GEB_AUS2

of 104
Transcript of GEB_AUS2
-
AUSSTEIFUNG VON HOCHBAUTEN
Berechnungsanstze, Formeln Grenzen der Berechnung
Matthias Kttler
KLN
2002 http://www.kup-koeln.de [email protected]
-
2
-
3
INHALT
INHALT......................................................................................................................................................... 3
1 GRUNDLAGEN DER PRAKTISCHEN NACHWEISE.......................................................................... 5
1.1 Behandlung der Gebudeaussteifung in den Vorschriften.......................................................................... 5
1.2 Verallgemeinerungen dieser Normregelungen ............................................................................................. 8
2 DIE ZUSAMMENFASSUNG DER AUSSTEIFENDEN SYSTEME ZU EINEM GESAMTSTAB........ 11
2.1 Mechanische Voraussetzungen .................................................................................................................... 11 2.1.1 Die Gre des Schubkorrekturfaktors ..................................................................................................... 12 2.1.2 Einsatzgrenzen des Berechnungsverfahrens............................................................................................ 14
2.2 Gleichungen des Gesamtsystems.................................................................................................................. 16
2.3 Aufteilung von Horizontalkrften auf die aussteifenden Stbe ................................................................ 20 2.3.1 Berechnung fr den torsionsfreien Fall ................................................................................................... 20 2.3.2 Berechnung von Aussteifungen mit Reiner Torsion ............................................................................... 22
2.4 Beanspruchung der Aussteifung durch Vertikallasten.............................................................................. 24 2.4.1 Das Abklingen der Schnittkraft in einer durch Einzelmomente beanspruchten Konstruktion ................ 24 2.4.2 Die Schnittkrfte im Gesamtsystem........................................................................................................ 32
2.5 Besonderheiten der Berechnung .................................................................................................................. 32 2.5.1 Scheiben mit ffnungen.......................................................................................................................... 32 2.5.2 Aufzugs- und Installationsschchte......................................................................................................... 34
2.6 Berechnung unter Bercksichtigung der Theorie II. Ordnung ................................................................ 37 2.6.1 Die theoretischen Grundlagen................................................................................................................. 37 2.6.2 Anwendungsgleichungen ........................................................................................................................ 37
2.7 Ermittlung von Eigenschwingungsdauern und Eigenwerten.................................................................... 38 2.7.1 Auswirkungen des berganges in den Zustand II................................................................................... 40 2.7.2 Auswirkungen der Schubverformung auf die erste Eigenform ............................................................... 41
3 DIE BERECHNUNG VON AUSSTEIFUNGSSYSTEMEN MIT 3-D-STABWERKEN ........................ 42
3.1 Berechnungsverlauf einer Aussteifungsberechnung mit 3-D Stabwerken................................... 42
3.2 Darstellung der Berechnungsschritte .......................................................................................................... 43 3.2.1 Die Stabsteifigkeitsmatrizen ................................................................................................................... 43 3.2.2 Stabsteifigkeitsmatrix des wlbfreien Stabes.......................................................................................... 46 3.2.3 Die Transformationsmatrix ..................................................................................................................... 46 3.2.4 Die Verschiebungsmatrix........................................................................................................................ 47
3.3 Die Zusammenfassung des aussteifenden Stabes........................................................................................ 47 3.3.1 Sortieren, um die Deckenverschiebungen nach oben zu holen ............................................................... 48 3.3.2 Die reduzierte Gesamtsteifigkeitsmatrix ................................................................................................. 48
3.4 Das Gleichungssystem des Weggrenverfahrens: .................................................................................... 49
3.5 Die Schnittkrfte ........................................................................................................................................... 50
-
4
3.6 Behandlung von Unregelmigkeiten ......................................................................................................... 50 3.6.1 Scheiben, die nicht ins unterste Gescho reichen.................................................................................... 50 3.6.2 Stbe mit verringertem Querschnitt ........................................................................................................ 50 3.6.3 ffnungen in Kernen und Wandscheiben ............................................................................................... 52
3.7 Berechnung nach Theorie 2. Ordnung ........................................................................................................ 53
3.8 Berechnungen von Erdbebenbeanspruchungen......................................................................................... 56 3.8.1 Kondensation der Gesamtsteifigkeitsmatrix............................................................................................ 56 3.8.2 Die Massenmatrix ................................................................................................................................... 57
4 LITERATUR ........................................................................................................................................ 58
-
5
1 Grundlagen der praktischen Nachweise
1.1 Behandlung der Gebudeaussteifung in den Vorschriften Auf Bauwerke wirken nicht nur Gewichtskrfte (vertikale Lasten) ein, sondern auch Horizontal-krfte, wie Wind- und Erdbebenlasten. Auch Lasten aus Gebudeschiefstellung werden rechne-risch wie Horizontalkrfte behandelt, was formal durch eine geringe Verdrehung des Koordina-tensystems um einen Betrag der ungewollten Schiefstellung geschieht. Damit entsteht eine Komponente der Vertikalkraft in Richtung der neuen H-Krfte. Hier werden als H-Krfte die Krfte in Richtung dieses gedrehten Koordinatensystems bezeichnet, ungeachtet dessen, da in globalen Koordinaten hier keine horizontalen, sondern ausschlielich lotrechte Krfte vorliegen. Die Vorschriften (z.B. DIN 1045-1) legen ein Ma fr die ungewollte Schiefstellung fest. So ist nach DIN 1045-1 fr den Nachweis der Gebudeaussteifung eine Schiefstellung von
la 100
11 = [ ]1 l = Bauwerkshhe in m
angenommen. Diese Schiefstellung darf nach der Anzahl der aussteifenden Bauteile n mit dem Faktor
2
11n
n
+= [ ]2 abgemindert werden.
In die Ermittlung der Zahl n sind dabei nur die Bauteile einzurechnen, die mindestens 70% der gemittelten Horizontalkraft nH bernehmen, d.h. die Ermittlung der Anzahl der beteiligten Bauteile wird erst nach der Festlegung des Verteilungsschlssels der Horizontalkrfte erfolgen knnen. Auerdem regelt DIN 1045 noch, bis zu welchem Aussteifungsgrad das Bauwerk als ausgesteift gelten kann, d.h. die Vergrerung der Schnittkrfte durch Verformungseinflsse vernachlssigt werden darf. Diese Grenze ist jeweils durch die Stabkennzahl m1,02,0 + fr 3m bzw. m6,0 fr 4m beschrieben, wobei m die Anzahl der Geschosse ist. Die Bedingung fr ist dabei fr beide Hauptachsenrichtungen der Aussteifung und fr die Verdrehung auszuwerten. Es gilt:
-
6
xcm
vtotx IE
Fh =
[ ]3 mit vF - Summe aller Vertikallasten xcm IE - Summe der Biegesteifigkeit aller aussteifenden Bauteile (Wenn in dem aussteifenden Bauteil Zugspannungen entstehen, sollte eine
Ersatzsteifigkeit xcmII IEB 6,0...8,0 eingefhrt werden.) Fr die Verdrehung gilt:
Gwcm
pvtot AIE
IFh
= [ ]4 mit pI - Polares Trgheitsmoment der Grundriflche des Gebudes um den Schubmittel-
punkt der Aussteifung. Es gilt: ( ) = 2jajpv rFIF mit ajF - Vertikalkraft in Sttze j
jr - Abstand der Sttze j vom Schubmittelpunkt der Aussteifung
wI - Wlbwiderstand des Gesamtsystems der aussteifenden Bauteile
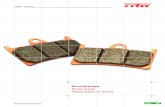
- Verformungsbeiwert aus der Theorie der Wlbkrafttorsion nach Brandt [3] (siehe Diagramm)
GA - Grundriflche
-
7
Bild 1 Torsionsbeiwert nach [3]
mit der Torsionskonstanten wcm
cmttot IE
GIh =
tI - St. Venantscher Torsionswiderstand
fr 10 ist Gt
pv
AIGIF
= 28,2 anzusetzen.
Die Bedingungen [ ]3 und [ ]4 wurden aus der mechanischen Bedingung gewonnen, da die Schnittkrfte nach Theorie II. Ordnung nicht mehr als 10 % grer sein drfen, als die Schnitt-krfte am unverformten System. Diese Grenze ist im gesamten Bereich der Bautechnik blich.
Torsionsbeiwert nach Brandt
( ) 35 43 33+( ) cosh ( )2 182 12+( ) cosh ( ) sinh ( ) 21 cosh ( ) 32 3+( ) sinh ( ) 33+ 3+ 27 3 cosh ( ) 2 cosh ( ) 2 sinh ( ) 2 cosh ( )+ 2( ) :=
1 2 3 4 5 6 7 8 9 10
0.2
0.4
0.6
0.8
1
Torsionsbeiwert nach BrandtTorsonskonstante
Bei
wer
t
-
8
1.2 Verallgemeinerungen dieser Normregelungen Die Regelungen von DIN 1045-1 setzen (ebenso wie die der Vorgngernormen) die Zusammen-fassung der Aussteifung zu einem Gesamtstab voraus. Mit der neuen Vorschrift wird lediglich die Erfassung des Torsionseinflusses nach Brandt in die Norm eingefhrt. So ist ein Schubmittelpunkt (als lastunabhngiger Drillruhepunkt) des Gesamtstabes nur dann definiert, wenn die mechanischen Voraussetzungen fr die Zusammenfassung des Aussteifungs-systems zu einem Gesamtstab gegeben sind. Diese Voraussetzungen sind: Die Decken mssen starre Scheiben sein, deren elastische Verformungen vernachlssigt wer-
den knnen, d.h. wesentlich kleiner sind als die Verformungen der Scheiben und Kerne. Smtliche Verformungen der aussteifenden Wnde und Kerne mssen zueinander affin sein.
Das bedeutet, da Strungen wie Querschnittsnderungen oder Aussparungen nicht zugelas-sen sind.
Gleichzeitig mu jedes aussteifende Bauteil als Kragtrger anzusehen sein, dessen Formn-
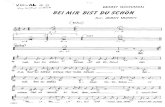
derungen ausschlielich durch Biegeverformungen bestimmt werden. Diese Voraussetzungen liegen auch den Gleichungen fr die Stabkennzahlen und dem Torsions-beiwert zugrunde, d.h. die Gleichungen gelten nur dann, wenn auch ein Schubmittelpunkt der Aussteifung existiert. Diese Voraussetzungen liegen selten vollstndig vor. Aus diesem Grunde ist die mechanische Deutung der in der Norm gegebenen Grenzen erforderlich. Die Grenze wurde aus der Bedingung gewonnen, da die Erhhung der Schnittkrfte nach Theorie II. Ordnung im GZT nicht mehr als 10% betragen darf. Bei einem Einflu der Theorie II. Ordnung unter 10% wird dieser innerhalb der gesamten Bautechnik vernachlssigt. Ist die Voraussetzung einer gleichmigen Aussteifung im Aufri nicht erfllt, so mu zum Nachweis der Zulssigkeit der Berechnung nach Theorie I. Ordnung eine gemittelte Steifigkeit gefunden werden, um die Nachweise fr die Stabkennzahl nach DIN 1045-1 zu fhren. In den Fllen, in denen sich bei den Sprngen in der Steifigkeit des Gesamtstabes der Ausstei-fung weder die Hauptachsenrichtung noch die Lage des Schubmittelpunktes wesentlich ndert, kann ein gemitteltes I mit folgendem Ansatz ermittelt werden:
Die Vertikallast wird als Horizontallast angenommen und durch fh
Fges = gleichmig auf-geteilt.
Die Durchbiegung )(xw infolge )(xf wird fr den Gesamtstab mit seinen vorhandenen Un-
regelmigkeiten ermittelt.
-
9
Fr die gemittelte Steifigkeit zur Berechnung von gilt dann:
( ) ( ) = l gesm
dxxfxwE
FhI
0
23
20 1
bzw. da die realen Verformungen und Krfte an bestimmten Punkten bekannt sind:
=
nn
gesm FwE
FhI
20
23
Die dieser Gleichung zugrundeliegende gleichmige Verteilung der Krfte ist fr 3- bis 6-geschossige Bauwerke nicht mehr hinreichend zutreffend. Die Gleichung geht dann in folgen-den Summenansatz fr ein k-geschossiges Bauwerk ber
( )
+
= =n
nn
n
n
kknkn
nm FwE
FlI
3
3 31
3223
mit l
hnn = ( =nh Hhe der jeweiligen Decke von
der Einspannebene) =nw Horizontale Durchbiegung des realen Stabes
unter den Gesamtlasten am Punkt n in horizontaler Richtung
Bild 2 Gemittelte Steifigkeit
1 Die Gleichung folgt aus: ( ) ( ) = ll I dxxfxwdxxfxw m00
)()(
mit ( ) =xwmI
Biegelinie des Kragarmes mit mI ( )xw = Biegelinie des realen Kragarmes ( )xf = Lastfunktion (als Horizontallast angesetzte Vertikallast). Dieser Ansatz fhrt zum gleichen Moment infolge der Tragwerksverformung aus dem realen System und dem Sy-stem mit der Ersatzsteifigkeit.
1h 2h
1F
2F
-
10
Fr die Verdrehung lassen sich die folgenden Gleichungen angeben:
( ) ( )
= lp
pges
dxxfixE
iFhI
0
223
20 bzw.:
=
npn
iges
FiEiFh
I 20223
oder fr ein k-geschossiges Bauwerk:
( )
+
= =n
npn
n
n
kknkpn
n
FiE
iFlI
3
3 31
32223
mit ip = polarer Trgheitsradius der Grundflche bezogen auf den Berech-nungspunkt (den Schubmittelpunkt der Aussteifung).
Lt sich kein Schubmittelpunkt angeben, so mssen die hier verwendeten Verformungen auf eine Berechnungsachse bezogen werden. Dies fhrt zu anderen Lsungen als fr die Labilitts-zahlen in der Norm gesucht wird. Die hier angegebenen Gleichungen fhren auch dann zu brauchbaren Nherungen, wenn sie auf ein und dieselbe Achse bezogen werden. Liegt diese Achse in der Nhe der Schubmittelpunktsachse, so werden die Ergebnisse mit den Gleichungen der DIN 1045/1 vergleichbar. Die gesuchte Aussage ist jedoch von der Wahl der Berechnungs-achse unabhngig. Bei unterschiedlicher Wahl der Berechnungsachse kann das nichterfllte Kri-terium von der Stabkennzahl der Verdrehung zu der einer Verschiebung wechseln. Falls die Hauptachsenrichtungen der unterschiedlichen Geschosse sehr stark voneinander abwei-chen, ergibt sich die Knickeigenform nicht mehr in einer Biegungsebene. Die Bestimmung der Knicklast wird zu einem rumlichen Problem. Diese Berechnung lt sich nicht mehr auf eine Stabkennzahl in x, y und Richtung zurckfhren. Theoretisch mten die Stabkennzahlen auf das durch die Eigenformen aufgespannte Koordinatensystem bezogen werden. Dies ist in praktischen Berechnungen nicht mglich. So mu in diesen allgemeinen Fllen der Nachweis auf die Bedingung zurckgefhrt werden, die den Labilittszahlen zugrunde liegt: Die Zuwchse der Schnittkrfte nach Theorie II. Ordnung drfen nur solange vernachlssigt werden, wie sie weniger als 10% der Schnittkrfte Theorie I. Ordnung betragen. Dieser Nach-weis ist im Zusammenhang mit einer Stabwerksberechnung nach Theorie II. Ordnung (siehe Ab-schnitt 3.6) oder einer FEM Berechnung mit Elementen, die einen Stab mit Wlbkrafttorsion abbilden, oder Faltwerkselementen mglich. Berechnet man den Knickeigenwert (das liefern moderne Stabwerksprogramme), so lt sich das Kriterium in der folgenden Form schreiben:
11ki mit
krit
vorhki N
N= =vorhN vorhandene Normalkraft
=kritN Knicknormalkraft an gleicher Stelle
-
11
2 Die Zusammenfassung der aussteifenden Systeme zu ei-nem Gesamtstab
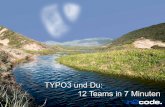
2.1 Mechanische Voraussetzungen Werden die Deckenscheiben eines Bauwerkes als biegeweich, jedoch dehnstarr betrachtet, so verbindet jede Decke die aussteifenden Bauteile in ihrer Ebene und erzwingt damit Verformun-gen, die von den Verschiebungen yx uu , und 2 der Decke sowie dem Abstand des aussteifen-den Bauteils vom Drehpunkt der Decke abhngen.
Bild 3 Deckenverschiebungen
Mit diesen Voraussetzungen werden die Formnderungen der einzelnen aussteifenden Bauteile zueinander affin, solange alle Bauteile ausschlielich Biegeverformungen erfahren. Damit ver-hlt sich die Aussteifung so, als wre sie ein Stab. Da jedoch jede aussteifende Wand auer Biegeverformungen auch Schubverzerrungen erfhrt, ist hier eine Grenze festzulegen, welche Schubverzerrungen vernachlssigt werden drfen. Im Rahmen praktischer Genauigkeit kann diese Grenze mit 10% der Biegeverformungen ange-setzt werden. Da jedoch die Schubverzerrungen in allen Scheiben in die gleiche Richtung wirken wie die Biegeverformungen, hat die Vernachlssigung dieser Schubverformung nicht so groe Auswirkungen, wie in der sonstigen Statik (oder bei der Berechnung von unregelmigen Aus-steifungen). Es wird als praktische Nherung dabei sogar mit 20% Schubverformung als Nach-weisgrenze bei Aussteifungsberechnungen zu rechnen sein. Diese Forderungen fhren in den jeweiligen Hauptachsen der Aussteifung auf die Bedingungen:
QKernKern
tot
ih 48 bzw. 96
fr 20% fr 10%
Lasten werden vereinbarungsgemnur in der Lage der Decken in dieaussteifenden Wnde und Kerne ein-getragen.
uy
ux
z
-
12
2.1.1 Die Gre des Schubkorrekturfaktors Der Schubkorrekturfaktor ergibt sich als der Faktor, mit dem die Querschnittsflche multipliziert werden mu, um die Schubgleitung mit der Gleichung
GA
QGA
Q QQ
== 0
ermitteln zu knnen. Der Faktor bestimmt sich aus dem Arbeitsansatz zu
=A
AdQA 2
2 Damit ergibt sich fr dnnwandige offene Querschnitte, die aus einer Anzahl schmaler Rechtek-ke zusammengesetzt sind nach [12]
sk
ikikxi
k
dsytsStI
A
++= 2
2 cos211
wobei gilt xiS - Statisches Moment der Querschnittsteile,
die am Querschnittsteil i angeschlossen sind, bezogen auf die Achse x
=
=i
hshhhxi ytsS
1
mit hs - Lnge des Rechteckes h ht - Dicke des Rechteckes h shy - Schwerpunktlage des Rechteckes h wobei die Summe ber alle i Querschnittsteile gefhrt wird, die mit dem Schnitt i vom Quer-schnitt abgetrennt werden. Mit dem Hilfswert
kdkkkxitxk sytsSR
+=21
mit kkkdk syy cos32 =
sowie kkksk syy cos21 =
wird schlielich
-
13
+
+
= kkskx
kk
x
xk
kk
kQy syI
stIR
tsA 222
232
cos601
121
bzw.
+
+
= kksky
kk
y
yk
kk
kQx sxI
stIR
tsA 222
23
2
sin601
121
mit kkksk sxx sin21 +=
und kkkdk sxx sin32 +=
sowie kdkkkytyk sxtsSR
+=21
Bei der Berechnung von Q ist formal nur die Wlbfunktion auszutauschen, d.h. an die Stelle der Flche A tritt die mit dem Quadrat des Abstandes zum Schubmittelpunkt multiplizierte Fl-che =
iiiQ AaI
2 ,
an die Stelle von y tritt , die Wlbordinate bezogen auf den Schubmittelpunkt. Mit diesen Werten ist die Integration2
( ) xi
s
i
i
w
aQ dt
xSCI i =
0
mit ( )xS i - Statisches Moment der durch den bei x gefhrten Schnitt
abgeschnittenen Querschnittsteile in der Wlbordinate =
A
AdS
Querschnitt
Rechteck
Kreis
I Trger
L (gleichschenklig)
Q
1,20
1,185
steg
ges
AA
2,4
Typische Werte des Schubkorrekturfaktors 2 2 Die in der Literatur vorhandene Gleichung ( )= e
aw
t dytyS
CI
2 geht fr 0=tI zu der Aussage G ber, die zwar die vor-ausgesetzte Wagner Hypothese enthlt, jedoch nur zur Lsung der Wlbtorsionsgleichung sinnvolle Ergebnisse liefert. Vergleiche Heilig: Der Schubverformungseinflu auf die Wlbkrafttorsion von Stben mit offenem Profil (Stahlbau 1961 S.97 103). Da im hier zu untersuchenden Fall die greren Verformungen von den Wlbwiderstnden der restlichen Scheiben bernommen werden mssen, ist der hier vorgestellte Ansatz zutreffend. Fr die Berechnung von Aussteifungen mit wesentlicher Torsion ist je-
doch die klassische Gleichung fr zu verwenden.
-
14
2.1.2 Einsatzgrenzen des Berechnungsverfahrens Die Auswirkungen dieser Grenze ergeben fr folgende typische Querschnittsformen mit der Querdehnzahl 2,0= (Beton, Mauerwerk):
Querschnittstyp
Schubverformung 20%
Schubverformung 10%
Scheibe
19,2tothb
10,3tothb
gleichschenkl. Winkel
38,4tothb
20,6tothb
gleichschenkl. Winkel
10,3tothb
38,4tothb
U-Profile
47,6tothb
15,9tothb
22,3tothb
56,4tothb
b
b
b
b
b
b
b
-
15
Querschnittstyp
Schubverformung 20%
Schubverformung 10%
38,4tothb
20,6tothb
02,2tothb
86,2tothb
30,3tothb
67,4tothb
33,1tothb
88,1tothb
56,6tothb
28,9tothb
38,2tothb
37,3tothb
b
b
b
b 2
b 4
b
b 2
b
b4
b
b
b
-
16
ber die aufgefhrten Bedingungen hinaus gelten die Elastizittsgesetze. Zur Modellierung von Stahlbetonbauwerken sind also mglicherweise wirksame Steifigkeiten unter Beachtung der Ribildung einzufhren.
2.2 Gleichungen des Gesamtsystems Die Querschnittswerte des Gesamtstabes setzen sich aus denen der einzelnen aussteifenden Bau-teile zusammen. Da die Hauptachsen der einzelnen aussteifenden Elemente gegenber dem Ausgangskoordina-tensystem gedreht sind, seien folgende Bezeichnungen eingefhrt: Bild 4 Das Aussteifungssystem Das Ausgangskoordinatensystem gx gy gz Die Koordinatensysteme der einzelnen Kerne bzw. Scheiben ix iy i = 1 ... n iz Die Haupttrgheitsmomente jedes aussteifenden Elementes xiI yiI iI
xg
yg
zg
x3
y3 z3 x1
1
z1
y1
x2
z2
y2
2
-
17
Da die jeweiligen Koordinatensysteme der Stbe in die Richtung der Hauptachsen gedreht sind und der Ursprung des Koordinatensystems der jeweilige Schubmittelpunkt des Stabes ist, gilt 0=xyiI fr alle i sowie 0== iyix II fr alle i Auerdem sei mit gix jeweils der Wert der Lage des Schubmittelpunktes des Stabes i in x - Rich-tung des Ausgangskoordinatensystems beschrieben, whrend igx die Lage des Ursprungspunktes im Koordinatensystem des Stabes i beschreibt. Damit gelten die Koordinatentransformationen ( )igiigiig yxx sincos = ( )igiigiig yxy cossin += mit i = dem Winkel der Hauptachsen des Kernes i gegenber dem
Ausgangskoordinatensystem. Die Querschnittswerte des Gesamtstabes werden damit: ( ) +=
iiyiixixG III 22 sincos
( ) +=i
iyiixiyG III 22 cossin ( ) =
iiiyixixyG III cossin
und schlielich mit dem endgltigen Koordinatensystem x0; y0 und 0
2
arctan
0
= yxxyG
III
000
20
20 cossin2sincos += xyGyGxGx IIII
0002
02
0 cossin2cossin ++= xyGyGxGy IIII Mit den bereitgestellten Werten wird der Schubmittelpunkt berechnet:
==F x
y
x II
dFyI
x0
00
01
-
18
( ) ( )
0
0000 cossinsincossinsincoscos
x
i iiiiyiiiixi
I
yIxI +=
==F y
x
y IIdFx
Iy
00
00
1
( ) ( )
0
0000 cossinsincossinsincoscos
y
i iiiixiiiiyi
I
xIyI +=
Damit bestimmen sich auch die Koordinaten der Schubmittelpunkte der einzelnen aussteifenden Bauteile, bezogen auf den Gesamt - Schubmittelpunkt. Mit diesen Werten bestimmen sich die Koordinaten des Schubmittelpunktes im Ausgangssystem zu 0000 sincos += yxxGM 0000 cossin += yxyGM In den Ausgangskoordinaten ergibt sich der Schubmittelpunkt nach den Gleichungen:
( ) ( )
( )
= 20
xyixiyi
xyiixiiyxixiiyxiiyi
EIEIEI
EIxEIyIEEIxEIyEIy
( ) ( )
( )
= 20
yxiyixi
yxiiyiixyiyiixyiixi
EIEIEI
EIyEIxEIEIyEIxEIx
Damit bestimmen sich auch die Koordinaten der Schubmittelpunkte der einzelnen aussteifenden Bauteile, bezogen auf den Gesamt - Schubmittelpunkt. Der Wlbwiderstand des Gesamtsystems ergibt sich dann zu ++=
i iyiiMxiiMiges IyIxII
22.
mit =iMx Lage des Gesamt - Schubmittelpunktes im Koordinatensystem
des aussteifenden Elementes i In den Ausgangskoordinaten wird der Wlbwiderstand +++= xyiiMiMyiiMxiiMyiiMxiiMiges IyxIyIxIyIxII 222 22. Wenn der Schubmittelpunkt bekannt ist, dann lassen sich auch die Wlbordinaten G aller Querschnittsteile angeben, die auf den Schubmittelpunkt bezogen sind. Unter Verwendung die-
-
19
ser Wlbordinaten ergibt sich der Gesamt - Wlbwiderstand des Aussteifungssystems nach der blichen Gleichung =
iiGiges dAI
2.
Die Bestimmung der Wlbordinate Gi des Querschnittes i erfolgt in der blichen Weise mit dem Ursprung des Umlaufes am Schubmittelpunkt des Gesamtsystems. Mit der Grundverwlbung =
siGGi dsr
Da das Gleichgewicht der Wlbnormalspannungen fr jeden Querschnitt i erfllt sein mu, wird nun fr jeden Querschnitt eine eigene Integrationskonstante
=F
Gii
iG dAA 10
bestimmt. Die Wlbordinate ergibt sich dann zu ( ) ( )ss GiiGGi += 0 Dies ist die Wlbordinate des Querschnittes i, bezogen auf den Gesamt Schubmittelpunkt.
-
20
2.3 Aufteilung von Horizontalkrften auf die aussteifenden Stbe
2.3.1 Berechnung fr den torsionsfreien Fall Die Torsion verschwindet fr den Fall 0= . Der Gesamtstab der Aussteifung wird nun durch die Steifigkeiten 0xI 0yI 0I beschrieben. Er befindet sich rechnerisch an dem geometrischen Ort des Gesamt Schubmittel-punktes und ist gegenber den Ausgangsrichtungen um den Winkel 0 gedreht. Dieser Stab wird von Horizontallasten beansprucht. Die Horizontalkrfte, die nicht durch die 0z Achse gehen, fhren regelmig zustzlich zu ei-nem Moment zM bzw. zur Entstehung eines Wlbbimomentes W. Die Horizontalkrfte sind dann in die Richtungen 0x und 0y aufzuteilen. Aus einer Horizontalkraft 0xH wird im Einzelstab i:
yix
xi
x
xixi II
HIHH 000 sinsincoscos
+=
xix
xi
x
xiyi II
HIHH 000 cossinsincos
+=
Fr eine Horizontalkraft 0yH wird:
xiy
yi
y
yiyi II
HIH
H 000 sinsincoscos
=
yiy
yi
y
yixi II
HIH
H 000 cossinsincos
+=
Die endgltigen Krfte ergeben sich dann aus der Summe dieser beiden Anteile.
-
21
Diese Ergebnisse gelten mit guter Nherung bis 5,0= und knnen im Stahlbetonbau wegen der Abnahme von Torsionssteifigkeiten im Zustand II bis 1= nherungsweise angenommen werden. Treten gleichzeitig xH und yH auf, so ergeben sich
xix
x
y
yi
x
x
y
yiyi II
HIH
IH
IH
H 00000 cossinsinsincoscos
+=
yix
x
y
yi
x
x
y
yixi II
HIH
IH
IH
H 00000 sincossincossincos
++
=
Aus dem Torsionsmoment kommt zu diesen Krften hinzu
o
tixiyi I
MxIH
=
0I
MyIH tiyixi = Das sekundre Wlb-Torsionsmoment ergibt sich zu
0
2
IMIM tit =
-
22
2.3.2 Berechnung von Aussteifungen mit Reiner Torsion Fr Gesamtstbe mit nicht zu vernachlssigender St. Venantscher Torsion ( )1> gelten die aus der Theorie der Wlbkrafttorsion bekannten Gleichungen. Die Schnittkrfte aus Verdrehung, die sich in den einzelnen Scheiben bzw. Kernen ergeben, sind also von der Hhe abhngig. Ein Teil des Torsionsmomentes wird durch reine Torsionsspannungen getragen. Damit knnen die Gleichungen fr den Schnittkraftverlauf angegeben [8] werden zu Bild 5 Beanspruchung durch Torsionsmomente
Mit =lx wird das St. Venantsche Torsionsmoment
( ) ( )
=
coshcosh1coshcoshcosh
11a
dt MxM im Bereich I
( )
coshcosh1cosh
)(1= adt MxM im Bereich II
Das sekundre Torsionsmoment infolge Wlbkrafttorsion
( ) ( )
coshcosh1coshcoshcosh
2
= adt MxM im Bereich I
( ) ( )
=
coshcosh1cosh
2a
dt MxM im Bereich II
Mt
II
I
b
a
x
x
x
x
-
23
Dieses sekundre Wlbtorsionsmoment teilt sich so auf, wie im vorherigen Abschnitt beschrie-ben und erzeugt in jedem Stab Querkrfte, Biegemomente und Wlbbimomente, die denen aus Verschiebung zu berlagern sind. Das Wlbbimoment ergibt sich zu:
( ) ( )
+=
coshsinh1coshsinhcosh a
dlMxW im Bereich I
( ) ( )
=
coshsinh1cosh a
dlMxW im Bereich II
Im Falle sehr hoher Systeme lt sich der Lastangriff des Torsionsmomentes als gleichmig verteiltes Streckenmoment auffassen. Die entsprechenden Schnittgren ergeben sich dann zu: Das St. Venantsche Torsionsmoment
( ) ( )
++= cosh
sinhsinh1cosh11lmM Dt
das sekundre Wlbtorsionsmoment
( )
+= cosh
sinhsinh1cosh2lmM Dt
Diese Gleichungen liegen in [6] graphisch ausgewertet vor.
-
24
2.4 Beanspruchung der Aussteifung durch Vertikallasten Die aussteifenden Bauteile bernehmen auch Vertikallasten. Wenn diese Vertikallasten nicht im Schwerpunkt des Einzelquerschnittes angreifen, so werden durch die Vertikallast auch Biege-momente und Wlbbimomente im Gesamt Aussteifungssystem und im Einzelquerschnitt her-vorgerufen. Die Momente bzw. Bimomente im Einzelquerschnitt klingen im Verlauf einiger Geschosse ab, whrend die Momente und Bimomente im Gesamtquerschnitt sich in diesen Geschossen entspre-chend aufbauen. Die Biegemomente infolge von Normalkrften haben die Gre
PyMPxM
Py
Px
==
Die Wlbbimomente haben die Gre PB P = wobei sich mit i das Wlbbimoment im Einzelquerschnitt und mit G das Wlbbimoment des Gesamtquerschnittes ergibt.
2.4.1 Das Abklingen der Schnittkraft in einer durch Einzelmomente bean-spruchten Konstruktion
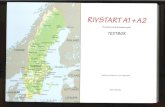
2.4.1.1 Allgemeine Erluterung Die Auswirkungen der Schubverzerrungen fr Wandscheiben sind in Bild 7 dargestellt.
Bild 6 Das Abklingverhalten eines an konkretenPunkten gehaltenen Trgers, der durch Momente be-ansprucht ist, hngt sehr stark von der Mitwirkungvon Schubverzerrungen ab. Da hier die Feldlnge derGeschohhe entspricht, ist die Schubverzerrungpraktisch bei jedem aussteifenden Element wesent-lich, d.h. auch wenn das Gesamtsystem nach Staban-stzen berechnet werden kann, ist das Abklingen derSchnittkrfte nicht ohne Beteiligung der Schubverzer-rung zu berechnen.
gh
gh
-
25
Bild 7 Momentenverlufe in gesttzten Scheiben bei unterschiedlicher
Scheibenschlankheit Aus diesen Wandscheiben ergeben sich horizontale Beanspruchungen auf den Gesamtstab. Bei den im Bild 7 dargestellten Scheiben sind dies die in Bild 8 gezeigten Krfte. Bild 8 Auflagerkrfte des Einzelstabes als Zusatzbelastung fr den Gesamtstab Diese Krfte wirken als Zusatzbelastung an dem Gesamtstab, d.h. sie fhren insofern wieder zu Schnittkrften in dem untersuchten Stab, wie er Bestandteil des Gesamtstabes ist.
1,00
- 0,14
0,02
- 0,003
0
1,00
0,34
0,12
0,04
0,03
1,00
0,61
0,36
0,28
0,25
gh5,0 gh2 gh4
ghM14,1
ghM30,1
ghM16,0
ghM02,0
ghM0
ghM66,0
ghM44,0
ghM14,0
ghM07,0
ghM01,0
ghM39,0
ghM14,0
ghM17,0
ghM05,0
ghM03,0
gh5,0 gh2 gh4
-
26
2.4.1.2 Berechnungsansatz fr Einzelmomente Fr die Berechnungen der abklingenden Schnittkrfte in den Einzelstben lt sich ein Glei-chungssystem mit der Dreimomentengleichung angeben (angepat auf schubweiche Stbe). Es gilt: Bild 9 Beanspruchung durch Biegemomente
mit ( ) ( )[ ]11 44121
++ +++= nnnnn llA
( )11 2121
= nnn lB
+
+= 11212261
nn
nn
n MMC
mit 2
2
8,2812
n
Qn
ilAGE =
Gleichmig aufgebauteMoment an den gesttzte
nM
1+nM
1nM
1+nl
nl
1nl
nA
1nA
1+nAmit den ueren Momenten nM ein Gleichungssystem
=
KKKK C
CC
M
MM
AB
BABBA
MML
LOMMMLL
2
1
2
1
1
321
21
00
000
I
2n
Q
l=
Systeme lassen sich auch mit den folgenden Einflufunktionen fr das Knoten in Abhngigkeit vom Schubfaktor berechnen. n
-
27
2.4.1.3 Einflufunktionen fr das Abklingen der Wirkung von Einzelmomen-ten
Bild 10 a Einflufunktion fr ein Mo-ment in einem Innenfeld eines langen Durchlauftrgers
Bild 10 b Einflufunktion fr ein Moment an der ersten Innensttze eines Durchlauftrgers
0 1 2 3 4 5 6 7 8 9
0.2
0.1
0.1
0.2
0.3
0.4
eta = 0eta = 1eta = 2eta = 5eta = 10eta = 20eta = 50
Einflufunktion fr ein Moment
Trger
Bie
gem
omen
t
G
0.5
0.5
0.5
0.5
0.5
0.5
0.5
0.133970.05051
0
0.08579
0.15693
0.22571
0.30482
0.0359
0.0051
0
0.01472
0.04925
0.10189
0.18583
0.009620.00052
0
0.00253
0.01546
0.04599
0.11331
0.00258
0.00005
0
0.00043
0.00485
0.02076
0.06912
0.000690.00001
0
0.00007
0.00152
0.00937
0.04221
0.00019
0
0
0.00001
0.00048
0.00423
0.02584
0.0000500
0
0.00015
0.00191
0.01594
0.00001
0
0
0
0.00005
0.00087
0.01003
00
0
0
0.00001
0.00041
0.00662
=
0
1
2
5
10
20
50
0 1 2 3 4 5 6 7 8 9
0.2
0.1
0.1
0.2
0.3
0.4
eta = 0eta = 1eta = 2eta = 5eta = 10eta = 20eta = 50
Einflufunktion fr ein Moment
Trger
Bie
gem
omen
t
G
0.49742
0.49995
0.5
0.49957
0.49515
0.47924
0.43095
0.133280.0505
0
0.08571
0.15541
0.21634
0.26271
0.03571
0.0051
0
0.01471
0.04878
0.09766
0.16015
0.009570.00052
0
0.00252
0.01531
0.04408
0.09763
0.00256
0.00005
0
0.00043
0.0048
0.0199
0.05952
0.000690.00001
0
0.00007
0.00151
0.00898
0.03628
0.00018
0
0
0.00001
0.00047
0.00406
0.02212
0.0000500
0
0.00015
0.00183
0.01348
0.00001
0
0
0
0.00005
0.00083
0.00822
00
0
0
0.00001
0.00037
0.00501
=
0
1
2
5
10
20
50
-
28
Bild 10 c Einflulinie fr ein Moment am 2. Innenknoten (oberer Teil fr den unteren Teil kann die Linie des unendli-chen Trgers verwendet werden)
Bild 10 d Einflulinie fr ein Moment am 3. Innenknoten (oberer Teil fr den unteren Teil kann die Linie des unendlichen Tr-gers verwendet werden)
0 1 2
0.3
0.2
0.1
0.1
0.2
0.3
0.4
0.5
0.6
eta = 0eta = 1eta = 2eta = 5eta = 10eta = 20eta = 50
Einflufunktion fr ein Moment
Trger
Bie
gem
omen
t
G
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.000000
0.1346650.050516
0.000000
0.085861
0.158452
0.235081
0.346902
0.500185
0.500001
0.500000
0.500013
0.500478
0.504231
0.525662
=
0
1
2
5
10
20
50
0 1 2 3
0.3
0.2
0.1
0.1
0.2
0.3
0.4
0.5
0.6
eta = 0eta = 1eta = 2eta = 5eta = 10eta = 20eta = 50
Einflufunktion fr ein Moment
Trger
Bie
gem
omen
t
G
0.00000
0.00000
0.00000
0.00000
0.00000
0.00000
0.00000
0.03608
0.00510
0.00000
0.01473
0.04973
0.10612
0.21148
0.134020.05051
0.00000
0.08579
0.15708
0.22762
0.32045
0.50001
0.50000
0.50000
0.50000
0.50005
0.50086
0.50954
=
0
1
2
5
10
20
50
-
29
Bild 10 e Einflulinie fr ein Moment am 4. Innenknoten (oberer Teil fr den unteren Teil kann die Linie des unendlichen Trgers verwendet werden)
Bild 10 f Einflufunktion fr das Moment am 2. Innenlager vom ein-gespannten Rand an.
0 1 2 3 4
0.4
0.3
0.2
0.1
0.1
0.2
0.3
0.4
0.5
eta = 0eta = 1eta = 2eta = 5eta = 10eta = 20eta = 50
Einflufunktion fr ein Moment
Trger
Bie
gem
omen
t
G
0.00000
0.00000
0.00000
0.00000
0.00000
0.00000
0.00000
0.009670.00052
0.00000
0.00253
0.01561
0.04790
0.12892
0.03591
0.00510
0.00000
0.01472
0.04930
0.10275
0.19535
0.133980.05051
0.00000
0.08579
0.15694
0.22610
0.31062
0.50000
0.50000
0.50000
0.50000
0.50000
0.50018
0.50354
=
0
1
2
5
10
20
50
0 1 2
0.4
0.3
0.2
0.1
0.1
0.2
0.3
0.4
0.5
eta = 0eta = 1eta = 2eta = 5eta = 10eta = 20eta = 50
Einflufunktion fr ein Moment
Trger
Bie
gem
omen
t
G
0.00000
0.00000
0.00000
0.00000
0.00000
0.00000
0.00000
0.124360.04999
0.00000
0.08326
0.14147
0.17971
0.19153
0.49742
0.49995
0.50000
0.49957
0.49515
0.47924
0.43095
=
0
1
2
5
10
20
50
-
30
Bild 10g Einflufunktion fr das Moment am 3. Innenlager vom eingespannten Rand an.
Bild 10 h Einflufunktion fr das Moment am 4. Innenlager vom eingespannten Rand an.
0 1 2 3
0.4
0.3
0.2
0.1
0.1
0.2
0.3
0.4
0.5
eta = 0eta = 1eta = 2eta = 5eta = 10eta = 20eta = 50
Einflufunktion fr ein Moment
Trger
Bie
gem
omen
t
G
0.00000
0.00000
0.00000
0.00000
0.00000
0.00000
0.00000
0.03332
0.00505
0.00000
0.01429
0.04440
0.08113
0.11676
0.133280.05050
0.00000
0.08571
0.15541
0.21634
0.26271
0.49981
0.50000
0.50000
0.49999
0.49952
0.49577
0.47434
=
0
1
2
5
10
20
50
0 1 2 3 4
0.4
0.3
0.2
0.1
0.1
0.2
0.3
0.4
0.5
eta = 0eta = 1eta = 2eta = 5eta = 10eta = 20eta = 50
Einflufunktion fr ein Moment
Trger
Bie
gem
omen
t
G
0.00000
0.00000
0.00000
0.00000
0.00000
0.00000
0.00000
0.008930.00051
0.00000
0.00245
0.01394
0.03662
0.07118
0.03571
0.00510
0.00000
0.01471
0.04878
0.09766
0.16015
0.133930.05051
0.00000
0.08578
0.15678
0.22380
0.28916
0.49999
0.50000
0.50000
0.50000
0.49995
0.49914
0.49046
=
0
1
2
5
10
20
50
-
31
2.4.1.4 Beanspruchung durch Wlbbimomente Beim nicht torsionsfreien Stab ergeben sich fr den Eintrag eines Wlbbimomentes in den Stab folgende Gleichungen [7]:
Bild 11 Gesamtstab tyx IIII ;;; Gleichungen: Verdrehungen : Bereich I
( ) ( )( ) ( )
coshsinh1cosh
=IElBz
Bereich II
( ) ( )( ) ( ) ( )( )
=
sinhcosh
sinh1coshIElBz
mit geshz=
gesht=
St. Venantsche Torsion ( )1 : Bereich I
( ) ( )( ) ( )( )
coshsinh1cosh
1=
lBzM t
Bereich II
( ) ( )( ) ( ) ( )( ) = sinh
coshsinh1cosh
1 lBzM t
Wlbbimoment:
Wlbbimoment B
z
Bereich II
Bereich I
t = Hhe des Lasteintrages
-
32
Bereich I
( ) ( )( ) ( )
coshcosh1cosh = BzB
Bereich II
( ) ( )( ) ( ) ( )( ) = cosh
coshcos1coshBzB
Wlbtorsionsmoment: Bereich I ( ) 02 =zM t Bereich II ( ) 02 =zM t Die Gleichungen sind im wesentlichen von Wlassow [7] angegeben. Sie beruhen auf der klassischen Theorie der Wlbkrafttorsion, d.h. sie gelten, solange die aussteifenden Bauteile als Stbe anzusehen sind (vergl. Kapitel 2.1.2). Die angreifenden Wlbbimomente ermitteln sich, indem die Kraft in Stabrichtung mit der Wlbordinate ihres Angriffspunktes multipliziert wird. Dies gilt auch fr Krfte, die auerhalb des Querschnittes an-greifen. Die Wlbordinaten dieser Punkte sind von den Querschnittestellen, an denen die Krfte ange-schlossen sind so fortzuschreiben, da die Umfahrung von Schubmittelpunkt aus einfach fortgesetzt wird.
2.4.2 Die Schnittkrfte im Gesamtsystem Die Schnittkrfte im Gesamtsystem, die sich aus Vertikalkrften ermitteln, sind insoweit trivial, wie es sich um Biegemomente und Wlbbimomente von torsionsfreien Aussteifungssystemen handelt. Sie er-mitteln sich nach Kap. 2.3.1 aus den horizontalen Auflagerkrften, die mit den Anstzen aus 2.4.1 bereit-gestellt werden knnen. Verfgt der Gesamtstab ber St. Venantsche Torsionssteifigkeit, so gelten hier die Anstze von 2.3.2.
2.5 Besonderheiten der Berechnung
2.5.1 Scheiben mit ffnungen Allgemein lassen sich Scheiben mit ffnungen als Rahmentragwerke darstellen, bei dem die nicht durch ffnungen gestrten Teile als Riegel bzw. Rahmenstiele aufgefat werden. Die Riegel und Stiele sind dabei als Timoshenko-Stbe zu modellieren, d.h. die Schubverformung ist zu beteiligen. Um die Steifigkeit der Knotenbereiche zu erfassen, ist es weder sinnvoll, bei allen Knotenbereichen durchweg unverformbare Zonen anzunehmen, noch lassen sich die Knoten auf die theoretischen Kreu-zungspunkte setzen. Die beste Nherung drfte damit erzielt werden, da die Stbe mit der Dicke d in den Knoten um 2d hin-ein verlngert werden. (siehe Bild 12)
-
33
Bereich praktisch nicht verformbar (Starrkrper) elastischer Stab Bild 12 Steife Bereiche in rahmenartigen Strukturen
In der Literatur finden sich zahlreiche Berechnungsanstze fr Scheiben mir ffnungsreihen. Diesen ist gemeinsam, da die Wirkung der ffnungsreihe verschmiert wird, d.h. als ein Bereich verminderter Schubsteifigkeit aufgefat wird. Eine einfache Berechnungsmglichkeit solcher Systeme besteht darin, die Verschiebungen des rahmenar-tigen Tragwerkes getrennt zu ermitteln. 1 Bild 13: Verformung des Rahmens Mit einer Vernderung des Q - Wertes zu
kNhvAG
g
Rges 1
2,1 +=
mit Rv - Verschiebung eines Geschosses infolge der Horizontalkraft 1 kN infolge
der Biegemomente im Rahmen (bei gedrungenen Riegeln kann hier auch die Schubverformung der Riegel beteiligt werden)
G - Gleitmodul A - Querschnittsflche der Sttzenquerschnitte gh - Geschohhe Fr die Wand mit einer ffnungsreihe wird:
( ) bGAhkNbh
IEkNhb
IIEkNv
R
ss
R
s
sRsLR
+++=
212,112
112
1 2223
Rv
-
34
Bild 14 Rahmenartiger Stab Damit knnen die Trgheitsmomente des Gesamtquerschnittes verwendet werden. Die Berechnung von Scheiben mit regelmigen ffnungsreihen ist mit diesem Ansatz mit den Gleichungen auszufhren, die fr geschlossene Querschnitte gelten.
2.5.2 Aufzugs- und Installationsschchte
Aufzugsschchte und Installationsschchte eignen sich zur Aussteifung von Bau-werken, da sie natrlicherweise in allen Geschossen vorhanden sind. Als schachtar-tige Baukrper sollten sie sowohl ber eine Biegesteifigkeit, als auch ber ein Tor-sionssteifigkeit verfgen. Wegen der in jedem Gescho vorhandenen ffnungen ist eine Berechnung als geschlossener Querschnitt jedoch nicht mglich. Die Sturzbereiche ber den Trffnungen fhren jedoch zu einer nicht geringen Torsionssteifigkeit, die nach den hier beschriebenen Regeln zu berechnen ist. Der Aufzugsschacht wird zunchst als offener Querschnitt aufgefat, dessen Quer-schnittswerte bestimmt werden. Er ist am geometrischen Ort seines Schubmittel-punktes angeordnet. Wenn der Querschnitt nun tordiert wird, so wirken die Rah-men aus den Trsturzbereichen und den Pfeilerbereichen neben den Tren der Verwlbung des Querschnittes entgegen. Die Verschieblichkeit des die Verwl-bung behindernden Rahmens berechnet sich zu
Abbildung 15 Querschnitt
slsr bba ++2
3
Abbildu
sLI sRI
sh
RR AI ;
RR AI ;
bng 16 Aufzugsschacht
slsrrr KKAG
aIE
a+
++=122,1
12
-
35
mit 12
3r
rrhtI =
rrr htA =
stsrsr h
btEK3=
slslsl h
btEK3=
=srt Dicke der Sttze Die Verschiebungsmatrix des offenen Schachtes bestimmt sich zu (i Ort; k Stelle der Ursache)
( )[ ] ( )
coshsinh1cosh4 2
= ges
miK hIE
A
solange Ki
( )[ ] ( )
1
2
coshsinh1cosh4
+= ges
mii hIE
A
fr Ki < wird: ( )[ ] ( ) ( )[ ]
=
sinhcosh
sinh1cosh4 2ges
miK hIE
A
mit schschm dbA = = umschlossene Flche des Schachtes
IEIGh tges =
ges
K
hh=
ges
i
hh=
Die Lastseite des Gleichungssystems ermittelt sich aus den angreifenden Torsionsmomenten auf die Aus-steifung.
=
=h
KoiKoi
1
( )( ) ( )( ) ( )( )
=
cosh
1cosh1coshcoshcosh12 22gesKm
oiK
hIEMA
-
36
fr iK
( )( ) ( )( )
cosh1cosh1cosh2
2
2 = gesKmoiK
hIEMA
Damit ergibt sich das Gleichungssystem
=
nnnn
n
n F
FF
MLL
MOMMML
L
M2
1
1
2221
11211
0
02
01
dessen Lsung die gesuchten Riegelquerkrfte sind. Die Verdrehungen des Systems ermitteln sich mit den Gleichungen des Abschnittes 2.4.2 unter Beach-tung des Zusammenhanges fr das Wlbbimoment aus einer nicht im Schubmittelpunkt angreifenden Normalkraft mii AFB = Regelmige Aufzugskerne lassen sich durch Verschmieren der Riegel berechnen, indem eine gleich-mige Torsionssteifigkeit des Aufzugsschachtes von
1
2 14+= Gh
AIIges
mttv
mit 1 - Verschieblichkeit der Riegel aus Riegel siehe oben. Um Labilittszahlen auch bei unregelmigen Aufzugsschchten zu ermitteln, kann die Nherungsformel auch fr unregelmige Schchte verwendet werden. Sie nimmt dann die Form an
[ ] +=
GhAIIges
mttv
12
224
Die Summe ist ber alle Geschosse zu fhren.
-
37
2.6 Berechnung unter Bercksichtigung der Theorie II. Ordnung
2.6.1 Die theoretischen Grundlagen Ist die Grenze der Stabkennzahlen in Kapitel 1.1 nicht eingehalten, so fordert die Norm eine Bercksich-tigung von Einflssen aus der Stabverformung. Die Stabilittsberechnung des Aussteifungssystems mit den angekoppelten Sttzen fhrt auf die Berechnung poltreuer Lasteinleitung. Bei hinreichend vielen Geschossen lassen sich die Abtriebskrfte in der Hhe verteilt ansetzen (ver-schmiert), so da die Knick-DGL wieder allgemein gelst werden kann. Dieser Fall ist fr Aussteifungen, die mit einem Ersatzstab nachgewiesen werden knnen, hinreichend, da diese Berechnung ohnehin ein hheres Bauwerk voraussetzt.
2.6.2 Anwendungsgleichungen Mit den Grundannahmen des Vianello-Verfahrens3 ermittelt man fr einen Kragarm mit gleichmig ver-teilt angeschlossenen biegeschlaffen Nebensttzen einen Erhhungsfaktor fr die Biegemomente, solange ein reines Euler-Knicken magebend wird zu
( )22
.
12,1
1
1
ges
d
gesd
HIE
F
=
bzw. mit dem Sicherheitssystem von DIN 1045 A88
( )22
.
2 12,1
1
1
837,71
1
ges
gesu
ges
ges
HIE
F
HIEF
=
=
Fr die Verdrehung lt sich ein einfacher Ausdruck im Falle der Stabilisierung ohne reine Torsion ange-ben, der theoretisch nur gilt, wenn die stabilisierenden Bauteile selbst keine Vertikallasten abtragen. Sie sollte also nur angewandt werden, wenn 80% der Vertikallasten durch die angekoppelten Sttzen ge-tragen werden. Die Gleichung ist dann
3 Das Verfahren nach L. Vianello (1911) geht von der Nherung aus, da die Lastbiegelinie nach Theorie I.Ordnung affin zu der Biegelinie nach Theorie II.Ordnung ist. Damit gilt fr die Durchbiegung nach Theorie II.Ordnung
1= vvff III bzw.
1= vvMM III mit
vorh
ki
nnv =
-
38
( )22
.
12,1
1
1
ges
wd
Pgesd
HCE
IF
=
Hinweis: Der Index d steht fr designete Lasten bzw. Materialwerte, die mit den entsprechen-
den Sicherheitsfaktoren multipliziert wurden. Wenn eine Berechnung Theorie II. Ordnung erforderlich wird und die Vertikalkrfte wesentlich von den aussteifenden Bauteilen getragen werden oder wesentliche reine Torsion zu beachten ist, dann ist eine Be-rechnung nach Kap. 3 als 3-D-Stabwerk erforderlich.
2.7 Ermittlung von Eigenschwingungsdauern und Eigenwerten Zum Nachweis der Erdbebensicherheit nach dem Antwortspektrumverfahren ist die Ermittlung der Ei-genschwingungsdauer und der Eigenform erforderlich. Wenn das Bauwerk durch Zusammenfassung der aussteifenden Elemente zu einem Ersatzstab zu berechnen war, knnen die Eigenformen aus den Verfor-mungsfhigkeiten mit den folgenden Anstzen ermittelt werden: Die Eigenfrequenzen und Eigenformen bestimmen sich als Eigenwerte der Gleichung [ ] 0det = MK wobei K die Gesamtsteifigkeitsmatrix des Bauwerkes ist, die (mindestens) alle massebelegten Verfor-mungen enthlt. Zur Ermittlung von K kann die Beziehung 1= DK genutzt werden, wobei D die Deformationsmatrix (aus dem Kraftgrenverfahren) des Systems ist. Diese Matrix D lt sich fr alle massebelegten Verformungen mit folgenden Beziehungen aufstellen: Wenn fr das Aussteifungssystem eines Gebudes die Voraussetzungen der technischen Biegelehre gelten (mit den Wagnerschen Erweiterungen), dann ergeben sich fr die Verschiebungen und Verdrehungen des Bauwerkes die bekannten Differentialgleichungen: ( ) ''''wIExp = fr die Verbiegungen in Richtung einer Hauptachse und ( ) ''''= ECxm wt fr die Verdrehungen um den Schubmittelpunkt Die Lsung dieser Gleichungen lassen sich aus jedem Handbuch der Statik entnehmen. So ergibt sich Bild 11 Kragtrger
fr den eingespannten Kragarm die Biegelinie
( ) ( )33 326
+= IEPlxw
-
39
Damit ergibt sich fr die Verformung des Punktes i unter einer Last am Punkt k der Ausdruck
+
=33
326 k
i
k
ikik h
hhh
IEhP
fr ik hh fr ki hh knnen nach dem Betti-Satz die Indizes vertauscht werden und damit
die gleichen Anstze verwendet werden. Verdrehungen des Wlbstabes ohne St. Venantschen Torsionswiderstand lassen sich auf eben diese Wei-se berechnen. Es gilt:
( ) ( )33 326
+=
wCElMx
und damit
+
=33
326 k
i
k
i
w
kikM h
hhh
CEhM
Damit wird die entsprechende Untermatrix
=
nnnnn
n
n
n
MD
LMOMMM
LLLLL
321
3332313
22212
11211
wobei n jeweils die Anzahl der Geschosse ist. Befinden sich die Massen nun nicht auf der Steifigkeitsachse, sondern in einem Abstand xe und ye , so ergeben sich aus den Verdrehungen auch Verschiebungsanteile. Es wird damit fr die Verschiebungen in x Richtung
+
+
=333
1 3266 ki
k
i
w
kykyixkxik h
hhh
CEheeP
IEhP
Aus xP kommt hier auch eine Verschiebung in y-Richtung
+
=33
2 326 ki
k
i
w
kxiykxik h
hhh
CEheeP
-
40
bzw. aus der Beanspruchung mit Momenten
+
=33
3 326 ki
k
i
w
kxiik h
hhh
CEheM
Diese -Werte stehen jeweils in den entsprechenden Untermatrizen 1D , 2D bzw. 3D . Die Untermatrizen 4D , 5D und 6D entstehen jeweils durch Vertauschung der Indizes x und y aus 1D ,
2D und 3D . Die Gesamt-Nachgiebigkeitsmatrix wird damit
=
563
642
321
DDDDDDDDD
D TTT
Die Hebelarme xe und ye knnen dabei vom Gescho abhngen. Es ist also regelmig xke bzw. yke in die Gleichungen einzusetzen.
2.7.1 Auswirkungen des berganges in den Zustand II Schlanke Aussteifungssysteme knnen durch Ribildungen weicher werden, d.h. eine geringere Biege- u. Wlbsteifigkeit aufweisen. Da beide Effekte Biegewirkungen sind, kann fr beide Effekte nherungswei-se die gleiche Abminderung verwendet werden. Nherungsweise wird mit einer Steifigkeit IIB von rund 0,8 EI bzw. 0,8 wEC gerechnet. Der Ansatz der Steifigkeitsminderung ist jedoch nicht auf der sicheren Seiten, da ein steiferes Bauwerk grere Erdbebenkrfte ausbilden kann. So sollte die Abminderung fr den bergang zum Zustand II nur dann angesetzt werden, wenn das Aussteifungssystem garantiert in den Zustand II gert (die Betonzug-
spannungen unter Wind grer als 32
30,0 bzm = werden). Wenn in dieser Berechnung die Schubverformungen bercksichtigt werden sollen, so knnen die Steifig-keiten aller Trgheiten mit den Gleichungen unten genannter Tabelle abgemindert werden. Das Ergebnis ist dann fr die erste Eigenform nherungsweise zutreffend, fr weitere Eigenformen je-doch nicht brauchbar. Eine Berechnung, die auch hhere Eigenformen zutreffend abbildet, ist mit den Anstzen in Kapitel 3 mglich.
-
41
2.7.2 Auswirkungen der Schubverformung auf die erste Eigenform System
Faktor fr die Umrechnung der Querschnittswerte aller Einzelstbe zur Ermittlung der Eigenformen unter Beteiligung der Schubverzerrung
222
. 2,7 nQnredn ih
hII +=
222
. 8,28 nQnredn ih
hII +=
hh1
1 =
( )( ) ( )2123121212
312
121
2
. 12,711
++++=
nQnredn ikh
hII
222
1 58,721
nQn ih
hI +=
hh1
1 = ; hh2
2 =
( )( )( )( ) ( )2221232312122212
32
312
122
21
2
. 12,711
+++++++++=
nQnredn ih
hII
32
1 = ; 222
2 06,831
nQn ih
hI +=
Mit Q = Beiwert in Abhngigkeit von der Querschnittsform
h
h
h
1h
h
2h
1h
-
42
3 Die Berechnung von Aussteifungssystemen mit 3-D-Stabwerken
Die Berechnung des Aussteifungssystems durch Zusammenfassung zum Gesamtstab gestaltet sich, wie oben gezeigt, durchaus aufwendig. Auerdem ist der Berechnungsansatz an sehr enge Grenzen gebunden. Es liegt nahe, diese Berechnung durch den allgemeinen Ansatz eines rum- lichten Stabwerkes zu erset-zen. Vorteile des Ansatzes von rumlichen Stabwerken sind: Steifigkeitssprnge lassen sich bercksichtigen.
Die Schubverformung ist gesondert zu behandeln, d.h. mit einer entsprechenden nderung der
Schubtragfhigkeit knnen die Berechnungsergebnisse gendert werden.
Die Berechnung wird weitgehend unabhngig von der Vorstellung eines Schubmittelpunktes.
Die Ergebnisse der Aussteifungsberechnung sind unmittelbar fr den Nachweis der Erdbebensi-cherheit nutzbar.
3.1 Berechnungsverlauf einer Aussteifungsberechnung mit 3-D Stabwerken Die Berechnung einer Aussteifung mit 3-D-Stabwerken folgt grundstzlich den Regeln des Weggren-verfahrens. Das bedeutet: Es werden die Stabsteifigkeitsmatrizen aller beteiligten Stbe aufgestellt.
Die Steifigkeitsmatrizen werden mittels einer Transformationsmatrix in den Winkel gedreht, in
dem das Hauptachsensystem zum globalen Koordinatensystem steht.
Diese Matrix wird mit einer Verschiebungsmatrix auf die Stelle des Schubmittelpunktes des ent-sprechenden Stabes geschoben. Der Ausgangspunkt (Ursprung des globalen Koordinatensystems) ist dabei nicht vorgeschrieben.
Durch entsprechende Zusammenfassung der geschoweisen Stabsteifigkeitsmatrizen werden die Gesamtsteifigkeitsmatrizen eines jeden aussteifenden Stabes gebildet.
Die Gesamtsteifigkeitsmatrizen der Stbe werden so umgeordnet, da die Verschiebungswerte xu , yu und t eines jeden Geschosses an den Anfang treten.
Damit lt sich die Gesamtsteifigkeitsmatrix des Systems bilden. Die Geschoverschiebungen xu ,
yu und t werden dabei von den einzelnen Stben gleich angenommen.
Mit dieser Gesamtsteifigkeitsmatrix kann das Gleichungssystem des Weggrenverfahrens gelst
werden.
-
43
I t 0:=
3.2 Darstellung der Berechnungsschritte
3.2.1 Die Stabsteifigkeitsmatrizen Fr Aussteifungsberechnungen kommen die Stabsteifigkeitsmatrizen eines 3-D-Stabes mit oder ohne St. Venantsche Torsion bzw. mit oder ohne Wlbkrafttorsion in Frage. Da die Torsionsmomente regelmig nur in den Geschodecken, d.h. den Knoten eingeleitet werden, ist ein Nherungsansatz fr die Torsion mglich. Die Stabsteifigkeitsmatrizen sind im einzelnen: Fr den 3-D-Stab mit St. Venantscher Torsion und Wlbkrafttorsion Mit den Vorwerten:
Wobei die Abkrzungen: Mit l = Stablnge und sowie: wird schlielich die Stabsteifigkeitsmatrix aus den 4 Untermatritzen zusammengesetzt:
Diese Form der Stabsteifigkeitsmatrix sollte nur bei wesentlicher Torsionsstei-figkeit verwendet werden, da der Anteil der Wlbschubverformung fr ebenfalls verschwindet.
k0 2 1 C( ) 1 Q+( ) S l+:=k1 1 Q+( ) S:=k2 C 1:=
k3 C l 11 Q+( ) S:=
k41
1 Q+( ) S l:=
C cosh l( ):=S sinh l( ):=
G ItE Cw
1Q 1+
:=
x12E Iy xQ
G A l2:= y
12E Ix yQG A l2
:=
KK1
K2T
K2
K3
:=
-
44
K 1
E Al
0
0
0
0
0
0
0
12 E I xl3 1 y+( )
0
0
0
6 E I xl2 1 y+( )
0
0
0
12 E I yl3 1 x+( )
0
6 E I yl2 1 x+( )
0
0
0
0
0
G I tk 1k 0
0
0
G I tk 2k 0
0
0
6 E I yl2 1 x+( )
0
4 x+( ) E I yl 1 x+( )
0
0
0
6 E I xl2 1 y+( )
0
0
0
4 y+( ) E I xl 1 y+( )
0
0
0
0
G I tk 2k 0
0
0
G I tk 3k 0
:=
E
K 2
E Al
0
0
0
0
0
0
0
12 E I xl 3 1 y+( )
0
0
0
6 E I xl 2 1 y+( )
0
0
0
12 E I yl3 1 x+( )
0
6 E I yl2 1 x+( )
0
0
0
0
0
G I tk 1k 0
0
0
G I tk 2k 0
0
0
6 E I yl2 1 x+( )
0
2 x( ) E I yl 1 x+( )
0
0
0
6 E I xl2 1 y+( )
0
0
0
2 y( ) E I xl 1 y+( )
0
0
0
0
G I tk 2k 0
0
0
G I tk 4k 0
:=
K 3
E Al
0
0
0
0
0
0
0
12 E I xl3 1 y+( )
0
0
0
6 E I xl2 1 y+( )
0
0
0
12 E I yl3 1 x+( )
0
6 E I yl2 1 x+( )
0
0
0
0
0
G I tk 1k 0
0
0
G I tk 2k 0
0
0
6 E I yl2 1 x+( )
0
4 x+( ) E I yl 1 x+( )
0
0
0
6 E I xl2 1 y+( )
0
0
0
4 y+( ) E I xl 1 y+( )
0
0
0
0
G I tk 2k 0
0
0
G I tk 3k 0
:=
-
45
Fr den 3-D-Stab mit oder ohne St. Venantscher Torsion sowie mit Wlbkrafttorsion:
K1
E Al
0
0
0
0
0
0
0
12 E Ixl3 1 y+( )
0
0
0
6 E Ixl2 1 y+( )
0
0
0
12 E Iyl3 1 x+( )
0
6 E Iyl2 1 x+( )
0
0
0
0
0
12 E Cwl3 1 +( )
6 G It5 l+
0
0
6 E Cwl2 1 +( )
G It10
+
0
0
6 E Iyl2 1 x+( )
0
4 x+( ) E Iyl 1 x+( )
0
0
0
6 E Ixl2 1 y+( )
0
0
0
4 y+( ) E Ixl 1 y+( )
0
0
0
0
6 E Cwl2 1 +( )
G It10
+
0
0
4 +( )E Cwl 1 +( )
2G It l15
+
:=
K2
E Al
0
0
0
0
0
0
0
12 E Ixl3 1 y+( )
0
0
0
6 E Ixl2 1 y+( )
0
0
0
12 E Iyl3 1 x+( )
0
6 E Iyl2 1 x+( )
0
0
0
0
0
12 E Cwl3 1 +( )
6 G It5 l
0
0
6 E Cwl2 1 +( )
G It10
0
0
6 E Iyl2 1 x+( )
0
2 x( ) E Iyl 1 x+( )
0
0
0
6 E Ixl2 1 y+( )
0
0
0
2 y( ) E Ixl 1 y+( )
0
0
0
0
6 E Cwl2 1 +( )
G It10
+
0
0
2 ( )E Cwl 1 +( )
G It l30
:=
K3
E Al
0
0
0
0
0
0
0
12 E Ixl3 1 y+( )
0
0
0
6 E Ixl2 1 y+( )
0
0
0
12 E Iyl3 1 x+( )
0
6 E Iyl2 1 x+( )
0
0
0
0
0
12 E Cwl3 1 +( )
6 G It5 l+
0
0
6 E Cwl2 1 +( )
G It10
0
0
6 E Iyl2 1 x+( )
0
4 x+( ) E Iyl 1 x+( )
0
0
0
6 E Ixl2 1 y+( )
0
0
0
4 y+( ) E Ixl 1 y+( )
0
0
0
0
6 E Cwl2 1 +( )
G It10
0
0
4 +( )E Cwl 1 +( )
2G It l15
+
:=
-
46
Hier gilt fr mit dem Querkraftbeiwert nach Gl. [] Die Stabsteifigkeitsmatrix setzt sich wieder aus den Untermatrizen zusammen:
3.2.2 Stabsteifigkeitsmatrix des wlbfreien Stabes Beim wlbfreien Stab ist die Verwlbung definitionsgem 0. Damit einfllt in jeder der vorstehenden Untermatrizen die letzte Zeile bzw. Spalte.
3.2.3 Die Transformationsmatrix Die Transformationsmatrix ist, da alle an der Aussteifung beteiligten Stbe senkrecht stehen, nur vom Winkel , der Verdrehung des Hauptachsensystems des Stabes zum globalen Koordinatensy-stem, abhngig. Sie lautet fr Stbe mit Wlbkrafttorsion (die Stabsehnenlngennderung ist hier weggelassen).
sowie fr Stbe ohne Wlbkrafttorsion
12E Cw Q
G Ir l2:=
KK1
K2T
K2
K3
:=
T
cos ( )sin ( )
0
0
0
0
0
0
0
0
0
0
sin ( )cos ( )
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
cos ( )sin ( )
0
0
0
0
0
0
0
0
0
0
sin ( )cos ( )
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
cos ( )sin ( )
0
0
0
0
0
0
0
0
0
0
sin ( )cos ( )
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
cos ( )sin ( )
0
0
0
0
0
0
0
0
0
0
sin ( )cos ( )
0
0
0
0
0
0
0
0
0
0
0
0
1
:=
T
cos ( )sin ( )
0
0
0
0
0
0
0
0
sin ( )cos ( )
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
cos ( )sin ( )
0
0
0
0
0
0
0
0
sin ( )cos ( )
0
0
0
0
0
0
0
0
0
0
cos ( )sin ( )
0
0
0
0
0
0
0
0
sin ( )cos ( )
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
cos ( )sin ( )
0
0
0
0
0
0
0
0
sin ( )cos ( )
:=
-
47
Die gedrehte Steifigkeitsmatrix ist dann TKTK
T =
3.2.4 Die Verschiebungsmatrix Die Verschiebungsmatrix nimmt eine Parallelverschiebung des Stabes um den Betrag x und y vor. Sie er-gibt sich zu:
Fr den Stab entfallen wieder die 6. und die 12. Zeile bzw. Spalte.
Damit wird die Steifigkeitsmatrix des verschobenen Stabes VKVK T =
3.3 Die Zusammenfassung des aussteifenden Stabes
Die Steifigkeitsmatrix des aussteifenden Stabes ergibt sich mit
=bbba
abaa
KKKK
K
T v
1
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
y m
x m1
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
y m
x m1
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
1
:=
-
48
zu
+
+=
OMMMKOLL
3
3322
221
0
0
ba
abaabbba
abaabb
KKKKK
KKK
G
In dieser Matrix werden die Formnderungen geschoweise in folgender Reihenfolge behandelt
Verschiebungen in den Richtungen x bzw. y
Verdrehung um die lotrechte Achse
Verdrehung um die Hauptachsenrichtungen x bzw. y
Verwlbung des Querschnittes
3.3.1 Sortieren, um die Deckenverschiebungen nach oben zu holen
Diese Matrix ist so umzustellen, da die Deckenverformungen 1xu , 1yu , 1t , 2xu usw. an dem An-fang stehen. Die Steifigkeitsmatrix unterteilt sich damit in die Untermatrizen
=nn
nnn UUF
UFUDK
hungenStabverdrechiebungenDeckenvers
3.3.2 Die reduzierte Gesamtsteifigkeitsmatrix
Die Gesamtsteifigkeitsmatrix hat dann die Struktur
u yl
u xl
tl yl xl tlu yr
u xr
tr yr xr tl
-
49
=
OMMMLLL
22
11
21
00
UUFUUF
UFUFUD
GE
Dabei bedeuten =UD Untermatrix der Verschiebewerte der Decken = nUDUD d.h. Summe aller Steifigkeitswerte der einzelnen Stbe nU bzw. nUF sind die entsprechenden Untermatrizen der umgeordneten Steifigkeitsmatrix
Wenn auf die Berechnung von Stabdrehwinkeln verzichtet werden kann, kann diese Matrix nach Kap. 3.7.1 reduziert werden.
3.4 Das Gleichungssystem des Weggrenverfahrens: Mit dem Lastvektor (erster Index: Gescho) (zweiter Index: aussteifender Stab)
=
M
M
21
11
11
11
2
1
1
1
y
x
y
x
t
x
y
MWMM
PMPP
L
wird das Gleichungssystem LUGE = mit dem Lsungsvektor U, den Verschiebungen. Diese Verschiebungen sind wieder in die oben er-luterte Reihenfolge zu ordnen, womit der Vektor [ ]u entsteht.
-
50
3.5 Die Schnittkrfte
Die Schnittkrfte eines jeden Stabes ergeben sich zu: [ ]KuTS T = mit u = Verschiebungsvektor der Stabendknoten in der Reihenfolge von K. Es ergeben sich die Schnittkrfte in der Reihenfolge: Qy ; Qx ; Mt ; Mx ; My ; W.
3.6 Behandlung von Unregelmigkeiten Nur selten sind Aussteifungssysteme so ausgebildet, da alle aussteifenden Elemente in jedem Gescho in gleicher Weise vorhanden sind. Gerade in den Untergeschossen vieler Bauwerke sind hufig ffnun-gen in aussteifenden Wnden erforderlich und damit wesentliche Strungen des Aussteifungssystems ge-geben. Diese Abweichungen sollten bei einer Aussteifungsberechnung und mssen bei einem rechne- rischen Erdbebennachweis bercksichtigt werden. Mit der Berechnung mittels schubweicher 3-D-Stbe ist diese Einarbeitung auch ohne greren Aufwand mglich, weil die Stabsteifigkeitsmatrix eines jeden Stabes in jedem Gescho anders sein kann. Dabei knnen folgende Flle auftreten:
3.6.1 Scheiben, die nicht ins unterste Gescho reichen Sind Scheiben oder Kerne in einem Gescho ber der Einspannebene abgefangen, so ist diese Abfang-ebene auch rechnerisch der Beginn dieser Scheibe (wenn das System nicht nach Theorie II. Ordnung un-tersucht werden mu). Die Abfangkonstruktion ist dann durch Biegefedern in beide Richtungen bzw. eine federnde Wlbein-spannung zu ersetzen. Bei Systemen, die nach Theorie II. Ordnung zu rechnen sind, knnen diese Biege- und Wlbfedern auch als Stabsteifigkeiten eines Stabes mit sehr groen Q -Werten (sehr kleinen Schubflchen) aufgefat wer-den. Damit knnen alle aussteifenden Elemente bis in die Einspannebene gefhrt werden, um die Aus-wirkung der Theorie II. Ordnung mit zu untersuchen (vergl. Abschnitt 3.7).
3.6.2 Stbe mit verringertem Querschnitt Ist ein aussteifender Kern in einem Gescho stark geschwcht, so kann dieser kleinere Querschnitt solange problemlos zur Bildung des aussteifenden Stabes in Rechnung gestellt werden, wie die einzelnen Querschnittsteile aneinander angeschlossen sind, so da die Schnittkrfte von einem in den anderen Quer-schnitt bergeben werden knnen.
-
51
Bild 12 Steifigkeitssprung Ist das nicht der Fall, so entsteht in einem Stab mglicher-weise ein Wlbbimoment aus der Lastweiterleitung. In die-sen Fllen empfiehlt sich eine Untersuchung des Details mit Faltwerks-anstzen. In Einzelfllen sind auch hier die bergangsbedingungen anzugeben.
Bild 13 Kern mit entstehenden Wlbbimomenten am Steifig-keitssprung
Die bertragungsbedingungen lauten
1000000100000010000
0001000000100000010
0001
M
M
M
M
yx
yx
yxyx
mit x = Versatz der Schwereachsen der Stbe in x - Richtung y = Versatz der Schwereachsen der Stbe in y - Richtung
Mx ; My = Versatz der Schubmittelpunktsachsen
-
52
3.6.3 ffnungen in Kernen und Wandscheiben Wandscheiben und Kerne enthalten nicht selten einzelne ffnungen oder ganze ffnungsreihen. Diese ffnungen fhren dann zu stark verminderter Schubtragfhigkeit, weil der verbleibende Teil des ausstei-fenden Bauteiles sich rahmenartig verformt. Bei der Berechnung des rumlichen Stabwerkes gengt es hier hufig, allein den Wert Q zu korrigieren, da mit diesem Wert die Schubverformung vollstndig gesteuert werden kann. Es wird mit den Anstzen einer Rahmenberechnung die Horizontalverformung unter der Last 1 ermit-telt. Mit dem nach Abschnitt 2.2 ermittelten Wert fr Q ergibt sich dann
GAh Qg+= 11
Daraus wird ein resQ. gebildet mit
Qgg
resQ hGA
hGA +== 1.
Bild 14 Ersatzschubflche
1
-
53
3.7 Berechnung nach Theorie 2. Ordnung Wenn sich beim Vergleich der Stabkennzahlen nach Kapitel 1 die Notwendigkeit einer Berechnung nach Theorie II. Ordnung ergibt, so kann diese auch mit Hilfe der Stabwerksanstze erfolgen. Zu den Steifigkeitsmatrizen der einzelnen aussteifenden Stbe wird jeweils die geometrische Stabsteifig-keitsmatrix addiert. Dabei ist zu unterscheiden zwischen der geometrischen Stabsteifigkeitsmatrix fr Normalkrfte und eine geometrische Stagsteifigkeitsmatrix fr die Biegemomente. Letztere tritt nur bei Querschnitten auf, deren Schubmittelpunkt vom Schwerpunkt abweicht. Fallen Schubmittelpunkt und Schwerpunkt zusammen, so wird die geometrische Stabsteifigkeitsmatrix der Momentenbeanspruchung zur Nullmatrix. Die geometrische Stabsteifigkeitsmatrix fr Normalkrfte hat die in Bild dargestellte Form: Auerdem mssen zustzliche Stbe eingefhrt werden, die die Wirkung der angekoppelten Stbe darstel-len. Die statische Steifigkeitsmatrix dieser stabilisierten Stbe ist eine Nullmatrix, ihre geometrische Stei-figkeitsmatrix ist ausschlielich die oben genannte geometrische Steifigkeitsmatrix der Normalkrfte. Es gengt, die unbelasteten Stbe durch zwei solche Hilfsstbe dergestalt zu ersetzen, da der Schwerpunkt der Lasten auf die unbelasteten Stbe ebenso erhalten bleibt, wie das polare Trgheitsmoment dieser La-sten. Mit den Untermatritzen aus Bild wird schlielich die geometrische Steifigkeitsmatrix fr die Normal-kraft (Wirkungen der Verschiebungen 2. Ordnung):
Die Geometrische Stabsteifigkeitsmatrix fr die Biegemomente ist im folgenden getrennt nach denn Anteilen fr N und M dargestellt.
K gNK 1
K 21
K 2
K 3
:=
-
54
K 1 N
0
0
0
0
0
0
0
0
1.2l
0
1.2 y Ml
0
0.1
0.1 y M
0
0
1.2l
1.2 xMl
0.1
0
0.1 xM
0
1.2 y Ml
1.2 xMl
0
0.1 xM
0.1 y M
0
0
0
0.1
0.1 xM
2 l15
0
2 l15
xM
0
0.1
0
0.1 y M
0
2 l15
2 l15
y M
0
0.1 y M
0.1 xM
0
2 l15
xM
2 l15
y M
0
:=
K 2 N
0
0
0
0
0
0
0
0
1.2l
0
1.2 y Ml
0
0.1
0.1 y M
0
0
1.2l
1.2 xMl
0.1
0
0.1 xM
0
1.2 y Ml
1.2 xMl
0
0.1 xM
0.1 y M
0
0
0
0.1
0.1 xM
l30
0
l30
xM
0
0.1
0
0.1 y M
0
l30
l30
y M
0
0.1 y M
0.1 xM
0
l30
xMl
30 y M
0
:=
K 3 N
0
0
0
0
0
0
0
0
1.2l
0
1.2 y Ml
0
0.1
0.1 y M
0
0
1.2l
1.2 xMl
0.1
0
0.1 xM
0
1.2 y Ml
1.2 xMl
0
0.1 xM
0.1 y M
0
0
0
0.1
0.1 xM
2 l15
0
2 l15
xM
0
0.1
0
0.1 y M
0
2 l15
2 l15
y M
0
0.1 y M
0.1 xM
0
2 l15
xM
2 l15
y M
0
:=
-
55
K1
0
0
0
0
0
0
0
0
0
0
11Myi Myk( )l 10
0
0
0.1 Myi
0
0
0
11Mxi Mxk( )l 10
0
0
0.1 Mxi
0
11Myi Myk( )l 10
11Mxi Mxk( )l 10
35 l Ki Kk+( )Mxi 2Mxk+
10
Myi 2Myk+10
Kk10
0
0
0
Mxi 2Mxk+10
0
0
l 3Mxi Mxk( )30
0
0
0
Myi 2Myk+10
0
0
l 3Myi Myk( )30
0
0.1 Myi
0.1 Mxi
Kk10
l 3Mxi Mxk( )30
l 3Myi Myk( )30
lK110
Kk30
+
:=
K2
0
0
0
0
0
0
0
0
0
0
11 Myi Myk( )l 10
0
0
0.1 Myi
0
0
0
11 Mxi Mxk( )l 10
0
0
0.1 Mxi
0
11 Myi Myk( )l 10
11 Mxi Mxk( )l 10
35 l Ki Kk+( )Mxi 2 Mxk+
10
Myi 2 Myk+10
Kk10
0
0
0
2 Mxi Mxk+10
0
0
l Mxk30
0
0
0
2 Myi Myk+10
0
0
l Myk30
0
0.1 Myi
0.1 Mxi
Ki10
l Mxi30
l Myi30
l Ki Kk+( )60
:=
K3
0
0
0
0
0
0
0
0
0
0
Myi 11 Myk( )l 10
0
0
0.1 Myi
0
0
0
Mxi 11 Mxk( )l 10
0
0
0.1 Mxi
0
Myi 11 Myk( )l 10
Mxi 11 Mxk( )l 10
35 l Ki Kk+( )2 Mxi Mxk+
10
2 Myi Myk+10
Ki10
0
0
0
2 Mxi Mxk+10
0
0
l Mxi 3 Mxk( )30
0
0
0
2 Myi Myk+10
0
0
l Myi 3 Myk( )30
0
0.1 Myi
0.1 Mxi
Ki10
l Mxi 3 Mxk( )30
l Myi 3 Myk( )30
lK130
Kk10
+
:=
-
56
3.8 Berechnungen von Erdbebenbeanspruchungen
3.8.1 Kondensation der Gesamtsteifigkeitsmatrix Da die Gesamtsteifigkeitsmatrix in dieser Berechnung bereits vorliegt, ist die Ermittlung der Schwin-gungseigenwerte unmittelbar mglich. Um jedoch die Gre der Gesamtsteifigkeitsmatrix zu begrenzen ist es sinnvoll, diejenigen Freiheitsgrade zu beseitigen, die nicht mit Massen belegt sind. Dazu bedient man sich der statischen Kondensation, die hier dargestellt wird: Zweckmigerweise wird die Matrix dazu so geordnet, da die nicht mit Massen belegten Freiheitsgrade nach unten gerckt werden. Dazu dient eine Umordnungsmatrix U, die an allen Stellen 1=iKU hat, wenn die Zeile i auf die Stelle K treten soll. Es ist dann die umgeordnete Gesamtsteifigkeitsmatrix: Tu uGuG =
Mit den Schnittkrften am Stabanfang i und am Stabende k
sowie dem Wagner Koeffizient:
K NI iM2 MxI ry MyI rx+ WI r+:=
wobei: NI usw. Schnittkrfte nach Th. 1.Ordnung darstellen
und den sog. Kindemschen Lngen
ry
Ay r2
d
Ix:=
rx
Ax r2
d
Iy:=
r
A r2
d
Cw:=
sowie:
iM
Ar2
d
A:=
wobei r stets den Abstand zum Schubmittelpunkt darstellt
-
57
Diese Matrix ist dann zu teilen in eine Matrix unG der n Zeilen und Spalten, die mit Massen belegt sind, sowie in die Matrizen TuKnunK GG = sowie die Matrix uKG der Zeilen und Spalten der zu ersetzenden Tei-le.
uKuKn
unKun
GGGG
}}
Daraus ist mit
= TunKuKn
GGE
A 1
die Transformationsmatrix A zu bilden. Die kondensierte Matrix ergibt sich dann zu AGAG u
T=~
3.8.2 Die Massenmatrix Die Gesamtsteifigkeitsmatrix wurde fr einen willkrlichen Punkt aufgestellt, der im allgemeinen nicht mit den Massenschwerpunkten der Geschosse bereinstimmen mu. Die Massenmatrix nimmt damit die folgende Form an:
=
k
MxMyMxMMyM
MxMyMxMMyM
M
LMOMMMMMM
LLLLLL
000000
0000000000000000000000000000
22222
222
222
11111
111
111
Dabei bedeuten: Mn die Masse des Geschosses n
n das Massentrgheitsmoment des Geschosses n um die senkrechte z Achse xn bzw. yn den Abstand des Massenschwerpunktes des Geschosses n vom Nullpunkt der Berechnung in x bzw. y - Richtung.
verbleibende Freiheitsgrade zu beseitigende Freiheitsgrade
-
58
4 Literatur [1] DIN 1045 - 1 [2] DIN 1053 - 1 [3] Brandt: Zur Beurteilung der Gebudestabilitt Beton- u. Stahlbetonbau 71 (1976) S. 177 - 178 [4] Beck, Schfer: Die Berechnung von Hochhusern durch Zusammenfassung
aller aussteifenden Bauteile zu einem Balken Der Bauingenieur 44 (1969) S. 80 - 87 [5] Ramm, Hofmann: Baustatik Beitrag in der Buchreihe Der Ingenieurbau Grundlagen Ernst + Sohn [6] Wendehorst: Bautechnische Zahlentafeln Teubner, Stuttgart 2000 [7] Wlassow: Dnnwandige elastische Stbe Bd. 1 und 2 Bauwesen Berlin 1965 [8] Bornscheuer: Systematische Darstellung des Biege- und Verdrehvorganges
unter besonderer Bercksichtigung der Wlbkrafttorsion Stahlbau 1952 S. 1 ff [9] Schlechte: Die Torsion dnnwandiger Stbe mit Schubverformung
aus behinderter Querschnittsverwlbung Bauplanung Bautechnik Berlin 1964 [10] Heilig: Der Schubverformungseinflu auf die Wlbkrafttorsion
von Stben mit offenem Profil Stahlbau 1961 S. 97 ff [11] Roik, Sedlacek: Theorie der Wlbkrafttorsion unter Bercksichtigung
der sekundren Schubverformungen Stahlbau 1966 [12] Schlechte: Festigkeitslehre fr Bauingenieure Werner-Verlag 1967 [13] Kalik, Kolbe Mathematik Steinbach, Beitrag in der Buchreihe Der Ingenieurbau Grundwissen Wendland: Ernst + Sohn 1999 [14] Knig, Liphardt Hochhuser aus Stahlbeton Beton Kalender 1990 Teil II
-
Dipl. - Ing. Matthias Kttler KTTLER UND PARTNER Prfingenieur fr Baustatik Ingenieurbro fr Baukonstruktionen Tel 0221/9636290 KLN Fax 0221/636090
59
Teil 2 Beispiele
-
Dipl. - Ing. Matthias Kttler KTTLER UND PARTNER Prfingenieur fr Baustatik Ingenieurbro fr Baukonstruktionen Tel 0221/9636290 KLN Fax 0221/636090
60
Beispiel 1 Ein Reihenhaus mit geringer Aussteifung
Beispiel 2
Gebude mit Zusammenfassung der Aussteifung zum Gesamtstab
Beispiel 3 Hochhaus mit gemischter Torsion in der Aussteifung
Beispiel 4 Gebude mit Aussteifung mit weichem Erdgescho (Berechnung eines rumlichen Stabwerkes)
-
Dipl. - Ing. Matthias Kttler KTTLER UND PARTNER Prfingenieur fr Baustatik Ingenieurbro fr Baukonstruktionen Tel 0221/9636290 KLN Fax 0221/636090
61
12,50
6,50
3,00
Beispiel 1 Ein Reihenhaus mit geringer Aussteifung
1.1 Das typische Reihenhaus 1.1.1 Die ausreichende Aussteifung Vorbemerkung Reihenhuser sind blicherweise aus Mauerwerk mit Stahlbetondecken errichtet. Sie verfgen im allge-meinen ber ein Kellergescho, ein Erdgescho und ein Obergescho. Die typische Gebudebreite ist 6,50 m, whrend die Tiefe bis zu 14 m reicht. Wegen der vorhandenen Nachbarbebauung erhlt das Reihenhaus zwar keine Windlast, dies darf jedoch mit Rcksicht auf die Bauordnung nicht in Rechnung gestellt werden, da kein Gebude seine Standsi-cherheit nur unter Zuhilfenahme der Nachbarbebauung erhalten darf. blicherweise sind sowohl die Vor-der-, als auch die Rckfront von Reihenhusern stark aufgelst, so da aussteifende Wnde nur im Ge-budeinneren sein knnen. Notwendigkeit des Nachweises:
Die beiden Giebelwnde steifen das Bauwerk sowohl in Bauwerkslngsrichtung, als auch gegen Verdre-hung so gut aus, dass sich nach DIN 1053-1, Ab-schnitt 6.4 ein Nachweis erbrigt. Demzufolge ge-ngt hier ein Nachweis in Bauwerksquerrichtung.
Das Kellergescho ist ebenfalls durch viele Wnde (alle 4 Auenwnde und 2 Innenwnde) hin-reichend ausgesteift.
3,00
2,80
2,60
-
Dipl. - Ing. Matthias Kttler KTTLER UND PARTNER Prfingenieur fr Baustatik Ingenieurbro fr Baukonstruktionen Tel 0221/9636290 KLN Fax 0221/636090
62
Als Nachweisgrenze gibt Reh im Mauerwerkskalender die folgenden Kriterien an: Gebude geringer Hhe ( h < 9 m) knnen als ausgesteift ohne Nachweis gelten, wenn sie ber so-viel Aussteifungswnde StFK 12 / MG IIa mit mindestens 115 mm Dicke und 2,75 m Lnge verf-gen, da auf die einzelne Aussteifungswand maximal 30 m Windeinfluflche entfallen. 1 Dies ist hier in Querrichtung nicht gegeben, demzufolge mu ein Nachweis gefhrt werden. Nachweis (mit einzeln wirkenden Wandscheiben, d.h. die Wnde werden nicht im Verband hergestellt) Vergleiche die Stabkennzahl (Labilittszahl)
12175,03103
190080,5 432
6 mmkN
kNm =
1,022,04,026,0 +==
-
Dipl. - Ing. Matthias Kttler KTTLER UND PARTNER Prfingenieur fr Baustatik Ingenieurbro fr Baukonstruktionen Tel 0221/9636290 KLN Fax 0221/636090
63
Mit dem Wind ergibt sich damit eine Lastausmitte von
32
62839,0
3317,277 == me
Damit wird die Wand im Fubereich aufreien, jedoch nicht kippen.
( )( ) 2max 191,05,15,15,17331
cmkN
em==
gew. StFK 12 / MG IIa 20 16,0 cmkN=
Wegen der Plastifizierung der Kantenpressung wird damit 221,016,033,1 cmkN
zul == Hinweis: Beim Berechnen der Decke wird man eine Last von ca.
kNmkN
mkNm 11325,265,1225,1
25,3 =
+
auf den Wandkopf erhalten. Diese Kraft wird sich jedoch, wenn die Wand sich unter der Windlast ver-formt, umlagern und mu damit nicht mit der Windlast berlagert werden. Voraussetzung ist jedoch, dass die Deckenplatten bei dieser Umlagerung nicht versagen. Die Deckenplatten sollten demzufolge ohne die Sttzu