
+ 1
8
Bei der Modellbildung ist die Ordnung des Moving-Average- und autoregressiven Pro-zesses zu bestimmen. Beim Moving-Average- Prozess lässt sich die Prozessordnung an-hand der signifikanten Stichprobenautokorrelationen gut bestimmen, da die theoretischen Autokorrelationskoeffizienten eines MA(q)-Prozesses für Lags, die größer als q sind, ver-schwinden. Die Ordnung eines autoregressiven Prozesses kann dagegen nicht auf diese Art und Weise bestimmt werden, da gedämpfte Schwingungen oder monoton fallende Stichprobenautokorrelationen für alternative Lag- Ordnungen q zu erwarten sind. Eine Identifikation der Prozessordnung kann hier jedoch auf der Grundlage der partiellen Autokorrelationsfunktion (PACF) erfolgen. Bei der partiellen Autokorrelationsfunktion zum Lag τ werden die Einflüsse der Variablen X t-1 , X t-2 , ..., X t-τ+1 auf die Variable X t „herauspartialisiert“. Es wird allein der direkte Ein-fluss von X t-τ auf X t gemessen: Partielle Autokorrelation t 1 t t X X t 2 t X 1 t X t X t direkter Einfluss
description
t. -. t. t. -. t. +. 1. t. . . . . . L. X. X. X. X. X. t. -. + 1. t. -. t. t. -. 2. t. -. 1. t. direkter Einfluss. - PowerPoint PPT Presentation
Transcript of + 1

Bei der Modellbildung ist die Ordnung des Moving-Average- und autoregressiven Pro-zesses zu bestimmen. Beim Moving-Average-Prozess lässt sich die Prozessordnung an-hand der signifikanten Stichprobenautokorrelationen gut bestimmen, da die theoretischen Autokorrelationskoeffizienten eines MA(q)-Prozesses für Lags, die größer als q sind, ver-schwinden. Die Ordnung eines autoregressiven Prozesses kann dagegen nicht auf diese Art und Weise bestimmt werden, da gedämpfte Schwingungen oder monoton fallende Stichprobenautokorrelationen für alternative Lag-Ordnungen q zu erwarten sind. Eine Identifikation der Prozessordnung kann hier jedoch auf der Grundlage der partiellen Autokorrelationsfunktion (PACF) erfolgen.
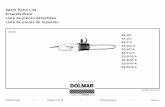
Bei der partiellen Autokorrelationsfunktion zum Lag τ werden die Einflüsse der Variablen Xt-1, Xt-2, ..., Xt-τ+1 auf die Variable Xt „herauspartialisiert“. Es wird allein der direkte Ein-fluss von Xt-τ auf Xt gemessen:
Partielle Autokorrelation
t 1t
tX X t
2tX
1tX
tX
t
direkter Einfluss

Der partielle Autokorrelationskoeffizient ist ein Spezialfall des partiellen Korrelations-koeffizienten, bei dem Einflüsse dritter Größen auf den Zusammenhang zwischen zwei Merkmalen eliminiert werden.
Das Konzept der partiellen Autokorrelation lässt sich am besten anhand der Regres-sionsgleichung
erklären. Der erste Index bei den Regressionskoeffizienten gibt den Lag an, der zweite Index die Prozessordnung. Der Regressionskoeffizient pp ist der partielle Auto-korrelationskoeffizient p-ter Ordnung, da er den zusätzlichen (partiellen) Einfluss misst, der von Xt-p auf Xt ausgeübt wird, wenn die zeitlich dazwischen liegenden Variablen Xt-1, Xt-2, ..., Xt-p+1 bereits berücksichtigt sind. Entsprechend sind die übrigen Regressionskoeffizienten zu interpretieren. Entscheidend für die Identifikation der Prozessordnung ist die Eigenschaft, dass die partiellen Autokorrelationskoeffizienten eines AR(p)-Prozesses für ein Lag τ > p verschwindet:
tptpp2tp21tp1t UX...XXX
pfür0
pfür0p

Um die Ordnung eines autoregressiven Prozesses identifizieren zu können, sind die signifikanten partiellen Stichprobenautokorrelationskoeffizienten zu ermitteln, wobei man eine Signifikanz bei einem sehr hohen Lag in der Regel unberücksichtigt lässt. Hierzu ist die Kenntnis der Verteilung der geschätzten PAC-Koeffizienten erforderlich:
Bei einer vorgegebenen Irrtumswahrscheinlichkeit um 5% sind diejenigen partiellen Autokorrelationskoeffizienten als signifikant einzustufen, die außerhalb des approximativen Konfidenzintervalls liegen.
.n1
,0~ˆa
p
]n/2;n/2[

In der Gleichung muss sein.
Setzt man an, so muss außerdem gelten, da bei einem
AR(1)-Prozess die verzögerten Variablen Xt-2 (ebenso wie die verzögerten Variablen Xt-3, Xt-4, ...) nicht in der Prozessgleichung enthalten sind. Das bedeutet, dass die partiellen Autokorrelationen für Lags, die größer als 1 sind, verschwinden. Die partielle Autokorrelationsfunktion eines AR(1)-Prozesses, , hat daher die Form
Da zwischen Xt-1 und Xt keine intervenierende Variable liegt, muss gelten, d.h. der partielle AC-Koeff. 1. Ordn. entspricht dem gewöhnlichen AC-Koeff. 1. Ordn.
t1t11t UXX 011
t2t211t11t UXXX
Lag Ord- nung
Lag Ord- nung
1
1für0
1für
0für1
111
1111
Partielle Autokorrelationsfunktion (PACF)
• AR(1)-Prozess:
t1t11t UXX
Prozessordnung
Lag
021

1
01 2 3 4 5
-1
0,4
0,2
0,6
0,8
-0,2
-0,4
-0,6
-0,8
1
1
01 2 3 4 5
-1
0,4
0,2
0,6
0,8
-0,2
-0,4
-0,6
-0,8
1
Abbildung : Partielle Autokorrelationsfunktion für AR(1)-Prozess
t1tt UX8,0X
8,01 (a)
t1tt UX6,0X
6,01 (b)

• AR(2)-Prozess:
t2t221t12t UXXX
Lag Ord- nung
Lag Ord- nung
Für τ = 1 ergibt sich der partielle Autokorrelationskoeffizient eines AR(2)-Prozesses wie folgt:
12
)1()(
:)XX(E)X(E)XX(E
UXXX
22112
122121
02t1t222
1t12t1t
t2t221t12t
Für τ = 2 erhält man den partielle Autokorrelationskoeffizienten 22 aus
21
212
22112222
221122
02
2t221t2t12t2t
1 : )(von Einsetzen nach und
:)X(E)XX(E)XX(E

2für0
2für)1/()(
1für)1/()1()1/(
0für1
21
212
2121221
2
Für τ > 2 verschwinden die partiellen Autokorrelationskoeffizienten 2, was analog wie bei dem AR(1)-Prozess begründet werden kann.
Damit hat die partielle Autokorrelationsfunktion eines AR(2)-Prozesses, 2, die Form

1
01 2 3 4 5
-1
0,4
0,2
0,6
0,8
-0,2
-0,4
-0,6
-0,8
1
01 2 3 4 5
-1
0,4
0,2
0,6
0,8
-0,2
-0,4
-0,6
-0,8
6,0,3,0)a( 21 4,0,2,0)b( 21
Abbildung: Partielle Autokorrelationsfunktion für AR(2)-Prozess
0 1 2 3 4 5 6
1 0,3/(1-0,6)=0,75
0,6 0 0 0 0
0 1 2 3 4 5 6
1-0,2/(1-0,4)=-0,333
0,4 0 0 0 0











![Ursula von rydingsvard[1][1][1][1]](https://static.fdokument.com/doc/165x107/58ee04fa1a28ab521c8b45a9/ursula-von-rydingsvard1111.jpg)




