






Sprachen
Seiten
Rechtliche

Polynome im Einsatz:Bezier-Kurven im CAD
Dipl.-Inform. Wolfgang Globke
Institut fur Algebra und GeometrieArbeitsgruppe Differentialgeometrie
Universitat Karlsruhe
1 / 25
Kurven im Raum
Eine Kurve im R3 ist durch eine Abbildung
c : [a, b]→ R3, t 7→
x(t)y(t)z(t)
gegeben.Dabei kann man sich t als Zeitparameter vorstellen, so dass dieKurve c im Zeitraum von t = a bis t = b abgelaufen wird.
2 / 25
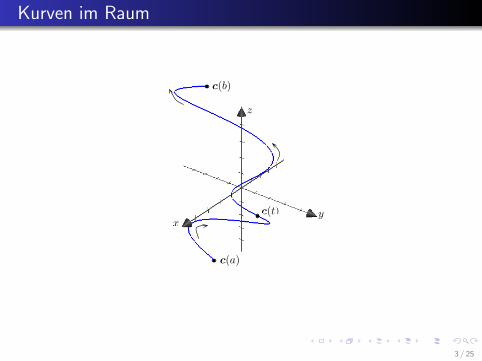
Kurven im Raum
c(a)
c(b)
c(t)x
y
z
3 / 25
Tangenten
Die Tangente einer Raumkurve c im Punkt c(t0) ist die Gerade, diedurch den Punkt c(t0) in Richtung der Ableitung c′ nach demZeitparameter t zum Zeitpunkt t0 verlauft:
c′(t0) =
x ′(t0)y ′(t0)z ′(t0)
Die Ableitung c′(t0) selbst ist ein Richtungsvektor, den man sicham Punkt c(t0) befestigt vorstellen kann, und die Kurve
”entlanggleitet“, wenn t0 variiert.
Die Lange ‖c′(t0)‖ der Ableitung kann als Geschwindigkeitaufgefasst werden.
4 / 25

Tangenten
c(t0)
c!(t0)
5 / 25
Kurven im CAD
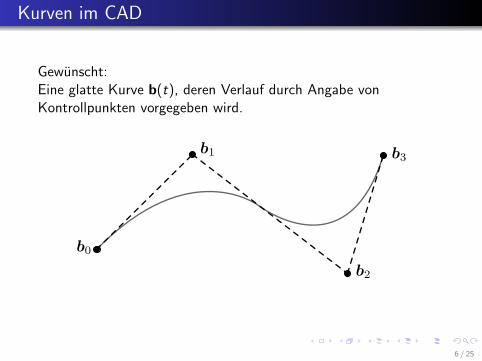
Gewunscht:Eine glatte Kurve b(t), deren Verlauf durch Angabe vonKontrollpunkten vorgegeben wird.
b3
b2
b1
b0
6 / 25
Kurven im CAD
Forderungen:
1 Zum Zeitpunkt t = a soll die Kurve im Startpunkt liegen:b(a) = b0.
2 Zum Zeitpunkt t = b soll die Kurve im Endpunkt liegen:b(b) = b3.
3 In der ersten Halfte des Kurvenverlaufs soll die Kurve stark zub1 hingezogen werden.
4 In der zweiten Halfte des Kurvenverlaufs soll die Kurve starkzu b2 hingezogen werden.
7 / 25
Kurven im CAD
Ansatz:Zu jedem Zeitpunkt t ∈ [a, b] soll b(t) eine
”gewichtete Summe“
der Kontrollpunkte sein:
b(t) = B0(t)b0 + B1(t)b1 + B2(t)b2 + B3(t)b3
mit
B0(t) + B1(t) + B2(t) + B3(t) = 1 fur alle t ∈ [a, b],
Bi (t) ≥ 0 fur t ∈ [a, b], i = 0, 1, 2, 3.
8 / 25
Bernstein-Polynome
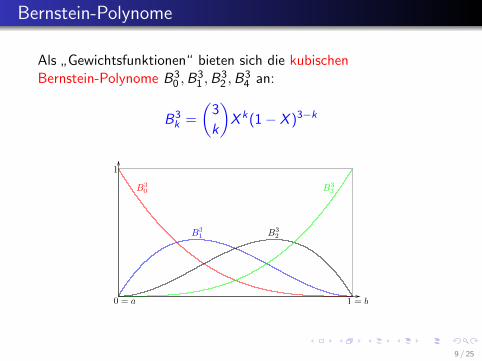
Als”Gewichtsfunktionen“ bieten sich die kubischen
Bernstein-Polynome B30 , B3
1 , B32 , B3
4 an:
B3k =
(3
k
)X k(1− X )3−k
1 = b0 = a
B30
B31 B3
2
B33
1
9 / 25
Bernstein-Polynome
Die Bernstein-Polynome sind geeignete Gewichtsfunktionen:
Sie sind eine Partition der 1, d.h.
1 = (X + (1− X ))3 =3∑
k=0
(3
k
)X k(1− X )3−k =
3∑k=0
B3k .
Auf dem Intervall [0, 1] gilt stets
B3k (t) ≥ 0.
(Fur beliebige Intervalle [a, b]: Umparametrisieren.)
10 / 25

Bezier-Kurven
Eine kubische Bezier-Kurve b(t) hat die Bernstein-Polynome alsGewichtsfunktionen:
b(t) = B30 (t)b0 + B3
1 (t)b1 + B32 (t)b2 + B3
3 (t)b3
Somit hat die Kurve die gewunschten Eigenschaften:
1 Bei t = 0 ist B30 (0) = 1 und B3
1 (0) = B32 (0) = B3
3 (0) = 0,also b(0) = b0.
2 Bei t = 1 ist B33 (0) = 1 und B3
0 (0) = B31 (0) = B3
2 (0) = 0,also b(1) = b3.
3 In der ersten Halfte des Kurvenverlaufs ist der Wert von B31 (t)
am großten, die Kurve wird also zu b1 hingezogen.
4 In der zweiten Halfte des Kurvenverlaufs ist der Wert vonB3
2 (t) am großten, die Kurve wird also zu b2 hingezogen.
11 / 25
Bezier-Kurven
Die beiden franzosischen Ingenieure Pierre Bezier (1910-1999) undPaul Faget de Casteljau (1930- ) entwickelten in den 1960erJahren unabhangig voneinander die Bezier-Kurven in derAutomobilindustrie (der eine fur Renault, der andere fur Citroen).
12 / 25
Bezier-Kurven
Die kubischen Bernstein-Polynome bilden eine Basis desRaums der Polynome vom Grad 3.
Somit konnen alle Kurven, die auf einem Segment mit einerpolynomialen kubischen Kurve ubereinstimmen, alsBezier-Kurven dargestellt werden.
Fur polynomiale Kurvensegmente von beliebigem Grad n kannman die Bernstein-Polynome vom Grad n verwenden:
Bnk =
(n
k
)X k(1− X )n−k .
13 / 25
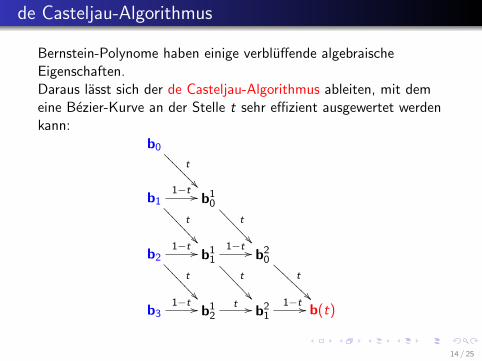
de Casteljau-Algorithmus
Bernstein-Polynome haben einige verbluffende algebraischeEigenschaften.Daraus lasst sich der de Casteljau-Algorithmus ableiten, mit demeine Bezier-Kurve an der Stelle t sehr effizient ausgewertet werdenkann:
b0
t
��???
????
?
b11−t //
t
��>>>
>>>>
> b10
t
��>>>
>>>>
b2
t
��>>>
>>>>
>1−t // b1
11−t //
t
��>>>
>>>>
b20
t
AAA
AAAA
A
b31−t // b1
2t // b2
11−t // b(t)
14 / 25
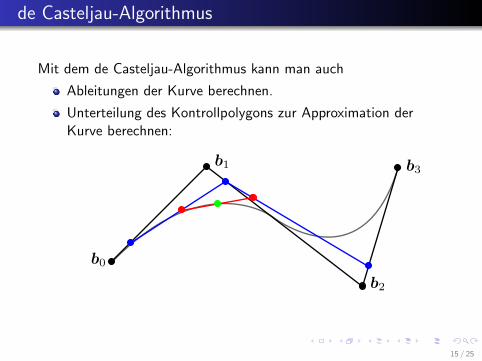
de Casteljau-Algorithmus
Mit dem de Casteljau-Algorithmus kann man auch
Ableitungen der Kurve berechnen.
Unterteilung des Kontrollpolygons zur Approximation derKurve berechnen:
b3
b2
b1
b0
15 / 25
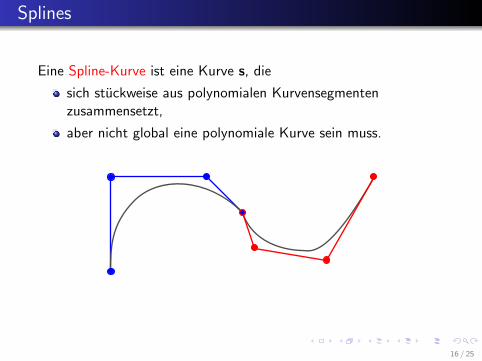
Splines
Eine Spline-Kurve ist eine Kurve s, die
sich stuckweise aus polynomialen Kurvensegmentenzusammensetzt,
aber nicht global eine polynomiale Kurve sein muss.
16 / 25

Splines
Statt stuckweise durch Bezier-Kurven, kann man Splines auch alsLinearkombination von B-Splines (
”B“ fur Basis) darstellen.
B-Splines sind keine Polynome, aber stimmen uber gewissenIntervallen mit Polynomen uberein.
Vorteil: Kontrollpunkte beeinflussen den Kurvenverlauf nurlokal.
In der Industrie bekannt als”Non-Uniform Rational B-Splines“
(NURBS).
17 / 25
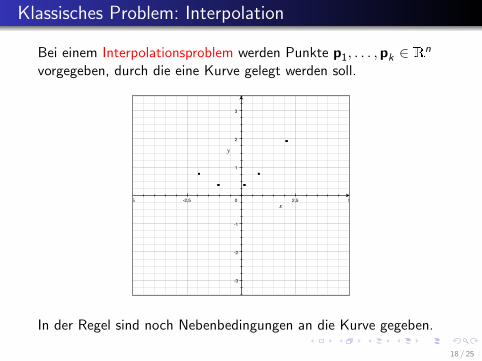
Klassisches Problem: Interpolation
Bei einem Interpolationsproblem werden Punkte p1, . . . ,pk ∈ Rn
vorgegeben, durch die eine Kurve gelegt werden soll.
-5 -2,5 0 2,5 5
-3
-2
-1
1
2
3
In der Regel sind noch Nebenbedingungen an die Kurve gegeben.
18 / 25

Klassisches Problem: Interpolation
Interpolation leicht durch Polynome zu losen(es ist nur ein LGS zu losen).Aber: Fur k Punkte Polynom vom Grad k notwendig - dieskann zu schlechten Losungen fuhren:
-5 -2,5 0 2,5 5
-3
-2
-1
1
2
3
Besser: Kurve stuckweise aus Polynomen zusammensetzen.19 / 25
Klassisches Problem: Interpolation
Hermite-Interpolation: Ableitungen der Kurve in denInterpolationspunkten werden zusatzlich vorgegeben.
Durch Bezier-Kurven ohne Aufwand losbar.
Ableitungen der Bezier-Kurve sind durch das Kontrollpolygonvorzugeben.
20 / 25
Klassisches Problem: Interpolation
Spline-Interpolation: Beliebig viele Interpolationspunkte, aberKurve nur stuckweise polynomial vom Grad 3.
Kurve ist Linearkombination von B-Splines.
Linearkombination wird durch Losen eines LGS bestimmt:4 11 4 1
. . .
1 4 11 4
c>0c>1...
c>k−1
c>k
=
p>0p>1...
p>k−1
p>k
21 / 25
Anwendungen
Freiformkurven (und -flachen) in der Computergraphik.
Laufwege fur Roboter und Maschinen.
Schriftsatze als Vektorgraphiken.
Modellierung von 3D-Daten.
Numerische Simulation physikalischer Prozesse.
22 / 25
Weitere Grundlagen
Die Theorie der Bezier- und Spline-Kurven beruhrt auch folgendeBereiche der Mathematik:
Differentialgeometrie.
Numerische Mathematik.
Projektive Geometrie.
23 / 25

CAD in Karlsruhe
IBDS Prautzsch
Institut fur angewandte Geometrie und Computergraphik
Vorlesung: Kurven und Flachen im CAD
Vorlesung: Unterteilungsalgorithmen
Vorlesung: Rationale Splines
Vorlesung: Netze und Punktwolken
Praktikum: Geometrisches Modellieren
24 / 25
G. Farin:Curves and Surfaces for CAGD (Morgan Kaufmann)
H. Prautzsch, W. Boehm, M. Paluszny:Bezier and B-Spline Techniques (Springer)
25 / 25
Top Related