
ft:pedia · PDF filegrund, dass der Motor Master ja eigentlich das Topmodell der Master-Serie...
77
Herausgegeben von Dirk Fox und Stefan Falk ISSN 2192-5879 Z 1 S=Z 0 Pause kurz kurz („i“) lang („a“) ft:pedia Heft 3/2014
Transcript of ft:pedia · PDF filegrund, dass der Motor Master ja eigentlich das Topmodell der Master-Serie...
Herausgegeben vonDirk Fox und Stefan Falk
ISSN 2192-5879
Z1S=Z0Pause
kurzkurz („i“)
lang („a“)
ft:pediaHeft 3/2014
Heft 3/2014 ft:pedia
2
Editorial
Dynamik XXL
Dirk Fox, Stefan FalkRespekt. Wer hätte das gedacht: fischer-technik, das Modellbausystem für Nerdsund Technik-Freaks, wirtschaftlich längstabgehängt von Lego (mit Lego Technik undMindstorms), gewinnt den Spielwaren-Oscar 2014 – mit einem Kasten der „Profi“-Serie: dem „Dynamic XL“. Ein Baukasten,der Anforderungen an Motorik und tech-nisches Verständnis stellt, und dessenModelle Geduld, Zeit und Feinjustierungerfordern, um zu funktionieren.
Da scheint irgendetwas nicht ganz zu stim-men mit dem Bild vom deutschen Xbox-Kinderzimmer. Zwar gibt es sie noch – dieebay-Verkäufer, die kaum bespielte fischer-technik-Kästen ihrer Kinder mit dem Argu-ment feilbieten, jene seien inzwischen im„Zockeralter“; und die Kritiker, die dem„Dynamic XL“ vorwerfen, dass die kon-struierte Kugelbahn nicht auf Anhieb funk-tioniert. Aber offenbar gewinnt eine Eltern-Fraktion an Bedeutung, bei denen Spielzeugmehr sein darf als ein beschäftigungs-therapeutisches Hilfsmittel zur temporärenRuhigstellung des Nachwuchses.
Bei Amazon erreichte der Kasten inzwi-schen in der Kategorie ‚Spielzeug‘ die TOP1.000, obwohl sein Preis deutlich jenseitsder 100 € bei vielen Erstkäufern zweifellosspontan Schnappatmung auslösen dürfte.Abgezeichnet hat sich diese Entwicklungschon beim Vorgängerkasten „Dynamic“,der trotz seines Preises zum Verkaufs-schlager wurde. Besonders erfreulich daran:Der Baukasten lässt Einsteiger das „Systemfischertechnik“ erkennen – Bausteine, diesich universell kombinieren lassen und
einem durchgängigen Grundmaß folgen,die vielseitige mechanische Konstruktionenerlauben und physikalisch-technische Zu-sammenhänge spielerisch erlebbar machen.Die Einführung der Kugelbahnen könntealso eine anhaltende Begeisterungswelle fürfischertechnik ausgelöst haben. Mit etwasGeschick sollte es fischertechnik gelingen,diese Welle zu reiten. Vielleicht wäre jetztder richtige Zeitpunkt für eine pfiffigePlakat-Kampagne…
Und jetzt: Ran an die Kästen!
Beste Grüße, Euer ft:pedia-TeamP.S.: Am einfachsten erreicht ihr uns [email protected] oder über die Ru-brik ft:pedia im Forum der ft-Community.
ft:pedia Inhalt • Termine • Hinweise • Impressum
3
Inhalt Dynamik XXL ........................................................................ 2Die ‚neue fischertechnik‘ – 1989-1994 .................................. 4Mini-Modelle (Teil 3): Scheinwerfer ..................................... 11Mini-Modelle (Teil 4): Hubschrauber ................................... 12Kaulquappen (Teil 5) ........................................................... 14Pneumatische Drehdurchführung........................................ 17ft-Spezialteile made by TST (Teil 9) .................................... 20Druckluftsteuerungen (Teil 3) .............................................. 21Druckmessung mit RoboTX Controller ................................ 32Binäraddierer....................................................................... 36Endliche Automaten in Robo Pro ........................................ 42Detail Engineering R2D3 (3) – IR-Fernbedienung amRobo TX Controller ............................................................. 51LEDs in Leuchtsteinen ........................................................ 55Parallel Interface – durch Arduino gesteuert (3) .................. 61Strichcode-Leser am Robo TX Controller (1):Automatisiert mit RoboPro .................................................. 66Navigation ........................................................................... 72
Termine Was? Wann? Wo?ft Convention 2014 27.09.2014 Erbes-BüdesheimScience Days 16.-18.10.2014 Europapark RustMaker Space 20.-23.11.2014 Messe Stuttgart
Impressum http://www.ftcommunity.de/ftpediaHerausgeber: Dirk Fox, Ettlinger Straße 12-14, 76137Karlsruhe und Stefan Falk, Siemensstraße 20, 76275 EttlingenAutoren: Christian Andersch (Carrera124), GerhardBirkenstock (gggb), Stefan Falk (steffalk), Dirk Fox (Dirk Fox),Johann Fox, Andreas Gail, Jens Lemkamp (lemkajen),Thomas Püttmann (geometer), Harald Steinhaus (Harald),Andreas Tacke (TST), René Trapp (H.A.R.R.Y.)Copyright: Jede unentgeltliche Verbreitung der unverändertenund vollständigen Ausgabe sowie einzelner Beiträge (mitvollständiger Quellenangabe: Autor, Ausgabe, Seitenangabeft:pedia) ist nicht nur zulässig, sondern ausdrücklicherwünscht. Die Verwertungsrechte aller in ft:pedia ver-öffentlichten Beiträge liegen bei den jeweiligen Autoren.
Heft 3/2014 ft:pedia
4
ft-Geschichte
Die ‚neue fischertechnik‘ – 1989-1994
Christian AnderschVor ziemlich genau 50 Jahren erblickte fischertechnik im Herbst 1964, zunächst als Kunden-Weihnachtsgeschenk gedacht, das Licht der Welt. Der perfekte Zeitpunkt, um den Blick auf dieEntwicklungsgeschichte der fischertechnik-Kästen zu richten. Der Beitrag beleuchtet die – fürSammler interessante und bei fischertechnik-Fans nicht unumstrittene – Phase der ‚neuenfischertechnik‘, die das einheitliche „grau-rot“ des Teilesortiments beendete.
Ich gebe es zu, in meiner Kindheit haben dieBauklötze aus Dänemark mein Kinder-zimmer dominiert. Zusätzlich stand eineCarrera-Rennbahn im Hobbyraum, somitgab es zwei Systemspielzeuge, die anGeburtstagen und zu Weihnachten kontinu-ierlich erweitert wurden. Für fischertechnikwar da kein Platz, sowohl im wörtlichen alsauch im übertragenen Sinn.Nichtsdestotrotz habe ich das fischertech-nik-Sortiment immer mit einem Auge ver-folgt. Es war Familientradition, in der Vor-weihnachtszeit die Spielwarengeschäfte inder Stadt zu besuchen. Mit Vedes, Idee &Spiel, Spielzeug-Ring und weiteren lokalenGeschäften waren wir in den 80er Jahrennoch gut versorgt. Ebenfalls war es guteTradition, die Kataloge dieser Spielwaren-ketten mitzunehmen und zuhause intensivdurchzublättern. Im Gegensatz zu vielenanderen Haushalten wurden dieses Kata-loge aber nicht entsorgt sondern aufbe-wahrt, so dass ich hier eine nahezu durch-gängige Kollektion angesammelt habe,beginnend mit den ausklingenden 70erJahren.
Zurück zu fischertechnik. Das System derGrund- und Erweiterungsbaukästen der80er Jahre fand ich als Kind immer etwasschwierig zu durchschauen. Die kleinenFührerhäuser und die Halma-ähnlichenFiguren sprachen mit ebenfalls nicht
wirklich an. Ganz anders verhielt es sich mitdem Modellbaukästen: Schwerlastkran,Hydraulik-Kipper, Universalfahrzeug undso weiter, damit hätte man mich durchausbegeistern können. Aus den oben erwähntenGründen kam es leider nie dazu.
Die ‚neue fischertechnik‘Die Jahre 1989 und 1990Auch 1989 wurden Kataloge besorgt, sodass mir hier der Prospekt „Die neuefischertechnik“ in die Hände fiel. AlteZöpfe wurden rigoros abgeschnitten, dasSortiment von Grund auf erneuert undvöllig neu gegliedert. Besonders auffälligwar die Abkehr vom rot-grauen Look hin zumehr Farbe: Standardbausteine waren jetztschwarz und Statikteile gelb. Die neueAufteilung in Junior- und Master-Serieerschien mir sinnvoll. Als Grundbaukastengedacht, hatten diese – im Gegensatz zu denfrüheren Start 100/200 Kästen – endlichauch große Führerhäuser und die dazu-gehörigen großen Figuren.
Los ging es mit drei Baukästen: Junior(30300), Master (30301) und Motor Master(30302). Ebenfalls neu war die Ver-packung: Anstelle einer herkömmlichenPappschachtel wurde eine Art „Werkzeug-koffer“ aus Kunststoff verwendet (Abb. 1).Hübsch anzusehen, aber in der Handhabungnicht ganz so praktisch wie gedacht, weil

ft:pedia ft-Geschichte
5
der Sortiereinsatz nicht bündig mit demDeckel abschließt: trägt man den Koffer amTragegriff, purzeln innen kleinere Bauteileaus ihren Sortierfächern heraus undverteilen sich überall. Das war sicher nichtim Sinne des Erfinders.
Abb. 1: Der Junior-Koffer (30300), 1989
Weiterhin lässt sich bei den einzelnenSerien so etwas wie ein ‚Farbcode‘ fest-stellen: Der Junior-Koffer verfügte über einrotes Fahrerhaus und gelbe Felgen. EinSchema, das auch in nachfolgenden Kästender Junior-Serie beibehalten wurde.Der Master-Koffer (Abb. 2) war mit einemblauen Führerhaus und roten Felgen ausge-stattet, die Teile für die LKW-Ladepritschewaren gelb. Auch dieses Schema wurde fürnachfolgende Kästen der Master-Seriebeibehalten.
Abb. 2: Master (30301), 1989
Abweichend davon war die Ausstattung desMotor Master (Abb. 3): Hier wurden nichtnur die zusätzlichen Teile für Motor undGetriebe beigelegt, sondern gegenüber demnicht motorisierten Master auch die Farben
von Felgen und Ladepritsche getauscht.Vermutlich sollten diese Maßnahmenbewirken, dem Topmodell unter den Bau-kästen etwas mehr Eigenständigkeit zu ver-schaffen, anstatt einfach nur einen erweiter-ten Master-Baukasten darzustellen.
Abb. 3: Motor Master (30302), 1989
Auch wurden 1989 bereits die „MasterPlus“-Erweiterungen angekündigt und imFalle der Motorisierung 30310 auch bereitsausgeliefert (Abb. 4). 1990 folgten weitereMaster Plus Kästen (Abb. 5).
Abb. 4: Master Plus – Motorisierung (30310)
Abb. 5: Master Plus – Figuren (30311)

Heft 3/2014 ft:pedia
6
Erste Umstellung 1991 – ab in denKartonDen Kunststoffkoffern war nur ein relativkurzes Leben beschieden, bereits 1991erhielten die Grundbaukästen der Junior-und Master-Serie herkömmliche Papp-schachteln mit tiefgezogenen Sortierein-sätzen aus Kunststoff (Abb. 6).
Abb. 6: Master (30301), 1991
Gemeinhin herrscht die Annahme, dasszeitgleich mit diesem Schritt auch dieUmstellung beim Motor von 6 V auf 9 Verfolgte und der quadratische Power Blockdurch die rechteckige Version abgelöstwurde. Diese Annahme kann aber nichtzutreffen, denn im 1991er Katalog ist einMotor-Master-Baukasten abgebildet, dertrotz Kartonverpackung weiterhin den qua-dratischen Power Block sowie die gelbenFelgen und die rote Ladepritsche auf demDeckel zeigt, mithin also die identischeTeilebestückung wie die Koffer-Versionenthält.
Abb. 7: Motor Master (30302), 1991
Dabei handelt es sich nicht nur um eineKatalogabbildung, solche Kästen wurden
tatsächlich produziert und ausgeliefert(Abb. 7). Allerdings ist die Vermutungnaheliegend, dass dies Version nur ver-gleichsweise kurzzeitig produziert wurdeund heute entsprechend selten ist.
Profi Kästen und Special Sets ab1991Die Special Sets waren die Nachfolger derService Sets aus den 80er Jahren. Motoren,Power Block und Standardbausteine konn-ten hier einzeln bzw. in kleinen Mengenerworben werden, insofern kann man dieseProduktlinie als kleineren Bruder derMaster-Plus-Ergänzungskästen betrachten.Oberhalb der Master-Serie war die neueProfi-Serie angesiedelt, in der u. a. auch dieComputing-Kästen eine neue Heimatfanden.
1992 – eine weitere Umstellung beimMotor MasterAbermals wurde der Motor Master über-arbeitet, jetzt endlich erfolgte die Umstel-lung auf 9 V und den rechteckigen PowerBlock. Interessanterweise wurde nun auchdie Farbe von Felgen und Ladepritsche andie Bestückung des nicht motorisiertenMaster angeglichen: rote Felgen und gelbePritsche, dies ist sowohl am Deckelbild alsauch in der Anleitung sichtbar (Abb. 8).
Abb. 8: Motor Master (30302), 1992
Die Gründe für die Änderung dürften aufder Hand liegen: die Master-Plus-Ergän-zungskästen, insbesondere Trucks (30314)und Special Trucks (30317), waren farblichauf den Master-Baukasten abgestimmt, die

ft:pedia ft-Geschichte
7
daraus baubaren Modelle wirken harmo-nisch: einheitlich rote Felgen und gelbeLadepritschen.Ganz anders bei der Kombination mit einemder beiden frühen Motor-Master-Versio-nen: hier konnten die Modelle dann insge-samt nur mit gemischtfarbigen Rädern undbunt zusammengewürfelten Ladepritschengebaut werden. Kein besonders glücklicherUmstand, erst recht nicht vor dem Hinter-grund, dass der Motor Master ja eigentlichdas Topmodell der Master-Serie darstellte,wozu solche farblichen Ungereimtheitennun wirklich nicht passten.Bemerkenswert ist weiterhin, dass sowohlauf dem Deckelbild als auch auf der Bau-anleitung der etwas füllige junge Mannhinter dem Power Block wegretuschiertwurde (Abb. 8). Über die Gründe kann mannur spekulieren, möglicherweise warendicke Kinder auf Produktverpackungennicht mehr erwünscht.
Abb. 9: fischertechnik-Sortiment 1992(aus: Katalog Idee & Spiel)
Schwächen des Junior- und Master-SystemsDie Grundidee der „neuen Fischertechnik“ab 1989 bestand darin, nur ein vergleichs-weise kleines Sortiment an Grundbaukästenanzubieten, die von der Kundschaft dannsystematisch und nach Lust und Laune mitden Plus- und Special-Sets erweitert werdenkonnten (Abb. 9). Selbst der Aufstieg vonder Junior- auf die Master-Serie war übereine entsprechende Erweiterungspackungnamens Junior Plus problemlos möglich. Inder Praxis hatte dieses eigentlich so klareund übersichtliche Konzept aber doch seineTücken.
Zum einen war nicht jedem Kunden –beispielsweise den Großeltern beim Weih-nachtsgeschenke-Einkauf – klar, dass dieMaster-Plus-Kästen nur zur Ergänzunggedacht waren und beim Beschenkten dasVorhandensein eines Master- oder Motor-Master-Grundbaukastens voraussetzten.Recht schnell wurden deshalb die Master-Plus-Kästen mit relativ großformatigenAufklebern nachgerüstet, die auf diesenUmstand hinwiesen (Abb. 10).
Abb. 10: Hinweis auf Master-Plus-Kästen
Zum anderen gab es diverse ‚strategischwichtige‘ Teile, die nur in den Grund-baukästen, nicht aber in den Plus-Ergän-zungskästen enthalten waren. Exemplarischsei hier das Führerhaus genannt; der gleich-zeitige Bau eines Lastwagens und einesLadekrans jeweils mit Führerhaus oder vonzwei Lastwagen war somit nicht möglich.
Lenkungsteile und Räder waren ebenfallsMangelware; letztere waren neben denGrundbaukästen immerhin in den beidenbereits erwähnten Master-Plus-Kästen
Heft 3/2014 ft:pedia
8
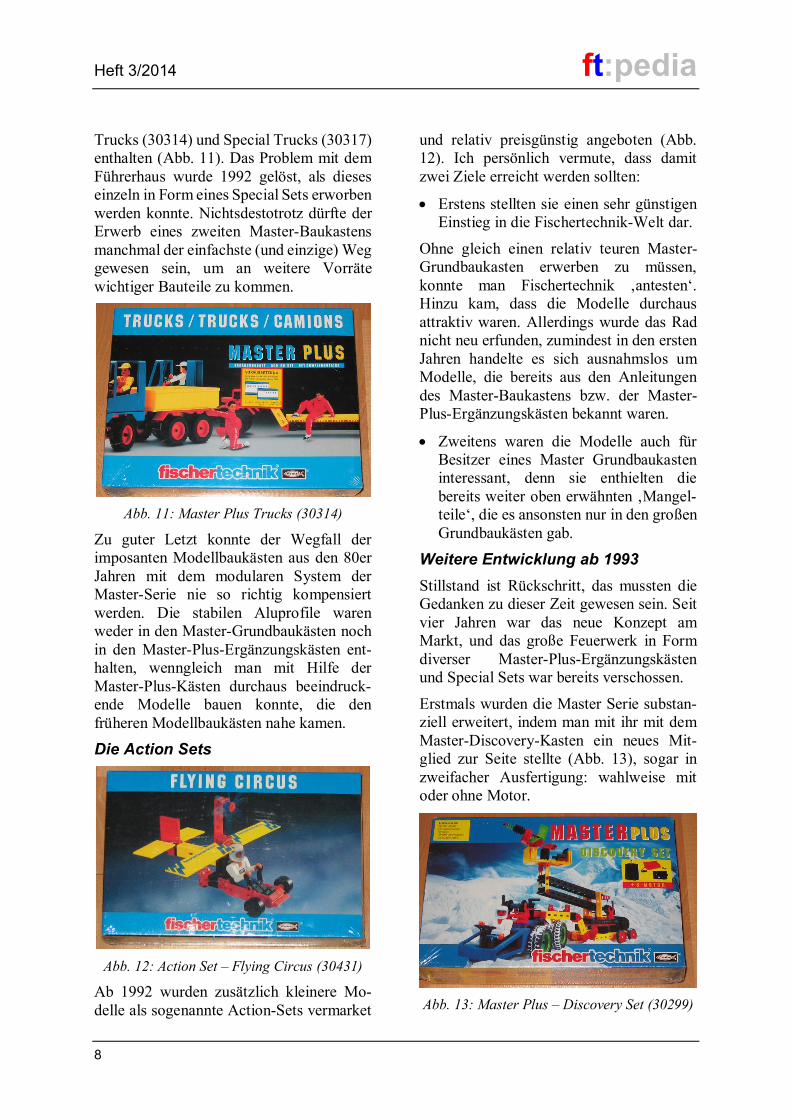
Trucks (30314) und Special Trucks (30317)enthalten (Abb. 11). Das Problem mit demFührerhaus wurde 1992 gelöst, als dieseseinzeln in Form eines Special Sets erworbenwerden konnte. Nichtsdestotrotz dürfte derErwerb eines zweiten Master-Baukastensmanchmal der einfachste (und einzige) Weggewesen sein, um an weitere Vorrätewichtiger Bauteile zu kommen.
Abb. 11: Master Plus Trucks (30314)
Zu guter Letzt konnte der Wegfall derimposanten Modellbaukästen aus den 80erJahren mit dem modularen System derMaster-Serie nie so richtig kompensiertwerden. Die stabilen Aluprofile warenweder in den Master-Grundbaukästen nochin den Master-Plus-Ergänzungskästen ent-halten, wenngleich man mit Hilfe derMaster-Plus-Kästen durchaus beeindruck-ende Modelle bauen konnte, die denfrüheren Modellbaukästen nahe kamen.
Die Action Sets
Abb. 12: Action Set – Flying Circus (30431)
Ab 1992 wurden zusätzlich kleinere Mo-delle als sogenannte Action-Sets vermarket
und relativ preisgünstig angeboten (Abb.12). Ich persönlich vermute, dass damitzwei Ziele erreicht werden sollten:
· Erstens stellten sie einen sehr günstigenEinstieg in die Fischertechnik-Welt dar.
Ohne gleich einen relativ teuren Master-Grundbaukasten erwerben zu müssen,konnte man Fischertechnik ‚antesten‘.Hinzu kam, dass die Modelle durchausattraktiv waren. Allerdings wurde das Radnicht neu erfunden, zumindest in den erstenJahren handelte es sich ausnahmslos umModelle, die bereits aus den Anleitungendes Master-Baukastens bzw. der Master-Plus-Ergänzungskästen bekannt waren.
· Zweitens waren die Modelle auch fürBesitzer eines Master Grundbaukasteninteressant, denn sie enthielten diebereits weiter oben erwähnten ‚Mangel-teile‘, die es ansonsten nur in den großenGrundbaukästen gab.
Weitere Entwicklung ab 1993Stillstand ist Rückschritt, das mussten dieGedanken zu dieser Zeit gewesen sein. Seitvier Jahren war das neue Konzept amMarkt, und das große Feuerwerk in Formdiverser Master-Plus-Ergänzungskästenund Special Sets war bereits verschossen.
Erstmals wurden die Master Serie substan-ziell erweitert, indem man mit ihr mit demMaster-Discovery-Kasten ein neues Mit-glied zur Seite stellte (Abb. 13), sogar inzweifacher Ausfertigung: wahlweise mitoder ohne Motor.
Abb. 13: Master Plus – Discovery Set (30299)

ft:pedia ft-Geschichte
9
Wie üblich, dachte man auch an die Master-Besitzer und gibt ihnen mit dem Master-Plus-Discovery-Kasten die Möglichkeit, ihrvorhandenes Material auf den Umfang desneuen Master-Discovery-Grundbaukastenszu erweitern. Gewöhnungsbedürftig warallerdings die giftgrüne Farbgebung man-cher Teile des Master-Discovery-Grund-baukastens.1994 erschien mit dem Master Plus Galaxynoch ein Ergänzungskasten, der speziell fürden Master Discovery konzipiert war (Abb.14). Es sollte die letzte Neuheit für die 1989begonnene Junior- und Master-Serie sein.
Abb. 14: Master Plus – Galaxy (30322)
In den Folgejahren wurden lediglich dieProfi-Serie noch weiter ausgebaut; andereNeuheiten erschienen ohne explizitenamentliche Zuordnung zu einer Serie.Erst 1998 erschien wieder ein neuer Junior-Kasten, allerdings in anderer optischerAufmachung und ohne erkennbare Zuge-hörigkeit zur ursprünglichen Junior-Serie.
1 Auch diese Kästen werden hoffentlich irgend-wann den Weg in meine Sammlung finden. Undwer eine ungeöffnete Packung Special Trucks
Die heutige Situation ausSammlersichtLetztlich erstreckt sich die betrachtetePeriode auf die Jahre 1989 bis 1994. Aufdem Gebrauchtmarkt sind nahezu alleKästen der Junior- und Master-Serie ausdieser Epoche zu niedrigen Preisen verfüg-bar. Allerdings habe ich persönlich leidernoch keinen Gebrauchtkauf getätigt, beidem wirklich alle Teile komplett vorhandenwaren: irgendetwas fehlte immer.Mit etwas Geduld sind auch ungeöffneteKästen zu bekommen, selbst bei den frühenVersionen im Werkzeugkoffer ist das nichtillusorisch. Die Preise sind meiner persön-lichen Meinung nach als moderat zubezeichnen, wenn man als Referenz dieerzielten Preise für ungeöffnete Baukästenaus dänischer Produktion aus dem gleichenZeitraum 1989-1995 heranzieht. Ähnlich istdie Lage bei den Master-Plus-Kästen, mitAusnahme der beiden größten (und damalsentsprechend teuren) Exemplare mit demZusatztitel ‚Top Edition‘.1
Uneinheitlich sieht die Sache bei denSpecial Sets aus: normale Bausteine sinddurchaus in ungeöffneter Originalver-packung zu bekommen, wohingegen dieelektrischen Komponenten wie Motoren,Power Supply, Power Controller und PowerBlock als lose Gebrauchtware eher seltenanzutreffen sind.
(30317) abzugeben hat, ist ebenfalls will-kommen.
Heft 3/2014 ft:pedia
10
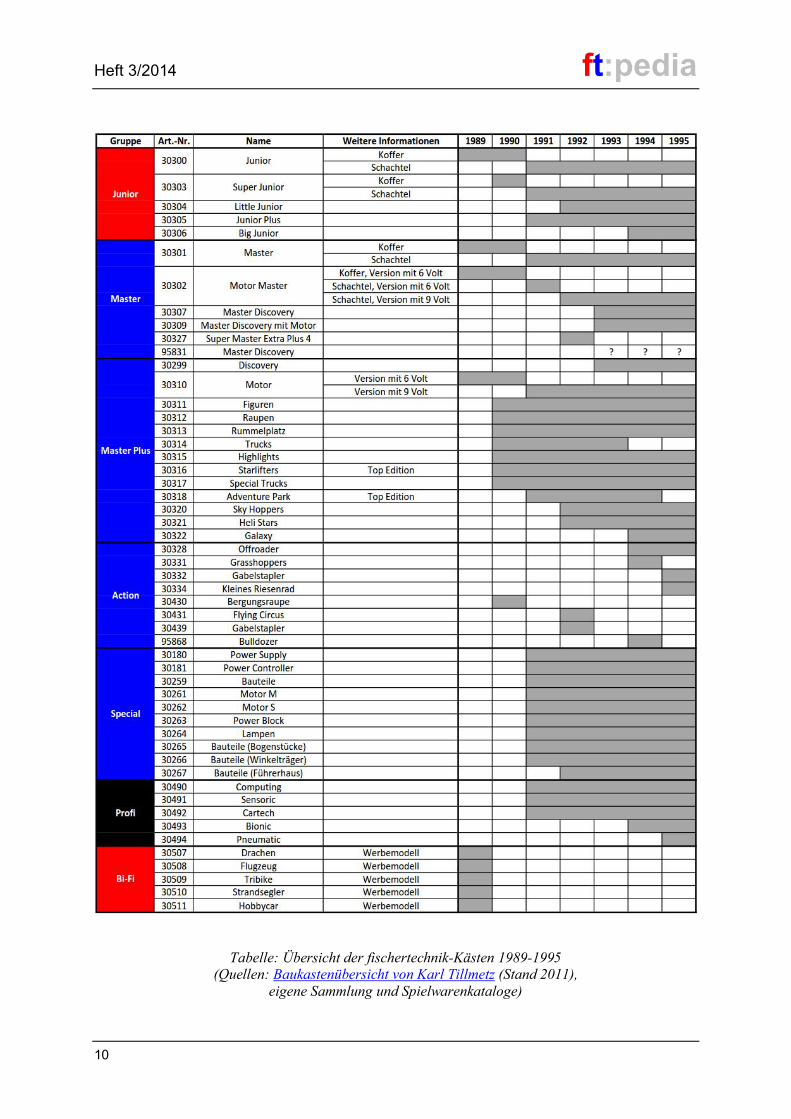
Tabelle: Übersicht der fischertechnik-Kästen 1989-1995(Quellen: Baukastenübersicht von Karl Tillmetz (Stand 2011),
eigene Sammlung und Spielwarenkataloge)
ft:pedia Modell
11
Modell
Mini-Modelle (Teil 3): Scheinwerfer
René TrappDas dritte Modell in der Reihe ‚Mini-Modelle im GiveAway-Format‘ bringt Licht ins Dunkel.
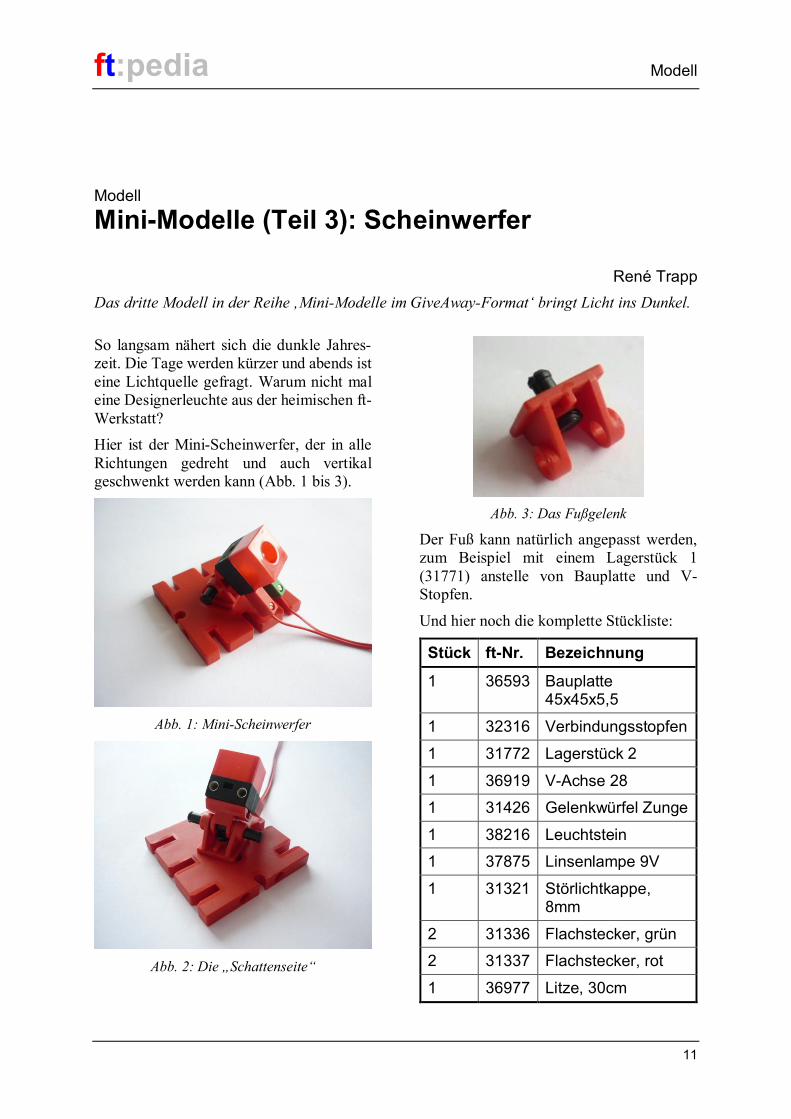
So langsam nähert sich die dunkle Jahres-zeit. Die Tage werden kürzer und abends isteine Lichtquelle gefragt. Warum nicht maleine Designerleuchte aus der heimischen ft-Werkstatt?Hier ist der Mini-Scheinwerfer, der in alleRichtungen gedreht und auch vertikalgeschwenkt werden kann (Abb. 1 bis 3).
Abb. 1: Mini-Scheinwerfer
Abb. 2: Die „Schattenseite“
Abb. 3: Das Fußgelenk
Der Fuß kann natürlich angepasst werden,zum Beispiel mit einem Lagerstück 1(31771) anstelle von Bauplatte und V-Stopfen.
Und hier noch die komplette Stückliste:
Stück ft-Nr. Bezeichnung
1 36593 Bauplatte45x45x5,5
1 32316 Verbindungsstopfen
1 31772 Lagerstück 2
1 36919 V-Achse 28
1 31426 Gelenkwürfel Zunge
1 38216 Leuchtstein
1 37875 Linsenlampe 9V
1 31321 Störlichtkappe,8mm
2 31336 Flachstecker, grün
2 31337 Flachstecker, rot
1 36977 Litze, 30cm
Heft 3/2014 ft:pedia
12
Modell
Mini-Modelle (Teil 4): Hubschrauber
Johann FoxUnd gleich noch ein Modell im GiveAway-Format für die Minimodell-Sammlung: ein Mini-Hubschrauber aus lediglich 17 Teilen.
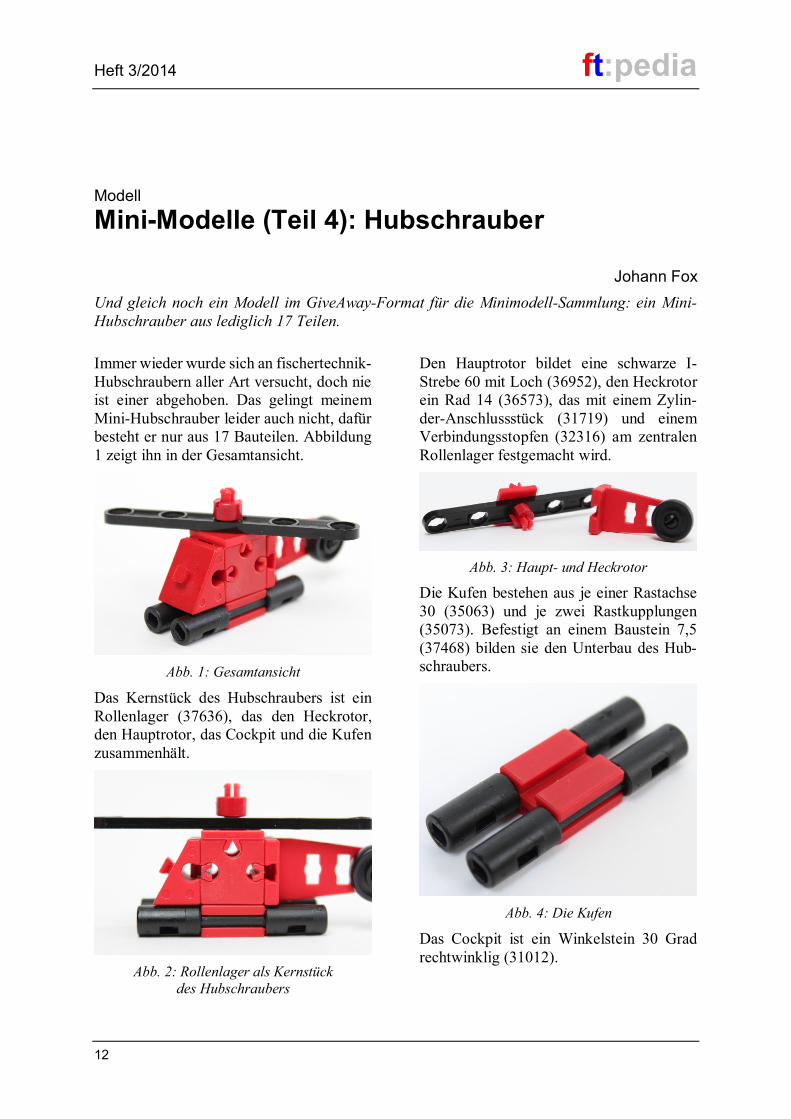
Immer wieder wurde sich an fischertechnik-Hubschraubern aller Art versucht, doch nieist einer abgehoben. Das gelingt meinemMini-Hubschrauber leider auch nicht, dafürbesteht er nur aus 17 Bauteilen. Abbildung1 zeigt ihn in der Gesamtansicht.
Abb. 1: Gesamtansicht
Das Kernstück des Hubschraubers ist einRollenlager (37636), das den Heckrotor,den Hauptrotor, das Cockpit und die Kufenzusammenhält.
Abb. 2: Rollenlager als Kernstückdes Hubschraubers
Den Hauptrotor bildet eine schwarze I-Strebe 60 mit Loch (36952), den Heckrotorein Rad 14 (36573), das mit einem Zylin-der-Anschlussstück (31719) und einemVerbindungsstopfen (32316) am zentralenRollenlager festgemacht wird.
Abb. 3: Haupt- und Heckrotor
Die Kufen bestehen aus je einer Rastachse30 (35063) und je zwei Rastkupplungen(35073). Befestigt an einem Baustein 7,5(37468) bilden sie den Unterbau des Hub-schraubers.
Abb. 4: Die Kufen
Das Cockpit ist ein Winkelstein 30 Gradrechtwinklig (31012).
ft:pedia Modell
13
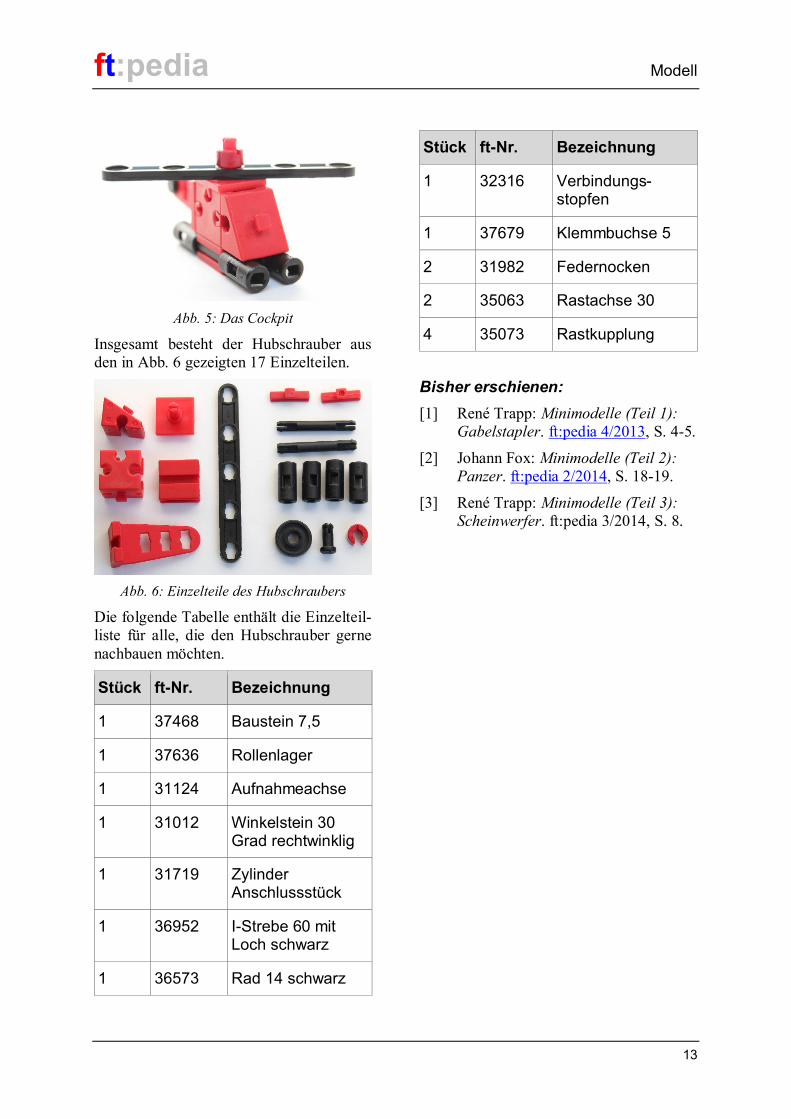
Abb. 5: Das Cockpit
Insgesamt besteht der Hubschrauber ausden in Abb. 6 gezeigten 17 Einzelteilen.
Abb. 6: Einzelteile des Hubschraubers
Die folgende Tabelle enthält die Einzelteil-liste für alle, die den Hubschrauber gernenachbauen möchten.
Stück ft-Nr. Bezeichnung
1 37468 Baustein 7,5
1 37636 Rollenlager
1 31124 Aufnahmeachse
1 31012 Winkelstein 30Grad rechtwinklig
1 31719 ZylinderAnschlussstück
1 36952 I-Strebe 60 mitLoch schwarz
1 36573 Rad 14 schwarz
Stück ft-Nr. Bezeichnung
1 32316 Verbindungs-stopfen
1 37679 Klemmbuchse 5
2 31982 Federnocken
2 35063 Rastachse 30
4 35073 Rastkupplung
Bisher erschienen:[1] René Trapp: Minimodelle (Teil 1):
Gabelstapler. ft:pedia 4/2013, S. 4-5.
[2] Johann Fox: Minimodelle (Teil 2):Panzer. ft:pedia 2/2014, S. 18-19.
[3] René Trapp: Minimodelle (Teil 3):Scheinwerfer. ft:pedia 3/2014, S. 8.

Heft 3/2014 ft:pedia
14
Tipps & Tricks
Kaulquappen (Teil 5)
Harald SteinhausEinen kleinen Vorteil hat so ein nasser verregneter Sommer wie der jetzige schon: es gibtgenügend Zeit, sich mit Kaulquappen (siehe auch Teil 1-4 [1]) zu befassen und dafür zu sorgen,dass der eine oder andere Frosch daraus hervor geht, den man durch den Kuss einer Muse zumPrinzen verwandeln kann. Trotz alledem, mit echtem Sonnenlicht würde zumindest dasFotografieren leichter fallen.
Die Lok-Grundplatte 31557 der Bauspiel-bahn eignet sich als Träger für ein Winkel-getriebe (Abb. 1).
Abb. 1: Winkelgetriebeträger
Mit dem Reifen 60 auf Position kann dasz. B. zum Obst- oder Weinbautraktorwerden, der wie auf beräderten Stelzen übereine Reihe von Büschen oder Reben fährt(Abb. 2).
Durch Umschlingen runder Bauteile mit derschwarzen Kette erhält man neue Zahnräder(Abb. 3). Das große Innenzahnrad wurdeaußen etwas dünner gedreht, damit dieKette darauf passte, und ergibt ein Z46.
Abb. 2: Ein Traubenvollernter; Foto vonErhard Kührer (wikipedia)
Die Drehscheibe 60 ergibt ein Z42.
Abb. 3: Z46 (aus Innenzahnrad)und Z42 (aus Drehscheibe 60)
ft:pedia Tipps & Tricks
15
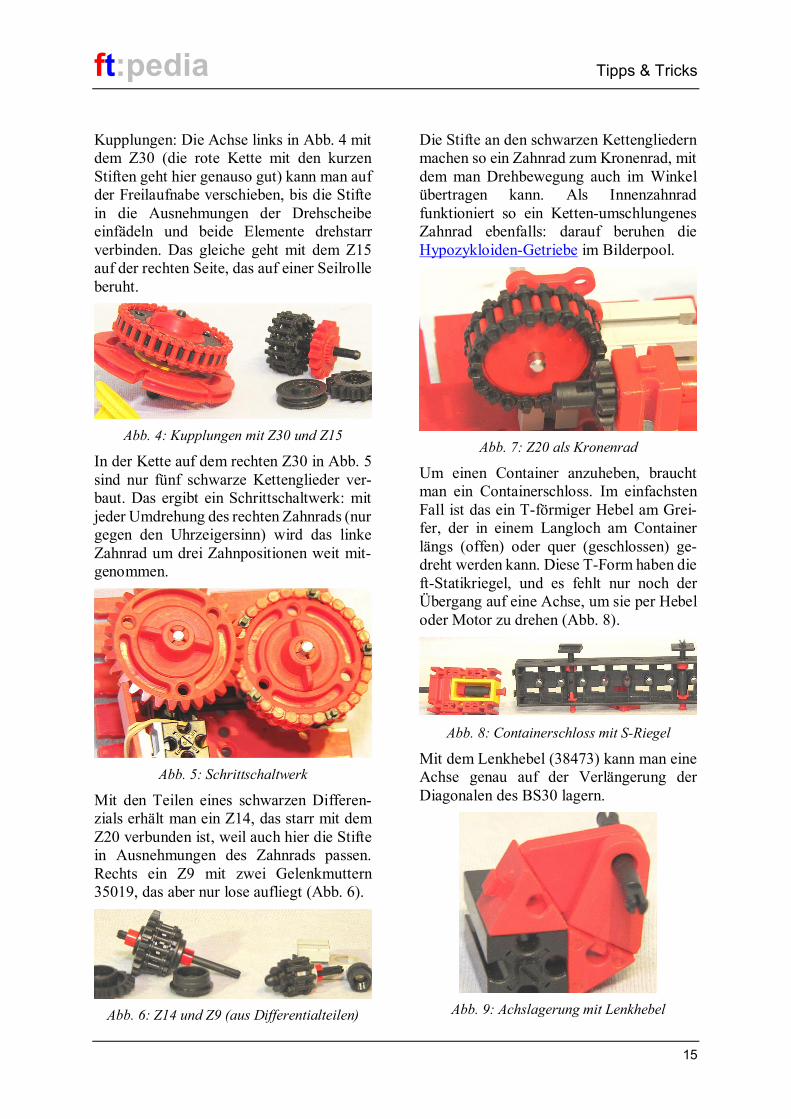
Kupplungen: Die Achse links in Abb. 4 mitdem Z30 (die rote Kette mit den kurzenStiften geht hier genauso gut) kann man aufder Freilaufnabe verschieben, bis die Stiftein die Ausnehmungen der Drehscheibeeinfädeln und beide Elemente drehstarrverbinden. Das gleiche geht mit dem Z15auf der rechten Seite, das auf einer Seilrolleberuht.
Abb. 4: Kupplungen mit Z30 und Z15
In der Kette auf dem rechten Z30 in Abb. 5sind nur fünf schwarze Kettenglieder ver-baut. Das ergibt ein Schrittschaltwerk: mitjeder Umdrehung des rechten Zahnrads (nurgegen den Uhrzeigersinn) wird das linkeZahnrad um drei Zahnpositionen weit mit-genommen.
Abb. 5: Schrittschaltwerk
Mit den Teilen eines schwarzen Differen-zials erhält man ein Z14, das starr mit demZ20 verbunden ist, weil auch hier die Stiftein Ausnehmungen des Zahnrads passen.Rechts ein Z9 mit zwei Gelenkmuttern35019, das aber nur lose aufliegt (Abb. 6).
Abb. 6: Z14 und Z9 (aus Differentialteilen)
Die Stifte an den schwarzen Kettengliedernmachen so ein Zahnrad zum Kronenrad, mitdem man Drehbewegung auch im Winkelübertragen kann. Als Innenzahnradfunktioniert so ein Ketten-umschlungenesZahnrad ebenfalls: darauf beruhen dieHypozykloiden-Getriebe im Bilderpool.
Abb. 7: Z20 als Kronenrad
Um einen Container anzuheben, brauchtman ein Containerschloss. Im einfachstenFall ist das ein T-förmiger Hebel am Grei-fer, der in einem Langloch am Containerlängs (offen) oder quer (geschlossen) ge-dreht werden kann. Diese T-Form haben dieft-Statikriegel, und es fehlt nur noch derÜbergang auf eine Achse, um sie per Hebeloder Motor zu drehen (Abb. 8).
Abb. 8: Containerschloss mit S-Riegel
Mit dem Lenkhebel (38473) kann man eineAchse genau auf der Verlängerung derDiagonalen des BS30 lagern.
Abb. 9: Achslagerung mit Lenkhebel

Heft 3/2014 ft:pedia
16
Mit der gelenkig gelagerten Achse aus Abb.10 kann man den Taster aus der Ferne betä-tigen. Gegebenenfalls muss die Achseetwas aufgepolstert werden, denn die ft-Taster streuen recht stark bezüglich derAuslösepunkte.
Abb. 10: Hebel zur Tasterbetätigung
Der Anlenkhebel (31894) wurde gemoddetund hat jetzt einen sauber runden Kugel-kopf. Dieser gleitet in der Längsnut desBS30. Zieht man die gelbe Strebe in Abb.11 nach links und rechts, schwenkt derBS30 nach hinten bzw. vorne.
Abb. 11: Modifizierter Anlenkhebel
Der Prinz aus Abb. 12 ist eine Servolen-kung: Man denke sich die gelbe Strebe alsSpurstange einer Vorderachse und daraneinen ft-Servo, sowie an der Laufrolle einenHebel, den ein „ordentlicher“ Motorbewegt. Die Spurstange bewegt die beidenBS15-Lochsteine in Soll-Position undnimmt dabei die beiden Taster mit, soweites deren Lagerung mit Gelenk und Gummi-ring zulässt. Ein schwarzes Kettenglied, dasauf eine alte Seilrolle gesteckt ist, liefert dieIst-Position des Vorderrads. Beim Lenk-einschlag weichen Soll und Ist voneinanderab, einer der Taster ist gedrückt, und derGummiring erlaubt die mechanische Fehl-stellung. Der gedrückte Taster steuert denLenkmotor solange an, bis das gelenkte Radwieder mit den BS15 fluchtet.
Abb. 12: Servolenkung
Abb. 13: Die Servolenkung, aufgeklappt.
Referenzen[1] Harald Steinhaus: Kaulquappen.
Teil 1: ft:pedia 1/2011, S. 22-28;Teil 2: ft:pedia 2/2011, S. 9-13;Teil 3: ft:pedia 3/2012, S. 24-26;Teil 4: ft:pedia 1/2014, S. 21-23.

ft:pedia Tipps & Tricks
17
Tipps & Tricks
Pneumatische Drehdurchführung
René TrappVia Schleifring kann man drehende Motoren und Lampen mit Strom versorgen – wie aberbekommt man Luftdruck auf ein rotierendes Bauteil? Der Beitrag zeigt, wie sich eine vollfunktionsfähige pneumatische Drehdurchführung mit Hausmitteln aus Zylindereinzelteilen undeinem Messingrohr konstruieren lässt.
Zur Übertragung elektrischer Energie aufrotierende Teile gibt es bekanntlich dieSchleifringe. Die sind zwar nur nochgebraucht zu bekommen, aber immerhinhatte sich fischertechnik des Problemseinmal angenommen. Für die Pneumatikfehlt solch ein Teil jedoch und es ist auchkeine Lösung aus dem Schwarzwald inSicht. Hier ein Vorschlag, wie ihr euch imEigenbau eine voll funktionsfähige pneu-matische Drehdurchführung aus ft-Zylin-dereinzelteilen und einem Messingrohrkonstruieren könnt.
Die IdeeDie Idee entstand beim Umgang mit Pneu-matik-Zylindern. Die Kolbenstange lässtsich bekanntlich drehen – damit ist klar,dass die Dichtungen sich prinzipiell auchfür eine Drehdurchführung eignen müssen.Die Kolbenstange muss dabei durch einRohr ersetzt werden, das es (nicht nur) imBaumarkt gibt. Als einziges ‚echtesProblem‘ blieb, die Zylindereinzelteile zubekommen.
Die BeschaffungEine Anfrage bei den Fischer-Werken ergableider eine Absage. Dafür war unserfischerfriendsman hingegen sicher froh,seinen sonst unverkäuflichen Zylinder-schrott loszuwerden – zumindest diebesseren Teile davon. An dieser Stelle mal
einen dicken herzlichen Dank an ihn. Werin seiner Sammlung einen oder gar mehreredefekte Zylinder hat, kann natürlich dieseals ‚Teilespender‘ verwenden.Das Messingrohr ist Standardware aus demeinschlägigen Fachhandel (Modellbaushop,Baumarkt, …). Der Außendurchmessermuss 4 mm betragen, für den Innendurch-messer empfehle ich 3 mm.
Die FertigungIn dem gelieferten Zylinderschrott fandensich alle benötigten Teile: Zylinderköpfe,Zylinderfüße, Zylinderrohre, Kolbenstan-gen und Dichtungspakete. Von einemblauen Pneumatikzylinder war der Fuß mitangeklebtem Rohr vorhanden. Es entsprachdamit dem neuen Ballonadapter (122647).
Abb. 1: Ballonadapter (122647) [1]
Am oberen (offenen) Ende war dasZylinderrohr allerdings gesplittert. Da eineDrehdurchführung keinen Hub machen

Heft 3/2014 ft:pedia
18
muss, sägte ich den zersplitterten Teileinfach ab. Dabei achtete ich darauf, dasRohr auf 14 mm zu kürzen, sodass diefertige Durchführung im ft-Raster verbautwerden kann.Einen einzelnen blauen Zylinderkopf säu-berte ich mit einer Schlüsselfeile vorsichtigam Klebekragen, da die Reste eines Zylin-derrohres und des werksseitigen Kleberssehr hart sind. Der Kragen an den Zylin-derköpfen und –füßen selbst ist hingegenrecht dünn und weich.Nachdem der Zylinder so vorbereitet war,zog ich ein Dichtungspaket von einer Kol-benstange. Das Dichtungspaket, bestehendaus zwei Gummilippendichtungen undeinem roten Stabilisatorring aus Kunststoff,wurde dann auf ein Stück Messingrohr(Außendurchmesser 4 mm, Innendurch-messer 3 mm) aufgeschoben.Durch die Klemmwirkung ist bereits einguter Sitz gewährleistet. Abb. 2 zeigt dievorbereiteten Hälften. Die Klemmbuchse 5(37679) verhindert Hubbewegungen, kannaber auch weggelassen werden.
Abb. 2: Drehdurchführung offen
Das Dichtungspaket wurde vorsichtig in daskurze Rohrende eingefädelt, der Zylin-derkopf aufgesetzt, jedoch nicht verklebt.Damit erhält man einen Zylinder 30, derzwar nur bestenfalls (ohne die Klemm-buchse) 5 mm Hub macht, aber alspneumatische Drehdurchführung sehr guteDienste leistet (Abb. 3).
Abb. 3: Fertige Drehdurchführung
Solange der Zylinderkopf nicht mit demkurzen Zylinderrohr verklebt ist, kann dieDurchführung jederzeit z. B. für Wartungs-zwecke zerlegt werden.Nun wird noch eine geeignete Montage derDrehdurchführung benötigt. Besonders ele-gant ist die Unterbringung in einem Schleif-ring, damit man gleichzeitig elektrischeEnergie oder Signale übertragen kann; Abb.4 zeigt ein Beispiel.
Abb. 4: Drehdurchführung am Schleifring
Ist der Schlauchstutzen am Zylinderkopf(Abb. 5) bei der Montage im Weg, darf erproblemlos gekürzt oder auch ganz abge-schnitten werden.
Mögliche ModifikationenNatürlich darf die Drehdurchführung auchlänger sein (z. B. unter Verwendung einesalten Zylinders 60). So wird es möglich, dieDurchführung auch als Längenausgleichs-element zu nutzen.
ft:pedia Tipps & Tricks
19
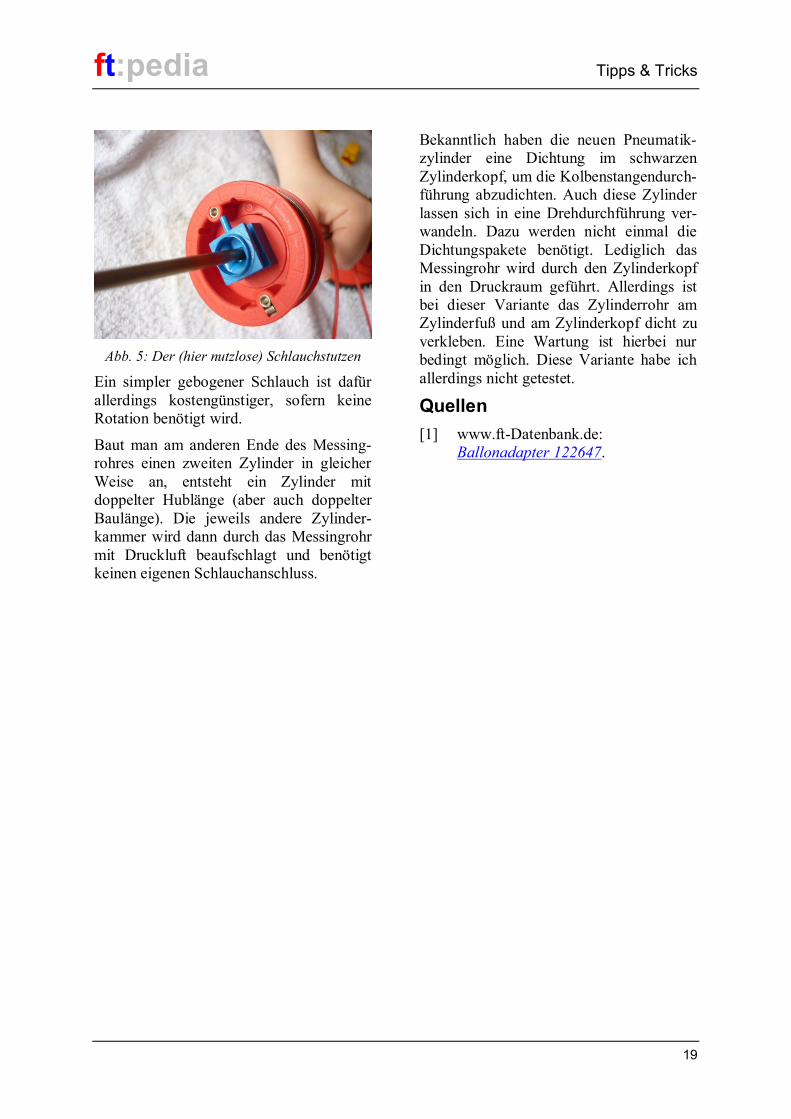
Abb. 5: Der (hier nutzlose) Schlauchstutzen
Ein simpler gebogener Schlauch ist dafürallerdings kostengünstiger, sofern keineRotation benötigt wird.
Baut man am anderen Ende des Messing-rohres einen zweiten Zylinder in gleicherWeise an, entsteht ein Zylinder mitdoppelter Hublänge (aber auch doppelterBaulänge). Die jeweils andere Zylinder-kammer wird dann durch das Messingrohrmit Druckluft beaufschlagt und benötigtkeinen eigenen Schlauchanschluss.
Bekanntlich haben die neuen Pneumatik-zylinder eine Dichtung im schwarzenZylinderkopf, um die Kolbenstangendurch-führung abzudichten. Auch diese Zylinderlassen sich in eine Drehdurchführung ver-wandeln. Dazu werden nicht einmal dieDichtungspakete benötigt. Lediglich dasMessingrohr wird durch den Zylinderkopfin den Druckraum geführt. Allerdings istbei dieser Variante das Zylinderrohr amZylinderfuß und am Zylinderkopf dicht zuverkleben. Eine Wartung ist hierbei nurbedingt möglich. Diese Variante habe ichallerdings nicht getestet.
Quellen[1] www.ft-Datenbank.de:
Ballonadapter 122647.
Heft 3/2014 ft:pedia
20
Tipps & Tricks
ft-Spezialteile made by TST (Teil 9)
Andreas TackeIn einer lockeren Reihe stellt TST einige von ihm entwickelte Spezialteile vor, die so mancheLücke beim Bauen mit fischertechnik schließen. In diesem Beitrag geht es um Pneumatik,genauer gesagt um eine Alternative zu den Drosselventilen aus den 80er Jahren.
Wer kennt sie noch, die Drosselventile(36077), die in den Pneumatik Kästen der80er waren? Und: Wer weiß, was der Ein-satzzweck einer Drossel ist?
Eine Drossel dient dazu den Luftstrom zureduzieren. Somit lässt sich z. B. ein Pneu-matikzylinder in seiner Aus- oder Einfahr-geschwindigkeit steuern [1]. Durch die Ver-engung des Leitungsquerschnitts wird derLuftstrom reduziert. In der Industrie werdensolche Drosseln sehr häufig eingesetzt.Die Drosselventile 36077 sind super, aberleider auch rar geworden. Welche Alter-native gibt es also?
Peter Damen hat mich mit seiner Idee, eineLüsterklemme zu nehmen (Abb. 1), auf eineIdee gebracht.
Abb. 1: Lüsterklemme als Drossel [2]
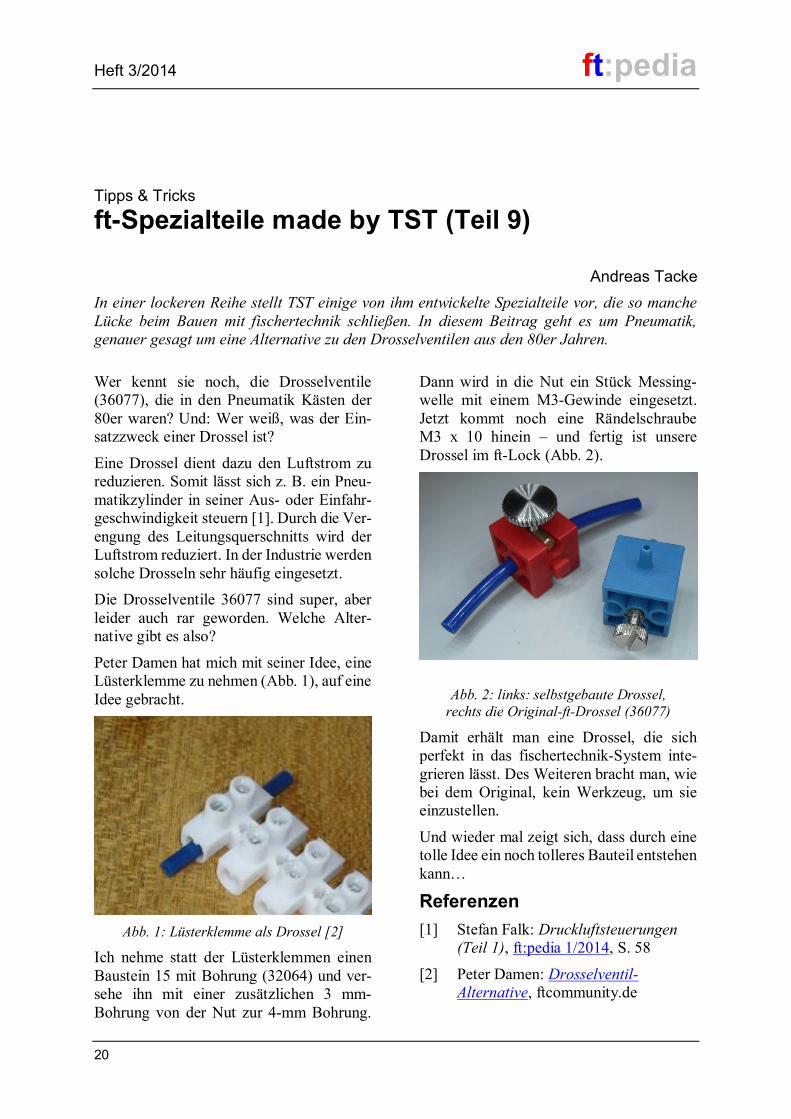
Ich nehme statt der Lüsterklemmen einenBaustein 15 mit Bohrung (32064) und ver-sehe ihn mit einer zusätzlichen 3 mm-Bohrung von der Nut zur 4-mm Bohrung.
Dann wird in die Nut ein Stück Messing-welle mit einem M3-Gewinde eingesetzt.Jetzt kommt noch eine RändelschraubeM3 x 10 hinein – und fertig ist unsereDrossel im ft-Lock (Abb. 2).
Abb. 2: links: selbstgebaute Drossel,rechts die Original-ft-Drossel (36077)
Damit erhält man eine Drossel, die sichperfekt in das fischertechnik-System inte-grieren lässt. Des Weiteren bracht man, wiebei dem Original, kein Werkzeug, um sieeinzustellen.
Und wieder mal zeigt sich, dass durch einetolle Idee ein noch tolleres Bauteil entstehenkann…
Referenzen[1] Stefan Falk: Druckluftsteuerungen
(Teil 1), ft:pedia 1/2014, S. 58
[2] Peter Damen: Drosselventil-Alternative, ftcommunity.de

ft:pedia Pneumatik
21
Pneumatik
Druckluftsteuerungen (Teil 3)
Stefan FalkNach Schwellwertschalter und Zeitglied im letzten Beitrag dieser Serie geht es in dieserAusgabe darum, besonders empfindliche pneumatische Sensoren zu bauen – nur mit aktuellenfischertechnik-Teilen. Wir werden in zwei Modellen zum Nachbauen eine neue Bauart vonDrossel, einen neuen, empfindlichen pneumatischen Taster, eine enorm empfindliche pneu-matische Staudüse und als Krönung einen Druck-Verstärker kennenlernen.
Modell 1: Ein pneumatischesDigital-ZählwerkEin mechanisches Zählwerk (siehe auchVom Zählen und Abzählen (1) in ft:pedia1/2012 [1]) kann natürlich auch durch einenPneumatikzylinder angesteuert werden.Einen Modellvorschlag dafür zeigenAbb. 1. und 2, mit den folgenden Kompo-nenten:
· Ein Kompressor liefert die Druckluft.
· Die Druckluft muss zunächst durch eineDrossel. Deren neue Bauart und warumsie notwendig ist, werden wir gleichnoch ausführlich besprechen.
· Die so gedrosselte Druckluft gehtgleichermaßen zu einem einfach-wirkenden Pneumatikzylinder (alsoeinem mit Rückstellfeder, von dem nurein Anschluss verwendet wird) sowie
· zu einer ebenfalls neuen Bauart vonpneumatischem Taster.
Abb. 1: Pneumatisches Zählwerk mit Taster-Ansteuerung

Heft 3/2014 ft:pedia
22
· Der Pneumatikzylinder betätigt einSchrittschaltwerk,
· welches schließlich ein zweistelligesdigitales Zählwerk ansteuert.
Pneumatisches SchrittschaltwerkAuch ohne Drossel und Taster könnt ihr dasZählwerk selbst schon aufbauen und testen.Jedes Mal, wenn der Zylinder mit Druckluftbeaufschlagt wird, fährt er aus und schaltetein Rast-Z10 um genau einen Zahn weiter.Eine Sperre verhindert, dass beim Zurück-fahren des Zylinders das Z10 mit zurückgenommen wird. Abb. 3 zeigt die Mechanikim Detail.
Die Anordnung kommt mit wenigen Bau-teilen aus: Die Achse des zählenden Z10sitzt in einem Gelenkbaustein (siehe auchRaffiniertes mit Achsen in ft:pedia 3/2013[2]). Am beweglichen BS5 sitzt oben eineVerkleidungsplatte 30x15. Die greift mitihrer Unterkante in die Zähne des Z10 ein,sodass beim Bewegen des BS5 durch denPneumatikzylinder das Zahnrad gedrehtwird. Links in Abb. 3 ist ein stabil gebauterAnschlag in Form einiger Grundbausteinezu sehen. Der sorgt dafür, dass der Zylinder
auch bei vollem Druck das Z10 nicht ummehr als einen Zahn weiter schaltet.
Abb. 3: Zähl- und Sperrklinke
An der Unterseite des Zahnrads befindetsich, einfach von zwei Winkelsteinen 60°getragen, eine weitere Platte 30x15. Die istso angeordnet, dass sie ein Zurückdrehendes Z10 beim Wiedereinfahren desZylinders zuverlässig verhindert, denn auchsie greift in die Zähne des Z10 ein.Am besten probiert ihr die Mechanikzunächst durch Verdrehen des Zählhebelsvon Hand aus, und dann mit einfacherAnsteuerung des Zylinders.
Abb. 2: Rückansicht des pneumatischen Zählwerks

ft:pedia Pneumatik
23
Das ZählwerkDie Mechanik zum digitalen Zählen istähnlich wie in [1] aufgebaut (Abb. 4). Aufder gegenüberliegenden Seite der Rastachsedes zählenden Z10 steckt eine Rastkurbel,und zwar eine solche, in der man wiederumeine Rastachse so einführen kann, dassdiese mitgedreht wird. Letztere Achse führtdirekt zu der Flachnabe für die Einer-Stelleder Zählung. Da zum Zählen ein Z10 umgenau einen Zahn pro Schritt weitergedrehtwird, können wir die Flachnaben einfachmit den Ziffern 0–9 beschriften. EineVorlage zum Ausschneiden zeigt Abb. 5.
Abb. 4: Zählwerk mit Zehner-Übertrag
Abb. 5: Ziffernaufkleber für die Flachnaben
Der Übertrag von der Einer- zur Zehner-stelle geschieht dadurch, dass die Rast-kurbel ein Mal pro Umdrehung ein weiteresZ10 wiederum um genau einen Zahnweiterdreht. Damit die Flachnaben derEiner- und Zehnerstelle sich in dieselbeRichtung drehen und also identischbeschriftet werden können, ist noch einZwischen-Z10 zur Drehrichtungsumkehreingefügt.Damit das sauber funktioniert, muss dasvon der Kurbel angesteuerte Z10 hin-reichend genau im richtigen Abstand zur
Kurbel stehen. Deshalb sitzen die Z10 derZehnerstelle auf einer per Federnockenquerverschiebbaren Anordnung aus BS7,5,BS5 mit zwei Zapfen und Rollenbock32085 (Abb. 6).
Abb. 6: Justierung der Zehnerstelle
Die Ansteuerung des ZählwerksBesitzer der älteren fischertechnik/Festo-Pneumatikteile würden zum Ansteuern desPneumatikzylinders mit einem Taster nichtlange grübeln müssen. Ein Ventil mitblauem Stößel (ein Öffner) 36082 und viel-leicht noch ein Rollenhebel 31641 [3], undfertig ist die Laube!
Abb. 7: Kombination aus Festo-Ventil undBetätigungshebel der ft-Ur-Pneumatik
Es könnte also alles ganz einfach sein –wenn diese Teile noch produziert würdenund nicht bloß selten und zu horrendenPreisen auf dem Gebrauchtmarkt zu bekom-men wären. (fischertechnik, hört ihr?)
Heft 3/2014 ft:pedia
24
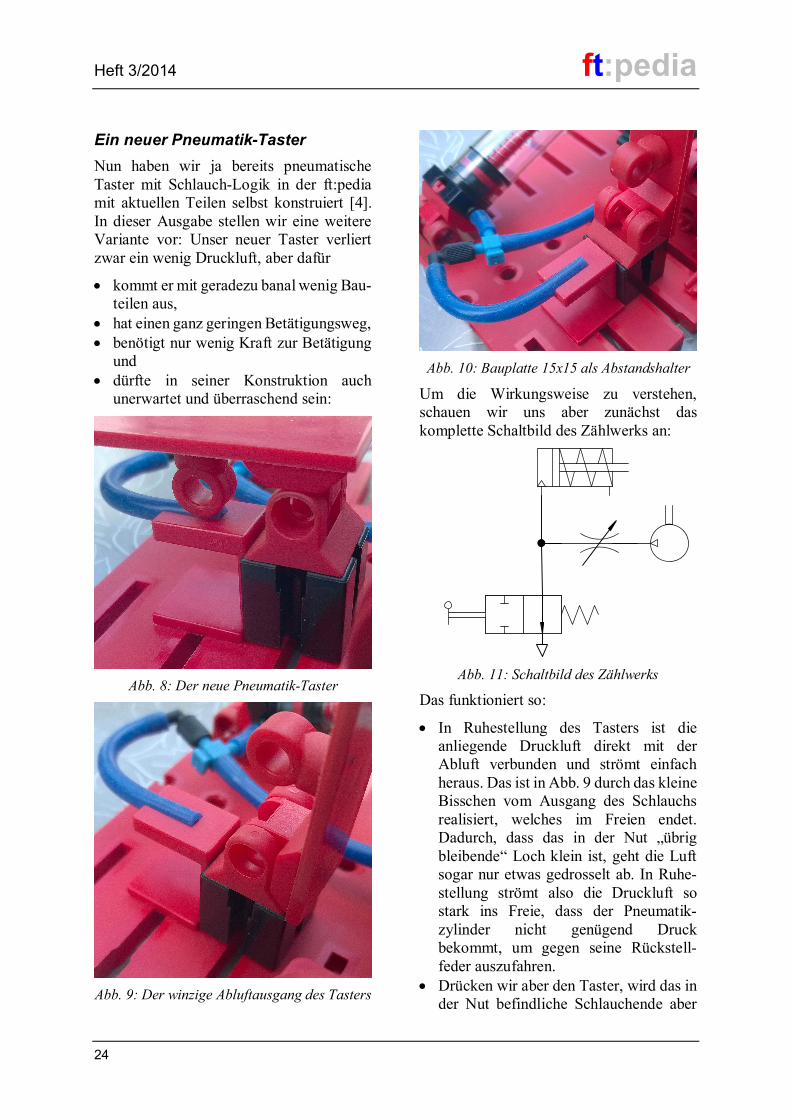
Ein neuer Pneumatik-TasterNun haben wir ja bereits pneumatischeTaster mit Schlauch-Logik in der ft:pediamit aktuellen Teilen selbst konstruiert [4].In dieser Ausgabe stellen wir eine weitereVariante vor: Unser neuer Taster verliertzwar ein wenig Druckluft, aber dafür
· kommt er mit geradezu banal wenig Bau-teilen aus,
· hat einen ganz geringen Betätigungsweg,· benötigt nur wenig Kraft zur Betätigung
und· dürfte in seiner Konstruktion auch
unerwartet und überraschend sein:
Abb. 8: Der neue Pneumatik-Taster
Abb. 9: Der winzige Abluftausgang des Tasters
Abb. 10: Bauplatte 15x15 als Abstandshalter
Um die Wirkungsweise zu verstehen,schauen wir uns aber zunächst daskomplette Schaltbild des Zählwerks an:
Abb. 11: Schaltbild des Zählwerks
Das funktioniert so:
· In Ruhestellung des Tasters ist dieanliegende Druckluft direkt mit derAbluft verbunden und strömt einfachheraus. Das ist in Abb. 9 durch das kleineBisschen vom Ausgang des Schlauchsrealisiert, welches im Freien endet.Dadurch, dass das in der Nut „übrigbleibende“ Loch klein ist, geht die Luftsogar nur etwas gedrosselt ab. In Ruhe-stellung strömt also die Druckluft sostark ins Freie, dass der Pneumatik-zylinder nicht genügend Druckbekommt, um gegen seine Rückstell-feder auszufahren.
· Drücken wir aber den Taster, wird das inder Nut befindliche Schlauchende aber

ft:pedia Pneumatik
25
durch einen Pneumatik-Achsadapter31422 dergestalt zugequetscht, dass seinkleiner Abluftausgang praktisch voll-ständig verschlossen wird. Dadurch kanndie durch die Drossel strömende Druck-luft, wenn auch nicht schlagartig, denPneumatikzylinder füllen und zum Aus-fahren bringen.
· Lassen wir den Taster los, wird deutlich,warum die Drossel notwendig ist: Es darfnur weniger Luft vom Kompressor nach-strömen, als durch das Rest-Loch desSchlauchs im Taster abströmen kann.Ohne die Drossel wäre das nicht der Fall,und der Zylinder bliebe ständig aus-gefahren. Bitte ausprobieren!
Abb. 10 zeigt schließlich, dass für dierichtigen Abstände unterhalb des 38423Winkelstein 10x15x15 einfach eine unter-geschobene Bauplatte 15x15 genügt. Diesorgt dafür, dass sich der Winkel auch nachhäufiger Betätigung nicht in der Nut desBS15 absenken kann.
Eine neue DrosselUnsere bisherigen Selbstbau-Drosseln [4]funktionierten dadurch, dass wir eineSchraube oder ft-Schnecke mehr oderweniger stark auf einen Schlauch drückenließen. Ein Nachteil dieser Bauart ist aber,dass der Schlauch nicht nur zugedrückt,sondern auch durch das auf ihm sichdrehende Stellglied bei jedem Drehen etwasbeansprucht wird. Das führt nach vielenEinstell-Drehungen mitunter zu Material-ermüdung des Schlauches, weil schlicht einLoch hineingebohrt wurde.
Diesen Nachteil vermeiden wir, indem wiruns auf die ja schon in Ventilen [4] erfolg-reich verwendete Methode des Abknickenseines Schlauches besinnen:
Die in Abb. 12 vorgestellte neue Drossel-Variante knickt ein kurzes StückchenSchlauch per Schneckenantrieb mehr oderweniger stark ab und bewirkt so die einstell-bare Drosselwirkung.
Abb. 12: Die neue Drossel
Nur der rechte BS15 mit Bohrung im Bildist mit dem darunterliegenden BS15verbunden. Der untere linke soll nur verhin-dern, dass sich der Schneckenbaustein aufder Schnecke verdreht. Durch das Einstell-Z10 kann also der Abstand des Schnecken-bausteins (links) vom Führungsbaustein(rechts) eingestellt werden.
An zwei BS7,5 ist wieder je ein Pneumatik-T-Stück befestigt, von denen je ein Aus-gang per P-Stopfen verschlossen ist. Dieankommende Luft muss also durch daskurze, variabel stark abgeknickte Schlauch-stückchen gedrosselt durch, um zum Aus-gang auf der anderen Seite zu gelangen.Das ergibt
· eine sehr fein einstellbare Drossel-wirkung,
· eine sehr leichtgängige Einstellungsowie
· die Schonung des Schlauchmaterials,weil nichts an ihm reibt.
Die Drossel muss nun so stark geschlossenwerden, dass im Pneumatikzylinder befind-liche Druckluft bei unbetätigtem Taster insFreie abströmen kann. Durch die gedrossel-te Zufuhr und (über den winzigen Ausgangdes Tasters) Abfuhr der Druckluft geht einZählschritt zwar nicht besonders schnell,aber zuverlässig.
Damit ist das Zählwerk vollendet. JederDruck auf den Taster zählt einen Schrittweiter, von 00 bis 99 immer wiederholend.

Heft 3/2014 ft:pedia
26
Modell 2: PneumatischerBausteinauswurfIm nächsten Modell wollen wir eineAnordnung konstruieren, die auf eine ganzsachte, leichte Betätigung hin einen Pneu-matikzylinder mit vollem Druck ausfährt.Wir brauchen also einen besondersempfindlichen pneumatischen Sensor undeine Verstärkung des von diesem Sensorstammenden Druckluftsignals.
Die herzustellende Maschine soll Bau-steine, die sich in einem Magazin befinden,einzeln auswerfen, bis das Magazin leer ist.Immer wenn sich ein Baustein direkt vordem auswerfenden Pneumatikzylinderbefindet, soll dieser ausfahren, um den Bau-stein auszustoßen – und dann natürlichwieder einfahren, um Platz für den nächstenBaustein zu schaffen. Die Maschine ist inAbb. 13 von vorne zu sehen.
Abb. 13: Pneumatischer Auswurf mit empfindlichem Staudüsen-Sensor und Druckverstärker
ft:pedia Pneumatik
27
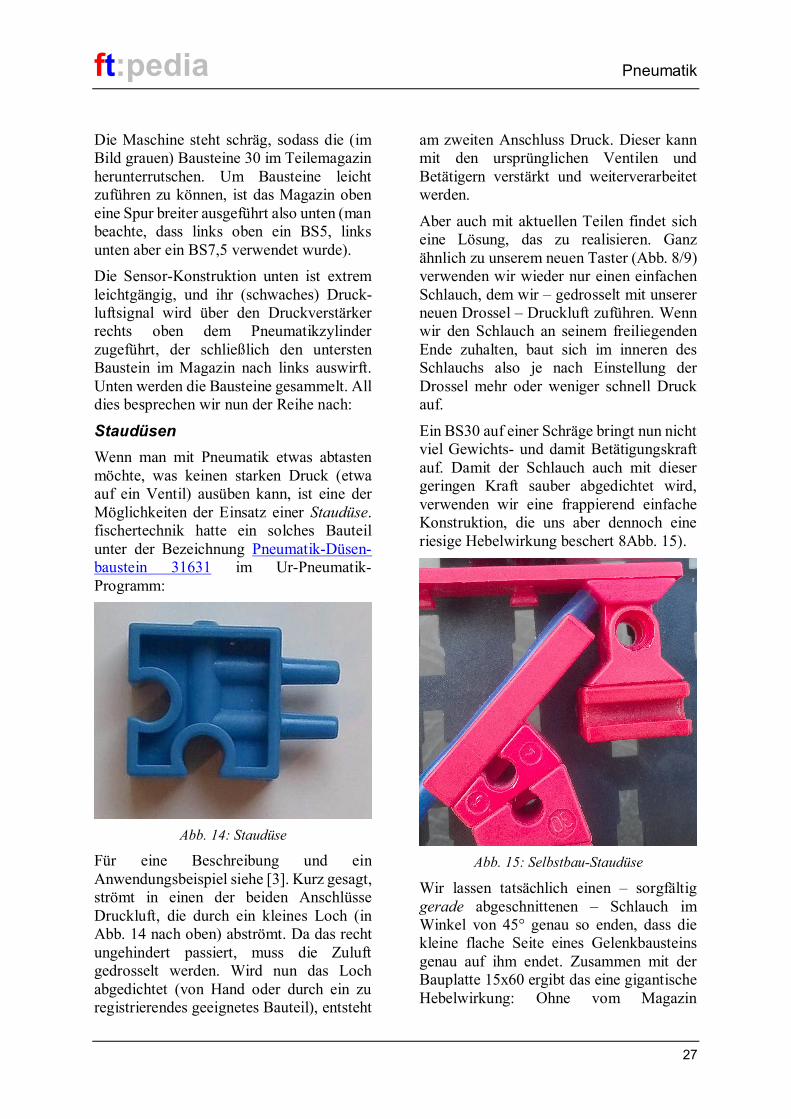
Die Maschine steht schräg, sodass die (imBild grauen) Bausteine 30 im Teilemagazinherunterrutschen. Um Bausteine leichtzuführen zu können, ist das Magazin obeneine Spur breiter ausgeführt also unten (manbeachte, dass links oben ein BS5, linksunten aber ein BS7,5 verwendet wurde).Die Sensor-Konstruktion unten ist extremleichtgängig, und ihr (schwaches) Druck-luftsignal wird über den Druckverstärkerrechts oben dem Pneumatikzylinderzugeführt, der schließlich den unterstenBaustein im Magazin nach links auswirft.Unten werden die Bausteine gesammelt. Alldies besprechen wir nun der Reihe nach:
StaudüsenWenn man mit Pneumatik etwas abtastenmöchte, was keinen starken Druck (etwaauf ein Ventil) ausüben kann, ist eine derMöglichkeiten der Einsatz einer Staudüse.fischertechnik hatte ein solches Bauteilunter der Bezeichnung Pneumatik-Düsen-baustein 31631 im Ur-Pneumatik-Programm:
Abb. 14: Staudüse
Für eine Beschreibung und einAnwendungsbeispiel siehe [3]. Kurz gesagt,strömt in einen der beiden AnschlüsseDruckluft, die durch ein kleines Loch (inAbb. 14 nach oben) abströmt. Da das rechtungehindert passiert, muss die Zuluftgedrosselt werden. Wird nun das Lochabgedichtet (von Hand oder durch ein zuregistrierendes geeignetes Bauteil), entsteht
am zweiten Anschluss Druck. Dieser kannmit den ursprünglichen Ventilen undBetätigern verstärkt und weiterverarbeitetwerden.
Aber auch mit aktuellen Teilen findet sicheine Lösung, das zu realisieren. Ganzähnlich zu unserem neuen Taster (Abb. 8/9)verwenden wir wieder nur einen einfachenSchlauch, dem wir – gedrosselt mit unsererneuen Drossel – Druckluft zuführen. Wennwir den Schlauch an seinem freiliegendenEnde zuhalten, baut sich im inneren desSchlauchs also je nach Einstellung derDrossel mehr oder weniger schnell Druckauf.
Ein BS30 auf einer Schräge bringt nun nichtviel Gewichts- und damit Betätigungskraftauf. Damit der Schlauch auch mit diesergeringen Kraft sauber abgedichtet wird,verwenden wir eine frappierend einfacheKonstruktion, die uns aber dennoch eineriesige Hebelwirkung beschert 8Abb. 15).
Abb. 15: Selbstbau-Staudüse
Wir lassen tatsächlich einen – sorgfältiggerade abgeschnittenen – Schlauch imWinkel von 45° genau so enden, dass diekleine flache Seite eines Gelenkbausteinsgenau auf ihm endet. Zusammen mit derBauplatte 15x60 ergibt das eine gigantischeHebelwirkung: Ohne vom Magazin
Heft 3/2014 ft:pedia
28
kommende BS30 genügt die Elastizität desSchlauches selbst, den Gelenkstein geradeso weit hoch zu drücken, dass sein planabgeschnittenes Ende nicht plan vomGelenkstein abgedeckt wird. Dadurch kannDruckluft entweichen.
Sobald aber nur ein Hauch von Belastungauf das entfernte Ende der Bauplatte 15x60kommt, wird das Schlauchende zuverlässigverschlossen. Das winzige StückchenSchlauch, was aus dem Baustein 5 15x30(35049), der ihn führt, auf dem Weg zumGelenkstein herausragt, genügt als federn-des Element völlig. Etwas Justierung istwohl nötig, aber weniger als befürchtet - dieAnordnung funktioniert überraschendperfekt.
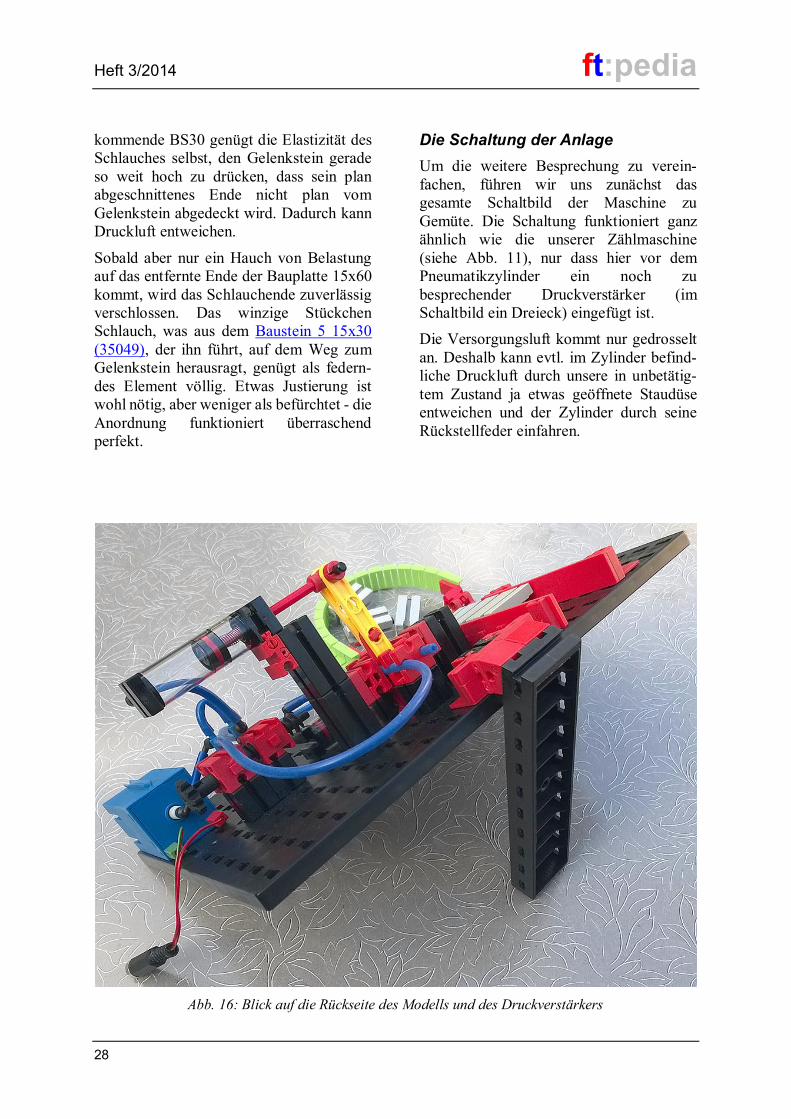
Die Schaltung der AnlageUm die weitere Besprechung zu verein-fachen, führen wir uns zunächst dasgesamte Schaltbild der Maschine zuGemüte. Die Schaltung funktioniert ganzähnlich wie die unserer Zählmaschine(siehe Abb. 11), nur dass hier vor demPneumatikzylinder ein noch zubesprechender Druckverstärker (imSchaltbild ein Dreieck) eingefügt ist.Die Versorgungsluft kommt nur gedrosseltan. Deshalb kann evtl. im Zylinder befind-liche Druckluft durch unsere in unbetätig-tem Zustand ja etwas geöffnete Staudüseentweichen und der Zylinder durch seineRückstellfeder einfahren.
Abb. 16: Blick auf die Rückseite des Modells und des Druckverstärkers
ft:pedia Pneumatik
29
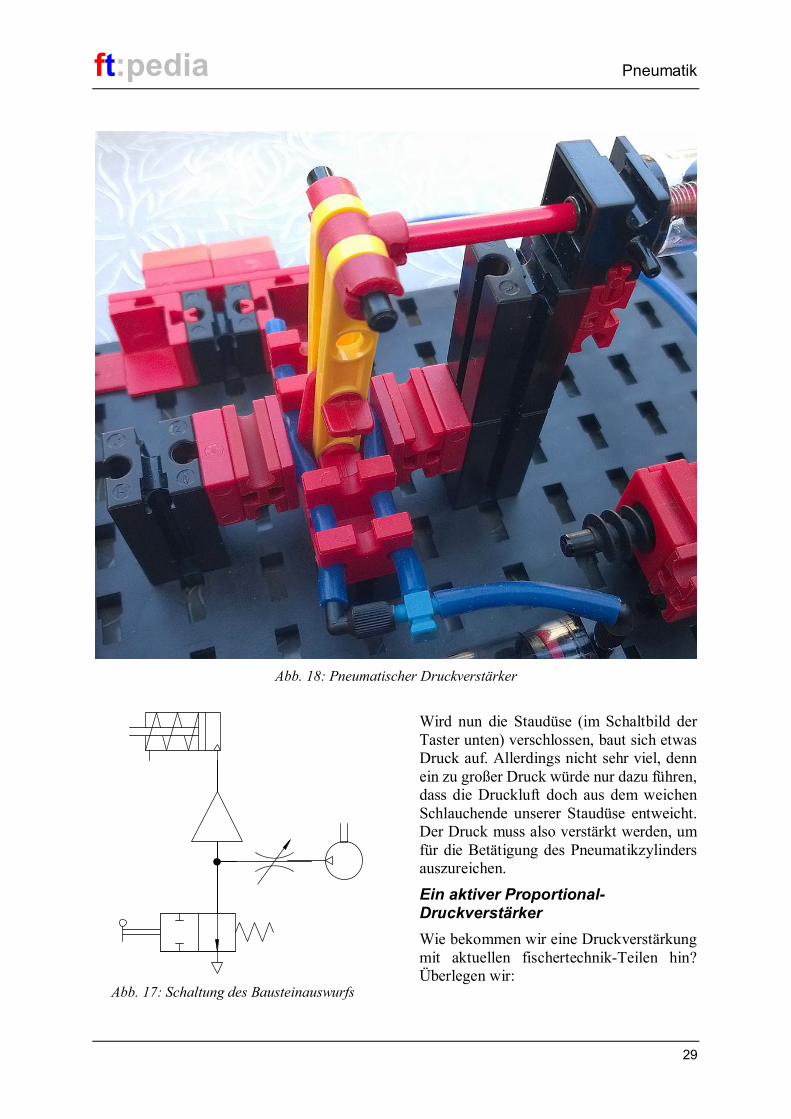
Abb. 17: Schaltung des Bausteinauswurfs
Wird nun die Staudüse (im Schaltbild derTaster unten) verschlossen, baut sich etwasDruck auf. Allerdings nicht sehr viel, dennein zu großer Druck würde nur dazu führen,dass die Druckluft doch aus dem weichenSchlauchende unserer Staudüse entweicht.Der Druck muss also verstärkt werden, umfür die Betätigung des Pneumatikzylindersauszureichen.
Ein aktiver Proportional-DruckverstärkerWie bekommen wir eine Druckverstärkungmit aktuellen fischertechnik-Teilen hin?Überlegen wir:
Abb. 18: Pneumatischer Druckverstärker

Heft 3/2014 ft:pedia
30
Wir müssen dem Zylinder sowohl Druck-luft zuführen als auch diese wieder ins Freieabströmen lassen können. Der von der Stau-düse bewirkte schwache Eingangsdruckmuss dabei in einen hohen Druck übersetztwerden – stark genug für den Zylinder.Anders gesagt: Eine nur kleine Druck-änderung am Eingang muss eine großeDruckänderung am Ausgang zur Folgehaben.Wenn wir mal in die vielleicht gewohntereMechanik schweifen: Eine kleine Kraftübersetzt man dort in eine große mittelseines geeigneten Hebels. Was liegt alsonäher, als einen langen, leichtgängigenHebel mit einem (weiteren) Pneumatik-zylinder um ein relativ langes Maß zubewegen, um damit einen kurzen Hebel mitviel Kraft um eine kurze Strecke zubewegen. Dazu würde es ja genügen,einfach einen langen Hebel von einemZylinder bewegen zu lassen, und an einerdem Hebeldrehpunkt näherliegenden Stelledie benötigte kräftige Bewegung (wennauch nur über eine kurze Distanz) zuverwerten.Bleibt also noch die Aufgabe, mit einerkurzen, aber kräftigen Bewegung ein selbst-gebautes Pneumatikventil zwischen„Druckluft durchlassen, Abluft verschlie-ßen“ und „Druckluft absperren, Abluft insFreie strömen lassen“ umzusteuern. Daswiederum gelingt mit der in Abb. 18 gezeig-ten Konstruktion.Der Trick ist, je einen Pneumatikschlauchfür Zu- und Abluft immer fast vollständigzugeklemmt zu halten. Damit ist nur nochein geringes Stückchen Hebelweg not-wendig, um den einen oder eben denanderen Schlauch vollständig zu ver-schließen und sein jeweiliges Gegenstückzumindest soweit zu öffnen, dass es für dieAnsteuerung des Auswurfzylinders genügt.
Da hier ganz ordentliche Kräfte zusammen-kommen, muss diese Anordnung hin-reichend stabil gebaut sein. Abb. 20 zeigt
eine Detailaufnahme. Hier ist eine deräußeren Begrenzungen abgenommen.Dabei ist bitte zu beachten: Damit auch dieS-Riegel 8 genug Platz haben und die„Absperrflosse“ beweglich bleibt, sitztletztere nicht etwa mittig auf dem Gelenk-stein, sondern versetzt. Der Gelenksteinmuss also mit seiner Nut in der richtigenRichtung verbaut werden. Aus demselbenGrund sitzen die Rollenböcke, die dieSchläuche aufnehmen, nicht ganz nachinnen geschoben, sondern mit etwasAbstand.
Abb. 19: Beide Schläuche sind immer fastzugeklemmt
Der steuernde Pneumatikzylinder sitzt weitoben an einem langen Hebel. Für ihn genügtalso wenig Druck (der der Staudüsenämlich), um über den langen Hebel auszwei gelochten Statikstreben 45 einegelenkig aufgehängte 38260 S-Kupplung22,5 zwar nur ein wenig, aber dafür sehrkräftig, zu verdrehen. Deren schmaleKanten sind prima geeignet, scharf in dieSchläuche hinein zu drücken und siezuverlässig abzuklemmen. Dadurch, dassdieses Bauteil so dünn ist, braucht es dieSchläuche ja nur an einer kleinen Stelleeinzudrücken; deshalb genügt hier dieerreichbare Kraft.Links und rechts sind beide Schläuche sehrstramm zwischen der beweglichen Absperr-flosse und den drum herum angebrachten
ft:pedia Pneumatik
31
Bauteilen eingeklemmt. Je ein BS5, BS7,5und eine Bauplatte 15x15 bringen dierichtigen Abstände.
Abb. 20: Detailblick auf den Verstärker
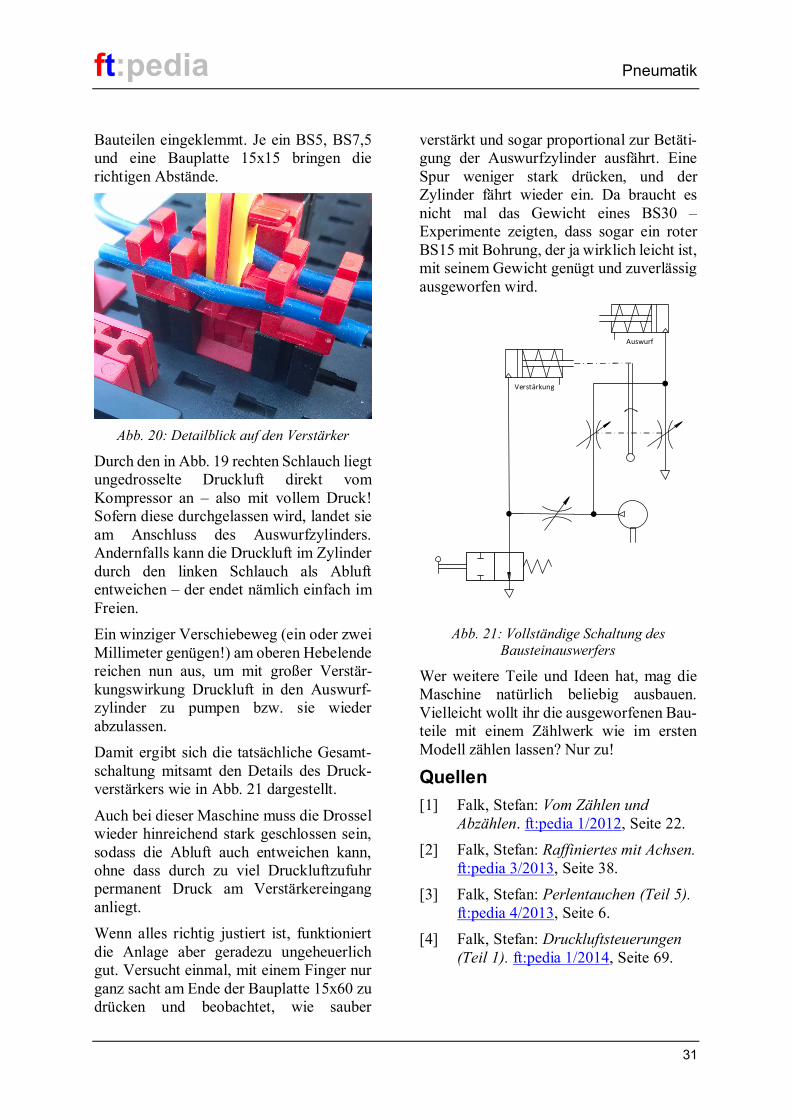
Durch den in Abb. 19 rechten Schlauch liegtungedrosselte Druckluft direkt vomKompressor an – also mit vollem Druck!Sofern diese durchgelassen wird, landet sieam Anschluss des Auswurfzylinders.Andernfalls kann die Druckluft im Zylinderdurch den linken Schlauch als Abluftentweichen – der endet nämlich einfach imFreien.Ein winziger Verschiebeweg (ein oder zweiMillimeter genügen!) am oberen Hebelendereichen nun aus, um mit großer Verstär-kungswirkung Druckluft in den Auswurf-zylinder zu pumpen bzw. sie wiederabzulassen.Damit ergibt sich die tatsächliche Gesamt-schaltung mitsamt den Details des Druck-verstärkers wie in Abb. 21 dargestellt.
Auch bei dieser Maschine muss die Drosselwieder hinreichend stark geschlossen sein,sodass die Abluft auch entweichen kann,ohne dass durch zu viel Druckluftzufuhrpermanent Druck am Verstärkereinganganliegt.Wenn alles richtig justiert ist, funktioniertdie Anlage aber geradezu ungeheuerlichgut. Versucht einmal, mit einem Finger nurganz sacht am Ende der Bauplatte 15x60 zudrücken und beobachtet, wie sauber
verstärkt und sogar proportional zur Betäti-gung der Auswurfzylinder ausfährt. EineSpur weniger stark drücken, und derZylinder fährt wieder ein. Da braucht esnicht mal das Gewicht eines BS30 –Experimente zeigten, dass sogar ein roterBS15 mit Bohrung, der ja wirklich leicht ist,mit seinem Gewicht genügt und zuverlässigausgeworfen wird.
Auswurf
Verstärkung
Abb. 21: Vollständige Schaltung desBausteinauswerfers
Wer weitere Teile und Ideen hat, mag dieMaschine natürlich beliebig ausbauen.Vielleicht wollt ihr die ausgeworfenen Bau-teile mit einem Zählwerk wie im erstenModell zählen lassen? Nur zu!
Quellen[1] Falk, Stefan: Vom Zählen und
Abzählen. ft:pedia 1/2012, Seite 22.[2] Falk, Stefan: Raffiniertes mit Achsen.
ft:pedia 3/2013, Seite 38.[3] Falk, Stefan: Perlentauchen (Teil 5).
ft:pedia 4/2013, Seite 6.[4] Falk, Stefan: Druckluftsteuerungen
(Teil 1). ft:pedia 1/2014, Seite 69.

Heft 3/2014 ft:pedia
32
Computing
Druckmessung mit RoboTX Controller
Andreas GailSeit der Einführung von Pneumatik-Bauelementen durch Fischertechnik ist die Druckmessungdes Betriebsdrucks in den Pufferbehältern eine bislang nur bedingt gelöste Aufgabenstellung.Mit der Kenntnis des Betriebsdrucks kann beispielsweise das Ein- und Ausschalten desKompressors geregelt werden (Zweipunktregler) oder die Bewegungskraft der Pneumatik-zylinder bei konstantem Druck reproduzierbar eingestellt werden. Für alle diese Funktionen isteine einfache und verlässliche Druckmessung die gemeinsame Grundlage.
Druckmesszelle undMessumformerDie Grundlage der Druckmessung ist eineDruckmesszelle, in der der anliegendeDruck in ein elektrisches Signal umge-wandelt wird, welches anschließend weiter-verarbeitet werden kann. Der Gesamt-aufbau wird als Messumformer bezeichnet.Hierzu wird ein fertiges Bauteil (Motorola,Senseon, MPX5100) verwendet (z. B.Conrad Electronic 183890).
Abb. 1: DruckmessumformerMotorola MPX5100
Für weitere Detailinformationen zumBauteil empfiehlt es sich, das zugehörigeDatenblatt von der Internetseite des Her-stellers oder Händlers zu beschaffen [2].
SystemintegrationUm den o. g. Druckmessumformer ein-schließlich Spannungsversorgung fürfischertechnik verwendbar zu machen, wirdgemäß Datenblätter der Hersteller folgendeSchaltung benötigt [1, 2]:
Abb. 2: Schaltung zum Betrieb desDruckmessumformers Motorola MPX5100
Der Brückengleichrichter B1 hat die Auf-gabe, die versehentliche falsche Polung derVersorgungsspannung an die beidenAnschlüsse ACDC zu verhindern. IC1erzeugt eine geregelte Gleichspannung von5V, die für eine genaue Messung erforder-lich ist. Die Anschlüsse DS1-DS3 werdenentsprechend 1-3 an den Druckmessum-former angeschlossen. Die Anschlüsse 4-6des Druckmessumformers werden nichtbeschaltet. Das eigentliche elektrischeMesssignal wird am Ausgang Mess bereit-gestellt. Die Bauteile R1 und C1 sind zurStabilisierung des Messsignals vorgesehen.Mit diesen Informationen kann nun derAufbau begonnen werden.
ft:pedia Computing
33
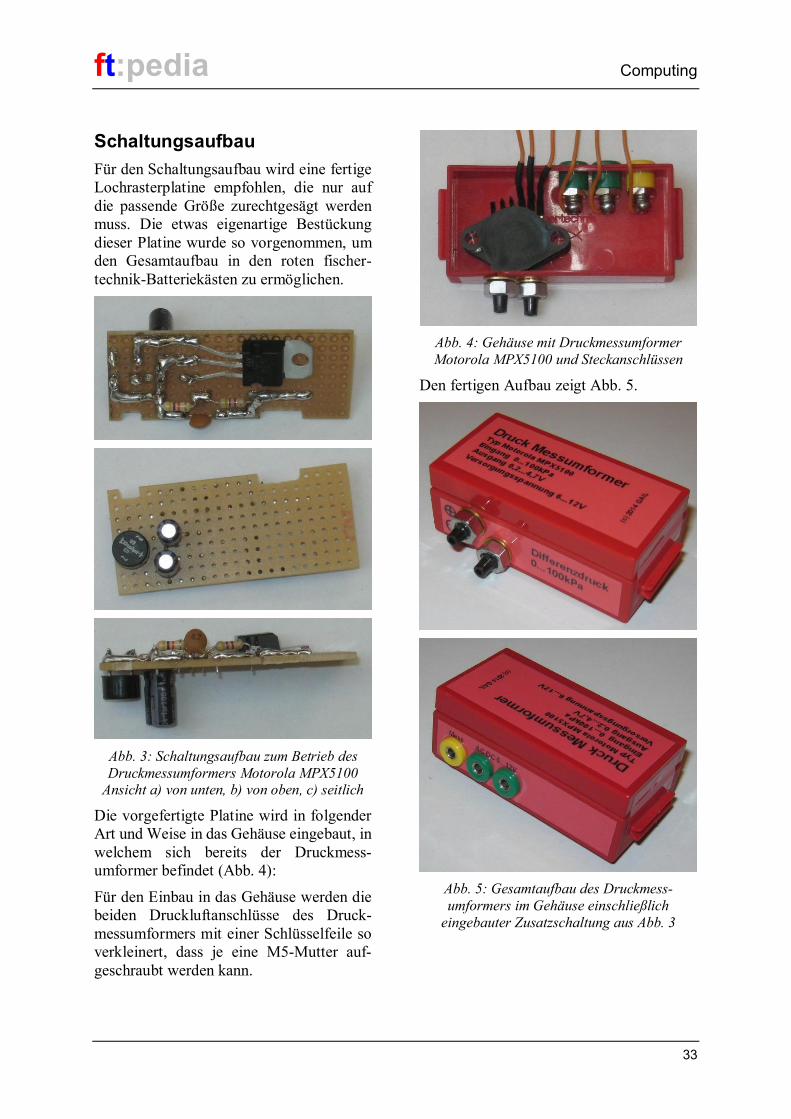
SchaltungsaufbauFür den Schaltungsaufbau wird eine fertigeLochrasterplatine empfohlen, die nur aufdie passende Größe zurechtgesägt werdenmuss. Die etwas eigenartige Bestückungdieser Platine wurde so vorgenommen, umden Gesamtaufbau in den roten fischer-technik-Batteriekästen zu ermöglichen.
Abb. 3: Schaltungsaufbau zum Betrieb desDruckmessumformers Motorola MPX5100
Ansicht a) von unten, b) von oben, c) seitlich
Die vorgefertigte Platine wird in folgenderArt und Weise in das Gehäuse eingebaut, inwelchem sich bereits der Druckmess-umformer befindet (Abb. 4):
Für den Einbau in das Gehäuse werden diebeiden Druckluftanschlüsse des Druck-messumformers mit einer Schlüsselfeile soverkleinert, dass je eine M5-Mutter auf-geschraubt werden kann.
Abb. 4: Gehäuse mit DruckmessumformerMotorola MPX5100 und Steckanschlüssen
Den fertigen Aufbau zeigt Abb. 5.
Abb. 5: Gesamtaufbau des Druckmess-umformers im Gehäuse einschließlich
eingebauter Zusatzschaltung aus Abb. 3

Heft 3/2014 ft:pedia
34
SoftwareZur Verarbeitung des vom Druckmess-umformer bereitgestellten Spannungs-signals soll der Robo TX Controller (TX)verwendet werden, als Programmierumge-bung die Robo Pro-Software. ZumAnschluss kann ein beliebiger Eingang amTX genutzt werden.Dieser Eingang muss zur analogenSpannungsmessung konfiguriert sein. Dereingestellte Sensortyp ist dabei unerheblich;diese Einstellung beeinflusst nur diebildliche Darstellung (Abb. 6).
Abb. 6: Konfiguration des elektrischenEingangs am Robo TX Controller mithilfe der
Robo Pro-Programmierumgebung
Die Software zur Messung ist recht einfachaufgebaut und zeigt nur den jeweiligen Ist-wert der Druckmessung an. Zunächst wirdperiodisch das Messsignal des Druckmess-umformers erfasst (siehe Abb. 7). DiesesMesssignal ist in mV angegeben (1000 mV= 1 V) und wird in der Variablen Spannunggespeichert. Nachfolgend erfolgt dieUmrechnung ausgehend vom Messsignal inmV in eine Druckeinheit in kPa (100 kPa =1000 mbar = 1 bar). Das Rechenergebniswird unter der Variablen Druck_kPa aus-gegeben. Schließlich wird der Druckwert inmbar umgerechnet und unter der VariablenDruck_mbar ausgegeben (rot markiert).
Abb. 7: Robo Pro-Konfiguration zur Umrech-nung eines Spannungseingangssignals in eineDruckmessgröße in kPa / mbar (rot markiert)
Kalibrierung / JustierungLaut Datenblatt des Herstellers liefert derDruckmessumformer folgende Spannungenin Abhängigkeit vom angelegten Druck:
0...100 kPa entsprechen 200...4700 mVBei der Betrachtung des Druckwertes wirdim Grunde immer der Differenzdruck derbeiden Druckeingänge registriert. Da deruntere Druckeingang stets offen bleibtbeschreibt die Angabe des Druckwertesimmer den Überdruck in Bezug auf denUmgebungsdruck. Beim vorliegendenDruckmessumformer zeigt sich bei 0 kPaeine Spannung von 913 mV statt derspezifizierten 200 mV. Die Kalibrierung(Überprüfung) dieses Druckwertes ergabdemnach einen erheblichen Messfehler. ZurKalibrierung eines weiteren Messpunktesmüssten ein höherer Druck angelegt(möglichst am oberen Messbereichsende)und mit einem geeigneten Messmittel (alsoeinem möglichst genauen Druckmessgerät)der angelegte Druck und der gemesseneSpannungswert notiert werden. Da keinweiteres Druckmessgerät zur Verfügungstand, wurde am oberen Grenzwert dieHerstellerspezifikation verwendet. Das

ft:pedia Computing
35
führt sicherlich zu einer recht ungenauenMessung, für die weiteren Erläuterungensollte es jedoch ausreichend sein.Die zuvor bei einer Kalibrierung gewon-nene Erkenntnis soll nun zur Verbesserungdes Messergebnisses eingesetzt werden.Dieses wird als Justierung der Mess-einrichtung bezeichnet. Stellen wir uns vor,wir hätten bei einer Zweipunktkalibrierungfolgende Messpunkte erhalten:
P [kPa] U [mV]0 913
100 4700Tab. 1: Zwei Kalibrierwertepaare
des Druckmessumformers
Jetzt kommt ein Beispiel für alle, die in derSchule nie etwas mit Koordinatensystemenund Geradengleichungen anfangen konn-ten: Aus den beiden Punkten gemäß Tab. 1kann mithilfe einer Tabellenkalkulationeinfach die zugehörige Geradengleichungberechnet werden. Im klassischen Koordi-natensystem wird dabei der Druck P auf dery-Achse aufgetragen und die Spannung Uauf der x-Achse. Dieses ergibt folgendesBild (Abb. 8):
Abb. 8: Berechnung einer Geradengleichungmithilfe einer Tabellenkalkulation
Werden die beiden rot markierten Punktegemäß Abb. 8 mit einer linearen Trendlinieverbunden ergibt sich folgende Geraden-gleichung: y = 0,0264∙x – 24,109 (all-gemeine Geradengleichung: y = m·x + b).Das bedeutet eine Steigung der Geraden
m = 0,0264 und einen y-Achsenabschnittb = -24,109. Diese beiden Werte wurdenzuvor in die RoboPro-Konfiguration gemäßAbb. 7 eingetragen (RoboPro schreibt statt0,0264 die Zahl 26.400m, was technischrecht ungebräuchlich ist). Wer mehr übernicht-lineare Kalibrierungen wissen will,der werfe einen Blick in [3].
Kalibrierung vs. EichungOft werden oben genannte Tätigkeiten auchals Eichung bezeichnet. Fachlich gibt esdabei keinen Unterschied. Es ist jedoch zubeachten, dass eine offizielle Eichung nurvom Eichamt oder einer zugelassenen Ein-richtung durchgeführt werden darf.
Wie geht es weiter?Mit dem erhaltenen Druckmesswert kannnun kräftig experimentiert werden. Nebenden oben bereits genannten Zweipunkt-Druckreglern können auch PI- und PID-Regler aufgebaut werden, oder auch nureinfache Messwertvisualisierungen im zeit-lichen Verlauf. Mit einem geregelten Druckwäre auch eine Fahrzeugstabilisierungdenkbar, die sich an die Untergrundverhält-nisse anpassen könnte.
Viel Spaß bei weiteren Experimenten!
QuellenDie Links zu den Datenblättern sind nichtangegeben, da sie sich leider häufig ändern.[1] STMicroelectronics, Spannungs-
regler Datenblatt L78Sxx, (Doc ID2148 Rev 7), 2012.
[2] Motorola, Inc, DruckmessumformerDatenblatt MPX5100 series (Doc IDMPX5100/D), 1997.
[3] Dirk Fox: „Einmessen“ eines digita-len Messgeräts. ft:pedia 1/2013, S.39-48.
[4] Georg Stiegler: I²C mit dem TX –Teil 3: Luftdruckmessung. ft:pedia1/2013, S. 32-38.

Heft 3/2014 ft:pedia
36
Mechanisches Rechnen
Binäraddierer
Thomas PüttmannBinäres Rechnen bildet eine der Grundlagen der heutigen Computertechnologie. In diesemArtikel wird gezeigt, wie aus wenigen fischertechnik-Bauteilen ein fehlerfrei funktionierender,unterrichtstauglicher 4-Bit-Kugel-Binäraddierer konstruiert werden kann. Mit ihm lässt sichdie Welt des binären Rechnens spielerisch erforschen.
GeschichteZahlen kann man auf verschiedene Art undWeise bezeichnen und benennen. Stellen-wertsysteme wie unser heute gebräuch-liches Dezimalsystem haben zwei vorteil-hafte Eigenschaften: Erstens ist das Hin-schreiben und Lesen selbst großer Zahlenmit wenigen Symbolen (Ziffern) möglich.Dadurch ist der Schreib-/Lesevorgangwenig fehleranfällig. Zweitens ergibt sichaus dem System heraus eine systematischeBenennung der Zahlen, die zur effizientenmündlichen Kommunikation benutztwerden kann. So kann die Zahl 3421 trotzihrer Größe (man stelle sich z. B. 3421Metallachsen vor) im Dezimalsystem mitnur vier Ziffern dargestellt werden, und siebesitzt den systematischen Namen Drei-tausendvierhunderteinundzwanzig.Mechanische Rechenmaschinen benutztenfast ausschließlich die Darstellung derZahlen im Dezimalsystem. Die erstensolchen Maschinen wurden unabhängigvoneinander von Wilhelm Schickard (1592-1635) und Blaise Pascal (1623-1662) in derersten Hälfte des 17. Jahrhunderts erfundenund funktionierten nur unzuverlässig undmit menschlichem Nachhelfen. EinenDurchbruch stellte die vom Universalge-lehrten Gottfried Wilhelm Leibniz (1646-1716) im Jahr 1673 erfundene Staffelwalzedar.
Leibniz war es auch, der als erster die Binär-darstellung von Zahlen entdeckte. DieseDarstellung verwendet nur die zwei Sym-bole 0 und 1 als Ziffern. Die Zahlen werdendamit systematisch 0, 1, 10, 11, 100, 101,usw. benannt. Unter allen Stellenwert-systemen sind die Rechenoperationen imBinärsystem am einfachsten durchzuführen.Der Preis dafür ist, dass man für einegegebene Zahl im Binärsystem die meistenStellen benötigt. So hat die Binärdarstellung110101011101 der Zahl 3421 zwölf Stellenstatt vier. Man sagt, es handelt sich um eine12-Bit-Zahl. Bit steht dabei für binary digit.Weniger bekannt als die Tatsache, dassLeibniz das Binärsystem entdeckte, ist, dassLeibniz auch als erster eine Rechen-maschine skizzierte, die das Binärsystemverwendet. In seiner dreiseitigen Auf-zeichnung De progressione Dyadica ausdem Jahr 1679 beschreibt er einen Binär-addierer und -multiplizierer mit rollendenKugeln, siehe [1, 2]. Nach dieser Skizzeentwarf Ludolf von Mackensen (*1938) einModell, das im Jahr 1971 am DeutschenMuseum gebaut wurde, aber nicht zuver-lässig funktionierte. Ein fehlerfrei rechnen-des Modell wurde im Jahr 2004 von ErwinStein (*1931) und Gerhard Weber entwor-fen und gebaut und ist in der Leibniz-Dauer-ausstellung der Universität Hannover zusehen [2].
ft:pedia Mechanisches Rechnen
37
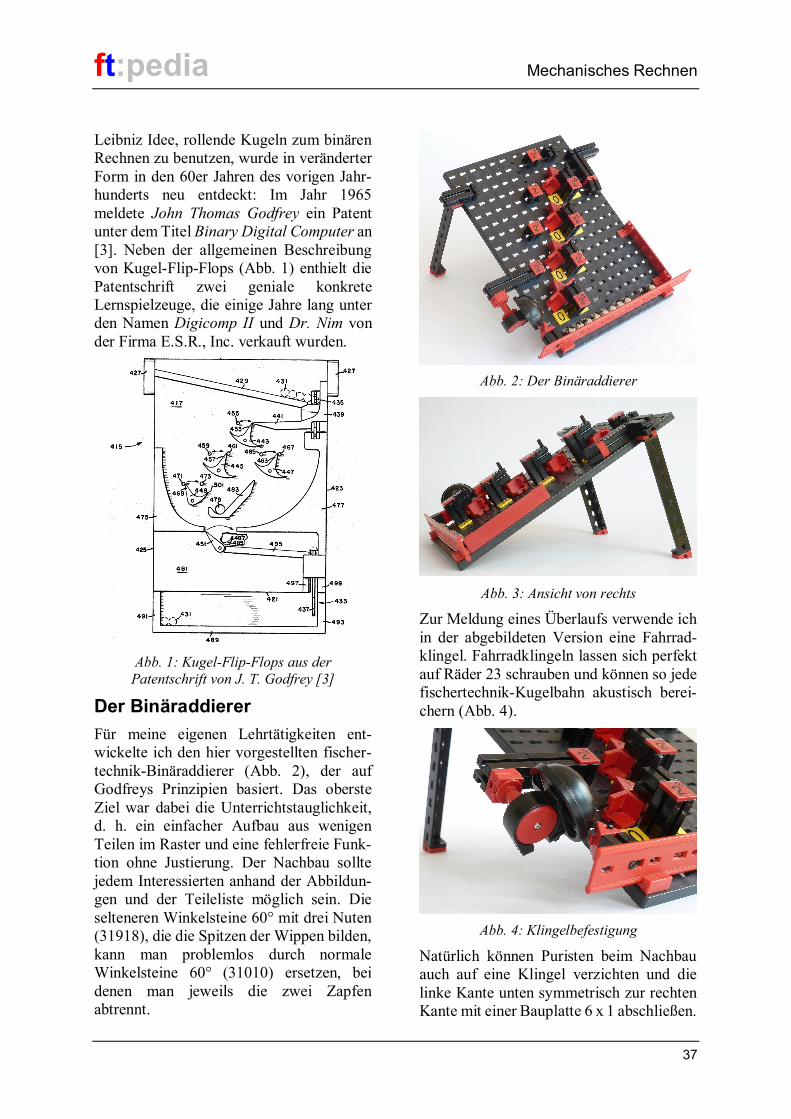
Leibniz Idee, rollende Kugeln zum binärenRechnen zu benutzen, wurde in veränderterForm in den 60er Jahren des vorigen Jahr-hunderts neu entdeckt: Im Jahr 1965meldete John Thomas Godfrey ein Patentunter dem Titel Binary Digital Computer an[3]. Neben der allgemeinen Beschreibungvon Kugel-Flip-Flops (Abb. 1) enthielt diePatentschrift zwei geniale konkreteLernspielzeuge, die einige Jahre lang unterden Namen Digicomp II und Dr. Nim vonder Firma E.S.R., Inc. verkauft wurden.
Abb. 1: Kugel-Flip-Flops aus derPatentschrift von J. T. Godfrey [3]
Der BinäraddiererFür meine eigenen Lehrtätigkeiten ent-wickelte ich den hier vorgestellten fischer-technik-Binäraddierer (Abb. 2), der aufGodfreys Prinzipien basiert. Das obersteZiel war dabei die Unterrichtstauglichkeit,d. h. ein einfacher Aufbau aus wenigenTeilen im Raster und eine fehlerfreie Funk-tion ohne Justierung. Der Nachbau solltejedem Interessierten anhand der Abbildun-gen und der Teileliste möglich sein. Dieselteneren Winkelsteine 60° mit drei Nuten(31918), die die Spitzen der Wippen bilden,kann man problemlos durch normaleWinkelsteine 60° (31010) ersetzen, beidenen man jeweils die zwei Zapfenabtrennt.
Abb. 2: Der Binäraddierer
Abb. 3: Ansicht von rechts
Zur Meldung eines Überlaufs verwende ichin der abgebildeten Version eine Fahrrad-klingel. Fahrradklingeln lassen sich perfektauf Räder 23 schrauben und können so jedefischertechnik-Kugelbahn akustisch berei-chern (Abb. 4).
Abb. 4: Klingelbefestigung
Natürlich können Puristen beim Nachbauauch auf eine Klingel verzichten und dielinke Kante unten symmetrisch zur rechtenKante mit einer Bauplatte 6 x 1 abschließen.

Heft 3/2014 ft:pedia
38
Vor mir hat übrigens schon Holger Howeyeinen fischertechnik-Binäraddierer gebaut.Er war 2010 auf der Modellausstellung inMünster zu sehen.
Teileliste
Anz. ft-Nr. Bezeichnung
1 31010 Winkelstein 60°
1 31016 Seiltrommel rot
1 31034 Metallachse 30
4 31918 Winkelstein 60°(drei Nuten)
7 31981 Winkelstein 15°
4 32064 BS 15 m. Bohrung
9 32879 BS 30 schwarz
13 32881 BS 15 schwarz
1 32985 Grundplatte 500
1 36581 Rad 23 rot
2 37237 BS 5 rot
2 36293 Winkelträger 120
8 38236 Bauplatte 1x1 gelb
8 38240 Eckstein 15
1 38245 Bauplatte 6x1 rot
8 38246 Bauplatte 1x1 rot
4 38414 Kunststoffachse 40
2 38423 Winkelstein 10 rot
10 144262 KugelnEine pdf-Datei mit den Zahlen, die auf dieBauplatten 1x1 geklebt werden, habe ichzum Download bereitgestellt. Und schließ-lich benötigt ihr noch eine Fahrradklingel.
AufbauHauptbestandteil des Addierers sind dievier Toggle-Flip-Flops. Jedes dieser Flip-Flops besteht aus einer Wippe, die zwei sta-bile Zustände einnehmen kann. Ist einesolche Wippe nach links gekippt, so nennenwir den Zustand des Flip-Flops 0. Das Flip-Flop befindet sich im Zustand 1, wenn dieWippe nach rechts gekippt ist. Die vier Flip-Flops zusammen bilden das Addierwerk.Der Gesamtzustand des Addierwerks ergibtsich aus den Zuständen der einzelnen Flip-Flops, indem wir sie von links unten nachrechts oben auslesen und die ausgelesenenWerte von links nach rechts nebeneinanderschreiben. Der Gesamtzustand des Addier-werks wird also durch eine 4-Bit-Binärzahlbeschrieben.
Abb. 5: Aufbau des Binäraddierers
Oberhalb der Flip-Flops befinden sich vierBausteine 15 mit roten Platten, die zusam-men das Eingaberegister bilden. Ein Bit desEingaberegisters ist 1, wenn auf dem Bau-stein 15 eine Kugel liegt, ansonsten 0.
ZählenZunächst führen wir einen Reset aus, d. h.wir setzen mit der Hand alle vier Flip-Flopsdes Binäraddierers in den Zustand 0. DerGesamtzustand des Addierwerks ist also0000. Lassen wir jetzt Kugeln durch denoberen Einlass fallen, so ändert sich der
ft:pedia Mechanisches Rechnen
39
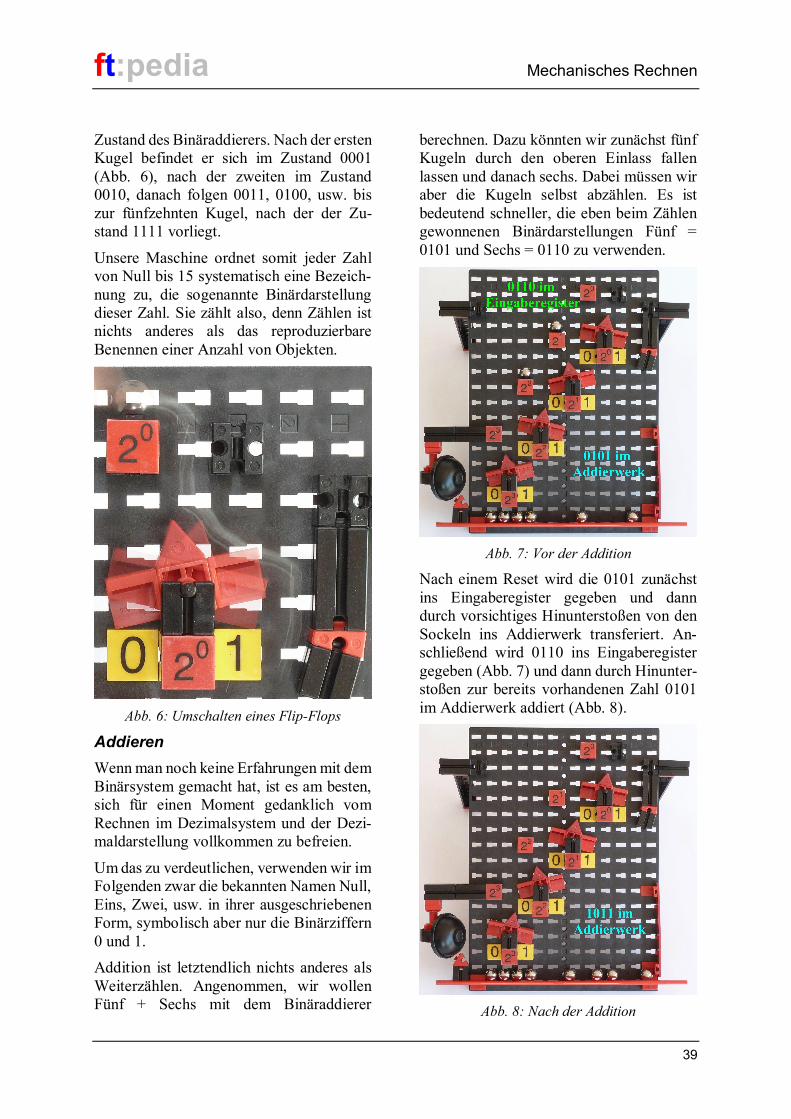
Zustand des Binäraddierers. Nach der erstenKugel befindet er sich im Zustand 0001(Abb. 6), nach der zweiten im Zustand0010, danach folgen 0011, 0100, usw. biszur fünfzehnten Kugel, nach der der Zu-stand 1111 vorliegt.
Unsere Maschine ordnet somit jeder Zahlvon Null bis 15 systematisch eine Bezeich-nung zu, die sogenannte Binärdarstellungdieser Zahl. Sie zählt also, denn Zählen istnichts anderes als das reproduzierbareBenennen einer Anzahl von Objekten.
Abb. 6: Umschalten eines Flip-Flops
AddierenWenn man noch keine Erfahrungen mit demBinärsystem gemacht hat, ist es am besten,sich für einen Moment gedanklich vomRechnen im Dezimalsystem und der Dezi-maldarstellung vollkommen zu befreien.
Um das zu verdeutlichen, verwenden wir imFolgenden zwar die bekannten Namen Null,Eins, Zwei, usw. in ihrer ausgeschriebenenForm, symbolisch aber nur die Binärziffern0 und 1.Addition ist letztendlich nichts anderes alsWeiterzählen. Angenommen, wir wollenFünf + Sechs mit dem Binäraddierer
berechnen. Dazu könnten wir zunächst fünfKugeln durch den oberen Einlass fallenlassen und danach sechs. Dabei müssen wiraber die Kugeln selbst abzählen. Es istbedeutend schneller, die eben beim Zählengewonnenen Binärdarstellungen Fünf =0101 und Sechs = 0110 zu verwenden.
Abb. 7: Vor der Addition
Nach einem Reset wird die 0101 zunächstins Eingaberegister gegeben und danndurch vorsichtiges Hinunterstoßen von denSockeln ins Addierwerk transferiert. An-schließend wird 0110 ins Eingaberegistergegeben (Abb. 7) und dann durch Hinunter-stoßen zur bereits vorhandenen Zahl 0101im Addierwerk addiert (Abb. 8).
Abb. 8: Nach der Addition

Heft 3/2014 ft:pedia
40
Man erhält als Ergebnis 1011, d. h. dieBinärdarstellung der Zahl Elf, die wir beimZählen oben gewonnen haben.
FunktionUm genau zu verstehen, wie und warum dieMaschine funktioniert, schauen wir unseinmal an, wie die Binärdarstellung vonZahlen mathematisch definiert ist. Eineganze Zahl N zwischen Null und Fünfzehnwird dabei geschrieben alsN = a • Zwei•Zwei•Zwei +
b • Zwei•Zwei + c • Zwei + d= ((a • Zwei + b) • Zwei + c) • Zwei + d
wobei die vier Stellen a, b, c und d entweder0 oder 1 sind. Die Zahl Zwei selbst erhältalso die Binärdarstellung 0010, die ZahlVier = Zwei•Zwei die Binärdarstellung0100, und so weiter.Die erste Frage, die wir beantworten wol-len, ist: Warum sind das genau die Darstel-lungen, die unsere Maschine beim Zählenliefert?Fällt eine Kugel in ein Flip-Flop, so ändertsich dessen Zustand (siehe Abb. 6). Ist derZustand vorher 0, so ist er nachher 1 und dieKugel fällt ohne weitere Wirkung nachunten ins Ablagefach. Ist der Zustandvorher 1, so ist er nachher 0, die Kugel wirdaber nach links unten ans nächste Flip-Flopweitergeleitet.Wenn N Kugeln ein anfänglich zurück-gesetztes Flip-Flop durchlaufen, wird dieabgerundete Hälfte der Kugeln ans nächsteFlip-Flop weitergegeben. Der Zustand desersten Flip-Flops ist zum Schluss 0, wenn Ngerade ist, und 1, wenn N ungerade ist.Benutzen wir die mathematische Binärdar-stellung von N von oben, so ist die abge-rundete Hälfte von N gerade (a • Zwei + b)• Zwei + c und d ist der Zustand des erstenFlip-Flops zum Schluss. Das erste Flip-Flophat also das d aus der Binärdarstellungextrahiert. Das nächste Flip-Flop extrahiert
auf die gleiche Weise das c aus der über-gebenen Kugelanzahl (a • Zwei + b) • Zwei+ c und leitet a • Zwei + b an das folgendeFlip-Flop weiter. Dieses extrahiert daraus bund gibt a Kugeln an das vierte Flip-Flopweiter. Insgesamt zeigen also die Flip-Flopsdie Binärdarstellung abcd von N an.Ein Beispiel: Werden elf Kugeln durch denoberen Einlass in die zurückgesetzteMaschine gegeben, so befindet sich dasoberste Flip-Flop zum Schluss im Zustand1, da Elf ungerade ist. Fünf Kugeln werdenan das zweite Flip-Flop übergegeben.Dieses hat zum Schluss den Zustand 1, weilFünf ungerade ist. Zwei Kugeln werden andas dritte Flip-Flop weitergeleitet. Dasbefindet sich zum Schluss im Zustand 0,weil Zwei gerade ist. Eine Kugel wird andas vierte Flip-Flop übergeben, die es in denZustand 1 versetzt. Die Binärdarstellungvon Elf ist somit 1011.
Die zweite Frage, die wir beantwortenwollen, ist: Warum kann man mit derMaschine die Binärdarstellungen zweierZahlen addieren?
Hat man zwei Zahlen und ihre Binärdarstel-lungen
N1 = a1 • Zwei•Zwei•Zwei+ b1 • Zwei•Zwei + c1 • Zwei + d1,
N2 = a2 • Zwei•Zwei•Zwei+ b2 • Zwei•Zwei + c2 • Zwei + d2,
so erhält man deren Summe, indem man dieentsprechenden Stellen addiert und dieÜberträge berücksichtigt, die entstehen,wenn beide Stellen den Wert 1 haben.
Zwei Beispiele: 0101+ 0110= 1011
Hier entsteht nur ein Übertrag in der drittenStelle.
0011+ 0111= 1010
Hier entsteht ein Übertrag in der ersten,zweiten und dritten Stelle. An der zweiten

ft:pedia Mechanisches Rechnen
41
Stelle werden sogar drei Einsen addiert.Jedes Flip-Flop stellt nun einen 1-Bit-Addierer dar:0 im Flip-Flop + 1 Kugel von oben
= 1 im Flip-Flop,1 im Flip-Flop + 1 Kugel von oben
= 0 im Flip-Flop + Übertrag nach links.Wenn die Kugeln alle gleichzeitig vom Ein-gaberegister ins Addierwerk gestoßenwerden, erfolgt die Addition der entstehen-den Überträge zeitversetzt. Daher bereitetdie Addition der drei Einsen im zweitenBeispiel kein Problem. Man muss hier nichtwie bei elektronischen Addierern zwischenHalb- und Volladdierern unterscheiden.
Subtrahieren, Multiplizieren undDividierenMit der Maschine lassen sich halbautoma-tisch auch Subtraktionen, Multiplikationenund Divisionen durchführen. Praktischführt man die Subtraktion Elf minus Sechsdurch, indem man zunächst Elf = 1011 insAddierwerk eingibt. Die Sechs wird dannkomplementär ins Eingaberegister einge-geben, d. h. man legt die Kugeln genau anden Stellen ins Eingaberegister, an denendie Binärdarstellung 0110 von Sechs Nullenhat, also links unten und rechts oben. DasEingaberegister wird nun durch Hinunter-stoßen addiert. Abschließend wird noch0001 addiert. Man erhält 0101 + Überlauf.Der Überlauf wird ignoriert. Das Ergebnisist also Fünf.
Dieses auf den ersten Blick etwas seltsamanmutende Vorgehen lässt sich mit denBegriffen Einerkomplement und Zweier-komplement erklären. Das Zweierkomple-ment einer Zahl N zwischen Null undFünfzehn ist die Zahl N’, so dass N + N’ =Sechzehn ist. Zu Sechs = 0110 ist also zumBeispiel das Zweierkomplement Zehn =1010. Wenn man nun zu einer Zahl M dasZweierkomplement N’ von N addiert,addiert man Sechzehn – N und erhält aufunserer Maschine dabei M – N + Überlauf.Wenn man den Überlauf ignoriert, ist also
Subtraktion das gleiche wie Addition mitdem Zweierkomplement.
Schneller als das Zweierkomplement einerZahl kann man im Kopf das Einerkomple-ment bilden, bei dem jede Binärstelleeinzeln komplementiert wird. Die Summeeiner Zahl und ihres Einerkomplementsergibt offensichtlich immer 1111 = Fünf-zehn, da an jeder Stelle eine 1 und eine 0addiert werden. Das Einerkomplement plus1 ist also das Zweierkomplement. Damit istdas obige Vorgehen vollständig erklärt.Die Multiplikation Fünf = 0101 mal Drei =0011 führt man praktisch durch, indem mandie Drei einmal unverändert eingibt unddann um zwei Stellen nach links versetzt(1100) dazu addiert. Man erhält 1111 =Fünfzehn. Mathematisch liegt das amDistributivgesetz: 0101 • 0011 = (0100 +0001) • 0011 = 1100 + 0011. Mit dieserÜberlegung ist klar, dass man bei jedembeliebigen Produkt nur verschobene Kopiendes zweiten Faktors addieren muss.
Die halbautomatische Division zweierZahlen orientiert sich wie die Multiplika-tion an der schriftlichen Rechnung undnutzt damit ebenfalls das Distributivgesetz.Sie wird hier nicht weiter erklärt.
SchlussbemerkungenIn einer der nächsten Ausgaben werdenweitere fischertechnik-Kugellogik-Elemen-te und Anwendungen vorgestellt, insbeson-dere ein R-S-Flip-Flop. Ein Video des hiervorgestellten Binäraddierers findet ihr inyoutube.
Literatur und Links[1] Georgi Dalakov: Gottfried Leibniz.
http://history-computer.com/
[2] Erwin Stein: Die Leibniz-Dauerausstellung der GottfriedWilhelm Leibniz Universität inHannover. 2008.
[3] John Thomas Godfrey: Binary Digi-tal Computer, US Patent 3,390,471
Heft 3/2014 ft:pedia
42
Computing
Endliche Automaten in Robo Pro
Dirk FoxEndliche Automaten sind ein zentrales Konzept der Informatik. Sie eignen sich besonders gutzur Modellierung autonomer IT-Systeme – wie z. B. Roboter oder Steuerungen. Die Program-mierung Endlicher Automaten wird von Robo Pro hervorragend unterstützt – eine Einführungin Endliche Automaten sucht man in fischertechnik-Anleitungen jedoch vergebens. Das holenwir hiermit nach.
HintergrundWer mit der Programmierung in Robo Probeginnt, wird – auch durch die einführendenBeispiele in der ausführlichen Online-Hilfe– leicht dazu verleitet, Robo Pro-Program-me grundsätzlich wie einen linearen „Pro-grammablaufplan“ zu schreiben. Das istzwar für viele einfache Aufgabenstellungenein geeignetes Vorgehen, aber komplexereSteuerungsaufgaben lassen sich so nur sehrholprig verwirklichen. Das Ergebnis sindunübersichtliche, oft gar chaotische Pro-gramme. Sie stellen häufig wenig eleganteProblemlösungen dar, bei der das Lösungs-konzept schwer erkennbar und die Fehler-suche aufwändig ist. Vor allem aber bleibensie weit hinter den Möglichkeiten vonRobo Pro zurück – einer sehr mächtigenProgrammierumgebung, die gerade für dieLösung von Steuerungsaufgaben besondersgeeignet ist.
Diese „heimlichen“ Stärken von Robo Prolassen sich besonders gut mit dem Konzeptdes ‚Endlichen Automaten‘ verstehen underläutern. Daher starten wir mit einemkleinen Ausflug in die Welt der EndlichenAutomaten – wem das bereits ein Begriffist, der darf die beiden folgenden Ab-schnitte auch gerne überspringen. Anschlie-ßend werden wir die Modellierung undProgrammierung in Robo Pro an Beispielenvorstellen.
Endliche AutomatenAls ‚Endlicher Automat‘ wird ein Modellbezeichnet, in dem das Verhalten einesSystems als eine endliche Menge vonZuständen beschrieben wird. Der Übergangvon einem Zustand in einen anderen wirddabei von Bedingungen (wie z. B. Ereig-nissen) ausgelöst, auf die jeweils eineAktion folgt. Endliche Automaten werdendaher auch „Zustandsmaschinen“ genannt.Endliche Automaten haben in der Infor-matik bei der Entwicklung von Compilern(‚Übersetzern‘) für Computersprachen einewichtige Rolle gespielt. Aber auch einge-bettete Systeme wie z. B. eine Aufzug-steuerung oder ein Roboter lassen sichhervorragend als Endlicher Automat model-lieren (mehr dazu im nächsten Abschnitt).In der Theoretischen Informatik wird dasKonzept des Endlichen Automaten verwen-det, um einige fundamentale Aussagen überAlgorithmen zu formulieren und zu bewei-sen – damit wollen wir uns hier aber nichtbeschäftigen. Wer mehr über die theore-tischen Hintergründe wissen möchte, demempfehle ich als Lektüre das Grundlagen-werk der Automatentheorie von Hopcroftund Ullman [1].Für diesen Beitrag ist wichtig, dass sichprinzipiell jedes informationstechnischeSystem – ein MP3-Spieler, ein Smartphone,

ft:pedia Computing
43
ein Computer – als Endlicher Automatbeschreiben bzw. ‚modellieren‘ lässt. Dabeientsteht ein sehr klarer Überblick über das(gewünschte) Systemverhalten. Wird einesolche Modellierung allerdings zu komplex,stellt sie beim Systementwurf keine großeHilfe mehr dar; daher versucht man, kom-plexe Systeme zunächst auf einer höherenAbstraktionsebene als Endlichen Automa-ten zu modellieren, damit das Systemver-halten als Ganzes noch überschaubar bleibt.
fischertechnik-AutomatenVor allem für die Aufgabenstellungen, diesich mit einem fischertechnik-Interfaceoder dem TX(T)-Controller lösen lassen,stellt die Modellierung als Endlicher Auto-mat eine große Hilfe bei der Program-mierung dar. Warum ist das so?Ein Endlicher Automat – hier vielleichtanschaulicher Zustandsmaschine genannt –kennt nicht nur die Zustände, in die er,ausgelöst durch ein Ereignis wie einbestimmter Sensorwert oder eine Taster-betätigung, als nächstes übergeht, sondernauch die Zustände, die er zuvor eingenom-men hat. Er verfügt also gewissermaßenüber ein „Gedächtnis“. Damit können die-selben Sensoren (Fototransistoren, Reed-Kontakte etc.) abhängig vom Zustand desSystems unterschiedliche Aktionen veran-lassen.Bei Systemen, die komplett durch externeEreignisse gesteuert werden, ist genau dieseEigenschaft wesentlich – denn in der Regelsoll sich ein solches System bei Eintritteines bestimmten Ereignisses nicht in jederSituation (= Zustand) gleich verhalten.Beispielsweise soll die Schrankensteuerungeiner Parkgarage einem neu eintreffendenFahrzeug das Ziehen eines Parktickets nurdann ermöglichen, wenn es noch freie Park-plätze gibt. Und das Unterbrechen derLichtschranke im Fahrstuhl soll nur dannzum Öffnen der Türe führen, wenn siegerade schließt – aber natürlich nicht wäh-rend der Fahrt.
ModellierungWill man ein Programm zur Lösung einerbestimmten Aufgabenstellung entwickeln,sollte man sich immer zunächst (mindestensim Kopf, besser auf Papier) ein Modell vonder Lösung machen, anstatt gleich mit derProgrammierung zu beginnen. Erst, wenndas Modell auf Korrektheit geprüft ist,sollte man in die Tasten greifen. Wer dasnicht tut, läuft leicht Gefahr, ein chaotischesProgramm mit viel Flickwerk zu erzeugen –das er möglicherweise schon wenig späterselbst nicht mehr so recht durchschaut.
In einem solchen Modell versucht man, dieAufgabenstellung zunächst in Teilproblemezu zerlegen, die sich unabhängig vonein-ander lösen lassen. Dann zerlegt man dieseTeilprobleme wiederum in unabhängigeTeilprobleme – so lange, bis nur nochsolche Teilprobleme übrig bleiben, die sichnicht mehr sinnvoll weiter zerlegen lassen.Anschließend löst man jedes TeilproblemSchritt für Schritt, indem man den Lösungs-weg konkret beschreibt. Das Verfahrenähnelt der römischen Herrschaftsstrategiedes divide et impera („teile und herrsche“)– und funktioniert ebenso erfolgreich.Will man eine Problemlösung als EndlichenAutomaten modellieren, muss man zu-nächst alle Zustände definieren, die das zuentwickelnde System annehmen soll, und indenen es einen ‚Auslöser‘ (= Bedingung)erwartet, um in einen anderen Zustand über-zugehen und eine Aktion zu veranlassen.Dann wird einer dieser Zustände als Start-zustand S des Endlichen Automaten ge-wählt. In diesem Zustand befindet sich dasSystem direkt nach der Aktivierung.
Damit die Lösung auch terminiert (d. h.irgendwann endet) muss der Automat min-destens einen Endzustand E besitzen.Anders als beim Startzustand kann derAutomat über beliebig viele Endzuständeverfügen, aus denen er in keinen anderenZustand mehr übergeht.
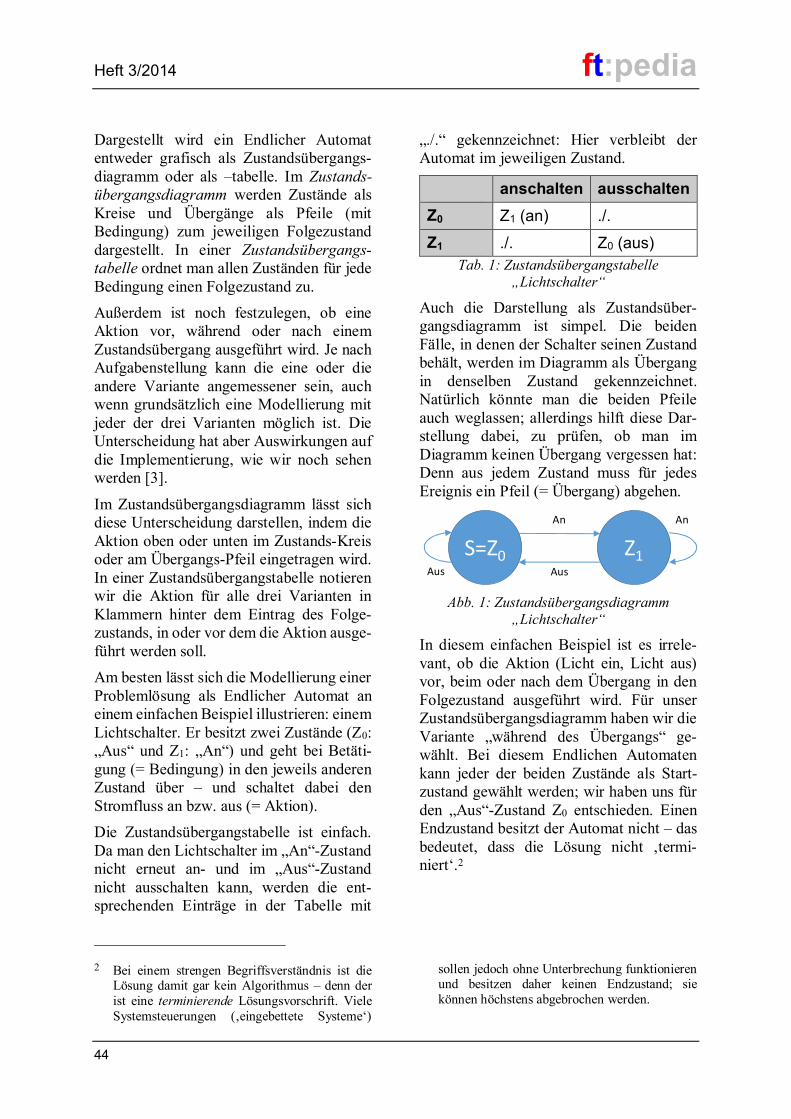
Heft 3/2014 ft:pedia
44
Dargestellt wird ein Endlicher Automatentweder grafisch als Zustandsübergangs-diagramm oder als –tabelle. Im Zustands-übergangsdiagramm werden Zustände alsKreise und Übergänge als Pfeile (mitBedingung) zum jeweiligen Folgezustanddargestellt. In einer Zustandsübergangs-tabelle ordnet man allen Zuständen für jedeBedingung einen Folgezustand zu.Außerdem ist noch festzulegen, ob eineAktion vor, während oder nach einemZustandsübergang ausgeführt wird. Je nachAufgabenstellung kann die eine oder dieandere Variante angemessener sein, auchwenn grundsätzlich eine Modellierung mitjeder der drei Varianten möglich ist. DieUnterscheidung hat aber Auswirkungen aufdie Implementierung, wie wir noch sehenwerden [3].
Im Zustandsübergangsdiagramm lässt sichdiese Unterscheidung darstellen, indem dieAktion oben oder unten im Zustands-Kreisoder am Übergangs-Pfeil eingetragen wird.In einer Zustandsübergangstabelle notierenwir die Aktion für alle drei Varianten inKlammern hinter dem Eintrag des Folge-zustands, in oder vor dem die Aktion ausge-führt werden soll.Am besten lässt sich die Modellierung einerProblemlösung als Endlicher Automat aneinem einfachen Beispiel illustrieren: einemLichtschalter. Er besitzt zwei Zustände (Z0:„Aus“ und Z1: „An“) und geht bei Betäti-gung (= Bedingung) in den jeweils anderenZustand über – und schaltet dabei denStromfluss an bzw. aus (= Aktion).Die Zustandsübergangstabelle ist einfach.Da man den Lichtschalter im „An“-Zustandnicht erneut an- und im „Aus“-Zustandnicht ausschalten kann, werden die ent-sprechenden Einträge in der Tabelle mit
2 Bei einem strengen Begriffsverständnis ist dieLösung damit gar kein Algorithmus – denn derist eine terminierende Lösungsvorschrift. VieleSystemsteuerungen (‚eingebettete Systeme‘)
„./.“ gekennzeichnet: Hier verbleibt derAutomat im jeweiligen Zustand.
anschalten ausschaltenZ0 Z1 (an) ./.
Z1 ./. Z0 (aus)Tab. 1: Zustandsübergangstabelle
„Lichtschalter“
Auch die Darstellung als Zustandsüber-gangsdiagramm ist simpel. Die beidenFälle, in denen der Schalter seinen Zustandbehält, werden im Diagramm als Übergangin denselben Zustand gekennzeichnet.Natürlich könnte man die beiden Pfeileauch weglassen; allerdings hilft diese Dar-stellung dabei, zu prüfen, ob man imDiagramm keinen Übergang vergessen hat:Denn aus jedem Zustand muss für jedesEreignis ein Pfeil (= Übergang) abgehen.
Abb. 1: Zustandsübergangsdiagramm„Lichtschalter“
In diesem einfachen Beispiel ist es irrele-vant, ob die Aktion (Licht ein, Licht aus)vor, beim oder nach dem Übergang in denFolgezustand ausgeführt wird. Für unserZustandsübergangsdiagramm haben wir dieVariante „während des Übergangs“ ge-wählt. Bei diesem Endlichen Automatenkann jeder der beiden Zustände als Start-zustand gewählt werden; wir haben uns fürden „Aus“-Zustand Z0 entschieden. EinenEndzustand besitzt der Automat nicht – dasbedeutet, dass die Lösung nicht ‚termi-niert‘.2
sollen jedoch ohne Unterbrechung funktionierenund besitzen daher keinen Endzustand; siekönnen höchstens abgebrochen werden.
Z1S=Z0
An
Aus Aus
An

ft:pedia Computing
45
Ist die Aufgabenstellung komplexer, kannes sinnvoll sein, die Modellierung auf unter-schiedlichen Abstraktionsebenen vorzuneh-men. So kann man zunächst mit einer gro-ben Unterscheidung von Zuständen begin-nen, die sich später jeweils wiederum alseigene Endliche Automaten darstellenlassen. Auf diese Weise kann durch eineschrittweise Konkretisierung ein Teilpro-blem nach dem anderen präzisiert werden,ohne dass dabei die Systematik der Gesamt-lösung (der ursprüngliche, abstrakte End-liche Automat) verändert werden muss.
Programmierung in Robo ProDie Unterprogramme in Robo Pro bieteneine hervorragende Möglichkeit, ein alsEndlicher Automat modelliertes Systemübersichtlich und anschaulich zu program-mieren: sie können nämlich mehrere Aus-gänge besitzen.Damit lässt sich in Robo Pro jeder Zustanddes Zustandsübergangsdiagramms alsUnterprogramm realisieren, das – abhängigvon unterschiedlichen Ereignissen – übereinen anderen Ausgang verlassen wird undvon dort in den Folgezustand übergeht,sprich: ein anderes Unterprogramm aufruft.Das Hauptprogramm entspricht damit demZustandsübergangsdiagramm, die Unter-programme bilden die Zustände, die Auf-rufe der Unterprogramme stellen dieZustandsübergänge dar. Die Endzuständewerden durch das Programmende-Symbol(rotes Ampelmännchen) realisiert.
BeispieleWie hilfreich die Modellierung und Pro-grammierung einer Aufgabenstellung alsEndlicher Automat in der Praxis ist, möch-ten wir im Folgenden an drei Beispielenverdeutlichen: der Steuerung einer Trep-penhausbeleuchtung, der Programmierungeines Spurfolger-Roboters und der Reali-sierung eines Morsezeichen-Dekodierers.
TreppenhausbeleuchtungWir beginnen mit einem einfachen Beispiel.Eine Treppenhausbeleuchtung soll sowohldurch einen Bewegungsmelder als auchdurch einen Taster für eine festgelegte Zeit(eine Minute) aktiviert werden können. DerBewegungsmelder soll allerdings nur funk-tionieren, wenn es im Treppenhaus hin-reichend dunkel ist. Für diese Steuerungs-aufgabe können wir die folgenden Zuständeunterscheiden:
· Zustand 0: Die Treppenhausbeleuchtungund der Bewegungsmelder sind inaktiv(Startzustand).
· Zustand 1: Die Treppenhausbeleuchtungist inaktiv, aber der Bewegungsmelderist aktiviert.
· Zustand 2: Die Treppenhausbeleuchtungist aktiv.
Die Übergänge zwischen diesen drei Zu-ständen werden durch vier Ereignisse ge-steuert:
· einen Dämmerungssensor (Fototransis-tor), der einen festgelegten Wert über-oder unterschreitet,
· einen Taster, mit dem die Treppenhaus-beleuchtung aktiviert werden kann und
· einen Infrarot-Bewegungsmelder, derbei einer Bewegung im Raum schaltet.
Die eigentliche Aktion – das Aktivieren derTreppenhausbeleuchtung für eine vorgege-bene Zeit – findet im Zustand Z2 statt. Diebeiden anderen Zustände warten nur auf dasEintreten der Ereignisse. Damit lässt sichdie folgende Zustandsübergangstabellebilden:
hell dunkel Taster Bewegung
Z0 ./. Z1 Z2 ./.
Z1 Z0 ./. Z2 Z2
Z2 Z0 Z1 ./. ./.Tab. 2: Zustandsübergangstabelle
Treppenhausbeleuchtung
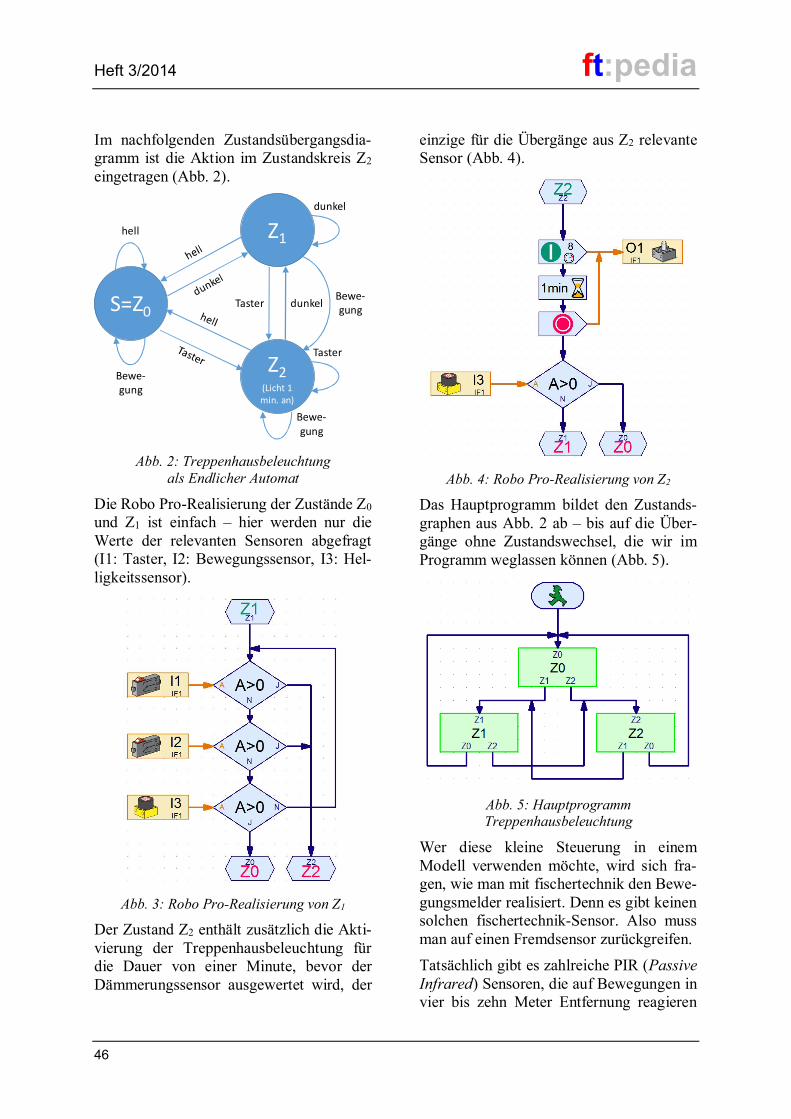
Heft 3/2014 ft:pedia
46
Im nachfolgenden Zustandsübergangsdia-gramm ist die Aktion im Zustandskreis Z2eingetragen (Abb. 2).
Abb. 2: Treppenhausbeleuchtungals Endlicher Automat
Die Robo Pro-Realisierung der Zustände Z0und Z1 ist einfach – hier werden nur dieWerte der relevanten Sensoren abgefragt(I1: Taster, I2: Bewegungssensor, I3: Hel-ligkeitssensor).
Abb. 3: Robo Pro-Realisierung von Z1
Der Zustand Z2 enthält zusätzlich die Akti-vierung der Treppenhausbeleuchtung fürdie Dauer von einer Minute, bevor derDämmerungssensor ausgewertet wird, der
einzige für die Übergänge aus Z2 relevanteSensor (Abb. 4).
Abb. 4: Robo Pro-Realisierung von Z2
Das Hauptprogramm bildet den Zustands-graphen aus Abb. 2 ab – bis auf die Über-gänge ohne Zustandswechsel, die wir imProgramm weglassen können (Abb. 5).
Abb. 5: HauptprogrammTreppenhausbeleuchtung
Wer diese kleine Steuerung in einemModell verwenden möchte, wird sich fra-gen, wie man mit fischertechnik den Bewe-gungsmelder realisiert. Denn es gibt keinensolchen fischertechnik-Sensor. Also mussman auf einen Fremdsensor zurückgreifen.Tatsächlich gibt es zahlreiche PIR (PassiveInfrared) Sensoren, die auf Bewegungen invier bis zehn Meter Entfernung reagieren
Z1
Z2(Licht 1min. an)
S=Z0 dunkelTaster
Taster
hell
Bewe-gung
dunkel
Bewe-gung
Bewe-gung
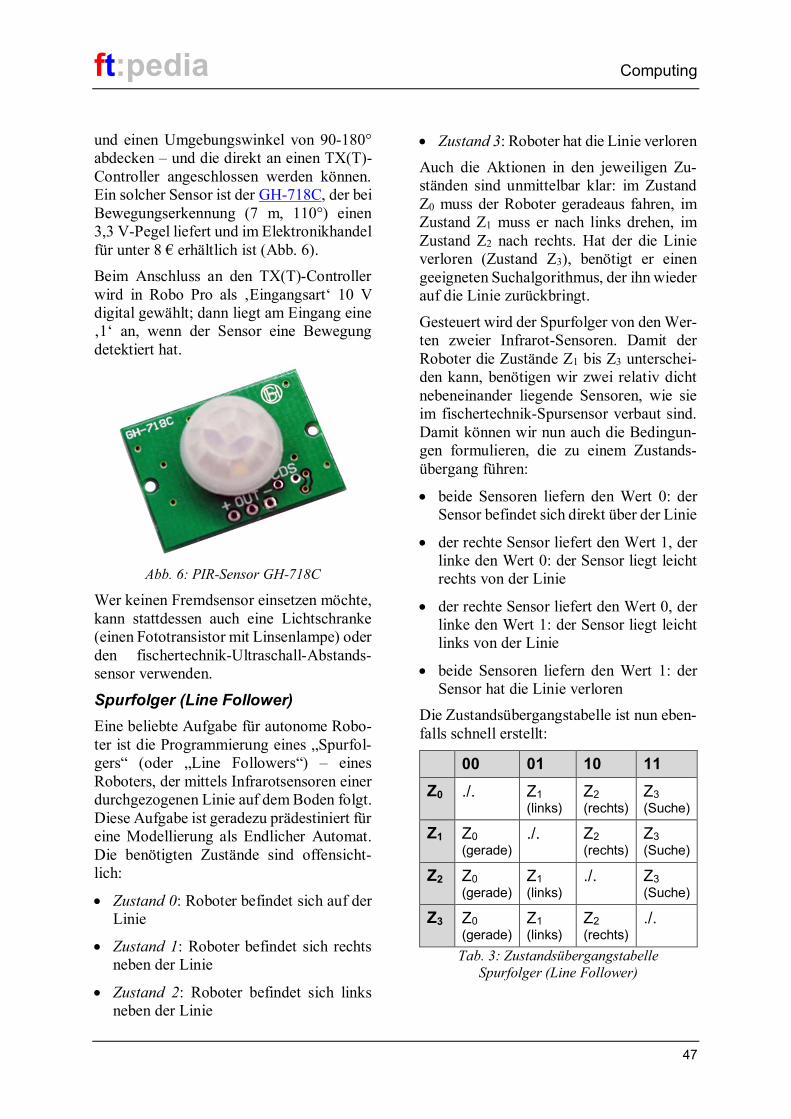
ft:pedia Computing
47
und einen Umgebungswinkel von 90-180°abdecken – und die direkt an einen TX(T)-Controller angeschlossen werden können.Ein solcher Sensor ist der GH-718C, der beiBewegungserkennung (7 m, 110°) einen3,3 V-Pegel liefert und im Elektronikhandelfür unter 8 € erhältlich ist (Abb. 6).Beim Anschluss an den TX(T)-Controllerwird in Robo Pro als ‚Eingangsart‘ 10 Vdigital gewählt; dann liegt am Eingang eine‚1‘ an, wenn der Sensor eine Bewegungdetektiert hat.
Abb. 6: PIR-Sensor GH-718C
Wer keinen Fremdsensor einsetzen möchte,kann stattdessen auch eine Lichtschranke(einen Fototransistor mit Linsenlampe) oderden fischertechnik-Ultraschall-Abstands-sensor verwenden.
Spurfolger (Line Follower)Eine beliebte Aufgabe für autonome Robo-ter ist die Programmierung eines „Spurfol-gers“ (oder „Line Followers“) – einesRoboters, der mittels Infrarotsensoren einerdurchgezogenen Linie auf dem Boden folgt.Diese Aufgabe ist geradezu prädestiniert füreine Modellierung als Endlicher Automat.Die benötigten Zustände sind offensicht-lich:
· Zustand 0: Roboter befindet sich auf derLinie
· Zustand 1: Roboter befindet sich rechtsneben der Linie
· Zustand 2: Roboter befindet sich linksneben der Linie
· Zustand 3: Roboter hat die Linie verlorenAuch die Aktionen in den jeweiligen Zu-ständen sind unmittelbar klar: im ZustandZ0 muss der Roboter geradeaus fahren, imZustand Z1 muss er nach links drehen, imZustand Z2 nach rechts. Hat der die Linieverloren (Zustand Z3), benötigt er einengeeigneten Suchalgorithmus, der ihn wiederauf die Linie zurückbringt.
Gesteuert wird der Spurfolger von den Wer-ten zweier Infrarot-Sensoren. Damit derRoboter die Zustände Z1 bis Z3 unterschei-den kann, benötigen wir zwei relativ dichtnebeneinander liegende Sensoren, wie sieim fischertechnik-Spursensor verbaut sind.Damit können wir nun auch die Bedingun-gen formulieren, die zu einem Zustands-übergang führen:
· beide Sensoren liefern den Wert 0: derSensor befindet sich direkt über der Linie
· der rechte Sensor liefert den Wert 1, derlinke den Wert 0: der Sensor liegt leichtrechts von der Linie
· der rechte Sensor liefert den Wert 0, derlinke den Wert 1: der Sensor liegt leichtlinks von der Linie
· beide Sensoren liefern den Wert 1: derSensor hat die Linie verloren
Die Zustandsübergangstabelle ist nun eben-falls schnell erstellt:
00 01 10 11Z0 ./. Z1
(links)Z2(rechts)
Z3(Suche)
Z1 Z0(gerade)
./. Z2(rechts)
Z3(Suche)
Z2 Z0(gerade)
Z1(links)
./. Z3(Suche)
Z3 Z0(gerade)
Z1(links)
Z2(rechts)
./.
Tab. 3: ZustandsübergangstabelleSpurfolger (Line Follower)
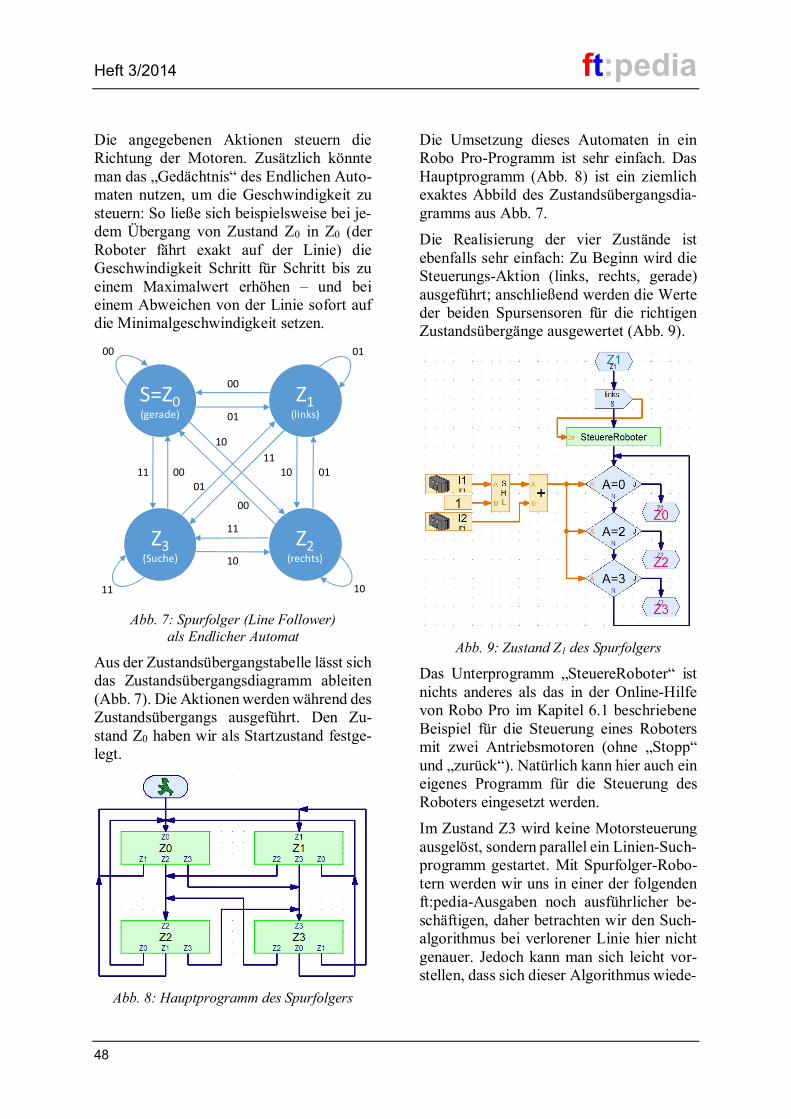
Heft 3/2014 ft:pedia
48
Die angegebenen Aktionen steuern dieRichtung der Motoren. Zusätzlich könnteman das „Gedächtnis“ des Endlichen Auto-maten nutzen, um die Geschwindigkeit zusteuern: So ließe sich beispielsweise bei je-dem Übergang von Zustand Z0 in Z0 (derRoboter fährt exakt auf der Linie) dieGeschwindigkeit Schritt für Schritt bis zueinem Maximalwert erhöhen – und beieinem Abweichen von der Linie sofort aufdie Minimalgeschwindigkeit setzen.
Abb. 7: Spurfolger (Line Follower)als Endlicher Automat
Aus der Zustandsübergangstabelle lässt sichdas Zustandsübergangsdiagramm ableiten(Abb. 7). Die Aktionen werden während desZustandsübergangs ausgeführt. Den Zu-stand Z0 haben wir als Startzustand festge-legt.
Abb. 8: Hauptprogramm des Spurfolgers
Die Umsetzung dieses Automaten in einRobo Pro-Programm ist sehr einfach. DasHauptprogramm (Abb. 8) ist ein ziemlichexaktes Abbild des Zustandsübergangsdia-gramms aus Abb. 7.Die Realisierung der vier Zustände istebenfalls sehr einfach: Zu Beginn wird dieSteuerungs-Aktion (links, rechts, gerade)ausgeführt; anschließend werden die Werteder beiden Spursensoren für die richtigenZustandsübergänge ausgewertet (Abb. 9).
Abb. 9: Zustand Z1 des Spurfolgers
Das Unterprogramm „SteuereRoboter“ istnichts anderes als das in der Online-Hilfevon Robo Pro im Kapitel 6.1 beschriebeneBeispiel für die Steuerung eines Robotersmit zwei Antriebsmotoren (ohne „Stopp“und „zurück“). Natürlich kann hier auch eineigenes Programm für die Steuerung desRoboters eingesetzt werden.Im Zustand Z3 wird keine Motorsteuerungausgelöst, sondern parallel ein Linien-Such-programm gestartet. Mit Spurfolger-Robo-tern werden wir uns in einer der folgendenft:pedia-Ausgaben noch ausführlicher be-schäftigen, daher betrachten wir den Such-algorithmus bei verlorener Linie hier nichtgenauer. Jedoch kann man sich leicht vor-stellen, dass sich dieser Algorithmus wiede-
Z1(links)
Z2(rechts)
Z3(Suche)
S=Z0(gerade)
01
00 01
1011
11
10
11
00
01
100001
1110
00
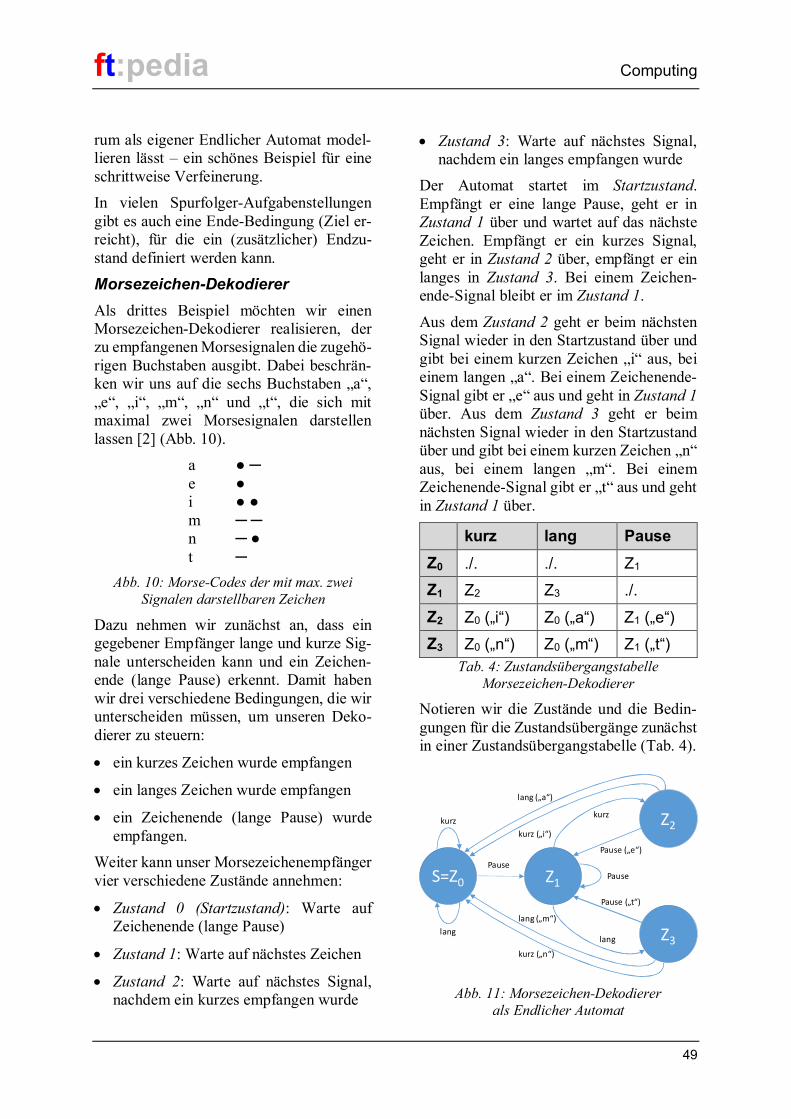
ft:pedia Computing
49
rum als eigener Endlicher Automat model-lieren lässt – ein schönes Beispiel für eineschrittweise Verfeinerung.In vielen Spurfolger-Aufgabenstellungengibt es auch eine Ende-Bedingung (Ziel er-reicht), für die ein (zusätzlicher) Endzu-stand definiert werden kann.
Morsezeichen-DekodiererAls drittes Beispiel möchten wir einenMorsezeichen-Dekodierer realisieren, derzu empfangenen Morsesignalen die zugehö-rigen Buchstaben ausgibt. Dabei beschrän-ken wir uns auf die sechs Buchstaben „a“,„e“, „i“, „m“, „n“ und „t“, die sich mitmaximal zwei Morsesignalen darstellenlassen [2] (Abb. 10).
a ● ─e ●i ● ●m ─ ─n ─ ●t ─
Abb. 10: Morse-Codes der mit max. zweiSignalen darstellbaren Zeichen
Dazu nehmen wir zunächst an, dass eingegebener Empfänger lange und kurze Sig-nale unterscheiden kann und ein Zeichen-ende (lange Pause) erkennt. Damit habenwir drei verschiedene Bedingungen, die wirunterscheiden müssen, um unseren Deko-dierer zu steuern:
· ein kurzes Zeichen wurde empfangen
· ein langes Zeichen wurde empfangen
· ein Zeichenende (lange Pause) wurdeempfangen.
Weiter kann unser Morsezeichenempfängervier verschiedene Zustände annehmen:
· Zustand 0 (Startzustand): Warte aufZeichenende (lange Pause)
· Zustand 1: Warte auf nächstes Zeichen
· Zustand 2: Warte auf nächstes Signal,nachdem ein kurzes empfangen wurde
· Zustand 3: Warte auf nächstes Signal,nachdem ein langes empfangen wurde
Der Automat startet im Startzustand.Empfängt er eine lange Pause, geht er inZustand 1 über und wartet auf das nächsteZeichen. Empfängt er ein kurzes Signal,geht er in Zustand 2 über, empfängt er einlanges in Zustand 3. Bei einem Zeichen-ende-Signal bleibt er im Zustand 1.
Aus dem Zustand 2 geht er beim nächstenSignal wieder in den Startzustand über undgibt bei einem kurzen Zeichen „i“ aus, beieinem langen „a“. Bei einem Zeichenende-Signal gibt er „e“ aus und geht in Zustand 1über. Aus dem Zustand 3 geht er beimnächsten Signal wieder in den Startzustandüber und gibt bei einem kurzen Zeichen „n“aus, bei einem langen „m“. Bei einemZeichenende-Signal gibt er „t“ aus und gehtin Zustand 1 über.
kurz lang PauseZ0 ./. ./. Z1
Z1 Z2 Z3 ./.
Z2 Z0 („i“) Z0 („a“) Z1 („e“)Z3 Z0 („n“) Z0 („m“) Z1 („t“)
Tab. 4: ZustandsübergangstabelleMorsezeichen-Dekodierer
Notieren wir die Zustände und die Bedin-gungen für die Zustandsübergänge zunächstin einer Zustandsübergangstabelle (Tab. 4).
Abb. 11: Morsezeichen-Dekodiererals Endlicher Automat
Z1
Z2
Z3
kurz
lang
Pause
Pause („e“)
Pause („t“)
S=Z0Pause
kurz
langlang („m“)
kurz („i“)
lang („a“)
kurz („n“)
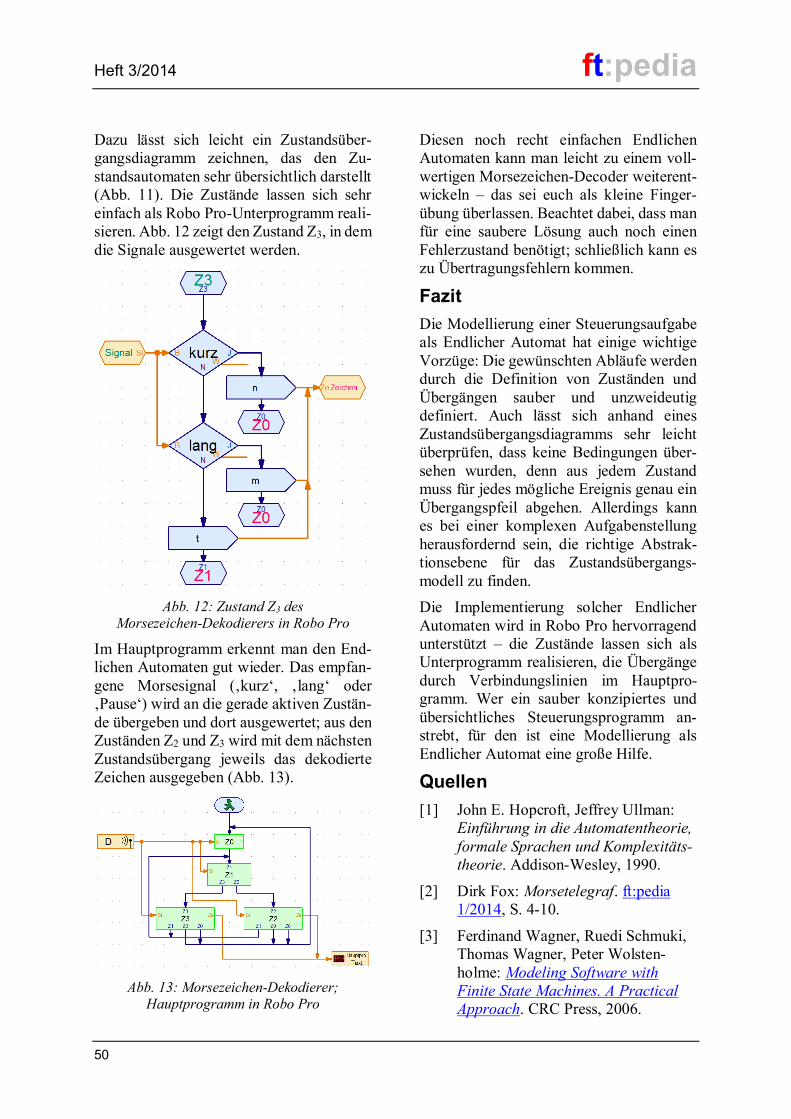
Heft 3/2014 ft:pedia
50
Dazu lässt sich leicht ein Zustandsüber-gangsdiagramm zeichnen, das den Zu-standsautomaten sehr übersichtlich darstellt(Abb. 11). Die Zustände lassen sich sehreinfach als Robo Pro-Unterprogramm reali-sieren. Abb. 12 zeigt den Zustand Z3, in demdie Signale ausgewertet werden.
Abb. 12: Zustand Z3 desMorsezeichen-Dekodierers in Robo Pro
Im Hauptprogramm erkennt man den End-lichen Automaten gut wieder. Das empfan-gene Morsesignal (‚kurz‘, ‚lang‘ oder‚Pause‘) wird an die gerade aktiven Zustän-de übergeben und dort ausgewertet; aus denZuständen Z2 und Z3 wird mit dem nächstenZustandsübergang jeweils das dekodierteZeichen ausgegeben (Abb. 13).
Abb. 13: Morsezeichen-Dekodierer;Hauptprogramm in Robo Pro
Diesen noch recht einfachen EndlichenAutomaten kann man leicht zu einem voll-wertigen Morsezeichen-Decoder weiterent-wickeln – das sei euch als kleine Finger-übung überlassen. Beachtet dabei, dass manfür eine saubere Lösung auch noch einenFehlerzustand benötigt; schließlich kann eszu Übertragungsfehlern kommen.
FazitDie Modellierung einer Steuerungsaufgabeals Endlicher Automat hat einige wichtigeVorzüge: Die gewünschten Abläufe werdendurch die Definition von Zuständen undÜbergängen sauber und unzweideutigdefiniert. Auch lässt sich anhand einesZustandsübergangsdiagramms sehr leichtüberprüfen, dass keine Bedingungen über-sehen wurden, denn aus jedem Zustandmuss für jedes mögliche Ereignis genau einÜbergangspfeil abgehen. Allerdings kannes bei einer komplexen Aufgabenstellungherausfordernd sein, die richtige Abstrak-tionsebene für das Zustandsübergangs-modell zu finden.Die Implementierung solcher EndlicherAutomaten wird in Robo Pro hervorragendunterstützt – die Zustände lassen sich alsUnterprogramm realisieren, die Übergängedurch Verbindungslinien im Hauptpro-gramm. Wer ein sauber konzipiertes undübersichtliches Steuerungsprogramm an-strebt, für den ist eine Modellierung alsEndlicher Automat eine große Hilfe.
Quellen[1] John E. Hopcroft, Jeffrey Ullman:
Einführung in die Automatentheorie,formale Sprachen und Komplexitäts-theorie. Addison-Wesley, 1990.
[2] Dirk Fox: Morsetelegraf. ft:pedia1/2014, S. 4-10.
[3] Ferdinand Wagner, Ruedi Schmuki,Thomas Wagner, Peter Wolsten-holme: Modeling Software withFinite State Machines. A PracticalApproach. CRC Press, 2006.
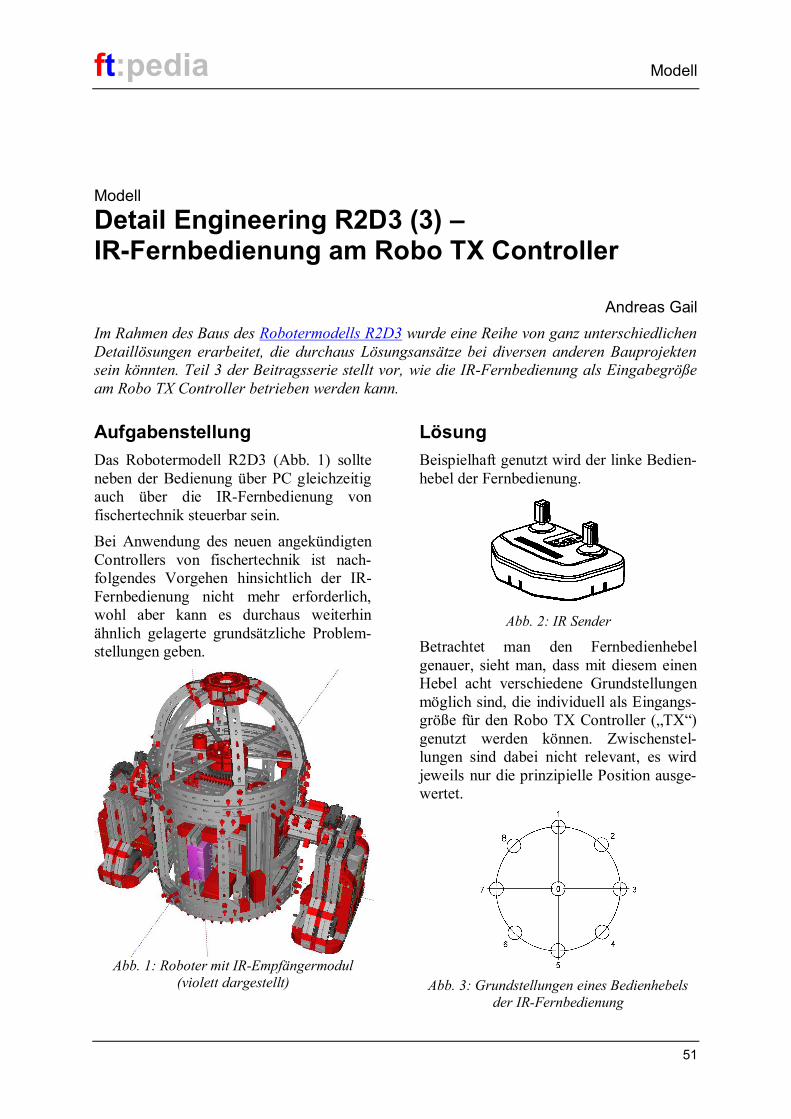
ft:pedia Modell
51
Modell
Detail Engineering R2D3 (3) –IR-Fernbedienung am Robo TX Controller
Andreas GailIm Rahmen des Baus des Robotermodells R2D3 wurde eine Reihe von ganz unterschiedlichenDetaillösungen erarbeitet, die durchaus Lösungsansätze bei diversen anderen Bauprojektensein könnten. Teil 3 der Beitragsserie stellt vor, wie die IR-Fernbedienung als Eingabegrößeam Robo TX Controller betrieben werden kann.
AufgabenstellungDas Robotermodell R2D3 (Abb. 1) sollteneben der Bedienung über PC gleichzeitigauch über die IR-Fernbedienung vonfischertechnik steuerbar sein.Bei Anwendung des neuen angekündigtenControllers von fischertechnik ist nach-folgendes Vorgehen hinsichtlich der IR-Fernbedienung nicht mehr erforderlich,wohl aber kann es durchaus weiterhinähnlich gelagerte grundsätzliche Problem-stellungen geben.
Abb. 1: Roboter mit IR-Empfängermodul(violett dargestellt)
LösungBeispielhaft genutzt wird der linke Bedien-hebel der Fernbedienung.
Abb. 2: IR Sender
Betrachtet man den Fernbedienhebelgenauer, sieht man, dass mit diesem einenHebel acht verschiedene Grundstellungenmöglich sind, die individuell als Eingangs-größe für den Robo TX Controller („TX“)genutzt werden können. Zwischenstel-lungen sind dabei nicht relevant, es wirdjeweils nur die prinzipielle Position ausge-wertet.
Abb. 3: Grundstellungen eines Bedienhebelsder IR-Fernbedienung
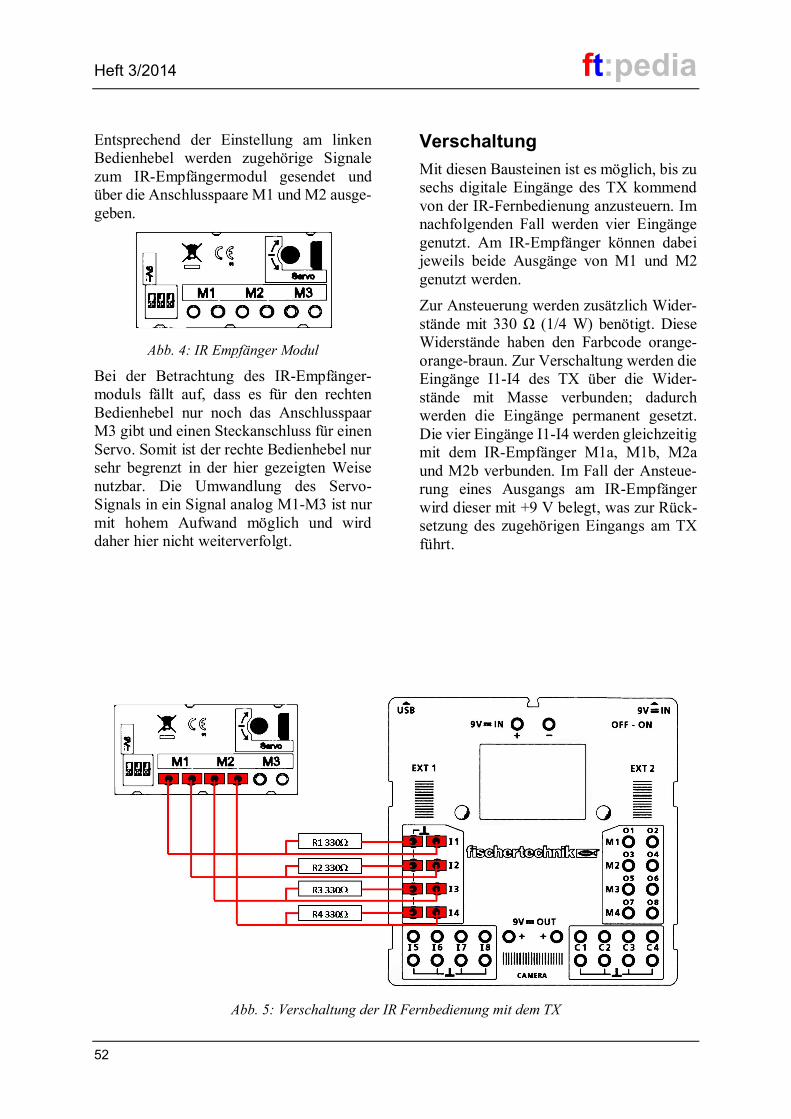
Heft 3/2014 ft:pedia
52
Entsprechend der Einstellung am linkenBedienhebel werden zugehörige Signalezum IR-Empfängermodul gesendet undüber die Anschlusspaare M1 und M2 ausge-geben.
Abb. 4: IR Empfänger Modul
Bei der Betrachtung des IR-Empfänger-moduls fällt auf, dass es für den rechtenBedienhebel nur noch das AnschlusspaarM3 gibt und einen Steckanschluss für einenServo. Somit ist der rechte Bedienhebel nursehr begrenzt in der hier gezeigten Weisenutzbar. Die Umwandlung des Servo-Signals in ein Signal analog M1-M3 ist nurmit hohem Aufwand möglich und wirddaher hier nicht weiterverfolgt.
VerschaltungMit diesen Bausteinen ist es möglich, bis zusechs digitale Eingänge des TX kommendvon der IR-Fernbedienung anzusteuern. Imnachfolgenden Fall werden vier Eingängegenutzt. Am IR-Empfänger können dabeijeweils beide Ausgänge von M1 und M2genutzt werden.Zur Ansteuerung werden zusätzlich Wider-stände mit 330 Ω (1/4 W) benötigt. DieseWiderstände haben den Farbcode orange-orange-braun. Zur Verschaltung werden dieEingänge I1-I4 des TX über die Wider-stände mit Masse verbunden; dadurchwerden die Eingänge permanent gesetzt.Die vier Eingänge I1-I4 werden gleichzeitigmit dem IR-Empfänger M1a, M1b, M2aund M2b verbunden. Im Fall der Ansteue-rung eines Ausgangs am IR-Empfängerwird dieser mit +9 V belegt, was zur Rück-setzung des zugehörigen Eingangs am TXführt.
Abb. 5: Verschaltung der IR Fernbedienung mit dem TX

ft:pedia Modell
53
Signale an M1 und M2Entsprechend der Hebelstellung an der IR-Fernbedienung ergeben sich am IR-Empfängermodul folgende Signale (inversdargestellt):
M1bAn2In1
M2aAn3In2
M2bAn4In3
M1aAn1In4
Beschreibung
0 0 0 0Pos = 0Hebel Grundstellungmittig
1 0 0 0 Pos = 1Hebel oben
1 1 0 0 Pos = 8Hebel oben-links
1 0 1 0 Pos = 2Hebel oben-rechts
0 1 0 0 Pos = 7Hebel links
0 0 1 0 Pos = 3Hebel rechts
0 0 0 1 Pos = 5Hebel unten
0 1 0 1 Pos = 6Hebel unten-links
0 0 1 1 Pos = 4Hebel unten-rechts
Tab. 1: IR-Empfängermodul-Signale inAbhängigkeit der Hebelstellung
der IR-Fernbedienung
SoftwareDa die vom IR-Empfänger abgegebenenSignale ungenau sind und teilweise flackern(auch wenn diese gar nicht angesteuertwerden) ist eine Kompensation mithilfe dervorliegenden Software erforderlich. Hierbeiwerden bei 3.000 Durchläufen die Eingängedes TX ausgelesen.
Nur wenn bei diesen 3.000 Durchgängen55% (bzw. 60%) der Durchgänge eineAnsteuerung angezeigt haben, wird davonausgegangen, dass tatsächlich eine gewollteBedienung vorliegt.Der Eingang I1 (M1a-An1-In2) zeigte einetwas abweichendes Verhalten von denanderen Eingängen, so dass in diesem Fall60% der Ansteuerungen vorgelegen habenmüssen, um diese als ‚gewollt‘ zu werten.Im vorliegenden Fall läuft die Software aufeinem PC und wurde nicht in den TXgeladen. Die 3.000 Durchläufe führen dabeizu einer Ansprechverzögerung von etwa0,5 s.
Zu Beginn der Schrittkette wird zunächstdie Variable Zaehler = 0 gesetzt sowieanschließend An1-An4 = 0. Nachfolgendwird geprüft, ob im Hauptprogramm derSchalter IR aktiviert wurde; wenn neinwerden die globalen Variablen In1-In4 = 0gesetzt und das Unterprogramm wirdverlassen. Dann ist die Bedienung über dieIR-Fernbedienung abgeschaltet.Wenn der Schalter IR aktiviert wurde,beginnt ein 3.000-facher Schleifendurch-lauf; Schleifenzähler ist die VariableZaehler. Bei jedem Schleifendurchlauf wirdgeprüft, wie die Einstellung der EingängeI1-I4 beschaltet sind, entsprechend wird dieVariable An1-An4 bei jedem Durchlauf umeins erhöht bzw. nicht erhöht. Nach 3.000Schleifendurchläufen beginnt die Auswer-tung und Anpassung der globalen VariablenIn1-In4. Wenn z. B. bei mehr als 1.650 von3.000 (55%) Schleifendurchläufen eineSignalaufschaltung erkannt wurde, so wirddie zugehörige globale Variable In1-In4 = 1gesetzt. Wenn die Einstellung In1-In4 geän-dert wurde, wird dies im Bedienfeld desHauptprogramms visualisiert. Die Auswer-tung von In1-In4 erfolgt in anderenProgrammteilen.
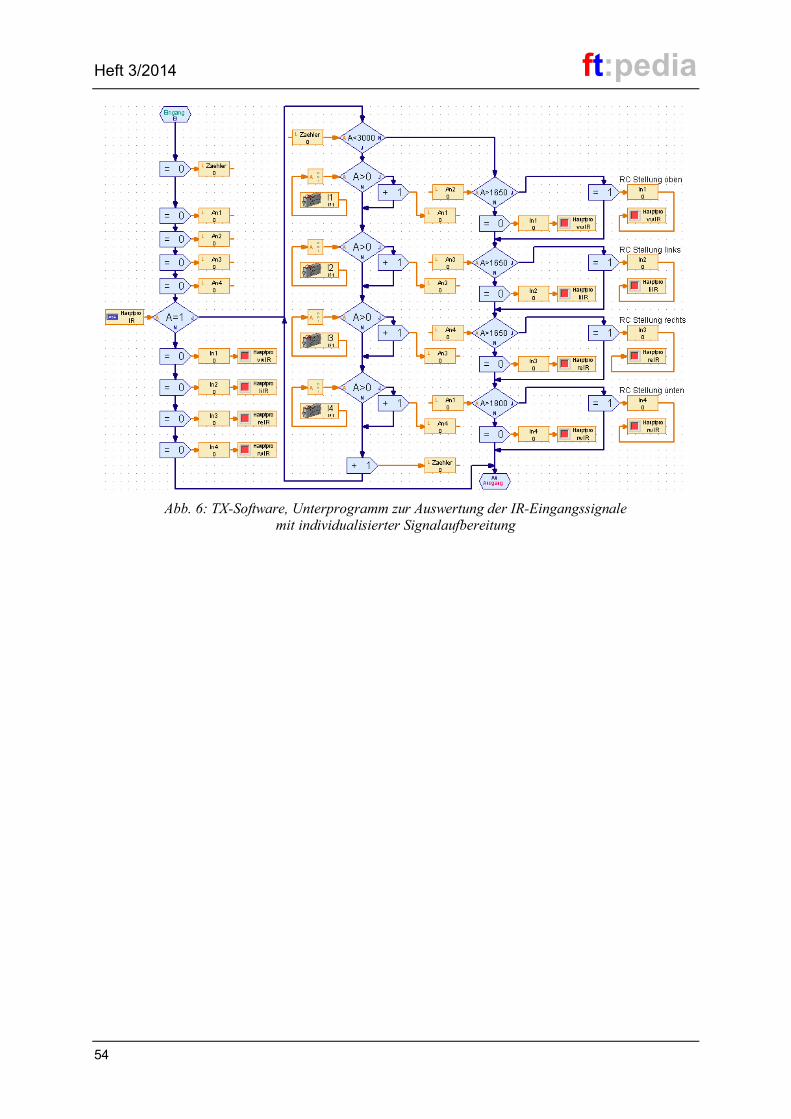
Heft 3/2014 ft:pedia
54
Abb. 6: TX-Software, Unterprogramm zur Auswertung der IR-Eingangssignalemit individualisierter Signalaufbereitung

ft:pedia Elektronik
55
Elektronik
LEDs in Leuchtsteinen
Gerhard BirkenstockWenn man heute eine neue Lampe kauft, ist mit hoher Wahrscheinlichkeit LED-Technik ein-gebaut. Dank des guten Wirkungsgrades und ihrer langen Lebensdauer stoßen LEDs in alleBereiche des täglichen Lebens vor. Dieser Beitrag zeigt, wie man auf elegante Weise von derft-Glühlampe zur ft-LED in den Leuchtsteinen umstellen kann.
Ärger mit den ft-GlühlampenKennst du das? Man hat ein ft-Modellgebaut. Ein selbst steuerndes Fahrzeug miteinem Lichtsensor in Richtung Fahrbahn,welches einer Bodenmarkierung folgt. Odereine Fertigungsstraße mit Lichtschrankenund Farbsortierungen. Und dann... aufeinmal fährt das Fahrzeug einfach weg, rastunter die Nähmaschine und versucht, mitdurchdrehenden Antriebsrädern die Haus-wand zu versetzen. Und bei der Fertigungs-straße... fliegen die zu bearbeitenden Teilevöllig unkontrolliert vom Transportband.Alles fällt in einen Topf. Von Bearbeitenund Sortieren ist keine Rede mehr.Nach wenigen Sekunden der Fehlersuchesteht fest: es ist mal wieder eine ft-Glüh-lampe ausgefallen. Der Glaskörper ist ein-fach schwarz. Durchgebrannt.Bei mir ging der Frust so weit, dass ichschon keine Modelle mit Lampe mehrgebaut habe. Ich wollte einfach nicht schonwieder eine der ft-Glühlampen verwenden.Es musste ein Lösung her.
Lösungsfindung und IdeeEs sollte etwas Leuchtendes sein, was nichtstetig durchbrennt, sondern eine höhereLebensdauer hat. Also eine LED!Auch im Jahre 2007, in dem ich dieseGedanken alle hatte, hatten die LEDs schoneine gute Lichtausbeute. Es war der Anfang
des heute schon allgegenwärtigen Sieges-zuges der LED-Technologie. Somit war derGedanke schnell gefasst. Einziges Problem:LEDs wollen Gleichstrom. Wenn man sieverpolt, sind sie sehr schnell genauso defektwie die Version mit Glühfaden. Hier mussteAbhilfe geschaffen werden. Der LED-Ersatz musste gleiche oder bessere Eigen-schaften wie die Lampen haben.
Es musste eine Schaltung her, welche denStrom an der LED immer in der gleichenRichtung anbietet, egal, wie ich außen dieKontakte anschließe: Die Graetz-Brücke[1]. Zudem wird ein sogenannter Vorwider-stand zur Stromeinstellung zwingendbenötigt (ft:pedia 2/2011 [2]).Nach diesen Überlegungen stand fest:
· eine LED,· ein Widerstand und· vier Diodenmüssen verwendet werden. Um das nichtfliegend verdrahten zu müssen, wurde aucheine Platine notwendig. Um Bauraum zusparen, sollte alles in SMD-Technik(Surface Mounted Device, zu Deutsch:Oberflächenmontage [3]) ausgeführtwerden.
LED mit Vorwiderstand:BerechnungDie zu verwendeten Bauteile müssen nunberechnet werden.

Heft 3/2014 ft:pedia
56
Eine LED, welche gelblich-weißes Lichtabgibt, benötigt eine Spannung von ca.1,8 V. Jede der Dioden für den Gleichrichterhat eine Schwellspannung von ca. 0,7 V.Wie in den Bildern zu erkennen, sind immerzwei Dioden in Durchlassrichtung geschal-tet.Weiterhin muss man noch etwas über dieviel verwendeten ft-Transformatoren wis-sen. Es wird immer angegeben, dass mit 9 Vgearbeitet wird. Sobald ein Motor als Lastangeschlossen wird, ist dies auch richtig.Wird jedoch nur wenig Strom von einemTransformator abgenommen, beträgt dieSpannung gut 12 V. Daher muss bei derBerechnung der Komponenten mit dermaximalen Spannung gerechnet werden.
Die Spannung am Vorwiderstand ergibtsich nun aus den bekannten Informationen:
= − − 2
= 12 V− 1,8 V− 2 ∙ 0,7 V = 8,8 VEs ist natürlich energietechnisch nichtgerade toll, mehr als das Vierfache derelektrischen Energie am Widerstand inWärme umzusetzen, die in der LED fürLicht sorgt. Wenn man sich jedoch überlegt,dass die Glühlampen bis zu 0,1 A brauchen,sind die LEDs mit ihren 0,02 A richtigeSparer.
Mittels Ohm’schem Gesetz ergibt sich nunder Vorwiderstand aus:
= =8,8 V
0,02 A= 440
Die elektrische Leistung an den Gleich-richterdioden und an der LED braucht nichtberücksichtigt zu werden. Der verwendeteDiodentyp LL4148 kann mehr als 100 mAvertragen und die LED ist ja für die 20 mAvom Hersteller ausgelegt worden. Nur dervon mir bestimmte Widerstand musskontrolliert werden. An ihm fällt folgendeLeistung ab:
= ∙ = 8,8 V ∙ 0,02 A = 0,176 W
Wir verwenden keine bedrahteten, sondernSMD-Widerstände. Erstere vertragentypischerweise 0,25 W. Ein Blick in dasDatenblatt zeigt aber, dass die SMD-Widerstände in der angestrebten Baugrößenur bis 0,125 W belastbar sind.
Nach kurzer Überlegung war die Lösungda: Die Verlustleistung wird einfach aufzwei Widerstände aufgeteilt. Wir verwen-den zweimal 220 Ω anstatt einmal 440 Ω,und jeder muss nur die halbe Leistung ver-kraften, da nur die halbe Spannung an ihmabfällt (während der Strom gleich bleibt):
= 2 ∙ =8,8 V
2 ∙ 0,02 A = 0,088 W
Super, so geht es tadellos.
Diese Widerstände sind sogar aus der allge-meinen E6-Normreihe direkt erhältlich.
Abb. 1: Gesamtschaltung mit Graetz-Dioden-brücke und den beiden Vorwiderständen
Diese Schaltung versorgt die LED unab-hängig von der außen anliegenden Span-nung immer in der korrekten Richtung mitStrom. Das zeigen die folgenden Abbil-dungen, in denen die je nach Stromrichtungungenutzten Dioden des Gleichrichters derÜbersichtlichkeit wegen weggelassenwurden:
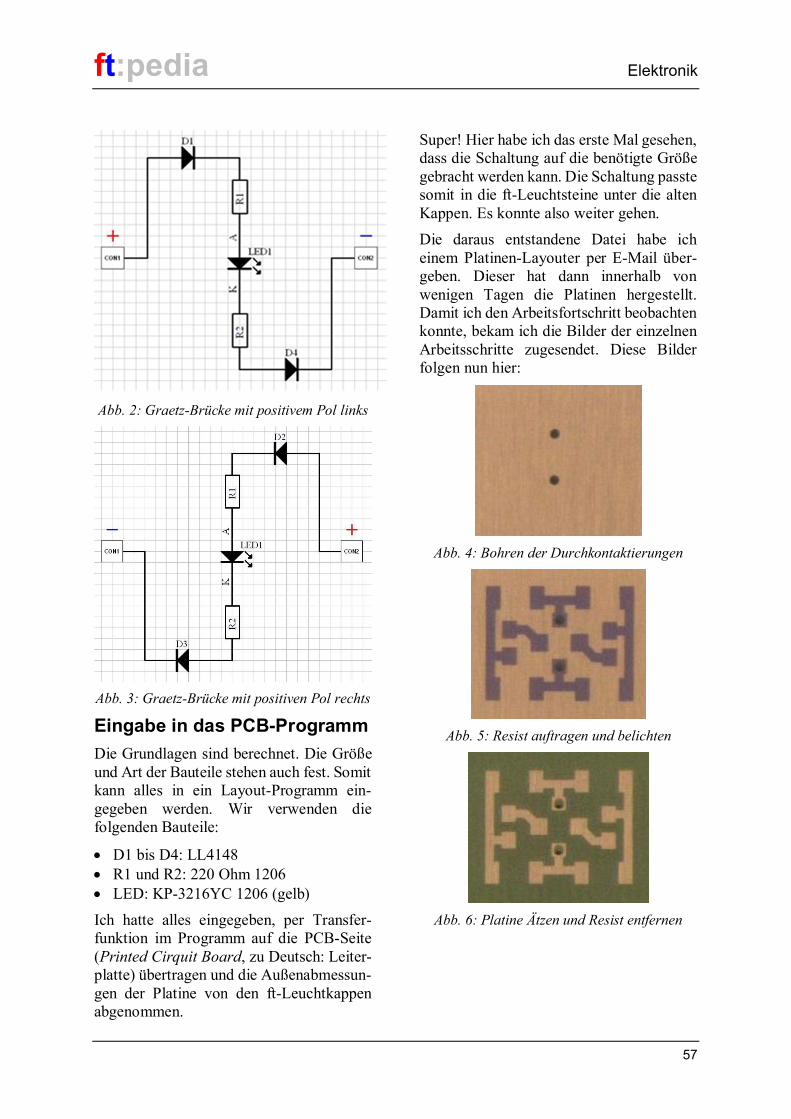
ft:pedia Elektronik
57
Abb. 2: Graetz-Brücke mit positivem Pol links
Abb. 3: Graetz-Brücke mit positiven Pol rechts
Eingabe in das PCB-ProgrammDie Grundlagen sind berechnet. Die Größeund Art der Bauteile stehen auch fest. Somitkann alles in ein Layout-Programm ein-gegeben werden. Wir verwenden diefolgenden Bauteile:
· D1 bis D4: LL4148· R1 und R2: 220 Ohm 1206· LED: KP-3216YC 1206 (gelb)Ich hatte alles eingegeben, per Transfer-funktion im Programm auf die PCB-Seite(Printed Cirquit Board, zu Deutsch: Leiter-platte) übertragen und die Außenabmessun-gen der Platine von den ft-Leuchtkappenabgenommen.
Super! Hier habe ich das erste Mal gesehen,dass die Schaltung auf die benötigte Größegebracht werden kann. Die Schaltung passtesomit in die ft-Leuchtsteine unter die altenKappen. Es konnte also weiter gehen.Die daraus entstandene Datei habe icheinem Platinen-Layouter per E-Mail über-geben. Dieser hat dann innerhalb vonwenigen Tagen die Platinen hergestellt.Damit ich den Arbeitsfortschritt beobachtenkonnte, bekam ich die Bilder der einzelnenArbeitsschritte zugesendet. Diese Bilderfolgen nun hier:
Abb. 4: Bohren der Durchkontaktierungen
Abb. 5: Resist auftragen und belichten
Abb. 6: Platine Ätzen und Resist entfernen

Heft 3/2014 ft:pedia
58
Abb. 7: Lötstopplack aufbringen und aushärten
Lötstopplack brauchte ich bei der kleinenPlatine nicht. Daher ist das Auftragen inAbb. 7 nur am Rand erkennbar.
Abb. 8: Letzter Schritt: chemischZinn auftragen
Die Platinen sind nun gebrauchsfertig. DieLötpads für die Bauteile sind gut zuerkennen. Die beiden Löcher für dieAnschlussdrähte sind an der richtigenPosition, sodass die Anschlussdrähte angenau derselben Stelle heraus kommen, wiedie Glühlampen es fischertechnik vorge-geben haben. Die Außenumrandung ist gutam Rand des Lötstopplacks zu erkennen.Die Ecken halten den Platz für die vierSteckstifte der alten ft-Leuchtstein-Kappenfrei.Was ich zu diesem Zeitpunkt noch nichtwusste: Für den nach der Biegung zurückkommenden Draht brauche ich noch zweiBohrungen. Diese fügte ich nachträglich perStandbohrmaschine ein.
ft-ProduktionsstraßeWenn man eine Platine bestellt, muss manheutzutage immer mindestens 1 dm² abneh-men. Die kleinen Platinen sind nichtwirklich groß. Somit wurden aus einer ganzviele...Ich hielt nach zwei Wochen Lieferzeit gute60 Stück in meinen Händen. Das war etwasviel, aber es gibt ja eBayJ. Alle, die mir zuviel waren, wurden dort angeboten – und siewurden mir innerhalb weniger Wochen ausden Händen gerissen. Der schöne kleineNebeneffekt war, dass ich bei jedem Ver-kauf einen kleinen Gewinn machte. Geradeso groß, dass am Ende der Materialwert vonallen abgedeckt war. Die LEDs, welche ichmir zurückgelegt hatte, waren somitbezahlt. Ich hatte nur meine Arbeitszeitselbst zu tragen, und das tat ich mit Freude.
Abb. 9: Das defekte ft Lämpchenund die LED-Lösung

ft:pedia Elektronik
59
Abb. 10: Platine im auf gesteckten Zustand
Hier sieht man sehr schön die nachträglicheingebrachten Löcher für die zurückkommenden Anschlussdrähte (Abb. 10).
Abb. 11: Rückansicht der Platine
Abb. 12: Der Beweis – es funktioniert!
Produktions-PlattformUm die vielen Lötungen einfacher zugestalten, habe ich mir damals einen kleinenDrehtisch mit fischertechnik gebaut. DiePlatine wurde aufgesteckt, dann dieAnschlussdrähte. Die darunter befindlichenLöcher waren in der richtigen Länge vorbe-stimmt. Die Drähte wurden abgeschnittenund verlötet. Dann habe ich von innen nachaußen bestückt und gelötet. Erst die LED,dann die Widerstände und zum Schluss dieGleichrichter-Dioden. Bei den Dioden istnatürlich immer die Polung wichtig.Es hat Spaß gemacht und gut funktioniert.
Ausblick: Was geht noch...Im Text habe ich erwähnt, dass diese vonmir gemachten LEDs nur für die alteVersion der Leuchtkappen funktionieren.Zum damaligen Zeitpunkt besaß ich keineLeuchtkappen mit Verriegelung – das istheute anders. Von den Kappen habe ichbereits die Maße abgenommen. Auch hierpasst die Schaltung unter die Kappen. DenBeweis hat mein PCP-Programm schongeliefert...Mit den Platinen kann man natürlich auchetwas spielen. Beispielsweise kann man denGleichrichter weglassen und setzt nur dieWiderstände und eine zweifarbige LED ein.Nun leuchtet die LED in einer Polung in derersten Farbe und in der anderen Polung inder zweiten. Im Wechselstrom-Betrieb wirddaraus die Mischfarbe. Wenn man ROBOPro verwendet, kann man durch Zeitversatz
Heft 3/2014 ft:pedia
60
(Impulsbreitensteuerung, [4]) sogar dieFarbe verschieben.
Da LEDs sehr schnell reagieren (der Glüh-faden der klassischen Lämpchen verhältsich viel träger) sind auch Stroboskop-Anwendungen denkbar. Hier ist nur dieVerarbeitungsgeschwindigkeit von ROBOPro die Bremse.
Quellen[1] Wikipedia: Gleichrichter.[2] Thomas Habig: LEDs mit Vorwider-
stand. ft:pedia 2/2011, S. 14-18.[3] Wikipedia: Surface-mounted device.
[4] Wikipedia: Pulsweitenmodulation.
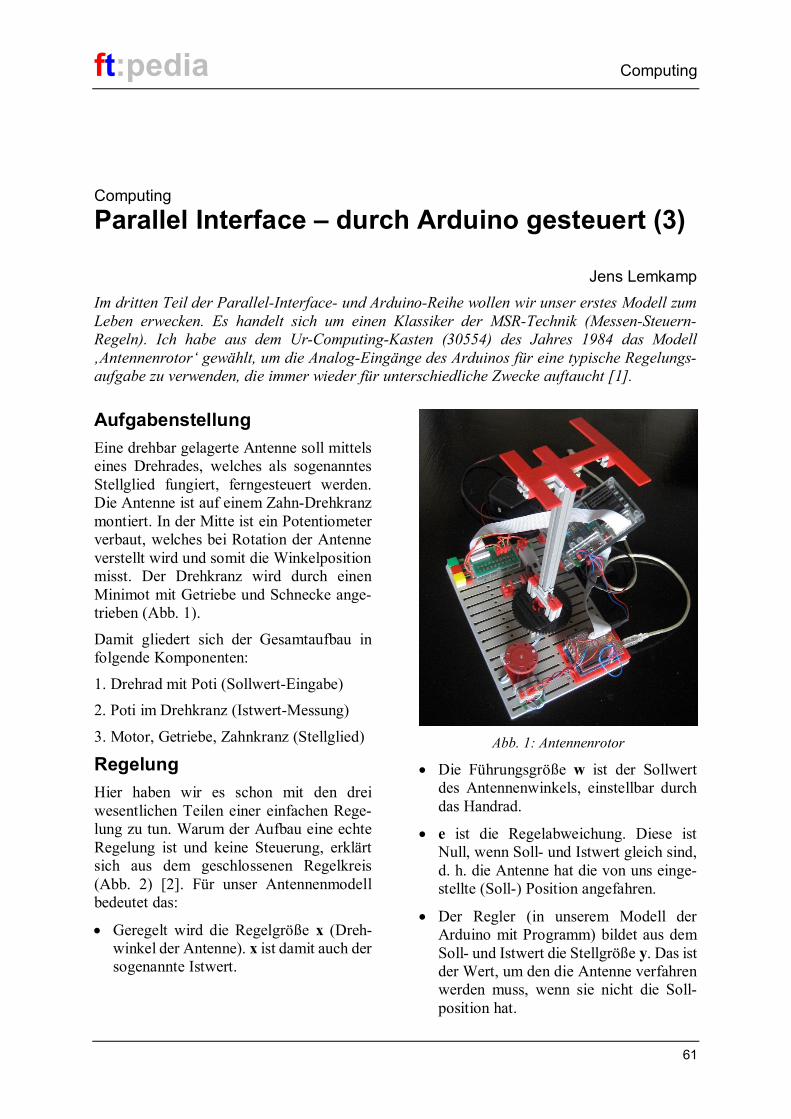
ft:pedia Computing
61
Computing
Parallel Interface – durch Arduino gesteuert (3)
Jens LemkampIm dritten Teil der Parallel-Interface- und Arduino-Reihe wollen wir unser erstes Modell zumLeben erwecken. Es handelt sich um einen Klassiker der MSR-Technik (Messen-Steuern-Regeln). Ich habe aus dem Ur-Computing-Kasten (30554) des Jahres 1984 das Modell‚Antennenrotor‘ gewählt, um die Analog-Eingänge des Arduinos für eine typische Regelungs-aufgabe zu verwenden, die immer wieder für unterschiedliche Zwecke auftaucht [1].
AufgabenstellungEine drehbar gelagerte Antenne soll mittelseines Drehrades, welches als sogenanntesStellglied fungiert, ferngesteuert werden.Die Antenne ist auf einem Zahn-Drehkranzmontiert. In der Mitte ist ein Potentiometerverbaut, welches bei Rotation der Antenneverstellt wird und somit die Winkelpositionmisst. Der Drehkranz wird durch einenMinimot mit Getriebe und Schnecke ange-trieben (Abb. 1).
Damit gliedert sich der Gesamtaufbau infolgende Komponenten:
1. Drehrad mit Poti (Sollwert-Eingabe)2. Poti im Drehkranz (Istwert-Messung)
3. Motor, Getriebe, Zahnkranz (Stellglied)
RegelungHier haben wir es schon mit den dreiwesentlichen Teilen einer einfachen Rege-lung zu tun. Warum der Aufbau eine echteRegelung ist und keine Steuerung, erklärtsich aus dem geschlossenen Regelkreis(Abb. 2) [2]. Für unser Antennenmodellbedeutet das:
· Geregelt wird die Regelgröße x (Dreh-winkel der Antenne). x ist damit auch dersogenannte Istwert.
Abb. 1: Antennenrotor
· Die Führungsgröße w ist der Sollwertdes Antennenwinkels, einstellbar durchdas Handrad.
· e ist die Regelabweichung. Diese istNull, wenn Soll- und Istwert gleich sind,d. h. die Antenne hat die von uns einge-stellte (Soll-) Position angefahren.
· Der Regler (in unserem Modell derArduino mit Programm) bildet aus demSoll- und Istwert die Stellgröße y. Das istder Wert, um den die Antenne verfahrenwerden muss, wenn sie nicht die Soll-position hat.

Heft 3/2014 ft:pedia
62
Abb. 2: Regelkreis
· Die Regelstrecke besteht aus Motor,Schnecke und Zahnrad.
· z ist die Störgröße. In der Realität könntez. B. der Wind eine Kraft auf die An-tenne bringen, welche zur Veränderungdes Istwertes (also des Drehwinkels derAntenne) führt. Der Regler stellt dannautomatisch nach.
Somit haben wir einen vollständiggeschlossen Regelkreis.
SchaltungEin Potentiometer (kurz: Poti) ist ein ver-stellbarer Widerstand mit drei Anschlüssen.Ein Schleifer wird durch die Verstellungdes Drehwinkels einer Achse über eineWiderstandsbahn geführt. Die beiden äuße-ren Anschlüsse werden mit 0 V und +5 Vverbunden (Abb. 3).
Abb. 3: Schaltzeichen Poti
Der Schleifer ist mit dem Anschluss ‚X‘verbunden. Wenn das Poti ganz nach rechtsbzw. im Schaltbild nach oben gedreht wird,ist der Schleifer direkt mit + bzw. 5 Vverbunden, auf Linksanschlag bzw. untenentsprechend mit 0 V.Bei Einstellungen zwischen 5 V und 0 Vstellen sich analog zum Drehwinkel Zwi-schenwerte ein. Sollte z. B. der Schleiferexakt auf Mittelstellung stehen, erhalten wir2,5 V am Anschluss ‚X‘.
Abb. 4: Spannungsteiler
Das Poti verhält sich wie ein Spannungs-teiler (Abb. 4). Widerstände werden mitdem Formelzeichen R bezeichnet, Spannun-gen mit U. Die Einheiten sind W (sprich:Ohm) für den elektrischen Widerstand undV (sprich: Volt) für die Spannung. Dabeigelten die folgenden Gesetzmäßigkeiten:
· Die beiden Einzelwiderstände addierensich zu einem Gesamtwiderstand:
R1 + R2 = Rges.
· Die Spannungen am Spannungsteilerverhalten sich zueinander im Verhältniswie die Widerstände zueinander:
U1 + U2 = Uges.
Dabei ist U1 die Spannung über R1 und U2über R2. Uges. ist die Spannung über beideWiderstände, hier also 5 V.Wenn unser Poti einen Gesamtwiderstandvon z. B. 100 kW hat (dieser Wert ist meistauf dem Gehäuse aufgedruckt; manchmalwird das W-Zeichen weggelassen und manfindet nur ‚100 k‘) und das Poti auf Mittel-stellung gedreht wird, teilen sich die Wider-standswerte genau auf.Mit einem Ohm-Meter (ist in den meistenMultimetern bzw. Vielfach-Messgerätenenthalten) kann man dann also zwischendem Mittelabgriff und jedem der beidenanderen Anschlüssen jeweils 50 kW (alsogenau die Hälfte von 100 kW) messen.Achtung: Wenn man Widerstandswerte miteinem Messgerät messen möchte, muss jede
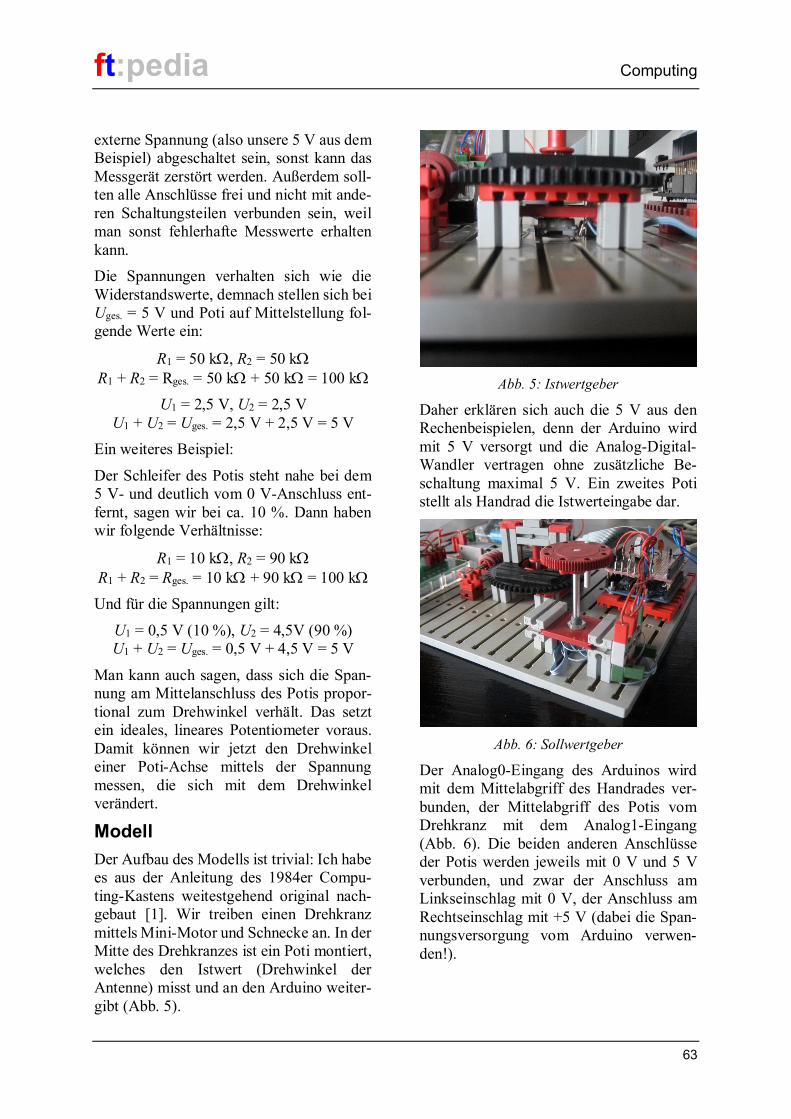
ft:pedia Computing
63
externe Spannung (also unsere 5 V aus demBeispiel) abgeschaltet sein, sonst kann dasMessgerät zerstört werden. Außerdem soll-ten alle Anschlüsse frei und nicht mit ande-ren Schaltungsteilen verbunden sein, weilman sonst fehlerhafte Messwerte erhaltenkann.Die Spannungen verhalten sich wie dieWiderstandswerte, demnach stellen sich beiUges. = 5 V und Poti auf Mittelstellung fol-gende Werte ein:
R1 = 50 kW, R2 = 50 kWR1 + R2 = Rges. = 50 kW + 50 kW = 100 kW
U1 = 2,5 V, U2 = 2,5 VU1 + U2 = Uges. = 2,5 V + 2,5 V = 5 V
Ein weiteres Beispiel:
Der Schleifer des Potis steht nahe bei dem5 V- und deutlich vom 0 V-Anschluss ent-fernt, sagen wir bei ca. 10 %. Dann habenwir folgende Verhältnisse:
R1 = 10 kW, R2 = 90 kWR1 + R2 = Rges. = 10 kW + 90 kW = 100 kWUnd für die Spannungen gilt:
U1 = 0,5 V (10 %), U2 = 4,5V (90 %)U1 + U2 = Uges. = 0,5 V + 4,5 V = 5 V
Man kann auch sagen, dass sich die Span-nung am Mittelanschluss des Potis propor-tional zum Drehwinkel verhält. Das setztein ideales, lineares Potentiometer voraus.Damit können wir jetzt den Drehwinkeleiner Poti-Achse mittels der Spannungmessen, die sich mit dem Drehwinkelverändert.
ModellDer Aufbau des Modells ist trivial: Ich habees aus der Anleitung des 1984er Compu-ting-Kastens weitestgehend original nach-gebaut [1]. Wir treiben einen Drehkranzmittels Mini-Motor und Schnecke an. In derMitte des Drehkranzes ist ein Poti montiert,welches den Istwert (Drehwinkel derAntenne) misst und an den Arduino weiter-gibt (Abb. 5).
Abb. 5: Istwertgeber
Daher erklären sich auch die 5 V aus denRechenbeispielen, denn der Arduino wirdmit 5 V versorgt und die Analog-Digital-Wandler vertragen ohne zusätzliche Be-schaltung maximal 5 V. Ein zweites Potistellt als Handrad die Istwerteingabe dar.
Abb. 6: Sollwertgeber
Der Analog0-Eingang des Arduinos wirdmit dem Mittelabgriff des Handrades ver-bunden, der Mittelabgriff des Potis vomDrehkranz mit dem Analog1-Eingang(Abb. 6). Die beiden anderen Anschlüsseder Potis werden jeweils mit 0 V und 5 Vverbunden, und zwar der Anschluss amLinkseinschlag mit 0 V, der Anschluss amRechtseinschlag mit +5 V (dabei die Span-nungsversorgung vom Arduino verwen-den!).
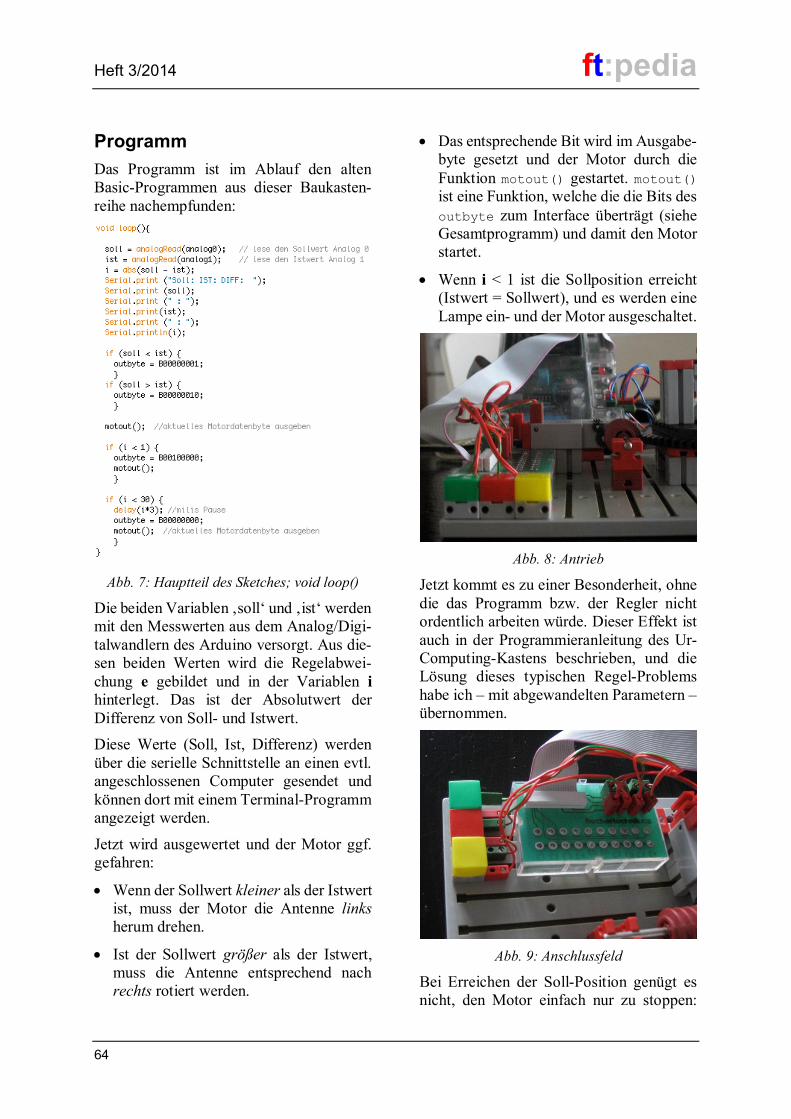
Heft 3/2014 ft:pedia
64
ProgrammDas Programm ist im Ablauf den altenBasic-Programmen aus dieser Baukasten-reihe nachempfunden:
Abb. 7: Hauptteil des Sketches; void loop()
Die beiden Variablen ‚soll‘ und ‚ist‘ werdenmit den Messwerten aus dem Analog/Digi-talwandlern des Arduino versorgt. Aus die-sen beiden Werten wird die Regelabwei-chung e gebildet und in der Variablen ihinterlegt. Das ist der Absolutwert derDifferenz von Soll- und Istwert.Diese Werte (Soll, Ist, Differenz) werdenüber die serielle Schnittstelle an einen evtl.angeschlossenen Computer gesendet undkönnen dort mit einem Terminal-Programmangezeigt werden.
Jetzt wird ausgewertet und der Motor ggf.gefahren:
· Wenn der Sollwert kleiner als der Istwertist, muss der Motor die Antenne linksherum drehen.
· Ist der Sollwert größer als der Istwert,muss die Antenne entsprechend nachrechts rotiert werden.
· Das entsprechende Bit wird im Ausgabe-byte gesetzt und der Motor durch dieFunktion motout() gestartet. motout()ist eine Funktion, welche die die Bits desoutbyte zum Interface überträgt (sieheGesamtprogramm) und damit den Motorstartet.
· Wenn i < 1 ist die Sollposition erreicht(Istwert = Sollwert), und es werden eineLampe ein- und der Motor ausgeschaltet.
Abb. 8: Antrieb
Jetzt kommt es zu einer Besonderheit, ohnedie das Programm bzw. der Regler nichtordentlich arbeiten würde. Dieser Effekt istauch in der Programmieranleitung des Ur-Computing-Kastens beschrieben, und dieLösung dieses typischen Regel-Problemshabe ich – mit abgewandelten Parametern –übernommen.
Abb. 9: Anschlussfeld
Bei Erreichen der Soll-Position genügt esnicht, den Motor einfach nur zu stoppen:
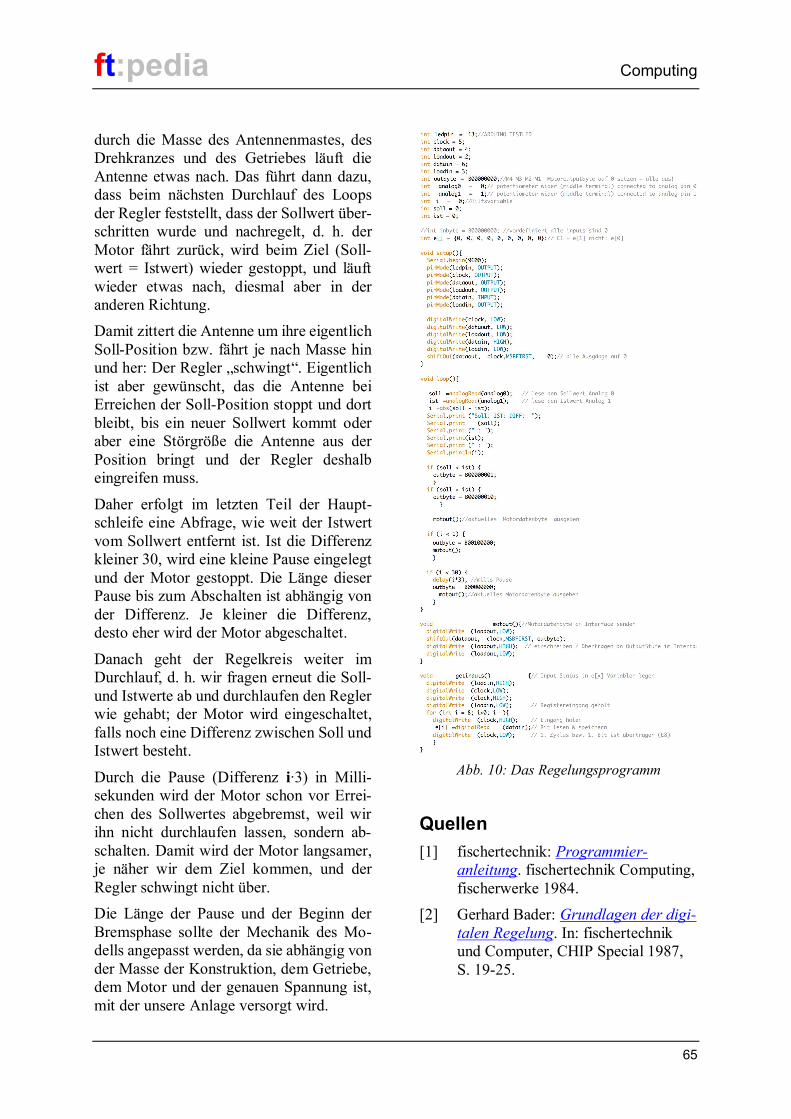
ft:pedia Computing
65
durch die Masse des Antennenmastes, desDrehkranzes und des Getriebes läuft dieAntenne etwas nach. Das führt dann dazu,dass beim nächsten Durchlauf des Loopsder Regler feststellt, dass der Sollwert über-schritten wurde und nachregelt, d. h. derMotor fährt zurück, wird beim Ziel (Soll-wert = Istwert) wieder gestoppt, und läuftwieder etwas nach, diesmal aber in deranderen Richtung.Damit zittert die Antenne um ihre eigentlichSoll-Position bzw. fährt je nach Masse hinund her: Der Regler „schwingt“. Eigentlichist aber gewünscht, das die Antenne beiErreichen der Soll-Position stoppt und dortbleibt, bis ein neuer Sollwert kommt oderaber eine Störgröße die Antenne aus derPosition bringt und der Regler deshalbeingreifen muss.
Daher erfolgt im letzten Teil der Haupt-schleife eine Abfrage, wie weit der Istwertvom Sollwert entfernt ist. Ist die Differenzkleiner 30, wird eine kleine Pause eingelegtund der Motor gestoppt. Die Länge dieserPause bis zum Abschalten ist abhängig vonder Differenz. Je kleiner die Differenz,desto eher wird der Motor abgeschaltet.
Danach geht der Regelkreis weiter imDurchlauf, d. h. wir fragen erneut die Soll-und Istwerte ab und durchlaufen den Reglerwie gehabt; der Motor wird eingeschaltet,falls noch eine Differenz zwischen Soll undIstwert besteht.
Durch die Pause (Differenz i∙3) in Milli-sekunden wird der Motor schon vor Errei-chen des Sollwertes abgebremst, weil wirihn nicht durchlaufen lassen, sondern ab-schalten. Damit wird der Motor langsamer,je näher wir dem Ziel kommen, und derRegler schwingt nicht über.Die Länge der Pause und der Beginn derBremsphase sollte der Mechanik des Mo-dells angepasst werden, da sie abhängig vonder Masse der Konstruktion, dem Getriebe,dem Motor und der genauen Spannung ist,mit der unsere Anlage versorgt wird.
Abb. 10: Das Regelungsprogramm
Quellen[1] fischertechnik: Programmier-
anleitung. fischertechnik Computing,fischerwerke 1984.
[2] Gerhard Bader: Grundlagen der digi-talen Regelung. In: fischertechnikund Computer, CHIP Special 1987,S. 19-25.
Heft 3/2014 ft:pedia
66
Computing
Strichcode-Leser am Robo TX Controller (1):Automatisiert mit RoboPro
Andreas GailStrichcodes oder auch Barcodes begegnen uns täglich bei allem, was wir im Supermarkt odersonstwo kaufen. Der vorliegende Beitrag zeigt, wie ein Strichcode-Leser mit Standard-fischertechnik-Bauteilen aufgebaut werden kann. Weiterhin werden zwei unterschiedlicheAutomatisierungslösungen vorgestellt: in Teil 1 unter Anwendung der RoboPro Software, inTeil 2 mithilfe von Microsoft Visual Basic 2010.
Der TestaufbauDer Testaufbau des Strichcode-Lesers(Abb. 1) erfolgt ausschließlich mitStandardteilen. Die Gliederkette zur Kabel-führung ist beim fischertechnik-Koopera-tionspartner Knobloch GmbH erhältlich.Zum Start des Lesevorgangs wird der Taster{1} (TX I8) betätigt. Die Transporteinheit{2} (TX M1) setzt sich daraufhin nach linksin Bewegung, läuft unter der Leseeinheit{5} (TX I1-I2) hindurch und bleibtschließlich links stehen, wenn der Taster{4} (TX I4) von der Transporteinheit {2}ausgehend betätigt wird. Auf dieselbe Artund Weise kann auch ein Lesevorgang vonlinks nach rechts durchgeführt werden. ZumStart ist erneut Taster {1} zu betätigen. DieTransporteinheit {2} bleibt erneut stehen,wenn rechts der Taster {3} (TX I3) betätigtwird. Abb. 5 zeigt den Anschlussplan.
Die Leseeinheit {5} ist zum Abhalten vonStörlicht mit Platten verblendet. Der eigent-liche Lesesensor ist der IR-Spur-Sensor vonfischertechnik (128598). Hierbei handelt essich vermutlich um ein Bauteil ähnlich demSHARP IS471F (Conrad Electronic185094).
Code 39Es gibt verschiedene standardisierte Strich-codes. Die folgenden Ausführungenbeziehen sich auf den Typ Code 39. Hiermitsind die Ziffern 0-9 und die Buchstaben A-Z darstellbar. Zur Vereinfachung wird dieDecodierung exemplarisch nur für Zahlen-codes dargestellt; eine Buchstabenerken-nung könnte analog ergänzt werden.Jeder Zahlenstreifencode besteht ausweißen und schwarzen (zur Verdeutlichungoben farbigen) Streifen. Zwischen denZahlenstreifencodes ist immer ein dünner
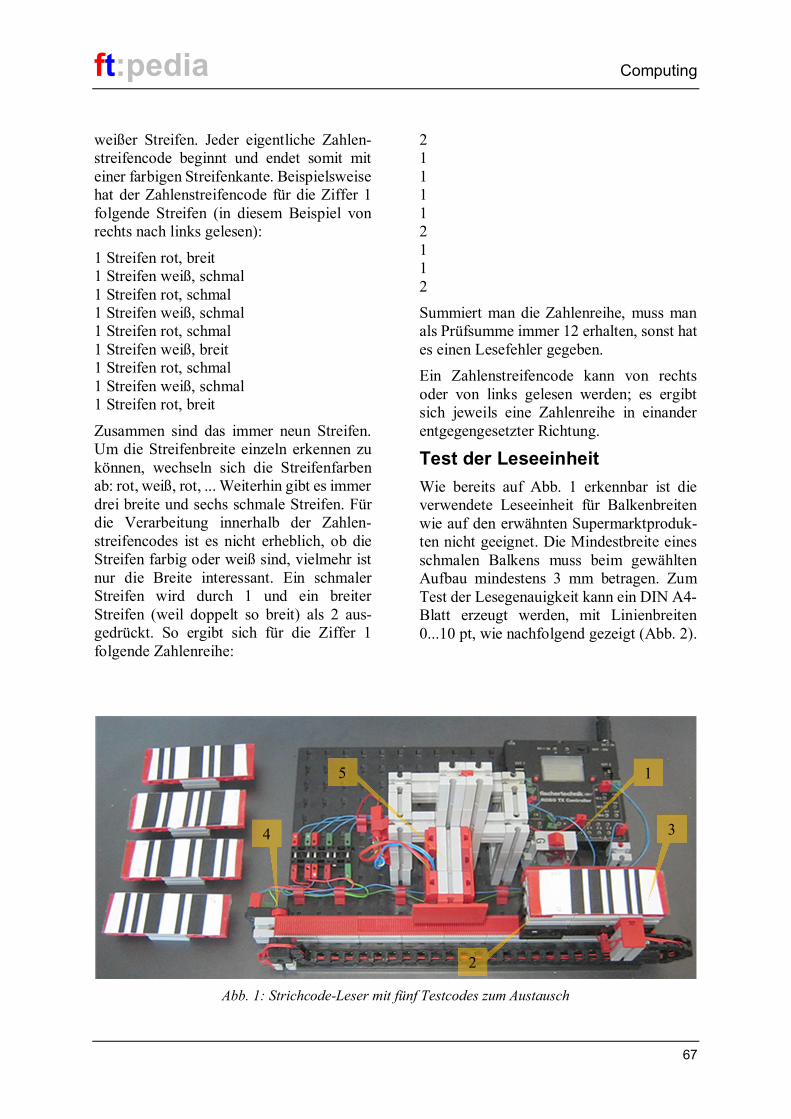
ft:pedia Computing
67
weißer Streifen. Jeder eigentliche Zahlen-streifencode beginnt und endet somit miteiner farbigen Streifenkante. Beispielsweisehat der Zahlenstreifencode für die Ziffer 1folgende Streifen (in diesem Beispiel vonrechts nach links gelesen):
1 Streifen rot, breit1 Streifen weiß, schmal1 Streifen rot, schmal1 Streifen weiß, schmal1 Streifen rot, schmal1 Streifen weiß, breit1 Streifen rot, schmal1 Streifen weiß, schmal1 Streifen rot, breit
Zusammen sind das immer neun Streifen.Um die Streifenbreite einzeln erkennen zukönnen, wechseln sich die Streifenfarbenab: rot, weiß, rot, ... Weiterhin gibt es immerdrei breite und sechs schmale Streifen. Fürdie Verarbeitung innerhalb der Zahlen-streifencodes ist es nicht erheblich, ob dieStreifen farbig oder weiß sind, vielmehr istnur die Breite interessant. Ein schmalerStreifen wird durch 1 und ein breiterStreifen (weil doppelt so breit) als 2 aus-gedrückt. So ergibt sich für die Ziffer 1folgende Zahlenreihe:
211112112Summiert man die Zahlenreihe, muss manals Prüfsumme immer 12 erhalten, sonst hates einen Lesefehler gegeben.Ein Zahlenstreifencode kann von rechtsoder von links gelesen werden; es ergibtsich jeweils eine Zahlenreihe in einanderentgegengesetzter Richtung.
Test der LeseeinheitWie bereits auf Abb. 1 erkennbar ist dieverwendete Leseeinheit für Balkenbreitenwie auf den erwähnten Supermarktproduk-ten nicht geeignet. Die Mindestbreite einesschmalen Balkens muss beim gewähltenAufbau mindestens 3 mm betragen. ZumTest der Lesegenauigkeit kann ein DIN A4-Blatt erzeugt werden, mit Linienbreiten0...10 pt, wie nachfolgend gezeigt (Abb. 2).
Abb. 1: Strichcode-Leser mit fünf Testcodes zum Austausch
1
2
34
5
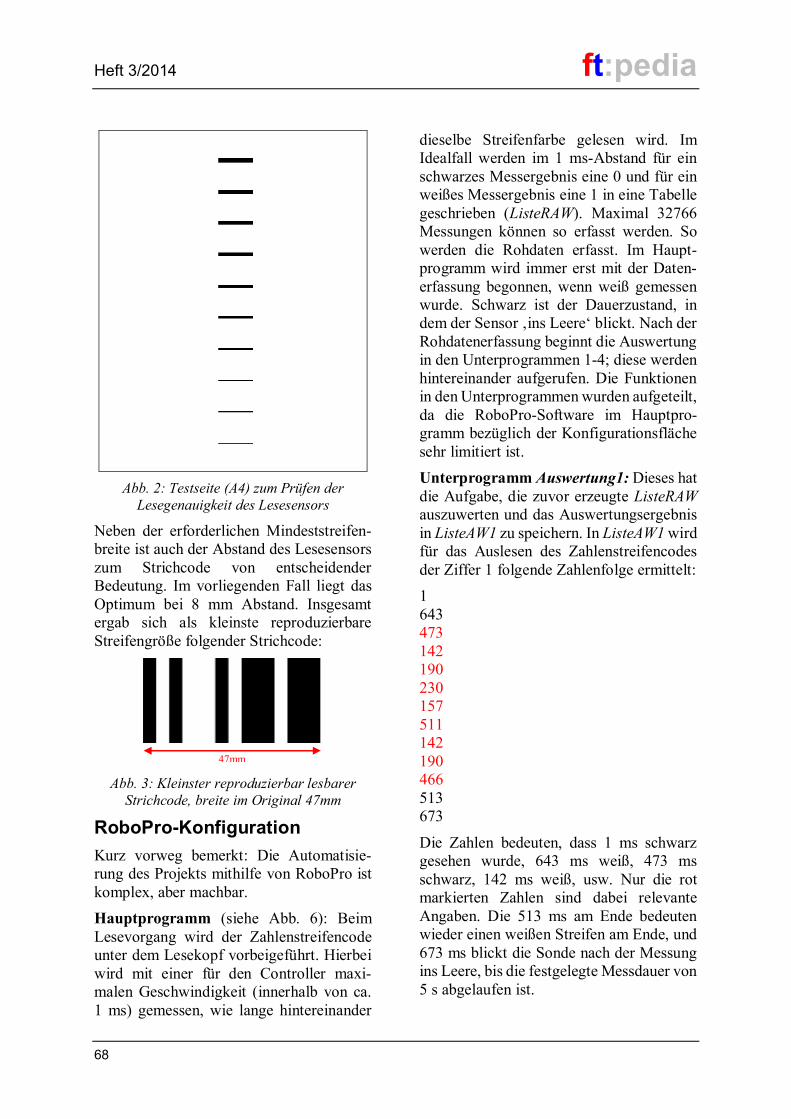
Heft 3/2014 ft:pedia
68
Abb. 2: Testseite (A4) zum Prüfen derLesegenauigkeit des Lesesensors
Neben der erforderlichen Mindeststreifen-breite ist auch der Abstand des Lesesensorszum Strichcode von entscheidenderBedeutung. Im vorliegenden Fall liegt dasOptimum bei 8 mm Abstand. Insgesamtergab sich als kleinste reproduzierbareStreifengröße folgender Strichcode:
Abb. 3: Kleinster reproduzierbar lesbarerStrichcode, breite im Original 47mm
RoboPro-KonfigurationKurz vorweg bemerkt: Die Automatisie-rung des Projekts mithilfe von RoboPro istkomplex, aber machbar.Hauptprogramm (siehe Abb. 6): BeimLesevorgang wird der Zahlenstreifencodeunter dem Lesekopf vorbeigeführt. Hierbeiwird mit einer für den Controller maxi-malen Geschwindigkeit (innerhalb von ca.1 ms) gemessen, wie lange hintereinander
dieselbe Streifenfarbe gelesen wird. ImIdealfall werden im 1 ms-Abstand für einschwarzes Messergebnis eine 0 und für einweißes Messergebnis eine 1 in eine Tabellegeschrieben (ListeRAW). Maximal 32766Messungen können so erfasst werden. Sowerden die Rohdaten erfasst. Im Haupt-programm wird immer erst mit der Daten-erfassung begonnen, wenn weiß gemessenwurde. Schwarz ist der Dauerzustand, indem der Sensor ‚ins Leere‘ blickt. Nach derRohdatenerfassung beginnt die Auswertungin den Unterprogrammen 1-4; diese werdenhintereinander aufgerufen. Die Funktionenin den Unterprogrammen wurden aufgeteilt,da die RoboPro-Software im Hauptpro-gramm bezüglich der Konfigurationsflächesehr limitiert ist.Unterprogramm Auswertung1: Dieses hatdie Aufgabe, die zuvor erzeugte ListeRAWauszuwerten und das Auswertungsergebnisin ListeAW1 zu speichern. In ListeAW1 wirdfür das Auslesen des Zahlenstreifencodesder Ziffer 1 folgende Zahlenfolge ermittelt:1643473142190230157511142190466513673
Die Zahlen bedeuten, dass 1 ms schwarzgesehen wurde, 643 ms weiß, 473 msschwarz, 142 ms weiß, usw. Nur die rotmarkierten Zahlen sind dabei relevanteAngaben. Die 513 ms am Ende bedeutenwieder einen weißen Streifen am Ende, und673 ms blickt die Sonde nach der Messungins Leere, bis die festgelegte Messdauer von5 s abgelaufen ist.
47mm
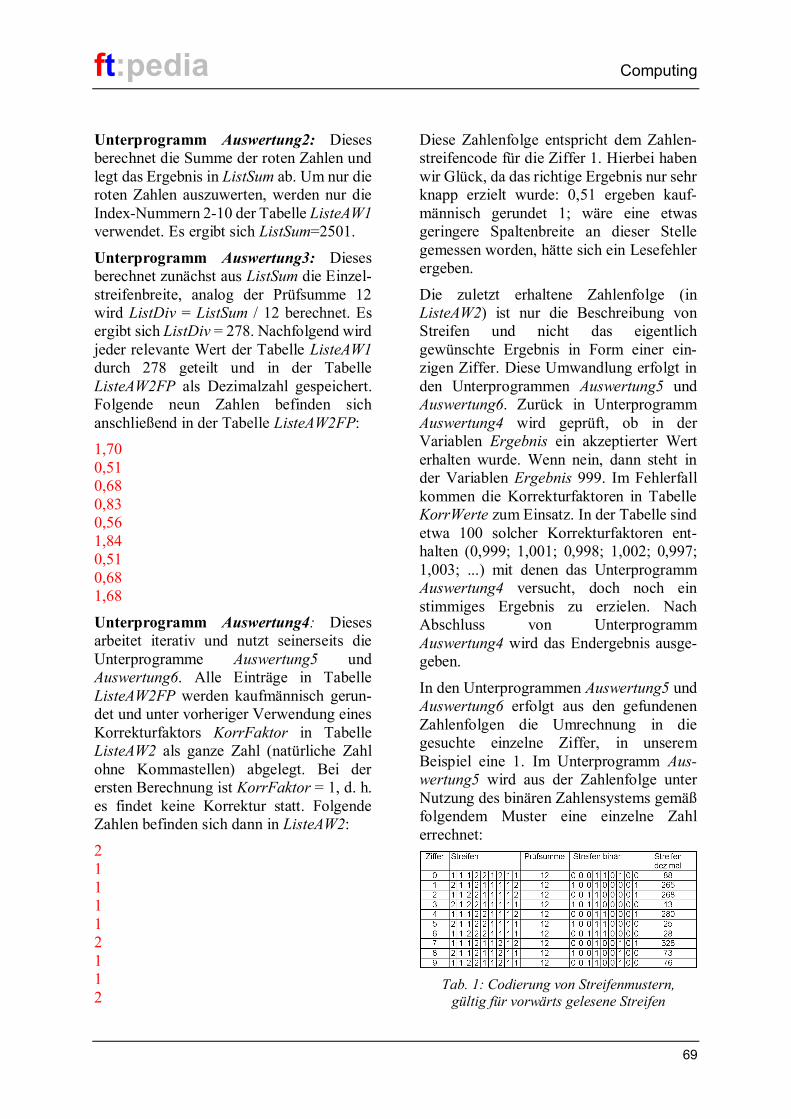
ft:pedia Computing
69
Unterprogramm Auswertung2: Diesesberechnet die Summe der roten Zahlen undlegt das Ergebnis in ListSum ab. Um nur dieroten Zahlen auszuwerten, werden nur dieIndex-Nummern 2-10 der Tabelle ListeAW1verwendet. Es ergibt sich ListSum=2501.
Unterprogramm Auswertung3: Diesesberechnet zunächst aus ListSum die Einzel-streifenbreite, analog der Prüfsumme 12wird ListDiv = ListSum / 12 berechnet. Esergibt sich ListDiv = 278. Nachfolgend wirdjeder relevante Wert der Tabelle ListeAW1durch 278 geteilt und in der TabelleListeAW2FP als Dezimalzahl gespeichert.Folgende neun Zahlen befinden sichanschließend in der Tabelle ListeAW2FP:1,700,510,680,830,561,840,510,681,68
Unterprogramm Auswertung4: Diesesarbeitet iterativ und nutzt seinerseits dieUnterprogramme Auswertung5 undAuswertung6. Alle Einträge in TabelleListeAW2FP werden kaufmännisch gerun-det und unter vorheriger Verwendung einesKorrekturfaktors KorrFaktor in TabelleListeAW2 als ganze Zahl (natürliche Zahlohne Kommastellen) abgelegt. Bei derersten Berechnung ist KorrFaktor = 1, d. h.es findet keine Korrektur statt. FolgendeZahlen befinden sich dann in ListeAW2:
211112112
Diese Zahlenfolge entspricht dem Zahlen-streifencode für die Ziffer 1. Hierbei habenwir Glück, da das richtige Ergebnis nur sehrknapp erzielt wurde: 0,51 ergeben kauf-männisch gerundet 1; wäre eine etwasgeringere Spaltenbreite an dieser Stellegemessen worden, hätte sich ein Lesefehlerergeben.
Die zuletzt erhaltene Zahlenfolge (inListeAW2) ist nur die Beschreibung vonStreifen und nicht das eigentlichgewünschte Ergebnis in Form einer ein-zigen Ziffer. Diese Umwandlung erfolgt inden Unterprogrammen Auswertung5 undAuswertung6. Zurück in UnterprogrammAuswertung4 wird geprüft, ob in derVariablen Ergebnis ein akzeptierter Werterhalten wurde. Wenn nein, dann steht inder Variablen Ergebnis 999. Im Fehlerfallkommen die Korrekturfaktoren in TabelleKorrWerte zum Einsatz. In der Tabelle sindetwa 100 solcher Korrekturfaktoren ent-halten (0,999; 1,001; 0,998; 1,002; 0,997;1,003; ...) mit denen das UnterprogrammAuswertung4 versucht, doch noch einstimmiges Ergebnis zu erzielen. NachAbschluss von UnterprogrammAuswertung4 wird das Endergebnis ausge-geben.
In den Unterprogrammen Auswertung5 undAuswertung6 erfolgt aus den gefundenenZahlenfolgen die Umrechnung in diegesuchte einzelne Ziffer, in unseremBeispiel eine 1. Im Unterprogramm Aus-wertung5 wird aus der Zahlenfolge unterNutzung des binären Zahlensystems gemäßfolgendem Muster eine einzelne Zahlerrechnet:
Tab. 1: Codierung von Streifenmustern,gültig für vorwärts gelesene Streifen
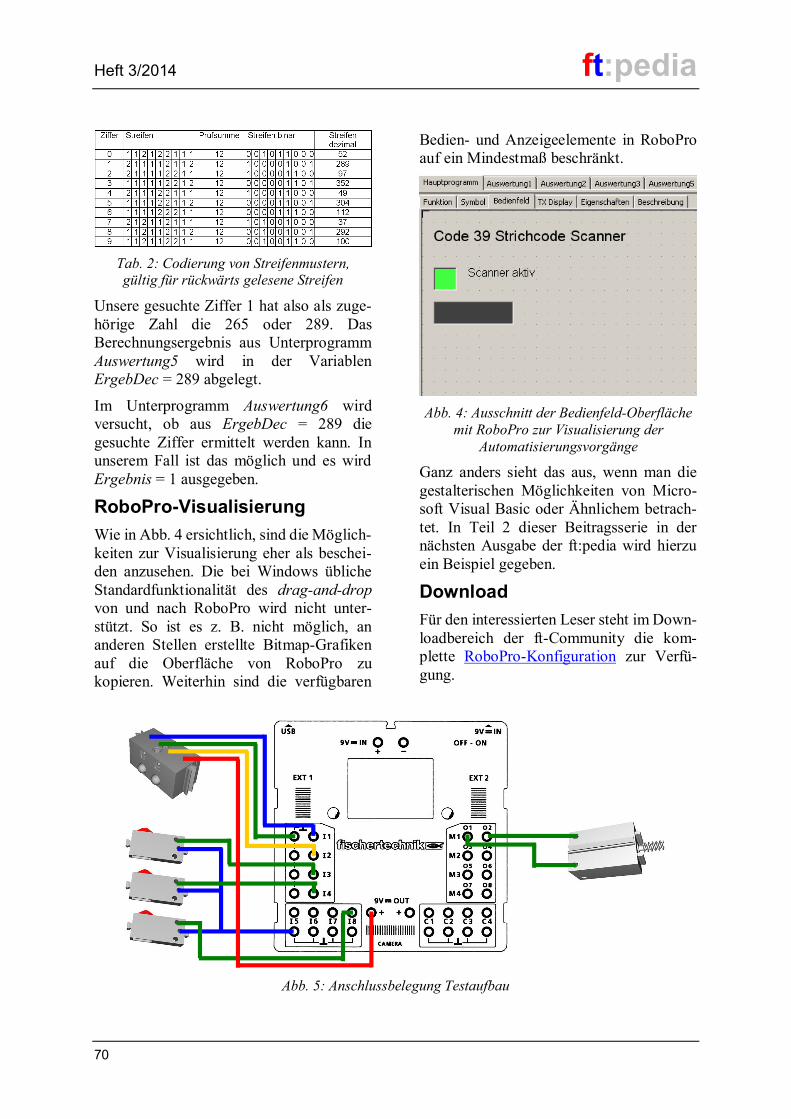
Heft 3/2014 ft:pedia
70
Tab. 2: Codierung von Streifenmustern,gültig für rückwärts gelesene Streifen
Unsere gesuchte Ziffer 1 hat also als zuge-hörige Zahl die 265 oder 289. DasBerechnungsergebnis aus UnterprogrammAuswertung5 wird in der VariablenErgebDec = 289 abgelegt.
Im Unterprogramm Auswertung6 wirdversucht, ob aus ErgebDec = 289 diegesuchte Ziffer ermittelt werden kann. Inunserem Fall ist das möglich und es wirdErgebnis = 1 ausgegeben.
RoboPro-VisualisierungWie in Abb. 4 ersichtlich, sind die Möglich-keiten zur Visualisierung eher als beschei-den anzusehen. Die bei Windows üblicheStandardfunktionalität des drag-and-dropvon und nach RoboPro wird nicht unter-stützt. So ist es z. B. nicht möglich, ananderen Stellen erstellte Bitmap-Grafikenauf die Oberfläche von RoboPro zukopieren. Weiterhin sind die verfügbaren
Bedien- und Anzeigeelemente in RoboProauf ein Mindestmaß beschränkt.
Abb. 4: Ausschnitt der Bedienfeld-Oberflächemit RoboPro zur Visualisierung der
Automatisierungsvorgänge
Ganz anders sieht das aus, wenn man diegestalterischen Möglichkeiten von Micro-soft Visual Basic oder Ähnlichem betrach-tet. In Teil 2 dieser Beitragsserie in dernächsten Ausgabe der ft:pedia wird hierzuein Beispiel gegeben.
DownloadFür den interessierten Leser steht im Down-loadbereich der ft-Community die kom-plette RoboPro-Konfiguration zur Verfü-gung.
Abb. 5: Anschlussbelegung Testaufbau
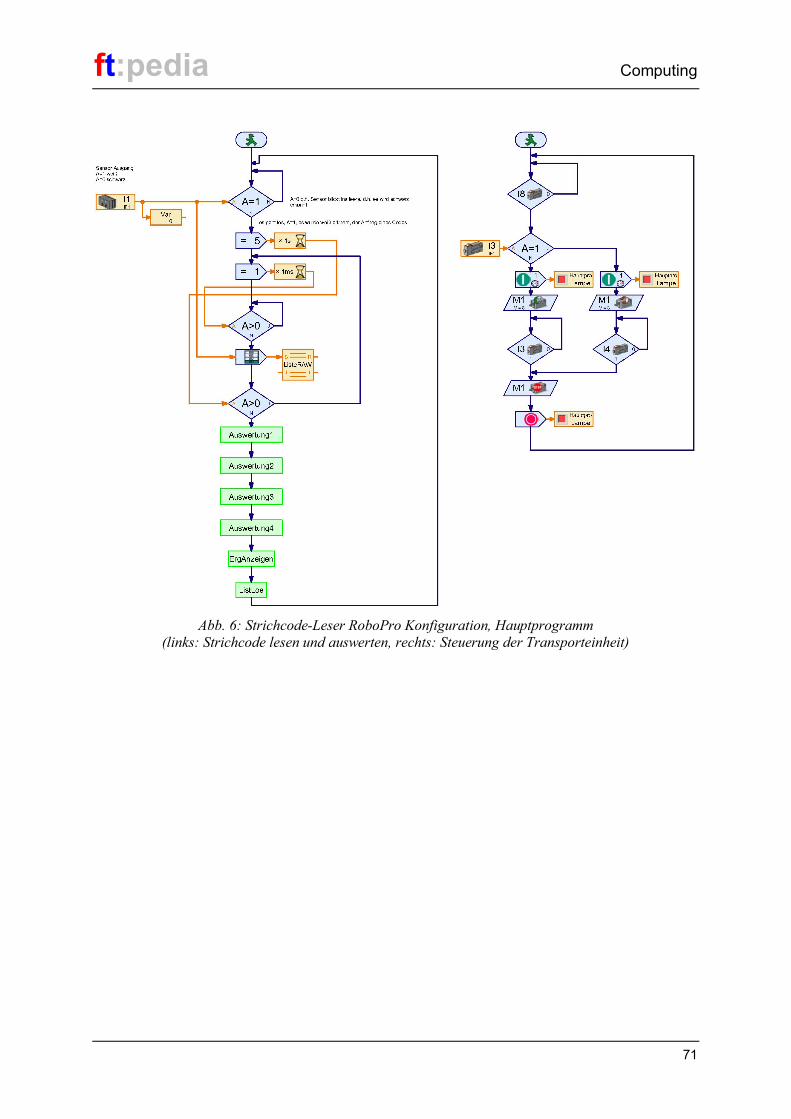
ft:pedia Computing
71
Abb. 6: Strichcode-Leser RoboPro Konfiguration, Hauptprogramm(links: Strichcode lesen und auswerten, rechts: Steuerung der Transporteinheit)
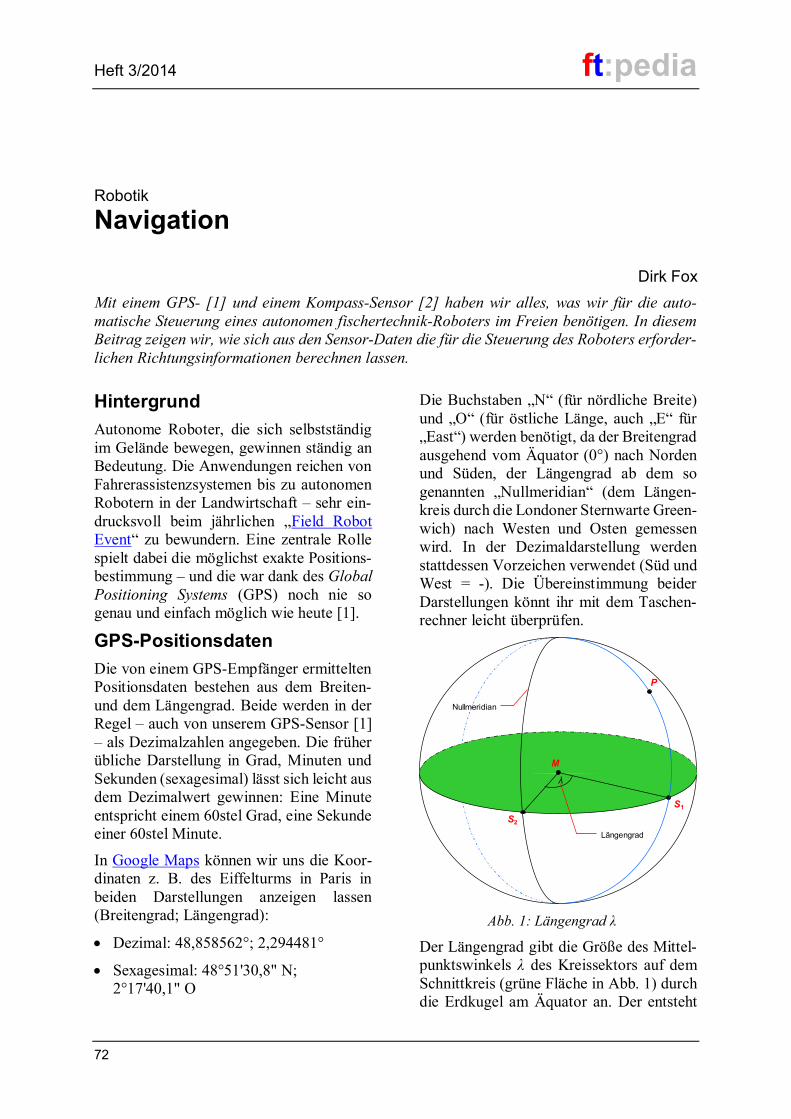
Heft 3/2014 ft:pedia
72
Robotik
Navigation
Dirk FoxMit einem GPS- [1] und einem Kompass-Sensor [2] haben wir alles, was wir für die auto-matische Steuerung eines autonomen fischertechnik-Roboters im Freien benötigen. In diesemBeitrag zeigen wir, wie sich aus den Sensor-Daten die für die Steuerung des Roboters erforder-lichen Richtungsinformationen berechnen lassen.
HintergrundAutonome Roboter, die sich selbstständigim Gelände bewegen, gewinnen ständig anBedeutung. Die Anwendungen reichen vonFahrerassistenzsystemen bis zu autonomenRobotern in der Landwirtschaft – sehr ein-drucksvoll beim jährlichen „Field RobotEvent“ zu bewundern. Eine zentrale Rollespielt dabei die möglichst exakte Positions-bestimmung – und die war dank des GlobalPositioning Systems (GPS) noch nie sogenau und einfach möglich wie heute [1].
GPS-PositionsdatenDie von einem GPS-Empfänger ermitteltenPositionsdaten bestehen aus dem Breiten-und dem Längengrad. Beide werden in derRegel – auch von unserem GPS-Sensor [1]– als Dezimalzahlen angegeben. Die früherübliche Darstellung in Grad, Minuten undSekunden (sexagesimal) lässt sich leicht ausdem Dezimalwert gewinnen: Eine Minuteentspricht einem 60stel Grad, eine Sekundeeiner 60stel Minute.
In Google Maps können wir uns die Koor-dinaten z. B. des Eiffelturms in Paris inbeiden Darstellungen anzeigen lassen(Breitengrad; Längengrad):
· Dezimal: 48,858562°; 2,294481°
· Sexagesimal: 48°51'30,8" N;2°17'40,1" O
Die Buchstaben „N“ (für nördliche Breite)und „O“ (für östliche Länge, auch „E“ für„East“) werden benötigt, da der Breitengradausgehend vom Äquator (0°) nach Nordenund Süden, der Längengrad ab dem sogenannten „Nullmeridian“ (dem Längen-kreis durch die Londoner Sternwarte Green-wich) nach Westen und Osten gemessenwird. In der Dezimaldarstellung werdenstattdessen Vorzeichen verwendet (Süd undWest = -). Die Übereinstimmung beiderDarstellungen könnt ihr mit dem Taschen-rechner leicht überprüfen.
Abb. 1: Längengrad λ
Der Längengrad gibt die Größe des Mittel-punktswinkels λ des Kreissektors auf demSchnittkreis (grüne Fläche in Abb. 1) durchdie Erdkugel am Äquator an. Der entsteht
λ
Längengrad
Nullmeridian
S1
S2
M
P
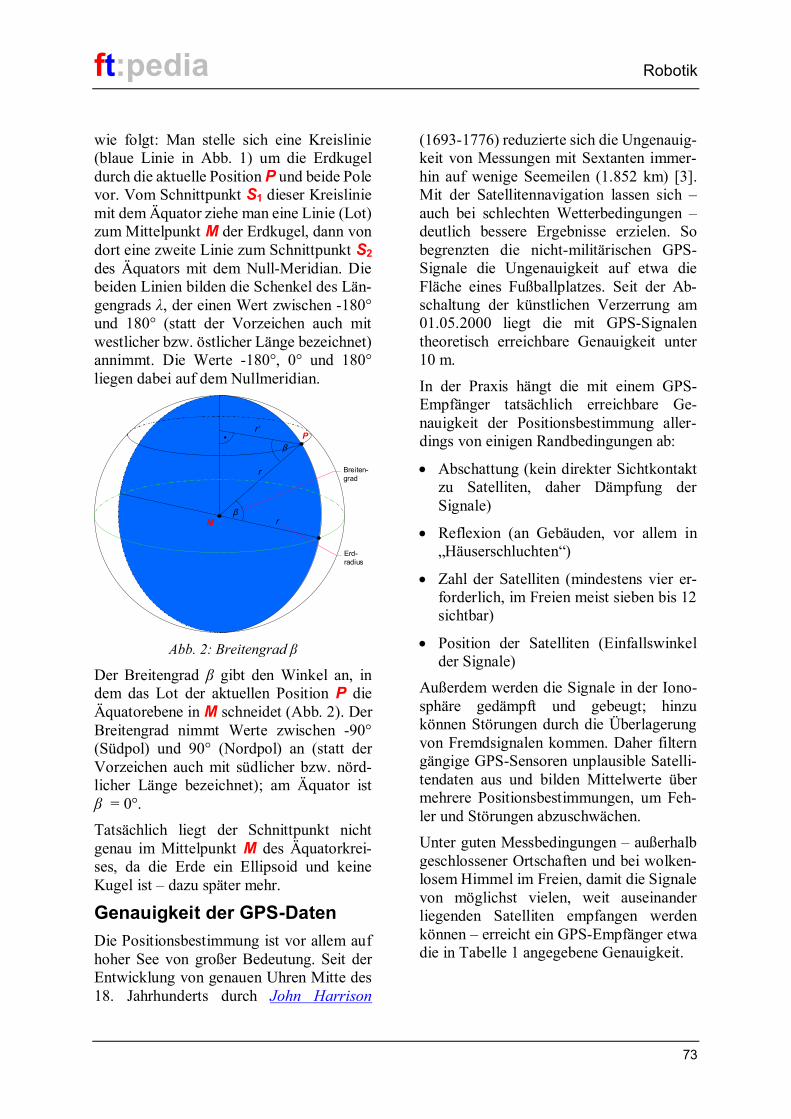
ft:pedia Robotik
73
wie folgt: Man stelle sich eine Kreislinie(blaue Linie in Abb. 1) um die Erdkugeldurch die aktuelle Position P und beide Polevor. Vom Schnittpunkt S1 dieser Kreisliniemit dem Äquator ziehe man eine Linie (Lot)zum Mittelpunkt M der Erdkugel, dann vondort eine zweite Linie zum Schnittpunkt S2des Äquators mit dem Null-Meridian. Diebeiden Linien bilden die Schenkel des Län-gengrads λ, der einen Wert zwischen -180°und 180° (statt der Vorzeichen auch mitwestlicher bzw. östlicher Länge bezeichnet)annimmt. Die Werte -180°, 0° und 180°liegen dabei auf dem Nullmeridian.
Abb. 2: Breitengrad β
Der Breitengrad β gibt den Winkel an, indem das Lot der aktuellen Position P dieÄquatorebene in M schneidet (Abb. 2). DerBreitengrad nimmt Werte zwischen -90°(Südpol) und 90° (Nordpol) an (statt derVorzeichen auch mit südlicher bzw. nörd-licher Länge bezeichnet); am Äquator istβ = 0°.Tatsächlich liegt der Schnittpunkt nichtgenau im Mittelpunkt M des Äquatorkrei-ses, da die Erde ein Ellipsoid und keineKugel ist – dazu später mehr.
Genauigkeit der GPS-DatenDie Positionsbestimmung ist vor allem aufhoher See von großer Bedeutung. Seit derEntwicklung von genauen Uhren Mitte des18. Jahrhunderts durch John Harrison
(1693-1776) reduzierte sich die Ungenauig-keit von Messungen mit Sextanten immer-hin auf wenige Seemeilen (1.852 km) [3].Mit der Satellitennavigation lassen sich –auch bei schlechten Wetterbedingungen –deutlich bessere Ergebnisse erzielen. Sobegrenzten die nicht-militärischen GPS-Signale die Ungenauigkeit auf etwa dieFläche eines Fußballplatzes. Seit der Ab-schaltung der künstlichen Verzerrung am01.05.2000 liegt die mit GPS-Signalentheoretisch erreichbare Genauigkeit unter10 m.
In der Praxis hängt die mit einem GPS-Empfänger tatsächlich erreichbare Ge-nauigkeit der Positionsbestimmung aller-dings von einigen Randbedingungen ab:
· Abschattung (kein direkter Sichtkontaktzu Satelliten, daher Dämpfung derSignale)
· Reflexion (an Gebäuden, vor allem in„Häuserschluchten“)
· Zahl der Satelliten (mindestens vier er-forderlich, im Freien meist sieben bis 12sichtbar)
· Position der Satelliten (Einfallswinkelder Signale)
Außerdem werden die Signale in der Iono-sphäre gedämpft und gebeugt; hinzukönnen Störungen durch die Überlagerungvon Fremdsignalen kommen. Daher filterngängige GPS-Sensoren unplausible Satelli-tendaten aus und bilden Mittelwerte übermehrere Positionsbestimmungen, um Feh-ler und Störungen abzuschwächen.Unter guten Messbedingungen – außerhalbgeschlossener Ortschaften und bei wolken-losem Himmel im Freien, damit die Signalevon möglichst vielen, weit auseinanderliegenden Satelliten empfangen werdenkönnen – erreicht ein GPS-Empfänger etwadie in Tabelle 1 angegebene Genauigkeit.
β
Breiten-grad
r‘
r
β∙
Erd-radius
r
P
M
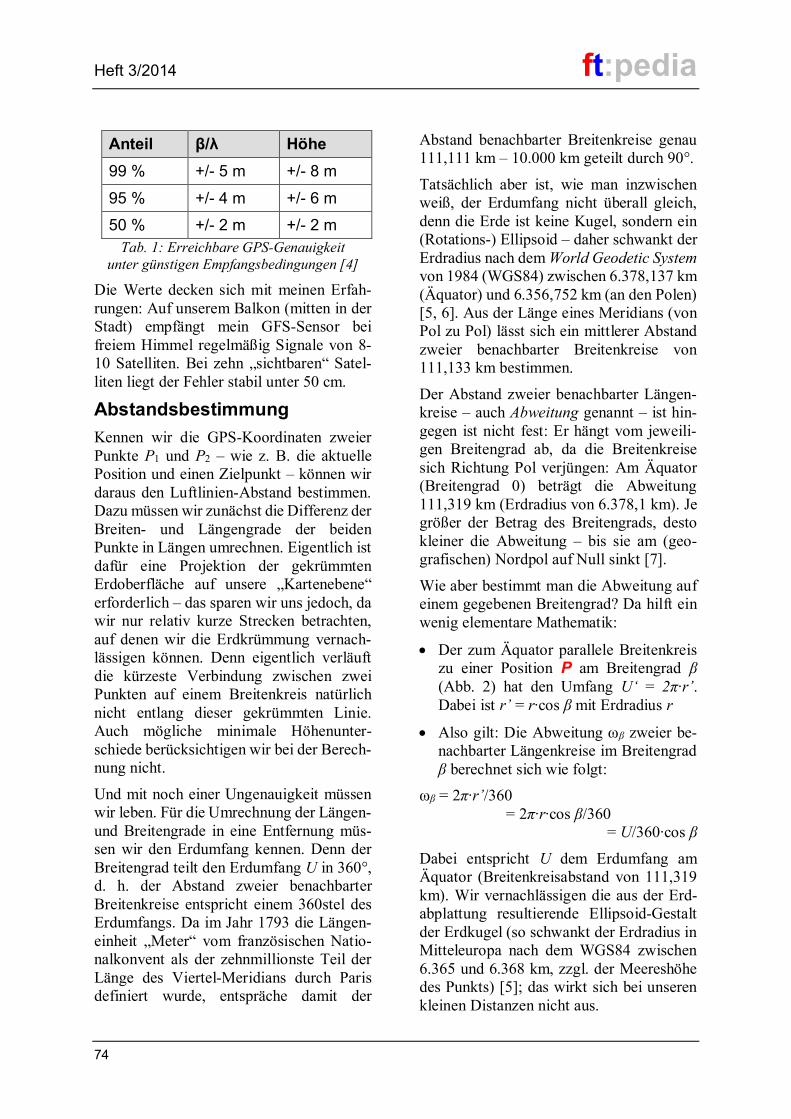
Heft 3/2014 ft:pedia
74
Anteil β/λ Höhe99 % +/- 5 m +/- 8 m
95 % +/- 4 m +/- 6 m
50 % +/- 2 m +/- 2 mTab. 1: Erreichbare GPS-Genauigkeit
unter günstigen Empfangsbedingungen [4]
Die Werte decken sich mit meinen Erfah-rungen: Auf unserem Balkon (mitten in derStadt) empfängt mein GFS-Sensor beifreiem Himmel regelmäßig Signale von 8-10 Satelliten. Bei zehn „sichtbaren“ Satel-liten liegt der Fehler stabil unter 50 cm.
AbstandsbestimmungKennen wir die GPS-Koordinaten zweierPunkte P1 und P2 – wie z. B. die aktuellePosition und einen Zielpunkt – können wirdaraus den Luftlinien-Abstand bestimmen.Dazu müssen wir zunächst die Differenz derBreiten- und Längengrade der beidenPunkte in Längen umrechnen. Eigentlich istdafür eine Projektion der gekrümmtenErdoberfläche auf unsere „Kartenebene“erforderlich – das sparen wir uns jedoch, dawir nur relativ kurze Strecken betrachten,auf denen wir die Erdkrümmung vernach-lässigen können. Denn eigentlich verläuftdie kürzeste Verbindung zwischen zweiPunkten auf einem Breitenkreis natürlichnicht entlang dieser gekrümmten Linie.Auch mögliche minimale Höhenunter-schiede berücksichtigen wir bei der Berech-nung nicht.
Und mit noch einer Ungenauigkeit müssenwir leben. Für die Umrechnung der Längen-und Breitengrade in eine Entfernung müs-sen wir den Erdumfang kennen. Denn derBreitengrad teilt den Erdumfang U in 360°,d. h. der Abstand zweier benachbarterBreitenkreise entspricht einem 360stel desErdumfangs. Da im Jahr 1793 die Längen-einheit „Meter“ vom französischen Natio-nalkonvent als der zehnmillionste Teil derLänge des Viertel-Meridians durch Parisdefiniert wurde, entspräche damit der
Abstand benachbarter Breitenkreise genau111,111 km – 10.000 km geteilt durch 90°.
Tatsächlich aber ist, wie man inzwischenweiß, der Erdumfang nicht überall gleich,denn die Erde ist keine Kugel, sondern ein(Rotations-) Ellipsoid – daher schwankt derErdradius nach dem World Geodetic Systemvon 1984 (WGS84) zwischen 6.378,137 km(Äquator) und 6.356,752 km (an den Polen)[5, 6]. Aus der Länge eines Meridians (vonPol zu Pol) lässt sich ein mittlerer Abstandzweier benachbarter Breitenkreise von111,133 km bestimmen.
Der Abstand zweier benachbarter Längen-kreise – auch Abweitung genannt – ist hin-gegen ist nicht fest: Er hängt vom jeweili-gen Breitengrad ab, da die Breitenkreisesich Richtung Pol verjüngen: Am Äquator(Breitengrad 0) beträgt die Abweitung111,319 km (Erdradius von 6.378,1 km). Jegrößer der Betrag des Breitengrads, destokleiner die Abweitung – bis sie am (geo-grafischen) Nordpol auf Null sinkt [7].
Wie aber bestimmt man die Abweitung aufeinem gegebenen Breitengrad? Da hilft einwenig elementare Mathematik:
· Der zum Äquator parallele Breitenkreiszu einer Position P am Breitengrad β(Abb. 2) hat den Umfang U‘ = 2π∙r’.Dabei ist r’ = r∙cos β mit Erdradius r
· Also gilt: Die Abweitung ωβ zweier be-nachbarter Längenkreise im Breitengradβ berechnet sich wie folgt:
ωβ = 2π∙r’/360= 2π∙r∙cos β/360
= U/360∙cos β
Dabei entspricht U dem Erdumfang amÄquator (Breitenkreisabstand von 111,319km). Wir vernachlässigen die aus der Erd-abplattung resultierende Ellipsoid-Gestaltder Erdkugel (so schwankt der Erdradius inMitteleuropa nach dem WGS84 zwischen6.365 und 6.368 km, zzgl. der Meereshöhedes Punkts) [5]; das wirkt sich bei unserenkleinen Distanzen nicht aus.
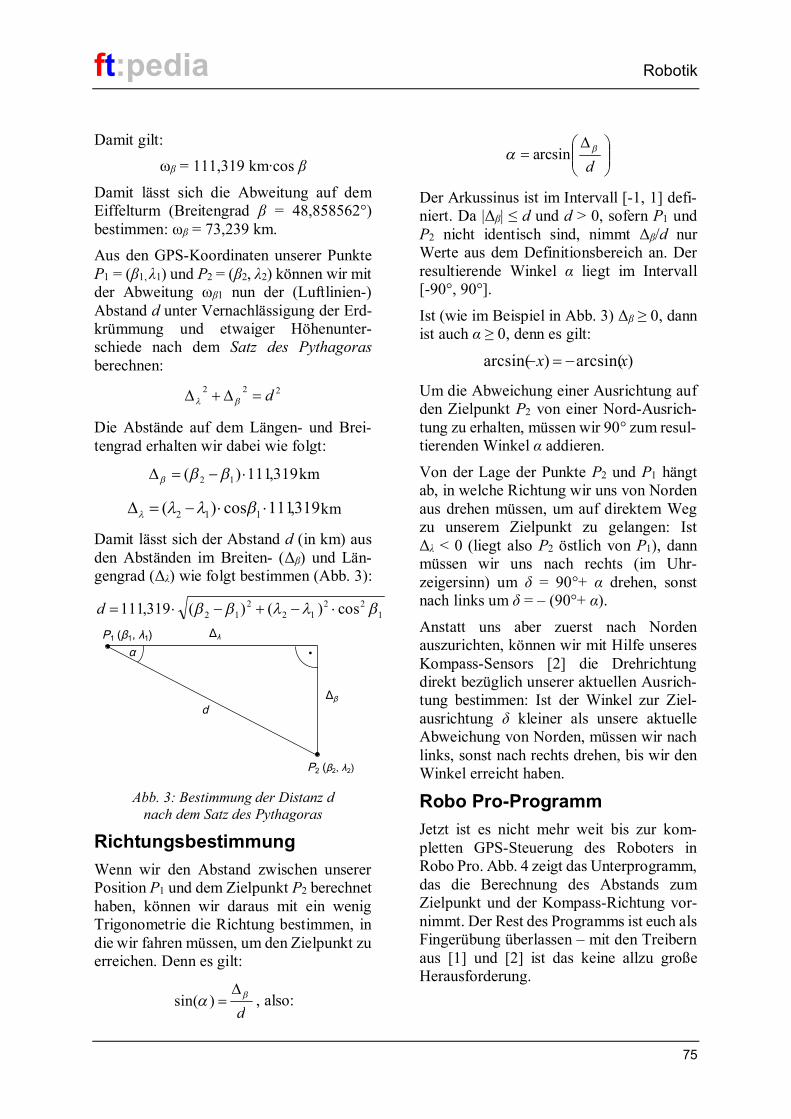
ft:pedia Robotik
75
Damit gilt:ωβ = 111,319 km∙cos β
Damit lässt sich die Abweitung auf demEiffelturm (Breitengrad β = 48,858562°)bestimmen: ωβ = 73,239 km.Aus den GPS-Koordinaten unserer PunkteP1 = (β1, λ1) und P2 = (β2, λ2) können wir mitder Abweitung ωβ1 nun der (Luftlinien-)Abstand d unter Vernachlässigung der Erd-krümmung und etwaiger Höhenunter-schiede nach dem Satz des Pythagorasberechnen:
222 d=D+D bl
Die Abstände auf dem Längen- und Brei-tengrad erhalten wir dabei wie folgt:
319,111)( 12 ×-=D bbb km
319,111cos)( 112 ××-=D blll km
Damit lässt sich der Abstand d (in km) ausden Abständen im Breiten- (Δβ) und Län-gengrad (Δλ) wie folgt bestimmen (Abb. 3):
122
122
12 cos)()(319,111 bllbb ×-+-×=d
Abb. 3: Bestimmung der Distanz dnach dem Satz des Pythagoras
RichtungsbestimmungWenn wir den Abstand zwischen unsererPosition P1 und dem Zielpunkt P2 berechnethaben, können wir daraus mit ein wenigTrigonometrie die Richtung bestimmen, indie wir fahren müssen, um den Zielpunkt zuerreichen. Denn es gilt:
dba
D=)sin( , also:
÷÷ø
öççè
æ D=
dba arcsin
Der Arkussinus ist im Intervall [-1, 1] defi-niert. Da |Δβ| ≤ d und d > 0, sofern P1 undP2 nicht identisch sind, nimmt Δβ/d nurWerte aus dem Definitionsbereich an. Derresultierende Winkel α liegt im Intervall[-90°, 90°].
Ist (wie im Beispiel in Abb. 3) Δβ ≥ 0, dannist auch α ≥ 0, denn es gilt:
)arcsin()arcsin( xx -=-
Um die Abweichung einer Ausrichtung aufden Zielpunkt P2 von einer Nord-Ausrich-tung zu erhalten, müssen wir 90° zum resul-tierenden Winkel α addieren.
Von der Lage der Punkte P2 und P1 hängtab, in welche Richtung wir uns von Nordenaus drehen müssen, um auf direktem Wegzu unserem Zielpunkt zu gelangen: IstΔλ < 0 (liegt also P2 östlich von P1), dannmüssen wir uns nach rechts (im Uhr-zeigersinn) um δ = 90°+ α drehen, sonstnach links um δ = – (90°+ α).
Anstatt uns aber zuerst nach Nordenauszurichten, können wir mit Hilfe unseresKompass-Sensors [2] die Drehrichtungdirekt bezüglich unserer aktuellen Ausrich-tung bestimmen: Ist der Winkel zur Ziel-ausrichtung δ kleiner als unsere aktuelleAbweichung von Norden, müssen wir nachlinks, sonst nach rechts drehen, bis wir denWinkel erreicht haben.
Robo Pro-ProgrammJetzt ist es nicht mehr weit bis zur kom-pletten GPS-Steuerung des Roboters inRobo Pro. Abb. 4 zeigt das Unterprogramm,das die Berechnung des Abstands zumZielpunkt und der Kompass-Richtung vor-nimmt. Der Rest des Programms ist euch alsFingerübung überlassen – mit den Treibernaus [1] und [2] ist das keine allzu großeHerausforderung.
Δλ
Δβ
∙
d
P1 (β1, λ1)
P2 (β2, λ2)
α
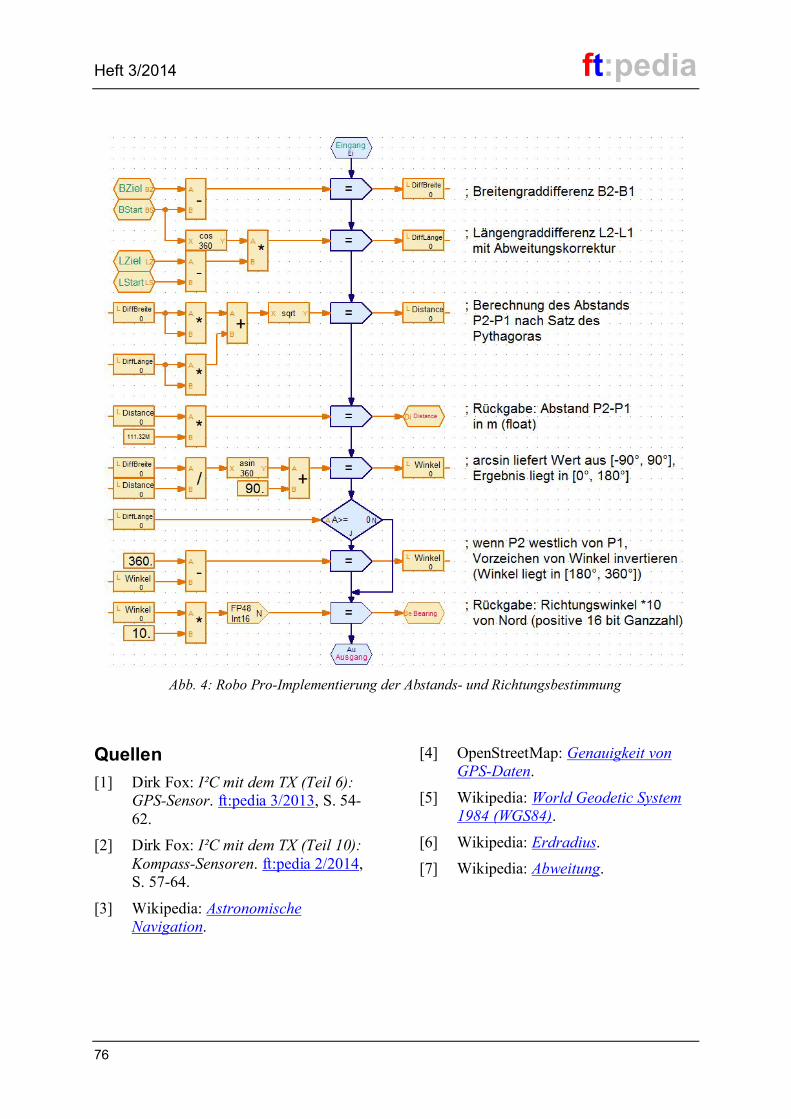
Heft 3/2014 ft:pedia
76
Quellen[1] Dirk Fox: I²C mit dem TX (Teil 6):
GPS-Sensor. ft:pedia 3/2013, S. 54-62.
[2] Dirk Fox: I²C mit dem TX (Teil 10):Kompass-Sensoren. ft:pedia 2/2014,S. 57-64.
[3] Wikipedia: AstronomischeNavigation.
[4] OpenStreetMap: Genauigkeit vonGPS-Daten.
[5] Wikipedia: World Geodetic System1984 (WGS84).
[6] Wikipedia: Erdradius.[7] Wikipedia: Abweitung.
Abb. 4: Robo Pro-Implementierung der Abstands- und Richtungsbestimmung

ft:pedia Robotik
77
Roboter mit neuem TXT-Controller und Kamera


















