Skript zur Vorlesung Partielle Di erentialgleichungen ...haller/Skripten/skript_pdgl_sose11.pdf ·...
92
Skript zur Vorlesung Partielle Differentialgleichungen, klassische Methoden Christian Meyer basierend auf der Vorlesung ” Theorie partieller Differentialgleichungen“ von Prof. F. Tr¨ oltzsch, TU Berlin
Transcript of Skript zur Vorlesung Partielle Di erentialgleichungen ...haller/Skripten/skript_pdgl_sose11.pdf ·...

Skript zur Vorlesung
Partielle Differentialgleichungen,
klassische Methoden
Christian Meyer
basierend auf der Vorlesung
”Theorie partieller Differentialgleichungen“
von Prof. F. Troltzsch, TU Berlin

Material fur: ca. 12 Vorlesungen a 90 Minuten
Fehler und Kommentare bitte an: [email protected]
Stand: 24. Juni 2011

Inhaltsverzeichnis
Kapitel 1. Einfuhrung und Motivation 5
1 Notation 6
Kapitel 2. Mathematische Modellierung 9
1 Die Kontinuitatsgleichung 10
2 Die Impulsbilanz 12
3 Die Energiebilanz 15
4 Die Warmeleitgleichung und Laplace-Gleichung 17
5 Die Wellengleichung 18
6 Rand- und Anfangsbedingungen 20
Kapitel 3. Grundbegriffe und Klassifikation 23
Kapitel 4. Elliptische Differentialgleichungen – die Laplace-Gleichung 29
1 Trennung der Variablen – die Fourier-Methode 30
2 Fundamentallosung 38
3 Die Greensche Funktion 47
4 Maximumprinzip 53
Kapitel 5. Parabolische Differentialgleichungen – die Warmeleitgleichung 61
1 Fundamentallosung 62
2 Maximumprinzip und Eindeutigkeit 66
Kapitel 6. Hyperbolische Differentialgleichungen – die Wellengleichung 71
1 Die eindimensionale Wellengleichung – die d’Alembertsche Formel 71
2 Die Wellengleichung in R3 – die Kirchhoffsche Formel 74
Anhang A. Grundlagen fur die Separationsmethode 79
1 Fourier-Reihen 79
2 Sturm-Liouvillesche Eigenwertprobleme 85
Anhang. Literaturverzeichnis 89
Anhang. Index 91
3


KAPITEL 1
Einfuhrung und Motivation
Inhalt
1 Notation 6
Partielle Differentialgleichungen (in diesem Skript mit PDGl’en abgekurzt) spie-len in zahlreichen physikalisch-technischen Anwendungen eine herausragende Rolle.Prominente Beispiele sind
• die Navier-Stokes-Gleichungen in der Stromungsmechanik• die Maxwell-Gleichungen des Elektromagnetismus• die Schrodiner-Gleichung in der Quantenphysik.
Aber auch in anderen Bereichen spielen PDGl’en eine wichtige Rolle wie beispiels-weise in der Chemie oder den Sozial- und Wirtschaftswissenschaften.
Physikalische Großen hangen i.d.R. von mehreren unabhangigen Variablen ab, wiebeispielsweise der Zeit und den drei Raumrichtungen. PDGl’en setzen zeitliche undraumliche Ableitungen von Funktionen miteinander in Beziehung. Dieses Vorgehenerlaubt es zahlreiche Prozesse zu realitatsnah modellieren. Ein klassisches Beispiel istdie Warmeleitgleichung , bei der die zeitliche Entwicklung der Temperaturverteilungin einem Korper mit dem raumlichen Temperaturgradienten in Relation gebrachtwird. der physikalische hintergrund ist anschaulich klar: je goßer die Temperaturun-terschiede in einem Korper sind, desto schneller wird sich die Temperatur an einemgegebenen Punkt des Korpers andern.
Es ist leider kaum moglich, eine einheitliche mathematische Theorie der PDGl’enzu formulieren, da die verschiedenen Typen von PDGl’en auf unterschiedliche Weisebehandelt werden mussen. Man unterscheidet im Wesentlichen drei Arten:
• elliptische PDGl’en• parabolische PDGl’en• hyperbolische PDGl’en.
Wir werden uns im Laufe der Vorlesung mit jeweils einem grundlegenden linearenBeispiel fur die einzelnen Typen von PDGl’en befassen. Die mathematische Be-handlung der verschiedenen Typen unterscheidet sich nicht nur hinsichtliche derAnalysis und damit verbundenen Fragestellungen wie Existenz und Eindeutigkeiteiner Losung, sondern auch bezuglich der Losungsansatze und -methoden. Bei denMethoden zur Losung einer PDGl handelt es sich im Wesentlichen um numerischeNaherungsverfahren, da PDGl’en i.A. nicht
”per Hand“ losbar sind. Wir werden al-
lerdings einige Spezialfalle kennenlernen, in denen es dennoch moglich ist, Losungenanalytisch zu bestimmen. Hinsichtlich der numerischen Losungsverfahren sei bei-spielsweise auf die Vorlesung
”Numerik parabolischer Differentialgleichungen“ ver-
wiesen.
5

6 1. EINFUHRUNG UND MOTIVATION
Auch fur jeweils einen der drei Typen von PDGl’en gibt es keine einheitliche Theo-rie, sondern verschiedene Zugange. Beispielsweise konnen elliptische Gleichungen mitHilfe der so genannten klassischen Theorie behandelt werden, aber auch mittels derschwachen Losungstheorie oder als Operatorgleichung im Banachraum1 betrachtetwerden. Die einzelnen Zugange basieren auf vollig unterschiedlichen mathematischenGrundlagen. Wir werden uns im Rahmen dieser Vorlesung vor allem mit dem klassi-schen Zugang befassen, die schwache Theorie – wenn es die Zeit erlaubt – allerdingsam Ende der Vorlesung ebenfalls kurz ansprechen, da sie fur wichtige numerischeVerfahren wie beispielsweise die Finite Elemente Methode unerlasslich ist.
Das vorliegende Skript und damit die gesamte Vorlesung basiert in weiten Teilen aufden Vorlesungen
”Theorie partieller Differentialgleichungen“ von Prof. F. Troltzsch
(TU Berlin) und”Elementare partielle Differentialgleichungen“ von Prof. R. Farwig
(TU Darmstadt). Ihnen gebuhrt mein Dank fur die Bereitstellung des jeweiligenVorlesungsmaterials.
§ 1 Notation
Bevor wir mit der eigentlichen Vorlesung beginnen, wird eine kurze Einfuhrung indie verwendete Notation gegeben. Hangt eine Funktion von mehreren Veranderlichenab, wie beispielsweise f(x, t), dann bezeichnen wir die partiellen Ableitungen mit
∂f
∂x,
∂f
∂t.
Hangt die Funktion von nur einer Variablen ab, beispielsweise f(t), so schreiben wird fd t
. Der Gradient einer Funktion f : Rn → R, f : x 7→ f(x), ist der durch
∇f(x) =
∂f∂x1...∂f∂xn
definierte Zeilenvektor. Die Jacobi-Matrix einer Funktion f : Rn → Rm ist definiertdurch
f ′(x) =
∂f1∂x1
∂f1∂x2
. . . ∂f1∂xn
∂f2∂x1
∂f2∂x2
. . . ∂f2∂xn
......
......
∂fm∂x1
∂fm∂x2
. . . ∂fm∂xn
Wir bezeichnen offene, einfach zusammenhangende Teilmengen des Rn als Gebiet .Ist Ω ⊂ Rn ein beschranktes Gebiet, dann wird mit C(Ω) die Menge der stetigenFunktionen auf Ω bezeichnet. Die Menge der auf Ω k-mal stetig diffbaren Funktionenheißt Ck(Ω). Die Menge der bis zum Rand von Ω stetigen Funktionen bezeichnenwir mit C(Ω). Mit der Supremumsnorm
‖u‖∞ := ‖u‖C(Ω) = supx∈Ω
|u(x)| (1.1)
wird die Menge zu einem Banachraum, s. z.B. [Alt, 2006, Abschnitt 1.2]. Entspre-chend wird Ck(Ω) mit der Norm
‖u‖Ck(Ω) =∑|α|≤k
supx∈Ω
|Dαu(x)|
1– was im gewissen Sinne aquivalent zur schwachen Theorie ist –

1. NOTATION 7
zu einem Banach-Raum. Hierbei ist α ein Multiindex, deren genaue Definition wirin Kapitel 3 noch kennenlernen werden.
Sei x ∈ Rn gegeben. Die euklidische Norm von x bezeichnen wir mit
|x| :=
(n∑i=1
x2i
)1/2
Die offene Kugel im euklidischen Raum mit Radius r um den Punkt x0 wird mit
B(x; r) := x ∈ Rn : |x− x0| < rbezeichnet. Ihre Oberflache wird mit S(x; r) = ∂B(x; r) bezeichnet. Ist A ⊂ Rn eine(Lebesgue-)messbare Menge, dann bezeichnen wir mit |A| =
∫Adx das (Lebesgue-
)Maß der Menge A.
Sei Ω ⊂ Rn ein Gebiet und fn, n ∈ N, fn : Ω → R, eine Folge von Funktionen,die gleichmaßig auf Ω gegen eine Funktion f konvergiert. Dann schreiben wir
fn(x) ⇒ f(x) in Ω ⇔ supx∈Ω|fn(x)− f(x)| → 0
fur n→∞.


KAPITEL 2
Mathematische Modellierung
Inhalt
1 Die Kontinuitatsgleichung 10
2 Die Impulsbilanz 12
3 Die Energiebilanz 15
4 Die Warmeleitgleichung und Laplace-Gleichung 17
5 Die Wellengleichung 18
6 Rand- und Anfangsbedingungen 20
Wir beschranken uns in diesem Kapitel auf die Grundgleichungen der Kontinuums-physik in Eulerschen Koordinaten zur Beschreibung der Bewegung eines Fluids unterinneren und außeren Kraften. Genauer gesagt betrachten wir die
• Massenerhaltungsgleichung oder Kontinuitatsgleichung• Impluserhaltungsgleichung oder Impulsbilanz• Energieerhaltungsgleichung oder Energiebilanz .
Im Rahmen dieser Vorlseung konnen wir die Herleitung dieser Gleichungen nur sehrgrob skizieren; eine wesentlich detaillierte Herleitung dieser Gleichungen lasst sichbeispielsweise in Spurk [1996] finden. Naturlich umfasst die mathematische Model-lierung weitaus mehr Gebiete als nur die Grundgleichungen der Kontinuumsphysikin dieser Form. Allerdings ist die Herleitung dieser PDGl’en als durchaus reprasen-tativ anzusehen. Daruber hinaus befassen wir uns in diesem Abschnitt mit wichtigenVereinfachungen dieser Grundgleichungen fur bestimmte physikalische Spezialfalle.Diese Vereinfachungen weisen ebenfalls typische Aspekte der mathematischen Mo-dellierung auf und fuhren zudem auf drei spezielle PDGl’en, mit denen wir uns imLaufe der Vorlesung aus mathematischer Sicht naher befassen werden:
• Schwingungs- und Wellengleichung• Laplace-Gleichung• Warmeleitgleichung
Abschließemd sei darauf hingewiesen, dass alle Umformungen und Berechnungenin diesem Kapitel rein formal sind und keineswegs mathematisch rigoros betrach-tet werden sollen, d.h. insbesondere, dass wir uns in diesem Kapitel nicht um dieRegularitat der betrachteten Funktionen kummern.
9

10 2. MATHEMATISCHE MODELLIERUNG
§ 1 Die Kontinuitatsgleichung
Gegeben sei die Stromung eines Fluids, wie z.B. Wasser oder Luft. Wir betrachteneine feste Menge an Fluidteilchen, die wir im Folgenden als Teilchenpaket bezeich-nen. Da sich das Teilchenpaket in der Stromung bewegt, hangt auch das von ihmbedeckte Volumen von der Zeit ab. Wir wollen dieses mit dem Teilchenpaket mitbe-wegte Volumen als V (t) bezeichnen. Das Axiom der Massenerhaltung sagt aus, dassMasse weder verschwinden noch entstehen kann. Das bedeutet, dass sich die Massedes Teilchenpakets zeitlich nicht andert. Es gilt also
M =
∫V (t)
ρ(x, t) dx = konst. ⇔ d
dt
∫V (t)
ρ(x, t) dx = 0, (1.1)
wobei ρ(x, t) die Dichteverteilung des Fluids ist. Die weitere Umformung dieserGleichung ist nicht-trivial, da das vom Teilchenpaket bedeckte Volumen V (t) vonder Zeit abhangt und man deshalb nicht einfach Differentiation und Integration in(1.1) vertauschen kann. Abhilfe schafft hier das Reynoldssche Transporttheorem, daseine Uberfuhrung des obigen Ausdrucks in ein ortsfestes Volumen ermoglicht. Wirwollen das Reynoldssche Transporttheorem hier nur kurz motivieren. Eine rigoroseHerleitung basiert auf einer Integraltransformation in materielle Koordinaten undist in [Spurk, 1996, Abschnitt 1.2.3] zu finden. Sei V das (ortsfeste) Volumen, dasdas betrachtete Teilchenpaket zum Zeitpunkt t einnimmt. Da sich das Teilchenpaketin der Stromung bewegt, ist klar, dass es dieses Volumen i.d.R. sofort wieder verlasstund neue Fluidteilchen uber die Oberflache von V in das Volumen eintreten. Deshalbist die Anderung der Masse des Teilchenpakets nicht allein durch die Dichteanderungin V gegeben, sondern der Massenstrom uber die Oberflache von V muss ebenfallsberucksichtigt werden. Fur den Fall der Massenerhaltung lautet das ReynoldsscheTransporttheorem daher wie folgt:
d
dt
∫V (t)
ρ(x, t) dx =
∫V
∂ρ
∂tdx+
∫∂V
ρ ~u · ~n dA, (1.2)
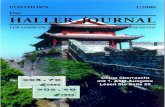
wobei ~u die Geschwindigkeit des Fluids, ∂V die Oberflache von V , dA das zugehorigeOberflachenelement und ~n die außere Normale auf ∂V bezeichnen. Das Oberflachen-intgral modelliert in der Tat den Zu- bzw. Abfluss in V , da ~u · ~n dA = ~u · d ~A denVolumenstrom aus V heraus darstellt, und ρ ~u·~n dA deshalb den Massenstrom durchdie Oberflache ∂V von V modelliert, vgl. Abb 1.1.
Abbildung 1.1. Massenstrom durch ein Testvolumen

2. DIE KONTINUITATSGLEICHUNG 11
Das Reynoldssche Transporttheorem gilt allerdings nicht nur fur die Dichte ρ, son-dern allgemein fur Volumen bezogene Fluideigenschaften, wie beispielsweise auchdie Energiedichte:
Satz 1.1 (Reynoldssches Transporttheorem)Die Funktion ϕ(x, t) beschreibe eine auf das Volumen bezogene Fluideigenschaft.Des Weiteren bezeichne V (t) das mit einem beliebigen Teilchenpaket mitbewegteVolumen, wahrend V das Volumen ist, das zu einem festen Zeitpunkt t > 0 vondiesem Teilchenpaket eingenommen wird. Dann gilt
d
dt
∫V (t)
ϕ(x, t) dx =
∫V
∂ϕ
∂tdx+
∫∂V
ϕ~u · ~n dA,
wobei ~u die Geschwindigkeit des Fluids ist und ~n die außere Normale auf V bezeich-net.
Mit Hilfe des Reynolds’schen Transporttheorems kann man nun die Kontinuitats-gleichung herleiten. Dazu setzen wir (1.2) in (1.1) ein und erhalten∫
V
∂ρ
∂tdx+
∫∂V
ρ ~u · ~n dA = 0. (1.3)
Diese Gleichung bedeutet anschaulich, dass Zu- und Abfluß in bzw. aus dem VolumenV und die Dichteanderung in V gerade im Gleichgewicht sind. Dieses entsprichtauch unserer taglichen Erfahrung, was sehr deutlich im Fall von inkompressiblenStromungen wird, d.h. bei Stromungen von Fluiden deren Dichte konstant ist, wiez.B. Wasser. Dann vereinfacht sich (1.3) zu∫
∂V
ρ ~u · ~n dA = 0,
was nichts anderes bedeutet, als dass alles, was in V hineinstromt, auch wiederhinausstromen muss, was sehr anschaulich bei einer einfachen Rohrstromung klarwird (vgl. Ubung).
Um die Kontinuitatsgleichung in differenzieller Form herzuleiten, betrachten wirwieder (1.3) und wenden den Integralsatz von Gauß auf das Oberflachenintegral an:
Satz 1.2 (Integralsatz von Gauß)
Sei Ω ⊂ Rn ein Gebiet mit hinreichend glattem Rand und ~φ : Ω → Rn eine stetigdifferenzierbare Funktion.1 Dann gilt∫
Ω
div ~φ dx =
∫∂Ω
~φ · ~n dA,
wobei div die Divergenz bezeichnet, die durch
div ~φ :=n∑i=1
∂φi∂xi
definiert ist.
1Diese Voraussetzung an ~φ kann man stark abschwachen, s. beispielsweise [Evans, 1998, ...].Dort lassen sich auch die genauen Voraussetzungen an das Gebiet nachlesen.

12 2. MATHEMATISCHE MODELLIERUNG
Angewandt auf (1.3) ergibt sich damit∫V
(∂ρ∂t
+ div (ρ~u))dx. (1.4)
In den obigen Uberlegungen war das Teilchenpaket und damit das Testvolumen Vbeliebig. Deshalb gilt (1.4) fur jedes beliebige Volumen V , was nur erfullt sein kann,wenn der Integrand verschwindet, d.h. wenn gilt
∂ρ
∂t+ div (ρ~u) = 0. (1.5)
Diese PDGl wird auch als Massenerhaltungs- oder Kontinuitatsgleichung bezeichnet,da sie sich aus dem Prinzip der Massenerhaltung ableitet, wie wir gesehen haben.
§ 2 Die Impulsbilanz
Der Impuls eines starren Festkorpers ist bekanntermaßen durch das Produkt ausdessen Masse und Geschwindigkeit gegeben. Analog dazu ist der Impuls eines Teil-chenpakets in einer Stromung gegeben durch
~I =
∫V (t)
ρ(x, t) ~u(x, t) dx (2.1)
gegeben, wobei V (t) wieder das mit dem Teilchenpaket mitbewegte Volumen be-zeichnet.2 Nach dem ersten Newtonschen Axiom ist die Anderung des Impulseseines Korpers – in unserem Fall des Teilchenpakets – gleich der auf diesen Korperwirkenden Kraft ~F :
d
dt~I = ~F . (2.2)
Aus dem Reynolds’schen Transporttheorem und dem Satz von Gauß folgt fur dielinke Seite mit i = 1, 2, 3
d
dtIi =
d
dt
∫V (t)
ρ ui dx
=
∫V
∂
∂t(ρ ui) dx+
∫∂V
ρ ui ~u · ~n dA
=
∫V
[ ∂∂t
(ρ ui) + div (ρ ui ~u)]dx
=
∫V
[ρ∂ui∂t
+ ui∂ρ
∂t+ ui
∑j
∂ρ uj∂xj
+ ρ∑j
uj∂ui∂xj
]dx
=
∫V
[ui
( ∂ρ∂t
+∑j
∂ρ uj∂xj︸ ︷︷ ︸
=0
)+ ρ(∂ui∂t
+∑j
uj∂ui∂xj
)]dx
=
∫V
ρ(∂ui∂t
+ ~u · ∇ui)dx,
(2.3)
wobei wir die Kontinuitatsgleichung (1.5) ausgenutzt haben.
Die auf unser Teilchenpaket wirkende Kraft ~F setzt sich aus zwei Komponentenzusammen:
2Das Integral in der Formel ist komponentenweise zu verstehen.

2. DIE IMPULSBILANZ 13
• Volumenkraften, die in jedem Punkt des betrachteten Volumens wirken, wiebeispielsweise die Erdanziehungskraft oder elektromagnetische Kraftfelderbei elektrisch leitenden Stromungen• Oberflachen- oder Kontaktkraften, die nur an der Oberflache des Volumens
wirken und durch die durch Reibung bedingte Wechselwirkung des Teil-chenpakets mit dem umgebenden Fluid entstehen.
Im Fall der Volumenkrafte beschranken wir uns auf die Erdanziehungskraft. Wie beieinem starren Festkorper ist sie durch das Produkt aus Masse und Erdbeschleuni-gung gegeben, also
~FV =
∫V
ρ~g dx, (2.4)
wobei ~g die Erdbeschleunigung bezeichnet. Man beachte, dass wir hier nicht zwischenV und V (t) unterscheiden mussen, da das ortsfeste Volumen V ja gerade so gewahltwar, dass es zum Zeitpunkt t mit V (t) ubereinstimmt, und das Integral in (2.4) imGegensatz zum Reynolds’schen Transporttheorem nicht nach der Zeit differenziertwird.
Die Oberflachenkraft ergibt sich als Integral uber den Spannungsvektor
~FA =
∫∂V
~t dA. (2.5)
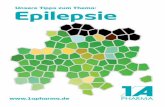
Der Spannungsvektor gibt an, welche Kraft pro Flacheneinheit das umgebende Fluidauf unser Teilchenpaket ausubt. Er lasst sich in drei Komponenten zerlegen, eine
Abbildung 2.1. Der Spannungsvektor
Druckspannung senkrecht zur Oberflache und zwei Schubspannungen tangential da-zu (s. Abb. 2.1) und ergibt sich aus dem symmetrischen Spannungstensor 3 uber
~t = τ · ~n =( 3∑j=1
τijnj
)3
i=1, (2.6)
wobei ~n wieder die außere Normale auf ∂V bezeichnet.
3Die Symmetrie von τ kann aus der Drehimpulserhaltung gefolgert werden, s. [Spurk, 1996,Abschnitt 2.4].

14 2. MATHEMATISCHE MODELLIERUNG
Insgesamt folgt damit aus (2.1)–(2.5), dass fur i = 1, 2, 3 gilt∫V
ρ(∂ui∂t
+ ~u · ∇ui)dx =
∫V
ρ gi dx+
∫∂V
ti dA
=
∫V
ρ gi dx+
∫∂V
∑j
τij nj dA
=
∫V
ρ gi dx+
∫V
∑j
∂τij∂xj
dx,
wobei wir wieder den Satz von Gauß verwendet haben. Es gilt demnach∫V
[ρ(∂ui∂t
+ ~u · ∇ui)− ρ gi −
∑j
∂τij∂xj
]dx = 0 fur i = 1, 2, 3.
Wie bei der Herleitung der Kontinuitatsgleichung war das betrachtete Teilchenpaketbeliebig, so dass die obige Gleichung fur jedes Testvolumen V gelten muss, was nurerfullt sein kann, wenn der Integrand verschwindet:
ρ(∂ui∂t
+ ~u · ∇ui)
= ρ gi +∑j
∂τij∂xj
fur i = 1, 2, 3
oder in symbolischer Schreibweise:
ρ(∂~u∂t
+ ~u · ∇~u)
= ρ~g + div τ (2.7)
Hierbei bezeichnet ∇~u die Transponierte der Jacobi-Matrix von ~u, und die einfacheUberschiebung ~u · ∇~u ist definiert durch
~u · ∇~u :=(∑
j
∂ui∂xj
uj
)i
= (∇~u)T~u.
Des Weiteren ist div τ := (∑
j∂τij∂xj
)i die tensorielle Divergenz. Die PDGl (2.7) heißt
Impulsbilanz und stellt das erste Newtonsche Axiom im Fall stromender Fluide inEulerschen bwz. ortsfesten Koordinaten dar.
Um mit der Kontinuitatsgleichungen ein geschlossenes Gleichungssystem fur die Un-bekannten ρ und ~u zu erhalten, muss der Spannungstensor als Funktion dieser Unbe-kannten ausgedruckt werden. Dies geschieht mit Hilfe so genannter Materialgleichun-gen, also Gleichungen, die im Rahmen der Kontinuumsphysik nicht allgemein gultigsind, sondern nur fur spezielle Materialien gelten und daher meistens auch nochexperimentell zu ermittelnde Materialparameter enthalten. Das weitaus wichtigsteMaterialgesetz zur Beschreibung des Spannungstensors in Fluiden ist das Cauchy-Poisson-Gesetz fur Newtonsche Fluide:
τij = −pδij + λ∑k
∂uk∂xk
δij + η(∂ui∂xj
+∂uj∂xi
)fur i, j = 1, 2, 3 (2.8)
mit
δij :=
1, i = j
0, sonst.
Des Weiteren bezeichnet die skalare Große p den Druck im Fluid. Er ist eine weitereunbekannte Feldgroße des Fluids, fur die ebenfalls ein Materialgesetz benotigt wird.

2. DIE ENERGIEBILANZ 15
Man erkennt an (2.8), dass der Druck die Wechselwirkungen zwischen Fluidteil-chen im hydrostatischen Fall, d.h., wenn ~u(x, t) ≡ 0, vollstandig beschreibt. Danngilt τij = −p δij und fur den Spannungsvektor gilt nach (2.6), dass ~t = −p~n, sodass die Oberflachenspannungen und -krafte im Fluid senkrecht auf den Testvolu-mina stehen, vgl. Abb 2.1. Es handelt sich demnach um reine Druckkrafte und alleSchub- bzw. Scherkrafte entfallen im hydrostatischen Fall. Daruber hinaus sind λund η materialabhangige Zahigkeiten, die ihrerseits wieder Funktionen von Druckund Temperatur des Fluids sein konnen. Durch das Materialgesetz (2.8) wird einegroße Zahl technisch relevanter Fluide sehr gut beschrieben, wie beispielsweise Luft,Wasser oder auch Mineralole. Es gibt allerdings auch Fluide deren Verhalten sichnicht durch (2.8) beschreiben lasst, wie z.B. Blut oder Zahnpasta.
Wir nehmen nun an, dass λ und η konstant sind. Dann ergibt sich durch Umbenen-nung der Summationsindizes und Vertauschung der Differentiationsreihenfolge∑
j
∂τij∂xj
= − ∂p
∂xi+ λ(∑
k
∂2uk∂xk∂xi
)+ η(∑
j
∂2ui∂x2
j
+∑j
∂2uj∂xi∂xj
)= − ∂p
∂xi+ (λ+ η)
∂
∂xi
∑j
(∂uj∂xj
)+ η
∑j
∂2ui∂x2
j
.
Setzt man dies unter Benutzung des Vektor-Laplace ∆~u := (∑
j∂2ui∂x2j
)i in (2.7) ein,
dann erhalt man die Navier-Stokes-Gleichungen
ρ(∂~u∂t
+ ~u · ∇~u)
= ρ~g −∇p+ (λ+ η)∇(div ~u) + η∆~u (2.9a)
∂ρ
∂t+ div (ρ~u) = 0, (2.9b)
wobei die zweite Gleichung gerade die Kontinuumsgleichung (1.5) ist. Um daraus eingeschlossenes Gleichungssystem zu erhalten, muss man noch ein Materialgesetz furdie Beziehung zwischen Druck und Dichte angeben. Der einfachste Ansatz hierfurist der eines inkompressiblen Fluids, bei dem ρ(x, t) = konst. gilt. Dann folgt aus(2.9b), dass div ~u = 0, und die Navier-Stokes-Gleichungen vereinfachen sich zu
ρ(∂~u∂t
+ ~u · ∇~u)− η∆~u+∇p = ρ~g (2.10a)
div ~u = 0. (2.10b)
§ 3 Die Energiebilanz
Die Energie eines stromenden Fluids setzt sich aus zwei Bestandteilen zusammen,der inneren Energie E und der kinetischen Energie K. Die innere Energie ist aufmolekulare Bewegung im Fluid zuruckzufuhren, was im Rahmen der Kontinuums-physik nicht explizit modelliert wird. Stattdessen fuhren wir eine innere Energie proMasseneinheit e als neue unbekannte Feldgroße ein, aus der sich die innere Energiedes betrachteten Teilchenpakets analog zu Masse und Impuls durch
E =
∫V (t)
e ρ dx

16 2. MATHEMATISCHE MODELLIERUNG
ergibt. Analog zum starren Festkorper ist die kinetische Energie des Teilchenpaketsdurch
K =1
2
∫V (t)
ρ |~u|2 dx
gegeben, wobei | . | die euklidische Norm im R3 bezeichnet.
Nach dem Energieerhaltungssatz der klassischen Mechanik 4 ergibt sich die zeitli-che Anderung der Gesamtenergie eines Korpers durch die Leistung der am Korperangreifenden Krafte plus der zugefuhrten Warmeenergie, in Formeln:
d
dt(K + E) = P + Q, (3.1)
wobei P die Leistung der angreifenden Krafte und Q die zugefuhrte Warmemengebezeichnen. Die Leistung die eine Kraft auf einen Massepunkt ausubt ist durch dasProdukt aus den Betragen dieser Kraft und der Geschwindigkeit in Richtung dieserKraft gegeben. Fur unser Teilchenpaket folgt daher mit Hilfe des Satzes von Gauß:
P =
∫V
ρ∑i
ui gi dx+
∫∂V
∑i
ui ti dA
=
∫V
ρ∑i
ui gi dx+
∫∂V
∑i
ui∑j
τij nj dA
=
∫V
ρ∑i
ui gi dx+
∫V
∑ij
∂ui τij∂xj
dA
=
∫V
(ρ ~u · ~g + div (~u · τ)
)dx.
(3.2)
Die zugefuhrte Warmemenge wiederum ergibt sich aus dem Warmestrom ~q in dasVolumen V hinein, das das Teilchenpaket zum Zeitpunkt t einnimmt:5
Q = −∫∂V
~q · ~n dA = −∫V
div ~q dx. (3.3)
Da die im Teilchenpaket gespeicherte Energie zunimmt, falls der Warmestrom indas Volumen V hinein und damit entgegen der außeren Normalen ~n gerichtet ist,geht das obige Integral mit negativem Vorzeichen in die Energiebilanz ein. Daruberhinaus haben wir mit dem gleichen Argument wie im Fall von (2.4) auch in (3.2)und (3.3) das zeitabhangige Volumen V (t) durch V ersetzt. Fur die linke Seitein (3.1) liefern das Reynolds’sche Transporttheorem, der Satz von Gauß und dieKontinuitatsgleichung vollig analog zu (2.3) (mit |~u|2 + e anstelle von ui)
d
dt(K + E) =
d
dt
∫V (t)
ρ( |~u|2
2+ e)dx
=
∫V
ρ[ ∂∂t
( |~u|22
+ e)
+ ~u · ∇( |~u|2
2+ e)]dx.
4Spezialfall des ersten Hauptsatzes der Thermodynamik5Der Warmestrom tangential zur Oberflache von V spielt dabei keine Rolle, er tritt ja nicht
in das Volumen ein. Daher die Multiplikation mit ~n.

2. DIE WARMELEITGLEICHUNG UND LAPLACE-GLEICHUNG 17
Setzt man diese Gleichung zusammen mit (3.2) und (3.3) in (3.1) ein, so erhalt mandie Energiebilanz in integraler Form:∫
V
ρ[ ∂∂t
( |~u|22
+ e)
+ ~u · ∇( |~u|2
2+ e)]dx =
∫V
(ρ ~u · ~g + div (~u · τ)− div ~q
)dx.
Auch diese Gleichung gilt wieder fur beliebige Teilchenpakete, also fur beliebigeVolumina, woraus die Energiebilanz in differentieller Form folgt:
ρ[ ∂∂t
( |~u|22
+ e)
+ ~u · ∇( |~u|2
2+ e)]
= ρ ~u · ~g + div (~u · τ)− div ~q. (3.4)
Um zusammen mit Kontinuitatsgleichung und Impulsbilanz ein geschlossenes Glei-chungssystem zu erhalten ist neben dem Materialgesetz fur τ ein weiteres fur denWarmestrom notwendig. Ein Beispiel hierfur lernen wir im folgenden Abschnitt ken-nen.
§ 4 Die Warmeleitgleichung und Laplace-Gleichung
In diesem Abschnitt werden wir die Energiebilanz fur den Spezialfall des ruhen-den idealen Gases vereinfachen. Dies fuhrt auf zwei PDGl’en, die wir im Laufe derVorlesung aus mathematischer Sicht genauer untersuchen werden.
Zunachst fuhren wir die innere Energie e auf eine andere Feldgroße zuruck, dieTemperatur θ = θ(x, t). Im Fall eines (kalorisch) idealen Gases gilt
e = cv θ
mit der spezifischen Warmekapazitat cv, die ein materialabhangiger Parameter ist.6
Eine detaillierte Herleitung dieser Beziehung geht uber diese Vorlesung hinaus undist in [Muller, 1994, Abschnitt 2.3] zu finden.
Daruber hinaus nehmen wir an, dass das Gas ruhe, d.h. ~u(x, t) ≡ 0.7 Dann verein-facht sich (3.4) zu
ρ∂
∂t(cv θ) + div ~q = 0. (4.1)
Wie bereits oben angedeutet, benotigt man noch ein Materialgesetz fur den Warme-strom ~q. Wir betrachten hier das Fouriersche Gesetz fur isotrope Materialien:
~q = −κ∇θ (4.2)
mit der materialabhangigen skalaren Warmleitfahigkeit κ. Der Hintergrund dieseslinearen Materialgesetzes ist die so genannte Gradientendiffusion: der Warmestromzeigt entgegen des Temperaturgradienten, also vom Warmen ins Kalte, und ist umsogroßer, je großer der Temperaturunterschied ist. In (4.1) eingesetzt ergibt sich
ρ∂
∂t(cv θ)− div (κ∇θ) = 0.
6Im Fall des idealen Gases ist sie durch cv = (3R)/(2M) gegeben, wobei R die universelleGaskonstante und M die molare Masse ist.
7Diese Annahme ist nicht ganz realistisch, da Temperaturunterschiede in Gasen immer aucheinen konvektiven Warmetransport und damit eine Stromung induzieren. Bei geringen Tempera-turunterschieden kann diese jedoch als vernachlassigbar angesehen werden.

18 2. MATHEMATISCHE MODELLIERUNG
Nehmen wir weiterhin an, dass cv und κ konstant sind, erhalt man die folgendePDGl:
ρ cvκ
∂θ
∂t−∆θ = 0 (4.3)
mit dem Laplace-Operator
∆θ := div∇θ =∑i
∂2θ
∂x2i
(4.4)
(s. Ubungsaufgabe). O.B.d.A. nehmen wir an, dass ρ = cv = κ = 1,8 so dass sich diefolgende PDGl ergibt
∂θ
∂t−∆θ = 0, (4.5)
die als (lineare) Warmeleitgleichung bezeichnet wird. Diese Gleichung beschreibtnicht nur die Warmeausbreitung in ruhenden (idealen) Gasen, sondern auch inFestkorpern mit isotroper Warmeleitfahigkeit.
Wir konzentrieren uns nun auf den stationaren Fall, d.h. den Fall bei dem die Tem-peraturverteilung zeitlich konstant ist. Dieses thermische Gleichgewicht stellt sichbeispielsweise ein, wenn in einen Koper unendlich lange eine konstante Warmemengeeingebracht wird und die Abstrahlung an die kuhlende Umgebung ebenfalls immerkonstant ist. Dann vereinfacht sich (4.5) zu
−∆θ = 0, (4.6)
der so genannten Laplace-Gleichung . Bei dieser Gleichung geht man davon aus, dassdie Warme uber den Rand des Korpers eingebracht wird, was mathematisch durcheintsprechende Randbedingungen modelliert werden muss, auf die wir in Abschnitt6 eingehen werden. Wird die Warmeenergie als verteilte Warmequelle eingebracht,wie beispielsweise in einem Microwellenherd, dann erhalt man statt der homogenenGleichung (4.6) die folgende inhomogene PDGl
−∆θ = f, (4.7)
die auch als Poisson-Gleichung bezeichnet wird.
Die Gleichungen (4.5)–(4.7) sind mathematisch sehr gut untersucht und stellen Re-ferenzfalle fur ganze Klassen von PDGl’en dar, so genannte elliptische und para-bolische Gleichungen. Sie modellieren nicht nur die Warmeausbreitung in ruhendenFluiden und Festkorpern; es gibt zahlreiche andere physikalische Phanomene, die gutdurch (4.5)–(4.7) abgebildet werden, wie beispielsweise das zweite Ficksche Gesetzder Spezies-Diffusion im Fall von (4.5) oder die elektrostatische Potentialgleichungim Fall von (4.6).
§ 5 Die Wellengleichung
In diesem Abschnitt wollen wir mit Hilfe der Navier-Stokes-Gleichung (2.9) und derKontinuitatsgleichung (1.5) eine PDGl herleiten, die die Ausbreitung einer Schall-welle durch ein ruhendes Medium (Fluid) beschreibt. Schall kann als kleine Druck-schwankung interpretiert werden, die sich mit Schallgeschwindigkeit durch das Fluidbewegt.
8Wenn dies nicht der Fall ist, kann man (4.3) durch die Variablentransormation t′ = (κ/ρ cv)tin (4.5) uberfuhren.

2. DIE WELLENGLEICHUNG 19
Der Druck taucht als Feldgroße in den Bewegungsgleichungen eines Fluids auf, wes-halb sich die Gleichungen fur die Ausbreitung des Schalls daraus ableiten lassen.Dazu spalten wir Druck, Dichte und Geschwindigkeit zunachst in einen Gleich- undeinen Schwankungsanteil auf:9
p(x, t) = p0 + p′(x, t)
ρ(x, t) = ρ0 + ρ′(x, t)
~u(x, t) = ~u0 + ~u′(x, t) = ~u′(x, t).
(5.1)
Die so genannten Gleichanteile p0 und ρ0 werden als sehr viel großer als die Schwan-kungsanteile angenommen, die der Schallausbreitung zugeordnet werden. Der Gleich-anteil der Geschwindigkeit erfullt ~u0 = 0, da das Fluid als ruhend angenommenwurde, was bereits in den obigen Formeln berucksichtigt wurde. Da das Fluid ruht,werden die Gleichanteile als raumlich und zeitlich konstant angenommen.
Bei der Schallausbreitung spielt die Reibung nur eine untergeordnete Rolle, was mandaran erkennt, dass Schallwellen als minimale Druckstorungen sich vergleichsweiseweit ausbreiten. Wir vernachlassigen daher die Reibungsterme in den Navier-Stokes-Gleichungen (2.9), sodass fur die Zahigkeiten λ = η = 0 gilt. Dann resultiert aus(2.9a) die so genannte Euler-Gleichung fur ein reibungsfreies Fluid:
ρ(∂~u∂t
+ ~u · ∇~u)
= −∇p, (5.2)
wobei wir auch die Gravitation vernachlassigt haben, da die durch den Schall be-wegten Massen sehr klein sind. Wir setzen jetzt die Dekompositionen aus (5.1) in(5.2) und die Kontinuitatsgleichung (1.5) ein und erhalten:
∂
∂t(ρ0 + ρ′) + div
((ρ0 + ρ′)~u′
)= 0
(ρ0 + ρ′)(∂~u′∂t
+ ~u′ · ∇~u′)
= −∇(p0 + p′).
Da die Schwankungsgroßen sehr klein gegenuber dem jeweiligen Gleichanteil sind,vernachlassigen wir die Terme, in denen die Schwankungsgroßen oder deren Ablei-tungen quadratisch auftauchen, was einer Linearisierung der obigen Gleichungenentspricht.10 Wenn man zudem berucksichtigt, dass die Ableitungen der konstantenGleichanteile verschwinden, erhalt man:
∂ρ′
∂t+ ρ0 div ~u′ = 0 (5.3)
ρ0∂~u′
∂t= −∇p′. (5.4)
Wir haben somit vier Gleichungen fur funf Unbekannte. Um das Gleichungssystemzu schließen, benotigen wir noch ein Materialgesetz, die Druck-Dichte-Beziehung ,deren detaillierte physikalische Herleitung in Ehrenfried [2004] zu finden ist:
p′(x, t) = c2 ρ′(x, t),
9Die Schwankungsgeschwindigkeit ~v′ ist nicht die Schallgeschwindigkeit, sondern die Schnelle,also die Geschwindigkeit, mit der Wellenberge und -taler auf- und abschwingen.
10Um die Ableitungen vernachlassigen zu konnen, sind streng genommen weitere Vorausset-zungen notig, s. Ehrenfried [2004].

20 2. MATHEMATISCHE MODELLIERUNG
wobei c die Schallgeschwindigkeit im jeweiligen Fluid ist. Wir setzen diese Beziehungjetzt in die linearisierte Kontinuitatsgleichung (5.3) ein und differenzieren diese nachder Zeit:11
1
c2
∂2p′
∂t2+ ρ0
∂
∂t
(div ~u′
)= 0.
Auf der anderen Seite bilden wir die Divergenz von (5.4):
ρ0 div(∂~u′∂t
)+ div (∇p′) = 0.
Wegen div ( ∂∂t
( . )) = ∂∂t
(div . ) und div∇ = ∆, s. (4.4), ergibt eine Subtraktion derbeiden Gleichungen:
∂2p′
∂t2− c2 ∆p′ = 0. (5.5)
Diese PDGl wird als Wellengleichung bezeichnet. Sie kann als Referenzfall fur dieKlasse der hyperbolischen Gleichungen angesehen werden. Im raumlich eindimensio-nalen Fall reduziert sie sich auf die so genannte Schwingungsgleichung
∂2p′
∂t2− c2 ∂
2p′
∂x2= 0. (5.6)
Die Wellengleichung beschreibt nicht nur die Ausbreitung von Schallwellen, sondernvon Wellen allgemein. So wird beispielsweise die Ausbreitung einer elektromagneti-schen Welle ebenfalls durch diese Gleichung beschrieben, die sich in dem Fall ausden Maxwell’schen Gleichungen ableiten lasst.
§ 6 Rand- und Anfangsbedingungen
Wie bei gewohnlichen Differentialgleichungen benotigt man bei PDGl’en neben derDifferentialgleichung selbst weitere Bedingungen um eine Losung eindeutig festzu-legen, so genannte Rand- und Anfangsbedingungen.
Wir leiten hier exemlarisch die Rand- und Anfangsbedingungen fur die Warmeleit-gleichung (4.5) und die Laplace-Gleichung (4.6) her. Dazu betrachten wir statt einesFluids die Temperaturverteilung in einem (Fest-)Korper, die ebenfalls durch die li-neare Warmeleitgleichung (4.5) oder im stationaren Fall durch (4.6) beschriebenwird. Die PDGl gilt in jedem Punkt des vom Korper bedeckten Gebietes Ω ⊂ R3,d.h. z.B.
−∆θ(x) = 0 ∀x ∈ Ω.
Am Rand von Ω, hier mit Γ bezeichnet, d.h. Γ = ∂Ω, konnen verschiedene Situatio-nen auftreten:
(1) Dirichlet-Ranbedingungen:Die Temperatur am Rand ist genau gleich einer vorgebenen Temperatur θΓ,d.h.
θ(x) = θΓ(x) ∀x ∈ Γ.
Diese Wahl der Randbedingung motiviert sich dadurch, dass die Tempera-turverteilung im Raum i.d.R. stetig ist, und die Temperatur am Rand des
11Mathematisch gesehen ist dies eine rein formale Umformung, da sie die Losungsmenge even-tuell verandert. Gleiches gilt fur die folgende Umformung.

2. RAND- UND ANFANGSBEDINGUNGEN 21
Korpers daher mit der Umgebungstemperatur ubereinstimmt. Diese Rand-bedingung idealisiert die Realitat allerdings im gewissen Sinne, da sie dieWirkung der Korpertemperatur auf die Umgebung nicht berucksichtigt. IstθΓ ≡ 0, dann sricht man von homogenen Dirichlet-Randbedingungen, sonstvon inhomogenen.
(2) Neumann-Randbedingung:Hierbei wird der Warmestrom am Rand vorgegeben. Liegt beispielsweisevollstandige Isolation vor, bedeutet das, dass keine Warme uber den Randabfließen kann, also ~q(x) · ~n = 0. Unter Berucksichtigung des FourierschenGesetzes (4.2) folgt also
κ∂θ
∂n(x) = 0 ∀x ∈ Γ, (6.1)
wobei ∂θ∂n
= ∇θ · ~n die Normalenableitung bezeichnet. Da kein Materialvollstandig isolierend wirkt, ist auch dies eine idealisierte Randbedingung.Bei (6.1) handelt es sich wieder um eine homogene Neumann-Randbedingung,ware die rechte Seite ungleich Null; hatten wir eine inhomogene Neumann-Randbedingung.
(3) Robin-Randbedingung:Im Gegensatz zur Dirichlet- und Neumann-Randbedingung stellt die Robin-Randbedingung bei niedrigen Temperaturen ein durchaus realitatsnahesModell dar. Sie ist gegeben durch
κ∂θ
∂n(x) + α θ(x) = 0 ∀x ∈ Γ,
wobei α > 0 die materialabhangige Warmeubergansgzahl ist. Auch hierunterscheidet man wieder zwischen dem homogenen und inhomogenen Fall.
Die drei Randbedingungen werden manchmal auch als Randbedingung erster, zwei-ter und dritter Art bezeichnet. Es gibt weitere Randbedingungen fur die Laplace-Gleichung, beispielsweise Randbedingungen, die die Warmestrahlung berucksichti-gen, was bei hohen Temperaturen entscheidend ist. Diese Randbedingungen sinddann i.d.R. nicht-linear wie beispielsweise die Boltzmann-Randbedingung.
Bei zeitabhangigen Problemen werden neben Randbedingungen auf Γ auch noch An-fangsbedingungen zum Startzeitpunkt t = t0 benotigt. Bei der Warmeleitgleichungwird dazu einfach die Temperaturverteilung im Korper zur Startzeit vorgegeben:
θ(x, t0) = θ0(x) ∀x ∈ Ω.
Bei PDGl’en mit einer zweiten Zeitableitung wie der Wellengleichung (5.5) wird eineweitere Anfangsbedingung benotigt, vgl. Kapitel ??.


KAPITEL 3
Grundbegriffe und Klassifikation
In diesem Kapitel werden wir eine Schreibweise kennenlernen, mit der man eleganteine allgemeine Form einer PDGl formulieren kann. Danach werden wir PDGl’enzweiter Ordnung in drei Klassen unterteilen. Im Gegensatz zu Kapitel 2 werdenwir im Folgenden Vektoren nicht mehr durch einen Vektorpfeil kennzeichnen. DesWeiteren heißt die gesuchte Losung einer PDGl von nun an u, und wir bezeichnenden Vektor der unabhangigen Variablen (x1, ..., xn) gelegentlich einfach als x.
Um eine PDGl kompakt aufschreiben zu konnen, fuhren wir so genannte Multiindizesein:
Definition 1.1Sei n ∈ N. Ein n-Tupel nicht-negativer reeller Zahlen α = (α1, ..., αn), αi ∈ N∪0,i = 1, 2, ..., n, heißt Multiindex. Der Betrag von α ist definiert durch |α| := α1 + ...+αn.
Mit Hilfe von Multiindizes lassen sich (mehrfache) Ableitungen sehr kompakt schrei-ben. Dazu sei n ∈ N und α ein gegebener Multiindex. Ferner sei u : Rn → R eine|α|-mal stetig diffbare Funktion. Wir definieren
Dαu :=∂|α|u
∂xα11 ∂x
α22 ...∂x
αnn
. (1.2)
Beispielsweise erhalten wir fur n = 5, α = (0, 1, 0, 2, 0):
Dαu =∂3u
∂x2∂x24
.
Derartige Differentialoperationen mit Multiindizes kann man naturlich auch mehr-fach hintereinander ausfuhren, z.B. fur n = 3
α = (1, 0, 2), β = (0, 1, 1) ⇒ DαDβu =∂5u
∂x1∂x23∂x2∂x3
=∂5u
∂x1∂x2∂x33
(wobei wir vorausgesetzt haben, dass u 5-mal stetig diffbar und somit der Satz vonSchwarz anwendbar ist, so dass die Differentiationen vertauscht werden konnen).Falls α = ej (j-ter kartesischer Einheitsvektor) ist Dαu = ∂u
∂xj. Wir schreiben
in diesem Fall auch einfach Dju = ∂u∂xj
. Entsprechend erhalt man beispielsweise
DiDju = ∂2u∂xi∂xj
und
∇u = (Diu)ni=1, ∆u =n∑i=1
D2i u.
Mit dieser Schreibweise ist lasst sich der allgemeine Differentialoperator aus (1.2)auch als Dαu = Dα1
1 Dα22 ...Dαn
n u schreiben. Mit Hilfe von (1.2) konnen wir nundefinieren, was wir unter dem Begriff
”partiellen Differentialgleichung“ eigentlich
genau verstehen wollen:
23

24 3. GRUNDBEGRIFFE UND KLASSIFIKATION
Definition 1.2 (Partielle Differentialgleichung)Sei Ω ⊂ Rn, n ∈ N, ein Gebiet und F : Ω×Rk → R, k ∈ N, und f : Ω→ R gegebeneFunktionen. Eine Gleichung der Form
F (x,Dα1
u(x), ..., Dαk
u(x)) = f(x), x ∈ Ω, (1.3)
heißt partielle Differentialgleichung (PDGl) in n reellen Veranderlichen fur die ge-suchte Funktion u : Ω→ R. Dabei sind α1, ..., αk Multiindizes, also jeweils Vektorender Dimension n. Gilt |αi| ≤ m fur alle i = 1, ..., k, und existiert ein αj mit |αj| = m,so heißt die PDGl von m-ter Ordnung .1 (Wir gehen bei dieser und den folgenden De-finitionen davon aus, dass die Nichtlineartat F keinen Term nullter Ordnung enthalt,d.h. keinen Term, der von u unabhangig ist und als Summand auftaucht. Die rechteSeite f ist somit der einzige Term dieser Art.)
Definition 1.3Ist f(x) ≡ 0, dann heißt eine PDGl der Form (1.3) homogen. Andernfalls nennenwir sie inhomogen.
Beispiel 1.4
Es sei n = 2, sodass u = u(x1, x2). Das Gebiet ist durch den Einheitskreis gegeben,d.h. Ω = (x1, x2)| x2
1 + x22 < 1. Wir wahlen k = 2 und
F (x,w) = x1w21 + w2, α1 = (1, 0), α2 = (1, 2).
Dann ergibt sich die folgende (homogene) PDGl
x1(D1u)2 +D1D22u = 0, x ∈ Ω.
Ihre Ordnung ist m = 3.
Wie bei gewohnlichen Differentialgleichungen benotigt man noch weitere Gleichun-gen, um Losungen von PDGlen eindeutig zu bestimmen, so geannte Anfangs- undRandbedingungen, s. Abschnitt 2.6. Wieviele derartiger Gleichungen benotigt wer-den, hangt von der Ordnung der PDGl ab. Beispiele hierfur werden wir im Laufeder Vorlesung noch kennenlernen.
Im Folgenden werden wir verschiedene Typen von PDGl’en unterscheiden.
Definition 1.5 (Lineare und nichtlineare PDGl)Im Folgenden sei Ω ⊂ Rn ein Gebiet und f : Ω→ R eine gegebene Funktion.
(1) Eine partielle Differentialgleichung der Form∑|α|≤k
aα(x)Dαu = f(x) (1.4)
mit gegebenen Funktionen aα heißt linear .(2) Hat eine partielle Differentialgleichung k-ter Ordnung die Form∑
|α|=k
aα(x)Dαu+ F (x,Dα1
u, ..., Dαl
u) = f(x),
mit |α1|, ..., |αl| < k (d.h. alle in F stehenden Ableitungen besitzen die Ord-nung kleiner als k), dann heißt sie semilinear . Der Term
∑|α|=k aα(x)Dαu
wird (linearer) Hauptteil genannt.
1Dabei wird stillschweigend vorausgesetzt, dass nach Daj
x u umgestellt werden kann, diese Ab-leitung also wirklich auftritt.

3. GRUNDBEGRIFFE UND KLASSIFIKATION 25
(3) Hat eine PDGl die Ordnung k und die Gestalt∑|α|=k
aα(x,Dβ1
u, ..., Dβp
u)Dαu+ F (x,Dα1
u, ..., Dαl
u) = f(x),
wobei |α1|, ..., |αl|, |β1|, .., |βp| ≤ k − 1 gilt, so heißt sie quasilinear . DerHauptteil ist hier zwar nichtlinear, die hochsten Ableitungen kommen al-lerdings nur linear vor.
(4) Trifft keiner der vorigen Falle zu, so heißt die PDGl nichtlinear .
Wir beobachten, dass jede lineare PDGl semilinear und jede semilineare PDGl qua-silinear ist.
Beispiel 1.6 (1) Homogene, lineare PDGl 2. Ordnung:
x31D2D3u+D1u = 0 ⇔
aαD
αu+Dβu = 0
mit α = (0, 1, 1), aα(x) = x31, β = (1, 0, 0)
(2) Inhomogene, semilineare PDGl 2. Ordnung:
x31D2D3u+ (D1u)2 = sin(x)
(3) Homogene, quasilineare PDGl 2. Ordnung:
x31(D2D3u)(D1u)2 = 0
(4) Homogene, nichlineare PDGl 1. Ordnung:
(D1u)2 + (D2u)2 = 0
Bemerkung 1.7In der Literatur lasst sich im Falle linearer PDGl’en haufig folgende Notation furdie linke Seite von (1.4) finden:
Lu :=∑|α|≤k
aα(x)Dαu.
L wird als Differentialoperator bezeichnet. Er bildet Funktionen auf andere Funktio-nen ab. Beispielsweise bildet L = ∆ =
∑iD
2i zweimal stetig diffbare Funktionen auf
stetige ab. Differentialoperatoren sind deshalb Abbildungen in Funktionenraumen.
Wir hatten bereits in Kapitel 2 die Begriffe”elliptische“,
”parabolische“ und
”hyper-
bolische“ PDGl erwahnt. Wir wollen diese Begriffe nun fur den Fall von semilinearenPDGl’en zweiter Ordnung exakt definieren. PDGl’en zweiter Ordnung kommt einebesondere Bedeutung zu, da sie in vielen physikalischen Modellen auftreten, vgl.(4.5), (4.6) und (5.5). Nach Definition 1.5(2) kann eine solche PDGl in die Form
n∑i=1
n∑j=1
aij(x)DiDju+ F (x, u,D1u, . . . , Dnu) = f(x) (1.5)
gebracht werden. Hierbei sind |α1|, ..., |αl| < 2 wie in Definition 1.5(2) und dieaij : Ω → R sind so gewahlt, dass aij = aα, falls die i-te und j-te Komponentedes entsprechenden Multiindex α ungleich Null sind, und aij ≡ 0, sonst. Die aijdefinieren eine Matrix A ∈ Rn×n, A = (aij)
ni,j=1, die wir Koeffizientenmatrix nennen

26 3. GRUNDBEGRIFFE UND KLASSIFIKATION
wollen. Wir konnen o.B.d.A. annehmen, dass A symmetrisch ist. Falls dies nichtder Fall ist, konnen wir die PDGl so umformen, dass eine symmetrische Koeffizien-tenmatrix entsteht, denn wegen des Satzes von Schwarz , also DiDju = DjDiu furzweimal stetig diffbare u, gilt:
n∑i,j=1
aijDiDju =n∑
i,j=1
aij + aji2
DiDju =:n∑
i,j=1
aijDiDju.
Die neue Koeffizientenmatrix A ist dann symmetrisch.
Die Einteilung der PDGl ist durch die Vorzeichen der Eigenwerte von A gegeben:
Definition 1.8 (Elliptische, parabolische, hyperbolische PDGl’en)Wir betrachten eine PDGl der Form (1.5) mit symmetrischer KoeffizientenmatrixA. Die PDGl heißt
(1) elliptisch in x ∈ Ω, falls die Eigenwerte von A(x) entweder alle positiv oderalle negativ sind,
(2) parabolisch in x ∈ Ω, falls alle Eigenwerte von A(x) entweder positiv odernegativ sind, außer einem, der gleich Null ist.
(3) hyperbolisch in x ∈ Ω, falls A(x) nur einen negativen Eigenwert hat undalle anderen Eigenwerte positiv sind, oder falls A(x) nur einen positivenEigenwert hat und alle anderen negativ sind.
Falls die entsprechende Eigenschaft in jedem Punkt x ∈ Ω gilt, heißt die PDGlelliptisch, parabolisch bzw. hyperbolisch.
Bemerkung 1.9Falls es sowohl mehrere positive als auch negative Eigenwerte gibt und keiner derEigenwerte gleich Null ist, nennt man die PDGl ultrahyperbolisch. Derartige Glei-chungen werden wir im Rahmen dieser Vorlesung nicht behandeln.
Bemerkung 1.10Wir beobachten, dass diese Einordnung von PDGl’en nur vom Hauptteil abhangt.Lineare PDGl’en zweiter Ordnung als Spezialfall semilinearer Gleichungen werdendaher genauso eingeteilt wie in Definition 1.8.
Des Weiteren spielt auch die Inhomogenitat keine Rolle bei der Einteilung vonPDGl’en in elliptische, parabolische und hyperbolische Gleichungen.
Lemma 1.11Sei n = 2 (zweidimensionales Gebiet). Dann ist die PDGl in (1.5)
• elliptisch, falls a11 a22 − a212 > 0
• parabolisch, falls a11 a22 − a212 = 0
• hyperbolisch, falls a11 a22 − a212 < 0.
Beweis: Der Einfachheit halber unterdrucken wir die (mogliche) Abhangigkeit vonA von x. Fur die Eigenwerte λi, i = 1, 2, von A ∈ R2×2 gilt
λ1 λ2 = detA = a11 a22 − a12 a21 = a11 a22 − a212.
Ist die PDGl elliptisch, dann gilt nach Definition 1.8(1) λ1λ2 > 0, woraus die ersteAussage folgt. Entsprechend diskutiert man die anderen Falle.

3. GRUNDBEGRIFFE UND KLASSIFIKATION 27
Beispiel 1.12Wir betrachten u.a. die PDGl’en aus Kapitel 2.
(1) Lapace-Gleichung: Nach (4.6) ist die Laplace-Gleichung durch
−∆u = −n∑i=1
D2i u = 0
gegeben. Da keine gemischten Ableitungen auftreten, gilt A = −I :=diag(−1, ...,−1) in (1.5). Die Eigenwerte von A sind also alle negativ, sodass die Laplace-Gleichung elliptisch ist. Wir beobachten außerdem, dassdie PDGl linear ist. Die gleichen Aussagen gelten naturlich auch fur diePoisson-Gleichung (4.7), da die Inhomogenitat bei der Einordnung derPDGl keine Rolle spielt.
(2) Warmeleitgleichung: Die Warmeleitgleichung lautet nach (4.5)
∂u
∂t−
n∑i=1
∂2u
∂x2i
= 0. (1.6)
Hierbei ist Anzahl der reellen Veranderlichen durch n + 1 gegeben, undt =: xn+1 ist die (n+ 1)-ste Variable. Damit ist (1.6) aquivalent zu
−n∑i=1
D2i u+Dn+1u = 0,
so dass
A =
−1 0 0 . . . 00 −1 0 . . . 0
. . .0 0 . . . −1 00 0 0 . . . 0
da keine Ableitung nach xn+1 im Hauptteil der PDGl auftaucht. Nach De-finition 1.8(2) ist die PDGl daher parabolisch.2 Wie die Laplace-Gleichungist auch diese PDGl linear.
(3) Wellengleichung: Wieder setzen wir xn+1 := t. Dann ist die Wellengleichungdurch
−c2
n∑i=1
D2i u+D2
n+1u = 0,
gegeben, vgl. (5.5). Damit ist
A =
−c2 0 0 . . . 0
0 −c2 0 . . . 0. . .
0 0 . . . −c2 00 0 0 . . . 1
und die Wellengleichung nach Definition 1.8(3) deshalb hyperbolisch. WieWarmeleit- und Laplace-Gleichung ist auch die Wellengleichung linear.
2Beachte, dass die Eigenwerte der Diagonalmatrix A gerade die Diagonaleintrage sind.

28 3. GRUNDBEGRIFFE UND KLASSIFIKATION
(4) Tricomi-Gleichung: Diese PDGl ist definiert durch
x2∂2u
∂x21
+∂2u
∂x22
= 0 ⇔ x2D21u+D2
2u = 0.
Sie taucht bei der Modellierung transsonischer Fluide auf. Hierbei ist dieKoeffizientenmatrix gegeben durch
A(x) = A(x1, x2) =
(x2 00 1
)Demnach ist die Tricomi-Gleichung elliptisch in x ∈ R2 : x2 > 0, para-bolisch auf x ∈ R2 : x2 = 0 und hyperbolisch in x ∈ R2 : x2 < 0.
Die zunachst willkurlich erscheinende Einteilung von PDGl’en zweiter Ordnung nachden Vorzeichen der Eigenwerte der Koeffizientenmatrix ist dadurch begrundet, dassdie PDGl’en in der jeweilige Klasse durch ahnliche Techniken analytisch behan-deln und losen lassen.3 Wir werden uns in den nachsten Kapiteln eingehender mitLaplace-, Warme- und Wellengleichung als Prototypen fur elliptische, parabolischeund hyperbolische PDGl’en befassen. Andere lineare PDGl’en dieser Typen lassensich mit ahnlichen Techniken behandeln.4 Nichtlineare PDGl’en dagegen erfordernandere Techniken, auf die wir aus Zeitgrunden nicht eingehen konnen.
3Das gilt sowohl fur analytische wie auch numerische Losungstechniken.4Vorausgesetzt die Daten, wie z.B. die Koeffizientenfunktionen, sind genugend regular.

KAPITEL 4
Elliptische Differentialgleichungen – die Laplace-Gleichung
Inhalt
1 Trennung der Variablen – die Fourier-Methode 30
2 Fundamentallosung 38
3 Die Greensche Funktion 47
4 Maximumprinzip 53
Im folgenden Kapitel untersuchen wir die Klasse der elliptischen PDGl’en. Wir kon-zentrieren uns dabei auf die Laplace- bzw. Poisson-Gleichung (4.6) und (4.7), also1
−∆u(x) = 0 fur x in Ω
und Randbdg.
−∆u(x) = f(x) fur x in Ω
und Randbdg.,
wobei wir die ersten zwei Randbedingungen aus Abschnitt 2.6 betrachten, d.h.
u(x) = g(x) fur x auf Γ oder∂u
∂n(x) = g(x) fur x auf Γ,
wobei Γ = ∂Ω wieder der Rand von Ω ist. Die Losung u wird im Folgenden alsskalarwertig angenommen.
Zunachst lernen wir ein Verfahren kennen, mit dem man Losungen der Laplace-bzw. Poisson-Gleichung in bestimmten Situationen explizit ausrechnen kann. Da-nach analysieren wir diese Gleichungen aus mathematischer Sicht. Wir zeigen, unterwelchen Umstanden eindeutige Losungen dieser Gleichung existieren, und entwi-ckeln eine allgemeine Darstellung solcher Losungen. Diese Darstellung lasst zudemverschiedene Aussagen uber die jeweilige Losung zu. Die damit zusammenhangen-de Theorie wird klassische Theorie genannt. Diese Theorie diskutiert Fragen nachExistenz und Eindeutigkeit in den Raumen die sich beim ersten Blick auf die PDGlanbieten, im Fall der Laplace-Gleichung z.B. im Raum der zweimal stetig diffbarenFunktionen.
Bemerkung 0.13Auf ahnliche Weise wie fur die Laplace- bzw. Poisson-Gleichung kann man dieseTheorie auch fur eine ganze Klasse von elliptische PDGl’en der Form
−divA(x)∇u(x) = f(x) fur x in Ω
(A(x)∇u(x)) · n(x) + α(x)u(x) = g(x) fur x auf Γ
entwickeln. Hierbei ist A : Ω → Rn×n eine fur alle x ∈ Ω (uniform) positiv definiteMatrix, und α : Γ → R erfullt α(x) ≥ α0 > 0 fur alle x ∈ Γ. Hierzu muss man
1Wie schon im vorigen Kapitel bezeichnen wir die Losung einer PDGl mit u.
29

30 4. ELLIPTISCHE DIFFERENTIALGLEICHUNGEN – DIE LAPLACE-GLEICHUNG
allerdings hohe Regularitatsanforderungen an A und α stellen. Diese kann man um-gehen, wenn man elliptische PDGl’en mit Hilfe der so genannten schwachen Theoriediskutiert, s. Abschnitt ??.
§ 1 Trennung der Variablen – die Fourier-Methode
Bei der Fourier-Methode handelt es sich um eine Technik, mit der man eine großeZahl linearer PDG’en auf einfachen Gebieten, wie beispielsweise einem Rechteck odereinem Kreis, losen kann. Sie ist auch als Methode der Trennung der Variablen oderSeparationsmethode bekannt. Als Losungen ergeben sich i.A. allerdings unendlicheReihen, also etwas unhandliche Objekte. Wir erlautern in dieser Vorlesung dieseTechnik nur fur homogene PDGl’en. Man kann sie auch auf inhomogene PDGl’enadaptieren, worauf wir aber nicht eingehen werden, s. Bemerkung 1.5.
Die Fourier-Methode erklart man am einfachsten an Beispielen, was wir im Folgen-den anhand zweier Laplace-Gleichungen ausfuhren werden.
1. Beispiel – Die Laplace-Gleichung auf dem Einheitsquadrat
Wir betrachten die Laplace-Gleichung auf dem Einheitsquadrat mit inhomogenenDirichlet-Randbedingungen
−∆u = 0 in Ω = (0, 1)× (0, 1) (1.1a)
u = g auf Γ = ∂Ω. (1.1b)
Die Rand-Inhomogenitat g habe folgende Struktur:
g(0, y) = g(1, y) = 0 ∀ y ∈ [0, 1],
g(x, 0) = 0 ∀x ∈ [0, 1], g(x, 1) = f(x) ∀x ∈ [0, 1]
mit einer gegebenem Funktion f . Die Inhomogenitat g ist also nur auf dem oberenRand des Quadrats ungleich Null.
Wir nehmen an, dass die Losung folgende Struktur hat
u(x, y) = X(x)Y (y) (1.2)
(oder eine additive Superposition solcher Losungen ist). Hierbei sind X, Y : [0, 1]→R Funktionen, die nur von einer Variablen abhangen. Bei (1.2) handelt es sich umeinen Ansatz, den Separationsansatz , d.h. wir vermuten nur, dass eine moglicheLosung so aussehen konnte.2 Beim Separationsansatz treten die unabhangigen Va-riablen x und y (multiplikativ) getrennt voneinander auf, daher der Name
”Trennung
der Variablen“.
Setzt man den Seperationsansatz in die Laplace-Gleichung (1.1a) ein, ergibt sich(unter der Annahme, dass X(x) 6= 0, Y (y) 6= 0)
−X′′(x)
X(x)=Y ′′(y)
Y (y).
2Die Struktur des Gebiets, also des Quadrats (x, y) ∈ R2 : x ∈ (0, 1), y ∈ (0, 1), bei dessenBeschreibung x und y unabhangig voneinander sind, deutet darauf hin, dass der Separationsansatzzum Erfolg fuhren konnte.

4. TRENNUNG DER VARIABLEN – DIE FOURIER-METHODE 31
Die linke Seite dieser Gleichung hangt nur von x ab, die rechte nur von y. Dannkonnen die beiden Seiten nur gleich sein, wenn sie gleich einer Konstanten sind, diewir λ ∈ R nennen wollen. Es folgt also
− X ′′(x)
X(x)=Y ′′(y)
Y (y)= λ (1.3)
bzw.
X ′′(x) + λX(x) = 0 in (0, 1) (1.4)
Y ′′(y)− λY (y) = 0 in (0, 1). (1.5)
Die erste GDGl (1.4) entspricht gerade dem Sturm-Liouvilleschen Eigenwertproblem(A.2.1) aus Anhang A. Aus der Dirichlet-Randbedingungen (1.1b) ergeben sich fol-gende Randbedingungen fur (1.4):
u(0, y) = X(0)Y (y)!
= 0 ∀ y ∈ [0, 1]
u(1, y) = X(1)Y (y)!
= 0 ∀ y ∈ [0, 1]
⇒ X(0) = X(1) = 0, (1.6)
also Randbedingungen der Form (A.2.2). Nicht-triviale Losungen fur (1.4) mit diesenRandbedingungen sind nach Satz A.2.2 nur moglich, falls λ mit einem Eigenwertλn = (nπ)2, n = 1, 2, ..., ubereinstimmt. Die zugehorige nicht-triviale Losung istdann die Eigenfunktionen in (A.2.11), also
Xn(x) = sin(nπ x),
bzw. jedes beliebige Vielfache davon. Um also uberhaupt nicht-triviale Losungen zuerhalten, muss die Konstante in (1.3) also gleich einem Eigenwert sein, so dass diezweite GDGl fur Y durch
Y ′′(y)− (nπ)2Y (y) = 0 in (0, 1) (1.7)
gegeben ist. Nach den Uberlegungen im vorigen Abschnitt ist die Losung dieserGleichung durch (2.5) gegeben, also:
Y (y) = c1enπ y + c2e
−nπ y.
Die Randbedingung bei y = 0 lautet u(x, 0) = 0 fur alle x ∈ [0, 1], so dass Y nachderselben Argumentation wie in (1.6) die Randbedingung Y (0) = 0 erfullen muss.Es gilt also
Y (0) = c1 + c2!
= 0 ⇒ c1 = −c2.
Die Losung von (1.7) hat daher die Form
Y (y) = c1
(enπ y − e−nπ y
)= 2 c1 sinh(nπ y) =: 2 c1 Yn(y)
mit Yn(y) = sinh(nπ y). Zusammenfassend haben wir damit gezeigt, dass die Funk-tionen
un(x, y) := Xn(x)Yn(y) = sin(nπ x) sinh(nπ y)
die Laplace-Gleichung (1.1a) und die Randbedingungen u(x, 0) = 0 und u(0, y) =u(1, y) = 0 erfullen. Man sieht leicht, dass wegen der Linearitat der Laplace-Gleichungdasselbe auch fur beliebige Linearkombinationen der un gilt. Um auch die Randbe-dingung u(x, 1) = f(x) zu erfullen, wahlen wir als Ansatz fur die Losung der PDGleine unendliche Linearkombination der un:
u(x, y) =∞∑n=1
cnun(x, y) =∞∑n=1
cn sin(nπ x) sinh(nπ y). (1.8)

32 4. ELLIPTISCHE DIFFERENTIALGLEICHUNGEN – DIE LAPLACE-GLEICHUNG
Dieser Ausdruck muss zu diesem Zeitpunkt noch formal aufgefasst werden, da wirja noch gar nicht wissen, ob und in welchem Sinne die obige Reihe konvergiert,geschweige denn, ob die Grenzfunktion differenzierbar ist. Bevor wir uns mit diesenFragen beschaftigen, rechnen wir formal weiter und bestimmen die Koeffizienten cn.Um auch die Randbedingung bei y = 1 zu erfullen, muss
u(x, 1) =∞∑n=1
cn sinh(nπ) sin(nπ x)!
= f(x) (1.9)
gelten. Wenn wir nun f in eine Sinus-Reihe entwickeln, vgl. (1.6), d.h.
f(x) =∞∑n=1
bn sin(nπ x) mit bn = 2
∫ 1
0
f(x) sin(nπ x) dx,
ergibt ein Koeffizientenvergleich in (1.9), dass
cn =bn
sinh(nπ).
Man beachte hierbei: die Fourierreihenentwicklung von f ist eindeutig, so dass dieKoeffizienten bn bzw. cn eindeutig festgelegt sind. Unser Kandidat fur die Losungvon (1.1) lautet also
u(x, y) =∞∑n=1
bnsinh(nπ)
sin(nπ x) sinh(nπ y) mit bn = 2
∫ 1
0
f(x) sin(nπ x) dx.
(1.10)Um zu beweisen, dass dies wirklich eine (die3) Losung von (1.1) ist, mussen wirzunachst einmal definieren, was wir unter einer Losung von (1.1) verstehen wollen.
Definition 1.1Eine Funktion u : Ω → R heißt (klassische) Losung der Laplace-Gleichung (1.1),falls u ∈ C2(Ω) ∩ C(Ω) und −∆u(x) = 0 fur alle x ∈ Ω und u(x) = g(x) fur allex ∈ Γ.
Man beachte, dass Ω = (0, 1) × (0, 1) eine offene Menge ist, und die Stetigkeit derersten und zweiten Ableitungen von u auf dem Rand nicht gefordert wird. Da furu ∈ C2(Ω) ∩ C(Ω) die Funktion u zweimal stetig diffbar in Ω und stetig bis zumRand ist, sind ∆u in Ω und die Randwerte von u wohl-definiert, so dass Definition1.1 Sinn macht.
Um zu beweisen, dass die Reihe in (1.10) tatsachlich eine Losung im Sinne der obigenDefinition ist, mussen wir zeigen, dass die Reihe konvergiert und den entsprechen-den Regularitatsanforderungen genugt. Dann erfullt u nach Konstruktion die PDGl(1.1).
Satz 1.2Die Funktion f : [0, 1]→ R erfulle die folgenden Voraussetzungen:
(1) f sei stetig und stuckweise stetig differenzierbar.(2) f habe homogene Randwerte.
3Wir werden noch sehen, dass Losungen der Laplace-Gleichung mit Dirichlet-Randbedingungeneindeutig sind, vgl. Abschnitt 4.

4. TRENNUNG DER VARIABLEN – DIE FOURIER-METHODE 33
Dann ist die Reihe in (1.10) gleichmassig konvergent mit einem Grenzwert u ∈C(Ω)∩C2(Ω), der die Laplace-Gleichung mit inhomogenen Randbedingungen (1.1)erfullt.
Beweis: Wir zeigen zunachst die gleichmaßige Konvergenz der Reihe in (1.10). Dazuseien cn und un wie oben definiert. Mit der Supremumsnorm aus (1.1.1) gilt
∞∑n=1
‖cnun‖∞ =∞∑n=1
supx∈Ω
|cnun(x, y)|
≤∞∑n=1
|bn| supx∈[0,1]
| sin(nπ x)| supy∈[0,1]
∣∣∣sinh(nπ y)
sinh(nπ)
∣∣∣≤
∞∑n=1
|bn| <∞,
da die Reihe der Fourier-Koeffizienten von stetigen und stuckweise stetig diffbarenFunktionen absolut konvergiert (s. beispielsweise [Forster, 1992, Satz 23.3]). Nachdem Majorantenkriterium von Weierstraß, s. [Forster, 1992, Satz 23.2], konvergiertdie Reihe
∑∞n=1 cnun daher absolut und gleichmaßig gegen eine Funktion u, die wegen
der gleichmaßigen Konvergenz und der Stetigkeit der Partialsummen nach [Forster,1992, Satz 23.1] stetig ist, d.h. u ∈ C(Ω).
Um die Differenzierbarkeit zu zeigen, leiten wir formal zweimal partiell ab:
∂2u
∂x2= −
∞∑n=1
π2n2 bnsinh(nπ)
sin(nπ x) sinh(nπ y) (1.11)
∂2u
∂x∂y=∞∑n=1
π2n2 bnsinh(nπ)
cos(nπ x) cosh(nπ y) (1.12)
∂2u
∂y2=∞∑n=1
π2n2 bnsinh(nπ)
sin(nπ x) sinh(nπ y). (1.13)
Wir untersuchen exemplarisch die Reihe in (1.11). Die anderen Terme konnen aufahnliche Weise diskutiert werden.
Man sieht sofort, dass man den Term n2 kompensieren muss, um Konvergenz derReihe zu zeigen. Glucklicherweise konvergiert der Ausdruck sinh(nπ y)/ sinh(nπ) fury < 1 gegen Null, was eine Abschatzung im Gebiet Ω zulasst. Dazu betrachten wirn fur einen Moment als reelle Variable. Man zeigt leicht, dass fur alle n ≥ 1/2 diefolgenden Abschatzungen gelten:
n2(enπ(y−1) − n−2
)≤ n2 sinh(nπ y)
sinh(nπ)≤ 1
1− e−πn2 enπ(y−1).
Eine einfache Rechnung beweist weiter, dass die Terme auf der rechten und linkenSeite ihr Maximum bzgl. n jeweils bei n∗ = 2/((1− y)π) annehmen, so dass
n2 sinh(nπ y)
sinh(nπ)≤ 1
1− e−π4
(1− y)2π2e−2 =: C(y)
mit C(y) <∞, falls y < 1. Der Term ist also bzgl. n durch C(y) beschrankt, so dass∞∑n=1
∣∣∣π2n2 bnsinh(nπ)
sin(nπ x) sinh(nπ y)∣∣∣ ≤ π2C(y)
∞∑n=1
|bn| <∞,

34 4. ELLIPTISCHE DIFFERENTIALGLEICHUNGEN – DIE LAPLACE-GLEICHUNG
falls y < 1. Nach dem Majorantenkriterium fur Reihen konvergiert die Reihe deshalbpunktweise gegen eine Funktion v(x, y), falls y < 1, also insbesondere in Ω.4 Dasreicht aber noch nicht, um zu zeigen, dass v die stetige zweite partielle Ableitungvon u ist. Auf der anderen Seite kann man aber auch keine gleichmaßige Konvergenzder Reihe erwarten, da aus den obigen Uberlegungen folgt:
(n∗)2 sinh(n∗π y)
sinh(n∗π)≥ 4
(1− y)2π2e−2 − 1→∞ fur y 1.
Hier muss man etwas subtiler argumentieren. Dazu sei ξ = (x, y) ∈ Ω beliebig
aber fest. Da Ω offen ist, existiert ein ε > 0, so dass Bε(ξ) ⊂ Ω, wobei Bε(ξ)
die abgeschlossene Kugel um ξ mit Radius ε bezeichnet. Auf dem Kompaktum[y − ε, y + ε] ist C(y) stetig (da y + ε < 1), so dass C(y) nach dem Satz vonWeierstraß dort sein Maximum annimmt, dass wir mit C < ∞ bezeichnen wollen.Dieses hangt naturlich von ξ und ε ab. Dann folgt
∞∑n=1
supx∈Bε(ξ)
∣∣∣π2n2 bnsinh(nπ)
sin(nπ x) sinh(nπ y)∣∣∣ ≤ π2 C
∞∑n=1
|bn| <∞,
also – wie oben nach dem Weierstraß’schen Majorantenkriterium – die gleichmaßigeKonvergenz der Reihe auf Bε(ξ). Da wir bereits punktweise Konvergenz gegen v
gezeigt haben, konvergiert die Reihe demnach gleichmaßig auf Bε(ξ) gegen v. Genauwie oben impliziert die Stetigkeit die Partialsummen die Stetigkeit von v. Die Folgeder zweiten partiellen Ableitungen der Partialsummen konvergiert also gleichmassigauf Bε(ξ) gegen eine stetige Funktion, weshalb u auf Bε(ξ) nach [Forster, 1992, Satz
21.5] zweimal nach x stetig partiell differenzierbar ist. Damit ist u insbesondere in ξ
zweimal stetig partiell diffbar mit zweiter partieller Ableitung v(ξ). Fur die anderen
partiellen Ableitungen argumentiert man analog. Da ξ ∈ Ω beliebig war, haben wirso die zweimalige stetige Diffbarkeit von u in Ω bewiesen.
Die partiellen Ableitungen sind gerade durch (1.11)–(1.13) gegeben, woran man
erkennt, dass ∂2
∂x2u(x, y) = − ∂2
∂y2u(x, y) fur alle (x, y) ∈ Ω, so dass u also die
Laplace-Gleichung (1.1a) in Ω erfullt. Die Randbedingungen sind nach Konstruk-tion der Losung sowieso erfullt. (Man beachte hierbei, dass u(x, 1) = f(x) fur allex ∈ [0, 1] wegen der gleichmassigen Konvergenz der Fourier-Reihe von f .) Damit istu ∈ C(Ω) ∩ C2(Ω) Losung der PDGl (1.1) im Sinne von Definition 1.1.
Wenn f regularer ist, kann man zeigen, dass auch die Losung glatter ist. Dazubetrachten wir folgendes Resultat:
Proposition 1.3Neben den Bedingungen in Satz 1.2 sei f zweimal stetig differenzierbar und erfullef ′′(0) = f ′′(l) = 0. Des Weiteren sei die zweite Ableitung von f stuckweise stetigdifferenzierbar. Dann ist u ∈ C2(Ω), d.h. die zweiten Ableitungen von u lassen sichstetig zum Rand fortsetzen.
Beweis: Wir beweisen die zusatzliche Regularitat von u, indem wir zeigen, dass dieReihen in (1.11)–(1.13) nicht nur punktweise sondern gleichmassig in Ω konvergieren.
4Man beachte, dass Ω = (0, 1)× (0, 1) also offen ist.

4. TRENNUNG DER VARIABLEN – DIE FOURIER-METHODE 35
Dazu mussen wir den Faktor n2 kompensieren. Hierfur intergrieren wir den Ausdruckfur die Fourier-Koeffizienten von f zweimal partiell und erhalten:
bn =
∫ 1
0
f(x) sin(nπ x) dx
=1
nπ
(− f(x) cos(nπ x)
∣∣∣10
+
∫ 1
0
f ′(x) cos(nπ x) dx)
=1
nπ
∫ 1
0
f ′(x) cos(nπ x) dx
=1
(nπ)2
(f ′(x) sin(nπ x)
∣∣∣10−∫ 1
0
f ′′(x) sin(nπ x) dx)
= − 1
(nπ)2
∫ 1
0
f ′′(x) sin(nπ x) dx =: − 1
(nπ)2βn,
wobei βn gerade die Fourier-Koeffizienten der Sinus-Reihe von f ′′ sind. Fur die Reihein (1.11) folgt damit
∞∑n=1
supx∈Ω
∣∣∣π2n2 bnsinh(nπ)
sin(nπ x) sinh(nπ y)∣∣∣
=∞∑n=1
supx∈Ω
∣∣∣ βnsinh(nπ)
sin(nπ x) sinh(nπ y)∣∣∣ ≤ ∞∑
n=1
|βn| <∞,
da die Reihe der Fourier-Koeffizienten von f ′′ wie die von f nach den Voraussetzun-gen an f ′′ absolut konvergieren. Nach dem Weierstraß’schen Majorantenkriteriumkonvergiert die Reihe in (1.11) damit gleichmaßig und alle Partialsummen sind ste-tig, so dass der Grenzwert ebenfalls eine in Ω stetige Funktion ist. Da die Folge derzweiten Ableitungen der Partialsummen gleichmassig gegen eine stetige Funktionkonvergiert, ist u nach [Forster, 1992, Satz 21.5] zweimal nach x stetig partiell dif-ferenzierbar. Fur die anderen partiellen Ableitungen argumentiert man analog, sodass sich insgesamt u ∈ C2(Ω) ergibt.
Bemerkung 1.4Nach Satz 1.4 konvergiert eine Fourier-Reihe auch unter wesentlich schwacherenVoraussetzungen an f , dann aber nur im quadratischen Mittel. Wenn man aberden Losungsbegriff entsprechend erweitert, stellen auch solche Grenzwerte sinnvolleLosungen von PDGl’en dar. Allerdings muss man dann auf eine andere Losungsde-finition zuruckgreifen, die so genannten schwachen Losungen, s. Kapitel ??.
Bemerkung 1.5Die Fourier-Methode kann auch auf inhomogene PDGl’en angewendet werden, wiebeispielsweise die Poisson-Gleichung
−∆u(x, y) = f(x, y) fur (x, y) in Ω
und Randbdg.
mit gegebenem f . Hierzu halt man zunachst eine unabhangige Variable fest, bei-spielweise y, und wahlt einen Fourier-Reihen-Ansatz fur u bzgl. der anderen Va-riable x. Dieser Ansatz muss (im gewissen Sinne) zu den Randbedingungen passen(bei homogenen Dirichlet-Randbedingungen z.B. wieder eine Sinus-Reihe wie oben).

36 4. ELLIPTISCHE DIFFERENTIALGLEICHUNGEN – DIE LAPLACE-GLEICHUNG
Dann wird f in gleicher Weise in eine Fourier-Reihe eintwickelt. Durch einen Koef-fizientenvergleich erhalt man auf diese Weise GDGl’en fur die unbekannten Fourier-Koeffizienten der Losung u. Fur nahere Einzelheiten sei auf [Tychonoff and Samarski,1959, Abschnitt II.3.4] verwiesen.
Bemerkung 1.6Die Methode der Trennung der Variablen funktioniert analog auch fur parabolischeund hyperbolische PDGl’en, s. Ubung.
2. Beispiel – Die Laplace-Gleichung auf dem Einheitskreis
Am ersten Beispiel erkennt man, dass die Form des Gebiets fur die Anwendung derFourier-Methode essentiell ist. Wenn das Gebiet Ω kein Rechteck ist, kann man esin manchen Fallen durch eine geeignete Transformation darauf zuruckfuhren, wasdie Anwendung der Fourier-Methode ermoglicht. Ein Beispiel hierfur ist der Kreis.Wir betrachten daher die Aufgabe
−∆u = 0 in Ω
u = f auf Γ = ∂Ω.
fur den Einheitskreis
Ω = (x, y) ∈ R× R : x2 + y2 < 1.Um den Kreis auf ein Quadrat zu uberfuhren, transformieren wir das Problem inPolarkoordinaten (r, ϕ), d.h.
x = r cosϕ, y = r sinϕ
mit r ≥ 0 und ϕ ∈ [0, 2π]. Der Laplace-Operator in Polarkoordinaten lautet
∆(.) = (1/r)∂r(r∂r(.)) + (1/r2)∂2ϕϕ(.),
s. Ubung. Um auch die Randbedingung in Polarkoordinaten zu uberfuhren, nehmenwir an, dass die Funktion f die Form f = f(ϕ) mit f(0) = f(2π) hat. Dann lautet dieDirichlet-Randbedingung in Polarkoordinaten u(1, ϕ) = f(ϕ). Die Randbedingungfur ϕ ergibt sich aus unserem Losungsbegriff: da wir nur zweimal stetig partielldiffbare Losungen betrachten, sind Sprunge von u und seiner Ableitung nicht erlaubt.Daraus resultiert, dass u und ∇u bzgl. ϕ 2π-periodisch sein mussen, d.h. u(r, 0) =u(r, 2π) und ∂ϕu(r, 0) = ∂ϕu(r, 2π).5 Damit erhalten wir die folgende transformiertePDGl:
−∂2u
∂r2− 1
r
∂u
∂r− 1
r2
∂2u
∂ϕ2= 0 in Ω = (0, 1)× (0, 2π) (1.14a)
u(1, ϕ) = f(ϕ) fur ϕ ∈ (0, 2π). (1.14b)
u(r, 0) = u(r, 2π) fur r ∈ (0, 1). (1.14c)
∂u
∂ϕ(r, 0) =
∂u
∂ϕ(r, 2π) fur r ∈ (0, 1). (1.14d)
Analog zu (1.2), wahlen wir den Separationsansatz
u(r, ϕ) = R(r)Φ(ϕ). (1.15)
5Beachte: ∂ru(r, 0) = ∂ru(r, 2π) muss man nicht explizit fordern, da diese Gleichheit fur diff-bare periodische Funktionen automatisch erfullt ist.

4. TRENNUNG DER VARIABLEN – DIE FOURIER-METHODE 37
Setzt man diesen in (1.14a) ein, ergibt eine zu (1.3) analoge Argumentation diefolgenden GDGl’en fur R und Φ:
Φ′′(ϕ) + λΦ(ϕ) = 0 in (0, 2π) (1.16)
r2R′′(r) + rR′(r)− λR(r) = 0 in (0, 1) (1.17)
Die Randbedingungen fur Φ folgen aus den periodischen Randbedingungen (1.14c)und (1.14d)
Φ(0) = Φ(2π), Φ′(0) = Φ′(2π). (1.18)
Damit erhalten wir ein Sturm-Liouvillesches Eigenwertproblem mit periodischenRandbedingungen fur Φ. Die zugehorigen Eigenwerte sind nach (A.2.10) mit l = 2πdurch λn = n2 gegeben und die Eigenfunktionen lauten nach (A.2.14)
Φn(ϕ) = cos(nϕ), Φn(ϕ) = sin(nϕ), n ∈ N ∪ 0.
Jede Linearkombination dieser Eigenfunktionen ist nach Satz A.2.2 eine nicht-trivialeLosung von (1.16) mit den periodischen Randbedingungen.
Die GDGl fur R ist eine Euler-DGl , deren Losung fur λn = n2 durch
R0(r) = k(1)0 + k
(2)0 log(r), n = 0
Rn(r) = k(1)n rn + k(2)
n r−n, n > 0
gegeben ist, s. Ubung. Da wir in Ω stetige Losungen suchen, muss k(2)n = 0 (denn
sonst hatten die Rn eine Singularitat bei r = 0).
Aus diesen Uberlegungen folgern wir, dass Funktionen der Form
un(r, ϕ) = Rn(r)(c(1)n Φn(ϕ) + c(2)
n Φn(ϕ))
= rn(c(1)n rn cos(nϕ) + r−n sin(nϕ)
)die beiden GDGl’en (1.16) und (1.17) losen und die Periodizitatsbedingung (1.18)erfullen. Ahnlich wie in (1.8) wahlen wir daher den Ansatz
u(r, ϕ) =∞∑n=0
un(r, ϕ) =∞∑n=0
rn(c(1)n cos(nϕ) + c(2)
n sin(nϕ))
und hoffen, durch die Wahl einer unendlichen Reihe auch die Randbedingung beir = 1, d.h. (1.14b) erfullen zu konnen. Wie im vorigen Abschnitt entwickeln wir die2π-periodische Funktion in eine Fourier-Reihe, und zwar
f(ϕ) =a0
2+∞∑n=1
(an cos(nϕ) + bn sin(nϕ)
)mit
an =1
π
∫ 2π
0
f(ϕ) cosnϕ dϕ, n = 0, 1, 2, ...,
bn =1
π
∫ 2π
0
f(ϕ) sinnϕ dϕ, n = 1, 2, ...,
vgl. (1.5). Dann folgt aus der Randbedingung (1.14b) mittels Koeffizientenvergleich,dass
c(1)0 =
a0
2, c(1)
n = an, c(2)n = bn, n > 0.

38 4. ELLIPTISCHE DIFFERENTIALGLEICHUNGEN – DIE LAPLACE-GLEICHUNG
Damit ist der Kandidat fur die Losung gefunden:
u(r, ϕ) =a0
2+∞∑n=1
rn(an cos(nϕ) + bn sin(nϕ)
), (1.19)
mit den Fourier-Koeffizienten an und bn von f . Bleibt die Frage zu klaren, ob dieseReihe tatsachlich eine Losung im Sinne der Losungsdefinition 1.1 (mit f anstelle vong) ist.
Satz 1.7Die Funktion f : [0, 2π] → R sei stetig, stuckweise stetig differenzierbar und 2π-periodisch. Dann konvergiert die Reihe in (1.19) und der Grenzwert erfullt u ∈C(Ω)∩C2(Ω) und lost die PDGl (1.14) im Sinne einer klassischen Losung (vgl. Def.1.1).
Beweis: Der Beweis ist dem Beweis von Satz 1.2 sehr ahnlich, weshalb wir ihn nurskizzieren. Die gleichmaßige Konvergenz von der Reihe in (1.19) in Ω zeigt manwieder mit Hilfe des Majorantenkriteriums von Weierstraß. Hierbei benotigt manwieder absolute Konvergenz der Fourier-Koeffizienten von f , die aus der gleichmaßi-gen Konvegenz der entsprechenden Fourier-Reihe nach Proposition 1.11 folgt. (Dieseist anwendbar, da f u.a. 2π-periodisch ist.) Damit ist u stetig bis zum Rand, so dassdie Dirichlet-Randbedingungen wohl definiert sind.
Um die zweimalige Diffbarkeit von u in Ω zu zeigen, geht man ebenfalls genau wie imBeweis von Satz 1.2 vor. Wieder entsteht bei (formaler) zweimaliger Differentiationder lastige Faktor n2. Diesmal konnen wir ihn im Inneren des Gebiets, d.h. fur r < 1,mit dem Faktor rn kompensieren. (rn spielt also die Rolle des sinh-Terms im Beweisvon Satz 1.2). Dann argumentiert man genau wie im Beweis von Satz 1.2, um zuzeigen, dass u in Ω, d.h. im Inneren des Kreises, zweimal stetig diffbar ist. Dass udie PDGl inkl. der Randbedingungen erfullt folgt gerade wieder nach Konstruktion.
Bemerkung 1.8
In [Tychonoff and Samarski, 1959, Abschnitt IV.3.2] wird fur das Beispiel der Laplace-Gleichung auf einem Kreisgebiet gezeigt, dass man sogar Losungen im Sinne derDefinition 1.1 erhalt, falls f nur stetig und nicht auch stuckweise stetig diffbar ist.Wir wollen auf diesen etwas technischen Beweis hier nicht eingehen.
§ 2 Fundamentallosung
Eine Kernaussage der klassischen Theorie partieller Differentialgleichungen ist dieIntegraldarstellung von Losungen mit Hilfe der so genannten Greenschen Funktion.Diese Darstellung von Losungen erlaubt theoretische Aussagen, fuhrt aber auch aufnumerische Verfahren, wie beispielsweise die Boundary Element Methode.
Bei dieser Integraldarstellung spielt die Fundamentallosung der Laplace-Gleichungeine wesentliche Rolle. Wir werden sehen, dass sie als Greensche Funktion fur denganzen Raum interpretiert werden kann. Die Fundamentallosung, die wir mit Φbezeichnen, ist eine Losung der Laplace-Gleichung, sie erfullt also ∆Φ = 0. SolcheFunktionen nennen wir harmonisch.

4. FUNDAMENTALLOSUNG 39
Definition 2.1Eine Funktion u ∈ C2(Ω), welche die Laplace-Gleichung lost, heißt harmonisch inΩ.
Die Fundamentallosung ist harmonisch in Rn \ 0, und gleichzeitig radialsymme-trisch, d.h. es gilt
Φ(x) = φ(r(x)) mit r = r(x) = |x| =
(n∑i=1
x2i
)1/2
.
Man sieht leicht (vgl. Ubung), dass solche Funktionen die folgende Form habenmussen:
φ(r) =
c1 + c2
rn−2 , n ≥ 3
c1 + c2 ln r, n = 2.
mit beliebigen c1, c2 ∈ R.
Definition 2.2Die Funktion Φ : Rn \ 0 → R,
Φ(x) =
− 1
2πln |x|, n = 2
1(n−2)ωn
1|x|n−2 , n ≥ 3
nennt sich Fundamentallosung fur die Laplace-Gleichung. Dabei bezeichnet ωn =|S(0; 1)| =
∫S(0;1)
ds das Oberflachenmaß der Einheitskugel in Rn (also den Fachen-
inhalt der n-dimensionalen Einheitskugeloberflache).
Bemerkung 2.3
Nach Lemma 4.1 (s.u.) gilt fur das Volumen Vn der Einheitskugel des Rn
Vn =
∫B(0;1)
dx =
∫ 1
0
∫S(0,r)
ds dr =
∫ 1
0
rn−1
∫S(0;1)
ds dr =1
nωn,
wobei wir ausgenutzt haben, dass |S(0; r1)| = (r1/r2)n−1|S(0; r2)| (s. Ubung). Daherist die obige Definition der Fundamentallosung aquivalent zu
Φ(x) =
− 1
2πln |x|, n = 2
1n(n−2)Vn
1|x|n−2 , n ≥ 3,
welche in der Literatur ebenfalls haufig verwendet wird.
Den Grund fur die spezielle Normierung in dieser Definition sehen wir spater. DieFundamentallosung hat eine Singularitat bei x = 0. Sie ist trotzdem integrierbar,wie das folgende Lemma zeigt:
Lemma 2.4Es bezeichnen B(0;R) und S(0;R) die Kugel im Rn um 0 mit Radius R > 0 und ihreOberflache, s. Abschnitt 1.1. Die Fundamentallosung und ihre partiellen Ableitungensind integrierbar, d.h. insbesondere, dass die uneigentlichen Integrale∫
B(0;R)
Φ(x) dx <∞,∫B(0;R)
DiΦ(x) dx <∞, i = 1, ..., n,

40 4. ELLIPTISCHE DIFFERENTIALGLEICHUNGEN – DIE LAPLACE-GLEICHUNG
existieren. Daruber hinaus gilt∫B(0;ε)
Φ(x) dx→ 0,
∫S(0;ε)
Φ(x) ds→ 0 fur ε ↓ 0.
Beweis: s. Ubung. Der Beweis beruht im Wesentlichen darauf, dass DiΦ(x) ∼ |x|1−n.
Bemerkung 2.5Die zweiten partiellen Ableitungen von Φ sind allerdings nicht mehr integrierbar,denn DiDjΦ(x) ∼ |x|−n.
Mit Hilfe der Fundamentallosung kann man Losungen der Poisson-Gleichung in Rn,also6
−∆u = f in Rn,
in Form eines Integrals darstellen. Dafur benotigen wir allerdings noch folgendeDefinitionen und Hilfssatze.
Definition 2.6Sei Ω ⊂ Rn ein Gebiet und f : Ω→ R eine Funktion. Die Menge
supp f := x ∈ Ω : f(x) 6= 0
heißt Trager von f (engl.”support“). Es ist die kleinste abgeschlossene Menge,
außerhalb derer f verschwindet.
Definition 2.7Mit Ck
0 (Rn) bezeichnen wir die Menge der auf Rn k-mal stetig diffbaren Funktionenmit kompaktem (also beschranktem und abgeschlossenem) Trager.
Lemma 2.8Sei K ⊂ R eine offene und beschrankte Menge und f : K → R eine stetig diffba-re Funktion, deren Ableitung sich stetig zum Rand von K fortsetzen lasst. Dannkonvergiert der Differenzenquotient gleichmaßig auf K gegen die Ableitung von f ,d.h.
f(x+ h)− f(x)
h⇒ f ′(x) fur h→ 0 in K.
Beweis: Sei x ∈ K beliebig. Nach dem Mittelwertsatz existiert ein λ = λ(x, h) ∈[0, 1], sodass ∣∣∣∣f(x+ h)− f(x)
h− f ′(x)
∣∣∣∣ = |f ′(x+ λh)− f ′(x)|. (2.1)
Nach dem Satz von Heine ist die stetige Funktion f ′ gleichmaßig stetig auf demKompaktum K, so dass es zu jedem ε ein h(ε) > 0, unabhangig von x, gibt mit
|f ′(x+ λh)− f ′(x)| < ε
fur alle h < h(ε), alle λ ∈ [0, 1] und alle x ∈ K. Zusammen mit (2.1) folgt darausdie Aussage.
6Da das Gebiet hier der ganze Raum ist, macht es keinen Sinn Randbedingungen zu fordern.

4. FUNDAMENTALLOSUNG 41
Bemerkung 2.9Vollig analog zeigt man im Mehrdimensionalen die entsprechende Aussage fur diepartiellen Ableitungen, also
f(x+ hei)− f(x)
h⇒ Dif(x) fur h→ 0,
wobei ei der entsprechende karthesische Einheitsvektor ist.
Lemma 2.10Sei x ∈ Rn ein gegebener Punkt und f : Rn → R eine in x stetige Funktion. Danngilt
f(x) = limε↓0
1
|B(x; ε)|
∫B(x;ε)
f(y) dy und f(x) = limε↓0
1
|S(x; ε)|
∫S(x;ε)
f(y) dsy.
Hierbei bezeichnen |B(x; ε)| und |S(x; ε)| das Maß von B(x; ε) und S(x; ε), also z.B.|B(x; ε)| =
∫B(x;ε)
dx.
Beweis: Wir beweisen die Aussage fur B(x; ε). Die zweite Behauptung zeigt manvollig analog. Es gilt
1
|B(x; ε)|
∫B(x;ε)
f(y) dy =1
|B(x; ε)|
[ ∫B(x;ε)
f(x) dy +
∫B(x;ε)
(f(y)− f(x)
)dy]
= f(x) +1
|B(x; ε)|
∫B(x;ε)
(f(y)− f(x)
)dy.
Die Stetigkeit von f in x liefert fur den zweiten Summanden∣∣∣ 1
|B(x; ε)|
∫B(x;ε)
(f(y)− f(x)
)dy∣∣∣
≤ 1
|B(x; ε)|
∫B(x;ε)
dy supy∈B(x;ε)
|f(y)− f(x)| = supy∈B(x;ε)
|f(y)− f(x)| → 0 fur ε ↓ 0,
woraus die Aussage folgt.
Bemerkung 2.11Fur Mathematiker: Die erste Aussage gilt bis auf Nullmengen auch fur lokal Lebesgue-integrierbare Funktionen und ist als Lebesguescher Differentiationssatz bekannt, s.[Evans, 1998, Thm. E.6].
Lemma 2.12 (Greensche Formel)Sei Ω ⊂ Rn eine beschranktes Gebiet mit glattem Rand7. Die außere Normale auf ∂Ωbezeichnen wir mit ν. Weiter seien zweimal stetig diffbare Funktionen u, v : Ω→ Rgegeben, d.h. u, v ∈ C2(Ω). Dann gelten die erste und zweite Greensche Formel :∫
Ω
∇u · ∇v dx = −∫
Ω
u∆v dx+
∫∂Ω
u∂v
∂νds (2.2)∫
Ω
(u∆v − v∆u) dx =
∫∂Ω
(u∂v
∂ν− v ∂u
∂ν
)ds. (2.3)
7genauer: C1-Rand, s. Definition 3.1.

42 4. ELLIPTISCHE DIFFERENTIALGLEICHUNGEN – DIE LAPLACE-GLEICHUNG
Beweis: s. Ubung. Beide Gleichungen ergeben sich direkt aus dem Satz von Gauß2.1.2. Um (2.2) herzuleiten, setzt man im Satz von Gauß φ = v∇u. Vertauscht manu und v in (2.2) und subtrahiert die entstehende Gleichung von (2.2), erhalt man(2.3).
Jetzt konnen wir die oben angedeutete Integraldarstellung von Losungen der Poisson-Gleichung herleiten.
Satz 2.13Es sei f ∈ C2
0(Rn) gegeben und u durch
u(x) =
∫Rn
Φ(x− y)f(y) dy (2.4)
definiert. Dann gilt u ∈ C2(Rn) und
−∆u = f in Rn. (2.5)
Beweis: Wir beweisen zunachst, dass u tatsachlich zweimal stetig diffbar ist. Mitder Substitution y = x− y erhalt man
u(x) =
∫Rn
Φ(x− y)f(y) dy =
∫Rn
Φ(y)f(x− y) dy.
(Wir schreiben im Folgenden y statt y.) Dass u (punktweise) wohl definiert ist, folgtdann sofort aus ‖f‖∞ < ∞ und der Integrierbarkeit von Φ auf dem kompaktenTrager von f nach Lemma 2.4. Wir vermuten, dass die partiellen Ableitungen vonu durch
Diu(x) =
∫Rn
Φ(y)Dif(x− y) dy
DiDju(x) =
∫Rn
Φ(y)DiDjf(x− y) dy
gegeben sind. Da supp f kompakt also beschrankt ist, gibt es ein R > 0, so dassf(x − y) fur alle y /∈ B(x;R), also außerhalb des Kreises mit Radius R, mitsamtseinen Ableitungen verschwindet. Wahlen wir R genugend groß, dann gilt dies auchfur f(x− y + hei), falls h > 0 hinreichend klein ist. Damit ergibt sich fur beliebigesaber festes x ∈ Rn:∣∣∣u(x+ hei)− u(x)
h−Diu(x)
∣∣∣=∣∣∣ ∫
Rn
Φ(y)(f(x− y + hei)− f(x− y)
h−Dif(x− y)
)dy∣∣∣
=∣∣∣ ∫
B(x;R)
Φ(y)(f(x− y + hei)− f(x− y)
h−Dif(x− y)
)dy∣∣∣
≤∫B(x;R)
|Φ(y)| dy supy∈B(x;R)
∣∣∣f(x− y + hei)− f(x− y)
h−Dif(x− y)
∣∣∣→ 0
fur h ↓ 0 wegen der Integrierbarkeit von Φ und der gleichmaßigen Konvergenz desDifferenzenquotienten nach Lemma 2.8. Im Fall der zweiten Ableitung argumentiertman vollig analog. Um die Stetigkeit der zweiten Ableitung zu zeigen, betrachtenwir zwei beliebige aber feste Punkte x, x ∈ Rn. Wegen der Kompaktheit von supp f

4. FUNDAMENTALLOSUNG 43
verschwinden f ′′(x − y) und f ′′(x − y) wieder, falls y /∈ B(x;R) mit hinreichendgroßem R. Daraus folgt
|DiDju(x)−DiDju(x)| ≤∫B(x;R)
|Φ(y)| dy supB(x;R)
|DiDjf(x− y)−DiDjf(x− y)|,
so dass |DiDju(x) − DiDju(x)| → 0, falls |x − x| → 0 wegen der gleichmaßigenStetigkeit der Hessematrix von f auf dem Kompaktum B(x;R). Daher ist u ∈C2(Rn) wie behauptet.
Es bleibt nachzuweisen, dass u wie in (2.4) definiert tatsachlich die Poisson-Gleichungerfullt. Dazu sei x ∈ Rn beliebig aber fest. Wir wissen bereits, dass ∆u(x) =∫Rn Φ(y)∆xf(x− y) dy, allerdings ist eine Auswertung dieses Integrals nicht trivial,
da Φ eine Singularitat bei x = 0 hat. Wir spalten daher das Integral wie folgt auf:
∆u(x) =
∫Rn
Φ(y)∆xf(x− y) dy
=
∫B(0;ε)
Φ(y)∆xf(x− y) dy +
∫Rn\B(0;ε)
Φ(y)∆xf(x− y) dy
=: Iε + Jε.
(2.6)
Der erste Term Iε wird mit ε klein, denn aus Lemma 2.4 und der stetigen Diffbarkeitvon f folgt:
|Iε| ≤ ‖∆f‖∞∫B(0;ε)
|Φ(y)| dy → 0 fur ε ↓ 0. (2.7)
Bei Jε integrieren wir partiell und verwenden die Kurzschreibweisen Bε = B(0; ε)und Sε = ∂Bε. Die Kettenregel impliziert, dass ∆xf(x − y) = ∆yf(x − y), so dassaus der ersten Greenschen Formel (2.2) folgt:
Jε =
∫Rn\Bε
Φ(y)∆xf(x− y) dy
=
∫Rn\Bε
Φ(y)∆yf(x− y) dy
=
∫Sε
Φ(y)∂f
∂ν(x− y) dsy −
∫Rn\Bε
∇Φ(y)∇yf(x− y) dy
= Kε + Lε.
(2.8)
Streng genommen gilt der Satz von Gauß und die Greensche Formel nur auf be-schrankten Gebieten. Wenn wir aber berucksichtigen, dass f kompakten Trager hatund daher samt seinen Ableitungen außerhalb und auf dem Rand von B(0;R) ver-schwindet, wenn R nur groß genug gewahlt wird, dann kann man statt uber Rn
auch uber x −B(0;R) integrieren und dort die Greensche Formel anwenden. Diedabei entstehenden Randintegrale entfallen, da ∇f auf ∂B(0;R) gleich Null ist. DasIntegral uber B(0;R) kann anschließend wieder durch das uber Rn ersetzt werden,da ∇f außerhalb von B(0;R) verschwindet.
Der Term Kε wird wieder mit ε klein, denn
|Kε| ≤ ‖∇f‖∞∫Sε
|Φ(y)| dsy → 0 fur ε ↓ 0 (2.9)

44 4. ELLIPTISCHE DIFFERENTIALGLEICHUNGEN – DIE LAPLACE-GLEICHUNG
nach Lemma 2.4. Bei Lε benutzen wir noch einmal die erste Greensche Formel, um∆Φ = 0 in R \ 0 ins Spiel zu bringen:
Lε = −∫Sε
∂Φ
∂ν(y)f(x− y) dsy +
∫Rn\Bε
∆Φ(y)f(x− y) dy
= −∫Sε
∂Φ
∂ν(y)f(x− y) dsy,
(2.10)
weil Φ außerhalb des Nullpunktes harmonisch ist. Wie bei Jε musste man bei derpartiellen Integration streng genommen wieder einen Umweg uber B(0;R) mit hin-reichend großem R machen. Die Ableitung von Φ fur n ≥ 2 ist durch
∇Φ(y) = − 1
ωn
y
|y|n(2.11)
gegeben (s. Ubung) und die außere Normale auf Sε ist ν = − y|y| = −y
ε(negativ, da
partielle Integration uber das Außengebiet!). Daher ergibt sich fur die Normalena-bleitung von Φ auf Sε
∂Φ
∂ν= ∇Φ · ν =
1
ωn
|y|2
εn+1=
1
|S(0; 1)| εn−1=
1
|Sε|,
wobei wir wie in Bemerkung 2.3 wieder |S(0; r1)| = (r1/r2)n−1|S(0; r2)| verwendethaben. Mit der Koodinatentransformation y = x− y folgt daraus
Lε = − 1
|Sε|
∫Sε
f(x− y) dsy
= − 1
|S(x; ε)|
∫S(x;ε)
f(y) dsy → −f(x) fur ε ↓ 0
(2.12)
nach Lemma 2.10. Vollziehen wir also den Grenzubergang ε ↓ 0, so erhalten wirinsgesamt
∆u(x) =
∫Rn
Φ(y)∆xf(x− y) dy = −f(x).
Da x ∈ Rn beliebig war, ist das aquivalent zu (2.5).
Bemerkung 2.14Man kann Satz 2.13 auch unter wesentlich schwacheren Voraussetzungen an f be-weisen, z.B. fur Funktionen aus C1
0(Rn), vgl. [Farwig, SoSe 2008, Korollar 4.5] oder[Gilbarg and Trudinger, 1977, Abschnitt 2].
Die Integraldarstellung (2.4) erlaubt es nun bei gegebener rechte Seite f die Losungan jedem Punkt x ∈ Rn durch Berechnung des Integrals zu bestimmen. Man kanndaruber hinaus mit Hilfe von (2.4) die Fundamentallosung genauer charakterisieren.Dazu benotigen wir allerdings den etwas unhandlichen Begriff der Distribution, furdessen Definition wir wiederum folgenden Konvergenzbegriff fur Funktionen ausC∞0 (Rn) brauchen:
Definition 2.15Es sei ϕ ∈ C∞0 (Rn) und eine Folge ϕkk∈N ∈ C∞0 (Rn) gegeben. Wir sagen, die Folgeϕk konvergiert in D gegen ϕ und schreiben
ϕkD→ ϕ fur k →∞,
wenn gilt:

4. FUNDAMENTALLOSUNG 45
(1) Es gibt eine kompakte Menge K ⊂ Rn mit suppϕk ⊂ K fur alle k ∈ N undsuppϕ ⊂ K.
(2) Gleichmaßige Konvergenz aller Ableitungen auf K, d.h. supx∈K |Dαϕk(x)−Dαϕ(x)| → 0 fur alle Multiindizes α.
Definition 2.16 (Distributionen)Eine Distribution T : C∞0 (Rn) → R ist eine lineare Abbildung von C∞0 (Rn) in R,fur die gilt:
ϕkD→ ϕ ⇒ T (ϕk)→ T (ϕ)
(Stetigkeit bzgl. Konvergenz in D).
Beispiel 2.17Zwei Beispiele fur Distributionen sind die Folgenden:
(1) Es sei f ∈ C(Rn) gegeben. Wir definieren fur ϕ ∈ C∞0 (Rn)
Tf (ϕ) :=
∫Rn
f(x)ϕ(x) dx.
(Beachte: da ϕ kompakten Trager hat, ist das obige Integral wohl definiert.)Dann ist Tf eine Distribution, denn Linearitat von Tf folgt aus der Linea-ritat des Integrals und die Stetigkeit von Tf folgt aus
|Tf (ϕk)− Tf (ϕ)| = |∫K
f(x)(ϕk(x)− ϕ(x)
)dx|
≤∫K
|f(x)| dx supx∈K|ϕk(x)− ϕ(x)| → 0
wegen der gleichmaßigen Konvergenz von ϕk. Distributionen, die wie Tfdurch Integrale definiert sind, nennt man auch regulare Distributionen.
(2) Ein weiteres Beispiel ist die Diracsche Delta-Distribution. Seien ϕ ∈ C(Rn)und x ∈ Rn beliebig aber fest. Dann ist die Delta-Distribution δx : C(Rn)→R definiert durch:
δx(ϕ) := ϕ(x)
Man zeigt leicht, dass δx linear ist und im Sinne der Konvergenz in Dstetig, also in der Tat eine Distribution ist, s. Ubung. Allerdings ist δx keineregulare Distribution.
Definition 2.18 (Distributionelle Ableitung)Es sei T eine Distribution und α ein Multiindex. Die Ableitung T (α) von T istdefiniert durch
DαT (ϕ) = (−1)|α|T (Dαϕ).
Mit ϕ ∈ C∞0 (Rn) gilt auch Dαϕ ∈ C∞0 (Rn), damit ist T (Dαϕ) und somit auchDαT (ϕ) wohl definiert und selbst wieder eine Distribution. Da ϕ unendlich oft dif-ferenziebar ist, besitzt jede Distribution alle Ableitungen beliebig hoher Ordnung.Das zeigt, wie allgemein dieser Ableitungsbegriff ist.
Beispiel 2.19Wir betrachten die Ableitungen der Distributionen aus Beispiel 2.17.

46 4. ELLIPTISCHE DIFFERENTIALGLEICHUNGEN – DIE LAPLACE-GLEICHUNG
(1) Fur Tf ergibt sich
DαTf (ϕ) = (−1)|α|∫Rn
f(x)Dαϕ(x) dx.
Man spricht im Fall regularer Distributionen auch von der distributionellenAbleitung von f und meint damit DαTf , also die Ableitung von Tf . Andieser Formel sieht man auch, warum es Sinn macht von distributionellerAbleitung zu sprechen. Denn, wenn wir annehmen, dass f selber |α|-malstetig differenzierbar ist, also f ∈ C |α|(Rn), dann ergibt |α|-malige partielleIntegration (beachte: ϕ hat kompakten Trager), dass
DαTf (ϕ) =
∫Rn
Dαf(x)ϕ(x) dx.
DαTf ist also gerade die (regulare) Distribution, die durch Dαf gebildetwird. Auf ahnliche Weise kann man auch den Begriff der schwachen Ablei-tung einfuhren, s. Abschnitt ??.
(2) Die Ableitung der Delta-Distribution ist gegeben durch
Dαδx(ϕ) = (−1)|α|δx(Dαϕ) = (−1)|α|Dαϕ(x).
Wie δx selber ist auch sie keine regulare Distribution. Bemerkung 2.20Genau wie auf Rn definiert man Distributionen und ihre Ableitung auf GebietenΩ ⊂ Rn.
Was hat die distributionelle Ableitung nun mit der Fundamentallosung zu tun?Dafur setzen wir (2.5) in (2.4) ein und erhalten:
−∫Rn
Φ(x− y)∆u(y) dy = u(x).
Diese Formel gilt nach Satz 2.13 fur jede Funktion u ∈ C2(Rn), fur die ∆u ∈ C20(Rn)
gilt. Sie gilt damit erst recht fur alle ϕ ∈ C∞0 (Rn). Mit x = 0 und Φ(x) = Φ(−x)folgt daraus∫
Rn
Φ(y)∆ϕ(y) dy = −ϕ(0) = −δ0(ϕ) fur alle ϕ ∈ C∞0 (Rn).
Die linke Seite in dieser Gleichung ist nach Definition 2.18 aber gerade der distribu-tionelle Laplace von Φ, denn
∆TΦ(ϕ) = ∆(∫
Rn
Φ(y)ϕ(y) dy)
= (−1)2
∫Rn
Φ(y)∆ϕ(y) dy.
(Wir bezeichnen den distributionellen Laplace mit demselben Symbol wie den nor-malen Laplace-Operator.) Damit haben wir folgendes Resultat bewiesen:
Proposition 2.21Der distributionelle Laplace der Fundamentallosung ist die negative Delta-Distributionin der Null:
−∆Φ = δ0.
Man beachte: ∆Φ ist keine regulare Distribution mehr, lasst sich also nicht mehrals Integral schreiben. Das war auch nicht zu erwarten, schließlich hat die (normale)zweite Ableitung der Fundamentallosung eine Singularitat im Ursprung, die nichtmehr integrierbar ist, vgl. Bemerkung 2.5.

4. DIE GREENSCHE FUNKTION 47
§ 3 Die Greensche Funktion
Im vorigen Abschnitt haben wir eine Integraldarstellung der Losung der Poisson-Gleichung hergeleitet, allerdings nur fur den Fall Ω = Rn. In den allermeisten An-wendungen mussen PDGl’en allerdings auf beschrankten Gebieten gelost werden.Wir werden den schwierigeren Fall eines beschrankten Gebietes Ω mit Rand ∂Ω = Γim Folgenden behandeln. Dazu muss das Gebiet bzw. dessen Rand gewissen Regu-laritatsanforderungen genugen.
Definition 3.1 (Glatte Gebiete)Ein beschranktes Gebiet Ω ⊂ Rn gehort zur Klasse Ck, k ∈ N ∪ 0, wenn endlichviele lokale Koordinatensysteme S1, ..., Sm, m ∈ N, und endlich viele Funktionenh1, ..., hm : Rn−1 → R sowie Konstanten a, b > 0 existieren, so dass
(1) Alle Funktionen hi sind auf dem (n− 1)-dimensionalen Wurfel
Qn−1 = y ∈ Rn−1 : |yi| < a, i = 1, ..., n− 1k-mal stetig differenzierbar ist und die k-ten Ableitungen lassen sich stetigzum Rand von Qn−1 fortsetzen.
(2) Zu jedem Randpunkt P ∈ Γ gibt es ein i ∈ 1, ...,m, so dass P im Koor-dinatensystem Si die Darstellung
P = (y, h(y))
mit einem y ∈ Qn−1 hat. (Beachte: Qn−1 ist offen!)(3) Im lokalen Koordinatensystem Si gilt
(y, yn) ∈ Ω ⇔ y ∈ Qn−1, hi(y) < yn < hi(y) + b
(y, yn) 6∈ Ω ⇔ y ∈ Qn−1, hi(y)− b < yn < hi(y),
was anschaulich bedeutet, dass Ω nur auf einer Seite des Randes liegenkann.
Bemerkung 3.2Sind die Funktionen hi nicht nur k-mal stetig diffbar, sondern ist ihre k. Ableitungauch noch Lipschitz stetig, d.h. es existiert ein L > 0, so dass
|h(k)i (y)− h(k)
i (y)| ≤ L |y − y| ∀ y, y ∈ Qn−1,
dann ist das Gebiet Ω von der Klasse Ck,1. Im Fall k = 0 spricht man auch voneinem Gebiet mit Lipschitz-Rand .
Ein Beispiel fur ein glattes Gebiet, das den Anforderungen in Definition 3.1 miteinem gewissen k > 1 genugt ist in Abbildung 3.1 zu sehen. Abbildung 3.2 hingegenzeigt Gebiete, die den Bedingungen in Definition 3.1 nicht genugen. Das Gebiet Ω1
weist eine nicht differenzierbare Stelle auf, wohingegen bei Gebiet Ω2 die Bedingung(3) verletzt ist.
Wir betrachten im Folgenden die Poisson-Gleichung (4.7) mit inhomogenen Dirichlet-Randbedingungen, also
−∆u = f in Ω
u = g auf Γ.
Um auch in diesem Fall eine Integraldarstellung der Losung u in Abhangigkeit vonf und g herleiten zu konnen, benotigen wir zunachst das folgende Lemma:

48 4. ELLIPTISCHE DIFFERENTIALGLEICHUNGEN – DIE LAPLACE-GLEICHUNG
Abbildung 3.1. Ein glattes Gebiet
Abbildung 3.2. Zwei unzulassige Gebiete
Lemma 3.3Sei Ω ein Gebiet mit C1-Rand. Dann gilt fur u ∈ C2(Ω) und fur alle x ∈ Ω dieIntegraldarstellung
u(x) =
∫Γ
Φ(y − x)∂u
∂ν(y) dsy −
∫Γ
u(y)∂Φ
∂ν(y − x) dsy
−∫
Ω
Φ(y − x)∆u(y) dy,
(3.1)
wobei ν wieder die außere Normale auf Γ bezeichnet.
Beweis: Der Beweis ist ganz ahnlich zu dem von Satz 2.13. Seien u ∈ C2(Ω) und
x ∈ Ω beliebig aber fest. Da Ω offen ist, ist B(x; ε) ⊂ Ω, falls ε > 0 hinreichendklein ist, wovon wir im Folgenden ausgehen. Wir definieren
Vε := Ω \B(x; ε),
so dass der Rand von Vε durch Γ und Γε = ∂B(x; ε) gegeben ist. Nach Voraussetzungist u zweimal stetig diffbar auf Vε. Da x /∈ Vε, gilt dasselbe fur die in x verschobeneFundamentallosung Φ( .− x). Wir konnen daher die zweite Greensche Formel (2.3)fur u und Φ( .− x) anwenden und erhalten:∫Vε
(u(y)∆Φ(y−x)−Φ(y−x)∆u(y)
)dy =
∫Γ∪Γε
(u(y)
∂Φ
∂ν(y−x)−Φ(y−x)
∂u
∂ν(y))dsy

4. DIE GREENSCHE FUNKTION 49
und wegen ∆Φ(y − x) = 0 fur x 6= y∫Γε
u(y)∂Φ
∂ν(y − x) dsy −
∫Γε
Φ(y − x)∂u
∂ν(y) dsy
=
∫Γ
Φ(y − x)∂u
∂ν(y) dsy −
∫Γ
u(y)∂Φ
∂ν(y − x) dsy −
∫Vε
Φ(y − x)∆u(y) dy.
(3.2)
Die Integrale uber Γε haben dieselbe Struktur wie die Terme Lε und Kε im Beweisvon Satz 2.13, vgl. (2.8) und (2.10). Daher ergibt sich vollig analog zu (2.9) und(2.12), dass∫
Γε
Φ(y − x)∂u
∂ν(y) dsy → 0,
∫Γε
u(y)∂Φ
∂ν(y − x) dsy → u(x) fur ε ↓ 0. (3.3)
Fur das Integral uber Vε ergibt sich∫Vε
Φ(y − x)∆u(y) dy =
∫Ω
Φ(y − x)∆u(y) dy −∫B(x:ε)
Φ(y − x)∆u(y) dy,︸ ︷︷ ︸→ 0 fur ε ↓ 0
(3.4)
vgl. (2.6) bzw. (2.7). Geht man also in (3.2) zur Grenze ε ↓ 0 uber und berucksichtigt(3.3) und (3.4), so ergibt sich gerade (3.1).
Nun wenden wir (3.1) auf die Poisson-Gleichung an: Wegen −∆u = f in Ω undu = g auf Γ fehlt uns nur noch ∂u/∂ν auf Γ, um u im Inneren bestimmen zukonnen. Leider haben wir den Term ∂u/∂ν nicht. Mit einem Trick kann dieser Termaus der Integraldarstellung (3.1) aber eliminiert werden. Wir definieren dazu eineKorrekturfunktion φx(y) als Losung der folgenden Laplace-Gleichung
−∆φx(y) = 0 in Ω
φx(y) = Φ(y − x) auf Γ.(3.5)
Wir wissen naturlich nicht, ob diese Gleichung fur alle x ∈ Ω eindeutig losbar ist,weshalb wir das im Folgenden explizit voraussetzen mussen.
Definition 3.4 (Greensche Funktion)Die Laplace-Gleichung (3.5) besitze fur alle x ∈ Ω eine Losung φx ∈ C2(Ω). Dannheißt die Funktion G : Ω× Ω→ R definiert durch
G(x, y) := Φ(y − x)− φx(y), x 6= y,
Greensche Funktion.
Unter der Voraussetzung, dass (3.5) losbar ist mit einer Losung φx ∈ C2(Ω), ergibtdie zweite Greensche Formel (2.3):
−∫
Ω
φx(y)∆u(y) dy = −∫
Ω
u∆φx dy +
∫Γ
(∂φx∂ν
u− ∂u
∂νφx)dsy
=
∫Γ
∂φx
∂νu dsy −
∫Γ
Φ(y − x)∂u
∂νdsy
(3.6)
Addieren wir (3.1) und (3.6), so fallen die Terme mit ∂u/∂ν weg:
u(x) =
∫Γ
u(y)
(∂φx
∂ν(y)− ∂Φ
∂ν(y − x)
)dsy +
∫Ω
(φx(y)− Φ(y − x))∆u(y) dy
= −∫
Γ
u(y)∂G
∂ν(x, y) dsy −
∫Ω
G(x, y)∆u(y) dy,

50 4. ELLIPTISCHE DIFFERENTIALGLEICHUNGEN – DIE LAPLACE-GLEICHUNG
mit∂G
∂ν(x, y) = ∇yG(x, y) · ν(y) auf Γ.
Daraus folgern wir:
Satz 3.5Fur jedes x ∈ Ω existiere eine eindeutige Losung φx ∈ C2(Ω) von (3.5), so dass dieGreensche Funktion wohl definiert ist. Ist u ∈ C2(Ω) eine Losung von
−∆u = f in Ω
u = g auf Γ,
dann gilt fur alle x ∈ Ω
u(x) = −∫
Γ
g(y)∂G
∂ν(x, y) dsy +
∫Ω
f(y)G(x, y) dy. (3.7)
Bemerkung 3.6
(1) Der Satz sagt nichts uber die Existenz von u aus. Auch die Existenz vonG(x, y) wird angenommen. Die Existenz von φx und damit von G ist bei-spielsweise in [Gilbarg and Trudinger, 1977, Abschnitt 2] nachzulesen.
(2) Aus den Regularitatsannahmen an u und φx folgt, dass alle Integrale in (3.7)wohl definiert sind. Allerdings kann man die Regularitatsanforderungen anu und φx erheblich abschwachen, s. [Farwig, SoSe 2008, Abschnitt 4.3].
(3) Die Greensche Funktion wurde wie folgt konstruiert: Da φx harmonisch aufΩ ist stimmt der distributionelle Laplace von G mit dem von Φ uberein, sodass aus Proposition 2.21 fur festes x folgt:
−∆G = δx in Ω
G = 0 auf Γ,
wobei mit ∆G der distributionelle Laplace bzgl. y gemeint ist, also
∆G(ϕ) =
∫Ω
G(x, y)∆ϕ(y) dy, ϕ ∈ C∞0 (Ω).
Die Korrektur φx erfolgt so, dass G die homogene Randbedingung erfullt,was Φ selbst nicht gewahrleistet. Entsprechend verfahrt man auch bei an-deren Randbedingungen wie beispielsweise Neumann-Randbedingungen.
Nun bleibt die Frage, wie man G fur allgemeines Ω ermittelt? Das geht leider nurbei einfachen Geometrien. Wir betrachten exemplarisch die Kugel.
Die Greensche Funktion fur die Kugel
Wir leiten die Greensche Funktion exemplarisch fur die Einheitskugel B(0, 1) herund verwenden dazu die so genannte Spiegelungsmethode. Hierzu definieren wir
Definition 3.7Es sei x ∈ Rn \ 0. Dann heißt der Punkt
x =1
|x|2x
Spiegelpunkt oder konjugierter Punkt zu x.

4. DIE GREENSCHE FUNKTION 51
Abbildung 3.3. Der Spiegelpunkt fur den Einheitskreis
Eine graphische Illustration fur den Spiegelpunkt im R2 ist in Abbildung 3.3 zusehen. Wir beobachten, dass x /∈ B(0, 1), falls x ∈ B(0, 1).
Fur die Korrekturfunktion φx wahlen wir
φx(y) = Φ(|x|(y − x))
Da sich der Spiegelpunkt außerhalb von B(0, 1) befindet, falls x ∈ B(0, 1), liegt auchdie Singularitat der rechten Seite außerhalb der Einheitskugel. Deshalb ist φx furalle x ∈ B(0, 1) wohl definiert und auf B(0, 1) unendlich oft differenzierbar. Weil dieFundamentallosung außer in ihrer Singularitat harmonisch ist, gilt daruber hinausfur alle x ∈ B(0, 1)
−∆φx(y) = 0 in B(0, 1).
Es bleibt zu zeigen, dass φx auch die Randbedingung in (3.5) erfullt. Auf dem Randder Kugel, also fur y ∈ S(0, 1), erhalten wir wegen |y| = 1
|x|2|y − x|2 = |x|2(
1− 2y · x 1
|x|2+
1
|x|2)
= |x|2 − 2y · x+ |y|2 = |x− y|2,
so dass
||x|(y − x)| = |x||y − x| = |x− y| fur y ∈ S(0, 1). (3.8)
Da Φ nur vom Betrag des Arguments abhangt, s. Definition 2.2, gilt deshalb
φx(y) = Φ(|x|(y − x)) = Φ(y − x) auf ∂B(0, 1) = S(0, 1),
so dass φx insgesamt die geforderte Laplace-Gleichung fur die Korrekturfunktion(3.5) erfullt. Im Fall x = 0 ist der Spiegelpunkt nicht definiert. Hier setzten wirφ0(y) ≡ Φ((1, 0, . . . , 0))(= const.). Dann ist −∆φ0 = 0. Außerdem gilt Φ(y)|S(0,1) =Φ((1, 0, . . . , 0)), da Φ radialsymmetrisch ist. Daraus folgt φ0(y) = Φ(y − 0) aufS(0, 1). Damit haben wir die Greensche Funktion fur die Einheitskugel gefunden.
Definition 3.8
Die Greensche Funktion G : B(0, 1) × B(0, 1) → R fur die Einheitskugel des Rn,n ≥ 2, ist durch
G(x, y) =
Φ(y − x)− Φ(|x|(y − x)), x 6= 0, y 6= x
Φ(y)− Φ((1, 0, . . . , 0)), x = 0, y 6= 0
definiert, wobei x der Spiegelpunkt zu x ∈ B(0, 1) ist.

52 4. ELLIPTISCHE DIFFERENTIALGLEICHUNGEN – DIE LAPLACE-GLEICHUNG
Wir wollen nun Satz 3.5 fur die Laplace-Gleichung mit Dirichlet-Randbedingungenauf der Einheitskugel anwenden. Wir betrachten also
∆u = 0 in B(0, 1)
u = f auf S(0, 1).
Dann folgt aus (3.7)
u(x) = −∫S(0,1)
f(y)∂G
∂ν(x, y) dsy. (3.9)
Das wollen wir nun noch weiter umformen. Sei dazu zunachst x 6= 0. Mit der For-mel fur die Ableitung der Fundamentalfunktion, s. (2.11), erhalten wir (Kettenregelbeachten!)
∇yG(x, y) = ∇yΦ(y − x)−∇yΦ(|x|(y − x)
= − 1
ωn
y − x|y − x|n
+1
ωn|x| |x|(y − x)
|x|n|y − x|n,= − 1
ωn
(1− |x|2)y
|y − x|n,
wobei wir |x|2x = x und (3.8) benutzt haben. Zusammen mit ν(y) = y fur y ∈ S(0, 1)folgt daraus, dass
∂G
∂ν(x, y) = ∇yG(x, y) · ν(y)
= − 1
ωn
1− |x|2
|y − x|n,
weil y · y = |y|2 = 1 auf S(0, 1). Eingesetzt in (3.9) ergibt sich damit
u(x) =1− |x|2
ωn
∫S(0,1)
f(y)
|y − x|ndsy. (3.10)
Im Fall x = 0 folgt wegen |y| = 1 auf S(0, 1), dass
∂G
∂ν(0, y) = ∇yΦ(y) · ν(y) = − 1
ωn
y
|y|n· y|y|
= −1− |0|2
ωn
1
|y − 0|n,
so dass sich auch fur x = 0 die Formel (3.10) ergibt. Fur eine Kugel mit Radius Rkann man mit Hilfe der Transformation y = Ry die Formel
u(x) =R2 − |x|2
ωn
∫S(0,R)
f(y)
|y − x|ndsy
fur die Losung der entsprechenden Laplace-Gleichung mit Dirichlet-Randbedingungenableiten. Diese Darstellungsformel ist auch als Poissonsche Formel fur die Kugelbekannt. Wir formen (3.10) fur den zweidimensionalen Fall n = 2 mit Hilfe vonPolarkoordinaten weiter um. Mit x = (r, ϕ) und y = (1, ψ) ergibt sich
|y − x|2 =(
cos2 ψ − r cos2 ϕ)2
+(
sin2 ψ − r sin2 ϕ)2
= 1 + r2 − 2 r cos(ψ − ϕ),
wobei wir das Additionstheorem
cosψ cosϕ+ sinψ sinϕ = cos(ψ − ϕ) (3.11)
benutzt haben. Damit ergibt sich
u(r, ϕ) =1− r2
2 π
∫ 2π
0
f(ψ)
1 + r2 − 2 r cos(ψ − ϕ)dψ (3.12)
(beachte: ω2 = 2π).

4. MAXIMUMPRINZIP 53
In Abschnitt 1 haben wir ebenfalls die Laplace-Gleichung auf dem Einheitskreis mitDirichlet-Randbedingungen behandelt, allerdings mit Hilfe der Fourier-Methode.Damit hatten wir die Losungsformel
u(r, ϕ) =a0
2+∞∑i=1
rn(an cos(nϕ) + bn sin(nϕ)
), (3.13)
mit
an =1
π
∫ 2π
0
f(ψ) cos(nψ) dψ, n = 0, 1, 2, ...,
bn =1
π
∫ 2π
0
f(ψ) sin(nψ) dψ, n = 1, 2, ...,
hergeleitet, vgl. (1.19). Gibt es also zwei unterschiedliche Losungen der Laplace-Gleichung mit Dirichlet-Randbedingungen, namlich (3.12) und (3.13)? Nein, dennbei beiden Darstellungen handelt es sich um dieselbe Funktion. Um dies zu sehen,mussen wir (3.13) etwas umformen. Mit Hilfe von (3.11) ergibt sich
u(r, ϕ) =1
2π
∫ 2π
0
f(ψ)dψ +1
π
∞∑n=1
rn∫ 2π
0
f(ψ)(cosnψ cosnϕ+ sinnψ sinnϕ)dψ
=1
2π
∫ 2π
0
f(ψ) dψ +1
π
∞∑n=1
rn∫ 2π
0
f(ψ) cosn(ψ − ϕ) dψ
=1
2π
∫ 2π
0
f(ψ)(
1 + 2∞∑n=1
rn cosn(ψ − ϕ))dψ (3.14)
Jetzt verwendet man die folgende trickreiche Umformung fur r < 1∞∑n=0
rn cos(nω) =∞∑n=0
rn<(einω)
= <( ∞∑n=0
(reiω)n)
= <( 1
1− reiω)
=1− r cos(ω)
1 + r2 − 2r cos(ω),
wobei wir die Eulersche Formel eiϕ = cosϕ+ i sinϕ und die Konvergenz der geome-trischen Reihe wegen r < 1 benutzt haben. Daraus erhalt man wiederum
1 + 2∞∑n=1
rn cos(n(ψ − ϕ)
)=
1− r2
1 + r2 − 2r cos(ψ − ϕ).
Setzt man dies in (3.14) ein, dann ergibt sich gerade (3.12), also die PoissonscheFormel fur den Einheitskreis. Die mit Hilfe der Fourier-Methode berechnete Losungstimmt also mit der uber die Greensche Funktion ermittelten Losung uberein.
§ 4 Maximumprinzip
Wir haben bereits unterschiedliche Darstellungen von Losungen der Laplace- bzw.Poisson-Gleichung kennengelernt, z.B. mit Hilfe der Greenschen Funktion oder alsReihendarstelllung als Ergebnis der Fourier-Methode. Es stellt sich also die Frage, obdiese Losungsdarstellungen wie im Fall des Einheitskreises immer ubereinstimmen,also die Frage nach der Eindeutigkeit von Losungen. Diese lasst sich mit Hilfe desMaximumprinzips fur harmonische Funktionen beantworten, das wir im Folgenden

54 4. ELLIPTISCHE DIFFERENTIALGLEICHUNGEN – DIE LAPLACE-GLEICHUNG
herleiten wollen. Dazu benotigen wir zunachst den Mittelwertsatz fur harmonischeFunktionen.
Lemma 4.1Seien x ∈ Rn, n ∈ N, und 0 < R ≤ ∞ gegeben. Sei ferner f eine auf B(x;R) stetigeund integrierbare Funktion (mit B(x;R) = Rn). Dann gilt:∫
B(x;R)
f(y) dy =
∫ R
0
∫S(x;r)
f(y) dsy dr.
Beweis: Spezialfall von [Wust, 1995, Satz 20.2].
Satz 4.2 (Mittelwertsatz fur harmonische Funktionen)Sei Ω ⊂ Rn ein Gebiet und u ∈ C2(Ω) harmonisch in Ω. Dann gilt fur jede KugelB(x; r) ⊂ Ω
u(x) =1
|S(x, r)|
∫S(x,r)
u(y) dsy =1
|B(x; r)|
∫B(x;r)
u(y) dy
mit S(x, r) = ∂B(x; r).
Beweis: Wir definieren
φ(r) :=1
|S(x, r)|
∫S(x,r)
u(y) dsy. (4.1)
Um φ ableiten zu konnen, transformieren wir das Integral durch die Transformationy = x+ rz auf die Einheitskugeloberflache:
φ(r) =1
|S(x, r)|
∫S(x,r)
u(y) dsy =1
|S(x, r)|rn−1
∫S(0,1)
u(x+ rz) dsz
=1
|S(0, 1)|
∫S(0,1)
u(x+ rz) dsz
(vgl. Ubung). Hierbei haben wir wie in Bemerkung 2.3 wieder ausgenutzt, dass|S(x1, r1)| = (r1/r2)n−1|S(x2, r2)| fur beliebige r1, r2 > 0 und beliebige x1, x2 ∈ Rn.Wegen der stetigen Differenzierbarkeit von u ist auch die Abbildung r 7→ u(x+ rz)stetig diffbar, so dass φ differenzierbar ist. Da die Integrationsgrenzen jetzt nichtmehr von r abhangen, konnen wir Differentiation und Integration vertauschen underhalten mittels Rucktransformation z = (1/r)(y − x)
φ′(r) =1
|S(0, 1)|
∫S(0,1)
d
dru(x+ rz) dsz
=1
|S(0, 1)|
∫S(0,1)
∇u(x+ rz) · z dsz
=1
|S(x, r)|
∫S(x,r)
∇u(y) · y − xr
dsy
=1
|S(x, r)|
∫S(x,r)
∇u(y) · ν dsy =1
|S(x, r)|
∫B(x;r)
∆u dy = 0.
Hierbei haben wir zunachst ausgenutzt, dass (1/r)(y − x) = ν fur y ∈ S(x, r)die außere Normale auf B(x; r) darstellt. Daruber hinaus haben wir fur die letzteUmformung den Satz von Gauß 2.1.2 angewandt und ausgenutzt, dass u auf B(x; r)

4. MAXIMUMPRINZIP 55
harmonisch ist, also ∆u = 0 in B(x; r). Damit ist φ konstant fur alle r > 0, worausmit Lemma 2.10 folgt, dass
1
|S(x, r)|
∫S(x,r)
u(y) dsy = φ(r) = limt↓0
1
|S(x, t)|
∫S(x,t)
u(y) dsy = u(x)
womit der erste Teil bewiesen ist. Die zweite Gleichung folgt aus der ersten∫B(x;r)
u(y) dy =
∫ r
0
(∫S(x;ρ)
u(y) dsy
)dρ =
∫ r
0
u(x) |S(x, ρ)| dρ = u(x) |B(x; r)|,
wobei wir Lemma 4.1 angewendet haben.
Mit Hilfe des Mittelwertsatzes kann man nun das folgende Maximumprinzip bewei-sen. Dazu sei Ω im Folgenden ein beschranktes Gebiet, das allerdings nicht notwen-digerweise zusammenhangend sein muss.
Satz 4.3 (Maximumprinzip)Sei Ω ⊆ Rn, n ∈ N, ein beschranktes Gebiet und u ∈ C2(Ω) ∩ C(Ω) eine in Ωharmonische Funktion. Dann gilt
maxx∈Ω
u(x) = maxx∈∂Ω
u(x), minx∈Ω
u(x) = minx∈∂Ω
u(x),
d.h. u nimmt sein Maximum bzw. Minimum auf dem Rand von Ω an.
Beweis: Zunachst beobachten wir, dass Ω beschrankt und u stetig ist, so dass u aufΩ nach dem Satz von Weierstraß sein Maximum und Minimum annimmt. Es gibtalso mindestens ein x0 ∈ Ω mit u(x0) = maxx∈Ω u(x) =: M . Ist x0 ∈ ∂Ω haben wirnichts zu beweisen. Wenn x0 ein innerer Punkt ist, konnen wir eine Kugel B(x0; r)um x0 legen, die ganz in Ω liegt. Wir zeigen, dass dann u(x) ≡ M in B(x0; r) gilt.Nehmen wir an, das sei falsch, d.h. u ist irgendwo in B(x0; r) kleiner als M . Dannliefert der Mittelwertsatz 4.2 wegen der Stetigkeit von u, dass
M = u(x0) =1
|B(x0; r)|
∫B(x0;r)
u(y) dy <1
|B(x0; r)|M |B(x0; r)| = M,
also einen Widerspruch. Folglich muss u(x) ≡M inB(x0; r) gelten. Ist nun %0 der mi-nimale Abstand von x0 zu ∂Ω, gilt demnach u(x) ≡M fur alle x ∈ B(x0; %0). Wegenu ∈ C(Ω) folgt hieraus, dass u(x) = M = maxx∈Ω u(x) fur alle x ∈ ∂B(x0; %0)∩ ∂Ω,so dass das Maximum auch in einem Randpunkt angenommen wird.
Den Fall des Minimums kann man auf den des Maximums zuruckfuhren, wenn manberucksichtigt, dass minx∈Ω u(x) = maxx∈Ω u(x) mit u(x) := −u(x). (Man beachte,dass u wie u naturlich auch harmonisch ist.)
Falls Ω zusammenhangend ist, kann man diese Aussage noch verscharfen:
Satz 4.4 (Starkes Maximumprinzip)Sei Ω ⊂ Rn, n ∈ N, ein zusammenhangendes Gebiet und u ∈ C2(Ω)∩C(Ω) eine in Ωharmonische Funktion. Existiert ein innerer Punkt x0 ∈ Ω mit u(x0) = maxx∈Ω u(x)oder u(x0) = minx∈Ω u(x), dann ist u konstant in Ω.
Beweis: Wir zeigen wieder nur den Fall, in dem u(x0) = maxx∈Ω u(x). Den Fall desMinimums kann man wie oben durch die Substitution u = −u diskutieren. Sei x1 einbeliebiger anderer Punkt in Ω. Wir zeigen u(x0) = u(x1), womit der Satz bewiesenist. Wir wenden dazu das Kreiskettenverfahren an. Da Ω zusammenhangend ist,konnen wir x0 und x1 durch eine ganz in Ω verlaufende Kurve verbinden. Da Ω offen

56 4. ELLIPTISCHE DIFFERENTIALGLEICHUNGEN – DIE LAPLACE-GLEICHUNG
ist, gibt es ein % > 0, so dass alle Punkte der Kurve einen Abstand großer als % von∂Ω haben. Wie im Beweis des Maximumprinzip zeigt man, dass u(x) ≡ u(x0) in derKugel B(x0; %). Wir wahlen nun den Schnittpunkt xs von S(x0; %) mit der Kurveals Mittelpunkt fur die nachste Kugel mit Radius %. Wegen Stetigkeit ist u(xs) =u(x0) und wie oben zeigt man u(x) ≡ u(xs) = u(x0) in B(xs; %). Nun wiederholenwir diesen Schritt mit dem Schnittpunkt von S(xs; %) mit der Verbindungskurve,vgl. Abbildung 4.1. Auf diese Weise entstehen endlich viele Kugeln endlang der
Abbildung 4.1. Zum Kreiskettenverfahren
Verbindungskurve, und in all diesen Kugeln ist u(x) ≡ u(x0), also konstant. ImAbschluss der letzen Kugel liegt x1 (s. Abb. 4.1), woraus u(x1) = u(x0) folgt. Da x1
beliebig war, ist die Aussage bewiesen.
Bemerkung 4.5Die Aussage kann auch durch ein abstraktes topologisches Argument bewiesen wer-den: Am Beweis des schwachen Maximumsprinzip erkennt man, dass man um jedenPunkt x0 ∈ Ω mit u(x0) = maxx∈Ω u(x) =: M eine Kugel legen kann, die in Ω liegt (Ωist offen) und in der u(x) ≡M gilt. Daher ist die MengeM := x ∈ Ω : u(x) = Moffen. Auf der anderen Seite folgt aus der Stetigkeit von u, dass M relativ abge-schlossen in Ω ist. Die Menge M ist also gleichzeitig offen und abgeschlossen in Ω,was bei zusammenhangendem Ω nur gelten kann, falls M = Ω, woraus u(x) ≡ Min Ω folgt.
Aus den beiden Maximumsprinzipien folgen eine Reihe von Aussagen, u.a. auchdie in den vorigen Abschnitten bereits angedeutete Eindeutigkeit von Losungen derLaplace- bzw. Poisson-Gleichung.
Korollar 4.6Die Funktion u ∈ C2(Ω) ∩ C(Ω) sei eine Losung von der Laplace-Gleichung mitinhomogenen Dirichlet-Randbedingungen
−∆u = 0 in Ω
u = g auf Γ = ∂Ω.(4.2)
(1) Dann folgt aus g(x) ≥ 0 auf Γ, dass auch u(x) ≥ 0 in Ω. Ist Ω zusam-menhangend und g zusatzlich irgendwo auf Γ positiv, so gilt u(x) > 0 furalle x ∈ Ω.
(2) Gilt |g(x)| ≤ c auf Γ, dann gilt auch |u(x)| ≤ c in Ω.

4. MAXIMUMPRINZIP 57
Beweis: Zunachst ist u harmonisch in Ω, so dass die beiden Maximumprinzipienanwendbar sind. Wir beginnen mit (1). Ware u irgendwo in Ω negativ, wurde dasMinimum von u nicht auf dem Rand liegen, was dem Maximumsprinzip widerspricht,woraus die erste Aussage folgt. Gilt zudem g(x) > 0 fur ein x ∈ Γ, dann ware u(x0) =0 mit x0 ∈ Ω ein inneres Minimum, woraus nach dem starken Maximumsprinzipu(x) ≡ 0 in Ω folgt. Daraus wurde wegen Stetigkeit von u aber g(x) ≡ 0 folgen, einWiderspruch.
Nach dem Maximumsprinzip kann kein x0 ∈ Ω existieren mit u(x0) > maxx∈Γ g(x)oder u(x0) < minx∈Γ g(x), woraus sofort (2) folgt.
Satz 4.7 (Eindeutigkeit fur das inhomogene Dirichlet-Problem)Es seien g ∈ C(Γ) und f ∈ C(Ω) vorgegeben. Dann existiert hochstens eine Losungu ∈ C2(Ω) ∩ C(Ω) des Problems
−∆u = f in Ω
u = g auf Γ.(4.3)
Beweis: Wir nehmen als Widerspruchsannahme an, es existierten zwei Losungen u1
und u2 von (4.3), dann lost die Differenz u1 − u2 die folgende homogene PDGl
−∆(u1 − u2) = 0 in Ω
(u1 − u2) = 0 auf Γ
(wegen der Linearitat der PDGl). Nach Korollar 4.6, (2) folgt daraus, dass |u1(x)−u2(x)| ≤ 0 in Ω, d.h. u1 = u2.
Satz 4.8 (Stabilitat fur das Dirichlet-Problem)Es seien u1 ∈ C2(Ω) ∩ C(Ω) und u2 ∈ C2(Ω) ∩ C(Ω) Losungen der PDGl (4.2) mitden Randinhomogenitaten g1 bzw. g2. Dann folgt aus |g1(x)− g2(x)| ≤ δ auf Γ, dass
|u1(x)− u2(x)| ≤ δ in Ω,
d.h. die Losung der Laplace-Gleichung mit Dirichlet-Randbedingungen hangt stetigvon den Daten ab.
Beweis: Die Differenz lost die Gleichung
−∆(u1 − u2) = 0 in Ω
u1 − u2 = g1 − g2 auf Γ.
Damit folgt die Aussage sofort aus Korollar 4.6, (2).
Bemerkung 4.9Wir haben nur Aussagen uber die Eindeutigkeit von Losungen getroffen, nicht uberderen Existenz. Die Existenz von Losungen der Laplace- oder Poisson-Gleichung mitHilfe der klassischen Theorie zu zeigen, ist vergleichsweise aufwendig und in [Gilbargand Trudinger, 1977, Abschnitt 2] nachzulesen.
Wir wollen abschließend noch auf die Laplace- bzw. Poisson-Gleichung mit Neumann-statt Dirichlet-Randbedingung eingehen. Die Eindeutigkeit kann hier ohne zur Hil-
fenahme eines Maximumsprinzip mit Hilfe von Energiemethoden gezeigt werden.Dazu definieren wir

58 4. ELLIPTISCHE DIFFERENTIALGLEICHUNGEN – DIE LAPLACE-GLEICHUNG
Definition 4.10Sei u ∈ C1(Ω) gegeben. Dann heißt der Ausdruck
E(u) :=1
2
∫Ω
|∇u|2 dx
Dirichlet-Energie zu u.
Bemerkung 4.11Man benotigt nicht die stetige Differenzierbarkeit von u, damit die Dirichlet-Energiewohl definiert ist. Es reicht, wenn ∇u ∈ L2(Ω), also quadratisch integrierbar ist. DieAbbildung u 7→ E(u) wird auch Energiefunktional genannt.
Wir betrachten die folgende Laplace-Gleichung mit Neumann-Randbedingungen
−∆u = f in Ω
∂u
∂ν= g auf Γ,
(4.4)
wobei ν wieder die außere Normale auf Γ bezeichnet. Es ist klar, dass diese Gleichungnicht eindeutig losbar sein kann, denn, wenn u die PDGl (4.4) lost, dann ist auchu = u + c mit einer beliebigen Konstanten c ∈ R eine Losung. Wir zeigen nun mitHilfe des Energiefunktionals, dass dies allerdings die einzige Moglichkeit ist, wie sichLosungen unterscheiden konnen.
Satz 4.12 (Eindeutigkeit fur das Neumann-Problem)Es seien u ∈ C2(Ω)∩C1(Ω) und u ∈ C2(Ω)∩C1(Ω) zwei Losungen von (4.4). Danngibt es eine Konstante c ∈ R, so dass u(x) = u(x) + c fur alle x ∈ Ω.
Beweis: Die Differenz lost folgende PDGl
−∆(u− u) = 0 in Ω (4.5a)
∂
∂ν(u− u) = 0 auf Γ, (4.5b)
Wir multiplizieren (4.5a) mit u − u und integrieren uber Ω. Mit Hilfe der erstenGreenschen Formel erhalten wir
0 = −∫
Ω
(u− u) ∆(u− u) dx
=
∫Ω
∇(u− u) · ∇(u− u) dx−∫
Γ
(u− u)∂
∂ν(u− u) ds = 2E(u− u),
wobei wir die Randbedingung (4.5b) ausgenutzt haben. Aus E(u− u) = 0 folgt aber,dass |∇(u(x)− u(x))| = 0 fur alle x ∈ Ω, so dass ∇u = ∇u in Ω. Daher konnen sichu und u hochstens um eine Konstante unterscheiden.
Bemerkung 4.13Betrachtet man die folgende PDGl
−∆u+ u = f in Ω
∂u
∂ν= g auf Γ,
dann kann man mit Hilfe des modifizierten Energiefunktionals
E(u) :=1
2
∫Ω
(|∇u|2 + u2
)dx

4. MAXIMUMPRINZIP 59
zeigen, dass die Losung dieser Gleichung (falls existent) wirklich eindeutig ist. Eine
analoge Rechnung wie im obigen Beweis zeigt wieder E(u−u) = 0, woraus in diesemFall
∫Ω
(u− u)2 dx = 0 folgt, was nur erfullt sein kann, wenn u = u in Ω.
Bemerkung 4.14Man kann das Maximumprinzip und die daraus resultierenden Konsequenzen aufzahlreiche Weise verallgemeinern, beispielsweise auf allgemeine elliptische PDGl’enwie in Bemerkung 0.13 beschrieben oder auch auf unbeschrankte Gebiete, s. hierzu[Farwig, SoSe 2008, Abschnitt 4.2].


KAPITEL 5
Parabolische Differentialgleichungen – dieWarmeleitgleichung
Inhalt
1 Fundamentallosung 62
2 Maximumprinzip und Eindeutigkeit 66
Im folgenden Abschnitt diskutieren wir die Warmeleitgleichung (2.4.5), wobei wiruns auf Dirichlet-Randbedingungen beschranken. Wir betrachten demnach die PDGl
∂u
∂t(x, t)−∆u(x, t) = f(x, t) in Q := Ω× (0, T )
u(x, t) = g(x, t) auf Σ := ∂Ω× (0, T )
u(x, 0) = u0(x) in Ω.
(0.6)
Hierbei ist Ω ⊂ Rn ein gegebenes Gebiet, und T > 0 legt das Zeitintervall fest,auf dem die PDGl betrachtet werden soll. Man nennt Q = Ω × (0, T ) auch denRaum-Zeit-Zylinder , und Σ = ∂Ω × (0, T ) ist entsprechend dessen Mantelflache, s.Abbildung 0.1. Wie bereits in Kapitel 2 angedeutet, benotigt man im Fall insta-
Abbildung 0.1. Der Raumzeitzylinder
tionarer Probleme neben den Randbedingungen noch Anfangsbedingungen, damitLosungen der entsprechenden PDGl eindeutig bestimmt sind. Im Fall von (0.6) wirddazu einfach der Wert von u zum Zeitpunkt t = 0 auf dem gesamten OrtsgebietΩ vorgegeben, indem er auf eine gegebene Funktion u0 gesetzt wird, die wir auchStartwert nennen. Man nennt (0.6) daher auch Anfangs-Randwertproblem.
61

62 5. PARABOLISCHE DIFFERENTIALGLEICHUNGEN – DIE WARMELEITGLEICHUNG
Bemerkung 0.15Wenn man im Rahmen der klassischen Theorie glatte Losungen sucht, also Losungen,die insbesondere auf dem Rand des Raum-Zeit-Zylinders stetig sind, dann musseng und u0 gewisse Kompatibilitatsbedingungen erfullen: Fasst man g und u0 als eineFunktion g definiert uber Ω× 0 ∪ Σ auf (also der Manelfache zusammen mit derGrundfache von Q), dann muss diese Funktion also stetig sein.
Die klassische Theorie fur parabolische Gleichungen wie die Warmeleitgleichung er-innert stark an die Theorie fur die elliptischen Gleichungen aus dem vorhergehendenKapitel. Auch wenn die Beweise zum Teil etwas anders verlaufen, sind die wesent-lichen Resultate dieselben, insbesondere was das Maximumprinzip und die Konse-quenzen daraus angeht. Wir werden die klassische Theorie fur die parabolischenGleichungen daher weniger detailliert als im elliptischen Fall in Kapitel 4 darstellen.
§ 1 Fundamentallosung
Wie die Fundamentallosung im elliptischen Fall aus Definition 2.2 wird die Fun-damentallosung fur die Warmeleitgleichung so konstruiert, dass die zum einen diehomogene Warmeleitgleichung erfullt und zum anderen radialsymmtrisch bzgl. x ist.
Definition 1.1Die Funktion Φ : Rn × R \ 0 → R, definiert durch
Φ(x, t) :=
1
(4π t)n/2 e− |x|
2
4t x ∈ Rn, t > 0
0 x ∈ Rn, t < 0
heißt Fundamentallosung der Warmeleitgleichung.
Wir beobachten, dass diese Fundamentallosung im Gegensatz zum elliptischen Fallkeine Singularitat bzgl. x aufweist, allerdings eine bei t = 0.
Lemma 1.2Die Fundamentallosung Φ ist radialsymmetrisch und erfullt
∂Φ
∂t−∆Φ = 0 in Rn × R \ 0. (1.1)
Außerdem gilt fur t > 0 ∫Rn
Φ(x, t) dx = 1. (1.2)
Beweis: Die Radialsymmetrie von Φ erkennt man sofort. Eine einfache Rechnungzeigt (1.1), s. Ubung. Daruber hinaus berechnen wir mit Hilfe der Transformationz = 1
2√tx und Lemma 4.1∫
Rn
Φ(x, t) dx =1
(4π t)n/2
∫Rn
e−|x|24t dx =
1
πn/2
∫Rn
e−|z|2
dz
=1
πn/2
∫ ∞0
∫S(0;r)
e−|z|2
dsz dr =1
πn/2
∫ ∞0
e−r2 |S(0; r)| dr
=1
πn/2|S(0; 1)|
∫ ∞0
e−r2
rn−1 dr =1
πn/2nπn/2
Γ(1 + n/2)
Γ(n/2)
2= 1

5. FUNDAMENTALLOSUNG 63
mit der Γ-Funktion Γ(x) =∫∞
0e−ttx−1dt, x > 0. Hierbei haben wir ausgenutzt, dass
|S(0; 1)| = nπn/2/Γ(1 + n/2) und Γ(1 + n/2) = (n/2)Γ(n/2).
Mit Hilfe der Fundamentallosung konnen wir nun ein Resultat ahnlich Satz 4.2.13herleiten. Wir betrachten dazu das so genannte Cauchy-Problem
∂u
∂t(x, t)−∆u(x, t) = 0 in Rn × R+
u(x, 0) = u0(x) in Rn(1.3)
mit R+ = (0,∞). Das Cauchy-Problem ist also ein parabolisches Anfangswertpro-blem auf dem gesamten Raum. Wie im Fall von Satz 4.2.13 macht es deshalb wiederkeinen Sinn Randbedingungen zu stellen. Analog zu 4.(2.4) setzten wir die Losungals Integral an:
u(x, t) =
∫Rn
Φ(x− y, t)u0(y) dy =1
(4π t)n/2
∫Rn
e−|x−y|2
4t u0(y) dy (1.4)
mit (x, t) ∈ Rn×(0,∞). Die so definierte Funktion ist wie Φ bei t = 0 nicht definiert.Wir werden aber sehen, dass diese Singularitat keine Polstelle, sondern eine hebbareLucke ist, so dass die Anfangsbedingung in (1.3) Sinn macht.
Satz 1.3Die Funktion u0 erfulle u0 ∈ C(Rn) und supx∈Rn |u0(x)| < ∞. Dann gilt fur diedurch (1.4) definierte Funktion
(1) u ∈ C∞(Rn × R+)(2) Dtu−∆u = 0 in Rn × R+
(3) lim(x,t)→(x0,t)
(x,t)∈Rn×R+
u(x, t) = u0(x0) fur jedes x0 ∈ Rn.
Beweis: (1) Differenzierbarkeit von u.
Diesen sehr technischen Teil des Beweises skizzieren wir nur und untersuchen exem-plarisch die Differenzierbarkeit nach t. Wir zeigen zunachst, dass u wohl definiertist. Aus Lemma 1.2 folgt
|u(x, t)| =∣∣∣ ∫
Rn
Φ(x− y, t)u0(y) dy∣∣∣
≤∫Rn
Φ(x− y, t) dy supy∈Rn
|u0(y)| = supy∈Rn
|u0(y)| =: M0 <∞,
so dass u fur jedes (x, t) ∈ Rn × R+ in der Tat wohl definiert ist.
Wir zeigen nun, dass u fur t > 0 partiell nach t differenzierbar ist. Dazu sei (x0, t0) ∈Rn×R+ beliebig aber fest. Wir vermuten, dass die partielle Ableitung in (x0, t0) dieForm
∂u
∂t(x0, t0) =
∫Rn
∂
∂tΦ(x0 − y, t0)u0(y) dy
hat. Dazu mussen wir zeigen, dass∣∣∣1τ
(u(x0, t0)− u(x0, t0 + τ)
)−∫Rn
∂
∂tΦ(x0 − y, t0)u0(y) dy
∣∣∣→ 0 (1.5)

64 5. PARABOLISCHE DIFFERENTIALGLEICHUNGEN – DIE WARMELEITGLEICHUNG
fur τ → 0. Sei dazu ε > 0 beliebig. Zunachst beobachten wir, dass fur alle t mit|t− t0| ≤ t0/2 (so dass t > t0/2 > 0) gilt∣∣∣ ∂
∂tΦ(x0 − y, t)u0(y)
∣∣∣=∣∣∣ 1
(4π)n/2
( 1
t2+n/2
|x− y|2
4− n
2
1
t1+n/2
)exp
(− |x0 − y|2
4t
)u0(y)
∣∣∣≤ M0
(4π)n/2
( 2n/2
t2+n/20
|x− y|2 +n 2n/2
t1+n/20
)exp
(− |x0 − y|2
2t0
)=: G0(y).
(1.6)
Ahnlich zum Beweis von Lemma 1.2 berechnen wir mit der Transformation z =1√2t0
(x0 − y) fur beliebiges k ∈ N∫Rn
e−|x0−y|2
2t0 |x0 − y|k dy = (2t0)(k+n)/2
∫Rn
e−|z|2|z|k dz
= (2t0)(k+n)/2|S(0; 1)|∫ ∞
0
e−r2
rn+k−1 dr
= (2t0)(k+n)/2|S(0; 1)| 12
Γ(n+ k − 1
2
)<∞.
(1.7)
Im Fall von G0 (d.h. k = 2) folgt daraus die Existenz eines R > 0, so dass∫Rn\B(x0;R)
G0(y) dy ≤ ε
4, (1.8)
wobei R von t0, M0 und ε abhangt. Nach dem Mittelwertsatz der Differentialrech-nung gibt es ein λ ∈ [0, 1] mit
1
τ
(Φ(x0 − y, t0)− Φ(x0 − y, t0 + τ)
)u0(y) =
∂
∂tΦ(x0 − y, t0 + λτ)u0(y).
Fur τ < t0/2 folgt somit aus (1.6)∣∣∣1τ
(Φ(x0 − y, t0)− Φ(x0 − y, t0 + τ)
)u0(y)
∣∣∣ ≤ G0(y). (1.9)
Jetzt konnen wir den Term in (1.5) abschatzen. Dazu spalten wir wie folgt auf:∣∣∣1τ
(u(x0, t0)− u(x0, t0 + τ)
)−∫Rn
∂
∂tΦ(x0 − y, t0)u0(y) dy
∣∣∣≤∣∣∣ ∫
B(x0;R)
(1
τ
(Φ(x0 − y, t0)− Φ(x0 − y, t0 + τ)
)u0(y)− ∂
∂tΦ(x0 − y, t0)u0(y)
)dy∣∣∣
+
∫Rn\B(x0;R)
∣∣∣1τ
(Φ(x0 − y, t0)− Φ(x0 − y, t0 + τ)
)u0(y)
∣∣∣ dy+
∫Rn\B(x0;R)
∣∣∣ ∂∂t
Φ(x0 − y, t0)u0(y)∣∣∣ dy
=: I1 + I2 + I3.
Aus (1.6), (1.9) und (1.8) folgt
I2 + I3 ≤ 2
∫Rn\B(x0;R)
G0(y) dy ≤ ε
2,
fur τ < t0/2. Da Φ in (x0, t0) partiell nach t differenzierbar (beachte: t > 0), DtΦstetig und B(x0;R) kompakt ist, folgt I1 → 0 fur τ → 0, s. beispielsweise [Wust,

5. FUNDAMENTALLOSUNG 65
1995, Satz 19.3]. Daher gilt I1 ≤ ε/2, falls τ < τ0 hinreichend kleinem τ0, worausI1 + I2 + I3 ≤ ε fur τ ≤ minτ0, t0/2. Da ε > 0 beliebig war, beweist dies diepartielle Differenzierbarkeit von u nach t.
Fur die zweite und alle folgenden Ableitungen nach t argumentiert man analog. An-stelle von (1.6) erhalt man analoge Abschatzungen, in denen immer nur Ausdruckeder Form
1
tm0|x0 − y|k exp
(−|x0 − y|2
2t0
)(1.10)
mit k,m ∈ N auftauchen. Deren Integrale konnen wie G0 mit Hilfe von (1.7) ab-geschatzt werden. Auf diese Weise zeigt man, dass u in (x0, t0) unendlich oft nacht partiell differenzierbar ist. Die Stetigkeit der jeweiligen Ableitung folgt dann ausder Differenzierbarkeit. Im Falle der Ortsableitungen und gemischten Ableitungenargumentiert man ahnlich.
(2) u erfullt die homogene Warmeleitgleichung
In (1) haben wir gesehen, dass man Differentiation und Integration im Falle von uvertauschen kann. Wegen (1.1) folgt daraus sofort
∂u
∂t(x, t)−∆u(x, t) =
∫Rn
(∂Φ
∂t(x− y, t)−∆xΦ(x− y, t)
)u0(y) dy
=
∫Rn
(∂Φ
∂t(z, t)−∆zΦ(z, t)
)u0(x− z) dz = 0.
(3) Anfangsbedingung
Um die dritte Aussage zu zeigen, seien x0 ∈ Rn und ε > 0 beliebig aber fest. AufGrund der Stetigkeit von u0 gibt es ein δ > 0, so dass |u0(y) − u0(x0)| < ε fur alley ∈ B(x0; δ). Sei nun x ∈ B(x0; δ/2) beliebig. Dann folgt aus (1.2)
|u(x, t)− u0(x0)| =∣∣∣ ∫
Rn
Φ(x− y, t)(u0(y)− u0(x0)
)dy∣∣∣
≤∫B(x0;δ)
Φ(x− y, t)∣∣u0(y)− u0(x0)
∣∣ dy+
∫Rn\B(x0;δ)
Φ(x− y, t)∣∣u0(y)− u0(x0)
∣∣ dy =: Iε + Jε.
Fur das erste Integral erhalten wir mit (1.1)
Iε ≤∫Rn
Φ(x− y, t) dy︸ ︷︷ ︸=1
supy∈B(x0;δ)
|u0(y)− u0(x0)|︸ ︷︷ ︸≤ε
= ε.
Im Fall von Jε gilt |y − x0| > δ, woraus sich mit Hilfe der Dreiecksungleichung
|y − x0| ≤ |y − x|+ |x− x0|︸ ︷︷ ︸≤δ/2
≤ |y − x|+ 1
2|y − x0|
und damit |y − x| > 12|y − x0| ergibt. Daraus wiederum folgt
Jε ≤ 2 supy∈Rn
|u0(y)|∫Rn\B(x0;δ)
Φ(x− y, t)dy
≤ 2M0
(4πt)n/2
∫Rn\B(x0;δ)
e−|x−y|2
4t dy ≤ 2M0
(4πt)n/2
∫Rn\B(x0;δ)
e−|x0−y|2
16t dy

66 5. PARABOLISCHE DIFFERENTIALGLEICHUNGEN – DIE WARMELEITGLEICHUNG
Wie im Beweis von Lemma 1.2 transformieren wir∫Rn
e−|x0−y|2
16t dy −∫B(0;δ)
e−|x0−y|2
16t dy = (16t)n/2(∫
Rn
e−|z|2
dz −∫B(0;δ/(4
√t))
e−|z|2
dz),
so dass sich insgesamt ergibt:
Jε ≤2n+1
πn/2M0
(∫Rn
e−|z|2
dz −∫B(0;δ/(4
√t))
e−|z|2
dz)
=2n+1
πn/2M0|S(0; 1)|
(∫ ∞0
e−r2
rn−1 dr −∫ δ/(4
√t)
0
e−r2
rn−1 dr)→ 0 fur t ↓ 0
wegen der Intergierbarkeit von e−r2rn−1 auf R+. Daraus folgt |u(x, t)− u0(x)| ≤ 2ε
fur |x − x0| ≤ δ/2 und t > 0 hinreichend klein. Da ε > 0 beliebig war, ergibt diesdie Aussage.
Bemerkung 1.4
Die Fundamentallosung Φ(x, t) wird auch Warmeleitungskern genannt.
Im Fall von verteilten Inhomogenitaten, also
∂u
∂t(x, t)−∆u(x, t) = f in Rn × R+
u(x, 0) = 0 in Rn(1.11)
ist der Ansatz fur die Integraldarstellung der Losung
u(x, t) =
∫ t
0
∫Rn
Φ(x− y, t− s)f(y, s) dy ds. (1.12)
Die grundlegende Beweisidee, mit der man zeigt, dass das so definierte u tatsachlicheine Losung darstellt, beruht auf dem Duhamelschen Prinzip. Dieses besagt, dassman eine Losung von (1.11) als Integral u(x, t) =
∫ t0us(x, t)ds darstellen kann, wobei
us(x, t) das Anfangswertproblem
∂us
∂t(x, t)−∆us(x, t) = 0 in Rn × (s,∞)
us(x, s) = f(x, s) in Rn(1.13)
lost. Nach Satz 1.3 (mit geeigneter Zeittransformation) ist eine Losung dieses Pro-blems durch
us(x, t) =
∫Rn
Φ(x− y, t− s)f(y, s) dy
gegeben, was schließlich auf (1.12) fuhrt. Ein rigoroser Beweis ist in [Evans, 1998,Abschnitt 2.3.1] nachzulesen.
§ 2 Maximumprinzip und Eindeutigkeit
Definition 2.1
Die Menge Q ist durch Q = Ω× (0, T ] definiert. Sie besteht somit aus dem Raum-Zeit-Zylinder zusammen mit seinem
”Deckel“ Ω×T. Des Weiteren definieren wir
Σ = Q \ Q = Ω× 0 ∪ ∂Ω× (0, T ].

5. MAXIMUMPRINZIP UND EINDEUTIGKEIT 67
Definition 2.2Sei Ω ⊆ Rn ein Gebiet und 0 < T ≤ ∞ gegeben und Q = Ω × (0, T ). Der RaumCk,m(Q), k,m ∈ N ∪ 0, ist die Menge aller Funktionen, die m-mal stetig in derZeit und k-mal stetig im Raum differenzierbar sind, d.h.
u ∈ Ck,m(Q) ⇔ Dmt u ∈ C(Q), Dα
xu ∈ C(Q) fur alle Multiindizes α mit |α| ≤ k.
Entsprechend schreiben wir u ∈ Ck,m(Q), falls sich die partiellen Ableitungen von ustetig zum Rand von Q fortsetzen lassen.
Definition 2.3Fur festes (x, t) ∈ Rn × R und gegebenes r > 0 ist die Menge E(x, t; r) durch
E(x, t; r) :=
(y, s) ∈ Rn × R : s ≤ t, Φ(x− y, t− s) ≥ 1
rn
definiert.
Abbildung 2.1 zeigt den Rand der Menge E(x, t; r) fur den Fall n = 2 und r = 1, r =√2. Die Menge E(x, t; r) spielt im parabolischen Fall die Rolle, die die Kugel B(x; r)
0.6 0.8 1 1.2 1.4
0.8
0.82
0.84
0.86
0.88
0.9
0.92
0.94
0.96
0.98
1
0 5 10 15 20 25 30 35 40
x
tr = 1
r =√
2
Abbildung 2.1. Die Menge E(x, t; r) im Zweidimensionalen
im Fall der Laplace-Gleichung gespielt hat, wie man am folgenden Mittelwertsatzerkennt, vgl. Satz 4.2.
Satz 2.4 (Mittelwertsatz fur die Warmeleitgleichung)
Seien ein Gebiet Ω ⊂ Rn und T > 0 gegeben. Die Funktion u ∈ C2,1(Q) lose die
homogene Warmeleitgleichung auf Q, d.h. Dtu − ∆u = 0 in Q. Dann gilt fur alleE(x, t; r) ⊂ Q, dass
u(x, t) =1
4rn
∫E(x,t;r)
u(y, s)|x− y|2
(t− s)2dy ds.
Beweis: Der Beweis funktioniert genauso wie der des Mittelwertsatzes fur harmoni-sche Funktionen, s. Satz 4.2. Analog zu (4.1) definiert man in diesem Fall
φ(r) :=1
rn
∫E(x,t;r)
u(y, s)|x− y|2
(t− s)2dy ds

68 5. PARABOLISCHE DIFFERENTIALGLEICHUNGEN – DIE WARMELEITGLEICHUNG
und zeigt, dass φ′(r) = 0. Da zudem limr→0 Φ(r) = 4u(x, t) gilt, folgt daraus dieAussage, s. [Evans, 1998, Theorem 2.3.3] fur einen detaillierten Beweis.
Mit Hilfe dieses Mittelwertsatzes kann man dann genauso wie im elliptischen Fallfolgendes Maximumprinzip beweisen (vgl. Satz 4.3 und 4.4). Ein rigoroser Beweisist in [Evans, 1998, Theorem 2.3.4] zu finden.
Satz 2.5 (Starkes Maximumprinzip fur die Warmeleitgleichung)
Seien Ω ⊂ Rn ein beschranktes Gebiet, und T > 0. Die Funktion u ∈ C2,1(Q)∩C(Q)
lose die homogene Warmeleitgleichung auf Q.
(1) Dann gilt
max(x,t)∈Q
u(x, t) = max(x,t)∈Σ
u(x, t).
(Beachte, dass Σ abgeschlossen ist, so dass das max auf der rechten Seiteexistiert.)
(2) Falls Ω zudem zusammenhangend ist und ein Punkt (x0, t0) ∈ Ω × (0, T ]existiert, so dass u(x0, t0) = max(x,t)∈Q u(x, t), dann ist u konstant in Ω ×[0, t0].
Genau wie im elliptischen folgt aus dem Maximumprinzip sofort die Eindeutigkeitder Losung auf beschrankten Gebieten, vgl. Satz 4.7. Fur einen detaillierten Beweissei auf [Evans, 1998, Theorem 2.3.5] verwiesen.
Satz 2.6 (Eindeutigkeit auf beschrankten Gebieten)
Seien f ∈ C(Q), g ∈ C(∂Ω × [0, T ]) und u0 ∈ C(Ω) mit u0(x) = g(x, 0) fur alle
x ∈ ∂Ω. Dann existiert hochstens eine Losung u ∈ C2,1(Q) × C(Q) des Anfangs-Randwertproblems
∂u
∂t(x, t)−∆u(x, t) = f(x, t) in Q
u(x, t) = g(x, t) auf Σ
u(x, 0) = u0(x) in Ω.
Wir wollen nun noch einmal auf das Cauchy-Problem (1.3) zuruckkommen. Dasobige Maximumprinzip aus Satz 2.5 ist hier leider nicht anwendbar, weil das Gebietdes Cauchy-Problems unbeschrankt ist. Stattdessen muss man von der Losung nocheine Wachstumsbedingung fordern, um ein Maximumprinzip herleiten zu konnen.
Satz 2.7 (Maximumprinzip fur das Cauchy-Problem)Die Funktion u ∈ C2,1(Rn × (0, T ])× C(Rn × [0, T ]) lose
∂u
∂t(x, t)−∆u(x, t) = 0 in Rn × (0, T )
u(x, 0) = u0(x) in Rn
und erfulle mit Konstanten A,α > 0 die Wachstumsbedingung
u(x, t) ≤ Aeα|x|2
fur alle (x, t) ∈ Rn × [0, T ]. Dann gilt
sup(x,t)∈Rn×[0,T ]
u(x, t) = supx∈Rn
g(x).

5. MAXIMUMPRINZIP UND EINDEUTIGKEIT 69
Beweis: Wir skizzieren den Beweis nur grob. Zunachst nehmen wir an, dass
4 a T < 1, (2.1)
so dass ein ε > 0 existiert mit 4a(T + ε) < 1. Dann definiert man fur festes, aberbeliebiges y ∈ Rn und µ > 0 die Funktion v : Rn × R+ → R durch
v(x, t) := u(x, t)− µ
(T + ε− t)n/2exp
( |x− y|2
4(T + ε− t)
)Eine einfache Rechnung zeigt, dass v die homogene Warmeleitgleichung lost. Daherkann man das Maximumprinzip aus Satz 2.5 auf dem beschrankten Gebiet BT =B(y, r)× (0, T ], r > 0, auf v anwenden, so dass
max(x,t)∈BT
v(x, t) = max(x,T )∈ST
v(x, t) (2.2)
mit ST = B(y, r)×0∪∂B(y, r)× (0, T ]. Daruber hinaus zeigt man, dass v(x, 0) ≤u0(x) fur alle x ∈ Rn, und unter Ausnutzung der Wachstumsbedingung, dass v(x, t) ≤supx∈Rn u0(x) fur t ∈ [0, T ] und x ∈ ∂B(y, r), s. [Evans, 1998, Theorem 2.3.6]. Dannfolgt aus (2.2), dass v(x, t) ≤ supx∈Rn u0(x) fur alle t ∈ [0, T ] und alle x ∈ B(y, r),also erst recht fur y selber, so dass maxt∈[0,T ] v(y, t) ≤ supx∈Rn u0(x). Fur µ→ 0 gehtv(y, t) gegen u(y, t), woraus schließlich maxt∈[0,T ] u(y, t) ≤ supx∈Rn u0(x) folgt. Day ∈ Rn beliebig war, folgt daraus die Aussage, falls (2.1) gilt. Ist dies nicht erfullt,beweist man die Aussage zunachst auf dem Intervall [0, Ta] mit Ta = 1/(8a) undwiederholt dann die Argumentation sukzessive auf [Ta, 2Ta], [2Ta, 3Ta], usw., bis dieEndzeit T erreicht ist.


KAPITEL 6
Hyperbolische Differentialgleichungen – die Wellengleichung
Inhalt
1 Die eindimensionale Wellengleichung – die d’Alembertsche
Formel 71
2 Die Wellengleichung in R3 – die Kirchhoffsche Formel 74
Abschließend wollen wir uns noch mit der Wellengleichung (2.5.5) befassen. Ahn-lich wie bei den elliptischen und parabolischen Gleichungen werden wir auch indiesem Fall Integraldarstellungen der Losung herleiten, wobei wir uns wie im Fallder parabolischen Gleichungen auf Probleme in ganz Rn beschranken. Wir werdenjedoch sehen, dass die hierbei verwendeten Techniken sich grundlegend von denenim elliptischen und parabolischen Fall unterscheiden, was auf den grundsatzlich un-terschiedlichen Charakter hyperbolischer Gleichungen zuruckzufuhren ist.
Die Fourier-Methode, d.h. die Trennung der Variablen, funktioniert im hyperboli-schen Fall vollig analog zum elliptischen bzw. parabolischen, s. Ubung. Wir verzich-ten daher auf ein Beispiel fur die Fourier-Methode im hyperbolischen Fall.
§ 1 Die eindimensionale Wellengleichung – die d’Alembertsche Formel
Wir betrachten nun die raumlich eindimensionale Wellengleichung 2.(5.6) auf ganzR2, d.h.
∂2u
∂t2− c2 ∂
2u
∂x2= 0 fur (x, t) ∈ R× R (1.1)
mit c ∈ R, c 6= 0, gegeben. Wie in Abschnitt 2.5 bereits nennt man diese Gleichungauch Schwingungsgleichung. Des Weiteren stellen wir Anfangsbedingungen an u undseine Zeitableitung:
u(x, 0) = u0(x) in R∂u
∂t(x, 0) = v0(x) in R
(1.2)
mit gegebenen Funktionen ϕ und ψ. Wie das Cauchy-Problem im Fall der Warme-leitgleichung ist auch die PDGl (1.1)–(1.2) auf dem ganzen Raum gegeben, weshalbauch diese Gleichung oft als Cauchy-Problem bezeichnet wird.
Sei nun u ∈ C2(R×R) eine beliebige Losung des Cauchy-Problems. Wir fuhren dieKoordinatentransformation
ξ = x+ c t, η = x− c t71

72 6. HYPERBOLISCHE DIFFERENTIALGLEICHUNGEN – DIE WELLENGLEICHUNG
ein und setzen v(ξ(x, t), η(x, t)) = u(x, t). Dann ergibt sich nach der Kettenregel
∂2u
∂t2=∂2v
∂ξ2
(∂ξ∂t
)2
+∂2v
∂η2
(∂η∂t
)2
+ 2∂2v
∂ξ∂η
∂ξ
∂t
∂η
∂t+∂v
∂ξ
∂2ξ
∂t2+∂v
∂η
∂2η
∂t2
= c2(∂2v
∂ξ2− 2
∂2v
∂ξ∂η+∂2v
∂η2
)Analog berechnen wir
∂2u
∂x2=∂2v
∂ξ2+ 2
∂2v
∂ξ∂η+∂2v
∂η2
so dass aus (1.1) folgt
0 =∂2u
∂t2− c2 ∂
2u
∂x2= −4c2 ∂2v
∂ξ∂η
und somit∂
∂ξ
(∂v∂η
)= 0.
Folglich ist ∂ηv von ξ unabhangig, so dass eine Funktion w(η) existieren muss mit∂ηv(ξ, η) = w(η). Integration dieser Gleichung bzgl. ξ liefert dann
v(ξ, η) =
∫ η
η0
w(s) ds+ f(ξ) =: g(η) + f(ξ),
woraus fur u
u(x, t) = v(ξ(x, t), η(x, t)) = f(x+ c t) + g(x− c t)folgt. Die unbekannten Funktionen f und g werden aus den Anfangsbedingungenbestimmt:
u(x, 0) = f(x) + g(x) = u0(x)
∂u
∂t(x, 0) = c f ′(x)− c g′(x) = v0(x).
Also erhalten wir nach Integration der zweiten Gleichung
f(x) + g(x) = u0(x)
f(x)− g(x) =1
c
∫ x
x0
v0(s) ds+ C.
Wir erhalten somit die Losung
f(x) =1
2u0(x) +
1
2a
∫ x
x0
v0(s) ds+C
2
g(x) =1
2u0(x)− 1
2a
∫ x
x0
v0(s) ds− C
2,
woraus
u(x, t) =1
2
(u0(x+ c t) + u0(x− c t)
)+
1
2c
(∫ x+c t
x0
v0(s) ds−∫ x−c t
x0
v0(y) dy
)=
1
2
(u0(x+ c t) + u0(x− c t)
)+
1
2c
∫ x+c t
x−c tv0(s) ds.
Die letzte Gleichung wird auch als d’Alembertsche Formel bezeichnet. Da u ∈ C2(R×R) eine beiliebige Losung war, hat unsere Herleitung gezeigt, dass jede Losung von(1.1)–(1.2) dieser Formel genugen muss. Umgekehrt uberzeugt man sich leicht, dass

6. DIE EINDIMENSIONALE WELLENGLEICHUNG – DIE D’ALEMBERTSCHE FORMEL 73
die d’Alembertsche Formel eine Losung liefert, falls u0 ∈ C2(R) und v0 ∈ C1(R) (s.Ubung). Damit haben wir gezeigt:
Satz 1.1Sind u0 ∈ C2(R) und v0 ∈ C1(R) vorgegebene Cauchydaten, so besitzt das Cauchy-problem (1.1)–(1.2) fur die eindimensionale Schwingungsgleichung genau eine Losungu ∈ C2(R× R), welche durch die d’Alembertsche Formel gegeben ist, d.h.
u(x, t) =1
2
(u0(x+ c t) + u0(x− c t)
)+
1
2c
∫ x+c t
x−c tv0(s) ds.
Bemerkung 1.2Ist v0 ≡ 0, dann ergibt sich
u(x, t) =1
2
(u0(x+ c t) + u0(x− c t)
).
Die Funktionen u0(x, t) := u0(x + c t) und u0(x, t) := u0(x− c t) sind konstant ent-lang der Geraden x ± c t = konst. Diese Geraden nennt man Charakteristiken desCauchy-Problems (1.1)–(1.2), s. Abb. 1.1. Anschaulich beschreiben die Funktionen
Abbildung 1.1. Charakteristiken der eindimensionalen Wellengleichung
u0 und u0 im Fall c > 0 nach links bzw. rechts laufende Wellen mit Ausbreitungsge-schwindigkeit c. Das bedeutet, das Anfangssignal u0(x) wird mit Geschwindigkeit cnach links bzw. rechts bewegt, ohne die Form des Signals zu verandern, s. Abb. 1.2.Die Losung u des Cauchy-Problems (1.1)–(1.2) im Fall v0 ≡ 0 ergibt sich gerade alsUberlagerung dieser Wellen.
Bemerkung 1.3
Sei (ξ, τ) ∈ R × R ein beliebiger Raum-Zeit-Punkt mit τ > 0. Dann zeigt died’Alembertsche Formel, dass die Losung des Cauchy-Problems (1.1)–(1.2) in (ξ, τ)nur von den Anfangsdaten u0(x) und v0(x) mit
x ∈ B(ξ; cτ) = [ξ − cτ, ξ + cτ ]
abhangt. Im Fall v0 ≡ 0 hangt die Losung sogar nur von u0(x) mit x ∈ ∂B(ξ; cτ)ab.
Die Losung hangt also nicht von den Anfangswerten außerhalb von B(ξ; cτ) ab,was die endliche Ausbreitungsgeschwindigkeit von Storungen bzw. Signalen im hy-perbolischen Fall demonstriert. Ware die Ausbreitungsgeschwindigkeit des von der

74 6. HYPERBOLISCHE DIFFERENTIALGLEICHUNGEN – DIE WELLENGLEICHUNG
Abbildung 1.2. Nach rechts laufende Welle
Wellengleichung modellierten physikalischen Systems unendlich groß, dann musstenalle Anfangswerte u0(x), v0(x) mit x ∈ R fur beliebiges τ > 0 Einfluss auf dieLosung u(ξ, τ) haben. Das aber ist genau bei parabolischen PDGl’en der Fall, wiedie Integraldarstellung in (5.1.4) zeigt: da der Anfangswert u0 hier uber den gan-zen Rn integriert wird, haben alle Raumpunkte Einfluss auf die Losung. Im Fall derparabolischen Warmeleitgleichung ist die Ausbreitungsgeschwindigkeit von Signalendaher unendlich groß.
§ 2 Die Wellengleichung in R3 – die Kirchhoffsche Formel
Wir betrachten jetzt das Cauchy-Problem in R3, d.h.
∂2u
∂t2− c2 ∆u = 0 in R3 × R
u(x, 0) = u0(x) in R3
∂u
∂t(x, 0) = v0(x) in R3.
(2.1)
Auch fur diese PDGl lasst sich eine integrale Losungsdarstellung finden. Hierzuwenden wir die Methode der spharischen Mittel an, die wir im Folgenden nur inAuszugen skizzieren wollen. Diese Methode lasst sich auch in anderen Raumdimen-sionen anwenden, wobei man zwischen geraden und ungeraden Raumdimensionenunterscheiden muss, s. [Evans, 1998, Abschnitt 2.4.1].
Definition 2.1Fur eine Funktion f ∈ C(Rn) der spharische Mittelwert Mf (x, r) definiert durch
Mf (x, r) :=1
|S(x; r)|
∫S(x;r)
f(y) dsy.

6. DIE WELLENGLEICHUNG IN R3 – DIE KIRCHHOFFSCHE FORMEL 75
Mit Hilfe derselben Integraltransformation wie im Beweis des Mittelwertsatzes 4.4.2zeigt man
Mf (x, r) =1
ωn
∫S(0;1)
f(x+ r y) dsy (2.2)
mit ωn = |S(0; 1)|, d.h. die Einheitskugeloberflache wie in Kapitel 4. Auf Basis dieserGleichung kann man die Funktion Mf auch fur negative Werte von r definieren. Furdiese Funktion gilt:
Lemma 2.2Sei f ∈ Ck(Rn), k ∈ N, gegeben. Dann gilt fur den zugehorigen spharischen Mittel-wert
(1) Mf ∈ Ck(Rn × R)(2) Mf ist gerade bzgl. r, d.h. Mf (x, r) = Mf (x,−r)(3) lim
r→0Mf (x, r) = f(x).
Beweis: Zu (1): In (2.2) kann man Integration und Differentiation vertauschen, sodass die Regularitat von Mf mit der von f ubereinstimmt.
Zu (2): Folgt unmittelbar aus (2.2) mit Hilfe der Koordinatentransformation y = −y.
Zu (3): Das ist genau die Aussage von Lemma 4.2.10.
Korollar 2.3Dieselben Aussagen gelten auch im zeitabhangigen Fall, d.h. fur
Mf (x, r, t) =1
ωn
∫S(0;1)
f(x+ r y, t) dsy. (2.3)
Insbesondere ist Mf genauso glatt wie f , und es gilt limr→0Mf (x, r, t) = f(x, t).
Mit Hilfe des spharischen Mittelwerts kann die Wellengleichung in R3 auf die eindi-mensionale Wellengleichung und damit auf die d’Alembertsche Formel zuruckgefuhrtwerden. Entscheidend dafur ist das folgende Lemma, das wir hier nicht beweisenwollen. Fur einen ausfuhrlichen Beweis, s. [Farwig, SoSe 2008, Abschnitt 3.1] oder[Evans, 1998, Abschnitt 2.4.1].
Lemma 2.4Sei u ∈ C2(Rn × R) eine Losung des Cauchy-Problems (2.1). Dann genugt derzugehorige spharische Mittelwert Mu fur jedes x ∈ Rn der Euler-Poisson-Darboux-Gleichung :
∂2Mu
∂t2− c2
(∂2Mu
∂r2+n− 1
r
∂Mu
∂r
)= 0 in R× R
Mu(x, r, 0) = Mu0(x, r) in R∂Mu
∂t(x, r, 0) = Mv0(x, r) in R.
Jetzt beschranken wir uns auf den Fall n = 3. Dann folgt
∂2Mu
∂r2+
2
r
∂Mu
∂r=
1
r
∂2
∂r2(rMu),

76 6. HYPERBOLISCHE DIFFERENTIALGLEICHUNGEN – DIE WELLENGLEICHUNG
so dass∂2
∂t2(rMu)− c2 ∂
2
∂r2(rMu) = 0 in R× R
rMu(x, r, 0) = rMu0(x, r) in R∂(rMu)
∂t(x, r, 0) = rMv0(x, r) in R,
d.h. rMu lost fur jedes x ∈ R3 das eindimensionale Cauchy-Problem (1.1)–(1.2). Furdiese PDGl haben wir im vorigen Abschnitt die d’Alembertsche Formel hergeleitet:
rMu(x, r, t) =1
2
((r + c t)Mu0(x, r + c t) + (r − c t)Mu0(x, r − c t)
)+
1
2c
∫ r+c t
r−c tsMv0(x, s) ds.
Da Mv0(x, r) bzgl. r gerade ist, verschwindet das Integral∫ r−ct−(r−ct) sMv0(x, s)ds, so
dass
Mu(x, r, t) =1
2r
((r + c t)Mu0(x, r + c t) + (r − c t)Mu0(x, r − c t)
)+
1
2cr
∫ r+c t
c t−rsMv0(x, s) ds.
Jetzt kann man zur Grenze r → 0 ubergehen. Dafur fassen wir den ersten Teil aufder rechten Seite der obigen Gleichung als Differenzenquotient auf und erhalten:
1
2r
((r + c t)Mu0(x, r + c t) + (r − c t)Mu0(x, r − c t)
)→ ∂
∂r
((r + c t)Mu0(x, r + c t)
)∣∣r=0
=∂
∂t
(tMu0(x, c t)
).
Mit Fx(.) =∫sMv0(x, s) ds ergibt sich fur den zweiten Term
1
2cr
∫ r+c t
c t−rsMv0(x, s) ds =
Fx(c t+ r)− Fx(c t− r)2cr
→ 1
c
∂
∂rFx(c t+ r)
∣∣r=0
=1
cF ′x(c t) = tMv0(x, c t)
und damit insgesamt
u(x, t) =∂
∂t
(tMu0(x, c t)
)+ tMv0(x, c t).
Unter Berucksichtigung der Definition der spharischen Mittelwerte und |S(x; ct)| =4πc2t fur n = 3 haben wir damit folgendes Resultat bewiesen:
Satz 2.5Sei u ∈ C2(Rn×R) eine Losung des Cauchy-Problems fur die Wellengleichung (2.1).Dann gilt die Kirchhoffsche Formel
u(x, t) =1
4πc2t
∫S(x,ct)
v0(y)dsy +∂
∂t
( 1
4πc2t
∫S(x,ct)
u0(y)dsy
). (2.4)
Bemerkung 2.6 (1) Man kann umgekehrt auch zeigen, dass die rechte Seite
in der Kirchhoffschen Formel eine Losung von (2.1) ist. Da u in der obigenHerleitung eine beliebige Losung war, ist die rechte Seite (2.4) somit dieeindeutige Losung von (2.1).

6. DIE WELLENGLEICHUNG IN R3 – DIE KIRCHHOFFSCHE FORMEL 77
(2) Wenn man die Differentiation auf der rechten Seite von (2.4) ausfuhrt, erhaltman folgende aquivalente Formulierung der Kirchhoffschen Formel:
u(x, t) =1
4πc2t
∫S(x,ct)
(tv0(y) + u0(y) + (y − x) · ∇u0(y)
)dsy
(3) An der Kirchhoffschen Formel erkennt man, dass die Losung an einem belie-bigen Raum-Zeit-Punkt (ξ, τ) mit τ > 0 wieder nur von den Anfangswerten
u0(x), v0(x) mit x ∈ B(ξ; ct) abhangt, vgl. Bemerkung 1.3.
Bemerkung 2.7
Wie im parabolischen Fall kann das inhomogene Pendant zu (2.1), also
∂2u
∂t2− c2 ∆u = f in R3 × R
u(x, 0) = u0(x) in R3
∂u
∂t(x, 0) = v0(x) in R3,
wieder mit Hilfe des Duhamelschen Prinzips behandelt werden, s. [Evans, 1998,Abschnitt 2.4.2].
Zum Abschluss wollen wir uns noch mit der Eindeutigkeit von Losungen befassen.Wie schon am Ende von Abschnitt 4.4 verwenden wir hierbei eine Energiemethode.
Satz 2.8 (Eindeutigkeit fur die Wellengleichung)Es sei Ω ⊂ Rn ein beschranktes Gebiet mit hinreichend glattem Rand Γ und T > 0gegeben. Dann existiert hochstens eine Funktion u ∈ C2(Q), welche die Aufgabe
∂2u
∂t2(x, t)−∆u(x, t) = f(x, t) in Q = Ω× (0, T )
u(x, t) = g(x, t) in Σ = Γ× (0, T )
u(x, 0) = u0(x) in Ω
∂u
∂t(x, 0) = v0(x) in Ω
(2.5)
lost.
Beweis: Es seien u1 und u2 zwei unterschiedliche Losungen von (2.5). Dann lostu = u1 − u2 das entsprechende homogene Problem
∂2u
∂t2(x, t)−∆u(x, t) = 0 in Q = Ω× (0, T )
u(x, t) = 0 in Σ = Γ× (0, T )
u(x, 0) =∂u
∂t(x, 0) = 0 in Ω.
Wir mussen nur u ≡ 0 zeigen. Dazu definieren wir das folgende Energiefunktional
e(t) :=1
2
∫Ω
[(∂u∂t
(x, t))2
+ |∇u(x, t)|2]dx, 0 ≤ t ≤ T.
Da u zweimal stetig differenzierbar und Ω beschrankt ist, ist auch e nach t diffbarmit
de
dt=
∫Ω
(∂u∂t
∂2u
∂t2+∇u · ∇∂u
∂t
)dx.

78 6. HYPERBOLISCHE DIFFERENTIALGLEICHUNGEN – DIE WELLENGLEICHUNG
Die erste Greensche Formel impliziert fur den zweiten Summanden∫Ω
∇u · ∇∂u∂t
dx =
∫Γ
∂u
∂t
∂u
∂νds−
∫Ω
∂u
∂t∆u dx = −
∫Ω
∂u
∂t∆u dx.
Hierbei haben wir ausgenutzt, dass aus u = 0 auf Γ fur alle t auch ∂u∂t
= 0 auf Γfolgt. Damit ergibt sich unter Ausnutzung der homogenen PDGl fur u:
de
dt=
∫Ω
∂u
∂t
(∂2u
∂t2−∆u
)dx = 0 fur alle t ∈ (0, T ),
also ist e konstant in (0, T ). Da u ∈ C2(Q) gilt, ist e stetig bis zum Rand, so dasse(t) ≡ e(0) fur alle t ∈ [0, T ] folgt. Aus den Anfangsbedingungen folgt aber e(0) = 0,denn u(x, 0) = 0 in Ω impliziert naturlich ∇u(x, 0) = 0. Wir erhalten also e(t) = 0fur alle t ∈ [0, T ], woraus sofort
∂u
∂t≡ 0 und ∇u ≡ 0 in Q
folgt. Daher ist u konstant in Q, und wegen u(x, 0) = 0 und der Stetigkeit von u aufQ gilt u ≡ 0 in Q, was wiederum u1 = u2 impliziert.

ANHANG A
Grundlagen fur die Separationsmethode
Inhalt
1 Fourier-Reihen 79
2 Sturm-Liouvillesche Eigenwertprobleme 85
§ 1 Fourier-Reihen
Im nachsten Abschnitt lernen wir eine Technik zur Losung linearer PDGl’en kennen,die so genannte Fourier-Methode. Dafur brauchen wir einiges an
”Handwerkszeug“
aus der hoheren Mathematik, was wir im Folgenden wiederholen werden.
Wir beginnen mit der Fourier-Reihenentwicklung .
Definition 1.1 (Periodische Funktionen)Eine Funktion f : R → R und L ∈ R, L > 0 seien gegeben. Gilt f(x + L) = f(x),dann sagen wir, f ist L-periodisch.
Ein Beispiel fur eine 2-periodische Funktion zeigt Abb. 1.1.
Abbildung 1.1. Eine 2-periodische Funktion
Definition 1.2 (Fourier-Reihe)Sei f : R → R eine L-periodische Funktion, die uber dem Interval [−L/2, L/2]integrierbar ist.1 Die unendliche Reihe
a0
2+∞∑k=1
(ak cos(k
2π
Lx) + bk sin(k
2π
Lx))
(1.1)
1Fur Mathematiker: Hierbei und bei den folgenden Satzen sind sowohl Riemann- als auchLebesgue-integrierbare Funktionen zugelassen.
79

80 A. GRUNDLAGEN FUR DIE SEPARATIONSMETHODE
mit
ak =2
L
∫ L/2
−L/2f(x) cos(k
2π
Lx) dx , k = 0, 1, 2, ...
bk =2
L
∫ L/2
−L/2f(x) sin(k
2π
Lx) dx , k = 1, 2, ...
(1.2)
heißt Fourier-Reihe von f . Die Koeffizienten ak und bk nennt man Fourier-Koeffizienten.Die Partialsummen von (1.1) bezeichnen wir mit
Sn(x) =a0
2+
n∑k=1
(ak sin(k
2π
Lx) + bk cos(k
2π
Lx))
Bemerkung 1.3
Falls f auf [−L/2, L/2] integrierbar ist, dann ist auch f(x) sin(k 2πLx) fur jedes k ∈
N auf [−L/2, L/2] integierbar. Gleiches gilt auch fur f(x) cos(k 2πLx), so dass die
Fourier-Koeffizienten wohl definiert sind.
Fourier-Reihen sind sehr nutzlich, weil man mit ihrer Hilfe Funktionen approximie-ren also beliebig genau annahern kann:
Satz 1.4Sei f : R→ R eine L-periodische Funktion, die auf [−L/2, L/2] (Riemann-)integrierbarist.
(1) Dann konvergiert die Fourier-Reihe von f im quadratischen Mittel gegen f ,d.h.
‖Sn − f‖2L2(−L/2,L/2) :=
∫ L/2
−L/2|Sn(x)− f(x)|2 dx→ 0 fur n→∞.
(2) Ist f zudem stetig und stuckweise stetig differenzierbar, dann konvergiertdie Fourierreihe sogar gleichmaßig gegen f , d.h. fur jedes ε > 0 existiert einN = N(ε) ∈ N, so dass |Sn(x) − f(x)| ≤ ε fur alle x ∈ R und alle n > N .(Gleichmaßige Konvergenz: N hangt nur von ε ab, nicht von x.)
Beweis: s. [Forster, 1992, Satz 23.2 und Satz 23.3].2
Wegen der punktweisen Konvergenz aus Satz 1.4(2) konnen wir bei stetigen undstuckweise diffbaren L-periodische Funktionen
f(x) =a0
2+∞∑k=1
(ak cos(k
2π
Lx) + bk sin(k
2π
Lx))
(1.3)
schreiben.
Definition 1.5Eine Funktion f : R → R heißt gerade, falls f(x) = f(−x) fur alle x ∈ R gilt (alsofalls f spiegelsymmetrisch zur Ordinate ist). Sie heißt ungerade, falls f(x) = −f(−x)fur alle x ∈ R gilt (also falls f punktsymmetrisch zum Ursprung ist).
Klassische Beispiele fur gerade bzw. ungerade Funktionen sind sin und cos, was wirim Folgenden benutzen werden.
2Fur Mathematiker: Der erste Teil des Satzes ist auch fur quadratisch Lebesgue-integrierbareFunktionen korrekt, s. beispielsweise Alt [2006].

A. FOURIER-REIHEN 81
Lemma 1.6Seien L ∈ R, L > 0, und j, k ∈ N beliebig. Dann gilt:∫ L/2
−L/2cos(j
2π
Lx) cos(k
2π
Lx) dx = δjk∫ L/2
−L/2sin(j
2π
Lx) sin(k
2π
Lx) dx = δjk∫ L/2
−L/2cos(j
2π
Lx) sin(k
2π
Lx) dx = 0
mit δjk = 1, falls k = j, und 0 sonst.
Beweis: Das Resultat ergibt sich aus den jeweiligen Stammfunktionen, wenn mangleichzeitig ausnutzt, dass sin(ax) und cos(ax) fur jedes a ∈ R gerade bzw. ungeradesind, s. Ubung.
Lemma 1.7Die Funktion f : R→ R sei L-periodisch, stetig und stuckweise diffbar.
(1) Ist f gerade, d.h. f(x) = f(−x), dann gilt fur die Fourier-Koeffizientenbk = 0 fur alle k = 1, 2, ...
(2) Ist f ungerade, d.h. f(x) = −f(−x), dann gilt ak = 0 fur alle k = 1, 2, ...
Beweis: Wir beweisen exemplarisch die erste Aussage, die zweite zeigt man ana-log. Sei j ∈ N beliebig. Wir multiplizieren f(x) mit sin(j 2π
Lx) und intergieren das
Produkt uber [−L/2, L/2]. Dann ergibt sich:∫ L/2
−L/2sin(j
2π
Lx)f(x) dx
=
∫ L/2
−L/2sin(j
2π
Lx)[a0
2+∞∑k=1
(ak cos(k
2π
Lx) + bk sin(k
2π
Lx))]
=a0
2
∫ L/2
−L/2sin(j
2π
Lx) dx
+∞∑k=1
ak
∫ L/2
−L/2sin(j
2π
Lx) cos(k
2π
Lx) dx+
∞∑k=1
bk
∫ L/2
−L/2sin(j
2π
Lx) sin(k
2π
Lx) dx
= bj
Hierbei haben wir die Fourier-Reihen-Darstellung von f benutzt. Man beachte, dassIntegration und Summation vertauscht werden durfen wegen der gleichmassigenKonvergenz aus Satz 1.4(2). Des Weiteren haben wir Lemma 1.6 benutzt. Auf deranderen Seite berechnet man mit Hilfe der Koordinatentransformation ξ = −x (be-achte: f ist gerade und sin ungerade):∫ L/2
−L/2sin(j
2π
Lx)f(x) dx =
∫ 0
−L/2sin(j
2π
Lx)f(x) dx+
∫ L/2
0
sin(j2π
Lx)f(x) dx
=
∫ 0
L/2
sin(−j 2π
Lξ)f(−ξ) (−1)dξ +
∫ L/2
0
sin(j2π
Lx)f(x) dx
= −∫ L/2
0
sin(j2π
Lξ)f(ξ) dξ +
∫ L/2
0
sin(j2π
Lx)f(x) dx = 0

82 A. GRUNDLAGEN FUR DIE SEPARATIONSMETHODE
und daher bj = 0 fur alle j = 1, 2, ... (da j beliebig war).
Bemerkung 1.8
Mit dem obigen Lemma und Satz 1.4(2) folgt fur stetige und stuckweise diffbareL-periodische gerade bzw. ungerade Funktionen
f(x) =a0
2+
n∑k=1
cos(k2π
Lx) bzw. f(x) =
n∑k=1
sin(k2π
Lx).
Wir haben bislang periodische Funktionen und deren Fourierreihenentwicklung be-trachtet. Was aber, wenn eine Funktion nicht periodisch ist? Dazu definieren wirfolgende Fortsetzungen von f :
Definition 1.9Auf einem Intervall [0, l], l > 0, sei die Funktion f : [0, l] → R gegeben. Wirdefinieren
(1) die periodische Fortsetzung von f durch fp : R→ R mit
fp(x) := f(x− bxlc l)
wobei bx/lc der ganzzahlige Anteil von x/l ist, also die großte ganze Zahlz, fur die z ≤ x/l gilt.
(2) die gerade Fortsetzung von f durch fg : R→ R mit
fg(x) :=
f((bx
lc+ 1)l − x
), falls bx
lc ungerade ist
f(x− bx
lcl), falls bx
lc gerade ist,
(3) die ungerade Fortsetzung von f durch fu : R→ R mit
fu(x) :=
−f((bx
lc+ 1)l − x
), falls bx
lc ungerade ist
f(x− bx
lcl), falls bx
lc gerade ist.
(Beachte hierbei: es gilt x−bx/lc l ∈ [0, l[ und (bx/l+ 1)l ∈ [0, l], so dass die rechteSeiten in den drei Formeln wohl definiert sind.)
Diese etwas unhandlichen Definitionen macht man sich am besten anhand von Bei-spielen klar, s. z.B. Abb. 1.2. Man erkennt, dass die Fortsetzungen nicht stetig diff-bar und zum Teil noch nicht einmal stetig sind, obwohl f unendlich glatt ist. DesWeiteren sehen wir, dass auch die gerade und ungerade Fortsetzung periodischeFunktionen sind.
Bemerkung 1.10Die periodische Fortsetzung ist eine l-periodische Funktion, wahrend gerade undungerade Fortsetzung 2l-periodisch sind. Des Weiteren sind fg und fu gerade bzw.ungerade Funktionen (daher der Name).
Mit Hilfe der Fortsetzungen konnen wir nun auch Funktionen auf Intervallen inFourier-Reihen entwickeln, indem wir die entsprechenden Fortsetzungen in Fourier-Reihen entwickeln. Unter geeigneten Annahmen konvergieren die Fourier-Reihen furdie Fortsetzungen gleichmassig, und damit auch fur die eigentliche Funktion (aufdem betrachteten Intervall). Das fuhrt auf das folgende Resultat:

A. FOURIER-REIHEN 83
Abbildung 1.2. Eine Funktion und ihre periodische, gerade und un-grade Fortsetzung
Proposition 1.11
Sei f eine auf dem Interval [0, l], l > 0, definierte, stetige und stuckweise stetigdiffbare Funktion. Dann konvergiert die Reihe
a(g)0
2+∞∑k=1
a(g)k cos(k
π
lx) (1.4)
mit
a(g)k =
2
l
∫ l
0
f(x) cos(kπ
lx) dx , k = 0, 1, 2, ...
gleichmassig fur alle x ∈ [0, l] gegen f . Gilt außerdem f(0) = f(l) bzw. f(0) =f(l) = 0, dann konvergieren auch die Reihen
a(p)0
2+∞∑k=1
(a
(p)k cos(k
2π
lx) + b
(p)k sin(k
2π
lx))
(1.5)
∞∑k=1
b(u)k sin(k
π
lx) (1.6)
mit
a(p)k =
2
l
∫ l
0
f(x) cos(k2π
lx) dx , k = 0, 1, 2, ...
b(p)k =
2
l
∫ l
0
f(x) sin(k2π
lx) dx , k = 1, 2, ...
b(u)k =
2
l
∫ l
0
f(x) sin(kπ
lx) dx , k = 1, 2, ...
gleichmaßig auf [0, l] gegen f .
Beweis: Zunachst beobachten wir, dass unter den getroffenen Annahmen alle dreiFortsetzungen stetig und stuckweise stetig diffbar sind, so dass Satz 1.4(2) auf sieanwendbar ist und die entsprechenden Fourierreihen gleichmaßig in R konvergieren.3
3Fur die Stetigkeit der Fortsetzungen benotigen wir die Bedingungen f(0) = f(l) im Fall von
fp bzw. f(0) = f(l) = 0 im Fall von fu.

84 A. GRUNDLAGEN FUR DIE SEPARATIONSMETHODE
Wir bilden zunachst die periodische Fortsetzung fp von f . Diese ist l-periodisch bzgl.[0, l], aber auch bzgl. des Intervalls [−l/2, l/2], s. beispielsweise Abb. 1.2. Daherkonnen wir sie in eine Fourier-Reihe der Form (1.1) entwickeln. Fur die Fourier-Koeffizienten berechnen wir nach (1.2) mittels der Koordinatentransformation ξ =x+ l
ak =2
l
∫ 0
−l/2fp(x) cos(k
2π
lx) dx+
2
l
∫ l/2
0
fp(x) cos(k2π
lx) dx
=2
l
∫ l
l/2
f(ξ − l) cos(k2π
l(ξ − l)) dξ +
2
l
∫ l/2
0
f(x) cos(k2π
lx) dx = a
(p)k ,
wobei wir ausgenutzt haben, dass fp(x) und cos(k 2πlx) l-periodisch sind und dass
fp(x) = f(x) fur x ∈ [0, l] wegen der Definition der periodischen Fortsetzung. Fur b(p)k
argumeniert man analog, so dass (1.5) gerade der Fourierreihe fur fp entspricht. Dadiese Fourierreihe gleichmaßig in R konvergiert, konvergiert sie erst recht gleichmaßigauf [0, l], wo fp und f ubereinstimmen. Das beweist die erste Behauptung.
Zum Beweis der zweiten Aussage betrachten wir die gerade Fortsetzung von f . Dieseist 2l-periodisch und gerade, so dass bk = 0 nach Lemma 1.7. Die ak berechnen sichnach (1.2) mit Hilfe der Koordinatentransformation ξ = −x zu
ak =1
l
∫ 0
−lfg(x) cos(k
π
lx) dx+
1
l
∫ l
0
fg(x) cos(kπ
lx) dx
= −1
l
∫ 0
l
f(−ξ) cos(−k πlξ) dξ +
1
l
∫ l
0
f(x) cos(kπ
lx) dx = a
(g)k ,
wobei wir ausgenutzt haben, dass fg und cos gerade sind und fg = f auf [0, l] nachDefinition der geraden Fortsetzung. Damit entspricht (1.4) gerade der Fourier-Reihe
von fg, die wie oben dargelegt gleichmaßig gegen fg konvergiert, auf [0, l] also gegenf . Die Aussage fur (1.6) beweist man vollig analog.
Bemerkung 1.12
Die Reihen (1.4) und (1.6) nennt man auch Cosinus- und Sinus-Reihe. Der obigeBeweis zeigt, dass sie nur Spezialfalle der Fourier-Reihe sind.
Bemerkung 1.13Die Theorie der Fourier-Reihen mutet auf den ersten Blick etwas merkwurdig an:wieso sollte es moglich sein, mit einer unendlichen Reihe aus sin und cos belie-bige Funktionen darstellen zu konnen? Man kann die Funktionen sin(k 2π
Lx) und
cos(k 2πLx) allerdings als Basis-Funktionen interpretieren. Genau wie die kartesischen
Einheitsvektoren erfullen sie gewisse Orthonormalitatseigenschaften, s. Lemma 1.6,und Funktionen konnen (unter gewissen Umstanden) als Linearkombinationen dieserBasis-Funktionen dargestellt werden, s. (1.3). Die Basis-Funktionen spannen also,wie die kartesischen Einheitsvektoren den Rn, einen Raum auf, genauer einen Funk-tionenraum. Allerdings benotigt man im Gegensatz zum Rn unendlich viele vonihnen, wie man an der Summe in (1.3) sieht. Funktionenraume sind deshalb i.A.unendlichdimensional.

A. STURM-LIOUVILLESCHE EIGENWERTPROBLEME 85
§ 2 Sturm-Liouvillesche Eigenwertprobleme
In diesem Abschnitt wollen wir auf eine bestimmte gewohnliche Differentialgleichung(GDGl) mit konstanten Koeffizienten eingehen. Wir betrachten die homogene GDGl
X ′′(x) + λX(x) = 0 in (0, l) (2.1)
mit Dirichlet-Randbedingungen
X(0) = X(l) = 0, (2.2)
Neumann-RandbedingungenX ′(0) = X ′(l) = 0 (2.3)
oder periodischen Randbedingungen
X(0) = X(l), X ′(0) = X ′(l) (2.4)
mit gegebenem l > 0. Fur festes λ ∈ R handelt es sich hierbei um eine homogeneGDGl mit konstanten Koeffizienten, fur die es die bekannten Losungsmethoden gibt.Naturlich ist X ≡ 0 eine Losung, die so genannte triviale Losung. Die Frage ist nun,fur welche Werte von λ es nicht-triviale Losungen gibt. Dieses Problem nennt manSturm-Liouvillesches Eigenwertproblem4.
Als Ansatz fur die Losung von (2.1) wahlen wir (wie ublich) X(x) = eω x. Eingesetztin (2.1) fuhrt das auf das folgende charakteristische Polynom:
ω2 = −λ ⇒ ω1,2 = ±√−λ
Je nachdem, welches Vorzeichen λ besitzt, ergeben sich daraus verschiedene Losun-gen, s. beispielsweise [Heuser, 2009, Kapitel IV.14]:
(1) λ < 0 (zwei reelle Nullstellen):
X(x) = c1e√−λx + c2e
−√−λx (2.5)
(2) λ = 0 (doppelte reelle Nullstelle):
X(x) = c1x+ c2 (2.6)
(3) λ > 0 (konjugiert komplexe Nullstelle):
X(x) = c1 cos(√λx) + c2 sin(
√λx) (2.7)
In Abhangigkeit der Randbedingungen kann man einige dieser Falle ausschließen:
• Dirichlet-Randbedingungen (2.2):(1) Damit (2.5) die Randbedingung bei x = 0 erfullt, muss c1 = −c2 sein.
Dann ist aber X(l) 6= 0, außer wenn c1 = c2 = 0, was der trivialenLosung X ≡ 0 entspricht.
(2) Um mit (2.6) die Dirichlet-Randbedingungen zu erfullen, mussen wie-der c1 = c2 = 0 sein, so dass X ≡ 0.
(3) Aus den Randbedingungen (2.2) folgt fur (2.7):
X(0) = c1!
= 0 ⇒ X(x) = c2 sin(√λx)
X(l) = c2 sin(√λ l)
!= 0 ⇒
√λ l = ±nπ, n ∈ N ∪ 0.
4Da −λ als Eigenwert des entsprechenden Differentialoperators −d2(.)/dx2 aufgefasst werdenkann.

86 A. GRUNDLAGEN FUR DIE SEPARATIONSMETHODE
Damit sind nicht-triviale Losungen des Sturm-Liouvilleschen Eigenwertpro-blems mit Dirichlet-Randbedingungen moglich, falls λ = λn := (nπ/l)2 ist.Die zugehorige nicht-triviale Losung hat die Form
X(x) = Xn(x) := sin(√λn x) = sin
(nπ
lx).
Man nennt diese Funktion Eigenfunktion, s. Definition 2.1 unten. Da dieGDGl (2.1) linear ist, erfullt auch jedes positive oder negative Vielfachevon Xn die Gleichung. Wegen sin(−a) = − sin(a) mussen die zu negativenn gehorenden Eigenfunktionen daher nicht berucksichtigt werden, sondernkonnen auf die Eigenfunktion zu |n| zuruckgefuhrt werden.• Neumann-Randbedingungen (2.3):
(1) Mit analogen Argumenten wie oben bleibt von (2.5) nur die trivialeLosung ubrig.
(2) Die Neumann-Randbedingung impliziert fur (2.6), dassX ′(0) = X ′(l) =c1. Wahlen wir also c1 = 0, dann lost X ≡ c2 mit beliebigem c2 ∈ Rdas Eigenwertproblem mit den Randbedingungen (2.3).
(3) Aus den Randbedingungen (2.3) folgt diesmal fur (2.7):
X ′(0) =√λ c2
!= 0 ⇒ X(x) = c1 cos(
√λx)
X ′(l) = −√λ c1 sin(
√λ l)
!= 0 ⇒
√λ l = ±nπ, n ∈ N ∪ 0.
Nicht-triviale Losungen ergeben sich also wieder, falls λ = λn := (nπ/l)2.Die Eigenfunktionen dagegen lauten jetzt:
Xn(x) = cos(nπ
lx)
mit n ∈ N ∪ 0. (2.8)
Nicht-triviale Losungen zu (2.1) sind also durch Xn bzw. beliebige Vielfachedavon gegeben. Negative n mussen wegen cos(a) = cos(−a) wieder nichtberucksichtigt werden. Die konstante Eigenfunktion aus dem Fall (2) (λ =0) ist im Fall n = 0 bzw. X0(x) ≡ 1 enthalten.• Periodische Randbedingungen (2.4):
(1) Setzten wir (2.5) in (2.4), erhalten wir
c1 + c2 = c1e√−λ l + c2e
−√−λ l
√−λ c1 −
√−λ c2 =
√−λ c1e
√−λ l −
√−λ c2e
−√−λ l,
woraus sofort c1 = c2 = 0 folgt, also erneut nur die triviale Losung.(2) (2.6) in (2.4) eingesetzt liefert c1 = 0, so dass wie im Fall der Neumann-
Randbedingung X ≡ c2 mit beliebigem c2 ∈ R das Eigenwertproblemmit den periodischen Randbedingungen lost.
(3) Die Randbedingungen (2.3) implizieren fur (2.7):
c1 = c1 cos(√λ l) + c2 sin(
√λ l)
c2 = −c1 sin(√λ l) + c2 cos(
√λ l).
Man rechnet leicht nach, dass eine nicht-triviale Losung, nur moglichist, falls
√λ l = ±n 2π, n ∈ N ∪ 0.
Gilt dies, dann sind die periodischen Randbedingungen fur alle c1, c2 ∈R erfullt.

A. STURM-LIOUVILLESCHE EIGENWERTPROBLEME 87
Jetzt ergeben sich nicht-triviale Losungen, falls λ = λn := (n2π/l)2. Einezugehorige nicht-triviale Losung hat die Form
X(x) = c(1) cos(n
2π
lx)
+ c(2) sin(n
2π
lx)
(2.9)
und ist damit eine Linearkombination der Eigenfunktionen
Xn(x) := cos(n
2π
lx)
und Xn(x) := sin(n
2π
lx).
Wieder konnen wir die Falle mit negativem n auf die zu |n| gehorendenEigenfunktionen zuruckfuhren. Wie im Fall der Neumann-Randbedingungist der Fall λ = 0, d.h. konstante Eigenfunktion, aquivalent zu n = 0.
Wir fassen diese Ergebnisse wie folgt zusammen:
Definition 2.1Die Eigenwerte des Sturm-Liouville-Problems sind durch
λn :=(nπ
l
)2(2.10)
definiert mit n ∈ N im Fall der Neumann-Randbedingungen und n ∈ N ∪ 0 beiDirichlet-Randbedingungen. Die zugehorigen Eigenfunktionen fur die Dirichlet- undNeumann-Randbedingungen lauten
Xn(x) := sin(nπ
lx), n ∈ N, (2.11)
Xn(x) := cos(nπ
lx), n ∈ N ∪ 0. (2.12)
Im Fall der periodischen Randbedingungen sind die Eigenwerte durch
λn :=(n
2π
l
)2, n ∈ N ∪ 0 (2.13)
gegeben. Diese sind doppelte Eigenwerte und ihre Eigenfunktionen sind durch
Xn(x) := cos(n
2π
lx), Xn(x) := sin
(n
2π
lx), n ∈ N ∪ 0. (2.14)
definiert.
Satz 2.2Das Sturm-Liouvillesche Eigenwertproblem (2.1) mit Dirichlet-, Neumann- oder pe-ridodischen Randbedingungen besitzt genau dann eine nicht-triviale Losung, fallsλ gleich einen Eigenwert aus (2.10) bzw. (2.13) ist. Jede Linearkombination derzugehorigen Eigenfunktionen ist eine nicht-triviale Losung von (2.1).


Literaturverzeichnis
H. W. Alt. Lineare Funktionalanalysis, 5. Auflage. Springer, Berlin, 2006.K. Ehrenfried. Stromungsakustik. Mensch-und-Buch-Verlag, Berlin, 2004.L. C. Evans. Partial Differential Equations, volume 19 of Graduate Studies in Ma-
thematics. AMS, Providence, 1998.R. Farwig. Elementare partielle Differentialgleichungen. Vorlesungsskript, TU
Darmstadt, SoSe 2008.O. Forster. Analysis 1. Vieweg, Wiesbaden, 1992.D. Gilbarg and N. S. Trudinger. Elliptic Partial Differential Equations of Second
Order, volume 224 of Grundlehren der mathematischen Wissenschaften. Springer,Berlin, 1977.
H. Heuser. Gewohnliche Differentialgleichungen, 6. Auflage. Vieweg, Wiesbaden,2009.
I. Muller. Grundzuge der Thermodynamik. Springer, Berlin, 1994.J.H. Spurk. Stromungslehre. Springer, Berlin, 1996.A.N. Tychonoff and A.A. Samarski. Differentialgleichungen der mathematischen
Physik, volume 39 of Hochschulbucher fur Mathematik. Deutscher Verlag derWissenschaften, Berlin, 1959.
R. Wust. Hohere Mathematik fur Physiker, Teil 2. de Gruyter, Berlin, 1995.
89


Index
Ck-Gebiet, 47
Anfangsbedingung, 20
Boundary Element Methode, 38
Differentialoperator, 25Diracsche Delta-Distribution, 45Dirichlet-Energie, 58Dirichlet-Randbedingung, 20Distribution, 45Divergenz, 11Durck-Dichte-Beziehung, 19
elliptische PDGl, 18, 26Energiebilanz, 9, 17Energieerhaltungssatz, 16Energiefunktional, 58Energiemethode, 57Erstes Newtonsches Axiom, 12Euler-Gleichung, 19Eulersche Differentialgleichung, 37
Finite Elemente Methode, 6Fourier-Methode, 30Fouriersches Gesetz, 17Fundamentallosung, 38, 39
Gauß’scher Integralsatz, 11Gebiet, 6Greensche Formel, 41Greensche Funktion, 38, 49Grundgleichungen der Kontinuumsphysik, 9
harmonische Funktion, 38Hauptteil, 24homogene PDGl, 24hyperbolische PDGl, 20, 26
ideales Gas, 17Impulsbilanz, 9, 14inkompressible Stromung, 11inkompressibles Fluid, 15innere Energie, 15
kinetische Energie, 15klassische Theorie, 29
Koeffizientenmatrix, 25Kontinuitatsgleichung, 9, 12Kreiskettenverfahren, 55
Laplace-Gleichung, 9, 18, 29Laplace-Operator, 18lineare PDGl, 24Lipschitz-Rand, 47
Materialgleichung, 14Maximumprinzip, 55Mittelwertsatz, 54Multiindex, 23
Navier-Stokes-Gleichungen, 15Neumann-Randbedingung, 21, 57Newtonsches Fluid, 14nichtlineare PDGl, 25Normalenableitung, 21
Oberflachenkraft, 13Ordnung einer PDGl, 24
parabolische PDGl, 18, 26Partielle Differentialgleichung, 24Poisson-Gleichung, 18, 29, 40Poissonsche Formel, 52
quasilineare PDGl, 25
Randbedingung, 20regulare Distribution, 45Reynoldssches Transporttheorem, 10, 11Robin-Randbedingung, 21
Satz von Schwarz, 26schwache Ableitung, 46schwache Losung, 35Schwingungsgleichung, 9, 20semilineare PDGl, 24Separationsansatz, 30Separationsmethode, 30Spannungstensor, 13Spiegelpunkt, 50starkes Maximumprinzip, 55Supremumsnorm, 6
91

92 INDEX
Trager einer Funktion, 40Trennung der Variablen, 30
ultrahyperbolische PDGl, 26
Vektor-Laplace, 15Volumenkraft, 13
Warmeleitgleichung, 5, 9, 18Wellengleichung, 9, 20