Die Entwicklung der Robotik - etz.de · lung von Maschinen oder sich ändernde Sicherheits- und...
3
SPECIAL: MOTION & MECHATRONICS 94 www.etz.de 9/2013 Die Entwicklung der Robotik Vor rund 35 Jahren setzte die Industrie in Fräsmaschinen erstmals Roboter für Handling-Prozesse ein. Vorangetrieben durch Innovationen in angrenzenden Automatisierungsbereichen, wie EDM- und CNC-Prozessen, und aufgrund sich ändernder Marktanforderungen sind in den letzten drei Jahrzehnten aus einer Art „Manipulator“ in einer Maschine über ein reines Handling-Stand-Alone-Gerät hochtechnologische und intelligente Lösungen entstanden, die in komplexe Systeme eingebunden sind. Text: Jan-Philipp Liersch F ür den Jungingenieur von heute kaum vorstellbar: In den Anfängen der Robotik wurden die Geräte noch mit Gleichstrom-Servomotoren über Zahnriemen oder Drahtseile angetrieben. Dazu wurden die damals aktuellen Inkremen- tal-Encoder verwendet, wobei nach jedem Neustart eine Re- ferenzfahrt nötig war. Wenig später folgten leistungsfähigere und kompaktere AC-Servomotoren. Mit der Einführung des Knickarmroboters RV-E2 setzte Mitsubishi Electric [1] 1994 erstmalig Absolut-Encoder ein, die eine Referenzfahrt überflüssig machten. Die direkte Gegenüberstellung ver- deutlicht den Fortschritt: Im Vergleich zu den Inkremental- Encodern mit damals 256 Schritten verfügen die Absolut- Encoder heute über eine Auflösung von über vier Millionen Schritten pro Umdrehung. Mit der Erhöhung der Encoder-Auflösung ließen sich die Präzision und die Regelung beim Positionsanfahren opti- 01 Ein RM-501 aus dem Jahr 1984 und ein mehrfach leistungsstärkerer RV-6SD aus 2008 veranschaulichen die Entwicklung der letzten Jahrzehnte Bild: Battenberg Robotic
Transcript of Die Entwicklung der Robotik - etz.de · lung von Maschinen oder sich ändernde Sicherheits- und...

SPECIAL: MOTION & MECHATRONICS
94 www.etz.de 9/2013
Die Entwicklung der RobotikVor rund 35 Jahren setzte die Industrie in Fräsmaschinen erstmals Roboter für
Handling-Prozesse ein. Vorangetrieben durch Innovationen in angrenzenden
Automatisierungsbereichen, wie EDM- und CNC-Prozessen, und aufgrund sich
ändernder Marktanforderungen sind in den letzten drei Jahrzehnten aus einer
Art „Manipulator“ in einer Maschine über ein reines Handling-Stand-Alone-Gerät
hochtechnologische und intelligente Lösungen entstanden, die in komplexe
Systeme eingebunden sind.
Text: Jan-Philipp Liersch
Für den Jungingenieur von heute kaum vorstellbar: In den Anfängen der Robotik wurden die Geräte noch mit
Gleichstrom-Servomotoren über Zahnriemen oder Drahtseile angetrieben. Dazu wurden die damals aktuellen Inkremen-tal-Encoder verwendet, wobei nach jedem Neustart eine Re-ferenzfahrt nötig war. Wenig später folgten leistungsfähigere und kompaktere AC-Servomotoren. Mit der Einführung des Knickarmroboters RV-E2 setzte Mitsubishi Electric [1]
1994 erstmalig Absolut-Encoder ein, die eine Referenzfahrt über�üssig machten. Die direkte Gegenüberstellung ver-deutlicht den Fortschritt: Im Vergleich zu den Inkremental-Encodern mit damals 256 Schritten verfügen die Absolut-Encoder heute über eine Au�ösung von über vier Millionen Schritten pro Umdrehung.
Mit der Erhöhung der Encoder-Au�ösung ließen sich die Präzision und die Regelung beim Positionsanfahren opti-
01 Ein RM-501 aus dem Jahr 1984 und ein mehrfach leistungsstärkerer RV-6SD aus 2008 veranschaulichen
die Entwicklung der letzten Jahrzehnte
Bil
d:
Ba
tte
nb
erg
Ro
bo
tic

959/2013 www.etz.de
mieren. Da die Steuerung komplexe Algorithmen unter Be-rücksichtigung aller physikalischen Ein�üsse kompensieren und den Roboterarm exakt regeln kann, sind Überschwin-gen oder Einregeln der Positionen kein "ema mehr. Außer-dem sind wesentlich höhere Geschwindigkeiten möglich: Ein moderner 6-Achs-Roboter ist bis 15-mal schneller als sein 20 Jahre älteres Pendant. Die Wiederholgenauigkeit ließ sich sogar um das 25-Fache auf ± 0,02 mm verbessern. Von diesen Entwicklungen pro%tiert nicht nur die Robotik; der technologische Fortschritt verändert auch unseren Alltag.
Antreiber: Innovationen
Die ersten Roboter wurden direkt über ein Eingabegerät programmiert, eine schrittweise Abarbeitung der festgeleg-ten Positionen erfüllte die meisten Zwecke. Mit dem Einzug der Bürorechner und dem Intel-Mikroprozessor 80286 kam die erste PC-Software zur Roboterprogrammierung auf den
Markt, mit der sich ein Programm auf der Steuerung spei-chern und ändern ließ. Der Speicher wurde erweitert, sodass einige Kilobyte Speicherplatz für mehr als 100 Positionen ausreichten. Die Datenlöschung gestaltete sich allerdings etwas komplizierter als heute, denn dazu musste der Spei-cherchip manuell unter UV-Licht gehalten werden.
Aus den großen, vergleichsweise ungenau arbeitenden Maschinen mit umfangreicher Steuerungstechnik wurden mit der Zeit kompakte, hochpräzise Geräte. Davon pro%-tiert auch die Marburger Firma Battenberg, die ihre intel-ligenten Prüfroboter unter anderem im Automobilbereich einsetzt. Früher wurden festgelegte Positionen an den Prüf-teilen von außen bzw. vor Einbau mit dem Roboter ange-fahren. Dank der platzsparende Bauweise und gesteigerten Flexibilität durch direkt getriebene Achsen und kompakte Getriebe können die Roboter heute auch im Fahrzeuginteri-eur eingesetzt werden. Die Messergebnisse sind dabei immer exakter geworden, wodurch sich letztlich die Produktquali-tät verbessert hat und ein zunehmend personalisiertes Fahr-zeuginterieur entstanden ist. So erlebt der Fahrer eines klei-nen Stadt�itzers auch durch die Haptik der Druckknöpfe von Radio oder Klimaanlage den Innenraum anders als der Fahrer einer Luxuslimousine.
Die Vernetzung der Roboter mit einem PC oder die In-tegration in eine SPS machen den mobilen Betrieb von Messstationen möglich. Dabei setzt Battenberg auf moderne Sensortechnik und die Anwendungssimulation am PC. Die Bedeutung der Simulation für die Industrie hat das Unter-nehmen früh erkannt und eine Software integriert, die heute den Roboter in Echtzeit darstellt und Taktzeiten sowie Teile-handling vorab exakt berechnet.
Grundlage für die Robotersimulation am PC und die Kommunikation mit Komponenten waren in den 1990er-Jahren die steigende Rechnerleistung und 3D-Gra%k-Pro-zessoren. Bildverarbeitung und Bus-Anbindungen innerhalb der Robotersteuerung ermöglichten die Kameraanbindung und die Vernetzung in der Anlage. Heute gehört die Robo-tersimulation vor der Installation zur gängigen Praxis, Ka-
02 In dem mobilen Prüfstand der Firma Battenberg aus dem
Jahr 2008 misst ein RV-6SD die Haptik von Multimedia-Einheiten
aus dem Automobilbereich
!!Enthält 30 Jahre Erfahrung von Herstellern und Anwendern
!!DualGroundTM: Sicheres prüfen mit beidseitig geerdeten Leistungsschaltern
!!Zuverlässige Prüfergebnisse in störsignalbehafteter Hochspannungsumgebung
!!Fünf Konfi gurationen zur Wahl – Stand-Alone oder mit PC
!!Integrierte Bedieneinheit mit 8-Zoll-Touchscreen
!Kontaktwiderstand, Zeitmessung, Bewegung, SDRM, Vibration
!Online- und Offl ine-Messungen mit CabaWin
Noch mehr Vorteile fi nden Sie auf www.megger-blog.de
Megger GmbH T +49 (0) 6171-92987-0 E [email protected] I www.megger.de
Ihre wertvolle Erfahrung in der
Leistungsschalterprüfung - bei uns fest eingebaut
TM1700-Serie (TM1710, TM1720, TM1740, TM1750, TM1760)
Bil
d:
Ba
tte
nb
erg
Ro
bo
tic
SPECIAL: MOTION & MECHATRONICS
96 www.etz.de 9/2013
meraanbindung oder Förderbandverfolgung sind Standard-funktionen. Mit Ethernet- oder Feldbus-Anbindung lassen sich die Roboter leichter und �exibler integrieren.
Innerhalb industrieller Automatisierungsanwendungen arbeiten Roboter zunehmend enger mit anderen Kompo-nenten zusammen. Eine reibungslose, direkte Datenüber-tragung über eine Automatisierungsplattform ist deshalb essenziell und bringt Produktionsvorteile. Mit der iQ Platform können zum Beispiel über einen High-Speed-Rückwand daten bus alle Automatisierungskomponenten von der CNC-CPU, Roboter-CPU bis zur Motion-CPU untereinander sowie mit unterschiedlichen SPS-Modulen integriert kommunizieren.
Echtzeitsteuerung gewinnt an Bedeutung
Ein aktuelles "ema in der Robotik ist die Echtzeitsteu-erung. Die sensorgesteuerten Prüfroboter von Battenberg sind darauf ausgerichtet, möglichst ohne zeitliche Verzöge-rung auf Signale zu reagieren. Dank der intelligenten Robo-terprüftechnik sind analoge Messverfahren über�üssig, was die anspruchsvolle Haptikmessung und -analyse des Fahr-zeuginterieurs erlaubt. Aufgrund der hohen Beweglichkeit der 6-Achs-Roboter lässt sich der menschliche dreidimen-sionale Tastsinn nahezu vollständig abbilden. Die Ergebnisse �ießen unmittelbar in die Produktion ein. Die integrierte
Ethernet-Schnittstelle und neue Speicher- und Prozessor-technologien ermöglichen komplexe Trajektorien und im laufenden Betrieb �exibel veränderbare Programmabläufe.
Faktoren, wie E(zienz- und Produktivitätssteigerung, Erhöhung von Taktzeiten und Genauigkeit, Weiterentwick-lung von Maschinen oder sich ändernde Sicherheits- und Hygienevorschriften, treiben die Evolution in der Robotik seit 30 Jahren voran. Innovationen in angrenzenden Berei-chen, wie Kamerasystemen oder Sensorlösungen, und sich ändernde Anforderungen an die Robotik tragen ebenfalls zum Fortschritt bei. Die Anzahl der treibenden Kräfte ist hoch und lässt eine rasante Weiterentwicklung absehen, an deren Horizont völlig autonom arbeitende, intelligente Ro-boter stehen könnten. (hz)
Literatur
[1] Mitsubishi Electric Europe B.V. Industry Automation, Ratingen:
www.mitsubishi-automation.de
Autor
Dipl.-Ing. Jan-Philip Liersch ist verantwortlich
für den Bereich Produkt Management Robotik bei
Mitsubishi Electric, Factory Automation Ratingen.
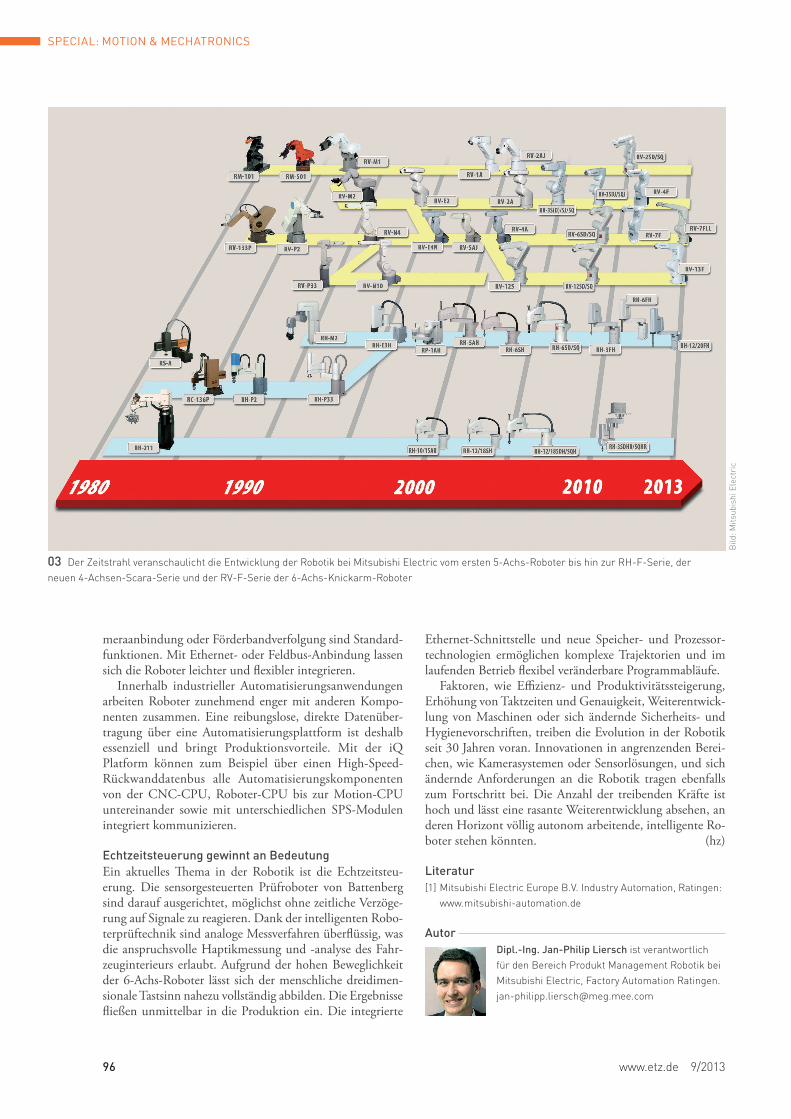
03 Der Zeitstrahl veranschaulicht die Entwicklung der Robotik bei Mitsubishi Electric vom ersten 5-Achs-Roboter bis hin zur RH-F-Serie, der
neuen 4-Achsen-Scara-Serie und der RV-F-Serie der 6-Achs-Knickarm-Roboter
Bil
d:
Mit
sub
ish
i Ele
ctri
c