Anlagen: Grundlagen zur Versuchsvorbereitung – LEV (Stand...
12
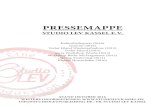
Anlagen: Grundlagen zur Versuchsvorbereitung – LEV (Stand 2013) Übersicht relevanter Fahrwiderstände Auf jedes Fahrzeug wirkt eine Kraft, welche entgegengesetzt der Fahrtrichtung, die Fortbewegung hemmt. Sie wird durch sogenannte Fahrwiderstände verursacht, welche überwunden werden müssen, um ein Fahrzeug auf eine bestimmte Geschwindigkeit zu beschleunigen und diese auch anschließend konstant halten zu können. Im Allgemeinen wird zwischen den Fahrwiderständen unterschieden, die während des Geradeauslaufs wirken und jene, die zusätzlich in Kurvenfahrten auftreten. Bei Zweirädern ist es jedoch üblich, die zusätzlichen Widerstände bei der Kurvenfahrt zu vernachlässigen. Sie fallen im Vergleich zu den auftretenden Fahrwiderständen im Geradeauslauf nur geringfügig ins Gewicht. Somit liegt der Fokus auf den Fahrwiderständen der Längsbewegung des Zweirads (Abbildung 1). Abbildung 1: Einteilung der Fahrwiderstände Es wird im Allgemeinen zwischen den stationären und den instationären Fahrwiderständen unterschieden. Die Stationären treten bei konstanter Geschwindigkeit auf und können noch weiter konkretisiert werden. Wie in Abbildung 1 zu sehen, bestehen sie aus dem Roll-, Luft- und Steigungswiderstand. Ebenso ist die Einteilung der instationären Fahrwiderstände in der Abbildung 1 dargestellt. Diese treten während der Beschleunigung des Fahrzeuges auf und können in translatorische und rotatorische Widerstände aufgeteilt werden. Alle Fahrwiderstände ergeben in ihrer Summe den gesamten Fahrwiderstand des Fahrzeugs, den der Antrieb überwinden muss, um den Vortrieb zu gewährleisten.
Transcript of Anlagen: Grundlagen zur Versuchsvorbereitung – LEV (Stand...

Anlagen: Grundlagen zur Versuchsvorbereitung – LEV (Stand 2013)
Übersicht relevanter Fahrwiderstände
Auf jedes Fahrzeug wirkt eine Kraft, welche entgegengesetzt der Fahrtrichtung, die Fortbewegung
hemmt. Sie wird durch sogenannte Fahrwiderstände verursacht, welche überwunden werden
müssen, um ein Fahrzeug auf eine bestimmte Geschwindigkeit zu beschleunigen und diese auch
anschließend konstant halten zu können. Im Allgemeinen wird zwischen den Fahrwiderständen
unterschieden, die während des Geradeauslaufs wirken und jene, die zusätzlich in Kurvenfahrten
auftreten. Bei Zweirädern ist es jedoch üblich, die zusätzlichen Widerstände bei der Kurvenfahrt zu
vernachlässigen. Sie fallen im Vergleich zu den auftretenden Fahrwiderständen im Geradeauslauf nur
geringfügig ins Gewicht. Somit liegt der Fokus auf den Fahrwiderständen der Längsbewegung des
Zweirads (Abbildung 1).
Abbildung 1: Einteilung der Fahrwiderstände
Es wird im Allgemeinen zwischen den stationären und den instationären Fahrwiderständen
unterschieden. Die Stationären treten bei konstanter Geschwindigkeit auf und können noch weiter
konkretisiert werden. Wie in Abbildung 1 zu sehen, bestehen sie aus dem Roll-, Luft- und
Steigungswiderstand. Ebenso ist die Einteilung der instationären Fahrwiderstände in der Abbildung 1
dargestellt. Diese treten während der Beschleunigung des Fahrzeuges auf und können in
translatorische und rotatorische Widerstände aufgeteilt werden. Alle Fahrwiderstände ergeben in
ihrer Summe den gesamten Fahrwiderstand des Fahrzeugs, den der Antrieb überwinden muss, um
den Vortrieb zu gewährleisten.

Rollwiderstand
Bei geringen Geschwindigkeiten überwiegt der Rollwiderstand, auch Reibungswiderstand genannt,
gegenüber den anderen stationären Fahrwiderständen. Dieser setzt sich wiederum aus mehreren
Teilwiderständen zusammen. Der überwiegende Anteil entsteht, wenn sich der Luftreifen in seiner
Aufstandsfläche unter dem Fahrzeuggewicht verformt. Neben diesen Walkwiderständen entsteht
zusätzlich in den Lagern und allen bewegten Teilen des Antriebstranges Reibung. Durch die Rotation
der Räder, etc. entstehen zusätzliche Ventilationsverluste, beispielsweise hervorgerufen durch
Luftverwirbelungen bei rotierenden Speichenrädern. Zusammengefasst wird die Kraft, verursacht
durch den Rollwiderstand, wie folgt berechnet:
(1)
Die Gesamtmasse setzt sich aus der Fahrzeugmasse und dem Gewicht des Fahrers zusammen.
Multipliziert mit der Erdbeschleunigung , erhält man die Gewichtskraft des kompletten Fahrzeugs.
Der Rollwiderstandsbeiwert enthält zusammengefasst alle auftretenden Rollwiderstände sowie
alle anderen Einflussfaktoren der Reibung. Auf befestigter ebener Fahrbahn liegt er zwischen 0,015 …
0,02 und kann während der Fahrt als konstant angenommen werden. Für eine genauere Betrachtung
müsste er in aufwendigen Versuchen ermittelt und berechnet werden. Eine einfache und hinreichend
genaue Bestimmung des Rollwiderstandsbeiwerts kann mithilfe von Schleppversuchen in der Ebene
realisiert werden. Dazu wird bei geringer konstanter Geschwindigkeit das Fahrzeug inklusive dem
Fahrer gezogen und die dafür notwendige Kraft experimentell ermittelt. Durch Umstellen der
Gleichung (1) nach Gleichung (2) ist es möglich, auf den Rollwiderstandsbeiwert zu schließen.
Vorausgesetzt, die Gesamtmasse des Fahrzeugs ist bekannt.
(2)
Luftwiderstand
Erst bei höheren Geschwindigkeiten ist der größte Anteil des Fahrwiderstands der zu überwindende
Luftwiderstand . Aus Gleichung (3) ist ersichtlich, dass mit zunehmender Geschwindigkeit der
Luftwiderstand quadratisch ansteigt.
(3)
Neben der Geschwindigkeit spielen die Luftdichte ρ sowie die Projektionsfläche und der
Luftwiderstandsbeiwert eine Rolle. Aufgrund der quadratischen Abhängigkeit des Luftwiderstands
von der Geschwindigkeit können bereits geringe Toleranzen einen großen Fehler hervorrufen.
Deshalb ist eine möglichst exakte Bestimmung der Geschwindigkeit notwendig. Ebenso muss evtl.
auftretender Gegen- bzw. Rückenwind mitberücksichtigt werden.

Steigungswiderstand
Um eine Höhendifferenz im Streckenprofil, also eine Steigung, überwinden zu können, muss jedes
Fahrzeug einen zusätzlichen Fahrwiderstand kompensieren. Der Steigungswiderstand, verursacht
durch die Hangabtriebskraft, ist nicht von der Geschwindigkeit abhängig, sondern wird allein von der
Fahrzeuggesamtmasse und dem Steigungswinkel beeinflusst.
In der Gleichung (4) ist der mathematische Zusammenhang zur Berechnung des
Steigungswiderstands dargestellt.
(4)
Die Steigung wird im Allgemeinen in Prozent angegeben und berechnet sich aus der vertikalen
Fahrbahnkomponente dividiert durch die horizontale Fahrbahnkomponente. Somit entspricht die
Steigung dem Tangens des Steigungswinkels . Abbildung 2 soll die Winkelbeziehungen und den
Sachverhalt veranschaulichen.
Abbildung 2: Winkelbeziehungen des Steigungswiderstands
Die zulässige Steigung auf deutschen Straßen liegt bei maximal 10 %. Als Sonderfall gilt für
Alpenstraßen eine maximale Steigung von 30 %. Selbst diese Steigung entspricht nur einem
Steigungswinkel von 17°. Aufgrund dieser geringen Winkelgrößen wird folgende Näherung für die
Berechnung der Steigung vereinbart:
(5)

Mit dieser Vereinfachung lässt sich der Steigungswiderstand mit folgender Gleichung (6)
berechnen.
(6)
Beschleunigungswiderstände
Zum beschleunigen eines Fahrzeugs müssen Kräfte überwunden werden. Diese Kräfte entstehen,
weil die Massenträgheiten des Fahrzeugs der Geschwindigkeitsänderung entgegenwirken. Diese
instationären Fahrwiderstände lassen sich in translatorische und rotatorische Fahrwiderstände
aufteilen. In Gleichung (7) ist der Zusammenhang zur Berechnung des translatorischen
Fahrwiderstands dargestellt.
(7)
Der translatorische Fahrwiderstand beschreibt die Widerstandskraft, welche überwunden werden
muss, um ein Fahrzeug mit einer Gesamtmasse mit einer Beschleunigung zu beschleunigen.
Die einzelnen rotatorischen Fahrwiderstände entstehen während dem Beschleunigen aller
rotierenden Massen im Fahrzeug. Zu diesen, sich drehenden Massen, gehören neben den Rädern des
Fahrzeugs auch alle Teile des Antriebstrangs. Das dazu notwendige Drehmoment müsste für jedes
Teil einzeln berechnet werden aufgrund der unterschiedlichen Massenträgheitsmomente und
Winkelbeschleunigungen. Es ist jedoch möglich, Massenträgheitsmomente, in Hinsicht auf eine
Bezugsachse, unter Berücksichtigung der unterschiedlichen Winkelbeschleunigungen,
zusammenzufassen. Das dadurch entstehende Ersatzträgheitsmoment ergibt multipliziert mit
der Ersatzwinkelbeschleunigung das Ersatzdrehmoment auf der neu definierten
Bezugsachse.
(8)
Praktischerweise sollte die neu definierte Bezugsachse auf der Hinterradachse des Zweirads liegen.
Um anschließend von dem Drehmoment auf eine Kraft schließen zu können, wird es durch den
dynamischen Hinterradradius geteilt. Somit erhält man, wie in Gleichung (9) zu sehen, den
rotatorischen Beschleunigungs-widerstand des Antriebstrangs.
(9)
Der gesamte rotatorische Beschleunigungswiderstand setzt sich aus der Summe der einzelnen
Beschleunigungswiderstände der Räder und sowie des Antriebstrangs zusammen.
(10)
Durch einsetzen aller Größen in Gleichung (10), ergibt sich für die Berechnung des rotatorischen
Beschleunigungswiderstands Gleichung (11).

(11)
Unter Berücksichtigung der dynamischen Radien der einzelnen Widerstände kann das gleiche
Bezugssystem, die Fahrbahnoberfläche, an dem die Beschleunigungswiderstände wirken
angenommen werden. Mit der einfachen allgemeinen Beziehung zwischen Winkelbeschleunigung
und translatorischer Beschleunigung aus Gleichung (12) kann Gleichung (11) zu Gleichung (13)
vereinfacht werden.
(12)
(13)
Diese Vereinfachung erlaubt es den translatorischen Beschleunigungs-widerstand mit dem
Rotatorischen zu addieren, um den gesamten Beschleunigungswiderstand zu erhalten. Die
Gleichung (14) zeigt die aufgestellte Formel.
(14)
Durch Einsetzen der einzelnen Formeln kann der Beschleunigungswiderstand wie in Gleichung (15)
zu sehen berechnet werden.
(15)

Auswirkung der Fahrwiderstände
Nachdem alle relevanten Fahrwiderstände bekannt sind, kann die benötige Antriebsleistung und die
daraus schließende Motorleistung definiert werden. Bei geradliniger Fahrt mit konstanter
Geschwindigkeit muss der Motor am Hinterrad eine Kraft aufbringen, welche der Summe aller
Fahrwiderstände entspricht.
(16)
Der Fahrwiderstand aus Gleichung (16) ist aufgrund des Luftwiderstands
geschwindigkeitsabhängig und kann, wie in Abbildung 3 zusehen, grafisch dargestellt werden. Bei
geringen Geschwindigkeiten überwiegt der über den ganzen Bereich konstante Rollwiderstand .
Erst mit zunehmender Geschwindigkeit dominiert, aufgrund des quadratischen Einflusses, der
Luftwiderstand. Der geschwindigkeitsunabhängige Steigungswiderstand wird als konstante Größe zu
den wirkenden Fahrwiderständen aufaddiert.
Abbildung 3: Beispiel-Fahrwiderstandsdiagramm
Mithilfe des dynamischen Hinterradradius kann aus dem am Antriebsrad verfügbaren
Drehmoment die Zugkraft den Fahrzeugs in Gleichung (17) berechnet werden.
(17)
Die Zugkraft eines Fahrzeugs wird in erster Linie zur Überwindung der Fahrwiderstände benötigt.
Der Zugkraftüberschuss kann für Bergfahrten bzw. zur Beschleunigung des Fahrzeugs verwendet

werden. Ein typischer Elektroantrieb leistet zu Beginn sein maximales Drehmoment, welches mit
steigender Drehzahl stetig absinkt. Die daraus folgende Zugkraftkennlinie für ein elektrisches Zweirad
ist zusammen mit dem Fahrwiderstand in Abbildung 4 exemplarisch dargestellt.
Abbildung 4: Zugkraftdiagramm mit eingetragenen Fahrwiderständen
Mit zunehmender Geschwindigkeit nähern sich Zugkraftkennlinie und Fahrwiderstand einander an
(Abbildung 4). Im Schnittpunkt der Kurven hat das Fahrzeug seine Höchstgeschwindigkeit erreicht. Es
stehen keine Drehmomentreserven mehr zur Verfügung, um es weiter zu beschleunigen.
In der Regel weicht das aufgebrachte Motordrehmoment von dem am Antriebsrad abrufbaren
Drehmoment ab. Im Falle einer verbauten Getriebestufe zwischen Motor und Antriebsrad
findet eine, durch das Übersetzungsverhältnisses bestimmte, Drehmomentwandlung statt.
Radnabenmotoren stellen mit einem Übersetzungsverhältnis von 1:1 eine Ausnahme dar. Die in
jedem Fall auftretenden mechanischen Antriebsverluste setzen sich aus allen zwischen Motorwelle
und Antriebsrad auftretenden Reibungswiderständen zusammen. Aufgrund der fehlenden
Getriebestufe entstehen bei Radnabenmotoren lediglich Lagerreibungsverluste. Dadurch haben sie
erwartungsgemäß die geringstmöglichen Antriebsverluste. Das Motordrehmoment lässt sich,
unter Berücksichtigung des Übersetzungsverhältnisses und Antriebwirkungsgrads , mithilf der
Gleichung (18) berechnen.
(18)
Die Motorleistung ist von dem Motordrehmoment und der dazugehörigen
Motordrehzahl abhängig. Sie lässt sich durch die einfache Beziehung aus Gleichung (19)
berechnen.
(19)

Analog verhält sich die Radleistung in Gleichung (20), welche sich direkt mit der
Raddrehzahl berechnen lässt oder über das Übersetzungsverhältnis mithilfe der
Motordrehzahl .
(20)
Vergleich zwischen E-Antrieb und Verbrennungskraftmaschine
Eine Verbrennungskraftmaschine (VKM) weist prinzipbedingt ein Grundlegen anderes Verhalten auf
als ein Elektromotor. Sie benötigen eine Mindestdrehzahl, um genügend Drehmoment zur
Eigenerhaltung aufbringen zu können (Standgas). Ebenso baut sich das abrufbare Drehmoment erst
mit steigender Drehzahl auf. Aus diesen Gründen benötigen Fahrzeuge mit Verbrennungsmotor eine
Kupplung und eine mehrgängige Getriebeübersetzung. Ein exemplarisches Zugkraftdiagramm für
sechs Getriebestufen ist auf der rechten Seite in Abbildung 5 zusammen mit den wirkenden
Fahrwiderständen dargestellt.
Abbildung 5: Zugkraftdiagramm E-Fahrzeug (links) und VKM
Für einen Beschleunigungsvorgang über alle Getriebestufen beschreibt das Zugkraftdiagramm eines
Fahrzeugs mit VKM im Idealfall eine fallende progressive Kurve. Auf der linken Seite in Abbildung 5 ist

zum direkten Vergleich das Zugkraftdiagramm eines elektrisch betriebenen Fahrzeugs dargestellt.
Wie zu erkennen ist, beschreibt der Verlauf des E-Antriebs das ideale Verhalten einer Antriebseinheit
mit VKM. Aus diesem Grund sind Elektromotoren bestens für den Einsatz als Fahrzeugantriebe
geeignet. Bei richtiger Dimensionierung, fallen zusätzlich Verschleißteile wie Getriebe und Kupplung
zur Kraftübertragung weg.
Die spezifische Zugkraft
Um das Beschleunigungsvermögen der Fahrzeuge vergleichen zu können reicht es nicht aus die
Leistungs- bzw. Drehmomentverläufe übereinander zu legen. Hierfür muss sich der spezifischen
Zugkraft bedient werden, welche die absolute Zugkraft des Antriebs auf die Fahrzeugmasse bezieht.
Somit ergibt sich ein Prozentwert der das Beschleunigungsvermögen des gesamten Fahrzeugs incl.
Fahrer bescheibt und es ermöglicht Fahrzeuge untereinander zu vergleichen. Aufgrund der einfachen
Normierung entspricht der grafische Verlauf den der absoluten Zugkraft. In der Abbildung 6 ist die
spezifische Zugkraft exemplarisch dargestellt.
Abbildung 6: spezifische Zugkraft
Um eine Vorstellung der Größenordnung zu bekommen soll folgendes Beispiel dienen:
Ein Fahrzeug mit einer spez. Zugkraft von 100 % beschleunigt mit exakt 1 g, vorausgesetzt die Reifen
besitzen soviel Traktion. Der Fahrer wird also mit der einfachen Erdbeschleunigung von 9,81 m/s²
beschleunigt.

Rollenleistungsprüfstand: Funktion und Messmethodik
Ein Rollenleistungsprüfstand ist eine stationäre Prüfvorrichtung für motorbetriebene Fahrzeuge. In
erster Linie dient er zur Erfassung der Fahrleistungen eines zwei-, drei- oder vierrädrigen
Kraftfahrzeugs. Der Fokus liegt jedoch auf der Prüfung von motorisierten Zweirädern mit
Heckantrieb. Diese Fahrzeugkategorie wird standardisiert auf einem Prüfstand mit nur einer Rolle
getestet. Sie ist über eine Welle im Unterbau drehend gelagert, wie in Abbildung 7 zu sehen ist.
Darauf wird das Antriebsrad des Prüffahrzeugs gesetzt, um die Rolle antreiben zu können. Zur
Stabilisierung dient eine spezielle Halterung, in der das Vorderrad fixiert wird.
Abbildung 7: Rollenleistungsprüfstand
Dieser Prüfstandstyp arbeitet nach dem Trägheitsprinzip zur Messung der Fahrleistungen. Dabei
wirkt die Massenträgheit der Rolle in Form eines Bremsmoments dem beschleunigenden Fahrzeug
entgegen. Der dadurch generierte künstliche Fahrwiderstand muss vom Antrieb überwunden
werden, um eine Geschwindigkeitszunahme ausüben zu können.
Die Berechnung der Fahrleistungen des Zweirads kann indirekt über die Dynamik der Rolle erfolgen.
Für eine Drehzahländerung der Rolle muss ihre Massenträgheit durch ein Drehmoment
überwunden werden. Vereinfacht lässt sich die Trägheit eines Vollzylinders wie in Gleichung (1)
berechnen.

(1)
Aufgrund der statischen Masse und des festen Radius eines Metallzylinders ist dessen
Massenträgheit als konstant anzunehmen. Dieser Sachverhalt kann auch auf die Massenträgheit
der Prüfstandsrolle übertragen werden. Somit ist laut Gleichung (2) die Winkelbeschleunigung die
einzige Variable zur Bestimmung des Drehmoments .
(2)
Als Analogie ist der translatorische Beschleunigungswiderstand zu nennen. Die
Winkelbeschleunigung in Gleichung (3) steht für eine Winkelgeschwindigkeitsänderung
innerhalb einer bestimmten Zeit .
(3)
Zusammengefasst bedeutet dies für die Fahrleistung, umso schneller die Rolle beschleunigt wird,
desto größer ist das Drehmoment, welches der Antrieb des Fahrzeugs aufbringen muss.
Die Leistung wird wie in Gleichung (4) durch Multiplikation von Drehmoment und momentaner
Winkelgeschwindigkeit berechnet.
(4)
Die daraus bestimmbaren Fahrleistungen beziehen sich auf die Radleistung des Fahrzeugs. Der
entstehende Schlupf zwischen Rad und Rolle wird im Allgemeinen vernachlässigt, aufgrund der
geringen Auswirkung in Relation zu dem damit verbundenen hohen messtechnischen Aufwand.
Zur Realisierung einer Leistungsmessung mit diesem Systemaufbau wird lediglich ein Drehzahlsensor
benötigt. Aus der gemessenen Rollendrehzahl können softwareseitig, mithilfe der Zeitmessung, das
Drehmoment und die Leistung eines Fahrzeugs, wie beschrieben, bestimmt werden.

Die Leistungs-/Drehmomentkennlinie
Wie in der Abbildung 8 zu sehen ist, wird im Allgemeinen das Drehmoment zusammen mit der
Leistung in einem Graphen abgebildet. Die horizontale Achse besteht wahlweise aus Motor-,
Rollendrehzahl oder Geschwindigkeit. Die Kennlinien geben Auskunft über das maximal mögliche
Drehmoment und der maximalen Leistung in Abhängigkeit der Drehzahl. Neben den Maximalwerten
geben die Messungen auch Aufschluss über die Leistungsentfaltung innerhalb des gesamten
Drehzahlbandes des Antriebstrangs. Somit können subjektive Eindrücke messtechnisch erfasst und
ausgewertet werden.
Abbildung 8: repräsentative Drehzahl-/Drehmomentkennlinie eines E-Rollers