Materialien-Heft 29: Grundlagen zur Dorfökologie - Kapitel 1-3

Kapitel 2
Grundlagen der Magnetresonanz
In einem statischen Magnetfeld ermöglicht die Kernmagnetische Resonanz (Nuclear MagneticResonance, NMR) durch die Wechselwirkung von externen magnetischen Hochfrequenzfeldernmit den magnetischen Momenten der Atomkerne im Körper eine nicht-invasive Diagnostik. Fürdiese werden vorwiegend die in großer natürlicher Häufigkeit auftretenden Wasserstoffkerne(Protonen) verwendet, die Bilder mit einer guten Ortsauflösung (im Millimeter-Bereich) undsehr guten Gewebekontrasten liefern. Aber auch andere schwerere Kerne, wie z.B. 13C, 19F,23Na und 31P können trotz ihrer geringen Konzentration mit Hilfe der NMR im biologischenGewebe nachgewiesen werden, ohne für die NMR Bildgebung und Spektroskopie vergleichbareBedeutung wie die 1H NMR erlangt zu haben.
In diesem Kapitel werden die physikalischen Grundlagen der Kernresonanz beschrieben, so-weit sie für das Verständnis der eingesetzten Methoden in der Kernspintomographie (im me-dizinischen Bereich wird diese vorwiegend Magnetresonanztomographie (MRT) genannt) fürdie medizinischen Diagnostik nötig sind. Dazu wird auf die Verfahren zur Ortsauflösung nähereingegangen, sowie Einflußgrößen wie z.B. das Signal-Rausch-Verhältnis und die Kontrast-mechanismen dargestellt. Darüber hinaus werden Verfahren der Magnetresonanzspektroskopie(MRS) beschrieben, sofern sie für die Methoden der Temperaturbestimmung im zweiten Teildieser Arbeit von Bedeutung sind.
2.1 Kernmagnetisierung
Alle Atomkerne mit ungerader Protonen– oder Neutronenzahl besitzen im Kerngrundzustandeinen Eigendrehimpuls ~I, der durch die Kernspinquantenzahl I charakterisiert ist. I kann dabeiganz– bzw. halbzahlige Werte annehmen. Kerne mit gerader Protonen– und gerader Neutronen-zahl besitzen dagegen im Kerngrundzustand keinen Drehimpuls (I = 0). Mit dem Eigendrehim-puls ~I ist ein ihm proportionales magnetisches Moment~µ verbunden, die Proportionalitätskon-stante ist das gyromagnetische Verhältnis γ
~µ = γ~I. (2.1)
5

6 2.1. Kernmagnetisierung
Ist I der zum Eigendrehimpulses ~I gehörende Operator, so ergibt sich in einem von außen an-gelegten Magnetfeld der Flußdichte ~B0 (~B0 wird dabei üblicherweise in z-Richtung des Koor-dinatensystems gewählt) für die zum Magnetfeld parallele Komponente m als Eigenwert desOperators Iz
〈Iz〉= m − I ≤ m≤ I, (2.2)
d.h. m kann nur 2I +1 Werte annehmen. Damit verbunden sind die diskreten Energiezustände
〈H〉= Em =−γB0m. (2.3)
Die folgenden Betrachtungen beziehen sich auf Protonen (I = 1/2,γ/2π = 42,577MHz/T, s.Abbildung 2.1). Die beiden diskreten Energiezustände E1,2 in einem äußeren Magnetfeld ~B0
sind dann
E1,2 =±12
γB0, (2.4)
wobei die parallele Einstellung (m = +1/2) die energetisch günstigere Lage darstellt (γ > 0).Für einen magnetischen Dipolübergang benötigt man die Energie
∆E = ωL = γB0. (2.5)
Die Frequenz ωL wird als Lamorfrequenz bezeichnet. Die relative Besetzung (N+ für m = +1/2,N− für m =−1/2, N = N+ +N−) der beiden Energiezustände ist im thermischen Gleichgewichtdurch den Boltzmann-Faktor gegeben
N−N+
= e−∆E/kT = e−γB0/kT . (2.6)
k = Boltzmann-Konstante (k = 1.380658 ·10−23J/K)PSfrag replacements
Iz ~B0
12
− 12
E
0
ohne Feld im Feld B0
∆E = γB0
Iz =− 12
Iz = 12
E
N−
N+
Besetzungszahl
e−E/kT
Abbildung 2.1: Einstellmöglichkeiten eines Kernspins mit dem Drehimpuls I = 1/2 in einem äußerenMagnetfeld ~B0. (links) Die Komponente parallel zum Magnetfeld kann nur zwei Werte annehmen m =±1/2. (Mitte) Für einen Übergang ist die Energie ∆E = γB0 nötig. (rechts) Die Besetzung der beidenZustände erfolgt entsprechend der Boltzmann-Verteilung.

2. Grundlagen der Magnetresonanz 7
Bei Raumtemperatur ist die thermische Energie (kT ) wesentlich größer als die Energiedifferenz∆E der beiden Zustände (bei Raumtemperatur T = 293K und einem Magnetfeld der FlußdichteB0 = 3T etwa 5 ·104 mal größer), so daß die Exponentialfunktion in Gleichung 2.6 linearisiertwerden kann und sich eine Differenz der Besetzungszahlen
N+−N− = (γB0/kT )N+ ≈ (γB0/2kT )N (2.7)
ergibt. Im thermischen Gleichgewicht ist der energetisch günstigere Zustand N+ nur geringfügigstärker besetzt ist (Faktor 2 · 10−5 bei T = 293K, B0 = 3T). Die Vektorsumme aller magneti-schen Momente~µ in einem gewählten Volumenelement V bezeichnet man als die Kernmagne-tisierung
~M =1V
N
∑i=1
~µi (2.8)
für die im thermischen Gleichgewicht gilt:
M0 =γ2
2B0ρ0
3kTI(I +1) =
γ2
2B0ρ0
4kT(2.9)
wobei ρ0 = N/V die Anzahl der Wasserstoffkerne pro m3 und M0 parallel zum externen Ma-gnetfeld ~B0 ist. Die Kernmagnetisierung ist eine makroskopische Größe und erlaubt die Erschei-nung der kernmagnetischen Resonanz im Rahmen der klassischen Mechanik zu betrachten.
2.2 Blochsche Gleichungen
Wird die Kernmagnetisierung aus dem Gleichgewichtszustand gebracht, so wirkt durch dasäußere Magnetfeld ~B0 ein Drehmoment und die Kernmagnetisierung folgt der Bewegungsglei-chung
d ~M(t)dt
= γ~M(t)×~B0. (2.10)
Daraus resultiert eine Präzession der Kernmagnetisierung um die Richtung des Magnetfeldesmit der Lamorfrequenz
~ωL =−γ~B0, (2.11)
die durch eine Messung der induzierten Wechselspannung in einer Spule nachgewiesen wer-den kann (Kernresonanz). In einem mit der konstanten Winkelgeschwindigkeit ~ω rotierendenKoordinatensystem ist die Bewegungsgleichung der Kernmagnetisierung
d ~M(t)dt
= γ~M(t)×(
~B0 +~ωγ
)
, (2.12)
d.h. für den Fall, daß ~ω = ~ωL, ist ~M(t) konstant. Die Gleichungen 2.10 bis 2.12 gelten nur fürden Fall nicht-wechselwirkender Spins und wenn das Magnetfeld an jedem Ort gleich ist.
Durch die Wechselwirkung der Spins untereinander (Spin-Spin-Wechselwirkung) und mit ihrerjeweiligen örtlichen Umgebung (Spin-Gitter-Wechselwirkung) strebt die Kernmagnetisierung

8 2.3. Relaxation
ihrem thermischen Gleichgewichtszustand zu. Phänomenologisch wird dieser Vorgang durchdie Einführung sogenannter Relaxationsterme beschrieben. Unter der Annahme, daß die Längs–bzw. Quermagnetisierung die jeweiligen Gleichgewichtszustände mit einer Rate anstreben, dieproportional der jeweiligen Abweichung vom Gleichgewicht ist, läßt sich die Gleichung 2.10erweitern:
d ~M(t)dt
= γ(
~M(t)×~B0
)
− Mz(t)−M0
T1~ez−
Mx(t)T2
~ex−My(t)
T2~ey. (2.13)
~ex,~ey,~ez = Einheitsvektoren des Labor-KoordinatensystemM0 = Gleichgewichtsmagnetisierung in z-Richtung (s. Gleichung 2.9)
Die Zeitkonstante T1 wird Spin-Gitter-Relaxationszeit genannt, da die Rückkehr der longitudi-nalen Magnetisierung Mz, die sie beschreibt, mit einer Energieabgabe an die Umgebung (Gitter)verbunden ist. Die Relaxationszeit T2 beschreibt das Verschwinden der Quermagnetisierung Mx
und My, d.h. die Phasenbeziehung der einzelnen Spins zueinander geht verloren, und wird des-halb als Spin-Spin-Relaxationszeit bezeichnet. Damit verbunden ist keine Energieänderung desSystems.
2.3 Relaxation
In Gleichung 2.13 wurde die Relaxation nur phänomenologisch eingeführt. Der Ursprung dersie verursachenden Prozesse liegt in der Wechselwirkung der Spins mit der Umgebung, z.B.umgebende andere Spins oder einem magnetischen Gradientenfeld bei Diffusion. Die einenKern umgebenden Spins, sei es von umgebenden anderen Kernen oder ungepaarten Elektronen,verursachen ein lokales magnetisches Zusatzfeld Blok(t), das durch die Brownsche Molekular-bewegung und die Rotation der Moleküle zeitlich schwankt (s. Abbildung 2.2). Der wichtigsteWechselwirkungsmechanismus ist die magnetische Dipol-Dipol-Wechselwirkung (für den FallI = 1/2). Spektralkomponenten bei der Resonanzfrequenz ermöglichen Übergänge und führenso zur Relaxation des Systems. Die zeitunabhängige Autokorrelationsfunktion
G(τ) = 〈Blok(t)Blok(t + τ)〉 (2.14)
kann im Falle einer statistischen Bewegung der Moleküle durch einen exponentiellen Abfallangesetzt werden
G(τ) = G0e−|τ|/τc, (2.15)
mit der Korrelationszeit τc. Die Fourier-Transformierte
J(ω) =
∞∫
−∞
G(τ)e−iωτdτ =2G0τc
1+ω2τ2c
(2.16)

2. Grundlagen der Magnetresonanz 9
wird als spektrale Dichtefunktion bezeichnet. Die Dipol-Dipol-Wechselwirkung zweier gleicherSpins in demselben Molekül (Abstand r konstant) liefert für die Relaxationszeiten [Hen93]
1T1
=310
( µ0
4π
)2 γ4
2
r6 [Jr(ωL)+4Jr(2ωL)] (2.17)
1T2
=320
( µ0
4π
)2 γ4
2
r6 [3Jr(0)+5Jr(ωL)+2Jr(2ωL)] (2.18)
mit der relativen spektralen Komponente Jr(ω) = J(ω)/(2G0).
PSfrag replacements
Blok(t)
G(τ)
Zeit
G
τ
Blok
G0
0
τc
J(ω)/G0
ω (Hz)
τc = 5 ·10−11 s
τc = 5 ·10−7 s
100
102
104
106
108
1010 10
-12
10-10
10-8
10-6
PSfrag replacements
Blok(t)
G(τ)
Zeit
G
τBlok
G0
0
τc
J(ω)/G
0
ω (Hz)
τc = 5 ·10−11 s
τc = 5 ·10−7 s
Abbildung 2.2: (links) Spins von umgebenden Kernen oder ungepaarten Elektronen erzeugen am Kernortein zeitlich schwankendes magnetisches Zusatzfeld Blok. Für die zeitunabhängige Autokorrelationsfunkti-on G(τ) dieses Feldes läßt sich ein exponentieller Abfall mit der Korrelationszeit τc ansetzen (s.Gleichung2.15). (rechts) Darstellung der spektralen Dichtefunktion J(ω) (s. Gleichung 2.16) für zwei verschiede-ne Korrelationszeiten, entsprechend einer langsamen (τc = 5 · 10−7 s für Makromoleküle) und schnellen(τc = 5 · 10−11 s für freies Wasser) Bewegung. Wegen des doppelt-logarithmischen Maßstabes ist der lor-entzförmige Verlauf der Kurven nicht zu erkennen, deren Flächen identisch sind.
Bei Flüssigkeiten ist die Korrelationszeit τc proportional dem Quotienten aus Viskosität η undTemperatur T . Da sich biologisches Gewebe ähnlich einer zähen Flüssigkeit verhält, sind dieRelaxationszeiten gewebeabhängig, wodurch bei der MR-Bildgebung große Kontraste erzieltwerden können (s. Abschnitt 2.8). Darüber hinaus lassen sich krankhaft veränderte Gebieteaufgrund von veränderten Relaxationszeiten oft lokalisieren.
Neben der Dipol-Dipol-Wechselwirkung zwischen zwei identischen Kernen kann das fluktuie-rende Magnetfeld auch durch ungepaarte Elektronen verursacht werden. Da das magnetischeMoment von Elektronen sehr viel größer ist als das der Protonen, können daraus sehr kurz Re-laxationszeiten resultieren, wenn die Entfernung zwischen dem Elektron und dem Kern kleingenug ist. Schon kleine Mengen paramagnetischer Ionen können deshalb die Relaxationsratendeutlich erhöhen. Endogenene paramagnetische Verbindungen sind z.B. molekularer Sauerstoffund Desoxyhämoglobin. Als exogene paramagnetische Verbindungen werden häufig Chelateder Lanthaniden (z.B. Gadolinium-DTPA) als Kontrastmittel eingesetzt. Da Wasser sehr nahean solche paramagnetischen Zentren gelangen kann, ist es besonders sensitiv auf die Anwesen-heit dieser Verbindungen.

10 2.4. Kernresonanz
2.4 Kernresonanz
Ein Hochfrequenzfeld der Frequenz ~ω kann magnetische Dipolübergänge induzieren, wenn dieResonanzbedingung erfüllt ist, d.h. ~ω =~ωL =−γ~B0. Dazu muß dieses Hochfrequenzfeld senk-recht zum Hauptmagnetfeld ~B0 sein. Ein linear polarisiertes Hochfrequenzfeld kann als dieSumme zweier gegenläufiger zirkular polarisierter Felder angesehen werden. Betrachtet mannur die Komponente, deren Drehrichtung der Lamorpräzession entspricht, so muß die Bewe-gungsgleichung 2.12 in dem mit der Frequenz ~ω rotierenden Bezugssystem erweitert werden:
d ~M(t)dt
= γ~M(t)×~Beff (2.19)
~Beff = ~B0 +~ωγ
+~B1.
In diesem Bezugssystem ist ~B1 konstant und im Resonanzfall ~ω =~ωL ist ~Beff = ~B1 und es findeteine Präzession der Kernmagnetisierung um die Richtung des Hochfrequenzfeldes ~B1 mit derRabi-Frequenz ~ω1 = −γ~B1 statt. Die gegenläufige Komponente des Hochfrequenzfeldes wirktin dem rotierenden Bezugssystem wie eine Störung mit der doppelten Lamorfrequenz, derenWirkung sich in erster Näherung ausmittelt, in zweiter Näherung jedoch zu einer Resonanzver-schiebung führt (Bloch-Siegert Verschiebung).
Findet die Störung (Resonanzanregung) durch einen Hochfrequenz-Impuls mit der AmplitudeB1 und der Dauer τ T1,T2 statt, d.h. Relaxationseffekte können vernachlässigt werden, dannist der Winkel α zwischen der Kernmagnetisierung ~M und dem statischen Magnetfeld ~B0 nachder Anregung
α = γB1τ. (2.20)
Von besonderer Bedeutung ist der 90-Puls, d.h. α = 90, bei dem die gesamte Magnetisierungin die xy-Ebene gekippt wird. Aus Gleichung 2.13 folgt dann für die präzedierende Querma-gnetisierung M⊥ = Mx + iMy im Laborsystem
M⊥(t) = M0e−iωLte−t/T2 (2.21)
und die Längsmagnetisierung
Mz(t) = M0
(
1− e−t/T1
)
. (2.22)
Der Realteil der komplexen Fourier-Transformierten von M⊥(t) beschreibt die Frequenzabhän-gigkeit von Mx (Dispersionslinie)
Mx(ω) = ωLM0T 2
2 (ωL−ω)
1+(ωL−ω)2 T 22
(2.23)
2. Grundlagen der Magnetresonanz 11
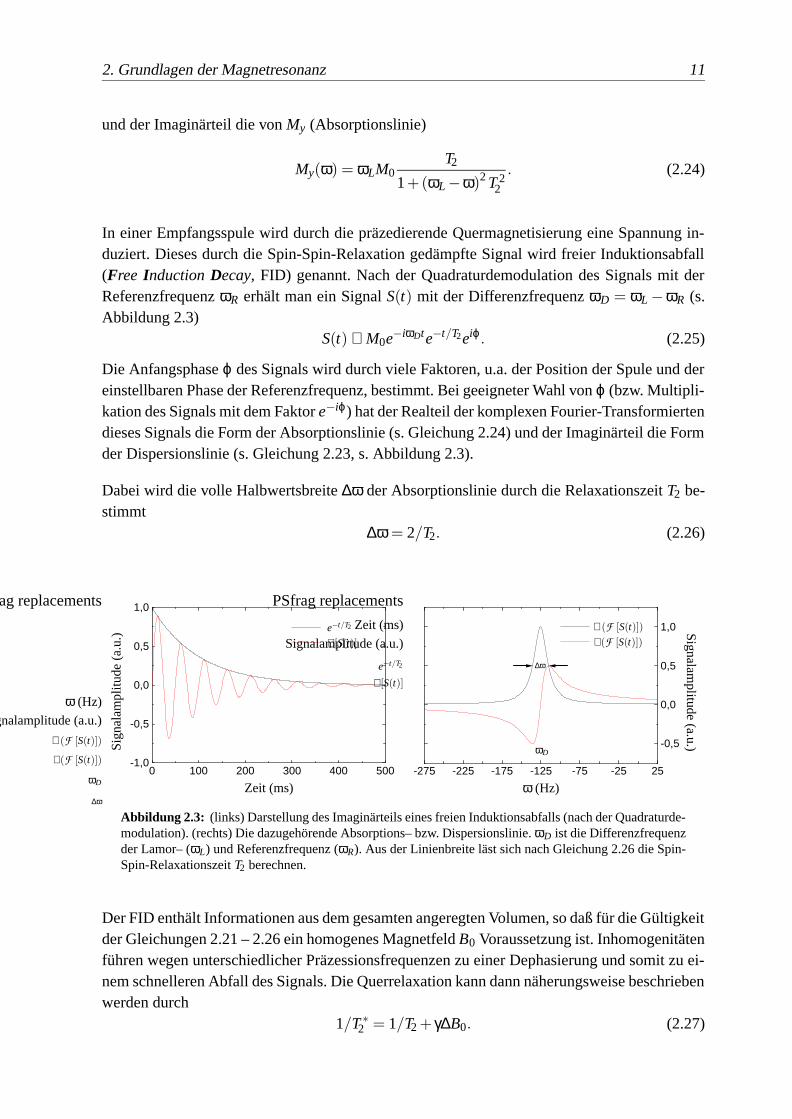
und der Imaginärteil die von My (Absorptionslinie)
My(ω) = ωLM0T2
1+(ωL−ω)2 T 22
. (2.24)
In einer Empfangsspule wird durch die präzedierende Quermagnetisierung eine Spannung in-duziert. Dieses durch die Spin-Spin-Relaxation gedämpfte Signal wird freier Induktionsabfall(Free Induction Decay, FID) genannt. Nach der Quadraturdemodulation des Signals mit derReferenzfrequenz ωR erhält man ein Signal S(t) mit der Differenzfrequenz ωD = ωL−ωR (s.Abbildung 2.3)
S(t) ∝ M0e−iωDte−t/T2eiϕ. (2.25)
Die Anfangsphase ϕ des Signals wird durch viele Faktoren, u.a. der Position der Spule und dereinstellbaren Phase der Referenzfrequenz, bestimmt. Bei geeigneter Wahl von ϕ (bzw. Multipli-kation des Signals mit dem Faktor e−iϕ) hat der Realteil der komplexen Fourier-Transformiertendieses Signals die Form der Absorptionslinie (s. Gleichung 2.24) und der Imaginärteil die Formder Dispersionslinie (s. Gleichung 2.23, s. Abbildung 2.3).
Dabei wird die volle Halbwertsbreite ∆ω der Absorptionslinie durch die Relaxationszeit T2 be-stimmt
∆ω = 2/T2. (2.26)
0 100 200 300 400 500-1,0
-0,5
0,0
0,5
1,0
PSfrag replacements
Zeit (ms)
Sign
alam
plitu
de(a
.u.)
e−t/T2
ℑ[S(t)]
ω (Hz)
Signalamplitude (a.u.)
ℜ(F [S(t)])
ℑ(F [S(t)])
ωD
∆ω
-275 -225 -175 -125 -75 -25 25
-0,5
0,0
0,5
1,0
PSfrag replacements
Zeit (ms)
Signalamplitude (a.u.)
e−t/T2
ℑ[S(t)]
ω (Hz)
Signalamplitude
(a.u.)
ℜ(F [S(t)])
ℑ(F [S(t)])
ωD
∆ω
Abbildung 2.3: (links) Darstellung des Imaginärteils eines freien Induktionsabfalls (nach der Quadraturde-modulation). (rechts) Die dazugehörende Absorptions– bzw. Dispersionslinie. ωD ist die Differenzfrequenzder Lamor– (ωL) und Referenzfrequenz (ωR). Aus der Linienbreite läst sich nach Gleichung 2.26 die Spin-Spin-Relaxationszeit T2 berechnen.
Der FID enthält Informationen aus dem gesamten angeregten Volumen, so daß für die Gültigkeitder Gleichungen 2.21 – 2.26 ein homogenes Magnetfeld B0 Voraussetzung ist. Inhomogenitätenführen wegen unterschiedlicher Präzessionsfrequenzen zu einer Dephasierung und somit zu ei-nem schnelleren Abfall des Signals. Die Querrelaxation kann dann näherungsweise beschriebenwerden durch
1/T ∗2 = 1/T2 + γ∆B0. (2.27)

12 2.5. Chemische Verschiebung
2.5 Chemische Verschiebung
Die Lamorfrequenz ist nach Gleichung 2.11 proportional der magnetischen Flußdichte B amOrt des Kerns. Ist der Atomkern Bestandteil eines Moleküls, so wird das äußere Magnetfeld B0
durch ein Zusatzfeld B′ abgeschwächt, das durch die Wechselwirkung der Elektronen in demMolekül, die die chemische Bindung bewirken, mit dem Magnetfeld B0 verursacht wird. Daseffektive Feld am Kernort ist dann
Beff = B0−B′ = (1−σ)B0 (2.28)
und die Resonanzbedingung lautet:
ω = γ(1−σ)B0. (2.29)
Die Abschirmkonstante σ ist von der Größenordnung 10−4 bis 10−6. Die Verschiebung der Re-sonanzfrequenz wird relativ zu einer Standardsubstanz angegeben. Die chemische Verschiebungδ wird folgendermaßen definiert
δ =ω−ωref
ω0= σref −σ (2.30)
und in ppm (parts per million, 10−6) angegeben. Als Referenz für Protonen wird Tetramethyl-silan (TMS, Si(CH3)4, δ = 0) verwendet.
Dieser Effekt wird in der Kernresonanzspektroskopie (s. Abbildung 2.4 und Abschnitt 2.7) aus-genutzt. Bei der Bildgebung sind außer den Wasserprotonen nur die in relativ großer Häufigkeitvorkommenden Protonen der Fette von Bedeutung. Die Differenz der chemischen Verschiebun-gen von Fett– und Wasserprotonen (etwa 3,5ppm) kann bei der Ortskodierung zu Artefaktenführen.
4 3 2 1-5
0
5
10
15
20
PSfrag replacements
δ (ppm)
Sign
alin
tens
ität(
a.u.
)
tCrIns
tChotCr
NAA
MMGlu
Abbildung 2.4: Protonenspektrum aus einem8ml großen Voxel im Gehirn eines Probanden,aufgenommen mit einer PRESS Methode (s. Ab-schnitt 2.7.1). Einige Resonanzen sind bekann-ten Metaboliten zugeordnet. Wegen der fehlendenReferenz (TMS, δ = 0) wird δ von Wasser auf4,7ppm gesetzt.

2. Grundlagen der Magnetresonanz 13
2.6 Ortskodierung
Die Überlagerung des homogenen Hauptmagnetfeldes ~B0 (in z-Richtung) mit durch Zusatzspu-len erzeugten linearen magnetischen Feldgradienten
Gx =∂Bz
∂x,Gy =
∂Bz
∂y,Gz =
∂Bz
∂z, (2.31)
ruft ein ortsabhängiges Magnetfeld
B(x,y,z) = B0 + xGx + yGy + zGz (2.32)
und somit eine ortsabhängige Kernresonanzfrequenz ω(x,y,z) = γB(x,y,z) hervor. Um z.B. beieinem zweidimensionalen Meßobjekt eine eindeutige Ortskodierung zu erreichen, wird wäh-rend der Signaldetektion in einer Richtung ein Gradientenfeld geschaltet (Auslesegradient), sodaß die Signalfrequenz vom Ort in dieser Richtung abhängig ist. Durch einen weiteren Gradi-entenpuls in der anderen Ortsrichtung zwischen der Anregung und der Signaldetektion ist dieSignalphase vom Ort in der zweiten Ortsrichtung abhängig (Phasenkodiergradient). Der 1983eingeführte k-Raum-Formalismus [Lju83][Twi83], der im Folgenden beschrieben wird, lieferteine ausführliche Beschreibung der Ortskodierung und bildet die Grundlage für das Verständnisder verschiedenen, vor allem schnellen Bildgebungssequenzen in der MR.
2.6.1 k-Raum
Nach der Anregung präzediert die Kernmagnetisierung entsprechend der magnetischen Fluß-dichte B(~x, t) = B0 +~x~G(t). Im mit der Frequenz ~ωL = −γ~B0 rotierenden Bezugssystem führtdies zu einer Phase φ zum Zeitpunkt t
φ(~x, t) =−γt∫
0
~x~G(τ)dτ =−2π~k(t)~x (2.33)
mit
~k(t) =γ
2π
t∫
0
~G(τ)dτ. (2.34)
Unter der Voraussetzung eines homogenen Magnetfeldes B0 und der Vernachlässigung der Re-laxationseffekte ist das durch die Kernmagnetisierung in dem Volumen V in der Empfangsspuleinduzierte Signal
s(t) ∝∫
V
M⊥(t,~x)d~x =∫
V
M⊥(~x)e−2πi~k(t)~xd~x. (2.35)
Durch eine schichtselektive Anregung (s. Abschnitt 2.6.2) kann die Gleichung 2.35 auf zweiDimensionen (O. E. d. A. die xy-Ebene, Schichtdicke 4z) reduziert werden:
s(t) ∝4z∫ ∫
M⊥(x,y)e−2πi(kx(t)x+ky(t)y)dxdy (2.36)

14 2.6. Ortskodierung
und nach einer Reparametrisierung
s(kx,ky) ∝∫ ∫
M⊥(x,y)e−2πi(kxx+kyy)dxdy. (2.37)
Aus Gleichung 2.9 folgt, daß M0 und damit auch M⊥ proportional der Spindichte ρ ist, so daß
s(kx,ky) ∝4z∫
ρ(x,y)e−2πi(kxx+kyy)dxdy (2.38)
und damit1
ρ(x,y) ∝ F −1[s(kx,ky)]. (2.39)
Der k-Raum ist der Ortsfrequenz-Raum der Spindichteverteilung ρ, in dem das MR-Signal auf-genommen wird. Wird dieser ausreichend abgetastet, so erhält man durch eine zweidimensio-nale Fourier-Transformation die räumliche Verteilung der Spindichte (s. Abbildung 2.5). Durcheine geeignete Wahl der Sequenzparameter können verschiedene Kontraste, z.B. abhängig vonder Verteilung der T1- bzw. T2-Relaxationszeiten, erreicht werden (s. Abschnitt 2.8).
PSfrag replacements
FF −1
PSfrag replacements FF −1
PSfrag replacements
FF −1
Abbildung 2.5: (links) MR-Bild (Ortsraum) einer Schicht eines mit CuSO4-Lösung gefüllten Glaskolbensund (rechts) das dazugehörende k-Raum-Bild (Ortsfrequenz-Raum, logarithmische Darstellung). Durch ei-ne Fourier– bzw. Fourier-Rücktransformation gelangt man von einem Raum zum anderen.
k-Raum-Trajektorie
Der zum k-Raum (Ortsfrequenz-Raum) duale Raum ist der Raum der Spindichteverteilung(Ortsraum), wobei der Übergang durch eine inverse Fourier-Transformation erfolgt:
F −1 :~k →~x. (2.40)
1In dieser Arbeit wird folgende Definition der Fourier-Transformierten
s(~k) = F [ρ(~x)] =∫ ∞
−∞ρ(~x)e−2πi~k~xd~x
und der inversen Fourier-Transformierten
ρ(~x) = F −1[s(~k)] =∫ ∞
−∞s(~k)e2πi~k~xd~k
verwendet.
2. Grundlagen der Magnetresonanz 15
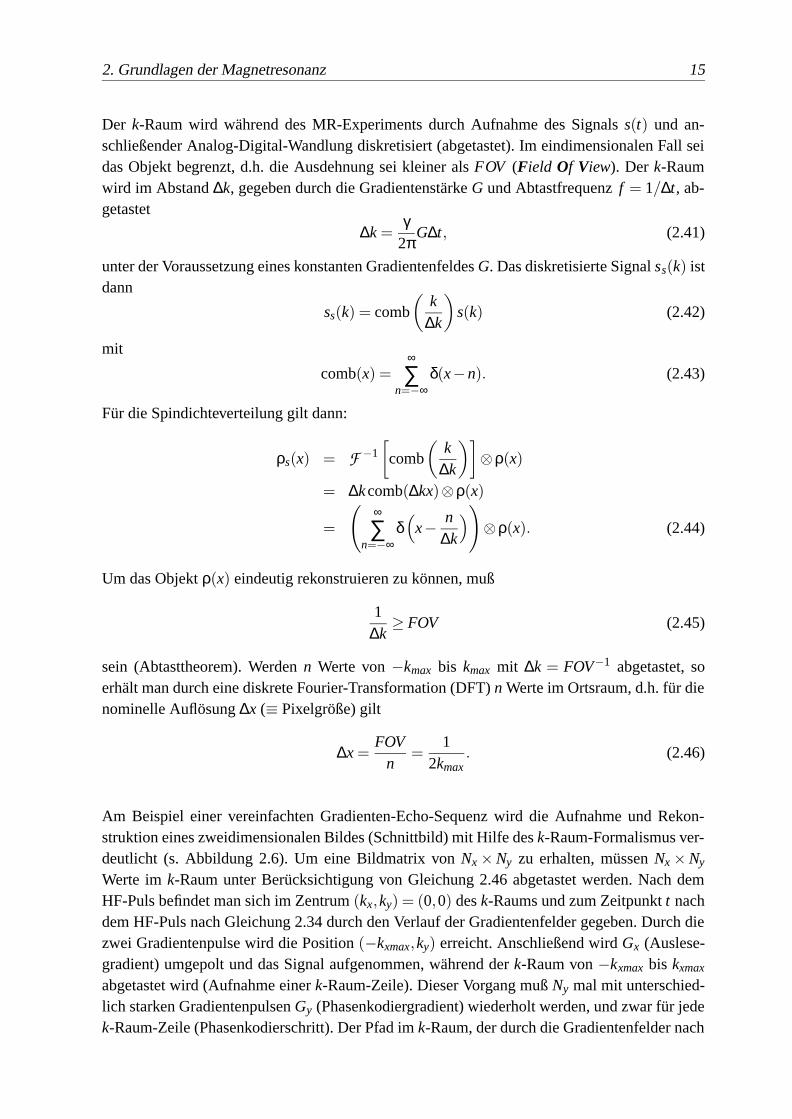
Der k-Raum wird während des MR-Experiments durch Aufnahme des Signals s(t) und an-schließender Analog-Digital-Wandlung diskretisiert (abgetastet). Im eindimensionalen Fall seidas Objekt begrenzt, d.h. die Ausdehnung sei kleiner als FOV (Field Of View). Der k-Raumwird im Abstand ∆k, gegeben durch die Gradientenstärke G und Abtastfrequenz f = 1/∆t, ab-getastet
∆k =γ
2πG∆t, (2.41)
unter der Voraussetzung eines konstanten Gradientenfeldes G. Das diskretisierte Signal ss(k) istdann
ss(k) = comb
(k
∆k
)
s(k) (2.42)
mit
comb(x) =∞
∑n=−∞
δ(x−n). (2.43)
Für die Spindichteverteilung gilt dann:
ρs(x) = F −1[
comb
(k
∆k
)]
⊗ρ(x)
= ∆k comb(∆kx)⊗ρ(x)
=
(∞
∑n=−∞
δ(
x− n∆k
))
⊗ρ(x). (2.44)
Um das Objekt ρ(x) eindeutig rekonstruieren zu können, muß
1∆k
≥ FOV (2.45)
sein (Abtasttheorem). Werden n Werte von −kmax bis kmax mit ∆k = FOV−1 abgetastet, soerhält man durch eine diskrete Fourier-Transformation (DFT) n Werte im Ortsraum, d.h. für dienominelle Auflösung ∆x (≡ Pixelgröße) gilt
∆x =FOV
n=
12kmax
. (2.46)
Am Beispiel einer vereinfachten Gradienten-Echo-Sequenz wird die Aufnahme und Rekon-struktion eines zweidimensionalen Bildes (Schnittbild) mit Hilfe des k-Raum-Formalismus ver-deutlicht (s. Abbildung 2.6). Um eine Bildmatrix von Nx ×Ny zu erhalten, müssen Nx ×Ny
Werte im k-Raum unter Berücksichtigung von Gleichung 2.46 abgetastet werden. Nach demHF-Puls befindet man sich im Zentrum (kx,ky) = (0,0) des k-Raums und zum Zeitpunkt t nachdem HF-Puls nach Gleichung 2.34 durch den Verlauf der Gradientenfelder gegeben. Durch diezwei Gradientenpulse wird die Position (−kxmax,ky) erreicht. Anschließend wird Gx (Auslese-gradient) umgepolt und das Signal aufgenommen, während der k-Raum von −kxmax bis kxmax
abgetastet wird (Aufnahme einer k-Raum-Zeile). Dieser Vorgang muß Ny mal mit unterschied-lich starken Gradientenpulsen Gy (Phasenkodiergradient) wiederholt werden, und zwar für jedek-Raum-Zeile (Phasenkodierschritt). Der Pfad im k-Raum, der durch die Gradientenfelder nach
16 2.6. Ortskodierung
PSfrag replacements
HF
Gx
Gy
Ny Wiederholungen
e−t/T ∗2
Gradienten-Echo
A/D Abtastung
1© 2© 3© 4©
FIDTE
1©
2©
3©
4©
−kxmax
0
kxmax
−kymax
0
kymax
kx
ky
PSfrag replacements
HFGx
Gy
Ny Wiederholungen
e−t/T ∗2
Gradienten-Echo
A/D Abtastung
1©
2©
3©
4©
FID
TE
1©
2©3© 4©
−kxmax 0 kxmax
−kymax
0
kymax
kx
ky
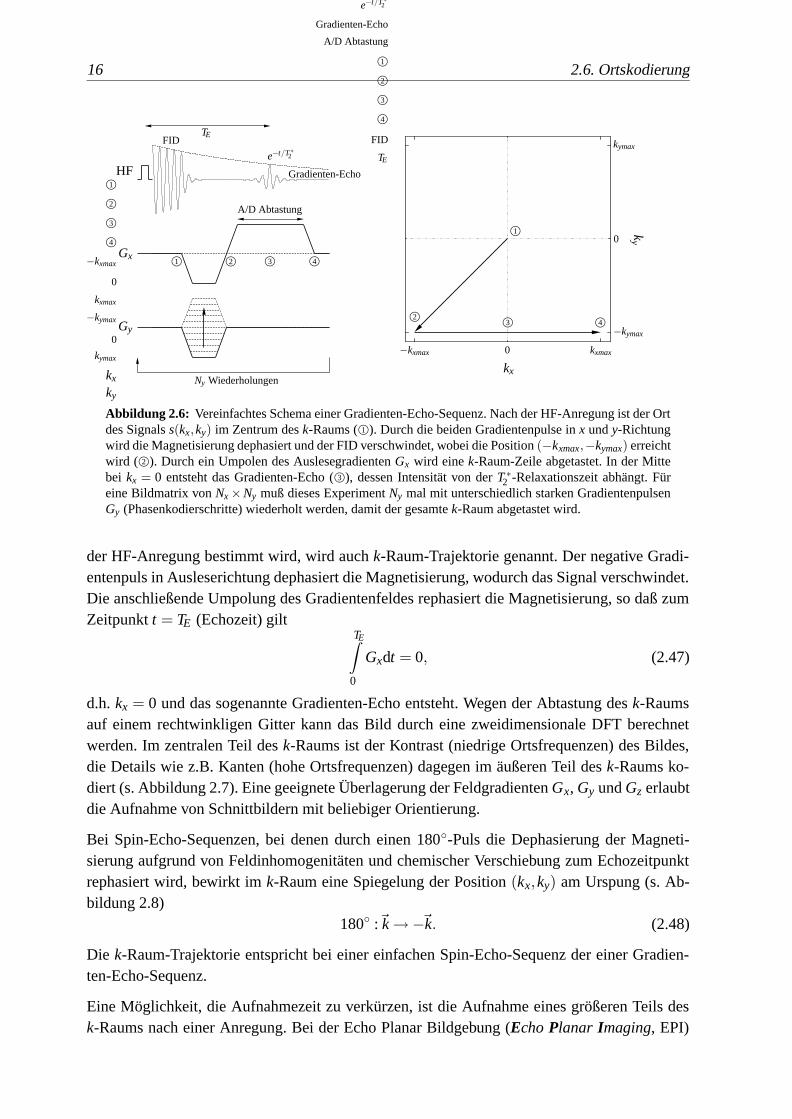
Abbildung 2.6: Vereinfachtes Schema einer Gradienten-Echo-Sequenz. Nach der HF-Anregung ist der Ortdes Signals s(kx,ky) im Zentrum des k-Raums ( 1©). Durch die beiden Gradientenpulse in x und y-Richtungwird die Magnetisierung dephasiert und der FID verschwindet, wobei die Position (−kxmax,−kymax) erreichtwird ( 2©). Durch ein Umpolen des Auslesegradienten Gx wird eine k-Raum-Zeile abgetastet. In der Mittebei kx = 0 entsteht das Gradienten-Echo ( 3©), dessen Intensität von der T ∗2 -Relaxationszeit abhängt. Füreine Bildmatrix von Nx×Ny muß dieses Experiment Ny mal mit unterschiedlich starken GradientenpulsenGy (Phasenkodierschritte) wiederholt werden, damit der gesamte k-Raum abgetastet wird.
der HF-Anregung bestimmt wird, wird auch k-Raum-Trajektorie genannt. Der negative Gradi-entenpuls in Ausleserichtung dephasiert die Magnetisierung, wodurch das Signal verschwindet.Die anschließende Umpolung des Gradientenfeldes rephasiert die Magnetisierung, so daß zumZeitpunkt t = TE (Echozeit) gilt
TE∫
0
Gxdt = 0, (2.47)
d.h. kx = 0 und das sogenannte Gradienten-Echo entsteht. Wegen der Abtastung des k-Raumsauf einem rechtwinkligen Gitter kann das Bild durch eine zweidimensionale DFT berechnetwerden. Im zentralen Teil des k-Raums ist der Kontrast (niedrige Ortsfrequenzen) des Bildes,die Details wie z.B. Kanten (hohe Ortsfrequenzen) dagegen im äußeren Teil des k-Raums ko-diert (s. Abbildung 2.7). Eine geeignete Überlagerung der Feldgradienten Gx, Gy und Gz erlaubtdie Aufnahme von Schnittbildern mit beliebiger Orientierung.
Bei Spin-Echo-Sequenzen, bei denen durch einen 180-Puls die Dephasierung der Magneti-sierung aufgrund von Feldinhomogenitäten und chemischer Verschiebung zum Echozeitpunktrephasiert wird, bewirkt im k-Raum eine Spiegelung der Position (kx,ky) am Urspung (s. Ab-bildung 2.8)
180 :~k →−~k. (2.48)
Die k-Raum-Trajektorie entspricht bei einer einfachen Spin-Echo-Sequenz der einer Gradien-ten-Echo-Sequenz.
Eine Möglichkeit, die Aufnahmezeit zu verkürzen, ist die Aufnahme eines größeren Teils desk-Raums nach einer Anregung. Bei der Echo Planar Bildgebung (Echo Planar Imaging, EPI)

2. Grundlagen der Magnetresonanz 17
Abbildung 2.7: (links) Kopfaufnahme mit dazugehörendem k-Raum-Bild (logarithmische Darstellung).(Mitte) In dem zentralen Teil des k-Raums (niedrige Ortfrequenzen) ist die Information über den Kontrastund (rechts) im äußeren Teil (hohe Ortsfrequenzen) über die Details enthalten.
PSfrag replacements
HF
Gx
Gy
Ny Wiederholungen
Spin-Echo
A/D Abtastung
1© 2© 3© 4© 5©
FID
e−t/T2
TE/2TE/2
1©
2©
3©
4©
5©
−kxmax
0
kxmax
−kymax
0
kymax
kx
ky
PSfrag replacements
HFGx
Gy
Ny Wiederholungen
Spin-Echo
A/D Abtastung
1©
2©
3©
4©
5©
FID
e−t/T2
TE/2
1©
2©
3©4© 5©
−kxmax 0 kxmax
−kymax
0
kymax
kx
ky
Abbildung 2.8: Vereinfachtes Schema einer Spin-Echo-Sequenz. Ein zweiter HF-Puls (180) rephasiertdie Magnetisierung zum Echozeitpunkt. Im k-Raum bewirkt dieser eine Spiegelung am Ursprung ( 2© →3©). Deshalb haben im Gegensatz zur Gradienten-Echo-Sequenz (s. Abbildung 2.6) die Gradientenpulse
in Ausleserichtung zur Dephasierung bzw. Rephasierung die gleiche Polarität. Da der 180-Puls die De-phasierungen aufgrund von Feldinhomogenitäten und der chemischen Verschiebung zum Echozeitpunktrephasiert, ist die Intensität des Spin-Echos von der T2-Relaxationszeit abhängig.
[Man77] wird der gesamte k-Raum nach einer Anregung akquiriert (s. Abbildung 2.9). Da-bei sind auch andere k-Raum-Trajektorien, wie z.B. bei der Spiralbildgebung (spiral scans)[Ahn86], möglich (s. Abbildung 2.10). Wird der k-Raum jedoch nicht auf einem rechtwink-

18 2.6. Ortskodierung
ligen Gitter abgetastet, so muß vor der Anwendung der DFT eine Interpolation (Regridding-Methoden) durchgeführt werden [Jac91]. Die eigentliche Ortsauflösung einer Sequenz wirddurch die Punktbildfunktion (Point Spread Function, PSF) bestimmt, die unter anderem vonder k-Raum-Trajektorie abhängt. Bei langen Akquisitionszeiten können die Relaxationseffektenicht mehr vernachlässigt werden, was zu Signalverlusten oder zur Auflösungsverschlechterungführen kann. Zusätzlich sind solche Sequenzen im Allgemeinen artefaktanfälliger.
PSfrag replacements
HF
Gx
Gy
e−t/T ∗2
TE
−kxmax
0
kxmax
−kymax
0
kymax
kx
ky
PSfrag replacements
HFGx
Gy
e−t/T ∗2
TE
−kxmax 0 kxmax
−kymax
0
kymax
kx
ky
Abbildung 2.9: (links) Schematische Darstellung einer Echo-Planar-Pulssequenz (EPI) und (rechts) derentsprechenden k-Raum-Trajektorie. Um die Meßzeit zu verkürzen, wird hierbei ein großer Teil des k-Raums nach einer HF-Anregung abgetastet. Wegen der langen Zeiten, während der das Signal abgetastetwird, ist diese Methode unter anderem stärker anfällig für Inhomogenitäten des B0-Feldes. Der Offset vonGy bstimmt die Steigung der k-Raum-Trajektorie.
PSfrag replacements
HF
Gx
Gy
e−t/T ∗2
TE
−kxmax
0
kxmax
−kymax
0
kymax
kx
ky
PSfrag replacements
HFGx
Gy
e−t/T ∗2
TE
−kxmax 0 kxmax
−kymax
0
kymax
kx
ky
Abbildung 2.10: (links) Schematische Darstellung einer Spiralbildgebungs-Sequenz und (rechts) der ent-sprechenden k-Raum-Trajektorie. Ein Vorteil dieser Methode ist der Beginn im Zentrum des k-Raums (kur-ze Echozeit TE ) und die gleichmäßige Abtastung des k-Raums.

2. Grundlagen der Magnetresonanz 19
2.6.2 Schichtselektive Anregung
Um die in Abschnitt 2.6.1 beschriebene Ortskodierung auf zwei Dimensionen beschränken zukönnen, wird eine schichtselektive Anregung durchgeführt, bei der nur die Kernmagnetisierunginnerhalb einer begrenzten Schicht aus dem Gleichgewichtszustand gebracht wird. Dies wirddurch eine Überlagerung des homogenen Hauptmagnetfeldes ~B0 = |~B0|~ez mit einem Gradien-tenfeld ~G erreicht, wodurch die Resonanzfrequenz ortsabhängig wird
~ωL =−|~ωL|~ez =−γ(
~B0 +(~x~G)~ez
)
(2.49)
und der HF-Puls mit der Frequenz ~ω =−|~ω|~ez nur für eine Schicht die Resonanzbedingung er-füllt. Ist der HF-Puls amplitudenmoduliert, d.h. ~B1(t) = B1(t)(cosφ(t)~ex + sinφ(t)~ey) mit einermöglichen zusätzlichen Phase φ(t), dann ist die Bewegungsgleichung in dem mit der Frequenz~ω rotierenden Bezugssystem nach Gleichung 2.12
d ~M(t)dt
= γ~M(t)×~Beff (2.50)
~Beff = ~B0 +(~x~G)~ez +~ωγ
+~B1(t)
=∆Ωγ
~ez +~B1(t)
mit∆Ω = |~ωL|− |~ω|+ γ~x~G. (2.51)
Mit M⊥ = Mx + iMy lauten die Blochschen Gleichungen für die Längs- bzw. Querkomponenten
dM⊥(t)dt
= −i∆ΩM⊥(t)+ iγMz(t)B1(t)eiφ(t) (2.52)
dMz(t)dt
= γB1(t)(
Mx(t)sinφ(t)−My(t)cosφ(t))
. (2.53)
Bei der Näherung für kleine Drehwinkel (Linearisierung der Blochschen Gleichungen) wirdangenommen, daß der HF-Puls einen vernachlässigbaren Effekt auf die Längsmagnetisierunghat, so daß diese als konstant und gleich der Gleichgewichtsmagnetisierung angenommen wird,d.h. Mz(t) = M0. Dann muß nur Gleichung 2.52 gelöst werden. Für die Pulsdauer Tp gilt somitzum Zeitpunkt t ≥ Tp:
M⊥(t) = iγM0e−i∆Ωt
Tp∫
0
B1(τ)eiφ(τ)ei∆Ωτdτ, (2.54)
d.h. für kleine Drehwinkel ist die ortsabhängige Quermagnetisierung zum Zeitpunkt Tp
M⊥(∆Ω) = iγM0e−i∆ΩTpF −1[B1(t)eiφ(t)], (2.55)

20 2.6. Ortskodierung
wobei ∆Ω = ∆Ω(~x) durch Gleichung 2.51 definiert ist. Der zusätzliche Phasengang e−i∆ΩTp
kann durch einen umgepolten Feldgradienten nach dem HF-Puls ausgeglichen (refokussiert)werden. Die resultierende Quermagnetisierung wird als Schichtprofil bezeichnet. O.E.d.A. seiim folgenden ~G = Gz~ez. Als Schichtdicke ∆z wird die Halbwertsbreite der Quermagnetisierungdefiniert, die nach Gleichung 2.55 mit der Bandbreite ∆ f des HF-Pulses zusammenhängt. AusGleichung 2.51 folgt dann für die Schichtdicke
∆z =∆ fγ
2πGz. (2.56)
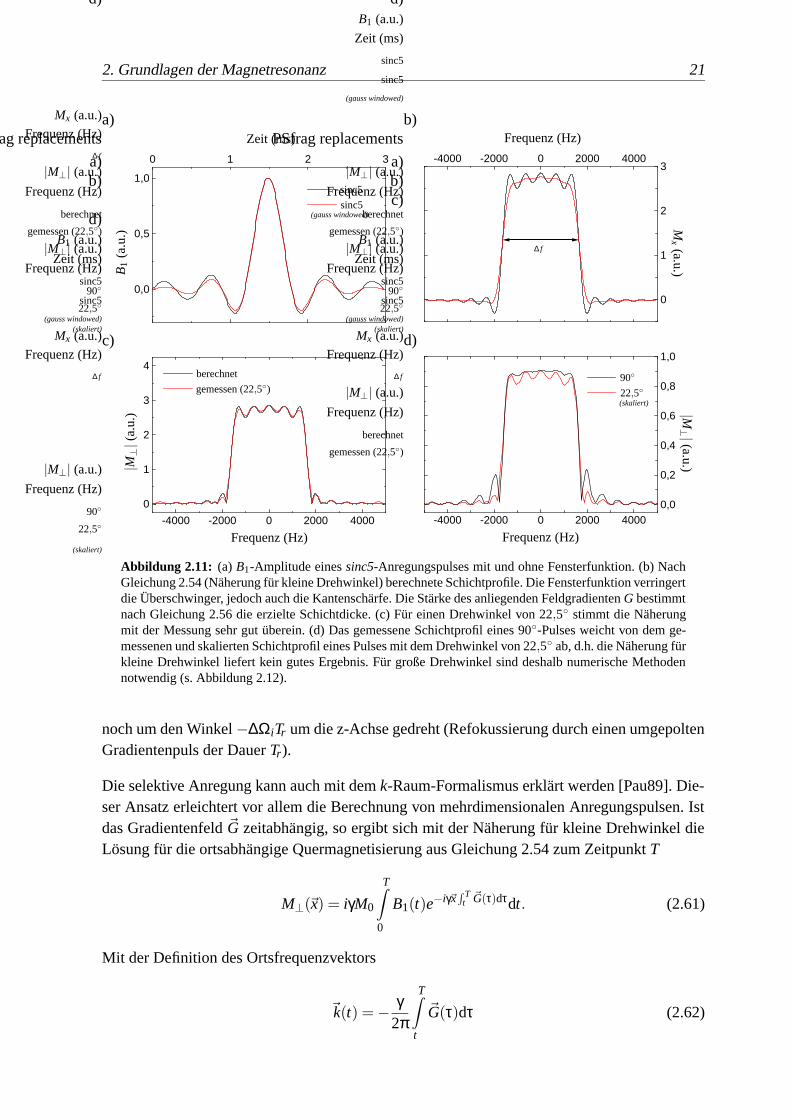
Um ein rechteckförmiges Schichtprofil zu erhalten, ist eine Amplitudenmodulation des HF-Pulses entsprechend der Funktion sin t/t (sinc-Funktion) mit unendlicher Länge nötig. Eineendliche Länge des Pulses führt zu Abweichungen (s. Abbildung 2.11). Durch eine schicht-selektive Anregung ist die Kernmagnetisierung an einem Ort (x,y) die Projektion längs derSchicht, d.h.
M⊥(x,y) =∫
M⊥(x,y,z)dz. (2.57)
Ist die Kernmagnetisierung in der Schicht nicht gleichgerichtet, d.h. besteht ein Phasengang, soführt dies zu einer Verringerung der Gesamtmagnetisierung und somit zu Signalverlusten.
Die Schichtposition zm (Mitte des Schichtprofils) ergibt sich aus Gleichung 2.51
zm =ω−ω0
γGz, (2.58)
und ist wegen Gleichung 2.29 (s. Abschnitt 2.5) auch von der chemischen Verschiebung δ ab-hängig (chemical shift artifact). Die Differenz der Schichtpositionen von Fett– und Wassersi-gnalen zdiff beträgt mit ∆δ = δH2O−δFett = 3,5ppm
zdiff /∆z =γ
2πB0∆δ/∆ f . (2.59)
Die Linearisierung der Blochschen Gleichungen liefert bei Drehwinkeln bis zu 30 gute Ergeb-nisse. Größere Drehwinkel (90 oder 180) erfordern numerische Lösungen2. Dazu wird derHF-Puls diskretisiert und auf den zu erreichenden Drehwinkel α skaliert
α = γN
∑n=0
B1(n∆t)∆t (2.60)
mit ∆t = Tp/N. Der Frequenzbereich |∆Ωi|< Ωmax wird in I Intervalle ∆ω unterteilt (0≤ i≤ I =
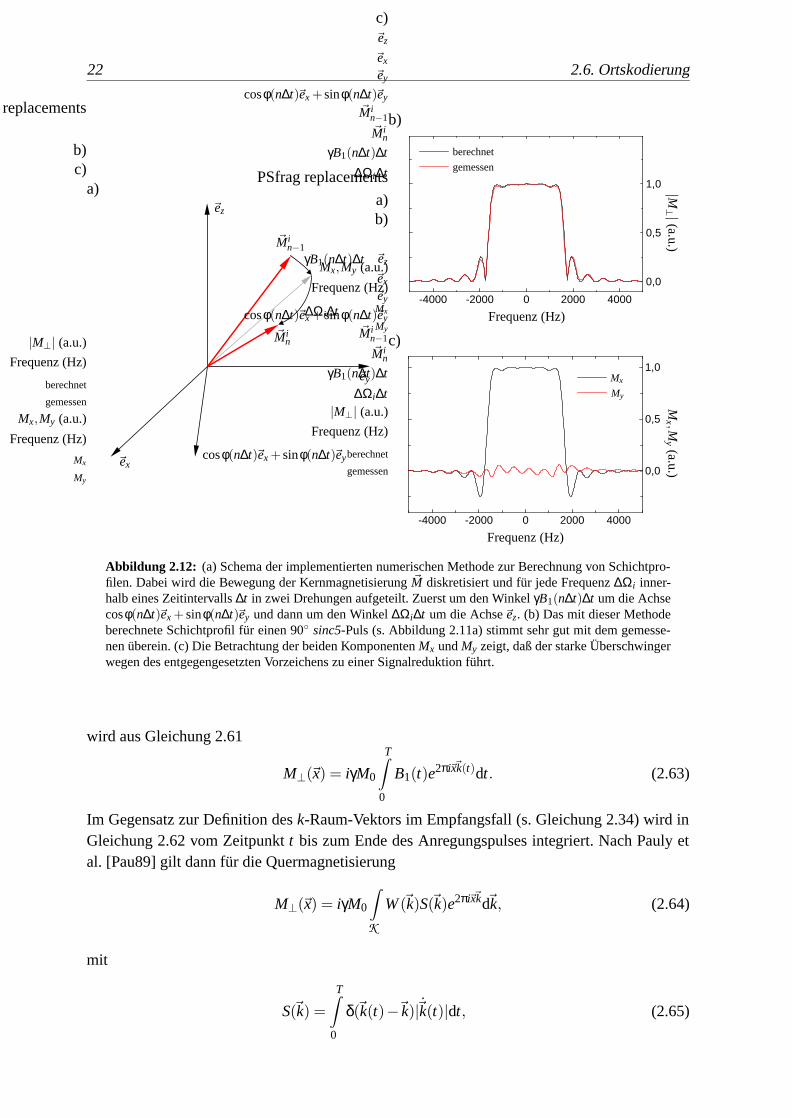
2Ωmax/∆ω). Um die Bewegung der Kernmagnetisierung ~M diskretisieren zu können, müssenγB1(n∆t)∆t und Ωmax∆t infinitesimale Drehungen sein. Dann wird für jede Frequenz ∆Ωi dieMagnetisierung ~Mi
n zum Zeitpunkt n∆t aus ~Min−1 durch zwei Drehungen berechnet, und zwar
zuerst um den Winkel γB1(n∆t)∆t um die Achse cosφ(n∆t)~ex + sinφ(n∆t)~ey in der xy-Ebeneund dann um den Winkel ∆Ωi∆t um die z-Achse (s. Abbildung 2.12). Abschließend wird ~Mi
N
2Das Programm zur numerischen Lösung der Schichtprofile von HF-Pulsen wurde von Herrn Dr. F. Seifertentwickelt, der auch die Berechnungen für den sinc5-Puls durchgeführt hat.
2. Grundlagen der Magnetresonanz 21
0,0
0,5
1,0
0 1 2 3
PSfrag replacements
a)
b)c)d)
B1
(a.u
.)
Zeit (ms)
sinc5
sinc5(gauss windowed)
Mx (a.u.)
Frequenz (Hz)
∆ f
|M⊥| (a.u.)
Frequenz (Hz)
berechnet
gemessen (22,5)
|M⊥| (a.u.)
Frequenz (Hz)
90
22,5
(skaliert)
-4000 -2000 0 2000 4000
0
1
2
3
PSfrag replacements
a)
b)
c)d)
B1 (a.u.)
Zeit (ms)
sinc5
sinc5
(gauss windowed)
Mx
(a.u.)
Frequenz (Hz)
∆ f
|M⊥| (a.u.)
Frequenz (Hz)
berechnet
gemessen (22,5)
|M⊥| (a.u.)
Frequenz (Hz)
90
22,5
(skaliert)
-4000 -2000 0 2000 4000
0
1
2
3
4
PSfrag replacements
a)b)
c)
d)B1 (a.u.)
Zeit (ms)
sinc5
sinc5
(gauss windowed)
Mx (a.u.)
Frequenz (Hz)
∆ f
|M⊥|(
a.u.
)
Frequenz (Hz)
berechnet
gemessen (22,5)
|M⊥| (a.u.)
Frequenz (Hz)
90
22,5
(skaliert)
-4000 -2000 0 2000 40000,0
0,2
0,4
0,6
0,8
1,0
PSfrag replacements
a)b)c)
d)
B1 (a.u.)
Zeit (ms)
sinc5
sinc5
(gauss windowed)
Mx (a.u.)
Frequenz (Hz)
∆ f
|M⊥| (a.u.)
Frequenz (Hz)
berechnet
gemessen (22,5)
|M⊥ |(a.u.)
Frequenz (Hz)
90
22,5(skaliert)
Abbildung 2.11: (a) B1-Amplitude eines sinc5-Anregungspulses mit und ohne Fensterfunktion. (b) NachGleichung 2.54 (Näherung für kleine Drehwinkel) berechnete Schichtprofile. Die Fensterfunktion verringertdie Überschwinger, jedoch auch die Kantenschärfe. Die Stärke des anliegenden Feldgradienten G bestimmtnach Gleichung 2.56 die erzielte Schichtdicke. (c) Für einen Drehwinkel von 22,5 stimmt die Näherungmit der Messung sehr gut überein. (d) Das gemessene Schichtprofil eines 90-Pulses weicht von dem ge-messenen und skalierten Schichtprofil eines Pulses mit dem Drehwinkel von 22,5 ab, d.h. die Näherung fürkleine Drehwinkel liefert kein gutes Ergebnis. Für große Drehwinkel sind deshalb numerische Methodennotwendig (s. Abbildung 2.12).
noch um den Winkel−∆ΩiTr um die z-Achse gedreht (Refokussierung durch einen umgepoltenGradientenpuls der Dauer Tr).
Die selektive Anregung kann auch mit dem k-Raum-Formalismus erklärt werden [Pau89]. Die-ser Ansatz erleichtert vor allem die Berechnung von mehrdimensionalen Anregungspulsen. Istdas Gradientenfeld ~G zeitabhängig, so ergibt sich mit der Näherung für kleine Drehwinkel dieLösung für die ortsabhängige Quermagnetisierung aus Gleichung 2.54 zum Zeitpunkt T
M⊥(~x) = iγM0
T∫
0
B1(t)e−iγ~x
∫ Tt
~G(τ)dτdt. (2.61)
Mit der Definition des Ortsfrequenzvektors
~k(t) =− γ2π
T∫
t
~G(τ)dτ (2.62)
22 2.6. Ortskodierung
PSfrag replacements
a)
b)c)
~ez
~ex
~ey
cosφ(n∆t)~ex + sinφ(n∆t)~ey
~Min−1
~Min
γB1(n∆t)∆t
∆Ωi∆t
|M⊥| (a.u.)
Frequenz (Hz)
berechnet
gemessen
Mx,My (a.u.)
Frequenz (Hz)
Mx
My
-4000 -2000 0 2000 4000
0,0
0,5
1,0
PSfrag replacements
a)
b)
c)~ez
~ex
~ey
cosφ(n∆t)~ex + sinφ(n∆t)~ey
~Min−1
~Min
γB1(n∆t)∆t
∆Ωi∆t
|M⊥ |(a.u.)
Frequenz (Hz)
berechnet
gemessen
Mx,My (a.u.)
Frequenz (Hz)
Mx
My
-4000 -2000 0 2000 4000
0,0
0,5
1,0
PSfrag replacements
a)b)
c)
~ez
~ex
~ey
cosφ(n∆t)~ex + sinφ(n∆t)~ey
~Min−1
~Min
γB1(n∆t)∆t
∆Ωi∆t|M⊥| (a.u.)
Frequenz (Hz)
berechnet
gemessen
Mx ,M
y(a.u.)
Frequenz (Hz)
Mx
My
Abbildung 2.12: (a) Schema der implementierten numerischen Methode zur Berechnung von Schichtpro-filen. Dabei wird die Bewegung der Kernmagnetisierung ~M diskretisiert und für jede Frequenz ∆Ωi inner-halb eines Zeitintervalls ∆t in zwei Drehungen aufgeteilt. Zuerst um den Winkel γB1(n∆t)∆t um die Achsecosφ(n∆t)~ex + sinφ(n∆t)~ey und dann um den Winkel ∆Ωi∆t um die Achse ~ez. (b) Das mit dieser Methodeberechnete Schichtprofil für einen 90 sinc5-Puls (s. Abbildung 2.11a) stimmt sehr gut mit dem gemesse-nen überein. (c) Die Betrachtung der beiden Komponenten Mx und My zeigt, daß der starke Überschwingerwegen des entgegengesetzten Vorzeichens zu einer Signalreduktion führt.
wird aus Gleichung 2.61
M⊥(~x) = iγM0
T∫
0
B1(t)e2πi~x~k(t)dt. (2.63)
Im Gegensatz zur Definition des k-Raum-Vektors im Empfangsfall (s. Gleichung 2.34) wird inGleichung 2.62 vom Zeitpunkt t bis zum Ende des Anregungspulses integriert. Nach Pauly etal. [Pau89] gilt dann für die Quermagnetisierung
M⊥(~x) = iγM0
∫
K
W (~k)S(~k)e2πi~x~kd~k, (2.64)
mit
S(~k) =
T∫
0
δ(~k(t)−~k)|~k(t)|dt, (2.65)

2. Grundlagen der Magnetresonanz 23
W(
~k(t))
=B1(t)
|~k(t)|, (2.66)
wobei W (~k) die Gewichtungsfunktion im mehrdimensionalen k-Raum K ist und für alle~k 6∈~k(t)
undefiniert bleibt. S(~k) ist die Sampling-Funktion, die durch den Faktor |~k(t)| normiert wird.Damit gilt
M⊥(~x) ∝ F −1[S(~k)]⊗F −1[W (~k)]. (2.67)
Die Wahl von S(~k) und W (~k) bestimmt den Gradientenverlauf nach Gleichung 2.62 und damitdie Amplitudenmodulation des HF-Pulses nach Gleichung 2.66. Dabei beschränkt sich der k-Raum-Formalismus nicht nur auf die Ortsfrequenz-Räume kx, ky und kz, sondern kann auch aufkω angewendet werden, wodurch auch ein spektral und räumlich selektiver Anregungspuls ge-neriert werden kann, der nur die Anregung der Wasserprotonen in einer Schicht erlaubt und so-mit eine Fettunterdrückung darstellt (spektral und räumlich selektiver Anregungspuls, s. näch-ster Abschnitt).
Spektral und räumlich selektiver Anregungspuls
Das Fettsignal kann in der Bildgebung zu vielfältigen Artefakten führen, insbesondere bei derschnellen Bildgebung, die auf Echo Planar bzw. Spiralbildgebungs-Verfahren beruhen. EineMöglichkeit, das Fettsignal zu unterdrücken, besteht darin, nur die Wasserprotonen anzuregen.Für eine gleichzeitige schichtselektive Anregung ist ein mehrdimensionaler Anregungspuls er-forderlich, der am 3-Tesla-Tomographen für eine schnelle Herzbildgebung (s. Kapitel 5) imple-mentiert wurde, im Rahmen dieser Arbeit für diese Anwendung jedoch nicht mehr zum Einsatzkam. Im folgenden wird die Konstruktion eines solchen Anregungspulses, wie sie von Meyeret. al [Mey90] beschrieben wurde, kurz skizziert (für eine ausführliche Herleitung s. AnhangC). Es sei der k-Raum K = (kz,kω) und
kz(t) = −R
0∫
t
Gz(τ)dτ (2.68)
kω(t) =1
2πt (2.69)
mit −T ≤ t ≤ 0 und R = γ2π m · s, so daß kz und kω die gleiche Einheit haben. Man wählt
Gz(t) = GcosΩt (2.70)
und daraus folgt
kz(t) =RGΩ
sinΩt =RGΩ
sin2πΩkω. (2.71)
Unter der Annahme, daß S(~k) den k-Raum gleichmäßig abtastet und die QuermagnetisierungM⊥ sowohl in Orts– als auch in Frequenzrichtung ein Gaußprofil aufweisen soll, ist
W (~k) = ae−(2πkz)2/b2
e−(2πkω+T/2)2/c2(2.72)

24 2.6. Ortskodierung
und somit nach Gleichung 2.66
B1(t) = Be−αsin2 Ωte−β(t+T/2)2 |cosΩt|. (2.73)
Jedoch muß auch die Auswirkung der Samplingfunktion S(~k) berücksichtigt werden, d.h.
F −1[S(~k)] =∫
Kz
∫
Kω
S(kz,kω)e2πi(kzz+kωω)dkω dkz
=∞
∑n=−∞
∫
Kz
Cn(kz)e2πikzzdkzδ(ω−nΩ) (2.74)
mit
Cn(kz) = Ω1/2Ω∫
−1/2Ω
S(kz,kω)e2πinΩkωdkω, (2.75)
da S(kz,kω) bezüglich kω die Periode 1/Ω hat. Da W (~k) separabel ist, d.h. W (~k) =W (kz)W (kω),gilt für M⊥(z,ω)
M⊥(z,ω) ∝ M0
∫
Kω
W (kω)e2πikωωdkωδ(z)
(2.76)
⊗∞
∑n=−∞
∫
Kz
W (kz)e2πikzzdkz⊗
J1(Az′)2Az′
⊗ Jn(z′)
δ(ω−nΩ)
mit
A =
√
1+1
R2G2(2.77)
z′ =RGzΩ
. (2.78)
Ist Ω groß im Vergleich zur Breite von F −1[W (kω)], so gilt für die Maxima in ω-Richtung
M⊥(z,ω = nΩ) = F −1[W (kz)]⊗J1(Az′)
2Az′⊗ Jn(z
′). (2.79)
Um die Fettprotonen nicht anzuregen, sollte deren Resonanzfrequenz in einem der Minima lie-gen, also (n+1/2)Ω = 450Hz (bei 3 Tesla). Das erste Minimum, d.h. Ω = 900Hz, bietet dabeidie geringste Anfälligkeit für Feldinhomogenitäten (s. Abbildung 2.13 und 2.14). Wegen derhohen Frequenz, mit der das Gradientenfeld Gz(t) oszilliert, ist jedoch die minimale Schicht-dicke des implementierten Anregungspulses etwa 1,6cm. Um diese zu reduzieren, müßte die zuunterdrückende Resonanzfrequenz in dem zweiten Minimum liegen, d.h. Ω = 300Hz, wodurchdie minimale Schichtdicke bei etwa 5mm läge, jedoch einerseits die Pulslänge und andererseitsdie Anfälligkeit für Feldinhomogenitäten vergrößert wären.

2. Grundlagen der Magnetresonanz 25
0 2 4 6
-40
0
40
-100
0
100
0
20
40
60
80
100
0 2 4 6
PSfrag replacementsG
(%vo
nG
max
)
Zeit (ms)
kz
(%von
RG
/Ω)
G kz
B1
(a.u
.)
Zeit (ms)
0
1000
2000
−1000
−2000
0
−2
2
Frequenz (Hz)
z (cm)
PSfrag replacements
G (% von Gmax)
Zeit (ms)kz (% von RG/Ω)
G
kz
B1 (a.u.)
Zeit (ms)
0 1000 2000−1000−2000
0
−2
2
Frequenz (Hz)
z (cm)
Abbildung 2.13: (oben) B1-Amplitude, Gradientenverlauf und daraus resultierende k-Raum-Trajektoriedes implementierten spektral und räumlich selektiven Anregungspulses. (unten) Messung des frequenzab-hängigen Schichtprofils M⊥(z,ω) dieses Pulses. Die Oszillationsfrequenz des Gradienten wurde so gewählt,daß das Fettsignal (Frequenzdifferenz zum Wassersignal etwa 450Hz bei 3T) im ersten Minimum liegt.
Eine Verschiebung der Schicht um δz wird bei einem solchen Puls nicht durch eine Ände-rung der Sendefrequenz erreicht (s. Gleichung 2.58), sondern indem die AmplitudenmodulationB1(t) mit e−2πikz(t)δz multipliziert wird. Dann folgt aus Gleichung 2.64
M⊥(z,ω) = iγM0
∫
K
W (~k)S(~k)e2πi(kz(z−δz)+kωω)d~k. (2.80)

26 2.7. Magnetresonanzspektroskopie
PSfrag replacements
a
b
c
PSfrag replacements
a
b
c
PSfrag replacements
a
b
c
Abbildung 2.14: (a) Transversaler Schnitt einer Wade, aufgenommen mit einer Gradienten-Echo-Sequenzmit einem sinc3-Anregungspuls. (b) Wasser– und (c) Fettbild, aufgenommen mit derselben Sequenz unterVerwendung des spektral und räumlich selektiven Anregungspulses. Um das Fettbild zu erhalten, muß zurAnregung die Resonanzfrequenz der Fettprotonen verwendet werden (Wasserunterdrückung). Die Fett–bzw. Wasserunterdrückung des Anregungspulses ist sehr gut.
2.7 Magnetresonanzspektroskopie
Aufgrund der chemischen Verschiebung (s. Abschnitt 2.5) können in einem Kernresonanzspek-trum, das z.B. durch Aufnahme eines FID gewonnen wird, verschiedene Resonanzlinien vor-kommen. Die Spin-Spin-Kopplung (J-Kopplung) zwischen den Kernen, die über die Elektronender chemischen Bindung vermittelt wird, führt zu einer Feinaufspaltungen der Kernresonanzli-nien und somit zu Multipletts. Diese Aufspaltung ist unabhängig vom statischen Magnetfeld B0.Anhand ihres Spektrums lassen sich typische Metabolite mit Hilfe der Magnetresonanzspek-troskopie in vivo nachweisen. Die Lokalisation kann auf verschiedenen Wegen durchgeführtwerden.
2.7.1 Einzelvoxel Spektroskopie
Bei der PRESS (Point RESolved Spectroscopy) Methode wird die Lokalisation durch drei or-thogonale, schichtselektive Anregungspulse (90− 180− 180) erreicht (s. Abbildung 2.15).Das zweite Spin-Echo enthält nur Signale von dem Durchschnitt der drei Schichten, dem so-genannten VOI (Volume Of Interest). Kerne außerhalb des VOI werden dabei entweder nichtangeregt, oder deren Signal nicht refokussiert.
2.7.2 Spektroskopische Bildgebung
Wie bei der MR-Bildgebung kann die Ortskodierung auch durch zusätzliche Gradientenfeldererzeugt werden. Auch hier ermöglicht der k-Raum-Formalismus eine anschauliche Darstellung.Dabei ist wie im Sendefall (s. Abschnitt 2.6.2) der zur Frequenz gehörende k-Raum kω dieZeit t. In Abbildung 2.16 ist eine vierdimensionale CSI (Chemical Shift Imaging) Sequenzabgebildet. Durch die drei Gradientenpulse (Phasenkodierung) nach der Anregung wird diePosition (kx,ky,kz,0) erreicht, um dann anschließend einen FID und somit eine k-Raum-Zeileaufzunehmen. Für eine Nx×Ny×Nz×Nω Bildmatrix muß dieses Experiment Nx×Ny×Nz mal

2. Grundlagen der Magnetresonanz 27
PSfrag replacements
90180 180
TE
HF
Gx
Gy
Gz
Abbildung 2.15: Pulssequenz der PRESS Methode (Einzelvoxel-Spektroskopie) mit Wasserunterdrückung(drei CHESS (Chemical Shift Selective) Sequenzen). Durch die drei orthogonalen, schichtselektiven Anre-gungspulse stammt das Signal des aufgenommenen FID nur aus dem Durchschnitt, dem sogenannten VOI.Das Spektrum in Abbildung 2.4 wurde mit dieser Methode aufgenommen.
mit unterschiedlichen Gradientenpulsen durchgeführt werden. Da dies schon bei einer kleinenBildmatrix zu langen Meßzeiten führt, gibt es schnelle spektroskopische Bildgebungsmethoden,bei denen nach der Anregung ein größerer Teil des k-Raums abgetastet wird.
PSfrag replacements
HF
Gx
Gy
Gz
e−t/T ∗2
A/D Abtastung
Nx×Ny×Nz Wiederholungen
1© 2©
−kxmax
0
kxmax
0
kx
kω
1©
2©
PSfrag replacements
HFGx
Gy
Gz
e−t/T ∗2
A/D Abtastung
Nx×Ny×Nz Wiederholungen
1©
2©
−kxmax 0 kxmax
0
kx
kω
1©
2©
Abbildung 2.16: 4D-CSI Pulssequenz (spektroskopische Bildgebung). Nach jeder Anregung wird durchden aufgenommenen FID eine Zeile im vierdimensionale k-Raum abgetastet. Selbst für einen Datensatzmit einer kleinen Datenmatrix in den drei Raumrichtungen ist eine lange Meßzeit nötig.
28 2.8. Kontrast
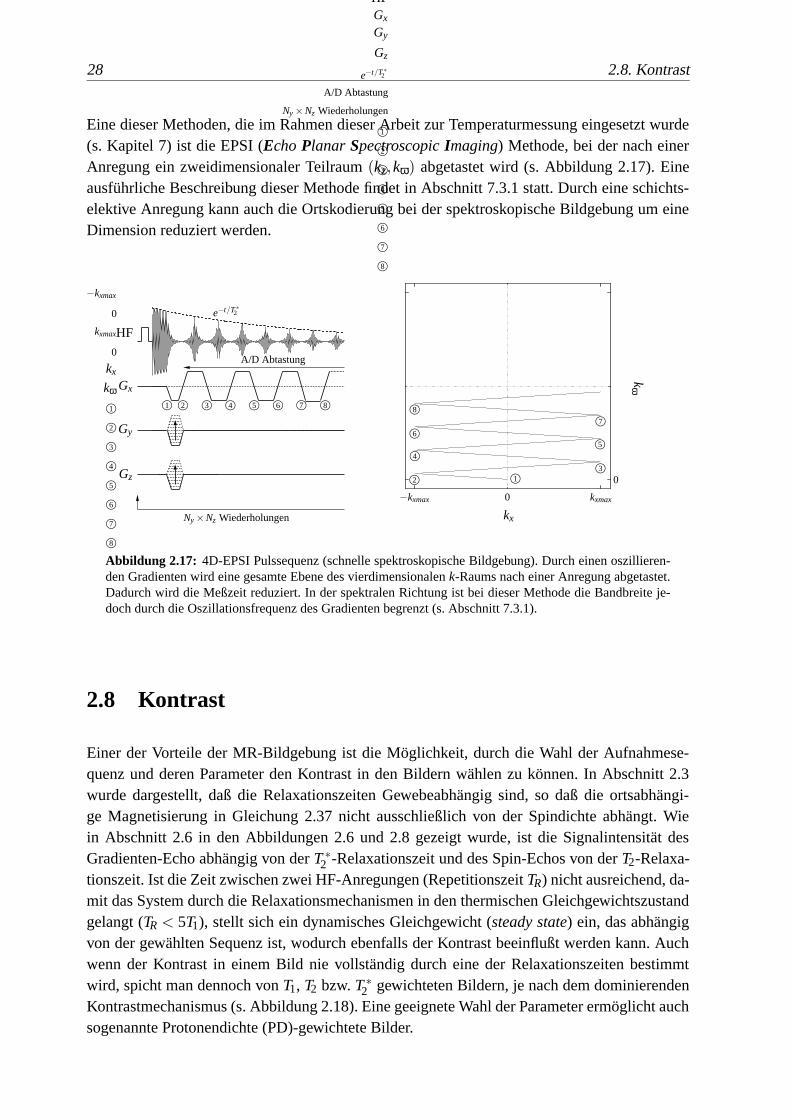
Eine dieser Methoden, die im Rahmen dieser Arbeit zur Temperaturmessung eingesetzt wurde(s. Kapitel 7) ist die EPSI (Echo Planar Spectroscopic Imaging) Methode, bei der nach einerAnregung ein zweidimensionaler Teilraum (kz,kω) abgetastet wird (s. Abbildung 2.17). Eineausführliche Beschreibung dieser Methode findet in Abschnitt 7.3.1 statt. Durch eine schichts-elektive Anregung kann auch die Ortskodierung bei der spektroskopische Bildgebung um eineDimension reduziert werden.
PSfrag replacements
HF
Gx
Gy
Gz
e−t/T ∗2
A/D Abtastung
Ny×Nz Wiederholungen
1© 2© 3© 4© 5© 6© 7© 8©
−kxmax
0
kxmax
0
kx
kω
1©
2©
3©
4©
5©
6©
7©
8©
PSfrag replacements
HFGx
Gy
Gz
e−t/T ∗2
A/D Abtastung
Ny×Nz Wiederholungen
1©
2©
3©
4©
5©
6©
7©
8©
−kxmax 0 kxmax
0
kx
kω
1©2©3©
4©5©
6©7©
8©
Abbildung 2.17: 4D-EPSI Pulssequenz (schnelle spektroskopische Bildgebung). Durch einen oszillieren-den Gradienten wird eine gesamte Ebene des vierdimensionalen k-Raums nach einer Anregung abgetastet.Dadurch wird die Meßzeit reduziert. In der spektralen Richtung ist bei dieser Methode die Bandbreite je-doch durch die Oszillationsfrequenz des Gradienten begrenzt (s. Abschnitt 7.3.1).
2.8 Kontrast
Einer der Vorteile der MR-Bildgebung ist die Möglichkeit, durch die Wahl der Aufnahmese-quenz und deren Parameter den Kontrast in den Bildern wählen zu können. In Abschnitt 2.3wurde dargestellt, daß die Relaxationszeiten Gewebeabhängig sind, so daß die ortsabhängi-ge Magnetisierung in Gleichung 2.37 nicht ausschließlich von der Spindichte abhängt. Wiein Abschnitt 2.6 in den Abbildungen 2.6 und 2.8 gezeigt wurde, ist die Signalintensität desGradienten-Echo abhängig von der T ∗2 -Relaxationszeit und des Spin-Echos von der T2-Relaxa-tionszeit. Ist die Zeit zwischen zwei HF-Anregungen (Repetitionszeit TR) nicht ausreichend, da-mit das System durch die Relaxationsmechanismen in den thermischen Gleichgewichtszustandgelangt (TR < 5T1), stellt sich ein dynamisches Gleichgewicht (steady state) ein, das abhängigvon der gewählten Sequenz ist, wodurch ebenfalls der Kontrast beeinflußt werden kann. Auchwenn der Kontrast in einem Bild nie vollständig durch eine der Relaxationszeiten bestimmtwird, spicht man dennoch von T1, T2 bzw. T ∗2 gewichteten Bildern, je nach dem dominierendenKontrastmechanismus (s. Abbildung 2.18). Eine geeignete Wahl der Parameter ermöglicht auchsogenannte Protonendichte (PD)-gewichtete Bilder.
2. Grundlagen der Magnetresonanz 29
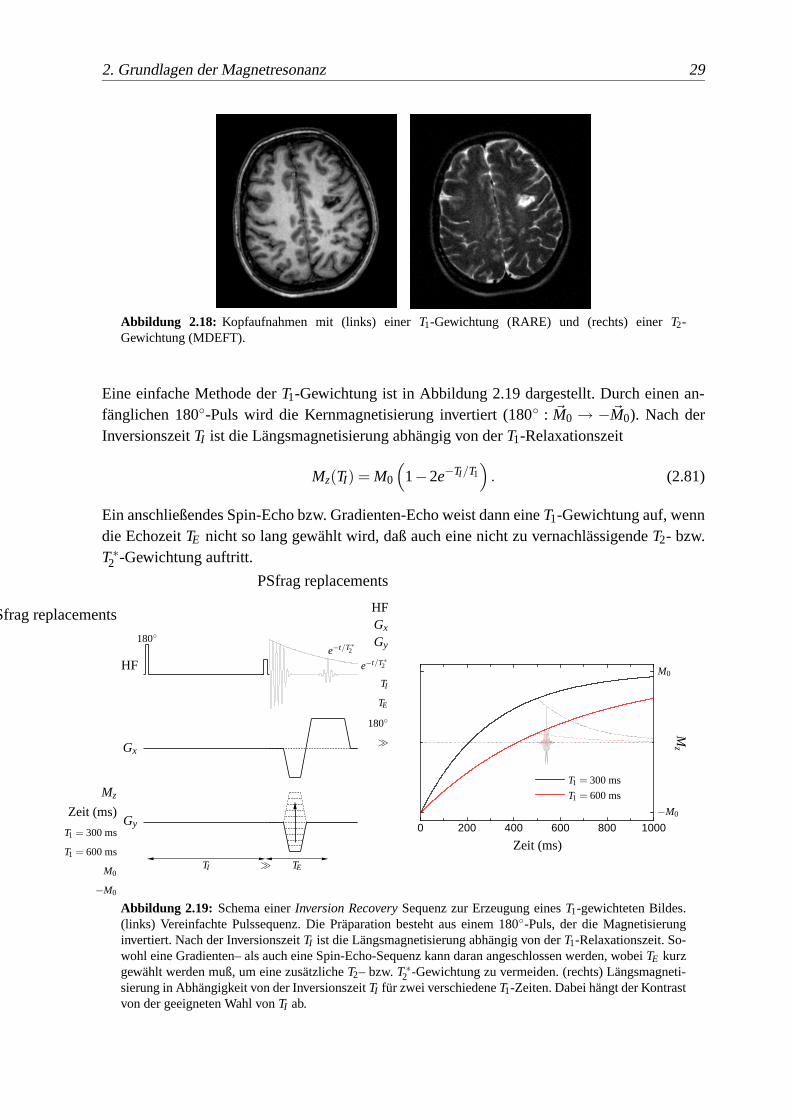
Abbildung 2.18: Kopfaufnahmen mit (links) einer T1-Gewichtung (RARE) und (rechts) einer T2-Gewichtung (MDEFT).
Eine einfache Methode der T1-Gewichtung ist in Abbildung 2.19 dargestellt. Durch einen an-fänglichen 180-Puls wird die Kernmagnetisierung invertiert (180 : ~M0 → −~M0). Nach derInversionszeit TI ist die Längsmagnetisierung abhängig von der T1-Relaxationszeit
Mz(TI) = M0
(
1−2e−TI/T1
)
. (2.81)
Ein anschließendes Spin-Echo bzw. Gradienten-Echo weist dann eine T1-Gewichtung auf, wenndie Echozeit TE nicht so lang gewählt wird, daß auch eine nicht zu vernachlässigende T2- bzw.T ∗2 -Gewichtung auftritt.
PSfrag replacements
HF
Gx
Gy
e−t/T ∗2
TI TE
180
Mz
Zeit (ms)
T1 = 300 ms
T1 = 600 ms
M0
−M0
0 200 400 600 800 1000
PSfrag replacements
HFGx
Gy
e−t/T ∗2
TI
TE
180
Mz
Zeit (ms)
T1 = 300 ms
T1 = 600 ms
M0
−M0
Abbildung 2.19: Schema einer Inversion Recovery Sequenz zur Erzeugung eines T1-gewichteten Bildes.(links) Vereinfachte Pulssequenz. Die Präparation besteht aus einem 180-Puls, der die Magnetisierunginvertiert. Nach der Inversionszeit TI ist die Längsmagnetisierung abhängig von der T1-Relaxationszeit. So-wohl eine Gradienten– als auch eine Spin-Echo-Sequenz kann daran angeschlossen werden, wobei TE kurzgewählt werden muß, um eine zusätzliche T2– bzw. T ∗2 -Gewichtung zu vermeiden. (rechts) Längsmagneti-sierung in Abhängigkeit von der Inversionszeit TI für zwei verschiedene T1-Zeiten. Dabei hängt der Kontrastvon der geeigneten Wahl von TI ab.

30 2.9. Signal-Rausch-Verhältnis
2.9 Signal-Rausch-Verhältnis
Der von der präzedierenden Kernmagnetisierung ~M in der Nachweisspule induzierten Wechsel-spannung US überlagert ist eine Rauschspannung UR, die durch die thermische Bewegung derElektronen in der Spule selbst und die Brownsche Molekularbewegung der Ladungsträger imMeßobjekt erzeugt wird. Diese ist gegeben durch
UR =√
(2/π)kT R∆ω. (2.82)
k = Boltzmann-KonstanteT = TemperaturR = Widerstand∆ω = Nachweisbandbreite
Der Widerstand R setzt sich dabei aus mehreren Komponenten zusammen
R = RΩ +Rs +Rp. (2.83)
RΩ = Ohmscher Widerstand der NachweisspuleRs = StrahlungswiderstandRp = durch das Meßobjekt eingekoppelter Verlustwiderstand
~
~
PSfrag replacements
US
UR
L C
RΩ Rs Rp
Abbildung 2.20: Erstazschaltbild einer Nach-weisspule. Der Widerstand R setzt sich im wesent-lichen aus dem ohmschen Widerstand der SpuleRΩ, dem Strahlungswiderstand Rs und dem Ver-lustwiderstand Rp, der durch das Meßobjekt ein-gekoppelt wird, zusammen.
Bei den in der medizinischen Diagnostik eingesetzten Feldstärken bzw. den daraus resultieren-den Frequenzen und den relativ großen Meßobjekten (hohe Beladung der Spule) überwiegt dasdurch das Meßobjekt induzierte Rauschen. Dieses wird durch die im Meßobjekt umgesetzteVerlustleistung
P =12
∫
V
σE2dV (2.84)
σ = elektrische LeitfähigkeitE = elektrische Feldstärke
bestimmt. Das elektrische Feld wird durch das magnetische Wechselfeld B1(t) = B1eiωt erzeugt,so daß E ∝ ω ist, und somit P ∝ ω2. Damit gilt für die Rauschspannung
UR ∝ ω. (2.85)

2. Grundlagen der Magnetresonanz 31
Die in der Spule induzierte Spannung US ist proportional der Kernmagnetisierung M und derFrequenz ω, so daß mit Gleichung 2.9 gilt
US ∝ ω2. (2.86)
Aus den Gleichungen 2.85 und 2.86 folgt für das Signal-Rausch-Verhältnis
S/R = US/UR ∝ ω. (2.87)
Unter den oben gemachten Annahmen ist somit das Signal-Rausch-Verhältnis proportional derFeldstärke des MR-Tomographen.