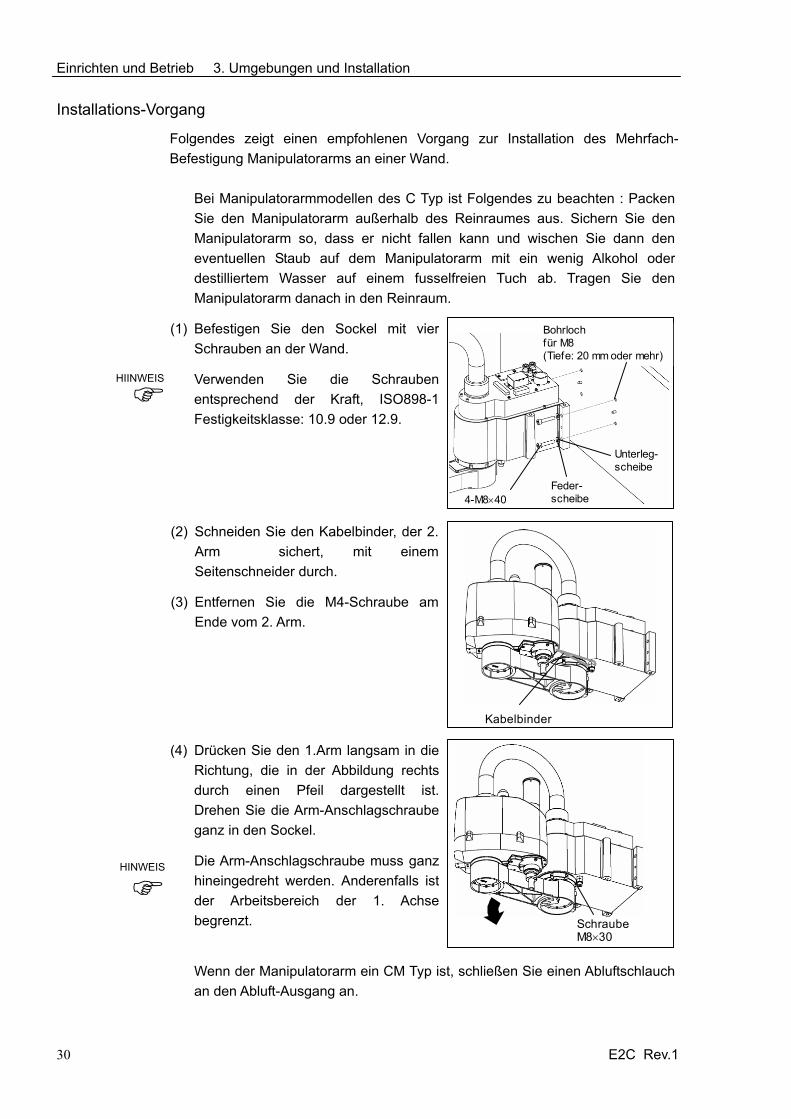
Installations-Vorgang
Folgendes zeigt einen empfohlenen Vorgang zur Installation des Mehrfach-Befestigung Manipulatorarms an einer Wand.
Bei Manipulatorarmmodellen des C Typ ist Folgendes zu beachten : Packen Sie den Manipulatorarm außerhalb des Reinraumes aus. Sichern Sie den Manipulatorarm so, dass er nicht fallen kann und wischen Sie dann den eventuellen Staub auf dem Manipulatorarm mit ein wenig Alkohol oder destilliertem Wasser auf einem fusselfreien Tuch ab. Tragen Sie den Manipulatorarm danach in den Reinraum.
(1) Befestigen Sie den Sockel mit vierSchrauben an der Wand.
Verwenden Sie die Schrauben entsprechend der Kraft, ISO898-1 Festigkeitsklasse: 10.9 oder 12.9.
Bohrloch für M8 (Tiefe: 20 mm oder mehr)
4-M8×40 Feder- scheibe
Unterleg- scheibe
(2) Schneiden Sie den Kabelbinder, der 2. Arm sichert, mit einem Seitenschneider durch.
(3) Entfernen Sie die M4-Schraube am Ende vom 2. Arm.
Kabelbinder
(4) Drücken Sie den 1.Arm langsam in dieRichtung, die in der Abbildung rechtsdurch einen Pfeil dargestellt ist.Drehen Sie die Arm-Anschlagschraubeganz in den Sockel.
Die Arm-Anschlagschraube muss ganzhineingedreht werden. Anderenfalls ist der Arbeitsbereich der 1. Achsebegrenzt. Schraube
M8×30
Wenn der Manipulatorarm ein CM Typ ist, schließen Sie einen Abluftschlauch an den Abluft-Ausgang an.
HIINWEIS
HINWEIS
Einrichten und Betrieb 3. Umgebungen und Installation
E2C Rev.1 31
3.5 Die Kabel anschließen
■ Um die Spannungsversorgung des Robotersystems abzustellen, ziehen Sie denNetzstecker aus der Steckdose. Stellen Sie sicher, dass das AC-Stromkabel mit einer Steckdose verbunden wird. Verbinden Sie es nicht direkt mit der Werksstromversorgung.
■ Bevor Sie einen Auswechselvorgang durchführen, schalten Sie die Steuerung unddas damit zusammenhängende Equipment AUS und trennen Sie dann denNetzstecker von der Spannungsversorgung.Das Ausführen eines Austauschvorganges bei eingeschalteter Spannung istextrem gefährlich und kann zu einem elektrischen Schlag und/oder zurFehlfunktion des Robotersystems führen.
■ Schließen Sie die Kabel richtig an. Erlauben Sie keine unnötige Belastung auf den Kabeln. (Stellen Sie keine schweren Objekte auf die Kabel. Verbiegen oderziehen Sie die Kabel nicht gewaltsam.) Die unnötige Belastung auf dem Kabel kann zu Schäden an den Kabel, zur Trennung und/oder Kontaktausfall führen.Beschädigte Kabel, Trennung oder Kontaktausfall sind sehr gefährlich und könnenzu elektrischem Schlag und/oder ungenauer Funktion des Robotersystemsführen.
■ Wenn Sie den Manipulatorarm und die Steuerung anschließen, vergewissern Siesich, dass die Seriennummern auf jedem Gerät zusammenpassen. Eineungenaue Verbindung zwischen der Steuerung und dem Manipulatorarm kannnicht nur eine ungenaue Funktion des Robotersystems verursachen, sondern auch zu ernsten Sicherheitsproblemen führen. Die Anschluss-Methode variiert entsprechend der verwendeten Software. Für Details über den Anschluss, lesenSie das Steuerungs-Handbuch.
Anschließen der Kabel für das Reinraum-Modell (C, CM-Typen)
Wenn der Manipulatorarm ein Reinraum-Modell (C, CM-Typen) ist, verwenden Sie ihn mit einem Abluft-System. Für Details, lesen Sie Einrichten & Betrieb: 2.4 Spezifikationen.
Einrichten und Betrieb 3. Umgebungen und Installation
32 E2C Rev.1
Kabelanschlüsse
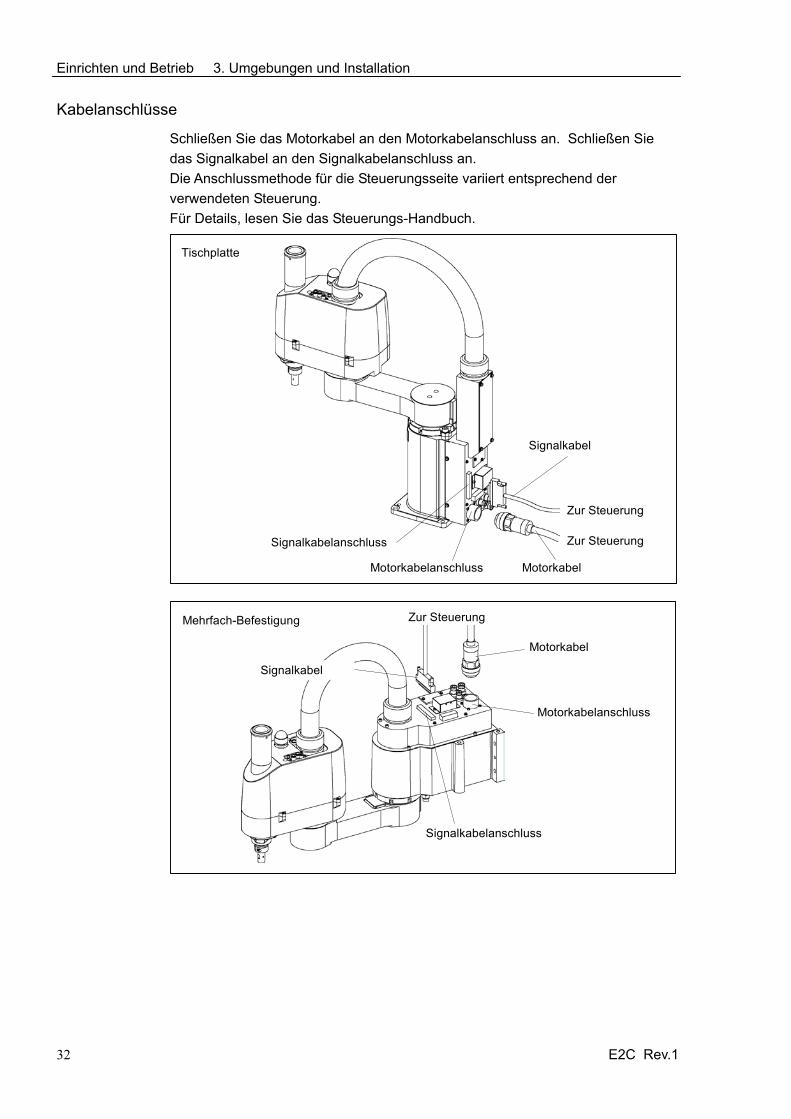
Schließen Sie das Motorkabel an den Motorkabelanschluss an. Schließen Sie das Signalkabel an den Signalkabelanschluss an. Die Anschlussmethode für die Steuerungsseite variiert entsprechend der verwendeten Steuerung. Für Details, lesen Sie das Steuerungs-Handbuch.
Signalkabel
Motorkabel
Zur Steuerung
Signalkabelanschluss
Motorkabelanschluss
Zur Steuerung
Tischplatte
Signalkabel
Motorkabel
Zur Steuerung
Signalkabelanschluss
Motorkabelanschluss
Mehrfach-Befestigung
Einrichten und Betrieb 3. Umgebungen und Installation
E2C Rev.1 33
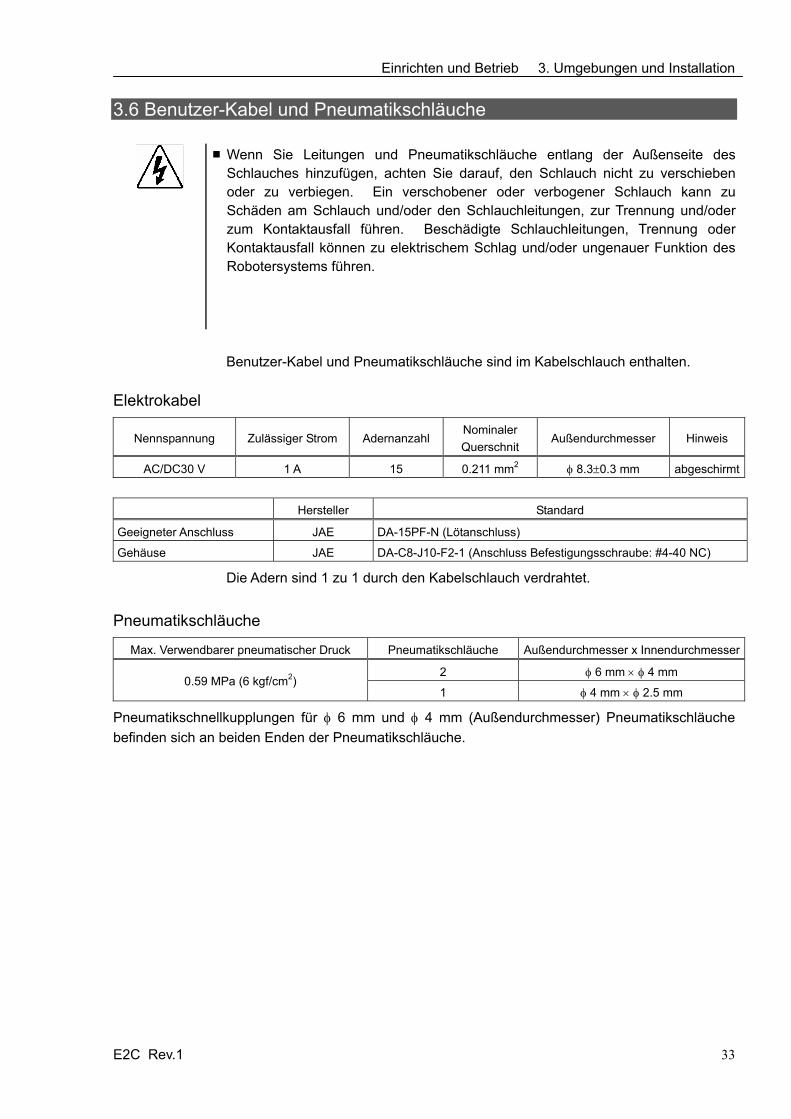
3.6 Benutzer-Kabel und Pneumatikschläuche
■ Wenn Sie Leitungen und Pneumatikschläuche entlang der Außenseite desSchlauches hinzufügen, achten Sie darauf, den Schlauch nicht zu verschiebenoder zu verbiegen. Ein verschobener oder verbogener Schlauch kann zu Schäden am Schlauch und/oder den Schlauchleitungen, zur Trennung und/oderzum Kontaktausfall führen. Beschädigte Schlauchleitungen, Trennung oderKontaktausfall können zu elektrischem Schlag und/oder ungenauer Funktion desRobotersystems führen.
Benutzer-Kabel und Pneumatikschläuche sind im Kabelschlauch enthalten.
Elektrokabel
Nennspannung Zulässiger Strom Adernanzahl Nominaler Querschnit
Außendurchmesser Hinweis
AC/DC30 V 1 A 15 0.211 mm2 φ 8.3±0.3 mm abgeschirmt
Hersteller Standard
Geeigneter Anschluss JAE DA-15PF-N (Lötanschluss)
Gehäuse JAE DA-C8-J10-F2-1 (Anschluss Befestigungsschraube: #4-40 NC)
Die Adern sind 1 zu 1 durch den Kabelschlauch verdrahtet.
Pneumatikschläuche
Max. Verwendbarer pneumatischer Druck Pneumatikschläuche Außendurchmesser x Innendurchmesser
2 φ 6 mm × φ 4 mm 0.59 MPa (6 kgf/cm2)
1 φ 4 mm × φ 2.5 mm
Pneumatikschnellkupplungen für φ 6 mm und φ 4 mm (Außendurchmesser) Pneumatikschläuche befinden sich an beiden Enden der Pneumatikschläuche.
Einrichten und Betrieb 3. Umgebungen und Installation
34 E2C Rev.1
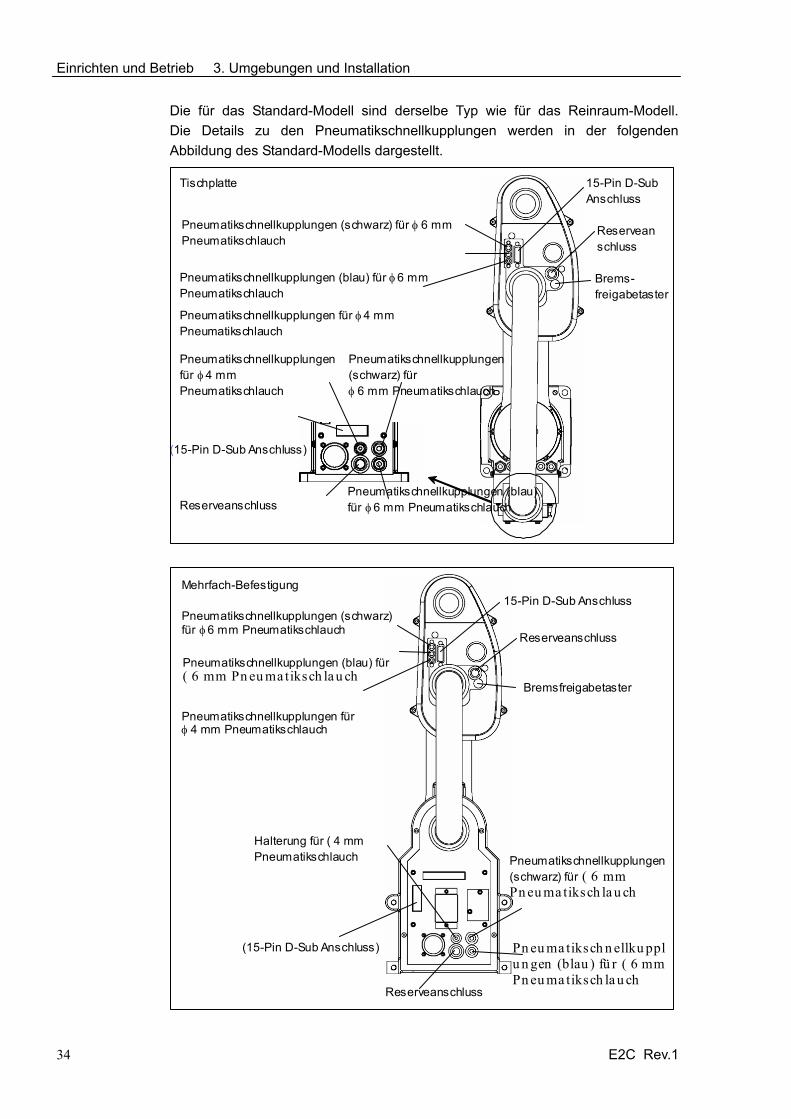
Die für das Standard-Modell sind derselbe Typ wie für das Reinraum-Modell. Die Details zu den Pneumatikschnellkupplungen werden in der folgenden Abbildung des Standard-Modells dargestellt.
Pneumatikschnellkupplungen (blau) für φ 6 mm Pneumatikschlauch
Pneumatikschnellkupplungen (schwarz) für φ 6 mm Pneumatikschlauch
Reserveanschluss
Pneumatikschnellkupplungen für φ 4 mm Pneumatikschlauch
Brems- freigabetaster
15-Pin D-Sub Anschluss
Reserveanschluss
(15-Pin D-Sub Anschluss)
Pneumatikschnellkupplungen für φ 4 mm Pneumatikschlauch
Pneumatikschnellkupplungen (schwarz) für φ 6 mm Pneumatikschlauch
Pneumatikschnellkupplungen (blau) für φ 6 mm Pneumatikschlauch
Tischplatte
Reserveanschluss
(15-Pin D-Sub Anschluss)
Pneumatikschnellkupplungen (schwarz) für ( 6 mm Pn eu ma tiksch la u ch
Pn eu ma tiksch n ellku pplu n gen (blau ) fü r ( 6 mm Pn eu ma tiksch la u ch
Halterung für ( 4 mm Pneumatikschlauch
Pneumatikschnellkupplungen (blau) für ( 6 mm Pn eu ma tiksch lau ch
Pneumatikschnellkupplungen (schwarz) für φ 6 mm Pneumatikschlauch
Reserveanschluss
Pneumatikschnellkupplungen für φ 4 mm Pneumatikschlauch
Bremsfreigabetaster
15-Pin D-Sub Anschluss Mehrfach-Befestigung
Einrichten und Betrieb 3. Umgebungen und Installation
E2C Rev.1 35
3.7 Standortwechsel und Lagerung 3.7.1 Vorkehrungen für Standortwechsel und Lagerung
Beachten Sie Folgendes, wenn Sie den Standort des Manipulatorarms wechseln, den Manipulatorarm lagern oder transportieren.
■ Bevor Sie den Standort des Manipulatorarms wechseln, knicken Sie den Arm einund sichern Sie ihn fest mit einem Kabelbinder, um Hände und Finger davor zuschützen, im Manipulatorarm hängen zubleiben.
■ Wenn Sie die Befestigungsschrauben entfernen, stützen Sie den Manipulatorarm, um zu verhindern, dass er herunterfällt. Das Entfernen derBefestigungsschrauben ohne Stützen des Manipulatorarms kann dazu führen,dass er fällt und, dass Ihre Hände, Finger oder Füße einquetschen.
■ Um den Manipulatorarm zu tragen, brauchen Sie zwei oder mehr Personen, umden Manipulatorarm an der Transportsicherung zu befestigen oder die Unterseitevom 1. Arm , die Hauptkabel- Ellbogen-Halterung und den Boden des Sockels von Hand zu halten. Wenn Sie den Boden des Sockels von Hand halten, passen Siesehr auf, dass sich Ihre Hände oder Finger nicht einquetschen.
■ Stabilisieren Sie den Manipulatorarm mit Ihren Händen, wenn Sie ihn hochheben.Instabiles Anheben ist extrem gefährlich und kann dazu führen, dass derManipulatorarm herunterfällt.
Wenn Sie den Manipulatorarm über eine lange Strecke transportieren, befestigen Sie ihn an der Transportsicherung, so dass der Manipulatorarm nicht fallen kann. Wenn nötig, verpacken Sie den Manipulatorarm genauso, wie er geliefert wurde. Wenn der Manipulatorarm nach einer langfristigen Lagerung wieder für das Robotersystem verwendet wird, führen Sie einen Testlauf des Robotersystems durch, um zu überprüfen, ob es richtig funktioniert. Transportieren und lagern Sie den Manipulatorarm in einem Bereich von -25°C bis +55°C. Es wird eine Luftfeuchtigkeit von 10% bis 90% empfohlen. Wenn am Manipulatorarm während des Transport oder der Lagerung Kondensation entsteht, schalten Sie die Stromversorgung erst ein, wenn die Kondensation abgetrocknet ist. Setzen Sie den Manipulatorarm während des Transportes keinen Schlägen oder Erschütterungen aus.
Einrichten und Betrieb 3. Umgebungen und Installation
36 E2C Rev.1
3.7.2 Den Standort der Tischplatten-Modelle wechseln
Folgen Sie den unten beschriebenen Prozeduren, wenn Sie den Standort des Manipulatorarms wechseln.
(1) Schalten Sie die Stromversorgung an allen Geräte aus und ziehen Sie die Kabel heraus.
Entfernen Sie die mechanischen Stopper, wenn Sie diese verwenden, um den Arbeitsbereich der 1.Achse und 2.Achse zu begrenzen. Für Details über den Arbeitsbereich, lesen Sie Einrichten & Betrieb: 5.2 Arbeitsbereich-Einstellung durch mechanische Stopper.
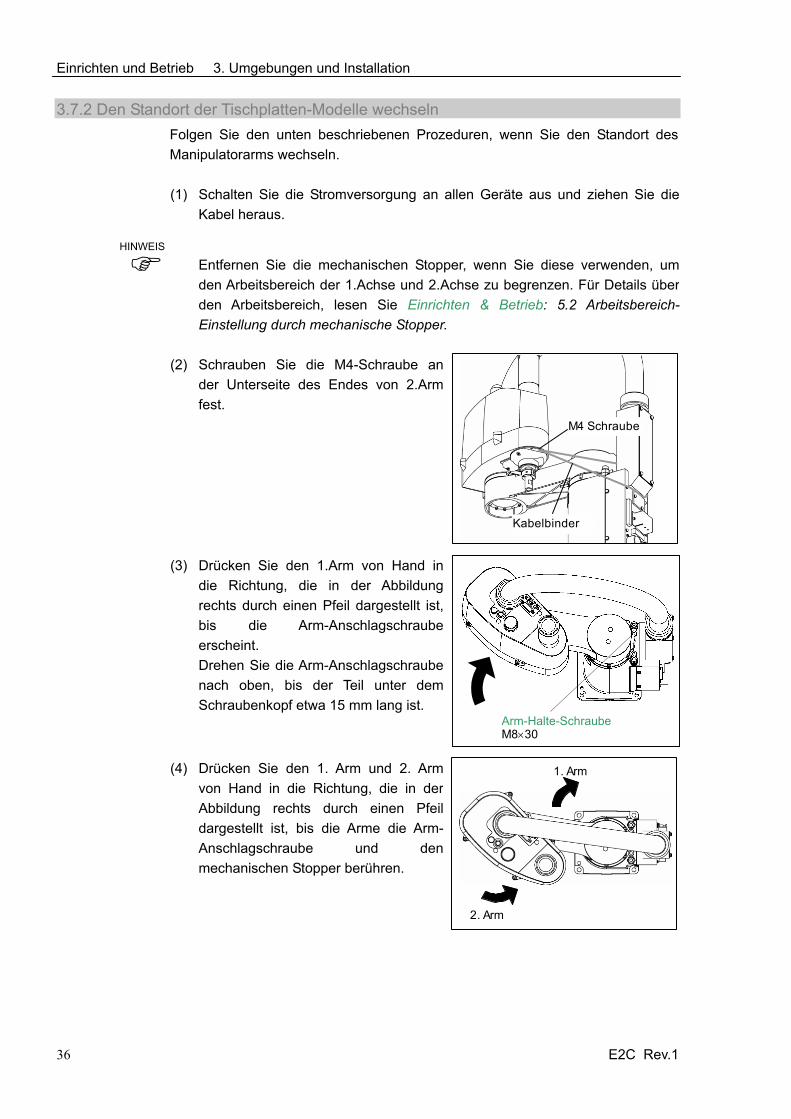
(2) Schrauben Sie die M4-Schraube an der Unterseite des Endes von 2.Armfest.
Kabelbinder
M4 Schraube
(3) Drücken Sie den 1.Arm von Hand in die Richtung, die in der Abbildungrechts durch einen Pfeil dargestellt ist,bis die Arm-Anschlagschraube erscheint. Drehen Sie die Arm-Anschlagschraube nach oben, bis der Teil unter demSchraubenkopf etwa 15 mm lang ist.
Arm-Halte-Schraube M8×30
(4) Drücken Sie den 1. Arm und 2. Armvon Hand in die Richtung, die in derAbbildung rechts durch einen Pfeil dargestellt ist, bis die Arme die Arm-Anschlagschraube und denmechanischen Stopper berühren.
1. Arm
2. Arm
HINWEIS
Einrichten und Betrieb 3. Umgebungen und Installation
E2C Rev.1 37
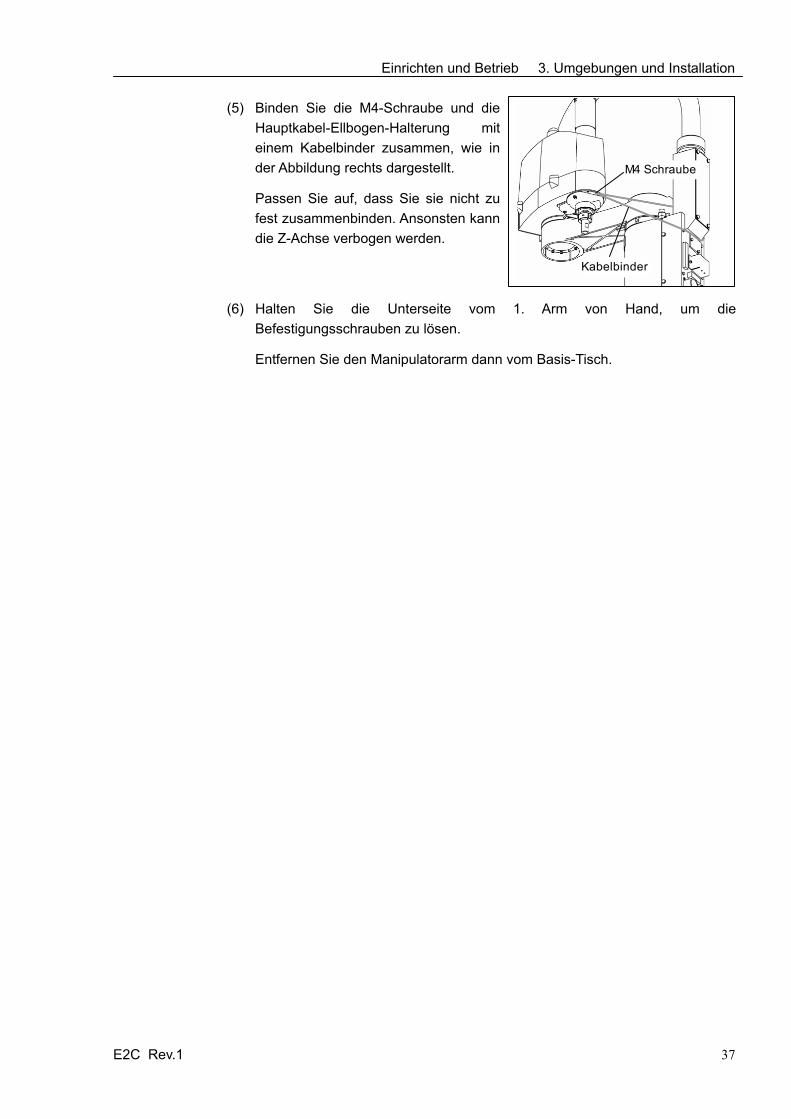
(5) Binden Sie die M4-Schraube und die Hauptkabel-Ellbogen-Halterung mit einem Kabelbinder zusammen, wie inder Abbildung rechts dargestellt.
Passen Sie auf, dass Sie sie nicht zufest zusammenbinden. Ansonsten kanndie Z-Achse verbogen werden.
Kabelbinder
M4 Schraube
(6) Halten Sie die Unterseite vom 1. Arm von Hand, um die Befestigungsschrauben zu lösen.
Entfernen Sie den Manipulatorarm dann vom Basis-Tisch.
Einrichten und Betrieb 3. Umgebungen und Installation
38 E2C Rev.1
3.7.3 Den Standort der Mehrfach-Befestigungs-Modelle wechseln
■ Installieren Sie den Mehrfach-Befestigungs Manipulatorarm mit zwei oder mehr
Personen. Der Manipulatorarm wiegt etwa 16 kg. Passen Sie auf, dass sich Ihre Hände,Finger oder Füße nicht einquetschen und/oder dass kein Geräteschaden durchden Fall des Manipulatorarms entsteht.
■ Wenn Sie den Manipulatorarm von der Wand entfernen, sützten Sie denManipulatorarm und entfernen Sie dann die Befestigungsschrauben. Das Entfernen der Befestigungsschrauben ohne den Manipulatorarm zu stützen, istsehr gefährlich und kann dazuführen, dass er herunterfällt.
Folgen Sie den unten beschriebenen Prozeduren, wenn Sie den Standort des Manipulatorarms wechseln.
(1) Schalten Sie die Stromversorgung an allen Geräte aus und ziehen Sie die Kabel heraus.
Entfernen Sie die mechanischen Stopper, wenn Sie diese verwenden, um den Arbeitsbereich der 1.Achse und 2.Achse zu begrenzen. Für Details über den Arbeitsbereich, lesen Sie Einrichten & Betrieb 5.2 Arbeitsbereich-Einstellung durch mechanische Stopper.
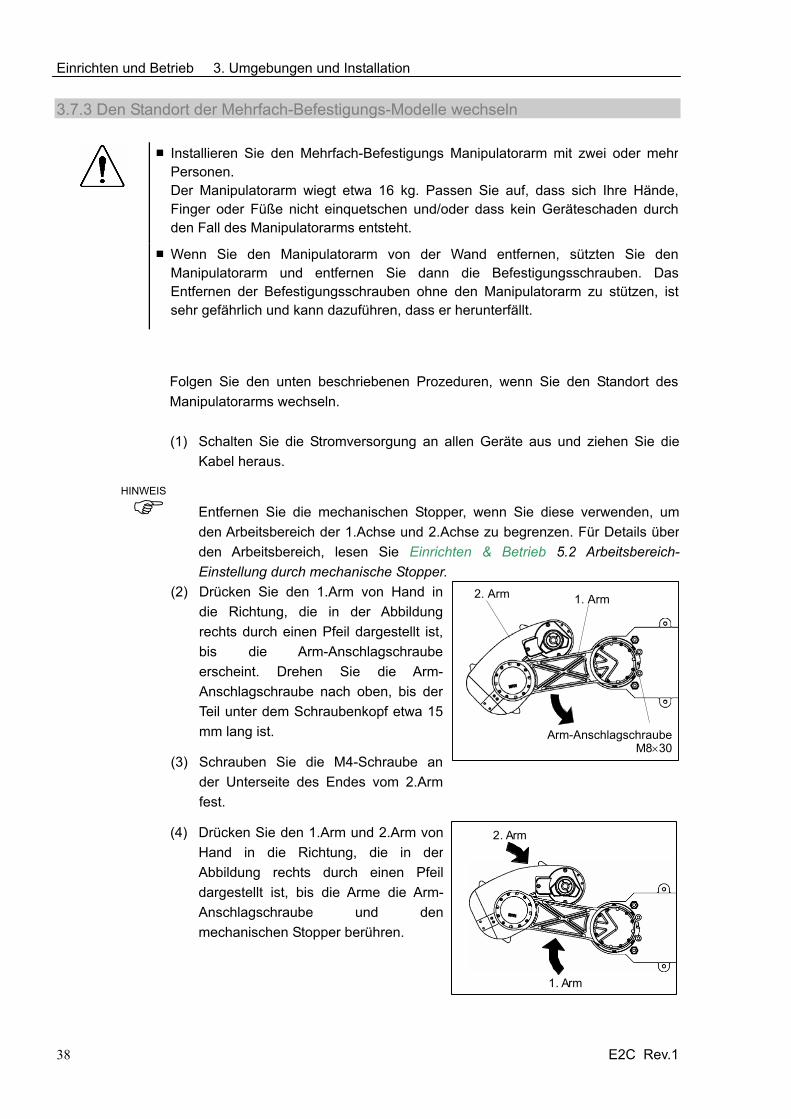
(2) Drücken Sie den 1.Arm von Hand in die Richtung, die in der Abbildung rechts durch einen Pfeil dargestellt ist, bis die Arm-Anschlagschraubeerscheint. Drehen Sie die Arm-Anschlagschraube nach oben, bis der Teil unter dem Schraubenkopf etwa 15 mm lang ist.
(3) Schrauben Sie die M4-Schraube an der Unterseite des Endes vom 2.Arm fest.
1. Arm 2. Arm
Arm-AnschlagschraubeM8×30
(4) Drücken Sie den 1.Arm und 2.Arm vonHand in die Richtung, die in derAbbildung rechts durch einen Pfeildargestellt ist, bis die Arme die Arm-Anschlagschraube und denmechanischen Stopper berühren.
1. Arm
2. Arm
HINWEIS
Einrichten und Betrieb 3. Umgebungen und Installation
E2C Rev.1 39
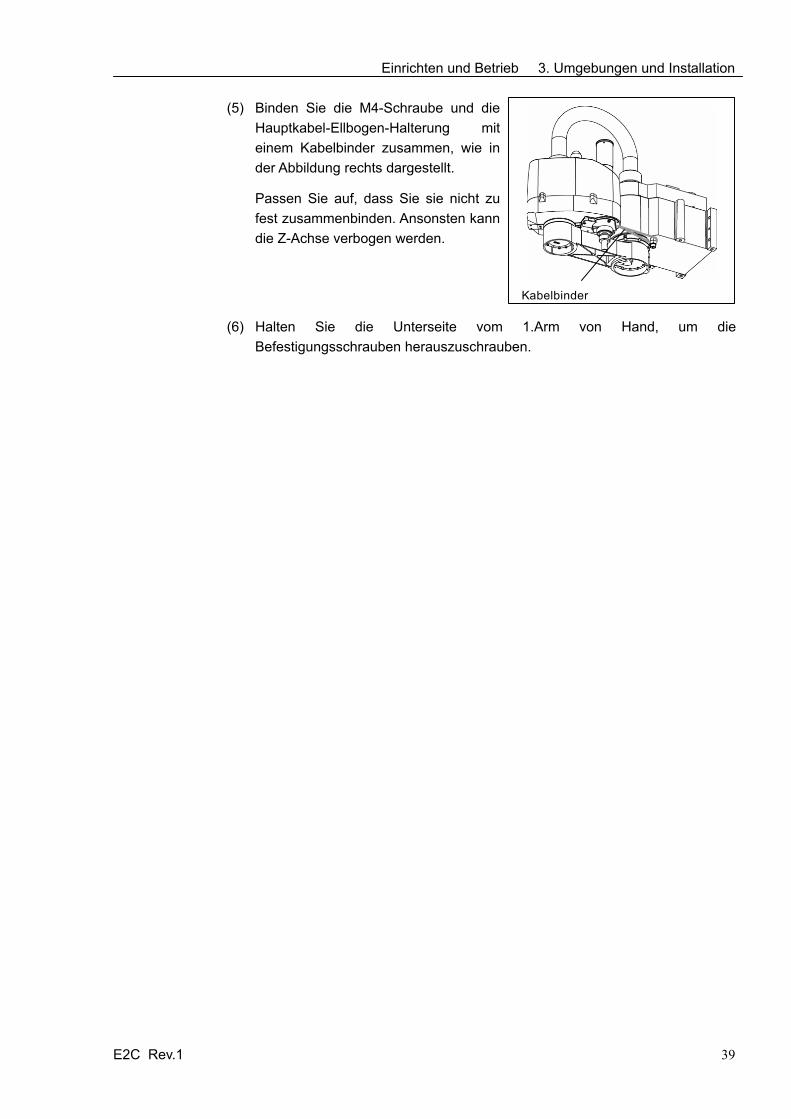
(5) Binden Sie die M4-Schraube und die Hauptkabel-Ellbogen-Halterung mit einem Kabelbinder zusammen, wie inder Abbildung rechts dargestellt.
Passen Sie auf, dass Sie sie nicht zufest zusammenbinden. Ansonsten kann die Z-Achse verbogen werden.
Kabelbinder
(6) Halten Sie die Unterseite vom 1.Arm von Hand, um die Befestigungsschrauben herauszuschrauben.
Einrichten und Betrieb 4. Einstellung des Greifers
40 E2C Rev.1
4. Einstellung des Greifers 4.1 Einen Greifer anbringen
Die Benutzer sind für die Herstellung ihres eigenen Greifers / ihrer eigenen Greifer verantwortlich. Bevor Sie einen Greifer anbringen, befolgen Sie diese Richtlinien.
■ Wenn Sie einen Greifer verwenden, der mit einer Greiferzange oder einem Spannfutter ausgestattet ist, schließen Sie Leitungen und/oder Pneumatikschläuche richtig an, so dass die Greiferzange das Werkstück nicht loslässt, wenn der Strom des Robotersystems AUSgeschaltet wird. Ungenaues Anschließen der Kabel und/oder Pneumatikschläuche kann das Robotersystem und/oder das Werkstück beschädigen, weil das Werkstück losgelassen wird, wenn der Not-Aus-Schalter gedrückt wird. Die E/As sind bei Herstellung so eingestellt worden, dass diese automatisch durch Strom-Trennung, den Not-Aus-Schalter oder die anderen Sicherheitseigenschaften des Robotersystems ausschalten (0).
Z-Achse
♦ Bringen Sie einen Greifer am unteren Ende der Z-Achse an. Für die Z-Achsenabmessungen und die Gesamtabmessungen des Manipulatorarms, lesen Sie Einrichten & Betrieb: 2. Spezifikationen.
♦ Verschieben Sie den mechanischen Stopper der Obergrenze nicht auf die untere Seite der Z-Achse. Anderenfalls kann der mechanische Stopper den Manipulatorarm treffen, wenn eine „Jump (Sprung)-Bewegung“ ausgeführt wird, und das Robotersystem kann möglicherweise nicht richtig funktionieren.
♦ Verwenden Sie einen Klemmring mit einer M4-Schraube oder größer, um den Greifer an der Z-Achse zu befestigen.
Einrichten und Betrieb 4. Einstellung des Greifers
E2C Rev.1 41
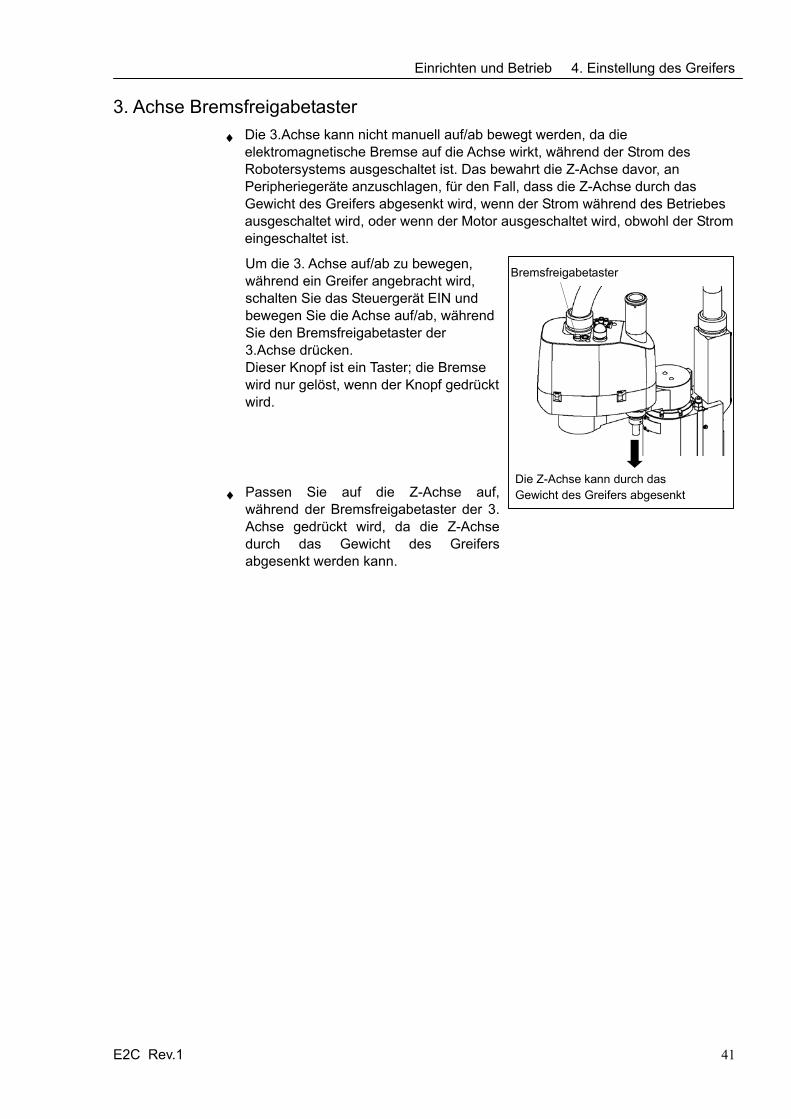
3. Achse Bremsfreigabetaster ♦ Die 3.Achse kann nicht manuell auf/ab bewegt werden, da die
elektromagnetische Bremse auf die Achse wirkt, während der Strom des Robotersystems ausgeschaltet ist. Das bewahrt die Z-Achse davor, an Peripheriegeräte anzuschlagen, für den Fall, dass die Z-Achse durch das Gewicht des Greifers abgesenkt wird, wenn der Strom während des Betriebes ausgeschaltet wird, oder wenn der Motor ausgeschaltet wird, obwohl der Strom eingeschaltet ist.
Um die 3. Achse auf/ab zu bewegen, während ein Greifer angebracht wird, schalten Sie das Steuergerät EIN und bewegen Sie die Achse auf/ab, während Sie den Bremsfreigabetaster der 3.Achse drücken. Dieser Knopf ist ein Taster; die Bremse wird nur gelöst, wenn der Knopf gedrückt wird.
♦ Passen Sie auf die Z-Achse auf, während der Bremsfreigabetaster der 3. Achse gedrückt wird, da die Z-Achse durch das Gewicht des Greifersabgesenkt werden kann.
Bremsfreigabetaster
Die Z-Achse kann durch das Gewicht des Greifers abgesenkt
Einrichten und Betrieb 4. Einstellung des Greifers
42 E2C Rev.1
Layouts
♦ Wenn Sie den Manipulatorarm mit einem Greifer betreiben, kann der Greifer den Manipulatorarm aufgrund des Außendurchmessers des Greifers, der Größe des Werkstückes oder der Position des Armes behindern. Wenn Sie Ihren Systemaufbau entwerfen, beachten Sie den Störbereich des Greifers. Wenn der maximale Radius des Greifers über 37 mm beträgt, kann der Greifer den Manipulatorarm abhängig von der Bewegung treffen.
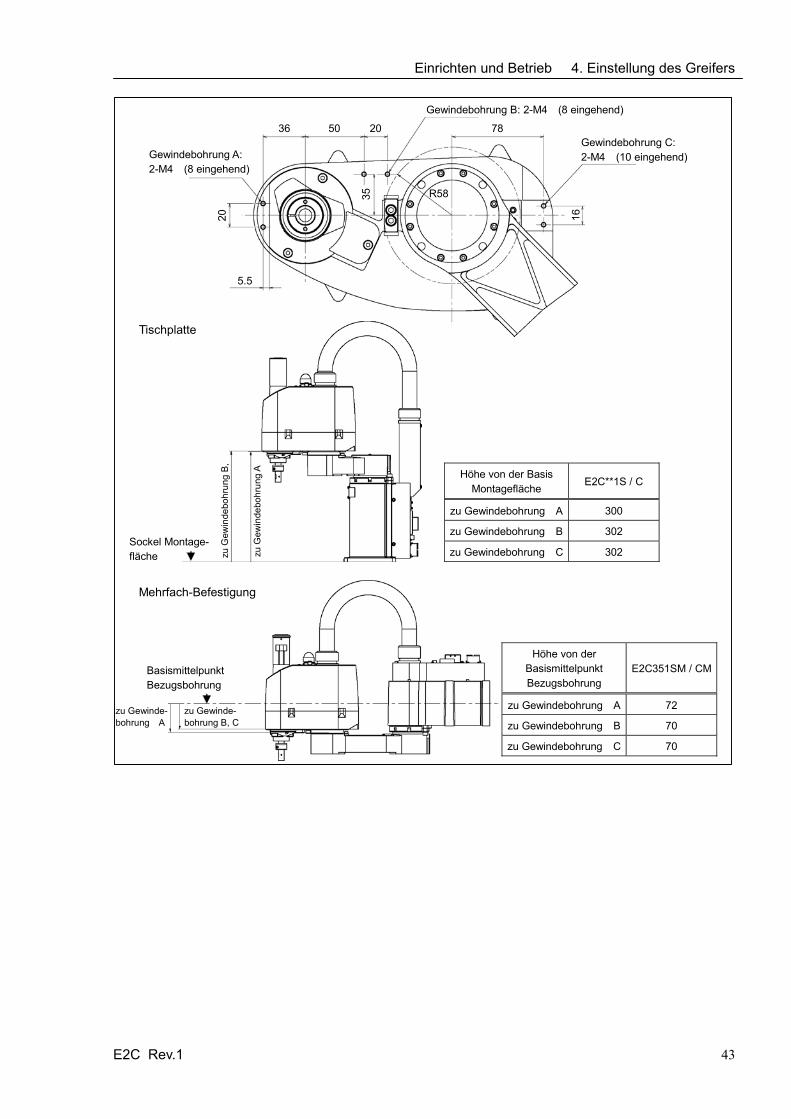
4.2 Kameras und Ventile anbringen Der 2. Arm hat Gewindebohrungen, wie in der Abbildung unten dargestellt. Verwenden Sie diese Bohrungen, um Kameras, Ventile oder andere Geräte anzubringen.
Einrichten und Betrieb 4. Einstellung des Greifers
E2C Rev.1 43
36
5.5
20
zu G
ewin
debo
hrun
g A
zu G
ewin
debo
hrun
g B
,
Tischplatte
Mehrfach-Befestigung
zu Gewinde- bohrung A
zu Gewinde- bohrung B, C
Sockel Montage- fläche
Basismittelpunkt Bezugsbohrung
Höhe von der Basis Montagefläche
E2C**1S / C
zu Gewindebohrung A 300
zu Gewindebohrung B 302
zu Gewindebohrung C 302
Höhe von der Basismittelpunkt Bezugsbohrung
E2C351SM / CM
zu Gewindebohrung A 72
zu Gewindebohrung B 70
zu Gewindebohrung C 70
Gewindebohrung B: 2-M4 (8 eingehend)
50 20 78
35
16
R58
Gewindebohrung C: 2-M4 (10 eingehend) Gewindebohrung A:
2-M4 (8 eingehend)
Einrichten und Betrieb 4. Einstellung des Greifers
44 E2C Rev.1
4.3 WEIGHT (Gewicht) und INERTIA (Trägheit) Einstellungen
Um eine optimale Manipulatorarm-Leistung sicherzustellen, ist es wichtig zu überprüfen, ob die Last (Gewicht des Greifers und Werkstücks) und das Masseträgheitsmoment der Last innerhalb der maximalen Nennwerte für den Manipulatorarm liegen, und dass die 4.Achse nicht exzentrisch wird.Wenn die Last oder das Trägheitsmoment die Nennwerte überschreitet oder wenn die Last exzentrisch wird, folgen Sie den Schritten 4.3.1 und 4.3.2 unten, um die Parameter einzustellen. Das Einstellen der Parameter optimiert den Betrieb des Manipulatorarms, reduziert die Oszillation zur Verkürzung der Betriebszeit und verbessert die Kapazität für größere Last. Zusätzlich reduziert es die anhaltende Osziallation, die erzeugt wird, wenn das Trägheitsmoment an Greifer und Werkstück größer ist.
4.3.1 WEIGHT (Gewicht) Einstellung
■ Das Gesamtgewicht des Greifers und des Werkstückes muss 3 kg oder weniger betragen. Die E2C Serie-Manipulatorarme sind nicht dazu konstruiert, mit Lasten zu arbeiten, die schwerer als 3 kg sind. Stellen Sie die WEIGHT-Parameter immer entsprechend dieser Last ein. Das Einstellen eines Wertes, der kleiner ist als die tatsächliche Last, kann Fehler, plötzliche Stoßbewegungen und ungenügende Funktion des Manipulatorarms verursachen und/oder die Lebensdauer der Teile/Mechanismen verkürzen.
Die zulässige Gewichtskapazität (Greifer und Werkstück) in der E2C Serie beträgt 1 kg Nennlast und 3 kg Maximallast. Wenn die Last (Gewicht des Greifers und Werkstückes) die Nennlast überschreitet, ändern Sie die Einstellung des WEIGHT-Parameters. Nachdem die Einstellung geändert wurde, wird die maximale Geschwindigkeit der Beschleunigung/Verzögerung des Robotersystems entsprechend dem „WEIGHT-Parameter“ automatisch eingestellt.
Last an der Z-Achse
Die Last (Gewicht des Greifers und Werkstückes) an der Z-Achse kann durch die WEIGHT-Parameter eingestellt werden. Die Methode zum Einstellen der Parameter variiert mit der verwendeten Software.
SPEL CT Geben Sie das kombinierte Gesamtgewicht des Greifers und Werkstückes in das[Weight:] Textfeld im [WEIGHT]-Feld ([Setup] – [Robot Parameters] ein).
EPSON RC+
Geben Sie das kombinierte Gesamtgewicht des Greifers und Werkstückes in das[Weight:] Textfeld im [WEIGHT]-Feld ([Projekt] – [Roboterparameter] ein).Sie können auch den WEIGHT-Befehl aus dem [EPSON RC+ Online-Fenster] ausführen.
Einrichten und Betrieb 4. Einstellung des Greifers
E2C Rev.1 45
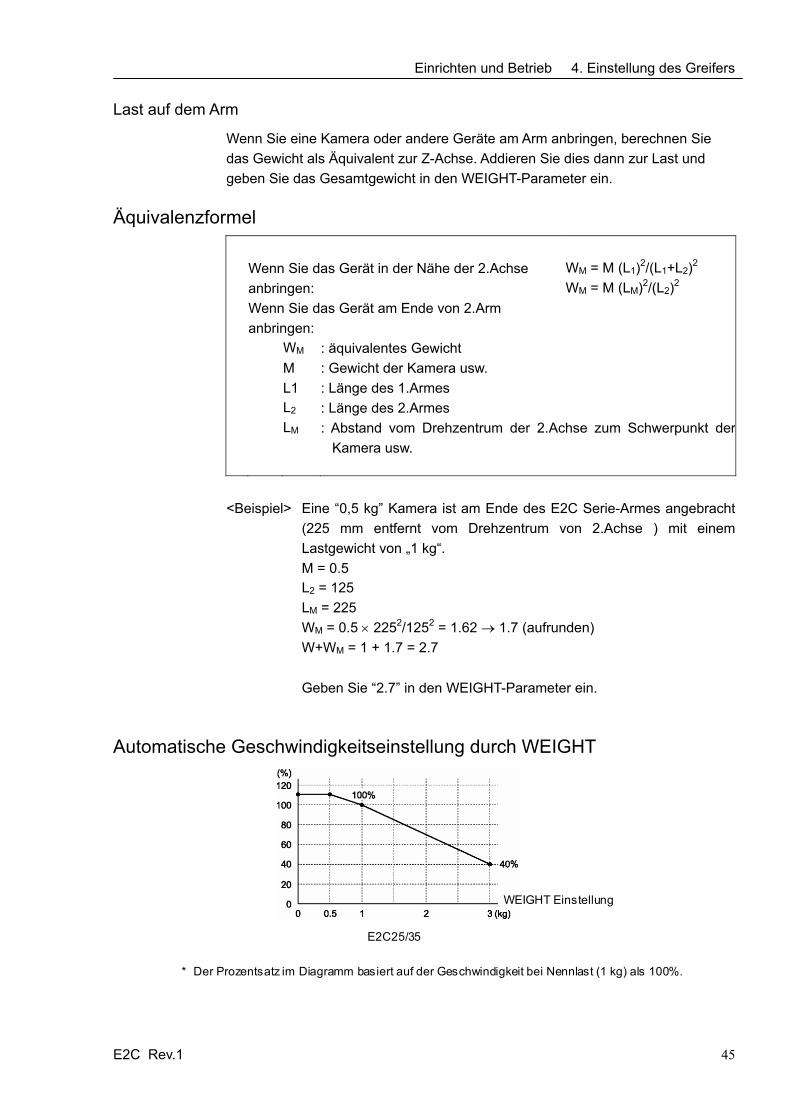
Last auf dem Arm
Wenn Sie eine Kamera oder andere Geräte am Arm anbringen, berechnen Sie das Gewicht als Äquivalent zur Z-Achse. Addieren Sie dies dann zur Last und geben Sie das Gesamtgewicht in den WEIGHT-Parameter ein.
Äquivalenzformel
Wenn Sie das Gerät in der Nähe der 2.Achse anbringen: Wenn Sie das Gerät am Ende von 2.Arm anbringen:
WM = M (L1)2/(L1+L2)2 WM = M (LM)2/(L2)2
WM M L1 L2 LM
: äquivalentes Gewicht : Gewicht der Kamera usw. : Länge des 1.Armes : Länge des 2.Armes : Abstand vom Drehzentrum der 2.Achse zum Schwerpunkt der
Kamera usw.
<Beispiel> Eine “0,5 kg” Kamera ist am Ende des E2C Serie-Armes angebracht
(225 mm entfernt vom Drehzentrum von 2.Achse ) mit einemLastgewicht von „1 kg“.
M = 0.5 L2 = 125 LM = 225 WM = 0.5 × 2252/1252 = 1.62 → 1.7 (aufrunden) W+WM = 1 + 1.7 = 2.7 Geben Sie “2.7” in den WEIGHT-Parameter ein.
Automatische Geschwindigkeitseinstellung durch WEIGHT
* Der Prozentsatz im Diagramm basiert auf der Geschwindigkeit bei Nennlast (1 kg) als 100%.
WEIGHT Einstellung
E2C25/35
Einrichten und Betrieb 4. Einstellung des Greifers
46 E2C Rev.1
4.3.2 INERTIA (Trägheit) Einstellung Trägheitsmoment und die INERTIA-Einstellung
Das Trägheitsmoment ist definiert als “das Verhältnis des Drehmoments, angewendet auf einen starren Körper und dessen Widerstand gegen die Bewegung“. Dieser Wert wird typischerweise als “Trägheitsmoment“, „Trägheit“ oder „GD²“ bezeichnet. Wenn der Manipulatorarm arbeitet, nachdem Objekte wie zum Beispiel ein Greifer an der Z-Achse angebracht wurden, muss das Massenträgheitsmoment der Last bedacht werden.
■ Das Massenträgheitsmoment der Last (Gewicht des Greifers und des Werkstücks) muss 0.05 kg m2 oder weniger betragen. Die E2C Serie-Manipulatorarme sind nicht dazu konstruiert, mit Trägheitsmomenten zu arbeiten, die 0.05 kg m2
überschreiten. Stellen Sie den Trägheitsmoment (INERTIA)-Parameter immer entsprechend dem Trägheitsmoment ein. Das Einstellen eines Wertes, der kleiner als das tatsächliche Trägheitsmoment ist, kann Fehler, plötzliche Stoßbewegungen und ungenügende Funktion des Manipulatorarms verursachen und/oder die Lebensdauer der Teile/Mechanismen verkürzen. Das zulässige Massenträgheitsmoment der Last bei der E2C Serie ist 0.005 kg m² als Nennwert und 0.05 kg m² als Maximalwert. Wenn das Massenträgheitsmoment der Last den Nennwert überschreitet, ändern Sie die Einstellung des Massenträgheitsmoment-(INERTIA)-Parameters des INERTIA-Befehl. Nachdem die Einstellung geändert wurde, wird die maximale Geschwindigkeit der Beschleunigung/Verzögerung der 4.Achse entsprechend dem „Trägheitsmoment“ automatisch eingestellt.
Massenträgheitsmoment auf der Z-Achse
Das Massenträgheitsmoment (Gewicht des Greifers und des Arbeitsstückes) auf der Z-Achse kann durch den „Trägheitsmoment (INERTIA)“-Parameter des INERTIA-Befehls eingestellt werden. Die Methode zum Einstellen der Parameter variiert mit der verwendeten Software.
SPEL CT Geben Sie das kombinierte Gesamtträgheitsmoment des Greifers undWerkstückes in das [Load inertia:] Textfeld im [INERTIA]-Feld ([Setup] – [Robot Parameters] ein).
EPSON RC+
Geben Sie das kombinierte Gesamtträgheitsmoment des Greifers undWerkstückes in das [Lastträgheit:] -Textfeld im [TRÄGHEIT]-Feld ([Projekt] –[Roboterparameter] ein).Sie können auch den INERTIA-Befehl aus dem [EPSON RC+ Online-Fenster] ausführen.
Einrichten und Betrieb 4. Einstellung des Greifers
E2C Rev.1 47
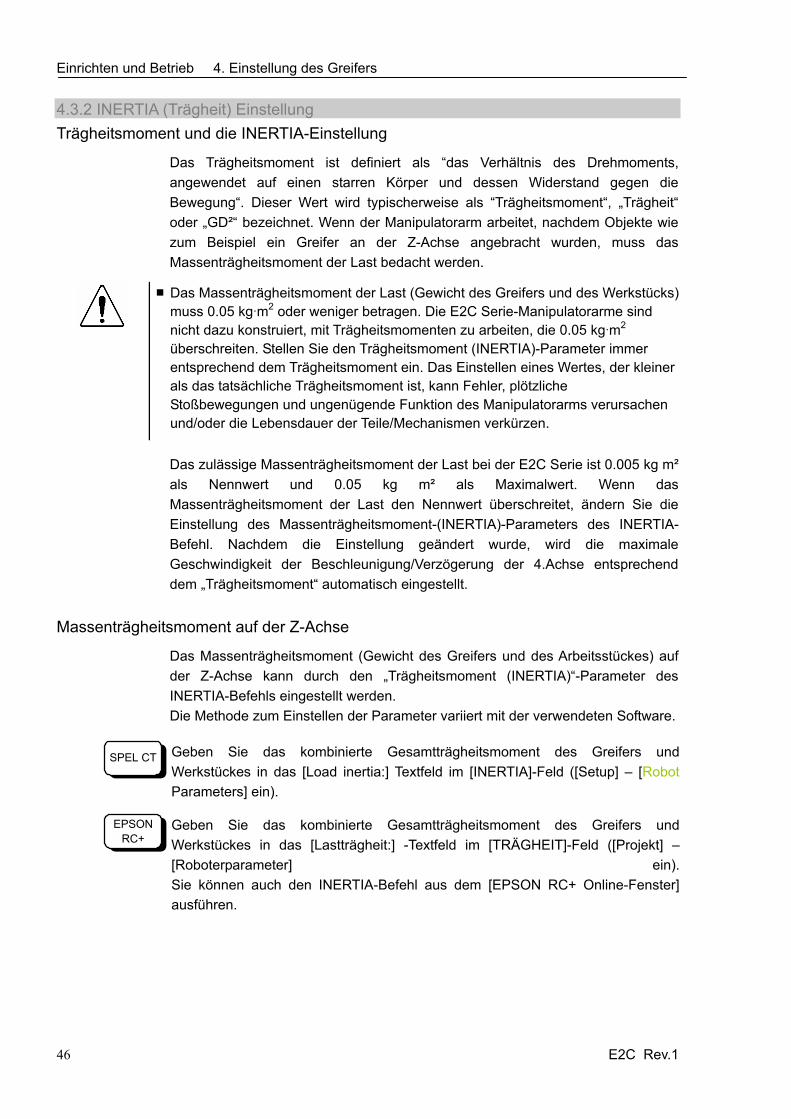
Automatische Beschleunigungs-/Verzögerungs-Einstellung der 4.Achse durch INERTIA (Trägheitsmoment)
* Der Proz ents a tz im Diagra mm b as iert a uf der G es c hw indigk eit z u m Ne nnträ ghe its mo m ent (0.00 5 kg m²) als 10 0% .
Trägh eits mo men t- Eins tel lung
E2C 25 /35
Größe der Exzentrizität und INERTIA-Einstellung
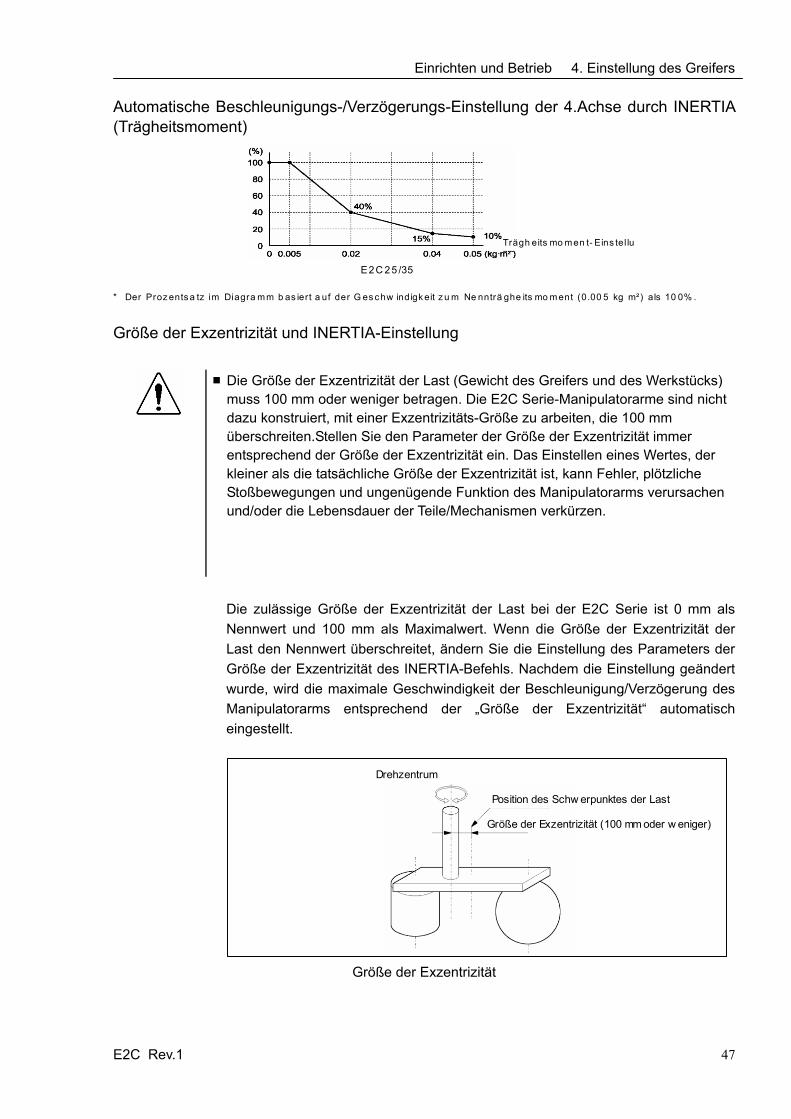
■ Die Größe der Exzentrizität der Last (Gewicht des Greifers und des Werkstücks) muss 100 mm oder weniger betragen. Die E2C Serie-Manipulatorarme sind nicht dazu konstruiert, mit einer Exzentrizitäts-Größe zu arbeiten, die 100 mm überschreiten.Stellen Sie den Parameter der Größe der Exzentrizität immer entsprechend der Größe der Exzentrizität ein. Das Einstellen eines Wertes, der kleiner als die tatsächliche Größe der Exzentrizität ist, kann Fehler, plötzliche Stoßbewegungen und ungenügende Funktion des Manipulatorarms verursachen und/oder die Lebensdauer der Teile/Mechanismen verkürzen.
Die zulässige Größe der Exzentrizität der Last bei der E2C Serie ist 0 mm als Nennwert und 100 mm als Maximalwert. Wenn die Größe der Exzentrizität der Last den Nennwert überschreitet, ändern Sie die Einstellung des Parameters der Größe der Exzentrizität des INERTIA-Befehls. Nachdem die Einstellung geändert wurde, wird die maximale Geschwindigkeit der Beschleunigung/Verzögerung des Manipulatorarms entsprechend der „Größe der Exzentrizität“ automatisch eingestellt.
Position des Schw erpunktes der Last
Drehzentrum
Größe der Exzentrizität (100 mm oder w eniger)
Größe der Exzentrizität
Einrichten und Betrieb 4. Einstellung des Greifers
48 E2C Rev.1
Größe der Exzentrizität der Last auf der Z-Achse Die Größe der Exzentrizität der Last (Gewicht des Greifers und des Arbeitsstückes) auf der Z-Achse kann durch den „exzentrische Quantität“-Parameter des INERTIA-Befehls eingestellt werden. Die Methode zum Einstellen der Parameter variiert mit der verwendeten Software.
SPEL CT Geben Sie das kombinierte Gesamt-exzentrische Quantität des Greifers undWerkstückes in das [Exzentrizität:] Textfeld im [INERTIA]-Feld ([Setup] – [RobotParameters] ein).
EPSON RC+
Geben Sie die kombinierte Gesamt-Größe der Exzentrizität des Greifers und desWerkstückes in das [Exzentrizität:] Textfeld im [TRÄGHEIT]-Feld ([Projekt] –[Roboterparameter] ein). Sie können auch den INERTIA-Befehl aus dem [EPSON RC+ Online-Fenster]ausführen.
Einrichten und Betrieb 4. Einstellung des Greifers
E2C Rev.1 49
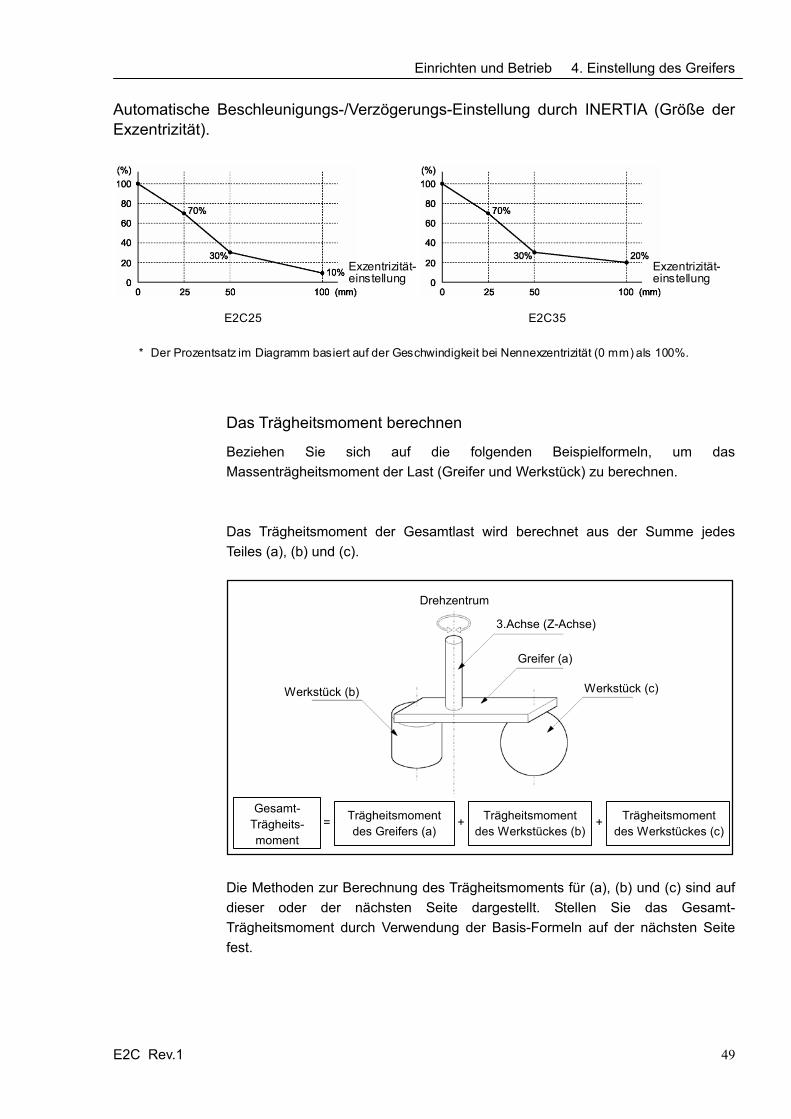
Automatische Beschleunigungs-/Verzögerungs-Einstellung durch INERTIA (Größe der Exzentrizität).
* Der Prozentsatz im Diagramm basiert auf der Geschwindigkeit bei Nennexzentrizität (0 mm) als 100%.
Exzentrizität-einstellung
E2C35
Exzentrizität-einstellung
E2C25
Das Trägheitsmoment berechnen
Beziehen Sie sich auf die folgenden Beispielformeln, um das Massenträgheitsmoment der Last (Greifer und Werkstück) zu berechnen. Das Trägheitsmoment der Gesamtlast wird berechnet aus der Summe jedes Teiles (a), (b) und (c).
Werkstück (b) Werkstück (c)
Greifer (a)
3.Achse (Z-Achse)
Drehzentrum
Trägheitsmoment des Greifers (a)
= Trägheitsmoment des Werkstückes (b)
+ Trägheitsmoment des Werkstückes (c)
+ Gesamt-
Trägheits- moment
Die Methoden zur Berechnung des Trägheitsmoments für (a), (b) und (c) sind auf dieser oder der nächsten Seite dargestellt. Stellen Sie das Gesamt-Trägheitsmoment durch Verwendung der Basis-Formeln auf der nächsten Seite fest.
Einrichten und Betrieb 4. Einstellung des Greifers
50 E2C Rev.1
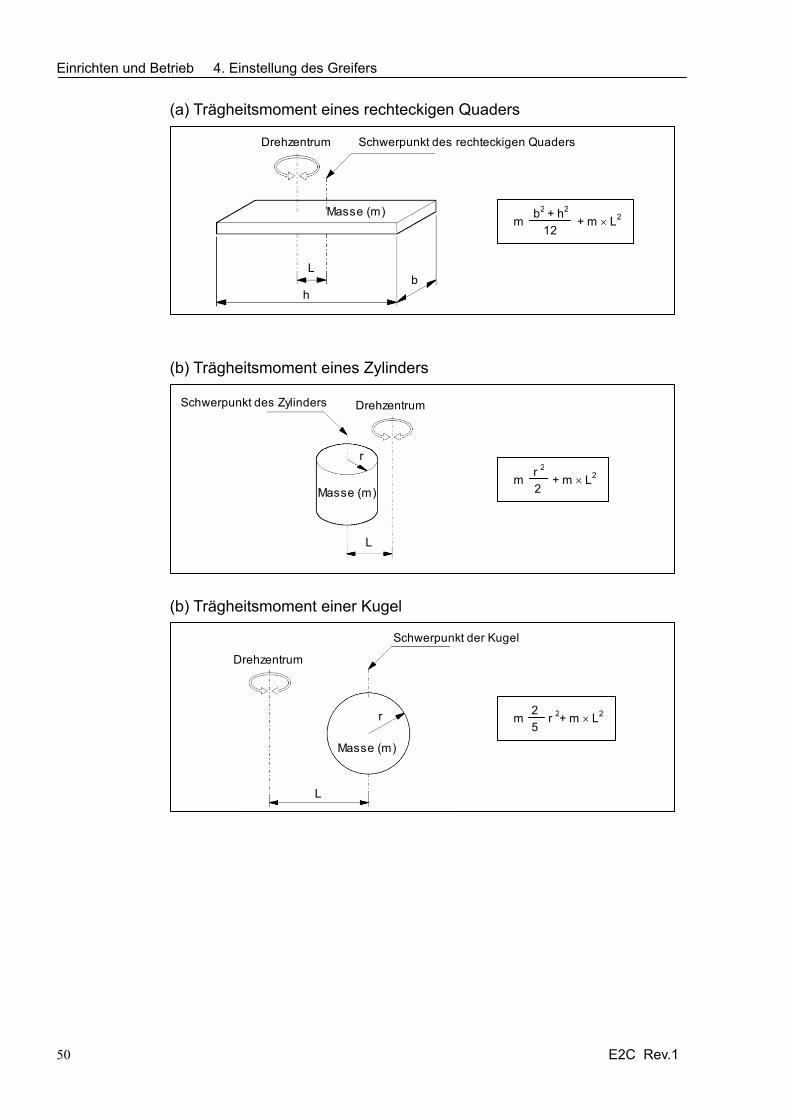
(a) Trägheitsmoment eines rechteckigen Quaders
h b
L
Masse (m)
Schwerpunkt des rechteckigen Quaders Drehzentrum
m + m × L2 b2 + h2
12
(b) Trägheitsmoment eines Zylinders
m + m × L2 r 2 2 Masse (m)
L
r
Schwerpunkt des Zylinders Drehzentrum
(b) Trägheitsmoment einer Kugel
m r 2+ m × L2 2 5
Schwerpunkt der Kugel
r
Masse (m)
L
Drehzentrum
Einrichten und Betrieb 4. Einstellung des Greifers
E2C Rev.1 51
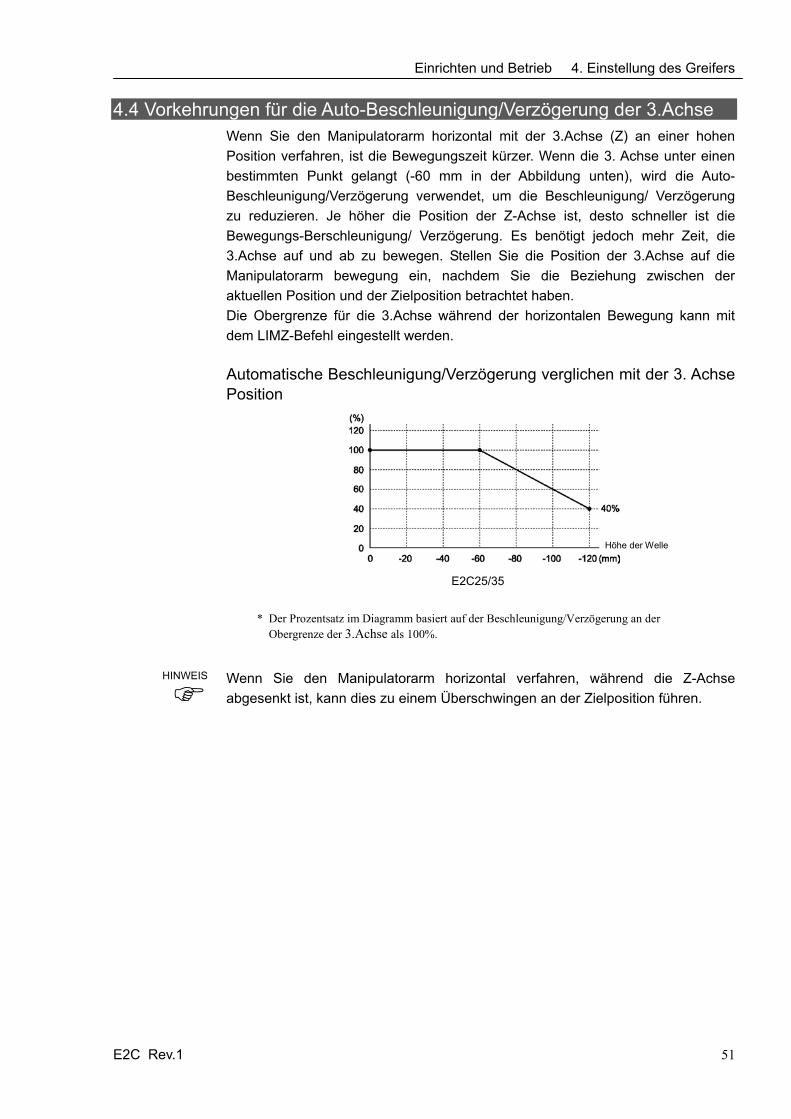
4.4 Vorkehrungen für die Auto-Beschleunigung/Verzögerung der 3.Achse
Wenn Sie den Manipulatorarm horizontal mit der 3.Achse (Z) an einer hohen Position verfahren, ist die Bewegungszeit kürzer. Wenn die 3. Achse unter einen bestimmten Punkt gelangt (-60 mm in der Abbildung unten), wird die Auto-Beschleunigung/Verzögerung verwendet, um die Beschleunigung/ Verzögerung zu reduzieren. Je höher die Position der Z-Achse ist, desto schneller ist die Bewegungs-Berschleunigung/ Verzögerung. Es benötigt jedoch mehr Zeit, die 3.Achse auf und ab zu bewegen. Stellen Sie die Position der 3.Achse auf die Manipulatorarm bewegung ein, nachdem Sie die Beziehung zwischen der aktuellen Position und der Zielposition betrachtet haben. Die Obergrenze für die 3.Achse während der horizontalen Bewegung kann mit dem LIMZ-Befehl eingestellt werden. Automatische Beschleunigung/Verzögerung verglichen mit der 3. Achse Position
Höhe der Welle
E2C25/35
* Der Prozentsatz im Diagramm basiert auf der Beschleunigung/Verzögerung an der Obergrenze der 3.Achse als 100%.
Wenn Sie den Manipulatorarm horizontal verfahren, während die Z-Achse abgesenkt ist, kann dies zu einem Überschwingen an der Zielposition führen.
HINWEIS
Einrichten und Betrieb 5. Arbeitsbereich
52 E2C Rev.1
5. Arbeitsbereich
■ Wenn Sie den Arbeitsbereich aus Gründen der Sicherheit begrenzen, müssen der Pulse-Bereich und die mechanischen Stopper* immer gleichzeitig eingestellt werden.
* Für den Reinraum-Model-Manipulatorarm kann der Arbeitsbereich, der mit dem mechanischen Stopper der 3.Achse eingestellt wurde, nicht geändert werden.
Der Arbeitsbereich wird bei Herstellung voreingestellt, wie in Einrichten & Betrieb: 5.4 Standard Arbeitsbereich erklärt. Das ist der maximale Arbeitsbereich des Manipulatorarms. Es gibt drei Methoden, den Arbeitsbereich einzustellen:
1. Einstellen durch den Pulse-Bereich (für alle vier Achsen)
2. Einstellen durch mechanische Stopper (für die 1. bis 3. Achse des Standard-Modells / 1. und 2. Achse des Reinraum-Models)
3. Einstellen des kartesischen (rechteckigen) Bereichs im X, Y Koordinatensystem des Manipulatorarmes (für 1. und 2. Achse)
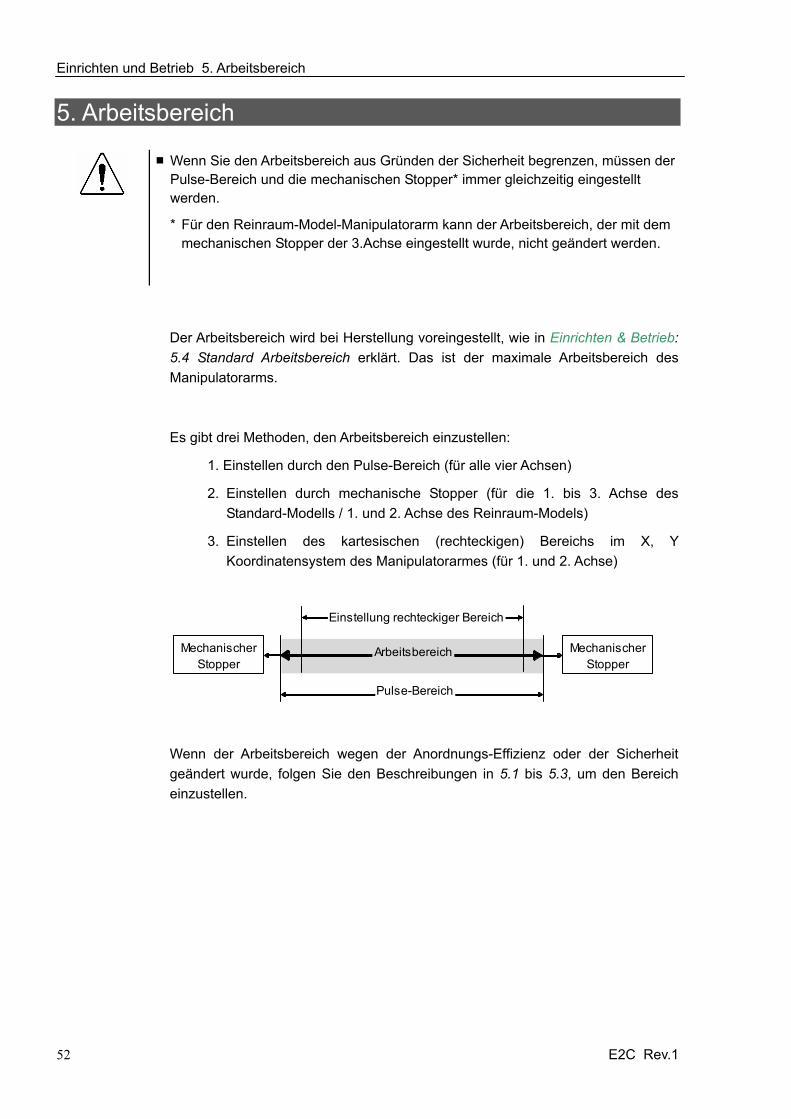
Mechanischer Stopper
Einstellung rechteckiger Bereich
Pulse-Bereich
Arbeitsbereich Mechanischer Stopper
Wenn der Arbeitsbereich wegen der Anordnungs-Effizienz oder der Sicherheit geändert wurde, folgen Sie den Beschreibungen in 5.1 bis 5.3, um den Bereich einzustellen.
Einrichten und Betrieb 5. Arbeitsbereich
E2C Rev.1 53
5.1 Einstellung des Arbeitsbereiches durch den Pulse-Bereich (für alle Achsen)
Pulse sind die Basiseinheit der Manipulatorarm-Bewegung. Der Arbeitsbereich des Manipulatorarms wird durch den Pulse-Bereich zwischen dem unteren Pulse-Limit und dem oberen Limit jeder Achse gesteuert. Pulse-Werte werden vom Encoder-Ausgang des Servomotors gelesen. Für den maximalen Pulse-Bereich, lesen Sie die folgenden Abschnitte. Der Pulse-Bereich muss innerhalb des mechanischen Stopper-Bereiches eingestellt werden.
5.1.1 Max. Pulse-Bereich der 1.Achse 5.1.2 Max. Pulse-Bereich der 2.Achse 5.1.3 Max. Pulse-Bereich der 3.Achse 5.1.4 Max. Pulse-Bereich der 4.Achse
Sobald der Manipulatorarm einen Arbeitsbefehl erhalten hat, überprüft er, ob sich die Zielposition, die durch den Befehl angegeben wurde, im Pulse-Bereich befindet, bevor er arbeitet. Wenn die Zielposition außerhalb des einstellten Pulse-Bereiches liegt, tritt ein Fehler (124,126 oder 129) auf und der Manipulatorarm bewegt sich nicht. Die Methode zum Einstellen des Pulse-Bereiches variiert mit der verwendeten Software.
SPEL CT Der Pulse-Bereich kann im [RANGE]-Bereich eingestellt werden, welcher dargestellt wird, wenn Sie [Setup]-[Robot Parameters] auswählen.
EPSON RC+
Der Pulse-Bereich kann im [RANGE]-Bereich eingestellt werden, welcher dargestellt wird, wenn Sie [Projekt]-[Roboterparameter] auswählen. Sie können auch den RANGE-Befehl aus dem [EPSON RC+ Online-Fenster] ausführen.
HINWEIS
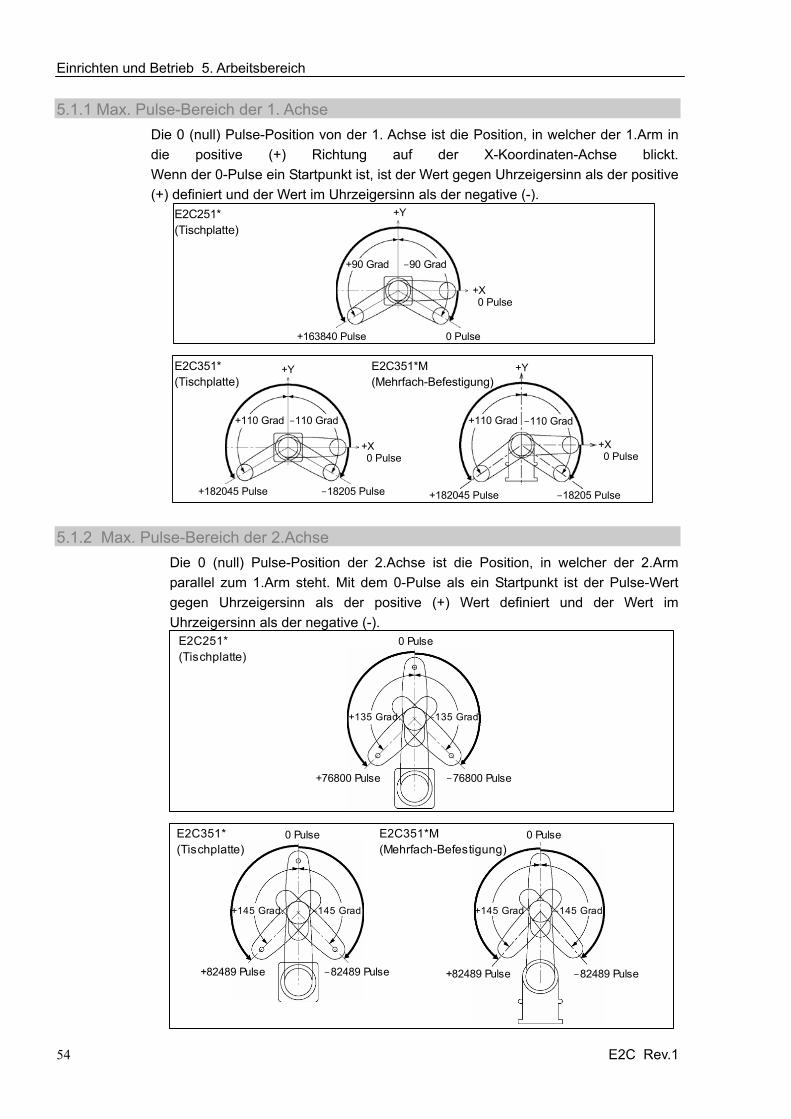
Einrichten und Betrieb 5. Arbeitsbereich
54 E2C Rev.1
5.1.1 Max. Pulse-Bereich der 1. Achse
Die 0 (null) Pulse-Position von der 1. Achse ist die Position, in welcher der 1.Arm in die positive (+) Richtung auf der X-Koordinaten-Achse blickt. Wenn der 0-Pulse ein Startpunkt ist, ist der Wert gegen Uhrzeigersinn als der positive (+) definiert und der Wert im Uhrzeigersinn als der negative (-).
+Y
+X 0 Pulse
+163840 Pulse 0 Pulse
E2C251* (Tischplatte)
-90 Grad +90 Grad
+Y
+X 0 Pulse
+182045 Pulse -18205 Pulse
E2C351* (Tischplatte)
+Y
+X 0 Pulse
+182045 Pulse -18205 Pulse
E2C351*M (Mehrfach-Befestigung)
-110 Grad +110 Grad -110 Grad +110 Grad
5.1.2 Max. Pulse-Bereich der 2.Achse Die 0 (null) Pulse-Position der 2.Achse ist die Position, in welcher der 2.Arm parallel zum 1.Arm steht. Mit dem 0-Pulse als ein Startpunkt ist der Pulse-Wert gegen Uhrzeigersinn als der positive (+) Wert definiert und der Wert im Uhrzeigersinn als der negative (-).
-76800 Pulse +76800 Pulse
0 Pulse E2C251* (Tischplatte)
+135 Grad. -135 Grad
-82489 Pulse +82489 Pulse
0 Pulse 0 Pulse
-82489 Pulse +82489 Pulse
E2C351* (Tischplatte)
E2C351*M (Mehrfach-Befestigung)
+145 Grad. -145 Grad +145 Grad -145 Grad
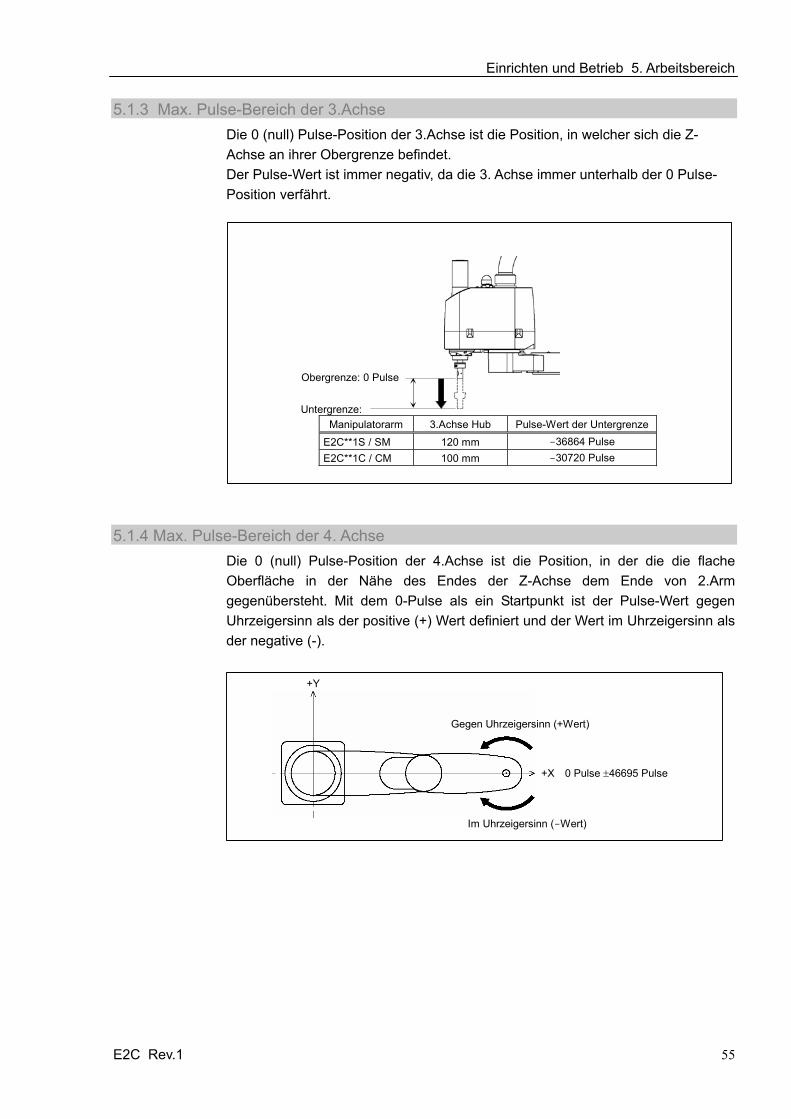
Einrichten und Betrieb 5. Arbeitsbereich
E2C Rev.1 55
5.1.3 Max. Pulse-Bereich der 3.Achse
Die 0 (null) Pulse-Position der 3.Achse ist die Position, in welcher sich die Z-Achse an ihrer Obergrenze befindet. Der Pulse-Wert ist immer negativ, da die 3. Achse immer unterhalb der 0 Pulse-Position verfährt.
Obergrenze: 0 Pulse
Untergrenze: Manipulatorarm 3.Achse Hub Pulse-Wert der Untergrenze
E2C**1S / SM 120 mm -36864 Pulse E2C**1C / CM 100 mm -30720 Pulse
5.1.4 Max. Pulse-Bereich der 4. Achse Die 0 (null) Pulse-Position der 4.Achse ist die Position, in der die die flache Oberfläche in der Nähe des Endes der Z-Achse dem Ende von 2.Arm gegenübersteht. Mit dem 0-Pulse als ein Startpunkt ist der Pulse-Wert gegen Uhrzeigersinn als der positive (+) Wert definiert und der Wert im Uhrzeigersinn als der negative (-).
+X 0 Pulse ±46695 Pulse
+Y
Im Uhrzeigersinn (-Wert)
Gegen Uhrzeigersinn (+Wert)
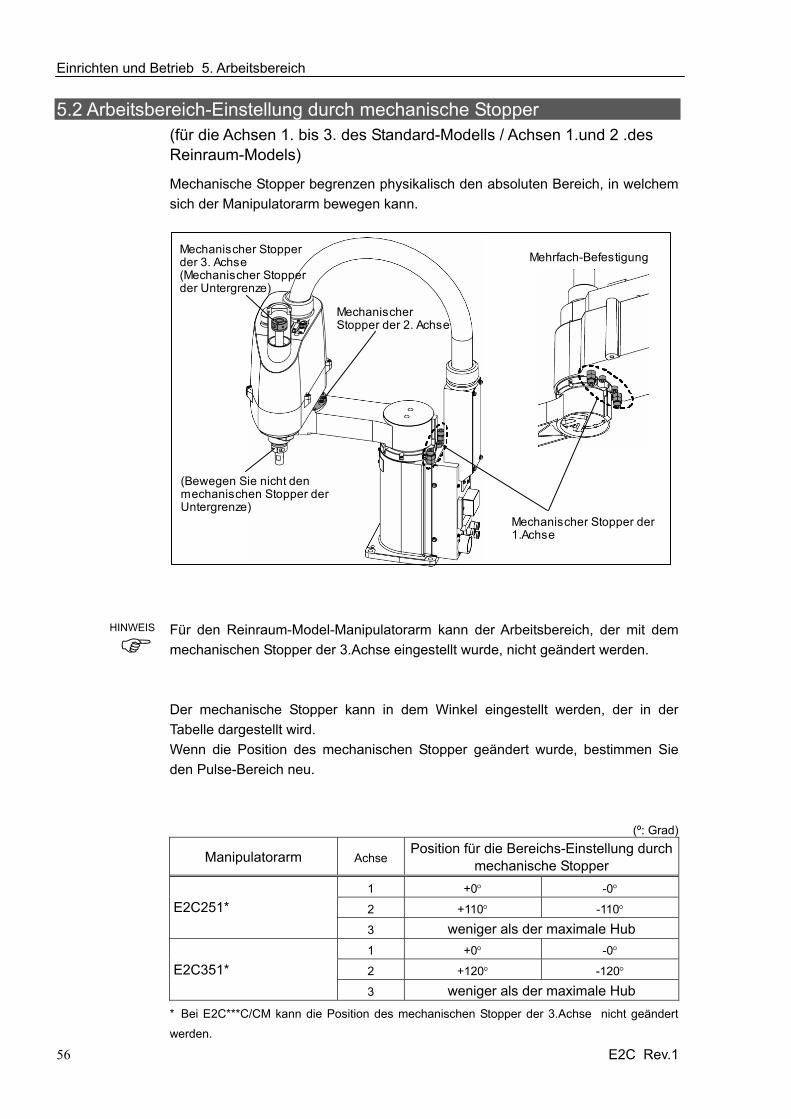
Einrichten und Betrieb 5. Arbeitsbereich
56 E2C Rev.1
5.2 Arbeitsbereich-Einstellung durch mechanische Stopper
(für die Achsen 1. bis 3. des Standard-Modells / Achsen 1.und 2 .des Reinraum-Models)
Mechanische Stopper begrenzen physikalisch den absoluten Bereich, in welchem sich der Manipulatorarm bewegen kann.
Mechanischer Stopper der 2. Achse
Mechanischer Stopper der 1.Achse
(Bewegen Sie nicht den mechanischen Stopper der Untergrenze)
Mehrfach-Befestigung Mechanischer Stopper der 3. Achse (Mechanischer Stopper der Untergrenze)
Für den Reinraum-Model-Manipulatorarm kann der Arbeitsbereich, der mit dem mechanischen Stopper der 3.Achse eingestellt wurde, nicht geändert werden. Der mechanische Stopper kann in dem Winkel eingestellt werden, der in der Tabelle dargestellt wird. Wenn die Position des mechanischen Stopper geändert wurde, bestimmen Sie den Pulse-Bereich neu.
(º: Grad)
Manipulatorarm Achse Position für die Bereichs-Einstellung durch mechanische Stopper
1 +0° -0°
2 +110° -110° E2C251* 3 weniger als der maximale Hub 1 +0° -0°
2 +120° -120° E2C351* 3 weniger als der maximale Hub
* Bei E2C***C/CM kann die Position des mechanischen Stopper der 3.Achse nicht geändert
werden.
HINWEIS
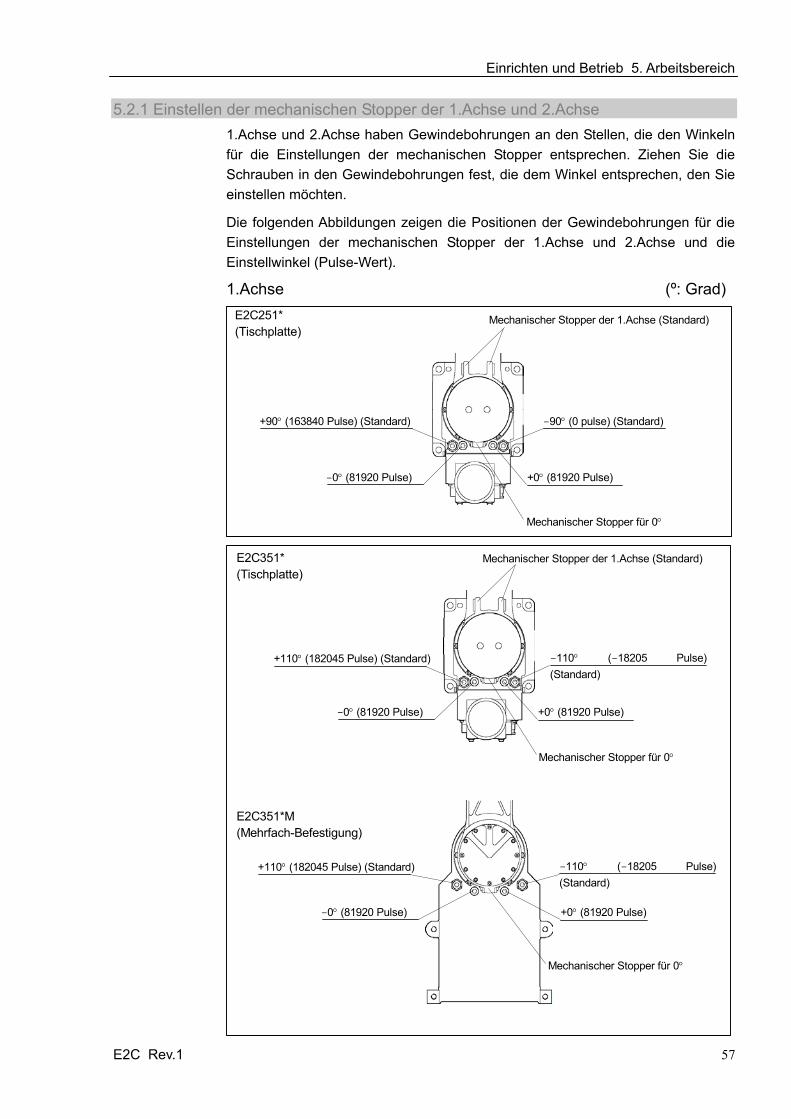
Einrichten und Betrieb 5. Arbeitsbereich
E2C Rev.1 57
5.2.1 Einstellen der mechanischen Stopper der 1.Achse und 2.Achse
1.Achse und 2.Achse haben Gewindebohrungen an den Stellen, die den Winkeln für die Einstellungen der mechanischen Stopper entsprechen. Ziehen Sie die Schrauben in den Gewindebohrungen fest, die dem Winkel entsprechen, den Sie einstellen möchten.
Die folgenden Abbildungen zeigen die Positionen der Gewindebohrungen für die Einstellungen der mechanischen Stopper der 1.Achse und 2.Achse und die Einstellwinkel (Pulse-Wert).
1.Achse (º: Grad) E2C251*
(Tischplatte)
+90° (163840 Pulse) (Standard) -90° (0 pulse) (Standard)
+0° (81920 Pulse)
Mechanischer Stopper der 1.Achse (Standard)
Mechanischer Stopper für 0°
-0° (81920 Pulse)
E2C351*
(Tischplatte)
E2C351*M (Mehrfach-Befestigung)
+110° (182045 Pulse) (Standard) -110° (-18205 Pulse) (Standard)
+0° (81920 Pulse)
Mechanischer Stopper der 1.Achse (Standard)
Mechanischer Stopper für 0°
-0° (81920 Pulse)
+110° (182045 Pulse) (Standard) -110° (-18205 Pulse) (Standard)
+0° (81920 Pulse)
Mechanischer Stopper für 0°
-0° (81920 Pulse)
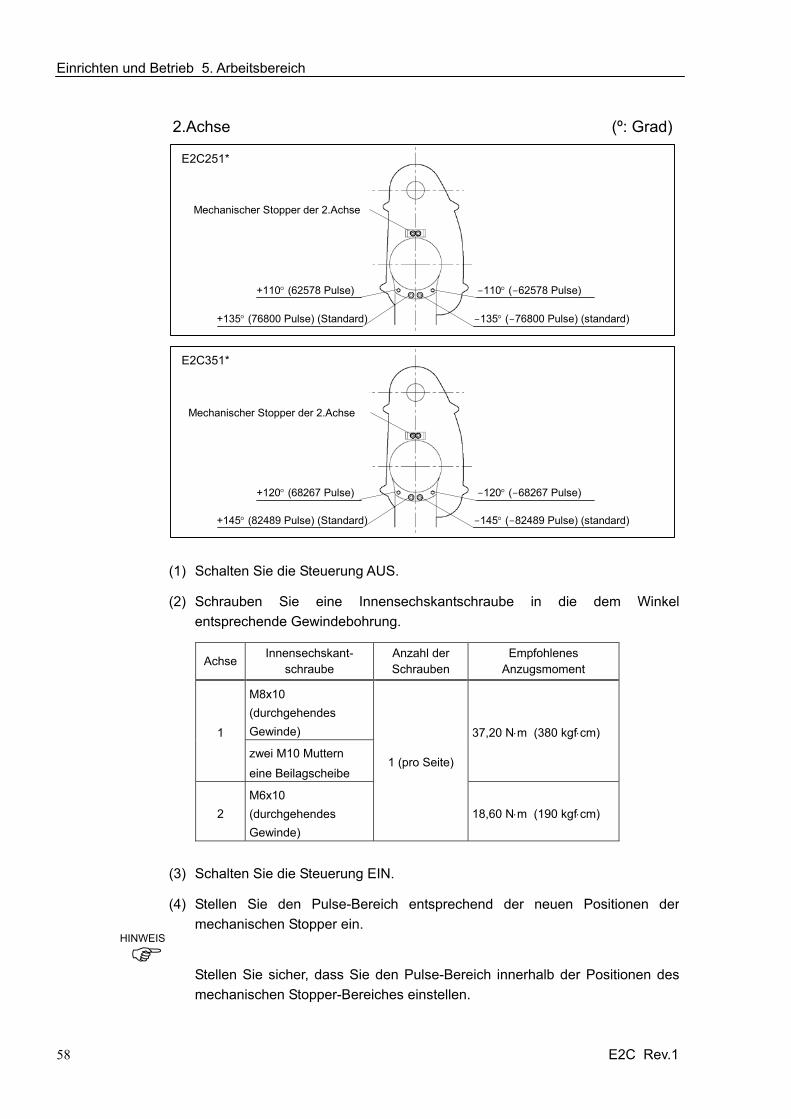
Einrichten und Betrieb 5. Arbeitsbereich
58 E2C Rev.1
2.Achse (º: Grad)
E2C251*
+135° (76800 Pulse) (Standard) -135° (-76800 Pulse) (standard)
+110° (62578 Pulse) -110° (-62578 Pulse)
Mechanischer Stopper der 2.Achse
E2C351*
+145° (82489 Pulse) (Standard) -145° (-82489 Pulse) (standard)
+120° (68267 Pulse) -120° (-68267 Pulse)
Mechanischer Stopper der 2.Achse
(1) Schalten Sie die Steuerung AUS.
(2) Schrauben Sie eine Innensechskantschraube in die dem Winkel entsprechende Gewindebohrung.
Achse Innensechskant-
schraube Anzahl der Schrauben
Empfohlenes Anzugsmoment
M8x10 (durchgehendes Gewinde) 1
zwei M10 Muttern
eine Beilagscheibe
37,20 N⋅m (380 kgf⋅cm)
2 M6x10 (durchgehendes Gewinde)
1 (pro Seite)
18,60 N⋅m (190 kgf⋅cm)
(3) Schalten Sie die Steuerung EIN.
(4) Stellen Sie den Pulse-Bereich entsprechend der neuen Positionen der mechanischen Stopper ein.
Stellen Sie sicher, dass Sie den Pulse-Bereich innerhalb der Positionen des mechanischen Stopper-Bereiches einstellen.
HINWEIS
Einrichten und Betrieb 5. Arbeitsbereich
E2C Rev.1 59
<Beispiel: Der Winkel der 1.Achse ist von -90 Grad bis +90 Grad eingestelltDer Winkel der 2.Achse ist von -110 Grad bis +135 Grad eingestellt>
Die Methode zum Einstellen des Pulse-Bereiches variiert mit der verwendeten Software.
SPEL CT
Wählen Sie den [RANGE]-Karteireiter. Stellen Sie den unteren Grenzwert für die 1.Achse auf “0” und den oberen Grenzwert auf “81920”.
EPSON RC+
Führen Sie folgende Befehle vom [EPSON RC+ Online-Fenster] aus.
>JRANGE 1,0,81920 'Stellt den Pulse-Bereich der 1.Achse ein
>JRANGE 2,-62578,76800 'Stellt den Pulse-Bereich der 2.Achse ein
>RANGE 'Überprüft die Einstellung unter Verwendung von
RANGE
0,81920,-62578,76800,-36864,0,-46695,46695
(5) Verschieben Sie den Arm von Hand, bis er die mechanischen Stopper berührt und stellen Sie sicher, dass der Arm während des Betriebes nicht an ein Peripheriegerät anschlägt.
(6) Betreiben Sie die geänderte Achse mit geringen Geschwindigkeiten, bis sie die Positionen des minimalen und maximalen Pulse-Bereiches erreicht.Stellen Sie sicher, dass der Arm nicht an die mechanischen Stopper anschlägt.
<Beispiel: Der Winkel der 1.Achse ist von -90 Grad bis +90 Grad eingestelltDer Winkel der 2.Achse ist von -110 Grad bis +135 Grad eingestellt>
Die Methode zum Einstellen des Pulse-Bereiches variiert mit der verwendeten Software.
SPEL CT
Klicken Sie auf den <Debug Pane>-Button, und führen Sie die folgenden Befehle vom [Command Execution]-Fenster aus.
MOTOR ON 'Schalten Sie den Motor EIN
SPEED 5 'Stellt eine niedrige Geschwindigkeit ein
GO PULSE(0,0,0,0) 'Verfährt an die min. Pulse-Position von der
1.Achse GO PULSE(81920,0,0,0) 'Verfährt an die max. Pulse-Position von der
1.Achse GO PULSE(40960-62578,0,0) 'Verfährt an die min. Pulse-Position von der
2.Achse GO PULSE(40960,76800,0,0) ''Verfährt an die max. Pulse-Position von der
2.Achse
Einrichten und Betrieb 5. Arbeitsbereich
60 E2C Rev.1
Führen Sie folgende Befehle vom [EPSON RC+ Online-Fenster] aus.MOTOR ON 'Schaltet den Motor EIN
>SPEED 5 'Stellt eine niedrigen Geschwindigkeit ein
GO PULSE(0,0,0,0 'Verfährt an die min. Pulse-Position von der 1.Achse
GO PULSE(81920,0,0,0) 'Verfährt an die max. Pulse-Position von der 1.Achse
GO PULSE(40960,-62578,0,0 Verfährt an die min. Pulse-Position von der 2.Achse
GO PULSE(40960,76800,0,0) 'Verfährt an die max. Pulse-Position von der 2.Achse
Der Befehl PULSE (GO PUSLSE-Befehl) verfährt alle Achsen gleichzeitig in die angegebenen Positionen. Geben Sie sichere Positionen, unter Berücksichtigung aller Achsen, an.
In diesem Beispiel wird die 1.Achse in die Position nahe dem Mittelpunkt ihres Bewegungsbereiches verfahren (Pulse-Wert: 40960) während die 2.Achse überprüft wird.
Wenn der Arm an die mechanischen Stopper anschlägt oder wenn ein Fehler auftritt, nachdem der Arm an die mechanischen Stopper angeschlagen ist, setzen Sie den Pulse-Bereich entweder auf einen engeren Bereich zurück oder erweitern Sie die Positionen des mechanischen Stopper innerhalb der Grenzen.
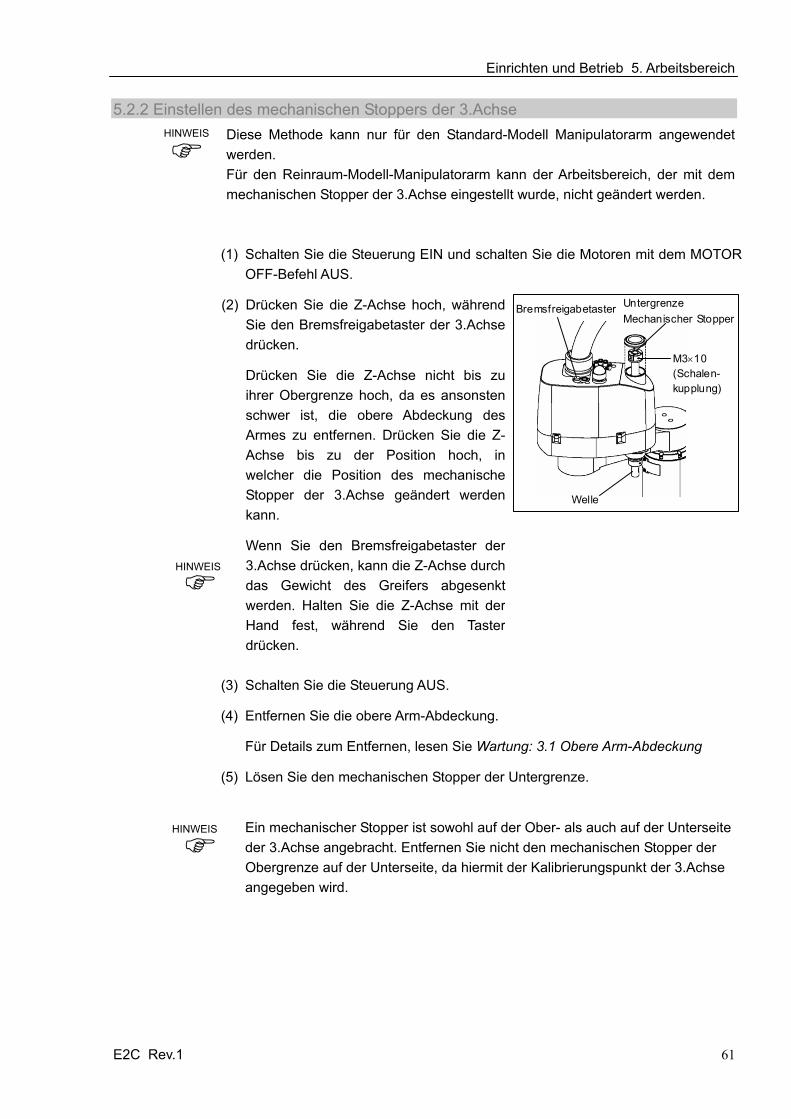
Einrichten und Betrieb 5. Arbeitsbereich
E2C Rev.1 61
5.2.2 Einstellen des mechanischen Stoppers der 3.Achse
Diese Methode kann nur für den Standard-Modell Manipulatorarm angewendet werden. Für den Reinraum-Modell-Manipulatorarm kann der Arbeitsbereich, der mit dem mechanischen Stopper der 3.Achse eingestellt wurde, nicht geändert werden.
(1) Schalten Sie die Steuerung EIN und schalten Sie die Motoren mit dem MOTOROFF-Befehl AUS.
(2) Drücken Sie die Z-Achse hoch, während Sie den Bremsfreigabetaster der 3.Achsedrücken.
Drücken Sie die Z-Achse nicht bis zu ihrer Obergrenze hoch, da es ansonsten schwer ist, die obere Abdeckung des Armes zu entfernen. Drücken Sie die Z-Achse bis zu der Position hoch, in welcher die Position des mechanische Stopper der 3.Achse geändert werden kann.
Wenn Sie den Bremsfreigabetaster der 3.Achse drücken, kann die Z-Achse durch das Gewicht des Greifers abgesenkt werden. Halten Sie die Z-Achse mit der Hand fest, während Sie den Taster drücken.
Untergrenze Mechanischer Stopper
M3×10 (Schalen- kupplung)
Bremsfreigabetaster
Welle
(3) Schalten Sie die Steuerung AUS.
(4) Entfernen Sie die obere Arm-Abdeckung.
Für Details zum Entfernen, lesen Sie Wartung: 3.1 Obere Arm-Abdeckung
(5) Lösen Sie den mechanischen Stopper der Untergrenze.
Ein mechanischer Stopper ist sowohl auf der Ober- als auch auf der Unterseite der 3.Achse angebracht. Entfernen Sie nicht den mechanischen Stopper der Obergrenze auf der Unterseite, da hiermit der Kalibrierungspunkt der 3.Achse angegeben wird.
HINWEIS
HINWEIS
HINWEIS
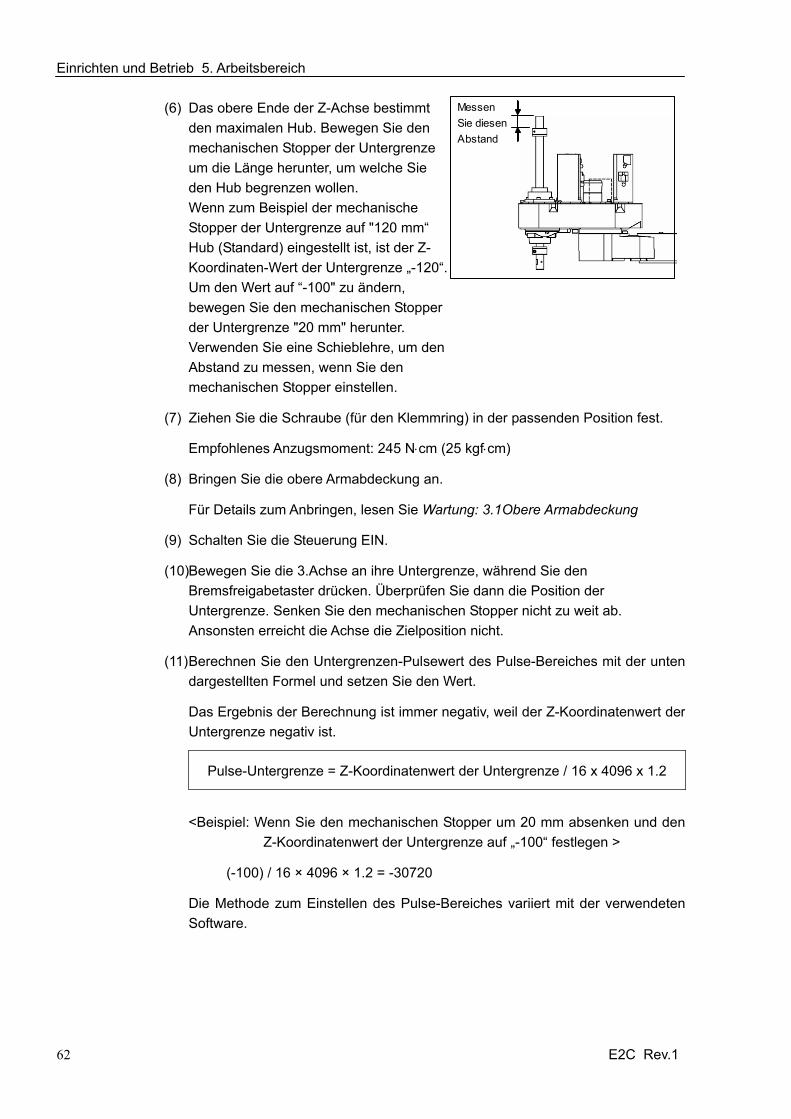
Einrichten und Betrieb 5. Arbeitsbereich
62 E2C Rev.1
(6) Das obere Ende der Z-Achse bestimmt den maximalen Hub. Bewegen Sie den mechanischen Stopper der Untergrenze um die Länge herunter, um welche Sie den Hub begrenzen wollen. Wenn zum Beispiel der mechanische Stopper der Untergrenze auf "120 mm“ Hub (Standard) eingestellt ist, ist der Z-Koordinaten-Wert der Untergrenze „-120“. Um den Wert auf “-100" zu ändern, bewegen Sie den mechanischen Stopper der Untergrenze "20 mm" herunter. Verwenden Sie eine Schieblehre, um den Abstand zu messen, wenn Sie den mechanischen Stopper einstellen.
Messen Sie diesen Abstand
(7) Ziehen Sie die Schraube (für den Klemmring) in der passenden Position fest.
Empfohlenes Anzugsmoment: 245 N⋅cm (25 kgf⋅cm)
(8) Bringen Sie die obere Armabdeckung an.
Für Details zum Anbringen, lesen Sie Wartung: 3.1Obere Armabdeckung
(9) Schalten Sie die Steuerung EIN.
(10)Bewegen Sie die 3.Achse an ihre Untergrenze, während Sie den Bremsfreigabetaster drücken. Überprüfen Sie dann die Position der Untergrenze. Senken Sie den mechanischen Stopper nicht zu weit ab. Ansonsten erreicht die Achse die Zielposition nicht.
(11) Berechnen Sie den Untergrenzen-Pulsewert des Pulse-Bereiches mit der unten dargestellten Formel und setzen Sie den Wert.
Das Ergebnis der Berechnung ist immer negativ, weil der Z-Koordinatenwert der Untergrenze negativ ist.
Pulse-Untergrenze = Z-Koordinatenwert der Untergrenze / 16 x 4096 x 1.2
<Beispiel: Wenn Sie den mechanischen Stopper um 20 mm absenken und den
Z-Koordinatenwert der Untergrenze auf „-100“ festlegen >
(-100) / 16 × 4096 × 1.2 = -30720
Die Methode zum Einstellen des Pulse-Bereiches variiert mit der verwendeten Software.
Einrichten und Betrieb 5. Arbeitsbereich
E2C Rev.1 63
SPEL CT
Wählen Sie den [RANGE]-Karteireiter und setzen Sie für die 3.Achse den Untergrenzen-Wert auf „-30720“ und den Obergrenzen-Wert auf „0“.
EPSON RC+
Führen Sie den folgenden Befehl vom [EPSON RC+ Online-Fenster] aus.>JRANGE 3,-30720,0 ' Stellt den Pulse-Bereich von 3.Achse ein
(12) Verwenden Sie den PULSE-Befehl (GO PULSE-Befehl), um die 3.Achse mit
langsamen Geschwindigkeiten in die Position der Untergrenze des Pulse-Bereiches zu verfahren. Wenn der Bereich des mechanischen Stopper kleinerist als der Pulse-Bereich, trifft die 3.Achse den mechanischen Stopper und ein Fehler tritt auf. Wenn der Fehler auftritt, ändern Sie entweder den Pulse-Bereich auf einen engeren Bereich oder erweitern Sie die Position desmechanischen Stopper innerhalb der Grenzen.
Der Abstand zwischen der Pulse-Position der Untergrenze und dem mechanischen Stopper sollte etwa 11 mm betragen.
Wenn es schwierig zu überprüfen ist, ob die 3.Achse an einen mechanischenStopper anschlägt, schalten Sie die Steuerung AUS und heben Sie die obere Arm-Abdeckung an, um von der Seite den Umstand zu prüfen, der das Problem verursacht hat. Für Details zum Entfernen, lesen Sie Wartung: 3.1 Obere Arm-Abdeckung.
<Beispiel: Wenn Sie den mechanischen Stopper um 20 mm absenken und den
Z-Koordinatenwert der Untergrenze auf „-100“ festlegen >
Die Methode zum Einstellen des Pulse-Bereiches variiert mit der verwendeten Software.
SPEL CT
Klicken Sie auf den <Debug Pane>-Button, und führen Sie die folgenden Befehle vom [Command Execution]-Fenster aus. MOTOR ON 'Schaltet den Motor EIN SPEED 5 'Stellt eine niedrige Geschwindigkeit ein
GO PULSE(0,0,-30720,0) 'Verfährt in die Pulse-Position der Untergrenze der
3.Achse. (In diesem Beispiel sind alle Pulse, außer denen der 3.Achse "0". Ersetzen Sie diese “0”en durch andere Pulse-Werte, die eine Position bestimmen, an welcher keine Beeinträchtigung besteht, auch wenn die 3.Achse abgesenkt wird.)
HINWEIS
Einrichten und Betrieb 5. Arbeitsbereich
64 E2C Rev.1
EPSON RC+
Führen Sie folgende Befehle vom [EPSON RC+ Online-Fenster] aus. MOTOR ON 'Schaltet den Motor EIN SPEED 5 'Stellt eine niedrige Geschwindigkeit ein
>PULSE 0,0,-30720,0 'Verfährt in die Pulse-Position der Untergrenze der
3.Achse. (In diesem Beispiel sind alle Pulse, außer denen der 3.Achse "0". Ersetzen Sie diese Nullen durch andere Pulse-Werte, die eine Position angeben, an welcher die 3. Achse ohne Störung abgesenkt werden kann.)
Einrichten und Betrieb 5. Arbeitsbereich
E2C Rev.1 65
5.3 Einstellen des kartesischen (rechteckigen) Bereiches in der X-, Y-Koordinate
System des Manipulatorarms (für die 1. Achse und 2. Achse) Verwenden Sie diese Methode, um die Ober- und Untergrenzen der X- und Y-Koordinaten zu setzen. Diese Einstellung betrifft nur die Software. Daher ändert sie nicht den physikalischen Bereich. Der maximale physikalische Bereich richtet sich nach der Position der mechanischen Stopper. Für E2C251* zur Tischplattenmontage und Mehrfach-Befestigung-Manipulatorarme ist der kartesische (rechteckige) Bereich vor der Lieferung eingestellt worden (XYLIM-Einstellung). Sobald die XYLIM-Einstellung gelöscht ist (alle Einstellungen werden "0"), kann der Greifer aufgrund der Bewegung an die die Rückseite des Manipulatorarms anschlagen. Wenn Sie die XYLIM-Einstellung ändern, stellen Sie sicher, dass der Greifer den Manipulatorarm nicht behindert. Die Methode zum Ändern der XYLIM-Einstellung variiert mit der verwendeten Software.
SPEL CT Stellen Sie die XYLIM-Einstellung im [XYLIM]-Bereich ein, welcher dargestellt wird, wenn Sie [Setup]-[Robot Parameters] auswählen.
EPSON RC+
Stellen Sie die XYLIM-Einstellung im [XYLIM]-Bereich ein, welcher dargestellt wird, wenn Sie [Projekt]-[Roboter Parameter] auswählen.Sie können auch den XYLIM-Befehl aus dem [EPSON RC+ Online-Fenster] ausführen.
Die Werte von E2C251* für Tischplattenmontage und Mehrfach-Befestigung-Manipulatorarme zur Lieferzeit, finden Sie in Einrichten & Betrieb: 5.4 Standard Arbeitsbereich.
Einrichten und Betrieb 5. Arbeitsbereich
66 E2C Rev.1
5.4 Standard Arbeitsbereich
Der “Arbeitsbereich” zeigt die Standard (maximale) Spezifikation. Wenn sich jeder Achsmotor unter Servosteuerung befindet, bewegt sich der Mittelpunkt des niedrigsten Punktes der 3.Achse (Z-Achse) in den Bereich, der in der Abbildung dargestellt ist. “Durch mechanischen Stopper begrenzter Bereich” ist der Bereich, in welchem der Mittelpunkt des niedrigsten Punktes der 3.Achse bewegt werden kann, wenn sich kein Achsmotor unter Servosteuerung befindet. “Mechanischer Stopper" stellt den begrenzten Arbeitsbereich ein, so dass der Mittelpunkt der 3.Achse nicht mechanisch über den Bereich hinaus bewegt werden kann. “Maximaler Raum” ist der Bereich, der die weiteste Reichweite der Arme beinhaltet. Wenn der maximale Radius des Greifers über 44 mm beträgt, fügen Sie „Durch mechanischen Stopper begrenzter Bereich" und "Radius des Greifers" hinzu. Der Gesamtwert wird als der maximale Bereich bestimmt.
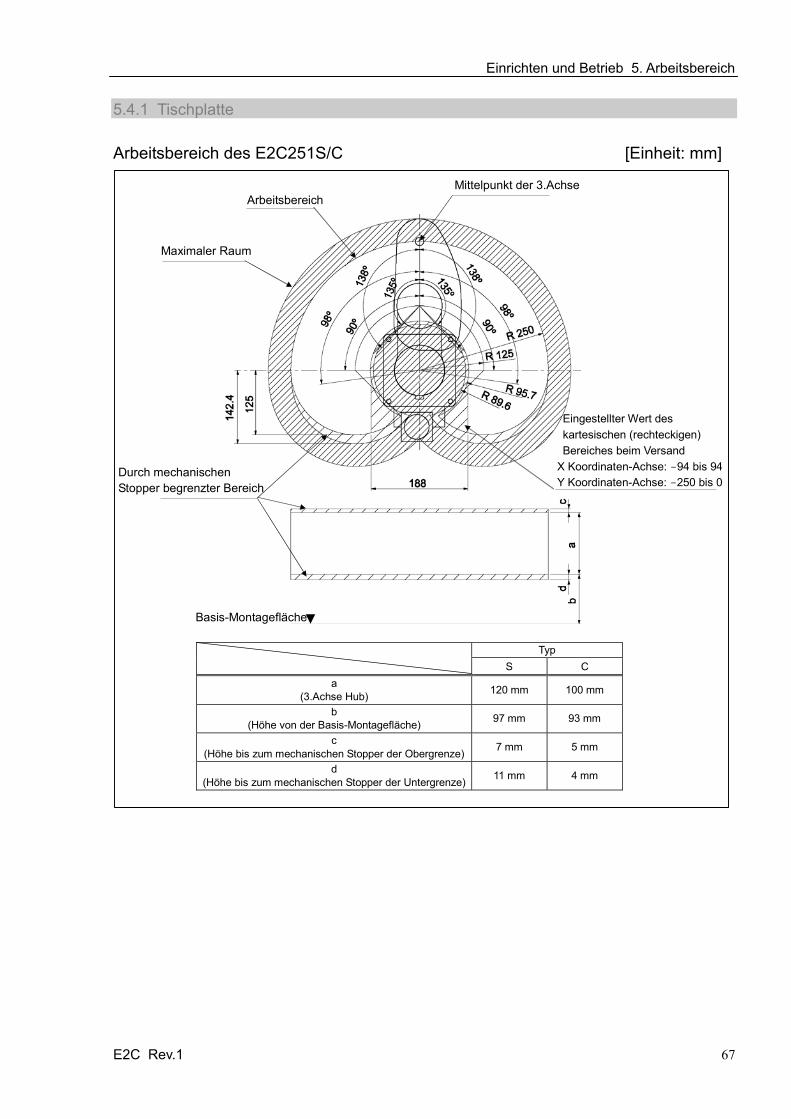
Einrichten und Betrieb 5. Arbeitsbereich
E2C Rev.1 67
5.4.1 Tischplatte
Arbeitsbereich des E2C251S/C [Einheit: mm]
Typ
S C a
(3.Achse Hub) 120 mm 100 mm
b (Höhe von der Basis-Montagefläche) 97 mm 93 mm
c (Höhe bis zum mechanischen Stopper der Obergrenze) 7 mm 5 mm
d (Höhe bis zum mechanischen Stopper der Untergrenze) 11 mm 4 mm
Mittelpunkt der 3.Achse
Maximaler Raum
Arbeitsbereich
Durch mechanischen Stopper begrenzter Bereich
Basis-Montagefläche
Eingestellter Wert des kartesischen (rechteckigen) Bereiches beim Versand
X Koordinaten-Achse: -94 bis 94 Y Koordinaten-Achse: -250 bis 0
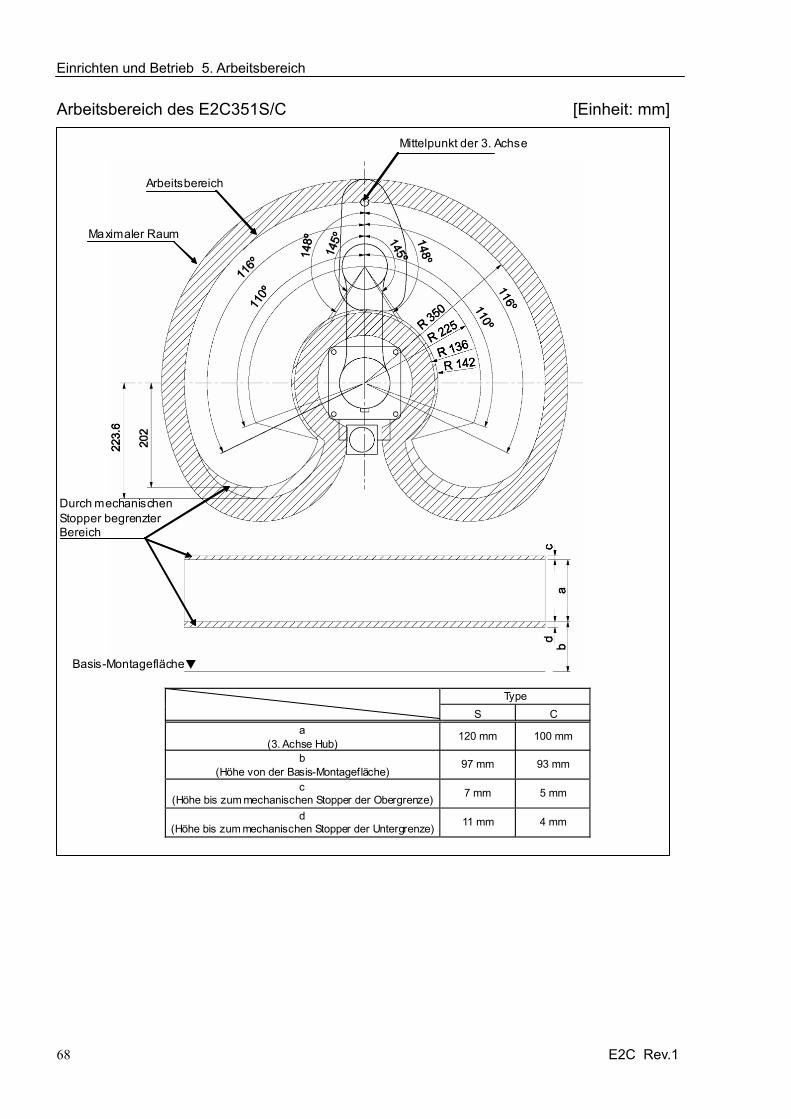
Einrichten und Betrieb 5. Arbeitsbereich
68 E2C Rev.1
Arbeitsbereich des E2C351S/C [Einheit: mm]
Type S C
a (3. Achse Hub)
120 mm 100 mm
b (Höhe von der Basis-Montagefläche)
97 mm 93 mm
c (Höhe bis zum mechanischen Stopper der Obergrenze) 7 mm 5 mm
d (Höhe bis zum mechanischen Stopper der Untergrenze) 11 mm 4 mm
Mittelpunkt der 3. Achse
Maximaler Raum
Arbeitsbereich
Durch mechanischen Stopper begrenzter Bereich
Basis-Montagefläche
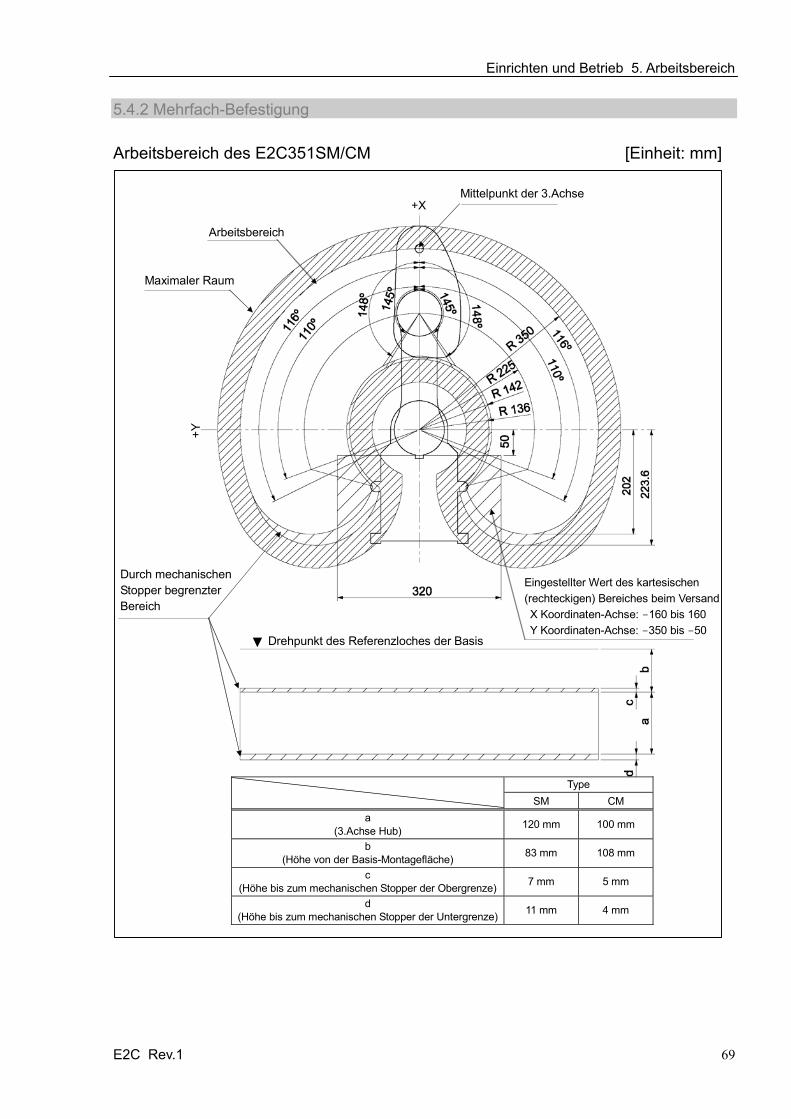
Einrichten und Betrieb 5. Arbeitsbereich
E2C Rev.1 69
5.4.2 Mehrfach-Befestigung Arbeitsbereich des E2C351SM/CM [Einheit: mm]
Type
SM CM a
(3.Achse Hub) 120 mm 100 mm
b (Höhe von der Basis-Montagefläche) 83 mm 108 mm
c (Höhe bis zum mechanischen Stopper der Obergrenze) 7 mm 5 mm
d (Höhe bis zum mechanischen Stopper der Untergrenze) 11 mm 4 mm
Mittelpunkt der 3.Achse
Maximaler Raum
Arbeitsbereich
Durch mechanischen Stopper begrenzter Bereich
+X +Y
Drehpunkt des Referenzloches der Basis
Eingestellter Wert des kartesischen (rechteckigen) Bereiches beim VersandX Koordinaten-Achse: -160 bis 160 Y Koordinaten-Achse: -350 bis -50


















