In dieser Ausgabe - dfs.de · In dieser Ausgabe: UAS Traffic Management (UTM) aus Sicht der DFS The...
56
In dieser Ausgabe: UAS Traffic Management (UTM) aus Sicht der DFS The SESAR Operational Concept Document (OCD 2018) Berechnung konfliktfreier Trajektorien mithilfe von Optimalsteuerungsmethoden Flight Level Prediction with a Deep Feedforward Network Entwicklung einer Methodik zum wirtschaftlichen Vergleich von ADS-B gegenüber Mode S Radaranlagen Ausgabe 2/2018
Transcript of In dieser Ausgabe - dfs.de · In dieser Ausgabe: UAS Traffic Management (UTM) aus Sicht der DFS The...

In dieser Ausgabe: UAS Traffic Management (UTM) aus Sicht der DFS The SESAR Operational Concept Document (OCD 2018) Berechnung konfliktfreier Trajektorien mithilfe von
Optimalsteuerungsmethoden Flight Level Prediction with a Deep Feedforward Network Entwicklung einer Methodik zum wirtschaftlichen Vergleich von ADS-B
gegenüber Mode S Radaranlagen
Ausg
abe
2/20
18


Innovation im Fokus 2 – 2018 3
Inhaltsverzeichnis
Übersicht der Artikel in diesem Heft .................................................................................... 4
UAS Traffic Management (UTM) aus Sicht der DFS ............................................................... 5
Ralf Heidger
The SESAR Operational Concept Document (OCD 2018) ..................................................... 21
Gabriele Zaki & Othmar Schnabel
Berechnung konfliktfreier Trajektorien mithilfe von Optimalsteuerungsmethoden ................... 25
Sandra Himburg (TU Darmstadt) & Dr. Matthias Poppe
Flight Level Prediction with a Deep Feedforward Network.................................................... 37
Dr. Matthias Poppe (DFS), Debora Fieberg (Universität Heidelberg), Roland Scharff & Jörg Buxbaum (DFS);
Entwicklung einer Methodik zum wirtschaftlichen Vergleich von ADS-B gegenüber Mode S Radaranlagen .................................................................................................................. 47
Maximilian Menk
Impressum ..................................................................................................................... 55
Die Autoren sind, soweit nicht anders gekennzeichnet, Mitarbeiterinnen und Mitarbeiter der DFS. Die Rechte an den Artikeln liegen bei den jeweiligen Autoren.

4 Innovation im Fokus 2 – 2018
Übersicht der Artikel in diesem Heft Ralf Heidger: UAS Traffic Management (UTM) aus Sicht der DFS. Drohnen oder „Unmanned Aircraft Systems“ (UAS) entwickeln sich zunehmend zu einer Herausforderung für die Flugsicherung. Taktisch sind vor allem kleine UAS ein potentielles Sicherheitsrisiko für die bemannte Luftfahrt, Strategisch stellen UAS, UTM und der UAS-Markt eine disruptive technologische Herausforderung für das System der Luftfahrt und für ATM dar. Vor dem Paradigma „Sichere und faire Integration von UAS in den Luftraum“ wird das UTM Konzept der DFS unter betrieblichen, technologischen und wirtschaftlichen Gesichtspunkten umfänglich dargestellt.
Gabriele Zaki & Othmar Schnabel: The SESAR Operational Concept Document (OCD 2018). Eine der vielen Aufgaben des DFS Bereichs Planung und Innovation besteht in der Leitung und fortlaufenden Aktualisierung des Operationellen Konzeptes im EU-geförderten Forschung- und Entwicklungsprogramm SESAR. In dem Artikel werden die wichtigsten Kernelemente des Konzeptes in einem kurzen Überblick vorgestellt und ein aktueller Ausblick auf die im Wesentlichen zu erwartenden Veränderungen im europäischen ATM Bereich bis ins Jahr 2035 gegeben.
Sandra Himburg (TU Darmstadt) & Dr. Matthias Poppe: Berechnung konfliktfreier Trajektorien mithilfe von Optimalsteuerungsmethoden. In diesem Artikel wird beschrieben, wie ein bestehendes MATLAB--Framework zur Bestimmung konfliktfreier Trajektorien für Luftverkehrsszenarien mit Hilfe der Optimalsteuerungstheorie, auf einen dreidimensionalen Raum erweitert werden kann. In der Optimalsteuerungstheorie wird ein beliebiges System durch Zustandsvariablen, Steuerungen, konstante Parameter und eine Reihe von Differentialgleichungen beschrieben. Das Hauptziel dieser Arbeit war das Aufstellen bzw. Erweitern der Eingangsdaten--Struktur des drei dimensionalen Problems. Das entwickelte Framework ist ein Schritt in die Zukunft, in der konfliktfreie und für alle Verkehrsteilnehmer optimale Trajektorien in einem definierten Luftraum berechnet werden können.
Dr. Matthias Poppe, Debora Fieberg (Universität Heidelberg), Roland Scharff & Jörg Buxbaum: Flight Level Prediction with a Deep Feedforward Network. Ein tiefes Feedforward-Netzwerk wurde verwendet, um das Flugniveau mit einer Vorausschauzeit von bis zu sechs Minuten für Steigflüge vorherzusagen. Es wurden Darstellungsmerkmale entwickelt, die ausreichende Flugeigenschaften bieten. Mode S Enhanced Surveillance-Daten von mehr als 400.000 realen Flügen wurden zur Berechnung des Merkmalsvektors erfasst. Nach einem beaufsichtigten Training des Netzwerks werden die Ergebnisse für verschiedene Vorhersagehorizonte präsentiert.
Maximilian Menk: Entwicklung einer Methodik zum wirtschaftlichen Vergleich von ADS-B gegenüber Mode S Radaranlagen. Investitionsentscheidungen haben aufgrund ihrer langfristigen Wirkung und dem großen Einfluss auf den Geschäftsverlauf für Unternehmen eine hohe strategische Bedeutung. Unter Berücksichtigung politischer Vorgaben sind neben Bewertung der Technologien in die investiert werden soll, auch ökonomische Kriterien entscheidend. Der vorliegende Artikel beleuchtet ein Auswahlproblem, bei dem zwischen zwei Investitionsalternativen entschieden werden muss. Die Auswahl einer Investitionsrechnung anhand geeigneter Bewertungskriterien, die Weiterentwicklung der Methodik zum Vergleich der Investitionsalternativen sowie die Bewertung der Alternativen und die Bestimmung der Vorteilhaftigkeit werden dargestellt.

UTM aus Sicht der DFS
Innovation im Fokus 2 – 2018 5
UAS Traffic Management (UTM) aus Sicht der DFS Ralf Heidger
Einleitung: Die Herausforderung für ANSPs
Drohnen oder in der ICAO-Definition „Unmanned Aircraft Systems“ (UAS) [ICAO, 2015] entwickeln sich spätestens seit etwa 2015 zu einer Herausforderung für die Flugsicherungen der Welt (ANSPs), durch ihr massenhaftes Erscheinen vor allem im untersten Luftraum (very low level airspace, VLL), aber auch in wachsenden Stückzahlen in anderen Bereichen des kontrollierten Luftraums (C, D, E) und sogar oberhalb dessen (very high level airspace, VHL). Das dabei benötigte „UAS Traffic Management“ (UTM), ein von der NASA und der FAA aufgebrachter Begriff für ein neues Verkehrsmanagementsystem [P. Kopardekar et.al., 2016], soll dabei mit einem hohen Automatisierungsgrad den Verkehr von UAS überwachen und steuern. Folgerichtig hat dazu die NASA ein mehrjähriges Forschungsprogramm gestartet. Die Herausforderung an die Flugsicherungen ist dabei zweifach:
(1) Taktisch sind vor allem kleine UAS ein potentielles Sicherheitsrisiko für die bemannte Luftfahrt, da sie weder optisch für ein „See and avoid“ durch Piloten gesehen, noch durch die üblichen Sensoren in der Luftfahrt (Radar, Multilateration, ADS-B) detektiert werden können, um Kollisionen zu vermeiden.
(2) Strategisch stellen UAS, UTM und der UAS-Markt eine disruptive technologische Herausforderung für das System der Luftfahrt und für ATM dar, denn sie repräsentieren neue Flugtechnologien mit einem hohen Automatisierungspotenzial, auch und gerade in UTM. Das Wachstum ihrer Stückzahl zeigt hohe, oft zweistellige Zuwachsraten. Durch die zahlreichen neuen Anwendungsgebiete für UAS erzeugt dieser Markt sein eigenes Ökosystem. Die Expansion der Anwendungen und der Stückzahlen erfolgt in alle Richtungen, und zahlreiche alte Geschäftsmodelle der Luftfahrt laufen Gefahr, dramatisch verändert, obsolet bzw. durch UAS-Operationen bzw. UTM-Systeme ersetzt zu werden.
Sehr verlässliche Zahlen zu den Stückzahlen in Deutschland liegen nicht vor. Die DFS schätzte aufgrund von Umsatzzahlen von DJI und anderen Drohnen-herstellern sowie Daten der Landesluftfahrt-behörden zu Aufstiegsgenehmigungen für 2016 etwa 400.000 Stück, davon nicht mehr als 100.000 im gewerblichen Einsatz, die übrigen privat für Hobby- und Sportzwecke genutzt, und für 2017 etwa 600.000 Stück, mit etwa
150.000 im gewerblichen Einsatz. Insbesondere bei den privat genutzten UAS ist eine hohe Volatilität festzustellen, da viele Nutzer einerseits mehrere Folgegenerationen von Drohnen erwerben sowie oft mehrere Typen nebeneinander betreiben, andererseits aber auch ein hoher, nicht bezifferbarer Anteil wieder ungenutzt im Hobbykeller verschwindet. Beim gewerblichen Drohneneinsatz ist ein langsameres, aber stetiges Wachstum zu verzeichnen, hier werden die UAS aber auch kontinuierlich und über längere Zeit eingesetzt. Darauf deuten vor allem die Zahlen der Aufstiegsanträge und –genehmigungen hin.
Die Einsatzgebiete für UAS sind vielfältig, und wenn man eine Kategorisierung versucht, stellt man fest, dass sie schon in kurzer Zeit durch Neuerungen wieder überholt ist. Das Konzeptpapier der U-Space Task Force [European Commission DG MOVE, 2018] führt folgende Anwendungsbereiche auf:
Precision Agriculture Transport and Package Delivery Infrastructure Monitoring Mapping/Photography Land Surveying Environmental Assessment Security/Surveillance Emergency Response/ Search & Rescue Recreation „Infrastructure Monitoring“, „Mapping/Photography“ und „Land Surveying“ dürften heute nach „Recreation“ der größte Anwendungsbereich sein, gefolgt von „Precision Agriculture“ und „Environmental Assessment“, sodann von „Security/Surveillance“ und „Emergency Response/SAR“, und schließlich „Transport and Package Delivery“ [SJU, 2016]. „Transport and Delivery“ wird in der SESAR Outlook Study ein großes Wachstums-potenzial eingeräumt, allerdings müssen hier wegen des vglw. hohen Risikos der Operation besonders hohe technologische Sicherheits- und Genehmigungshürden überwunden werden, insbesondere dann, wenn UAS-Airtaxis Passagiere transportieren, so dass hier das Wachstum erst verzögert einsetzen dürfte [SJU, 2016], analog auch die Umfrageergebnisse von UVS International [van Blyenburgh, 2018].

UTM aus Sicht der DFS
6 Innovation im Fokus 2 – 2018
Reaktion in der DFS-Strategie
In Anerkennung der eingangs geschilderten zweifachen Herausforderung an die ANSPs reagierte die DFS Anfang 2016 mit der Bildung eines „Issue Managements UAS“ das unter dem Paradigma „Sichere und faire Integration von UAS in den Luftraum“ eine proaktive Strategie für den Umgang mit dem Drohnenmarkt formulierte. Diese Strategie umfasst 4 Bereiche:
(1) Regulierung und Standardisierung (2) Betrieb (3) Technik und Systeme (4) Wirtschaftliche Aspekte
Als klassisches Thema der Unternehmensentwicklung und –strategie war es naheliegend, dies in unmittelbarer Nähe der Geschäftsführung anzusiedeln. Dies erwies sich als außerordentlich hilfreich, um die strategische Aufmerksamkeit der Unternehmensleitung, der betroffenen Bereiche und das erforderliche Anschub-budget zu erhalten.
Regulierung und Standardisierung
Beim Themenkomplex „Regulierung und Standar-disierung“ war und ist erforderlich,
das Sicherheitsniveau der bemannten Luftfahrt den neuen Akteuren in der unbemannten Luftfahrt zu vermitteln und zu einem geeigneten Transfer gestaltend beizutragen,
innovative Ansätze aus diesem neuen Markt aufzugreifen und für die eigenen Aufgaben nutzbar zu machen,
dazu regulative Ziele und benötigte Standards zu identifizieren,
die dazu nötigen Arbeitsgruppen zu identifizieren und ihnen beizutreten oder ggf. neue Arbeits-gruppen ins Leben zu rufen,
in diesen Arbeitsgruppen bzw. durch politische Willensbildung für die Vorstellungen der DFS zu argumentieren, richtige Anregungen Dritter aufzunehmen und die eigenen ggf. modifizierten Ziele durchzusetzen.
Dazu wirkt die DFS in den folgenden Arbeitsgruppen und Projekten mit:
auf nationaler Ebene u.a. in den DIN-Arbeitsgruppen zu UAS-
Begriffsdefinitionen und zu UTM, um dort die eigenen benutzten Begriffsdefinitionen und Erkennt-nisse bekannt zu machen und die DFS-Vorstellungen einzubringen [DIN 5452-1, 2018];
in der Bund-Länder-Arbeitsgruppe zur SORA (SORA-GER) und zu den UAS-Missions-Genehmigungs-prozessen, um diese Prozesse mitzugestalten (Forderung einer nationalen Registration und E-Identifikation von UAS, einer verbindlichen Kartendatenquelle für Geofencing, und eines Drohnenführerscheins), ins eigene UTM einzubringen und dem BMVI und den Landesluftfahrt-behörden (LLBs) die eigenen UTM-Entwicklungen bekannt zu machen und diese in Zukunft als Kunden zu gewinnen;
als Beobachter, Konferenzteilnehmer und Referent bei der UAV DACH mit ihrer jährlichen Konferenz bei der AERO-Messe in Friedrichshafen, der UTM-Arbeitsgruppe und ihrem jährlichen „European Drone Summit“ (EDS), um das Netzwerk mit UAS-Operateuren und –Herstellern zu pflegen und deutsche Marktentwicklungen zu beobachten;
auf europäischer Ebene u.a. in der sehr aktiven und fokussierten UAS-Task Force
der „A6“, der wichtigsten europäischen ANSPs (DFS, DSNA, ENAV, ENAIRE, NATS und eine Gruppe kleinerer ANSPs, u.a. mit Naviair, Austrocontrol, PANSA und LFV) zur Interessenvertretung im SESAR-Joint Untertaking (SJU), um strategische Ziele und Vorstellungen der ANSPs bzgl. eines nationalen UTMs gegenüber der Kommission und dem Direktorat „DG Move“ zu formulieren [A6 Alliance 2018];
in der “Adhoc U-Space Task Force” bei DG Move in der Europäischen Kommission zur Stärkung der ANSP-Position im zukünftigen „U-Space“ [European Commission DG MOVE, 2018];
Abb. 1: Vier-Felder-Strategie „Safe and fair integration“
• ATM adaptation
• Registration DB
• Exploration
• UTM development
• Funding
• Projects
• Fee regime
• Business plan
• ATM ConOps
• UTM ConOps
• ATM requirements
• UTM requirements
• Registration
• Qualification
• Insurance
• UAS Surveillance
Regulation and
Standardisation
Operations
Economics Systems

UTM aus Sicht der DFS
Innovation im Fokus 2 – 2018 7
als Beobachter in der EUROCAE, in der WG 105 und den Subgruppen zu UAS und UTM, um Standardisierungsentwicklungen zu verfolgen;
im EU-SESAR-Projekt „CORUS“ zusammen mit anderen ANSPs wie NATS, DSNA, Eurocontrol und ENAV zur Mitgestaltung eines Referenz- „Concept of Operation“ (ConOps) für Drohnenmissionen und einer Referenzarchitektur für UTM-Systeme [Hately et al., 2018];
auf internationaler Ebene u.a. im RPAS-Panel der ICAO ist die DFS seit Beginn
vertreten und begleitet die Produktion von Regelungen und Manualen zu RPAS nicht nur in der Klasse über 150 kg und für grenzüberschreitende Flüge, sondern nun auch für die kleineren UAS, denen sich die ICAO seit 2018 auch zuwendet;
in der Global UTM Association (GUTMA) mit Sitz in Genf ist die DFS Gründungsmitglied seit 2016, wirkt an Architekturpapieren und Diskussionen zu Datenformaten mit;
insbesondere im europäischen Flügel der CANSO ist die DFS aktiv, um die zentrale Rolle von ANSPs in UTM insbesondere bzgl. UAS-Registration, Identifikation, Kartenproduktion für Geofencing sowie Surveillance und Tracking von UAS zusammen mit benachbarter bemannter Luftfahrt zu betonen sowie die Regulierungsentwürfe der EC zu UAS zu kommentieren.
Diese Aktivitäten führen insgesamt zu einem profilierten internationalen Bild der DFS mit einem klaren Bekenntnis zu einer aktiven und zentralen „UTM Service Provider“-Rolle der ANSPs im entstehenden UAS- und UTM-Markt anstelle eines ANSPs, der „nur“ für ATM zuständig bleibt, mit neuen Service Providern in UTM Daten austauscht, und so aber mehr oder weniger nur am Rande das Geschehen im Drohnenmarkt verfolgt. Die DFS sieht in einer solchen möglichen Rollenzuteilung langfristig die Gefährdung der bemannten Luftfahrt und des in der Luftfahrt etablierten hohen Sicherheitsniveaus sowie der Zukunft der ANSPs.
Betriebliche Aspekte
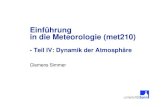
Im Bereich „Betrieb“ ist die Sicht der DFS, dass sich UTM und ATM vor allem durch Zuordnung zu bestimmten Lufträumen einerseits und durch einige wichtige paradigmatische Unterschiede voneinander abgrenzen. Die Luftraum-Zuordnung wird mit der nachfolgenden grafischen Darstellung für die Verhältnisse in Deutschland deutlich [Luftraumklassifikation siehe DFS, 2018].
Kontrollierter und unkontrollierter Luftraum umfassen unbemannte und bemannte Luftfahrt, allerdings mit unterschiedlichen Schwerpunkten. Die überwiegende Menge der UAS werden im VLL operieren, also im
unkontrollierten Luftraum G (weißer Bereich des Bildes), hier je nach den sich etablierenden Regelwerken und Betriebskonzepten (ConOps) bis 100m oder 150m AGL. Dieser Luftraum indes ist nicht leer, bemannte Luftfahrt wie VFR-Fliegerei, Helikopter von Notfalldiensten und Polizei, Luftsport wie Ballonflug, Segler, Gleiter uvm. sind hier unterwegs. Die Kollision nicht nur von UAS untereinander, sondern zwischen UAS und bemannter Luftfahrt stellt ein ernstes Risiko dar, da wegen der geringen Abmessungen der UAS das ohnehin schon schwierige und anspruchsvolle „keep well clear“ und „see and avoid“ nach den ICAO-Regeln für die Fliegerei praktisch nicht anwendbar ist. In diesem Luftraum sieht die DFS heute in erster Linie den Anwendungsbereich für UTM.
Im kontrollierten Luftraum C, D, E ist in erster Linie bemannte Luftfahrt nach IFR- oder VFR-Regeln unterwegs, aber auch hier treten heute und zukünftig UAS-Operationen auf, wie z.B. Inspektionen mit UAS an Flughäfen, militärische UAS-Operationen, Durch-querungen von kontrolliertem Luftraum für Aufstiege in den VHL-Luftraum (VHL = very high level; über FL 660) bzw. Abstiege und ggf. zukünftige UAS-Missionen für Güter- oder gar Personentransport. Hier wird es aus DFS-Sicht vor allem darum gehen, diese UAS-Missionen in die ATM-Systeme zu integrieren, mit entsprechender Labeldarstellung, Missionsdaten-verarbeitung und Koordination mit der restlichen Luftfahrt. Hier besteht bereits heute die Pflicht, Transponder für Identifikation, Surveillance und Tracking mitzuführen, auch für UAS (in E ab 5000 ft).
Abb. 2: Luftraumstruktur in Deutschland und Zuordnung
UTM und ATM
Unkontrollierter Luftraum G „Golf“ darin VLL
Kontrollierter Luftraum Kontrollierter Luftraum
ATM
UTM

UTM aus Sicht der DFS
8 Innovation im Fokus 2 – 2018
Über dem kontrollierten Luftraum, im VHL ab FL 660, sind ebenfalls UAS-Operationen zu erwarten, so z.B. meteorologisches „Station Keeping“, Messflüge, Langzeitmissionen z.B. zur Versorgung mit Internet- oder Mobilfunkkonnektivität bzw. militärische Aufklärungs-missionen. Es ist wahrscheinlich organisatorisch sinnvoller, dies als besonderen Teil in den ATM-Systemen zu belassen statt dies als weiteres, abgesetztes Layer in UTM zu verorten.
„UTM“ ist aus unserer Sicht dabei vor allem ein technischer Begriff, der analog zu ATM ein System bezeichnet, während der von der europäischen Verkehrskommissarin Violeta Bulc 2016 aufgeworfene Begriff von „U-Space“ in erster Linie ein politisches Zielkonzept darstellt, mit dem Verkehrs-, Technologie- und Wirtschaftsziele über 4 Phasen (U1 – U4) verknüpft werden [SJU, 2017]. Allerdings wird in der Diskussion von einem erweiterten Systembegriff ausgegangen, nicht zuletzt wegen des Rückgriffs auf die überaus positiven Erfahrungen aus der Sicherheitskultur der bemannten Luftfahrt der vergangenen Jahrzehnte:
Ein funktionierendes und sicheres Gesamtsystem umfasst neben den eigentlichen technischen Systemkomponenten stets auch menschliche Akteure, die nach geltenden Regeln in einem System von Interaktionen und Organisationen ein oder mehrere technische Systeme einsetzen, um in einem definierten Luftraum Verkehrsmanagement-Funktionen zum Zweck der Sicherheit, fairem Zugang und Effizienz auszuüben [siehe auch GUTMA, 2017].
Trotz der weiter unten noch darzustellenden paradigmatischen Unterschiede gehören jedoch UTM-Systeme wie ATM-Systeme in der Informationstechnik zu den „Command, Control and Communications Systems“ (C³-Systeme), die weltweit für Verkehrsüberwachung und
–koordination für die unterschiedlichsten Verkehrsträger wie Luftfahrt, Seefahrt und Straßenverkehr im Einsatz sind [Heidger, 2014]. C³-Systeme weisen eine typische funktionale Pyramide auf, die auch wieder für UTM-Systeme maßgeblich ist und die Entwicklung der betrieblichen Anforderungen leiten kann:
Fundament eines UAS Traffic Managements ist demzufolge zunächst einmal eine Datenbank mit allen registrierten UAS und ihren hinterlegten Daten zur Ausstattung, Kennzeichnungen sowie dem Bezug zu den Haltern, also Drohnenoperateuren (Firmen) und ihren Piloten bzw. Einzelpersonen, wo Operateur und Pilot identisch sind. Diese Daten können im Tracking und bei der Nutzung des Systems durch Behörden mit Ordnungs- und Sicherheitsaufgaben (BOS) genutzt werden.
Im darüberliegenden funktionalen Layer sind Kartend-arstellungen erforderlich, die die Missionsumgebung und die Örtlichkeit 2D und/oder 3D visualisieren. Neben Hintergrund-Bitmaps mit Topographie, Satellitenbildern oder Stadt- und Straßenkarten wird es Overlays geben, die No-Fly-Zones (NFZs) und andere Lufträume sowie besonders relevante Punkte darstellen. Diese Kartendaten sind natürlich laufend zu aktualisieren, und es ist naheliegend, dass dies am besten vollautomatisch zu bestimmten Stichtagen wie AIRAC-Terminen erfolgt.
Abb. 3: Ein erweiterter Systembegriff von UTM
A s
yste
mo
f
people/stakeholders
interactions
rules
one or many UTM systems
UTM functions
in VLL airspace
Abb. 4: Funktionale Pyramide von Verkehrsmanagement-
Systemen, angewandt auf UTM
HMI
Traffic flow
Deconfliction
Mission planning
Safety net functions
Environmental dataprocessing
Mission data processing
Surveillance & tracking
Mapping
Database for registration

UTM aus Sicht der DFS
Innovation im Fokus 2 – 2018 9
Auch 3D-Hindernis-Kartendaten gehören zu dieser Kategorie. Das nächsthöhere funktionale Layer benutzt Surveillance-Daten aus unterschiedlichen Quellen von UAS-Positionen, und in einer Multisensordatenfusion wird dies zu einem dynamischen Lagebild zusammen-gerechnet. Dieses Lagebild wird so nicht notwendigerweise direkt auf den HMI Clients gezeigt, es muss aber innerhalb des UTM-Systems als permanent aktualisiertes „Lagegedächtnis“ existieren, damit es von den verschiedenen weiteren funktionalen Layern wie Konflikterkennung und Lagedarstellung benutzt werden kann.
Eine Missions- bzw. Flugplanung erfolgt vor dem Flug in der „preflight phase“, und ist ein Flugplan validiert und genehmigt, wartet er im System auf den Aufgriff durch den Tracker bei Start des Fluges, wird mit dem passenden Track kombiniert oder „korreliert“ und stellt dann bedarfsweise für den betreffenden Track die zusätzlichen Plandaten zur Verfügung. Dies kann wiederum im nächsthöheren Layer von der Konfliktdetektion benutzt werden. Neben den Tracks und den Flugplan- oder Missionsdaten sind in UTM (wie auch in ATM) Umweltdaten erforderlich, um ein Gesamt-lagebild zu erzeugen. Diese Umweltdaten umfassen im wesentlichen Wetter mit einer UTM-spezifischen Ausprägung (Bodenwind und Niederschlag in hoher Auflösung sowie KP-Index der Sonnenaktivität wg. GPS-Störung sind hier von besonderer Bedeutung; KP steht dabei für „planetarische Kennziffer“ der magnetischen Wirkung solarer Teilchenstrahlung) sowie für den VLL-Höhenbereich gefilterte NOTAMs.
Im nächsthöheren Layer benutzen Safety Net Funktionen die Menge der Tracks und Missionsdaten, Kartendaten, NOTAMs und Wetterinformationen, um folgende Konflikte zu identifizieren:
Verletzen UAS statische und temporäre sowie zukünftig auch dynamische (z.B. wetterbasierte) No-Fly-Zones?
Bleiben UAS in zugewiesenen Geocages (Zylinder, Gebiete oder Korridore einer Mission)?
Nähern sich UAS untereinander unterhalb kritischer vertikaler und horizontaler Abstände?
Nähern sich UAS und bemannte LFZ unterhalb kritischer vertikaler und horizontaler Abstände?
Nähern sich UAS Hindernissen oder Terrain unterhalb kritischer Abstände?
Gibt es zwischen den Missionsplänen von UAS untereinander kritische Überschneidungen in Raum und Zeit?
Im nächsthöheren Layer kann auf der Basis der Missionspläne und der detektierten Konflikte ermittelt werden, welche Flugwegveränderungen oder ggf. auch Stopps (Multikopter-UAS sind ja dazu in der Lage) einen Konflikt bereinigen, und in einem weiteren Ausbauschritt ist denkbar, dass das UTM-System die dazugehörenden Kommandos automatisch an die betreffende Drohne übermittelt, sofern die dazu nötige Konnektivität sichergestellt ist.
Als „Königsdisziplin“ ist oberhalb dieser funktionalen Layer eine Verkehrsfluss-Prädiktion und –Steuerung denkbar, in der die potenziellen Konflikte und ihre passende Lösung schon so frühzeitig gesteuert werden, dass ein reibungsloser Fluss der UAS sichergestellt werden kann. Als oberstes funktionales Layer werden dazu angepasste, laufend weiterentwickelte HMIs benötigt. Da es bei UTM mehr Stakeholder als in ATM gibt und diese unterschiedlichen Organisationen angehören, werden Web-Technologie-gestützte HMI-Clients bedeutsam. Da auch UAS-Piloten im Feld zwecks „situational awareness“ zu den Nutzern gehören werden, sind außerdem mobile App-HMIs auf Smartphones bzw. Tablets zu berücksichtigen. Rotiert man diese funktionale Pyramide in eine Zeitdimension, erhält man im Übrigen eine der Sequenz von U1, U2, U3, U4 wie im U-Space Blueprint sehr ähnliche Abfolge, mit dem Unterschied, dass die Funktionalitäten „Surveillance“ und „Tracking“ bereits von Anfang an Teil der Roadmap sind [SJU, 2017].
Die vorgenannten Funktionen gehören überwiegend zur „inflight phase“ der Drohnenoperationen; UTM soll aber auch die „preflight phase“ und die „postflight phase“ unterstützen. Hierzu werden mindestens die folgenden Anforderungen unterschieden,
in der „Preflight Phase“:
Registrierung von Operateur, Pilot und UAS, Befüllung und Pflege des Operator-Datensatzes mit
den erforderlichen Zertifikaten, Nachweisen, Betriebshandbüchern, Versicherungsdokumenten und Qualifikationen seiner Piloten,
Definition, Editierung und ggf. Modifikation von UAS-Missionen,
Validierung dieser Missionen gegen bestehende nationale Regelungswerke,
Identifikation von strategischen Plankonflikten mit anderen Missionen in gleichen Zeitfenstern,
Abwicklung des Genehmigungsprozesses einer Mission oder einer Serie von Missionen

UTM aus Sicht der DFS
10 Innovation im Fokus 2 – 2018
insbesondere mit den Landesluftfahrtbehörden (LLBs),
und in der „Postflight Phase“:
Erzeugen von Reports. Pflege des Logbuches. ggf. Incident Management. ggf. weitere Maintenance-Funktionen. Wie schon angeklungen, identifizieren wir zusätzlich zu dem Fokus in ATM auf Piloten und Lotsen als Stakeholder im UTM-System eine ganze Reihe weiterer Akteure, während der Lotse im klassischen Sinne voraussichtlich nur noch an bestimmten Brennpunkten wie Flugplätzen eine Rolle spielt. UTM setzt schon allein aufgrund der schieren erwarteten Zahl von UAS Missionen auf Selbstorganisation und –verantwortung von Operateuren und Piloten. Diese Akteure sind:
UAS Operateure als UAS-Betreiber, UAS-Piloten als Steuerer bzw. Überwacher
automatischer Flüge mit Eingriffsverantwortung, Piloten von VFR-Flügen im VLL, ANSP als UTM Service Provider (USP) mind. des
zentralen UTM-Systems in einem Land, wenn nicht auch der USP überhaupt,
Behörden für die Genehmigung (CAA in vielen Ländern, in Deutschland an erster Stelle die LLBs, ggf. aber auch Ordnungsämter und Naturschutzbehörden),
Behörden mit Ordnungs- und Sicherheitsaufgaben (BOS) zur Durchsetzung der Regeln und Ahndung von Verstößen (v.a. Polizei),
Ggf. noch weitere Luftfahrtbehörden mit Rollen im Registrations-, Zertifizierungs- oder Genehmigungsprozess (BMVI, LBA, BAF, mil. Stellen)
Abbildung 5 zeigt ein Gesamtbild der Akteure in einer landesweiten UTM-Cloud. Insbesondere für den Genehmigungsprozess, aber auch für das Monitoring des Geschehens im Sinne von BOS-Aufgaben sind zusätzlich zu den bisherigen HMI-Anforderungen auch Webclients für die behördlichen Aufgaben erforderlich, und zwar
Lagemonitoring im Zuständigkeitsbereich, Zugriff auf die Registratur zur Identifikation von
Regelverletzern, Abwicklung von Missionsgenehmigungen im
Zuständigkeitsbereich,
Definition (und Aufhebung) von temporären zusätzlichen NFZs zur Absicherung von Veranstaltungen, Unfällen sowie ähnlichen lokalen und schutzwürdigen Ereignissen.
Es ist erkennbar, dass es in UTM zahlreiche funktionale Analogien zu ATM gibt, aber es existieren auch einige fundamentale paradigmatische Unterschiede zu ATM:
Eine beschleunigte Automatisierung nicht nur in der Robotik des UAS (damit Ermöglichung von Funktionen der Selbstorganisation wie Detect & Avoid, Schwarmformation u.a.), sondern auch der UTM-Funktionen werden von der technologischen Innovation („brushless motors“, Sensor-miniaturisierung, Leistungssteigerung in FMS, AI-Algorithmen) vorangetrieben.
Eine geradezu explodierende Vielfältigkeit und Menge von einzubeziehenden Ressourcendaten in anderen Größenordnungen als in ATM (Karten, 3D Objektdaten – statt 1 Mio. ca. 100 Mio. Geodaten), sowie Umweltdaten (detailliertere Wetterdaten, NOTAMs) stellt das UTM-System vor Performanz-Herausforderungen.
Eine Vielfalt von Identifikationsmitteln, Positions-sensoriken und Übertragungswegen fordert von Beginn an die Fähigkeit des UTM-Systems zu einer Multisensordatenfusion (MSDF).
Die erwartete Menge von UAS-Operationen erfordert Selbstorganisation und Selbst-Service für die Nutzer, insbesondere Operateure und Piloten, aber auch Behörden, sowie neue webbasierte HMIs und Abläufe.
Während ATM relativ privat in geschlossenen Systemen in ACCs und TWRs abgewickelt wird, ist UTM durch seine Vielzahl an Nutzern und Stakeholdern viel mehr ein öffentliches System und stellt andere Anforderungen an die IT-Sicherheit.
Abb. 5: Stakeholder in der Cloud eines UTM-Systems
Users of UTM PRO web clients Users of UTM SENTRY web clients
Users of UTM PRO app clients (UAS and A/C pilots)
LLB 1 LLB 2 LLB 3
ANSP
LBA
BMVI
POL 1 POL ...
OP ...OP 3
OP 2
OP 1
...VFR
Pilot 2VFR
Pilot 1
UAS Pilot 2
UAS Pilot 1
...

UTM aus Sicht der DFS
Innovation im Fokus 2 – 2018 11
Es gibt in UTM eine Vielfältigkeit und Heterogenität der Nutzer über das ATM-Paar „Lotse und Pilot“ hinaus.
Daher sind intuitive und nutzerfreundliche HMIs von viel größerer Bedeutung als in ATM.
Die Erwartungshaltung im Markt der mobilen Apps ist zudem ein vglw. niedriger Preis.
Ebenso dürften einfach nachvollziehbare Abrechnungsmodalitäten zu den Erwartungen gehören.
Die Finanzierung von UTM wird u.U. auch andere, neuere Wege einschlagen als dies bei ATM der Fall war.
Auch diese paradigmatischen Unterschiede wirken sich auf die betriebliche Anforderungsentwicklung an UTM aus. Die zentrale Lageproduktion in den Trackservern der UTM-Cloud und die unterschiedlichen Darstellungs-bedürfnisse der Stakeholder sowie die zu berück-sichtigenden Anforderungen an die Sicherheit der bemannten Luftfahrt dürften dazu führen, dass UTM Clients im Internet/Web
ein ausgeklügeltes Login-, Rechte- und Funktionsfreischaltungskonzept benötigen,
ausgereifte Lagedarstellungsfilter für die Zieldarstellung von UAS und umgebender Luftfahrt benötigen, ggf. auch geeignete Aggregationen (da niemand etwas mit einem „Wimmelbild“ von massenhaften UAS-Flügen anfangen kann),
diese Kommunikation sicher erfolgt und gegen Verfälschungen abgesichert wird.
Ein weiterer Treiber für die betrieblichen Anforderungen werden die „Concepts of Operation“ (ConOps) sein, die in diversen Missionsentwürfen von UAS bei den Operateuren, aber auch in EU-Projekten (wie z.B. ein Referenz-ConOps in CORUS [Hately et al., 2018]) bzw. als Standardszenarios für die SORA-Bewertung bei JARUS [2017, darin auch Annex J] entstehen. Dabei wird es bedeutsam sein, wie diese ConOps die Regulierungs-vorschläge der europäischen Agentur EASA [EASA, 2017, Opinion Nr. 01/2018] zur Einführung eines risikobasierten Ansatzes für die Genehmigung von UAS-Operationen der Kategorien „open“, „specific“ und „certified“ aufgreifen. In CORUS ist das eine der zentralen inhaltlichen Diskussionen. Diese ConOps adressieren darüber hinaus typischerweise:
Anwendungstypen von UAS-Missionen, Missionsabläufe (Normalfall, Contingency und
Emergency-Fälle),
Auswirkungen von unterschiedlichen UAS-Typen auf Missionsabläufe,
Überlegungen zu Risiken, Risikobewertungen und zur SORA [siehe JARUS, 2017],
UAS-Luftraumstrukturierungen und darin geltende Bestimmungen und Abläufe,
Regeln für die Missionsabwicklung und den Flug, Mitwirkende bei Missionen und ihre genauen Rollen
und Aufgaben, Vorschläge zu Abstandsminima zu NFZs, anderen
UAS und bemannter Luftfahrt, Regelungen zu Vorwarnungen, Warnungen und
Alarmen, sowie die vorgesehene Interaktion mit einem
zukünftigen UTM-System. Auch das CORUS-Referenz-ConOps wird diese Themen bearbeiten und Vorschläge z.B. zu Separationsminima unterbreiten, ebenso wie andere Initiativen und Projekte auch, die dann in die globale Diskussion der „Best Practices“ für UAS-Betrieb eingehen werden und u.U. zur Regelbildung bei EASA bzw. dem europäischen Trilog zwischen Kommission, Rat und Parlament beitragen oder über JARUS-Vorschläge und Aufgriffe in den ICAO-Arbeitsgremien Teil der zukünftigen internationalen Regeln zum UAS-Betrieb werden.
Für das UTM-Projekt der DFS selbst, das November 2016 anlässlich der DFS-Drohnenkonferenz „The drone challenge“ in Langen unter dem Arbeitsnamen „U:CON Drones Connected“ zwischen der DFS und dem Partner „Deutsche Telekom AG“ (DTAG) ins Leben gerufen wurde, wurde nach der initialen Anforderungsdefinition v.1.0 vom Januar 2017 im Juni 2018 ein wesentlich umfangreicheres Anforderungsdokument v.2.2 erstellt. Dieses hat die bisherigen Erkenntnisse aus den mittlerweile über 20 unterschiedlichen U:CON Use Cases, der Arbeit der DFS in CORUS, den ConOps aus Projekten der DFS und DAS mit externen Kunden aufgegriffen [Heidger, 2018]. Dieses Anforderungsset ist die Grundlage der weiteren UTM-Entwicklung durch das Systemhaus und den externen Lieferanten Unifly aus Antwerpen in Belgien [Unifly, 2017].
UTM-Anforderungen an die bestehenden ATM-Systeme sind zum heutigen Stand noch nicht erarbeitet worden. Dies ist sicherlich ein betriebliches Erfordernis, die als weiterer Schritt zur Komplettierung der sicheren und fairen UAS-Integration in den deutschen Luftraum erfolgen muss. Wahrscheinlich ist es dazu am zweckdienlichsten, wenn sich die jeweiligen Anforderungs- und Produktmanagements der operativen

UTM aus Sicht der DFS
12 Innovation im Fokus 2 – 2018
ATM-Systeme mit den Vertretern des entstehenden UTM-Produktmanagements zum geeigneten Zeitpunkt zwecks Requirements Engineering zusammensetzen. Sicherlich ist es dabei von praktischem Nutzen, dass es auf UTM-Seite schon Vorstellungen zum Datenaustausch zwischen ATM und UTM gibt, und als Nebeneffekt der Wahl des weit in der DFS verbreiteten PHOENIX-MSDF-Trackers nebst AWP als TrackServer-Backbone für die UTM-Cloud Tracks von UAS-Missionen im ATM-Kontext wie z.B. in einem Tower sichtbar gemacht werden können.
Systementwicklung und UTM-Architektur
Im Bereich „Systeme“ folgte nach der „Drohnen-konferenz“ der DFS Anfang November 2016 eine rasche Entscheidung für ein exploratives Projekt zusammen mit der DTAG. Ebenso erfolgte eine frühe Entscheidung für die Einbeziehung von MSDF und Tracking auf der Basis des DFS-Trackers PHOENIX als zentrale Server-seitige Datenverarbeitungsfunktionalität und der Nutzung der Mobilfunkinfrastruktur der DTAG als zentralem Medium für die Übertragung von UAS-Positionsdaten. Als ein exploratives Projekt war „U:CON“ deswegen angelegt, weil noch unklar war, wie gut sich Drohnen verfolgen („tracken“) lassen, denn sie haben eine andere Flugdynamik als gewöhnliche Luftfahrt. Ebenso unklar
war die ausreichende Abdeckung des GSM, LTE- und 5G-Mobilfunknetzes in Deutschland. Und schließlich mussten die Vorstellungen zu den UTM-Funktionalitäten im Verlauf des Projektes weiter ausgearbeitet und konkretisiert werden, da zu UTM weder ausreichend „best practices“ noch klare gesetzliche Vorgaben existierten (und auch heute noch fehlen).
Parallel dazu entwarf die DFS die Anforderungen und den ersten Prototyp einer nationalen Registrations-datenbank. Die Einführung einer UAS-Registration ab z.B. 250g (ursprünglicher DFS-Vorschlag) oder 900g [EASA, 2017] war von Beginn an eine der zentralen Forderungen der DFS an die Luftfahrtbehörden in Deutschland, nur wollte man dort die Regelungsentwicklung bei der EASA abwarten, um dann evtl. auf deren Grundlage Bestimmungen zu erlassen. So diente der prototypische Entwurf der DFS dem Zweck, der Politik zu signalisieren, dass eine Lösung bei der DFS bereitsteht, sobald das politische Mandat dazu erteilt wird. Mittlerweile ist die Registrationsdatenbank Teil des prototypischen UTM-Systems geworden, weil es sinnvoll ist, UTM-Services direkt auf die Registrationsdaten zugreifen zu lassen, u.a. wegen Identifikation und Labelling, Track-Flugplan-DB-Korrelation, Nutzung von Registrationsinformationen für die Missionsvalidierung, Neukundenanlage, und Recherche für die Verfolgung von Ordnungswidrigkeiten bzw. Rechtsdurchsetzung („Law Enforcement“).
Abb. 6: Die DFS UTM-Referenzarchitektur
stagedUTM Cloud
UAS RPS as client
Mobileapp
clients
Web clients
operators
Web clientsauthorities
UTM Server(s)
DB server(Reg.,
Tracks,FP)
Web-server
Geo-server
Weatherserver
Conflictserver
UTM MSDF Track Server(s)
MSDF plotfusionserver
Track fusionserver
MSDF R&R server
Interface agents
Mission/ FP server
LTE/HOD/HID
RPS FLARM ATM Plots/Tracks
Radars MLATDDS
Plots/tracks
Plot/Track Analysis Tools
UTM Adminstration
toolsWeather
NOTAM
Maps
Obstacle/3D data
ADS-B

UTM aus Sicht der DFS
Innovation im Fokus 2 – 2018 13
Wie schon oben dargestellt führt die Vielzahl von Nutzern und Stakeholdern, die landesweit in unterschiedlichsten Organisationen und Firmen verteilt sind, ganz natürlich zu einer webbasierten, skalierungsfähigen Cloud-Lösung. Früh war jedoch klar, dass dies eine private Cloud der DFS sein würde, denn für Polizei, BOS-Kräfte und andere deutsche Organisationen wie die DFS selbst, die vertrauliche Daten in dem System würden handhaben müssen, wäre eine Amazon- oder Microsoft-Cloud problematisch wegen des nicht kontrollierbaren Datenzugriffs, und schon ganz und gar würden solche UTM-Clouds ausfallen, wo die Lieferanten beim Betrieb in ihrer Cloud gemäß ihren Lizenzbestimmungen automatisch Datenverwertungsrechte erwerben würden (zu diesem Zeitpunkt bei Altitude Angels und AIRMAP sowie anderen US-amerikanischen UTM-Lösungen der Fall).
Im Zuge dieser Erörterungen schärfte sich das DFS-eigene Bild einer UTM-Referenzarchitektur, die so dann auch in die Diskussion von CORUS und der A6 eingebracht wurde. Sie ist in Abbildung 6 dargestellt:
Demzufolge existiert ein UTM-System in einer privaten „staged cloud“ mit öffentlichen Zugängen. Eine „staged cloud“ deswegen, weil in dieser Cloud eine Entwicklungsebene benötigt wird (Stage 1), typischerweise „Sandbox-Umgebungen“, sodann eine Test- und Integrationsebene (Stage 2), und schließlich eine öffentlich zugängliche Ebene (Stage 3), die aus einer Instanz heraus gemanagt werden müssen, um Konsistenz zu wahren. Damit wird UTM nebenbei auch ein Treiber von Cloud-Technologie-Anwendungen bei ANSPs. Die Server-Seite ist zudem zweigeteilt:
(1) UTM-MSDF Track Server für die MSDF
mit MSDF Plot Fusion Server für die Verarbeitung von ungetrackten UAS-Positionsmeldungen (sowie ungetrackten Messdaten aus der bemannten Luftfahrt),
und einem Track Fusion Server für die Verarbeitung von getrackten UAS-Positionsmeldungen (sowie ggf. vorverarbeiteten ATM-Tracks),
sowie einem Recording&Replay-Server für „Legal Recording & Replay“ für Analyse- und Investigationszwecke.
(2) UTM Server erhalten die Tracks unbemannter und bemannter LFZ und verarbeiten diese weiter, und dies im Wesentlichen mit Hilfe folgender Serverprozesse:
Datenbankserver zur Aufnahme der Registrationsdatenbank, der Datenbank aller aktuellen Tracks und der Datenbank aller aktuellen
Flugpläne (sowie ggf. „History Stores“ für zurückliegende Vorfalluntersuchungen)
Geoserver zur Verarbeitung von 2D- und 3D-Karten- und Hindernisdaten für das schnelle Zeichnen von Hintergrundkacheln und Vordergrundlayern für die Flugplanung und -validierung bzw. den FlightView-Lagedisplay
Wetterserver zur Verarbeitung von Umweltdaten, v.a. UAS-relevante METEO-Informationen, Identifikation von dynamischen Geofences (z.B. Gewitterfronten, Schnee- und Regenfronten, bodennahen Sturmgebieten)
Mission- bzw. Flugplanserver zur Korrelation von Tracks mit Missionen/Flugplänen, Validierung von Flugplänen, Conformance Monitoring von aktuellen Tracks gegen Flugpläne und zur Konfliktdetektion von Flugplänen untereinander (Plankonflikte), sowie zukünftig sicherlich auch zur Konfliktlösung und evtl. Kommandierung von UAS aus UTM heraus im Konfliktfall (sofern dazu die rechtlichen Implikationen angemessen geregelt sind).
Conflict Server berechnen die schon im vorigen Kapitel aufgeführten Konfliktfälle, sowohl in der Missionsplanung wie im aktuellen Flug, auf der Basis von Tracks, Flugplänen, Geodaten und Wetter.
Webserver binden die Nutzersysteme an und stellen mobilen Apps bzw. Web-Clients die erforderlichen UTM-Funktionen und HMIs zur Verfügung.
NOTAM-Input wird voraussichtlich sowohl von Flugplanservern wie Geoservern verarbeitet werden müssen, insbesondere, wenn sich der Status von Lufträumen ändert und dies Auswirkungen auf aktuelle wie zukünftig geplante UAS-Missionen hat.
Diese Server sind nicht notwendigerweise eigene Hardwarekomponenten, sondern zunächst einmal ausführbare Linux-Prozesse in einer skalierbaren Umgebung von virtuellen Maschinen, die über einen ESB-Bus miteinander Daten austauschen können. Wichtig bei allen Serverprozessen ist ihre Skalierbarkeit, damit dem erwarteten starken Aufwuchs der schieren Zahl von Drohnenmissionen in der Performance Rechnung getragen werden kann. Daneben wird es eine Schicht von Prozessen geben, die UTM-Administrationstools für den UTM- und Cloud-Betrieb und Plot- bzw. Track-Analysetools für die Diagnostik und laufende Qualitätssicherung der Zieldatenverarbeitung bereit-stellen.
Von der Sensor-Seite ins „Feld der UAS-Operationen“ hinein wird erwartet, dass folgende Input-Kanäle und

UTM aus Sicht der DFS
14 Innovation im Fokus 2 – 2018
Sensortechnologien zur möglichst vollständigen Surveillance des Luftraumes eine zentrale Rolle spielen:
RPS als Quelle der UAS-Id- und Positionsdaten-übertragung aus der RPS-Telemetrie,
LTE- (bzw. GSM bzw. zukünftig G5) gestützte HODs und HIDs als Quelle von Position und Id (HODs sind drohnenagnostisch und daher universell einsetzbar, haben aber keine Verbindung zum UAS-eigenen Autopiloten oder Telemetrie; HIDs hingegen sind integrierte Lösungen und daher verbunden, sind aber UAS-spezifisch zu implementieren und daher von der jeweiligen UAS-Herstellerpolitik abhängig),
FLARM als Quelle von Position und Id für UAS und bemannte Luftfahrt,
Radaranlagen (PAR, PSR, SSR, Mode S) als Quelle von Position und Id für UAS und bemannte Luftfahrt,
ADS-B bzw. low-Power-ADS-B als Quelle von Position und Id für UAS und bemannte Luftfahrt,
Multilateration (Nahbereich-MLAT oder Weitbereich- WAM) als Quelle von Position und Id für UAS und bemannte Luftfahrt),
Plots aus ATM-Systemen oder vorverarbeitete Tracks aus ATM-Systemen als Quelle von Position und Id für bemannte Luftfahrt,
Drohnendetektionssysteme (DDS) für non-kooperative UAS als Quelle von Position und Id für „rogue UAS“ (benutzen i.d.R. eine Kombination von PAR oder holographischen Radaren, Akustik, Optik, und Frequenzscanning als Detektor-Technologien).
Hier ist interessant zu beobachten, dass das Auftreten von UAS im VLL die Surveillance von bemannter Luftfahrt im gleichen Bereich stark beschleunigt.
Die bemannte Luftfahrt im Luftraum G ist nicht verpflichtet, sich zu identifizieren, und die ANSPs haben üblicherweise hier kein FVK-Mandat. Aus Eigen-sicherungsgründen hat sich hier in den vergangenen 10 Jahren unter den Nutzern ein Low-Cost „Grassroots-ATC“ auf der Basis von ADS-B (Flightradar 24) und FLARM (sowie Power-FLARM und FANET für Gleitschirmflieger) entwickelt. Das Auftreten von UAS in VLL thematisiert
Abb. 7: Die Vervollständigung der Surveillance im VLL
Abb. 8: Das in der DFS im Aufbau befindliche UTM System
data flows
mobile telecom connections
PHOENIX
UTM Framework
Hook-on/ Hook-in Devices
(UTM Box)
Profess. AppAnalysis Tools Web Clients
UTM- AWP
CWP
ATM
Pilot
Fleet Operator
BOS
LLB
Manufacturer
Transponder
ADS-B
FLARM
…
U:CONUTM System
Users
Core System
Cloud services
Data services
DDS
IEEE802.11P
MAVLINK
...
CODs
Weather
MapData

UTM aus Sicht der DFS
Innovation im Fokus 2 – 2018 15
nun verstärkt die Sichtbarwerdung von VFR-Fliegerei in ebendiesem Luftraum. Nun kann auf diese Technologien zurückgegriffen werden, um das Luftlagebild Zug um Zug zu vervollständigen.
Neben diesen Inputs der Surveillance werden UTM-Systeme laufend weitere externe Daten verarbeiten. Hier sind insbesondere zu nennen:
Wetterdaten Karten-/Geodaten Obstacle/3D Daten NOTAMs Auf der Client-Seite befinden sich zwei Gruppen von Applikationen in der Referenzarchitektur:
(1) Mobile Anwendungen auf Smartphones und Tablets (typischerweise Android- und iOS-Plattformen)
Mobile Apps als Clients des UTM a. Kostenfreie Informationsdisplays für die
Allgemeinheit (wie z.B. die „DFS-DrohnenApp“)
b. Kostenpflichtige mobile Clients („Apps“) für die Profi-UAS-Piloten
c. Kostenpflichtige mobile Clients/Apps für die VFR-Piloten
d. Kostenpflichtige mobile Clients/Apps für BOS-Kräfte (z.B. die in Vorbereitung befindliche DFS-App „What´s that drone?“)
Modifizierte und UTM-integrierte UAS-RPS [wie Mission Planner, 2019 oder QGround Control, 2019] als Clients
(2) Web-Clients
Web-Clients für Operateure und Piloten (in der DFS-Client-Terminologie „Pro Web Clients“)
Web-Clients („Sentry Clients“) für Behörden, BOS, LLBs und ANSPs bzw. Web-Displays für offizielle Informationsseiten (siehe z.B. in Europa bei Austrocontrol, Naviair, und Belgocontrol)
Diese Referenzarchitektur befindet sich bei der DFS in der Implementierung. Ein Gesamtbild dazu liefert Abbildung 8.
Dabei wird die MSDF-Tracking-Funktionalität von einem erweiterten PHOENIX–IMM-Tracker verrichtet [siehe zur Theorie des Kalman-Filters im Tracking: Heidger, 2014; u.v.a. Mathias & Pourvoyeur 2010; Grundlagen in: Bar-Shalom & Li, 1993, sowie Kalman, 1960], der vor allem durch folgende Anpassungen „drohnentauglich“ gemacht wurde:
Schaffung der Interfaces zum HOD/HID [UAS Plot ICD Format: Heidger, Caprdja, Pourvoyeur & Dix, 2018] sowie zu MAVLINK und FLARM;
Erweiterung der Konfigurationsmöglichkeiten im Tracker für UAS-Daten (aus Input-Kanälen des Trackers, die der UAS-Detektion zugeordnet sind – Nutzung des PHOENIX-Konzeptes der „sensorlokalen Trackerkonfiguration“);
Erweiterung des ASTERIX Cat 62-Outputs [UAS Track ICD: Pourvoyeur & Dix 2018] für die höhere Positionsgenauigkeit der UAS-Daten;
Vergrößerung des Wertebereichs für Positions- und Kinematikdaten im Tracker (dadurch höhere Auflösung);
Implementierung einer Feature-Fusion für unterschiedliche Ids von Drohnen aus IMSI, ADS-B-Kennung, MAVLINK-Kennung oder FLARM-Identifier;
Verarbeitung und Umrechnung von geometrischer und barometrischer Höhe für UAS.
Die erreichten Ergebnisse wurden im technischen Report des explorativen Projektes U:CON zusammengestellt [Frisch & Heidger, 2018]. Es wurden 2017 – 2018 mehr als 15 Trackingtests an diversen Orten verteilt über ganz Deutschland durchgeführt, und zwar
auf dem DFS-Campus ab 07/2017-2018, mit Agrar-Flugpattern GA Flugplatz Pforzheim
07/2017, mit den Multi-UAS-Experimenten auf dem
Fluggeländes des Modellflugclubs MFC Langen 07-09/2017,
mt den Multi-UAS Flügen am FH Egelsbach 07-10/2017,
mit den Agrar-Pattern auf den Testflächen für Weinanbau der Univ. Geisenheim, 10/2017,
mit der erstmaligen Integration mit ATM-Plots, DLRG Horneburg 10/2017,
mit den „Search pattern”-Flügen bei THW Bonn-Beuel 11/2017,
mit den HOD-Flügen hoch bis 2700ft bei St. Leon-Roth südlich von Heidelberg 12/2017,
mit den Airtaxi-UAS-Flügen bei Volocopter am Flugplatz Bruchsal 04/2018,
mit den Survey Pattern bei Duisburg am Rhein 05/2018 (inkl. Produktion von ATM-Tracks),
mit Airport Construction Site Inspektionsflügen bei Fraport in Frankfurt 06 und 10/2018 (inkl. ATM-Tracks),

UTM aus Sicht der DFS
16 Innovation im Fokus 2 – 2018
mit Sensor-Fusionstests rund um den DTAG-Funkturm in Waghäusel und weiteren Standorten in Südpfalz und Baden-Württemberg 06/2018 (inkl. ATM-Tracks).
Die ausgesprochen vielversprechenden Ergebnisse der Tracking-Tests sind in Tabelle 1 zusammengefasst:
Tabelle 1: Ergebnisse der Tracking-Tests
Positionsgenauigkeit horizontal
1m im Geradeausflug 3m bei schnellen Kurvenflügen
Erfassung in der Horizontalen
Im gesamten Bundesgebiet im D1-Mobilfunknetz
Erfassung in der Vertikalen Flächendeckend meist bis 150m, Gebietsweise sehr unterschiedlich
Datenreisezeit im MF-Netz 100 – 400 ms Datengröße pro Meldung 40 – 150 byte Trackkontinuität Für kurzzeitige Aussetzer
gegeben Trackkapazität modif. UTM-PHOENIX
10.000 max
Handlungsbedarf besteht noch im Zeitverhalten der HODs und bei einzelnen Varianten der Sensor- und Id-Fusion für UAS in Abgrenzung zu Tracks bemannter LFZ.
Analysefunktionen und Recording&Replay-Dienste übernimmt dabei die PHOENIX AWP (siehe Abb. 9). Sie
wurde schon in den letzten Monaten für die Trackingtests benutzt. Genaue Analysen von Tracks, Messdaten, Zeitverhalten, Lücken, Dateninhalten und Trackerperformanz sind damit möglich, ebenso Regressionstests mit Recording und Replay inkl. Re-Tracking mit veränderten Parametern bzw. Algorithmen.
Wetterdaten werden im Rahmen des bestehenden Servicevertrages zukünftig vom DWD geliefert, der dazu sein Lieferprogramm vor allem um Winddaten in Bodennähe in feinerer Zellenauflösung vertikal und horizontal zur Verfügung stellt, ebenso Niederschlags-daten, Temperatur, Taupunkt, QNH, und den KP-Index der Sonnenaktivitäten, die die Genauigkeit von GNSS-Messungen beeinträchtigen können (KPI > 4).
Die zentralen UTM-Services werden auf das UTM-Framework von Unifly gestützt (siehe die folgenden Abbildungen 10 und 11), ebenso die mobilen Apps mit Ausnahme der „What’s that drone?“ App für BOS, die zum Einstieg in die App-Entwicklungstechnologie vom DFS-Systemhaus gebaut wird.
Das HOD wird von der DTAG bereitgestellt. Bisher wurden zwei Generationen von Prototypen erprobt, diese sind funktional noch nicht ganz ausreichend, eine dritte mit der Nutzung von MQTT und einem weiter
Abb. 10: Planungsdisplay in „UTM PRO“
Abb. 11: Lagedisplay in „UTM-SENTRY“
Abb. 9: PHOENIX AWP Luftlage mit UAS und bemannter
Luftfahrt (Campus DFS, Waghäusel)

UTM aus Sicht der DFS
Innovation im Fokus 2 – 2018 17
verbesserten Zeit- und Timeout-Verhalten wird ggw. getestet. Bei den bisherigen Versuchen hat sich gezeigt, dass eine vertikale Ausrichtung der HOD-Antenne die besten Erfassungsergebnisse liefert. Die benutzten Frequenzbereiche sind das 800 MHZ- (für große Flächenabdeckung), das 1600 MHZ- (Standardspektrum für LTE), und das 2800 MHZ-Band (lokaler Einsatz zur Erhöhung der Kapazität) [Frisch & Heidger, 2018]. Die Geräte verbinden sich auch nicht unbedingt mit den nächsten Mobilfunkzellen, sondern durch ihre Flughöhe mit weiter entfernten, was zu Herausforderungen an die Verbindungszuteilung im Netz führt.
Neu in dem Instrumentarium der Analyse- und Lagedisplay-Tools für UTM ist der „TrackViewer“, der eine konfigurierbare und filterbare Luftlage übers Web an ausgewählte freigeschaltete Nutzer bereitstellt, um direkt aktuelle UseCase Experimente in U:CON zu unterstützen (siehe Abb. 12). Dieses mit „Ruby on Rails“ entwickelte Werkzeug wird für ein schnelles Prototyping eingesetzt, um neue Ideen des HMIs und des Nutzersupports möglichst schnell auszuprobieren und dann nach erfolgter Evaluation in den UTM-Clients nachzuimplementieren.
In den nächsten Monaten wird der Schwerpunkt der Entwicklung auf dem Testen, Fehlerbehebung und
Herstellen eines „Minimum Viable Products“ (MVP) liegen, um die öffentliche Freischaltung des UTM-Systems übers Internet durch DFS und DTAG zu ermöglichen. Dabei sind insbesondere die Genehmigungsabläufe zwischen Operateuren und Landesluftfahrtbehörden zu erproben und zu härten, damit das UTM-System die Genehmigung v.a. von BVLOS-Flügen unterstützt. Im Genehmigungsprozess selbst werden Kriterien des SORA zukünftig eine zentrale Rolle spielen. Hier ist noch abzuwarten, wie sich die deutsche SORA-Variante nach der Publikation der SORA von JARUS und den zugehörigen Standardszenarios anpassen wird. Die Funktionalitäten der Konfliktwarnung werden im Anschluss intensiver getestet, um dann – voraussichtlich ab 2020 – die höheren Funktionen der Konfliktauflösung und der Auflösung von Verkehrsüberlastungen (Congestion Management) anzugehen.
Beim Datenaustausch zwischen ATM und UTM, der bald zu einem weiteren zentralen Entwicklungsthema wird, ist aus Sicht der DFS davon auszugehen, dass es dabei mindestens um die folgenden Daten geht:
Trackdaten von UAS bzw. LFZ, v.a. an Transitionszonen,
Flugplandaten von UAS, v.a. in Kontrollzonen und an Flughäfen,
(ggf. aggregierte) Zustandsdaten wichtiger Ereignisse, wichtiger Verkehrseinheiten und von Lufträumen,
Meldungen, Warnungen und Alarme zu Konflikten (UAS-UAS, UAS-LFZ, UAS-NFZs),
ggf. NOTAMs falls diese sich als Austauschmedium von Informationen zwischen ATM und UTM bewähren sollten.
Zwischenzeitlich wird auch erörtert, wie die Kommunikation zwischen verschiedenen UTMs zukünftig aussehen soll. Dazu hat Google einen „Inter-USS“- Plattformvorschlag gemacht, der aber von vielen ANSPs als problematisch angesehen wird, denn er impliziert die anschließende Abhängigkeit von Google. Aus ANSP-Sicht entwickeln sich derartige Schnittstellen besser ohne Abhängigkeiten aus den nationalen UTM-Systemen heraus, in einem zweiten Schritt, und dabei möglichst gemeinsam vereinbarten Standards folgend.
Wirtschaftliche Aspekte
Im vorliegenden Rahmen ist nicht genug Raum, alle wirtschaftlichen Aspekte von UTM zu erörtern. Es ist schon wegen des andersartigen Marktes klar, dass neue Bezahlprinzipien wie „Software as a service“ und „User
Abb. 12: TrackViewer-Darstellung für UAS-Marathon der
Dronemasters Berlin August 2018

UTM aus Sicht der DFS
18 Innovation im Fokus 2 – 2018
pays for login time / flight time“ in einem gegenüber ATM erweiterten Nutzerkreis und sogar unter Einschluss von Öffentlichkeit zur Anwendung kommen müssen. Im erstellten Businessplan von DFS und DTAG wird auch im Wesentlichen auf diese neuen Prinzipien zurückgegriffen. UTM ist für die DFS auch eine Investition in ein neues Geschäftsfeld bzw. Markt sowie in neue Technologien wie Cloud, Web und AI, die auch im traditionellen Geschäft neue Lösungen anbieten können. Unabhängig von der Geschäftsform für die neuen Aktivitäten ist dabei festgelegt, dass die UTM System Services aus der DFS heraus erbracht werden sollen.
Fazit und Ausblick
Aktuell wird in der europäischen Kommission, in SESAR und der A6 intensiv die zukünftige „UTM Deployment Architektur“ diskutiert, und damit auch die Rolle der ANSPs und ihr Verhältnis zu den zukünftigen dritten UTM Service Providern (USPs). Die DFS nimmt hier einen dezidierten Standpunkt ein und sieht ein nationales UTM in den Händen des ANSP, zumindest mit den Funktionen Registration, Surveillance Integration und Tracking, AIM Datenbereitstellung, Wetterinformationen, sowie Geofencing/-caging, Missionsplanung, Deconfliction und Festlegung von Priorisierungsregeln sowie dem ANSP-Anteil am Genehmigungsprozess. Sollte es irgendwann einmal weitere regionale USPs geben, würden hier eher spezifische Lagedarstellungen, Payload-spezifische Services und Flottenmanagement angesiedelt sein. Mit Blick auf die hier skizzierten Fragestellungen erweist sich UTM als thematisch enorm groß, als Beginn einer langen Entwicklung, mit einem Umfang potenziell größer als ATM. Es mag durchaus sein, dass irgendwann ATM und UTM miteinander verschmelzen und wir vor einem fundamental veränderten Luftfahrtsystem stehen.
Abkürzungen
5G 5. Generation-Standard des Mobilfunks
A6 „ANSP 6“ - Gruppe
ACC Area Control Center
ADS-B Airborne dependent surveillance – broadcasting (mode)
AGL Above ground level
AIRAC Aeronautical Information Regulation and Control
ANSP Air Navigation Service Provider
ASTERIX All Purpose Structured Eurocontrol Surveillance Information Exchange
ATM Air Traffic Management
AWP Analysis Working Position
BAF Bundesaufsichtsamt für Flugsicherung
BMVI Bundesministerium für Verkehr und Infrastruktur
BOS Behörden mit Ordnungs- und Sicherheitsaufgaben
BVLOS Beyond visual line of sight
CAA Civil aviation authority
COD Carry-on-device (=Tablet oder Smartphone)
CONOPS Concept of Operations
CORUS Concept of Operations for EuRopean UTM Systems
DDS Drohnendetektionssystem (für nicht-kooperative UAS)
DIN Deutsche Industrie-Norm
DTAG Deutsche Telekom AG
DWD Deutscher Wetterdienst
ESB Enterprise Service Bus
FANET Flying ad-hoc Networks
FL Flight Level
FLARM Flight Alarm
FMS Flight Management System (Autopilot der Drohne)
FVK Flugverkehrskontrolle
GSM Global System for mobile Communications, 3G-Standard des Mobilfunks
HID Hook-in-device
HMI Human Machine Interface
HOD Hook-on-device
ICAO International Civil Aviation Organisation

UTM aus Sicht der DFS
Innovation im Fokus 2 – 2018 19
IFR Instrument Flight Rules
IMM (IMM-KF)
Interacting multiple model Kalman Filter
IMSI International mobile subscriber identity (internationale Mobilfunkteilnehmerkennung)
JV Joint Venture
KP Kennziffer, planetarisch
LBA Luftfahrtbundesamt
LLB Landesluftfahrtbehörden
LTE „Long term evolution“-Standard des Mobilfunks, auch „4G“ genannt
MAVLINK Micro Air Vehicle Link
MF Mobilfunk
MLAT Multilateration
MSDF Multisensordatenfusion
MVP Minimum viable product
NFZ No-Fly Zones
NOTAM Notice to Airmen
PAR Phased array radar (oft auch „holografisches Radar“ genannt
PSR Primary Surveillance Radar
RPS Remote Pilot Station
SESAR Single European Sky ATM Research
SJU SESAR Joint Undertaking
SORA Specific operations risk assessment
SSR Secondary Surveillance Radar
TWR Tower
UAS Unmanned aircraft system, Drohne
USP UTM Service Provider
UTM UAS Traffic Management
UVS Unmanned Vehicle Systems
VFR Visual Flight Rules
WAM Wide Area Multilateration
Referenzen
A6 Alliance (2018): U-Space architecture and the role of ANSPs. Version of 16.10.2018. URL abgerufen am 15.01.2019 von https://www.a6alliance.net
Bar-Shalom, Y. & Xiao-Rong Li (1993). Estimation and Tracking: Principles, Techniques, and Software. Boston, London: Artech House.
DFS (2018). DFS AIP: Aeronautical Information Publication. Langen: DFS Deutsche Flugsicherung GmbH.
DIN 5452-1 (2018). Luft- und Raumfahrt – Unbemannte Luftfahrzeugsysteme (UAS) – Teil 1: Begriffe. Berlin: DIN e.V.
European Commission DG MOVE (2018). Model for a future U-Space in Europe. A discussion paper. From Flying Drones to Doing Business. Version 0.40 of 26.10.2018. Brussels.
European Aviation Safety Agency (2017). Notice of proposed Amendment 2017-05 (A): Introduction of a regulatory framework for the operation of drones. (EASA NPA 2017-05). Köln. dazu auch als Aktualisierung: EASA Opinion No 01/2018.
Frisch, A. & Heidger, R. (2018). UTM-Lösungen für die sichere und faire Integration von UAS in das Luftverkehrssystem. Mobilfunk, Surveillance und Tracking U:CON vom 04.02.2018. Bonn und Langen: Deutsche Telekom AG und DFS Deutsche Flugsicherung GmbH.
GUTMA (2017): UTM System Architecture. Published on the Global UTM Association Website. URL abgerufen am 16.01.2019 von http://gutma.org.
Hately, A. (2018). CORUS: Concept of Operations for U-Space. By A. Hately, et.al.; Eurocontrol Open Sky Teams CORUS Webpage; Version 1.0, 25.06.2018.
Heidger, R. (2014). The PHOENIX White Paper, Version 5.0, Langen: DFS Deutsche Flugsicherung GmbH
Heidger, R. (2018). UTM System Requirements, Version 2.2 vom 08.08.2018, Langen: DFS Deutsche Flugsicherung GmbH.
Heidger, R., Caprdja, K., Pourvoyeur, K. & Dix, A. (2018). U:CON Message Specification Plot Message CSV Format. v.2.1 vom 15.05.2018.

UTM aus Sicht der DFS
20 Innovation im Fokus 2 – 2018
(Plot ICD für UAS). Langen: DFS Deutsche Flugsicherung GmbH.
ICAO (2015). Manual on Remotely Piloted Aircraft Systems (RPAS). Doc 10019. AN/507. ICAO, Montreal Canada, (1).
JARUS Guidelines on Specific Operations Risk Assessment (SORA). JAR-DEL-WG6-D.04. V. 1.0, 26.06.2017. URL abgerufen am 16.01.2019 von http://jarus-rpas.org.
Kalman, R. E. (1960): A New Approach to Linear Filtering and Prediction Problems (= Transaction of the ASME, Journal of Basic Engineering). S. 35-45.
Kopardekar, P. et.al. (2016). Unmanned Aircraft System Traffic Management (UTM) Concept of Operations. In: AIAA Aviation. 13-17 June 2016, Washington D.C. 16th AIAA Aviation Technology, Integration, and Operations Conference. American Institute of Aeronautics and Astronautics.
Mathias, A. & Pourvoyeur, K. (2010): "Enhanced IMM Model Switching using Residual Accumulation," in Proc. Enhanced Surveillance of Aircraft and Vehicles (ESAVS 2010), Berlin, Germany, March 16 17, 2010.
Mission Planner (2019). Webseite mit Dokumentation und Downloads. URL abgerufen am 15.01.2019 von http://www.ardupilot.org.
Pourvoyeur, K. & Dix, A. (2018). PHOENIX Standard Document for Surveillance Data Exchange. UCON-Cat062/SP - Mobile Communication Track Messages. V. 2.2 vom 15.06.2018. Langen: DFS Deutsche Flugsicherung GmbH.
QGround Control (2019). Webseite mit Dokumentation und Downloads. URL abgerufen am 15.01.2019 von http://qgroundcontrol.com
SJU (2016). SESAR Joint Untertaking: European Drones Outlook Study. Unlocking the value for Europe. Brussels.
SJU (2017). SESAR Joint Undertaking: U-Space Blueprint. Luxembourg: Publications Office of the European Union.
Van Blyenburgh, P. (2018). Is Europe ready for commercial drone operations? In: European Drone Summit 2018. UVS International. Frankfurt/Main: UAV DACH e.V.
Unifly (2017). Unifly Architecture. Draft Version. November 2017, Update January 2018, Antwerp: Unifly NV.

SESAR OCD
Innovation im Fokus 2 – 2018 21
The SESAR Operational Concept Document (OCD 2018) Gabriele Zaki & Othmar Schnabel
Background
One of the manifold activities of the DFS department ‘Planning and Innovation’ is to lead the development of Operational Concepts in the frame of the SESAR programme. The objective of SESAR is to modernise European ATM by defining, developing and delivering new or improved technologies and procedures (SESAR Solutions). For this purpose, it coordinates and concentrates EU research and development (R&D) activities in ATM, pooling together the experts to develop the new generation of ATM. Today, SESAR unites around 3,000 experts in Europe and beyond.
Several Concepts of Operation for the so-called Step 1 (time-based operations) and Step 2 (trajectory-based operations) were developed in SESAR 1. Furthermore, a Transition CONOPS that paved the way from SESAR 1 to SESAR 2020 was produced.
The Operational Concept Document, which is more high-level than the CONOPS was delivered by SESAR 2020 project 19-02 “Content Integration – ATM Operations” – led by DFS – end of October 2018.
Objective and Scope
The Operational Concept Document (OCD) describes the future Air Traffic Management (ATM) operations envisaged in Europe. The objective of this document is to provide a high-level view of the operational characteristics of ATM in the future European airspace coming from the development of the SESAR Programme, and the main significant changes they imply in operating practices along with the capabilities they require.
The concept addresses so far, the development in the timeframe until 2035 and describes areas where operational improvements supported by technical enablers will bring performance gains that yield the overall performance expected in Single European Sky High-Level Goals as set out in the European ATM Master Plan. The description follows the three operational key features of SESAR:
• High Performing Airport Operations,
• Optimised ATM Network Management and
• Advanced ATS.
The 4th SESAR key feature “Enabling Infrastructure” is not elaborated in the OCD as it deals with technical enablers only.
The OCD allows civil and military Airspace Users, Service Providers, Airports, Aviation and ATM industries, as well as Aviation Regulation bodies to gain a high level view of the operational characteristics of the likely future ATM environment and the main changes implied in operating practices along with the capabilities required.
Concept Overview
The SESAR 2020 Operational Concept Document (OCD) bridges the Vision of the European ATM Master Plan with the practical solutions achieving the objectives and overall performance expected in Single European Sky High-Level Goals [1] as set out in the European ATM Master Plan [2]. It is the main common reference for all operationally related SESAR tasks.
The OCD’s objective is to describe how Operational Improvements achieve the SESAR Vision, and how they are integrated and orchestrated into the ATM system to deliver a high-performing ATM system that allows Airspace Users (AUs) to fly their optimum trajectories as far as possible, satisfying their business and/or operational needs.
The main Operational Improvements (OI) are based on advances in digitisation and automation - with use of artificial intelligence where appropriate - accompanied by the growing need in the aviation world for robust cyber-security, which is addressed with the securing of data exchange. Continuity of operations and resilience will be essential to maintain the trust in the aviation system.
Trajectory Based Operations (TBO)
A significant and fundamental shift takes place with the adoption of 4D Trajectory Management principles to manage flights, which facilitates the performance-friendly transition from tactical intervention towards a more strategic focus on planning and intervention by exception. This enables Airspace Users to operate their preferred trajectory from gate to gate and to perform fuel-efficient continuous descent and climb, generating environmental benefits in terms of both emissions and noise. TBO enables effective dynamic adjustment of

SESAR OCD
22 Innovation im Fokus 2 – 2018
airspace characteristics to meet predicted demand and makes full use of developed civil/military collaboration, whilst aiming to keep any distortions to the Business/Mission Trajectories to the absolute minimum without compromising the flexibility required for optimisation purposes.
Optimised ATM Network Services
Network optimisation is supported by improved flight trajectories provided through integration of a number of key processes. This sees Dynamic Airspace Configuration (DAC) being fully integrated with Demand Capacity Balancing (DCB), and dynamic DCB being fully integrated with ATC planning. These, together with Queue Management, are able to optimise new operations, supporting optimised trajectories in an environment that includes Free Route, flight and/or flow-centric and use of Collaborative Control. The dynamic adjustment of airspace through DAC delivers an optimised and coordinated organisation of airspace reservations in the context of advanced airspace management and ATC sectorisation to match capacity to demand as much as feasible. This delivers performance gains by responding flexibly to the Airspace Users’ expectations.
The User Driven Prioritisation Process (UDPP) becomes a key mechanism to enable Airspace Users to prioritize their flights based on company policy and business model and agree to a mutually acceptable plan in a cooperative manner.
Airport performance and access
Airport performance and access is improved through increased capacity and predictability at high traffic airports, implementation of enhanced runway throughput technologies, navigation that is more accurate and routing tools, and technical solutions to maintain performance in all weather conditions.
Digitalisation, technological evolution with new tools and automation
Increased digitisation and implementation of virtualisation technologies enable a cost effective performance-oriented service provision that allows an increase of the global ATM system performance. Performance monitoring becomes an integral part of the ATM system, which allows both Air Navigation Service Providers (ANSPs) and AUs to choose which key performance areas they want to prioritise to serve their customers’ needs.
The technological evolution of civil and military airborne and ground systems coincides with the harmonisation of performance requirements. In this context, cyber security is of particular importance, securing the confidentiality, integrity and availability of ATM operations. Cyber security will be an inherent and collaborative element in the development of ATM operational solutions
New decision-making support tools and automation provide coupling of Arrival Manager/Advanced Surface Movement Guidance and Control System/Departure Manager (AMAN/A-SMGCS/DMAN).
Advanced controller tools provide new capabilities. The introduction of standardised and interoperable systems together with complexity tools, enable controllers to manage both flows of traffic and individual flights. Controllers use enhanced knowledge of the predicted vertical behaviour of the aircraft to support Continuous Climb and Descent Operations, bridging the transition between the TMA and both free route airspace and fixed route airspace, facilitating of a broad range of climb and descent profiles, which are fuel-efficient for the specific flight.
The role of the human
The role of the human, and its continued importance within the concept, is recognised in the future system, which takes into account the necessary balance between the efficiency created by automation and human capabilities. The human decision always needs to take primacy over a system, independent of the automation level.
The improvement and integration of automation is supported by digitalisation technology, enhancing conflict detection and resolution tools and conformance monitoring tools as well as agreed protocols for delegation of spacing to the aircraft in order to reduce the need for ad hoc interventions. Automation of routine tasks and wide introduction of data communication also allows controllers to concentrate on added-value tasks, handling more traffic in a safer way, improving ATCO productivity and enhancing flight efficiency.
Safety
Safety is the overarching aim of the entire Single European Sky (SES) II initiative and is the central element of any technical solution developed by SESAR.
The concepts are supported by new tools designed to prevent or reduce the risk of loss of separation, to

SESAR OCD
Innovation im Fokus 2 – 2018 23
reduce the risk of runway excursion, to improve runway condition awareness and to alert for taxi non-conformance and for collision avoidance in surface operation. Safety nets are updated to ensure operation within the new SESAR environment through the redevelopment of advanced collision avoidance tools taking advantage of additional information and improving compatibility between all AUs.
Reduction in environmental impact
Through management of airborne and surface routing and associated procedures, this is an important element in reducing the effect on climate, noise and health for direct stakeholders and the wider community.
Outlook
The concept addresses so far, the development in the time frame of 2035. Going beyond, performance-based operations will be developed with multiple options which might lead to the reorganisation of services in relation to geography and flight operations.
Next step will be to produce a Concept of Operations 2019 which will provide the transition from the current SESAR 2020 Wave 1 to Wave 2. The ATM Master Plan 2019 which will be published in autumn may lead to updates of the Concepts of Operation.
References
[1] European Commission (2019). High-Level Goals, URL retrieved on 16/01/2019 from: https://www.sesarju.eu/background-ses.
[2] SJU (2015). European ATM Master Plan: The roadmap for delivering High Performing Aviation for Europe. Edition 2015. ISBN 978-92-9216-034-0.

24 Innovation im Fokus 2 – 2018

Berechnung konfliktfreier Trajektorien
Innovation im Fokus 2 – 2018 25
Berechnung konfliktfreier Trajektorien mithilfe von Optimalsteuerungsmethoden
Sandra Himburg (TU Darmstadt) & Dr. Matthias Poppe
1. Einleitung
Das Ziel dieser Projektarbeit bestand darin, das von Markus Hochstrasser [1][2], Leif Walter [3] entwickelte MATLAB--Framework zur Bestimmung konfliktfreier Trajektorien für Luftverkehrsszenarien auf Basis von Optimalsteuerungstheorie, auf einen drei dimensionalen Raum zu erweitern.
Das Langzeit-Ziel des Konzepts ist die Implementierung eines autonomen ATM-Systems bzw. die Unterstützung der Air Traffic Controller durch fortgeschrittene Decision Support Tools. Aus den Radar- und Flugplandaten erstellt das hier entwickelte Framework ein Optimalsteuerungs-problem, welches in ein endlich-dimensionales Optimierungsproblem umgewandelt und anschließend mithilfe eines Sequential Quatratic Programming (SQP)-Verfahrens gelöst wird. Die berechneten Steuerungen (Anweisungen bzw. Freigaben) und Flugbahnen werden dann in geeigneter Form z.B. mit Hilfe von Data Link an die Flugzeuge weitergegeben. Dieser Ansatz soll es ermöglichen, unter gleichzeitiger Berücksichtigung aller Flugzeuge optimale konfliktfreien Trajektorien zu generieren, d.h. dass die Abweichungen vom Eintritts- zum Austrittspunkt im betrachteten Luftraum im Falle von Konflikten in der Summe aller Flugzeuge minimiert werden (siehe dazu auch [5]).
Die angegebenen Diplomarbeiten sowie diese Projektarbeit beschäftigen sich ausschließlich mit der Implementierung des Frameworks zur Erstellung und Lösung des Optimalsteuerungsproblems.
Da in den meisten Fällen die Eintrittshöhe eines Flugzeuges in einen Sektor nicht seiner Austrittshöhe aus dem selbigen entspricht, soll die Hinzunahme einer Höhenkomponente zu den Flugplänen im Framework das Konzept der Realität noch einen großen Schritt näherbringen. In dieser Projektarbeit wurde die Erweiterung des kontinuierlichen Problems1 erarbeitet. Des Weiteren sei darauf hingewiesen, dass einige vereinfachende Annahmen bezüglich der Modellierung der Flugzeuge sowie der Definition der Szenarien
1 In der Arbeit von Markus Hochstrasser [1] sind auch Problemformulierungen mit binären und hyperbolischen Funktionen beschrieben.
getroffen wurden. Diese müssen noch überarbeitet werden, bevor man an eine Einsetzung des Konzepts in der Realität denken kann.
Benötigte mathematische Grundlagen zum Thema Optimalsteuerung und deren Lösungsverfahren lassen sich den Arbeiten von Markus Hochstrasser [1] und Leif Walter [3] entnehmen.
2. Optimalsteuerungstheorie
In der Optimalsteuerungstheorie wird ein beliebiges System durch Zustandsvariablen, Steuerungen, konstante Parameter und eine Menge von Differentialgleichungen beschrieben. Die Zustands-variablen 𝒙(𝑡) für einen bestimmten Zeitpunkt 𝑡 enthalten alle Informationen, die nötig sind um die gegenwärtigen Eigenschaften des Systems anzugeben. Weiter ist bei bekannten Steuerungen 𝒖(𝑡) und konstanten Parametern 𝒒 die Dynamik des Systems durch die Menge der Differentialgleichungen definiert. Die Parameter 𝒖(𝑡) und 𝒒 beschreiben also äußere Einflüsse auf das System.
Die Optimalsteuerungstheorie zielt nun darauf ab, eine Steuerungshistorie zu finden, die eine gegebene Zielfunktion unter den Nebenbedingungen der Dynamik des Systems sowie weiteren Limitierungen an die Parameter des Systems minimiert bzw. maximiert. Genauer besteht ein allgemeines Optimal-steuerungsproblem (engl. Optimal Control Problem, kurz OCP) also aus den folgenden Komponenten:
Einer Menge von Differentialgleichungen �̇�(𝑡), die die Dynamik des Systems beschreiben,
Randbedingungen 𝝍, die Informationen über den Anfangs- und ggf. den Endzustand des Systems bereitstellen (sog. Event Constraints),
Gleichungs- und/oder Ungleichungsneben-bedingungen 𝑪, die weitere Beschränkungen an das System enthalten (sog. Path Constraints) und

Berechnung konfliktfreier Trajektorien
26 Innovation im Fokus 2 – 2018
einer Zielfunktion 𝐽, die die Kosten beschreibt und als Optimalitätsmaß des Problems dient. Diese muss daher minimiert werden.
Die allgemeine mathematische Formulierung mit Mayer- und Lagrange-Term2 lautet folgendermaßen:
min𝑢,𝑥,𝑞
𝐽 = 𝜙(𝑥(𝑡0), 𝑡0, 𝑥(𝑡𝑓), 𝑡𝑓 , 𝑞)
+ ∫ ℒ(𝑥(𝑡), 𝑢(𝑡), 𝑡, 𝑞)𝑑𝑡𝑡𝑓
𝑡0
𝑠. 𝑡. �̇�(𝑡) = 𝑓(𝑥(𝑡), 𝑢(𝑡), 𝑡, 𝑞)
𝜓𝑚𝑖𝑛 ≤ 𝜓(𝑥(𝑡0), 𝑢(𝑡0), 𝑡0, 𝑥(𝑡𝑓), 𝑢(𝑡𝑓), 𝑡𝑓 , 𝑞) ≤ 𝜓𝑚𝑎𝑥
𝐶𝑚𝑖𝑛 ≤ 𝐶(𝑥(𝑡), 𝑢(𝑡), 𝑡, 𝑞) ≤ 𝐶𝑚𝑎𝑥
mit Zustandsvektor 𝒙, Startzeit 𝑡0, (freier oder fester) Endzeit 𝑡𝑓, Steuerungsvektor 𝒖 und Parametervektor 𝒒.
Im Gegensatz zu einem statischen nichtlinearen Optimierungsproblem (NLP), bei dem man einen endlich-dimensionalen Vektor sucht, basieren OCPs auf der Suche stetiger Funktionen 𝒖(𝑡) und 𝒙(𝑡). Man könnte sie als unendlichdimensionale Erweiterungen allgemeiner NLPs ansehen. Zur Lösung eines Optimalsteuerungs-problems benötigt man Methoden, um dieses in ein NLP zu übersetzen und anschließend bekannte Lösungs-verfahren für nichtlineare Optimierungs-probleme darauf anzuwenden. Eine dieser Methoden wird im folgenden Kapitel vorgestellt.
3. Lösungsmethode
Es gibt im Wesentlichen zwei unterschiedliche Lösungsmethoden für unendlich dimensionale Optimal-steuerungsprobleme. Bei beiden Varianten werden jeweils Diskretisierungs- und Optimierungsschritte kombiniert. Man spricht von direkten und indirekten Methoden.
Bei direkten Methoden wird das unendlich dimensionale Problem zunächst mittels Diskretisierung durch ein endlich dimensionales Problem approximiert und anschließend gelöst. First discretize, then optimize.
Im Gegensatz dazu werden bei indirekten Methoden zunächst Optimalitätsbedingungen des stetigen unendlich dimensionalen Problems abgeleitet, bevor eine Diskretisierung durchgeführt wird. First optimize, then discretize.
2 Die beiden Terme sind äquivalent. Der Mayer-Term ∅ beschreibt die Kosten in Bezug auf die Zeit, während der
Für genauere Informationen zu den Methoden sei auf Kapitel 2.3 der Diplomarbeit von Markus Hochstrasser verwiesen [1].
Die erreichbare Genauigkeit sowie Optimalität der Ergebnisse und somit auch die Anwendbarkeit einer Lösungsmethode hängt stark von der konkreten Struktur des Problems ab. In dieser Ausarbeitung wird wie in der Implementierung von Herrn Hochstrasser eine direkte pseudospektrale Radau-Kollokationsmethode mit Legendre-Gauß-Radau-Punkten verwendet. Jeder direkte Ansatz kann in drei fundamentalen Schritten zusammen-gefasst werden:
1. Konvertieren des dynamischen Systems in ein Problem mit einer endlichen Variablenmenge durch Diskretisierung der Steuerungen, der Zustände und der Nebenbedingungen mit Auswerten der Bedingungen an den Gitterpunkten.
2. Numerisches Lösen des endlich dimensionalen Problems mithilfe einer gewöhnlichen NLP-Lösungsmethode (z.B. einer SQP-Methode).
3. Abschätzen der Fehlergenauigkeit der Approximation und falls notwendig, Wiederholen des Transkriptionsvorgangs und der Optimierung nach einer Gitterverfeinerung.
Unter der Diskretisierung einer Funktion versteht man in diesem Kontext das Konvertieren der Funktion in eine diskrete Entsprechung (z.B. durch Betrachtung der Funktionswerte an den Gitterpunkten). Sie sollte nicht mit der Parametrisierung verwechselt werden, welche für die Aufnahme der Funktionswerte an den Diskre-tisierungspunkten in die Menge der zu bestimmenden Optimierungsvariablen steht.
Innerhalb des Lösungsprozesses müssen in jedem Fall Integrale gelöst werden. Zur Bestimmung der Integrale der nun diskreten Steuerungen und Zustände ist zunächst eine Approximation oder Interpolation notwendig. In unserem Fall wird sowohl zur Approximation der Zustände als auch zur Approximation der Steuerungen globale Lagrange-Interpolation verwendet.
Daraufhin werden in der Kollokationsmethode alle diskreten Zustandsgleichungen an den sogenannten Kollokationspunkten, die den Diskretisierungspunkten oder einer Teilmenge davon entsprechen, in algebraische Nebenbedingungen umgeschrieben. Im
Lagrange-Term ℒ den Pfadkosten entspricht (siehe dazu auch [9], Kapitel 2).

Berechnung konfliktfreier Trajektorien
Innovation im Fokus 2 – 2018 27
entstehenden gewöhnlichen nichtlinearen Optimierungs-problem wird die Erfülltheit der ursprünglichen Neben-bedingungen an allen Kollokationspunkten sichergestellt. Zwischen den Kollokationspunkten müssen die Zustände und Steuerungen diesen Nebenbedingungen nun allerdings nicht mehr genügen, weshalb Kollokations-methoden oft mit Gitterverfeinerungsalgorithmen, die iterativ die Anzahl der Kollokationspunkte erhöhen, kombiniert werden. Ein Nachteil des Verfahrens ist, dass das entstehende NLP-Problem abhängig von der Anzahl an Kollokationspunkten und der Anzahl der Differential-gleichungen sehr groß werden kann. Allerdings werden schwach besetzte Matrizen produziert, so dass geeignete hoch effiziente Lösungsstrategien angewendet werden können. Eine ausführliche Beschreibung verschiedener Kollokationsmethoden ist z.B. in [4], Abschnitt 4.3 zu finden.
Die genauen Schritte der pseudospektralen Radau-Kollokationsmethode werden nun anhand des allgemeinen Optimalsteuerungsproblems (siehe Gleichungssystem Kapitel 2) noch einmal genauer beschrieben. Der Einfachheit halber wird der Vorgang auf einem globalen Zeitgitter erklärt. Aus Stabilitäts-gründen ist es bei der Implementierung allerdings sinnvoll, mehrere Zeitgitter zu definieren und auf den einzelnen Gittern jeweils die Kollokationsmethode anzuwenden. Bei dieser Methode werden sowohl Zustands- als auch Steuervariablen parametrisiert. Zunächst wird jedoch das Zeitgitter diskretisiert.
3.1 Diskretisierung des Zeitgitters und Zeit-Transformation des Problems
Aus Konvergenzgründen der Polynominterpolation sowie des gesamten Verfahrens werden die Legendre-Gauß-Radau-Punkte (LGR-Punkte) verwendet. Es handelt sich um Nullstellen von Legendre-Polynomen verschiedener Grade und man unterscheidet zwischen gewöhnlichen LGR-Punkten, die im Intervall [−1,1) liegen und „geflippten“ LGR-Punkten, die im Intervall (−1,1] liegen. Bei beiden Sorten sind die Punkte im Allgemeinen nicht äquidistant über dem Intervall verteilt, sondern häufen sich an dessen Rändern. Wir verwenden die gewöhnlichen LGR-Punkte als Kollokationspunkte und bezeichnen diese mit {𝜏0, … , 𝜏𝐾} 𝜖 [−1,1). Es handelt sich dabei um die 𝐾 Nullstellen der Funktion 𝑃𝐾(𝑡) + 𝑃𝐾+1 (𝑡), wobei
𝑃𝑛(𝑡) = 1
2𝑛𝑛!
𝑑𝑛
𝑑𝑡𝑛[(𝑡2 − 1)𝑛], 𝑛 ∈ ℕ
das Legendre-Polynom vom Grad 𝑛 ist. Weitere Details und Eigenschaften der Legendre-Polynomen sind in [4], Abschnitt 4.3.2 und in [14] zu finden.
Da das allgemeine Optimalsteuerungsproblem auf dem Intervall [𝑡0, 𝑡𝑓] definiert ist, müssen wir es zunächst auf das feste Intervall [−1, 1] transformieren, bevor wir die oben definierten Diskretisierungs- und Kollokations-punkte verwenden können. Dazu nutzen wir gemäß [6] die Substitution
𝜏 = 2𝑡
𝑡𝑓− 𝑡0−
𝑡𝑓+ 𝑡0
𝑡𝑓− 𝑡0 mit 𝑑𝑡
𝑑𝜏=
𝑡𝑓− 𝑡0
2 (1)
3.2 Interpolation der Zustands- und Steuerungsfunktion
Um ein endlich dimensionales Problem zu erhalten, muss die Menge der in der Optimierung zu bestimmenden Variablen auf eine endliche Menge verkleinert werden. Zu diesem Zweck wird die Steuerungs- und die Zustands-funktion des Problems parametrisiert. Das bedeutet, in der Optimierung werden nur noch deren Werte an den Gitterpunkten bestimmt. Aufgrund des in der Zielfunktion vorkommenden Integrals benötigen wir allerdings Steuerungs- und Zustandswerte auf dem gesamten Zeitintervall, so dass diese approximiert werden müssen. Bei der pseudospektralen Radau-Methode wird dazu sowohl bei der Steuerungs- als auch bei der Zustandsfunktion des Problems globale Lagrange-Interpolation verwendet. Bei den Steuerungsvariablen nutzt man die 𝐾 LGR-Punkte als Stützstellen und die Approximation lautet:
𝒖(𝜏) ≈ 𝑼(𝜏) = ∑ �̃�𝑘(𝜏) ∗ 𝑼(𝜏𝑘)
𝐾−1
𝑘=0
mit den Lagrange-Polynomen
�̃�𝑘(𝜏) ∶= ∏𝜏 − 𝜏𝑗
𝜏𝑘 − 𝜏𝑗, 𝑘 = 0,… , 𝐾 − 1
𝐾−1
𝑗=0,𝑗≠𝑘
Die Zustandstrajektorie wird hingegen an den 𝐾 LGR-Punkten und dem Endpunkt approximiert:
𝒙(𝜏) ≈ 𝑿(𝜏) = ∑𝐿𝑖(𝜏) ∗ 𝑿(𝜏𝑖)
𝐾
𝑖=0
(2)
mit
𝐿𝑖(𝜏) ∶= ∏𝜏 − 𝜏𝑗
𝜏𝑖 − 𝜏𝑗, 𝑖 = 0, … , 𝐾
𝐾
𝑗=0,𝑗≠𝑖
Nähere Details zu dieser Approximation sind in [8] zu finden.

Berechnung konfliktfreier Trajektorien
28 Innovation im Fokus 2 – 2018
3.3 Transkription der Nebenbedingungen und der Zielfunktion
Wir müssen die 𝐾 mit (1) skalierten Gleichungen
�̇�(𝜏𝐾) − 𝑡𝑓 − 𝑡0
2 𝑓(𝒙(𝜏𝐾), 𝒖(𝜏𝐾), 𝜏𝐾 , 𝒒, 𝑡0,𝑡𝑓) = 𝟎 ,
𝑘 = 0,… , 𝐾 − 1
die sicherstellen, dass die Differentialgleichungs-nebenbedingungen an den Kollokations- bzw. an den LGR-Punkten erfüllt sind, in algebraische Gleichungen ohne vorkommende Ableitungen überführen. Dies ist möglich, indem man durch Differenzieren von Gleichung (2) eine Approximation der Zustandsableitungen bestimmt:
�̇�(𝜏) ≈ �̇�(𝜏) = ∑𝐿�̇�(𝜏) ∗ 𝑿(𝜏𝑖)
𝐾
𝑖=0
Auswerten der Ableitungen des 𝑖-ten Lagrange-Polynoms �̇�𝑖 (𝜏) an jedem Kollokationspunkt 𝜏𝐾(𝑘 = 0,… , 𝐾 − 1) führt zur non-square Radau psuedospectral differentiation Matrix
𝐷𝑘𝑖 = �̇�𝑖 (𝜏𝐾), 0 ≤ 𝑘 ≤ 𝐾 − 1, 0 ≤ 𝑖 ≤ 𝐾,
für deren Bestimmung auf [7] verwiesen sei.
3.4 Umgeschriebenes Optimalsteuerungsproblem
Mit der Notation 𝑿𝒊 ≔ 𝑿(𝜏𝑖) für alle Diskretisierungspunkte 𝜏𝑖 (𝑖 = 0,… , 𝐾), 𝑼𝐾 ≔ 𝑼(𝜏𝐾) für alle Kollokationspunkte 𝜏𝑘 (𝑘 = 0,… , 𝐾 − 1) und 𝑧 ∶=(𝑈0
𝑇 , … , 𝑈𝐾−1𝑇 , 𝑋0
𝑇 , … , 𝑋𝐾𝑇) für den Vektor der NLP-
Variablen lautet das gesamte umgeschriebene Problem:
min𝑢,𝑥,𝑞
𝐽 = 𝜙(𝑿0, 𝑡0, 𝑿𝑓 , 𝑡𝑓 , 𝒒) + 𝑡𝑓 − 𝑡0
2∑𝑤𝑘
𝐾−1
𝑘=0
∙ ℒ(𝑿𝑘 , 𝑼𝑘 , 𝜏𝑘 , 𝒒, 𝑡0, 𝑡𝑓),
𝑠. 𝑡. ∑𝐷𝑘𝑖𝑿𝑖
𝐾
𝑖=0
− 𝑡𝑓 − 𝑡0
2 𝑓(𝑿𝑘 , 𝑼𝑘 , 𝜏𝑘 , 𝒒, 𝑡0, 𝑡𝑓) = 0
𝜓𝑚𝑖𝑛 ≤ 𝜓(𝑿0, 𝑼0, 𝑡0, 𝑿𝑓 , 𝑼𝑓 , 𝑡𝑓 , 𝒒) ≤ 𝜓𝑚𝑎𝑥
𝐶𝑚𝑖𝑛 ≤ 𝐶(𝑿𝑘 , 𝑼𝑘 , 𝜏𝑘 , 𝒒, 𝑡0, 𝑡𝑓) ≤ 𝐶𝑚𝑎𝑥
𝑘 = 0,… , 𝐾 − 1
Es hat nun die Form eines allgemeinen nichtlinearen Optimierungsproblems und kann somit an Standardlöser für solche Probleme übergeben werden.
4. Problemformulierung
4.1 Allgemeiner Aufbau
Der Luftraum ist in mehrere fast autonom kontrollierte Sektoren unterteilt. Als Gebiet der Optimierung verwenden wir einen solchen Sektor. Abbildung 1 zeigt ein Beispiel für einen Sektor.
Abbildung 1: Beispiel für einen Sektor
Zur Modellierung der Flugzeuge wurden folgende teils stark vereinfachte Annahmen getroffen. Flugzeuge werden innerhalb des Problems als punktförmige Objekte betrachtet, die eine höhenabhängige nominale Geschwindigkeit besitzen, welche nach einer Faust-formel um 2% pro 1000 Fuß Höhenzunahme steigt. Darüber hinaus besitzen die Flugzeuge eine minimale, maximale sowie nominale Steigrate und innerhalb der Optimierung kann ihnen, entgegen der Realität, in der die umsetzbaren Steigraten einer Maschine von diversen unbekannten Faktoren abhängen, genau vorgegeben werden, mit welcher Rate sie steigen oder sinken sollen.
In einem Szenario kann einem Sektor eine beliebige Anzahl an Flugzeugen zugewiesen werden, die ggf. zu unterschiedlichen Zeiten in den Sektor eintreten können und deren Ein- und Austrittspunkte festgelegt sind. Die Flugzeuge können beim Eintritt in den Sektor bereits freigegeben sein oder noch von einem angrenzenden Sektor kontrolliert werden. Im ersten Fall liegen sowohl Eintritts- als auch Austrittspunkt am Rand sowie auf einer diskreten Flugfläche des Sektors. Bei den diskreten Flugflächen des Sektors handelt es sich um alle Flugflächen zwischen der minimalen und maximalen Flugfläche des Sektors, die durch 10 teilbar sind.
Im Fall, dass das eintretende Flugzeug noch nicht freigegeben ist, wird der Eintrittspunkt des Flugzeugs auf den Punkt gesetzt, an dem er seine Freigabehöhe erreicht. Sein Eintrittspunkt muss somit nicht mehr auf

Berechnung konfliktfreier Trajektorien
Innovation im Fokus 2 – 2018 29
dem Rand oder auf einer diskreten Flugfläche des Sektors liegen.
Störungen durch unterschiedliche Wind-, Wetter- und Druckverhältnisse werden in den Szenarien dieser Projektarbeit vernachlässigt.
Während des Fluges durch den Sektor müssen alle Flugzeuge stets einen minimalen Separierungsabstand von 7,5 nautischen Meilen (NM) lateral und 1500 Fuß vertikal einhalten. Die Abstände sind bewusst größer gewählt als die eigentlichen Vorgaben der ICAO von 5 NM lateral und 1000 Fuß vertikal, um trotz der vereinfachten Annahmen eine hinreichende Sicherheits-toleranz zu gewährleisten.
Zur Steuerung der Flugzeuge kann ihre Steigrate, ihr lateraler Winkel, sowie ihre Geschwindigkeit genutzt werden. Allerdings sollte zunächst auf ein Ausweichen in der Höhe, dann erst auf eine Kursänderung der lateralen Richtung und als letztes auf eine Geschwindigkeits-änderung der Flugzeuge zurückgegriffen werden. Des Weiteren sollte die Steuerung flugtechnisch umsetzbar sein, ein Zittern der Steuerungen ist z.B. nicht erwünscht. Dies wird durch einen Smoothing-Ansatz sichergestellt.
Wir verwenden die folgende Notation:
𝑑𝑙𝑎𝑡,𝑚𝑖𝑛 Minimaler Separierungsabstand in der lateralen Ebene in [m]
𝑑𝑣𝑒𝑟𝑡,𝑚𝑖𝑛 Minimaler Separierungsabstand in der Höhe in [m]
𝑟0 Eintrittspunkt, 𝑟0 = (𝑥0, 𝑦0, 𝑧0)𝑇
𝑟𝑓 Austrittspunkt, 𝑟𝑓 = (𝑥𝑓 , 𝑦𝑓 , 𝑧𝑓)𝑇
𝜒𝑙𝑎𝑡 Richtungswinkel des Flugweges in der lateralen Ebene wie in Abbildung 4
𝜒𝑐𝑙𝑖𝑚𝑏 Steigungswinkel des Flugzeugs
𝐶 Steigrate des Flugzeugs in [m/s]
𝑉 Geschwindigkeit des Flugzeugs in [m/s]
Tabelle 2: Verwendete Notation
Dabei bezeichnet (𝒙)𝑇 die Transponierte eines Vektors 𝒙. Zur Erläuterung der nominalen Route eine Flugzeugs definieren wir zunächst dessen nominalen lateralen Winkel 𝜒𝑙𝑎𝑡,𝑛𝑜𝑚.
Abbildung 2: Lateraler Winkel (aus [1] entnommen)
Dieser gibt den lateralen Winkel der direkten Route zwischen Ein- und Austrittspunkt an und lässt sich folgendermaßen berechnen:
𝜒𝑙𝑎𝑡,𝑛𝑜𝑚 ≔ {
+arccos (𝑦𝑓 − 𝑦0‖∆𝑟‖2
) , 𝑓ü𝑟 (𝑥𝑓 − 𝑥0) ≥ 0,
− arccos (𝑦𝑓 − 𝑦0‖∆𝑟‖2
) , 𝑠𝑜𝑛𝑠𝑡
wobei ∆𝑟 = 𝑟𝑓 − 𝑟0 ≠ 0. Der resultierende Winkel liegt wie in Abbildung 2 aufgezeichnet im Intervall (−𝜋, 𝜋]. Dabei bezeichnet ‖∙‖2 die euklidische Norm eines Vektors.
Die nominale Route eines Flugzeugs ist nun folgendermaßen definiert. Falls Ein- und Austrittspunkt des Flugzeuges nicht auf derselben Höhe liegen, steigt bzw. sinkt das Flugzeuge zunächst mit seiner nominalen Steigrate bis auf seine Zielhöhe und fliegt dann lateral auf direktem Weg zu seinem Austrittspunkt weiter. Sowohl beim Steig- bzw. Sinkvorgang als auch beim darauffolgenden lateralen Flug entspricht sein lateraler Winkel dem oben angegebenem 𝜒𝑙𝑎𝑡,𝑛𝑜𝑚. Die nominale Route besteht somit aus bis zu 2 Geradenstücken, während ihre Projektion in die 𝑥, 𝑦-Ebene eine einzige Gerade ergibt, vgl. Abbildung 3. Liegen Eintritts- und Austrittspunkt auf einer Höhe, so fällt der Steig- bzw. Sinkflug weg und die nominale Route entspricht einfach der direkten Route zwischen den beiden Punkten.

Berechnung konfliktfreier Trajektorien
30 Innovation im Fokus 2 – 2018
Abbildung 3: Projektion der Trajektorie in die Ebene
4.2 Flugzeug Dynamik
Es sei 𝑁 die Anzahl der im Problem enthaltenen Flugzeuge bzw. Flugpläne. Der Zustandsvektor 𝑥(𝑛) des 𝑛-ten Flugzeugs besteht aus den Koordinaten des Flugzeugs 𝑥(𝑛), 𝑦(𝑛) und 𝑧(𝑛) sowie seiner individuellen Sektordurchquerungszeit 𝜏(𝑛):
𝒙(𝑛)(𝑡) = (𝑥(𝑛)(𝑡), 𝑦(𝑛)(𝑡), 𝑧(𝑛)(𝑡), 𝜏(𝑛)(𝑡))𝑇
,
𝑛 = 1,…𝑁.
Der Gesamtzustandsvektor 𝒙 ∈ ℝ4𝑁 ist dann definiert als
𝒙(𝑡) = (𝒙(1)(𝑡)⋮
𝒙(𝑁)(𝑡)
)
Der Steuerungsvektor 𝒖 ∈ ℝ3𝑁, bestehend aus den Kommandos für die Steigraten 𝐶(𝑛), die Richtungswinkel 𝜒𝑙𝑎𝑡(𝑛) und die Geschwindigkeiten 𝑉(𝑛) der Flugzeuge, ist
entsprechend konstruiert:
𝒖(𝑡) = (𝒖(1)(𝑡)⋮
𝒖(𝑁)(𝑡)
) mit
𝒖(𝑛)(𝑡) = (𝐶(𝑛)(𝑡), 𝜒𝑙𝑎𝑡(𝑛)(𝑡), 𝑉(𝑛)(𝑡))
𝑇
, 𝑛 = 1,… , 𝑁
Der Richtungswinkel in der Ebene wird hierbei mit 𝜒𝑙𝑎𝑡(𝑛) bezeichnet, der Steigungswinkel des 𝑛-ten
Flugzeugs 𝜒𝑐𝑙𝑖𝑚𝑏(𝑛) .
Abbildung 4: Darstellung der Geometrie
Dieser ist über folgende Bedingung definiert (siehe Abbildung 4 und Abbildung 5):
𝜒𝑐𝑙𝑖𝑚𝑏(𝑛) (𝑡) = arctan (
𝐶(𝑛)(𝑡)
𝑉(𝑛)(𝑡)) , 𝑛 = 1,… , 𝑁.
Abbildung 5: Steigungswinkel
Man beachte, dass die Veränderung der Geschwindigkeit aufgrund einer Höhenzunahme oder Höhenabnahme nicht in der Differentialgleichung enthalten ist, da die Geschwindigkeit nur als Steuer- und nicht als Zustands-variable vorkommt. Stattdessen enthalten die Flugzeuge in der Implementierung selbst eine höhenabhängige Nominalgeschwindigkeit, mit der die Steuerungs-geschwindigkeit in der Zielfunktion verglichen wird.
Bevor wir uns nun den Nebenbedingungen des Problems widmen, erweitern wir die Dynamik noch durch ein Smoothing der Steuerungsvariablen. Wie bereits erwähnt sollen dadurch stark zitternde oder abrupt springende und somit nicht flugtechnisch umsetzbare Steuerungsfunktionen vermieden werden.
Unter Verwendung von Sigmoid-Smoothing für 𝜒𝑙𝑎𝑡 und PT1-Smoothing für 𝐶 und 𝑉 ergibt sich die folgende Menge von Differentialgleichungen:

Berechnung konfliktfreier Trajektorien
Innovation im Fokus 2 – 2018 31
�̇�(𝑛)(𝑡) =
(
�̇�(𝑛)(𝑡)
�̇�(𝑛)(𝑡)
�̇�(𝑛)(𝑡)
�̇�(𝑛)(𝑡)
�̇�(𝑛)(𝑡)
�̇�(𝑛)(𝑡)
�̇�(𝑛)(𝑡))
, d.h.
�̇�(𝑛)(𝑡)=
(
1
𝑇𝐶∙ (𝐶𝑐𝑚𝑑
(𝑛) (𝑡) − 𝐶(𝑛)(𝑡))
tanh(𝑎𝜒(𝜒𝑙𝑎𝑡,𝑐𝑚𝑑(𝑛) (𝑡) − 𝜒𝑙𝑎𝑡
(𝑛)(𝑡))) ∙ �̇�𝑙𝑎𝑡,𝑚𝑎𝑥1
𝑇𝑉∙ (𝑉𝑐𝑚𝑑
(𝑛) (𝑡) − 𝑉(𝑛)(𝑡))
𝑉(𝑛)(𝑡) ∙ cos(𝜒𝑐𝑙𝑖𝑚𝑏(𝑛) (𝑡)) ∙ sin(𝜒𝑙𝑎𝑡
(𝑛)(𝑡))
𝑉(𝑛)(𝑡) ∙ cos(𝜒𝑐𝑙𝑖𝑚𝑏(𝑛) (𝑡)) ∙ cos(𝜒𝑙𝑎𝑡
(𝑛)(𝑡))
𝑉(𝑛)(𝑡) ∙ sin(𝜒𝑐𝑙𝑖𝑚𝑏(𝑛) (𝑡))
1 )
Dabei sind 𝑇𝐶, 𝑎𝜒 und 𝑇𝑉 Konstanten, die die Steigung der Smoothing Funktionen beschreiben und �̇�𝑙𝑎𝑡,𝑚𝑎𝑥 ist die obere Schranke der Drehrate, die hier 1.5° betragen soll.
Für genauere Informationen bezüglich des Smoothing-Ansatzes sei auf Kapitel 4.5 der Diplomarbeit von Markus Hochstrasser verwiesen [1].
4.3 Nebenbedingungen
Während der gesamten Zeit muss zwischen allen beteiligten Flugzeugen ein minimaler Abstand in der horizontalen oder vertikalen Ebene eingehalten werden. Für den Anfangszustand wird dies bereits vor dem Start der Optimierung bei Erstellen des Szenariums geprüft. Ist die Bedingung verletzt, so ist das Problem nicht lösbar und es wird ein Fehler ausgegeben. Für die restlichen Zustände muss der Separierungsabstand durch entsprechende Nebenbedingungen sichergestellt werden. Die Funktionen für die Abstände der Flugzeuge lauten
𝐶𝑖,𝑗𝑙𝑎𝑡(𝑡) = ‖(
𝑥(𝑗)(𝑡)
𝑦(𝑗)(𝑡)) − (
𝑥(𝑖)(𝑡)
𝑦(𝑖)(𝑡))‖
2
2
− 𝑑𝑙𝑎𝑡,𝑚𝑖𝑛2 ,
𝑖 = 1, … , 𝑁, 𝑗 = 𝑖 + 1,… , 𝑁
für die horizontale Ebene und
𝐶𝑖,𝑗𝑣𝑒𝑟𝑡(𝑡) = (𝑧(𝑗)(𝑡) − 𝑧(𝑖)(𝑡))2 − 𝑑𝑣𝑒𝑟𝑡,𝑚𝑖𝑛
2 ,
𝑖 = 1, … , 𝑁, 𝑗 = 𝑖 + 1,… , 𝑁
für die vertikale Ebene (siehe auch Tabelle 2: Verwendete Notation). Da immer mindestens einer der beiden Abstände eingehalten werden muss, ergeben sich die Nebenbedingungen
𝐶𝑖,𝑗(𝑡) = 𝑚𝑎𝑥{𝐶𝑖,𝑗𝑙𝑎𝑡(𝑡), 𝐶𝑖,𝑗
𝑣𝑒𝑟𝑡(𝑡)} ≥ 0,
∀𝑖 = 1,…𝑁, 𝑗 = 𝑖 + 1,… , 𝑁, 𝑡 ∈ [𝑡0, 𝑡𝑓].
Es handelt sich unter Vernachlässigung der Zeit 𝑡 um
𝑀 = (𝑁2) =
𝑁!
2! ∙ (𝑁 − 2)!= 𝑁 ∙ (𝑁 − 1)
2
viele Ungleichungen. Die Anzahl steigt also quadratisch mit der Anzahl der Flugzeuge. Um vorkommende Wurzelfunktionen zu vermeiden, verwendet man die quadrierten Abstände der Flugzeuge. Dies dient der Stabilität der Optimierung, da der Grenzwert des Gradienten einer Wurzelfunktion für 0 gegen Unendlich strebt.
4.4 Zielfunktion
Bei der Zielfunktion handelt es sich um einen Bolza-Typ. Diese besteht aus einem sogenannten Mayer-Term, der lediglich vom Start- und vom Endzustand des Systems abhängt, und aus einem Lagrange-Term, der eine Funktion über alle Zustände integriert.
Bei unserem Problem entspricht der Mayer Term lediglich einem Term für die finale Zeit:
𝜙 = 𝑤𝑡𝑓 ∙ 𝑡𝑓 , 𝑤𝑡𝑓 ≥ 0
Man sollte das Gewicht 𝑤𝑡𝑓 des Terms allerdings nicht zu groß wählen, da die Geschwindigkeit sonst, trotz eines Terms im Lagrange-Teil, der die Abweichung der Geschwindigkeit von der nominalen Geschwindigkeit bestraft, stets maximal gewählt würde.
Zusätzlich wird später ein weiterer Term zum Mayer-Teil der Zielfunktion hinzugefügt, der die Abweichung der voraussichtlichen Durchflugszeit der Flugzeuge von ihrer nominalen Durchflugszeit beschreibt. Für diesen benötigt man ein Fading der Zustandsvariable 𝜏(𝑡), welches in Kapitel 4.6 eingeführt wird. Es sei allerdings erwähnt, dass sich dieser Zielfunktionsterm bereits im Framework von Markus Hochstrasser als relativ instabil herausgestellt hat.
Der Lagrange-Term der Zielfunktion besteht insgesamt aus vier gewichteten Faktoren
ℒ = ∫ 𝑤𝐶 ∙ ℒ𝐶(𝒙(𝑡), 𝑡) + 𝑤𝜒 ∙ ℒ𝜒(𝒙(𝑡), 𝑡) + 𝑤𝑉
𝑡𝑓
𝑡0
∙ ℒ𝑉(𝒙(𝑡), 𝑡) + 𝑤𝑑𝛾 ∙ ℒ𝑑𝛾(𝒙(𝑡), 𝑡) 𝑑𝑡
wobei ℒ𝐶 die quadratische Abweichung von der (höhenabhängigen) nominalen Steigrate
ℒ𝐶(𝒙(𝑡), 𝑡) = ∑ (𝐶𝑛𝑜𝑚(𝑛) (𝑧(𝑛)(𝑡)) − 𝐶(𝑛)(𝑡))
2
,
𝑁
𝑛=1

Berechnung konfliktfreier Trajektorien
32 Innovation im Fokus 2 – 2018
ℒ𝜒 die quadratische Abweichung vom nominalen Richtungswinkel in der lateralen Ebene
ℒ𝜒(𝒙(𝑡), 𝑡) = ∑(𝜒𝑙𝑎𝑡,𝑛𝑜𝑚(𝑛)
− 𝜒𝑙𝑎𝑡(𝑛)(𝑡))
2,
𝑁
𝑛=1
ℒ𝑉 die quadratische Abweichung von der höhenabhängigen Nominalgeschwindigkeit
ℒ𝑉(𝒙(𝑡), 𝑡) = ∑ (𝑉𝑛𝑜𝑚(𝑛) (𝑧(𝑛)(𝑡)) − 𝑉(𝑛)(𝑡))
2
,
𝑁
𝑛=1
und ℒ𝑑𝛾 den räumlichen quadratischen Abstand der Trajektorie zur nominalen Route
ℒ𝑑𝛾(𝒙(𝑡), 𝑡) = ∑(𝑑𝛾(𝑛)(𝑟(𝑛)(𝑡)))
2𝑁
𝑛=1
beschreibt. Dabei ist die höhenabhängige nominale Steigrate 𝐶𝑛𝑜𝑚
(𝑛) (𝑧𝑛(𝑡)) eines Flugzeugs so definiert, dass sie gleich 0 ist, wenn es bereits an seiner Zielhöhe angekommen ist und der festen nominalen Steigrate des Flugzeugtyps (mit entsprechendem Vorzeichen) entspricht, wenn es diese noch nicht erreicht hat.
Für gewöhnlich werden nicht alle Kostenfunktionsterme zur selben Zeit aktiviert, da einige widersprüchliche Ziele haben. Des Weiteren sollte hier 𝑤𝐶 < 𝑤𝜒 < 𝑤𝑉 gewählt werden, da wir zunächst eine Steuerung über die Höhe priorisieren möchten, dann eine Steuerung über den lateralen Winkel und erst zuletzt eine Steuerung über die Geschwindigkeit.
4.5 Modellierung der Austrittspunkte via Escape Areas
Eine große Schwierigkeit des Konzepts ist der unbekannte Zeithorizont des Problems. Die Simulation endet, wenn das letzte Flugzeug seinen Endpunkt erreicht hat. Da dieser Zeitpunkt von den optimierten Steuerungen und Trajektorien abhängt, kann er nicht im Voraus bestimmt werden. Aus diesem Grund wird das Problem in unserer Methode durch Skalieren auf das feste Zeitintervall [−1,1] in ein Problem mit fester Endzeit transformiert. Allerdings würden bei der Skalierung der Trajektorien aller Flugzeuge auf dieses Zeitintervall, unabhängig von deren Eintritts- und Austrittzeit, Zustände verglichen, die in der Realität zu unterschiedlichen Zeiten gehören. Um diesem Nachteil vorzubeugen, dürfen die Trajektorien der Flugzeuge nach Verlassen des Sektors nicht stoppen, bevor das letzte Flugzeug seinen Endpunkt erreicht hat. Es wird eine Strategie benötigt, wie mit Flugzeugen umge-gangen werden kann, die bereits ihren Zielpunkt passiert
haben und die somit keinen Einfluss mehr auf die Optimierung haben sollen. Dazu werden für jedes Flugzeug sogenannte Escape Areas definiert. Es handelt sich jeweils um einen räumlichen Bereich außerhalb des Sektors, in dem der Endpunkt des Flugzeugs liegen darf. Statt einem festen Endzustand wird den Flugzeugen also in der Optimierung eine minimale und maximale Schranke für den Endzustand zugewiesen. Abbildung 6 zeigt ein Beispiel in 2D. Für genauere Informationen zur Konstruktion der Escape Areas sei auf Kapitel 4.6 der Diplomarbeit von Herrn Hochstrasser verwiesen [1].
Abbildung 6: Escape Area (aus [1] entnommen)
Dieses Konzept löst zwar die Schwierigkeit der variierenden Austrittszeiten der Flugzeuge, bringt jedoch ein anderes Problem mit sich. Wie man in Abbildung 6 sehen kann, ist nicht mehr garantiert, dass die Flugzeuge ihre Endpunkte passieren. Zur Lösung dieses Problems verwenden wir approximierte Treppen-funktionen, um die Dynamik des Flugzeugs beim Eintritt in die Escape Area auszuschalten.
4.6 Fading der Dynamik und der Separationsbedingungen
Zur Approximation einer Treppenfunktion zum Ausschalten der Dynamik und der Nebenbedingung des Problems soll eine Sigmoid-Funktion verwendet werden. Diese approximiert eine Treppenfunktion abhängig von ihrer Steigung am Wendepunkt beliebig genau und ist im Gegensatz zu einer Treppenfunktion differenzierbar. Die gewünschte S-Form der Kurve kann durch eine Funktion aus Abbildung 7 erlangt werden. Hier wird ein

Berechnung konfliktfreier Trajektorien
Innovation im Fokus 2 – 2018 33
modifizierter Tangens Hyperbolicus verwendet, der von 0 bis zum Wert 𝐾 reicht:
𝑦 = 𝐾 ∙ (1
2) tanh(𝑎(𝑥 − 𝑥𝑠)) +
1
2
Abbildung 7: Sigmoid-Funktionen
Der Wert 𝑥𝑠 entspricht der Position des Wendepunktes der Funktion. Im besten Fall springt die Sigmoid-Funktion so schnell wie eine Treppenfunktion zwischen den Werten hin und her, so dass das Flugzeug sofort gestoppt und seine Separationsbedingung umgehend ausgeschaltet wird. Die dafür verantwortliche Steigung ist durch den Parameter 𝑎 gegeben. Sein Wert muss bedächtig gewählt werden, da zu steile Gradienten der Optimierung numerische Schwierigkeiten bereiten könnten, aber zu flache Steigungen das gewünschte Verhalten nicht gut repräsentieren.
Sobald ein Flugzeug seinen Austrittspunkt passiert, sollen seine Dynamik und seine Separationsbedingungen ausgeschaltet werden.
4.7 Formulierung des Optimalsteuerungsproblems
Mit der in den vorigen Kapiteln angegebenen Zielfunktion sowie den definierten Nebenbedingungen kann nun das Optimalsteuerungsproblem zusammengefasst werden:
Eine Darstellung in ausführlicher Notation ist in Kapitel 4.7 in [7] zu finden.
5. Framework
Während ursprünglich geplant war, das Framework in der Open-Source-Software Python zu implementieren, wurde letztendlich doch lediglich eine Erweiterung des MATLAB-Frameworks von Herrn Hochstrasser inklusive der GPOPS-Erweiterung [10][11] durchgeführt. Dies hat den Grund, dass es für Python bisher noch keine offenen zugänglichen, ausreichend entwickelten Löser für Optimalsteuerungsprobleme gibt. Auch ein Versuch der Implementierung eines eigenen Lösers für Optimal-steuerungsprobleme mithilfe des Python-Lösers scipy.optimize.minimize ist bereits für ein zwei-dimensionales Separationsproblem an der Performance des Lösers gescheitert. Im Folgenden wird das weiterentwickelte MATLAB-Framework vorgestellt.
Bei GPOPS handelt es sich um eine pseudospektrale hp-Adaptive Legendre-Gauß-Radau Quadratur Integral Methode. Das bedeutet, die Software unterteilt das Zeitgitter des Problems zunächst in mehrere Teilinte-rvalle und wendet dann die Radau-Kollokationsmethode auf jedes dieser Intervalle an. GPOPS führt also die Transformation des Optimalsteuerungsproblems in ein gewöhnliches nichtlineares Optimierungsproblem durch und reicht dieses daraufhin an den Löser SNOPT weiter, der die Optimierung des Problems durchführt. SNOPT verwendet dabei Sequential Quadratic Programming (SQP) für large-scale Probleme unter Ausnutzung dünn-besetzer Matrizen. Dieses SQP-Verfahren ist mittlerweile die häufigste Wahl zur Lösung von Problemen mit hoher Nichtlinearität. Dabei werden in jeder Iteration durch Lösen quadratischer Probleme neue Suchrichtungen generiert. Die quadratischen Probleme entstehen hierbei durch quadratische Approximation der Lagrange-Funktion und durch lineare Approximation der Karush-Kuhn-Tucker-(KKT)-Bedingungen [13] des Ausgangs-problems. Für weitere Informationen sei auf [1] oder Standardlektüre für nichtlineare Optimierungsprobleme verwiesen.
Das Hauptziel dieser Projektarbeit war das Aufstellen bzw. Erweitern der Input-Daten-Struktur des drei dimensionalen Problems für GPOPS. Diese Daten-Struktur besteht aus der Dynamik, den restlichen Neben-bedingungen, der Zielfunktion sowie den Rand-bedingungen des Systems und den Initiallösungen des Separationsproblems aus Abschnitt 4.7.
6. Ergebnisse
Für Szenarien mit Flugplänen, bei denen Ein- und Austrittshöhe übereinstimmen, also letztendlich Szenarien, bei denen sich die Flugbewegungen nur in der

Berechnung konfliktfreier Trajektorien
34 Innovation im Fokus 2 – 2018
lateralen Ebene abspielen, wurden entsprechend die gleichen sehr guten Ergebnisse erhalten wie in der 2D-Version des Frameworks. Dabei wurden insgesamt 14 verschiedene Szenarien mit bis zu 12 Flugzeugen getestet. Bei allen war die Optimierung erfolgreich und hat gute („optimale“ Trajektorien geliefert. Für genauere Auswertungen sei auf Kapitel 8 von Herrn Hochstrasser verwiesen.
Bei dem 3D-Framework wurde zunächst nur ein Szenario aus drei Flugplänen getestet, bei dem ein Flugzeug eine höhere Aus- als Eintrittshöhe hat. Je nach Werten für die Dichte der Kollokationspunkte und die Gewichte für die Abweichung der Steigraten und die räumliche Abweichung der Trajektorie von der nominalen Route in der Zielfunktion wurden erfolgreiche Ergebnisse oder Schwierigkeiten in der Optimierung erhalten.
Zwei Beispielszenarien sind in den Abbildung 8 bis Abbildung 11 zu sehen.
Bei Abbildung 8 handelt es sich um ein Szenario aus vier Flugplänen, bei dem zwei Flugzeuge von Flugfläche 100 auf 120 steigen, sich ein Flugzeug in der lateralen Ebene auf Flugfläche 130 bewegt und das letzte ebenfalls einen Steigflug von Flugfläche 130 auf 140 durchführt. In Abbildung 9 sind die lateralen Separationsabstände zwischen den Flugzeugen dargestellt. Man kann sehen, dass für jedes Paar der Flugzeuge immer das laterale Staffelungsminimum von fünf NM eingehalten wird. Darüber hinaus weicht jede Trajektorie nur wenig von ihrer nominalen Route ab, die in der Abbildung des Sektors gestrichelt zu sehen ist.
Das zweite Beispiel in Abbildung 10 zeigt ein Szenario bei dem 6 Flugzeuge hintereinander in den Sektor eintreten. Anhand des Abstandsplots in Abbildung 11 lassen sich die Ein- und Austrittszeiten der Flugzeuge erkennen. In diesem Beispiel bewegen sich alle bis auf das erste Flugzeug nur in der lateralen Ebene bei Flugfläche 100. Das erste Flugzeug steigt hingegen von Flugfläche 100 auf 120. Auch bei diesem Szenario wurden optimale Trajektorien erhalten, die in Abbildung 10 dargestellt sind.
Abbildung 8: Szenario A, Sektorsicht
Abbildung 9: Szenario A, lateraler Abstand
Lässt man allerdings beispielsweise noch ein Flugzeug, dass sich zeitgleich zu dem steigenden Flugzeug im Sektor befindet, auf die Flugfläche 120 steigen, so entstehen in der Optimierung numerische Schwierig-keiten. Bisher ist nicht ganz klar, worin diese Schwierigkeiten begründet sind. Dafür müsste noch eine genauere Untersuchung angestellt werden.
Ein ähnliches Problem liegt bei allen Szenarien mit Sinkflügen vor. Dort erhält man bei beiden Versionen des Lösers und allen getesteten Werten für die Gewichte der Zielfunktion stets numerische Schwierigkeiten in der Optimierung und dementsprechend Routen, die offensichtlich „unsinnig“ sind, d.h. zum Beispiel stark oszillieren.

Berechnung konfliktfreier Trajektorien
Innovation im Fokus 2 – 2018 35
Abbildung 10: Szenario B, Sektorsicht
Abbildung 11: Szenario B, lateraler Abstand
Szenarien mit mehr als 6 Flugzeugen wurden aus Zeitgründen noch nicht getestet.
7. Fazit und Ausblick
Wie man anhand des vorherigen Kapitels erkennen kann, sind noch genauere Untersuchungen des Lösungs-frameworks nötig, um auch komplexere Szenarien und vor allem Szenarien mit Sinkflügen lösen zu können. Dafür sollten sowohl die Gewichte der Zielfunktion als auch die Dichte der Kollokationspunkte noch einmal variiert und für verschieden Szenarien getestet werden. Des Weiteren sollte man sich genauer mit dem Vorgehen des Lösers SNOPT beschäftigen, da naheliegt, dass die Schwierigkeiten bei Szenarien mit Sinkflügen darin begründet sind.
Bei den Fällen in denen der Löser keine numerischen Schwierigkeiten erhielt, wurden sehr vielversprechende Ergebnisse erhalten. Aus diesem Grund sollte sich der Aufwand genauerer Untersuchungen lohnen, um letztendlich ein stabiles und mächtiges Lösungs-framework zur Bestimmung konfliktfreier Trajektorien zu erhalten.
Ist die Überarbeitung für kontinuierliche Steuerungs-funktionen abgeschlossen, so sollten auch die Lösungs-strategien zur Bestimmung der Trajektorien mit diskreten Steueranweisungen erweitert werden. Damit können (diskrete) Lotsenfreigaben abgebildet werden, die den heutigen Arbeitsverfahren sehr nahekommen.
Des Weiteren sollten die im Lösungsframework getroffenen Annahmen weiter an die Realität angepasst werden. Beispielsweise könnten Windkomponenten und Druckverhältnisse, sowie deren Auswirkungen auf das dynamische System, integriert oder der Treibstoff-verbrauch der Flugzeuge berücksichtigt werden. Für weitere lohnenswerte Erweiterungen des Lösungs-frameworks sei noch einmal auf Kapitel 10 der obigen Diplomarbeit [1] sowie auf [3] und [4] verwiesen.
In Zukunft könnten mit dem hier entwickelten Framework Flugzeuge oder auch Drohnen konfliktfrei in einem definierten Luftraum gesteuert werden, wobei die Steueranweisungen eine für alle Verkehrsteilnehmer optimale Trajektorie im Sinne der verwendeten Optimalitätsbedingungen garantieren. Ob diese Anweisungen dann in Form von Sprache oder per Data Link an die Flugzeuge oder Drohnen übermittelt werden, spielt dabei nur eine untergeordnete Rolle. Wenn man eine weitergehende Automatisierung anstrebt oder auch sich Verkehrsszenarien vorstellt, die ein Lotse nach heutigem Verständnis nicht mehr sicher kontrollieren kann, bietet dieser Ansatz eine Möglichkeit der bodengestützten Verkehrskontrolle, die gleichzeitig die Kosten der Verkehrsteilnehmer minimiert.
Es soll aber auch nicht verschwiegen werden, dass bis dahin noch die oben genannten Probleme theoretischer Natur und natürlich auch weitgehende rechtliche und organisatorische Änderungen in Bezug auf die Flug-verkehrskontrolle gelöst werden müssen. Allerdings wäre nach Einschätzung der Autoren eine recht nahe-liegende Anwendung die Implementierung solcher Verfahren für Drohnen schon in näherer Zukunft durchaus realistisch.

Berechnung konfliktfreier Trajektorien
36 Innovation im Fokus 2 – 2018
Dieser Artikel ist eine Zusammenfassung des Praktikumsberichts von Sandra Himburg [7]. Sie absolvierte ein freiwilliges Praktikum bei der DFS Deutsche Flugsicherung GmbH vom 23. April bis zum 28. September 2018.
8. Literatur
[1] Markus Hochstrasser. A Unified MATLAB-Framework for Nonlinear Optimization of Mixed Integer Optimal Control Problems in Air Traffic Separation Management. Technische Universität München, 2013.
[2] Markus Hochstrasser, Dr. Matthias Poppe. Erweiterung in der Trajektorien-Optimierung mehrerer Flugzeuge mit Hilfe der optimalen Steuerung. TE im Fokus, 2013.
[3] Leif Walter. Direct Optimal Control Method for a Centralized Approach to Separation Management. Phillips-Universität Marburg, 2012.
[4] Jutta Heinz. Control Optimization in Air Traffic Management. OTH Regensburg, 2013
[5] Milena Lepojevic, Dr. Matthias Poppe. Mehrkriterielle Optimierung: Ein Ansatz zur Automatisierung in der Flugsicherung. TE im Fokus, 2014.
[6] Geoffrey Todd Huntington. Advancement and Analysis of a Gauss Pseudospectral Transcription for Optimal Control Problems. Department of Aeronautics and Astronautics, Massachusetts Institute of Technology, 2007.
[7] Sandra Himburg. Berechnung konfliktfreier Trajektorien mithilfe von Optimal-Steuerungs-methoden. Praktikumsbericht DFS Deutsche Flugsicherung GmbH, September 2018.
[8] Schwarz, Rudolf H. and Köckler, N. Numerische Mathematik. Wiesbaden : Springer-Verlag, 2011.
[9] Longuski, Guzman, Prussing. Optimal Control with Aerospace Applications. Springer-Verlag, 2014
[10] www.gpops2.com, zuletzt besucht am 03.01.2019
[11] Patterson, Rao. GPOPS-II: A MATLAB Software for Solving Multiple-Phase Optimal Control Problems Using hp-Adaptive Gaussian Quadrature Collocation Methods and Sparse Nonlinear Programming. ACM Transactions on Mathematical Software, Volume 41, Issue 1, October 2014
[12] www.sbsi-sol-optimize.com /asp/sol_product_snopt.htm, zuletzt besucht am 03.01.2019
[13] https://de.wikipedia.org/wiki/Karush-Kuhn-Tucker-Bedingungen, zuletzt besucht am 03.01.2019
[14] https://de.wikipedia.org/wiki/Legendre-Polynom, zuletzt besucht am 04.01.2019

Flight Level Prediction
Innovation im Fokus 2 – 2018 37
Flight Level Prediction with a Deep Feedforward Network Dr. Matthias Poppe (DFS), Debora Fieberg (Universität Heidelberg), Roland Scharff & Jörg Buxbaum (DFS);
Abstract
A deep feedforward network has been used to predict the flight level with look ahead time up to six minutes for climbing flights. Representing features were developed which provide adequate flight characteristics. Mode S Enhanced Surveillance data from more than 400,000 real world flights were collected to calculate the feature vector. After supervised training of the network, the results for different prediction horizons will be presented.
1. Introduction
In Air Traffic Control, current and future operational concepts rely on the accurate prediction of the aircraft trajectory [1]. Controller Decision Support tools like Conflict Detection or Conflict Resolution tools require a good knowledge about the future position of an aircraft in lateral, vertical and longitudinal dimension. Of particular interest is the improvement of the vertical part of the trajectory, which seems to be one of the most challenging research questions because of the high bandwidth of vertical climb rates, speed development and the associated operational and technical uncertainty [2]. The prediction is already rather accurate in the lateral plane because aircraft follow their route with a high precision, defined by the Required Navigation Performance (RNP).
A successful and more accurate vertical prediction would be highly advantageous for the Controller Assistance Tools (CATO), which provides conflict detection and resolution support for Air Traffic Controllers [3]. Since these tools do not use aircraft performance models like Base of Aircraft Data BADA [4], the predicted flight level is calculated as follows: Whenever two planes are foreseen to come closer than six Nautical Miles (NM) on the lateral axis, a vertical conflict calculation is kicked off. A prediction for the next six minutes (value derived from SESAR real time validations [5][30]) will allow the controller in lower airspace to successfully resolve potential conflicts in advance.
For now, this is being done by simply taking the most recent rate of climb from the radar with a static buffer of ±500 feet per minute. This buffer is needed to consider the vertical uncertainty and to obtain a good compromise between false and missed alarms [5].
However, this procedure necessarily results in a higher workload for controllers due to the likely increase in alarm rates. With more potential conflicts to resolve, their attention is constantly captured inducing stress and perhaps even mistrust in the system. To reduce false alarms while keeping the rate of missed conflicts reasonably low, a more accurate prediction would be beneficial.
The focus of this work lies in predicting an aircraft’s altitude immediately after Take Off up to Flight Level 285 (1FL = 100ft) after its initial climb by making use of machine learning methods with supervised learning in form of a deep feedforward neural network.
In the past, many research activities regarding trajectory prediction (TP) rely on parametric models where typical aircraft characteristics are derived from the EUROCONTROL BADA model [4]. A Literature Survey of Trajectory Predictor Technology [6] provides an extensive overview of TP research studies. The majority uses a point-mass model with the problem of estimating the a priori not known input data, e.g. Take Off weight. Another unknown is the operational environment of the flight, which may impose other constraints that heavily impact the performance of the aircraft [9].
Current research tries to overcome part of these problems by applying machine learning techniques to estimate some of the most important parameters, e.g. the Calibrated Airspeed [10] or the aircraft mass at Take Off [11]. By training a network with the observed trajectory data, the BADA parameters could be adjusted accordingly and the future altitude could be predicted with a significantly reduced root mean square error. In [12], a hybrid system based on BADA has been developed in an online context where known altitudes were used to fit the model parameters and to predict the remaining part of the trajectory for the climbing phase. This paper again confirms the need to use aircraft derived data to feed the BADA model.
Non-parametric approaches are less frequent because in general they require a huge amount of input data for sufficient training. In [13], a single hidden layer feed forward network was trained with a relatively small set of trajectories. It has been trained for a selected aircraft type and already demonstrates the potential of these networks. Other approaches [14] use genetic programming to learn the structure of the variables of a

Flight Level Prediction
38 Innovation im Fokus 2 – 2018
linear regression. Disadvantage of the non-parametric trajectory prediction is the difficulty to generalize the model once it has been trained, and, as mentioned before, the required data base.
In this paper, the main contribution stems from the fact that recorded data from real operations for more than three months with hundred thousands of flights from all major German airports were available. They were used for selecting features, training and validation of a neural network to predict the flight level of the next six (configurable parameter) minutes. The advantage with this approach is the good generalization because the results are not constrained to a specific aircraft type or operational ATC/airport environment.
After a general introduction to neural networks, the chosen feature vectors for the Machine Learning approach as well as their extraction from the available Mode S data will be explained. Section IV provides some feature statistics and first results on a large data set. The outlook includes some ideas how to combine this approach with other machine learning techniques.
2. Neural Networks
Brief Introduction In general, three different ways of Machine Learning can be distinguished: supervised learning, unsupervised learning and reinforcement learning. A thorough introduction to the subject can be found in [15].
The main objective for supervised learning, which is supposed to be applied for this trajectory prediction task, is to train a model with considered training data. This trained model allows to make predictions of future yet unknown input data. The training data are often called ‘features’ 𝑥 of an observed phenomenon (the explanatory variables) while the output data are called ‘labels’ 𝑦. We assume that there exists a relation 𝑦 = 𝑓(𝑥) between 𝑥 and a target variable 𝑦. In general, a model ℎ is learned with examples of the outputs (𝑦0 , … , 𝑦𝑁) associated with the inputs (𝑥0, … , 𝑥𝑁), approximating 𝑓. A performance measure 𝑃 will be applied to measure the abilities of the machine learning algorithm.
Supervised learning itself can be broadly divided into two different main categories: classification and regression. In classification tasks, the output 𝑦 belongs to a category or group. For example, we could forecast the aircraft type given certain input trajectories to train a network. In regression tasks, 𝑦 is a variable with a ‘real’ numerical value or a vector of values. In our problem, we will use regression techniques to forecast the flight level
in up to six minutes, expressed as a numerical value, e.g. FL326.
Unsupervised learning is used to discover structures in big data sets and to extract useful information without knowing the corresponding output 𝑦 like in supervised learning. Unsupervised learning problems can be further divided into association and clustering problems. An association rule learning problem is where you want to discover rules that describe large portions of your data. A clustering problem is where you want to discover the inherent groupings in the data. In Air Traffic Control, for example, it could be interesting to group aircraft with similar performance without knowing certain parameters like the Cost Index or the Take Off weight.
In Reinforcement Learning, a computer program will interact with a dynamic environment in which it must perform a particular goal (such as playing a game with an opponent or driving a car). The program is provided with feedback in terms of rewards and punishments as it navigates through its problem space. Being exposed to this environment of continuous training, the machine learns to make specific decisions with the aid of its algorithm. For example, an Arrival Manager could learn to turn and space the aircraft with minimum separation while receiving feedback in terms of the number of landings per hour (the more the better) in relation to other parameters.
Feedforward Netwok Figure 1 shows a feedforward network with one input layer 𝒙, two hidden layers 𝒉𝑖 , 𝒉𝑗 and one output layer 𝒉𝑙.
Figure 1: Schematic diagram of a feedforward network
The feedforward network defines the mapping of the supervised target 𝒚 = ℎ(𝒙; 𝜽) and learns the value of the parameters 𝜃 that result in the best function approximation. 𝜽 may consist of weights 𝑤 and a bias 𝑏. In this example, layer 𝑗 computes an output vector 𝒉𝒋

Flight Level Prediction
Innovation im Fokus 2 – 2018 39
using the output 𝒉𝒊 of the previous layer, starting with the input 𝒙 = 𝒉𝟎. Thus:
𝒉𝒋 = 𝜎(𝒃𝒋 + 𝑊𝑗𝒉𝒊) (1)
with 𝑊𝑗 as a matrix of weights and 𝜎 as the in general non-linear activation function. The rectified activation function is the default function recommended for use with most feedforward neural networks [15]:
𝜎(𝑢) = {0, 𝑢 < 0𝑢, 𝑢 ≥ 0
(2)
The goal is to minimize the cost function or the loss of our model. In most cases, our parametric model defines a distribution 𝑝(𝒚|𝒙; 𝜽) and we can use the principle of maximum likelihood, i.e. we use − log 𝑝(𝒚|𝒙; 𝜽) as cost function. Other cost functions can be used as well, e.g. predicting the median value of 𝒚 for each 𝒙 (mean absolute error). In optimizing the cost function, it is expected that the chosen performance measure 𝑃 is optimized as well.
In general, the hidden layers (𝑖, 𝑗, see Figure 1) in a well-trained neural network form a “good” representation of the data, which helps to make good predictions. Multiple layer neural networks with deep architectures are more difficult to train than those with shallow architectures [16]. With random initialization, the layers closer to the input layer are poorly trained. Much better results can e.g. be achieved with unsupervised pre-training. It is anyway a big challenge to optimize all hyperparameters of a deep feedforward network.
3. Data Set and Used Features
We have restricted the input data to easily available radar data that could be obtained from the vast majority of aircraft. Since there is a Mode EHS mandate in Germany since March 2005 for all aircraft with a maximum take-off mass in excess of 5.7 tons [17], [18], the current equipage rate for IFR flights is more than 98% in Germany (according to DFS internal statistics from 2017, Lage- und Informationszentrum).
It is essential that the raw input data are pre-processed in order to obtain a representative feature vector 𝒙 ∈ 𝑹𝒏. A well-chosen set of features can greatly enhance the predictive capabilities of the chosen machine learning model. For this reason, we have put some effort in defining and pre-processing the raw input data in order to obtain features that are well suited for this task.
Extraction and Decoding of Mode-S EHS Selected Mode S Enhanced Surveillance Data (EHS) were collected in spring and summer 2018 in order to
extract the required information for data preparation. Seven radar stations all over Germany were considered:
Frankfurt South FFS/ASR
München South MUS/ASR
Düsseldorf DUS/ASR
Nordholz NHZ/SREM
Tegel TGL/ASR
Auersberg AUB/SREM
Gosheim GOS/SREM.
ASR: Airport Surveillance Radar
SREM: Surveillance Radar Equipment Medium-Range
The date and time are converted into a timestamp and the CAT48 Item 250 Mode-S Enhanced Surveillance (Mode-S EHS) data were decoded [19]. The Mode-S EHS data contain the Comm-B Data Selector (BDS) number with the available register. Further details of the BDS register can be obtained from [20]. Selected were:
1. BDS 4.0 - Selected Vertical Intention 2. BDS 5.0 - Track and Turn Report 3. BDS 6.0 - Heading and Speed Report
The flight example in Figure 2 shows the different extracted parameters and how they evolve over time. The IAS restriction of 250 knots (red line) below FL100 at about 200 seconds can be seen. After that, the acceleration takes place with the typical drop in the vertical rate (orange line). Then, the IAS remains constant until the change to Mach at ≈ 780 seconds. The Flight Control Unit (FCU) Selected Altitude (blue line) reflects the current clearance. The figure also shows a typical initial peak in the climb rate shortly after take-off (≈ 3000 feet/minute).
The two vertical bars mark the prediction interval: the earliest predictions are made 60 seconds after take-off while the latest predictions are made not later than Flight Level 220. The main reason for this choice is to avoid making forecasts, once the aircraft has been levelled off.

Flight Level Prediction
40 Innovation im Fokus 2 – 2018
Figure 2: Example of obtained (raw) flight data
Data Cleansing Being interested in making predictions for climbing flights, a flight was defined to be “climbing” whenever the recorded data fulfils:
𝑚𝑖𝑛𝑡 {𝐹𝐿(𝑡)} < 20, 𝑚𝑎𝑥𝑡 {𝐹𝐿(𝑡)} > 285 and
𝑎𝑟𝑔𝑚𝑖𝑛𝑡 {𝐹𝐿(𝑡)} < 𝑎𝑟𝑔𝑚𝑎𝑥𝑡 {𝐹𝐿(𝑡)} (3)
The data are filtered such that these conditions hold true. In addition, all datasets for which no time stamp was available were dropped since no information can be gained from these. Unavailable call signs were replaced by a numeric ID. A posteriori, it was observed that a few data sets contained a call sign of question marks or blank spaces. These flights were also discarded.
Furthermore, the radar stations were not always capable of capturing all data so that we had to deal with incomplete datasets. We used the benefits of the Python NumPy library [21] as well as interpolation techniques for this purpose. In total, more than 400.000 climbing flights all over Germany were extracted using this cleansing method.
Feature Extraction In order to determine which features are predictive for the dynamics of the climbing phase, information from multiple sources were gathered, including the knowledge of controllers, pilots and Airbus employees, statistics of the given datasets, and a full flight simulator study. All features are calculated using the Mode S EHS data and the aircraft type.
The motivation for the chosen features was to keep the Machine Learning network relatively small with fewer layers and less neurons per layer, compared to an unfiltered set of features with less predictive
characteristics. The training is also expected to be faster and more efficient.
Ultimately, the following features have been selected:
a) Take Off Safety Speed V2 (𝑥0) We want to get an approximation of the V2 take off safety speed, which is the minimal speed an airplane needs to climb to the first safe altitude with one engine inoperative. Typically, all engines will be used, so usually the aircraft will fly with 𝑉2 + 10 knots. This speed will be reached shortly after take-off (see Figure 3). When the acceleration altitude between 1000-2000 feet above ground is reached, the aircraft will accelerate to the next maximum allowed airspeed.
Figure 3: Take Off Safety Speed V2 at 0 seconds (red dot at IAS)
The data suggested to use the first finite entry of the IAS, where the flight level is less than 1000ft for mimicking the V2.
Thus, the feature was set to be
𝑉2 ≔ 𝐼𝐴𝑆(𝑡𝑥) 𝑤𝑖𝑡ℎ 𝑡𝑥 𝑠𝑢𝑐ℎ 𝑡ℎ𝑎𝑡 𝐹𝐿(𝑡𝑥) ≤ 1000 (4)
As the V2 speed is related to aircraft-specific parameters such as weight, temperature, and wind, it is expected to gain some information about aircraft performance characteristics. It varies considerably across aircraft types [22][23].
b) Average and Actual Rate of Climb (𝑥1, 𝑥2) This feature describes the average and actual value of the rate of climb (ROC) over time. From the data, three different rates of climb were extracted: the inertial vertical velocity, the barometric altitude rate and the rate of climb calculated from the flight level and time. Since

Flight Level Prediction
Innovation im Fokus 2 – 2018 41
numeric differentiation is noisy and may lead to huge errors, data from Mode-S were used. Due to the measurement method, the inertial vertical velocity is more accurate than the barometric altitude rate. For all features, the inertial ROC is used if more than 80% of the data points are available, and the one with more available data points in any other case.
c) ROC Peak below 2800ft (𝑥3) Controllers observed that during the initial climb phase, there is a vertical speed peak immediately after take-off, which - to a certain degree - seems to correspond with the rate of climb after FL100 when the IAS becomes constant. Indeed, a moderate correlation of this peak and the average rate of climb between FL100 and FL285 exists (correlation coefficient r = 0.40).
The peak might be typical for the performance of different aircraft types and could give a hint to the energy share factor used depending on the cost index of a particular flight. The maximum climb rate value below 2800ft was used as a value for this peak for our feature vector:
𝑥3 ∶= max{𝑅𝑂𝐶(𝑡) | 𝐹𝐿(𝑡) < 2800} (5)
The value of 2800ft was chosen but could be replaced by other altitudes in this range. It is important to include the characteristic peak, but not any other peaks that might occur later in time due to the acceleration phase.
d) Wind below FL285 (𝑥4, 𝑥5) The wind component in flight direction influences the aircrafts performance during climb as well. The average wind in flight direction is calculated from the ground speed (GS), the true air speed (TAS), the true track angle as well as the magnetic heading ℎ. The heading has to be adjusted to the geographic/true heading ℎ𝑡𝑟𝑢𝑒 by adding the angle between magnetic north and geographic north for Germany (𝑉𝐴𝑅).
ℎ𝑡𝑟𝑢𝑒 = ℎ(𝑡) + 𝑉𝐴𝑅 (6)
For the sake of simplicity, a constant declination of 𝑉𝐴𝑅 = 2.0 degree is assumed. Compared to other errors and the resolution of the BDS register, this assumption may be justifiable. The wind components in flight direction are binary coded (0: tailwind, 1: headwind). A second bit indicates the wind strength above a certain threshold. This threshold has been set to 40 knots. Only some wind data are actually finite since there are missing data sets involved in the calculations. The main cause of this problem is the sparse availability of the BDS 5.0 register. The selected radars (except
München) receive this register only every 10th antenna revelation.
e) Heading Change Flag (𝑥6) It is assumed that the influence of our wind feature (x4, x5) would be less predictive if the aircraft makes bigger turns. Therefore, we include a feature of heading changes, which is the accumulation of observed heading changes. A flag is used to indicate whether these changes are above a certain threshold. Currently, this threshold has been set to 160 degree.
f) Altitude Restriction Flag (𝑥7) Especially below FL100, the aircraft is restricted in its climb rate by the Flight Control Unit (FCU) or Control and Display Unit (CDU) settings because of the trade-off between acceleration to constant CAS and vertical rate. We assume that restrictions will not change very much the average climb rate, but that there might be some deviations arising due to restrictions like level-off clearances.
Therefore, a Boolean flag was set, which is true, if the aircraft comes closer than a certain threshold to the FCU selected altitude. It is assumed that this impacts the average climb rate although we have observed that aircraft tend to compensate this level-off period by higher climb rates later on (of course, within the limits of aircraft performance envelopes).
𝑥7 ∶= {0, 𝑖𝑓 ∃ 𝑡: 𝐹𝐶𝑈(𝑡) − 100 ∗ 𝐹𝐿(𝑡) ≤ 𝜔 1, 𝑒𝑙𝑠𝑒
(7)
After discussion with Air Traffic Controller, := 1400 [feet] was chosen.
g) Time since FL100 (𝑥8) Furthermore, the time that passed since Take Off (in seconds) was included. The work of Maximilian Beierl [24] has shown, that climb rates can well be fit by an exponential model after FL100 with 𝑅𝑂𝐶(𝑡) = 𝑎 ∗ 𝑒−𝑏𝑡. It might be useful for the network to include the following feature:
𝑥8 = 𝑡 − 𝑡100 where 𝐹𝐿𝑡100 = 100 (8)
h) Last FL (𝑥9 𝑡𝑜 𝑥13) To provide a history and the development over time of the flight level, five features were included:
FL 60s ago … FL 0s ago (actual FL).
To obtain these values, the FL needs to be interpolated to estimate the values if they were missing at these

Flight Level Prediction
42 Innovation im Fokus 2 – 2018
particular times. Calculations of the linear interpolation include all previous flight levels since 60 seconds ago.
i) Last IAS (𝑥14 𝑡𝑜 𝑥18) For the same reason, an interpolation of the IAS at the above-mentioned times is also included:
IAS 60s ago … IAS 0s ago (actual IAS).
If the aircraft is not yet flying with constant IAS, this feature may well describe the acceleration (or in general: the change) of the speed.
j) Aircraft Type (𝑥19) The aircraft type has been added as a separate feature since this study was carried out with all aircraft types.
Figure 4: Most frequent aircraft types
In summary, more than 120 different types, ranging from business jet to military aircraft, have been observed Figure 4 shows the ten most frequently collected aircraft types. The types have been encoded using a) label encoding and b) one hot encoding. In both cases, no significant difference in the overall results could be observed.
4. Feature Statistics
In order to check whether the extraction yield reasonable features, the distribution of the features for all flights was analysed. Figure 5 to Figure 7 show the distribution for some selected features.
Figure 5: Altitude Restriction Flag
Distributions The average rate of climb (Figure 6) can be fitted with a Gaussian distribution. We observed a mean of about 2216 feet per minute (fpm) and a standard deviation of 438 fpm. The distribution of IAS interestingly shows two characteristic peaks. This may be due to 250 knots restriction below FL100 and due to the constant airspeed regime, which aircraft apply after the acceleration phase during climb. In the future, one could perhaps come up with different criteria or additional clustering methods in order to sort aircraft into different performance groups, e.g. according to aircraft types.
The altitude restriction flag indicates that more than 2 3⁄ of all aircraft could climb without restriction in the sense that the difference between FCU Selected Flight Level and actual Flight Level is always more than 1400 feet.
Figure 6: Average Rate of Climb (ROC) assuming a normal distribution

Flight Level Prediction
Innovation im Fokus 2 – 2018 43
Figure 7: Distribution of current IAS
Label Creation, Splitting and Scaling The aim is to predict the flight level of the aircraft for the next six minutes (360s) as this is the currently configured look ahead time for CATO conflict detection. It was decided to label each feature vector with a four-dimensional vector containing the FL values in
𝑛 ∗ 90 𝑠𝑒𝑐𝑜𝑛𝑑𝑠 | 𝑛 = {1,2,3,4} (9)
Again, to obtain these values, an interpolation of the flight level had to be used. Due to performance considerations, the network was trained separately for each FL prediction horizon.
For each flight, random indices were chosen and the feature vector as well as the corresponding labels were created for each index (only the data up to this index are provided, as it will be the case in future applications). In total, close to 400.000 features and label were generated leading to a feature vector of shape 𝑿(397.242, 20). The data were randomly split with shuffling into 80% training data and 20% test data.
In a second step, we standardized the features and labels by removing the mean and scaled them to unit variance. Centring and scaling happen independently on each feature by computing the relevant statistics on the samples. Standardization of a dataset is a common requirement for many estimators: they might behave badly if the individual feature do not look like standard normally distributed data. If a feature has a variance that is orders of magnitude larger than others, it might dominate the objective function and make the estimator unable to learn from other features correctly as expected [25].
5. Machine Learning Results
The neural network has been developed with Keras, a well-known deep learning library, together with tensorflow [26][27]. These open source software libraries support flexible machine learning architectures and allow computation across a variety of platforms including Graphic Processor Units (GPU).
The obtained results were achieved with a network of six hidden layers while each layer contains a different number of nodes in descending order with one node for the output layer. The rectified linear unit has been chosen as activation (3) for each layer. Different optimizers were tested (ADAM, Adadelta, stochastic gradient descent SGD, refer to [28] for an overview) but no significant differences in convergence could be observed. Figure 8 shows an example of the learning curve for training and validation (test) data with SGD.
Figure 8: Training and validation loss
While the model fit with the training data further improves with the number of epochs, the loss of the test data seems to improve only quite slowly. Further evaluations with the number of layers and neurons per layer may lead to smaller gaps between training and test data and thus a better bias-variance trade-off. For assessment of the model performance, a 𝑘-fold cross validation (𝐶𝑉) has been used. This approach involves randomly dividing the set of observations into 𝑘 groups, or folds, of approximately equal size. The first fold is treated as a validation set, and the method is fit on the remaining 𝑘 −1 folds. The scorer function (𝑆𝐹 e.g. mean squared error) is then computed and the procedure is repeated 𝑘 times.
𝐶𝑉 = 1
𝑘 ∑ 𝑆𝐹𝑖𝑘𝑖=1 (10)

Flight Level Prediction
44 Innovation im Fokus 2 – 2018
The 𝑅2 statistic provides a measure of fit. It measures the proportion of variability in 𝑌 that can be explained using 𝑋. An 𝑅2 statistic that is close to 1 indicates that a large proportion of the variability in the response has been explained by the regression [29]. For 𝑘 = 8 and using the 𝑅2 statistic as scorer function, the resulting mean score and standard deviation is 0.922 ± 0.002 (360 seconds prediction horizon).
After training of the network with the training data set, the output predictions are generated with the previously splitted test data. We can now compare the predicted flight level with the features (i.e. the ‘true’ flight level) and perform an evaluation with the mean and standard deviation of the error between prediction and test data. Figure 9 shows the resulting distributions for 360 seconds prediction horizon. At first glance, there seems to be a good match although the network seems to predict higher levels in the first segment. This can probably be explained with the acceleration phase of the aircraft at the beginning of the flight that results in a significant drop of the climb rate. It seems that this drop-in climb rate is not taken into account to full extent.
Figure 9: Distribution of Predicted Flight Level (Test Data)
0provides for different prediction times the obtained 𝑅2score, the mean absolute error and the standard deviation of the error, considering the absolute difference between network predicted flight level and the measured flight level. The number in brackets indicate the values training the network only with A320 aircraft (and suppressing feature 𝑥19 Aircraft type).
As expected, all metrics improve with a shorter prediction horizon. With the chosen network architecture, there is only a minor difference between the training and the test data, which indicates no problems with overfitting. Assuming a standard vertical separation of 1000 feet or 10 FL, we observe a mean error of about 8 FL for a prediction horizon of six minutes. This means that the mean error is less than the vertical separation standard. The standard deviation
reflects the uncertainty, to some extent caused by human (controller and pilot) intervention. If the Managed Mode flag in the Mode S EHS could be made available, the standard deviation could possibly be decreased. Up to now, only few modern aircraft (e.g. B787, A350) transmit this flag.
Table 1: Prediction Metrics all Flights (A320)
Metric Prediction Time 360 seconds
Test Data Train Data
R2 score 0.922 (0.931) 0.931 (0.942)
Mean error 8.14 (7.58) FL 7.63 (6.78) FL
Std. Dev. error 7.21 (6.84) FL 7.04 (6.56) FL
Metric Prediction Time 270 seconds
Test Data Train Data
R2 score 0.953 (0.956) 0.959 (0.963)
Mean error 7.01 (6.68) FL 6.49 (6.02) FL
Std. Dev. error 6.49 (6.30) FL 6.27 (6.01) FL
Metric Prediction Time 180 seconds
Test Data Train Data
R2 score 0.975 (0.978) 0.978 (0.981)
Mean error 5.35 (5.13) FL 4.95 (4.53) FL
Std. Dev. error 5.32 (5.16) FL 5.13 (4.85) FL
The results for a single selected aircraft type (here: A320) are slightly better than for all aircraft types together. This may be due to less variance in the performance parameters although we had less training (77.000) and test (19.000) data available. With a perfectly trained network and One Hot encoding for the aircraft type, we could finally expect the same mean error.
6. Conclusion and Future Work
The obtained results show that the mean error for the flight level prediction horizon of up to six minutes is much better than the currently chosen static buffer in CATO of ±500 feet per minute, which results in ±30 FL in six minutes. Given the high operational and also technical uncertainty in climb behaviour of aircraft, the results seem to be promising. The cross validation with the high number of training and test data confirms the validity of the results, without any limitations with regard to the

Flight Level Prediction
Innovation im Fokus 2 – 2018 45
aircraft type. The developed features describe the general climb behaviour and allow to train the neural network, obtaining in all cases statistical 𝑅2scores above 0.9. The authors conclude that this approach allows to reduce the uncertainty buffers for Decision Support Tools in the climb phase, which is the most challenging part of a flight in terms of trajectory predictions.
Future work should extend this neural network to predict not only one flight level but multiple level with e.g. 30 seconds intervals. The number of layers and neurons could also be increased to improve the overall performance. Regularization like Early Stopping or Dropout may also enhance the results and prevent overfitting. Additional benefit would be to include the controller vertical rate clearances, which reflects the human intervention. These clearances could be made available via the ATM system, Data Link or Voice Recognition. The feature importance should be studied with the objective to reduce the number of features, e.g. with Sequential Backward Selection algorithm. It is also envisaged to cluster the aircraft types according to their climb behaviour, which reduces the size of the respective feature vector. The authors also believe that a combination of this neural network with recurrent neural networks like Long Short-Term Memory (LSTM) sequence models will further improve the performance.
This article has also been published in the proceedings to the SESAR 2018 Innovation Days conference in Salzburg.
Abbreviations
ASR Airport Surveillance Radar
BADA Base of Aircraft Data
BDS Comm-B Data Selector
CAS Calibrated Air Speed
CATO Controller Assistance Tools
CDU Control and Display Unit
CI Cost Index
EHS Enhanced Surveillance
FCU Flight Control Unit
FL Flight Level
GS Ground Speed
IAS Indicated Air Speed
iTEC interoperability Through European Collaboration
ML Machine Learning
ROC Rate of Climb
SESAR Single European Sky ATM Research
SREM Surveillance Radar Equipment Medium-range
TP Trajectory Prediction
References
[1] Christian Bousmanne et.al., SESAR 2020 Concept of Operations Edition 2017, EUROCONTROL, November 2017
[2] Common Trajectory Prediction Capability for Decision Support Tools, Sip Swierstra, EUROCONTROL HQ, Brussels, Steven M. Green, National Aeronautics and Space Administration, Ames Research Center, Moffett Field, CA, 5th USA-Europe ATM Seminar, Budapest, June 2003
[3] Controller Assistance Tools Requirements Specification, Development Requirements - Release 6 / Final for industrial Prototype, Version 1.0, 22.01.2015
[4] A. Nuic. User Manual for the Base of Aircraft Data (BADA), Revision 3.12, EUROCONTROL, August 2014
[5] Poppe, M., Herr, S., Reinhardt, K. & Achatz, G. (2015). Erste Validierungsergebnisse der Controller Assistance Tools an der iCAS-SESAR-Plattform, Innovation im Fokus 2/15
[6] Ben Musialek, Carmen F. Munafo, Ryan Hollis, and Paglione Mike. Literature Survey of Trajectory Predictor Technology. Technical Report
[7] DOT/FAA/TCTN11/1, Federal Aviation Administration, William J.
[8] Hughes Technical Center, 2010. [9] Martin Lindner. Entwicklung eines Algorithmus
zur Anpassung der Vorhersage von Trajektorien an spezifische Flug-manöver von Luftverkehrsgesellschaften. Technical University of Dresden, 2013

Flight Level Prediction
46 Innovation im Fokus 2 – 2018
[10] Richard Alligier, David Gianazza, Nicolas Durand. Machine Learning applied to Airspeed Prediction during Climb. ATM Seminar 2015, 11th USA/EUROPE Air Traffic Management Seminar
[11] Richard Alligier, David Gianazza, Nicolas Durand. Ground based estimation of Aircraft Mass, adaptive vs. least square method. ATM Seminar 2013, 10th USA/EUROPE Air Traffic Management Seminar
[12] Areski Hadjaz, Gaetan Marceau, Pierre Saveant, Marc Schoenauer. Online Learning for Ground Trajectory Prediction. SESAR 2nd Innovation Days, 2012.
[13] Yann Le Fablec and Jean Marc Alliot. Using Neural Networks to predict aircraft trajectories. In Proceedings of the International Conference on Artificial Intelligence (ICAI 99), Las Vegas, 1999
[14] Caikun Zhang; Xuan Zhang; Chuan Shi; Wenfu Liu. Aircraft Trajectory Prediction based on genetic programming. 3rd International Conference on Information Science and Control Engineering (ICISCE), July 2016
[15] Ian Goodfelow, Yoshua Bengio and Aaron Courville. Deep Learning. MIT Press Cambridge, Massachusetts, London, England, 2016
[16] Yoshua Bengio. Learning Deep Architectures for AI. Foundations and Trends in Machine Learning. Vol. 2, No. 1. 2009
[17] Honeywell. White Paper Mode S and the European Mandates. Revision 13, 2004
[18] DFS Deutsche Flugsicherung GmbH. Aeronautical Information Circular IFR 7, SSR Mode S Enhanced Surveillance. January 2003
[19] Debora Fieberg. Feature Preparation for a Machine Learning Prediction of Trajectories of Climbing Flights, Voluntary Internship at DFS. 2018
[20] ICAO Doc 9871 AN/464 Technical Provisions for Mode S Services and Extended Squitter, First Edition, 2008
[21] www.numpy.org [22] Dr Darren Rhodes, Capt. Spencer Norton.
Aircraft Climb Performance. Presentation 2017 [23] Airbus Flight Operations. Getting to grips with
Aircraft Performance. January 2002 [24] Maximilian Beierl, OTH Regensburg, March
2018. ‘Trajektorienprädiktion‘. Arbeit zur
Erlangung des akademischen Grades Bachelor of Science
[25] Scikit-learn developers. Scikit-learn User Guide. Release 0.21.dev0. 2018
[26] Francois Collet et.al. Keras. 2015. https://keras.io
[27] Martin Abadi et.al. TensorFlow: Large-scale machine learning on heterogeneous systems. 2015. Software available from tensorflow.org
[28] Sebastian Ruder. An overview of gradient descent optimization algorithms. Insight Centre for Data Analysis, NUI Galway. June 2017
[29] Gareth James, Daniela Witten, Trevor Hastie, Robert Tibshirani. An Introduction to Statistical Learning. Springer New York Heidelberg Dordrecht London. 2013
[30] SESAR Project 04.07.02 Deliverable D09, Validation Report Exercise VP175, Edition 00.01.01, September 2015

ADS-B Vergleich
Innovation im Fokus 2 – 2018 47
Entwicklung einer Methodik zum wirtschaftlichen Vergleich von ADS-B gegenüber Mode S Radaranlagen
Maximilian Menk
Einleitung
Investitionen sind für Unternehmen von enormer Bedeutung, denn sie dienen der Verbesserung der Wettbewerbsfähigkeit. Sie sind Aufgabe der Unternehmensführung und richten sich nach den Zielen des Unternehmens. Aufgrund von Unsicherheit, den gesetzten Zielen und zu wenig oder zu vielen Alternativen sind Investitionsentscheidungen oft komplex und schwierig zu treffen. Daher erscheint eine Analyse der Investitionsalternativen sinnvoll, um die geeignetste Alternative zu identifizieren und dadurch das Risiko einer Fehlentscheidung zu minimieren. Der vorliegende Artikel beleuchtet ein Auswahlproblem, bei dem zwischen zwei Investitionsalternativen entschieden werden muss. Die Alternativen sind einerseits die Einführung und der Aufbau einer ADS-B Empfangsinfrastruktur zur Ortung von Luftfahrzeugen für den Anwendungsfall der Substitution eines der drei Mode S Layer (im Folgenden Investitionsalternative ADS-B) und andererseits die Ersatzinvestition in die herkömmliche Radartechnik (im Folgenden Investitionsalternative Mode S). Es handelt sich also um eine Sachinvestition in Ortungssysteme, da die in Betrieb befindlichen Radaranlagen das Ende ihres Lebenszyklus erreicht haben und ersetzt werden müssen.
Wirtschaftlichkeit
Grundsätzlich können die zwei Grundprinzipien der Wirtschaftlichkeit unterschieden werden:
Das Minimalprinzip gilt, wenn versucht wird, ein vorgegebenes Ziel mit möglichst geringen Mitteln zu erreichen. Eine Maßnahme wird durch die Bemühung eine Kostenminimierung zu erreichen ausgelöst.
Mit dem Maximalprinzip wird versucht ein größt-mögliches Ergebnis mit gegebenen Mitteln zu erreichen. Hintergrund einer Maßnahme ist beispielsweise die Gewinnmaximierung.
Während das Minimalprinzip im Privatbereich häufig Anwendung findet, dominiert im Unternehmenskontext das Maximalprinzip (vgl. Schuster & Collenberg, 2017, S.7). Das Flugsicherungsumfeld bildet hiervon allerdings eine Ausnahme.
Am 1. Januar 2012 ist durch die Europäische Kommission ein ATM-Regulierungskonzept für das Gesamtsystem Luftfahrt in Kraft gesetzt worden (vgl. DFS, 2018). In der Folge gilt ein gemeinschaftliches Leistungssystem, dass die durch die Europäische Kommission festgelegten Leistungsziele für den Funktionalen Luftraumblock Europe Central (FABEC) enthält. Die damit verbundene ökonomische Regulierung hat zur Folge, dass eine Steigerung der Einnahmen ausschließlich vom Luftverkehrsaufkommen abhängig ist. Daher gilt es, das Minimalprinzip anzuwenden, um die durch die Europäische Kommission geforderte Leistung mit minimalem Aufwand zu erreichen. Kosteinsparungsprogramme zur Erreichung der Kostenziele sind bei vielen ANSPs in Europa die Folge (vgl. DFS, 2018; Austrocontrol, 2018). Auch die hier betrachtete Investitionsentscheidung muss im Kontext dieser Einsparprogramme gesehen werden. Das Minimalprinzip findet ebenso wie bei allen Investitionsvorhaben von flugsicherungstechnischen Einrichtungen Anwendung.
Methodik
Investitionsentscheidungen haben aufgrund ihrer langfristigen Wirkung und dem großen Einfluss auf den Geschäftsverlauf für Unternehmen eine große strategische Bedeutung. Daher erscheint es wichtig, die Auswirkungen einer Investition mit Hilfe einer Investitionsrechnung zu bewerten. Durch genauere Investitionsrechnungen ließe sich eine Einsparung von 10% der Bruttoanlageinvestitionen erreichen, behauptet Poggensee und legt dar, dass sich dadurch auf Deutschland bezogen ein gesamtwirtschaftliches Einsparvolumen von jährlich rund 40 Milliarden Euro erzielen ließe. Der Effekt wäre damit größer als der vieler staatlicher Konjunktur- oder Steuererleichterungsprogramme (vgl. Poggensee, 2014, S. 5). Dies macht deutlich, wie wichtig der Einsatz eines Investitionsrechnungsverfahrens ist, um einen sorgsamen und ökonomischen Einsatz von Ressourcen zu gewährleisten. Investitionsrechnungen dienen aber nicht allein dazu, die wirtschaftliche Vorteilhaftigkeit eines Investitionsobjektes zu bestimmen. Vielmehr können sie eine Entscheidungshilfe zur Frage, ob eine Rationalisierungsinvestition sinnvoll ist, bieten. Darüber hinaus helfen sie dabei, die wirtschaftlichen

ADS-B Vergleich
48 Innovation im Fokus 2 – 2018
Auswirkungen eines Projektes zu bestimmen und es so auszugestalten, dass es für das Unternehmen am vorteilhaftesten ist (vgl. Carl, Fiedler, Jórasz, & Kiesel, 2017, S. 128; Schuster & Collenberg, 2017, S. 8). Im vorliegenden Fall wird das methodische Vorgehen in drei Schritte gegliedert, um die Vorteilhaftigkeit einer der beiden Investitionsalternativen zu erhalten:
1. Auswahl einer Investitionsrechnung anhand geeigneter Bewertungskriterien
2. Weiterentwicklung der Methodik zum Vergleich der Investitionsalternativen
3. Bewertung der Alternativen und Bestimmung der Vorteilhaftigkeit
Aus den Unternehmenszielen werden Bewertungs-kriterien abgeleitet, die im Hinblick auf die Zielstellung gewichtet werden. Mit diesem umfassenden Analysewerkzeug erfolgt der Vergleich der Methoden, auf dessen Basis entschieden wird, welche der Investitionsrechnungsmethoden als Grundlage für den Entwurf einer aussagekräftigen, auf den Anwendungsfall zugeschnittenen Methode genutzt wird. Dabei muss beachtet werden, dass das Verfahren nicht alle Unsicherheiten und alle Konsequenzen des Investitionsgeschehens berücksichtigen kann, da es sonst zu komplex wird, um es durchführen zu können. Gleichzeitig muss trotz unsicherer Eingangsgrößen eine zuverlässige Voraussetzung für eine vorurteilsfreie Entscheidung geschaffen werden. Ein solches Modell muss mit situationsorientierten Parametern ausgestattet werden, um die wichtigsten Faktoren zu erfassen. Dadurch werden nur bestimmte Teilaspekte des Investitionsvorgangs betrachtet und andere vernachlässigt. Folglich erfreuen sich Rechenmodelle, die die Projektumwelt vereinfachen, als praktikable Lösungsansätze großer Beliebtheit (vgl. Schuster & Collenberg, 2017, S. 27).
Mit dem adaptierten Investitionsrechnungsverfahren werden die Investitionsalternativen schließlich einer eingehenden Beurteilung unterzogen. Anschließend kann anhand der Bewertung die vorteilhafteste Investitionsalternative bestimmt werden. Der Aufbau einer ADS-B Empfangsinfrastruktur und die Einführung von ADS-B in die operationelle Nutzung können durch die Anwendung einer solchen Methode so gestaltet werden, dass es für den Flugsicherungsdienstleister am vorteilhaftesten ist.
Kriterienrahmen
Um die Investitionsrechnungsverfahren vergleichen zu können, wird ein Kriterienkatalog aufgestellt. In der
Literatur lassen sich zwar entsprechende Kriterien-kataloge finden, allerdings keiner, der speziell auf das Umfeld flugsicherungstechnischer Einrichtungen zugeschnitten ist. Mit Hilfe dieses Katalogs wird die Idealvorstellung eines Investitionsrechnungsverfahrens erarbeitet, an dem die häufigsten in der Literatur erwähnten Methoden gemessen werden. Angelehnt an Pietsch, der Investitionsrechnungsverfahren anhand von Fragen bewertet (vgl. Pietsch, 2003, S. 49), soll die Eignung für den geschilderten Anwendungsfall ebenfalls anhand von fünf Fragen überprüft werden. Die daraus abgeleiteten Kriterien werden ebenfalls dargestellt:
Wie flexibel ist das Verfahren bei veränderten Anforderungen? Zur Bewertung der Flexibilität wird untersucht, inwiefern ein Investitionsrechnungsverfahren in der Lage ist, auf veränderte Situationen und Eingangsgrößen zu reagieren.
Wie gut sind die zugrundeliegenden Informationen geeignet, ihren Zweck in einem Investitionsrechnungsverfahren zu erfüllen? Dieses Kriterium dient dazu, die dem Investitionsrechnungsverfahren zugrundeliegenden Informationen zu bewerten. Dazu wird einerseits die Informationsquelle und andererseits die Datenqualität bewertet. So kann beurteilt werden, ob die Daten im Hinblick auf die Zielstellung der Arbeit eine Nutzbarkeit und Relevanz besitzen.
Welches ökonomische Prinzip liegt dem Verfahren zugrunde? Wie bereits erläutert, liegt Investitionen in flugsicherungstechnische Einrichtungen das Minimalprinzip zu Grunde. Das heißt, dass ein gegebener Output mit minimalem Input erreicht werden soll. Ein Investitionsrechnungsverfahren im flugsicherungstechnischen Umfeld muss also die Zielsetzung der Inputminimierung verfolgen.
Wie aufwändig ist der Einsatz des Verfahrens? Mit dem Kriterium Bewertungsaufwand soll die Handhabbarkeit der Investitionsrechnungsverfahren bewertet werden. Dazu wird die Herangehensweise, welche die erhobenen Daten in ein Ergebnis transferiert, bezüglich des notwendigen Aufwandes beurteilt. Eine hohe Bewertung wird erzielt, wenn die Handhabbarkeit und der Aufwand der beurteilten Methode gering bzw. einfach sind.
Ist das Ergebnis transparent und nachvollziehbar? Die Ergebnisse sind dann nachvollziehbar, wenn sie schrittweise ermittelt und dargestellt werden. Der Zusammenhang zwischen der Ausrichtung der

ADS-B Vergleich
Innovation im Fokus 2 – 2018 49
Investition und den Unternehmenszielen ist leicht erkennbar. Werden die Ergebnisse in ihrem ursprünglichen Zustand dargestellt, ermöglicht dies eine verbesserte Erklärung der Wirkzusammenhänge. Durch eine strukturierte Vorgehensweise kann eine hohe Transparenz und leichte Nachvollziehbarkeit erreicht werden.
Beurteilung der Investitionsrechnungsverfahren
Die Kostenvergleichsrechnung bietet in allen fünf untersuchten Kriterien Vorteile zur Bearbeitung der beschriebenen Problemstellung. Daher ist sie im Hinblick auf die Zielerreichung als Investitionsrechnungsmethode ausgewählt worden. Die Vorteile der Kostenvergleichsrechnung sind im Einzelnen:
Flexibilität: Die Kostenvergleichsrechnung ermög-licht die Berücksichtigung von mehreren Investitionsalternativen. Einzelne Kennzahlen können verändert werden.
Datenqualität: Die verwendeten Daten stehen aus der Inbetriebhaltung der Radaranlagen zur Verfügung. Für ADS-B können die Daten aus der Inbetriebhaltung anderer flugsicherungstechnischer Einrichtungen abgeleitet werden.
Ökonomisches Prinzip: Die Kostenver-gleichsrechnung berücksichtigt als einzige betrachtete Investitionsvergleichsrechnung das Minimalprinzip, nachdem gilt, ein vorgegebenes Ziel mit möglichst geringen Mitteln zu erreichen.
Bewertungsaufwand: Der Bewertungsaufwand der Kostenvergleichsrechnung ist dem Ergebnis angemessen.
Transparenz: Da keine Daten geschätzt werden müssen und aufgrund der einfachen Berech-nungsmethode kann transparent nachvollzogen werden, welchen Einfluss die einzelnen Kennzahlen auf das Gesamtergebnis haben.
Ausschlaggebend für die Auswahl der Kosten-vergleichsrechnung ist, dass zur Ermittlung der Vorteilhaftigkeit lediglich die Kosten der Investitionsalternativen erhoben werden müssen. Da die Erlöse der Ortungsinfrastruktur nicht gesondert ausgewiesen werden, hätten diese Daten beim Einsatz eines anderen Investitionsrechnungsverfahrens
1 Rechnungsmethode zur Berechnung des Zeitraums zwischen Investitionsbeginn und Break-Even.
geschätzt werden müssen. Ein weiterer ausschlaggebender Faktor für die Auswahl der Kostenvergleichsrechnung ist das zugrundeliegende Minimalprinzip. Das in der Problembeschreibung umschriebene Problem ist die Zielerreichung mit möglichst geringen Mitteln. Daher werden die betrachteten Investitionsalternativen mit Hilfe der Kostenvergleichsrechnung im Hinblick auf die entstehenden Kosten verglichen. Allen anderen betrachteten Investitionsrechnungsverfahren liegt entweder das Maximalprinzip zugrunde oder es wird, wie bei den Amortisationsrechnungsverfahren1, eine Risikoabschätzung durchgeführt. Daher ist die Kostenvergleichsrechnung das geeignetste Investitionsrechnungsverfahren.
Weiterentwicklung des ausgewählten Investitionsrechnungsverfahren
Aus der Literatur ist folgende Formel der Kostenvergleichsrechnung zum Vergleich zweier Investitionsalternativen bekannt:
𝐾𝑀𝑜𝑑𝑒 𝑆 ⋛ 𝐾𝐴𝐷𝑆−𝐵
In der Formel bezeichnet 𝐾𝑀𝑜𝑑𝑒 𝑆 die Kosten der Investitionsalternative Radar während 𝐾𝐴𝐷𝑆−𝐵 die Kosten der Investitionsalternative ADS-B bezeichnen.
Um ein möglichst exaktes Ergebnis zu erhalten, ist es notwendig, die Formel der Kostenvergleichsrechnung anzupassen. Zuerst wird davon ausgegangen, dass jeweils eine Anzahl an ADS-B Bodenstationen und Mode S Radaranlagen ermittelt werden kann, die mit in die Kostenvergleichsrechnung einfließen. Weiterhin kann davon ausgegangen werden, dass durch die Datenerhebung die durchschnittlichen Kosten per Periode und Station für die betrachteten Technologien ermittelt werden kann. Darüber hinaus werden die Kosten einer zentralen ADS-B Validierungseinheit mit in die Wirtschaftlichkeitsbetrachtung einfließen. Daraus ergibt sich die folgende Formel:
𝐺𝑆𝑀𝑜𝑑𝑒 𝑆 ∗ 𝐾𝑀𝑜𝑑𝑒 𝑆⋛ (𝐺𝑆𝐴𝐷𝑆−𝐵 ∗ 𝐾𝐴𝐷𝑆−𝐵)
+ 𝐾𝐴𝐷𝑆−𝐵 𝑧𝑒𝑛𝑡𝑟𝑎𝑙
In der Formel bezeichnen
𝐺𝑆𝑀𝑜𝑑𝑒 𝑆 Anzahl an eingesparten Mode S Radaranlagen

ADS-B Vergleich
50 Innovation im Fokus 2 – 2018
𝐺𝑆𝐴𝐷𝑆−𝐵 Anzahl an mindestens notwendigen ADS-B Bodenstationen
𝐾𝑀𝑜𝑑𝑒 𝑆 periodische Kosten einer Mode S Radaranlage
𝐾𝐴𝐷𝑆−𝐵 periodische Kosten einer ADS-B Bodenstationen
𝐾𝐴𝐷𝑆−𝐵 𝑧𝑒𝑛𝑡𝑟𝑎𝑙 periodische Kosten der zentralen ADS-B Komponenten
Mit Hilfe dieser Formel kann die Investitionsalternative mit der größeren Vorteilhaftigkeit ermittelt werden. Um eine absolute Vorteilhaftigkeit der Investitionsalternative von ADS-B zu ermittelten, soll ein Indikator errechnet werden. Der Wert dieses Indikators entspricht der Vorteilhaftigkeit von ADS-B:
𝑥 =(𝐺𝑆𝐴𝐷𝑆−𝐵 ∗ 𝐾𝐴𝐷𝑆−𝐵) + 𝐾𝐴𝐷𝑆−𝐵 𝑧𝑒𝑛𝑡𝑟𝑎𝑙
𝐺𝑆𝑀𝑜𝑑𝑒 𝑆 ∗ 𝐾𝑀𝑜𝑑𝑒 𝑆
Dabei entspricht der Indikator 𝑥 der Wirtschaftlichkeit von ADS-B, für den folgende Annahmen gelten:
1. 𝑥 < 1 ADS-B Bodenstationen weisen von beiden Investitionsalternativen die größere Vorteil-haftigkeit auf.
2. 𝑥 = 1 ADS-B und Mode S weisen eine gleich große Vorteilhaftigkeit auf.
3. 𝑥 > 1 Mode S Radaranlagen weisen von beiden Investitionsalternativen die größere Vortei-lhaftigkeit auf.
Durchführung
Das Hauptproblem für Investitionsrechnungsverfahren ist, wie bei allen empirische Modellen, die Beschaffung von Daten über Ereignisse in der Zukunft. Dies ist, da die Zukunft nicht eindeutig vorhersehbar ist, in den meisten Fällen für Investitionsobjekte nur mit unvollständiger Realitätsnähe möglich. Für den vorliegenden Anwendungsfall kann auf die Datenerfassung aus dem Inbetriebhaltungsprozess flugsicherungstechnischer Einrichtungen zurückgegriffen werden. Die Kosten einer Radaranlage setzen sich zusammen aus den einmal anfallenden Anschaffungskosten sowie den wiederkehrenden, periodischen Kosten zur Instand-haltung.
Die Anschaffungskosten einer Radaranlage umfassen:
Anschaffungskosten Radartechnik
2 Als Deduplizierung wird der Vorgang bezeichnet, in dem mehrere ADS-B Datenpakete unterschiedlicher
Anschaffungskosten Gebäude Anschaffungskosten technisches Gebäude-
management (inkl. Klimaanlage, unterbrechungs-freie Stromversorgung, Netzersatzanlage, Einbruch- und Brandmeldeanlage)
Die periodischen Kosten setzen sich zusammen aus:
Instandhaltungskosten Radartechnik Datenleitungen Instandhaltung technisches Gebäudemanagement Energiekosten
Die Kosten für eine ADS-B Empfangsinfrastruktur setzen sich aus mehreren Beträgen zusammen. Neben den Kosten für eine ADS-B Empfangsstation müssen auch die Kosten für die darüber hinaus notwendige Infrastruktur berücksichtigt werden. Dazu gehört die Anpassung der Software des PAM FRA Systems und die Kosten für einen zentralen Prozessor, der zur Verarbeitung der empfangenen ADS-B Daten benötigt wird. Neben einer Deduplizierung2 sind in diesem zentralen Prozessor auch Sicherheitsmechanismen zur Validierung der ADS-B Daten implementiert. Im Einzelnen werden in diesem Kapitel die folgenden Kostenbestandteile der ADS-B Ortungsinfrastruktur betrachtet:
Beschaffungskosten einer ADS-B Empfangsstation - Anschaffungskosten ADS-B Empfangsstation - Installationskosten ADS-B Empfangsstation
Periodische Kosten einer ADS-B Empfangsstation - Instandhaltungskosten ADS-B Empfangsstation - Datenleitungen - Mietkosten - Energiekosten
Beschaffungskosten einer ADS-B Infrastruktur - Anschaffungskosten einer zentralen Validier-
ungseinheit - Anpassung der PAM FRA Software
Periodische Kosten einer ADS-B Infrastruktur - Instandhaltungskosten einer zentralen Validier-
ungseinheit - Energiekosten
Darüber hinaus sind Daten erhoben worden, die für beide Investitionsalternativen gleichermaßen gelten. Dazu gehören die Kapitalkosten, die Personalkosten und
Empfangsstationen des gleichen Luftfahrzeugs zu einem konsolidierten Datenpaket verarbeitet werden.

ADS-B Vergleich
Innovation im Fokus 2 – 2018 51
jährliche Inflation. Den unterschiedlich langen Nutzungsdauern der Investitionsalternativen wird durch die Berücksichtigung der kalkulatorischen Abschreibungen Rechnung getragen. Da davon ausgegangen wird, dass die Rückflüsse in das Unternehmen für beide Alternativen gleich groß und unabhängig von der ausgewählten Alternative auftreten, erscheint es nicht sinnvoll, diese zu berücksichtigen. Ebenso erscheint die Annahme sinnvoll, dass aus Vereinfachungsgründen ein kontinuierlicher Kapitalbindungsverlauf unterstellt wird. Daraus folgt, dass die kalkulatorischen Zinsen durch Multiplikation des Kalkulationszinssatzes mit dem durchschnittlich gebundenen Kapital ermittelt werden können. Mit der erarbeiteten Formel ist die Möglichkeit geschaffen worden, die beiden betrachteten Investitionsalternativen direkt zu verglichen. Als Ergebnis liegt anschließend ein Indikator 𝑥 vor, aus dem direkt ersichtlich ist, welche Investitionsalternative eine größere wirtschaftliche Vorteilhaftigkeit aufweist.
Ergebnis
Die ermittelten Kosten der beiden Investitions-alternativen werden zur Ermittlung einer wirtschaftlichen Vorteilhaftigkeit genutzt. Dazu wird die entwickelte Methode der Kostenvergleichsrechnung angewendet. Zusätzlich werden die Ergebnisse einer Analyse der Empfangsüberdeckung benötigt. Daraus ergibt sich, dass maximal sieben Mode S Radaranlagen eingespart werden können und dafür im Gegenzug mindestens 35 ADS-B Empfangsstationen aufgebaut werden müssen.
Unter Berücksichtigung aller bisher erarbeiteten Ergebnisse ergibt sich zur Ermittlung der Vorteilhaftigkeit folgende Rechnung:
𝑥 =(35 ∗ 37.100 €) + 51.801 €
7 ∗ 471.389 €
𝑥 =1.350.301 €
3.299.723 €
𝑥 = 0,41
Gemäß dem definierten Kriterium weisen ADS-B Bodenstationen von beiden Investitionsalternative die größere wirtschaftliche Vorteilhaftigkeit auf. Der ermittelte Wert sagt aus, dass die periodischen Kosten für die Investitionsalternative ADS-B 41% der Kosten der vergleichbaren Lösung mit Radaranlagen betragen. Damit kann im betrachteten Fall pro Jahr mehr als die Hälfte der entstehenden Kosten durch die Verwendung von ADS-B zur Etablierung eines dritten Mode S Layer eingespart werden. Daraus folgt der eindeutige Nachweis, dass durch die Nutzung von ADS-B
grundsätzlich finanzielle Chancen genutzt werden können.
Aufgrund der Analyse verschiedener Szenarien mit unterschiedlichen Realisierungsrisiken kann das Einsparpotential für den untersuchten Luftraum auf drei bis sieben Mode S Radaranlagen eingegrenzt werden. Derzeit kann keine genaue Aussage über das Einsparpotential der Radaranlagen getroffen werden. Um eine Entscheidung nicht vorwegzunehmen, soll aufgezeigt werden, welchen Einfluss die Anzahl an eingesparten Mode S Radaranlagen auf die wirtschaft-liche Vorteilhaftigkeit der beiden betrachteten Investitionsalternativen hat. Gleiches gilt für die ADS-B Empfangsinfrastruktur. Grundsätzlich sieht die derzeitige Planung des ADS-B Programms eine dreifache Mehrfachüberdeckung zur Erreichung der Entdeckungswahrscheinlichkeit vor. Es kann nicht ausgeschlossen werden, dass in Bereichen mit einer hohen Verkehrsbelastung und einer daraus resul-tierenden hohen Funkfeldbelastung eine höhere, bis zu 5-fache Mehrfachüberdeckung notwendig sein wird, um jedes Luftfahrzeug sicher identifiziert zu können. Zusammen mit dem Einfluss eingesparter Radaranlagen soll auch der Einfluss der Anzahl an notwendigen ADS-B Empfangsstationen auf die Wirtschaftlichkeit der Investitionsalternative ADS-B aufgezeigt werden.
Um einen einfachen Überblick über die Vorteilhaftigkeit der beiden betrachteten Investitionsalternativen unter veränderten Rahmenbedingungen zu bieten, werden 130 Fälle ausgewertet. Die wirtschaftliche Vorteilhaftigkeit der Investitionsalternativen wird anhand des Vorteilhaftigkeitskriteriums, dass mit Hilfe der entwickelten Formel errechnet wird, aufgezeigt. Die Einfärbung der einzelnen Zellen erfolgt dabei gemäß des Vorteilhaftigkeitskriteriums x (s.o. Abschnitt „Weiterentwicklung des ausgewählten Investitionsrechnungsverfahren“).

ADS-B Vergleich
52 Innovation im Fokus 2 – 2018
Dabei gilt, dass die Investitionsalternative ADS-B umso vorteilhafter ist, je grüner die Zelle eingefärbt ist. Ist eine Zelle rot eingefärbt, liegt eine Vorteilhaftigkeit für die Investitionsalternative Mode S vor. Ist der Wert in einer Zelle genau 1, liegt für keine der beiden Investitionsalternativen eine Vorteilhaftigkeit vor. Die auf diese Weise entstandene Matrix zeigt die Abhängigkeit der Wirtschaftlichkeit vom Umfang der einzusparenden Mode S Radaranlagen und der aufzubauenden ADS-B Bodenstationen anschaulich auf.
Fazit & Ausblick
Mit Hilfe der strukturierten Vorgehensweise ist es gelungen, den Nachweis zu erbringen, dass durch die Nutzung von ADS-B grundsätzlich finanzielle Chancen genutzt werden können und das obwohl die erzielten Einsparungen zu einem Teil für die Erstellung der notwendigen Infrastruktur verwendet werden müssen. Ausschlaggebend dafür ist das geplante Vorgehen zur Einführung von ADS-B, das hauptsächlich auf den drei folgenden Punkten aufbaut:
Durch den flächendeckenden Einsatz von ADS-B kann die Substitution eines der drei Mode S Layer erfolgen.
Die Nutzung des Multilaterationssystems PAM Frankfurt mit 34 Empfangsstationen und einer Ausdehnung von 80 mal 120 NM als Wegbereiter zur Einführung von ADS-B.
Die Verwendung von bereits betrieblich genutzten Standorten der Kommunikations-, Navigations- und Ortungssysteme senkt die Einstiegshürde in die Technologie ADS-B.
Um ein geeignetes Investitionsrechnungsverfahren für die vorliegende Problemstellung auszuwählen sind die klassischen, herkömmlichen Investitionsrechnungs-verfahren mit Hilfe von Kriterien bewertet worden.
Aufgrund dieser Bewertung erfolgte die Auswahl der Kostenvergleichsrechnung als am besten geeignete Methode. Ausschlaggebend dafür war zum einen die Ermittlung der Vorteilhaftigkeit lediglich anhand der Kosten der Investitionsalternativen und zum anderen das der Kostenvergleichsrechnung zugrundeliegende Minimalprinzip, nämlich die Zielerreichung mit möglichst geringen Mitteln.
Anschließend ist eine auf den Anwendungsfall zugeschnittene Investitionsrechnung entwickelt worden, die mit allen Parametern ausgestattet ist, um die
wichtigsten Faktoren der vorliegenden Investitionsentscheidung zu erfassen. Damit kann ein aussagekräftiges Ergebnis erzielt werden, ohne dass ein kompliziertes Verfahren, welches weitere Unsicherheiten berücksichtigt, zur Anwendung kommt. Grundsätzlich ist die erarbeitete Kostenvergleichsrechnungsmethode für alle Anwendungsfälle geeignet, in denen zwei oder mehr Investitionsalternativen nach dem Minimalprinzip verglichen werden. Im Flugsicherungsumfeld findet das Minimalprinzip Anwendung, weil eine Steigerung der Einnahmen vom Luftverkehrsaufkommen abhängig ist. Aus diesem Grund eignet sich das erarbeitete Investitionsrechnungsverfahren besonders für Fragestellungen in diesem Umfeld. Da aber ausschließlich die wirtschaftlichen Aspekte der betrachteten Investitionsalternativen untersucht werden, sollte das Investitionsrechnungsverfahren niemals allein zur Entscheidungsfindung dienen, sondern immer mit einem qualitativen Vergleich der Investitionsalternativen kombiniert werden.
Wie für alle empirischen Modelle ist das Hauptproblem für Investitionsrechnungsverfahren die Datenbe-schaffung. Zur Ermittlung der Kosten der betrachteten Investitionsalternativen ist auf die Datenerfassung aus dem Inbetriebhaltungsprozess bestehender flugsicher-ungstechnischer Einrichtungen zurückgegriffen worden. Dadurch sind die ermittelten Kosten wesentlich genauer
Abb. 1: Vergleich der Vorteilhaftigkeit der Investitionsalternativen (x<1: Vorteilhaftigkeit ADS-B Bodenstationen, x=1:
Vorteilhaftigkeit gleich, x>1 Vorteilhaftigkeit Mode S)
35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60
3 0,95 0,98 1,01 1,03 1,06 1,09 1,11 1,14 1,16 1,19 1,22 1,24 1,27 1,30 1,32 1,35 1,37 1,40 1,43 1,45 1,48 1,51 1,53 1,56 1,58 1,61
4 0,72 0,74 0,76 0,78 0,79 0,81 0,83 0,85 0,87 0,89 0,91 0,93 0,95 0,97 0,99 1,01 1,03 1,05 1,07 1,09 1,11 1,13 1,15 1,17 1,19 1,21
5 0,57 0,59 0,60 0,62 0,64 0,65 0,67 0,68 0,70 0,71 0,73 0,75 0,76 0,78 0,79 0,81 0,82 0,84 0,86 0,87 0,89 0,90 0,92 0,93 0,95 0,97
6 0,48 0,49 0,50 0,52 0,53 0,54 0,56 0,57 0,58 0,60 0,61 0,62 0,63 0,65 0,66 0,67 0,69 0,70 0,71 0,73 0,74 0,75 0,77 0,78 0,79 0,81
7 0,41 0,42 0,43 0,44 0,45 0,47 0,48 0,49 0,50 0,51 0,52 0,53 0,54 0,56 0,57 0,58 0,59 0,60 0,61 0,62 0,63 0,65 0,66 0,67 0,68 0,69
Rad
ara
nla
gen
ADS-B EmpfangsstationenAnzahl
an

ADS-B Vergleich
Innovation im Fokus 2 – 2018 53
als eine Schätzung. Die so erhobenen Informationen bieten eine ausreichend gute Qualität, sodass aufgrund dieser umfangreichen Datenbasis die ermittelten Kosten als Grundlage für ein Investitionsrechnungsverfahren verwendbar sind.
Als Teilergebnis ist ermittelt worden, dass die maximale Einsparung von sieben Radaranlagen erreicht werden kann. Im Hinblick auf zukünftige Modernisierungsprogramme und den dann benötigten Reserve- und Ausweichstandorten erscheint es sinnvoll, nicht alle möglichen Einsparungen zu realisieren. Daher erscheint die Frage, wieviel Radaranlagen tatsächlich eingespart werden können, vielmehr eine strategisch-politische als eine rein technisch-wirtschaftliche Fragestellung zu sein. Dieser Umstand wird berücksichtig, indem der Zusammenhang zwischen der Anzahl an eingesparten Radaranlagen und der Wirtschaftlichkeit der Investitionsalternativen aufgezeigt worden ist.
Mit der ausgewählten und weiterentwickelten Investitionsrechnungsmethode ist lediglich der Zielzustand der beiden Investitionsalternativen verglichen worden. Um ein vollständiges Bild der wirtschaftlichen Aspekte der Investition zu bekommen, muss jedoch auch der Zeitraum der Transition betrachtet werden, da vor allem Zinseffekte (Diskontierung) das Ergebnis wesentlich beeinflussen. Dafür wird derzeit eine Wirtschaftlichkeitsbetrachtung gemäß der DFS Projekt- und Investitionsrichtlinie durchgeführt. Grundlage dafür sind die für die hier beschriebene Kostenvergleichsrechnung erhobenen Daten der Investitionsalternativen.
Literaturverzeichnis
Austrocontrol (2018). Von Ein Luftraum für Europa. URL abgerufen am 25.01.2018 von https://www.austrocontrol.at/jart/prj3/austro_control/main.jart?rel=de&content-id=1311169872605
Carl, N., Fiedler, R., Jórasz, W., & Kiesel, M. (2017). BWL kompakt und verständlich. Würzburg: Springer Vieweg.
DFS (2018). Von Deutsche Flugsicherung bleibt auf Erfolgskurs. URL abgerufen am 25.01.2018 von https://www.dfs.de/dfs_homepage/de/Presse/Pressemitteilungen/2017/25.04.2017.-%20Deutsche%20Flugsicherung%20bleibt%20auf%20Erfolgskurs/
DFS (2018). Von Europa Performance. URL abgerufen am 25.01.2018 von http://www.dfs.de/dfs_homepage/de/Europa/Performance/
Pietsch, P. D. (2003). Bewertung von Informations- und Kommunikationssystemen. Berlin: Erich Schmidt Verlag.
Poggensee, K. (2014). Investitionsrechnung. Kiel: Springer Gabler.
Schuster, T., & Collenberg, L. R. (2017). Investitionsrechnung. Mannheim: Springer Gabler.

54 Innovation im Fokus 2 – 2018

Impressum
Innovation im Fokus 2 – 2018 55
Innnovation im Fokus Informationen zu Forschung, Entwicklung und Validierung
Innnovation im Fokus erscheint halbjährlich und beschäftigt sich bevorzugt mit Informationen zu Forschung, Entwicklung und Validierung mit Beteiligung DFS Deutsche Flugsicherung GmbH. Diese Ausgabe ist elektronisch im Internet (www.dfs.de > Flugsicherung > F&E > Service) sowie über das DFS Intranet verfügbar. 80 Exemplare werden in gedruckter Form aufgelegt.
Wie auch der Vorgänger-Zeitschrift „TE im Fokus“ wurde dieser Zeitschrift von der Deutschen Bibliothek eine ISSN (International Standard Serial Number) zugeteilt:
Printversion: ISSN 2198-8951 (vormals: 1861-6364)
Internet-Version: ISSN 2198-896X (vormals: 1861-6372)
Datum dieser Ausgabe: 30.01.2019
DISCLAIMER
Alle hier erwähnten Warenzeichen sind Eigentum ihrer jeweiligen Besitzer. Warenzeichen werden nicht ausdrücklich als solche gekennzeichnet. Aus dem Fehlen von Urheber- oder Markenrechtskennzeichen darf jedoch nicht geschlossen werden, dass es sich um einen nicht geschützten Namen oder um eine nicht geschützte Marke handelt.
COPYRIGHT
Dieses Werk einschließlich aller seiner Teile ist urheberrechtlich geschützt. Jede Verwendung außerhalb der Grenzen des Urheberrechtsgesetzes ist ohne Zustimmung der DFS Deutsche Flugsicherung GmbH unzulässig und wird zivil- und strafrechtlich verfolgt. Das gilt insbesondere für Vervielfältigungen, Übersetzungen, Mikroverfilmungen und die Einspeicherung und Verarbeitung in elektronischen Systemen.
Copyright 2019 by DFS Deutsche Flugsicherung GmbH - Weitergabe sowie Vervielfältigung dieser Unterlage, Verwertung und Mitteilung ihres Inhalts nicht gestattet, soweit nicht ausdrücklich zugestanden. Zuwiderhandlungen verpflichten zu Schadensersatz. Alle Rechte vorbehalten, insbesondere für den Fall der Patenterteilung oder GM-Eintrag.
Impressum
Innovation im Fokus
Informationen zu Forschung, Entwicklung und Validierung
Herausgeber:
DFS Deutsche Flugsicherung GmbH
Günter Achatz, Ralf Bertsch, Bereichsleitung Planung & Innovation;
Redaktion:
Dr. Konrad Hagemann Tel. +49 (0)6103 707 5745 E-Mail: [email protected]
Stefan Tenoort Tel. +49 (0)6103 707 5769 E-Mail: stefan.tenoort @dfs.de
Dr. Morten Grandt Tel. +49 (0)6103 707 1139 E-Mail: [email protected]
Oliver Haßa Tel. +49 (0)6103 707 5762 E-Mail: [email protected]
Anschrift der Redaktion:
DFS Deutsche Flugsicherung GmbH Redaktion Innovation im Fokus Am DFS-Campus 5 63225 Langen E-Mail: [email protected]
Nachdruck nur mit Genehmigung.