
Grundlagen der Propulsion - Über uns | SSI · $E4TEXT/veroe...
27
Grundlagen der Propulsion 5. April 2004 Grundlagen der Propulsion 1 Begriffsbestimmung 1.1 Leistungen, G¨ utegrad der Propulsion Bisher wurde der Schiffswiderstand sowohl f¨ ur Glattwasserbedingungen als auch die wesentlichen Zusat- zwiderst¨ ande behandelt. Bei gegebenem Gesamtwiderstand R T als Funktion der Schiffsgeschwindigkeit v S l¨ aßt sich dann die sogenannte Schleppleistung P E (E steht dabei f¨ ur Effective) angeben: P E = R T v S (1) P E entspricht also der Leistung, die man aufwenden muß, um das Schiff hinter sich her zu ziehen (z.B. eine geschleppte Barge o. ¨ a.). F¨ ur selbst fahrende Schiffe, die ¨ uber einen eigenen Antrieb verf¨ ugen, ist als relevantes Kriterium die aufgewendete Leistung wichtig. Dabei treibt eine Arbeitsmaschine einen Propulsor an (unter Propulsor wird hier zun¨ achst ganz allgemein eine Vorrichtung verstanden, welche die Drehleistung einer Arbeitsmaschine in eine hydrodynamische Vortriebsleistung bestehend aus L¨ angskraft mal einer Geschwindigkeit umsetzt). Die von der Arbeitsmaschine zur Verf¨ ugung gestellte Leistung nennt man P B , wobei der Index B f¨ ur Brake steht. Die Leistung P B steht also am Abtriebsflansch der Arbeitsmaschine zur Verf¨ ugung und wird durch eine Wellenleitung sowie ggf. ein Getriebe, das Moment und Drehzahl wandelt, auf den Propulsor ¨ ubertragen. Am Propulsor selbst steht dann die Drehleistung P D (der Index steht f¨ ur Delivered) wie folgt zur Verf¨ ugung: P D =2πQn (2) Dabei bedeutet Q das Arbeitsmoment des Propulsors, das bei station¨ aren Zust¨ anden gleich dem von der Antriebsmaschine gelieferten Arbeitsmoment -ggf. f¨ ur die Getriebe¨ ubersetzung umgerechnet- sein muß. n bedeutet die Drehzahl des Propulsors, ggf. entsprechend einer evtl. vorhandenen Getriebe¨ ubersetzung. Zwischen der am Propulsor verf¨ ugbaren Leistung P D und der von der Arbeitsmaschine abgegebenen Leistung P B besteht folgender Zusammenhang: P D = P B · η S · η G - P PTO (3) Dabei bedeutet η S der Wirkungsgrad der Wellenleitung (S steht f¨ ur shaft), η G der Wirkungsgrad eines eventuell vorhandenen Getriebes (G steht f¨ ur Gear) und P PTO die eventuell abzuziehende Leistung von Wellengeneratoren (PTO steht f¨ ur Power Take Off), falls die Antriebsanlage solche hat. Bei diesel- elek- trischen Antrieben gilt im Prinzip das gleiche, wenn als Arbeitsmaschine der elektrische Antriebsmotor verstanden wird. F¨ ur die einzelnen Wirkungsgrade kann folgendes angesetzt werden: • F¨ ur direkt gekuppelte Anlagen ohne Getriebe ist η S etwa gleich 0.99 • F¨ ur einstufige Getriebe und Einmotorenanlagen (je Welle) ist η S · η G etwa 0.98 • F¨ ur einstufige Getriebe und Mehrmotorenanlagen ist η S · η G etwa 0.97 • F¨ ur starke Eisverst¨ arkung verringern sich die Wirkungsgrade je noch etwa um 1%. Der Propulsor wird also mit der Drehleistung P D =2πQn angetrieben, dabei ist P D aus der Sicht des Schiffbauers die im Sinne eines Wirkungsgrades aufzuwendende Leistung, wobei der Nutzen die Schlepp- leistung des Schiffes P E ist. Damit l¨ aßt sich die Qualit¨ at des Propulsors und dessen Zusammenwirken mit dem Schiff wie folgt ausdr¨ ucken: P E P D = R T v S 2πQn = η D (4) Dabei wird die Gr¨ osse η D als G¨ utegrad der Propulsion bezeichnet. Eigentlich ist sie ein Wirkungsgrad, aber im deutschen Sprachgebrauch ist die Bezeichnung G¨ utegrad ¨ ublich (im englischen heißt es total Stefan Krueger (TKB) $E4TEXT/veroeffentl/vorlesung/propulsion/propulsion.tex [email protected] 1/27
Transcript of Grundlagen der Propulsion - Über uns | SSI · $E4TEXT/veroe...

Grundlagen der Propulsion 5. April 2004
Grundlagen der Propulsion
1 Begriffsbestimmung
1.1 Leistungen, Gutegrad der Propulsion
Bisher wurde der Schiffswiderstand sowohl fur Glattwasserbedingungen als auch die wesentlichen Zusat-zwiderstande behandelt. Bei gegebenem Gesamtwiderstand RT als Funktion der SchiffsgeschwindigkeitvS laßt sich dann die sogenannte Schleppleistung PE (E steht dabei fur Effective) angeben:
PE = RT vS (1)
PE entspricht also der Leistung, die man aufwenden muß, um das Schiff hinter sich her zu ziehen (z.B.eine geschleppte Barge o. a.). Fur selbst fahrende Schiffe, die uber einen eigenen Antrieb verfugen, istals relevantes Kriterium die aufgewendete Leistung wichtig. Dabei treibt eine Arbeitsmaschine einenPropulsor an (unter Propulsor wird hier zunachst ganz allgemein eine Vorrichtung verstanden, welche dieDrehleistung einer Arbeitsmaschine in eine hydrodynamische Vortriebsleistung bestehend aus Langskraftmal einer Geschwindigkeit umsetzt). Die von der Arbeitsmaschine zur Verfugung gestellte Leistungnennt man PB , wobei der Index B fur Brake steht. Die Leistung PB steht also am Abtriebsflansch derArbeitsmaschine zur Verfugung und wird durch eine Wellenleitung sowie ggf. ein Getriebe, das Momentund Drehzahl wandelt, auf den Propulsor ubertragen. Am Propulsor selbst steht dann die DrehleistungPD (der Index steht fur Delivered) wie folgt zur Verfugung:
PD = 2πQn (2)
Dabei bedeutet Q das Arbeitsmoment des Propulsors, das bei stationaren Zustanden gleich dem von derAntriebsmaschine gelieferten Arbeitsmoment -ggf. fur die Getriebeubersetzung umgerechnet- sein muß.n bedeutet die Drehzahl des Propulsors, ggf. entsprechend einer evtl. vorhandenen Getriebeubersetzung.Zwischen der am Propulsor verfugbaren Leistung PD und der von der Arbeitsmaschine abgegebenenLeistung PB besteht folgender Zusammenhang:
PD = PB · ηS · ηG − PPTO (3)
Dabei bedeutet ηS der Wirkungsgrad der Wellenleitung (S steht fur shaft), ηG der Wirkungsgrad eineseventuell vorhandenen Getriebes (G steht fur Gear) und PPTO die eventuell abzuziehende Leistung vonWellengeneratoren (PTO steht fur Power Take Off), falls die Antriebsanlage solche hat. Bei diesel- elek-trischen Antrieben gilt im Prinzip das gleiche, wenn als Arbeitsmaschine der elektrische Antriebsmotorverstanden wird. Fur die einzelnen Wirkungsgrade kann folgendes angesetzt werden:
• Fur direkt gekuppelte Anlagen ohne Getriebe ist ηS etwa gleich 0.99
• Fur einstufige Getriebe und Einmotorenanlagen (je Welle) ist ηS · ηG etwa 0.98
• Fur einstufige Getriebe und Mehrmotorenanlagen ist ηS · ηG etwa 0.97
• Fur starke Eisverstarkung verringern sich die Wirkungsgrade je noch etwa um 1%.
Der Propulsor wird also mit der Drehleistung PD = 2πQn angetrieben, dabei ist PD aus der Sicht desSchiffbauers die im Sinne eines Wirkungsgrades aufzuwendende Leistung, wobei der Nutzen die Schlepp-leistung des Schiffes PE ist. Damit laßt sich die Qualitat des Propulsors und dessen Zusammenwirkenmit dem Schiff wie folgt ausdrucken:
PEPD
=RT vS2πQn
= ηD (4)
Dabei wird die Grosse ηD als Gutegrad der Propulsion bezeichnet. Eigentlich ist sie ein Wirkungsgrad,aber im deutschen Sprachgebrauch ist die Bezeichnung Gutegrad ublich (im englischen heißt es total
Stefan Krueger (TKB)$E4TEXT/veroeffentl/vorlesung/propulsion/propulsion.tex
Grundlagen der Propulsion 5. April 2004
propulsion efficiency). Nun ist zu beachten, daß das eigentliche Entwurfsziel die Minimierung derLeistung PD ist. Dies kann - zumindest theoretisch - auf folgende Weisen erfolgen: Man minimiert denWiderstand RT , oder maximiert den Propulsionsgutegrad ηD oder beides. Spater wird gezeigt werden,dass eine Minimierung der Drehleistung immer beides bedeuten muß und dass eine Widerstandserhohungin jedem Fall eine Vergroßerung der Antriebsleistung bedeuten muß, weil die zusatzlich aufzuwendendeDrehleistung hierfur immer mit dem Propulsionsgutegrad, der je nach Schiff etwa zwischen 0.65 und0.75 liegt, behaftet ist.
1.2 Freifahrtwirkungsgrad des Propulsors
Bisher wurden uber den Propulsor noch keine weiteren Angaben gemacht als die, dass er eine Drehlei-stung 2πQn in eine Schubleistung umsetzen soll. Betrachtet man nun den Propulsor isoliert fur sich(so macht man es im Versuchswesen auch) unter homogener Zustromung (sogenannte Freifahrt, englischopen water condition), dann laßt sich fur einen Propulsor ein Wirkungsgrad wie folgt definieren:
ηO =TvA
2πQOn(5)
Darin bedeuten T der Schub (Langskraft) des Propulsors (englisch Thrust), vA die Anstromgeschwin-digkeit des Propulsors (A steht fur Advance), n die Drehzahl des Propulsors und QO das Momentdes Propulsors. Der Index O steht fur Open Water und soll deutlich machen, daß es sich hier umKenngroßen des Propulsors handelt, die unter Freifahrtbedingungen (also Propulsor ohne Schiff in ho-mogener Zustromung) gewonnen werden. Die Drehzahl erhalt konsequenter Weise keinen Index, warumder Schub T keinen gesonderten Index erhalt, wird weiter unten erlautert. Fur den Propulsor lautetnun die Optimalbedingung (maximaler Wirkungsgrad), dass eine benotigte Schubleistung TvA mit einerminimalen Drehleistung 2πQOn erzeugt wird.
1.3 Sog, Propulsionsbedingung
Bringt man nun den Propulsor am Schiff an und stellt die Drehleistung so ein, daß das Schiff gera-de mit der Geschwindigkeit vs stationar vorwarts fahrt, und mißt dann den Propellerschub T , dannstellt man fest, daß der Schub T meist erheblich großer ist als der Schiffswiderstand RT . Dies liegtan der Wirkungsweise des Propulsors: Um einen Schub T zu erzeugen, muß Wasser beschleunigt wer-den. Daraus resultieren nach der Bernoulli-Gleichung Unterdrucke, die auf das Schiff wirken (wennder Propeller hinten angebracht ist) oder eine Erhohung des Staudruckes (wenn er vorne angebrachtist). Dadurch entsteht eine Anderung der Druckverteilung am Schiffsrumpf, die praktisch immer miteiner Widerstandserhohung verbunden ist. Da man dies bezuglich des Glattwasserwiderstandes zumAusdruck bringen will, betrachtet man die Widerstandserhohung durch den Propeller gesondert undnennt sie Sog. Fur stationare Geradeausfahrt des Schiffes gilt demnach die Propulsionsbedingung:
T = RT + SOG (6)
Der benotigte Propulsorschub T setzt sich also zusammen aus dem Schiffswiderstand ohne Propellerund dem Sog, der eine Widerstandserhohung durch den laufenden Propeller darstellt. Der Sog istdabei eine Propulsor- Rumpfwechselwirkung, wobei die Reihenfolge Propulsor- Rumpf andeuten soll,daß die Wirkungsweise vom Propulsor generiert wird und auf den Rumpf wirkt (stromaufwarts), unddaß der Propulsor dabei einen Teil seiner eigenen Belastung generiert (uber die Ruckwirkung). Der Sogwird praktisch immer in normierter Form durch die Sogziffer t (im englischen THDF, thrust deductionfraction) wie folgt ausgedruckt:
t = 1− RTT
(7)
Oder in anderer Darstellung,RT = (1− t)T (8)
Stefan Krueger (TKB)$E4TEXT/veroeffentl/vorlesung/propulsion/propulsion.tex
Grundlagen der Propulsion 5. April 2004
wobei dann besonders deutlich wird, daß nur der Anteil (1− t)T effektiv zur Kompenstion des Wider-standes RT zur Verfugung steht. Die Sogziffer liegt typischerweise im Bereich von 0.1 .. 0.2, wobei0.1 eher fur sehr schlanke Schiffe und/oder Zweischrauber steht und 0.2 eher fur sehr vollige Schiffe.Liegt die Sogziffer deutlich uber 0.2, sollte man den Entwurf uberprufen. Weil der Sog etwa zu 80% ausPotentialanteilen besteht, entspricht die Sogziffer des naturgroßen Schiffes etwa der des Modelles.
1.4 Nachstrom
Bedingt durch die Reibung und z.T. durch die Verdrangungswirkung des Schiffes ist die Zustromungzum Proulsor (wenn dieser hinten angeordnet ist) geringer als die tatsachliche Schiffsgeschwindigkeit.Die Geschwindigkeitsverminderung am Ort des Propulsors ist direkt ein Maß fur den Schiffswiderstand,vor allem fur den Reibungswiderstand. Je großer dieser ist, desto mehr Energie wird durch Reibung andie Stromung abgegeben, was zur Folge hat, daß der Nachlauf intensiver ausgepragt ist und damit dieZustomung zum Propulsor gegenuber der Schiffsgeschwindigkeit verringert wird. Um nun die Verhaltnis-se hinter dem Schiff denen der freien Zustromung zum Propulsor anzunahern, wird die Nachstromzifferw (Englisch: WFT, Taylor Wake Fraction) wie folgt eingefuhrt:
(1− w) =vAvS
(9)
wobei vA die aquivalente homogene Zustromung zum Propulsor bedeutet, bei der die Wirkung desPropulsors die gleiche ist wie in der inhomogenen Zustromung hinter dem Schiff. Die inhomogeneZustromung zum Propulsor wird also durch eine homogene Zustromung der Große (1 − w)vS ersetzt.Der Nachstrom ist wie der Sog eine Schiffs-Propulsor- Wechselwirkungsgroße, allerdings geht hier dieWirkung vom Rumpf stromabwarts zum Propulsor (anders als beim Sog). Die Nachstromziffer isthauptsachlich von der Reibung abhangig (Grenzschicht), daher ist sie am Modell erheblich großer alsam naturgroßen Schiff, was bei einer Propulsionsprognose berucksichtigt werden muß. Nachstromziffernliegen fur Zweischrauber oder sehr schlanke Einschrauber etwa bei 0.14.. 0.16, bei volligeren Einschrau-bern geht die Nachstromziffer bis 0.25 nach oben. Bei hoheren Werten ist der Entwurf wahrscheinlichuntauglich.
2 Aufteilung des Propulsionsgutegrades
2.1 Herleitung
Der Propulsionsgutegrad war gegeben als das Verhaltnis von Schleppleistung zu Drehleistung:
ηD =PEPD
=RT vs2πQn
(10)
Ersetzt man nun den Schiffswiderstand RT durch (1− t)T und die Schiffsgeschwindigkeit vS durch denAusdruck va/(1− w), so erhalt man:
ηD =T (1− t)va
(1− w)2πQn(11)
Der Ausdruck wird nun mit dem Freifahrtmoment des Propulsors QO erweitert, das anliegt, wenn dieserden Schub T abgibt, und etwas umsortiert, man erhalt dann:
ηD =T (1− t)va
(1− w)2πQnQ0
Q0(12)
=(1− t)(1− w)
Tva2πQ0n
Q0
Q(13)
= ηHη0ηR (14)
Stefan Krueger (TKB)$E4TEXT/veroeffentl/vorlesung/propulsion/propulsion.tex
Grundlagen der Propulsion 5. April 2004
2.2 Schiffseinflußgrad
Den Term (1− t)/(1− w) beinhaltet zwei Wechselwirkungsgroßen zwischen Rumpf und Propulsor. Erberucksichtigt einerseits, welche Arbeitsbedingungen der Rumpf dem Propulsor anbietet und anderer-seits, wie der Rumpf auf den Propulsor reagiert. Dieser Term wird mit ηH bezeichnet und Schiffsein-flußgrad genannt (in Englisch: Hull Efficiency, wobei hier das Wort Efficiency nicht ganz korrekt ist,denn ηH kann durchaus Werte annehmen, die grosser sind als 1).
2.3 Propulsorfreifahrtwirkungsgrad
Der Term Tva2πQ0n
stellt den schon bekannten Freifahrtwirkungsgrad (Englisch: Open Water Efficiency)ηO des Propulsors dar, der dessen Nutzen (Schubleistung) zu dessen Aufwand (Drehleistung) in dasVerhaltnis setzt. ηO ist also ein echter Wirkungsgrad. Typische Werte fur den Propulsorwirkungs-grad sind etwa 0.65-0.75, wobei 0.75 fur Zweischrauber gilt. Bei hochbelasteten Propulsoren liegen dieWirkungsgrade deutlich unter 0.65, teilweise sinken sie bis auf 0.5, z. B. bei Schleppern. Wenn Eis-verstarkung gefordert ist, sinkt der Propulsorwirkungsgrad etwa um 3% bei der hochsten Eisklasse (1ASuper bzw. GL E4) und um ca. 0.5% bei der niedrigsten Eisklasse. Manche Propulsorhersteller, insbe-sondere bei Ruderpropellern, neigen dazu, Teile der anderen Faktoren ihrem Propulsor gutzurechnen,hier muss man ggf. aufpassen, dass alle Propulsionsfaktoren sinngemaß richtig angesetzt werden.
2.4 Gutegrad der Anordnung
Der Term Q0Q stellt das Verhaltnis des aufgenommenen Moments des Propulsors fur Freifahrtbedingun-
gen zu dem hinter dem Schiff dar. Dieser Faktor ηR wird falschlicherweise Gutegrad der Anordnunggenannt (im Englischen: Relative Rotative Efficiency, weil dieser Faktor ursprunglich von R. Froude,dem Sohn von W. Froude eingefuhrt wurde, um bei Zweischraubenschiffen den Unterschied im Propel-lerdrehsinn - man kann die Propeller ja uber oben nach außen als auch nach innen drehen lassen - zuerfassen). Daß der Gutegrad der Anordnung sich als Verhaltnis der Momente ergibt, hangt mit derBevorzugung des Schubes zusammen (s.u.). Man hatte analog einen Gutegrad der Anordnung aus demSchubverhaltnis bilden konnen, wenn man die obige Gleichung mit dem Faktor T0/T0 erweitert hatte,wobei T0 der Schub unter Freifahrtbedingungen ist, bei dem der Propulsor das Moment Q aufnimmt(hinter dem Schiff). Typische Werte fur etaR liegen etwa bei leicht unter 1.0 fur Zweischrauber und biszu 1.05, fur Einschrauber, in Extremfallen auch daruber. Hier muss man aber aufpassen, da große ηR-Werte meist nur im Modellversuch auftreten und damit oft uberzeichnet sind.
2.5 Propulsorwirkungsgrad hinter dem Schiff
Manchmal wird auch der Wirkungsgrad des Propulsors fur die Bedingung hinter dem Schiff ηB betrachtet(Englisch: Behind condition):
ηB = ηOηR (15)
2.6 Bedeutung der Propulsionsfaktoren
Man kann mit Recht einwenden, daß die einzelnen Propulsionsfaktoren technisch unwichtig sind, weil esallein auf die benotigte Leistung ankommt. Das ist zunachst auch richtig, aber man muß dabei bedenken,daß die Propulsionsfaktoren aus einem Modellversuch (bzw. aus Kombinationen von Versuchen, s.u.)gewonnen werden, bei denen die Reynoldsche Ahnlichkeit nicht eingehalten werden kann und damitReibungseffekte im Modellversuch stark uberzeichnet werden. Weil die einzelnen Propulsionsfaktorenaber jeweils unterschiedlichen Maßstabsgesetzen gehorchen, ist es fur den Entwerfer schon wichtig,deren Ubertragbarkeit auf die Grossausfuhrung richtig einschatzen zu konnen. Ausserdem werden bei
Stefan Krueger (TKB)$E4TEXT/veroeffentl/vorlesung/propulsion/propulsion.tex
Grundlagen der Propulsion 5. April 2004
Modellversuchen oft kleine Modifikationen am Modell untersucht, deren Effekt oft sowohl innerhalb derMessgenauigkeit als auch innerhalb der Prognosetoleranz liegen. Als goldene Regel fur die Bewertungsolcher Verbesserungen kann man ansetzen, dass Sie nur in dem Fall erfolgversprechend sind, wenn sichalle Propulsionsfaktoren physikalisch begrundbar in eine Richtung verschieben. Oft kann man auch ander Große der einzelnen Propulsionsfaktoren erkennen, wo noch Optimierungspotential vorhanden ist.Daher wird im folgenden erlautert, wie die einzelnen Propulsionsfaktoren ermittelt werden.
3 Die Bestimmung der Propulsionsfaktoren aus dem Modell-versuch
3.1 Benotigte Modellversuche
Zur Bestimmung der Propulsionsziffern sind drei verschiedene Modellversuche notwendig:
• Der Widerstandsversuch, bei dem der Schiffswiderstand als Funktion der Geschwindigkeit ermitteltwird.
• Der Propulsorfreifahrtversuch, bei dem der Propulsor unter homogener Zustromung getestet wird.Ermittelt werden dabei als Funktion von Anstromgeschwindigkeit vA und Drehzahl n des Propul-sors dessen Schub T und Moment Q0.
• Der Propulsionsversuch. Hierbei fahrt das Schiff mit Eigenantrieb, die Propulsordrehzahl wird soeingeregelt, daß das Modell mit der Geschwindigkeit vS fahrt. Dafur werden der Schub T und dasMoment Q gemessen.
Fur die Ermittlung der Propulsionskennziffern ist das Verhalten des Propulsors entscheidend, daherwird im folgenden kurz die Wirkungsweise des Propulsors erlautert. Der eigentliche Propulsor wirdspater behandelt. Im folgenden wird ohne Einschrankung der Allgemeinheit als Propulsor der Schrau-benpropeller behandelt, einfach weil er das am haufigsten verwendete Propulsionsorgan ist und weil dieTerminologie vom Schraubenpropeller abgeleitet ist. Andere Propulsoren (z. B. Ruder- Propeller oderSchaufelrader) konnen aber auf gleiche Weise bewertet werden.
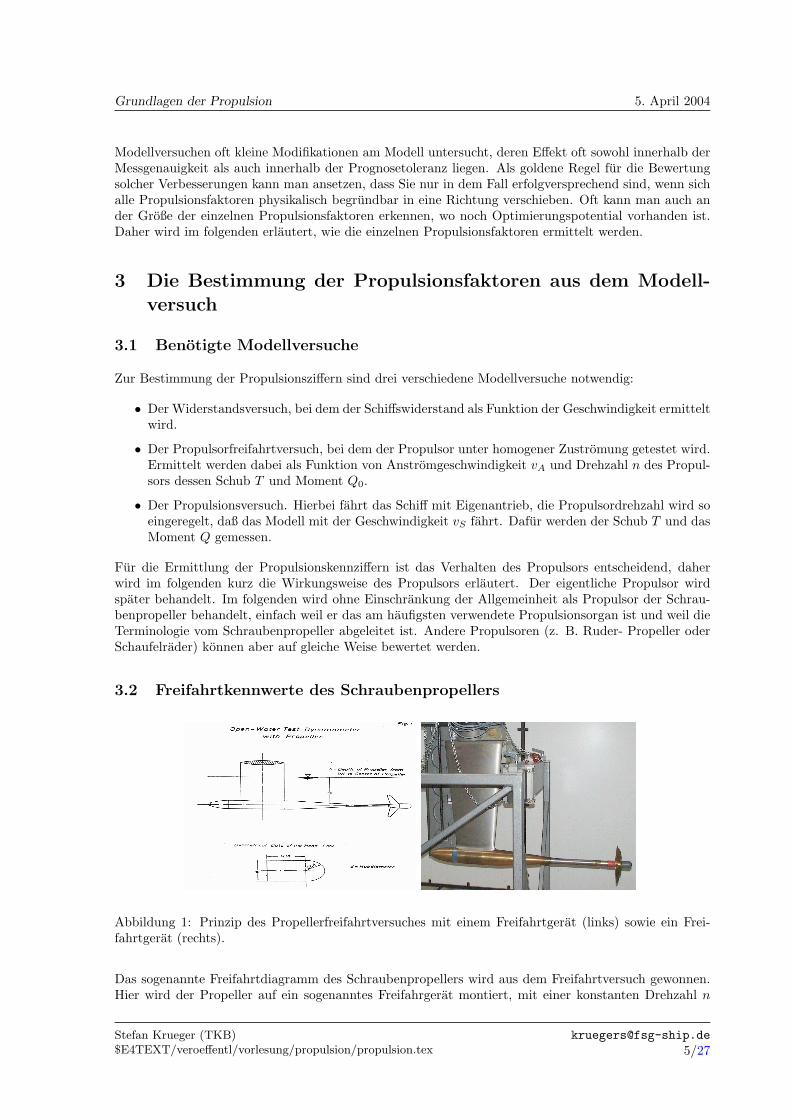
3.2 Freifahrtkennwerte des Schraubenpropellers
Abbildung 1: Prinzip des Propellerfreifahrtversuches mit einem Freifahrtgerat (links) sowie ein Frei-fahrtgerat (rechts).
Das sogenannte Freifahrtdiagramm des Schraubenpropellers wird aus dem Freifahrtversuch gewonnen.Hier wird der Propeller auf ein sogenanntes Freifahrgerat montiert, mit einer konstanten Drehzahl n
Stefan Krueger (TKB)$E4TEXT/veroeffentl/vorlesung/propulsion/propulsion.tex

Grundlagen der Propulsion 5. April 2004
gedreht und mit einer Geschwindigkeit vA durchs Wasser gezogen. Dabei werden Schub T und MomentQ gemessen. Die Versuche werden -obwohl der Propeller tiefgetaucht ist - nach der Froude´schenAhnlichkeit durchgefuhrt. Dies liegt daran, daß Reibungseffekte an Propellern im Gegensatz zu Schiffeneine deutlich geringere Rolle spielen. Das hangt damit zusammen, dass die Stromung um einen Propellerwie beim Tragflugel (ein Propeller ist im Grunde genommen ein verwundener Tragflugel) eine Stromungmit Auftrieb ist, und bei derartigen Stromungen der Auftrieb eines Tragflugels (im wesentlichen einPotentialeffekt) erheblich hoher als dessen Widerstand ist (im wesentlichen ein Reibungseffekt), solangedie Stromung nicht ablost. Dies Problem lost man dadurch, dass man die Drehzahl des Propellersentsprechend hoch wahlt. Nach der Froude´schen Anhlichkeit ergeben sich aus praktischer Sicht vielvorteilhaftere Geschwindigkeiten und Drehzahlen als nach der Reynolds´ schen Ahnlichkeit.
Eine wichtige Kenngroße fur Schraubenpropeller ist der sogenannte Fortschrittsgrad J (Englisch:JADVC, steht fur Advance), der wie folgt definiert ist:
J =vanD
(16)
mit va als Anstromgeschwindigkeit des Propellers, n als Drehzahl und D als Propellerdurchmesser. DerFortschrittsgrad laßt sich als das Verhaltnis von Anstromgeschwindigkeit zur Flugelspitzengeschwindig-keit deuten, und er enspricht einer Ganghohe der aquivalenten Schraubenbahn. Tatsachlich ensprichtdie Steigung der vom Propeller abgehenden freien Wirbel in guter Naherung der Große arctan(J/π).
Abbildung 2: Verdeutlichung der Steigung der freien Wirbel an einem Propeller durch den kavitierendenSpitzenwirbel.
Der Fortschrittsgrad des Propellers ist von fundamentaler Bedeutung fur dessen Wirkungsweise: Beigleichem Fortschrittsgrad hat ein Propeller immer die gleichen normierten Schube und Drehmomente,weshalb man alle Kennwerte des Propellers immer uber dem Fortschrittsgrad auftragt. So kann manim Prinzip die Kennwerte fur den Modellpropeller direkt auf die Großausfuhrung ubertragen. Daher istes beim Freifahrtversuch auch gerechtfertigt, die Drehzahl fest vorzugeben und den J- Wert uber dieAnstromgeschwindigkeit einzustellen.
Der Propellerschub wird durch den Schubbeiwert kT ausgedruckt, der folgendermaßen definiert ist:
kT =T
ρn2D4(17)
Anschaulich laßt sich kT so deuten: Eine Kraft wird in der Hydrodynamik immer mit einem Staudruckund einer Flache dimensionslos gemacht. Der Staudruck ist dabei reprasentiert durch ρ(nD)2 (nDenspricht der Flugelspitzengeschwindigkeit geteilt durch 2/π), und D2 entspricht der Propellerflache,wobei der Faktor π/4 z. T in der Umfangsgeschwindigkeit und in dem fehlenden 1/2 von ρ steckt. Das
Stefan Krueger (TKB)$E4TEXT/veroeffentl/vorlesung/propulsion/propulsion.tex
Grundlagen der Propulsion 5. April 2004
Moment Q wird durch den Momentenbeiwert kQ ausgedruckt, der folgendermassen definiert ist:
kQ =Q0
ρn2D5(18)
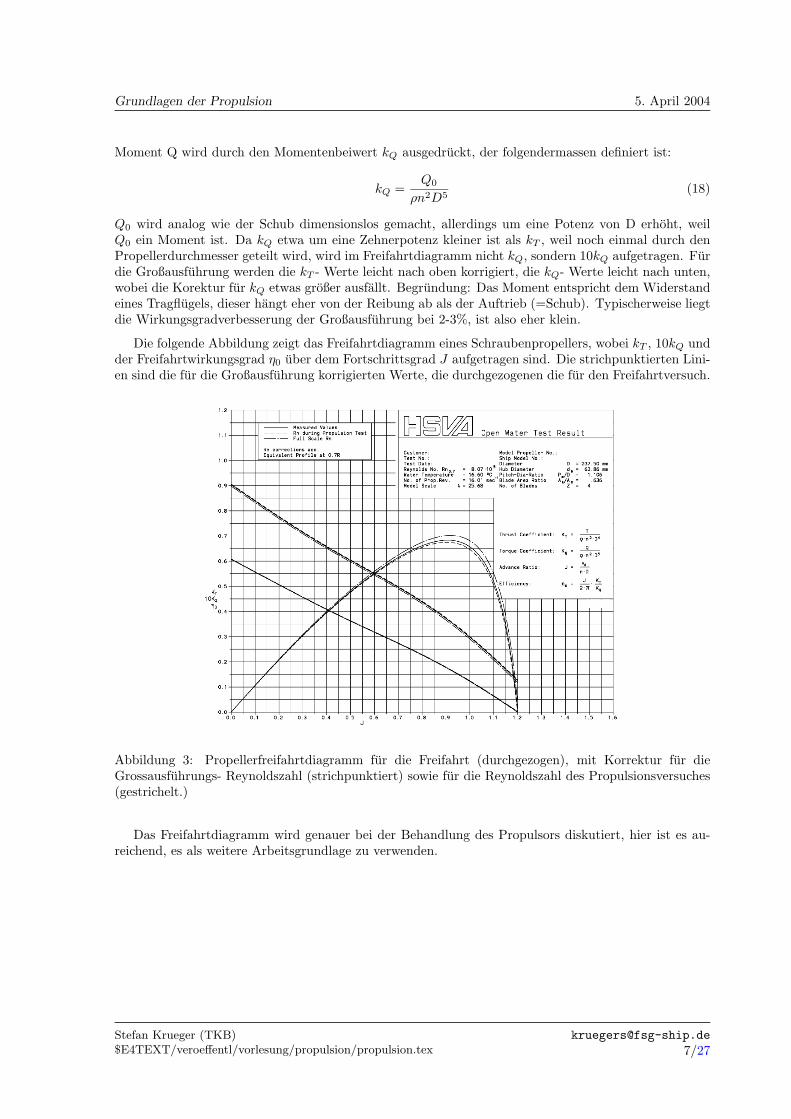
Q0 wird analog wie der Schub dimensionslos gemacht, allerdings um eine Potenz von D erhoht, weilQ0 ein Moment ist. Da kQ etwa um eine Zehnerpotenz kleiner ist als kT , weil noch einmal durch denPropellerdurchmesser geteilt wird, wird im Freifahrtdiagramm nicht kQ, sondern 10kQ aufgetragen. Furdie Großausfuhrung werden die kT - Werte leicht nach oben korrigiert, die kQ- Werte leicht nach unten,wobei die Korektur fur kQ etwas großer ausfallt. Begrundung: Das Moment entspricht dem Widerstandeines Tragflugels, dieser hangt eher von der Reibung ab als der Auftrieb (=Schub). Typischerweise liegtdie Wirkungsgradverbesserung der Großausfuhrung bei 2-3%, ist also eher klein.
Die folgende Abbildung zeigt das Freifahrtdiagramm eines Schraubenpropellers, wobei kT , 10kQ undder Freifahrtwirkungsgrad η0 uber dem Fortschrittsgrad J aufgetragen sind. Die strichpunktierten Lini-en sind die fur die Großausfuhrung korrigierten Werte, die durchgezogenen die fur den Freifahrtversuch.
Abbildung 3: Propellerfreifahrtdiagramm fur die Freifahrt (durchgezogen), mit Korrektur fur dieGrossausfuhrungs- Reynoldszahl (strichpunktiert) sowie fur die Reynoldszahl des Propulsionsversuches(gestrichelt.)
Das Freifahrtdiagramm wird genauer bei der Behandlung des Propulsors diskutiert, hier ist es au-reichend, es als weitere Arbeitsgrundlage zu verwenden.
Stefan Krueger (TKB)$E4TEXT/veroeffentl/vorlesung/propulsion/propulsion.tex

Grundlagen der Propulsion 5. April 2004
3.3 Propulsionsversuch
MotorSeitliche ModellführungBremse zum Beschleunigen
Dynamometer
Getriebe
Abbildung 4: Prinzip des Propulsionsversuchen mit einem freifahrenden Modell.
Beim Propulsionsversuch ist das Modell mit Propeller(n) und einem Fahrmotor ausgerustet. Nach einerkurzen Beschleunigungsphase, bei der das Modell durch eine Bremse mit dem Schleppwagen verbundenist, wird das Modell freigelassen (in Langsrichtung, seitlich ist es noch gefuhrt). Dann wird die Pro-pellerdrehzahl so eingeregelt, daß das Modell stationar neben dem Schleppwagen herfahrt. Ist dieserZustand ausreichend stabil, werden Drehmoment und Schub des (oder der Propeller) gemessen. Dabeiist folgendes zu beachten: Der Propulsor arbeitet im Modellversuch -verglichen mit der Großausfuhrung-beim vollig falschen Arbeitspunkt, da
• die Anstromgeschwindigkeit des Propulsors wegen des uberzeichneten Reibungseinflusses deutlichzu niedrig ist (auch der Propulsionsversuch wird mit Froude´scher Ahnlichkeit gefahren)
• der Reibungswiderstand des Modelles verglichen mit de Großausfuhrung erheblich zu groß ist.
Den erstgenannten Effekt kann man nur spater bei der Propulsionsprognose der Großausfuhrung beruck-sichtigen, den zweitgenannten aber sehr wohl schon im Modellversuch: Der Widerstandsbeiwert desModells betragt namlich nach der Froude´schen Hypothese
cT,M = cF0,M + cR (19)
der fur das naturgroße Schiff einschhließlich des Korrelationszuschlages ca (der Restwiderstandsbeiwertist nach der Froude´schen Hypothese fur naturgroßes Schiff und Modell gleich!):
cT,S = cF0,S + cR + ca (20)
Damit der Modellpropeller entsprechend der Großausfuhrung belastet ist, muss das Modell folgender-maßen um den sogenannten Reibungsabzug FDA entlastet werden:
FDA = (cT,M − cT,S)ρ
2v2MSM (21)
= (cF0,M − cF0,S − ca)ρ
2v2MSM (22)
Der Reibungsabzug kann auf zwei Weisen auf das Modell aufgebracht werden:
• Nach der sogenannten kontinentalen Methode: Dabei wird der Reibungsabzug uber einGewicht aufgebracht, daß uber Umlenkrollen durch einen Seilzug am Modell befestigt ist, so dasseine konstante Zugkraft aufgebracht wird.
• Nach der sogenannten englischen Methode: Dabei wird das Modell mit einer Federwaage anden Schleppwagen gefesselt. Es wird die Restkraft als Funktion der Propellerbelastung gemessenund es wird dann entsprechend interpoliert.
Stefan Krueger (TKB)$E4TEXT/veroeffentl/vorlesung/propulsion/propulsion.tex

Grundlagen der Propulsion 5. April 2004
Die kontinentale Methode ist deutlich einfacher, die englische bietet (formal) die Moglichkeit der Last-variation. Diese laßt sich aber auch durch die Anderung des Reibungszuges durchfuhren (s.u.), weshalbsich international wohl die kontinentale Methode durchgesetzt hat. Abb. 4 zeigt ein Modell ausgerustetfur den Propulsionsversuch. Man erkennt die Vorrichtung zum Aufbringen des Reibungsabzuges, dieDynamometer zum Messen von Schub und Moment sowie die Bremse und die seitliche Fuhrung.
3.4 Bestimmung der Sogziffer
Die Sogziffer wird aufgrund des Vergleiches des Widerstandsversuches mit dem Propulsionsversuch be-stimmt. Mit dem oben eingefuhrten Reibungsabzug ergibt sich fur die Sogziffer (weil im Modell derWiderstand um FDA zu vermindern ist:
tM = 1− RT,M − FDATM
(23)
Der Index M bezeichnet in obiger Gleichung die Großen des Modells. Bei der Bewertung der Sogziffer istggf. zu beachten, daß die absolute Große der Sogziffer erheblich vom Ausrustungszustand des Modellesim Widerstands- und Propulsionsversuch abhangt. So zum Beispiel, ob das Modell beim Widerstands-versuch schon mit Rudern ausgerustet wurde oder nicht. Die Sogziffer stellt ja die Differenz zwischenWiderstands- und Propulsionsversuch dar, und alle Anderungen des Modelles schlagen dann auf dieSogziffer durch. Die einzelnen Effekte des Soges werden weiter unten diskutiert.
Die Sogziffer wird fur das naturgroße Schiff unkorrigiert vom Modell ubernommen, weil man davonausgeht, daß etwa 80% des Soges tatsachlich Potentialsog sind. Daher ist es wichtig, alle Anteile in derSogziffer, die viskoser Natur sein konnen, moglichst zu eliminieren. Fur die Sogziffer gilt also:
tS = tM (24)
Großausfuhrungsmessungen des Soges sind bis auf Einzelfalle nicht bekannt, so daß man diesen Ansatzschlecht verifizieren kann. Praktisch scheint der Ansatz aber ausreichend genau zu sein, wenn man dieGesamtprognose betrachtet.
3.5 Bestimmung der Nachstromziffer
Die Bestimmung der Nachstromziffer ist deutlich komplizierter und gelingt nur unter Verwendung desFreifahrtdiagrammes. Bei den besseren Versuchsanstalten wird das Freifahrtdiagramm analog wie furden naturgroßen Propeller auf die Reynoldszahl des Propulsionsversuches, die wegen der geringerenDrehzahl erheblich niedriger ist als beim Freifahrtversuch umgerechnet (gestrichelte Kurve im Frei-fahrtdiagramm Abb. 3). Um die Nachstromziffer aus dem Propellerfreifahrtdiagramm zu ermitteln,gibt es im Prinzip zwei Moglichkeiten, vgl. dazu auch Abb. 5:
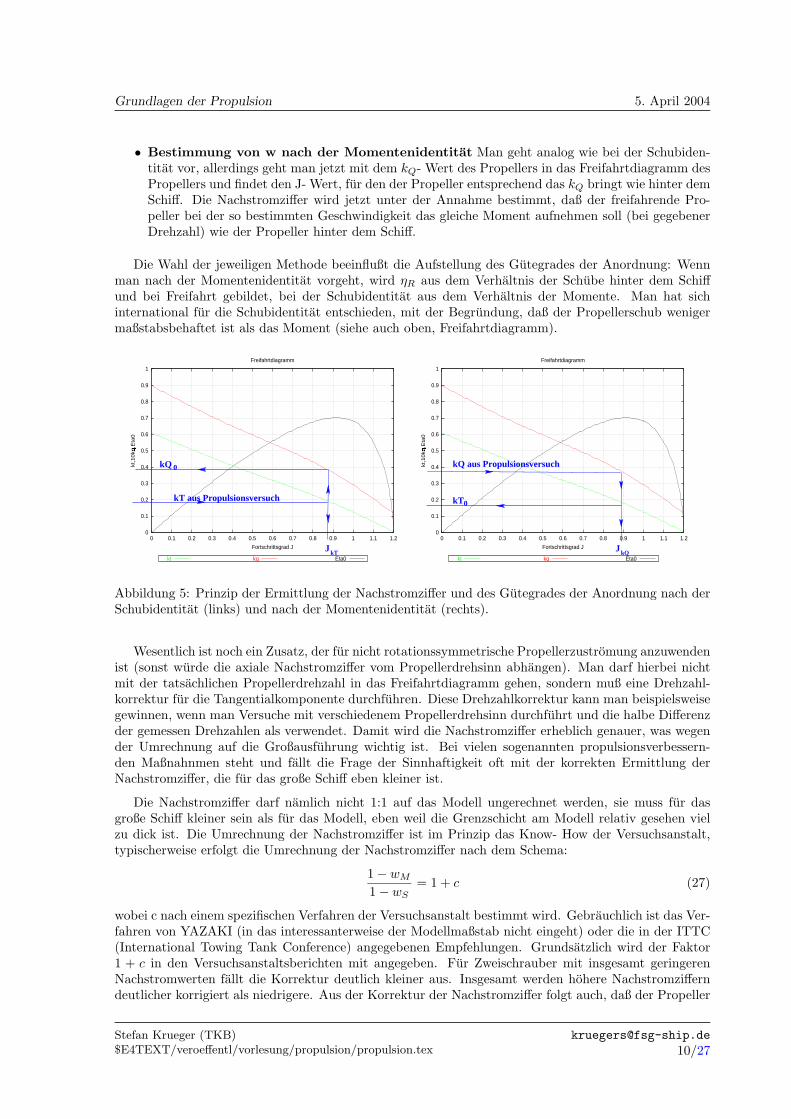
• Bestimmung von w nach der SchubidentitatDazu bildet man mit dem gemessenen Schub T den kT - Wert des Propellers (T und n sind jaaus dem Versuch bekannt). Dann liesst man im Freifahrtdiagramm den J- Wert, bei dem derPropeller den entsprechenden kT - Wert bringt, ab und erhalt dann mit
vA = JnD (25)
entsprechend die Nachstromziffer w mit
w = 1− vAvS
(26)
Die Nachstromziffer wird also unter der Annahme bestimmt, daß der freifahrende Propeller beider so bestimmten Geschwindigkeit den gleichen Schub abgeben soll (bei gegebener Drehzahl) wieder Propeller hinter dem Schiff.
Stefan Krueger (TKB)$E4TEXT/veroeffentl/vorlesung/propulsion/propulsion.tex
Grundlagen der Propulsion 5. April 2004
• Bestimmung von w nach der Momentenidentitat Man geht analog wie bei der Schubiden-titat vor, allerdings geht man jetzt mit dem kQ- Wert des Propellers in das Freifahrtdiagramm desPropellers und findet den J- Wert, fur den der Propeller entsprechend das kQ bringt wie hinter demSchiff. Die Nachstromziffer wird jetzt unter der Annahme bestimmt, daß der freifahrende Pro-peller bei der so bestimmten Geschwindigkeit das gleiche Moment aufnehmen soll (bei gegebenerDrehzahl) wie der Propeller hinter dem Schiff.
Die Wahl der jeweiligen Methode beeinflußt die Aufstellung des Gutegrades der Anordnung: Wennman nach der Momentenidentitat vorgeht, wird ηR aus dem Verhaltnis der Schube hinter dem Schiffund bei Freifahrt gebildet, bei der Schubidentitat aus dem Verhaltnis der Momente. Man hat sichinternational fur die Schubidentitat entschieden, mit der Begrundung, daß der Propellerschub wenigermaßstabsbehaftet ist als das Moment (siehe auch oben, Freifahrtdiagramm).
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2
kt,1
0kq
,Eta
0
�
Fortschrittsgrad J
Freifahrtdiagramm
kt kq Eta0
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2
kt,1
0kq
,Eta
0
�
Fortschrittsgrad J
Freifahrtdiagramm
kt kq Eta0
kT aus Propulsionsversuch
kQ
JkT
0
JkQ
kQ aus Propulsionsversuch
kT
0
Abbildung 5: Prinzip der Ermittlung der Nachstromziffer und des Gutegrades der Anordnung nach derSchubidentitat (links) und nach der Momentenidentitat (rechts).
Wesentlich ist noch ein Zusatz, der fur nicht rotationssymmetrische Propellerzustromung anzuwendenist (sonst wurde die axiale Nachstromziffer vom Propellerdrehsinn abhangen). Man darf hierbei nichtmit der tatsachlichen Propellerdrehzahl in das Freifahrtdiagramm gehen, sondern muß eine Drehzahl-korrektur fur die Tangentialkomponente durchfuhren. Diese Drehzahlkorrektur kann man beispielsweisegewinnen, wenn man Versuche mit verschiedenem Propellerdrehsinn durchfuhrt und die halbe Differenzder gemessen Drehzahlen als verwendet. Damit wird die Nachstromziffer erheblich genauer, was wegender Umrechnung auf die Großausfuhrung wichtig ist. Bei vielen sogenannten propulsionsverbessern-den Maßnahnmen steht und fallt die Frage der Sinnhaftigkeit oft mit der korrekten Ermittlung derNachstromziffer, die fur das große Schiff eben kleiner ist.
Die Nachstromziffer darf namlich nicht 1:1 auf das Modell ungerechnet werden, sie muss fur dasgroße Schiff kleiner sein als fur das Modell, eben weil die Grenzschicht am Modell relativ gesehen vielzu dick ist. Die Umrechnung der Nachstromziffer ist im Prinzip das Know- How der Versuchsanstalt,typischerweise erfolgt die Umrechnung der Nachstromziffer nach dem Schema:
1− wM1− wS
= 1 + c (27)
wobei c nach einem spezifischen Verfahren der Versuchsanstalt bestimmt wird. Gebrauchlich ist das Ver-fahren von YAZAKI (in das interessanterweise der Modellmaßstab nicht eingeht) oder die in der ITTC(International Towing Tank Conference) angegebenen Empfehlungen. Grundsatzlich wird der Faktor1 + c in den Versuchsanstaltsberichten mit angegeben. Fur Zweischrauber mit insgesamt geringerenNachstromwerten fallt die Korrektur deutlich kleiner aus. Insgesamt werden hohere Nachstromzifferndeutlicher korrigiert als niedrigere. Aus der Korrektur der Nachstromziffer folgt auch, daß der Propeller
Stefan Krueger (TKB)$E4TEXT/veroeffentl/vorlesung/propulsion/propulsion.tex

Grundlagen der Propulsion 5. April 2004
der Großausfuhrung einen anderen Arbeitspunkt hat als hinter dem Schiff. Diese mit Hilfe des Freifahrt-diagrammes bestimmte Nachstromziffer nennt man effektive Nachstromziffer, weil sie unter Anwesenheitdes Propellers gewonnen wurde. Sie hangt naturlich auch vom Propeller selbst ab. Demgegenuber gibtes noch einen Nachstrom, der ohne den Propeller ermittelt wird, den sogenannten nominellen Nach-strom. Dieser wird unten erklart. Verwendet man den Begriff Nachstromziffer ohne Zusatz, ist immerder effektive Nachstrom gemeint.
3.6 Die Bestimmung des Gutegrades der Anordnung
Die Bestimmung des Gutegrades der Anordnung ergibt sich aus dem gewahlten Verfahren zur Bestim-mung der Nachstromziffer. Da man praktisch immer die Schubidentitat verwendet, wird nur dieseMethode erlautert: Man liesst im Freifahrtdiagramm bei dem gefundenen J- Wert, der fur die Be-rechnung der Nachstromziffer gefunden wurde, den zugehorigen kQ- Wert ab und berechnet sich dasFreifahrtmoment QO entsprechend
QO = kqρn2D4 (28)
Dann berechnet man sich den Gutegrad der Anordnung ηR aus dem Verhaltnis QO/Q, wobei Q dasgemessene Moment hinter dem Schiff ist. Alternativ kann man auch bei gegebenem J-Wert den Frei-fahrtwirkungsgrad des Propellers ηO ablesen, der auch folgendermaßen geschrieben werden kann:
η0 =J
2πkTkQ
(29)
Mit bekanntem Propulsiongutegrad (PD ist ja aus dem Propulsionsversuch bekannt) berechnet mandann ηR zu:
ηR =ηDηHηO
(30)
Der Gutegrad der Anordnung stellt sich also dar als der Unterschied des Propellerverhaltens hinter demSchiff und bei Freifahrt und muß zusammen mit der Bestimmung der Nachstromziffer gesehen werden.Dieser Gutegrad der Anordnung ist also ausschließlich eine auf Reibung zuruckzufuhrende Große, wirdaber trotzdem 1:1 auf die Großausfuhrung ubertragen (wahrscheinlich enthalt die Nachstromkorrekturauch Anteile, die eigentlich auf ηR zuzuschlagen sind. Unter wird gezeigt werden, daß ηR fur dieGroßausfuhrung immer dichter an 1 liegen muß als beim Modell, weshalb Modellversuchsergebnisse, diesehr hohe ηR- Werte aufweisen (etwa ab 1.05) mit Vorsicht zu betrachten sind. Moglicherweise wird einEffekt bewertet, der an der Großausfuhrung nicht auftritt. Also gilt, zumindest laut Prognose:
ηR,M = etaR,S (31)
3.7 Propulsionsprognose fur das naturgroße Schiff
Nachdem fur das Modell alle einzelnen Propulsionkoeffizienten bestimmt und entsprechend auf die Groß-ausfuhrung umgerechnet wurden, muß jetzt der Propulsionspunkt der Großausfuhrung berechnet wer-den. Dieser ist aus zwei Grunden ein anderer als beim Modell:
• Trotz Korrektur durch Reibungsabzug mussen noch Zuschlage auf den Widerstand (und damitauf den Schub) aufgebracht werden, namlich Eigenfahrtwind (der ist im Modell praktisch nichtvorhanden, da der Windhauptspant des Modelles sehr klein ist) und Zuschlage fur Anhange, dieim Widerstandsversuch nicht angebaut waren.
• Die Zustromgeschwindigkeit zum Propeller ist eine andere, weil der Nachstrom korrigiert werdenmuß.
Stefan Krueger (TKB)$E4TEXT/veroeffentl/vorlesung/propulsion/propulsion.tex

Grundlagen der Propulsion 5. April 2004
Dabei muß ein neuer Arbeitspunkt des Propellers gefunden werden, vor allem die Drehzahl, mit der diePropulsionsbedingung Schub = Widerstand + Sog erfullt wird. Der Gang der Rechnung ist folgender(vgl. auch Abb. 6):
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1.1
1.2
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3
Pro
puls
or
& S
hip
�
Advance Coefficient
Propulsor Diagram
kt10kq CPP
10kq FPP(kt/j**2)*j**2 ship
10 kq(CPP)
Je
KT
10 kQ(FPP)
kt aus Gleichgewicht Schiff/Propeller
zugehöriges kq
Abbildung 6: Propulsordiagramm mit schiffsseitiger Belastungskurve (kT /J2)J2 (dunkelblau) zur Be-stimmung des Propellerarbeitspunktes. Grun die kQ- Linie eines Festpropellers, hellblau die eines Ver-stellpropellers mit Konstantdrehzahl und zuruckgenommener Steigung) zur Bestimmung des Arbeits-punktes des Propellers. Der Index e meint den Gleichgewichtszustand (Equilibrium).
Mit der korrigierten Nachstromziffer (s. a. unten) ergibt sich fur gegebene Schiffsgeschwindigkeit vSdie Anstromgeschwindigkeit des Propellers wie folgt:
va = vS(1− w) (32)
Mit der bekannten Sogziffer folgt daraus:
T =RT
1− t(33)
Damit kann der Schubbeiwert des Propellers wie folgt geschrieben werden:
kT =RT
ρn2D4(1− t)(34)
Das Problem liegt nun darin, die unbekannte Drehzahl zu eliminieren. Dies geschieht, in dem dieGleichung fur kT durch geeignete Potenzen von J (hier: J2) dividiert wird. Man erhalt dann:
kTJ2
=RT
ρD2(1− t)v2S(1− w)2
(35)
Dabei ist die Anstromgeschwindigkeit va bereits durch vS(1 − w) ausgedruckt worden. Man erkenntnun, daß fur einen gegebenen Punkt vS die rechte Seite eine Konstante ist, von der alle Grossen furdiesen Punkt bekannt sind. Damit kann man nun den Schubbeiwert wie folgt ausdrucken:
kT =kTJ2J2 = const · J2 (36)
Stefan Krueger (TKB)$E4TEXT/veroeffentl/vorlesung/propulsion/propulsion.tex

Grundlagen der Propulsion 5. April 2004
Diese Kurve fur kT nennt man schiffseitige Belastungskurve, und damit die GleichgewichtsbedingungSchub = Widerstand+Sog erfullt ist, liegt der Gleichgewichtspunkt gerade dort, wo sich die Kurve mitdem propellerseitigen Schubbeiwert schneidet (vgl. Abb. 6). Aus dem Schnittpunkt der beiden Kurvenerhalt man den J-Wert der Gleichgewichtsbedingung. Damit laßt sich nun das Propellerfreifahrtmomentberechnen, in dem fur gegebenes J der Momentenbeiwert abgelesen wird:
Q0 = kQρn2D5 (37)
Die Drehleistung am Propeller laßt sich dann auf zwei Arten ermitteln, wobei jeweils exakt das selbeherauskommt: Mit bekanntem Freifahrtmoment Q0 ergibt sich aus der Definition des Gutegrades derAnordnung das Propellermoment hinter dem Schiff:
Q =Q0
ηr(38)
Die Propellerdrehzahl n ergibt sich aus dem gefundenen J-Wert J des Gleichgewichtszustandes:
n =vaJD
(39)
Daraus folgt die Propellerdrehleistung:PD = 2πQne (40)
Analog laßt sich die Drehleistung uber den Propulsionsgutegrad berechnen. Mit gefundenem kT undkQ fur den Gleichgewichtszustand gilt fur den Propellerfreifahrtwirkungsgrad η0
η0 =Je2π
kTkQ
(41)
und damit wird der Propulsionsgutegrad
ηD = η0ηR1− t1− w
= η0ηRηH (42)
und die Propellerdehleistung wird
PD =PEηD
=RT vSηD
. (43)
Stefan Krueger (TKB)$E4TEXT/veroeffentl/vorlesung/propulsion/propulsion.tex

Grundlagen der Propulsion 5. April 2004
4 Sog
4.1 Detaillierte Betrachtung des Soges
Propellereinfluss
Abbildung 7: Einfluss des Propellers auf die Umstromung des Hinterschiffes. An den bezeichnetenStellen findet eine merkliche Beschleunigung der Stromung durch den Propeller statt. Ergebnis einerPaneel- Berechnung.
Der Sog wurde oben als Propeller- Schiffs- Wechselwirkungrsgroße eingefuhrt. Die theoretische Be-grundung fur den Sog lag dabei in der lokalen Beschleunigung der Stromung durch den arbeitendenPropeller, womit eine Druckabsenkung am Hinterschiff und damit ein erhohter Widerstand verbundenist. Rein praktisch laßt sich die Einwirkung des Soges nur aus der Differenz zwischen Widerstands- undPropulsionsversuch ermitteln (Großausfuhrungsmessungen scheiden aus praktischen Erwagungen aus),und unmittelbar damit verknupft ist der jeweilige Zustand des Modells. Der Sog (oder die Sogziffer)beinhaltet praktisch den Unterschied im Verhalten des Modells mit und ohne laufenden Propeller imjeweiligen Versuchszustand. Praktisch wird die Wirkung des Soges 1:1 auf das naturgroße Schiff ubert-ragen. Von daher ist es wichtig, sich klar zu machen, welche Effekte den Sog beeinflussen, um beurteilenzu konnen, ob im Einzelfall alle Effekte nach dem richtigen Maßstabsgesetz ubertragen werden. Weil sichder Sog aus der Differenz zwischen Widerstands- und Propulsionsversuch formal unter Berucksichtigungdes Reibungsabzuges FDA ergibt zu
SOG = T −RT − FDA (44)
wobei RT aus dem Widerstandsversuch, T aus dem Propulsionsversuch und FDA die Propellerentlastungim Propulsionsversuch (Reibungsabzug) darstellt, ergeben sich neben dem Haupteffekt klar folgendeNebenffekte, die anteilig in den Sog (oder die Sogziffer) eingehen konnen:
• Der Haupteffekt des Soges liegt eindeutig an einer lokalen Beschleunigung der Stromung imHinterschiffsbereich. Dadurch wird einmal ein Unterdruck induziert, der als Potentialeffekt eineKraft bewirkt, die den Widerstand des Schiffes erhoht. Durch die lokale Beschleunigung derStromung wird aber auch der Reibungswiderstand des Schiffes erhoht.
• Der Zustand des Modelles: Je nachdem, wie das Modell ausgerustet ist, ergeben sich unter-schiedliche Sogziffern. Oft wird das Modell im Widerstandsversuch ohne Ruder geschleppt, unddiese werden erst im Propulsionsversuch angebaut. In diesem Falle wird die Kombination Pro-peller plus Ruder als Propulsor aufgefaßt, und die Sogziffer wird naturgemaß großer, weil auch
Stefan Krueger (TKB)$E4TEXT/veroeffentl/vorlesung/propulsion/propulsion.tex

Grundlagen der Propulsion 5. April 2004
der Widerstand des (der) Ruder unter Propulsionsbedingungen in die Sogziffer eingeht. Dieserist aber im wesentlichen reibungsbedingt und wird dann nach dem falschen Maßstabsgesetz um-gerechnet. Richtiger ist in jedem Falle, das Modell auch schon im Widerstandsversuch mit dem(den) Ruder(n) auszurusten und den Sog als Differenz zwischen Zustand mit und ohne Propellerauszudrucken. Dann namlich geht in den Sog nur die Anderung der Ruderumstromung durchden Propeller ein, die zwar auch reibungsbedingt ist, aber die Differenz ist eben kleiner. Auftriebam Ruder infolge der auftretenden Anstellwinkel ist im wesentlichen ein Potentialeffekt und wirdrichtig als Reduktion des Soges wiedergeben und ubertragen.
• Maßstabseffekte am Ruder: Insbesondere bei Schiffen mit hohem Schubbelastungsgrad kannes im Modellversuch zu lokalen Ablosungen an der Rudervorkante durch Einwirkung des Propel-lers kommen. Dabei nimmt der Sog dann oft relativ große Werte an, die dann 1:1 auf die Groß-ausfuhrung ubertragen wurden (Ohne Propellereinfluß, also im Widerstandsversuch ohne Propellerist die Ablosung nicht vorhanden, da praktisch keine Anstellwinkel auf das Ruder wirken). Somitwurde eine Propulsionsprognose auf der konservativen Seite liegen, da bei der Großausfuhrungdie Ablosung wegen der deutlich hoheren Reynoldszahl entweder gar nicht oder nur in geringeremMaße auftreten wird. Gelegentlich wird im Modellversuch festgestellt, dass etwas dickere Rudereinen geringeren Widerstand haben. Dies kann oft auf eine Ablosung an den dunnen Profilen imBereich der Vorkante zuruckgefuhrt werden. Man kann im Propulsionsversuch leicht testen, obam Ruder eine Ablosung vorliegt, in dem man den Reibungsabzug variiert. Andert sich der Pro-pellerschub nicht genau um die Differenz im Reibungsabzug, dann muß der Sog sich als Funktionder Propellerbelastung geandert haben, was dann auf eine Ablosung am Ruder hindeutet.
• Anstellung der Ruder: Bei Zweischraubern hat man die Moglichkeit, die Ruder um einenbestimmten Winkel anzustellen um damit die Antriebsleistung zu minimieren. Praktisch mussendie Ruder etwas mehr als um den neutralen Ruderwinkel angestellt werden, typischerweise 2-4Grad, um die geringste Antriebsleistung zu erzielen (ob nach innen oder aussen hangt auch vonder Drehrichtung der Propeller ab). Der Ruderauftrieb wird dann Teil der Sogziffer, dieser Anteilwird richtig ubertragen.
• Ablosung am Hinterschiff: Bei volligen Schiffen lost die Stromung im Widerstandsversuch oftvor dem Propeller ab, was einen extrem starken Widerstandszuwachs bewirkt. Manchmal, wennder Propeller ausreichend dicht am Schiff angebracht ist, kann der arbeitende Propeller durchseine Sogwirkung die Stromung wieder zumindest teilweise wieder zum Anliegen bringen. Darausergibt sich dann eine sehr geringe Sogziffer. Damit werden dann stark reibungsabhangige Antei-le mit dem falschen Maßstabsgesetz auf die Großausfuhrung ubertragen. Die Ablosung bei derGroßausfuhrung wird ohnehin deutlich geringer sein als beim Modell, und inwieweit der natur-große Propeller tatsachlich die Stromung zum Anliegen bringt, ist unklar. Es erscheint insgesamtvernunftiger, Ablosungen im Hinterschiff generell zu vermeiden und den Propeller ausreichendweit weg vom Rumpf anzuordnen.
• Beeinflussung des Wellenbildes: Tatsachlich kann der arbeitende Propeller einen Einfluß aufdas Wellenbild haben, namlich dann, wenn der Propeller sehr groß ist und der auflaufende Propel-lerstrahl (beschleunigte Stromung) an einem Wellenberg die Wasseroberflache trifft. Dann kanndurch die Beschleunigung der Berg verringert werden, wodurch sich Heckwellen und Wellenwider-stand verringern. Dieser Anteil wird ebenfalls richtig ubertragen.
• Propellernabeneinfluß: Insbesondere bei Verstellpropellern mit dicken Naben ist zu beachten,daß die Propellernabe im Freifahrtversuch sozusagen falsch herum angestromt wird (anstelle derAblaufhaube des Propellers sitzt ja das Freifahrtgerat). An der Ablaufhaube kommt es beimPropulsionsversuch in jedem Fall zur Ablosung, die beim Freifahrtversuch nicht vorhanden seinkann. Dieser Anteil, der eigentlich eine Schubverminderung des Propellers darstellt, wird dannals Soganderung an das Schiff weitergegeben und nach dem falschen Maßstabsgesetz ubertragen.Außerdem ist beim Widerstandsversuch bei dicken Propellern darauf zu achten, daß die Stromunghinter dem Stevenrohr auf jeden Fall ablost und dass diese Ablosung ggf. nicht mit vorhandenem
Stefan Krueger (TKB)$E4TEXT/veroeffentl/vorlesung/propulsion/propulsion.tex

Grundlagen der Propulsion 5. April 2004
Propeller auftritt (z. B. wenn das Ruder eine Propulsionsbirne hat). Die Differenz mit und ohnePropeller geht dann in die Sogziffer, obwohl diese Effekte eindeutig reibungsbehaftet sind.
Aus obiger Aufzahlung wird deutlich, dass in die Sogziffer aus praktischen Grunden ihrer Ermittlung dieunterschiedlichsten Effekte eingehen, die z. T. stark reibungsbehaftet sind und damit mit dem falschenMaßstabsgesetz auf die Großausfuhrung ubertragen werden.
4.2 Maßnahmen zur Verringerung des Soges
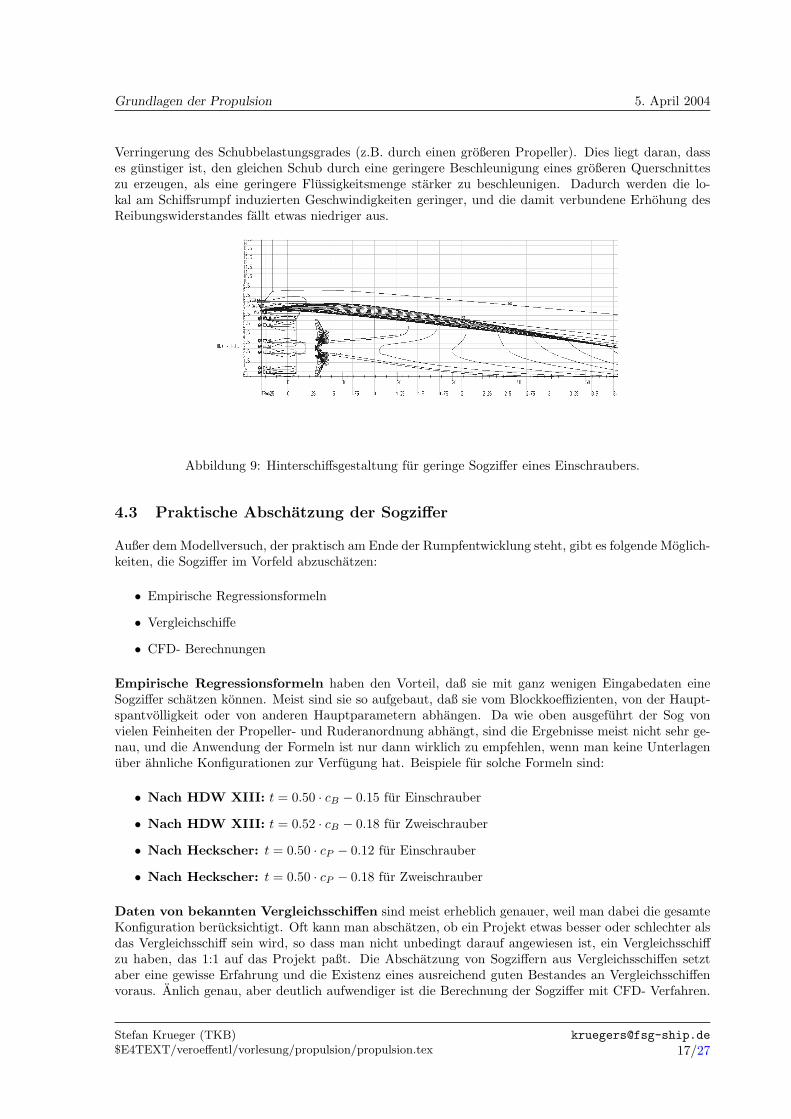
Praktisch bringt die Verringerung des Soges ebensoviel wie eine Widerstandsreduktion. Oft wird aberder Sog nicht mit der gleichen Sorgfalt behandelt wie der Widerstand. Da die Wirkung des Propellersstromaufwarts stark abnimmt, laßt sich der Sog oft auf baulich einfache Weise gering halten, was beimWiderstand nicht immer so einfach ist. Der Hauptanteil des Soges ist ja auf Potentialeffekte zuruck-zufuhren, die vom arbeitenden Propeller verursacht werden, und es reicht wegen der stromaufwartsstark abnehmenden Wirkung des Propellers meist aus, die unmittelbar im Einflußbereich des Propel-lers (stromaufwarts etwa 2 Propellerdurchmesser) liegenden Partien des Schiffskorpers entsprechend zugestalten. Die Grundregel ist dabei, daß man den Propeller moglichst weit von den Orten des Schiffesentfernt anbringen soll, die einen merklichen Normalenvektoranteil in Langsrichtung haben, vgl. Abb.8 und auch 9.
Propeller
Wasserlinie
CL
F
α
P
Sα
F : Gesamtdruckkraft auf WL P
S : Soganteil von F = F sin’ P P
Abbildung 8: Prinzip der Sogwirkung an einer Wasserlinie. Der Langsanteil entspricht dem Sog, derQueranteil hebt sich bei symmetrischen Schiffen auf.
Dies kann erreicht werden durch großzugig bemessene Schraubenbrunnen bzw. ausreichend langeStevenrohre.
Gleichzeitig sollte man versuchen, die Wasserlinen (bei Einschraubern) oder die Schnitte (bei Zwei-schraubern) so flach wie moglich verlaufen zu lassen, um den Normalenvektoranteil gering zu halten. BeiEinschraubern empfiehlt es sich zusatzlich, das Stevenrohr auch unten großzugig freizuschneiden unddie Schnitte flach laufen zu lassen. Abb. 9 zeigt die Hinterschiffsgestaltung eines Einschraubers mit ex-trem geringer Sogziffer, in die obige Empfehlungen eingearbeitet wurden. Weiterhin lohnt es fur Schiffemit geringem Tiefgang oder sehr großen Propellern, zu versuchen, den auflaufenden Propellerstrahl aufeinen Heckwellenberg zu legen, falls das moglich ist. Ferner sollte man immer den Abstand zwischenRuder und Propeller optimieren, weil dadurch oft einiges gewonnen werden kann. Extreme Vorsicht istbei Bugpropellern oder seitlich angeordneten Propellern angebracht: Fur diese Anordnungen ist der Sogerheblich, weil der voll beschleunigte Propellerstrahl auf den Rumpf trifft. Der Schiffseinflußgrad ist furBugpropeller daher deutlich geringer als 1, weil der Sog erheblich und der Nachstrom sehr gering ist.Umgekehrt gilt, daß der Sog immer dann gering wird, wenn der benotigte Propellerschub auch gering ist.Also wirkt sich eine Verminderung des Widerstandes immer positiv auf den Sog aus, weil die Wirkungdes Propellers dann auch geringer ist. Nicht ganz so ausgepragt, aber in die gleiche Richtung geht eine
Stefan Krueger (TKB)$E4TEXT/veroeffentl/vorlesung/propulsion/propulsion.tex
Grundlagen der Propulsion 5. April 2004
Verringerung des Schubbelastungsgrades (z.B. durch einen großeren Propeller). Dies liegt daran, dasses gunstiger ist, den gleichen Schub durch eine geringere Beschleunigung eines großeren Querschnitteszu erzeugen, als eine geringere Flussigkeitsmenge starker zu beschleunigen. Dadurch werden die lo-kal am Schiffsrumpf induzierten Geschwindigkeiten geringer, und die damit verbundene Erhohung desReibungswiderstandes fallt etwas niedriger aus.
Abbildung 9: Hinterschiffsgestaltung fur geringe Sogziffer eines Einschraubers.
4.3 Praktische Abschatzung der Sogziffer
Außer dem Modellversuch, der praktisch am Ende der Rumpfentwicklung steht, gibt es folgende Moglich-keiten, die Sogziffer im Vorfeld abzuschatzen:
• Empirische Regressionsformeln
• Vergleichschiffe
• CFD- Berechnungen
Empirische Regressionsformeln haben den Vorteil, daß sie mit ganz wenigen Eingabedaten eineSogziffer schatzen konnen. Meist sind sie so aufgebaut, daß sie vom Blockkoeffizienten, von der Haupt-spantvolligkeit oder von anderen Hauptparametern abhangen. Da wie oben ausgefuhrt der Sog vonvielen Feinheiten der Propeller- und Ruderanordnung abhangt, sind die Ergebnisse meist nicht sehr ge-nau, und die Anwendung der Formeln ist nur dann wirklich zu empfehlen, wenn man keine Unterlagenuber ahnliche Konfigurationen zur Verfugung hat. Beispiele fur solche Formeln sind:
• Nach HDW XIII: t = 0.50 · cB − 0.15 fur Einschrauber
• Nach HDW XIII: t = 0.52 · cB − 0.18 fur Zweischrauber
• Nach Heckscher: t = 0.50 · cP − 0.12 fur Einschrauber
• Nach Heckscher: t = 0.50 · cP − 0.18 fur Zweischrauber
Daten von bekannten Vergleichsschiffen sind meist erheblich genauer, weil man dabei die gesamteKonfiguration berucksichtigt. Oft kann man abschatzen, ob ein Projekt etwas besser oder schlechter alsdas Vergleichsschiff sein wird, so dass man nicht unbedingt darauf angewiesen ist, ein Vergleichsschiffzu haben, das 1:1 auf das Projekt paßt. Die Abschatzung von Sogziffern aus Vergleichsschiffen setztaber eine gewisse Erfahrung und die Existenz eines ausreichend guten Bestandes an Vergleichsschiffenvoraus. Anlich genau, aber deutlich aufwendiger ist die Berechnung der Sogziffer mit CFD- Verfahren.
Stefan Krueger (TKB)$E4TEXT/veroeffentl/vorlesung/propulsion/propulsion.tex

Grundlagen der Propulsion 5. April 2004
Da es sich beim Sog im wesentlichen um Potentialeffekte handelt, kommt man auch mit relativ einfachenPaneelverfahren aus. Typischerweise muss man dabei keine freie Oberflache berucksichtigen, sondernes reicht aus, eine Doppelkorperstromung zu berechnen, so dass das Problem linear bleibt und mannicht iterieren muss. Fur den Rumpf berechnet man mit geeigneten Paneelverfahren die Losung mitund ohne laufenden Propeller, die Differenz ist dann der Sog. Auf diese Weise wird der numerischeFehler der Panellierung weitgehend ausgeschaltet. Gleicherweise kann man aus beiden Losungen diemittleren Geschwindigkeitsquadrate auf dem Rumpf berechnen und damit eine Differenz im Formfaktorbestimmen, aus der sich die Anderung des Reibungswiderstands ergibt. Man muß dann aber noch denRuderanteil mitberechnen, in dem man analog mit geeigneten Verfahren die Langskraft des Ruders mitund ohne laufenden Propeller berechnet und zum Sog zuschlagt. Da das Verfahren relativ aufwendig ist,wird es nur dann angewendet, wenn keine geeigneten Daten von Vergleichsschiffen vorliegen oder wennoptimiert werden soll. Abb. 10 zeigt beispielsweise eine Sogberechnung fur einen Uberlastzustand (dasSchiff beschleunigt bei 100% MCR, ist aber noch bei langsamen Geschwindigkeiten), und man erkennt,daß der Einfluß des erheblich belasteten Propellers auf das Schiff deutlich ist.
Abbildung 10: Sogberechnung fur ein schnelles Schiff mit Paneelverfahren. Der Zustand entsprichteinem Uberlastzustand beim Beschleunigen des Schiffes, die Propeller drehen mit Nenndrehzahl, dieGeschwindigkeit ist aber noch deutlich unter dem Gleichgewichtszustand der Propulsion.
5 Nachstrom
5.1 Einfuhrung
Oben wurde der Begriff des Nachstromes ganz allgemein so definiert, daß aufgrund der Anwesenheitdes Schiffskorpers vor dem Propulsor dessen Zustromung anders ist als die Fahrtgeschwindigkeit desSchiffes. Dies liegt an folgenden Effekten:
• Bedingt durch die Reibung, hinterlaßt das Schiff einen Abdruck im Nachlauf (s.a. Schiffswider-stand), die sogenannte Nachstromdelle. Dieser Effekt macht typischerweise 80-90% des Gesamt-nachstromes aus und ist klar reibungsbedingt, also im Modellversuch stark uberzeichnet.
Stefan Krueger (TKB)$E4TEXT/veroeffentl/vorlesung/propulsion/propulsion.tex

Grundlagen der Propulsion 5. April 2004
• Bedingt durch die potentialtheoretische Druckverteilung am Schiffskorpern erreicht die Stromungin der Propellerebene u. U. nicht den vollen Staudruck, sondern einen anderen. Dies ist vor allemfur Twin-Skeg- Hinterschiffe bedeutsam, bei denen der Tunnel zwischen den Skegs wie ein Diffusorwirkt.
• Aufgrund des Wellensystems am Schiff entsteht eine Orbitalbewegung, die zusatzliche Geschwin-digkeiten induziert (Wellennachstrom). Insbesondere bei schlanken und extrem schnellen Schiffen,bei denen am Heck ein Wellental liegt, kann der Nachstrom stark durch diesen Effekt vermindertwerden.
Man unterscheidet zwei Arten des Nachstromes, die eigentlich nur wegen ihrer praktischen Bestimmungeine Bedeutung haben:
• Effektiver Nachstrom: Dieser wird aus dem Vergleich des Propellerverhaltens hinter dem Schiffbezuglich der Propellerfreifahrt gewonnen, wobei der Propeller sozusagen als Integrator wirkt.Der effektive Nachstrom beeinhaltet immer den laufenden Propeller und ist eine Funktion desSchiffes und der Propellercharakteristik. Der effektive Nachstrom beschrankt sich darauf, eineZahl (namlich die Nachstromziffer w) als integrale Wirkung anzugeben.
• Nomineller Nachstrom: Dieser wird ohne laufenden Propeller durch Aufmessen des Geschwin-digkeitsfeldes in der Propellerebene gewonnen. Der nominelle Nachstrom beinhaltet die Erfassungsowohl aller Geschwindigkeitskomponenten (also axial, tangential und radial, aus Sicht des Pro-pellers) als auch aller Orte (das Geschwindigkeitsfeld wird immer als Funktion des Radius undWinkels ermittelt). Anders als der effektive Nachstrom, der lediglich quantitativ zur Berechnungder Propulsionsfaktoren verwendet wird, hat der nominelle Nachstrom folgende wesentliche Be-deutung:
– Er ist Grundlage fur den endgultigen Propellerentwurf. Dabei wird vor allem das Umfangs-mittel fur verschiedene Radien herangezogen, um die lokale Propellersteigung (als Funktiondes Radius) festzulegen.
– Er ist wesentlich fur die Umfangsschwankungen der Propellerkrafte und Momente, insbeson-dere fur Drehschwingungen und Schubschwankungen.
– Er ist die entscheidende Große uberhaupt fur Propellerkavitation und dadurch ausgelosteDruckschwankungen. Fast alle Schiffe, die Probleme mit Schwingungen haben, haben auchProbleme mit dem Nachstrom.
Zusammengefaßt laßt sich also festhalten, daß der effektive Nachstrom fur die Antriebsleistung wesentlichist, und nur dafur, wohingegen der nominelle Nachstrom ganz wesentlich fur das Gesamtverhaltendes Schiffes verantwortlich ist. Leider last sich der Nachstrom bis heute nicht rechnerisch zuverlassigbestimmen (auch noch nicht routinemaßig mit RANSE-Verfahren in der benotigten Qualitat), so dassman hier immer auf einen Modellversuch angewiesen ist. Der Modellversuch leidet aber stark darunter,dass der Nachstrom quantitativ (das gilt fur effektiven und nominellen) vollig verkehrt ist, weil dieReibungseffekte im Modellversuch stark uberzeichnet werden. So ist man beim Entwurf der Schiffe sehrstark auf Erfahrung angewiesen. Im folgenden soll erlautert werden, welche Effekte beim Nachstromwichtig sind.
Stefan Krueger (TKB)$E4TEXT/veroeffentl/vorlesung/propulsion/propulsion.tex

Grundlagen der Propulsion 5. April 2004
5.2 Bestimmung des nominellen Nachstroms
Abbildung 11: Prinzip der Aufmessnung des nominellen Nachstromes mit einer Nachstromharke, beste-hend aus 5-Loch Pitot- Sonden.
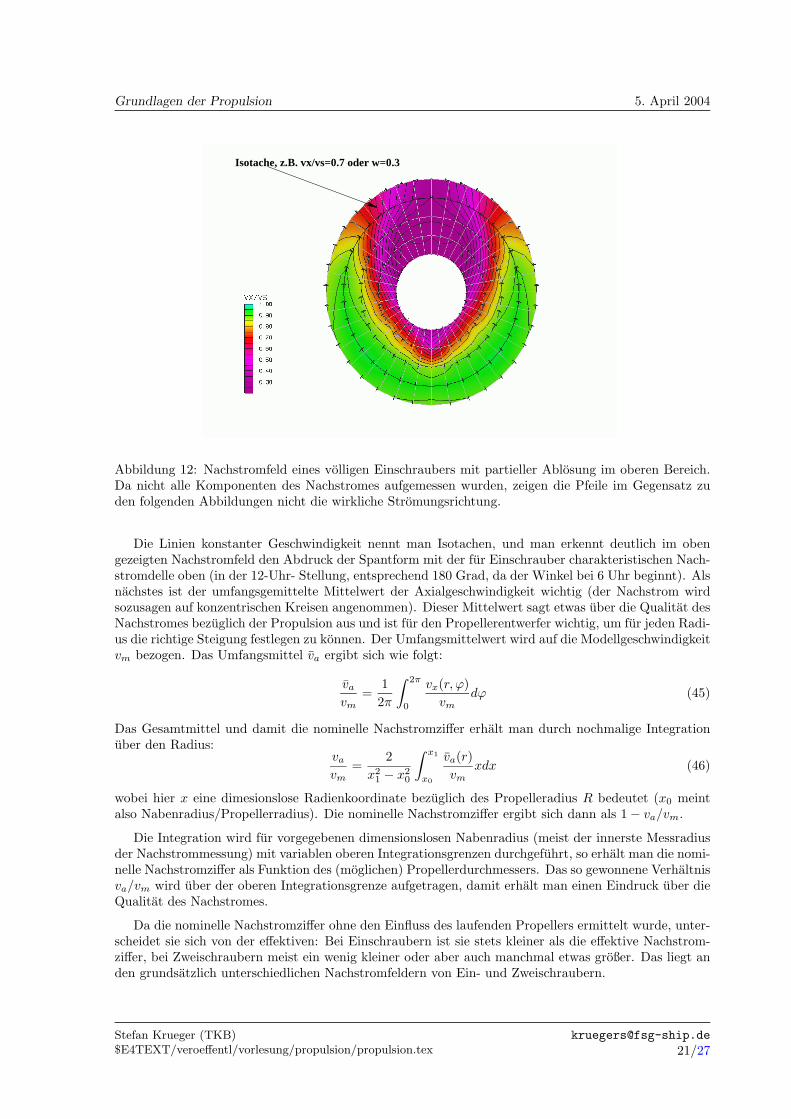
Der nominelle Nachstrom wird praktisch bestimmt durch Aufmessen des Stromungsfeldes in der Pro-pellerebene, wobei der Propeller selbst nicht anwesend ist. Dies geschieht mit einer sogennanten Nach-stromharke, das sind 5-Loch-Pitotsonden, die mehrfach auf einer Harke so angeordenet sind, dass miteiner Messfahrt mehrere Radien und Winkelstellungen (bezogen auf Mitte Propellerwelle, 0 Grad ent-spricht dabei der 6- Uhr Flugelstellung, 180 Grad der 12-Uhr Flugelstellung) abgefahren werden konnen.Abb. 11 zeigt eine solche Nachstromharke. Bei Einschraubern mit symmetrischer Zustromung wird nureine Halfte des Nachstromes aufgemesssen, typischerweise in 10-Grad-Schritten. Bei Zweischraubernmuss wegen der Unsymmetrie bezuglich Mitte Welle der ganze Winkelberech abgefahren werden, undzwar typischerweise in 5- Grad Schritten wegen der Anhange (s.u.). Die bedeutendste Komponenteist ganz klar der Axialnachstrom, da er zahlenmaßig den hochsten Anteil hat. Bei Zweischraubern istder Tangentialnachstrom ebenfalls wichtig, und zwar vor allem fur die Anstellwinkelanderung an denPropellerflugeln, die konform geht mit den propellererregten Druckschwankungen 1 Als Ergebnis derNachstrommessung erhalt man also die Verteilung der Geschwindigkeit in der Propellerebene v(x, r, ϕ),wobei x die Propellerebene ist und festliegt. Abb. 12 zeigt ein solches Nachstromfeld fur einen Ein-schrauber.
1Der Form halber sei hier erwahnt, dass Zweischrauber ohnehin die Schiffe reprasentieren, bei denen es erheblichmehr auf Komfortfragen o. dergl. ankommt, die im wesentlichen durch das Nachstromfeld beeinflußt werden. Beiden ohnehin hohen Anforderungen muss dann zusatzlich der Tangentialnachstrom beachtet werden, weil dei durch denTangentialnachstrom bedingten Anstellwinkelschwankungen Ausloser fur Kavitation und Druckschwankungen sind.
Stefan Krueger (TKB)$E4TEXT/veroeffentl/vorlesung/propulsion/propulsion.tex
Grundlagen der Propulsion 5. April 2004
Isotache, z.B. vx/vs=0.7 oder w=0.3
Abbildung 12: Nachstromfeld eines volligen Einschraubers mit partieller Ablosung im oberen Bereich.Da nicht alle Komponenten des Nachstromes aufgemessen wurden, zeigen die Pfeile im Gegensatz zuden folgenden Abbildungen nicht die wirkliche Stromungsrichtung.
Die Linien konstanter Geschwindigkeit nennt man Isotachen, und man erkennt deutlich im obengezeigten Nachstromfeld den Abdruck der Spantform mit der fur Einschrauber charakteristischen Nach-stromdelle oben (in der 12-Uhr- Stellung, entsprechend 180 Grad, da der Winkel bei 6 Uhr beginnt). Alsnachstes ist der umfangsgemittelte Mittelwert der Axialgeschwindigkeit wichtig (der Nachstrom wirdsozusagen auf konzentrischen Kreisen angenommen). Dieser Mittelwert sagt etwas uber die Qualitat desNachstromes bezuglich der Propulsion aus und ist fur den Propellerentwerfer wichtig, um fur jeden Radi-us die richtige Steigung festlegen zu konnen. Der Umfangsmittelwert wird auf die Modellgeschwindigkeitvm bezogen. Das Umfangsmittel va ergibt sich wie folgt:
vavm
=1
2π
∫ 2π
0
vx(r, ϕ)vm
dϕ (45)
Das Gesamtmittel und damit die nominelle Nachstromziffer erhalt man durch nochmalige Integrationuber den Radius:
vavm
=2
x21 − x2
0
∫ x1
x0
va(r)vm
xdx (46)
wobei hier x eine dimesionslose Radienkoordinate bezuglich des Propelleradius R bedeutet (x0 meintalso Nabenradius/Propellerradius). Die nominelle Nachstromziffer ergibt sich dann als 1− va/vm.
Die Integration wird fur vorgegebenen dimensionslosen Nabenradius (meist der innerste Messradiusder Nachstrommessung) mit variablen oberen Integrationsgrenzen durchgefuhrt, so erhalt man die nomi-nelle Nachstromziffer als Funktion des (moglichen) Propellerdurchmessers. Das so gewonnene Verhaltnisva/vm wird uber der oberen Integrationsgrenze aufgetragen, damit erhalt man einen Eindruck uber dieQualitat des Nachstromes.
Da die nominelle Nachstromziffer ohne den Einfluss des laufenden Propellers ermittelt wurde, unter-scheidet sie sich von der effektiven: Bei Einschraubern ist sie stets kleiner als die effektive Nachstrom-ziffer, bei Zweischraubern meist ein wenig kleiner oder aber auch manchmal etwas großer. Das liegt anden grundsatzlich unterschiedlichen Nachstromfeldern von Ein- und Zweischraubern.
Stefan Krueger (TKB)$E4TEXT/veroeffentl/vorlesung/propulsion/propulsion.tex

Grundlagen der Propulsion 5. April 2004
5.3 Bewertung von Nachstromfeldern
Wichtig beim Nachstrom ist, dass nicht nur globale Eigenschaften der Schiffsform sich dort wiederfindenlassen, sondern auch viele lokale Effekte, falls sie dicht genug an der Propellerebene liegen. Generellgilt, dass jede Storung der Stromung ihren Abdruck im Nachstromfeld liefert, mit den entsprechendenNachteilen. Abb. 13
Finne
Messradius 1.2 * D
Abbildung 13: Nachstromfeld eines sehr schlanken Einschraubers mit sehr gutem Nachstromfeld imoberen Bereich. Unten erkennt man deutlich den Abdruck der kleinen Finne im Nachstromfeld.
zeigt ein global sehr gutes Nachstromfeld eines Einschraubers, und man erkennt deutlich den mar-kanten Peak bei der 6-Uhr-Stellung, der auf die kleine Finne zuruckzufuhren ist. Dieser kleine Peak istsehr schadlich, weil er extreme Anstellwinkelschwankungen uber einen kurzen Winkelbereich generiertund damit die Propulsion ungunstig beeinflußt. Die Mehrleistung aufgrund der 6-Uhr Delle ergab sichzu etwa 900 kW, obwohl die Finne nicht einmal 2% der benetzten Oberflache betragen hat.
Stefan Krueger (TKB)$E4TEXT/veroeffentl/vorlesung/propulsion/propulsion.tex
Grundlagen der Propulsion 5. April 2004
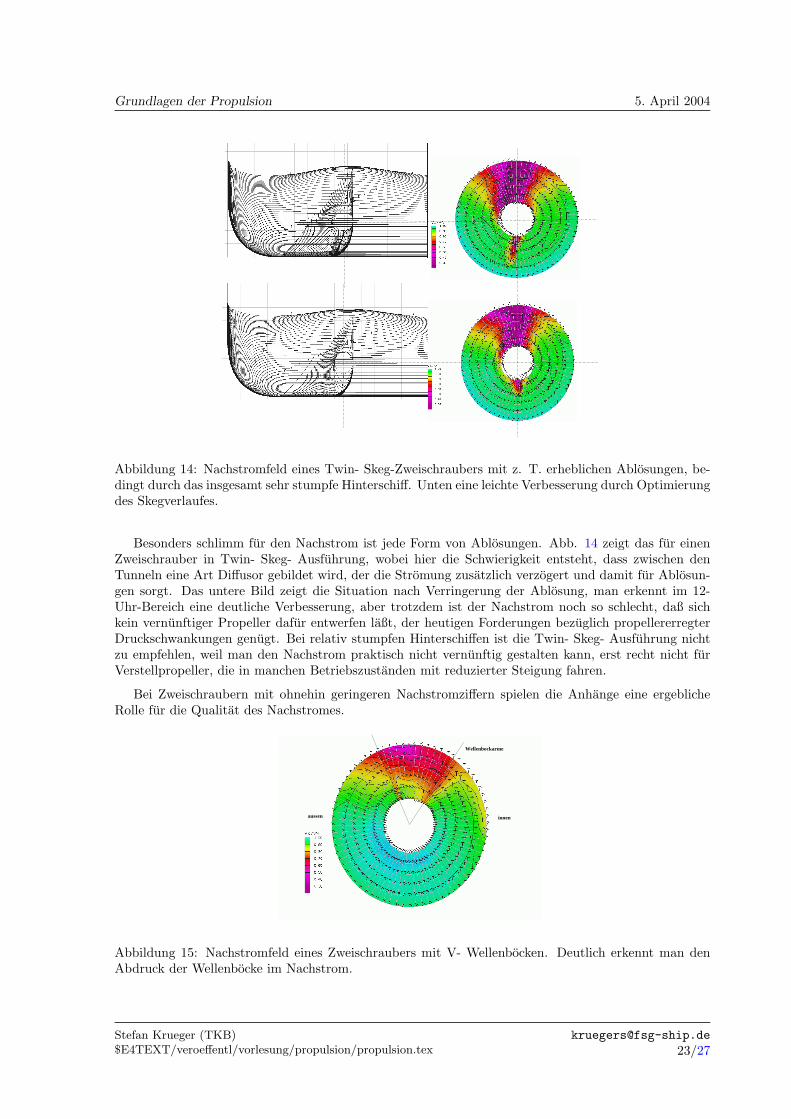
Abbildung 14: Nachstromfeld eines Twin- Skeg-Zweischraubers mit z. T. erheblichen Ablosungen, be-dingt durch das insgesamt sehr stumpfe Hinterschiff. Unten eine leichte Verbesserung durch Optimierungdes Skegverlaufes.
Besonders schlimm fur den Nachstrom ist jede Form von Ablosungen. Abb. 14 zeigt das fur einenZweischrauber in Twin- Skeg- Ausfuhrung, wobei hier die Schwierigkeit entsteht, dass zwischen denTunneln eine Art Diffusor gebildet wird, der die Stromung zusatzlich verzogert und damit fur Ablosun-gen sorgt. Das untere Bild zeigt die Situation nach Verringerung der Ablosung, man erkennt im 12-Uhr-Bereich eine deutliche Verbesserung, aber trotzdem ist der Nachstrom noch so schlecht, daß sichkein vernunftiger Propeller dafur entwerfen laßt, der heutigen Forderungen bezuglich propellererregterDruckschwankungen genugt. Bei relativ stumpfen Hinterschiffen ist die Twin- Skeg- Ausfuhrung nichtzu empfehlen, weil man den Nachstrom praktisch nicht vernunftig gestalten kann, erst recht nicht furVerstellpropeller, die in manchen Betriebszustanden mit reduzierter Steigung fahren.
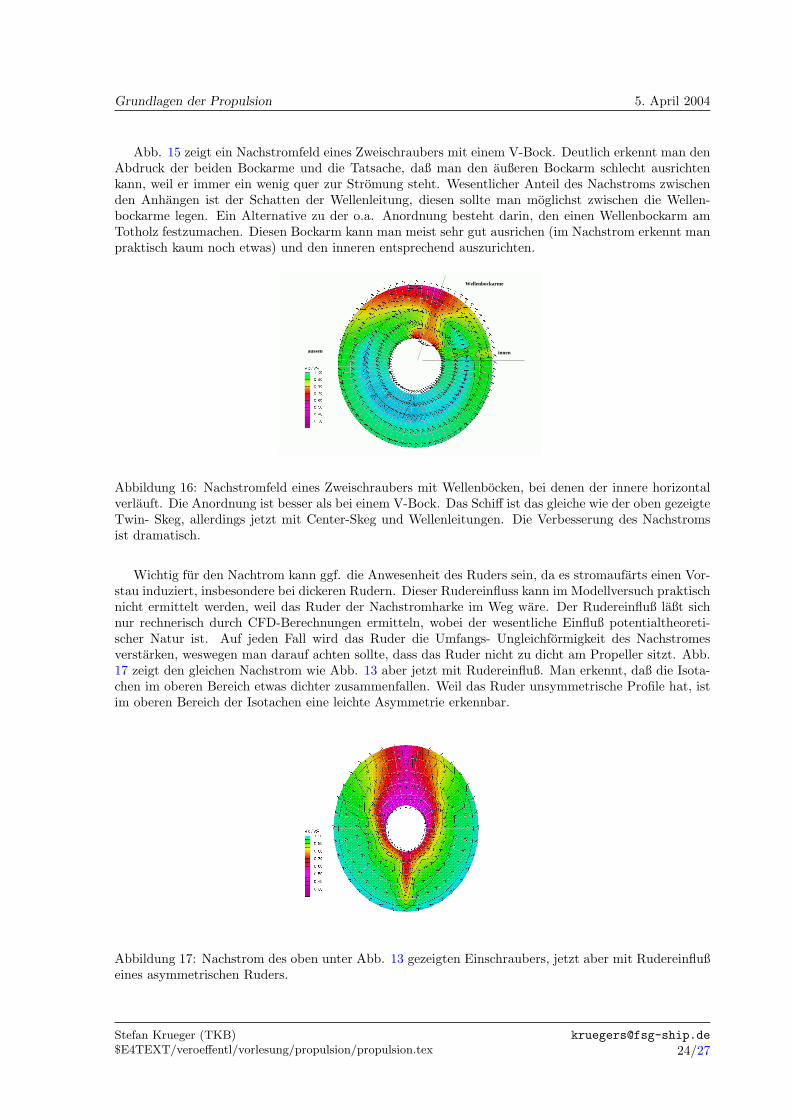
Bei Zweischraubern mit ohnehin geringeren Nachstromziffern spielen die Anhange eine ergeblicheRolle fur die Qualitat des Nachstromes.
Wellenbockarme
innenaussen
Abbildung 15: Nachstromfeld eines Zweischraubers mit V- Wellenbocken. Deutlich erkennt man denAbdruck der Wellenbocke im Nachstrom.
Stefan Krueger (TKB)$E4TEXT/veroeffentl/vorlesung/propulsion/propulsion.tex
Grundlagen der Propulsion 5. April 2004
Abb. 15 zeigt ein Nachstromfeld eines Zweischraubers mit einem V-Bock. Deutlich erkennt man denAbdruck der beiden Bockarme und die Tatsache, daß man den außeren Bockarm schlecht ausrichtenkann, weil er immer ein wenig quer zur Stromung steht. Wesentlicher Anteil des Nachstroms zwischenden Anhangen ist der Schatten der Wellenleitung, diesen sollte man moglichst zwischen die Wellen-bockarme legen. Ein Alternative zu der o.a. Anordnung besteht darin, den einen Wellenbockarm amTotholz festzumachen. Diesen Bockarm kann man meist sehr gut ausrichen (im Nachstrom erkennt manpraktisch kaum noch etwas) und den inneren entsprechend auszurichten.
Wellenbockarme
innenaussen
Abbildung 16: Nachstromfeld eines Zweischraubers mit Wellenbocken, bei denen der innere horizontalverlauft. Die Anordnung ist besser als bei einem V-Bock. Das Schiff ist das gleiche wie der oben gezeigteTwin- Skeg, allerdings jetzt mit Center-Skeg und Wellenleitungen. Die Verbesserung des Nachstromsist dramatisch.
Wichtig fur den Nachtrom kann ggf. die Anwesenheit des Ruders sein, da es stromaufarts einen Vor-stau induziert, insbesondere bei dickeren Rudern. Dieser Rudereinfluss kann im Modellversuch praktischnicht ermittelt werden, weil das Ruder der Nachstromharke im Weg ware. Der Rudereinfluß laßt sichnur rechnerisch durch CFD-Berechnungen ermitteln, wobei der wesentliche Einfluß potentialtheoreti-scher Natur ist. Auf jeden Fall wird das Ruder die Umfangs- Ungleichformigkeit des Nachstromesverstarken, weswegen man darauf achten sollte, dass das Ruder nicht zu dicht am Propeller sitzt. Abb.17 zeigt den gleichen Nachstrom wie Abb. 13 aber jetzt mit Rudereinfluß. Man erkennt, daß die Isota-chen im oberen Bereich etwas dichter zusammenfallen. Weil das Ruder unsymmetrische Profile hat, istim oberen Bereich der Isotachen eine leichte Asymmetrie erkennbar.
Abbildung 17: Nachstrom des oben unter Abb. 13 gezeigten Einschraubers, jetzt aber mit Rudereinflußeines asymmetrischen Ruders.
Stefan Krueger (TKB)$E4TEXT/veroeffentl/vorlesung/propulsion/propulsion.tex

Grundlagen der Propulsion 5. April 2004
Zusammenfassend kann man uber die Qualitat des nominellen Nachstromes folgendes sagen:
• Die radiale Ungleichformigkeit (also wenn man den umfangsgemittelten Nachstrom betrachtet undsich das Nachstromfeld sozusagen auf konzentrischen Kreisen mit dem jeweilgen radialen Mittel-wert vorstellt) des Nachstromes ist meist gunstig fur die Propulsion. Dies liegt daran, dass derEnergieinhalt der Propellerzustromung, der vom Quadrat der Geschwindigkeit abhangt, fur eineungleichformige Zustromung immer großer ist als fur eine nach Impulsgleichheit gemittelte (s.a.Definition der nominellen Nachstromziffer). Da der Propeller verglichen mit der Freifahrtbedin-gung (homogen) ein hoheres Energieniveau angeboten bekommt, kann er dieses gewinnbringendumsetzen. Daher ruhrt die Vorstellung, daß man aus dem Nachstrom Energie zuruckgewinnenkann, was nur teilweise richtig ist. Korrekt ist, dass bei gegebener Nachstromziffer die radialeUngleichformigkeit gewinnbringend umgesetzt werden kann, falsch ist die Vorstellung, dass mangenerell durch hoheren Nachstrom etwas gewinnt. 2
• Die tangentiale Ungleichformigkeit des Nachstroms (zur Verdeutlichung: gemeint ist nicht dieUngleichformigkeit des Tangentialnachstromes, sondern die Umfangsungleichformigkeit des Axial-nachstromes) ist immer schlecht. Fur die Propulsion ist sie immer nachteilig, weil sie zu Schwan-kungen des Anstellwinkels der Propellerflugel fuhrt, und es aus energetischen Uberlegungen klarist, dass ein Propellerflugel bei einem konstanten mittleren Anstellwinkel einen besseren Gutegradhaben muß (etwa ausgedruckt durch das Verhaltnis Auftrieb/Widerstand) als wenn dieser Anstell-winkel heftig schwankt. Fur die propellerregten Druckschwankungen oder Schub- und Drehmo-mentenschwankungen sind tangentiale Ungleichformigkkeiten in jedem Falle schlecht. Im schlimm-sten Fall kommt es zur Ablosung auf den Propellerflugeln und damit zu erheblichem zusatzlichenLeistungsbedarf, vgl. Abb. 18. Der Mehrbedarf an Leistung durch die Storung im Nachstromergab sich zu etwa 900 kW, obwohl die Finne, die den Nachstrompeak verursacht hat, nur knapp2% der benetzten Oberflache des Schiffes ausmacht.
Ablösung.
Positiver Druckgradient=
Abbildung 18: Stromungsablosung auf der Saugseite eines Propellers beim Durchgang durch einen ex-tremen Nachstrom- Peak. Die drei Bilder zeigen den Flugel in Winkelschritten von 2.5 Grad, in derMitte wird die Druckverteilung auf dem Propellerflugel durch ein markantes Uberdruckgebiet zerschnit-ten, so dass es zur Stromungsablosung auf dem Flugel kommt, was fur die Winkelstellung eine extremeZunahme des Momentes bedeutet.
Zusammenfassend laßt sich sagen, daß der Nachstrom zwei gegenteilige Effekte hat: Radiale Un-gleichformigkeit verbessert i.A. die Propulsion, tangentiale verschlechtert sie. Generell gilt, dass manversuchen muss, den Nachstrom so gering wie moglich zu halten. Unabdingbare Voraussetzung dafur
2Dazu ein sehr schoner Kommentar von E. van Dieren, JSTG 1955, S. 203: ’Man hat immer viel gesprochen vomNachstromgewinnen. Die Freude uber diese Gewinne ist meines Erachtens wie die Freude eines Mannes uber die Groschen,die auf dem Ruckweg teilweise zuruckfindet, nachdem er sie auf dem Hinweg durch ein Loch in seiner eigenen Tascheverloren hat. Die Versuche, den Nachstromgewinn durch Schiffsformanderungen zu vergroßern sind zu vergleichen mitdem Vergroßern des Loches in der Tasche. Diese Bestrebungen haben sehr unangenehme Nebenwirkungen, dass sie zuvergroßerten Vibrationen fuhren, sowohl im Schiff als auch im Ruder.’
Stefan Krueger (TKB)$E4TEXT/veroeffentl/vorlesung/propulsion/propulsion.tex

Grundlagen der Propulsion 5. April 2004
ist die Vermeidung von Ablosungen im Hinterschiff sowie die Vermeidung von Storungen unmittelbarvor dem Propeller. Bei Zweischraubern dominiert meist die tangentiale Ungleichformigkeit, bei Ein-schraubern meist die radiale. Daher haben Zweischrauber meist etwas geringere Schiffseinflussgrade,aber deutlich hohere Propellerwirkungsgrade. Wenn es um die Vermeidung von Vibrationen geht, sindZweischrauber immer uberlegen, da fur die propellererregten Druckschwankungen ausschliesslich derUmfangs-Gradient der Isotachen auf den ausseren Blattschnitten wesentlich ist, der bei Zweischraubernerheblich geringer ausfallt.
5.4 Effektive Nachstromziffer
Wie oben erlautert, gewinnt man die effektive Nachstromziffer aus dem Freifahrtdiagramm des Pro-pellers unter Beachtung der Schubidentitat. Damit ist klar, daß sich die effektive Nachstromziffer furverschiedene Propeller unterscheiden muß. Sie ist meist großer (bei Zweischraubern auch manchmaletwas kleiner) als die nominelle Nachstromziffer. Das liegt daran, dass der Propeller das Nachstromfeldetwas anders integriert als die fur die Berechnung der nominellen Nachstromziffer angegebene Formel.Messungen des effektiven Nachstromfeldes sind extrem aufwendig (geht nur beruhrungslos) und auchschwer zu deuten, da das effektive Nachstromfeld von der momentanten Propellerflugelstellung abhangt.Theoretisch konnte man fur den effektiven Nachstrom die vom Propeller in seiner Ebene induziertenGeschwindigkeiten berechnen und dem nominellen Nachstrom uberlagern, was dann aber einen Wi-derspruch zur Freifahrt darstellt. Konsistenter ist die Vorstelllung, daß der Propeller aufgrund seinerinduzierten Geschwindigkeiten nach der Kontinuitatsgleichung zu einer Kontraktion des Nachstromfel-des fuhren muss. Man kann dann die propellerinduzierten Geschwindigkeiten als Funktion des Radiusberechnen, woraus sich fur jeden Messradius eine Strahlkontraktion ergibt, um die die einzelnen Messra-dien dann nach innen verschoben werden. Dies fuhrt bei Einschraubern zu einer leichten Vergroßerungdes Nachstromes, wenn Isotachen mit geringer Geschwindigkeit vom Propeller erfaßt werden, und beiZweischraubern u.U. zum Gegenteil, wenn Isotachen mit relativ hoher Geschwindigkeit vom Propellererfaßt werden. Auf jeden Fall liegt dann der mit der Strahlkontraktion verbesserte nominelle Nach-strom dichter am effektiven. Gleichfalls erkennt man aus diesen Uberlegungen, daß Propeller mit einermoglichst gleichmaßigen Flugelbelastung in radialer Richtung zu besseren effektiven Nachstromen undzu geringeren Unterschieden zwischen nominellem und effektivem Nachstrom fuhren.
Bei der Abschatzung der effektiven Nachstromziffer im Vorenturf geht man ahnlich vor wie bei derSogziffer: Entweder schatzt man den Nachstrom von einem bekannten Vergleichsschiff ab, oder manbenutzt analog zur Sogziffer aufgebaute empirische Formeln, die aber meist nicht sehr genau sind, weilsie zu wenig Details berucksichtigen. Benutzt man diese Formeln, dann empfiehlt es sich, fur Nachstrom-und Sogziffer den gleichen Autor heranzuziehen. Beispiele fur solche Formeln sind (weitere konnen dereinschlagigen Literatur entnommen werden):
• Nach HDW XIII: w = 0.75 · cB − 0.24 fur Einschrauber
• Nach HDW XIII: w = 0.81 · cB − 0.34 fur Zweischrauber
• Nach Heckscher: w = 0.70 · cP − 0.18 fur Einschrauber
• Nach Heckscher: w = 0.70 · cP − 0.30 fur Zweischrauber
6 Gutegrad der Anordnung
Der Gutegrad der Anordung ergab sich bei Ansatz der Schubidentitat daraus, daß der Propeller hinterdem Schiff im Nachstrom bei gleichem Schub wie in der Freifahrt ein anderes Moment als fur Frei-fahrtbedingungen aufnimmt. Der Gutegrad der Anordung ist daher eigentlich ein Nachstromgutegrad,und alles, was bezuglich der Nachstromziffer gesagt wurde, gilt gleichermaßen fur den Gutegrad der
Stefan Krueger (TKB)$E4TEXT/veroeffentl/vorlesung/propulsion/propulsion.tex

Grundlagen der Propulsion 5. April 2004
Anordnung. Wichtig ist dabei, dass es fur den Gutegrad der Anordnung von fundamentaler Bedeu-tung ist, wie die Nachstromziffer bestimmt wurde. Obwohl der Gutegrad der Anordung eindeutig aufReibungseffekte zuruckzufuhren ist, wird er 1:1 auf die Grossausfuhrung ubertragen, was physikalischoffensichtlich falsch ist. Dass die Prognosen der Versuchsanstalten trotzdem meist brauchbare Ergebnis-se liefern,liegt an dem permanten Abgleich mit Probefahrten und einem wohlausgewogenen Ritual vonempirischen Korrektruren im Gesamtverfahren. Wahrscheinlich berucksichtigt die Nachstromkorrekturfur die Großausfuhrung auch irgendwie die Anderung von ηR.
Trotzdem muss man als Entwurfsingenieur immer aufpassen, wenn Versuchsergebnisse hohe Gute-grade der Anordnung liefern, weil man diese eben nicht 1:1 auf die Großausfuhrung ubertragen kann.Dazu hilft folgende Uberlegung: Stellt man sich einen Modellversuch im Maßstab∞ vor (z.B. eine quasiunendlich große Großausfuhrung), dann wird die Reynoldszahl fur die Großausfuhrung praktisch auch∞, und damit wird die Grenzschichtdicke dieser Großausfuhrung praktisch 0. Damit enspricht diesertheoretische Fall der homogenen Zustromung zum Propeller, fur den definitionsgemaß der Gutegrad derAnordnung 1 sein muß. Fur das unendlich große Schiff wird also immer
ηR,λ=∞ = 1 (47)
Da die Reynoldszahl des naturgrossen Schiffes bei Froudescher ahnlichkeit etwa zwei Grossenordnungenuber der des Modelles liegt, muß ηR der Grossausfuhrung immer dichter an 1 liegen als beim Modell.Daraus folgt, dass ein Modellversuch, der ein ηR von weniger als 1 liefert, eher konservative Ergebnisseliefert, wohingegen ein Modellversuch mit einem hohen ηR auf der unsicheren Seite liegt. Hohe ηR-Werte deuten meist darauf hin, dass irgendetwas beim Versuch schiefgelaufen ist oder dass die Nach-stromziffer nicht korrekt ermittelt wurde. Dies gilt besonders fur Schiffe mit einem deutlichen und nichtpunktsymmetrischen Tangentialnachstrom, weil die Tangentialanteile uber die Anstellwinkelanderungdes Propellers auf dessen Belastung und damit auf die Bestimmung der (eigentlich axialen) Nachstrom-ziffer durchschlagen, welche wieder an den Gutegrad der Anordnung gekoppelt ist. Daher wird in praxibei solchen Schiffen die Schubidentitat nicht mit der tatsachlichen Propellerdrehzahl durchgefuhrt, son-dern mit einer um den gemittelten tangentialen Anteil korrigierten Drehzahl, was meist zu realistischerenErgebnissen fuhrt. Diese Auswertung ist aber sehr aufwendig, weil erst das tangentiale Mittel bestimmtwerden muß, was aber ggf. auch aus dem Tangentialnachstrom gewonnen werden kann.
Bei der Abschatzung des Gutegrades der Anordung geht man entweder von einem Vergleichschiffaus oder setzt ηR einfach zu 1, was in den meisten Fallen ausreicht. Damit liegt man -wenn man keinVergleichschiff- hat, auf der sicheren Seite.
7 Weiterfuhrende Literatur
Bertram, V. (2000), Practical Ship Hydrodynamics. Butterworth-Heinemann
Saunders, H. E. (1965), Hydrodynamics in Ship Design. The Society of Naval Architects and MarineEngineers, New York
Van Lammeren, W. P. A. (1948), Resistance, Propulsion and Steering of Ships (RPSS). The TechnicalPublishing Company H. Stam- Haarlem-Holland
Stefan Krueger (TKB)$E4TEXT/veroeffentl/vorlesung/propulsion/propulsion.tex

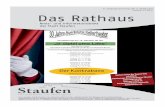

![Buchliteratur - Springer978-3-322-99491...Thermische Turbomaschinen, Berlin 1958. [A 19] J. Zucrow. Aircraft and Missile Propulsion, New York 1958. [A 20] A. Betz, Einflihrung in die](https://static.fdokument.com/doc/165x107/614abe1112c9616cbc699cf5/buchliteratur-springer-978-3-322-99491-thermische-turbomaschinen-berlin-1958.jpg)





![Literatur978-3-662-61758...Automobiltechnische Zeitschrift 2/2000 ISSN 0001-2785 [24] Gombert, B.: eCorner: Antrieb durch Radnabenmotoren in „Alternative Propulsion Systems for Automobiles“,](https://static.fdokument.com/doc/165x107/613d6807e1ef621e9f2db419/literatur-978-3-662-61758-automobiltechnische-zeitschrift-22000-issn-0001-2785.jpg)








