
(An Ing 2) - People – Department of Mathematicspeople.math.ethz.ch/~blatter/Inganalysis_2.pdf ·...
95
2 Funktionen 2.1 Erscheinungsformen Begriff der Funktion Zu Eulers Zeiten verstand man unter einer “Funktion f (x) ” das, was wir heute als Funktionsterm bezeichnen: einen mehr oder weniger komplizierten Ausdruck in der unabh¨ angigen Variablen x, Bsp: log ( x + √ 1+ x 2 ) 2 + cos x , der f¨ ur jede Zahl x eines geeigneten Bereichs der Zahlengeraden einen wohl- bestimmten Funktionswert f (x) festlegt. Seither ist diese Vorstellung umfassend verallgemeinert und auch pr¨ azisiert worden. Insbesondere sind wir heute gewohnt, die eigentliche Funktion, das “Rechengesetz”, mit f ( gelegentlich mit f (·) , s.u. ) zu bezeichnen und nur dann f (x) zu schreiben, wenn tats¨ achlich der Funktionswert an der Stelle x gemeint ist. Diese Linie l¨ aßt sich allerdings nicht immer durchziehen; so sprechen wir etwa von der “Funktion e t ” und meinen damit die Funktion exp : t → e t . Also: Sind A und B beliebige Mengen, so versteht man unter einer Funktion oder Abbildung von A nach B eine Vorschrift f , die f¨ ur jeden Punkt x ∈ A einen bestimmten Punkt y ∈ B als Funktionswert oder Bildpunkt festlegt. Wir schreiben daf¨ ur f : A → B, x → y := f (x) .
Transcript of (An Ing 2) - People – Department of Mathematicspeople.math.ethz.ch/~blatter/Inganalysis_2.pdf ·...

2Funktionen
2.1 Erscheinungsformen
Begriff der Funktion
Zu Eulers Zeiten verstand man unter einer “Funktion f(x) ” das, was wirheute als Funktionsterm bezeichnen: einen mehr oder weniger kompliziertenAusdruck in der unabhangigen Variablen x,
Bsp:log
(x +
√1 + x2
)
2 + cos x,
der fur jede Zahl x eines geeigneten Bereichs der Zahlengeraden einen wohl-bestimmten Funktionswert f(x) festlegt.
Seither ist diese Vorstellung umfassend verallgemeinert und auch prazisiertworden. Insbesondere sind wir heute gewohnt, die eigentliche Funktion, das“Rechengesetz”, mit f
(gelegentlich mit f(·) , s.u.
)zu bezeichnen und nur
dann f(x) zu schreiben, wenn tatsachlich der Funktionswert an der Stellex gemeint ist. Diese Linie laßt sich allerdings nicht immer durchziehen; sosprechen wir etwa von der “Funktion et ” und meinen damit die Funktionexp : t 7→ et.
Also: Sind A und B beliebige Mengen, so versteht man unter einer Funktionoder Abbildung von A nach B eine Vorschrift f , die fur jeden Punkt x ∈ Aeinen bestimmten Punkt y ∈ B als Funktionswert oder Bildpunkt festlegt.Wir schreiben dafur
f : A → B , x 7→ y := f(x) .

2.1 Erscheinungsformen 79
Die Menge A =: dom (f) heißt der Definitionsbereich (englisch: domain) vonf , die Menge B der Zielbereich (englisch: range) von f . Die Menge
im (f) :=y ∈ B
∣∣ ∃x ∈ A : y = f(x)
der tatsachlich angenommenen Werte ist im allgemeinen eine echte Teilmengevon B und heißt Bildmenge oder Wertebereich von f .
Bsp: Die Sinusfunktion laßt sich zum Beispiel als Funktion sin: R → R
oder als Funktion sin:[−π
2 , π2
]→ [−1, 1 ] auffassen. In beiden Fallen ist
im (sin) = [−1, 1 ].
Hat eine Funktion einen Namen, der nicht gerade functionlike ist, etwa ‘ p ’,so konnen wir mit der Schreibweise p(·) anstelle von p deutlich machen, daßhier von einer Funktion die Rede ist. In ahnlicher Weise schreiben wir x(·),wenn die vorher freie Variable x in neuem Zusammenhang als Funktion eineranderen Variablen, etwa der “Zeit” t aufgefaßt werden soll. — Die Schreib-weise
f : R y R
druckt aus, daß f auf einer nicht naher spezifizierten, aber “vernunftigen”Teilmenge von R, etwa auf einem Intervall, definiert ist. In diesem Sinne lebteine Funktion f : R3 y R typischerweise auf einer offenen (s.u.) Teilmengedes dreidimensionalen Raums.
Zu jeder Funktion f : A → B gehort ihr Graph G(f), eine wohlbestimmteTeilmenge von A×B. Im Fall einer Funktion f : R y R ist das die vertraute“Kurve y = f(x) ”; allgemein ist G(f) definiert durch
G(f) :=
(x, y) ∈ A × B∣∣ x ∈ A , y = f(x)
.
Die Figur 2.1.1 zeigt den Graphen einer Funktion ums: [ 1 . . 12 ] → R≥0.
500000
1000000
1500000ums
Fig. 2.1.1
80 2 Funktionen
Erscheinungsformen
Die Festlegung oder die Prasentation einer Funktion kann in ganz verschie-dener Weise erfolgen. Wir weisen hier auf die folgenden Moglichkeiten hin:
I Wertetabelle
Ist dom (f) eine beliebige endliche Menge, so laßt sich die gesamte in f ent-haltene Information in einer zweispaltigen oder zweizeiligen Matrix, eben derWertetabelle von f , abspeichern.
Bsp:x f(x)
Aadorf 8355Aarau 5000Aarberg 3270...Lustmuhle 9062...Zwischenbergen 3901Zwischenfluh 3756
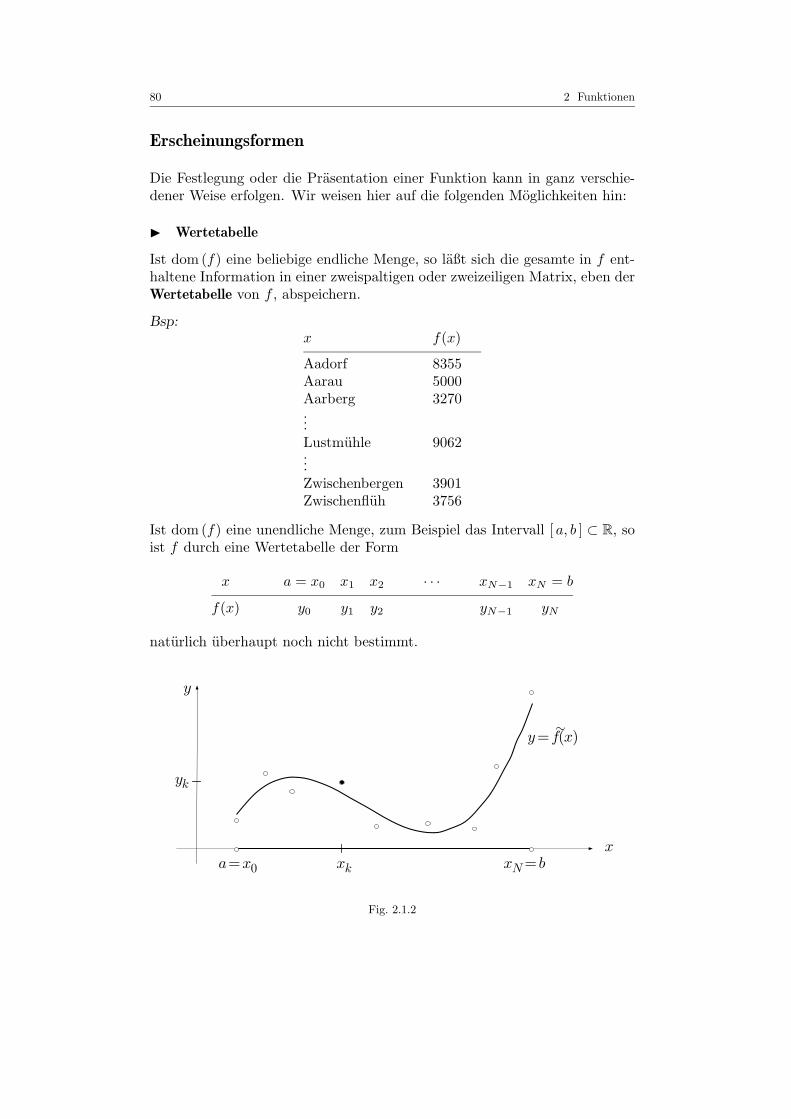
Ist dom (f) eine unendliche Menge, zum Beispiel das Intervall [ a, b ] ⊂ R, soist f durch eine Wertetabelle der Form
x a = x0 x1 x2 · · · xN−1 xN = b
f(x) y0 y1 y2 yN−1 yN
naturlich uberhaupt noch nicht bestimmt.
yk
a = x0 xk xN = b
y
y = f(x)∼
x
Fig. 2.1.2
2.1 Erscheinungsformen 81
Die numerische Mathematik stellt Methoden zur Verfugung, die
— ein “einfaches” f : [ a, b ] → R finden, das ungefahr die gegebenen Werterealisiert (Fig. 2.1.2). Das ist dann sinnvoll, wenn die gegebenen Daten(xk, yk) ohnehin mit Meßfehlern behaftet sind.
— oder aber die gegebenen Werte als genau ansehen und in die Teilin-tervalle einfache Verbindungskurven (zum Beispiel Geradenstucke oderParabelbogen) einpassen.
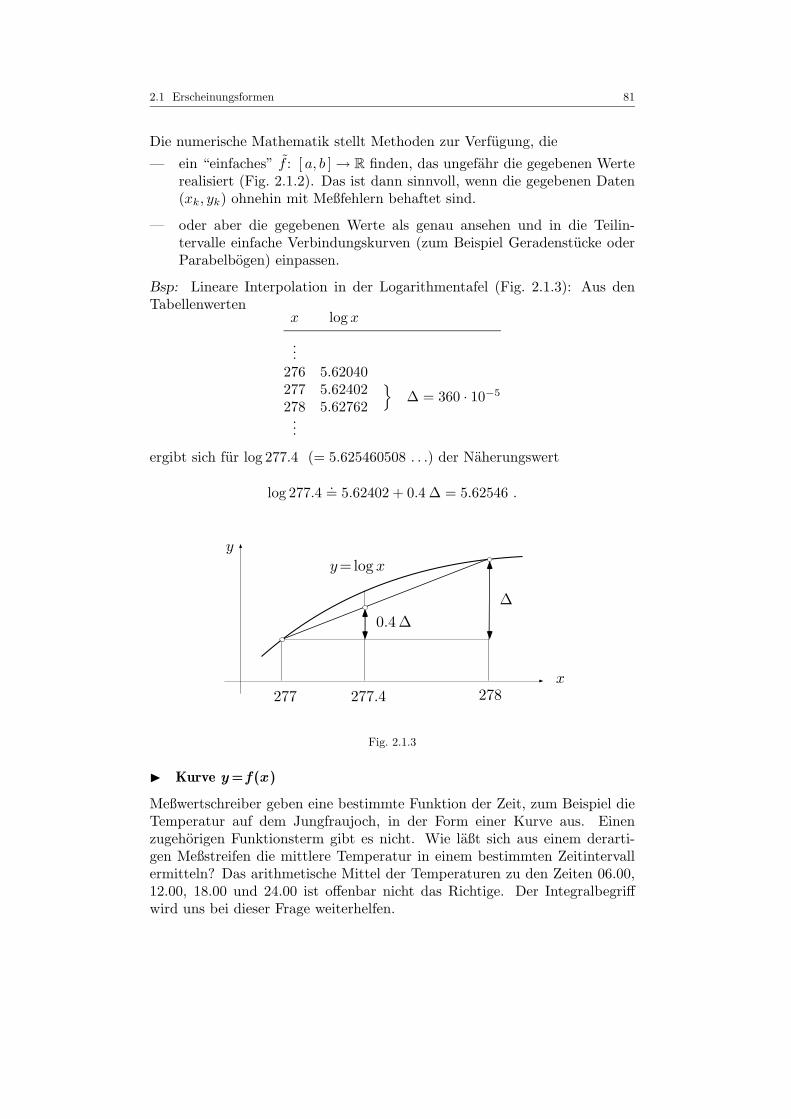
Bsp: Lineare Interpolation in der Logarithmentafel (Fig. 2.1.3): Aus denTabellenwerten
x log x
...276 5.62040277 5.62402
∆ = 360 · 10−5
278 5.62762...
ergibt sich fur log 277.4 (= 5.625460508 . . .) der Naherungswert
log 277.4.= 5.62402 + 0.4 ∆ = 5.62546 .
277 277.4 278
y
x
y = log x
0.4 ∆∆
Fig. 2.1.3
I Kurve y = f (x )
Meßwertschreiber geben eine bestimmte Funktion der Zeit, zum Beispiel dieTemperatur auf dem Jungfraujoch, in der Form einer Kurve aus. Einenzugehorigen Funktionsterm gibt es nicht. Wie laßt sich aus einem derarti-gen Meßstreifen die mittlere Temperatur in einem bestimmten Zeitintervallermitteln? Das arithmetische Mittel der Temperaturen zu den Zeiten 06.00,12.00, 18.00 und 24.00 ist offenbar nicht das Richtige. Der Integralbegriffwird uns bei dieser Frage weiterhelfen.
82 2 Funktionen
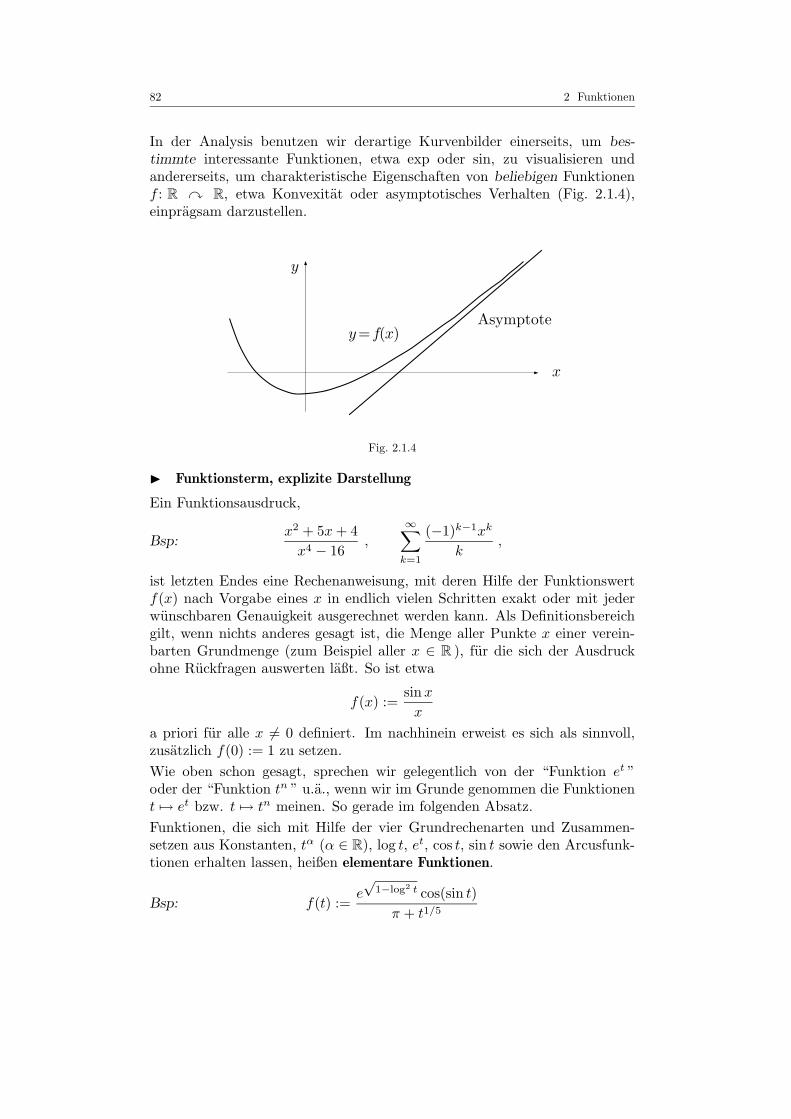
In der Analysis benutzen wir derartige Kurvenbilder einerseits, um bes-timmte interessante Funktionen, etwa exp oder sin, zu visualisieren undandererseits, um charakteristische Eigenschaften von beliebigen Funktionenf : R y R, etwa Konvexitat oder asymptotisches Verhalten (Fig. 2.1.4),einpragsam darzustellen.
y
x
y = f(x)Asymptote
Fig. 2.1.4
I Funktionsterm, explizite Darstellung
Ein Funktionsausdruck,
Bsp:x2 + 5x + 4
x4 − 16,
∞∑
k=1
(−1)k−1xk
k,
ist letzten Endes eine Rechenanweisung, mit deren Hilfe der Funktionswertf(x) nach Vorgabe eines x in endlich vielen Schritten exakt oder mit jederwunschbaren Genauigkeit ausgerechnet werden kann. Als Definitionsbereichgilt, wenn nichts anderes gesagt ist, die Menge aller Punkte x einer verein-barten Grundmenge (zum Beispiel aller x ∈ R ), fur die sich der Ausdruckohne Ruckfragen auswerten laßt. So ist etwa
f(x) :=sinx
x
a priori fur alle x 6= 0 definiert. Im nachhinein erweist es sich als sinnvoll,zusatzlich f(0) := 1 zu setzen.
Wie oben schon gesagt, sprechen wir gelegentlich von der “Funktion et ”oder der “Funktion tn ” u.a., wenn wir im Grunde genommen die Funktionent 7→ et bzw. t 7→ tn meinen. So gerade im folgenden Absatz.
Funktionen, die sich mit Hilfe der vier Grundrechenarten und Zusammen-setzen aus Konstanten, tα (α ∈ R), log t, et, cos t, sin t sowie den Arcusfunk-tionen erhalten lassen, heißen elementare Funktionen.
Bsp: f(t) :=e√
1−log2 t cos(sin t)
π + t1/5

2.1 Erscheinungsformen 83
Die Ableitung einer elementaren Funktion ist wieder eine elementare Funk-tion (dies folgt mit vollstandiger Induktion aus den Ableitungsregeln); es gibtaber elementare Funktionen, deren Stammfunktionen nicht elementar sind,zum Beispiel die Funktion e−t2/2, die in der Wahrscheinlichkeitstheorie einegroße Rolle spielt. Der Umfang einer Ellipse ist keine elementare Funktionder Halbachsen (sonst hatten Sie die Formel schon gesehen . . .).
Als explizite (“ausdruckliche”) Darstellungen von Funktionen sind auch diefolgenden Beispiele anzusehen:
abs x := |x| :=
x (x ≥ 0)−x (x ≤ 0)
;
bxc := max
k ∈ Z∣∣ k ≤ x
(= großte ganze Zahl ≤ x ) ,
dxe := min
k ∈ Z∣∣ k ≥ x
(= kleinste ganze Zahl ≥ x ) .
Ist eine Funktion in expliziter Darstellung gegeben, so entsteht das Prob-lem, ihre qualitativen Eigenschaften (Monotoniecharakter, Extrema, Singu-laritaten, asymptotisches Verhalten usw.) herauszulesen und in einer geeig-neten Figur pragnant darzustellen. Die Behandlung dieses Problems ist imFall einer Funktion f : R y R die beliebte “Graphendiskussion”.
I Implizite Funktionen
Gelegentlich sind zwei (an sich “gleichberechtigte”) reelle Großen x, y ver-knupft durch eine Gleichung
F (x, y) = 0 . (1)
x2 + y2 = 1 ,Bsp:
x3 + y3 = 3axy , a > 0 fest.
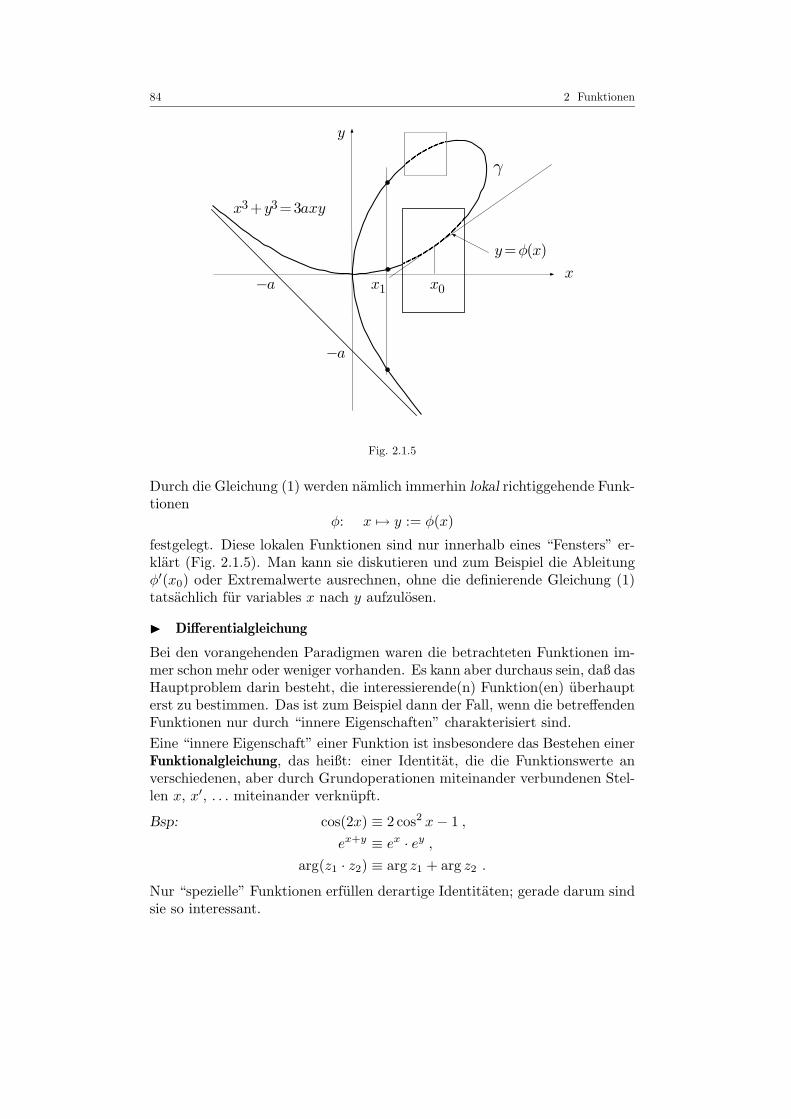
In diesem Fall sind x und y nicht mehr unabhangig voneinander beliebig wahl-bar. Die “zulaßigen” Paare (x, y) bilden vielmehr eine Teilmenge γ ⊂ R2, inaller Regel eine Kurve.
Die zwischen x und y bestehende Abhangigkeit laßt sich aber nur selten alsglobale Funktion
x 7→ y := f(x)
auffassen, da zu einem gegebenen x-Wert ohne weiteres mehrere verschiedeney-Werte gehoren konnen (siehe z.B. die Stelle x1 in Fig. 2.1.5). Trotzdemsagt man, eine Gleichung der Form (1) definiere y implizit als Funktion vonx (oder x als Funktion von y), und zwar auch dann, wenn es nicht gelingt,die Variable y formelmaßig durch x (oder x durch y) auszudrucken.
84 2 Funktionen
−a
−a
x1 x0
y
x
y = φ(x)
x3 + y3 = 3axy
γ
Fig. 2.1.5
Durch die Gleichung (1) werden namlich immerhin lokal richtiggehende Funk-tionen
φ: x 7→ y := φ(x)
festgelegt. Diese lokalen Funktionen sind nur innerhalb eines “Fensters” er-klart (Fig. 2.1.5). Man kann sie diskutieren und zum Beispiel die Ableitungφ′(x0) oder Extremalwerte ausrechnen, ohne die definierende Gleichung (1)tatsachlich fur variables x nach y aufzulosen.
I Differentialgleichung
Bei den vorangehenden Paradigmen waren die betrachteten Funktionen im-mer schon mehr oder weniger vorhanden. Es kann aber durchaus sein, daß dasHauptproblem darin besteht, die interessierende(n) Funktion(en) uberhaupterst zu bestimmen. Das ist zum Beispiel dann der Fall, wenn die betreffendenFunktionen nur durch “innere Eigenschaften” charakterisiert sind.
Eine “innere Eigenschaft” einer Funktion ist insbesondere das Bestehen einerFunktionalgleichung, das heißt: einer Identitat, die die Funktionswerte anverschiedenen, aber durch Grundoperationen miteinander verbundenen Stel-len x, x′, . . . miteinander verknupft.
cos(2x) ≡ 2 cos2 x − 1 ,Bsp:
ex+y ≡ ex · ey ,
arg(z1 · z2) ≡ arg z1 + arg z2 .
Nur “spezielle” Funktionen erfullen derartige Identitaten; gerade darum sindsie so interessant.

2.1 Erscheinungsformen 85
©1 Gesucht sind die (stetigen) Funktionen, die der folgenden Funktionalglei-chung genugen:
∀x, x′ > 0 : f(x · x′) = f(x) · f(x′) .
Losung: Außer f(x) :≡ 0 sind dies genau die Funktionen f(x) := xα, α ∈ R
fest. (Wie man darauf kommt und warum es keine andern gibt, konnen wirhier nicht erortern.) ©
Am allerhaufigsten ist die “innere Eigenschaft” der gesuchten Funktionent 7→ y(t) in der Form eines Wachstumsgesetzes gegeben: Die momentanezeitliche Anderungsrate y(t)
(oder die Momentanbeschleunigung y(t)
)ist
eine gegebene Funktion der Zeit t und vor allem des Istwertes y(t)(eventuell
auch von y(t)):
y = F (t, y) bzw. y = F (t, y, y) .
Eine derartige Gleichung heißt eine Differentialgleichung. Gesucht sind Funk-tionen y(·), fur die gilt:
∀t : y(t) = F(t, y(t)
)bzw. y(t) = F
(t, y(t), y(t)
).
©2 Ein frei fallender Korper (Fig. 2.1.6) sei der als konstant angenommenenErdbeschleunigung g := 9.81 m/sec2 unterworfen. Wir fragen nach seinem“Fahrplan” t 7→ y(t). Nach Annahme gilt y(t) = −g fur alle t, in anderenWorten: Die gesuchte Funktion y(·) genugt der Differentialgleichung (zweiterOrdnung)
y = −g .
y(t)
0
y
y(t).
Fig. 2.1.6

86 2 Funktionen
Diese Differentialgleichung hat unendlich viele Losungen, namlich genau dieFunktionen
y(t) := −g
2t2 + At + B , A, B ∈ R .
Zur Festlegung der sogenannten Integrationskonstanten A, B sind weitereAngaben, zum Beispiel uber Ort und Geschwindigkeit zur Zeit t := 0, not-wendig. ©Bei gewissen geometrischen Problemen wird nach Kurven σ: y = f(x)gefragt, deren Tangenten bestimmte Bedingungen erfullen. Zum Beispielsollen die gesuchten Kurven samtliche Kurven einer gegebenen KurvenscharΓ senkrecht schneiden (Fig. 2.1.7). Ein derartiges Problem fuhrt auf eineDifferentialgleichung der Form
y′ = F (x, y)
mit einer bekannten Funktion F (·, ·), denn fur jeden von der Schar Γ bedeck-ten Punkt (x, y) laßt sich leicht ausrechnen, welche Steigung die durch diesenPunkt gehende “Orthogonaltrajektorie” dort haben muß. — Von Kurven-scharen handelt der Abschnitt 5.6.
.(x,y)
σ: y = f(x)
y
x
Γ
Fig. 2.1.7
Typologie der Funktionen in diesem Buch
Als Definitions- und Zielbereiche der in der Analysis betrachteten Funk-tionen f : A → B kommen in erster Linie die in Kapitel 1 behandeltenGrundstrukturen N, R, C, R2, R3 oder vernunftige Teilmengen davon (zumBeispiel Intervalle, Kreisscheiben, Spharen) in Frage. Ein wesentliches An-liegen von spateren Kapiteln wird sein, die von den Funktionen f : R y R
her vertrauten Begriffe (Grenzwert, Stetigkeit, Ableitung, Integral usw.) aufmehrdimensionale Situationen zu ubertragen. Wir wollen aber schon schonjetzt auf die sich darbietenden Typen, Figuren und Interpretationen aufmerk-sam machen.
2.1 Erscheinungsformen 87
x0
x1
x3, x4
xk
B
x, x99
Fig. 2.1.8
N → B
Es sei B eine beliebige Menge (Fig. 2.1.8) und x Variable fur Elemente vonB. Eine Funktion
x. : N → B , k 7→ xk
von N in den Zielbereich B heißt eine Folge. Ist B = R oder B = C, sospricht man von einer Zahlfolge. Die einzelnen Funktionswerte xk sind dieGlieder der Folge. Anstelle von x. schreibt man auch (xk)k∈N, wenn man dieganze Folge meint. — Von Folgen handelt der Abschnitt 2.4.
R y R
Der Funktionstyp f : R y R stellt das “Grundmodell” der Funktionenlehredar. Wir wollen die betreffenden Funktionen reelle Funktionen nennen; vonihnen handelt ein Großteil der folgenden Abschnitte und Kapitel.
Der Definitionsbereich einer reellen Funktion ist in aller Regel ein Intervall,
dom (sin) = R ,Bsp:
f(x) :=√
1 − x2 =⇒ dom (f) = [−1, 1 ] ,
g(x) := 1/√
1 − x2 =⇒ dom (g) = ]−1, 1[ ,
oder eine Vereinigung von Intervallen,
Bsp: dom (tan) =∞⋃
k=−∞
]
kπ − π
2, kπ +
π
2
[
.
Die meisten der in der Praxis vorkommenden Funktionen f : R y R besitzeneine naturliche Fortsetzung f : C y C, und oft ist erst von da her eine be-friedigende Theorie der betreffenden Funktionen moglich. Wir haben dasbei den Polynomen gesehen (Fundamentalsatz der Algebra); dasselbe trifftzu fur die Exponentialfunktion (s.u.). — Von den Funktionen f : C → C im

88 2 Funktionen
allgemeinen handelt die sogenannte komplexe Analysis, auch einfach Funk-tionentheorie genannt.
©3 Die Funktion
f(x) :=1
1 + x2
ist fur alle x ∈ R definiert und so “schon”, wie man nur will. Fur |x| < 1 gilt
f(x) = 1 − x2 + x4 − x6 + . . . =∞∑
k=0
(−1)kx2k
(geometrische Reihe); fur |x| ≥ 1 ist aber die Reihe rechter Hand divergentund stellt die Funktion nicht mehr dar. Die Ursache dieses beim Betrag 1eintretenden “Konvergenzzusammenbruchs” wird erst erkennbar, wenn wirdie Fortsetzung
f : C → C , z 7→ 1
1 + z2
betrachten (Fig. 2.1.9): Potenzreihen wie die obige konvergieren im Kom-plexen grundsatzlich auf Kreisscheiben, siehe Satz (2.9). Da die Funktion fin den Punkten ±i eine Singularitat (einen sogenannten Pol) besitzt, kannder Konvergenzradius der zugehorigen Reihe nicht großer als 1 sein. ©
Konvergenzintervall
i
−i
1−1x
Fig. 2.1.9
R y R2, R y R3
Ist der Zielbereich einer Funktion f mehrdimensional, so sprechen wir voneiner vektorwertigen Funktion. Fur vektorwertige Funktionen verwenden wir
2.1 Erscheinungsformen 89
im allgemeinen halbfette Buchstaben: f , x(·), r(·). Eine vektorwertige Funk-tion laßt sich festlegen durch Angabe der zugehorigen Koordinatenfunktionenfi :
t 7→ f(t) =(f1(t), . . . , fm(t)
), t 7→ r(t) =
(x(t), y(t), z(t)
);
es geht aber auch ohne Koordinaten:
Bsp: f : t 7→ cos ta + sin tb (0 ≤ t ≤ 2π)
(dieses f produziert eine Ellipse mit konjugierten Halbmessern a und b).
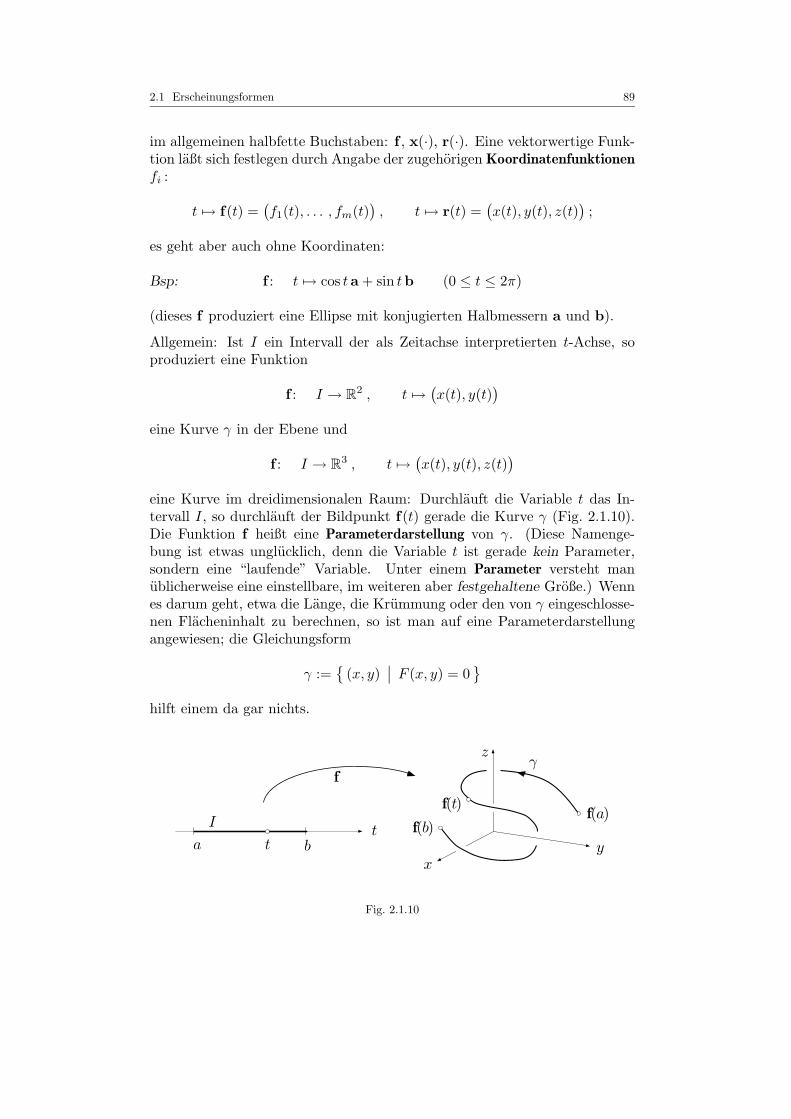
Allgemein: Ist I ein Intervall der als Zeitachse interpretierten t-Achse, soproduziert eine Funktion
f : I → R2 , t 7→(x(t), y(t)
)
eine Kurve γ in der Ebene und
f : I → R3 , t 7→(x(t), y(t), z(t)
)
eine Kurve im dreidimensionalen Raum: Durchlauft die Variable t das In-tervall I, so durchlauft der Bildpunkt f(t) gerade die Kurve γ (Fig. 2.1.10).Die Funktion f heißt eine Parameterdarstellung von γ. (Diese Namenge-bung ist etwas unglucklich, denn die Variable t ist gerade kein Parameter,sondern eine “laufende” Variable. Unter einem Parameter versteht manublicherweise eine einstellbare, im weiteren aber festgehaltene Große.) Wennes darum geht, etwa die Lange, die Krummung oder den von γ eingeschlosse-nen Flacheninhalt zu berechnen, so ist man auf eine Parameterdarstellungangewiesen; die Gleichungsform
γ :=
(x, y)∣∣ F (x, y) = 0
hilft einem da gar nichts.
a bt
t
I
xy
z
f(a)f(t)
f(b)
γf
Fig. 2.1.10

90 2 Funktionen
Jede Parameterdarstellung beinhaltet einen ganz bestimmten “Fahrplan”,nach dem die Kurve γ durchlaufen werden soll. Eine und dieselbe Kurve be-sitzt viele verschiedene Parameterdarstellungen, entsprechend den verschie-denen denkbaren “Fahrplanen”. Wenn es sich nicht um einen bestimmtenzeitlichen Bewegungsablauf handelt, sondern nur um den geometrischen Ge-halt der betreffenden Kurve, so wird man wenn moglich eine langs der Kurveveranderliche geometrische Große als “Parameter” (unabhangige Variable)wahlen, zum Beispiel die x-Koordinate oder das Argument des laufendenPunktes oder dessen langs der Kurve gemessenen Abstand vom Anfangs-punkt, die sogenannte Bogenlange. — Wir geben einige Beispiele.
©4 Eine als Graph
γ : y = f(x) (a ≤ x ≤ b)
gegebene ebene Kurve laßt sich ohne weiteres auch parametrisch darstellen:Man schreibt
γ: [ a, b ] → R2 , t 7→
x(t) = t
y(t) = f(t)
oder einfachγ: x 7→
(x, f(x)
)(a ≤ x ≤ b) ,
denn auf den Namen der unabhangigen Variablen kommt es nicht an, undda kann man schon gleich den Namen der als Parameter gewahlten geome-trischen Große, hier: x, verwenden. ©
tx
y
(a cos t, a sin t)
(b cos t, b sin t)
(x(t), y(t))
a
bγ
Fig. 2.1.11
2.1 Erscheinungsformen 91
©5 Sind a und b gegebene positive Zahlen, so stellt
γ: t 7→
x(t) = a cos t
y(t) = b sin t(0 ≤ t ≤ 2π)
eine Ellipse mit Halbachsen a und b dar (Fig. 2.1.11), denn γ entsteht ausdem Einheitskreis t 7→ (cos t, sin t) durch Streckung um den Faktor a in x-Richtung und um den Faktor b in y-Richtung. Die Variable t bezeichnet nichtetwa das Argument des laufenden Ellipsenpunktes P := (x, y), sondern dasArgument eines mit P verknupften Kreispunktes (siehe die Figur).
Man kann es auch so sehen: Es ist
x2(t)
a2+
y2(t)
b2≡ 1 ;
folglich genugen samtliche Punkte von γ der Ellipsengleichungx2
a2 +y2
b2 = 1.
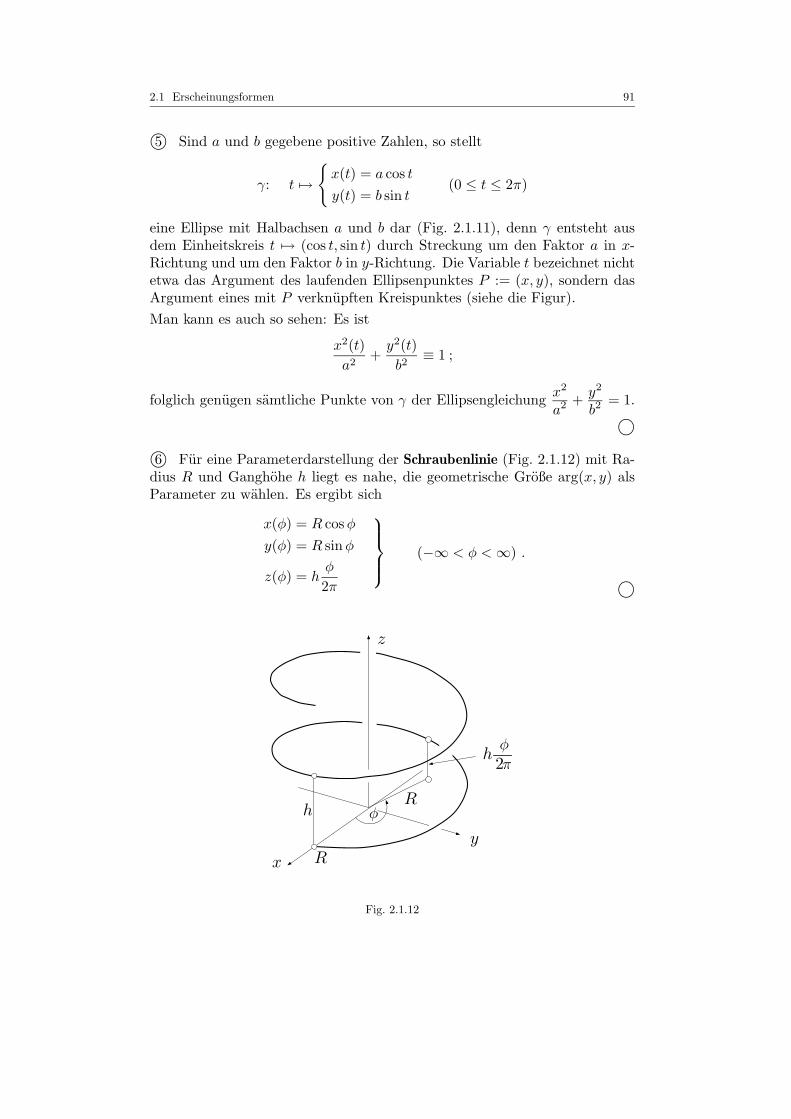
©©6 Fur eine Parameterdarstellung der Schraubenlinie (Fig. 2.1.12) mit Ra-dius R und Ganghohe h liegt es nahe, die geometrische Große arg(x, y) alsParameter zu wahlen. Es ergibt sich
x(φ) = R cos φ
y(φ) = R sinφ
z(φ) = hφ
2π
(−∞ < φ < ∞) .
©
φ
Rx
y
z
hR
h2πÆ
φ
Fig. 2.1.12
92 2 Funktionen
R y C
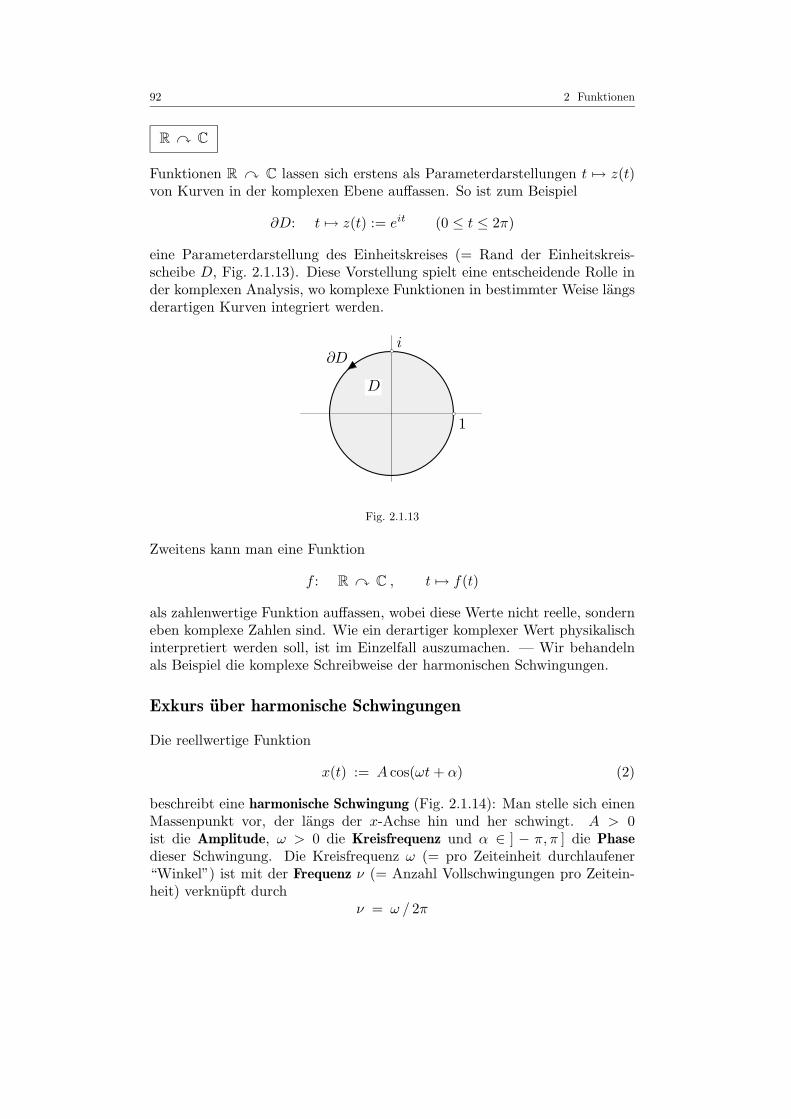
Funktionen R y C lassen sich erstens als Parameterdarstellungen t 7→ z(t)von Kurven in der komplexen Ebene auffassen. So ist zum Beispiel
∂D: t 7→ z(t) := eit (0 ≤ t ≤ 2π)
eine Parameterdarstellung des Einheitskreises (= Rand der Einheitskreis-scheibe D, Fig. 2.1.13). Diese Vorstellung spielt eine entscheidende Rolle inder komplexen Analysis, wo komplexe Funktionen in bestimmter Weise langsderartigen Kurven integriert werden.
∂Di
1
D
Fig. 2.1.13
Zweitens kann man eine Funktion
f : R y C , t 7→ f(t)
als zahlenwertige Funktion auffassen, wobei diese Werte nicht reelle, sonderneben komplexe Zahlen sind. Wie ein derartiger komplexer Wert physikalischinterpretiert werden soll, ist im Einzelfall auszumachen. — Wir behandelnals Beispiel die komplexe Schreibweise der harmonischen Schwingungen.
Exkurs uber harmonische Schwingungen
Die reellwertige Funktion
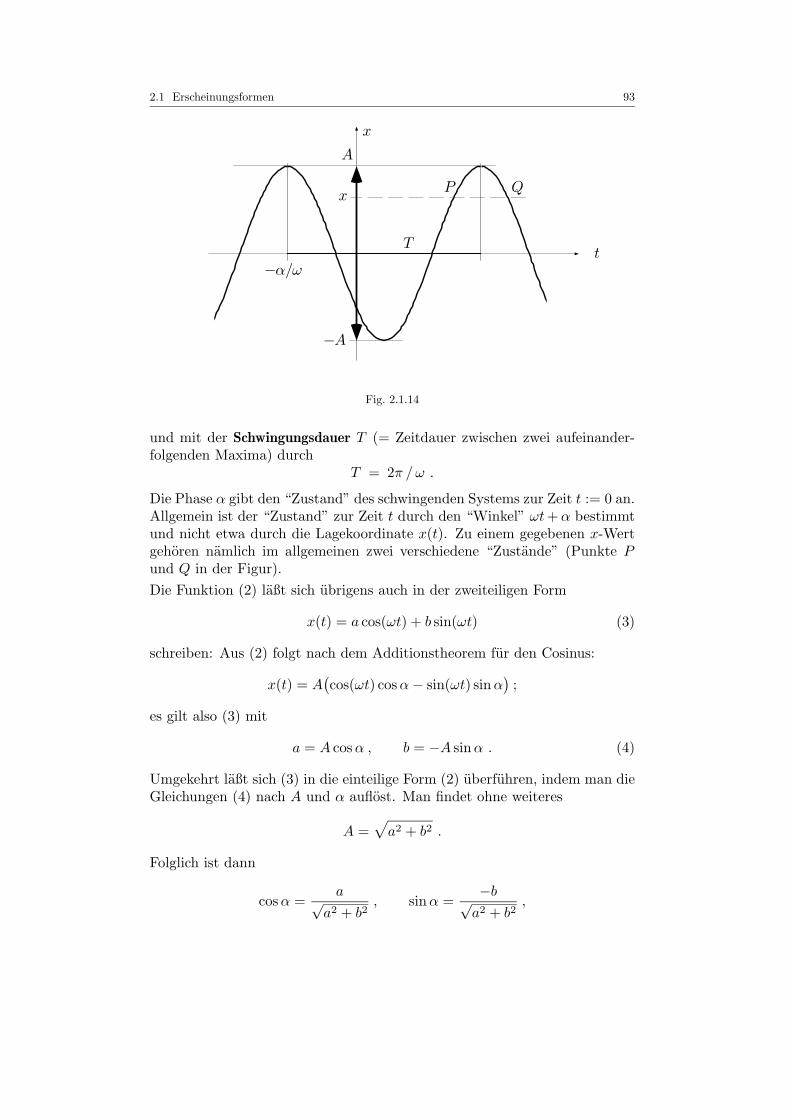
x(t) := A cos(ωt + α) (2)
beschreibt eine harmonische Schwingung (Fig. 2.1.14): Man stelle sich einenMassenpunkt vor, der langs der x-Achse hin und her schwingt. A > 0ist die Amplitude, ω > 0 die Kreisfrequenz und α ∈ ] − π, π ] die Phasedieser Schwingung. Die Kreisfrequenz ω (= pro Zeiteinheit durchlaufener“Winkel”) ist mit der Frequenz ν (= Anzahl Vollschwingungen pro Zeitein-heit) verknupft durch
ν = ω / 2π
2.1 Erscheinungsformen 93
A
−A
−α¬/ω
Tt
x
xP Q
Fig. 2.1.14
und mit der Schwingungsdauer T (= Zeitdauer zwischen zwei aufeinander-folgenden Maxima) durch
T = 2π / ω .
Die Phase α gibt den “Zustand” des schwingenden Systems zur Zeit t := 0 an.Allgemein ist der “Zustand” zur Zeit t durch den “Winkel” ωt + α bestimmtund nicht etwa durch die Lagekoordinate x(t). Zu einem gegebenen x-Wertgehoren namlich im allgemeinen zwei verschiedene “Zustande” (Punkte Pund Q in der Figur).
Die Funktion (2) laßt sich ubrigens auch in der zweiteiligen Form
x(t) = a cos(ωt) + b sin(ωt) (3)
schreiben: Aus (2) folgt nach dem Additionstheorem fur den Cosinus:
x(t) = A(cos(ωt) cos α − sin(ωt) sinα
);
es gilt also (3) mit
a = A cos α , b = −A sinα . (4)
Umgekehrt laßt sich (3) in die einteilige Form (2) uberfuhren, indem man dieGleichungen (4) nach A und α auflost. Man findet ohne weiteres
A =√
a2 + b2 .
Folglich ist dann
cos α =a√
a2 + b2, sinα =
−b√a2 + b2
,
94 2 Funktionen
und diese Angaben bestimmen α modulo 2π. Alles in allem haben wir
A =√
a2 + b2 , α = arg(a,−b) (= arctan−b
a, falls a > 0) .
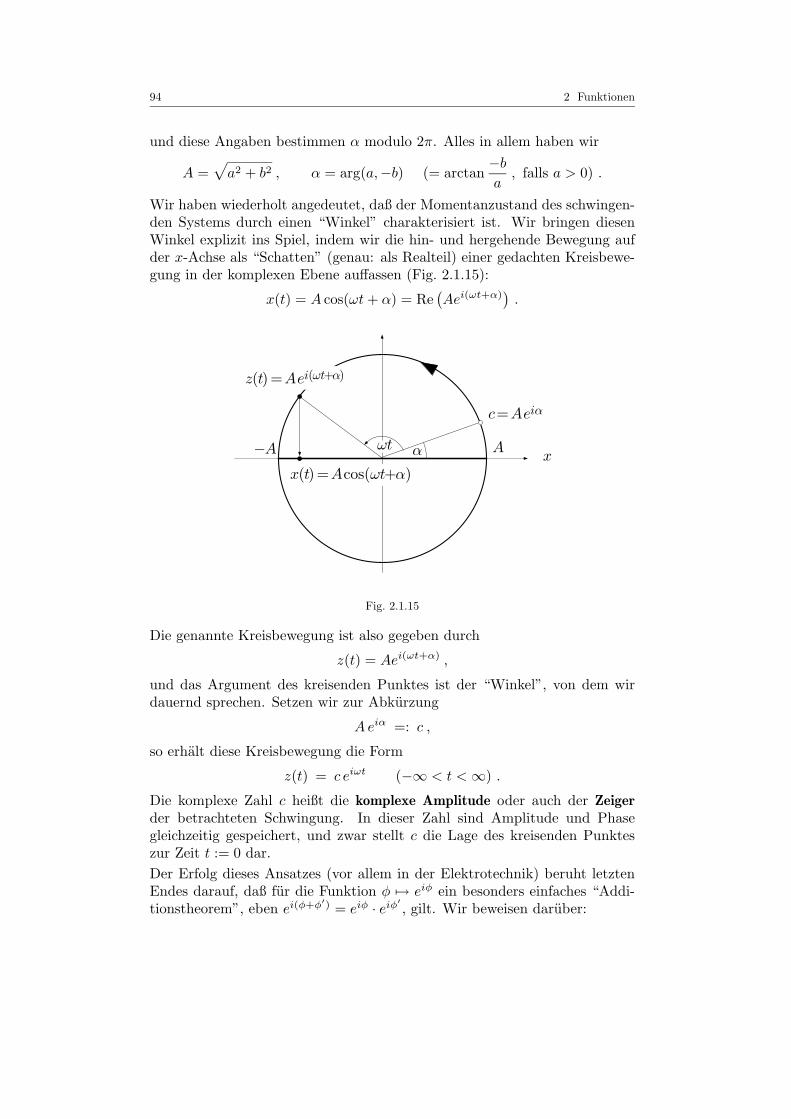
Wir haben wiederholt angedeutet, daß der Momentanzustand des schwingen-den Systems durch einen “Winkel” charakterisiert ist. Wir bringen diesenWinkel explizit ins Spiel, indem wir die hin- und hergehende Bewegung aufder x-Achse als “Schatten” (genau: als Realteil) einer gedachten Kreisbewe-gung in der komplexen Ebene auffassen (Fig. 2.1.15):
x(t) = A cos(ωt + α) = Re(Aei(ωt+α)
).
α
c = A eiα
xA−A ωt
z(t) = A ei(ωt+α)
x(t) = A cos(ωt+α)
Fig. 2.1.15
Die genannte Kreisbewegung ist also gegeben durch
z(t) = Aei(ωt+α) ,
und das Argument des kreisenden Punktes ist der “Winkel”, von dem wirdauernd sprechen. Setzen wir zur Abkurzung
A eiα =: c ,
so erhalt diese Kreisbewegung die Form
z(t) = c eiωt (−∞ < t < ∞) .
Die komplexe Zahl c heißt die komplexe Amplitude oder auch der Zeigerder betrachteten Schwingung. In dieser Zahl sind Amplitude und Phasegleichzeitig gespeichert, und zwar stellt c die Lage des kreisenden Punkteszur Zeit t := 0 dar.
Der Erfolg dieses Ansatzes (vor allem in der Elektrotechnik) beruht letztenEndes darauf, daß fur die Funktion φ 7→ eiφ ein besonders einfaches “Addi-tionstheorem”, eben ei(φ+φ′) = eiφ · eiφ′
, gilt. Wir beweisen daruber:

2.1 Erscheinungsformen 95
(2.1) Sind x1(·), x2(·) zwei harmonische Schwingungen der gleichen Kreis-frequenz ω mit komplexen Amplituden c1, c2, so ist ihre Superposition
x(·) := x1(·) + x2(·)
die harmonische Schwingung der Kreisfrequenz ω mit komplexer Amplitudec1 + c2.
x(t) = x1(t) + x2(t) = Re(c1e
iωt)
+ Re(c2e
iωt)
= Re((c1 + c2)e
iωt)
.
©7 Die Phasen dreier Schwingungen gleicher Kreisfrequenz und gleicher Am-plitude sollen so festgelegt werden, daß die Superposition der drei Schwingun-gen identisch verschwindet.
c1
c2c3
120
Fig. 2.1.16
Die komplexen Amplituden c1, c2, c3 der drei Schwingungen sind drei gleichlange Vektoren der Summe 0. Die Additionsfigur ist somit ein gleichseitigesDreieck (Fig. 2.1.16), und die gesuchten Phasendifferenzen betragen 120.
©
Funktionen von mehreren Variablen
R2 y R, R3 y R
Besitzt eine Funktion
f : Rn y R , (x1, . . . , xn) 7→ f(x1, . . . , xn) bzw. x 7→ f(x)
einen “echt n-dimensionalen” Definitionsbereich, so spricht man von einerFunktion von n Variablen. Im Fall n = 2 laßt sich eine derartige Funktion

96 2 Funktionen
auffassen als “Temperaturverteilung” in der Ebene: Fur jeden Punkt (x, y) ∈dom (f) ist eine “Temperatur” f(x, y) festgelegt. Zur Visualisierung vonTemperaturverteilungen verwendet man zum Beispiel in Wetterkarten diesogenannten Isothermen; das sind die “Kurven gleicher Temperatur”.
Allgemein: Ist f : A → B eine beliebige Funktion, so kann man fur jedesgegebene c ∈ B die Menge derjenigen x ∈ A bilden, fur die f(x) = c ist.Diese Menge heißt das Urbild des Punktes c und wird mit f−1(c) bezeichnet:
f−1(c) :=x ∈ A
∣∣ f(x) = c
.
Geht es um eine Funktion f : R2 y R und ein gegebenes C ∈ R, so heißtf−1(C) die Niveaulinie von f zum Niveau C (Fig. 2.1.17) — wir schreibendafur auch NC :
NC :=(x, y) ∈ dom (f)
∣∣ f(x, y) = C
.
f(x,y) = C
dom(f)
x
y
Fig. 2.1.17
NC ist in aller Regel eine Kurve oder eine Vereinigung von Kurven, eventuellmit Singularitaten. (Dieser Sachverhalt wird in Kapitel 5 genauer unter-sucht.) Zeichnet man die Niveaulinien fur hinreichend viele verschiedeneWerte C, so erhalt man ein anschauliches Bild des globalen Funktionsver-laufs.
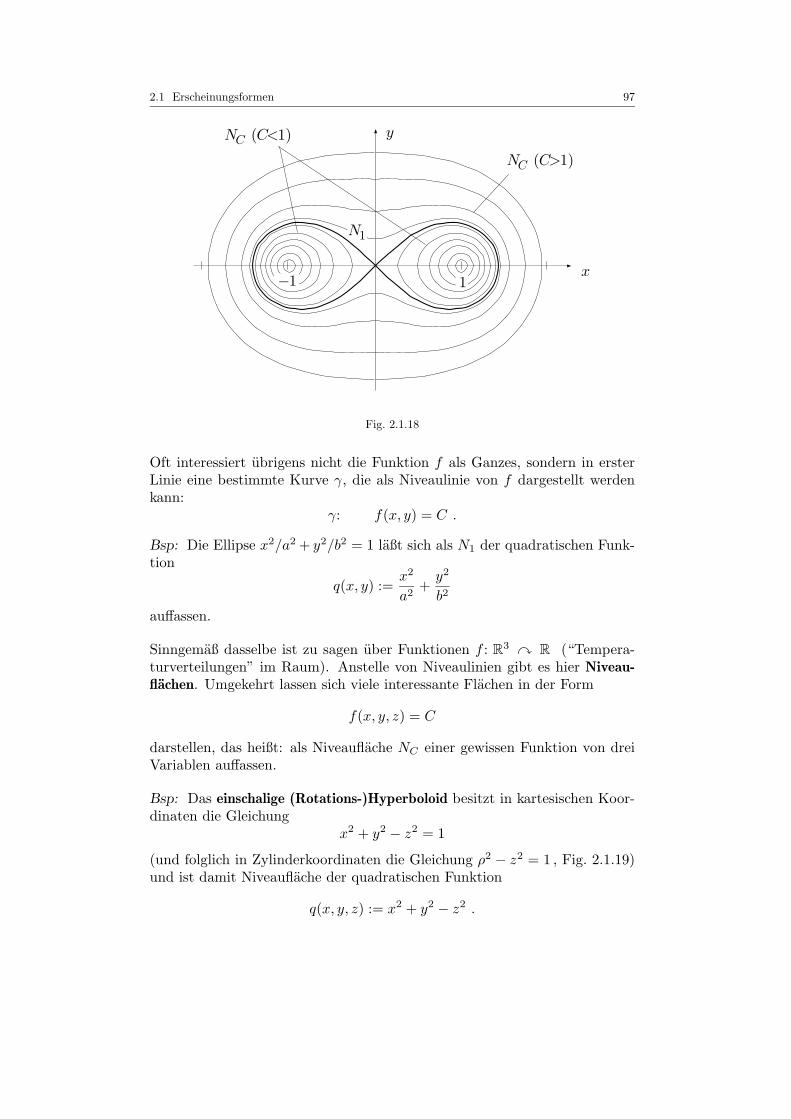
©8 Wir zeichnen einige Niveaulinien der Funktion
f(x, y) :=√
(x − 1)2 + y2√
(x + 1)2 + y2
(Fig. 2.1.18). Der Funktionswert an der Stelle (x, y) ist das Produkt derAbstande von (x, y) zu den beiden Punkten (±1, 0) . N1 ist die sogenannteLemniskate; allgemein heißen die hier betrachteten Niveaulinien NC (C > 0)Cassinische Kurven. ©
2.1 Erscheinungsformen 97
y
N1
NC (C<1)
NC (C>1)
x−1 1
Fig. 2.1.18
Oft interessiert ubrigens nicht die Funktion f als Ganzes, sondern in ersterLinie eine bestimmte Kurve γ, die als Niveaulinie von f dargestellt werdenkann:
γ: f(x, y) = C .
Bsp: Die Ellipse x2/a2 + y2/b2 = 1 laßt sich als N1 der quadratischen Funk-tion
q(x, y) :=x2
a2+
y2
b2
auffassen.
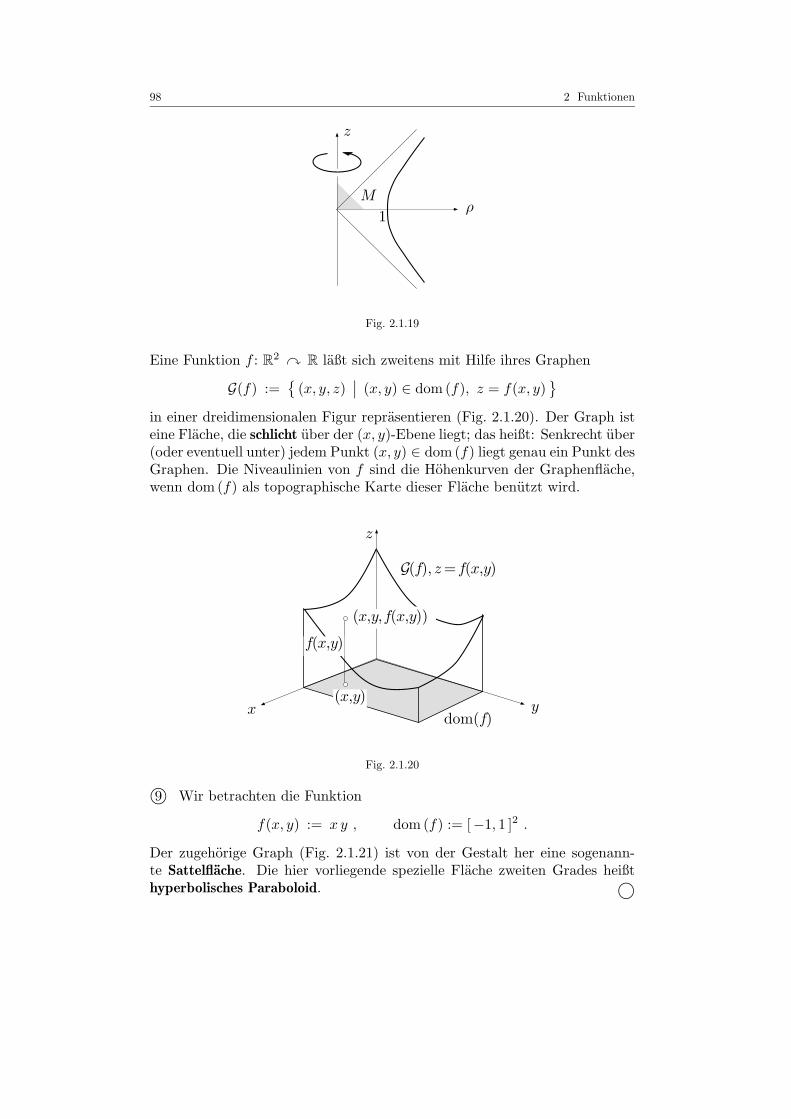
Sinngemaß dasselbe ist zu sagen uber Funktionen f : R3 y R (“Tempera-turverteilungen” im Raum). Anstelle von Niveaulinien gibt es hier Niveau-flachen. Umgekehrt lassen sich viele interessante Flachen in der Form
f(x, y, z) = C
darstellen, das heißt: als Niveauflache NC einer gewissen Funktion von dreiVariablen auffassen.
Bsp: Das einschalige (Rotations-)Hyperboloid besitzt in kartesischen Koor-dinaten die Gleichung
x2 + y2 − z2 = 1
(und folglich in Zylinderkoordinaten die Gleichung ρ2 − z2 = 1 , Fig. 2.1.19)und ist damit Niveauflache der quadratischen Funktion
q(x, y, z) := x2 + y2 − z2 .
98 2 Funktionen
ρ
z
M
1
Fig. 2.1.19
Eine Funktion f : R2 y R laßt sich zweitens mit Hilfe ihres Graphen
G(f) :=
(x, y, z)∣∣ (x, y) ∈ dom (f), z = f(x, y)
in einer dreidimensionalen Figur reprasentieren (Fig. 2.1.20). Der Graph isteine Flache, die schlicht uber der (x, y)-Ebene liegt; das heißt: Senkrecht uber(oder eventuell unter) jedem Punkt (x, y) ∈ dom (f) liegt genau ein Punkt desGraphen. Die Niveaulinien von f sind die Hohenkurven der Graphenflache,wenn dom (f) als topographische Karte dieser Flache benutzt wird.
x y
z
(x,y)
dom(f)
G(f), z = f(x,y)
f(x,y)
(x,y, f(x,y))
Fig. 2.1.20
©9 Wir betrachten die Funktion
f(x, y) := x y , dom (f) := [−1, 1 ]2 .
Der zugehorige Graph (Fig. 2.1.21) ist von der Gestalt her eine sogenann-te Sattelflache. Die hier vorliegende spezielle Flache zweiten Grades heißthyperbolisches Paraboloid. ©

2.1 Erscheinungsformen 99
x
yz
1−1
1−1
Fig. 2.1.21
R2 y R3
Abbildungen f : R2 y R3 sind typischer Weise Parameterdarstellungen vonkrummen Flachen.
Eine Kurve γ ⊂ R3 ist eine “eindimensionale Mannigfaltigkeit”. Zu einer Pa-rameterdarstellung von γ gehoren als Standardmodell einer derartigen Man-nigfaltigkeit ein Intervall I der t-Achse und eine vektorwertige Funktion
f : I → R3 , t 7→ x(t) ,
die die einzelnen Kurvenpunkte produziert.
Eine Flache S ⊂ R3 ist eine “zweidimensionale Mannigfaltigkeit”. Zu einerParameterdarstellung von S gehoren als Standardmodell einer derartigenMannigfaltigkeit ein Bereich A in der (u, v)-Ebene und eine vektorwertigeFunktion
f : A → R3 , (u, v) 7→ f(u, v) =(x(u, v), y(u, v), z(u, v)
),
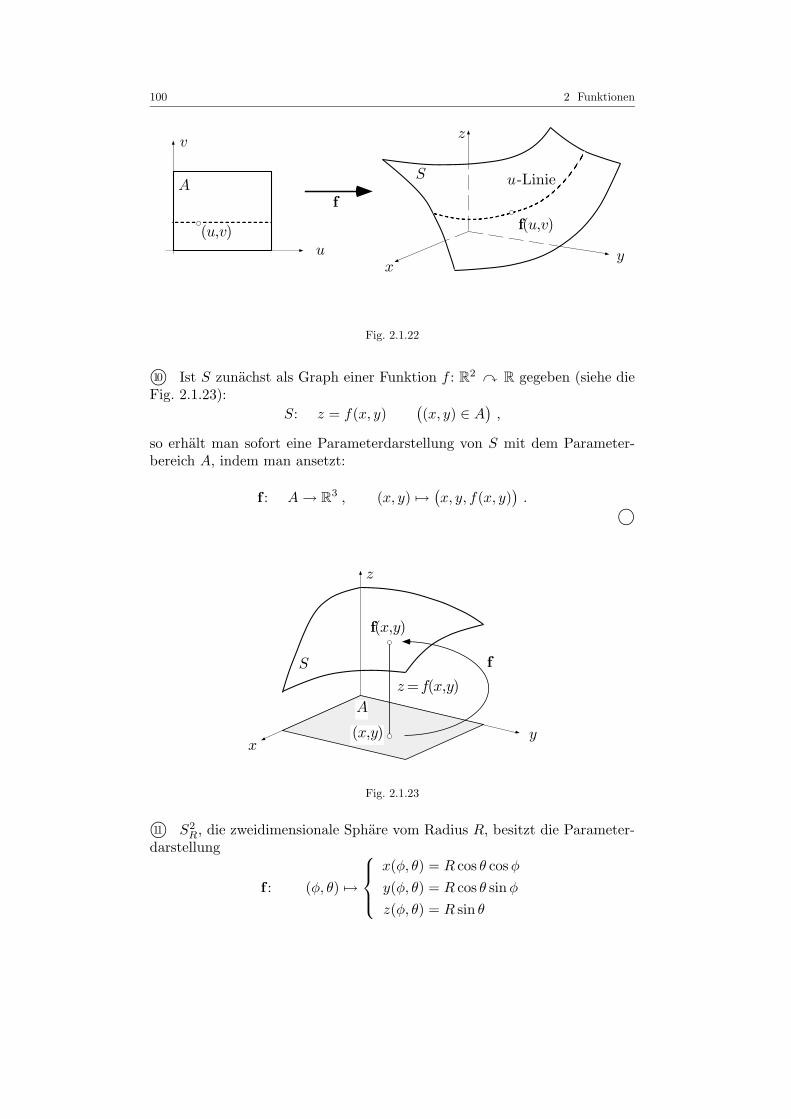
die fur jeden “Parameterpunkt” (u, v) ∈ A einen Raumpunkt f(u, v) liefert,siehe die Fig. 2.1.22. Durchlauft (u, v) den Parameterbereich A, so durchlauftf(u, v) die Flache S.
Bei allgemeinen Betrachtungen uber Flachen verwenden wir u, v als Parame-ter. Sobald man aber eine konkrete, geometrisch beschriebene Flache vor sichhat, wahlt man (wie bei Kurven) auf der Flache variable geometrische Großenals Parameter und behalt deren Namen bei. Die folgenden Beispiele sollendas erlautern; siehe auch die Beispiele 1.5.©2 (Torus) und 1.6.©3 (Ebene).
100 2 Funktionen
f(u,v)
u -Linie
z
xy
S
v
u(u,v)
Af
Fig. 2.1.22
©10 Ist S zunachst als Graph einer Funktion f : R2 y R gegeben (siehe dieFig. 2.1.23):
S: z = f(x, y)((x, y) ∈ A
),
so erhalt man sofort eine Parameterdarstellung von S mit dem Parameter-bereich A, indem man ansetzt:
f : A → R3 , (x, y) 7→(x, y, f(x, y)
).
©
z
xy
A
(x,y)
z = f(x,y)
f(x,y)
S f
Fig. 2.1.23
©11 S2R, die zweidimensionale Sphare vom Radius R, besitzt die Parameter-
darstellung
f : (φ, θ) 7→
x(φ, θ) = R cos θ cos φ
y(φ, θ) = R cos θ sinφ
z(φ, θ) = R sin θ
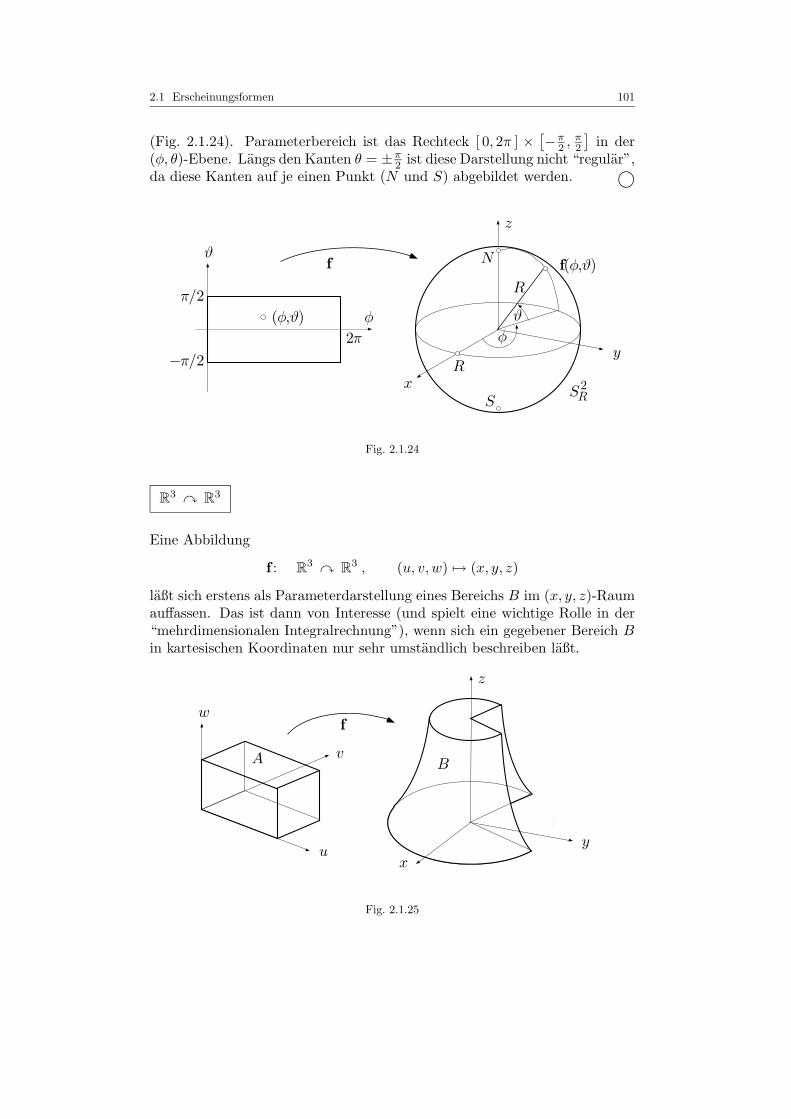
2.1 Erscheinungsformen 101
(Fig. 2.1.24). Parameterbereich ist das Rechteck [ 0, 2π ] ×[−π
2 , π2
]in der
(φ, θ)-Ebene. Langs den Kanten θ = ±π2 ist diese Darstellung nicht “regular”,
da diese Kanten auf je einen Punkt (N und S) abgebildet werden. ©
φ
ϑ
πÆ/2
−πÆ/2
2π
(φ,ϑ) ϑ
φ
f(φ,ϑ)
R
R
x
y
z
N
S
f
SR2
Fig. 2.1.24
R3 y R3
Eine Abbildung
f : R3 y R3 , (u, v, w) 7→ (x, y, z)
laßt sich erstens als Parameterdarstellung eines Bereichs B im (x, y, z)-Raumauffassen. Das ist dann von Interesse (und spielt eine wichtige Rolle in der“mehrdimensionalen Integralrechnung”), wenn sich ein gegebener Bereich Bin kartesischen Koordinaten nur sehr umstandlich beschreiben laßt.
z
y
x
B
w
u
vA
f
Fig. 2.1.25

102 2 Funktionen
Man ersetzt dann diese Beschreibung durch eine Parameterdarstellung miteinem Parameterbereich A im (u, v, w)-Raum, der wenn irgend moglich einachsenparalleler Quader ist (Fig. 2.1.25). Gelegentlich wird dann der BereichA gar nicht gezeichnet, sondern man faßt u, v, w als “neue Koordinaten” im(x, y, z)-Raum auf und bringt sie in geeigneter Weise in der (x, y, z)-Figurzur Darstellung. Siehe dazu etwa die Figur 1.5.11.
©12 Es sei B der von den drei linear unabhangigen Vektoren a, b, c aufge-spannte Spat und I := [ 0, 1 ]3 der Einheitswurfel im (u, v, w)-Raum. Dannist
f : I → B , (u, v, w) 7→ ua + vb + wc
eine Parameterdarstellung von B (Fig. 2.1.26). ©
Oxy
z
u
v
w
1
1
0 ab
c1
Fig. 2.1.26
©13 Die Kugelkoordinaten liefern eine Parameterdarstellung der Kugel
BR :=
(x, y, z)∣∣
√
x2 + y2 + z2 ≤ R
;
Parameterbereich ist ein Quader im (r, φ, θ)-Raum:
f : [ 0, R ] × [ 0, 2π ] ×[
−π
2,π
2
]
→ BR
(r, φ, θ) 7→
x = r cos θ cos φ
y = r cos θ sinφ
z = r sin θ
.
Dabei wird die ganze Seitenflache r = 0 des Quaders auf den einzigen PunktO abgebildet. Da aber diese Seitenflache kein Volumen besitzt und der PunktO auch nicht, spielt das zum Beispiel fur die Zwecke der Integration keineRolle. ©
2.1 Erscheinungsformen 103
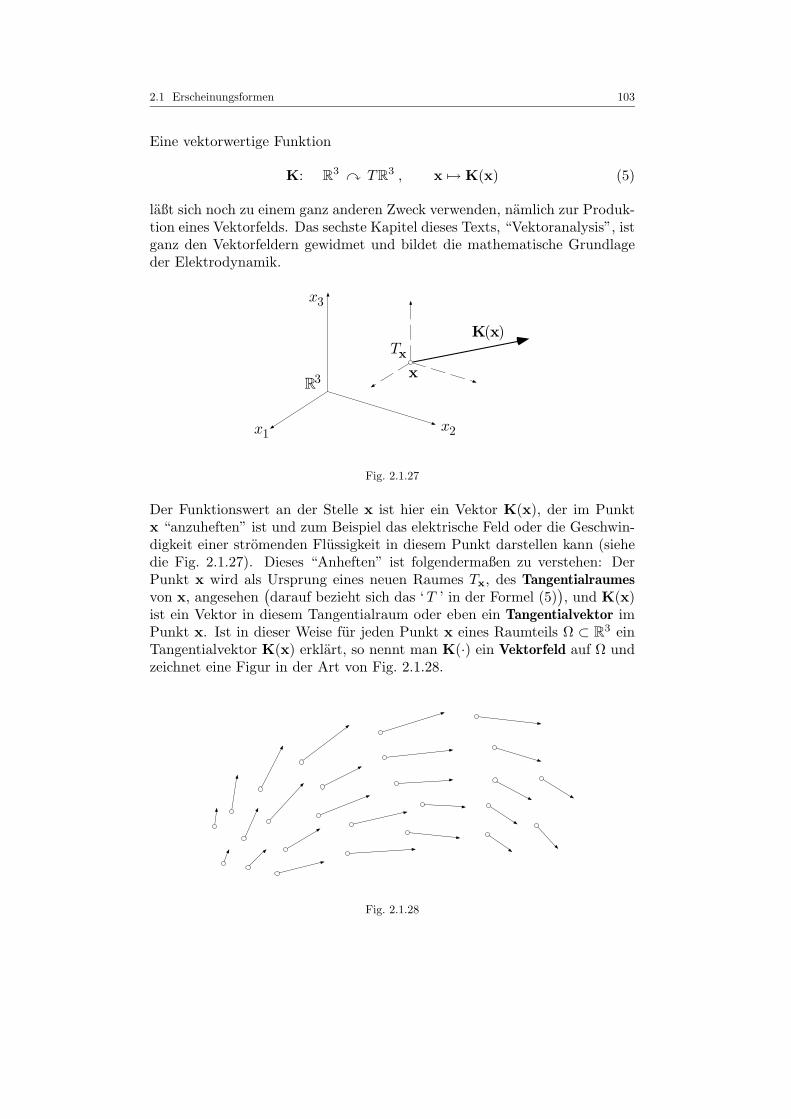
Eine vektorwertige Funktion
K: R3 y TR3 , x 7→ K(x) (5)
laßt sich noch zu einem ganz anderen Zweck verwenden, namlich zur Produk-tion eines Vektorfelds. Das sechste Kapitel dieses Texts, “Vektoranalysis”, istganz den Vektorfeldern gewidmet und bildet die mathematische Grundlageder Elektrodynamik.
x1x2
x3
x
Tx
R3
K(x)
Fig. 2.1.27
Der Funktionswert an der Stelle x ist hier ein Vektor K(x), der im Punktx “anzuheften” ist und zum Beispiel das elektrische Feld oder die Geschwin-digkeit einer stromenden Flussigkeit in diesem Punkt darstellen kann (siehedie Fig. 2.1.27). Dieses “Anheften” ist folgendermaßen zu verstehen: DerPunkt x wird als Ursprung eines neuen Raumes Tx, des Tangentialraumesvon x, angesehen
(darauf bezieht sich das ‘T ’ in der Formel (5)
), und K(x)
ist ein Vektor in diesem Tangentialraum oder eben ein Tangentialvektor imPunkt x. Ist in dieser Weise fur jeden Punkt x eines Raumteils Ω ⊂ R3 einTangentialvektor K(x) erklart, so nennt man K(·) ein Vektorfeld auf Ω undzeichnet eine Figur in der Art von Fig. 2.1.28.
Fig. 2.1.28
104 2 Funktionen
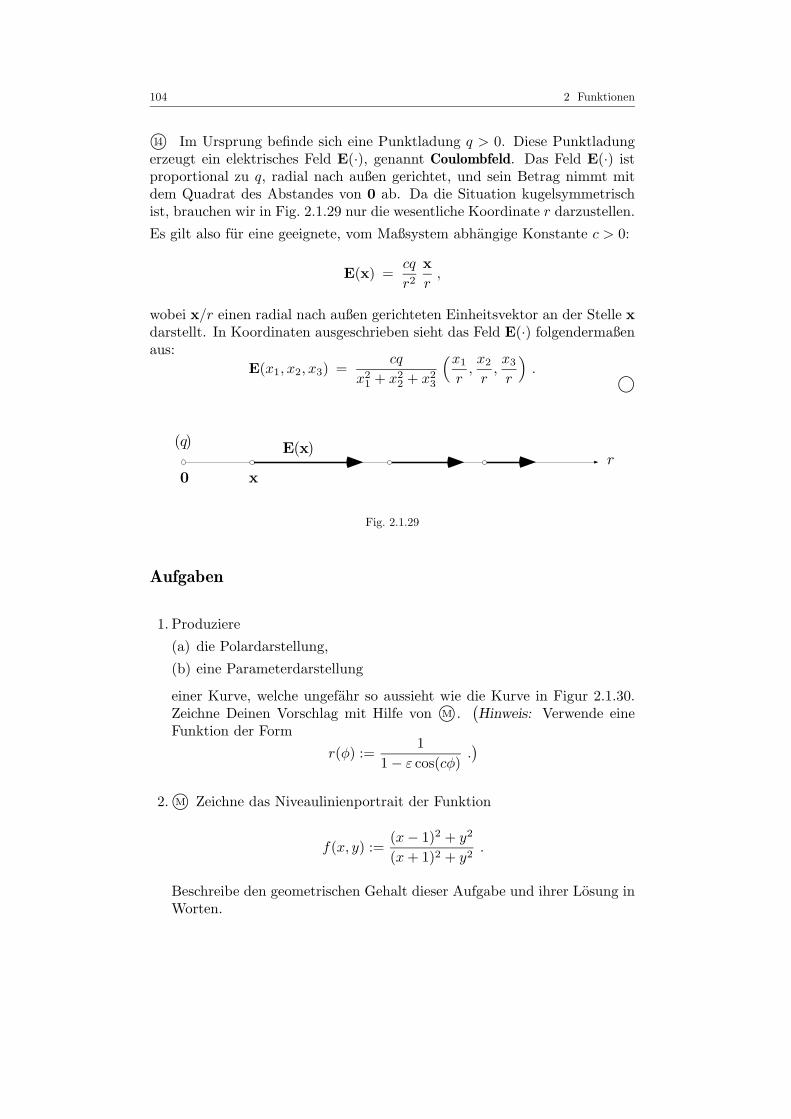
©14 Im Ursprung befinde sich eine Punktladung q > 0. Diese Punktladungerzeugt ein elektrisches Feld E(·), genannt Coulombfeld. Das Feld E(·) istproportional zu q, radial nach außen gerichtet, und sein Betrag nimmt mitdem Quadrat des Abstandes von 0 ab. Da die Situation kugelsymmetrischist, brauchen wir in Fig. 2.1.29 nur die wesentliche Koordinate r darzustellen.
Es gilt also fur eine geeignete, vom Maßsystem abhangige Konstante c > 0:
E(x) =cq
r2
x
r,
wobei x/r einen radial nach außen gerichteten Einheitsvektor an der Stelle xdarstellt. In Koordinaten ausgeschrieben sieht das Feld E(·) folgendermaßenaus:
E(x1, x2, x3) =cq
x21 + x2
2 + x23
(x1
r,x2
r,x3
r
)
.©
r(q)
0 x
E(x)
Fig. 2.1.29
Aufgaben
1. Produziere
(a) die Polardarstellung,
(b) eine Parameterdarstellung
einer Kurve, welche ungefahr so aussieht wie die Kurve in Figur 2.1.30.Zeichne Deinen Vorschlag mit Hilfe von ©M .
(Hinweis: Verwende eine
Funktion der Form
r(φ) :=1
1 − ε cos(cφ).)
2.©M Zeichne das Niveaulinienportrait der Funktion
f(x, y) :=(x − 1)2 + y2
(x + 1)2 + y2.
Beschreibe den geometrischen Gehalt dieser Aufgabe und ihrer Losung inWorten.

2.1 Erscheinungsformen 105
Fig. 2.1.30
3. Eine gegebene harmonische Schwingung der Amplitude A wird von einerzweiten Schwingung derselben Kreisfrequenz uberlagert, wobei die Ampli-tude dieser Storung hochstens A/2 betragt. Um welchen Betrag konnensich dabei Amplitude und Phase der ursprunglichen Schwingung hoch-stens verandern? (Hinweis: Geometrisch argumentieren!)
4. Zwischen drei harmonischen Schwingungen gleicher Kreisfrequenz beste-hen folgende Phasendifferenzen: 60 zwischen der ersten und der zweiten,150 zwischen der zweiten und der dritten, 150 zwischen der dritten undder ersten. Die Summe der drei Schwingungen verschwindet identisch.Wie verhalten sich die Amplituden?
5. Betrachte den Halbkreisbogen γ :=(x, y)
∣∣ x2 + y2 = 1, x ≥ 0
sowie
die in der ganzen (x, y)-Ebene definierte Funktion
f(x, y) := “Distanz von (x, y) zum nachstgelegenen Punkt von γ ” .
Gewunscht ist eine formelmaßige Darstellung von f(x, y) mit moglichstwenig Verzweigungen. (Hinweis: Die Losung ergibt sich im wesentlichendurch Inspektion der Figur; wenn notig die Betragsfunktion verwenden.)

2.2 Eigenschaften von Funktionen
Surjektiv, injektiv, bijektiv
Wir beginnen diesen Abschnitt mit einigen Definitionen fur Funktionen (Ab-bildungen) f : A → B im allgemeinen; A und B sind irgendwelche Mengen.Angegeben ist dom (f) = A. Gilt auch im (f) = B, in Worten: Tritt jederPunkt y des angebotenen Zielbereichs B tatsachlich als Funktionswert auf,so heißt f surjektiv, altmodisch: eine Abbildung von A auf B.
Bsp: Die reelle Funktion
g: R → R , x 7→ g(x) := x3 − 2x
(Fig. 2.2.1) ist surjektiv, die Funktion sin: R → R hingegen nicht wegenim (sin) = [−1, 1] 6= R.
y1
y
x
y = g(x)
1
1
−1
−1
Fig. 2.2.1
Die Funktion (Abbildung) f heißt injektiv, altmodisch: eineindeutig, wennsie in verschiedenen Punkten verschiedene Werte annimmt, in anderen Wor-ten: wenn aus f(x1) = f(x2) folgt: x1 = x2.
Bsp: Die eben betrachtete Funktion g ist nicht injektiv; so wird etwa der Werty1 an drei verschiedenen Stellen angenommen. Die eingeschrankte Funktion
sin:[
−π
2,π
2
]
→ R
ist injektiv, da sin in dem angegebenen Intervall streng monoton wachst.Parameterdarstellungen von Kurven, Flachen oder raumlichen Bereichen sind“im wesentlichen” injektiv.
2.2 Eigenschaften von Funktionen 107
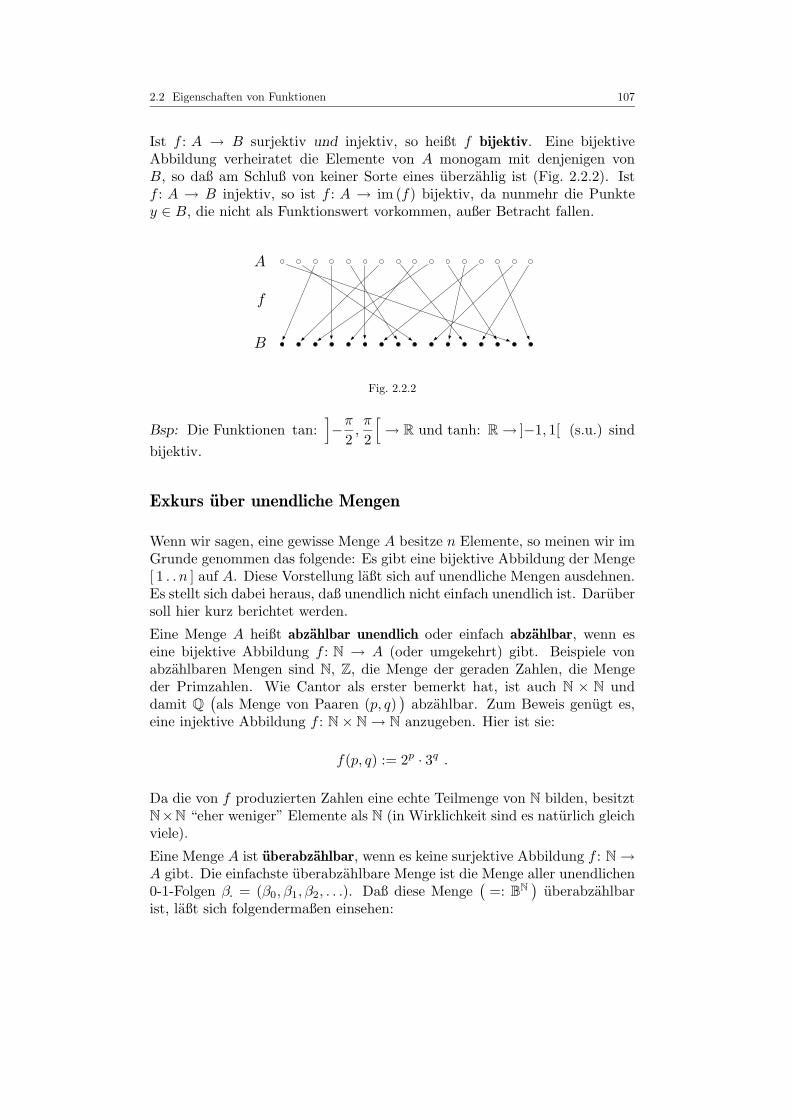
Ist f : A → B surjektiv und injektiv, so heißt f bijektiv. Eine bijektiveAbbildung verheiratet die Elemente von A monogam mit denjenigen vonB, so daß am Schluß von keiner Sorte eines uberzahlig ist (Fig. 2.2.2). Istf : A → B injektiv, so ist f : A → im (f) bijektiv, da nunmehr die Punktey ∈ B, die nicht als Funktionswert vorkommen, außer Betracht fallen.
A
B
f
Fig. 2.2.2
Bsp: Die Funktionen tan:]
−π
2,π
2
[
→ R und tanh: R → ]−1, 1[ (s.u.) sind
bijektiv.
Exkurs uber unendliche Mengen
Wenn wir sagen, eine gewisse Menge A besitze n Elemente, so meinen wir imGrunde genommen das folgende: Es gibt eine bijektive Abbildung der Menge[ 1 . . n ] auf A. Diese Vorstellung laßt sich auf unendliche Mengen ausdehnen.Es stellt sich dabei heraus, daß unendlich nicht einfach unendlich ist. Darubersoll hier kurz berichtet werden.
Eine Menge A heißt abzahlbar unendlich oder einfach abzahlbar, wenn eseine bijektive Abbildung f : N → A (oder umgekehrt) gibt. Beispiele vonabzahlbaren Mengen sind N, Z, die Menge der geraden Zahlen, die Mengeder Primzahlen. Wie Cantor als erster bemerkt hat, ist auch N × N unddamit Q
(als Menge von Paaren (p, q)
)abzahlbar. Zum Beweis genugt es,
eine injektive Abbildung f : N × N → N anzugeben. Hier ist sie:
f(p, q) := 2p · 3q .
Da die von f produzierten Zahlen eine echte Teilmenge von N bilden, besitztN×N “eher weniger” Elemente als N (in Wirklichkeit sind es naturlich gleichviele).
Eine Menge A ist uberabzahlbar, wenn es keine surjektive Abbildung f : N →A gibt. Die einfachste uberabzahlbare Menge ist die Menge aller unendlichen0-1-Folgen β. = (β0, β1, β2, . . .). Daß diese Menge
(=: BN
)uberabzahlbar
ist, laßt sich folgendermaßen einsehen:

108 2 Funktionen
Ware BN abzahlbar, so konnte man sich einen Computer vorstellen,der die samtlichen Binarfolgen in unendlich langen Zeilen nacheinander aus-druckt:
01011010100110011110 . . .
00010011100101010110 . . .
10101000110001100001 . . .
00000110000011001010 . . .
11011110110001101011 . . .
10001101111111001100 . . .
01011001101110001 . . .
...
Wahrend der Computer an der Arbeit ist, betrachten wir die Hauptdiagonaleder entstehenden Matrix
[βjk
]und bilden eine besondere Folge β.∗ gemaß
der Vorschrift
β∗k :=
1 (βk.k = 0)0 (βk.k = 1)
,
in dem obigen Beispiel also die Folge
β.∗ := (1101001 . . .) .
Diese Folge wird vom Computer nicht produziert, denn sie unterscheidet sichvon jeder ausgedruckten Folge an wenigstens einer Stelle.
Faßt man die Binarfolgen als unendliche Dualbruche β0 . β1 β2 . . . auf, soerhalt man gerade die samtlichen reellen Zahlen im Intervall [ 0, 2 ], die aller-meisten genau ein Mal. Damit ist auch R uberabzahlbar.
Umkehrfunktion
Eine bijektive Funktion (Abbildung)
f : dom (f) → im (f) , x 7→ y := f(x)
besitzt eine wohlbestimmte und ebenfalls bijektive Umkehrfunktion, auchinverse Abbildung genannt, und zwar ist
f−1 : im (f) → dom (f)
(Fig. 2.2.3) definiert durch
f−1(y) := “das x ∈ dom (f) mit f(x) = y ” .
2.2 Eigenschaften von Funktionen 109
f
f−1
x = f−1(y)
im(f) = dom(f−1)dom(f) = im(f−1)
y = f(x)
Fig. 2.2.3
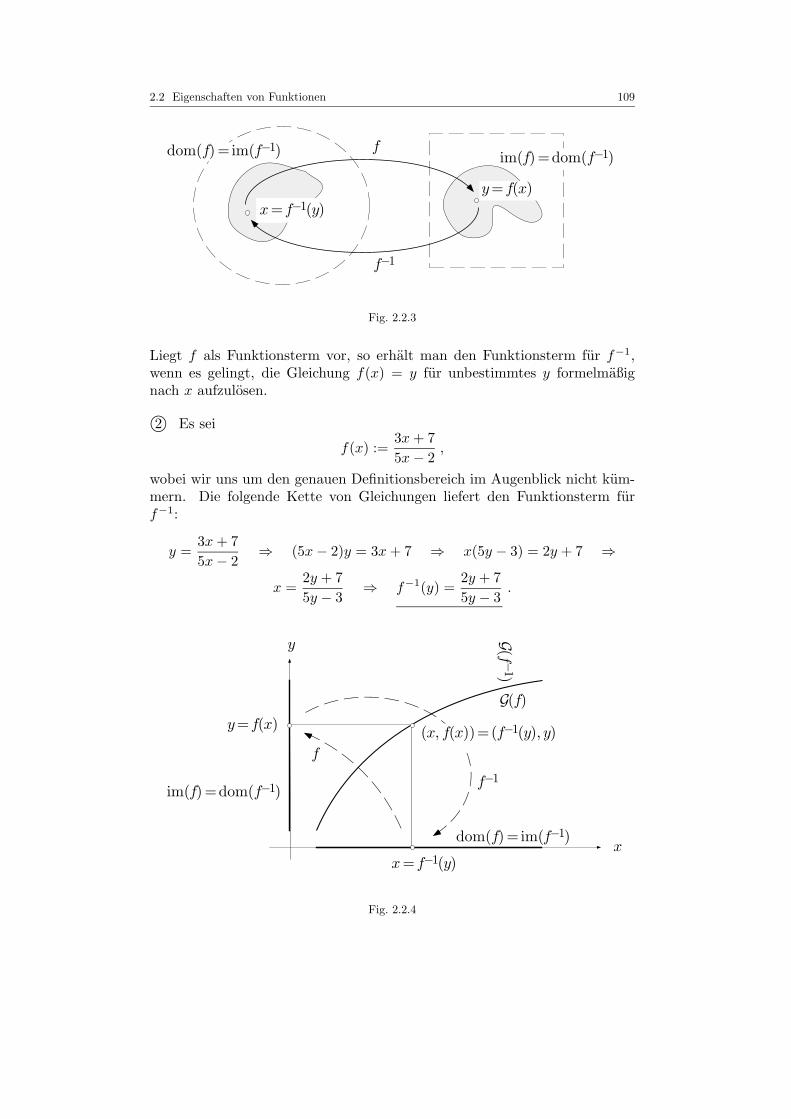
Liegt f als Funktionsterm vor, so erhalt man den Funktionsterm fur f−1,wenn es gelingt, die Gleichung f(x) = y fur unbestimmtes y formelmaßignach x aufzulosen.
©2 Es sei
f(x) :=3x + 7
5x − 2,
wobei wir uns um den genauen Definitionsbereich im Augenblick nicht kum-mern. Die folgende Kette von Gleichungen liefert den Funktionsterm furf−1:
y =3x + 7
5x − 2⇒ (5x − 2)y = 3x + 7 ⇒ x(5y − 3) = 2y + 7 ⇒
x =2y + 7
5y − 3⇒ f−1(y) =
2y + 7
5y − 3.
im(f) = dom(f−1)
dom(f) = im(f−1)
y = f(x)
x = f−1(y)
f−1
f
(x, f(x)) = (f−1(y), y)
G(f)
G(f −
1)
y
x
Fig. 2.2.4

110 2 Funktionen
Fig. 2.2.4 zeigt f und f−1 im Graphenbild. Der Graph von f kann alsoauch als Graph von f−1 dienen; dabei muß man nur den Kopf so halten, wieFig. 2.2.5 zeigt.
Fig. 2.2.5
Anmerkung : Werden f und f−1 gleichzeitig betrachtet, so behalt manmit Vorteil x als Variable in dom (f) = im (f−1) und y als Variable inim (f) = dom (f−1) bei; insbesondere ist dann y die unabhangige Variablevon f−1. Interessiert das f nicht mehr, so kann man den Graphen von f−1
in die ubliche Position bringen, d.h. f−1 als Funktion einer neuen, horizontalskalierten Variablen x darstellen.
Die Umkehrfunktion “existiert” unter den angefuhrten Umstanden, auchwenn es nicht moglich ist, sie formelmaßig mit Hilfe von “schon vorhan-denen” Funktionen darzustellen. Viele wichtige Funktionen, zum Beispieldie Arcus-Funktionen und letzten Endes auch arg, sind ausdrucklich alsUmkehrfunktionen von anderen Funktionen definiert und zunachst nicht an-derweitig darstellbar.
©3 Es sei n ≥ 1. Die Potenzfunktion
potn: R≥0 → R≥0 , x 7→ y := xn
ist injektiv: Aus 0 ≤ x′ < x folgt
xn − x′n = (xn−1 + xn−2x′ + . . . + x′n−1) (x − x′) > 0 ,
insbesondere xn 6= x′n. Ferner ist potn auch surjektiv (wird spater bewiesen).Es gibt daher eine Umkehrfunktion, genannt n-te Wurzel:
wrzn: R≥0 → R≥0 , y 7→ x := wrzn(y) .
Anstelle von wrzn(y) schreibt naturlich jedermann n√
y. ©
2.2 Eigenschaften von Funktionen 111
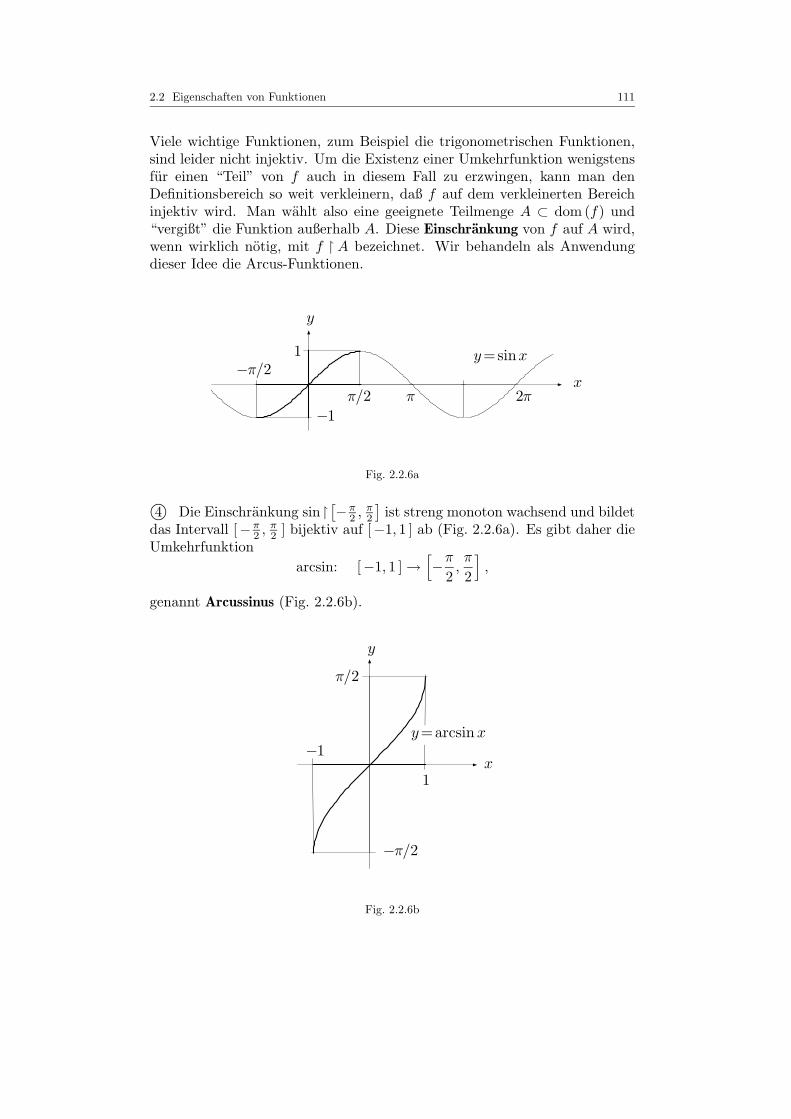
Viele wichtige Funktionen, zum Beispiel die trigonometrischen Funktionen,sind leider nicht injektiv. Um die Existenz einer Umkehrfunktion wenigstensfur einen “Teil” von f auch in diesem Fall zu erzwingen, kann man denDefinitionsbereich so weit verkleinern, daß f auf dem verkleinerten Bereichinjektiv wird. Man wahlt also eine geeignete Teilmenge A ⊂ dom (f) und“vergißt” die Funktion außerhalb A. Diese Einschrankung von f auf A wird,wenn wirklich notig, mit f ¹ A bezeichnet. Wir behandeln als Anwendungdieser Idee die Arcus-Funktionen.
−1
1
π/2 π 2π
−π/2
y
x
y = sin x
Fig. 2.2.6a
©4 Die Einschrankung sin¹[−π
2 , π2
]ist streng monoton wachsend und bildet
das Intervall [−π2 , π
2 ] bijektiv auf [−1, 1 ] ab (Fig. 2.2.6a). Es gibt daher dieUmkehrfunktion
arcsin: [−1, 1 ] →[
−π
2,π
2
]
,
genannt Arcussinus (Fig. 2.2.6b).
π/2
−π/2
−1
1x
y
y = arcsin x
Fig. 2.2.6b
112 2 Funktionen
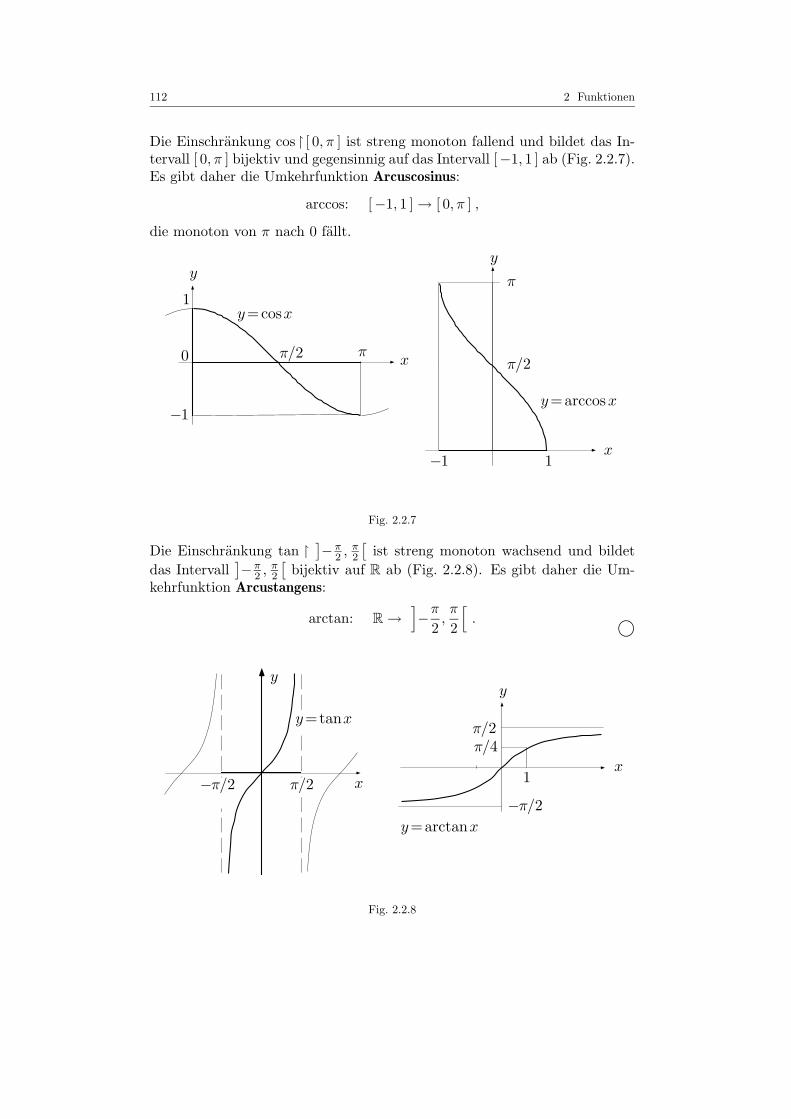
Die Einschrankung cos ¹ [ 0, π ] ist streng monoton fallend und bildet das In-tervall [ 0, π ] bijektiv und gegensinnig auf das Intervall [−1, 1 ] ab (Fig. 2.2.7).Es gibt daher die Umkehrfunktion Arcuscosinus:
arccos: [−1, 1 ] → [ 0, π ] ,
die monoton von π nach 0 fallt.
π/2
−1 1x
y
y = arccos x
π
ππ/2
1
−1
x
y
y = cos x
0
Fig. 2.2.7
Die Einschrankung tan ¹]−π
2 , π2
[ist streng monoton wachsend und bildet
das Intervall]−π
2 , π2
[bijektiv auf R ab (Fig. 2.2.8). Es gibt daher die Um-
kehrfunktion Arcustangens:
arctan: R →]
−π
2,π
2
[
. ©
x
y
y = tan x
−π/2 π/2
y
x
−π/2
π/2π/4
1
y = arctan x
Fig. 2.2.8

2.2 Eigenschaften von Funktionen 113
Verknupfungen von Funktionen
Sind f und g Funktionen mit gemeinsamem Definitionsbereich (eine be-liebige Menge) und Werten in der gleichen Grundstruktur, zum Beispiel inC, so lassen sich f und g ebenfalls den in C vorhandenen Operationen undVerknupfungen unterwerfen. Damit sind in naturlicher Weise die Funktionen
f , |f |, Re f, Im f, f + g, λf, f · g, f/g
mit demselben Definitionsbereich erklart — f/g naturlich nur in den Punktenx, wo g(x) 6= 0 ist.
Funktionen (Abbildungen) lassen sich aber noch auf eine weitere Art mitein-ander verknupfen: Sind f : A → B und g: B → C zwei Funktionen, so ist furjedes x ∈ A zunachst durch f der Punkt f(x) ∈ B festgelegt und zu diesemdann durch g der Punkt g
(f(x)
)∈ C (Fig. 2.2.9). Damit entsteht von selbst
die zusammengesetzte Abbildung
g f : A → C , x 7→ g(f(x)
).
A B C
x f(x)g(f(x)) = g f (x)
Fig. 2.2.9
©5 Die beiden Funktionen
f(x) := ex , g(x) := cos x
lassen sich als Abbildungen von R nach R auffassen und somit auf zweierleiArten zusammensetzen. Die beiden Zusammensetzungen
g f : x 7→ cos(ex) , f g: x 7→ ecos x
sind offensichtlich voneinander verschieden: g f nimmt Werte im Intervall[−1, 1 ] an, f g im Intervall
[1e , e
]. ©
114 2 Funktionen
AB
f−1
f
x = f−1(y)
y = f(x)
Fig. 2.2.10
R R>0
exp
log
Fig. 2.2.11
©6 Ist f : A → B bijektiv, so gilt
f−1 f = idA , f f−1 = idB
(Fig. 2.2.10); dabei bezeichnet
idA: A → A , x 7→ x
die identische Abbildung von A.
Bsp: Logarithmus und Exponentialfunktion (Fig. 2.2.11). Man hat
∀t ∈ R : log(et) = t ;
∀r ∈ R>0 : elog r = r . ©©7 Es seien
γ: R y R3 , t 7→ x(t)
die Parameterdarstellung einer Raumkurve (als “Flugplan” zu interpretieren)und
u: R3 y R , x 7→ u(x)
eine Temperaturverteilung im Raum. Dann stellt die Zusammensetzung
f(t) := u(x(t)
)
den vom mitfliegenden Beobachter aufgezeichneten zeitlichen Temperaturver-lauf dar. ©
2.2 Eigenschaften von Funktionen 115
Stetigkeit
Theoretisch betrachten wir die Punkte (Zahlen, Vektoren) unserer Grund-strukturen als ideale Objekte, die mit “unendlicher Genauigkeit” erfaßt undmanipuliert werden konnen. In einem Computer sind aber nur die allerwenig-sten Zahlen, zum Beispiel die Zahlen
± p / q (p ∈ N , q ∈ N≥1 ; p, q ≤ 248)
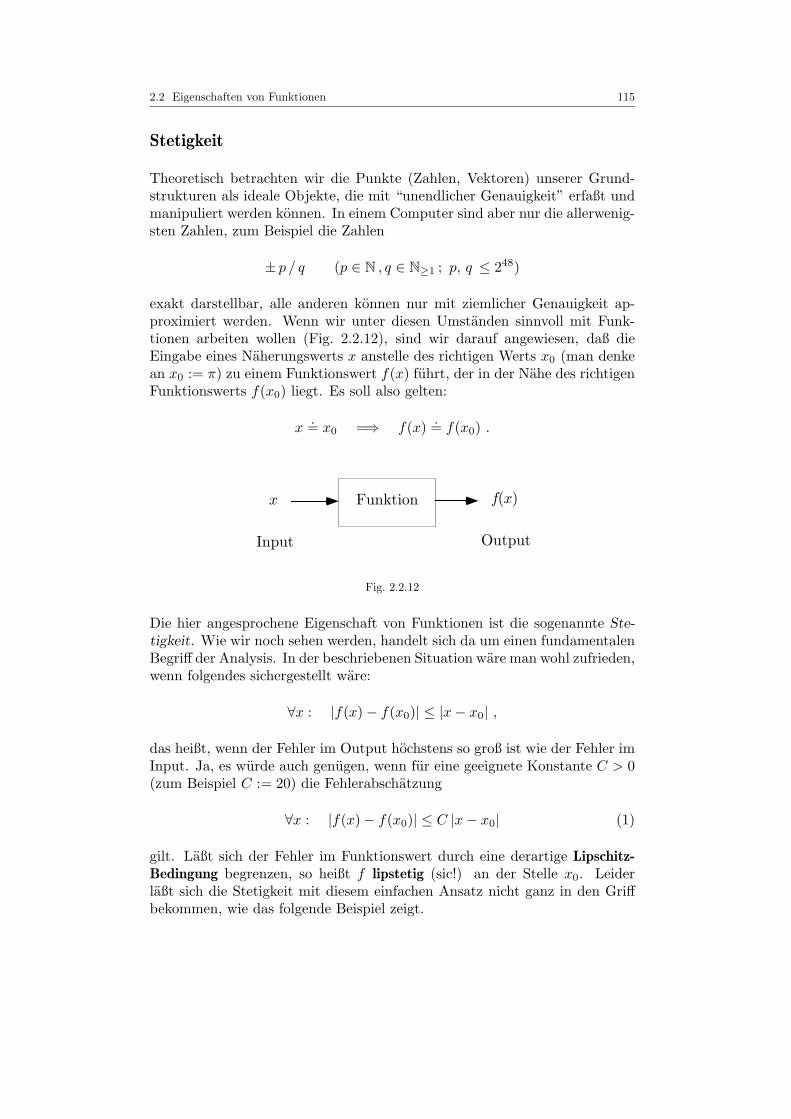
exakt darstellbar, alle anderen konnen nur mit ziemlicher Genauigkeit ap-proximiert werden. Wenn wir unter diesen Umstanden sinnvoll mit Funk-tionen arbeiten wollen (Fig. 2.2.12), sind wir darauf angewiesen, daß dieEingabe eines Naherungswerts x anstelle des richtigen Werts x0 (man denkean x0 := π) zu einem Funktionswert f(x) fuhrt, der in der Nahe des richtigenFunktionswerts f(x0) liegt. Es soll also gelten:
x.= x0 =⇒ f(x)
.= f(x0) .
Funktion
OutputInput
x f(x)
Fig. 2.2.12
Die hier angesprochene Eigenschaft von Funktionen ist die sogenannte Ste-tigkeit. Wie wir noch sehen werden, handelt sich da um einen fundamentalenBegriff der Analysis. In der beschriebenen Situation ware man wohl zufrieden,wenn folgendes sichergestellt ware:
∀x : |f(x) − f(x0)| ≤ |x − x0| ,
das heißt, wenn der Fehler im Output hochstens so groß ist wie der Fehler imInput. Ja, es wurde auch genugen, wenn fur eine geeignete Konstante C > 0(zum Beispiel C := 20) die Fehlerabschatzung
∀x : |f(x) − f(x0)| ≤ C |x − x0| (1)
gilt. Laßt sich der Fehler im Funktionswert durch eine derartige Lipschitz-Bedingung begrenzen, so heißt f lipstetig (sic!) an der Stelle x0. Leiderlaßt sich die Stetigkeit mit diesem einfachen Ansatz nicht ganz in den Griffbekommen, wie das folgende Beispiel zeigt.

116 2 Funktionen
©8 Die Wurzelfunktion
√· : R≥0 → R≥0 , x 7→
√x
ist zweifellos stetig, und zwar auch im Ursprung: Je naher x bei 0 ist, destonaher ist auch
√x bei
√0 = 0. Wegen
|√x −√
0||x − 0| =
√x
x=
1√x
→ ∞ (x → 0+)
gibt es aber kein C > 0, so daß fur alle x ≥ 0 die Fehlerbegrenzung
|√
x −√
0| ≤ C |x − 0|
garantiert ist.
y
x
y = x√y = Cx
ε
ε2
Fig. 2.2.13
Folgendes trifft hingegen zu (Fig. 2.2.13): Ist eine (beliebig kleine) Toleranzε > 0 vorgegeben, so laßt sich |√x −
√0| < ε erzwingen, indem man x
hinreichend nahe bei 0 wahlt: Es genugt, daß |x − 0| < ε2 ist. ©Diese eigentumlich verschachtelte Bedingung liegt der allgemeinen Definitionder Stetigkeit zugrunde: Die Funktion f ist an der Stelle x0 stetig, wenn sichzu noch so kleiner Toleranz ε > 0 ein “Schlupf” δ > 0 angeben laßt, so daßfur alle x ∈ dom (f) gilt:
|x − x0| < δ =⇒ |f(x) − f(x0)| < ε .
Der Schlupf δ wird in aller Regel von ε abhangen: Je kleiner die Fehlerto-leranz beim Funktionswert ist, desto weniger Schlupf darf die unabhangige

2.2 Eigenschaften von Funktionen 117
Variable aufweisen. — Eine Funktion f heißt ganz einfach stetig, wenn siean jeder Stelle x0 ∈ dom (f) stetig ist.
Erfreulicherweise benotigen wir diese allgemeine Definition kaum; denn in denallermeisten Fallen ist eine Lipschitz-Bedingung (1) erfullt, und das reicht furdie Stetigkeit aus: Gilt (1) fur ein gewisses C und ist eine Toleranz ε > 0vorgegeben, so ist |f(x) − f(x0)| < ε garantiert, sobald |x − x0| < ε/C ist.Folglich ist δ := ε/C ein zulaßiger Schlupf.
Alles, was hier gesagt wird, gilt nicht nur fur Funktionen f : R y R, sondernfur Funktionen, die in einer beliebigen Grundstruktur
X ∈R, R2, R3, . . . , C
definiert sind und in einer derartigen Struktur X′ Werte annehmen. In allendiesen Strukturen ist eine naturliche Abstandsmessung
d(x, a) := |x − a|
vorhanden, und etwas anderes haben wir bei der Definition der Stetigkeitnicht gebraucht. Anstelle dieses euklidischen Abstandes verwendet man gele-gentlich auch die Abstandsfunktion
‖x − a‖ := max1≤k≤n
|xk − ak| (x,a ∈ Rn) .
Die “Einheitskugel” ist dann ein achsenparalleler Wurfel der Kantenlange 2.Wie man sich leicht uberlegt, gilt
‖x − a‖ ≤ |x − a| ≤√
n ‖x − a‖ .
Die beiden Abstandsmessungen unterscheiden sich also hochstens um denFaktor
√n. Fur Konvergenz- und Stetigkeitsbetrachtungen spielt es daher
keine Rolle, ob man mit dem euklidischen Betrag |x| oder mit der “Wurfel-norm” ‖x‖ arbeitet.
Wir notieren die folgenden Grundprinzipien:
(2.2) (a) Konstante Funktionen sind stetig.
(b) Die identische Abbildung x 7→ x ist stetig.
(c) Die Zusammensetzung von stetigen Funktionen ist stetig.
(d) Die Umkehrfunktion einer injektiven stetigen Funktion f : R y R iststetig.
Wir beweisen nur (c), wobei wir die folgenden vereinfachenden Annah-men zugrundelegen: Die Funktion f : x 7→ y sei lipstetig an der Stelle x0:
∀x : |f(x) − f(x0)| ≤ C|x − x0| ,

118 2 Funktionen
und die Funktion g: y 7→ z sei lipstetig an der Stelle y0 := f(x0):
∀y : |g(y) − g(y0)| ≤ C ′|y − y0| .
Hieraus folgt: Fur alle x gilt
|g f(x) − g f(x0)| = |g(f(x)) − g(f(x0))|≤ C ′ |f(x) − f(x0)|≤ C ′ C |x − x0| ;
somit genugt g f an der Stelle x0 einer Lipschitz-Bedingung mit der Kon-stanten C ′ C. (Das ist die “Kettenregel” fur Lipstetigkeit!)
a = (a1, a2, a3)
x = (x1, x2, x3)
|xi − ai|
(= f(t))
(= f(t0))
|x − a|
Fig. 2.2.14
Fur zwei beliebige Punkte x = (x1, x2, x3) und a = (a1, a2, a3) im R3 geltendie Ungleichungen
|xi − ai| ≤ |x − a| ≤ |x1 − a1| + |x2 − a2| + |x3 − a3| (2)
(Fig. 2.2.14). Aus diesen Ungleichungen, bzw. den analogen Ungleichungenin den anderen Grundstrukturen, folgt:
(2.3) (a) Die Projektionen
pri: X → R , x 7→ xi
auf die Koordinatenachsen, insbesondere auch Re und Im, sind stetig.
(b) Eine X-wertige Funktion
t 7→ f(t)(
=(f1(t), f2(t), f3(t)
), z.B.
)
ist genau dann stetig, wenn die einzelnen Koordinatenfunktionen fi stetigsind.

2.2 Eigenschaften von Funktionen 119
(a) Die linke Ungleichung (2) besagt, daß pri lipstetig ist mit Lipschitz-Konstante 1. — (b) Ist f stetig, so ist nach (2.2)(c) auch jedes fi = pri fstetig. Fur die Hauptaussage von (b), daß namlich die Stetigkeit der fi dieStetigkeit des “Gesamtobjekts” f nach sich zieht, verwenden wir die rechteUngleichung (2) mit x := f(t), a := f(t0). Wenn wir fur die fi vereinfachend(1) annehmen, so ergibt sich
|f(t) − f(t0)| ≤3∑
i=1
|fi(t) − fi(t0)| ≤3∑
i=1
Ci|t − t0|
= (C1 + C2 + C3)|t − t0| .
Somit ist f an der Stelle t0 ebenfalls lipstetig, wobei C := C1 + C2 + C3 alsLipschitz-Konstante dienen kann.
Stetigkeit der Rechenoperationen
Fur die analytische Praxis ist nun das folgende entscheidend:
(2.4) Die in den Grundstrukturen X vorhandenen Operationen sind stetig.
Wir behandeln nur das Produkt von reellen Zahlen, das wir als eineFunktion p(·) der Vektorvariablen x = (x1, x2) betrachten:
p(x) := x1 · x2 .
x2
x1
a = (a1, a2)
x = (x1, x2)
Fig. 2.2.15
Es genugt, die Stetigkeit von p(·) an einer fest gewahlten Stelle a ∈ R2 zubeweisen. Da wir dabei nur Produkte x1 ·x2 von Zahlen x1
.= a1 und x2
.= a2
betrachten mussen, durfen wir von vorneherein
‖x − a‖ ≤ 1
120 2 Funktionen
annehmen (Fig. 2.2.15). Wir erhalten dann folgende Kette von Ungleichun-gen:
|p(x) − p(a)| = |x1x2 − a1a2|= |(x1 − a1)a2 + a1(x2 − a2) + (x1 − a1)(x2 − a2)|≤ |a2| |x1 − a1| + |a1| |x2 − a2| + |x1 − a1| |x2 − a2|≤ ‖a‖ ‖x − a‖ + ‖a‖ ‖x − a‖ + ‖x − a‖2
≤ (2‖a‖ + 1) ‖x − a‖ ;
somit ist p(·) lipstetig an der Stelle a.
Aus den Satzen (2.2)–(2.4) folgt insbesondere
(2.5) Ein mit stetigen Funktionen gebildeter rationaler Ausdruck ist, soweitdefiniert, stetig.
Wir konnen zum Beispiel das Produkt g := f1 · f2 von zwei stetigenFunktionen f1, f2 : X y R als Zusammensetzung g = p f von stetigenFunktionen interpretieren:
f p
X y R2 → R
t 7→(f1(t), f2(t)
)7→ f1(t) · f2(t) .
Die erste Funktion ist stetig gemaß Prinzip (2.3)(b), die zweite nach Satz(2.4), die Zusammensetzung nach (2.2)(c).
Wenn wir die Stetigkeit der Funktionen exp, cos, sin einmal voraussetzen,ergibt sich hieraus weiter mit Satz (2.2)(d): Alle elementaren Funktionensind in ihrem Definitionsbereich stetig.
©9 Die Potenzfunktionen potn: x 7→ xn sind als endliche Produkte von steti-gen Funktionen x 7→ x stetig. Nach (2.2)(d) sind also auch die Wurzelfunk-tionen n
√· stetig. — Die Funktion
f(x) :=e1−log2 x arccos 1
1+x2
log sin(1 + ex)
ist, soweit definiert, stetig. ©

2.2 Eigenschaften von Funktionen 121
Zwischenwertsatz
Die Stetigkeit garantiert nicht nur, daß mit den betreffenden Funktionenin vernunftiger Weise numerisch gearbeitet werden kann, sondern sie bildetauch die Grundvoraussetzung fur fundamentale Satze der Analysis, so furden folgenden Zwischenwertsatz. Es leuchtet ein, daß ein derartiger Satz furFunktionen, die Sprunge machen, nicht gilt.
(2.6) Es sei f : [ a, b ] → R eine stetige Funktion und
f(a) < 0 < f(b) .
Dann besitzt f im Intervall [ a, b ] wenigstens eine Nullstelle ξ.
Wir konstruieren durch fortgesetztes Halbieren des Intervalls [ a, b ] rekur-siv eine Folge von Intervallen [ ak, bk ]:
a0 := a , b0 := b ;
[ ak+1, bk+1 ] :=
[
ak , ak + bk2
]
, falls f(
ak + bk2
)
> 0 ,[ak + bk
2 , bk
]
, falls f(
ak + bk2
)
≤ 0 .
Dann ist die Folge a. monoton wachsend (Fig. 2.2.16), die Folge b. monotonfallend, und es gilt fur alle k:
bk − ak =1
2k(b − a) , f(ak) ≤ 0 < f(bk) .
Hieraus folgt mit Satz (1.1): Die beiden Folgen besitzen einen gemeinsamenGrenzwert ξ; wir behaupten naturlich: Es ist f(ξ) = 0.
bx
b0b1b2
a
a0
a1a2 a3
b3
a4
b4
a5
b5b6
a6ξ
Fig. 2.2.16

122 2 Funktionen
Wir beweisen das indirekt und nehmen an, es sei etwa f(ξ) =: 2ε > 0. Da fan der Stelle ξ stetig ist, gibt es zu diesem ε einen Schlupf δ > 0 mit
|x − ξ| < δ =⇒ |f(x) − f(ξ)| < ε .
Insbesondere ist dann f(x) > ε > 0 fur alle x ∈ ]ξ−δ, ξ ]. Da die ak von untengegen ξ konvergieren, gibt es bestimmt ein ak in diesem Intervall (siehe dieFig. 2.2.17), und man hatte f(ak) > 0 — ein Widerspruch.
Mit Hilfe des Zwischenwertsatzes laßt sich zum Beispiel leicht beweisen, daßdie Potenzfunktionen potn: R≥0 → R≥0 surjektiv sind.
Die im Beweis von (2.6) angegebene Konstruktion einer Nullstelle ξ heißtbinare Suche und wird auch in der numerischen Praxis haufig verwendet.Wir behandeln dazu ein numerisches Beispiel.
©10 Gegeben ist das Polynom dritten Grades
f(x) := x3 − x − 1 .
Es ist f(0) = −1, f(2) = 5. Wir legen dann die folgende Tabelle an:
ak bkak + bk
2f(
ak + bk
2
)
0 2 1 −11 1.5 0.875
1.5 1.25 −0.29691.25 1.375 0.2246
1.375 1.3125 −0.05151.3125 1.34375 0.0826
1.34375 1.328125 0.0145761.328125 1.320313 −0.018711
1.320313 1.324219 −0.0021281.324219 1.326172 0.006209
1.326172 1.325195 0.0020371.325195 1.324707 −0.000047
Folglich besitzt f die Nullstelle ξ.= 1.3247. ©
©11 Ist B ⊂ R2 eine beschrankte konvexe Menge mit glattem Rand ∂B,so gibt es einen geradlinigen Schnitt, der sowohl den Flacheninhalt wie denUmfang von B halbiert.

2.2 Eigenschaften von Funktionen 123
ξ
f(ξ)
2ε
ε
xak
δÒ
Fig. 2.2.17
Es bezeichne A den Flacheninhalt und L den Umfang von B. Wahle fur∂B eine Parameterdarstellung
∂B : s 7→ z(s) (0 ≤ s ≤ L)
mit der Bogenlange als Parameter. Jeder geradlinige Schnitt durch zweiPunkte
z(s) , z(s + L2 )
(0 ≤ s ≤ L
2
)
halbiert den Umfang. Es bezeichne a(s) den Flacheninhalt zur Rechten einesderartigen Schnittes. Ist zum Beispiel a(0) < A
2 , so ist a(
L2
)= A−a(0) > A
2 .
Es gibt daher ein s0 ∈[0, L
2
]mit a(s0) = A
2 .
©
Aufgaben
1. Die Funktion
f : x 7→√
9 −√
25 −√
x
wird als reellwertige Funktion der reellen Variablen x betrachtet.
(a) Bestimme den Definitionsbereich dom (f) =: D sowie den Wertebe-reich im (f) =: W .
(b) Uberlege: f ist Zusammensetzung von streng monotonen Funktionenund damit injektiv.
(c) ©M Bestimme den analytischen Ausdruck der Umkehrfunktion
f−1 : W → D .
(d) ©M Zeichne die Graphen von f und von f−1.

124 2 Funktionen
2. Produziere ein anregendes Beispiel von drei reellen Funktionen f , g, h, sodaß fur ein geeignetes Intervall I gilt:
h g f = idI .
3. Es sei #A = 5, #B = 8. Bestimme
(a) die Anzahl der injektiven Abbildungen f : A → B,
(b) die Anzahl der surjektiven Abbildungen g : B → A.(Hinweis: Fur (b) gibt es keine einfache Formel.
)
4.©M Es sei f(x) := x2 + 2x + 2. Man bestimme, soweit moglich, dieUmkehrfunktionen der Einschrankungen
(a) f¹R≥0 , (b) f¹[−2, 0 ] , (c) f¹R≤−2 .
5. Zwei reelle Großen x und y sind durch die Beziehung√
1 + x +√
1 + y = 2
aneinander gekoppelt. Ist diese Beziehung monoton? Welche Intervalleder x- und der y-Achse werden dadurch aufeinander abgebildet? Figur!
6. Erfinde eine Funktion f : R → N, die in jedem noch so kurzen Intervalljeden Wert k ∈ N annimmt.
7. Erfinde eine bijektive Abbildung von R≥0 auf R>0.
8.©M Die vier Teilflachen in der Figur 2.2.18 sind gleich groß. Bestimmeden Winkel α mit Hilfe eines Taschenrechners und binarer Suche (eineTabelle anlegen!). Wieviel Schritte waren notig, um α auf 10−6 Gradgenau zu berechnen?
α
Fig. 2.2.18
9.©M Man bestimme die Konstanten α und β sowie f(−1), f(1) derart, daßdie Funktion
f(x) :=
x2 − αx + β (x < −1)(α + β)x (−1 < x < 1)x2 + αx − β (x > 1)

2.2 Eigenschaften von Funktionen 125
auf der ganzen reellen Achse stetig wird, und zeichne den resultierendenGraphen von f . (Hinweis: Diese Aufgabe kann von A bis Z mit ©M gelostwerden.)
10. Eine Funktion f : I → R heißt unimodal, wenn sie bis zu einer bestimmtenStelle ξ ∈ I streng monoton wachst und anschließend streng monoton fallt.
(a) Erfinde einen Suchalgorithmus fur ξ(I = [ a, b ] vorausgesetzt
).
(b) Wende diesen Algorithmus an auf das Beispiel
f(t) :=√
t − et (0 ≤ t ≤ 1) .
11. Zeige: Ist f : S1 → R eine stetige Funktion auf der Peripherie des Ein-heitskreises, so gibt es zwei Diametralpunkte auf S1, in denen f denselbenWert annimmt.
12. Verifiziere die folgenden Identitaten:
(a) arcsinx + arccos x =π2
(0 ≤ x ≤ 1) ,
(b) tan(arcsin x
)=
x√
1 − x2(−1 < x < 1) .

2.3 Grenzwerte
Ist eine gegebene Funktion als stetig erwiesen, so ist man sicher, daß sie sichauf ihrem ganzen Definitionsbereich vernunftig verhalt. Wenn wir aber dasVerhalten einer Funktion in den Randzonen von dom (f) oder in der Nahevon isolierten Ausnahmepunkten (Beispiel: sinx/x bei x := 0 ) beschreibenwollen, so benotigen wir den Begriff des Grenzwerts.
Einige Begriffe aus der allgemeinen Topologie
Bevor wir damit beginnen, erlautern wir einige Begriffe aus der sogenann-ten allgemeinen Topologie, dem Teilgebiet der Mathematik, das sich mitStetigkeit “an sich”, mit der Konvergenz in unendlichdimensionalen Raumenund mit Ahnlichem befaßt.
Es sei A eine beliebige Teilmenge des Grundraums X, z.B. von C. Ein Punkta ∈ A ist ein innerer Punkt von A, wenn es eine (u.U. kleine) Vollkugel mitZentrum a gibt, die noch ganz zu A gehort (Fig. 2.3.1). Man kann dann vona aus in jeder Richtung noch ein Stuck weit gehen, ohne A zu verlassen. EineMenge A, die nur aus inneren Punkten besteht, heißt offen. Als Faustregelkann das folgende dienen: Eine durch endlich viele strenge Ungleichungendefinierte Menge ist offen.
Bsp: Das offene Intervall ]0, 1[ ist offen in R, die Kreisscheibez ∈ C
∣∣ |z| <
1
ist offen in C, und(x, y, z)
∣∣ 0 < z < 1 −
√
x2 + y2
ist ein offenerKreiskegel im R3.
ξ ′
∂AX\A
A
aξ
Fig. 2.3.1
Ein Punkt ξ ∈ X, ob er nun zu A gehort oder nicht (Fig. 2.3.1), ist einRandpunkt von A, wenn jede (noch so kleine) Vollkugel mit Mittelpunkt ξsowohl die Menge A wie deren Komplement X \A schneidet. Die Menge derRandpunkte von A wird mit ∂A bezeichnet. Die betrachtete Menge A heißtabgeschlossen, wenn ∂A ⊂ A gilt, das heißt: wenn der Rand vollstandig zu Adazugehort. Als Faustregel kann das folgende dienen: Eine durch Gleichun-gen und ≤-Ungleichungen definierte Menge A ⊂ X ist abgeschlossen.

2.3 Grenzwerte 127
Bsp: R≥0 und [ a, b ] sind abgeschlossene Teilmengen von R, die Ellipse(x, y)
∣∣ 2x2 + 5y2 ≤ 7
ist eine abgeschlossene Menge in der Ebene, und die
x-Achse(x, y, z) ∈ R3
∣∣ y = 0, z = 0
ist eine abgeschlossene Menge im R3.
Begriff des Grenzwerts
Wir betrachten also eine Funktion f : X y X′ und konzentrieren unsereAufmerksamkeit auf einen bestimmten Punkt ξ ∈ X, typischer Weise einenRandpunkt von dom (f). Da wir das Verhalten von f studieren wollen, wenn“ x nach ξ strebt”, nehmen wir von vorneherein an, daß es in beliebiger Nahevon ξ tatsachlich Punkte x ∈ dom (f) gibt. Die Frage nach dem Verhalten vonf(x) fur x → ξ fuhrt auf die Frage: Konnte man den Wert f(ξ) so definierenbzw. umdefinieren, daß die durch f(ξ) := η erweiterte bzw. abgeanderteFunktion f an der Stelle ξ stetig wird? Damit kommen wir auf die folgendeDefinition:
Die Funktion f besitzt an der Stelle ξ den Grenzwert η, in Zeichen:
limx→ξ
f(x) = η bzw. f(x) → η (x → ξ) ,
wenn sich fur beliebig kleine Toleranz ε > 0 ein Schlupf δ > 0 angeben laßt,so daß fur alle x ∈ dom (f) gilt (Fig. 2.3.2):
|x − ξ| < δ, x 6= ξ =⇒ |f(x) − η| < ε .
x1
x2
y
f(x)
ηÅ
δ
ε
εξ
f
x
dom(f)
Fig. 2.3.2
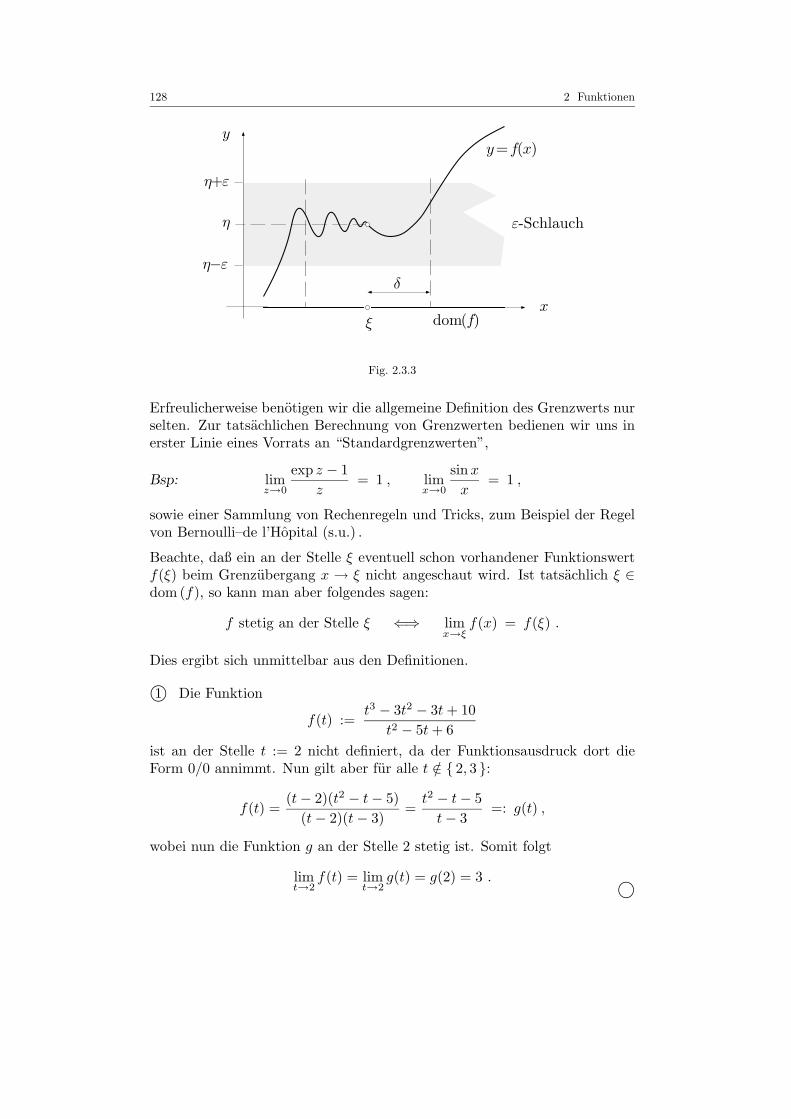
Fig. 2.3.3 stellt diesen Sachverhalt im Graphenbild dar. Fur jedes noch sokleine ε > 0 muß der Graph von f innerhalb des schraffierten “ ε-Schlauches”verlaufen, sobald x nahe genug bei ξ liegt (aber 6= ξ ist).
128 2 Funktionen
ξ
ηÅ
ηÅ+ε
ηÅ−ε
yy = f(x)
xdom(f)
ε-Schlauch
δÒ
Fig. 2.3.3
Erfreulicherweise benotigen wir die allgemeine Definition des Grenzwerts nurselten. Zur tatsachlichen Berechnung von Grenzwerten bedienen wir uns inerster Linie eines Vorrats an “Standardgrenzwerten”,
Bsp: limz→0
exp z − 1
z= 1 , lim
x→0
sinx
x= 1 ,
sowie einer Sammlung von Rechenregeln und Tricks, zum Beispiel der Regelvon Bernoulli–de l’Hopital (s.u.) .
Beachte, daß ein an der Stelle ξ eventuell schon vorhandener Funktionswertf(ξ) beim Grenzubergang x → ξ nicht angeschaut wird. Ist tatsachlich ξ ∈dom (f), so kann man aber folgendes sagen:
f stetig an der Stelle ξ ⇐⇒ limx→ξ
f(x) = f(ξ) .
Dies ergibt sich unmittelbar aus den Definitionen.
©1 Die Funktion
f(t) :=t3 − 3t2 − 3t + 10
t2 − 5t + 6
ist an der Stelle t := 2 nicht definiert, da der Funktionsausdruck dort dieForm 0/0 annimmt. Nun gilt aber fur alle t /∈ 2, 3 :
f(t) =(t − 2)(t2 − t − 5)
(t − 2)(t − 3)=
t2 − t − 5
t − 3=: g(t) ,
wobei nun die Funktion g an der Stelle 2 stetig ist. Somit folgt
limt→2
f(t) = limt→2
g(t) = g(2) = 3 . ©

2.3 Grenzwerte 129
Uneigentliche Grenzlagen und Grenzwerte
Bevor wir auf die angekundigten Rechenregeln kommen, erganzen wir dieGrunddefinition durch einige Zusatze.
Die reelle Achse R laßt sich durch die beiden uneigentlichen Randpunkte −∞und ∞ auf naturliche Weise “abschließen”. Diese beiden Punkte sind keinereellen Zahlen, mit denen man rechnen, sondern “bloß gedachte Objekte”, dieman aber auf koharente Weise in Grenzwertuberlegungen einbeziehen kann.
Ist f eine Funktion, deren Definitionsbereich beliebig große reelle Zahlenenthalt,
Bsp: f : R>0 → R , f : N → C ,
so hat es einen Sinn, nach dem Verhalten von f(x) zu fragen, wenn “x nach∞ strebt”. Hierzu mussen wir den Sachverhalt “x hinreichend nahe bei∞ ” beschreiben, und dazu konnen wir offensichtlich keinen “Schlupf δ > 0 ”brauchen. An seine Stelle tritt ein “Pflock” M wie folgt: Der Sachverhalt
limx→∞
f(x) = η bzw. f(x) → η (x → ∞)
liegt vor, wenn sich fur jede noch so kleine Toleranz ε > 0 ein Pflock M sosetzen laßt, daß gilt:
x > M =⇒ |f(x) − η| < ε .
In anderen Worten: Fur jedes noch so kleine ε > 0 muß der Graph von finnerhalb des “ ε-Schlauches” um den Wert η verlaufen, sobald x jenseits einesgeeigneten Pflocks M liegt (Fig. 2.3.4). Je kleiner die vorgegebene Toleranzist, desto weiter rechts wird man den Pflock einschlagen mussen.
ηÅ
ηÅ+ε
ηÅ−ε
yy = f(x)
xM
Fig. 2.3.4
130 2 Funktionen
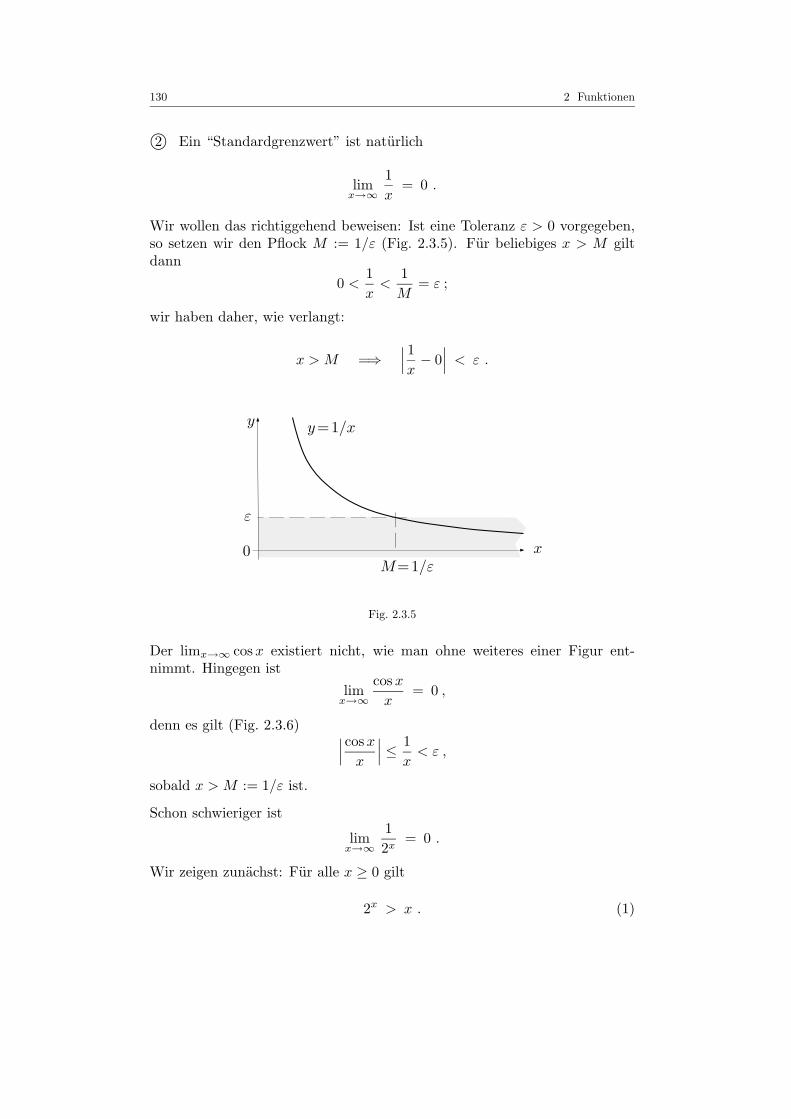
©2 Ein “Standardgrenzwert” ist naturlich
limx→∞
1
x= 0 .
Wir wollen das richtiggehend beweisen: Ist eine Toleranz ε > 0 vorgegeben,so setzen wir den Pflock M := 1/ε (Fig. 2.3.5). Fur beliebiges x > M giltdann
0 <1
x<
1
M= ε ;
wir haben daher, wie verlangt:
x > M =⇒∣∣∣1
x− 0
∣∣∣ < ε .
ε
M = 1/ε
y y = 1/x
x0
Fig. 2.3.5
Der limx→∞ cos x existiert nicht, wie man ohne weiteres einer Figur ent-nimmt. Hingegen ist
limx→∞
cos x
x= 0 ,
denn es gilt (Fig. 2.3.6)∣∣∣cos x
x
∣∣∣ ≤ 1
x< ε ,
sobald x > M := 1/ε ist.
Schon schwieriger ist
limx→∞
1
2x= 0 .
Wir zeigen zunachst: Fur alle x ≥ 0 gilt
2x > x . (1)

2.3 Grenzwerte 131
y = 1/x
y
y = cos x/x
x
Fig. 2.3.6
Die Menge[1 . . 2n
]enthalt insbesondere die n + 1 Zahlen 1, 2, 4, . . .,
2n, und hieraus folgt schon 2n ≥ n + 1 fur alle n ∈ N. Setze jetzt bxc =: n ;dann folgt
2x ≥ 2n ≥ n + 1 > x ,
wobei wir stillschweigend vorausgesetzt haben, daß die Funktion x 7→ 2x
monoton wachst.
Hiernach gilt bei vorgegebenem ε > 0:
0 <1
2x<
1
x< ε ,
sobald x > M := 1/ε . ©Wir haben hier den Grenzubergang x → ∞ fur die unabhangige Variable xbetrachtet. Es ist aber auch moglich, wertseitig dem Sachverhalt
f(x) → ∞ (x → ξ)
einen Sinn zu erteilen. Es sei also f : X y R eine reellwertige Funktion undξ ein eigentlicher oder uneigentlicher Randpunkt von dom (f). Wir sagen, fbesitze an der Stelle ξ den uneigentlichen Grenzwert ∞, in Zeichen:
limx→ξ
f(x) = ∞ bzw. f(x) → ∞ (x → ξ) ,
wenn sich fur jede noch so große Schranke C ein Schlupf δ > 0 (bzw. einPflock M) finden laßt, so daß fur alle x ∈ dom (f) gilt:
|x − ξ| < δ , x 6= ξ (bzw. x > M) =⇒ f(x) > C .
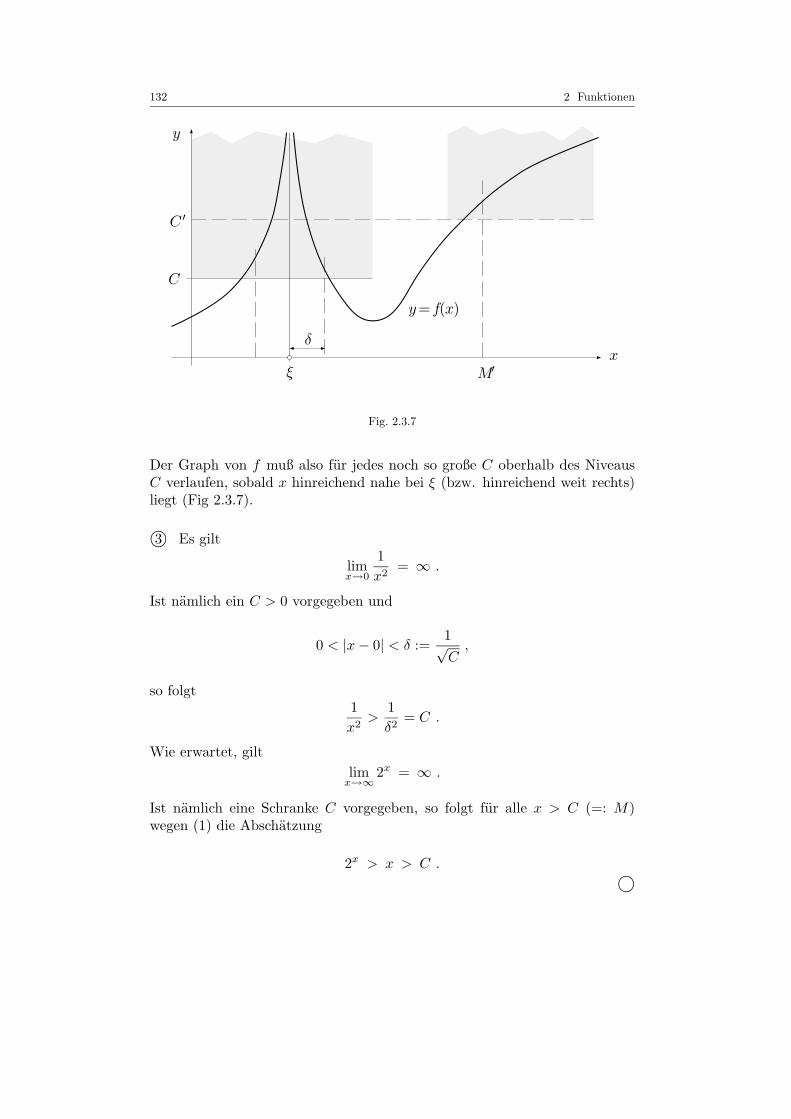
132 2 Funktionen
C
C ′
M′x
y = f(x)
ξ
δÒ
y
Fig. 2.3.7
Der Graph von f muß also fur jedes noch so große C oberhalb des NiveausC verlaufen, sobald x hinreichend nahe bei ξ (bzw. hinreichend weit rechts)liegt (Fig 2.3.7).
©3 Es gilt
limx→0
1
x2= ∞ .
Ist namlich ein C > 0 vorgegeben und
0 < |x − 0| < δ :=1√C
,
so folgt1
x2>
1
δ2= C .
Wie erwartet, gilt
limx→∞
2x = ∞ .
Ist namlich eine Schranke C vorgegeben, so folgt fur alle x > C (=: M)wegen (1) die Abschatzung
2x > x > C .
©

2.3 Grenzwerte 133
Wir treffen hier die folgende Vereinbarung: Ist irgendwo ∞ oder −∞ alsGrenzwert zugelassen, so wird das an der betreffenden Stelle ausdrucklichgesagt. Ohne diesbezuglichen Hinweis wird unter “Konvergenz” immer Kon-vergenz gegen einen endlichen Wert η verstanden. Sinngemaß dasselbe giltfur Zahlfolgen (s.u.) .
Einseitige Grenzwerte
Wir betrachten weiter fur eine Funktion f : R y X und einen festen Punktξ ∈ R den Grenzubergang x → ξ, wobei aber nur die Funktionswerte f(x)in Punkten x > ξ berucksichtigt und die Funktionswerte links von ξ nichtdem Toleranztest unterzogen werden sollen (Fig. 2.3.8). Man schreibt dafurx → ξ+ und nennt
limx→ξ+
f(x) =: f(ξ+)
den rechtsseitigen Grenzwert von f an der Stelle ξ. Analog wird der links-seitige Grenzwert f(ξ−) erklart.
η
ξ
δÒ
ε
x
y = f(x)
y
Fig. 2.3.8
Gilt f(ξ+) = f(ξ), so ist f rechtsseitig stetig an der Stelle ξ. Gilt f(ξ−) =f(ξ) = f(ξ+), so ist f an der Stelle ξ stetig, und umgekehrt. Existieren dieeinseitigen Grenzwerte f(ξ+), f(ξ−) und sind sie voneinander verschieden, sobesitzt f an der Stelle ξ eine Sprungstelle. Eine bis auf isolierte Sprungstellenstetige Funktion heißt stuckweise stetig.
©4 Trivial istsgn (0+) = 1 , sgn (0−) = −1 .
Ist n ∈ Z, so gilt
limx→n+
bxc = n ( = bnc ) , limx→n−
bxc = n − 1 ( 6= bnc ) ,

134 2 Funktionen
und fur alle ξ 6= Z istlimx→ξ
bxc = bξc .
Die Funktion x 7→ bxc ist hiernach in den ganzzahligen Punkten nur rechts-seitig stetig, in allen ubrigen Punkten stetig.
Weiter haben wir die “Standardgrenzwerte”
limx→0+
1
x= ∞ , lim
x→0−
1
x= −∞ .
Es sei C > 0 eine beliebig große vorgegebene Schranke (Fig. 2.3.9) undδ := 1/C. Dann gilt
0 < x < δ =⇒ 1
x>
1
δ= C ,
wie verlangt. Ist zweitens −δ < x < 0, so gilt 0 < −x < δ und somit
1
−x>
1
δ= C .
C
−C
δÒ = 1/C
−δÒx
y
y = 1/x
Fig. 2.3.9
In summa ergibt sich die erforderliche Implikation
−δ < x < 0 =⇒ 1
x< −C .
Wir zeigen noch:
limx→0+
21/x = ∞ , limx→0−
21/x = 0 .
Wir haben es hier mit “ineinandergeschachtelten Grenzwerten” zu tun, wofures eigentlich eine allgemeine Rechenregel gibt (s.u.) . Die Idee ist: Strebt x

2.3 Grenzwerte 135
gegen 0+, so strebt y := 1/x gegen ∞ und folglich 21/x = 2y auch gegen ∞.Der exakte Beweis verlauft folgendermaßen:
Es sei eine Schranke C > 0 vorgegeben. Wegen limy→∞ 2y = ∞ gibt esein M mit
y > M =⇒ 2y > C . (2)
Wegen limx→0+1x = ∞ gibt es weiter ein δ > 0 mit
0 < x < δ =⇒ 1
x> M . (3)
Nehmen wir (2) und (3) zusammen, so folgt
0 < x < δ =⇒ 21/x > C ,
wie verlangt. — Ahnlich schließt man im zweiten Fall.
©
Substitutionsregel fur zusammengesetzte Grenzwerte
Die eben verwendete Schlußweise laßt sich verallgemeinern zum Beweis desnachstehenden Satzes uber zusammengesetzte (“ineinandergeschachtelte”)Grenzwerte. Man beachte die Analogie zum Satz (2.2)(c) uber die Stetigkeitvon zusammengesetzten Funktionen. Der Satz handelt vom Konvergieren “ansich”; die darin auftretenden Punkte ξ, η, ζ durfen daher auch uneigentlichsein.
(2.7) Existieren die Grenzwerte
limx→ξ
f(x) = η , limy→η
g(y) ( =: ζ )
(und ist g stetig im Punkt η, falls f diesen Wert uberhaupt annimmt), so gilt
limx→ξ
g(f(x)
)= lim
y→ηg(y) .
In anderen Worten: Unter den angegeben Voraussetzungen darf man in demverschachtelten Ausdruck limx→ξ g
(f(x)
)die innere Funktion durch eine
neue Variable y substituieren und y gegen den Grenzwert η der inneren Funk-tion streben lassen.
Anmerkung: Die in Klammern gesetzte Bedingung ist in den typischen An-wendungsfallen offensichtlich erfullt, und wir verzichten darauf, sie jedesmal

136 2 Funktionen
zu uberprufen. Es geht aber nicht ohne, wie das folgende Beispiel zeigt: Essei
f(x) :≡ 1 , g(y) :=
2 (y = 1)3 (y 6= 1)
.
Dann ist g(f(x)
)≡ 2 und folglich α := limx→0 g
(f(x)
)= 2. Hier strebt die
innere Funktion mit x → 0 gegen 1, was α = limy→1 g(y) = 3 suggeriert.
©5 Es istlim
t→∞21/t = lim
y→0+2y = 20 = 1 ;
dabei haben wir stillschweigend benutzt, daß y 7→ 2y stetig ist. — Es gilt
limx→0+
(x cos1
x) = lim
y→∞(1
ycos y) = 0 ,
und hieraus folgt weiter
limx→0+
√
4 + x cos1
x= lim
t→0
√4 + t = 2 ,
denn√· ist stetig. ©
Weitere Rechenregeln
(2.8) Es sei f := (f1, f2, . . . , fn) ein n-Tupel von Funktionen, die in derUmgebung des (eigentlichen oder uneigentlichen) Punktes ξ definiert sindund fur x → ξ Grenzwerte besitzen:
limx→ξ
fi(x) = ai (1 ≤ i ≤ n) .
Dann gilt:
(a) limx→ξ
f(x) = a .
(b) Ist R(f1(x), f2(x), . . . , fn(x)
)ein rationaler Ausdruck in den fi und ist
der Wert R(a1, a2, . . . , an) definiert, so gilt
limx→ξ
R(f1(x), . . . , fn(x)
)= R(a1, . . . , an) .
Die Behauptung (b) besagt, daß man an jeder Stelle des Ausdrucks den be-treffenden Grenzwert einsetzen darf. Ist R(a1, . . . , an) nicht definiert, etwa

2.3 Grenzwerte 137
von der Form 1/0 oder 0/0, so muß man weitere Uberlegungen anstellen.Unter (b) lassen sich naturlich unzahlige einfachere Grenzwertregeln sub-sumieren (die man sonst einzeln beweisen mußte).
Bsp: limx→ξ
(f1(x) · f2(x)
)= a1 · a2 .
(a) Aus der Ungleichung 2.2(2) folgt
|f(x) − a| ≤n∑
i=1
|fi(x) − ai| .
Es sei eine Toleranz ε > 0 vorgegeben. Ist x hinreichend nahe bei ξ, so istjeder Summand rechter Hand < ε/n, also ist dann |f(x) − a| < ε.
(b) Nach Satz (2.5) ist die Funktion y 7→ R(y) an der Stelle a stetig. Mit(a) und (2.7) folgt daher
limx→ξ
R(f(x)
)= lim
y→a
R(y) = R(a) .
Handlich ist das folgende Vergleichskriterium, womit wir unsere Regelkol-lektion abschließen:
(2.9) Gilt fur eine geeignete Konstante C > 0 in der Umgebung des Punktesξ die Abschatzung
|f(x)| ≤ C · g(x)
und ist limx→ξ g(x) = 0, so ist auch limx→ξ f(x) = 0.
Es sei ein ε > 0 vorgegeben. Nach Voraussetzung uber g gilt g(x) < ε/Cfur alle hinreichend nahe bei ξ gelegenen x. Fur diese x ist dann |f(x)−0| < ε,wie verlangt.
©6 Zu berechnen ist die Große
Q := limx→1−
√
9 + 500 · 21/(x−1) cos 1x − 1 + 1
arcsin x + ex
x5 − 1x − 1 − log(x3 + x)
.
Es istlim
x→1−21/(x−1) = lim
y→0−21/y = 0 ,
ferner gilt:
x5 − 1
x − 1= x4 + x3 + x2 + x + 1 → 5 (x → 1) ,
138 2 Funktionen
da das Polynom rechter Hand an der Stelle 1 stetig ist. Wir erhalten dahermit Hilfe von (2.8)(b) und (2.9):
Q =3 + 2
π + e
5 − log 2= 1.4755 . ©
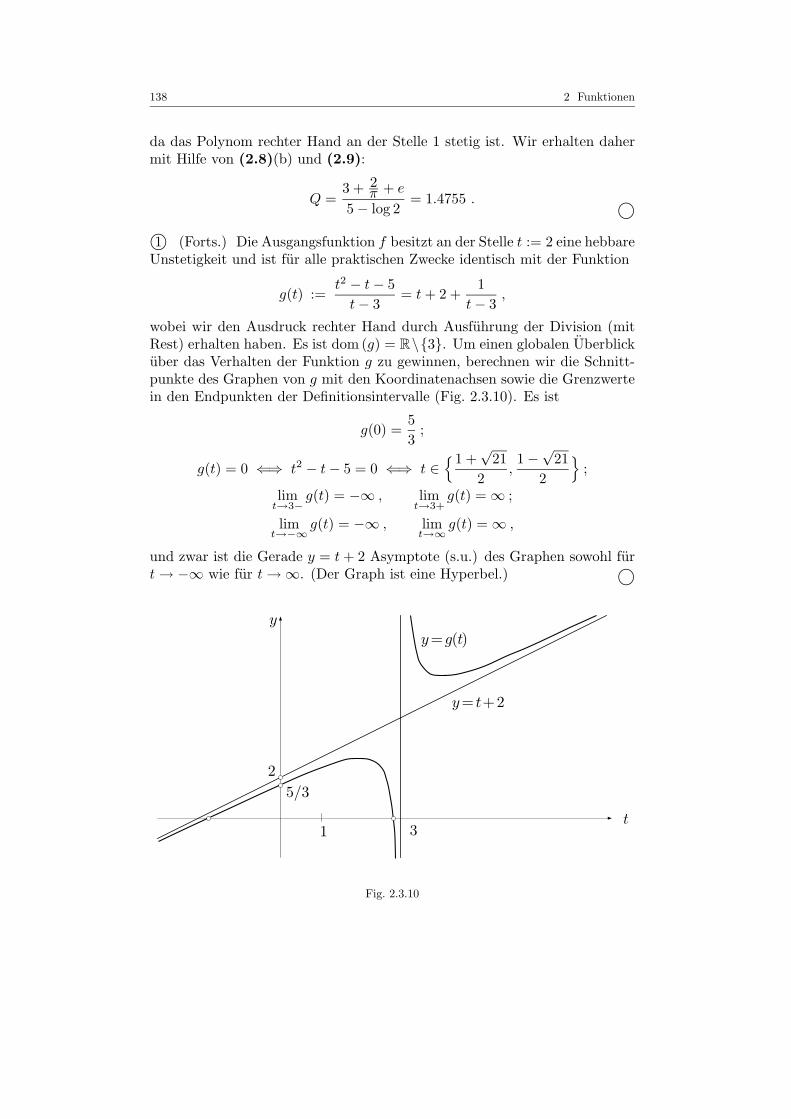
©1 (Forts.) Die Ausgangsfunktion f besitzt an der Stelle t := 2 eine hebbareUnstetigkeit und ist fur alle praktischen Zwecke identisch mit der Funktion
g(t) :=t2 − t − 5
t − 3= t + 2 +
1
t − 3,
wobei wir den Ausdruck rechter Hand durch Ausfuhrung der Division (mitRest) erhalten haben. Es ist dom (g) = R\3. Um einen globalen Uberblickuber das Verhalten der Funktion g zu gewinnen, berechnen wir die Schnitt-punkte des Graphen von g mit den Koordinatenachsen sowie die Grenzwertein den Endpunkten der Definitionsintervalle (Fig. 2.3.10). Es ist
g(0) =5
3;
g(t) = 0 ⇐⇒ t2 − t − 5 = 0 ⇐⇒ t ∈1 +
√21
2,1 −
√21
2
;
limt→3−
g(t) = −∞ , limt→3+
g(t) = ∞ ;
limt→−∞
g(t) = −∞ , limt→∞
g(t) = ∞ ,
und zwar ist die Gerade y = t + 2 Asymptote (s.u.) des Graphen sowohl furt → −∞ wie fur t → ∞. (Der Graph ist eine Hyperbel.) ©
y
2
1
y = t + 2
y = g(t)
t
5/3
Fig. 2.3.10

2.3 Grenzwerte 139
Asymptoten
Die X-wertige Funktion f sei fur alle t > a definiert. Die Gerade
y = pt + q , p, q ∈ X fest ,
heißt Asymptote von G(f) (Fig. 2.3.11) fur t → ∞, wenn
limt→∞
(f(t) − (pt + q)
)= 0
ist. Die Parameter p und q berechnen sich nach den Formeln
p = limt→∞
f(t)
t, q = lim
t→∞
(f(t) − pt
).
Nicht jedes f : R>a → X besitzt eine Asymptote! Fur f(t) := t +√
t strebtf(t)
t zwar gegen 1, aber f(t) − t gegen ∞ .
y = f(t)
q
y = p t + q
y
tt
Fig. 2.3.11
Aufgaben
1.©M Bestimme die folgenden Grenzwerte, falls vorhanden:
(a) limx→−3
x3 + 27
x4 − 81, (b) lim
x→1
xp − 1
xq − 1(p, q ∈ N∗) ,
(c) limx→∞
sin(√
x)
, (d) limx→∞
sin
(
2x − 1(√
x + 1)3
)
,
(e) limx→2+
x2 − 14x + 24
|x − 2| + |x2 − 4| , (f) limx→2−
x2 − 14x + 24
|x − 2| + |x2 − 4| ,

140 2 Funktionen
(g) limx→∞
(√
x(x + a) − x)
, (h) limn→∞
(3n − 4)(n2 + 1)
7n(2n2 + 10 000),
(i) limn→∞
(√n + 1 −
√n
), (j) lim
n→∞
(
n(
1 −√
1 − a
n
))
.
2. (a) ©M Bestimme die Parameter α, β, γ so, daß die Differenz
√
t4 − 2t2 + 7t + 1 − (at2 + βt + γ)
mit t → ∞ gegen 0 strebt. (Hinweis: Mit der Summe der beidenerweitern.)
(b) ©M Stelle eine instruktive Figur der resultierenden Situation her.
3. Bei den folgenden Funktionen bestimme man, soweit vorhanden, die zut → ∞ gehorigen Asymptoten:
(a) f(t) :=t
t +√
t, (b) g(t) := t
(
2 − sin1t
)
.

2.4 Folgen und Reihen
Folgen als mathematisches Konstruktionswerkzeug
Im Grunde genommen konnen wir bis dahin nur rationale Zahlen und ra-tionale Funktionen in rechtsgenugender Weise erfassen und manipulierenbzw. evaluieren. Quadratwurzeln, allgemein: n-te Wurzeln, sind zwar in R
vorhanden, und die Wurzelfunktionen sind auch stetig, aber wir haben keinsystematisches Verfahren, das den Wurzelexponenten n und ein beliebigesc ≥ 0 als Input akzeptiert und n
√c mit vorgeschriebener Genauigkeit ausgibt.
Oder: Wie rechnet ein Taschenrechner sin 23.5 aus?
Wir benotigen ein allgemeines Konstruktionswerkzeug fur “analytische Ob-jekte”, Zahlen oder Funktionen, und zwar in zweierlei Hinsicht:
— Erstens geht es darum, neuartige Objekte begrifflich zu konzipieren undformelmaßig darzustellen.
Bsp: e :=∞∑
k=0
1k!
.
— Zweitens sollte man instandgesetzt werden, diese Objekte in endlich vie-len Schritten mit jeder wunschbaren Genauigkeit (numerisch) zu berech-nen.
Ein derartiges Konstruktionswerkzeug ist der Folgenbegriff und im Anschlußdaran die Idee der “Reihe”.
Man kann den Definitionsbereich N einer Folge
x.: N → X , k 7→ xk (1)
als eine Teilmenge von R mit dem uneigentlichen Randpunkt ∞ betrach-ten oder als einen Grundbereich sui generis — jedenfalls heißt die Folge (1)konvergent gegen den Grenzwert ξ ∈ X, in Zeichen:
limk→∞
xk = ξ bzw. xk → ξ (k → ∞) ,
wenn es zu jedem ε > 0 einen Pflock k0 gibt mit
k > k0 =⇒ |xk − ξ| < ε .
Existiert kein derartiges ξ ∈ X, so heißt die Folge (1) divergent. Hierunterfallen insbesondere die uneigentlich konvergenten Folgen, die sinngemaß er-klart sind.
Die Rechenregeln (2.8), (2.9) gelten naturlich auch fur Folgengrenzwerte.So hat man zum Beispiel
∀k : |xk| ≤ C · rk ∧ limk→∞
rk = 0 =⇒ limk→∞
xk = 0 . (2)
Satz (2.7) uber zusammengesetzte Grenzwerte liefert umgehend das folgendewichtige Prinzip (Fig. 2.4.1):

142 2 Funktionen
(2.10) Ist limx→ξ f(x) = η (bzw. : Ist f stetig an der Stelle ξ ), so gilt furjede gegen ξ konvergente Punktfolge x. in dom (f):
limk→∞
f(xk) = η(bzw. lim
k→∞f(xk) = f(ξ)
).
dom(f)
x0
x1x2
ξδxk
Fig. 2.4.1
©1 limk→∞
1
k= 0 ;
limk→∞
(3k − 1)(k2 + 5)
(2k + 7)3= lim
k→∞
(3 − 1k )(1 + 5
k2 )
(2 + 7k )3
=3
8.
Betrachte weiter ein festes q ∈ C. Wir behaupten: Ist 0 < |q| < 1, so gilt
limk→∞
qk = 0 .
Nach Voraussetzung ist1|q| > 1, also
1|q| = 1 + δ fur ein δ > 0. Es folgt
1
|q|k = (1 + δ)k = 1 + kδ + . . . > kδ
(binomischer Lehrsatz) und somit
∣∣qk
∣∣ = |q|k <
1
kδ.
Da hier die rechte Seite mit k → ∞ gegen 0 strebt, folgt die Behauptung mitHilfe des Vergleichskriteriums (2).
©

2.4 Folgen und Reihen 143
In der Praxis tritt folgende Situation immer wieder auf: Gesucht ist derGrenzwert ξ einer Folge x. , die in bestimmter Weise rekursiv definiert ist:
x0 := a
xk+1 := xk + ∆xk (k ≥ 0)
; (3)
dabei ist es in der Regel so, daß das Inkrement ∆xk ohne großen Rechen-aufwand berechnet werden kann. Die Rechnung wird abgebrochen, sobalddie Inkremente vernachlaßigbar klein werden, und man betrachtet das letzteberechnete xk als Naherungswert fur den gesuchten Grenzwert ξ.
Diese Situation liegt zum Beispiel vor beim Newtonschen Verfahren (s.u.)zur numerischen Berechnung von Nullstellen von Funktionen f : R y R. DieRekursionsformel hat hier folgende Gestalt:
xk+1 = xk +−f(xk)
f ′(xk)(k ≥ 0) .
Unendliche Reihen
Den Begriff der Reihe konnen wir unter demselben Aspekt betrachten. Ist a.eine beliebige Folge in einer Grundstruktur X, so kann man versuchen, der“unendlichen Summe”
∞∑
k=0
ak (4)
einen Sinn zu erteilen. Hierzu betrachtet man die Folge s. der endlichenPartialsummen
sn :=n∑
k=0
ak = a0 + a1 + . . . + an−1 + an .
Die Folge s. ist eine Folge der in (3) betrachteten Art: Offensichtlich gilt
sn+1 = sn + an+1 (n ≥ 0) ,
es ist also ∆sn = an+1 .
Man nennt (4) eine (unendliche) Reihe. Die Reihe ist konvergent, wenn dieFolge s. der Partialsummen einen endlichen Grenzwert besitzt. Der Ausdruck(4) bezeichnet dann auch diesen Grenzwert oder eben die Summe der Reihe.
©2 Es sei q ∈ C fest, |q| < 1 . Dann gilt
∞∑
k=0
qk = 1 + q + q2 + q3 + . . . =1
1 − q
(geometrische Reihe).

144 2 Funktionen
Aus
sn(1 − q) = (1 + q + q2 + . . . qn)(1 − q) = 1 − qn+1
(alles andere hebt sich heraus) folgt
sn =1 − qn+1
1 − q
und somit wegen limn→∞ qn+1 = 0 die Behauptung.
Die harmonische Reihe
∞∑
k=1
1
k= 1 +
1
2+
1
3+
1
4+ . . .
ist divergent, obwohl die Summanden mit k → ∞ gegen 0 konvergieren. Esgilt namlich
s2n − sn =1
n + 1+
1
n + 2+ . . . +
1
n + n≥ n · 1
2n=
1
2.
Wegen s20 = s1 = 1 folgt hieraus
s2r ≥ 1 +r
2
und damit limn→∞ sn = ∞ .
Die alternierende harmonische Reihe
∞∑
k=1
(−1)k−1
k= 1 − 1
2+
1
3− 1
4+ . . .
ist hingegen konvergent und besitzt die Summe log 2 (s.u.) . ©
Ist c. eine Folge von positiven Zahlen, die monoton fallend gegen 0 kon-vergiert, so heißt
∞∑
k=0
(−1)k ck = c0 − c1 + c2 − c3 + . . .
eine alternierende Reihe. Hieruber gilt der folgende Satz:
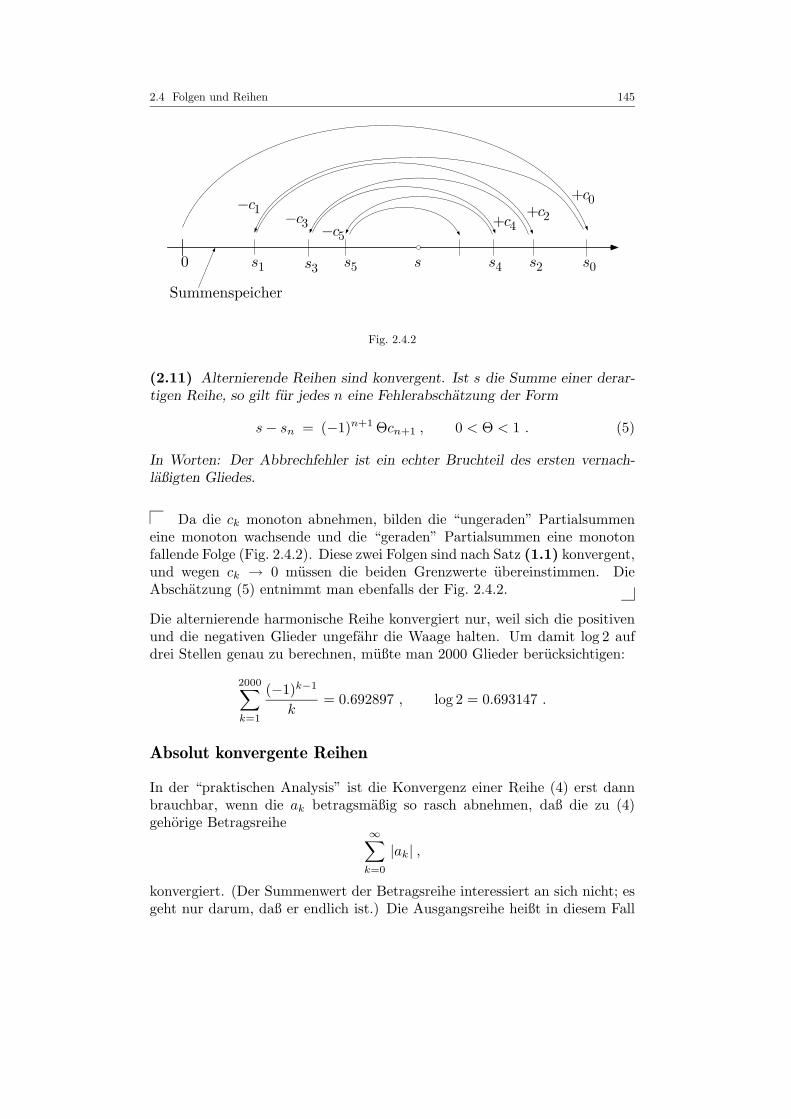
2.4 Folgen und Reihen 145
Summenspeicher
0 s1 s3 s5 s2 s0s4
+c0+c2+c4
−c1 −c3 −c5
s
Fig. 2.4.2
(2.11) Alternierende Reihen sind konvergent. Ist s die Summe einer derar-tigen Reihe, so gilt fur jedes n eine Fehlerabschatzung der Form
s − sn = (−1)n+1 Θcn+1 , 0 < Θ < 1 . (5)
In Worten: Der Abbrechfehler ist ein echter Bruchteil des ersten vernach-laßigten Gliedes.
Da die ck monoton abnehmen, bilden die “ungeraden” Partialsummeneine monoton wachsende und die “geraden” Partialsummen eine monotonfallende Folge (Fig. 2.4.2). Diese zwei Folgen sind nach Satz (1.1) konvergent,und wegen ck → 0 mussen die beiden Grenzwerte ubereinstimmen. DieAbschatzung (5) entnimmt man ebenfalls der Fig. 2.4.2.
Die alternierende harmonische Reihe konvergiert nur, weil sich die positivenund die negativen Glieder ungefahr die Waage halten. Um damit log 2 aufdrei Stellen genau zu berechnen, mußte man 2000 Glieder berucksichtigen:
2000∑
k=1
(−1)k−1
k= 0.692897 , log 2 = 0.693147 .
Absolut konvergente Reihen
In der “praktischen Analysis” ist die Konvergenz einer Reihe (4) erst dannbrauchbar, wenn die ak betragsmaßig so rasch abnehmen, daß die zu (4)gehorige Betragsreihe
∞∑
k=0
|ak| ,
konvergiert. (Der Summenwert der Betragsreihe interessiert an sich nicht; esgeht nur darum, daß er endlich ist.) Die Ausgangsreihe heißt in diesem Fall

146 2 Funktionen
absolut konvergent. Absolut konvergente Reihen sind tatsachlich konvergent(ohne Beweis) und durfen mehr oder weniger wie endliche Summen behandeltwerden. Insbesondere darf man zwei derartige Reihen distributiv miteinandermultiplizieren und die entstehenden “ ∞2 ” Glieder (allenfalls zu “Paketen”zusammengefaßt) in irgendeiner Reihenfolge aufsummieren. Das heißt: Esgilt
∞∑
i=0
ai ·∞∑
k=0
bk =∑
(i,k)∈N2
aibk .
Wir geben nun zwei Kriterien fur absolute Konvergenz:
(2.12) Gibt es ein C > 0, ein q < 1 und ein k0 mit
|ak| ≤ C qk ∀ k > k0 , (6)
so ist die Reihe∑∞
k=0 ak absolut konvergent.
Nach allfalliger Vergroßerung von C durfen wir annehmen, daß (6) furalle k gilt. Die Partialsummen
sn :=n∑
k=0
|ak|
der zu∑
ak gehorigen Betragsreihe bilden eine monoton wachsende und we-gen
sn ≤n∑
k=0
Cqk ≤ C
1 − q
beschrankte Folge.
©3 Betrachte fur ein festes φ ∈ R die Reihe
S :=∞∑
k=0
cos(kφ)
2k. (7)
Diese Reihe ist wegen∣∣∣∣
cos(kφ)
2k
∣∣∣∣≤
(1
2
)k
absolut konvergent. Ihre Summe laßt sich folgendermaßen berechnen:
S = Re∞∑
k=0
eikφ
2k= Re
∞∑
k=0
(eiφ
2
)k
= Re1
1 − eiφ/2
= Re1 − e−iφ/2
(1 − eiφ/2)(1 − e−iφ/2)=
1 − 12 cos φ
1 − cos φ + 14
=4 − 2 cos φ
5 − 4 cos φ.

2.4 Folgen und Reihen 147
Sehen wir nachtraglich φ als variabel an, so konnen wir dieses Ergebnis fol-gendermaßen interpretieren: Die Reihe (7) stellt die 2π-periodische Funktion
f(φ) :=4 − 2 cos φ
5 − 4 cos φ
(Fig. 2.4.3) als Summe von reinen Cosinus-Schwingungen ganzzahliger Kreis-frequenzen k dar. (7) ist die sogenannte Fourier-Reihe von f . ©
y
y = f(φ)
−π 0 πφ
2/3
2
Fig. 2.4.3
Die von Satz (2.12) erfaßten Reihen konvergieren so gut wie die geometrischeReihe, also “linear”. Das heißt konkret: Mit jedem zusatzlich berucksichtig-ten Term wird der Abbrechfehler, er ist von der Großenordnung
C
1 − qqn+1 ,
um denselben Faktor q verkleinert. Bei den Reihen, die nach dem folgendenSatz konvergieren, ist die Konvergenz viel langsamer.
(2.13) Gibt es ein C > 0, ein δ > 0 und ein k0 mit
|ak| ≤ C1
k1+δ∀ k > k0 ,
so ist die Reihe∑∞
k=0 ak absolut konvergent.
Es genugt offenbar zu zeigen, daß die Reihe∑
1/k1+δ konvergiert, undhierfur wiederum genugt es, daß die Partialsummen
sn :=
n∑
k=1
1
k1+δ
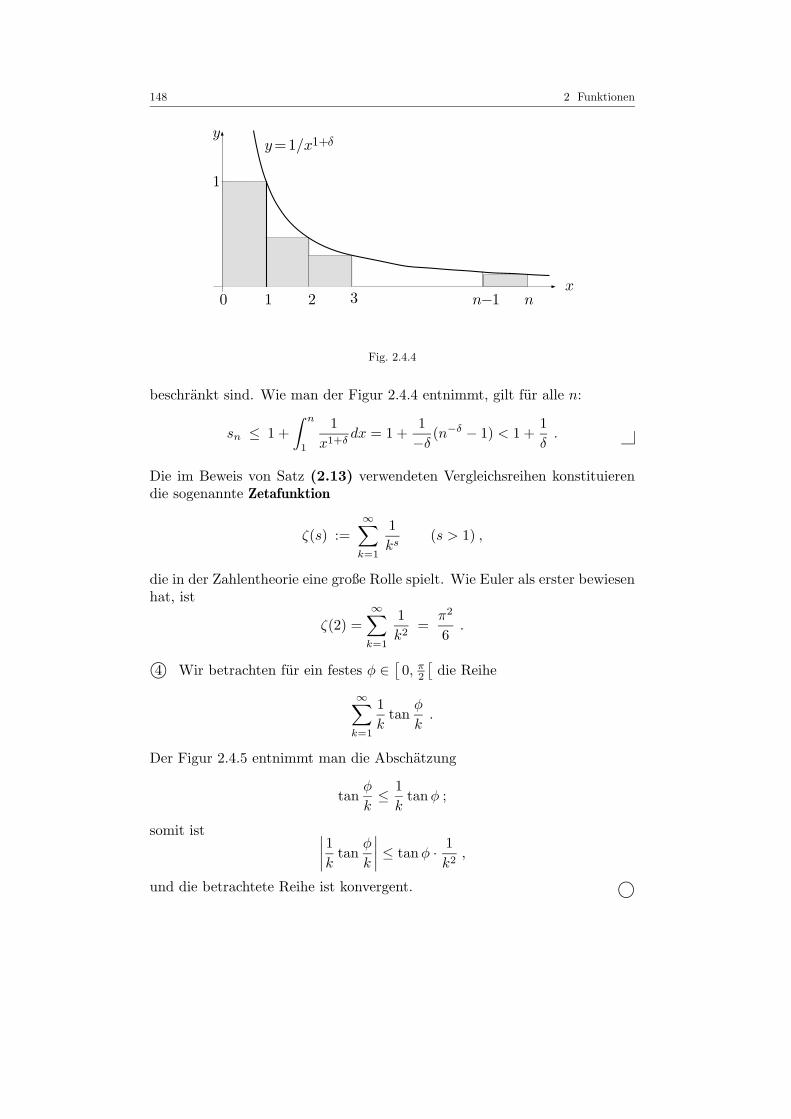
148 2 Funktionen
yy = 1/x1+δ
1 2 30 nx
1
n−1
Fig. 2.4.4
beschrankt sind. Wie man der Figur 2.4.4 entnimmt, gilt fur alle n:
sn ≤ 1 +
∫ n
1
1
x1+δdx = 1 +
1
−δ(n−δ − 1) < 1 +
1
δ.
Die im Beweis von Satz (2.13) verwendeten Vergleichsreihen konstituierendie sogenannte Zetafunktion
ζ(s) :=
∞∑
k=1
1
ks(s > 1) ,
die in der Zahlentheorie eine große Rolle spielt. Wie Euler als erster bewiesenhat, ist
ζ(2) =∞∑
k=1
1
k2=
π2
6.
©4 Wir betrachten fur ein festes φ ∈[0, π
2
[die Reihe
∞∑
k=1
1
ktan
φ
k.
Der Figur 2.4.5 entnimmt man die Abschatzung
tanφ
k≤ 1
ktanφ ;
somit ist ∣∣∣∣
1
ktan
φ
k
∣∣∣∣≤ tanφ · 1
k2,
und die betrachtete Reihe ist konvergent. ©

2.4 Folgen und Reihen 149
y
φφφ/k
y = tan φ
π/2
Fig. 2.4.5
Funktionenreihen
Soviel zu den Reihen mit konstanten Gliedern. Viel interessanter sind na-turlich Reihen von Funktionen, denn damit haben wir zum ersten Mal einMittel in der Hand, das uns aus dem Bereich der Polynome und der rationalenFunktionen
f(t) :=antn + an−1t
n−1 + . . . + a0
bmtm + bm−1tm−1 + . . . + b0, bm 6= 0 ,
herausfuhrt und neue interessante Funktionen erschließt.
Ist f. eine Folge von Funktionen mit gemeinsamem Definitionsbereich A:
fk: A → X , x 7→ fk(x) (k ∈ N) ,
so wird durch
s(x) :=∞∑
k=0
fk(x) (8)
eine Funktion s(·) definiert. Definitionsbereich von s(·) ist im allgemeinennicht die ganze Menge A, sondern nur die Menge derjenigen x ∈ A, fur diedie Reihe (8) konvergiert, also der Konvergenzbereich der Reihe.
©5 Mit fk(x) :=xk
k!erhalt man die Exponentialreihe
expx :=∞∑
k=0
xk
k!= 1 + x +
x2
2!+
x3
3!+ . . . .
Legt man zum Beispiel dom (fk) = R zugrunde, so ist auch dom (exp) = R
(dies wird weiter unten gezeigt).

150 2 Funktionen
Mit fk(x) := xk erhalt man die geometrische Reihe
s(x) :=
∞∑
k=0
xk . (8)
Hier ist dom (fk) = R, aber dom (s) = ]−1, 1[ . Es ist allerdings wahr, daß seine naturliche Fortsetzung s auf ganz R \ 1 besitzt, namlich die Funktion
s(x) :=1
1 − x.
Wer nur die Konvergenz verstanden hat, aber nicht dividieren kann, hat schonmit (8) eine hochinteressante neue Funktion produziert.
Die Reihe
ϑ(x) := 1 + 2∞∑
k=1
e−k2πx
konvergiert im Intervall R>0. ©
Potenzreihen
Von den Funktionenreihen sind die Potenzreihen am verbreitetsten und amleichtesten zu handhaben, theoretisch und rechnerisch. Das folgende Prinzipstammt von Newton: “Jede vernunftige Funktion f laßt sich an jeder Stelleim Inneren ihres Definitionsbereichs in eine Potenzreihe entwickeln oder alsPotenzreihe ansetzen.” Die Theorie der Potenzreihen wird am besten ver-standlich, wenn man sie im Komplexen betrachtet, siehe dazu das Beispiel2.1.©3 . Wir werden also wahlweise die reelle Variable x oder die komplexeVariable z benutzen.
Es sei a. eine ganz beliebige Folge von reellen oder komplexen Zahlen. Dannheißt
∞∑
k=0
akzk = a0 + a1z + a2z2 + . . . (9)
eine Potenzreihe (an der Stelle 0), und die ak sind die Koeffizienten dieserReihe. Allgemein ist
∞∑
k=0
ak(x − x0)k = a0 + a1(x − x0) + a2(x − x0)
2 + . . .
eine Potenzreihe an der Stelle x0. Der Konvergenzbereich hangt ab von denKoeffizienten ak: Streben zum Beispiel die Betrage |ak| mit k → ∞ schnellgegen 0, so darf |z| ziemlich groß sein, und die Reihe (9) konvergiert immernoch. Wenn die Betrage |ak| im Gegenteil mit k → ∞ “exponentiell” anwach-sen, so wird die Reihe nur fur sehr kleine |z| konvergieren. Im einzelnen giltder folgende Satz:
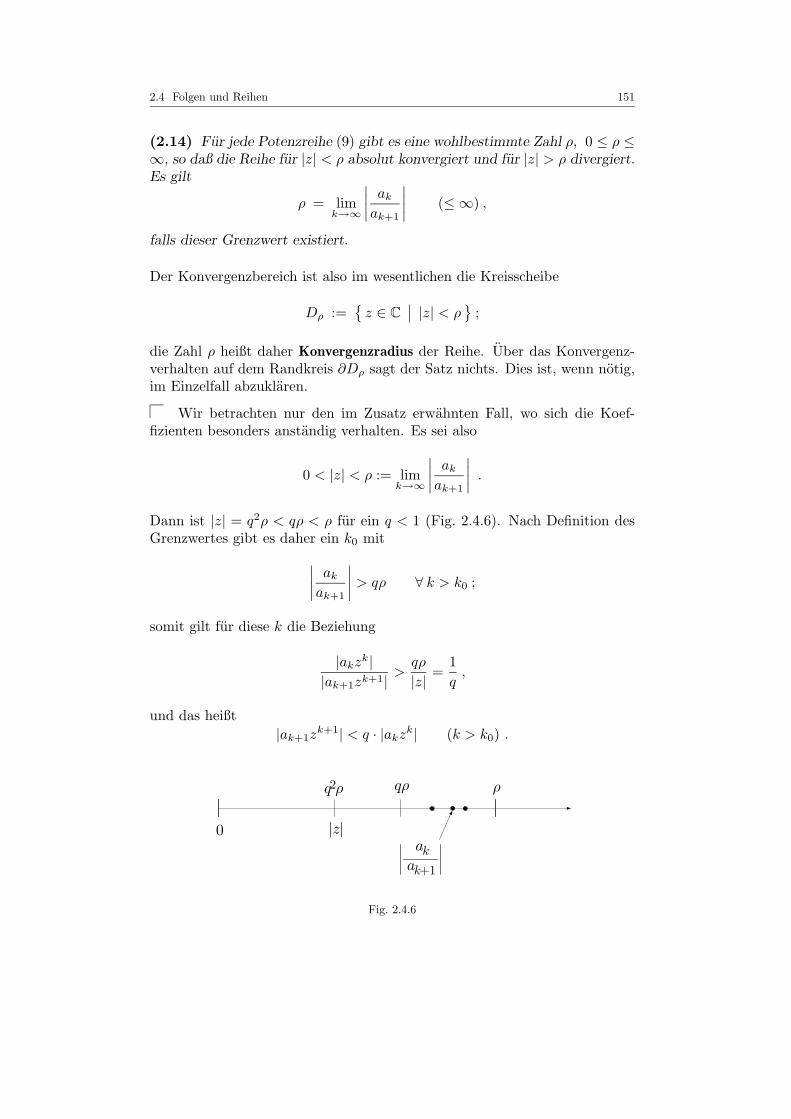
2.4 Folgen und Reihen 151
(2.14) Fur jede Potenzreihe (9) gibt es eine wohlbestimmte Zahl ρ, 0 ≤ ρ ≤∞, so daß die Reihe fur |z| < ρ absolut konvergiert und fur |z| > ρ divergiert.Es gilt
ρ = limk→∞
∣∣∣∣
ak
ak+1
∣∣∣∣
(≤ ∞) ,
falls dieser Grenzwert existiert.
Der Konvergenzbereich ist also im wesentlichen die Kreisscheibe
Dρ :=
z ∈ C∣∣ |z| < ρ
;
die Zahl ρ heißt daher Konvergenzradius der Reihe. Uber das Konvergenz-verhalten auf dem Randkreis ∂Dρ sagt der Satz nichts. Dies ist, wenn notig,im Einzelfall abzuklaren.
Wir betrachten nur den im Zusatz erwahnten Fall, wo sich die Koef-fizienten besonders anstandig verhalten. Es sei also
0 < |z| < ρ := limk→∞
∣∣∣∣
ak
ak+1
∣∣∣∣
.
Dann ist |z| = q2ρ < qρ < ρ fur ein q < 1 (Fig. 2.4.6). Nach Definition desGrenzwertes gibt es daher ein k0 mit
∣∣∣∣
ak
ak+1
∣∣∣∣> qρ ∀ k > k0 ;
somit gilt fur diese k die Beziehung
|akzk||ak+1zk+1| >
qρ
|z| =1
q,
und das heißt
|ak+1zk+1| < q · |akzk| (k > k0) .
ρqρq2ρ
|z|ak
ak+1
0
Fig. 2.4.6
152 2 Funktionen
Von der Nummer k0 an werden also die Glieder unserer Potenzreihe von einemzum nachsten betragsmaßig um wenigstens den Faktor q < 1 verkleinert.Hieraus folgt mit vollstandiger Induktion: Es gilt
|akzk| ≤ Cqk (k > k0)
fur eine geeignete Konstante C. Nach (2.12) ist somit die Reihe (9) fur dasbetrachtete z absolut konvergent. — Ahnlich zeigt man, daß die Reihe (9)fur ein z mit |z| > ρ divergiert, da die |akzk| in diesem Fall sogar nach ∞streben.
©5 (Forts.) Die Exponentialreihe
exp z :=
∞∑
k=0
zk
k!= 1 + z +
z2
2!+
z3
3!+ . . .
besitzt die Koeffizienten ak := 1/k!, und es folgt∣∣∣∣
ak
ak+1
∣∣∣∣=
(k + 1)!
k!= k + 1 → ∞ (k → ∞) .
Der Konvergenzradius ist also ∞, und das heißt: Die Exponentialreihe ist furjedes z ∈ C absolut konvergent.
Bei der geometrischen Reihe∑∞
k=0 xk haben wir ak = 1 fur alle k; somit ist
ρ = limk→∞
∣∣∣∣
ak
ak+1
∣∣∣∣= 1 ,
wie erwartet. Aber auch die Reihe∞∑
k=1
k2 xk = x + 4x2 + 9x3 + 16x4 + . . .
besitzt den Konvergenzradius 1 (obwohl die ak gegen ∞ streben):
limk→∞
∣∣∣∣
ak
ak+1
∣∣∣∣= lim
k→∞
1
(1 + 1k )2
= 1 .
Bei der Reihe1 + 2x2 + 4x4 + 8x6 + 16x8 + . . . (10)
sind alle ak = 0 (k ungerade); der nutzliche Grenzwert existiert also nicht.Es liegt nahe, x2 =: u zu setzen; die Reihe (10) geht dann uber in die Reihe
1 + 2u + 4u2 + 8u3 + . . . =∞∑
j=0
bj uj
mit bj = 2j . Fur diese Reihe ist∣∣∣∣
bj
bj+1
∣∣∣∣=
2j
2j+1=
1
2(j ≥ 0) ,

2.4 Folgen und Reihen 153
sie konvergiert daher im Bereich |u| < 12 . Der Konvergenzradius der ur-
sprunglichen Reihe (10) ist somit 1/√
2 . ©
Die folgenden Tatsachen sind fur das Arbeiten mit Potenzreihen fundamentalund seien hier ohne Beweis angefuhrt:
(2.15) (a) Jede Potenzreihe stellt im Inneren ihres Konvergenzbereichs einestetige, ja sogar beliebig oft differenzierbare Funktion dar.
(b) Im Innern des Konvergenzbereichs darf man eine Potenzreihe gliedweise(das heißt: wie ein Polynom) differenzieren und integrieren.
(c) Zwei konvergente Potenzreihen darf man “distributiv” miteinander mul-tiplizieren, wobei nach Zusammenfassung gleichartiger Terme die Potenzreiheder Produktfunktion entsteht.
Rechnen mit Anfangsstucken von Potenzreihen
Es gibt auch eine Art, mit Anfangsstucken ( = Partialsummen) von konver-genten Potenzreihen zu rechnen wie mit endlichen Dezimalbruchen. Damitman weiß, welche Koeffizienten im Endergebnis noch als sicher gelten konnen,empfiehlt es sich, den mit einer bestimmten Zahl von “signifikanten Stellen”angeschriebenen Ausgangsreihen einen koeffizientenlosen, aber geeignet mar-kierten Zusatzterm anzuhangen. Das sieht bei drei “signifikanten Stellen”zum Beispiel so aus:
f(x) = 2 − x
2+ 3x2+ ?x3 ,
und allgemein folgendermaßen:
f(x) = a0 + a1x + . . . + ar−1xr−1+ ?xr .
Dabei vertritt das Fragezeichen letzten Endes eine ganze Potenzreihe, dennin Wirklichkeit ist ja
f(x) = a0 + a1x + . . . + ar−1xr−1 + arx
r + ar+1xr+1 + . . .
= a0 + a1x + . . . + ar−1xr−1 +
(ar + ar+1x + ar+2x
2 + . . .)
xr .
Nur von dem Fragezeichen “unverschmutzte” Koeffizienten des Endergeb-nisses sind sicher. Die folgenden Beispiele zeigen, wie die Rechnung imeinzelnen vor sich geht. — Das Computersystem Mathematica bezeichnetin derartigen Rechnungen den Restterm ?xr mit O[x]
r.

154 2 Funktionen
©6 Fur cos und sin hat man die Entwicklungen
cos x = 1 − x2
2+
x4
24+ ?x6 ,
sinx = x − x3
6+
x5
120+ ?x7 = x
(1 − x2
6+
x4
120+ ?x6
)
(wird im nachsten Abschnitt bewiesen). Hieraus folgt
tanx = x1 − 1
6x2 + 1120x4+ ?x6
1 − 12x2 + 1
24x4+ ?x6.
Wir fuhren nun die Division tatsachlich aus und erhalten:
(1 − 16x2+ 1
120x4+ ?x6) : (1 − 12x2 + 1
24x4+ ?x6) = 1 + 13x2 + 2
15x4+ ?x6
−1+ 12x2− 1
24x4 + ?x6
+ 13x2− 1
30x4 + ?x6
− 13x2+ 1
6x4 + 172x6
+ 215x4 + ?x6
− 215x4 + 1
15x6
+ ?x6
Die Potenzreihenentwicklung des Tangens an der Stelle 0 besitzt daher fol-gendes Anfangsstuck:
tanx = x +1
3x3 +
2
15x5+ ?x7 .
©
©7 Gesucht ist die Losung t 7→ y(t) des Anfangswertproblems
y = t + y + y2 , y(0) = 1 .
(Diese Differentialgleichung laßt sich nicht “formelmaßig” losen!) Wir machenden Ansatz
y(t) := 1 + αt + βt2 + γt3+ ?t4 (11)
mit unbestimmten Koeffizienten α, β, γ. Dann ist
y(t) = α + 2βt + 3γt2+ ?t3 , (12)
so daß wir im weiteren nur noch “auf t2 genau” rechnen konnen. Wirbenotigen noch
y2(t) = (1 + αt + βt2+ ?t3)(1 + αt + βt2+ ?t3)
= 1 + 2αt + (α2 + 2β)t2+ ?t3 . (13)

2.4 Folgen und Reihen 155
Setzen wir nun (11)–(13) in die Differentialgleichung ein, so ergibt sich
α + 2βt + 3γt2+ ?t3 = t + 1 + αt + βt2 + 1 + 2αt + (α2 + 2β)t2+ ?t3 .
Koeffizientenvergleich fuhrt auf die Gleichungen
α = 2 , 2β = 1 + 3α 3γ = β + α2 + 2β ,
aus denen sich α, β, γ nacheinander berechnen zu
α = 2 , β =7
2, γ =
29
6.
Damit konnen wir die gesuchte Funktion y(·) in der Form
y(t) = 1 + 2t +7
2t2 +
29
6t3+ ?t4
(=: p(t)+ ?t4
)
schreiben. Wir durfen nun das Polynom p(·) in der Umgebung von t := 0 alsNaherungsfunktion fur die “wahre Losung” y(·) betrachten, und zwar ist derFehler fur t → 0 von der Großenordnung C · t4 oder, wie man ublicherweiseschreibt:
|y(t) − p(t)| = O(t4) (t → 0) . ©
Die Binomialreihe
Als weiteres Beispiel zu den Potenzreihen betrachten wir die Binomialreiheund definieren zunachst fur beliebiges α ∈ R (ja sogar α ∈ C ) und k ∈ N denBinomialkoeffizienten
(αk
)durch
(α
0
)
:= 1 ,
(α
k
)
:=α(α − 1) · . . . · (α − k + 1)
k!(k ≥ 1) .
Ist α ∈ N, so stimmt das mit der fruheren Definition uberein, und es ist(αk
)= 0 fur k > α . Ist α /∈ N, so sind alle Binomialkoeffizienten
(αk
)6= 0 .
Wir notieren noch die Identitat(
α
k + 1
)
(k + 1) =
(α
k
)
(α − k) . (14)
Wir wahlen nun ein festes α und bilden mit Hilfe der(αk
)die Binomialreihe
bα(x) :=∞∑
k=0
(α
k
)
xk = 1 + αx +α(α − 1)
2x2 + . . . .

156 2 Funktionen
Ist α ∈ N, so ist bα in Wirklichkeit ein Polynom, und es gilt nach dem bino-mischen Lehrsatz
∀x ∈ R : bα(x) = (1 + x)α .
Im weiteren sei daher α /∈ N; dann sind alle ak :=(αk
)6= 0 , und wir erhalten
mit (14):
∣∣∣∣
ak
ak+1
∣∣∣∣=
∣∣∣∣∣
(αk
)
(α
k+1
)
∣∣∣∣∣=
∣∣∣∣
k + 1
α − k
∣∣∣∣=
∣∣∣∣
1 + 1/k
α/k − 1
∣∣∣∣→ 1 (k → ∞) .
Die Binomialreihe besitzt somit den Konvergenzradius 1. Wir zeigen nun:
(2.16) Im Intervall −1 < x < 1 gilt
∞∑
k=0
(α
k
)
xk = (1 + x)α .
Die Behauptung legt nahe, die Hilfsfunktion
f(x) := bα(x) (1 + x)−α
einzufuhren. Wir mussen zeigen, daß f(x) ≡ 1 ist. Zunachst ist f(0) = 1.Weiter gilt
f ′(x) = b′α(x) (1 + x)−α + bα(x)(−α)(1 + x)−α−1
= (1 + x)−α−1((1 + x)b′α(x) − αbα(x)
).
Im Inneren des Konvergenzintervalls durfen wir die Binomialreihe gliedweisedifferenzieren und erhalten
b′α(x) =∞∑
k=1
(α
k
)
k xk−1 =∞∑
k′=0
(α
k′ + 1
)
(k′ + 1)xk′
=∞∑
k=0
(α
k
)
(α − k) xk ,
wobei wir (14) benutzt und am Schluß wieder k anstelle von k′ geschriebenhaben. Die beiden Darstellungen von b′α(x) werden nun verwendet fur dieBerechnung von
(1+x)b′α(x) =∞∑
k=0
(α
k
)
(α−k) xk +∞∑
k=0
(α
k
)
k xk =∞∑
k=0
α
(α
k
)
xk = α bα(x) .
Somit ist f ′(x) ≡ 0. Es folgt f(x) ≡ 1 und damit die Behauptung.

2.4 Folgen und Reihen 157
©8 Wir betrachten den Wert α := − 12 und erhalten zunachst
(− 12
k
)
=(− 1
2 )(− 12 − 1) · . . . · (− 1
2 − (k − 1))
k!=
(− 12 )(− 3
2 ) · . . . · (− 2k−12 )
k!
= (−1)k 1 · 3 · 5 · . . . · (2k − 1)
2k k!.
Damit ergibt sich
1√1 − t
=(1 + (−t)
)−1/2
=∞∑
k=0
(−1)k 1 · 3 · 5 · . . . · (2k − 1)
2k k!(−t)k
= 1 +1
2t +
1 · 32 · 4 t2 +
1 · 3 · 52 · 4 · 6 t3 + . . . (−1 < t < 1) .
Wir machen zur Ubung noch die Probe: Aus
1√1 − t
= 1 +1
2t +
3
8t2+ ?t3
folgt1
1 − t= (1 +
1
2t +
3
8t2+ ?t3)(1 +
1
2t +
3
8t2+ ?t3)
= 1 + (1
2+
1
2)t + (
3
8+
1
4+
3
8)t2+ ?t3
= 1 + t + t2+ ?t3 ,
wie erwartet. ©
Aufgaben
1. Fur gegebene reelle Zahlen α und β wird die Folge x. rekursiv definiertdurch
x0 := α , x1 := β , xn :=1 + xn−1
xn−2(n ≥ 2) .
(a) Bestimme die Haufungspunkte dieser Folge. (Hinweis: Mit speziellenWerten von α und β experimentieren, bis eine Gesetzmaßigkeit zumVorschein kommt.)
(b) Bestimme die Menge derjenigen Paare (α, β), die als Anfangsdatenausgeschlossen werden mussen. Figur!

158 2 Funktionen
2. (a) Berechne den Konvergenzradius der Potenzreihe
∞∑
k=0
xk
cosh(kα)
(=: f(x)
),
dabei ist α > 0 eine vorgegebene Zahl und cosh t := (et + e−t)/2 .
(b) Zeige: Die Funktion f genugt der Funktionalgleichung
f(eαx
)+ f
(e−αx
)≡ 2
1 − x.
3.©M Der Umfang U einer Ellipse mit Halbachsen a und b ist gegeben durch
U = 4a
∫ π/2
0
√
1 − ε2 sin2 t dt , ε :=
√a2 − b2
a.
Um einen fur kleine Exzentrizitat ε brauchbaren Naherungswert fur U zuerhalten, kann man U nach Potenzen von ε entwickeln:
U = c0 + c1ε + c2ε2 + c3ε
3 + c4ε4 + . . . .
Bestimme die Koeffizienten c0 bis und mit c4. Dabei kommen die folgen-den Formeln zu Hilfe:
√1 + u = 1+
u
2− u2
8+?u3 ,
∫ π/2
0
sin2 t dt =π
4,
∫ π/2
0
sin4 t dt =3π
16.
4. Es bezeichne an die Anzahl Arten, n Leute im Verhaltnis 1:2 in zweiGruppen einzuteilen. Berechne den Konvergenzradius der Potenzreihe
∞∑
n=0
anzn = 1 + 3z3 + . . . .
5. Mit Hilfe der Fibonacci-Folge
a0 := 0 , a1 := 1 ak := ak−1 + ak−2 (k ≥ 2)
wird folgende Potenzreihe gebildet:
∞∑
k=0
akzk = z + z2 + 2z3 + 3z4 + 5z5 + . . . . (∗)

2.4 Folgen und Reihen 159
Hieruber ist nacheinander folgendes zu beweisen:
(a) Die Reihe (∗) konvergiert mindestens fur |z| < 1/2 und stellt dort eineFunktion f(z) dar.
(b) Es ist f(z) =z
1 − z − z2.
(Hinweis: Zeige (1 − z − z2)f(z) ≡ z .
)
(c) Die Funktion f besitzt eine Zerlegung der Form
f(z) =A
1 − λz+
B
1 − µz
und laßt sich daher als Summe von zwei geometrischen Reihen schrei-ben. Dies liefert eine zweite Darstellung von f als Potenzreihe unddamit einen geschlossenen Ausdruck fur die k-te Fibonacci-Zahl ak.
6. (a) ©M Die Funktion f sei in einer Umgebung von x = 0 definiert undgenuge der Funktionalgleichung
f(f(x)
)≡ x
1 − x;
endlich sei f(0) = 0. Bestimme die Koeffizienten α, β, γ, δ in derEntwicklung
f(x) = α + βx + γx2 + δx3+?x4 .
(b) In Wirklichkeit ist f eine Funktion der einfachen Form x 7→ xcx + d
.
Bestimme c und d.
7. Die Folge (an)n≥0 := (0, 1, 1, 3, 5, 11, 21, . . .) entsteht mit Hilfe der Rekur-sionsformel an := an−1 + 2an−2. Bestimme den Konvergenzradius derPotenzreihe
∑∞
n=0 anzn. (Hinweis: Die Quotienten an/an+1 besitzeneinen Grenzwert ρ. Dies ist nicht zu beweisen; es genugt, ρ zu bestim-men.)
8. Stelle ein Rekursionsschema auf, das reelle Zahlen x als Input akzeptiertund eine gegen 2x konvergente Folge produziert. Dabei durfen nur dievier Grundrechenarten, also weder Logarithmen noch Fakultaten, benutztwerden. Schreibe ein Computerprogramm, das den vorgeschlagenen Al-gorithmus realisiert.
Hinweis: 2 =(
1 − 1
2
)−1
.
9. Durch die Rekursionsvorschrift
z0 := 1 , zn+1 :=1
2zn +
i
zn(n ≥ 0)
wird eine Folge von komplexen Zahlen zn = xn + iyn definiert.
(a) Berechne z0, z1, z2.
(b) Zeige mit vollstandiger Induktion: Fur alle n ≥ 0 gilt xn ≥ 0, yn ≥ 0.
(c) Die zn konvergieren mit n → ∞ gegen eine gewisse komplexe Zahl ζ(ist nicht zu beweisen). Berechne ζ.

2.5 Die Exponentialfunktion
Die Funktionalgleichung
Die Exponentialfunktion
exp z :=
∞∑
k=0
zk
k!
ist fur alle z ∈ C definiert. Den meisten Eigenschaften dieser Funktion liegtdas folgende “Additionstheorem” zugrunde:
(2.17) Fur beliebige z, w ∈ C gilt
exp(z + w) = exp z · expw .
Wir multiplizieren die beiden absolut konvergenten Reihen
exp z :=∞∑
k=0
zk
k!, expw :=
∞∑
k=0
wk
k!
miteinander und erhalten
exp z · expw =∑
j, k
1
j! k!zj wk .
Fassen wir in der Doppelsumme fur jedes r ≥ 0 die Glieder mit k + j = r zueinem Paket zusammen und summieren anschließend uber r, so ergibt sich:
. . . =∑
r=0
∑
k+j=r
1
j! k!zj wk
und nach Erweiterung mit r! :
. . . =∞∑
r=0
1
r!
(r∑
k=0
r!
(r − k)! k!zr−k wk
)
=∞∑
r=0
1
r!(z + w)r = exp(z + w) ,
wie behauptet.

2.5 Die Exponentialfunktion 161
Setzt man zur Abkurzung
exp 1 = 1 +1
1!+
1
2!+
1
3!+ . . . =: e (
.= 2.718) ,
so folgt aus (2.17) fur jedes n ∈ N :
expn = exp( 1 + 1 + . . . + 1︸ ︷︷ ︸
n
) = (exp 1)n = en ,
und durch ahnliche Uberlegungen ergibt sich weiter:
∀ p
q∈ Q : exp
p
q= q
√ep = ep/q ,
was den Namen “Exponentialfunktion” hinreichend begrundet. Es liegt nun-mehr nahe, fur beliebige z ∈ C zu definieren:
ez := exp z .
Wir verwenden in freier Weise abwechselnd beide Schreibweisen, je nachtypographischer Zweckmassigkeit.
x
e
t
x = et
1
−1 0 1
Fig. 2.5.1
Betrachten wir die Exponentialfunktion vorerst fur reelle t, so konnen wirnotieren (Fig. 2.5.1):

162 2 Funktionen
(2.18) (a) Die Exponentialfunktion ist auf R positiv und streng monotonwachsend.
(b) Fur jedes feste q ∈ N gilt:
limt→∞
et
tq= ∞ ; lim
t→−∞et = 0 .
Die Exponentialfunktion wachst also mit t → ∞ schneller als jede festePotenz von t.
(a) Wegen et ·(e−t/2
)2 ≡ 1 gilt et > 0 fur alle t ∈ R. Fur positives h isteh = 1 + h + . . . > 1 und somit
et+h − et = (eh − 1)et > 0 .
(b) Fur jedes einzelne q ∈ N gilt
et >tq+1
(q + 1)!(t > 0) ,
und hieraus folgtet
tq>
t
(q + 1)!(t > 0) .
Der betrachtete Quotient strebt daher mit t → ∞ gegen ∞ .
Die Logarithmusfunktion
Die Exponentialfunktion bildet hiernach die reelle Achse bijektiv auf die po-sitive reelle Achse R>0 ab, und es existiert die Umkehrfunktion
(exp)−1 =: log : R>0 → R ,
genannt naturlicher Logarithmus (Fig. 2.5.2). Damit gelten automatisch dieIdentitaten
∀t ∈ R : log(et
)= t , ∀x ∈ R>0 : elog x = x (1)
(siehe Beispiel 2.2.©6 )
; ferner hat man die Grenzwerte
limx→0+
log x = −∞ , limx→∞
log x = ∞ .

2.5 Die Exponentialfunktion 163
yy = log x
1 e
1
0 x45
Fig. 2.5.2
Aus der Funktionalgleichung der Exponentialfunktion(Satz (2.17)
)folgt
diejenige des Logarithmus:
(2.18) log(u · v) = log u + log v (u, v ∈ R>0) ,
die bekanntlich dem Funktionieren des Rechenschiebers und der seinerzeiti-gen Bedeutung der (Zehner-)Logarithmen furs numerische Rechnen zugrun-deliegt: Sie verwandelt die Multiplikation in die (numerisch einfachere) Ad-dition.
Mithilfe von (1) ergibt sich nacheinander
log(u · v) = log(elog u · elog v
)= log
(elog u+log v
)= log u + log v .
Betrachte ein festes a > 0. Ahnlich wie vorher exp(p/q) = ep/q beweist mannun mithilfe von (2.18):
log(ap/q
)=
p
qlog a (p ∈ Z , q ∈ N∗) ,
und mit (1) folgt:
∀ p
q∈ Q : ap/q = e
p
qlog a .
Dies legt nahe, fur beliebiges reelles x die allgemeine Potenz ax folgen-dermaßen zu definieren:
ax := ex log a (a > 0 , x ∈ R) .

164 2 Funktionen
Es gelten dann die ublichen Rechenregeln:
log(ax) = x log a ,
ax+y = ax · ay ,
(a · b)x = ax · bx ,
(ax)y
= axy .
Wahrend die Exponentialfunktion in ihrem Wachstumsverhalten starker istals jede noch so hohe Potenz t 7→ tq, ist die Logarithmusfunktion schwacherals jede noch so kleine Potenz x 7→ xα (α > 0) :
(2.19) Fur jedes feste α > 0 gilt
limx→∞
log x
xα= 0 , lim
x→0+(xα log x) = 0 .
Man hat nacheinander
limx→∞
log x
eα log x= lim
y→∞
y
eαy=
1
αlim
t→∞
t
et= 0 ;
ahnlich schließt man bei der zweiten Behauptung.
Zwei Standardgrenzwerte
Fur spatere Zwecke und zur allgemeinen Bildung berechnen wir noch zweiGrenzwerte:
(2.20)(a) limz→0
ez − 1
z= 1 .
(b) ∀x ∈ R : limn→∞
(
1 +x
n
)n
= ex ;
insbesondere gilt limn→∞
(
1 +1n
)n
= e .
(a) Aus
ez = 1 + z +z2
2!+
z3
3!+ . . .
ergibt sich fur beliebiges z 6= 0 :
ez − 1
z= 1 +
z
2!+
z2
3!+ . . . =: g(z) .

2.5 Die Exponentialfunktion 165
Hier ist g eine (fur alle z konvergente) Potenzreihe, mithin eine stetige Funk-tion, und es folgt
limz→0
ez − 1
z= lim
z→0g(z) = g(0) = 1 .
(b) Wir betrachten den Logarithmus des zu untersuchenden Ausdrucks undhaben
log(
1 +x
n
)n
= n log(
1 +x
n
)
= xlog
(1 + x
n
)− log 1
x/n.
Mitxn
=: hn ergibt sich daher
limn→∞
log(
1 +x
n
)n
= x limn→∞
log(1 + hn) − log 1
hn= x log′(1) = x ,
wobei wir zuletzt von der Ableitung der Logarithmusfunktion Gebrauch ge-macht haben.
(1 + x
n )n strebt daher gegen ex, wie behauptet.
Hyperbolische Funktionen
In den Anwendungen treten oft gewisse “symmetrische” Kombinationen vonex und e−x auf, die sogenannten hyperbolischen Funktionen. Wir beginnenmit der folgenden Bemerkung: Eine Funktion f : X y X′ heißt gerade, wenngilt:
∀x ∈ dom (f) : f(−x) = f(x) ,
und ungerade, wenn gilt:
∀x ∈ dom (f) : f(−x) = −f(x) ;
dabei wird naturlich vorausgesetzt, daß dom (f) bezuglich 0 symmetrisch ist.Die Potenzfunktionen z 7→ zk, k ∈ Z, sind gerade fur gerades k und ungeradefur ungerades k. Die Potenzreihenentwicklung einer geraden (bzw. ungera-den) Funktion im Ursprung enthalt nur Terme mit geraden (bzw. ungeraden)Exponenten.
Jede Funktion mit einem bezuglich 0 symmetrischen Definitionsbereich laßtsich in einen geraden und einen ungeraden “Anteil” zerlegen:
f(x) ≡ f(x) + f(−x)
2︸ ︷︷ ︸
gerade
+f(x) − f(−x)
2︸ ︷︷ ︸
ungerade
.

166 2 Funktionen
Fuhren wir diese Zerlegung fur die Exponentialfunktion durch (Fig. 2.5.3),so erhalten wir als geraden Anteil den hyperbolischen Cosinus
cosh x :=ex + e−x
2(x ∈ R)
und als ungeraden Anteil den hyperbolischen Sinus
sinhx :=ex − e−x
2(x ∈ R) .
Diese Funktionen sind ubers Komplexe mit den entsprechenden trigonometri-schen Funktionen verwandt und besitzen formal analoge Additionstheoremeusw. wie jene. Mit Hilfe des “Additionstheorems” ex+y = ex ·ey beweist manleicht
cosh2 x − sinh2 x ≡ 1 (hyperbolischer Pythagoras),
cosh(x + y) = cosh x cosh y + sinhx sinh y ,
sinh(x + y) = sinhx cosh y + cosh x sinh y .
y
x
y = sinh xy = cosh x
y = e−xy = ex
−1 1
1
Fig. 2.5.3
Als Differenz einer streng monoton wachsenden und einer streng monotonfallenden Funktion ist sinh streng monoton wachsend; ferner gilt
limx→±∞
sinhx = ±∞ .

2.5 Die Exponentialfunktion 167
Folglich existiert die Umkehrfunktion, genannt Areasinus:
(sinh)−1 =: arsinh : R → R .
Uberraschenderweise laßt sich arsinh durch “schon bekannte” Funktionenausdrucken. Aus y = sinhx folgt namlich nacheinander
2y = ex − e−x , e2x − 2yex − 1 = 0 , ex = y ±√
y2 + 1 .
Da jedenfalls ex > 0 ist, muß hier das obere Zeichen zutreffen, und wirerhalten x = log(y +
√
y2 + 1) ; das heißt, es gilt
arsinh y = log(y +√
y2 + 1) (y ∈ R) .
Auf dem Intervall R≥0 wachst
x 7→ cosh x =√
sinh2 x + 1
(als Zusammensetzung von wachsenden Funktionen) streng monoton von 1bis ∞ und besitzt somit daselbst eine Umkehrfunktion Areacosinus:
(cosh)−1 =: arcosh : R≥1 → R≥0 ,
die sich ebenfalls durch Logarithmen ausdrucken laßt. Man erhalt
arcosh y = log(y +√
y2 − 1) (y ≥ 1) .
Wir definieren schließlich noch den hyperbolischen Tangens (Fig. 2.5.4) durch
tanhx :=sinhx
cosh x=
ex − e−x
ex + e−x.
Aus
tanhx = 1 − 2e−2x
1 + e−2x
folgt: Der Graph des hyperbolischen Tangens nahert sich mit x → ∞ “expo-nentiell” der Asymptote y = 1. Fur die Umkehrfunktion Areatangens
(tanh)−1 =: artanh : ]−1, 1[ → R
erhalt man
artanh y =1
2log
1 + y
1 − y(−1 < y < 1) .

168 2 Funktionen
1
−1
−1 1
y
x
y = tanh x
Fig. 2.5.4
Von seinem Charakter her eignet sich der hyperbolische Tangens besonderszur Modellierung von Vorgangen, bei denen eine seit Urzeiten bestehendeSituation evolutionar in eine andere dauerhafte Situation ubergeht.
Die cis-Funktion
In Abschnitt 1.7 wurde (vorlaufig) als handliche Abkurzung die Schreibweise
cos t + i sin t =: eit
eingefuhrt. Wir mussen zum Schluß zeigen, daß das mit den jetzigen defini-tiven Vorstellungen uber die Exponentialfunktion konsistent ist; in anderenWorten: Wir mussen die sogenannte cis-Funktion
cis: t 7→ eit (t ∈ R )
(‘cis’ fur ‘cos +i sin’) untersuchen.
Da die Exponentialreihe reelle Koeffizienten besitzt, gilt fur beliebige z ∈ C :
exp z = exp z .
Ist ak = ak fur alle k ≥ 0, so folgt
∞∑
k=0
akzk =∞∑
k=0
ak zk =∞∑
k=0
akzk .
Hieraus ergibt sich fur beliebige reelle t:
∣∣eit
∣∣2
= eit · eit = eit · eit = eit · e−it = e0 = 1 ;
die Punkte eit liegen somit auf dem Einheitskreis ∂D :=
z ∈ C∣∣ |z| = 1
der komplexen Ebene. Es gilt aber noch mehr:
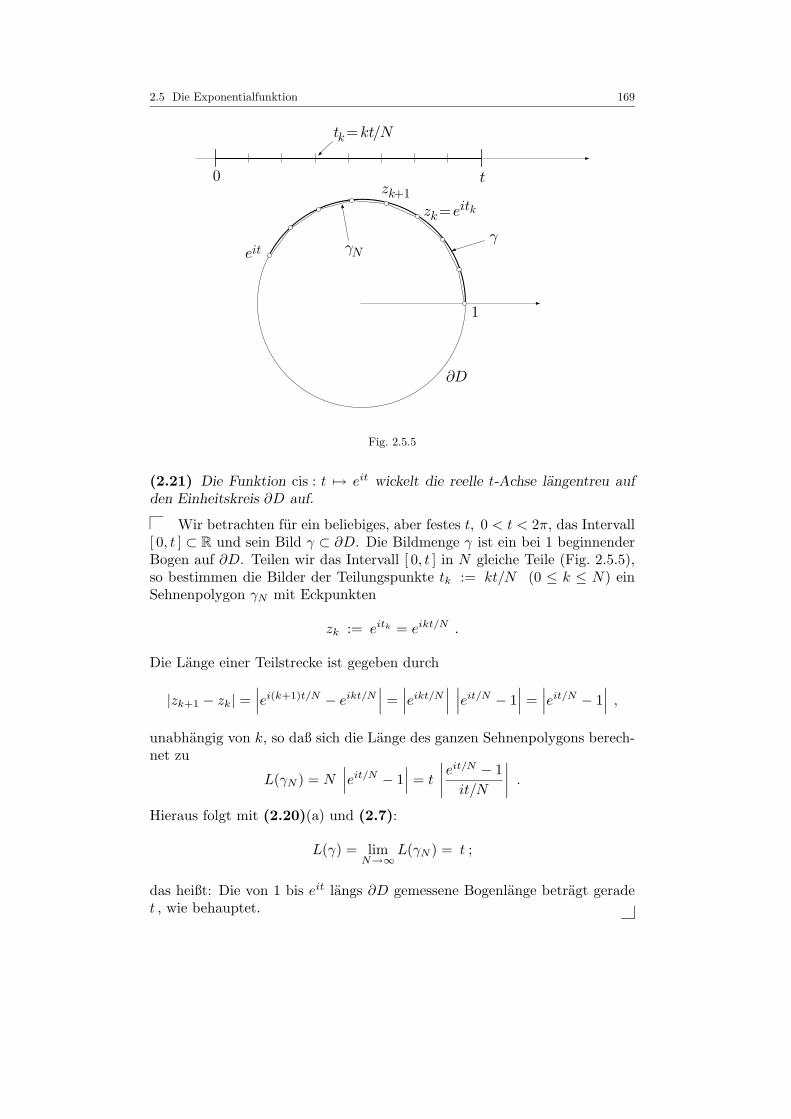
2.5 Die Exponentialfunktion 169
γγN
∂D
t0
tk = k t/N
zk = eitkzk+1
eit
1
Fig. 2.5.5
(2.21) Die Funktion cis : t 7→ eit wickelt die reelle t-Achse langentreu aufden Einheitskreis ∂D auf.
Wir betrachten fur ein beliebiges, aber festes t, 0 < t < 2π, das Intervall[ 0, t ] ⊂ R und sein Bild γ ⊂ ∂D. Die Bildmenge γ ist ein bei 1 beginnenderBogen auf ∂D. Teilen wir das Intervall [ 0, t ] in N gleiche Teile (Fig. 2.5.5),so bestimmen die Bilder der Teilungspunkte tk := kt/N (0 ≤ k ≤ N) einSehnenpolygon γN mit Eckpunkten
zk := eitk = eikt/N .
Die Lange einer Teilstrecke ist gegeben durch
|zk+1 − zk| =∣∣∣ei(k+1)t/N − eikt/N
∣∣∣ =
∣∣∣eikt/N
∣∣∣
∣∣∣eit/N − 1
∣∣∣ =
∣∣∣eit/N − 1
∣∣∣ ,
unabhangig von k, so daß sich die Lange des ganzen Sehnenpolygons berech-net zu
L(γN ) = N∣∣∣eit/N − 1
∣∣∣ = t
∣∣∣∣
eit/N − 1
it/N
∣∣∣∣
.
Hieraus folgt mit (2.20)(a) und (2.7):
L(γ) = limN→∞
L(γN ) = t ;
das heißt: Die von 1 bis eit langs ∂D gemessene Bogenlange betragt geradet , wie behauptet.

170 2 Funktionen
t
eit
cos t
sin tBogenlange = t¨
= cos t + i sin t
Fig. 2.5.6
Hiernach ist eit der Punkt auf ∂D mit dem Argument (Polarwinkel) t, alsoder Punkt cos t+i sin t (Fig. 2.5.6), in Ubereinstimmung mit unserer fruherenVereinbarung. Wir haben damit einen neuen Zugang zu den trigonometri-schen Funktionen gewonnen. Sie sind mit der Exponentialfunktion (nicht nurformal, sondern tatsachlich) verknupft durch die Eulerschen Formeln
cos t = Re (eit) =eit + e−it
2,
sin t = Im (eit) =eit − e−it
2i.
Cosinus und Sinus stellen also im wesentlichen den geraden und den ungera-den Anteil der Funktion t 7→ eit dar. Aus
eit = 1 + it +(it)2
2!+
(it)3
3!+
(it)4
4!+ . . .
ergeben sich durch Trennung von Real- und Imaginarteil die folgenden furalle t ∈ R konvergenten Potenzreihen von cos und sin :
cos t = 1 − t2
2!+
t4
4!− t6
6!+ . . . =
∞∑
j=0
(−1)j t2j
(2j)!,
sin t = t − t3
3!+
t5
5!− t7
7!+ . . . =
∞∑
j=0
(−1)j t2j+1
(2j + 1)!.

2.5 Die Exponentialfunktion 171
Aufgaben
1. Auf einem Taschenrechner stehen nur noch die Tasten 1 , = , + ,1x und x2 zur Verfugung. Berechne (mit akzeptablem Aufwand) eine
brauchbare Approximation fur e.
2.©M Es sei c :=log 22π
+ i. Dann ist
γ : t 7→ z(t) := ect (−∞ < t < ∞)
eine Kurve in der z-Ebene.
(a) Bestimme die Momentangeschwindigkeit z(t) des laufenden Punktes.
(b) Werden die Geschwindigkeitsvektoren z(t) im Ursprung angeheftet,so bilden ihre Spitzen eine neue Kurve γ (den Hodographen von γ).In welcher geometrischen Relation stehen γ und γ zueinander?
(c) Zeichne die beiden Kurven γ und γ.
3. Es seif0(x) := x , fn+1(x) := efn(x) (n ≥ 0) .
Berechne limx→−∞ f4(x).
4. Fritz macht sich hinter eine volle Literflasche Whisky seines Vaters. Ertrinkt immer wieder einen minimalen Bruchteil λ des Inhalts und fullt mitWasser nach, bis schließlich die Whiskykonzentration in der Flasche auf≤ 1/2 gesunken ist. Wieviel Liter Whisky und wieviel Liter Wasser hatFritz dabei im ganzen getrunken? Berechne die Grenzwerte fur λ → 0.
5. Produziere eine Funktion t 7→ f(t) (t > 0), die fur t → ∞ schnellerwachst als jede Potenz tn, n ≥ 0, aber langsamer als irgendwelche Expo-nentialfunktionen eλt, λ > 0.
6. Jemand berechnet e−10 (≈ 5 · 10−5) mit Hilfe der Exponentialreihe undberucksichtigt alle Glieder bis und mit 1038/38! . Wieviel signifikanteDezimalstellen erhalt sie ungefahr? (39! ≈ 2 · 1046)
7. Vergleiche das Wachstum der drei Funktionen
f(t) := t√
log t , g(t) := (log t)log t , h(t) := exp(√
t/ log t)
fur t → ∞. (Hinweis: Betrachte die Logarithmen von f , g und h.)
8. Berechne den Konvergenzradius der Potenzreihe∑∞
k=0
(1− tanh(kα)
)xk .
9. Produziere eine Funktion f : R>0 → R>0, fur die gilt
f(f(t)
)≡
√t .

172 2 Funktionen
10. (a) Bestimme die samtlichen komplexen Losungen der Gleichung
exp1 − i
z= 1 .
(b) Bestimme die kleinstmogliche Kreisscheibe um 0 ∈ C, die alle Losun-gen dieser Gleichung enthalt. Figur!
11.©M Wieviel gibt, sinngemaß, cos(i log 2) ?


















