Synchrone Mobilität 2023 - crm.saena.de · 14.11.2018 Synchrone Mobilität 2023 Vorstellung der...
30
14.11.2018 Vorstellung der Ausstellungsfläche und Präsentationsfahrten Sabine Springer, TU Chemnitz Rico Auerswald, Fraunhofer IVI Dr. Alexander Jungmann, IAV Mario Krumnow, TU Dresden Mike Ludwig, Dresden Elektronik Dr. Thomas Otto, Fraunhofer IVI David van de Renne, Preh Car Connect 14. November 2018, Dresden, Deutschland Synchrone Mobilität 2023 Urbane Testumgebung für automatisiertes und vernetztes Fahren
Transcript of Synchrone Mobilität 2023 - crm.saena.de · 14.11.2018 Synchrone Mobilität 2023 Vorstellung der...
14.11.2018
Vorstellung der Ausstellungsfläche und PräsentationsfahrtenSabine Springer, TU ChemnitzRico Auerswald, Fraunhofer IVIDr. Alexander Jungmann, IAVMario Krumnow, TU DresdenMike Ludwig, Dresden ElektronikDr. Thomas Otto, Fraunhofer IVIDavid van de Renne, Preh Car Connect
14. November 2018, Dresden, Deutschland
Synchrone Mobilität 2023
Urbane Testumgebung für automatisiertes und vernetztes Fahren
14.11.2018
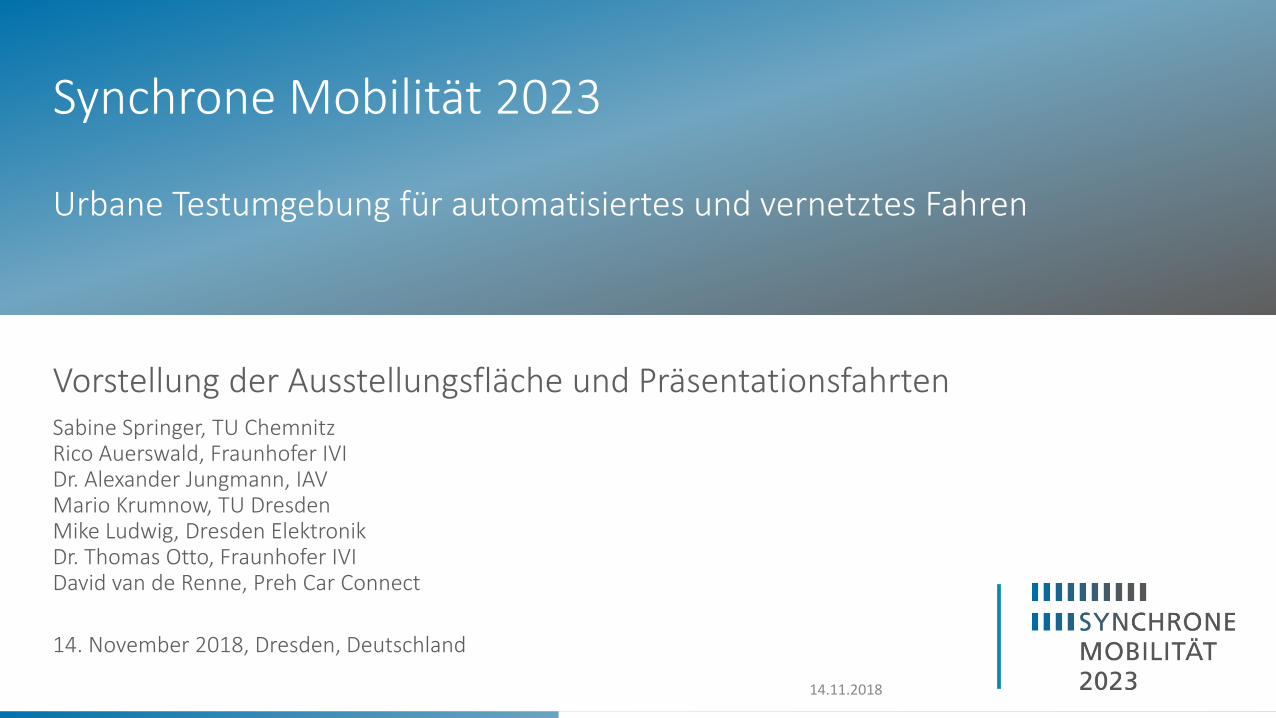
Synchrone Mobilität 2023Vorstellung der Ausstellungsfläche
44Synchrone Mobilität 2023 – Testevent Dresden Flughafenkorridor
Automatisier-tes Fahrzeug
Verkehrs-management
Simulation
Zentrale ArchitekturenInfrastruktur
Strecke
Vernetztes Fahrzeug
Vortragsraum
Catering
14.11.2018
Automatisiertes Fahrzeug
Fahrfunktion
Verkehrsmanagement VAMOS
Simulation
Zentrale Architekturen Testfeld-Backend
Facilities
Infrastruktur Strecke
Synchrone Mobilität 2023Vorstellung der Ausstellungsfläche
45Synchrone Mobilität 2023 – Testevent Dresden Flughafenkorridor
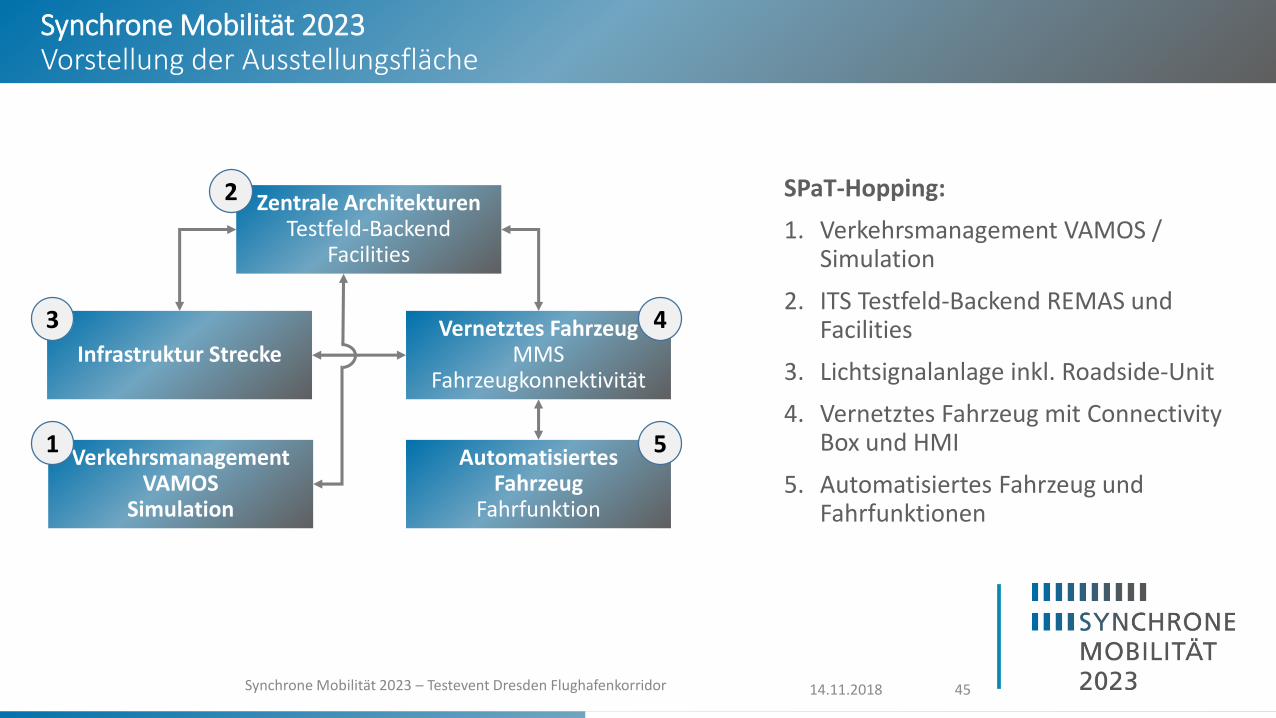
SPaT-Hopping:
1. Verkehrsmanagement VAMOS / Simulation
2. ITS Testfeld-Backend REMAS und Facilities
3. Lichtsignalanlage inkl. Roadside-Unit
4. Vernetztes Fahrzeug mit Connectivity Box und HMI
5. Automatisiertes Fahrzeug und Fahrfunktionen
2
3
1 5
Vernetztes FahrzeugMMS
Fahrzeugkonnektivität
4
14.11.2018
Synchrone Mobilität 2023Vorstellung der Ausstellungsfläche
46Synchrone Mobilität 2023 – Testevent Dresden Flughafenkorridor
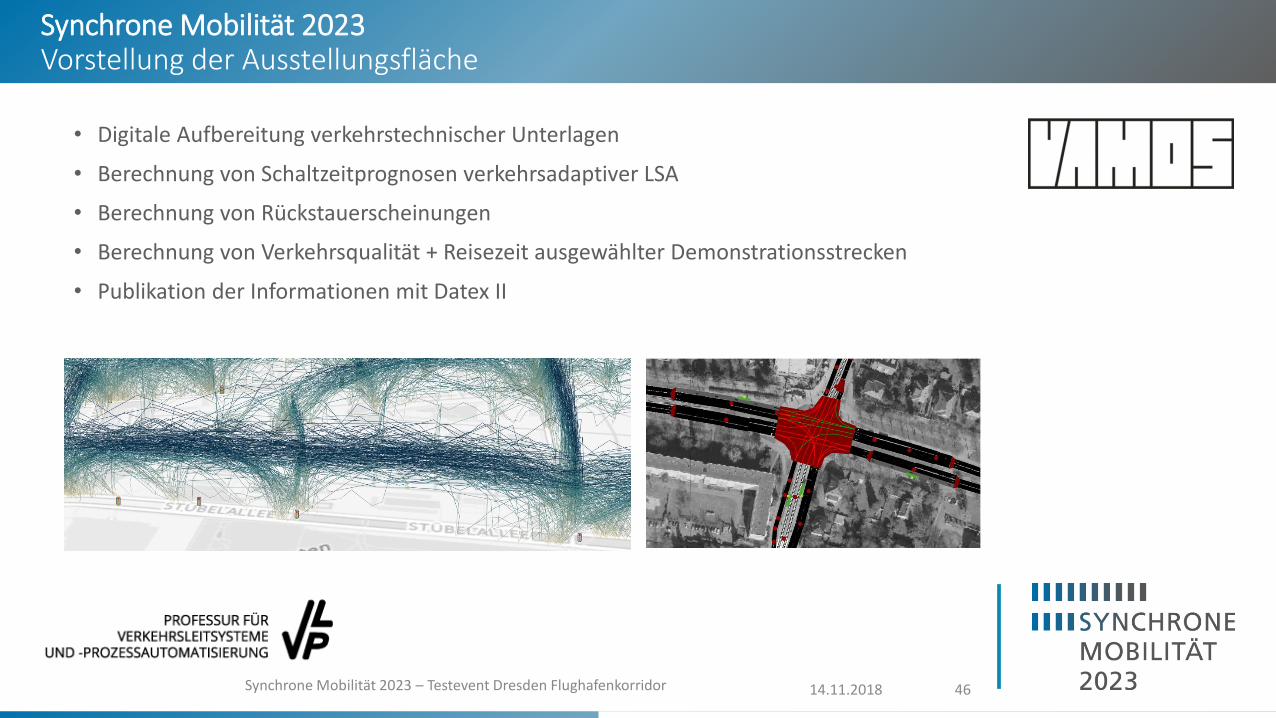
• Digitale Aufbereitung verkehrstechnischer Unterlagen
• Berechnung von Schaltzeitprognosen verkehrsadaptiver LSA
• Berechnung von Rückstauerscheinungen
• Berechnung von Verkehrsqualität + Reisezeit ausgewählter Demonstrationsstrecken
• Publikation der Informationen mit Datex II

14.11.2018
Synchrone Mobilität 2023Vorstellung der Ausstellungsfläche
47Synchrone Mobilität 2023 – Testevent Dresden Flughafenkorridor
• Erarbeitung realistischer Simulationen auf Basis:
• realer geografische Daten (UTM)
• Detektordaten, LSA Schaltdaten
• Verkehrsmengenkarten/Verkehrsumlegungen
Ziel: Realitätsnahe Untersuchung der verkehrlichen Wirkung von FAS

14.11.2018
Synchrone Mobilität 2023Vorstellung der Ausstellungsfläche
48Synchrone Mobilität 2023 – Testevent Dresden Flughafenkorridor
• Kopplung verschiedener Simulationen (Sumo, IPG CarMaker, DetraSim)
• Variation diverse makroskopischer Simulationsparameter
• Verkehrssituation, Verkehrszusammensetzung, Fahrerverhalten
• Variation diverser mikroskopischer Simulationsparameter
• Funkreichweite, Fahrzeugverhalten, Sensorverfügbarkeit
Ziel: Definition, Kalibrierung und Validierung von FAS Systemen
14.11.2018
Synchrone Mobilität 2023Vorstellung der Ausstellungsfläche
49Synchrone Mobilität 2023 – Testevent Dresden Flughafenkorridor
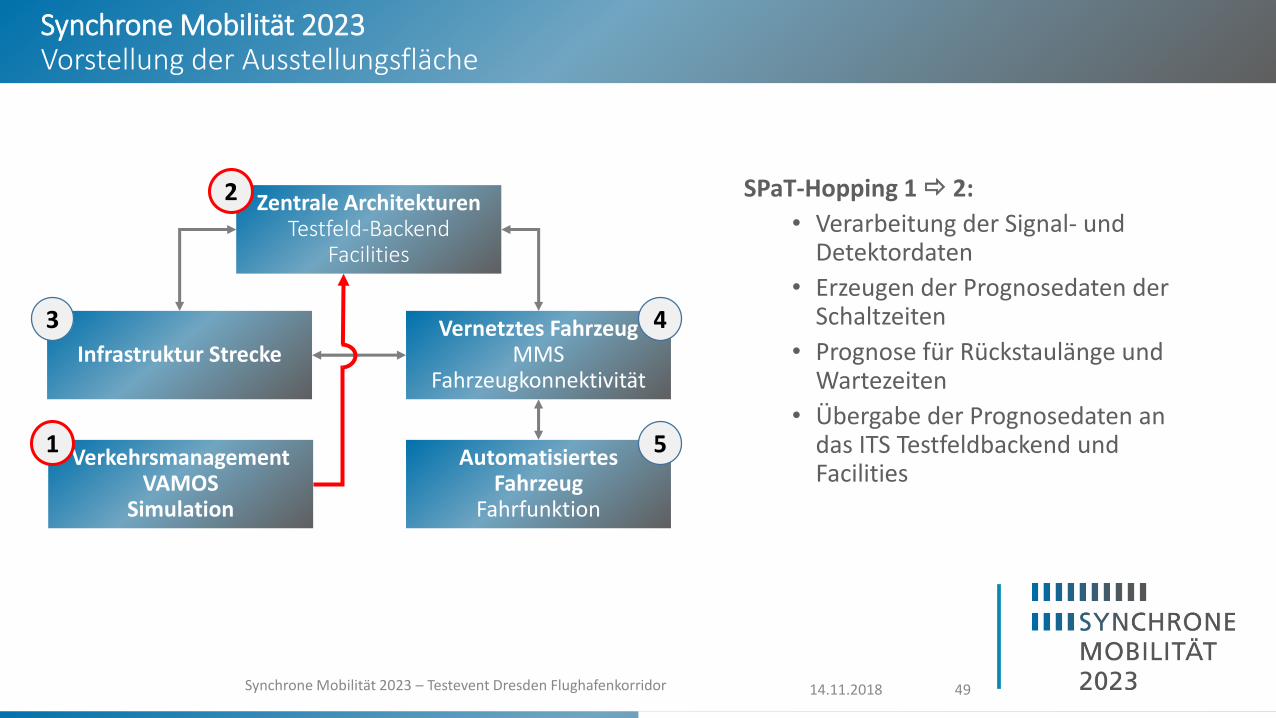
SPaT-Hopping 1 2:
• Verarbeitung der Signal- und Detektordaten
• Erzeugen der Prognosedaten der Schaltzeiten
• Prognose für Rückstaulänge und Wartezeiten
• Übergabe der Prognosedaten an das ITS Testfeldbackend und Facilities
Automatisiertes Fahrzeug
Fahrfunktion
Verkehrsmanagement VAMOS
Simulation
Zentrale Architekturen Testfeld-Backend
Facilities
Infrastruktur Strecke
2
3
1 5
Vernetztes FahrzeugMMS
Fahrzeugkonnektivität
4
14.11.2018
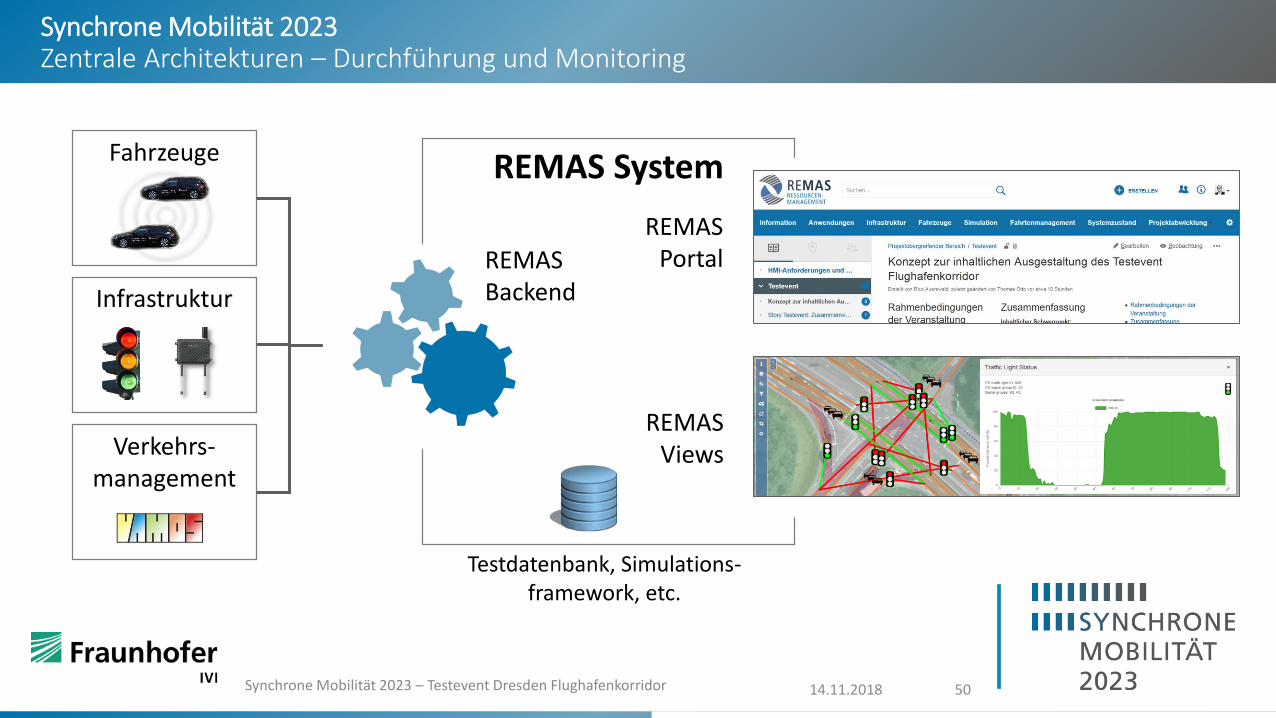
Synchrone Mobilität 2023Zentrale Architekturen – Durchführung und Monitoring
50Synchrone Mobilität 2023 – Testevent Dresden Flughafenkorridor
REMAS System
REMASBackend
REMASPortal
REMASViews
Testdatenbank, Simulations-framework, etc.
Fahrzeuge
Infrastruktur
Verkehrs-management

14.11.2018
Synchrone Mobilität 2023Zentrale Architekturen – Testplanung und Unterstützung
51Synchrone Mobilität 2023 – Testevent Dresden Flughafenkorridor
Streckencharakteristik auswählenSzenario planenSzenario fahren
Export zur Test-AppOpenScenario
14.11.2018
Synchrone Mobilität 2023Zentrale Architekturen – C-ITS Facilities - Kommunikationsstack
52Synchrone Mobilität 2023 – Testevent Dresden Flughafenkorridor
Man
agem
ent
Secu
rity
Access
Network & Transport
C4CART Facilities
Application
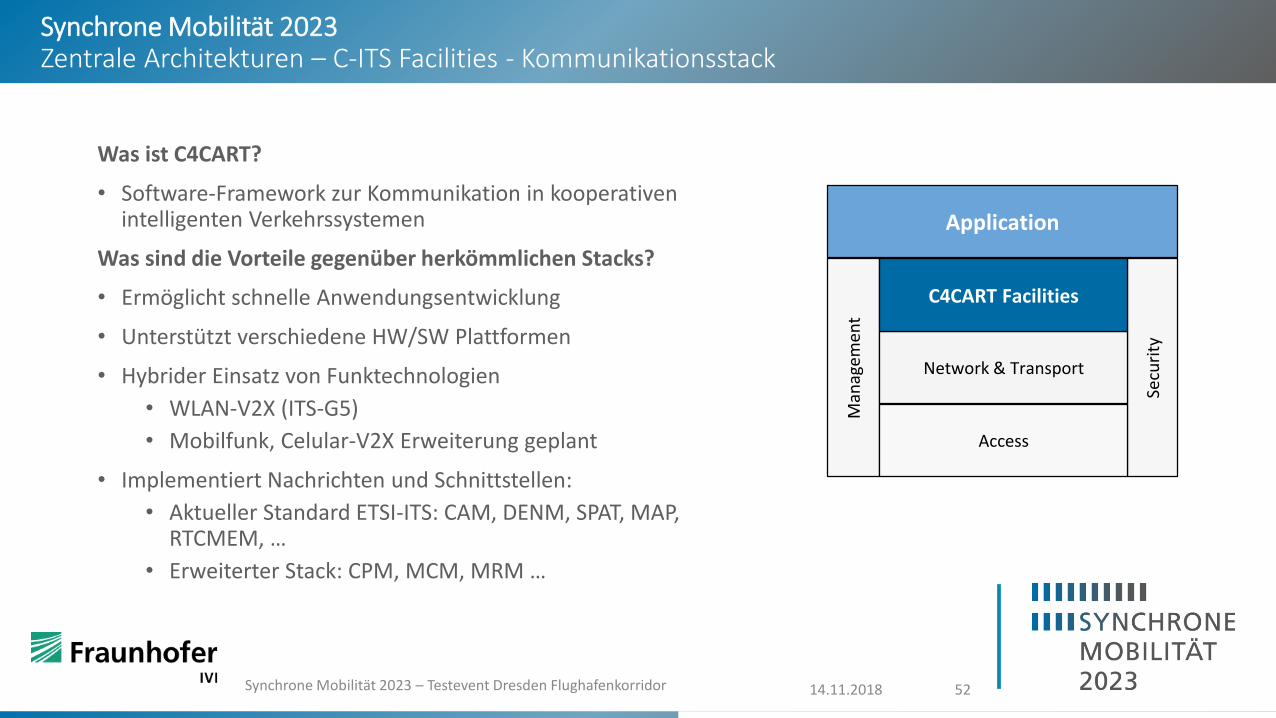
Was ist C4CART?
• Software-Framework zur Kommunikation in kooperativen intelligenten Verkehrssystemen
Was sind die Vorteile gegenüber herkömmlichen Stacks?
• Ermöglicht schnelle Anwendungsentwicklung
• Unterstützt verschiedene HW/SW Plattformen
• Hybrider Einsatz von Funktechnologien
• WLAN-V2X (ITS-G5)
• Mobilfunk, Celular-V2X Erweiterung geplant
• Implementiert Nachrichten und Schnittstellen:
• Aktueller Standard ETSI-ITS: CAM, DENM, SPAT, MAP, RTCMEM, …
• Erweiterter Stack: CPM, MCM, MRM …
14.11.2018
Synchrone Mobilität 2023Zentrale Architekturen – Applikation und Algorithmen
53Synchrone Mobilität 2023 – Testevent Dresden Flughafenkorridor
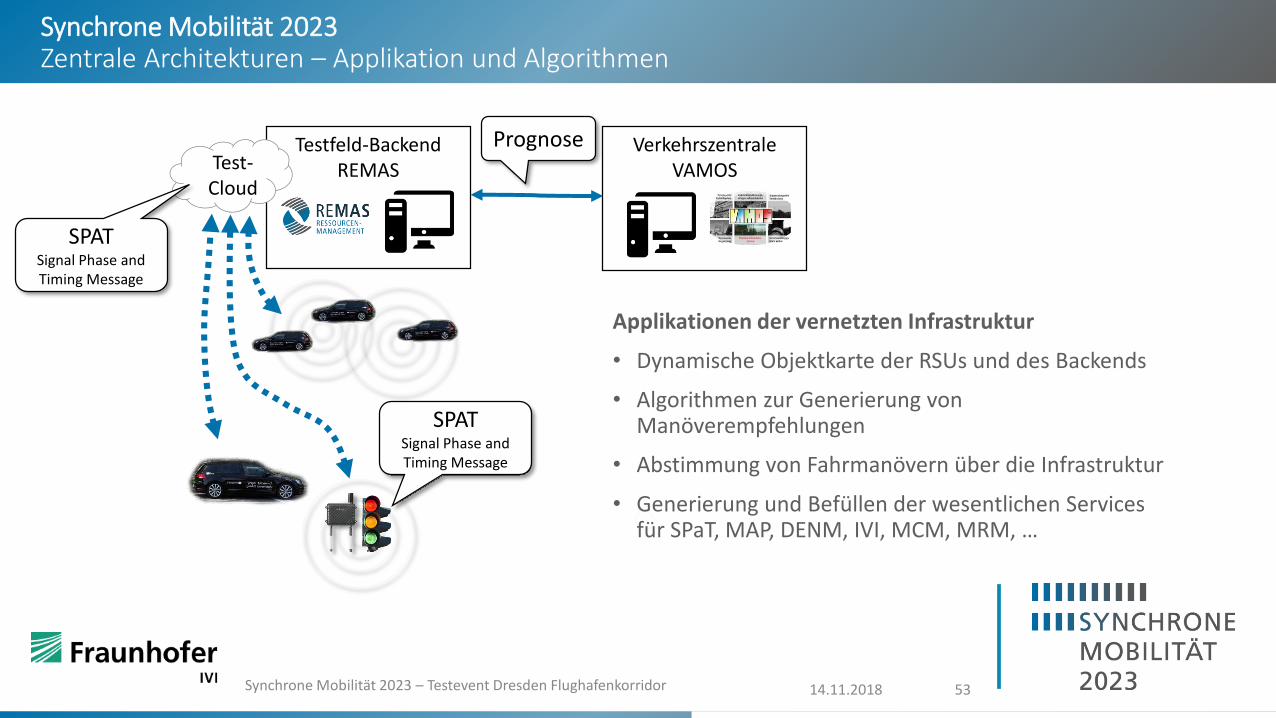
Testfeld-BackendREMAS
SPATSignal Phase andTiming Message
Test-Cloud
VerkehrszentraleVAMOS
Prognose
SPATSignal Phase andTiming Message
Applikationen der vernetzten Infrastruktur
• Dynamische Objektkarte der RSUs und des Backends
• Algorithmen zur Generierung von Manöverempfehlungen
• Abstimmung von Fahrmanövern über die Infrastruktur
• Generierung und Befüllen der wesentlichen Services für SPaT, MAP, DENM, IVI, MCM, MRM, …
14.11.2018
Automatisiertes Fahrzeug
Fahrfunktion
Verkehrsmanagement VAMOS
Simulation
Zentrale Architekturen Testfeld-Backend
Facilities
Infrastruktur Strecke
Synchrone Mobilität 2023Vorstellung der Ausstellungsfläche
54Synchrone Mobilität 2023 – Testevent Dresden Flughafenkorridor
2
3
1 5
Vernetztes FahrzeugMMS
Fahrzeugkonnektivität
4
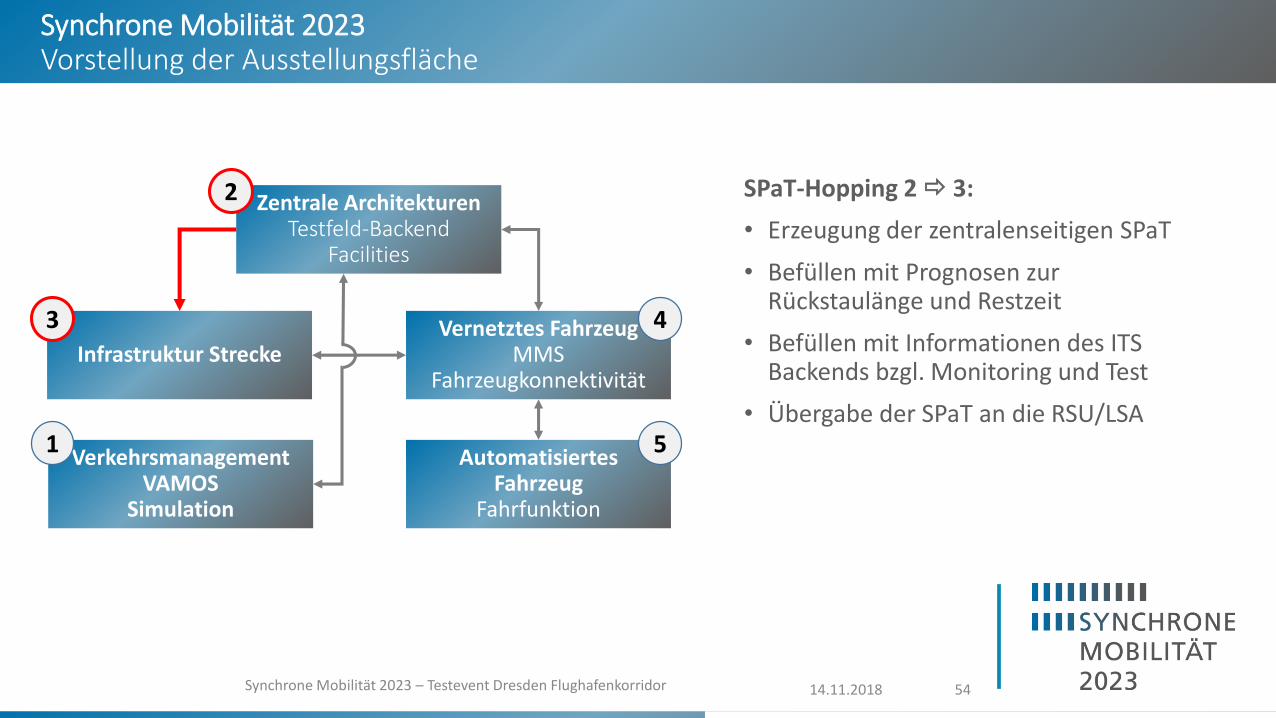
SPaT-Hopping 2 3:
• Erzeugung der zentralenseitigen SPaT
• Befüllen mit Prognosen zur Rückstaulänge und Restzeit
• Befüllen mit Informationen des ITS Backends bzgl. Monitoring und Test
• Übergabe der SPaT an die RSU/LSA
14.11.2018
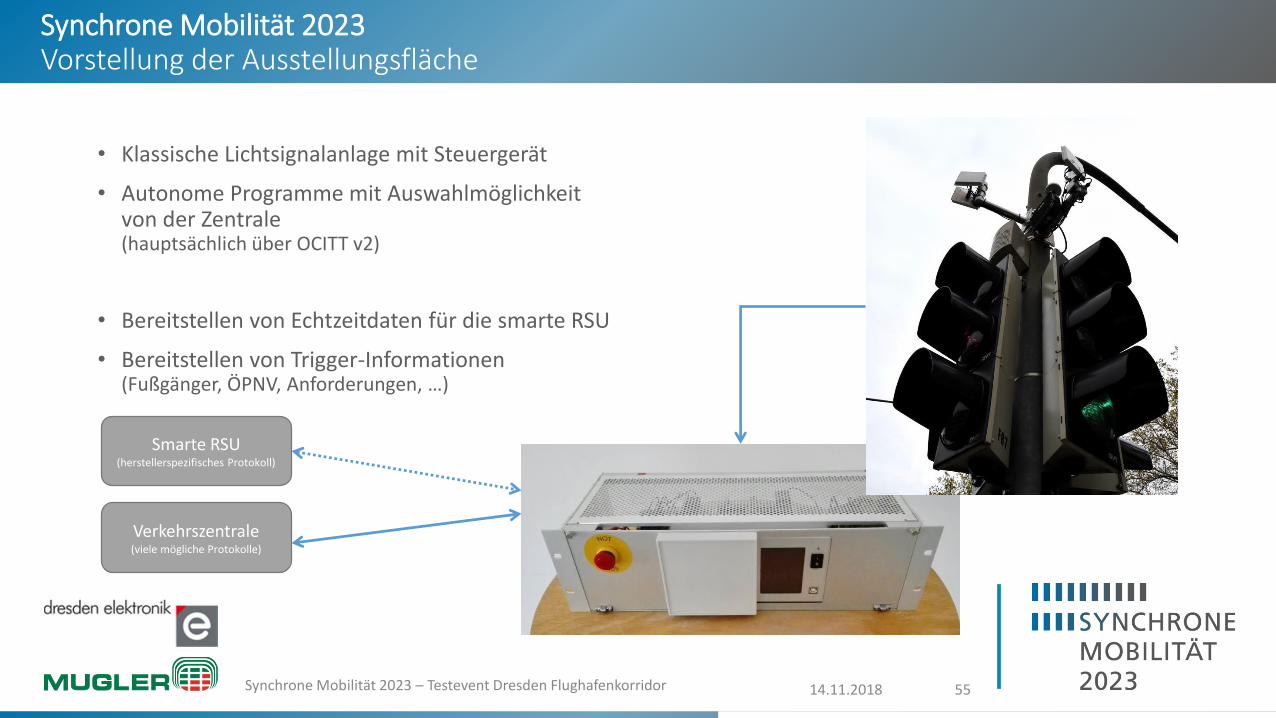
• Klassische Lichtsignalanlage mit Steuergerät
• Autonome Programme mit Auswahlmöglichkeit von der Zentrale (hauptsächlich über OCITT v2)
• Bereitstellen von Echtzeitdaten für die smarte RSU
• Bereitstellen von Trigger-Informationen(Fußgänger, ÖPNV, Anforderungen, …)
Synchrone Mobilität 2023Vorstellung der Ausstellungsfläche
55Synchrone Mobilität 2023 – Testevent Dresden Flughafenkorridor
Verkehrszentrale(viele mögliche Protokolle)
Smarte RSU(herstellerspezifisches Protokoll)
14.11.2018
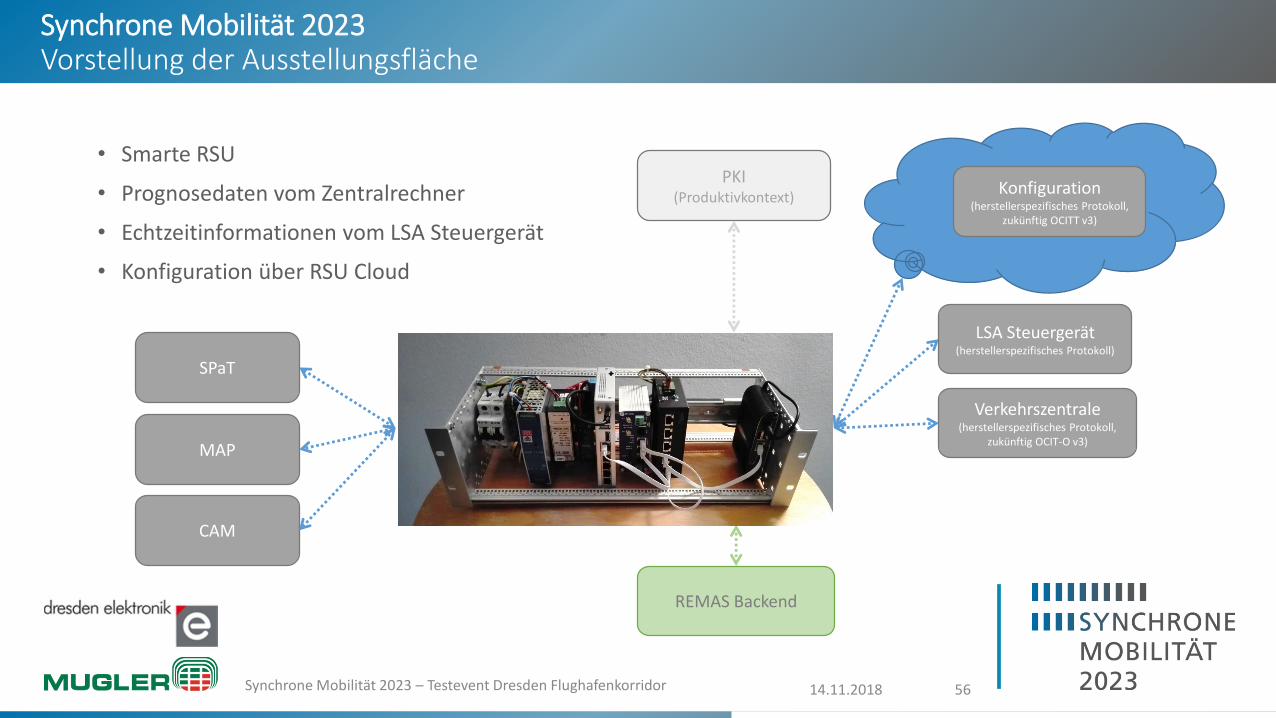
• Smarte RSU
• Prognosedaten vom Zentralrechner
• Echtzeitinformationen vom LSA Steuergerät
• Konfiguration über RSU Cloud
Synchrone Mobilität 2023Vorstellung der Ausstellungsfläche
56Synchrone Mobilität 2023 – Testevent Dresden Flughafenkorridor
LSA Steuergerät(herstellerspezifisches Protokoll)
Konfiguration(herstellerspezifisches Protokoll,
zukünftig OCITT v3)
Verkehrszentrale(herstellerspezifisches Protokoll,
zukünftig OCIT-O v3)
SPaT
MAP
CAM
PKI(Produktivkontext)
REMAS Backend
14.11.2018
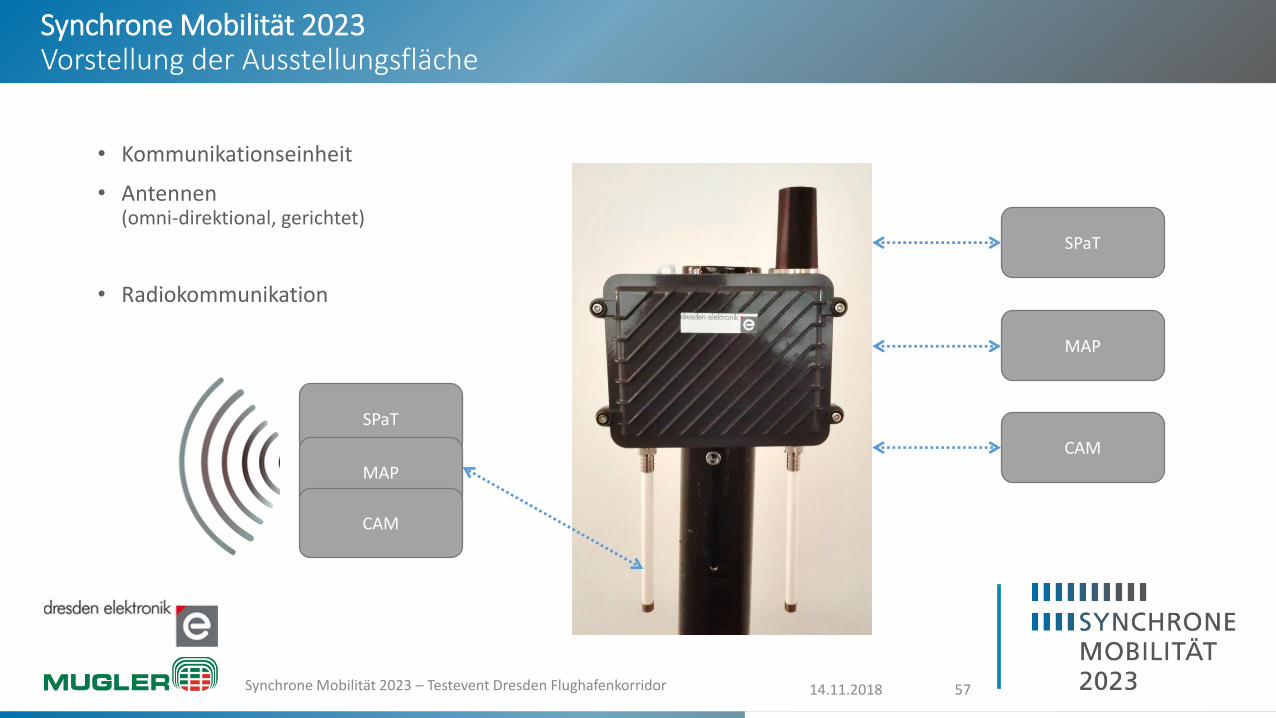
• Kommunikationseinheit
• Antennen(omni-direktional, gerichtet)
• Radiokommunikation
Synchrone Mobilität 2023Vorstellung der Ausstellungsfläche
57Synchrone Mobilität 2023 – Testevent Dresden Flughafenkorridor
SPaT
MAP
CAM
SPaT
MAP
CAM
14.11.2018
Automatisiertes Fahrzeug
Fahrfunktion
Verkehrsmanagement VAMOS
Simulation
Zentrale Architekturen Testfeld-Backend
Facilities
Infrastruktur Strecke
Synchrone Mobilität 2023Vorstellung der Ausstellungsfläche
58Synchrone Mobilität 2023 – Testevent Dresden Flughafenkorridor
2
3
1 5
Vernetztes FahrzeugMMS
Fahrzeugkonnektivität
4
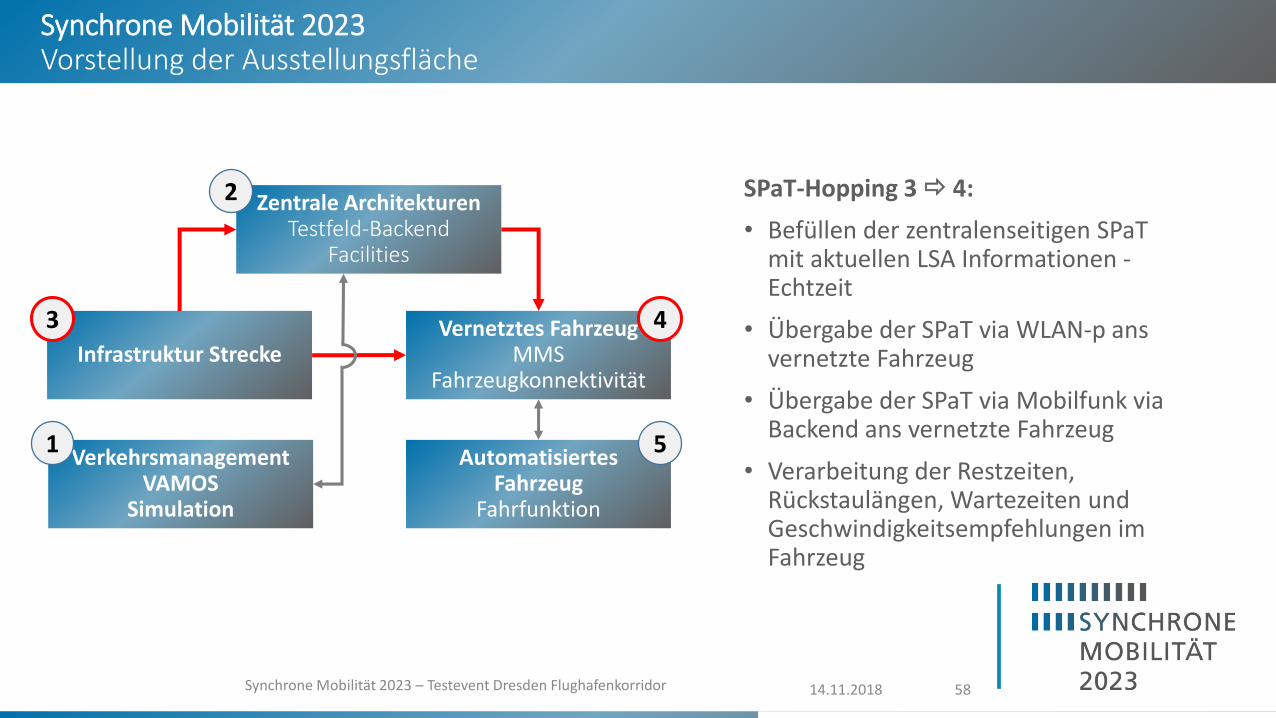
SPaT-Hopping 3 4:
• Befüllen der zentralenseitigen SPaTmit aktuellen LSA Informationen -Echtzeit
• Übergabe der SPaT via WLAN-p ans vernetzte Fahrzeug
• Übergabe der SPaT via Mobilfunk via Backend ans vernetzte Fahrzeug
• Verarbeitung der Restzeiten, Rückstaulängen, Wartezeiten und Geschwindigkeitsempfehlungen im Fahrzeug
14.11.2018
Synchrone Mobilität 2023Vorstellung der Ausstellungsfläche
59Synchrone Mobilität 2023 – Testevent Dresden Flughafenkorridor
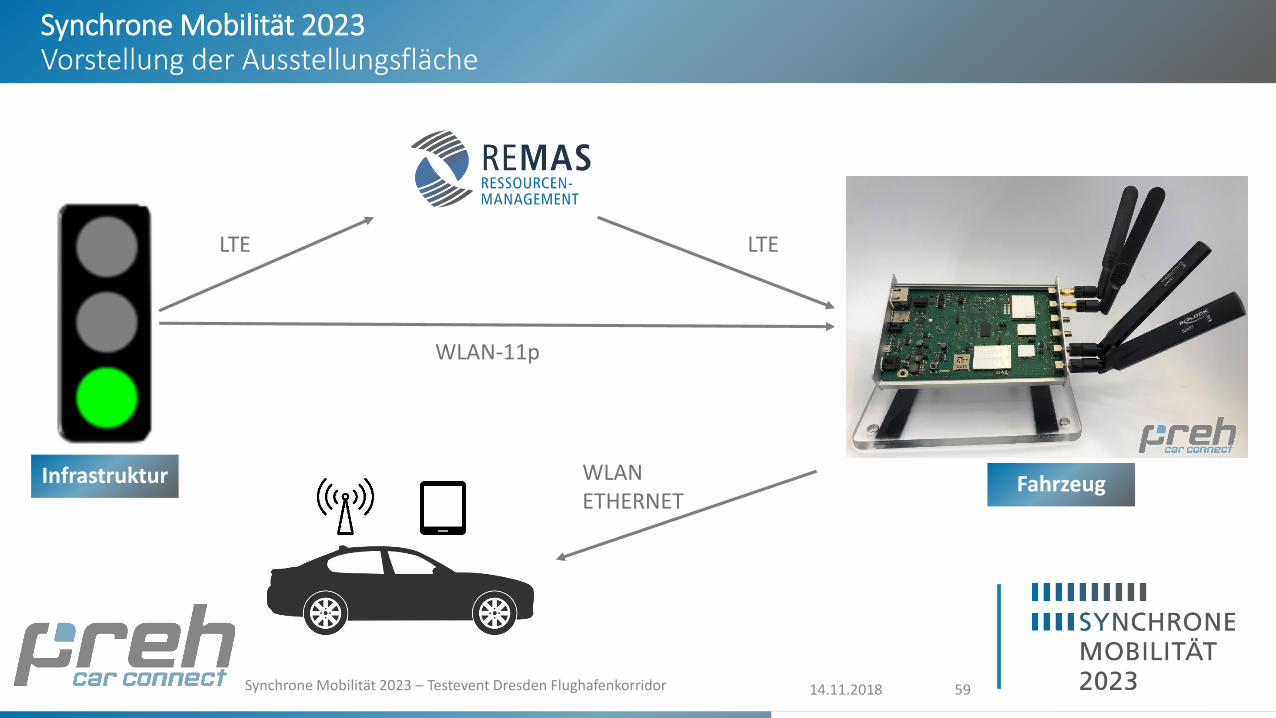
WLAN-11p
LTE
WLANETHERNET
LTE
Infrastruktur Fahrzeug
14.11.2018
Synchrone Mobilität 2023Vorstellung der Ausstellungsfläche
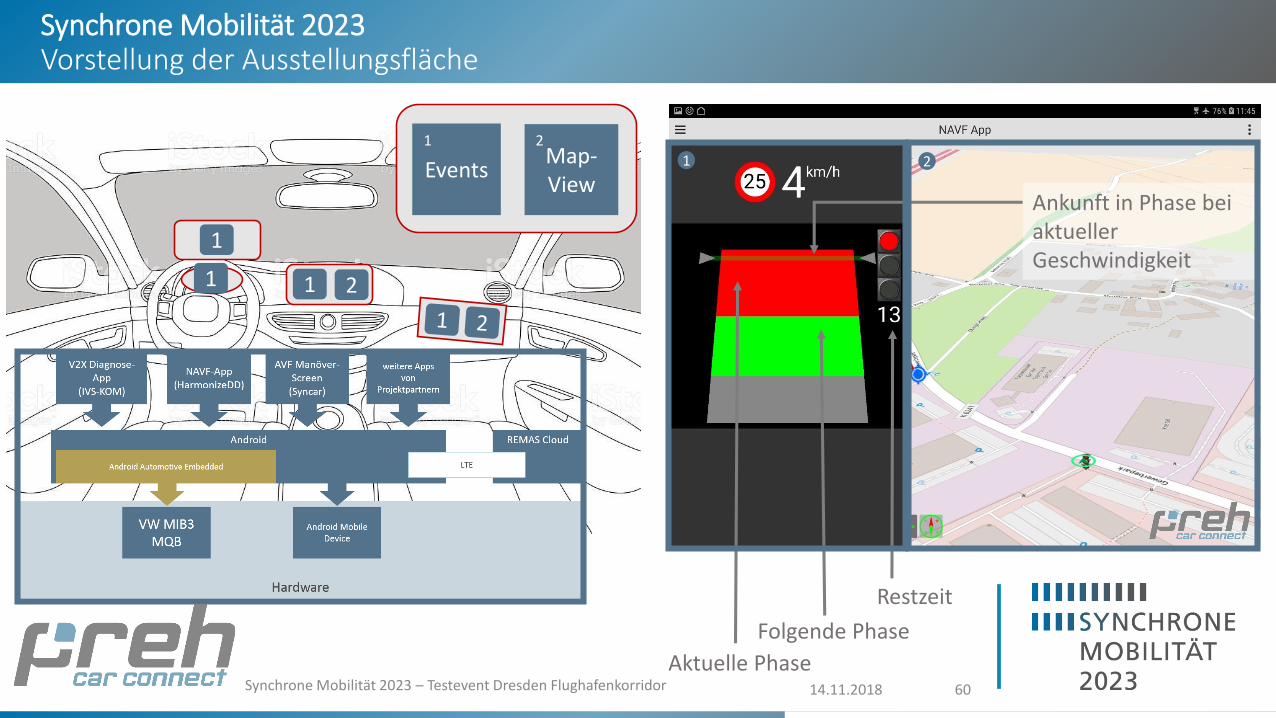
60Synchrone Mobilität 2023 – Testevent Dresden Flughafenkorridor
EventsMap-View
1 21
Aktuelle Phase
Folgende Phase
Restzeit
Ankunft in Phase bei aktueller Geschwindigkeit
1
1 2
1 2
14.11.2018 61Synchrone Mobilität 2023 – Testevent Dresden Flughafenkorridor
Synchrone Mobilität 2023Vorstellung der Ausstellungsfläche
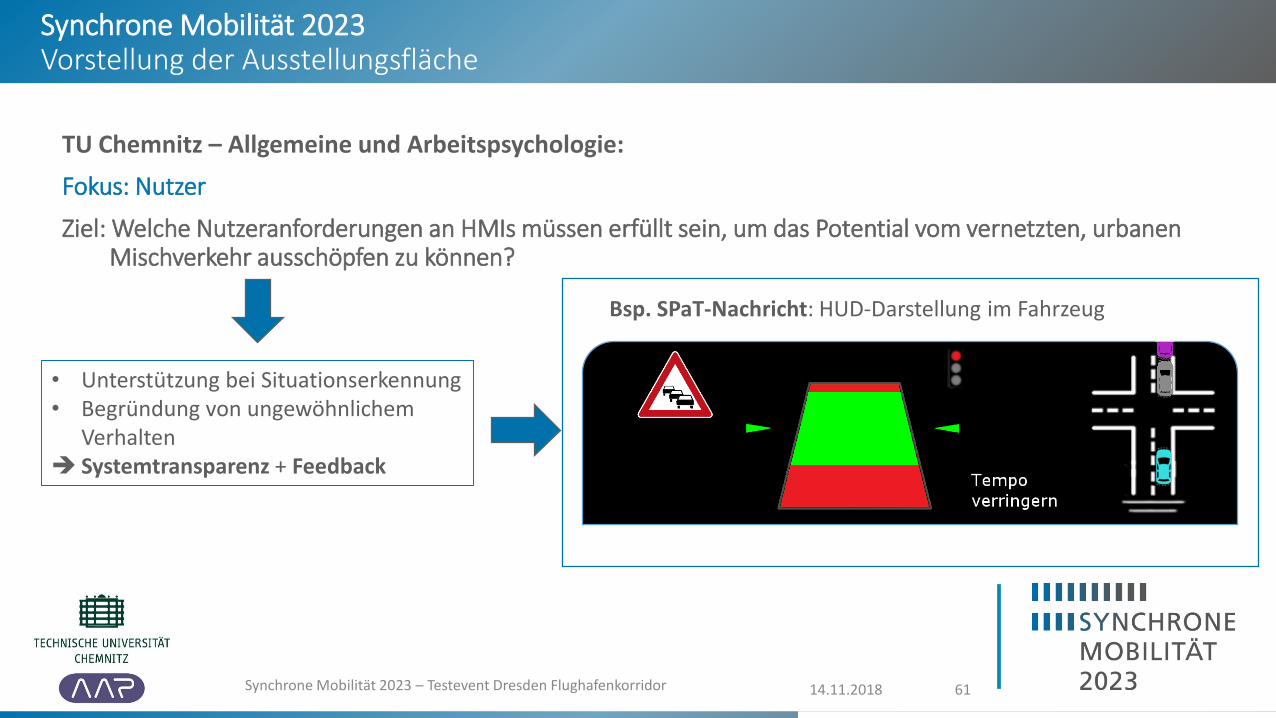
TU Chemnitz – Allgemeine und Arbeitspsychologie:
Fokus: Nutzer
Ziel: Welche Nutzeranforderungen an HMIs müssen erfüllt sein, um das Potential vom vernetzten, urbanen Mischverkehr ausschöpfen zu können?
• Unterstützung bei Situationserkennung• Begründung von ungewöhnlichem
Verhalten Systemtransparenz + Feedback
Bsp. SPaT-Nachricht: HUD-Darstellung im Fahrzeug
14.11.2018 62Synchrone Mobilität 2023 – Testevent Dresden Flughafenkorridor
Synchrone Mobilität 2023Vorstellung der Ausstellungsfläche
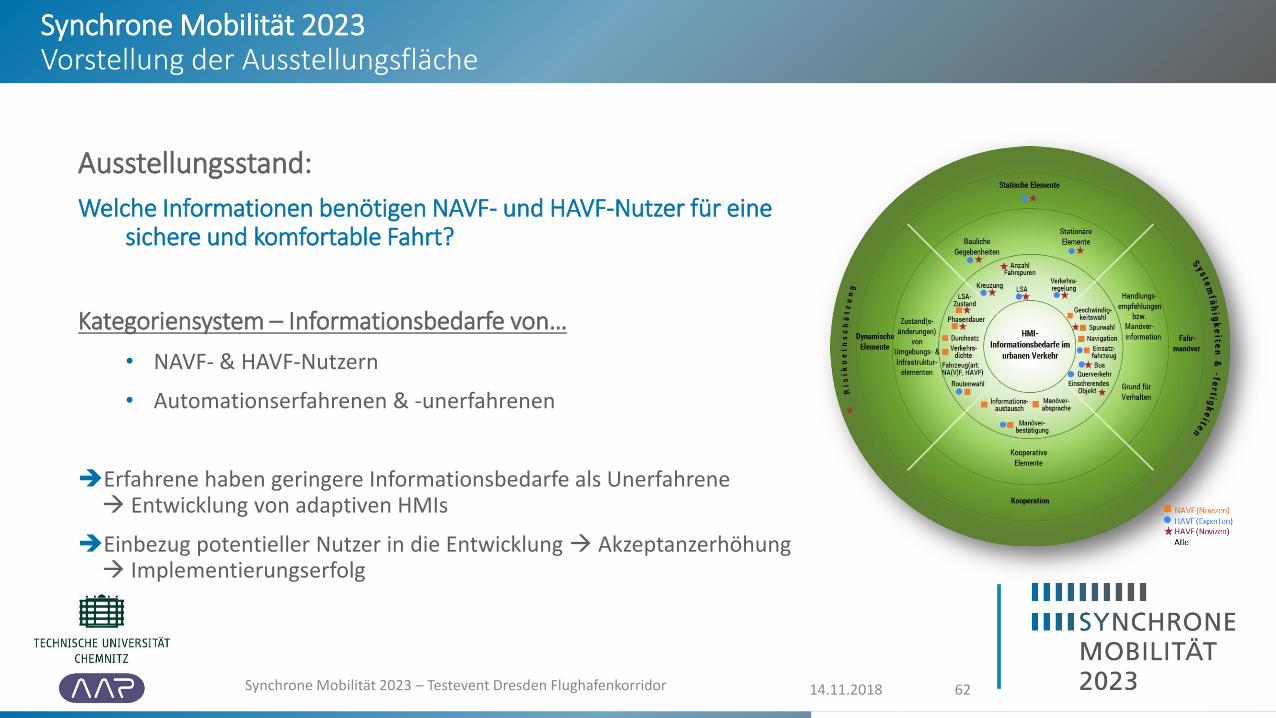
Ausstellungsstand:
Welche Informationen benötigen NAVF- und HAVF-Nutzer für eine sichere und komfortable Fahrt?
Kategoriensystem – Informationsbedarfe von…
• NAVF- & HAVF-Nutzern
• Automationserfahrenen & -unerfahrenen
Erfahrene haben geringere Informationsbedarfe als Unerfahrene Entwicklung von adaptiven HMIs
Einbezug potentieller Nutzer in die Entwicklung Akzeptanzerhöhung Implementierungserfolg
14.11.2018
Automatisiertes Fahrzeug
Fahrfunktion
Verkehrsmanagement VAMOS
Simulation
Zentrale Architekturen Testfeld-Backend
Facilities
Infrastruktur Strecke
Synchrone Mobilität 2023Vorstellung der Ausstellungsfläche
63Synchrone Mobilität 2023 – Testevent Dresden Flughafenkorridor
2
3
1 5
Vernetztes FahrzeugMMS
Fahrzeugkonnektivität
4
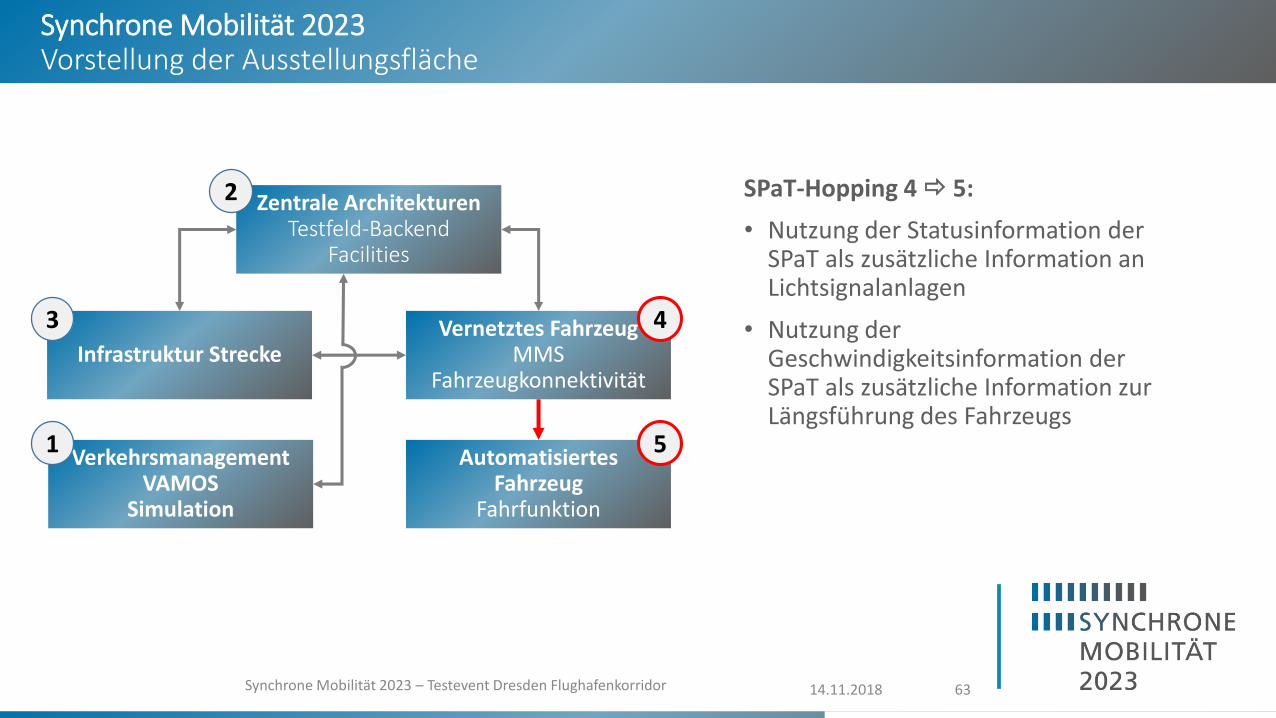
SPaT-Hopping 4 5:
• Nutzung der Statusinformation der SPaT als zusätzliche Information an Lichtsignalanlagen
• Nutzung der Geschwindigkeitsinformation der SPaT als zusätzliche Information zur Längsführung des Fahrzeugs
14.11.2018
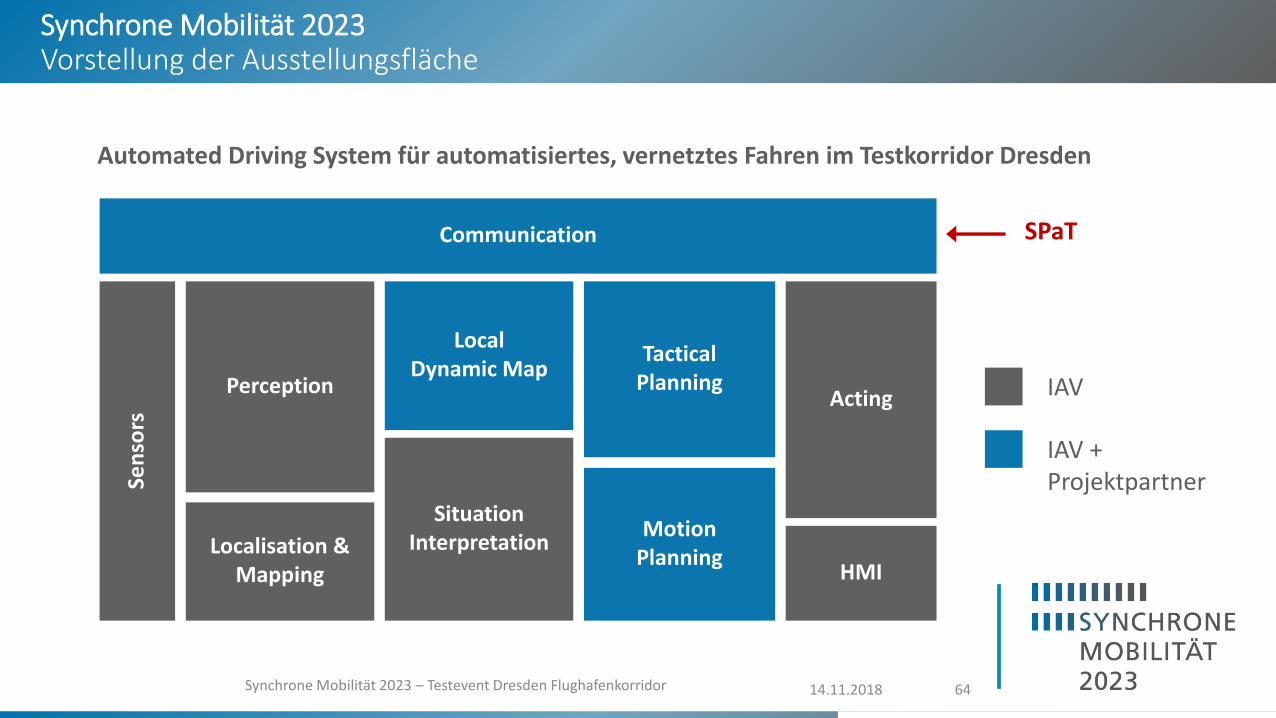
Automated Driving System für automatisiertes, vernetztes Fahren im Testkorridor Dresden
Synchrone Mobilität 2023Vorstellung der Ausstellungsfläche
64Synchrone Mobilität 2023 – Testevent Dresden Flughafenkorridor
PerceptionActing
Localisation & Mapping
Communication
Sen
sors
SituationInterpretation
LocalDynamic Map
TacticalPlanning
Motion Planning
HMI
IAV
IAV + Projektpartner
SPaT
14.11.2018
Synchrone Mobilität 2023Vorstellung der Ausstellungsfläche
65Synchrone Mobilität 2023 – Testevent Dresden Flughafenkorridor
Fraunhofer IVI & Dresden ElektronikInfrastruktur
Fraunhofer IVIBackend
IAVAutomatisiertes Vernetztes Fahrzeug
Taktische Planung
DGPS Lokalisierung
AXIO-NET
Umfeldsensorik
Radar
Kamera
Lidar
Spur-/Linienerkennung & -
fusion
Objektkennung & -fusion
HochgenaueKarte
Human Machine Interface
TU Chemnitz NTLocal Dynamic Map
Längs- und Querregelung
FusionSystemsFahrstratege
Bewegungsplanung
Sensordaten + Spuren
Sensordaten + Objekte
TU Dresden Verkehrsleitsysteme und -prozessautomatisierungVerkehrsmanagementsystem VAMOS
LTE SchnittstelleFraunhofer IVI
V2X Schnittstelle
GPS KorrekturdatenLSA Daten
(Aktuelle Phase + Phasenrestdauer)
ObjekteGPS Korrekturdaten
LSA Daten
TU Dresden FZMGLOSA MPC
Quer- und Längsführung
Aktuelle LSA Phase
SPAT, [MAP, MRM] [CAM, CPM, MCM]
Prognosedaten
Fahrtrajektorie
Position
Statische Kartendaten
Manöverempfehlung und Manöverintentionen
V2X Objekte
Manöver
Spurdaten
Objekte
Situationsinterpretation
LSA Daten
Umgebungsdaten
Situation
[CAM, CPM, MCM]
LSA RSUPrognostizierte LSA Phasenrestdauer
Fahrzeug Fahrzeug
(Automatisiertes) Vernetztes Fahrzeug
Sensordaten
Freiraumerkennung & -fusion
Sensordaten
Situation
Freiraum
IAV Weitere IVS ProjektpartnerIVS Projektpartner am Stand
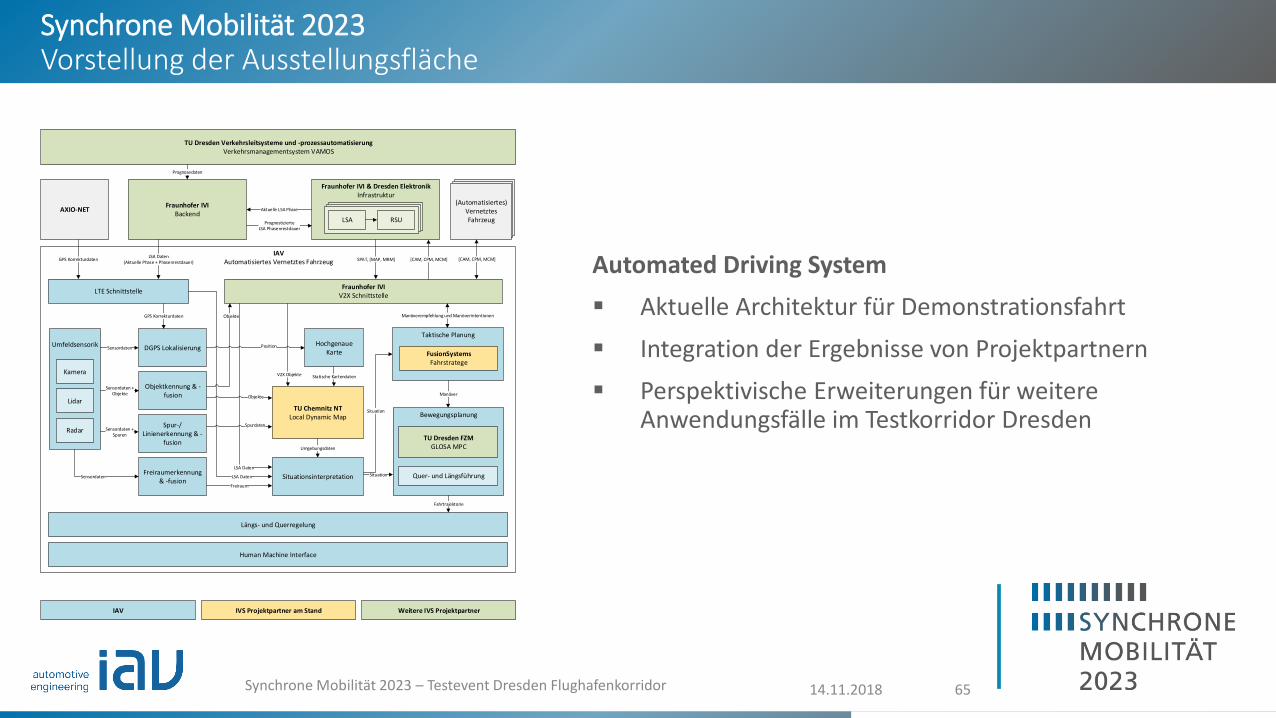
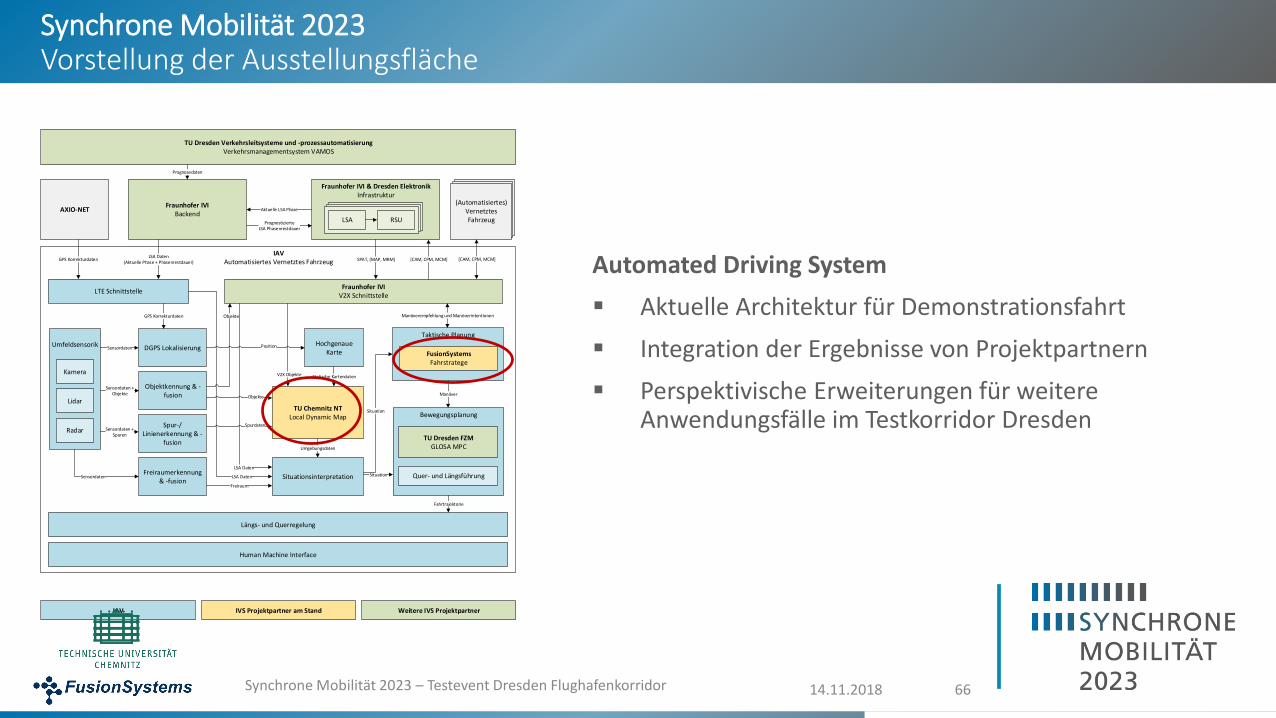
Automated Driving System
Aktuelle Architektur für Demonstrationsfahrt
Integration der Ergebnisse von Projektpartnern
Perspektivische Erweiterungen für weitere Anwendungsfälle im Testkorridor Dresden
14.11.2018
Fraunhofer IVI & Dresden ElektronikInfrastruktur
Fraunhofer IVIBackend
IAVAutomatisiertes Vernetztes Fahrzeug
Taktische Planung
DGPS Lokalisierung
AXIO-NET
Umfeldsensorik
Radar
Kamera
Lidar
Spur-/Linienerkennung & -
fusion
Objektkennung & -fusion
HochgenaueKarte
Human Machine Interface
TU Chemnitz NTLocal Dynamic Map
Längs- und Querregelung
FusionSystemsFahrstratege
Bewegungsplanung
Sensordaten + Spuren
Sensordaten + Objekte
TU Dresden Verkehrsleitsysteme und -prozessautomatisierungVerkehrsmanagementsystem VAMOS
LTE SchnittstelleFraunhofer IVI
V2X Schnittstelle
GPS KorrekturdatenLSA Daten
(Aktuelle Phase + Phasenrestdauer)
ObjekteGPS Korrekturdaten
LSA Daten
TU Dresden FZMGLOSA MPC
Quer- und Längsführung
Aktuelle LSA Phase
SPAT, [MAP, MRM] [CAM, CPM, MCM]
Prognosedaten
Fahrtrajektorie
Position
Statische Kartendaten
Manöverempfehlung und Manöverintentionen
V2X Objekte
Manöver
Spurdaten
Objekte
Situationsinterpretation
LSA Daten
Umgebungsdaten
Situation
[CAM, CPM, MCM]
LSA RSUPrognostizierte LSA Phasenrestdauer
Fahrzeug Fahrzeug
(Automatisiertes) Vernetztes Fahrzeug
Sensordaten
Freiraumerkennung & -fusion
Sensordaten
Situation
Freiraum
IAV Weitere IVS ProjektpartnerIVS Projektpartner am Stand
Synchrone Mobilität 2023Vorstellung der Ausstellungsfläche
66Synchrone Mobilität 2023 – Testevent Dresden Flughafenkorridor
Automated Driving System
Aktuelle Architektur für Demonstrationsfahrt
Integration der Ergebnisse von Projektpartnern
Perspektivische Erweiterungen für weitere Anwendungsfälle im Testkorridor Dresden
14.11.2018
Synchrone Mobilität 2023Vorstellung der Ausstellungsfläche
67Synchrone Mobilität 2023 – Testevent Dresden Flughafenkorridor
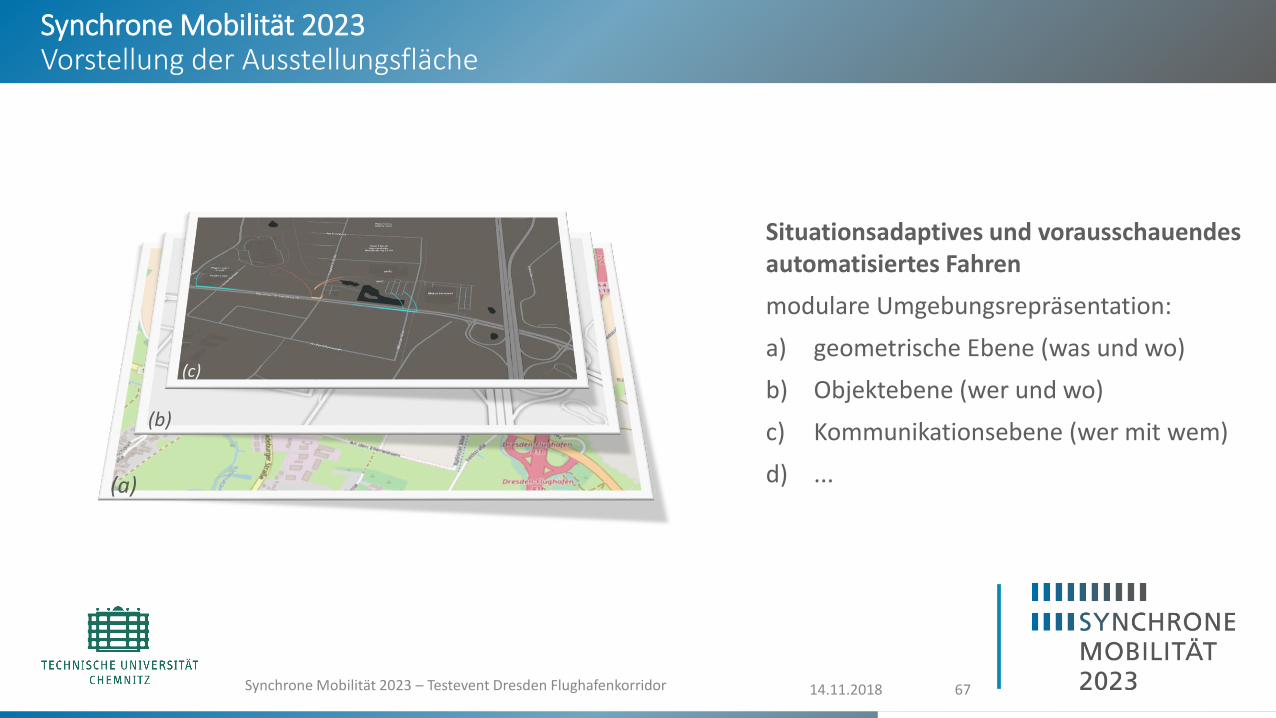
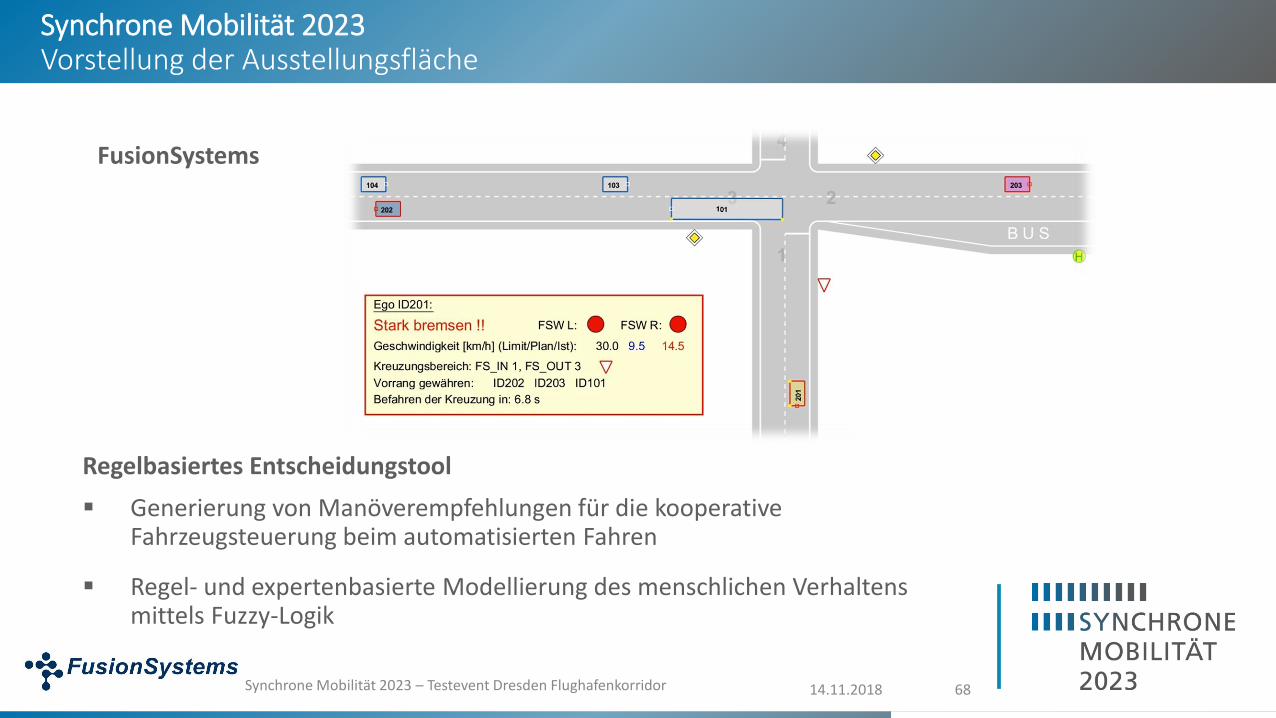
Situationsadaptives und vorausschauendes automatisiertes Fahren
modulare Umgebungsrepräsentation:
a) geometrische Ebene (was und wo)
b) Objektebene (wer und wo)
c) Kommunikationsebene (wer mit wem)
d) ...(a)
(b)
(c)
14.11.2018
Synchrone Mobilität 2023Vorstellung der Ausstellungsfläche
68Synchrone Mobilität 2023 – Testevent Dresden Flughafenkorridor
Regelbasiertes Entscheidungstool
Generierung von Manöverempfehlungen für die kooperative Fahrzeugsteuerung beim automatisierten Fahren
Regel- und expertenbasierte Modellierung des menschlichen Verhaltens mittels Fuzzy-Logik
FusionSystems

14.11.2018
Synchrone Mobilität 2023Vorstellung der Präsentationsfahrten
69Synchrone Mobilität 2023 – Testevent Dresden Flughafenkorridor
• Vernetzung:3x LSA im Zuge des Events
• Automatisierung:zwei Streckenabschnitte mit automatisierter Fahrfunktion
• Fahrt mit einem automatisierten Fahrzeug
• Fahrt mit weiteren drei vernetzten Fahrzeugen

14.11.2018
Synchrone Mobilität 2023Vorstellung der Präsentationsfahrten
70Synchrone Mobilität 2023 – Testevent Dresden Flughafenkorridor
1. Fahrt ins Testfeld inkl. Fahranweisung via REMAS-App
2. Annäherung an hochflexible LSA (Sprünge in Prognose, Restzeitanzeige) - automatisiert
1
2
3
3. Annäherung an stetige LSAmit Geschwindigkeits-empfehlung - automatisiert
4. Abbiegen aufgrund Baustelleninformation + Umfahrung
4

14.11.2018
Synchrone Mobilität 2023Vorstellung der Präsentationsfahrten
71
6
8. Verdichtung des Pulks + Annäherung mit Restzeitanzeige
9. Spurwechsel mit Abstimmung
5
7
8 9
5. Annäherung an LSA ohne Informationen
6. Fahrt mit Geschwindigkeits-empfehlung - automatisiert
14.11.2018
Synchrone Mobilität 2023Vorstellung der Präsentationsfahrten
72Synchrone Mobilität 2023 – Testevent Dresden Flughafenkorridor
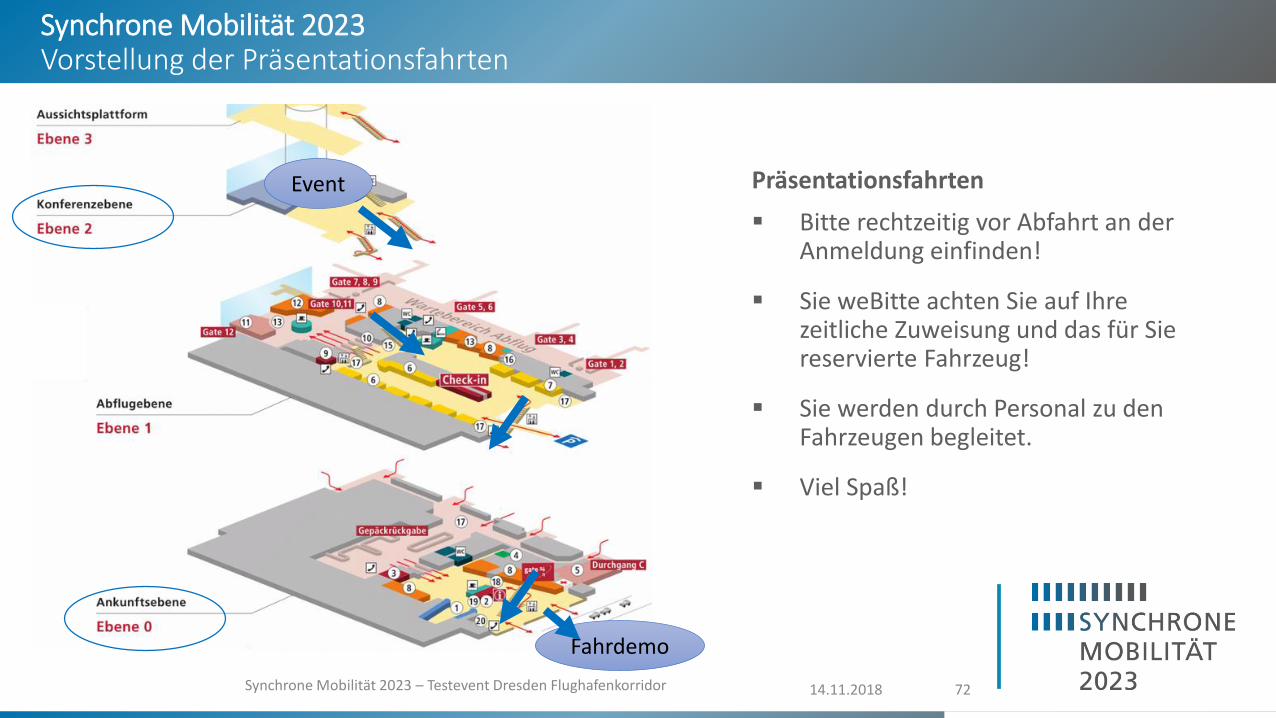
Event
Fahrdemo
Präsentationsfahrten
Bitte rechtzeitig vor Abfahrt an der Anmeldung einfinden!
Sie weBitte achten Sie auf Ihre zeitliche Zuweisung und das für Sie reservierte Fahrzeug!
Sie werden durch Personal zu den Fahrzeugen begleitet.
Viel Spaß!