Drohnen und Multicopter bauen - mitp.de · Quadcopter, daher wird sich das Buch auf diesen Typ...
17
Transcript of Drohnen und Multicopter bauen - mitp.de · Quadcopter, daher wird sich das Buch auf diesen Typ...


5
Inhaltsverzeichnis
Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1 Die Geschichte der Drohne. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.1 Was ist eine Drohne?. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.1.1 Drei Umgebungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
1.1.2 Anatomie einer Drohne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.2 Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2 Eine Galerie selbst gebauter Drohnen . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.1 Fahrradfelge als Quadcopter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.2 Mini-Quadcopter aus dem 3D-Drucker . . . . . . . . . . . . . . . . . . . . . . . . 24
2.3 Wäscheleinen-Flitzer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.4 Wasserfahrzeuge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.5 Funkferngesteuertes Luftschiff . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.6 Quadcopter mit Kameras an Bord . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2.7 Funkferngesteuertes Dreirad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.8 Zusammenlegbarer Quadcopter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.9 Mini-Quadcopter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.10 Funkferngesteuertes Boot aus dem 3D-Drucker . . . . . . . . . . . . . . . . . 30
2.11 Tricopter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.12 Rover mit Mecanum-Rädern . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.13 Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
3 Eine Auswahl kommerzieller Drohnen und Bausätze . . . . . . . . . . . . 35
3.1 Parallax ELEV-8 Quadcopter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.2 DJI Phantom 2 Vision+ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.3 OpenROV . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.4 Actobotics Nomad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.5 Brooklyn Aerodrome Flack . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.6 Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
4 Bau eines Quadcopters I: Auswahl des Flugwerks . . . . . . . . . . . . . . . 47
4.1 Welches Flugwerk? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4.1.1 Auswahl kommerzieller Produkte. . . . . . . . . . . . . . . . . . . . . . 49
4.1.2 Flugwerk im Eigenbau . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
© des Titels »Drohnen und Multicopter bauen« (ISBN 9783958452794) 2016 by mitp Verlags GmbH & Co. KG, Frechen. Nähere Informationen unter: http://www.mitp.de/279

Inhaltsverzeichnis
6
4.2 Projekt 1: MakerBeam-Flugwerk. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
4.2.1 MakerBeam . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.2.2 Bauteile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4.2.3 Arbeitsschritte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4.3 Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
5 Projekt Raketen-Drohne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
5.1 Modellraketentechnik im Hobbybereich . . . . . . . . . . . . . . . . . . . . . . . 61
5.2 Arduino-Einmaleins . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
5.3 Projekt 2: Daten sammelnde Rakete . . . . . . . . . . . . . . . . . . . . . . . . . . 69
5.3.1 Stückliste für den Bau der Daten sammelnden Rakete . . . . . 69
5.3.2 Arbeitsschritte beim Bau der Daten sammelnden Rakete . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
5.3.3 Programmierung des Arduinos. . . . . . . . . . . . . . . . . . . . . . . . 74
5.4 Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
6 Bau eines Quadcopters II: Motoren und Propeller . . . . . . . . . . . . . . . 77
6.1 Auswahl der Motoren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
6.1.1 Außenläufer kontra Innenläufer . . . . . . . . . . . . . . . . . . . . . . . 78
6.1.2 Bürstenmotoren kontra bürstenlose Motoren . . . . . . . . . . . . 78
6.1.3 Wechselstrom kontra Gleichstrom . . . . . . . . . . . . . . . . . . . . . 79
6.2 Auswahl der Propeller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
6.2.1 Propelleradapter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
6.3 Projekt 3: Motoren und Propeller montieren. . . . . . . . . . . . . . . . . . . . 83
6.3.1 Bauteile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
6.3.2 Arbeitsschritte bei der Montage von Motoren und Propellern . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
6.3.3 Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
7 Projekt Luftschiff . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
7.1 Funkfernsteuerung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
7.1.1 Sender . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
7.1.2 Empfänger. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
7.2 ESC (Electronic Speed Controller, elektronischer Geschwindigkeitsregler) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
7.3 Projekt 4: Luftschiff . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
7.3.1 Bauteile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
7.3.2 Arduino und Zubehör . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
7.3.3 Arbeitsschritte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
© des Titels »Drohnen und Multicopter bauen« (ISBN 9783958452794) 2016 by mitp Verlags GmbH & Co. KG, Frechen. Nähere Informationen unter: http://www.mitp.de/279

Inhaltsverzeichnis
7
7.4 Autonome Steuerung per Arduino. . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
7.4.1 Code. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
7.5 Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
8 Bau eines Quadcopters III: Flugsteuerung . . . . . . . . . . . . . . . . . . . . . 105
8.1 ESC-Kenntnisse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
8.1.1 Gebräuchliche ESCs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
8.1.2 ESCs programmieren. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
8.2 Empfänger . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
8.3 Flugsteuerung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
8.3.1 Beispiele für Flugsteuerungen . . . . . . . . . . . . . . . . . . . . . . . . 113
8.4 Einbau der Flugelektronik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
8.4.1 Bauteile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
8.4.2 Einbau der ESCs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
8.4.3 Einbau der Flugsteuerung . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
8.4.4 Einbau des Empfängers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
8.5 Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
9 Der Arbeitstisch des Drohnenbauers . . . . . . . . . . . . . . . . . . . . . . . . . . 119
9.1 Entwurf. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
9.2 Schrauben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
9.3 Messen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
9.4 Schneiden und Bohren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
9.5 Verdrahtung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
9.6 Befestigung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
9.7 Computergestützte Werkzeuge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
9.8 Löten und Lötausrüstung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
9.8.1 Lötausrüstung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
9.8.2 Arbeitsschritte beim Löten. . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
9.9 Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
10 Bau eines Quadcopters IV: Energieversorgung. . . . . . . . . . . . . . . . . . 133
10.1 Auswahl des Akkus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
10.1.1 Akkutypen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
10.2 Verwendung von Rundsteckern . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
10.2.1 Warum Rundstecker verwenden? . . . . . . . . . . . . . . . . . . . . . . 136
10.2.2 Bauteilliste . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
10.2.3 Arbeitsschritte beim Einbau der Rundstecker . . . . . . . . . . . . 137
© des Titels »Drohnen und Multicopter bauen« (ISBN 9783958452794) 2016 by mitp Verlags GmbH & Co. KG, Frechen. Nähere Informationen unter: http://www.mitp.de/279

Inhaltsverzeichnis
8
10.3 Bau des Kabelbaums . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
10.3.1 Bauteile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142
10.3.2 Arbeitsschritte beim Bau des Kabelbaums . . . . . . . . . . . . . . . 142
10.4 Anschluss von Flugsteuerung und Empfänger . . . . . . . . . . . . . . . . . . 146
10.5 Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
11 Projekt Wasserfahrzeug . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149
11.1 Wasserfahrzeuge und Elektronik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150
11.1.1 Nachteile von Wasserfahrzeugen . . . . . . . . . . . . . . . . . . . . . . 150
11.1.2 Vorteile von Wasserfahrzeugen . . . . . . . . . . . . . . . . . . . . . . . . 151
11.2 Wasserfeste Elektronik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
11.2.1 Butterbrotdose. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
11.2.2 Produktreihe Pelican 1000 . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
11.2.3 Abdichten eines Röhrchens . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
11.3 Vermaschte XBee-Netzwerke . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
11.4 Projekt Plastikflaschenboot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156
11.4.1 Bauteile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
11.4.2 Bau der Drohne. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
11.4.3 Bau der Fernsteuerung. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167
11.4.4 Programmierung des Plastikflaschenboots . . . . . . . . . . . . . . 169
11.5 Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
12 Bau eines Quadcopters V: Zubehör . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
12.1 Zubehör für den Quadcopter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174
12.1.1 Kamera . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174
12.1.2 First-Person-Video (FPV) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175
12.1.3 Landekufen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 176
12.1.4 Fallschirm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177
12.1.5 Schutzabdeckung oder Kuppel . . . . . . . . . . . . . . . . . . . . . . . . 177
12.1.6 Propellerschutz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 179
12.2 Projekt: Einbau von Zubehör in den Quadcopter . . . . . . . . . . . . . . . . 179
12.2.1 Montage der Kamerahalterung . . . . . . . . . . . . . . . . . . . . . . . . 180
12.2.2 Montage der Landekufen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183
12.2.3 Montage der Schutzabdeckung . . . . . . . . . . . . . . . . . . . . . . . . 185
12.3 Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187
© des Titels »Drohnen und Multicopter bauen« (ISBN 9783958452794) 2016 by mitp Verlags GmbH & Co. KG, Frechen. Nähere Informationen unter: http://www.mitp.de/279

Inhaltsverzeichnis
9
13 Bau eines Rovers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 189
13.1 Vor- und Nachteile von Bodenfahrzeugen. . . . . . . . . . . . . . . . . . . . . . 190
13.1.1 Vorteile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 190
13.1.2 Nachteile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 190
13.2 Fahrgestelltypen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191
13.2.1 Tamiya . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192
13.2.2 mBot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193
13.2.3 Arduino Robot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193
13.2.4 Actobotics Bogie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 194
13.3 Navigation per RFID-Transponder. . . . . . . . . . . . . . . . . . . . . . . . . . . . 195
13.4 Projekt: RFID-gesteuerter Rover . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 196
13.4.1 Bauteile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 197
13.4.2 Arbeitsschritte. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 197
13.4.3 Programmierung des RFID-gesteuerten Rovers . . . . . . . . . . 211
13.5 Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 216
14 Bau eines Quadcopters VI: Software . . . . . . . . . . . . . . . . . . . . . . . . . . 217
14.1 Software zur Flugsteuerung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 217
14.1.1 OpenPilot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 218
14.1.2 MultiWii . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 218
14.1.3 APM Planner 2.0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 219
14.1.4 eMotion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 220
14.1.5 AR.Freeflight. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 221
14.1.6 3DR Solo App . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 221
14.2 Konfiguration der MultiWii . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222
14.3 Der Sketch zur Steuerung der MultiWii . . . . . . . . . . . . . . . . . . . . . . . 223
14.4 Prüfliste vor dem ersten Flug . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 225
14.5 Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 226
A Glossar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 227
B Bezugsquellen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233
Stichwortverzeichnis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 235
© des Titels »Drohnen und Multicopter bauen« (ISBN 9783958452794) 2016 by mitp Verlags GmbH & Co. KG, Frechen. Nähere Informationen unter: http://www.mitp.de/279

15
Kapitel 1
Die Geschichte der Drohne
Stellen Sie sich ein Auto ohne Fahrer oder ein Flugzeug ohne Piloten vor. Die dasFahrzeug steuernde Person ist durch einen Computer ersetzt worden – Sie habenes mit einer Drohne zu tun.
Über Drohnen wird in den Medien dauernd berichtet, insbesondere über unbe-mannte Luftfahrzeuge (Unmanned Aerial Vehicles, UAVs), die Raketen auf Zieleabfeuern, die Tausende von Kilometern von der Person entfernt sind, die auf denKnopf zum Abschuss des Flugkörpers drückt. Allerdings werden nicht alle Droh-nen im Krieg eingesetzt. Es gibt auch friedliche Drohnen.
Durch Haushaltskürzungen bei der NASA gerieten derartige ferngesteuerte Sondenins Rampenlicht – vor allem die Mars-Rover (Abbildung 1.1). Diese ferngelenktenFahrzeuge haben weitaus mehr geleistet, als die NASA-Ingenieure zu hoffen wagten.
Abb. 1.1: Künstlerische Darstellung eines Mars-Rovers (Bild: NASA/JPL/Cornell University)
© des Titels »Drohnen und Multicopter bauen« (ISBN 9783958452794) 2016 by mitp Verlags GmbH & Co. KG, Frechen. Nähere Informationen unter: http://www.mitp.de/279

Kapitel 1Die Geschichte der Drohne
16
Der staatliche Einsatz von Drohnen ist eine Sache, aber nutzen auch AmateureDrohnen? Die Antwort lautet ja. Normale Hobbyisten, Bastler und Besitzer kleinerGeschäfte bauen und betreiben ihre eigenen Drohnen. Beispielsweise verwendenWeinbauern mit einer Kamera ausgerüstete Quadcopter (Miniaturhelikopter mitvier Rotoren), um den Zustand der Belaubung ihrer Weinstöcke zu überwachen,ohne das Haus verlassen zu müssen. Andere Unternehmer haben das Geschäftmit Luftbildern auf den Kopf gestellt, weil nicht mehr die Notwendigkeit besteht,Helikopter normaler Größe einzusetzen. Amazon und andere Firmen experimen-tieren damit, Ware durch Drohnen auszuliefern, und die Deutsche Post transpor-tiert seit Kurzem eilige Medikamente per Drohne auf die Nordseeinsel Juist.
Dieses Buch möchte Sie in den gegenwärtigen Stand der Technik von Quadcop-tern, UAVs, ROVs (Remotely-operated Vehicles, ferngesteuerte Fahrzeuge) und ähn-lichen Fahrzeugen einführen und Ihnen die Möglichkeit bieten, eigene einfacheDrohnen-Projekte in die Tat umzusetzen, beispielsweise eine Rakete mit einemBeschleunigungsmesser an Bord, eine schwimmfähige Drohne oder ein Luft-schiff, das durch Heliumballons zum Fliegen gebracht wird. Gleichzeitig erkläreich dabei nach und nach sorgfältig den Bau eines Quadcopters, damit Sie in derLage sind, ihn nachzubauen oder sogar einen noch besseren zu konstruieren.
1.1 Was ist eine Drohne?
Zunächst einmal muss klargestellt werden: Die Definition von »Drohne« ist nichtbesonders genau.
Drohnen verdanken ihren Namen den männlichen Honigbienen, die blindlingsihre Aufgabe erledigen, so als ob sie von einer weit entfernten Bienenkönigingesteuert würden. Auf ähnliche Weise funktioniert auch ein unbemanntes Flug-zeug, das von einem Mikrocontroller gesteuert wird, der als Autopilot program-miert ist, wenn auch mithilfe der Technik.
Als Drohnen bezeichnete Geräte lassen sich in zwei Kategorien aufteilen. Zumeinen gibt es autonome Roboter, bei denen der Operator nur bei Bedarf eingreift.Die übrige Zeit werden sie von einem Autopiloten gesteuert, sodass ein einzigerOperator theoretisch mehrere Fahrzeuge bedienen könnte. Sollte es notwendigsein, kann der Operator den Autopiloten jederzeit deaktivieren und selbst die Kon-trolle übernehmen.
Zum anderen gibt es Quadcopter und andere Helikopter-artige Fluggeräte, diehäufig ebenfalls als Drohnen bezeichnet werden, obwohl sie meistens gar nichtautonom, sondern lediglich funkferngesteuert sind. Dass beide Definitionen ineinen Topf geworfen wurden, könnte daran liegen, dass in jüngster Zeit Flug-geräte mit mehreren Rotoren zu einer hervorragenden Plattform für automatischgesteuertes, Mikrocontroller-basiertes autonomes Fliegen geworden sind.
© des Titels »Drohnen und Multicopter bauen« (ISBN 9783958452794) 2016 by mitp Verlags GmbH & Co. KG, Frechen. Nähere Informationen unter: http://www.mitp.de/279

1.1Was ist eine Drohne?
17
Hobbyisten betreiben ganze Flotten von Quadcoptern, entwickeln neue Spiele, beidenen die Drohnen gegeneinander antreten, und sie bauen in ihre Entwicklungenalles nur Erdenkliche ein, von Kameras über Barometer bis hin zu Ultraschall-sensoren zur Entfernungsmessung. Mittlerweile hat sich ein riesiger Markt entwi-ckelt, denn viele Teenager und jüngere Kinder verwenden Baukastensysteme wieLEGO Mindstorms und VEX, um autonome Fluggeräte zu bauen.
Wir erleben derzeit die Anfänge eines coolen Phänomens und können ein Teildavon sein. Bauen wir also ein paar Drohnen!
1.1.1 Drei Umgebungen
Drohnen werden anhand der Umgebung unterschieden, in der sie sich bewegen:
� Unbemannte Luftfahrzeuge (Unmanned Aerial Vehicles, UAVs)
� Ferngesteuerte Fahrzeuge (Remote-operated Vehicles, ROVs)
� Rover
Diese drei Drohnentypen werden in den folgenden Abschnitten erläutert.
Unbemannte Luftfahrzeuge (UAVs)
Dieser Begriff beschreibt Drohnen-Flugzeuge (wie den in Abbildung 1.2 gezeigtenPredator) und -Helikopter. Vereinfacht ausgedrückt: Wenn das Gerät fliegt, wird esals UAV bezeichnet. Das unter Hobbyisten beliebteste UAV ist der Quadrotor oderQuadcopter, daher wird sich das Buch auf diesen Typ konzentrieren.
Abb. 1.2: Die Predator-Drohne hat Drohnen und ihre Funktionsweise einer breiten Öffentlichkeit bekannt gemacht (Quelle: U.S. Air Force).
© des Titels »Drohnen und Multicopter bauen« (ISBN 9783958452794) 2016 by mitp Verlags GmbH & Co. KG, Frechen. Nähere Informationen unter: http://www.mitp.de/279
Kapitel 1Die Geschichte der Drohne
18
Die meistens UAVs werden durch die von einer Handfernsteuerung gesendetenFunksignale gesteuert. Einige verwenden zur Kommunikation auch WLAN oderMobilfunktechnologie. Viele der Geräte verfügen außerdem über einen GPS-Emp-fänger, damit ihre Flugroute auf einer Landkarte dargestellt werden kann.
Ferngesteuerte Fahrzeuge (ROVs)
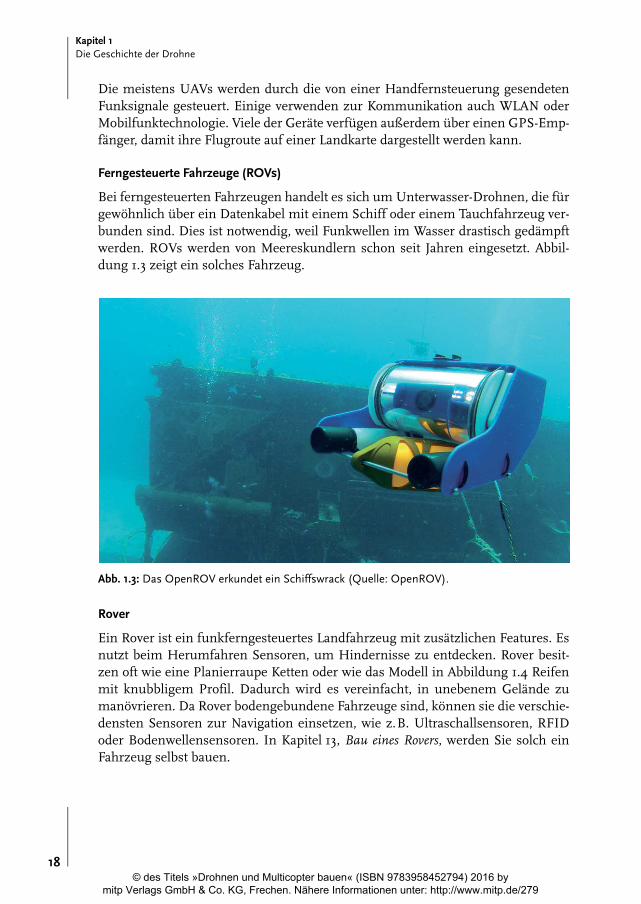
Bei ferngesteuerten Fahrzeugen handelt es sich um Unterwasser-Drohnen, die fürgewöhnlich über ein Datenkabel mit einem Schiff oder einem Tauchfahrzeug ver-bunden sind. Dies ist notwendig, weil Funkwellen im Wasser drastisch gedämpftwerden. ROVs werden von Meereskundlern schon seit Jahren eingesetzt. Abbil-dung 1.3 zeigt ein solches Fahrzeug.
Abb. 1.3: Das OpenROV erkundet ein Schiffswrack (Quelle: OpenROV).
Rover
Ein Rover ist ein funkferngesteuertes Landfahrzeug mit zusätzlichen Features. Esnutzt beim Herumfahren Sensoren, um Hindernisse zu entdecken. Rover besit-zen oft wie eine Planierraupe Ketten oder wie das Modell in Abbildung 1.4 Reifenmit knubbligem Profil. Dadurch wird es vereinfacht, in unebenem Gelände zumanövrieren. Da Rover bodengebundene Fahrzeuge sind, können sie die verschie-densten Sensoren zur Navigation einsetzen, wie z.B. Ultraschallsensoren, RFIDoder Bodenwellensensoren. In Kapitel 13, Bau eines Rovers, werden Sie solch einFahrzeug selbst bauen.
© des Titels »Drohnen und Multicopter bauen« (ISBN 9783958452794) 2016 by mitp Verlags GmbH & Co. KG, Frechen. Nähere Informationen unter: http://www.mitp.de/279

1.1Was ist eine Drohne?
19
Abb. 1.4: Dieser mit einer Kamera ausgerüstete Rover besitzt für unebenes Gelände geeignete knubblige Reifen (Quelle: Geoffrey Irons).
1.1.2 Anatomie einer Drohne
Alle selbst gebauten Drohnen unterscheiden sich voneinander, die meisten habenjedoch auch viele Gemeinsamkeiten. Bei der folgenden Liste handelt es sich umgängige Quadcopter-Komponenten. Sehen Sie sich dazu Abbildung 1.5 an, umfestzustellen, wo die Teile beim fertigen Projekt hingehören.
Abb. 1.5: Der Quadcopter besteht aus vielen verschiedenen Bauteilen (Quelle: Steve Lodefink).
© des Titels »Drohnen und Multicopter bauen« (ISBN 9783958452794) 2016 by mitp Verlags GmbH & Co. KG, Frechen. Nähere Informationen unter: http://www.mitp.de/279

Kapitel 1Die Geschichte der Drohne
20
A. Propeller – Ein Quadcopter besitzt typischerweise zwei normale Propeller undzwei sogenannte Pusher-Propeller, die in entgegengesetzter Richtung rotieren.
B. Motoren – Quadcopter verwenden sowohl Gleichstrom- als auch Wechselstrom-motoren. Es gibt zahllose Varianten in allen Preisklassen und wohlhabendenBastlern stehen Spitzenmotoren zur Verfügung. In Kapitel 6, Bau eines Quad-copters II: Motoren und Propeller, werde ich einige für Hobbyisten geeigneteMotoren ausführlich vorstellen.
C. Elektronische Geschwindigkeitsregler (Electronic Speed Controllers, ESCs) – ESCswandeln Gleichstrom in Wechselstrom für bürstenlose Motoren um und steu-ern die Energieversorgung des Motors. Für jeden Motor ist ein eigener ESCerforderlich. Die Firmware eines ESCs kann modifiziert werden, um das Verhal-ten des Motors zu ändern. Viele ESCs sind beispielsweise so konfiguriert, dassder Motor nicht abrupt gestoppt, sondern langsam heruntergeregelt wird.
D. Flugsteuerung – Die Flugsteuerung assistiert beim manuellen Fliegen durchdie Automatisierung bestimmter Funktionen. Viele Flugsteuerungen verfügenbeispielsweise über einen Lagesensor, der die horizontale Ausrichtung derDrohne stabilisiert. Viele Flugsteuerungen führen außerdem bestimmte vor-programmierte Aktionen aus, falls der Quadcopter außer Reichweite der Funk-fernsteuerung gerät.
E. Flugwerk – Die Bezeichnung für das Chassis der Drohne lautet Flugwerk. DasFlugwerk besteht aus einer Reihe verschiedener Elemente, dazu gehören etwadie Motoraufhängung und ein Gehäuse, das die Elektronik beherbergt bzw. einePlatte, auf der sie befestigt wird.
F. Akkusatz – Oftmals ein Lithium-Polymer-Akku (LiPo) zum Antrieb der Propel-ler, der auch die übrige Bordelektronik mit Spannung versorgt.
G. Tragrahmen der Kamera – Auf dieser drehbaren Scheibe ist eine Kamera mon-tiert, die der Operator während des Flugs mithilfe von Servomotoren drehenund kippen kann.
H. Landekufen – Quadcopter mit einem Kameratragrahmen oder anderen hervor-stehenden Objekten benötigen Landekufen, auf denen die Drohne steht, wennsie sich am Boden befindet. Drohnen ohne solch einen Tragrahmen kommenoft auch ohne Kufen aus und setzen beim Landen einfach mit dem gesamtenFlugwerk auf.
I. Markierung der Vorder- oder Rückseite – Der Quadcopter-Operator muss wis-sen, wo sich die Vorderseite der Drohne befindet – und das ist nicht immerleicht erkennbar. Hierfür sind verschiedene Lösungen verfügbar, wie z.B. far-bige Streben, LEDs oder Licht reflektierende Materialien. Bei dem Quadcopterin Abbildung 1.5 markiert ein farbiger Ball die Rückseite des Luftfahrzeugs. Ent-scheidend ist hier nur, dass die Markierung für Sie einen Sinn ergibt.
© des Titels »Drohnen und Multicopter bauen« (ISBN 9783958452794) 2016 by mitp Verlags GmbH & Co. KG, Frechen. Nähere Informationen unter: http://www.mitp.de/279

1.2Zusammenfassung
21
J. Videokamera (Ich-Perspektive) – Kamera mit geringer Auflösung, die Bilder ausder Ich-Perspektive per Funk zu einer Bodenstation übermittelt.
K. Empfänger – Dieses kleine Kästchen übersetzt die empfangenen Funksignale inAnweisungen für die Flugsteuerung.
1.2 Zusammenfassung
In diesem Kapitel haben Sie Drohnen, deren typische Ausstattung und die ver-schiedenen Komponenten kennengelernt. In Kapitel 2, Eine Galerie selbst gebauterDrohnen, werden Sie erfahren, was andere Drohnenbauer mit dieser Technologieangestellt haben. Sie werden staunen, welch eine Vielfalt an Projekten es gibt!
© des Titels »Drohnen und Multicopter bauen« (ISBN 9783958452794) 2016 by mitp Verlags GmbH & Co. KG, Frechen. Nähere Informationen unter: http://www.mitp.de/279

235
Stichwortverzeichnis
Numerisch3D-Drucker 24, 1263DRobotics 221
AAbisolieren 138Abisolierzange 124ABS (Kunststoff) 198Abstandsbolzen 185Actobotics Bogie 194Actobotics Nomad 41, 197Akku
Energiedichte 134Entladungsrate 134Kapazität 134Sicherheitsmaßnahmen 136Spannung 134Typ 134
Akkusatz 20Akkuschrauber 123Aluminiumröhren 48Anker 78Antikorrosionsspray 155APM Planner 2.0 219AR.Freeflight 221ArduCopter 114Arduino
autonome Steuerung 100Bibliothek 75Grundlagen 64Micro 64Motor-Shield 211Robot 193Sketch 74UNO 64Zubehör 91
Ardupilot 114, 219ArduPlane 114ArduRover 114Außenläufer 78Autopilot-Software 218
BBalsaholz 61Basis 161Befestigung 125Beschleunigungssensor 74Blattsteigung 80Bodenfahrzeug 190Bohren 123Brooklyn Aerodrome Flack 44Bürstenmotor 78Butterbrotdose 152
CChumby One (Mikrocontroller) 32CNC-Fräse 127Contour ROAM (Kamera) 174
DDatenlogger 70, 71Diode 162DJI Phantom 38Dreirad 28Dremel 123Dritte Hand 129Drohne
Absturz 177als Sportgerät 175Aufbau 19Bausatz 35Definition 16Deutsche Post 16Fahrradfelge 23Flugwerk 48Galerie 23Geschichte 15Kategorie 16Umgebung 17
Durchgangsprüfer 125
© des Titels »Drohnen und Multicopter bauen« (ISBN 9783958452794) 2016 by mitp Verlags GmbH & Co. KG, Frechen. Nähere Informationen unter: http://www.mitp.de/279

Stichwortverzeichnis
236
EElectronic Speed Controller Siehe ESCElektronik
wasserfeste 152Elektronikarbeiten 124Emitter 161eMotion 220Empfänger 21, 89, 110Entlötlitze 129Entlötpumpe 129ESC
Abschaltmodus 109Akkutyp 109Bremse 109Einbau 116Programmierkarten 110Programmierung 108Startmodus 109
ESC (Electronic Speed Controller) 20, 79, 89, 106
Estes Rockets 61
FFahrgestelltyp 191Fallschirm 63, 177Feinmechanik-Schraubendreher 121Ferngesteuerte Unterwasserfahrzeuge 13Flack 44Flatterband 63Flone 52Flugelektronik 115Flugsteuerung 20, 105, 112, 146
Einbau 117Flugwerk 20, 49
3D-Drucker 51Bauteile 55Eigenbau 50Holz 52MakerBeam 53Material 49
FPV (First-Person-Video) 175Fritzing 119Funkfernsteuerung 87
GGeschwindigkeitsregler Siehe ESCGetriebe 78Gewindekleber 85Gleichstrommotor 79
GoPro-Kamera 174GPS 18
HHeißkleber 126HitCase 181Hochachse Siehe YawHöhenmesser 69HoverflyOPEN 113
IInbus-Schlüssel 121Inkscape 120Innenläufer 78Innensechskantschlüssel 121Inverter 80
KKabelbaum 99, 141Kabelbinder 126Kamerahalterung 180Kameratragrahmen 113Kanäle 88, 111Klebeband (doppelseitig) 126Klettverschlussbänder 126Knarrenschlüssel 121Kollektor 162Kolophoniumlötdraht 129Kontermutter 95
LLadestecker 99Landekufen 20, 49, 176, 183Längsachse Siehe RollLaserschneider 126LED 157Leviathan 62Lineal 122Lithium-Akkus 135Litze 142Lötauge 130Lötausrüstung 125, 129Luftschiff 26, 90
MMakerBeam 47, 54Mars-Rover 15, 191Maßband 122mBot 193
© des Titels »Drohnen und Multicopter bauen« (ISBN 9783958452794) 2016 by mitp Verlags GmbH & Co. KG, Frechen. Nähere Informationen unter: http://www.mitp.de/279

Stichwortverzeichnis
237
Mecanum-Räder 32Messen 122Messingschwamm 129Metallsäge 123Mikrocontroller 115Mitnehmer 81Modellraketentechnik 61Mosquito 62Motor
Auswahl 77Außenläufer 78bürstenloser 79Getriebe 78Gleichstrom 20, 77Halterung 93Innenläufer 78Korrosion 150Wechselstrom 20
Motorhalterung 203Motor-Shield 211MSP (MultiWii Serial Protocol) 224Multimeter 125Multitool 120MultiWii 114, 147, 218MultiWii-Konfiguration 222MultiWii-Sketch 223
NNetzgerät 124Nickel-Akkus 134Nunchuk 114
OOpenBeam 55OpenPilot 218OpenROV 18, 39, 154
PParallax 35Parrot 221Pelican 153PING-Sketch 101Pitch (Querachse) 111Plastikflaschenboot 156Predator 17Projektentwurf 119Propeller 20, 80Propelleradapter 81Propellerschutz 179
Prop-Saver 81Prüfliste 225Pusher-Propeller 20, 80PVC-Rohre 154
QQuadcopter 47
ELEV-8 35Flugwerk 47Funkfernsteuerung 111Gewicht 50Größe 49Kamera 16, 27, 174Kamerahalterung 180Landekufen 183Stabilität 50Zubehör 173zusammenlegbarer 28
Querachse Siehe Pitch
RRakete 61Raketenbausatz 61Raketenflügel 63Raketenkopf 62Raketenrumpf 63Raketentriebwerk 61Reibung 151RFID-Breakout-Board 197RFID-Sensor 189RFID-Transponder 195Roboter
als Wetterstation 190autonomer 16Fahrgestell 48schwimmender 149
Röhren abdichten 154Roll (Längsachse) 111ROV 13, 16, 18Rover 18, 190
Bereifung 42Rückkopplung 162Rundstecker 136, 142
SSchablonenmesser 123Scheinwerfer 41Schieblehre 122Schlauchhalterung 164
© des Titels »Drohnen und Multicopter bauen« (ISBN 9783958452794) 2016 by mitp Verlags GmbH & Co. KG, Frechen. Nähere Informationen unter: http://www.mitp.de/279
Stichwortverzeichnis
238
Schneiden 123Schrauben 120Schraubendreher 122Schraubensicherungslack 85Schraubzwinge 129Schrumpfschlauch 137Schutzabdeckung 177, 185Scratch 193Seitenschneider 124Sender 88SenseFly 220Sensorkalibrierung 223Servo 94, 157, 207Shield 114Sicherungsmutter 85Signalfrequenz 89Sketch 64SketchUp 120Skycat-Rettungssystem 177Slow-Fly-Propeller 81Solo-App 221Speicherkarte 74Spitzzange 121Startrampe 61Stator 78Steckbrett 70Superkleber 126
TTamiya 192Taster 157, 169Thingiverse 24Tragrahmen 20Transistor 157Transpondercode 196Treibsatz 63Tricopter 31
UUAV 13, 15, 17Ultraschallsensor 92, 101, 197Unbemanntes Luftfahrzeug 13U-Träger 198
VVerzinnen 130, 139
WWäscheleinen-Flitzer 25Wasserfahrzeug 25, 149Wasserflächen 150Wechselrichter 80Wechselstrommotor 79Werkzeug 119Widerstand 157WinGUI 223Winkelmesser 122WLAN 18
XXBee 26XBee-Modul 156XBee-Netzwerk 155XBee-Reichweite 156XT60-Steckverbinder 144
YYaw (Hochachse) 111
ZZigBee-Protokoll 156Zubehör 173Zündvorrichtung 63
© des Titels »Drohnen und Multicopter bauen« (ISBN 9783958452794) 2016 by mitp Verlags GmbH & Co. KG, Frechen. Nähere Informationen unter: http://www.mitp.de/279