Autonome Automobile – Wer steuert das Fahrzeug der Zukunft? · 15 Jahre Adaptive Cruise Control...
53
Autonome Automobile – Wer steuert das Fahrzeug der Zukunft? Prof. Dr.-Ing Markus Maurer, Institut für Regelungstechnik, 21 Mai 2015 21. Mai 2015
Transcript of Autonome Automobile – Wer steuert das Fahrzeug der Zukunft? · 15 Jahre Adaptive Cruise Control...

Autonome Automobile –Wer steuert das Fahrzeug der Zukunft?Prof. Dr.-Ing Markus Maurer, Institut für Regelungstechnik,
21 Mai 201521. Mai 2015

Autonome Automobile – Wer steuert das Fahrzeug der Zukunft?
Was ist autonomes Fahren?Forschung und Entwicklung seit 1993 für
autonomes Fahren und Fahrerassistenz – eine persönliche BilanzMotivatorenMotivatorenHandlungsfelder auf dem Weg zum autonomen Fahren (Auswahl)Persönliche PrognosenPersönliche Prognosen
21. Mai 2015 Seite 2

WAS IST AUTONOMES FAHREN?
21. Mai 2015 Seite 3

Was ist autonomes Fahren?
© Hessen Mobil, Straßen- und Verkehrsmanagement© TU Braunschweig
21. Mai 2015 Seite 4
Automobil
„Auto- [zu griech. autòs]: bedeutet ... selbst, persönlich,
eigen“ (Duden:1999) „-mobil [zu lat. mobilis = beweglich]“
(Duden:1999)
21. Mai 2015 Seite 5
Autonomie bei Immanuel Kant: „Selbstbestimmung im Rahmen eines übergeordneten (Sitten) Gesetzes“ (Feil 1987)übergeordneten (Sitten)-Gesetzes“ (Feil, 1987), das in diesem Fall der Mensch vorgibt.
Vollautomatisiertes Fahren (nach BASt 2012)ÜDas Fahrzeug fährt selbst ohne menschliche Überwachung.
Bei Degradation der Leistungsfähigkeit überführt sich das Fahrzeug selbstständig „in den risikominimalen Systemzustand“.
21. Mai 2015 Seite 6
4 Use-Cases
A tobahnpilot Autobahnpilot Autonomes Valet-Parken Vollautomat (mit Verfügbarkeitsfahrer) Vehicle-on-Demand
Illustration des autonomen Fahrens
21. Mai 2015 Seite 7

Was ist autonomes Fahren?
© Hessen Mobil, Straßen- und Verkehrsmanagement© TU Braunschweig
Teilautomatisiert: Vollautomatisiert:Menschlicher Sicherheitsfahrer ohne menschliche Überwachung
21. Mai 2015 Seite 8

Historie und Stand der Technik: Automatisiertes Fahren, FAS
Three Decades of Driver Assistance Systems: R i d F t P tiReview and Future PerspectivesK. Bengler, K. Dietmayer, B. Färber, M. Maurer, C. Stiller, H. Winner2014; Intelligent Transportation Systems Magazine, IEEE, Band 6; http://uni-das.de/documents/BenglerDietmayerFarberMaurerStillerWinner2014ITSM.PDF
Autonomes FahrenAutonomes FahrenR. Matthaei, A. Reschka, J. Rieken, F. Dierkes, S. Ulbrich, T. Winkle, M. MaurerIn Handbuch FahrerassistenzsystemeIn Handbuch Fahrerassistenzsysteme,
H. Winner et al. S. 1139-1165, Springer 2015
21. Mai 2015 Seite 9
Autonomes Fahren im Film
F. Kröger: Das automatisierte Fahren im gesellschaftsgeschichtlichen und kulturwissenschaftlichen Kontextgesellschaftsgeschichtlichen und kulturwissenschaftlichen Kontext
„Neben das Phantasma des selbst lenkenden Menschen tritt deshalb schon früh der Traum des sich selbst steuernden Autos, das uns ohne Unfall zum gewünschten Ziel bringt. Erstaunlich ist, dass die Realisierung dieser Wunschphantasie seit fast 100 J h i 20 J h tf t bli b i t (W t100 Jahren immer 20 Jahre entfernt geblieben ist (Wetmore2003, S. 14).“
„Damit ist das fahrerlose Auto in der Realität angekommen. Lange Zeit inspirierte die Forschung den Film, nun scheint es umgekehrt zu sein: Der Film dient Forschungsteams als Referenz: …“
21. Mai 2015 Seite 10

FORSCHUNG UND ENTWICKLUNG SEIT 1993 FÜR AUTONOMES FAHREN UND FAHRERASSISTENZ –AUTONOMES FAHREN UND FAHRERASSISTENZ –EINE PERSÖNLICHE BILANZ
21. Mai 2015 Seite 11

Bordautonomes Fahren 1993-1999
• Langstreckenfahrt von Neubiberg nach
Odense (Dänemark, November 1995):
95 Prozent der experimentell zurückgelegten
n
Strecke mit automatischer Quer- und
Längsführung (1678 km von 1758 km)B
unde
sweh
r Mün
chen
• Überwiegend auf Autobahnen
• Längster zusammenhängender Abschnitt
© U
nive
rsitä
t der
B
66,4km
• Spurwechsel vom Menschen eingeleitet, vom g
Fahrzeug ausgeführtnach Maurer (2000)
21. Mai 2015 Seite 12
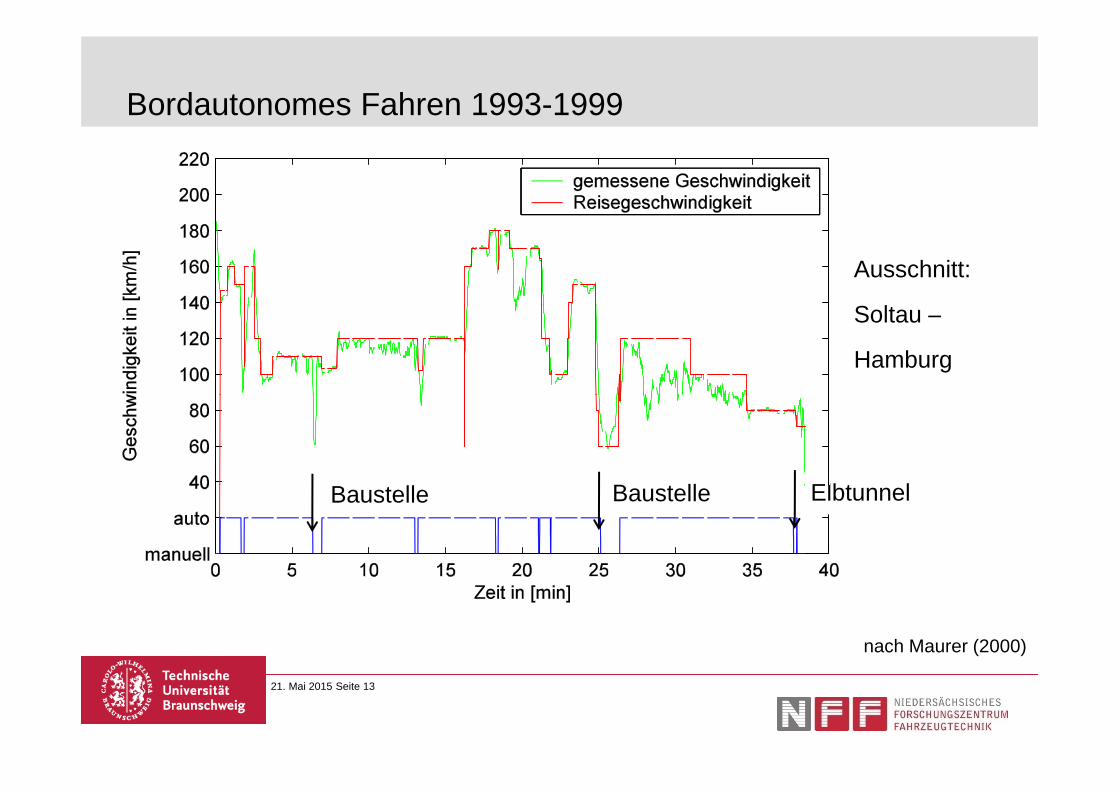
Bordautonomes Fahren 1993-1999
Ausschnitt:
S ltSoltau –
Hamburg
B t ll Elbt lBaustelle Baustelle Elbtunnel
nach Maurer (2000)
21. Mai 2015 Seite 13

Bordautonomes Fahren 1993-1999
Ausschnitt: Soltau HamburgAusschnitt: Soltau – Hamburg
• Autonomes Fahren bedeutete in den• Autonomes Fahren bedeutete in den
1990er Jahren „bordautonomes“
FahrenFahren
• Der Fahrer war als trainierter(!)• Der Fahrer war als trainierter(!)
Überwacher unverzichtbar.
nach Maurer (2000)
21. Mai 2015 Seite 14

Bordautonomes Fahren 1993-1999
Ausschnitt: Soltau – Hamburg
• In nichtmodellierten Umgebungen
funktioniert(e) die
Fahrspurerkennung nicht mehr.
• Für den trainierten Überwacher
genügt „graceful degradation“.Baustelle
nach Maurer (2000)
21. Mai 2015 Seite 15

Bordautonomes Fahren 1993-1999
automatische Fahrtmit 180 km/h Ausschnitt: Soltau – Hamburg
• Die Überwachungsaufgabe bei
hohen Geschwindigkeiten ist
Schwerstarbeit.
• Was ist der sichere Zustand bei
autonomen
Hochgeschwindigkeitsfahrten?
• Wie kann er sicher erreicht
werden?
nach Maurer (2000)
21. Mai 2015 Seite 16

Automatische Notbremse 2000-2007
Aud
i AG
Funktionsdefinition:
© A
Ein Bremseingriff mit maximaler Verzögerung wird ausgelöst, wenn ein Unfall fahrphysikalisch nicht mehr zu verhindern ist.
21. Mai 2015 Seite 17

Automatische Notbremse 2000-2007
Systembeschreibung:„Eine Notbremsung, d.h.
• Die ANB ist ein autonom
intervenierendes „ g,Bremseingriff mit max. Verzögerung, wird dann
l t i
Fahrerassistenzsystem.
veranlasst, wenn ein Unfall fahrphysikalisch nicht mehr zu verhindern
• Signifikanter Kundennutzen ist
Grundvoraussetzung, dass der Aufwand
Gist. und das damit verbundene Risiko
verhältnismäßig erscheinen.
© A
udi A
G
21. Mai 2015 Seite 18

Automatische Notbremse 2000-2007
• Es gibt derzeit keinen gesellschaftlichen
Konsens, wann eine ANB sicher genug
ist.
• Homann (2002, 2005) skizziert, wann eine
ANB trotz technischer Unzulänglichkeiten
ethisch vertretbar eingesetzt werden
kann.
• Die Absicherung einer ANB ist technisch
© A
udi A
G
und kommerziell herausfordernd.
©
21. Mai 2015 Seite 19
15 Jahre Adaptive Cruise Control im Serieneinsatz
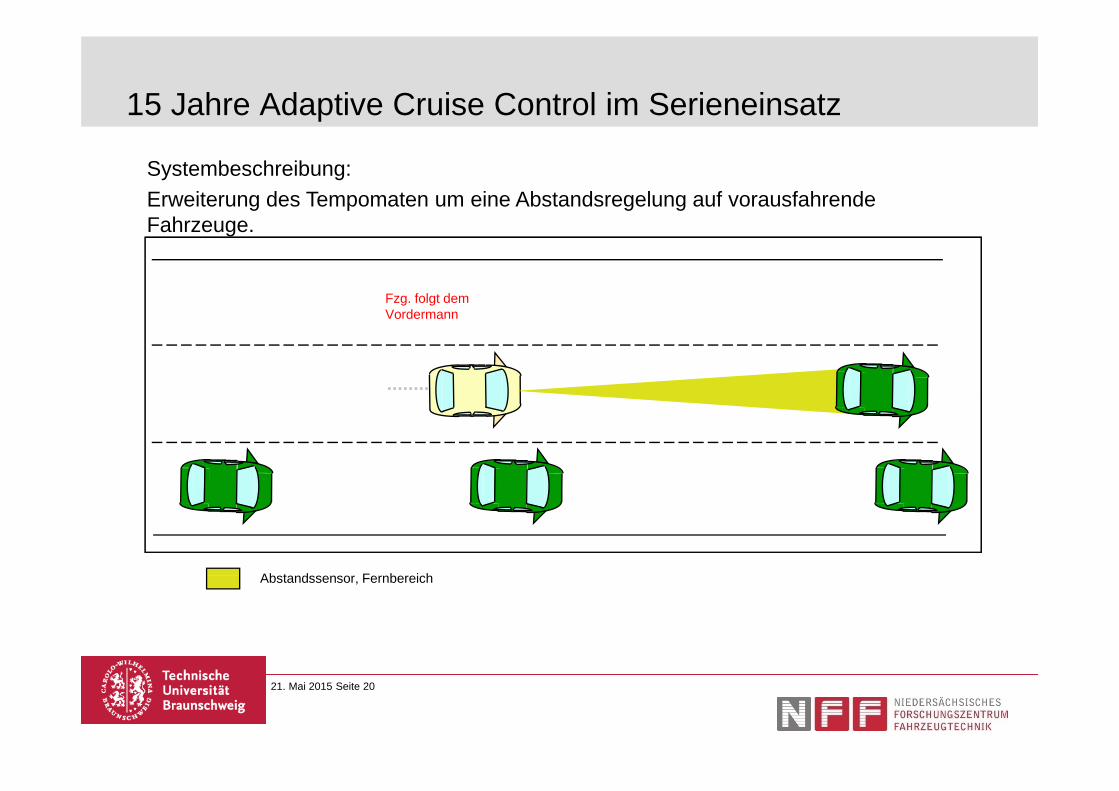
Systembeschreibung:Erweiterung des Tempomaten um eine Abstandsregelung auf vorausfahrende Fahrzeuge.
Fzg. folgt demVordermann
Ab t d F b i hAbstandssensor, Fernbereich
21. Mai 2015 Seite 20

15 Jahre Adaptive Cruise Control im Serieneinsatz
Ob ACC St &G i h l b i t• Ob ACC Stop&Go sicher erlernbar ist,
hängt von einer sorgfältigen
F k i l bFunktionsauslegung ab.
(Schmitt, 2006; Neukum, 2008)
• Wird die Fahraufgabe zu stark
automatisiert, zieht sich der Fahrer aus
G der Fahraufgabe zurück (Bainbridge,
1983; Buld, 2005)©
Aud
i AG
21. Mai 2015 Seite 21

15 Jahre Adaptive Cruise Control im SerieneinsatzInitial: Zurückhaltung der Kunden
• Viele Autofahrer schätzen am Autofahren gerade ihre
eigenen Einflussmöglichkeiten auf die
„Erlebnismaschine“ Fahrzeug. „… durch die Art wie ich
es fahre…, kann ich meine individuelle Freiheit, Mobilität © A
udi A
G
und Autonomie genießen und mich narzisstisch an
meiner Geschicklichkeit erfreuen“
(Karmasin, 2008).
• Der Mensch will motorisch tätig sein (Krüger, 2008).
21. Mai 2015 Seite 22
15 Jahre Adaptive Cruise Control im Serieneinsatz
Frage im Plenum: Hypothese:
Für welchen Kundennutzen steht ACC? „Entlastung auf Autobahnen“
© A
udi A
G©
Wohin stellen Sie den rechten Fuß?
21. Mai 2015 Seite 23

15 Jahre Adaptive Cruise Control im Serieneinsatz
Hypothese:
„Entlastung auf Autobahnen“Theorie in der Psychologie:
• “unsere Motivation ziele darauf ab eing • unsere Motivation ziele darauf ab, ein
optimales, vermutlich mittleres
Aktivierungsniveau aufrechtzuerhalten“Aktivierungsniveau aufrechtzuerhalten
• “wenn man zu stark oder zu wenig
aktiviert ist wird man dazu motiviertaktiviert ist, wird man dazu motiviert,
seine Situation zu verändern, bis das
Aktivierungsniveau in den normalen
Yerkes-Dodson-Law (1908):
Leistungsfähigkeit über
Aktivierungsniveau in den normalen
Bereich zurückkehrt”nach Bourne, Ekstrand. Einführung in die
Leistungsfähigkeit über arousal
Psychologie, 2001.
arousal – Aktivierung, Erregung21. Mai 2015 Seite 24

Stadtpilot: „teilautomatisiertes“ Fahren in BS (seit 2008)
Ergebnissex
Ergebnisse
• „teilautomatisiertes“ Fahren auf dem Stadtring in BraunschweigStadtring in Braunschweig (seit 2010)
• Öffentliche Demonstrationen im Stadtverkehr (seit 2010)
• Direkte Kommunikation mit Ampeln; Reaktion auf Ampeln
• Film: 11.3.2012, „Auto mit Autopilot“©TU Braunschweig
21. Mai 2015 Seite 25

© A
udi A
G
MOTIVATOREN
21. Mai 2015 Seite 26

“Motorized road transport …resulting Jährliche Verkehrstote in Deutschland p gin more than 1.5 million deaths … annually.(Weltbank 2015)
http://siteresources.worldbank.org/INTTOPGLOROASAF/Resources/IHME_T4H_FINAL_TO_WORLD BANK-compressed pdfORLD_BANK compressed.pdf
Zahlen nach Bundesanstalt für Straßenwesen (BAST)
21. Mai 2015 Seite 27
für Straßenwesen (BAST)

Assistenzbedarf des Fahrers
temporär:Hypothese:
• Stau
• Medikamente
„Assistenzbedarf des Fahrers“
• Müdigkeit
• Unaufmerksamkeit
kontinuierlich:
• Nachlassen der Sinne
• Erkrankungend. Muskulaturd Skelettsd. Skeletts@TU Braunschweig
21. Mai 2015 Seite 28

Assistenzbedarf des Fahrers
Hypothese: Autonome Fahrfähigkeiten eröffnen „Assistenzbedarf des Fahrers“ neue Assistenzchancen für die
individuelle Mobilität
Mittelfristig:
Das Fahrzeug als „intelligentes
Werkzeug“
Langfristig:
Cyborg, Verschmelzung von Mensch
und Roboter@TU Braunschweig
21. Mai 2015 Seite 29

Neue Fahrzeugkonzepte
http://blog.cebit.de/wp-content/uploads/2014/12/Google-Self-Driving-Car.jpg http://www.zdnet.de/wp-content/uploads/2015/01/f_015_luxury_in_motion.jpg
21. Mai 2015 Seite 30
Rationalisierungsaspekte
B f (2012 2016)
© Hessen Mobil, Straßen- und Verkehrsmanagement
z.B. afas (2012-2016)
21. Mai 2015 Seite 31

Verkehrs- und Stadtplanung, neue Mobilitätskonzepte
S. Beiker (Stanford University)R Cyganski (DLR VF)R. Cyganski (DLR-VF) H. Flämig (TU Hamburg-Harburg)E. Fraedrich (HU Berlin)( )B. Friedrich (TU Braunschweig)D. Heinrichs (DLR-VF)B. Lenz (DLR-VF, HU Berlin)M. Pavone (Stanford University)P Wagner (DLR TS)P. Wagner (DLR-TS)
21. Mai 2015 Seite 32

Stif
tung
/Oes
terg
aard
© D
aim
ler u
nd B
enz
S
HANDLUNGSFELDER AUF DEM WEG ZUM AUTONOMEN FAHREN
21. Mai 2015 Seite 33

Handlungsfelder: Maschinelle Wahrnehmung (der Umwelt)
“but machine cognition and situational awareness are still in th i i f T i th i ifi t itheir infancy. To improve them, significant progress is required in symbolic scene classification, e.g. object recognition under dynamic conditions, as well as in contextual scene understanding”
Film u. Softwarecontextual scene understanding
Three Decades of Driver Assistance Systems: R i d F t P ti
Von Jens Rieken(2015)
Review and Future PerspectivesK. Bengler, K. Dietmayer, B. Färber, M. Maurer, C. Stiller, H. Winner2014; Intelligent Transportation Systems Magazine, IEEE, Band 6; http://uni-das.de/documents/BenglerDietmayerFarberg yMaurerStillerWinner2014ITSM.PDF
21. Mai 2015 Seite 34

Handlungsfelder: Maschinelle Wahrnehmung (des Fahrzeugs)
• Automatisieren der Überwachungsaufgabe des Fahrers
• Repräsentation und Wahrnehmung der eigenen Fähigkeiten(z.B. Maurer, 2000;
Stif
tung
/Oes
terg
aard
(z.B. Maurer, 2000; Bergmiller 2015)
• Selbstdiagnose von Fehlern
© D
aim
ler u
nd B
enz
S
• Degradation in den sicheren Zustand• Automatische Umkonfiguration im
FehlerfalleFehlerfalle
21. Mai 2015 Seite 35

Handlungsfelder: Maschinelles Verhalten
Wertebasierte Verhaltensentscheidung
- Grundsätzliche Frage in der Robotik:Nach welchen Wertesystemen verhalten sich Roboter?Nach welchen Wertesystemen verhalten sich Roboter?
- Frühe Zusammenfassung von Wildermuth (2011) mit Beispielen ausV k h Militä M di i t h ik d Wi t h ftVerkehrs-, Militär-, Medizintechnik und Wirtschaft (Moral in Silizium)
- Auflösen von Zielkonflikten: z.B. Verletzen von Regeln im Gefahrenfall
- Folgenabschätzung der eigenen Handlung (Notbremse auf Querverkehr)Querverkehr)
- Selten aber instruktiv: Dilemmasituationen (Trolley Car Problem)
21. Mai 2015 Seite 36
Handlungsfelder: Maschinelles Verhalten
Junges Forschungsthema: Kooperation
- In Verbindung mit automatisiertem Fahren eingeschränktes Begriffsverständnis von Kooperation:eingeschränktes Begriffsverständnis von Kooperation:impliziert Kommunikation per Funk mit anderen Verkehrsteilnehmern oder InfrastrukturT h i h k f ht K ti h- Technisch kaum erforscht: Kooperation ohne Funkkontakt!Für Mensch alltäglich in der Stadt
Neue Forschungsvorhaben:DFG SPP BMWi-FörderprojektKooperative interaktive FahrzeugeStart: 2015
BMWi Förderprojekt Kooperatives Hochautomatisiertes Fahrenbeantragt
21. Mai 2015 Seite 37
Handlungsfelder: Datensicherheit
K. Rannenberg
Wäh d l F h h i h i h„Während also autonomes Fahren theoretisch nicht zu mehr Datenschutzproblemen führen muss, gibt es eine realistische Bedrohung, dass in der Praxis genau das passiert, wenn Entwurf und Architektur der Systeme Datenschutzprobleme nicht sorgfältig verhindern.Daher ist ein Privacy-by-Design-Ansatz für autonomesDaher ist ein Privacy-by-Design-Ansatz für autonomes Fahren und die einschlägigenSzenarien nötig.“
21. Mai 2015 Seite 38

Handlungsfelder: Funktionale Sicherheit
Wie sicher müssen autonome Fahrzeuge sein, damit sie in der Gesellschaft akzeptiert werden? (Maurer 2013)akzeptiert werden? (Maurer, 2013)
Wie lässt sich das zu definierende Sicherheitsniveau nachweisen?
W l h K t M th d dWelche Konzepte, Methoden und Prozesse sind erforderlich, um das zu definierende Sicherheitsniveau zu erreichen?
21. Mai 2015 Seite 39

Handlungsfelder: Testen
„…dass aktuelle Testkonzepte nicht geeignet sind, umdas neue System des autonomen Fahrens abzusichern.D F th lt kt ll T tk tDas Festhalten an aktuellen Testkonzeptenwürde zu einem ökonomisch nicht vertretbaren Aufwand führen und zur Freigabefalle für das autonome Fahren
“werden.“W. Wachenfeld, H. Winner
Aktuell verschiedene Anträge für öffentlich geförderte Projekte zur Absicherung vom hochautomatisierten und vollautomatisierten Fahren.
21. Mai 2015 Seite 40

Handlungsfelder: Akzeptanz und Risiko
Gesellschaftliche Risikokonstellation für autonomes Fahren – Analyse, Einordnung und BewertungA GrunwaldA. Grunwald „[…] nichts ist massenmedial verdächtiger, als zu behaupten: Risiken gibt es nicht, und wir haben alles unter Kontrolle Sorgen und Fragen müssen ernstKontrolle. Sorgen und Fragen müssen ernst genommen werden […]. Für all dies ist frühzeitige und offene Kommunikation […] wichtig, […] auch im Sinne einer partizipativen Technikgestaltung ”
A.GrunwaldLeiter des Büros für einer partizipativen Technikgestaltung.
„Eine Risikofokussierung würde daher vermutlich am Kern d H f d b i füh t h id d
Technikfolgen-Abschätzung beim Deutschen Bundestag (TAB)der Herausforderung vorbei führen: entscheidend
scheinen eher die Nutzenerwartungen zu sein.”(TAB)Professor für Technikphilosophie am KIT
21. Mai 2015 Seite 41

Handlungsfelder: Komplexität
Methoden zur Beherrschung von Komplexität
• Requirements EngineeringRequirements Engineering• Entwurf von Architekturen• Simulation und Test von
Fahrzeugeigenschaften in derEntwicklungsphase
• Entwicklung von Prozessengzum Systementwurf Manager Magazin: Car Wars 11/2014
21. Mai 2015 Seite 42
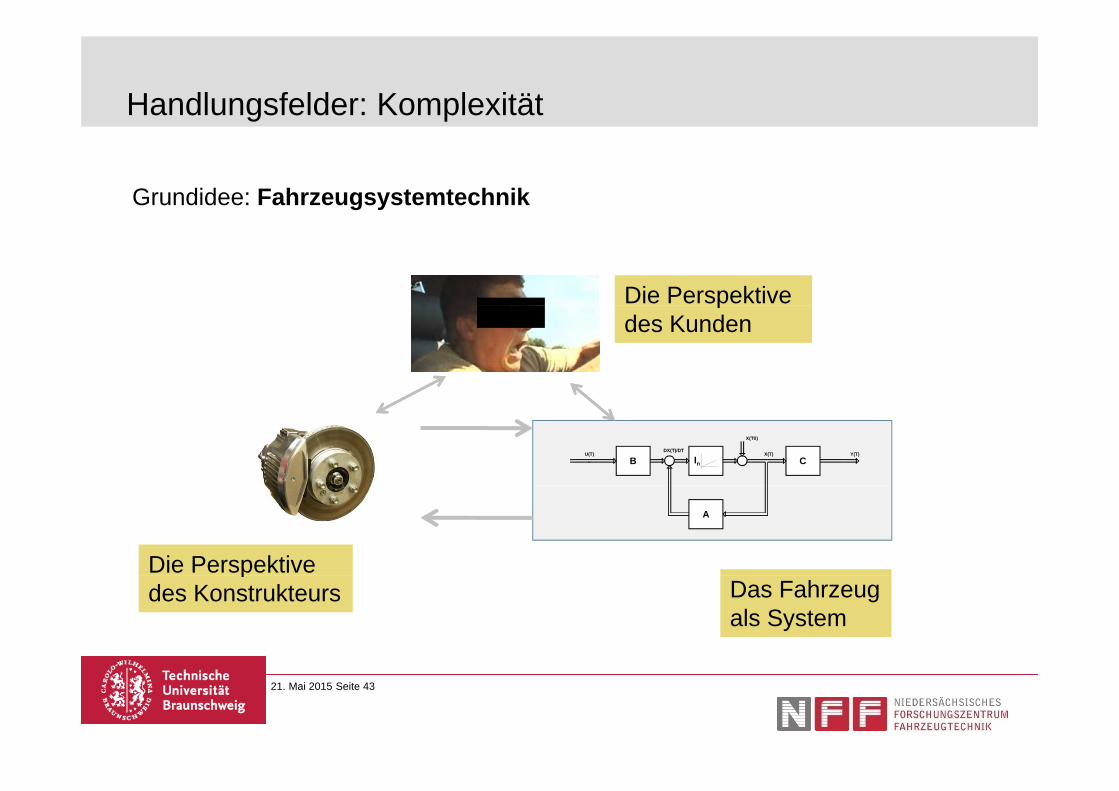
Handlungsfelder: Komplexität
Grundidee: Fahrzeugsystemtechnik
Die Perspektive pdes Kunden
B In CU(T)
DX(T)/DTX(T) Y(T)
X(T0)
Die Perspektive
A
pdes Konstrukteurs Das Fahrzeug
als System
21. Mai 2015 Seite 43

Handlungsfelder: Komplexität, Funktionale Systemarchitektur
ExterneAbsolute globale Selbst‐Umfeld‐ Missions‐DatenLokalisierung
en
wahrnehmungwahrnehmung umsetzung
Poseschätzung Welt‐modellierungru
ngssen
sore
Umfeld‐ und Selbst‐modellierung Fahrzeugführung
mun
ikation
Lokalisie
Kom
Fahrzeug relativ zur WeltUmfeld‐Sensorik
Fahrzeug‐Sensorik AktorikWelt relativ zum Fahrzeug Sensorik Sensorikg
(Matthaei u. Maurer 2015)21. Mai 2015 Seite 44
(Matthaei u. Maurer 2015)

Handlungsfelder: Komplexität, Funktionale Systemarchitektur
ExterneAbsolute globale Selbst‐Umfeld‐ Missions‐
MakroskalePoseschätzung
Straßengenaue Weltmodellierung
DatenLokalisierung
en
Straßentopologie‐ und Verkehrsflussmodellierung
wahrnehmungwahrnehmung
Navigation
umsetzung
MesoskalePoseschätzung
Fahrstreifen‐genaue
Weltmodellierungrungssen
sore
Kontext‐modellierung Führung
mun
ikation
MikroskalePoseschätzung
Quasi‐kontinuierliche
Weltmodellierung
Weltmodellierung
Lokalisie
Merkmalsextraktion und modellbasiertes Filtern Stabilisierung
Kom
Weltmodellierung
Fahrzeug relativ zur WeltUmfeld‐Sensorik
Fahrzeug‐Sensorik AktorikWelt relativ zum Fahrzeug Sensorik Sensorikg
(Matthaei u. Maurer 2015)21. Mai 2015 Seite 45
(Matthaei u. Maurer 2015)

Handlungsfelder: Ausbildung
seit 2014: Neuer Masterstudiengang (TU BS):Elektronische Systeme in Fahrzeugtechnik, Luft-und Raumfahrt
seit 2008: Carolo-Cupseit 2008: Carolo-Cup
2008: 6 Teams: Sieger RWTH Aacheng2009: 8 Teams: Sieger TU Braunschweig2010: 10 Teams: Sieger RWTH Aachen2011: 8 Teams: Sieger Uni Ulm2012 9 Teams Sieger TU Bra nsch eig2012: 9 Teams: Sieger TU Braunschweig2013: 11 Teams: Sieger TU München2014: 13 Teams: Sieger Uni Ulm2015: 16 Teams: Sieger Uni Ulm
21. Mai 2015 Seite 46
g

PROGNOSE(„WER STEUERT DAS FAHRZEUG DER ZUKUNFT?“)
21. Mai 2015 Seite 47
Persönliche Prognose (1/3)
1. Autonome Fahrzeuge eröffnen Chancen für die erweiterte Teilhabe am individuellen motorisierten Massenverkehr füram individuellen motorisierten Massenverkehr für • Kinder, • Hochbetagte und g• Behinderte, aber auch für • allgemein Fahrtüchtige unter aktuellen
Ei b h ä kEignungsbeschränkungen.2. In Zukunft wird es möglich sein, autonome Fahrzeuge zu
entwickeln, die vollautomatisiert Missionen absolvieren.,3. Mit ihnen wird sich ein Individualverkehr gestalten lassen, der
sicherer und ressourceneffizienter sein wird als der heutige IndividualverkehrIndividualverkehr.
21. Mai 2015 Seite 48

Persönliche Prognose (2/3)
4. Komplexe technische Systeme sind nicht fehlerfrei. Daher kann es auch im vollautomatisierten individuellen Massenverkehr zu Unfällenauch im vollautomatisierten individuellen Massenverkehr zu Unfällen kommen, auch mit tödlichen Folgen.
5. Die Gesellschaft muss vor Einführung autonomer Systeme intensiv diskutieren, ob sie bereit ist, die Risiken des autonomen Fahrens zu tragen.
6 Wir kennen heute keine Methoden mit denen wir zu ökonomisch6. Wir kennen heute keine Methoden, mit denen wir zu ökonomisch vertretbaren Kosten nachweisen können, dass eine von der Gesellschaft festzulegende Fehlerwahrscheinlichkeit von autonomen Fahrzeugen eingehalten wirdFahrzeugen eingehalten wird.
21. Mai 2015 Seite 49

Persönliche Prognose (3/3)
7. Für Wirtschaftsunternehmen ist es risikoreich, vollautomatisierte Fahrzeugführungssysteme oder auch Fahrerassistenzsysteme mitFahrzeugführungssysteme oder auch Fahrerassistenzsysteme mit signifikantem Eingriff in die Fahrdynamik einzuführen, die der Fahrer nicht überwachen muss oder kann.
8. Für die Einführung autonomer Fahrzeuge werden wir neue Formen des Risikomanagements benötigen.
9 Es ist eine offene Frage ob Gesellschaften in Zukunft bereit sein9. Es ist eine offene Frage, ob Gesellschaften in Zukunft bereit sein werden, vollautomatisiertes Fahren im Individualverkehr zuzulassen.
10. Sollten diese Systeme sehr erfolgreich abgesichert und eingeführt d i k i h di F l f i ti k h Wworden sein, kann sich diese Frage langfristig umkehren: Wenn
nachweislich der vollautomatisierte Verkehr deutlich sicherer ist als der Individualverkehr mit menschlichen Fahrern, kann es zu der Diskussion kommen, ob es weiter verantwortlich ist, menschliche Fahrer selber fahren zu lassen.
21. Mai 2015 Seite 50

Literatur
Bainbridge, L. (1983): Ironies of Automation, Automatica 19/6, 775-779Gasser T M ; Arzt C ; Ayoubi M ; Bartels A ; Bürkle L ; Eier J ; Flemisch F ; Häcker D ;Gasser, T.M.; Arzt, C.; Ayoubi, M.; Bartels, A.; Bürkle, L.; Eier, J.; Flemisch, F.; Häcker, D.; Hesse, T.; Huber, W.; Lotz, C.; Maurer, M.; Ruth-Schumacher, S.; Schwarz, J.; Vogt, W. (2012): Rechtsfolgen zunehmender Fahrzeugautomatisierung, Berichte der Bundesanstalt für Straßenwesen. Unterreihe Fahrzeugtechnik, 83. gBengler, K.; Dietmayer, K.; Färber, B.; Maurer, M.; Stiller, C.; Winner, H. (2014): ThreeDecades of Driver Assistance Systems: Review and Future Perspectives In: Intelligent Transportation Systems Magazine, IEEE, Band 6.Bergmiller, P. (2015): Towards functional safety in drive-by-wire vehicle, Springer 2015.Buld, S; Tietze, H.; Krüger, H.-P. (2015): Auswirkung von Teilautomation auf das Fahren, In: Maurer, M.; Stiller, C., Fahrerassistenzsysteme mit maschineller Wahrnehmung, Springer.Duden (1999): Das große Wörterbuch der deutschen Sprache, 10 Bde. Duden-Verlag, Mannheim 1999.Feil, E. (1987): Antithetik neuzeitlicher Vernunft – „Autonomie – Heteronomie“ und „rational – irrational“. 1. Auflage Göttingen: Vandenhoeck & Ruprecht.
21. Mai 2015 Seite 51

Literatur
Homann (2002): Wirtschaft und gesellschaftliche Akzeptanz: Fahrerassistenzsysteme auf dem Prüfstand. Vortrag auf Workshop FAS 2002, Walting.g p , gHomann (2005): Wirtschaft und gesellschaftliche Akzeptanz In Maurer, M; Stiller, C. (Hrsg.): Fahrerassistenzsysteme mit maschineller Wahrnehmung. Springer, Heidelberg, 2005.Karmasin, H. (2008): Motivation zum Kauf von Fahrerassistenzsystemen, In: 24. VDI/VW( ) yGemeinschaftstagung Integrierte Sicherheit und Fahrerassistenzsysteme. VDI-Berichte 2048. WolfsburgKrüger, H.-P. (2008): Hedonomie – die emotionale Dimension der Fahrerassistenz. In: Aktive Sicherheit durch Fahrerassistenz, München. Maurer, M. (2000): Flexible Automatisierung von Straßenfahrzeugen mit Rechnersehen. In: Fortschritt-Berichte VDI, Reihe 12, Nr. 443.Maurer, M. (2013): Pressekonferenz mit der Daimler und Benz Stiftung. 19.9.2013Maurer, M; Gerdes, J.C.; Lenz, B.; Winner, H. (2015): Autonomes Fahren: Technische, rechtliche und gesellschaftliche Akzeptanz, Springer.M tth i R M M (2015) A t d i i t d hMatthaei, R.; Maurer, M. (2015): Autonomous driving–a top-down-approach,at-Automatisierungstechnik,63,3,155-167,
21. Mai 2015 Seite 52

Literatur
Matthaei, R.; Reschka, A.; Rieken, J.; Dierkes, F.; Ulbrich, S.; Winkle, T.; Maurer, M. (2015): Autonomes Fahren, In: Winner, H. et al (Hrsg.): Handbuch ( ) , , ( g )Fahrerassistenzsysteme,1139-165, SpringerNeukum, A.; Lübbeke, T.; Krüger, H.-P.; Mayser, C.; Steinle, J. (2008): ACC Stop&Go: Fahrerverhalten an funktionalen Systemgrenzen In: Maurer, M; Stiller, C. (2008): 5. Workshop Fahrerassistenzsysteme FAS2008, Walting.Schmitt, J; Färber, B; Maurer, M; Breu, A (2006): Menschliches und technisches Verhalten an den Systemgrenzen eines FAS, VDI-Berichte,1960, Wild th V (2011) M l i Sili i D t hl df k S d t i 1 5 2011Wildermuth, V. (2011): Moral in Silizium, Deutschlandfunk, Sendetermin: 1.5.2011.
21. Mai 2015 Seite 53