Die Methode der efiektiven Duktilit˜at beim Lastfall Erdbeben · Die Methode der efiektiven...
133
Die Methode der effektiven Duktilit ¨ at beim Lastfall Erdbeben von Diplom–Ingenieur Ingo Hylla aus Bad Saarow von der Fakult¨ at VI der Technischen Universit¨ at Berlin zur Erlangung des akademischen Grades Doktor der Ingenieurwissenschaften – Dr.–Ing. – genehmigte Dissertation Promotionsausschuss: Vorsitzender: Prof. Dr.–Ing. S. Savidis Gutachter: Prof. Dr.–Ing. R. Harbord Gutachter: Prof. Dr.–Ing. W. St¨ uhler Tag der wissenschaftlichen Aussprache: 11. Juli 2005 Berlin 2005 D 83
Transcript of Die Methode der efiektiven Duktilit˜at beim Lastfall Erdbeben · Die Methode der efiektiven...

Die Methode der effektiven Duktilitatbeim Lastfall Erdbeben
von Diplom–IngenieurIngo Hylla
aus Bad Saarow
von der Fakultat VIder Technischen Universitat Berlin
zur Erlangung des akademischen Grades
Doktor der Ingenieurwissenschaften– Dr.–Ing. –
genehmigte Dissertation
Promotionsausschuss:
Vorsitzender: Prof. Dr.–Ing. S. SavidisGutachter: Prof. Dr.–Ing. R. HarbordGutachter: Prof. Dr.–Ing. W. Stuhler
Tag der wissenschaftlichen Aussprache: 11. Juli 2005
Berlin 2005D 83

Inhaltsverzeichnis
1 Einleitung 11.1 Allgemeines zur Erdbebenbemessung . . . . . . . . . . . . . . 1
1.1.1 Voruberlegung . . . . . . . . . . . . . . . . . . . . . . . 11.1.2 Materialverhalten . . . . . . . . . . . . . . . . . . . . . 2
1.1.2.1 Allgemein . . . . . . . . . . . . . . . . . . . . 21.1.2.2 Fließgelenktheorie . . . . . . . . . . . . . . . 4
1.1.3 Antwortspektrenverfahren . . . . . . . . . . . . . . . . 51.1.3.1 Ubersicht . . . . . . . . . . . . . . . . . . . . 51.1.3.2 Schwinger mit einem Freiheitsgrad . . . . . . 51.1.3.3 Systeme mit mehreren Freiheitsgraden . . . . 61.1.3.4 Modales Antwortspektrenverfahren . . . . . . 9
1.1.4 Zeitverlaufsberechnungen . . . . . . . . . . . . . . . . . 111.1.5 Bewertung . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.2 Die Methode der Kapazitatsbemessung . . . . . . . . . . . . . 141.2.1 Duktilitat . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.2.1.1 Dehnungsduktilitat . . . . . . . . . . . . . . . 141.2.1.2 Krummungsduktilitat . . . . . . . . . . . . . 141.2.1.3 Rotationsduktilitat . . . . . . . . . . . . . . . 151.2.1.4 Verschiebeduktilitat . . . . . . . . . . . . . . 15
1.2.2 Physikalischer Hintergrund . . . . . . . . . . . . . . . . 161.2.3 Reduktionsfunktionen der Erdbebenersatzlast . . . . . 20
1.2.3.1 Empirische Reduktionsfunktionen . . . . . . . 201.2.3.2 Mathematische Reduktionsfunktionen . . . . 21
1.2.4 Standardmethode der Kapazitatsbemessung . . . . . . 231.2.5 Reduziertes Antwortspektrum . . . . . . . . . . . . . . 25
1.3 Erweiterung der Methode der Kapazitatsbemessung . . . . . . 271.4 Aufbau der Arbeit . . . . . . . . . . . . . . . . . . . . . . . . 28
2 Verwendete numerische Verfahren 292.1 Uberblick . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 292.2 Fließgelenkmethode . . . . . . . . . . . . . . . . . . . . . . . . 29
2.2.1 Erfassung der Gelenke . . . . . . . . . . . . . . . . . . 29

INHALTSVERZEICHNIS III
2.2.2 Programmablauf . . . . . . . . . . . . . . . . . . . . . 312.3 Zeitschrittverfahren . . . . . . . . . . . . . . . . . . . . . . . . 33
2.3.1 Allgemeines . . . . . . . . . . . . . . . . . . . . . . . . 332.3.2 Mittelpunktsverfahren . . . . . . . . . . . . . . . . . . 342.3.3 Dynamische Belastung bei einer Fußpunktanregung . . 352.3.4 Dampfung . . . . . . . . . . . . . . . . . . . . . . . . . 372.3.5 Nachlaufberechnung . . . . . . . . . . . . . . . . . . . 38
2.3.5.1 Standardnachlaufberechnung . . . . . . . . . 382.3.5.2 Beispielberechnung eines Biegebalkens . . . . 392.3.5.3 Angepasste Nachlaufberechnung . . . . . . . . 43
2.4 Modifiziertes Zeitschrittverfahren . . . . . . . . . . . . . . . . 442.4.1 Modifizierung . . . . . . . . . . . . . . . . . . . . . . . 442.4.2 Programmierung . . . . . . . . . . . . . . . . . . . . . 472.4.3 Programmablauf beim Zeitschrittverfahren . . . . . . . 48
2.5 Modale Verfahren . . . . . . . . . . . . . . . . . . . . . . . . . 482.6 Beispiel zur Uberprufung der implementierten Routinen . . . . 50
2.6.1 System . . . . . . . . . . . . . . . . . . . . . . . . . . . 502.6.2 Vergleichsergebnisse . . . . . . . . . . . . . . . . . . . . 512.6.3 Kontrollberechnungen linear–elastisch . . . . . . . . . . 52
2.6.3.1 Berechnung . . . . . . . . . . . . . . . . . . . 522.6.3.2 Bewertung . . . . . . . . . . . . . . . . . . . 53
2.6.4 Kontrollberechnungen inelastisch . . . . . . . . . . . . 532.6.4.1 Berechnung . . . . . . . . . . . . . . . . . . . 532.6.4.2 Bewertung . . . . . . . . . . . . . . . . . . . 54
3 Die Methode der effektiven Duktilitat 553.1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 553.2 Ermittlung der energieabhangigen Systemduktilitat . . . . . . 55
3.2.1 Elastisch gespeicherte Energie . . . . . . . . . . . . . . 563.2.1.1 Integration der Kraft uber den Weg . . . . . . 583.2.1.2 Integration des Weges uber die Kraft . . . . . 62
3.2.2 Plastisch dissipierte Energie . . . . . . . . . . . . . . . 633.2.3 Duktilitatsgleichung . . . . . . . . . . . . . . . . . . . 63
3.3 Die Methode der effektiven Duktilitat . . . . . . . . . . . . . . 643.3.1 Prinzipielles Vorgehen . . . . . . . . . . . . . . . . . . 643.3.2 Bestimmung der Skalierung . . . . . . . . . . . . . . . 66
3.4 Vergleichsberechnungen . . . . . . . . . . . . . . . . . . . . . . 703.4.1 Berechnung . . . . . . . . . . . . . . . . . . . . . . . . 703.4.2 Auswertung . . . . . . . . . . . . . . . . . . . . . . . . 713.4.3 Beispiele mit Skalierung . . . . . . . . . . . . . . . . . 73

INHALTSVERZEICHNIS IV
4 Abschließende Bemerkungen und Zusammenfassung 774.1 Vergleich der neuen Methode mit dem Eurocode EC–8 . . . . 774.2 Bewertung der Methode der effektiven Duktilitat . . . . . . . 814.3 Ausblick . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
4.3.1 Anregungsrichtung . . . . . . . . . . . . . . . . . . . . 824.3.2 P–∆ Effekt und standige Lasten . . . . . . . . . . . 834.3.3 Nichtlineares Materialverhalten . . . . . . . . . . . . . 844.3.4 Form des elastischen Antwortspektrums . . . . . . . . 85
5 Anhang 86A Gelenkelemente . . . . . . . . . . . . . . . . . . . . . . . . . . 86
A.1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . 86A.2 Ansatzfunktionen . . . . . . . . . . . . . . . . . . . . . 89A.3 Matrizen . . . . . . . . . . . . . . . . . . . . . . . . . . 91
A.3.1 Steifigkeitsmatrix schubstarr . . . . . . . . . . 91A.3.2 Steifigkeitsmatrix schubsteif . . . . . . . . . . 92A.3.3 Steifigkeitsmatrix Theorie II. Ordnung . . . . 94A.3.4 Bettungsmatrix . . . . . . . . . . . . . . . . . 96
A.4 Massenmatrizen . . . . . . . . . . . . . . . . . . . . . . 98A.4.1 Translation . . . . . . . . . . . . . . . . . . . 98A.4.2 z–Achse . . . . . . . . . . . . . . . . . . . . . 98
A.5 Zusammenfassung . . . . . . . . . . . . . . . . . . . . . 100A.6 Berechnung Winkelsprung . . . . . . . . . . . . . . . . 102
A.6.1 Winkelsprung infolge Einheitsverschiebungen 102A.6.2 Winkelsprung infolge Streckenlast . . . . . . . 102
A.7 Fehlerbetrachtung . . . . . . . . . . . . . . . . . . . . . 103A.7.1 Allgemein . . . . . . . . . . . . . . . . . . . . 103A.7.2 Theorie II. Ordnung . . . . . . . . . . . . . . 103A.7.3 Elastische Bettung . . . . . . . . . . . . . . . 104
B Eigenwertloser . . . . . . . . . . . . . . . . . . . . . . . . . . . 106B.1 Einfuhrung . . . . . . . . . . . . . . . . . . . . . . . . 106B.2 Vektoriteration/Krylov–Subraume . . . . . . . . . . . 106B.3 Lanczos–Methode . . . . . . . . . . . . . . . . . . . . . 107B.4 QR–Methode . . . . . . . . . . . . . . . . . . . . . . . 111B.5 Lanczos–Implementierung . . . . . . . . . . . . . . . . 113
C Beispielberechnungen elastisch gespeicherte Energie . . . . . . 117C.1 Drei Federn und zwei Fließgelenke . . . . . . . . . . . . 117C.2 Vier Federn, eine Kraft und ein Fließgelenk . . . . . . 120C.3 Vier Federn, zwei Krafte und ein Fließgelenk . . . . . . 121C.4 Vier Federn, eine Kraft und ein Fließgelenk . . . . . . 123C.5 Zusammenfassung . . . . . . . . . . . . . . . . . . . . . 125

Formelzeichen und Symbole V
Formelzeichen und Symbole
Matrizen und Vektoren
D SystemdampfungsmatrixD∗ modale DampfungsmatrixD ll lokale Elementdamfungsmatrixf S Vektor der KnotenkrafteI EinheitsmatrixK SystemsteifigkeitsmatrixKk Krylov–SubraumK ∗ modale SteifigkeitsmatrixK ll lokale Elementsteifigkeitsmatrixlk Lanczos–VektorenM SystemmassenmatrixM ∗ modale MassenmatrixM ll lokale ElementmassenmatrixQk Matrix der Lanczosvektorens0 BelastungsvektorT k Tridiagonalmatrix des reduzierten Eigenwertproblemsu Vektor der Knotenverschiebungenv Vektor der Knotengeschwindigkeitenv Vektor der Knotenbeschleunigungenx Vektor der Fußpunktverschiebungenx Vektor der Fußpunktbeschleunigungψ Eigenvektor bzw. EigenschwingungsformΨ Matrix der Eigenvektoren
Variablen, Funktionen
Bψ Anzahl der berucksichtigten EigenschwingungsformenEeg elastische gespeicherte FormanderungsenergieEpd plastisch dissipierte EnergieM MomentMpl plastisches MomentN NormalkraftNpl plastische NormalkraftQ Querkraftx Fußpunktverschiebungx Fußpunktbeschleunigung∆t Zeitschrittinkrementε Grad der Massenanregung

Formelzeichen und Symbole VI
Variablen, Funktionen
λ Eigenwertϑ Dampfungsgradρ Laststeigerungsfaktor bei der FließgelenkmethodeρU wegaquivalenter Lastfaktor gemaß der Gleichung (3.5)µε DehnungsduktilitatµE energieabhangige Systemduktilitatµκ Krummungsduktilitatµ∆θ Rotationsduktilitatµ∆ VerschiebeduktilitatµG Grenzduktilitatξ normierte Koordinateω0 ungedampfte Eigenkreisfrequenzωd gedampfte Eigenkreisfrequenz
Konstanten
A QuerschnittsflachecN NormalkraftfederkonstanteE ElastizitatsmodulI Flachentragheitsmomentµ Massenbelegung
Indizierungen
mS m–fach modifiziertes System (m Fließgelenke)
i i–tes Fließgelenk
k Dimension des Krylov–Subraums
l lokaler Bezug (Vektor)
ll lokaler Bezug (Matrix)
n n–ter Zeitschritt
Koordinaten
x, y, z kartesische Koordinaten auf ElementebeneX1, X2, X3 kartesische Koordinaten auf Systemebene

1 Einleitung
1.1 Allgemeines zur Erdbebenbemessung
1.1.1 Voruberlegung
Bei der Bemessung von Bauwerken ist auf der einen Seite die vorhandenestatische Belastung und ihr gegenuber der Widerstand des Tragwerks maß-gebend. Im Allgemeinen ist die Festlegung der Belastung unproblematisch.Die zur Bemessung notwendigen Beanspruchungen, z.B. in Form der Schnitt-großen, lassen sich unter der Annahme linear elastischen Materialverhaltensebenfalls problemlos ermitteln. Werden nun die Materialwiderstande linear–elastisch erfasst, liegt ein elastisch–elastisches Bemessungskonzept vor.
Verhalt sich das Material entgegen der Annahme zur Ermittlung derSchnittgroßen inelastisch bzw. plastisch, wird die Vertraglichkeit verletzt. Un-ter Beachtung des Gleichgewichts ist diese Verletzung in bestimmten Grenzenvertretbar. Dabei kommt es zu Umlagerungen bei den Schnittgroßen. Es wirddavon ausgegangen, dass sich die tatsachliche Vertraglichkeit einstellt. Hier-bei handelt es sich folglich um ein elastisch–plastisches Bemessungskonzept.
Beim plastisch–plastischen Konzept werden auch die Schnittgroßen, z.B.mit der Fließgelenkmethode, unter Berucksichtigung plastischen Materialver-haltens ermittelt.
Steht ein Bauwerk unter dem Einfluss einer zeitlich veranderlichen Belas-tung, z.B. in Form eines Erdbebens, ist die Ermittlung der Beanspruchungschwieriger. Sie hangt maßgeblich von der Fußpunktbeschleunigung als Er-regung sowie den dynamischen Eigenschaften des Systems ab.
Der Wissensstand zur Konstruktion und Bemessung von Gebauden unter derBerucksichtigung des Lastfalls Erdbeben unterliegt einer standigen Entwick-lung. Allerdings kommt es immer wieder zu schweren Schaden an Gebaudenund sonstigen Konstruktionen, so dass der erreichte Stand nicht als befriedi-gend empfunden werden kann.
Die Berucksichtigung von inelastischem Materialverhalten hat beim Last-fall Erdbeben einen weit großeren Einfluss auf die Bemessung als bei sonsti-gen Belastungen. Dieser Sachverhalt spiegelt sich in den neueren Normen zur
1.1 Allgemeines zur Erdbebenbemessung 2
Auslegung von Gebauden unter Erdbebenlast wieder. Mit der Entwicklungder Methode der Kapazitatsbemessung wurde ein Werkzeug geschaffen, wel-ches eine sichere und kostengunstige konstruktive Auslegung von Gebaudenermoglicht.
Dabei wird bei der Durchbildung des Tragwerks und der Wahl derverwendeten Materialien sowie der konstruktiven Details darauf geachtet,dass sich das Gebaude unter der Einwirkung eines Erdbebens moglichstduktil (zah) verhalt, ohne dabei instabil zu werden. Durch den geringerenWiderstand, den das Gebaude durch das Zulassen plastischer Verformungendem Erdbeben bietet, reduzieren sich auch die Beanspruchungen der imelastischen Bereich verbleibenden Tragglieder.
Die Reduktion der Beanspruchung wird im Allgemeinen unabhangigvon der tatsachlich in Anspruch genommenen Duktilitat vorgegeben.Uber die Form des Tragwerks und die Eigenschaften der verwendetenKonstruktionsdetails ist lediglich eine Abschatzung der maximal moglichenGrenzduktilitat vorgesehen, welche vereinfachend zur Reduktion herangezo-gen wird.
In der vorliegenden Arbeit wird ein Weg aufgezeigt, wie die Beanspru-chungsreduktion von der sich effektiv einstellenden Duktilitat abhangiggemacht werden kann.
1.1.2 Materialverhalten
Bei der Methode der Kapazitatsbemessung wird das inelastische Materialver-halten der verwendeten Werkstoffe berucksichtigt. Dieser Abschnitt enthaltdaher einen kleinen Uberblick uber das Materialverhalten sowie die Erfassunginelastischen Materialverhaltens mit Hilfe der Fließgelenktheorie.
1.1.2.1 Allgemein
Das Materialverhalten beschreibt im Allgemeinen die Reaktion eines Werk-stoffs auf Beanspruchungen. Diese Beanspruchungen bestehen im Bauwesenhauptsachlich in Form von Spannungen aufgrund von Kraften und Momen-ten, Temperatureinwirkungen, Feuchtigkeit und Feuer. In der vorliegendenArbeit ist das Verhalten infolge von Spannungen relevant und wird im Fol-genden allgemein als Materialverhalten bezeichnet.
Das Materialverhalten beschreibt die Reaktion der Werkstoffe auf Span-nungen σ in Form von Dehnungen ε. Verhalten sich diese Dehnungenreversibel bei einer Be– und Entlastung, wird dieses Verhalten als elastischbezeichnet. Das Verhaltnis aus Spannung und Dehnung in diesem Bereich

1.1 Allgemeines zur Erdbebenbemessung 3
wird dem entsprechend als Elastizitatsmodul bezeichnet. Bei einigen Werk-stoffen, wie z.B. unlegiertem Stahl, kann dieser Elastizitatsmodul bis zu ei-ner bestimmten Grenze als konstant angenommen werden. Das Spannungs–Dehnungsdiagramm weist in diesem Bereich einen linearen Verlauf auf. DiesesVerhalten wird demnach als linear–elastisches Materialverhalten bezeichnet.
Ab der Fließgrenze ist der Dehnungsverlauf nicht mehr ohne Energieauf-wand reversibel. Die Energie wird zum großten Teil in Warme dissipiert. Eingeringer Anteil verbleibt in inneren Spannungszustanden im Material.
Das Verhalten in diesem Bereich wird als plastisch bezeichnet. Kann die-ser Bereich ebenfalls durch eine Gerade angenahert werden, so wird diesals bilinear elastisch–plastisches Materialverhalten bezeichnet. Als elastisch–ideal plastisch wird ein Materialverhalten bezeichnet, bei welchem die plas-tischen Dehnungen ohne das Aufbringen von zusatzlichen Spannungen ent-stehen, also die zweite Gerade des Spannungs–Dehnungsdiagramms durcheine Horizontale beschrieben werden kann. Letztlich kommt es bei weitererBelastung zum Versagen des Werkstoffs.
Die meisten Werkstoffe, wie z.B. Beton, verhalten sich nicht linear–elastisch. Fur die Berechnungen der Schnittgroßen von Stahlbetonbautenwird im Allgemeinen jedoch ein idealisiertes linear–elastisches Materialver-halten vorausgesetzt. Dabei wird die Spannungs–Dehnungskurve durch eineSekante angenahert. Die zuvor beschriebenen Eigenschaften lassen sich ubereinaxiale Zug- bzw. Druckversuche unter ansonsten konstanten Bedingungenermitteln. Dabei sind die ubrigen im Raum moglichen Spannungen Null.
Die Bedingungen, unter welcher ein Werkstoff seine elastischen Eigen-schaften verliert, hangen jedoch auch von den ubrigen Spannungen ab. DieseFließbedingungen lassen sich in Abhangigkeit des dreidimensionalen Span-nungszustands, der Temperatur, der Beanspruchungsgeschichte, der Bean-spruchungsgeschwindigkeit sowie teilweise auch dem Materialalter definie-ren. Im Hauptspannungsraum lassen sich aus diesen Fließbedingungen so ge-nannte Fließflachen konstruieren, bei deren Erreichen das Material zu fließenbeginnt.
Ebenso ist das Materialverhalten im plastischen Bereich von den zuvorerwahnten Bedingungen abhangig. So verhalten sich beispielsweise die unterNormalbedingungen sproden Werkstoffe Marmor und Sandstein unter hohemhydrostatischem (gleichseitigem) Druck plastisch.
Die Erfassung des nicht linear–elastischen sowie plastischen Materialver-halten ist Gegenstand zahlreicher Forschungen. Einen Blick uber die Grund-lagen des Materialverhaltens gibt Kaliszky in [3]. Die baupraktische Erfas-sung des linearisierten elastisch–ideal plastischen Materialverhaltens wirddurch die im folgenden Abschnitt kurz vorgestellte Fließgelenktheorie be-schrieben.
1.1 Allgemeines zur Erdbebenbemessung 4
1.1.2.2 Erfassung des elastisch–plastischen Materialverhaltensdurch die Fließgelenktheorie
Zur Berechnung von Bauwerken werden deren lastabtragenden Bestandtei-le, die Tragwerke, im Allgemeinen auf eine einfach zu berechnende System-ebene zuruckgefuhrt. So lassen sich Platten und Scheiben als zweidimen-sionale Flachen und Balken als Linien erfassen. Dabei werden die Quer-schnittsabmessungen der Tragglieder durch entsprechende Kennwerte wiez.B. die Flache und das Flachentragheitsmoment berucksichtigt. Zusammenmit den das Materialverhalten beschreibenden Werkstoffeigenschaften ist ei-ne Berechnung der Beanspruchung der Tragwerksglieder im Bereich linear–elastischen Materialverhaltens damit sehr einfach moglich.
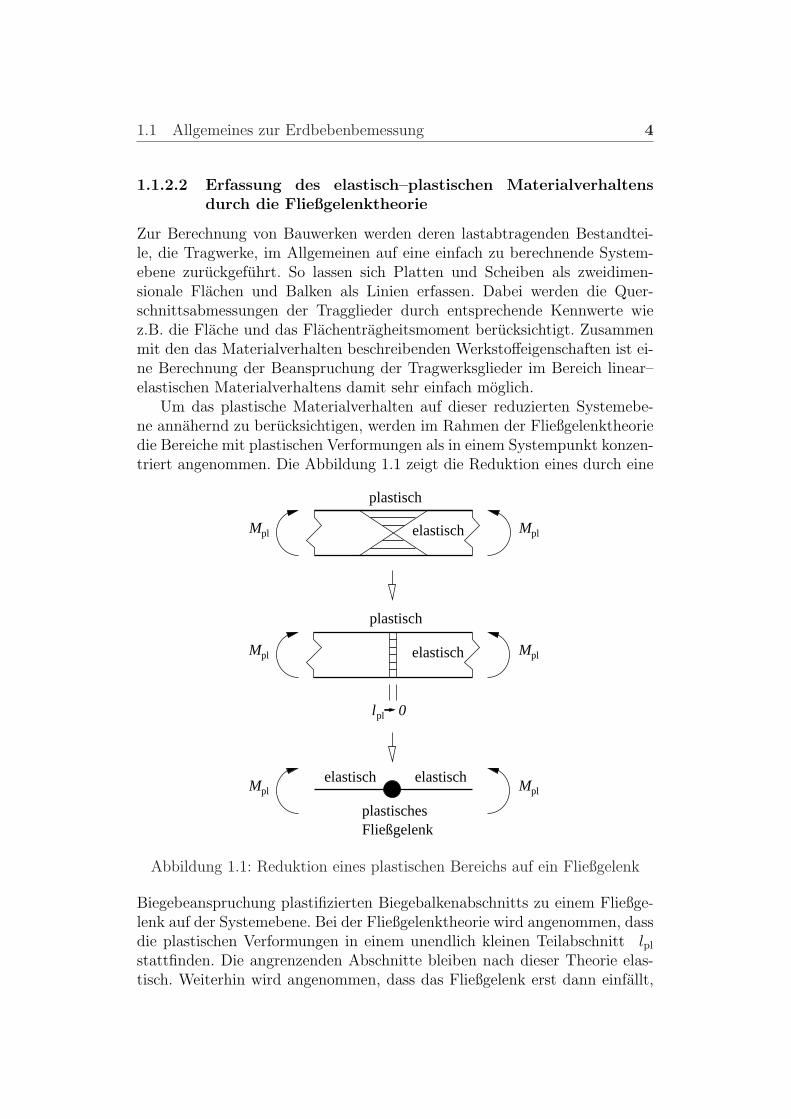
Um das plastische Materialverhalten auf dieser reduzierten Systemebe-ne annahernd zu berucksichtigen, werden im Rahmen der Fließgelenktheoriedie Bereiche mit plastischen Verformungen als in einem Systempunkt konzen-triert angenommen. Die Abbildung 1.1 zeigt die Reduktion eines durch eine
Mpl Mpl
Mpl Mpl
Mpl Mpl
elastisch
plastisch
elastisch
elastischelastisch
plastisch
pll 0
plastischesFließgelenk
Abbildung 1.1: Reduktion eines plastischen Bereichs auf ein Fließgelenk
Biegebeanspruchung plastifizierten Biegebalkenabschnitts zu einem Fließge-lenk auf der Systemebene. Bei der Fließgelenktheorie wird angenommen, dassdie plastischen Verformungen in einem unendlich kleinen Teilabschnitt lpl
stattfinden. Die angrenzenden Abschnitte bleiben nach dieser Theorie elas-tisch. Weiterhin wird angenommen, dass das Fließgelenk erst dann einfallt,

1.1 Allgemeines zur Erdbebenbemessung 5
wenn die Spannungen in allen Fasern des Querschnitts die Fließgrenze er-reicht haben. Somit ergibt sich fur ein Fließgelenk ein linearisiertes elastisch–plastisches Materialverhalten. In dieser Arbeit wird weiterhin davon ausge-gangen, dass im plastischen Bereich Verformungen ohne eine Spannungs-veranderungen stattfinden. Damit liegt ein elastisch–ideal plastisches Mate-rialverhalten vor.
Da bei der Belastung durch ein Erdbeben in den Bauwerken im Allgemei-nen Fließgelenke infolge von Momenten auftreten, werden in dieser Arbeitfast ausschließlich diese Momentenfließgelenke berucksichtigt. Lediglich furerklarende Beispielberechnungen werden im Anhang C Normalkraftfließge-lenke betrachtet.
Die unter voller Ausbildung der plastischen Bereiche aufnehmbaren Mo-mente werden mit Mpl bzw. aufnehmbaren Normalkrafte mit Npl be-zeichnet.
1.1.3 Antwortspektrenverfahren
1.1.3.1 Ubersicht
Fur die Erlauterung des modalen Antwortspektrenverfahrens wird zuerstdie Bildung von Antwortspektren1) fur Schwinger mit einem Freiheitsgraderlautert. Von diesem Einfreiheitsgradsystem ausgehend kann dann fur li-neare Schwinger mit mehreren Freiheitsgraden gezeigt werden, dass beiproportionaler viskoser Dampfung eine modale Entkopplung moglich ist,so dass ein Schwingungssystem mit n Freiheitsgraden durch ein Systemvon n Schwingern mit einem Freiheitsgrad beschrieben werden kann. Dasmodale Antwortspektrenverfahren basiert nun auf der n–fachen Anwendungdes Antwortspektrenverfahrens fur einen Freiheitsgrad zur Ermittlung desLosungsverhaltens und damit der Beanspruchungen vom Bauwerk unter Erd-bebenlast und der Superposition der Einzelergebnisse.
1.1.3.2 Schwinger mit einem Freiheitsgrad
Antwortspektren beschreiben die maximal auftretenden Verschiebun-gen (umax), Geschwindigkeiten (vmax) bzw. Beschleunigungen (amax)von Einfreiheitsgradschwingern wahrend eines Erdbebens p(t) inAbhangigkeit der Eigenschwingzeiten T und der viskosen Dampfung derEinfreiheitsgradschwinger. Sie werden durch die Auswertung von Seismo-grammen vergangener Erdbeben gewonnen.
1)In der Schwingungstechnik werden diese Antwortspektren als Responsespektren be-zeichnet.
1.1 Allgemeines zur Erdbebenbemessung 6
Unter der Annahme linear–elastischen Materialverhaltens lassen sich mitHilfe des Antwortspektrenverfahrens die maximalen Einwirkungen und diedaraus folgenden Beanspruchungen gut ermitteln.
1.1.3.3 Systeme mit mehreren Freiheitsgraden
Tragwerke lassen sich als Systeme mit mehreren Freiheitsgraden berechnen.Beim Lastfall Erdbeben besteht die Belastung aus einer Fußpunktverschie-bung x(t), welche bei Bauwerken geringer Abmessungen fur alle Fußpunk-te als gleich groß angenommen werden kann. Der Gesamtverschiebungs-vektor z (t) lasst sich aus der Summe aus dem Relativverschiebungsvek-tor u(t) und der mit einem Richtungsvektor rL fur die zu untersuchendeAnregungsrichtung L multiplizierten Fußpunktverschiebung durch
z (t) = u(t) + rL · x(t)
darstellen. Damit ergibt sich das Bewegungsdifferenzialgleichungssystem fureine Fußpunktanregung zu
Mz (t) + Du(t) + Ku(t) = 0
bzw.M
(u(t) + rL · x(t)
)+ Du(t) + Ku(t) = 0
mit
M Massenmatrix,
D Dampfungsmatrix,
K Steifigkeitsmatrix,
u(t) Beschleunigungsvektor,
u(t) Geschwindigkeitsvektor und
u(t) Verschiebungsvektor,
welches sich zu dem ublichen Differenzialgleichungssystem
Mu(t) + Du(t) + Ku(t) = −MrL · x(t) = p(t) (1.1)
mitp(t) Belastungsvektor der Erdbebenanregung
umformen lasst.Zur Ermittlung der Maximalantworten des zu bemessenden Tragwerks
wird dieses zunachst einer modalen Analyse unterworfen. Zur Losung des

1.1 Allgemeines zur Erdbebenbemessung 7
Gleichungssystems (1.1) wird fur den Verschiebungsvektor u(t) ein Pro-duktansatz aus allen n am ungedampften System ermittelten Eigenschwin-gungsformen ψj sowie den Zeitfunktionen qj(t) gewahlt. Er berechnetsich zu
u(t) =n∑
j=1
ψjqj(t) =[ψ1 ψ2 . . . ψj . . . ψn
] ·
q1
q2...qj...qn
= Ψ · q(t),
wobei die Eigenschwingungsformen ψj in der Matrix der Eigenschwin-gungsformen Ψ und die Zeitfunktionen qj(t) in dem Vektor q(t) zu-sammengefasst wurden.
Das Gleichungssystem (1.1) wird nun von links mit der transponiertenMatrix der Eigenschwingungsformen gemaß
ΨTMΨq + ΨTDΨq + ΨTKΨq = −ΨTMrL · x(t) (1.2)
multipliziert. Es lasst sich nachweisen [13], dass es sich bei
ΨTMΨ = M ∗
undΨTKΨ = K ∗
bei einem ungedampften System um Diagonalmatrizen handelt. Unter derAnnahme einer proprotionalen Dampfungsmatrix
D = FM ·M + FK ·K
mit den Proportionalitatsfaktoren FM und FK ergibt sich weiterhin dieDiagonalmatrix D∗ zu
ΨTDΨ = D∗.
Diese Diagonalmatrizen werden als modale Massenmatrix M ∗, modaleDampfungsmatrix D∗ sowie modale Steifigkeitsmatrix K ∗ bezeichnet.Damit ergibt sich aus dem Gleichungssystem (1.2) ein nicht gekoppeltes Dif-ferenzialgleichungssystem
M ∗ · q + D∗ · q + K ∗ · q = −ΨTMrL · x(t)

1.1 Allgemeines zur Erdbebenbemessung 8
bzw.
m∗1 0 . . . 0
0 m∗2 . . . 0
......
. . ....
0 0 . . . m∗n
q1
q2...qn
+
d∗1 0 . . . 00 d∗2 . . . 0...
.... . .
...0 0 . . . d∗n
q1
q2...qn
+
k∗1 0 . . . 00 k∗2 . . . 0...
.... . .
...0 0 . . . k∗n
q1
q2...qn
=
ψT1
ψT2...
ψTn
MrL · x(t).
Jede Zeile dieses Gleichungssystems entspricht der Bewegungsgleichung einesEinfreiheitsgradschwingers gemaß
m∗j qj(t) + d∗j qj(t) + k∗j qj(t) = −ψT
j MrL · x(t) = −LLj · x(t) = pL
j (t) (1.3)
mit der modalen Massem∗
j = ψTj Mψj,
der modalen Dampfungd∗j = ψT
j Dψj
und der modalen Steifigkeit
k∗j = ψTj Kψj
fur die Eigenschwingungen j = 1, 2, . . . , n.Der Faktor
LLj = ψT
j MrL
wird als Beteiligungsfaktor der j–ten Eigenschwingung fur die Anregungs-richtung L bezeichnet.
Die Gleichung (1.3) kann mit dem Dampfungsgrad
ϑj =d∗j
2√
k∗j ·m∗j
und der Eigenkreisfrequenz
ωd,j = ω0,j
√1− ϑ2 ≈ ω0,j =
√k∗jm∗
j
bei geringen Dampfungsgraden in der Standardform der Differenzialgleichungeines Einfreiheitsgradschwingers
qj(t) + 2 ϑj · ω0,j · qj(t) + ω20,j · qj(t) = −LL
j
m∗j
x(t) =pL
j (t)
m∗j
(1.4)
dargestellt werden.

1.1 Allgemeines zur Erdbebenbemessung 9
1.1.3.4 Modales Antwortspektrenverfahren
Um die Beanspruchung von Bauwerken aus zukunftigen Erdbeben er-mitteln zu konnen, werden aus den Umhullenden der Antwortspektrenvon mehreren als maßgebend beurteilter vergangener Erdbeben die so ge-nannten Bemessungs–Antwortspektren oder kurz Bemessungsspektren ge-wonnen. Die Spektralwerte dieser Bemessungsspektren werden im Folgen-den als Sd(ω0, ϑ) fur die Verschiebungen (displacement), Sv(ω0, ϑ) furdie Geschwindigkeiten (velocity) bzw. Sa(ω0, ϑ) fur die Beschleunigun-gen (acceleration) fur einen Schwinger mit einem Freiheitsgrad, der Eigen-kreisfrequenz ω0 sowie dem Dampfungsgrad ϑ bezeichnet. Mit Hilfe die-ser Bemessungsspektren konnen nun in der modalen Synthese die maximal zuerwartenden Anteile der einzelnen Eigenschwingungen an der Gesamtantwortdes Bauwerks auf ein Erdbeben bestimmt werden.
Die Gleichung (1.4) gleicht bis auf den Faktor LLj /m∗
j der Bewegungs-differenzialgleichung eines Einfreiheitsgradschwingers unter einer Fußpunkt-anregung. Aus dieser Analogie lassen sich nun mit Hilfe des Spektralwertsder Beschleunigung Sa,j die maximalen Beschleunigungsanteile z j,max derEigenschwingung j gemaß
z j,max =
∣∣∣∣∣qjψj +LL
j
m∗j
xψj
∣∣∣∣∣max
=LL
j
m∗j
Sa,j(ω0,j, ϑj) ·ψj
bestimmen, worin
LLj
m∗j
xψj =(ψT
j Mψj
)−1ψT
j MrLxψj = rLx
ist. Somit ergibt sich der maximaler Beschleunigungsanteil der Eigenschwin-gung j zu
z j,max =∣∣ψj · qj + rLx
∣∣max
= ψj · Sa,j(ω0,j, ϑj)LL
j
m∗j
.
Zur Berechnung der Schnittgroßen des Systems konnen nun die aus den maxi-malen Beschleunigungen der Eigenschwingungsformen und der Massenmatrixdes Systems die Ersatzlastvektoren H L
j durch
H Lj = M · z j,max = M ·ψj · Sa,j(ω0,j, ϑj)
LLj
m∗j
(1.5)
bestimmt werden. Diese Ersatzlasten bilden die Eingangswerte in eine stati-sche Berechnung zur Ermittlung der maximalen Verschiebungsanteile u j,max

1.1 Allgemeines zur Erdbebenbemessung 10
fur jede der Eigenschwingung j. Sie ergeben sich zu
u j,max = K−1 ·H Lj
= K−1 ·M ·ψj · Sa,j(ω0,j, ϑj)LL
j
m∗j
= ω−2j ·ψj · Sa,j(ω0,j, ϑj)
LLj
m∗j
u j,max = ψj · Sd,j(ω0,j, ϑj)LL
j
m∗j
. (1.6)
Bei der Berucksichtigung mehrerer Eigenschwingungen im modalen Ant-wortspektrenverfahren mussen die maximalen Antworten der einzelnen Ei-genschwingungen noch sinnvoll uberlagert werden, da sie nicht zur gleichenZeit auftreten. Ublich ist die Uberlagerung durch die Quadratwurzel aus derSumme der Quadrate der Antworten (SRSS–Regel
”square root of the sum
of the squares“). Haben Eigenschwingungen die gleiche Eigenfrequenz, soist anzunehmen, dass ihre maximalen Antworten zeitgleich erfolgen. Durchdie Methode der vollstandigen Quadratkombination (CQC–Regel
”complete
quadratic combination“, z.B. [13]) kann der Abstand der Eigenfrequenzender beteiligten Eigenschwingungen berucksichtigt werden.
Eigenschwingungen mit einem geringen Anteil an der Gesamtantwort desTragwerks konnen vernachlassigt werden, worin ein weiterer Vorteil des mo-dalen Antwortspektrenverfahrens liegt. Zur Abschatzung des Anteils der Ei-genschwingungsform j an der Gesamtantwort fur die zu untersuchende An-regungsrichtung L wird die in dieser Richtung einwirkende Gesamtersatz-last HL
j durch die Projektion der Ersatzlasten H Lj auf diese Richtung
gewonnen. Sie berechnet sich zu
HLj = (rL)T ·H L
j = (rL)TM ·ψj · Sa,j(ω0,j, ϑj)LL
j
m∗j
= Sa,j(ω0,j, ϑj)(LL
j )2
m∗j
.
Diese Projektion ist als Produkt der durch die Eigenschwingungsform jangeregten Masse in Richtung L mit dem Spektralwert der Beschleuni-gung Sa,j zu werten. Mit
MLj =
HLj
Sa,j(ω0,j, ϑj)=
(LLj )2
m∗j
ist somit die durch die Eigenschwingungsform j in der Anregungsrich-tung L angeregte Masse ML
j ermittelt. Diese Masse wird als effektivemodale Masse der Eigenschwingung j fur die Anregungsrichtung L be-zeichnet [4, 5].

1.1 Allgemeines zur Erdbebenbemessung 11
Zum Vergleich wird die in der Anregungsrichtung L insgesamt anreg-bare Masse ML ermittelt. Sie ergibt sich aus der quadratischen Form
ML = (rL)TMrL,
wobei es sich im Allgemeinen um die Gesamtmasse des Tragwerks handelt.Das Verhaltnis εL
j der effektiven modalen Masse zur Gesamtmasse desTragwerks
εLj =
MLj
ML· 100 % (1.7)
gibt also den prozentualen Anteil der j–ten Eigenschwingung fur die Anre-gungsrichtung L an und wird im Folgenden gemaß [2] als Grad der Mas-senanregung εL
j bezeichnet. Es lasst sich zeigen [5], dass die Summe al-ler n effektiven modalen Massen gleich der Gesamtmasse des Tragwerksist.
Ublicherweise werden alle Eigenschwingungen mit einem Grad der Mas-senanregung > 1, 0 % berucksichtigt. Die Uberprufung, ob die Summe
Bψ∑j=1
εLj → 100 %
annahernd 100 % erreicht, gibt an, ob genugend Eigenschwingungen Bψ
berucksichtigt wurden.Im Normalfall eines regelmaßigen orthogonalen Tragsystems ohne Tor-
sionsschwingungen um die vertikale Achse wird ublicherweise angenommen,dass lediglich die Berucksichtigung der Grundschwingung (Eigenschwingungmit der kleinsten Eigenfrequenz) je Richtung ausreichend ist. Weiterhin istin diesem Fall die Ermittlung der Eigenschwingungsform und –frequenz uberNaherungsformeln moglich, wodurch sich der Aufwand der numerischen Be-rechnung stark reduziert.
Es ist zu beachten, dass die Einwirkungen des Erdbebens auf im Trag-werk vorhandene Substrukturen oder Einbauteile auf Grund ihrer verhalt-nismaßig geringen Massen und hohen Eigenfrequenzen nur berucksichtigtwerden, wenn die fur die Strukturen relevanten Eigenschwingungsformen mitberucksichtigt wurden. Die Alternative besteht im Erstellen von Etagenant-wortspektren fur die Verankerungspunkte der Substrukturen. Mit den je-weiligen Etagenantwortspektren werden dann separate Berechnungen durch-gefuhrt.
1.1.4 Zeitverlaufsberechnungen
Mit der Hilfe von Zeitverlaufsberechnungen ist die Ermittlung der Systemant-worten zu jedem Zeitpunkt des Erdbebens moglich. Dabei wird das Tragwerk

1.1 Allgemeines zur Erdbebenbemessung 12
mehreren ehemals gemessenen bzw. kunstlich erzeugten bemessungsspektren-kompatiblen Bodenbeschleunigungszeitverlaufen x(t) ausgesetzt.
Die Bewegungsdifferenzialgleichung
Mu + Du + Ku = −MrLx(t)
wird in der Zeit schrittweise gelost. Die Ergebnisse jedes Zeitschritts n mitder Schrittweite ∆t dienen dabei als Anfangsbedingungen fur den Zeit-schritt n+1. Das in dieser Arbeit verwendete Zeitschrittverfahren wird imAbschnitt 2.3.2 erlautert.
Der numerische Aufwand der Zeitverlaufsberechnungen ist jedoch un-gleich hoher als beim modalen Antwortspektrenverfahren. Zwar besteht auchhier die Moglichkeit einer Reduktion des Rechenaufwands durch die modaleZerlegung des Systems. Dabei werden die Reaktionen der einzelnen beruck-sichtigten Eigenschwingungsformen an jedem diskreten Zeitpunkt zu einerGesamtantwort uberlagert. Der Nachteil der modalen Zeitverlaufsberechnun-gen liegt aber darin, dass ebenfalls von linear–elastischem Materialverhaltenausgegangen werden muss.
1.1.5 Bewertung
Gerade beim Lastfall Erdbeben ist jedoch die Berucksichtigung plastischenMaterialverhaltens fur eine wirtschaftliche Auslegung der Konstruktion not-wendig, wenn es darum geht, den Infarkt des Tragsystems bei einem Erdbe-ben mit geringer Auftretenswahrscheinlichkeit und großer Intensitat zu ver-hindern. In diesem Fall werden bleibende plastische Verformungen in Kaufgenommen. Weiterhin besteht das Ziel, das Tragwerk so auszulegen, dass esbei Erdbeben geringerer Intensitat mit hoherer Auftretenswahrscheinlichkeitkeine oder nur geringfugige bleibende Verformungen erfahrt.
Die mathematisch exakte Berucksichtigung plastischen bzw. allgemeinernichtlinearen Materialverhaltens ist nur mit einer nicht modalen Zeitverlaufs-berechnung moglich. Jedoch das Bestreben, den hohen numerischen und dendie plastischen Eigenschaften beschreibenden Aufwand der Zeitverlaufsbe-rechnung zu umgehen, fuhrte zur Entwicklung einer Methode, welche dieBerucksichtigung des Einflusses plastischen Materialverhaltens mit Hilfe desAntwortspektrenverfahrens ermoglicht.
Diese Methode der Kapazitatsbemessung hat seinen Ursprung in Neusee-land, wobei auf die umfangreichen Veroffentlichungen von T. Paulay hinge-wiesen sei. Im deutschen Sprachraum ist H. Bachmann, emeritierter Prof.an der ETH Zurich zu nennen, der unter anderem in Zusammenarbeit mitPaulay die Grundlagen der Methode in z.B. [7] und [8] bzw. [9] zusammen-fassend beschreibt. In [10] beschreibt er den Stand und die noch bevorste-henden Aufgaben auf dem Gebiet der Baudynamik. Fur einen umfassenden

1.1 Allgemeines zur Erdbebenbemessung 13
Uberblick zum Thema Erdbebeningenieurwesen und Kapazitatsbemessungist ebenfalls [11] von E. Keintzel (Universitat Karlsruhe TH) zu empfehlen.Weitere Hinweise zu den breit gefacherten Forschungsgebieten rund um dieKapazitatsbemessung finden sich in den genannten Schriften.

1.2 Die Methode der Kapazitatsbemessung 14
1.2 Die Methode der Kapazitatsbemessung
In diesem Abschnitt wird zunachst auf den Begriff Duktilitateingegangen. Danach folgt die Beschreibung der Standardme-thode der Kapazitatsbemessung sowie deren Anwendung nachdem Eurocode EC–8 [4].
1.2.1 Duktilitat
Bei der Methode der Kapazitatsbemessung wird der Begriff der Duktilitatverwendet. Daher wird dieser zunachst erlautert. Die Duktilitat µ ist eineSystem– bzw. Bauelementeigenschaft. Allgemein beschreibt sie das Verhalt-nis der Gesamtverformung V aus plastischem und elastischem Verfor-mungsanteil zum rein elastischen Verformungsanteil Ve gemaß
µ =V
Ve
.
1.2.1.1 Dehnungsduktilitat
So beschreibt z.B.µε =
ε
εy
, ε > εy
die Dehnungsduktilitat µε eines Stabes, wobei εy die Dehnung beim Er-reichen der Fließgrenze ist. Die Bruchdehnung ist mit εu festgelegt, woraussich eine Grenzduktilitat µε,G von εu/εy ergibt. Fur einen Bewehrungs-stahl aus BSt 500 mit einer Bruchdehnung von 10 % und einer Fließdehnungvon 2,38 ‰ ergibt sich eine Grenzduktilitat von µε,G = 42.
1.2.1.2 Krummungsduktilitat
Analog lasst sich die Krummungsduktilitat µκ eines Biegebalkens durchdie aktuelle Krummung κ und die Krummung κy beschreiben, welchevorliegt, wenn die außeren Fasern bzw. die Zugbewehrung bei einem Stahl-betonquerschnitt anfangen zu fließen,
µκ =κκy
, κ > κy.
Die Krummungsduktilitat hangt nicht nur von den Materialkennwerten, son-dern auch vom Querschnitt bzw. der Lage der Bewehrung ab. Eine weitereBegrenzung der Krummungsduktilitat bei Stahlbetonquerschnitten ist dasErreichen der Betondruckfestigkeit auf der gedruckten Querschnittsseite. Die-se kann durch Querverbugelung erhoht werden.

1.2 Die Methode der Kapazitatsbemessung 15
1.2.1.3 Rotationsduktilitat
Wird ein plastifiziertes Teilstuck des Biegebalkens betrachtet, lasst sich ei-ne Rotationsduktilitat µ∆θ definieren. Diese plastifizierten Teilstucke wer-den in der vorliegenden Arbeit durch die Fließgelenktheorie gemaß demAbschnitt 1.1.2.2 erfasst. Bei den Fließgelenken werden die Winkeldifferen-zen ∆θ zwischen dem Anfang und dem Ende des plastifizierten Teilstucks,also die Integration der Krummung uber die Lange des plastifizierten Biege-balkenteilstucks, zur Definition der Duktilitat herangezogen. Bei einem Fließ-gelenk hangt die Rotationsduktilitat
µ∆θ =∆θ
∆θy
, ∆θ > ∆θy, ∆θy Rotationswinkel bei Fließbeginn
also auch von der Lange des plastifizierten Teilstucks ab.
1.2.1.4 Verschiebeduktilitat
Die Beschreibung der Duktilitat eines Tragwerks lasst sich schwer verallge-meinern. Bei regelmaßigen Hochbauten kann z.B. eine Verschiebeduktilitat
µ∆ =∆
∆y
, ∆ > ∆y (1.8)
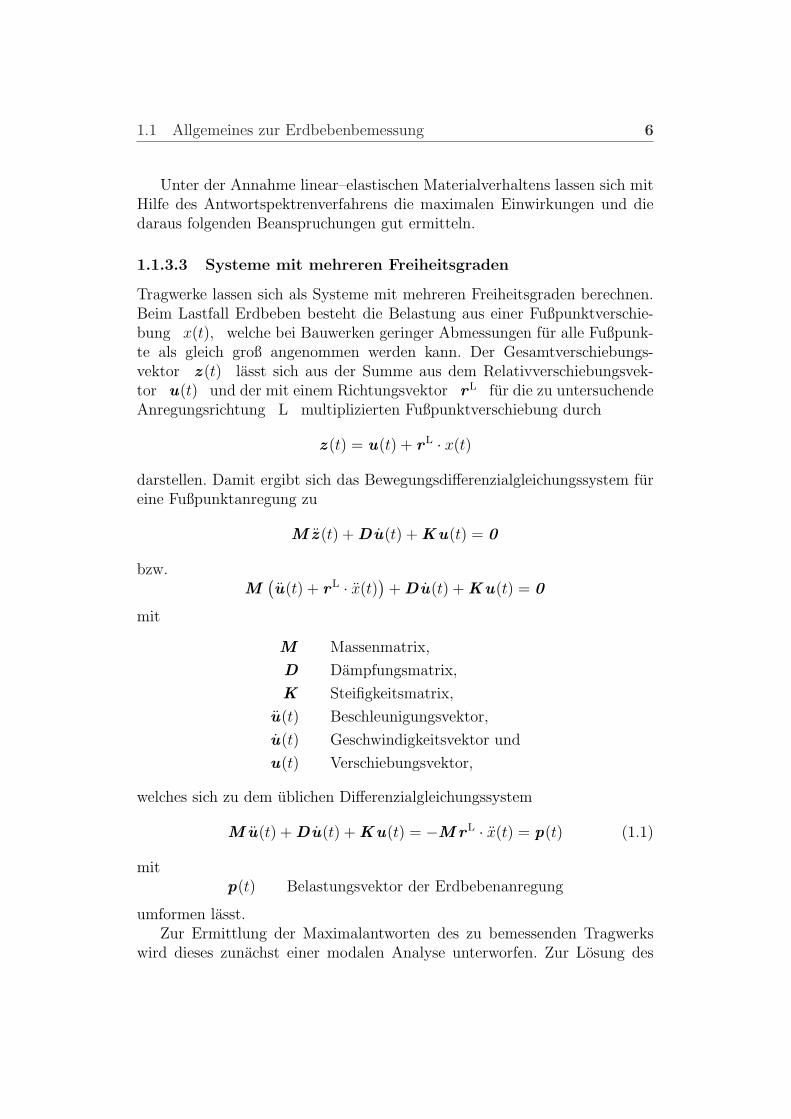
definiert werden. Darin beschreibt ∆ die horizontale Verschiebung einesbestimmten, zumeist des hochsten Punktes des Tragwerks und ∆y die hori-zontale Verschiebung zu Fließbeginn des Systems. Als Belastung werden dieerwarteten Erdbebenersatzlasten der Grundschwingungsform des modalenAntwortspektrenverfahrens angesetzt. In der Abbildung 1.2 ist mit der durch-gezogenen Linie beispielhaft eine entsprechende Last–Verformungskurve un-ter Verwendung der Fließgelenktheorie dargestellt. Dabei sind an der Ordi-natenachse neben dem Schub in Fundamenthohe auch die Lastpunkte beimEinfallen der einzelnen Fließgelenke dargestellt.
Bei der Festlegung, wann das System zu fließen anfangt, wird im Allge-meinen nicht das Auftreten des ersten Fließgelenks bzw. plastischen Bereichsim System herangezogen. Dies konnte schon bei minimaler Last geschehen.Bei der Festlegung soll das gesamte System bzgl. seiner Duktilitat erfasstwerden. In [7] wird vorgeschlagen, die tatsachliche Last–Verformungskurvedurch eine bilineare elastisch–plastische Last–Verformungskurve (siehe Ab-bildung 1.2, gestrichelte Linie) anzunahern, um die idealisierte Verschiebungbeim Fließbeginn ∆y unter der Last Fy festlegen zu konnen. Dabei wirddie idealisierte elastische Steifigkeit bei 75 % des Tragwiderstands Fy mitder tatsachlichen, durch Experimente abgesicherten Steifigkeit gleichgesetzt.
1.2 Die Methode der Kapazitatsbemessung 16
1. Fließgelenk
2. Fließgelenk
3. Fließgelenk
4. Fließgelenk
letztes Fließgelenk
∆y ∆G
Verschiebung der obersten Stockwerksdecke ∆
Sch
ub i
n
Fun
dam
enth
öhe
0,75 Fy
1,00 Fy
Fließgelenkverfahrenbilinear
Abbildung 1.2: Last–Verformungskurve
In obigem Beispiel erfolgte die Berechnung der Last–Verformungskurveunter Berucksichtigung des plastischen Materialverhaltens mit der Fließge-lenktheorie. Dort ergibt sich eine Grenzduktilitat von
µ∆,G =∆G
∆y
(1.9)
mit der Verschiebung ∆G, bei welcher das erste Fließgelenk seine maximaleGelenkrotation erfahrt.
1.2.2 Physikalischer Hintergrund
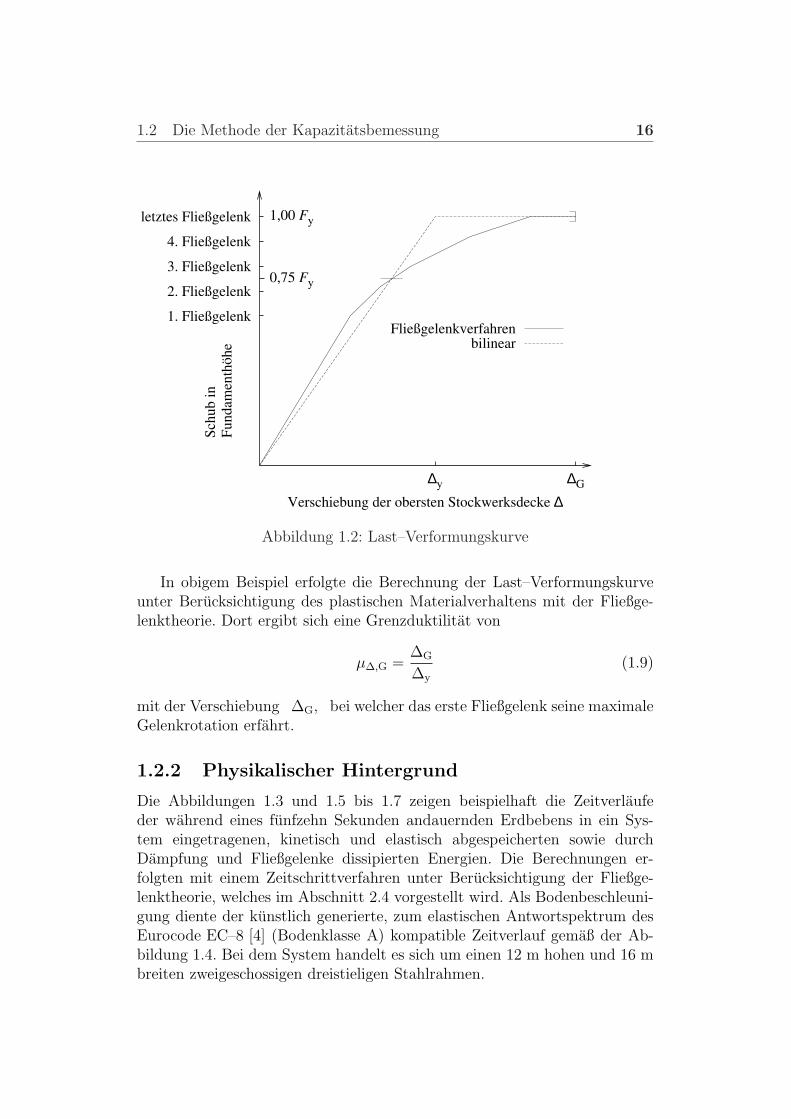
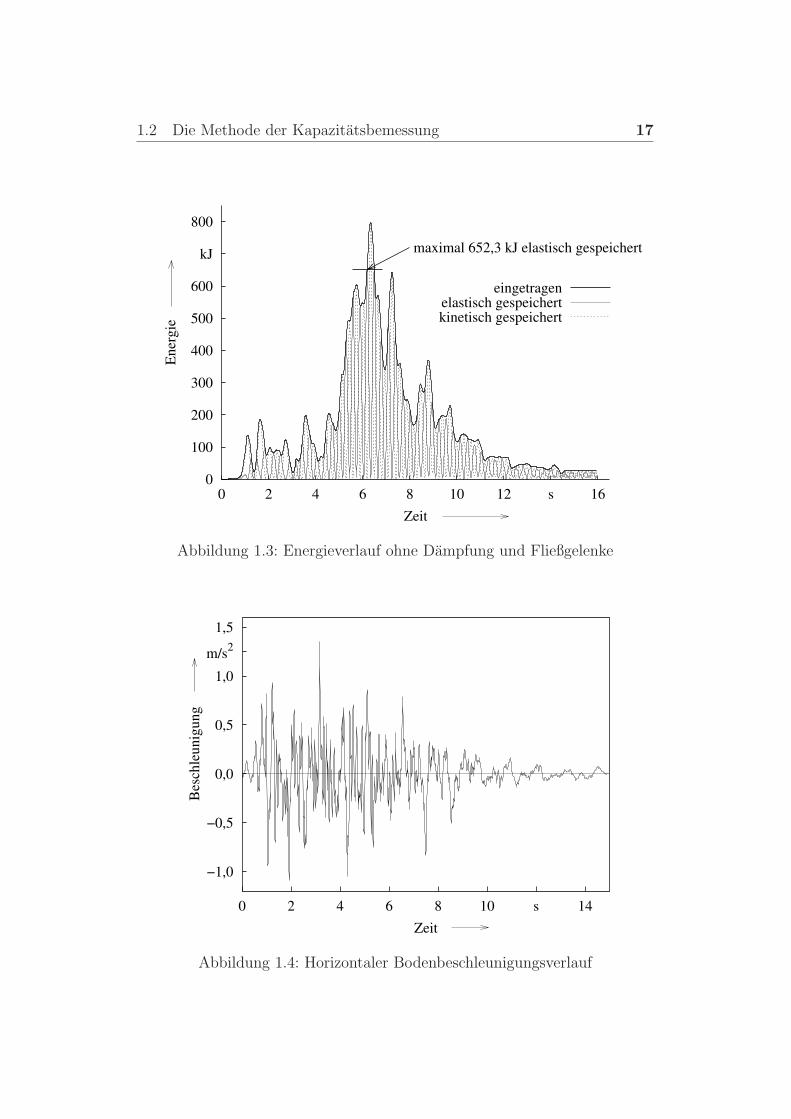
Die Abbildungen 1.3 und 1.5 bis 1.7 zeigen beispielhaft die Zeitverlaufeder wahrend eines funfzehn Sekunden andauernden Erdbebens in ein Sys-tem eingetragenen, kinetisch und elastisch abgespeicherten sowie durchDampfung und Fließgelenke dissipierten Energien. Die Berechnungen er-folgten mit einem Zeitschrittverfahren unter Berucksichtigung der Fließge-lenktheorie, welches im Abschnitt 2.4 vorgestellt wird. Als Bodenbeschleuni-gung diente der kunstlich generierte, zum elastischen Antwortspektrum desEurocode EC–8 [4] (Bodenklasse A) kompatible Zeitverlauf gemaß der Ab-bildung 1.4. Bei dem System handelt es sich um einen 12 m hohen und 16 mbreiten zweigeschossigen dreistieligen Stahlrahmen.
1.2 Die Methode der Kapazitatsbemessung 17
0
100
200
300
400
500
600
kJ
800
0 2 4 6 8 10 12 s 16
En
ergie
Zeit
maximal 652,3 kJ elastisch gespeichert
eingetragenelastisch gespeichertkinetisch gespeichert
Abbildung 1.3: Energieverlauf ohne Dampfung und Fließgelenke
−1,0
−0,5
0,0
0,5
1,0
m/s2
1,5
0 2 4 6 8 10 s 14
Zeit
Bes
chle
un
igu
ng
Abbildung 1.4: Horizontaler Bodenbeschleunigungsverlauf

1.2 Die Methode der Kapazitatsbemessung 18
0
100
200
300
400
500
kJ
700
0 2 4 6 8 10 12 s 16
En
erg
ie
Zeit
maximal 176,5 kJ elastisch gespeichert
eingetragendurch Dämpfung dissipiert
elastisch gespeichertkinetisch gespeichert
Abbildung 1.5: Energieverlauf mit Dampfung und ohne Fließgelenke
Ohne die Berucksichtigung von Dampfung und plastischem Materialver-halten in Form von Fließgelenken (siehe Abbildung 1.3) werden im Sys-tem maximal 652, 3 kJ als Energie elastisch abgespeichert. Schon bei derBerucksichtigung eines Dampfungsgrades von 5 % sinkt gemaß der Abbil-dung 1.5 dieser Maximalwert auf 176, 5 kJ.
Aus den Verhaltnissen der elastisch gespeicherten Energien lassen sich diedurchschnittlichen Schnittkraftreduktionen ermitteln. Dies sei am Beispieleiner Normalkraftfeder erklart. Die elastisch gespeicherte Energie Eeg,F inder Feder betragt Eeg,F = N2
F/2cN. Damit ergibt sich das Verhaltnis vonzwei unterschiedlichen Normalkraften zu
NF,1
NF,2
=
√N2
F,1/2cN
N2F,2/2cN
=
√Eeg,F,1
Eeg,F,2
. (1.10)
Unter Verwendung der Gleichung (1.10) folgt unter Berucksichtigung derDampfung uberschlaglich eine durchschnittliche Schnittkraftreduktion zurrein elastischen Antwort auf
√176, 5 kJ
652, 3 kJ· 100 % = 53, 2 %.
Werden zusatzlich Fließgelenke zugelassen (siehe Abbildung 1.6), kommt es
1.2 Die Methode der Kapazitatsbemessung 19
0
100
200
300
400
500
kJ
700
0 2 4 6 8 10 12 s 16
En
erg
ie
Zeit
maximal 45,8 kJ elastisch gespeichert
eingetragen
durch Dämpfung dissipiert
durch Fließgelenke dissipiert
elastisch gespeichert
kinetisch gespeichert
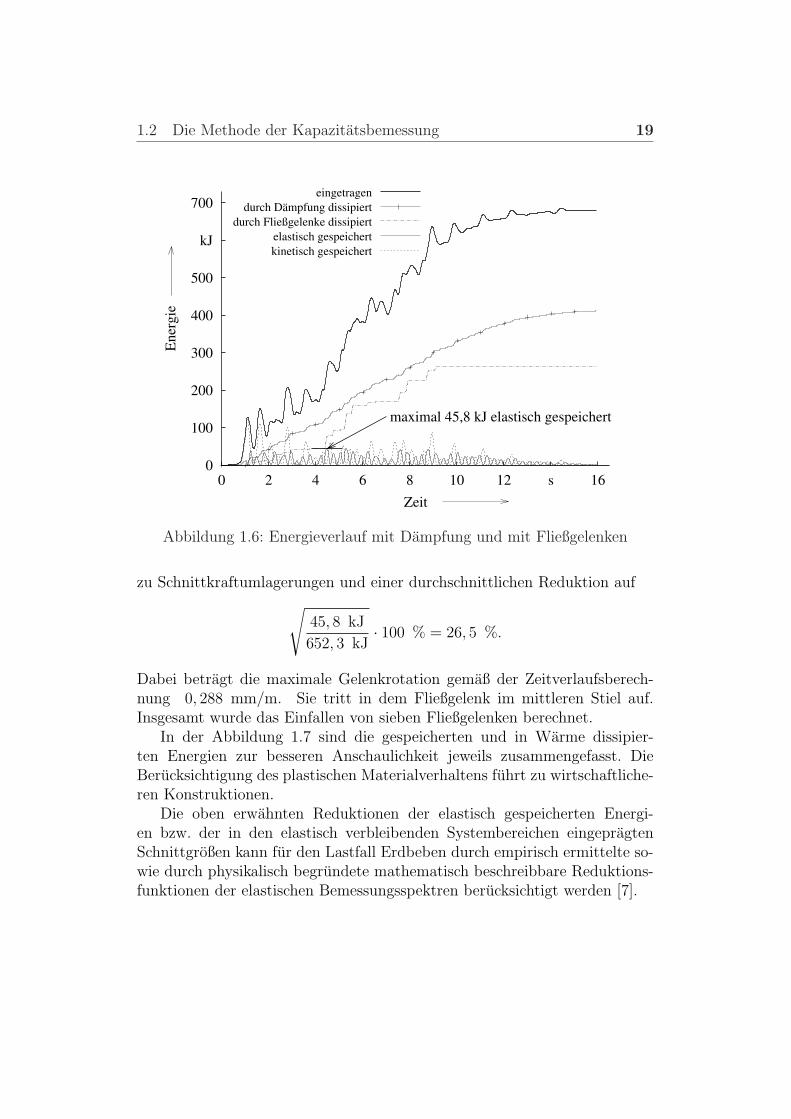
Abbildung 1.6: Energieverlauf mit Dampfung und mit Fließgelenken
zu Schnittkraftumlagerungen und einer durchschnittlichen Reduktion auf
√45, 8 kJ
652, 3 kJ· 100 % = 26, 5 %.
Dabei betragt die maximale Gelenkrotation gemaß der Zeitverlaufsberech-nung 0, 288 mm/m. Sie tritt in dem Fließgelenk im mittleren Stiel auf.Insgesamt wurde das Einfallen von sieben Fließgelenken berechnet.
In der Abbildung 1.7 sind die gespeicherten und in Warme dissipier-ten Energien zur besseren Anschaulichkeit jeweils zusammengefasst. DieBerucksichtigung des plastischen Materialverhaltens fuhrt zu wirtschaftliche-ren Konstruktionen.
Die oben erwahnten Reduktionen der elastisch gespeicherten Energi-en bzw. der in den elastisch verbleibenden Systembereichen eingepragtenSchnittgroßen kann fur den Lastfall Erdbeben durch empirisch ermittelte so-wie durch physikalisch begrundete mathematisch beschreibbare Reduktions-funktionen der elastischen Bemessungsspektren berucksichtigt werden [7].

1.2 Die Methode der Kapazitatsbemessung 20
0
100
200
300
400
500
kJ
700
0 2 4 6 8 10 12 s 16
En
erg
ie
Zeit
eingetragendissipiert
gespeichert
Abbildung 1.7: Zusammengefasster Energieverlauf mit Dampfung und mitFließgelenken
1.2.3 Reduktionsfunktionen der Erdbebenersatzlastinfolge der Duktilitat
1.2.3.1 Empirische Reduktionsfunktionen
Werden infolge von aufgezeichneten Erdbebenzeitverlaufen die Reaktionenvon Einfreiheitsgradschwingern mit inelastischem Materialverhalten ermit-telt, so konnen deren Maximalreaktionen in den so genannten inelasti-schen Antwortspektren erfasst werden. Dabei ergeben sich mehrere, von denwahrend des Erdbebens aufgetretenen Duktilitaten der einzelnen Einfrei-heitsgradschwinger abhangige Verlaufe. Fur die spatere Verwendung dieserVerlaufe in einer Erdbebenbemessung erweist sich deren Normierung auf daszu dem Erdbeben gehorige elastische Antwortspektrum durch eine Redukti-onsfunktion als vorteilhaft.
Nach der Auswertung verschiedener Erdbebenzeitverlaufe konnen danndurch eine Mittelwertbildung und Glattung der einzelnen Reduktionsfunk-tionen empirische Reduktionsfunktionen bestimmt werden. Sie geben inAbhangigkeit von den Eigenschwingungszeiten des zu untersuchenden duk-tilen Tragwerks das Verhaltnis der anzusetzenden Erdbebenersatzlasten zuden Erdbebenersatzlasten des elastischen Bemessungsspektrums beim moda-len Antwortspektrenverfahren an.

1.2 Die Methode der Kapazitatsbemessung 21
1.2.3.2 Mathematische Reduktionsfunktionen
Liegen keine empirisch ermittelten Reduktionsfunktionen vor, so konnen dieinelastischen Bemessungsspektren durch die mathematisch formulierten Re-duktionsfunktionen infolge der Verschiebeduktilitaten µ∆ gemaß der bei-den folgenden Prinzipien gewonnen werden.
Prinzip der gleichen Verschiebung: Dieses Prinzip beruht auf der An-nahme, dass die Verschiebung ∆ep eines Einfreiheitsgradschwingers miteinem elastisch–ideal plastischen Materialverhalten bei gleicher Erdbebenbe-lastung genauso groß ist wie die Verschiebung ∆le eines analogen Ein-freiheitsgradschwingers mit rein linear–elastischem Materialverhalten undgleicher Anfangssteifigkeit (siehe Abbildung 1.8). Die Reduktion der Erd-bebenersatzlast wird uber die Reduktionsfunktion αµ(µ∆) erfasst. Sie
Bel
astu
ngF
Fy
∆ y ∆ ep∆ le
Fle
∆=
Verschiebung
linear elastisch
elastisch−ideal plastisch
Abbildung 1.8: Prinzip der gleichen Verschiebung
beschreibt das Verhaltnis der maximalen Belastung des Einfreiheitsgrad-schwingers mit einem elastisch–ideal plastischen Materialverhalten Fy zuder Belastung Fle des Einfreiheitsgradschwingers mit einem rein linear–elastischen Materialverhalten und berechnet sich als Reziprokwert der Ver-schiebeduktilitat µ∆ zu
αµ(µ∆) =Fy
Fle
=∆y
∆ep
=1
µ∆
. (1.11)
Prinzip der gleichen Arbeit: Bei diesem Prinzip werden nicht die Ver-schiebungen, sondern die in dem Einfreiheitsgradschwinger mit einem rein

1.2 Die Methode der Kapazitatsbemessung 22
Bel
astu
ngF
Fy
∆ y ∆ ep∆ le
∆Verschiebung
Eep
Fle E
le
elastisch−ideal plastisch
linear elastisch
Abbildung 1.9: Prinzip der gleichen Arbeit
linear–elastischen Materialverhalten gespeicherte Energie Ele sowie die indem Einfreiheitsgradschwinger mit einem elastisch–ideal plastischen Mate-rialverhalten gespeicherte sowie in Warme dissipierte Energie Eep gemaßder Abbildung 1.9 als gleich groß angenommen. Daraus ergibt sich
Ele =1
2Fle ·∆le = Fy
(∆ep − ∆y
2
)= Eep. (1.12)
Nach einigen Umstellungen der Gleichung (1.12), der Verwendung der Glei-chung
∆le = ∆µFle
Fy
und der Verwendung der Duktilitatsgleichung (1.8) ergibt sich die Redukti-onsfunktion nach dem Prinzip der gleichen Arbeit zu
αµ(µ∆) =Fy
Fle
=1√
2µ∆ − 1. (1.13)
Mit den hier beschriebenen Reduktionsfunktionen konnen Bauwerke un-ter Berucksichtigung ihrer Duktilitat unter einer Erdbebenbelastung bemes-sen werden. Bei der konstruktiven Auslegung zur Sicherstellung der Dukti-litat sind jedoch verschiedene Konstruktionsprinzipien zu beachten. In denfolgenden Abschnitten werden diese Grundprinzipien nach der Methode derKapazitatsbemessung sowie deren Anwendung unter Verwendung des moda-len Antwortspektrenverfahrens erlautert.

1.2 Die Methode der Kapazitatsbemessung 23
1.2.4 Grundlagen der Standardmethode der Kapa-zitatsbemessung
Bei der Bemessung von Gebauden fur den Lastfall Erdbeben sind die Ziel-stellungen von der Wichtigkeit des Gebaudes und der Wahrscheinlichkeit derangenommenen Belastung abhangig. Insbesondere tritt aus Kostengrundenbei sinkender Wahrscheinlichkeit das Ziel der Gebrauchstauglichkeit nachdem Erdbeben in den Hintergrund. Lediglich die Standsicherheit ist zumSchutz der Personen und hoherwertiger Ausstattung zu gewahrleisten. Dabeisind nicht nur sehr große, sondern auch bleibende Verformungen moglich.
Im Rahmen der Standardmethode der Kapazitatsbemessung [7] wird derpositive Effekt der Energiedissipation beim Entstehen der bleibenden Verfor-mungen in den plastischen Bereichen durch eine Reduktion der Erdbebener-satzlasten des modalen Antwortspektrenverfahrens berucksichtigt.
Die Bereiche, in denen plastische Verformungen auftreten konnen, werdendabei so gewahlt, dass das Gesamtsystem seine Tragfahigkeit behalt und beimoglichst großen Verschiebeduktilitaten moglichst kleine plastische Verfor-mungen auftreten, siehe Abbildung 1.10(a) (Riegelmechanismus).
(a) Riegelmechanismus (b) Stockwerksmechanismus
Abbildung 1.10: Versagensmechanismen
Dazu sind plastische Bereiche in den senkrechten Traggliedern bis aufdiejenigen an der Bauwerksunterkante zu verhindern. Die plastischen Ver-formungen sollen hauptsachlich in den horizontalen Traggliedern stattfinden.Weiterhin ist dafur Sorge zu tragen, dass die lokalen Duktilitaten aller Trag-glieder (Rotations-, Krummungsduktilitat) die globale Verschiebeduktilitatermoglichen.
1.2 Die Methode der Kapazitatsbemessung 24
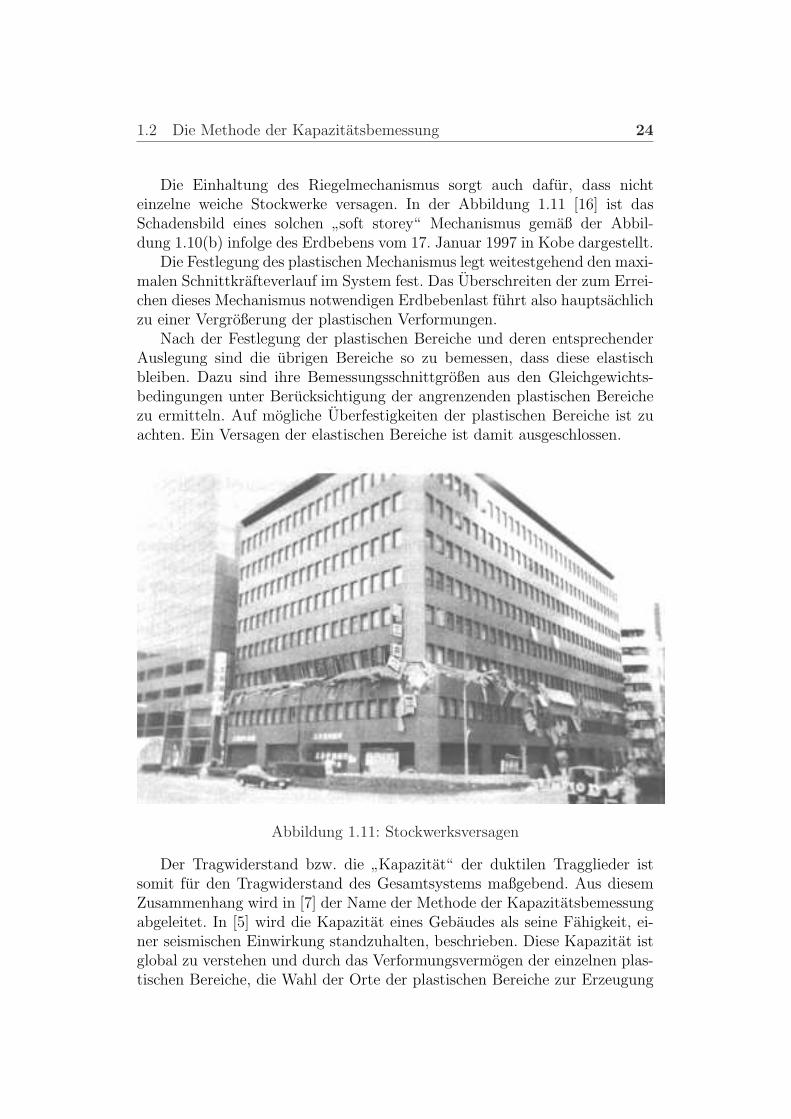
Die Einhaltung des Riegelmechanismus sorgt auch dafur, dass nichteinzelne weiche Stockwerke versagen. In der Abbildung 1.11 [16] ist dasSchadensbild eines solchen
”soft storey“ Mechanismus gemaß der Abbil-
dung 1.10(b) infolge des Erdbebens vom 17. Januar 1997 in Kobe dargestellt.Die Festlegung des plastischen Mechanismus legt weitestgehend den maxi-
malen Schnittkrafteverlauf im System fest. Das Uberschreiten der zum Errei-chen dieses Mechanismus notwendigen Erdbebenlast fuhrt also hauptsachlichzu einer Vergroßerung der plastischen Verformungen.
Nach der Festlegung der plastischen Bereiche und deren entsprechenderAuslegung sind die ubrigen Bereiche so zu bemessen, dass diese elastischbleiben. Dazu sind ihre Bemessungsschnittgroßen aus den Gleichgewichts-bedingungen unter Berucksichtigung der angrenzenden plastischen Bereichezu ermitteln. Auf mogliche Uberfestigkeiten der plastischen Bereiche ist zuachten. Ein Versagen der elastischen Bereiche ist damit ausgeschlossen.
Abbildung 1.11: Stockwerksversagen
Der Tragwiderstand bzw. die”Kapazitat“ der duktilen Tragglieder ist
somit fur den Tragwiderstand des Gesamtsystems maßgebend. Aus diesemZusammenhang wird in [7] der Name der Methode der Kapazitatsbemessungabgeleitet. In [5] wird die Kapazitat eines Gebaudes als seine Fahigkeit, ei-ner seismischen Einwirkung standzuhalten, beschrieben. Diese Kapazitat istglobal zu verstehen und durch das Verformungsvermogen der einzelnen plas-tischen Bereiche, die Wahl der Orte der plastischen Bereiche zur Erzeugung

1.2 Die Methode der Kapazitatsbemessung 25
eines gunstigen plastischen Mechanismus zur Gewahrleistung einer großenGrenzverschiebeduktilitat sowie die Auslegung der elastischen Bereiche unterBerucksichtigung der Uberfestigkeiten der angrenzenden plastischen Bereichesichergestellt.
Im folgenden Abschnitt wird die Anwendung der Standardmethode derKapazitatsbemessung uber ein reduziertes Antwortspektrum nach dem Eu-rocode EC–8 erlautert.
1.2.5 Reduziertes elastisches Antwortspektrum
Wie im Abschnitt 1.2.3 beschrieben, lasst sich die Reduktion der Erdbe-benersatzlasten infolge der Bauwerksduktilitat durch die Verwendung voninelastischen Antwortspektren berucksichtigen. Diese konnen durch die An-gabe von Reduktionsfunktionen der elastischen Antwortspektren beschriebenwerden.
Die Abbildung 1.12 zeigt beispielhaft die Reduktion des elasti-schen Antwortspektrums (fett durchgezogene Linie) auf die
”Bemes-
sungsspektren“ uber verschiedene das duktile Tragverhalten beruck-sichtigende Verhaltensbeiwerte q nach dem Eurocode EC–8, wobeibzgl. der Bedeutung der dort verwendeten Variablen auf den Euro-code EC–8 [4] verwiesen wird.
Die Bezeichnung der Spektren ist gegenuber der sonstigen Literatur un-einheitlich. Teilweise wird das elastische Antwortspektrum als elastischesBemessungsspektrum und die Bemessungsspektren als inelastische Bemes-sungsspektren bezeichnet. In diesem Abschnitt wird der Namensgebung desEurocode EC–8 gefolgt.
Das tatsachliche Verhalten eines Tragwerks unter einer Erdbebenlast lasstsich ohne eine nichtlineare Zeitverlaufsberechnung nicht angeben. Grundsatz-lich lassen sich jedoch Tendenzen des duktilen Verhaltens in Abhangig-keit vom Tragwerkstyp, der Zahigkeit der verwendeten Materialien, der Re-gelmaßigkeit des Tragwerks sowie der vorherrschenden Versagensart ange-ben. Bzgl. der Beurteilung der Verformungsvermogen verschiedener Trag-werke sei z.B. auf [7] und [4] verwiesen.
Der Verhaltensbeiwert q wird durch die Kombination aller Einflussedurch
q = q0 · kD · kR · kW ≥ 1, 5 (1.14)
mit
q0 als Grundwert in Abhangigkeit vom Tragwerkstyp (2 bis 5),
kD als Beiwert zur Berucksichtigung der Zahigkeitsklasse,
kR als Beiwert zur Berucksichtigung der Regelmaßigkeit im Aufriss und
kW als Beiwert zur Berucksichtigung der vorherrschenden Versagensart,

1.2 Die Methode der Kapazitatsbemessung 26
ag • S bzw. α • S
ag • S • 2,5 • η • βo
α • S • βo/ q (=1,1)
α • S • βo/ q (=5,0)
TB TC TD
Eigenschwingzeit T / s
Se
/ m
/s2 b
zw. S
d /
-
α • S • βo/ q (=2,5)
elastischreduziert (q=1,1)reduziert (q=2,5)reduziert (q=5,0)
Beispiel mit βo = 2, 5 und S = 1, 0 (Baugrundklasse B) mit:
ag Bemessungswert der Bodenbeschleunigung fur die Referenz–Wiederkehrperiode
α Verhaltnis zwischen ag und der Erdbeschleunigung g (α = ag/g)
β0 Verstarkungsbeiwert der Spektralbeschleunigungfur 5 % viskose Dampfung
S Bodenparameter
Sd Ordinate des mit der Erdbeschleunigung g normierten Bemessungs-spektrums
Se Ordinate des elastischen Antwortspektrums
TB, TC Grenzen des Bereichs mit konstanter Spektralbeschleunigung
TD Wert, der den Beginn der Verschiebung mit konstanter Ver-schiebung im Spektrum bestimmt
q Verhaltensbeiwert
Abbildung 1.12: Beschleunigungsspektren des Eurocode EC–8
1.3 Erweiterung der Methode der Kapazitatsbemessung 27
beispielhaft fur Stahlbetonbauten gemaß dem Abschnitt 2.3.2.1 des Euroco-de EC–8 Teil 1-3, gewonnen. Die Beiwerte kD bis kW sind jeweils ≤ 1, 0,wodurch sich ein maximaler Verhaltensbeiwert von q = 5, 0 ergibt. Uberden Verhaltensbeiwert ist auch der Einfluss der Dampfung zu berucksichti-gen.
Der Verhaltensbeiwert q ist frequenzunabhangig definiert. In einer Viel-zahl von Versuchen wurde jedoch fur nichtlineare Einfreiheitsgradschwingereine Frequenzabhangigkeit nachgewiesen (siehe z.B. [12]). Fur den mittle-ren Frequenzbereich von etwa 2 bis 10 Hz liefert der Ansatz zur Reduktionnach dem Prinzip der gleichen Arbeit gemaß der Gleichung (1.13) gute Re-sultate. Mit steigenden Eigenschwingzeiten vergroßert sich die Reduktion beigleicher Duktilitat und wird besser durch das Prinzip der gleichen Verschie-bung gemaß der Gleichung (1.11) beschrieben. Mit steigenden Eigenfrequen-zen verringert sich die Reduktion, bis sie ab 33 Hz im Allgemeinen zuNull angenommen wird. Systeme mit hohen Eigenfrequenzen verhalten sichdemnach quasi elastisch.
Die Berucksichtigung der vorgenannten Frequenzabhangigkeit erfolgtbeim Eurocode EC–8 naherungsweise uber die Anpassung der Form des Be-messungsspektrums. Grundsatzliche Uberlegungen dazu finden sich in [12].
1.3 Erweiterung der Methode der Kapa-
zitatsbemessung in der vorliegenden Ar-
beit
Die Festlegung des duktilen Tragverhaltens eines Bauwerks stellt die großteUnsicherheit bei der Standardmethode der Kapazitatsbemessung dar. DieGrenzduktilitat des Tragwerks lasst sich uber die Definition der Verschiebe-duktilitat gemaß der Gleichung (1.9) noch recht gut abschatzen.
Die volle Duktilitat wird jedoch nur erreicht, wenn alle Fließgelenke einfal-len. Bei einem Erdbeben geringerer Intensitat ist dies nicht gegeben. Der Be-reich zwischen der rein elastischen und der voll plastischen Antwort des Trag-werks lasst sich mit der Methode der Kapazitatsbemessung nicht erfassen.Vielmehr liegen die mit ihr ermittelten Schnittgroßen und Verformungen un-ter den zu erwartenden. Es ist lediglich eine Aussage daruber moglich, ob dasBauwerk den Belastungen des Erdbebens prinzipiell standhalt. Welche Ver-formungen und Krafte in diesem Bereich der Erdbebenintensitat tatsachlichzu erwarten sind, kann mit der Standardmethode der Kapazitatsbemessungnicht bestimmt werden. Außerdem werden bei der Verteilung und Ermittlungder Erdbebenersatzlasten die am System mit linear–elastischem Materialver-halten ermittelten Eigenschwingungsformen zugrundegelegt.

1.4 Aufbau der Arbeit 28
Das Ziel dieser Arbeit ist, die sich tatsachlich einstellenden plastischenund elastischen Verformungen zur Ermittlung der Systemduktilitat und da-mit der Reduktion des elastischen Antwortspektrums heranzuziehen. Die Sys-temduktilitat wird also in der Berechnung als Unbekannte eingefuhrt. DieSchnittgroßen aus der Erdbebenlast werden nach dem modalen Antwortspek-trenverfahren fortlaufend unter Verwendung der Fließgelenktheorie und dieSystemduktilitat in Abhangigkeit der gespeicherten elastischen Formande-rungsenergie sowie der in den Fließgelenken dissipierten Energie ermittelt.Die Reduktion des elastischen Antwortspektrums erfolgt dann in Abhangig-keit der effektiv auftretenden energieabhangigen Systemduktilitat.
Der wissenschaftliche Fortschritt dieser Arbeit besteht darin, die Reaktio-nen eines Bauwerkes auf ein Erdbeben unter Berucksichtigung des duktilenTragverhaltens mit Hilfe des modalen Verfahrens und geringem zusatzlichennumerischen Aufwand genauer als bisher bestimmen zu konnen.
1.4 Aufbau der Arbeit
Im nachsten Abschnitt werden die verwendeten numerischen Verfahren vor-gestellt. Die Kombination aus dem Fließgelenkverfahren mit stetiger Laststei-gerung und dem Zeitschrittverfahren wurde fur umfangreiche Berechnungenunter antwortspektrenkompatiblen Bodenbeschleunigungszeitverlaufen her-angezogen. Das modale Verfahren wurde zum Erreichen des oben genann-ten Ziels modifiziert. Die Verifikation der Erdbebenersatzlastreduktion beimmodalen Antwortspektrenverfahren erfolgte uber die Ergebnisse der Zeitver-laufsberechnungen.
Im Abschnitt 3 wird die Modifizierung des modalen Verfahrens zur Er-fassung der energieabhangigen Systemduktilitat vorgestellt. Danach folgt imAbschnitt 4 ein Vergleich zu dem Berechnungsverfahren des Eurocode–EC 8.Weiterhin wird dort ein Ausblick gegeben, welche Untersuchungen zurFortfuhrung der Forschungsarbeit durchgefuhrt werden konnten.
Im Anhang befindet sich eine Herleitung der verwendeten finiten Elemen-te und des Eigenwertlosers sowie Beispielberechnungen zur Ermittlung derelastisch gespeicherten Formanderungsenergie unter Berucksichtigung vonFließgelenken.

2 Numerische Verfahren
2.1 Uberblick
In diesem Abschnitt werden die zur numerischen Berechnung verwende-ten Verfahren vorgestellt. Dazu wurde das institutseigene Stabtragwerkspro-gramm FEMAS erweitert. Dieses Programm steht uber die Internetseitedes Fachgebiets Statik der Baukonstruktionen zur Verfugung. Zu Beginnder Arbeit war die Berechnung nach Theorie I. und II. Ordnung moglich.Die Berucksichtigung von Imperfektionen, Temperatur und Vorspannung ne-ben den ublichen Knoten- und Streckenlasten war ebenso wie die Erfassungvon elastisch gebetteten Balken moglich. Weiterhin waren Stabilitats- undSchwingungsanalysen programmiert.
Der Lastfall Erdbeben konnte mit dem modalen Verfahren berechnet wer-den. Dabei standen verschiedene Bemessungsspektren zur Verfugung. DasBemessungsspektrum des Eurocode EC–8 wurde hinzugefugt.
Zur Berucksichtigung des duktilen Tragverhaltens unter Erdbebenlastwurde das Programmsystem erweitert. Zuerst wird die Vorgehensweise zurBerucksichtigung von Fließgelenken im Allgemeinen, das gewahlte Verfah-ren zur numerischen Integration im Zeitbereich und dann die Kombinationbeider Verfahren dargestellt. Letztlich folgt eine Beschreibung eines modifi-zierten modalen Verfahrens, welches fur Vergleichsberechnungen entwickeltwurde, sowie des modalen Verfahrens zur Berucksichtigung der Systemduk-tilitat beim Lastfall Erdbeben.
2.2 Fließgelenkmethode unter statischer Last
- stetige Laststeigerung
2.2.1 Erfassung der Gelenke
Zur Berucksichtigung von plastischem Materialverhalten in Form von Fließ-gelenken gemaß dem Abschnitt 1.1.2.2 in einem Finite Elemente Programmbieten sich mehrere Moglichkeiten:
2.2 Fließgelenkmethode 30
1. Fließgelenke werden uberall im System zugelassen.
Vorteil: Fließgelenke innerhalb von Elementen, also im Falle von Stre-ckenlasten, konnen berucksichtigt werden.
Nachteil: Die Erfassung gelingt nur uber komplizierte Elemente oderuber das adaptive Einfuhren bzw. Entfernen von zusatzlichenKnoten am Ort des entstandenen Fließgelenks.Bei der adaptiven Variante wurde sich die Dimension des zu losen-den Gleichungssystems und die Inzidenz des Systems mit jedemLaststeigerungsschritt verandern. Dies hat neben dem program-miertechnischen auch den Nachteil, dass die Ubergabe der er-mittelten Eigenschwingungsformen als Startvektor zur Erstellungdes Krylov–Subraums beim modalen Verfahren gemaß dem Ab-schnitt 2.5 nicht moglich ist.
2. Fließgelenke werden nur an den Knoten außerhalb der Balkenelementezugelassen.
Die Vor- und Nachteile von Punkt 1 sind hier entgegengesetzt.
Weiterer Nachteil: An den Knoten mussen vorab zusatzliche Ele-mente mit Drehfreiwerten installiert werden, um im Falle einesFließgelenks zwischen dem Systemknoten und dem angreifendenElement einen Winkelsprung zuzulassen. Damit erhoht sich vonvornherein die Dimension des zu losenden Gleichungssystems. JeElement mussen ein bis zwei zusatzliche Elemente eingefuhrt wer-den.
3. Fließgelenke werden nur an den Knoten in den Elementen zugelassen,wobei sie durch geanderte Elementsteifigkeitsmatrizen erfasst werden.
Die Vor- und Nachteile von Punkt 1 sind auch hier entgegengesetzt.
Weiterer Vorteil: Es ist lediglich die Information uber das Einfalleneines Fließgelenks abzuspeichern und eine modifizierte Element-steifigkeitsmatrix gemaß Anhang A zur Verfugung zu stellen.
Nachteil: Die Information uber die Große des Winkelsprungs muss,wie auch bei Punkt 1, in einer gesonderten Nachlaufberechnungermittelt und abgespeichert werden.
Der Vorteil von Punkt 1 ist vernachlassigbar und uber eine verfeinerte Ele-mentierung in kritischen Bereichen zu erfassen. Aufgrund dieser Uberlegun-gen wurde entsprechend Punkt 3 verfahren.

2.2 Fließgelenkmethode 31
2.2.2 Programmablauf
Gestartet wird mit dem unmodifizierten System und der gesamten Last. Beijedem neuen Lastschritt wird die Systemsteifigkeitsmatrix unter Verwendungder modifizierten Elementsteifigkeitsmatrix des Elementes mit dem neuenFließgelenk angepasst. Dazu wird zunachst die Elementsteifigkeitsmatrix oh-ne Berucksichtigung der Modifikation von der Systemsteifigkeitsmatrix sub-trahiert und danach die modifizierte Elementsteifigkeitsmatrix addiert.
Nach jedem Laststeigerungsschritt, wobei jeweils die gesamte Last ange-setzt wird, werden mehrere Fakten abgepruft:
1. Ist der Winkelsprung in einem schon entstandenen Fließgelenk be-tragsmaßig kleiner geworden bzw. erhalt der Winkelsprung sogar einanderes Vorzeichen? Ist dies der Fall, wird das Fließgelenk wieder ge-schlossen und der Laststeigerungsschritt wiederholt.
2. Gibt es im System Biegemomente, die großer sind als das im voll pla-stifizierten Zustand aufnehmbare plastische Moment Mpl des dazu-gehorigen Elements? Falls ja, entsteht das neue Fließgelenk an der Stel-le, an der das Verhaltnis zwischen der Differenz aus dem plastischen Mo-ment und dem schon vorhandenen Moment aus den vorangegangenenLastschritten zu dem Moment Mi aus dem aktuellen Lastschritt amkleinsten ist. Dazu muss die Last um die Laststeigerungsdifferenz ∆ρi
gesteigert werden. Er berechnet sich zu
∆ρi =
(sign(Mi)Mpl −
i−1∑j=1
∆ρjMj
)/Mi mit sign(Mi) =
Mi
|Mi| .
Der Laststeigerungsfaktor ρ wird dann gemaß
ρ =i∑
j=1
∆ρj
jeweils um ∆ρi vergroßert.
Im Normalfall wird bei dem Punkt 2 darauf geachtet, dass der Last-steigerungsfaktor ρ nicht großer als 1,0 wird. Ist jedoch der kritischeLaststeigerungsfaktor gesucht, wird die Laststeigerung fortgefuhrt, bis dasSystem kinematisch wird.
Zur Ermittlung einer vorliegenden Kinematik wird das zu losende FEM–Gleichungssystem auf Singularitat uberpruft. Die Singularitat liegt vor,wenn wahrend der Cholesky–Zerlegung der Steifigkeitsmatrix ein Haupt-diagonalelement zu Null wird. Durch die numerische Ungenauigkeit der
2.2 Fließgelenkmethode 32
digitalen Datenverarbeitung muss der Vergleich jedoch nicht mit exaktNull, sondern mit einem von der Rechengenauigkeit abhangigen Grenzwerterfolgen. Bei einem System mit extremen Systemwerten (z.B. sehr kurzenElementlangen) ist es moglich, dass ein gewahlter Grenzwert trotz nichtvorhandener Singularitat unterschritten wird. Andererseits fuhrt ein zugeringer Grenzwert teilweise dazu, dass trotz Singularitat weitergerechnetwird.
Eine Moglichkeit zur Losung dieses Problems besteht darin, den Grenz-wert von dem kleinsten Hauptdiagonalwert des ersten Berechnungslaufsabhangig zu machen. Im Programm wird so verfahren, dass vor derGleichungslosung der kleinste Eigenwert des speziellen Eigenwertproblemsgesucht und dieser ebenfalls mit einem Grenzwert verglichen wird. Somitergeben sich zwei Moglichkeiten zur Uberprufung der Singularitat unddadurch mehr Spielraum bei der Anpassung der Grenzwerte.
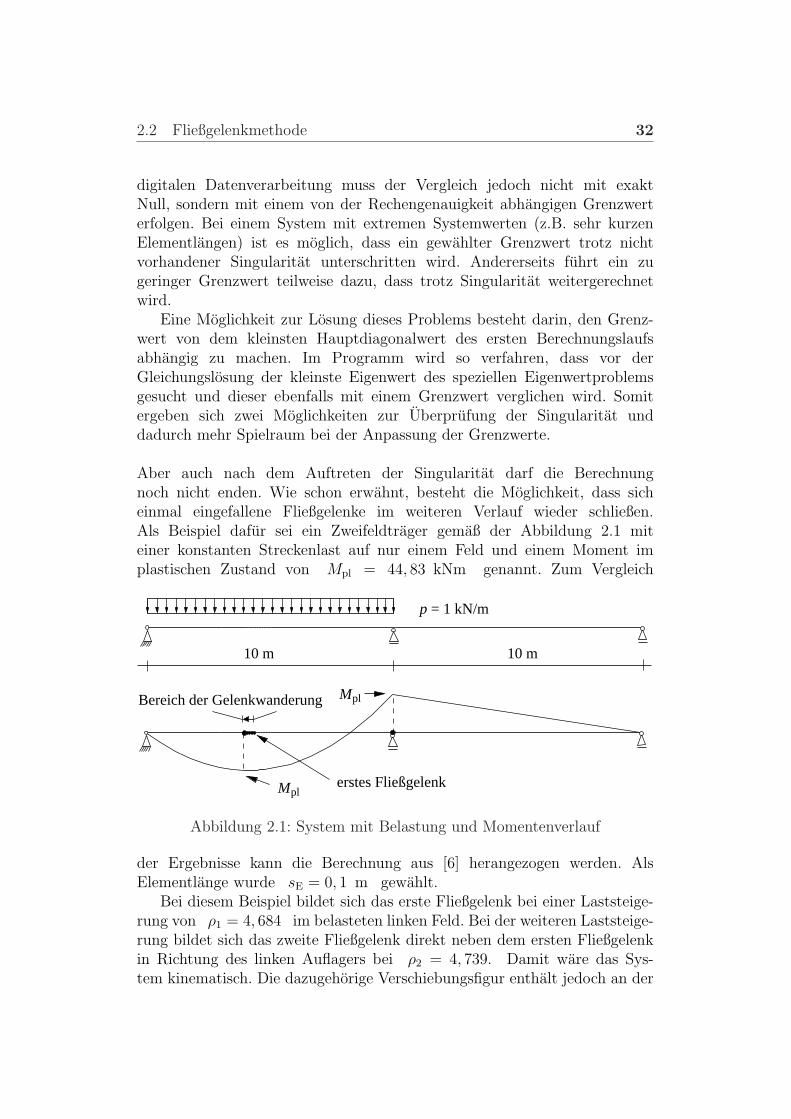
Aber auch nach dem Auftreten der Singularitat darf die Berechnungnoch nicht enden. Wie schon erwahnt, besteht die Moglichkeit, dass sicheinmal eingefallene Fließgelenke im weiteren Verlauf wieder schließen.Als Beispiel dafur sei ein Zweifeldtrager gemaß der Abbildung 2.1 miteiner konstanten Streckenlast auf nur einem Feld und einem Moment implastischen Zustand von Mpl = 44, 83 kNm genannt. Zum Vergleich
plM
plM
10 m 10 m
Bereich der Gelenkwanderung
erstes Fließgelenk
= 1 kN/mp
Abbildung 2.1: System mit Belastung und Momentenverlauf
der Ergebnisse kann die Berechnung aus [6] herangezogen werden. AlsElementlange wurde sE = 0, 1 m gewahlt.
Bei diesem Beispiel bildet sich das erste Fließgelenk bei einer Laststeige-rung von ρ1 = 4, 684 im belasteten linken Feld. Bei der weiteren Laststeige-rung bildet sich das zweite Fließgelenk direkt neben dem ersten Fließgelenkin Richtung des linken Auflagers bei ρ2 = 4, 739. Damit ware das Sys-tem kinematisch. Die dazugehorige Verschiebungsfigur enthalt jedoch an der

2.3 Zeitschrittverfahren 33
Stelle des ersten Fließgelenks einen Winkelsprung in Richtung des Schnitt-moments. Das Fließgelenk schließt sich also wieder und das System ist damitstabil. Dieser Vorgang wiederholt sich, bis letztlich bei einer Laststeigerungvon ρ = 5, 226 das Moment uber dem mittleren Auflager den Wert Mpl
erreicht und damit das System tatsachlich versagt.Um diesen Fall zu erfassen, wird nach der Feststellung der Singularitat
die zu erwartende Verschiebungsfigur eingepragt. Dazu wird am zuletzt ent-standenen Fließgelenk uber inhomogene Verknupfungsbedingungen der Kno-tenfreiwerte des entsprechenden Elements ein Winkelsprung entgegen derRichtung des Schnittmoments eingepragt. Da das System zu diesem Zeit-punkt schon kinematisch ist, muss das System zuvor modifiziert werden,indem eine zusatzliche Fessel eingefugt wird. Dies gelingt ohne Verfalschungder gesuchten Winkelsprunge mit dem Schließen des zuletzt entstandenenFließgelenks, an dem die Uberprufung entfallen kann.
2.3 Zeitschrittverfahren
2.3.1 Allgemeines
Zur direkten Zeitschrittintegration dynamischer Bewegungsgleichungen ste-hen verschiedene Arten von Verfahren zur Verfugung. Allen gemein ist, dassdie Zeitachse in diskrete Zeitschritte eingeteilt wird, und die Differenzialglei-chung dann schrittweise gelost wird.
Folgende DGl sind im Zeitbereich zu losen:
Mv + Dv + Ku = p
u = v
mit
M als Massenmatrix,
D als Dampfungsmatrix,
K als Steifigkeitsmatrix,
p als Belastungsvektor,
v als Beschleunigungsvektor,
v als Geschwindigkeitsvektor und
u als Verschiebungsvektor.
Aufgrund der zeitlichen Veranderlichkeit der Systemmatrizen infolge desEinfallens von Fließgelenken ist die Verwendung von Mehrschrittverfahren,bei denen zur Berechnung der Ergebnisse am aktuellen Zeitschrittende dievorangegangenen Werte mehrerer Zeitschritte berucksichtigt werden, nicht

2.3 Zeitschrittverfahren 34
moglich. Somit fallt die Wahl auf ein Einschrittverfahren. Dabei wird imZeitschritt eine lineare Veranderung der Verschiebung und Geschwindigkeitvorausgesetzt. Aus der Vielzahl der nun noch zur Verfugung stehenden Ver-fahren wurde das Mittelpunktsverfahren ausgewahlt. Es bietet einen ausge-wogenen Kompromiss zwischen Genauigkeit, Stabilitat und Rechenaufwand.Durch die Wahl der maximalen Zeitschrittweite ∆t = 0, 01 s (siehe [17])liegt der Fehler fur die fur Bauwerke ublichen Eigenfrequenzen in akzeptablenGrenzen. Zur Untersuchung von Strukturen mit einer ersten Eigenfrequenzvon mehr als 10 Hz wurde die Zeitschrittweite auf ∆t = 0, 0025 s verrin-gert.
2.3.2 Gemischtes Verfahren (Mittelpunktsverfahren)
Bei dem gemischten Zeitschrittverfahren werden die Geschwindigkeitsratenim Intervallmittelpunkt implizit und die Losungen am Intervallende mit ei-nem expliziten Schritt berechnet. Das Verfahren stellt also eine Kombinationvon
”Euler-vorwarts“ und
”Euler-ruckwarts“ dar. Am Intervallanfang stehen
folgende Werte aus dem vorangegangenen Zeitschritt zur Verfugung:
Bekannte Losung am Intervallanfang:
un, vn, vn.
Gesucht wird zunachst die
Beschleunigung in Intervallmitte:
vn+ 12.
Mit ihr lassen sich die Geschwindigkeit sowie der Weg in Intervallmitte ausden Werten am Intervallanfang extrapolieren.
Unbekannte Großen in Intervallmitte:
un+ 12
= un +∆t
2vn +
∆t
4
2
vn+ 12
= un +∆t
2vn+ 1
2
vn+ 12
= vn +∆t
2vn+ 1
2.
Jetzt wird das dynamische
Gleichgewicht in Intervallmitte,
Mvn+ 12
+ Dvn+ 12
+ Kun+ 12
= pn+ 12,
gefordert. Nach dem

2.3 Zeitschrittverfahren 35
Einsetzen der Ansatze in das DGLS
Mvn+ 12
+ D
(vn +
∆t
2vn+ 1
2
)+ K
(un +
∆t
2vn +
∆t
4
2
vn+ 12
)= pn+ 1
2,
folgt die
Berechnung der Geschwindigkeitsrate:
vn+ 12
=
(M +
∆t
2D +
∆t
4
2
K
)−1 (pn+ 1
2−Dvn −K
(un +
∆t
2vn
)).
Letztlich werden aus der Beschleunigung in Intervallmitte die Geschwindig-keit und der Weg am Intervallende berechnet.
Berechnung der unbekannten Großen am Intervallende:
un+1 = un + ∆t vn +∆t
2
2
vn+ 12
= un + ∆t vn+ 12
vn+1 = vn + ∆t vn+ 12.
Die gewonnenen Großen dienen als Startwerte fur den nachsten Zeitschritt.
2.3.3 Dynamische Belastung bei einer Fußpunktanre-gung
In der zu losenden Bewegungsdifferenzialgleichung
Mv + Dv + Ku = p (2.1)
mit dem Geschwindigkeitsvektor v = u resultiert die Belastung p in-folge eines Erdbebens aus der gleichmaßigen Fußpunktbeschleunigung x .Dabei ist u die Relativverschiebung bzgl. der Fußpunkte. Die Gesamtver-schiebung z setzt sich aus der Verschiebung u und der Fußpunktver-schiebung x zusammen. Beispielhaft sei hier die schwache Form der zulosenden Bewegungsdifferenzialgleichung
∫uvµz +
∫uv′EAu′ = 0 (2.2)
fur einen Dehnstab ohne Dampfung dargestellt. Darin ist µ die konstanteMassenbelegung entlang der Stabachse.
Mit der Gesamtverschiebung z = u + x und Gesamtbeschleuni-gung z = u + x lasst sich die Gleichung (2.2) auch schreiben als
∫uvµx +
∫uvµu +
∫uv′EAu′ = 0

2.3 Zeitschrittverfahren 36
bzw. ∫uvµu +
∫uv′EAu′ = −
∫uvµx.
Nach dem Einsetzen der fur die Verschiebung u vorgesehenen linearenFormfunktionen entsteht die FE-Gleichung
uv · (Mu + Ku − s0)
= 0
bzw.Mu + Ku = s0.
Der diskretisierte Belastungsvektor s0 als Belastung p aus einer Fuß-punktbeschleunigung ergibt sich durch
−∫ s
2
− s2
uvµxdx =−1∫
−1
[uv
A uvB
]φuµx dξ
s
2
−∫ s
2
− s2
uvµxdx =− [uv
A uvB
] [s/2s/2
]µx =
[uv
A uvB
]s0
mit der Ansatzfunktion fur die Verschiebung im Element
φu =
[(1− ξ)/2(1 + ξ)/2
]
zu s0 = −µx[s/2 s/2]T. Die Belastung lasst sich also einfach uber dieBerucksichtigung einer konstanten Streckenlast entgegen der Fußpunktbe-schleunigung berucksichtigen. Der Vektor s0 lasst sich aber auch aus derAuswertung des Integrals ∫
uvµx
uber die Annahme eines konstanten Verlaufs der Fußpunktbeschleuni-gung x = xA = xB und der Ansatzfunktion φx = φu uber das Elementermitteln. Mit der Massenmatrix
M =
1∫
−1
φuµφTx dξ
s
2
ergibt sich die rechte Seite zu
s0 = −Mx ,
wobei die Stutzwerte der Fußpunktbeschleunigung x an jedem Knotengleich groß sind. Im Falle eines Biegebalkens ist die Vorgehensweise analog.Auch hier besteht die Moglichkeit der Lastvektorermittlung aus der Multipli-kation der Massenmatrix mit der Fußpunktbeschleunigung, wobei die Win-kelbeschleunigungen jeweils Null und die translatorischen Beschleunigungengleich groß sind.
2.3 Zeitschrittverfahren 37
2.3.4 Berucksichtigung der Dampfung
Die Untersuchungen in dieser Arbeit sollen fur verschieden stark gedampf-te Systeme durchgefuhrt werden. Beim modalen Verfahren wird die Damp-fung als viskose Dampfung uber die Vorgabe eines pauschalen Dampfungs-grades ϑ naherungsweise linearisiert erfasst.
Zur Vergleichbarkeit mit dem modalen Verfahren soll eine aquivalenteDampfungsmatrix erstellt werden. Die modale Steifigkeitsmatrix
K ∗ = ΨTKΨ
sowie die modale Massenmatrix
M ∗ = ΨTMΨ
mitΨ als Matrix der Eigenvektoren
werden vor der Berechnung mit dem Zeitschrittverfahren ermittelt. Bekann-termaßen handelt es sich dabei um Diagonalmatrizen. Die Hauptdiagonal-elemente d∗ij der modalen Dampfungsmatrix sind durch die Vorgabe desDampfungsbeiwertes gegeben:
d∗ij = 2ϑj
√m∗
ijk∗ij ; i = j,
d∗ij = 0 ; i 6= j.
Sind alle Eigenschwingungsformen bekannt, kann uber die Bestimmungsglei-chung der modalen Dampfungsmatrix
D∗ = ΨTDΨ
die gesuchte Dampfungsmatrix D durch
D = (Ψ−1)TD∗Ψ−1
berechnet werden. Dabei kann die Inverse der Matrix der Eigenschwingungs-formen z.B. uber die Gleichung
M ∗ = ΨTMΨ
zuΨ−1 = M ∗−1ΨTM
ermittelt werden. Damit ergibt sich die Dampfungsmatrix zu
D = MψM ∗−1D∗M ∗−1ΨTM

2.3 Zeitschrittverfahren 38
bzw.D = Kψk−1D∗K ∗−1ΨTK .
Ein Vorteil des modalen Verfahrens liegt in der Vernachlassigung der Ant-wortanteile aus Eigenschwingungen mit einem geringen Grad der Massenan-regung gemaß der Gleichung (1.7). In diesem Fall lasst sich keine aquivalenteDampfungsmatrix erzeugen.
Mit der Hilfe der Bequemlichkeitshypothese wird sie aus der Uberlagerungder Massen- und Steifigkeitsmatrix, welche mit den Faktoren FM und FK
skaliert werden (Rayleigh–Dampfung) durch
D = FM ·M + FK ·Kerzeugt. Dadurch wird zumindest sichergestellt, dass bei der Multiplikation
ΨTDΨ = D∗
eine Diagonalmatrix entsteht. Zur Ermittlung der Faktoren FM und FK
wird nun folgende Uberlegung angestellt. Fur jede Eigenschwingung j er-geben sich die Glieder der modalen Dampfungsmatrix zu
d∗jj = FMm∗jj + FKk∗jj = 2ϑjm
∗jj
√k∗jjm∗
jj
.
Diese Gleichung kann nach dem Dampfungsgrad ϑj umgestellt werden. Erberechnet sich zu
ϑj =1
2
(FM
ω0,j
+ FKω0,j
). (2.3)
Die Gleichung (2.3) wird nun fur zwei Eigenfrequenzen ausgewertet, woraussich die gesuchten Faktoren bestimmen lassen. Welche Eigenfrequenzen zurAnwendung kommen sollen, steht dem Nutzer des Programms frei. UberKennziffern ist zu steuern, ob z.B. als untere Eigenkreisfrequenz die ersteund als obere die letzte mit einem Grad der Massenanregung uber 1 % ineiner vorzugebenden Richtung verwendet werden sollen.
2.3.5 Nachlaufberechnung
2.3.5.1 Standardnachlaufberechnung
Nach Bestimmung der Weg-, Geschwindigkeits- und Beschleunigungsvekto-ren mussen fur jeden Zeitschritt die Knotenschnittkrafte zur weiteren Aus-wertung ermittelt werden. Ublicherweise (siehe z.B. [15]) werden die Knoten-krafte f S fur jedes Element uber die Gleichung
f S = M llu l + D llu l + K llu l − s0l (2.4)

2.3 Zeitschrittverfahren 39
ermittelt. Der Index l steht hier fur den Bezug auf das lokale Koordi-natensystem des Elements, M ll, D ll und K ll sind die Elementmassen–,–dampfungs– und –steifigkeitsmatrizen. Dabei wird davon ausgegangen,dass sich zum betrachteten Zeitpunkt ein Gleichgewicht aus den Massen-kraften (M llu l), den Dampfungskraften (D llu l), der außeren Belas-tung (−s0
l ) und den elastischen Reaktionskraften (K llu l) einstellt.Im statischen Fall entfallen die Massen- und Dampfungskrafte. Der Anteil
der außeren Belastung wird uber das Prinzip der virtuellen Verruckungen,hier beispielhaft fur einen Biegebalken mit der Durchbiegung w und einerStreckenlast p senkrecht zur Stabachse, uber das Integral
∫ s
0
wv(x)p dx
uber die Stablange s erfasst. Die ermittelten Schnittkrafte an den Knotenstimmen nicht mehr mit den Verzerrungen aus den kubischen Verformungs-ansatzen fur die Durchbiegung uberein. Die zusatzlichen Verformungen ausder Streckenlast p entsprechen der partikularen Losung der Biegebalken-differenzialgleichung
w′′′′EI = p.
Sollen nun zusatzlich die Massen- und Dampfungskrafte im Gleichgewichtberucksichtigt werden, erweitert sich die Differenzialgleichung auf
w′′′′EI + wµ + wd = p. (2.5)
Die Losung der Gleichung (2.5) ist zeitabhangig und lasst sich mit der Glei-chung (2.4) nur dann auswerten, wenn davon ausgegangen wird, dass diesich aus der partikularen Losung ergebenden zusatzlichen Geschwindigkei-ten und Beschleunigungen im Element keinen Einfluss auf die Massen- undDampfungskrafte haben.
Dies ist jedoch nicht der Fall. Der folgende Abschnitt enthalt eine Be-rechnung, deren Ergebnisse zeigen, dass die Auswertung der Gleichung (2.4)nur eine Annaherung an die tatsachlich zu erwartenden Knotenkrafte ergibt.Danach folgen die Konsequenzen aus dieser Erkenntnis fur die vorliegendeArbeit.
2.3.5.2 Biegebalken mit einer konstanten Massenbelegung entlangder Stabachse
Als Beispiel dient der beidseitig eingespannte dampfungsfreie Biegebalkenmit zeitlich und ortlich konstanter Streckenlast
p(x, t) = p0

2.3 Zeitschrittverfahren 40
aus der Abbildung 2.2 mit der Eigenkreisfrequenz ω0,1. Der Verschiebungs-verlauf w(x, t) soll durch eine modale Uberlagerung der Anteile der Eigen-schwingungsformen i gemaß
w(x, t) =n∑
i=1
wi(x, t),
mit n als Anzahl der zu berucksichtigenden Eigenschwingungsformen, ge-wonnen werden. Zur Ermittlung der Eigenkreisfrequenzen ω0,i wird fur den
s
p
wx
0
Abbildung 2.2: Biegebalken mit konstanter Streckenlast
anteiligen Verschiebungsverlauf wi(x, t) jeder Eigenschwingungsform ider Produktansatz
wi(x, t) = fi(t) · φi(x)
gewahlt. Die erforderlichen Ableitungen ergeben sich zu
wi = fi · φi und w′′′′i = fi · φ′′′′i .
Nach dem Einsetzen in die homogene Bewegungsgleichung
w′′′′EI + wµ = 0
und einer kurzen Umstellung ergibt sich die Gleichung
EI
µ· φ′′′′i
φi
= − fi
fi
.
Diese Gleichung kann nur erfullt werden, wenn die linke und die rechte Seiteden gleichen konstanten Wert annehmen. Mit der Abkurzung
ω20,i = − fi
fi
ergeben sich die Differenzialgleichungen
EI
µ· φ′′′′i
φi
= ω20,i (2.6)
undfi(t) + ω2
0,i · fi(t) = 0. (2.7)

2.3 Zeitschrittverfahren 41
Die Integrationskonstanten ci,1 und ci,2 des Losungsansatzes
fi(t) = ci,1 · sin ω0,it + ci,2 · cos ω0,it
fur den zeitabhangigen Teil des Verschiebungsverlaufs gemaß der Glei-chung (2.7) ergeben sich aus den Anfangsbedingungen.
Zur Bestimmung des ortsabhangigen Teils φi(x) des Verschiebungsver-laufs sowie der Eigenkreisfrequenzen ω0,i wird die Gleichung (2.6) umge-stellt. Die allgemeine Losung der Gleichung
φ′′′′i (x)− µ · ω20,i
EI· φi(x) = 0
lautet
φi(x) = Ai · sin aix + Bi · cos aix + Ci · sinh aix + Di · cosh aix (2.8)
mit
ai =4
√µ · ω2
0,i
EI.
Die vier Integrationskonstanten und die Eigenkreisfrequenzen ω0,i in derGleichung (2.8) werden mit den Randbedingungen
φi(0) = 0, φi(s) = 0
φ′i(0) = 0, φ′i(s) = 0
bestimmt. Dabei fuhrt die Anwendung von φi(0) = 0 zu der Glei-chung Bi = −Di und von φ′i(0) = 0 zu der Gleichung Ai = −Ci.Weiterhin kann durch das Einsetzen der beiden Randbedingungen am Bal-kenende das Verhaltnis
Ai
Bi
=cosh ais− cos ais
sin ais− sinh ais=
sin ais + sinh ais
cos ais− cosh ais(2.9)
bestimmt werden. Letztlich konnen uber die beiden rechten Glieder der Glei-chung (2.9) die Faktoren ai und mit
ω0,i = a2i
√EI
µ
die Eigenkreisfrequenzen ω0,i ermittelt werden. Die Umformung der Glei-chung (2.9) ergibt die Gleichung
cosh ais · cos ais− 1 = 0. (2.10)

2.3 Zeitschrittverfahren 42
Als Nullstellen dieser Gleichung ergeben sich fur die ersten drei Eigenschwin-gungsformen die Werte:
a1s = 4, 73 = 1, 505π ⇒ ω0,1 = 2, 267π2
√EI
s4µ
a2s = 7, 854 ≈ 2, 5π ⇒ ω0,2 = 6, 25π2
√EI
s4µ
a3s = 10, 995 ≈ 3, 5π ⇒ ω0,3 = 12, 25π2
√EI
s4µ.
Durch das stetige Anwachsen von cosh ais mit großer werdendem ai
kann die Gleichung (2.10) nur noch in der Nahe des Nulldurchgangs voncos ais erfullt werden. Somit kann fur hohere Eigenfrequenzen die Bestim-mungsgleichung
ω0,i ≈(
i +1
2
)2
π2
√EI
s4µ
angegeben werden.
s0
w
x
Abbildung 2.3: Eigenschwingungsform φ1
Wird fur obiges Beispiel eine Lange s = 1, 0 m und die Integrations-konstante B1 = −1, 0 m vorgegeben, ergibt sich aus der Gleichung (2.9)die Integrationskonstante A1 zu
A1 =cos 4, 73− cosh 4, 73
sinh 4, 73− sin 4, 73m = 0, 9825 m
und die erste Eigenschwingungsform zu
φ1(x) = (0, 9825 · sin 4, 73x−cos 4, 73x−0, 9825 · sinh 4, 73x+cosh 4, 73x) m.
Sie ist in der Abbildung 2.3 dargestellt.

2.3 Zeitschrittverfahren 43
ps2/12
ps2/6
0 TG 2TG 3TG
Zeit t
Ein
span
n−
mom
ente
ME
Abbildung 2.4: Verlauf der Einspannmomente
Mit Hilfe der modalen Analyse ließen sich nun alle Eigenschwingungsfor-men als Anteile der Losung der Bewegungsgleichung
w′′′′EI + wµ = p
ermitteln. Darauf wird hier verzichtet und statt dessen der zeitliche Ver-lauf der Einspannmomente ME(t) des Biegebalkens am linken und rech-ten Rand aus einer entsprechenden numerischen Berechnung in der Abbil-dung 2.4 dargestellt. Durch die symmetrische Streckenlast p0 werden nurdie symmetrischen Eigenformen angeregt, so dass der zeitliche Verlauf derEinspannmomente auf beiden Seiten des Biegebalkens gleich ist.
2.3.5.3 Angepasste Nachlaufberechnung
Wird der Biegebalken des obigen Beispiels durch ein einzelnes finites Ele-ment erfasst, so ergibt die Auswertung der Gleichung (2.4) Knotenmomentevon MK = ME = ps2/12. Die Gleichung (2.4) approximiert also die alsMittelwert im Verlauf der Zeit ab Beginn der Nachlaufberechnung zu erwar-tenden Schnittgroßen. Da die Nachlaufberechnung nach jedem Zeitschrittneu startet, ergeben sich mit der Gleichung (2.4) nur die Ergebnisse, diedurchschnittlich zu erwarten waren, wenn ab dem Beginn der Nachlaufbe-rechnung die Knotenverschiebungen eingefroren waren. In der numerischenBerechnung sind jedoch die Ergebnisse genau zum Zeitpunkt der Nachlauf-berechnung, also zum Zeitpunkt T = 0 in der Abbildung 2.4 auszuwerten.
Die Verwendung der Gleichung (2.4) wurde bei einem Lastwechsel zusprunghaften Schnittgroßenveranderungen in der Zeit fuhren, welche aufGrund der Massentragheit auszuschließen sind.
Bei der Programmierung des Zeitschrittverfahrens unter Berucksichtigungder Moglichkeit des Einfallens von Fließgelenken fuhren unstetige Schnitt-kraftveranderungen zu Problemen. Bei der gewahlten Methode zur Erfassungder Fließgelenke werden auch die Winkelsprunge in der Nachlaufberechnung

2.4 Modifiziertes Zeitschrittverfahren 44
ermittelt. Somit ergaben sich sofort nach dem Einfallen der Gelenke Win-kelsprunge und beim Schließen sofort Momente. Bei der Kontrolle, ob einFließgelenk einfallt oder es sich schließt, ist das Auftreten von Endlosschlei-fen moglich.
Folglich werden die Schnittgroßen wahrend der Nachlaufberechnung indieser Arbeit nur uber die Knotenverschiebungen
f S = K llu l, (2.11)
also ausschließlich uber die Vertraglichkeit ermittelt. Die Ergebnisse beidermoglicher Nachlaufberechnungen konvergieren bei einer Verfeinerung der Ele-mentierung zu den gleichen Werten.
2.4 Modifiziertes Zeitschrittverfahren zur
Berucksichtigung von Fließgelenken
2.4.1 Modifizierung
Fur Vergleichsberechnungen wurden das Fließgelenk– und das Zeitschrittver-fahren kombiniert. Zur Anwendung der Berechnung im Zeitbereich kommtdas Mittelpunktsverfahren aus dem Abschnitt 2.3. Das Gleichgewicht wirdin der Zeitschrittmitte gemaß
Mvn+ 12
+ Dvn+ 12
+ Kun+ 12
= pn+ 12
aufgestellt.Das Einsetzen der Ansatze fur die Verformung un+ 1
2= un + ∆t
2vn+ 1
2
und die Verformungsgeschwindigkeit vn+ 12
= vn + ∆t2vn+ 1
2fuhrt uber
Mvn+ 12
+ D
(vn +
∆t
2vn+ 1
2
)+ K
(un +
∆t
2vn +
∆t
4
2
vn+ 12
)= pn+ 1
2
auf die effektive Steifigkeit
K~ = M +∆t
2D +
∆t
4
2
K (2.12)
und auf die effektive Belastung
p~ =
(pn+ 1
2−Dvn −K
(un +
∆t
2vn
))
sowie das zu losende Gleichungssystem
vn+ 12
=
(M +
∆t
2D +
∆t
4
2
K
)−1 (pn+ 1
2−Dvn −K
(un +
∆t
2vn
)).
(2.13)

2.4 Modifiziertes Zeitschrittverfahren 45
Bei linear elastischem Materialverhalten bleiben die Systemmatrizen M ,Dund K konstant. Die Annaherung an ein elastisch–ideal plastisches Ver-halten uber die Fließgelenktheorie fuhrt zu plotzlichen Veranderungen dieserMatrizen wahrend der Berechnung mit dem Zeitschrittverfahren gemaß denAnhangen A.3.1 und A.4.1.
Dennoch ist im Fall zeitlich veranderlicher Lasten die Berechnung derVerformungs- und Schnittgroßen am modifizierten System moglich. Im wei-teren Verlauf sollen die am modifizierten System mS ermittelten Großendurch den vorangestellten Index gekennzeichnet werden. Dabei ist m derZahler der Systemveranderung durch das Einfallen oder das Schließen vonFließgelenken.
Die Zeit der Systemveranderung wahrend eines Zeitschritts lasst sichdurch die dimensionslose Koordinate
ξ = ξ(t, ∆t) ; ξ = mt− tn/∆t ; 0 ≤ ξ ≤ 1
festhalten.Nach der Losung der Gleichung (2.13) werden aus den ermittelten Be-
schleunigungen vn+ 12
in der Zeitschrittmitte und den Geschwindigkeitensowie Verschiebungen am Zeitschrittanfang die Geschwindigkeiten und Ver-schiebungen am Zeitschrittende berechnet:
un+1 = un + ∆t vn +∆t
2
2
vn+ 12
= un + ∆t vn+ 12
vn+1 = vn + ∆t vn+ 12.
Dann folgt die Nachlaufberechnung unter Verwendung der Gleichung (2.11),womit der, fur eventuelle Systemmodifikationen bestimmende, zeitliche Ver-lauf des Momentenzustands im System vorliegt. Die Momentenzustands-veranderung im Zeitschritt n, eine lineare Zustandsanderung im Zeitschrittvorausgesetzt, lasst sich durch
Mn+ξ = Mn + ξ(Mn+1 −Mn) (2.14)
beschreiben, wobei sich der Momentenzustand M zu jedem Zeitpunkt ausdem zeitlich veranderlichen Zustand infolge der Belastung mM(p) und demZustand aus den am modifizierten System eingepragten plastischen Momen-ten mM(Mpl) superponieren lasst. Damit kann die Gleichung (2.14) unterder Annahme, dass wahrend des betrachteten Zeitschritts n kein Fließge-lenk einfallt, auch mit
Mn+ξ = mMn(p) + mMn+ξ(Mpl) + ξ(
mMn+1(p)− mMn(p))
(2.15)
angeschrieben werden. Bis zum Einfallen eines Fließgelenks gilt
mMn+ξ(Mpl) = mMn(Mpl),

2.4 Modifiziertes Zeitschrittverfahren 46
wodurch aus der Gleichung (2.15) der Zeitpunkt des Einfallens eines Fließ-gelenks ermittelt werden kann. Fur jeden Systempunkt j ist zu prufen,ob
Mpl,j ≥∣∣mMn,j(p) + mMn,j(Mpl) + ξ
(mMn+1,j(p)− mMn,j(p)
)∣∣ (2.16)
ist, wodurch sich die normierte Zeitkoordinate ξj1) zu
ξj =sign
(mMn+1,j(p)− mMn,j(p)
)Mpl,j − mMn,j(p)− mMn,j(Mpl)
mMn+1,j(p)− mMn,j(p), (2.17)
ergibt. Offensichtlich tritt ein neues Fließgelenk m + 1 zur Zeit tn+(m+1)ξ
des kleinsten ξj am Punkt j ein, wenn ξj ≤ 1 erfullt ist.Programmiertechnisch ist es sinnvoll, den Momentenverlauf M(Mpl)
nicht bei jeder Berechnung neu zu ermitteln, sondern ihn jeweils beim Ein-fallen eines neuen Fließgelenks m + 1 abzuspeichern. Er berechnet sichzu
(m+1)M(Mpl) = mM(Mpl) + mMn+(m+1)ξ(p)− (m+1)Mn+(m+1)ξ(p). (2.18)
Die Berechnung des Momentenverlaufs mM(Mpl) + mMn+(m+1)ξ(p) erfolgtuber die Gleichung (2.14) und von (m+1)Mn+(m+1)ξ(p) uber eine erneuteNachlaufberechnung mit den Verschiebungsgroßen
un+(m+1)ξ = mun + (m+1)ξ(
mun+1 − mun
)(2.19)
an dem System (m+1)S.Die bis zum Eintreten der Systemmodifikation im System gespeicher-
ten elastischen Ruckstellkrafte Kun+ξ bleiben dem System erhalten undmussen deshalb abgespeichert werden. So ergibt sich eine effektive Ersatz-last mp∼ fur die Systemveranderung m von
mp~ =
(pn+ 1
2− mDvn −
m∑m=1
m−1K(u(mt)− u(m−1t)
)− mK∆t
2vn
).
Zur weiteren Berechnung wird auch der Momentenverlauf (m+1)Mn+(m+1)ξ(p)abgespeichert. Tritt im Zeitschritt n ein Gelenkschluss auf, ist die Glei-chung (2.18) ebenfalls anzuwenden.
Nach einer Systemveranderung muss eine neue Zeitschrittberechnung abder Zeit n + (m+1)ξ durchgefuhrt werden. Bezuglich der Auswertung undder Vergleichbarkeit ist es wunschenswert, die Ergebnisse der Berechnungjeweils zu den gleichen diskreten Zeitpunkten (n ·∆t) zu ermitteln.
1) ξ wird in dieser Gleichung immer positiv. Die Betragsstriche konnen entfallen.

2.4 Modifiziertes Zeitschrittverfahren 47
Um dies zu erreichen, konnte nun eine Berechnung mit der verandertenSchrittweite ∆t∗ = (1 − (m+1)ξ)∆t erfolgen. Beim Aufbau der effektivenSteifigkeitsmatrix (siehe Gleichung (2.12)) geht ∆t∗ quadratisch bei derBerucksichtigung der Systemsteifigkeit ein, wobei die Schrittweite ∆t∗ be-liebig kleine Werte annehmen kann. Dabei besteht die Gefahr, durch die nu-merischen Berechnungen inakzeptabel große Fehler zu erhalten. Bei masse-und dampfungsfreien Systemteilbereichen ist auch mit einer Singularitat dereffektiven Steifigkeitsmatrix zu rechnen. Damit wurde die Berechnung abbre-chen.
Alternativ dazu wird die Berechnung mit der Zeitschrittweite ∆tfortgefuhrt. Nun wird die Veranderung des Momentenzustands ab derZeit n + (m+1)ξ bis n + 1 gemaß
Mn+(m+1)ξ+(m+2)ξ∆t∗ = Mn+(m+1)ξ +(m+2) ξ(Mn+1+(m+1)ξ −Mn+(m+1)ξ
) ∆t∗
∆t
betrachtet und uberpruft, ob sich erneut eine Systemmodifikation am Zeit-punkt (m+2)ξj < 1 ergibt. Dieses Vorgehen wird fur jeden Zeitschritt so oftwiederholt, bis sich kein Zeitpunkt ξj < 1 mehr finden lasst. Danach wirddie Berechnung fur den nachsten Zeitschritt durchgefuhrt.
2.4.2 Programmierung
Durch die Charakteristik des Zeitschrittverfahrens als Naherung kann es dazukommen, dass, im Gegensatz zur Fließgelenkmethode mit unveranderlichenLasten, Momentenzustande berechnet werden, die eigentlich nicht auftretenkonnen. So kann an der Kopplung zweier Elemente ein Fließgelenk eigentlichnur in einem Element entstehen. Danach ist die entsprechende DrehsteifigkeitNull, weshalb sich kein weiteres Moment an diesem Knoten aufbauen kann.
Durch die oben erwahnte Ungenauigkeit ist diese Forderung beim Zeit-schrittverfahren nicht immer erfullt. Es ist also in speziellen Fallen moglich,dass ein Drehfreiwert durch die Bildung von zwei Fließgelenken an einemKnoten vom System entkoppelt wird. Der Knoten wurde sich dann, reinrechnerisch, ungehindert mit gleichbleibender Rotationsgeschwindigkeit wei-terdrehen. Um dies zu verhindern, kann bei den Elementen angegeben wer-den, ob sich prinzipiell ein Fließgelenk an einen Knoten bilden kann. Somitist es moglich, bei einer Aneinanderkettung von Elementen z.B. nur jeweilsam Ende der einzelnen Elemente Fließgelenke zuzulassen. Damit kann anjedem Knoten nur ein Fließgelenk entstehen.

2.5 Modale Verfahren 48
2.4.3 Programmablauf beim Zeitschrittverfahren
Zusammenfassend kann der Programmablauf fur jeden Zeitschritt folgender-maßen beschrieben werden:
• Berechnung der Beschleunigungs- und Geschwindigkeitsraten in derZeitschrittmitte.
• Berechnung der Verschiebungsgroßen u am Ende des Zeitschritts.Daraus werden in einer Nachlaufberechnung der Momentenverlauf so-wie die Winkelsprunge in den vorhandenen Fließgelenken ermittelt.
• Untersuchung der Veranderung des Momentenverlaufs und der Win-kelsprunge in den Fließgelenken vom Beginn zum Ende des Zeitschrittsbzgl. einer Systemmodifikation. Der Zeitpunkt einer eventuellen Modi-fikation wird festgehalten.
• Bei jeder Systemmodifikation wird der aktuelle Momentenzustand er-mittelt und abgespeichert. Danach startet eine neue Zeitschrittberech-nung mit gleichbleibender Schrittweite an dem modifizierten System abdem Zeitpunkt der Systemmodifikation. Der Momentenverlauf und dieWinkelsprunge am tatsachlichen Zeitschrittende werden interpoliert.
• Dieser Vorgang wiederholt sich, bis im aktuellen Zeitschritt keine Sy-stemmodifikation mehr eintritt.
• Am Ende des Zeitschritts erfolgt nochmals die Berechnung des Mo-mentenverlaufs zur Auswertung im nachsten Zeitschritt, wobei jeweilsdie Anteile aus den am modifizierten System eingepragten plastischenMomenten sowie aus der Belastung separat abgespeichert werden.
2.5 Modale Verfahren
Das modale Antwortspektrenverfahren gemaß dem Abschnitt 1.1.3.4 wurdezur Berucksichtigung des plastischen Materialverhaltens modifiziert. Dabeiwird einem Grundgedanken der Methode der Kapazitatsbemessung gefolgt,das modale Verfahren auch zur Erfassung des Einflusses plastischen Ma-terialverhaltens heranzuziehen. Es wird also davon ausgegangen, dass dienichtlinearen Reaktionen des Bauwerks mit Hilfe der am System mit linear–elastischem Materialverhalten ermittelten Eigenschwingungsformen und de-ren Uberlagerung durch eine pauschale Ersatzlastreduktion in Abhangigkeitder Systemduktilitat erfasst werden konnen. Der dabei akzeptierte Fehler isteine der Ursachen fur den Naherungscharakter der Methode der Kapazitats-bemessung.

2.5 Modale Verfahren 49
Im ersten Rechenschritt werden dazu die Erdbebenersatzlasten am Sys-tem unter der Annahme linear–elastischen Materialverhaltens ermittelt unddurch einen die Duktilitat berucksichtigenden Verhaltensbeiwert reduziert.Die gewonnenen Ersatzlasten dienen dann wahlweise als Eingangswerte fureine linear–elastische Berechnung (vgl. [13]) oder eine Berechnung nach derFließgelenkmethode. Dabei werden die Anteile der zu berucksichtigendenEigenschwingungsformen jeweils vor der Ermittlung des aktuellen Laststei-gerungsfaktors nach der Wurzel–Quadrat Methode bzw. der vollstandigenQuadratkombination uberlagert.
Ziel der vorliegenden Arbeit ist gemaß dem Abschnitt 3.3 die sukzes-sive Ermittlung der sich einstellenden Systemduktilitat, um auf derenAbschatzung uber einen Verhaltensbeiwert verzichten zu konnen. Dazuwurde das modale Verfahren nochmals erweitert.
Die Berechnung startet am unmodifizierten System. Nach der Uber-lagerung der Schnittgroßen aus den beteiligten Eigenschwingungsformenwird der Laststeigerungsfaktor ρ1 zum Erreichen des ersten Fließgelenksbestimmt. Im weiteren Verlauf werden die modifizierten Systeme erneutdem modalen Verfahren unterzogen und die Ergebnisse entsprechend denDifferenzlaststeigerungen ∆ρ mit den vorherigen superponiert. DieseVorgehensweise ist, wie oben schon erwahnt, mathematisch nicht exakt,fuhrt aber, wie noch gezeigt wird, zu brauchbaren Ergebnissen im Rahmeneiner Kapazitatsbemessung.
Bei dieser Vorgehensweise ergibt sich die Moglichkeit zur Optimierungder Eigenwertsuche, wenn die Eigenwerte mittels der Lanczos–Methode imtransformierten Krylov–Subraum gesucht werden. Die genaue Vorgehens-weise ist im Anhang B beschrieben.
Die Vorgabe der Subraumdimension bleibt zunachst dem Nutzer uberlas-sen. Die ersten 70 % der gefundenen Eigenwerte gelten als ausreichend genau,wobei es auch hier dem Nutzer uberlassen bleibt, wie viele der gefundenenEigenwerte er in die Auswertung einbeziehen mochte. Im vorliegenden Fallder Fließgelenkmethode soll der Rechenaufwand an die zu losende Aufgabeangepasst werden. Die Gute der Ergebnisse hangt maßgeblich von dem ver-wendeten Startvektor zur Erstellung des Krylov–Subraums ab. Bestunde eraus den gesuchten Eigenvektoren, so waren 100 % der gefundenen Eigenwerteausreichend genau.
Zu Beginn der Berechnung stehen die Eigenvektoren bzw. Eigenschwin-gungsformen naturgemaß nicht zur Verfugung. Nach dem ersten Durchlaufkonnen jedoch die jeweils zuvor gefundenen Eigenschwingungsformen ent-sprechend ihrer Massenbeteiligung superponiert und als Startvektor verwen-det werden. Gerade bei mehrfach statisch unbestimmten Systemen, welche

2.6 Beispiel zur Uberprufung der implementierten Routinen 50
hier untersucht werden, verandern sich die Eigenschwingungsformen mit demEinfallen von Fließgelenken wenig. Allgemein sind die Eigenfrequenzen bzgl.geringer Systemmodifikationen sehr robust. Durch den verbesserten Start-vektor ist eine Reduktion der Dimension des Subraums moglich.
Dazu wird zunachst ermittelt, welche Eigenschwingungsformen bei derErmittlung der Systemreaktionen einen maßgeblichen Anteil haben. Dabeiwerden alle Eigenschwingungsformen mit einem Grad ε < 1, 0 % der Mas-senanregung ausgeschlossen.
Die Anzahl der im weiteren Verlauf zu berucksichtigenden Eigenschwin-gungsformen wird dann 20 % hoher gesetzt als die letzte beteiligte Eigen-schwingungsform des ersten Durchlaufs. Die Dimension des aufzuspannendenSubraums bestimmt sich aus der Vorgabe, dass die Anzahl der zu berucksich-tigenden Eigenschwingungsformen kleiner als 70 % der Subraumdimensi-on sein soll.
2.6 Beispiel zur Uberprufung der implemen-
tierten Routinen
2.6.1 System
Zum Abschluss des Abschnitts uber die verwendeten numerischen Verfah-ren soll anhand eines einfachen Beispiels die Richtigkeit der Implementie-rung der numerischen Routinen in das verwendete Computerprogramm uber-pruft werden. Berechnet wird ein masseloser Kragtrager gemaß der Abbil-dung 2.5 mit einer Punktmasse m = 500 kg und einer zeitlich verander-lichen beliebig wahlbaren Einzellast P (t) an seinem Ende. Die Biegestei-
= 2 ml
= 17 600 kNmEI 2
P(t)
m = 500 kg
d
w(x,t)
x
Abbildung 2.5: Ersatzsystem eines Kragtragers mit Punktmasse

2.6 Beispiel zur Uberprufung der implementierten Routinen 51
figkeit EI des Kragtragers betragt EI = 17600 kNm2, seine Lange lwird mit l = 2 m vorgegeben.
Aus den Systemwerten ergibt sich eine Steifigkeit k des Kragtragerendesin Richtung der angreifenden Einzellast von
k =3EI
l3=
3 · 17600 kNm2
(2 m)3= 6600
kN
m.
Mit der Masse von m = 500 kg an dem Kragtragerende ergibt sich fureinen Einfreiheitsgradschwinger die Eigenkreisfrequenz ω0 zu
ω0 =
√k
m=
√6600 kN/m
500 kg= 114, 89 s−1.
2.6.2 Vergleichsergebnisse
Der zeitliche Verlauf der Einzellast P (t) ist im oberen Teil der Abbil-dung 2.6 ersichtlich. Das Beispiel entspricht dem Beispiel 1–13 aus [5]. Dortwurden die Verschiebungsverlaufe w(l, t) unter Annahme von zwei polygo-nalen Nichtlinearitatsmodellen zur Berucksichtigung des plastischen Mate-rialverhaltens in dem sich in der Einspannung bildenden plastischen Gelenkermittelt. In beiden Fallen wurde fur das Einspannmoment ME,G des Krag-tragers beim Erreichen der elastischen Grenzverschiebung wel,G = 0, 008 mam Kragtragerende der gleiche Wert festgelegt.Er betragt ME,G = 105, 6 kNm.
• Bilineares Modell
Im Unterschied zum rein linear elastisch–ideal plastischen Modell,wird bei dem bilinearen Modell davon ausgegangen, dass nach demErreichen der Fließgrenze eine reduzierte Steifigkeit erhalten bleibt.Die obere Kurve im unteren Teil der Abbildung 2.6 zeigt den Ver-schiebungsverlauf w(l, t) bei der Annahme einer Reststeifigkeit kpl
von 1 % der Anfangssteifigkeit, also
kpl = k · p = k · 0, 01 = 66, 0N
m
nach dem Einfallen des Fließgelenks. Nach dem Schließen des Fließge-lenks wird eine unveranderte linear–elastische Steifigkeit fur den abfal-lenden Ast der Kraft–Verformungskurve angenommen.

2.6 Beispiel zur Uberprufung der implementierten Routinen 52
• Umemura–Modell
Das Umemura–Modell berucksichtigt einen progressiven Steifigkeits-abfall bei wachsender nichtlinearer Verformung. Die angenommenenSteifigkeit ergibt sich dabei aus der Gesamtverformung beim Schlie-ßen des Fließgelenks im Verhaltnis zur Kraft beim Erreichen derFließgrenze. Der plastische Bereich wird als ideal angenommen.
0
0,004
0,008
0,012
m
0,02
45 kN
0 0,1 0,2 0,3 0,4 0,5
Zeit t
Zeit t
Ver
sch
ieb
un
g w
(l,t
)
P(t)
s
0,02 0,1 0,2 0,3 0,4 s 0,5
Umemura bilinear mit p=0,01
linear elastisch
elastisch−ideal plastisch
plastisches Materialverhaltenlinear elastisch mit ϑ = 1 %linear elastsich mit ϑ = 10 %
Abbildung 2.6: Verlauf der Last und der Verschiebung w(l, t)
Zum Vergleich wurde in [5] ebenfalls der Verschiebungsverlauf unter Annah-me eines rein linear–elastischen Materialverhaltens mit einem Dampfungs-grad ϑ = 1 % ermittelt. Die drei Verschiebungsverlaufe w(l, t) sind inder Abbildung 2.6 dargestellt.
2.6.3 Kontrollberechnungen unter Annahme linear–elastischen Materialverhaltens
2.6.3.1 Berechnung
Zunachst wurden die Verschiebungsverlaufe w(l, t) des Kragtragerendesunter Annahme eines linear–elastischen Materialverhaltens mit dem imple-mentierten Zeitschrittverfahren gemaß dem Abschnitt 2.3 berechnet. Die

2.6 Beispiel zur Uberprufung der implementierten Routinen 53
gewahlte Zeitschrittlange ∆t des Zeitschrittverfahrens ist ∆t = 0, 001 s.Die beiden unteren Kurven im unteren Teil der Abbildung 2.6 zeigen dieentsprechenden Verschiebungsverlaufe unter Annahme der Dampfungsgra-de ϑ = 1 % und ϑ = 10 %.
Zum Vergleich wurde das Faltungsintegral
w(l, t) =ω0
k⊥ · ωd
∫ t
0
P (τ) · eδ(t−τ) sin ωd(t− τ) dτ
mit der Eigenkreisfrequenz ωd des gedampften Schwingers mit einen Damp-fungsgrad ϑ = 1 % von
ωd = ω0 ·√
1− 0, 012 = 114, 88 s−1 und δ = 0, 01 · ω0 = 1, 15 s−1
und mit der Eigenkreisfrequenz ωd des gedampften Schwingers mit einenDampfungsgrad ϑ = 10 % von
ωd = ω0 ·√
1− 0, 12 = 114, 31 s−1 und δ = 0, 1 · ω0 = 11, 49 s−1
numerisch gelost. Auch hier wurde eine Zeitschrittweite von ∆t = 0, 001 sgewahlt.
2.6.3.2 Bewertung
Die geringen Abweichungen der Losungen unter der Annahme eines linear–elastischen Materialverhaltens von maximal 0, 03 mm sind durch die nu-merische Genauigkeit sowie die Gleichsetzung der gedampften mit der un-gedampften Eigenkreisfrequenz im implementierten Zeitschrittverfahren be-grundet. Die Verschiebungsverlaufe der Referenzlosungen aus der Auswer-tung des Faltungsintegrals sind nahezu deckungsgleich, weshalb auf derenDarstellung in der Abbildung 2.6 verzichtet wurde.
2.6.4 Kontrollberechnungen unter der Annahmeelastisch–ideal plastischen Materialverhaltens
2.6.4.1 Berechnung
Um die Kombination aus Fließgelenk- und Zeitschrittverfahren gemaß demAbschnitt 2.4 zu testen, wurde an der Einspannung des Kragtragers einplastisches Moment von Mpl = 105, 6 kNm zugelassen. Die Dampfungwurde entsprechend dem Beispiel aus [5] fur die Nichtlinearitatsmodellemit ϑ = 0 % angesetzt.
Fur den linear–elastischen Bereich, also bis zum Einfallen des Fließgelenksin der Einspannung, wurde das Zeitschrittverfahren schon getestet. Zum Zeit-punkt t = 0, 025 s wird nach diesem Verfahren in der Einspannung das

2.6 Beispiel zur Uberprufung der implementierten Routinen 54
Erreichen des plastischen Moments Mpl berechnet. Die Geschwindigkeitder Masse m betragt dann vm = 0, 577 m/s.
Das Einspannmoment ME(P ) aus der dynamischen Last P (t) ist abder Zeit t = 0, 02 s gleich bleibend,
ME,t>0,02(P ) = 45 kN · 2 m = 90 kNm < Mpl.
Zum Abbau des Impulses
I = m · vm = 500 kg · 0, 577 m/s = 288, 5 Ns
der bis zum Einfallen des Fließgelenks beschleunigten Masse m steht eineDifferenzkraft FD aus der Wirkung des plastischen Moments Mpl sowieder dynamischen Belastung P (t > 0, 02 s) von
FD = 45, 0 kN− 105, 6 kNm
2, 0 m= 7800 N
am Kragtragerende zur Verfugung. Nach der Zeitspanne
∆t =I
FD
=288, 5 Ns
7800 N= 0, 037 s,
also zum Zeitpunkt t = 0, 025 s + 0, 037 s = 0, 062 s, muss demnach dieMasse m zum Stillstand kommen. Diese Berechnung stimmt mit dem Er-gebnis des kombinierten Fließgelenk–/Zeitschrittverfahrens uberein. In die-sem Moment schließt sich das Fließgelenk. Die Zeitspanne ∆t, in welcherdas Fließgelenk vorliegt, ist in der Abbildung 2.6 durch eine verstarkte ge-strichelte Linie der Verschiebungsfunktion hervorgehoben. Danach schwingtdie Masse mit der Eigenschwingzeit T0 = 2π/ω0 = 0, 0547 s weiter.
2.6.4.2 Bewertung
Bis zum Erreichen der Fließgrenze bestehen bei den drei Modellen zur Erfas-sung des inelastischen Materialverhaltens keine Unterschiede. Danach stehtim bilinearen Modell eine zusatzliche Steifigkeit zur Verfugung. Die maxi-male Verschiebung muss also kleiner ausfallen, als bei den beiden anderenModellen. Nach dem Schließen des Fließgelenks bestehen verglichen mit demelastisch–ideal plastischen Modell wieder gleiche Steifigkeitsverhaltnisse, waszur gleichen Eigenschwingzeit fuhren muss.
Die Steifigkeit bei dem Umemura–Modell ist nach dem Schließen desFließgelenks kleiner als bei den beiden anderen Modellen. Daraus resultierteine großere Eigenschwingzeit. Bis zum Schließen des Fließgelenks bestehtkein Unterschied zum elastisch–ideal plastischen Modell, was zu einem glei-chen Verschiebungsverlauf bis dahin fuhren muss.
Die angestellten Uberlegungen stimmen mit den Verschiebungsverlaufenin der Abbildung 2.6 uberein.

3 Die Methode der effektivenDuktilitat in Verbindung mitdem modalen Fließgelenk-verfahren
3.1 Einleitung
In dem Abschnitt 1.2.1 wurde der Begriff der Duktilitat erklart. Bei der Me-thode der Kapazitatsbemessung wird zur Bestimmung der Systemduktilitatdie Verschiebeduktilitat µ∆ gemaß der Gleichung (1.8) herangezogen. DieVerwendung der Verschiebeduktilitat beschrankt sich jedoch auf im Aufrissregelmaßige Tragwerke.
In dieser Arbeit soll eine allgemeiner gultige Definition zur Ermittlung dersogenannten energieabhangigen Systemduktilitat µE herangezogen werden,welche im folgenden Abschnitt hergeleitet wird. Danach folgt die Beschrei-bung des neu entwickelten modalen Fließgelenkverfahrens zur Erfassung dereffektiven Duktilitat unter Verwendung der hier hergeleiteten energieabhangi-gen Systemduktilitat.
3.2 Ermittlung der energieabhangigen
Systemduktilitat
Bei elastischen Verformungen wird Energie (Eeg) im System gespeichertund bei plastischen Verformungen Epd in Warme dissipiert. Die Definitioneiner energieabhangigen Systemduktilitat
µE =E
Eeg
=Eeg + Epd
Eeg
, Epd ≥ 0 (3.1)
ist nicht mehr von der Betrachtung eines einzelnen Punktes im System ab-hangig.

3.2 Ermittlung der energieabhangigen Systemduktilitat 56
In der vorliegenden Arbeit wird das Materialverhalten durch die Fließge-lenktheorie elastisch–ideal plastisch erfasst. Zunachst wird die Ermittlung derelastisch abgespeicherten Energie hergeleitet, welche sich nach dem Einfal-len des ersten Fließgelenks als ein wenig kompliziert darstellt. Zum besserenVerstandnis enthalt der Anhang C vier einfache Beispiele zur Anwendung derhergeleiteten Gleichung. Danach folgt die Ermittlung der plastisch dissipie-renden Energie, welche sich auf die Fließgelenke beschrankt. Letztlich wirddie Duktilitatsgleichung (3.1) in Abhangigkeit des Laststeigerungsfaktors ρder Fließgelenkmethode dargestellt.
3.2.1 Elastisch gespeicherte Energie
Nc
NF
uF
Eeg,F
Abbildung 3.1: Elastisch gespeicherte Energie in einer Dehnfeder
Die elastisch gespeicherte Formanderungsenergie eines Systems mitlinear–elastischem Materialverhalten lasst sich durch die Integration deraußeren Last NF uber den durch sie erzeugten Weg uF berechnen. Fureine Dehnfeder (siehe Abbildung 3.1) gilt die Gleichung
Eeg,F =
∫ uF
0
NF duF =
∫ uF
0
(uF · cN) duF =1
2uF ·NF =
1
2u2
F · cN. (3.2)
Diese Gleichung lasst sich verallgemeinern. Die elastisch gespeicherte Ener-gie in einem System mit linear–elastischem Materialverhalten entspricht derHalfte des Produktes aus der Steifigkeit und dem Quadrat der Verschiebung.
In einem FEM–Modell muss diese Integration an jedem Systemknotenerfolgen. Dazu muss die linear–elastische Steifigkeitsmatrix mit dem Weg-großenvektor multipliziert werden. Der dabei entstandene Kraftgroßenvektorwird dann von links mit dem transponierten Weggroßenvektor multipliziert.Dabei werden an jedem Systemknoten die arbeitskonformen Weg- und Kraft-großen multipliziert. Durch den linearen Zusammenhang der die Krafte er-zeugenden Wege entspricht gerade die Halfte der entstandenen Große derelastisch gespeicherten Energie (vgl. mit der Gleichung (3.2)).

3.2 Ermittlung der energieabhangigen Systemduktilitat 57
Bei dem modalen Antwortspektrenverfahren muss gemaß dem Ab-schnitt 1.1.3.4 die Ermittlung der elastisch gespeicherten Formanderungs-energie fur jede Eigenschwingungsform separat erfolgen. Weiterhin andertsich beim Einfallen von Fließgelenken durch die Modifikation der Systemma-trizen die abspeicherbare Energie. Diese Systemmodifikation wird im Folgen-den durch einen vorangestellten Index i gekennzeichnet.
Zur Ermittlung der elastisch gespeicherten Energie iEeg,j nach dem Ein-fallen des i–ten Fließgelenks wird fur jede der Bψ berucksichtigten Eigen-schwingungsformen j die modifizierte Steifigkeitsmatrix iK (siehe Ab-schnitt 2.4) von links und rechts mit den modalen Verschiebungsgroßen u j
sowie dem Faktor 0, 5 aus der obigen Erkenntnis zur Ermittlung der elas-tisch gespeicherten Energie multipliziert. Damit ergibt sich
iEeg,j = 0, 5 · uTj iK u j (3.3)
als Bestimmungsgleichung fur die elastisch gespeicherten Energie der Eigen-schwingungsform j.
Die modalen Verschiebungsgroßen ergeben sich unter Verwendung derGleichung (1.6) aus den Eigenschwingungsformen ψj, den entsprechendenSpektralwerten der Verschiebung Sd,j = Sa,j ·ω2
0,j des verwendeten Bemes-sungsspektrums, dem Beteiligungsfaktor fur die Anregungsrichtung L undder modalen Masse m∗
j zu
u j = ψj · Sd,j
LLj
m∗j
.
Die durch das modifizierte System i insgesamt abspeicherbare Ener-gie iEeg wird durch die Summierung der Energieanteile der einzelnen Ei-genschwingungsformen gemaß der Gleichung (3.3) uber alle berucksichtigtenEigenschwingungsformen als
iEeg = 0, 5
Bψ∑j=1
(ψT
j iKψj
(Sd,j
Lj
m∗j
)2)
(3.4)
gewonnen.Dadurch, dass die global im System berechnete Verdrehung an einem
Knoten eines finiten Elements mit einem Gelenk keinen Einfluss auf die Ver-formung in diesem Element hat, entsteht bei der Energieberechnung nach derGleichung (3.4) ein Fehler. Dieser Fehler wird fur jede Eigenschwingungsformund jedes Element mit Gelenken in einer Nachlaufberechnung korrigiert. Beiwenigen Elementen mit Gelenken fuhrt diese Vorgehensweise zu einer Re-duktion des Rechenaufwands gegenuber der Ermittlung der elastisch gespei-cherten Energie jedes einzelnen Elementes.

3.2 Ermittlung der energieabhangigen Systemduktilitat 58
Bei dem modalen Antwortspektrenverfahren stehen die Informationenuber die Richtungen der Verschiebungen aus den Ergebnisanteilen der einzel-nen Eigenschwingungen nicht zur Verfugung. Es konnte also sein, dass sichdie Verschiebungsanteile aus den einzelnen Eigenschwingungen bei der Uber-lagerung teilweise aufheben. Unter der Verwendung der Gleichung (3.4), alsodurch die Uberlagerung der Absolutwerte der Energien, wird dieser Sach-verhalt nicht berucksichtigt. In dieser Arbeit werden die ermittelten Ener-giegroßen lediglich zur Bestimmung der Systemduktilitat entsprechend derVerhaltnisgleichung (3.1) verwendet. Diese wird, wie spater noch gezeigtwird, durch entsprechende Vergleichsberechnungen skaliert, weshalb auf eineebenfalls mogliche Uberlagerungen der Energieanteile nach der SRSS–Regeloder der CQC–Regel gemaß dem Abschnitt 1.1.3.4 verzichtet werden konnte.Wichtig ist, dass die in den Fließgelenken plastisch dissipierten Energien ingleicher Weise uberlagert werden.
Durch das Einfallen von Fließgelenken verringert sich die Systemsteifig-keit. Bis zum Erreichen des vollen plastischen Mechanismus verbleiben immerweniger elastische Systemteilbereiche zur Abtragung der Belastungen. Durchdie verringerte Systemsteifigkeit wird die Fahigkeit, bei gleicher BelastungEnergie in elastischen Verformungen zu speichern, erhoht. Die verringerteSteifigkeit fuhrt bei gleicher Belastung auch zu großeren Verformungen, wo-bei an Stellen mit Fließgelenken die weitere elastische Verformung begrenztwird. Durch das Einfallen von Fließgelenken werden also sowohl die elasti-schen, als auch die plastischen Verformungen bei der weiteren Lastaufnahmeerhoht.
Im Folgenden sollen nun zwei Wege aufgezeigt werden, wie sich die elas-tisch gespeicherte Energie in Abhangigkeit der Laststeigerung ρ berechnenlasst. Zusatzlich zur Integration der außeren Last uber den durch sie er-zeugten Weg ist die Berechnung durch die Integration des Weges uber dieihn erzeugende außere Kraft moglich. Der zweite Weg soll einem einfacherenVerstandnis der gewonnenen Gleichung dienen.
3.2.1.1 Integration der Kraft uber den Weg
Zunachst wird, wie oben gezeigt, die bei voller Last F theoretisch ab-speicherbare Energie 0Eeg am unmodifizierten System 0S ermittelt. Wei-terhin wird der Laststeigerungsfaktor ρ1 bestimmt, bei dem das erste Fließ-gelenk einfallt. Bis dahin liegt ein quadratischer Verlauf der elastisch gespei-cherten Energie vor. Sie berechnet sich zu
Eeg = 0Eeg · ρ2.
In der Abbildung 3.2 sind die Anteile, aus denen sich die elastisch abgespei-cherte Energie in jedem Laststeigerungsschritt zusammensetzt, dargestellt.
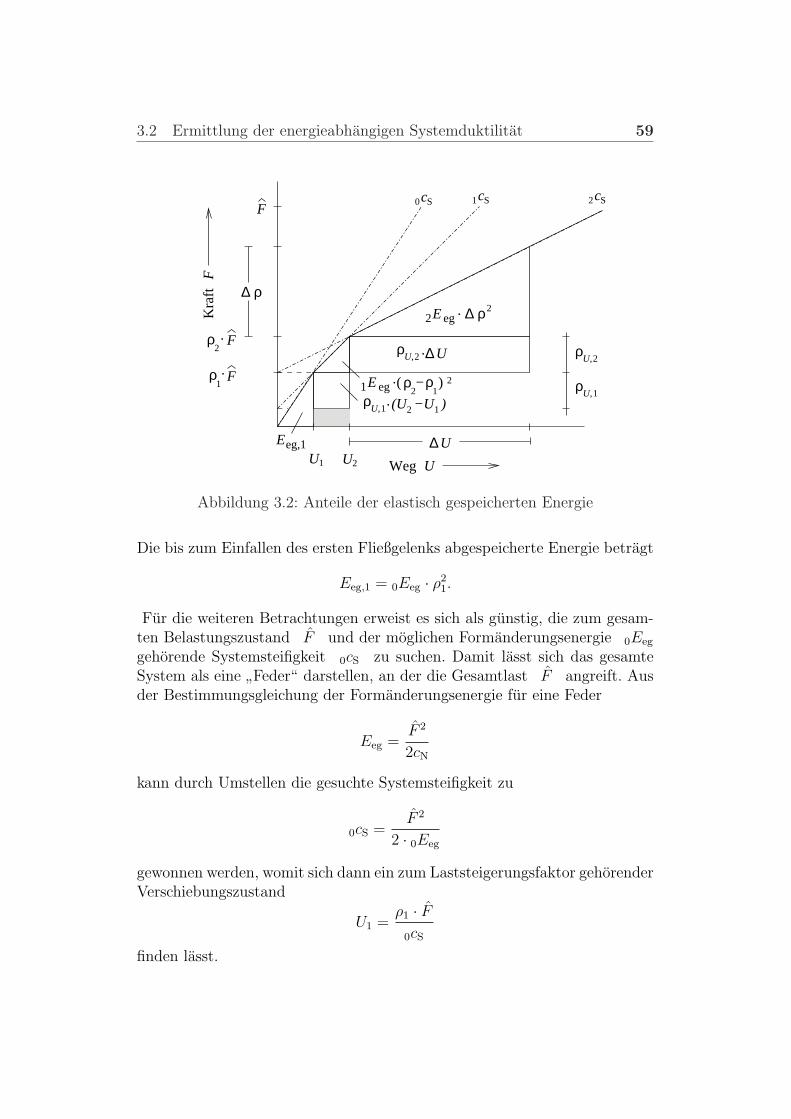
3.2 Ermittlung der energieabhangigen Systemduktilitat 59
F
F
F
Eeg,1
ρ2
c2 Sc1 Sc0 S
E1 eg
ρ2
U2
ρU,2∆U
ρU,1
ρU,2
ρU,1
1U∆U
F
U
∆ ρ
( − )2ρρ1
1
∆ ρ2.E2 eg
.
..
.
.2 1(U −U )
Kra
ft
Weg
Abbildung 3.2: Anteile der elastisch gespeicherten Energie
Die bis zum Einfallen des ersten Fließgelenks abgespeicherte Energie betragt
Eeg,1 = 0Eeg · ρ21.
Fur die weiteren Betrachtungen erweist es sich als gunstig, die zum gesam-ten Belastungszustand F und der moglichen Formanderungsenergie 0Eeg
gehorende Systemsteifigkeit 0cS zu suchen. Damit lasst sich das gesamteSystem als eine
”Feder“ darstellen, an der die Gesamtlast F angreift. Aus
der Bestimmungsgleichung der Formanderungsenergie fur eine Feder
Eeg =F 2
2cN
kann durch Umstellen die gesuchte Systemsteifigkeit zu
0cS =F 2
2 · 0Eeg
gewonnen werden, womit sich dann ein zum Laststeigerungsfaktor gehorenderVerschiebungszustand
U1 =ρ1 · F
0cS
finden lasst.

3.2 Ermittlung der energieabhangigen Systemduktilitat 60
Nun wird an dem modifizierten System 1S weitergerechnet und dazu dietheoretisch abspeicherbare Energie 1Eeg gemaß der Gleichung (3.4) sowiedie Steifigkeit 1cS,
1cS =F 2
2 · 1Eeg
= 0cS0Eeg
1Eeg
,
ermittelt. Um den Verschiebungszustand U1 am modifizierten System zuerreichen, wird lediglich der Kraftanteil ρU,1 ·F benotigt. Er fuhrt zu keinerweiteren elastisch abspeicherbaren Formanderungsenergie und wird zu
ρU,1 · F = 1cS · U1 =1cS · ρ1 · F
0cS
= ρ1 · F 0Eeg
1Eeg
(3.5)
ermittelt. Der verbleibende Kraftanteil (ρ1−ρU,1) · F wird benotigt, um indem ersten plastischen Gelenk die plastische Schnittgroße einzupragen.
Die zusatzliche Laststeigerung nach dem Einfallen des ersten Fließge-lenks ∆ρ fuhrt zu der zusatzlichen Verschiebung
∆U =∆ρ · F
1cS
.
Die elastisch gespeicherte Energie setzt sich nun aus drei Teilen zusammen:
1. aus der bis zum Erreichen von ρ1 am unmodifizierten System gespei-cherten Energie Eeg,1,
2. aus der Energie, die durch die Bewegung des Kraftanteils ρU,1 · F aufdem zusatzlichen Weg ∆U speichert wird und
3. aus der weiteren, im modifizierten System gespeichertenEnergie 1Eeg ·∆ρ2,
Eeg(ρ1 + ∆ρ) = Eeg,1 + ρU,1 · F ·∆U + 1Eeg ·∆ρ2
= Eeg,1 + ρ1 · F 0Eeg
1Eeg
· ∆ρ · F1cS
+ 1Eeg ·∆ρ2
= Eeg,1 + ρ1 · 0Eeg
1Eeg
· ∆ρ · F 2 · 2 · 1Eeg
F 2+ 1Eeg ·∆ρ2
Eeg(ρ1 + ∆ρ) = Eeg,1 + 2ρ1 · 0Eeg ·∆ρ + 1Eeg ·∆ρ2.
Hinweis: Die grau angelegte Flache (ρ1 − ρU,1) · F · (U2 − U1) in der Ab-bildung 3.2 entspricht der wahrend der zweiten Laststeigerung in Warmedissipierten Energie.

3.2 Ermittlung der energieabhangigen Systemduktilitat 61
Nach dem Einfallen des zweiten Fließgelenks bei der Laststeigerung ρ2
ist wieder der entsprechende Verschiebungszustand U2 zu ermitteln. Dabeimussen die Zustande der beiden Laststeigerungen akkumuliert werden, also
U2 = U1 + ∆U
=ρ1 · F
0cS
+(ρ2 − ρ1) · F
1cS
=ρ1 · F · 2 · 0Eeg
F 2+
(ρ2 − ρ1) · F · 2 · 1Eeg
F 2
U2 =2
F· (0Eeg · ρ1 + 1Eeg · (ρ2 − ρ1)) .
Der Kraftanteil ρU,2 , welcher zum Erreichen des Wegzustands U2 ammodifizierten System 2S mit der Steifigkeit 2cS notwendig ist, ergibt sichzu
ρU,2 = 2cS · U2/F
=F 2
22Eeg
2
F 2· (0Eeg · ρ1 + 1Eeg · (ρ2 − ρ1))
ρU,2 =1
2Eeg
(0Eeg · ρ1 + 1Eeg · (ρ2 − ρ1)) .
Die Entwicklung der elastisch gespeicherten Energie
Eeg(ρ2 + ∆ρ) = Eeg,2 + 2Eeg ·∆ρ2 + ρU,2 · F ·∆U
= Eeg,2 + 2Eeg ·∆ρ2
+1
2Eeg
(0Eeg · ρ1 + 1Eeg · (ρ2 − ρ1)) · ∆ρ · F 2
2cS
= Eeg,2 + 2Eeg ·∆ρ2
+1
2Eeg
(0Eeg · ρ1 + 1Eeg · (ρ2 − ρ1)) · ∆ρ · F 2 · 2 · 2Eeg
F 2
Eeg(ρ2 + ∆ρ) = Eeg,2 + 2Eeg ·∆ρ2
+2 (0Eeg · ρ1 + 1Eeg · (ρ2 − ρ1)) ·∆ρ (3.6)
lasst sich nun fur den Bereich nach dem Einfallen des i–ten Fließgelenksverallgemeinern:
Eeg(ρi + ∆ρ) =Eeg,i + iEeg ·∆ρ2 + ρU,i ·∆U
Eeg(ρi + ∆ρ) =Eeg,i + iEeg ·∆ρ2
+ 2∆ρ
i∑
k=1
(k−1)Eeg · (ρk − ρ(k−1))
mit ρ0 = 0 und Eeg,0 = 0.
(3.7)

3.2 Ermittlung der energieabhangigen Systemduktilitat 62
Eeg,2
Fρ2.Fρ
1.
ρ1
F / c0 S1U = .
ρ2
( − )ρ12 1U =U + F / c1 S
.
∆ U= F / c2 S
E ( )eg
F
U
F
∆ ρ
∆ ρ .
∆ ρ
Kraft
Weg
Abbildung 3.3: Anteile der elastisch gespeicherten Energie
Diese Entwicklung setzt sich fort, bis kein weiteres Fließgelenk mehr einfallt.
3.2.1.2 Integration des Weges uber die Kraft
Die elastisch gespeicherte Formanderungsenergie Eeg eines linear elasti-schen Systems lasst sich ebenfalls durch die Integration des Weges U(F )uber die ihn erzeugende außere Kraft F durch
Eeg =
∫ F
0
U(F ) dF (3.8)
berechnen. Durch die Anwendung der Gleichung (3.8) vereinfacht sich dieBestimmung der Gleichung (3.7).
Die elastisch gespeicherte Formanderungsenergie nach dem Einfallen deszweiten Fließgelenks ergibt sich durch die Berechnung der Flacheninhalte aus

3.2 Ermittlung der energieabhangigen Systemduktilitat 63
der Abbildung 3.3 zu
Eeg(ρ2 + ∆ρ) =U1
2ρ1 · F +
U1 + U2
2(ρ2 − ρ1) · F +
2U2 + ∆U
2∆ρ · F
=Eeg,2 +∆U + 2U2
2∆ρ · F
=Eeg,2 +∆U + 2(U1 + U2 − U1)
2∆ρ · F
=Eeg,2 +
(∆ρ · F 2
2 · 2cS
+ 2
(ρ1 · F 2
2 · 0cS
+(ρ2 − ρ1) · F 2
2 · 1cS
))∆ρ
Eeg(ρ2 + ∆ρ) =Eeg,2 + 2Eeg ·∆ρ2 + 2 (0Eeg · ρ1 + 1Eeg · (ρ2 − ρ1)) ·∆ρ.
Diese Gleichung stimmt mit der Gleichung (3.6) uberein und lasst sich wiederzu der Gleichung (3.7) verallgemeinern.
3.2.2 Plastisch dissipierte Energie
Die Ermittlung der in Warme dissipierten Energie Epd gestaltet sich bedeu-tend einfacher. Hier muss lediglich fur jede Eigenschwingungsform in allenFließgelenken der Wert des plastischen Momentes mit dem dazugehorigenWinkelsprung multipliziert werden. Danach folgt die Skalierung auf den ak-tuellen Lastfaktor, so dass zur Bestimmung der plastisch dissipierten Energiedie Gleichung
Epd(ρi + ∆ρ) = Epd,i + iEpd ·∆ρ (3.9)
zur Verfugung steht.
3.2.3 Duktilitatsgleichung
Unter Verwendung der Gleichungen (3.7) und (3.9) lasst sich die energie-abhangige Systemduktilitat µE aus der Gleichung (3.1) in Abhangigkeitvom Laststeigerungsfaktor ρ durch die Gleichung
µE(ρi + ∆ρ) =E(ρi + ∆ρ)
Eeg(ρi + ∆ρ)=
Eeg(ρi + ∆ρ) + Epd(ρi + ∆ρ)
Eeg(ρi + ∆ρ)(3.10)
angeben. Der Verlauf der Systemduktilitat uber der Last ist beim Einfalleneines Fließgelenks unstetig. Dazwischen ist der Verlauf quadratisch (vgl. mitder Gleichung (3.7)).

3.3 Die Methode der effektiven Duktilitat 64
3.3 Die Methode der effektiven Duktilitat
3.3.1 Prinzipielles Vorgehen
Im Rahmen der Methode der Kapazitatsbemessung nach Abschnitt 1.1.3.4werden die Erdbebenersatzlasten H gemaß der Gleichung (1.5) anhandder ermittelten bzw. angenommenen maximal moglichen Grenzduktilitatender zu untersuchenden Tragwerke reduziert.
Bei der in dieser Arbeit entwickelten Methode der effektiven Duktilitatwird die sich unter der Erdbebenlast einstellende energieabhangige System-duktilitat zur Reduktion der Erdbebenlast herangezogen. Dazu wird zurBerechnung der Systembeanspruchungen die Erdbebenersatzlast schrittwei-se gesteigert. Die Entwicklung der sich einstellenden Duktilitat infolge derLaststeigerung der Erdbebenersatzlast wird als Unbekannte eingefuhrt undanhand der Gleichung (3.10) ermittelt. Diese Duktilitatsberechnung ist dieGrundlage fur die Reduktion der Erdbebenersatzlast.
Die Reduktion der Erdbebenersatzlast wird im Folgenden durch den Last-steigerungsfaktor des Fließgelenkverfahrens 0 ≤ ρ ≤ 1 gemaß
H red = ρ(µE) ·H (3.11)
erfasst. Die Berechnung startet mit der Ermittlung der elastischen Eigen-schwingungsformen und der Berechnung der Schnittgroßen mittels der mo-dalen Synthese unter Ansatz der nicht reduzierten Erdbebenersatzlasten amunmodifizierten System 0S. Danach wird der Laststeigerungsfaktor ρ1
ermittelt, bei welchem das erste Fließgelenk einfallt. Diese Laststeigerungbegrenzt das rein elastische Verhalten des Tragwerks und stellt somit denGrenzwert dar, bis zu welchem keine Duktilitat des Tragwerks vorliegt.
Ist ρ1 ≥ 1, 0 , so muss auf eine Reduktion der Erdbebenersatzlast ver-zichtet werden. Dem widersprechend wird bei der Standardmethode der Ka-pazitatsbemessung von vornherein eine Reduktion der Erdbebenersatzlastenangesetzt.
Ergibt sich ein Laststeigerungsfaktor ρ1 < 1, 0 , wird eine erneute mo-dale Analyse des modifizierten Systems 1S also des Systems mit dem ers-ten Fließgelenk, durchgefuhrt. Durch das Vorhandensein eines Fließgelenksergibt sich bei der weiteren Verformung des Systems eine Energiedissipati-on, welche als plastisch dissipierte Energie mit der Gleichung (3.9) ermitteltwerden kann. Mit der bis dahin elastisch gespeicherten Energie gemaß derGleichung (3.7) wird die energieabhangige Systemduktilitat µE nach derGleichung (3.10) berechnet.
In Abhangigkeit der nun im System vorliegenden Duktilitat werden dieErdbebenersatzlasten reduziert. Um den Einfluss der Dampfung und der Ei-genfrequenzen der beteiligten Eigenschwingungsformen erfassen zu konnen,

3.3 Die Methode der effektiven Duktilitat 65
wurde die Reduktionsgleichung uber den Reziprokwert der Duktilitat,
ρi + ∆ρ =1
µE
=Eeg
Eeg + Epd
, (3.12)
durch die Skalierung der plastisch dissipierten Energie Epd erweitert. DerFaktor zur Skalierung wird im Folgenden mit Fpd bezeichnet. Somit erwei-tert sich die Gleichung (3.12) auf
ρi + ∆ρ =Eeg
Eeg + Fpd · Epd
. (3.13)
Bei jedem Laststeigerungsschritt i wird zur Ermittlung eines neuen Fließ-gelenks zunachst der kleinste Laststeigerungsfaktor ρ bzw. die kleinstezusatzliche Laststeigerung nach dem Einfallen des i–ten Fließgelenks ∆ρermittelt, bei der das nachste Fließgelenk einfallen wurde. Dann wird ge-pruft, ob die Ungleichung
ρ = ρi + ∆ρ <Eeg
Eeg + Fpd · Epd
(3.14)
erfullt ist. Ist dies der Fall, entsteht ein neues Fließgelenk bei einer Laststei-gerung von ρ = ρi+1.
Ist die Ungleichung (3.14) nicht erfullt, wird die Gleichung (3.13) zurErmittlung des endgultigen Laststeigerungsfaktors ρ zu
(Eeg + Fpd · Epd)(ρi + ∆ρ) = Eeg (3.15)
umgestellt. Das Einsetzen der Gleichungen (3.7) sowie (3.9) in die Glei-chung (3.15) gemaß
(Eeg,i + ρU,i ·∆ρ + iEeg ·∆ρ2 + Fpd · Epd,i + Fpd · iEpd ·∆ρ
) · (ρi + ∆ρ)
= Eeg,i + ρU,i ·∆ρ + iEeg ·∆ρ2 + Epd,i + iEpd ·∆ρ,
fuhrt zu der kubischen Gleichung
iEeg ·∆ρ3
+ (ρU,i + iEeg · (ρi − 1) + iEpd · Fpd) ·∆ρ2
+ (Eeg,i + ρU,i · (ρi − 1) + Epd,i · Fpd + iEpd · ρi · Fpd) ·∆ρ
= (Eeg,i · (1− ρi) + Fpd · ρi · Epd,i) · 1.
(3.16)
Der Faktor ρU,i entspricht dabei dem Term
ρU,i = 2i∑
k=1
(k−1)Eeg(ρk − ρ(k−1))

3.3 Die Methode der effektiven Duktilitat 66
aus der Gleichung (3.7).
Zum Schluss ergibt sich eine effektive Duktilitat in Abhangigkeit vondem Laststeigerungsfaktor ρ von
µE,eff = 1 +Epd(ρ)
Eeg(ρ)= 1 +
Epd,i +i Epd ·∆ρ
Eeg,i + ρU,i ·∆ρ +i Eeg ·∆ρ2.
Die Losung der Gleichung (3.16) fuhrt zu den reduzierten Erdbebenersatz-lasten H red = ρ ·H unter Berucksichtigung der gegenseitigen Beeinflus-sung mit der durch die Lasten entstandenen Duktilitat. Der Skalierungsfak-tor Fpd in der Gleichung (3.16) muss nun noch uber Vergleichsberechnun-gen bestimmt werden.
3.3.2 Bestimmung der Skalierung
Zur Bestimmung eines geeigneten Skalierungsfaktors Fpd fur die plastischdissipierte Energie in der Gleichung (3.13) wurden umfangreiche Vergleichs-berechnungen mit dem modifizierten Zeitschrittverfahren gemaß dem Ab-schnitt 2.4 durchgefuhrt und ausgewertet. Auf die genaue Vorgehensweisewird noch im Abschnitt 3.4 eingegangen. Es zeigt sich eine Abhangigkeitdes Skalierungsfaktors Fpd von der Bauwerksdampfung sowie den Eigen-frequenzen der in der modalen Methode berucksichtigten Eigenschwingungs-formen.
Um den Einfluss der Dampfung zu erfassen, wurden alle Berechnungenmit einem Dampfungsgrad ϑ = (0, 1, 2, 5, 7, 10 und 15) % durchgefuhrt.Der Einfluss der Eigenfrequenzen wurde durch die Variation der Steifigkeitder ansonsten unveranderten Systeme untersucht.
Ohne das Einfallen von Fließgelenken sowie bei voller Ausbildung desplastischen Mechanismus ergaben sich erwartungsgemaß nur geringe Abwei-chungen zu den Ergebnissen nach dem modifizierten Zeitschrittverfahren. Beirein elastischem Materialverhalten konnte so uberpruft werden, ob die Ergeb-nisse des Zeitschrittverfahrens mit denen der modalen Methode korrespondie-ren. Die Ausbildung aller Fließgelenke fuhrt, wie schon in dem Abschnitt 1.2.4erwahnt, zu annahernd gleichen Ergebnissen, da der Schnittkrafteverlauf zwi-schen den Fließgelenken hauptsachlich durch die plastischen Momente fest-gelegt ist. Ziel dieser Arbeit war, gerade den Bereich zwischen dem Einfallendes ersten Fließgelenks als obere Grenze des rein elastischen Materialver-haltens und dem Einfallen des letzten Fließgelenks unter der Bildung desplastischen Mechanismus zu erfassen. Die plastischen Momente wurden beiallen Beispielberechnungen dementsprechend variiert.
Die Abbildungen 3.4 und 3.5 (die kartesischen Raumkoordinatenwerden im Folgenden mit X1, X2 und X3 bezeichnet) verdeutlichen

3.3 Die Methode der effektiven Duktilitat 67
0
100
200
300
400400
500
600
0 1 2 5 7 10 15
Abw
eich
ung
en M
E,m
od
al /
ME
,Zei
tsch
ritt
Dämpfungsgrad ϑ%
%
1
2
3
4
567
1 Mpl = 5 kNm
2 Mpl = 35 kNm
3 Mpl = 65 kNm
4 Mpl = 95 kNm
5 Mpl = 125 kNm
6 Mpl = 155 kNm
7 Mpl = 185 kNm
Mpl = 215 kNm
Mpl = 245 kNm
Abbildung 3.4: Abweichungen der Einspannmomente ohne Skalierung
beispielhaft die Abweichungen der Ergebnisse fur die Schnittmomen-te um die X2 –Achse bei der Verwendung eines Skalierungsfaktorsvon Fpd = 1, 0, also ohne die Berucksichtigung der Dampfung und der Ei-genfrequenzen bei der Berechnung eines dreistieligen Beispielrahmens. Dabeizeigt die Abbildung 3.4 die prozentualen Abweichungen der Einspannmomen-te ME der außeren Stutzen des Beispielrahmens. In der Abbildung 3.5 sinddie Abweichungen im gesamten System dargestellt. Fur jeden untersuchtenDampfungsgrad wurde hier der untersuchte Rahmen separat dargestellt undin der Tiefe versetzt. Die Ergebnisse der Zeitverlaufsberechnungen wurdenmit denen der Methode der effektiven Duktilitat ins Verhaltnis gesetzt. Damitsind die Abweichungen der Ergebnisse an jedem Systempunkt in der freienRichtung des zweidimensionalen Rahmens darstellbar. Bei diesem Beispielist zu erkennen, dass die Stutzeneinspannmomente bei hoheren Dampfungs-werten geringere Abweichungen aufweisen.
Nach Auswertung aller Vergleichsberechnungen lasst sich der Einfluss derBauwerksdampfung ϑ annahernd durch
Fskal,D(ϑ) ≈ 1, 37
1, 0 + ϑ+ 0, 88− 0, 022ϑ (3.17)
erfassen. Ihr Verlauf ist in der Abbildung 3.6(a) dargestellt. Eine hohereDampfung fuhrt zu einer geringeren Reduktion der Erdbebenlast infolge der
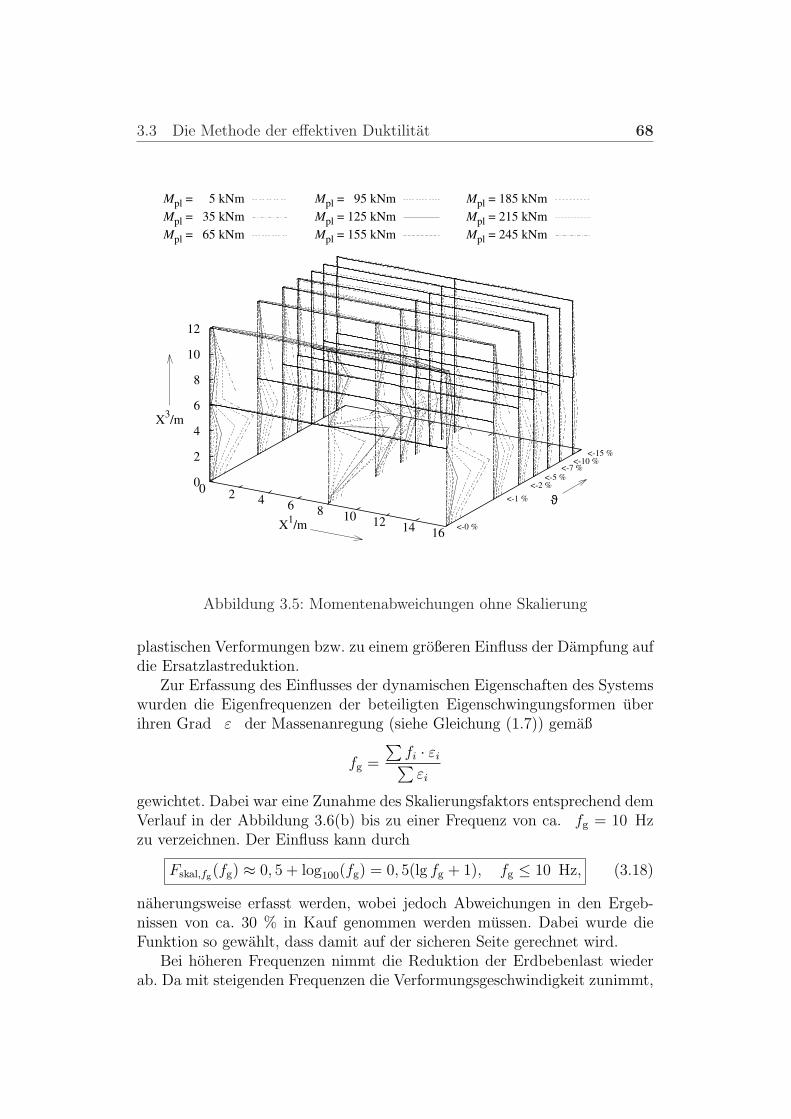
3.3 Die Methode der effektiven Duktilitat 68
<-0 %
<-1 %
<-2 %<-5 %
<-7 %<-10 %
<-15 %
ϑ
X3/m
Mpl = 5 kNm
Mpl = 35 kNm
Mpl = 65 kNm
Mpl = 95 kNm
Mpl = 125 kNm
Mpl = 155 kNm
Mpl = 185 kNm
Mpl = 215 kNm
Mpl = 245 kNm
0 2 4 6 8 10 12 14 16X
1/m
0
2
4
6
8
10
12
Abbildung 3.5: Momentenabweichungen ohne Skalierung
plastischen Verformungen bzw. zu einem großeren Einfluss der Dampfung aufdie Ersatzlastreduktion.
Zur Erfassung des Einflusses der dynamischen Eigenschaften des Systemswurden die Eigenfrequenzen der beteiligten Eigenschwingungsformen uberihren Grad ε der Massenanregung (siehe Gleichung (1.7)) gemaß
fg =
∑fi · εi∑
εi
gewichtet. Dabei war eine Zunahme des Skalierungsfaktors entsprechend demVerlauf in der Abbildung 3.6(b) bis zu einer Frequenz von ca. fg = 10 Hzzu verzeichnen. Der Einfluss kann durch
Fskal,fg(fg) ≈ 0, 5 + log100(fg) = 0, 5(lg fg + 1), fg ≤ 10 Hz, (3.18)
naherungsweise erfasst werden, wobei jedoch Abweichungen in den Ergeb-nissen von ca. 30 % in Kauf genommen werden mussen. Dabei wurde dieFunktion so gewahlt, dass damit auf der sicheren Seite gerechnet wird.
Bei hoheren Frequenzen nimmt die Reduktion der Erdbebenlast wiederab. Da mit steigenden Frequenzen die Verformungsgeschwindigkeit zunimmt,

3.3 Die Methode der effektiven Duktilitat 69
0,0
0,5
1,0
1,5
2,0
2,5
0,0 2 4 6 8 10 % 14
Fsk
al,
D
ϑ
(a) Fskal,D
0,0
0,5
1,0
0 2 4 6 Hz 10
Fsk
al,f
g
fg
(b) Fskal,fg
Abbildung 3.6: Skalierungsfaktoren
deren Einfluss auf den Widerstand in den Fließgelenken mit der einfachenFließgelenktheorie jedoch nicht erfasst wird, sind fur diesen Bereich weitereUntersuchungen notwendig.Auch bei uber 30 Hz ergab sich nicht die bei sons-tigen Untersuchungen festgestellte Reduktion von Null, sondern ein Faktorvon ca. 0,5.
Durch die Multiplikation der Skalierungsfaktoren
Fpd = Fskal,D · Fskal,fg · Fq
wird ihr gemeinsamer Einfluss erfasst. Der Faktor Fq (0 ≤ Fq ≤ 1) dientdazu, eine geringere Ersatzkraftreduktion vorgeben zu konnen, wenn z.B.unregelmaßige Tragwerke berechnet werden sollen. Prinzipiell ist damit ei-ne Erhohung der Sicherheit bei der Bemessung moglich. Bei einem Fak-tor Fq = 0 erfolgt keine Reduktion der Ersatzlast, wobei jedoch die Schnitt-großen unter Annahme elastisch–ideal plastischen Materialverhaltens ermit-telt werden.
Es zeigt sich, dass die Reduktionsabhangigkeit infolge der Dampfung we-sentlich genauer zu erfassen ist, als diejenige, infolge der Frequenzen. DieAbbildung 3.7 zeigt beispielhaft die Reduktion der Erdbebenersatzlast αµ
infolge Dampfung, gewichteter Eigenfrequenz und der sich einstellenden Duk-tilitat. Zum Vergleich enthalt die Abbildung ebenfalls die ublichen Reduk-tionsfunktionen nach den Prinzipien der gleichen Verschiebung sowie dergleichen Arbeit in Abhangigkeit der Verschiebeduktilitat gemaß dem Ab-schnitt 1.2.3.2.

3.4 Vergleichsberechnungen 70
0,0
0,2
0,4
0,6
0,8
1,0
1 2 3 4 5 6
Red
ukti
on
αµ
Duktilität µ∆ bzw. µΕ
fg = 0,3 Hz, ϑ = 15 %, f (µE)
fg = 1,0 Hz, ϑ = 5 %, f (µE)
Arbeitsgleichheit ⇒ 1/(2 · µ∆−1)0,5
Verschiebungsgleichheit ⇒ 1/ µ∆fg = 10,0 Hz, ϑ = 0 %, f (µE)
Abbildung 3.7: Reduktionsfunktionen des elastischen Spektrums
3.4 Vergleichsberechnungen
3.4.1 Berechnung
Um die Ergebnisse der Berechnungen mit der Methode der effektivenDuktilitat verifizieren zu konnen, wurden Vergleichsberechnungen mit demmodifizierten Zeitschrittverfahren und unter Berucksichtigung von Fließ-gelenken unter antwortspektrenkompatiblen Fußpunktbeschleunigungszeit-verlaufen durchgefuhrt. Die zu den elastischen Antwortspektren des Euroco-de EC–8 [4] kompatiblen Beschleunigungszeitverlaufe wurden mit dem Pro-gramm von Heuer [14] erstellt.
Die Erdbebendauer wurde von 10 bis 25 Sekunden in funf SekundenAbstanden variiert. Fur die sieben untersuchten Dampfungsgrade musstenjeweils eigene Beschleunigungszeitverlaufe erstellt werden. Bei drei Boden-klassen und durch die Notwendigkeit von speziellen Verlaufen fur die vertikaleAnregungsrichtung ergaben sich insgesamt 168 verschiedene Parametersatze,fur die jeweils drei Beschleunigungszeitverlaufe erstellt wurden. Die drei ver-schiedenen Beschleunigungszeitverlaufe beruhen auf der Vorgabe von dreiverschiedenen Zufallszeitverlaufen, die uber die Initialzahl des Zufallszahlen-generator in dem Programm von Heuer vorgegeben werden konnen.
Um moglichst genaue Ergebnisse zu erhalten, wurden zunachst jeweils 500verschiedene Zufallszeitverlaufe vorgegeben und dann die drei Verlaufe mit

3.4 Vergleichsberechnungen 71
der geringsten Abweichung zum vorgegebenen Antwortspektrum ausgewahlt.Der großte Fehler von 15,9 % trat bei 0 % Dampfung und der Bodenklasse Afur die horizontale Richtung auf. Dabei handelt es sich um die großte Ab-weichung des zum Beschleunigungszeitverlauf passenden Antwortspektrumszum Vorgegebenen. Der durchschnittliche Fehler liegt bei 10 %.
Linear–elastische Vergleichsberechnungen zwischen dem modifiziertenZeitschrittverfahren mit den gewahlten Beschleunigungszeitverlaufen unddem modalen Antwortspektrenverfahren ergaben die zu erwartenden Ergeb-nisse. Die Abweichungen von maximal 25 % sind hauptsachlich auf die Uber-lagerung der Ergebnisse bei dem modalen Antwortspektrenverfahren und dieoben erwahnten Fehler bei der Ermittlung der Beschleunigungszeitverlaufezuruckzufuhren.
Fur jedes Testbeispiel konnten nun mit Hilfe eines Programms alle mogli-chen Kombinationen der Anregungsfunktionen durchgerechnet werden. Sosind bei einer Anregung unter 45° in der Horizontalen Ebene und unterBerucksichtigung der vertikalen Anregung pro fester Dampfung und Boden-klasse 36 Kombinationen moglich. Bei vier verschiedenen Erdbebendauernergeben sich 144 Ergebnissatze pro Parametersatz. Wird ein zweidimensiona-les System ohne Anregung in vertikaler Richtung untersucht, bleiben immernoch 12 Ergebnissatze. Weiterhin ist mit Hilfe des erwahnten Programms dieVariation einzelner Parameter wie z.B. dem plastischen Moment moglich,wobei gleichzeitig nach der modalen Methode mit den gleichen Parameterngerechnet wird.
3.4.2 Auswertung
Zunachst wurden fur jeden Parametersatz aus den Ergebnissen der ver-schiedenen Zeitverlaufsberechnungen die durchschnittlichen Weg- und Kraft-großen jeder Berechnung ermittelt. Dabei interessierten nur die Maxima derAbsolutwerte der Ergebnisse in der Zeit, da diese mit den Ergebnissen desmodalen Verfahrens zu vergleichen sind.
Die Auswertung erfolgte an jedem Systemknoten. Dabei wurdendie Ergebnisse ins Verhaltnis gesetzt (modale Methode / DurchschnittZeitschrittverfahren). Bei zweidimensionalen Beispielen bietet sich dieDarstellung dieses Verhaltnisses minus eins in der freien Richtung an denKnoten des Systems an. Wenn sich die Figur aus den Verhaltnissen auf demtatsachlichen System abbildet, betragt die Abweichung Null. Ansonstensind die Orte und die Große der Abweichungen sehr anschaulich dargestellt.Dabei ist jedoch darauf zu achten, das an Stellen von Nulldurchgangen deruntersuchten Ergebnisgroßen die Abweichungen ansteigen, ohne jedoch eineBedeutung zu haben.
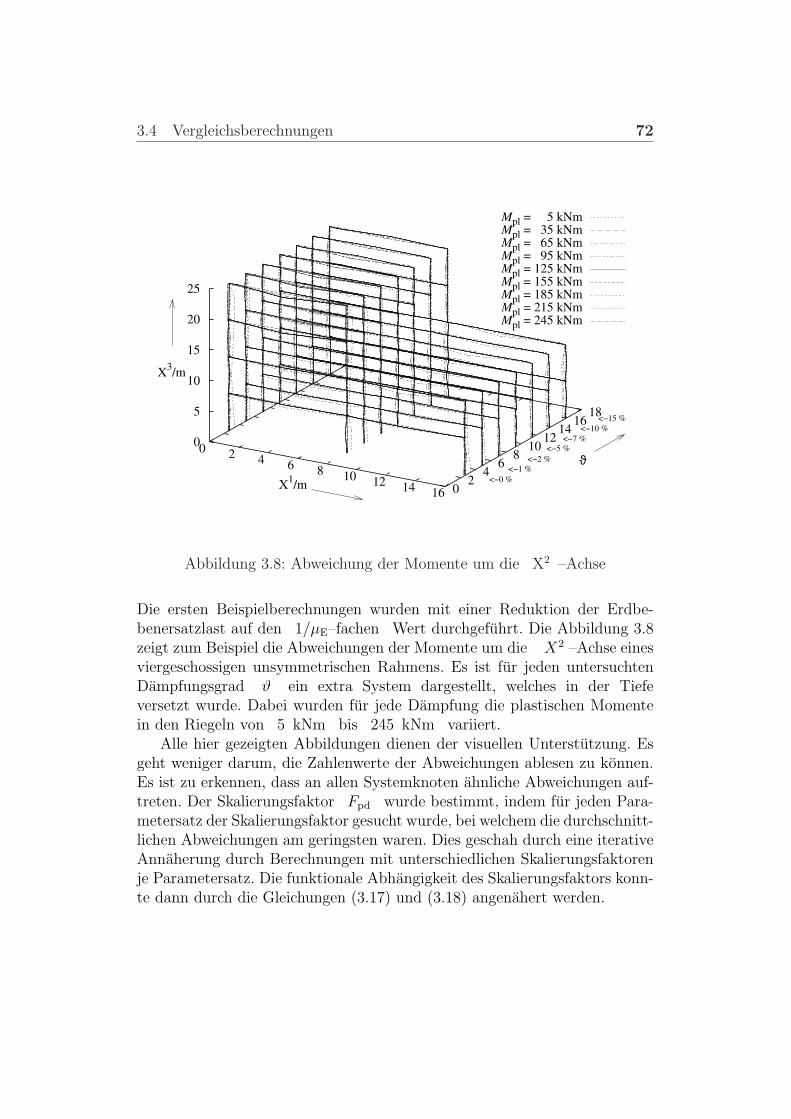
3.4 Vergleichsberechnungen 72
<−0 %
<−1 %
<−2 %
<−5 %
<−7 %
<−10 %
<−15 %
ϑ
X3/m
Mpl = 5 kNmMpl = 35 kNmMpl = 65 kNmMpl = 95 kNmMpl = 125 kNmMpl = 155 kNmMpl = 185 kNmMpl = 215 kNmMpl = 245 kNm
0 2 4 6 8 10 12 14 16X
1/m 0
24
68
1012
1416
18
0
5
10
15
20
25
Abbildung 3.8: Abweichung der Momente um die X2 –Achse
Die ersten Beispielberechnungen wurden mit einer Reduktion der Erdbe-benersatzlast auf den 1/µE–fachen Wert durchgefuhrt. Die Abbildung 3.8zeigt zum Beispiel die Abweichungen der Momente um die X2 –Achse einesviergeschossigen unsymmetrischen Rahmens. Es ist fur jeden untersuchtenDampfungsgrad ϑ ein extra System dargestellt, welches in der Tiefeversetzt wurde. Dabei wurden fur jede Dampfung die plastischen Momentein den Riegeln von 5 kNm bis 245 kNm variiert.
Alle hier gezeigten Abbildungen dienen der visuellen Unterstutzung. Esgeht weniger darum, die Zahlenwerte der Abweichungen ablesen zu konnen.Es ist zu erkennen, dass an allen Systemknoten ahnliche Abweichungen auf-treten. Der Skalierungsfaktor Fpd wurde bestimmt, indem fur jeden Para-metersatz der Skalierungsfaktor gesucht wurde, bei welchem die durchschnitt-lichen Abweichungen am geringsten waren. Dies geschah durch eine iterativeAnnaherung durch Berechnungen mit unterschiedlichen Skalierungsfaktorenje Parametersatz. Die funktionale Abhangigkeit des Skalierungsfaktors konn-te dann durch die Gleichungen (3.17) und (3.18) angenahert werden.

3.4 Vergleichsberechnungen 73
3.4.3 Beispiele mit Skalierung
Die nachsten Abbildungen enthalten die Ergebnisse von zwei untersuchtenRahmen unter Verwendung der gefundenen Skalierungsfaktoren zur Erfas-sung der Dampfung sowie der Eigenfrequenzen der Systeme. Dabei handelt essich um einen unsymmetrischen vier- bzw. zweigeschossigen Rahmen gemaßder Abbildung 3.9 und den oft untersuchten zweigeschossigen Rahmen in derAbbildung 3.10 mit einer gewichteten Frequenz von fg = 1, 596 Hz.
Im unteren Beispiel, siehe Abbildung 3.10(b), wurde auf die Fließgelenkein den Stutzen verzichtet, so dass sich kein plastischer Mechanismus einstellenkonnte.
Auch bei diesen Beispielabbildungen geht es vornehmlich um eine visu-elle Unterstutzung. Es ist zu erkennen, an welchen Orten des Systems dieAbweichungen am großten sind. Die Abbildungen 3.11(a) und 3.11(b) zei-gen die Abweichungen der Einspannmomente ME der außeren Stutzen deszweigeschossigen Rahmens.

3.4 Vergleichsberechnungen 74
<−0 %<−1 %
<−2 %<−5 %
<−7 %<−10 %
<−15 %
ϑ
X3/m
Mpl = 600,0 kNm
Mpl = 700,0 kNm
Mpl = 800,0 kNm Mpl = 900,0 kNm
Mpl = 1000,0 kNm
0 2 4 6 8 10 12 14 16X
1/m 0
510
1520
25
0
5
10
15
20
25
(a) Vergleich Mmodal/MZeitschritt
<−0 %<−1 %
<−2 %<−5 %
<−7 %<−10 %
<−15 %
ϑ
X3/m
Mpl = 600,0 kNm
Mpl = 700,0 kNm
Mpl = 800,0 kNm Mpl = 900,0 kNm
Mpl = 1000,0 kNm
0 2 4 6 8 10 12 14 16X
1/m 0
510
1520
25
0
5
10
15
20
25
(b) Vergleich MZeitschritt/Mmodal
Abbildung 3.9: Rahmen 4–2

3.4 Vergleichsberechnungen 75
<−0 %
<−1 %
<−2 %<−5 %
<−7 %<−10 %
<−15 %
ϑ
X3/m
Mpl = 700,0 kNm Mpl = 800,0 kNm Mpl= 900,0 kNm
0 2 4 6 8 10 12 14 16X
1/m 0
24
68
1012
1416
18
0
2
4
6
8
10
12
(a) Vergleich Mmodal/MZeitschritt mit Fließgelenken in den Stutzen
<−0 %
<−1 %<−2 %
<−5 %<−7 %
<−10 %<−15 %
ϑ
X3/m
Mpl = 700,0 kNm Mpl = 800,0 kNm Mpl = 900,0 kNm
0 2 4 6 8 10 12 14 16X
1/m 0
24
68
1012
1416
18
0
2
4
6
8
10
12
(b) Vergleich Mmodal/MZeitschritt ohne Fließgelenke in den Stutzen
Abbildung 3.10: Rahmen 2–2
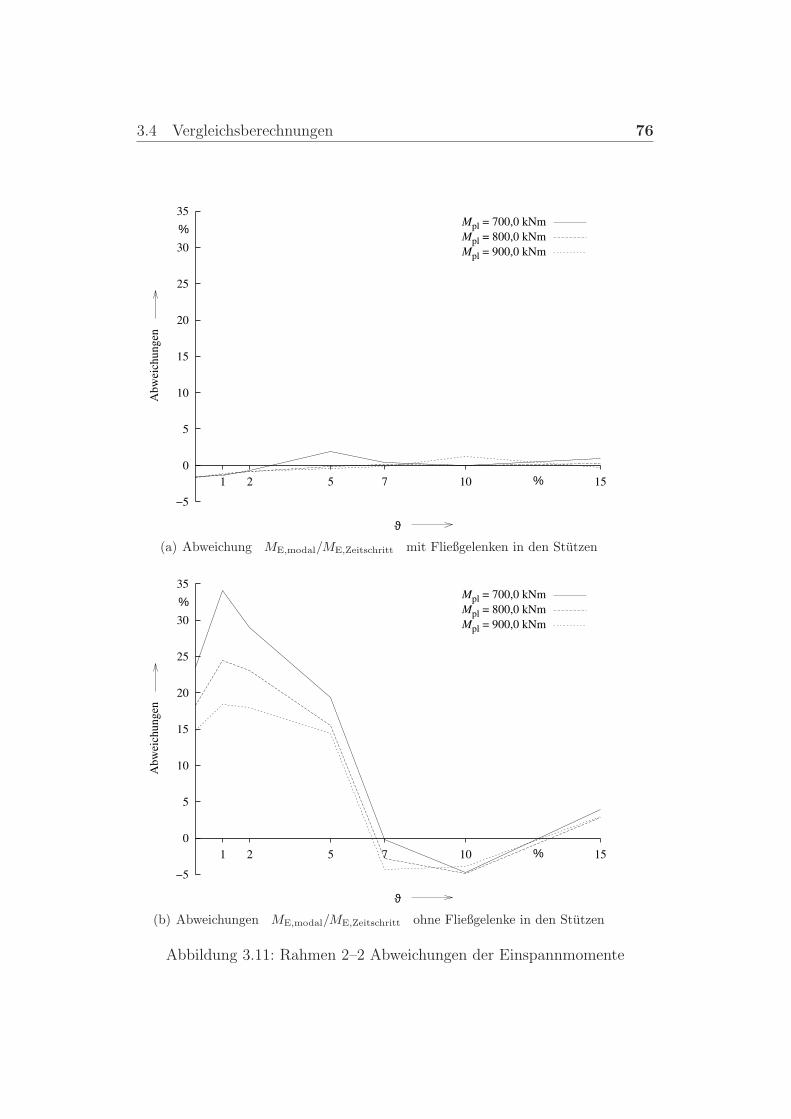
3.4 Vergleichsberechnungen 76
−5
0
5
10
15
20
25
30
35
1 2 5 7 10 15
Abw
eich
ung
en
ϑ
%
% Mpl = 700,0 kNm
Mpl = 800,0 kNm
Mpl = 900,0 kNm
(a) Abweichung ME,modal/ME,Zeitschritt mit Fließgelenken in den Stutzen
−5
0
5
10
15
20
25
30
35
1 2 5 7 10 15
Ab
wei
chun
gen
ϑ
%
% Mpl = 700,0 kNm
Mpl = 800,0 kNm
Mpl = 900,0 kNm
(b) Abweichungen ME,modal/ME,Zeitschritt ohne Fließgelenke in den Stutzen
Abbildung 3.11: Rahmen 2–2 Abweichungen der Einspannmomente

4 Abschließende Bemerkungenund Zusammenfassung
4.1 Vergleich zwischen der Methode der ef-
fektiven Duktilitat und dem Verfahren
nach dem Eurocode EC–8
Mit der Kombination der Standardmethode der Kapazitatsbemessung unddem reduzierten Antwortspektrum des Eurocode EC–8 ist der Nachweis derStandsicherheit eines Bauwerkes unter Berucksichtigung seiner duktilen Ei-genschaften moglich. Dabei wird eine Grenzsystemduktilitat durch konstruk-tive Maßnahmen sichergestellt und zur Ermittlung der Erdbebenersatzlastherangezogen. Fuhrt die Erdbebenbelastung nicht dazu, dass die Grenzduk-tilitat ausgeschopft wird, so lag die Annahme der Reduktion der Erdbeben-ersatzlast auf der unsicheren Seite. Trotzdem liegen die Ergebnisse bei derEinhaltung der Regeln der Kapazitatsbemessung bzgl. der Standsicherheitdes Tragwerks auf der sicheren Seite, denn bei einer Erhohung der Eingangs-belastung wird mehr Energie dissipiert, was wiederum zu einer großeren Re-duktion der Ersatzlast fuhrt.
Im Extremfall, also ohne die Ausbildung von plastischen Bereichen, muss-te die Berechnung ohne eine Reduktion erfolgen. Die Suche nach dem Scha-dengrenzbeben, bei dessen Uberschreitung mit bleibenden Verformungen zurechnen ist, gestaltet sich noch recht einfach. Nach einer rein elastischenBerechnung mussen dazu die Ergebnisse und damit die gewahlte Erdbeben-intensitat so skaliert werden, dass an einer Stelle des Systems die plastischenSchnittgroßen gerade erreicht sind.
Um unter Verwendung der Standardmethode der Kapazitatsbemessungein moglichst genaues Schadensbild und die dazugehorigen Schnittgroßen so-wie Verformungen infolge eines Erdbebens großerer Intensitat zu erhalten,ware ein iterativer Prozess notig. Dabei musste nach der Berechnung derVerformungen die Duktilitat ermittelt werden, welche sich tatsachlich einge-stellt hat. Stimmt diese mit der angenommenen Duktilitat nicht uberein, somuss die Berechnung mit einer angepassten Duktilitat erneut durchgefuhrt

4.1 Vergleich der neuen Methode mit dem Eurocode EC–8 78
werden, bis die vorausgesetzte Duktilitat mit der sich einstellenden Duktilitatubereinstimmt. Die hier beschriebene Anpassung der Duktilitat wird im All-gemeinen bei der Standardmethode der Kapazitatsbemessung vernachlassigtund ist z.B. im Eurocode EC–8 nicht vorgesehen. Weiterhin ist die Bestim-mung der Verschiebeduktilitat eines Systems aufwendig.
Durch die Verwendung der in dieser Arbeit entwickelten Methode der ef-fektiven Duktilitat ist eine iterative Anpassung der Duktilitat nicht mehr not-wendig. Die Anpassung erfolgt durch die Einfuhrung der energieabhangigenSystemduktilitat in den Berechnungsvorgang als Unbekannte automatisch.Weiterhin werden durch die Berucksichtigung der plastischen Systemberei-che in Form von Fließgelenken weit realistischere Schnittkrafte– und Ver-formungsverlaufe als mit der Standardmethode berechnet. Eine nachtragli-che Schnittkraftumlagerung bei einer Uberschreitung der plastischen Schnitt-krafte ist nicht mehr notwendig.
Um den Vorteil der neuen Methode der effektiven Duktilitat aufzuzeigen,wurde beispielhaft der in der Abbildung 4.1 sechsfach dargestellte dreistieli-ge Rahmen berechnet. In der Abbildung sind verschiedene Momentenverlaufeinfolge einer Erdbebenbelastung, die dem Bemessungsspektrum des Euroco-de EC–8 unter der Annahme der Bodenklasse B fur den Untergrund undeinem Dampfungsgrad von 5 % entspricht, dargestellt. Die Berechnungenwurden fur zwei unterschiedlich große Erdbebenintensitaten durchgefuhrt.Dabei sind jeweils die Momentenverlaufe unter der Annahme des gleichen Be-messungswertes der Bodenbeschleunigung [ag = (1, 0 und 2, 0) m/s2] un-tereinander abgebildet. Alle Großen sind in dem selben Maßstab dargestellt.
Die, den Ergebnissen der Zeitverlaufsberechnungen entsprechenden Mo-mentenverlaufe nach der Methode der effektiven Duktilitat, sind in den obe-ren Abbildungen dargestellt. Bei den Berechnungen unter der Annahme dergeringeren Erdbebenintensitat (Abbildung 4.1(a)) ergab sich eine Ersatzlast-reduktion auf 76,11 %, wobei sich eine energieabhangige Systemduktilitatvon µE,eff = 1, 28 einstellte. Bei der Berechnung unter der Annahme derhohen Erdbebenintensitat (Abbildung 4.1(b)) war infolge der sich einstellen-den Systemduktilitat von µE,eff = 2, 67 eine Reduktion auf 35,1 % moglich.Auf die Darstellung der nicht reduzierten Ergebnisse wurde verzichtet. Dazusind die Momentenverlaufe in den Abbildungen in der untersten Zeile um diedort jeweils angegebenen Verhaltensbeiwerte q zu vergroßern.
Um einigermaßen vergleichbare Ergebnisse mit dem modalen Verfahrendes Eurocode EC–8, also unter Verwendung der Standardmethode der Kapa-zitatsbemessung, zu erhalten, mussten die Schnittkrafte infolge der Ersatzlastmit dem Fließgelenkverfahren (in der Abbildung 4.1 als FG–Verfahren ab-gekurzt) ermittelt werden. Normalerweise erfolgt die Ermittlung der Schnitt-großen lediglich am elastischen System. Die entsprechenden Verlaufe sind inder Mitte dargestellt.

4.1 Vergleich der neuen Methode mit dem Eurocode EC–8 79
ag = 1, 0 m/s2 ag = 2, 0 m/s2
(a) Reduktion durch Duktilitat (b) wie links mit hoher Last
(c) EC–8 mit FG–Verfahren (q=2,25) (d) wie links mit hoher Last und q = 3,6
(e) EC–8 elastisch (q=2,25) (f) wie links mit hoher Last und q = 3,6
Abbildung 4.1: Momentenverlaufe
Da es sich um einen regelmaßigen Rahmen handelt, konnte nach demEurocode EC–8 der die Duktilitat erfassende Verhaltensbeiwert q = 5

4.1 Vergleich der neuen Methode mit dem Eurocode EC–8 80
gewahlt werden. Jedoch wird bei geringer Erdbebenlast ag = 1, 0 m/s2
eine annahernde Ubereinstimmung der Momentenverlaufe gemaß der Abbil-dung 4.1(c) zu den Ergebnissen des Zeitverlaufsverfahrens bei der Vorgabe ei-nes Verhaltensbeiwerts von q = 2, 5 erreicht. Wurde der Verhaltensbeiwerthoher angesetzt, so waren die gewonnenen Schnitt- und Verformungsgroßenkleiner als eigentlich zu erwarten ist. Erst bei der zweifachen Bodenbeschleu-nigung ag = 2, 0 m/s2 entsteht der gewunschte plastische Mechanismus,welcher zur Vorgabe eines hohen Verhaltensbeiwerts vorausgesetzt wird. DieMomentenverlaufe gemaß der Abbildung 4.1(d) stimmen allerdings nur un-ter der Annahme eines Verhaltensbeiwerts von q = 3, 6 mit denen nachdem Zeitschrittverfahren uberein. Obwohl es sich jeweils um das selbe Sys-tem handelt, mussen zur Annaherung an die nach dem Zeitschrittverfahrenzu erwartenden Ergebnisse verschiedene Verhaltensbeiwerte gewahlt werden.Die effektiv zur Reduktion der Systemantwort zur Verfugung stehende Duk-tilitat ist von der Erdbebenintensitat abhangig. Dies bleibt bei der Vorgabedes Verhaltensbeiwerts nach dem Eurocode EC–8 allein auf Grundlage derSystemeigenschaften unberucksichtigt.
Dem planenden Ingenieur fehlt die Grundlage zur Abschatzung des Aus-nutzungsgrades der Duktilitat. Ebenfalls ist die Bestimmung der Erdbeben-intensitat, bei welcher die ersten plastischen Verformungen eintreten, also dieIntensitat des Schadengrenzbebes, relativ aufwendig. Mit der in dieser Ar-beit entwickelten Methode kann die Intensitat des Schadengrenzbebens uberden Laststeigerungsfaktor beim Erreichen des ersten Fließgelenks berechnetwerden, wenn dies als Schadensgrenze definiert wird. In [7] wird zur Berech-nung des Schadengrenzbebens vorgeschlagen, die Reduktionsgleichung (1.13)nach dem Prinzip der gleichen Arbeit zu verwenden. Wird dabei die sichtatsachlich einstellende Duktilitat nicht uberpruft, sondern z.B. eine Dukti-litat von µ∆ = 4 vorgegeben, so ergibt sich nach der Berechnung mit einerBodenbeschleunigung von ag = 1, 0 m/s2 eine Schadensgrenzbeschleuni-gung ag,S von
ag,S =ag√
2 · µ∆ − 1=
1, 0 m/s2
√2 · 4− 1
= 0, 38 m/s2
und mit einer Bodenbeschleunigung von ag = 2, 0 m/s2 eine Schadens-grenzbeschleunigung von
ag,S =2, 0 m/s2
√2 · 4− 1
= 0, 76 m/s2.
Da es sich jedoch jeweils um das selbe System handelt, muss die Schadens-grenzbeschleunigung unabhangig von der Bodenbeschleunigung gleich großsein. Dieses Beispiel zeigt, dass die Vorgabe einer Duktilitat lediglich in

4.2 Bewertung der Methode der effektiven Duktilitat 81
Abhangigkeit der Systemeigenschaften die Gefahr der Fehleinschatzung derSystembeanspruchungen mit sich bringt, welche unter Verwendung der neuentwickelten Methode der effektiven Duktilitat minimiert wird.
Zum Vergleich sind in der untersten Zeile der Abbildung 4.1 noch die Mo-mentenverlaufe nach dem Eurocode EC–8 dargestellt, welche sich bei einerelastischen Schnittkraftermittlung ergeben. Ohne die Ausbildung der Fließ-gelenke ergeben sich dabei qualitativ andere Momentenverlaufe. So sind dieMomente in den mittleren Riegeln großer als bei den nach der Fließgelenkme-thode ermittelten Verlaufen und die Momente an den Stutzenfußen kleiner.
4.2 Bewertung der Methode der effektiven
Duktilitat
Die vorliegenden Untersuchungen bestatigen einen prinzipiellen Zusammen-hang zwischen der Reduktion der durch ein Erdbeben hervorgerufenen Be-lastung und dem duktilen Verformungsvermogen eines Bauwerkes. Ebenfallswar eine Abhangigkeit der Reduktion von den Dampfungseigenschaften undden Eigenfrequenzen des Systems feststellbar.
Die angegebenen Abhangigkeiten beruhen auf der Auswertung von achtSystemen, bei denen die Steifigkeiten, Massenbelegung, Anregungsinten-sitat und die plastischen Eigenschaften im großen Maße variiert wurden.Hauptsachlich zwei dieser Systeme, ein dreistieliger zweigeschossiger und einzweistieliger achtgeschossiger Rahmen, waren Grundlage zur Angabe der Re-duktionsfunktionen. Insgesamt ergaben sich uber 100000 Einzelberechnun-gen.
Auf Grund der geringen Variation der Systemabmaße besteht keineausreichende Grundlage zur Verallgemeinerung der Ergebnisse. Weiterhinsind die im nachsten Abschnitt aufgefuhrten Untersuchungen fur ein abge-schlossenes Verfahren notwendig.
Bei der Einhaltung der Kriterien der Kapazitatsbemessung, insbeson-dere der Systemsymmetrie und der Ubereinstimmung von lokaler undglobaler Duktilitat, liefert die Methode der effektiven Duktilitat bei nochsicherzustellender Ubertragbarkeit der Reduktionsfunktionen auf andereSysteme brauchbare Aussagen zum Tragwerksverhalten bei Erdbebenin-tensitaten zwischen dem Schadengrenzbeben und einem Erdbeben, daszur Ausbildung des plastischen Mechanismus fuhrt. Dabei hat sich alsbesonderes wichtig herausgestellt, dass alle Fließgelenke annahernd beider gleichen Laststeigerung entstehen mussen. Wenngleich die Ergebnisseanderenfalls an einigen Stellen inakzeptabel (uber 100 %) voneinanderabweichen, ist aber die Einhaltung dieser Forderung bei der Verwendung der

4.3 Ausblick 82
Methode der effektiven Duktilitat iterativ moglich.Damit steht dem Ingenieur ein Hilfsmittel zur Verfugung, die duktilen
Eigenschaften des Bauwerks durch die Variation der plastischen Gelenke zuverbessern.
Weiterhin besteht die Moglichkeit, bei nicht symmetrischen Systemenzu prufen, an welchen Orten Fließgelenke sinnvoll sind, um bei moglichstkleinen Gelenkrotationen moglichst große Gesamtverformungen zu erhaltenund ob sich uberhaupt ein plastischer Mechanismus einstellt.
Wie im Abschnitt 4.1 gezeigt, liegen die Ergebnisse der Maximalwerteder Schnittgroßen und Verformungen der vorgestellten Methode weit dichteran den tatsachlich bei einem Erdbeben zu erwartenden Werten als nach derStandardmethode der Kapazitatsbemessung. Ohne die Berucksichtigung derplastischen Systembereiche in Form von Fließgelenken wahrend der Berech-nung kann kein wirklichkeitsnaher Schnitt- und Verformungsgroßenverlaufermittelt werden. Aber auch mit den moglichen Momentenumlagerungenim Nachlauf ist die Berechnung der Ersatzlast am elastischen System einegrobe Naherung.
Insofern stellt die entwickelte Methode mit der Moglichkeit der Beruck-sichtigung des Einflusses der sich tatsachlich einstellenden effektiv zurVerfugung stehenden Duktilitat auf die Erdbebenersatzlast eine Verbesse-rung dar, deren Weiterfuhrung sinnvoll ist.
Die Erfassung der Systemduktilitat unter Verwendung der elastischgespeicherten und plastisch dissipierten Energie im System erwies sich alspraktikabel. Einer der Vorteile dieses Ansatzes liegt in der Moglichkeit, dieDuktilitat unregelmaßiger Tragwerke erfassen zu konnen.
4.3 Ausblick
4.3.1 Anregungsrichtung
Zur Bestimmung der Erdbebenersatzlastreduktionsfunktion gemaß der Glei-chung (3.11) wurden die Berechnungen an zweidimensionalen Systemen miteiner Erdbebeneinwirkung aus nur einer Richtung (horizontal) ausgewertet.Bei der Betrachtung eines im Grundriss achssymmetrischen Systems untereinem in der Horizontalen um 45° gedreht angreifenden Erdbebens, kannbei rein elastischem Materialverhalten eine separate Berechnung fur beideHauptrichtungen mit jeweils 1/
√2–facher Last erfolgen. Stellt sich in einer
der Richtungen der plastische Mechanismus ein, so kann die Ersatzlast furdiese Richtung entsprechend reduziert werden. In der zweiten Richtung mussjedoch weiterhin die volle Lastkomponente angesetzt werden.

4.3 Ausblick 83
Bei unsymmetrischen Systemen ist diese klare Trennung nicht mehrmoglich. Dies stellt ein prinzipielles Problem des modalen Antwort-spektrenverfahrens unter Berucksichtigung inelastischen Materialverhaltensdar.
Weiterfuhrende Untersuchungen konnten mit dem Ziel durchgefuhrt wer-den, den Anteil der Richtungskomponenten an der sich einstellenden Dukti-litat zu erfassen, um daruber jeweils unterschiedliche Reduktionen der Be-lastung festlegen zu konnen. Bei obigem Beispiel haben die beiden Kompo-nenten keinen Anteil an der Erzeugung des plastischen Mechanismus in derjeweils orthogonalen Richtung.
Die Berucksichtigung des vertikalen Anteils der Bodenbeschleunigungfuhrt ebenfalls zu einer Interaktion. Auf der sicheren Seite liegend wird imEurocode EC–8 [4] auf eine Reduktion dieser Komponente prinzipiell ver-zichtet. Die fur die vertikale Richtung maßgebenden Eigenschwingungsfor-men (Schwingen der Riegel) konnen die Biegemomente an den Orten derFließgelenke erhohen aber auch vermindern, wobei die Information uber denzeitlichen Verlauf dieses Einflusses unter Verwendung des modalen Antwort-spektrenverfahrens nicht zur Verfugung steht.
4.3.2 P–∆ Effekt und standige Lasten
In der vorliegenden Arbeit wurde der Einfluss der Theorie II. Ordnung nichtuntersucht. Die das Kippmoment beeinflussenden Normalkrafte infolge derdynamischen Belastung sind im Mittel Null. Entscheidend sind eher die Nor-malkrafte infolge der standigen Last P. Diese lassen sich durch eine Vor-abberechnung nach der Theorie I. Ordnung abschatzen.
Durch die Berucksichtigung der Theorie II. Ordnung ergeben sichzunachst geanderte Eigenfrequenzen des Systems, was zu anderen Spektral-werten der Beschleunigung fuhrt. Eine Moglichkeit zur naherungsweisen Er-fassung des P–∆ Effekts besteht nun darin, die entsprechend dem erwarte-ten Laststeigerungsfaktor ρi skalierten Eigenschwingungsformen als imper-fekte Systeme zur Berechnung nach Theorie II. Ordnung infolge der standi-gen Lasten zu verwenden. Die resultierenden zusatzlichen Schnittgroßen undVerformungen werden dann zu den entsprechenden Großen der Eigenschwin-gungsform addiert. Danach erfolgt die Uberlagerung der Ergebnisse der Ei-genschwingungsformen gemaß dem Abschnitt 2.5, um den Laststeigerungs-faktor ρi erneut zu berechnen.
Prinzipiell ist die gleichzeitige Berucksichtigung der Schnittgroßen aus denstandigen und den dynamischen Lasten notwendig. So fuhrt die Abminde-rung der fur die dynamischen Lasten verfugbaren plastischen Momente infol-ge der Schnittgroßen aus den standigen Lasten zur richtigen Bestimmung desLaststeigerungsfaktors, aber zu einem Fehler bei der Ermittlung der plastisch

4.3 Ausblick 84
dissipierten Energie, da dabei das volle plastische Moment berucksichtigt wer-den muss. Ebenso fuhrt eine elastische Vorverformung infolge der standigenLasten zu geanderten Werten der elastisch abgespeicherten Energie. BeideEnergiegroßen vergroßern sich bei der Berucksichtigung der standigen Las-ten.
Stehen wahrend der Berechnung alle Schnittgroßen zur Verfugung, kannauch deren Interaktion bzgl. der plastischen Widerstandsgroßen berucksich-tigt werden.
4.3.3 Nichtlineares Materialverhalten
Die Verwendung der Fließgelenkmethode nahert das inelastische Material-verhalten durch ein bilinear rein elastisch – rein plastisches, verformungs-geschwindigkeitsunabhangiges Materialverhalten an. Gerade bei Stahlbeton-querschnitten ist schon ein linear–elastischer Ansatz eine grobe Naherung.Das Reißen des Betons und weitere Effekte unter zyklischer Belastung konnendurch eine Abminderung der Steifigkeit Ie gemaß [7] durch eine Reduktiondes gesamten Tragheitsmomentes Ig in Abhangigkeit der Normaldruck-kraft P im Querschnitt,
Ie = (0, 5 +1, 5P
fcAg
)Ig,
annahernd erfasst werden. Dabei ist fc die Rechenfestigkeit des Betonsund Ag die Flache des Querschnitts.
Das zyklische Verhalten im elastischen und plastischen Bereich ist Gegen-stand zahlreicher Forschungsarbeiten. Bei der Verwendung finiter Elementeim Bereich der erwarteten Fließgelenke bzw. Zonen, welche dieses Verhaltengenauer erfassen, bleibt der Einfluss des nichtlinearen Materialverhaltens desubrigen Systems unberucksichtigt. Die Modellierung des Gesamtsystems mitentsprechenden Elementen fuhrt fur die praktische Anwendung bei der Erd-bebenbemessung mit der zur Zeit verfugbaren Rechenleistung zu einem vielzu großen Rechenaufwand.
Trotzdem ist eine genauere Betrachtung des zyklischen Verhaltens derFließgelenke notwendig. Die Abnahme des plastischen Moments mit der An-zahl der Zyklen ist evident. Bei der Verwendung des modalen Antwort-spektrenverfahrens steht allerdings die Information uber die Zyklenanzahlnicht zur Verfugung. Sie kann lediglich durch die Eigenfrequenzen und dieStarkbebendauer abgeschatzt werden.
Weiterhin muss untersucht werden, ob uber die Eigenfrequenzen das ver-formungsgeschwindigkeitsabhangige Verhalten der Fließgelenke erfasst wer-den kann.

4.3 Ausblick 85
4.3.4 Form des elastischen Antwortspektrums
0,0
0,5
1,0
1,5
2,0
m/s2
3,0
0,0 0,5 1,0 1,5 2,0 2,5 3,0 3,5 s 4,5
Sp
ektr
alw
ert
Se(
T)
der
Bes
chle
unig
ung
Eigenschwingzeit T
ag · S · η · βo mit S = 1,0
ag · S · η · βo mit S = 0,9
Bodenklasse A
Bodenklasse B
Bodenklasse C
Abbildung 4.2: Elastisches Antwortspektrum des Eurocode EC–8
Die Abbildung 4.2 zeigt das elastische Antwortspektrum des Euro-code EC–8 fur die Bodenklassen A - C unter der Annahme eines Damp-fungsgrades von 5 %, also eines Dampfungs–Korrekturbeiwertes von η = 1.Die Vergleichsberechnungen zur Berucksichtigung der Eigenfrequenzen desSystems bei der Wahl der Ersatzlastreduktion ergaben zwischen den Boden-klassen leichte Abweichungen.
Die Eigenfrequenzen werden nach dem Einfallen der Fließgelenke jeweilsneu ermittelt und dann der entsprechende Spektralwert der Beschleunigungfur den aktuellen Laststeigerungsschritt verwendet. Zur Bestimmung der fre-quenzabhangigen Reduktion entsprechend der Gleichung (3.18) werden je-doch nur die Eigenfrequenzen des unmodifizierten Systems verwendet. Hierkonnten weitere Untersuchungen durchgefuhrt werden und die Eigenfrequen-zen jedes Laststeigerungsschritts gemittelt und moglicherweise entsprechendder Form des elastischen Antwortspektrums gewichtet werden.

5 Anhang
Anhang A Grundlagen der finiten Balkenelemente——–iiiiii mit Momentengelenken
A.1 Einleitung
In diesem Anhang werden die Steifigkeitsmatrizen der verwendeten finitenElemente mit Momentengelenken hergeleitet. Dabei werden der Vollstandig-keit halber auch die Theorie II. Ordnung sowie die elastische Bettung be-trachtet.
Die Standarddifferenzialgleichung des Biegebalkens ergibt sich aus derBetrachtung der Vertraglichkeit v′′ + M/EI = 0 und des Gleichge-wichts M ′′ + p = 0.
Zusatzlich konnen weitere Einflusse durch die Berucksichtigung der Theo-rie II. Ordnung, von Imperfektionen (pInp), von Streckenlasten (pV orsp)aus dem Lastfall Vorspannung und die Kraft aus der Massenbeschleunigungfur das Gleichgewicht sowie die elastische Bettung und die Temperaturbe-lastung (pTemp) fur die Vertraglichkeit erfasst werden. Mit der Substituti-on M ′′ = EIv′′′′ aus der Vertraglichkeitsbetrachtung ergibt sich die Diffe-renzialgleichung des Biegebalkens zu
EIv′′′′︸ ︷︷ ︸ − p︸︷︷︸ − (Hv′)′︸ ︷︷ ︸Biege− Strecken− Theorie II.
steifigkeit lasten Ordnung
+ Aρv︸︷︷︸ − Iρv′′︸︷︷︸ + Kv︸︷︷︸ = 0.
T ranslations− Rotations− Bettungmasssen massen
(5.1)
Nach Anwendung des Prinzips der virtuellen Wege (PvW) wird im Rahmendes Verfahrens der Stabsteifigkeiten (VdS) die Differenzialgleichung
W v(vv, v) =
∫
s
vv(x)[EIv′′′′(x)− p(x)
− (H(x)v′(x))′ + Aρv − Iρv′′(x) + Kv(x)] dx = 0

A Gelenkelemente 87
bereichsweise in schwacher Form erfullt. Durch der Reduktion der Ableitungs-ordnung mit Hilfe von partiellen Integrationen entsteht die Arbeitsgleichung
W v(vv, v) =
∫
s
[v′′v(x)EIv′′(x)− vv(x)p(x) + v′v(x)(H)v′(x)
+ vv(x)Aρv + v′v(x)Iρv′(x) + vv(x)Kv(x)] dx
− [vv(x)V (x)]R + [χv(x)M(x)]R
= 0.
(5.2)
Auf die weitere Betrachtung der Randausdrucke [. . . ]R wird aus folgendenGrunden verzichtet. Auf dem geometrischen Rand stehen die Verschiebun-gen fest, weshalb die virtuelle Verschiebung zu Null wird. Auf dem stati-schen Rand sind entweder homogene Randbedingungen vorhanden, so dassder Randterm ebenfalls entfallt oder aber die Kraftgroßen sind als Einwir-kungen bekannt bzw. ergeben sich aus den Differenzkraften an den Kontakt-knoten zweier Elemente und werden auf Systemebene im Knotenlastvektorberucksichtigt.
Zur Auswertung der Gleichung (5.2) in dem finiten Bereich der Lange swerden kubische Ansatzfunktionen fur die Durchbiegung v mit den Stutz-werten vA, χA, vB und χB gewahlt.
Im Folgenden werden die verwendeten Ansatzfunktionen zur Darstellungvon schubstarren Balkenelementen mit Momentengelenken am Elementan-fang bzw. -ende vorgestellt. Dabei ist auf der Seite des Gelenks darauf zuachten, dass die zweite Ableitung, also die Krummung v′′B zu Null wird (sie-he beispielhaft Abbildung 5.1). Mit diesen Ansatzen werden die lokalen (In-dex ll ) Elementsteifigkeitsmatrizen nach Theorie I. und II. Ordnung sowiefur die elastische Bettung und die Massenmatrix hergeleitet. Der Ansatz furdie Verschiebung in Richtung der Normalkraft bleibt unverandert.
Die gesuchten Steifigkeitsmatrizen konnen auch durch eine Matrizenkon-densation gewonnen werden. Diese Vorgehensweise wird beispielhaft zur Er-stellung der Elementsteifigkeitsmatrix unter Berucksichtigung der Schubstei-figkeit angewandt.

A Gelenkelemente 88
0,0
0,2
0,4
0,6
0,8
1,0
-1,0 -0,5 0 0,5 1,0
ξ
f (ξ)
f (ξ) = (ξ3 - 3ξ2
- 9ξ + 11) / 16
(a) Stutzwert vA = 1, 0
0,0
0,2
0,4
0,6
0,8
-1,0 -0,5 0 0,5 1,0
ξ
f (ξ)
f (ξ) = s•(ξ3 - 3ξ2
- ξ + 3) / 16
df (ξ= -1) / dξ = s/2 = dx / dξ
(b) Stutzwert χA = s/2
0,0
0,2
0,4
0,6
0,8
1,0
-1,0 -0,5 0 0,5 1,0
ξ
f (ξ)
f (ξ) = (-ξ3 + 3ξ2
+ 9ξ + 5) / 16
(c) Stutzwert vB = 1, 0
Abbildung 5.1: Ansatzfunktionen fur die Durchbiegung eines Biegebalkensmit einem Momentengelenk am Elementende

A Gelenkelemente 89
A.2 Ansatzfunktionen
Ansatzfunktion fur die Knotenverschiebung vA gemaß Abbildung 5.1(a) :
f(ξ) =1
16(ξ3 − 3ξ2 − 9ξ + 11)
f ′(ξ) =1
16(3ξ2 − 6ξ − 9)
f ′′(ξ) =1
16(6ξ − 6).
Ansatzfunktion fur die Knotenverdrehung χA gemaß Abbildung 5.1(b) :
f(ξ) =s
16(ξ3 − 3ξ2 − ξ + 3)
f ′(ξ) =s
16(3ξ2 − 6ξ − 1)
f ′′(ξ) =s
16(6ξ − 6).
Ansatzfunktion fur die Knotenverschiebung vB gemaß Abbildung 5.1(c) :
f(ξ) =1
16(−ξ3 + 3ξ2 + 9ξ + 5)
f ′(ξ) =1
16(−3ξ2 + 6ξ + 9)
f ′′(ξ) =1
16(−6ξ + 6).
Mit den gewahlten Ansatzfunktionen ergeben sich die realen Verschiebungs-funktionen:
v(ξ) =1
16((ξ3 − 3ξ2 − 9ξ + 11)vA + s(ξ3 − 3ξ2 − ξ + 3)χA
+(−ξ3 + 3ξ2 + 9ξ + 5)vB) (5.3)
dv(ξ)
dx=
2
16s((3ξ2 − 6ξ − 9)vA + s(3ξ2 − 6ξ − 1)χA +
(−3ξ2 + 6ξ + 9)vB)
d2v(ξ)
dx2=
4
16s2((6ξ − 6)vA + s(6ξ − 6)χA + (−6ξ + 6)vB)
d2v(ξ)
dx2=
3
2s2((ξ − 1)vA + s(ξ − 1)χA + (−ξ + 1)vB).

A Gelenkelemente 90
und die virtuellen Verschiebungsfunktionen:
vv(ξ) =1
16((ξ3 − 3ξ2 − 9ξ + 11)vv
A + s(ξ3 − 3ξ2 − ξ + 3)χvA
+(−ξ3 + 3ξ2 + 9ξ + 5)vvB)
dvv(ξ)
dx=
2
16s((3ξ2 − 6ξ − 9)vv
A + s(3ξ2 − 6ξ − 1)χvA + (−3ξ2 + 6ξ + 9)vv
B)
d2vv(ξ)
dx2=
4
16s2((6ξ − 6)vv
A + s(6ξ − 6)χvA + (−6ξ + 6)vv
B)
d2vv(ξ)
dx2=
3
2s2((ξ − 1)vv
A + s(ξ − 1)χvA + (−ξ + 1)vv
B).

A Gelenkelemente 91
A.3 Matrizen
A.3.1 Biegesteifigkeitsmatrix nach Theorie I. Ordnung(schubstarr)
Die Abkurzungen werden in der Zusammenstellung A.1 nachfolgend erklart.
∫ s2
− s2
v′′v(x)EIv′′(x) dx
=9EI
4s4
1∫
−1
[vv
A χvA vv
B
]
ξ − 1s(ξ − 1)−ξ + 1
[
ξ − 1 s(ξ − 1) −ξ + 1]
vA
χA
vB
dξ
s
2
=9EI
8s3
1∫
−1
[vv
A χvA vv
B
]
(ξ − 1)2 s(ξ − 1)2 −(ξ − 1)2
s(ξ − 1)2 s2(ξ − 1)2 −s(ξ − 1)2
−(ξ − 1)2 −s(ξ − 1)2 (ξ − 1)2
vA
χA
vB
dξ
=9EI
8s3
1∫
−1
[vv
A χvA vv
B
]
αI sαI −αI
sαI s2αI −sαI
−αI −sαI αI
vA
χA
vB
dξ
=9EI
8s3
[vv
A χvA vv
B
]∣∣∣∣∣∣∣∣∣
βI sβI −βI
sβI s2βI −sβI
−βI −sβI βI
∣∣∣∣∣∣∣∣∣
1
−1
vA
χA
vB
=9EI
8s3
[vv
A χvA vv
B
]
23
+ 2 s(23
+ 2) −23− 2
s(23
+ 2) s2(23
+ 2) −s(23
+ 2)
−23− 2 −s(2
3+ 2) 2
3+ 2
vA
χA
vB
∫ s2
− s2
v′′v(x)EIv′′(x) dx =
[vv
A χvA vv
B
]EI
3
s3
3
s2− 3
s3
3
s2
3
s− 3
s2
− 3
s3− 3
s2
3
s3
vA
χA
vB

A Gelenkelemente 92
αI =ξ2 − 2ξ + 1
βI =ξ3
3− ξ2 + ξ
Abkurzungen A.1: Theorie I. Ordnung
A.3.2 Steifigkeitsmatrix nach Theorie I. Ordnung(schubsteif)
Die Steifigkeitsmatrix k ll(EI, GAQ) unter zusatzlicher Berucksichtigungder Schubsteifigkeit wird hier durch Kondensation gewonnen, indem das Mo-ment am Knoten B gemaß
12ψEI
s3
6ψEI
s2−12ψEI
s3
6ψEI
s2
6ψEI
s2
(1 + 3ψ)EI
s−6ψEI
s2
(−1 + 3ψ)EI
s
−12ψEI
s3−6ψEI
s2
12ψEI
s3−6ψEI
s2
6ψEI
s2
(−1 + 3ψ)EI
s−6ψEI
s2
(1 + 3ψ)EI
s
vA
χA
vB
χB
=
QA
MA
QB
0
,
mit dem Korrekturfaktor ψ =1
1 + 12EIGAQs2
, zu Null gesetzt wird.
Durch die Auswertung der letzten Zeile ist χB durch die ubrigen Frei-werte ausdruckbar, also
χB = − 6ψ
(1 + 3ψ)svA − −1 + 3ψ
1 + 3ψχA +
6ψ
(1 + 3ψ)svB,

A Gelenkelemente 93
weshalb die letzte Spalte durch
6ψEI
s2
(−1 + 3ψ)EI
s
−6ψEI
s2
[− 6ψ
(1 + 3ψ)s−−1 + 3ψ
1 + 3ψ
6ψ
(1 + 3ψ)s
]
vA
χA
vB
=
− 36ψ2EI
(1 + 3ψ)s3−(−1 + 3ψ)6ψEI
(1 + 3ψ)s2
36ψ2EI
(1 + 3ψ)s3
−(−1 + 3ψ)6ψEI
(1 + 3ψ)s2−(−1 + 3ψ)2EI
(1 + 3ψ)s
(−1 + 3ψ)6ψEI
(1 + 3ψ)s2
36ψ2EI
(1 + 3ψ)s3
(−1 + 3ψ)6ψEI
(1 + 3ψ)s2− 36ψ2EI
(1 + 3ψ)s3
vA
χA
vB
abgelost werden kann. Die Uberlagerung der gewonnenen Matrix mit denersten drei Spalten und Zeilen der Ausgangsmatrix ergibt die gesuchte Stei-figkeitsmatrix
k ll(EI, GAQ) =
12ψEI
(1 + 3ψ)s3
12ψEI
(1 + 3ψ)s2− 12ψEI
(1 + 3ψ)s3
12ψEI
(1 + 3ψ)s2
12ψEI
(1 + 3ψ)s− 12ψEI
(1 + 3ψ)s2
− 12ψEI
(1 + 3ψ)s3− 12ψEI
(1 + 3ψ)s2
12ψEI
(1 + 3ψ)s3
.
Ubersichtlicher ist die Verwendung eines neuen Korrekturfaktors ψg gemaß
ψg =1
1 + 3EIGAQs2
.
Nach einigen Umformungen ergibt sich eine Steifigkeitsmatrix
k ll(EI, GAQ) =
3ψgEI
s3
3ψgEI
s2−3ψgEI
s3
3ψgEI
s2
3ψgEI
s2−3ψgEI
s2
−3ψgEI
s2−3ψgEI
s2
3ψgEI
s2
,
deren Glieder nur um den Faktor ψg von denen der Matrix unter Annahmevon Schubstarrheit abweichen.

A Gelenkelemente 94
A.3.3 Biegesteifigkeitsmatrixdifferenznach Theorie II. Ordnung
Die Abkurzungen werden in der Zusammenstellung A.2 nachfolgend erklart.
∫ s2
− s2
v′v(x)Hv′(x) dx =H
64s2
1∫
−1
[vv
A χvA vv
B
]
αβγ
[
α β γ]
vA
χA
vB
dξ
s
2
=H
128s
1∫
−1
[vv
A χvA vv
B
]
α2 αβ −α2
αβ β2 −αβ−α2 −αβ α2
vA
χA
vB
dξ
=H
128s
1∫
−1
[vv
A χvA vv
B
]
δ ε −δε ϑ −ε−δ −ε δ
vA
χA
vB
dξ
=H
128s
[vv
A χvA vv
B
]∣∣∣∣∣∣∣∣
δI εI −δI
εI ϑI −εI
−δI −εI δI
∣∣∣∣∣∣∣∣
1
−1
vA
χA
vB
=2H
128s
[vv
A χvA vv
B
]
δII εII −δII
εII ϑII −εII
−δII −εII δII
vA
χA
vB
∫ s2
− s2
v′v(x)Hv′(x) dx =
[vv
A χvA vv
B
]H
5
6
s1 −6
s
1 s −1
−6
s−1
6
s
vA
χA
vB

A Gelenkelemente 95
α =3ξ2 − 6ξ − 9
β =s(3ξ2 − 6ξ − 1)
γ =− 3ξ2 + 6ξ + 9 = −α = −(3ξ2 − 6ξ − 9)
δ =9ξ4 − 36ξ3 − 18ξ2 + 108ξ + 81
ε =s(9ξ4 − 36ξ3 + 6ξ2 + 60ξ + 9)
ϑ =s2(9ξ4 − 36ξ3 + 30ξ2 + 12ξ + 1)
δI =9
5ξ5 − 9ξ4 − 6ξ3 + 54ξ2 + 81ξ
εI =s(9
5ξ5 − 9ξ4 + 2ξ3 + 30ξ2 + 9ξ)
ϑI =s2(9
5ξ5 − 9ξ4 + 10ξ3 + 6ξ2 + ξ)
δII =9
5− 6 + 81
εII =s(9
5+ 2 + 9)
ϑII =s2(9
5+ 10 + 1)
Abkurzungen A.2: Theorie II. Ordnung

A Gelenkelemente 96
A.3.4 Biegesteifigkeitsmatrixdifferenz fur Bettung
Die Abkurzungen werden in der Zusammenstellung A.3 nachfolgend erklart.
∫ s2
− s2
vv(x)Kv(x) dx =K
256
1∫
−1
[vv
A χvA vv
B
]
ηθι
[
η θ ι]
vA
χA
vB
dξ
s
2
=Ks
512
1∫
−1
vvA
χvA
vvB
T
η2 ηθ ηιηθ θ2 θιηι θι ι2
vA
χA
vB
dξ
=Ks
512
1∫
−1
vvA
χvA
vvB
T
κ λ µ
λ ν $
µ $ %
vA
χA
vB
dξ
=Ks
512
vvA
χvA
vvB
T ∣∣∣∣∣∣
κI λI µI
λI νI $I
µI $I %I
∣∣∣∣∣∣
1
−1
vA
χA
vB
=Ks
53760
vvA
χvA
vvB
T ∣∣∣∣∣∣
κII λII µII
λII νII $II
µII $II %II
∣∣∣∣∣∣
1
−1
vA
χA
vB
=2Ks
53760
[vv
A χvA vv
B
]
κIII λIII µIII
λIII νIII $III
µIII $III %III
vA
χA
vB
∫ s2
− s2
vv(x)Kv(x) dx =[vv
A χvA vv
B
] Ks
840
408 72s 117
72s 16s2 33s
117 33s 198
vA
χA
vB

A Gelenkelemente 97
η =ξ3 − 3ξ2 − 9ξ + 11
θ =s(ξ3 − 3ξ2 − ξ + 3)
ι =− ξ3 + 3ξ2 + 9ξ + 5
κ =ξ6 − 6ξ5 − 9ξ4 + 76ξ3 + 15ξ2 − 198ξ + 121
λ =s(ξ6 − 6ξ5 − 1ξ4 + 44ξ3 − 33ξ2 − 38ξ + 33)
µ =− ξ6 + 6ξ5 + 9ξ4 − 60ξ3 − 63ξ2 + 54ξ + 55
ν =s2(ξ6 − 6ξ5 + 7ξ4 + 12ξ3 − 17ξ2 − 6ξ + 9)
$ =s(−ξ6 + 6ξ5 + ξ4 − 28ξ3 − 15ξ2 + 22ξ + 15)
% =ξ6 − 6ξ5 − 9ξ4 + 44ξ3 + 111ξ2 + 90ξ + 25
κI =1
7ξ7 − ξ6 − 9
5ξ5 + 19ξ4 + 5ξ3 − 99ξ2 + 121ξ
λI =s(1
7ξ7 − ξ6 − 1
5ξ5 + 11ξ4 − 11ξ3 − 19ξ2 + 33ξ)
µI =− 1
7ξ7 + ξ6 +
9
5ξ5 − 15ξ4 − 21ξ3 + 27ξ2 + 55ξ
νI =s2(1
7ξ7 − ξ6 +
7
5ξ5 + 3ξ4 − 17
3ξ3 − 3ξ2 + 9ξ)
$I =s(−1
7ξ7 + ξ6 +
1
5ξ5 − 7ξ4 − 5ξ3 + 11ξ2 + 15ξ)
%I =1
7ξ7 − ξ6 − 9
5ξ5 + 11ξ4 + 37ξ3 + 45ξ2 + 25ξ
κII =15ξ7 − 105ξ6 − 189ξ5 + 1995ξ4 + 525ξ3 − 10395ξ2 + 12705ξ
λII =s(15ξ7 − 105ξ6 − 21ξ5 + 1155ξ4 − 1155ξ3 − 1995ξ2 + 3465ξ)
µII =− 15ξ7 + 105ξ6 + 189ξ5 − 1575ξ4 − 2.205ξ3 + 2835ξ2 + 5775ξ
νII =s2(15ξ7 − 105ξ6 + 147ξ5 + 315ξ4 − 595ξ3 − 315ξ2 + 945ξ)
$II =s(−15ξ7 + 105ξ6 + 21ξ5 − 735ξ4 − 525ξ3 + 1155ξ2 + 1575ξ)
%II =15ξ7 − 105ξ6 − 189ξ5 + 1155ξ4 + 3885ξ3 + 4725ξ2 + 2625ξ
κIII =15− 189 + 525 + 12− 705
λIII =s(15− 21− 1155 + 3465)
µIII =− 15 + 189− 2205 + 5775
νIII =s2(15 + 147− 595 + 945)
$III =s(−15 + 21− 525 + 1575)
%III =15− 189 + 3885 + 2625
Abkurzungen A.3: Bettung

A Gelenkelemente 98
A.4 Massenmatrizen
A.4.1 Massenmatrix Translation
Der Ausgangsterm vv(x)µv(x) ahnelt dem Term zur Erstellung der Steifig-keitsmatrix zur Erfassung der Bettung, vv(x)Kv(x). Entsprechend ergibtsich die Massenmatrix fur die Translation aus
∫ s2
− s2
vv(x)µv(x) dx =[vv
A χvA vv
B
] µs
840
408 72s 11772s 16s2 33s117 33s 198
vA
χA
vB
.
A.4.2 Massenmatrix zur Berucksichtigung der Rota-tion um die z–Achse
Da die Masse des Elements nicht in der Stabachse konzentriert ist, entstehenzusatzlich zu den Beschleunigungskraften aus der Translation Reaktionen ausden Winkelbeschleunigungen um die Hauptachsen.
Unter Betrachtung des Gleichgewichts eines differenziellen Elementes dxdes finiten Balkenelements enstehen bei einer negativen Winkelbeschleuni-gung −χ um die z–Achse aus jeder differenziellen Flache dA = b ·dy desQuerschnitts Momentenanteile aus dem Abstand y und der dort beschleu-nigten Masse ρ · dx · dA. Die Beschleunigung betragt −yχ. Das gesamtezusatzliche Moment dM des differenziellen Elements dx ergibt sich ausdem Integral uber die Querschnittsflache gemaß
dM = −∫
A
y · yχ · ρ dx dA = −∫
A
y2 dA · χρ · dx = −Iz · χρ · dx.
Mit dem Ansatz von χ = v′ bzw. χ = v′ entsteht die Gleichgewichtsaus-sage M ′′(x) + Iρv′′ = 0. Damit erweitert sich die DGL des Biegebalkens(Gleichung (5.1)) um −Iρv′′ und die schwache Form der Arbeitsgleichungum
∫sv′v(x)Iρv′(x) dx. Die Abkurzungen wurden in der Zusammenfas-
sung A.2 erklart.

A Gelenkelemente 99
∫ s2
− s2
v′v(x)Iρv′(x) dx =Iρ
64s2
1∫
−1
[vv
A χvA vv
B
]
αβγ
[
α β γ]
vA
χA
vB
dξ
s
2
=Iρ
128s
1∫
−1
vvA
χvA
vvB
T
α2 αβ −α2
αβ β2 −αβ−α2 −αβ α2
vA
χA
vB
dξ
=Iρ
128s
1∫
−1
vvA
χvA
vvB
T
δ ε −δε ϑ −ε−δ −ε δ
vA
χA
vB
dξ
=Iρ
128s
vvA
χvA
vvB
T ∣∣∣∣∣∣
δI εI −δI
εI ϑI −εI
−δI −εI δI
∣∣∣∣∣∣
1
−1
vA
χA
vB
=2Iρ
128s
[vv
A χvA vv
B
]
δII εII −δII
εII ϑII −εII
−δII −εII δII
vA
χA
vB
∫ s2
− s2
v′v(x)Iρv′(x) dx =
[vv
A χvA vv
B
]Iρ
5
6
s1 −6
s
1 s −1
−6
s−1
6
s
vA
χA
vB

A Gelenkelemente 100
A.5 Zusammenfassung der Matrizen
Die Steifigkeitsmatrix k ll setzt sich aus dem Anteil nach der Theorie I. Ord-nung, dem zusatzlichen Anteil zur Berucksichtigung der Theorie II. Ordnungund dem Anteil zur Berucksichtigung der elastischen Bettung zusammen:
k ll = k ll(EI,GAQ) + k ll(H) + k ll(K).
• Elastische Steifigkeit (Theorie I. Ordnung):
vTl k ll(EI,GAQ)v l =
∫ s2
− s2
χ′v(x)EIχ′(x) + v′v(x)GAQv′(x) dx
=
[vv
A χvA vv
B
]
3ψgEI
s3
3ψgEI
s2−3ψgEI
s3
3ψgEI
s2
3ψgEI
s2−3ψgEI
s2
−3ψgEI
s2−3ψgEI
s2
3ψgEI
s2
vA
χA
vB
mit ψg =1
1 + 3EIGAQs2
• Geometrische Steifigkeit (Theorie II. Ordnung):
vTl k ll(H)v l =
∫ s2
− s2
v′v(x)Hv′(x) dx
vTl k ll(H)v l =
[vv
A χvA vv
B
] H
5
6
s1 −6
s
1 s −1
−6
s−1
6
s
vA
χA
vB
• Elastische Bettung:
vTl k ll(K)v l =
∫ s2
− s2
vv(x)Kv(x) dx
vTl k ll(K)v l =
[vv
A χvA vv
B
] Ks
6720
3453 513s 2259513s 128s2 264s2259 264s 1584
vA
χA
vB

A Gelenkelemente 101
Bei der Massenmatrix m ll werden Anteile aus der Translation und ausder Rotation um die Hauptachsen berucksichtigt:
m ll = m ll(T) + m ll(R).
• Translation:
vTl m ll(T)v l =
∫ s2
− s2
vv(x)µv(x) dx
vTl m ll(T)v l =
[vv
A χvA vv
B
] µs
6720
3453 513s 2259513s 128s2 264s2259 264s 1584
vA
χA
vB
• Rotation:
vTl m ll(R)v l =
∫ s2
− s2
v′v(x)Iρv′(x) dx
vTl m ll(R)v l =
[vv
A χvA vv
B
] Iρ
5
6
s1 −6
s
1 s −1
−6
s−1
6
s
vA
χA
vB

A Gelenkelemente 102
A.6 Berechnung der Winkelsprunge an den Gelenken
Zur Berechnung der in den Fließgelenken dissipierten Energie sowie fur diegrafische Auswertung werden die Winkelsprunge benotigt. Die Berechnungerfolgt wahrend der Nachlaufberechnung. Es folgt das Beispiel fur ein Gelenkum die z–Achse am Knoten B.
A.6.1 Winkelsprung infolge Einheitsverschiebungen
Die Berechnung des Winkelsprungs ∆χ infolge der Knotenverschiebun-gen erfolgt durch die Auswertung der Ableitung der Ansatzfunktion (Glei-chung (5.3)):
dv(ξ)
dx=
1
8s((3ξ2 − 6ξ − 9)vA + s(3ξ2 − 6ξ − 1)χA + (−3ξ2 + 6ξ + 9)vB)
∆χB =dv(ξ = 1)
dx+ χB
=1
8s((3− 6− 9)vA + s(3− 6− 1)χA + (−3 + 6 + 9)vB) + χB
∆χB =1
2s(−3vA − sχA + 3vB)− χB.
Entsprechend folgt fur ein Gelenk am Knoten A
∆χA = χA +1
2s(3vA − sχB − 3vB)
und fur einen beidseitig gelenkigen Balken
∆χA = χA +1
s(vA − vB)
sowie
∆χB =1
s(vB − vA)− χB.
A.6.2 Winkelsprung infolge einer konstanten Stre-ckenlast p
Zur Ermittlung des Winkelsprungs infolge einer konstanten Streckenlast wirddie Biegebalkendifferenzialgleichung
EIv′′′′(x) = p(x) = EId4v(x)
dx4
integriert und fur die vorliegenden Randbedingungen ausgewertet. Mit denRandbedingungen fur ein Gelenk am Knoten A folgt
EIv(ξ) =p
24
(ξ4 + ξ3 − 3ξ2 − ξ + 2
) (dx
dξ
)4
.

A Gelenkelemente 103
Fur den Anstieg v′ am Knoten A errechnet sich aus
EIv′(ξ) =(p
6ξ3 +
p
8ξ2 − p
4ξ − p
24
) (dx
dξ
)3
an der Stelle ξ = −1
v′(−1) =dv
dx=
p
6EI
s3
8.
Der Winkelsprung ∆χA am Knoten A infolge einer konstanten Streckenlastbetragt demnach
∆χA =ps3
48EI.
A.7 Fehlerbetrachtung der Gelenkelemente
A.7.1 Allgemein
Nach Theorie I. Ordnung ohne Streckenbelastung liefert ein linearer Verfor-mungsansatz fur die translatorische Verformung u und ein kubischer An-satz fur die Durchbiegung w und v exakte Ergebnisse. Die FEM-Losungstimmt mit der analytischen uberein. Fur die Theorie II. Ordnung und dieelastische Bettung trifft dies nicht mehr zu. Ziel der folgenden Uberlegungenist es, eine Langenbegrenzung festzulegen, bei der ein Fehler von maximalca. 3 % auftritt.
A.7.2 Theorie II. Ordnung
Beispielhaft wird ein Grundstab (links fest eingespannt und rechts gelenkig)unter Druck (H negativ) mit einer Verdrehung χA versehen und die nu-merische mit der analytischen Losung verglichen. Das Einspannmoment amKnoten A aus der analytischen Betrachtung errechnet sich zu
ManalytischA = C ′
an
EI
s· χA, C ′
an =ε2 sin ε
sin ε− ε cos ε, ε = s
√|H|EI
.
Die numerische Losung ergibt sich aus der zweiten Zeile der Matrizenglei-chung
QA
MA
QB
= EI
3
s3
3
s2− 3
s3
3
s2
3
s− 3
s2
− 3
s3− 3
s2
3
s3
vA = 0
χA
vB = 0
+H
5
6
s1 −6
s
1 s −1
−6
s−1
6
s
vA = 0
χA
vB = 0

A Gelenkelemente 104
zu
MnumerischA = C ′
nu
EI
s· χA =
(3EI
s+
Hs
5
)· χA, C ′
nu = 3
(1 +
ε2
15
).
Soll der Fehler (C ′nu/C
′an − 1) · 100 % fur Druck auf 3 % beschrankt wer-
den, ergibt sich eine maximale Stabkennzahl von 1, 7909. Wird ε auf 1, 8und damit die Elementlange auf s = 1, 8
√EI/|H| beschrankt, ergibt sich
ein maximaler Fehler von 3,08 %. Im Falle von Zug (H positiv) ist der Fehlerkleiner und betragt bei gleicher Langenbeschrankung 1, 46 %.
A.7.3 Elastische Bettung
Beispielhaft wird hier ein elastisch gebetteter Grundstab (links fest einge-spannt und rechts gelenkig) mit einer Verschiebung am Knoten A vA ver-sehen und die numerische mit der analytischen Losung verglichen. Das Bie-gemoment am Knoten A Manalytisch
A ergibt sich zu
ManalytischA = fan
EI
s2vA =
(fKL
2 fLK1
fKL1 − fLK
2
)EI
s2vA, f-Faktoren gemaß [1].
Die numerische Losung ergibt sich aus der zweiten Zeile der Matrizenglei-chung
QA
MA
QB
= EI
3
s3
3
s2− 3
s3
3
s2
3
s− 3
s2
− 3
s3− 3
s2
3
s3
vA
χA = 0
vB = 0
+Ks
6720
3453 513s 2259
513s 128s2 264s
2259 264s 1584
vA
χA = 0
vB = 0
zu
MnumerischA = fnu
EI
s2· vA =
(3EI
s2+
513
6720Ks2
)· vA
mit
fnu =
(3 +
513
1680λ4
)und λ = s
4
√K
4EI.

A Gelenkelemente 105
Um den Fehler (fnu/fan − 1) · 100 % auf 3 % zu beschranken, muss derAbklingfaktor λ ≤ 1, 9456 gewahlt werden. Wird λ auf 1, 95 % unddamit die Elementlange auf s = 1, 95 4
√4EI/K beschrankt, ergibt sich ein
maximaler Fehler von 3, 09 %. Zwischen λ = 0 und λ = 1, 76 ist derFehler mit einem Minimum von −1, 9 % bei λ = 1, 4 negativ.
Werden auf beiden Seiten Momentengelenke eingefuhrt, wird die Durch-biegung nur noch linear approximiert. Dadurch vergroßert sich der Feh-ler. Hier tritt bei einer Elementlange von s = 1, 05 4
√4EI/K ein Fehler
von 3, 0 % auf.

B Eigenwertloser 106
Anhang B Eigenwertloser
B.1 Einfuhrung
Im Folgenden wird das im Programmsystem FEMAS vor Beginn dieserArbeit bereits implementierte Verfahren zur Losung von Eigenwertaufgabenerklart. Dies dient dem Verstandnis, warum bei dem in dieser Arbeit ent-wickelten Verfahren eine Reduktion des Rechenaufwands zur Ermittlung derEigenfrequenzen und Eigenschwingungsformen moglich ist.
B.2 Vektoriteration/Krylov–Subraume
Zur Einleitung sollen noch einmal die Uberlegungen zur Vektoriteration dar-gestellt werden. Bei der Vektoriteration (Av ,A2v ,A3v . . .) entsteht derzum großten Eigenwert λ1 gehorende Eigenvektor ψ1 mit |λ1| > |λ2| . . .fur das spezielle Eigenwertproblem Av = λv . Der Startvektor v lasstsich als Linearkombination
v = c1ψ1 + c2ψ2 + · · ·+ cnψn
der Eigenvektoren ψ1,ψ2 . . . darstellen. Im i–ten Iterationsschritt ergibtsich damit
Aiv = c1λi1ψ1 + c2λ
i2ψ2 + · · ·+ cNλi
nψn, i = 1, 2, 3, . . . .
Da der Eigenwert λ1 großer als die anderen Eigenwerte ist, zeigt der Aus-druck mit steigender Iteration i immer mehr in Richtung ψ1. Anschau-licher wird das durch die Skalierung mit dem potenzierten Eigenwert λi
1
gemaßAiv
λi1
= c1ψ1 + c2λi
2
λi1
ψ2 + · · ·+ cNλi
n
λi1
ψn. (5.4)
Die Konvergenz der Iteration ist linear und proportional zum Verhaltnis derEigenwerte |λ1
λ2|. Voraussetzung fur die Konvergenz in Richtung des ersten
Eigenvektors ψ1 ist, dass der Faktor c1 6= 0 ist.Die Subraume, welche von den Vektoren der Vektoriteration gespannt
werden, heißen Krylov–Subraume. Wird die Iteration n–mal ausgefuhrt (nsei die Dimension von A), so lassen sich aus dem Polynom
p[v ] ≡ p(A)v = a0v 0 + a1Av + a2A2v + · · ·+ an−1A
n−1v + Anv = 0
die Koeffizienten des charakteristischen Polynoms der Matrix A
p(λ) = det(λI −A) = a0 + a1λ + · · ·+ an−1λn−1 + λn
bestimmen.

B Eigenwertloser 107
B.3 Lanczos–Methode
Da im vorliegenden Fall nicht alle Eigenwerte des Systems mit der Dimensi-on n benotigt werden und die Ermittlung sehr rechenintensiv ist, wird dasSystem zuvor mit Hilfe von Lanczos–Vektoren in einen Subraum mit weitkleinerer Dimension k transformiert.
Bei dem speziellen Eigenwertproblem
Av = λv
mit dem Rayleigh-Quotienten ρ(v) = vTAv/vTIv fuhrt die Variation desVektors v fur einen maximalen Rayleigh-Quotienten zum großten Eigen-wert
λmax = λ1 = maxv∈Rn
v 6=0
ρ(v).
Der Vektor v ist dann der dazugehorige Eigenvektor ψ1. Diese Extrem-wertaufgabe lasst sich auch in einer Folge von Teilraumen K1 ⊂ K2 ⊂ · · ·Rn
losen. Als Teilraume werden hier die Krylov–Subraume
Kk(v) := span{v ,Av , . . . ,Ak−1v}
mit einem Startvektor v 6= 0 und k = 1, 2, . . . gewahlt, wodurch
λ(k)max = max
y∈Kk(v )
yTAy
yTIy≤ λmax
sein muss.Mit wachsender Dimension k erweitert sich der Subraum immer mehr,
so dass der Eigenvektor ψ1 immer wahrscheinlicher vollstandig enthaltenund damit der Eigenwert λ1 immer besser approximiert wird.
Eine Orthonormalbasis Q dieser Subraume kann durch die Lanczos–Vektoren lk gebildet werden. Dazu sind folgende Schritte 1) auszufuhren:
l 0 = 0, l 1 =v
‖ v ‖2
αk = lTk Alk
βk+1 = (lT
k+1lk+1)12 =‖ lk+1 ‖2
lk+1 = βk+1lk+1 = Alk − αklk − βklk−1
k = 1, 2, . . . .
1)Wichtig ! Um die Rundungsfehler der Computerberechnung auszugleichen, mussendie neu entstandenen Vektoren nicht nur zu den letzten beiden, sondern bis zu einerfestzulegenden Abbruchschranke auch zu den anderen Vektoren orthogonalisiert werden.

B Eigenwertloser 108
Wird nun die symmetrische Ausgangsmatrix A von rechts und links mitden Lanczos–Vektoren Qk = [l 1l 2 . . . lk] und QT
k multipliziert, entstehtdie Tridiagonalmatrix T k
T k = QTk AQk =
α1 β2
β2 α2 β3
. . . . . . . . .
βk−1 αk−1 βk
βk αk
.
Mit dem Ansatz y = Qkz fur ein z ∈ Rk gilt yTy = zTz , da dieLanczos–Vektoren senkrecht zueinander stehen (QT
k Qk = I ) und damitauch
yTAy = zTQTk AQkz = zTT kz .
Somit ist der großte im Subraum gefundene Eigenwert
λ(k)max = max
y∈Kk(v )
yTAy
yTIy= max
z∈Rk
zTT kz
zTIz≤ λmax
undλ(k+1)
max ≥ λ(k)max da Kk+1 ⊃ Kk.
Mit wachsender Dimension k konvergiert der großte Eigenwert derTridiagonalmatrix T k also gegen den großten Eigenwert der Matrix Aund mit der Dimension k = n ist der Eigenwert λ
(k)max = λmax. Wie
verhalt es sich aber mit den nachsten Eigenwerten λ2, λ3, . . . , welche furdie vorliegende Arbeit ebenfalls interessant sind?
Wird der Subraum bis auf die Dimension der Ausgangsmatrix Aerweitert (k = n), handelt es sich bei der Erzeugung der Ma-trix T k = T n = QT
nAQn um eine Ahnlichkeitstransformation derAusgangsmatrix. Die Eigenwerte der Tridiagonalmatrix Tn entsprechendann denen der Ausgangsmatrix A. Bei der Folge der charakteristischenPolynome der Matrizen T k (Pk = (αk − λ)Pk−1 − β2
kPk−2) handelt essich um eine Sturm´sche Kette. Die entsprechenden Eigenwerte genugenalso der Bedingung
λ(k)1 > λ
(k−1)1 > λ
(k)2 > λ
(k−1)2 > . . . > λ
(k)k−1 > λ
(k−1)k−1 > λ
(k)k .

B Eigenwertloser 109
Da aber die Vektoren, welche den gewahlten Subraum aufspannen, mit jedemSchritt k mehr in Richtung der zu den großen Eigenwerten gehorendenEigenvektoren zeigen (vgl. mit der Gleichung (5.4)), werden zuerst die großenEigenwerte gut approximiert.
Der großte Eigenwert der Matrix T k ist λ(k)1 = maxz (1)∈Rk
z T(1)
T kz (1)
z T(1)
Iz (1)
,
wobei z (1) der zu λ(k)1 gehorende Eigenvektor des Subraums ist. Der
Eigenwert λ(k)2 lasst sich ebenfalls durch eine Extremwertaufgabe,
λ(k)2 = max
z (2)∈Rk
zT(2)T kz (2)
zT(2)Iz (2)
mit z (2) ⊥ z (1)
ermitteln.Der Winkel zwischen den Vektoren y (2) = Qkz (2) und ψ2 ist großer
als der zwischen y (1) = Qkz (1) und ψ1, da die Vektoren, welche denSubraum aufspannen, mehr in Richtung des ersten Eigenvektors ψ1 als inRichtung des zweiten ψ2 zeigen. Allgemein gilt:
^(ψ1,y (1)) < ^(ψ2,y (2)) < · · · < ^(ψk,y (k)).
Der Fehler in den Eigenwerten nimmt also fur jeden weiteren Eigenwert mehrund mehr zu, wird aber mit steigender Subraumdimension k wiederumverringert. Es sei erwahnt, dass der Startvektor v zum Aufspannen desKrylov–Subraums Komponenten in Richtung aller gesuchter Eigenvektorenenthalten muss, also c1, c2, . . . , ck 6= 0 gelten muss.
Im Programmsystem FEMAP ist kein automatischer Abbruch desLanczos-Algorithmus vorgesehen. Der Nutzer muss die Dimension des zuerstellenden Subraums k mit der Kennziffer KIV selbst vorgeben. Jenach Aufgabe sind ca. 70 % der gefundenen großten Eigenwerte mit einemvertretbaren Fehler behaftet. Die Anzahl der fur weitere Berechnungen zunutzenden Eigenwerte KIVA sollte also ≤ 0, 7 KIV gewahlt werden.Zur Uberprufung, welche Eigenwerte gut approximiert wurden, kann KIVvariiert werden. Die Veranderung des untersuchten Eigenwerts gibt Auskunftuber die Gute des Ergebnisses.
Die oben angestellten Uberlegungen gelten fur symmetrische Matrizen.Im Fall unsymmetrischer Matrizen konnen zwei Basen zur Reduktion derAusgangsmatrix in eine nun nicht mehr symmetrische Tridiagonalmatrixgefunden werden. Als zweiter Subraum dient hier der Krylov–Subraum
W k(w) := span{w ,ATw , . . . , (AT)k−1w},
welcher mit der Transponierten der Ausgangsmatrix gebildet wird. Die Eigen-werte aus ATw = λ w entsprechen denen des Ausgangsproblems, da die

B Eigenwertloser 110
Determinante |(A−λI )T| = |AT−λI T| gleich der Determinante |A−λI |ist. Die Eigenvektoren φ1, φ2, . . . , φn der transponierten Ausgangsmatrixsind biorthonormal zu ψ1,ψ2, . . . , ψn. Im Folgenden werden die beidenEigenwerte λi und λj mit i 6= j betrachtet:
A ψi = λi ψi (5.5)
ATφj = λj φj. (5.6)
Zunachst wird die Transponierte der Gleichung (5.6) von rechts mit demEigenvektor ψi und die Gleichung (5.5) von links mit dem Eigenvektor φT
j
multipliziert. Nach Abzug der Gleichung (5.6) von der Gleichung (5.5), ergibtsich dann
(λi − λj) φTj ψi = 0.
Mit der Zusammenfassung der Eigenvektoren ψ1,ψ2, . . . , ψn in Ψ undφ1,φ2, . . . , φn in Φ lasst sich nun
ΦTΨ = I
schreiben.Um das Eigenwertproblem in die Form
λ(k)max = max
yTAy
yTIy= max
zTT kz
zTIz
zu reduzieren, mussen die biorthonormalen Basen der Krylov–SubraumeKk(v)
(Qk(R) = [l1 l2 . . . lk]
)und Wk(w)
(Qk(L) = [b1b2 . . . bk]
)gefun-
den werden. Sie werden nach folgender Vorschrift gebildet:
b0 = l 0 = 0, bT1 l 1 = 1
αk = bTk Alk
δk+1 = |bT
k+1lk+1| 12βk+1 = δk+1 sign (b
T
k+1lk+1)
bk+1 = βk+1bk+1 = ATbk − αkbk − δkbk−1
lk+1 = δk+1lk+1 = Alk − αklk − βklk−1
k = 1, 2, . . . .

B Eigenwertloser 111
Unter Verwendung dieser Basen entsteht die Tridiagonalmatrix
T k = QTk(L)AQk(R) =
α1 β2
δ2 α2 β3
. . . . . . . . .
δk−1 αk−1 βk
δk αk
,
deren Eigenwerte ebenfalls denen der Ausgangsmatrix im oberen Spektrummit einem, mit zunehmendem k abnehmenden Fehler entsprechen. Die Be-stimmungsgleichungen fur den unsymmetrischen Fall stellen eine allgemeineFormulierung des Lanczos-Algorithmus dar und fuhren fur den Fall einersymmetrischen Ausgangsmatrix A zu den dafur vorgestellten Gleichun-gen.
B.4 QR–Methode
Das durch den Lanczos–Algorithmus reduzierte Eigenwertproblem, im Fol-genden wird die Aufgabe T kz = λ(k)z wieder durch Av = λv ersetzt,wird nun mit Hilfe der QR–Methode gelost. Dabei handelt es sich um eine si-multane Multivektoriteration. Bei der Vektoriteration im Abschnitt B.2 galtals Voraussetzung, dass der Anteil des ersten Eigenvektors c1 6= 0 ist. Dasbedeutet aber auch, dass, um den zweiten Eigenvektor ψ2 zu finden, nurein Startvektor gefunden werden muss, welcher senkrecht zum ersten Eigen-vektor ψ1 steht. Damit ist dann c1 = 0 und die Iteration konvergiert mitdem Verhaltnis |λ2
λ3| in Richtung des zweiten Eigenvektors ψ2. So kann
unter den Voraussetzungen |λ1| > |λ2| . . . |λn| > 0 und c1, c2, . . . , cN 6= 0jeder Eigenvektor gefunden werden, indem der Startvektor jeweils orthogonalzu den bereits gefundenen gewahlt wird.
Anstatt nun zuerst den ersten Eigenvektor zu suchen, in einer zweiten Ite-ration den zweiten mit einem zum ersten Eigenvektor ψ1 orthogonalenStartvektor und so weiter, ist es sinnvoller die Iteration gleichzeitig mit meh-reren orthogonalen Vektoren S zu starten und diese nach jedem Itera-tionsschritt wieder zu orthogonalisieren. Sind in der Matrix S genau nStartvektoren enthalten, so lassen sich alle Eigenvektoren finden. Aus derVektoriteration (Av ,A2v ,A3v . . . ) wird dann die simultane Multivekto-riteration (AS⊥,A2S⊥,A3S⊥ . . .).

B Eigenwertloser 112
QR–Algorithmus. Bei der Zerlegung der Martix A = QR in eine unitare(orthonormale) Q Matrix mit QTQ = I und damit Q−1 = Q und ei-ne Rechtsdreiecksmatrix R entstehen in Q orthogonale Vektorenmit a1 = q1r11,a2 = q1r12 + q2r22, . . . , wobei der erste Vektor der Ma-trix A nur mit r11
−1 skaliert, die ubrigen jedoch orthogonalisiert werden.Wird die Matrix A von links mit der Matrix Q multipliziert,
D i+1 = AQ i,
handelt es sich um den ersten Schritt der simultanen Multivektoriteration.Nun kann die Matrix D i+1 wieder in die Matrizen D i+1 = Q i+1Ri+1 zer-legt und damit die im i–ten Iterationsschritt gewonnenen Vek-toren d (i+1)1,d (i+1)2, . . . orthogonalisiert werden. Mit der Matrix D1 = Abzw. Q0 = I lasst sich diese Iteration starten.
Zur Uberprufung, ob die Eigenwerte ausreichend genau gefunden wurden,wird das Produkt
Ai = QTi AQ i
gebildet. Wurden die Eigenvektoren in der Orthonormalbasis Q i gefunden,so muss Ai annahernd eine Rechtsdreiecksmatrix sein, auf deren Hauptdia-gonalen die Eigenwerte stehen. Sind die Eigenvektoren noch nicht gefunden,so wird bei der Operation eine zu A ahnliche Matrix mit den gleichenEigenwerten gefunden.
Bei der QR–Methode wird diese Ahnlichkeitstransformation in jedem Ite-rationsschritt durchgefuhrt, also
A = A0 = Q1R1, A1 = QT1 A0Q1 .
Da R1 = Q−11 A0 = QT
1 A0 ist, kann nun auch
A1 = R1Q1
oder allgemeiner
Ai = RiQ i ⇐⇒ Ai−1 = Q iRi
geschrieben werden. Damit wurde gezeigt, dass die QR–Methode unter dengenannten Voraussetzungen iterativ zu einer Rechtsdreiecksmatrix Ai mitden Eigenwerten auf der Hauptdiagonalen konvergiert. Der hohe Rechenauf-wand der QR–Methode kann stark reduziert werden, wenn die Matrix Avorher auf die obere Hessenbergform transformiert wird. Trotzdem ist derRechenaufwand, alle Eigenwerte zu finden, sehr hoch und wird deshalb inFEMAP nur auf das reduzierte Eigenwertproblem angewandt. Dabei erweistsich als vorteilhaft, dass Tridiagonalmatrizen (Hessenbergform von symme-trischen Matrizen) bei der QR–Iteration tridiagonal bleiben.

B Eigenwertloser 113
B.5 Lanczos-Implementierung(symmetrischer Fall)
Ausgehend von dem zu losenden allgemeinen Eigenwertproblem
Av = λCv
und dem Ziel, die kleinsten Eigenwerte zu finden, wird die zuvor fur ein spezi-elles Eigenwertproblem beschriebene Lanczos–Methode hier noch angepasst.
Um die kleinsten Eigenwerte zu finden, wird die Aufgabe
Cv =1
λAv
gelost. Diese Aufgabe kann in die spezielle Eigenwertaufgabe
A−1Cv = λ−1v = µv
umwandelt werden. Die Komponenten der gesuchten Tridiagonalmatrix T k
lassen sich dann durch:
l 0 =v
‖ v ‖2
αk = lTk Clk
βk = (lT
k Alk)12
lk+1 = βk+1lk+1 = A−1Clk − αklk − βklk−1
k = 1, 2, . . .
ermitteln, wodurch sich der Rayleigh–Quotient fur einen Vek-tor y = Qkz , z ∈ Rk des Subraums Kk(v) zu
ρ(k)(y) =yTA−1Cy
yTIy=
yTCy
yTAy=
zTQTk CQkz
zTQTk AQkz
=zTT kz
zTIz
ermitteln lasst. Die Transformationsvektoren Qk = [l 1l 2 . . . lk] sind dabeibezuglich der Ausgangsmatrix A orthogonal:
lTi Al i =
lT
i Al i
β2i
=β2
i
β2i
= 1
lTi Al j = 0
QTk AQk = I
lTi Al j = δij (Kronecker-Symbol). (5.7)

B Eigenwertloser 114
Bei der Transformation der Matrix C mit den Lanczos–Vektoren entstehtdie Tridiagonalmatrix
T k = QTk CQk =
α1 β2
β2 α2 β3
. . . . . . . . .
βk−1 αk−1 βk
βk αk
,
denn lTi Cl j = lT
i AA−1Cl j = lTi A(l j+1 + αjl j + βjl j−1) und mit der Or-
thogonalitatsbeschreibung der Gleichung (5.7) lasst sich nun schreiben
lTi Cl j = (βj+1δi,j+1 + αjδi,j + βjδi,j−1).
In der Bibliothek FEMAP steht die SUBROUTINE FEE01H2) fur die Er-stellung der Tridiagonalmatrix im Falle einer symmetrischen Ausgangsmatrixzur Verfugung. Dabei werden in einerSchleife von k = I100 = 1 bis KIV folgende Schritte ausgefuhrt:
• Ermittlung von β2k = RQFA = lT
k Alk mit der Subroutine FEM01.lk = REV(NV1).
• Ermittlung von βk = RFVN =√
β2k .
• Normierung des Transformationsvektors mit βk.lk = lk/βk ⇔ REV(NV1) = REV(NV1) / RFVN.
• Ermittlung von αk = RQFC = lTk Clk mit der Subroutine FEM01.
Dabei wird in RAF(NF1) der Vektor Clk gespeichert.
• Wenn k = KIV erreicht wurde, dann Schleife uber k verlassen.
• Ermittlung von REV(NV0) = l∗∗k+1 = A−1Clk. Dabei wird mit
der Subroutine FEL01 das Gleichungssystem Al∗∗k+1 = Clk = RAF(NF1)
gelost und das Ergebnis in RAF(NF1) abgespeichert.
• Modifizierung von l∗∗k+1 mit αk.
REV(NV0) = l∗k+1 = l
∗∗k+1−αklk = RAF(NF1) - RQFC * REV(NV1).
2)Den verwendeten Subroutinen FEM01 und FEL01 mussen die Matrizen in zerlegterForm ubergeben werden.

B Eigenwertloser 115
• Modifizierung von l∗k+1 mit βk.
REV(NV0) = lk+1 = l∗k+1−βklk−1 = REV(NV0) - RVFN * REV(NV2).
Wie schon erwahnt, entstehen durch Rundungsfehler (Rechengenauigkeit desComputers) Abweichungen, welche durch eine zusatzliche Reorthogonalisie-rung minimiert werden. Fur jedes i < (k + 1) wird nun derFehler ri,k+1 = lT
i Alk+1 festgestellt und mit einer Schranke ε = REPSverglichen. Ist der Fehler großer als ε, so wird der Vektor lk+1 durch
l s+1k+1 = l s
k+1 − rsi,k+1l i
bezuglich A reorthogonalisiert. Ist der Fehler kleiner als ε, wird dies ver-merkt und in den folgenden Reorthogonalisierungswiederholungen s derentsprechende Vektor ausgelassen. Zusammenfassend kann die Orthogonali-sierung durch
l s+1k+1 = l s
k+1 −k∑
i=1
lTi Al s
k+1l i s = 1, 2, . . . , 30
beschrieben werden, wobei, um die Rechenzeit zu optimieren, die Anteile ausder Summe ausscheiden, deren Fehler die Schranke bereits unterschreiten. Istbis zum s = 30–ten Schritt der Vektor l 30
k+1 nicht zu jedem der Vektoren l i
im vorgegebenen Rahmen orthogonalisiert, so wird spatestens dann die Reor-thogonalisierung abgebrochen und eine entsprechende Warnung ausgegeben.
Programmtechnisch werden die beschriebenen Schritte in einer Schlei-fe s = I103 = 1 bis 30 folgendermaßen umgesetzt:
• Ermittlung von RAF(NF1) = Al sk+1 = A∗ REV(NV0) mit der
Subroutine FEM01.
• Schleife uber i = I104 = 1 bis k = I100
– Uberprufung, ob in einem vorhergehenden Schritt s die Schran-ke ε fur den Transformationsvektor l i bereits unterschrittenwurde (Ist IAF(i)=0?).
– Wenn nein, dann Ermittlung des ReorthogonalisierungsfaktorsRA = rs
i,k+1 = lTi Al s
k+1 = (RAF(NF2)*RAF(NF1)). Dazuwurde zuvor der Transformationsvektor l i aus dem Feld REVin das Arbeitsfeld RAF mit der Startadresse NF2 transfe-riert.
– Genauigkeitsabfrage ob RA < ε . Wenn ja, ⇒ merken(IAF(i) = 0).

B Eigenwertloser 116
– Wenn nein, reorthogonalisieren:REV(NV0) = l
(s+1)k+1 = l
(s)k+1−rs
i,k+1l i = REV(NV0) - RAF(NF2)* RA.
• Ende der Schleife uber die Transformationsvektoreni = I104 bis k = I100.
Ende der Schleife s = I103 bis 30.Ende der Schleife uber k = I100 = 1 bis KIV.
Nach der Ermittlung der Eigenwerte und Eigenvektoren z (1), z (2), . . . , z (k)
des reduzierten Eigenwertproblems mit der QR–Methode in der SubroutineFEE03H, werden diese auf das Ausgangssystem transformiert:
• λj = µ−1j j = 1, 2, . . . , k
• ψj = Qkz (j) .
Dann werden die Rayleigh–Quotienten des Ausgangssystems
ρ(ψj) =ψT
j Aψj
ψTj Cψj
mit den gefundenen Eigenvektoren gebildet und mit den Eigenwerten λj
verglichen.

C Beispielberechnungen elastisch gespeicherte Energie 117
Anhang C Beispielberechnungen zur Ermittlung————i der elastisch gespeicherten————i Formanderungsenergie
Die vier folgenden Beispiele zur Veranschaulichung der im Abschnitt 3.2.1 ge-wonnenen Gleichung (3.7) bestehen, um die Nachvollziehbarkeit zu erhohen,ausschließlich aus Dehnfedern und Normalkraftfließgelenken.
C.1 Beispiel mit drei Federn und zwei Fließgelenken
Der rechte Teil der Abbildung 5.2 zeigt ein System mit drei nebeneinan-derstehenden Federn als Ersatzsystem z.B. fur drei Stahlbetonstutzen. Sietragen die Einzellast F1 in das gemeinsame Auflager. Die Federsteifigkei-ten cN werden gleich groß angenommen. Die unter voller Plastifizierung inden Normalkraftfließgelenken aufnehmbaren Normalkrafte Npl differieren:
Npl,1 = 0, 1F1, Npl,2 = 0, 2F1 und Npl,3 > ∞.
Die theoretisch abspeicherbare Energie ohne das Einfallen eines Fließgelenksergibt sich aus der Anfangssteifigkeit 0cS = 3cN des Systems gemaß
0Eeg = 0, 5 · u(F1) · 0cS · u(F1) = 0, 5 · F1
3cN
· 3cN · F1
3cN
=F 2
1
6cN
=
∫ F13cN
0
u3cNdu.
Offensichtlich fallt jedoch das erste Fließgelenk bei einer Laststeigerung vonρ1 = 0, 3 ein. Die Flache E1 im linken Teil der Abbildung 5.2 entsprichtder bis dahin abgespeicherten Energie
Eeg,1 = 0Eeg · ρ21 =
0, 09F 21
6cN
= 0,015F 2
1
cN
.
Das gleiche Ergebnis entsteht bei der Addition der in den einzelnen Federngespeicherten Energie
Eeg,1 = 3 · (0, 1F1)2
2cN
= 0,015F 2
1
cN
.
Bei dieser Laststeigerung ergibt sich ein Verschiebungszustand von
U1 =ρ1 · F
0cS
=20Eeg · ρ1
F=
0, 1F 21
cN · F.
In diesem Beispiel gibt es nur eine Last F1, wodurch diese mit der Sys-tembelastung F ubereinstimmt. Der Verschiebungszustand U1 stimmtfolglich mit der Verschiebung des Lastangriffspunktes
u1 =0, 3F1
3cN
=0, 1F1
cN
=0, 1F 2
1
cN · F1

C Beispielberechnungen elastisch gespeicherte Energie 118
2bE
0,2
0,2
0,70,2
1,0
3a
1
=0,5
=0,3
1
ρ1
ρ2
ρ
F
=0,11
2a
3bE
E
E
E
U
2 13
U
U,1
ρ
c c cN N N
Normalkraftfließgelenke
1 2 3
Abbildung 5.2: Beispiel mit drei Federn und zwei Fließgelenken
uberein.Durch das Einfallen des ersten Fließgelenks reduziert sich die Systemstei-
figkeit auf
1cS =1
2cN
,
woraus sich die theoretisch abspeicherbare Energie 1Eeg unter vollerLast F1 zu
1Eeg =F 2
1
4cN
ergibt. Um nun den Verschiebungszustand U1 am modifizierten System 1Szu erreichen, musste die Last ρU,1 = 0, 2F1 eingepragt werden, was durchdie Anwendung der Gleichung (3.5)
ρU,1 = ρ1 · F 0Eeg
1Eeg
= 0, 3FF 2
1 · 4cN
6cN · F 21
= 0, 2F
bestatigt wird. Die Abhangigkeit der weiteren Verschiebung ∆U von derweiteren Laststeigerung ∆ρ ist durch den Anstieg der mit 2cN gekenn-zeichneten Linie im linken Teil der Abbildung 5.2 gegeben. Die Differenzver-schiebung berechnet sich zu
∆U =∆ρ · F
1cS
= 2∆ρ · F · 1Eeg
F 2=
∆ρ · F2cN
.
Die Differenzlaststeigerung vom ersten zum zweiten Fließgelenk be-tragt ∆ρ = 0, 2. Damit sind alle Werte zur Berechnung der, bis zum Ein-

C Beispielberechnungen elastisch gespeicherte Energie 119
fallen des zweiten Fließgelenks bei ρ2 = 0, 5 abgespeicherten Energie
Eeg,2 = Eeg,1 + ρU,1 ·∆U + 1Eeg∆ρ2
= Eeg,1 + 2ρ1 · 0Eeg ·∆ρ + 1Eeg ·∆ρ2
=0, 015F 2
1
cN
+ 2 · 0, 3 F 21
6cN
· 0, 2 + 0, 22 F 21
4cN
,
Eeg,2 = (0, 015 + 0, 02 + 0, 01)F 2
1
cN
= 0,045F 2
1
cN
vorhanden. Die drei Summanden der Gleichung entsprechen den Flachenin-halten von E1, E2a und E2b in der Abbildung 5.2.
Zum Vergleich sollen auch hier die in den einzelnen Federn gespeichertenEnergien berechnet und addiert werden. Die Normalkraft in der ersten Federbetragt Npl,1 = 0, 1F1 und in den beiden anderen gerade 0, 2F1. Somitbetragt die elastisch gespeicherte Energie wie oben schon berechnet
Eeg,2 =(0, 1F1)
2
2cN
+ 2(0, 2F1)
2
2cN
= 0,045F 2
1
cN
.
Da nun kein weiteres Fließgelenk mehr einfallen kann, betragt die zusatzlicheLaststeigerung bis zur vollen Last ∆ρ = 1− ρ2 = 0, 5. Die Anwendung derGleichung (3.7) ergibt die letztlich abgespeicherte Energie:
Eeg(ρ = 1) = Eeg,2 + 2Eeg ·∆ρ2 + ρU,2 ·∆U
= Eeg,2 + 2Eeg ·∆ρ2
+ 2∆ρ
2∑j=1
(j−1)Eeg(ρj − ρ(j−1))
Eeg(ρ = 1) = 0, 045F 2
1
cN
+ 0, 52 F 21
2cN
+ 2 · 0, 5F 21
cN
(0, 3
6+
0, 2
4
)
Eeg(ρ = 1) = (0, 045 + 0, 125 + 0, 1)F 2
1
cN
= 0,27F 2
1
cN
.
Hierin entsprechen die beiden letzten Summanden den Inhalten derFlachen E3b und E3a in der Abbildung 5.2.
Die Normalkraft in der ersten Feder betragt bei vollerLast Npl,1 = 0, 1F1, in der zweiten Npl,2 = 0, 2F1 und in der drit-ten aus Gleichgewichtsgrunden 0, 7F1. Auch hier fallt der Vergleich mitden in den einzelnen Federn gespeicherten Energien positiv aus:
Eeg(ρ = 1) =(0, 1F1)
2
2cN
+(0, 2F1)
2
2cN
+(0, 7F1)
2
2cN
= 0,27F 2
1
cN
.

C Beispielberechnungen elastisch gespeicherte Energie 120
ρU,1
1F
0,5 1,25
=1/3
1,0
0,5
1
2a
2b
1
E
E
Eρ
U
c cN N2 /3
Normalkraftfließgelenk
1 2
3 4
Abbildung 5.3: Beispiel mit vier Federn und einer Kraft
C.2 Beispiel mit vier Federn, einer Kraft und einemFließgelenk
Im zweiten Beispiel soll nun das System aus der Abbildung 5.3 untersuchtwerden. Die Federsteifigkeiten cN werden wieder gleich groß angenommen.Die plastischen Normalkrafte differieren:
Npl,1 =F1
4, Npl,(2−4) > ∞.
Es ist zu erwarten, dass bei einer Laststeigerung von ρ = 0, 5 das ersteFließgelenk einfallt. Die elastisch gespeicherte Energie betragt dann
Eeg,1 = 4(0, 25F1)
2
2cN
= 0,125F 2
1
cN
als Summe der Energien in den einzelnen Federn. Danach fallt kein weiteresGelenk mehr ein. Die Normalkraft in der ersten Feder betragt unter vollerLast Npl,1 = 0, 25F1, in der zweiten Feder F1 −Npl,1 = 0, 75F1 und in denbeiden anderen Federn jeweils 0, 5F1, woraus eine elastisch gespeicherteEnergie von
Eeg(ρ = 1) = (0, 252 + 0, 752 + 2 · 0, 52)F 2
1
2cN
= 0,5625F 2
1
cN
resultiert.

C Beispielberechnungen elastisch gespeicherte Energie 121
Diese Werte werden nun mit Hilfe der Gleichung (3.7) zu
0Eeg =F 2
1
2cN
,
Eeg,1 = 0Eeg · ρ21 = 0, 25
F 21
2cN
= 0,125F 2
1
cN
,
1Eeg =F 2
1
2cN
+F 2
1
4cN
=3F 2
1
4cN
,
Eeg(ρ = 1) = Eeg,1 + 1Eeg ·∆ρ2
+2∆ρ
1∑j=1
(j−1)Eeg(ρj − ρ(j−1))
= 0, 125F 2
1
cN
+ 0, 52 3F 21
4cN
+ 2 · 0, 5 F 21
2cN
· 0, 5
Eeg(ρ = 1) = (0, 125 + 0, 1875 + 0, 25)F 2
1
cN
= 0,5625F 2
1
cN
errechnet, wobei die drei Summanden in der letzten Gleichung den Inhal-ten der Flachen E1, E2b und E2a im linken Teil der Abbildung 5.3entsprechen.
C.3 Beispiel mit vier Federn, zwei Kraften und einemFließgelenk
Das dritte Beispiel in der Abbildung 5.4 unterscheidet sich von dem zweitennur dadurch, dass in der Mitte des Systems eine zweite Kraft angreift. Dar-aus resultiert eine elastisch gespeicherte Energie beim Einfallen des erstenFließgelenks bei ρ1 = 0, 5 von
Eeg,1 = 2(0, 25F1)
2
2cN
+ 2(0, 5F1)
2
2cN
= 0,3125F 2
1
cN
,
welche dem Inhalt der Flache E1 in der Abbildung 5.4 entspricht.Die Normalkraft in der ersten Feder betragt unter voller Last wie-
der Npl,1 = 0, 25F1 und in der zweiten Feder F1 − Npl,1 = 0, 75F1. DieNormalkrafte in den beiden anderen Federn betragen jeweils 1, 0F1, worauseine elastische gespeicherte Energie von
Eeg(ρ = 1) = (0, 252 + 0, 752 + 2 · 12)F 2
1
2cN
= 1,3125F 2
1
cN
resultiert.

C Beispielberechnungen elastisch gespeicherte Energie 122
1F
1FcN
1E
2aE
2bE
1,25
5/12
2,75
0,5
1,0
U
ρ
cN2 /5 1 /3
Normalkraftfließgelenk
1 2
3 4
Abbildung 5.4: Beispiel mit 4 Federn und 2 Kraften
Auch diese Werte lassen sich durch die im Abschnitt 3.2 gefundenenGleichungen errechnen. Die elastisch gespeicherte Formanderungsenergie amunmodifizierten System unter voller Last betragt
0Eeg = 2(0, 5F1)
2
2cN
+ 2F 2
1
2cN
= 1, 25F 2
1
cN
.
Bei einer Laststeigerung von ρ1 = 0, 5 wird demnach die Energie
Eeg,1 = 0Eeg · ρ21 = 1, 25
F 21
cN
· 0, 52 = 0,3125F 2
1
cN
im System gespeichert.
Die Systemsteifigkeit errechnet sich zu
0cS =F 2
20Eeg
=2
5
F 2
F 21
cN
und der zum Laststeigerungsfaktor ρ1 = 0, 5 gehorende Verschiebungszu-stand zu
U1 =ρ1 · F
0cS
=5
4
F 21
FcN.
Die elastisch gespeicherte Formanderungsenergie am modifizierten Sys-tem 1S unter voller Last betragt
1Eeg =F 2
1
2cN
+ 2F 2
1
2cN
=3
2
F 21
cN

C Beispielberechnungen elastisch gespeicherte Energie 123
und die modifizierte Systemsteifigkeit
1cS =F 2
21Eeg
=1
3
F 2
F 21
cN.
Gemaß der Gleichung (3.5) ist am modifizierten System ein Lastanteil von
ρU,1 = ρ10Eeg
1Eeg
= 0, 51, 25
1, 5=
5
12
notwendig, um den Verschiebungszustand U1 zu erreichen. Die Anwendungder Gleichung (3.7) ergibt wiederum die unter voller Last abgespeicherteEnergie:
Eeg(ρ = 1) = Eeg,1 + 1Eeg ·∆ρ2
+ 2∆ρ1∑
j=1
(j−1)Eeg(ρj − ρ(j−1))
Eeg(ρ = 1) = 0, 3125F 2
1
cN
+ 0, 52 · 1, 5F 21
cN
+ 2 · 0, 5F 21
cN
· (1, 25 · 0, 5)
Eeg(ρ = 1) = (0, 3125 + 0, 375 + 0, 625)F 2
1
cN
= 1,3125F 2
1
cN
.
C.4 Beispiel mit vier Federn, einer Kraft und einemFließgelenk
Der kombinatorischen Vollstandigkeit halber soll nun das dritte Beispielnochmals abgeandert werden. Dazu wird die plastische Normalkraft der drit-ten Feder ebenfalls auf Npl,3 = 0, 25F1 gesetzt. Das erste Fließgelenk trittnun bei einer Laststeigerung von ρ1 = 0, 25 und das zweite bei ρ2 = 0, 5

C Beispielberechnungen elastisch gespeicherte Energie 124
auf. Weiterhin folgt aus der Anschauung:
0Eeg = 2(0, 5F1)
2
2cN
+ 2F 2
1
2cN
= 1, 25F 2
1
cN
1Eeg = 2(0, 5F1)
2
2cN
+(2F1)
2
2cN
= 2, 25F 2
1
cN
2Eeg =(F1)
2
2cN
+(2F1)
2
2cN
= 2, 5F 2
1
cN
Eeg,1 = 2(0, 125F1)
2
2cN
+ 2(0, 25F1)
2
2cN
= 0,078125F 2
1
cN
Eeg,2 = 2(0, 25F1)
2
2cN
+(0, 25F1)
2
2cN
+(0, 75F1)
2
2cN
Eeg,2 = 0,375F 2
1
cN
und
Eeg(ρ = 1) = 2(0, 25F1)
2
2cN
+(0, 75F1)
2
2cN
+(1, 75F1)
2
2cN
Eeg(ρ = 1) = 1,875F 2
1
cN
.
Mit der Gleichung (3.7) ergibt sich die elastisch gespeicherte Energie im Sys-tem beim Einfallen des ersten Fließgelenks zu
Eeg,1 = 0Eeg · ρ21 = 1, 25
F 21
cN
· 0, 252 = 0,078125F 2
1
cN
,
die elastisch gespeicherte Energie beim Einfallen des zweiten Fließgelenks zu
Eeg,2 = Eeg,1 + 1Eeg ·∆ρ2
+ 2∆ρ
1∑j=1
(j−1)Eeg(ρj − ρ(j−1))
Eeg,2 = 0, 078125F 2
1
cN
+ 2, 25F 2
1
cN
· 0, 252 + 2 · 0, 25F 2
1
cN
· (1, 25 · 0, 25)
Eeg,2 = (0, 078125 + 0, 140625 + 0, 15625)F 2
1
cN
= 0,375F 2
1
cN

C Beispielberechnungen elastisch gespeicherte Energie 125
und die elastisch gespeicherte Energie unter voller Last zu
Eeg(ρ = 1) = Eeg,2 + 2Eeg ·∆ρ2
+ 2∆ρ
2∑j=1
(j−1)Eeg(ρj − ρ(j−1))
Eeg(ρ = 1) = 0, 375F 2
1
cN
+ 2, 5F 2
1
cN
· 0, 52
+ 2 · 0, 5F 21
cN
· (1, 25 · 0, 25 + 2, 25 · 0, 25)
Eeg(ρ = 1) = (0, 375 + 0, 625 + 0, 875)F 2
1
cN
= 1,875F 2
1
cN
.
C.5 Zusammenfassung
Die Berechnung der elastisch gespeicherten Formanderungsenergie in den vierBeispielen aus der Anschauung sowie mit Hilfe der Gleichung (3.7) liefernidentische Ergebnisse.
Es bleibt zu erwahnen, dass sich bei dem in dieser Arbeit vorgestell-ten modalen Verfahren die Systemlast F = H , also die statische Erdbe-benersatzlast, bei jeder Systemmodifikation leicht andert. Trotzdem wird imRahmen der geforderten Genauigkeit die Gleichung (3.7) zur Ermittlung desVerlaufes der elastisch gespeicherten Energie verwendet.

Literaturverzeichnis
[1] R. Harbord: Skript zur Lehrveranstaltung Statik der Baukonstruk-tionen II - Statisch unbestimmte Stabtragwerke -Institut Statik der Baukonstruktionen, Technische Universitat Ber-lin 1997
[2] R. Harbord: Skript zur Lehrveranstaltung Statik der Baukonstruk-tionen Vertiefung II - Statische und dynamische Berechnung vonTragwerken -Institut Statik der Baukonstruktionen, Technische Universitat Ber-lin 2003
[3] S. Kaliszky: Plastizitatslehre – Theorie und technische Anwendun-genVDI–Verlag, Dusseldorf 1984
[4] DIN V ENV 1998 / Eurocode EC–8: Auslegung von Bauwerkengegen ErdbebenlastenBeuth Verlag Berlin 1997
[5] Meskouris, K. Hinzen, K.G.: Bauwerke und Erdbeben Friedr. Vieweg& Sohn Verlag/GWV Fachverlage GmbH, Wiesbaden 2003
[6] A. Hennig: Traglastberechnung ebener Rahmen - Theorie II. Ord-nung und Interaktion -Institut fur Statik, Technische Universitat Braunschweig 1975
[7] T. Paulay, H. Bachmann, K. Moser: Erdbebenbemessung von Stahl-betonhochbautenBirkhauser Verlag, Basel–Bosten–Berlin 1989
[8] H. Bachmann: Erdbebensicherung von BauwerkenBirkhauser Verlag, Basel–Bosten–Berlin 1995
[9] H. Bachmann: Erdbebensicherung von Bauwerken2. Auflage, Birkhauser Verlag, Basel–Bosten–Berlin 2002
LITERATURVERZEICHNIS 127
[10] H. Bachmann: Stahlbeton, Baudynamik und Erdbebeningenieurwe-sen - ein paar WidersprucheText und Bilder seiner Abschiedsvorlesung vom 27. Juni 2000, ETHZurich
[11] F. P. Muller, E. Keintzel: Erdbebensicherung von Hochbauten2. Auflage, Ernst & Sohn, Verlag fur Architektur und technischeWissenschaften, Berlin 1984
[12] E. Keintzel: Zur Ermittlung von Verhaltensfaktoren fur die Erdbe-benberechnung von Stahlbetonbauten Vortragsband der 4. Jahres-tagung der Deutschen Gesellschaft fur Erdbeben–Ingenieurwesenund Baudynamik, Dampfung/ Duktilitat/ Nichtlineares Bauwerks-verhalten S. 95–114, 1989
[13] I. Hylla: Entwicklung und Implementierung eines Berechnungsmo-duls fur die praxisorientierte Untersuchung des Lastfalls Erdbebennach der AntwortspektrenmethodeDiplomarbeit am Institut fur Statik und Baukonstruktionen, Tech-nische Universitat Berlin 1996
[14] A. Heuer: Untersuchung zur Zeitabhangigkeit des Lastfalls Erdbebenmit modalen LosungsverfahrenDiplomarbeit am Institut fur Statik und Baukonstruktionen, Tech-nische Universitat Berlin 1996
[15] R. Gasch, K. Knothe: Strukturdynamik Band 2 (Kontinua und ihreDiskretisierung)Springer–Verlag, Heidelberg 1989
[16] Eos, Vol. 76, No. 6, February 7, 1995, Seiten 49-51. © AmericanGeophysical Union 1995
[17] Ray W. Clough,J. Penzien: Dynamics of Structures McGraw–Hill,Inc., New York 1993