DLR Schülerheft Nav · Beim UTM-Gitter wird die gesamte Erdoberfläche in 1200 einzelne...
20
Navigation – da denken Sie sicherlich in erster Linie an den Kapitän eines Schiffes oder an einen Flugzeugkapitän und fragen sich: „Was hat denn Navigation mit mir zu tun?“ Um diese Frage zu beantworten und Ihnen einen Einblick in die vielfältigen Anwendungsgebiete der heutigen und zukünftigen Satellitennavigation zu geben, wurde diese Schulinformation zum Thema Navigation erstellt. Sie soll Ihnen neben einem kurzen Rückblick auf die Entwicklung der Navigation die wesentlichen Grundlagen der Funkortung zur Positionsbestimmung vermitteln und einen Ein- blick in die Funktionsweise eines Satellitennavi- gationssystems geben. Ein besonderes Augenmerk gilt dem im Aufbau befindlichen europäischen Satellitennavigationssystem „GALILEO“ , mit dem die europäische Industrie und Raumfahrt einen Weg beschreitet, der mit der Entwicklung neuer Produkte und Anwendungen für Ortsbestimmung und Wegführung in immer weitere Kreise unseres täglichen Lebens eingreifen wird. In diesem Umfeld bieten sich für junge, technisch orientierte Menschen hervorragende Chancen der beruflichen Positionierung. Die Ursprünge der Navigation liegen in der Seefahrt; leitet sich doch das Wort „navigieren“ vom Lateinischen ab – „navem agere“, zu deutsch „ein Schiff führen, ein Schiff lenken“. Navigation in unserem heutigen Sinne beschränkt sich bei weitem nicht mehr auf die Seefahrt, sondern auf alle Arten von Land-, See-, Luft- und Raumfahr- zeugen. Neben der terrestrischen und astronomi- schen Navigation wurden mit Beginn des aufstre- benden Luftverkehrs Anfang des 20. Jahrhunderts vermehrt funktechnische Verfahren entwickelt,mit deren Hilfe vor allem Luftfahrzeuge und die späteren Raumfahrzeuge ihre Position bestimmen konnten. Funktechnische Verfahren stellen auch heute noch die Grundlage der – wenngleich ein Vielfaches genaueren – neuzeitigen Satellitennavi- gation dar, mit der wir uns in der vorliegenden Ausgabe der Schulinformation Raumfahrt beschäf- tigen. Materialien für den naturwissenschaftlichen Projektunterricht Ausgabe 1/2005 Navigation Ein Informationsdienst des Deutschen Zentrums für Luft- und Raumfahrt | www.dlr.de/schulinfo
Transcript of DLR Schülerheft Nav · Beim UTM-Gitter wird die gesamte Erdoberfläche in 1200 einzelne...

Navigation – da denken Sie sicherlich in erster Liniean den Kapitän eines Schiffes oder an einenFlugzeugkapitän und fragen sich: „Was hat dennNavigation mit mir zu tun?“ Um diese Frage zubeantworten und Ihnen einen Einblick in dievielfältigen Anwendungsgebiete der heutigen undzukünftigen Satellitennavigation zu geben, wurdediese Schulinformation zum Thema Navigationerstellt. Sie soll Ihnen neben einem kurzenRückblick auf die Entwicklung der Navigation diewesentlichen Grundlagen der Funkortung zurPositionsbestimmung vermitteln und einen Ein-blick in die Funktionsweise eines Satellitennavi-gationssystems geben. Ein besonderes Augenmerkgilt dem im Aufbau befindlichen europäischenSatellitennavigationssystem „GALILEO“, mit demdie europäische Industrie und Raumfahrt einenWeg beschreitet, der mit der Entwicklung neuerProdukte und Anwendungen für Ortsbestimmungund Wegführung in immer weitere Kreise unserestäglichen Lebens eingreifen wird. In diesemUmfeld bieten sich für junge, technisch orientierteMenschen hervorragende Chancen der beruflichenPositionierung.
Die Ursprünge der Navigation liegen in derSeefahrt; leitet sich doch das Wort „navigieren“ vomLateinischen ab – „navem agere“, zu deutsch „einSchiff führen, ein Schiff lenken“. Navigation inunserem heutigen Sinne beschränkt sich beiweitem nicht mehr auf die Seefahrt, sondern aufalle Arten von Land-, See-, Luft- und Raumfahr-
zeugen. Neben der terrestrischen und astronomi-schen Navigation wurden mit Beginn des aufstre-benden Luftverkehrs Anfang des 20. Jahrhundertsvermehrt funktechnische Verfahren entwickelt, mitderen Hilfe vor allem Luftfahrzeuge und diespäteren Raumfahrzeuge ihre Position bestimmenkonnten. Funktechnische Verfahren stellen auchheute noch die Grundlage der – wenngleich einVielfaches genaueren – neuzeitigen Satellitennavi-gation dar, mit der wir uns in der vorliegendenAusgabe der Schulinformation Raumfahrt beschäf-tigen.
Materialien für dennaturwissenschaftlichenProjektunterricht
Ausgabe 1/2005 NavigationEi
n In
form
atio
nsdi
enst
des
Deu
tsch
en Z
entr
ums
für
Luft
- un
d R
aum
fahr
t|
ww
w.d
lr.d
e/sc
hu
linfo
1/2005 · Navigation 2
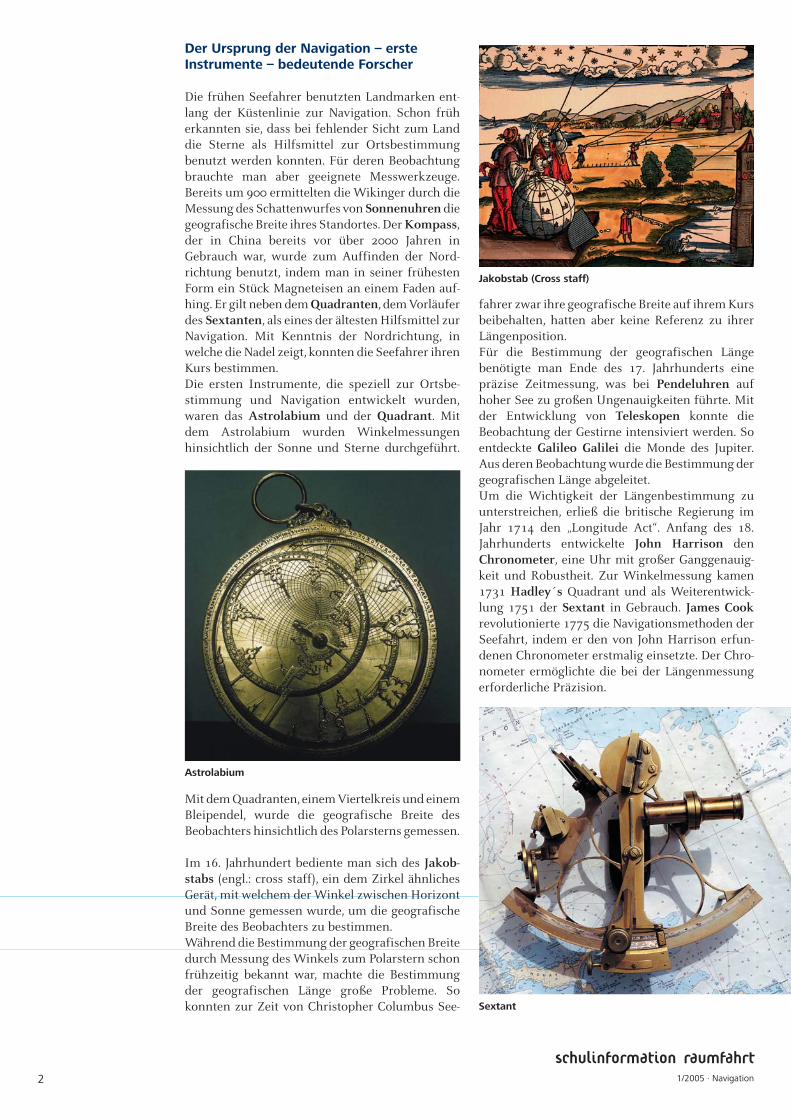
Der Ursprung der Navigation – ersteInstrumente – bedeutende Forscher
Die frühen Seefahrer benutzten Landmarken ent-lang der Küstenlinie zur Navigation. Schon früherkannten sie, dass bei fehlender Sicht zum Landdie Sterne als Hilfsmittel zur Ortsbestimmungbenutzt werden konnten. Für deren Beobachtungbrauchte man aber geeignete Messwerkzeuge.Bereits um 900 ermittelten die Wikinger durch dieMessung des Schattenwurfes von Sonnenuhren diegeografische Breite ihres Standortes. Der Kompass,der in China bereits vor über 2000 Jahren inGebrauch war, wurde zum Auffinden der Nord-richtung benutzt, indem man in seiner frühestenForm ein Stück Magneteisen an einem Faden auf-hing. Er gilt neben dem Quadranten, dem Vorläuferdes Sextanten, als eines der ältesten Hilfsmittel zurNavigation. Mit Kenntnis der Nordrichtung, inwelche die Nadel zeigt, konnten die Seefahrer ihrenKurs bestimmen.Die ersten Instrumente, die speziell zur Ortsbe-stimmung und Navigation entwickelt wurden,waren das Astrolabium und der Quadrant. Mitdem Astrolabium wurden Winkelmessungenhinsichtlich der Sonne und Sterne durchgeführt.
Mit dem Quadranten, einem Viertelkreis und einemBleipendel, wurde die geografische Breite desBeobachters hinsichtlich des Polarsterns gemessen.
Im 16. Jahrhundert bediente man sich des Jakob-stabs (engl.: cross staff), ein dem Zirkel ähnlichesGerät, mit welchem der Winkel zwischen Horizontund Sonne gemessen wurde, um die geografischeBreite des Beobachters zu bestimmen.Während die Bestimmung der geografischen Breitedurch Messung des Winkels zum Polarstern schonfrühzeitig bekannt war, machte die Bestimmungder geografischen Länge große Probleme. Sokonnten zur Zeit von Christopher Columbus See-
fahrer zwar ihre geografische Breite auf ihrem Kursbeibehalten, hatten aber keine Referenz zu ihrerLängenposition.Für die Bestimmung der geografischen Längebenötigte man Ende des 17. Jahrhunderts einepräzise Zeitmessung, was bei Pendeluhren aufhoher See zu großen Ungenauigkeiten führte. Mitder Entwicklung von Teleskopen konnte dieBeobachtung der Gestirne intensiviert werden. Soentdeckte Galileo Galilei die Monde des Jupiter.Aus deren Beobachtung wurde die Bestimmung dergeografischen Länge abgeleitet. Um die Wichtigkeit der Längenbestimmung zuunterstreichen, erließ die britische Regierung imJahr 1714 den „Longitude Act“. Anfang des 18.Jahrhunderts entwickelte John Harrison denChronometer, eine Uhr mit großer Ganggenauig-keit und Robustheit. Zur Winkelmessung kamen1731 Hadley´s Quadrant und als Weiterentwick-lung 1751 der Sextant in Gebrauch. James Cookrevolutionierte 1775 die Navigationsmethoden derSeefahrt, indem er den von John Harrison erfun-denen Chronometer erstmalig einsetzte. Der Chro-nometer ermöglichte die bei der Längenmessungerforderliche Präzision.
Astrolabium
Jakobstab (Cross staff)
Sextant
1/2005 · Navigation 3
Bestimmung der geografischen Breite:
Winkelmessung mit Sextant oder Oktant zu Polar-stern (Nordhemisphäre) bzw. Sternenkonstellation„Kreuz des Südens“ (Südhemisphäre).
Bestimmung der geografischen Länge:
Chronometer mit Anzeige der Uhrzeit einerbekannten Längenposition (z. B. Greenwich).Die eigene Uhrzeit kann durch den Sonnenhöchst-stand (12 Uhr) festgestellt werden.Eine Stunde entspricht 15°, da 24 x 15°=360° .Zeigt ein Chronometer (Anzeige der mitgeführtenGreenwich-Zeit) zur lokalen Mittagszeit (12 Uhr)bereits 14 Uhr Greenwich-Zeit, so muss sich derBeobachter 2 x 15° = 30° westlich der Länge vonGreenwich befinden.
Die wesentlichsten Grundlagen der astronomischenNavigation legte Johannes Kepler (1571–1630)fest, indem er für alle Massen, die sich um einenSchwerpunkt bewegen, die so genannten „Kepler´-schen Gesetze“ aufstellte. Diese Gesetzmäßigkeitengelten für alle Planeten im Sonnensystem mit derSonne als Massenmittelpunkt, aber auch für allekünstlichen Himmelskörper wie Satelliten im geo-zentrischen System mit der Erde (Geo) als Massen-mittelpunkt (Zentrum).
Entwicklungsschritte der Navigation vom 20. Jahrhundert bis heute
Radionavigation
Zu Beginn des 20. Jahrhunderts begann die Ent-wicklung der auf Radiowellen basierenden Funk-navigationssysteme, die hauptsächlich für die Navi-gation auf Schiffen und in Flugzeugen Verwendungfanden. Der Nachteil dieser bodengestützten Sys-teme war, dass diese Systeme – je nach Wahl dervom System verwendeten Wellenlänge – entwedereine große Reichweite bei geringer Genauigkeitoder aber eine geringe Reichweite bei großer Ge-nauigkeit hatten. Bis zum heutigen Tage sind Funk-navigationssysteme für unterschiedlichste Einsatz-zwecke und Einsatzgebiete verfügbar.
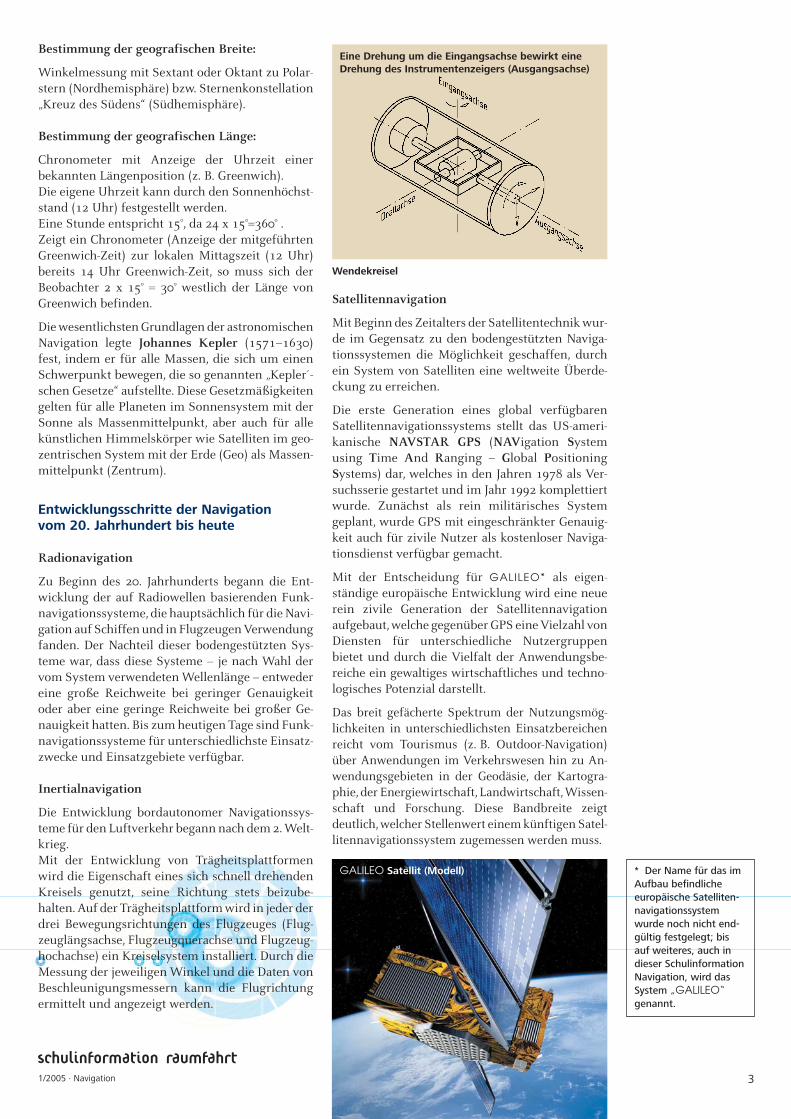
Inertialnavigation
Die Entwicklung bordautonomer Navigationssys-teme für den Luftverkehr begann nach dem 2. Welt-krieg.Mit der Entwicklung von Trägheitsplattformenwird die Eigenschaft eines sich schnell drehendenKreisels genutzt, seine Richtung stets beizube-halten. Auf der Trägheitsplattform wird in jeder derdrei Bewegungsrichtungen des Flugzeuges (Flug-zeuglängsachse, Flugzeugquerachse und Flugzeug-hochachse) ein Kreiselsystem installiert. Durch dieMessung der jeweiligen Winkel und die Daten vonBeschleunigungsmessern kann die Flugrichtungermittelt und angezeigt werden.
Satellitennavigation
Mit Beginn des Zeitalters der Satellitentechnik wur-de im Gegensatz zu den bodengestützten Naviga-tionssystemen die Möglichkeit geschaffen, durchein System von Satelliten eine weltweite Überde-ckung zu erreichen.
Die erste Generation eines global verfügbarenSatellitennavigationssystems stellt das US-ameri-kanische NAVSTAR GPS (NAVigation Systemusing Time And Ranging – Global PositioningSystems) dar, welches in den Jahren 1978 als Ver-suchsserie gestartet und im Jahr 1992 komplettiertwurde. Zunächst als rein militärisches Systemgeplant, wurde GPS mit eingeschränkter Genauig-keit auch für zivile Nutzer als kostenloser Naviga-tionsdienst verfügbar gemacht.
Mit der Entscheidung für GALILEO* als eigen-ständige europäische Entwicklung wird eine neuerein zivile Generation der Satellitennavigationaufgebaut, welche gegenüber GPS eine Vielzahl vonDiensten für unterschiedliche Nutzergruppenbietet und durch die Vielfalt der Anwendungsbe-reiche ein gewaltiges wirtschaftliches und techno-logisches Potenzial darstellt.
Das breit gefächerte Spektrum der Nutzungsmög-lichkeiten in unterschiedlichsten Einsatzbereichenreicht vom Tourismus (z. B. Outdoor-Navigation)über Anwendungen im Verkehrswesen hin zu An-wendungsgebieten in der Geodäsie, der Kartogra-phie, der Energiewirtschaft, Landwirtschaft,Wissen-schaft und Forschung. Diese Bandbreite zeigtdeutlich, welcher Stellenwert einem künftigen Satel-litennavigationssystem zugemessen werden muss.
GALILEO Satellit (Modell)
Wendekreisel
Eine Drehung um die Eingangsachse bewirkt eineDrehung des Instrumentenzeigers (Ausgangsachse)
* Der Name für das imAufbau befindlicheeuropäische Satelliten-navigationssystemwurde noch nicht end-gültig festgelegt; bisauf weiteres, auch indieser SchulinformationNavigation, wird dasSystem „GALILEO“genannt.

1/2005 · Navigation 4
Grundlagen der Navigation
Koordinatensysteme
Wesentliche Grundlagen für die Ortung undNavigation sind Karten, die je nach Anwendungs-und Einsatzgebiet unterschiedlich ausgestaltetsind. Sie werden im Landverkehr (Wanderkarte,Straßenkarte), im Schiffsverkehr, in der Luftfahrtund für technisch/wissenschaftliche Anwendungs-gebiete (Vermessungswesen, Geodäsie, Verkehrs-wegeplanung, infrastrukturelle Planungen) erstelltund basieren auf unterschiedlichen Koordinaten-systemen.Um einen Punkt auf einer Karte eindeutigbestimmen zu können, sind zwei Richtungswerte(Koordinaten) erforderlich. So wie in der Mathe-matik die x- und y-Koordinaten verwendet werden,um einen Punkt bezogen auf die Referenzachsen xund y zu definieren, so unterliegt auch den Navi-gationskarten ein Kartengitter, in welchem durchdie senkrechten und waagerechten Linien jederPunkt eindeutig bezeichnet werden kann. Diewichtigsten Koordinatensysteme sind das geogra-fische Gitter, das geodätische Gitter und das ECEF-Koordinatensystem.
Das geografische Gitter
Das geografische Gitter teilt die Erdkugel in einNetz von 360 Längengraden (Meridiane), die beimNullmeridian (Greenwich, England) beginnen undvon dort aus je 180° in östlicher und westlicherRichtung gezählt werden. Breitengrade beginnenam Äquator (0°) und zählen um 90° in nördlicherund 90° in südlicher Richtung. 90°N und 90°S fallenmit dem geografischen Nord- bzw. Südpol zusam-men. Jedes Grad wird in 60´(Minuten) und jedeMinute in 60“ (Sekunden) unterteilt.
Positionsangaben haben folgendes Format:z.B. 54° 35´ 17“ N · 102° 52´ 03“ E.
Während im geografischen Gitter alle Breitengradeden gleichen Abstand voneinander haben (1°entspricht 1/360 des Erdumfanges und damit rund111 Kilometer), laufen die Längengrade zu denPolen hin zusammen. Hieraus ergibt sich einProblem bei der großräumigen Kartendarstellung,da die Verzerrungen zu den Polen hin extremzunehmen.
In Atlanten werden deshalb Darstellungen gewählt,die auf einen Breitengrad als Bezugsgrad aufsetzen;die Längengrade laufen nach Norden hin aufeinan-der zu; die Entfernung zwischen zwei Längen-graden wird nach Norden hin kleiner. Um in extre-men nördlichen und südlichen Breitengraden dieseVerzerrungen auszugleichen, werden so genanntepolständige Kartenabbildungen gewählt, die alsBezugspunkt die jeweiligen geografischen Polehaben.
Das geodätische Gitter (UTM – UniversalesTransversales Mercator Gitter)
Um die Schwächen in der Darstellung des geo-grafischen Gitters auszugleichen, wurden verschie-dene rechtwinkelige Gitter (u.a. UTM) entwickelt,bei denen die einzelnen Linien überall den gleichenAbstand (Maßeinheiten: Meter bzw. Kilometer)voneinander haben. Das UTM-Gitter ist weltweitam stärksten verbreitet.Beim UTM-Gitter wird die gesamte Erdoberflächein 1200 einzelne festgelegte Ausschnitte unterteilt,bei denen wegen der relativ kleinräumigen Ausdeh-nung der Verzerrungseffekt durch die Wölbung derErdoberfläche vernachlässigt werden kann. DieErdoberfläche wird zerlegt in Zonenstreifen undBreitenbänder.
6°
N
S
Das UTM-Gitter wird zunächst gebildet durch 60 von Nordnach Süd laufende Streifen (Zonen), die an derDatumslinie (180. Breitengrad) beginnen und jeweils 6°breit sind. Die Zählweise beginnt mit 1 und setzt sich inöstlicher Richtung fort. Die Längsstreifen werden imWeiteren durch 20 Breitenbänder (Felder) gekreuzt, die bei80°S beginnen und jeweils 8 Breitengrade abdecken. DieZählweise beginnt mit dem Buchstaben C und endet beimBuchstaben X. Aus den Zonen und Feldern entstehendemnach 60 x 20 = 1200 Zonenfelder, die durch dieZonennummern und Breitenbandbuchstaben eindeutiggekennzeichnet werden.
UTM-Gitter

1/2005 · Navigation 5
Deutschland zum Beispiel liegt größtenteils in denZonenfeldern 32U und 33U.
ECEF-Koordinaten (Earth Centered - EarthFixed)
Hintergrund der Berechnungsalgorithmen beiSatellitennavigationssystemen (GPS, „GALILEO“)sind dreidimensionale Koordinatensysteme, die inx,y und z-Koordinaten rechnen. Die x-Achseschneidet den Nullmeridian (Greenwich) mit demÄquator, die y-Achse schneidet den 90. Längengradmit dem Äquator und die z-Achse verläuft durch diePole. Vorteil dieses Systems ist, dass im Gegensatzzu den zweidimensionalen Kartensystemen auchPunkte in topografischen Senken oder Erhebungengenau beschrieben werden können und somit auchdie Höheninformation mit berücksichtigt wird.
Wichtig im Zusammenspiel zwischen Kartenmate-rial und Positionsbestimmung auf der Grundlagevon Satellitennavigationssystemen ist das so
genannte Kartenbezugssystem oder Kartendatum(Map Datum). Wenn z. B. ein GPS-Empfänger diePosition in der Form anzeigen soll, dass man dieLängen- und Breitenanzeige in eine Karte einzeich-nen kann, muss in den Rechner im GPS-Empfängerdas Kartendatum eingegeben werden (in Europagängig „Europäisches Datum“ oder „Potsdam Da-tum“). Über die geräteinternen Umrechnungs-algorithmen rechnet der GPS-Empfänger die ECEF-Koordinaten in das gewählte Bezugssystem um.Alle GPS-Empfänger verwenden das internationalstandardisierte Kartendatum „WGS-84“ und dasKoordinatensystem ECEF. Liegt kein Kartendatumvor, arbeitet man mit dem WGS-84 Kartendatum.
Die Angabe der „Höhe“ in der Ortung und Navigation
Zur Bestimmung der Höhe über NN bezieht mansich bei Kartenmaterial auf die Höhenangaben vonmarkanten Punkten (meist Bergen) und auf dietopografischen Höhenlinien, wie sie in Landkarten(Wanderkarten) eingezeichnet sind. Beim Einsatzvon Satellitennavigationsempfängern wird nebender Positionsangabe (geografische Länge undgeografische Breite) auch die Höhenangabe über-mittelt; diese Angabe kann z.B. von Flugzeugen mitden bordeigenen Anzeigen des Höhenmessersabgeglichen werden.
Merkregel: Alle Breitenbänder der Nordhalb-kugel haben Buchstaben ab „N“, alle Breiten-bänder der Südhalbkugel haben Buchstaben vor„N“. Der Bezugspunkt jeder Zone liegt auf demMittelmeridian der jeweiligen Zone am Schnitt-punkt mit dem Äquator. Gezählt wird jeweilsvon West nach Ost (also nach rechts) und vonSüden nach Norden (also nach oben). Die Werte-angaben einer Position auf der UTM-Karte nenntman deshalb auch Rechtswert und Hochwert.
6° 12°9°56°
48°
0026 N
0016 N
0006 N
0095 N
0085 N
0075 N
0065 N
0055 N
0045 N
0035 N
0025 N
005
E
004
E
0 03
E
006
E
007
E
003
E
004
E
005
E
007
E
V13
U13
T13
32V
32U
32T
V33
U33
T33
006
E
005
E
Zonenfelder

1/2005 · Navigation 6
Prinzipien der Funkortung
Ortung bedeutet Ortsbestimmung durch Berech-nung der aktuellen Position. Um die Position (z.B.eines Luftfahrzeuges) eindeutig bestimmen zukönnen, braucht man einen Referenzpunkt (z.B.eine Sendestation), dessen Koordinaten bekanntsind. Durch Ermittlung von direkter Entfernungund relativer Richtung zu diesem Sender lässt sichdie eigene Position ermitteln.
Entfernungsmessung durch Laufzeitmessungvon elektromagnetischen Signalen
Das grundlegende physikalische Prinzip der Aus-breitung elektromagnetischer Wellen eines Sendersliefert hierbei die folgenden Abschätzungen vonEntfernungen zwischen Sender und Empfänger:
Grundlagen zur Standortbestimmung (Ortung)
Zur Ermittlung des Standortes werden bei derTriangulierung Entfernungsmessungen zu dreiSendern durchgeführt. Die Laufzeiten der einzel-
Im räumlichen Anwendungsfall (vier Satelliten) er-gibt sich der Standort aus dem gemeinsamenSchnittpunkt von vier Kugeln, die um die Sendergezogen werden. Die Radien der Kugeln entspre-chen den aus der Laufzeit der Signale errechnetenEntfernungen.In Anlehnung an die Triangulierung bedeutet
Quadrangulierung, dass Signale von vier Sendernaufgenommen werden. Dies führt zu einer eindeu-tigen Lösung (Laufzeitmessungen zu nur dreiSatelliten führen nur zu einer Zweideutigkeit desErgebnisses, wobei aber auch hier eine der beidenLösungen als unwahrscheinlich ausgeschlossenwerden kann).
nen Signale ergeben multipliziert mit der Lichtge-schwindigkeit die Schrägentfernung zwischen Sen-der und Empfänger.
Laufzeit des Signals ∆t mal Laufzeitmessung zwischen Sender Laufzeitmessung vom SenderLichtgeschwindigkeit c und Empfänger zurück zum Sendergleich Entfernung d (z. B. zwischen Navigationssender (z. B. Primärradar)
am Boden und Luftfahrzeug)
∆t (Laufzeit) c · ∆t 1/2 · c · ∆t
1 µs = 10–6 sec 299,7925 m 149,8963 m
A B
Findet der Signalaustausch zwischen Sender und Empfänger statt, so entspricht die Entfernung der Laufzeitdes Signals multipliziert mit der Lichtgeschwindigkeit c (Spalte A).Bei Primärradarsystemen wird z.B. ein ausgesendetes Signal an einem Objekt (Flugzeug) reflektiert und trifftbeim Sender wieder ein. In diesem Fall entspricht die Entfernung zwischen Sender und Objekt der halbenLaufzeit des Signals multipliziert mit der Lichtgeschwindigkeit c (Spalte B).
Im ebenen Fall (drei bodenseitige Sendestationen) ergibtsich der Standort aus dem gemeinsamen Schnittpunkt vondrei Kreisen, die um die Sender gezogen werden. DieRadien der Kreise entsprechen den aus der Laufzeit derSignale errechneten Entfernungen. In der nebenstehendenAbbildung ergeben sich aus der Entfernungsmessung zuSender BLAU und Sender ROT zwei mögliche Standorte.Durch die Hinzunahme der Entfernungsinformation zuSender GRÜN wird diese Zweideutigkeit aufgelöst; derStandort des Empfängers ist eindeutig bestimmt.Wenn die Position jedoch hinreichend bekannt ist, lässtsich bereits mit zwei Sendestationen der Standortermitteln, indem der zweite Schnittpunkt als Lösungausgeschlossen wird.
Entfernungsbestimmung durch Laufzeitmessungen
Positionsbestimmung aus Laufzeitmessung zudrei Sendern
7
Angewandte Methoden der Funkortung
In der Funkortung werden Positionsbestimmungenaus Entfernungsmessungen (engl.: range) gewon-nen. Hierzu gibt es unterschiedliche Verfahren:
1. Two-Way-Ranging (Zweiweg-Entfernungsmes-sung)Messung der Laufzeit des Signals vom bodensei-tigen Sender zum Satelliten und zurück.
2. One-Way-Ranging (Einweg-Entfernungsmes-sung) mit Uhr- und LaufzeitmessungMessung der Signallaufzeit vom Satelliten zumbodenseitigen Empfänger. Dieses Verfahrenwird bei GPS und „GALILEO“ verwendet. ZurMessung der Laufzeit des Signals ist eine Uhren-synchronisation erforderlich.
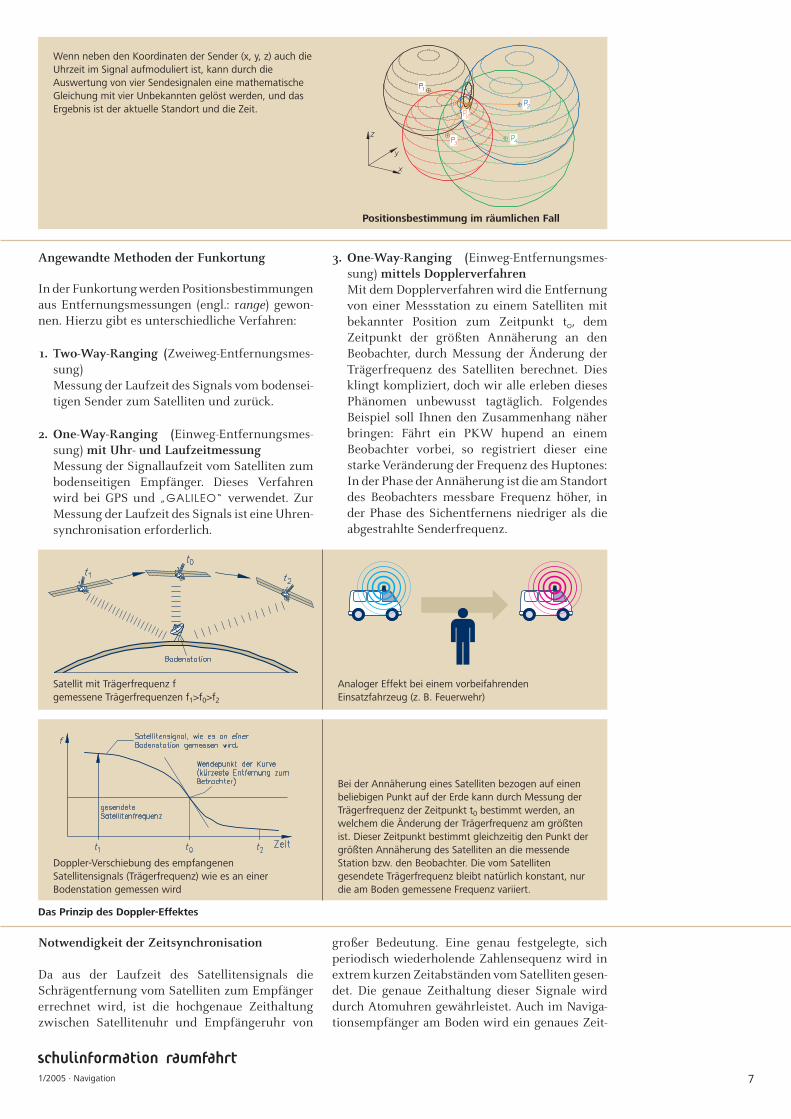
3. One-Way-Ranging (Einweg-Entfernungsmes-sung) mittels DopplerverfahrenMit dem Dopplerverfahren wird die Entfernungvon einer Messstation zu einem Satelliten mitbekannter Position zum Zeitpunkt t0, demZeitpunkt der größten Annäherung an denBeobachter, durch Messung der Änderung derTrägerfrequenz des Satelliten berechnet. Diesklingt kompliziert, doch wir alle erleben diesesPhänomen unbewusst tagtäglich. FolgendesBeispiel soll Ihnen den Zusammenhang näherbringen: Fährt ein PKW hupend an einemBeobachter vorbei, so registriert dieser einestarke Veränderung der Frequenz des Huptones:In der Phase der Annäherung ist die am Standortdes Beobachters messbare Frequenz höher, inder Phase des Sichentfernens niedriger als dieabgestrahlte Senderfrequenz.
1/2005 · Navigation
Notwendigkeit der Zeitsynchronisation
Da aus der Laufzeit des Satellitensignals dieSchrägentfernung vom Satelliten zum Empfängererrechnet wird, ist die hochgenaue Zeithaltungzwischen Satellitenuhr und Empfängeruhr von
großer Bedeutung. Eine genau festgelegte, sichperiodisch wiederholende Zahlensequenz wird inextrem kurzen Zeitabständen vom Satelliten gesen-det. Die genaue Zeithaltung dieser Signale wirddurch Atomuhren gewährleistet. Auch im Naviga-tionsempfänger am Boden wird ein genaues Zeit-
Bei der Annäherung eines Satelliten bezogen auf einenbeliebigen Punkt auf der Erde kann durch Messung derTrägerfrequenz der Zeitpunkt t0 bestimmt werden, anwelchem die Änderung der Trägerfrequenz am größtenist. Dieser Zeitpunkt bestimmt gleichzeitig den Punkt dergrößten Annäherung des Satelliten an die messendeStation bzw. den Beobachter. Die vom Satellitengesendete Trägerfrequenz bleibt natürlich konstant, nurdie am Boden gemessene Frequenz variiert.
Wenn neben den Koordinaten der Sender (x, y, z) auch dieUhrzeit im Signal aufmoduliert ist, kann durch dieAuswertung von vier Sendesignalen eine mathematischeGleichung mit vier Unbekannten gelöst werden, und dasErgebnis ist der aktuelle Standort und die Zeit.
Satellit mit Trägerfrequenz fgemessene Trägerfrequenzen f1>f0>f2
Analoger Effekt bei einem vorbeifahrendenEinsatzfahrzeug (z. B. Feuerwehr)
Positionsbestimmung im räumlichen Fall
Doppler-Verschiebung des empfangenen Satellitensignals (Trägerfrequenz) wie es an einerBodenstation gemessen wird
Das Prinzip des Doppler-Effektes

1/2005 · Navigation 8
signal mitgeführt, welches von einer Quarzuhrgeneriert wird. Ebenso läuft im Empfänger zeit-gleich wie im Satelliten dieselbe Zahlensequenz ab.Im Empfänger trifft jedoch die vom Satelliten ge-sendete Zahlensequenz durch die Laufzeit desSignals zeitversetzt ein. Die Signallaufzeit ist pro-portional zur Entfernung. Aus dem Vergleich desVersatzes der beiden Zahlensequenzen ermitteltder Rechner im Empfänger die Zeitdifferenz unddamit die Laufzeit des Signals vom Sender zumEmpfänger, woraus die Schrägentfernung Satellit –Empfänger berechnet wird.
Wegen der hohen Relativgeschwindigkeit desSatelliten müssen relativistische Effekte (EinsteinsRelativitätstheorie) berücksichtigt werden. Die Uhrim Satelliten muss zur Kompensation dieserEffekte um den Faktor 4,45 · 10-10 verlangsamtwerden. Die Uhrensynchronisation wird durch dieEinbeziehung eines vierten Satelliten in dieMessungen erreicht. Damit lässt sich mathematischein Gleichungssystem mit den drei unbekanntenKoordinaten des Empfängerstandortes (xE, yE undzE) sowie als vierte Unbekannte der Zeit imEmpfänger tE aufstellen und lösen.
Das Prinzip der Satellitennavigation und diewesentlichen Einflussgrößen auf dieMessgenauigkeiten
● Messung der Signallaufzeiten zu mindestensvier Satelliten zur Bestimmung der Koordinatendes Empfängerstandortes und der Zeit imEmpfänger
● Geometrie der Satellitenpositionen und derEmpfängerposition zueinander (Dilution of Pre-cision)
● Verlängerung des Signalweges und damit derLaufzeit durch atmosphärische Brechung (Re-fraction)
● Einflüsse der Dämpfung des Signals durchWettereinflüsse in der Troposphäre
Prinzip der Satellitennavigation; Signalweg und Einflussgrößen
9
Grundlagen der Satellitennavigation
Ortungs- und Navigationsverfahren hatten in denfrühen Zeiten der funktechnischen Verfahren denNachteil, dass sie bedingt durch die Positionierungder landgebundenen Bodenstationen keineweltweit in gleichem Maße verfügbare undzuverlässige Abdeckung hatten. Dieser Nachteilkonnte nur durch ein satellitengestütztes Systemumgangen werden.
Bahnhöhe
Die Bahnhöhe ergibt sich aus einer Gesamt-bewertung folgender Abhängigkeiten:– je größer die Bahnhöhe, desto größer die
Sichtbarkeitsfläche– je größer die Bahnhöhe, desto weniger
Satelliten sind erforderlich (Einsparung jedochminimal)
– je weniger Satelliten im Orbit (bei größererBahnhöhe), desto anfälliger ist dasGesamtsystem bei Ausfall eines einzelnenSatelliten
– je niedriger die Bahnhöhe, desto mehrSatelliten werden für die Überdeckungbenötigt, ohne dass die Verfügbarkeit desGesamtsystems steigt
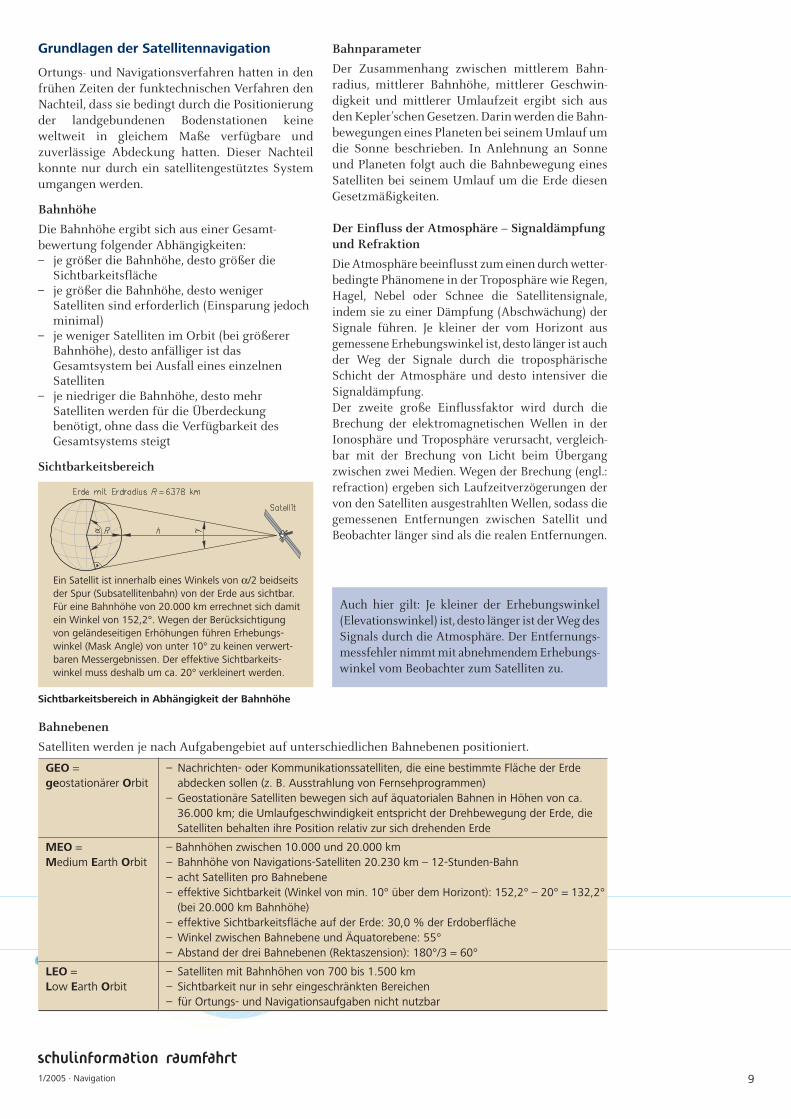
Sichtbarkeitsbereich
Bahnparameter
Der Zusammenhang zwischen mittlerem Bahn-radius, mittlerer Bahnhöhe, mittlerer Geschwin-digkeit und mittlerer Umlaufzeit ergibt sich ausden Kepler’schen Gesetzen. Darin werden die Bahn-bewegungen eines Planeten bei seinem Umlauf umdie Sonne beschrieben. In Anlehnung an Sonneund Planeten folgt auch die Bahnbewegung einesSatelliten bei seinem Umlauf um die Erde diesenGesetzmäßigkeiten.
Der Einfluss der Atmosphäre – Signaldämpfungund Refraktion
Die Atmosphäre beeinflusst zum einen durch wetter-bedingte Phänomene in der Troposphäre wie Regen,Hagel, Nebel oder Schnee die Satellitensignale,indem sie zu einer Dämpfung (Abschwächung) derSignale führen. Je kleiner der vom Horizont ausgemessene Erhebungswinkel ist, desto länger ist auchder Weg der Signale durch die troposphärischeSchicht der Atmosphäre und desto intensiver dieSignaldämpfung.Der zweite große Einflussfaktor wird durch dieBrechung der elektromagnetischen Wellen in derIonosphäre und Troposphäre verursacht, vergleich-bar mit der Brechung von Licht beim Übergangzwischen zwei Medien. Wegen der Brechung (engl.:refraction) ergeben sich Laufzeitverzögerungen dervon den Satelliten ausgestrahlten Wellen, sodass diegemessenen Entfernungen zwischen Satellit undBeobachter länger sind als die realen Entfernungen.
1/2005 · Navigation
Ein Satellit ist innerhalb eines Winkels von α/2 beidseitsder Spur (Subsatellitenbahn) von der Erde aus sichtbar.Für eine Bahnhöhe von 20.000 km errechnet sich damitein Winkel von 152,2°. Wegen der Berücksichtigungvon geländeseitigen Erhöhungen führen Erhebungs-winkel (Mask Angle) von unter 10° zu keinen verwert-baren Messergebnissen. Der effektive Sichtbarkeits-winkel muss deshalb um ca. 20° verkleinert werden.
Auch hier gilt: Je kleiner der Erhebungswinkel(Elevationswinkel) ist, desto länger ist der Weg desSignals durch die Atmosphäre. Der Entfernungs-messfehler nimmt mit abnehmendem Erhebungs-winkel vom Beobachter zum Satelliten zu.
Bahnebenen
Satelliten werden je nach Aufgabengebiet auf unterschiedlichen Bahnebenen positioniert.
GEO = – Nachrichten- oder Kommunikationssatelliten, die eine bestimmte Fläche der Erde geostationärer Orbit abdecken sollen (z. B. Ausstrahlung von Fernsehprogrammen)
– Geostationäre Satelliten bewegen sich auf äquatorialen Bahnen in Höhen von ca.36.000 km; die Umlaufgeschwindigkeit entspricht der Drehbewegung der Erde, dieSatelliten behalten ihre Position relativ zur sich drehenden Erde
MEO = – Bahnhöhen zwischen 10.000 und 20.000 kmMedium Earth Orbit – Bahnhöhe von Navigations-Satelliten 20.230 km – 12-Stunden-Bahn
– acht Satelliten pro Bahnebene– effektive Sichtbarkeit (Winkel von min. 10° über dem Horizont): 152,2° – 20° = 132,2°
(bei 20.000 km Bahnhöhe)– effektive Sichtbarkeitsfläche auf der Erde: 30,0 % der Erdoberfläche– Winkel zwischen Bahnebene und Äquatorebene: 55°– Abstand der drei Bahnebenen (Rektaszension): 180°/3 = 60°
LEO = – Satelliten mit Bahnhöhen von 700 bis 1.500 kmLow Earth Orbit – Sichtbarkeit nur in sehr eingeschränkten Bereichen
– für Ortungs- und Navigationsaufgaben nicht nutzbar
Sichtbarkeitsbereich in Abhängigkeit der Bahnhöhe

1/2005 · Navigation 10
Anwendungsgebiete für die Satellitennavigation
Die Anwendungsgebiete für den Einsatz der Satellitennavigation sind breit gefächert. Längst zählen nichtnur die ursprünglichen Einsatzbereiche wie die Schifffahrt und der Luftverkehr zu den „Nutzern“moderner Satellitennavigationssysteme. Der Einsatz von Navigationsempfängern findet bereits in Ihrerganz persönlichen Nähe statt, so zum Beispiel bei der Streckenführung im PKW, im Outdoor-Bereich aufWanderungen oder Fahrradtouren und auch bei der Notruf-Lokalisierung von hilflosen Menschen.
Landverkehr
Navigation im Straßenverkehr lässt sich unter technischen und wirtschaftlichen Gesichtspunkten ambesten mithilfe der Satellitennavigation lösen. Hauptsächliche Navigations-Aufgaben im Straßenverkehrsind:– Führung von einem Startpunkt zum Zielpunkt (Zielführungssystem)
– Spurverfolgung (Tracking and Tracing) von Fahrzeugen im Rahmen des Flottenmanagements (z. B. imTransportgewerbe)
– Unterstützung eines Verkehrsleitsystems (Busse, Straßenbahnen, U-/S-Bahn)
Das Zielführungssystem eines herkömmlichen PKW-Navigationssystems kann z. B. auf einem PDA mitintegriertem Satellitenempfangsteil realisiertwerden. Ein „differenzieller Empfangsteil“ dient derEinbeziehung von Referenzstationen (mitKorrekturdaten), um die Positionsgenauigkeit, z. B.in kleinräumigen Stadtgebieten, zu erhöhen. DasMarktpotenzial in diesem Bereich resultiert bei einerMarktdurchdringung von 50 % innerhalb dernächsten zehn Jahre bei rd. 30 MillionenFahrzeugen und einem Lebenszyklus von dreiJahren in einer Stückzahl von jährlich rd. fünfMillionen Geräten.
Beim Tracking von Fahrzeugen interessiert diePosition eines Fahrzeugs nicht nur denFahrzeugführer, sondern in besonderem Maße denTransportunternehmer, Flottenmanager undletztlich auch den Kunden (Wo befindet sich meinPaket?). Dies bedeutet, dass neben denNavigationssatelliten zur Positionsbestimmung auchnoch eine Kommunikationsverbindung zurÜbertragung der Positionsdaten via Mobilfunk odereinem Kommunikationssatelliten zumTransportunternehmer oder Kunden benötigt wird.
In vielen Städten sind an Haltestellen vonöffentlichen Verkehrsmitteln bereits Anzeigetafelninstalliert, an denen die nächsten Abfahrtzeitenoder Verkehrsinformationen aus einer Leitstelleabgelesen werden können. Ähnlich derSpurverfolgung im Fuhrparkmanagement spielenhier mehrere Systeme zusammen:– Positionsbestimmung mittels Nav.-Satelliten– Einbeziehung von Korrekturdaten mittels
Referenzstationen (z. B. über Radiosender)– Daten und Sprachkommunikation über
Mobilfunk zwischen Fahrzeugen und Zentrale– Anzeige umgerechneter Entfernungsdaten in
Zeitangaben auf der Anzeigetafel

1/2005 · Navigation 11
Seefahrt
Die Satellitennavigation darf in der Seefahrt alsprimäres Navigationssystem eingesetzt werden.Wegen der wesentlich höheren Navigations-genauigkeit ist sie den bisherigen Systemen DECCA, LORAN und OMEGA weit überlegen. Das Navigieren in Binnengewässern und Häfen istallerdings nur möglich, wenn – bedingt durch dieerforderlichen höherer Positionsgenauigkeiten –Referenzstationen verfügbar sind, die einKorrektursignal ausstrahlen.Zukünftig werden durch den Einsatz von „GALILEO“ auch in der Seefahrt weitere grund-sätzliche Verbesserungen wie zum Beispiel bei derRettung von Schiffbrüchigen und Havaristenerreicht (SAR).
In modernen Verkehrsflugzeugen werden imFlugmanagementsystem (FMS = Flight Manage-ment System) Satellitenempfängerdaten, differen-zielle Daten aus Referenzstationen, Daten desTrägheitsnavigationssystems und Daten von„Stützsensoren“ (z. B. barometrischer Höhen-messer) in einem Bordrechner zusammengeführtund daraus die Anzeigeinformationen für dasFluglagedisplay (HSI = Horizontal SituationIndicator) und weitere Anzeigen generiert.
Luftfahrt
Neben den wichtigsten bodenseitigen Navigations-systemen (für Streckenflug und Landeführung) unddem bordeigenen Inertial-Navigationssystem INSwird auch die Satellitennavigation als Navigations-system eingesetzt. Sie kann allerdings nicht als„primäres Navigationssystem“ verwendet werden,da die Genauigkeit unzureichend, die Verfügbarkeitzu gering und die Integrität des Systems nicht ge-geben ist. Jedoch in der Strecken- und Anflugna-vigation wird sie vorrangig eingesetzt. Obwohl dieSatellitennavigation eine Reihe von Vorteilen bie-tet, wie z. B. durch die Definition beliebiger Weg-punkte (Waypoints), die eine flexible Flächen-navigation erlauben, sind die Kriterien für Präzi-sionsanflüge aus genannten Gründen nicht erfüllt.Für Nicht-Präzisionsanflüge gibt es zwar einzelnenationale Festlegungen, doch eine internationalgültige Standardisierung ist bis heute nicht erfolgt.
Neben dem Einsatz an Bord von Flugzeugen wirddie Satellitennavigation in Verbindung mit „inte-grierter Navigation“ – also dem Zusammenspiel miteinem anderen Navigationssystem – auch für dieFlugsicherung viele Vorteile bringen, so zum Bei-spiel:– eine Verbreiterung der Flugkorridore – eine größere Präzision in den Angaben zur
Position und zum Bewegungsvektor des Flug-zeugs
– die Unabhängigkeit von Radargeräten– die Unabhängigkeit von bodenseitigen Funk-
feuern

1/2005 · Navigation 12
Vermessungswesen
Sonstige Anwendungsbereiche
Kartografie – Verfahren zur Vermessung von Oberflächen (Landkarten, Seekarten)– Verfahren zur Vermessung der Struktur des Meeresbodens und zur Bestimmung von Meerestiefen
Wissenschaft und Forschung– Seismologie– Gletscherbeobachtung– Strömungsmessungen in Gewässern– Bestimmung der Lage von Raumflugkörpern
(Bahnüberwachung von Satelliten)
Wirtschaft und Industrie– Erschließungsarbeiten im Berg- und Tagebau– Positionierung von Bohrplattformen– Trassenführung bei Pipeline, Straßenwegen,
Wasserkanälen– Synchronisierung der Leitungsnetze von
Energieversorgern
Land- und Forstwirtschaft (Precision Farming)– Einsatzsteuerung von Erntefahrzeugen– gezieltes Säen und Düngen, Ausbringen von Pestiziden– Transportlenkung beim Holzeinschlag
Nachrichtentechnik– Synchronisierung bei zeitgestaffelter Nachrichtenübertragung– Synchronisieren von Funknetzen
Touristik/Freizeit– Outdoor-Navigation (Tracking)– Ballooning– Paragliding– Segelflug
Im Vermessungswesen werden auch heute nochmechanische und optische Geräte eingesetzt. MittelsSatellitennavigation lassen sich bei wesentlichgeringerem Personal- und Zeiteinsatz unter Einbe-ziehung von Differentialverfahren höhere Genauig-keiten erzielen. Im Gegensatz zu optischen Verfahrenist die satellitengestützte Vermessung nicht anbestehende Sichtverhältnisse gebunden. Die Einbe-ziehung von Referenzstationen, die in Deutschlandunter dem Namen SAPOS (SAtellitenPOSitionierungs-dienst) läuft, bietet dem Vermesser Genauigkeiten bisin den cm-Bereich an.

13
Satellitenempfänger und deren Hauptfunktionen
Je nach Nutzergruppe werden auf dem Markt Geräte angeboten, die sich in Bezug auf Funktionalität,Bedienkomfort, Größe, Anzeige/Display-Format und natürlich auch im Preis unterscheiden.
Funktionsweise und Anzeigen-Systematik eines Satellitenempfängers für den Outdoor-/Tracking-Bereich
1/2005 · Navigation
Mit der Integration von Mobilfunktelefonen undSatellitenempfängern wird es in naher Zukunft dieMöglichkeit geben, den Standort des Nutzers zuermitteln und ihm dann Mehrwertinformationen
zu übertragen, so zum Beispiel den Hinweis aufeine Sehenswürdigkeit in der Nähe des aktuellenStandortes oder auch Hinweise auf Sport- undKulturveranstaltungen.
Komponente Ausgestaltung
Antenne integrierte Antennen (Patch-Microstrip-Antennen) oder anschließbare Außenantenne (Quadrifilar-Helix-Antennen)
Empfangs-Kanäle Multiplex-Empfänger oder Parallel-Empfänger
Display Ziffern-Display oder grafische Displays (s/w oder Farbe)
Tastatur Funktionstasten (für die wichtigsten Funktionen)
Stromversorgung Über Batterien oder Fahrzeuganschluss an 12-V-Spannungskreis
I/O Schnittstelle Schnittstelle zwischen GPS-Empfänger und externem Rechner (PC, Laptop, Palm)
Satelliten-Bordnavigationsempfänger (Luftfahrt)
� Kurzzeichen des nächsten Wegpunktes (WPT)� Sollkurs (BRG = Bearing) zum Wegpunkt� Entfernung (DST = Distance) zum Wegpunkt� vorauss. Ankunft (ETE = estimated time enroute)� aktueller Steuerkurs (TRK = Track)� aktuelle Geschwindigkeit (SPD = Speed in Knoten)
Satellitenempfänger aus der Seefahrt Satellitenempfänger im Landverkehr
� �
� � � �

1/2005 · Navigation 14
Grundfunktionen eines GPS-Empfängers
Seitenbezeichnung
1. Satellitenstatus-Seite
2. Navigations-Seite„Kompass-Seite“
3. Karten-Seite
4. Nachrichten/Alarm-Seite
Anzeigen/Parameter
Statusfeld (2D/3D Navigation)
Horizontalgenauigkeit EPE oderHorizontalgenauigkeit DOP
Skyview-Anzeige
grafische Darstellung einesMagnetkompasses
TRK (Track)
BRG (Bearing)
DST (Distance)
SPEED
Sonderfunktionen
Anzeige einer vereinfachtenRoutenskizze
Ausgabe von Warnmeldungenbzw. Signalisierung u. a. beiNotfällen
Erläuterungen zu den Anzeigen
2D Navigation bei Empfang von 3 Satelliten3D Navigation bei Empfang von 4 Satelliten
Estimated Position Error (in m)Dilution of Precision● günstige Sat. Positionen: Werte 1–3
Messgenauigkeit ca. 15 m● ungünstige Sat. Positionen: Werte 4–6
Messgenauigkeit ca. 100–300 m ● keine Sat. Position bestimmbar: Werte < 6
Messungen können nicht durchgeführtwerden.
stilisierte Darstellung des Himmels (Zenitsenkrecht über dem Standort im Mittelpunkt derAnzeige)Darstellung der relativen Sat. Positionen und Sat.Nummern sowie Anzeige der „Signalstärken“eines jeden Satelliten
Anzeige der Himmelsrichtungen N/E/S/W
aktueller Kurs in Grad
Sollkurs zum (nächsten) gewählten Wegpunkt (WPT)
Entfernung zum (nächsten) gewähltenWegpunkt (WPT)
aktuelle Geschwindigkeit (über Grund)
z. B. Kursabweichung, geschätzte Ankunftszeit,Zielannäherungsgeschwindigkeit
momentane PositionStartpunktZielpunktgewählte Wegpunkte
Poor Coverage (schlechter Empfang)APP (Approach = Annäherung an einenWegpunkt)CDI (Course Deviation Indicator = Abweichungvom Kurs)

15
„GALILEO“ – Einordnung in die Entwicklungvon Satellitennavigationssystemen
Die ersten zu Beginn der 60er-Jahre zu reinmilitärischer Nutzung entwickelten Satelliten-systeme waren TRANSIT (USA) und TSIKADA(UdSSR). Das TRANSIT System bestand aus sechsin polaren Umlaufbahnen operierenden Einheiten,die dem Nutzer mittels Dopplermessung diePositionsbestimmung ermöglichten. Eine 3D-Posi-tionsbestimmung war für bewegte Objekte nichtmöglich.
Im Jahr 1973 begannen die USA mit der Ent-wicklung des GPS-Vorläufers NAVSTAR GPS(Navigation Satellites with Time And RangingGlobal Positioning System); eine Parallelent-wicklung der UdSSR lautete auf den NamenGLONASS (GLObal NAvigation Satellite System).Das Raumsegment wurde bei GPS schrittweise aufzunächst 24 (aktuell 29) Satelliten ausgebaut, deren12-Stunden-Orbits in Bahnhöhen von 20.200 kmangesiedelt sind. Durch die spätere Freigabe einerzivilen Komponente (C/A-Code) konnten nebenden Militärs nun auch privatwirtschaftliche An-wender das System nutzen, allerdings halten sichdie Betreiber stets die Option offen, die System-genauigkeit (ca. 10–15 m) bewusst herunterzu-setzen. Eine solchermaßen permanent variierendeVerfälschung der Signale (Selective Availability)führt – wenn aktiviert – zu Positionsgenauigkeitenvon 100 m (95%) bis zu 300 m (5%).
Mit dem Aufbau des – im Gegensatz zu GPS reinzivil organisierten – europäischen Satellitennavi-gationssystems „GALILEO“ wird die Qualität vonOrtung und Navigation entscheidend verbessert.Ziel ist – gegenüber den bisherigen Satelliten-navigationssystemen – die Verfügbarkeit des Sys-tems zu steigern und die Messergebnisse durch eineReihe unterschiedlicher angebotener „Dienste“ fürden Anwender genauer zu machen.
Zur Geschichte:
Anfang der 90er-Jahre erwuchs bei den europäi-schen Verkehrsministern die Überlegung, sich ausder Abhängigkeit von einem durch die USAbetriebenen Satellitennavigationssystem (GPS) zubefreien. Im Dezember 1994 wurde in einer erstenGrundsatzerklärung der EU-Kommission beschlos-sen, ein eigenständiges europäisches Satellitennavi-gationssystem zu entwickeln, welches zu keinerZeit mit irgendwelchen Einschränkungen verbun-den sein sollte und gegenüber dem US-amerika-nischen GPS eine Reihe von Diensten für unter-schiedliche Nutzergruppen anbieten könnte. ImJahr 1999 wurde auf einer Konferenz der euro-päischen Verkehrsminister festgelegt, solch ein
europäisches System zu definieren. Im Jahr 2002wurde die Entwicklung des Systems durch den Ratder Verkehrsminister des Europäischen Rates be-schlossen.
Die Leitung des Projektes wurde bis zum Ende derEntwicklungs- und Validierungsphase auf einGemeinsames Unternehmen übertragen. Die po-litische Kontrolle wird über die Mitgliedstaaten derEuropäischen Union und der Europäischen Raum-fahrtagentur ESA ausgeübt. Die ESA selbst ist fürdie Entwicklung der Satelliten und der Boden-anlagen verantwortlich. Mit der Ausführung dereinzelnen Aufgaben sind eine Reihe von Insti-tutionen aus Wissenschaft, Forschung und derIndustrie aus allen europäischen Ländern beschäf-tigt.
Der Zeitplan für den Aufbau von „GALILEO“
(Stand: Dezember 2004)
Definitionsphase 1999–2002
Entwicklungsphase (inkl. Funktionstest) 2002–2008
erster Satellit im Orbit Ende 2005
weitere 3–4 Satelliten bis 2007
Ausbau des Systems auf 30 Satelliten 2009–2010
volle Operationsfähigkeit Ende 2010
1/2005 · Navigation

1/2005 · Navigation 16
Entwicklung, Aufbau und Betrieb von „GALILEO“
„GALILEO“ wird – laut Grundsatzerklärung der EU-Kommission – als Projekt in Form einer „Public PrivatePartnership“ (PPP) durchgeführt. Dies bedeutet, dass sichdie öffentliche Hand (Public) und die Industrie(privatwirtschaftliche Investoren) die Kosten fürEntwicklung, Bau und Einschuss des Raumsegmentes,sowie den Aufbau des Bodensegmentes in einem nochfestzulegendem Maße innerhalb dieser Partnerschaftteilen werden. Für den fortlaufenden Betrieb desGesamtsystems einschließlich der Erneuerung undModernisierung wäre ein privater Betreiber zuständig, derstaatlicherseits die Konzession erhält, für bestimmteDienste Nutzungsgebühren zu erheben.Es wird darauf hingewiesen, dass viele Voraussetzungenhierfür erst noch geschaffen werden müssen.
Stellenwert für die Europäische Industrie
Die Kosten für die Entwicklung undden Aufbau des Systems bis zur Inbe-triebnahme werden derzeit auf etwa 3,2Milliarden Euro geschätzt. Angesichtsder vielfältigen Einsatzmöglichkeiten lassen sichdiese hohen Investitionskosten sehr schnell amor-tisieren.
Die europäische Raumfahrtindustrie wird im Be-reich der Satellitennavigationstechnologie – ver-gleichbar mit der Erfolgsstory von Airbus gegen-über der Dominanz des US-amerikanischenHerstellers Boeing – zu den USA aufschließen undeinen eigenen Markt entwickeln. Dieser Markt wirdeine ganze Reihe von neuen Hochtechnologie-feldern erschließen, aus denen sowohl Produkte alsauch Dienstleistungen resultieren. Das Spektrumreicht vom Satellitenbau über die Nachrichten-technik, Mikroelektronik bis hin zur Raketen- undAntriebstechnik im Bereich von Trägerraketen-systemen.In vielen Bereichen der Industrie werden eineReihe von neuen Anwendungsgebieten mit dendamit verbundenen Wertschöpfungsketten ge-schaffen. Neben Chipherstellern werden in ersterLinie die Softwareentwickler mit der Program-mierung und Gestaltung anwenderfreundlicherAnwendungen beschäftigt sein. Zusätzlich werdenim Rahmen des Betriebs und der vielfältigen War-tungs- und Modernisierungsmaßnahmen inner-halb des Bodensegments eine Vielzahl hochquali-fizierter Arbeitsplätze in vielen Spezialdisziplinengeschaffen. Im Gesamtumfeld des zukünftigeneuropäischen Satellitennavigationssystems wirdeuropaweit ein Beschäftigungspotenzial von ca.150.000 qualifizierten Arbeitsplätzen erwartet.
Deutsches Engagement
Die Bundesrepublik Deutschland hat sich vonAnfang an für ein europäisches System stark ge-macht und immer mit vorangetrieben. Die Betei-
ligung der Bundesrepublik Deutschland bei derEntwicklung einer leistungsfähigen, innovativenund wirtschaftlich rentablen Satellitennavigationwird von staatlicher Seite vom Bundesministeriumfür Verkehr, Bau- und Wohnungswesen (BMVBW)wahrgenommen, welches die Bundesrepublik inden verschiedenen EU-Gremien vertritt. Das DLR-Raumfahrtmanagement ist im Auftrag des BMVBWin dem auf das Thema Navigation bezogenen ESA-Gremium tätig, vor allem, um die industriellenInteressen Deutschlands zu vertreten.Das große Engagement Deutschlands wird durchdie hohen finanziellen Beiträge in der EU und derESA unterstrichen. Damit konnte erreicht werden,dass der industrielle Hauptauftragnehmer für„GALILEO“ seinen Hauptsitz in Deutschland hat.Dadurch und mit Unterstützung von weiterennationalen Mitteln des Bundes und der Länder willman die Chance nutzen, um in Deutschland in den zukünftigen Wertschöpfungsbereichen mög-lichst viele neue Arbeitsplätze entstehen zu lassen.
GATE – Test- und Entwicklungsumgebung für„GALILEO“
Für das im Aufbau befindliche EuropäischeSatellitennavigationssystem wird derzeit imRahmen des vom Deutschen Zentrum für Luft- undRaumfahrt (DLR) beauftragten Vorhabens GATEeine bodengebundene Testumgebung errichtet,die sowohl die Entwickler von „GALILEO“-Empfangsgeräten als auch die Entwicklung vonneuen Anwendungen der Satellitennavigationunterstützen soll. Dazu werden in einem Testgebietin Süddeutschland von sechs erdgebundenenSendestationen aus Signale in ein ca. 25 km2
großes Areal abgestrahlt, wie sie auch später – vonden echten Navigationssatelliten ausgehend –empfangen werden können. Dadurch werdenNutzern aus Industrie und Forschung im GATE-Testgebiet sehr realitätsnahe Tests von Hardwareund Software bereits vor der Verfügbarkeit von„GALILEO“ ermöglicht. GATE soll im Herbst 2006seinen Betrieb aufnehmen.
17
„GALILEO“ – Systembeschreibung
Das Gesamtsystem „GALILEO“ umfasst folgendeglobale Komponente (Segmente):
Raumsegment
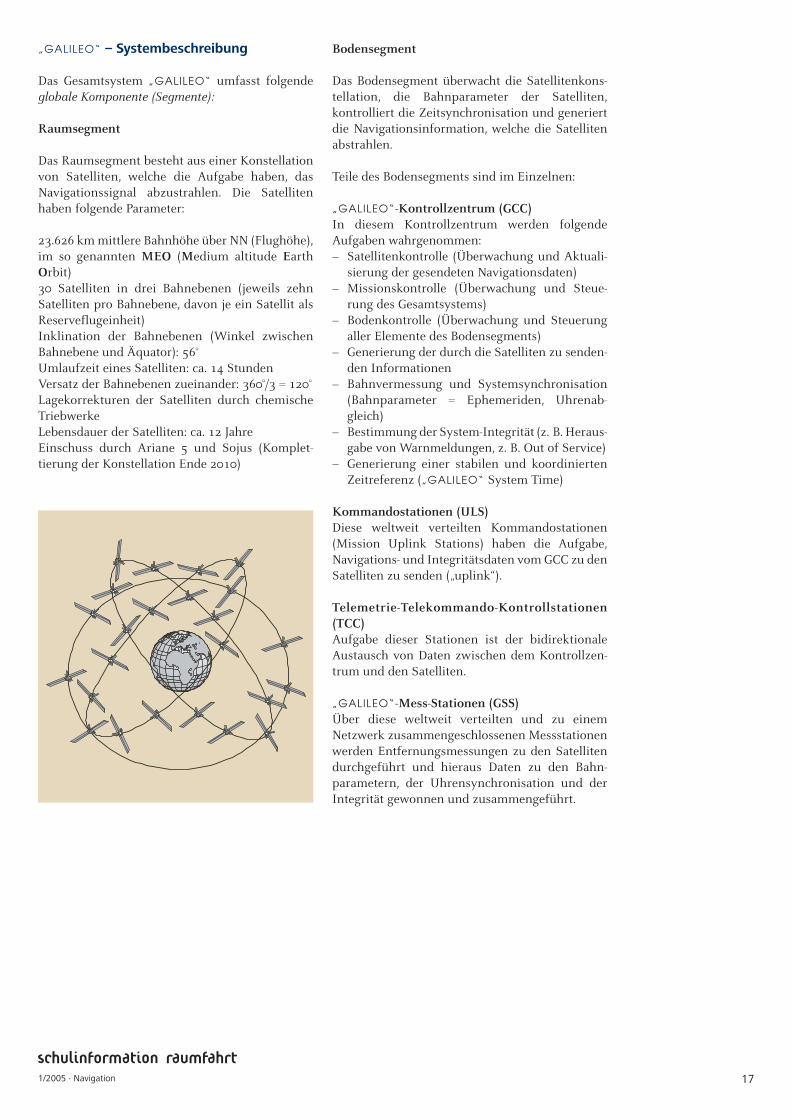
Das Raumsegment besteht aus einer Konstellationvon Satelliten, welche die Aufgabe haben, dasNavigationssignal abzustrahlen. Die Satellitenhaben folgende Parameter:
23.626 km mittlere Bahnhöhe über NN (Flughöhe),im so genannten MEO (Medium altitude EarthOrbit)30 Satelliten in drei Bahnebenen (jeweils zehnSatelliten pro Bahnebene, davon je ein Satellit alsReserveflugeinheit)Inklination der Bahnebenen (Winkel zwischenBahnebene und Äquator): 56°Umlaufzeit eines Satelliten: ca. 14 StundenVersatz der Bahnebenen zueinander: 360°/3 = 120°Lagekorrekturen der Satelliten durch chemischeTriebwerkeLebensdauer der Satelliten: ca. 12 JahreEinschuss durch Ariane 5 und Sojus (Komplet-tierung der Konstellation Ende 2010)
Bodensegment
Das Bodensegment überwacht die Satellitenkons-tellation, die Bahnparameter der Satelliten,kontrolliert die Zeitsynchronisation und generiertdie Navigationsinformation, welche die Satellitenabstrahlen.
Teile des Bodensegments sind im Einzelnen:
„GALILEO“-Kontrollzentrum (GCC)In diesem Kontrollzentrum werden folgendeAufgaben wahrgenommen:– Satellitenkontrolle (Überwachung und Aktuali-
sierung der gesendeten Navigationsdaten)– Missionskontrolle (Überwachung und Steue-
rung des Gesamtsystems)– Bodenkontrolle (Überwachung und Steuerung
aller Elemente des Bodensegments)– Generierung der durch die Satelliten zu senden-
den Informationen– Bahnvermessung und Systemsynchronisation
(Bahnparameter = Ephemeriden, Uhrenab-gleich)
– Bestimmung der System-Integrität (z. B. Heraus-gabe von Warnmeldungen, z. B. Out of Service)
– Generierung einer stabilen und koordiniertenZeitreferenz („GALILEO“ System Time)
Kommandostationen (ULS)Diese weltweit verteilten Kommandostationen(Mission Uplink Stations) haben die Aufgabe,Navigations- und Integritätsdaten vom GCC zu denSatelliten zu senden („uplink“).
Telemetrie-Telekommando-Kontrollstationen(TCC)Aufgabe dieser Stationen ist der bidirektionaleAustausch von Daten zwischen dem Kontrollzen-trum und den Satelliten.
„GALILEO“-Mess-Stationen (GSS)Über diese weltweit verteilten und zu einemNetzwerk zusammengeschlossenen Messstationenwerden Entfernungsmessungen zu den Satellitendurchgeführt und hieraus Daten zu den Bahn-parametern, der Uhrensynchronisation und derIntegrität gewonnen und zusammengeführt.
1/2005 · Navigation

1/2005 · Navigation 18
Nutzersegment
Das Nutzersegment beinhaltet die Gesamtheit aller(je nach Anwendungsgebiet unterschiedlich kon-zipierten) „GALILEO“ -Signalempfänger. Währendbei GPS nur zwischen zivilen und militärischenNutzern unterschieden wurde, unterscheidet daszukünftige europäische Satellitennavigationssystemdie Nutzer nach der Wahl der fünf unterschiedlichenangebotenen Dienste.
„GALILEO“ – Dienste
1. Open Service (OS)
Dieser „offene Dienst“ ist kostenfrei und für jeder-mann frei zugänglich. Er ist nutzbar zur weltweitenPositionsbestimmung und liefert Genauigkeitenvon 4 m (horizontal) und 8 m (vertikal) bei Ver-wendung von zwei Trägerfrequenzen; bei Verwen-dung von nur einer Trägerfrequenz liegen die Genauigkeiten bei 15 m (horizontal) und 35 m(vertikal).
2. Commercial Service (CS)
Als kommerziell konzipierter Dienst ist dieserkostenpflichtig, liefert jedoch durch den Zugriff aufzusätzliche Ortungssignale höhere Genauigkeitenfür die Ortsbestimmung
3. Safety-of-Life Service (SoL)
Dieser „sicherheitskritische Dienst“ ist dem OSgleichzusetzen; für die Nutzung kommen jedochnur Gruppen in Frage, die eine erhöhte Integri-tätsanforderung an das System haben (u. U. Zu-gangsbegrenzung auf die Zivilluftfahrt). Der SoL-Service muss innerhalb von 6 Sekunden einenAlarm auslösen und an die Empfänger übermitteln.
4. Public Regulated Service (PRS)
Dieser Dienst ist verschlüsselt und nur bestimmtenGruppen zugänglich (z. B. Polizei, Zivilschutz).
5. Search and Rescue Service (SAR)
Dieser Dienst soll es ermöglichen, in Notfällen diePosition eines Notrufsenders zu ermitteln, den Not-ruf über eine Bodenstation an Rettungsdienste wei-terzugeben und an den Havaristen eine Rückmel-dung über die Weitergabe des Notrufs zurückzu-schicken. Damit ist dieser Dienst – im Gegensatz zuden Diensten a bis d – ein bidirektionaler Nach-richtendienst.
Neben den globalen Systemkomponenten (Raum-segment, Bodensegment, Nutzersegment) gibt esnoch externe Komponenten und Schnittstellen zuanderen Diensten:
1. Regionale Komponenten
a. IMS (Integrity Monitoring Stations) messen dieIntegrität des Empfangssignals
b. ICC (Integrity Control Centers) übertragen dieIntegritätsinformation an das „GALILEO“- Kon-trollzentrum
c. EGNOS (European Geostationary OverlayService) ist ein satellitengestütztes Ergänzungs-system; es stellt von sich aus zusätzliche Infor-mationen bereit, um den Einsatz andererSatellitennavigationssysteme für sicherheits-kritische Bereiche durch die Verbesserung derGenauigkeit, Integrität und Kontinuität zuermöglichen.
2. Lokale Komponenten
Dies sind lokale Monitorstationen, die in Bereichenunzureichender Sichtbarkeit von Satelliten (z. B.Abschattung durch Gebäude oder Gelände) be-stimmten Nutzergruppen sowohl Navigationssig-nale als auch Integritätsinformationen liefern.Diese können z. B. durch Mobilfunk oder Radio-sender übertragen werden.
3. Search and Rescue (Schnittstelle zuminternationalen Such- und Rettungsdienst)
In allen Flugzeugen ist das Mitführen einesNotrufsenders (ELT = emergency locator trans-mitter) vorgeschrieben. Aber auch in anderenBereichen (z. B. der Seefahrt) kommen diese Senderzum Einsatz. Die Notrufsignale werden über deninternationalen Notdienst COSPAS-SARSAT durchSatelliten empfangen und an die entsprechendenregionalen Rettungsleitstellen weitergegeben. Mitder Einbeziehung von „GALILEO“ wird nun erst-mals auch eine Empfangsbestätigung und Kontroll-meldung an den Havaristen zurückgegeben. Damitwird das zukünftige europäische Satellitennaviga-tionssystem zu einem unterstützenden Teil desbestehenden Such- und Rettungsdienstes.
Galileo-

19
Einen Gesamtüberblick über die globalen Komponenten des zukünftigen europäischen Satellitennaviga-tionssystems „GALILEO“ sowie seine externen Komponenten und Schnittstellen gibt die folgendeDarstellung:
1/2005 · Navigation
„GALILEO“
„GALILEO“

1/2005 · Navigation
Die Schulinformation Raumfahrt wird herausgegeben vom:
Projektleitung:Dr. Hartmut Ripken (DLR Raumfahrtmanagement)Yvonne Nini (DLR Raumfahrtmanagement)
Fachliche Beratung:René Kleeßen (DLR Raumfahrtmanagement)Dr. Dieter Hausamann (Leiter DLR_School_Lab, Oberpfaffenhofen)Dr. Johann Furthner (DLR Institut für Kommunikation und Navigation, Oberpfaffenhofen) Mitarbeiter des DLR_School_Lab, Oberpfaffenhofen
Pädagogische Beratung:Dr. Winfried Schmitz (CJD Jugenddorf-Christophorusschule, Königswinter)Dr. Joachim Wallasch (Tannenbusch-Gymnasium, Bonn)
Text: James Welker
Grafiken: Michele DiGaspare
Bildnachweis:S. 2 (Mitte): © AKG-images, Berlin; S. 11 (oben), S. 13 (oben): © Airbus; S. 4, S. 5 (oben links): © BayerischesLandesvermessungsamt, München; S 1 (oben), S. 3 (unten), S. 8, S. 15, S. 16 (oben): © DLR; S. 12 (unten), S. 13 (Mitterechts), S. 14 (oben, Mitte, unten): © GPS GmbH Gräfelfing; S. 10 (unten): © Thomas Lusmöller, ÖPNV online –Nahverkehr Frankfurt am Main; S.1 (unten), S. 2 (oben & unten), S. 10 (Mitte) S. 11 (oben), S. 12 (oben & Mitte): © Picture-Alliance, Frankfurt am Main
Realisation und Redaktion: Bildungsverlag EINS GmbH, Troisdorf
Literaturhinweise:– Dodel, H. & Häupler, D.: Satellitennavigation, „GALILEO“ , GPS, GLONASS, Integrierte Verfahren. Heidelberg, 2004.– Höh, R.: GPS Outdoor-Navigation. Bielefeld, 2001.– Mansfeld, W.; Satellitenortung und Navigation. Grundlagen & Anwendung globaler Satellitennavigationssysteme. 2.
Auflage. Wiesbaden, 2004.– Urban, K. & Paul, G.: Physik im Wandel. Hamburg, 2000.
Raumfahrt und Satellitennavigation als Thema im DLR_School_Lab Oberpfaffenhofen
Das DLR hat die so genannten DLR_School_Labs aufgebaut, in denen Schülerinnen undSchüler durch selbstständiges Experimentieren an Themenkreise aus der Luft- und Raumfahrtherangeführt werden. Diese Einrichtungen bieten einen praxisbezogenen Einblick in die For-schungs- und Entwicklungsarbeiten der Institute des DLR, die die einzelnen DLR_School_Lab-Projekte direkt betreuen. Die DLR_School_Labs sehen sich damit als Medium der Interes-sensweckung bei den Schülerinnen und Schülern und als Bindeglied zwischen Wissenschaftund Schule. Weil der Stellenwert eines neuen europäischen Satellitennavigationssystems für die deutsche Industrie,Wissenschaft und Forschung erheblich ist, bildet die Satellitennavigation eines der Schwerpunktthemen im DLR_School_Lab Oberpfaffenhofen.
Die DLR_School_Labs erreichen Sie im Internet unter folgender Adresse:http://www.schoollab.dlr.de/schoollab/


![MSA Deutsch 2015 Schülerheft - Schleswig-Holstein...viel tauge, aber als Mechaniker bin ich nicht übel.“ 3 „Warum er ausgerechnet heute an sie [die Großmutter] denkt, ist mir](https://static.fdokument.com/doc/165x107/5e2d5cfa8887ff78e7108685/msa-deutsch-2015-schlerheft-schleswig-holstein-viel-tauge-aber-als-mechaniker.jpg)

![Nachhaltige Stadtentwicklung 2008 Richtlinie Richtlinie[1].pdf · 2.1 Maßnahmen der kleinräumigen Wirtschaftsförderung: Stärkung und Stabilisierung der Städte, Quartiere und](https://static.fdokument.com/doc/165x107/5f6bd6d12fb2b80f6460d6c6/nachhaltige-stadtentwicklung-2008-richtlinie-richtlinie1pdf-21-manahmen.jpg)






![Messen von kleinräumigen Verformungen in einem Rutschhang · WJP, Geodätische Woche, Köln, 2010 [20101006_GeodWoche.ppt] 3 © Ingenieurgeodäsie und Messsysteme Rutschhang Gradenbach](https://static.fdokument.com/doc/165x107/5d25ce3688c993e5378c38ee/messen-von-kleinraeumigen-verformungen-in-einem-rutschhang-wjp-geodaetische.jpg)