






Sprachen
Seiten
Rechtliche


AW Kurs 2.122: Dynamik 1
Kurs 2.122 PHYSIK, DYNAMIK
Anton Wüthrich, Lehrbeauftragter,Höhere Fachschule für Technik Mittelland
Ausgabe, édition 2016
1. Translation1.1. Begriffe1.2. Gleichförmige Bewegung1.3. Gleichmässig beschleunigte Bewegung1.4. Kraft und Bewegung1.5. Arbeit, Leistung1.6. Energie1.7. Impuls, Stoss
2. Rotation2.1. Gleichförmig Drehbewegung2.2. Gleichförmig beschleunigte Drehbewegung2.3. Drehmoment und Rotation2.4. Arbeit, Leistung bei Rotation2.5. Der Drehimpuls (Drall)2.6. Rotationsenergie
3. Gegenüberstellung Translation-Rotation
1. Translation1.1. Notions1.2. Mouvement uniforme1.3. Mouvement uniformément accéléré1.4. Force et mouvement1.5. Travail, puissance1.6. Énergie1.7. Impulsion, choc
2. Rotation2.1. Rotation uniforme2.2. Rotation uniformément accé- lérée2.3. Couple et rotation2.4. Travail, puissance de rotation2.5. Moment cinétique angulaire2.6. Énergie de rotation
3. Relation translation-rotation

AW Kurs 2.122 Dynamik 2
1. Translation; (geradlinige Bewegung)
1.1. Begriffe
Kinematik=> Gleichungen der Bewegungen von Körpern. Die dazu notwendigen Kräfte werden nicht untersucht.
Definitionen (vereinfacht):Wegabschnitt: s = s1 – s0
Zeitabschnitt: t = t1 – t0
1. Translation; (mouvement rectiligne)
1.1. Généralités
Cinématique=>Equations du mouvement des corps. Les forces nécessaires au mouvement ne sont pas analysées.
Définitions (simplifié):Segment de chemin : s = s1 – s0
Laps de temps : t = t1 – t0
s
s1
s0
s

AW Kurs 2.122 Dynamik 3
Gleichförmige Bewegung: v = konstant
Ungleichförmige (beschleunigte oder verzögerte) Bewegung: v konstant
Geradlinige BewegungKrummlinige Bewegung (Spezialfall: Kreisbewegung)
Mouvement uniforme : v = constant
Mouvement non uniforme.(accéléré, décéléré) : v constant
Mouvement rectiligneMouvement curviligne (cas particulier :mouvement circulaire)
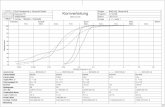
Diagramme v-t-Diagramm
ungleichförmignon uniforme
verzögertdécéléré
beschleunigtaccéléré
v = constant
t
v

AW Kurs 2.122 Dynamik 4
1.2. Gleichförmige Bewegung 1.2. Mouvement uniforme
v = constant, a = 0
t
s1
0t
t
v
t=0 t1
t
s
t=0 t1
v-t Diagramm Diagramme s-t
s
v = s = v * t
Fläche A v *t = s

AW Kurs 2.122 Dynamik 5
1.3. Gleichmässig beschleunigte(verzögerte) Bewegung
1.3.1 Grundlagen
1.3. Mouvement uniformément accéléré (décéléré)
1.3.1 Bases
a = constant, v0 = 0
sv
a
tt
a
t=0 t1
a-t Diagramm
Surface A a *t = v
v1
0 tt
v
t=0 t1
s1
0t
t
s
t=0 t1
Diagramme v-t s-t Diagramm
Fläche A v *t/2 = s
s =

AW Kurs 2.122 Dynamik 6
a = constant, v0 > 0
v0
v = a * t
v
a
tt
t=0 t1
a-t Diagramm
v1
tt
v
t=0 t1
s1
0 t
t
s
t=0 t1
s
Diagramme v-t s-t Diagramm
s = v0 * t + v = v0 + a * t

AW Kurs 2.122 Dynamik 7
Ohne AnfangsgeschwindigkeitSans vitesse initiale v0 = 0
Mit AnfangsgeschwindigkeitAvec vitesse initiale v0 > 0
EndgeschwindigkeitVitesse finale
v[m/s]
Zurückgelegter WegDistance parcourue
s[m]
Benötigte ZeitTemps écoulé
t[s]
BeschleunigungAccélération
a[m/s2]
s = s = v0 * t + s = s = * t
s = s =
v = a * t v =
v =
t = t =
t =
v = v0 + a*t v = - v0
v =
t = t =
t = ± -
a = a =
a =
a = a = 2*
a =
Zusammenstellung für gleichmässig beschleunigte BewegungRésumé pour mouvement uniformément accéléré

AW Kurs 2.122 Dynamik 8
1.3.2. Freier Fall ohne Luftwiderstand
Beschleunigung "a" ersetzten durch die Erdbeschleunigung "g":
g = 9.80665 9.81ms-2
1.3.2. Chute libre sans tenir compte de la résistance de l’air
Remplacer l'accélération "a" par l'accélération gravitationnelle "g"
g = 9.80665 9.81ms-2
1.3.3. Zusammengesetzte Bewegung
Weg s, Geschwindigkeit v und Beschleunigung "a" sind Vektoren. Sie werden nach der Vektortheorie zusammengesetzt oder zerlegt.
1.3.2. Mouvement combiné
La distance s, la vitesse v et l’accélération "a" sont des vecteurs. Elles sont composées et décomposées à l'aide de la théorie des vecteurs.
y
x
Wirkungslinie,ligne d'action
v2v1
v
y
x
s2 s3
s1
stot

AW Kurs 2.122 Dynamik 9
1.3.4. Waagrechter (horizontaler ) Wurf
Unabhängigkeitsprinzip: Die Bewegung eines Körpers in der X-Richtung, wird durch eine gleichzeitige Bewegung in der Y-Richtung nicht beeinflusst.
1.3.4. Projection horizontale
Principe d'indépendance : le mouve-ment d'un corps selon l’axe des X n'est pas influencé par le mouvement simul-tané du même corps selon l’axe des Y.
vy
vrsx
Parabelparabole
h
vy constant, a = g
xvx = constant, a = 0 vx
tt1
vy
t
t1

AW Kurs 2.122 Dynamik 10
Einige Formeln zum horizontalen Wurf
Quelques formules pour la projection horizontale
Wurfweite:Portée :
sx = v0 *
Fallhöhe:Hauteur de chute :
h =
Fallzeit:Durée de chute :
t =
RichtungswinkelAngle d’impact (de direction)
= arctan
Resultierende Geschw.Vitesse résultante
vr =

AW Kurs 2.122 Dynamik 11
1.3.5. Schiefer Wurf 1.3.5. Projection oblique
Auch beim SCHIEFEN WURF gilt das Unabhängigkeits-Prinzip. Die beiden Richtungen X und Y können unabhängig voneinander betrachtet werden. X: Geschwindigkeit konstantY: Beschleunigung oder Verzögerung mit g
Aussi lors de la projection oblique vaut le principe d'indépendance. les deux directions X et Y sont à traitées indépendantes.
X: Vitesse constanteY: Accélération ou décélération avec g
vy
v0
vx
Formeln aus Seite 4Formules de page 4
tFormeln aus Seite 7Formules de page 7

AW Kurs 2.122 Dynamik 12
Spezialfall: Abwurf und Landung auf gleicher Höhe
Cas spécial: Lancement et atterrissage au même niveau
vx
smax
v0
y
x0
tt1
vy
t
T
t2
hmax
Wurfhöhe:Apogée :
hmax =
Wurfzeit:Durée de vol :
T =
WurfweitePortée :
smax =
0

AW Kurs 2.122 Dynamik 13
1.4. Kraft und Bewegung
1.4.1. Newton'sche Axiome1) Jeder Körper bleibt in RUHE oder bewegt sich mit KONSTANTER GESCHWINDIGKEIT, wenn keine resultierende Kraft auf ihn wirkt.Der Körper bleibt im Gleichgewicht.
2) Um einen Körper (eine Masse m) mit der Beschleunigung "a" zu beschleunigen, muss eine resultierende Kraft Fres auf ihn wirken.
1.4. Force et mouvement
1.4.1 Axiomes de Newton1) Un corps demeure au REPOS ou se MEUT de façon UNIFORME si aucune force résultante n'agit sur lui.Dans ces cas, on dit que le corps est en équilibre.
2) Pour qu’un corps (une masse m) atteigne une accélération a, il faut qu’une force résultante Fres agisse sur lui.
Dynamisches Grundgesetz: Loi fondamentale de la dynamique:
Fres = m* a1N = 1kg*1
3) Actio = Reactio

AW Kurs 2.122 Dynamik 14
1.4.2. Prinzip von d'Alembert
Der Kraft Fres, die auf einen Körper wirkt, stellt sich die Trägheitskraft T entgegen.Die Trägheitskraft ist der Beschleu-nigungsrichtung entgegengesetzt.
1.4.2. Principe de d'Alembert
A la force Fres qui agit sur un corps en mouvement s’oppose une force d'inertie T.Le sens de cette force d'inertie est opposé à celui de l'accélération.
a
Fres T
m
DynamikaufgabeProblème dynamique d'Alembert Lösung mit Statikmethode
Solution à l'aide de la statique
Newton: FRes = m*ad'Alembert: FRes – m*a = 0
TT= MassenträgheitT = Inertie de la masse

AW Kurs 2.122 Dynamik 15
1.5. Arbeit, Leistung
1.5.1. Arbeit bei konstanter Kraft
1.5. Travail, puissance
Travail d'une force constante
Arbeit = Kraft in Bewegungs-richtung x zurückgelegter Weg
Travail = force dans le sens du mouvement x distance parcourue
sFx
F Fy
W = F(x)* s 1J = 1Nm FxW = Fx * s
ss
F

AW Kurs 2.122 Dynamik 16
1.5.2. Arbeit bei variabler Kraftz.B. Feder
1.5.2. Travail d'une force variablep.ex. ressort
F1
F
F=k*s
s
s
A Wf(r)
W = =
F
F2
ss1
A Wf(r)
s
W = * s = *(s2
2 – s12)
FederkonstanteConstante du ressort
s2

AW Kurs 2.122 Dynamik 17
1.5.3. Leistung 1.5.3. Puissance
Leistung = Arbeit pro Zeiteinheit
oder bei konstantem v
Leistung =Kraft x Geschwindigkeit
Puissance = travail par unité de temps
ou bien lors de v constante
puissance =force x vitesse
P = P = F * vP = 1W = bei v = konstantsi v = constant

AW Kurs 2.122 Dynamik 18
1.5.4. Wi rkungsgrad
Verlust meist durch Reibung (fest, flüssig, gasförmig)
1.5.4. Rendement
Pertes souvent dues au frottement (entre deux corps, liquide, gazeux)
Richtwerte für Gleitlager 0.98Verzahnung 0.98E-Motor 0.9Ottomotor 0.25!
Valeurs indicatives pour Palier lisse 0.98Denture 0.98Moteur électr. 0.9Moteur (Otto) 0.25!
%ohne Einheit odersans unité ou
tot = 1*2*3*...
P2 = P1 * tot

AW Kurs 2.122 Dynamik 19
1.6. Energie
1.6.1 Grundlagen
Energie in einem Körper = "gespeicherte Arbeit". (Arbeitsfähigkeit)
3 Typen von mechanischer Energie:potentielle E. (Höhenenergie)kinetische E. (Bewegungsenergie)Spannungs-E.
(Verformungsenergie)
Weitere Energiearten:Wärmeenergie, chemische Energie, Atomenergie, elektrische Energie, Druckenergie, Strahlungsenergie (Sonne).
1.6. É nergie
1.6.1. Bases
Énergie d'un corps = travail "stocké"(capacité d'effectuer du travail)
3 types d’énergie mécanique: É. potentielle (é.de la position
vert.) É. cinétique (é. de mouvement) É. de tension (é. de déformation)
Autres énergies :Énergie thermique, chimique, atomique, électrique, de compression, rayonnante (soleil).

AW Kurs 2.122 Dynamik 20
1.6.2. Energieerhaltungssatz
Energie kann von einer Energieart in eine andere umgewandelt werden.Dabei geht aber
nie Energie "verloren".Die Summe aller vorhandenen Energie
bleibt konstant.
Betrachten wir ein abgegrenztes technisches System, kann für dieses System aber sehr wohl Energie (Arbeit) zu- und abgeführt werden.
1.6.2. Théorème de la conservation de l'énergieL'énergie peut être transformée d’une forme à une autre. Mais on ne
"perd" jamais de l'énergie.La somme de toutes les énergies
reste constante
Considérons un système technique limité, on peut bel et bien alimenter et évacuer de l’énergie (travail) de ce système.

AW Kurs 2.122 Dynamik 21
Diese Situation kann in einerBlackbox
dargestellt werden
Cette situation peut être présentée par une
Blackbox
EE(f) = EA(d)+ Wzu(al)-WV(p)Energie am EndeEnergie à la fin
Energie am AnfangEnergie au début
Zugeführte ArbeitTravail alimenter
Verlustarbeit (Reibung)Travail pérdu (frottement)
WV(p)
EE(f)
Wzu(al)
Technischer VorgangProcédé technique
Blackbox
EA(d)

AW Kurs 2.122 Dynamik 22
Beispiel, exemple
1.6.3. Potentielle Energie Epot 1.6.3. É nergie potentielle E pot
hFR
s
EE(f)
EA(d)
WReibung(frottement) = FR*s
EE(f)
WFeder(ressort) =
BlackboxEA(d)

AW Kurs 2.122 Dynamik 23
Die Arbeit, die zum Heben des Körpers notwendig ist, ist nachher im Körper als Energie gespeichert. (Reibung vernachlässigt)
L'énergie accumulée dans un corps au niveau "h", correspond au travail, qui est nécessaire pour monter ce corps à ce niveau. (Frottement négligé)
W = F*s = m*g*h
Bezugsebene, plan de référence
h
Epot = m*g*h

AW Kurs 2.122 Dynamik 24
1.6.4. Kinetische Energie Ekin
Um eine Körper aus dem Stillstand auf eine Geschwindigkeit "v" zu bringen ist die Kraft
F = m * a notwendig. Die dabei geleistete Arbeit ist
W = F * s = F * =m*a* =m**
= *v2
Die gespeicherte kinetische Energie im Körper ist demnach
1.6.4. É nergie cinétique E kin
Pour accélérer un corps du repos à une vitesse "v", il faut la force
F = m * a le travail nécessaire est
W = F * s = F * =m*a* =m**
= *v2
Par conséquence, l'énergie accumulée dans ce corps vaut:
1.6.5. Spannungsenergie ES
Um eine Feder zu spannen ist die 1.6.5. É nergie de tension E s
Pour tendre un ressort il faut le travail

AW Kurs 2.122 Dynamik 25
Arbeit notwendig:Wf =
Die danach in der Feder gespeicherte Energie beträgt ebenfalls
ES = oder
Wf =L'énergie accumulée dans ce ressort est également
ES = ou
1.7. Impuls, Stoss
1.7.1 Der ImpulsBei kurzzeitigen Ereignissen (Pfahl
1.7. Impulsion, choc
1.7.1. L'impulsionLors d'un évènement en peu de temps
F
F=k*s
s
A Wf(r)
FederkonstanteConstante du ressort
s

AW Kurs 2.122 Dynamik 26
einschlagen, Billard-Kugel, Moleküle idealer Gase) wird von einem Impuls gesprochen.
Impulserhaltung:Ohne Fres bleibt der Gesamtimpuls eines Systems konstant.
(enfoncer un poteau, boule de billard, molécule des gazes idéales), on parle d'une impulsion.
Conservation de l'impulsionSans Fres l'impulsion totale d'un système reste constante.
F = m* a; a = F= m*

AW Kurs 2.122 Dynamik 27
m2*v2 = m1*v1 = constant
v1 v1 v2

AW Kurs 2.122 Dynamik 28
1.7.2. Elastischer StossDefinition Stoss: Zwei Körper berühren sich während sehr kurzer Zeit und verändern dabei den Bewegungs-zustand.
1.7.2. Choc élastiqueDéfinition du choc: Deux corps se touchent pendant peu de temps, et ses états de mouvement se changent.
c1 c2c
sphase de décompressionKompressionsphase
lmin
F
v2v1

AW Kurs 2.122 Dynamik 29
Ablauf des elastischen Stosses am Beispiel von 2 Kugeln:
1. Kompressionsphase:Nach der Berührung verformen sich beide Kugeln, bis zum Abstand lmin. Die Formänderungsarbeit wird der schnelleren Kugel entzogen. Beide Kugeln besitzen die gleiche Geschwindigkeit "c".
2. EntspannungsphaseDie gespeicherte Verformungsenergie wird verlustlos an die Kugel 2 abgegeben. Die beiden Kugeln nehmen die neuen Geschwindigkeiten c1 und c2 ein.
Déroulement du choc élastique à l'aide de l'exemple de deux boules.
1. Phase de compressionAprès la touche, les deux boules se déforment jusqu'à la distance lmin. Le travail de déformation est dessaisi à la boule la plus rapide.
Les deux boules se déplacent avec la (même) vitesse "c".
2. Phase de décompressionL'énergie de déformation accumulée est cédée aux deux boules sans perte. Les deux boules se déplacent avec leurs nouvelles vitesses c1 et c2.
c1= c2= v1 - v2 = c2- c1
(Ableitung in Böge 4.8.3)
c =

AW Kurs 2.122 Dynamik 30
1.7.3. Unelastischer StossKeine Federung. Beide Körper verformen sich plastisch.
1. Kompressionsphase:Wie beim elastischen Stoss. (s.Bild)
2. Entspannungsphase:Entfällt, da keine Entspannung nach der Phase 1 erfolgt. Beide Kugeln bewegen sich mit der Geschwindig-keit "c" weiter.
Ein Teil der kinetischen Energie geht durch die Materialverformung in Wärmeenergie über.
1.7.3. Choc non élastiqueAucune élasticité. Les deux corps se déforment plastiquement.
1. Phase de compressionVoir choc élastique. (Figure).
2. Phase de décompressionPhase non existante, puisque il n'y a pas de détention après phase 1. Les deux boules se déplacent avec la (même) vitesse "c".
Une partie de l'énergie cinématique se transforme à l'énergie thermique à cause de la déformation du matériau.
c =

AW Kurs 2.122 Dynamik 31
Anwendungen des unelastischen Stosses
Schmieden, Nieten. Hier liegt das Interesse an der Formänderungsarbeit.
1.7.4. Der wirkliche StossIn der Praxis liegt weder der absolut elastisch, noch der absolut unelastisch Stoss vor.
Application du choc non élastique
Forger, river. Là, on est intéressé au travail de déformation.
1.7.4. Le choc effectifEn pratique, il n'existe ni le choc absolument élastique ni absolument non élastique.
StosszahlCoefficient deréstitutionk =
Wärme, chaleur
c1 c2c
sphase de décomressionKompressionsphase
F
v2v1

AW Kurs 2.122 Dynamik 32
2. Drehbewegung, Rotation
2.1. Gleichförmige Drehbewegung
2.1.1 Der Einheitskreis
2. Rotation
2.1. Rotation uniforme
2.1.1 Cercle au rayon 1
b
2
/20
3/2
R =1
0
Umfang, CirconféranceU = 2**R
T
Frequenz, fréquence f = [sec-1]
0;2
Bogenlänge,Longueur de l'arcb = *R

AW Kurs 2.122 Dynamik 33
2.1.2. Winkelgeschwindigkeit
ist eine vom Radius unabhängige Grösse. stellt den zurückgelegten Drehwinkel pro Zeiteinheit dar.
2.1.2. Vitesse angulaire
est une grandeur non dépendent du rayon. présente l'angle parcouru par unité de temps.
2.1.3. Umfangsgeschwindigkeit vu 2.1.3. Vitesse circonférentielle vu
= = 2**f [f: in sec-1]
= [n: en min-1]
vU = *r
vU = *r
= s-1Einheit:Unité:

AW Kurs 2.122 Dynamik 34
2.2. Gleichmässig beschleunigte Drehbewegung
2.2.1. Grundlagen
2.2. Rotation uniformément accélérée
2.2.1 Bases
= * t =
Fläche A *t/2 =
-t DiagrammDiagramme -t
t=t1t=0
tt
0
1
t=t1t=0
tt
1
Surface A *t =
-t Diagramm
t=t1t=0
tt

AW Kurs 2.122 Dynamik 35
Ohne AnfangsgeschwindigkeitSans vitesse initiale 0 = 0
Mit AnfangsgeschwindigkeitAvec vitesse initiale 0 > 0
Winkelgeschwindigkeit
Vitesse angulaire[rad/s] [s-1]
Zurückgelegter WinkelAngle parcourrue
[rad] [-]
Benötigte ZeitTemps écoulé
t[s]
WinkelbeschleunigungAccélération angulaire
α[rad/s2] [s-2]
= = 0 * t + = = * t
= =
= * t =
=
t = t =
t =
= 0 + *t = - 0
=
t = t =
t = ± -
= =
=
= =2*
=
Zusammenstellung für gleichmässig beschleunigte RotationRésumé pour rotation uniformément accéléré

AW Kurs 2.122 Dynamik 36
2.2.2. Tangentialbeschleunigung 2.2.2. Accélération tangentielle
vu = * r
aT = * r
vu
aT

AW Kurs 2.122 Dynamik 37
2.2.3. Gegenüberstellung Transation-Rotation
2.2.3. Relation translation-rotation
Zeit; temps t Weg; distance sGeschwindigkeit; vitesse vBeschleunigung; accélération a
Diagramme v-t-Diagramm
smm/secm/sec2
Zeit; temps t Winkel; angle Winkelgeschw.; vitesse angulaire Winkelbeschl.; accélération angulaire
Diagramme -t-Diagramm
s1 (rad)1/sec1/sec2
v00
v1
0 t
v
1
0 t

AW Kurs 2.122 Dynamik 38
2.3. Drehmoment und Rotations-bewegung
2.3.1. Dynamisches Grundgesetz der Rotation
2.3. Moment et mouvement rotatif
2.3.1. Loi fondamentale de la rotation
r
mFT
aT
FT = m*aT
FT*r= m*aT*rM= m*aT*r = m*(*r)*r = m**r2 Mtot= m**r2
Mtot = *m*r2
M = J * J = Massenträgheitsmoment, J = Moment d'inertie de la masse
J
kgm2
Mi = J*
D'Alembert rotatif:

AW Kurs 2.122 Dynamik 39
2.3.2 Massenträgheitsmoment
Trägheitsmomente einfacher Körper siehe Tabelle Seite 37.
Liegen bei zusammengesetzten Körpern die Schwerachsen auf der Drehachse, können die einzelnen Trägheitsmomente addiert werden. (Bei Bohrungen subtrahiert.)
Ist dies nicht der Fall:
SATZ VON STEINER
2.3.2. Inertie de la masse
Inerties des corps simple voir tabelle page 37.
Corps composés: Les inerties partielles peuvent être additionnées (trous soustraits), si leurs axes de gravité se trouvent sur l'axe de rotation.
Si ce n'est pas le cas:
THÉORÈME DE STEINER

AW Kurs 2.122 Dynamik 40
Einige Massenträgheitsmomente Quelques moments d'inerties de la masse
Dünner Reifen um die eigene Drehachse.Bague mince autour de son propre axe.
J = m*r2
r
Dünner Ring um beiebigem Durchmesser.Bague mince autour d'un diamètre quelconque. J = m*r2
Zylinder um die eigene Drehachse.Cylindre autour de son propre axe.
J = m*r2
Kugel um ihre Achse.Bille autour son axe.
J = m*r2
Stab um die mittlere Achse.Barre mince autour axe moyenne.
J = m*l2
Zylinder um mittleren Durchmesser.Cylindre autour de son diam. moyen.J = m*r2 +m*l2
Ring um die eigene Drehachse.Bague autour de son propre axe.
J = m(R2+*r2)
r
r l
r
l
Platte um senkrechte Achse.Plaque autour son axe perpendiculaire.J= m*(a2+b2)a
br
Hohlzylinder um seine Drehachse. Cylindre creux autour de son axe de rotation.J=m*(R2+r2)
R

AW Kurs 2.122 Dynamik 41
2.3.3. Satz von Steiner 2.3.3.Théorème de Steiner
2.3.4. TrägheitsradiusRadius, auf welchem die Masse in einem Punkt konzentriert gedacht wird.
2.3.4 Rayon d'inertieRayon, sur lequel on suppose que la
masse est concentrée en un point.
Jtot = J1 + m1*l12 + J2 +m2*l2
2
i =
l1
l2
m1; J1
m2 ;J2

AW Kurs 2.122 Dynamik 42
2.3.5. Zentripetalkraft
Damit die Masse m sich nicht tangentiell fortbewegt, muss sie durch eine Kraft Fz zum Zentrum hin "gezogen" werden.
ZENTRIPETALKRAFT
Fz = m * az
az = r*2 =
2.3.5. Force centripète
Pour que la masse m ne se bouge pas tangentiellement, elle doit être "tirée" vers le centre par une force Fz
FORCE CENTRIPETE
Fz = m * az
az = r*2 =
r
m
FZvu

AW Kurs 2.122 Dynamik 43
2.4. Arbeit, Leistung bei Drehbewegung
2.4.1. Rotationsarbeit
2.4. Travail, puissance lors de la rotation
2.4.1. Travail de rotation
F
r
s
s = r *
Wrot = F*s = F * r *
F * r = M
Wrot = M * =
Wrot = * 2 Wrot = * (2 - 02)

AW Kurs 2.122 Dynamik 44
2.4.2. (Rotations-) Leistung 2.4.2. Puissance (de rotation)
Zahlenwertgleichungen: Equations aux valeurs numériques:
Prot = Prot =
Prot = M* 1W =
Prot = Prot P [W]M[Nm];n[min-1]
P [kW]M[Nm];n[min-1]
bei v = konstantsi v = constant

AW Kurs 2.122 Dynamik 45
2.5. Drehimpuls (Drall)
Ableitung analog Impuls.
Impulserhaltungssatz für Rotation:Ohne Mres bleibt der Drehimpuls (Drall) in einem System konstant.
2.5. Moment angulaire cinétique
Déduction analogue à l'impulsion.
Conservation du moment angulaire cinétique:Sans Mres dans un système, le moment angulaire cinétique reste constant.
J2*2 = J1*1 =constant
21

AW Kurs 2.122 Dynamik 46
2.6. Rotationsenergie
Um einen Körper mit dem Massenträgheitsmoment J auf eine Winkelgeschwindigkeit zu bringen ist das Drehmoment notwendig:
M = J*Die dabei geleistete Arbeit beträgt
Wrot = *2
(Ableitung siehe 2.4)
Diese Arbeit ist nun im Körper als Rotations-energie gespeichert.
2.6. Energie de rotation
Pour accélérer un corps d'un moment d'inertie J jusqu'à une vitesse angulaire, il faut le moment
M = J*
Le travail nécessaire vautWrot = *2
(Déduction voir 2.4)
Ce travail est accumulé dans ce corp.
3. Gegenüberstellung 3. RelationTranslation Rotation

AW Kurs 2.122 Dynamik 47GrösseGrandeur
Sym-bol
Gleichung, Ecuation
EinheitUnité
GrösseGrandeur
Sym-bol
Gleichung, Ecuation EinheitUnité
Zeit Temps t Basisgrösse
Grandeur de base s ZeitTemps t Basisgrösse
Grandeur de base s
Weg Distance parcourue s Basisgrösse
Grandeur de base m DrehwinkelAngle de rotation
BasisgrösseGrandeur de base -(rad)
Masse m BasisgrösseGrandeur de base kg Trägheitsmoment
Inertie J BasisgrösseGrandeur de base kgm2
Geschwindigkeit v = const.Vitesse v = constante v v = Winkelgeschwindigkeit
Vitesse angulaire = s-1
Arbeit Travail W W =F*s J(Nm) Rotationsarbeit
Travail de rotation WrotWrot = M* J(Nm)
Leistung Puissance P P= = F*v Leistung
Puissance P P = M*
Beschleunigung Accélération a a = Winkelbeschleunigung
Accélération angulaire = s-2
KraftForce F F = m*a N Moment
Moment M M=J* Nm
Potentielle EnergieEnergie potentielle Epot = m*g*h J(Nm)
Kinetische EnergieEnergie cinétique Ekin
Ekin =*v2J(Nm) Rotationsenergie
Energie de rotation ErotErot =*2
J(Nm)
FederenergieEnergie du ressort Ef
Ef =*s2J(Nm)
ImpulsImpulsion m*v=constant kgms-1 Drall
Moment angulaire cinét. J* =constant kgms-1
Top Related