Schnittstellenbeschreibung Magnetisch-induktiver ......2007/01/09 · Transmitter Variable assigned...
38
Schnittstellenbeschreibung D184B108U09 Magnetisch-induktiver Durchflussmesser FXT4000 (COPA-XT) HART-Protokoll Gültig ab Softwarestand A.20 D699C003U01
Transcript of Schnittstellenbeschreibung Magnetisch-induktiver ......2007/01/09 · Transmitter Variable assigned...
-
Schnittstellenbeschreibung D184B108U09
Magnetisch-induktiver DurchflussmesserFXT4000 (COPA-XT)
HART-Protokoll
Gültig ab Softwarestand A.20
D699C003U01
-
2
Magnetisch-induktiver Durchflussmesser
Schnittstellenbeschreibung D184B108U09
07.2006
Rev. 01
Hersteller: ABB Automation Products GmbH Dransfelder Straße 2 D-37079 Göttingen Germany Tel.: +49 800 1114411 Fax: +49 800 1114422 [email protected]
© Copyright 2006 by ABB Automation Products GmbH Änderungen vorbehalten
Dieses Dokument ist urheberrechtlich geschützt. Es unterstützt den Anwender bei der sicheren und effizienten Nutzung des Gerätes. Der Inhalt darf weder ganz noch teilweise ohne vorherige Genehmigung des Rechtsinhabers vervielfältigt oder reproduziert werden.
-
3
HART-Protokoll
Gerät: COPA-XT, DT4000
Software: Standard-Software
Kennung: D699C003 A.21
Projektnummer: 9803D5001
Erstellt von:
Name: Eggert Appel
Datum: 15.9.1998
Revision: 01
Name: Andreas Thöne
Datum: 20.06.2006
-
4
Inhaltsverzeichnis 1 Revisionsübersicht ......................................................................................................................................................6 2 Einleitung ....................................................................................................................................................................7 3 Universal Commands ..................................................................................................................................................8
3.1 HART-Command 0 : Read Transmitter Unique Identifier..................................................................................8 3.2 HART-Command 1 : Read Primary Variable .....................................................................................................8 3.3 HART-Command 2 : Read Current and Percent of Range .................................................................................8 3.4 HART-Command 3 : Read all dynamic Variables and Current ..........................................................................9 3.5 HART-Command 6 : Write Polling Address ......................................................................................................9 3.6 HART-Command 11 : Read Unique Identifier Associated With Tag...............................................................10 3.7 HART-Command 12 : Read Message...............................................................................................................10 3.8 HART-Command 13 : Read Tag, Descriptor, Date ..........................................................................................10 3.9 HART-Command 14 : Read Primary Variable Sensor Information..................................................................11 3.10 HART-Command 15 : Read Primary Variable Output Information .................................................................12 3.11 HART-Command 16 : Read Final Assembly Number......................................................................................12 3.12 HART-Command 17 : Write Message ..............................................................................................................12 3.13 HART-Command 18 : Write Tag, Descriptor, Date .........................................................................................13 3.14 HART-Command 19 : Write Final Assembly Number.....................................................................................13
4 Common Practice Commands ...................................................................................................................................14 4.1 HART-Command 33 : Read Transmitter Variables ..........................................................................................14 4.2 HART-Command 34 : Write Primary Variable Damping Value ......................................................................14 4.3 HART-Command 35 : Write Primary Variable Range Values .........................................................................15 4.4 HART-Command 38 : Reset Configuration Changed Flag...............................................................................15 4.5 HART-Command 40 : Enter/Exit Primary Variable Current Mode..................................................................15 4.6 HART-Command 44 : Write Primary Variable Units.......................................................................................16 4.7 HART-Command 45 : Trim Primary Variable Current DAC Zero...................................................................16 4.8 HART-Command 46 : Trim Primary Variable Current DAC Gain ..................................................................16 4.9 HART-Command 48 : Read Additional Transmitter Status..............................................................................17
5 Slot - Kommandos.....................................................................................................................................................18 5.1 Unsigned-char-Variablen ..................................................................................................................................18
5.1.1 HART-Command 128 : Lese unsigned-char-Variable ..............................................................................18 5.1.2 HART-Command 129 : Schreibe unsigned-char-Variable........................................................................18 5.1.3 Tabelle der „unsigned char“ –Variablen ...................................................................................................19
5.2 Unsigned-in-Variablen ......................................................................................................................................21 5.2.1 HART-Command 130 : Lese-unsigned int-Variable.................................................................................21 5.2.2 HART-Command 131 : Schreibe unsigned-int-Variable ..........................................................................21 5.2.3 Tabellen der „unsigned int“-Variablen......................................................................................................22
5.3 Float-Variablen..................................................................................................................................................23 5.3.1 HART-Command 132 : Lese float-Variable .............................................................................................23 5.3.2 HART-Command 133 : Schreibe float-Variable.......................................................................................23 5.3.3 Tabelle der „Float“-Variablen ...................................................................................................................24
5.4 Kurzübersicht der Slot-Kommandos .................................................................................................................26 6 Sonstige kundenzugängliche Kommandos................................................................................................................27
6.1 HART-Command 140 : Zähler >V und Überlauf >V löschen ..........................................................................27 6.2 HART-Command 141 : Zähler
-
5
7.1.4 Kurzübersicht der Slot-Kommandos .........................................................................................................34 7.2 Sonstige hausinterne Kommandos ....................................................................................................................35
7.2.1 HART-Command 148 : Load Primary Data..............................................................................................35 7.2.2 HART-Command 149 : Store Primary Data .............................................................................................35 7.2.3 HART-Command 152 : Initialisiere externes EEPROM...........................................................................35 7.2.4 HART-Command 155 : Starte autom. Abgleich Aufnehmernullpunkt.....................................................36 7.2.5 HART-Command 156 : Starte autom. Abgleich Aufnehmerspanne .........................................................36
8 Fehlersuche bei Hart..................................................................................................................................................37
-
6
1 Revisionsübersicht
Revision Datum Neue Seiten Geänderte Seiten Name
Nr. Soft
0 A.10 15.09.1998 erstellt - AP
1 A21 20.06.2006 S. 25 (Schleichmenge) Thn
-
7
2 Einleitung Die vorliegende Übersicht listet alle verfügbaren HART-Kommandos auf. In ihr sind sowohl die Universal und Common Practice als auch spezielle Kommandos wie Slot- oder sonstige Kommandos enthalten. Um Änderungen zu vorhergehenden Kommandoübersichten zu erkennen, war es früher notwendig, alle Kommandos genau auf Änderungen zu überprüfen. Dies ist nun nicht mehr notwendig, da Änderungen am jeweiligen Kommando im Punkt Revision leicht erkennbar sind. Die vorliegende Dokumentation ist für die folgenden Softwarerevisionen gültig: ab A.20
-
8
3 Universal Commands
3.1 HART-Command 0 : Read Transmitter Unique Identifier Revision
Request Data Bytes
none
Response Data Bytes
#0 #1 #2 #3 #4 #5 #6 #7 #8 #9
#10 #11
Device Type Code for Expansion Manufacturer Identification Code Manufacturer Device Type Number of Request Preambles Revision Level of Universal Command Revision Level of Transmitter Document Software Revision Level Hardware Revision Level Flags, none defined at this time Device Identification Number, 24 Bit, MSB Device Identification Number, 24 Bit Device Identification Number, 24 Bit, LSB
= 254 = 18 = ABB- Fischer&Porter = 9 = DT4000 = 8 = 5 = 0 = 1 = 0 oder 1 = 0 = 0 = MSB Gerätenummer = LSB Gerätenummer
Response Codes
0 5
No Command Specific Error Incorrect Byte Count
3.2 HART-Command 1 : Read Primary Variable Revision
Request Data Bytes
none
Response Data Bytes
#0 #1..#4
Primary Variable Unit Code (Table 2) Primary Variable, IEEE 754
Response Codes
0 5
No Command Specific Error Incorrect Byte Count
Bemerkung Primary Variable => Durchfluss
3.3 HART-Command 2 : Read Current and Percent of Range Revision
Request Data Bytes
none
Response Data Bytes
#0..#3 #4..#7
Analog Output Current mA, IEEE 754 Percent of Range, IEEE 754
Response Codes
0 5
No Command Specific Error Incorrect Byte Count
-
9
3.4 HART-Command 3 : Read all dynamic Variables and Current Revision
Request Data Bytes
none
Response Data Bytes
#0..#3
#4 #5..#8
#9
#10..#13
#14 #15..#18
#19
#20..#23
Analog Output Current mA, IEEE 754 Primary Variable Unit Code (Table 2) Primary Variable, IEEE 754 Secondary Variable Unit Code (Table 2) Secondary Variable, IEEE 754 Tertiary Variable Unit Code (Table 2) Tertiary Variable, IEEE 754 4th Variable Unit Code (Table 2) 4th Variable, IEEE 754
Response Codes
0 5
No Command Specific Error Incorrect Byte Count
Bemerkung Primary Variable = Secondary Variable = Tertiary Variable = Fourth Variable =
Durchfluss, Einheit siehe unsigned char-Slot 3 Zähler >V, Einheit siehe unsigned char-Slot 4 Zähler
-
10
3.6 HART-Command 11 : Read Unique Identifier Associated With Tag Revision
Request Data Bytes
#0..#5 Tag, Packed ASCII
Response Data Bytes
#0 #1 #2 #3 #4 #5 #6 #7 #8 #9
#10 #11
Device Type Code for Expansion Manufacturer Identification Code Manufacturer Device Type Number of Request Preambles Revision Level of Universal Command Revision Level of Transmitter Document Software Revision Level Hardware Revision Level Flags, none defined at this time Device Identification Number, 24 Bit, MSB Device Identification Number, 24 Bit Device Identification Number, 24 Bit, LSB
= 254 = 18 = ABB-Fischer&Porter = 9 = DT4000 = 8 = 5 = 0 = 1 = 0 oder 1 = 0 = 0 = MSB Gerätenummer = LSB Gerätenummer
Response Codes
0 5
No Command Specific Error Incorrect Byte Count
3.7 HART-Command 12 : Read Message Revision
Request Data Bytes
none
Response Data Bytes
#0..#23 Message, Packed ASCII
Response Codes
0 5
No Command Specific Error Incorrect Byte Count
3.8 HART-Command 13 : Read Tag, Descriptor, Date Revision
Request Data Bytes
none
Response Data Bytes
#0..#5 #6..#17
#18..#20
Tag, Packed-ASCII Descriptor, Packed-ASCII Date: Day, Month, Year
Response Codes
0 5
No Command Specific Error Incorrect Byte Count
-
11
3.9 HART-Command 14 : Read Primary Variable Sensor Information Revision
Request Data Bytes
none
Response Data Bytes
#0..#2 #3
#4..#7 #8..#11
#12..#15
Sensor Serial Number MSB, 24-bit unsigned integer Sensor Limits/Min Span Units, Table II Unit Codes Upper Sensor Limit, IEEE754 Lower Sensor Limit, IEEE754 Minimum Span, IEEE754
Response Codes
0 5
No Command Specific Error Incorrect Byte Count
Bemerkung Sensor Serial Number Upper Sensor Limit Lower Sensor Limit Minimum Span
= 0 = QmaxDN = 0 = 0.05 * QmaxDN
-
12
3.10 HART-Command 15 : Read Primary Variable Output Information Revision
Request Data Bytes
none
Response Data Bytes
#0 #1 #2
#3..#6 #7..#10
#11..#14 #15 #16
Alarm Select Code, Table VI Primary Variable Transfer Function Code, Table III Primary Variable Range Values Units Code, Table II Primary Variable Upper Range Value, IEEE754 Primary Variable Lower Range Value, IEEE754, always Zero Primary Variable Damping Value, IEEE754, Units of Seconds Write Protect Code, Table VII Private Label Distributor Code, Table VIII
Response Codes
0 5
No Command Specific Error Incorrect Byte Count
Bemerkung Alarm Selection Code PV Transfer Function Code PV Upper Range Value PV Lower Range Value PV Damping Value Write Protect Code Private Label Distributor
= 0 = High, 1 = Low = 0 = Linear = QmaxDN = 0 = Dämpfung = 251 = Not Implemented = 18 =ABB-FISCHER&PORTER
3.11 HART-Command 16 : Read Final Assembly Number Revision
Request Data Bytes
none
Response Data Bytes
#0..#2 Final Assembly Number
Response Codes
0 5
No Command Specific Error Incorrect Byte Count
3.12 HART-Command 17 : Write Message Revision
Request Data Bytes
#0..#23 Message, Packed-ASCII
Response Data Bytes
#0..#23 Message, Packed-ASCII
Response Codes
0 5
No Command Specific Error Incorrect Byte Count
-
13
3.13 HART-Command 18 : Write Tag, Descriptor, Date Revision
Request Data Bytes
#0..#5 #6..#17
#18..#20
Tag, Packed-ASCII Descriptor, Packed-ASCII Date: Day, Month, Year
Response Data Bytes
#0..#5 #6..#17
#18..#20
Tag, Packed-ASCII Descriptor, Packed-ASCII Date: Day, Month, Year
Response Codes
0 5
No Command Specific Error Incorrect Byte Count
3.14 HART-Command 19 : Write Final Assembly Number Revision
Request Data Bytes
#0..#2 Final Assembly Number
Response Data Bytes
#0..#2 Final Assembly Number
Response Codes
0 5
No Command Specific Error Incorrect Byte Count
-
14
4 Common Practice Commands
4.1 HART-Command 33 : Read Transmitter Variables Revision
Request Data Bytes
#0 #1 #2 #3
Transmitter Variable assigned to Slot #0 Transmitter Variable assigned to Slot #1 Transmitter Variable assigned to Slot #2 Transmitter Variable assigned to Slot #3
Response Data Bytes
#0 #1
#2..#5
#6 #7
#8..#11
#12 #13
#14..#17
#18 #19
#20..#23
Transmitter Variable assigned to Slot #0 Slot #0 Unit Code Slot #0 Variable, IEEE 754 Transmitter Variable assigned to Slot #1 Slot #1 Unit Code Slot #1 Variable, IEEE 754 Transmitter Variable assigned to Slot #2 Slot #2 Unit Code Slot #2 Variable, IEEE 754 Transmitter Variable assigned to Slot #3 Slot #3 Unit Code Slot #3 Variable, IEEE 754
Response Codes
0 2 5
No Command Specific Error Invalid Selection Incorrect Byte Count
Bemerkung Transmitter Variables:
Es lassen sich vier Variablen über die implementierten Slotkommandos auslesen (siehe Tabellen 5.3.3 und 7.1.3)
4.2 HART-Command 34 : Write Primary Variable Damping Value Revision
Request Data Bytes
#0..#3 Damping Value, IEEE 754
Response Data Bytes
#0..#3 Actual Damping Value, IEEE 754
Response Codes
0 3 4 5
No Command Specific Error Passed Parameter to Large Passed Parameter to Small Incorrect Byte Count
-
15
4.3 HART-Command 35 : Write Primary Variable Range Values Revision
Request Data Bytes
#0 #1..#4 #5..#8
PV Upper and Lower Range Values Units Code, Table II Primary Variable Upper Range Value, IEEE 754 Primary Variable Lower Range Value, IEEE 754
Response Data Bytes
#0 #1..#4 #5..#8
PV Upper and Lower Range Values Units Code, Table II Primary Variable Upper Range Value, IEEE 754 Primary Variable Lower Range Value, IEEE 754
Response Codes
0 2 5
11 12 13
No Command Specific Error Invalid Selection Incorrect Byte Count Upper Range Value too High Upper Range Value too Low Upper and Lower Range Values Out of Limits
Bemerkung PV Upper Range Value PV lower Range Value
= Qmax = 0
4.4 HART-Command 38 : Reset Configuration Changed Flag Revision
Request Data Bytes
none
Response Data Bytes
none
Response Codes
0 5
No Command Specific Error Incorrect Byte Count
4.5 HART-Command 40 : Enter/Exit Primary Variable Current Mode Revision
Request Data Bytes
#0..#3 Fixed Primary Variable Current Level, IEEE 754, mA
Response Data Bytes
#0..#3 Actual Fixed Primary Variable Current Level, IEEE 754, mA
Response Codes
0 3 4 5
11
No Command Specific Error Passed Parameter to Large (> 24.8 mA) Passed Parameter to Small (< 3.85 mA) Incorrect Byte Count In Multidrop Mode
-
16
4.6 HART-Command 44 : Write Primary Variable Units Revision
Request Data Bytes
#0 Primary Variable Unit Code
Response Data Bytes
#0 Primary Variable Unit Code
Response Codes
0 2 5
No Command Specific Error Invalid Selection Incorrect Byte Count
4.7 HART-Command 45 : Trim Primary Variable Current DAC Zero Revision
Request Data Bytes
#0..#3 Externally Measured Primary Variable Current Level, IEEE 754, Units of mA
Response Data Bytes
#0..#3 Actual Measured Primary Variable Current Level, IEEE 754, mA
Response Codes
0 3 4 5 9
11
No Command Specific Error Passed Parameter to Large (> 5mA) Passed Parameter to Small (< 3mA) Incorrect Byte Count Not in Proper Current Mode In Multidrop Mode
4.8 HART-Command 46 : Trim Primary Variable Current DAC Gain Revision
Request Data Bytes
#0..#3 Externally Measured Primary Variable Current Level, IEEE 754, Units of mA
Response Data Bytes
#0..#3: Actual Measured Primary Variable Current Level, IEEE 754, mA
Response Codes
0 3 4 5 9
11
No Command Specific Error Passed Parameter to Large (> 22mA) Passed Parameter to Small (< 18mA) Incorrect Byte Count Not in Proper Current Mode In Multidrop Mode
-
17
4.9 HART-Command 48 : Read Additional Transmitter Status Revision
Request Data Bytes
none
Response Data Bytes
#0..#2 Additional Status Information
Statusbyte #0, Bit 0 #0, Bit 1 #0, Bit 2 #0, Bit 3 #0, Bit 4 #0, Bit 5 #0, Bit 6 #0, Bit 7 #1, Bit 0 #1, Bit 1 #1, Bit 2 #1, Bit 3 #1, Bit 4 #1, Bit 5 #1, Bit 6 #1, Bit 7 #2, Bit 0 #2, Bit 1 #2, Bit 2 #2, Bit 3 #2, Bit 4 #2, Bit 5 #2, Bit 6 #2, Bit 7
Fehler 9: Fehler C: Fehler E: Fehler F: Fehler 1: Fehler 3: Fehler 5: Fehler 6: Fehler :
Unbenutzt Erregung A: MAX-Alarm B: MIN-larm Primary Funhtionstest Zähler >V Zähler 105% Unbenutzt EEPROM Zähler Unbenutzt Automatischer Abgleich läuft Automatischer Abgleich Mittelwertbestimmung läuft Unbenutzt Unbenutzt Unbenutzt Simulation läuft Funktionstest oder Test Mode läuft
Response Codes
0 5
No Command Specific Error Incorrect Byte Count
-
18
5 Slot - Kommandos Die Parameter des Meßumformers lassen sich in drei Gruppen einteilen: unsigned char-Variablen Parameter von Menüs mit Auswahllisten werden als "unsigned char" abgespeichert, z.B. Sprache: Deutsch = 0 Englisch = 1 unsigned int-Variablen Einige Zahlen, die nur ganzzahlig vorkommen, werden als "unsigned int" gespeichert, z.B. Gerätenummer. float-Variablen Die restlichen Zahlen sind als float (IEEE 754) gespeichert, z.B. Dämpfung. Im folgenden sind für die drei Gruppen das jeweilige Lese- und Schreib-Kommando und eine Tabelle mit den zugehörigen Parametern dargestellt.
5.1 Unsigned-char-Variablen
5.1.1 HART-Command 128 : Lese unsigned-char-Variable Revision
Request Data Bytes
#0 Slot-Index
Response Data Bytes
#0 #1
Slot-Index Inhalt des Slots
Response Codes
0 5 6
No Command Specific Error Incorrect Byte Count Transmitter Specific Command Error -> Ungültige Slotnummer
5.1.2 HART-Command 129 : Schreibe unsigned-char-Variable Revision
Request Data Bytes
#0 #1
Slot-Index Inhalt des Slots
Response Data Bytes
#0 #1
Slot-Index Inhalt des Slots
Response Codes
0 2 3 5 6
No Command Specific Error Invalid Selection Parameter to large Incorrect Byte Count Transmitter Specific Command Error -> Ungültige Slotnummer
-
19
5.1.3 Tabelle der „unsigned char“ –Variablen
Slot- nummer
Parameter Kennziffer Bedeutung Revision
0 Sprache 0 1
Deutsch Englisch
1 Nennweite 5 6 7 8 9 10 11 12 13 14
10 mm 15 mm 20 mm 25 mm 32 mm 40 mm 50 mm 65 mm 80 mm 100 mm
3/8 in 1/2 in 3/4 in 1 in 1-1/4 in 1-1/2 in 2 in 2-1/2 in 3 in 4 in
2 Filter 0 1
aus ein
3 Einheit Qmax
24 17 138 28 131 19 29 137 18 30 31 23 16 136 132 133 134 135 73 74 75 76 77 78 79 70 71 72 80 81
l/s l/min l/h m3/s m3/min m3/h m3/d igps igpm igph igpd mgd gpm gph bbl/s bbl/min bbl/h bbl/d kg/s kg/min kg/h kg/d t/min t/h t/d g/s g/min g/h lbs/s lbs/min
82 240 241 242
lbs/h programmierbare Einheit /s programmierbare Einheit /min programmierbare Einheit /h
4 Einheit Zähler 41 l 43 m3 42 igal
40 gal 46 bbl 61 kg
-
20
Slot-
Nummer Parameter Kennziffer Bedeutung Revision
62 60 63
244
t g lbs programmierbare Einheit
5 Programmierbare Einheit 0 1
ohne Dichte mit Dichte
6 Programmierbarer Ausgang 0 14 13 1 4 5 6 7 8 9
10 11
Keine Funktion Impulsausgang V/R-Signal _ V/R-Signal / Sammel-Alarm / Sammel-Alarm _ MAX/MIN Alarm / MAX/MIN Alarm _ MIN Alarm / MIN Alarm _ MAX Alarm / MAX Alarm _
9 Iout bei Alarm 0 1
High Low
16 Simulation 0 1
aus ein
17 Test-Mode 0 1
aus ein
18 Zählerfunktion 0 1
Standard Differenzzähler
19 20
1. Zeile 2. Zeile
7 2 1 0
11 8 6 5 4 3
Q [Bargraph] Q [mA] Q [Einheit] Q [%] Signal p/n Leerzeile TAG Nummer Zähler V Zähler
21 22
1. Zeile multiplex 2. Zeile multiplex
7 2 1 0
11 8 6 5 4 3
14
Q [Bargraph] Q [mA] Q [Einheit] Q [%] Signal p/n Leerzeile TAG Nummer Zähler V Zähler aus
24 Fließrichtung 0 1
Vorlauf Vor-/Rücklauf
25 Richtungsanzeige 0 1
normal invers
-
21
5.2 Unsigned-in-Variablen
5.2.1 HART-Command 130 : Lese-unsigned int-Variable Revision
Request Data Bytes
#0 Slot-Index
Response Data Bytes
#0 #1
#2..#3
Slot-Index Einheitenkode Inhalt von Slot
Response Codes
0 5 6
No Command Specific Error Incorrect Byte Count Transmitter Specific Command Error -> Ungültige Slotnummer
5.2.2 HART-Command 131 : Schreibe unsigned-int-Variable Revision
Request Data Bytes
#0 #1
#2 #3
Slot-Index Einheitenkode Inhalt von Slot MSB LSB
Response Data Bytes
#0 #1
#2 #3
Slot-Index Einheitenkode Inhalt von Slot MSB LSB
Response Codes
0 2 3 4 5 6
No Command Specific Error Invalid Selection -> Ungültiger Einheitenkode Parameter To Large -> Parameter zu groß Parameter To Small -> Parameter zu klein Incorrect Byte Count -> Anzahl Datenbytes ungleich 4 Transmitter Specific Command Error -> Ungültige Slotnummer
Anmerkung Der vom Master empfangene Einheitenkode wird bei der Kommandobearbeitung ignoriert und der gültige, eingestellete mit der Antwort zurückgegeben
-
22
5.2.3 Tabellen der „unsigned int“-Variablen Slot-
nummer Parameter Bedeutung Revision
0 MAX Alarm Einheit % = 57 Minimum = Maximum =
0 % 105 %
1 MIN Alarm Einheit % = 57 Minimum = Maximum =
0 % 105 %
2 Geräte Adresse Einheit None = 250 Minimum = Maximum =
0 15
3 Überlauf >V Einheit None = 250 Nur Lesen
4 Überlauf
-
23
5.3 Float-Variablen
5.3.1 HART-Command 132 : Lese float-Variable Revision
Request Data Bytes
#0 Slot-Index
Response Data Bytes
#0 #1
#2..#5
Slot-Index Einheitenkode Inhalt des Slots
Response Codes
0 5 6
No Command Specific Error Incorrect Byte Count Transmitter Specific Command Error -> Ungültige Slotnummer
5.3.2 HART-Command 133 : Schreibe float-Variable Revision
Request Data Bytes
#0 #1
#2..#5
Slot-Index Einheitenkode Inhalt des Slots
Response Data Bytes
#0 #1
#2..#5
Slot-Index Einheitenkode Inhalt des Slots
Response Codes
0 2 3 4 5 6
No Command Specific Error Invalid Selection -> Ungültiger Einheitenkode Parameter To Large -> Parameter zu groß Parameter To Small -> Parameter zu klein Incorrect Byte Count -> Anzahl Datenbytes ungleich 4 Transmitter Specific Command Error -> Ungültige Slotnummer
Anmerkung Der vom Master empfangene Einheitenkode wird bei der Kommandobearbeitung ignoriert und der gültige, eingestellete mit der Antwort zurückgegeben
-
24
5.3.3 Tabelle der „Float“-Variablen Slot-
nummer Parameter Bedeutung Revision
0 QmaxDN 10 m/s Einheit l/s l/min l/h m3/s m3/min m3/h m3/d igps igpm igph igpd mgd gpm gph bbl/s bbl/min bbl/h bbl/d
24 17 138 28 131 19 29 137 18 30 31 23 16 136 132 133 134 135
kg/s kg/min kg/h kg/d t/min t/h t/d g/s g/min g/h lbs/s lbs/min lbs/h prog.Einheit /s prog.Einheit /min prog.Einheit /h prog.Einheit /d
73 74 75 76 77 78 79 70 71 72 80 81 82 240 241 242 243
Anmerkung: Qmax DN 10m/s kann nur gelesen werden! 1 Qmax
Einheit l/s l/min l/h m3/s m3/min m3/h m3/d igps igpm igph igpd mgd gpm gph bbl/s bbl/min bbl/h bbl/d
24 17 138 28 131 19 29 137 18 30 31 23 16 136 132 133 134 135
kg/s kg/min kg/h kg/d t/min t/h t/d g/s g/min g/h lbs/s lbs/min lbs/h prog.Einheit /s prog.Einheit /min prog.Einheit /h prog.Einheit /d
73 74 75 76 77 78 79 70 71 72 80 81 82 240 241 242 243
Minimum = 0.05 * QmaxDN Maximum = QmaxDN
3 Impuls Einheit /l /igal /bbl /t /lbs
41 42 46 62 63
/m3 /gal /kg /g /prog.Einheit
43 40 61 60 244
Minimum = Maximum =
0.001 / Zählereinheit 1000 / Zählereinheit
4 Impulsbreite Einheit Millisekunden =
253 (Special)
-
25
Slot- nummer
Parameter Bedeutung Revision
Minimum = Maximum =
0.1 ms 2000ms
5 Schleichmenge Einheit % = 57 Minimum = Maximum =
x0,5%)chsendwert(MessbereimaxQmaxQ DN
10 %
6 Dämpfung Einheit s = 51 Minimum = Maximum =
2 s 100 s
7 Dichte Einheit g/cm3 = 91 Minimum = Maximum =
0.01 g/cm3 5.0 g/cm3
8 Systemnullpunkt Einheit Hz = 38 Minimum = Maximum =
-50 Hz 50 Hz
9 Einheitenfaktor Einheit Liter = 41 Minimum = Maximum =
0.00001 Liter 5000000 Liter
11 Zähler >F Einheit /l /igal /bbl /t /lbs
41 42 46 62 63
/m3 /gal /kg /g /prog.Einheit
43 40 61 60 244
Minimum = Maximum =
0 9999999
12 Zähler
-
26
5.4 Kurzübersicht der Slot-Kommandos Menütitel Variablentyp Kommando Slot Revision
Lesen Schreiben Sprache unsigned char 128 129 0 Nennweite (2) unsigned char 128 129 1 Filter unsigned char 128 129 2 Einheit Qmax unsigned char 128 129 3 Einheit Zähler unsigned char 128 129 4 Progr. Einheit unsigned char 128 129 5 Progr. Ausgang unsigned char 128 129 6 Iout bei Alarm unsigned char 128 129 9 Simulation unsigned char 128 129 16 Test-Mode unsigned char 128 129 17 Zählerfunktion unsigned char 128 129 18 1. Zeile unsigned char 128 129 19 2. Zeile unsigned char 128 129 20 1. Zeile multiplex unsigned char 128 129 21 2. Zeile multiplex unsigned char 128 129 22 Fließrichtung unsigned char 128 129 24 Richtungsanzeige unsigned char 128 129 25 MAX Alarm unsigned int 130 131 0 MIN Alarm unsigned int 130 131 1 Geräte Adresse unsigned int 130 131 2 Überlauf >V unsigned int 130 3 Überlauf V float 132 133 11 Zähler Qmax usw.) müssen bei Änderungen der Impulsbreite oder der Impulswertigkeit (Impuls), beide Parameter noch einmal gelesen werden, um die im Meßumformer gespeicherten Werte zu bekommen.
2. Um die Nennweite zu ändern, ist der Service-Kode einzugeben.
-
27
6 Sonstige kundenzugängliche Kommandos In diesem Abschnitt sind alle übrigen Kommandos aufgeführt, die weder Universal, Common Practice noch Slot-Kommandos sind.
6.1 HART-Command 140 : Zähler >V und Überlauf >V löschen Revision
Request Data Bytes
none
Response Data Bytes
none
Response Codes
0 5
No Command Specific Error Incorrect Byte Count
6.2 HART-Command 141 : Zähler
-
28
6.5 HART-Command 145 : Lese Text der programmierbaren Einheit Revision
Request Data Bytes
none
Response Data Bytes
#0..#3 Text der programmierbaren Einheit (ASCII) mit Endezeichen (0x00)
Response Codes
0 5
No Command Specific Error Incorrect Byte Count
6.6 HART-Command 146 : Schreibe Text der programmierbaren Einheit Revision
Request Data Bytes
#0..#3 Text der programmierbaren Einheit (ASCII) mit Endezeichen (0x00)
Response Data Bytes
#0..#3 Text der programmierbaren Einheit (ASCII) mit Endezeichen (0x00)
Response Codes
0 5
No Command Specific Error Incorrect Byte Count
6.7 HART-Command 147 : Starte automatischen Systemnullpunktabgleich
Revision
Request Data Bytes
none
Response Data Bytes
none
Response Codes
0 5
No Command Specific Error Incorrect Byte Count
Bemerkung Empfängt der Meßumformer Kommando 147, startet er den automatischen Systemnullpunktabgleich und beantwortet alle Kommandos, bis auf Kommando 48, mit „Access Restrict“ bis er den Abgleich beendet hat. Mit Kommando 48 kann der Status des Meßumformers abgefragt, und so ermittelt werden, ob sich der Meßumformer im Abgleich befindet, und ob der Abgleich erfolgreich beendet wurde (siehe Kommando 48). Der Wert des neuen Systemnullpunkts kann mit dem entsprechenden Slot-Kommando gelesen werden.
-
29
6.8 HART-Command 150 : Lade Daten aus dem externen EEPROM Revision
Request Data Bytes
none
Response Data Bytes
none
Response Codes
0 5
65 67
No Command Specific Error Incorrect Byte Count Ausführung nich möglich, da Fehler EEPROM oder Primary Nicht möglich, da Anlagendaten ungültig
6.9 HART-Command 151 : Speichere Daten im externen EEPROM Revision
Request Data Bytes
none
Response Data Bytes
none
Response Codes
0 5
65
No Command Specific Error Incorrect Byte Count Ausführung nich möglich, da Fehler EEPROM oder Primary
6.10 HART-Command 153 : Starte 50s Mittelwertbestimmung des Durchflusses
Revision
Request Data Bytes
none
Response Data Bytes
none
Response Codes
0 5
No Command Specific Error Incorrect Byte Count
-
30
6.11 HART-Command 154 : Lese 50s Mittelwert des Durchflusses Revision
Request Data Bytes
none
Response Data Bytes
#0 #1..#4
Einheitenkode 50s Durchfluss - Mittelwert
Response Codes
0 5
16
No Command Specific Error Incorrect Byte Count Zugriff verweigert, Mittelwertbestimmung noch nicht beendet oder kein Mittelwert vorhanden
-
31
7 Hausinterne Kommandos
7.1 Hausinterne Slot-Kommados
7.1.1 Tabelle hausinterner „unsigned char“- Variablen
Slot- nummer
Parameter Kennziffer Bedeutung Revision
27 QmaxDN velocity 0 1
10 m/s 33.33 ft/s
-
32
7.1.2 Tabelle hausinterner „unsigned int“- Variablen Slot-
nummer Parameter Bedeutung Revision
6 Service-Kode Einheit None = 250 Minimum = Maximum =
0 9999
7 Instrument no. Einheit None = 250 Minimum = Maximum =
0 65535
8 Calibration mode Einheit None = 250 Minimum = Maximum =
0 65535
-
33
7.1.3 Tabelle hausinterner „float“- Variablen Slot-
nummer Parameter Bedeutung Revision
13 Span adjust >F Einheit % = 57 Minimum = Maximum =
80 % 120 %
14 Span adjust
-
34
7.1.4 Kurzübersicht der Slot-Kommandos Menütitel Variablentyp Kommando Slot Revision
Lesen Schreiben Qmax DN velocity unsigned char 128 129 27 Service-Kode unsigned int 130 131 6 Instrument no. unsigned int 130 131 7 Calibration mode unsigned int 130 131 8 Span adjust >F float 132 133 13 Span adjust
-
35
7.2 Sonstige hausinterne Kommandos
7.2.1 HART-Command 148 : Load Primary Data Revision
Request Data Bytes
none
Response Data Bytes
none
Response Codes
0 5
65
No Command Specific Error Incorrect Byte Count Ausführung nich möglich, da Fehler EEPROM oder Primary
7.2.2 HART-Command 149 : Store Primary Data Revision
Request Data Bytes
none
Response Data Bytes
none
Response Codes
0 5
65
No Command Specific Error Incorrect Byte Count Ausführung nich möglich, da Fehler EEPROM oder Primary
7.2.3 HART-Command 152 : Initialisiere externes EEPROM Revision
Request Data Bytes
0..1 Kodenummer (unsigned integer)
Response Data Bytes
none
Response Codes
0 68
No Command Specific Error Kodenummer falsch oder Byte Count ungleich zwei
-
36
7.2.4 HART-Command 155 : Starte autom. Abgleich Aufnehmernullpunkt Revision
Request Data Bytes
0..1 Kodenummer (unsigned integer)
Response Data Bytes
none
Response Codes
0 16 68
No Command Specific Error Zugriff verweigert, Mittelwertbildung läuft noch Kodenummer falsch oder Byte Count ungleich zwei
Bemerkung Empfängt der Meßumformer Kommando 155, startet er den automatischen Abgleich des Aufnehmernullpunktes und beantwortet alle Kommandos, bis auf Kommando 48, mit „Access Restrict“ bis er den Abgleich beendet hat. Mit Kommando 48 kann der Status des Meßumformers abgefragt, und so ermittelt werden, ob sich der Meßumformer im Abgleich befindet, und ob der Abgleich erfolgreich beendet wurde (siehe Kommando 48). Der Wert des neuen Aufnehmernullpunkts kann mit dem entsprechenden Slot-Kommando gelesen werden.
7.2.5 HART-Command 156 : Starte autom. Abgleich Aufnehmerspanne Revision
Request Data Bytes
0..1 Kodenummer (unsigned integer)
Response Data Bytes
none
Response Codes
0 16 68
No Command Specific Error Zugriff verweigert, Mittelwertbildung läuft noch Kodenummer falsch oder Byte Count ungleich zwei
Bemerkung Empfängt der Meßumformer Kommando 156, startet er den automatischen Spanneabgleich des Aufnehmers und beantwortet alle Kommandos, bis auf Kommando 48, mit „Access Restrict“ bis er den Abgleich beendet hat. Mit Kommando 48 kann der Status des Meßumformers abgefragt, und so ermittelt werden, ob sich der Meßumformer im Abgleich befindet. Nach dem Abgleich, muß der vom Meßumformer ermittelte Spannewert auf den Master bezogen und der ermittelte Wert wieder in den Meßumformer gespeichert werden.
-
37
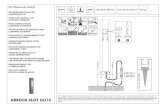
8 Fehlersuche bei Hart Wenn die HART-Kommunikation nicht funktioniert, sollten folgende Punkte überprüft werden: 1. Der Meßumformer muß mit einen HART-fähigen Stromausgangsmodul bestückt sein. 2. Die Bürde am Stromausgang muß zwischen 250 und 500 Ohm sein. 3. Die Geräteadresse im Menü Schnittstelle Wenn dies alles stimmt und dennoch die HART-Kommunikation nicht funktioniert, kann als nächstes der Empfang überprüft werden. Im Untermenü "Funktionstest" gibt es die Funktion "HART-Command": ╔═════════════════╗ ║ HART-Command ║ ║ 128 Slot 20 * ║ ╚═════════════════╝ └┬┘ └───┬──┘ │ │ │ └─── Blinkt bei jeden empfangenen Command kurz auf. │ └──────── Wird nur bei Slot-Commands 128-133 angezeigt, dezimal. └─────────────── Nummer des Commands, dezimal. Wird hier nichts angezeigt, funktioniert bereits der Empfang nicht. In diesen Fall sollte mit einen Oszilloskop kontrolliert werden, ob überhaupt ein HART-Signal am Meßumformer ankommt. Der Signalpegel ist typisch 1 mApp, so daß man z.B. an 500 Ohm Bürde 1 mApp * 500 Ohm = 500 mVpp Signal hat. Wenn ein Signal ankommt und der Meßumformer es nicht erkennt, ist vermutlich eine zu schlechte Signalqualität schuld. In diesen Fall sollte der Test unter besseren Bedingungen wiederholt werden. Wenn der Meßumformer die HART-Commands empfängt und die Gegenseite (z.B. Hand-Held-Communicator) dennoch Fehler meldet, sollte das Senden des Meßumformers mit einem Oszilloskop überprüft werden. Dies kann mit dem Funktions-test "HART-Transmitter" geschehen: ╔═════════════════╗ ║ HART-Transmitter║ ║ 0 ║ ╚═════════════════╝
Nach Aufruf sendet der Meßumformer logisch 0 (=2200Hz) und nach einen Tastendruck logisch 1 (=1200Hz). Weiterhin sollte mit dem Oszilloskop kontrolliert werden, ob der Meßumformer auf das Command antwortet.
-
ABB bietet umfassende und kompetente Beratung in über 100 Ländern, weltweit. www.abb.de/durchfluss
ABB optimiert kontinuierlich ihre Produkte, deshalb sind Änderungen der technischen Daten in diesem
Dokument vorbehalten.
Printed in the Fed. Rep. of Germany (07.2006)
© ABB 2006
D18
4B10
8U09
R
ev. 0
1
ABB Automation Products GmbH Vertrieb Instrumentation Borsigstr. 2, 63755 Alzenau, DEUTSCHLAND Der kostenlose und direkte Zugang zu Ihrem Vertriebszentrum: Tel: +49 800 1114411, Fax: +49 800 1114422 [email protected]
D184B108U091 Revisionsübersicht 2 Einleitung 3 Universal Commands 3.1 HART-Command 0 : Read Transmitter Unique Identifier3.2 HART-Command 1 : Read Primary Variable3.3 HART-Command 2 : Read Current and Percent of Range3.4 HART-Command 3 : Read all dynamic Variables and Current3.5 HART-Command 6 : Write Polling Address3.6 HART-Command 11 : Read Unique Identifier Associated With Tag3.7 HART-Command 12 : Read Message3.8 HART-Command 13 : Read Tag, Descriptor, Date3.9 HART-Command 14 : Read Primary Variable Sensor Information3.10 HART-Command 15 : Read Primary Variable Output Information3.11 HART-Command 16 : Read Final Assembly Number3.12 HART-Command 17 : Write Message3.13 HART-Command 18 : Write Tag, Descriptor, Date3.14 HART-Command 19 : Write Final Assembly Number
4 Common Practice Commands4.1 HART-Command 33 : Read Transmitter Variables4.2 HART-Command 34 : Write Primary Variable Damping Value4.3 HART-Command 35 : Write Primary Variable Range Values4.4 HART-Command 38 : Reset Configuration Changed Flag4.5 HART-Command 40 : Enter/Exit Primary Variable Current Mode4.6 HART-Command 44 : Write Primary Variable Units4.7 HART-Command 45 : Trim Primary Variable Current DAC Zero4.8 HART-Command 46 : Trim Primary Variable Current DAC Gain4.9 HART-Command 48 : Read Additional Transmitter Status
5 Slot - Kommandos 5.1 Unsigned-char-Variablen 5.1.1 HART-Command 128 : Lese unsigned-char Variable5.1.2 HART-Command 129 : Schreibe unsigned-char Variable5.1.3 Tabelle der „unsigned char“ –Variablen
5.2 Unsigned-in-Variablen5.2.1 HART-Command 130 : Lese-unsigned int Variable5.2.2 HART-Command 131 : Schreibe unsigned-int Variable5.2.3 Tabellen der „unsigned int“-Variablen
5.3 Float-Variablen5.3.1 HART-Command 132 : Lese float Variable5.3.2 HART-Command 133 : Schreibe float Variable5.3.3 Tabelle der „Float“-Variablen
5.4 Kurzübersicht der Slot-Kommandos
6 Sonstige kundenzugängliche Kommandos 6.1 HART-Command 140 : Zähler >V und Überlauf >V löschen6.2 HART-Command 141 : Zähler