Softwarepraktikum Teamrobotik SS05
23
Softwarepraktikum Teamrobotik SS05 ● Die Aufgabe ● Erste Ideen ● Probleme ● Weiteres Vorgehen ● Das Endprodukt ● Aufbau und Steuerung ● Software ● Webseite ● Review Jan Jurczynski, Patrick Gerlach, Marcus Förster
-
Upload
tanya-butler -
Category
Documents
-
view
33 -
download
1
description
Softwarepraktikum Teamrobotik SS05. Die Aufgabe Erste Ideen Probleme Weiteres Vorgehen Das Endprodukt Aufbau und Steuerung Software Webseite Review Jan Jurczynski, Patrick Gerlach, Marcus Förster. Die Aufgabe. Robo-Sokoban: - PowerPoint PPT Presentation
Transcript of Softwarepraktikum Teamrobotik SS05
Softwarepraktikum Teamrobotik SS05
● Die Aufgabe● Erste Ideen● Probleme● Weiteres Vorgehen● Das Endprodukt● Aufbau und Steuerung● Software● Webseite● Review
Jan Jurczynski, Patrick Gerlach, Marcus Förster
Die Aufgabe
Robo-Sokoban:Ziel ist es Fotodosen in kürzester Zeit in einen bestimmten Bereich zu befördern. Dazu sollten 2 Roboter entworfen, gebaut und programmiert werden. Zur Verfügung standen 2 Lego Mindstorm Baukästen. Im Wettbewerb soll die Steuerung der Roboter durch eine Person via PC erfolgen. B-Note für gelungene Endmelodie.
Erste Ideen
● Diesmal Kettenantrieb
● Effizienter Aufbau in Hinsicht auf den Transport der Dosen
● Sensoren zur Dosenerkennung und Steuerung
● autonome Steuerung
Erste Ideen
● schnelle und wendige Bewegungen
● Musik erstmal unwichtig
● Steuerung via Tastatur
● Einfach drauflos bauen
Probleme
● Schnelle Bewegung schränkt Genauigkeit ein● Kettenantrieb „schluckt“ Leistung
● Kompromiss zwischen Geschwindigkeit und Kraft● Transport der Dosen
● Dosen im Mittelpunkt der Roboter – gute Drehmöglichkeiten● Autonome Steuerung zu kompliziert und
ineffizient in Bezug auf die Zeit● Ansteuerung von 2 RCX
Weiteres Vorgehen
● Aufbau zum Zwischenergebnis nicht verändert
● Geeignete Getriebe Über- bzw. Untersetzung für Kettenantrieb
● Dadurch wendig aber auch recht flott
● Einfache Beförderung der Dosen durch Aufbau gewährleistet
Weiteres Vorgehen
● Erweiterung der Software um mit Tastatur zu Steuern und später für die Musik
● Sensoren sind geblieben, haben aber keine Funktion, da nicht autonom
● Optimierung der Steuerung (Folge von Pfeiltasten berücksichtigt)

Das Endprodukt
● Robi 1
● Robi 2
● Baugleich
Aufbau und Steuerung
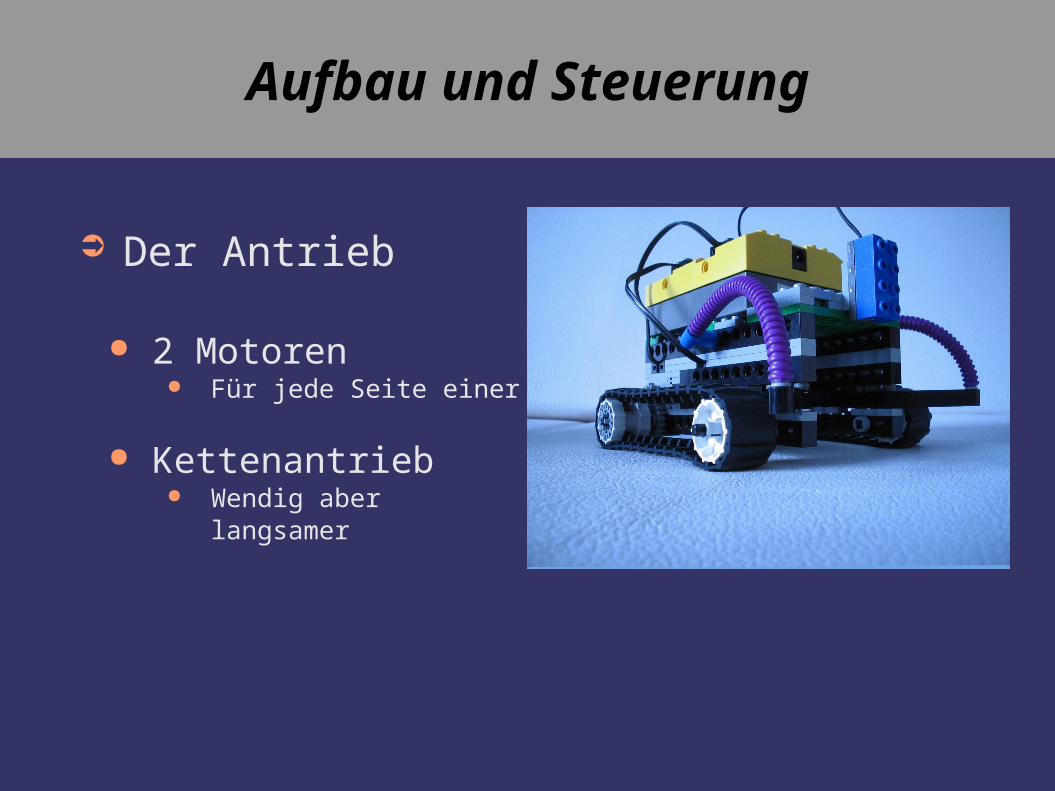
➲ Der Antrieb
● 2 Motoren● Für jede Seite einer
● Kettenantrieb● Wendig aber langsamer
Aufbau und Steuerung
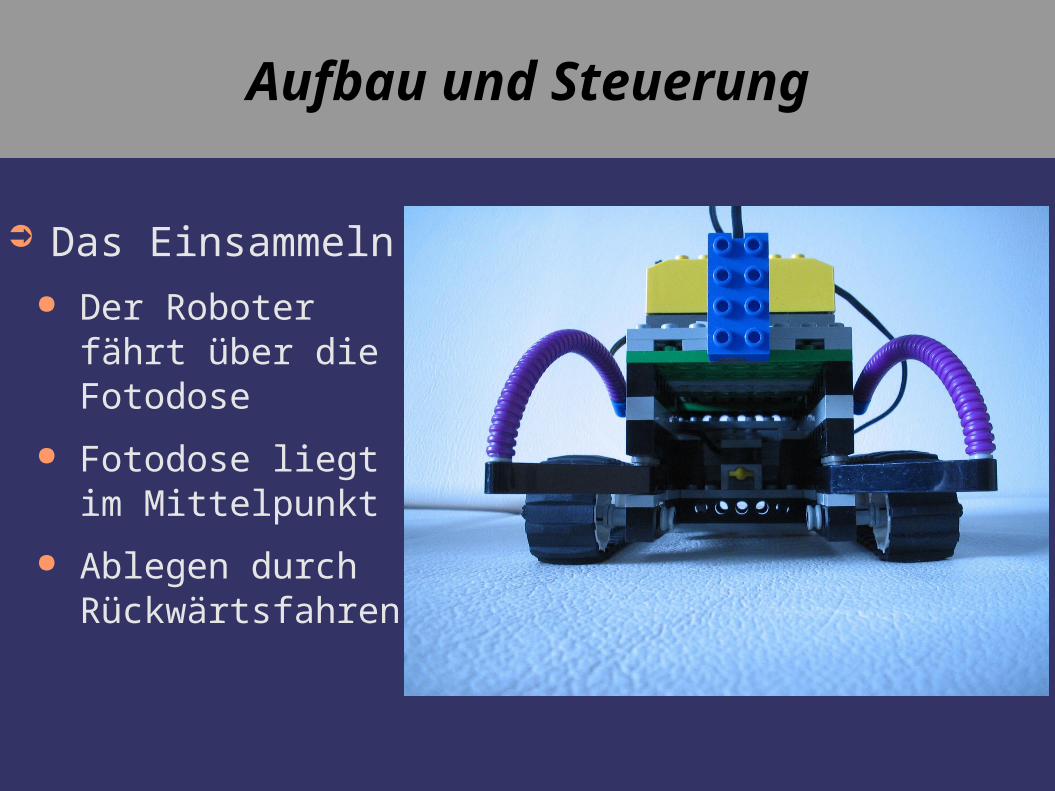
➲ Das Einsammeln● Der Roboter fährt
über die Fotodose
● Fotodose liegt im Mittelpunkt
● Ablegen durch Rückwärtsfahren

Aufbau und Steuerung
➲ Steuerung● Manuelle
Steuerung
● per PC und IR-Tower
● Separate Tasten für Robi 1 und Robi 2

Aufbau und Steuerung
● Berührungs- und Tastsensor
● Ohne Funktion
Aufbau und Steuerung
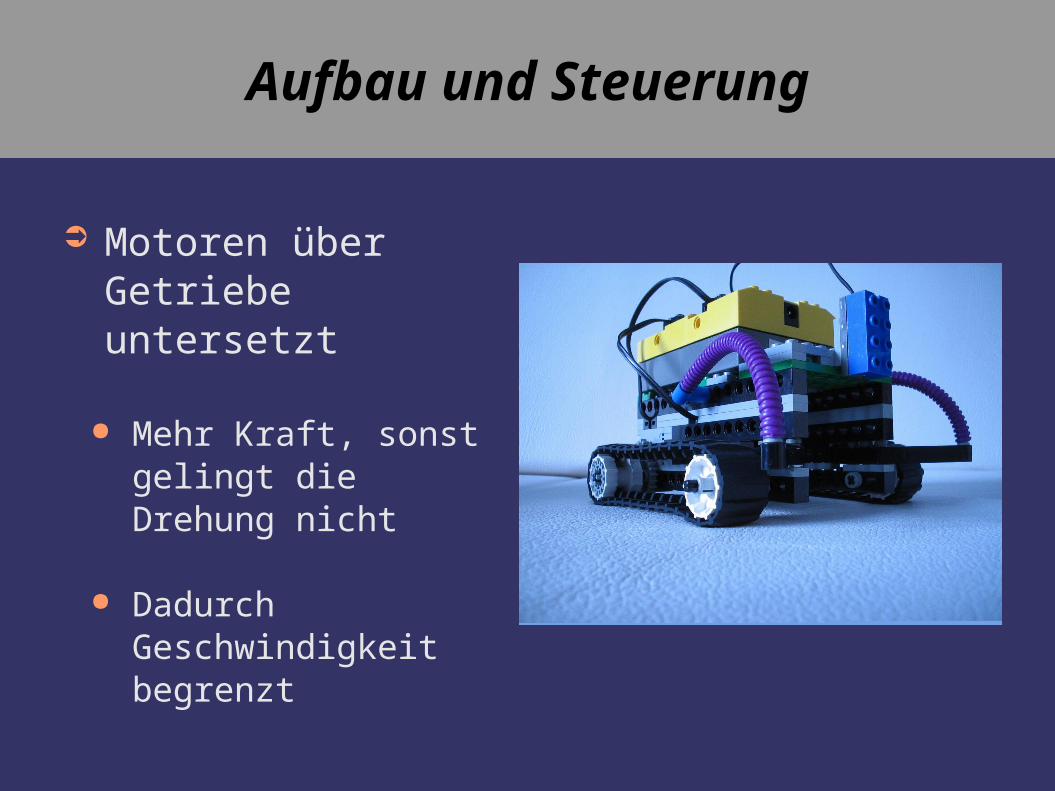
➲ Motoren über Getriebe untersetzt
● Mehr Kraft, sonst gelingt die Drehung nicht
● Dadurch Geschwindigkeit begrenzt
Software
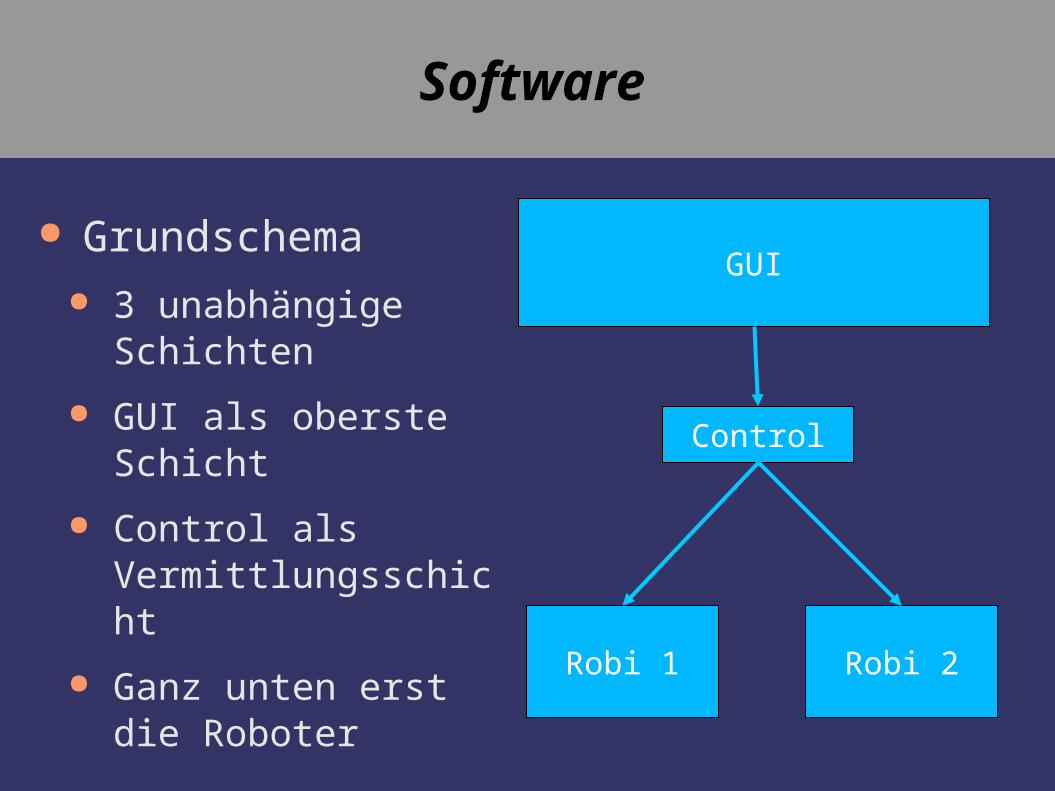
● Grundschema● 3 unabhängige
Schichten
● GUI als oberste Schicht
● Control als Vermittlungsschicht
● Ganz unten erst die Roboter
GUI
Control
Robi 1 Robi 2

Software
● Die GUI● Layout leicht
verändert
● Erweitert um Debug-Textfeld und Musik-Button
● Nun auch mit Tastenanschlägen
Software
● Die Control-Schicht
● Kapselt die Methoden zur Steuerung
● Verhindert, dass Befehle mehrfach hintereinander gesendet werden
● Verwaltet das Tower-Objekt und managed das Senden
Software
● Die Control-Schicht
● Indizes für die Bots (0, 1), um zu wissen, wer gemeint ist, Offset von 0 bzw. 64 Befehlsbereich 64 Befehle pro Bot
● Index * Offset + Befehlscode liefert das fertige zu übertragene Byte
Software
● Die beiden Receiver Schichten● Nehmen die Befehle direkt von der Control Schicht
entgegen
● Verteilen die ankommenden Befehle auf die Motoren
● Bei Kommando “13” reagieren beide mit Musik, zwei unabhängige Spuren in der jeweilige .java-Datei gespeichert
Webseite
➲ Erreichbar unter:http://home.arcor.de/pappag83/

Webseite
➲ Kleines Menü
● Übersichtlich
● Struktoriert
● Mittels CSS formatiert
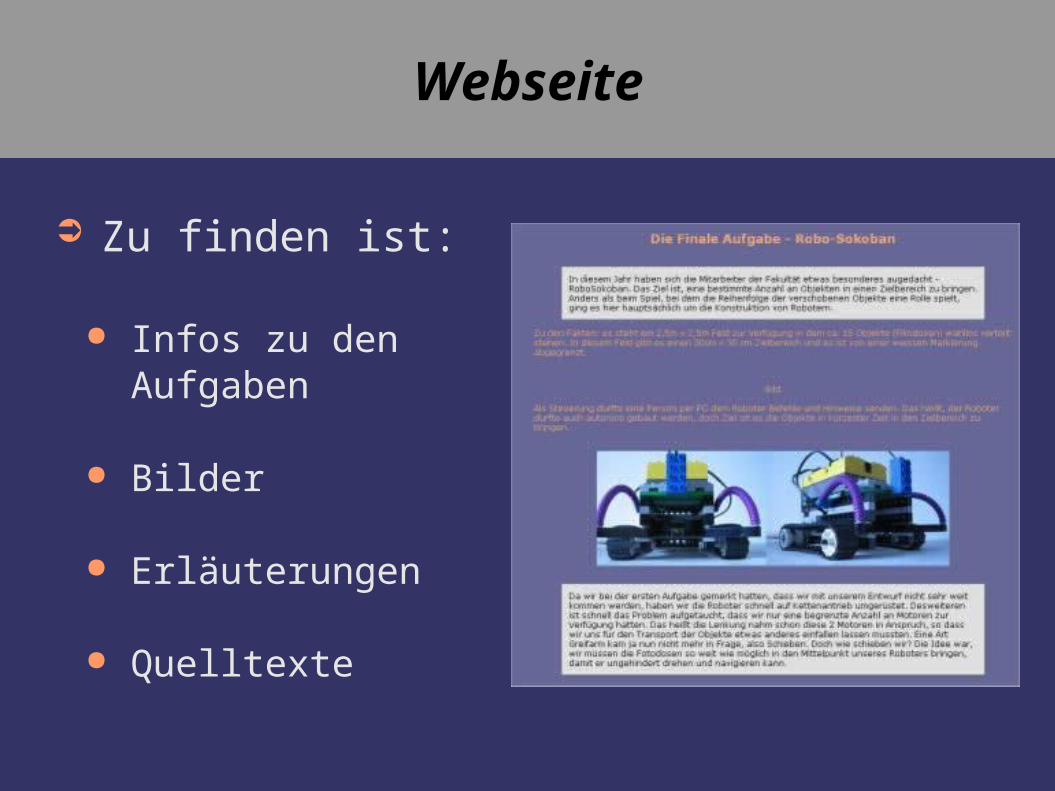
Webseite
➲ Zu finden ist:
● Infos zu den Aufgaben
● Bilder
● Erläuterungen
● Quelltexte
Review
➲ Was haben wir gelernt?
● Teamarbeit an einen gegebenen Problem
● Gemeinsam Lösungen erarbeiten
● Aufkommende Probleme lösen
Review
➲ Was haben wir gelernt?
● Programmierung eines RCX
● Teilweises wissenschaftliches Arbeiten
● Präsentation der Arbeit und Erstellung einer Webseite
● Kurz: das bauen von Robotern ist nicht einfach