Entwicklung und Inbetriebnahme eines mit einem ...
18
Fakult ¨ at Informatik Institut f ¨ ur Technische Informatik Professur f ¨ ur VLSI-Entwurfssysteme, Diagnostik und Architektur Masterarbeit Entwicklung und Inbetriebnahme eines Coprozessors zur Ansteuerung von BLDC-Motoren mit einem leistungsschwachen Prozessorkern Roman Reichel 1 / 18
Transcript of Entwicklung und Inbetriebnahme eines mit einem ...
Fakultat InformatikInstitut fur Technische InformatikProfessur fur VLSI-Entwurfssysteme, Diagnostik und Architektur
Masterarbeit
Entwicklung und Inbetriebnahme einesCoprozessors zur Ansteuerung von BLDC-Motorenmit einem leistungsschwachen Prozessorkern
Roman Reichel
1 / 18
Ubersicht
1 Einleitung
2 Literaturrecherche
3 Hardware
4 Erste Implementierung
5 Zusammenfassung und Ausblick
2 / 18

Einleitung
Jjmontero9, Wikimedia Commons, lizenziertunter CC BY-SA 3.0
Sebastian Koppehel, Wikimedia Commons,lizenziert unter CC BY 3.0
3 / 18
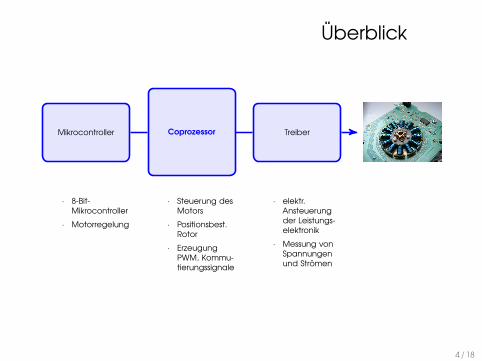
Uberblick
Mikrocontroller Coprozessor Treiber
· 8-Bit-Mikrocontroller
· Motorregelung
· Steuerung desMotors
· Positionsbest.Rotor
· ErzeugungPWM, Kommu-tierungssignale
· elektr.Ansteuerungder Leistungs-elektronik
· Messung vonSpannungenund Stromen
4 / 18
Aufgaben
Einarbeitung in die Thematik, Literaturstudium zuEC-Motorsteuerungen und BLDC-Motoren.
Implementierung der Gesamtarchitektur in ein FPGAfur Evaluierungszwecke.
Evaluierung des Systems bezuglich seiner Performanceund Dokumentation der Ergebnisse.
5 / 18
Literaturrecherche
HSU
LSU
HSV
LSV
HSW
LSW
100
110010
011
001 101
-10
1-0
10-
-01
0-1
01-
111000
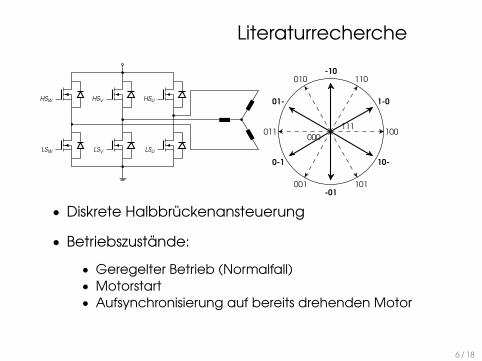
• Diskrete Halbbruckenansteuerung
• Betriebszustande:
• Geregelter Betrieb (Normalfall)• Motorstart• Aufsynchronisierung auf bereits drehenden Motor
6 / 18
Blockkommutierung
1 2 3 4 5 6
U
V
W
t
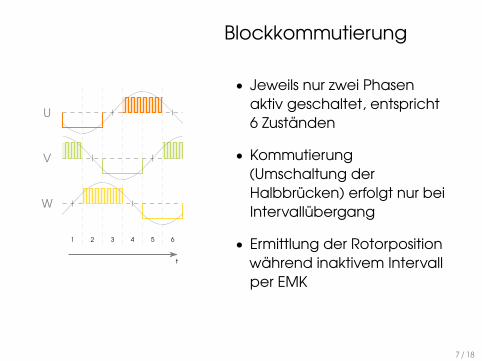
• Jeweils nur zwei Phasenaktiv geschaltet, entspricht6 Zustanden
• Kommutierung(Umschaltung derHalbbrucken) erfolgt nur beiIntervallubergang
• Ermittlung der Rotorpositionwahrend inaktivem Intervallper EMK
7 / 18
EMK-Messung
Kommutierung Kommutierung
Nulldurchgang
t
U
VBA
TG
ND
BA
t
U
VBA
T/2
GN
D
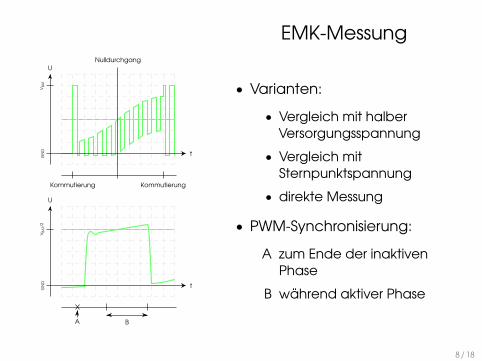
• Varianten:
• Vergleich mit halberVersorgungsspannung
• Vergleich mitSternpunktspannung
• direkte Messung
• PWM-Synchronisierung:
A zum Ende der inaktivenPhase
B wahrend aktiver Phase
8 / 18
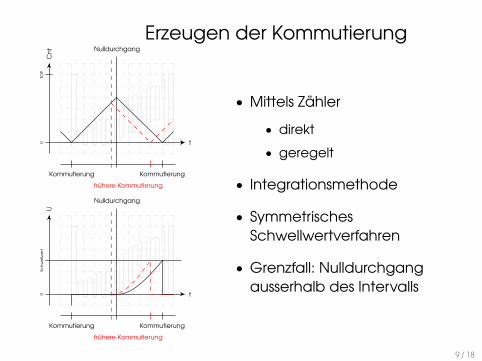
Erzeugen der Kommutierung
Kommutierung Kommutierung
Nulldurchgang
t
Cn
tTO
P0
fruhere Kommutierung
Kommutierung Kommutierung
Nulldurchgang
t
USc
hw
ellw
ert
0
fruhere Kommutierung
• Mittels Zahler
• direkt
• geregelt
• Integrationsmethode
• SymmetrischesSchwellwertverfahren
• Grenzfall: Nulldurchgangausserhalb des Intervalls
9 / 18
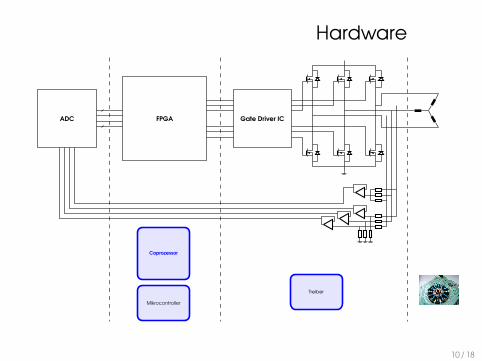
Hardware
Gate Driver ICFPGAADC
Mikrocontroller
Coprozessor
Treiber
10 / 18
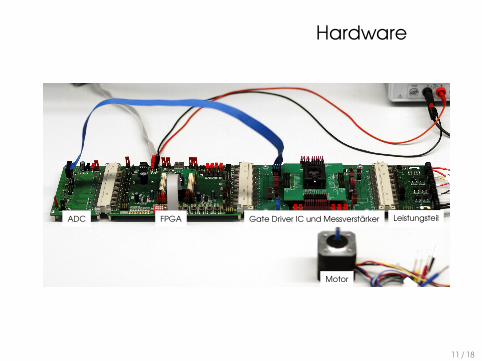
Hardware
ADC FPGA Gate Driver IC und Messverstarker Leistungsteil
Motor
11 / 18

FPGA
Introduction
The Micromodule series are OEM modules, based on Xilinx Spartan-3 platform FPGA. Many compo-nents like USB 2.0 transceiver, configuration Flash, power supply and optionally SDRAM are available on a tiny footprint of only 50,7 x 43,6 mm. A large number of configurable I/Os are pro-vided via B2B mini-connectors. Designed as a ready-to-use plug-in module for carrier boards, they integrate perfectly in battery-powered, hand-held or USB-powered applications.
The Micromodules can easily be modified on cus-tomer request and are available in versions with and without SDRAM and with different FPGA sizes.
Features
■ High-density plug-in Spartan-3 module
■ USB 2.0 interface
■ Platform Flash for in-system configuration
■ 16 Kbit serial EEPROM
■ Power supply via USB or external 5 Volt input
■ Low cost and flexible
■ Multiple micromodules are stackable
■ Flexible expansion via high-density board-to-board connectors
■ Prototyping-Carrier board available for evalua-tion
Applications
■ USB 2.0 Device development
■ IP development
■ Digital signal processing
■ General-purpose prototyping platform
■ OEM Module on custom Hardware
Figure 2: Micromodule with SDRAM Figure 1: Micromodule without SDRAM
Spartan-3 Micromodule
• Xilinx Spartan-3• XC3S1000
• 432 KBit BRAM
• 30(60) MHz Systemtakt
• Entwicklungsumgebung:ISE 14.7
12 / 18
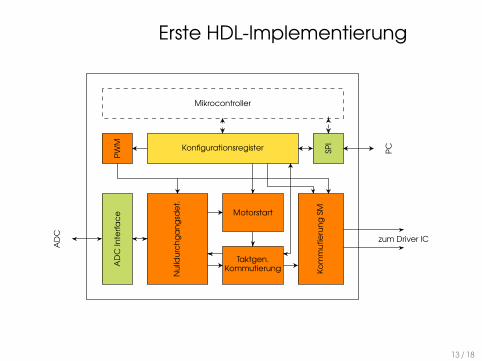
Erste HDL-Implementierung
Mikrocontroller
PWM Konfigurationsregister SPI
Kom
mut
ieru
ng
SMMotorstart
Taktgen.Kommutierung
Nu
lldu
rch
ga
ng
sde
t.
AD
CIn
terfa
ce
AD
C
PC
zum Driver IC
13 / 18
Motorstart
• Zwangskommutierung mit ansteigender Frequenz
• Start mit festem Parameterset (experimentell bestimmt)
• Parallel: Erkennung von Nulldurchgangen
• bei erfolgreicher Detektion Ubergang zu geregeltemBetrieb
14 / 18
Nulldurchgangserkennung
• Im Abtastfenster kontinuierlicher Vergleich vonSternpunktspannung und Phasenspannung
• Ergebnisse durchlaufen 6-Bit-Schieberegister
• Majoritatsbasierte Zustandswahl fur obere und untere 3Bit
• bei Ubergang von 0 nach 1 Signalisierung anTaktgenerator
• inharente Erkennung von Fruh-/Spatkommutierungdurch geeignete Initialisierung
15 / 18
Bisherige Ergebnisse
• Literaturrecherche
• Einarbeitung in die Thematik Motoransteuerung
• Inbetriebnahme der Entwicklungsplattform
• Erste Implementierung als Basis fur weitereUntersuchungen
16 / 18
Ausblick
• Ausbau des Motorstart-Algorithmus
• Aufsynchronisierung auf drehenden Motor
• Erkennung des Motorzustandes (Blockierung,fehlerhafte Kommutierung)
• Implementierung weiterer Verfahren zurNulldurchgangsdetektion und Kommutierung,Bewertung und Vergleich hinsichtlichRessourcenbedarf und Leistungsfahigkeit
17 / 18
LiteraturAVR493: Sensorless Commutation of Brushless DC Motor(BLDC) using AT90PWM3 and ATAVRMC100, AtmelCorporation, 12/2006
Jianwen Shao, Direct Back EMF Detection Method forSensorless Brushless DC (BLDC) Motor Drives, MasterThesis, Virginia Polytechnic Institute and State University,9/2003
AN1946: Sensorless BLDC Motor Control and BEMFSampling Methods with ST7MC, STMicroelectronics, Rev.2, 07/2007
Padmaraja Yedamale, AN885: Brushless DC (BLDC)Motor Fundamentals, Microchip Technology Inc.,07/2003
18 / 18


















