SPS-Programmierung einer Mischanlage · hierzu unter PLC Ressource Properties und nehmen folgende...
21
Fakultät für Informatik und Automatisierung Institut für Automatisierungs- und Systemtechnik Fachgebiet Automatisierungssysteme Prof. Matthias Althoff (JP) SPS-Programmierung einer Mischanlage
Transcript of SPS-Programmierung einer Mischanlage · hierzu unter PLC Ressource Properties und nehmen folgende...
-
Fakultät für Informatik und Automatisierung
Institut für Automatisierungs- und Systemtechnik
Fachgebiet Automatisierungssysteme
Prof. Matthias Althoff (JP)
SPS-Programmierung einer
Mischanlage
-
Fachgebiet Automatisierungssysteme Praktikum Mischanlage
1
Inhaltsverzeichnis
1. ZIELSTELLUNG 2
2. GRUNDLAGEN 2
2.1 AUFBAU UND FUNKTIONSWEISE EINER SPS 2
2.2 DIE NORM IEC 61131-3 3
2.2.1 PROGRAMMIERSPRACHEN 3
2.2.2 PROGRAMMORGANISATIONSEINHEITEN (POE) 4
2.2.3 VARIABLENARTEN 5
2.3 VERWENDETE SOFTWARE 6
2.3.1 OPENPCS 6
2.3.2 SIPN-EDITOR 7
2.3.3 SIEMENS SIMATIC STEP 7 11
2.3.3.1 SIMATIC MANAGER 11
2.3.3.2 SIMATIC KOP/AWL/FUP-EDITOR 12
2.3.3.3 SIMATIC S7-GRAPH 12
2.4 DER VERSUCHSAUFBAU 13
3. VORBEREITUNG 15
3.1 AUFGABE ZUR VORBEREITUNG 15
4. DURCHFÜHRUNG 15
4.1 AUFGABEN 17
5. ANHANG 19
5.1 FLUSSDIAGRAMM DES VERSUCHSAUFBAUS 19
5.2 SYMBOLTABELLE 20
-
Fachgebiet Automatisierungssysteme Praktikum Mischanlage
2
1. Zielstellung
Dieses Praktikum dient zur Anwendung und Vertiefung der in der Vorlesung
„Automatisierungstechnik 1“ vermittelten Kenntnisse zur Programmierung einer SPS mittels
der Normsprachen der IEC-Norm 61131-3. Dazu steht ein Versuchsaufbau mit 3 Tanks zur
Verfügung, dessen Aktoren und Sensoren über eine Siemens-SPS angesteuert und
ausgelesen werden können. Ebenso wird der Umgang mit der weit verbreiteten Siemens-
Software STEP 7 erlernt.
Aufgabe ist die Realisierung einer Steuerung zum Mischen von Flüssigkeiten. Dabei werden
die entworfenen Varianten erst als Petrinetz modelliert und dann zum Testen simuliert.
Danach wird das Petrinetz in die Ablaufsprache der IEC 61131-3 überführt und mittels der
Software Simatic Step 7 auf die Siemens-SPS übertragen.
Schritt für Schritt wird der Funktionsumfang der Steuerung erweitert, bis die volle
Funktionalität der Anlage genutzt wird.
2. Grundlagen
2.1 Aufbau und Funktionsweise einer SPS
Eine SPS (speicherprogrammierbare Steuerung) wird zur Steuerung oder Regelung einer
Maschine oder Anlage eingesetzt. Hardwareseitig besteht sie aus den für einen Computer
typischen Komponenten. Dazu gehören eine Stromversorgung, eine Zentraleinheit (CPU),
EEPROM-Speicher, RAM-Speicher und verschiedene Ein-, Ausgangs- und
Funktionsbaugruppen, sowie eine Schnittstelle zum Programmieren über einen PC.
Die Bauform einer SPS kann sehr unterschiedlich sein, zum Beispiel als Steckkarte für den
PC oder als Einzelgerät. Am gebräuchlichsten sind modulare Lösungen, wie bei der im
Praktikum verwendeten Siemens ET200 S.
Abbildung 1: Siemens ET200S
-
Fachgebiet Automatisierungssysteme Praktikum Mischanlage
3
Die Software einer SPS besteht aus einem Echtzeitbetriebssystem und vorgefertigten
Bausteinen, die verschiedene Grundfunktionen realisieren, wie z.B. Zeitfunktionen, Addierer,
Multiplizierer.
Die Anbindung einer SPS an eine Anlage erfolgt mittels Sensoren und Aktoren, die an die
entsprechenden Ein- / Ausgangsbaugruppen angeschlossen werden. Die anliegenden
Signale werden in analoge und digitale Signale unterteilt.
Die Abarbeitung eines SPS-Programms erfolgt bei einem Großteil der SPS-Geräte
zyklusorientiert. Nach Feststellung der Betriebsbereitschaft aller angeschlossenen
Baugruppen werden alle Eingänge abgefragt. Danach wird das Anwenderprogramm
gestartet und ermittelt aufgrund der anliegenden Eingänge die zu schaltenden Ausgänge.
Nach Abschluss des Anwenderprogramms geht die Kontrolle wieder an das Betriebssystem
über, welches die Ausgangsbaugruppen entsprechend ansteuert. Jetzt ist ein Zyklus
abgeschlossen und ein neuer Zyklus wird gestartet.
Neben den zyklusorientierten gibt es auch ereignisgesteuerte SPS, die alle eintretenden
Ereignisse auflisten und in der Reihenfolge des Auftretens entsprechende Teile des
Anwenderprogramms abarbeiten.
Mit dem Programmieren von SPS befasst sich die im Folgenden beschriebene Norm.
2.2 Die Norm IEC 61131-3
Die Norm IEC 61131-3 befasst sich mit Grundlagen zu speicherprogrammierbaren
Steuerungen einschließlich deren Peripherie, Programmier- und Testwerkzeugen.
Der für dieses Praktikum relevante Teil sind die 5 Programmiersprachen, die in dieser Norm
enthalten sind:
2.2.1 Programmiersprachen
Anweisungsliste (AWL)
Die Anweisungsliste ist eine sehr maschinennahe Programmiersprache, ähnlich der
Assemblerprogrammierung. Einzelne Anweisungen entsprechen den Arbeitsschritten, die bei
der Abarbeitung des Programms von der CPU durchgeführt werden. Die Operatoren in AWL
besitzen immer nur einen Operanden, deshalb ist die Strukturierung von Programmen nur
sehr umständlich über Sprungbefehle zu realisieren. Die damit erstellten Programme
belegen nur wenig Speicherplatz, was sich bei Speicherknappheit als Vorteil erweist. Ebenso
lassen sich in AWL gut laufzeitoptimierte Programme erstellen.
Viele Hersteller verwenden für ihre eigenen Programmiersprachen ebenfalls den Begriff
AWL, obwohl sie nicht exakt mit der IEC 61131-3 übereinstimmen. Dies ist auch bei Siemens
STEP 7 der Fall.
Heutzutage verliert AWL auf Grund genannter Nachteile immer mehr an Relevanz.
-
Fachgebiet Automatisierungssysteme Praktikum Mischanlage
4
Strukturierter Text (ST)
Strukturierter Text ist eine höhere Programmiersprache, die im Gegensatz zu AWL durch
ihren PASCAL-artigen Aufbau die Programmierung von Schleifen und bedingten
Verzweigungen vereinfacht. Deshalb eignet sich Strukturierter Text gut für
Formelberechnungen, komplexe Optimierungsalgorithmen oder die Verwaltung größerer
Datenmengen. Durch ihre besseren Strukturierungsmöglichkeiten löst sie AWL immer mehr
ab.
Funktionsbausteinsprache (FBS) oder Funktionsplan (FUP)
Bei der Funktionsbausteinsprache, die auch oft als Funktionsplan (FUP) bezeichnet wird,
handelt es sich um eine grafische Programmiersprache. Sie nutzt die Logiksymbole der
Booleschen Algebra zur Darstellung. Die Programmlogik lässt sich durch die Visualisierung
in logischen Boxen relativ leicht nachvollziehen. FBS eignet sich durch ihren Aufbau gut für
Verknüpfungssteuerungen, ist aber für Ablaufsteuerungen ungeeignet.
Kontaktplan (KOP)
Bei dem Kontaktplan handelt es sich um eine grafische Programmiersprache, die
Stromlaufplänen nachempfunden ist. Sie ist insbesondere für Verknüpfungssteuerungen
geeignet. Mit in Reihe geschalteten Elementen kann eine UND-Verknüpfung und mit parallel
geschalteten eine ODER-Verknüpfung realisiert werden. Der Kontaktplan eignet sich ähnlich
der FBS durch seinen Aufbau gut für Verknüpfungssteuerungen, ist aber ebenfalls für
Ablaufsteuerungen ungeeignet.
Ablaufsprache (AS)
Bei der Ablaufsprache handelt es sich um eine Programmiersprache, die in ihrer Form einem
Petrinetz ähnelt. Sie besteht aus Steuerungsschritten, in denen bestimmte Aktionen
ausgeführt werden und Schaltbedingungen (Transitionen), die bei bestimmten
Eingangssignalen das Weiterschalten von einem zum nächsten Schritt ermöglichen. Sie ist
gut geeignet für Fehleranalyse, da jeder aktuelle Steuerungsschritt und die entsprechenden
Transitionsbedingungen jederzeit visualisiert werden. Vor allem bei großen
Steuerungsanlagen ist sie sehr verbreitet. Unter Siemens STEP 7 wird die Ablaufsprache als
S7 Graph bezeichnet.
2.2.2 Programmorganisationseinheiten (POE)
Unabhängig von den Programmiersprachen sind folgende drei Programmorganisations-
einheiten (POE) definiert:
Programm (program): Hauptprogramm, welches Funktionsbausteine und Funktionen
enthält. Es verwaltet Ein- und Ausgänge der SPS und deklariert globale Variablen.
Funktionsbaustein (function block): Parametrierbare POE, deren Ergebnis von
inneren und externen Variablen abhängt. Er kann ein oder mehrere Ergebnisse liefern. Er
wird nur als Instanz (Kopie) aufgerufen.
Funktion (function): Parametrierbare POE, deren Ergebnis nur von externen Variablen
(deren Eingangswerten) abhängt.
-
Fachgebiet Automatisierungssysteme Praktikum Mischanlage
5
Der Name von POE’s ist projektweit bekannt und darf nicht mehrfach verwendet werden.
Lokale Unterprogramme, wie in höheren Programmiersprachen üblich, gibt es in der IEC
61131-3 nicht.
Figur 1: Aufbau einer POE
2.2.3 Variablenarten
Variablen sind nach Möglichkeit immer lokal zu definieren, um Auswirkungen von
Programmierfehlern lokal zu halten und die Fehlersuche zu vereinfachen.
Kurzbeschreibung der Variablenarten:
VAR, VAR_TEMP: Lokale Variable, die nur innerhalb der POE sichtbar ist.
VAR_INPUT: Eingangsvariable, die nur innerhalb der POE definiert und dort nur
lesbar ist (call-by-value).
VAR_OUTPUT: Ausgangsvariable, die außerhalb der POE lesbar, innerhalb les- und
schreibbar ist (call-by-value).
VAR_IN_OUT: Ein- und Ausgangsvariable, die intern und extern les- und schreibbar
ist (call-by-reference).
VAR_GLOBAL: Globale Variable, die in einer Konfiguration deklariert wird. Kann von
anderen POE’s gelesen und geschrieben werden. Dazu muss die Variable in den
POE’s als VAR_EXTERNAL mit identischem Namen deklariert sein.
VAR_EXTERNAL: siehe VAR_GLOBAL
VAR_ACCESS: Kommunikationskanal zwischen Ressourcen. Innerhalb einer POE
wie eine globale Variable benutzbar.
PROGRAM Name bzw.
FUNCTION_BLOCK Name bzw.
FUNCTION Name
Deklarationsteil:
Eingangsvariablen, Ausgangsvariablen, lokale Variablen, etc.
Anweisungsteil:
Programmierung der Funktion in AWL, ST, FBS, KOP, AS
-
Fachgebiet Automatisierungssysteme Praktikum Mischanlage
6
S: schreibend, L: lesend, SL: schreibend und lesend, *: nur schreibend als Formalparameter
beim Aufruf.
2.3 Verwendete Software
Im Verlauf des Praktikums werden für die verschiedenen Aufgaben mehrere Programme
benötigt. Dazu ein paar Hinweise zum Gebrauch und Download.
Bei Bedarf, wird ein Rechner im Fachgebiet zur Verfügung gestellt.
2.3.1 OpenPCS
Um im Praktikum Petrinetze zu simulieren, verwenden wir das Programm OpenPCS,
welches eine Software-SPS zur Verfügung stellt. An dieser können während der Simulation
mit dem SIPN-Editor die entsprechenden Eingänge gesetzt werden, um zu testen ob sich
das modellierte Petrinetz korrekt verhält.
Zum Download geht es über folgenden Link (Passwort benötigt):
http://www.tu-ilmenau.de/at/startseite/
Eine neuere Version ist auch über die Herstellerseite verfügbar. Da aber der SIPN-Editor
nicht weiterentwickelt wird, könnte es bei der Verwendung neuerer Versionen zu
Inkompatibilitäten kommen. Deshalb nutzen Sie bitte die Version im Downloadbereich der
Fachgebietsseite.
Installationshinweise (nur für Microsoft Windows):
Zur Installation führen Sie die heruntergeladene „openPCS6.54e.exe“ aus und folgen dem
Installationsassistenten. Danach ist ein neues Projekt zu erstellen. Dazu starten Sie
OpenPCS über die auf dem Desktop angelegte Verknüpfung, wählen unter File „New…“
aus. Im sich nun öffnenden Auswahldialog wählen sie in der linken Spalte „Projects“ aus. In
der rechten Spalte muss danach „Empty Project“ markiert sein. Geben Sie dem neuen
Projekt einen Namen und wählen Sie den Speicherort aus.
Variablenart definiert für Zugriffsrechte Programm Funktionsbaustein Funktion extern intern
VAR - SL VAR_INPUT * L
VAR_OUTPUT L SL VAR_IN_OUT SL SL
VAR_EXTERNAL SL SL VAR_GLOBAL SL SL VAR_ACCESS SL SL
VAR_TEMP - SL
http://www.tu-ilmenau.de/at/startseite/
-
Fachgebiet Automatisierungssysteme Praktikum Mischanlage
7
BITTE BEACHTEN: Den
Pfad zum Projektordner
bitte notieren, da Sie in
diesen den SIPN-Editor
installieren müssen.
Nach einem Klick auf „OK“
ist ein neues Projekt
angelegt.
Nun muss OpenPCS
entsprechend konfiguriert
werden. Wählen Sie
hierzu unter PLC
Ressource Properties und
nehmen folgende
Einstellungen vor:
OpenPCS sollte jetzt korrekt konfiguriert sein. In Verbindung mit dem SIPN-Editor folgen
noch einige weitere Einstellungen an entsprechender Stelle.
2.3.2 SIPN-Editor
Der SIPN-Editor wurde uns freundlicherweise von der Universität Kaiserslautern zur
Verfügung gestellt. Mit ihm werden im Praktikum signalinterpretierte Petrinetze modelliert
und simuliert, die dann im späteren Verlauf auf die SPS übertragen werden.
Um die Petrinetze zu simulieren muss zusätzlich das Programm OpenPCS installiert sein.
Zum Download geht es über folgenden Link (Passwort benötigt):
http://www.tu-ilmenau.de/at/praktikum/
Installationshinweise:
Als Voraussetzung zum Starten des Editors muss das Java Development Kit installiert sein
(Download). Zur Installation entpacken Sie das heruntergeladene Archiv in einen zuvor
erstellten Projektordner von OpenPCS, da sonst die Simulation von Petrinetzen nicht
gestartet werden kann. Nach dem Entpacken ist in der petri.bat der Installationspfad des
SIPN-Editors anzupassen. Dies geschieht durch einen Rechtsklick auf petri.bat und
Abbildung 2: Neues Projekt erstellen unter OpenPCS
Abbildung 3: Konfiguration von OpenPCS
http://www.tu-ilmenau.de/at/praktikum/http://www.oracle.com/technetwork/java/javase/downloads/index.html
-
Fachgebiet Automatisierungssysteme Praktikum Mischanlage
8
Auswählen von „Bearbeiten“. Danach muss unter set BASE der entsprechende Pfad
eingetragen werden. Zum Starten des SIPN-Editors ist die petri.bat auszuführen.
Petrinetze erstellen
Um ein leeres Petrinetzprojekt zu erstellen, genügt ein Klick auf den - Button. Zum
Erstellen der einzelnen Elemente eines Petrinetzes gibt es in der Bedienleiste die folgenden
vier Symbole für Plätze, Transitionen, Kanten und Marken.
Nach Auswahl des entsprechenden Symbols, genügt ein Klick in das Projektfenster um
einen Platz, eine Transition oder eine Marke zu erstellen. Beim Erstellen eines Platzes oder
einer Transition wird man direkt nach dem Mausklick dazu aufgefordert, einen Namen
einzugeben. Plätze und Transitionen verbindet man durch Kanten, indem man das erste
Element mit einem Linksklick auswählt und das zweite mit einem Rechtsklick. Knickpunkte
können durch zusätzliche Linksklicks eingefügt werden, bevor durch betätigen der rechten
Maustaste das Erstellen der Kante abgeschlossen wird. Um einen Platz mit einer Marke zu
füllen, genügt ein Klick in den entsprechenden Platz bei angewähltem Marken-Button.
Zum Bearbeiten einzelner Plätze und Transitionen,
sind diese bei aktiviertem - Button auszuwählen.
Über „Edit properties“ am linken Rand des Programm-
Fensters wird das folgende Einstellungsfenster
aufgerufen. Der im Comment-Feld eingetragene Text,
erscheint neben dem Platz bzw. der Transition. Im
Code-Feld wird bei Plätzen eingetragen, wie die
Ausgänge zu setzen sind und bei Transitionen, unter
welchen Bedingungen sie schalten. Dazu gibt es
folgende Befehle:
Platz Transition
S (Ausgang setzen)
R (Ausgang zurücksetzen)
AND
ANDN (= AND NOT)
OR
ORN
XOR
XORN
In einer Zeile darf dabei immer nur ein Befehl gefolgt von einer Variablen stehen. Im Fall
einer Transition muss der erste Befehl immer ein AND oder ANDN sein. Außerdem dürfen
Klammern genutzt werden.
Abbildung 4: Edit properties
-
Fachgebiet Automatisierungssysteme Praktikum Mischanlage
9
Die genutzten Variablen können über den - Button erstellt und editiert werden. Unter
„Name“ wird der Variablenname, unter „Kind“ der Variablentyp (IN, OUT oder INOUT) und
unter „Type“ der Datentyp (meist BOOL) eingetragen. Im Feld „Assigned“ wird ein
physikalischer Ein- bzw. Ausgang der virtuellen SPS zugewiesen. Dies geschieht in
folgender Form:
%IX0.0 für Eingänge
%QX0.0 für Ausgänge
Bei 0.0 steht die erste Ziffer für das virtuelle SPS-Modul (hier 0 oder 1). Ein- und Ausgänge
werden separat nummeriert. Die zweite Ziffer steht für den jeweiligen Anschluss des Moduls,
wobei jedes 16 Anschlüsse besitzt.
Simulation mit OpenPCS
Um die Simulation eines Petrinetzes
durchzuführen, ist OpenPCS vor dem Starten
des SIPN-Editors auszuführen. Ist das zu
simulierende Petrinetz erstellt, wird es mit
einem Klick auf den „IL-Button“ in eine
Anweisungsliste umgewandelt.
Den erstellten Programmcode legt der Editor in
der Datei MAIN.poe ab, welche automatisch von
OpenPCS in das Projekt eingelesen wird. Danach
ist die MAIN.poe noch der aktiven Ressource
zuzuweisen. Dies geschieht durch einen
Rechtsklick auf die Datei und Auswahl des
Menüpunktes „Link To Active Ressource“.
Abbildung 5: IL Button
Abbildung 6: Link To Active Ressource
-
Fachgebiet Automatisierungssysteme Praktikum Mischanlage
10
Nach der Zuweisung ist
der Task zu
konfigurieren. Dazu
wechselt man auf den
Reiter „Ressourcen“,
wählt mit einem
Rechtsklick den Eintrag
„MAIN“ aus und klickt auf
„Properties“. Dort sind
die Einstellungen wie auf
Abbildung 7 gezeigt zu
wählen.
Abschließend werden im SIPN-Editor unter Edit
Edit Preferences Simulation die Einstellungen wie
in folgender Abbildung übernommen.
Zum Starten einer Simulation betätigt man unter
OpenPCS den Online/Offline-Button in der
Bedienleiste oder unter PLC Online. Daraufhin
erscheinen 2 Abfragen die man mit „OK“ bestätigt und
die virtuelle SPS wird gestartet.
Die Inputs können durch
einen Mausklick auf die
entsprechende Adresse
gesetzt und zurückgesetzt
werden. Zum Simulieren
des erstellten Petrinetzes
im SIPN-Editor genügt ein
Klick auf den Button.
Die rot dargestellten Plätze
sind während der
Simulation aktiv.
Abbildung 7: MAIN Properties
Abbildung 8: SIPN-Editor Preferences
Abbildung 9: virtuelle SPS
-
Fachgebiet Automatisierungssysteme Praktikum Mischanlage
11
2.3.3 Siemens SIMATIC STEP 7
Bedienhinweise zu den STEP 7 Programmen finden Sie in Auszügen aus der Siemens
Dokumentation als Download auf der Fachgebietsseite. Die komplette Dokumentation finden
Sie auf dem Praktikumsrechner unter Start Programme SIMATIC Dokumentation.
In allen Editoren können mit dem -Symbol in der oberen Bedienleiste geöffnete Bausteine
beobachtet werden.
2.3.3.1 SIMATIC Manager
Der SIMATIC Manager ist die Einstiegsoberfläche, mit der Projekte erstellt, Hardware
konfiguriert und SPS Programme geschrieben werden können. Bei hergestellter Online-
Verbindung zur projektierten SPS können laufende Programme beobachtet oder neue
hochgeladen werden. Damit bildet er die Grundlage zum Arbeiten mit einer Siemens SPS.
Die für das Praktikum relevanten Bereiche findet man
über die Projektbaumstruktur unter dem S7
Programmnamen (in diesem Fall „Mischanlage“) und
dem Ordner Bausteine.
Unter „Mischanlage“ findet man die für das symbolische Programmieren wichtige
Symboltabelle. Dort werden jedem physikalischen Ein- bzw. Ausgang der SPS ein Name
oder Symbol zugewiesen, welches dann zum Programmieren anstatt der physikalischen
Adresse verwendet werden kann.
Abbildung 11: Auszug aus der Symboltabelle
Die vollständige Symboltabelle finden Sie im Anhang.
Unter „Bausteine“ sind alle verwendeten Funktionen, Funktions- und Organisationsbausteine
zu finden. Ein Organisationsbaustein (OB) ist das Pendant zu einem Programm der IEC-
Norm 61131-3. Dies ist nicht der einzige Unterschied zur IEC-Norm, da auch die Sprachen
Anweisungsliste, Kontakt- und Funktionsplan von ihr abweichen. Nur die Ablaufsprache und
der Strukturierte Text sind normkonform.
Abbildung 10: Projektbaumstruktur im SIMATIC Manager
-
Fachgebiet Automatisierungssysteme Praktikum Mischanlage
12
Je nach dem, in welcher der fünf Sprachen man einen Baustein erzeugt, öffnen sich
verschiedene STEP 7 Editoren.
2.3.3.2 SIMATIC KOP/AWL/FUP-Editor
Hier können Bausteine in den drei Sprachen Kontaktplan, Anweisungsliste und
Funktionsplan erstellt werden. Dabei werden die Eingaben sofort auf syntaktische Korrektheit
überprüft und Fehler angezeigt. Vor dem Abspeichern und Beenden des Editors sind alle
Fehler zu beseitigen.
Vor dem Erstellen eines Programms sind Symbole, die verwendet werden sollen, zu
definieren, da sonst der Baustein nicht übersetzt werden kann.
In folgendem Beispiel ist das gleiche Programm in den drei verschiedenen Sprachen
dargestellt. Die Pumpe „P101“ wir eingeschaltet, wenn Schalter „S111“ und „S112“ auf EIN
(1) sind oder wenn Schalter „S113“ auf AUS (0) ist.
Abbildung 12: Beispiel in FUP, KOP und AWL
2.3.3.3 SIMATIC S7-GRAPH
Mit diesem Editor ist es möglich Ablaufsteuerungen übersichtlich und schnell in
Ablaufsprache zu erstellen. Ein Prozess wird dabei in Schritte und Transitionen mit
überschaubarem Funktionsumfang zerlegt. In den Schritten werden auszuführende Aktionen
festgelegt und die Transitionen beinhalten die Bedingungen, um in den nächsten Schritt zu
schalten, ähnlich wie bei einem signalinterpretierten Petrinetz. Die Bedingungen der
Transitionen können entweder als Kontaktplan oder Funktionsplan definiert werden.
Folgende Abbildungen zeigen das Beispiel aus 2.3.3.2 als Petrinetz und als Ablaufsteuerung
in Ablaufsprache.
Abbildung 14: Petrinetz Abbildung 13: Ablaufsteuerung mit S7-Graph
-
Fachgebiet Automatisierungssysteme Praktikum Mischanlage
13
2.4 Der Versuchsaufbau
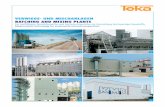
Die Versuchsanlage besteht aus drei Wassertanks, einem Drucktank und verschiedenen
Sensoren und Aktoren, die über ein Rohrleitungssystem miteinander verbunden sind. Durch
die entsprechende Anordnung der einzelnen Komponenten wird eine Mischanlage für das
Vermengen zweier Flüssigkeiten realisiert. Das folgende Flussdiagramm veranschaulicht
den Aufbau.
Abbildung 15: Flussdiagramm
Die Ansteuerung erfolgt über eine SPS des Modells ET200 S von Siemens. Diese ist
entweder direkt, über Messwandler oder Relais mit den folgenden Sensoren und Aktoren
verbunden.
Sensoren:
Digital:
vier Schwimmerschalter
zwei kapazitive Näherungssensoren
ein Not-Aus-Schalter
ein Durchflusssensor
Analog:
ein Durchflusssensor
ein Drucksensor
ein Ultraschallsensor zur Füllstandsmessung
zwei Temperatursensoren
-
Fachgebiet Automatisierungssysteme Praktikum Mischanlage
14
Aktoren:
Digital:
sieben Magnetventile
drei Pumpen
ein Heizstab
eine Fehler-LED
Analog:
ein Proportionalventil
eine Pumpe
Um die am PC erstellten Programme auf die SPS zu
übertragen, wird der Siemens MPI-Adapter verwendet,
der per USB an den Rechner und per Profi-DP an die
SPS angeschlossen wird.
Um mögliche Fehler abzufangen, die beim Lösen der Praktikumsaufgaben gemacht werden
können, ist in der SPS eine Sicherungssteuerung implementiert. Sollte ein Fehler auftreten,
werden die auslösenden Aktoren abgeschaltet und es leuchtet für 5 Sekunden die rote
Fehler-LED, die sich zwischen SPS und Netzteil befindet. Im Leitsystem der Mischanlage
blinkt zusätzlich eine rote Fehleranzeige rechts oben.
Abbildung 16: Siemens MPI-Adapter
-
Fachgebiet Automatisierungssysteme Praktikum Mischanlage
15
3. Vorbereitung
Zu Beginn des Praktikums findet ein Testat statt, dessen Ergebnis zu einem Viertel mit in die
Endnote einfließt. Dazu sollten Sie die Praktikumsanleitung gründlich gelesen haben und
den entsprechenden Stoff aus dem Vorlesungsskript von Automatisierungstechnik 1 noch
einmal aufarbeiten.
.
3.1 Aufgabe zur Vorbereitung
Entwerfen Sie ein Petrinetz, das folgende Steuerungsaufgabe realisiert:
Füllen von Tank 1 bis zum MAX-Füllstandssensor. Danach umfüllen einer bestimmten
Wassermenge in Tank 3, die daraufhin abgelassen wird. Fehler, die möglicherweise
auftreten können, sind durch die Steuerung abzufangen, wie z.B. das Überlaufen von
Tank 3.
Das entworfene Petrinetz wird im SIPN-Editor erstellt und dann mit OpenPCS simuliert, um
es auf korrektes Verhalten zu überprüfen.
Bringen Sie das abgespeicherte Petrinetz auf einem USB-Stick mit zum Praktikum, oder
lassen Sie es dem Praktikumsbetreuer vorher per Mail zukommen, da es die Grundlage für
die Versuchsdurchführung bildet.
Vor dem Praktikumsbeginn muss das korrekte Verhalten des Petrinetzes dem Betreuer
demonstriert werden.
4. Durchführung
Um sich mit dem Versuchsaufbau vertraut zu machen, starten Sie die Verknüpfung
„Mischanlage Leitsystem“ auf dem Desktop. Daraufhin startet eine Bedienoberfläche.
Auf dieser lassen sich alle wichtigen Daten ablesen. Durch einen Klick auf die Buttons lassen
sich die verschiedenen Aktoren aktivieren bzw. deaktivieren.
-
Fachgebiet Automatisierungssysteme Praktikum Mischanlage
16
Nachdem Sie die Anlage ausgetestet haben, beginnen Sie mit den Aufgaben.
Hinweise zur Bearbeitung der Aufgaben:
In allen Aufgaben sind mögliche auftretende Fehlerzustände zu berücksichtigen.
Im Organisationsbaustein OB1 sind nur das Netzwerk 1 und 2 zu verändern,
Netzwerk 3 darf nicht verändert werden. Darin befindet sich die Sicherungs-
steuerung.
Gehen Sie in den Aufgaben eins bis sechs immer erst vom Petrinetz als
Modellierungsgrundlage aus. Vor dem Implementieren im SIMATIC Manager ist das
erstellte Netz erst zu simulieren und zu überprüfen. Speichern Sie für jede Aufgabe
ein separates Petrinetz ab und verwenden Sie einen neuen Funktionsblock.
Wählen Sie die zu mischenden Wassermengen sinnvoll, da der Abfluss über Ventil
V106 aufgrund des kleineren Querschnittes sehr gering ist. Beim Testen kann zum
schnelleren Abfließen das Handventil neben V106 verwendet werden.
Zeiten sind in folgendem Format anzugeben: S5T#3s (Zeit ist hier 3 Sekunden).
Abbildung 17: Leitsystem der Mischanlage
-
Fachgebiet Automatisierungssysteme Praktikum Mischanlage
17
4.1 Aufgaben
Aufgabe 1
Implementieren Sie das vorbereitete Petrinetz im SIMATIC Manager in Ablaufsprache.
Legen Sie dazu einen Funktionsblock mit dem Namen FB1 an.
Um den erstellten Funktionsblock auszuführen, fügen Sie ihn im Organisationsbaustein OB1
im Netzwerk 1 ein. Prüfen Sie, ob die Steuerung korrekt funktioniert, entweder über das
Leitsystem oder mit der „Beobachten“-Funktion im SIMATIC Manager.
Aufgabe 2
Da die unter Aufgabe 1 implementierte Steuerung noch keine Flüssigkeiten mischt, wird
diese hier um das Befüllen von Tank 2, als parallel ablaufender Prozess zum Befüllen von
Tank 1, erweitert. Sind beide Tanks gefüllt, erfolgt der Mischvorgang in Tank 3 im Verhältnis
1:1. Die Pumpe P102 ist dazu noch nicht zu verwenden.
Die erweiterte Steuerung ist als FB2 zu speichern und im OB1 auszuführen.
Aufgabe 3
Als Teil eines größeren verfahrenstechnischen Prozesses sollen zwei Chemikalien gemischt
werden. Um die Reaktion der Chemikalien zu beschleunigen, soll die Chemikalie aus Tank 2
vor dem Mischvorgang auf 35°C erhitzt werden.
Erweitern Sie die Steuerung aus Aufgabe 2 um einen Heizvorgang als dritten parallelen
Prozess.
Die Heizung E104 ist erst einzuschalten, wenn sie mit Wasser bedeckt ist und sofort
auszuschalten, wenn der Wasserstand zu weit abfällt.
Speichern Sie die Steuerung als FB3 und führen Sie sie aus.
Aufgabe 4
Um den Mischvorgang zu beschleunigen ist nun Pumpe P102 zu verwenden.
Führen Sie die erweiterte Steuerung mit Hilfe von OB1 aus, nachdem sie unter FB4
abgespeichert wurde.
-
Fachgebiet Automatisierungssysteme Praktikum Mischanlage
18
Aufgabe 5
In dieser Aufgabe werden die Chemikalien zur besseren Reaktion separat anstatt gleichzeitig
in Tank 3 geleitet. Erweitern Sie die Steuerung entsprechend und mischen Sie die
Chemikalien im Verhältnis 3:1.
Das neue Steuerungsprogramm ist unter FB5 abzuspeichern und danach im OB1
auszuführen.
Aufgabe 6
Da das Mischverhältnis mit dem Ultraschallsensor nicht genau genug umgesetzt werden
kann, ist die Messung der Flüssigkeitsmenge mit dem Durchflusssensor zu realisieren. Dabei
ist von einem während des Umfüllvorgangs konstantem Durchfluss auszugehen.
Speichern Sie das erstellte Programm unter FB6 und führen Sie es aus.
Aufgabe 7
Um im Notfall die Anlage schnell abschalten und entleeren zu können, ist ein NOT-AUS-
Schalter rechts neben Tank 2 angebracht. Dieser ist von Ihnen mit einer entsprechenden
Funktionalität zu versehen.
Programmieren sie eine Funktion (FC) also Funktions- (FUP) oder Kopplungsplan, die bei
betätigtem NOT-AUS-Schalter die Anlage abschaltet und komplett entleert. Wenn der
Schalter nicht betätigt ist, dürfen keine Funktionsabläufe gestört oder blockiert werden.
Die Funktion ist im OB1 im Netzwerk 2 einzufügen.
Aufgabe 8
Das Rohrleitungssystem ist auf Dichtheit zu prüfen. Dazu werden die Rohrleitungen einem
Druck von 90-100 Millibar ausgesetzt. Entwerfen Sie eine Funktion in AWL, die diese
Aufgabe realisiert.
Die Funktion wird zum Testen im OB1 im Netzwerk 1 anstelle der Steuerung zum Mischen
eingefügt.
Beachten Sie, dass ein ständiges Ein- und Ausschalten der verwendeten Pumpe vermieden
wird.
-
Fachgebiet Automatisierungssysteme Praktikum Mischanlage
19
5. Anhang
5.1 Flussdiagramm des Versuchsaufbaus
-
Fachgebiet Automatisierungssysteme Praktikum Mischanlage
20
5.2 Symboltabelle
Symbol Adresse Datentyp Kommentar
B101 PEW 272 INT Füllstand
B102 PEW 288 INT Durchfluss
B102dig E 9.0 BOOL Durchflusssensor
B103 PEW 274 INT Druck
B104 PEW 290 INT Temperatur Tank 2
B105 PEW 304 INT Temperatur Tank 3
B113 E 9.3 BOOL Grenztaster max. Füllstand Tank 2
B114 E 9.4 BOOL Grenztaster max. Füllstand Tank 3
E104 A 8.1 BOOL Heizung in Tank 2
LED A 7.7 BOOL Fehler-LED
NOT_AUS E 10.4 BOOL Not-Aus-Schalter
P101 A 8.3 BOOL Pumpe 1 digital ein-/ausschalten
P101_dreh PAW 322 INT Drehzahl Pumpe 1
P102 A 8.5 BOOL Pumpe 2 digital ein-/ausschalten
P103 A 8.7 BOOL Pumpe 3 digital ein-/ausschalten
PumpPreset A 8.2 BOOL Vorwahl Pumpenansteuerung: 0=digital / 1=analog
S111 E 9.1 BOOL Schwimmerschalter Überlauf Tank 2
S112 E 9.2 BOOL Schwimmerschalter min. Füllstand Tank 1
S113 E 10.0 BOOL Schwimmerschalter min. Füllstand Tank 2
S114 E 10.2 BOOL Schwimmerschalter Überlauf Tank 3
V101 A 7.0 BOOL Ventil 1 auf/zu
V102 A 7.2 BOOL Ventil 2 auf/zu
V103 A 7.4 BOOL Ventil 3 auf/zu
V104 A 7.6 BOOL Ventil 4 auf/zu
V105 A 7.1 BOOL Ventil 5 auf/zu
V106 PAW 320 INT Hub von Proportionalventil 6
V106_On A 8.4 BOOL Proportionalventil einschalten
V107 A 7.3 BOOL Ventil 7 auf/zu
V108 A 7.5 BOOL Ventil 8 auf/zu
Variablen: DB 10 DB 10 Datenbaustein für Variablen:
FUELL REAL Füllstand in Tank 3
DUFLU REAL Durchfluss in L/Min
DRUCK REAL Druck in mBAR
TEMP1 REAL Temperatur in Tank 2 in °C
TEMP2 REAL Temperatur in Tank 3 in °C
EIN BOOL TRUE
AUS BOOL FALSE