







Sprachen
Seiten
Rechtliche

NÜT-Grundlagen Prof. Dr. Clemen 2.3 Fourierreihe WS 2004/2005
2 Signale und Systemtheorie Signal sind physikalische Träger für Information. (Strom, Spannung, Schalldruck , Auslenkung Membran, Lichtsignal, etc. )
Signalanalyse ist ein mathematisches Verfahren, um Signale (Zeitfunktionen oder auch Funktionen des Ortes und ähnlichem) in „Teilschwingungen“ zu zerlegen . Bei periodischen Signalen gelingt dies mit dem Verfahren der Fourierreihenzerlegung . Bei nichtperiodischen und stochastischen Signalen liegen die Frequenzen der Teilschwingungen beliebig dicht und die Beschreibung kann nicht mehr über Amplituden von diskreten Teilschwingungen erfolgen, sondern muß über eine Dichtefunktion der Energie oder Leistung der Teilschwingungen erfolgen (Energiedichte oder Leistungsdichte ----> Fouriertransformation ). Die Darstellung des Signals durch die Teilschwingungen wird Spektraldarstellung genannt, die Überführung in die Spektraldarstellung nennt man eine Transformation. Bei der technischen Berechnung von Spektren bzw. von Transformationen mit einem Rechner kann nur eine begrenzte Zahl von Abtastwerten des Signals verarbeitet werden. Das daraus abzuleitende diskrete Spektrum wird mit der diskreten Fouriertransformation berechnet.
2.2.1 Arten von Signalen : deterministisch Quasi-statistisch nicht deterministisch stochastisch (statistisch)
ergodisch stationär nicht stationär
sinusförmig periodisch quasiperiodisch nicht-periodisch
Energiesignale Leistungssignale
kontinuierlich zeit/werte diskret digital
reell komplexwertig Vektorfunktionen ( Stereosignal, Feldstärke, Bildsignal)
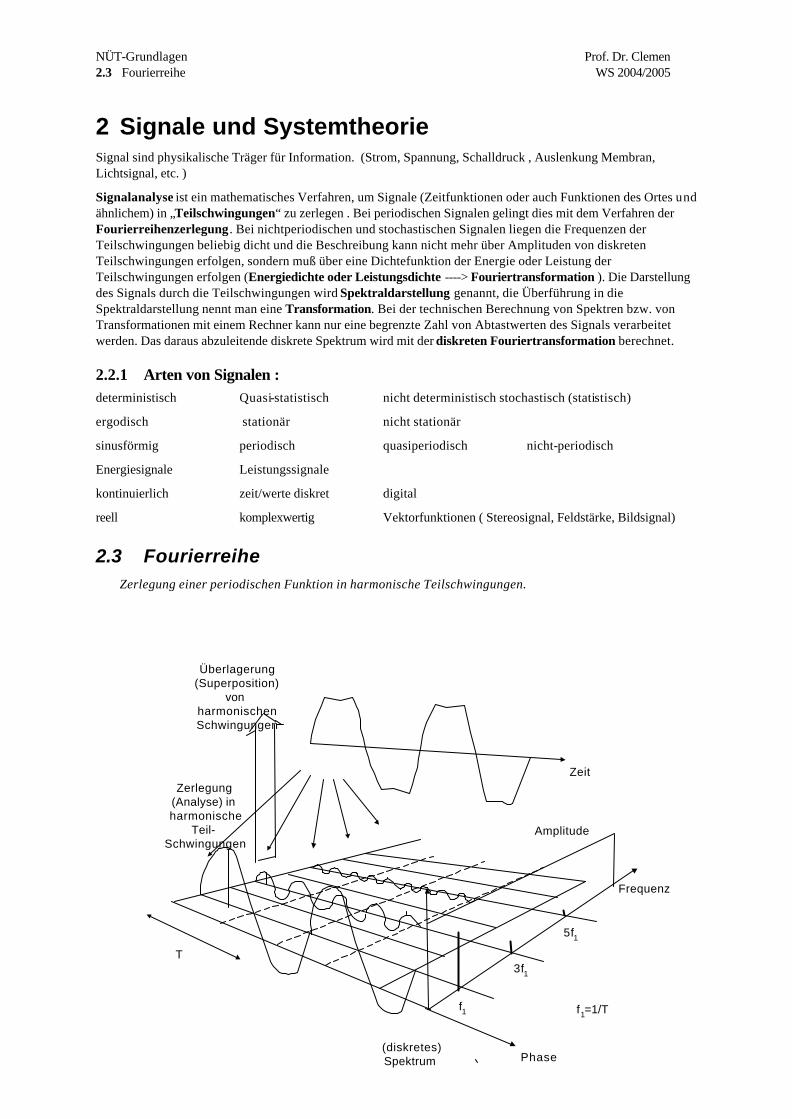
2.3 Fourierreihe Zerlegung einer periodischen Funktion in harmonische Teilschwingungen.
Überlagerung(Superposition)
vonharmonischenSchwingungen
Zerlegung(Analyse) inharmonische
Teil-Schwingungen
Phase
Amplitude
Frequenz
Zeit
(diskretes)Spektrum
T
f1
3f1
5f1
f1=1/T

NÜT-Grundlagen Prof. Dr. Clemen 2.3 Fourierreihe WS 04/05
2
uerPeriodendaTTtsts =+= ),()(
Approximation von s(t) durch Summe von Teilschwingungen, deren Frequenzen ganzzahlige Vielfache der Grundschwingung sind: Ak= Amplitude, ϕk = Phase der k-ten Teilschwingung
gungOberschwintenkderenzKreisfrequfkgungOberschwintenkderFrequenzfkf
enzGrundfrequT
f
kk
k
−⋅==−⋅=
==
πω 2,....3,2,1,
1
1
1
Ansatz für Approximationsfunktion:
S t s tN kk
N( ) ( )=
=∑
0
Dabei ist sk(t) die k-te Oberschwingung .
s t A tk k k k( ) cos( )= −ω ϕ
Zur Bestimmung der Koeffizienten Ak und ϕk ist eine Zerlegung der Teilschwingungen in einen Cosinus- und Sinusanteil vorteilhaft.
s t A t A t A t
a t b t mit a A b A
k k k k k ka
k k kb
k
k k k k k k k k k k
k k
( ) cos( ) cos cos sin sin
cos sin cos sin
= − = +
= + = =
ω ϕ ϕ ω ϕ ω
ω ω ϕ ϕ
1 24 34 1 24 34
Werden für die Approximation die Koeffizienten ak und b k bestimmt, so lassen sich die Koeffizienten Ak und ϕk aus der Umkehrung obiger Gleichungen bestimmen.
A a bbak k k k
k
k= + =2 2 ϕ arctan
Bestimmung der Koeffizienten ak und bk :
Beide Seiten der folgenden Gleichung * (Funktion = Approximationsfunktion)
mit cos(ωnt) multiplizieren und über eine Periode integrieren :
nn
T
kkn
T
kk
k
T
n
T
n
adtttbdtttadtta
dttts
=++=
=
∫∫∑∫
∫∞
=
])cos()cos()cos()cos([)cos(2
)cos()(
0010
0
0
ωωωωω
ω
Die rechte Seite der Gleichung ergibt wegen der Orthogonalität der trigonometrischen Funktionen an
ϕk
Ak
ak
bk
*)sincos(2
!)(
1
0 ∑∞
=
++=k
kkkk tbtaa
ts ωω

NÜT-Grundlagen Prof. Dr. Clemen 2.3 Fourierreihe WS 04/05
3
cos( )cos( )
sin( ) cos( )
ω ω
ω ω
k
T
n
k
T
n
t t dtT für n k
für n k
t t dt
0
0
20
0
∫
∫
=
=≠
=
Analog bestimmen sich die bk in dem man beide Seiten der Gleichung * (Funktion = Approximationsfunktion) mit sin(ωnt) multipliziert und dann über eine Periode integriert, wobei die Orthogonalität der trigonometrischen Funktionen zu beachten ist.
sin( ) sin( )ω ωk
T
nt t dtT für n k
für n k0
20
∫ =
=≠
aT
s t t dt
bT
s t t dt
k k
T
k k
T
=
=
∫
∫
2
2
0
0
( ) cos( )
( ) sin( )
ω
ω
Man kann beweisen, daß die Approximationsfunktion für N--∞ gegen die Funktion s(t) konvergiert (Ausnahme an Unstetigkeitsstellen) .
Eine für die meisten Berechnungen besser geeignete Form der Fourierreihe erhält man durch Einführung der komplexen e-Funktionen anstelle der reellen Sinus- und Cosinus- Funktionen.
*)(22
)cos()(
*
tjk
tjk
tj
c
jktj
c
jk
kkkk
kkk
k
kk
k
k ececeeA
eeA
tAts
⋅⋅⋅−⋅− +=+=
−=
ωωωϕωϕ
ϕω
4342143421
wobei sich die ck wie folgt berechnen lassen:
−=−== ∫∫− dttts
Tjdttts
Tjbae
Ac
T
k
T
kkkjk
kk )sin()(
2)cos()(
221
)(21
2 00
ωωϕ
cT
s t e dtkj t
Tk= − ⋅∫
1
0
( ) ω
[ ]∑∞
=
⋅⋅ +=0
*)()(k
tjk
tjk
kk ecects ωω
Die konjugiert komplexen Anteile lassen sich auch mit ‚negativen Frequenzen‘ schreiben:

NÜT-Grundlagen Prof. Dr. Clemen 2.3 Fourierreihe WS 04/05
4
kkkkk
tjk
tjtjtjtj
ec
tjtj
ec
tjtj
ccmitects
ececececccts
ececececccts
k
tjtj
ωωω
ωωωω
ωωωω
ωω
−===
++++++=
=++++++=
−−
∞
−∞=
⋅
⋅−
⋅⋅−
⋅
⋅−⋅⋅−⋅
∑
−−
⋅−−
⋅−−
:,*:)(
..*)(
...***)(
2211
22
22
11
11
221100
221100 4342143421
Aus den Fourierkoeffizienten ck lassen sich die A k und ϕk dann auf folgende Weise berechnen:
00
2
,
)(1
)(21
2
0
0
AccA
dtetsT
jbaeA
ecc
kkkk
TT
T
tfjkk
jkjkk
kk
=−==
=−=== ∫+
⋅⋅−−
ψϕ
πϕψ
Die Folge der Fourierkoeffizienten ck k= 0, ±1, ±2, ±3, ( k∈Z ganze Zahl ) beschreiben die Teilschwingungen der Funktion s(t) und heißen Frequenzbereichsdarstellung der Funktion s(t).
Die Folge ck kann man auch als diskrete komplexwertige Funktion der ganzahligen Variablen k ansehen. und darstellen. Dabei ergibt der Betrag das Amplitudenspektrum und das Argument von ck das Phasenspektrum. Die Frequenzachse läuft aus den oben genannten Gründen formal von -∞ bis +∞.
s(t) und die Folge { }c k k = ± ± ±0 1 2 3, , , ,...bilden ein Transformationspaar. Der Übergang von der einen
Darstellung in die andere wird durch die Transformationsgleichungen der Fourier-Transformation Diskret (F.T.D. ) und der Inversen Fourier-Transformation Diskret (I.F.T.D.) hergestellt:
{ }
∑
∫∞
−∞=
⋅
⋅−
=
=
←→
k
tjk
Ttj
k
kIFTD
FTD
eichungSyntheseglectsDTFI
ichungAnalysegledtetsT
cDTF
cts
k
k
ω
ω
)(....
)(1
...
)(
0
Bsp.: Rechteckfolge
A(τ/T)
fk
1/τ
1/T
|ck|
fk
φk
π
T t τ
A

NÜT-Grundlagen Prof. Dr. Clemen 2.3 Fourierreihe WS 04/05
5
Einzelpuls und Pulsfolge
∑∞
−∞=
−=
><
=⋅=
nT
nTtrectAtp
ttAt
rectAtp
)()(
2/||02/||
)()(
τ
ττ
τ
Spektrum: Folge der ck
( )
cT
Ae dtA
T j fe
AT f j
e e
AT
ff
c AT
ff
cfallsfalls
ff
ff
kj f t
k
j f t
k
j f j f
k
k
kk
kk
k
kk
k
k k
k k
= =−
=⋅
−−
=
= =
>
<
− ⋅ ⋅ − ⋅ ⋅
− −
− ⋅ ⋅ ⋅ ⋅
∫1
2
12
00
0
2 2
2
2
2
2π π
τ
τ
τ
τ
π τ π τ
π
π
τ π τπ τ
τ π τπ τ π
π τπ τ
π τπ τ
( )
( )
sin( )( )
sin( )( )
arg,
sin( )( )
sin( )( )
/
/
/
/
Die sinx/x Funktion wird auch Spaltfunktion genannt. Für x = 0 ergibt sich sin0/0 =1 . Die Nullstellen liegen - wie man leicht nachrechnet - bei n mal (1/τ) , n = ±1, ±2, ±3, ±4, ......
Man erkennt, daß der Betrag der komplexen Spektralfunktion symmetrisch bezüglich der Frequenz ist, während die Phasen schiefsymmetrisch sind: |c(-fk)| = |c(fk)| , ψ(-fk ) = - ψ(fk).
Die reellen Amplituden und Phasen der Teilschwingungen ergeben sich aus dem Teil des Spektrums mit positiven Frequenzen . Die Beträge der Spektralfunktion sind lediglich mit zwei zu multiplizieren und die Phasen mit -1 zu multiplizieren (umzudrehen).
Leistung
R
i(t)
u(t)
∑∫
∑∑∑
∫∫
∞
−∞=
∞
−∞=
∞
=
∞
=
==⇒
===
===
kk
T
kkk
k
k
k
TT
cdttsT
P
cAR
UP
dttsT
dtRtu
TP
Rtu
ts
2
0
2
0
22
0
2
0
0
2
00
2
0
0
00
)(1
21
21
)(1)(1)(
)(
NÜT-Grundlagen Prof. Dr. Clemen 2.1 Fouriertransformation WS 04/05
6
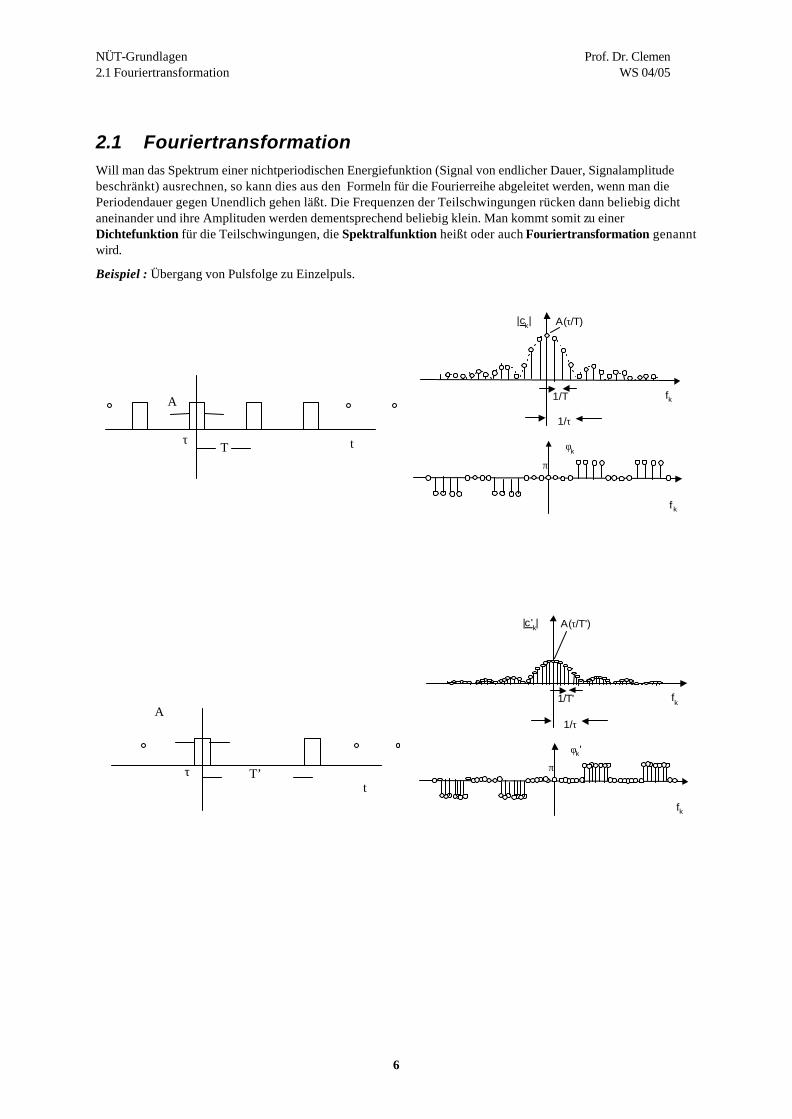
2.1 Fouriertransformation Will man das Spektrum einer nichtperiodischen Energiefunktion (Signal von endlicher Dauer, Signalamplitude beschränkt) ausrechnen, so kann dies aus den Formeln für die Fourierreihe abgeleitet werden, wenn man die Periodendauer gegen Unendlich gehen läßt. Die Frequenzen der Teilschwingungen rücken dann beliebig dicht aneinander und ihre Amplituden werden dementsprechend beliebig klein. Man kommt somit zu einer Dichtefunktion für die Teilschwingungen, die Spektralfunktion heißt oder auch Fouriertransformation genannt wird.
Beispiel : Übergang von Pulsfolge zu Einzelpuls.
A(τ/T)
fk
1/τ
1/T
|ck|
fk
φk
π
A(τ/T')
fk
1/τ
1/T'
|c'k|
fk
φk'
π
T’ t
τ
A
T t τ
A
NÜT-Grundlagen Prof. Dr. Clemen 2.1 Fouriertransformation WS 04/05
7
{ }s t c s t S f
cT
s t e dt c f df s t e dt
s t c e s t S f e df F T S f
F T D
F T D k
F T
F T
kj t
T
TT j f t
S f
kj t
k
T j f t
k
k
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( ) . . (
. . .
. . .
. .
. .
/
/
( )
→←
→←
= → =
= → = =
− −
− ⋅
−
→∞ − ⋅ ⋅
−∞
∞
⋅
= −∞
∞→ ∞ ⋅ ⋅
−∞
∞−
∫ ∫
∑ ∫
1 1
1
2
22
2 1
ω π
ω π
1 2444 3444
{ }
{ }
)
( ) ( ) . . ( )S f s t e dt F T s tj f t= =− ⋅ ⋅
−∞
∞
∫ 2π
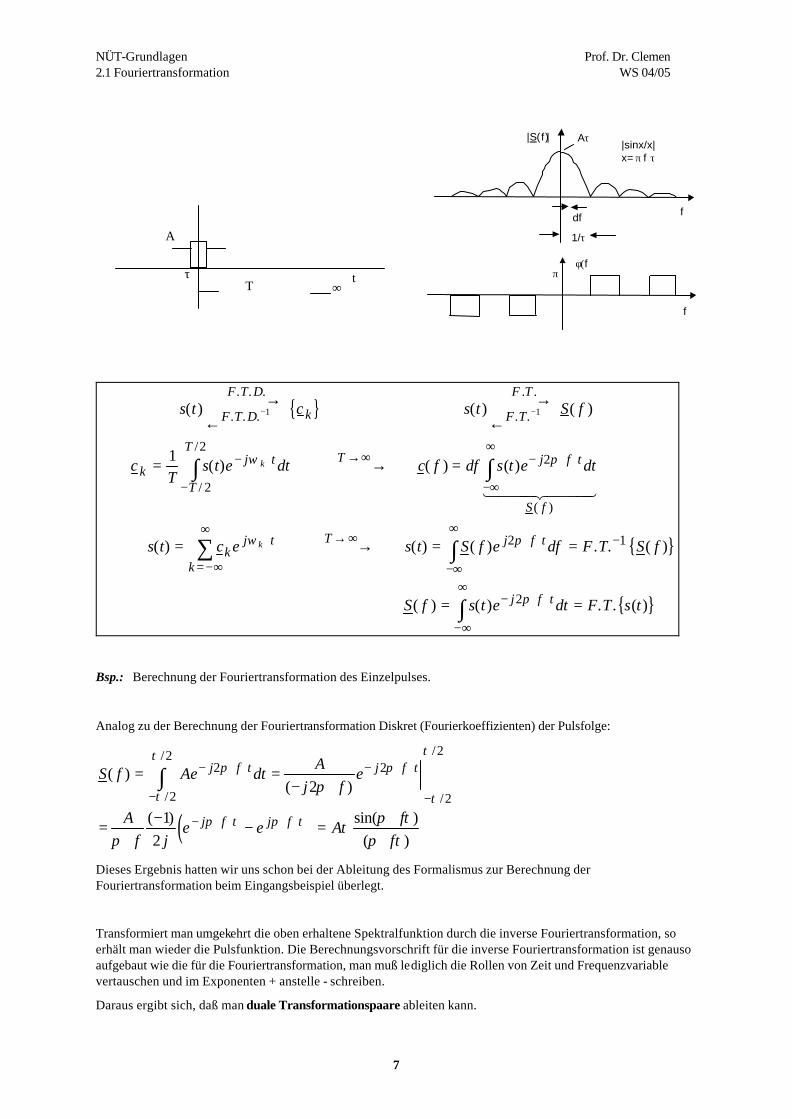
Bsp.: Berechnung der Fouriertransformation des Einzelpulses.
Analog zu der Berechnung der Fouriertransformation Diskret (Fourierkoeffizienten) der Pulsfolge:
( )
S f Ae dtA
j fe
Af j
e e Af
f
j f t j f t
j f j f
( )( )
( ) sin( )( )
/
/
/
/
= =− ⋅
=⋅
−− =
⋅⋅
− ⋅ ⋅ − ⋅ ⋅
− −
− ⋅ ⋅ ⋅ ⋅
∫ 2 2
2
2
2
2
2
12
π π
τ
τ
τ
τ
π τ π τ
π
πτ
π τπ τ
Dieses Ergebnis hatten wir uns schon bei der Ableitung des Formalismus zur Berechnung der Fouriertransformation beim Eingangsbeispiel überlegt.
Transformiert man umgekehrt die oben erhaltene Spektralfunktion durch die inverse Fouriertransformation, so erhält man wieder die Pulsfunktion. Die Berechnungsvorschrift für die inverse Fouriertransformation ist genauso aufgebaut wie die für die Fouriertransformation, man muß lediglich die Rollen von Zeit und Frequenzvariable vertauschen und im Exponenten + anstelle - schreiben.
Daraus ergibt sich, daß man duale Transformationspaare ableiten kann.
Aτ
f
1/τ
df
|S(f)|
f
φ(f)π
|sinx/x|x= π f τ
T t
∞ τ
A

NÜT-Grundlagen Prof. Dr. Clemen 2.1 Fouriertransformation WS 04/05
8
Bsp.: Die Spektralfunktion eines Pulses von der Form einer Spaltfunktion
s t A BBt
Bt( ) ( )
sin( )( )
= ⋅⋅
⋅2
22
ππ
ist eine zum Ursprung symmetrische Rechtecksfunktion mit der Breite 2B und Amplitude A.
( Ersetze in obigen Formeln : t durch f und f durch t sowie τ durch 2B)
Der Puls in Form einer Spaltfunktion wird auch sinx/x -Puls genannt. Das Spektrum dieses Pulses ist konstant bis zu einer durch die Breite des Pulses (Abstand zwischen den beiden Nullstellen = 1/B) gegebenen oberen Grenze (B) . Man sagt der sinx/x hat ein ideales bandbegrenztes Spektrum.
Folgerung: Die Transformationspaare (Rechteckzeitpuls ---> sinx/x Spektrum) und (sinx/x-Zeit-Puls ---> Rechteckspektrum) bilden eine duales Paar.
Interpretation der Dichtefunktion S(f):
Ein elektrisches Signal läßt sich durch Strom und Spannung charakterisieren. Das Spannungssignal sei s(t)= u(t)/√R, es erzeugt an einem Widerstand den Strom i(t) = u(t)/R und die momentane Leistung u(t)i(t)= u2(t)/R=s2(t).
Elektrische Energie während Zeit T, sowie die zeitlich gemittelte Leistung :
==
=
===
∫
∫∫∫T
TTT
dttsTT
WP
dttsdttuR
dttituW
0
2
0
2
0
2
0
)(1
)()(1
)()(
Zur Charakterisierung des Signals durch seine Energie oder Leistung läßt man den Widerstand weg und nimmt somit die auf den Widerstand normierte Energie und Leistung .
Falls das Signal zeitlich begrenzt ist und nur von kurzer Dauer ist, ist die Angabe der Energie sinnvoll. Ist das Signal von längerer Dauer und stationär, so kann man einen Ausschnitt wählen und für diesen die mittlere Leistung bestimmen.
Da die Zeitfunktion und die Spektralfunktion zwei äquivalente Darstellungsformen des Signals sind kann man die Energie bzw. Leistung auch im Frequenzbereich berechnen (sog. Parseval’sche Gleichung). Es gilt: Die Energiedichte der Teilschwingungen ist durch das Betragsquadrat der Fouriertransformierten gegeben:
w(f) df = 2|S(f)|2 df
Energie der kontinuierlich verteilten „Teilschwingungen“ im Frequenzbereich zwischen f und f +df = (Energiedichte bei Frequenz f) mal df =2 mal (Betragsquadrat der Fouriertransformierten von s(t) ) mal df
Entsprechend kann man die Leistungsdichte eines stationären Signals definieren. Dazu berechnet man die Fouriertransformierte eines Ausschnitts des Signals mit der Länge T - außerhalb dieses Zeitabschnitts wird die Funktion durch Null fortgesetzt (Nullfortsetzung ) - dann ist
p fw f
T
S f
TT( )
( ) ( )= =
2 2
Der Faktor 2 rührt daher, daß die Spektralfunktion für positive und negative Frequenzen definiert ist, der Betrag jedoch symmetrisch zum Ursprung ist.

NÜT-Grundlagen Prof. Dr. Clemen 2.4 Fouriertransformation eines periodischen Signals WS 04/05
9
Ableitung der Parseval‘schen Gleichung:
∫∫ ∫
∫ ∫∫∫∞
∞−
∞
∞−
∞
∞−
⋅⋅⋅
∞
∞−
∞
∞−
⋅⋅⋅∞
∞−
∞
∞−
=
=
==
dttsdtdfefSts
dfdtetsfSdffSfSdffS
tfj
tfj
)()()(
)()()(*)()(
22
22
π
π
∫∫∫∫∞∞∞
∞−
∞
∞−
====00
222 )()(2)()( dffwdffSdffSdttsW
Dabei wurde ausgenutzt, daß man die Integrale als Summen auffassen kann und man die Reihenfolge bei der Summenbildung über f und t vertauschen kann. Der bei s(t) stehende Faktor hängt ja von dem Produkt f mal t ab und kann somit auch zu S(f) geschrieben werden.
2.4 Fouriertransformation eines periodischen Signals
T
xp(t)
x(t) zeitbegrenzterAusschnitt
t
t
Abbildung 2-1
)(1
)(1
)(1 0
0
22k
TT
T
tfjtfjpk fX
Tdtetx
Tdtetx
Tc kk === ∫ ∫
+ ∞
∞−
⋅⋅−⋅⋅− ππ
2.5 Laplace- Transformation für kausale Signale (s(t)= 0 für t<0 ) wendet man bei Systembeschreibung mit Übertragungsfunktion anstelle der Fouriertransformation die Laplace- Transformation an. Vorteil es können auch nicht-Energie Signale wie dz.B: die Sprungfunktion transformiert werden und es gibt die Möglichkeit Umformungen im komplexen vorzunehmen :
• Definition des Systems über Pole und Nullstellen der Übertragungsfunktion ,
• Faktorisierung der Übertragungsfunktion ( Zerlegung in Stufen 2. Ordnung)
Erweiterung des Frequenzraumes (linearer Raum = Gerade „Frequenzachse“ ) ω zum Bildraum ( p = σ + jω = komplexe Ebene )
+<<
=sonst
TTtTtxtx p
0)(
)( 00
NÜT-Grundlagen Prof. Dr. Clemen 2.6 Umsetzung zeitkontinuierlicher Signale in zeitdiskrete Signale und umgekehrt WS 04/05
10
( ) ( ))()(
)()()()(..)(..0 0
fSpL
pLdtetsdteetsetsTFtsTL
Faktorrzeugenderkovergenzee
jp
tptjtt
t
=
====
=
=
∞ ∞⋅−⋅−⋅−⋅−
⋅−
∫ ∫
ω
ωσσ
σ
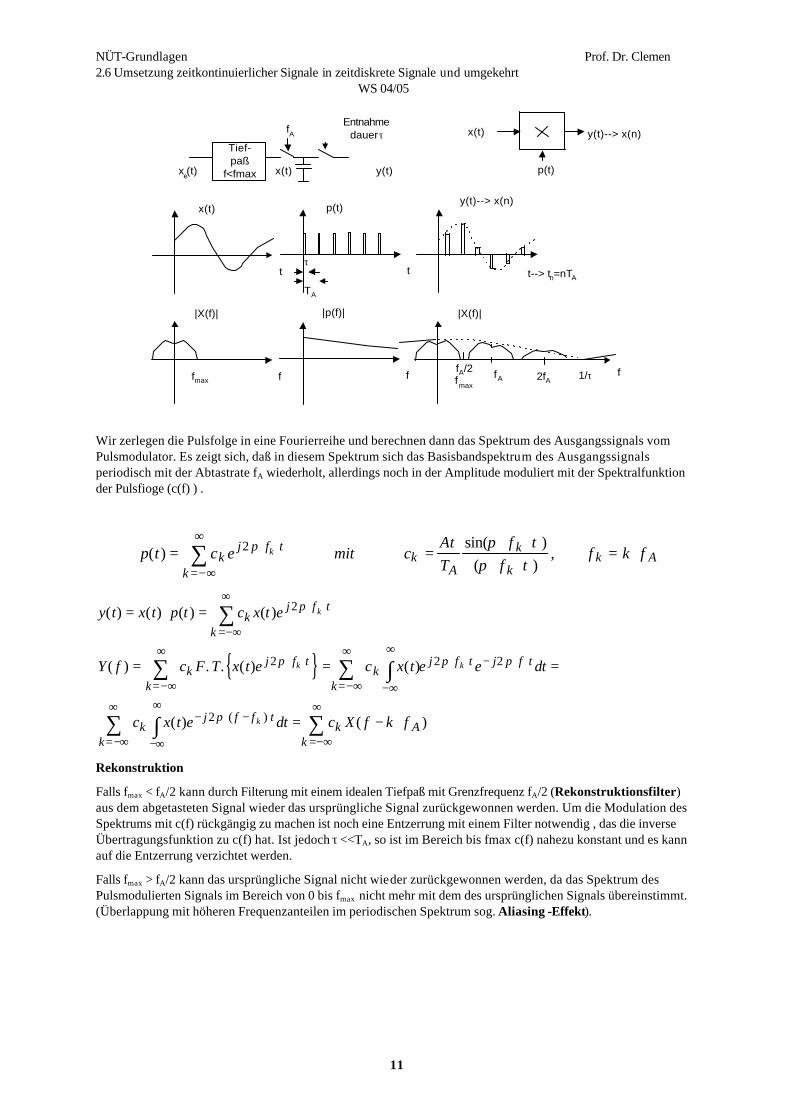
2.6 Umsetzung zeitkontinuierlicher Signale in zeitdiskrete Signale und umgekehrt
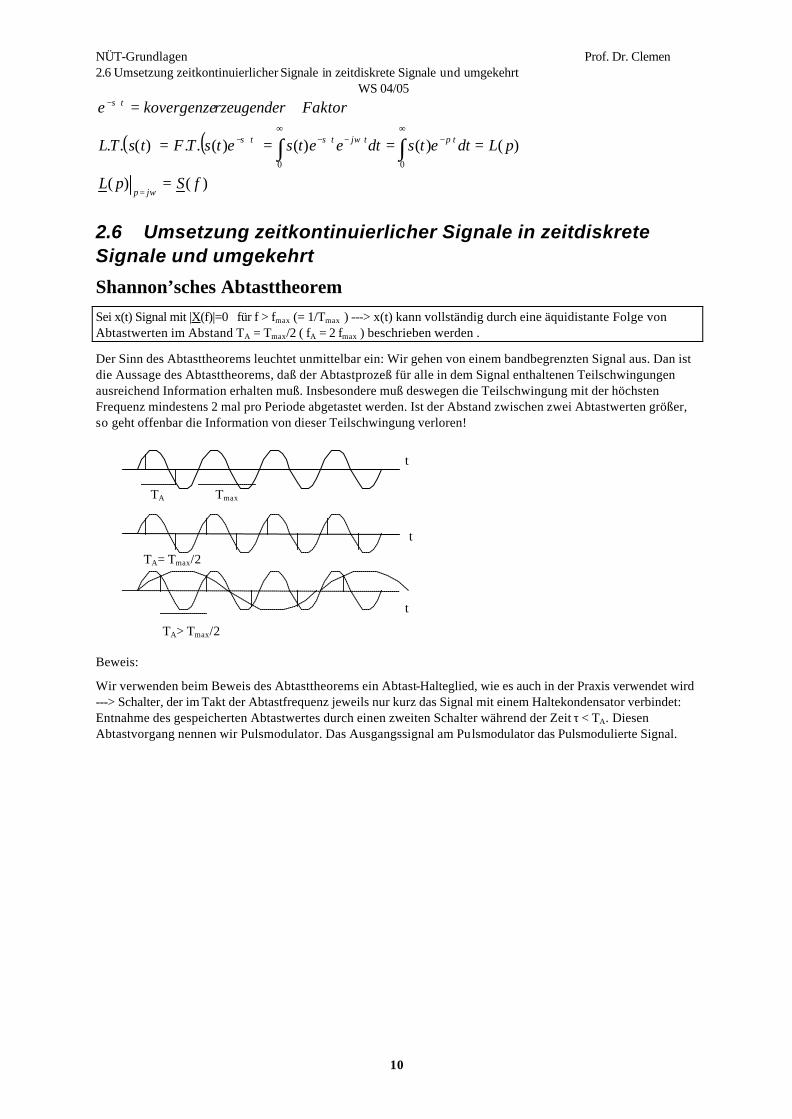
Shannon’sches Abtasttheorem Sei x(t) Signal mit |X(f)|=0 für f > fmax (= 1/Tmax ) ---> x(t) kann vollständig durch eine äquidistante Folge von Abtastwerten im Abstand TA = Tmax/2 ( fA = 2 fmax ) beschrieben werden .
Der Sinn des Abtasttheorems leuchtet unmittelbar ein: Wir gehen von einem bandbegrenzten Signal aus. Dan ist die Aussage des Abtasttheorems, daß der Abtastprozeß für alle in dem Signal enthaltenen Teilschwingungen ausreichend Information erhalten muß. Insbesondere muß deswegen die Teilschwingung mit der höchsten Frequenz mindestens 2 mal pro Periode abgetastet werden. Ist der Abstand zwischen zwei Abtastwerten größer, so geht offenbar die Information von dieser Teilschwingung verloren!
Beweis:
Wir verwenden beim Beweis des Abtasttheorems ein Abtast-Halteglied, wie es auch in der Praxis verwendet wird ---> Schalter, der im Takt der Abtastfrequenz jeweils nur kurz das Signal mit einem Haltekondensator verbindet: Entnahme des gespeicherten Abtastwertes durch einen zweiten Schalter während der Zeit τ < TA. Diesen Abtastvorgang nennen wir Pulsmodulator. Das Ausgangssignal am Pulsmodulator das Pulsmodulierte Signal.
t
Tmax TA
t
TA= Tmax/2
t
TA> Tmax/2
NÜT-Grundlagen Prof. Dr. Clemen 2.6 Umsetzung zeitkontinuierlicher Signale in zeitdiskrete Signale und umgekehrt WS 04/05
11
Tief-paß
f<fmax
fAEntnahme
dauer τ
x(t)xe(t) y(t)
y(t)--> x(n)
|p(f)|
f
t--> tn=nTA
p(t)
t
|X(f)|
2fAfmaxfA
fA/21/τ f
|X(f)|
f
x(t)
t
fmax
τ
TA
y(t)--> x(n)x(t)
p(t)
Wir zerlegen die Pulsfolge in eine Fourierreihe und berechnen dann das Spektrum des Ausgangssignals vom Pulsmodulator. Es zeigt sich, daß in diesem Spektrum sich das Basisbandspektrum des Ausgangssignals periodisch mit der Abtastrate fA wiederholt, allerdings noch in der Amplitude moduliert mit der Spektralfunktion der Pulsfioge (c(f) ) .
p t c e mit cAT
ff
f k fkj f t
kk
A
k
kk Ak( )
sin( )( )
,= =⋅ ⋅
⋅ ⋅= ⋅⋅ ⋅ ⋅
=−∞
∞
∑ 2 π τ π τπ τ
{ }
y t x t p t c x t e
Y f c F T x t e c x t e e dt
c x t e dt c X f k f
kj f t
k
kj f t
kk
j f t j f t
k
kj f f t
kk A
k
k
k k
k
( ) ( ) ( ) ( )
( ) . . ( ) ( )
( ) ( )( )
= ⋅ =
= = =
= − ⋅
⋅ ⋅ ⋅
=−∞
∞
⋅ ⋅ ⋅
=−∞
∞
−∞
∞⋅ ⋅ ⋅ − ⋅ ⋅ ⋅
=−∞
∞
−∞
∞− ⋅ ⋅ − ⋅
=−∞
∞
=−∞
∞
∑
∑ ∫∑
∫∑ ∑
2
2 2 2
2
π
π π π
π
Rekonstruktion
Falls fmax < fA/2 kann durch Filterung mit einem idealen Tiefpaß mit Grenzfrequenz fA/2 (Rekonstruktionsfilter) aus dem abgetasteten Signal wieder das ursprüngliche Signal zurückgewonnen werden. Um die Modulation des Spektrums mit c(f) rückgängig zu machen ist noch eine Entzerrung mit einem Filter notwendig , das die inverse Übertragungsfunktion zu c(f) hat. Ist jedoch τ <<TA, so ist im Bereich bis fmax c(f) nahezu konstant und es kann auf die Entzerrung verzichtet werden.
Falls fmax > fA/2 kann das ursprüngliche Signal nicht wieder zurückgewonnen werden, da das Spektrum des Pulsmodulierten Signals im Bereich von 0 bis fmax nicht mehr mit dem des ursprünglichen Signals übereinstimmt. (Überlappung mit höheren Frequenzanteilen im periodischen Spektrum sog. Aliasing -Effekt).
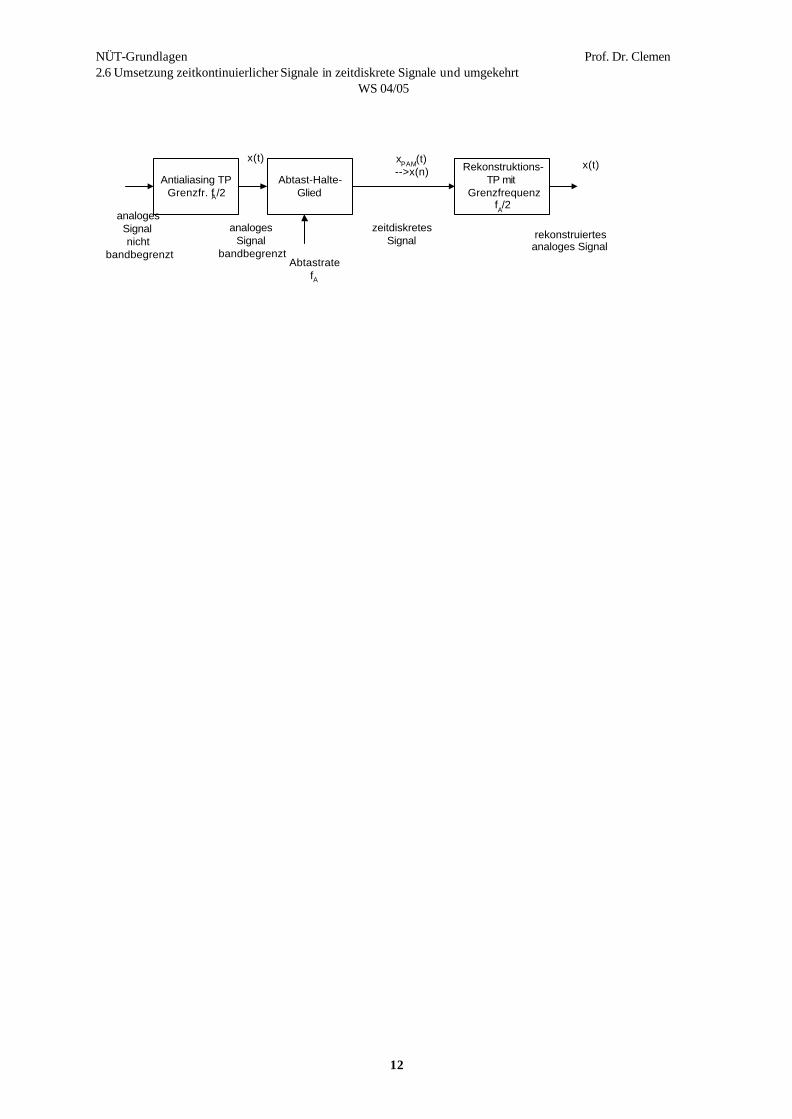
NÜT-Grundlagen Prof. Dr. Clemen 2.6 Umsetzung zeitkontinuierlicher Signale in zeitdiskrete Signale und umgekehrt WS 04/05
12
Antialiasing TPGrenzfr. fA/2
Abtast-Halte-Glied
Rekonstruktions-TP mit
GrenzfrequenzfA/2
xPAM(t)-->x(n)
x(t)x(t)
analogesSignalnicht
bandbegrenzt
analogesSignal
bandbegrenzt
zeitdiskretesSignal rekonstruiertes
analoges SignalAbtastrate
fA

NÜT-Grundlagen Prof. Dr. Clemen 2.7 Diskrete Signale: Beschreibung im Frequenzbereich WS 04/05
13
2.7 Diskrete Signale: Beschreibung im Frequenzbereich Wir haben im vorangegangenen Abschnitt das Spektrum eines abgetasteten Signals über die Fourierreihenzerlegung (Fouriertransformation diskret) bestimmt. Wir ersetzen die Pulse jetzt durch diskrete Funktionswerte und definieren dafür das Spektrum.
|X(f)|
2fAfmaxfA
fA/2 f
xPAM(t)
x(n)
tn=nTA
t TA
eine diskreteZeitfunktion mit
Werten imAbstand TA
kontinuierlichesperiodischesSpektrum mit
Periode fA
hat ein
Die Transformationsformeln lauten
Fourierkoeffizienten des periodischen Spektrums, sowie Fourierreihe für die Spektralfunktion:
x tf
X f e df
X f x t e
nA
j f t
f
f
nn
j f t
n
A
A
n
( ) ( )
( ) ( )
/
/
=
=
⋅ ⋅ ⋅
−
=−∞
∞− ⋅ ⋅ ⋅
∫
∑
1 2
2
2
2
π
π
Damit die Fourierreihe konvergiert muß x(tn) ein Energiesignal sein, d.h. x(tn) muß zeitlich begrenzt oder für große n stark abnehmende Werte haben.
Falls x(nTA) eine periodische Funktion ist,
x t x n N T x t Tn A n( ) (( ) ) ( )= + = +
kann das Spektrum somit nicht nach der obigen Definition berechnet werden Das Spektrum wird jetzt über die Diskrete Fouriertransformation berechnet, die wir im nächsten Abschnitt definieren.

NÜT-Grundlagen Prof. Dr. Clemen 2.8 Die diskrete Fouriertransformation (DFT) WS 04/05
14
2.8 Die diskrete Fouriertransformation (DFT) Zur Berechnung der Spektralfunktion ( des Spektrums, oder der Fouriertransformation) mit einem Digitalrechner.
Der Rechner entnimmt dem Signal innerhalb eines Zeitintervalls T eine Folge von äquidistanten ( Abtastperiode TA) Abtastwerten T= NTA . Wir sprechen von einem Signalabschnitt.
Setzt man in Gedanken diesen Signalabschnitt periodisch fort, so entsteht ein periodisches zeitdiskretes Signal.
Über das Spektrum dieses Signals können wir folgende Aussagen machen:
x(tn) ist periodisch mit T ---> X(f) muß diskret sein mit Werten im Abstand f0 = 1/T , diskrete Frequenzen fk =kf1
x(tn) ist zeitdiskrete Folge von Werten im zeitlichen Abstand TA = 1/ fA ---> X(fA) muß periodisch mit der Periode fA = 1/TA sein
|X(f)|
2fAfAfA/2fk=k(1/T)=kf1
x(n)
3fA/2
tn=nTA=n(1/fA)
T=NT A=N/fA fA=Nf 0=N/Tperiodische
diskrete,äquidistanteZeitfunktion
periodischesdiskretes,
äquidistantesSpektrum
Basisintervall Basisintervall
Da
X f x t ek nn
j f tk n( ) ( )== −∞
∞− ⋅ ⋅ ⋅∑ 2 π
wegen der Periodizität von x(tn) nicht konvergiert, setzen wir fest, daß zur Berechnung der Spektralwerte nur die vom Rechner entnommenen N Werte (aus dem sogenannten Basisintervall) herangezogen werden.
Nnk
nTNT
knTT
ktfdaenTxkfX
NketxfX
AA
AnkNnk
jN
nA
tfjN
nnk
nk
====
−==
⋅−−
=
⋅⋅⋅−−
=
∑
∑11
,)()(
1,...,1,0)()(
21
01
21
0
π
π
Für die Rücktransformation muß das im vorigen Abschnitt stehende Integral wegen der diskreten Frequenzen in eine Summe umgeschrieben werden. Es ergibt sich :

NÜT-Grundlagen Prof. Dr. Clemen 2.8 Die diskrete Fouriertransformation (DFT) WS 04/05
15
Nnk
jN
kA
A
A
f
f
tfjN
kkn
tfj
An
ekfXN
nTx
NTT
fdf
undT
dfda
efXN
txdfefXf
txA
A
nkn
⋅⋅−
=
−
⋅⋅⋅−
=
⋅⋅⋅
∑
∫ ∑
=
===
=→=
π
ππ
21
01
2/
2/
21
0
2
)(1
)(
11
)(1
)()(1
)(
Da wir wieder diskrete Frequenzen und somit diskrete Teilschwingungen haben, ist es günstiger, diese auch wieder durch ihre Amplituden zu charakterisieren und nicht durch deren Dichte. Es ist deswegen notwendig, den Faktor 1/N bei der Berechnung der Spektralfunktion hinzuzufügen . Dann muß er aber bei der Rücktransformation weggelassen werden.
Zur Übersichtlichkeit schreiben wir vereinfachend
kkfnnTA
→→
1
{ } { }x n X k
D F T X kN
x n e k N
I D F T x n X k e n N
n N k N
n
N j nkN
k
N j nkN
D F T
I D F T( ) ( )
. . : ( ) ( ) , ,....
. . . . ( ) ( ) , , ....
, ,.... , ,....
. : :
. : : .= − →
← = −
=
− − ⋅
=
− ⋅ ⋅
= = −
= = −
∑
∑
0 1 1 0 1 1
0
1 2
0
1 2
10 1 1
0 1 1
π
π
Drehfaktor:
W ej
N=−
2π
ist komplexe Zahl mit Betrag = 1 und Winkel -(2π)/N. Die Potenzen von W liegen auf dem Einheitskreis in äquidistanten Winkel-Abständen (2π)/N. Sie sind die komplexen Nullstellen der Gleichung zN-1 = 0
W0=W8
W1
W2
W3
W4
W5
W6
W7
1
j
2π/8
N=8
z e n
z e W
N j n
nj
nN n
= = =
⇒ = =
− ⋅
− ⋅
1 012
2
π
π
, , ... ..
Unter Verwendung der Abkürzung für den Drehfaktor und der Matrizenschreibweise:

NÜT-Grundlagen Prof. Dr. Clemen 2.9 Systemtheorie WS 04/05
16
( )( )
X kN
x n W k N
x n X k W n N
X Ax AN
W
x BX B A W
n
Nnk
k
Nnk
nk
nk
( ) ( ) , , ....
( ) ( ) , ,....
= ⋅ = −
= ⋅ = −
= =
= = =
=
−
=
−−
− −
∑
∑
10 1 1
0 1 1
1
0
1
0
1
1
r r
r r
XXX
X
N
W W WW W W
W W W
xxx
xN
N
N
N N N NN
0
1
2
1
2 1
2 4 2 1
1 2 1 1 1
0
1
2
1
1
1 1 1 111
1.
.
.
.. . . . .
.
..
( )
( )
( ) ( ) ( )( )−
−
−
− − − −−
=
Zur Berechnung der Inversen entfern man den Faktor 1/N und ersetzte bei den Drehfaktoren im Exponent das Plus-Vorzeichen durch ein Minuszeichen. Man beachte, daß für die Matrix A die i-te Zeile gleich der i-ten Spalte ist (Die Matrix ist gleich ihrer Transponierten).
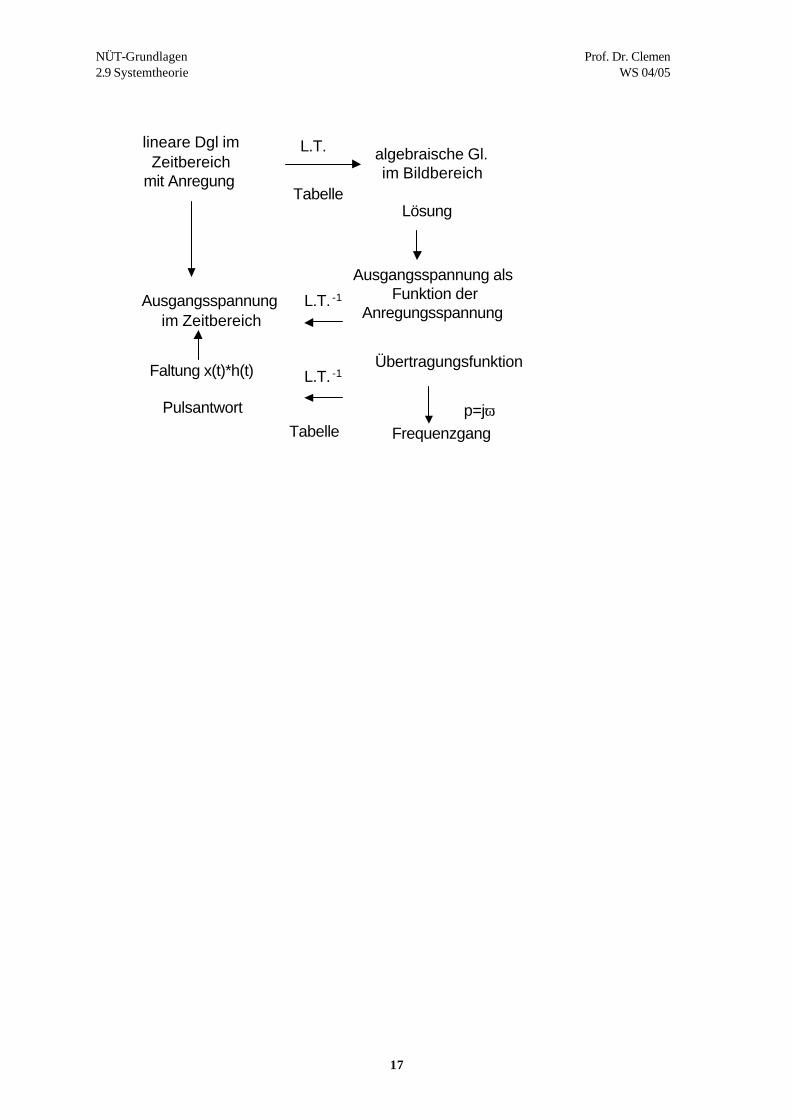
2.9 Systemtheorie
2.9.1 Allgemeines Vorgehen Elektrisches bzw. elektronisches analoges System setzt sich aus konzentrierten Bauteilen zusammen: Widerstände, Kondensator , Spulen (Induktivitäten,) , Transistoren, Dioden etc.
Bei einem LTI-System sind keine nichtlinearen Bauelemente vorhanden, bzw. sie werden nur im Kleinsignalbetrieb ausgesteuert.
LTI = Linear time invariant. Außerdem sei das System kausal, d.h. das Ausgangsignal reagiert (erscheint) erst nach einer Anregung am Eingang.
Schaltung definiert, wie diese Bauelemente zusammengefügt sind und zusammenwirken. Die Eigenschaften des System sind z.B.: Welche Ausgangsspannung ergibt sich bei bestimmter Anregung durch Eingangsspannung? Wie ist der Frequenzgang ?etc.
System läßt sich durch ein System von linearen Differentialgleichungen mit konstanten Koeffizienten beschreiben. Daraus können die Eigenschaften abgeleitet werden. Zur Lösung werden häufig die Differentialgleichungen aus dem Zeitbereich in den Bildbereich und von dort in den Frequenzbereich transformiert. Dort ergeben sich dann algebraische Gleichungen, die leichter zu lösen sind. Durch Rücktransformation ergibt sich die Lösung im Zeitbereich. Die Transformationen werden häufig anhand von Tabellen durchgeführt.
NÜT-Grundlagen Prof. Dr. Clemen 2.9 Systemtheorie WS 04/05
17
lineare Dgl imZeitbereich
mit Anregung
algebraische Gl.im Bildbereich
Lösung
Ausgangsspannung alsFunktion der
Anregungsspannung
Frequenzgang
Ausgangsspannungim Zeitbereich
L.T.
L.T. -1
p=jω
Übertragungsfunktion
Pulsantwort
L.T. -1Faltung x(t)*h(t)
Tabelle
Tabelle

NÜT-Grundlagen Prof. Dr. Clemen 2.9 Systemtheorie WS 04/05
18
2.9.2 Beispiel: RC-Glied
R
Cue(t)=x(t)
ua(t)=y(t)
1
t
1
t
( )τ
τττττ
πωτωω
ω
τ
τ
τ
τ
/1)()(
)(/1
111/1
1111
11)()()(
1)()()(
21
1
11
1)()(
)(
11
)()(
)(
)()()(
)()(
0
)()(0)()()(
t
g
g
eaa
aa
e
ea
ae
etutx
gchzerlegunPartialbrupppppp
pXpHpY
ppXSprungtutx
RCf
ff
jjjXjY
jH
ppXpY
pH
pXpYpYp
txtydtdy
RCuudt
duCR
udt
duCRu
Sprungtutudt
duCitutiRtu
−−=⇒
+
−=
+
⋅=⋅+
⋅=⋅=
⇒=⇒==
⋅⋅=
+=
⋅+==
⋅+==
=+⋅⋅
=+⋅
==+⋅
=+⋅+−
====+⋅+−
Berechnung der Sprungantwort im Zeitbereich:
0)0(11)(
1)(hom
)(ln:hom
0)1(1
//
/
=−=−=
⇒=
=⇒+−=−=−=
>−=
−−
−
att
a
a
ta
uwegeneketu
tuTeilsogenenindesLsgepartikulär
ketuCt
ydt
ydyy
dtdy
Teilogener
tydtdy
ττ
τ
τττ
τ
NÜT-Grundlagen Prof. Dr. Clemen 2.9 Systemtheorie WS 04/05
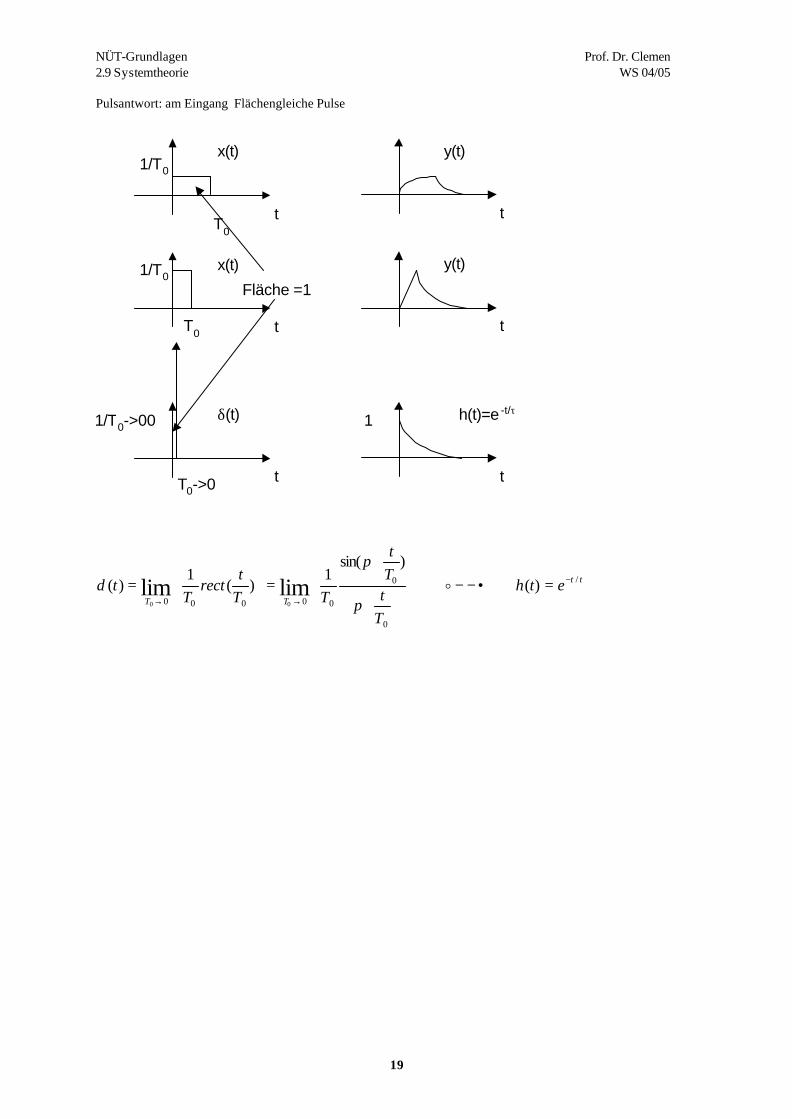
19
Pulsantwort: am Eingang Flächengleiche Pulse
t
x(t)
t
x(t)
t
δ(t)
t
y(t)
t
y(t)
t
h(t)=e -t/τ1
T0
1/T0
1/T0
1/T0->00
Fläche =1
T0
T0->0
τ
π
πδ /
0
0
00000)(
)sin(1
)(1
)( limlim00
t
TTeth
TtTt
TTt
rectT
t −
→→=•−−
⋅
⋅=
= o

NÜT-Grundlagen Prof. Dr. Clemen 2.9 Systemtheorie WS 04/05
20
Ausgangsspannung durch Überlagerung der Pulsantworten angestoßen aus Eingangssignal
-à Faltung der Eingangsspannung mit der Pulsantwort
∫∞
∞−
−= τττ dthxty )()()(
y(3)=x(0)h(3)dt+x(1)h(2)dt+x(2)h(1)dt+x(3)h(0)dt
dt
t
t
x(t)
y(t)
0 1 2 3 4 5 6
= Σ i=0..3x(idt)h(3dt-idt)dt
∫∫∫∞
∞−
=−=−=−= )(*)()()()()()()()( 10
10
11
11
thtxdthxdtttxthdttthtxtytt
τττ

NÜT-Grundlagen Prof. Dr. Clemen 2.9 Systemtheorie WS 04/05
21
2.9.3 Korrelation zweier Signale: allerdings für stochastische Signale, statistische Mittelwertsfunktion, gibt an, inwieweit zwei Zeitfunktionen übereinstimmen. Um die Übereinstimmung zu finden, müssen sie zeitlich gegeneinander verschoben werden.
∫∞
∞−
+= τττ dtyxtrxy )()()(
)()()()()(
)(*)()(* fYfXyxr
tytrr
xy
txyxy
⋅•−−∗−=
−==
oτττ
ττ
Autokorrelationsfunktion (AKF):
rxx(τ) Es gilt W = rxx(0) (Energie des Signals)
Skizze: „Passen die Signale zusammen , haben sie Gemeinsamkeiten, wenn man sie zeitlich in geeigneter Weise verschiebt?“
NÜT-Grundlagen Prof. Dr. Clemen 2.9 Systemtheorie WS 04/05
22
2.9.4 Übertragungsfunktion
Falls
))(.(.)()(
)()(
)()()()()(
)(
)(
thTFjHtx
tyfH
jHeXdeheXdheXdtheXty
eXtx
tjjtjtjj
tj
===
===−=
⇒=
∫∫ ∫∞
∞−
⋅−∞
∞−
∞
∞−
−⋅⋅
ω
ωττττττ ωτωωτωτω
ω
)()( fHth •−−o
wieder das Beispiel des RC-Tiefpaß:
τ
τ/1
11
..)( tep
TLth −− =
⋅+
=
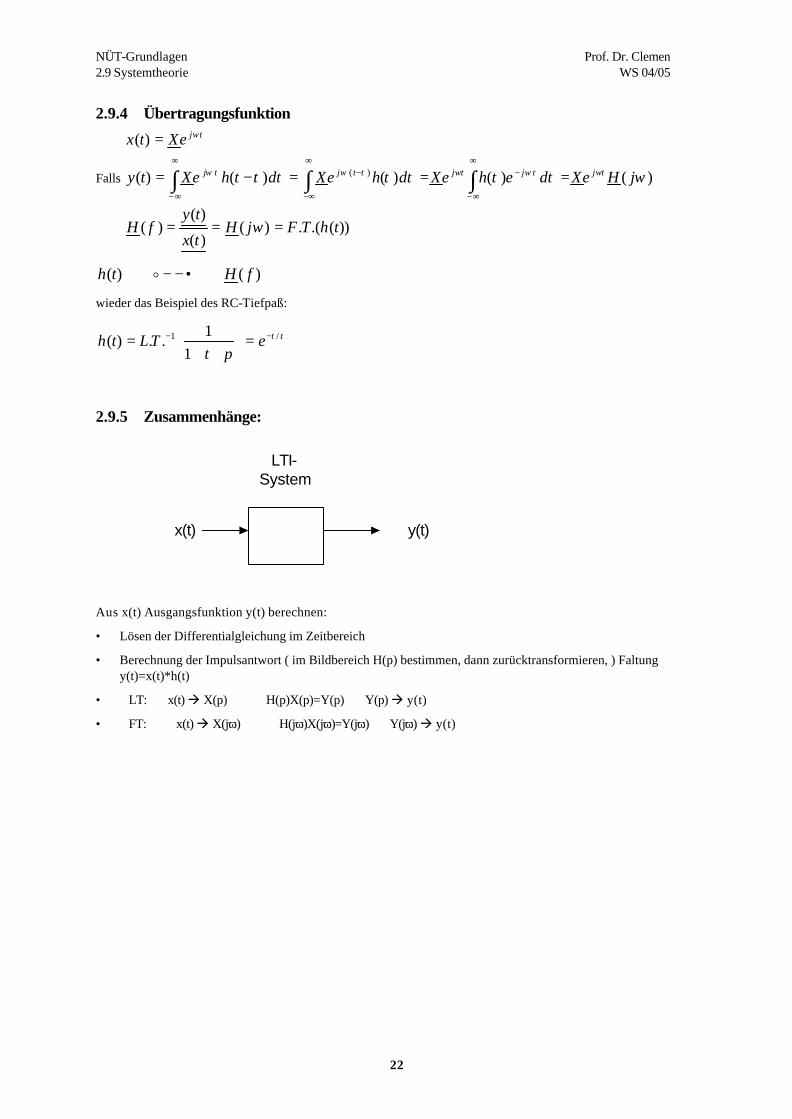
2.9.5 Zusammenhänge:
LTI-System
x(t) y(t)
Aus x(t) Ausgangsfunktion y(t) berechnen:
• Lösen der Differentialgleichung im Zeitbereich
• Berechnung der Impulsantwort ( im Bildbereich H(p) bestimmen, dann zurücktransformieren, ) Faltung y(t)=x(t)*h(t)
• LT: x(t) à X(p) H(p)X(p)=Y(p) Y(p) à y(t)
• FT: x(t) à X(jω) H(jω)X(jω)=Y(jω) Y(jω) à y(t)
NÜT-Grundlagen Prof. Dr. Clemen 2.9 Systemtheorie WS 04/05
23
NÜT-Grundlagen Prof. Dr. Clemen 2.9 Systemtheorie WS 04/05
24
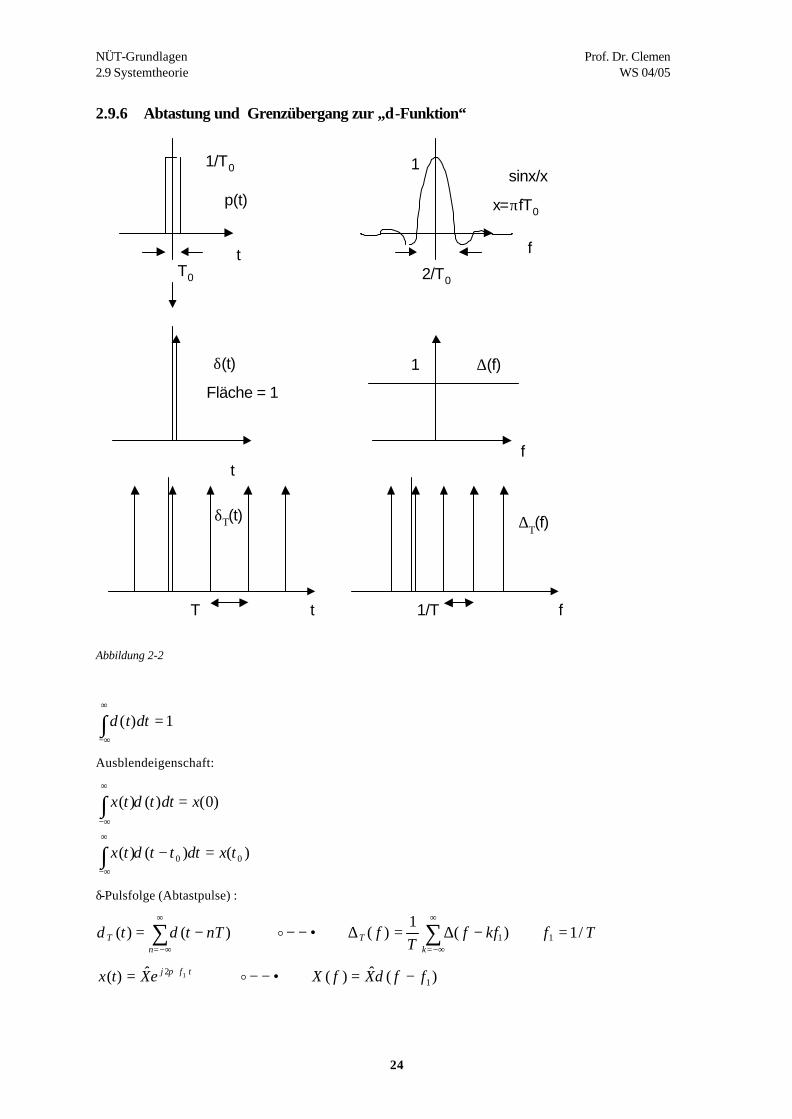
2.9.6 Abtastung und Grenzübergang zur „δ -Funktion“
1/T0
T0
t
t
δ(t)
p(t)
t
δΤ(t)
f
∆Τ(f)
1/T
f
∆(f)
1
f
x=πfT0
sinx/x
2/T0
1
T
Fläche = 1
Abbildung 2-2
∫∞
∞−
= 1)( dttδ
Ausblendeigenschaft:
∫
∫∞
∞−
∞
∞−
=−
=
)()()(
)0()()(
00 txdttttx
xdtttx
δ
δ
δ-Pulsfolge (Abtastpulse) :
TfkffT
fnTttk
Tn
T /1)(1
)()()( 11 =−∆=∆•−−−= ∑∑∞
−∞=
∞
−∞=
oδδ
)(ˆ)(ˆ)( 12 1 ffXfXeXtx tfj −=•−−= ⋅⋅ δπ o
Top Related