Digitale Regelsysteme || Einführung
4
Click here to load reader
Transcript of Digitale Regelsysteme || Einführung

1. EinfOhrung
ProzeBlenkung
Die bei der Lenkung (Flihrung) von technischen Prozessen auftretenden
Aufgaben konnen verschiedenen Ebenen zugeordnet werden, die hierar
chisch strukturiert sind, Bild 1.1.
In einer ersten Ebene sind direkt meBbare GroBen y zu regeln und zu
steuern. Die FlihrungsgroBen ~ sind entweder konstant (Festwert-Rege
lung und -Steuerung) oder werden durch hohere Ebenen vorgegeben (Flih
rungs-Regelung und -Steuerung). Wenn mehr als eine RegelgroBe gere
gelt oder gesteuert wird, spricht man von einer MehrgroBen-Regelung
oder -Steuerung. Das An- und Abfahren von Prozessen werde ebenfalls
als Bestandteil der ersten Ebene aufgefaBt.
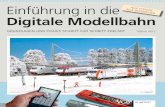
S. EBENE
4. EBENE
3.EBENE
Z.EBENE
1. EBENE
PLANUNG MARKT
1lf<:===ROHPRODUKTE L ___ J::=====n PERSONAL
2::., • J..2
Bild 1.1 ProzeBlenkung in mehreren Ebenen
R. Isermann, Digitale Regelsysteme© Springer-Verlag, Berlin/Heidelberg 1977

2 1. EinfUhrung
In der zweiten Ebene wird der ProzeB Uberwacht. Hierzu wird die Funk
tion des Prozesses laufend geprUft und festgestellt, ob besonders aus
gewahlte ZustandsgroBen festgelegte Grenzwerte Uberschreiten. Dabei
kann sich die Uberwachung auf momentane ZustandsgroBen beschranken,
aber auch zukUnftige, vorhergesagte ZustandsgroBen berUcksichtigen.
Die AusgangsgroBen der Uberwachungsebene sind z.B. Alarmmeldungen als
Vorwarnungen oder aber Kommandos zum schnellen Abfahren des Prozesses.
In einer dritten Ebene kann die Optimierung des Prozesses angeordnet
werden. Hierbei wird z.B. der Wirkungsgrad oder der Durchsatz maxi
miert. Oft ist nur die Optimierung des statischen Verhaltens der Pro
zesse von Interesse. Man spricht dann von statischer Optimierung.
Wenn die Optimierung on-line, also wahrend des Betriebsablaufes durch
gefUhrt wird, dann wird aus den MeBgroBen y ein GUtewert gebildet,
dessen Maximum mittels eines Optimierungsverfahrens durch systemati
sches Verandern verstellbarer EingangsgroBen, z.B. der FUhrungsgroBen
'!!.., gesucht wird.
Falls mehrere Prozesse in einem Verbund zusammenhangen, werden sie in
einer vierten Ebene koordiniert. Bei einem Verbund von FluB- und ther
mischen Kraftwerken ist diese Koordinierung die Lastverteilung, bei
einem Verbund von Prozessen der Stahlherstellung die gegenseitige An
pas sung von Hochofen, Stahlwerk und Walzwerken.
In der obersten Ebene, hier die funfte Ebene, findet schlieBlich das
Management statt, in der die Anpassung eines Systems von Prozessen
(Werk, Verbundnetz, groBere wirtschaftliche Einheiten) an die Planung,
den Markt, die vorhandenen Rohprodukte und das zur VerfUgung stehende
Personal erfolgt.
In allen Ebenen werden die Prinzipien der Steuerung und RegeZung
(Rlickflihrung) verwendet. 1m Fall von RUckfUhrungen kann man deshalb
auBer von Regelkreisen auch von Uberwachungskreisen, Optimierungs
kreisen und Koordinierungskreisen, oder allgemein von Mehrebenen-Re
geZung sprechen.
Einzelne Aufgaben der ProzeBlenkung wurden frliher, und werden zum
Teil auch noch heute, vom Bedienungspersonal durchgefUhrt. Der ProzeB
wird dann ganz oder teilweise "von Hand gefahren" oder "gelenkt". 1m
Zuge der Automatisierung der Proze2Zenkung libernahmen selbsttatig ar
beitende Gerate zunachst die Aufgaben der unteren Ebenen. Bis etwa
1960 erfolgte die automatische Regelung und Steuerung ausschlieBlich

1. Einflihrung 3
mit analog arbeitenden Reglern und Steuergliedern mit elektrischer,
pneumatischer oder hydraulischer Hilfsenergie. Programmsteuerungen
waren entweder mit elektrischen oder pneumatischen Bauelementen, die
binare Signale verarbeiten, realisiert. Zur Uberwachung verwendete
man analog und binar arbeitende Gerate. Eine Optimierung und Koordi
nierung wahrend des Betriebs wurde entweder von Hand oder gar nicht
ausgeflihrt. Die Verwendung von Digitalrechnern erlaubte dann in den
hoheren Ebenen eine Teilautomatisierung im Off-line-Betrieb.
Einsatz von ProzeBrechnern
Das Aufkommen von digitalen ProzeBrechnern beeinflusste die Automati
sierung der ProzeBlenkung sowohl in der gesamten Struktur als auch in
der Funktion wesentlich. Dabei beobachtete man folgende Entwicklungs
schritte.
In direkter, aber offener Kopplung mit dem ProzeB (on-line, open loop)
wurden erstmalig 1959 ProzeBrechner zur Datenregistrierung, Datenre
duzierung und Uberwachung von Prozessen eingesetzt. Die direkte Rege
lung von ProzeBgroBen ist dabei, zumeist aus Grlinden der noch unbe
friedigenden Zuverlassigkeit der damaligen ProzeBrechner, durch analog
arbeitende Gerate durchgeflihrt worden. Dann wurde dazu libergegangen,
die FlihrungsgroBen von analogen Reglern vom ProzeBrechner vorzugeben
(supervisory control), z.B. zur ProzeBsteuerung nach Zeitplanen oder
zur ProzeBoptimierung. ProzeBrechner zur direkten digitalen Regelung
(direct digital control + DDC) in direkter, geschlossener Kopplung
mit dem ProzeB (on-line, closed loop) sind zum ersten Mal 1962 bei
verfahrenstechnischen und energietechnischen Prozessen eingesetzt
worden [1. 1 J, [1. 2 J , [1. 3 J, [1. 4 J , [1. 5 J, [1. 6 J .
Der Entwicklung immer leistungsfahigerer ProzeBrechner und zugehori
ger Software entsprechend, hat der Einsatz von ProzeBrechnern zur
Flihrung von Prozessen seitdem stark zugenommen. ProzeBrechner sind
heute libliche Bestandteile der ProzeBautomatisierung [1.5J, [1.6J.
Weitere Angaben zur Entwicklung des Einsatzes von ProzeBrechnern
konnen den Blichern [1.7J bis [1.14J entnommen werden.
ProzeBrechner werden bisher auBer zur Datenregistrierung und -redu
zierung hauptsachlich in den Ebenen der Regelung, Uberwachung und
Koordinierung eingesetzt [1.7J bis [1.11J. Eine On-line-Optimierung
wurde nur selten ausgeflihrt.

4 1. Einfuhrung
Ein Kennzeichen der ersten 15 Jahre des Einsatzes von ProzeBrechnern
ist die Zentralisierung der ProzeBlenkung in einem Rechner, dessen
Funktion oft mit einem parallelen analogen Reservesystem oder einem
Reserverechner abgesichert sein muB.
Einsatz von MikroprozeBrechnern
Das Erscheinen von preiswerten Mikroprozessoren (ab 1971), die sich
mit Halbleiterspeichern und Ein/Ausgabebausteinen zu MikroprozeBrech
nern zusarnrnenfugen lassen, gestattet die Verteilung der Aufgaben der
ProzeBlenkung auf mehrere Rechner. Damit sind neue Strukturen von Pro
zeBlenkungssystemen moglich, die durch eine Dezentralisierung gekenn
zeichnet werden. Die ersten, 1975 auf dem Markt erscheinenden Mikro
prozeBrechner sind zur Regelung und Steuerung von 8 bis 16 GroBen und
zur Uberwachung vorgesehen. Sie ubernehmen damit zunachst die Funktio
nen von analogen Geraten und ProzeBrechnern in den unteren Ebenen. Die
weitere Entwicklung ist zur Zeit noch nicht eindeutig abzusehen. Mikro
prozeBrechner werden jedoch einen groBen EinfluB auf die kornrnende MeB
und Regelungstechnik ausuben.
Digitale Regelsysteme
Die Signalverarbeitung bei digitalen ProzeBrechnern bzw. MikroprozeB
rechnern ist bekanntlich nicht, wie bei Regel- und Steuergeraten in
analoger Technik oder bei prograrnrngesteuerten Steuerungen mit binaren
Bauelementen, an einige wenige standardisierte Grundfunktionen gebun
den, sondern kann mittels Software frei prograrnrniert und mit vielen
Rechnungen versehen werden. Dadurch lassen sich zur ProzeBlenkung vie
le neue Methoden entwickeln, die fur die unteren Ebenen als program
mierte Algorithmen und fur die hoheren Ebenen als prograrnrnierte Lo
sungsmethoden realisiert werden konnen. Da der Eingriff in allen Ebe
nen mittels Steuerungen und Regelungen erfolgt, mussen beim Einsatz
von ProzeBrechnern Mehrebenen-Regel- und Steueralgorithmen entworfen,
ausgewahlt und an den ProzeB angepaBt werden.
Dieses Buch befaBt sich mit der digitalen Regelung und Steuerung in
der untersten Ebene der ProzeBlenkung. Viele der behandelten Methoden
zum Entwurf von Algorithmen, zur Gewinnung von ProzeBmodellen, zur
Schatzung von ZustandsgroBen und Parametern, zur Storsignalfilterung
und Stellgliedansteuerung lassen sich jedoch auch zur Synthese digi
taler Uberwachungs-, Optimierungs- und Koordinierungssysteme verwen
den.