Gelenkwinkelregelung durch Elektrostimulation eines ...
9
This article is protected by German copyright law. You may copy and distribute this article for your personal use only. Other use is only allowed with written permission by the copyright holder. at 10/2011 Anwendungen Gelenkwinkelregelung durch Elektrostimulation eines antagonistischen Muskelpaares Joint-Angle Control by Electrical Stimulation of Antagonistic Muscles Christian Klauer, Thomas Schauer, Jörg Raisch, Technische Universität Berlin Zusammenfassung Dieser Beitrag beschreibt einen neuen Ansatz zur kaskadierten Positionsregelung menschlicher Extre- mitäten unter Elektrostimulation, welcher auch eine Rückfüh- rung der Beschleunigung in Form eines Störgrößenbeobachters verwendet. Bei der Stimulation eines antagonistischen Mus- kelpaares kann dieser Regelungsansatz unerwünschte Effekte, die durch eine nicht exakt bekannte Totzone in der musku- lären Aktivierung hervorgerufen werden, deutlich reduzieren. Der Reglerentwurf basiert auf einem stark vereinfachten neuro- muskulären Modell, das mit geringem Aufwand an den Pro- banden angepasst werden kann. Summary This contribution presents a new approach to human arm position control under electrical stimulation that employs an accelera- tion feedback. During stimulation of antagonistic muscle pairs, this approach can noticeably reduce negative effects that are caused by an uncertain dead-zone within the muscular activa- tion. The acceleration controller, realised using a disturbance observer, represents the lowest level of a cascaded control scheme. On higher levels the angle and the velocity are con- trolled. The overall control design is based on a highly simplified neuro-muscular model, which can be easily adapted to different subjects. Schlagwörter Funktionelle Elektrostimulation (FES), Beschleunigungsregelung, Störgrößenbeobachter, Totzone Keywords Functional Electrical Stimulation (FES), acceleration control, disturbance observer, dead-zone 1 Einleitung Multiple Sklerose, Friedreich-Ataxie und Amyotrophe Lateralsklerose – all dies sind Erkrankungen des zentra- len Nervensystems, welche motorische Einschränkungen bzw. Lähmungen bei den Patienten hervorrufen können. Sie können auch die oberen Extremitäten betreffen – die Patienten können dort willentlich keine oder nur sehr schwache Muskelkontraktionen erzeugen. Ähnliches gilt auch für Querschnittlähmungen mit hoher Läsionshöhe. Für Patienten mit vorhandener Restaktivität existieren mechanisch realisierte Lösungen (Exoskelette), die die auf den Arm wirkende Schwerkraft kompensieren, sodass die Betroffenen weniger Kraft aufbringen müssen [11]. Für komplett gelähmte Personen ist dies allerdings etwas schwieriger. Dieser Fall wird in diesem Artikel aufgegriffen: Es sollen die Voraussetzungen zur Entwick- lung einer Neuro-Prothese geschaffen werden. Ziel ist, die oberen menschlichen Extremitäten durch künstliche Aktivierung der gelähmten Muskulatur bei Vorhanden- sein einer passiven Gewichtskompensation zu bewegen. Auf eine technische Aktuierung wird bewusst verzichtet. 2 Problemstellung und experimenteller Aufbau Es soll eine Regelung entworfen werden, die definierte Bewegungen des menschlichen Unterarms bewirkt. Zur Aktuierung wird Elektrostimulation verwendet. Im kon- at – Automatisierungstechnik 59 (2011) 10 / DOI 10.1524/auto.2011.0955 © Oldenbourg Wissenschaftsverlag 629
Transcript of Gelenkwinkelregelung durch Elektrostimulation eines ...

Th
is a
rticle
is p
rote
cte
d b
y G
erm
an
co
pyrig
ht la
w. Y
ou
may c
op
y a
nd
dis
tribu
te th
is a
rticle
for y
ou
r pers
on
al u
se o
nly
. Oth
er u
se is
on
ly a
llow
ed
with
writte
n p
erm
issio
n b
y th
e c
op
yrig
ht h
old
er.
at 10/2011
Anwendungen ���
Gelenkwinkelregelung durchElektrostimulation einesantagonistischen MuskelpaaresJoint-Angle Control by Electrical Stimulation of Antagonistic Muscles
Christian Klauer, Thomas Schauer, Jörg Raisch, Technische Universität Berlin
Zusammenfassung Dieser Beitrag beschreibt einen neuenAnsatz zur kaskadierten Positionsregelung menschlicher Extre-mitäten unter Elektrostimulation, welcher auch eine Rückfüh-rung der Beschleunigung in Form eines Störgrößenbeobachtersverwendet. Bei der Stimulation eines antagonistischen Mus-kelpaares kann dieser Regelungsansatz unerwünschte Effekte,die durch eine nicht exakt bekannte Totzone in der musku-lären Aktivierung hervorgerufen werden, deutlich reduzieren.Der Reglerentwurf basiert auf einem stark vereinfachten neuro-muskulären Modell, das mit geringem Aufwand an den Pro-banden angepasst werden kann. ��� Summary This
contribution presents a new approach to human arm positioncontrol under electrical stimulation that employs an accelera-tion feedback. During stimulation of antagonistic muscle pairs,this approach can noticeably reduce negative effects that arecaused by an uncertain dead-zone within the muscular activa-tion. The acceleration controller, realised using a disturbanceobserver, represents the lowest level of a cascaded controlscheme. On higher levels the angle and the velocity are con-trolled. The overall control design is based on a highly simplifiedneuro-muscular model, which can be easily adapted to differentsubjects.
Schlagwörter Funktionelle Elektrostimulation (FES), Beschleunigungsregelung, Störgrößenbeobachter, Totzone ���Keywords Functional Electrical Stimulation (FES), acceleration control, disturbance observer, dead-zone
1 EinleitungMultiple Sklerose, Friedreich-Ataxie und AmyotropheLateralsklerose – all dies sind Erkrankungen des zentra-len Nervensystems, welche motorische Einschränkungenbzw. Lähmungen bei den Patienten hervorrufen können.Sie können auch die oberen Extremitäten betreffen – diePatienten können dort willentlich keine oder nur sehrschwache Muskelkontraktionen erzeugen. Ähnliches giltauch für Querschnittlähmungen mit hoher Läsionshöhe.
Für Patienten mit vorhandener Restaktivität existierenmechanisch realisierte Lösungen (Exoskelette), die die aufden Arm wirkende Schwerkraft kompensieren, sodass dieBetroffenen weniger Kraft aufbringen müssen [11].
Für komplett gelähmte Personen ist dies allerdingsetwas schwieriger. Dieser Fall wird in diesem Artikelaufgegriffen: Es sollen die Voraussetzungen zur Entwick-lung einer Neuro-Prothese geschaffen werden. Ziel ist,die oberen menschlichen Extremitäten durch künstlicheAktivierung der gelähmten Muskulatur bei Vorhanden-sein einer passiven Gewichtskompensation zu bewegen.Auf eine technische Aktuierung wird bewusst verzichtet.
2 Problemstellung und experimenteller AufbauEs soll eine Regelung entworfen werden, die definierteBewegungen des menschlichen Unterarms bewirkt. ZurAktuierung wird Elektrostimulation verwendet. Im kon-
at – Automatisierungstechnik 59 (2011) 10 / DOI 10.1524/auto.2011.0955 © Oldenbourg Wissenschaftsverlag 629

Th
is a
rticle
is p
rote
cte
d b
y G
erm
an
co
pyrig
ht la
w. Y
ou
may c
op
y a
nd
dis
tribu
te th
is a
rticle
for y
ou
r pers
on
al u
se o
nly
. Oth
er u
se is
on
ly a
llow
ed
with
writte
n p
erm
issio
n b
y th
e c
op
yrig
ht h
old
er.
Anwendungen
kreten Fall wird die Stimulation eines antagonistischenMuskelpaares, bestehend aus Trizeps und Bizeps, betrach-tet. Die Aufgabe besteht dann darin, einen gewünschtenWinkelverlauf für das Ellenbogengelenk zu erzeugen. Dadas resultierende System einfach und innerhalb kur-zer Zeit an verschiedene Probanden anpassbar seinsoll, wird ein minimaler Identifikationsaufwand gefor-dert. Nach längerer Stimulationsdauer ändert sich dieMuskelcharakteristik aufgrund von Ermüdungserschei-nungen, weswegen der Regler auch entsprechend robustausgelegt werden soll.
Ansätze zur Erzeugung von Armbewegungen unterElektrostimulation sind bereits vielfach untersucht wor-den. Diese unterteilen sich grob in Steuerungen (d. h.ohne Feedback), Regelsysteme mit Positionsrückführungund Regler auf Basis von neuronalen Netzen.
Eine Übersicht über eine Reihe von weiteren Strategienist in [2] veröffentlicht. In [3] wurde eine Positionsre-gelung mit überlagerter iterativ lernender Regelung [1]kombiniert. Jedoch ist hier ein sehr hoher Identifika-tionsaufwand notwendig, und der Arm ist zusätzlichmit einem Roboter verbunden. In den meisten der inder Literatur beschriebenen Fälle ist die Muskelkraft derSchwerkraft entgegen gerichtet, sodass nur ein Mus-kel statt eines antagonistischen Muskelpaars stimuliertwerden muss. In [13] wurde für ein antagonistischesMuskelpaar zusätzlich zu einer Positionsrückführungeine Steuerung auf Basis eines neuronalen Netzes ver-wendet. In den nur simulativen Ergebnissen zeigte sich,dass Für- und Gegenspieler gleichzeitig aktuiert wurden,was im Hinblick auf den Energieverbrauch nicht sinnvollerscheint und in der Praxis meist unnötig starke Kon-traktionen hervorruft.
In dieser Arbeit soll ein neuartiger Ansatz zurGelenkwinkelregelung mittels eines antagonistischenMuskelpaares untersucht werden, der es erstmalig er-möglicht Bewegungen, die nicht unter dem Einfluss derSchwerkraft stehen, kontrolliert zu erzeugen. Bild 1 stelltden vorläufigen Versuchsaufbau zur Entwicklung undValidierung der Regelungskonzepte dar. Zu sehen ist eineSchaukel, welche mit Seilen an einem Punkt der Laborde-cke befestigt ist. Diese dient der Gewichtskompensationdes darauf fixierten Unterarms.
Bild 1 Versuchsaufbau: Zur Gewichtskompensation ist der Arm aufeiner Schaukel befestigt, die Bewegungen des Vorderarms nur in derhorizontalen Ebene erlaubt.
An Ober- und Unterarm wurde jeweils ein Inerti-alsensor (Motion Tracker MT9-B, Xsens, Niederlande)befestigt, um die Orientierung der Armsegmente zubestimmen und daraus den Winkel des Ellenbogenge-lenks abzuleiten. Zusätzlich können mit diesen Sensorendie Winkelgeschwindigkeiten und Beschleunigungen be-züglich dreier orthogonaler Achsen gemessen werden.Daraus können unter Verwendung eines kinematischenModells der Armgeometrie Winkelgeschwindigkeit undWinkelbeschleunigung des Ellenbogengelenks berechnetwerden. Für die Bestimmung der Sensororientierungwurde ein Schätzalgorithmus verwendet, der auf der Or-thogonalisierung einer Rotationsmatrix basiert [8]. DieAbtastung der Inertialsensoren und die Signalverarbei-tung erfolgen mit einer Frequenz von 300 Hz.
Die elektrische Stimulation der beiden Muskeln er-folgt durch Oberflächenelektroden mit einer Frequenzvon 50 Hz, wobei die Stromstärken konstant auf 20 mAeingestellt werden. Die Impulsbreiten der Stimulations-signale werden durch den in Abschnitt 4 erläutertenRegelalgorithmus zwischen Null und 500 μs angepasst.Dieser ist auf einem PC mit dem Echtzeitbetriebs-system Linux/RTAI mithilfe von OpenRTDynamics1,Scilab/Scicos2 und der HART-Toolbox3 implementiert.Die Sensoren und das Stimulationsgerät (RehaStim 2,HASOMED GmbH, Magdeburg) sind über USB-Schnittstellen mit dem PC verbunden.
3 Muskuläres Verhaltenunter Elektrostimulation
Durch die Stimulation mit elektrischen Impulsen könnenu. a. antagonistische Muskeln zur Kontraktion gebrachtwerden. Das daraus resultierende Gelenkmoment kanndurch ein stark vereinfachtes nichtlineares dynamischesModell beschrieben werden.
Um eine Regelstrategie zu entwickeln, wird zunächstein Modell bestimmt, das einen Zusammenhang zwischenden Stimulationsintensitäten und der resultierendenArmbewegung herstellt. Dieses Modell besteht aus einemTeilmodell für ein antagonistisches Muskelpaar und ei-nem mechanischen Teilmodell. In Bild 2 ist das Modellals Blockschaltbild dargestellt. Für jeden Muskel wird ver-einfachend ein Hammerstein-Modell angenommen [4].Dieses besteht aus einer Reihenschaltung einer nichtli-nearen Kennlinie – der sogenannten Recruitmentkurve –und eines dynamischen Systems. Die Abhängigkeit derMuskelkontraktionen von Gelenkwinkel und Geschwin-digkeit wird bewusst vernachlässigt. Eingänge des Modellssind die zwischen Null und Eins (probandenspezifischesMaximum) normierten positiven Stimulationsintensitä-ten v1 (Bizeps) und v2 (Trizeps), im konkreten Fall dienormierten Impulsbreiten. Die Ausgänge sind die er-zeugten muskulären Momente. Die Kennlinien enthalten
1 http://openrtdynamics.sf.net2 http://www.scilab.org3 http://hart.sf.net
630

Th
is a
rticle
is p
rote
cte
d b
y G
erm
an
co
pyrig
ht la
w. Y
ou
may c
op
y a
nd
dis
tribu
te th
is a
rticle
for y
ou
r pers
on
al u
se o
nly
. Oth
er u
se is
on
ly a
llow
ed
with
writte
n p
erm
issio
n b
y th
e c
op
yrig
ht h
old
er.
Gelenkwinkelregelung durch Elektrostimulation ... ���
Bild 2 Modell des antagonistischen Muskelpaares mit den Bewegungs-gleichungen.
die Schwellen v1,thr und v2,thr, ab denen die Kontrak-tion der Muskeln einsetzen. Oberhalb dieser Schwellensind die Kennlinien Geraden mit den Anstiegen λ1
bzw. λ2. Eine Sättigung wird nicht betrachtet. Das li-neare dynamische System, das die Muskelaktivierungbeschreibt, ist ein Tiefpass zweiter Ordnung mit Tot-zeit: Gc(s)= 1/(sTca + 1)2 exp (–sTd). Dieses Modell wirdfür beide Muskeln als identisch angenommen. Die Zeit-konstante wird in Anlehnung an [10] mit Tca = 0,04 sangenommen. Ferner wurde die Totzeit mit Td = 0,02 sangesetzt. Zur vollständigen Modellierung eines antago-nistischen Muskelpaares werden die Ausgänge von zweiMuskelmodellen vorzeichenrichtig zu dem Moment Taddiert. Der mechanische Teil besteht aus dem Trägheits-moment und einer Doppelintegratorkette, deren Ausgangder Gelenkwinkel ϑ ist. Die Reibung wird vernachläs-sigt.
4 RegelungskonzeptDer Regler soll Armbewegungen ermöglichen, die den na-türlichen entsprechen. Da die Modellparameter aufgrundder in Abschnitt 4.1 besprochenen, schnell durchzufüh-renden Identifikationsmethode nur ungenau bekanntsind, soll der Regler robust gegenüber Unsicherheitensein. Insbesondere sollen Ungenauigkeiten in den Mus-kelkennlinien durch den Regler toleriert werden.
Zentrales Ziel der Regelung ist die Kompensationmechanischer Störungen. Aufgrund der Gravitations-kompensation müssen von den Muskeln nur kleine Kräftezur Einleitung einer Bewegung erzeugt werden. Das be-deutet allerdings, dass die Regelung im nichtlinearenBereich der Kennlinie stattfindet.
Um diese Ziele zu erreichen, sollen alle messbarenBewegungsinformationen (Winkel, Winkelgeschwindig-keit und Winkelbeschleunigung) zurückgeführt werden.Da sich diese in ihrem Frequenzspektrum deutlich un-terscheiden, wird das Regelungskonzept als Kaskaderealisiert und in zwei Teile aufgespalten. Der erste Teil –der innere Regelkreis der Kaskade – besteht aus einerBeschleunigungsregelung mit zusätzlicher Vorsteuerung.Diese leitet je nach Vorzeichen ein virtuelles Stellsignal anjeweils einen Muskel weiter, während der andere inaktivist. Hierauf aufbauend werden im äußeren Kreis Positionund Geschwindigkeit geregelt.
Die Regelung wird zeitdiskret implementiert und wirdmit einer Abtastrate von fam = 300 Hz betrieben. Dies
entspricht der Abtastrate der Inertialsensoren. Da dieStimulation mit einer Frequenz von fas = 50 Hz erfolgt,findet eine Ratenreduktion der Stellgröße statt.
4.1 Vorsteuerung und ModellidentifikationDa bidirektionale Gelenkbewegungen bei fehlender Ge-wichtskraft nur durch zwei entgegengesetzt wirkendeMuskeln möglich sind, ist eine Strategie zur Ansteuerungbeider Muskeln mit nur einem reglerinternen Stellsignal unotwendig. Dieses virtuelle Stellsignal entsteht bei der Zu-sammenfassung der Vorsteuerung mit dem Modell (sieheBild 3a). Am einfachsten ist eine Umschaltung zwischenbeiden Muskeln, bei der positive Stellgrößen auf denBizeps und negative betragsmäßig auf den Trizeps weiter-gereicht werden. Für den jeweils anderen Muskel würdedann keine Ansteuerung erfolgen.
Für positive Stellgrößen u wird auf den oberen Zweiggeschaltet, während der untere mit dem Nullsignal ver-sorgt wird. Für negative Werte von u wird analog deruntere Zweig benutzt. Beide Zweige führen eine Un-terkompensation der muskulären Kennlinie und eineNormierung der Muskelverstärkungen λ1 und λ2 unddes Trägheitsmomentes 1/J mit den Faktoren m1 = J/λ1
und m2 = J/λ2 durch.Um das Risiko einer Überkompensation zu verrin-
gern betragen die Offsets v1,thr und v2,thr ca. 80% derexperimentell ermittelten Kennlinienschwellen. Sie füh-ren damit zu einer weitgehenden aber nicht vollständigenKompensation. Die Schwellen werden durch ein einfa-ches Experiment für jeden Muskel separat ermittelt. DieStimulation wird für den zu untersuchenden Muskel beiInaktivität des jeweiligen Gegenspielers rampenförmig so-lange erhöht, bis durch die Beschleunigungssensoren eineMuskelbewegung detektiert wird.
Zur Bestimmung der beiden Quotienten λ1/J undλ2/J wird jeder der beiden Muskeln durch zwei über derAktivierungsschwelle liegende rechteckförmige Stimulati-onsverläufe mit einer Dauer von 60 ms angeregt, währendder Gegenspieler inaktiv ist (siehe Bild 4). Die Intensitä-ten vli und vhi sind dabei verschieden. Nach Messung der
Bild 3 (a) Vorsteuerung zur Aktuierung von zwei gegeneinander arbei-tenden Muskeln und (b) das dazu äquivalente resultierende Modell fürden Reglerentwurf.
631
Th
is a
rticle
is p
rote
cte
d b
y G
erm
an
co
pyrig
ht la
w. Y
ou
may c
op
y a
nd
dis
tribu
te th
is a
rticle
for y
ou
r pers
on
al u
se o
nly
. Oth
er u
se is
on
ly a
llow
ed
with
writte
n p
erm
issio
n b
y th
e c
op
yrig
ht h
old
er.
Anwendungen
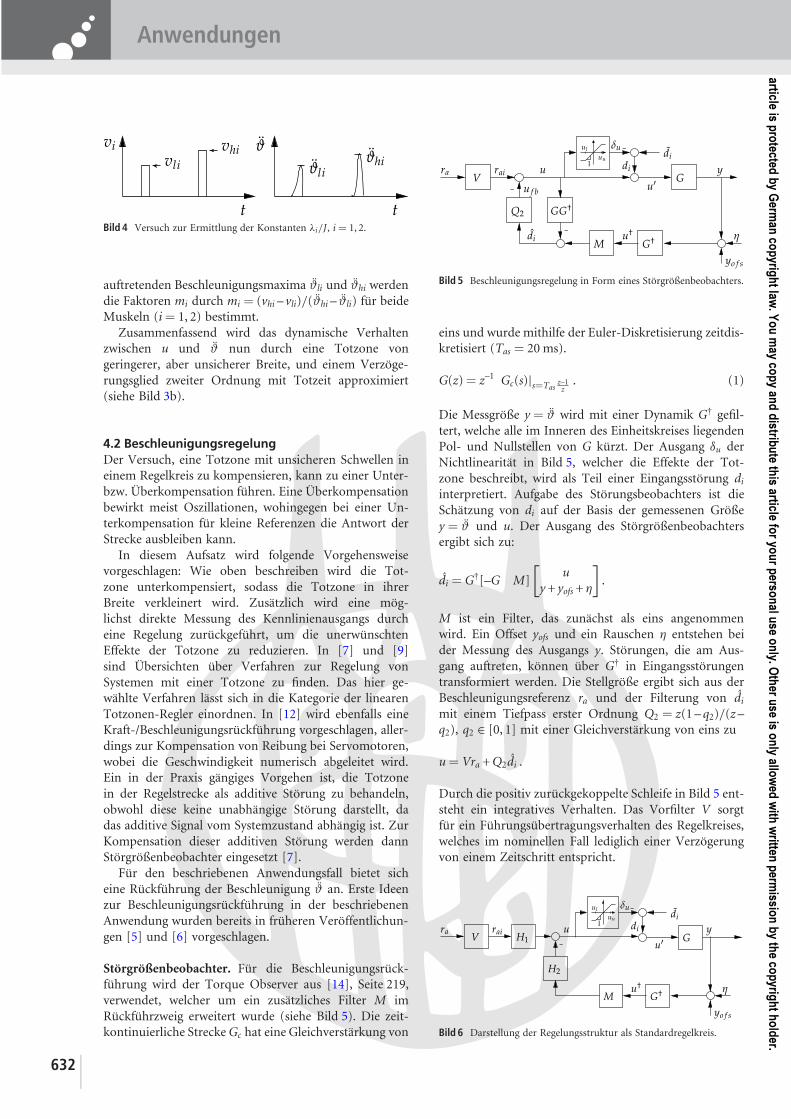
Bild 4 Versuch zur Ermittlung der Konstanten λi/J, i= 1, 2.
auftretenden Beschleunigungsmaxima ϑli und ϑhi werdendie Faktoren mi durch mi = (vhi – vli)/(ϑhi – ϑli) für beideMuskeln (i= 1, 2) bestimmt.
Zusammenfassend wird das dynamische Verhaltenzwischen u und ϑ nun durch eine Totzone vongeringerer, aber unsicherer Breite, und einem Verzöge-rungsglied zweiter Ordnung mit Totzeit approximiert(siehe Bild 3b).
4.2 BeschleunigungsregelungDer Versuch, eine Totzone mit unsicheren Schwellen ineinem Regelkreis zu kompensieren, kann zu einer Unter-bzw. Überkompensation führen. Eine Überkompensationbewirkt meist Oszillationen, wohingegen bei einer Un-terkompensation für kleine Referenzen die Antwort derStrecke ausbleiben kann.
In diesem Aufsatz wird folgende Vorgehensweisevorgeschlagen: Wie oben beschreiben wird die Tot-zone unterkompensiert, sodass die Totzone in ihrerBreite verkleinert wird. Zusätzlich wird eine mög-lichst direkte Messung des Kennlinienausgangs durcheine Regelung zurückgeführt, um die unerwünschtenEffekte der Totzone zu reduzieren. In [7] und [9]sind Übersichten über Verfahren zur Regelung vonSystemen mit einer Totzone zu finden. Das hier ge-wählte Verfahren lässt sich in die Kategorie der linearenTotzonen-Regler einordnen. In [12] wird ebenfalls eineKraft-/Beschleunigungsrückführung vorgeschlagen, aller-dings zur Kompensation von Reibung bei Servomotoren,wobei die Geschwindigkeit numerisch abgeleitet wird.Ein in der Praxis gängiges Vorgehen ist, die Totzonein der Regelstrecke als additive Störung zu behandeln,obwohl diese keine unabhängige Störung darstellt, dadas additive Signal vom Systemzustand abhängig ist. ZurKompensation dieser additiven Störung werden dannStörgrößenbeobachter eingesetzt [7].
Für den beschriebenen Anwendungsfall bietet sicheine Rückführung der Beschleunigung ϑ an. Erste Ideenzur Beschleunigungsrückführung in der beschriebenenAnwendung wurden bereits in früheren Veröffentlichun-gen [5] und [6] vorgeschlagen.
Störgrößenbeobachter. Für die Beschleunigungsrück-führung wird der Torque Observer aus [14], Seite 219,verwendet, welcher um ein zusätzliches Filter M imRückführzweig erweitert wurde (siehe Bild 5). Die zeit-kontinuierliche Strecke Gc hat eine Gleichverstärkung von
Bild 5 Beschleunigungsregelung in Form eines Störgrößenbeobachters.
eins und wurde mithilfe der Euler-Diskretisierung zeitdis-kretisiert (Tas = 20 ms).
G(z)= z–1 Gc(s)|s=Tasz–1
z. (1)
Die Messgröße y = ϑ wird mit einer Dynamik G† gefil-tert, welche alle im Inneren des Einheitskreises liegendenPol- und Nullstellen von G kürzt. Der Ausgang δu derNichtlinearität in Bild 5, welcher die Effekte der Tot-zone beschreibt, wird als Teil einer Eingangsstörung di
interpretiert. Aufgabe des Störungsbeobachters ist dieSchätzung von di auf der Basis der gemessenen Größey = ϑ und u. Der Ausgang des Störgrößenbeobachtersergibt sich zu:
di = G†[–G M]
[u
y + yofs +η
].
M ist ein Filter, das zunächst als eins angenommenwird. Ein Offset yofs und ein Rauschen η entstehen beider Messung des Ausgangs y. Störungen, die am Aus-gang auftreten, können über G† in Eingangsstörungentransformiert werden. Die Stellgröße ergibt sich aus derBeschleunigungsreferenz ra und der Filterung von di
mit einem Tiefpass erster Ordnung Q2 = z(1 – q2)/(z –q2), q2 ∈ [0, 1] mit einer Gleichverstärkung von eins zu
u= Vra + Q2di .
Durch die positiv zurückgekoppelte Schleife in Bild 5 ent-steht ein integratives Verhalten. Das Vorfilter V sorgtfür ein Führungsübertragungsverhalten des Regelkreises,welches im nominellen Fall lediglich einer Verzögerungvon einem Zeitschritt entspricht.
Bild 6 Darstellung der Regelungsstruktur als Standardregelkreis.
632
Th
is a
rticle
is p
rote
cte
d b
y G
erm
an
co
pyrig
ht la
w. Y
ou
may c
op
y a
nd
dis
tribu
te th
is a
rticle
for y
ou
r pers
on
al u
se o
nly
. Oth
er u
se is
on
ly a
llow
ed
with
writte
n p
erm
issio
n b
y th
e c
op
yrig
ht h
old
er.
Gelenkwinkelregelung durch Elektrostimulation ... ���
Mit G†G= z–1 und den Übertragungsfunktionen
H1(z)=1
1 – Q2z–1=
z – q2
z – 1
H2(z)=Q2
1 – Q2z–1=
z(1 – q2)
z – 1
kann Bild 5 in Bild 6 umgeformt werden.Aufgrund der Totzone sind drei Fälle zu unterschei-
den, wobei uu = v1,thr – v1,thr die obere und ul = v2,thr –v2,thr die untere Schwelle darstellt:a) ul ≤ u ≤ uu: Die Stellgröße u befindet sich innerhalb
der Totzone. Es gilt u′ = di. Die Regelschleife ist offen.b) uu < u: Die Stellgröße u befindet sich außerhalb der
Totzone im positiven Bereich. Es gilt u′ = u – uu + di.c) u < ul: Analog zu b) befindet sich u außerhalb der
Totzone im negativen Bereich. Es gilt u′ = u – ul + di.Für den Fall a) (offene Schleife) ergibt sich ein
Systemverhalten, bei welchem die Referenz über H1 inte-griert wird. Dies vollzieht sich umso schneller je kleinerq2 > 0 gewählt wurde. Für ein sprungförmiges Referenz-signal mit Sprunghöhe eins ergibt sich beispielsweise eineRampe u(k)= k(1 – q2) + 1, deren Anstieg mit kleineremq2 steiler wird. Eine kurze Integrationszeit wird benö-tigt, damit die Totzone möglichst schnell verlassen wird.Der Zweig H2Mz–1 besitzt ebenfalls integratives Verhal-ten. Sind die externen Störungen jedoch Null, so stelltsich für asymptotisch stabile M ein konstanter Wert amAusgang des Zweigs ein.
Für den Fall b) und analog c) (geschlossene Schleife)ergibt sich ein linearer Regelkreis, auf dessen Stabilitätund Robustheit anhand der offenen Kette L=H2Mz–1
geschlossen werden kann. Die Forderung ist hierbei, dassder Regler robust gegenüber unmodellierten Totzeitenund schnellen Polen ist, wie sie durch die mechanischeBefestigung der Beschleunigungssensoren entstehen kön-nen. Gleichermaßen sollen Störungen schnell ausgeregeltund Rauschen unterdrückt werden.
Für M = 1 ist q2 der einzige Parameter zur Einstellungdes Regelkreises. Eine Erhöhung der Robustheit durchVerringerung des Faktors (1 – q2) in L führt zwangs-läufig zu einer langsameren Integrationszeit für Fall a).Um einen zweiten Freiheitsgrad zu erhalten, wird nunzusätzlich ein Filter M eingeführt, welches eine Tiefpass-charakteristik besitzen soll:
M(z)=1 – q1
1 – a1
z – a1
z – q1, 1 > q1 > a1 > 0 (2)
Nur im Übergangsbereich hat das Filter eine relevanteAuswirkung auf den Phasengang und dämpft somit hoheFrequenzen mit kleiner Phasenverzögerung.
Das Filter M hat keinen Einfluss auf die Integrationder Referenz rai im Fall a), lediglich der Einfluss höher-frequenter Signale auf die Integration im Zweig H2Mz–1
wird reduziert. Die Integrationsgeschwindigkeit im Fall a)wird somit primär durch q2 eingestellt. Durch geeig-nete Wahl von M wird die Robustheit sowie die Stör-
und Rauschempfindlichkeit der Regelung wesentlich be-stimmt.
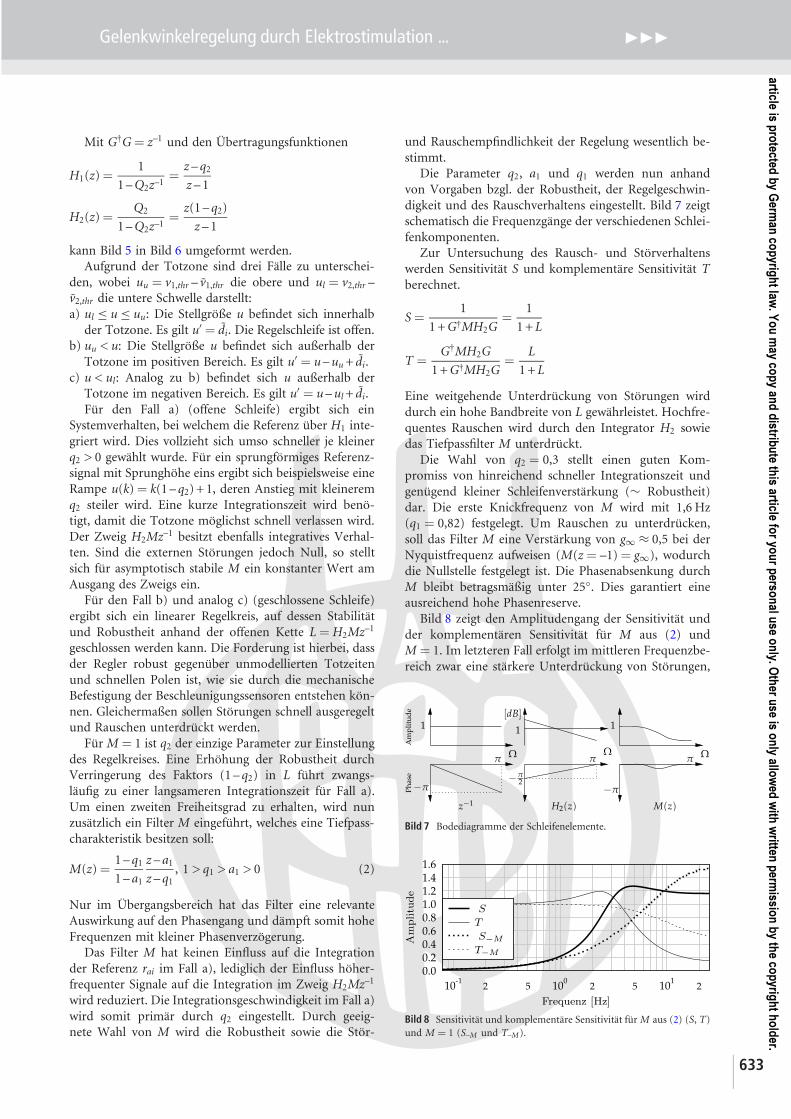
Die Parameter q2, a1 und q1 werden nun anhandvon Vorgaben bzgl. der Robustheit, der Regelgeschwin-digkeit und des Rauschverhaltens eingestellt. Bild 7 zeigtschematisch die Frequenzgänge der verschiedenen Schlei-fenkomponenten.
Zur Untersuchung des Rausch- und Störverhaltenswerden Sensitivität S und komplementäre Sensitivität Tberechnet.
S=1
1 + G†MH2G=
1
1 + L
T =G†MH2G
1 + G†MH2G=
L
1 + L
Eine weitgehende Unterdrückung von Störungen wirddurch ein hohe Bandbreite von L gewährleistet. Hochfre-quentes Rauschen wird durch den Integrator H2 sowiedas Tiefpassfilter M unterdrückt.
Die Wahl von q2 = 0,3 stellt einen guten Kom-promiss von hinreichend schneller Integrationszeit undgenügend kleiner Schleifenverstärkung (∼ Robustheit)dar. Die erste Knickfrequenz von M wird mit 1,6 Hz(q1 = 0,82) festgelegt. Um Rauschen zu unterdrücken,soll das Filter M eine Verstärkung von g∞ ≈ 0,5 bei derNyquistfrequenz aufweisen (M(z = –1)= g∞), wodurchdie Nullstelle festgelegt ist. Die Phasenabsenkung durchM bleibt betragsmäßig unter 25◦. Dies garantiert eineausreichend hohe Phasenreserve.
Bild 8 zeigt den Amplitudengang der Sensitivität undder komplementären Sensitivität für M aus (2) undM = 1. Im letzteren Fall erfolgt im mittleren Frequenzbe-reich zwar eine stärkere Unterdrückung von Störungen,
Bild 7 Bodediagramme der Schleifenelemente.
Bild 8 Sensitivität und komplementäre Sensitivität für M aus (2) (S, T)und M = 1 (S–M und T–M).
633
Th
is a
rticle
is p
rote
cte
d b
y G
erm
an
co
pyrig
ht la
w. Y
ou
may c
op
y a
nd
dis
tribu
te th
is a
rticle
for y
ou
r pers
on
al u
se o
nly
. Oth
er u
se is
on
ly a
llow
ed
with
writte
n p
erm
issio
n b
y th
e c
op
yrig
ht h
old
er.
Anwendungen
im hochfrequenten Bereich werden Störungen aber ver-stärkt. Auch ist das Rauschverhalten im hochfrequentenBereich für M = 1 deutlich schlechter.
Vorfilter. Das Vorfilter V wird so gewählt, dass das Über-tragungsverhalten von ra nach y im linearen Fall einerVerzögerung von einem Zeitschritt entspricht, d. h.
rai → y :H1G
1 + H2Mz–1, V =
1 + H2Mz–1
H1z.
Das resultierende Vorfilter V ist kausal und besitzt keineTotzeit.
Analyse in der Phasenebene. Der Regelkreis mit Tot-zone stellt ein schaltendes lineares System dar, dessenStabilitätsanalyse nicht trivial ist. Zur Beurteilung des Sys-temverhaltens werden zunächst Untersuchungen in derPhasenebene durchgeführt. Hierfür wird jeweils ein Zu-standsraummodell die Fälle a) (u′ = 0) und b) (u′ = u –uu ⇒ δu = –uu) aufgestellt, wobei die Eingangsstörungunberücksichtigt bleibt (di = 0). Der Fall c) (u′ = u –ul ⇒ δu = –ul) kann aus Symmetriegründen analog zub) behandelt werden. Hierzu wird die Reihenschaltungvon G und G† zu z–1 (siehe Bild 5) zusammenge-fasst und mit dem Filter Q2 kombiniert. Es ergibt sichQ′
2 = Q2z–1 = (1 – q2)/(z – q2). Eine Minimalrealisierungvon M = γ (z – a1)/(z – q1) mit γ = (1 – q1)/(1 – a1) lau-tet:
z1(k + 1)= q1z1(k) + [q1γ – a1γ ]u1(k) (3)
y1(k)= γu1(k) + z1(k) . (4)
Für das Filter Q′2 ist eine Minimalrealisierung:
z2(k + 1)= q2z2(k) + (1 – q2)u2(k) (5)
ufb(k)= z2(k) . (6)
Diese beiden Teilmodelle, bei denen u1 und u2 die Ein-gänge und y1 und ufb die Ausgänge sind, werden nungemäß des Schaltbildes in Bild 5 für die Fälle a) und b)zusammengefasst. Der Eingang für das Gesamtmodell istdie Referenz rai nach dem Vorfilter V , wobei zusätzlichδu als Eingang zur Modellierung der Totzone vorgesehenwurde.
Aus der Realisierung (5) (6) lässt sich unmittelbar eineRealisierung für den in Bild 9 gestrichelten Bereich auf-stellen:
z2(k + 1)= z2(k) + (1 – q2)[rai(k) – y1(k)]
u(k)= rai(k) + z2(k) .
Für den geschlossenen Regelkreis resultiert ein Zustands-raummodell zweiter Ordnung mit zustandsabhängigemschaltenden Verhalten (i ∈ {a, b, c}):
z(k + 1)= Aiz(k) + Birai(k) + Eiδu, z = [z1, z2]T .
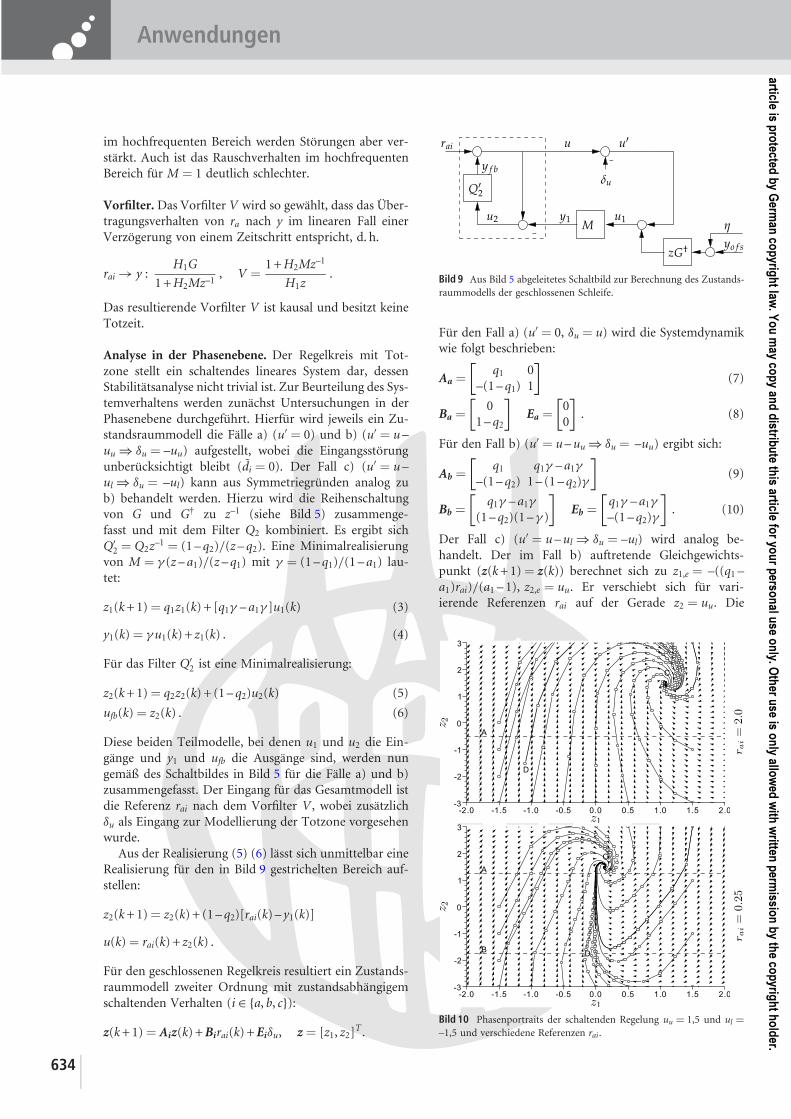
Bild 9 Aus Bild 5 abgeleitetes Schaltbild zur Berechnung des Zustands-raummodells der geschlossenen Schleife.
Für den Fall a) (u′ = 0, δu = u) wird die Systemdynamikwie folgt beschrieben:
Aa =
[q1 0
–(1 – q1) 1
](7)
Ba =
[0
1 – q2
]Ea =
[00
]. (8)
Für den Fall b) (u′ = u – uu ⇒ δu = –uu) ergibt sich:
Ab =
[q1 q1γ – a1γ
–(1 – q2) 1 – (1 – q2)γ
](9)
Bb =
[q1γ – a1γ
(1 – q2)(1 – γ )
]Eb =
[q1γ – a1γ
–(1 – q2)γ
]. (10)
Der Fall c) (u′ = u – ul ⇒ δu = –ul) wird analog be-handelt. Der im Fall b) auftretende Gleichgewichts-punkt (z(k + 1)= z(k)) berechnet sich zu z1,e = –((q1 –a1)rai)/(a1 – 1), z2,e = uu. Er verschiebt sich für vari-ierende Referenzen rai auf der Gerade z2 = uu. Die
Bild 10 Phasenportraits der schaltenden Regelung uu = 1,5 und ul =–1,5 und verschiedene Referenzen rai.
634
Th
is a
rticle
is p
rote
cte
d b
y G
erm
an
co
pyrig
ht la
w. Y
ou
may c
op
y a
nd
dis
tribu
te th
is a
rticle
for y
ou
r pers
on
al u
se o
nly
. Oth
er u
se is
on
ly a
llow
ed
with
writte
n p
erm
issio
n b
y th
e c
op
yrig
ht h
old
er.
Gelenkwinkelregelung durch Elektrostimulation ... ���
Stellgröße u ist in allen Fällen u= rai + z2. Zur Ana-lyse des dynamischen Verhaltens sind in Bild 10 diePhasenportraits für verschiedene feste Werte von rai ge-zeichnet. Die Schaltschwellen A (u= uu, z2 = uu – rai)und B (u= ul, z2 = ul – rai) sind für feste Werte von rai
als gestrichelte Geraden eingezeichnet und verschiebensich wegen der Beziehungen uu = rai + z2 und ul = rai + z2
in Abhängigkeit von rai. Diese Schaltgeraden untertei-len den Zustandsraum in den oberen (Fall b), denmittleren (Fall a) und den unteren Bereich (Fall c).Im gesamten Zustandsraum laufen die Trajektorien inden Gleichgewichtspunkt C. Ein sprungförmiger Wech-sel von einer negativen Referenz, unter der der Regelkreisden Gleichgewichtspunkt D im Bild einnimmt, auf dieentsprechende positive Referenz gleichen Betrages, wirddurch die jeweilige Trajektorie von D nach C dargestellt.
Für die betrachteten Fälle weist das Regelsystemasymptotisch stabile Ruhelagen auf. Weitere Phasenpor-traits für Variationen von rai und uu bzw. ul zeigen auchfür hohe Schwellen global asymptotisch stabiles Verhal-ten, wobei allerdings die Dauer des Einschwingvorgangsfür uu > 1,5 bzw. ul < –1,5 stark zunimmt.
4.3 WinkelregelungDie Winkelregelung wird nun als äußerer Teil ei-ner Kaskadenregelung realisiert. Die Stellgröße ist, wiein Bild 11 dargestellt, das Referenzsignal ra für dieBeschleunigung. Da wir die Winkelregelung deutlichlangsamer entwerfen als die Beschleunigungsregelung,kann der innere Beschleunigungs-Regelkreis durch dieideale Übertragungsfunktion 1 approximiert werden. DieWinkelregelung selbst ist wiederum als Kaskade realisiert(siehe Bild 11). Der innere Regelkreis besteht aus einerRückführung der Winkelgeschwindigkeit, der äußere auseiner Rückführung des Winkels. Da der Zusammenhangzwischen ra und ϑ sich durch einen einfachen Integratorapproximieren lässt, genügt als Geschwindigkeitsreglereine Konstante:
Kv(s)= kv = 2 .
Als nominelle Streckenübertragungsfunktion für dieWinkelregelung ergibt sich
Gv(s)=Kvs
1 + Kvs
1
s=
kv
(kv + s)s.
Hierfür wird ein algebraischer Reglerentwurf mittels Pol-vorgabe durchgeführt. Bei der Beschleunigungsmessungist ein Sensoroffset yofs zu erwarten, welches in einer Ein-
Bild 11 Positions- und Geschwindigkeitsregelung realisiert als Kaska-denregelung.
gangsstörung d bezüglich der Geschwindigkeitsregelungresultiert. Um bleibende Regelabweichungen zu verhin-dern muss ein Regler mit Integrator angesetzt werden:
Kp(s)=b0 + b1s + b2s2
s(s + a0).
Für das Polpolynom des geschlossenen Kreises ergibt sich
s4 + s3[kv + a0] + s2[kva0 + kvb2] + s[kvb1] + kvb0 .
Der Koeffizientenvergleich erfolgt mit einem „Wunsch-polynom“ mit den Nullstellen –kv, –0,1, –5, –35 undliefert die Reglerparameter. Es ergibt sich für die Füh-rungssprungantwort eine Anstiegszeit von ca. 0,4 s ohneÜberschwingen.
Der Regler Kp(s) wurde zur Implementierung zeitdis-kretisiert.
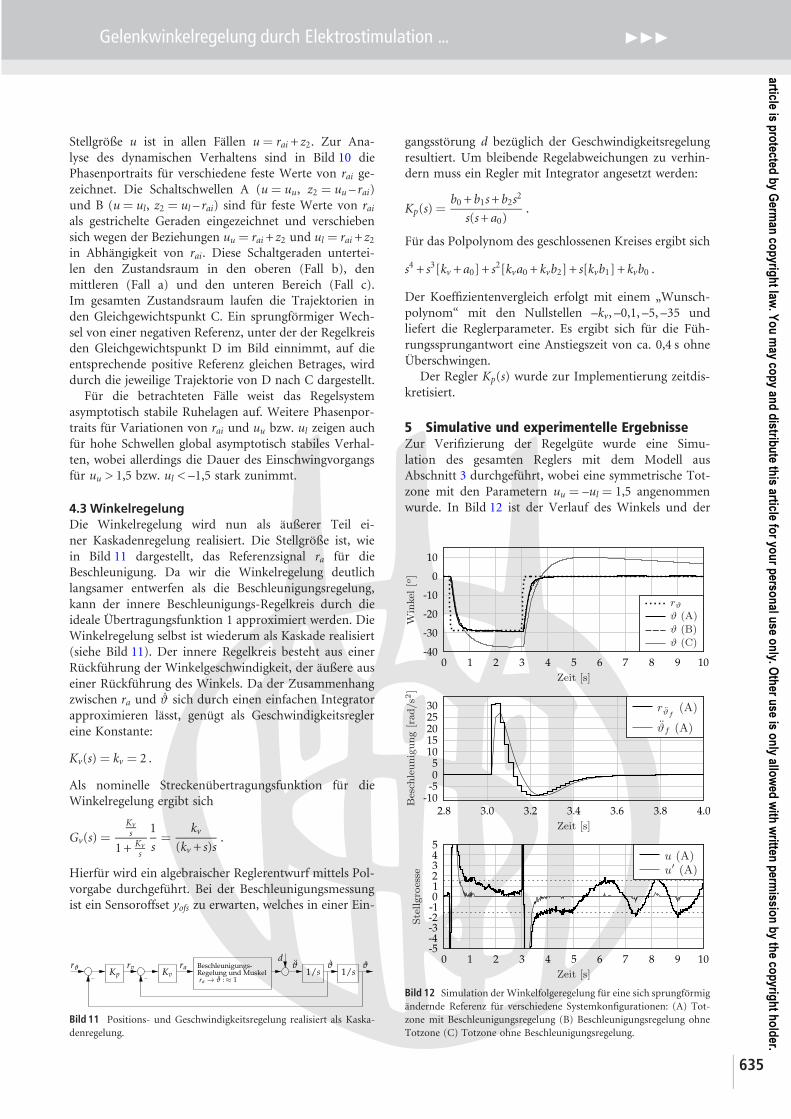
5 Simulative und experimentelle ErgebnisseZur Verifizierung der Regelgüte wurde eine Simu-lation des gesamten Reglers mit dem Modell ausAbschnitt 3 durchgeführt, wobei eine symmetrische Tot-zone mit den Parametern uu = –ul = 1,5 angenommenwurde. In Bild 12 ist der Verlauf des Winkels und der
Bild 12 Simulation der Winkelfolgeregelung für eine sich sprungförmigändernde Referenz für verschiedene Systemkonfigurationen: (A) Tot-zone mit Beschleunigungsregelung (B) Beschleunigungsregelung ohneTotzone (C) Totzone ohne Beschleunigungsregelung.
635

Th
is a
rticle
is p
rote
cte
d b
y G
erm
an
co
pyrig
ht la
w. Y
ou
may c
op
y a
nd
dis
tribu
te th
is a
rticle
for y
ou
r pers
on
al u
se o
nly
. Oth
er u
se is
on
ly a
llow
ed
with
writte
n p
erm
issio
n b
y th
e c
op
yrig
ht h
old
er.
Anwendungen
Bild 13 Verlauf des Ellenbogen-gelenkwinkels für ein Experimentam Probanden. Zum Vergleichwurde der Winkelverlauf gezeigt,welcher entsteht wenn die Win-kelregelung auf das nominellelineare Modell angewandt wird.
Beschleunigung für eine sich sprungförmig änderndeWinkelreferenz bei Verwendung verschiedener Regler-konfigurationen gezeigt. Im Fall (A) wurde der Regelkreismit Totzone und Beschleunigungsregelung simuliert. Fall(B) zeigt das Regelkreisverhalten mit Beschleunigungs-regler bei nicht vorhandener Totzone. Im letzten Fall (C)wurde bei aktiver Totzone die Beschleunigungsregelungdeaktiviert. In diesem Fall wurde das Vorfilter so ge-wählt, dass das Übertragungsverhalten der resultierendenSteuerung von rai nach y, wie im Fall der aktiviertenRückführung, z–1 beträgt.
Wie zu erkennen ist, verschlechtert sich die Re-gelgüte ohne Beschleunigungsregelung dramatisch. MitBeschleunigungsregelung können die negativen Effekteder Totzone nahezu ausgeregelt werden.
In Bild 13 ist das Ergebnis eines Experiments mit ei-nem neurologisch gesunden Probanden dargestellt, beidem der Winkel des Ellbogengelenks geregelt wurde. Eszeigt die typischerweise erreichbare Regelgüte. Das Refe-renzsignal konnte vom Probanden nicht gesehen werden.Interne Signale der unterlagerten Geschwindigkeits- undBeschleunigungsregelung sowie die damit verbundenen
Bild 14 Interne gemessene Signale der unterlagerten Geschwindigkeits-und Beschleunigungsregelung.
Stimulationsintensitäten sind in Bild 14 wiedergegeben.Das jeweilige Verhalten der Geschwindigkeits- undBeschleunigungsregelung zeigt gute Übereinstimmun-gen mit dem nominellen Fall. Dank der unterlagertenBeschleunigungsregelung ist eine hohe Regelgüte derWinkelregelung möglich.
6 Diskussion und ZusammenfassungDie entwickelte Beschleunigungsrückführung zur Verbes-serung der Regelgüte einer Winkelregelung zeigte guteErgebnisse sowohl in der Simulation als auch in erstenExperimenten. Ein Vorteil ist, dass die genaue Breite derTotzone nicht exakt bekannt sein muss. Zusätzlich wer-den durch die schnelle Regelschleife auch mechanischeStörungen gedämpft. Es wurde gezeigt, dass das Fehlendes Beschleunigungsreglers eine sehr schlechte Regelgütezur Folge hat.
Obwohl erste Untersuchungen in der Phasenebenenicht auf Instabilität und Grenzzyklen hinweisen, mussein formeller Stabilitätsnachweis noch erbracht werden.
Durch die Verwendung eines sehr einfachen Modellsist ein geringer Identifikationsaufwand erforderlich. Dieserleichtert die schnelle Anpassung der Regelung an ver-schiedene Probanden.
Das Regelungskonzept wird in naher Zukunft an Pati-enten mit verschiedenen neurologischen Erkrankung imRahmen des EU-Projektes MUNDUS evaluiert werden.Hierbei wird eine Gewichtskompensation durch ein pas-sives federbasiertes Exoskelett realisiert werden.
Danksagung
Die Autoren bedanken sich für die Unterstützung derForschungstätigkeiten im Projekt MUNDUS durch dieEuropäische Kommission im 7. Rahmenprogramm, Ver-tragsnummer 248326.
Literatur
[1] D. A. Bristow, M. Tharayil, and A. G. Alleyne. A survey of iterativelearning control. IEEE control systems magazine, 26(3):96–114,2006.
[2] P. E. Crago, N. Lan, P. H. Veltink, J. J. Abbas, and C. Kantor.New control strategies for neuroprosthetic systems. Development,33(2):158–172, 1996.
636

Th
is a
rticle
is p
rote
cte
d b
y G
erm
an
co
pyrig
ht la
w. Y
ou
may c
op
y a
nd
dis
tribu
te th
is a
rticle
for y
ou
r pers
on
al u
se o
nly
. Oth
er u
se is
on
ly a
llow
ed
with
writte
n p
erm
issio
n b
y th
e c
op
yrig
ht h
old
er.
Gelenkwinkelregelung durch Elektrostimulation ... ���
[3] C. T. Freeman, A. M. Hughes, J. H. Burridge, P. H. Chappell,P. L. Lewin, and E. Rogers. Iterative learning control of FES appliedto the upper extremity for rehabilitation. Control EngineeringPractice, 17(3):368–381, 2009.
[4] K. J. Hunt, M. Munih, N. Donaldson, and F. M. D. Barr. Investiga-tion of the hammerstein hypothesis in the modeling of electricallystimulated muscle. IEEE Transactions on Biomedical Engineering,45(8):998–1009, 1998.
[5] C. Klauer, T. Schauer, and J. Raisch. High performance motioncontrol by neuro-muscular electrical stimulation applied to theupper-limb. In Proceedings of IFESS 2010, pages 318–320, 2010.
[6] C. Klauer, T. Schauer, and J. Raisch. Positionsregelung der obe-ren extremitaten mittels elektrostimulation. In Fortschritt-BerichteVDI, Reihe 17, Nr. 279, pages 45–46, 2010.
[7] A. Lagerberg. A literature survey on control of automotive power-trains with backlash. Chalmers tekniska hogsk., 2001.
[8] R. Mahony, T. Hamel, and J. M. Pflimlin. Nonlinear complemen-tary filters on the special orthogonal group. IEEE Transactions onAutomatic Control, 53(5):1203–1218, 2008.
[9] N. Mattias and G. Per-Olof. Controlling Mechanical Systems withBacklash a Survey. Automatica, 38(10):1633–1649, 2002.
[10] R. Riener and T. Fuhr. Patient-driven control of FES-supportedstanding up. IEEE Trans. Rehabil. Eng, 6(2):113–124, 1998.
[11] R. J. Sanchez, J. Liu, S. Rao, P. Shah, R. Smith, T. Rahman,S. C. Cramer, J. E. Bobrow, and D. J. Reinkensmeyer. Automatingarm movement training following severe stroke: functional exerci-ses with quantitative feedback in a gravity-reduced environment.Neural Systems and Rehabilitation Engineering, IEEE Transactionson, 14(3):378–389, 2006.
[12] D. Stajic, N. Peric, and J. Deur. Friction Compensation Methodsin Position and Speed Control Systems. In IEEE InternationalSymposium on Industrial Electronics ISIE ’99, 1999.
[13] T. Watanabe and K. Fukushima A study on feedback error learningcontroller for fes: Generation of target trajectories by minimumjerk model. In Proceedings of IFESS 2010, pages 124–126, 2010.
[14] B. Wittenmark. Computer-controlled Systems: Theory and De-sign. 1990.
Manuskripteingang: 31. März 2011
Dipl.-Ing. Christian Klauer ist wissenschaftlicherMitarbeiter am Fachgebiet Regelungssysteme derTechnischen Universität Berlin. Hauptarbeitsge-biet: Entwicklung von Regelungsstrategien fürelektrisch stimulierte Muskeln.
Adresse: Technische Universität Berlin, Fakul-tät IV – Elektrotechnik und Informatik, Fach-gebiet Regelungssysteme, Sekr. EN11, Einstein-ufer 17, D-10587 Berlin,E-Mail: [email protected]
Dr. Thomas Schauer ist wissentschaftlicher Mit-arbeiter und Leiter der Arbeitsgruppe TechnischeAssistenzsysteme in der Medizin am FachgebietRegelungssysteme an der Technischen UniversitätBerlin. Hauptarbeitsgebiete: Mess- und Automa-tisierungstechnik in der Medizin, NeurologischeRehabilitation.
Adresse: Technische Universität Berlin, Fakul-tät IV – Elektrotechnik und Informatik, Fach-gebiet Regelungssysteme, Sekr. EN11, Einstein-ufer 17, D-10587 Berlin,E-Mail: [email protected]
Prof. Dr.-Ing. Jörg Raisch leitet das FachgebietRegelungssysteme an der Fakultät für Elektro-technik und Informatik der TU Berlin. Er istexternes wissenschaftliches Mitglied des Max-Planck-Instituts für Dynamik komplexer tech-nischer Systeme in Magdeburg und leitet dortdie Fachgruppe System- und Regelungstheorie.Hauptarbeitsgebiete: Hybride und Ereignisdis-krete Systeme
Adresse: Technische Universität Berlin, Fakul-tät IV – Elektrotechnik und Informatik, Fach-gebiet Regelungssysteme, Sekr. EN11, Einstein-ufer 17, D-10587 Berlin,E-Mail: [email protected]
637