Fokus-serien basierte Rekonstruktion von Mikroobjekten (2002)
26
Fokusserien-basierte Rekonstruktion von Mikroobjekten Fokusserien-basierte Rekonstruktion von Mikroobjekten Jan Wedekind 16.5.2002 Betreuer: Axel B¨ urkle Referent: Prof. Heinz W¨ orn Universit¨ at Karlsruhe (TH) -1- Institut f¨ ur Prozeßrechentechnik, Automation und Robotik
-
Upload
jan-wedekind -
Category
Technology
-
view
393 -
download
0
Transcript of Fokus-serien basierte Rekonstruktion von Mikroobjekten (2002)

Fokusserien-basierte Rekonstruktion von Mikroobjekten
Fokusserien-basierte Rekonstruktion von Mikroobjekten
Jan Wedekind
16.5.2002
Betreuer: Axel Burkle
Referent: Prof. Heinz Worn
Universitat Karlsruhe (TH) - 1 -Institut fur Prozeßrechentechnik,
Automation und Robotik
Fokusserien-basierte Rekonstruktion von Mikroobjekten
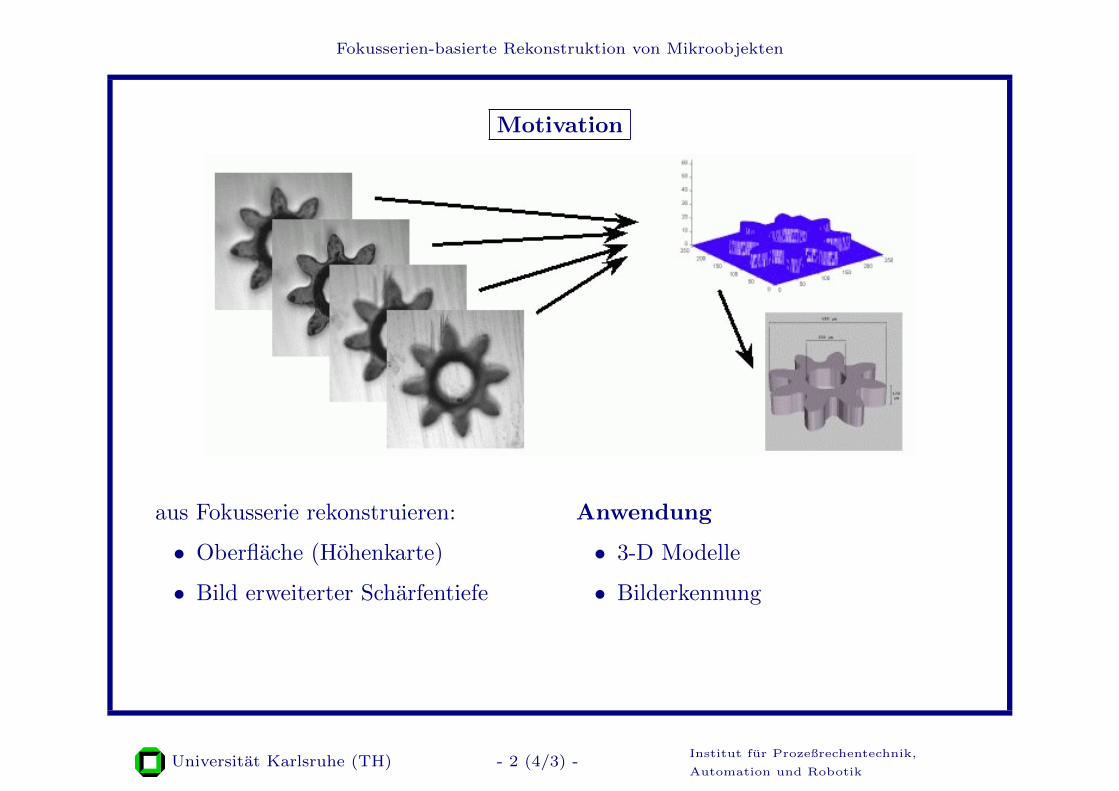
Motivation
aus Fokusserie rekonstruieren:
• Oberflache (Hohenkarte)
• Bild erweiterter Scharfentiefe
Anwendung
• 3-D Modelle
• Bilderkennung
Universitat Karlsruhe (TH) - 2 (4/3) -Institut fur Prozeßrechentechnik,
Automation und Robotik

Fokusserien-basierte Rekonstruktion von Mikroobjekten
Verwandte Techniken
Laser
Kamera
∆x
α∆z
XYZ−Tisch
Piezo
Pfad1 Pfad2
LaserStrahlteiler
Detektor
Linse1 Linse2
Probe
Lasertriangulation
• Vorteil: schnell, stabil
• Grenze: Linienbreite,
Scharfentiefe
Konfokales
Laserscanningmikroskop
• hohe Auflosung, 3-D
• teuer
Universitat Karlsruhe (TH) - 3 (10/9) -Institut fur Prozeßrechentechnik,
Automation und Robotik

Fokusserien-basierte Rekonstruktion von Mikroobjekten
Stand der Technik
• Hohenkarte d(x, y) aus
– Maximierung eines Scharfemaßes
∗ Gradientenbetrag
∗ lokale Grauwertvarianz
∗ Wavelet, 2. Ableitung
– Vergleich der Unscharfe
• Bild erweiterter Scharfentiefe
v(x, y) = gd(x,y)(x, y)
Fusion
TiefenbildFokusserie
Höhenkarte
Laplace
Universitat Karlsruhe (TH) - 4 (7/6) -Institut fur Prozeßrechentechnik,
Automation und Robotik

Fokusserien-basierte Rekonstruktion von Mikroobjekten
Meßaufbau
• Leica DM RXA Mikroskop
– 2 Kanal Beleuchtung mit
Filtereinsatz
– Motorisierter Z-Tisch
(Schrittweite 0.1µm)
• Dual Pentium III mit 1GHz
Prozessoren
• 768× 576 CCD-Kamera 8-Bit
⇒ Auflosung bis zu 0.74 µm/Pixel
Universitat Karlsruhe (TH) - 5 (7/6) -Institut fur Prozeßrechentechnik,
Automation und Robotik

Fokusserien-basierte Rekonstruktion von Mikroobjekten
Projektion von Hilfsmustern
Ohne Verwendung von
Hilfsmuster
Mit
projiziertem 13µm-
Schachbrettmuster
Universitat Karlsruhe (TH) - 6 (6/5) -Institut fur Prozeßrechentechnik,
Automation und Robotik
Fokusserien-basierte Rekonstruktion von Mikroobjekten
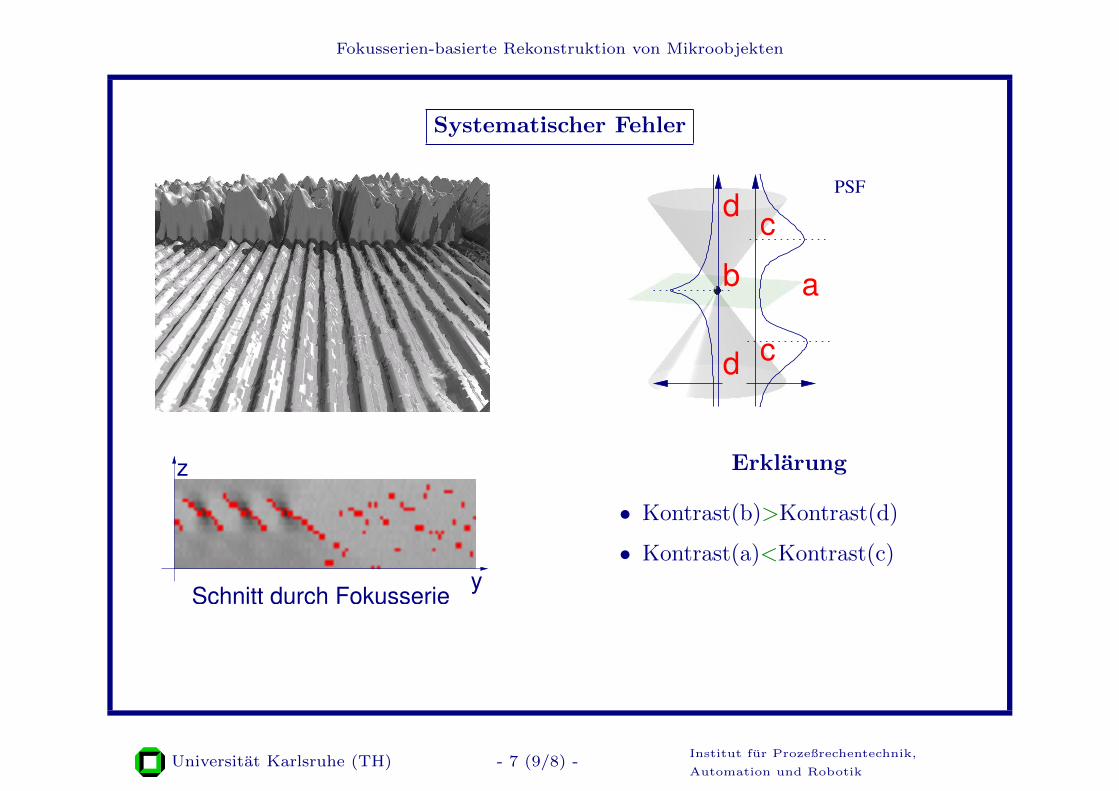
Systematischer Fehler
PSF
c
c
ab
d
d
Schnitt durch Fokusseriey
z Erklarung
• Kontrast(b)>Kontrast(d)
• Kontrast(a)<Kontrast(c)
Universitat Karlsruhe (TH) - 7 (9/8) -Institut fur Prozeßrechentechnik,
Automation und Robotik

Fokusserien-basierte Rekonstruktion von Mikroobjekten
adaptives Scharfemaß
-(·)2
gz(x, y) gz(x, y)2
-(·)2
⊗ h ⊗ h
⊗ s ⊗ s
⊗ s ⊗ s
(·)2
+
1
+
2
Filterung
FilterungVerkleinerung
FilterungVerkleinerung
Fokusserie
Scharfemaß fur verschiedene
Auflosungen
• hier lokale Grauwertvarianz
• Komplexitat O(N)
Universitat Karlsruhe (TH) - 8 -Institut fur Prozeßrechentechnik,
Automation und Robotik
Fokusserien-basierte Rekonstruktion von Mikroobjekten
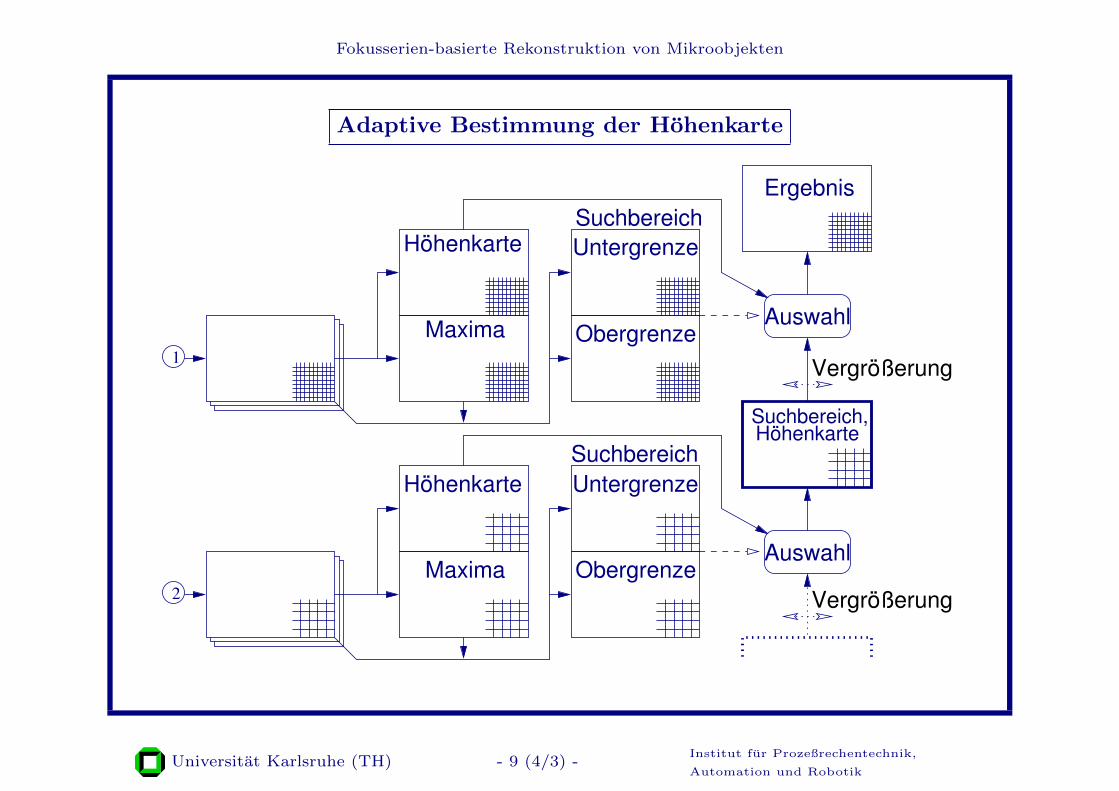
Adaptive Bestimmung der Hohenkarte
Höhenkarte
Maxima
Untergrenze
Obergrenze
Suchbereich
1
Auswahl
Ergebnis
2
Auswahl
Höhenkarte
Maxima
Untergrenze
Obergrenze
Suchbereich
Suchbereich,Höhenkarte
Vergrößerung
Vergrößerung
Universitat Karlsruhe (TH) - 9 (4/3) -Institut fur Prozeßrechentechnik,
Automation und Robotik

Fokusserien-basierte Rekonstruktion von Mikroobjekten
Ergebnis
Universitat Karlsruhe (TH) - 10 (3/2) -Institut fur Prozeßrechentechnik,
Automation und Robotik
Fokusserien-basierte Rekonstruktion von Mikroobjekten
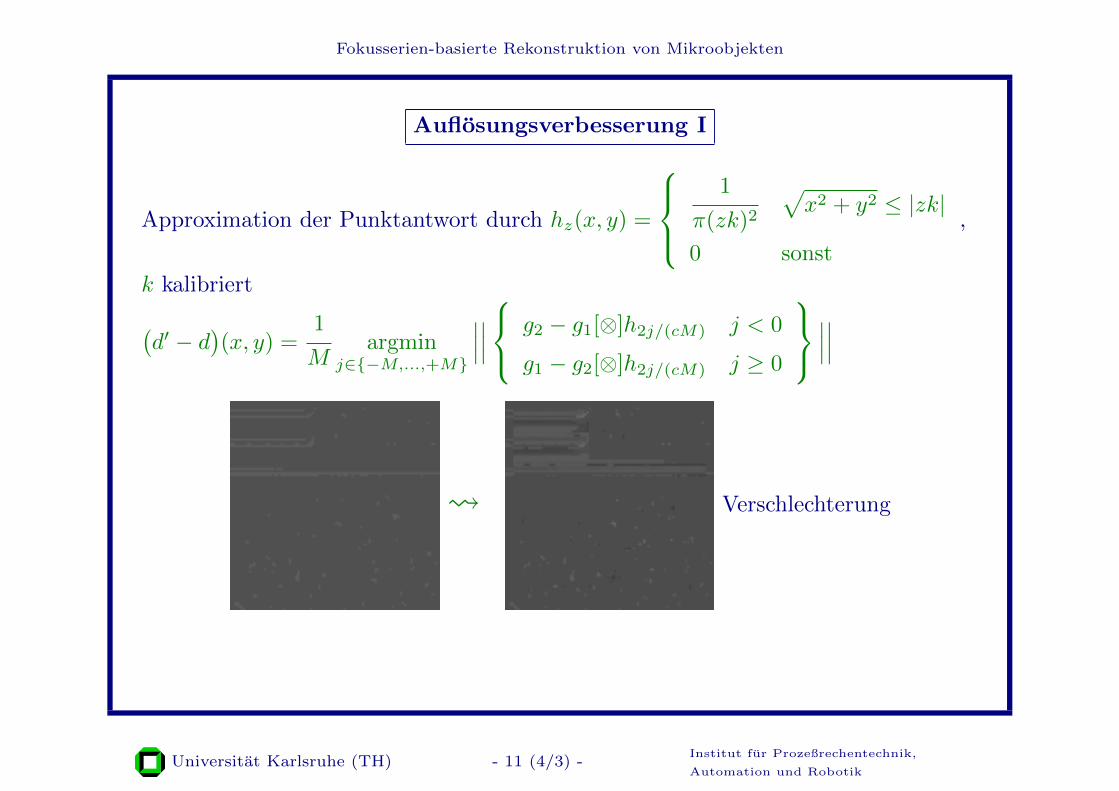
Auflosungsverbesserung I
Approximation der Punktantwort durch hz(x, y) =
1
π(zk)2
√x2 + y2 ≤ |zk|
0 sonst
,
k kalibriert(d′ − d
)(x, y) =
1
Margmin
j∈{−M,...,+M}
∣∣∣∣∣∣ g2 − g1[⊗]h2j/(cM) j < 0
g1 − g2[⊗]h2j/(cM) j ≥ 0
∣∣∣∣∣∣
Verschlechterung
Universitat Karlsruhe (TH) - 11 (4/3) -Institut fur Prozeßrechentechnik,
Automation und Robotik

Fokusserien-basierte Rekonstruktion von Mikroobjekten
Auflosungsverbesserung II
Maxima
Schärfemaß
Regressions−Parabel
zMaximum der Regressionsparabel
Universitat Karlsruhe (TH) - 12 -Institut fur Prozeßrechentechnik,
Automation und Robotik

Fokusserien-basierte Rekonstruktion von Mikroobjekten
Vergleich I
ohne Muster mit Muster
Stand der Technik
adaptiv
Universitat Karlsruhe (TH) - 13 (3/2) -Institut fur Prozeßrechentechnik,
Automation und Robotik

Fokusserien-basierte Rekonstruktion von Mikroobjekten
Vergleich II
simulierte 1003-Fokusserie: geneigte Ebene
Gutemaß σ2d =
1
N2argmina1,a2,b∈R
N−1∑x=0
N−1∑y=0
(a1x+ a2y + b− d(x, y))2
g50(x, y)
Algorithmus σd
einfach 21.6531
adaptiv 1.4135
+ Vgl. d. Unscharfe 1.4956
+ Interpolation 1.3704
Universitat Karlsruhe (TH) - 14 (10/9) -Institut fur Prozeßrechentechnik,
Automation und Robotik

Fokusserien-basierte Rekonstruktion von Mikroobjekten
Vergleich III
Algorithmus σd/2µm
einfach 3.66435
adaptiv 0.76254
+ Vgl. d. Unscharfe 0.97060
+ Interpolation 0.67578
Universitat Karlsruhe (TH) - 15 (11/10) -Institut fur Prozeßrechentechnik,
Automation und Robotik

Fokusserien-basierte Rekonstruktion von Mikroobjekten
Zusammenfassung
• Adaptiver Algorithmus unterdruckt systematische Fehler
• Projektion von Hilfsmuster
• wenige Parameter
• Komplexitat O(N)
• Berechnung von Tiefenbildern
• Auflosungsverbesserung durch Interpolation
Universitat Karlsruhe (TH) - 16 (7/6) -Institut fur Prozeßrechentechnik,
Automation und Robotik

Fokusserien-basierte Rekonstruktion von Mikroobjekten
Ausblick
• Meßaufbau:
– Helligkeitsregler fur Beleuchtung
• Algorithmus:
– Adaptiver Vergleich der Unscharfe
– Fusion von Fokusserien
– Interpolation der Hohenkarte
– Scharfemaß aus Wavelets
– Zusammensetzen von Hohenkarten
Universitat Karlsruhe (TH) - 17 (9/8) -Institut fur Prozeßrechentechnik,
Automation und Robotik

Fokusserien-basierte Rekonstruktion von Mikroobjekten
Mikrogitter
Universitat Karlsruhe (TH) - 18 -Institut fur Prozeßrechentechnik,
Automation und Robotik

Fokusserien-basierte Rekonstruktion von Mikroobjekten
Rillen
Universitat Karlsruhe (TH) - 19 -Institut fur Prozeßrechentechnik,
Automation und Robotik
Fokusserien-basierte Rekonstruktion von Mikroobjekten
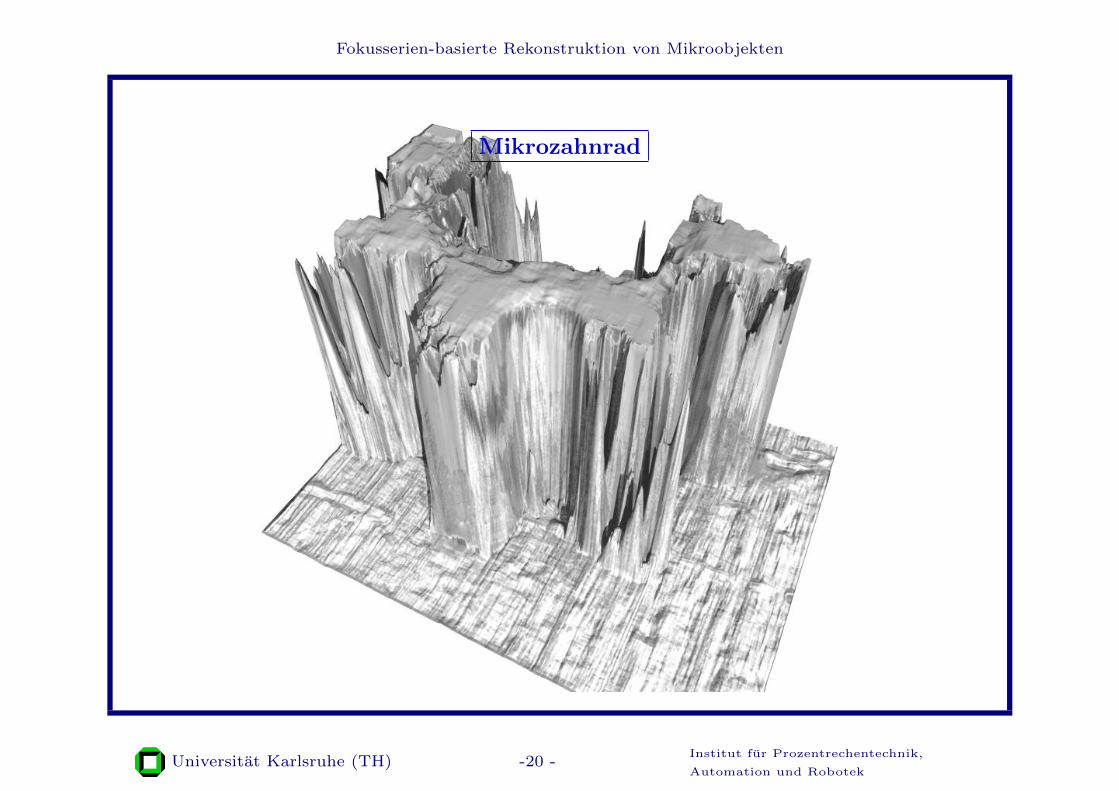
Mikrozahnrad
Universitat Karlsruhe (TH) -20 -Institut fur Prozentrechentechnik,
Automation und Robotek

Fokusserien-basierte Rekonstruktion von Mikroobjekten
1-Cent Euro “E”
Universitat Karlsruhe (TH) - 21 -Institut fur Prozeßrechentechnik,
Automation und Robotik
Fokusserien-basierte Rekonstruktion von Mikroobjekten
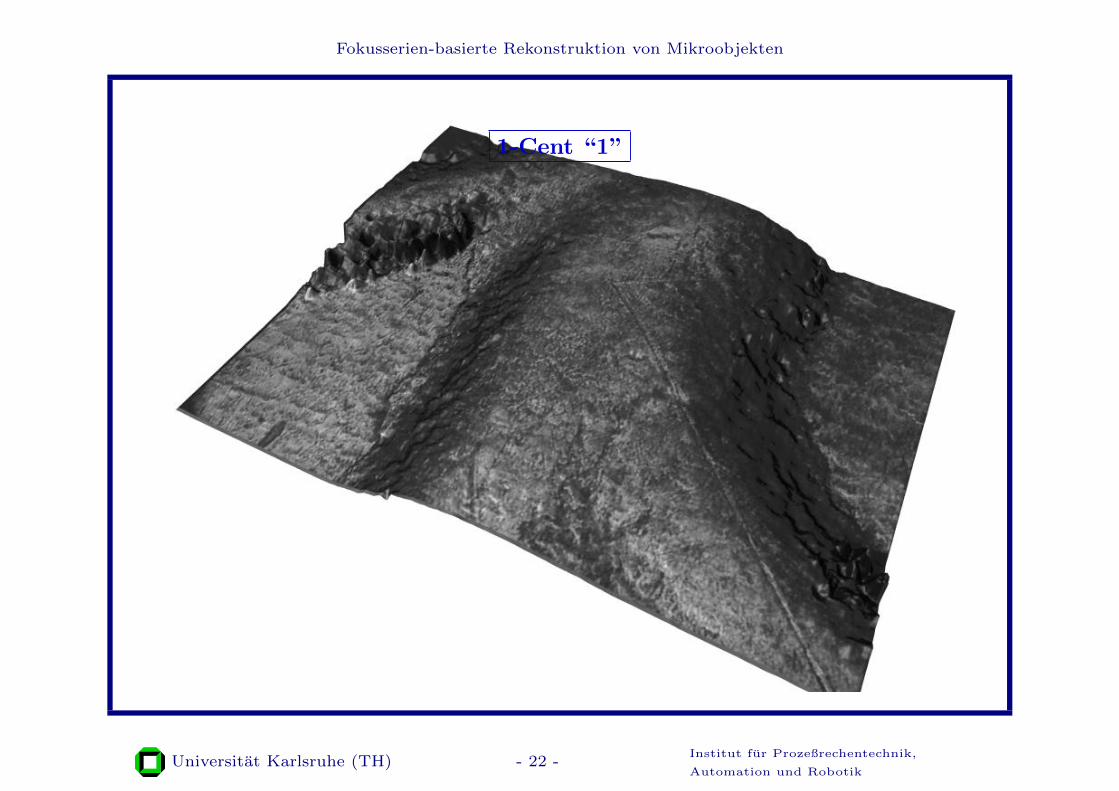
1-Cent “1”
Universitat Karlsruhe (TH) - 22 -Institut fur Prozeßrechentechnik,
Automation und Robotik

Fokusserien-basierte Rekonstruktion von Mikroobjekten
kleines Mikrozahnrad
∅0.6 mm
Universitat Karlsruhe (TH) - 23 -Institut fur Prozeßrechentechnik,
Automation und Robotik
Fokusserien-basierte Rekonstruktion von Mikroobjekten
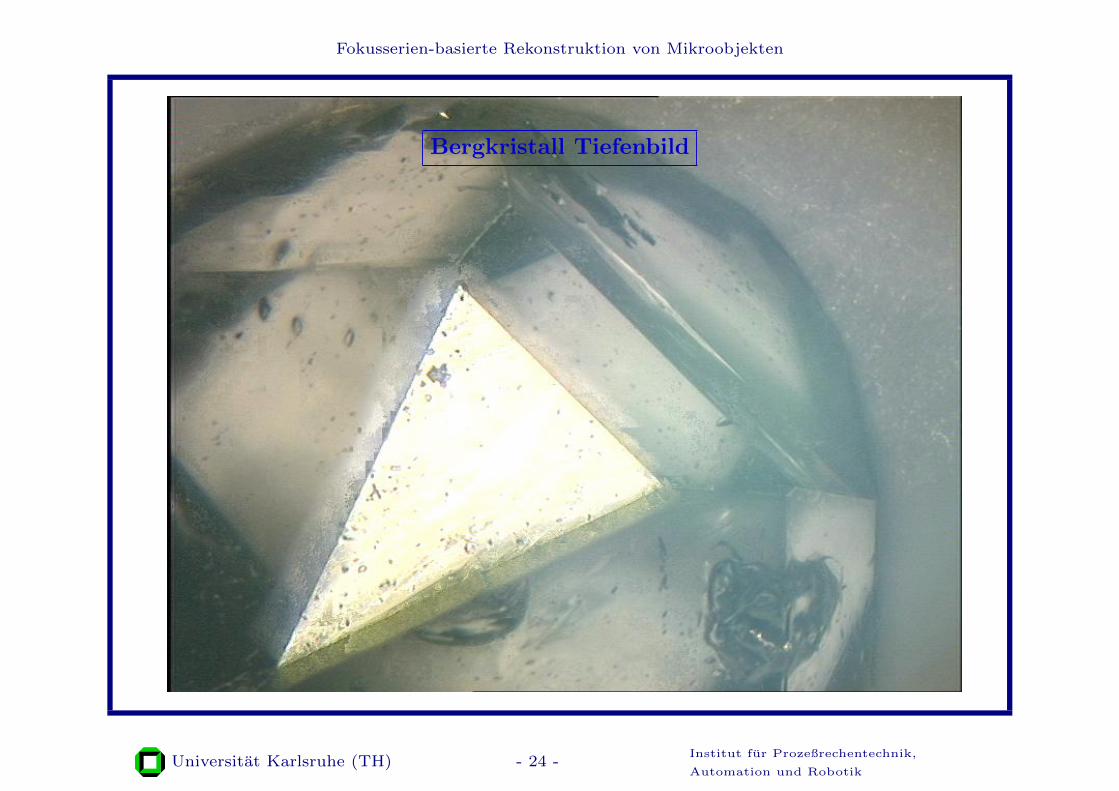
Bergkristall Tiefenbild
Universitat Karlsruhe (TH) - 24 -Institut fur Prozeßrechentechnik,
Automation und Robotik

Fokusserien-basierte Rekonstruktion von Mikroobjekten
Ammonit 3D
Universitat Karlsruhe (TH) - 25 -Institut fur Prozeßrechentechnik,
Automation und Robotik

Fokusserien-basierte Rekonstruktion von Mikroobjekten
Universitat Karlsruhe (TH) - 26 (3/2) -Institut fur Prozeßrechentechnik,
Automation und Robotik