Ein Beitrag zum Einsatz - uni-due.de · hes Konzept aus Somit ist der univ erselle Einsatz des Ein...
41
Transcript of Ein Beitrag zum Einsatz - uni-due.de · hes Konzept aus Somit ist der univ erselle Einsatz des Ein...

Ein Beitrag zum Einsatzselbsteinstellender PI�Regler mitFuzzy�Logik am Beispiel einer
Bauteilpr�ufmaschine
Michael Berger
Forschungsbereicht Nr� �����
Me��� Steuer� und Regelungstechnik
�Ubersicht� In diesem Bericht werden Ein� und Nachstellverfahren zur automatischen
Anpassung der Regelparameter eines PIReglers mit FuzzyLogik fur eine Bauteilprufma�
schine vorgestellt und am Versuchstrager dokumentiert� Die Ein� und Nachstellverfahren
dienen zur Erstinbetriebnahme der Anlage mit dem PIRegler und der Nachstellung der
Regelparameter beim Wechsel der Betriebspunkte und zahlen zu den selbsteinstellenden
Verfahren im geschlossenen Regelkreis�
Gerhard�Mercator�Universitat �GH Duisburg
Me��� Steuer� und Regelungstechnik
Prof� Dr��Ing� H� Schwarz

Inhaltsverzeichnis I
Inhaltsverzeichnis
Nomenklatur II
� Einleitende �Ubersicht �
� Beschreibung des Versuchstr�agers �
��� Konventionelle Reglereinstellverfahren � � � � � � � � � � � � � � � � � � � � �
��� Reglereinstellverfahren mit der FuzzyLogik � � � � � � � � � � � � � � � � � �
� Einstellverfahren klassischer PI�Regler mit der Fuzzy�Logik �
�� Einstellverfahren nach dem Muster des WendetangentenVerfahrens � � � � �
�� Einstellverfahren uber zwei Merkmale � � � � � � � � � � � � � � � � � � � � � ��
� Modi�kation des Adaptions Algorithmus � � � � � � � � � � � � � � � � � � � ��
� Zusammenfassung und Ausblick �
Literaturverzeichnis ��
Anhang ��
A Me�ergebnisse ��
Nomenklatur II
Nomenklatur
Ak � Flache unter der kten FuzzyReferenzmenge des Ausgangs
c � Federrate
cI � Relativer IAnteil
cirTuning � Ausgangsvariable der FuzzyEinstellebene
c��� � Begrenzung des Ein�u�bereiches der FuzzyReferenzmengen
e � Regelabweichung
eblb� e� � bleibende Regelabweichung
emax � maximale Uberschwingweite
Fist � IstKraft
Fsoll � SollKraftRe�t�dt � Integral der Regelabweichung
k � diskretes Zeitargument
kC � Verstarkung�kC � Verstarkung nach der Berechnung des FuzzyAlgorithmus
k�alt�C �
�alte� Verstarkung ��I � ��te Iteration�
k�neu�C �
�neue� Verstarkung ��I�te Iteration�
ki � Skalierungsfaktor
kI � integrale Verstarkung �PIRegler�
kp � proportionale Verstarkung �PIRegler�
krTuning � Ausgangsvariable der FuzzyEinstellebene
mi � Modalwert der iten FuzzyReferenzmenge
mu � Anzahl der FuzzyReferenzmengen des Ausgangs
ov � Uberschwingweite
t � Zeit
tan � Anregelzeit�tan � Anschwingzeit
tein � Einschwingzeit
ti � Nachstellzeit�ti � Nachstellzeit nach der Berechnung des FuzzyAlgorithmus
t�alt�i �
�alte� Nachstellzeit ��I � ��te Iteration�
t�neu�i �
�neue� Nachstellzeit ��I�te Iteration�
Tu � Verzugszeit
Ts � Anstiegszeit
u � Stellgro�e
w � Fuhrungsgro�e
W � Wendepunkt der Wendetangente
y � Systemantwort
y� � Beharrungswert der Systemantwort
Nomenklatur III
Mengen�
A � FuzzyMenge
A � Menge der FuzzyReferenzmengen
D � De�nitionsbereich
DN � De�nitionsbereich normierter Gro�en �DN � ���� ���
D�N � De�nitionsbereich normierter positiver Gro�en �D�
N � ���� ���
XEblbi�Eblb�
� i�Eblb�te FuzzyReferenzmenge bzgl� Eblb
XTani�Tan�
� i�Tan�te FuzzyReferenzmenge bzgl� Tan
XEmaxi�Emax�
� i�Emax�te FuzzyReferenzmenge bzgl� Emax
AOvi�Ov�
� i�Ov�te FuzzyReferenzmenge bzgl� Ov
A�i��� � i���te FuzzyReferenzmenge bzgl� �
Y Tii�Ti�
� i�Ti�te FuzzyReferenzmenge bzgl� Ti
Y KC
i�KC�� i�KC�te FuzzyReferenzmenge bzgl� KC
ZCirTuningi�CirTuning �
� i�CirTuning�te FuzzyReferenzmenge bzgl� CirTuning
ZKrTuningi�KrTuning �
� i�KrTuning�te FuzzyReferenzmenge bzgl� KrTuning
Unscharfe Gr�o�en�
Eblb � fuzzi�zierte Gro�e eblbEmax � fuzzi�zierte Gro�e emax
KC � fuzzi�zierte Gro�e kCOv � fuzzi�zierte Gro�e ovTan � fuzzi�zierte Gro�e tanTi � fuzzi�zierte Gro�e ti� � fuzzi�zierte Gro�e �
Vektoren und Matrizen�
p� p� � Reglerparametervektor
x � Vektor der Eingangsgro�en des FuzzyAlgorithmus
Griechische Buchstaben�
� � Erfulltheitsgrad
�A � linke Spannweite der FuzzyReferenzmenge
�A � rechte Spannweite der FuzzyReferenzmenge
Nomenklatur IV
� � Einregelverhalten
� � Toleranzband
Funktionen�
�A � Zugehorigkeitsfunktion zur FuzzyMenge A
� U�k � Zugehorigkeitsfunktion der FuzzyMenge �Uk� die Ergebnis aller Regeln
mit der FuzzyReferenzmenge Uk ist
�� U�k � Zugehorigkeitsfunktion der FuzzyMenge��Uk� welcher Ausgang
des FuzzySystems ist
Operatoren�
max ��� � MaximumOperator
min ��� � MinimumOperator
� � Element von
�� � kein Element von
���T � transponierte Gro�eP� SummationWa
i� � MaximumOperator uber aGro�en
D � Di�erenzierer
� � Allquantor

� Einleitende �Ubersicht �
� Einleitende �Ubersicht
Ziel des regelungstechnischen Entwurfes ist die gezielte Beein�ussung realer dynamischer
Systeme� Dazu wird einerseits eine Regelstruktur und andererseits ein Bewertungskriteri�
um z� B� uber ein Gutefunktional �Schwarz ����� fur die Gute der entworfenen Struktur
benotigt� Die ideale Losung ware ein Optimalregler� d� h� eine durch nichts zu verbes�
sernde Struktur� In den meisten Fallen wird man auf die Strukturoptimalitat verzichten
mussen� da die wichtigsten Grundvorrausetzungen zur Aufstellung des dynamischen Op�
timierungsproblems� namlich die exakte Modellierbarkeit des zu steuernden�regelnden
Systems in einer Zustandsraumdarstellung nicht erfullt werden kann� In der Praxis hilft
man sich an dieser Stelle mit vorhandenen und bewahrten parametrischen Reglerstruk�
turen� wobei die Parametereinstellung entweder auf dem der Parameteroptimierung oder
auf der Basis heuristischer Faustformeln und Tuningvorschriften �Kuhn ����a� mit dem
Ziel einer hinreichenden Gute� welches hier behandelt wird� erfolgt�
Zur Uberprufung der Dauerfestigkeit von Bauteilen la�t sich in einer Prufmaschine mit
Hilfe eines hydraulischen Zylinders ein gewunschtes Belastungspro�l erzeugen� Die dy�
namischen und statischen Eigenschaften der Regelstrecke werden ma�geblich durch die
zu untersuchenden Proben bestimmt und sind daher in der Regel nicht exakt bekannt�
so da� die Parameter der Kraftregelung an das veranderliche Streckenverhalten angepa�t
werden mussen� Der zeitliche Verlauf der Belastungskraft wird mit einem konventionellen
PIRegler geregelt� Die Anpassung erfolgt zur Zeit von Hand� z� B� nach heuristischen
Faustformeln oder Tuningvorschriften und soll automatisiert werden� Der Einsatz der au�
tomatischen Inbetriebnahmehilfe dient daher zur Verkurzung der Inbetriebnahmezeit und
damit zur Senkung der Inbetriebnahmekosten� Als Voraussetzungen fur die Akzeptanz
eines solchen Inbetriebnahmeverfahrens seitens der Anwender sind folgende Punkte zu
beachten�
� einfache Handhabung�
� moglichst einfaches und verstandliches Konzept�
� wenig oder keine Bedienparameter und
� keine oder geringe Anforderungen an das Streckenverhalten �
Das selbsteinstellende Verfahren dient wahrend der Inbetriebnahmephase der Anlage oder
auf gesonderten Wunsch des Anwenders eine geeignete Reglereinstellung zu gewinnen� Hie�
bei wird die Reaktion des Prozesses auf ein Testsignal �Fuhrungssprung� ausgewertet� Die
Auswertung beschrankt sich dabei auf wenige Merkmale� Anhand dieser werden die Re�
gelparameter sukzessiv eingestellt� In diesem Bericht werden zwei verschiedene Ein� und
Nachstellverfahren zur automatischen Anpassung der Regelparameter eines PIReglers
mit FuzzyLogik �Zadeh ����� fur eine Bauteilprufmaschine vorgestellt und am Versuch�
strager dokumentiert� Die Ein� und Nachstellverfahren dienen zur Erstinbetriebnahme der
� Einleitende �Ubersicht �
Anlage mit dem PIRegler und der Nachstellung der Regelparameter beim Wechsel der
Betriebspunkte und zahlen zu den selbsteinstellenden Verfahren im geschlossenen Regel�
kreis� Die Ein� und Nachstellverfahren verlangen nur� da� die Regelstrecke stabil ist und
zeichnen sich durch ein einfaches und verstandliches Konzept aus� Somit ist der universelle
Einsatz des Ein� und Nachstellverfahrens fur verschiedene Bauteilprufmaschinen gegeben�
wobei entsprechend der Regelstrecke und den Anforderungen Gutekriterien wie Uber�
schwingweite� statische Regelabweichung und Anregelzeit festgelegt werden konnen� Die
Parameter des PIReglers werden dabei sukzessiv im geschlossenen Regelkreis eingestellt�
Im Gegensatz dazu konnen die meisten konventionellen Ein� und Nachstellverfahren nur
angewandt werden� wenn die Regelstrecke eine oder mehrere gro�e Zeitkonstanten besitzt
und�oder die Sprungantwort einen sformigen Verlauf aufweist� womit die Einsatzfahig�
keit der meisten konventionellen Ein� und Nachstellverfahren auf bestimmteRegelstrecken
begrenzt ist�
Im Abschnitt � wird der Versuchstrager der Bauteilprufmaschine mit seinen Me�ein�
richtungen vorgestellt� Danach werden kurz einige aus der Literatur bekannte konven�
tionelle Einstellverfahren fur PIDRegler bzw� PIRegler vorgestellt �Ziegler und Nichols
����� Chien� Hrones und Reswick ����� Klein� Hartmut und Pandit ����� Latzel ���
und Kuhn ����b� und auf ihre Anwendbarkeit bezuglich der Bauteilprufmaschine un�
tersucht� Der Abschnitt befa�t sich mit den von Tlili ���� � und von Jorissen ������
optimierten� entwickelten FuzzyEinstellverfahren konventioneller PIRegler nach dem
Muster des WendetangentenVerfahrens und dem von Chatziioannidis ������ angepa�ten
von Pfei�er ������ entwickelten FuzzyEinstellverfahren� Beide Verfahren wurden bereits
in der Simulation mit dem Simulationsprogramm Hyvos ��� der Firma Mannesmann
Rexroth erfolgreich getestet� Die Verfahren zeichnen sich dadurch aus� da� sie mit sehr
wenigen Merkmalen �zwei bis drei� und Iterationsschritten �Anpassungsschritten� �funf
bis zehn� zur Einstellung der Regelparameter auskommen� Im Vergleich zum erstellten
FuzzyEinstellverfahren von Zarneckow ���� �� welches mehr als sechs Merkmale und
mehr als �� Iterationsschritte benotigt� In diesem Bericht wird die Leistungsfahigkeit der
beiden FuzzyEinstellvefahren am realen Proze� einer Bauteilprufmaschine dokumentiert�
Der Bericht schlie�t mit einer Zusammenfassung und einem Ausblick in Abschnitt ��
� Beschreibung des Versuchstr�agers
� Beschreibung des Versuchstr�agers
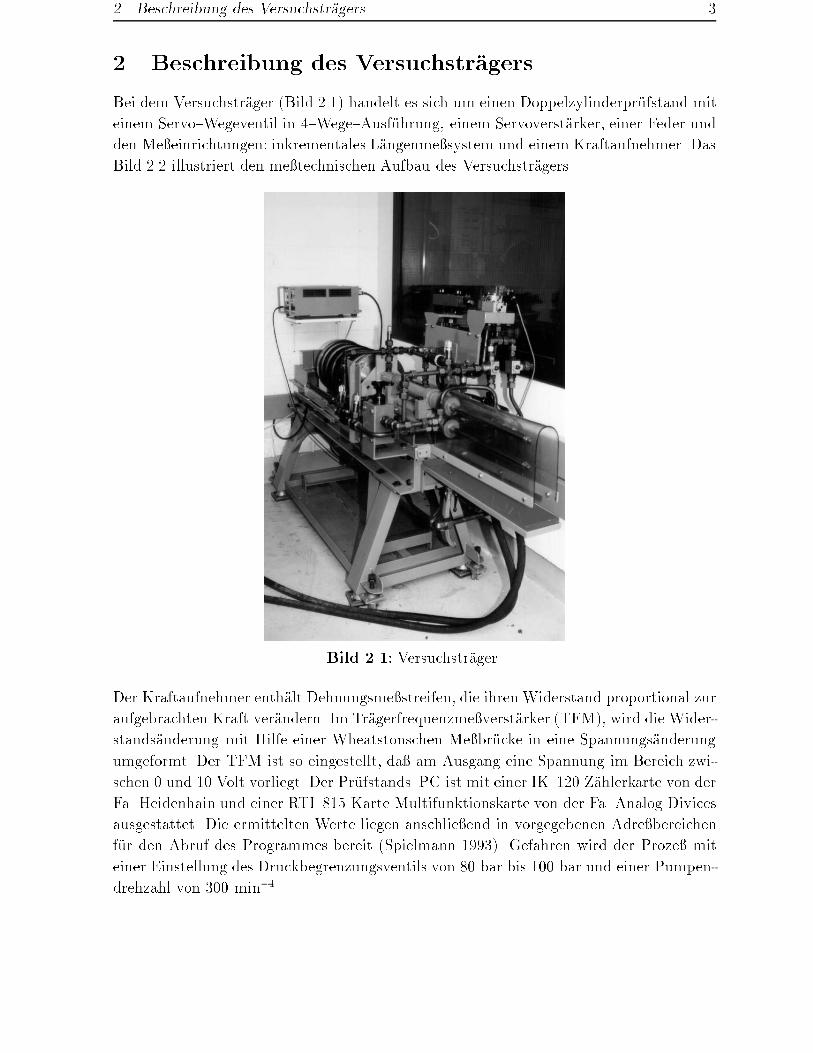
Bei dem Versuchstrager �Bild ���� handelt es sich um einen Doppelzylinderprufstand mit
einem ServoWegeventil in �WegeAusfuhrung� einem Servoverstarker� einer Feder und
den Me�einrichtungen� inkrementales Langenme�system und einem Kraftaufnehmer� Das
Bild ��� illustriert den me�technischen Aufbau des Versuchstragers�
Bild � �� Versuchstrager
Der Kraftaufnehmer enthalt Dehnungsme�streifen� die ihren Widerstand proportional zur
aufgebrachten Kraft verandern� Im Tragerfrequenzme�verstarker �TFM�� wird die Wider�
standsanderung mit Hilfe einer Wheatstonschen Me�brucke in eine Spannungsanderung
umgeformt� Der TFM ist so eingestellt� da� am Ausgang eine Spannung im Bereich zwi�
schen � und �� Volt vorliegt� Der PrufstandsPC ist mit einer IK��� Zahlerkarte von der
Fa� Heidenhain und einer RTI��� Karte Multifunktionskarte von der Fa� Analog Divices
ausgestattet� Die ermittelten Werte liegen anschlie�end in vorgegebenen Adre�bereichen
fur den Abruf des Programmes bereit �Spielmann ��� �� Gefahren wird der Proze� mit
einer Einstellung des Druckbegrenzungsventils von �� bar bis ��� bar und einer Pumpen�
drehzahl von �� min���

� Beschreibung des Versuchstr�agers �
M Kraftaufnehmer
TFM
RTI���
PC
DA
IK���
P� PT
A B
c
y
Bild � �� Schematischer Aufbau des Versuchstragers

� Beschreibung des Versuchstr�agers �
��� Konventionelle Reglereinstellverfahren
Bei der Inbetriebnahme von Regelungen sind hau�g uber die Regelstrecke nur gerin�
ge Kenntnisse vorhanden� Auch ist nicht immer und uberall ein Datenerfassungssystem
implementiert� um die Regelstrecke zu identi�zieren und einen Regler anzugeben� Daher
mu� man sich mit der Streckenubergangsfunktion begnugen� um mit deren Hilfe geeignete
Regelparameter zu ermitteln �Latzel ��� �� Die bekanntesten konventionellen Einstellver�
fahren beruhen darauf� da� man die Streckenubergangsfunktion durch die Kenngo�en
Proportionalbeiwert Ks� Anstiegszeit Ts und der Verzugszeit Tu beschreibt� Die empirisch
aus einer Vielzahl von Regelkreisuntersuchungen gefundenen Einstellungsregeln von Zieg�
ler und Nichols ������ haben sich zum Teil in der Praxis bewahrt� Jedoch konnen diese
Einstellverfahren nicht an jeder Strecke zur Anwendung kommen�Zum einen konnen einige
Prozesse aus technischen Grunden �Sicherheit� Verschlei�� nicht bis an ihre Stabilitats�
grenze gefahren werden und zum anderen besitzt nicht jede Strecke gro�e Zeitkonstanten�
so da� eine Approximation des Systemverhaltens durch ein System erster Ordnung mit
Totzeit nicht zu rechtfertigen ist� So kann z� B� das Verfahren von Sowa ������ zur Selbst�
einstellung von PIReglern� welches vom Grundgedanken her eine Automatisierung des
Wendetangentenverfahrens nach Ziegler und Nichols ist� nicht verwendet werden� Das Ver�
fahren eignet sich besonders fur Prozesse mit den folgenden dynamischen Eigenschaften�
� stabile o�ene Strecke�
� reelle Pole in der linken sHalbebene �ohne imaginaren Anteil� und
� gro�e Zeitkonstanten�
Grundsatzlich wird auch hier eine signi�kante Ersatztotzeitkonstante Tu zur Bestimmung
der Regelparameter benotigt� Da die Bauteilprufmaschine ein System ohne Ausgleich ist
�o�ene Strecke�� sehr kleine Zeitkonstanten besitzt und ein schwingungsfahiges Verhalten
aufweisen kann� eignet sich das Verfahren von Sowa ������ zur automatischen Selbstein�
stellung von PIReglern fur diesen Proze� nicht� Auch die Chien�Hornes�ReswickRegeln
�Wendetangentenverfahren� �Chien� Hornes und Reswick ����� erfordern eine nicht zu
vernachlassigbare Ersatztotzeit der Strecke� Neuere Verfahren� wie das von Latzel ���� ��
liefert zwar sehr gute Ergebnisse� erfordert jedoch ein Nachschlagen in Tabellen� Man
kann nicht durch rasches Betrachten der Sprungantwort auf die Regelparameter schlie�
�en� Die Einstellregeln fur PIDRegler nach der TSummenRegel von Kuhn �����b�
ergeben vergleichbare Ergebnisse hinsichtlich der zu erzielenden Regelgute wie das Ver�
fahren von Latzel ���� � �Kuhn ����b� und haben sich in der Praxis an verschiedenen
Strecken bewahrt� Es wird jedoch zur Auswertung der Einstellregeln die sogenannte s
formige Sprungantwort benotigt und ist somit fur den Proze� der Bauteilprufmaschine
nicht geeignet�

� Beschreibung des Versuchstr�agers �
��� Reglereinstellverfahren mit der Fuzzy�Logik
Eine Art der Reglereinstellung beinhaltet das onlineTuning des Reglers im geschlos�
senen Kreis� So kann die Reaktion der Regelgro�e auf sprungformige Anderungen der
Fuhrungsgro�en beobachtet und die Regelparameter� beginnend z� B� von kleinen Wer�
ten� sukzessiv nachgestellt werden� Um diesen Vorgang zu automatisieren� bietet es sich
an� die dabei benutzten�Faustregeln� mit Hilfe der FuzzyLogik zu beschreiben� In den
folgenden zwei Abschnitten werden zwei verschiedene FuzzyAlgorithmen zur Selbstein�
stellung von PIReglern vorgestellt und ihre Leistungsfahigkeit an dem beschriebenen
Versuchstrager dokumentiert� wobei nur das von Chatziioannidis ������ stark modi�zier�
te Verfahren von Pfei�er ������ unabhangig von der Anfangseinstellung des PIReglers
eine voll automatische Reglereinstellung realisiert� welche zu einer hinreichenden Gute der
Sprungantwort fuhrt� In Bild �� ist schematisch die Struktur der Selbsteinstellung des
PIReglers mit der FuzzyEinstellebene dargestellt� In beiden FuzzyAlgorithmen wird
der IstKraftverlauf fur sprungartige Anderungen des SollKraftverlaufes ausgewertet�
jedoch mit unterschiedlichen Merkmalen� Die FuzzyAlgorithmen sind auf die Selbstein�
stellung eines PIReglers zugeschnitten� da unter Verwendung eines PIDReglers schon
bei sehr kleiner Vorhaltezeit tv des DAnteils die Regelgro�e zu Schwingungen neigt�
M Kraftaufnehmer
P� PT
A B
c
Fuzzy
Einstellebene
PIRegler
Fist
Fsoll
Bild � �� Schematische Struktur der Selbsteinstellung des PIReglers im Regelkreis mit
der FuzzyEinstellebene

� Einstellverfahren klassischer PI�Regler mit der Fuzzy�Logik �
� Einstellverfahren klassischer PI�Regler mit der
Fuzzy�Logik
Die folgenden vorgestellten Einstellverfahren werden zur o�line Adaption der PIRegler�
parameter �selbsteinstellende Verfahren im geschlossenen Regelkreis� fur den Versuch�
strager einer Bauteilprufmaschine eingesetzt� Hierbei werden die Parameter eines idealen
PIReglers
u�t� � kP e�t� kI
Z t
�e�t�dt � ���
bzw� in Standardform
u�t� � kC
�e�t�
�
ti
Z t
�e�t�dt
�� ���
mit den Verstarkungen kC � der Nachstellzeit ti mit Hilfe der FuzzyLogik nachgestellt� Der
Vorteil dieser Ansatze liegt in der einfachen Erweiterbarkeit bestehender konventioneller
PIRegler um die Einstellkomponenten �Kroll ��� ��
��� Einstellverfahren nach dem Muster des Wendetangenten�
Verfahrens
Bei der Beurteilung der Gute einer Regelung erweist es sich als zweckma�ig� den zeitlichen
Verlauf der Regelgro�e y�t� zu betrachten� Eine typische Antwort eines schwingungsfahi�
gen Regelungskreises auf eine sprungformige Erregung der Fuhrungsgro�e ist im Bild
�� dargestellt� Zur naheren Beschreibung dieser Fuhrungsubergangsfunktion werden die
folgenden Begri�e eingefuhrt�
� Die maximale �Uberschwingweite emax gibt den Betrag der maximalen Regelabwei�
chung an� die nach erstmaligem Erreichen des Sollwertes ���� !� auftritt�
� Die Anstiegszeit Ts ergibt sich aus dem Schnittpunkt der Tangente im Wendepunkt
W von y�t� mit der �! und ���!Linie�
� Die Verzugszeit Tu ergibt sich aus dem Schnittpunkt der Wendetangente mit der
tAchse�
� Die Anregelzeit tan ist der Zeitpunkt� bei dem erstmalig der Sollwert ���� !� erreicht
wird� Es gilt naherungsweise
tan � Tu Ts �
� Die bleibende Regelabweichung eblb � e��

� Einstellverfahren klassischer PI�Regler mit der Fuzzy�Logik �
t
y�t�
Wendetangente
W
emaxeblb
Tu Ts
�����
TuTstanemax
eblb
tan
� � �� ���
���
���
��
���
���
���
VerzugszeitAnstiegszeitAnregelzeit
bleibende Reglabweichungmaximale Uberschwingweite
Bild � �� Merkmale der Sprungantwort
Von den hier eingefuhrten Gro�en kennzeichnet emax die Dampfung des Systems und tanbzw� Tu und Ts die Dynamik des Regelkreisverhaltens� wahrend die bleibende Regelab�
weichung eblb das statische Verhalten charakterisiert� Zur Ein und Nachstellung der
Regelparameter p � �kp� kI � bzw� p� � �kC � ti� des PIReglers wird die maximale Uber�
schwingweite emax� die Anregezeit tan � Tu Ts und die bleibende Regelabweichung eblbverwendet� Diese drei Merkmale werden anhand der Sprungantwort des Systems bestimmt
und dem FuzzyAlgorithmus als Eingangsgro�en zugefuhrt� Uber diese drei Merkmale der
Sprungantwort berechnet der FuzzyAlgorithmus die Verstarkung �kC und die Nachstell�
zeit �ti� Die Regelparameter des PIReglers werden dann uber
kC � k�neu�C � �kC k
�alt�C � � �
bzw�
ti � t�neu�i � �ti t
�alt�i � ���
berechnet�

� Einstellverfahren klassischer PI�Regler mit der Fuzzy�Logik �
Fuzzi�zierung�
Nachdem aus dem Verlauf der Sprungantwort die drei Merkmale der Regelgro�e bestimmt
wurden� werden sie durch entsprechende Skalierungsfaktoren keblb� ktan und kemax multi�
plikativ auf einen normierten De�nitionsbereich DN bzw� D�N gebracht und anschlie�end
uber FuzzyEinermengen fuzzi�ziert �Wang ������
De�nition � �Bertram u� a� �����
Eine FuzzyEinermenge A ist eine FuzzyMenge� deren Zugehorigkeitsfunkti�
on �A nur an einer Stelle x� von Null verschieden ist� das hei�t� es gilt x � D
�A�x� � � fur x � x�
und
�A�x� � � fur alle x �� x� � �
Durch die Fuzzi�zierung uber FuzzyEinermengen erhalt man die unscharfen Merkma�
le Eblb� Tan und Emax �fuzzi�zierte Gro�en�� Die fuzzi�zierten Gro�en wurden zunachst
von Tlili ���� � uber je funf FuzzyReferenzmengen XEblbi�Eblb�
�XTani�Tan�
und XEmaxi�Emax�
�mit
i�Eblb� � i�Tan� � i�Emax� � �� � � � � �� partitioniert und in einer anschlie�enden Arbeit
von Jorissen ������ auf drei FuzzyReferenzmengen optimiert �mit i�Eblb� � i�Tan� �
i�Emax� � �� � � � � �� So konnte die Regelbasis des FuzzyAlgorithmus von �� relationalen
Regeln auf � relationale Regeln reduziert werden� welches eine Minimierung der Rechen�
zeit zur Auswertung des FuzzyAlgorithmus bedeutet� Die FuzzyReferenzmengenwerden
uber stuckweise linerare Zugehorigkeitfunktionen beschrieben�
FuzzyReferenzmenge als Dreieck�
�A �x� �
�����������
� fur x �� �c�� c��x� c�m� c�
fur x � �c��m�
� fur x � mc� � x
c� �m fur x � �m� c��
� ���
mit c� � f��� �g� c� � f�� �� �g� m � f�� �� �g� A �nXEblb
� �XEblb� �XTan
� � XEmax�
ound
x � �Eblb� Tan� Emax��
FuzzyReferenzmenge als halbes DreieckR�
�A � �x� �
�������� fur x �� �m� c��
� fur x � mc� � x
c� �m fur x � �m� c��� ���

� Einstellverfahren klassischer PI�Regler mit der Fuzzy�Logik ��
mit c� � �� �� m � �� A �nXTan
� �XEmax�
ound x � �Tan� Emax��
FuzzyReferenzmenge als halbes TrapezL�
�A �x� �
������ fur x � c�x� c�m� c�
fur x � �c��m�
� fur x � m
� ���
mit c� � �� �� m � �� A �nXEblb
�XTan� �XEmax
�
ound x � �Eblb� Tan� Emax��
FuzzyReferenzmenge als halbes TrapezR�
�A �x� �
������ fur x c�c� � x
c� �m fur x � �c��m�
� fur x m
� ���
mit c� � �� m � ��� A � XEblb� und x � Eblb�
In den Bildern �� bis �� sind die FuzzyReferenzmengen der verschiedenen fuzzi�zierten
Eingangsgro�en dargestellt� Da der FuzzyAlgorithmus so geschrieben ist� da� er zwi�
schen�Unter und Uberschwingen� unterscheidet �Tlili ��� � �positive als auch negative
eblbWerte�� wird die fuzzi�zierte Eingangsgro�e Eblb uber funf FuzzyReferenzmengen
partitioniert�
�
���
� ��� � Eblb
XEblb� XEblb
� XEblb�
�XEblbi�Eblb� XEblb
��
Bild � �� Partitionierung der FuzzyReferenzmengen XEblbi�Eblb�
� mit i�Eblb� � �� � � � � � uber
den De�nitionsbereich D�N
Regelbasis und Inferenz�
Die Regelbasis besteht aus jeweils � bzw� �� relationalen Regeln der Form
Wenn �Eblb IstXEblbi�Eblb�
� Und �Tan IstXTani�Tan�
� Dann � �Ti Ist YTii� Ti�� � � ���
bzw�
Wenn �Emax IstXEmaxi�Emax�
� Und �Tan IstXTani�Tan�
� Dann � �KC Ist YKC
i� KC�� �� ����
In den Tabellen �� bis � sind die KarnaughTafeln der beiden Regelbasen zur Berech�
nung der Verstarkungen �kC und der Nachstellzeit �ti dargestellt�

� Einstellverfahren klassischer PI�Regler mit der Fuzzy�Logik ��
�
���
�� ��� � Tan
XTan� XTan
� XTan�
�XTani�Tan�
Bild � �� Partitionierung der FuzzyReferenzmengen XTani�Tan�
� mit i�Tan� � �� � � � � uber
den De�nitionsbereich DN
�
���
�� ��� � Emax
XEmax� XEmax
� XEmax�
�XEmaxi�Emax �
Bild � �� Partitionierung der FuzzyReferenzmengen XEmaxi�Emax�
� mit i�Emax� � �� � � � �
uber den De�nitionsbereich DN
Tan
XTan� XTan
� XTan�
XEblb� Y
Ti� Y
Ti� Y
Ti�
Eblb XEblb� Y
Ti� Y
Ti� Y
Ti�
XEblb� Y
Ti� Y
Ti� Y
Ti�
XEblb Y
Ti� Y
Ti� Y
Ti�
Tabelle � �� KarnaughTafel des FuzzyAlgorithmus zur Berechnung der Nachstellzeit�ti bei �
uberschwingen� und�unterschwingen��
Tan
XTan� XTan
� XTan�
XEmax� Y
KC� Y
KC� Y
KC�
Emax XEmax� Y
KC� Y
KC� Y
KC�
XEmax� Y
KC� Y
KC� Y
KC�
Tabelle � �� KarnaughTafel des FuzzyAlgorithmus zur Berechnung der Verstarkung�kC bei �
uberschwingen��

� Einstellverfahren klassischer PI�Regler mit der Fuzzy�Logik ��
Tan
XTan� XTan
� XTan�
XEblb� Y
KC� Y
KC� Y
KC�
Eblb XEblb� Y
KC� Y
KC� Y
KC�
XEblb� Y
KC� Y
KC� Y
KC�
Tabelle � �� KarnaughTafel des FuzzyAlgorithmus zur Berechnung der Verstarkung�kC bei �
unterschwingen��
Der Erfulltheitgrad � einer jeden Regel
� �Eblb� Tan� � min��XEblbi�Eblb�
� �XTani�Tan�
�� ����
bzw�
� �Emax� Tan� � min��XEmaxi�Emax �
� �XTani�Tan�
�� ����
wird uber den MinimumOperator berechnet�
Defuzzi�zierung�
Die scharfen Ausgangsgro�en werden nach der Summenmethode �CenterofSums� Dri�
ankov� Hellendoorn und Reinfrank ��� �
u�kT � �
mUXk�
ZD
�� U�k�u��udu
mUXk�
ZD
�� U�k�u�du
� �� �
berechnet� Mit der MAXMINKompensation berechnet sich dann die Verstarkung �kCund die Nachstellzeit �ti zu
�kC �
�Xk�
ZD
� U�k�u����z�
�k�z �Emax� Tan� �udu
�Xk�
ZD
� U�k�u����z�
�k�z �Emax� Tan� du
�
�Xk�
����z�
�k�z �Emax� Tan�
Akmk
�Xk�
����z�
�k�z �Emax� Tan�
Ak
� ����
und
�ti �
�Xk�
���
z�
�k�z �Eblb� Tan�
Akmk
�Xk�
���
z�
�k�z �Eblb� Tan�
Ak
� � ����

� Einstellverfahren klassischer PI�Regler mit der Fuzzy�Logik �
Durch die Verwendung der MAXMINKomposition ist die vertikale Partialaggregation
uber den MaxOperator und die Aktivierung sowie die Pramissenauswertung uber den
MinOperator belegt� Die Ausgangsgro�en werden durch drei FuzzyReferenzmengen ab�
gebildet �Bild �� und ����
�
���
� �ti
YTi
� YTi
� YTi
�
�Y
�Tii� �Ti�
�� � �
Bild � � Partitionierung der FuzzyReferenzmengen YTii� Ti�
� mit i� �Ti� � �� � � � � uber den
De�nitionsbereich D
�
���
� �kC
YKC
� YKC
� YKC
�
�Y
�KCi� �KC �
�� � �
Bild � �� Partitionierung der FuzzyReferenzmengen YKC
i� Ki�� mit i� �KC� � �� � � � � uber
den De�nitionsbereich D
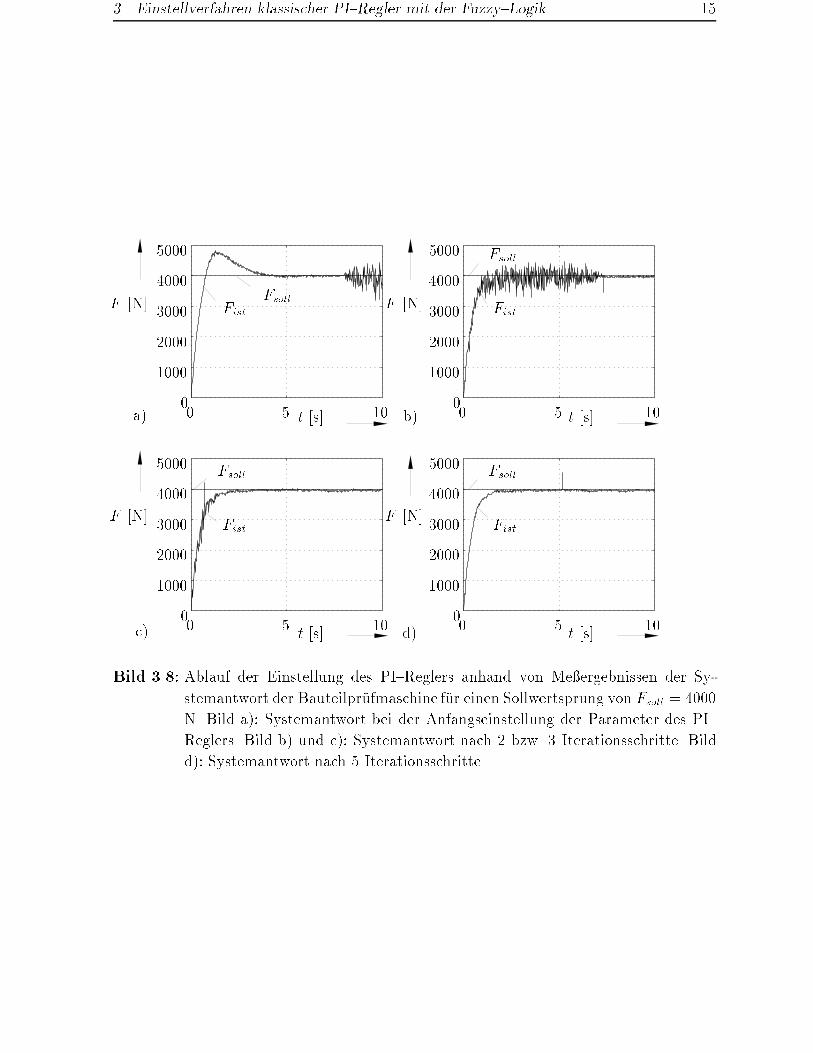
In Bild �� ist der Verlauf der Einstellung des PIReglers anhand von Me�daten der Bau�
teilprufmaschine dargestellt� Ausgehend von einer Parametereinstellung des PIReglers
von kC � � und ti � � s �Bild �� a�� �mit deutlichen Uberschwingen� werden die Regel�
parameter in � Iterationsschritten so eingestellt� da� die Fuhrungsgro�e Fsoll � ��� N
ohne Uberschwingen mit einer geringen Anstiegszeit und ohne statische Regelabweichung
erreicht wird� Bei einer Paramerteinstellung des PIReglers� welche zu einem sehr tragen
Systemverhalten fuhrt z� B� fur kC � � und ti � ��� s ist der FuzzyAlgorithmus nicht
in der Lage den PIRegler automatisch einzustellen� Somit bleibt das Verfahren auf be�
stimmte Arten von Systemantworten begrenzt und wird aus diesem Grund nicht fur den
Proze� der Bauteilprufmaschine eingesetzt�

� Einstellverfahren klassischer PI�Regler mit der Fuzzy�Logik ��
� � ���
����
����
���
����
� � ���
����
����
���
����
� � ���
����
����
���
����
� � ���
����
����
���
����
a� b�
c� d�
Fist
Fist
Fist Fist
FsollFsoll
Fsoll
Fsoll
t �s� t �s�
t �s� t �s�
F �N� F �N�
F �N�F �N�
Bild � �� Ablauf der Einstellung des PIReglers anhand von Me�ergebnissen der Sy�
stemantwort der Bauteilprufmaschine fur einen Sollwertsprung von Fsoll � ���
N� Bild a�� Systemantwort bei der Anfangseinstellung der Parameter des PI
Reglers� Bild b� und c�� Systemantwort nach � bzw� Iterationsschritte� Bild
d�� Systemantwort nach � Iterationsschritte
� Einstellverfahren klassischer PI�Regler mit der Fuzzy�Logik ��
� � ���
����
����
���
����
����
� � ���
����
����
���
����
����
� � ���
����
����
���
����
����
� � ���
����
����
���
����
����
F �N�
t �s�a� b�
c� d�
Fist F �N� Fist
t �s�
F �N�Fist
t �s�
F �N�Fist
t �s�
Fsoll
Fsoll
FsollFsoll
Bild � � Ablauf der Einstellung des PIReglers anhand von Me�ergebnissen der Sy�
stemantwort der Bauteilprufmaschine fur einen Sollwertsprung von Fsoll � ����
N� Bild a�� Systemantwort bei der Anfangseinstellung der Parameter des PI
Reglers� Bild b� und c�� Systemantwort nach � bzw� Iterationsschritte� Bild
d�� Systemantwort nach � Iterationsschritte
� Einstellverfahren klassischer PI�Regler mit der Fuzzy�Logik ��
��� Einstellverfahren �uber zwei Merkmale
Bei diesem Einstellverfahren wird genauso wie beim Einstellverfahren nach dem Muster
des WendetangentenVerfahrens nur verlangt� da� die Regelstrecke stabil ist� Es werden
keine weiteren AprioriKenntnisse uber Ordnung� Totzeit oder Eigendynamik vorausge�
setzt� Das Ziel ist hierbei� ausgehend von sehr kleinen Reglerverstarkungen die Parameter
so nachzustellen� da� sich�optimale� feste Regelparameter ergeben� Pfei�er ������ be�
schrankt sich mit seinem Verfahren auf PIRegler� Der Grundgedanke besteht darin� die
Regelgro�e einem SollVerlauf folgen zu lassen und anhand von Gutekriterien und deren
Auswertung mittels FuzzyLogik die Regelparameter nachzustellen� bis eine hinreichende
Gute erreicht ist� Als Bewertungskriterien der Regelgute werden zwei Merkmale ausge�
wertet� welche Eingangsgro�en des FuzzyAlgoritmus sind�
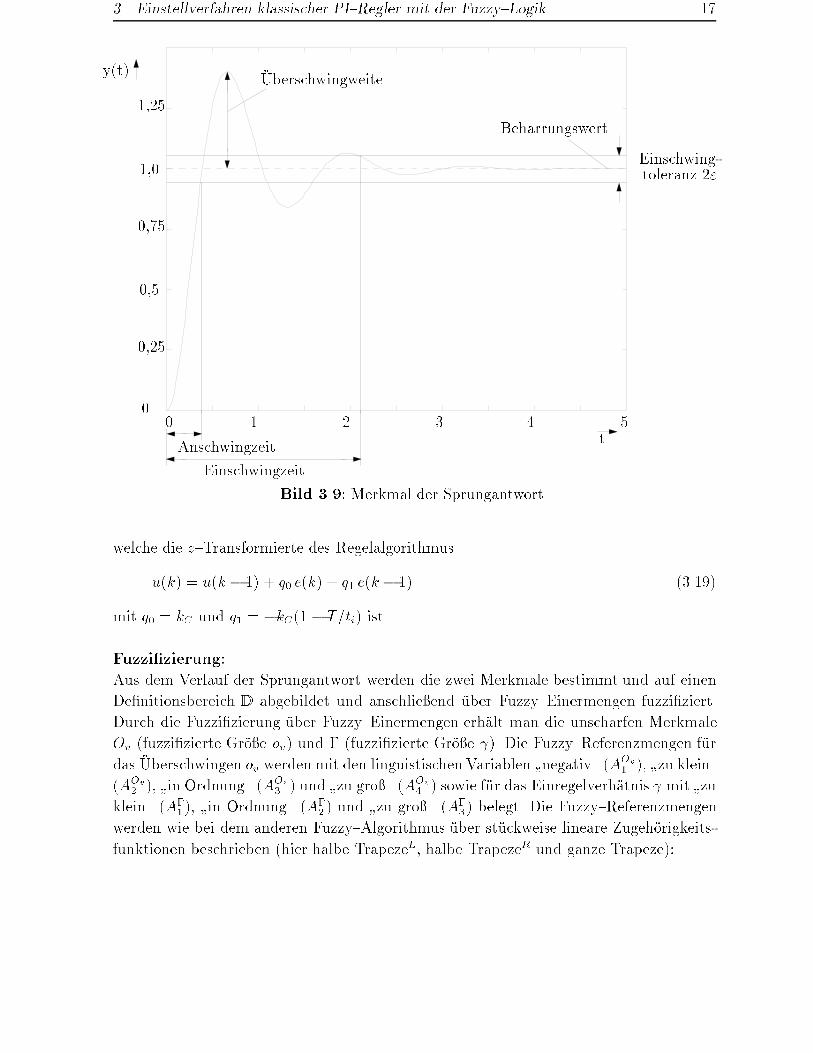
� �Uberschwingweite ov�
Nach der DIN ������ Teil �� ist dies die gro�te Abweichung der Sprungantwort vom
Beharrungswert y� nach dem erstmaligen Erreichen der Einschwingtoleranz y���
Da der Uberschwinger nur in der ersten Halfte der Sprungantwort gesucht wird�
konnen auch negative Werte erreicht werden� falls das Toleranzband gar nicht er�
reicht wird� Zur Normierung wird der Signalwert auf die Hohe des Fuhrungssprunges
bezogen�
� Einregelverh�altnis � � �tantein�
beschreibt die Anschwingzeit �tan� bezogen auf die Einschwingzeit tein� Nach Verstrei�
chen der Einschwingzeit bleiben die Abweichungen des Signals vom Beharrungs�
zustand innerhalb des Toleranzbandes �� Bei der Anschwingzeit �tan erreicht die
Sprungantwort erstmals die Einschwingtoleranz �Bild ����
Die scharfen Werte der beiden Merkmale Uberschwingweite ov und Einregelverhaltnis �
werden fur jede sprungartige Anderung der Fuhrungsgro�e ermittelt� fuzzi�ziert �uber
FuzzyEinermengen� und daraus die Korrekturen der Regelparameter fur den nachsten
Sprung errechnet� Ausgangsvariablen der FuzzyEinstellebene sind die Faktoren krTuningund cirTuning zur Anpassung der Regelparameter gema�
kc � kc krTuning � ����
und
cI � cI cirTuning � ����
mit cI �q��q�k� kc � p� und den Ausgangsvariablen der FuzzyEinstellebenen krTuning
und cirTuning� welche durch Auswertung von ov und � mit der FuzzyLogik ermittelt
werden� cI ist der relative IAnteil und kc die Verstarkung der zUbertragungsfunktion
des PIReglers
GR�z� � kc
�� cI
z��
� � z��
� � ����
� Einstellverfahren klassischer PI�Regler mit der Fuzzy�Logik ��
Uberschwingweite
Beharrungswert
Einschwing�toleranz ��
Anschwingzeit
y�t�
t
����
���
����
���
����
�� � � � �
Einschwingzeit
Bild � �� Merkmal der Sprungantwort
welche die zTransformierte des Regelalgorithmus
u�k� � u�k � �� q� e�k� q� e�k � �� � ����
mit q� � kC und q� � �kC�� � Tti� ist�
Fuzzi�zierung�
Aus dem Verlauf der Sprungantwort werden die zwei Merkmale bestimmt und auf einen
De�nitionsbereich D abgebildet und anschlie�end uber FuzzyEinermengen fuzzi�ziert�
Durch die Fuzzi�zierung uber FuzzyEinermengen erhalt man die unscharfen Merkmale
Ov �fuzzi�zierte Gro�e ov� und � �fuzzi�zierte Gro�e ��� Die FuzzyReferenzmengen fur
das Uberschwingen ov werden mit den linguistischen Variablen �negativ� �AOv
� �� �zu klein�
�AOv� �� �
in Ordnung� �AOv� � und �
zu gro�� �AOv � sowie fur das Einregelverhatnis � mit �
zu
klein� �A���� �
in Ordnung� �A�� � und �
zu gro�� �A��� belegt� Die FuzzyReferenzmengen
werden wie bei dem anderen FuzzyAlgorithmus uber stuckweise lineare Zugehorigkeits�
funktionen beschrieben �hier halbe TrapezeL� halbe TrapezeR und ganze Trapeze��
� Einstellverfahren klassischer PI�Regler mit der Fuzzy�Logik ��
FuzzyReferenzmenge als Trapez�
�A �x� �
�����������
� fur x �� �c�� c��x� c�m� � c�
fur x � �c��m��
� fur x � �m��m��c� � x
c� �m�fur x � �m�� c��
� � ����
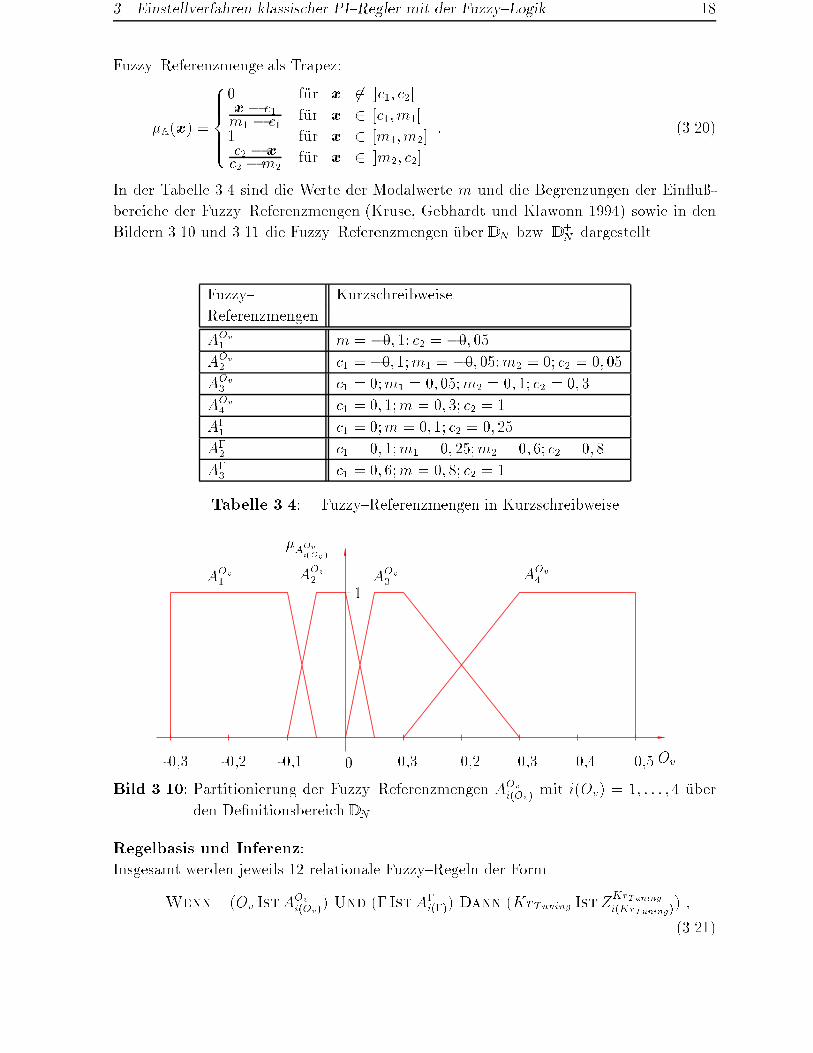
In der Tabelle �� sind die Werte der Modalwerte m und die Begrenzungen der Ein�u��
bereiche der FuzzyReferenzmengen �Kruse� Gebhardt und Klawonn ����� sowie in den
Bildern ��� und ��� die FuzzyReferenzmengen uber DN bzw� D�N dargestellt�
Fuzzy Kurzschreibweise
Referenzmengen
AOv� m � ��� �� c� � ��� ��
AOv� c� � ��� ��m� � ��� ���m� � �� c� � �� ��
AOv� c� � ��m� � �� ���m� � �� �� c� � ��
AOv c� � �� ��m � �� � c� � �
A�� c� � ��m � �� �� c� � �� ��
A�� c� � �� ��m� � �� ���m� � �� �� c� � �� �
A�� c� � �� ��m � �� �� c� � �
Tabelle � �� FuzzyReferenzmengen in Kurzschreibweise
AOv�
�AOvi�Ov�
AOv� AOv
� �� ��� �� ��� ��� Ov�����������
�AOv
�
Bild � ��� Partitionierung der FuzzyReferenzmengen AOvi�Ov�
mit i�Ov� � �� � � � � � uber
den De�nitionsbereich DN
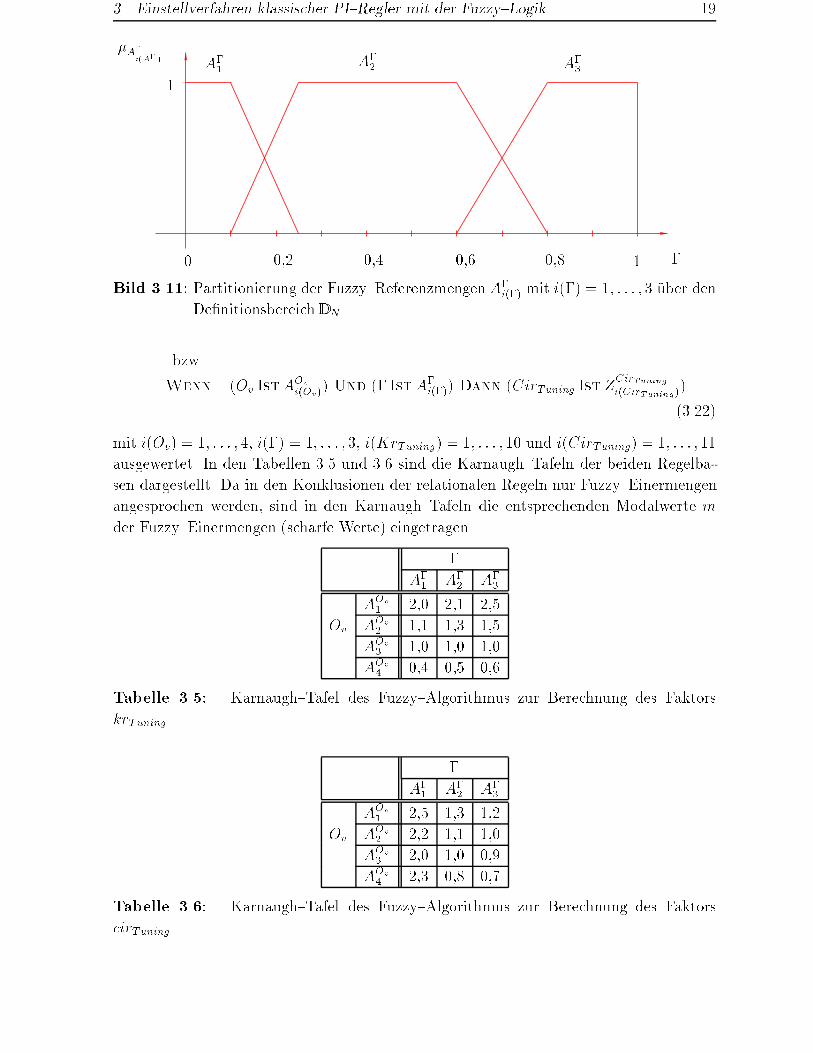
Regelbasis und Inferenz�
Insgesamt werden jeweils �� relationale FuzzyRegeln der Form
Wenn �Ov IstAOvi�Ov�
� Und �� IstA�i���� Dann �KrTuning IstZ
KrTuningi�KrTuning�
� �
� ����
� Einstellverfahren klassischer PI�Regler mit der Fuzzy�Logik ��
A��
A�� A�
�
�A�i�A��
� ��� ��� ��� ��� � �
�
Bild � ��� Partitionierung der FuzzyReferenzmengen A�i��� mit i��� � �� � � � � uber den
De�nitionsbereich DN
bzw�
Wenn �Ov IstAOvi�Ov�
� Und �� IstA�i���� Dann �CirTuning IstZ
CirTuningi�CirTuning�
�
� ����
mit i�Ov� � �� � � � � �� i��� � �� � � � � � i�KrTuning� � �� � � � � �� und i�CirTuning� � �� � � � � ��
ausgewertet� In den Tabellen �� und �� sind die KarnaughTafeln der beiden Regelba�
sen dargestellt� Da in den Konklusionen der relationalen Regeln nur FuzzyEinermengen
angesprochen werden� sind in den KarnaughTafeln die entsprechenden Modalwerte m
der FuzzyEinermengen �scharfe Werte� eingetragen�
�
A�� A�
� A��
AOv� ��� ��� ���
Ov AOv� ��� �� ���
AOv� ��� ��� ���
AOv ��� ��� ���
Tabelle � � KarnaughTafel des FuzzyAlgorithmus zur Berechnung des Faktors
krTuning
�
A�� A�
� A��
AOv� ��� �� ���
Ov AOv� ��� ��� ���
AOv� ��� ��� ���
AOv �� ��� ���
Tabelle � �� KarnaughTafel des FuzzyAlgorithmus zur Berechnung des Faktors
cirTuning

� Einstellverfahren klassischer PI�Regler mit der Fuzzy�Logik ��
Der Erfulltheitsgrad einer jeden Regel
�z �Ov��� � �AOvi�Ov �
�A�i���
� �� �
berechnet sich uber das algebraische Produkt� Die Komposition wird uber den SUM
PRODOperator vorgenommen� Dies bedeutet� da� die Implikation bzw� Aktivierung
nach Larsen erfolgt und die vertikale Partialaggregation durch die Summenbildung be�
legt ist�
Defuzzi�zierung�
Die Defuzzi�zierung erfolgt nach der Schwerpunktmethode fur FuzzyEinermengen �Kah�
lert und Frank ��� � Bertram u� a� ����� zur Berechnung der Ausgangsvariablen des
FuzzyAlgorithmus
krTuning �
��Xz�
�z �Ov���mz
��Xz�
�z �Ov���
� ����
bzw�
cirTuning �
��Xz�
�z �Ov���mz
��Xz�
�z �Ov���
� � ����
��� Modi�kation des Adaptions Algorithmus
Nach Pfei�er ������ mu� die Sprunglange gro� genug gewahlt werden� so da� der Proze�
einen stationaren Endwert erreichen kann� Somit konnen die Merkmale �tan und tein be�
stimmt werden� Uber die Gro�e des Toleranzbandes macht Pfei�er keine Aussagen� Liegt
z� B� die Sprungantwort unterhalb der fest vorgegebenen Schranke� kann die Einregel�
zeit nicht bestimmt werden� Um dies zu vermeiden� wurde ein variables Toleranzband
� �� const� gewahlt� da� sich nach dem letzten Wert der Sprungantwort richtet� In
einem ersten Ansatz wurden die FuzzyReferenzmengen der Uberschwingweite Ov nach
links verschoben und die Modalwerte m sowie die Begrenzungen der Ein�u�bereiche c der
FuzzyReferenzmegen AOvi�Ov�
nach heuristischen Gesichtspunkten modi�ziert �Bild �����
Damit wurde eine Uberschwingweite von �!��! realisiert� Das Uberschwingen kann nicht
ganz eliminiert werden� da da� Verfahren ein schwingungsfahiges System voraussetzt� Bei
der hier vorliegenden Regelstrecke la�t sich ein Uberschwinger durch eine Vergro�erung
der Nachstellzeit kompensieren� Dabei soll die Verstarkung geringfugig verkleinert wer�
den� Dazu wurde eine zusatzliche vierte FuzzyReferenzmenge fur die Eingangsgro�e �
de�niert �Bild �� ��

� Einstellverfahren klassischer PI�Regler mit der Fuzzy�Logik ��
��� ���� ���� � ��� ��� �� ��� ���
AOv� AOv
� AOv� AOv
�AOvi�Ov �
Ov
�
Bild � ��� Modi�zierte Partitionierung der FuzzyReferenzmengen AOvi�Ov�
mit i�Ov� �
�� � � � � � uber den De�nitionsbereich D
� ��� ��� �� ��� ���
A�� A�
� A�� A�
�A�i���
Ov��� ��� ��� ��� �
�
�
Bild � ��� Modi�zierte Partitionierung der FuzzyReferenzmengen A�i��� mit i��� �
�� � � � � � uber den De�nitionsbereich D
Die Konklusionen wurden in der Simulation fur die modi�zierten Mengen angepa�t und
erweitert� In der Tabelle �� sind die Modalwerte m und die Begrenzungen der Ein�u��
bereiche c der FuzzyReferenzmengen AOvi�Ov�
und A�i��� zusammengefa�t�
Fuzzy Kurzschreibweise
Referenzmengen
AOv� m � ��� � � c� � ��� ��
AOv� c� � ��� � �m� � ��� ���m� � ��� ��� c� � �� ��
AOv� c� � ��� ���m� � �� ���m� � �� ��� c� � �� �
AOv c� � �� ���m � �� �
A�� m � �� c� � �� ��
A�� c� � ��m� � �� ���m� � �� �� c� � �� ��
A�� c� � �� ��m� � �� ���m�� � �� �� c� � �� �
A� c� � �� ��m � �� �
Tabelle � �� FuzzyReferenzmengen in Kurzschreibweise
Aufgrund der zusatzlich eingefuhrten FuzzyReferenzmenge A�� werden nun �� relatio�
nale FuzzyRegeln der Form � ���� und � ���� mit i�Ov� � �� � � � � �� i��� � �� � � � � ��
i�KrTuning� � �� � � � � � und i�CirTuning� � �� � � � � �� ausgewertet� In den Tabellen ��

� Einstellverfahren klassischer PI�Regler mit der Fuzzy�Logik ��
und �� sind die modi�zierten KarnaughTafeln der beiden Regelbasen dargestellt�
�
A�� A�
� A�� A�
AOv� ��� ��� ��� ���
Ov AOv� ��� ��� ��� ���
AOv� ��� ��� ��� ���
AOv ��� ��� ���� ���
Tabelle � � Modi�zierte KarnaughTafel des FuzzyAlgorithmus zur Berechnung des
Faktors krTuning
�
A�� A�
� A�� A�
AOv� ��� �� �� ���
Ov AOv� ��� ��� ��� ���
AOv� ��� ��� ��� ���
AOv �� ��� ���� ���
Tabelle � �� Modi�zierte KarnaughTafel des FuzzyAlgorithmus zur Berechnung des
Faktors cirTuning
�����
������
����
������
����
�
���
�
���
�
���
cirTuning
ov�
Bild � ��� Kennfeld des Faktors cirTuning
� Einstellverfahren klassischer PI�Regler mit der Fuzzy�Logik �
0.3
�������� � ��� ������ ��� �
������
������
�
�
���
�
���
�
���
krTuning
�
ov
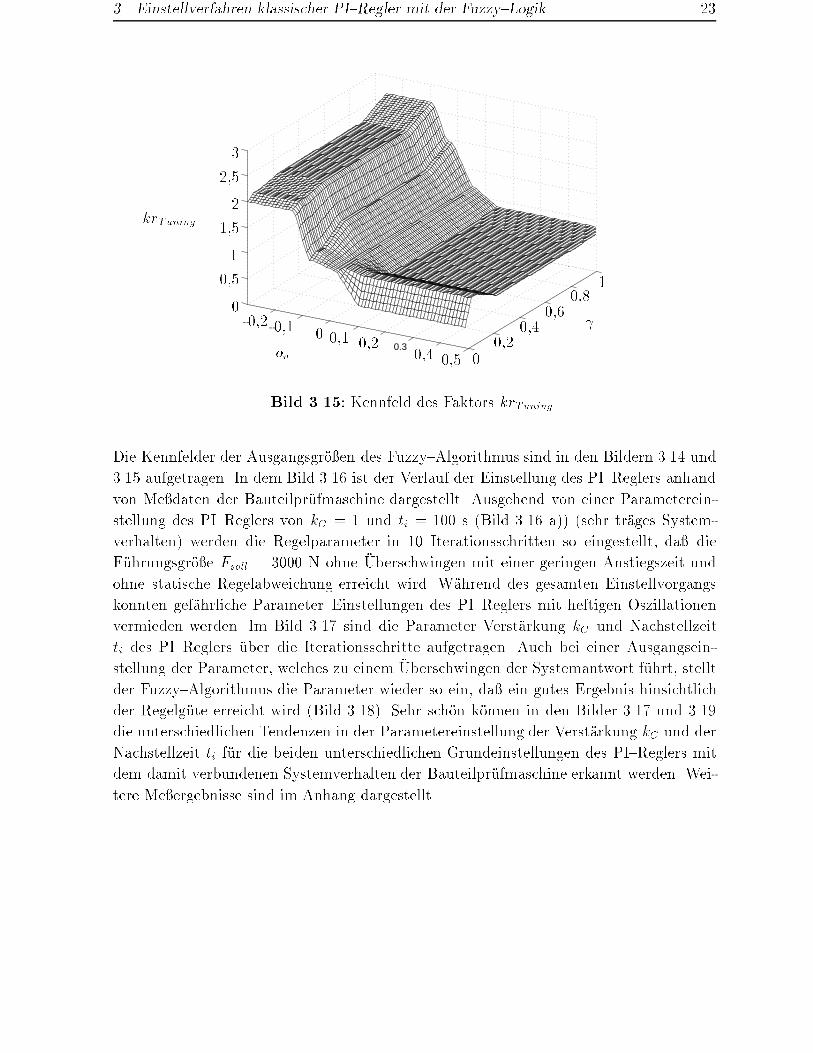
Bild � �� Kennfeld des Faktors krTuning
Die Kennfelder der Ausgangsgro�en des FuzzyAlgorithmus sind in den Bildern ��� und
��� aufgetragen� In dem Bild ��� ist der Verlauf der Einstellung des PIReglers anhand
von Me�daten der Bauteilprufmaschine dargestellt� Ausgehend von einer Parameterein�
stellung des PIReglers von kC � � und ti � ��� s �Bild ��� a�� �sehr trages System�
verhalten� werden die Regelparameter in �� Iterationsschritten so eingestellt� da� die
Fuhrungsgro�e Fsoll � ��� N ohne Uberschwingen mit einer geringen Anstiegszeit und
ohne statische Regelabweichung erreicht wird� Wahrend des gesamten Einstellvorgangs
konnten gefahrliche ParameterEinstellungen des PIReglers mit heftigen Oszillationen
vermieden werden� Im Bild ��� sind die Parameter Verstarkung kC und Nachstellzeit
ti des PIReglers uber die Iterationsschritte aufgetragen� Auch bei einer Ausgangsein�
stellung der Parameter� welches zu einem Uberschwingen der Systemantwort fuhrt� stellt
der FuzzyAlgorithmus die Parameter wieder so ein� da� ein gutes Ergebnis hinsichtlich
der Regelgute erreicht wird �Bild ����� Sehr schon konnen in den Bilder ��� und ���
die unterschiedlichen Tendenzen in der Parametereinstellung der Verstarkung kC und der
Nachstellzeit ti fur die beiden unterschiedlichen Grundeinstellungen des PIReglers mit
dem damit verbundenen Systemverhalten der Bauteilprufmaschine erkannt werden� Wei�
tere Me�ergebnisse sind im Anhang dargestellt�

� Einstellverfahren klassischer PI�Regler mit der Fuzzy�Logik ��
� � ���
����
����
���
����
� � ���
����
����
���
����
� � ���
����
����
���
����
� � ���
����
����
���
����
����
Fsoll
Fist
Fsoll
Fist
Fsoll
Fsoll
Fist Fist
t �s�
t �s�t �s�
t �s�a� b�
c� d�
F �N�
F �N�
F �N�
F �N�
Bild � ��� Ablauf der Einstellung des PIReglers anhand von Me�ergebnissen der Sy�
stemantwort der Bauteilprufmaschine fur einen Sollwertsprung von Fsoll �
���� N� Bild a�� Systemantwort bei der Anfangseinstellung der Parameter des
PIReglers� Bild b� und c�� Systemantwort nach bzw� � Iterationsschritten�
Bild d�� Systemantwort nach �� Iterationsschritten

� Einstellverfahren klassischer PI�Regler mit der Fuzzy�Logik ��
� � � � � � � � ���
�
�
�
� � � � � � � � �����
���
���
���
���
���
Iterations�
schritte
kC
ti
Iterations�
schritte
Bild � ��� Anderungen der Parameter des PIReglers kC und ti uber die Iterationsschrit�
te fur Fsoll � ���� N ausgehend von einem sehr tragem Systemverhalten �mit
einer Parametereinstellung �Anfangseinstellung� von kC � �� � und ti � ���
s�

� Einstellverfahren klassischer PI�Regler mit der Fuzzy�Logik ��
� � ���
����
����
����
����
� � ���
����
����
����
����
� � ���
����
����
����
����
� � ���
����
����
����
����
Fist
Fsoll
Fist
Fsoll
Fsoll
Fist Fist
Fsoll
t �s�
t �s�
t �s�
t �s�
a� b�
d�c�
F �N�
F �N�
F �N�
F �N�
Bild � �� Ablauf der Einstellung des PIReglers anhand von Me�ergebnissen der Sy�
stemantwort der Bauteilprufmaschine fur einen Sollwertsprung von Fsoll �
��� N� Bild a�� Systemantwort bei der Anfangseinstellung der Parameter des
PIReglers� Bild b� und c�� Systemantwort nach � bzw� � Iterationsschritten�
Bild d�� Systemantwort nach �� Iterationsschritten
� Einstellverfahren klassischer PI�Regler mit der Fuzzy�Logik ��
� � �� ���
���
��
�
���
� � �� ���
��
��
�
��
��
kC
ti
Iterations�schritte
Iterations�schritte
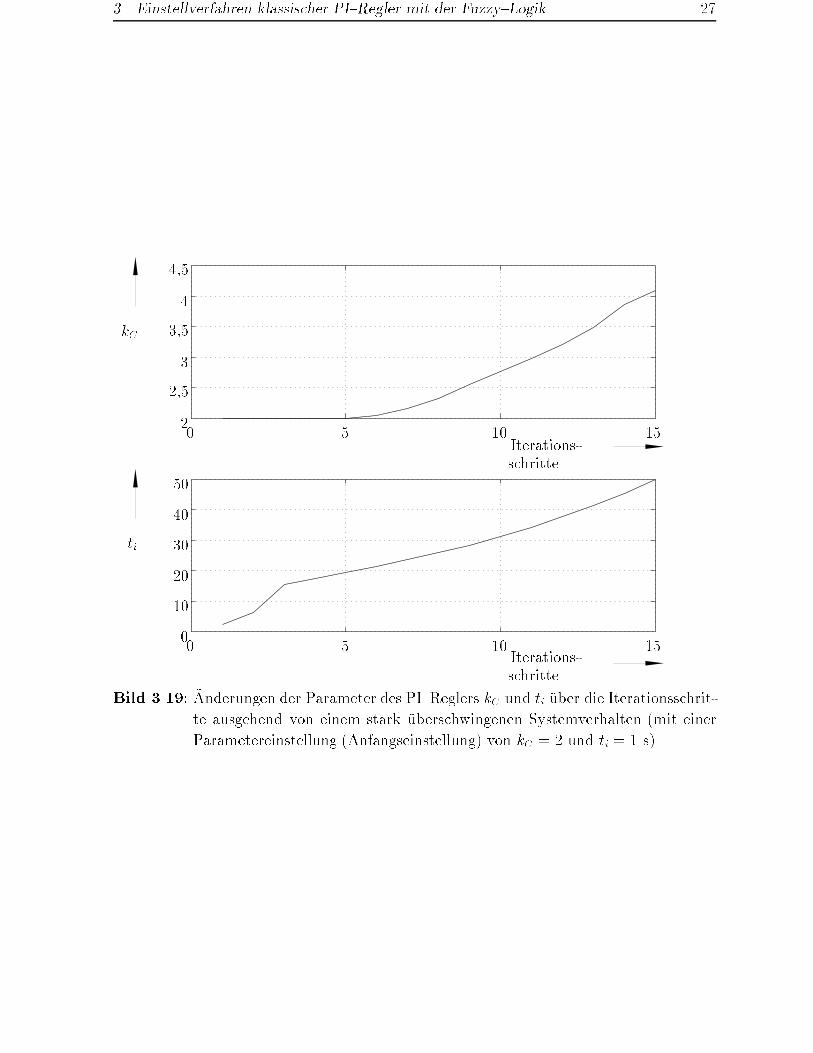
Bild � ��� Anderungen der Parameter des PIReglers kC und ti uber die Iterationsschrit�
te ausgehend von einem stark uberschwingenen Systemverhalten �mit einer
Parametereinstellung �Anfangseinstellung� von kC � � und ti � � s�

� Zusammenfassung und Ausblick ��
� Zusammenfassung und Ausblick
Zur Uberprufung der Dauerfestigkeit von Bauteilen la�t sich in einer Prufmaschine mit
Hilfe eines hydraulischen Zylinders ein gewunschtes Belastungspro�l erzeugen� Die dyna�
mischen und statischen Eigenschaften der Regelstecke werden ma�geblich durch die zu
untersuchenden Proben bestimmt und sind daher in der Regel nicht exakt bekannt� so
da� die Parameter der Kraftregelung an das veranderliche Streckenverhalten angepa�t
werden mussen� Der zeitliche Verlauf der Belastungskraft wird mit einem konventionellen
PIRegler geregelt� Die Anpassung erfolgt zur Zeit von Hand z� B� nach heuristischen
Faustformeln oder Tuningvorschriften�
In diesem Bericht werden zwei FuzzyAlgorithmen zur voll automatisierten Regeleinstel�
lung vorgestellt� Beide zeichnen sich durch
� eine einfache Handhabung�
� ein einfaches und verstandliches Konzept�
� keine Bedienparameter
� sowie eine geringe Anforderung an das Streckenverhalten
aus� Das selbsteinstellende Verfahren dient dazu� wahrend der Inbetriebnahmephase der
Anlage oder auf gesonderten Wunsch des Anwenders eine geeignete Reglereinstellung zu
gewinnen� Die Parameter der PIRegler werden dabei sukzessiv im geschlossenen Regel�
kreis eingestellt� Die besten Ergebnisse konnten mit dem stark modi�zierten selbsteinsstel�
lenden Verfahren von Pfei�er erzielt werden �Chatziioannidis ������ Das Verfahren zeigte
in der Simulation mit dem Simulationsprogramm Hyvos ��� der Firma Mannesmann
Rexroth fur unterschiedlichste Federstei�gkeiten und auch am Versuchstrager einer Bau�
teilprufmaschine hervorragende Ergebnisse� Das Verfahren zeichnet sich durch die sehr
wenige Merkmale �zwei� und Iterationsschritte �Anpassungsschritte� �zehn� zur Einstel�
lung der Regelparameter aus� Weiter ist der Algorithmus sehr logisch aufgebaut und in
seiner Berechnung der Parameter des PIReglers sehr gut nachvollziebar und somit sehr
transparent und seine Anwendbarkeit ist unabhangig von der Anfangseinstellung des PI
Reglers� Zur Anwendung des selbsteinstellenden Verfahrens ist kein mathematisches Pro�
ze�modell und keine weiteren Apriori Informationen hinsichtlich Ordnung oder Totzeit
eines Prozesses notig� Vorausgesetzt werden mu� lediglich� da� der Proze� stabil ist und
das ein PIRegler prinzipiell geeignet ist�
Nachdem eine automatische Inbetriebnahme der Bauteilprufmaschine moglich ist� kann
nun eine online Adaption der Regelparameter des PIReglers durchgefuhrt werden� Eine
Moglichkeit besteht in der Adaption der Regelparameter des konventionellen PIReglers
nach jedem Abtastschritt wahrend des Betriebs nach Entscheidungstafeln �Tzafestas und
Papanikolopoulos ����� He� Tan und Hang ��� � He� Tan und Xu ��� ��

� Literaturverzeichnis ��
� Literaturverzeichnis
Bertram� T � F Svaricek� T Bindel� R B�ohm� H Kiendl� B Pfei�er� und M
Weber ����� Fuzzy Control� Zusammenstellung und Beschreibung wichtiger Be�
gri�e� Automatisierungstechnik at ��� �� ���
B�ohme� G ��� � Fuzzy�Logik� Einf�uhrung in die algebraischen und logischen Grundla�
gen� Berlin� Springer�
Chatziioannidis� T ����� Erprobung adaptiver Regelungen mit Hilfe der Fuzzy�Logik
zur Pr�ufmaschinen�Kraftregelung� Studienarbeit� MSRT� Universitat Duisburg�
Chien� K L � J A Hrones und J B Reswick ����� On the Automatic Control of
Generalized Passiv Systems� Trans� AMSE ��� �������
Driankov� D � H Hellendoorn und M Reinfrank ��� � An Introduction to Fuzzy�
Control� Berlin� Springer�
He� S Z � S Tan und C C Hang ��� � Control of dynamical process using an online
ruleadaptive fuzzy control system� Fuzzy Sets and Systems �� �����
He� S Z � S Tan und F L Xu ��� � Fuzzy selftuning of PID controllers� Fuzzy Sets
and Systems � ����
J�orissen� D ����� Optimierung und Erprobung einer adaptiven Pr�ufmaschinen�Kraft�
regelung� Studienarbeit� MSRT� Universitat Duisburg�
Kruse� R � J Gebhardt und F Klawonn ����� Foundations of Fuzzy Systems� New
York� John Wiley " Sons�
Kroll� A ��� � Verfahren f�ur adaptive Regelungen mit der Fuzzy�Logik� Forschungsbe�
richt ���� � MSRT� Universitat Duisburg�
Kuhn� T ����a� Losung von Adaptionsproblemen klassischer Regler mittel optimaler
FuzzyLogik� Symposium zu Neuro�Fuzzy Technologien� Lutherstadt�Wittenberg�
� ���
Kuhn� U ����b� Eine praxisnahe Einstellregel fur PIDRegler� Die TSummen Regel�
Automatisierungstechnik at � �����
Latzel� W ��� � Einstellregeln fur vorgegebene Uberschwingweiten� Automatisierungs�
technik at ��� �� �� �
Pedrycz� W ��� � Fuzzy Control and Fuzzy Systems� New York� John Wiley " Sons�

� Literaturverzeichnis �
Pfei�er� B �M ����� Selbsteinstellende klassische Regler mit FuzzyLogik� Automati�
sierungstechnik at �� ��� �
Schwarz� H ����� Optimale Regelung und Filterung� Braunschweig�Wiesbaden� View�
eg�
Sowa� J ����� Ein Beitrag zum industriellen Einsatz selbsteinstellender PIDRegler fur
verfahrenstechnische Regelstrecken� Fortschrittbericht VDI Reihe � Nr� ���� Dussel�
dorf� VDIVerlag�
Spielmann� M ��� � Konstruktive Erweiterung und Inbetriebnahme eines Zylinderpr�uf�
standes zur Lastsimulation f�ur eine Bauteilpr�ufmaschine� Studienarbeit� MSRT�
Universitat Duisburg�
Tlili� K ��� � Entwurf eines adaptiven PID�Reglers zur Regelung einer Bauteilpr�ufma�
schine mit Hilfe der Fuzzy�Logik� Studienarbeit� MSRT� Universitat Duisburg�
Tzafestas� S und N P Papanikolopoulos ����� Incremental Fuzzy Expert PID Con�
trol� IEEE Transactions on industrial electronics �� �� ���
Wang� L ����� Adaptive Fuzzy Systems and Control� Design and Stability Analysis�
Englewood Cli�s New Jersey� Prentice Hall�
Zadeh� L A ����� Fuzzy Sets� Information and Control �� � � �
Zarneckow� U ��� � Adaption der Reglerparameter mittels der Fuzzy�Set�Logik bei der
Kraftregelung einer elektrohydraulischen Achse�Diplomarbeit� FachhochschuleWurz�
burg Schweinfurt�
Ziegler� J G und N B Nichols ����� Optimum Setting for Automatic Controllers�
Trans� AMSE �� �������
A Me�ergebnisse �
A Me�ergebnisse
� � ���
����
����
���
� � ���
����
����
���
����
� � ���
����
����
���
� � ���
����
����
���
Fsoll Fsoll
Fsoll
Fsoll
Fist
Fist
FistFist
F �N�
F �N�
F �N�
F �N�
t �s�
t �s�
t �s�
t �s�
a�
c�
b�
d�
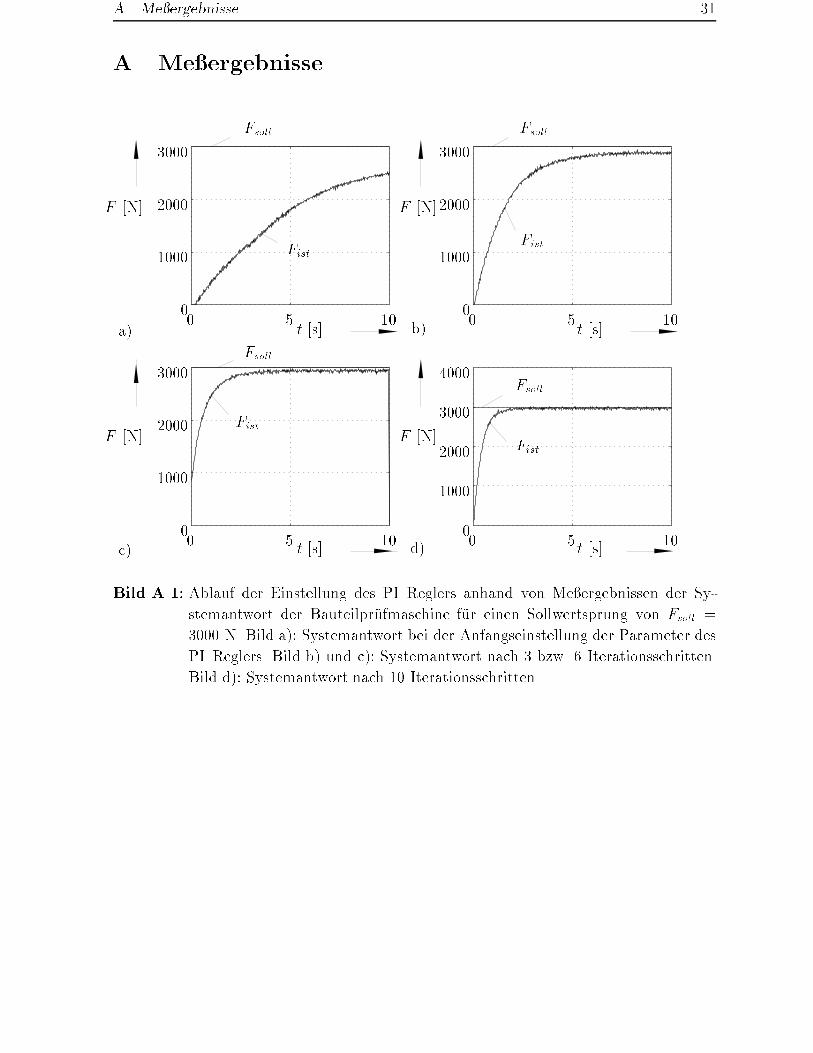
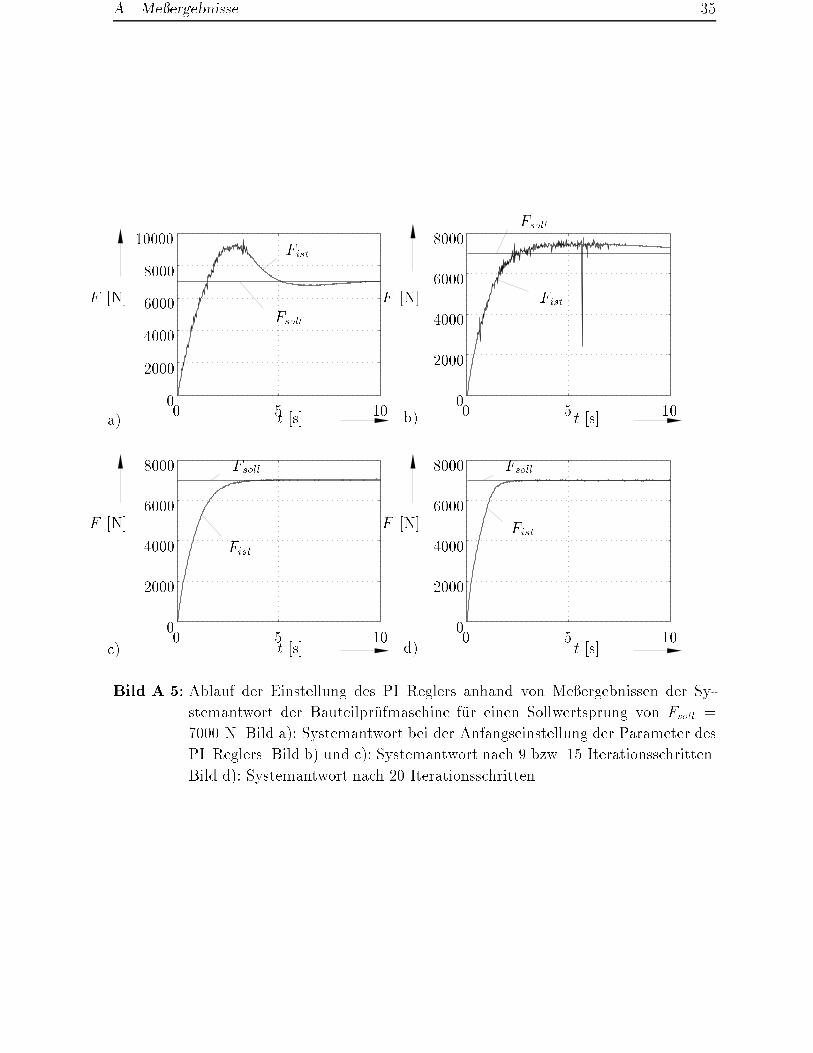
Bild A �� Ablauf der Einstellung des PIReglers anhand von Me�ergebnissen der Sy�
stemantwort der Bauteilprufmaschine fur einen Sollwertsprung von Fsoll �
��� N� Bild a�� Systemantwort bei der Anfangseinstellung der Parameter des
PIReglers� Bild b� und c�� Systemantwort nach bzw� � Iterationsschritten�
Bild d�� Systemantwort nach �� Iterationsschritten

A Me�ergebnisse �
� � � � � � � � ���
�
�
�
�
� � � � � � � � �����
���
���
���
kC
ti
Iterations�schritte
schritteIterations�
Bild A �� Anderungen der Parameter des PIReglers kC und ti uber die Iterationsschritte
ausgehend von einem sehr tragem Systemverhalten �mit einer Parameterein�
stellung �Anfangseinstellung� von kC � �� � und ti � ��� s�
A Me�ergebnisse
� � ���
����
����
����
� � ���
����
����
���
����
����
� � ���
����
����
���
����
����
� � ���
����
����
���
����
����
Fist
Fsoll
Fist
Fsoll
Fsoll
Fist
Fsoll
Fist
t �s�
t �s�t �s�
t �s�a� b�
c� d�
F �N� F �N�
F �N� F �N�
Bild A �� Ablauf der Einstellung des PIReglers anhand von Me�ergebnissen der Sy�
stemantwort der Bauteilprufmaschine fur einen Sollwertsprung von Fsoll �
���� N� Bild a�� Systemantwort bei der Anfangseinstellung der Parameter des
PIReglers� Bild b� und c�� Systemantwort nach bzw� � Iterationsschritten�
Bild d�� Systemantwort nach �� Iterationsschritten
A Me�ergebnisse �
1.5� � � � � �� ��
�
���
��
� � � � � �� ���
��
��
�
��
kC
ti
Iterations�
schritte
schritte
Iterations�
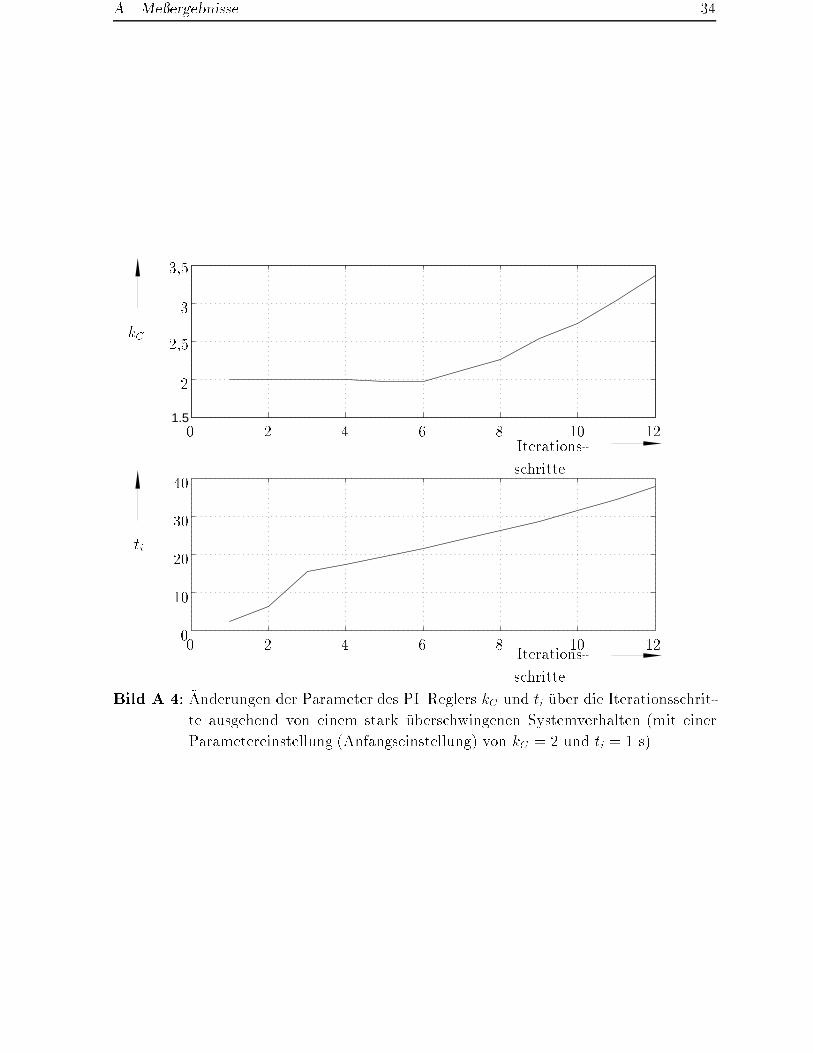
Bild A �� Anderungen der Parameter des PIReglers kC und ti uber die Iterationsschrit�
te ausgehend von einem stark uberschwingenen Systemverhalten �mit einer
Parametereinstellung �Anfangseinstellung� von kC � � und ti � � s�
A Me�ergebnisse �
� � ���
����
����
����
����
�����
� � ���
����
����
����
����
� � ���
����
����
����
����
� � ���
����
����
����
����
Fist
Fsoll
Fsoll
Fist
Fsoll
Fist
Fsoll
Fist
t �s�
t �s�t �s�
t �s�
F �N�F �N�
F �N� F �N�
a� b�
d�c�
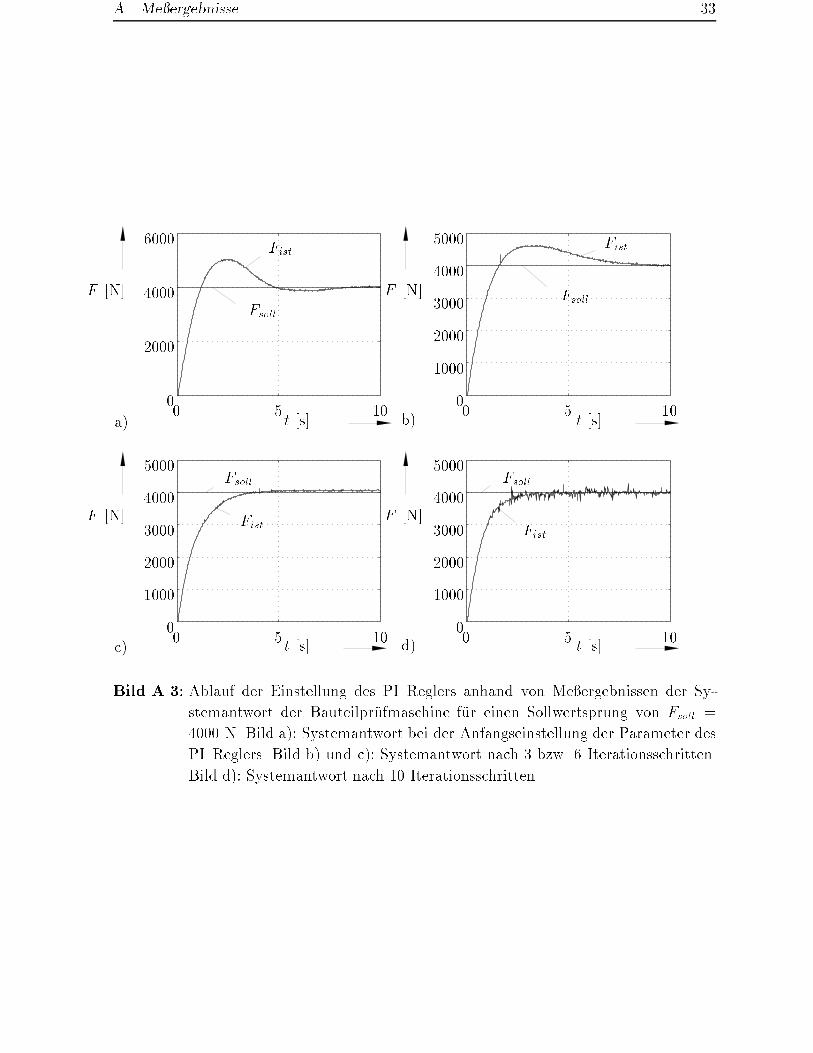
Bild A � Ablauf der Einstellung des PIReglers anhand von Me�ergebnissen der Sy�
stemantwort der Bauteilprufmaschine fur einen Sollwertsprung von Fsoll �
���� N� Bild a�� Systemantwort bei der Anfangseinstellung der Parameter des
PIReglers� Bild b� und c�� Systemantwort nach � bzw� �� Iterationsschritten�
Bild d�� Systemantwort nach �� Iterationsschritten

A Me�ergebnisse �
� � � � � �� �� �� �� �� ���
�
�
�
�
� � � � � �� �� �� �� �� ���
��
��
��
��
���
kC
ti
Iterations�schritte
Iterations�schritte
Bild A �� Anderungen der Parameter des PIReglers kC und ti uber die Iterationsschrit�
te ausgehend von einem stark uberschwingenen Systemverhalten �mit einer
Parametereinstellung �Anfangseinstellung� von kC � � und ti � � s�