
Titel: Stossantwort und Faltung Titel-Kürzel: TDOM Autoren...
23
Signale + Systeme Stossantwort und Faltung Version 2.3 1 Titel: Stossantwort und Faltung Titel-Kürzel: TDOM Autoren: Ulrich Gysel, gys, Koautoren: G. Lekkas, lks Version: v2.0 18. November 2005 v2.1 28. November 2005 Impulsantwort durch Stossantwort ersetzt, Winword-Umbruch und pdf-Version verbessert Version: v2.2 5. Februar 2007 einige Fehler korrigiert und Aufgaben mit Lösungen hinzugefügt Version: v2.3 4. September 2007 Verbesserungsvorschläge von J. Wild verarbeitet
-
Upload
nguyennhan -
Category
Documents
-
view
213 -
download
0
Transcript of Titel: Stossantwort und Faltung Titel-Kürzel: TDOM Autoren...
Signale + Systeme Stossantwort und Faltung
Version 2.3 1
Titel: Stossantwort und Faltung
Titel-Kürzel: TDOM
Autoren: Ulrich Gysel, gys,
Koautoren: G. Lekkas, lks
Version: v2.0 18. November 2005
v2.1 28. November 2005
Impulsantwort durch Stossantwort ersetzt, Winword-Umbruch und pdf-Version
verbessert
Version: v2.2 5. Februar 2007
einige Fehler korrigiert und Aufgaben mit Lösungen hinzugefügt
Version: v2.3 4. September 2007
Verbesserungsvorschläge von J. Wild verarbeitet
Signale + Systeme Stossantwort und Faltung
Version 2.3 2
Stossantwort und Faltung
1. Einstieg 3
2. Die Stossantwort 5
3. Stossantwort und Stabilität 6
4. Die Ausblendeigenschaften des Diracstosses 8
5. Die Faltung 10
6. Praktische Berechnung der Faltung 14 6.1 Analytische Berechnung 14 6.2 Numerische Berechnung der Faltung 15 6.3 Abschliessende Bemerkungen 18
7. Zusammenfassung 19
Aufgaben 20
Lösungen 22

Signale + Systeme Stossantwort und Faltung
Version 2.3 3
Lernziele
• In diesem Kapitel lernen Sie die Stoss- oder Impulsantwort als wichtige Beschreibungsart eines dynamischen Systems kennen.
• Mit Hilfe der Stossantwort können auch Ausgangssignale eines Systems für allgemeine Eingangssignale berechnet werden. Dieses Verfahren nennt man Faltung.
• Sie lernen verschiedene Verfahren kennen, wie man die Faltung in der Praxis bestimmen kann und Sie werden sie an einfachen Beispielen erproben.
Voraussetzungen
• Für dieses Kapitel brauchen Sie keine speziellen Vorkenntnisse ausser grundlegenden Operationen der Differential- und Integralrechnung.
• Dann machen wir Gebrauch von der Diracfunktion, welche Sie im ersten Kapitel kennengelernt haben.
1. Einstieg
Ein Lift fährt auf einem Stockwerk los und wird später wieder abgebremst, bis er einige Stockwerke höher zum Stillstand kommt. Oder ein heisser Ofen kühlt sich langsam ab, sobald die Heizung abgestellt wird. Beide Vorgänge stellen typische Reaktionen eines dynamischen Systems in Funktion der Zeit dar. In unserer realen Welt interessieren uns vor allem solche Systemreaktionen als Funktionen der Zeit. Im letzten Kapitel haben wir die Differentialglei-chungen von Systembeispielen hergeleitet, diese Gleichungen gelöst und die Ausgangssignale für typische Eingangssignale, insbesondere den Einheitsschritt berechnet.
In der Praxis müssen Ingenieure oft zwischen verschiedenen Systemvarianten die optimale wählen. Dazu müssen sie die zur Auswahl stehenden Lösungen miteinander vergleichen. Sie könnten dies im Prinzip auf Grund der Lösungen der Systemgleichungen machen. Doch wer kann schon aus Koeffizienten in Gleichungen leicht die Frage beantworten, welches System nun das geeignetste ist? Viel aussagekräftiger ist ein Vergleich der Ausgangssignale aller zur Auswahl stehenden Systemvarianten. Damit die Resultate vergleichbar werden, unterwerfen wir alle zur Wahl stehenden Systeme demselben Eingangssignal. Die verschiedenen Aus-gangssignale können grafisch dargestellt und leicht miteinander verglichen werden. Dabei soll das Prüfsignal möglichst einfach und mit einem Minimum an Parametern beschrieben werden können.
Als Prüfsignal haben wir im Kapitel Modellbildung bereits den Einheitsschritt kennen gelernt. Das Ausgangssignal des Systems auf den Einheitsschritt nennt man die Schrittantwort. Dabei sind gleichzeitig alle Anfangsbedingungen null. Für theoretische Untersuchungen verwendet man sehr häufig auch den Dirac- oder Stossimpuls mit dem Gewicht 1 als Eingangssignal. Das erzeugte Ausgangssignal nennt man dann die Stoss- oder
Impulsantwort. Beim RC-Glied des letzten Kapitels erhält man das in Fig. 1 dargestellte Resultat. Am Eingang legen wir einen Spannungsstoss an, der das Gewicht = 1 Vs haben soll. Am Ausgang misst man dann zur Zeit t = 0 einen Sprung der Ausgangsspannung auf den
Signale + Systeme Stossantwort und Faltung
Version 2.3 4
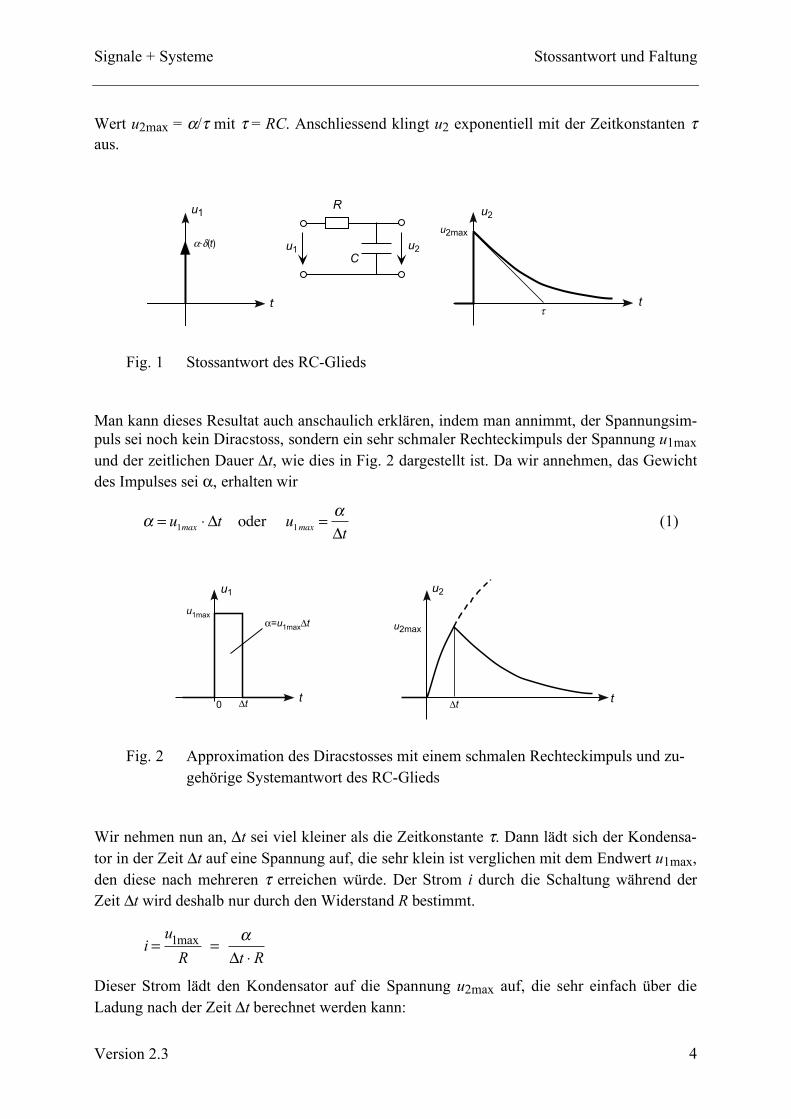
Wert u2max = / mit = RC. Anschliessend klingt u2 exponentiell mit der Zeitkonstanten aus.
α δ���
�
���
��� ��
�
��
�����
τ
Fig. 1 Stossantwort des RC-Glieds
Man kann dieses Resultat auch anschaulich erklären, indem man annimmt, der Spannungsim-puls sei noch kein Diracstoss, sondern ein sehr schmaler Rechteckimpuls der Spannung u1max
und der zeitlichen Dauer t, wie dies in Fig. 2 dargestellt ist. Da wir annehmen, das Gewicht
des Impulses sei , erhalten wir
= u1max t oder u1max = t
(1)
�
��
�
��
�����
� Δ� Δ�
������
�����
Fig. 2 Approximation des Diracstosses mit einem schmalen Rechteckimpuls und zu-
gehörige Systemantwort des RC-Glieds
Wir nehmen nun an, t sei viel kleiner als die Zeitkonstante . Dann lädt sich der Kondensa-
tor in der Zeit t auf eine Spannung auf, die sehr klein ist verglichen mit dem Endwert u1max,
den diese nach mehreren erreichen würde. Der Strom i durch die Schaltung während der
Zeit t wird deshalb nur durch den Widerstand R bestimmt.
i = u
1max
R =
t R
Dieser Strom lädt den Kondensator auf die Spannung u2max auf, die sehr einfach über die
Ladung nach der Zeit t berechnet werden kann:
Signale + Systeme Stossantwort und Faltung
Version 2.3 5
u
2max =
Q
C =
t i
C =
t
C t R = (2)
Der aufgeladene Kondensator entlädt sich anschliessend über den Widerstand R durch die Spannungsquelle, welche definitionsgemäss nach dem Spannungsstoss als Kurzschluss wirkt. Die Zeitkonstante dieser Entladung ist = RC.
Mit Recht wird eingewandt, dieses Verfahren sei messtechnisch nicht praktikabel. Die Stoss-antwort kann in der Praxis nicht wirklich gemessen werden, die Schrittantwort hingegen schon. Trotzdem wird häufig der Diracstoss als Anregungssignal benützt, da er den grossen Vorteil besitzt, dass das erzeugte Ausgangssignal direkt mit einer weiteren Beschreibungsart des Systems zusammenhängt. Zudem kann die Stossantwort als Ableitung aus der Schrittantwort berechnet werden, da der Diracstoss die Ableitung des Einheitsschrittes ist.
Im nächsten Abschnitt werden wir die Stossantwort allgemein formulieren. Dann benötigen wir für das weitere Vorgehen noch eine wichtige Eigenschaft des Diracstosses. In einem weiteren Abschnitt werden wir zeigen, dass sich mit Hilfe der Stossantwort das Ausgangssig-nal auch für allgemeine Eingangssignale bestimmen lässt. Dieses Verfahren funktioniert auch dann, wenn man vom System nur die Stossantwort kennt und noch keine Differentialglei-chung aufgestellt hat.
2. Die Stossantwort
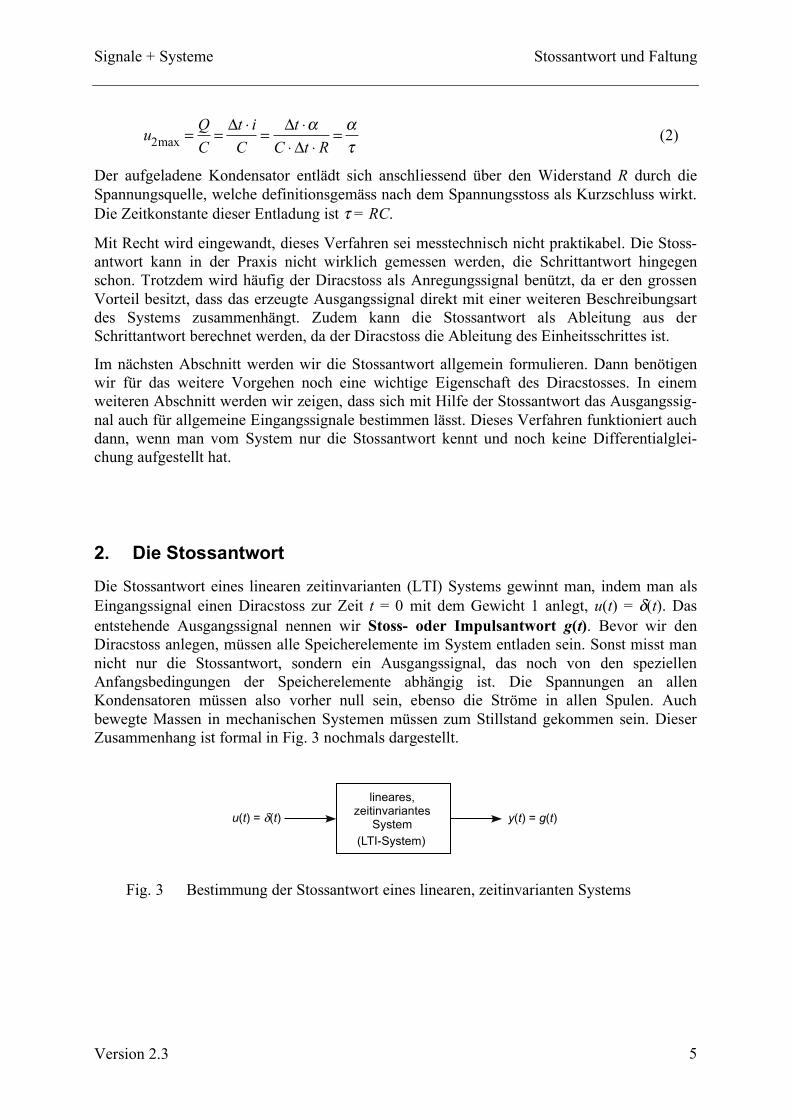
Die Stossantwort eines linearen zeitinvarianten (LTI) Systems gewinnt man, indem man als Eingangssignal einen Diracstoss zur Zeit t = 0 mit dem Gewicht 1 anlegt, u(t) = (t). Das entstehende Ausgangssignal nennen wir Stoss- oder Impulsantwort g(t). Bevor wir den Diracstoss anlegen, müssen alle Speicherelemente im System entladen sein. Sonst misst man nicht nur die Stossantwort, sondern ein Ausgangssignal, das noch von den speziellen Anfangsbedingungen der Speicherelemente abhängig ist. Die Spannungen an allen Kondensatoren müssen also vorher null sein, ebenso die Ströme in allen Spulen. Auch bewegte Massen in mechanischen Systemen müssen zum Stillstand gekommen sein. Dieser Zusammenhang ist formal in Fig. 3 nochmals dargestellt.
��� ��������� �����
��������������� �����������
������������
Fig. 3 Bestimmung der Stossantwort eines linearen, zeitinvarianten Systems
Signale + Systeme Stossantwort und Faltung
Version 2.3 6
Beispiel 1: Pendel
Als typisches System wählen wir ein Pendel, das sich im Ruhezustand befindet (Fig. 4). Zur Zeit t = 0 wird dieses System mit einem Diracstoss (t) aus
seiner Ruhelage gebracht. Aus Erfahrung wissen wir, dass das Pendel durch den Stoss ausgelenkt wird und anschliessend nach mehreren, immer kleiner werdenden Schwingungen in seinen Ruhe-zustand zurückkehrt. Bei relativ starker Reibung könnte die Auslenkung etwa den Verlauf von Fig. 5 einnehmen.
Fig. 4 Pendel wird mit Stossimpuls angeregt
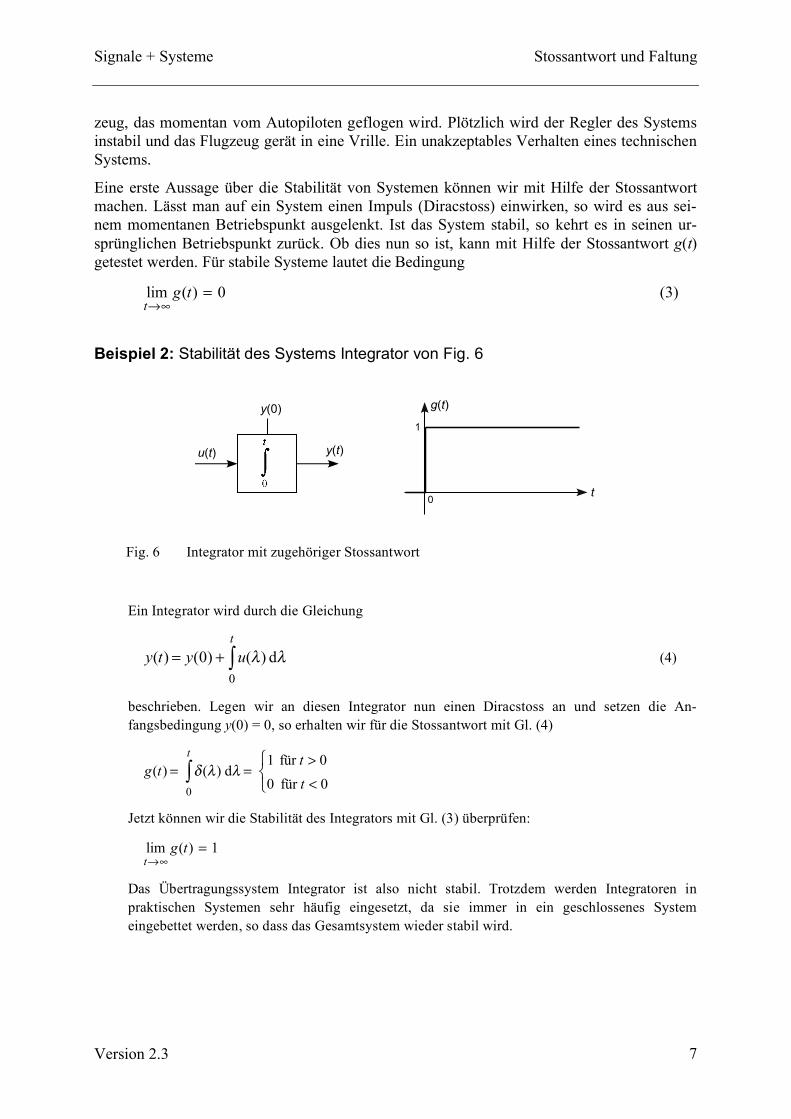
Fig. 5
Typische Stossantwort g(t) eines
stark gedämpften mechanischen
Pendels
Es liegt auf der Hand, dass die Stossantwort mit der Differentialgleichung eines Systems zu-sammenhängt. Wie dieser Zusammenhang aussieht, wollen wir noch etwas zurückstellen, da wir dazu noch nicht alle Werkzeuge zur Verfügung haben. Es soll im Moment genügen, dass man die Stossantwort bestimmen kann, sei dies analytisch oder dann über ein Experiment.
3. Stossantwort und Stabilität
Eine sehr wichtige Eigenschaft von dynamischen Systemen ist ihre Stabilität. Wir wollen hier einen ersten Blick darauf werfen, kommen aber später nochmals ausführlich darauf zu-rück. Technische Systeme müssen stabil sein. Stellen Sie sich vor, Sie sitzen in einem Flug-
�
����
Signale + Systeme Stossantwort und Faltung
Version 2.3 7
zeug, das momentan vom Autopiloten geflogen wird. Plötzlich wird der Regler des Systems instabil und das Flugzeug gerät in eine Vrille. Ein unakzeptables Verhalten eines technischen Systems.
Eine erste Aussage über die Stabilität von Systemen können wir mit Hilfe der Stossantwort machen. Lässt man auf ein System einen Impuls (Diracstoss) einwirken, so wird es aus sei-nem momentanen Betriebspunkt ausgelenkt. Ist das System stabil, so kehrt es in seinen ur-sprünglichen Betriebspunkt zurück. Ob dies nun so ist, kann mit Hilfe der Stossantwort g(t) getestet werden. Für stabile Systeme lautet die Bedingung
limt
g(t) = 0 (3)
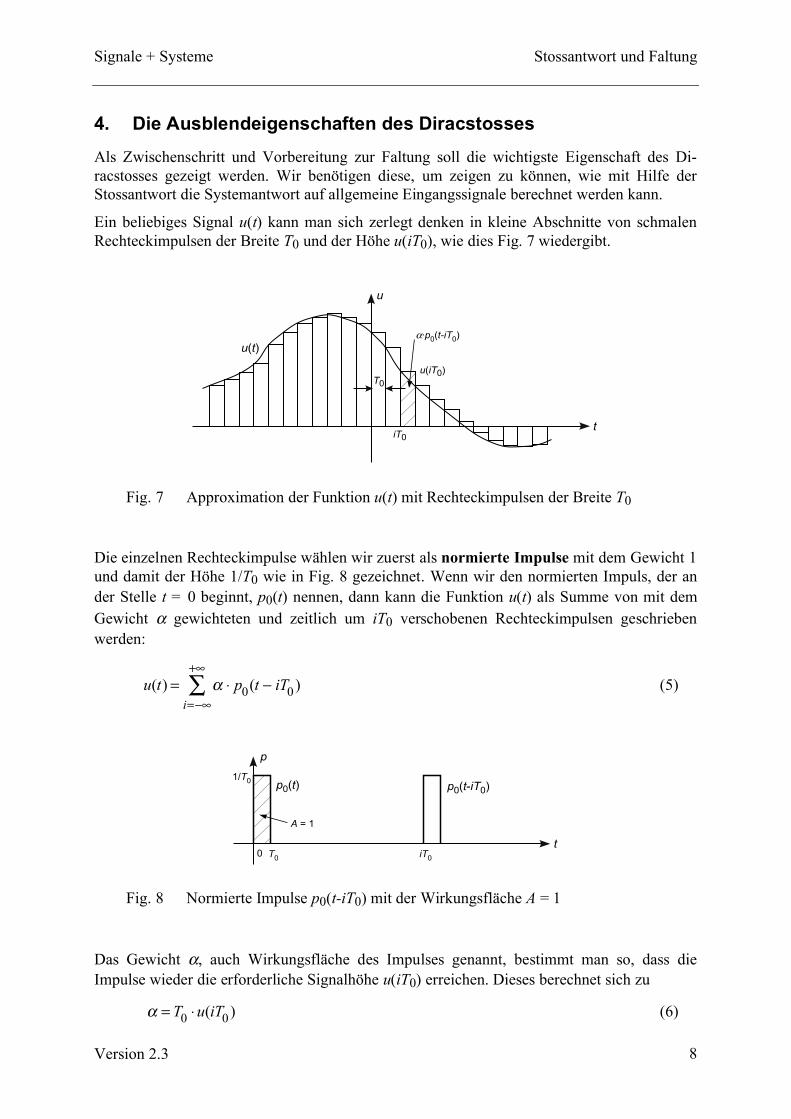
Beispiel 2: Stabilität des Systems Integrator von Fig. 6
���� ����
����
�
����
�
�
Fig. 6 Integrator mit zugehöriger Stossantwort
Ein Integrator wird durch die Gleichung
y(t) = y(0) + u( ) d
0
t
(4)
beschrieben. Legen wir an diesen Integrator nun einen Diracstoss an und setzen die An-fangsbedingung y(0) = 0, so erhalten wir für die Stossantwort mit Gl. (4)
g(t) = ( ) d
0
t
= 1 für t > 0
0 für t < 0
Jetzt können wir die Stabilität des Integrators mit Gl. (3) überprüfen:
limt
g(t) = 1
Das Übertragungssystem Integrator ist also nicht stabil. Trotzdem werden Integratoren in praktischen Systemen sehr häufig eingesetzt, da sie immer in ein geschlossenes System eingebettet werden, so dass das Gesamtsystem wieder stabil wird.
Signale + Systeme Stossantwort und Faltung
Version 2.3 8
4. Die Ausblendeigenschaften des Diracstosses
Als Zwischenschritt und Vorbereitung zur Faltung soll die wichtigste Eigenschaft des Di-racstosses gezeigt werden. Wir benötigen diese, um zeigen zu können, wie mit Hilfe der Stossantwort die Systemantwort auf allgemeine Eingangssignale berechnet werden kann.
Ein beliebiges Signal u(t) kann man sich zerlegt denken in kleine Abschnitte von schmalen Rechteckimpulsen der Breite T0 und der Höhe u(iT0), wie dies Fig. 7 wiedergibt.
�
�
��
��
�����
����α �������
Fig. 7 Approximation der Funktion u(t) mit Rechteckimpulsen der Breite T0
Die einzelnen Rechteckimpulse wählen wir zuerst als normierte Impulse mit dem Gewicht 1 und damit der Höhe 1/T0 wie in Fig. 8 gezeichnet. Wenn wir den normierten Impuls, der an der Stelle t = 0 beginnt, p0(t) nennen, dann kann die Funktion u(t) als Summe von mit dem
Gewicht gewichteten und zeitlich um iT0 verschobenen Rechteckimpulsen geschrieben werden:
u(t) =
i=
+
p0(t iT
0) (5)
��
�������� �������
����
�����
Fig. 8 Normierte Impulse p0(t-iT0) mit der Wirkungsfläche A = 1
Das Gewicht , auch Wirkungsfläche des Impulses genannt, bestimmt man so, dass die Impulse wieder die erforderliche Signalhöhe u(iT0) erreichen. Dieses berechnet sich zu
= T
0u(iT
0) (6)
Signale + Systeme Stossantwort und Faltung
Version 2.3 9
Nun lassen wir die Breite der Reckteckimpulse gegen null streben. Dabei wird aus T0 d ,
aus iT0 , aus p0(t - iT0) (t- ) und aus der Summe ein Integral, nämlich
u(t) = u( )
+
(t ) d (7)
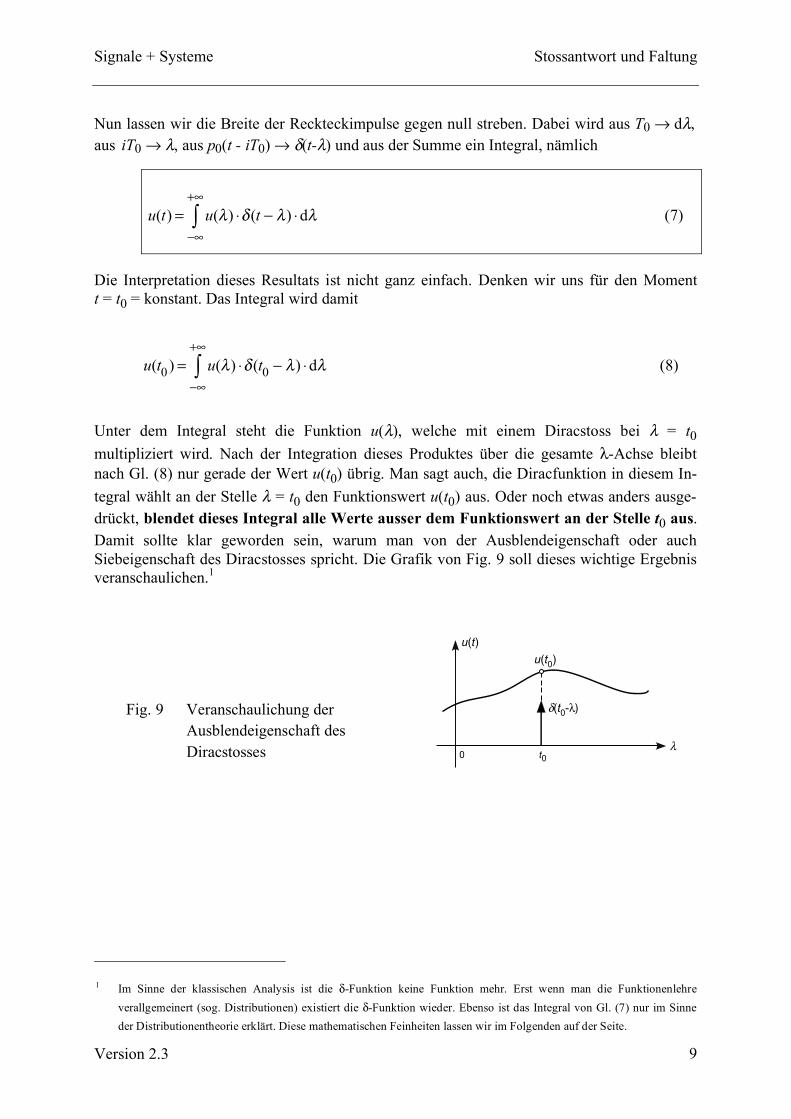
Die Interpretation dieses Resultats ist nicht ganz einfach. Denken wir uns für den Moment t = t0 = konstant. Das Integral wird damit
u(t0
) = u( )
+
(t0
) d (8)
Unter dem Integral steht die Funktion u( ), welche mit einem Diracstoss bei = t0
multipliziert wird. Nach der Integration dieses Produktes über die gesamte -Achse bleibt nach Gl. (8) nur gerade der Wert u(t0) übrig. Man sagt auch, die Diracfunktion in diesem In-
tegral wählt an der Stelle = t0 den Funktionswert u(t0) aus. Oder noch etwas anders ausge-
drückt, blendet dieses Integral alle Werte ausser dem Funktionswert an der Stelle t0 aus.
Damit sollte klar geworden sein, warum man von der Ausblendeigenschaft oder auch Siebeigenschaft des Diracstosses spricht. Die Grafik von Fig. 9 soll dieses wichtige Ergebnis veranschaulichen.1
Fig. 9 Veranschaulichung der
Ausblendeigenschaft des
Diracstosses
1 Im Sinne der klassischen Analysis ist die -Funktion keine Funktion mehr. Erst wenn man die Funktionenlehre
verallgemeinert (sog. Distributionen) existiert die -Funktion wieder. Ebenso ist das Integral von Gl. (7) nur im Sinne
der Distributionentheorie erklärt. Diese mathematischen Feinheiten lassen wir im Folgenden auf der Seite.
λ
����
� ��
δ����λ�
�����

Signale + Systeme Stossantwort und Faltung
Version 2.3 10
5. Die Faltung
Mit den Ergebnissen des vorherigen Abschnitts haben wir die Mittel beisammen, um aus der Stossantwort g(t) eines linearen, zeitinvarianten Systems sein Ausgangssignal y(t) für ein beliebiges Eingangssignal u(t) zu berechnen. Dazu führen wir die folgenden 3 Schritte durch:
1. Wir zerlegen in Gedanken das Eingangssignal in eine kontinuierliche Folge von ge-wichteten schmalen Impulsen, Fig. 10a, wie wir dies schon in Fig. 7 gemacht haben.
2. Da das System zeitinvariant angenommen wurde, hat eine Zeitverzögerung des Ein-gangssignals keinen Einfluss auf die Stossantwort. Ein einzelner Impuls zur Zeit iT0, nämlich p0(t-iT0), erzeugt deshalb am Ausgang eine Stossantwort, welche um die Zeit iT0 verschoben ist, also g(t-iT0), wie Fig. 11 zeigt. Dabei treffen wir die Annahme, die einzelnen schmalen Impulse erzeugen je eine Stossantwort, was genau genommen nur für Diracstösse am Eingang gilt. Diese Ungenauigkeit wird aber später wegfallen, wenn wir die Impulsbreite wieder gegen null streben lassen.
�
�
��
��
�����
����
�
�
�� ���� �������
��
��
��
�� �� �� ���� ���
�� ����� ��������
���
Fig. 10 Zur Herleitung der Faltung, a) das Eingangssignal, approximiert mit einzelnen
schmalen Impulsen und b) das Ausgangssignal, das sich aus zeitversetzten
Stossantworten zusammensetzt

Signale + Systeme Stossantwort und Faltung
Version 2.3 11
�
����
� ��
�����������
�
����
� ��
�������
Fig. 11 In einem zeitinvarianten System ist die Stossantwort unabhängig vom Zeit-
punkt des Diracstosses
3. Weil wir von einem linearen System ausgehen, dürfen wir die einzelnen, zeitlich ver-schobenen Stossantworten summieren, Fig. 10b. Dabei müssen wir diese noch mit dem Gewicht oder der Wirkungsfläche = T0·u(iT0) der einzelnen Eingangsimpulse multiplizieren.
Im allgemeinsten Fall sind alle Stossantworten der Grösse T0·u(iT0)·g(t-iT0) zu summieren. Als Resultat erhalten wir die Summe
y(t) = T0
u(iT0
) g(t
i=
+
iT0
) (9)
Diese Approximation ist umso genauer, je kleiner wir die Impulsbreite T0 wählen. Lässt man diese gegen null gehen im Sinne eines mathematischen Grenzübergangs, so wird die Berech-nung des Ausgangssignals exakt. Dabei geschieht Folgendes:
1. Aus der endlichen Impulsbreite T0 wird der infinitesimale Zeitabschnitt d .
2. Der Zeitpunkt iT0 wird durch die Variable ersetzt.
3. Aus der Summe wird ein Integral.
So entsteht das sog. Faltungsintegral
y(t) = u( )
+
g(t ) d (10)
Kennt man die Stossantwort, so kann man mit Hilfe des Faltungsintegrals das Ausgangssignal für jedes beliebige Eingangssignal berechnen. Mit der Variablentransformation = t – kann
man die Faltung noch umformen und anschliessend die Variable wieder durch ersetzen:
y(t) = u(t ) h( ) d = u(t )
+
g( ) d
+
(11)
Die Faltung ist also kommutativ. Für die Faltungsoperation wird das Symbol * verwendet. Damit kann die Faltung in Kurzform als
Signale + Systeme Stossantwort und Faltung
Version 2.3 12
y(t) = g(t)* u(t) = u(t)* g(t) (12)
geschrieben werden.2
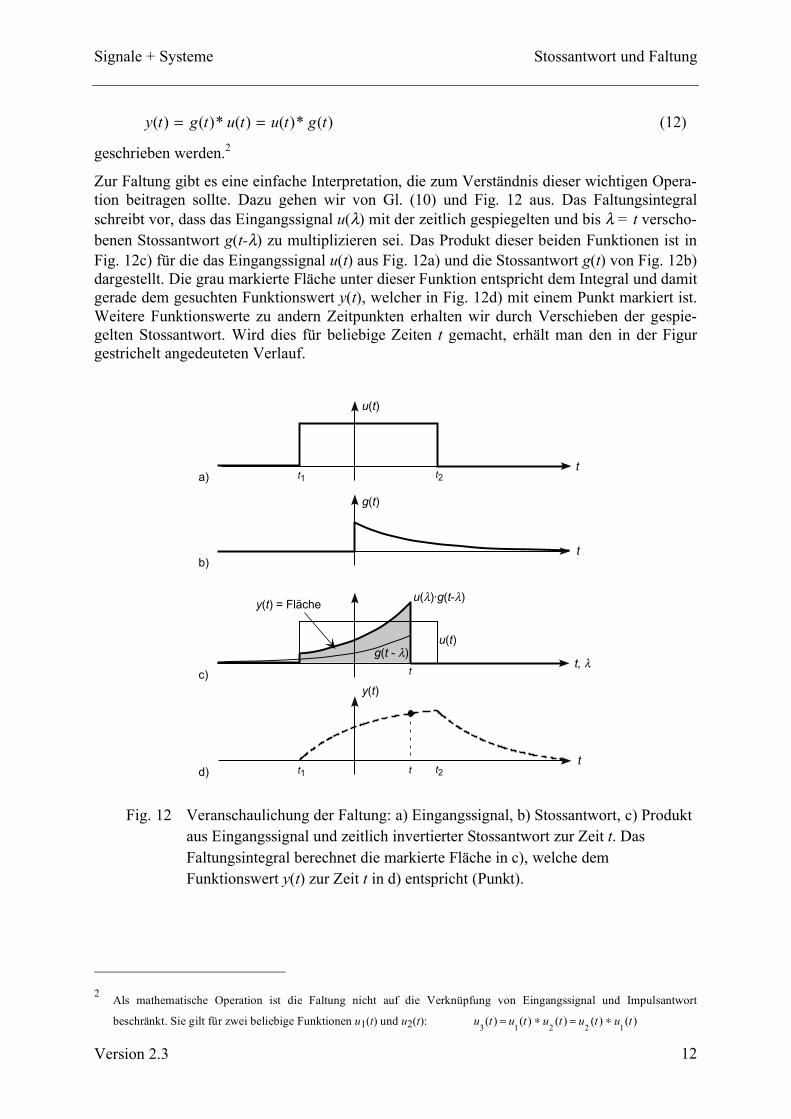
Zur Faltung gibt es eine einfache Interpretation, die zum Verständnis dieser wichtigen Opera-tion beitragen sollte. Dazu gehen wir von Gl. (10) und Fig. 12 aus. Das Faltungsintegral schreibt vor, dass das Eingangssignal u( ) mit der zeitlich gespiegelten und bis = t verscho-
benen Stossantwort g(t- ) zu multiplizieren sei. Das Produkt dieser beiden Funktionen ist in Fig. 12c) für die das Eingangssignal u(t) aus Fig. 12a) und die Stossantwort g(t) von Fig. 12b) dargestellt. Die grau markierte Fläche unter dieser Funktion entspricht dem Integral und damit gerade dem gesuchten Funktionswert y(t), welcher in Fig. 12d) mit einem Punkt markiert ist. Weitere Funktionswerte zu andern Zeitpunkten erhalten wir durch Verschieben der gespie-gelten Stossantwort. Wird dies für beliebige Zeiten t gemacht, erhält man den in der Figur gestrichelt angedeuteten Verlauf.
�
����
����
�
���λ�
��λ ����λ�
������λ�
�
����
�������
�
�� ��
�� ��
��
��
��
��
����
Fig. 12 Veranschaulichung der Faltung: a) Eingangssignal, b) Stossantwort, c) Produkt
aus Eingangssignal und zeitlich invertierter Stossantwort zur Zeit t. Das
Faltungsintegral berechnet die markierte Fläche in c), welche dem
Funktionswert y(t) zur Zeit t in d) entspricht (Punkt).
2 Als mathematische Operation ist die Faltung nicht auf die Verknüpfung von Eingangssignal und Impulsantwort
beschränkt. Sie gilt für zwei beliebige Funktionen u1(t) und u2(t): u
3(t) = u
1(t) u
2(t) = u
2(t) u
1(t)

Signale + Systeme Stossantwort und Faltung
Version 2.3 13
Da wir von einem kausalen System ausgehen, ist unsere Stossantwort g(t) für t < 0 immer null. Damit liegt wegen der Spiegelung von g(t- ) die obere Grenze unseres Integrals bei t. Für ein kausales System kann man das Faltungsintegral also auf den Bereich von - bis t beschränken:
y(t) = u( )
t
g(t ) d (13)
Ist unser Eingangssignal für t < t1 ebenfalls null, darf für kleinere Zeiten als t1 auch kein Ausgangssignal vorhanden sein. Diesen Zusammenhang erkennt man auch daran, dass sich für t < t1 die beiden Funktionen u( ) und g(t- ) nicht überlappen. Das Integral kann also wei-ter auf das Zeitintervall t1 bis t beschränkt werden.
An dieser Stelle können wir auch formal zeigen, dass bei einem Diracstoss als Eingangssignal das Ausgangssignal gleich der Stossantwort ist. Wir wählen dazu u(t) = (t), setzen dies in Gl. (10) ein und erhalten
y(t) = ( )
+
g(t ) d = g(t) (14)
Dabei haben wir die Ausblendeigenschaft des Diracstosses, Gl. (7) verwendet.
Schliesslich müssen wir der Dimension der Stossantwort g(t) noch unsere Aufmerksamkeit schenken. Wir kehren dazu nochmals zu Gl. (10) zurück und betrachten darin nur die Dimensionen der einzelnen Faktoren. Man beachte, dass die Integration über die Zeit einer Multiplikation mit der Einheit Sekunde entspricht.
y(t) = u(t) g(t) s (15)
oder aufgelöst nach der Dimension von g(t)
g(t) = y(t)
u(t) s (16)
In Gl. (14) sieht man diesen Zusammenhang der Dimensionen von g(t) und y(t) nicht mehr. Diese Gleichung muss also bezüglich der Dimensionen von g(t) und y(t) gemäss Gl. (16) noch korrigiert werden.
Handelt es sich bei y(t) und u(t) um Spannungen, wie dies z.B. im einführenden Beispiel des RC-Glieds der Fall ist, so hat g(t) die Dimension s-1. Dieses Ergebnis folgt auch aus der Di-mension des Diracstosses. Im Kapitel Signalformen und Systemtypen wurde der Diracstoss als unendlich schmaler und unendlich hoher Impuls mit der Fläche 1 definiert:
(t) dt = 1
+
(17)
Daraus haben wir bereits dort die Dimension des Diracstosses mit [ (t)] = s-1 bestimmt. Legen wir an den Eingang eines Systems einen Diracstoss einer bestimmten physikalischen Grösse, so muss seine Einheit zusätzlich den Faktor s-1 enthalten, der auch wieder in der Di-mension des Ausgangssignals auftauchen muss. Ein zweites Beispiel für die Dimension der

Signale + Systeme Stossantwort und Faltung
Version 2.3 14
Stossantwort sei ein System, bei dem das Eingangssignal eine Kraft F und das Ausgangssignal eine Geschwindigkeit v sei. Dann hat die Stossantwort die Einheit [g(t)] = [v]/([F]·s) = m/(Ns2).
6. Praktische Berechnung der Faltung
Schnell stellt sich die Frage, welchen praktischen Nutzen die Faltung hat. Wie kann man das Faltungsintegral berechnen? Die Antwort hängt ganz von der Art ab, wie die Funktionen g(t) und u(t) gegeben sind und wie genau das Resultat sein soll. Wir betrachten drei Berech-nungsmethoden:
a) Die analytische Methode. Sind g(t) und u(t) analytisch gegeben, so kann das Faltungsin-tegral prinzipiell gelöst werden. Das ist bei etwas umfangreicheren Systemen sehr auf-wändig. Zudem gibt es für diesen Fall einen eleganteren Weg, den wir später kennen ler-nen werden.
b) Die grafische Methode. Wie bei andern Integralen auch, kann das Faltungsintegral gra-fisch ausgewertet werden. Diese Methode ist nicht besonders genau, gibt aber schnell eine Idee über den Verlauf des Ausgangssignals.
c) Die numerische Methode. Kennt man von den beiden Funktionen die Werte zu diskreten Zeiten, am besten beide in gleichen Zeitabständen, so kann das Integral numerisch appro-ximativ gelöst werden. Bei einer sehr guten zeitlichen Auflösung der Funktionen erhält man so sehr genaue Resultate. Diese Methode eignet sich auch sehr gut, wenn die Funkti-onen auf Grund von Messresultaten vorliegen.
6.1 Analytische Berechnung
Dazu genüge ein Beispiel.
Beispiel 3: Analytische Berechnung der Faltung
Wir wählen nochmals das RC-Glied von Fig. 1. Die Stossantwort dieser Schaltung hat die Form
g(t) = (t)
1e
t / mit = RC (18)
Man beachte hier [g(t)] = s-1!
Auf dieses Netzwerk geben wir einen Impuls, der dieselbe Form habe, wie die Stossantwort des Netzwerks, aber mit der Zeitkonstanten 1, also
u(t) = (t) u
0e
t /1 (19)
Für das Ausgangssignal finden wir
Signale + Systeme Stossantwort und Faltung
Version 2.3 15
y(t) = u
0 e/
1e(t ) /
d
0
t
= u
0 et /
e(
1
1
1)d
0
t
= u0
1
1
et /
1 et /( ) (20)
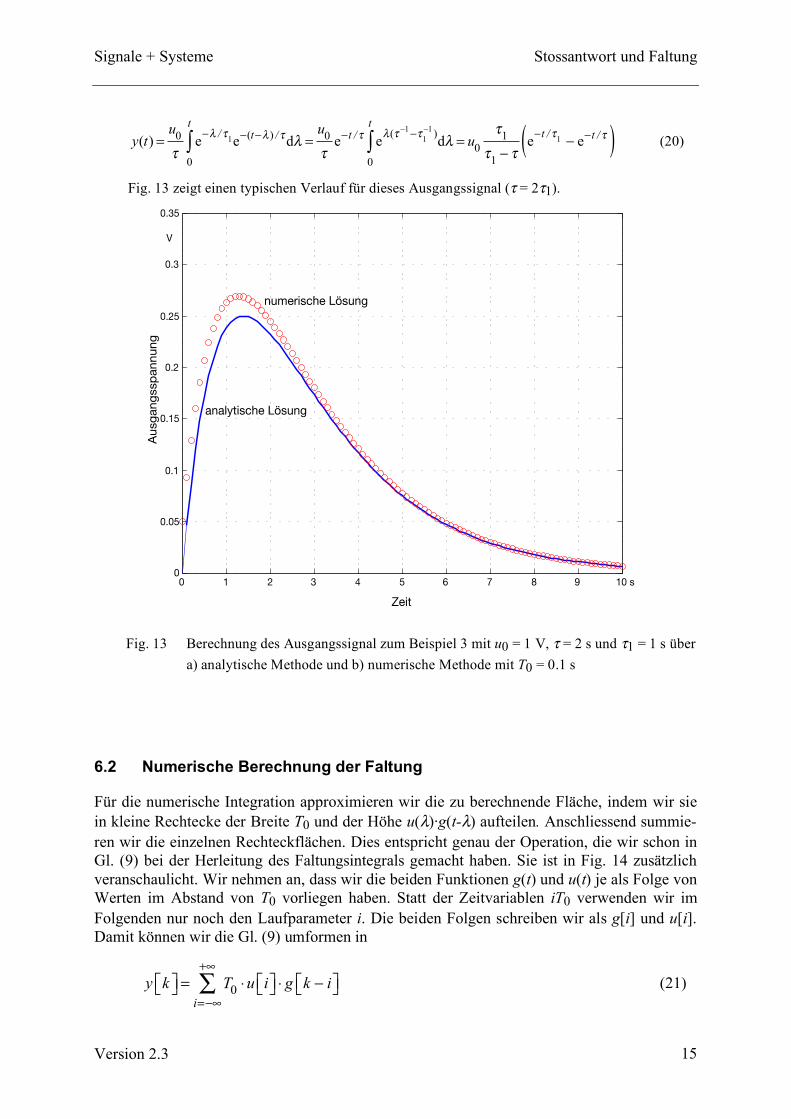
Fig. 13 zeigt einen typischen Verlauf für dieses Ausgangssignal ( = 2 1).
� � � � � � � �����
���
���
���
���
���
���
���
�
����������������
����
������������ ����
��!�"������ ����
Fig. 13 Berechnung des Ausgangssignal zum Beispiel 3 mit u0 = 1 V, = 2 s und 1 = 1 s über
a) analytische Methode und b) numerische Methode mit T0 = 0.1 s
6.2 Numerische Berechnung der Faltung
Für die numerische Integration approximieren wir die zu berechnende Fläche, indem wir sie in kleine Rechtecke der Breite T0 und der Höhe u( )·g(t- ) aufteilen. Anschliessend summie-ren wir die einzelnen Rechteckflächen. Dies entspricht genau der Operation, die wir schon in Gl. (9) bei der Herleitung des Faltungsintegrals gemacht haben. Sie ist in Fig. 14 zusätzlich veranschaulicht. Wir nehmen an, dass wir die beiden Funktionen g(t) und u(t) je als Folge von Werten im Abstand von T0 vorliegen haben. Statt der Zeitvariablen iT0 verwenden wir im Folgenden nur noch den Laufparameter i. Die beiden Folgen schreiben wir als g[i] und u[i]. Damit können wir die Gl. (9) umformen in
y k = T0
u i g k i
i=
+
(21)

Signale + Systeme Stossantwort und Faltung
Version 2.3 16
� !
� ��!
� � ��!
���� �����
��
�
Fig. 14 Zur numerischen Berechnung des Faltungsintegrals am Beispiel aus Fig. 12
Die unendlichen Grenzen in dieser Summe sind für eine praktische Auswertung ungeeignet und müssen auf die konkret vorliegenden Signaldauern angepasst werden. Als erstes nehmen wir wieder an, das System sei kausal. Damit sind alle Werte von g[i] für i < 0 identisch null. Zudem klingt in allen passiven Systemen die Stossantwort ab, sobald nur schon kleinste Verluste vorhanden sind. Ab einer oberen Grenze Ig können wir daher die Folge von g[i] abbrechen. Auch das Eingangssignal u[i] selber soll zeitlich begrenzt sein, sagen wir zwischen I1·T0 t I2·T0. Damit vereinfacht sich, wie man sich anhand von Fig. 14 überlegen kann, Gl. (21) zu
y k = T0
u i g k i
i= Iu
Io
mit Io = min(k , I
2)
Iu = max(I
1, k I
g)
(22)
k = I
1 , I
2+ I
g
für alle andern k wird y k := 0
Praktisch führt man die Berechnung mit einem Programm wie Matlab durch. Dieses besitzt für die Faltungsberechnung eigens den Befehl conv(g,u). Zwei konkrete Beispiele mögen dies verdeutlichen.
Beispiel 4: Numerische Berechnung des Beispiels 3.
Der Matlabcode für die analytische wie auch die numerische Berechnung ist anschliessend auf-geführt.
%Beispiele 3 und 4: Berechnung der exakten und numerischen Faltung
t0=0.1; %Zeitschritt T0
te=20; %maximale Zeit für den Zeitvektor
tau1=1; %Zeitkonstante 1 des Eingangssignals
tau=2; %Zeitkonstante der Stossantwort
t=0:t0:te; %Bestimmung des Zeitvektors
u=exp(-t/tau1); %Eingangssignal u(t) mit u0=1
g=exp(-t/tau)/tau; %Stossantwort g(t)

Signale + Systeme Stossantwort und Faltung
Version 2.3 17
figure(1)
plot(t,u,t,g);
%exakte Lösung der Faltung
ye=tau1/(tau1-tau)*(exp(-t/tau1)-exp(-t/tau));
y=t0*conv(g,u); %numerische Berechnung der Faltung
j=10/t0+1; %maximaler Laufparameter für die Darstellung
figure(2)
plot(t(1:j),ye(1:j),t(1:j),y(1:j),'go')
grid
Das Ergebnis der Faltung der numerischen Berechnung ist zusätzlich zu analytischen in Fig. 13 eingezeichnet und zwar für T0 = 0.1 s.
Beispiel 5: Eingangssignal mit einigen Perioden einer Sinusschwingung
In diesem Beispiel soll ein Eingangssignal, das aus einigen Sinusschwingungen besteht, auf ein System gegeben werden, welches eine Stossantwort in der Form des Ausgangssignals von Fig. 13 hat:
Eingangssignal: Vier Perioden einer Sinusschwingung
u(t) = sin(2 t / T ) (t) (t 4T )( )
Stossantwort:
g(t) = 5 s
1e
t /2 e
t /1( )
Die Resultate der Berechnungen mit Matlab für T = 4 s, 1 = 1 s und 2 = 2 s zeigt Fig. 15. Man
beachte speziell die Länge des Ausgangsvektors bei der numerischen Berechnung der Faltung. Weist die Folge des Eingangssignals i Funktionswerte, jene der Stossantwort j Funktionswerte auf, dann ist die Länge des Ausgangsvektors i+j-1. Dies erkennt man, wenn man die Berechnungsroutine conv für die Faltung genauer ansieht. In der Grafik zeigt sich diese Eigenschaft, indem die Dauer des Ausgangssignals der Summe der Dauer des Eingangssignals und der Stossantwort beträgt. In Fig. 15c) wurde dabei die Darstellung der Stossantwort wie des Ausgangssignals vorzeitig abgebrochen.

Signale + Systeme Stossantwort und Faltung
Version 2.3 18
� " �� �" �����
�#"
�
�#"
�����
� " �� �" ������
��#"
�
�#"
�
� " �� �" �� �"����#"
��
��#"
�
�#"
�
�#"
�
�#"
��$
%�
��
�&'
���
���
(�
)�
�)
��)
��
��
���
*%
�)
��
)��)
��
����
�
+��
+��
+��
��
��
��
Fig. 15 Numerische Berechnung der Faltung mittels der Matlab-Routine conv, a) Stossantwort
des Systems, b) das Eingangssignal und c) das Ausgangssignal
6.3 Abschliessende Bemerkungen
Mit der Stossantwort g(t) haben wir eine wichtige Systembeschreibung kennen gelernt. Sie ist in der Praxis nur auf Umwegen messbar. Dafür hat sie den Vorteil, dass mit ihr über das Faltungsintegral das Ausgangssignal für beliebige Eingangssignale berechnet werden kann.

Signale + Systeme Stossantwort und Faltung
Version 2.3 19
Dies ist besonders dann nützlich, wenn die Stossantwort und das Eingangssignal als Folgen von Werten zu diskreten Zeiten vorliegen (diskrete Faltung). Dann führt die Berechnung des Ausgangssignals zu jedem Zeitpunkt zu einer Summation von einfachen Produkten, die nu-merisch mit jedem Rechner ausgeführt werden kann.
Alle bisherigen Betrachtungen erfolgten mit Zeitsignalen. Wir sprechen in diesem Zusam-menhang auch vom Zeitbereich. Stossantwort und Faltung sind Systembeschreibungen bzw. –operationen im Zeitbereich. Im Gegensatz dazu werden wir im folgenden Kapitel als Anregung eine reine Sinusschwingung verwenden. Dabei stossen wir auf eine neue Beschreibung eines Systems, bei welcher die Frequenz der sinusförmigen Anregung die entscheidende Rolle spielt. Man spricht dann von einer Beschreibung im Frequenzbereich.
7. Zusammenfassung
Stoss- oder Impulsantwort
Eingangssignal u(t) = (t) Ausgangssignal y(t) = g(t)
Ausblendeigenschaft des Diracstosses
u(t) = u( )
+
(t ) d
Faltung
y(t) = u( )
+
g(t ) d = u(t )
+
g( ) d
Kurzschreibweise y(t) = g(t)* u(t) = u(t)* g(t)
Für kausale Systeme mit g(t) = 0 für t < 0 gilt
y(t) = u( )
t
g(t ) d

Signale + Systeme Stossantwort und Faltung
Version 2.3 20
Aufgaben
1. Bestimmen Sie grafisch ohne grosse Berechnungen das Ausgangssignal y(t) mittels der Faltung aus den Paaren von dimensionslosen Eingangsfunktionen u(t) und den Stossantworten g(t) der Systeme von Fig. 16a) bis d). Skizzieren Sie dazu zuerst das Produkt u( ) g(t ) für geeignete Werte von t und bestimmen dann von Hand das
Faltungsintegral.
�
����
����
�
�� ���
�� ���
�����
�
�
�
�
����
����
�
�� �
�� ���
,
�
�
-��
�
����
����
�
�� ,��
�
�
�
�
����
����
�
�� ���
�� ����
�
�
��� ���
�#"
�
�#"����
� �
� " .
�����
�����
Fig. 16 Paare von Eingangssignalen u(t) und Stossantworten g(t).
2. Die Impulsantwort eines elektrischen Systems zur Spannungsübertragung laute:
g(t) = (t)
1e t /
Die Eingangsspannung ist ein einzelner Sägezahnimpuls, der von t = 0 linear auf U0 = 2 V
bei t1 = 5 s ansteigt und für alle übrigen Zeiten null ist. Berechnen Sie die
Ausgangsspannung
a) analytisch
b) numerisch mit einem geeigneten Mathematikprogramm.
Signale + Systeme Stossantwort und Faltung
Version 2.3 21
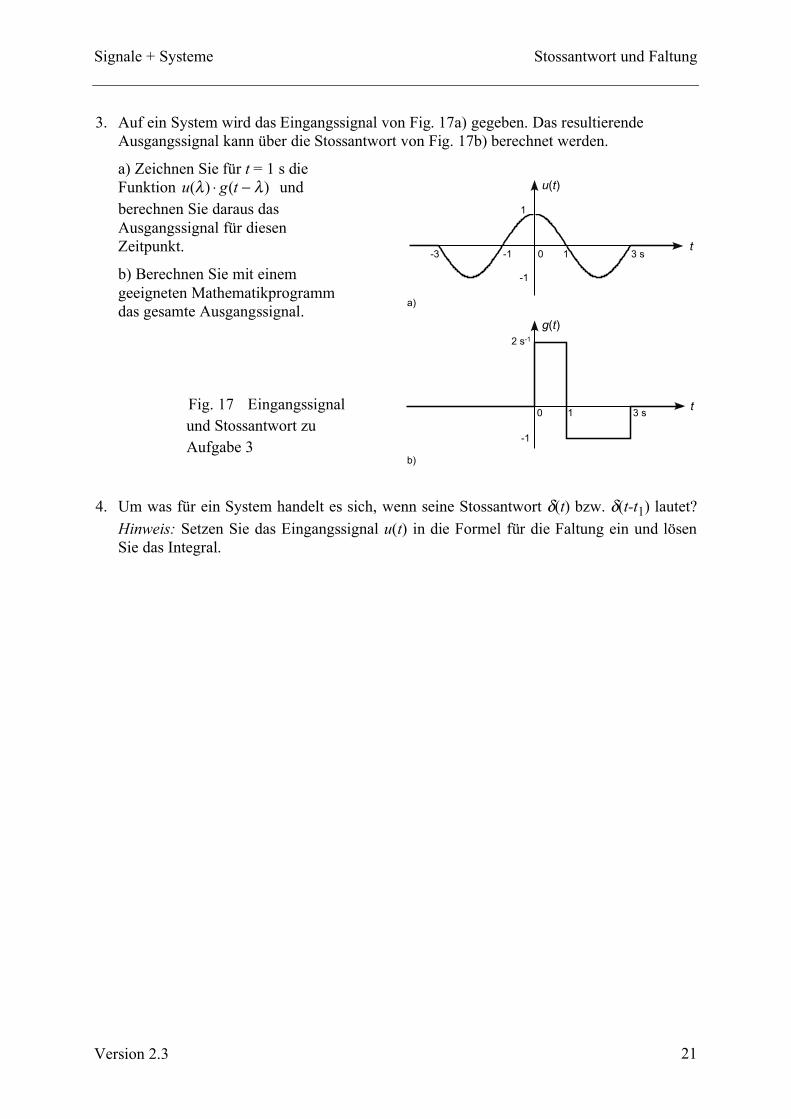
3. Auf ein System wird das Eingangssignal von Fig. 17a) gegeben. Das resultierende Ausgangssignal kann über die Stossantwort von Fig. 17b) berechnet werden.
a) Zeichnen Sie für t = 1 s die Funktion u( ) g(t ) und
berechnen Sie daraus das Ausgangssignal für diesen Zeitpunkt.
b) Berechnen Sie mit einem geeigneten Mathematikprogramm das gesamte Ausgangssignal.
Fig. 17 Eingangssignal
und Stossantwort zu
Aufgabe 3
4. Um was für ein System handelt es sich, wenn seine Stossantwort (t) bzw. (t-t1) lautet?
Hinweis: Setzen Sie das Eingangssignal u(t) in die Formel für die Faltung ein und lösen Sie das Integral.
�
����
����
�
�
��
��
�, �� � � ,��
� � ,��
�����
��
��
Signale + Systeme Stossantwort und Faltung
Version 2.3 22
Lösungen
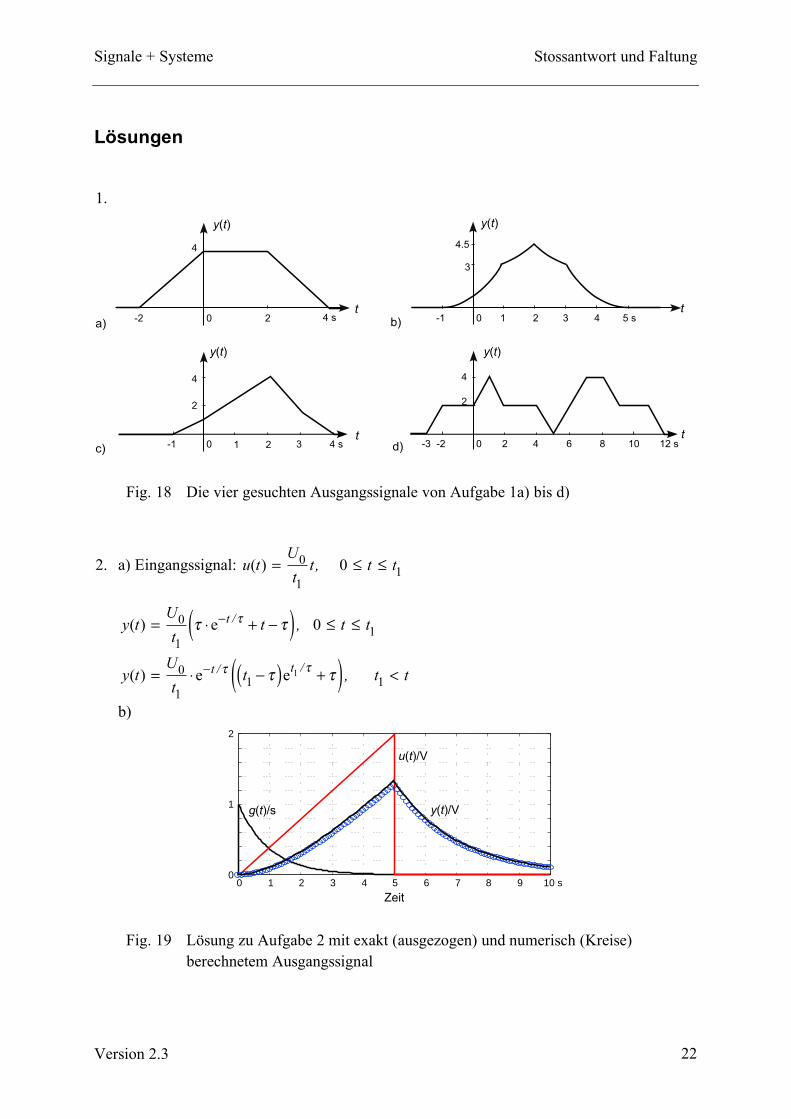
1.
����
�
���� �
-
�
����
��� �� �
,
�
�
����
�� ,��
����
�� ��
�
-
� �
-�� "��� , -
-#"
-����
�
-
. �� �����, - /��
Fig. 18 Die vier gesuchten Ausgangssignale von Aufgabe 1a) bis d)
2. a) Eingangssignal:
u(t) = U
0
t1
t , 0 t t1
y(t) = U
0
t1
e t /+ t( ) , 0 t t
1
y(t) = U
0
t1
e t / t1( )et
1/
+( ) , t1 < t
b)
�����0
������
0 1 2 3 4 5 6 7 8 9 10 s0
1
2
�����0
+��
Fig. 19 Lösung zu Aufgabe 2 mit exakt (ausgezogen) und numerisch (Kreise)
berechnetem Ausgangssignal

Signale + Systeme Stossantwort und Faltung
Version 2.3 23
3. a) y(t = 1 s) = 4/
Fig. 20
Die Funktion
u( ) g(t ) zum Zeitpunkt
t = 1 s
b)
Fig. 21
Numerische, mit Matlab
berechnete Lösung
4. Das Faltungsintegral lautet:
y(t) = u( )
+
(t ) d = u(t)
Dies gilt auf Grund der Ausblendeigenschaft des Diracstosses. Das System, dessen Stossantwort identisch mit dem Diracstoss ist, entspricht einer direkten Verbindung von Ausgang mit dem Eingang. Analog gilt
y(t) = u( )
+
(t t1
) d = u(t t1)
Dieses System entspricht einer reinen Verzögerung des Eingangssignals um die Zeit t1.
τ
��τ�
�
��
�, �� � � ,��
��������τ���τ� ��������τ�
-6 -4 -2 0 2 4 6 s-3
-2
-1
0
1
2
3
����
�
��'�*%1)������


















