






Sprachen
Seiten
Rechtliche

Annette Eicker APMG 1
1
11.04.23
Annette Eicker15.12.2011
Bewegte Bezugssysteme
Annette Eicker APMG 1
2
11.04.23
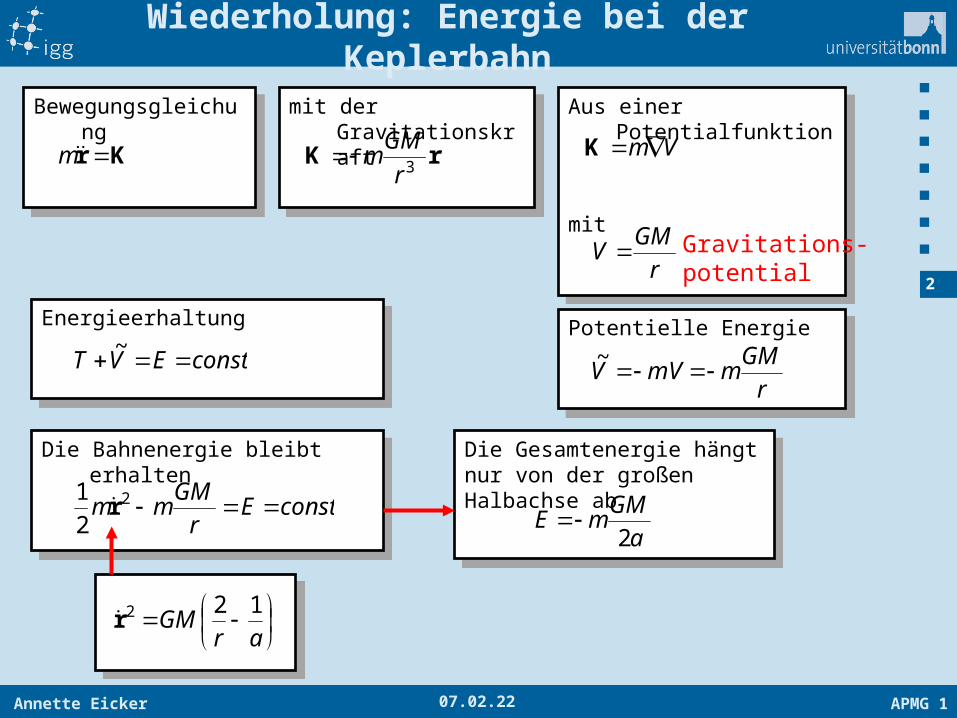
Wiederholung: Energie bei der Keplerbahn
Die Bahnenergie bleibt erhaltenDie Bahnenergie bleibt erhalten
constEr
GMmm 2
2
1r
BewegungsgleichungBewegungsgleichung mit der Gravitationskraftmit der Gravitationskraft
rK 3r
GMm
Aus einer Potentialfunktion
mit
Aus einer Potentialfunktion
mit
r
GMV
VmKKr m
arGM
122r
Die Gesamtenergie hängt nur von der großen Halbachse ab
Die Gesamtenergie hängt nur von der großen Halbachse ab
a
GMmE2
EnergieerhaltungEnergieerhaltung
constEVT ~Potentielle EnergiePotentielle Energie
r
GMmmVV ~
Gravitations-potential
Annette Eicker APMG 1
3
11.04.23
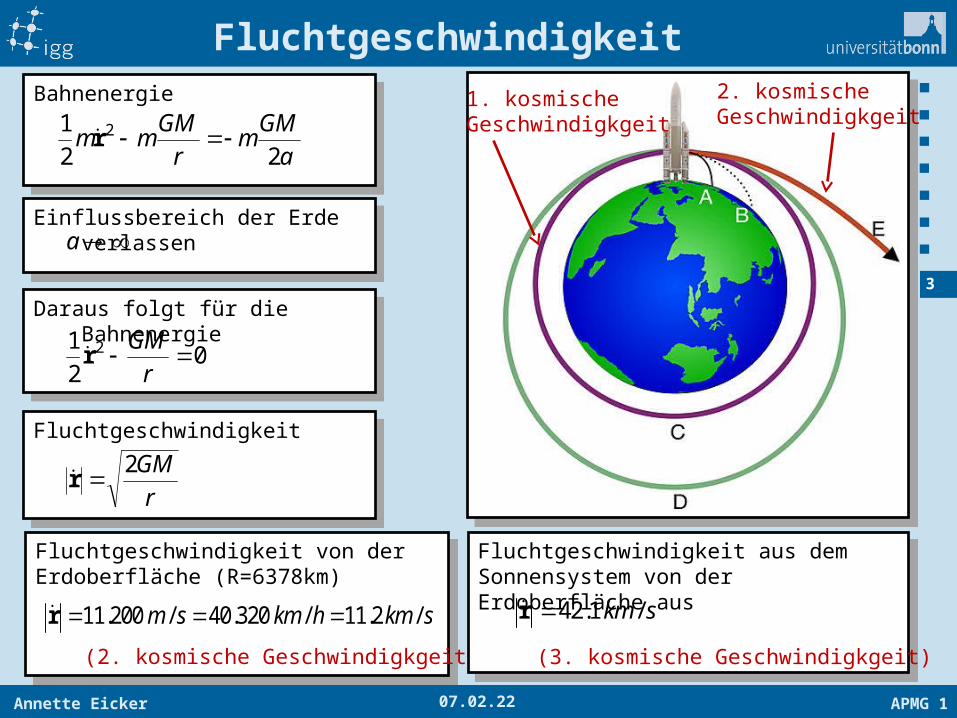
Fluchtgeschwindigkeit
BahnenergieBahnenergie
a
GMm
r
GMmm
22
1 2 r
Einflussbereich der Erde verlassenEinflussbereich der Erde verlassena
Daraus folgt für die BahnenergieDaraus folgt für die Bahnenergie
02
1 2 r
GMr
FluchtgeschwindigkeitFluchtgeschwindigkeit
r
GM2r
Fluchtgeschwindigkeit von der Erdoberfläche (R=6378km)
Fluchtgeschwindigkeit von der Erdoberfläche (R=6378km)
11.200 / 40.320 / 11.2 /m s km h km s r
(2. kosmische Geschwindigkgeit)
Fluchtgeschwindigkeit aus dem Sonnensystem von der Erdoberfläche aus
Fluchtgeschwindigkeit aus dem Sonnensystem von der Erdoberfläche aus
42.1 /km sr
(3. kosmische Geschwindigkgeit)
1. kosmische Geschwindigkgeit
2. kosmische Geschwindigkgeit
Annette Eicker APMG 1
4
11.04.23
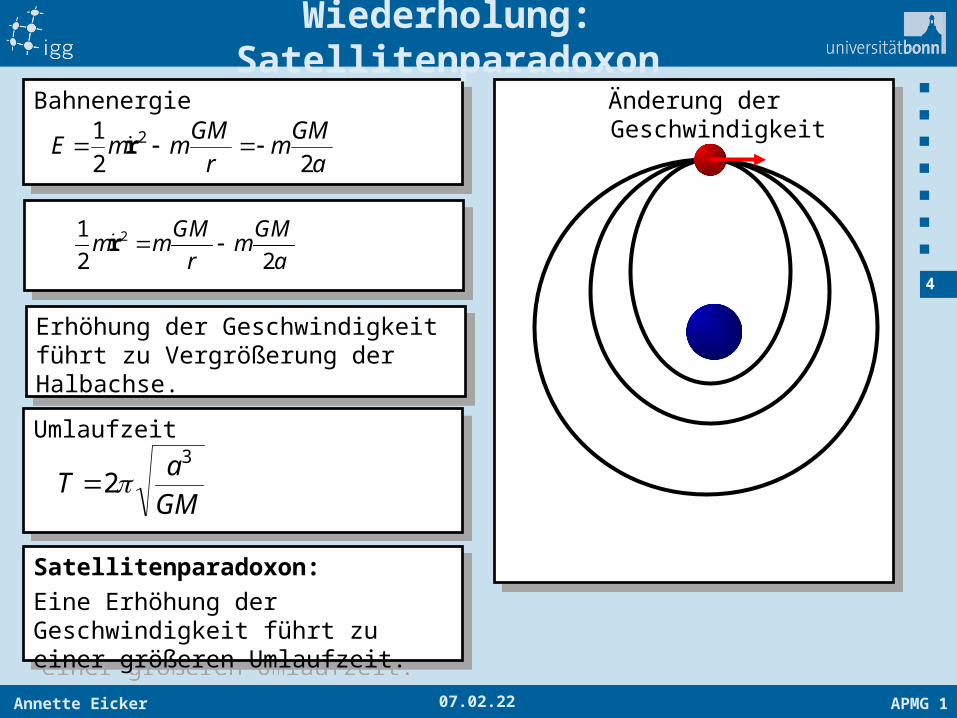
BahnenergieBahnenergie
Wiederholung: Satellitenparadoxon
Änderung der GeschwindigkeitÄnderung der Geschwindigkeit
a
GMm
r
GMmmE
22
1 2 r
UmlaufzeitUmlaufzeit
GM
aT
3
2
Satellitenparadoxon:
Eine Erhöhung der Geschwindigkeit führt zu einer größeren Umlaufzeit.
Satellitenparadoxon:
Eine Erhöhung der Geschwindigkeit führt zu einer größeren Umlaufzeit.
21
2 2
GM GMm m m
r a r
Erhöhung der Geschwindigkeit führt zu Vergrößerung der Halbachse.
Erhöhung der Geschwindigkeit führt zu Vergrößerung der Halbachse.
Annette Eicker APMG 1
5
11.04.23
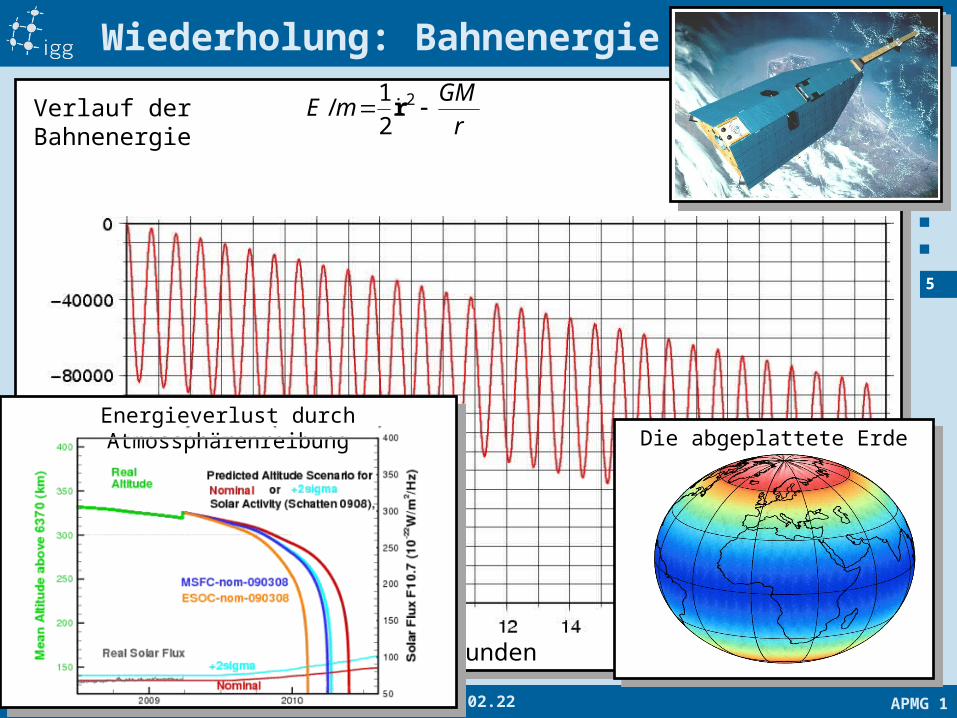
Wiederholung: Bahnenergie CHAMP
m²/s²
r
GMmE 2
2
1/ rVerlauf der Bahnenergie
Stunden
Die abgeplattete ErdeDie abgeplattete ErdeEnergieverlust durch AtmossphärenreibungEnergieverlust durch Atmossphärenreibung
Annette Eicker APMG 1
6
11.04.23
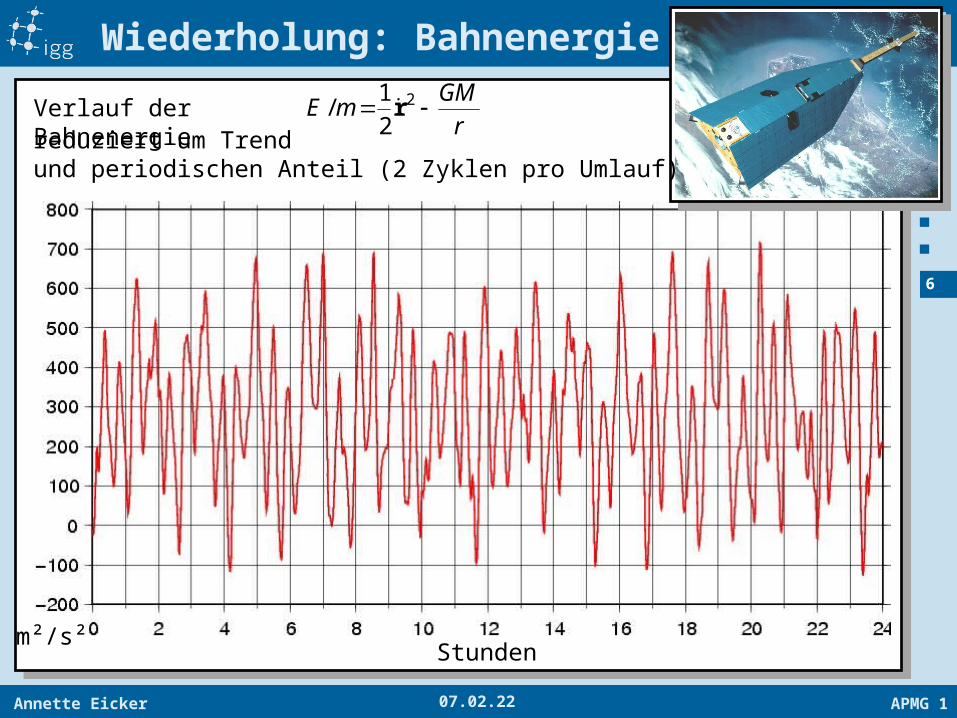
Wiederholung: Bahnenergie CHAMP
m²/s²
r
GMmE 2
2
1/ rVerlauf der Bahnenergie
reduziert um Trendund periodischen Anteil (2 Zyklen pro Umlauf)
Stunden
Annette Eicker APMG 1
7
11.04.23
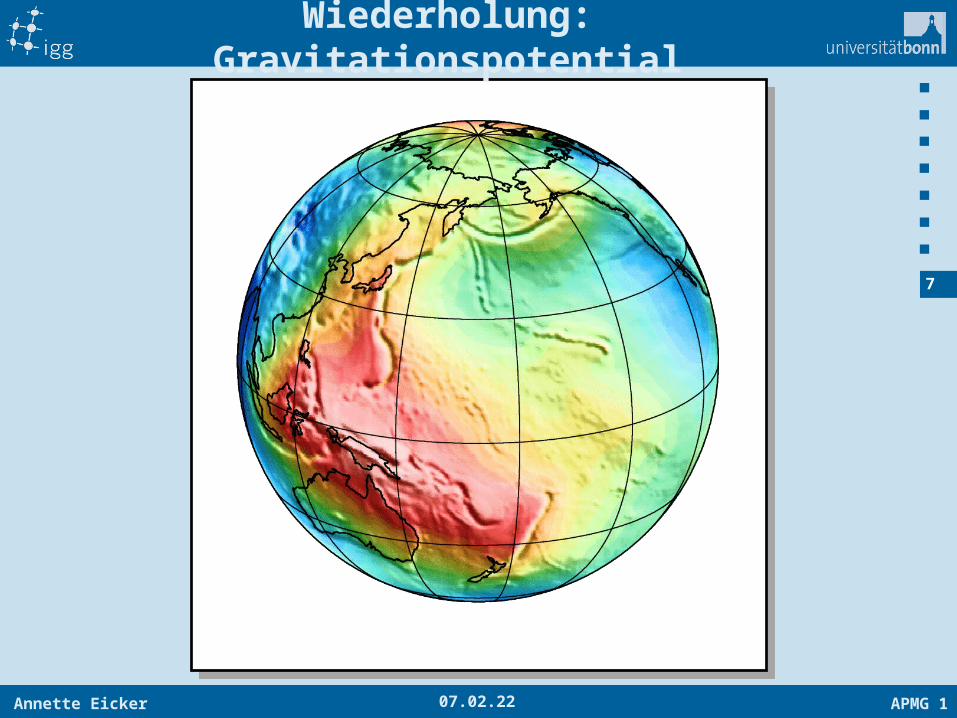
Wiederholung: Gravitationspotential
Annette Eicker APMG 1
8
11.04.23
Bewegte BezugssystemeBewegte Bezugssysteme
Annette Eicker APMG 1
9
-11.04.23
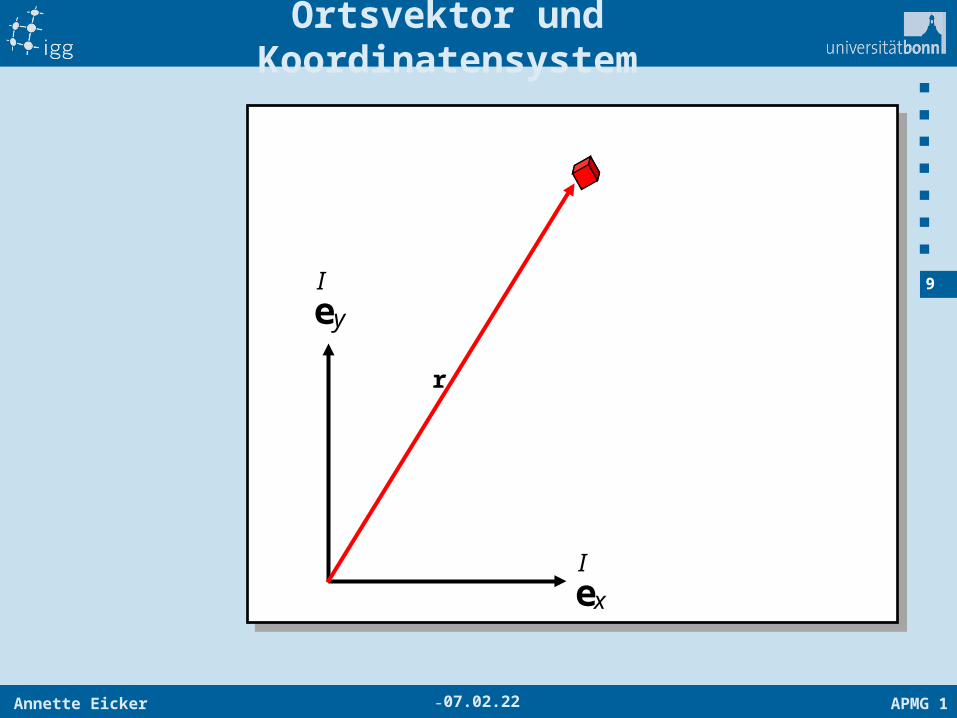
Ortsvektor und Koordinatensystem
x
I
e
y
I
e
r
Annette Eicker APMG 1
10
-11.04.23
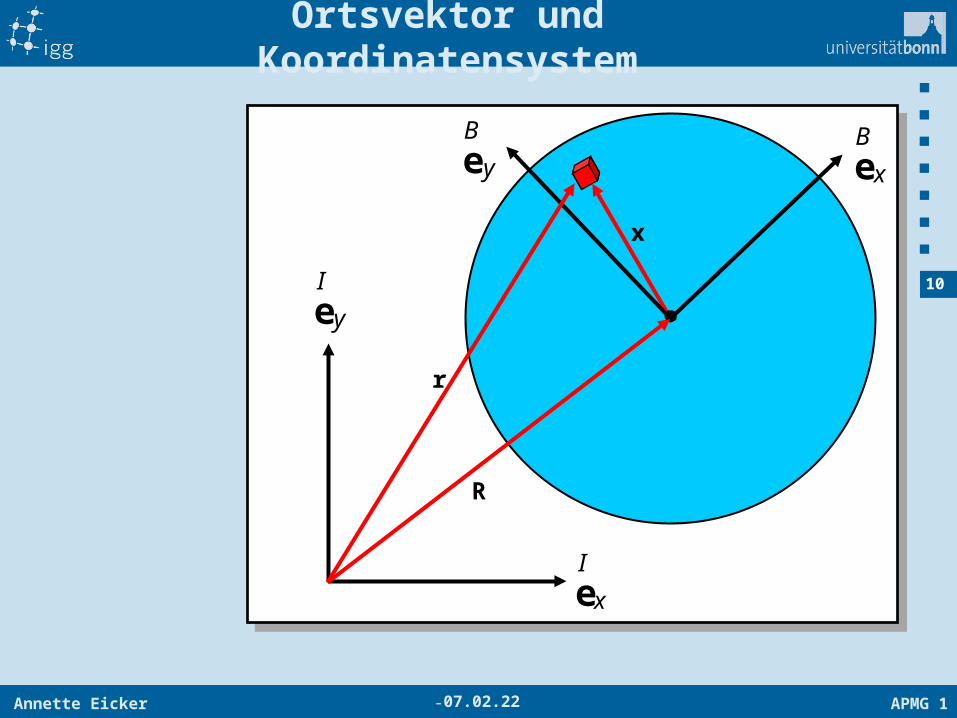
Ortsvektor und Koordinatensystem
x
x
B
ey
B
e
x
I
e
y
I
e
r
R
Annette Eicker APMG 1
11
-11.04.23
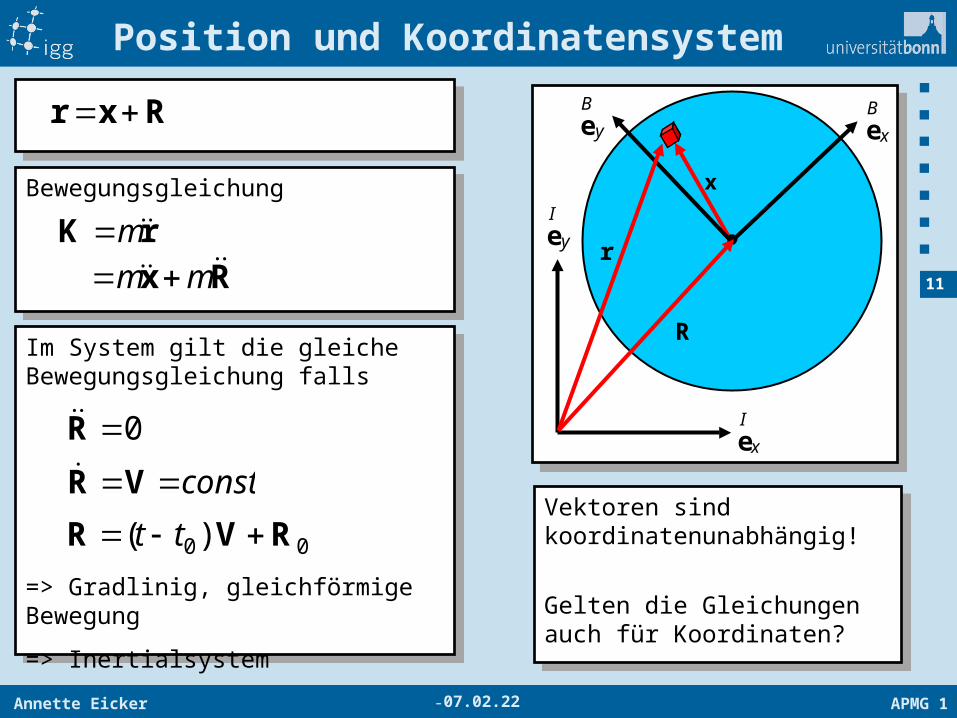
Position und Koordinatensystem
x
x
B
ey
B
e
x
I
e
y
I
er
R
Rxr
BewegungsgleichungBewegungsgleichung
rK mRx mm
Im System gilt die gleiche Bewegungsgleichung falls
Im System gilt die gleiche Bewegungsgleichung falls
0R
constVR
00 )( RVR tt
=> Gradlinig, gleichförmige Bewegung
=> Inertialsystem
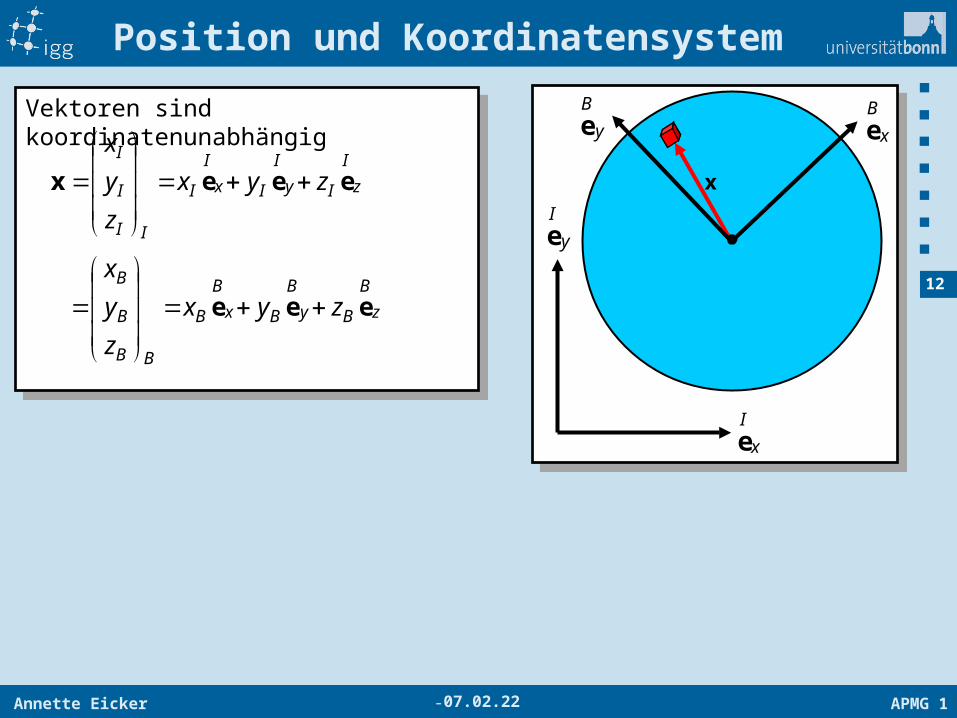
Vektoren sind koordinatenunabhängig!
Gelten die Gleichungen auch für Koordinaten?
Vektoren sind koordinatenunabhängig!
Gelten die Gleichungen auch für Koordinaten?
Annette Eicker APMG 1
12
-11.04.23
Position und Koordinatensystem
x
x
B
ey
B
e
x
I
e
y
I
e
Vektoren sind koordinatenunabhängigVektoren sind koordinatenunabhängig
z
I
Iy
I
Ix
I
I
II
I
I
zyx
z
y
x
eeex
z
B
By
B
Bx
B
B
BB
B
B
zyx
z
y
x
eee
Annette Eicker APMG 1
13
-11.04.23
Position und Koordinatensystem
x
x
B
ey
B
e
x
I
e
y
I
e
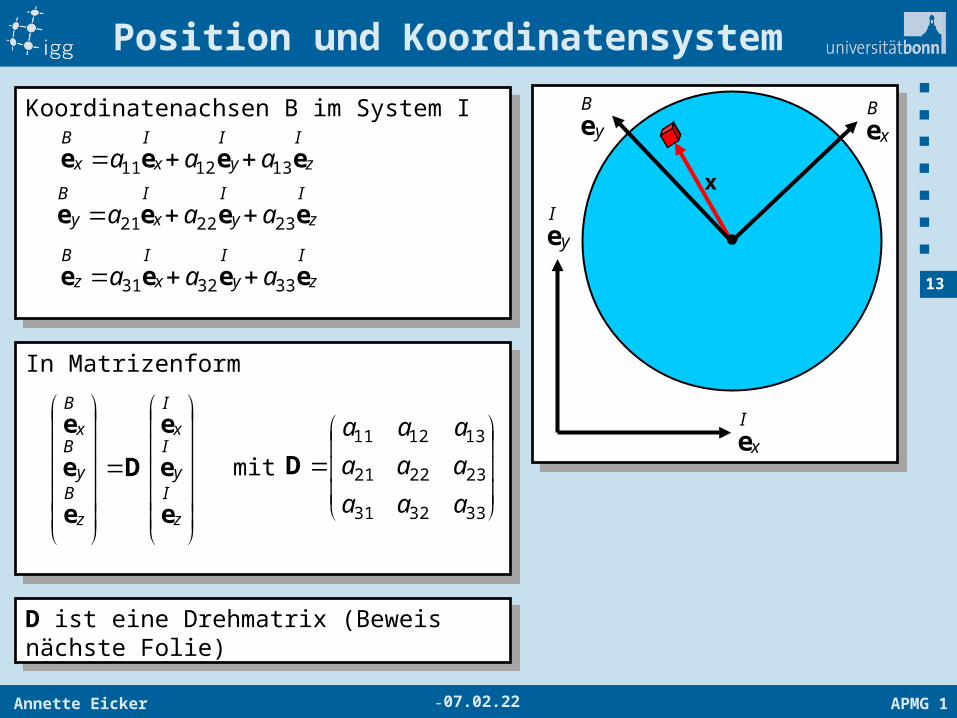
Koordinatenachsen B im System IKoordinatenachsen B im System I
z
I
y
I
x
I
x
B
aaa eeee 131211
z
I
y
I
x
I
y
B
aaa eeee 232221
z
I
y
I
x
I
z
B
aaa eeee 333231
In MatrizenformIn Matrizenform
z
Iy
Ix
I
z
By
Bx
B
e
e
e
D
e
e
e
333231
232221
131211
aaa
aaa
aaa
Dmit
D ist eine Drehmatrix (Beweis nächste Folie)D ist eine Drehmatrix (Beweis nächste Folie)
Annette Eicker APMG 1
14
-11.04.23
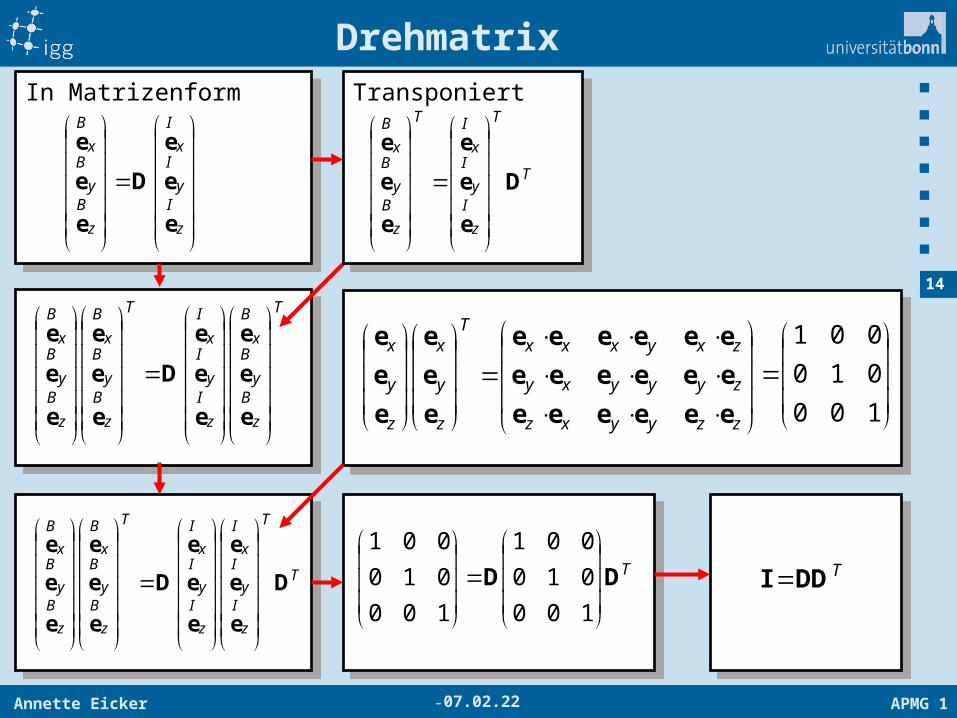
In MatrizenformIn Matrizenform
Drehmatrix
z
Iy
Ix
I
z
By
Bx
B
e
e
e
D
e
e
e
T
z
By
Bx
B
z
Iy
Ix
IT
z
By
Bx
B
z
By
Bx
B
e
e
e
e
e
e
D
e
e
e
e
e
e
T
T
z
Iy
Ix
I
z
Iy
Ix
IT
z
By
Bx
B
z
By
Bx
B
D
e
e
e
e
e
e
D
e
e
e
e
e
e
TDD
100
010
001
100
010
001TDDI
zzyyxz
zyyyxy
zxyxxxT
z
y
x
z
y
x
eeeeee
eeeeee
eeeeee
e
e
e
e
e
e
100
010
001
TransponiertTransponiert
T
T
z
Iy
Ix
IT
z
By
Bx
B
D
e
e
e
e
e
e
Annette Eicker APMG 1
15
-11.04.23
Position und Koordinatensystem
x
x
B
ey
B
e
x
I
e
y
I
e
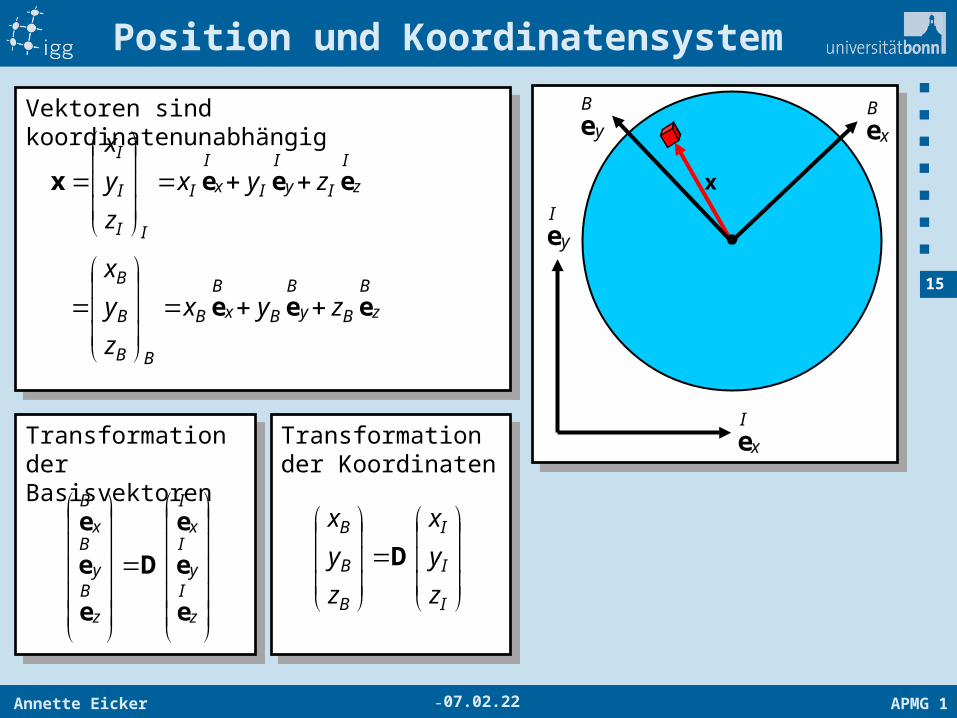
Vektoren sind koordinatenunabhängigVektoren sind koordinatenunabhängig
z
I
Iy
I
Ix
I
I
II
I
I
zyx
z
y
x
eeex
z
B
By
B
Bx
B
B
BB
B
B
zyx
z
y
x
eee
Transformation der Basisvektoren
Transformation der Basisvektoren
z
Iy
Ix
I
z
By
Bx
B
e
e
e
D
e
e
e
Transformation der Koordinaten
Transformation der Koordinaten
I
I
I
B
B
B
z
y
x
z
y
x
D
Annette Eicker APMG 1
16
-11.04.23
Position und Koordinatensystem
x
x
B
ey
B
e
x
I
e
y
I
e
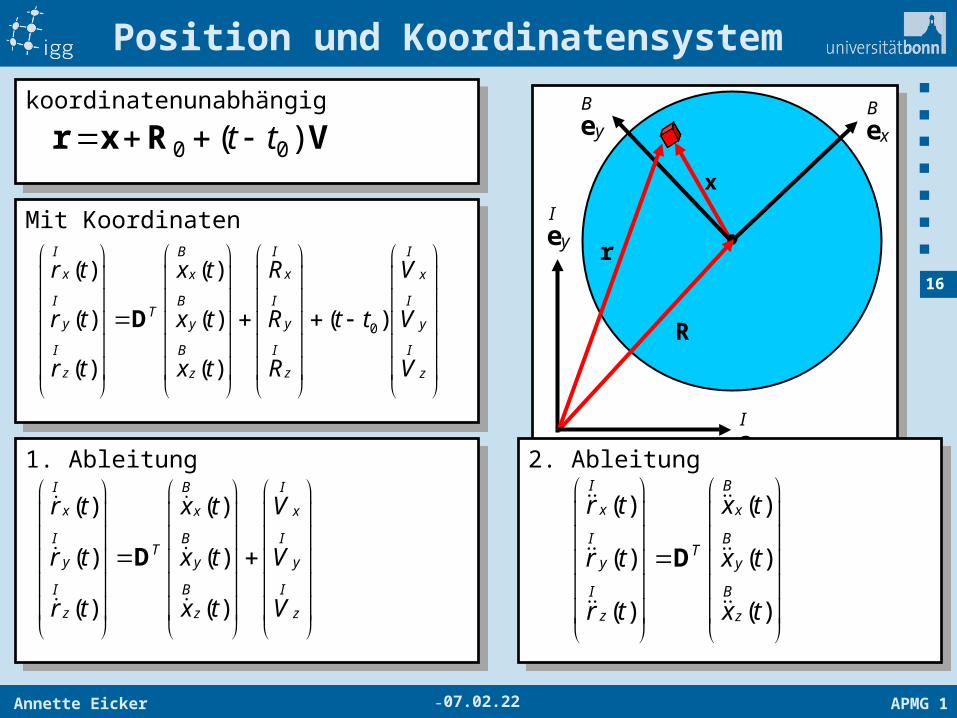
koordinatenunabhängigkoordinatenunabhängig
r
R
VRxr )( 00 tt
Mit KoordinatenMit Koordinaten
0
( ) ( )
( ) ( ) ( )
( ) ( )
I B I I
x xx x
I B I IT
y yy y
I B I I
z zz z
r t x t R V
r t x t R t t V
r t x t R V
D
1. Ableitung1. Ableitung
( ) ( )
( ) ( )
( ) ( )
I B I
x x x
I B IT
y y y
I B I
z z z
r t x t V
r t x t V
r t x t V
D
2. Ableitung2. Ableitung
( ) ( )
( ) ( )
( ) ( )
I B
x x
I BT
y y
I B
z z
r t x t
r t x t
r t x t
D
Annette Eicker APMG 1
17
-11.04.23
Position und Koordinatensystem
x
x
B
ey
B
e
x
I
e
y
I
er
R
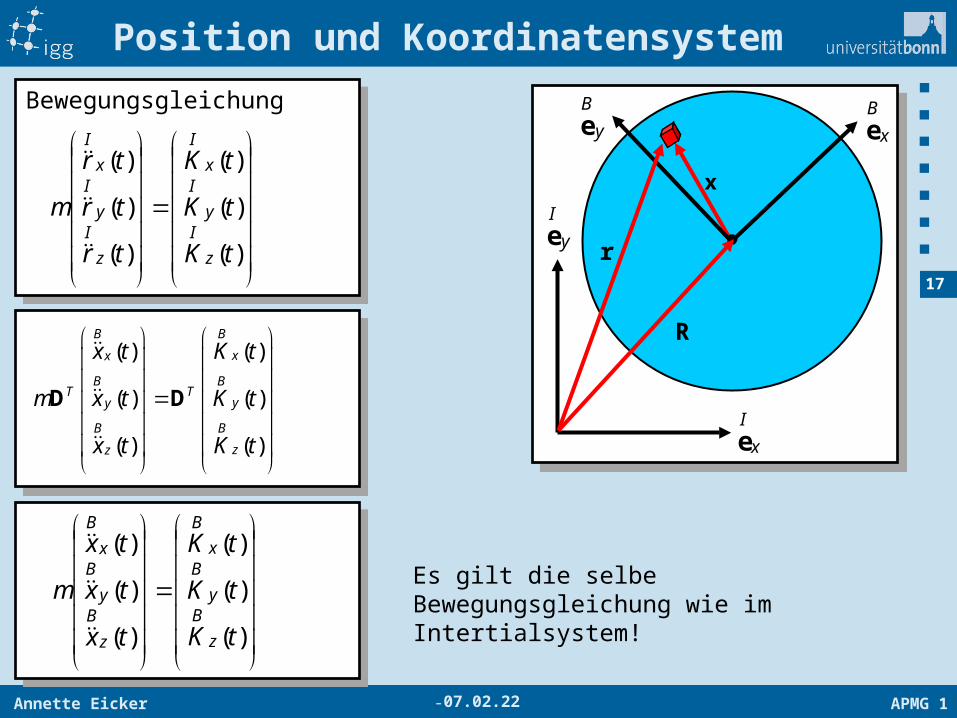
BewegungsgleichungBewegungsgleichung
)(
)(
)(
)(
)(
)(
tK
tK
tK
tr
tr
tr
m
z
Iy
Ix
I
z
Iy
Ix
I
( ) ( )
( ) ( )
( ) ( )
B B
xx
B BT T
yy
B B
zz
x t K t
m x t K t
x t K t
D D
)(
)(
)(
)(
)(
)(
tK
tK
tK
tx
tx
tx
m
z
By
Bx
B
z
By
Bx
B
Es gilt die selbe Bewegungsgleichung wie im Intertialsystem!
Annette Eicker APMG 1
18
-11.04.23
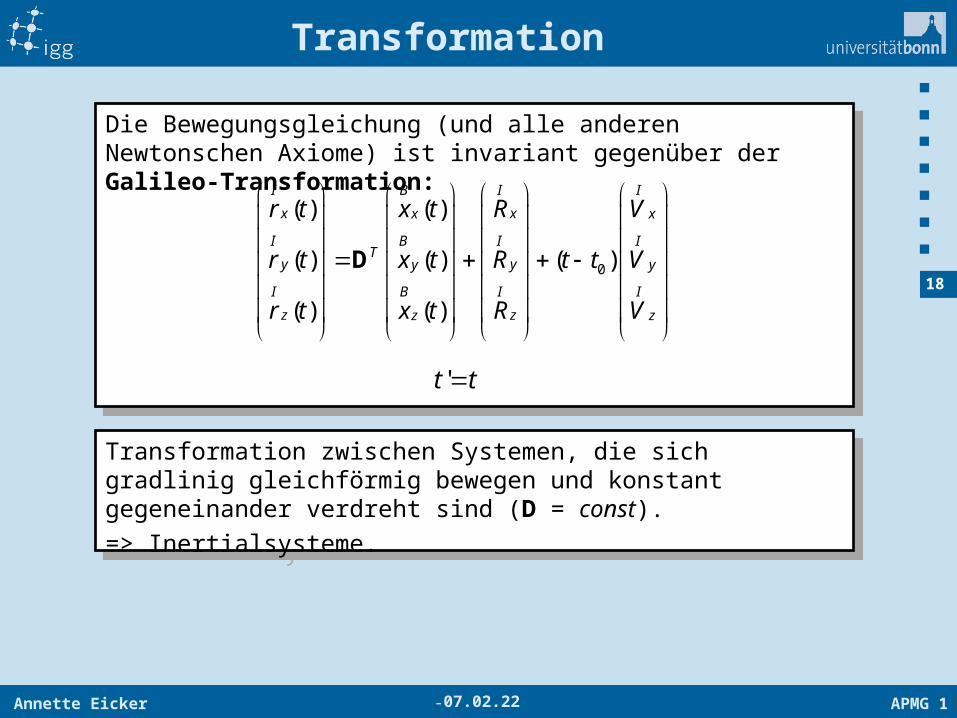
Die Bewegungsgleichung (und alle anderen Newtonschen Axiome) ist invariant gegenüber der Galileo-Transformation:
Die Bewegungsgleichung (und alle anderen Newtonschen Axiome) ist invariant gegenüber der Galileo-Transformation:
Transformation
Transformation zwischen Systemen, die sich gradlinig gleichförmig bewegen und konstant gegeneinander verdreht sind (D = const).=> Inertialsysteme.
Transformation zwischen Systemen, die sich gradlinig gleichförmig bewegen und konstant gegeneinander verdreht sind (D = const).=> Inertialsysteme.
0
( ) ( )
( ) ( ) ( )
( ) ( )
I B I I
x xx x
I B I IT
y yy y
I B I I
z zz z
r t x t R V
r t x t R t t V
r t x t R V
D
tt '
Annette Eicker APMG 1
19
-11.04.23
Rotierende BezugssystemeRotierende Bezugssysteme
Annette Eicker APMG 1
20
-11.04.23
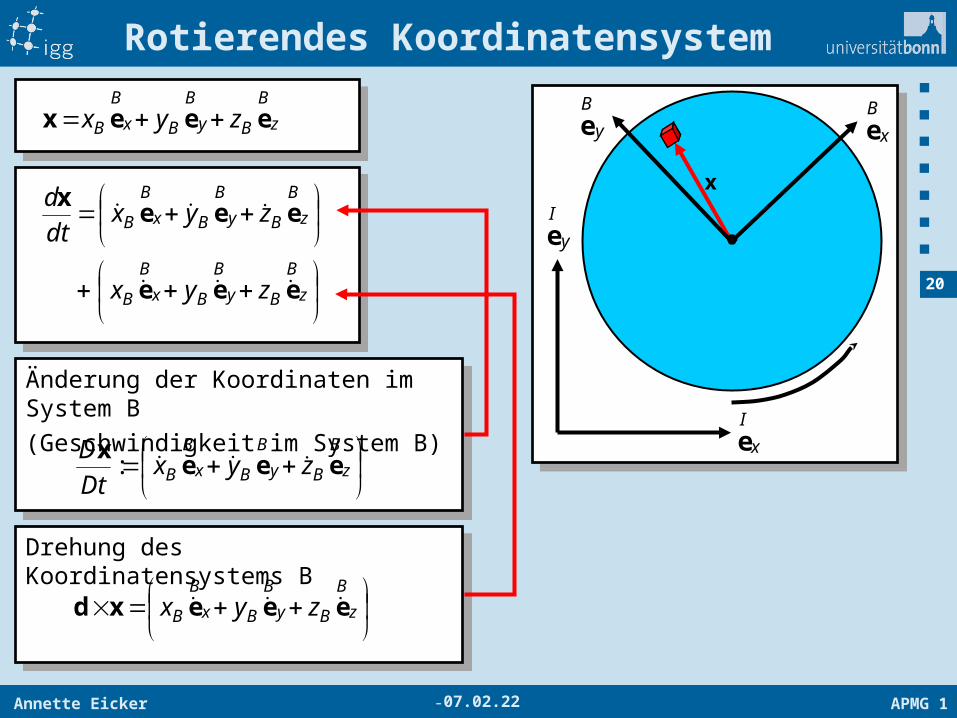
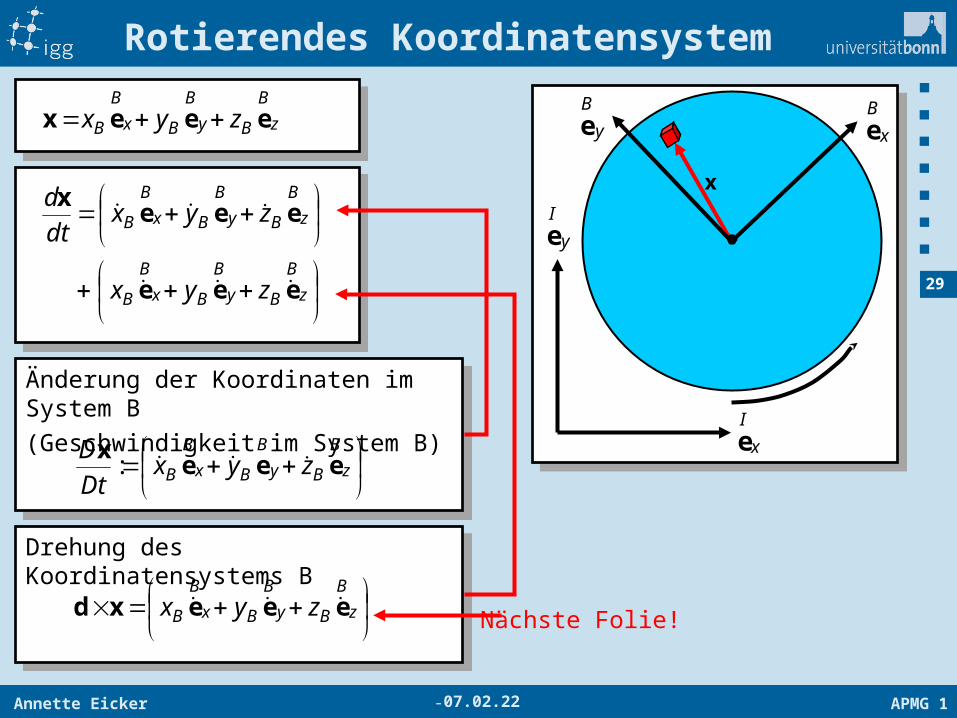
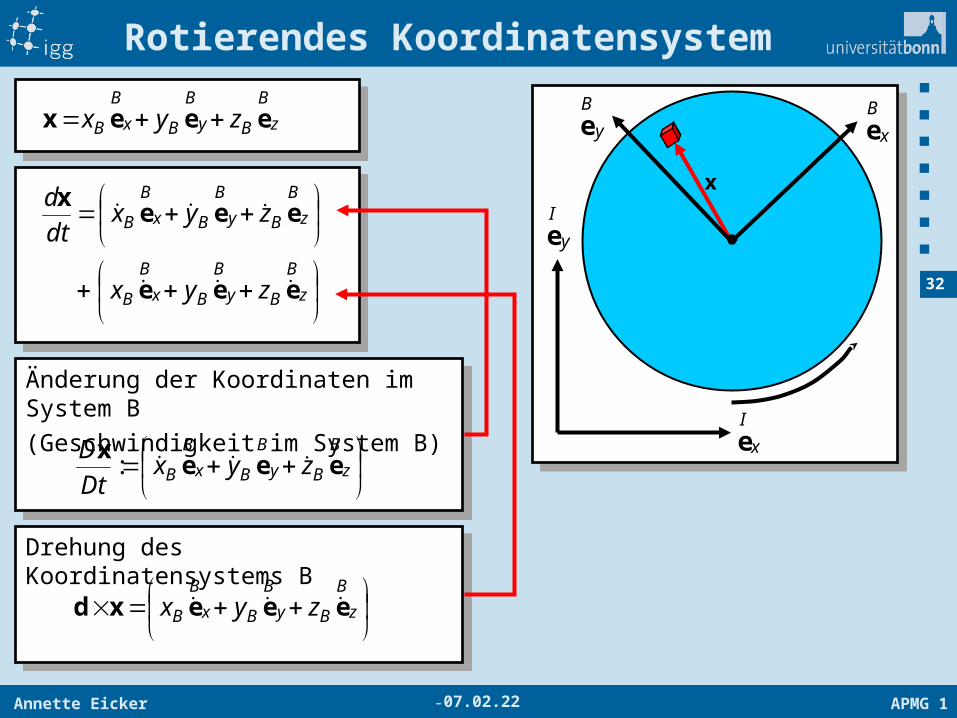
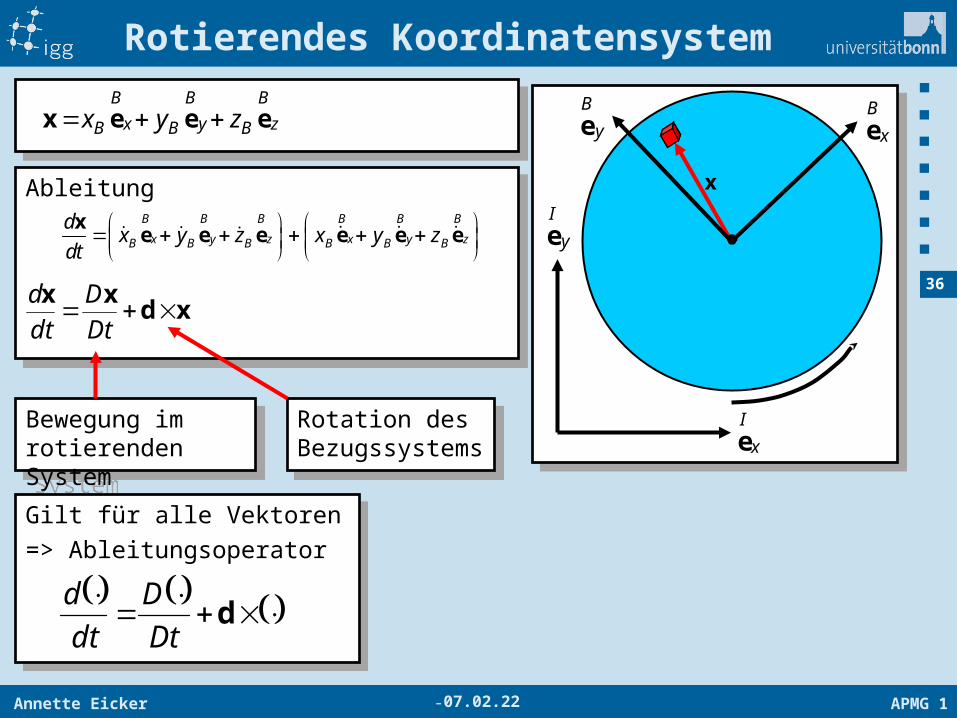
Rotierendes Koordinatensystem
z
B
By
B
Bx
B
B zyx eeex
x
x
B
ey
B
e
x
I
e
y
I
e
z
B
By
B
Bx
B
B
z
B
By
B
Bx
B
B
zyx
zyxdt
d
eee
eeex
Änderung der Koordinaten im System B(Geschwindigkeit im System B)
Änderung der Koordinaten im System B(Geschwindigkeit im System B)
z
B
By
B
Bx
B
B zyxDt
Deee
x:
Drehung des Koordinatensystems BDrehung des Koordinatensystems B
z
B
By
B
Bx
B
B zyx eeexd
Annette Eicker APMG 1
21
-11.04.23
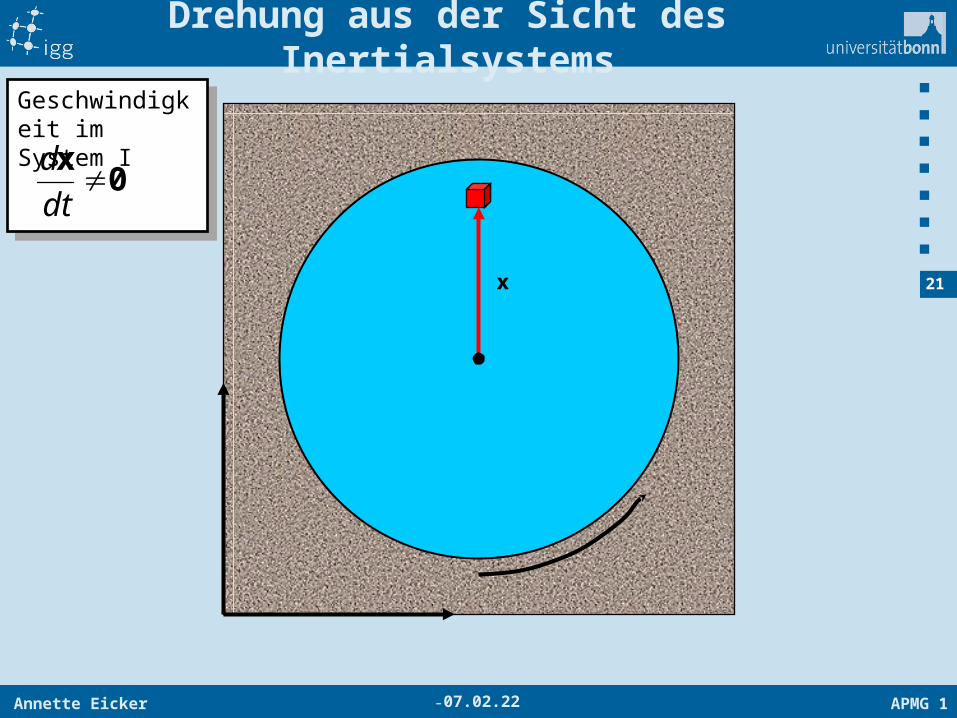
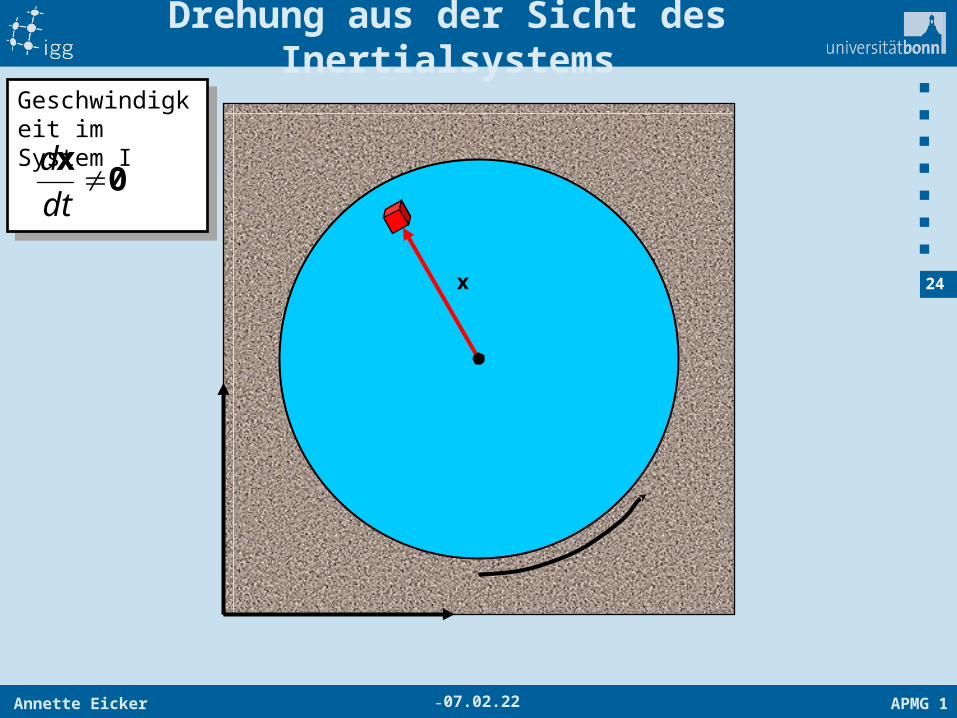
Geschwindigkeit im System I
Geschwindigkeit im System I
Drehung aus der Sicht des Inertialsystems
x
0x
dt
d
Annette Eicker APMG 1
22
-11.04.23
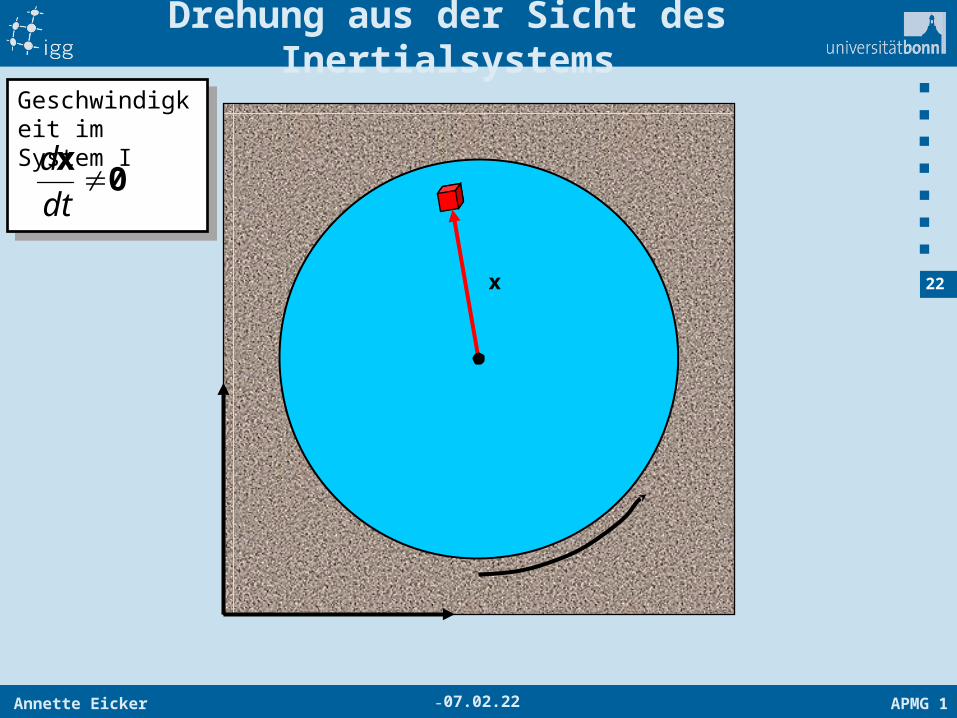
Drehung aus der Sicht des Inertialsystems
x
Geschwindigkeit im System I
Geschwindigkeit im System I
0x
dt
d
Annette Eicker APMG 1
23
-11.04.23
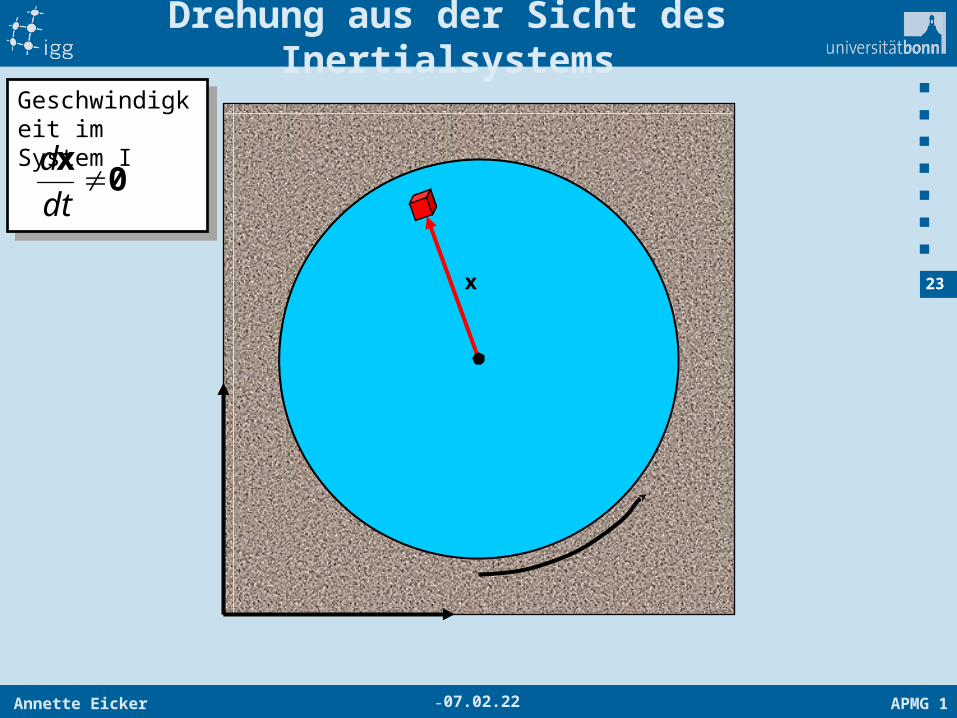
Drehung aus der Sicht des Inertialsystems
x
Geschwindigkeit im System I
Geschwindigkeit im System I
0x
dt
d
Annette Eicker APMG 1
24
-11.04.23
Drehung aus der Sicht des Inertialsystems
x
Geschwindigkeit im System I
Geschwindigkeit im System I
0x
dt
d
Annette Eicker APMG 1
25
-11.04.23
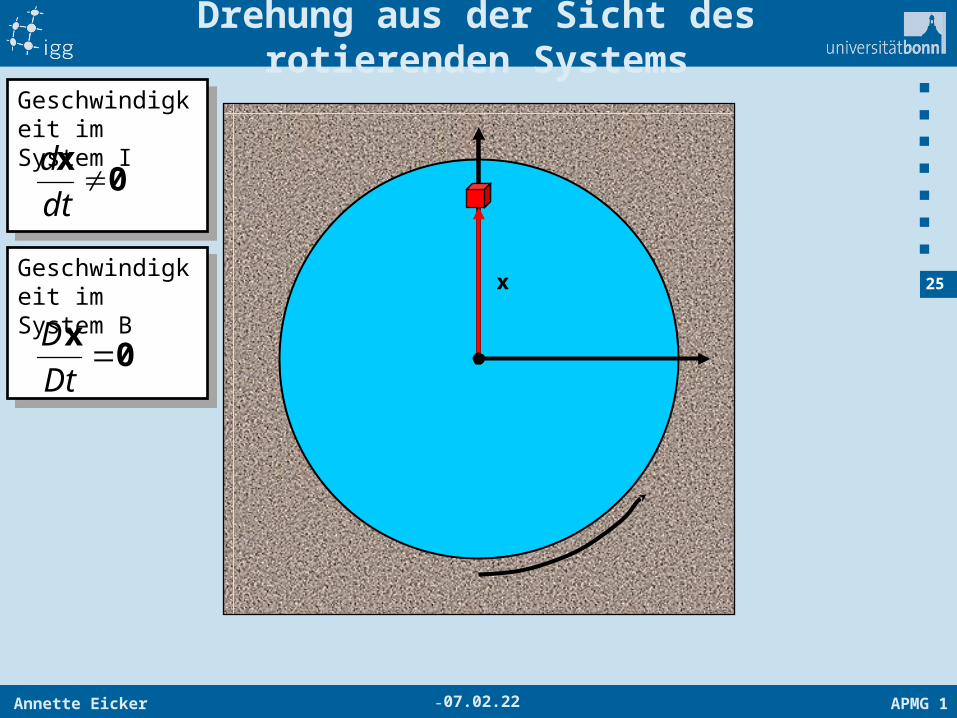
Geschwindigkeit im System B
Geschwindigkeit im System B
0x
Dt
D
x
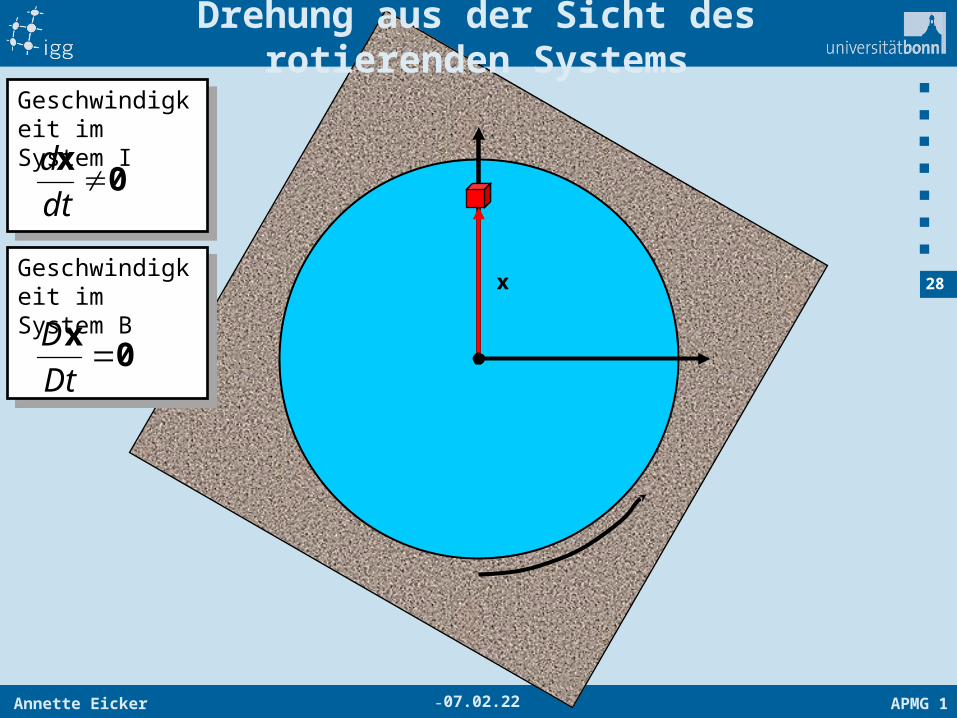
Drehung aus der Sicht des rotierenden Systems
Geschwindigkeit im System I
Geschwindigkeit im System I
0x
dt
d
Annette Eicker APMG 1
26
-11.04.23
x
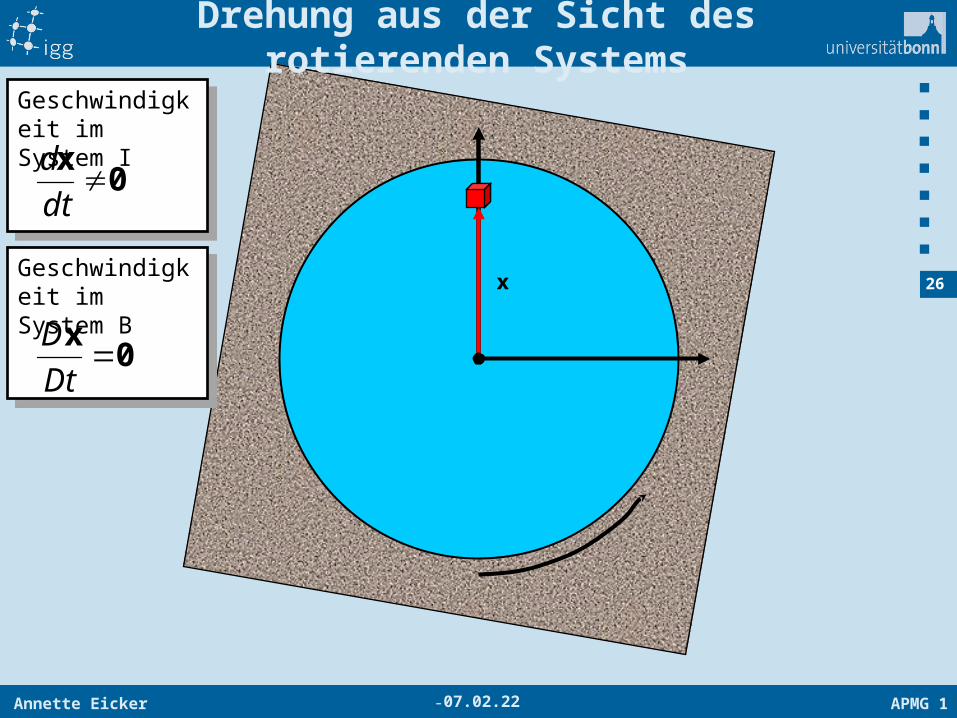
Drehung aus der Sicht des rotierenden Systems
Geschwindigkeit im System I
Geschwindigkeit im System I
0x
dt
d
Geschwindigkeit im System B
Geschwindigkeit im System B
0x
Dt
D
Annette Eicker APMG 1
27
-11.04.23
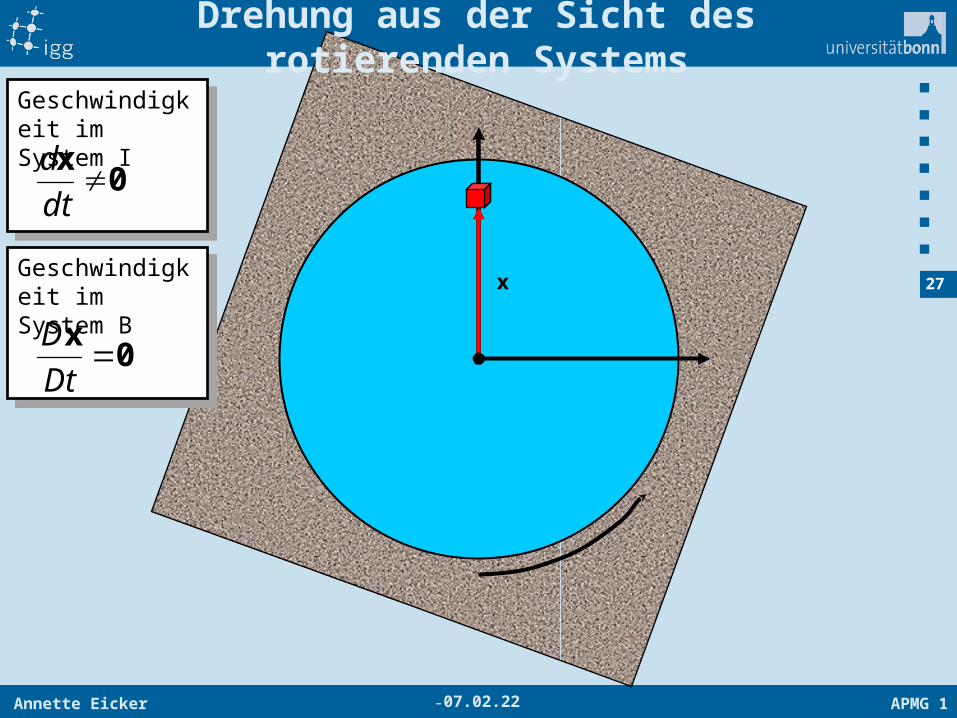
Drehung aus der Sicht des rotierenden Systems
x
Geschwindigkeit im System I
Geschwindigkeit im System I
0x
dt
d
Geschwindigkeit im System B
Geschwindigkeit im System B
0x
Dt
D
Annette Eicker APMG 1
28
-11.04.23
Drehung aus der Sicht des rotierenden Systems
x
Geschwindigkeit im System I
Geschwindigkeit im System I
0x
dt
d
Geschwindigkeit im System B
Geschwindigkeit im System B
0x
Dt
D
Annette Eicker APMG 1
29
-11.04.23
Rotierendes Koordinatensystem
z
B
By
B
Bx
B
B zyx eeex
x
x
B
ey
B
e
x
I
e
y
I
e
z
B
By
B
Bx
B
B
z
B
By
B
Bx
B
B
zyx
zyxdt
d
eee
eeex
Änderung der Koordinaten im System B(Geschwindigkeit im System B)
Änderung der Koordinaten im System B(Geschwindigkeit im System B)
z
B
By
B
Bx
B
B zyxDt
Deee
x:
Drehung des Koordinatensystems BDrehung des Koordinatensystems B
z
B
By
B
Bx
B
B zyx eeexd Nächste Folie!
Annette Eicker APMG 1
30
-11.04.23
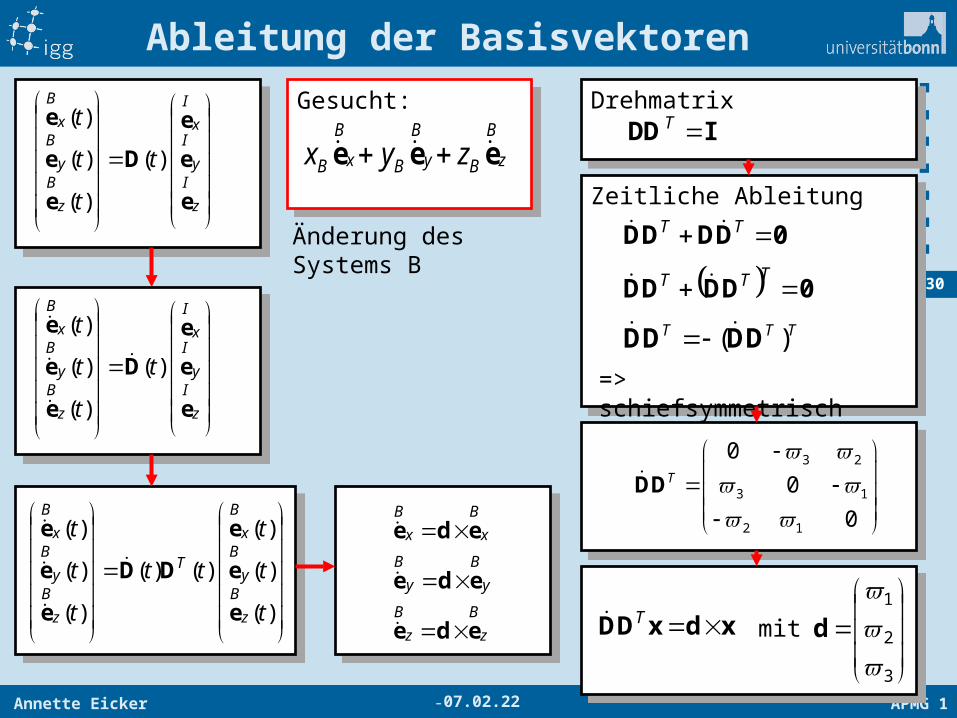
Ableitung der Basisvektoren
z
Iy
Ix
I
z
By
Bx
B
t
t
t
t
e
e
e
D
e
e
e
)(
)(
)(
)( DrehmatrixDrehmatrixIDD T
Zeitliche AbleitungZeitliche Ableitung
0DDDD TT
0DDDD TTT
( )T T TDD DD
=> schiefsymmetrisch
z
Iy
Ix
I
z
By
Bx
B
t
t
t
t
e
e
e
D
e
e
e
)(
)(
)(
)(
)(
)(
)(
)()(
)(
)(
)(
t
t
t
tt
t
t
t
z
By
Bx
B
T
z
By
Bx
B
e
e
e
DD
e
e
e
z
B
z
B
y
B
y
B
x
B
x
B
ede
ede
ede
3 2
3 1
2 1
0
0
0
T
DD
xdxDD T
3
2
1
dmit
Gesucht:Gesucht:B B B
x y zB B Bx y z e e e
Änderung des Systems B
Annette Eicker APMG 1
31
-11.04.23
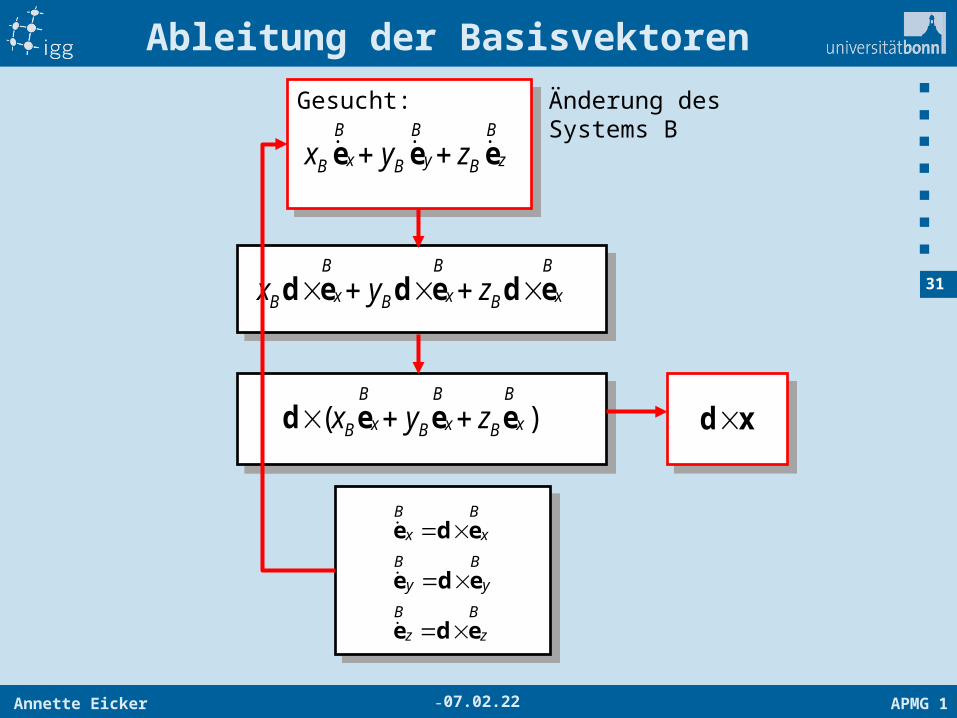
Ableitung der Basisvektoren
z
B
z
B
y
B
y
B
x
B
x
B
ede
ede
ede
Gesucht:Gesucht:B B B
x y zB B Bx y z e e e
B B B
x x xB B Bx y z d e d e d e
( )B B B
x x xB B Bx y z d e e e d x
Änderung des Systems B
Annette Eicker APMG 1
32
-11.04.23
Rotierendes Koordinatensystem
z
B
By
B
Bx
B
B zyx eeex
x
x
B
ey
B
e
x
I
e
y
I
e
z
B
By
B
Bx
B
B
z
B
By
B
Bx
B
B
zyx
zyxdt
d
eee
eeex
Änderung der Koordinaten im System B(Geschwindigkeit im System B)
Änderung der Koordinaten im System B(Geschwindigkeit im System B)
z
B
By
B
Bx
B
B zyxDt
Deee
x:
Drehung des Koordinatensystems BDrehung des Koordinatensystems B
z
B
By
B
Bx
B
B zyx eeexd
Annette Eicker APMG 1
33
-11.04.23
Rotierendes Koordinatensystem
z
B
By
B
Bx
B
B zyx eeex
x
x
B
ey
B
e
x
I
e
y
I
e
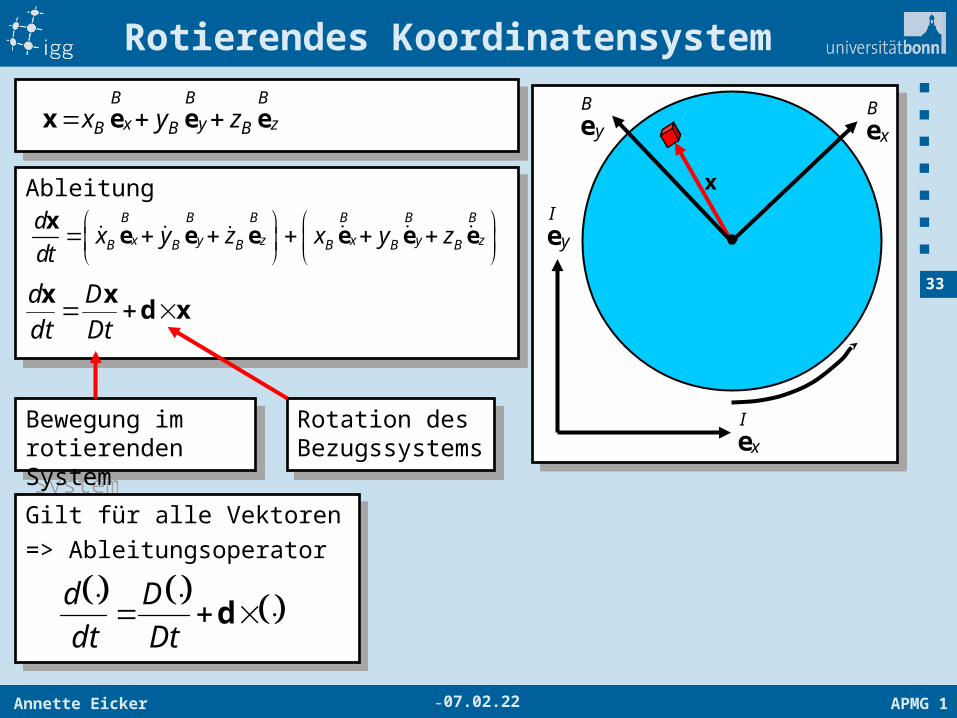
AbleitungAbleitung
xdxx Dt
D
dt
d
Bewegung im rotierenden System
Bewegung im rotierenden System
Gilt für alle Vektoren=> Ableitungsoperator
Gilt für alle Vektoren=> Ableitungsoperator
dDt
D
dt
d
B B B B B B
x y z x y zB B B B B B
dx y z x y z
dt
xe e e e e e
Rotation des Bezugssystems
Rotation des Bezugssystems
Annette Eicker APMG 1
34
Interpretation des Vektors d
-11.04.23
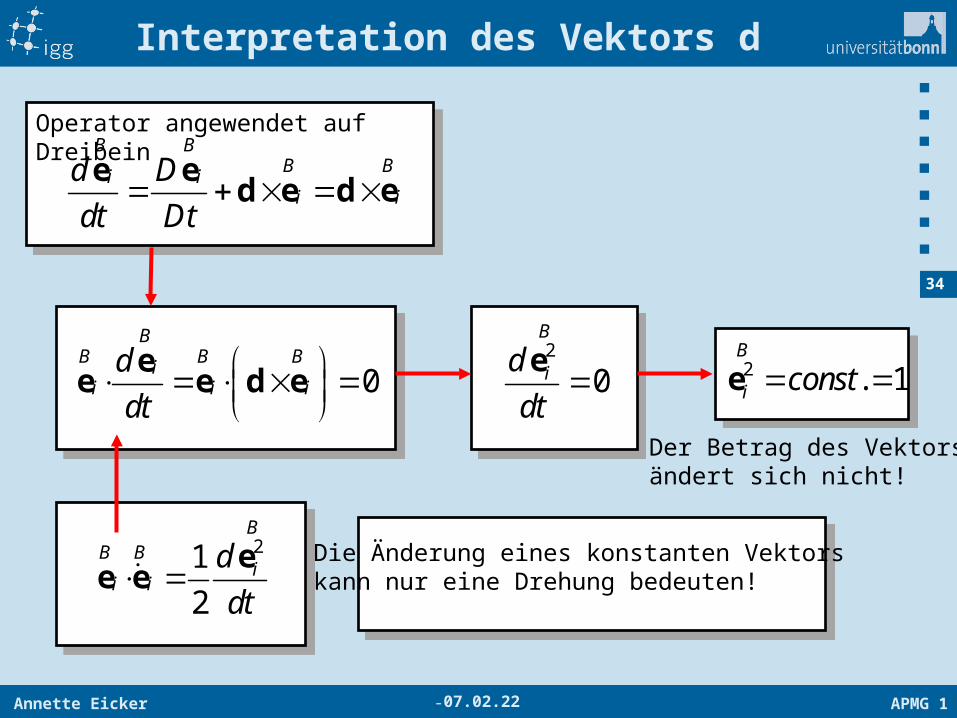
Operator angewendet auf DreibeinOperator angewendet auf DreibeinB B
B Bi i
i id D
dt Dt
e ed e d e
0
BB B B
ii i id
dt
ee e d e
21
2
BB B
ii i
d
dt
ee e
2
0
B
id
dt
e 2 . 1B
i const e
Der Betrag des Vektors ändert sich nicht!
Die Änderung eines konstanten Vektors kann nur eine Drehung bedeuten!
Annette Eicker APMG 1
35
Interpretation des Vektors d
-11.04.23
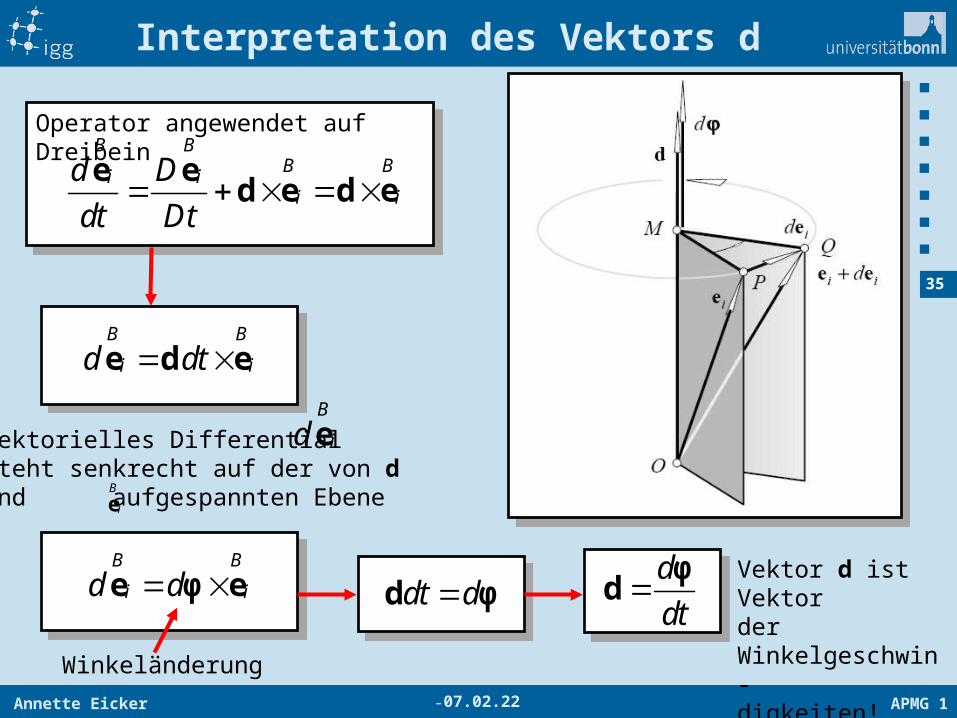
Operator angewendet auf DreibeinOperator angewendet auf DreibeinB B
B Bi i
i id D
dt Dt
e ed e d e
B B
i id dt e d e
Vektorielles Differentialsteht senkrecht auf der von d und aufgespannten Ebene
B
id e
B
ie
B B
i id d e φ e
Winkeländerung
dt dd φd
dtφ
dVektor d ist Vektor der Winkelgeschwin-digkeiten!
Annette Eicker APMG 1
36
-11.04.23
Rotierendes Koordinatensystem
z
B
By
B
Bx
B
B zyx eeex
x
x
B
ey
B
e
x
I
e
y
I
e
AbleitungAbleitung
xdxx Dt
D
dt
d
Bewegung im rotierenden System
Bewegung im rotierenden System
Rotation des Bezugssystems
Rotation des Bezugssystems
Gilt für alle Vektoren=> Ableitungsoperator
Gilt für alle Vektoren=> Ableitungsoperator
dDt
D
dt
d
B B B B B B
x y z x y zB B B B B B
dx y z x y z
dt
xe e e e e e
Annette Eicker APMG 1
37
-11.04.23
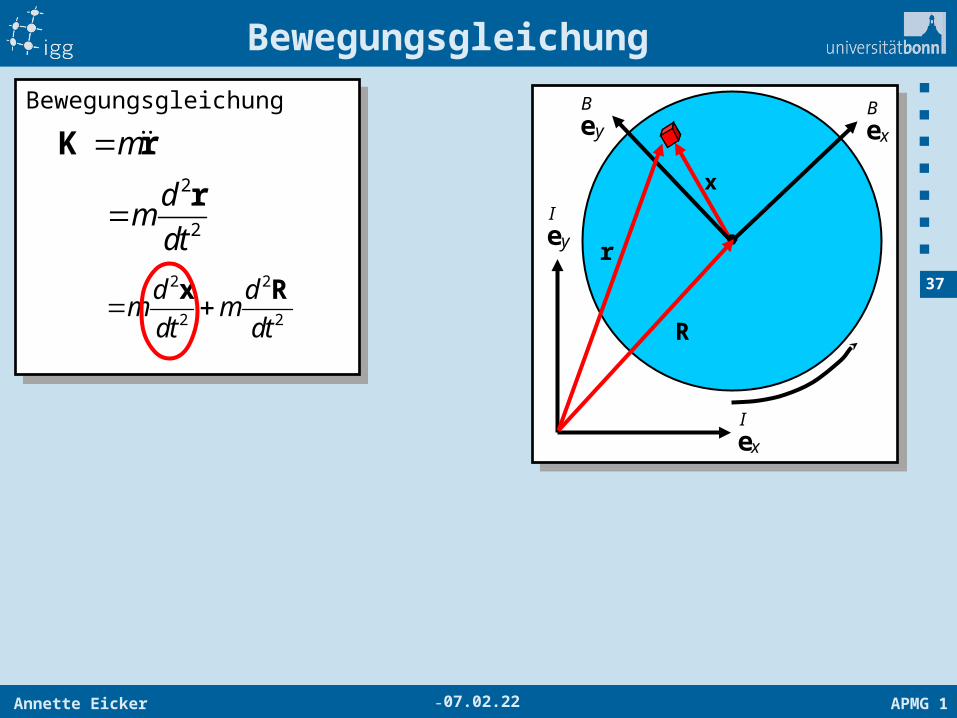
Bewegungsgleichung
BewegungsgleichungBewegungsgleichung
x
x
B
ey
B
e
x
I
e
y
I
e
rK m
r
R
2
2
dmdt
r
2 2
2 2
d dm mdt dt
x R
Annette Eicker APMG 1
38
-11.04.23
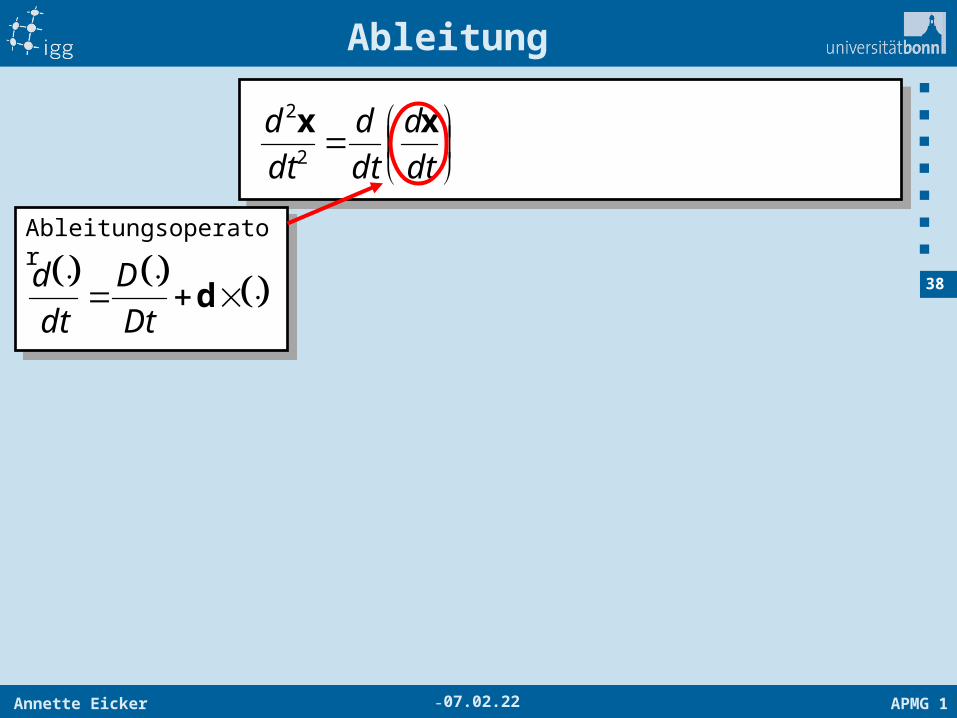
Ableitung
dt
d
dt
d
dt
d xx2
2
AbleitungsoperatorAbleitungsoperator
dDt
D
dt
d
Annette Eicker APMG 1
39
-11.04.23
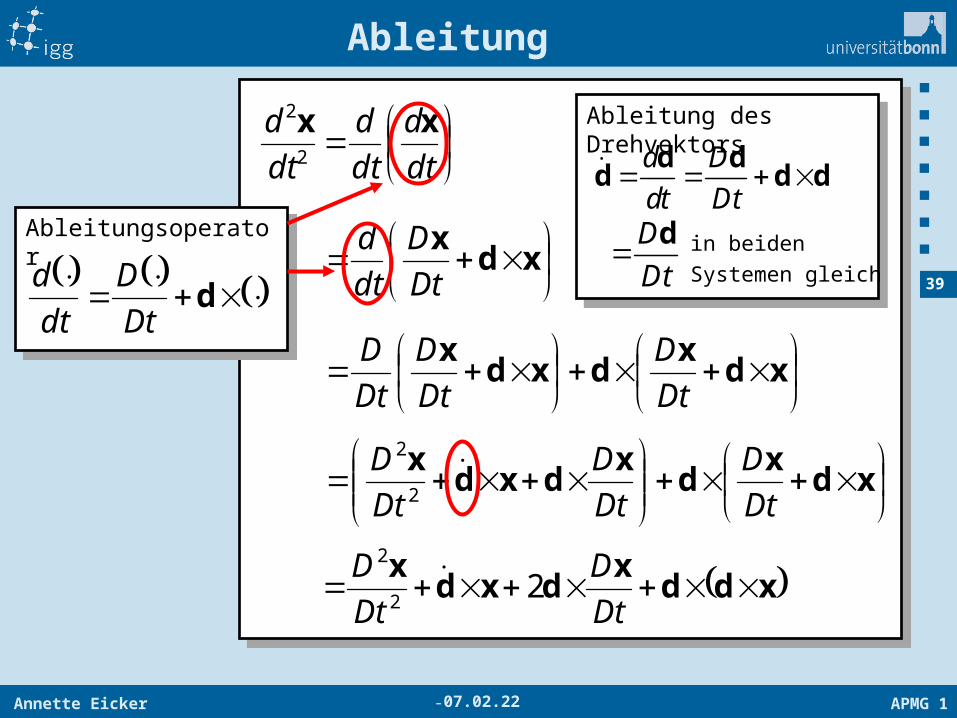
Ableitung
dt
d
dt
d
dt
d xx2
2
xd
xdxd
x
Dt
D
Dt
D
Dt
D
xd
xd
xdxd
x
Dt
D
Dt
D
Dt
D 2
2
xddx
dxdx
Dt
D
Dt
D2
2
2
xdx
Dt
D
dt
dAbleitungsoperatorAbleitungsoperator
dDt
D
dt
d
Ableitung des DrehvektorsAbleitung des Drehvektors
d D
dt Dt d d
d d d
D
Dt
d in beiden
Systemen gleich
Annette Eicker APMG 1
40
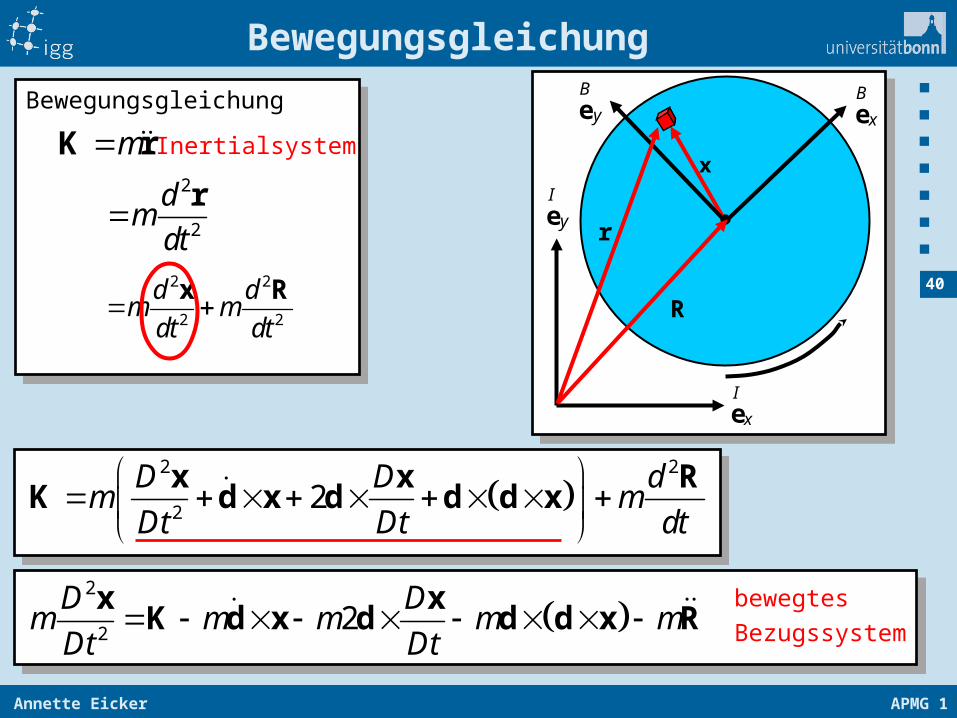
Bewegungsgleichung
BewegungsgleichungBewegungsgleichung
rK mx
x
B
ey
B
e
x
I
e
y
I
er
R
2
2
dmdt
r
2 2
2 2
d dm mdt dt
x R
2 2
22
D D dm mDt Dt dt
x x RK d x d d d x
2
22
D Dm m m m mDt Dt
x x
K d x d d d x R
Inertialsystem
bewegtes Bezugssystem
Annette Eicker APMG 1
41
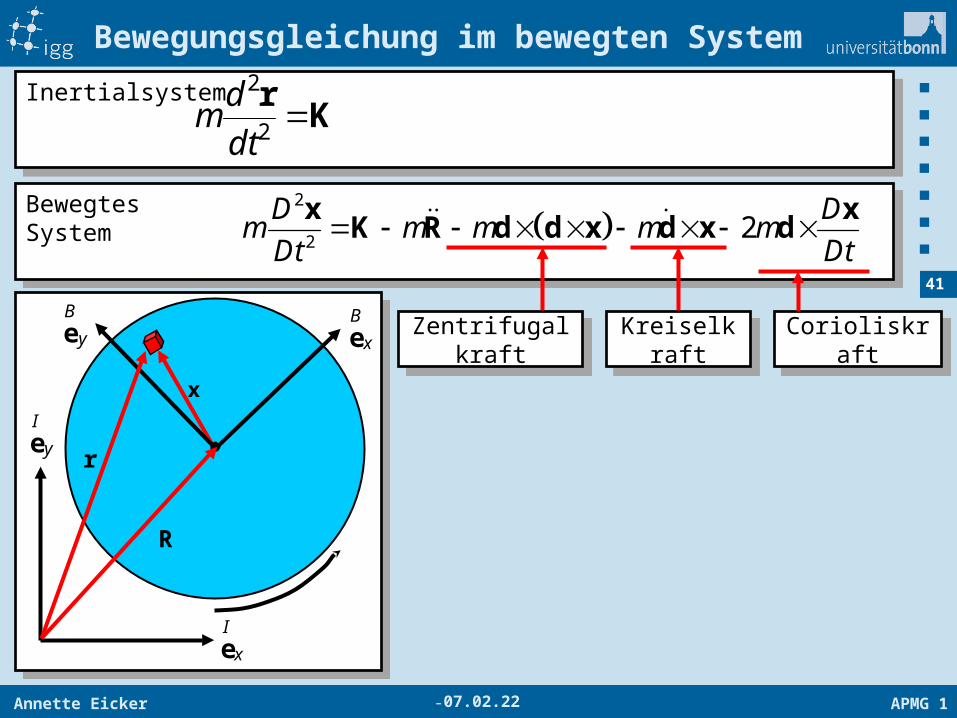
-11.04.23
Bewegungsgleichung im bewegten System
BewegtesSystem
BewegtesSystem
2
22
D Dm m m m mDt Dt
x x
K R d d x d x d
CorioliskraftCorioliskraftKreiselkraftKreiselkraftZentrifugalkraftZentrifugalkraft
Inertialsystem Inertialsystem K
r 2
2
dt
dm
x
x
B
ey
B
e
x
I
e
y
I
er
R
Annette Eicker APMG 1
42
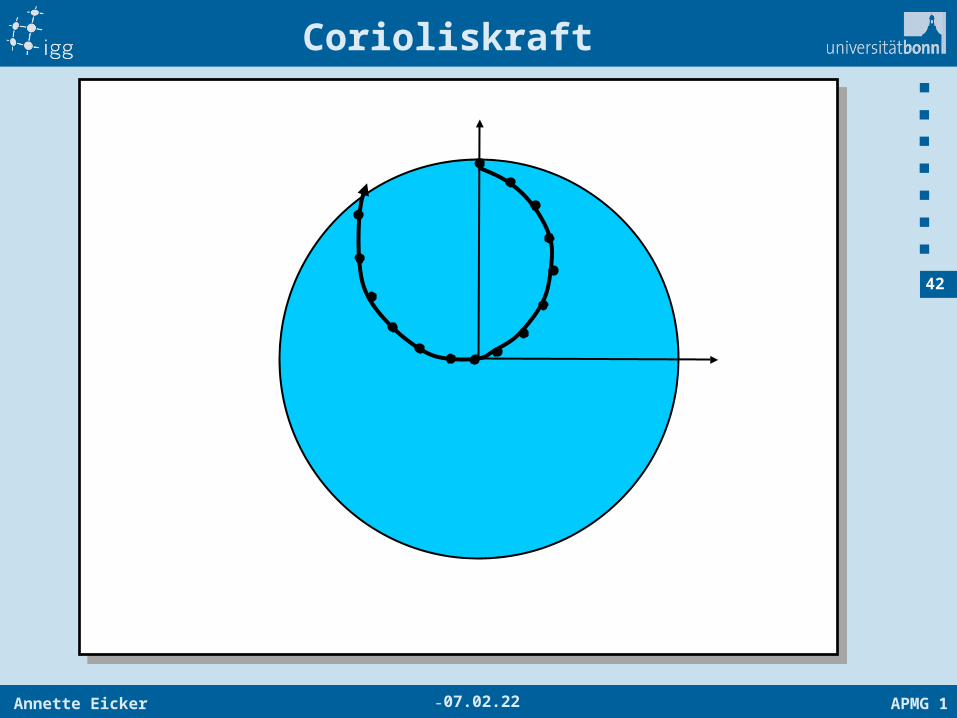
-11.04.23
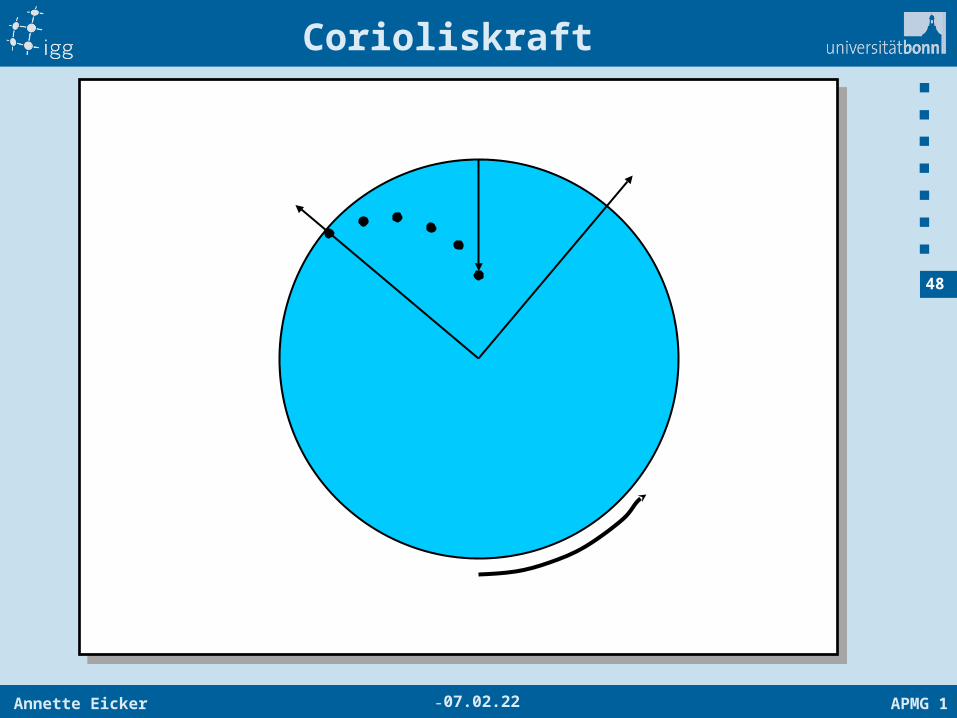
Corioliskraft
Annette Eicker APMG 1
43
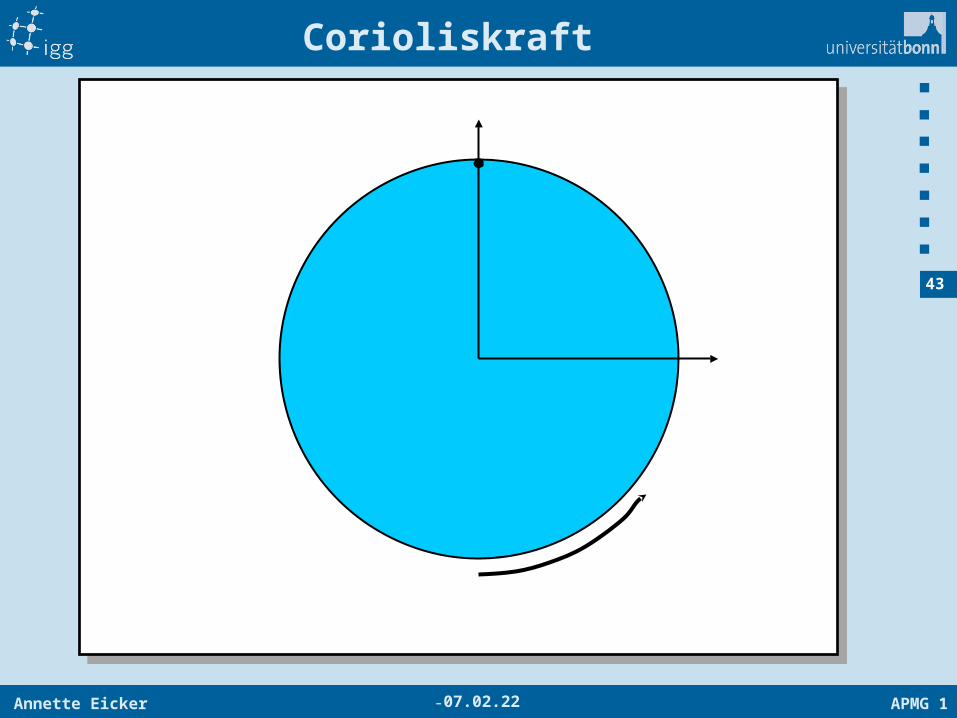
-11.04.23
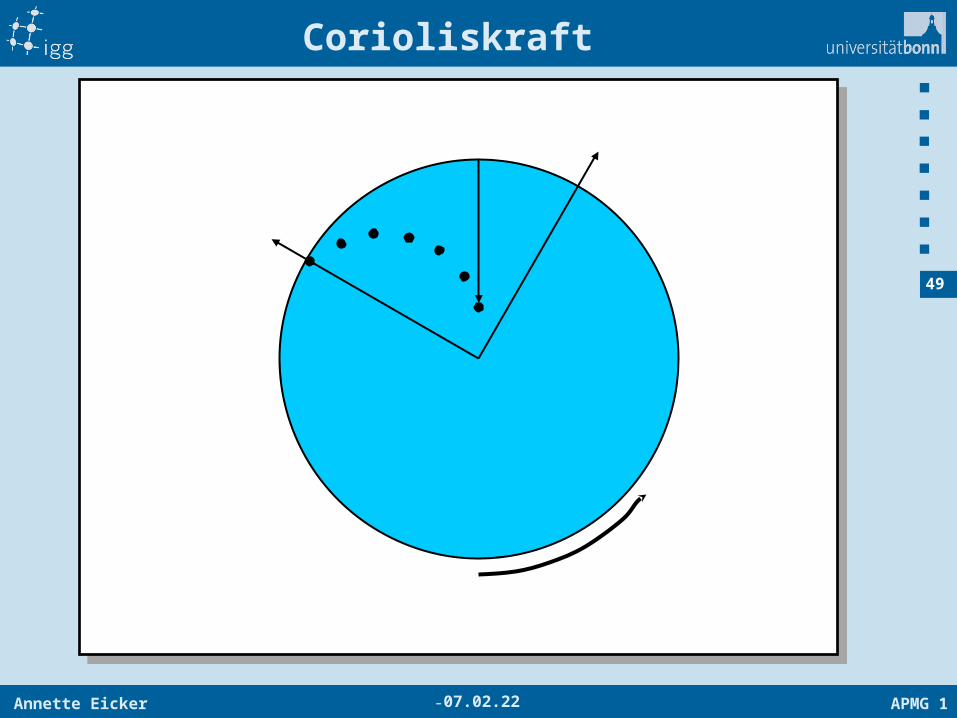
Corioliskraft
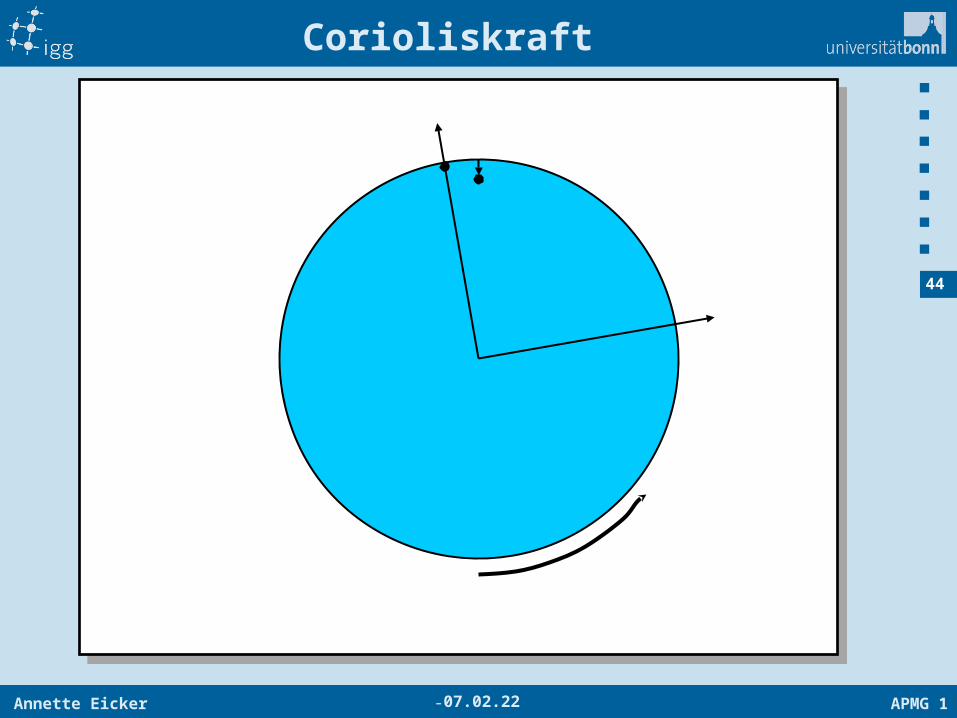
Annette Eicker APMG 1
44
-11.04.23
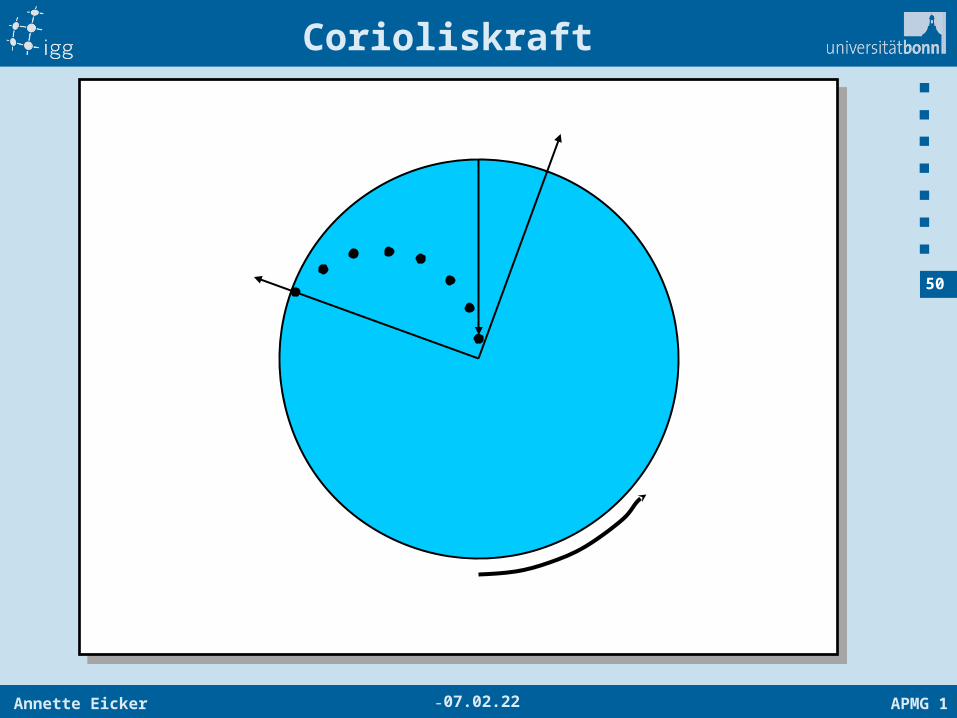
Corioliskraft
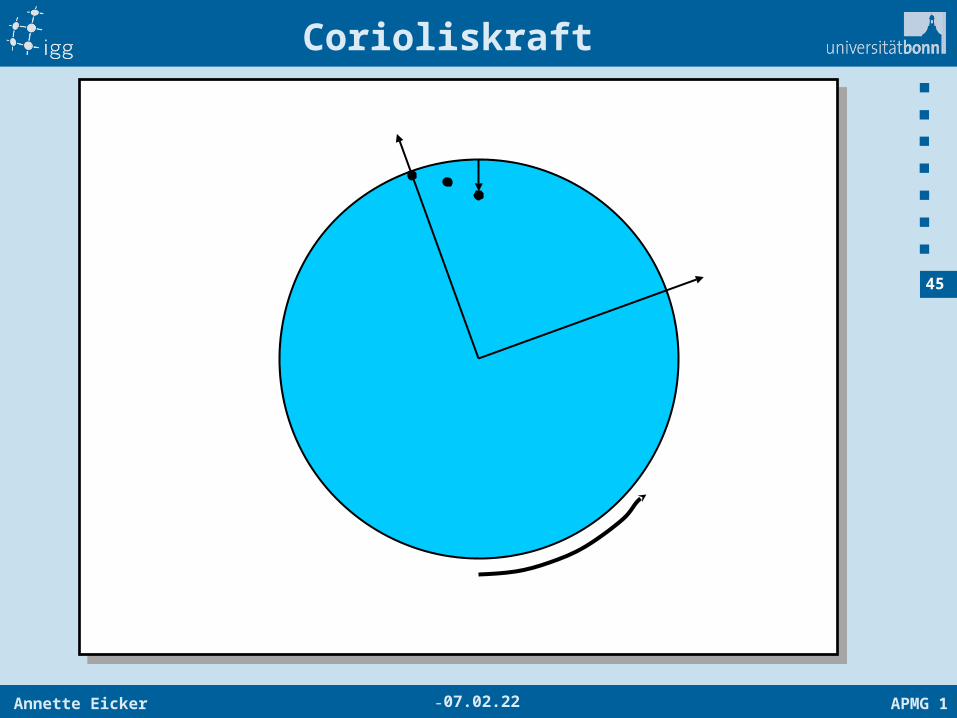
Annette Eicker APMG 1
45
-11.04.23
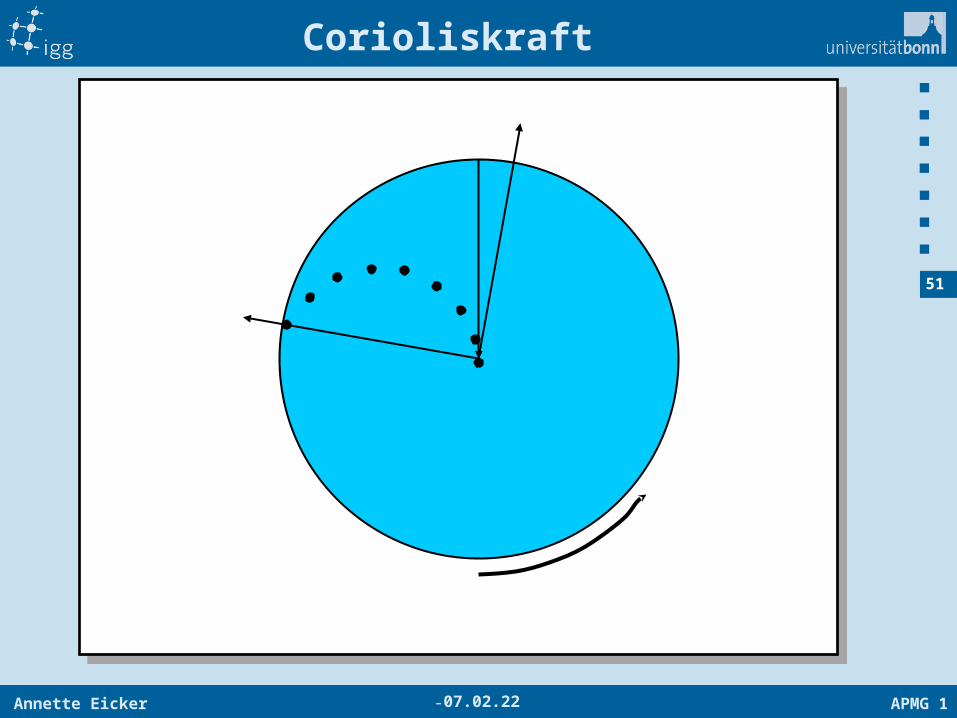
Corioliskraft
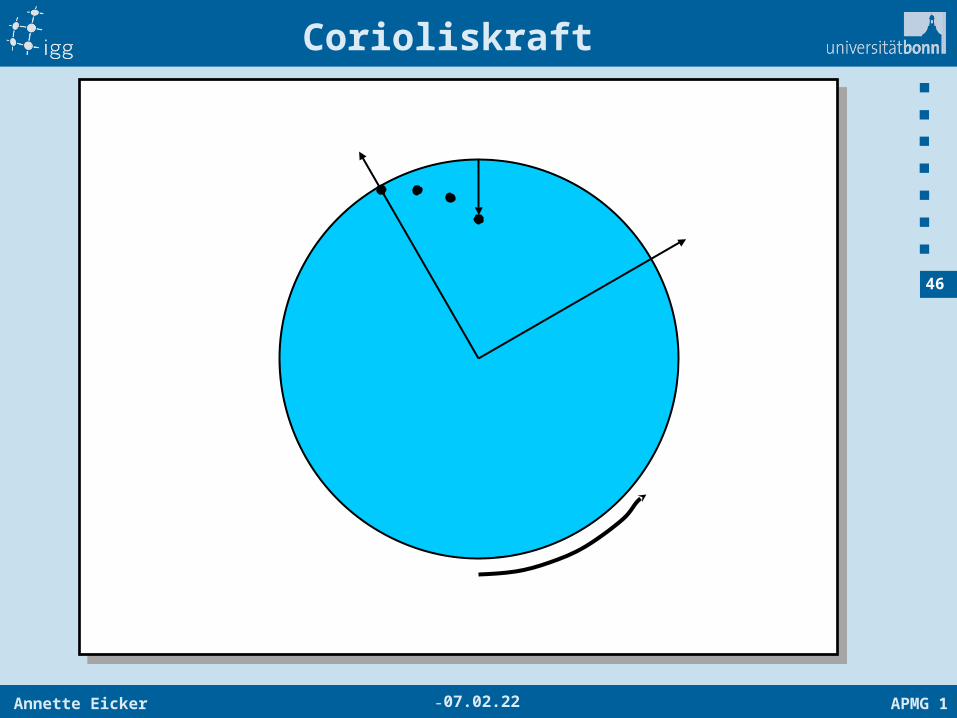
Annette Eicker APMG 1
46
-11.04.23
Corioliskraft
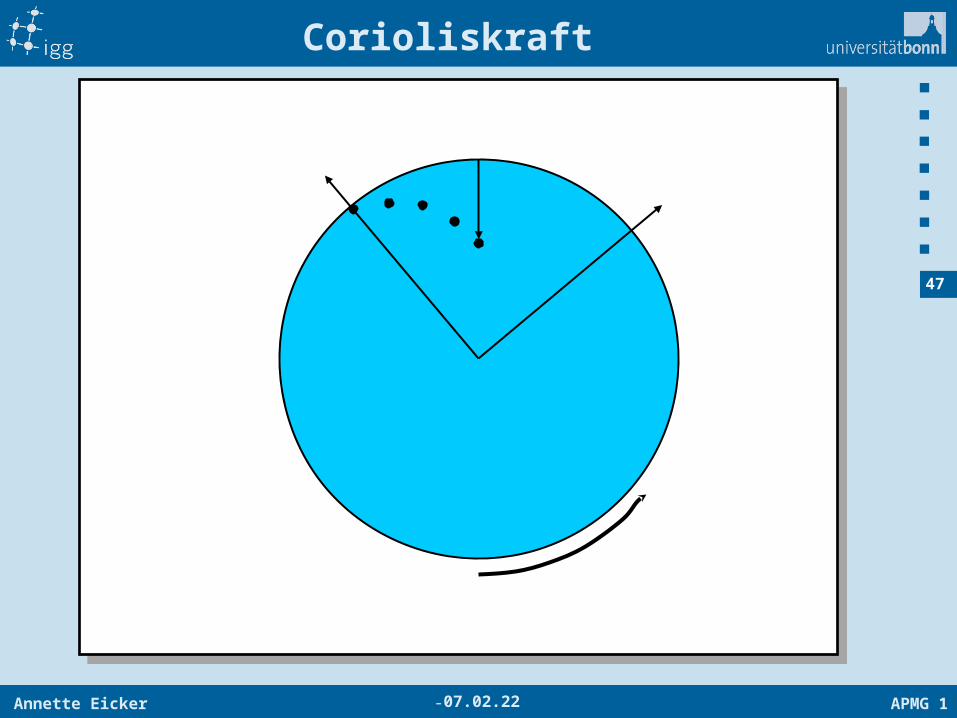
Annette Eicker APMG 1
47
-11.04.23
Corioliskraft
Annette Eicker APMG 1
48
-11.04.23
Corioliskraft
Annette Eicker APMG 1
49
-11.04.23
Corioliskraft
Annette Eicker APMG 1
50
-11.04.23
Corioliskraft
Annette Eicker APMG 1
51
-11.04.23
Corioliskraft
Annette Eicker APMG 1
52
-11.04.23
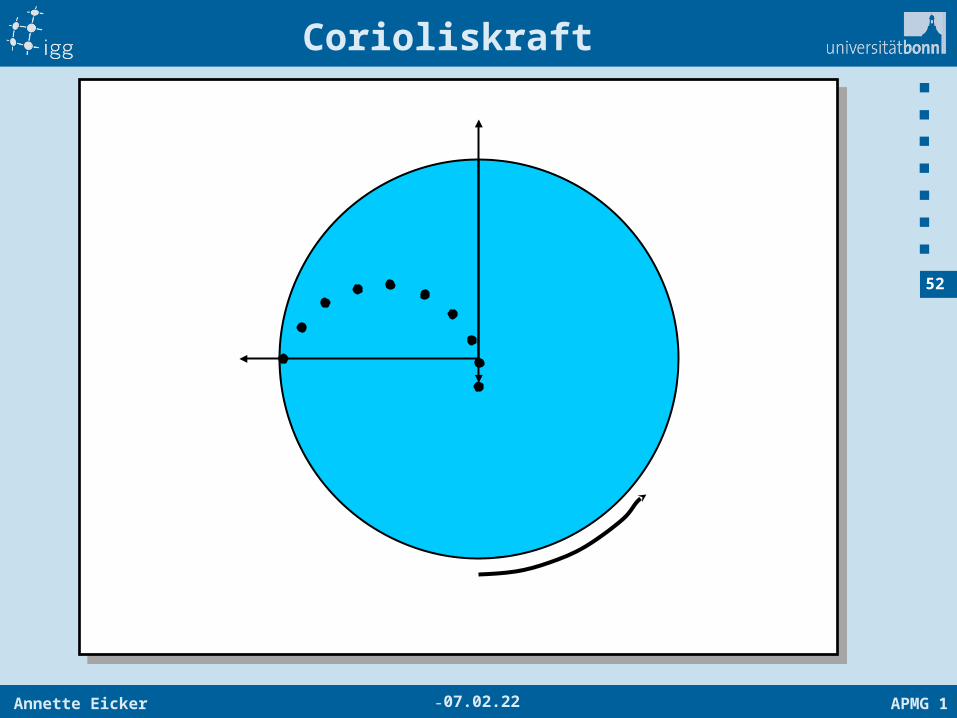
Corioliskraft
Annette Eicker APMG 1
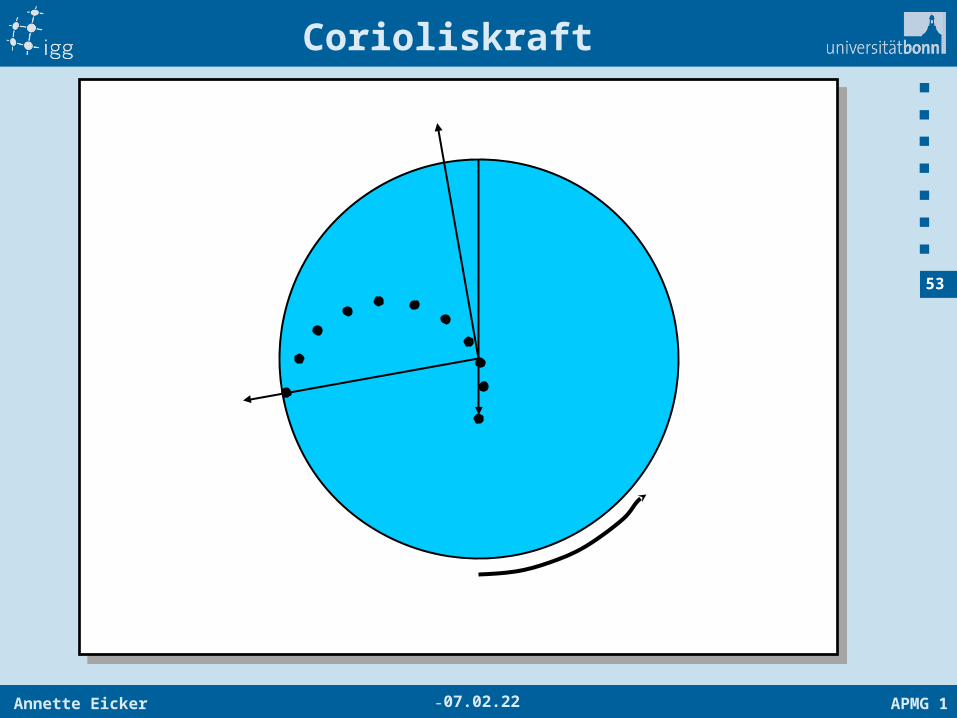
53
-11.04.23
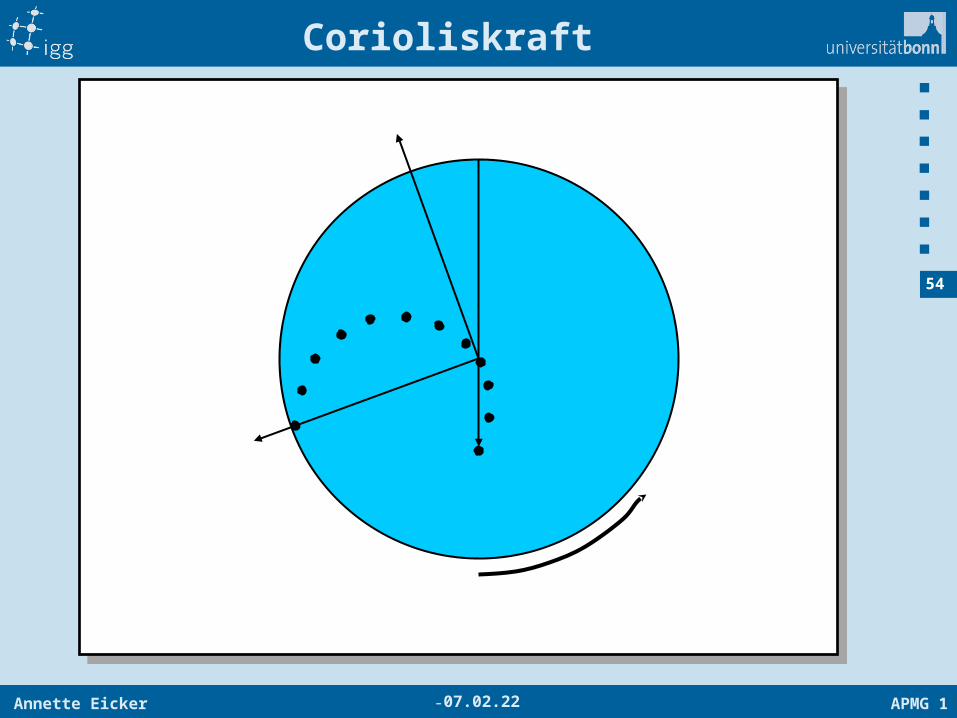
Corioliskraft
Annette Eicker APMG 1
54
-11.04.23
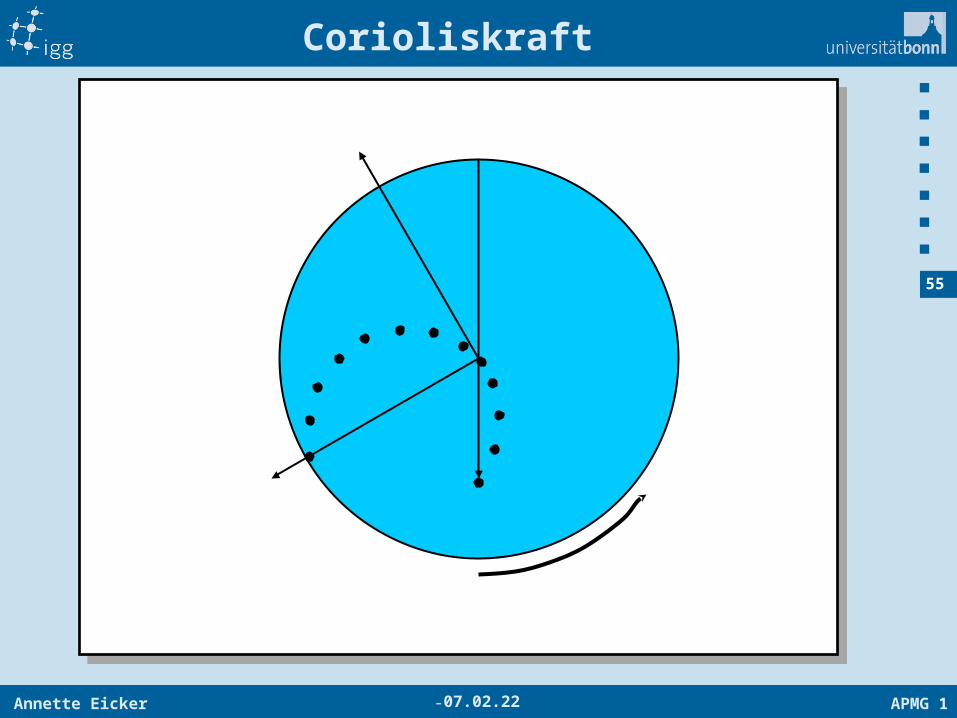
Corioliskraft
Annette Eicker APMG 1
55
-11.04.23
Corioliskraft
Annette Eicker APMG 1
56
-11.04.23
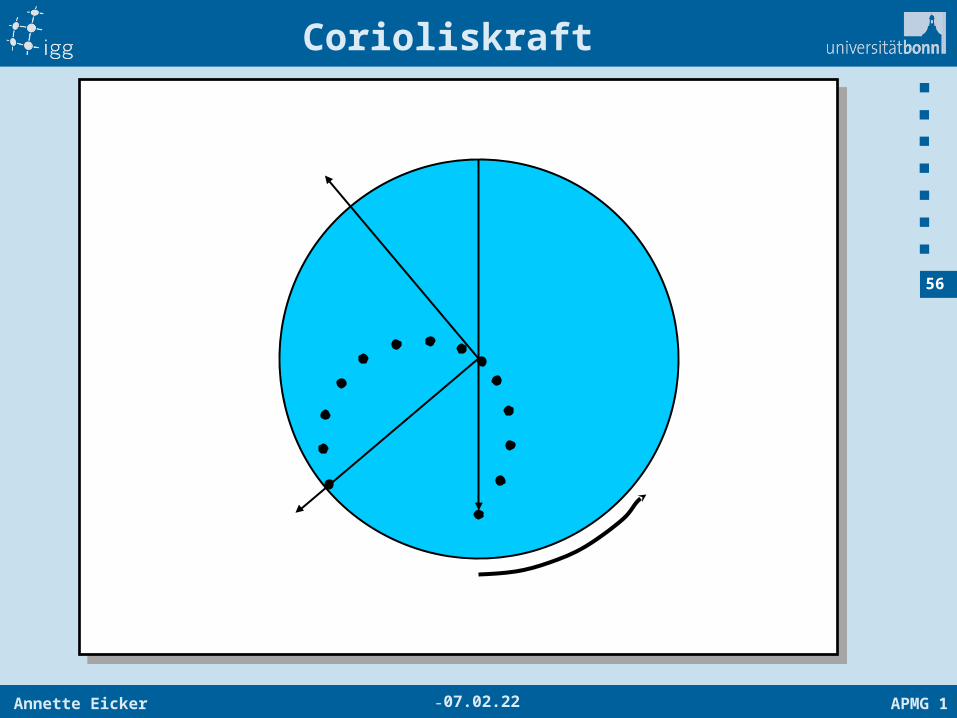
Corioliskraft
Annette Eicker APMG 1
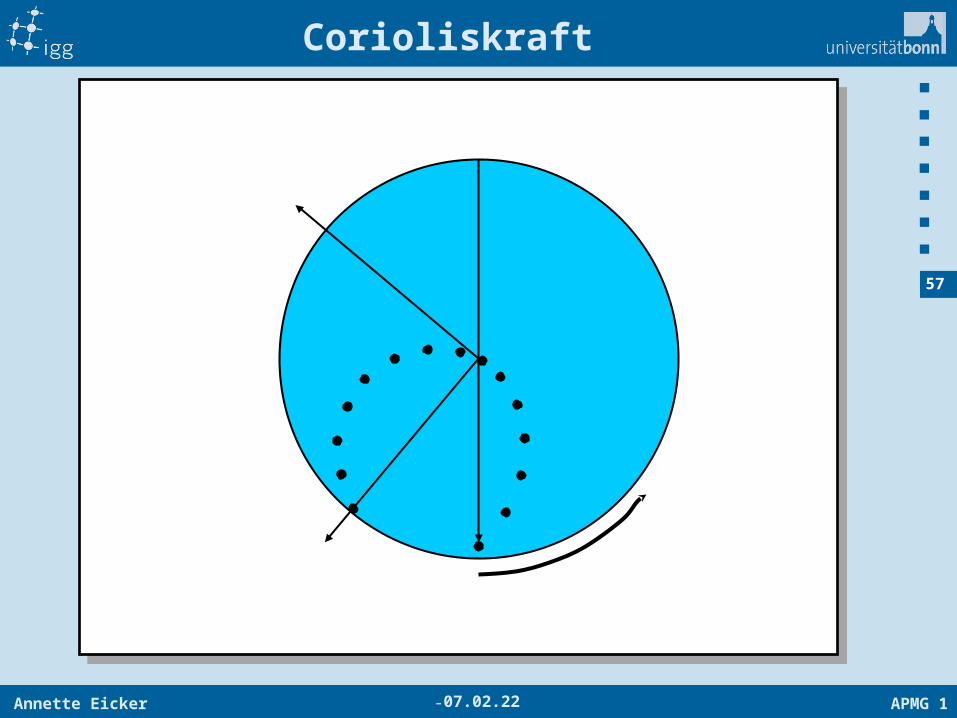
57
-11.04.23
Corioliskraft

Annette Eicker APMG 1
58
-11.04.23
Corioliskraft
Top Related