Studienarbeit - hs-ulm.de · Studienarbeit Entwicklung eines Demo-Modells „Stabilisierung eines...
86
Studienarbeit Entwicklung eines Demo-Modells „Stabilisierung eines Inversen Pendels“ mit einem flächenaufspannenden SCARA-Roboter mit Parallelkinematik als Stellglied 28.02.2013 Tobler, Manuel Masterstudiengang SYE Mat.-Nr.: 3107735 WS 2012/2013 Betreuer: Prof. Dr.-Ing. Schweizer
Transcript of Studienarbeit - hs-ulm.de · Studienarbeit Entwicklung eines Demo-Modells „Stabilisierung eines...
Studienarbeit
Entwicklung eines Demo-Modells „Stabilisierungeines Inversen Pendels“ mit einem
flächenaufspannenden SCARA-Roboter mitParallelkinematik als Stellglied
28.02.2013
Tobler, ManuelMasterstudiengang SYE
Mat.-Nr.: 3107735WS 2012/2013
Betreuer: Prof. Dr.-Ing. Schweizer

Zusammenfassung
Der Einsatz von Robotern in der Bauart eines Selective Compliance Assembly Robot Arm,kurz SCARA, in der modernen Fertigungstechnik ist heutzutage nicht mehr wegzuden-ken. Durch ihre sehr hohe wiederholbare Fertigungspräzision und die Variabilität könnensie, für den Menschen oft nicht ausführbare Arbeiten in gleichmäßiger Qualität produ-zieren. Dieser Aspekt und das Verlangen nach einem neuen Demonstrationsmodell fürdie Regelung einer instabilen Strecke, bildeten den Ausgangspunkt für den Inhalt dieserArbeit. Mit einem SCARA mit Parallelkinematik als Stellglied, soll die instabile Streckedes Inversen Pendels geregelt werden. Der Schwerpunkt liegt hierbei auf der Entwicklungeines Modells des dynamischen Übertragungsverhaltens der Parallelkinematik zur Bewe-gung des Tool Center Points (TCP) auf einer Ebene. Zusätzlich werden die Beziehungenzwischen dem TCP und den Winkel an den beiden Antrieben des SCARAs berechnet.Darauf aufbauend wird eine Methode zur Parametrierung der dezentralen Regler, aufder Grundlage des nichtlinearen Stellgliedübertragungsverhaltens aufgezeigt. Zusätzlichwird auf die, für das Verfahren des TCPs notwendige, Bahnsteuerung eingegangen. Ab-gerundet wird das Projekt mit der theoretischen Untersuchung eines Kamerasystems mitBildverarbeitung als ortsfeste, berührungslose Sensorik zur Detektion der Pendelspitze.
Danksagung
Die vorliegende Studienarbeit wäre ohne die Unterstützung zahlreicher Personen nichtmöglich gewesen. Allen voran möchte ich meinem Betreuer Professor Dr.-Ing. Schweizerdanken, der mich über den gesamten Zeitraum in Fragen der Projektplanung, sowie beider Bewältigung theoretischer Problemstellungen, unterstützte.Weiterhin gilt der Dank Herrn Professor Dr. Schrade, dessen Kompetenzen im BereichKinetik meine Arbeit positiv beeinflussten. Zusätzlich danke ich Herrn Professor Dr.-Ing.Schroer und Herrn Alders, die immer sehr gute Ansprechpartner waren.
Hochschule Ulm i
Eigenhändigkeitserklärung
Hiermit erkläre ich, dass die vorliegende Studienarbeit selbstständig und ohne die Benut-zung anderer als der angegebenen Hilfsmittel angefertigt wurde. Die aus fremden Quellendirekt oder indirekt übernommenen Wortlaute, Bilder oder Tabellen sind als solche kennt-lich gemacht. Diese Studienarbeit wurde bisher in gleicher oder ähnlicher Form keineranderen Prüfungsbehörde vorgelegt und auch nicht veröffentlicht.
Ulm, den 28.02.2013
Tobler Manuel
Hochschule Ulm ii
Inhaltsverzeichnis
Inhaltsverzeichnis
Abbildungsverzeichnis v
Tabellenverzeichnis vii
Abkürzungsverzeichnis viii
Symbolverzeichnis ix
1 Einleitung 11.1 Motivation und Aufgabenstellung . . . . . . . . . . . . . . . . . . . . . . . 11.2 Projektplan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2.1 Arbeitspakete . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.2.2 Zeitplan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3 Grundlagen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.3.1 Inverses Pendel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.3.2 SCARA mit Parallelkinematik . . . . . . . . . . . . . . . . . . . . . 8
1.3.2.1 Bewegungsgleichungen . . . . . . . . . . . . . . . . . . . . 111.3.2.2 Geometrische Beziehungen (Koordinatentransformation) . 21
2 Modellimplementierung 252.1 Sensorik und Lagerung des Pendels . . . . . . . . . . . . . . . . . . . . . . 25
2.1.1 Pendelsensorik für einachsige Messungen . . . . . . . . . . . . . . . 252.1.2 Lagerung des Pendels . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2.2 Implementierung des Modells . . . . . . . . . . . . . . . . . . . . . . . . . 282.2.1 SCARA-Mechanik . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.2.1.1 Randbedingungen . . . . . . . . . . . . . . . . . . . . . . 292.2.1.2 Kräfte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 302.2.1.3 Dynamik . . . . . . . . . . . . . . . . . . . . . . . . . . . 302.2.1.4 Implementierung der Parallelkinematik . . . . . . . . . . . 31
2.2.2 Pendel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Hochschule Ulm iii
Inhaltsverzeichnis
2.2.3 Regelsystem für das Stellglied . . . . . . . . . . . . . . . . . . . . . 332.2.3.1 Regelungstechnische Grundlagen . . . . . . . . . . . . . . 332.2.3.2 Regelkreisdefintion . . . . . . . . . . . . . . . . . . . . . . 352.2.3.3 Reglerauswahl und Einstellung . . . . . . . . . . . . . . . 372.2.3.4 Regelkreisparametrierung . . . . . . . . . . . . . . . . . . 38
2.2.4 Bewegungsart und Interpolation allgemein . . . . . . . . . . . . . . 412.2.4.1 Steuerungsarten . . . . . . . . . . . . . . . . . . . . . . . 412.2.4.2 Bahnsteuerung zur Pendelstabilisierung . . . . . . . . . . 43
2.3 Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3 Detektion der Pendelspitze durch Bildverarbeitung 473.1 Bildverarbeitung im Einsatz . . . . . . . . . . . . . . . . . . . . . . . . . . 47
3.1.1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 473.1.2 Vermessung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
3.2 Theoretischer Ansatz zur Detektion der Pendelspitze . . . . . . . . . . . . 513.2.1 Räumliche Auflösung . . . . . . . . . . . . . . . . . . . . . . . . . . 523.2.2 Bildrate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 543.2.3 Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4 Resümee und Ausblick 574.1 Resümee . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 574.2 Ausblick . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Literaturverzeichnis 61
A Herleitung des Signalverhaltens eines linearen inversen Pendels IA.1 Großsignalverhalten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . IA.2 Übertragungsfunktion mit Linearisierung . . . . . . . . . . . . . . . . . . . III
B Nebenrechnungen für die Parallelkinematik VB.1 Zeitliche Ableitungen der Oberarmschwerpunktkoordianten . . . . . . . . . VB.2 Gleichungen Vorwärtstransformation . . . . . . . . . . . . . . . . . . . . . VI
B.2.1 x-Koordinate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . VIB.2.2 y-Koordinate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . VIII
B.3 Vektoren des Dynamikmodells der Parallelkinematik . . . . . . . . . . . . . X
Hochschule Ulm iv
Abbildungsverzeichnis
Abbildungsverzeichnis
1.1 Schematische Darstellung eines räumlichen Inversen Pendels . . . . . . . . 41.2 Segway™i2 [22] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.3 Modell lineares Inverses Pendels . . . . . . . . . . . . . . . . . . . . . . . . 61.4 Klassischer SCARA-Roboter für den Industrieeinsatz [12] . . . . . . . . . . 91.5 Konstruktionszeichnung eines SCARA-Roboters mit Parallelkinematik und
der Bezeichnung der Einzelteile (nach [17]) . . . . . . . . . . . . . . . . . . 101.6 Beispiel zum D’ALEMBERTsche-Prinzip [1, S.138] . . . . . . . . . . . . . 111.7 Koordinatenbezeichnungen des SCARA-Roboters mit Parallelkinematik . . 121.8 Linker Oberarm mit zusätzlicher Masse am TCP (schematisch) . . . . . . . 131.9 Linker Unterarm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141.10 Linker Oberarm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161.11 Rechter Oberarm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181.12 Rechter Unterarm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201.13 Geometrische Lösung der Rücktransformation am Beispiel des linken Arms
des vorliegenden SCARA-Roboters (nach [23, S.56]) . . . . . . . . . . . . . 23
2.1 Kreuztisch (links); Pendellagerung beim Kreuztisch (rechts) . . . . . . . . 282.2 Flussdiagramm zur Dynamik der Parallelkinematik . . . . . . . . . . . . . 322.3 Schematischer Aufbau eines Regelkreises mit Regeleinrichtung und Regel-
strecke ([8, nach S.5]) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 342.4 Schematischer Aufbau des definierten Regelkreises zur TCP-Einstellung
über die Winkel an den Antrieben. . . . . . . . . . . . . . . . . . . . . . . 362.5 Berechnung von Zwischenwerten auf einer Geraden für eine lineare CP-
Steuerung (aus [23, S.81]) . . . . . . . . . . . . . . . . . . . . . . . . . . . 432.6 Allgemeine Darstellung der Beschleunigungs-, Geschwindigkeits- und Weg-
diagramme für ein Sinoidenprofil (aus [23, S.73]) . . . . . . . . . . . . . . . 45
3.1 Veränderung der scheinbaren Öffnungsdurchmesser durch unterschiedlicheBelichtungen ([5, S.201]) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
Hochschule Ulm v
Abbildungsverzeichnis
4.1 Übersicht aller notwendigen und in der vorliegenden Arbeit gelösten Aufga-ben zum Thema „Stabilisierung eines Inversen Pendels mit dem Stellglied- SCARA mit Parallelkinematik“. . . . . . . . . . . . . . . . . . . . . . . . 58
Hochschule Ulm vi
Tabellenverzeichnis
Tabellenverzeichnis
3.1 Vergleich verschiedener Auflösungen einer Kamera mit den zugehörigenAuflösungen in mm pro Pixel im Arbeitsraum . . . . . . . . . . . . . . . . 53
Hochschule Ulm vii
Abkürzungsverzeichnis
Abkürzungsverzeichnis
AP Arbeitspaket
CP Continuous Path
FHG Freiheitsgrad
MP Megapixel
NI National Instruments
PTP Point to Point
SCARA Selective Compliance Assembly Robot Arm
TCP Tool Center Point
Hochschule Ulm viii
Symbolverzeichnis zur Parallelkinematik
Symbolverzeichnis zum Inversen Pendel
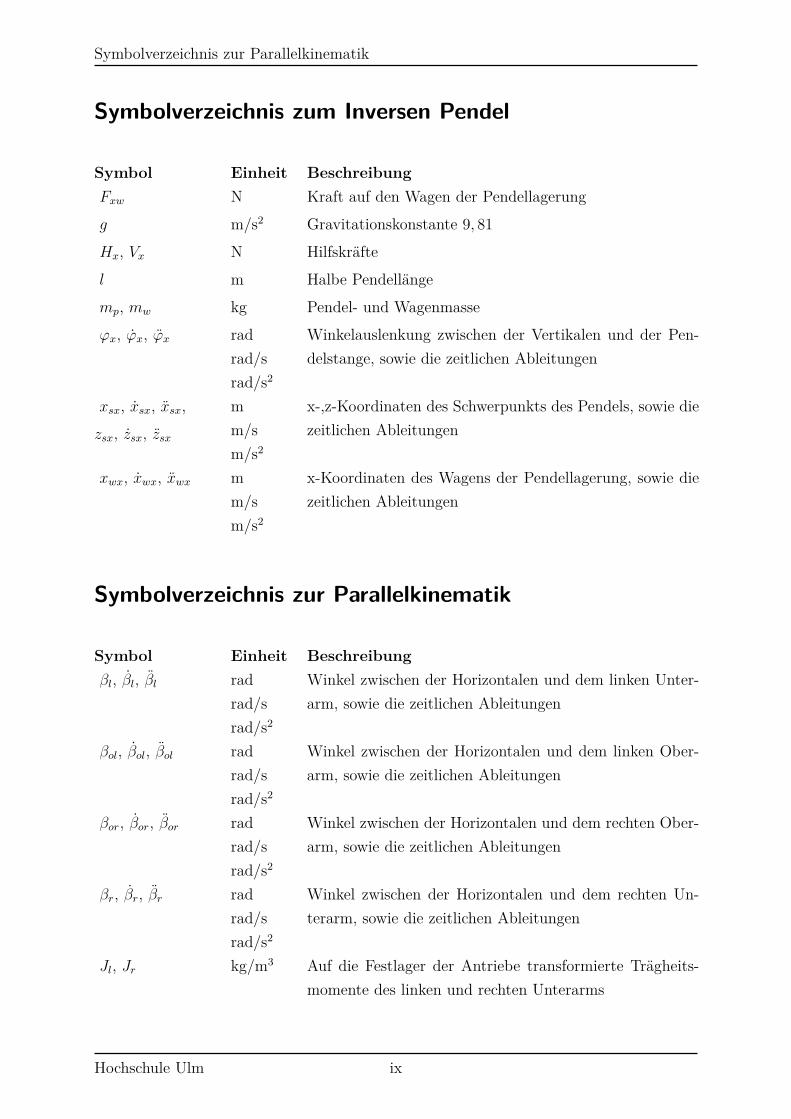
Symbol Einheit BeschreibungFxw N Kraft auf den Wagen der Pendellagerungg m/s2 Gravitationskonstante 9, 81Hx, Vx N Hilfskräftel m Halbe Pendellängemp, mw kg Pendel- und Wagenmasseϕx, ϕx, ϕx rad
rad/srad/s2
Winkelauslenkung zwischen der Vertikalen und der Pen-delstange, sowie die zeitlichen Ableitungen
xsx, xsx, xsx,zsx, zsx, zsx
mm/sm/s2
x-,z-Koordinaten des Schwerpunkts des Pendels, sowie diezeitlichen Ableitungen
xwx, xwx, xwx mm/sm/s2
x-Koordinaten des Wagens der Pendellagerung, sowie diezeitlichen Ableitungen
Symbolverzeichnis zur Parallelkinematik
Symbol Einheit Beschreibungβl, βl, βl rad
rad/srad/s2
Winkel zwischen der Horizontalen und dem linken Unter-arm, sowie die zeitlichen Ableitungen
βol, βol, βol radrad/srad/s2
Winkel zwischen der Horizontalen und dem linken Ober-arm, sowie die zeitlichen Ableitungen
βor, βor, βor radrad/srad/s2
Winkel zwischen der Horizontalen und dem rechten Ober-arm, sowie die zeitlichen Ableitungen
βr, βr, βr radrad/srad/s2
Winkel zwischen der Horizontalen und dem rechten Un-terarm, sowie die zeitlichen Ableitungen
Jl, Jr kg/m3 Auf die Festlager der Antriebe transformierte Trägheits-momente des linken und rechten Unterarms
Hochschule Ulm ix
Symbolverzeichnis zur linearen Bahnsteuerung
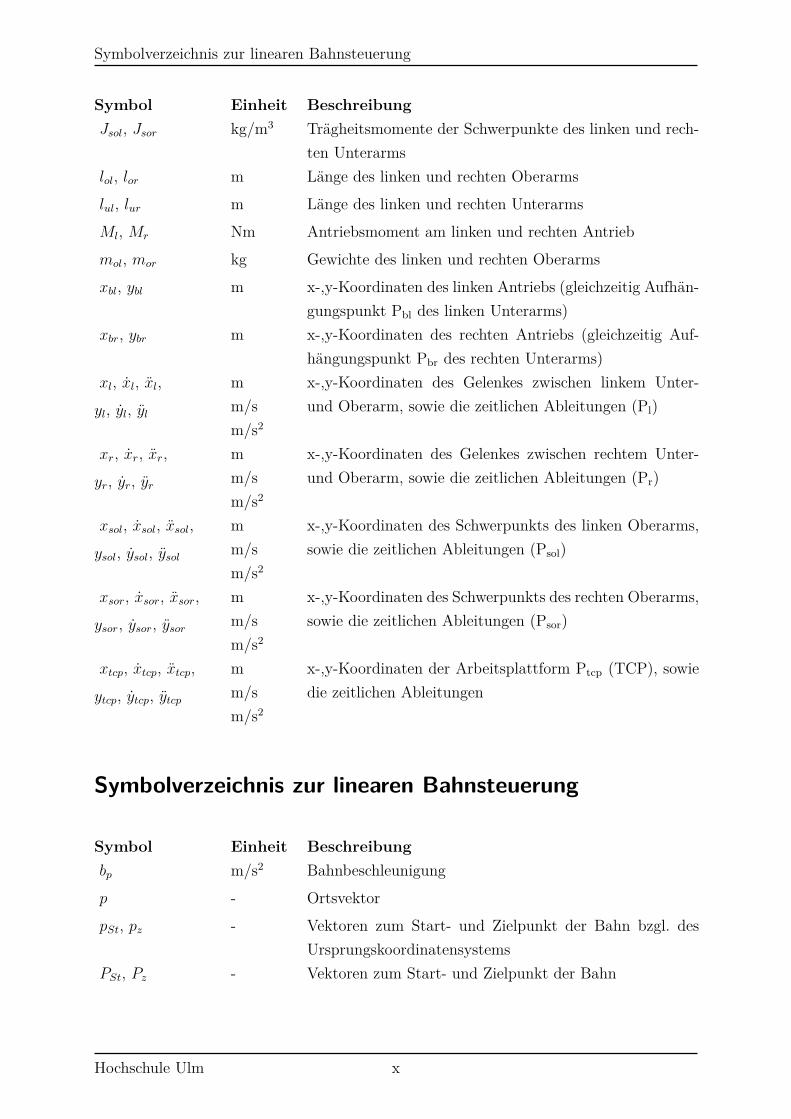
Symbol Einheit BeschreibungJsol, Jsor kg/m3 Trägheitsmomente der Schwerpunkte des linken und rech-
ten Unterarmslol, lor m Länge des linken und rechten Oberarmslul, lur m Länge des linken und rechten UnterarmsMl, Mr Nm Antriebsmoment am linken und rechten Antriebmol, mor kg Gewichte des linken und rechten Oberarmsxbl, ybl m x-,y-Koordinaten des linken Antriebs (gleichzeitig Aufhän-
gungspunkt Pbl des linken Unterarms)xbr, ybr m x-,y-Koordinaten des rechten Antriebs (gleichzeitig Auf-
hängungspunkt Pbr des rechten Unterarms)xl, xl, xl,yl, yl, yl
mm/sm/s2
x-,y-Koordinaten des Gelenkes zwischen linkem Unter-und Oberarm, sowie die zeitlichen Ableitungen (Pl)
xr, xr, xr,yr, yr, yr
mm/sm/s2
x-,y-Koordinaten des Gelenkes zwischen rechtem Unter-und Oberarm, sowie die zeitlichen Ableitungen (Pr)
xsol, xsol, xsol,ysol, ysol, ysol
mm/sm/s2
x-,y-Koordinaten des Schwerpunkts des linken Oberarms,sowie die zeitlichen Ableitungen (Psol)
xsor, xsor, xsor,ysor, ysor, ysor
mm/sm/s2
x-,y-Koordinaten des Schwerpunkts des rechten Oberarms,sowie die zeitlichen Ableitungen (Psor)
xtcp, xtcp, xtcp,ytcp, ytcp, ytcp
mm/sm/s2
x-,y-Koordinaten der Arbeitsplattform Ptcp (TCP), sowiedie zeitlichen Ableitungen
Symbolverzeichnis zur linearen Bahnsteuerung
Symbol Einheit Beschreibungbp m/s2 Bahnbeschleunigungp - OrtsvektorpSt, pz - Vektoren zum Start- und Zielpunkt der Bahn bzgl. des
UrsprungskoordinatensystemsPSt, Pz - Vektoren zum Start- und Zielpunkt der Bahn
Hochschule Ulm x
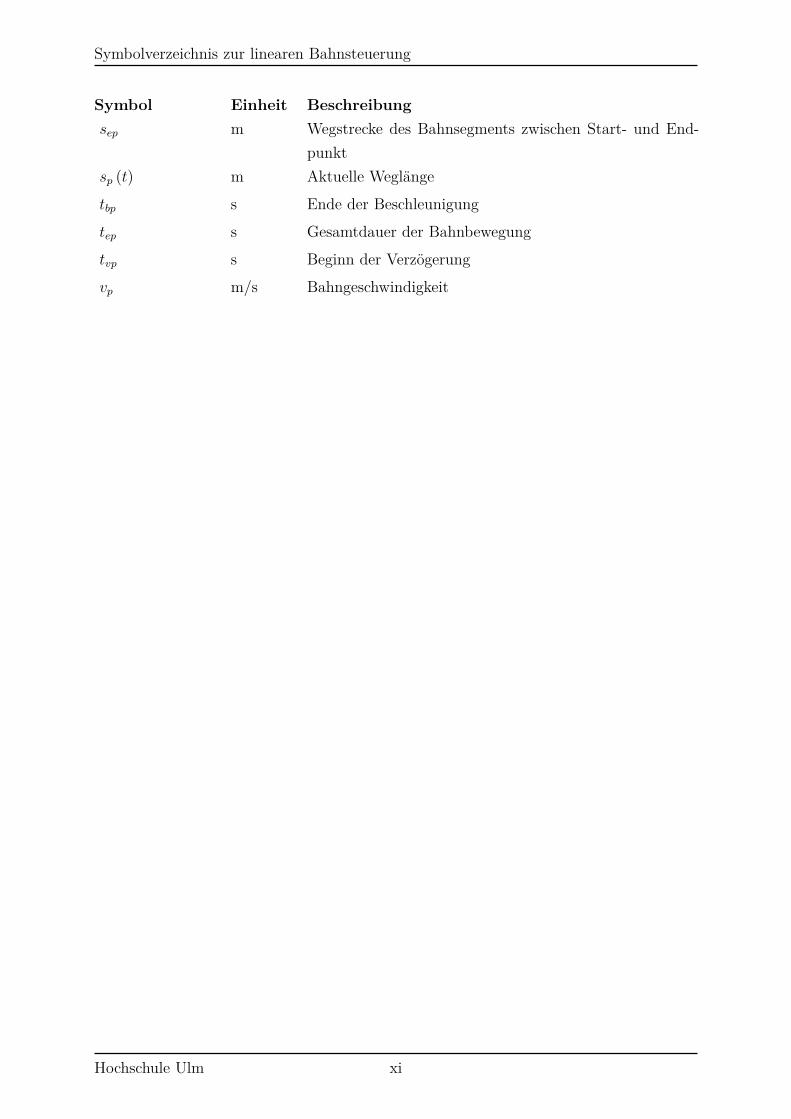
Symbolverzeichnis zur linearen Bahnsteuerung
Symbol Einheit Beschreibungsep m Wegstrecke des Bahnsegments zwischen Start- und End-
punktsp (t) m Aktuelle Weglängetbp s Ende der Beschleunigungtep s Gesamtdauer der Bahnbewegungtvp s Beginn der Verzögerungvp m/s Bahngeschwindigkeit
Hochschule Ulm xi
Einleitung
1 Einleitung
In diesem Kapitel werden die Aufgabenstellung, die Projektplanung und die physikalischenGrundlagen aufgeführt und erläutert.
1.1 Motivation und Aufgabenstellung
Jeder hat in seinem Leben schon einmal versucht, etwas auf der Spitze einer seiner Fingerzu balancieren. Sei es ein Löffel, ein Teller oder einen Besenstiel. Genau diesen Besenstielkennt die Mathematik schon sehr lange als Inverses Pendel, wobei er auch gemeinhin alsbalancierender Stab bekannt ist. Gerade das Ausbalancieren des Pendels, welches sich umzwei Achsen frei bewegen kann, ist eine Herausforderung für einen Automat. Hingegenkann der Mensch mit seinen vielen Sinnen und seiner Lernfähigkeit die nötige Korrek-turbewegung zur Stabilisierung des Pendels problemlos ausführen. Die dafür erforderlicheBewegung soll in einem Demonstrationsmodell durch einem Selective Compliance Assem-bly Robot Arm (SCARA)-Roboter mit Parallelkinematik in einer x-y-Ebene, d.h. mit zweiFreiheitsgraden, als Stellglied ausgeführt werden. Sicher kann der Mensch auch die z-Achsezur vertikalen Bewegung einsetzen, jedoch wird dies in der vorliegenden Arbeit mit demgegebenen flächenaufspannenden SCARA nicht verwendet. Es gibt viele Möglichkeitenden menschlichen Arm in einem Automat für eine mechanische Bewegung nachzubilden,jedoch wurde in einer vorherigen Studienarbeit ein SCARA-Roboter als Basis für ein In-verses Pendel bereits konstruiert. In Folge dessen wird in dieser Arbeit auf keine weiterenBewegungsansätze zur vertikalen Pendelfußverschiebung eingegangen.Das Ziel dieser Arbeit ist es die mathematische Beschreibung des Pendels und des SCARA-Roboters mit Parallelkinematik zu entwickeln und durch ein Modell (MATLAB©) miteiner Regelung für den SCARA, der als Stellglied bezeichnet wird, zu beschreiben, bzw.zu simulieren. Dabei steht die Stabilisierung des Pendels eher im Hintergrund. Neben dervorangegangen Studienarbeit über die Konstruktion eines SCARAs mit Parallelkinematikgibt es bisher keinen realen Aufbau. Jedoch gibt es die Möglichkeit einen Roboter dieserBauart zu erwerben. Dies widerspricht aber dem Ziel der Hochschule, Geräte selbst zu ent-
Hochschule Ulm 1

Einleitung
wickeln. Die Literatur liefert nur Modelle, Beschreibungen und Herleitungen für sequenti-elle Knickarm-Roboter und Tetrapode. Folglich nimmt die mathematische Beschreibungund die Modellimplementierung mit passende Regler für das Stellglied die zentrale Rollein der vorliegenden Arbeit ein. Weiterhin werden sensortechnische Möglichkeiten zur Be-stimmung des Neigungswinkels des Pendels bezüglich der Horizontalen erörtert, wobei derSchwerpunkt auf dem Gebiet der digitalen Bildverarbeitung liegt. Um die Pendelbewe-gungen um zwei Achsen nachzubilden, muss auch eine passenden Aufhängung/Lagerungfür den Pendelstab gefunden werden, wobei verschiedene Ansätze betrachtet werden sol-len.Zusammenfassend liegt meine Motivation bei der Erarbeitung der Aufgaben im Bereichder Modellbildung und der Regelungstechnik. Die digitale Bildverarbeitung eröffnet mireinen Einblick in den Bereich des aktuellen Industrieeinsatzes hinsichtlich berührungsloserLagemessungen.
1.2 Projektplan
Der Projektplan beinhaltet die Zeitplanung für die verschiedenen Arbeitspaketen.
1.2.1 Arbeitspakete
Die Projektarbeit beinhaltet viele Einzelpunkte. Um den Überblick zu behalten, wurdensogenannte Arbeitspakete (AP) erstellt. Diese ermöglichen eine Abgrenzung der Teilauf-gaben zueinander und spiegeln den aktuellen Projektstand wider. Nach Abschätzung deszeitlichen Aufwands zur Erreichung der Projektziele wurden die folgenden AP geschnürt.Dabei wurde das Paket zur digitalen Bildverarbeitung als letztes angestellt, um die pri-mären Ziele der Arbeit nicht zu behindern.
AP1 Einarbeitung in das Thema Inverses Pendel und SCARA mit Parallelkinematik
AP2 Sensorprinzipien und konstruktive Ansätze in Mechanik und Elektronik
AP3 Mathematische Beschreibung der Einzelelemente
AP4 Regelmodell und MATLAB© -Modell
AP5 Pendelwinkelbestimmung mit digitaler Bildverarbeitung
Hochschule Ulm 2
Einleitung
AP6 Dokumentation und Präsentation der Ergebnisse
1.2.2 Zeitplan
Die Zeitplanung und die Meilensteine spielen in einem Projekt eine wichtige Rolle, daman mit diesem den Projektfortschritt messen bzw. den aktuellen Stand bewerten kann.Auf Grund dieser Mess-und Bewertungsmöglichkeit können ggf. Änderungen und/oderMaßnahmen zum weiteren Vorgehen im Projekt vorgenommen werden. Die Zeitplanungfür die sechs Arbeitspakete (APe) zeigt die folgende Liste:
AP1 KW 41 bis 43 (2012)
AP2 KW 44 bis 45
AP3 KW 46 bis 52
AP4 KW 1 bis 3 (2013)
AP5 KW 4 bis 7
AP6 KW 8 bis 10
Der Zeitplan ist zu Projektbeginn erstellt worden. Während der Bearbeitungszeit fandenzweiwöchentlich Projektmeetings mit den Betreuern statt.
1.3 Grundlagen
In diesem Kapitel werden die beiden Hauptelemente, das Inverse Pendel und der SCARAmit Parallelkinematik ausführlich untersucht und dabei die zugehörigen mathematischenBeschreibungen entwickelt. Die darauf aufbauende Modellimplementierung und die Er-stellung des Gesamtmodells, werden aber erst in Kapitel 2 beschrieben.
Hochschule Ulm 3
Einleitung
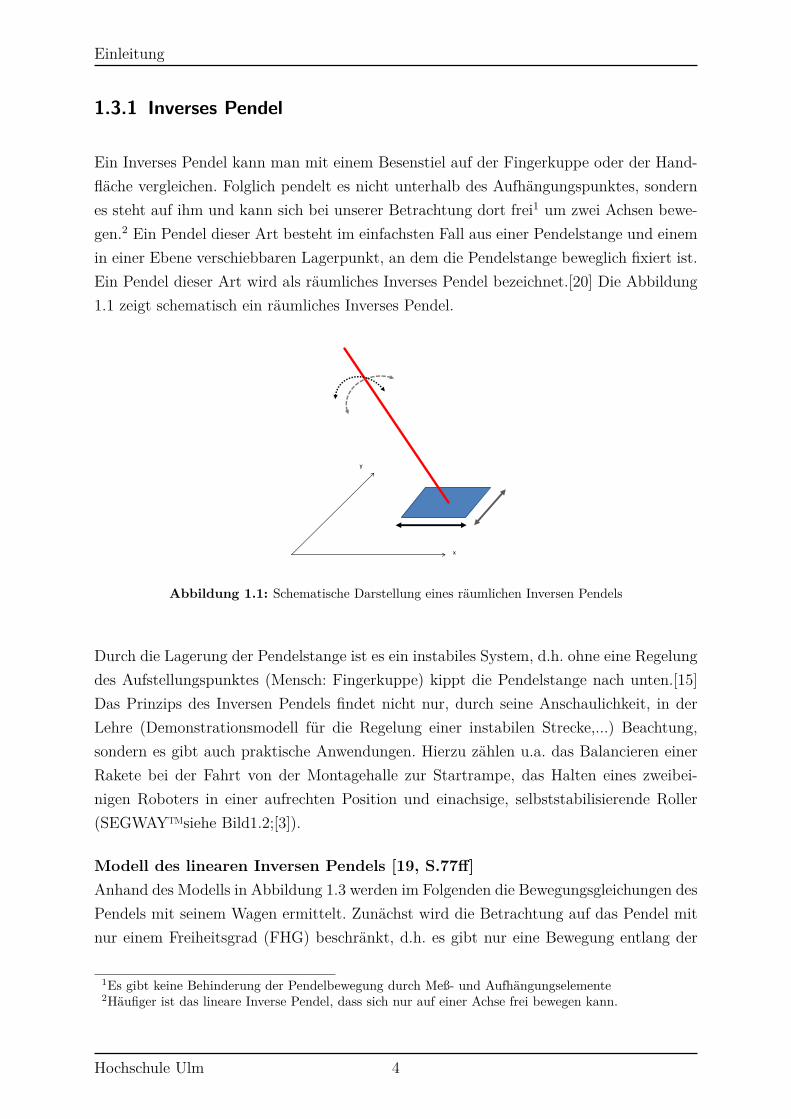
1.3.1 Inverses Pendel
Ein Inverses Pendel kann man mit einem Besenstiel auf der Fingerkuppe oder der Hand-fläche vergleichen. Folglich pendelt es nicht unterhalb des Aufhängungspunktes, sondernes steht auf ihm und kann sich bei unserer Betrachtung dort frei1 um zwei Achsen bewe-gen.2 Ein Pendel dieser Art besteht im einfachsten Fall aus einer Pendelstange und einemin einer Ebene verschiebbaren Lagerpunkt, an dem die Pendelstange beweglich fixiert ist.Ein Pendel dieser Art wird als räumliches Inverses Pendel bezeichnet.[20] Die Abbildung1.1 zeigt schematisch ein räumliches Inverses Pendel.
y
x
Abbildung 1.1: Schematische Darstellung eines räumlichen Inversen Pendels
Durch die Lagerung der Pendelstange ist es ein instabiles System, d.h. ohne eine Regelungdes Aufstellungspunktes (Mensch: Fingerkuppe) kippt die Pendelstange nach unten.[15]Das Prinzips des Inversen Pendels findet nicht nur, durch seine Anschaulichkeit, in derLehre (Demonstrationsmodell für die Regelung einer instabilen Strecke,...) Beachtung,sondern es gibt auch praktische Anwendungen. Hierzu zählen u.a. das Balancieren einerRakete bei der Fahrt von der Montagehalle zur Startrampe, das Halten eines zweibei-nigen Roboters in einer aufrechten Position und einachsige, selbststabilisierende Roller(SEGWAY™siehe Bild1.2;[3]).
Modell des linearen Inversen Pendels [19, S.77ff]Anhand des Modells in Abbildung 1.3 werden im Folgenden die Bewegungsgleichungen desPendels mit seinem Wagen ermittelt. Zunächst wird die Betrachtung auf das Pendel mitnur einem Freiheitsgrad (FHG) beschränkt, d.h. es gibt nur eine Bewegung entlang der
1Es gibt keine Behinderung der Pendelbewegung durch Meß- und Aufhängungselemente2Häufiger ist das lineare Inverse Pendel, dass sich nur auf einer Achse frei bewegen kann.
Hochschule Ulm 4
Einleitung
Abbildung 1.2: Segway™i2 [22]
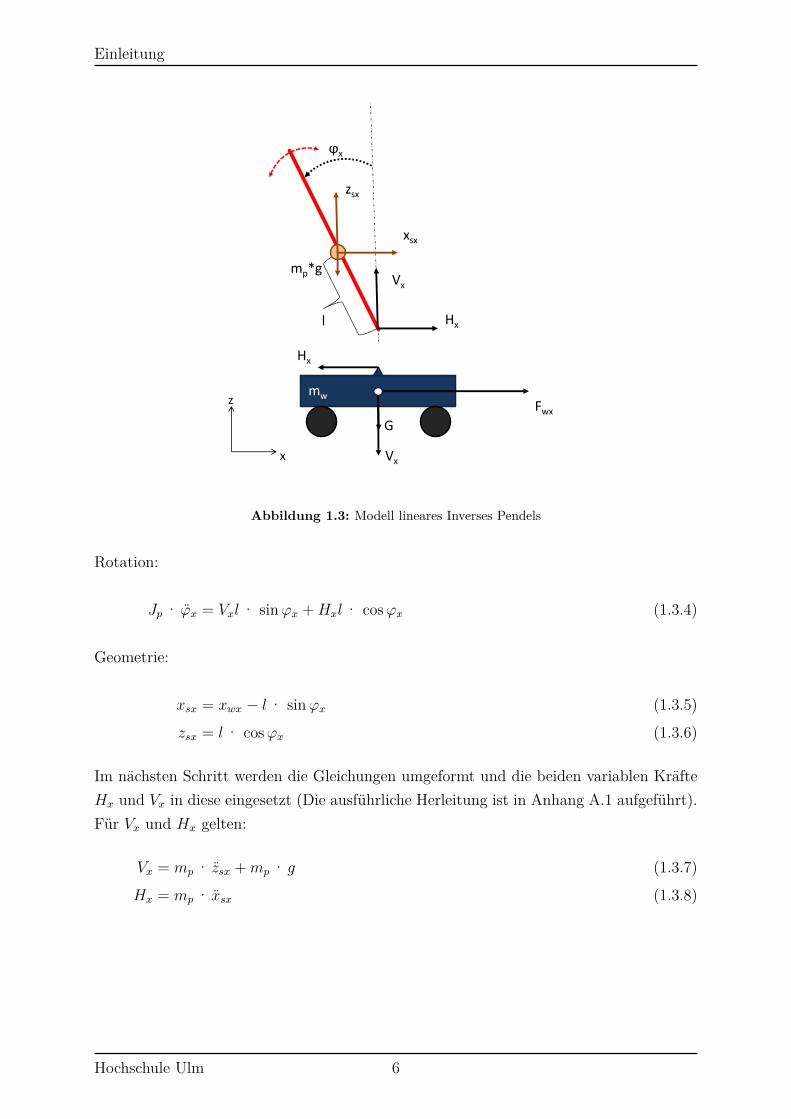
x-Achse. Aus diesen Ergebnissen wird dann auf ein Pendel das zwei FHGe besitzt über-gegangen. Die mathematische Beschreibung erfolgt ohne Linearisierung3 des Systemver-haltens, d.h. es wird das Großsignalverhalten beschrieben. Für die Bewegungsgleichungendes Pendels mit Wagen sind die beiden Elemente freigeschnitten. Wobei der Wagen dieMassemw und das Pendel die Massemp, die Länge 2l und das Trägheitsmoment Jp = mpl2
3besitzen. Der Wagen kann nur horizontal (Entlang der x-Achse mit Koordinate xwx) be-wegt werden. Hingegen kann das Pendel um seinen Lagerpunkt drehen (Winkel ϕx), dabeierfährt sein Schwerpunkt eine Bewegung in zwei Achsen (Koordinatenrichtungen xsx undzsx). Die Antriebskraft des Wagens ist Fxw; G bzw. mw · g sind Gravitationskräfte. DieKräfte Hx und Vx sind Reaktionskräfte am Lagerpunkt der Pendelstange.
Translation:
mw · xwx = Fxw −Hx (1.3.1)
mp · xsx = Hx (1.3.2)
mp · zsx = Vx −mp · g (1.3.3)
3Bei der Linearisierung werden nur Abweichungen um einen Arbeitspunkt betrachtet (Kleinsignalver-halten). Damit entstehen lineare Differentialgleichungen. [8, S.106]
Hochschule Ulm 5
Einleitung
x
z
Hx
mw Fwx
Hx
l
Vx
Vx
G
xsx
zsx
mp*g
ϕx
Abbildung 1.3: Modell lineares Inverses Pendels
Rotation:
Jp · ϕx = Vxl· sinϕx +Hxl· cosϕx (1.3.4)
Geometrie:
xsx = xwx − l· sinϕx (1.3.5)
zsx = l· cosϕx (1.3.6)
Im nächsten Schritt werden die Gleichungen umgeformt und die beiden variablen KräfteHx und Vx in diese eingesetzt (Die ausführliche Herleitung ist in Anhang A.1 aufgeführt).Für Vx und Hx gelten:
Vx = mp · zsx +mp · g (1.3.7)
Hx = mp · xsx (1.3.8)
Hochschule Ulm 6

Einleitung
Umgeformt erhält man:
Vx = (−1) ·mp · l· ϕx · sinϕx −mp · l· ϕ2x · cosϕx +mp · g (1.3.9)
Hx = mp · xwx − ·mp · l· ϕx · cosϕx −mp · l· ϕ2x · sinϕx (1.3.10)
Die Gleichung der translatorischen und der rotatorischen Bewegung werden wie folgtbeschrieben:
Translation
xwx (mp +mw) = Fwx +mp · l· ϕx · cosϕx −mp · l· ϕ2x · sinϕx (1.3.11)
Rotation
ϕx(Jp +mp · l2
)= mp · l· g· sinϕx +mp · l· xwx · cosϕx (1.3.12)
Damit sind alle kinematischen Zusammenhänge eines linearen inversen Pendels beschrie-ben. Leider liefert das Großsignalverhalten des Pendels mit seinen Termen cosϕx undsinϕx ein nichtlineares Verhalten. Folglich gelingt es daraus nicht, die gewünschte Funk-tionsgleichung ϕ = f (Fxw) zu ermitteln. Um die störenden nichtlinearen sin - und cos -Terme zu eliminieren, stellt man Randbedingungen auf. Es bietet sich hier an, den Winkelϕx als sehr klein anzunehmen! Unter dieser Betrachtung lassen sich die Terme cosϕx zu 1und sinϕx zu ϕx vereinfachen. Anschließend werden alle Potenzwerte von ϕx und dessenAbleitungen zu Null gesetzt, da diese sehr viel kleiner als ϕx sind. Ausgangslage für dieBerechnung der gesuchten Funktionsgleichung mit der Abhängigkeit zwischen Transla-tion und Rotationen sind die Gleichungen 1.3.11 und 1.3.1. Nach der Eliminierung dernichtlinearen Terme und der Potenzwerte ergibt sich für beide Gleichungen:
ϕx(Jp +mp · l2
)= mp · l· g·ϕx +mp · l· xwx (1.3.13)
xwx (mp +mw) = Fxw + ϕx ·mp · l (1.3.14)
Hochschule Ulm 7
Einleitung
Um den Zusammenhang zwischen dem Winkel ϕx und der Kraft Fxw zu erhalten, wird derTerm xwx durch Einsetzen eliminiert. Durch weiteres Umformen ergibt sich die Übertra-gungsfunktion Gs (s) = ϕx(s)
Fxw(s) (Die zugehörigen Schritte sind im Anhang A.2 einzusehen).
Gs (s) = b0
s2a2 + sa1 + a0
b0 = 1g· (mw +mp)
a0 = −1
a1 = 0
a2 = 4l3g −
mp · l
g· (mw +mp)
(1.3.15)
Mit der entstandenen Übertragungsfunktion kann die Instabilität des inversen Pendelsgezeigt werden. Ein System ist als instabil zu bezeichnen, wenn der Realteil mindestenseines Pols4 der Übertragungsfunktion G (s) positiv ist.[8, nach S.410f]
s2(
4l3g −
mp · l
g· (mw +mp)
)− 1 = 0 (1.3.16)
s2 = 14l3g −
mp · lg· (mw+mp)
(1.3.17)
s1 = +√√√√ 1
4l3g −
mp · lg· (mw+mp)
(1.3.18)
s2 = −√√√√ 1
4l3g −
mp · lg· (mw+mp)
(1.3.19)
Die nun entwickelten Gleichungen gelten nur für eindimensionale Inverse Pendel. DieseÜbertragungsfunktion kann aber auch auf die vorliegende zweidimensionale Version mitzwei FHG übertragen werden, da wie z.B. beim Kreuztisch5, die zwei Achsen unabhängiggelagert werden können. Ein passender Implementierungsansatz wird im Kapitel 2.2.2untersucht.
1.3.2 SCARA mit Parallelkinematik
In der modernen Fertigung von Produkten aller Art sind Industrieroboter nicht mehrwegzudenken. Sie können ohne Ermüdung 24 Stunden am Tag und 7 Tage in der Wo-
4Nullstellen des Nenners einer Übertragungsfunktion.5x- und y-Achsen werden unabhängig verstellt, das Pendel ist achsenbezogen gelagert und die Auslenk-winkel werden achsenbezogen gemessen.
Hochschule Ulm 8
Einleitung
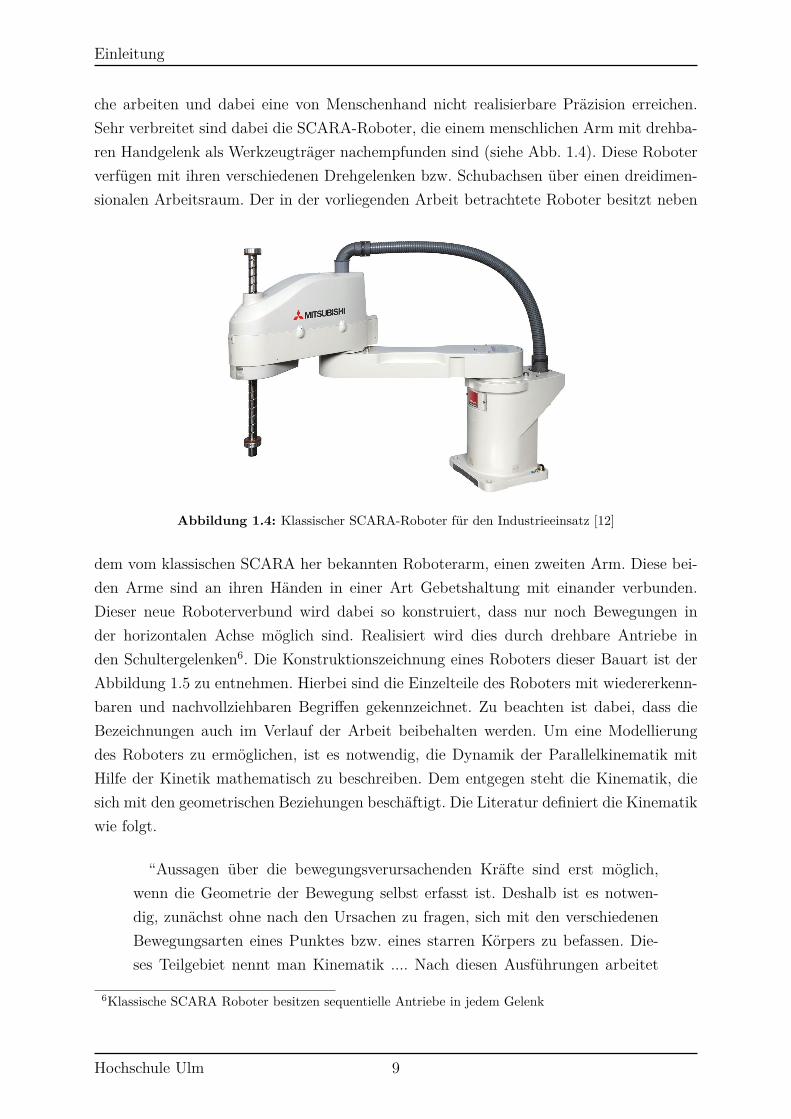
che arbeiten und dabei eine von Menschenhand nicht realisierbare Präzision erreichen.Sehr verbreitet sind dabei die SCARA-Roboter, die einem menschlichen Arm mit drehba-ren Handgelenk als Werkzeugträger nachempfunden sind (siehe Abb. 1.4). Diese Roboterverfügen mit ihren verschiedenen Drehgelenken bzw. Schubachsen über einen dreidimen-sionalen Arbeitsraum. Der in der vorliegenden Arbeit betrachtete Roboter besitzt neben
Abbildung 1.4: Klassischer SCARA-Roboter für den Industrieeinsatz [12]
dem vom klassischen SCARA her bekannten Roboterarm, einen zweiten Arm. Diese bei-den Arme sind an ihren Händen in einer Art Gebetshaltung mit einander verbunden.Dieser neue Roboterverbund wird dabei so konstruiert, dass nur noch Bewegungen inder horizontalen Achse möglich sind. Realisiert wird dies durch drehbare Antriebe inden Schultergelenken6. Die Konstruktionszeichnung eines Roboters dieser Bauart ist derAbbildung 1.5 zu entnehmen. Hierbei sind die Einzelteile des Roboters mit wiedererkenn-baren und nachvollziehbaren Begriffen gekennzeichnet. Zu beachten ist dabei, dass dieBezeichnungen auch im Verlauf der Arbeit beibehalten werden. Um eine Modellierungdes Roboters zu ermöglichen, ist es notwendig, die Dynamik der Parallelkinematik mitHilfe der Kinetik mathematisch zu beschreiben. Dem entgegen steht die Kinematik, diesich mit den geometrischen Beziehungen beschäftigt. Die Literatur definiert die Kinematikwie folgt.
“Aussagen über die bewegungsverursachenden Kräfte sind erst möglich,wenn die Geometrie der Bewegung selbst erfasst ist. Deshalb ist es notwen-dig, zunächst ohne nach den Ursachen zu fragen, sich mit den verschiedenenBewegungsarten eines Punktes bzw. eines starren Körpers zu befassen. Die-ses Teilgebiet nennt man Kinematik .... Nach diesen Ausführungen arbeitet
6Klassische SCARA Roboter besitzen sequentielle Antriebe in jedem Gelenk
Hochschule Ulm 9

Einleitung
Rechter Unter-arm (4)
Rechter Ober-arm (3)
Arbeitsplattform (TCP/Spitze)
Linker Ober -arm (2)
Linker Unter -arm (1)
Linker Antrieb (mit Getriebe)
Rechter Antrieb (mit Getriebe)
Abbildung 1.5: Konstruktionszeichnung eines SCARA-Roboters mit Parallelkinematik und der Be-zeichnung der Einzelteile (nach [17])
die Kinematik als Lehre von Bewegungen mit den Grundgrößen Länge undZeit.“[1, S.1]
An diese Betrachtung anknüpfend, wird genau der vorliegende Fall beschrieben, dennfür den SCARA gibt es nur die Abhängigkeit zwischen Position(Länge) und Zeit. Da-bei wird die Position der bewegten Plattform (Roboter-Hand/TCP) aus den Stellungender Roboter-Arme bestimmt. Der unabhängige Zusammenhang zwischen den Aktoren,also den Antrieben, und der bewegten Roboter-Hand wird als Parallelkinematik bezeich-net. Bei der Parallelkinematik wirken alle Aktoren unmittelbar auf die gleiche bewegtePlattform. Dem entgegen steht die Seriellkinematik, bei der eine klare Zuordnung Ak-tor/Achse besteht.7 Die Vorteile der Parallelkinematik gegenüber der seriellen Bauartsind u.a. die geringere Massenträgheit, keine bewegten Kabel, keine Akkumulation vonFührungsfehlern und der kompaktere Aufbau.[14] Der Vorteil bei der Massenträgheit undder Folgeführungsfehler kommt der späteren Regelung entgegen. Hingegen werden bei derKinetik die Kräfte, die für eine Bewegung notwendig bzw. bei einer Bewegung vorhandensind, betrachtet. Mit dem Einfluss dieser Definition werden im Folgenden Abschnitt dieBewegungsgleichungen für die vorliegende Parallelkinematik entwickelt.
7Der Aktor der Folgeachse wird durch die vorangegangene Achse bewegt, d.h. seine Position wird damitbestimmt.
Hochschule Ulm 10
Einleitung
1.3.2.1 Bewegungsgleichungen
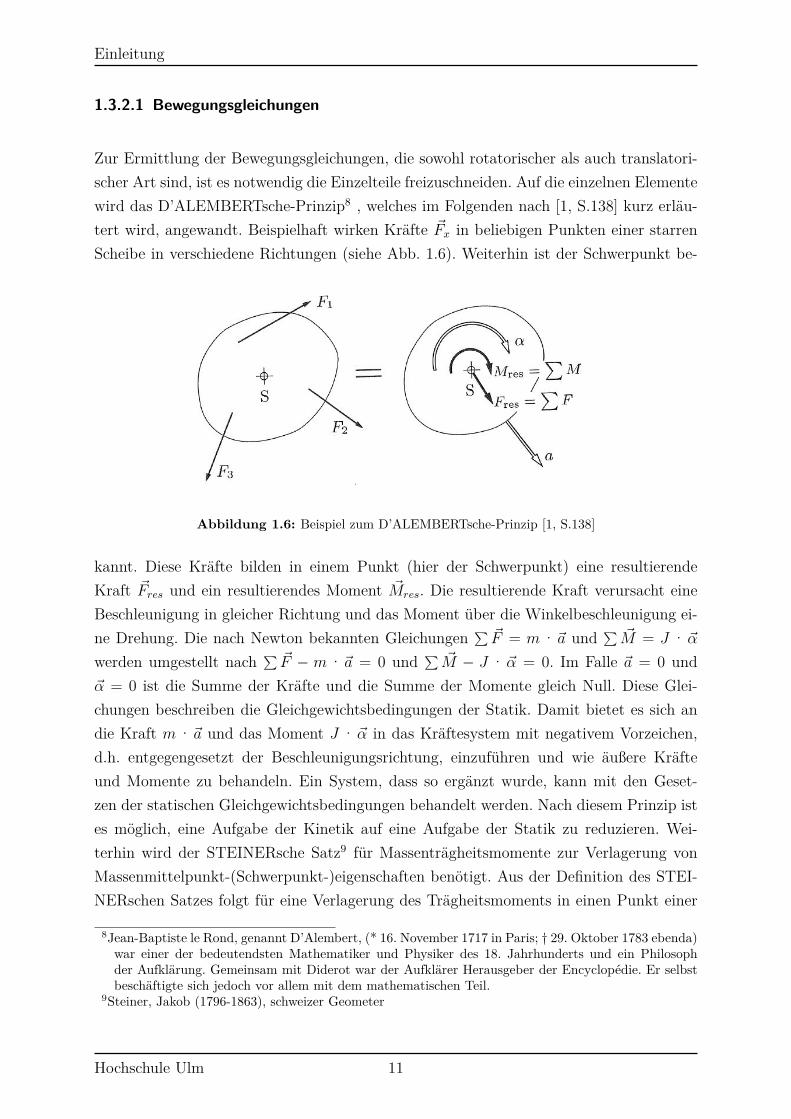
Zur Ermittlung der Bewegungsgleichungen, die sowohl rotatorischer als auch translatori-scher Art sind, ist es notwendig die Einzelteile freizuschneiden. Auf die einzelnen Elementewird das D’ALEMBERTsche-Prinzip8 , welches im Folgenden nach [1, S.138] kurz erläu-tert wird, angewandt. Beispielhaft wirken Kräfte ~Fx in beliebigen Punkten einer starrenScheibe in verschiedene Richtungen (siehe Abb. 1.6). Weiterhin ist der Schwerpunkt be-
Abbildung 1.6: Beispiel zum D’ALEMBERTsche-Prinzip [1, S.138]
kannt. Diese Kräfte bilden in einem Punkt (hier der Schwerpunkt) eine resultierendeKraft ~Fres und ein resultierendes Moment ~Mres. Die resultierende Kraft verursacht eineBeschleunigung in gleicher Richtung und das Moment über die Winkelbeschleunigung ei-ne Drehung. Die nach Newton bekannten Gleichungen ∑ ~F = m·~a und ∑ ~M = J · ~α
werden umgestellt nach ∑ ~F − m·~a = 0 und ∑ ~M − J · ~α = 0. Im Falle ~a = 0 und~α = 0 ist die Summe der Kräfte und die Summe der Momente gleich Null. Diese Glei-chungen beschreiben die Gleichgewichtsbedingungen der Statik. Damit bietet es sich andie Kraft m·~a und das Moment J · ~α in das Kräftesystem mit negativem Vorzeichen,d.h. entgegengesetzt der Beschleunigungsrichtung, einzuführen und wie äußere Kräfteund Momente zu behandeln. Ein System, dass so ergänzt wurde, kann mit den Geset-zen der statischen Gleichgewichtsbedingungen behandelt werden. Nach diesem Prinzip istes möglich, eine Aufgabe der Kinetik auf eine Aufgabe der Statik zu reduzieren. Wei-terhin wird der STEINERsche Satz9 für Massenträgheitsmomente zur Verlagerung vonMassenmittelpunkt-(Schwerpunkt-)eigenschaften benötigt. Aus der Definition des STEI-NERschen Satzes folgt für eine Verlagerung des Trägheitsmoments in einen Punkt einer
8Jean-Baptiste le Rond, genannt D’Alembert, (* 16. November 1717 in Paris; † 29. Oktober 1783 ebenda)war einer der bedeutendsten Mathematiker und Physiker des 18. Jahrhunderts und ein Philosophder Aufklärung. Gemeinsam mit Diderot war der Aufklärer Herausgeber der Encyclopédie. Er selbstbeschäftigte sich jedoch vor allem mit dem mathematischen Teil.
9Steiner, Jakob (1796-1863), schweizer Geometer
Hochschule Ulm 11
Einleitung
parallelen Achse zum Schwerpunkt das Massenträgheitsmoment J = Js + l2 ·m. Hierbeiist J das verlagerte Trägheitsmoment, Js das Trägheitsmoment im Schwerpunkt, l derAbstand zum Schwerpunkt und m die Masse des zugehörigen Körpers (nach [1, S.180ff]).
x
y
β Pbl(xbl/ybl)
Pbr(xbr/ybr)
Pr(xr/yr)
Ptcp(xtcp/ytcp)
Pl(xl/yl)
βl
βr
1
2 3
4 Ml Mr
βor βol
Psol(xsol/ysol) Psor(xsor/ysor)
Ob
erar
me
U
nte
rarm
e
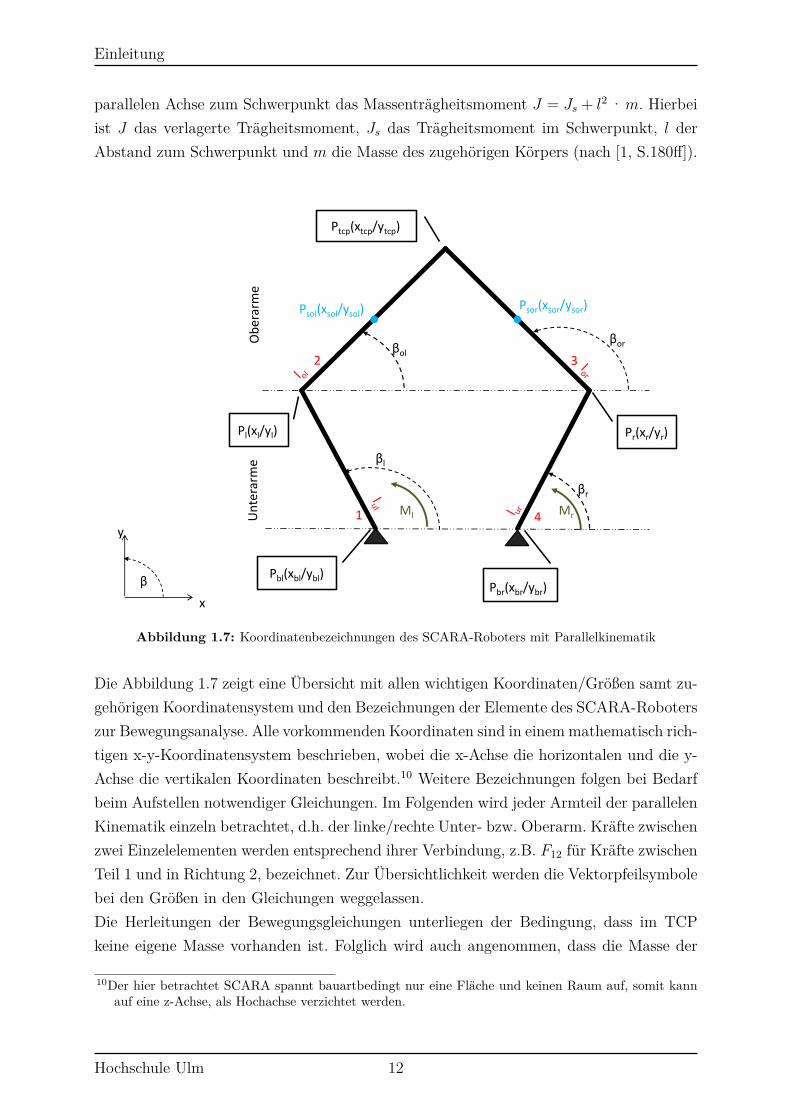
Abbildung 1.7: Koordinatenbezeichnungen des SCARA-Roboters mit Parallelkinematik
Die Abbildung 1.7 zeigt eine Übersicht mit allen wichtigen Koordinaten/Größen samt zu-gehörigen Koordinatensystem und den Bezeichnungen der Elemente des SCARA-Roboterszur Bewegungsanalyse. Alle vorkommenden Koordinaten sind in einem mathematisch rich-tigen x-y-Koordinatensystem beschrieben, wobei die x-Achse die horizontalen und die y-Achse die vertikalen Koordinaten beschreibt.10 Weitere Bezeichnungen folgen bei Bedarfbeim Aufstellen notwendiger Gleichungen. Im Folgenden wird jeder Armteil der parallelenKinematik einzeln betrachtet, d.h. der linke/rechte Unter- bzw. Oberarm. Kräfte zwischenzwei Einzelelementen werden entsprechend ihrer Verbindung, z.B. F12 für Kräfte zwischenTeil 1 und in Richtung 2, bezeichnet. Zur Übersichtlichkeit werden die Vektorpfeilsymbolebei den Größen in den Gleichungen weggelassen.Die Herleitungen der Bewegungsgleichungen unterliegen der Bedingung, dass im TCPkeine eigene Masse vorhanden ist. Folglich wird auch angenommen, dass die Masse der
10Der hier betrachtet SCARA spannt bauartbedingt nur eine Fläche und keinen Raum auf, somit kannauf eine z-Achse, als Hochachse verzichtet werden.
Hochschule Ulm 12
Einleitung
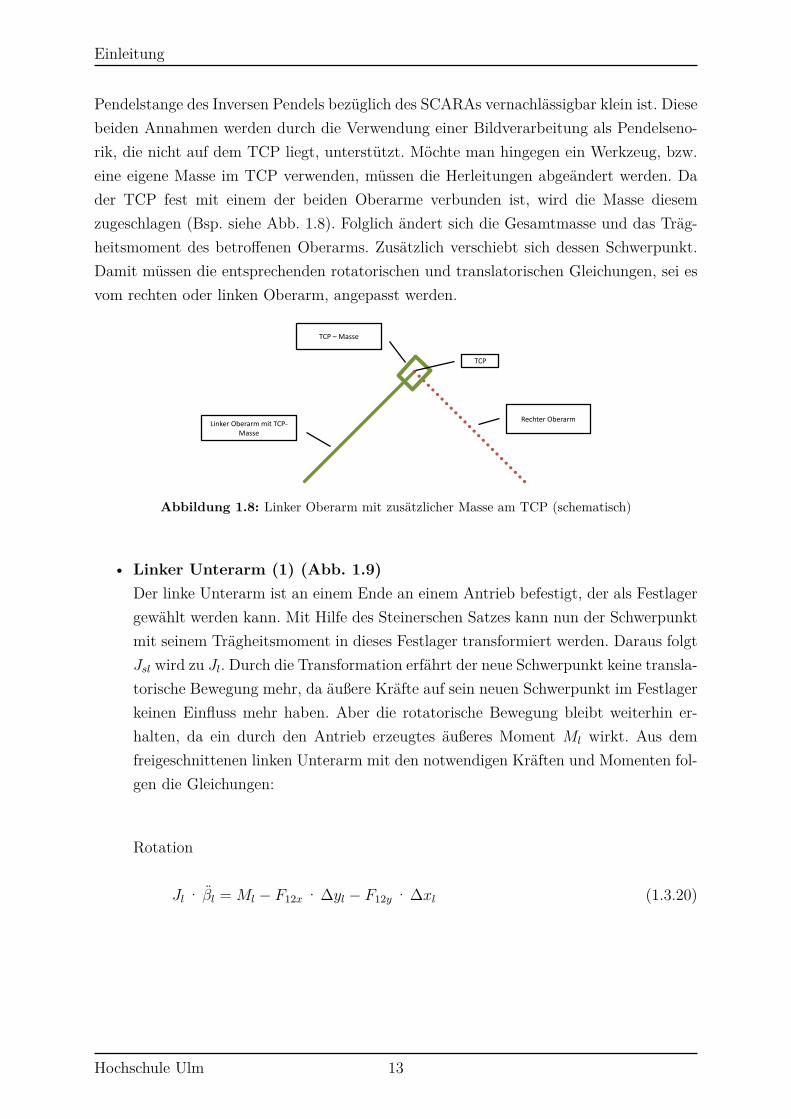
Pendelstange des Inversen Pendels bezüglich des SCARAs vernachlässigbar klein ist. Diesebeiden Annahmen werden durch die Verwendung einer Bildverarbeitung als Pendelseno-rik, die nicht auf dem TCP liegt, unterstützt. Möchte man hingegen ein Werkzeug, bzw.eine eigene Masse im TCP verwenden, müssen die Herleitungen abgeändert werden. Dader TCP fest mit einem der beiden Oberarme verbunden ist, wird die Masse diesemzugeschlagen (Bsp. siehe Abb. 1.8). Folglich ändert sich die Gesamtmasse und das Träg-heitsmoment des betroffenen Oberarms. Zusätzlich verschiebt sich dessen Schwerpunkt.Damit müssen die entsprechenden rotatorischen und translatorischen Gleichungen, sei esvom rechten oder linken Oberarm, angepasst werden.
TCP – Masse
Linker Oberarm mit TCP-Masse
Rechter Oberarm
TCP
Abbildung 1.8: Linker Oberarm mit zusätzlicher Masse am TCP (schematisch)
• Linker Unterarm (1) (Abb. 1.9)Der linke Unterarm ist an einem Ende an einem Antrieb befestigt, der als Festlagergewählt werden kann. Mit Hilfe des Steinerschen Satzes kann nun der Schwerpunktmit seinem Trägheitsmoment in dieses Festlager transformiert werden. Daraus folgtJsl wird zu Jl. Durch die Transformation erfährt der neue Schwerpunkt keine transla-torische Bewegung mehr, da äußere Kräfte auf sein neuen Schwerpunkt im Festlagerkeinen Einfluss mehr haben. Aber die rotatorische Bewegung bleibt weiterhin er-halten, da ein durch den Antrieb erzeugtes äußeres Moment Ml wirkt. Aus demfreigeschnittenen linken Unterarm mit den notwendigen Kräften und Momenten fol-gen die Gleichungen:
Rotation
Jl · βl = Ml − F12x · ∆yl − F12y · ∆xl (1.3.20)
Hochschule Ulm 13

Einleitung
Geometrische Beziehungen für Pl
∆xl = xl − xbl (1.3.21)
∆yl = yl − ybl (1.3.22)
xl = xbl + lul · cos (βl) (1.3.23)
yl = ybl + lul · sin (βl) (1.3.24)
x
y
β
Δyl
Δxl
F12x
F12y
Ml
Jl*βl‘‘
βl
Pl(xl/yl)
Pbl(xbl/ybl)
Steiner‘scher Satz
Abbildung 1.9: Linker Unterarm
Hochschule Ulm 14

Einleitung
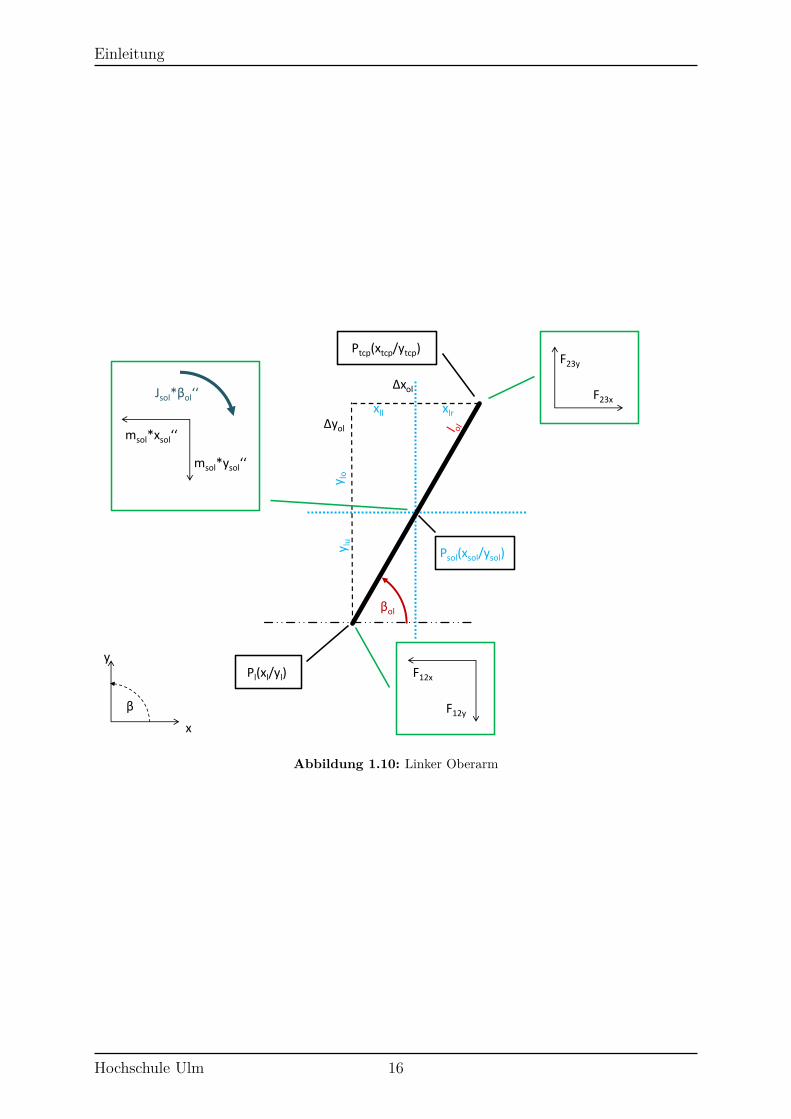
• Linker Oberarm (2) (Abb. 1.10)Der linke Oberarm besitzt kein Festlager und sein Schwerpunkt Psol erfährt einetranslatorische und rotatorische Bewegung. Durch die Lage des Schwerpunktes inder Stabmitte ist zu beachten, dass gilt: ylo = ylu = 1
2∆yol bzw. xll = ylr = 12∆xol.
Rotation
Jsol · βol = −F12x · ylu + F12y ·xll − F23x · ylo + F23y ·xlr
= 12 (∆yol (−F12x − F23x) + ∆xol (F12y + F23y))
(1.3.25)
Geometrische Beziehungen für die Spitze Ptcp
∆xol = xtcp − xl mit xl siehe Gleichung 1.3.23 (1.3.26)
∆yol = ytcp − yl mit yl siehe Gleichung 1.3.24 (1.3.27)
xtcp = xbl + lul · cos (βl) + lol · cos (βol) (1.3.28)
ytcp = ybl + lul · sin (βl) + lol · sin (βol) (1.3.29)
Translation
mol · xsol = −F12x + F23x (1.3.30)
mol · ysol = −F12y + F23y (1.3.31)
Die zweifache zeitliche Ableitung der Koordinaten des Schwerpunktes dieses Ober-arms wird im Anhang B.1 ausführlich hergeleitet. Für den rechten Oberarm befindetsich die Herleitung ebenfalls dort.
Hochschule Ulm 15
Einleitung
x
y
β
Δyol
Δxol
F12x
F12y
βol
Ptcp(xtcp/ytcp)
Pl(xl/yl)
F23y
F23x
y lu
y lo
xlr xll
Psol(xsol/ysol)
Jsol*βol‘‘
msol*xsol‘‘
msol*ysol‘‘
Abbildung 1.10: Linker Oberarm
Hochschule Ulm 16

Einleitung
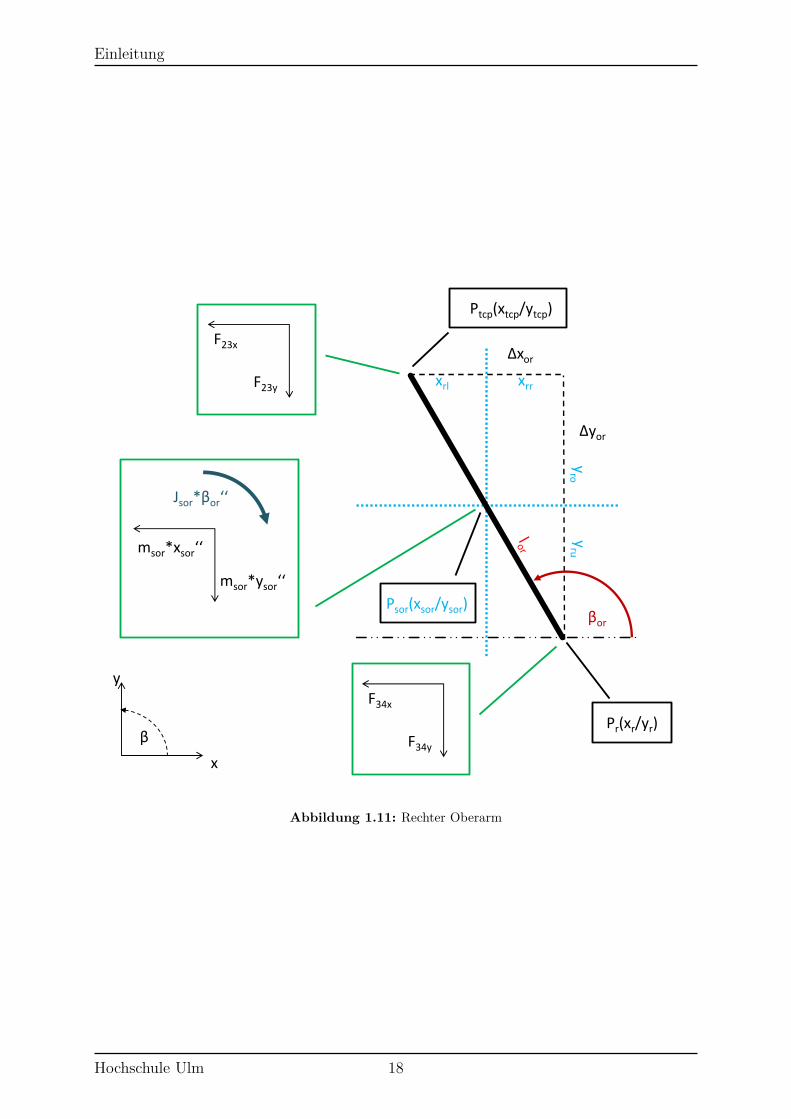
• Rechter Oberarm (3) (Abb. 1.11)Für den rechten Oberarm gelten die gleichen Randbedingungen wie für den linkenOberarm. Für die Lage des Schwerpunktes in der Stabmitte gilt nun analog: yro =yru = 1
2∆yor bzw. xrl = yrr = 12∆xor.
Rotation
Jsor · βor = F23x · yro + F23y ·xrl − F34x · yru − F34y ·xrr
= 12 (∆yor (F23x − F34x) + ∆xor (F23y − F34y))
(1.3.32)
Geometrische Beziehungen für die Spitze Ptcp
∆xor = xtcp − xr (1.3.33)
∆yor = ytcp − yr (1.3.34)
xr = xbr + lur · cos (βr) (1.3.35)
yr = ybr + lur · sin (βr) (1.3.36)
xtcp = xbr + lur · cos (βr) + lor · cos (βor) (1.3.37)
ytcp = ybr + lur · sin (βr) + lor · sin (βor) (1.3.38)
Translation
mor · xsor = −F23x + F34x (1.3.39)
mor · ysor = −F23y + F34y (1.3.40)
Hochschule Ulm 17
Einleitung
x
y
β
Δyor
Δxor
F23x
F23y
βor
Ptcp(xtcp/ytcp)
Pr(xr/yr)
yru
y
ro
xrr xrl
Jsor*βor‘‘
msor*xsor‘‘
msor*ysor‘‘ Psor(xsor/ysor)
F34x
F34y
Abbildung 1.11: Rechter Oberarm
Hochschule Ulm 18
Einleitung
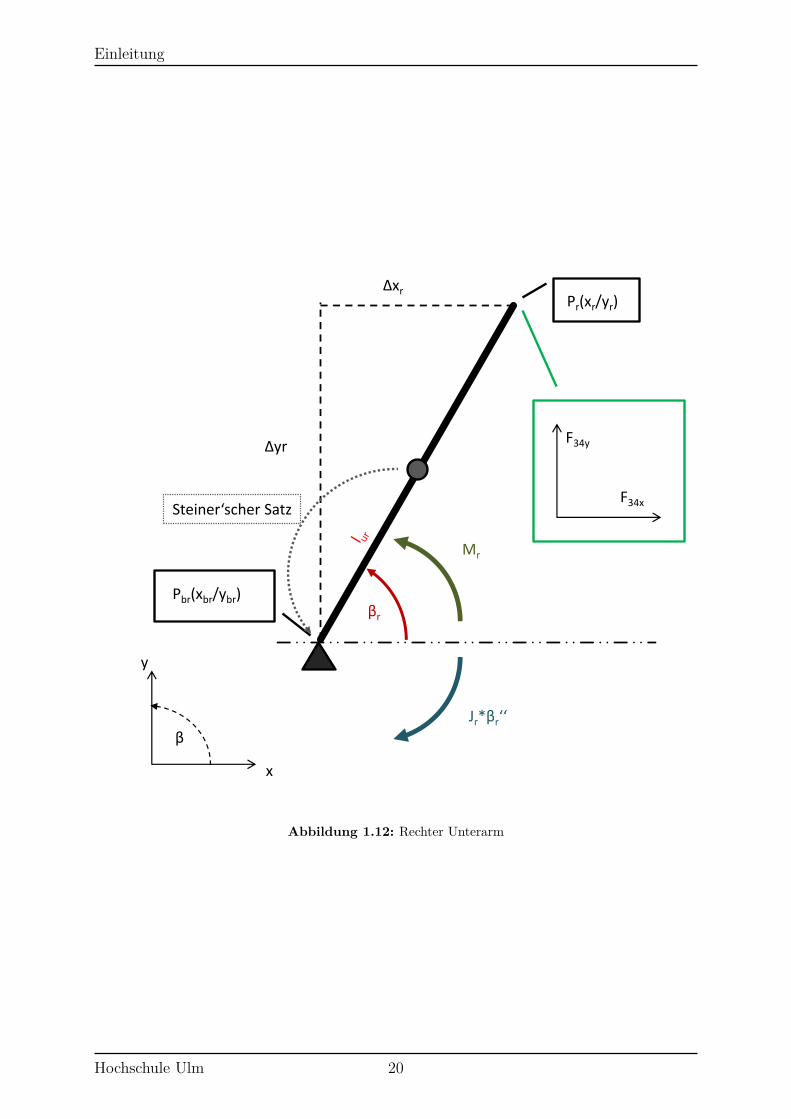
• Rechter Unterarm (4) (Abb. 1.12)Beim rechten Unterarm wird ebenfalls die Schwerpunkttransformation angewandt.Dabei wird analog zum linken Unterarm Jsr zu Jr. Das wirkende Antriebsmomentwird mit Mr bezeichnet.
Rotation
Jr · βr = Mr − F34x · ∆yr + F34y · ∆xr (1.3.41)
Geometrische Beziehungen für den Punkt Pr
∆xr = xr − xbr mit xr siehe Gleichung 1.3.35 (1.3.42)
∆yr = yr − ybr mit yr siehe Gleichung 1.3.36 (1.3.43)
Hochschule Ulm 19
Einleitung
x
y
β
Δyr
Δxr
F34x
F34y
Mr
Jr*βr‘‘
βr
Pr(xr/yr)
Pbr(xbr/ybr)
Steiner‘scher Satz
Abbildung 1.12: Rechter Unterarm
Hochschule Ulm 20
Einleitung
• TCP (Spitze Ptcp):Die Beschleunigungen im TCP wirken sich direkt auf das Pendelverhalten aus, dasich die Pendellagerung im TCP befindet. Folglich müssen auch die Gleichungen fürxtcp und ytcp bestimmt werden. Diese Beschleunigungen verhalten sich wie die, derSchwerpunkte in den Oberarmen des SCARAs. Hier zeigt sich nochmals die Bedin-gung, dass im TCP keine separate Masse mit translatorischen und ggf. rotatorischenEigenschaften angenommen wird. Ausgehend von den Gleichungen B.1.1 und B.1.2,jedoch mit a = b = 1, ergibt sich:
xtcp = (−1) · lul ·(
sin (βl) · βl + cos (βl) ·(βl)2)
+ · (−1) · lol ·(
sin (βol) · βol + cos (βol) ·(βol)2) (1.3.44)
ytcp = lul ·(
cos (βl) · βl − sin (βl) ·(βl)2)
+ · lol ·(
cos (βol) · βol − sin (βol) ·(βol)2) (1.3.45)
Damit sind alle notwendigen Gleichungen für die Bewegung des SCARAs aufgestellt. Hierwerden noch keine Parameterbegrenzungen und keine Werte berücksichtigt. Die Para-metrierung, das Festlegen von Grenzwerten und das Beschreiben von Nebenbedingungenwerden erst im Kapitel 2.2.1, das sich ausführlich mit der Implementierung des System-modells beschäftigt, vorgenommen.
1.3.2.2 Geometrische Beziehungen (Koordinatentransformation)
Neben der dynamischen Betrachtung der mechanischen Komponente „Parallelkinematik“ist auch eine reine geometrische Betrachtung notwendig. Diese beschreibt den Zusam-menhang zwischen den Winkeln an den beiden Antrieben und den kartesischen TCP-Koordinaten der Parallelkinematik (TCP = f (βr, βl)). Die Rückwärtstransformation, aus-gehend vom TCP, ist für die vorliegende Anwendung von großer Bedeutung. Begründetwird dies mit der Bedingung, dass der SCARA für eine Stabilisierung den TCP zumPunkt, den das Pendel auf die Ebene projiziert, bewegen soll. Da man nur den TCP überdie Winkel (βr, βl) beeinflussen kann, müssen die zum Ziel-TCP passenden Winkelwertebestimmt werden.
Hochschule Ulm 21
Einleitung
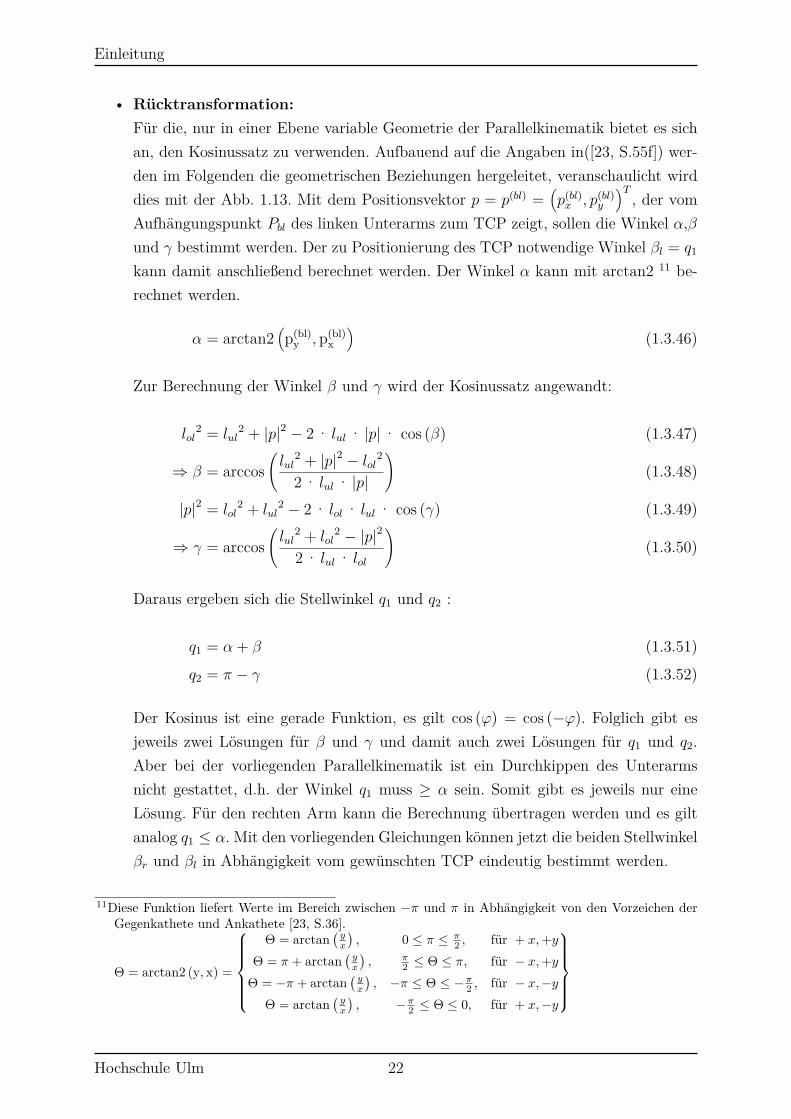
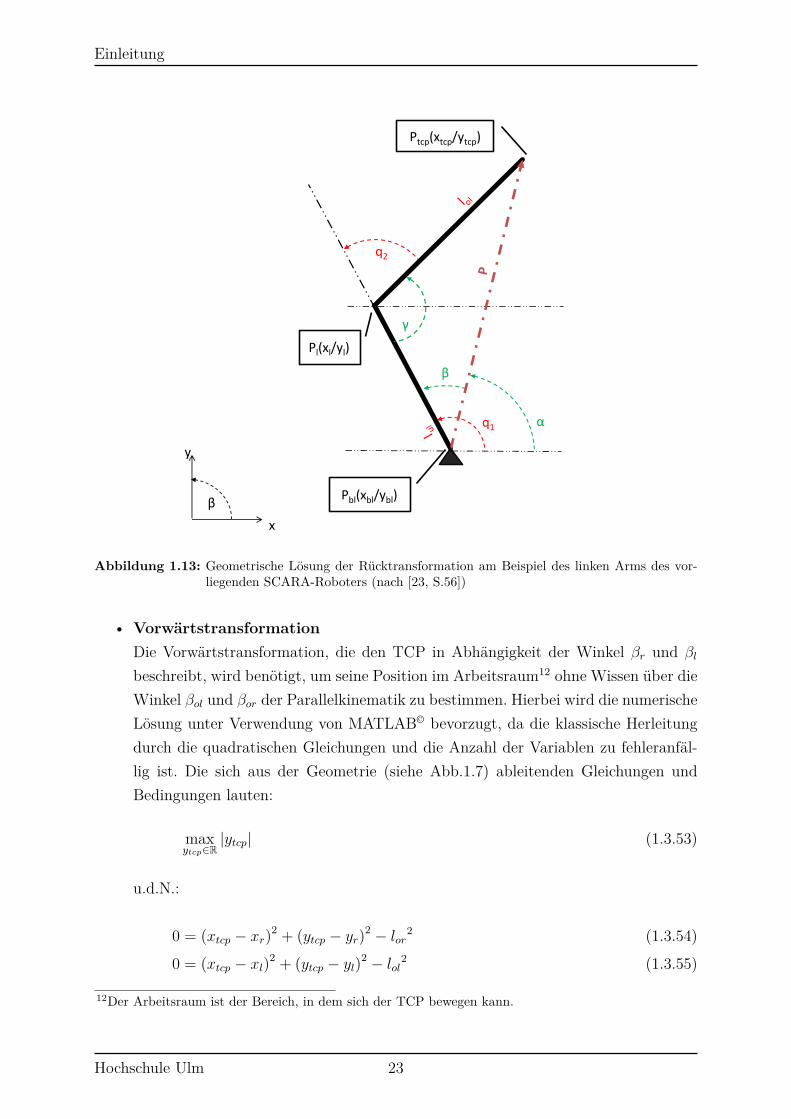
• Rücktransformation:Für die, nur in einer Ebene variable Geometrie der Parallelkinematik bietet es sichan, den Kosinussatz zu verwenden. Aufbauend auf die Angaben in([23, S.55f]) wer-den im Folgenden die geometrischen Beziehungen hergeleitet, veranschaulicht wirddies mit der Abb. 1.13. Mit dem Positionsvektor p = p(bl) =
(p(bl)x , p(bl)
y
)T, der vom
Aufhängungspunkt Pbl des linken Unterarms zum TCP zeigt, sollen die Winkel α,βund γ bestimmt werden. Der zu Positionierung des TCP notwendige Winkel βl = q1
kann damit anschließend berechnet werden. Der Winkel α kann mit arctan2 11 be-rechnet werden.
α = arctan2(p(bl)
y , p(bl)x
)(1.3.46)
Zur Berechnung der Winkel β und γ wird der Kosinussatz angewandt:
lol2 = lul
2 + |p|2 − 2 · lul · |p|· cos (β) (1.3.47)
⇒ β = arccos(lul
2 + |p|2 − lol2
2 · lul · |p|
)(1.3.48)
|p|2 = lol2 + lul
2 − 2 · lol · lul · cos (γ) (1.3.49)
⇒ γ = arccos(lul
2 + lol2 − |p|2
2 · lul · lol
)(1.3.50)
Daraus ergeben sich die Stellwinkel q1 und q2 :
q1 = α + β (1.3.51)
q2 = π − γ (1.3.52)
Der Kosinus ist eine gerade Funktion, es gilt cos (ϕ) = cos (−ϕ). Folglich gibt esjeweils zwei Lösungen für β und γ und damit auch zwei Lösungen für q1 und q2.Aber bei der vorliegenden Parallelkinematik ist ein Durchkippen des Unterarmsnicht gestattet, d.h. der Winkel q1 muss ≥ α sein. Somit gibt es jeweils nur eineLösung. Für den rechten Arm kann die Berechnung übertragen werden und es giltanalog q1 ≤ α. Mit den vorliegenden Gleichungen können jetzt die beiden Stellwinkelβr und βl in Abhängigkeit vom gewünschten TCP eindeutig bestimmt werden.
11Diese Funktion liefert Werte im Bereich zwischen −π und π in Abhängigkeit von den Vorzeichen derGegenkathete und Ankathete [23, S.36].
Θ = arctan2 (y, x) =
Θ = arctan
(yx
), 0 ≤ π ≤ π
2 , für + x,+yΘ = π + arctan
(yx
), π
2 ≤ Θ ≤ π, für − x,+yΘ = −π + arctan
(yx
), −π ≤ Θ ≤ −π2 , für − x,−y
Θ = arctan(yx
), −π2 ≤ Θ ≤ 0, für + x,−y
Hochschule Ulm 22
Einleitung
x
y
β Pbl(xbl/ybl)
Ptcp(xtcp/ytcp)
Pl(xl/yl)
β
γ
q1
q2
α
Abbildung 1.13: Geometrische Lösung der Rücktransformation am Beispiel des linken Arms des vor-liegenden SCARA-Roboters (nach [23, S.56])
• VorwärtstransformationDie Vorwärtstransformation, die den TCP in Abhängigkeit der Winkel βr und βl
beschreibt, wird benötigt, um seine Position im Arbeitsraum12 ohne Wissen über dieWinkel βol und βor der Parallelkinematik zu bestimmen. Hierbei wird die numerischeLösung unter Verwendung von MATLAB© bevorzugt, da die klassische Herleitungdurch die quadratischen Gleichungen und die Anzahl der Variablen zu fehleranfäl-lig ist. Die sich aus der Geometrie (siehe Abb.1.7) ableitenden Gleichungen undBedingungen lauten:
maxytcp∈R
|ytcp| (1.3.53)
u.d.N.:
0 = (xtcp − xr)2 + (ytcp − yr)2 − lor2 (1.3.54)
0 = (xtcp − xl)2 + (ytcp − yl)2 − lol2 (1.3.55)
12Der Arbeitsraum ist der Bereich, in dem sich der TCP bewegen kann.
Hochschule Ulm 23
Einleitung
Für die Koordinaten xl, yl, xr und yr gelten die Gleichungen 1.3.23 und 1.3.24, sowiedie analogen Beziehungen für den rechten Arm. Aus der numerischen Berechnungentsteht genau ein Koordinatenpaar, für den TCP. Dieser numerische Ansatz kannauch durch Auflösen und Umformen der Gleichungen in eine Funktion für xtcp undytcp gewandelt werden. Diese Umformung wurde auf Grund des Rechenaufwands mitMATLAB© durchgeführt. Diese beiden Gleichungen liefern zwei Koordinatenpaare,wobei es im vorliegenden Fall, jenes mit der größeren ytcp-Koordinate ist. Die errech-neten Gleichungen sind dem Anhang B.2 zu entnehmen, da diese sehr umfangreichsind.
Damit sind alle für die Implementierung des SCARA-Modells notwendigen Gleichungenbekannt. Im nachfolgenden Kapitel werden die Komponenten Pendel und SCARA alsStellglied zusammengeführt und als MATLAB© -Modell implementiert.
Hochschule Ulm 24
Modellimplementierung
2 Modellimplementierung
Dieses Kapitel beinhaltet einen Überblick über Sensoren zur Lagebestimmung des Pendelsund einer möglichen Pendellagerung. Weiterhin wird das Modell der Mechanik des SCA-RAs und das Modell des Pendels entwickelt und in MATLAB© übertragen. Anschließendwird ein Regelungsansatz zur Regelung des SCARA mit Parallelkinematik als Stellgliedbeschrieben. Das Kapitel wird mit der Erläuterung verschiedener Verfahrstrategien fürdas Verfahren des TCP im Arbeitsraum abgerundet.
2.1 Sensorik und Lagerung des Pendels
In diesem Abschnitt werden diverse Sensorprinzipien zur Lagebestimmung des Pendelsausführlich beschrieben. Zusätzlich wird ein Vorschlag für die Lagerung der Pendelstangeauf dem TCP dargestellt.
2.1.1 Pendelsensorik für einachsige Messungen
Als Pendelsensorik wird die Messeinrichtung zur Lagebestimmung der Pendelstange be-zeichnet. Die primäre Messgröße, die zur Regelung und Stabilisierung des Pendels ver-wendet wird, ist der Winkel zwischen der vertikalen Ausrichtung und der Pendelstange.Möglich ist auch die Bestimmung des Winkels zur Horizontalen, dies wird in der Praxisaber nur gelegentlich angewendet. Es gibt verschiedenste Messverfahren von denen diegängigsten im Folgenden vorgestellt werden.
• PotentiometerBei der gängigsten Methode wird der Pendelwinkel mit einem Potentiometer mitanschließender A/D-Wandlung realisiert. Hierbei wird der Winkel mit einem alsSpannungsteiler geschalteten Widerstand in eine winkelproportionale Spannung um-gesetzt. Diese wird anschließend verstärkt und ggf. digitalisiert. Der Vorteil dieser
Hochschule Ulm 25

Modellimplementierung
Methode ist die hohe Auflösung und eine kostengünstige Realisierung. Nachteilig istdie Notwendigkeit eines A/D-Wandlers und einer Referenzspannungsquelle. Hierbeimuss auch beachtet werden, dass durch Berührungen (z.B. des Schleiferkontaktes)mechanische Widerstände auftreten, die die Pendelbewegung beeinflussen.
• Optischer EncoderEin rotatorisch optischer Encoder bietet eine weitere Möglichkeit zur Bestimmungdes Pendelwinkels. Dabei wird eine aus hellen und dunklen Segmenten codierteScheibe optoelektronisch abgelesen. Durch die Codierung besitzt jeder Winkel einganz spezielles einzigartiges Bitmuster, dass am Ausgang des Encoders anliegt. Umdie Fehler beim Ablesen der Scheibe, gerade beim Übergang zwischen zwei Mus-tern, zu minimieren, wird die Scheibe nach einem bestimmten Muster codiert. Einegängige Codiermethode ist der Gray-Code, bei dem sich zwischen zwei Werten nurein Bit ändert. Der größte Nachteile gegenüber einem Potentiometer sind der hohePreise und die geringe Auflösung.[4, vgl. S.39]
• Optischer InkrementalgeberDie überwiegende Anwendung von Inkrementalgeber ist die Drehzahlerfassung. Folg-lich ist auch eine Winkelmessung möglich! Die Funktionsweise ist an die des opti-schen Encoders angelehnt. Anstatt der Codescheibe wird eine Scheibe mit viele fei-nen Schlitzen eingesetzt. Es entsteht dabei aber keine absoluter Wert, sondern nurInkremente. Zur tatsächlichen Bestimmung des Winkels muss ein Referenzpunktdefiniert werden, von dem aus alle anderen Winkel durch Zählung der Inkrementeerrechnet werden können. Mit der hierfür verwendeten Fotodiode können höhereAuflösungen bis zu 4096 Inkrementen pro Umdrehung realisiert werden [3].
• Hall SensorDie Realisierung mit einem Hall Sensor ist eher selten. Bei den geprüften Reali-sierungen hat [21] als einziger den Hall Sensor angewandt. Diese Messung ist sehraufwendig und auch relativ ungenau. Bei einem Hallsensor generiert ein Permanent-magnet im Fußpunkt des Pendels ein statisches Magnetfeld. Die Feldlinien, die dieSensoren scheiden, erzeugen ein elektrisches Signal, indem sie bewegte Ladungsträ-ger auf Grund der Lorentzkraft ablenken. Diese Phänomen wird auch Hall-Effektgenannt. Durch die differentielle Betrachtung zweier Hall-Sensoren kann ein winkel-proportinales Signal gebildet werden. Der größte Vorteil liegt in der kontaktlosenund unsichtbaren Winkelmessung, die ein freistehendes Pendel ermöglicht. DieserAufbau spiegelt die ursprüngliche Idee des Balancieren eines Stabes auf der Finger-kuppel wieder.Der Halleffekt kann auch als Inkrementalgeber verwendet werden. Hierbei wird mit
Hochschule Ulm 26

Modellimplementierung
einem geteilten permanentmagnetischen Material das periodisch abwechselnd gepoltist gearbeitet. Abgetastet wird mit einem, von einem schwachen Strom gespeisten,Hallsensor der mit dem anliegenden Magnetfeld ein elektrisches Potential erzeugt.Dabei entstehen, dem optoelektronische Messprinzip ähnliche Signale.[4, vgl. S.40]
• KameraEine berührungslose Messung des Pendelwinkels ohne dessen Bewegung zu beein-flussen, ist über ein Kamerasystem möglich. Die Aufnahmen der Kamera werden mitder Hilfe von Bildverarbeitungsalgorithmen ausgewertet. Dieses System ähnelt demmenschlichen Auge und kann durch hohe Auflösungen und Bildrate1 extrem schnellarbeiten. Die Anwendung der Bildverarbeitung zur Bestimmung der Pendelspitzeund folglich auch der Winkel wird deshalb in dieser Arbeit im Kapitel 3 ausführlichdiskutiert.
2.1.2 Lagerung des Pendels
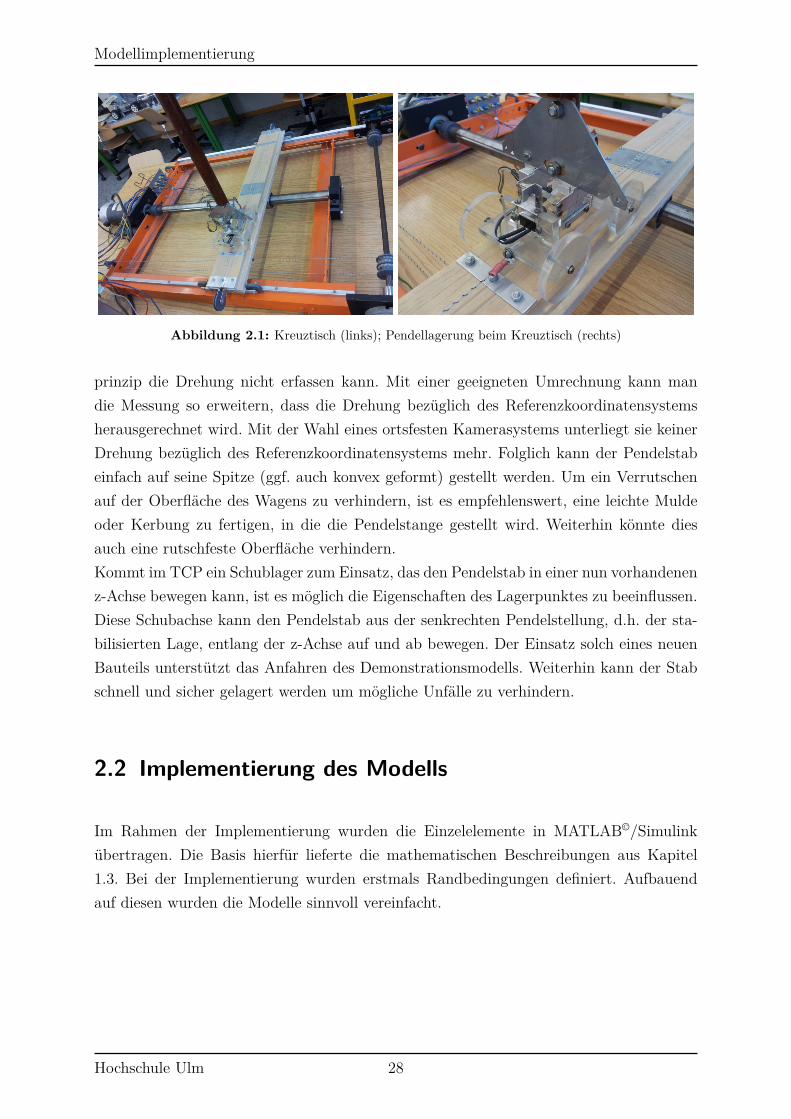
Die Suche nach einer passenden Lagerung der Pendelstangen ist wichtig. Die passendeLagerung ist hauptsächlich von der verwendeten Sensorik abhängig, da nicht jedes La-gerungsprinzip mit jeder Sensorik realisierbar ist. Hierbei darf nicht außer Acht gelassenwerden, dass man auch erst eine Lagerung wählen kann um dann eine bauformabhängigeSensorik zu wählen. Da in dieser Arbeit die Pendelsensorik mit Hilfe der digitalen Bild-verarbeitung und einer ortsfesten Kamera realisiert werden soll, müssen keine Ausnahmenbzw. Berechnungen erfolgen, wie der Winkel in zwei Ebenen entsprechend des Ursprungs-koordinatensystems gemessen wird.Soll die Messeinrichtung am Pendelfuß platziert werden, muss gewährleistet werden, dassdie Messung in beiden Achsen unabhängig erfolgt. Unter dieser Bedingung wurde in derbisherigen Demonstrationsanlage „Kreuztisch“ eine kartesische Lagerung verwendet. DieAbbildung 2.1 zeigt den Kreuztisch und dessen Pendellagerung. Dies ist aber nur möglich,da die Ausrichtung dieser Vorrichtung bezüglich des Referenzkoordinatensystems des Ur-sprungs keine Drehung erfährt.2
Genau diese Drehung erfährt das Pendel durch die Parallelkinematik des SCARA, da diePendellagerung hinsichtlich des Referenzkoordinatensystems durch die Bewegungseigen-schaften der Kinematik verdreht wird. Dadurch ist es nicht möglich, mit dem vorherigenPrinzip den Winkel, in die für die Regelung notwendige Koordinatenrichtung direkt, zumessen. Aber dies bedeutet nur, dass man mit dem bisher verwendeten einfachen Mess-
1Anzahl Bilder pro Zeit2Bei dieser Betrachtung sind die Messachse und die Stellachse gleich
Hochschule Ulm 27
Modellimplementierung
Abbildung 2.1: Kreuztisch (links); Pendellagerung beim Kreuztisch (rechts)
prinzip die Drehung nicht erfassen kann. Mit einer geeigneten Umrechnung kann mandie Messung so erweitern, dass die Drehung bezüglich des Referenzkoordinatensystemsherausgerechnet wird. Mit der Wahl eines ortsfesten Kamerasystems unterliegt sie keinerDrehung bezüglich des Referenzkoordinatensystems mehr. Folglich kann der Pendelstabeinfach auf seine Spitze (ggf. auch konvex geformt) gestellt werden. Um ein Verrutschenauf der Oberfläche des Wagens zu verhindern, ist es empfehlenswert, eine leichte Muldeoder Kerbung zu fertigen, in die die Pendelstange gestellt wird. Weiterhin könnte diesauch eine rutschfeste Oberfläche verhindern.Kommt im TCP ein Schublager zum Einsatz, das den Pendelstab in einer nun vorhandenenz-Achse bewegen kann, ist es möglich die Eigenschaften des Lagerpunktes zu beeinflussen.Diese Schubachse kann den Pendelstab aus der senkrechten Pendelstellung, d.h. der sta-bilisierten Lage, entlang der z-Achse auf und ab bewegen. Der Einsatz solch eines neuenBauteils unterstützt das Anfahren des Demonstrationsmodells. Weiterhin kann der Stabschnell und sicher gelagert werden um mögliche Unfälle zu verhindern.
2.2 Implementierung des Modells
Im Rahmen der Implementierung wurden die Einzelelemente in MATLAB©/Simulinkübertragen. Die Basis hierfür lieferte die mathematischen Beschreibungen aus Kapitel1.3. Bei der Implementierung wurden erstmals Randbedingungen definiert. Aufbauendauf diesen wurden die Modelle sinnvoll vereinfacht.
Hochschule Ulm 28
Modellimplementierung
2.2.1 SCARA-Mechanik
In diesem Abschnitt wird die Modellimplementierung der Mechanik des SCARA mit Par-allelkinematik beschrieben. Ausgenommen davon sind die, noch nicht genauer spezifizier-ten Antriebe und Getriebe.
2.2.1.1 Randbedingungen
Hinsichtlich der technischen Realisierung des SCARAs wurden folgende Randbedingungendefiniert:
• Die Längen lul und lur der beiden Unterarme sind gleich. Ebenfalls werden die bei-den Unterarme in ihren Eigenschaften (Masse, Trägheitsmoment, etc.) als identisch.angenommen.
• Für die beiden Oberarme gelten die gleichen Eigenschaften wie für die Unterarme.Jedoch müssen die Unter- und Oberarme nicht gleich lang sein, folglich sind auchdie Masse und das Trägheitsmoment gegenüber den Unterarmen verschieden.
• Die Schwerpunkte der Unter- und Oberarme liegen jeweils in der Mitte des jeweiligenGliedes3
• Um einen größeren Arbeitsraum zu erhalten, ist es notwendig die Oberarme längerals die Unterarme zu gestalten.[17, S.12]
• Notwendige Leitungen auf den Armen werden als symmetrisch angenommen undhaben keine Auswirkungen auf das Gewicht und die Trägheitsmomente der Armteile.
• Werkzeuge die vom TCP aufgenommen werden, haben zu ihm einen punktsymme-trischen Aufbau.
• Ein Durchkippen der Arme an den Ellenbogen ist nicht gestattet (siehe Rücktrans-formation Kap. 1.3.2.2).
• Um eine zerstörungsfreie Bewegung zu ermöglichen gilt: π9 ≤ βl < π und 0 < βr ≤ 89π
3Keine „eigene“ Masse im TCP.
Hochschule Ulm 29

Modellimplementierung
• Als Startbedingungen der Grundstellung für die Dynamiknachbildung sind die Win-kel βl und βr so einzustellen, dass sich der TCP in der Mitte des Arbeitsbereichsbefindet.4 Die zugehörigen Ableitungen βl = βl = βr = βr = 0 gesetzt. Dies be-schreibt einen stationären Arbeitspunkt der Parallelkinematik.
2.2.1.2 Kräfte
Die zur Berechnung der Dynamik notwendigen Kräfte werden aus den Bewegungsgleichun-gen mit Hilfe von Umformungen bestimmt. Hierfür werden die Gleichungen des linken bzw.rechten Oberarms verwendet. Die in den Gleichungen verwendeten Parameterwerte sindzum Zeitpunkt der Berechnung vorhanden. Im ersten Schritt werden die beiden transla-torischen Gleichungen (Gl. 1.3.30 und 1.3.31)in die Gleichung der Rotation (Gl. 1.3.25)eingesetzt und nach F12y aufgelöst. Hierbei werden die Kräfte F23x und F23y eliminiert.
F12y = 12∆xol
·(2Jsolβol + 2F12x∆yol + ∆yolmolxsol −∆xolmolysol
)(2.2.1)
Im zweiten Schritt wird die translatorische Gleichung des linken Unterarms (Gl. 1.3.20)nach F12x aufgelöst.
F12x = 1∆yl
·(Ml − F12y∆xl − Jlβl
)(2.2.2)
Nun kann Gleichung 2.2.2 in Gleichung 2.2.1 eingesetzt werden und damit F12y errechnetwerden. Unter Verwendung der Gleichungen 2.2.2, 1.3.30 und 1.3.31 können nun die ge-suchten Kräfte F12x, F23x und F23y bestimmt werden.Die für den rechten Oberarm gesuchten Kräfte F34x und F34y können anschließend mitden errechneten Kräften und den translatorischen Gleichungen 1.3.39 und 1.3.40 bestimmtwerden. Jetzt sind alle für die Dynamik benötigten Kräfte bestimmt.
2.2.1.3 Dynamik
Mit den errechneten Kräften können die Dynamikgleichungen gelöst werden. Jede derDynamikgleichungen liefert eine Winkelbeschleunigung βi. Durch zwei anschließende In-tegratoren wird im Modell erst die Winkelbeschleunigung βi und dann der Winkel βiberechnet. Diese Werte bilden die Grundlage für die Kräfteberechnung bzw. derer Pa-
4Es können keine Werte festgelegt werden, da die Längen der Arme noch nicht bekannt sind. Folglichist auch der zugehörige Arbeitsbereich unbekannt.
Hochschule Ulm 30

Modellimplementierung
rameter. Der vorliegende SCARA besitzt vier, der Anzahl der Armteile entsprechendeDynamikgleichungen.
βl = 1Jl
· (Ml − F12x∆yl − F12y∆xl) (2.2.3)
βol = 12Jsol
· (∆yol (−F12x − F23x) + ∆xol (F12y + F23y)) (2.2.4)
βor = 12Jsor
· (∆yor (F23x − F34x) + ∆xor (F23y − F34y)) (2.2.5)
βr = 1Jr
· (Mr + F34x∆yr − F34y∆xr) (2.2.6)
2.2.1.4 Implementierung der Parallelkinematik
Für die Implementierung des Modells werden alle Dynamik-, Kraft- und Geometrieglei-chungen verwendet. Zusätzlich müssen die Werte der technischen Parameter und alleRandbedingungen bekannt sein. Das Modell der Parallelkinematik ist in drei Hauptteileaufgeteilt.
• Koordinaten K: In diesem Modellteil werden aus den technischen Eigenschaften,z.B. Längen und Winkelwerten, alle variablen x-,y-Koordinaten und deren zeitlicheAbleitungen berechnet. Das Ausgangssignal ist der Vektor ~xy.
• KräfteN5: Dieses Element berechnet aus den errechneten Koordinaten, den Winkel-werten mit Ableitungen und den physikalischen Parametern die zugehörigen Kräfte,deren Gleichungen in Kap. 2.2.1.2 entwickelt wurden. Die errechneten Kräfte bildenden Vektor ~F .
• Dynamik D: Dieser Modellteil liefert alle, sich aus den Kräften und Koordinatenergebenden Winkel, Winkelgeschwindigkeiten und Winkelbeschleunigungen für dennächsten Berechnungsschritt. Die Dynamik liefert den Vektor ~B.
Diese drei Hauptelemente sind im Modell seriell angeordnet, wobei der Dynamikausgangauf den Modelleingang zurück geführt wird. Schematische Gleichungen:
~xy = K(~Bi, ~L
)(2.2.7)
~F = N(~Bi, ~J, ~m, ~M, ~xy
)(2.2.8)
~Bi+1 = D(~F , ~J, ~xy, ~M
)(2.2.9)
5In Anlehnung an Newton.
Hochschule Ulm 31
Modellimplementierung
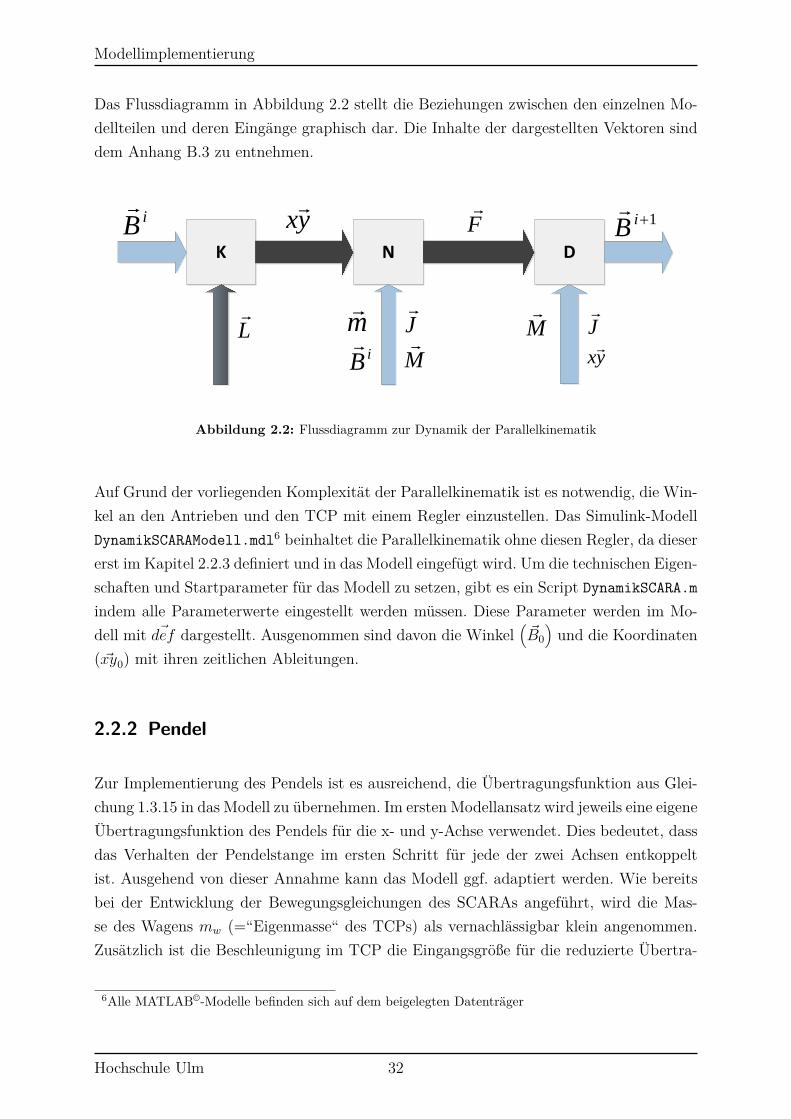
Das Flussdiagramm in Abbildung 2.2 stellt die Beziehungen zwischen den einzelnen Mo-dellteilen und deren Eingänge graphisch dar. Die Inhalte der dargestellten Vektoren sinddem Anhang B.3 zu entnehmen.
K N D
yx
F
1iB
iB
J
M
J
yx
L
m
iB
M
Abbildung 2.2: Flussdiagramm zur Dynamik der Parallelkinematik
Auf Grund der vorliegenden Komplexität der Parallelkinematik ist es notwendig, die Win-kel an den Antrieben und den TCP mit einem Regler einzustellen. Das Simulink-ModellDynamikSCARAModell.mdl6 beinhaltet die Parallelkinematik ohne diesen Regler, da diesererst im Kapitel 2.2.3 definiert und in das Modell eingefügt wird. Um die technischen Eigen-schaften und Startparameter für das Modell zu setzen, gibt es ein Script DynamikSCARA.mindem alle Parameterwerte eingestellt werden müssen. Diese Parameter werden im Mo-dell mit ~def dargestellt. Ausgenommen sind davon die Winkel
(~B0)und die Koordinaten
( ~xy0) mit ihren zeitlichen Ableitungen.
2.2.2 Pendel
Zur Implementierung des Pendels ist es ausreichend, die Übertragungsfunktion aus Glei-chung 1.3.15 in das Modell zu übernehmen. Im ersten Modellansatz wird jeweils eine eigeneÜbertragungsfunktion des Pendels für die x- und y-Achse verwendet. Dies bedeutet, dassdas Verhalten der Pendelstange im ersten Schritt für jede der zwei Achsen entkoppeltist. Ausgehend von dieser Annahme kann das Modell ggf. adaptiert werden. Wie bereitsbei der Entwicklung der Bewegungsgleichungen des SCARAs angeführt, wird die Mas-se des Wagens mw (=“Eigenmasse“ des TCPs) als vernachlässigbar klein angenommen.Zusätzlich ist die Beschleunigung im TCP die Eingangsgröße für die reduzierte Übertra-
6Alle MATLAB©-Modelle befinden sich auf dem beigelegten Datenträger
Hochschule Ulm 32
Modellimplementierung
gungsfunktion GxPTCP (s) = ϕx(s)xtcp(s) . Folglich ist die translatorische Gleichung (Gl. 1.3.14)
hinfällig. Für die x-Richtung gilt:
GxPTCP (s) = 1s2(l3 − l
)− (g)
(2.2.10)
Für die y-Richtung muss das x mit y substituiert werden.
2.2.3 Regelsystem für das Stellglied
Dieser Abschnitt behandelt die regelungstechnischen Grundlagen und ein Parametrie-rungsansatz für das Regelsystem für den vorliegenden SCARA, der später als Stellgliedfür die Stabilisierung des Pendels verwendet wird.
2.2.3.1 Regelungstechnische Grundlagen
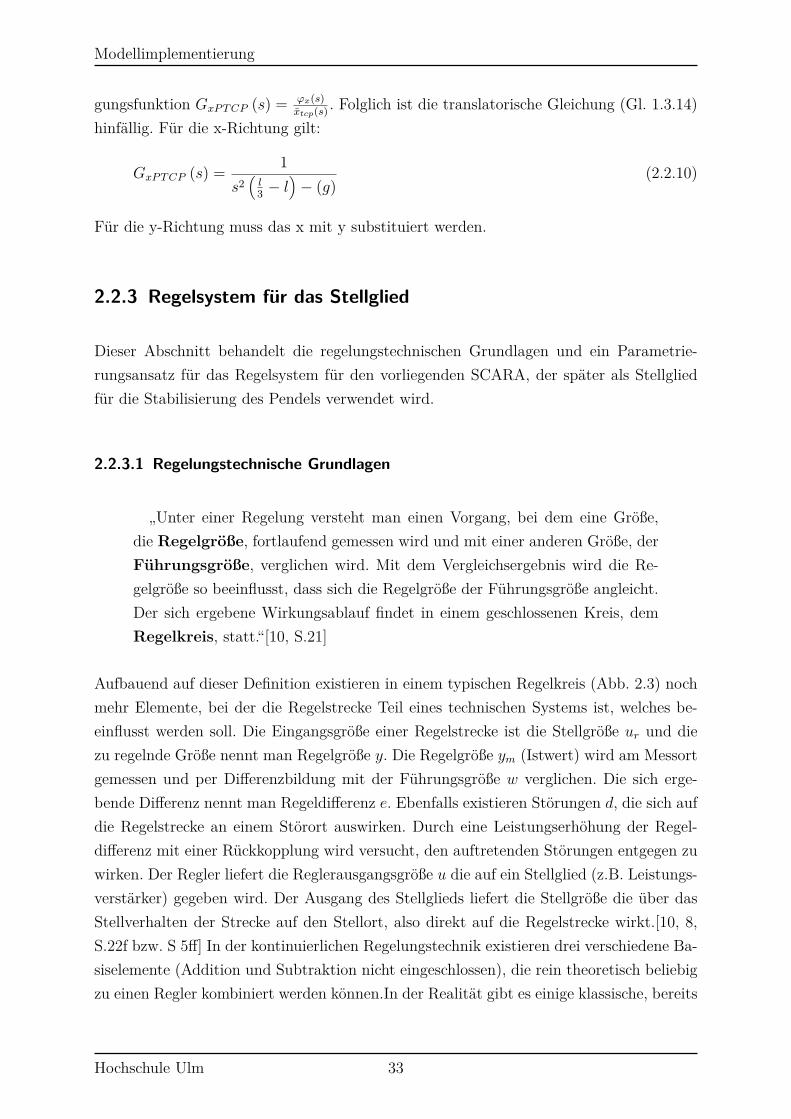
„Unter einer Regelung versteht man einen Vorgang, bei dem eine Größe,die Regelgröße, fortlaufend gemessen wird und mit einer anderen Größe, derFührungsgröße, verglichen wird. Mit dem Vergleichsergebnis wird die Re-gelgröße so beeinflusst, dass sich die Regelgröße der Führungsgröße angleicht.Der sich ergebene Wirkungsablauf findet in einem geschlossenen Kreis, demRegelkreis, statt.“[10, S.21]
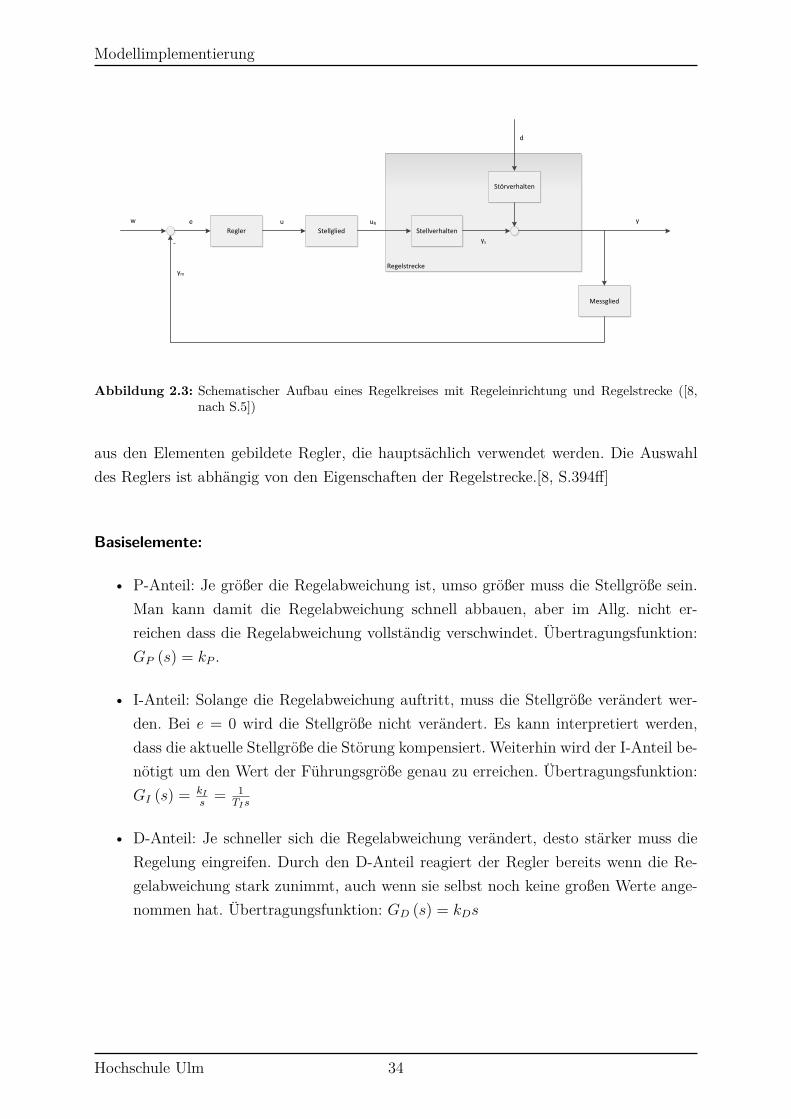
Aufbauend auf dieser Definition existieren in einem typischen Regelkreis (Abb. 2.3) nochmehr Elemente, bei der die Regelstrecke Teil eines technischen Systems ist, welches be-einflusst werden soll. Die Eingangsgröße einer Regelstrecke ist die Stellgröße ur und diezu regelnde Größe nennt man Regelgröße y. Die Regelgröße ym (Istwert) wird am Messortgemessen und per Differenzbildung mit der Führungsgröße w verglichen. Die sich erge-bende Differenz nennt man Regeldifferenz e. Ebenfalls existieren Störungen d, die sich aufdie Regelstrecke an einem Störort auswirken. Durch eine Leistungserhöhung der Regel-differenz mit einer Rückkopplung wird versucht, den auftretenden Störungen entgegen zuwirken. Der Regler liefert die Reglerausgangsgröße u die auf ein Stellglied (z.B. Leistungs-verstärker) gegeben wird. Der Ausgang des Stellglieds liefert die Stellgröße die über dasStellverhalten der Strecke auf den Stellort, also direkt auf die Regelstrecke wirkt.[10, 8,S.22f bzw. S 5ff] In der kontinuierlichen Regelungstechnik existieren drei verschiedene Ba-siselemente (Addition und Subtraktion nicht eingeschlossen), die rein theoretisch beliebigzu einen Regler kombiniert werden können.In der Realität gibt es einige klassische, bereits
Hochschule Ulm 33
Modellimplementierung
-
Regler Stellglied Stellverhalten
Störverhalten
Messglied
Regelstrecke
w
ym
e u uR
ys
d
y
Abbildung 2.3: Schematischer Aufbau eines Regelkreises mit Regeleinrichtung und Regelstrecke ([8,nach S.5])
aus den Elementen gebildete Regler, die hauptsächlich verwendet werden. Die Auswahldes Reglers ist abhängig von den Eigenschaften der Regelstrecke.[8, S.394ff]
Basiselemente:
• P-Anteil: Je größer die Regelabweichung ist, umso größer muss die Stellgröße sein.Man kann damit die Regelabweichung schnell abbauen, aber im Allg. nicht er-reichen dass die Regelabweichung vollständig verschwindet. Übertragungsfunktion:GP (s) = kP .
• I-Anteil: Solange die Regelabweichung auftritt, muss die Stellgröße verändert wer-den. Bei e = 0 wird die Stellgröße nicht verändert. Es kann interpretiert werden,dass die aktuelle Stellgröße die Störung kompensiert. Weiterhin wird der I-Anteil be-nötigt um den Wert der Führungsgröße genau zu erreichen. Übertragungsfunktion:GI (s) = kI
s= 1
TIs
• D-Anteil: Je schneller sich die Regelabweichung verändert, desto stärker muss dieRegelung eingreifen. Durch den D-Anteil reagiert der Regler bereits wenn die Re-gelabweichung stark zunimmt, auch wenn sie selbst noch keine großen Werte ange-nommen hat. Übertragungsfunktion: GD (s) = kDs
Hochschule Ulm 34

Modellimplementierung
Eine Kombination dieser drei Elemente ergibt den sog. idealen PID-Regler in additiverForm7. Für ihn gibt es die parallele und die sequenzielle Darstellung. Im ersten Fall istder P-Anteil direkt als eigenes Element in der Parallelschaltung eingebaut und besitztdie Übertragungsfunktion: GPIDp (s) = kP + kI
s+ kDs. Bei der sequenziellen Darstellung
wird der P-Anteil vor die Parallelschaltung gestellt und wirkt damit auf alle Elemente derSchaltung mit gleichem Anteil. Übertragungsfunktion: GPIDs (s) = kP
(1 + 1
TIs+ TDs
).
Dabei ist TI = KP
kIdie Nachstellzeit und TD = kD
kPdie Vorhaltzeit8.[8, s.394ff] Der reale
PID-Regler besitzt zusätzlich einen T1-Anteil, da ein idealer D-Anteil auf Grund von Sta-bilitätsgründen nicht realisiert werden kann. Unter dieser Bedingung entsteht ein PIDT1-Regler (PID-Regler mit Verzögerung I.Ordnung), wobei die zusätzliche Zeitkonstante T1
des Tiefpasses sehr viel kleiner ist TD. Diese notwendige Bedingung betrifft alle Regler mitD-Anteil (DT1,PDT1,...)![10, S.300] Lässt man einzelne Elemente des idealen PID-Reglersweg entstehen die typischen Regler.
Vom PID-Regler abgeleitete Regler:
• PI-Regler: GPI (s) = kp(1 + 1
TIs
)• PD-Regler: GPD (s) = kp (1 + TDs)
• P-Regler: GP (s) = kp
• I-Regler: GI (s) = kp
TIs= kI
s; oft wird kp und TI zu einem TI zusammengefasst
GI (s) = 1TIs
2.2.3.2 Regelkreisdefintion
Bevor man sich Gedanken über die Art des Reglers machen darf, muss das Verhalten dervorliegenden Regelstrecke mit dem Stellglied und der Sensorik definiert sein. Hierbei istdie Entwicklung einer klaren Struktur bzw. eines zumindest qualitativen Wirkungsplanesnotwendig. Dieses muss alle Einzelelemente beinhalten.Die Einstellung des TCPs wird durch die beiden Winkel an den Antrieben βl und βr be-stimmt. Die für einen bestimmten, im Arbeitsraum liegenden, TCP mit den Koordinatenxtcp und ytcp zugehörigen Soll-Winkel werden mit der Rücktransformation der Geometrieerrechnet. Diese errechneten Winkelwerte sind die SOLL-Größen βl,w und βr,w für das
7Es existiert auch eine multiplikative Form. Beide Formen können in einander umgerechnet werden8nach DIN 19226 Teil 2
Hochschule Ulm 35
Modellimplementierung
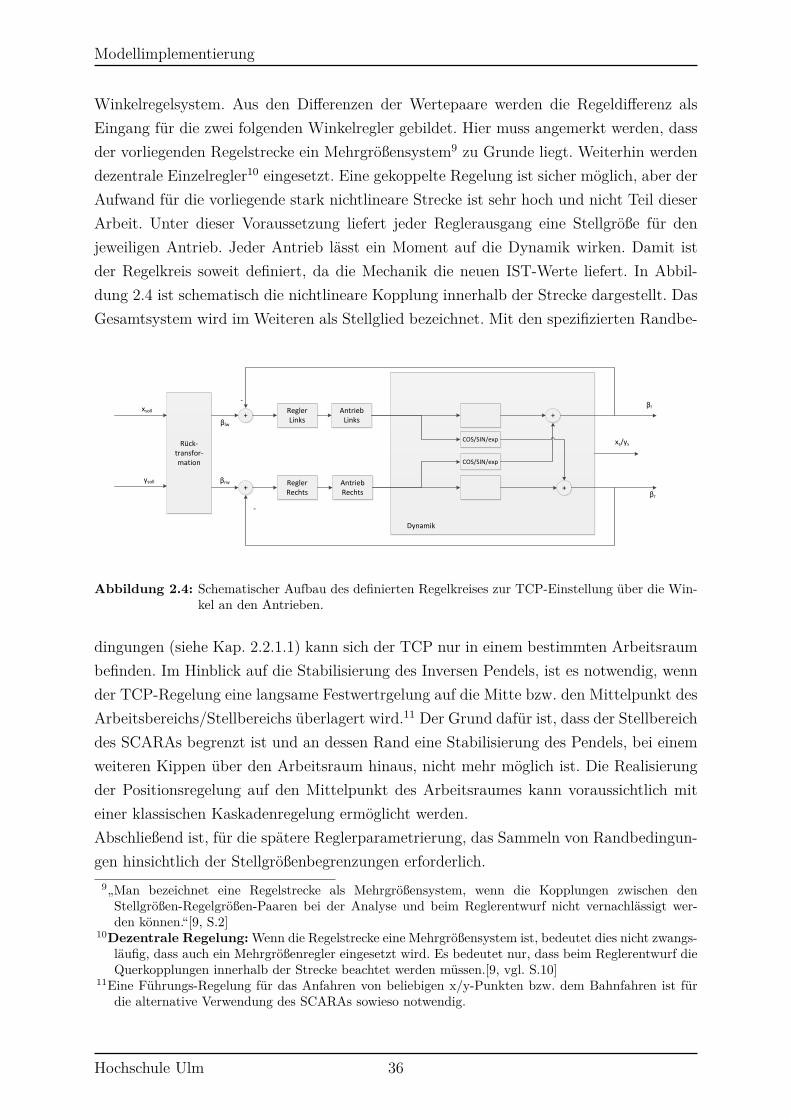
Winkelregelsystem. Aus den Differenzen der Wertepaare werden die Regeldifferenz alsEingang für die zwei folgenden Winkelregler gebildet. Hier muss angemerkt werden, dassder vorliegenden Regelstrecke ein Mehrgrößensystem9 zu Grunde liegt. Weiterhin werdendezentrale Einzelregler10 eingesetzt. Eine gekoppelte Regelung ist sicher möglich, aber derAufwand für die vorliegende stark nichtlineare Strecke ist sehr hoch und nicht Teil dieserArbeit. Unter dieser Voraussetzung liefert jeder Reglerausgang eine Stellgröße für denjeweiligen Antrieb. Jeder Antrieb lässt ein Moment auf die Dynamik wirken. Damit istder Regelkreis soweit definiert, da die Mechanik die neuen IST-Werte liefert. In Abbil-dung 2.4 ist schematisch die nichtlineare Kopplung innerhalb der Strecke dargestellt. DasGesamtsystem wird im Weiteren als Stellglied bezeichnet. Mit den spezifizierten Randbe-
Rück-transfor-mation
+
+
Regler Links
Regler Rechts
Antrieb Links
Antrieb Rechts
COS/SIN/exp
COS/SIN/exp
Dynamik
-
-
βl
βr
xs/ys
βlw
βrw
xsoll
ysoll
+
+
Abbildung 2.4: Schematischer Aufbau des definierten Regelkreises zur TCP-Einstellung über die Win-kel an den Antrieben.
dingungen (siehe Kap. 2.2.1.1) kann sich der TCP nur in einem bestimmten Arbeitsraumbefinden. Im Hinblick auf die Stabilisierung des Inversen Pendels, ist es notwendig, wennder TCP-Regelung eine langsame Festwertrgelung auf die Mitte bzw. den Mittelpunkt desArbeitsbereichs/Stellbereichs überlagert wird.11 Der Grund dafür ist, dass der Stellbereichdes SCARAs begrenzt ist und an dessen Rand eine Stabilisierung des Pendels, bei einemweiteren Kippen über den Arbeitsraum hinaus, nicht mehr möglich ist. Die Realisierungder Positionsregelung auf den Mittelpunkt des Arbeitsraumes kann voraussichtlich miteiner klassischen Kaskadenregelung ermöglicht werden.Abschließend ist, für die spätere Reglerparametrierung, das Sammeln von Randbedingun-gen hinsichtlich der Stellgrößenbegrenzungen erforderlich.
9„Man bezeichnet eine Regelstrecke als Mehrgrößensystem, wenn die Kopplungen zwischen denStellgrößen-Regelgrößen-Paaren bei der Analyse und beim Reglerentwurf nicht vernachlässigt wer-den können.“[9, S.2]
10Dezentrale Regelung: Wenn die Regelstrecke eine Mehrgrößensystem ist, bedeutet dies nicht zwangs-läufig, dass auch ein Mehrgrößenregler eingesetzt wird. Es bedeutet nur, dass beim Reglerentwurf dieQuerkopplungen innerhalb der Strecke beachtet werden müssen.[9, vgl. S.10]
11Eine Führungs-Regelung für das Anfahren von beliebigen x/y-Punkten bzw. dem Bahnfahren ist fürdie alternative Verwendung des SCARAs sowieso notwendig.
Hochschule Ulm 36
Modellimplementierung
2.2.3.3 Reglerauswahl und Einstellung
Der definierte Regelkreis verlangt nun geeignete Regler, die mit ihren Basiselementen dasRegeln der Regelstrecke ermöglichen. Die vorliegende Mehrgrößenregelung wird als dezen-trale Regelung realisiert. Mit dem Weg zur Lösung sind einige Bedingungen verknüpft.[9,S.206ff]
• Die Regelstrecke muss stabil sein.
• Die Güte des Regelkreises muss auf Stabilität und die Erzielung der Sollwertfolgefür sprungförmige Führungs- und Störsignale beschränkt sein. Scharfe Forderungen,d.h. ein Dirac-Impuls als Eingangsgröße, an das dynamische Übertragungsverhaltenkönnen nicht erfüllt werden.
• Es muss eine experimentelle Identifikation mit der Regelstrecke und dem geregeltenSystem durchführbar sein. Folglich muss die Regelstrecke bereits technisch realisiertsein.
Sind diese Voraussetzungen gegeben, kann der Regler auch ohne Einfluss der Regelgü-te am Prozess eingestellt werden. Dieser Regler wird als Tuning-Regler bezeichnet. Dasgrößte Problem ist der letzte Punkt, da zum Anfertigungszeitpunkt dieser Arbeit keinverwendbarer SCARA vorhanden war. Ein großer Vorteil dieser Methode ist, dass nurminimale Kenntnisse über die Regelstrecke bekannt sein müssen. Die Reglereinstellungkann bereits mit dem statischen Verhalten der zu regelnden Strecke bearbeitet werden.Es können sogar, bis auf einen, alle Parameter eines möglichen PI-Reglers bestimmt wer-den. Dabei wird sogar fast widerlegt, dass das dynamische Verhalten einer Regelstreckeimmer zur Reglerapplikation bekannt sein muss. Zusätzlich wird gezeigt, dass die Kennt-nisse der Regelstrecke in eine sinnvolle Beziehung zum angestrebten Regelungsziel gestelltwerden sollen.[9, vgl. S.205ff]
[9, S.206] „Wenn in einem Regelkreis mit einer stabilen Regelstrecke also nurdie Stabilität und die Sollwertfolge gesichert werden müssen, reicht im We-sentlichen eine statische Beschreibung der Regelstrecke und die Möglichkeit,den Regler durch Experimente vollständig festlegen zu können, aus.“
Zusammenfassend ist die Verwendung eines PI-Reglers für den vorliegenden Fall mit de-zentralen Einzelreglern von Vorteil.
Hochschule Ulm 37

Modellimplementierung
2.2.3.4 Regelkreisparametrierung
Das Ziel der Regelkreisparemtrierung ist es, die PI-Regler so einzustellen, dass die Früh-rungsgröße am Streckenausgang ansteht. Zusätzlich kann mit der Wahl der Parameterdas Streckenverhalten variiert werden. Für den gewünschten PI-Regler wird als erstes derI-Anteil und der damit verbundene Tuningfaktor berechnet. Dabei wird ausschließlich einstatisches Modell verwendet. Mit diesem, aufbauend auf dem Satz der Stabilität des I-geregelten Systems, entsteht ein stabiler Regelkreis.
Betrachtet wird ein Regelkreis, der aus einer asymptotisch sta-bilen Regelstecke und einem I-Regler
xr (t) = y (t)− w (t)
u (t) = −KI ·xr (t)
besteht. Verwendet man die Regelmatrix
KI = a· KI
so gibt es genau dann ein Intervall 0 < a ≤ a für den Tuning-faktor a, für das der Regelkreis asymptotisch stabil ist, wenndie Matrix KI die Bedingung
Re{λi{KsKI
}}> 0 (i = 1, 2, 3, ..., r) (2.2.11)
erfüllt. Wobei r die Zahl der Ausgangsgrößen und λi die zuge-hörigen Eigenwerte sind. [9, S.217]
Ist KI geeignet gewählt worden und die Bedingungen erfüllt, kann man den Tuningfaktora hinreichend klein wählen. Folglich kann man den Tuningfaktor durch Experimente mitder Regelstrecke bestimmen. Die basiert auf der Tatsache, dass die Statik Ks sehr einfachexperimentell bestimmt werden kann. Dies bedeutet, dass man ohne das dynamischeVerhalten der Strecke den Regler einstellen kann.
Einstellung des I-Anteils ([9, S. 218ff]):
• Die Regelstrecke muss asymptotisch stabil sein. (Re {λi} < 0)
Hochschule Ulm 38

Modellimplementierung
• Die Güteforderungen sind auf Stabilität und Sollwertfolge bei sprungförmigen Führungs-und Störsignalen beschränkt
1. Die Matrix Ks der statischen Verstärkungsfaktoren der Regelstrecke wird experi-mentell bestimmt.
2. Es wird die Existenzbedingung (RangKs = r) überprüft. Ist diese Bedingung nichterfüllt, so muss die Regelungsaufgabe mit anderen Stell- oder Regelgrößen gelöstwerden.
3. Es wird mit dem Regler
xr (t) = y (t)− w (t)
u (t) = −a· KI ·xr (t)
gearbeitet, wobei die Matrix KI die Bedingungen 2.2.11 erfüllen muss und zweck-mäßigerweise entsprechend Gleichung
KI = KTs
(KsK
Ts
)−1(2.2.12)
bzw.
KI = K−1s (2.2.13)
gewählt wird.
4. Der Regelkreis wird unter Verwendung eines sehr kleinen Tuningfaktors a geschlos-sen und das Zeitverhalten experimentell bestimmt. Der Tuningfaktor kann erhöhtwerden, solange die Experimente mit dem geschlossenen Kreis zeigen, dass der Kreiseine genügend große Stabilitätsreserve aufweist.
Ein ausführliche Beschreibung zur schrittweisen Bestimmung der I-Regler kann [9, S.218ff]entnommen werden. Nachdem die I-Anteile bestimmt wurden, wird der Proportionalanteildes PI-Reglers errechnet.
Einstellung des Proportionalanteils ([9, S. 221f]): Der Proportionalanteil dient zurVerbesserung des dynamischen Übertragungsverhaltens des Regelkreises und bringt keine,wenn er schwach eingestellt ist, wesentlichen Stabilitätsprobleme mit sich.Analog zum I-Anteil wird die ReglermatrixKP mitKP = bKP dargestellt. Hierbei ist b der
Hochschule Ulm 39

Modellimplementierung
Tuningfaktor des P-Anteils. Die Eigenwerte des geschlossenen Kreises mit einem P-Anteiländern sich bei einem sehr kleinen b stetig. Bei einem Kreis mit einer beliebigen MatrixKP und einem hinreichend kleinen b ist die Stabilität nicht gefährdet. Nun ist es möglichbei einem stabilen I-geregelten System, die Dynamik des Kreises durch den P-Anteil miteinem kleinen Tuningfaktor zu verbessern. In Anlehnung an den I-Anteil ist es zweckmä-ßig die inverse Statikmatrix zu verwenden KP = K−1
s . Ein wichtiges Argument hierfür istdie entkoppelnde Wirkung auf die unterschiedlichen Stellgrößen-Regelgrößenpaare.Ein zweiter Vorschlag ist durch die Eigenschaft, dass der P-Anteil die Strecke schnellermacht, begründet. Ausgehend von der Übertragungsfunktionsmatrix mit einer anschlie-ßenden Grenzwertbetrachtung ergibt sich:
y (0) = lims→∞
sC (sI − A)−1 B = lims→∞
C(I − 1
sA)−1
B = CB (2.2.14)
Durch Messen der Anstiege der entsprechenden Elemente der Übertragungsfunktionsma-trix zur Zeit t = 0, lassen sich die Elemente des Produktes CB ermitteln.12 Ist die sichergebende Matrix regulär und arbeitet man mit
KP = (CB)−1 (2.2.15)
wird der Übertragungsvorgang mit dem P-Anteil beschleunigt. In Anlehnung an die Ent-kopplungseigenschaften die mit der Wahl von KI (Gl. 2.2.12) erreicht werden, kann manzeigen, dass bei dieser Wahl von KP die i-te Stellgröße zur Zeit t nur auf die Ableitungder i-ten Regelgröße zur selben Zeit t wirkt.Die behandelten Eigenschaften erweitern die Auflistung für die I-Regler.
• Der Regler wird um einen P-Anteil ergänzt, so dass jetzt gilt:
u (t) = −aKIxr (t)− bKP (y (t)− w (t))
Hierbei wird die Matrix KP nach KP = K−1s bzw. Gleichung 2.2.15 gewählt.
• Der neue Regelkreis wird mit dem in Schritt 4 bestimmten Wert a und einem sehrkleinen Wert b geschlossen. Weiterhin kann der Tuningfaktor b solange erhöht wer-den, wie die Experimente zeigen, dass damit das dynamische Verhalten durch denP-Anteil verbessert wird.
Zusammenfassend ist ein PI-Mehrgrößenregler entstanden, der nur mit der Statik unddurch Experimente an der Stecke appliziert wurde. Die Literatur bietet in [18, S.443ff],
12H (t) =∫ t
0 CeAτBdτ +D [9, siehe S.38f]
Hochschule Ulm 40
Modellimplementierung
[9, S.223ff] und [16, S.255f] ausführliche Beispiele.Der Applikation des Reglers für einen SCARA mit Parallelkinematik als Stellglied stehtnun nichts mehr im Wege. Leider konnte die Applikation für das vorliegende Projekt nichtdurchgeführt werden, da kein technischer Aufbau für die Experimente vorhanden war.
2.2.4 Bewegungsart und Interpolation allgemein
Durch die Übertragung von Aufgaben, z.B. in Fertigungsstraßen, auf Roboter ist es not-wendig den Roboter so zu bewegen, dass er den Punkt an dem sein Arbeitsauftrag aus-geführt werden muss problemlos erreichen kann. Im Bezug zur Stabilisierung des Pendelsmuss der Roboter immer der Pendelspitze folgen, dabei wird eine Richtungsfahrt benötigt.Zusätzlich können auch Werkzeuge am TCP befestigt sein, welche gewünschte Konturenabfahren oder Punkte anfahren sollen. Darauf aufbauend beinhaltet dieser Abschnitt,Möglichkeiten, wie sich der Roboter, respektive der TCP, zwischen zwei Zielstellungenbewegen soll und wie Zwischenstellungen auf der Grundlage von Geschwindigkeit- undBeschleunigungsvorgaben von der Steuerung berechnet werden können.
2.2.4.1 Steuerungsarten
In der Literatur werden grundlegend zwei Steuerungsarten bei Robotern unterschieden.Dabei gibt es in jedem Bereich noch untergeordnete Spezialfälle.[23, S.65]
• Punktsteuerung/PTP13-BahnDie zeitlichen Zielwerte werden in Achskoordinaten berechnet, so dass sich der TCPauf einer für den Anwender nicht vorhersehbaren Raumkurve mit nicht definierterOrientierung auf den Zielpunkt bewegt. Es kommen dabei asynchrone und synchro-ne PTP-Steuerungen zur Anwendung. Bei der asynchronen PTP-Steuerung wirdjede Achse bzw. jeder Antrieb unabhängig bewegt, folglich gehen die Antriebe nichtgleichzeitig in den Stillstand über. Bei dieser Methode hängt das Bewegungsverhal-ten sehr von den gewählten Geschwindigkeiten ab, die mit den Antrieben erzeugtwerden. Bei der synchrone PTP-Steuerung bestimmt die Achse mit dem größten zu-rückzulegenden Weg und ihrer Geschwindigkeit, d.h. mit der größten Bahndauer alsLeitachse, die Bewegungsdauern der anderen Achsen. Dabei werden die Geschwin-digkeiten der anderen Achsen so weit verringert, dass alle Bewegungen zeitgleichbeendet werden. Mit diesem Ansatz entstehen durch die verringerten Geschwindig-
13Point to Point
Hochschule Ulm 41
Modellimplementierung
keiten und den geringeren Beschleunigungen weniger mechanische Anregungen. [23,vgl. S.65]
• Bahnsteuerung/CP14-SteuerungFür viele Anwendungen ist das PTP-Verfahren ausreichend (z.B. Punktschweißenauf einer Platte). Müssen jedoch Hindernisse umfahren15 und genaue Bahnen einge-halten werden (z.B. Laserschneiden und Lackieren einer Karosserie) sind definierteBahnen, auf denen sich der Roboter bewegen soll, zwingend. Die am Häufigsten beider CP-Steuerung verwendete Bahn ist die Linearbahn, bei der die Zielposition übereine Gerade angefahren wird. Weiterhin existiert die Möglichkeit eine Zirkularbahn,die einen Kreisbogen beschreibt, zu befahren. Diese Zirkularbahn wird über dreiPunkte bestimmt (Start-, Hilfs-, Endpunkt). Sollen während der Bewegung vordefi-nierte Zwischenpunkte ohne Stillstand der Achsen durchfahren werden, bietet sichdie Spline-Bahn an. Liegt der Fokus auf dem Abfahren beliebiger Konturen wirdeine CP-Bahn als Spline-Bahn mit geeigneten Zwischenpunkten definiert. [23, sieheS. 65ff]
Die Bahnsteuerung bietet viel Gestaltungsmöglichkeiten bei der Bewegung zwischen demStart- und Zielpunkt. Aber durch die gezwungene Bahn sind die Achsbewegungen meistnicht linear, d.h. ein Drehgelenk dreht nicht annähernd konstant von einem Startwinkelauf einen Endwinkel. Dabei können sogar schnelle und große Achsbewegungen, die vomProgrammierer nicht erwartet wurden, auftreten. Zusätzlich zu dem genannten Punktkönnen bei der CP-Steuerung sogar Zwischenpunkte außerhalb des Arbeitsraums des Ro-boters auftreten. Folglich ist die gewünschte Bahn nicht ausführbar. Wenn die Anwendunges zulässt, wird in der Praxis eine PTP-Steuerung eingesetzt. [23, S.66]Der im Projekt verwendete SCARA mit Parallelkinematik soll ein Inverses Pendel stabili-sieren, d.h. durch lineares Verfahren des TCPs (Pendelfußpunktes) unter die Pendelspitzedas Umfallen des Pendels zu verhindern. Durch das geforderte lineare Verfahren 16 musseine Bahnsteuerung gewählt werden, da das Robotermodell zeigt, dass es keine lineareBeziehung zwischen TCP und den Winkeln an der Antrieben gibt. Legt man die Bedin-gungen zu Grunde, dass nur kleine Auslenkungen der Pendelstange erlaubt sind, ist sogareine PTP-Steuerung in Erwägung zu ziehen. Doch im Hinblick auf den alternativen Ein-satz des Stellglieds, z.B. das Abfahren von Konturen mit einem Werkzeug im TCP, ist dieBeschreibung der einfachen linearen Bahnsteuerung naheliegend.
14Continuous Point15Auch mit PTP und geeigneten Zwischenpunkten möglich.16Verfahren des TCP in Fallrichtung der Pendelstange.
Hochschule Ulm 42

Modellimplementierung
2.2.4.2 Bahnsteuerung zur Pendelstabilisierung
Die Pendelsensorik liefert die Position der Pendelspitze. Mit der Vorgabe, dass der TCP zudieser Position fahren muss, ist der Zielpunkt PZ für die Bahnsteuerung bekannt. Die ak-tuelle Position des TCPs ist durch die Geometrie bekannt, weshalb auch der StartpunktPSt definiert ist. Wie bereits angesprochen, soll sich der TCP direkt auf einer linearenBahn zum Zielpunkt bewegen. Mit zwei Punkten kann man nun eine Bahn bestimmen.Diese Bahn wäre nach obiger Definition keine Bahnsteuerung sondern würde der PTP-Steuerung entsprechen. Ausgehen von den zwei Punkten kann man sich eine Funktionp = f (t) konstruieren.(s. Abb. 2.5) Diese Funktion beschreibt alle Punkte, die der TCP
Abbildung 2.5: Berechnung von Zwischenwerten auf einer Geraden für eine lineare CP-Steuerung (aus[23, S.81])
auf dem Weg zu seinem Zielpunkt durchlaufen muss. Somit wird bei der linearen CP-Steuerung das Prinzip der PTP-Steuerung auf sehr kleine Werte ∆x/∆y zwischen Start-und Zielpunkt heruntergebrochen und ein, im Gesamtverhalten betrachtetes, vollkomme-nes lineares Bewegungsprofil erzeugt und vorgegeben. Die Steigung der linearen Funktionwird durch die Einstellung der zugehörigen Beschleunigungs- und Geschwindigkeitskurvedefiniert. Hierbei muss aber beachtet werden, dass die Gesamtzeit, welche das Verfahrenzwischen Start- und Zielpunkt maximal benötigen darf, die Basis für alle Berechnungenist. Darauf aufbauend und nach [23, S.80ff] wird die Berechnung eines Zwischenpunktsmit dem Ortsvektor p (t) hergeleitet. Als erstes wird der Bahnparameter sp (t) eingeführt,der die zurückgelegte Wegstrecke des Bahnsegments zum (relativen) Zeitpunkt t definiert.Die Bewegung beginnt bei t = 0 und endet bei tep, wobei die Strecke sep zurückgelegt wirdsp (t) ≥ 0. Der Bahnparameter sp (t) ist ein Skalar. Aus den Koordinaten des Start- undZielpunktes kann die zu befahrende Wegstrecke berechnet werden.
sep = |pZ − pSt| =√
(PZ,x − PSt,x)2 + (PZ,y − PSt,y)2 (2.2.16)
Hochschule Ulm 43

Modellimplementierung
Mit dem Vektor der vom Startpunkt zum aktuellen Punkt des TCP (pZ−pSt)sep
zeigt und deraktuellen Weglänge sp (t) kann der Ortsvektor p (t) bestimmt werden.
p (t) = pSt + sp (t) · (pZ − pSt)sep
(2.2.17)
Folglich reicht es vollkommen aus, die Zwischenwerte für sp (t) zu berechnen, d.h. es mussnur für sp (t) eine Interpolation durchgeführt werden. Dabei beginnt die Bewegung ausder Ruhe und endet mit der Geschwindigkeit Null. Es gilt:
sp (0) = sp (0) = vp (0) = 0, sp (te) = vp (te) = 0 (2.2.18)
Für die Berechnung von sp (t) kann ein Rampenprofil oder Sinoidenprofil verwendet wer-den. 17 Ein weiterer Ansatz zur Applikation eines Rampenprofils beschreibt [24, S.105ff].In diesem wird ein ruckbegrenztes Profil entwickelt, bei dem der Wert des Ruckes selbstfestgelegt wird. Diese Literatur stellt das beschleunigungsbegrenzte, also klassische Ram-penprofil, dem ruckbegrenzten Rampenprofil gegenüber und ergänzt die Inhalte von [23].Das Prinzip des ruckfreien Anfahren wird für unsere Anwendung bevorzugt, da der Ruckauch an das Pendel übertragen würde. Die Berechnung eines Sinoidenprofils wird im Fol-genden anhand von Abbildung 2.6 erläutert. Durch Start- und Zielpunkt ist sep gegeben,die Werte für die Bahngeschwindigkeit vp und Bahnbeschleunigung bp können zunächstfrei gewählt werden. Damit die gewünschte Geschwindigkeit auch erreicht werden kann,muss gewährleistet sein, dass vp ≤
√sep · bp
2 ist.Die Beschleunigung beginnt bei t = 0 undendet bei t = tbp. Der Bremsvorgang, beginnt bei t = tvp und endet folglich bei t = tep DieGeschwindigkeit und Strecke kann über die Integration berechnet werden. Ist tep = 2 · tbp,liegt eine geschwindigkeitsoptimierte Bahn vor, bei der die Beschleunigungs- und Brems-zeiten gleich lang sind.[23, S.69ff] Die Abbildung 2.6 zeigt beispielhaft das Verhalten einesSinoidenprofils.
tbp = 2 · vpbp
(2.2.19)
tep = sepvp
+ tbp (2.2.20)
tvp = tep − tbp (2.2.21)
17Bei einem Rampenprofil wird die Beschleunigung sprungförming aufgeschaltet, d.h. die zeitliche Ab-leitung der Beschleunigung ist zum Zeitpunkt des Ausschaltens nicht begrenzt. Man nennt dies Ruck.Dies erzeugt nachteilige Einflüsse auf mechanische Bauteile. Das Sinoidenprofil erzeugt eine weiche-re Sollbewegung. Die Beschleunigung vom Beginn bis zum Ende der Beschleunigungszeit folgt einerZeitfunktion,z.B. dem Sinus.[23, S.71f]
Hochschule Ulm 44
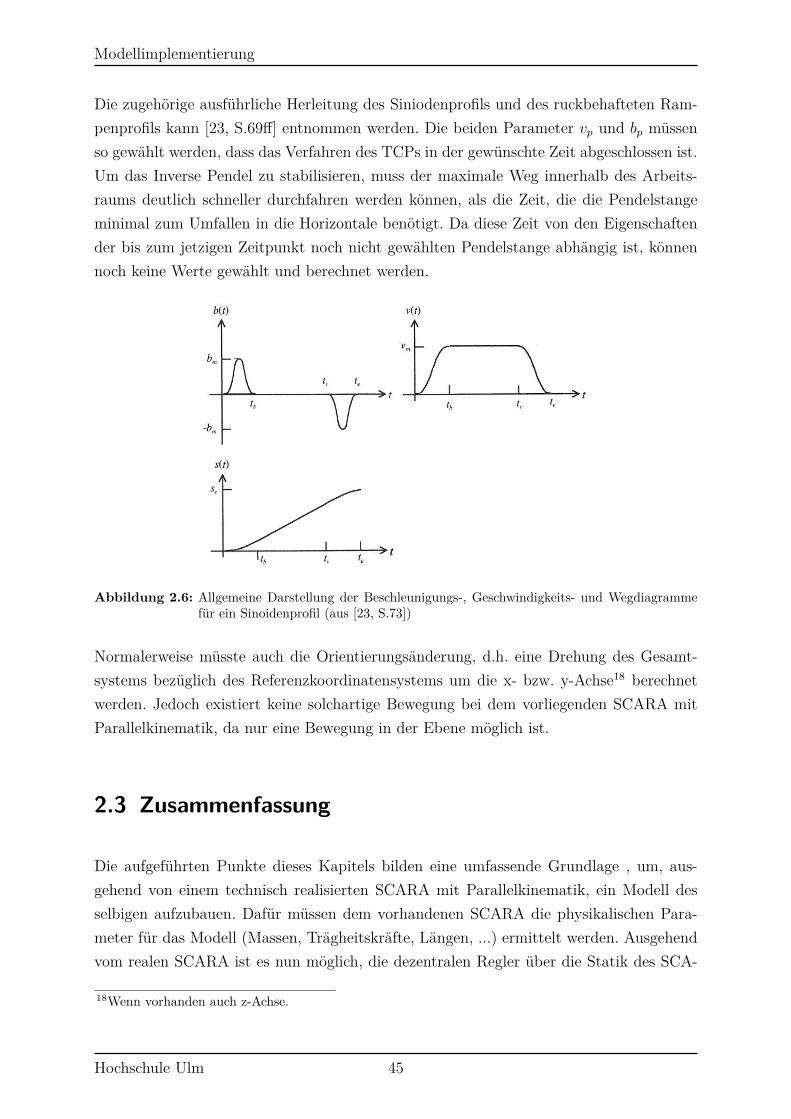
Modellimplementierung
Die zugehörige ausführliche Herleitung des Siniodenprofils und des ruckbehafteten Ram-penprofils kann [23, S.69ff] entnommen werden. Die beiden Parameter vp und bp müssenso gewählt werden, dass das Verfahren des TCPs in der gewünschte Zeit abgeschlossen ist.Um das Inverse Pendel zu stabilisieren, muss der maximale Weg innerhalb des Arbeits-raums deutlich schneller durchfahren werden können, als die Zeit, die die Pendelstangeminimal zum Umfallen in die Horizontale benötigt. Da diese Zeit von den Eigenschaftender bis zum jetzigen Zeitpunkt noch nicht gewählten Pendelstange abhängig ist, könnennoch keine Werte gewählt und berechnet werden.
Abbildung 2.6: Allgemeine Darstellung der Beschleunigungs-, Geschwindigkeits- und Wegdiagrammefür ein Sinoidenprofil (aus [23, S.73])
Normalerweise müsste auch die Orientierungsänderung, d.h. eine Drehung des Gesamt-systems bezüglich des Referenzkoordinatensystems um die x- bzw. y-Achse18 berechnetwerden. Jedoch existiert keine solchartige Bewegung bei dem vorliegenden SCARA mitParallelkinematik, da nur eine Bewegung in der Ebene möglich ist.
2.3 Zusammenfassung
Die aufgeführten Punkte dieses Kapitels bilden eine umfassende Grundlage , um, aus-gehend von einem technisch realisierten SCARA mit Parallelkinematik, ein Modell desselbigen aufzubauen. Dafür müssen dem vorhandenen SCARA die physikalischen Para-meter für das Modell (Massen, Trägheitskräfte, Längen, ...) ermittelt werden. Ausgehendvom realen SCARA ist es nun möglich, die dezentralen Regler über die Statik des SCA-
18Wenn vorhanden auch z-Achse.
Hochschule Ulm 45

Modellimplementierung
RAs und mit umfassenden Experimenten auszulegen. Möchte man nun das Modell umdie Regler ergänzen, müssen auch die Antriebe umfassenden modelliert werden, da siedas Bindeglied zwischen den Reglern und der Parallelkinematik sind. Bei den Antriebenkommt die Bahnsteuerung hinzu. Deren Auslegung ist ein wichtiger Punkt auf dem Wegzu einer sauberen Bewegung zwischen zwei Punkten mit einem minimalen Einfluss auf dasPendel. Ist das Stellglied mit allen seinen Eigenschaften, inklusive den Reglern, modelliertkann man sich mit den Informationen für den Stellgliedeingang befassen. Diese kommenaus der Detektion der Pendelspitze, die im vorliegenden Projekt über ein Kamerasystemrealisiert werden soll.
Hochschule Ulm 46
Detektion der Pendelspitze durch Bildverarbeitung
3 Detektion der Pendelspitze durchBildverarbeitung
Diese Kapitel befasst sich mit der Detektion der Pendelspitze, d.h. deren x- und y-Koordinaten, unter der Verwendung eines ortsfesten Kamerasystems als Sensor. Weiterhinwerden die theoretischen Grundlagen für ein geeignetes Kamerasystem, anhand eines bei-spielhaften SCARA-Pendelsystems, entwickelt.
3.1 Bildverarbeitung im Einsatz
Dieser Abschnitt beinhaltet eine kleine Einleitung zum Thema Bildverarbeitung und diepassende Begrifflichkeit für bestimmte Aufgaben. Des Weiteren wird für die vorliegendeProjektarbeit ein geeignetes Bildverarbeitungsprinzip, welches bestimmte Randbedingun-gen erfüllen muss, ausgewählt und bewertet.
3.1.1 Einleitung
Der Begriff Bildverarbeitung beschreibt ein weit gefächertes Spektrum. Das Spektrumreicht von einer einfachen Lichtschranke bis hin zur Videoüberwachung mit automatischerPersonen- und Gefahrenerkennung. Grundlegend kann man sagen, dass sich die Menge dersich im Einsatz befindlichen bildverarbeitenden Techniken vergrößert. Dies findet sowohlin der Industrie, als auch im Privaten durch immer günstiger werdende leistungsfähigereSystemlösungen, statt. Unter dem Decknamen Bildverarbeitung differenziert die Literatur[6] zwischen vier Hauptbegriffen.
Digitale Bildverarbeitung Dieser Begriff umfasst eine Vielzahl von Prozessen, deren Zieldie Gewinnung von nützlichen Daten aus einem Bild oder einer Bildfolge ist. Hierbei
Hochschule Ulm 47

Detektion der Pendelspitze durch Bildverarbeitung
werden wiederum vier unterschiedliche Schritte, die ein Bild dabei durchlaufen kann,aufzeigt.
• Bildbearbeitung - Image Enhancement (Bildverbesserung, Bildaufbereitung,Bildvorverarbeitung): Optimierung des Bildes z.B. mit Filtern, Punktopera-tionen, arithmetischen und logischen Bildoperationen, etc.
• Bildtransformation - Image Transformation: Transformation eines Bilder ineinen für den Computer vorteilhaften (mathematisch optimalen) Darstellungs-raum (z.B. FFT).
• Bildauswertung - Image Analysis: Eine Bildauswertung umfasst die Erstellungvon Histogrammen und Kennlinien. Dazu zählen auch das Extrahieren vonDaten wie z.B. Längen von Kanten dargestellter Objekte. Die Ausgabe einerBildauswertung ist in der Regel ein Datensatz!
• Bildkompression - Image Compression/Coding: Informationsreiche Bilder ha-ben eine sehr hohen Speicherbedarf, folglich müssen mit geeigneten Kompres-sionsalgorithmen die Bilddaten reduziert werden Ein alltägliches Beispiel istdie Kompression einer RAW-Bilddatei in eine JPEG-Bilddatei.
Computer Vision Dieser aus dem englischen Sprachgebrauch stammende Begriff beschreibtdas Verstehen eines Objekts oder einer Szene aus einem Bild bzw. einer Bilderfolge.Dies wird in der künstlichen Intelligenz von Robotern angewandt (sehender Robo-ter). Deutsche Begriffe hierfür sind Bildverstehen oder Bilderkennen.
Mustererkennung - Pattern Recognition Ein naher Verwandter der Computer Visionist die Mustererkennung. Sie ist nicht auf bildhafte Informationen beschränkt. DasZiel dieses Anwendungsbereichs ist es, logisch zusammengehörige Bildinhalte zu ent-decken, zu gruppieren und letztlich abgebildete Objekte, z.B. Buchstaben zu erken-nen. Ein bekanntes Beispiel ist die OCR1-Software von Scannern für Texterkennung.
Computer-Grafik Dieser Bereich beinhaltet die Generierung von Bildern in Bereichen wieDesktop-Publishing, elektronischen Medien und Videospielen. Jedoch verschwim-men hierbei die Grenzen zwischen Computergrafik und Bildverarbeitung. Ein Com-putertomographiebild auf dem Monitor wurde erst mit Bildverarbeitung für dasmenschliche Auge darstellbar.
1Optical Character Recognition (Optische Texterkennung)
Hochschule Ulm 48
Detektion der Pendelspitze durch Bildverarbeitung
Auf diesen Begrifflichkeiten aufbauend und der Blick in die Fachpresse zeigt, dass der In-halt der jeweiligen Bereiche durch die Anwender bzw. die Einsatzorte gegeben ist. Zusam-menfassend haben sich drei Hauptbereiche gebildet: Wissenschaftliche Bildverarbeitung,Industrielle Bildverarbeitung und Bildverarbeitung der Medien [6, siehe S.3f]. Unser Pro-jekt ist zwar an einer Hochschule angesiedelt, besitzt aber, durch die Handlingaufgabe,einen klaren industriellen Charakter. Davon ausgehend werden für das Projekt die Mög-lichkeit der industriellen Bildverarbeitung betrachtet.Nachdem die verschiedenen Arten der Bildverarbeitung erläutert sind, ist es wichtig zuverstehen, aus welchen Elementen ein Bildverarbeitungssystem besteht. Typische Kom-ponenten eines optischen Bildverarbeitungssystems sind ([6, 5]):
• Sensoren: Kameras, bzw. andere bildgebende Sensoren.
• Rechner: Übernehmen die (automatische) Bildverarbeitung mit geeigneter Software.
• Kommunikation: Datenübertragung zwischen der Bildverarbeitung im Rechner mitAktoren in Maschinen oder anderen Rechnersystemen.
Diese drei Elemente finden sich auch im theoretischen Ansatz zur Detektion der Pen-delspitze (Kap. 3.2) wieder. Dabei werden auch die Eigenschaften der drei Elemente er-gänzend beschrieben. Fokussiert man sich weiter auf den projektbezogenen Einsatz derBildverarbeitung, ist der Ansatz aus [5, S.4f], bei dem die verschiedenen Aufgaben derindustriellen Bildverarbeitung in acht unterschiedliche Bereiche aufgeteilt sind, sehr ge-eignet.
• Lageerkennung
• Kennzeichnungsidentifikation
• Form- und Maßprüfung bzw. Vermessung
• Vollständigkeitsprüfung
• Farbverarbeitung
• Bild- und Objektvergleich
• Oberflächeninspektion
• 3D-Bildverarbeitung
Hochschule Ulm 49

Detektion der Pendelspitze durch Bildverarbeitung
Dabei ist die Form- und Maßprüfung im Projekt von entscheidender Bedeutung. Sicherwäre die Lageerkennung, die die Lage des Pendels im Raum bestimmt, ein interessanterund alternativer Ansatz, der aber in dieser Arbeit nicht näher ausgeführt wird. Der Lö-sungsansatz bei einer Vermessung ist am geeignetsten, da eine Koordinatenbestimmung,z.B. die der Pendelspitze, also eine relative Abstandsmessung bezüglich eines Referenz-punktes2 durchgeführt werden muss.
3.1.2 Vermessung
Die Vermessung oder Form-Maßprüfung ist eines der anspruchsvollsten Gebiete der di-gitalen Bildverarbeitung in der Industrie. Es werden nicht nur hohe Ansprüche an dieSystemtechnik sondern auch an die bildverarbeitenden Algorithmen gestellt. Diese Prü-fungen haben ein sehr vielseitiges Einsatzgebiet, dazu zählen z.B. die groben Ermittlungenvon Objektdimensionen und die hoch genauen Vermessungen bis an die Grenzen des Na-nometerbereichs. Für ein Gelingen der Messaufgaben ist eine sorgfältige Wahl der Kompo-nenten notwendig, dies wird vor allem in der Peripherie des eigentlichen optischen Sensorsverlangt. Dazu zählen der mechanische Aufbau, die Beleuchtung und die Bildaufnahme ansich. Gerade bei der Vermessung von Objekten ist es erforderlich, dass absolut wiederhol-bare Bildverhältnisse sichergestellt sind. Dieses Problem kann z.B. mit der Lichtbeugungan einem Bohrloch verdeutlicht werden. (Abbildung 3.1) Sie zeigt für das gleiche Bauteildas Ergebnis mit drei verschiedenen, nicht näher definierten, Beleuchtungseinstellungen.Für den optischen Sensor entstehen dabei drei verschiedene Abmessungen mit unter-schiedlichen Kantengenauigkeiten3. Dies erklärt die Vielfalt der Verfahren und Systeme,
Abbildung 3.1: Veränderung der scheinbaren Öffnungsdurchmesser durch unterschiedliche Belichtungen([5, S.201])
die für die Vermessung entwickelt wurden. Sie reichen von der Feststellung relativer Maße
2z.B. Koordinatenursprung3Siehe Bogen in der Mitte des Bildes bzgl. des Bohrloches innerhalb des Bogens.
Hochschule Ulm 50
Detektion der Pendelspitze durch Bildverarbeitung
über die subpixelgenaue Vermessungen bis hin zu hochauflösenden Koordinatenmesssys-temen. Diese bestehen komplett aus Mechanik, Optik und Beleuchtung und erreichenGenauigkeiten bis zu einem Mikrometer.[5, vgl. S.195] Ein Anbieter solcher Bildverarbei-tungssysteme ist die Firma National Instruments (NI), deren Bildverarbeitungssystemefür ein breites Einsatzspektrum geeignet sind. Diese Systeme können auch mit den anderenProdukten von NI, z.B. LabVIEW kombiniert bzw. in sie integriert werden. Das Bildver-arbeitungssystem Farbort, kann z.B. eingesetzt werden, um vorher definierte Farbbereichein einem Bild schnell aufzufinden. Die Farbalgorithmen tragen dazu bei, Bildbereiche miteiner bestimmten Farbe schnell zu finden. Ein begrenzender Punkt ist jedoch, dass keineSubpixelgenauigkeit4 gefordert werden darf. Im NI-Tutorial [13] ist das Erkennen von ver-schiedenfarbigen Bonbons als Beispiel dargestellt. Stellt man sich darauf aufbauend einerunde farbige Kugel an der Pendelspitze des Inversen Pendels vor, so kann dessen Positiondamit bestimmt werden. Erweitert man nun das SCARA-Pendel-System um eine weitereverschieden farbige Kugel als Referenzmarke, z.B. für den Koordinatenursprung, könnenderen x- und y-Koordinate bestimmt werden. Folglich ist ein Ansatz für die Sensorikzur Detektion der Koordinaten der Pendelspitze gegeben. Zusätzlich kann mit den NI-Produkten auf einen großen Erfahrungsschatz innerhalb der Hochschule zurückgegriffenwerden.
3.2 Theoretischer Ansatz zur Detektion der Pendelspitze
Nachdem die Grundzüge der Bildverarbeitung dargestellt sind, ist es von Vorteil, die-se direkt auf die gegebene Problemstellung anzuwenden. Zusammengefasst ergeben sichdabei einige Punkte, die bei der Auslegung des Bildverarbeitungssystems zu beachtensind. Dazu sind primär die physikalischen Eigenschaften des Roboters und des Pendelsfestzulegen5:
• Die wichtigste Eigenschaft der geplanten Demonstrationsanlage ist die Transport-fähigkeit, z.B. für (Bildungs-)Messen. Die Gesamthöhe sollte dabei ca. einen Meternicht überschreiten.
4„Das Pixelraster eines Bildes – die Diskretisierung – begrenzt auf den ersten Blick die Genauigkeitvon Positions- und Abstandsangaben von Objekten oder Kanten. Tatsächlich können aber mancheGrößen, wie z.B. der Schwerpunkt oder die Lage einer Kante im Graustufenbild, in Bruchteilen einerPixelkantenlänge verlässlich ermittelt werden.“[7]
5Die im Folgenden verwendeten Werte sind Annahmen, die auf Diskussion und technischen Datenblät-tern, vor allem im Hinblick auf den SCARA, basieren
Hochschule Ulm 51

Detektion der Pendelspitze durch Bildverarbeitung
• Die Abmessungen der Grundfläche ist durch den SCARA mit Parallelkinematikplus einer Einhausung, z.B. ein zusammengesteckter Quader mit Plexiglasscheibenzur Betriebssicherheit, gegeben. Legt man die Abmessungen des SCARA-RobotersRP-5AH von Mitsubishi Electric zu Grunde, besitzt der SCARA einen Arbeitsraumvon ca. 600mm in der x-Achse und ca. 280mm in der y-Achse. Dieser Arbeitsraumwird entgegen der Angaben des technischen Datenblatts [11] als rechteckig angenom-men, um einen sinnvollen Bezug zu einer rechteckig aufnehmenden Bildverarbeitungherzustellen. Im Weiteren basieren alle Werte der physikalischen Eigenschaften desSCARAs auf dem genannten Datenblatt.6
• Für das Pendel wird eine Pendellänge von ca. 500mm angenommen. Addiert mandie Pendellänge und die die Höhe des TCPs des RP-5AH, ergibt sich eine Gesamt-höhe von ca. 760mm. Geht man davon aus, dass die Kamera senkrecht über demPendel befestigt wird, den ganzen, als quadratisch anzunehmenden Arbeitsraumdes SCARAs, erfasst und die gewünschte Bauhöhe eingehalten wird, bleiben zwi-schen einer senkrecht stehenden Pendelspitze und der Höhe von einen Meter nur ca.250mm übrig. Sollte es mit dem bisher noch nicht näher bestimmtem Kamerasysteminklusive Objektiv nicht möglich sein, den Arbeitsraum abzudecken, ist es notwen-dig, entweder die Pendelstange zu kürzen oder die Gesamthöhe von einem Meter zuüberschreiten. Alternativ käme ein stationärer Aufbau mit dem Kamerasystem ander Labordecke oder sogar an einer Teleskopstange in Frage.
Auf der Grundlage, dass bisher noch kein Kamerasystem gewählt wurde, können auchnoch keine Anforderungen an die Beleuchtung gestellt werden. Wichtig ist es in jedemFalle sich mit der Auflösung der Kamera zu beschäftigen.
3.2.1 Räumliche Auflösung
Die räumliche Auflösung gibt an, wie genau die Position eines Punktes im Raum, aufBasis des erzeugten Abbildes des Arbeitsraumes, bestimmt werden kann. Die folgendenAngaben beziehen sich nur auf die Pixel, die Subpixelgenauigkeit wird vernachlässigt. Inder Tabelle 3.1 sind, aus der Digitalphotographie bekannte, typische Auflösungen auf-gelistet und daraus sich ergebende, arbeitsraumbezogene Auflösungen in mm pro Pixelaufgeführt. Der Arbeitsraum beträgt 600 x 280mm, in diesem muss sich auch die Pen-delspitze befinden, um noch mit dem SCARA stabilisiert werden zu können. Diese Werte
6Auch wenn die vorläufige Auslegung eines SCARAs mit Parallelkinematik in einer Studienarbeit erar-beitet wurde, liegen über den RP-5AH deutlich mehr Daten vor.
Hochschule Ulm 52

Detektion der Pendelspitze durch Bildverarbeitung
gelten aber nur, wenn die Kamera genau den Arbeitsraum abdeckt. Sollte die Kameraeinen größeren Bereich aufnehmen, verschlechtern sich die Werte. Folglich gehen geradebei einer kleineren Auflösung viele Informationen verloren und die Messung wird dadurchungenauer. Der Unterschied zwischen den x- und y-Werten entsteht durch das Bildver-hältnis. Alle Auflösungen sind im Verhältnis 4 : 3 angegeben. Dem Entgegen besitzt derArbeitsraum ein Verhältnis von ca. 2 : 1. Folglich wäre es sinnvoll eine Kamera zu wäh-len, die dieses Bildverhältnis unterstützt und damit eine gleichmäßige Auflösung in x-und y-Richtung ermöglicht. Die größte Beachtung sollte die Auflösung in x-Richtung fin-
Auflösung in Megapixel(MP) (x-)Pixel x (y-)Pixel x mm pro Pixel y mm pro Pixel0, 1 800 x 600 0, 75 0, 471, 3 1280 x 960 0, 469 0, 2912 1600 x 1200 0, 375 0, 2333 2016 x 1512 0, 298 0, 1855 2576 x 1932 0, 233 0.1448 3264 x 2448 0, 184 0, 11412 4048 x 3040 0, 148 0, 092
Tabelle 3.1: Vergleich verschiedener Auflösungen einer Kamera mit den zugehörigen Auflösungen in mmpro Pixel im Arbeitsraum
de, da die y-Richtung mit der bereits angesprochenen Problematik des Bildverhältnissesim vorliegenden Fall viel genauer ist. Bereits bei einer für heutige Verhältnisse geringen,aber weit verbreiteten Auflösung von 1, 3 Megapixel, lässt sich die Lage eines Punktes aufeinen halben Millimeter genau bestimmen. Sicher sind höhere Auflösungen von Vorteil,diese erhöhen aber auch den Rechenaufwand der softwaremäßigen Bildverarbeitung. Ver-wendet man an der Pendelspitze eine Kugel mit einem Durchmesser von 10mm, müssteman bei der geringsten Auflösung von 0, 1 Megapixel mit einer Genauigkeit von einemdreiviertel Millimeter arbeiten. Würde das Inverse Pendel mit dieser Quantisierung (vgl.Quatisierungsproblem beim Analog-Digital-Wandler) stabilisiert, erzeugt es ein Zitternder Pendelspitze, um diesen Wert.Möchte man nun das Kamerasystem zur Pendeldetektion verwenden muss mit einem In-versen Problem gearbeitet werden, da die ortsfeste Kamera durch den Blickwinkel nichtdie tatsächlichen Koordinaten erkennt. Verstärkt wird das Problem, da der Aufhängungs-punkt des Pendels, also des TCP eigentlich wählbar ist, noch um die Verzerrung durchdas „Fallen“ der Pendelstange. Zur Lösung des Problems müssen geometrische Umrech-nungen/Korrekturen durchgeführt werden.
Hochschule Ulm 53

Detektion der Pendelspitze durch Bildverarbeitung
3.2.2 Bildrate
Neben der Auflösung ist die Bildrate7 ein wichtiger Punkt, da die Anzahl der aufgenomme-nen und ausgewerteten Bilder die Eingangsdaten für den zeitdiskreten Regelkreis liefern.Wird verlangt, dass der Regelkreis z.B. alle 10ms aktiv wird, muss auch das Bildverarbei-tungssystem mindestens in der gleichen Zeitspanne aktuelle Eingangsdaten liefern. DieseBedingung verlangt, vor allem bei sehr kleinen Abtastzeiten des Reglers, sehr leistungs-starke Bildverarbeitungssysteme. Problematisch dabei sind die maximalen Übertragungs-raten der Daten zwischen der Kamera und dem Auswertesystem, die Rechenleistung derBildverarbeitung und die Datenübergabe an die Regelung. Je höher die Auflösung der Bil-der, desto größer ist die Datenmenge, die verarbeitet werden muss. Somit bietet es sich an,eine hohe Bildrate mit einer möglichst geringen Auflösung zu verknüpfen. Vergleicht mandie RAW-Datenmenge zwischen zwei Bildern mit 24bit Farbtiefe8 und einer Auflösungvon 0, 1 MP und 8 MP so ist die Datenmenge des 8 MP-Bildes ca. 16 mal so groß. ZurBerechnung der notwendigen Datentransferrate zwischen Kamera und Bildverarbeitungwird angenommen , dass die Kamera alle 10ms ein Foto aufnimmt. Mit einer Auflösungvon 8 MP mit 24bit Farbtiefe ergibt sich eine notwendige Datenrate von ca. 2, 4 Gigabytepro Sekunde. Die Anbieter solcher Bildverarbeitungssysteme, z.B. Fa. Stemmer Imagine,können sogar mit Datenraten bis 6, 25 Gigabyte pro Sekunde arbeiten.
Rechenbeispiel: Dies ist eine kleine Überschlagsrechnung, um die notwendige Ab-tastrate der Bildverarbeitung mit Hilfe der maximalen Fallgeschwindigkeit zu bestim-men. Die Berechnung basiert auf dem Energieerhaltungssatz. Angenommen werdendie Pendellänge l = 0, 5m und der maximale Auslenkwinkel ϕ = 5◦.
Energieerhaltungssatz:
m· g·h = 12 ·m· v2
g·h = 12 · v2
v =√
2 · g·h
7Bildanzahl pro Zeit, meist Bilder pro Sekunde8224 darstellbare Farben im RGB-Farbraum (Farbort)
Hochschule Ulm 54

Detektion der Pendelspitze durch Bildverarbeitung
Maximale Geschwindigkeit ∆v zwischen ϕ = 0◦ und ϕ = 5◦:
h = l· cos (ϕ)
v =√g· cos (ϕ)
∆v =√g· cos (0◦)−
√g· cos (5◦)
∆v ≈ 6mm/s
Verwendet man nun eine mittlere Auflösung mit ca. α = 0, 3mm (3 MP) folgt für dieAbtastrate r:
r ≤ α
∆vr ≤ 50ms
Das Rechenbeispiel zeigt, dass die zu wählenden Auflösung und die Bildanzahl pro Sekun-de von den dynamischen Eigenschaften der Regelstrecke abhängig sind. Dabei wird auchgezeigt, dass mit einer hohen Auflösung die Abtastzeit vergrößert werden muss, bzw. miteiner kleinen Auflösung die Abtastzeit verringert werden kann.9
3.2.3 Zusammenfassung
Der Einsatz einer digitalen Bildverarbeitung ist sehr vielseitig, wobei der größte Vorteil dasberührungslose Messprinzip ist. Zusätzlich kann ein Kamerasystem sehr variabel zusam-mengestellt werden. Die damit verbundene Variabilität kann aber auch zu überdimensio-nierten Systemen führen. Um dies zu verhindern, ist es notwendig, so viele Informationenwie möglich über die noch zu erledigenden Aufgaben zu sammeln. Folglich muss ein Bild-verarbeitungssystem verantwortungsvoll gewählt und installiert werden. Der Markt bietetviele Kombinationen an und unterstützt den Kunden bei der Systemplanung. Hinsichtlichder Bildverarbeitungssoftware ist es für eine Vielzahl von Einsatzzwecken heutzutage nichtmehr sinnvoll, die Verarbeitungssoftware bzw. die damit verbundenen Algorithmen selbstzu implementieren. Durch die langjährige Erfahrungen mit den Produkten von NationalInstruments, sowie der Einsatz von LabVIEW bei der Implementierung von Regelungs-
9Um die maximale Datenrate pro Sekunde des Systems nicht zu überschreiten.
Hochschule Ulm 55

Detektion der Pendelspitze durch Bildverarbeitung
aufgaben, ist es naheliegend, dass auch die Bildverarbeitung von diesem Anbieter gewähltwerden sollte.
Hochschule Ulm 56
Resümee und Ausblick
4 Resümee und Ausblick
4.1 Resümee
Das Ergebnis der vorliegenden Arbeit ist als Grundlage für weitere Studien- respektiveAbschlussarbeiten anzusehen. Das Ziel der Arbeit, ein variables Modell für ein SCARAmit Parallelkinematik zu entwickeln wurde erreicht. Dabei konnten Erfahrungen im Be-reich der Herleitung von Dynamikgleichungen auf Basis des d’Alembertschen Prinzipsgewonnen werden. Dieses Modell und die entwickelten Koordinatentransformationen sindfür eine anschließende Regelsystemauslegung des Stellglieds von Nutzen. Leider konntenicht begonnen werden das Regelsystem für das Stellglied auszulegen, da kein Aufbau desSCARAs vorhanden war und diese Aufgabe wahrscheinlich den zeitlichen Rahmen derArbeit gesprengt hätte. Die Auflistung verschiedener Sensorsysteme für die Lagebestim-mung des Pendels ermöglicht es, wenn die Verwendung einer digitalen Bildverarbeitungnicht möglich wäre, eine Alternative zu wählen.Um das Stellglied auch für andere Einsatzzwecke, z.B. das Zeichnen mit einem Farbstif-te, wurde neben der einfachen PTP-Steuerung auch die Bahnsteuerung diskutiert, diedem Leser einen Einstieg in die Thematik ermöglicht. Der Einblick in die Bildverarbei-tung ermöglichte mir ein neues Themengebiet kennen zu lernen. Gerade die individuellenAnforderungen an ein Bildverarbeitungssystem zeigten die Komplexität dieses Themen-gebiets.Schlussendlich muss man sagen, dass viele Themenbereiche diskutiert und das Hauptthe-ma ausführlich erarbeitet wurden. Damit wurde eine Grundlage für eine positive Fort-führung der Arbeit geschaffen. Die Abbildung 4.1 zeigt das Gesamtsystem „Stabilisierungdes Inversen Pendels“, wobei der TCP des Stellgliedes (II) zur Stabilisierung an den Ortder detektierten Pendelspitze verfahren wird (IV). Zusätzlich wird der TCP in die Mittedes Arbeitsraumes bewegt (III).
Hochschule Ulm 57
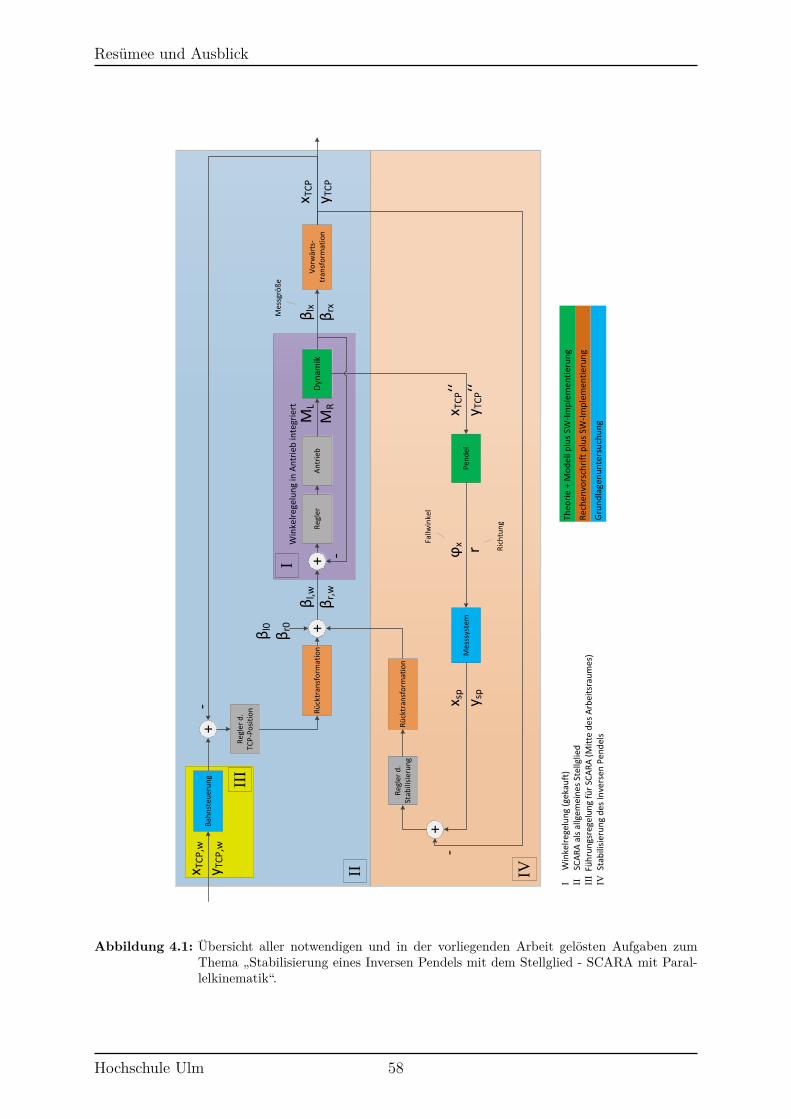
Resümee und Ausblick
ML
MR
x TC
P,w
y T
CP
,w
x TC
P
y TC
PR
egle
rA
ntr
ieb
Dyn
amik
Vo
rwär
ts-
tran
sfo
rmat
ion
Reg
ler
d.
Stab
ilisi
eru
ng
Mes
ssys
tem
Rü
cktr
ansf
orm
atio
n
Reg
ler
d.
TCP
-Po
siti
on
+
Win
kelr
egel
un
g in
An
trie
b in
tegr
iert
Rü
cktr
ansf
orm
atio
n
Pen
del
Bah
nst
euer
un
g+
x TC
P‘‘
y TC
P‘‘
βlx
βrx
βl,w
β
r,w
+ ϕx r
x sp
y sp
-
-
+-
βl0
β
r0
II IV
III
I
I
Win
kelr
egel
un
g (g
ekau
ft)
II
SC
AR
A a
ls a
llgem
ein
es S
tellg
lied
III
Fü
hru
ngs
rege
lun
g fü
r SC
AR
A (
Mit
te d
es A
rbei
tsra
um
es)
IV
Stab
ilisi
eru
ng
des
Inve
rsen
Pen
del
s
Theo
rie
+ M
od
ell p
lus
SW-I
mp
lem
enti
eru
ng
Rec
hen
vors
chri
ft p
lus
SW-I
mp
lem
enti
eru
ng
Gru
nd
lage
nu
nte
rsu
chu
ng
Mes
sgrö
ße
Fallw
inke
l
Ric
htu
ng
Abbildung 4.1: Übersicht aller notwendigen und in der vorliegenden Arbeit gelösten Aufgaben zumThema „Stabilisierung eines Inversen Pendels mit dem Stellglied - SCARA mit Paral-lelkinematik“.
Hochschule Ulm 58
Resümee und Ausblick
4.2 Ausblick
Um das Ziel der Demoanlage „Stabilisieren eines Inversen Pendels“ zu erreichen, müs-sen aufbauend auf der vorliegenden Arbeit, in Zukunft noch drei Hauptthemengebieteerarbeitet werden.
Technische Realisierung des SCARAs Der Aufbau des SCARAs muss eine hohe Prio-rität haben. Ist der Aufbau fertig, bzw. sind alle Bauteile gewählt, können die physika-lischen Parameter für das Modell abgeleitet werden. Weiterhin sollten das Getriebespiel,der geplanten Planetengetriebe, untersucht werden. Es empfiehlt sich, einen schrittweisenAufbau vorzunehmen. Für das Problem des Getriebespiels, bietet es sich an, zunächst nureinen Antrieb mit Getriebe und einem (Unter-)Arm zu analysieren.
Auslegung der Regelungen Ein umfangreicher Punkt ist die Auslegung des Regelsys-tems für den SCARA als Stellglied. Auf Grund der gewählten Antriebe, die bereits ei-ne eingebaute Winkelregelung besitzen, kann entweder nach dem wahrscheinlich spielbe-hafteten Getriebe ein indirekte Regelung verwendet werden oder eine direkte Regelungbasierend auf den TCP-Koordinaten erfolgen. Um dies durchzuführen muss sowohl dermechanische Aufbau des SCARAs vorhanden, als auch dessen Handbetrieb möglich sein.Das Primärziel ist erreicht, wenn der SCARA durch Koordinatenvorgabe den gewünsch-ten Zielpunktes, mit PTP- oder Bahnsteuerung, genau erreicht. Mit einem geregeltenStellglied können die Regelungen für gewünschte Anwendungsfälle, hauptsächlich die Sta-bilisierung des Pendels, ausgelegt werden. Daraus folgt, dass ohne ein funktionierendesund geregeltes Stellglied eine Fortführung des Projektes nicht sinnvoll ist.
Anwendbarkeit der Bildverarbeitung Diese Untersuchungen werden benötigt, um fest-zustellen, ob und in welchem Umfang eine Bildverarbeitung für den Einsatz mit dem SCA-RA möglich ist. Es geht nicht nur um die Lagebestimmung des Pendels, sondern auch umsonstige Positionsbestimmungen im Stellbereich des SCARAs. Hauptpunkte sind hierbei,für die erforderliche Bildrate zur Datenerfassung für den Regelkreis und die Aufhängungs-höhe des optischen Sensors, eine kostengünstige Lösung zu finden.Sind diese drei Punkte erarbeitet und das Stellglied funktioniert wie gewünscht, kann mansich mit diversen Zielapplikationen beschäftigen. Mögliche Einsatzzwecke sind:
• Stabilisierung des Inversen Pendels
Hochschule Ulm 59

Resümee und Ausblick
• Abfahren/Zeichnen von Figuren, ggf. mit einer z-Achse im TCP
• Transportvorgänge um kopflastige Objekte ohne „kippen“, z.B. Rakete wird aufTCP bewegt.
Abschließend zeigt sich, dass es noch ein langer Weg bis zu einer funktionierenden Demo-anlage „Stabilisieren eines Inversen Pendels“ auf Basis eines SCARAs mit Parallelkine-matik als Stellglied ist.
Hochschule Ulm 60

Literaturverzeichnis
Literaturverzeichnis
[1] Assmann, Bruno ; Selke, Peter (Hrsg.): Technische Mechanik 3 - Kinematik undKinetik. München [u.a.] : Oldenbourg, 2011
[2] Bartsch, Hans-Jochen: Taschenbuch mathematischer Formeln. 19. Auflage. Mün-chen ; Wien : Fachbuchverl. Leipzig im Hanser-Verl., 2001
[3] Berger, Benjamin: Realisierung einer prototypischen Hardwarelösung für ein in-verses Pendel, Teschnische Universität Leipzig, Diplomarbeit, 2004
[4] Beyer, W.: Industrielle Winkelmesstechnik - Grundlagen, Meßverfahren und Ge-räte; aufgabenspezifische Winkelmessung. Ehningen bei Böblingen : expert verlag,1990
[5] Demant, Christian ; Streicher-Abel, Bernd (Hrsg.) ; Springhoff, Axel (Hrsg.):Industrielle Bildverarbeitung - Wie optische Qualitätskontrolle wirklich funktioniert.Berlin, Heidelberg : Springer-Verlag Berlin Heidelberg, 2011
[6] Erhardt, Angelika: Einführung in die Digitale Bildverarbeitung - Grundlagen, Sys-teme und Anwendungen. Wiesbaden : Vieweg + Teubner, 2008
[7] Heckenkamp, Christoph: Grundprinzipien der Subpixel-Genauigkeit. : , 2013(12.02.2013). – URL http://www.inspect-online.com/topstories/automation/grundprinzipien-der-subpixel-genauigkeit
[8] Lunze, J.: Regelungstechnik 1 - Systemtheoretische Grundlagen, Analyse und Ent-wurf einschleifiger Regelungen. 8. Auflage. Berlin ; Heidelberg : Springer, 2010
[9] Lunze, J.: Regelungstechnik 2 - Mehrgrößensysteme, Digitale Regelung. 6. Auflage.Berlin ; Heidelberg : Springer, 2010 (Springer-Lehrbuch Bd. 2)
[10] Lutz, H. ; Wendt, W.: Taschenbuch der Regelungstechnik: mit MATLAB undSimulink. 7. Auflage. Frankfurt am Main : Velag Harri Deutsch, 2007
[11] Mitsubishi Electric: MELFA Industrieroboter Technisches Handbuch RP-1AH/3AH/5AH. Version A. : , August 2002
Hochschule Ulm 61

Literaturverzeichnis
[12] MITSUBISHI ELECTRIC EUROPE: SCARA Roboter. : , 2013 (02.01.2013).– URL http://www.directindustry.de/prod/mitsubishi-electric-europe/scara-roboter-12225-56844.html
[13] National Instruments: Bildanalyse und -verarbeitung. : , 2013 (12.02.2013). –URL http://www.ni.com/white-paper/3470/de. – Tutorium
[14] Physik Instrumente (PI) GmbH & Co. KG: Grundlagen der Mikropositio-nierung. : , 2012 (18.10.2012). – URL http://www.physikinstrumente.de/de/produkte/prdetail.php?sortnr=700500.00
[15] Polzer, Jan: Berechnung der Nulldynamik eines inversen Pendels mit unterschiedli-chen mathematischen Theorien / Gerhard-Mercator-Universität-GH Duisburg Meß-,Steuer- und Regelungstechnik. 2000 (01). – Forschungsbericht
[16] Raisch, J.: Mehrgrößenregelung im Frequenzbereich. 1. Auflage. München ; Wien :Oldenbourg, 1994
[17] Redinger, Andreas: SCARA-Roboter mit Parallelkinematik. Hochschule Ulm. 82012. – Studienarbeit
[18] Samal, E.: Grundriß der praktischen Regelungstechnik. 17. Auflage. München ;Wien : Oldenbourg, 1991
[19] Schulz, Gerd: Lineare und nichtlineare Regelung, rechnergestützter Reglerentwurf.3. Auflage. München ; Wien : Oldenbourg, 2007
[20] Schweitzer, Jörg ; Dörflinger, Justus ; Jopp, Ronny: Das Inverse Pendel -Prozessdatenverarbeitung. – URL http://www.cs.hs-rm.de/~linn/vpdv05/jopp_et_al/doku_pendel.pdf. – Hochschule RheinMain - University of Applied Sciences- Wiesbaden Rüsselsheim
[21] Sprenger, Bernhard ; Kucera, Ladislav ; Mourad, Safer: Balancing of an In-verted Pendulum with a SCARA Robot
[22] Urban Mobility Germany Authorized: Der neue Segway™i2. : , 2012(18.10.2012). – URL http://www.segway.de/type-i2.php
[23] Weber, W.: Industrieroboter: Methoden der Steuerung und Regelung. Fachbuchverl.Leipzig im Carl Hanser Verlag, 2002
[24] Zirn, Oliver ; Weikert, Sascha: Modellbildung und Simulation hochdynamischerFertigungssysteme - Eine praxisnahe Einführung. 1. Auflage. Berlin ; Heidelberg[u.a.] : Springer, 2006
Hochschule Ulm 62

Herleitung des Signalverhaltens eines linearen inversen Pendels
A Herleitung des Signalverhaltens eineslinearen inversen Pendels
A.1 Großsignalverhalten
In diesem Teil wird das komplette Großsignalverhalten des Inversen Pendels allgemeinhergeleitet. Die Ausgangslage ist das freigeschnittenen Pendel:
mw · xw = Fx −H (A.1.1)
mp · xs = H (A.1.2)
mp · zs = V −mp · g (A.1.3)
Jp · ϕ = V l· sinϕ+Hl· cosϕ (A.1.4)
xs = xw − l· sinϕ (A.1.5)
zs = l· cosϕ (A.1.6)
Ableitungen der zeitvariablen Funktion ϕ:
ϕ = f (t) (A.1.7)
f (t)′ = d
dtϕ = ϕ (A.1.8)
f (t)′′ = d2
dt2ϕ = ϕ (A.1.9)
Hochschule Ulm I
Herleitung des Signalverhaltens eines linearen inversen Pendels
Mit cosϕ:
g (t) = cosϕ (A.1.10)
g (t) = cos (f (t)) (A.1.11)
g (t)′ = − sin (f (t)) · f (t)′ (A.1.12)
g (t)′′ = − sin (f (t)) · f (t)′′ +(− cos (f (t)) · f (t)′ · f (t)′
)(A.1.13)
g (t)′′ = (−1) ·(ϕ· sinϕ+ ϕ2 · cosϕ
)(A.1.14)
Mit sinϕ:
h (t) = sinϕ (A.1.15)
h (t) = sin (f (t)) (A.1.16)
h (t)′ = cos (f (t)) · f (t)′ (A.1.17)
h (t)′′ = cos (f (t)) · f (t)′′ −(sin (f (t)) · f (t)′ · f (t)′
)(A.1.18)
h (t)′′ = ϕ· cosϕ− ϕ2 · sinϕ (A.1.19)
Anwendung auf V :
V = mp · zs − s+mp · g (A.1.20)
V = mp · d2
dt2(zs) +mp · g (A.1.21)
V = mp · l· d2
dt2(cosϕ) +mp · g (A.1.22)
d2
dt2(cosϕ) = (−1) ·
(ϕ· sinϕ+ ϕ2 · cosϕ
)(A.1.23)
V = (−1) ·mp · l· ϕ· sinϕ−mp · l· ϕ2 · cosϕ+mp · g (A.1.24)
Anwendung auf H:
H = mP · xs (A.1.25)
H = mp · d2
dt2(xs) (A.1.26)
H = mp · d2
dt2(xw − l· sinϕ) (A.1.27)
H = mp · xw − l·d2
dt2(sinϕ) (A.1.28)
d2
dt2(sinϕ) = ϕ· cosϕ− ϕ2 · sinϕ (A.1.29)
H = mp · xw −mp · l· ϕ· cosϕ+mp · l· ϕ2 · sinϕ (A.1.30)
Hochschule Ulm II

Herleitung des Signalverhaltens eines linearen inversen Pendels
Translatorische Bewegung:
mw = Fx −H (A.1.31)
xw (mw +mp) = Fx +mp · l· ϕ· cosϕ−mp · l· ϕ2 · sinϕ (A.1.32)
Rotatorische Bewegung:
Jp · ϕ = V l· sinϕ+Hl· cosϕ (A.1.33)
V l· sinϕ = −mp · l· ϕ· (sinϕ)2 −mp · l· ϕ2 · cosϕ· sinϕ
+mp · l· g· sinϕ(A.1.34)
Hl· cosϕ = mp · l· xw · cosϕ−mp · l· ϕ· (cosϕ)2
+mp · l· ϕ2 · cosϕ· sinϕ(A.1.35)
k = mp · l (A.1.36)
Jp · ϕ = −k· l· ϕ·((sinϕ)2 + (cosϕ)2
)+ k· l· ϕ2 · (− cosϕ· sinϕ+ cosϕ· sinϕ)
+ k· g· sinϕ+ k· xw · cosϕ
(A.1.37)
Additionstheoreme (siehe [2]):
cos (x1 − xs) = sin x1 · sin x2 + cosx1 · cosx2 (A.1.38)
sin (x1 − x2) = sin x1 · cosx2 − cosx1 · sin x2 (A.1.39)
x1 = x2 = ϕ (A.1.40)
cos (x1 − xs) = cos (0) = 1 (A.1.41)
sin (x1 − xs) = sin (0) = 0 (A.1.42)
Folglich:
Jp · ϕ = −k· l· ϕ+ k· g· sinϕ+ k· xw · cosϕ (A.1.43)
ϕ (Jp + k· l) = k· g· sinϕ+ k· xw · cosϕ (A.1.44)
A.2 Übertragungsfunktion mit Linearisierung
Dieser Abschnitt zeigt schrittweise die allgemeine Herleitung der ÜbertragungsfunktionGs (s) = ϕ
Fx. Startpunkte sind die beiden nichtlinearen Bewegungsgleichungen A.1.32
und A.1.44. Im ersten Schritt werden die nichtlinearen Terme durch den kleinen Winkel
Hochschule Ulm III

Herleitung des Signalverhaltens eines linearen inversen Pendels
ϕ eliminiert und anschließend die vernachlässigbar kleinen Potenzwerte von ϕ zu Nullgesetzt. Es gilt weiterhin k = mp · l.
ϕ (Jp + k· l) = k· g·ϕ+ k· xw (A.2.1)
xw (mw +mp) = Fx + k· ϕ− k· ϕ2 ·ϕ (A.2.2)
xw (mw +mp) = Fx + k· ϕ (A.2.3)
Durch einsetzten der zweiten Gleichung in die Erste wird der Term xw eliminiert und esentsteht einer Gleichung mit den zwei Veränderlichen ϕ und Fx.
ϕ (Jp + k· l) = k· g·ϕ+ k·(Fx + k· ϕ
mw +mp
)(A.2.4)
ϕ (Jp + k· l) = k· g·ϕ+ k·Fxmw +mp
+ k2 · ϕ
mw +mp
(A.2.5)
Fx · k
mw +mp
= ϕ
(Jp + k· l + k2
mw +mp
)− ϕ· k· g (A.2.6)
Jetzt kann die Übertragungsfunktion Gs (s) = ϕ(s)Fx(s) mit Hilfe des Laplaceoperators s = d
dt
bzw. s2 = d2
dt2erstellt werden.
ϕ (s)Fx (s) =
kmw+mp
s2(Jp + k· l + k2
mw+mp
)− (k· g)
(A.2.7)
Gs (s) =
(1
g· (mw+mp)
)s2(
4l3g −
mp · lg· (mw+mp)
)− 1
(A.2.8)
Gs (s) = b0
s2a2 + a0(A.2.9)
Hochschule Ulm IV
Nebenrechnungen für die Parallelkinematik
B Nebenrechnungen für dieParallelkinematik
B.1 Zeitliche Ableitungen derOberarmschwerpunktkoordianten
Hier werden die zeitlichen Ableitungen für die Schwerpunktkoordinaten der beiden Ober-arme berechnet. Die Bezeichnungen und Zusammenhänge können dem Kapitel 1.3.2.1entnommen werden. Für die Koordinaten des linken Oberarms gilt:
xsol = xbl + lul · cos (βl) + a· lol · cos (βol) (B.1.1)
ysol = ybl + lul · sin (βl) + b· lol · sin (βol) (B.1.2)
Die beiden Variablen a und b werden zur Definition der Schwerpunktlage benötigt. AlsNäherung wird in diesem Fall a = b = 1
2 , d.h. der Schwerpunkt liegt genau auf der halbenLänge lol des linken Oberarms.
xsol = (−1) · lul · βl · sin (βl) + 12 · lol · (−1) · βol · sin (βol) (B.1.3)
ysol = lul · βl · cos (βl) + 12 · lol · βol · cos (βol) (B.1.4)
Unter der Verwendung der Gleichungen A.1.14 und A.1.19 werden die beiden zeitlichenAbleitungen xsol und ysol bestimmt.
xsol = (−1) · lul ·(
sin (βl) · βl + cos (βl) ·(βl)2)
+ 12 · (−1) · lol ·
(sin (βol) · βol + cos (βol) ·
(βol)2) (B.1.5)
ysol = lul ·(
cos (βl) · βl − sin (βl) ·(βl)2)
+ 12 · lol ·
(cos (βol) · βol − sin (βol) ·
(βol)2) (B.1.6)
Hochschule Ulm V

Nebenrechnungen für die Parallelkinematik
Für die Schwerpunktkoordinaten des rechten Oberarms gilt analog:
xsor = xbr + lur · cos (βr) + a· lor · cos (βor) (B.1.7)
ysor = ybr + lur · sin (βr) + b· lor · sin (βor) (B.1.8)
xsor = (−1) · lur ·(
sin (βr) · βr + cos (βr) ·(βr)2)
+ 12 · (−1) · lor ·
(sin (βor) · βor + cos (βor) ·
(βor)2) (B.1.9)
ysor = lur ·(
cos (βr) · βr − sin (βl) ·(βr)2)
+ 12 · lor ·
(cos (βor) · βor − sin (βor) ·
(βor)2) (B.1.10)
B.2 Gleichungen Vorwärtstransformation
Mit den folgenden Gleichungen werden die Punkte Ptcp1 = (xtcp1/ytcp1) und Ptcp2 =(xtcp2/ytcp2) des TCP bestimmt. Die Basis liefern dafür die Koordinatenpunkte Pl =(xl/yl) und Pr = (xr/yr) und die Oberarmlängen lol und lor.
B.2.1 x-Koordinate
xtcp1 = xl2 + xr
2 +yl√q
n− yr
√r
n− lol
2 xln
+ lor2 xln
+ lol2 xrn− lor
2 xrn
(B.2.1)
xtcp2 = xl2 + xr
2 −yl√s
n+ yr
√t
n− lol
2 xln
+ lor2 xln
+ lol2 xrn− lor
2 xrn
(B.2.2)
n =2xl2 − 4xl xr + 2xr2 + 2 yl2 − 4 yl yr + 2 yr2 (B.2.3)
Hochschule Ulm VI

Nebenrechnungen für die Parallelkinematik
q =− lol4 + 2 lol2 lor2 + 2 lol2 xl2 − 4 lol2 xl xr + 2 lol2 xr2
+ 2 lol2 yl2 − 4 lol2 yl yr + 2 lol2 yr2 − lor4 + 2 lor2 xl2
− 4 lor2 xl xr + 2 lor2 xr2 + 2 lor2 yl
2 − 4 lor2 yl yr
+ 2 lor2 yr2 − xl4 + 4xl3 xr − 6xl2 xr2 − 2xl2 yl2
+ 4xl2 yl yr − 2xl2 yr2 + 4xl xr3 + 4xl xr yl2
− 8xl xr yl yr + 4xl xr yr2 − xr4 − 2xr2 yl2 + 4xr2 yl yr
− 2xr2 yr2 − yl4 + 4 yl3 yr − 6 yl2 yr2 + 4 yl yr3 − yr4
(B.2.4)
r =− lol4 + 2 lol2 lor2 + 2 lol2 xl2 − 4 lol2 xl xr + 2 lol2 xr2
+ 2 lol2 yl2 − 4 lol2 yl yr + 2 lol2 yr2 − lor4 + 2 lor2 xl2
− 4 lor2 xl xr + 2 lor2 xr2 + 2 lor2 yl
2 − 4 lor2 yl yr
+ 2 lor2 yr2 − xl4 + 4xl3 xr − 6xl2 xr2 − 2xl2 yl2
+ 4xl2 yl yr − 2xl2 yr2 + 4 xl xr3 + 4xl xr yl2
− 8xl xr yl yr + 4xl xr yr2 − xr4 − 2xr2 yl2 + 4xr2 yl yr
− 2xr2 yr2 − yl4 + 4 yl3 yr − 6 yl2 yr2 + 4 yl yr3 − yr4
(B.2.5)
s =− lol4 + 2 lol2 lor2 + 2 lol2 xl2 − 4 lol2 xl xr + 2 lol2 xr2
+ 2 lol2 yl2 − 4 lol2 yl yr + 2 lol2 yr2 − lor4 + 2 lor2 xl2
− 4 lor2 xl xr + 2 lor2 xr2 + 2 lor2 yl
2 − 4 lor2 yl yr
+ 2 lor2 yr2 − xl4 + 4xl3 xr − 6xl2 xr2 − 2xl2 yl2
+ 4xl2 yl yr − 2xl2 yr2 + 4xl xr3 + 4xl xr yl2
− 8xl xr yl yr + 4xl xr yr2 − xr4 − 2xr2 yl2 + 4xr2 yl yr
− 2xr2 yr2 − yl4 + 4 yl3 yr − 6 yl2 yr2 + 4 yl yr3 − yr4
(B.2.6)
Hochschule Ulm VII

Nebenrechnungen für die Parallelkinematik
t =− lol4 + 2 lol2 lor2 + 2 lol2 xl2 − 4 lol2 xl xr + 2 lol2 xr2
+ 2 lol2 yl2 − 4 lol2 yl yr + 2 lol2 yr2 − lor4 + 2 lor2 xl2
− 4 lor2 xl xr + 2 lor2 xr2 + 2 lor2 yl
2 − 4 lor2 yl yr
+ 2 lor2 yr2 − xl4 + 4xl3 xr − 6xl2 xr2 − 2xl2 yl2
+ 4xl2 yl yr − 2xl2 yr2 + 4xl xr3 + 4xl xr yl2 − 8xl xr yl yr+ 4xl xr yr2 − xr4 − 2xr2 yl
2 + 4xr2 yl yr − 2xr2 yr2
− yl4 + 4 yl3 yr − 6 yl2 yr2 + 4 yl yr3 − yr4
(B.2.7)
B.2.2 y-Koordinate
ytcp1 = yl2 + yr
2 −xl√q
n+ xr
√r
n− lol
2 yln
+ lor2 yln
+ lol2 yrn− lor
2 yrn
(B.2.8)
ytcp2 = yl2 + yr
2 + xl√s
n− xr
√t
n− lol
2 yln
+ lor2 yln
+ lol2 yrn− lor
2 yrn
(B.2.9)
n =2xl2 − 4xl xr + 2xr2 + 2 yl2 − 4 yl yr + 2 yr2 (B.2.10)
q =− lol4 + 2 lol2 lor2 + 2 lol2 xl2 − 4 lol2 xl xr + 2 lol2 xr2
+ 2 lol2 yl2 − 4 lol2 yl yr + 2 lol2 yr2 − lor4 + 2 lor2 xl2
− 4 lor2 xl xr + 2 lor2 xr2 + 2 lor2 yl
2 − 4 lor2 yl yr
+ 2 lor2 yr2 − xl4 + 4xl3 xr − 6xl2 xr2 − 2xl2 yl2 + 4xl2 yl yr
− 2xl2 yr2 + 4xl xr3 + 4xl xr yl2 − 8xl xr yl yr + 4xl xr yr2
− xr4 − 2xr2 yl2 + 4xr2 yl yr − 2xr2 yr
2 − yl4 + 4 yl3 yr− 6 yl2 yr2 + 4 yl yr3 − yr4
(B.2.11)
Hochschule Ulm VIII

Nebenrechnungen für die Parallelkinematik
r =− lol4 + 2 lol2 lor2 + 2 lol2 xl2 − 4 lol2 xl xr + 2 lol2 xr2
+ 2 lol2 yl2 − 4 lol2 yl yr + 2 lol2 yr2 − lor4 + 2 lor2 xl2
− 4 lor2 xl xr + 2 lor2 xr2 + 2 lor2 yl
2 − 4 lor2 yl yr
+ 2 lor2 yr2 − xl4 + 4xl3 xr − 6xl2 xr2 − 2xl2 yl2
+ 4xl2 yl yr − 2xl2 yr2 + 4 xl xr3 + 4xl xr yl2 − 8xl xr yl yr+ 4xl xr yr2 − xr4 − 2xr2 yl
2 + 4xr2 yl yr − 2xr2 yr2 − yl4
+ 4 yl3 yr − 6 yl2 yr2 + 4 yl yr3 − yr4
(B.2.12)
s =− lol4 + 2 lol2 lor2 + 2 lol2 xl2 − 4 lol2 xl xr + 2 lol2 xr2
+ 2 lol2 yl2 − 4 lol2 yl yr + 2 lol2 yr2 − lor4 + 2 lor2 xl2
− 4 lor2 xl xr + 2 lor2 xr2 + 2 lor2 yl
2 − 4 lor2 yl yr + 2 lor2 yr2
− xl4 + 4xl3 xr − 6xl2 xr2 − 2xl2 yl2 + 4xl2 yl yr − 2xl2 yr2
+ 4xl xr3 + 4xl xr yl2 − 8xl xr yl yr + 4xl xr yr2 − xr4
− 2xr2 yl2 + 4xr2 yl yr − 2xr2 yr
2 − yl4 + 4 yl3 yr− 6 yl2 yr2 + 4 yl yr3 − yr4
(B.2.13)
t =− lol4 + 2 lol2 lor2 + 2 lol2 xl2 − 4 lol2 xl xr + 2 lol2 xr2
+ 2 lol2 yl2 − 4 lol2 yl yr + 2 lol2 yr2 − lor4 + 2 lor2 xl2
− 4 lor2 xl xr + 2 lor2 xr2 + 2 lor2 yl
2 − 4 lor2 yl yr + 2 lor2 yr2
− xl4 + 4xl3 xr − 6xl2 xr2 − 2xl2 yl2 + 4xl2 yl yr − 2xl2 yr2
+ 4xl xr3 + 4xl xr yl2 − 8xl xr yl yr + 4xl xr yr2 − xr4
− 2xr2 yl2 + 4xr2 yl yr − 2xr2 yr
2 − yl4 + 4 yl3 yr − 6 yl2 yr2
+ 4 yl yr3 − yr4
(B.2.14)
Hochschule Ulm IX

Nebenrechnungen für die Parallelkinematik
B.3 Vektoren des Dynamikmodells der Parallelkinematik
Dieser Abschnitt zeigt den Inhalt der im schematischen Dynamikmodell der Parallelkine-matik dargestellten Vektoren.
~BT
=[βl, βl, βl, βol, βol, βol, βor, βor, βor, βr, βr, βr
](B.3.1)
~FT
= [F12x, F12y, F23x, F23y, F34x, F34y] (B.3.2)
~xy T = [∆xl,∆yl,∆xol,∆yol, xsol, ysol,∆xor,∆yor, xsor, ysor,∆xr,∆yr] (B.3.3)~J
T= [Jl, Jsol, Jsor, Jr] (B.3.4)
~m T = [mol,mor] (B.3.5)~L
T= [lul, lol, lor, lur, xbl, ybl, xbr, ybr] (B.3.6)
~MT
= [Ml,Mr] (B.3.7)
Hochschule Ulm X