Interfaz paralelo USP-PI - schmersal.net · Los datos técnicos son los más actuales que se...
30
Interfaz paralelo USP-PI Manual de instrucciones
-
Upload
nguyendiep -
Category
Documents
-
view
216 -
download
0
Transcript of Interfaz paralelo USP-PI - schmersal.net · Los datos técnicos son los más actuales que se...

Interfaz paralelo USP-PI
Manual de instrucciones
K. A. Schmersal GmbH
Industrielle Sicherheitsschaltsysteme
Möddinghofe 30
D - 42279 Wuppertal
Postfach 24 02 63
D - 42232 Wuppertal
Telefon +49 - (0)2 02 - 64 74 - 0
Telefax +49 - (0)2 02 - 64 74 - 100
E-Mail [email protected]
Internet www.schmersal.com ????
? /
????
/ 0
1.20
07 /
Tei
le-N
r. ??
????
?? /
BZ-
Nr.
????
????
???
/ A
usga
be ?
?
3
Interfaz paralelo USP-PI
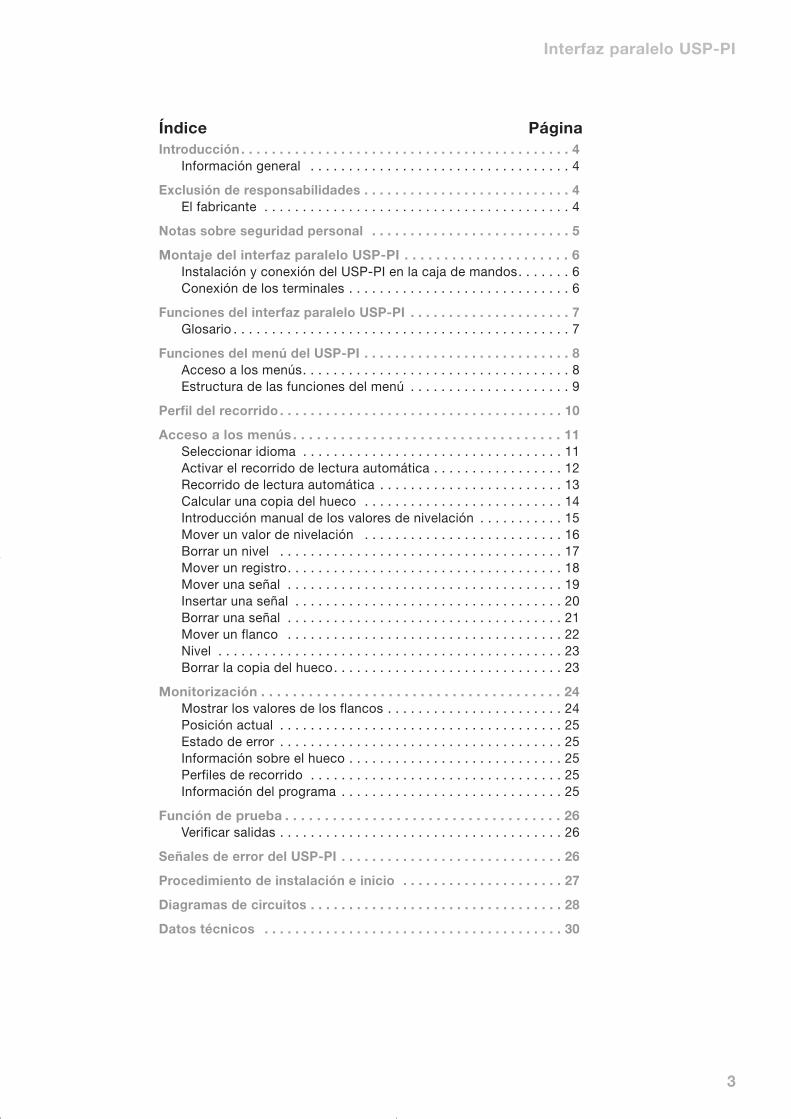
Índice PáginaIntroducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
Información general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
Exclusión de responsabilidades . . . . . . . . . . . . . . . . . . . . . . . . . . . 4El fabricante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
Notas sobre seguridad personal . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Montaje del interfaz paralelo USP-PI . . . . . . . . . . . . . . . . . . . . . 6Instalación y conexión del USP-PI en la caja de mandos. . . . . . . 6Conexión de los terminales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Funciones del interfaz paralelo USP-PI . . . . . . . . . . . . . . . . . . . . . 7Glosario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Funciones del menú del USP-PI . . . . . . . . . . . . . . . . . . . . . . . . . . . 8Acceso a los menús. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8Estructura de las funciones del menú . . . . . . . . . . . . . . . . . . . . . 9
Perfil del recorrido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Acceso a los menús . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11Seleccionar idioma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11Activar el recorrido de lectura automática . . . . . . . . . . . . . . . . . 12Recorrido de lectura automática . . . . . . . . . . . . . . . . . . . . . . . . 13Calcular una copia del hueco . . . . . . . . . . . . . . . . . . . . . . . . . . 14Introducción manual de los valores de nivelación . . . . . . . . . . . 15Mover un valor de nivelación . . . . . . . . . . . . . . . . . . . . . . . . . . 16Borrar un nivel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17Mover un registro. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18Mover una señal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19Insertar una señal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20Borrar una señal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21Mover un flanco . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22Nivel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23Borrar la copia del hueco. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Monitorización . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24Mostrar los valores de los flancos . . . . . . . . . . . . . . . . . . . . . . . 24Posición actual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25Estado de error . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25Información sobre el hueco . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25Perfiles de recorrido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25Información del programa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Función de prueba . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26Verificar salidas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Señales de error del USP-PI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Procedimiento de instalación e inicio . . . . . . . . . . . . . . . . . . . . . 27
Diagramas de circuitos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Datos técnicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
USP_PiMontage_ES.qxd 16.07.2007 7:41 Uhr Seite 3
4
Interfaz paralelo USP-PI
Introducción
Información generalEl interfaz paralelo USP-PI incorpora una tecnología muy avanzada. Todas las personas que
instalen u operen el USP deben utilizar este manual de instrucciones.
Es de suma importancia que todos los técnicos, ingenieros y personal de reparación y
mantenimiento dispongan de este manual en todo momento.
Para una operación segura y correcta del sistema, es imprescindible un conocimiento avanzado
de las normativas de seguridad, tanto las básicas como las especiales de los sistemas de
transporte por cinta o cable, y en particular de los ascensores.
El USP-PI sólo debe utilizarse para su finalidad prevista, y se prohíbe expresamente cualquier
cambio o adición al aparato.
Exclusión de responsabilidades
El fabricante no se hace responsable ante el comprador de este producto, ni ante terceros, de los
daños, pérdidas, costes o trabajos ocasionados por accidentes, uso indebido, instalación
incorrecta, modificaciones, reparaciones o adiciones no autorizadas sobre el producto. Asimismo,
en tales casos no será aplicable la garantía.
Los datos técnicos son los más actuales que se disponen. El fabricante no se hace responsable
de los posibles errores, incorrecciones y cambios en el material impreso.
El fabricanteK. A. Schmersal GmbH
Industrielle Sicherheitsschaltsysteme
Möddinghofe 30
D - 42279 Wuppertal
ALEMANIA
Teléfono: +49 - (0)2 02 - 64 74 - 0
Fax: +49 - (0)2 02 - 64 74 - 1 00
Email: [email protected]
Internet: www.schmersal.com
ISi necesita más ejemplares de este manual, pueden solicitarse en esta dirección.
USP_PiMontage_ES.qxd 16.07.2007 7:41 Uhr Seite 4
5
Interfaz paralelo USP-PI
Notas sobre seguridad personal
El presente manual proporciona detalles e información sobre seguridad, importantes y
necesarios para la instalación correcta del USP-PI.
Lea detenidamente la totalidad del manual.
• El mecánico debe conocer la normativa básica de seguridad y prevención de accidentes
laborales y contar con la formación adecuada para la manipulación de ascensores.
• Para las tareas de instalación y mantenimiento deben utilizarse sólo herramientas en perfecto
estado.
• El USP-PI debe conectarse en ausencia de alimentación eléctrica.
• El recorrido de lectura automática sólo puede realizarse en el modo de recorrido de
inspección.
• Durante el recorrido de lectura automática, asegúrese de que no haya nadie en el hueco del
ascensor.
USP_PiMontage_ES.qxd 16.07.2007 7:41 Uhr Seite 5
6
Interfaz paralelo USP-PI
Montaje del interfaz paralelo USP-PI
El módulo de comunicaciones USP-PI funciona como interfaz universal para los
controladores que no puedan procesar la información de posicionamiento serie. Con la
ayuda del USP-PI se simulan las señales de los interruptores magnéticos tipo Reed.
Instalación y conexión del USP-PI en la caja de mandos
El USP-PI está diseñado con una categoría de protección IP 00, por lo que debe
instalarse en una caja de mandos cerrada.
Instale el USP-PI en un espacio disponible y adecuado o en el soporte convencional de
la caja de mandos, donde no pueda ensuciarse. El perfil está diseñado para poder fijar
el aparato a una guía convencional simplemente presionando.
Durante el funcionamiento, los componentes electrónicos pueden calentarse.
¡No los toque ni los cubra!
Conecte el USP-PI tal y como se indica en el diagrama de circuitos del final de este manual.
USP_PiMontage_ES.qxd 16.07.2007 7:41 Uhr Seite 6
7
Interfaz paralelo USP-PI
Funciones del interfaz paralelo USP-PI
El módulo de comunicaciones USP-PI sirve para introducir y modificar todos los parámetros
necesarios para el cálculo de los puntos de conmutación en una copia del hueco del ascensor.
Además de la posibilidad de introducir manualmente los puntos de conmutación, el módulo
USP-PI permite la lectura automática de los valores de nivel mediante el botón de lectura
automática y el recorrido de lectura automática asociado. Para el cálculo de los puntos de
conmutación se emplea el denominado perfil del recorrido.
GlosarioValor de nivelación: Posición en la que el suelo de la cabina del ascensor y el suelo de un
piso concreto están el uno a ras del otro.
Nivel: Todas las señales y flancos de los interruptores que corresponden a un
piso en concreto (nivel).
Registro: Cada salida del USP-PI, con todas sus señales y flancos, forma un
registro.
Señal: Corresponde a una sola señal de conmutación de una salida o registro,
formada por su flanco de activación y su flanco de desactivación. Esta
señal corresponde a un impulso en la salida de un interruptor magnético
tipo Reed en un nivel específico.
Flanco: Punto de conmutación de una salida del USP-PI, que corresponde al
punto de conmutación de un interruptor magnético tipo Reed. Se
distinguen dos flancos, ascendentes y descendentes. La zona situada
entre los flancos se denomina señal.
Valor de posición: Información longitudinal del sistema USP, en pasos de un milímetro, que
corresponde a la distancia entre el transmisor y el receptor.
Copia del hueco: Ilustración de la ubicación de todos los interruptores en el hueco del
ascensor. Los puntos de conmutación de los interruptores se almacenan
en forma de tabla en el USP-PI.
Copiado del hueco: Proceso de conmutación de las salidas según los puntos de
conmutación preprogramados correspondientes. Los puntos de
conmutación se determinan a partir de la copia del hueco.
Perfil de recorrido: Descripción de la disposición de los interruptores en el hueco del
ascensor, que no se ve afectada por el número de plantas, y que sirve
de base al USP para el cálculo de los valores de nivelación de los pisos.
USP_PiMontage_ES.qxd 16.07.2007 7:41 Uhr Seite 7
8
Interfaz paralelo USP-PI
Funciones del menú del USP-PI
El módulo de comunicaciones USP-PI ofrece una amplia gama de funciones que permiten
modificar el cálculo de los puntos de conmutación del perfil de recorrido con la máxima
precisión.
Las numerosas funciones se subdividen en menús y submenús accesibles mediante
botones.
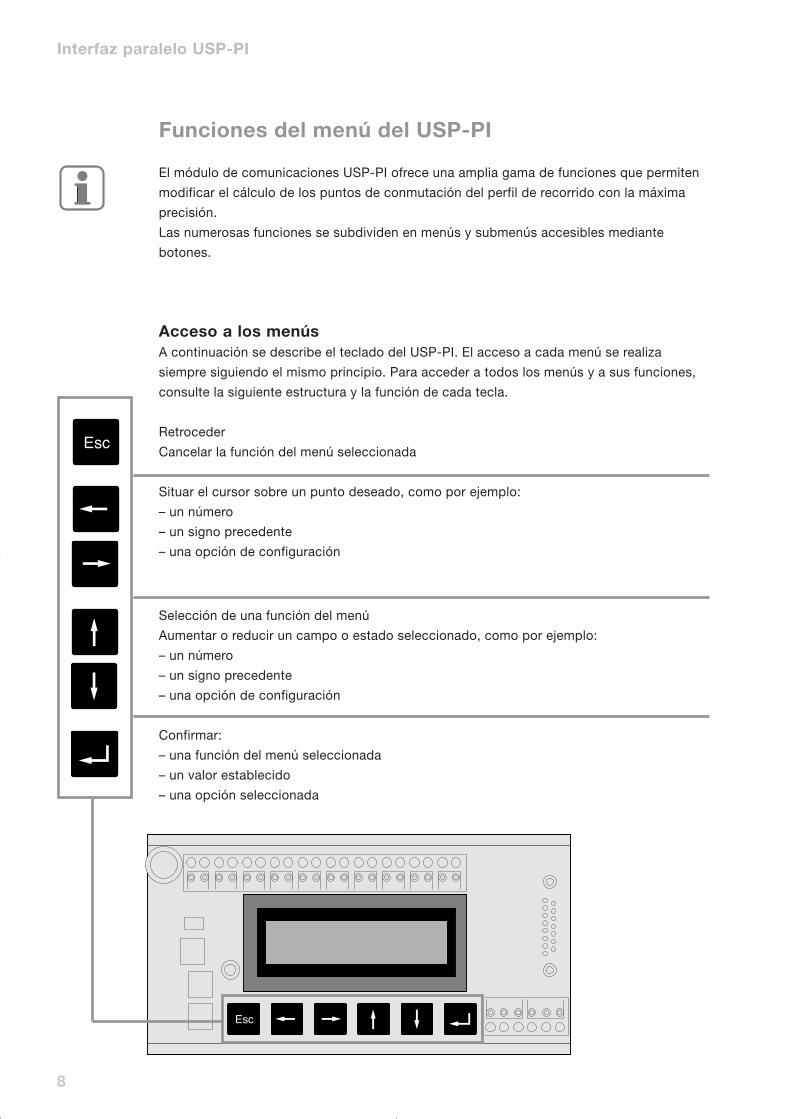
Acceso a los menúsA continuación se describe el teclado del USP-PI. El acceso a cada menú se realiza
siempre siguiendo el mismo principio. Para acceder a todos los menús y a sus funciones,
consulte la siguiente estructura y la función de cada tecla.
Retroceder
Cancelar la función del menú seleccionada
Situar el cursor sobre un punto deseado, como por ejemplo:
– un número
– un signo precedente
– una opción de configuración
Selección de una función del menú
Aumentar o reducir un campo o estado seleccionado, como por ejemplo:
– un número
– un signo precedente
– una opción de configuración
Confirmar:
– una función del menú seleccionada
– un valor establecido
– una opción seleccionada
Esc
Esc
USP_PiMontage_ES.qxd 16.07.2007 7:41 Uhr Seite 8
9
Interfaz paralelo USP-PI
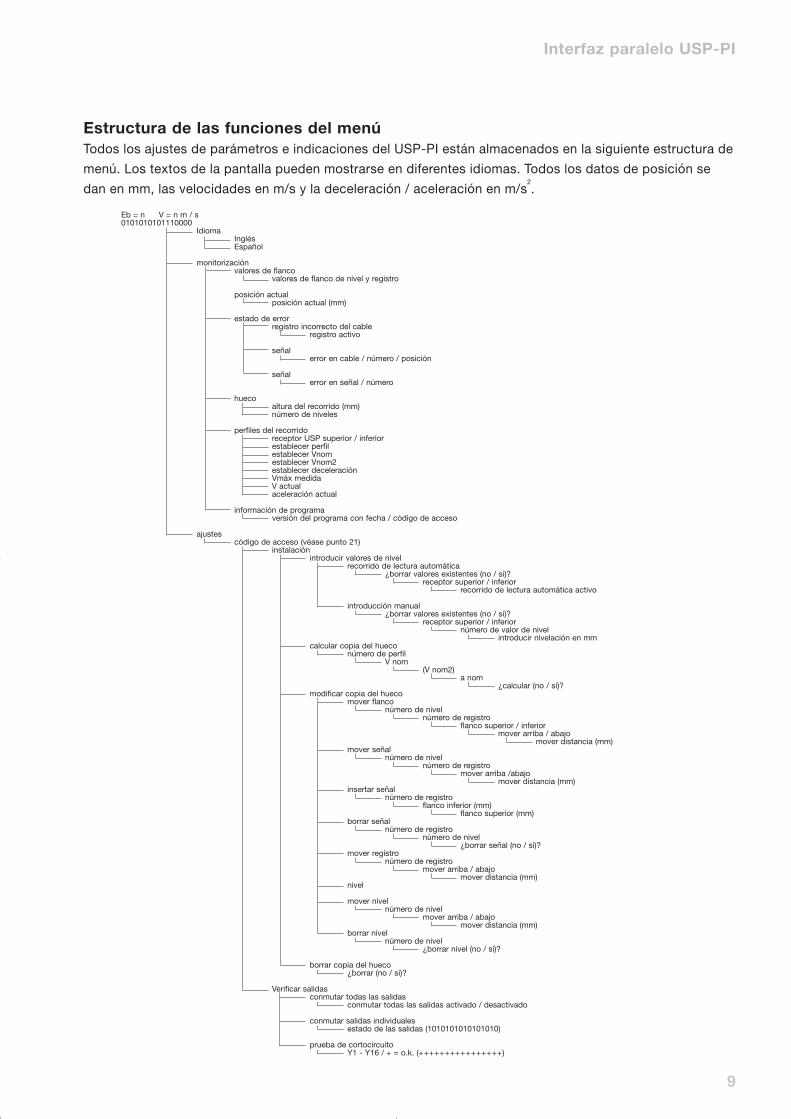
Estructura de las funciones del menúTodos los ajustes de parámetros e indicaciones del USP-PI están almacenados en la siguiente estructura de
menú. Los textos de la pantalla pueden mostrarse en diferentes idiomas. Todos los datos de posición se
dan en mm, las velocidades en m/s y la deceleración / aceleración en m/s2.
Eb = n V = n m / s0101010101110000
IdiomaInglésEspañol
monitorizaciónvalores de flanco
valores de flanco de nivel y registro
posición actualposición actual (mm)
estado de errorregistro incorrecto del cable
registro activo
señalerror en cable / número / posición
señalerror en señal / número
huecoaltura del recorrido (mm)número de niveles
perfiles del recorridoreceptor USP superior / inferiorestablecer perfilestablecer Vnomestablecer Vnom2establecer deceleraciónVmáx medidaV actualaceleración actual
información de programaversión del programa con fecha / código de acceso
ajustescódigo de acceso (véase punto 21)
instalaciónintroducir valores de nivel
recorrido de lectura automática¿borrar valores existentes (no / sí)?
receptor superior / inferiorrecorrido de lectura automática activo
introducción manual¿borrar valores existentes (no / sí)?
receptor superior / inferiornúmero de valor de nivel
introducir nivelación en mmcalcular copia del hueco
número de perfilV nom
(V nom2)a nom
¿calcular (no / sí)?modificar copia del hueco
mover flanconúmero de nivel
número de registroflanco superior / inferior
mover arriba / abajomover distancia (mm)
mover señalnúmero de nivel
número de registromover arriba /abajo
mover distancia (mm)insertar señal
número de registroflanco inferior (mm)
flanco superior (mm)borrar señal
número de registronúmero de nivel
¿borrar señal (no / sí)?mover registro
número de registromover arriba / abajo
mover distancia (mm)nivel
mover nivelnúmero de nivel
mover arriba / abajomover distancia (mm)
borrar nivelnúmero de nivel
¿borrar nivel (no / sí)?
borrar copia del hueco¿borrar (no / sí)?
Verificar salidasconmutar todas las salidas
conmutar todas las salidas activado / desactivado
conmutar salidas individualesestado de las salidas (1010101010101010)
prueba de cortocircuitoY1 - Y16 / + = o.k. (++++++++++++++++)
USP_PiMontage_ES.qxd 16.07.2007 7:41 Uhr Seite 9
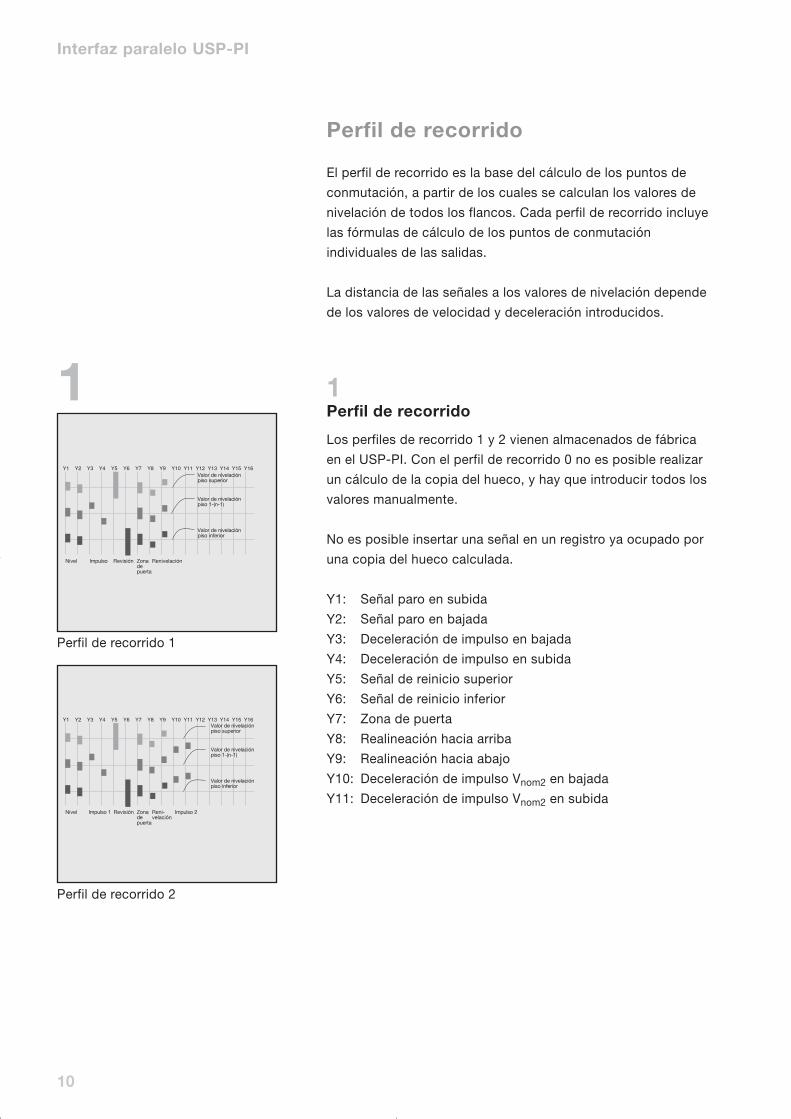
Perfil de recorrido
El perfil de recorrido es la base del cálculo de los puntos de
conmutación, a partir de los cuales se calculan los valores de
nivelación de todos los flancos. Cada perfil de recorrido incluye
las fórmulas de cálculo de los puntos de conmutación
individuales de las salidas.
La distancia de las señales a los valores de nivelación depende
de los valores de velocidad y deceleración introducidos.
1Perfil de recorrido
Los perfiles de recorrido 1 y 2 vienen almacenados de fábrica
en el USP-PI. Con el perfil de recorrido 0 no es posible realizar
un cálculo de la copia del hueco, y hay que introducir todos los
valores manualmente.
No es posible insertar una señal en un registro ya ocupado por
una copia del hueco calculada.
Y1: Señal paro en subida
Y2: Señal paro en bajada
Y3: Deceleración de impulso en bajada
Y4: Deceleración de impulso en subida
Y5: Señal de reinicio superior
Y6: Señal de reinicio inferior
Y7: Zona de puerta
Y8: Realineación hacia arriba
Y9: Realineación hacia abajo
Y10: Deceleración de impulso Vnom2 en bajada
Y11: Deceleración de impulso Vnom2 en subida
10
Interfaz paralelo USP-PI
1
Perfil de recorrido 1
Perfil de recorrido 2
Y1 Y2 Y3 Y4 Y5 Y6 Y7 Y8 Y9 Y10 Y11 Y12 Y13 Y14 Y15 Y16
Y1 Y2 Y3 Y4 Y5 Y6 Y7 Y8 Y9 Y10 Y11 Y12 Y13 Y14 Y15 Y16
Valor de nivelación piso superior
Valor de nivelación piso inferior
Nivel Impulso 1 Revisión Zonadepuerta
Reni-velación
Valor de nivelación piso 1-(n-1)
Valor de nivelación piso superior
Valor de nivelación piso inferior
Valor de nivelación piso 1-(n-1)
Impulso 2
Nivel Impulso Revisión Zonadepuerta
Renivelación
USP_PiMontage_ES.qxd 16.07.2007 7:41 Uhr Seite 10
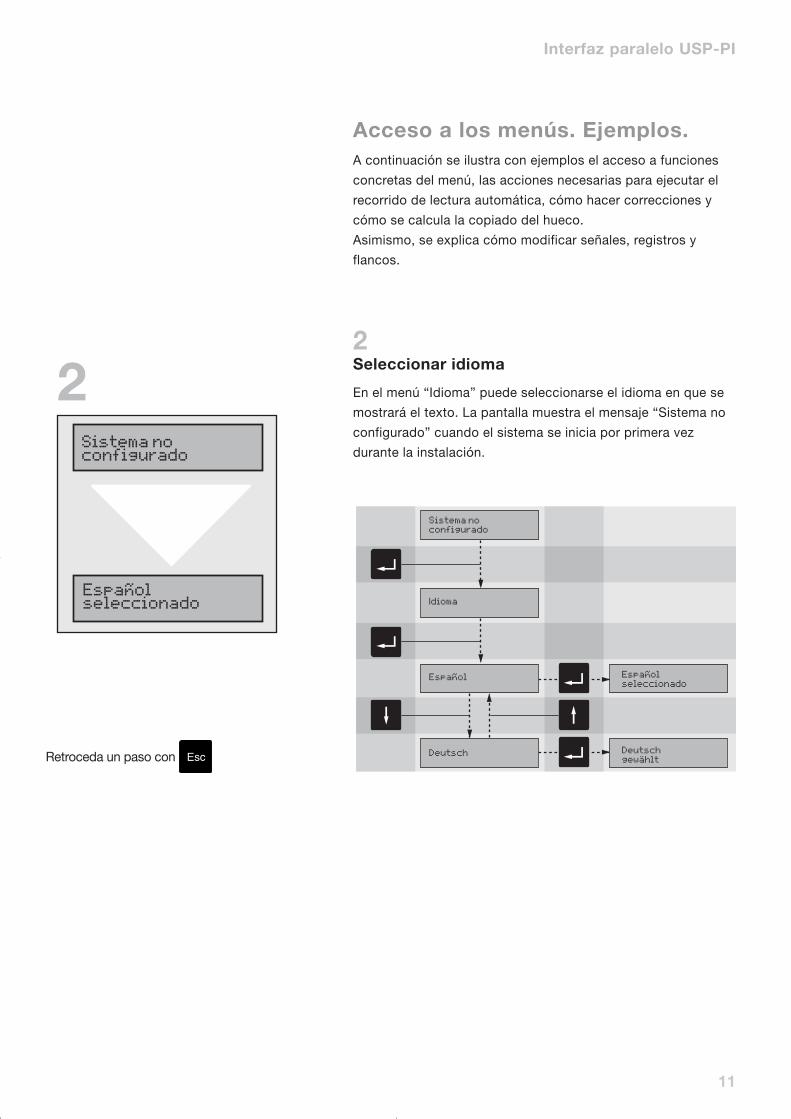
Acceso a los menús. Ejemplos.A continuación se ilustra con ejemplos el acceso a funciones
concretas del menú, las acciones necesarias para ejecutar el
recorrido de lectura automática, cómo hacer correcciones y
cómo se calcula la copiado del hueco.
Asimismo, se explica cómo modificar señales, registros y
flancos.
2Seleccionar idioma
En el menú “Idioma” puede seleccionarse el idioma en que se
mostrará el texto. La pantalla muestra el mensaje “Sistema no
configurado” cuando el sistema se inicia por primera vez
durante la instalación.
11
Interfaz paralelo USP-PI
2
EscRetroceda un paso con
Sistema noconfigurado
Españolseleccionado
Sistema no
configurado
Idioma
Español Español
seleccionado
Deutsch Deutsch
gewählt
USP_PiMontage_ES.qxd 16.07.2007 7:41 Uhr Seite 11
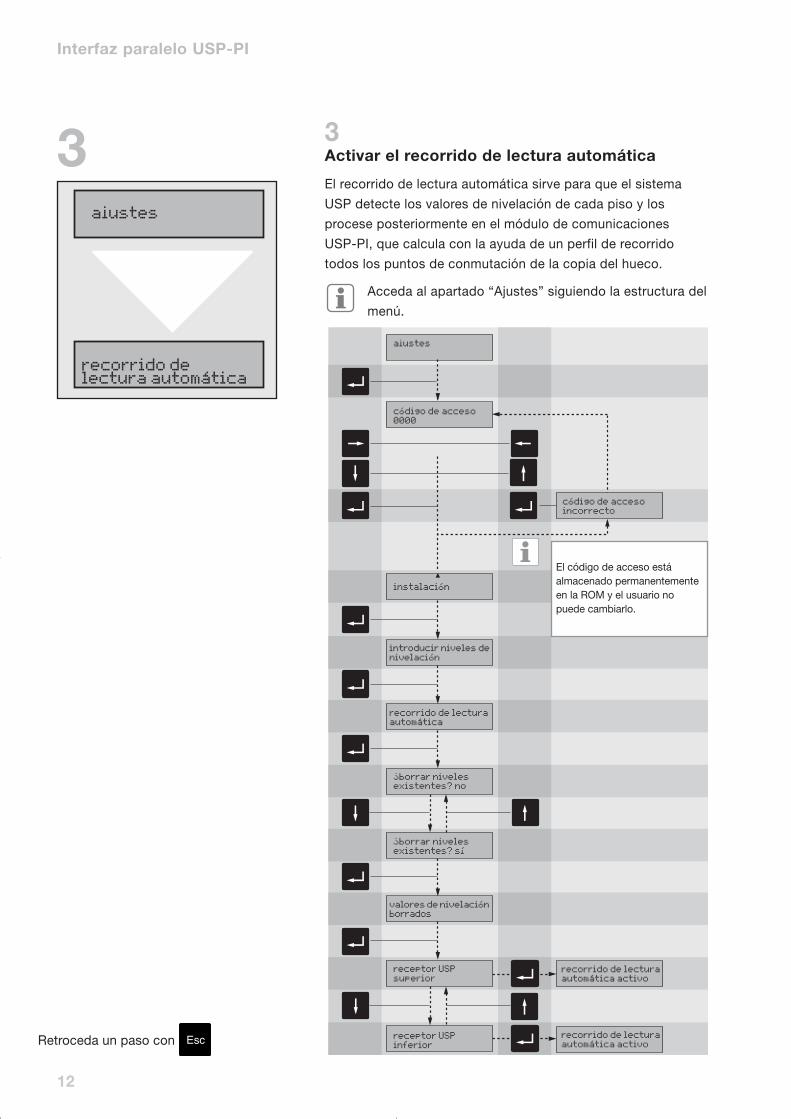
3Activar el recorrido de lectura automática
El recorrido de lectura automática sirve para que el sistema
USP detecte los valores de nivelación de cada piso y los
procese posteriormente en el módulo de comunicaciones
USP-PI, que calcula con la ayuda de un perfil de recorrido
todos los puntos de conmutación de la copia del hueco.
Acceda al apartado “Ajustes” siguiendo la estructura del
menú.
12
Interfaz paralelo USP-PI
3
EscRetroceda un paso con
El código de acceso estáalmacenado permanentementeen la ROM y el usuario nopuede cambiarlo.
ajustes
recorrido delectura automática
ajustes
código de acceso
0000
código de acceso
incorrecto
instalación
introducir niveles de
nivelación
recorrido de lectura
automática
¿borrar niveles
existentes? no
¿borrar niveles
existentes? sí
valores de nivelación
borrados
receptor USP
superior
recorrido de lectura
automática activo
recorrido de lectura
automática activo
receptor USP
inferior
USP_PiMontage_ES.qxd 16.07.2007 7:41 Uhr Seite 12
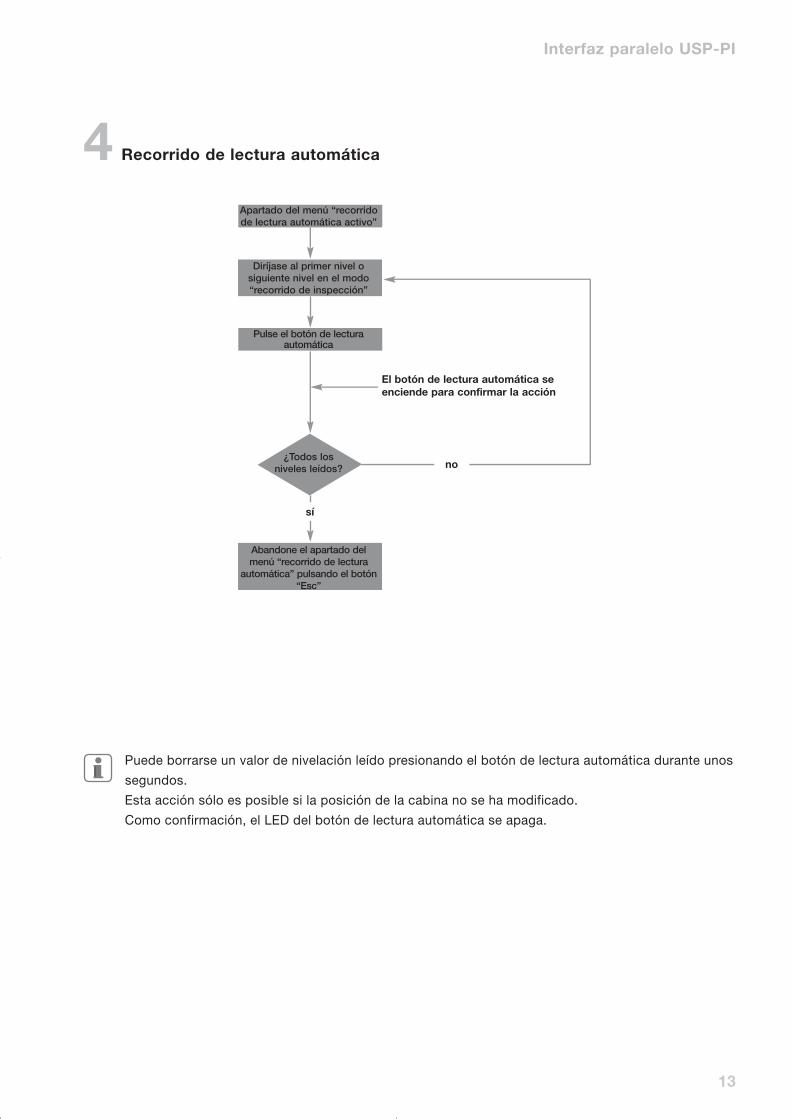
4 Recorrido de lectura automática
Puede borrarse un valor de nivelación leído presionando el botón de lectura automática durante unos
segundos.
Esta acción sólo es posible si la posición de la cabina no se ha modificado.
Como confirmación, el LED del botón de lectura automática se apaga.
13
Interfaz paralelo USP-PI
Apartado del menú “recorridode lectura automática activo”
Diríjase al primer nivel osiguiente nivel en el modo“recorrido de inspección”
El botón de lectura automática seenciende para confirmar la acción
Pulse el botón de lecturaautomática
¿Todos losniveles leídos? no
sí
Abandone el apartado del menú “recorrido de lectura
automática” pulsando el botón“Esc”
USP_PiMontage_ES.qxd 16.07.2007 7:41 Uhr Seite 13
14
Interfaz paralelo USP-PI
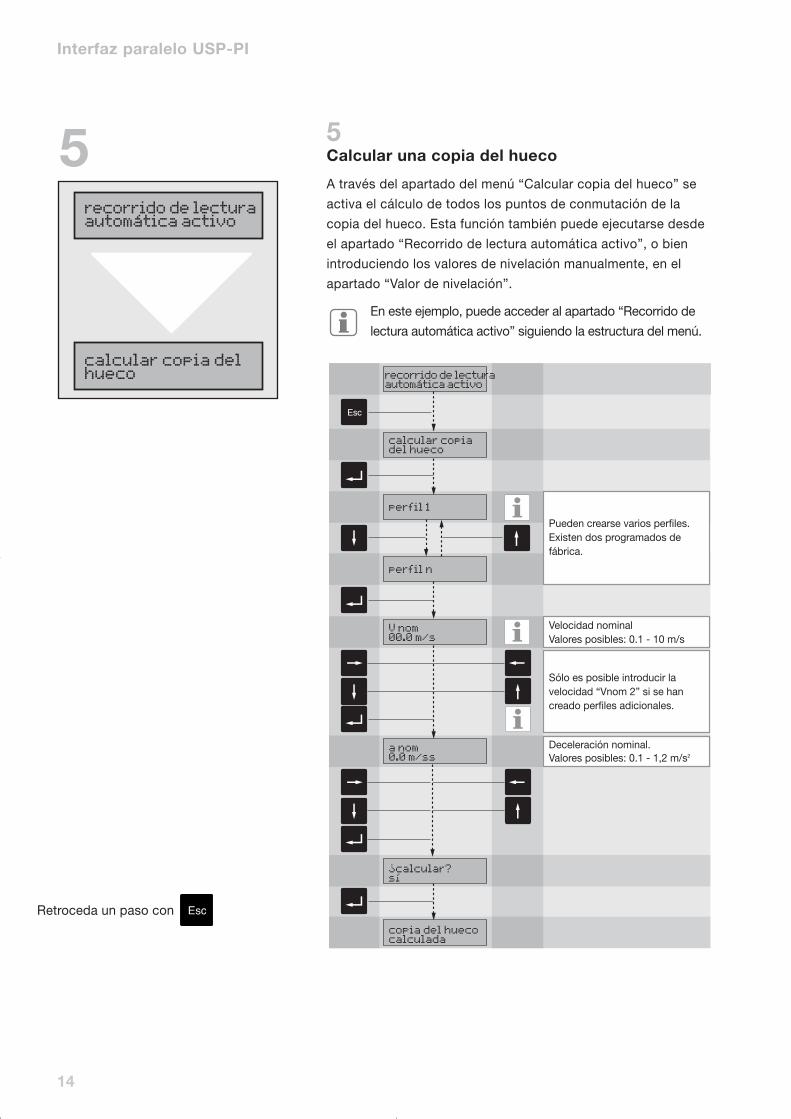
5Calcular una copia del hueco
A través del apartado del menú “Calcular copia del hueco” se
activa el cálculo de todos los puntos de conmutación de la
copia del hueco. Esta función también puede ejecutarse desde
el apartado “Recorrido de lectura automática activo”, o bien
introduciendo los valores de nivelación manualmente, en el
apartado “Valor de nivelación”.
En este ejemplo, puede acceder al apartado “Recorrido de
lectura automática activo” siguiendo la estructura del menú.
5
EscRetroceda un paso con
Esc
Pueden crearse varios perfiles.Existen dos programados defábrica.
Sólo es posible introducir lavelocidad “Vnom 2” si se hancreado perfiles adicionales.
Velocidad nominalValores posibles: 0.1 - 10 m/s
Deceleración nominal.Valores posibles: 0.1 - 1,2 m/s2
recorrido de lecturaautomática activo
calcular copiadel hueco
perfil 1
perfil n
V nom00.0 m/s
a nom0.0 m/ss
¿calcular?sí
copia del huecocalculada
recorrido de lecturaautomática activo
calcular copia delhueco
USP_PiMontage_ES.qxd 16.07.2007 7:41 Uhr Seite 14
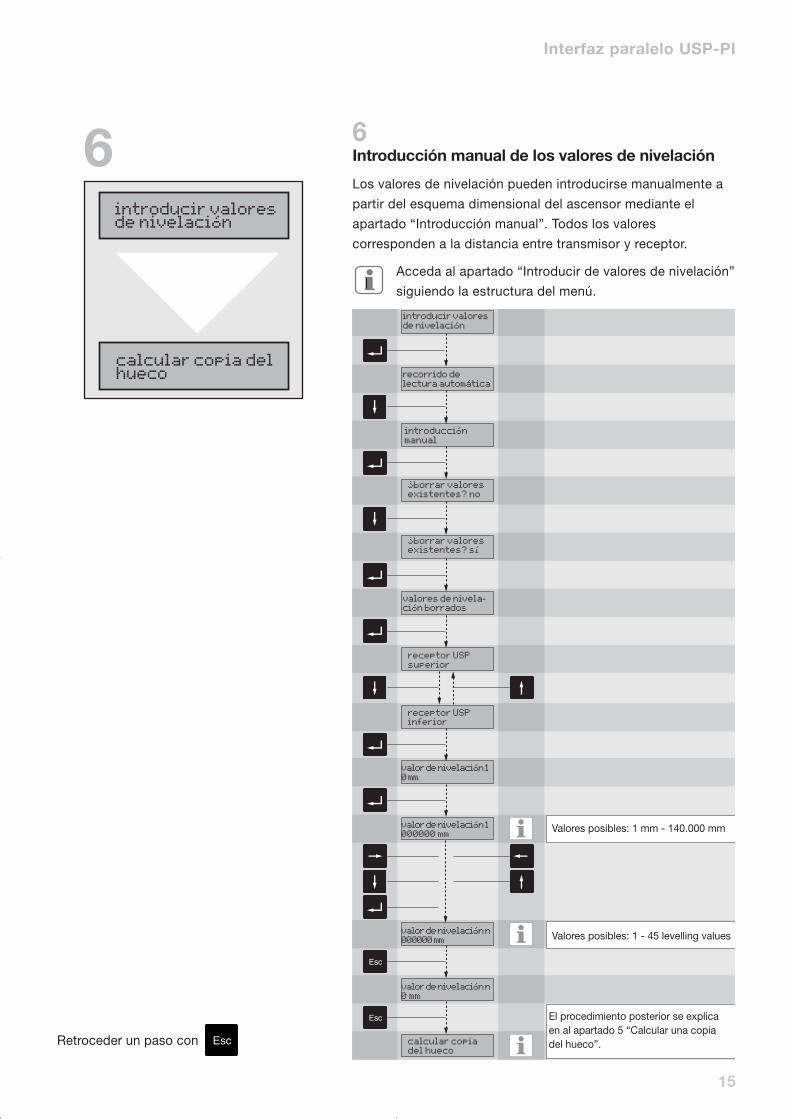
6Introducción manual de los valores de nivelación
Los valores de nivelación pueden introducirse manualmente a
partir del esquema dimensional del ascensor mediante el
apartado “Introducción manual”. Todos los valores
corresponden a la distancia entre transmisor y receptor.
Acceda al apartado “Introducir de valores de nivelación”
siguiendo la estructura del menú.
15
Interfaz paralelo USP-PI
6
EscRetroceder un paso con
Valores posibles: 1 mm - 140.000 mm
Valores posibles: 1 - 45 levelling values
El procedimiento posterior se explicaen al apartado 5 “Calcular una copiadel hueco”.
introducir valoresde nivelación
calcular copia delhueco
introducir valores
de nivelación
recorrido de
lectura automática
introducción
manual
¿borrar valores
existentes? no
¿borrar valores
existentes? sí
valores de nivela-
ción borrados
receptor USP
superior
receptor USP
inferior
valor de nivelación 1
0 mm
valor de nivelación n
0 mm
calcular copia
del hueco
valor de nivelación 1
000000 mm
valor de nivelación n
000000 mm
USP_PiMontage_ES.qxd 16.07.2007 7:41 Uhr Seite 15
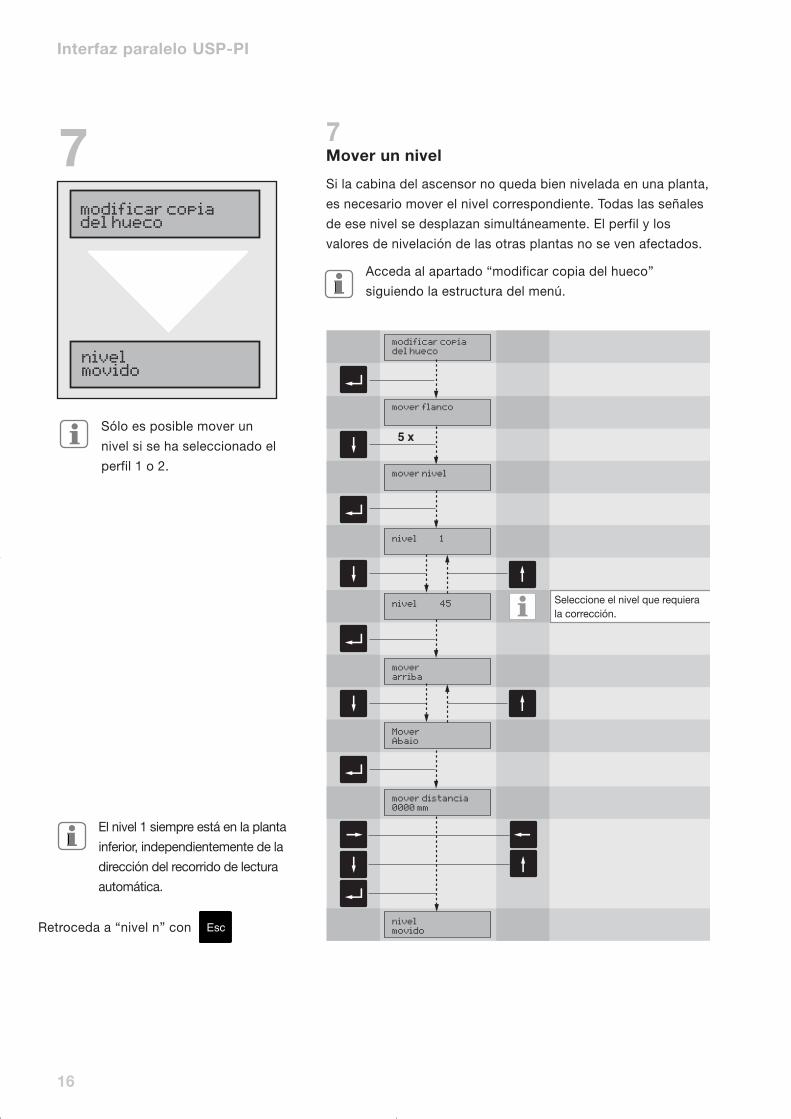
7Mover un nivel
Si la cabina del ascensor no queda bien nivelada en una planta,
es necesario mover el nivel correspondiente. Todas las señales
de ese nivel se desplazan simultáneamente. El perfil y los
valores de nivelación de las otras plantas no se ven afectados.
Acceda al apartado “modificar copia del hueco”
siguiendo la estructura del menú.
16
Interfaz paralelo USP-PI
7
Sólo es posible mover un
nivel si se ha seleccionado el
perfil 1 o 2.
EscRetroceda a “nivel n” con
El nivel 1 siempre está en la planta
inferior, independientemente de la
dirección del recorrido de lectura
automática.
5 x
Seleccione el nivel que requierala corrección.
modificar copiadel hueco
nivel movido
modificar copia
del hueco
mover flanco
mover nivel
nivel 1
nivel 45
mover
arriba
Mover
Abajo
mover distancia
0000 mm
nivel
movido
USP_PiMontage_ES.qxd 16.07.2007 7:41 Uhr Seite 16
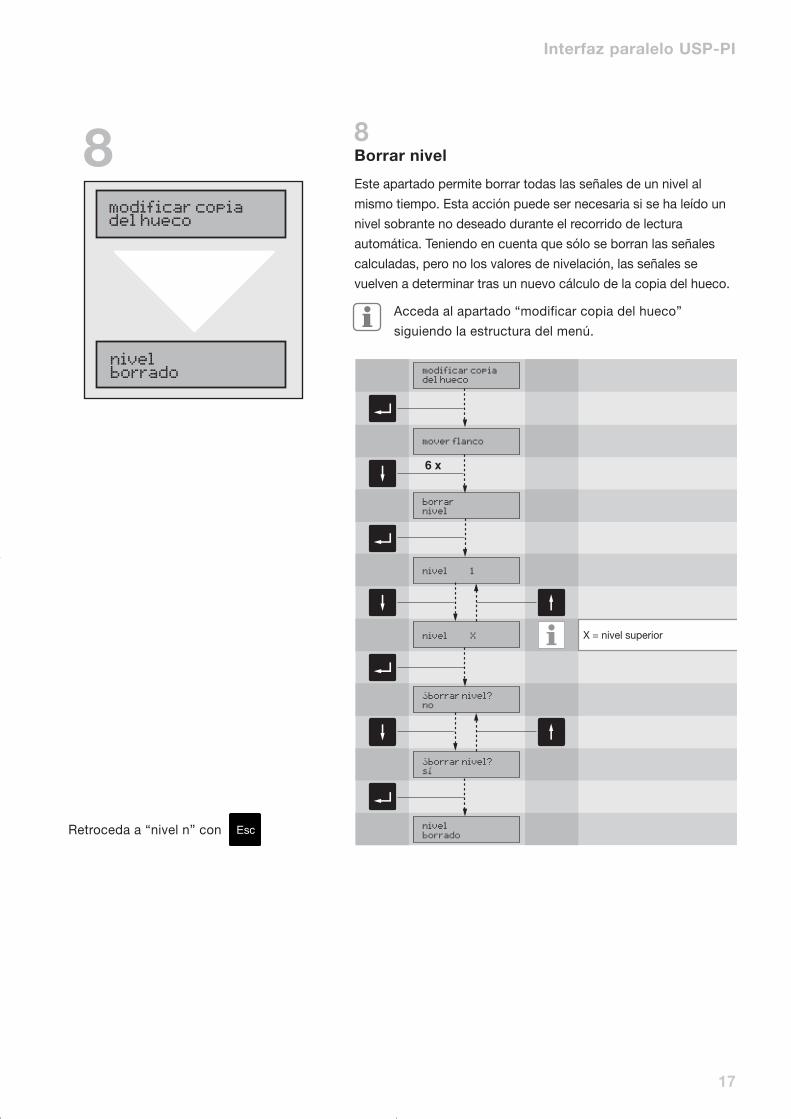
8Borrar nivel
Este apartado permite borrar todas las señales de un nivel al
mismo tiempo. Esta acción puede ser necesaria si se ha leído un
nivel sobrante no deseado durante el recorrido de lectura
automática. Teniendo en cuenta que sólo se borran las señales
calculadas, pero no los valores de nivelación, las señales se
vuelven a determinar tras un nuevo cálculo de la copia del hueco.
Acceda al apartado “modificar copia del hueco”
siguiendo la estructura del menú.
17
Interfaz paralelo USP-PI
8
EscRetroceda a “nivel n” con
6 x
modificar copiadel hueco
nivel borrado modificar copia
del hueco
mover flanco
borrar
nivel
nivel 1
nivel X
¿borrar nivel?
no
¿borrar nivel?
sí
nivel
borrado
X = nivel superior
USP_PiMontage_ES.qxd 16.07.2007 7:41 Uhr Seite 17
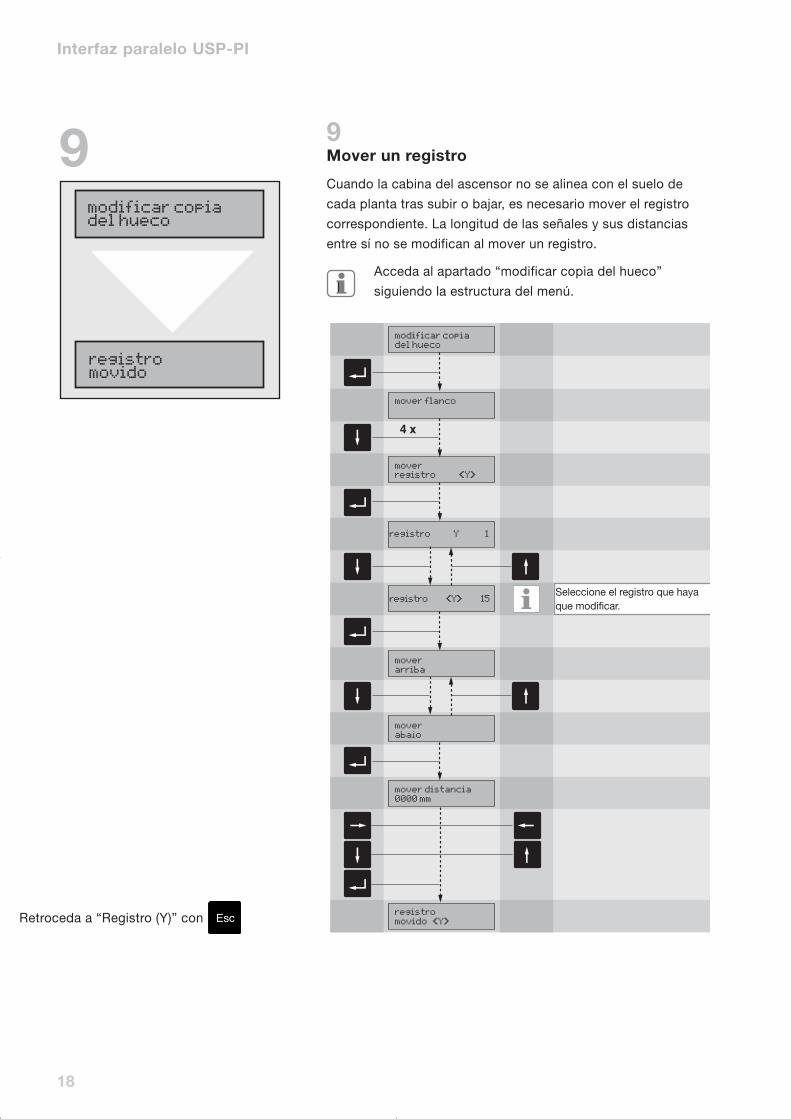
9Mover un registro
Cuando la cabina del ascensor no se alinea con el suelo de
cada planta tras subir o bajar, es necesario mover el registro
correspondiente. La longitud de las señales y sus distancias
entre sí no se modifican al mover un registro.
Acceda al apartado “modificar copia del hueco”
siguiendo la estructura del menú.
18
Interfaz paralelo USP-PI
9
EscRetroceda a “Registro (Y)” con
4 x
Seleccione el registro que hayaque modificar.
modificar copiadel hueco
registro movido
modificar copia
del hueco
mover flanco
mover
registro <Y>
registro Y 1
registro <Y> 15
mover
arriba
mover
abajo
mover distancia
0000 mm
registro
movido <Y>
USP_PiMontage_ES.qxd 16.07.2007 7:41 Uhr Seite 18
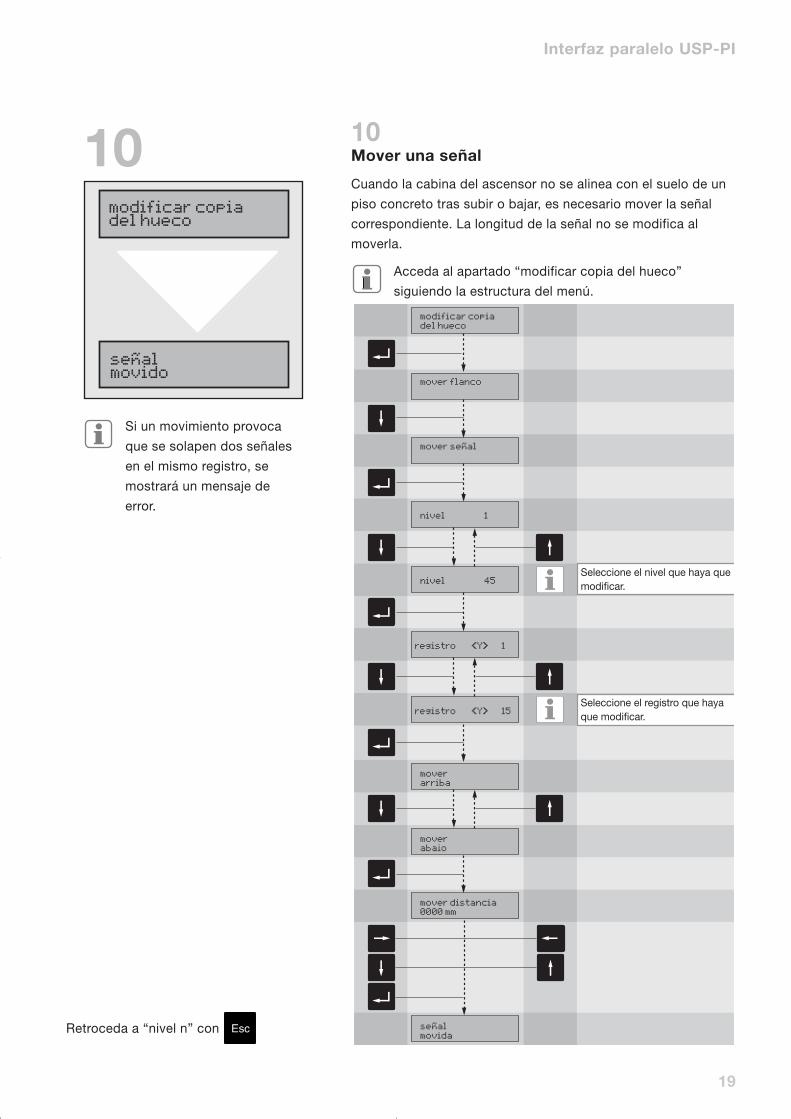
10Mover una señal
Cuando la cabina del ascensor no se alinea con el suelo de un
piso concreto tras subir o bajar, es necesario mover la señal
correspondiente. La longitud de la señal no se modifica al
moverla.
Acceda al apartado “modificar copia del hueco”
siguiendo la estructura del menú.
19
Interfaz paralelo USP-PI
10
Si un movimiento provoca
que se solapen dos señales
en el mismo registro, se
mostrará un mensaje de
error.
EscRetroceda a “nivel n” con
Seleccione el nivel que haya quemodificar.
Seleccione el registro que hayaque modificar.
modificar copiadel hueco
señal movido
modificar copia
del hueco
mover flanco
mover señal
nivel 1
nivel 45
registro <Y> 1
registro <Y> 15
mover
arriba
mover
abajo
mover distancia
0000 mm
señal
movida
USP_PiMontage_ES.qxd 16.07.2007 7:41 Uhr Seite 19
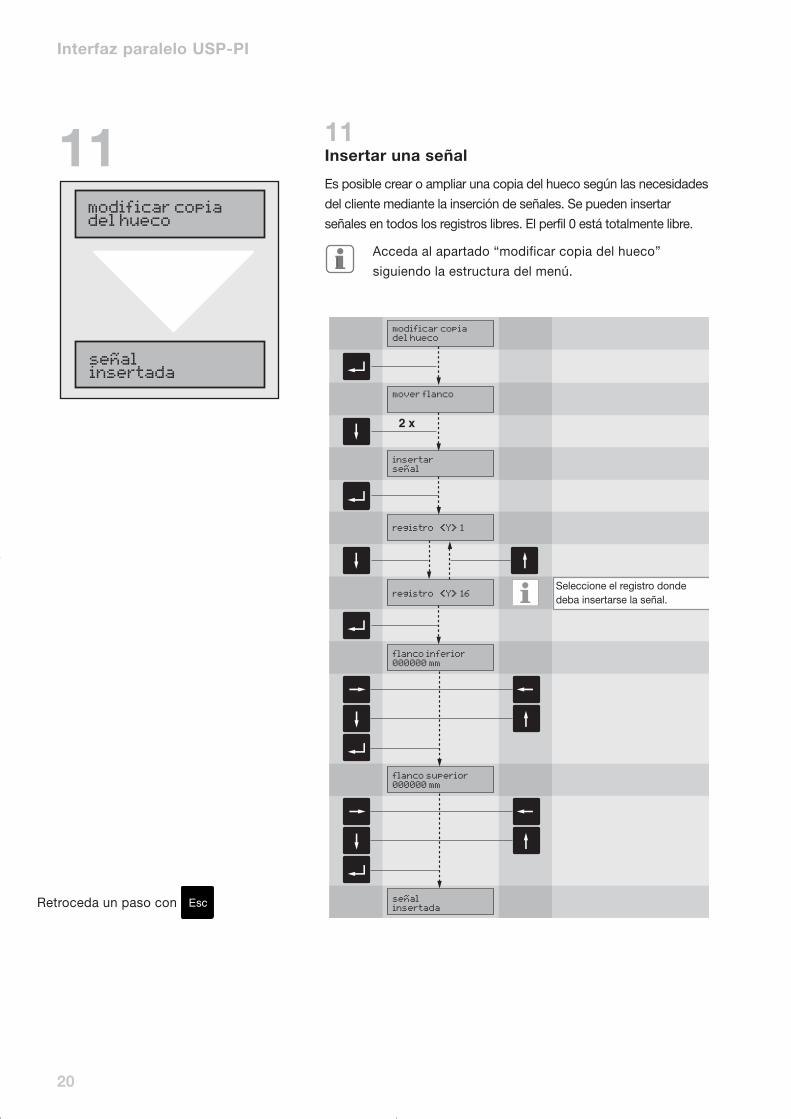
11Insertar una señal
Es posible crear o ampliar una copia del hueco según las necesidades
del cliente mediante la inserción de señales. Se pueden insertar
señales en todos los registros libres. El perfil 0 está totalmente libre.
Acceda al apartado “modificar copia del hueco”
siguiendo la estructura del menú.
20
Interfaz paralelo USP-PI
11
EscRetroceda un paso con
2 x
modificar copiadel hueco
señal insertada
modificar copia
del hueco
mover flanco
insertar
señal
registro <Y> 1
registro <Y> 16
flanco inferior
000000 mm
flanco superior
000000 mm
señal
insertada
Seleccione el registro dondedeba insertarse la señal.
USP_PiMontage_ES.qxd 16.07.2007 7:41 Uhr Seite 20
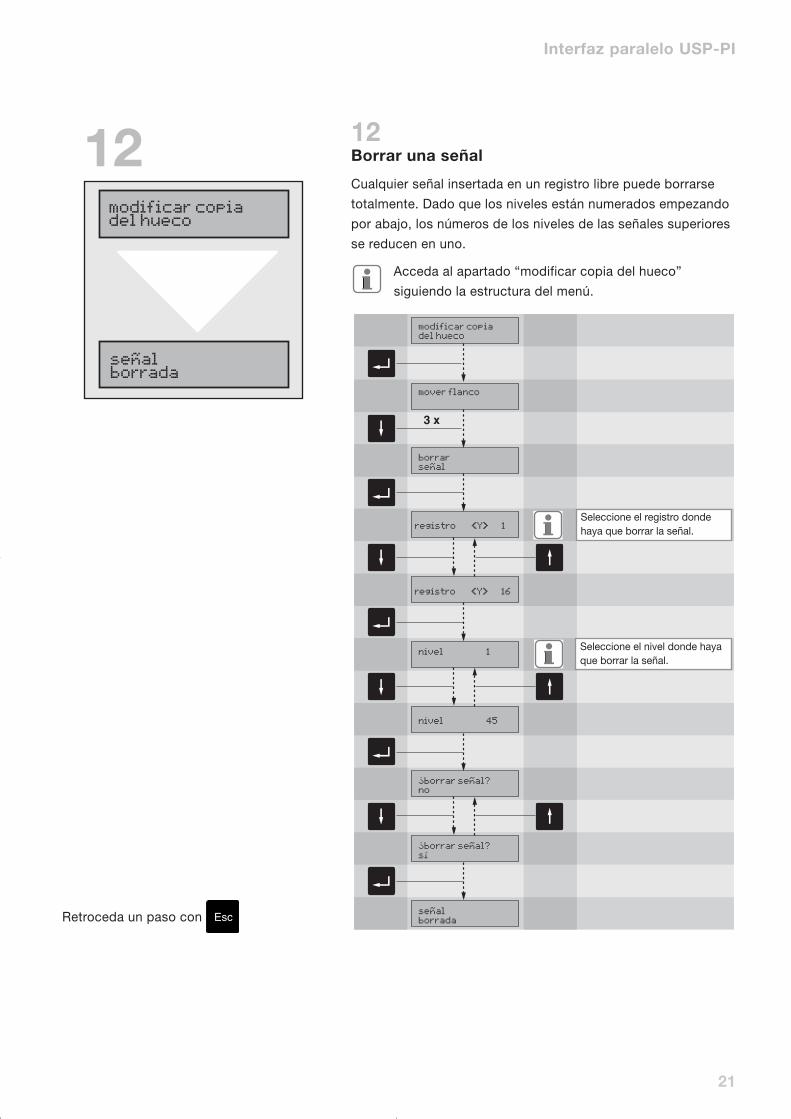
12Borrar una señal
Cualquier señal insertada en un registro libre puede borrarse
totalmente. Dado que los niveles están numerados empezando
por abajo, los números de los niveles de las señales superiores
se reducen en uno.
Acceda al apartado “modificar copia del hueco”
siguiendo la estructura del menú.
21
Interfaz paralelo USP-PI
12
EscRetroceda un paso con
3 x
modificar copiadel hueco
señal borrada
modificar copia
del hueco
mover flanco
borrar
señal
registro <Y> 1
registro <Y> 16
nivel 1
nivel 45
¿borrar señal?
no
¿borrar señal?
sí
señal
borrada
Seleccione el registro dondehaya que borrar la señal.
Seleccione el nivel donde hayaque borrar la señal.
USP_PiMontage_ES.qxd 16.07.2007 7:41 Uhr Seite 21
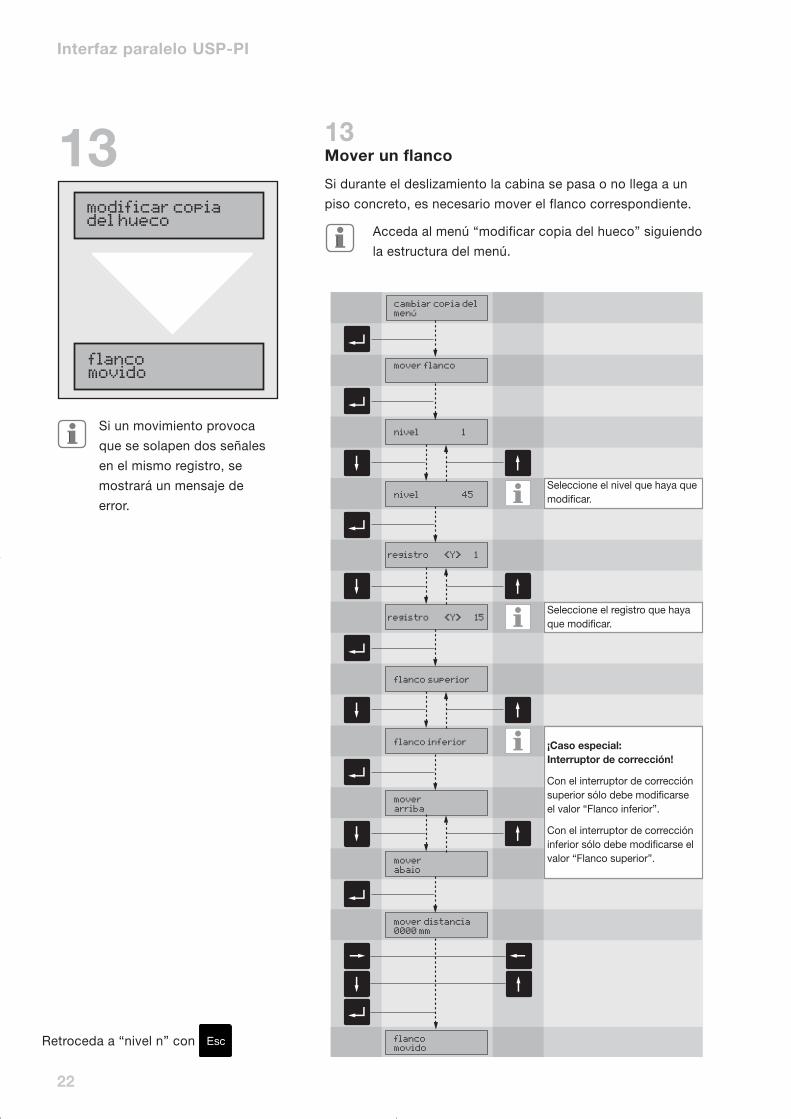
13Mover un flanco
Si durante el deslizamiento la cabina se pasa o no llega a un
piso concreto, es necesario mover el flanco correspondiente.
Acceda al menú “modificar copia del hueco” siguiendo
la estructura del menú.
22
Interfaz paralelo USP-PI
13
Si un movimiento provoca
que se solapen dos señales
en el mismo registro, se
mostrará un mensaje de
error.
EscRetroceda a “nivel n” con
Seleccione el nivel que haya quemodificar.
Seleccione el registro que hayaque modificar.
¡Caso especial:Interruptor de corrección!
Con el interruptor de correcciónsuperior sólo debe modificarseel valor “Flanco inferior”.
Con el interruptor de correccióninferior sólo debe modificarse elvalor “Flanco superior”.
modificar copiadel hueco
flanco movido
cambiar copia del
menú
mover flanco
flanco superior
flanco inferior
mover
arriba
mover
abajo
mover distancia
0000 mm
flanco
movido
registro <Y> 1
registro <Y> 15
nivel 1
nivel 45
USP_PiMontage_ES.qxd 16.07.2007 7:41 Uhr Seite 22
23
Interfaz paralelo USP-PI
14 Nivel
Para evaluar la precisión de la posición en relación con los ajustes del recorrido puedeemplearse el apartado “nivel”. En este caso, se muestra la planta actual y la desviación de laposición respecto del valor de nivelación leído. Los valores con un signo negativo indican quela cabina se encuentra por debajo de la posición de nivelación leída.
15 Borrar la copia del hueco
En el apartado “borrar copia del hueco” es posible borrar todas las señales y los valores denivelación. Esta acción es necesaria cuando se desea utilizar un aparato ya programado parauna nueva aplicación.
USP_PiMontage_ES.qxd 16.07.2007 7:41 Uhr Seite 23
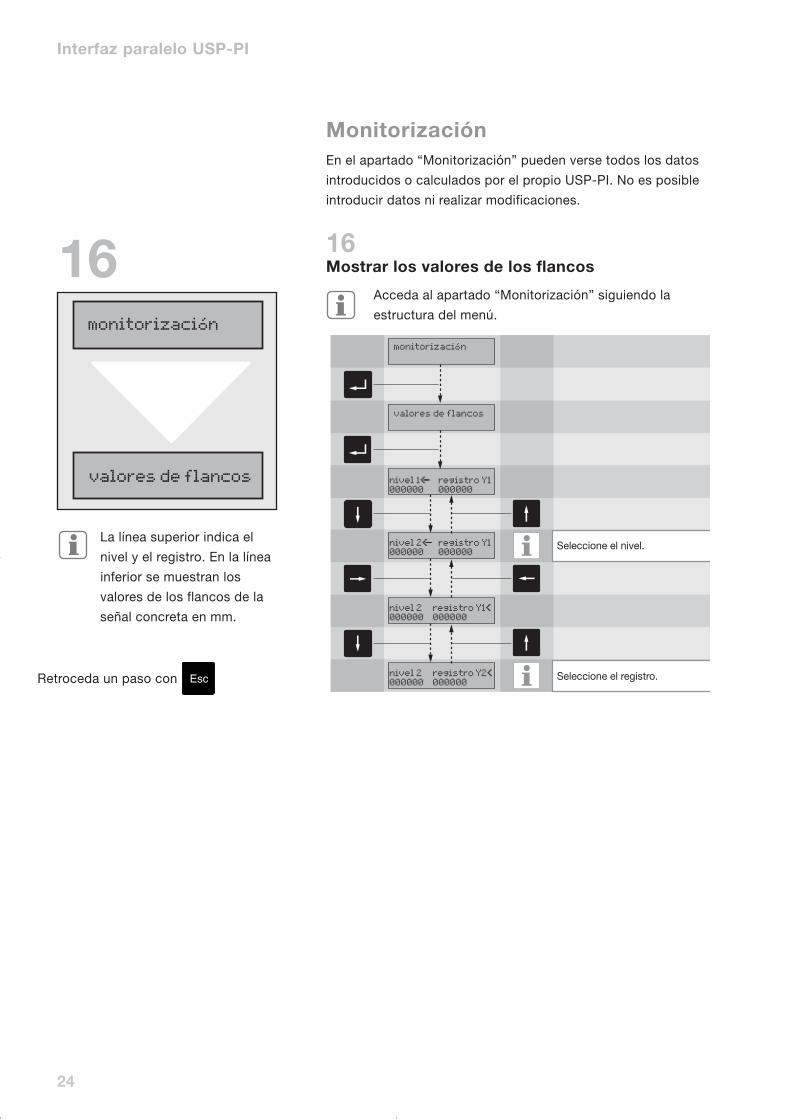
MonitorizaciónEn el apartado “Monitorización” pueden verse todos los datos
introducidos o calculados por el propio USP-PI. No es posible
introducir datos ni realizar modificaciones.
16Mostrar los valores de los flancos
Acceda al apartado “Monitorización” siguiendo la
estructura del menú.
24
Interfaz paralelo USP-PI
16
EscRetroceda un paso con
La línea superior indica el
nivel y el registro. En la línea
inferior se muestran los
valores de los flancos de la
señal concreta en mm.
monitorización
valores de flancos
monitorización
valores de flancos
nivel 1<––––– registro Y1
000000 000000
nivel 2<––––– registro Y1
000000 000000
nivel 2 registro Y1<
000000 000000
nivel 2 registro Y2<
000000 000000
Seleccione el nivel.
Seleccione el registro.
USP_PiMontage_ES.qxd 16.07.2007 7:41 Uhr Seite 24
25
Interfaz paralelo USP-PI
17 Posición actual
Este apartado muestra la posición actual de la cabina. El valor corresponde a la distancia entreel transmisor y el receptor.
18 Estado de error
Es posible mostrar los errores de la señal o del cable realizando un registro de errores delcable en el modo “recorrido de inspección”. El número de la posición de los errores se muestraen los apartados “señal” y “cable” del menú.
19 Información sobre el hueco
En este apartado aparece la longitud del recorrido y el número de niveles.
20 Perfiles de recorrido
En este apartado del menú se muestran los valores establecidos o medidos relativos avelocidad, aceleración y desaceleración. Además, es posible visualizar el perfil seleccionado yla posición del receptor USP.
21 Información del programa
Aquí encontrará información sobre la versión del programa y el código de acceso al apartado“ajustes”.
El código de acceso es 0202.
USP_PiMontage_ES.qxd 16.07.2007 7:41 Uhr Seite 25
26
Interfaz paralelo USP-PI
Función de prueba
22 Verificar salidas
Es posible comprobar las salidas del USP-PI y el cableado hacia la unidad de mando mediantela función de prueba “Verificar salidas”. Las salidas pueden conmutarse en su totalidad oindividualmente. Además, existe una prueba de cortocircuito.
Señales de error del USP-PI
Si el USP-PI detecta un error, la salidas 1-15 se activan y la 16 se desactiva.
Error de comunicación
Existen interferencias o no hay comunicación entre el receptor USP y el USP-PI.
Posibles causas:- El cable del receptor está desconectado o en mal estado.- Una fluctuación excesiva en la alimentación (véanse los datos técnicos).
Error en la pulsación ultrasónica
El receptor USP no reconoce la señal ultrasónica.
Posibles causas:- El cable de señal está en mal estado (retorcido o doblado)- El cable de señal está incorrectamente fijado al atenuador.- No hay conexión entre receptor y transmisor (el cable está desconectado o hay un cruce con
el cable móvil – comprobar el LED del transmisor).- Voltaje de alimentación insuficiente (véanse datos técnicos).
Error de salida
Causas:- Hay una o más salidas cruzadas.- Las salidas pueden comprobarse individualmente, tal y como se explica en el punto 22.
USP_PiMontage_ES.qxd 16.07.2007 7:41 Uhr Seite 26
Procedimiento de instalación e inicio
27
Interfaz paralelo USP-PI
A continuación se describen brevemente los pasos más básicos para instalar e iniciar el USP-PI.
1. Conecte el receptor USP mediante el conector sub-D de 15 pines.
2. Conecte el transmisor USP mediante los 2 pines de la tira de terminales de tornillo (T+, T-)
para disparar la línea hacia el transmisor.
3. Conecte el controlador del ascensor mediante los 15 pines de la tira de terminales de
tornillo (15 salidas de 24 V protegidas ante cortocircuitos – Y1 a Y15).
4. Conecte la alimentación (24 V CC) mediante los 2 pines de la tira de terminales de tornillo
(A1+, A2-).
5. Conecte el botón de lectura automática mediante los 4 pines de la tira de terminales de
tornillo inferior (Le, L+ / GND, Y16) y ejecute un recorrido de lectura automática, o
introduzca los valores de nivelación manualmente.
6. Calcula la copia del hueco.
7. Realice los ajustes precisos.
USP_PiMontage_ES.qxd 16.07.2007 7:41 Uhr Seite 27
28
Interfaz paralelo USP-PI
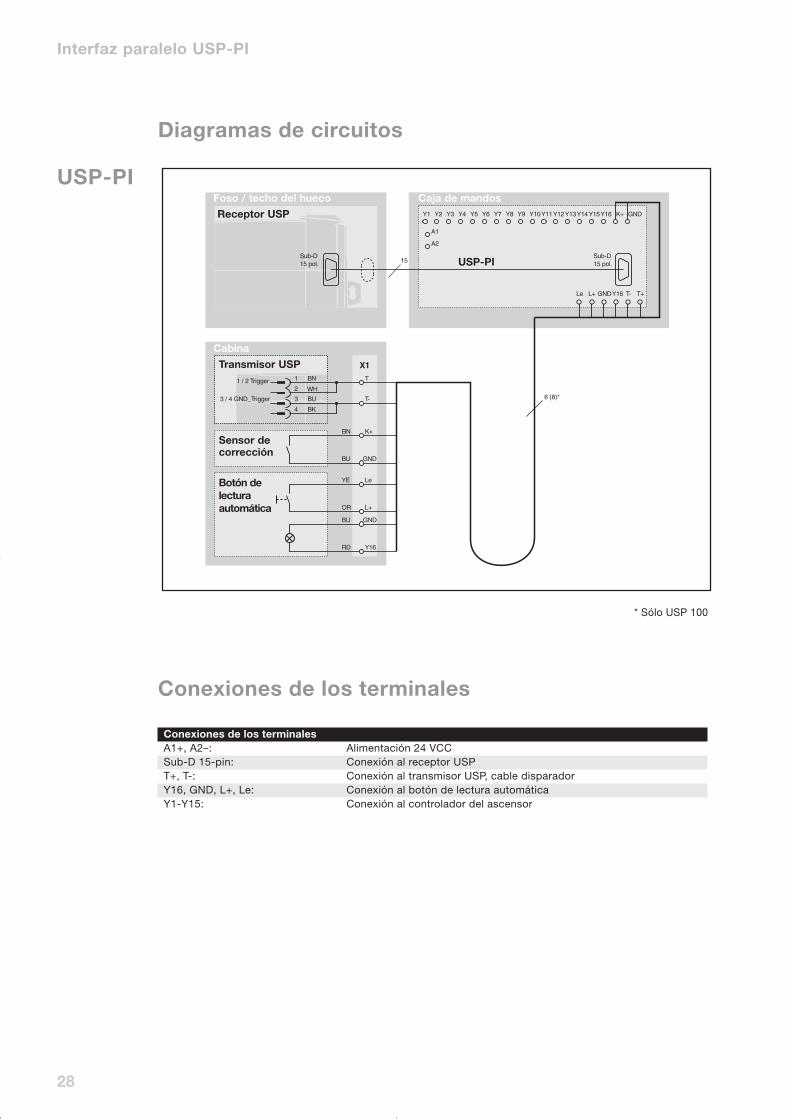
Diagramas de circuitos
* Sólo USP 100
Conexiones de los terminales
Conexiones de los terminalesA1+, A2–: Alimentación 24 VCCSub-D 15-pin: Conexión al receptor USPT+, T-: Conexión al transmisor USP, cable disparadorY16, GND, L+, Le: Conexión al botón de lectura automáticaY1-Y15: Conexión al controlador del ascensor
USP-PIFoso / techo del hueco Caja de mandos
Receptor USP
Cabina
Transmisor USP
Sensor decorrección
Botón delecturaautomática
USP-PI
USP_PiMontage_ES.qxd 16.07.2007 7:41 Uhr Seite 28
29
Interfaz paralelo USP-PI
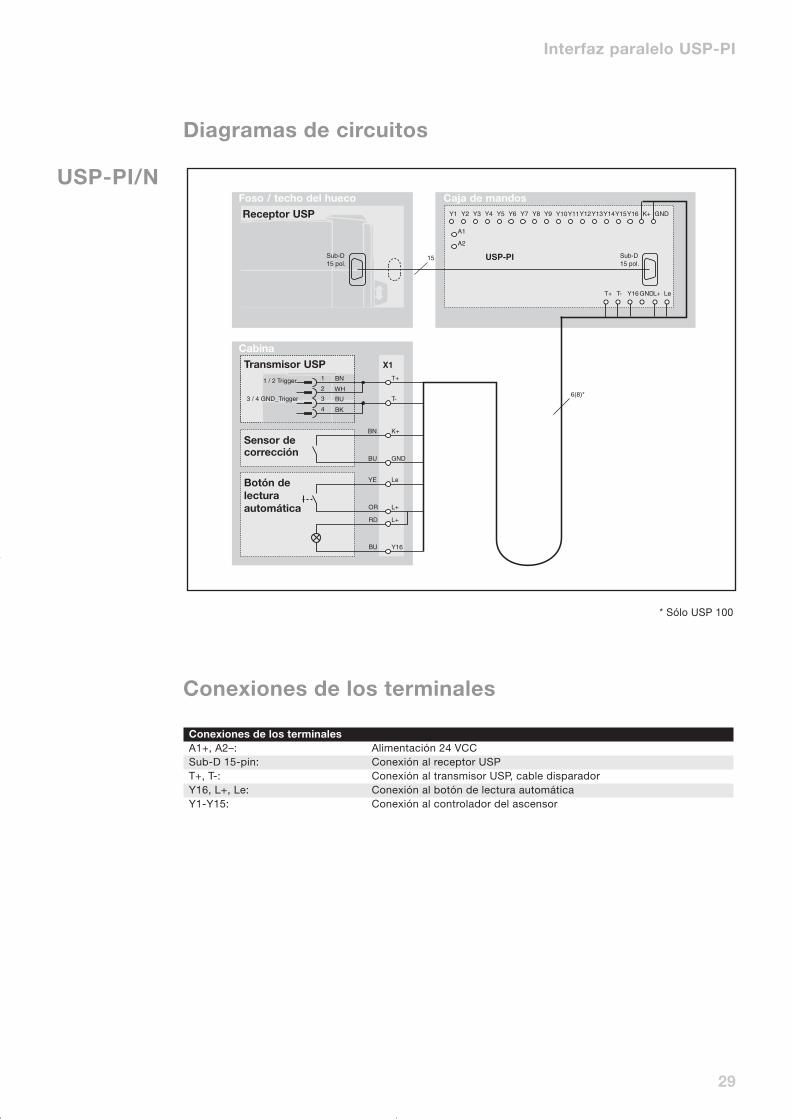
Diagramas de circuitos
* Sólo USP 100
Conexiones de los terminales
Conexiones de los terminales A1+, A2–: Alimentación 24 VCCSub-D 15-pin: Conexión al receptor USPT+, T-: Conexión al transmisor USP, cable disparadorY16, L+, Le: Conexión al botón de lectura automáticaY1-Y15: Conexión al controlador del ascensor
USP-PI/N
Y1
Sub-D15 pol.
Sub-D15 pol.
T-
T+1 / 2 Trigger
3 / 4 GND_Trigger
X1
Y2 Y3 Y4 Y5 Y6 Y7 Y8 Y9 Y10Y11Y12Y13Y14Y15Y16 K+ GND
Y16 GNDT+ T- L+ Le
L+
L+
Le
Y16
GND
K+
BU
BN
OR
YE
RD
BU
3
1
4
2
A1
A2
USP-PI
BN
WH
BU
BK
15
6(8)*
Foso / techo del hueco Caja de mandos
Receptor USP
Cabina
Transmisor USP
Sensor decorrección
Botón delecturaautomática
USP_PiMontage_ES.qxd 16.07.2007 7:41 Uhr Seite 29
Datos técnicos
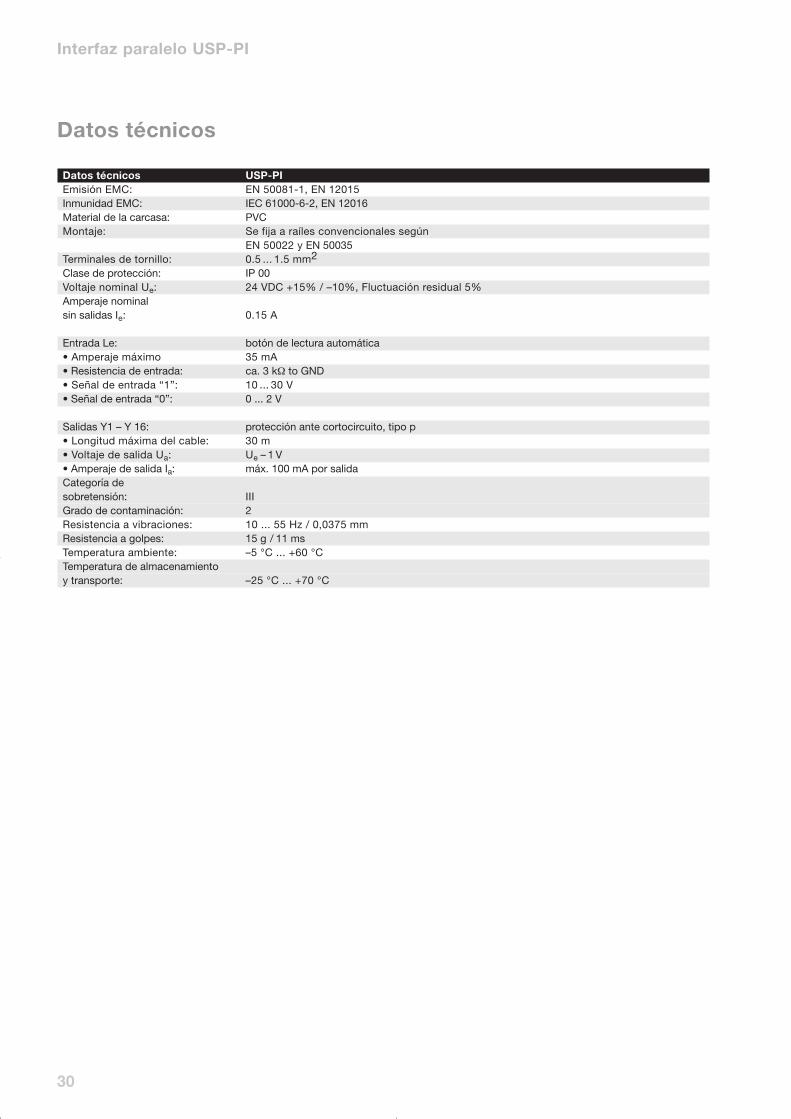
Datos técnicos USP-PIEmisión EMC: EN 50081-1, EN 12015Inmunidad EMC: IEC 61000-6-2, EN 12016Material de la carcasa: PVCMontaje: Se fija a raíles convencionales según
EN 50022 y EN 50035Terminales de tornillo: 0.5 ... 1.5 mm2
Clase de protección: IP 00Voltaje nominal Ue: 24 VDC +15% / –10%, Fluctuación residual 5%Amperaje nominal sin salidas Ie: 0.15 A
Entrada Le: botón de lectura automática• Amperaje máximo 35 mA• Resistencia de entrada: ca. 3 kΩ to GND• Señal de entrada “1”: 10 ... 30 V • Señal de entrada “0”: 0 ... 2 V
Salidas Y1 – Y 16: protección ante cortocircuito, tipo p• Longitud máxima del cable: 30 m• Voltaje de salida Ua: Ue – 1 V• Amperaje de salida Ia: máx. 100 mA por salidaCategoría de sobretensión: IIIGrado de contaminación: 2Resistencia a vibraciones: 10 ... 55 Hz / 0,0375 mmResistencia a golpes: 15 g / 11 msTemperatura ambiente: –5 °C ... +60 °CTemperatura de almacenamiento y transporte: –25 °C ... +70 °C
30
Interfaz paralelo USP-PI
USP_PiMontage_ES.qxd 16.07.2007 7:41 Uhr Seite 30

Interfaz paralelo USP-PI
Manual de instrucciones
K. A. Schmersal GmbH
Industrielle Sicherheitsschaltsysteme
Möddinghofe 30
D - 42279 Wuppertal
Postfach 24 02 63
D - 42232 Wuppertal
Telefon +49 - (0)2 02 - 64 74 - 0
Telefax +49 - (0)2 02 - 64 74 - 100
E-Mail [email protected]
Internet www.schmersal.com ????
? /
????
/ 1
2.20
07 /
Tei
le-N
r. ??
????
?? /
BZ-
Nr.
????
????
???
/ A
usga
be ?
?