
Vektoranalysis - TUM Fakultät für Mathematik - Zentrum …€¦ · · 2011-02-106.1...
80
Vektoranalysis Vorlesungsskript Wintersemester 2010/11 Bernd Schmidt ∗ Version vom 10. Februar 2011 * Zentrum Mathematik, Technische Universit¨ at M¨ unchen, Boltzmannstr. 3, 85747 Garching, [email protected] 1
-
Upload
duongkhanh -
Category
Documents
-
view
213 -
download
0
Transcript of Vektoranalysis - TUM Fakultät für Mathematik - Zentrum …€¦ · · 2011-02-106.1...
Vektoranalysis
Vorlesungsskript
Wintersemester 2010/11
Bernd Schmidt∗
Version vom 10. Februar 2011
∗ Zentrum Mathematik, Technische Universitat Munchen, Boltzmannstr. 3, 85747Garching, [email protected]
1
Inhaltsverzeichnis
Inhaltsverzeichnis 2
1 Einleitung 3
2 Mannigfaltigkeiten 52.1 Definition und Charakterisierung . . . . . . . . . . . . . . . . . . 52.2 Tangential- und Normalraum . . . . . . . . . . . . . . . . . . . . 152.3 Ausblick: Allgemeine Mannigfaltigkeiten . . . . . . . . . . . . . . 19
3 Oberflachenintegrale 223.1 Erinnerung: Lebesgue-Integration im R
n . . . . . . . . . . . . . . 223.2 Die Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243.3 Beispiele & Anwendungen . . . . . . . . . . . . . . . . . . . . . . 29
4 Orientierung und Teilmengen mit Rand 364.1 Orientierte Mannigfaltigkeiten . . . . . . . . . . . . . . . . . . . . 364.2 Teilmengen mit glattem Rand . . . . . . . . . . . . . . . . . . . . 40
5 Die klassischen Integralsatze 465.1 Vektorfelder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 465.2 Integrabilitat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 485.3 Der Integralsatz von Gauß . . . . . . . . . . . . . . . . . . . . . . 525.4 Anwendungen des Gaußschen Satzes . . . . . . . . . . . . . . . . 585.5 Der Integralsatz von Stokes . . . . . . . . . . . . . . . . . . . . . 61
6 Differentialformen 666.1 Multilineare Algebra . . . . . . . . . . . . . . . . . . . . . . . . . 666.2 Differentialformen im R
n . . . . . . . . . . . . . . . . . . . . . . . 706.3 Integration von Differentialformen . . . . . . . . . . . . . . . . . . 756.4 Der allgemeine Satz von Stokes . . . . . . . . . . . . . . . . . . . 77
Literaturverzeichnis 80
2
Kapitel 1
Einleitung
Die Vektoranalysis handelt – kurz gesagt – von Integralen uber “gekrummte Men-gen”, Differentialen von (vektorwertigen) Funktionen und deren Zusammenhang.Klassische “gekrummte Mengen” sind hier etwa glatte Flachen im Raum, wiedie Oberflache einer Kugel oder eines Torus, das Dach des Munchner Olym-piastadions, Bahnen von glatten Kurven, wie sie als Trajektorien dynamischerSysteme z.B. in der Mechanik auftreten, oder auch die “gekrummte Raumzeit”der Relativitatstheorie. Ganz allgemein entstehen solche gekrummten Mengen,die man in der Mathematik Mannigfaltigkeiten nennt, als Losungsmenge nicht-linearer Gleichungen auch in hoheren Dimensionen. Diese Objekte sind sowohlinnermathematisch als auch in Anwendungen von großem Interesse.
Die Vektoranalysis ist nun eine Analysis auf Mannigfaltigkeiten: Sie beschreibtdie Differential- und Integralrechnung von Funktionen auf diesen Mengen und lie-fert mit den zentralen Integralsatzen einen den Hauptsatz der Differential- undIntegralrechnung wesentlich verallgemeinernden Zusammenhang von Differentia-tion und Integration. Weiterfuhrende Aspekte von Mannigfaltigkeiten werdeninsbesondere in den angrenzenden Gebieten der Differentialgeometrie und derDifferentialtopologie untersucht.
Uberblick
Im Kapitel 2 untersuchen wir zunachst, wie wir Mannigfaltigkeiten adaquat ma-thematisch beschreiben konnen. Wir besprechen dabei verschiedene aquivalenteBedingungen, die durch unterschiedliche Blickpunkte und Anwendungen moti-viert sind. Als ersten Schritt zum Aufbau einer Analysis auf Mannigfaltigkeitenfuhren im Kapitel 3 die Integration uber gekrummte Flachen ein. Da Mannig-faltigkeiten typischerweise “niederdimensionale Mengen” im umgebenden Raumund also Nullmengen sind, ist es dabei wesentlich, genau zu verstehen, wie “nie-derdimensionale Volumina” gekrummter Mengen zu messen sind. Das darauf fol-gende Kaptiel 4 geht dann noch einmal auf weitere Aspekte von Mannigfaltigkei-ten ein: Orientierung und Teilmengen mit glattem Rand. Das Kapitel 5 behan-
3

delt schließlich die Kernaussagen dieser Vorlesung: die Integralsatze von Gaußund Stokes, wobei wir zweiteren zunachst nur im klassischen dreidimensionalenFall behandeln. Der zentrale Satz von Gauß kann als eine n-dimensionale Versi-on des Hauptsatzes der Differential- und Integralrechnung aufgefasst werden. Imabschließenden Kapitel 6 gehen wir noch auf den allgemeinen Satz von Stokesim Differentialformenkalkul ein. Dies ist eine weitreichende Verallgemeinerungdes Hauptsatzes der Differential- und Integralrechnung in beliebgen Dimensionenuber gekrummte Flachen.
Voraussetzungen
Vorkenntnisse sollten Sie haben uber:
• Lineare Algebra,
• Differentialrechnung im Rn (insbesondere den Satz uber implizite Funktio-
nen bzw. die Inverse)
• Maß- und Integrationstheorie (Lebesgue-Integral, Satz von Fubini, Trans-formationsformel).
Sie konnen der Vorlesung allerdings auch folgen, ohne die Maß- und Integrations-theorie gehort zu haben. Alles was wir hieraus benotigen, finden Sie in Abschnitt3.1 zusammengestellt. Es genugt, wenn sie diese Ergebnisse zunachst einfach glau-ben.
Literatur
Die Vektoranalysis im Rn, wie wir sie hier behandeln, finden Sie in vielen allge-
meinen Lehrbuchern zur Analysis. Empfehlenswert sind insbesondere die Bucher[For] von Forster und [Ko] von Konigsberger. Das Skript [Br] von Brokate ent-wickelt außerdem eine mehrdimensionale Riemannsche Integrationstheorie undeignet sich daher besonders, wenn Sie die Maß und Integrationstheorie noch nichtgehort haben. Das ausgezeichnete weiterfuhrende Buch [Ja] von Janich schließlichbietet eine Einfuhrung in die moderne Vektoranalysis im Differentialformenkalkul.
4

Kapitel 2
Mannigfaltigkeiten
Zuallererst mussen wir naturlich den Hauptgegenstand unserer Untersuchungen,die Mannigfaltigkeiten mathematisch sauber einfuhren. Wir werden in dieser Vor-lesung nur Untermannigfaltigkeiten des R
n betrachten. Das ist technisch einfa-cher, da man in diesem Fall einen “umgebenden Raum” zur Verfugung hat. Imletzten Abschnitt dieses Kapitels werden wir allerdings kurz noch auf den allge-meinen Mannigfaltigkeitsbegriff eingehen.
2.1 Definition und Charakterisierung
Es gibt verschiedene Moglichkeiten, Untermannigfaltigkeiten des Rn zu definie-
ren; der Leitgedanke ist aber immer der gleiche: Wenn die “geraden”, “nichtgekrummten” Teilmengen, also die affinen Unterraume durch affine Funktionenbeschrieben werden konnen, so mussen wir die Mannigfaltigkeiten mit Hilfe nicht-linearer Funktionen beschreiben. Indem wir differenzierbare Funktionen betrach-ten, erhalten wir allgemeine Teilmengen, auf denen sich eine “differenzierbareStruktur” definieren lassen wird.
Im Wesentlichen gibt es drei aquivalente Charakterisierungen:
• durch außere Karten,
• als Losungsmenge von Gleichungen oder
• durch Parametrisierungen bzw. innere Karten.
Motiviert sind diese Darstellungen durch die Beschreibung von Unterraumen desR
n: V ⊂ Rn ist ein k-dimensionaler Unterraum genau dann, wenn eine der drei
folgenden aquivalenten Bedingungen erfullt ist:
• Es gibt einen Isomorphismus Φ : Rn → R
n (eine “außere Karte”), so dassΦ(V ) = R
k × 0 ⊂ Rn ist.
5
• Es gibt eine lineare Abbildung f : Rn → R
n−k mit vollem Rang (alsoRang f = n− k), so dass V = Kern f = x ∈ R
n : f(x) = 0 gilt.
• Es gibt eine lineare Abbildung (eine “Parametrisierung”) Ψ : Rk → R
n mitRang Ψ = k und V = Bild f = Ψ(Rk).
Fur Mannigfaltigkeiten werden wir die entsprechenden Eigenschaften nur lo-kal fordern, d.h. auf kleinen Umgebungen ihrer Punkte. Eine globale Parametri-sierung ist z.B. schon fur die schone runde Kugel nicht moglich, die sicherlicheines unserer Paradebeispiele einer Mannigfaltigkeit sein wird. Wir definieren al-so Objekte, die lokal wie ein verformter k-dimensionaler Teilraum im R
n liegen,k ∈ 0, 1, . . . , n.
Untermannigfaltigkeiten: Die Definition
Wir wahlen die Beschreibung als Losungsmenge nichtlinearer Gleichungen alsDefinition, da sie am schnellsten zu interessanten Beispielen fuhrt.
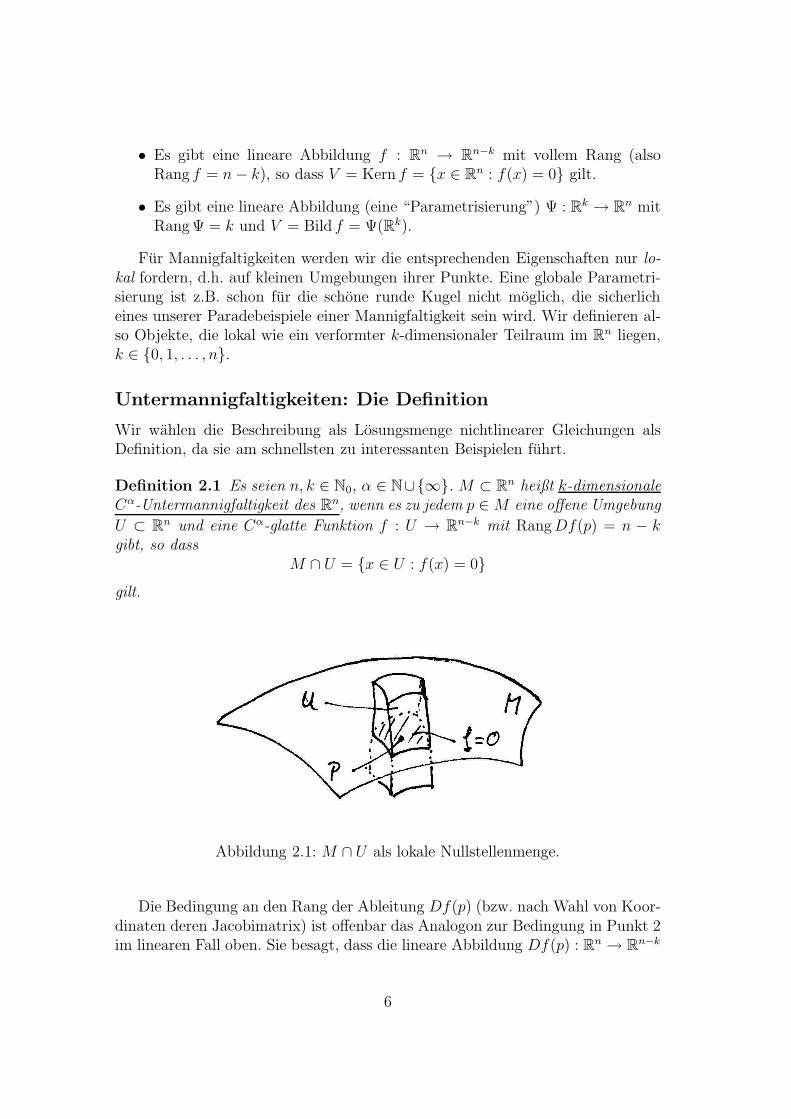
Definition 2.1 Es seien n, k ∈ N0, α ∈ N∪∞. M ⊂ Rn heißt k-dimensionale
Cα-Untermannigfaltigkeit des Rn, wenn es zu jedem p ∈M eine offene Umgebung
U ⊂ Rn und eine Cα-glatte Funktion f : U → R
n−k mit RangDf(p) = n − kgibt, so dass
M ∩ U = x ∈ U : f(x) = 0gilt.
Abbildung 2.1: M ∩ U als lokale Nullstellenmenge.
Die Bedingung an den Rang der Ableitung Df(p) (bzw. nach Wahl von Koor-dinaten deren Jacobimatrix) ist offenbar das Analogon zur Bedingung in Punkt 2im linearen Fall oben. Sie besagt, dass die lineare Abbildung Df(p) : R
n → Rn−k
6

surjektiv ist. Nach Verkleinerung von U kann man annehmen, dass diese Bedin-gung auf ganz U erfullt ist. (Eine solche Abbildung nennt man auch Submersion).Schreibt man f = (f1, . . . , fn−k), so ist sie aquivalent dazu, dass die n − k Gra-dienten
∇f1(p), . . . ,∇fn−k(p)
linear unabhangig sind. Im Falle k = n− 1 spricht man auch von Hyperflachen.Wir werden auch einfach nur von “Mannigfaltigkeiten” sprechen und α so-
wie k nicht extra erwahnen. Mit Ausnahme von Abschnitt 2.3 sind aber immerUntermannigfaltigkeien im R
n gemeint, wie eben definiert.
Beispiele:
1. Affine Unterraume sind C∞-Mannigfaltigkeiten.
2. Die n-dimensionale Sphare Sn = x ∈ Rn+1 : |x| = 1 ⊂ R
n+1 ist eine n-dimensionale C∞-Untermannigfaltigkeit des R
n+1, denn Sn = x ∈ Rn+1 :
f(x) = 0 fur f(x) = |x|2 − 1 und ∇f(x) = 2x 6= 0 auf Sn.
3. Das Hyperboloid Hc := x ∈ R3 : x2
1 + x22 = x2
3 + c, c 6= 0, ist einezweidimensionale C∞-Mannigfaltigkeit im R
3.
Ubung: Zeigen Sie dies sowie, dass Hc fur c = 0 keine Untermannigfaltig-keit des R
3 ist. Welche geometrische Figur ist H0?
4. Wir bezeichnen mit Rn×n ∼
= Rn2
den Vektorraum der reellen n×n-Matrizen.Die Menge der orthogonalen Matrizen
O(n) = A ∈ Rn×n : ATA = Id
(Id die Einheitsmatrix) ist eine n(n−1)2
-dimensionale C∞-Untermannigfaltig-keit des R
n×n.
Um das einzusehen, bemerken wir zunachst, dass O(n) = A ∈ Rn×n :
f(A) = 0 fur f : Rn×n → R
n×nsym mit f(A) = ATA−Id gilt, wobei R
n×nsym den
n(n+1)2
-dimensionalen Vektorraum der symmetrischen reellen n×n-Matrizenbezeichnet. Offensichtlich ist f C∞-glatt. Die Ableitung Df(A) ist gegebendurch
Df(A)H = limt→0
f(A+ tH) − f(A)
t
= limt→0
(A+ tH)T (A+ tH) −ATA
t= lim
t→0HTA+ ATH + tHTH
= HTA+ ATH.
7

Tatsachlich ist Df(A) fur A ∈ O(n) surjektiv, denn zu gegebenem B ∈R
n×nsym gilt Df(A)H = B etwa fur H := 1
2AB:
Df(A)H =1
2
((AB)TA+ ATAB
)=
1
2
(BTATA+ ATAB
)= B.
In all diesen Beispielen ergab sich die Mannigfaltigkeit sogar als Losungsmengex : f(x) = 0 einer einzigen Funktion f . Wir halten daher die folgende wichtigeBeobachtung, die sich direkt aus unserer Definition ergibt, fest:
Beobachtung: Ist U ⊂ Rn offen, f ∈ Cα(U ; Rn−k) und c ein regularer Wert
von f , also RangDf(p) = n − k fur alle p ∈ M := f−1(c), so ist M einek-dimensionale Cα-Untermannigfaltigkeit des R
n.
Außere Karten
Zur theoretischen Untersuchung ist es oft nutzlich, Untermannigfaltigkeiten imR
n auf eine alternative Art und Weise mittels außerer Karten zu charakterisieren.Anschaulich besagt diese Charakterisierung, dass eine k-dimensionale Unterman-nigfaltigkeiten – bis auf eine glatte Koordinatentransformation – lokal genau soim R
n liegt wie der Rk ∼
= x ∈ Rn : xk+1 = . . . xn = 0 im R
n. Diese Charakteri-sierung hat außerdem den Vorteil, dass sie in naturlicher Weise zum allgemeinenKonzept der Untermannigfaltigkeit einer Mannigfaltigkeit fuhrt.
Mit Rk × 0 bezeichnen wir den Unterraum x ∈ R
n : xk+1 = . . . = xn = 0des R
n. Ist f : U → V , U, V ⊂ Rn offen, bijektiv und sind sowohl f als auch f−1
Cα-glatt, α ∈ N ∪ ∞, so nennt man f einen Cα-Diffeomorphismus.
Satz 2.2 M ⊂ Rn ist genau dann eine k-dimensionale Cα-Mannigfaltigkeit,
wenn es zu jedem p ∈ M eine offene Umgebung U ⊂ Rn, eine offene Menge
V ⊂ Rn und einen Cα-Diffeomorphismus ϕ : U → V gibt, so dass
ϕ(M ∩ U) = (Rk × 0) ∩ V
gilt.
Eine solche Abbildung ϕ nennt man außere Karte oder manchmal auch einenFlachmacher, da sie die Mannigfaltigkeit in U in den linearen Raum R
k × 0“plattbugelt”, vgl. Abb. 2.2.
Beweis. “⇒”: Sei p ∈M , M k-dimensionale Mannigfaltigkeit. Wahle eine Umge-bung U von p und eine Funktion f ∈ Cα(U ; Rn−k) mit RangDf(p) = n− k undM ∩ U = x ∈ U : f(x) = 0. Durch Umnummerieren der Koordinaten konnenwir erreichen, dass die letzten n− k Spalten von Df(p) linear unabhangig sind.1
1Genauer: Sind die letzten n− k Spalten von Df(p) linear unabhangig, so verfahren wir wiebeschrieben. Der allgemeine Fall lasst sich durch Vorschalten einer linearen Abbildung, welchedurch eine geignete Permutationsmatrix gegeben ist, darauf zuruckfuhren.
8

Abbildung 2.2: Der Flachmacher.
Schreibt man x = (ξ, η), ξ ∈ Rk, η ∈ R
n−k, so ist also Dηf(p) invertierbar undder Satz uber implizite Funktionen liefert offene Mengen U1 und U2 in R
k bzw.R
n−k, so dass p ∈ U1 × U2 ⊂ U gilt, sowie ein ψ ∈ Cα(U1; Rn−k) existiert mit
M ∩ (U1 × U2) = (ξ, ψ(ξ)) : ξ ∈ U1.
Definiere nun ϕ : U := U1 × U2 → Rn durch
ϕ(ξ, η) := (ξ, η − ψ(ξ)).
Offenbar ist ϕ injektiv und Dϕ(ξ, η) =
(
Idk 0−Dξψ Idn−k
)
invertierbar, so dass nach
dem Satz uber inverse Funktionen ϕ ein Diffeomorphismus von U nach V := ϕ(U)ist. Außerdem ist naturlich
(ξ, η) ∈M ∩ U ⇐⇒ ϕ(ξ, η) ∈ (Rk × 0) ∩ V.
“⇐”: Sind nun umgekehrt p ∈M , eine offene Umgebung U ⊂ Rn, eine offene
Menge V ⊂ Rn und ein Cα-Diffeomorphismus ϕ : U → V gegeben, so dass
ϕ(M ∩ U) = (Rk × 0) ∩ V
gilt, so ist
M ∩ U = ϕ−1((Rk × 0) ∩ V ) = x ∈ U : ϕk+1(x) = . . . = ϕn(x) = 0.
Da Dϕ(x) fur jedes x ∈ U vollen Rang n hat, sind die ∇ϕk+1(x), . . . ,∇ϕn(x) inder Tat linear unabhangig.
Topologie
Da jede Mannigfaltigkeit im Rn insbesondere eine Teilmenge des R
n ist, “erbt”sie die Topologie des umgebenden Raums. Genauer: Durch Einschrankung der
9

ublichen Metrik des Rn auf eine beliebige Teilmenge M ⊂ R
n wird M zu einemmetrischen Raum. Fur Teilmengen von M sind also die Eigenschaften “offen”,“abgeschlossen” und “kompakt” wohldefiniert, wobei man – zumindest in den er-sten beiden Fallen – der Genauigkeit halber lieber “offen in M” bzw. “abgeschlos-sen in M” sagen sollte, da dies nicht aqivalent dazu ist, dass sie als Teilmengendes R
n offen bzw. abgeschlossen sind. Nun ist jedoch die vom Rn geerbte Metrik
oft nicht die “richtige” Metrik auf M . (Ein “besserer” Distanzbegriff zwischenzwei Punkten auf M ware etwa durch die Lange eines minimalen, ganz in Mverlaufenden Verbindungspfads gegeben.) Die topologischen Begriffe wie “offen”und “abgeschlossen” ergeben sich jedoch auch direkt aus den entspre chendenBegriffen im R
n ohne Ruckgriff auf die metrische Struktur.Abstrakt definiert man:
Definition 2.3 Ist T eine Menge und τ ⊂ P(T ) ein System von Teilmengen vonT mit der Eigenschaft, dass
(i) beliebige Vereinigungen von Mengen aus τ wieder in τ liegen,
(ii) endliche Durchschnitte von Mengen aus τ wieder in τ liegen und
(iii) ∅, T ∈ τ sind,
so nennt man (T, τ) einen topologischen Raum. Jede Menge U ∈ τ nennt manoffen.
Indem man in einem metrischen Raum T die Menge der (bzgl. der Metrik)offenen Mengen mit τ bezeichnet, wird (T, τ) zu einem topologischen Raum.Das ergibt sich unmittelbar aus den bekannten Eigenschaften offener Mengen inmetrischen Raumen. Der Begriff des topologischen Raumes verallgemeinert denBegriff des metrischen Raumes also in naturlicher Weise, genauso, wie der Begriffdes metrischen Raumes eine naturliche Varallgemeinerung der normierten Raumedarstellt.
Definition 2.4 Eine Teilmenge Ω ⊂ M heißt offen/abgeschlossen in M , wenn
es eine offene/abgeschlossene Menge Ω ⊂ Rn gibt, so dass Ω = Ω ∩M ist.
Ubung: Uberlegen Sie sich, dass
(a) auf diese Weise M zu einem topologischen Raum wird und
(b) diese Topologie mit der von der ererbten Metrik induzierten ubereinstimmt.
Der Begriff der Stetigkeit ubertragt sich auf topologische Raume, indem maneine Abbildung zwischen zwei topologischen Raumen stetig nennt, wenn Urbil-der offener Mengen offen sind. Fur metrische Raume ist das ja eine bekannteaquivalente Charakterisierung der Stetigkeit.
10

Parametrisierungen
Wir geben noch eine weitere Charakterisierung von Mannigfaltigkeiten mittelsParametrisierungen bzw. inneren Karten an. Diese Beschreibung wird uns spaterden Weg weisen, wie allgemeine Mannigfaltigkeiten auch ohne einen umgebendenEuklidischen Raum zu definieren sind.
Man nennt eine Abbildung f zwischen metrischen Raumen (oder allgemeinertopologischen Raumen) einen Homoomorphismus, wenn sie bijektiv ist und wennsowohl f als auch f−1 stetig sind.2
Satz 2.5 M ⊂ Rn ist genau dann eine k-dimensionale Cα-Mannigfaltigkeit,
wenn es zu jedem p ∈ M eine in M offene Umgebung U ⊂ M , eine offeneMenge V ⊂ R
k und einen Homoomorphismus Φ : V → U gibt, so dass
Φ ∈ Cα(V ; Rn) mit RangDΦ(x) = k ∀x ∈ V
gilt.
Eine solche Abbildung Φ nennt man auch eine lokale Parametrisierung odereine (innere) Karte3 von M . Abbildungen Ψ ∈ Cα(V ; Rn), V ⊂ R
k offen, mitRangDΨ = k auf V , d.h. DΨ(x) : R
k → Rn injektiv fur alle x ∈ V , nennt man
Immersionen.
Beweis. “⇒”: Ist M eine k-dimensionale Mannigfaltigkeit, so gibt es nach Satz2.2 zu jedem p ∈ M eine Umgebung U ⊂ R
n, eine offene Menge V ⊂ Rn und
einen Cα-Diffeomorphismus ϕ : U → V , so dass
ϕ(M ∩ U) = (Rk × 0) ∩ V
gilt. Definieren wir nun V := ξ ∈ Rk : (ξ, 0) ∈ V und Φ : V → M ∩ U =: U
durchΦ(ξ) = ϕ−1(ξ, 0),
so sind V und U offen in Rk bzw. M mit p ∈ U sowie Φ ein Cα-glatter Homoomor-
phismus. Es gilt
DΦ(ξ) = Dϕ−1(ξ, 0)
(Idk
0
)
=(Dϕ(ϕ−1(ξ, 0))
)−1(
Idk
0
)
nach der Kettenregel fur Φ = ϕ−1 P mit P : Rk → R
n, P (ξ) = (ξ, 0). Da(Dϕ(ϕ−1(ξ, 0)))−1 nicht singular ist, folgt RangDΦ(ξ) = Rang
(Idk
0
)= k.
2Ein Homoomorphismus f : T1 → T2 zwischen zwei topologoischen Raumen induziert eineBijektion zwischen den offenen Mengen in T1 und T2. Vom topologischen Standpunkt sind dieseRaume nicht zu unterscheiden.
3Achtung: Diese Bezeichnung ist zwar fur Untermannigfaltigkeiten des Rn gebrauchlich. In
der allgemeinen Theorie der Mannigfaltigkeiten bezeichnet man jedoch meist die Inverse Φ−1,die von M in den Euklidischen Raum abbildet als Karte, s. Abschnitt 2.3.
11

“⇐”: Es seien p, U , V und Φ wie im Satz angegeben. Durch eventuellesUmnummerieren der Koordinaten durfen wir annehmen, dass die ersten k Zeilenvon DΦ(Φ−1(p)) linear unabhangig sind. Betrachten wir die Abbildung
Φ′ = (Φ1, . . . ,Φk) : V → Rk,
die sich durch Streichen der letzten n − k Eintrage aus Φ ergibt, so ist dannDΦ′(Φ−1(p)) nicht singular und nach dem Satz uber inverse Funktionen gibt eseine Umgebung V ′ von Φ−1(p) und eine offene Menge U ′ ⊂ R
k, so dass Φ′ : V ′ →U ′ ein Cα-Diffeomorphismus ist.
Definiere nun Ψ : V ′ × Rn−k → U ′ × R
n−k durch
Ψ(ξ, η) = Φ(ξ) + (0, η).
Abbildung 2.3: Φ, Φ′ und Ψ.
Ψ ist bijektiv, denn fur alle ξ, ξ ∈ V ′ und η, η ∈ Rn−k gilt
Ψ(ξ, η) = Ψ(ξ, η) ⇒ Φ′(ξ) = Φ′(ξ) ⇒ ξ = ξ ⇒ η = η
und fur (ξ′, η′) ∈ U ′ × Rn−k ist ξ = (Φ′)−1(ξ′) ∈ V ′ und
Ψ(ξ, η) = Φ(ξ) + (0, η) = (ξ′, η′)
fur ein geeignetes η ∈ Rn−k. Des Weiteren ist
DΨ(ξ, η) =
(DΦ′(ξ) 0
∗ Idn−k
)
12

invertierbar und, weil Ψ außerdem Cα-glatt ist, ist Ψ nach dem Satz uber inverseFunktionen ein Cα-Diffeomorphismus.
Da Φ ein Homoomorphismus ist, ist Φ(V ′) offen in M . Wahlen wir U ⊂ Rn
offen mit Φ(V ′) = U ∩M und setzen U = (U ′ × Rn−k) ∩ U , so ist Ψ−1 : U →
V := Ψ−1(U) ein Cα-Diffeomorphismus mit
Ψ(V ∩ (Rk × 0)) = Ψ(V ∩ (V ′ × Rn−k) ∩ (Rk × 0))
= Ψ(V ∩ (V ′ × 0)) = Ψ(V ) ∩ Ψ(V ′ × 0)= U ∩ Φ(V ′) = U ∩ U ∩M = U ∩M,
wobei wir V ⊂ (V ′ × Rn−k) und U ⊂ U ausgenutzt haben, und damit
V ∩ (Rk × 0) = Ψ−1(U ∩M).
Ψ−1 ist also ein Flachmacher fur M in der Nahe von p, so dass die Behauptungaus Satz 2.2 folgt.
Im Allgemeinen kann man eine Mannigfaltigkeit nicht mit einer einzigen Karteparametrisieren. Zur vollstandigen Beschreibung benotigt man daher eine Samm-lung von Karten, die ganz M uberdecken: einen Atlas also.
Definition 2.6 Eine Familie (Φj) von Karten Φj : Vj → Uj wie in Satz 2.5definiert heißt ein Atlas von M , wenn M ⊂ ⋃j Uj gilt.
Bei der Untersuchung von Mannigfaltigkeiten mit Hilfe von Karten ist es wich-tig zu verstehen, inwiefern Eigenschaften der Mannigfaltigkeit von einer speziellgewahlten Karte abhangen.
Abbildung 2.4: Kartenwechsel.
13

Wir betrachten daher den Kartenwechsel
Φ−12 Φ1 : V ′
1 := Φ−11 (U1 ∩ U2) → V ′
2 := Φ−12 (U1 ∩ U2) (2.1)
fur zwei sich uberlappende Karten Φj : Vj → Uj , j = 1, 2, mit U1 ∩ U2 6= ∅.
Satz 2.7 Sind Φ1, Φ2 zwei sich uberlappende Karten einer Cα-Mannigfaltigkeitwie in (2.1), so sind V ′
1 und V ′2 offen in R
k und der Kartenwechsel Φ−12 Φ1 :
V ′1 → V ′
2 ist ein Cα-Diffeomorphismus.
Beweis. Da U1 und U2 und damit auch U1∩U2 offen in M und Φ1,Φ2 Homoomor-phismen sind, sind V ′
1 und V ′2 offen. Offensichtlich ist Φ−1
2 Φ1 : V ′1 → V ′
2 bijektiv.Es genugt also, noch Φ−1
2 Φ1 ∈ Cα(V ′1 ;V
′2) und (Φ−1
2 Φ1)−1 = Φ−1
1 Φ2 ∈Cα(V ′
2 ;V′1) zu zeigen.
Es sei p ∈ U1 ∩ U2. Nach Satz 2.2 gibt es offene Mengen U ⊂ U1 ∩ U2 und Vim R
n mit p ∈ U und einen Cα-Diffeomorphismus ϕ : U → V , so dass
ϕ(M ∩ U) = V ∩ (Rk × 0)
erfullt ist. Wie oben sieht man, dass die Mengen
Wj := Φ−1j (M ∩ U) ⊂ R
k, j = 1, 2,
offen sind.
Abbildung 2.5: Φ1, Φ2 und ϕ.
Die Bilder der Cα-glatten und bijektiven Abbildungen
ϕ Φj : Wj → ϕ(M ∩ U)
14
liegen in Rk × 0, so dass wir
ϕ Φj = (Ψj , 0) mit Ψj : Wj → Rk
schreiben konnen, vgl. Abb. 2.5. Wegen RangDϕ = n und RangDΦj = k istdabei RangDΨj = k. Der Satz uber inverse Funktionen zeigt nun, dass die
Ψj : Wj → Ψj(Wj) = ξ ∈ Rk : (ξ, 0) ∈ ϕ(M ∩ U)
Cα-Diffeomorphismen sind. Da nun
Φ−12 Φ1 = Ψ−1
2 Ψ1 und Φ−11 Φ2 = Ψ−1
1 Ψ2
auf W1 mit Φ−11 (p) ∈ W1 bzw. W2 mit Φ−1
2 (p) ∈ W2 gilt, wobei p ∈ U1 ∩ U2
beliebig war, folgt die Behauptung.
Beispiel: Ist γ : I → Rn, I ein Intervall, eine Cα-Kurve mit γ 6= 0, so dass
γ : I → γ(I) ein Homoomorphismus ist, so ist γ(I) eine Mannigfaltigkeit mitParametrisierung γ.
Abbildung 2.6: Kurven im Rn.
2.2 Tangential- und Normalraum
Wie man in der Analysis Funktionen durch ihre Ableitung, also durch lokaleLinearisierungen, untersucht, werden wir nun k-dimensionale Mannigfaltigkeitenlokal durch k-dimensionale lineare Raume beschreiben. Die Grundidee ist hierbei,dass kleine Umgebungen U ⊂M von Punkten p ∈M bis auf kleine Fehler (“Ter-me hoherer Ordnung”) in einem k-dimensionalen affinen Raum p + TpM liegen,wobei TpM ein k-dimensionaler Unterraum, der sogenannte Tangentialraum ist.p+ TpM liegt bei p tangential an M an. Mannigfaltigkeiten sind also “infinitesi-mal Euklidisch” und deshalb kann man Analysis auf ihnen betreiben. In diesemAbschnitt betrachten wir immer Mannigfaltigkeiten der Klasse C1.
Die wesentliche Idee zur Definition des Tangentialraums ist, dass eine jedeganz in M verlaufende differenzierbare Kurve γ nur an M tangentiale Ablei-tungsvektoren (“Geschwindigkeiten”) γ hat und umgekehrt jeder an M bei p
15
tangentiale Vektor als ein solcher Geschwindigkeitsvektor einer geeigneten Kurvein M durch p entsteht.
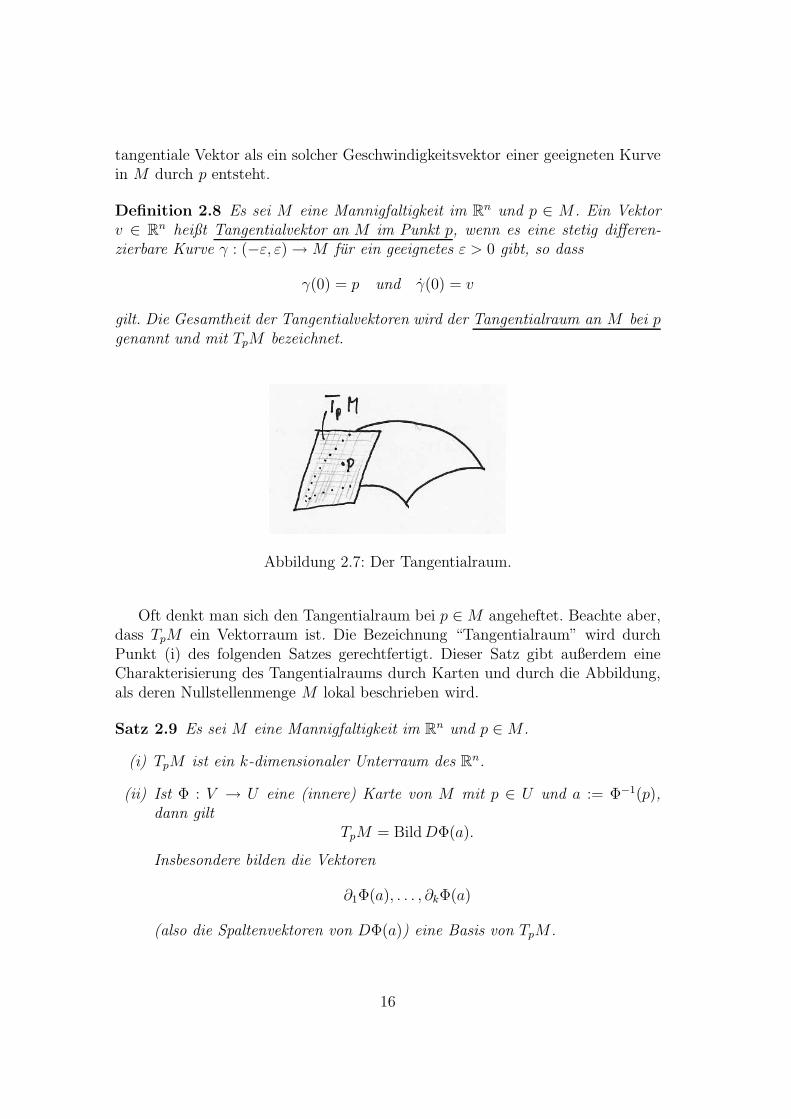
Definition 2.8 Es sei M eine Mannigfaltigkeit im Rn und p ∈ M . Ein Vektor
v ∈ Rn heißt Tangentialvektor an M im Punkt p, wenn es eine stetig differen-
zierbare Kurve γ : (−ε, ε) → M fur ein geeignetes ε > 0 gibt, so dass
γ(0) = p und γ(0) = v
gilt. Die Gesamtheit der Tangentialvektoren wird der Tangentialraum an M bei pgenannt und mit TpM bezeichnet.
Abbildung 2.7: Der Tangentialraum.
Oft denkt man sich den Tangentialraum bei p ∈M angeheftet. Beachte aber,dass TpM ein Vektorraum ist. Die Bezeichnung “Tangentialraum” wird durchPunkt (i) des folgenden Satzes gerechtfertigt. Dieser Satz gibt außerdem eineCharakterisierung des Tangentialraums durch Karten und durch die Abbildung,als deren Nullstellenmenge M lokal beschrieben wird.
Satz 2.9 Es sei M eine Mannigfaltigkeit im Rn und p ∈M .
(i) TpM ist ein k-dimensionaler Unterraum des Rn.
(ii) Ist Φ : V → U eine (innere) Karte von M mit p ∈ U und a := Φ−1(p),dann gilt
TpM = BildDΦ(a).
Insbesondere bilden die Vektoren
∂1Φ(a), . . . , ∂kΦ(a)
(also die Spaltenvektoren von DΦ(a)) eine Basis von TpM .
16

(iii) Ist U ⊂ Rn eine Umgebung von p und f ∈ C1(U ; Rn−k) mit RangDf(p) =
n− k, so dassM ∩ U = x ∈ U : f(x) = 0
gilt, so istTpM = KernDf(p).
(iv) Ist ϕ : U ′ → V ′ eine außere Karte von M mit p ∈ U ′, dann ist
TpM = (Dϕ(p))−1(Rk × 0).
Beweis. Wir werden
BildDΦ(a) ⊂ TpM ⊂ KernDf(p) (2.2)
zeigen. Aus
dim BildDΦ(a) = RangDΦ(a) = k = n− RangDf(p) = dim KernDf(p)
folgt dann, dass diese Mengen sogar gleich sind, was alle Behauptungen in (i),(ii) und (iii) beweist.
(iv) ergibt sich aus (ii), indem man wie im ersten Teil des Beweises von Satz2.5 bemerkt, dass durch Φ : V → M , Φ(ξ) = ϕ−1(ξ, 0) eine innere Karte aufV := ξ ∈ R
k : (ξ, 0) ∈ V ′ gegeben ist, fur die mit a = Φ−1(p)
TpM = DΦ(a)Rk =(Dϕ(ϕ−1(a, 0))
)−1(
Idk
0
)
Rk = (Dϕ(p))−1 (Rk × 0)
gilt.Es bleibt (2.2) zu begrunden. Sei also v ∈ BildDΦ(a), etwa v = DΦ(a)w,
w ∈ Rk. Fur hinreichend kleines ε ist dann
γ : (−ε, ε) → M, γ(t) = Φ(a+ tw)
eine stetig differenzierbar Kurve in M mit
γ(0) = Φ(a) = p und γ(0) = DΦ(a)w = v
(Kettenregel), was die erste Inklusion zeigt.Ist nun v ∈ TpM vorgelegt, so wahlen wir eine Kurve γ gemaß Definition 2.8.
Fur t genugend nahe bei 0 gilt dann γ(t) ∈ U und somit f(γ(t)) = 0. Darausergibt sich aber direkt
0 =d
dt
∣∣∣∣t=0
f(γ(t)) = Df(a)γ(0) = Df(a)v,
d.h. v ∈ KernDf(a).
17

Beispiele:
1. Es sei γ(I) die am Ende von Abschnitt 2.1 diskutierte eindimensionaleMannigfaltigkeit, die durch eine Cα-Kurve γ : I → R
n mit γ 6= 0 undγ : I → γ(I) ein Homoomorphismus entsteht. Dann ist Tpγ(I) = Rγ(a) furγ(a) = p.
2. Nach Abschnitt 2.1 ist die Mannigfaltigkeit der orthogonalen Matrizen O(n)durch O(n) = A ∈ R
n×n : f(A) = 0 mit f(A) = ATA−Id gegeben, wobei
Df(A)H = ATH +HTA
ist. Damit ist
TAO(n) = KernDf(A) = H ∈ Rn×n : HTA+ ATH = 0.
Speziell fur A = Id ergibt sich
TIdO(n) = H ∈ Rn×n : HT = −H =: R
n×nantisym.
Fur allgemeine A ∈ O(n) erhalt man gerade den entsprechend “gedrehtenRaum”:
TAO(n) = H ∈ Rn×n : (ATH)T = −ATH
= H ∈ Rn×n : ATH ∈ R
n×nantisym = AR
n×nantisym.
Die Normalenvektoren am Punkte p sind naturlich genau diejenigen Vektorenin R
n, die senkrecht auf TpM stehen:
Definition 2.10 Es sei M eine Mannigfaltigkeit im Rn und p ∈ M . NpM :=
(TpM)⊥ heißt der Normalenraum an M im Punkt p, seine Elemente Normalen-vektoren an M bei p.
Abbildung 2.8: Der Normalenraum.
Unmittelbar aus Satz 2.9 ergibt sich das folgende
18

Korollar 2.11 Es sei M eine Mannigfaltigkeit im Rn und p ∈ M . Ist U ⊂ R
n
eine Umgebung von p und f ∈ C1(U ; Rn−k) mit RangDf(p) = n− k, so dass
M ∩ U = x ∈ U : f(x) = 0
gilt, so bilden die Vektoren
∇f1(p), . . . ,∇fn−k(p)
(also die Zeilenvektoren von Df(p)) eine Basis von NpM .
Beweis. Da TpM = KernDf(p) k-dimensional ist, genugt es zu bemerken, dassKernDf(p) = (span∇f1(p), . . . ,∇fn−k(p))⊥ gilt.
Beispiele:
1. Im letzten Abschnitt haben wir insbesondere gesehen, dass fur U ⊂ Rn
offen, f ∈ C1(U ; R) mit regularem Wert c, die Niveauflache M = f−1(c)eine C1-Hyperflache im R
n ist. Korollar 2.11 zeigt, dass in diesem Fall ∇f(p)immer senkrecht auf TpM , p ∈M , steht.
2. Der Normalenraum an O(n) bei Id ist
NIdO(n) = (TIdO(n))⊥ =(R
n×nantisym
)⊥= R
n×nsym .
2.3 Ausblick: Allgemeine Mannigfaltigkeiten
Im letzten Abschnitt dieses Kapitels gehen wir kurz auf die allgemeine Definitioneiner Mannigfaltigkeit ein. Dies dient lediglich Ihrer Allgemeinbildung; wir werdendiesen allgemeinen Rahmen im Folgenden nicht weiter verwenden. Wir startenmit einem allgemeinen topologischen Raum M und nennen nun Homoomorphis-men von offenen Teilmengen von M auf offene Teilmengen des R
k Karten4. EineMenge von Karten, deren Definitionsgebiete ganz M uberdecken, nennt man wie-der einen Atlas.
Da wir nun aber keinen umgebenden Euklidischen Raum mehr voraussetzen,ist es zunachst nicht klar, wie man Differenzierbarkeit auf M definieren soll. Diewesentliche Idee hierzu ist nun, alles mittels Karten auf den R
k zuruckzuspielen.Dazu muss man jetzt allerdings voraussetzen, dass die Kartenwechsel differenzier-bar sind: Gilt fur je zwei uberlappende Karten Φ1 : U1 → V1, Φ2 : U2 → V2 mitUj offen in M , Vj offen in R
k, j = 1, 2, und U1 ∩ U2 6= ∅ eines Atlas, dass
Φ2 Φ−11 : Φ1(U1 ∩ U2) → Φ2(U1 ∩ U2)
ein Cα-Diffeomorphismus ist, so nennen wir den Atlas (Cα-)differenzierbar.
4Vgl. die Definition der inneren Karten zuvor, wo die Karten in die andere Richtung gehen.
19

Nun kann man zu jedem Atlas A all jene Karten hinzunehmen, die mit allenKarten aus A differenzierbar wechseln. Die so gewonnene Menge von Kartenbezeichent man mit D(A). Sie ist in der Tat wieder ein Atlas, sogar ein maximaler,was man wie folgt einsieht: Sind Φ1 : U1 → V1,Φ2 : U2 → V2 uberlappende Kartenaus D(A), so kann man um jeden Punkt p ∈ U1 ∩U2 eine Karte Φ aus A finden,so dass
Φ2 Φ−11 = Φ2 Φ−1 Φ Φ−1
1 und Φ1 Φ−12 = Φ1 Φ−1 Φ Φ−1
2
in entsprechend kleinen Umgebungen von Φ1(p) bzw. Φ2(p) differenzierbar sind.Einen maximalen differenzierbaren Atlas D nennt man auch eine differenzierbareStruktur.
Um Pathologien auszuschließen verlangt man noch, dassM ein Hausdorffraummit einer abzahlbaren Basis der Topologie ist. Motiviert durch Satz 2.5 definierenwir nun:
Definition 2.12 Einen Hausdorffraum M , der dem zweiten Abzahlbarkeitsaxiomgenugt, zusammen mit einer differenzierbaren Struktur D nennt man eine k-dimensionale Mannigfaltigkeit.
Wie oben angedeutet werden nun typische Eigenschaften durch “Zuruckholenmittels Karten” definiert. So nennt man eine Abbildung f : M → N zwischenzwei Mannigfaltigkeiten differenzierbar, wenn die Abbildung
Ψ f Φ−1
fur Karten Φ von M und Ψ von N mit geeignetem Definitionsbereich differen-zierbar ist. (Beachte, dass dies unabhangig von der Wahl der Karten Φ und Ψist.)
Der Tangentialraum muss nun auch ohne einen gegebenen Raum definiertwerden. Eine Moglichkeit – in Anlehnung an Definition 2.8 – besteht darin, zugegebenem p ∈M alle Kurven
Cp(M) = γ ∈ C1((−ε, ε);M) fur ein ε > 0
zu betrachten und auf dieser Menge durch
γ1 ∼ γ2 ⇐⇒ d
dt
∣∣∣∣t=0
Φ γ1 =d
dt
∣∣∣∣t=0
Φ γ2
fur eine Karte Φ um p eine Aquivalenzrelation einzufuhren. (Diese ist unabhangigvon der Wahl der Karte Φ.) Die Aquivalenzklassen [γ] ∈ Cp(M)/ ∼ nennt mannun Tangentialvektoren und deren Gesamtheit wird wieder der Tangentialrauman M bei p genannt und mit TpM bezeichnet. Mehr hierzu findet man etwa in[Ja].
20
Zum Schluss dieses Ausflugs in die allgemeine Theorie der Mannigfaltigkei-ten wollen wir noch zwei Punkte kurz anreißen. Erstens besagt der WhitneyscheEinbettungssatz, dass wir, selbst wenn wir nur Untermannigfaltigkeiten des R
n
betrachten, in gewisser Weise schon den allgemeinen Fall behandeln, denn jedek-dimensionale Mannigfaltigkeit M kann in den R
2k+1 eingebettet werden: Esexistiert eine Abbildung f : M → R
2k+1, so dass f(M) eine Untermannigfal-tigkeit von R
2k+1 und f : M → f(M) ein Diffeomorphismus ist. Das soll nunjedoch nicht heißen, dass die Beschaftigung mit allgemeinen Mannigfaltigkeitenuberflussig ware. Allein schon deshalb, weil diese Einbettung nicht kanonisch ge-geben ist und viele Konzepte in der “einbettungsfreien” Darstellung transparenterbleiben.
Zweitens legt der topologische Raum M (in Dimensionen ≥ 4) die differen-zierbare Struktur nicht eindeutig fest. Fur Untermannigfaltigkeiten des R
n ergibtsich diese etwa durch die Differenzierbarkeit außerer Karten als Abbilung desumgebenden Euklidischen Raums. Im Allgemeinen kann es jedoch auf M ver-schiedene differenzierbare Strukturen geben, so dass zwei Mannigfaltigkeiten, dienicht diffeomorph sind, dennoch homoomorph sein konnen.
21

Kapitel 3
Oberflachenintegrale
In diesem Kapitel fuhren wir die Integration von Funktionen uber Mannigfal-tigkeiten ein. Dabei mussen wir uns insbesondere uberlegen, wie wir das k-dimensionale Volumen (die Oberflache) einer Mannigfaltigkeit zu messen haben.
3.1 Erinnerung: Lebesgue-Integration im Rn
Wir tragen zunachst kurz die wesentlichen Begriffe und Tatsachen aus der Lebes-gueschen Integrationstheorie im R
n zusammen. Wenn Sie das Lebesgue-Integralnicht kennen sollten, werden Sie hier alles, was wir brauchen werden, so zusam-mengestellt finden, dass Sie diese Lucke auch spater noch schließen konnen. Furdiese Vorlesung mussen Sie das Folgende dann einfach ohne Begrundung akzep-tieren.
Das Mengensystem der (Lebesgue-)messbaren Mengen im Rn ist eine (sehr
große) Klasse von Teilmengen des Rn, zu der insbesondere alle offenen und abge-
schlossenen Mengen gehoren sowie mit einer hochstens abzahlbaren Familie vonMengen auch deren Vereinigung und Durchschnitt. (Merke: “So gut wie jede”Teilmenge ist messbar.1) Eine (große) Klasse von reellwertigen Funktionen aufeiner messbaren Menge wird ebenfalls (Lebesgue-)messbar genannt. Z.B. ist je-de stetige Funktion messbar und mit einer punktweise konvergenten Folge auchderen Grenzwert. (Merke: “So gut wie jede” Funktion ist messbar.2) Fur einepositive messbare Funktion auf einer messbaren Menge ist das Lebesgue-Integralimmer zumindest im uneigentlichen Sinne erklart und man nennt f : U → R
(Lebesgue-)integrierbar, wenn
‖f‖1 :=
∫
U
|f(x)| dx <∞
1Naturlich stimmt das nicht ganz. Ein Gegenbeispiel kann man mit dem Auswahlaxiomkonstruieren.
2Naturlich stimmt auch das nicht.
22
ist. Insbesondere ist jede stetige beschrankte Funktion uber eine beschrankteoffene Menge U integrierbar. Die Abbildung
f 7→∫
U
f(x) dx
ist hierbei eine lineare Abbildung vom Vektorraum der integrierbaren Funktio-nen nach R. Diesen Raum bezeichnen wir im Folgenden mit L1(U), wobei wirdie ublichen Vorsichtsmaßnahmen beachten mussen, da es sich ja eigentlich umAquivalenzklassen bezuglich “Ubereinstimmung bis auf eine Nullmenge” handelt.(L1(U), ‖ · ‖1) ist ein Banachraum. (Nullmengen sind kleine Ausnahmemengen,die man in der Lebesgueschen Theorie getrost vernachlassigen darf. Wenn Sie dienoch nicht kennen, so ignorieren Sie diese technische Feinheit hier und im Fol-genden einfach. Ublicherweise gelten Eigenschaften von Lebesgue-integrierbarenFunktionen “fast uberall (f.u.)” bzw. “fur fast alle x (f.f.a. x)”. Fur stetige Funk-tionen kann man diese Einschrankung aber meist weglassen, d.h. die Ausnahme-nullmenge N als leer annehmen.)
Fur das Lebesgue-Integral gelten starke Konvergenzsatze:
Satz 3.1 (Satz von der monotonen Konvergenz) Es sei (fk) ⊂ L1(U) eineFolge mit f1 ≤ f2 ≤ . . . (f.u.). Gilt
limk→∞
∫
U
fk(x) dx <∞,
so ist auch f mit f(x) := limk→∞ fk(x) (f.f.a. x) in L1(U) und es ist
limk→∞
∫
U
fk(x) dx =
∫
U
f(x) dx.
Satz 3.2 (Satz von der majorisierten Konvergenz) Es sei (fk) ⊂ L1(U)eine Folge mit limk→∞ fk(x) = f(x) (f.f.a. x) und es existiere eine Funktiong ∈ L1(U) mit |fk(x)| ≤ g(x) fur (fast) alle x und alle k. Dann ist auch f inL1(U) und es gilt
limk→∞
∫
U
fk(x) dx =
∫
U
f(x) dx.
Der nachste Satz zeigt, dass man n-dimensionale Integrale durch iterierteIntegration berechnen darf.
Satz 3.3 (Satz von Fubini) Ist f ∈ L1(U ×V ), U ⊂ Rk und V ⊂ R
m messbar(und damit U × V messbar in R
k × Rm ∼= R
k+m), so gibt es eine NullmengeN ⊂ U , so dass fur jedes y ∈ U \N die Abbildung
f(·, y) : U → R, x 7→ f(x, y)
23

in L1(U) liegt. Des weiteren gilt∫
U×V
f(x, y) d(x, y) =
∫
V
(∫
U
f(x, y) dx
)
dy,
wobei das innere Integral fur y ∈ N durch 0 ersetzt werde.
Besonders wichtig fur unsere Untersuchungen ist das Transformationsverhal-ten unter Anderungen des Integrationsbereichs.
Satz 3.4 (Transformationssatz) Es seien U, U ⊂ Rn offen und ϕ : U → U
ein C1-Diffeomorphismus. Ist nun f ∈ L1(U), so ist f ϕ · | detDϕ| ∈ L1(U) undes gilt ∫
U
f(x) dx =
∫
U
f(ϕ(x))| detDϕ(x)| dx.
3.2 Die Definition
Wir wollen nun Funktionen f uber C1-Mannigfaltigkeiten integrieren. Heuristischkann man sich dazu die Mannigfaltigkeit M in viele kleine “Maschen” Mi zerlegtdenken und versuchen, eine zugehorige Riemannsumme zu berechnen:
∫
M
f ≈∑
i∈I
f(pi) × k-dimensionales Volumen von Mi.
Ist z.B. M durch eine einzige Karte Φ : V →M parametrisiert, so konnte man Vdurch ein feines regulares Gitter partitionieren und erhielte auf diese Weise einePartitionierung von M aus den Bildern Mi von kleinen Quadern Qi in V unterΦ.
Abbildung 3.1: Partitionierung von V und M .
Doch was ist das k-dimensionale Volumen Volk(Mi) von Mi? Fur immer fei-nere Zerteilungen ist ja Mi = Φ(Qi) bis auf Translation approximativ durch
24

DΦ(Φ−1(pi))(Qi) gegeben und wir mussen das k-dimensionale Volumen eines so-genannten k-Spates bzw. k-dimensionalen Parallelotops bestimmen. Genauer:
Definition 3.5 Sind v1, . . . , vk ∈ Rn linear unabhangig, so heißt
P (v1, . . . , vk) := x ∈ Rn : ∃λ1, . . . , λk ∈ [0, 1] mit x = λ1v1 + . . .+ λkvk
(k-)Spat oder (k-)Parallelotop.
k Vektoren v1, . . . , vk ∈ Rn sind genau dann linear unabhangig, wenn die n× k-
Matrix A = (v1, . . . , vk) vom Rang k ist. Offenbar ist
P (v1, . . . , vk) = A([0, 1]k).
Fur k = n ergibt sich daraus
Voln(P (v1, . . . , vn)) = Voln(A[0, 1]n) = | detA| =√
det(ATA).
Es sei nun k < n. Sind alle vi von der Form vi =(
wi
0
)∈ R
k×0, d.h. A =(
B
0
)
mit B = (w1, . . . , wk), so sollte sicherlich
Volk(P (v1, . . . , vk)) = Volk(P (w1, . . . , wk)) = | detB|
gelten. Hier ist| detB| =
√
det(BTB) =√
det(ATA).
Im allgemeinen Fall betrachten wir eine orthogonale Matrix O ∈ Rn×n mit
O spanv1, . . . , vk ⊂ Rk × 0,
so dass OA von der Form(
B
0
)ist. (Erganze eine Orthonormalbasis (y1, . . . yk) von
spanv1, . . . , vk zu einer Orthonormalbasis (y1, . . . yn) des Rn und wahle O linear
mit Oyj = ej, j = 1, . . . n.) Da eine orthogonale Matrix eine starre Bewegungbeschreibt, sollte eine solche Transformation das Volumen nicht andern und wirerhalten
Volk(P (v1, . . . , vk)) = Volk(A[0, 1]k) = Volk(OA[0, 1]k)
=√
det((OA)T (OA)) =√
det(ATA).
Diese Voruberlegungen fuhren zu folgender Definition.
Definition 3.6 Es seien v1, . . . , vk ∈ Rn. Das k-dimensionale Volumen des von
ihnen aufgespannten Parallelotops ist
Volk(P (v1, . . . , vk)) :=√
det(ATA)
fur A = (v1, . . . , vk) ∈ Rn×k.
25

Beispiel: Fur k = 2 ist A = (v1, v2) und
det(ATA) = det
(v1 · v1 v1 · v2
v2 · v1 v2 · v2
)
= |v1|2|v2|2 − (v1 · v2)2
= |v1|2|v2|2(
1 − (v1 · v2)2
|v1|2|v2|2)
= |v1|2|v2|2(1 − cos2 <) (v1, v2)
)
= |v1|2|v2|2 sin2 <) (v1, v2),
so dassVol2(P (v1, v2)) = |v1||v2| | sin <) (v1, v2)|
gilt.
Definition 3.7 Es sei M ⊂ Rn eine k-dimensionale C1-Mannigfaltigkeit und
Φ : V → U eine (innere) Karte. Wir definieren den Maßtensor (oder auchmetrischen Tensor) als die matrixwertige Abbildung
G = (gij) : V → Rk×k, G(x) = (DΦ(x))TDΦ(x).
Ihre Determinante detG(x) heißt die Gramsche Determinante und wird oft mitg(x) bezeichnet.
Nach unseren Voruberlegungen ist nun die folgende Definition des Integralsuber einem Kartenbereich sinnvoll.
Definition 3.8 Es sei M ⊂ Rn eine k-dimensionale C1-Mannigfaltigkeit und
Φ : V → U eine (innere) Karte. Ist f : M → R eine Funktion, so dass f aufM \ U verschwindet, so heißt f integrierbar, wenn die Abbildung
x 7→ f(Φ(x))√
g(x)
in L1(V ) liegt. Man setzt dann∫
M
f(x) dS(x) :=
∫
V
f(Φ(x))√
g(x) dx.
Hiebei steht dS(x) fur das infinitesimale Oberflachenelement (engl. surfaceelement), welches sich aus dem infinitesimalen Euklidischen Volumenelement dxgemaß dS(x) =
√
g(x)dx ergibt. Dass dieses Integral wohldefiniert ist, ergibt sichdirekt aus dem folgenden Lemma.
Lemma 3.9 (i) Positivitat: Die Gramsche Determinante g ist immer positiv.
(ii) Sind Φ1 : V1 → U1, Φ2 : V2 → U2 uberlappende Karten mit U1 ∩ U2 6= ∅und Gramscher Determinante g1 bzw. g2, so ist ϕ = Φ−1
2 Φ1 : V ′1 → V ′
2 ,V ′
j := Φ−1j (U1 ∩ U2), j = 1, 2, ein Diffeomorphismus (vgl. Satz 2.7) und es
giltg1(x) = (detDϕ(x))2 g2(ϕ(x))
fur x ∈ Φ−11 (U1 ∩ U2).
26

Sind also zwei Karten Φ1 : V1 → U1 und Φ2 : V2 → U2 gegeben, so dass f aufM \U1 und M \U2 verschwindet, so ist tatsachlich nach dem Transformationssatz3.4 mit f Φ2 ·
√g2 uber V ′
2 auch
f Φ2 ϕ · √g2 ϕ| detDϕ| = f Φ1 ·√g1
uber V ′1 integrierbar und es gilt
∫
V2
f(Φ2(x))√
g2(x) dx =
∫
V1
f(Φ1(x))√
g1(x) dx.
Beweis von Lemma 3.9. (i) Wahle orthogonale Matrizen O(x) ∈ Rn×n, so dass
ODΦ =(
B
0
)fur die betrachtete Karte Φ gilt, wobei B ∈ R
k×k nicht singular ist,da RangB = RangDΦ = k gilt. Dann ist
g = det((DΦ)TDΦ
)= det
((ODΦ)TODΦ
)= det
(BTB
)= (detB)2 > 0.
(ii) Dass ϕ ein Diffeomorphismus ist, haben wir schon in Satz 2.7 gesehen.Auf V ′
1 gilt außerdem
g1(x) = det((DΦ1(x))
TDΦ1(x))
= det((D(Φ2 ϕ)(x))TD(Φ2 ϕ)(x)
)
= det((Dϕ(x))T (DΦ2(ϕ(x)))TDΦ2(ϕ(x))Dϕ(x)
)
= detDϕ(x) det((DΦ2(ϕ(x)))TDΦ2(ϕ(x))
)detDϕ(x)
= (detDϕ(x))2 g2(ϕ(x)).
Wir wenden uns nun der Definition des Oberflachenintegrals auf Mannigfal-tigkeiten zu, die nicht notwendig durch eine einzige Karte parametrisiert werden.Dabei behandeln wir jedoch nicht den allgemeinsten Fall, sondern setzen voraus,dass es einen endlichen Atlas gibt. Das wird fur die meisten interessanten Bei-spiele genugen. Beachten Sie, dass insbesondere jede kompakte Mannigfaltigkeiteinen endlichen Atlas hat:
Beobachtung: Ist M eine kompakte Mannigfaltigkeit in Rn, so hat M einen
endlichen Atlas. Ist namlich (Φj)j∈J , Φj : Vj → Uj, ein Atlas von M , so lasst sich
ausM =⋃
j∈J Uj eine endliche Teiluberdeckung auswahlen, etwa M =⋃N
m=1 Ujm,
so dass also auch (Φjm)1≤m≤N ein Atlas ist.
Um die Beitrage verschiedener Kartenbereiche “zusammenzustuckeln” benoti-gen wir das folgende technische Hilfsmittel:
Definition 3.10 Es sei (Uj)j=1,...,N eine Uberdeckung von M ⊂ Rn, d.h. M =
⋃N
j=1Uj. Eine Familie (αj)j=1,...,N von Funktionen αj : M → R heißt eine
der Uberdeckung (Uj) untergeordnete Zerlegung (oder Teilung) der Eins, wenn
27

(i) 0 ≤ αj ≤ 1 fur j = 1, . . . , N ,
(ii) αj ≡ 0 auf M \ Uj fur j = 1, . . . , N und
(iii)∑N
j=1 αj ≡ 1 auf M gilt.
Es ist leicht zu sehen, dass fur einen endlichen Atlas (Φj : Vj → Uj) eineder Uberdeckung (Uj) untergeordnete Zerlegung der Eins (αj) existiert, so dassαj Φj messbar ist: Wahle etwa
α1 = χU1 , α2 = χU2\U1 , . . . , αj = χUj\(U1∪...∪Uj−1), . . . ,
wobei χW die charakteristische Funktion einer Menge W bezeichnet. Dann istαj Φj = χVj\Φ
−1j (U1∪...∪Uj−1).
Definition 3.11 Es sei M ⊂ Rn eine k-dimensionale C1-Mannigfaltigkeit mit
endlichem Atlas (Φj : Vj → Uj)j=1,...,N . Eine Funktion f : M → R heißtintegrierbar, wenn χUj
f im Sinne von Definition 3.8 integrierbar ist fur alle j.
Ist (αj) eine der Uberdeckung (Uj) untergeordnete Zerlegung der Eins, so dassαj Φj messbar ist, so wird das Integral von f uber M definiert durch
∫
M
f(x) dS(x) :=N∑
j=1
∫
M
αj(x)f(x) dS(x),
wobei auf der rechten Seite die schon in Definition 3.8 erklarten Integrale stehen.
Es ist also
∫
M
f(x) dS(x) :=
N∑
j=1
∫
Vj
αj(Φj(x))f(Φj(x))√
g(x) dx.
Wir mussen rechtfertigen, dass dies wohldefniert ist: Zunachst ist klar, dasswegen 0 ≤ αj ≤ 1 mit χUj
f auch αjf integrierbar ist. Es seien nun (Φj : Vj →Uj)j=1,...,N und (Φ′
j : V ′j → U ′
j)j=1,...,N ′ Atlanten mit untergeordneten Zerlegungender Eins (αj) bzw. (α′
j). Ist χUjf fur alle j integrierbar, so auch χU ′
iαjf fur alle
i, j. Nach Definition 3.8 ist dann auchχU ′if =
∑
j χU ′iαjf integrierbar und es gilt
tatsachlich
N∑
j=1
∫
M
αj(x)f(x) dS(x) =
N∑
j=1
N ′
∑
i=1
∫
M
α′i(x)αj(x)f(x) dS(x)
=
N ′
∑
i=1
∫
M
α′i(x)f(x) dS(x).
Damit lasst sich nun auch der Begriff des k-dimensionalen Volumens auf all-gemeine Mannigfaltigkeiten ubertragen:
28

Definition 3.12 Es sei M ⊂ Rn eine k-dimensionale C1-Mannigfaltigkeit mit
endlichem Atlas. Ist A ⊂ M eine Teilmenge, so dass χA integrierbar ist, sonennen wir A selbst integrierbar und definieren das k-dimensionale Volumen vonA durch
Volk(A) :=
∫
M
χA(x) dS(x).
Ist Volk(A) = 0, so nennt man A eine k-dimensionale Nullmenge.Eine Funktion f : A → R heißt uber A integrierbar, wenn χAf integrierbar
ist. In diesem Falle setzt man∫
A
f(x) dS(x) :=
∫
M
χA(x)f(x) dS)(x).
Uberlegen Sie sich, dass fur A ⊂ M offen, wenn also A selbst eine Man-nigfaltigkeit ist, diese Definition mit dem Begriff der Integrierbarkeit uber dieMannigfaltigkeit A gemaß Definition 3.11 ubereinstimmt.
Wir schließen diesen Abschnitt mit der folgenden
Beobachtung: Es seien M ⊂ Rn eine k-dimensionale Mannigfaltigkeit mit endli-
chem Atlas, f, f : M → R mit f ≡ f außerhalb einer k-dimensionalen Nullmenge.Ist f integrierbar, so ist auch f integrierbar und es gilt
∫
Mf dS =
∫
Mf dS.
Begrundung: Ist A ⊂ M eine k-dimensionale Nullmenge, so gilt fur jede KarteΦ : V → U mit Gramscher Determinante g
0 = Volk(A) ≥∫
M
χA∩U dS =
∫
V
χA(Φ(x))√
g(x) dx =
∫
Φ−1(A)∩V
√
g(x) dx.
Da g nach Lemma 3.9 positiv ist, folgt daraus |V ∩ Φ−1(A)| = 0. Fur jede KarteΦ ist also f Φ = f Φ fast uberall in V . Daraus folgt die Behauptung.
3.3 Beispiele & Anwendungen
Kurvenintegrale
Es sei M die eindimensionale Mannigfaltigkeit M = γ(I) fur eine Kurve γ mitγ 6= 0, die I homoomorph auf M abbildet. Wir haben schon gesehen, dass dann γselbst eine Parametrisierung von M ist. Die zugehorige Gramsche Determinanteist gegeben durch
g = det(γT γ) = γ · γ = |γ|2.Fur eine integrierbare Funktion f : M → R ist hier
∫
M
f(x) dS(x) =
∫
I
f(γ(t))|γ(t)| dt,
ein Kurvenintegral.
29

Ist I endlich und etwa γ beschrankt, so hat die Kurve die (endliche) Lange
Vol1(M) =
∫
I
|γ(t)| dt.
Wenn Sie aus fruheren Vorlesungen schon eine andere Definition der Kurvenlangekennen, dann uberlegen Sie sich, dass diese mit der hier angegebenen uberein-stimmt.
Funktionsgraphen
Eine wichtige Klasse von Mannigfaltigkeiten sind Hyperflachen, die durch Funk-tionsgraphen gegeben sind. Ist U ⊂ R
n−1 offen und h ∈ Cα(U,R), so ist
M = Graphh = x ∈ Rn : x′ ∈ U, xn = h(x′),
wobei wir x′ = (x1, . . . , xn−1) abgekurzt haben, eine (n − 1)-dimensionale Cα-Mannigfaltigkeit im R
n mit Parametrisierung x′ 7→ (x′, h(x′)). Dies folgt daraus,
dass Dh =
(
Idn−1
Dx′h
)
Rang n− 1 hat und die Umkehrabbildung der Parametrisie-
rungM ∋ x = (x′, xn) 7→ x′
offenbar auch stetig ist.Der zugehorige metrische Tensor ergibt sich zu
g =
(Idn−1
Dx′h
)T (Idn−1
Dx′h
)
=
1 0 · · · 0 ∂1h
0 1. . .
......
.... . .
. . . 0...
0 · · · 0 1 ∂n−1h
1 0 · · · 0
0 1. . .
......
. . .. . . 0
0 · · · 0 1∂1h · · · · · · ∂n−1h
= (δij + ∂ih ∂jh)1≤i,j≤n−1 = Idn−1 +(Dh)TDh.
Ist Dh(x′) 6= 0, so hat diese Matrix den einfachen Eigenwert 1 + |Dh(x′)|2 (mitEigenvektor (Dh(x′))T ) und den (n − 1)-fachen Eigenwert 1 (mit Eigenraum(Dh(x′))T⊥). Die Gramsche Determinante ist somit
g(x′) = (1 + |Dh(x′)|2) · 1 · . . . · 1 = 1 + |Dh(x′)|2,was auch fur Dh(x′) = 0 richtig bleibt.
Zusammengefasst zeigen diese Uberlegungen:
Proposition 3.13 Ist h ∈ C1(U,R), U ⊂ Rn−1 offen, und f eine integrierbare
Funktion auf M = Graphh, so gilt∫
M
f(x) dS(x) =
∫
U
f(x′, h(x′))√
1 + |Dh(x′)|2 dx.
30

Skalierungen
Das Transformationsverhalten unter Reskalierungen und Verschiebungen einerMannigfaltigkeit ist besonders einfach (und wichtig).
Proposition 3.14 Es seien x0 ∈ Rn, r > 0 und M ⊂ R
n eine k-dimensionaleMannigfaltigkeit. Dann ist auch x0 + rM eine k-dimensionale Mannigfaltigkeit.Ist f : x0 + rM → R integrierbar, so ist3 f(x0 + r·) auf M integrierbar und esgilt ∫
x0+rM
f(x) dS(x) = rk
∫
M
f(x0 + rx) dS(x).
Beweis. Ist (Φj : Vj → Uj) ein Atlas fur M , so ist (x0 + rΦj) ein Atlas furx0 + rM , womit diese Menge insbesondere eine Mannigfaltigkeit ist. Dabei istD(x0 + rΦj) = rDΦj und daher
g(r)j = det(r(DΦj)
T rDΦj) = r2k det((DΦj)TDΦj) = r2kgj
fur die Gramschen Determinanten gj und g(r)j bezuglich Φj bzw. x0+rΦj . Fur eine
(x0 + rUj) untergeordnete Zerlegung der Eins (αj) ersieht man die Behauptungnun leicht aus
∫
x0+rM
f(x) dS(x) =∑
j
∫
x0+rM
αj(x)f(x) dS(x)
=∑
j
∫
Vj
αj(x0 + rΦj(x))f(x0 + rΦj(x))
√
g(r)j (x) dx
= rk∑
j
∫
Vj
αj(x0 + rΦj(x))f(x0 + rΦj(x))√
gj(x) dx
= rk∑
j
∫
M
αj(x0 + rx)f(x0 + rx) dS(x)
= rk
∫
M
f(x0 + rx) dS(x),
denn (αj(x0 + r·)) ist eine (Uj) untergeordnete Teilung der Eins auf M .
Ist M integrierbar, so folgt aus Proposition 3.14 unmittelbar
Volk(x0 + rM) = rk Volk(M).
Dieses Transformationsverhalten sollten wir fur k-dimensionale Objekte ja aucherwarten.
3f(x0 + r·) steht abkurzend fur die Abbildung x 7→ f(x0 + rx).
31

Faserung in Kugelschalen
Ahnlich wie man beim Satz von Fubini den n-dimensionalen Raum durch affineUnterraume fasert und das Integral einer Funktion sukzessive berechnet, indemman zuerst uber diese Unterraume integriert, konnen wir den R
n nun durch Ku-gelschalen ausschopfen. Fur r > 0 bezeichnen wir mit Br(x) oder genauer B
(n)r (x)
die offene Kugel y ∈ Rn : |y − x| < r.
Satz 3.15 Ist f ∈ L1(Rn), so ist f fur fast alle r ∈ (0,∞) uber die Sphare∂Br(0) integrierbar. Es gilt
∫
Rn
f(x) dx =
∫ ∞
0
∫
∂Br(0)
f(x) dS(x) dr =
∫ ∞
0
∫
∂B1(0)
f(ry) dS(y) rn−1 dr.
Beweis. Wir berechnen zunachst das Integral uber den oberen Halbraum x ∈R
n : xn > 0, kurz xn > 0. Die Abbildung
ϕ : B(n−1)1 (0) × (0,∞) → xn > 0, ϕ(x′, r) = (rx′, r
√
1 − |x′|2)
ist ein Diffeomorphismus: Sie ist injektiv, denn
(rx′, r√
1 − |x′|2) = (rx′, r√
1 − |x′|2)
impliziert, indem man das Quadrat der Normen vergleicht, zunachst
r2 = r2|x′|2 + r2(1 − |x′|2) = r2|x′|2 + r2(1 − |x′|2) = r2,
also r = r, und dann, indem man die ersten n− 1 Koordinaten vergleicht, auchx′ = x′. ϕ ist zudem surjektiv, denn zu gegebenem x = (x′, xn) mit xn > 0 ist
ϕ
(x′
|x| , |x|)
=
(
|x| x′
|x| , |x|√
1 − |x′|2|x|2
)
= (x′,√
|x|2 − |x′|2) = (x′,√
x2n) = x.
ϕ ist glatt mit
Dϕ(x′, r) =
(r Idn−1 x′
r −(x′)T√1−|x′|2
√
1 − |x′|2)
,
so dass
detDϕ(x′, r) =rn−1
√
1 − |x′|2det
1 0 · · · 0 x1
0 1. . .
......
.... . .
. . . 0...
0 · · · 0 1 xn−1
−x1 · · · · · · −xn−1 1 − |x′|2
32

ist. Diese Determinante kann man etwa dadurch bestimmen, dass man fur allei = 1, . . . , n− 1 das xi-fache der i-ten Zeile zur n-ten Zeile addiert, so dass sich
detDϕ(x′, r) =rn−1
√
1 − |x′|2det
1 0 · · · 0 x1
0 1. . .
......
.... . .
. . . 0...
0 · · · 0 1 xn−1
0 · · · · · · 0 1
=rn−1
√
1 − |x′|26= 0
ergibt. Daraus folgt nun auch die Glattheit von ϕ−1 aus dem Satz uber die Um-kehrfunktion.
Der Transformationssatz 3.4 und der Satz 3.3 von Fubini liefern daher∫
xn≥0
f(x) dx =
∫
ϕ−1(xn≥0)
f(ϕ(x′, r))| detDϕ(x′, r)| d(x′, r)
=
∫
B(n−1)1 (0)×(0,∞)
f(rx′, r√
1 − |x′|2) rn−1
√
1 − |x′|2d(x′, r)
=
∫ ∞
0
(∫
B(n−1)1 (0)
f(rx′, r√
1 − |x′|2) rn−1
√
1 − |x′|2dx′
)
dr,
wobei das innere Integral fur fast alle r definiert ist. Nun ist jedoch der Funkti-onsgraph der Abbildung h : B
(n−1)1 (0) → R mit h(x′) = (x′,
√
1 − |x′|2) die obere
Halbsphare ∂B(n)1 (0) ∩ xn > 0 mit Dh = −(x′)T√
1−|x′|2, also 1 + |Dh(x′)|2 = 1
1−|x′|2,
so dass nach Proposition 3.13 (angewendet auf y 7→ f(ry)rn−1 fur festes r)
∫
xn≥0
f(x) dx =
∫ ∞
0
(∫
∂B(n)1 (0)∩xn>0
f(ry)rn−1 dS(y)
)
dr
gilt. Da ∂B(n)1 (0)∩ xn > 0 eine (n− 1)-dimensionale Mannigfaltigkeit ist, folgt
daraus mit Proposition 3.14 schließlich auch
∫
xn≥0
f(x) dx =
∫ ∞
0
(∫
∂B(n)r (0)∩xn>0
f(x) dS(x)
)
dr.
Ganz analog zeigt man die entsprechenden Gleichungen auf dem negativenHalbraum xn < 0.
Die Hyperebene xn = 0 ist eine Nullmenge im Rn. Genauso ist der Schnitt
xn = 0 ∩ ∂Br(0) fur alle r > 0 eine (n− 1)-dimensionale Nullmenge. Damit istnun tatsachlich
∫
Rn
f(x) dx =
∫ ∞
0
∫
∂Br(0)
f(x) dS(x) dr =
∫ ∞
0
∫
∂B1(0)
f(ry) dS(y) rn−1 dr
33

gezeigt, denn wir durfen, ohne den Wert der auftretenden Integrale zu verandern,f durch χxn>0f + χxn<0f oder – aquivalent dazu – R
n durch Rn \ xn = 0
und die ∂Br(0) jeweils durch ∂Br(0) \ xn = 0 ersetzen.
Dieser Satz ist naturlich vor allem bei der Integration rotationssymmetrischerFunktionen hilfreich: Ist f ∈ L1(Rn) mit f(x) = f(r) fur r = |x|, so gilt
∫
Rn
f(x) dx =
∫ ∞
0
∫
∂B1(0)
f(ry) dS(y) rn−1 dr
= Voln−1(∂B1(0))
∫ ∞
0
rn−1f(r) dr.
Wir werden gleich sehen, wie man Voln−1(∂B1(0)) explizit bestimmen kann.
Die Kugeloberflache
Als Beispiel berechnen wir das (n − 1)-dimensionale Volumen der Kugelober-flache Sn−1. Dazu erinnern wir zunachst an die Formel fur das Volumen einern-dimensionalen Kugel vom Radius r: Es gilt
Voln(B(n)r ) =
πn2 rn
Γ(1 + n2),
wobei Γ die Gamma-Funktion4 bezeichnet. Dies ergibt sich z.B. durch Induktionnach n: Zunachst ist
Vol1(B(1)r ) = 2r =
r√π
12Γ(1
2)
=π
12 r
Γ(32), Vol2(B
(2)r ) = πr2 =
πr2
1 · Γ(1)=
πr2
Γ(2).
Weiter gilt
Voln(B(n)r ) =
∫
Rn
χx21+...+x2
n<r2(x) dx
=
∫
B(2)r
(∫
Rn−2
χx23+...+x2
n<r2−x21−x2
2(x) dx3 . . . dxn
)
dx1 dx2
=
∫
B(2)r
Voln−2
(
B(n−2)√
r2−x21−x2
2
)
dx1 dx2
=
∫
B(2)r
(r2 − x2
1 − x22
)n−22 dx1 dx2 Voln−2
(
B(n−2)1
)
fur n ≥ 3, wobei wir den Satz 3.3 von Fubini und die Skalierungseigenschaftaus Proposition 3.14 ausgenutzt haben. Das hier auftretende zweidimensionale
4Diese Funktion interpoliert die Fakultaten naturlicher Zahlen. Insbesondere erfullt sie dieFunktionalgleichung xΓ(x) = Γ(x+ 1) und es ist Γ(1
2) =
√π sowie Γ(1) = 1.
34

Integral lasst sich mit Polarkoordinaten explizit berechnen und wir erhalten, wenndie Formel in n− 2 Dimensionen schon etabliert ist,
Voln(B(n)r ) =
∫ r
0
∫ 2π
0
(r2 − s2)n−2
2 dθ s dsVoln−2
(
B(n−2)1
)
= 2π
[
−1
n(r2 − s2)
n2
]s=r
s=0
Voln−2
(
B(n−2)1
)
=2πrn
n
πn−2
2
Γ(1 + n−22
)=
πn2 rn
n2Γ(n
2)
=π
n2 rn
Γ(1 + n2).
Zur Berechnung der Oberflache Voln−1(Sn−1) bemerken nun, dass nach Satz
3.15
Voln(B(n)(0)) =
∫
Rn
χB(n)(0)(x) dx
=
∫ 1
0
∫
∂B(n)(0)
dS(x) rn−1 dr
= Voln−1(∂B(n)(0))
∫ 1
0
rn−1 dr
=1
nVoln−1(∂B
(n)(0))
gilt, so dass
Voln−1(Sn−1) =
nπn2
Γ(1 + n2)
=nπ
n2
n2Γ(n
2)
=2π
n2
Γ(n2)
ist. Nach Proposition 3.14 ist dann allgemein
Voln−1(rSn−1) =
2πn2 rn−1
Γ(n2).
35

Kapitel 4
Orientierung und Teilmengen mitRand
In diesem Kapitel untersuchen wir zunachst, wie auf Mannigfaltigkeiten der Be-griff einer Orientierung eingefuhrt werden kann, und wenden uns dann besondersgutartigen Teilmengen zu. Wir nehmen an, dass alle Mannigfaltigkeiten von derKlasse C1 sind und uberlegen uns ganz zum Schluss kurz, was fur eine allgemeineDifferenzierbarkeitsordnung Cα noch zu bedenken ist.
4.1 Orientierte Mannigfaltigkeiten
Oft ist es bei der Integration uber Mannigfaltigkeiten wichtig, eine Orientie-rung des Integrationsbereiches zu berucksichtigen. Das Phanomen ist aus derAnalysis 1 bekannt: Ein Integral
∫ b
af(x) dx andert das Vorzeichen, wenn man a
und b vertauscht und damit den “Durchlaufsinn” des Integrationsbereichs um-kehrt. Die zweisdimensionale Ebene kann man “gegen” oder “mit dem Uhrzeiger-sinn” orientieren und im dreidimensionalen Raum kann man eine Orientierungdurch “Rechts-” oder “Linkshandigkeit” festlegen. Allgemein lasst sich ein k-dimensionaler Raum, k ≥ 1, durch die Wahl einer Basis orientieren: Genauergesagt, definiert man zunachst, dass zwei Basen gleichorientiert sind, wenn dieMatrix des Basiswechsels positive Determinante hat. Dies ist eine Aquivalenz-relation mit zwei Aquivalenzklassen, die man dann die beiden Orientierungennennt. Im R
k nennt man die durch die kanonische Basis (e1, . . . , ek) gegebeneOrientierung positiv, die andere (etwa durch (−e1, e2, . . . , ek) induzierte) negativ.
Fur Mannigfaltigkeiten definieren wir:
Definition 4.1 Es sei M eine k-dimensionale Mannigfaltigkeit im Rn, k ≥ 1.
(i) Zwei Karten Φ1 : V1 → U1, Φ2 : V2 → U2 heißen gleich orientiert, wenn furU1 ∩ U2 6= ∅ der Kartenwechsel
ϕ = Φ−12 Φ1 : Φ−1
1 (U1 ∩ U2) → Φ−12 (U1 ∩ U2)
36

die Bedingung detDϕ > 0 erfullt. (Man sagt dann ϕ sei orientierungstreu.)
(ii) M heißt orientierbar, wenn M einen Atlas A aus gleichorientierten Kartenbesitzt. A heißt dann orientiert.
Beispiel: Jede Mannigfaltigkeit, die durch eine einzige Karte parametrisiert wer-den kann, ist orientierbar. Insbesondere ist jede offene Menge im R
n orientierbar,da sie ja z.B. durch die identische Abbildung parametrisiert wird.
Die Wahl eines orientierten Atlas A legt nun eine Orientierung auf M fest.Genauer gesagt: Ist Do(A) die Menge aller Karten, die gleichorientiert zu allenKarten aus A sind, so ist Do(A) selbst ein orientierter Atlas, was man ahnlichwie in Abschnitt 2.3 einsieht: Sind Φ1 : V1 → U1,Φ2 : V2 → U2 uberlappendeKarten aus Do(A), so kann man um jeden Punkt p ∈ U1 ∩ U2 eine Karte Φ ausA finden, so dass
Φ−12 Φ1 = (Φ−1
2 Φ) (Φ−1 Φ1)
in einer entsprechend kleinen Umgebung von Φ−11 (p) gilt. Da Φ−1
2 Φ und Φ−1Φ1
orientierungstreu sind, folgt dies auch fur Φ−12 Φ1, denn aus der Kettenregel folgt,
dass die Verkettung orientierungstreuer Abbildungen wieder orientierungstreu ist.Do(A) ist der maximale A enthaltende orientierte Atlas. Wir konnen dann ganzexakt definieren:
Definition 4.2 Eine Orientierung auf einer orientierbaren Mannigfaltigkeit istein maximaler orientierter Atlas.
Bemerkungen:
1. Eine Orientierung auf M induziert auch eine Orientierung der Tangen-tialraume TpM : Ist M durch den Atlas A orientiert, so legt die Basis(∂1Φ(a), . . . , ∂kΦ(a)), a = Φ−1(p), (vgl. Satz 2.9) eine Orientierung aufTpM fest. Diese ist unabhangig von der Wahl von Φ ∈ A.
Ubung: Zeigen Sie dies.
Da umgekehrt zwei nicht gleichorientierte Karten an mindestens einemPunkt p unterschiedliche Orientierungen auf TpM induzieren, ist eine Ori-entierung von M eindeutig durch die induzierten Orientierungen von TpMgegeben.
2. Fur den nulldimensionalen Raum legt man +1 und −1 als seine beidenOrientierungen fest. Damit lassen sich allgemein nulldimensionale Mannig-faltigkeiten, die ja nichts anderes sind als eine diskrete Menge von Punktenim R
n, dadurch orientieren, dass man an jedem Punkt eine der beiden Ori-entierungen ±1 vorschreibt.
37

Beispiel: Es sei γ : I → Rn eine C1-Kurve mit γ 6= 0, so dass γ : I → γ(I)
ein Homoomorphismus ist. Dann ist γ(I) eine Mannigfaltigkeit. γ induziert eineOrientierung auf γ(I), die eindeutig durch die induzierte Orietierung aller Tpγ(I)gegeben ist. Die Orientierung von Tpγ(I) ist dabei durch die eindimensionale
Basis γ(s) oder – aquivalent – durch den Tangenteneinheitsvektor t(p) := γ(s)|γ(s)|
,
s = γ−1(p), gegeben.
Fur den Fall von Mannigfaltigkeiten der Dimension n− 1, also Hyperflachen,gibt es ein nutzliches Kriterium fur die Orientierbarkeit:
Satz 4.3 Eine Hyperflache M ⊂ Rn ist genau dann orientierbar, wenn es auf M
ein stetiges Einheitsnormalenfeld, also eine stetige Abbildung ν : M → Rn mit
ν(p) ∈ NpM und |ν(p)| = 1 fur alle p ∈M , gibt.
Beweis. “⇒”: Es sei M orientierbar und A ein orientierter Atlas. Ist Φ : V →U aus A und p ∈ U , so wahlen wir denjenigen Einheitsvektor ν(p) aus demeindimensionalen Normalenraum NpM , der der Bedingung
det(ν(p), ∂1Φ(a), . . . , ∂n−1Φ(a)) > 0
genugt, wobei a = Φ−1(p) ist. Dies ist wohldefiniert, denn sind Φ1 : V1 → U1,Φ2 : V2 → U2 Karten mit p ∈ U1 ∩ U2 und entsprechenden Wahlen von Einheits-vektoren ν1 bzw. ν2 sowie a1 = Φ−1(p), a2 = Φ−1
2 (p), so ist
DΦ1(a1) = DΦ2(a2)Dϕ(a1),
wenn ϕ den Kartenwechsel Φ−12 Φ1 in einer Umgebung von a1 bezeichnet, und
daher
det(ν2(p), DΦ1(a1)) = det(ν2(p), DΦ2(a2)Dϕ(a1))
= det
(
(ν2(p), DΦ2(a2))
(1 00 Dϕ(a1)
))
> 0,
also ν1(p) = ν2(p).Es bleibt zu zeigen, dass ν stetig ist. Dazu wahlen wir fur gegebenes p ∈ M
eine Umgebung U von p in Rn und eine C1-Funktion f : U → R, so dass M ∩U =
x ∈ U : f(x) = 0 ist, gemaß Definition 2.1. Nach Korollar 2.11 ist dann ν ′ : ∇f
|∇f |
ein stetiges Einheitsnormalenfeld auf M ∩ U . Indem wir f gegebenenfalls durch−f ersetzen, konnen wir außerdem annehmen, dass
det(ν ′(p), ∂1Φ(Φ−1(p)), . . . , ∂n−1Φ(Φ−1(p))
)> 0
fur eine Karte Φ ∈ A um p und also ν ′(p) = ν(p) gilt. Aus Stetigkeitsgrunden istdann aber
det(ν ′(q), ∂1Φ(Φ−1(q)), . . . , ∂n−1Φ(Φ−1(q))
)> 0
38

fur alle q in einer (kleinen) Umgebung von p. Dort ist demnach ν = ν ′ undinsbesondere ν auch stetig.
“⇐”: Es sei nun ν ein stetiges Einheitsnormalenfeld auf M . Zu p ∈M wahleeine Karte Φ : V → U mit p ∈ U . Indem man Φ : V → U gegebenenfallsdurch Φ P : P (V ) → U ersetzt, wobei P die Spiegelung P (x1, . . . , xn−1) =(−x1, x2, . . . , xn−1) ist, kann man erreichen, dass
det(ν(p), ∂1Φ(Φ−1(p)), . . . , ∂n−1Φ(Φ−1(p))
)> 0
ist. Durch eventuelles Verkleinern von V konnen wir aus Stetigkeitsgrunden sogar
det (ν(Φ(x)), ∂1Φ(x), . . . , ∂n−1Φ(x)) > 0
fur alle x ∈ V annehmen. All diese Karten sind nun tatsachlich gleichorientiert:Ist ϕ = Φ−1
2 Φ1 : Φ−11 (U1 ∩ U2) → Φ−1
2 (U1 ∩ U2) ein Kartenwechsel, so ist furx ∈ Φ−1
1 (U1 ∩ U2) (also ϕ(x) ∈ Φ−12 (U1 ∩ U2))
0 < det(ν(Φ1(x)), DΦ1(x)
)= det
(ν(Φ2(ϕ(x))), DΦ2(ϕ(x))Dϕ(x)
)
= det
((ν(Φ2(ϕ(x))), DΦ2(ϕ(x))
)(
1 00 Dϕ(x)
))
.
Dann aber muss auch detDϕ(x) > 0 sein.
Beobachtung: Der zweite Beweisteil zeigt, dass ν in eindeutiger Weise eineOrientierung auf M induziert:
Definition 4.4 Es sei M ⊂ Rn eine Hyperflache mit stetigem Einheitsnorma-
lenfeld ν. Die durch die Bedingung
det(ν(p), ∂1Φ(Φ−1(p)), . . . , ∂n−1Φ(Φ−1(p))
)> 0
fur Karten Φ um p ∈ M eines orientierten Atlas festgelegte Orientierung heißtdie durch ν induzierte Orientierung von M .
Beispiele:
1. Ist U ⊂ Rn offen, f : U → R stetig differenzierbar und c ein regularer
Wert von f , so ist M := f−1(c), das nach der Beobachtung von Seite 8ja eine Hyperflache ist, orientierbar. Ein stetiges Einheitsnormalenfeld istgegeben durch p 7→ ∇f(p)
|∇f(p)|. Insbesondere ist die n-dimensionale Sphare Sn−1
orientierbar.
2. Das Bild M der Abbildung Ψ : R × (−12, 1
2) → R
3,
Ψ(s, t) =
cos ssin s
0
+t
coss
2
cos ssin s
0
+ sins
2
001
=
(1 + t cos s2) cos s
(1 + t cos s2) sin s
t sin s2
ist ein sogenanntes Mobiusband, s. Abb. 4.1.
Ubung: Zeigen Sie, dass M eine nicht orientierbare Mannigfaltigkeit ist.
39

Abbildung 4.1: Mobiusband.
3. Ist M ⊂ R3 eine orientierbare zweidimensionale Mannigfaltigkeit (also eine
Flache im Raum) mit orientiertem Atlas A, so ist ein stetiges Einheitsnor-malenfeld durch
ν(p) :=∂1Φ × ∂2Φ
|∂1Φ × ∂2Φ|(Φ−1(p))
gegeben, wobei Φ eine beliebige Karte aus A um p ist und × das Kreuz-produkt im R
3 bezeichnet. In der Tat ist die rechte Seite fur jede Wahl vonΦ ein Einheitsvektor des eindimensionalen NpM , da ja ∂1Φ und ∂2Φ denTpM aufspannen und es gilt
det
(∂1Φ × ∂2Φ
|∂1Φ × ∂2Φ|(a), ∂1Φ(a), ∂2Φ(a)
)
> 0
fur a = Φ−1(p) (s.u.), so dass ν wie im ersten Beweisteil von Satz 4.3angegeben ist und dieselbe Orientierung wie A induziert.
Ubung: Fur a, b ∈ R3 ist det(a× b, a, b) = |a× b|2.
4.2 Teilmengen mit glattem Rand
Wir untersuchen nun Teilmengen von Mannigfaltigkeiten mit besonders gutarti-gem Rand. Solche Mengen werden als Integrationsbereiche bei den Integralsatzender folgenden Kapitel auftreten. Dass der Rand eines Integrationsgebietes eine be-sondere Rolle spielt, sieht man ja schon im Eindimensionalen, wenn man Integralemittels Stammfunktionen berechnet.
Ist Ω ⊂M , M eine Mannigfaltigkeit im Rn, so bezeichnen wir mit ∂Ω = Ω\Ω
deren Rand. Hierbei ist immer der Abschluss Ω bzw. das Innere Ω in der Toplogievon M gemeint (vgl. Abschnitt 2.1).
40

Definition 4.5 Es sei M eine k-dimensionale Mannigfaltigkeit im Rn und Ω ⊂
M eine Teilmenge. Man sagt, dass Ω glatten Rand hat, wenn fur alle p ∈ ∂Ωeine Karte Φ : V → U mit p ∈ U und
Φ(V ∩ x1 ≤ 0) = Ω ∩ U sowie Φ(V ∩ x1 = 0) = ∂Ω ∩ U
existiert. Eine Karte mit diesen beiden Eigenschaften nennt man Rand-adaptiert.
Hierbei steht x1 ≤ 0 als Abkurzung fur den Halbraum x ∈ Rk : x1 ≤ 0 und
x1 = 0 fur dessen Rand ∂x1 ≤ 0 = x ∈ Rk : x1 = 0. Lokal liegt dann
Ω bis auf eine glatte Koordinatentransformation in M wie ein k-dimensionalerHalbraum im R
k (s. Abb. 4.2).
Abbildung 4.2: Rand-adaptierte Karte.
Lemma 4.6 Es sei M eine k-dimensionale Mannigfaltigkeit im Rn und Ω ⊂M
eine Teilmenge mit glattem Rand. Dann gibt es einen Atlas aus Rand-adaptiertenKarten. Ist M orientiert und k ≥ 2, so gibt es sogar einen orientierten Atlas ausRand-adaptierten Karten, der die gegebene Orientierung induziert.
Beweis. Um jeden Randpunkt von Ω gibt es nach Definition eine Rand-adaptierteKarte. Ist dagegen p /∈ ∂Ω, so kann man immer eine Karte Φ : V → U wahlen,so dass V ⊂ x1 < 0 und p ∈ U ⊂ Ω oder V ⊂ x1 > 0 und p ∈ U ⊂ M \ Ωgilt. Die Menge all dieser Rand-adaptierten Karten ist ein Atlas A.
Es sei nun M durch den orientierten Atlas A′ orientiert. Indem wir in derKonstruktion von A die Definitionsbereiche hinreichend klein wahlen, durfen wirannehmen, dass fur jedes Φ : V → U aus A ein Φ′ : V ′ → U ′ aus A′ existiert, sodass U ⊂ U ′ gilt und detD(Φ′−1 Φ) auf V das Vorzeichen nicht wechselt.
Ersetzt man nun alle Karten Φ aus A, fur die dieses Vorzeichen negativ ist,durch die Karte Φ P , wobei P die Spiegelung x 7→ (x1, . . . , xk−1,−xk) ist, soerhalt man einen Atlas A′′, der offenbar wieder Rand-adaptiert ist und
detD(Φ′−1 Φ) > 0 ∀Φ ∈ A′′
41

mit entsprechend gewahltem Φ′ ∈ A erfullt. Damit ist tatsachlich fur je zweiKarten Φ1 : V1 → U1,Φ2 : V2 → U2 aus A′′ mit U1 ∩ U2 6= ∅ und entsprechendenKarten Φ′
1 : V ′1 → U ′
1 ⊃ U1 bzw. Φ′2 : V ′
2 → U ′2 ⊃ U2
Φ−12 Φ1 = Φ−1
2 Φ′2 Φ′−1
2 Φ′1 Φ′−1
1 Φ1
= (Φ′2 Φ2)
−1 (Φ′−12 Φ′
1) (Φ′−11 Φ1)
orientierungstreu, da Verkettungen und Umkehrungen orientierungstreuer Abbil-dungen wieder orientierungstreu sind. A′ und A′′ induzieren die gleiche Orientie-rung, da fur Karten Φ1 : V1 → U1 aus A′′ mit entsprechender Karte Φ′
1 : V ′1 →
U ′1 ⊃ U1 aus A′ und beliebiger Karte Φ2 : V2 → U2 aus A′ mit U1 ∩ U2 6= ∅ auch
der Kartenwechsel
Φ−12 Φ1 = (Φ−1
2 Φ′1) (Φ′−1
1 Φ1),
wo er definiert ist, orientierungstreu ist.
Wir kommen nun zum wesentlichen Ergebnis dieses Abschnitts: Der Randeiner glatt berandeten Teilmenge ist selbst eine Mannigfaltigkeit.
Satz 4.7 Es sei M eine k-dimensionale Mannigfaltigkeit im Rn, k ≥ 1, und
Ω ⊂M eine Teilmenge mit glattem Rand. Dann ist ∂Ω eine (k−1)-dimensionaleMannigfaltigkeit. Ist M orientierbar, so auch ∂Ω.
Beweis. Ist A ein Rand-adaptierter Atlas fur M und Φ : V → U eine Karte aus Amit ∂Ω∩U 6= ∅, so definieren wir die stetige bijektive Abbildung Φ′ : V ′ → ∂Ω∩Udurch
V ′ := x′ ∈ Rk−1 : (0, x′1, . . . , x
′k−1) ∈ V , Φ′(x) = Φ(0, x′1, . . . , x
′k−1).
V ′ ist offenbar eine offene Teilmenge von Rk−1 und ∂Ω∩U eine offene Teilmenge
von ∂Ω. (Ist U offen im Rn mit U = U ∩ M , so gilt ∂Ω ∩ U = ∂Ω ∩ U .) Da
die Umkehrabbildung, gegeben durch Φ′−1 = P Φ−1|∂Ω∩U mit P : Rk → R
k−1,P (x) = (x2, . . . , xk), auch stetig ist, ist Φ′ ein Homoomorphismus. Wegen DΦ′ =(∂2Φ, . . . , ∂kΦ) und RangDΦ = k ist DΦ′ außerdem vom Rang k − 1. NachSatz 2.5 ist damit ∂Ω als (k − 1)-dimensionale Mannigfaltigkeit nachgewiesen.Die Menge A′ all dieser aus Karten Φ ∈ A, deren Kartenbereich ∂Ω schneidet,gewonnenen Karten Φ′ bildet einen Atlas fur ∂Ω.
Es sei nunM orientiert. Der Fall k = 1 ist trivial, da nulldimensionale Mannig-faltigkeiten immer orientierbar sind. Ist nun k ≥ 2, so durfen wir nach Lemma 4.6annehmen, dass A aus gleichorientierten Rand-adapierten Karten besteht. Wirbeschließen den Beweis, indem wir zeigen, dass dann alle Φ′ ∈ A′ gleichorientiertsind:
Dazu seien Φ1 : V1 → U1 und Φ2 : V2 → U2 mit U1 ∩ U2 ∩ ∂Ω 6= ∅ aus Aund Φ′
1 : V ′1 → ∂Ω ∩ U1 bzw. Φ′
2 : V ′2 → ∂Ω ∩ U2 die entsprechenden induzierten
Karten aus A′. Der Kartenwechsel
ϕ′ = Φ′−12 Φ′
1 : Φ−11 (∂Ω ∩ U1 ∩ U2) → Φ−1
2 (∂Ω ∩ U1 ∩ U2)
42

ist gegeben durch
ϕ′(x′) = P Φ−12 Φ1(0, x
′) = (ϕ2(0, x′), . . . , ϕk(0, x
′))
fur x′ ∈ Φ−11 (∂Ω ∩ U1 ∩ U2), wobei ϕ den Kartenwechsel
ϕ = Φ−12 Φ1 : Φ−1
1 (U1 ∩ U2) → Φ−12 (U1 ∩ U2)
bezeichnet. Insbesondere ist Dϕ′(x′) = ∂(ϕ2,...,ϕk)∂(x2,...,xk)
(0, x′) die rechte untere (k−1)×(k − 1)-Untermatrix von Dϕ(0, x′).
Da Φ1 und Φ2 Rand-adaptiert sind, gilt außerdem ϕ1(0, x2, . . . , xk) = 0 undϕ1(x1, . . . , xk) ≤ 0 fur x1 ≤ 0. Daraus folgt aber
∂iϕ1(0, x2, . . . , xk)
= 0 fur i ≥ 2,
≥ 0 fur i = 1.
Zusammengefasst zeigt dies
0 < detDϕ(0, x′) = det
(∂1ϕ1(0, x
′) 0∗ Dϕ′(x′)
)
= ∂1ϕ1(0, x′) detDϕ′(x′)
und daher tatsachlich detDϕ′(x′) > 0.
Die Konstruktion des Atlas fur ∂Ω aus dem von M induziert nun eine be-stimmte Orientierung:
Definition 4.8 Es sei M eine k-dimensionale Mannigfaltigkeit im Rn, k ≥ 2,
und Ω eine glatt berandete Teilmenge. Ist Do(A) eine Orientierung auf M , wobeiA o.B.d.A. Rand-adaptiert sei (vgl. Lemma 4.6), so definiert der im Beweis vonSatz 4.7 konstruierte Atlas die durch Do(A) induzierte Orientierung auf ∂Ω.
Bemerkung: Fur k = 1 muss die zweite Behauptung in Lemma 4.6 nicht gelten.(Warum?) Die induzierte Orientierung lasst sich aber immer noch erklaren: IstM durch A orientiert, so kann man A so wahlen, dass fur alle p ∈ ∂Ω eine KarteΦ : V → U mit p ∈ U , Φ(0) = p und
Φ(V ∩ x1 ≤ 0) = Ω ∩ U oder Φ(V ∩ x1 ≥ 0) = Ω ∩ U
gilt. Im ersten Fall wahlen wir +1 und im zweiten Fall −1 als Orientierung beip ∈ ∂Ω.
Beispiel: Ist M ⊂ R3 eine zweidimensionale Mannigfaltigkeit, Ω ⊂ M eine
Teilmenge mit glattem Rand und A ein orientierter Atlas aus Rand-adaptiertenKarten, so wird ∂Ω durch die Kurven s 7→ Φ(0, s) fur Φ : V → U aus A mit∂Ω ∩ U 6= ∅ parametrisiert und orientiert. In einem Punkt p ∈ ∂Ω sind dieTangentialraume TpM und Tp∂Ω entsprechend durch
(∂1Φ(a), ∂2Φ(a)) bzw. t(p) := ∂2Φ(a),
43
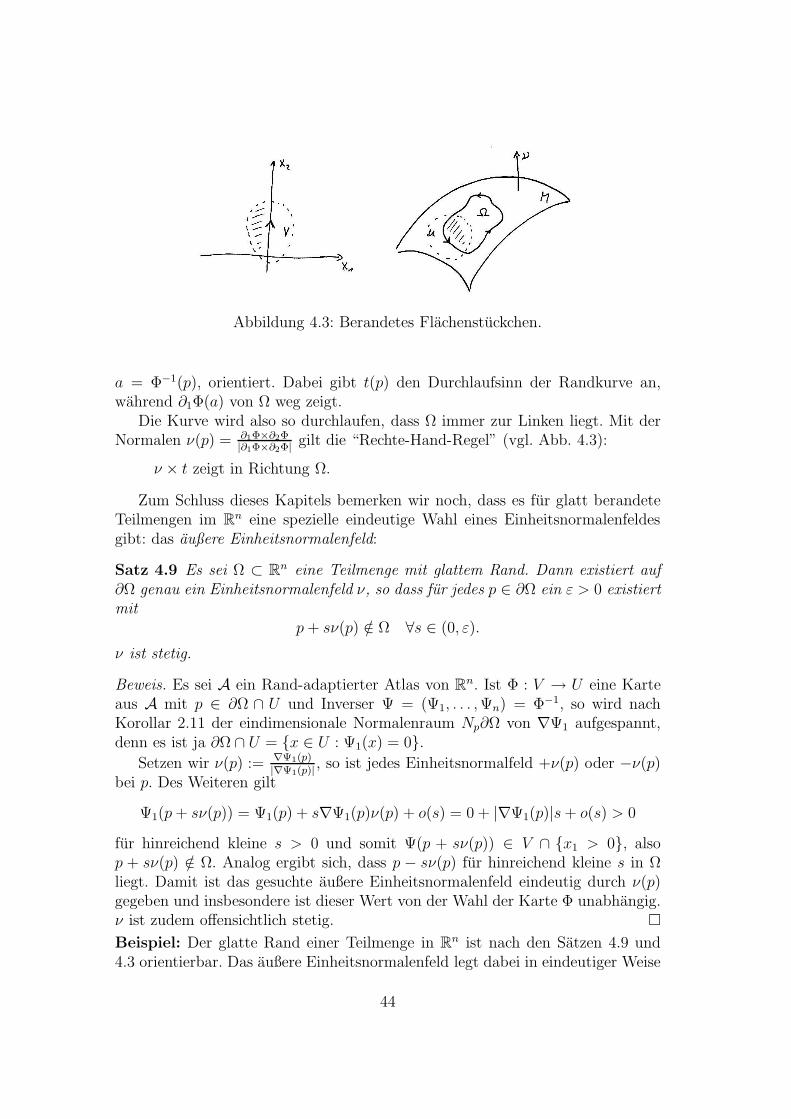
Abbildung 4.3: Berandetes Flachenstuckchen.
a = Φ−1(p), orientiert. Dabei gibt t(p) den Durchlaufsinn der Randkurve an,wahrend ∂1Φ(a) von Ω weg zeigt.
Die Kurve wird also so durchlaufen, dass Ω immer zur Linken liegt. Mit derNormalen ν(p) = ∂1Φ×∂2Φ
|∂1Φ×∂2Φ|gilt die “Rechte-Hand-Regel” (vgl. Abb. 4.3):
ν × t zeigt in Richtung Ω.
Zum Schluss dieses Kapitels bemerken wir noch, dass es fur glatt berandeteTeilmengen im R
n eine spezielle eindeutige Wahl eines Einheitsnormalenfeldesgibt: das außere Einheitsnormalenfeld:
Satz 4.9 Es sei Ω ⊂ Rn eine Teilmenge mit glattem Rand. Dann existiert auf
∂Ω genau ein Einheitsnormalenfeld ν, so dass fur jedes p ∈ ∂Ω ein ε > 0 existiertmit
p+ sν(p) /∈ Ω ∀s ∈ (0, ε).
ν ist stetig.
Beweis. Es sei A ein Rand-adaptierter Atlas von Rn. Ist Φ : V → U eine Karte
aus A mit p ∈ ∂Ω ∩ U und Inverser Ψ = (Ψ1, . . . ,Ψn) = Φ−1, so wird nachKorollar 2.11 der eindimensionale Normalenraum Np∂Ω von ∇Ψ1 aufgespannt,denn es ist ja ∂Ω ∩ U = x ∈ U : Ψ1(x) = 0.
Setzen wir ν(p) := ∇Ψ1(p)|∇Ψ1(p)|
, so ist jedes Einheitsnormalfeld +ν(p) oder −ν(p)bei p. Des Weiteren gilt
Ψ1(p+ sν(p)) = Ψ1(p) + s∇Ψ1(p)ν(p) + o(s) = 0 + |∇Ψ1(p)|s+ o(s) > 0
fur hinreichend kleine s > 0 und somit Ψ(p + sν(p)) ∈ V ∩ x1 > 0, alsop + sν(p) /∈ Ω. Analog ergibt sich, dass p − sν(p) fur hinreichend kleine s in Ωliegt. Damit ist das gesuchte außere Einheitsnormalenfeld eindeutig durch ν(p)gegeben und insbesondere ist dieser Wert von der Wahl der Karte Φ unabhangig.ν ist zudem offensichtlich stetig.
Beispiel: Der glatte Rand einer Teilmenge in Rn ist nach den Satzen 4.9 und
4.3 orientierbar. Das außere Einheitsnormalenfeld legt dabei in eindeutiger Weise
44

eine Orientierung fest. Insbesondere folgt daraus wieder, dass die n-dimensionaleSphare Sn−1 = ∂B1(0) orientierbar ist.
Bemerkung: Betrachtet man nun spezieller Cα-Mannigfaltigkeit, α ≥ 1, soandert sich in diesem Kapitel nichts, außer dass die betrachteten Einheitsnorma-lenfelder nun nicht nur stetig, sondern sogar Cα−1 sind. Daruberhinaus sieht manleicht, dass der glatte Rand einer Teilmenge selbst wieder eine Cα-Mannigfaltigkeitist.
45

Kapitel 5
Die klassischen Integralsatze
Die klassischen Integralsatze der Vektoranalysis involvieren nicht nur skalare In-tegranden sondern vielmehr Vektorfelder, die uber orientierte Kurven und Hyper-flachen in einer Weise zu integrieren sind, die die zugrunde liegende Orientierungberucksichtigt. Wir beschaftigen uns daher zunachst etwas allgemeiner mit Vek-torfeldern, bevor wir zu den zentralen Satzen von Gauß und Stokes kommen.
5.1 Vektorfelder
Eine Abbildung f : U → Rn, wobei U eine offene Teilmenge von R
n ist, nenntman ein Vektorfeld. Solche Abbildungen kommen vor allem in der Physik haufigvor, z.B. als Kraftfeld (etwa der Gravitation), elektrisches Feld, magnetisches Feld,Geschwindigkeitsfeld der Stromung von Gasen und Flussigkeiten. Dabei gibt f(x)gerade den betrachteten physikalischen Wert im Raumpunkt x ∈ U an.
Kurvenintegrale
Es sei γ : I → Rn, I ein Intervall, eine (stuckweise) stetig differenzierbare Kurve
und f : U → Rn ein stetiges Vektorfeld. Ganz allgemein definieren wir:
Definition 5.1 Das (orientierte) Kurvenintegral von f langs γ ist
∫
γ
f(x) · dx :=
∫
I
f(γ(s)) · γ(s) ds.
Es geht also darum, nur den zur Kurve tangentialen Anteil von f aufzuintegrieren.Ist sogar γ 6= 0 und γ : I → γ(I) ein Homoomorphismus, so ist γ(I) eine
Mannigfaltigkeit. γ induziert eine Orientierung auf γ(I), die Tpγ(I) durch den
46
Tangenteneinheitsvektor t(p) := γ(s)|γ(s)|
, s = γ−1(p), orientiert. Es gilt dann∫
γ
f(x) · dx =
∫
I
f(γ(s)) · γ(s) ds
=
∫
I
f(γ(s)) · t(γ(s)) |γ(s)| ds =
∫
γ(I)
f(x) · t(x) dS(x).
Insbesondere ersieht man hieraus, dass das Kurvenintegral unabhangig von derParametrisierung ist und bei Orientierungsumkehr das Vorzeichen wechselt, wasfur allgemeine Kurven, deren Spur nicht notwendig eine Mannigfaltigkeit ist, auchnoch richtig bleibt, genauer:
Lemma 5.2 Es sei γ : [a, b] → U , U ⊂ Rn offen, eine stuckweise stetig differen-
zierbare Kurve und f ∈ C(U ; Rn) ein stetiges Vektorfeld. Ist nun ϕ : [a′, b′] →[a, b] stetig differenzierbar mit ϕ(a′) = a und ϕ(b′) = b, so gilt
∫
γϕ
f(x) · dx =
∫
γ
f(x) · dx.
Ist dagegen ϕ : [a′, b′] → [a, b] stetig differenzierbar mit ϕ(a′) = b und ϕ(b′) = a,so gilt ∫
γϕ
f(x) · dx = −∫
γ
f(x) · dx.
Beweis. Ubung!
Motivation: Als motivierendes Beispiel fur diese Begriffsbildung nehmen wir an,dass γ die Bahn eines physikalischen Teilchens in einem Kraftfeld f sei. Gemaßdem physikalischen Gesetz
Arbeit = Kraft × Weg,
wobei hier nur der in Richtung des Wegs zeigende Anteil der Kraft zu nehmenist, gibt
∫
γ(I)f(x) · t(x) dS(x) nun tatsachlich die verrichtete Arbeit des Teilchens
an.
Integrale uber Hyperflachen
Ist nun M eine durch das Einheitsnormalenfeld ν orientierte Hyperflache, sodefinieren wir:
Definition 5.3 Das (orientierte) Oberflachenintegral von f uber M ist∫
M
f(x) · d~S :=
∫
M
f(x) · ν(x) dS(x).
Motivation: Eine physikalische Motivation fur diese Definition ergibt sich, wennf etwa das Geschwindigkeitsfeld einer Stromung ist. Das Oberflachenintegral∫
Mf(x) · ν(x) dS(x) gibt dann die Menge an Substanz an, die pro Zeiteinheit
die Flache M durchfließt.
47

Die klassischen Differentialoperatoren
Es sei U ⊂ Rn offen. Bekanntlich bezeichnet ∇f = (∂1f, . . . , ∂nf) den Vektor der
partiellen Ableitungen von f : U → R, wenn f differenzierbar ist. Fur Vektorfel-der sind die beiden folgenden Operationen besonders wichtig:
Definition 5.4 Ist f : U → Rn ein differenzierbares Vektorfeld, so bezeichnen
wir mit
(i) div f : U → R,
div f =n∑
i=1
∂ifi (= SpurDf = “∇ · f”),
die Divergenz von f und,
(ii) falls außerdem n = 3 ist, mit rot f : U → R3,
rot f =
∂2f3 − ∂3f2
∂3f1 − ∂1f3
∂1f2 − ∂2f1
(= “∇× f”),
die Rotation von f . (Im Englischen: curl f.)
∇, div und rot kann man dann als Abbildungen auf Funktionenraumen (“Ope-ratoren”) interpretieren:
∇ : Cα(U) → Cα−1(U ; Rn),
div : Cα(U ; Rn) → Cα−1(U),
rot : Cα(U ; R3) → Cα−1(U ; R3)
fur α ≥ 1.
Ubung: Zeigen Sie rot ∇ = 0 und div rot = 0, genauer: Fur U ⊂ R3 offen und
f ∈ C2(U), g ∈ C2(U ; R3) gilt
rot∇f = 0, div rot g = 0.
5.2 Integrabilitat
Eine wichtige Beispielklasse von Vektorfeldern sind die sogenannten konservativenVektorfelder:
48

Definition 5.5 Ein stetiges Vektorfeld f : U → Rn heißt konservativ, wenn fur
jede stuckweise stetig differenzierbare Kurve γ : [0, 1] → U mit γ(0) = γ(1) gilt∫
γ
f(x) · dx = 0.
Beispiel: Viele Kraftfelder in der Mechanik sind konservativ: Wenn ein Teilchenwieder am Ausgangspunkt angekommen ist, ist dann die gesamte geleistete Arbeitgleich Null.
Außer im Eindimensionalen hat nicht jedes Vektorfeld eine Stammfunktion.Ist z.B. f(x) = (−x2, x1), so kann es kein F mit ∇F = f geben, da nach demSatz von Schwarz sonst
−1 = ∂2f1 = ∂2∂1F = ∂1∂2F = ∂1f2 = 1
ware. Physikalisch motiviert, nennt man ein F mit −∇F = f auch ein Poten-tial fur f . Aus dem Satz von Schwarz ergibt sich also allgemein die notwendigeIntegrabilitatsbedingung
∂ifj = ∂jfi ∀ i, j ∈ 1, . . . , n (5.1)
dafur, dass f ∈ C1(U ; Rn) ein Potential besitzt.
Bemerkung: Ist n = 3, so bedeutet (5.1) gerade rot f = 0.
Der folgende Satz besagt insbesondere, dass konservative Vektorfelder geradesolche mit Stammfunktionen sind:
Satz 5.6 Es sei U ⊂ Rn offen und f ∈ C(U ; Rn) ein Vektorfeld. Dann sind
aquivalent:
(i) f ist konservativ.
(ii) Es existiert ein F ∈ C1(U) mit ∇F = f .
(iii) Fur alle stuckweise stetig differenzieraren Kurven γ : [a, b] → U hangt∫
γf(x) · dx nur von den Endpunkten γ(a) und γ(b) ab.
Beweis. (i) ⇒ (iii): Sind γ : [a, b] → U und γ′ : [a′, b′] → U stuckweise stetigdifferenzierbare Kurven mit γ(a) = γ′(a′) und γ(b) = γ′(b′), so ist auch γ :[0, 1] → U mit
γ(t) =
γ(a+ 2(b− a)t) fur 0 ≤ t ≤ 12,
γ′(b′ + 2(a′ − b′)(t− 12)) fur 1
2≤ t ≤ 1
stuckweise stetig differenzierbar, und es gilt γ(0) = γ(a) = γ′(a) = γ(1) = 0, also
0 =
∫
γ
f(x) · dx =
∫
γ
f(x) · dx−∫
γ′
f(x) · dx
49

nach Lemma 5.2.
(iii) ⇒ (ii): Es sei V eine Zusammenhangskomponente1 von U . Nach Lemma5.7 (s.u.) gibt es fur alle x, y ∈ V einen stuckweise stetig differenzierbaren Wegγx,y : [0, 1] → V mit γx,y(0) = x und γx,y(1) = y. Wir fixieren x0 ∈ V und setzen
F (x) :=
∫
γx0,x
f(y) · dy ∀x ∈ V.
Da Kurvenintegrale uber f nur von den Endpunkten der Kurve abhangen, folgtfur hinreichend kleine |h|
F (x+ h) − F (x) − f(x) · h|h| = |h|−1
(∫
γx,x+h
f(y) · dy − f(x) · h)
= |h|−1
(∫ 1
0
f(x+ th) · h dt− f(x) · h)
= |h|−1
∫ 1
0
(f(x+ th) − f(x)
)· h dt,
was fur |h| → 0 gegen 0 konvergiert, und somit ∇F (x) = f(x).
(ii) ⇒ (i): Es sei γ : [0, 1] → U eine stuckweise stetig differenzierbare Kurvemit γ(0) = γ(1) und f = ∇F . Dann ist
∫
γ
f(x) · dx =
∫ 1
0
∇F (γ(t)) · γ(t) dt
=
∫ 1
0
d
dt(F (γ(t)) dt
= F (γ(1)) − F (γ(0))
= 0.
Es bleibt noch zu zeigen:
Lemma 5.7 Es sei V ⊂ Rn eine offene zusammenhangende Menge. Dann gibt
es fur alle x, y ∈ V einen stuckweise stetig differenzierbaren Weg γ : [0, 1] → Vmit γ(0) = x und γ(1) = y.
1Erinnerung: Eine Menge V ⊂ Rn heißt zusammenhangend, wenn sie nicht als disjunkte
Vereinigung V = V1∪V2 von nicht leeren Mengen V1, V2 geschrieben werden kann, die offenin V sind, d.h. fur die Vi = V ∩ Ui mit offenen Mengen Ui gilt, i = 1, 2. Man nennt Vwegzusammenhangend, wenn es fur alle x, y ∈ V einen stetigen Weg γ : [0, 1] → V mit γ(0) = x
und γ(1) = y gibt. Ist V offen, so fallen diese Begriffe zusammen.
Jede Menge V ⊂ Rn zerfallt in disjunkte (Weg-)Zusammenhangskomponenten: V = ˙⋃
j∈JVj ,wobei die Vj die maximalen (weg-)zusammenhangenden Teilmengen von V sind. Ist V offen,so auch jedes Vj .
50

Beweis. Es sei γ : [0, 1] → V ein stetiger Weg mit γ(0) = x und γ(1) = y.Da γ([0, 1]) kompakt und R
n \ V abgeschlossen ist, gibt es ein ε > 0, so dass|γ(t)− y| ≥ ε fur alle t ∈ [0, 1] und y /∈ V ist. Wir definieren nun γ als den durchlineare Interpolation der Punkte γ(0), γ( 1
m), . . . , γ(1) entstehenden Polygonzug:
γ(t) = (1 + k −mt)γ
(k
m
)
+ (mt− k)γ
(k + 1
m
)
furk
m≤ t ≤ k + 1
m.
Aus der gleichmaßigen Stetigkeit von γ folgt, dass |γ(t)−γ(t)| < ε fur alle t ∈ [0, 1]gilt, wenn nur m genugend groß gewahlt ist. Das aber zeigt, dass tatsachlich γganz in V verlauft.
Fur besonders gutartige Gebiete, stellt sich nun heraus, dass die Integrabi-litatsbedingung (5.1) sogar schon hinreichend fur die Existenz eines Potentialsist.
Definition 5.8 Wir nennen eine Teilmenge U ⊂ Rn sternformig bezuglich x0 ∈
U , wenn mit x ∈ U auch die Verbindungsstrecke
[x0, x] = (1 − t)x0 + tx : t ∈ [0, 1]
ganz in U liegt. U heißt schlicht sternformig, wenn es sternformig bezuglich einesx0 ∈ U ist.
Satz 5.9 (Das Lemma von Poincare) Es sei U ⊂ Rn offen und sternformig
und f ∈ C1(U ; Rn) ein Vektorfeld. Dann sind aquivalent:
(i) Es gilt ∂ifj = ∂jfi fur i, j = 1, . . . , n.
(ii) Es existiert ein F ∈ C2(U) mit ∇F = f .
Bemerkung: Es genugt anzunehmen, dass U einfach zusammenhangend ist, waswir hier aber nicht vertiefen wollen.
Beweis. (ii) ⇒ (i): Das ist der Satz von Schwarz.
(i) ⇒ (ii): Es sei U sternformig bezuglich x0. Setze
F (x) =
∫
[x0,x]
f(y) · dy =
∫ 1
0
f((1 − t)x0 + tx) · (x− x0) dt.
Dann gilt F ∈ C1(U) und
∂iF (x) =
∫ 1
0
∂i
n∑
k=1
fk((1 − t)x0 + tx)(xk − x0k) dt
=
∫ 1
0
n∑
k=1
((∂ifk)((1 − t)x0 + tx)t (xk − x0
k) + fk((1 − t)x0 + tx) ∂i(xk − x0k))dt.
51
Mit Hilfe der Integrabilitatsbedingung und ∂ixk = δik (“Kronecker-delta”) folgt
∂iF (x) =
∫ 1
0
n∑
k=1
((∂kfi)((1 − t)x0 + tx)t (xk − x0
k) + fk((1 − t)x0 + tx) δik)dt
=
∫ 1
0
td
dtfi((1 − t)x0 + tx) + fi((1 − t)x0 + tx) dt
=
∫ 1
0
d
dt
(tfi((1 − t)x0 + tx)
)dt
= fi(x).
Also ist ∇F = f und F ∈ C2(U).
Beispiel: Das Vektorfeld f(x1, x2) =(
−x2
x21+x2
2, x1
x21+x2
2
)
genugt der Integrabilitats-
bedingung (5.1) auf der (nicht sternformigen(!) Menge) R2 \ 0. Es besitzt aber
kein Potential.
Ubung: Zeigen Sie dies!
Bemerkung: Es sei U ⊂ R3 offen und sternformig.
1. Dann ist die wegen rot ∇ = 0 notwendige Integrabilitatsbedingung rot f =0 fur ein stetig differenzierbares Vektorfeld f auch hinreichend fur die Exi-stenz eine Potentials F mit −∇F = f .
2. Die Bedingung div f = 0 notwendig fur die Existenz eines Vektorfeldes gmit rot g = f ist, denn rot div = 0. In der Tat gibt es auch fur jedesstetig differenzierbare divergenzfreie Vektorfeld f auf U ⊂ R
3 offen undsternformig ein Vektorpotential g mit rot g = f .
Ubung: Zeigen Sie dies! Tipp: O.B.d.A. sei Usternformig bezuglich 0. Setze dann
g(x) =
∫ 1
0
tf(tx) × x dt.
5.3 Der Integralsatz von Gauß
Wir kommen nun zum zentralen Ergebnis dieser Vorlesung. Zuvor benotigen wirallerdings noch eine technische Vorbereitung.
Glatte Zerlegungen der Eins
Wir konstruieren nun – ahnlich wie in Definition 3.10 – eine Zerlegung der Einsfur kompakte Mengen, die durch offene Mengen im R
n uberdeckt werden, wobei
52

die auftretenden Funktionen auf ganz Rn definiert und uberall glatt sind. Wie
zuvor ist dies unser wesentliches Hilfsmittel zur Lokalisierung.Vorbereitend untersuchen wir die Funktion χ′′ : R → R,
χ′′(t) =
0 fur t ≤ 0,
e−1t fur t > 0.
Diese Funktion ist C∞-glatt.
Ubung: Zeigen Sie dies. Tipp: Zeigen Sie zunachst, dass sich die k-ten Ablei-tungen, k ∈ N, auf (−∞, 0) durch pk(
1t)e−
1t fur geeignete Polynome pk darstellen
lassen.
Insbesondere ist dann auch die Funktion χ′ : R → R,
χ′(t) :=χ′′(4 − t)
χ′′(4 − t) + χ′′(t− 1)
= 1 fur t ≤ 1,
∈ (0, 1) fur 1 < t < 4,
= 0 fur t ≥ 4,
C∞-glatt und somit χ : Rn → R, χ(x) := χ′(|x|2) ebenfalls C∞-glatt und es gilt
χ(x)
= 1 fur |x| ≤ 1,
∈ (0, 1) fur 1 < |x| < 2,
= 0 fur |x| ≥ 2.
Satz 5.10 Es sei K ⊂ Rn kompakt und (Uj)j=1,...,N eine offene Uberdeckung
von K: K ⊂ ⋃N
j=1Uj. Dann gibt es eine der Uberdeckung (Uj) untergeordne-te Zerlegung der Eins (αj) auf einer Umgebung von K mit αj ∈ C∞(Rn) undsuppαj ⊂ Uj.
Beweis. Zu jedem x ∈ K wahlen wir j(x) mit x ∈ Uj(x) und eine Kugel Bε(x)(x)um x mit Radius ε(x) > 0, so dass B3ε(x)(x) ganz in Uj(x) enthalten ist. Da Kkompakt ist, gibt es endlich viele x1, . . . , xN ∈ K mit
K ⊂N⋃
i=1
Bε(xi)(xi).
Wir definieren wir nun βi(x) := χ(x−xi
ε(xi)), i = 1, . . . , N , und damit
α′i(x) =
βi(x)∑
k βk(x) +∏
k(1 − βk(x)).
Der Nenner verschwindet nirgends, denn∑
k βk(x) = 0 =⇒ βk(x) = 0 ∀ k =⇒∏
k(1 − βk(x)) = 1, und es ist α′i ∈ C∞(Rn). Fur alle i gilt außerdem wegen
53

βi = 1 und somit∏
k(1 − βk) = 0 auf Bε(xi)(xi) tatsachlich∑
i α′i = 1 auf
⋃N
i=1Bε(xi)(xi) ⊃ K. Nun ist suppα′i = B2ε(xi)(xi) ⊂ Uj(xi) und wir erhalten die
gesuchte Zerlegung der Eins indem wir
αj :=∑
i:j(xi)=j
α′i
setzen.
Der Gaußsche Satz
Satz 5.11 (Der Gaußsche Integralsatz) Es sei U ⊂ Rn eine offene Menge
und Ω ⊂ U eine kompakte Teilmenge mit glattem Rand und außerem Einheits-normalenfeld ν. Ist f ∈ C1(U ; Rn) ein stetig differenzierbares Vektorfeld, so gilt
∫
Ω
div f(x) dx =
∫
∂Ω
f(x) · ν(x) dS(x).
Mit der in Definition 5.3 eingefuhrten Bezeichnung gilt also
∫
Ω
div f(x) dx =
∫
∂Ω
f(x) · d~S(x).
Bemerkung: Die Annahme, dass Ω glatten Rand hat, kann abgeschwacht wer-den. Insbesondere darf ∂Ω “Ecken” und “Kanten” haben.
Der Beweis des Gaußschen Satzes wird in mehreren Schritten gefuhrt, wobeiwir der folgenden Strategie folgen:
• Zunachst betrachten wir das Innere von Ω und behandeln den Fall, dass fkompakten Trager in Ω hat, s. Lemma 5.12.
• In dem zentralen Lemma 5.13 beweisen wir einen Spezialfall fur Rander,die als Funktionsgraphen gegeben sind.
• Lemma 5.14 zeigt dann, dass wir fur hinreichend kleine Umgebungen vonRandpunkten tatsachlich annehmen durfen, dass sie von der eben behan-delten Art sind.
• Mittels einer glatten Teilung der Eins werden diese Ergebnisse schließlichzusammengefugt.
Lemma 5.12 Ist V ⊂ Rn offen und hat f ∈ C1(V ) kompkten Trager in V , so
ist ∫
V
∂jf(x) dx = 0 ∀ j = 1, . . . , n.
54

Beweis. Setzt man f durch 0 auf ganz Rn fort, ergibt sich aus dem Satz von
Fubini 3.3∫
V
∂jf(x) dx =
∫
Rn
∂jf(x) dx
=
∫
Rn−1
∫
R
∂jf(x) dxj
︸ ︷︷ ︸
=0
dx1 . . . dxj−1dxj+1 . . . dxn = 0.
Lemma 5.13 Es sei U = U ′×(a, b) ⊂ Rn eine offene Menge und h ∈ C1(U ′; (a, b)).
Setze
Ω− := x = (x′, xn) ∈ U : xn ≤ h(x′),Ω+ := x = (x′, xn) ∈ U : xn ≥ h(x′),M := x = (x′, xn) ∈ U : xn = h(x′)
(vgl. Abb. 5.1). Dann gilt fur f ∈ C1(U) mit kompaktem Trager in U
∫
Ω±
∂jf(x) dx = ∓∫
M
f(x)νj(x) dS(x), j = 1, . . . , n,
wobei ν durch
ν(x) = ν(x′, xn) =(−∇h(x′), 1)√
1 + |∇h(x′)|2gegeben sei.
Abbildung 5.1: Ωpm, M und supp f .
55

Beweis. In Abschnitt 3.3 haben wir gesehen, dass M eine Mannigfaltigkeit mitKarte Φ : U ′ → R
n, Φ(x′) = (x, h(x′)) und zugehoriger Gramscher Determinante1 + |∇h|2 ist. Wir betrachten zunachst Ω−.
Fall 1: j ∈ 1, . . . , n− 1. Definiere F : U → R durch
F (x) = F (x′, xn) =
∫ xn
a
f(x′, t) dt,
so dass
∂iF (x) =
∫ xn
a∂if(x′, t) dt fur i = 1, . . . , n− 1,
f(x′, xn) = f(x) fur i = n(5.2)
ist, und setze G(x′) = F (x′, h(x′)). G hat kompakten Trager in U ′ hat, so dassman
∫
U ′
∂jG(x′) dx′ = 0
erhalt, s. Lemma 5.12. Mit der Kettenregel fur G = F P mit P (x′) = (x′, h(x′))sieht man
0 =
∫
U ′
∂jG(x′) dx′ =
∫
U ′
(∂jF )(x′, h(x′)) + (∂nF )(x′, h(x′)) ∂jh(x′) dx′.
Zusammen mit (5.2) ergibt sich also nach Fubini
∫
Ω−
∂jf(x) dx =
∫
U ′
∫ h(x′)
a
∂jf(x′, t) dt dx′
=
∫
U ′
(∂jF )(x′, h(x′)) dx′
= −∫
U ′
(∂nF )(x′, h(x′)) ∂jh(x′) dx′
= −∫
U ′
f(x′, h(x′)) ∂jh(x′) dx′
=
∫
U ′
f(x′, h(x′))νj(x′, h(x′))
√
1 + |∇h(x′)|2 dx′
=
∫
M
f(x)νj(x) dS(x),
vgl. Proposition 3.13.
Fall 2: j = n. Der Hauptsatz der Differential- und Integralrechnung zeigt
∫ h(x′)
a
∂nf(x′, t) dt = f(x′, h(x′))
56

fur jedes x′ ∈ U ′, da f(x′, ·) kompakten Trager in (a, b) hat. Damit ist nach demSatz von Fubini 3.3 aber
∫
Ω−
∂nf(x) dx =
∫
U ′
∫ h(x′)
a
∂nf(x′, t) dt dx′
=
∫
U ′
f(x′, h(x′))νn(x)√
1 + |∇h(x′)|2 dx′
=
∫
M
f(x)νn(x) dS(x),
vgl. Proposition 3.13.
Fur Ω+ ergibt sich nun aus Lemma 5.12 und dem eben Bewiesenen∫
Ω+
∂jf(x) dx =
∫
Ω
∂jf(x) dx−∫
Ω−
∂jf(x) dx = −∫
M
f(x)νj(x) dS(x)
fur alle j ∈ 1, . . . , n.
Das ist der wesentliche Schritt im Beweis von Satz 5.11. ν ist die Normale anM , die in Richtung Ω+, also von Ω− aus gesehen nach außen zeigt. Das sieht mandaraus, dass ν senkrecht auf allen ∂jΦ(x′) = (0, . . . , 0, 1, 0, . . . , 0, ∂jh(x
′)) steht(die 1 im j-ten Eintrag) und dass νn > 0 ist.
Lemma 5.14 Es sei U ⊂ Rn eine offene Menge und Ω ⊂ U eine kompakte Teil-
menge mit glattem Rand. Zu jedem p ∈ ∂Ω gibt es – ggf. nach Umnummerierungder Koordinaten – eine offene Menge U ′ ⊂ R
n−1, ein offenes Intervall I ⊂ R undein ψ ∈ C1(U ′; I), so dass
U = U ′ × I und ∂Ω ∩ U = (x′, ψ(x′)) : x′ ∈ U ′
ist. Dabei ist
Ω ∩ U = x ∈ U : xn ≤ ψ(x) oder Ω ∩ U = x ∈ U : xn ≥ ψ(x).
Beweis. Es sei p ∈ ∂Ω. Indem wir ∂Ω lokal als Nullstellenmenge von Ψ1, wobeiΨ = (Ψ1, . . . ,Ψn) = Φ−1 die Inverse einer Rand-adaptierten Karte ist, schreiben,erhalten wir wie im ersten Beweisteil von Satz 2.2 nach eventueller Umnummerie-rung der Koordinaten offene Mengen U ′ ⊂ R
n−1 und I ⊂ R mit p ∈ U := U ′ × I,∂nΨ1 < 0 auf U oder ∂nΨ1 > 0 sowie eine stetig differenzierbare Abbildungψ : U ′ → I, so dass
∂Ω ∩ (U ′ × I) = (x′, ψ(x′)) : x′ ∈ U ′
gilt, mit Hilfe des Satzes uber implizite Funktionen. Indem wir U ′ hinreichendklein wahlen, konnen wir dabei o.B.d.A. annehmen, dass I ein Intervall ist. Jenachdem ob ∂nΨ1 positiv oder negativ auf ∂Ω ∩ U ist, gilt
57

Ω ∩ U = x ∈ U : Ψ1(x) ≤ 0 =
x ∈ U : xn ≤ ψ(x′) oder
x ∈ U : xn ≥ ψ(x′).
Beweis von Satz 5.11. Da ∂Ω kompakt ist, gibt es nach Lemma 5.14 endlich vieleMengen (Uj)j=1,...,N , die ∂Ω uberdecken, so dass fur jedes Uj nach einer Umnum-merierung der Koordinaten (von j abhangige) offene Mengen U ′ ⊂ R
n−1 undI = (a, b) ⊂ R sowie stetig differenzierbare Abbildungen ψ : U ′ → I existierenmit Uj = U ′ × I und
∂Ω ∩ (U ′ × I) = (x′, ψ(x′)) : x′ ∈ U ′,
Ω ∩ (U ′ × I) =
x ∈ U : xn ≤ ψ(x) oder
x ∈ U : xn ≥ ψ(x).
Ist ν die außere Normale an ∂Ω, so ist dann
ν(x) =(−∇ψ(x′), 1)√
1 + |∇ψ(x′)|2bzw. ν(x) =
(∇ψ(x′),−1)√
1 + |∇ψ(x′)|2
auf Uj. Es sei nun (αj)j=0,...,N eine (Ω, U1, . . . , UN) untergeordnete glatte Teilungder Eins auf Ω gemaß Satz 5.10. Nach Lemmas 5.12 und 5.13 gilt dann
∫
Ω
div f(x) dx =
∫
Ω
div (α0f) (x) dx+N∑
j=1
∫
Ω∩Uj
div (αjf) (x) dx
=N∑
j=1
∫
Ω∩Uj
n∑
k=1
∂k(αjfk)(x) dx
=
N∑
j=1
∫
∂Ω∩Uj
n∑
k=1
(αjfk)(x)νk(x) dS(x)
=
∫
∂Ω
f(x) · ν(x) dS(x).
5.4 Anwendungen des Gaußschen Satzes
Der Satz von Gauß hat unzahlige Anwendungen. Wir gehen hier zunachst kurzauf eine Anwendung in der Modellierung ein, bevor wir zu wichtigen Umformu-lierungen kommen, die selbst in vielen Anwendungen wichtig sind.
58

Modellierung
Der Gaußche Integralsatz spielt eine wichtige Rolle bei der Formulierung vonphysikalischen Gesetzen durch partielle Differentialgleichungen. Es sei u(x, t) dieKonzentration eines Stoffes im Raumpunkt x ∈ U . Wir betrachten ein kompaktesglatt berandetes “Testvolumen” V ⊂ U . Die zeitliche Veranderung der Konzen-tration
∫
Vu(x, t) dx des Stoffes in V ist dann gegeben durch
d
dt
∫
V
u(x, t) dx =
∫
V
∂tu(x, t) dx
(hinreichende Glattheit von u vorausgesetzt). Bezeichnet F (x, t) die (glatte) Fluss-dichte (Konzentration × Geschwindigkeit), so lasst sich dies auch durch
d
dt
∫
V
u(x, t) dx = −∫
∂V
F (x, t) · ν(x) dS(x) = −∫
V
divx F (x, t) dx
ausdrucken2, wobei wir den Satz von Gauß benutzt haben. Insbesondere ist furjede Kugel Bε(x0) ⊂ R
n
∫
Bε(x0)
(∂tu(x, t) + divx F (x, t)
)dx = 0
und damit die durch den Fluss F bewirkte Konzentrationsanderung
∂tu = − divx F,
weshalb man divF auch die Quellstarke des Feldes F nennt.Wir nehmen nun an, dass die Flußdichte proportional zum Konzentrations-
gradienten sei: F = −a∇u. Dann ist divF = −a div∇u = −a∆xu, wobei ∆x denLaplace-Operator2 ∆x =
∑n
i=1 ∂2i bezeichnet. Es gilt dann
∂tu = a∆xu
in U . Das ist die sogenannte Diffusions- oder Warmeleitungsgleichung.Dass F wirklich proportional zum Gradienten von u ist, ist eine konstitutive
Annahme an das untersuchte Modell. Je nach physikalischer Bedeutung von ubeschreibt die Gleichung F = −a∇u ein physikalisches Gesetz. Bezeichnet u etwaeine chemische Konzentration, so ist F = −a∇u das Ficksche Diffusionsgesetz,ist u die Warme eines Mediums in U , das Fouriersche Gesetz der Warmeleitung.
Gibt es zusatzliche Quellen oder Senken, die durch eine Dichte g beschriebenwerden, sodass sich die Konzentration in Testgebieten V zusatzlich um den Term∫
Vg(x, t) andert, erhalt man auf diese Weise die inhomogene Gleichung
∂tu = a∆xu+ g.
2Das Subskript x ist nur notig, wenn die betrachteten Funktionen von weiteren Variablen(hier t) abhangen.
59
Im statischen Fall, der Systeme im Gleichgewicht beschreibt, so dass die Großeu nicht von der Zeit abhangt, ergibt sich die Laplace-Gleichung
∆u = 0
oder, wenn Quellen und Senken existieren, die inhomogene Poisson-Gleichung
a∆u = g.
Partielle Integration und Greensche Formeln
Als Korollare des Gaußsschen Integralsatzes erhalt man wichtige Rechenregelnfur mehrdimensionale Integrale. In den beiden folgenden Korollaren sei U ⊂ R
n
eine offene Menge und Ω ⊂ U eine kompakte Teilmenge mit glattem Rand undaußerem Einheitsnormalenfeld ν.
Korollar 5.15 (Partielle Integration) Sind u, v ∈ C1(U), so gilt∫
Ω
(∂ju) v dx =
∫
∂Ω
u v νj dS −∫
Ω
u ∂jv dx
fur j ∈ 1, . . . , n.
Beweis. Wende den Gaußschen Satz auf das Vektorfeld f(x) = u(x)v(x)ej an.
Wahlt man v ≡ 1, so ergibt sich hieraus die aquivalente Formulierung desGaußschen Satzes ∫
Ω
∂ju dx =
∫
∂Ω
u νj dS
fur u ∈ C1(U), j ∈ 1, . . . , n.Ist nun x ∈ ∂Ω, u ∈ C1(U), so bezeichnen wir die Richtungsableitung in
Richtung ν(x) bei x mit ∂νu(x) = Du(x)ν(x).
Korollar 5.16 (Greensche Formeln) Sind u, v ∈ C2(U), so gilt
(i) ∫
Ω
∆u dx =
∫
∂Ω
∂νu dS.
(ii)∫
Ω
∇u · ∇v dx =
∫
∂Ω
u ∂νv dS −∫
Ω
u∆v dx.
(iii) ∫
Ω
u∆v − v∆u dx =
∫
∂Ω
u ∂νv − v ∂νu dS.
Beweis. Ubung!
60

5.5 Der Integralsatz von Stokes
Wir kommen nun zu einem weiteren beruhmten Satz der klassischen Vektorana-lysis: dem Satz von Stokes. Der klassische Satz von Stokes, auf den wir uns hierbeschranken, behandelt Integrale uber die Rotation eines Vektorfelds in n = 3Dimensionen. Er ist insbesondere fur die physikalischen Anwendungen wichtig.
Der Stokessche Satz
Satz 5.17 (Der Stokessche Integralsatz) Es sei M ⊂ U , U ⊂ R3 offen, eine
durch das Normalenfeld ν orientierte zweidimensionale C2-Mannigfaltigkeit. Ω ⊂M sei eine kompakte glatt berandete Teilmenge, deren Rand ∂Ω die induzierteOrientierung trage. Die hierdurch induzierte Orientierung auf Tp∂Ω, p ∈ ∂Ω, seidurch die Tangenteneinheitsvektoren t(p) gegeben. Ist nun f ∈ C1(U ; R3), so gilt
∫
Ω
rot f(x) · ν(x) dS(x) =
∫
∂Ω
f(x) · t(x) dS(x).
Wir erinnern daran, dass ν und t durch die Rechte-Hand-Regel “ν × t zeigt inRichtung Ω” verknupft sind. Mit der in Definition 5.1 eingefuhrten Bezeichnungfur die “Randkurve” ∂Ω schreibt man (etwas lax) auch
∫
Ω
rot f(x) · d~S(x) =
∫
∂Ω
f(x) · dx.
Zum Beweis benotigen wir ein elementares Lemma aus der linearen Algebra:
Lemma 5.18 Fur A = (aij) ∈ R3×3, x, y ∈ R
3 gilt die algebraische Identitat
(Ax) · y − (Ay) · x =
a32 − a23
a13 − a31
a21 − a12
· (x× y).
Beweis. Fur b, x ∈ R3 ist
b× x = Bx, wo B =
0 −b3 b2b3 0 −b1−b2 b1 0
.
Speziell fur b =
a32 − a23
a13 − a31
a21 − a12
ergibt sich
B =
0 a12 − a21 a13 − a31
a21 − a12 0 a23 − a32
a31 − a13 a32 − a23 0
= A− AT
61

und daher
(Ax) · y − (Ay) · x =((A− AT )x
)· y = (b× x) · y = (x× y) · b.
Beweis von Satz 5.17. Es sei A ein orientierter Atlas aus Rand-adaptierten Kar-ten, s. Lemma 4.6. Wir nehmen zunachst an, dass der Trager von f ganz in einemKartengebiet U einer Rand-adaptierten Karte Φ : V → U aus A liegt. Nach Bei-spiel 3 auf Seite 40 und dem Beispiel von Seite 43 ist die Orientierung auf Udurch die Normale
ν(p) =∂1Φ × ∂2Φ
|∂1Φ × ∂2Φ|(a), a = Φ−1(p),
induziert, wahrend die induzierte Orientierung auf ∂Ω ∩ U durch die eindimen-sionalen Karten s 7→ Φ(0, s) bzw. die entsprechenden Tangenteneinheitsvektoren
t(p) =∂2Φ(0, s)
|∂2Φ(0, s)| , (0, s) = Φ−1(p),
gegeben ist.Definieren wir das zweidimensionale Vektorfeld u ∈ C1(V ; R2) durch
u =
((f Φ) · ∂2Φ−(f Φ) · ∂1Φ
)
,
so ist nach Lemma 5.18
div u = ∂1
((f Φ) · ∂2Φ
)− ∂2
((f Φ) · ∂1Φ
)
=((Df) Φ ∂1Φ
)· ∂2Φ + (f Φ) · ∂1∂2Φ
−((Df) Φ ∂2Φ
)· ∂1Φ − (f Φ) · ∂2∂1Φ
=((Df) Φ ∂1Φ
)· ∂2Φ −
((Df) Φ ∂2Φ
)· ∂1Φ.
=
∂2f3 − ∂3f2
∂3f1 − ∂1f3
∂1f2 − ∂2f1
Φ
· (∂1Φ × ∂2Φ)
=((rot f) Φ
)· (∂1Φ × ∂2Φ) .
Nun ist die Gramsche Determinante der Karte Φ gerade durch
g = |∂1Φ × ∂2Φ|2
gegeben.
Ubung: Zeigen Sie dies!
62

Es gilt also∫
Ω
rot f · ν dS =
∫
V ∩x1≤0
((rot f) Φ
)· ∂1Φ × ∂2Φ
|∂1Φ × ∂2Φ||∂1Φ × ∂2Φ| dx
=
∫
V ∩x1≤0
((rot f) Φ
)· (∂1Φ × ∂2Φ) dx
=
∫
V ∩x1≤0
div u dx.
u hat kompakten Trager in V , so dass wir u durch 0 auf ganz R2 fortsetzen
konnen. Angewandt auf eine glatt berandete Teilmenge V ⊂ R2 mit V ∩ x1 ≤
0 ⊂ V ⊂ x1 ≤ 0 liefert der Gaußsche Satz dann∫
Ω
rot f · ν dS(x) =
∫
V ∩x1=0
u · e1 dS(x)
=
∫
s:(0,s)∈V
f(Φ(0, s)) · ∂2Φ(0, s) ds
=
∫
s:(0,s)∈V
f(Φ(0, s)) · t(Φ(0, s)) |∂2Φ(0, s)| ds
=
∫
∂Ω
f(x) · t(x) dS(x).
(Man kann V etwa als das “Stadium”
V = BR(−R,−R) ∪B1(−R,R) ∪ ([−2R, 0] × [−R,R])
fur hinreichend großes R wahlen.)
Ubung: Zeigen Sie, dass V tatsachlich eine kompakte glatt berandete Teilmengedes R
2 ist.
Im allgemeinen Fall gibt es, da Ω kompakt ist, endlich viele Karten (Φj :Vj → Ui) aus A, so dass Ω ⊂ ⋃j Uj ist. Ist (αj) eine (Uj) untergeordnete glatteTeilung der Eins auf einer Umgebung von Ω gemaß Satz 5.10, so ergibt sich ausdem schon behandelten Fall
∫
Ω
rot f · ν dS =∑
j
∫
Ω
rot(αjf) · ν dS =∑
j
∫
∂Ω
αjf · t dS =
∫
∂Ω
f · t dS.
Ahnlich wie die Divergenz die Quellstarke eines Feldes angibt, quantifiziertdie Rotation die Wirbelstarke: Ist Ω ⊂ R
3 eine Kreisscheibe vom Radius 1 mitNormale ν und Mittelpunkt x0 ∈ U , so ist nach dem Satz von Stokes
∫
rΩ
rot f(x) · d~S(x) =
∫
r∂Ω
f(x) · dx
63

fur Vektorfelder f ∈ C1(U) und r > 0 klein. Die rechte Seite aber misst, wiestark f um den Punkt x0 in der auf ν senkrechten Ebene “wirbelt”, indem sie fuber die x0 in dieser Ebene umlaufende Kurve r∂Ω aufintegriert. Teilt man durchVol2(rΩ) = πr2 und schickt r → 0, erhalt man
rot f(x0) · ν = limr→0
1
πr2
∫
r∂Ω
f(x) · dx.
Eine Anwendung
Mit Hilfe der Satze von Gauß und Stokes lassen sich physikalische Gesetze in“integraler Form” in eine “differentielle Form” bringen, die dann mit Methodender partielle Differentialgleichungen untersucht werden konnen. Wir behandelnhier beispielhaft die Maxwellschen Gleichungen der Elektrodynamik.
Im R3 sei eine Ladungsverteilung durch die Dichte ρ gegeben. Diese Ladung
erzeugt ein elektrisches Feld E, so dass fur jedes kompakte glatt berandete GebietΩ ⊂ R
3∫
∂Ω
E(x, t) · ν(x) dS(x) = ǫ−10
∫
Ω
ρ(x, t) dx
ist. Hierbei ist ǫ0 die elektrische Feldkonstante. Ist B das Magnetfeld, so gilt∫
∂Ω
B(x, t) · ν(x) dS(x) = 0.
(Die Ladung ist die Quelle des elektrischen Feldes, wahrend das magnetische Feldimmer quellenfrei ist.) Mit Hilfe des Gaußschen Satzes folgt nun, da Ω beliebigwar:
divE(x, t) = ǫ−10 ρ(x, t),
divB(x, t) = 0,
wobei div hier nur auf die Raumkoordinaten x wirkt.Es sei nun Ω ⊂ R
3 ein glatt berandetes orientiertes Flachenstuckchen (alsoeine glatt berandete Teilmenge einer orientierten zweidimensionalen Mannigfal-tigkeit M ⊂ R
3). Das Faradaysche Induktionsgesetz besagt, dass die zeitlicheAnderung des magnetischen Flusses durch Ω ein elektrisches Feld auf dem Rand∂Ω induziert, so dass
∫
∂Ω
E(x, t) · τ(x) dS(x) = − d
dt
∫
Ω
B(x, t) · ν(x) dS(x)
= −∫
Ω
∂tB(x, t) · ν(x) dS(x)
ist, wobei der Tangenteneinheitsvektor τ(x) auf ∂Ω die durch die Normale ν(x)auf Ω induzierte Orientierung angebe.
64

Umgekehrt induzieren nach dem Ampere-Maxwellschen Gesetz die zeitlicheAnderung des Flusses des elektrischen Feldes und ein durch eine Dichte j gege-bener elektrischer Strom durch Ω ein magnetisches Feld gemaß
∫
∂Ω
B(x, t) · τ dS(x) = µ0
∫
Ω
j(x, t) · ν(x) dS(x) + µ0ǫ0d
dt
∫
Ω
E(x, t) · ν(x) dS(x)
= µ0
∫
Ω
(j(x, t) + ǫ0∂tE(x, t)
)· ν(x) dS(x),
wobei µ0 die magnetische Feldkonstante bezeichnet.Mit dem Stokesschen Satz konnen wir nun auch diese beiden Gesetze um-
schreiben und erhalten, da Ω beliebig war,
rotE(x, t) = −∂tB(x, t),
rotB(x, t) = µ0
(j(x, t) + ǫ0 ∂tE(x, t)
),
wobei rot hier nur auf die Raumkoordinaten x wirkt.Zusammengefasst ergeben sich die vier Maxwellschen Gleichungen, die die
elektromagnetische Wechselwirkung vollstandig beschreiben:
divE = ǫ−10 ρ,
divB = 0,
rotE = −∂tB,
rotB = µ0
(j + ǫ0 ∂tE
).
Im statischen Fall, wenn B = B(x) und E = E(x) nicht von t abhangen, folgtinsbesondere rotE = 0. Daher gibt es, da R
3 sternformig ist, ein Potential u mit−∇u = E. Aus divE = ǫ−1
0 ρ erhalt man, dass u der Poissongleichung
−∆u = ǫ−10 ρ
genugt. Fur B existiert wegen divB = 0 ein Vektorpotential A mit rotA = B.Dieses erfullt die Gleiching
rot rotA = µ0j,
die sich auch in der Form
−∆A + ∇ divA = µ0j
schreiben lasst (s.u.).
Ubung: Zeigen Sie rot rot = −∆+∇ div, genauer: Fur f ∈ C2(U ; R3), U ⊂ R3
offen, giltrot rot f = −∆f + ∇ div f.
65
Kapitel 6
Differentialformen
Im letzten Kapitel dieser Vorlesung gehen wir noch auf eine weitreichende Verall-gemeinerung der klassischen Integralsatze ein: den allgemeinen Satz von Stokesim Differentialformenkalkul.
Differentialformen der Ordnung k, k ∈ N0, sind Abbildungen ω auf einerMannigfaltigkeit, so dass ω(p) eine alternierende k-Form auf dem Tangential-raum TpM ist. Diese alternierenden k-Formen sind spezielle Multilinearformenauf TpM . Ist k = 0, so handelt es sich schlicht um Funktionen. Fur k = 1 istω(p) eine Linearform auf TpM . Erinnern wir uns, dass Kurvenintegrale geradeauf den tangentialen Anteil eines Vektorfeldes wirken, so stellen sich im Differen-tialformenkalkul die Differentialformen der Ordnung 1 gerade als die geeignetenIntegranden uber eindimensionale Mannigfaltigkeiten heraus. Das ebenfalls imvorigen Kapitel untersuchte orientierte Integral eines Vektorfeldes uber eine Hy-perflache kann nun als ein Integral uber eine Differentialform der Ordnung n− 1interpretiert werden. Ganz allgemein werden wir Differentialformen der Ordnungk uber k-dimensionale Mannigfaltigkeiten integrieren. Die Multilinearitat vonω(p) stellt dabei sicher, dass wir das k-dimensionale Volumen kleiner ‘Maschen’auf M (vgl. den Beginn von Abschnitt 3.2) richtig messen. Dass ω(p) außerdemalterniert, gibt uns die Moglichkeit, zusatzlich die Orientierung solcher Maschenzu berucksichtigen.
Wir machen uns das Leben hier etwas einfacher, indem wir immer annehmen,dass ω auf einer Umgebung G vonM definiert ist und die alternierenden k-Formenω(p) auf ganz R
n wirken.
6.1 Multilineare Algebra
Es sei V ein n-dimensionaler reeller Vektorraum.
Definition 6.1 Eine alternierende k-Form (kurz k-Form) auf V , k ∈ N, ist eineAbbildung ω : V k → R, die
66

(i) in jedem Argument linear ist und
(ii) bei der Vertauschung zweier Eintrage das Vorzeichen wechselt:
ω(v1, . . . , vi, . . . , vj, . . . , vk) = −ω(v1, . . . , vj, . . . , vi, . . . , vk)
fur i 6= j.
Der Vektorraum der k-Formen wird mit Altk V bezeichnet, wobei man noch Alt0 V =R setzt.
Beispiele:
1. Die Determinantenabbildung (v1, . . . , vk) 7→ det(v1, . . . , vk) ist eine k-Formauf R
k.
2. Ist k = 1, so ist die Bedingung (ii) leer. Es gilt also Alt1 V = V ∗, wobei V ∗
den Dualraum von V bezeichnet.
Bemerkung: Ahnlich wie bei der Untersuchung der Eigenschaften der Determi-nante in der linearen Algebra sieht man, dass fur eine Abbildung ω : V k → R,die (i) genugt, (ii) aquivalent zu jeder der folgenden Bedingungen ist:
(iia) ω(v1, . . . , vk) verschwindet, wenn zwei der Eintrage gleich sind.
(iib) ω(v1, . . . , vk) verschwindet, wenn die v1, . . . , vk linear abhangig sind.
(iic) Ist π ∈ Sk, also eine Permutation auf 1, . . . , k, so gilt
ω(v1, . . . , vk) = sign(π)ω(vπ(1), . . . , vπ(k)).
Neben den Vektorraumoperationen in Altk V gibt es nun eine wichtige zusatz-liche Veknupfung zweier beliebiger Formen:
Definition 6.2 Es seien ω ∈ Altk V und η ∈ Altl V . Dann ist das außere Produkt
(oder Dachprodukt) ω ∧ η ∈ Altk+l V von ω und η durch
ω ∧ η(v1, . . . , vk+l) :=1
k!l!
∑
π∈Sk+l
sign(π)ω(vπ(1), . . . , vπ(k)) η(vπ(k+1), . . . , vπ(k+l))
definiert.
Mit Hilfe von (iic) erkennt man leicht, dass durch diese Vorschrift tatsachlich einealternierende (k + l)-Form auf V definiert wird.
Das folgende Lemma fasst die wesentlichen Eigenschaften des Dachproduktszusammen.
67

Lemma 6.3 Das Dachprodukt ist
(i) bilinear,
(ii) assoziativ,
(iii) antikommutativ, d.h. ω ∧ η = (−1)klη ∧ ω fur ω ∈ Altk V und η ∈ Altl Vund es gilt
(iv) 1 ∧ ω = ω ∧ 1 = ω fur 1 ∈ Alt0 = R und ω ∈ Altk V .
Beweis. (i) und (iv) sind elementar. Fur (iii) beachte, dass die Permutation(1, . . . , k + l) 7→ (k + 1, . . . , k + l, 1, . . . , k) Signum (−1)kl hat.
Es bleibt (ii) zu begrunden.1 Dazu werden wir zeigen, dass fur ω ∈ Altk V ,η ∈ Altl V und ζ ∈ Altm V sowohl ω∧(η∧ζ) als auch (ω∧η)∧ζ auf (v1, . . . , vk+l+m)durch∑
π∈Sk+l+m
sign(π)
k!l!m!ω(vπ(1), . . . , vπ(k)) η(vπ(k+1), . . . , vπ(k+l)) ζ(vπ(k+l+1), . . . , vπ(k+l+m))
(6.1)
gegeben ist.Wir behandeln nur ω ∧ (η ∧ ζ)(v1, . . . , vk+l+m), gegeben durch
∑
π∈Sk+l+m
sign(π)
k!(l +m)!ω(vπ(1), . . . , vπ(k)) (η ∧ ζ)(vπ(k+1), . . . , vπ(k+l+m)). (6.2)
Dass (ω ∧ η) ∧ ζ(v1, . . . , vk+l+m) auch durch (6.1) gegeben ist, folgt analog.Es sei a = (a1, . . . , ak) mit a1, . . . , ak ∈ 1, . . . , k+ l+m paarweise verschie-
den. Die Permutationen π mit π(1) = a1, . . . , π(k) = ak sind gegeben durch
π(j) =
τa(j), j = 1, . . . , k,
τa(k + π′(j − k)), j = k + 1, . . . , k + l +m,π′ ∈ Sl+m,
wobei τa ∈ Sk+l+m eine beliebige Permutation mit τa(1) = a1, . . . , τa(k) = ak ist.Hierbei ist sign(π) = sign(τa) sign(π′). (Das stimmt, wenn π′ die Identitat, alsoπ = τa ist, und ergibt sich im allgemeinen Fall durch sukzessives Anwenden vonTranpositionen.) Indem man (6.1) nun zuerst uber solche π aufsummiert, erhaltman∑
a
sign(τa)
k!ω(va1 , . . . , va1)
1
l!m!
∑
π′∈Sl+m
sign(π′)η(vτa(k+π′(1)), . . . , vτa(k+π′(l)))·
· ζ(vk+τa(π′(l+1)), . . . , vτa(k+π′(l+m)))
=∑
a
sign(τa)
k!ω(va1, . . . , va1) (η ∧ ζ)(vτa(k+1), . . . , vτa(k+l+m)).
1Beim ersten Lesen kann man diesen Beweis getrost uberspringen.
68

Summiert man (6.2) nun zuerst uber solche π, ergibt sich tatsachlich auch
∑
a
sign(τa)
k!ω(va1 , . . . , va1)
1
(l +m)!
∑
π′∈Sl+m
sign(π′)
· (η ∧ ζ)(vτa(k+π′(1)), . . . , vτa(k+π′(l+m)))
=∑
a
sign(τa)
k!ω(va1, . . . , va1)(η ∧ ζ)(vτa(k+1), . . . , vτa(k+l+m)),
denn weil η ∧ ζ alternierend ist, liefern alle Summanden in der inneren Summeden gleichen Beitrag.
Bemerkung: Auf ahnliche Weise erhalt man durch Induktion allgemein fur NSummanden: Sind ωi ∈ Altki V , i = 1, . . .N , so gilt
(ω1 ∧ . . . ∧ ωN)(v1, . . . , vk1+...+kN)
=∑
π∈Sk1+...+kN
sign(π)
k1! · . . . · kN !
∏
i
ωi(vπ(k1+...+ki−1+1), . . . , vπ(k1+...+ki)).
Sind insbesondere ω1, . . . , ωk ∈ V ∗, v1, . . . , vk ∈ V , so ist also
(ω1 ∧ . . . ∧ ωk)(v1, . . . , vk) = det((ωi(vj))ij
).
Mit Hilfe des Dachprodukts konnen wir aus einer Basis von V (bzw. ihrerdualen Basis von V ∗) Basen aller Altk V konstruieren:
Satz 6.4 Es sei (δ1, . . . , δn) eine Basis von V ∗. Dann ist (δi1 ∧ . . . ∧ δik : i1 <. . . < ik) eine Basis von Altk V . Ist (ei) die zu (δi) duale Basis von V , so gilt
ω =∑
1≤i1<...<ik≤n
ai1...ikδi1 ∧ . . . ∧ δik , ai1...ik = ω(ei1, . . . , eik).
Insbesondere ist dim Altk V =(
n
k
)und somit Altk V = 0 fur k ≥ n+ 1.
Beweis. Wir zeigen zunachst die angegebene Darstellung von ω. Durch Einsetzensieht man, dass die beiden Seiten angewandt auf (ej1 , . . . , ejk
) mit j1 < . . . < jkubereinstimmen und damit als alternierende k-Formen sogar schon uberall.
Ist∑
i1<...<ikbi1...ikδi1 ∧ . . . ∧ δik = 0, so erhalt man durch Einsetzen von
(ej1, . . . , ejk) mit j1 < . . . < jk, dass bj1...jk
= 0 sein muss, was die lineare Un-abhangigkeit der betrachteten Menge zeigt.
Besonders wichtig ist es, zu untersuchen, wie die Dachprodukte mit linearenTransformationen wechselwirken. Ist W ein weiterer reeller Vektorraum und f :V → W eine lineare Abbildung, so kann man jede k-Form auf W mittels f aufV zuruckholen:
69

Definition 6.5 Es seien V , W endlichdimensionale reelle Vektorraume und f :V → W linear. Ist ω ∈ Altk W , so ist die zuruckgeholte Form f ∗ω ∈ Altk Vdefiniert durch
f ∗ω(v1, . . . , vk) = ω(fv1, . . . , fvk).
Lemma 6.6 Es seien V , W endlichdimensionale reelle Vektorraume. Das Dach-produkt ist vertraglich mit linearen Abbildungen:
f ∗(ω ∧ η) = (f ∗ω) ∧ (f ∗η)
fur ω ∈ Altk W und η ∈ AltlW , f : V →W linear.
Beweis. Klar.
Lemma 6.7 Ist speziell W = V und ω eine n-Form, so gilt
f ∗ω = (det f)ω.
Beweis. Da Altn V eindimensional (s. Satz 6.4) und die Abbildung f ∗ : Altn V →Altn V linear ist, gibt es ein c ∈ R, so dass
f ∗ω = cω ∀ω ∈ Altn V
gilt. Es sei nun Φ : V → Rn ein Isomorphismus und ω = Φ∗ det (s. Beispiel 1 auf
Seite 67). Dann ergibt sich fur die kanonische Basis (ei) von Rn
c = c det(e1, . . . , en)
= cω(Φ−1e1, . . . ,Φ−1en)
= f ∗ω(Φ−1e1, . . . ,Φ−1en)
= ω(fΦ−1e1, . . . , fΦ−1en)
= det(ΦfΦ−1e1, . . . ,ΦfΦ−1en)
= det f.
6.2 Differentialformen im Rn
Im Folgenden sei G ⊂ Rn eine offene Menge.
Definition 6.8 Eine Differentialform der Ordnung k (kurz k-Form) auf G, k ∈N0, ist eine Abbildung ω : G→ Altk
Rn.
70

Beispiele:
1. Differentialformen der Ordnung 0 sind einfach reellwertige Funktionen aufG.
2. Ist f ∈ C1(G), so ist x 7→ Df(x) eine 1-Form.
Die Menge der k-Formen auf G wird bei punktweiser Addition und punktwei-ser Multiplikation mit Skalaren wieder zu einem Vektorraum. Auch das Dachpro-dukt definiert man punktweise gemaß (ω ∧ η)(x) = ω(x) ∧ η(x) fur eine k-Formω und eine l-Form η.
Das letzte Beispiel fuhrt zu einer Darstellung von Differentialformen in Ko-ordinaten. Ist f : G → R differenzierbar, so schreibt man in der Theorie derDifferentialformen df fur Df . Wir betrachten nun die i-te Koordinatenprojek-tion x 7→ xi. Verwirrenderweise ist es ublich, diese Funktion wieder mit demSymbol xi zu belegen, so dass also
xi : G→ R, xi(x) = xi
gilt. (Wenn man sich immer sorgfaltig klar macht, welche Rolle “xi” gerade spielt,ist das nach etwas Ubung gar nicht mehr so verwirrend.) Es ist dann dxi(x)ej = δijfur alle x ∈ G und i, j ∈ 1, . . . , n, so dass (dxi) die zur Standardbasis (ei)duale Basis des (Rn)∗ ist2. Nach Satz 6.4 lasst sich dann jede Differentialform derOrdnung k eindeutig durch
ω =∑
1≤i1<...<ik≤n
ai1...ikdxi1 ∧ . . . ∧ dxik , ai1...ik(x) = ω(x)(ei1 , . . . , eik)
darstellen.Beispiel: Ist f : G→ R differenzierbar, so gilt
df =n∑
j=1
∂f
∂xj
dxj ,
denn∑n
j=1 ∂jf(x) dxj(ei) = ∂if(x) = Df(x)ei = df(x)ei.
Ahnlich wie alternierende Formen auf Vektorraumen unter linearen Abbildungzuruckgeholt werden konnen, wollen wir nun Differentialformen unter differenzier-baren Abbildungen zuruckholen.
2Im allgemeinen Fall, wenn Differentialformen – wie zu Beginn dieses Kapitels erwahnt– nur auf Mannigfaltigkeiten definiert sind und Werte in
⋃
p∈M Altk TpM annehmen, ist dieAbbildung xi als die i-te Komponente der Inversen einer Karte definiert. Deren Ableitungdxi(p) stellt sich dann als lineare Abbildung dxi(p) : TpM → R heraus, die nun i.A. nichtkonstant in p ist. Selbst in unserer vereinfachten Situation wird sich diese – zunachst vielleichtetwas umstandlich wirkende – Notation jedoch als nutzlich erweisen.
71

Definition 6.9 Es seien G1 ⊂ Rm, G2 ⊂ R
n offen f ∈ C1(G1;G2) und ω eineDifferentialform der Ordnung k auf G2. Die auf G1 zuruckgeholte Form f ∗ω istdann definiert durch
f ∗ω(x) =((Df)∗ω
)(f(x)
).
Mit anderen Worten:
f ∗ω(x)(v1, . . . , vk) = ω(f(x))(Df(x)v1, . . . , Df(x)vk).
Die wesentliche Begriffsbildung ist nun die außere Ableitung von Differential-formen:
Satz 6.10 Es gibt genau eine Moglichkeit, jeder differenzierbaren k-Form ω, k ∈N0, eine (k + 1)-Form dω zuzuordnen, so dass
(i) d linear ist,
(ii) df = Df fur f : G→ R differenzierbar (also k = 0) gilt,
(iii) die Produktregel gilt:
d(ω ∧ η) = (dω) ∧ η + (−1)kω ∧ (dη),
wo ω eine k-Form und η eine beliebige Differentialform ist, und
(iv) die Komplexitatseigenschaft d d = 0 erfullt ist:
ddω = 0
fur ω ∈ C2(G; AltkR
n).
Ist ω gegeben durch ω =∑
i1<...<ikai1...ikdxi1 ∧ . . . ∧ dxik , so ergibt sich
dω =∑
i1<...<ik
dai1...ik ∧ dxi1 ∧ . . . ∧ dxik .
Definition 6.11 Die durch Satz 6.10 eindeutig festegelegte Operation wird fortanmit d bezeichnet. Ist ω eine differenzierbare Differentialform, so heißt dω dieaußere Ableitung (auch Cartansche Ableitung oder Differential) von ω.
Beweis. Es sei d eine solche Operation. Wir bemerken zunachst, dass wir wegen(ii) weiter dxi schreiben durfen. Der Reihe nach aus (i), (iii) und (iv) folgt nun
d∑
i1<...<ik
ai1...ikdxi1 ∧ . . . ∧ dxik =∑
i1<...<ik
dai1...ik ∧ dxi1 ∧ . . . ∧ dxik , (6.3)
was d eindeutig festlegt. Es bleibt nun umgekehrt zu zeigen, dass die durch (6.3)gegebene Abbildung d (i)–(iv) erfullt, wobei d auf der rechten Seite die AbleitungD bezeichnet.
72

(i) und (ii) sind klar. Insbesondere mussen wir im Folgenden nicht zwischenAbleitungen D und d unterscheiden.
(iii): Zum Nachweis von (iii) durfen wir wegen (i) und der Bilinearitat von ∧annehmen, dass
ω = aI dxI , η = aJ dxJ
ist, wobei wir abkurzend dxI = dxi1 ∧ . . . ∧ dxik und dxJ = dxi1 ∧ . . . ∧ dxik
fur I = (i1, . . . , ik) und J = (j1, . . . , jl) geschrieben haben und aI sowie aJ
differenzierbare Funktionen sind. Da anderenfalls beide Seiten in (iii) gleich 0ergeben, durfen wir außerdem ir 6= js fur alle r, s annehmen. Aus der Produktregelfur die gewohnliche Ableitung folgt nun
d(aI dxI ∧ aJ dxJ
)= d(aI aJ) ∧ dxI ∧ dxJ
= aJ daI ∧ dxI ∧ dxJ + aI daJ ∧ dxI ∧ dxJ
= (daI ∧ dxI) ∧ (aJ dxJ) + (−1)k(aI dxI) ∧ (daJ ∧ dxJ).
(iv) Fur 0-Formen f gilt nach dem Beispiel von Seite 71
ddf = d
n∑
j=1
∂jf dxj =
n∑
j=1
n∑
i=1
∂i∂j dxi ∧ dxj
=∑
i<j
(∂i∂jf − ∂j∂if)dxi ∧ dxj = 0
nach dem Satz von Schwarz. Allgemein ergibt sich daraus dann mit der Produkt-regel
dd∑
i1<...<ik
ai1...ikdxi1 ∧ . . . ∧ dxik = d∑
i1<...<ik
dai1...ik ∧ dxi1 ∧ . . . ∧ dxik = 0.
Der Beweis von (iv) zeigt insbesondere, dass die Komplexitatseigenschaft eineweitreichende Verallgemeinerung des Satzes von Schwarz darstellt.Beispiele:
1. Ist f : G→ R differenzierbar, so haben wir oben gesehen, dass
df =n∑
j=1
∂jf dxj ,
gilt. Die 1-Form∑n
j=1 ∂jf dxj gibt also den Gradienten von f an.
2. Jede (n− 1)-Form ω kann in der Form
ω =n∑
j=1
(−1)j−1fj dx1 ∧ . . . ∧ dxj−1 ∧ dxj+1 ∧ . . . ∧ dxn
73

geschrieben werden. Es gilt dann
dω =n∑
j=1
n∑
i=1
(−1)j−1∂ifj dxi ∧ dx1 ∧ . . . ∧ dxj−1 ∧ dxj+1 ∧ . . . ∧ dxn
=
n∑
j=1
(−1)j−1∂jfj dxj ∧ dx1 ∧ . . . ∧ dxj−1 ∧ dxj+1 ∧ . . . ∧ dxn
= (div f) dx1 ∧ . . . ∧ dxn.
Die außere Ableitung entspricht hier also der Divergenzbildung.
3. Ist n = 3, so kann jede 1-Form ω als
ω = f1 dx1 + f2 dx2 + f3 dx3
geschrieben werden. Es gilt dann
dω = df1 ∧ dx1 + df2 ∧ dx2 + df3 ∧ dx3
= ∂2f1 dx2 ∧ dx1 + ∂3f1 dx3 ∧ dx1 + ∂3f2 dx3 ∧ dx2 + ∂1f2 dx1 ∧ dx2
+ ∂1f3 dx1 ∧ dx3 + ∂2f3 dx2 ∧ dx3
= (∂2f3 − ∂3f2)dx2 ∧ dx3 + (∂3f1 − ∂1f3)dx3 ∧ dx1
+ (∂1f2 − ∂2f1)dx1 ∧ dx2.
Definieren wir das vektorielle Linienelement d~s, das vektorielle Flachenele-ment d~F und das Volumenelement dV durch
d~s :=
dx1
dx2
dx3
, d ~F :=
dx2 ∧ dx3
dx3 ∧ dx1
dx1 ∧ dx2
und dV := dx1 ∧ dx2 ∧ dx3,
so ergibt sich nach 1, obiger Rechnung und 2 fur die skalare Funktion f unddie Vektorfelder g und h
df = ∇f · d~s, d(g · d~s) = rot g · d~F und d(h · d~F ) = div h dV.
Die Differentialoperatoren ∇, rot und div entsprechen also der außerenAbleitung d. Die Komplexitatseigenschaft d d = 0 ist hier nichts anderesals rot ∇ = 0 und div rot = 0.
Zum Schluss dieses Abschnitts halten wir noch die fundamentale Eigenschaftfest, dass Zuruckholen von Differentialformen und außere Ableitung vertauschen:
Satz 6.12 Es seien G1 ⊂ Rm, G2 ⊂ R
n offen f ∈ C2(G1;G2) und ω einedifferenzierbare Differentialform auf G2. Dann ist auch f ∗ω differenzierbar undes gilt
d (f ∗ω) = f ∗(d ω).
74

Beweis. Es sei zunachst g eine differenzierbare 0-Form. Dann ist f ∗g = g fdifferenzierbar und
(f ∗dg)(x)(v) = dg(f(x))(Df(x)v) = D(g f)(x)v = d(f ∗g)(x)(v)
fur x ∈ G1 und v ∈ Rm, also f ∗dg = d(f ∗g).
Fur allgemeine ω =∑
i1<...<ikai1...ikdxi1 ∧ . . .∧ dxik folgt die Behauptung mit
Lemma 6.6 und dem schon behandelten Fall aus
f ∗dω =∑
i1<...<ik
f ∗dai1...ik ∧ f ∗dxi1 ∧ . . . ∧ f ∗dxik
=∑
i1<...<ik
d(f ∗ai1...ik) ∧ d(f ∗xi1) ∧ . . . ∧ d(f ∗xik)
=∑
i1<...<ik
d(f ∗ai1...ik) ∧ dfi1 ∧ . . . ∧ dfik
und
df ∗ω = d∑
i1<...<ik
f ∗ai1...ik dfi1 ∧ . . . ∧ dfik
=∑
i1<...<ik
d(f ∗ai1...ik) ∧ dfi1 ∧ . . . ∧ dfik ,
wobei wir im letzten Schritt die Produktregel und die Komplexitatseigenschaftvon d ausgenutzt haben.
6.3 Integration von Differentialformen
Differentialformen der Ordnung k werden uber orientierte k-dimensionale Man-nigfaltigkeiten integriert. Wir beginnen mit dem Spezialfall k = n, wobei eineoffene Menge G immer die kanonische Orientierung trage, die durch den nur ausder identischen Abbildung bestehenden Atlas induziert ist.
Definition 6.13 Eine n-Form ω = fdx1∧. . .∧dxn heißt integrierbar uber A ⊂ Gmessbar, wenn f uber A integrierbar ist. Man definiert dann
∫
A
ω :=
∫
A
f(x)dx.
Fur Differentialformen gilt die folgende Variante des Transformationssatzes:
Satz 6.14 Sind U, V ⊂ Rn offen, ϕ : V → U ein C1-Diffeomorphismus und ω
eine integrierbare n-Form auf U , so gilt∫
V
ϕ∗ω =
∫
U
ω,
wenn ϕ orientierungstreu ist.
75

Beweis. Das ergibt sich direkt aus Lemma 6.7 und dem Transformationssatz 3.4.
Ahnlich wie in Abschnitt 3.2 definieren wir nun Integrale zunachst uber Kar-tenbereiche.
Definition 6.15 Es sei M ⊂ G eine k-dimensionale orientierte Mannigfaltigkeitund Φ : V → U eine Karte eines die gegebene Orientierung induzierenden Atlas.Ist ω : G→ Altk
Rn eine k-Form, so dass ω auf M \ U verschwindet, so heißt ω
integrierbar, wenn die zuruckgeholte k-Form
Φ∗ω
auf V gemaß Definition 6.13 integrierbar ist. Man setzt dann∫
M
ω :=
∫
V
Φ∗ω.
Wie nach Definition 3.8 muss man sich wieder davon uberzeugen, dass dieseDefnition unabhangig von der gewahlten Karte ist. Dies folgt hier in analogerWeise mit Hilfe von Satz 6.14. Der allgemeine Fall wird wieder mit einer Zerlegungder Eins nach Definition 3.10 bewerkstelligt:
Definition 6.16 Es sei M ⊂ G eine k-dimensionale durch den endlichem At-las (Φj : Vj → Uj)j=1,...,N orientierte Mannigfaltigkeit. Eine k-Form ω heißtintegrierbar, wenn χUj
ω im Sinne von Definition 6.15 integrierbar ist fur alle j.
Ist (αj) eine der Uberdeckung (Uj) untergeordnete Zerlegung der Eins, so dassαj Φj messbar ist, so wird das Integral von ω uber M definiert durch
∫
M
ω :=N∑
j=1
∫
M
αjω,
wobei auf der rechten Seite die schon in Definition 6.15 erklarten Integrale stehen.
Die Wohldefiniertheit ergibt sich ganz analog zu der von Definition 3.11 inAbschnitt 3.2.
Beispiel: 1-Formen nennt man auch Pfaffsche Formen. Diese werden uber ein-dimensionale Mannigfaltigkeiten integriert. Ist etwa M als Spur γ(I) einer C1-Kurve mit γ 6= 0 und γ : I → γ(I) ein Homoomorphismus gegeben, so ist fur ω =∑n
j=1 fj dxj die durch γ zuruckgeholte Form∑
j(γ∗fj) d(γ
∗xj) =∑
j fj γ dγj.Damit ergibt sich, falls ω integrierbar ist,
∫
M
ω =
∫
I
γ∗ω =
∫
I
∑
j
fj(γ(t)) γj(t) dt =
∫
γ
f · dx,
was ja schon durch unsere Notation fur Kurvenintegrale nahegelegt wird. Wiein Definition 5.1 kann man auf diese Weise Kurvenintegrale
∫
γω uber Pfaffsche
Formen definieren, wenn γ(I) nicht notwendig eine Mannigfaltigkeit ist.
76
6.4 Der allgemeine Satz von Stokes
Satz 6.17 (Allgemeiner Stokesscher Integralsatz) Es seien M ⊂ G eineorientierte k-dimensionale C2-Mannigfaltigkeit, Ω ⊂M eine kompakte Teilmengemit glattem Rand und ω eine stetig differenzierbare (k − 1)-Form auf G, k ≥ 2.Der Rand ∂Ω trage die induzierte Orientierung. Dann ist
∫
Ω
dω =
∫
∂Ω
ω.
Beispiele:
1. Fur k = 1 ist das nichts anderes als der Hauptsatz der Differential- undIntegralrechnung.
2. Fur k = n− 1 ist dies eine Umformulierung des Gaußschen Integralsatzes.
3. Im R3 erhalten wir mit der Notation aus dem vorigen Abschnitt
∫
Ω
div h dV =
∫
Ω
d(h · d~F ) =
∫
∂Ω
h · d~F ,
fur Ω ⊂ R3 kompakt und glatt berandet, also den Gaußschen Satz, und
∫
Ω
rot g · d~F =
∫
Ω
d(g · d~s) =
∫
∂Ω
g · d~s
fur kompakte glatt berandete Flachenstuckchen Ω im R3, was gerade der
klassische Satz von Stokes ist. Dies ergibt sich jeweils aus d~F = ν · dS,genauer nach Zuruckholen mittels Karten:
Ubung: Ist Φ ∈ C1(V ; R3), V ⊂ R2 offen, so gilt
Φ∗d~F = (∂1Φ × ∂2Φ) dx1 ∧ dx2.
Der Beweis von Satz 6.17 ergibt sich im Wesentlichen aus dem folgendenSpezialfall:
Lemma 6.18 Ist ω eine stetig differenzierbare (k − 1)-Form mit kompaktemTrager auf R
k, k ≥ 2, so ist
∫
x1≤0
dω =
∫
∂x1≤0
ω.
77

Beweis. Schreiben wir ω =∑k
j=1(−1)j−1fj dx1 ∧ . . . ∧ dxj−1 ∧ dxj+1 ∧ . . . ∧ dxk
mit fj ∈ C1(Rk), supp fj kompakt, so folgt
∫
x1≤0
dω =
∫
x1≤0
(div f) dx1 ∧ . . . ∧ dxk
=
∫
x1≤0
div f(x) dx
nach Beispiel 2 auf Seite 73.Mit dem Satz von Fubini konnen wir den j-ten Summanden in der Divergenz
jeweils zuerst uber xj intgrieren. Dabei ergibt sich
∫ ∞
−∞
∂jfj dxj = 0
fur j = 2, . . . , k und
∫ 0
−∞
∂1f1(x) dx1 = f1(0, x2, . . . xk)
fur j = 1. Es gilt also
∫
x1≤0
dω =
∫
Rk−1
f1(0, x′) dx′.
Um das Randintegral zu berechnen, bezeichnen wir die Elemente von Rk−1
mit x′ = (x′1, . . . , x′k−1) und schreiben entsprechend dx′j, j = 1, . . . , k − 1. Die
identische Abbildung Φ : Rk → R
k, Φ(x) = x induziert die Karte
Φ′ : Rk−1 → ∂x1 ≤ 0 = x1 = 0, x′ 7→ Φ(0, x′) = (0, x′)
von ∂x1 ≤ 0. Nach Satz 6.12 gilt
(Φ′)∗dxj(v) = d(xj Φ′) =
dx′j−1 fur j ≥ 2,
0 fur j = 1,
so dass mit Lemma 6.6 folgt
∫
∂x1≤0
ω =
∫
Rk−1
(Φ′)∗ω
=
∫
Rk−1
f1(Φ′(x′)) dx′1 ∧ . . . ∧ dx′k−1
=
∫
Rk−1
f1(0, x′) dx′,
78
was die Behauptung zeigt.
Beweis von Satz 6.17. Es sei A ein orientierter Atlas aus Rand-adaptierten Kar-ten. Da Ω kompakt ist, gibt es endlich viele Karten Φj : Vj → Uj , j = 1, . . . , N , so
dass Ω ⊂ ⋃N
j=1 Uj ist. Es sei nun (αj) eine der Uberdeckung (Uj) untergeordneteglatte Teilung der Eins gemaß Satz 5.10. Dann konnen wir Φ∗
j (αjω) durch 0 stetigdifferenzierbar auf ganz R
k fortsetzen.Nach Satz 6.12 ist
∫
Ω
d(αjω) =
∫
Ω∩Uj
d(αjω) =
∫
Vj∩x1≤0
Φ∗j
(d(αjω)
)
=
∫
Vj∩x1≤0
d(Φ∗
j (αjω))
=
∫
x1≤0
d(Φ∗
j (αjω)).
Es sei nun Φ′j = Φj P : V ′
j → Uj mit P (x′) = (0, x′) die von Φj induzierteRandkarte (s. den Beweis von Satz 4.7). Dann ist
∫
∂Ω
αjω =
∫
∂Ω∩Uj
αjω =
∫
V ′j
(Φ′j)
∗(αjω) =
∫
V ′j
P ∗Φ∗j(αjω)
=
∫
Vj∩x1=0
Φ∗j (αjω) =
∫
∂x1≤0
Φ∗j (αjω)
Aus Lemma 6.18 folgt nun
∫
Ω
d(αjω) =
∫
∂Ω
αjω.
Summation uber alle j beschließt den Beweis.
79
Literaturverzeichnis
[Br] M. Brokate: Vektoranalysis. Vorlesungsskript. Munchen, 2008. http://www-m6.ma.tum.de/∼brokate/vek ws08.pdf
[For] O. Forster: Analysis 3. Vieweg Studium: Aufbaukurs Mathematik. Vieweg+ Teubner, Wiesbaden, 2009.
[Ja] K. Janich: Vektoranalysis. : Springer-Lehrbuch. Springer, Berlin, 2005.
[Ko] K. Konigsberger: Analysis 2. Springer-Lehrbuch. Springer, Berlin, 2004.
80


















