Kapitel 8 Das Riemannsche Integral - TU Wien · 2015. 8. 24. · Kapitel 8 Das Riemannsche Integral...
42
Kapitel 8 Das Riemannsche Integral 8.1 Ober- und Untersummen Schon die Mathematik der Antike beschäftigte man sich mit der Problemstellung, die Fläche gewisser Figuren zu berechnen. Bei Polygonen ist dies durch Zerlegung in Dreiecke unmittelbar möglich, bei krummlinigen Figuren ist dagegen nicht einmal so klar, wie Fläche überhaupt zu definieren ist. 8.1.1 Beispiel. Betrachte die Parabel gegeben durch f ( x) = x 2 . Wir sind an der Fläche, die von der x-Achse, der Parabel und der Geraden x = 1 begrenzt wird, interessiert. Dazu könnte man, unserer intuitiven Vorstellung von Fläche folgend, so vorgehen, dass man die Fläche in Streifen der Breite x zerlegt, z.B. x = 1 n , und die Fläche eines Streifens durch das Rechteck mit der Breite x und der Höhe min f ( x) approximiert, wobei das Minimum über die im betrachteten Streifen liegenden x-Koordinaten genommen wird. Ist x sehr klein, so wird man hoffen, dass die Summe der Flächen aller dieser Rechtecke fast gleich der zu bestimmenden Fläche ist. 0 1 1 n = 4 f ( x) = x 2 0 1 1 n = 8 f ( x) = x 2 Abbildung 8.1: Approximation der Fläche von unten
Transcript of Kapitel 8 Das Riemannsche Integral - TU Wien · 2015. 8. 24. · Kapitel 8 Das Riemannsche Integral...

Kapitel 8
Das Riemannsche Integral
8.1 Ober- und Untersummen
Schon die Mathematik der Antike beschäftigte man sich mit der Problemstellung, dieFläche gewisser Figuren zu berechnen. Bei Polygonen ist dies durch Zerlegung in Dreieckeunmittelbar möglich, bei krummlinigen Figuren ist dagegen nicht einmal so klar, wieFläche überhaupt zu definieren ist.
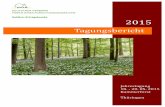
8.1.1 Beispiel. Betrachte die Parabel gegeben durch f (x) = x2.
Wir sind an der Fläche, die von der x-Achse, der Parabel und der Geraden x = 1 begrenztwird, interessiert. Dazu könnte man, unserer intuitiven Vorstellung von Fläche folgend, sovorgehen, dass man die Fläche in Streifen der Breite 4x zerlegt, z.B. 4x = 1
n , und die Flächeeines Streifens durch das Rechteck mit der Breite 4x und der Höhe min f (x) approximiert,wobei das Minimum über die im betrachteten Streifen liegenden x-Koordinaten genommenwird. Ist 4x sehr klein, so wird man hoffen, dass die Summe der Flächen aller dieserRechtecke fast gleich der zu bestimmenden Fläche ist.
0
1
1
n = 4
f (x) = x2
0
1
1
n = 8
f (x) = x2
Abbildung 8.1: Approximation der Fläche von unten

262 8 Das Riemannsche Integral
Wir erhalten folgende Näherung für die Gesamtfläche A:
Un =
n∑
k=1
min{ f (x) : (k − 1)1n≤ x ≤ k
1n} · 1
n=
n∑
k=1
(k − 1
n
)2
· 1n
=1n3
n−1∑
k=0
k2 =1n3
(n − 1)n(2n − 1)6
.
Für immer größer werdendes n bekommen wir limn→∞Un = 13 als Fläche A.
Genauso könnte man die Fläche des Streifens durch das Rechteck mit der Breite 4x undder Höhe max f (x) approximieren. Unserer Vorstellung von Fläche folgend, sollte beidieser zweiten Methode zur Flächenbestimmung dasselbe herauskommen.
0
1
1
n = 4
f (x) = x2
0
1
1
n = 8
f (x) = x2
Abbildung 8.2: Approximation der Fläche von oben
In der Tat gilt
On =
n∑
k=1
max{ f (x) : (k − 1)1n≤ x ≤ k
1n} · 1
n=
n∑
k=1
k2
n2
1n
=1n3
n∑
k=1
k2 =1n3
n(n + 1)(2n + 1)6
,
und für n→ ∞ erhalten wir denselben Wert limn→∞On = 13 für unsere Fläche A.
Wir wollen den Zugang aus dem letzten Beispiel formalisieren.
8.1.2 Definition. Sei [a, b] ein endliches Intervall in Rmit a < b. Wir nennen eine endlicheTeilmengeZ von [a, b] eine Zerlegung des Intervalls [a, b], falls a, b ∈ Z. Wir bezeichnenmit Z die Menge aller solcher Zerlegungen, versehen diese Menge mit der Relation ⊆, underhalten damit eine gerichtete Menge; vgl. Definition 5.3.1.Wollen wir die Elemente einer ZerlegungZ aufzählen, so werden wir das immer so tun,dass n(Z) + 1 die Mächtigkeit von Z bezeichnet, und dass Z = {ξ j : j = 0, . . . , n(Z)},wobei
a = ξ0 < ξ1 < · · · < ξn(Z) = b .
Sei nun f : [a, b] → R eine beschränkte Funktion. Zu einer gegebenen Zerlegung Z =
{ξ j : j = 0, . . . , n(Z)} ∈ Z bezeichnen wir mit U(Z) die zuZ gehörige Untersumme von

8.1 Ober- und Untersummen 263
f , also die Summe der Flächen der Rechtecke unter der Funktion f , die zur gegebenenZerlegung gehört:
U(Z) =
n(Z)∑
j=1
(ξ j − ξ j−1) inft∈[ξ j−1,ξ j]
f (t) . (8.1)
Entsprechend definieren wir die Obersumme
O(Z) =
n(Z)∑
j=1
(ξ j − ξ j−1) supt∈[ξ j−1,ξ j]
f (t) . (8.2)
ξ0 ξ1 ξ2 ξ3 ξ4 ξ5 ξ6 ξ7 ξ8 ξ9
f (x)
a = = bZ :
ξ0 ξ1 ξ2 ξ3 ξ4 ξ5 ξ6 ξ7 ξ8 ξ9
f (x)
a = = bZ :
Abbildung 8.3: Veranschaulichung einer Unter- bzw. Obersumme
Da wir f als beschränkt voraussetzen, existieren diese Ober- und Untersummen. Wegenb − a =
∑n(Z)j=1 (ξ j − ξ j−1) gilt dabei
(b − a) inft∈[a,b]
f (t) ≤ U(Z) ≤ O(Z) ≤ (b − a) supt∈[a,b]
f (t) .
Wir sehen also, dass alle Ober- und Untersummen gleichmäßig nach oben und nach untenbeschränkt sind. Somit macht folgende Definition Sinn.

264 8 Das Riemannsche Integral
8.1.3 Definition. Wir setzen
b−∫
a
f dx := infZ∈ZO(Z),
b∫
−a
f dx := supZ∈ZU(Z) ,
und bezeichnen die erste Zahl als das obere- und die zweite als das untere Integral von füber [a, b].Die Funktion f heißt integrierbar auf [a, b], falls das obere mit dem unteren Integralübereinstimmt. In diesem Fall bezeichnen wir ihren gemeinsamen Wert als das Integral1
von f über [a, b] und schreiben
b−∫
−a
f dx :=
b−∫
a
f dx =
b∫
−a
f dx .
8.1.4 Bemerkung. Da die Menge Z aller Zerlegungen von [a, b] bezüglich ⊆ eine gerich-tete Menge ist, können wir von den Netzen
(U(Z)
)Z∈Z und
(O(Z)
)Z∈Z sprechen.
Wir schreiben zwei ZerlegungenZ1,Z2 ∈ Z gemäß Definition 8.1.2 als
Z1 = {ξ j : j = 0, . . . , n(Z1)} und Z2 = {ηk : k = 0, . . . , n(Z2)}an. FallsZ1 ⊆ Z2, so gibt es zu jedem j ∈ {1, . . . , n(Z1)} Indizes k( j − 1) < k( j) mit
ξ j−1 = ηk( j−1) < ηk( j−1)+1 < · · · < ηk( j)−1 <︸ ︷︷ ︸k( j)−k( j−1)−1 viele
ηk( j) = ξ j .
Wegen (ξ j − ξ j−1) =∑k( j)
k=k( j−1)+1(ηk − ηk−1) folgt
(ξ j − ξ j−1) inft∈[ξ j−1,ξ j]
f (t) =
k( j)∑
k=k( j−1)+1
(ηk − ηk−1) inft∈[ξ j−1, ξ j]︸ ︷︷ ︸
⊇[ηk−1 ,ηk ]
f (t)
≤k( j)∑
k=k( j−1)+1
(ηk − ηk−1) inft∈[ηk−1,ηk]
f (t) .
Summiert man über alle j ∈ {1, . . . , n(Z1)} auf, so erhält man U(Z1) ≤ U(Z2). Wir sehenalso, dass
(U(Z)
)Z∈Z ein monoton wachsendes Netz ist. Nach (5.10) gilt daher
limZ∈Z
U(Z) = supZ∈Z
U(Z) =
b∫
−a
f dx .
1 Man spricht auch vom Darbouxschen Integral.

8.2 Das Riemann-Integral 265
Entsprechend ist das Netz(O(Z)
)Z∈Z der Obersummen monoton fallend, und
limZ∈Z
O(Z) = infZ∈Z
O(Z) =
b−∫
a
f dx .
Klarerweise ist damit auch das Netz(O(Z) − U(Z)
)Z∈Z monoton fallend, und besteht aus
nicht negativen reellen Zahlen. Also gilt auch
infZ∈Z
(O(Z) − U(Z)) = limZ∈Z
(O(Z) − U(Z)) , (8.3)
und wegen der Rechenregeln für R-wertige Netze (siehe Abschnitt 5.3) gleicht dieserAusdruck
limZ∈Z
O(Z) − limZ∈Z
U(Z) =
b−∫
a
f dx −b∫
−a
f dx . (8.4)
Also ist die Integrierbarkeit einer Funktion f äquivalent dazu, dass der Ausdruck in (8.3)verschwindet.
8.2 Das Riemann-IntegralDer oben vorgestellte Zugang ist zwar befriedigend, um dem Begriff Fläche unter einerKurve einen Sinn zu geben, um aber etwa komplex- oder vektorwertige Funktionenintegrieren zu können, benötigen wir einen alternativen Ansatz.
8.2.1 Definition. Wir nennen das Paar R =((ξ j)
n(R)j=0 ; (α j)
n(R)j=1
)eine Riemann-Zerlegung
eines reellen Intervalls [a, b] mit a < b, falls n(R) ∈ N und (ξ j)n(R)j=0 ∈ Rn(R)+1, (α j)
n(R)j=1 ∈
Rn(R), wobei
a = ξ0 < · · · < ξn(R) = b und α j ∈ [ξ j−1, ξ j] für alle j = 1, . . . , n(R) .
Weiters heißt|R| := max{(ξ j − ξ j−1) : j = 1, . . . , n(R)}
die Feinheit der Riemann-Zerlegung. Die Punkte ξ j heißen Stützstellen und die Punkte α j
Zwischenstellen. Wir versehen die Menge R aller solcher Riemann-Zerlegungen mit derRelation
R1 � R2 :⇔ |R2| ≤ |R1| ,und erhalten mit (R,�) eine gerichtete Menge2.
2� ist sicher nicht antisymmetrisch und unterscheidet sich wesentlich von der Halbordnung ⊆ auf Z ausDefinition 8.1.2.

266 8 Das Riemannsche Integral
Ist f : [a, b]→ R (C) eine beschränkte Funktion, so betrachtet man das Netz(S (R)
)R∈R,
wobei die Riemann-Summe zur Riemann-Zerlegung R durch
S (R) =
n(R)∑
j=1
(ξ j − ξ j−1) f (α j) .
definiert ist. Konvergiert dieses Netz, so nennen wir die Funktion f Riemann-integrierbarund bezeichnen
b∫
a
f dx := limR∈R
S (R)
als das Riemann Integral von f über [a, b].
ξ0α1ξ1α2ξ2
α3ξ3
α4ξ4α5
ξ5α6ξ6α7
ξ7α8
ξ8α9
ξ9
f (x)
a = = bR :
Abbildung 8.4: Veranschaulichung einer Riemann-Summe
Für limR∈R S (R) schreibt man auch lim|R|→0 S (R), um deutlich zu machen, dass R durchdie Feinheit der Riemann-Zerlegung gerichtet wird. Da es zu jedem δ > 0, δ ≤ b − a eineRiemann-Zerlegung R gibt mit |R| = δ, ist die Existenz von I = lim|R|→0 S (R) äquivalentzu
∀ε > 0 ∃δ > 0 : ∀R ∈ R, |R| ≤ δ⇒ |S (R) − I| < ε .8.2.2 Bemerkung. Ist f : [a, b]→ C, so folgt aus Re S ( f ,R) = S (Re f ,R), Im S ( f ,R) =
S (Im f ,R) und der Tatsache, dass ein komplexwertiges Netz genau dann konvergiert, wennReal- und Imaginärteil es tun, dass die Riemann-Integrierbarkeit von f zu der von Re fund Im f äquivalent ist.
8.2.3 Bemerkung. Für ein beschränktes f : [a, b] → R (C) sei M eine feste, endlicheTeilmenge von [a, b] mit m Elementen. Setzt man für eine Riemann-Zerlegung R
S M(R) =
n(R)∑
j=1M∩[ξ j−1,ξ j]=∅
(ξ j − ξ j−1) f (α j) ,

8.2 Das Riemann-Integral 267
so hat diese Summe höchstens 2m Summanden weniger als S (R), da jedes Element aus Min höchstens zwei verschiedenen Intervallen [ξ j−1, ξ j] liegen kann. Somit folgt
∣∣∣S M(R) − S (R)∣∣∣ ≤
n(R)∑
j=1M∩[ξ j−1,ξ j],∅
(ξ j − ξ j−1)| f (α j)| ≤ |R| · 2m · ‖ f ‖∞ , (8.5)
wobei ‖ f ‖∞ = sup{| f (t)| : t ∈ [a, b]}. Infolge konvergiert(S M(R)
)R∈R genau dann, wenn(
S (R))R∈R es tut. In diesem Fall gilt
∫ b
af dx = lim
|R|→0S (R) = lim
|R|→0S M(R) .
Als Anwendung dieser Bemerkung sieht man, dass, wenn sich zwei Funktionen f und gnur auf einer endlichen Menge M unterscheiden, aus der Riemann-Integrierbarkeit von fauch die von g folgt. In der Tat ist dann S M( f ,R) = S M(g,R), wobei das Argument f bzw.g andeutet, von welcher Funktion die entsprechende Riemann-Summe gebildet wird.
Mit Hilfe dieser Bemerkung können wir auch einen ersten Zusammenhang zwischenRiemann-Summen und Ober- bzw. Untersummen herstellen.
8.2.4 Lemma. Sei f : [a, b] → R eine beschränkte reellwertige Funktion, und sei Z0 ∈Z, ε > 0. Dann gibt es ein δ > 0, sodass
∀R ∈ R, |R| ≤ δ⇒ U(Z0) − ε ≤ S (R) ≤ O(Z0) + ε .
Beweis. Wir zeigen zunächst für ein beschränktes f : [a, b] → R mit f (x) ≥ 0 für allex ∈ [a, b], dass es ein δ > 0 gibt mit
∀R ∈ R, |R| ≤ δ⇒ S (R) ≤ O(Z0) + ε . (8.6)
Wir schreibenZ0 = {ηk : k = 0, . . . , n(Z0)}, und setzen M = Z0. Mit (8.5) erhalten wir∣∣∣S M(R) − S (R)
∣∣∣ ≤ |R| · 2(n(Z0) + 1) · ‖ f ‖∞ .Für R =
((ξ j)
n(R)j=0 ; (α j)
n(R)j=1
) ∈ R bedeutet M ∩ [ξ j−1, ξ j] = ∅, dass [ξ j−1, ξ j] sicher ganzin einem gewissen Intervall [ηk( j)−1, ηk( j)] enthalten ist. Mit J := { j ∈ {1, . . . , n(R)} :M ∩ [ξ j−1, ξ j] = ∅} folgt3
S M(R) =∑
j∈J
(ξ j − ξ j−1) f (α j) =
n(Z0)∑
k=1
∑
j∈J,k( j)=k
(ξ j − ξ j−1) f (α j)
≤n(Z0)∑
k=1
∑
j∈J,k( j)=k
(ξ j − ξ j−1)
︸ ︷︷ ︸≤ηk−ηk−1
supt∈[ηk−1,ηk]
f (t)
≤n(Z0)∑
k=1
(ηk − ηk−1) supt∈[ηk−1,ηk]
f (t) = O(Z0) ,
3 Die Voraussetzung f ≥ 0 geht in der letzten Ungleichung ein.

268 8 Das Riemannsche Integral
und daher
S (R) ≤∣∣∣S M(R) − S (R)
∣∣∣ + O(Z0) ≤ O(Z0) + |R| · 2(n(Z0) + 1) · ‖ f ‖∞ .Die zu beweisende Ungleichung (8.6) gilt nun für |R| ≤ δ := ε
2(n(Z0)+1)·‖ f ‖∞ .
Erfüllt ein beschränktes f : [a, b]→ R nicht notwendigerweise f (x) ≥ 0, so betrachte f +cfür ein hinreichend großes c ∈ R, wie etwa c = ‖ f ‖∞. Da f (x) + c ≥ 0 für alle x ∈ [a, b],erhalten wir (8.6) für f + c. Wegen
O( f + c,Z0) = O( f ,Z0) + c(b − a) und S ( f + c,R) = S ( f ,R) + c(b − a)
gilt (8.6) auch für f für ein bestimmtes δ > 0. Indem wir das Gezeigte auf − f anwendenund beachten, dass
O(− f ,Z0) = −U( f ,Z0) sowie S (− f ,R) = −S ( f ,R) ,
erhalten wir U( f ,Z0) − ε ≤ S ( f ,R) ≤ O( f ,Z0) + ε für |R| ≤ δ mit einem hinreichendkleinen δ > 0. q
Wir werden nun zeigen, dass die beiden vorgestellten Zugänge zur Integration für reellwer-tige Funktionen äquivalent sind.
8.2.5 Satz. Für eine beschränkte Funktion f : [a, b]→ R sind folgende Aussagen äquiva-lent:
(i) Das obere und das untere Integral von f stimmen überein.
(ii) infZ∈Z(O(Z) − U(Z)) = 0.
(iii) f ist Riemann-integrierbar: Der Grenzwert lim|R|→0 S (R) existiert.
(iv) Setzt man für eine beliebige Riemann-Zerlegung R =((ξ j)
n(R)j=0 ; (α j)
n(R)j=1
) ∈ R4
O(R) :=n(R)∑
j=1
(ξ j − ξ j−1) supt∈[ξ j−1,ξ j]
f (t), U(R) :=n(R)∑
j=1
(ξ j − ξ j−1) inft∈[ξ j−1,ξ j]
f (t) ,
so gilt lim|R|→0(O(R) − U(R)) = 0.
(v) Es gilt limn→∞(O(Rn) − U(Rn)) = 0 für zumindest eine Folge (Rn)n∈N von Riemann-Zerlegungen.
Treffen diese äquivalente Aussagen zu, so erhalten wirb−∫
−a
f dx =
∫ b
af dx = lim
|R|→0O(R) = lim
|R|→0U(R)
= limn→∞
S (Rn) = limn→∞
O(Rn) = limn→∞
U(Rn)
für jede beliebige Folge (Rn)n∈N von Riemann-Zerlegungen mit limn→∞ |Rn| = 0.4 Klarerweise gilt O(R) = O(Z) und U(R) = U(Z), wobeiZ = {ξ j : j = 0, . . . , n(R)} ∈ Z.

8.2 Das Riemann-Integral 269
Beweis.
(iii)⇒ (iv) : Wir wollen zeigen, dass mit R := lim|R|→0 S (R) auch R = lim|R|→0 O(R).
Zu jedem ε > 0 gibt es wegen der vorausgesetzten Konvergenz ein R0, sodass|R − S (R)| < ε für alle R � R0.
Sei R =((ξ j)
n(R)j=0 ; (α j)
n(R)j=1
) � R0 eine feste Riemann-Zerlegung. Wir wählen fürj = 1, . . . , n(R) und k ∈ N ein αk
j ∈ [ξ j−1, ξ j], sodass
supt∈[ξ j−1,ξ j]
f (t) − 1k< f (αk
j) ≤ supt∈[ξ j−1,ξ j]
f (t) .
Setzt man Rk =((ξ j)
n(R)j=0 ; (αk
j)n(R)j=1
), so folgt
∣∣∣O(R) − S (Rk)∣∣∣ ≤
n(R)∑
j=1
1k|ξ j − ξ j−1| = (b − a)
1k.
Wegen |Rk| = |R| ≤ |R0| gilt Rk � R0, und somit
|R − O(R)| ≤ |R − S (Rk)| + |S (Rk) − O(R)| < ε +b − a
k.
Für k → ∞ folgt |R−O(R)| ≤ ε und zwar für alleR � R0. Also gilt lim|R|→0 O(R) = R.Genauso verifiziert man lim|R|→0 U(R) = R. Aus den Rechenregeln für Grenzwertefolgt damit
0 = R − R = lim|R|→0
(O(R) − U(R)) .
(iv)⇒ (v) : Ist (Rn)n∈N eine Folge von Riemann-Zerlegungen mit limn→∞ |Rn| = 0, sobesagt dieses Grenzverhalten für die Feinheit gerade, dass
(O(Rn) − U(Rn)
)n∈N eine
Teilfolge des Netzes(O(R) − U(R)
)R∈R im Sinne von Definition 5.3.6 ist. Gemäß
Lemma 5.3.7 folgt
limn→∞
(O(Rn) − U(Rn)
)= lim|R|→0
(O(R) − U(R)
)= 0 .
Schließlich sei noch bemerkt, dass es offensichtlich eine Folge von Riemann-Zerlegungen mit limn→∞ |Rn| = 0 gibt. Man nehme etwa die Folge (Rn)n∈N, woRn genau n + 1 viele äquidistante Stützstellen hat, und wobei die Zwischenstellengenau in der Mitte zwischen den angrenzenden Stützstellen liegt.
(v)⇒ (ii) : Das ist klar, wenn man beachtet, dass O(R) = O(Z), U(R) = U(Z), wobeiZ = {ξ j : j = 0, . . . , n(R)} ∈ Z die Menge der Stützstellen einer gegebenenRiemann-Zerlegung R =
((ξ j)
n(R)j=0 ; (α j)
n(R)j=1
) ∈ R ist.
(i)⇔ (ii) : Das haben wir schon in Bemerkung 8.1.4 gesehen; vgl. (8.3) und (8.4).

270 8 Das Riemannsche Integral
(i)⇒ (iii) : Gelte I :=
b−∫a
f dx =b∫−a
f dx. Zu beliebigem ε > 0 wähleZ0 mit
I − ε < U(Z0) ≤ O(Z0) < I + ε .
Nach Lemma 8.2.4 folgt die Existenz eines δ > 0, sodass
I − 2ε < U(Z0) − ε ≤ S (R) ≤ O(Z0) + ε < I + 2ε
für |R| ≤ δ; also lim|Z|→0 S (R) = I.
Die Gültigkeit von limn→∞O(Rn) = lim|R|→0 O(R), limn→∞U(Rn) = lim|R|→0 U(R) undlimn→∞ S (Rn) = lim|R|→0 S (R) für limn→∞ |Rn| = 0 weist man ganz ähnlich wie im zweitenBeweisschritt nach. q
8.2.6 Beispiel. Die Folgen Un und On aus Beispiel 8.1.1 sind nichts anderes als U(Rn) bzw.O(Rn), wobei Rn = (( j
n)nj=0; ( j
n)nj=1)5. Wegen O(Rn) − U(Rn) = On − Un → 0 für n → ∞
folgt aus Satz 8.2.5 die Riemann-Integrierbarkeit von f (x) = x2 auf [0, 1].Wir können uns mit Satz 8.2.5 auch sicher sein, dass die Folgen Un und On tatsächlichgegen das Integral von f über [0, 1] konvergieren.
Wir werden später sehen, dass alle stetigen Funktionen integrierbar sind, und wie man mitHilfe der Differentialrechnung das Integral konkret ausrechnet. Es sind aber bei weitemnicht alle Funktionen integrierbar; vgl. Beispiel 8.2.8.
8.2.7 Beispiel. Betrachte die konstante Funktion f : [0, 1] → C definiert durch f (t) = cfür alle t ∈ [a, b]. Für eine Riemann-Zerlegung R von [0, 1] berechnet man
S (R) =
n(R)∑
j=1
(ξ j − ξ j−1) f (α j) = cn(R)∑
j=1
(ξ j − ξ j−1) = c(b − a) ,
und damit∫ b
ac dx = lim|R|→0 S (R) = c(b − a).
Wegen Bemerkung 8.2.3 sehen wir auch, dass jede Funktion, die konstant gleich c bis aufeine endliche Menge M ist, integrierbar ist und dass das Integral darüber ebenfalls c(b − a)ergibt.
Wie wir im folgenden Beispiel sehen werden, lässt sich der Sachverhalt aus Beispiel 8.2.7im Allgemeinen nicht auf den Fall eines abzählbaren M ausweiten.
8.2.8 Beispiel. Betrachte die Funktion f : [0, 1]→ R definiert durch
f (x) :=
0 , falls x irrational ,1 , falls x rational .
5 Die Zwischenstellen sind hier nicht von Bedeutung.

8.2 Das Riemann-Integral 271
IstZ = {ξ j : j = 0, . . . , n(Z)} eine Zerlegung von [0, 1], so enthält jedes Intervall [ξ j−1, ξ j]sowohl rationale als auch irrationale Zahlen. Damit folgt
U(Z) = 0, O(Z) = 1 .
Also ist f nicht integrierbar.
Im Folgenden wollen wir einige Eigenschaften von Integralen auflisten, die aus der Tatsachefolgen, dass Integrale Grenzwerte von Netzen sind.
8.2.9 Lemma.
(i) Seien f1, f2 : [a, b] → R (C) Riemann-integrierbar über [a, b] und sei c ∈ R (C).Dann sind auch f1 + f2 und c f1 Riemann-integrierbar, wobei
b∫
a
( f1 + f2) dx =
b∫
a
f1 dx +
b∫
a
f2 dx,
b∫
a
(c f1) dx = c
b∫
a
f1 dx .
(ii) Ist f Riemann-integrierbar über [a, b], so gilt
∣∣∣b∫
a
f dx∣∣∣ ≤
b−∫
a
| f (x)| dx ≤ (b − a) · ‖ f ‖∞ , (8.7)
wobei sogar |S ( f ,R)| ≤ (b − a) · ‖ f ‖∞ für jede Riemann-Zerlegung R von [a, b].
(iii) Sind g1, g2 : [a, b]→ R Riemann-integrierbar, so folgt aus g1(x) ≤ g2(x) für alle x ∈[a, b], dass
b∫
a
g1 dx ≤b∫
a
g2 dx .
Beweis. Zunächst folgt unmittelbar aus der Definition der Riemann-Summen
S ( f1 + f2,R) = S ( f1,R) + S ( f2,R), S (c f1,R) = cS ( f1,R), S (g1,R) ≤ S (g2,R) .
Durch den Grenzübergang |R| → 0 erhalten wir (i) und (iii).Zu gegebenen ε > 0 undZ0 ∈ Z sei δ > 0 wie in Lemma 8.2.4, sodass
|R| ≤ δ⇒ S (| f |,R) ≤ O(| f |,Z0) + ε .
Ist R eine Riemann-Zerlegung von [a, b] mit |R| ≤ δ, so folgt leicht aus der Definition derRiemann-Summen und der Obersummen sowie der Dreiecksungleichung
|S ( f ,R)| ≤ |S (| f |,R)| ≤ O(| f |,Z0) + ε ≤ ‖ f ‖∞(b − a) + ε .
(8.7) erhalten wir daraus durch Grenzwertbildung, und zwar zuerst |R| → 0 und dannZ0 ∈ Z, sowie der Tatsache, dass ε > 0 beliebig ist.Schließlich folgt |S ( f ,R)| ≤ (b − a) · ‖ f ‖∞ für jede Riemann-Zerlegung R von [a, b]unmittelbar aus der Dreiecksungleichung. q

272 8 Das Riemannsche Integral
8.3 Integrale von stetigen FunktionenZunächst wollen wir den Begriff der Oszillation einer Funktion f : D → Y einführen,wobei 〈Y, dY〉 ein metrischer Raum und D ⊆ X mit einem weiteren metrischen Raum〈X, dX〉 ist.
8.3.1 Definition. Die Oszillation ist die Abbildung ρ : (0,+∞)→ [0,+∞] definiert durch
ρ(γ) := sup{dY(f (s), f (t)
): s, t ∈ D, dX(s, t) ≤ γ}, γ ∈ (0,+∞) . (8.8)
Offenbar hängt ρ(γ) monoton wachsend von γ ab.
8.3.2 Bemerkung. Gemäß (6.1) ist f : D→ Y genau dann gleichmäßig stetig, wenn
∀ε > 0 ∃δ > 0 : ∀s, t ∈ D, dX(s, t) ≤ δ⇒ dY( f (s), f (t)) ≤ ε .Da ein Supremum die kleinste obere Schranke einer Teilmenge von R ist, ist das wegen(8.8) äquivalent zu
∀ε > 0 ∃δ > 0 : ρ(δ) ≤ ε .Wegen der Monotonie von ρ ist das wiederum dasselbe wie
∀ε > 0 ∃δ > 0 : 0 ≤ ρ(t) ≤ ε für alle t ∈ (0, δ] .
Insbesondere ist die gleichmäßige Stetigkeit von f äquivalent zu limγ→0+ ρ(γ) = 06.
8.3.3 Lemma. Für eine beschränkte Abbildung f : [a, b] → R (C) und zwei Riemann-Zerlegungen R1 und R2 von [a, b] gilt
∣∣∣S (R1) − S (R2)∣∣∣ ≤ 2(b − a) · ρ( max(|R1|, |R2|)) . (8.9)
Beweis. Um das einzusehen, sei R eine Riemann-Zerlegung, deren Stützstellen die von R1
und R2 umfasst. Das bedeutet, dass für
R1 =((ξ j)
n(R1)j=0 ; (α j)
n(R1)j=1
), R2 =
((ζ j)
n(R2)j=0 ; (γ j)
n(R2)j=1
),
R =((ηk)
n(R)k=0 ; (βk)
n(R)k=1
),
die Beziehung
{ξ j : j = 0, . . . , n(R1)} ∪ {ζ j : j = 0, . . . , n(R2)} ⊆ {ηk : k = 0, . . . , n(R)}gilt. Ist j ∈ {1, . . . , n(R1)}, so gibt es Indizes k( j − 1) < k( j), sodass
ξ j−1 = ηk( j−1) < ηk( j−1)+1 < · · · < ηk( j)−1 <︸ ︷︷ ︸k( j)−k( j−1)−1 viele
ηk( j) = ξ j .
6 Erfüllt die Funktion f : D→ Y sogar ρ(γ) ≤ Mγ für alle γ > 0 und ein festes M ≥ 0, so nennt man fLipschitz stetig. Man sieht leicht ein, dass das äquivalent zu dY ( f (s), f (t)) ≤ MdX(s, t) für alle s, t ∈ D ist.

8.4 Differential und Integralrechnung 273
Wir erhalten wegen (ξ j − ξ j−1) f (α j) =∑k( j)
k=k( j−1)+1(ηk − ηk−1) f (α j)
∣∣∣S (R1) − S (R)∣∣∣ =
∣∣∣∣∣∣∣
n(R1)∑
j=1
(ξ j − ξ j−1) f (α j) −k( j)∑
k=k( j−1)+1
(ηk − ηk−1) f (βk)
∣∣∣∣∣∣∣
=
∣∣∣∣∣∣∣
n(R1)∑
j=1
k( j)∑
k=k( j−1)+1
(ηk − ηk−1)(f (α j) − f (βk)
)∣∣∣∣∣∣∣
≤n(R1)∑
j=1
k( j)∑
k=k( j−1)+1
(ηk − ηk−1) · | f (α j) − f (βk)| .
Aus |α j − βk| ≤ (ξ j − ξ j−1) ≤ |R1| für k ∈ {k( j − 1) + 1, . . . , k( j)} folgt
|S (R1) − S (R)| ≤n(R2)∑
k=1
(ηk − ηk−1) · ρ(|R1|) = (b − a) · ρ(|R1|) .
Genauso zeigt man |S (R2) − S (R)| ≤ (b − a) · ρ(|R2|). Aus der Dreiecksungleichung undder Monotonie von ρ folgt dann (8.9). q
Für den folgenden Satz 8.3.4 sei in Erinnerung gerufen, dass gemäß Definition 5.3.10 einNetz (xi)i∈I mit Werten in einem metrischen Raum 〈X, d〉 über eine gerichtete Menge (I,�)als Cauchy-Netz bezeichnet wird, falls (5.13), also
∀ε > 0 ∃i0 ∈ I : ∀i, j � i0 ⇒ d(xi, x j) < ε
gilt. Aus Lemma 5.3.11 wissen wir, dass ein Netz in einem vollständigen metrischen Raumgenau dann konvergiert, wenn es ein Cauchy-Netz ist.
8.3.4 Satz. Ist f : [a, b]→ R (C) stetig auf dem reellen Intervall [a, b], so ist f Riemann-integrierbar.
Beweis. Die Funktion f ist wegen Proposition 6.1.13 beschränkt und wegen Satz 6.3.3gleichmäßig stetig. Gemäß Lemma 5.3.11 folgt die Konvergenz von
(S (R)
)R∈R, wenn wir
zeigen können, dass(S (R)
)R∈R ein Cauchy-Netz ist.
Dazu sei ε > 0, und sei δ > 0, sodass ρ(δ) ≤ ε3(b−a) ; vgl. Bemerkung 8.3.2. Sind nun R1 und
R2 Riemann-Zerlegungen von [a, b] mit |R1|, |R2| < δ, so folgt aus (8.9) sofort
|S (R1) − S (R2)| ≤ 2(b − a) · ρ( max(|R1|, |R2|)) < ε ,und damit die Tatsache, dass
(S (R)
)R∈R ein Cauchy-Netz ist. q
8.4 Differential und IntegralrechnungUm das Integral einer Funktion tatsächlich ausrechnen zu können, wollen wir einenwichtigen Zusammenhang zur Differentialrechnung herstellen. Bevor wir das tun, brauchenwir folgendes Lemma.

274 8 Das Riemannsche Integral
8.4.1 Lemma. Sei f : [a, b]→ R (C) ein Funktion auf dem reellen Intervall [a, b], und seic < d, [c, d] ⊆ [a, b]. Weiters bezeichne 1[c,d] die Indikatorfunktion (auch charakteristischeFunktion genannt):
1[c,d](t) =
1 , falls t ∈ [c, d] ,0 , falls t < [c, d] .
Dann ist die Riemann-Integrierbarkeit von f |[c,d] auf [c, d] äquivalent zur Riemann-Integrierbarkeit von 1[c,d] · f auf [a, b]. In dem Fall gilt
∫ b
a1[c,d] · f dx =
∫ d
cf |[c,d] dx .
Außerdem folgt aus der Riemann-Integrierbarkeit von f auf [a, b] die Riemann-Integrierbarkeit von f |[c,d] auf [c, d].
Beweis. Wir bezeichnen mit R ∈ R die Riemann-Zerlegungen von [a, b] und mit R′ ∈ R′die Riemann-Zerlegungen von [c, d].
Sei zunächst f über [a, b] Riemann-integrierbar. Wir zeigen, dass dann(S ( f |[c,d],R′))R′∈R′ ein Cauchy-Netz ist. Dazu sei ε > 0. Da
(S ( f ,R)
)R∈R konvergent
und daher ein Cauchy-Netz ist, gibt es ein δ > 0, sodass |S ( f ,R1) − S ( f ,R2)| < ε,wenn nur |R1|, |R2| ≤ δ.Sind nun R′1,R′2 ∈ R′ mit |R′1|, |R′2| ≤ δ, so wähle eine beliebige Fortsetzung R1 undR2 von R′1 bzw. R′2 zu Riemann-Zerlegungen von [a, b] mit einer Feinheit kleineroder gleich δ und sodass die Stütz- und Zwischenstellen von R1 und R2 außerhalbvon [c, d] übereinstimmen.
Die Summanden (ξ j − ξ j−1) f (α j) zu Intervallen [ξ j−1, ξ j] mit [ξ j−1, ξ j] * [c, d] tretendann bei S ( f ,R1) und bei S ( f ,R2) auf. Also folgt
∣∣∣S ( f ,R1) − S ( f ,R2)∣∣∣ =
∣∣∣S ( f |[c,d],R′1) − S ( f |[c,d],R′2)∣∣∣ < ε .
Somit ist(S ( f |[c,d],R′))R′∈R′ auch ein Cauchy-Netz und f |[c,d] daher auf [c, d]
Riemann-integrierbar.
Wegen (1[c,d] · f )|[c,d] = f |[c,d] folgt aus dem eben bewiesenen auch aus der Riemann-Integrierbarkeit von 1[c,d] · f die von f |[c,d].
Wir setzen M = {c, d}, und wissen aus Bemerkung 8.2.3, dass der Beweis vollendetist, wenn wir
I = lim|R′ |→0
S M( f |[c,d],R′)⇒ I = lim|R|→0
S M(1[c,d] · f ,R) ,
zeigen können. Dazu sei ε > 0 gegeben, und δ > 0, sodass aus |R′| ≤ δ dieUngleichung |I − S M( f |[c,d],R′)| < ε folgt.

8.4 Differential und Integralrechnung 275
Ist nun R =((ξ j)
n(R)j=0 ; (α j)
n(R)j=1
)eine Riemann-Zerlegung von [a, b] mit |R| ≤ δ, so sei
R′ =((ξ′j)
n(R′)j=0 ; (α′j)
n(R′)j=1
)die Riemann-Zerlegung von [c, d], für die
{ξ′1, . . . , ξ′n(R′)−1} = {ξ1, . . . , ξn(R)−1} ∩ (c, d) ,
sowie{α′2, . . . , α′n(R′)−1} = {α1, . . . , αn(R)} ∩ [ξ′1, ξ
′n(R′)−1] .
Es folgt
S M(1[c,d] · f ,R) =
n(R)∑
j=1c,d<[ξ j−1,ξ j]
(ξ j − ξ j−1)1[c,d](α j) f (α j)
=
n(R)∑
j=1c<ξ j−1,ξ j<d
(ξ j − ξ j−1) f (α j)
=
n(R′)−1∑
j=2
(ξ′j − ξ′j−1) f (α′j) = S M( f |[c,d],R′) .
Wegen |R′| ≤ |R| ≤ δ folgt |I − S M(1[c,d] · f ,R)| < ε, und wir erhalten I =
lim|R|→0 S M(1[c,d] · f ,R). q
8.4.2 Bemerkung. Mit Hilfe von Bemerkung 8.2.3 sieht man leicht, dass die Riemann-Integrierbarkeit von 1[c,d] · f über [a, b] zu der von 1(c,d) · f bzw. 1(c,d] · f oder auch dervon 1[c,d) · f äquivalent ist. Die entsprechenden Integrale stimmen alle überein.
8.4.3 Definition. Eine Abbildung f : [a, b] → R (C) heißt stückweise stetige Funktion,falls es eine Zerlegung a = t0 < t1 < · · · < tn = b von [a, b] gibt, sodass sich die Funktionenf |(t j−1,t j) stetig auf [t j−1, t j] fortsetzen lassen.
8.4.4 Bemerkung. Aus Lemma 8.4.1 folgt, dass jede stückweise stetige Funktion Riemann-integrierbar ist. Ist nämlich f : [a, b]→ R (C) und sind a = t0 < t1 < · · · < tn = b, sodasssich für alle j = 1, . . . , n, die Funktion f |(t j−1,t j) stetig auf [t j−1, t j] fortsetzen lässt, sosind alle Funktionen 1(t j−1,t j) · f und daher auch ihre Summe Riemann-integrierbar. DieseSumme unterscheidet sich aber von f nur an endlich vielen Punkten und ist daher selbstRiemann-integrierbar.
Für eine reell- bzw. komplexwertige, Riemann-integrierbare Funktion f auf [a, b] undc ∈ [a, b] setzen wir ∫ c
cf (x) dx := 0 .
Gilt a ≤ u ≤ v ≤ w ≤ b, so folgt mit dieser Konvention aus Lemma 8.4.1, Lemma 8.2.9und Bemerkung 8.4.2
∫ w
uf (t) dt =
∫ b
a1[u,w](t) · f (t) dt =
∫ b
a
(1[u,v)(t) + 1[v,w](t)
) · f (t) dt
=
∫ b
a1[u,v)(t) · f (t) dt +
∫ b
a1[v,w](t) · f (t) dt =
∫ v
uf (t) dt +
∫ w
vf (t) dt

276 8 Das Riemannsche Integral
bzw. ∫ w
uf (t) dt −
∫ v
uf (t) dt =
∫ w
vf (t) dt . (8.10)
8.4.5 Satz (Hauptsatz der Diff.-Int.Rechnung). Sei f eine reell- oder komplexwertigeFunktion auf [a, b], die über [a, b] Riemann-integrierbar ist. Für x ∈ [a, b] definiere7
F(x) :=
x∫
a
f (t) dt .
Dann ist die Funktion F : [a, b]→ R (C) stetig auf [a, b].Ist f in einem Punkt x0 stetig, so ist F bei x0 differenzierbar, und es gilt8
F′(x0) = f (x0) .
Beweis. Als erstes sei bemerkt, dass gemäß unser Definition 8.2.1 die Funktion f alsRiemann-integrierbare Funktion auch beschränkt ist. Für a ≤ x < y ≤ b folgt wegen (8.10)
|F(y) − F(x)| =∣∣∣∣∣∣∣∣
y∫
x
f (t) dt
∣∣∣∣∣∣∣∣≤ ‖ f ‖∞ · (y − x) .
Insbesondere ist F stetig9.Sei nun f stetig bei einem x0 ∈ [a, b). Ist ε > 0 gegeben, so existiert δ > 0, sodass
| f (t) − f (x0)| ≤ ε für alle t ∈ [a, b] mit |t − x0| < δ .Insbesondere gilt für x0 < x < min(x0 + δ, b) wegen (8.10) und (8.7)
∣∣∣∣∣F(x) − F(x0)
x − x0− f (x0)
∣∣∣∣∣ =
∣∣∣∣∣∣∣∣∣
x∫
x0
f (t) − f (x0)x − x0
dt
∣∣∣∣∣∣∣∣∣≤ sup
t∈[x0,x]| f (t) − f (x0)| ≤ ε .
Also folgt F′(x0)+ = limx→x0+F(x)−F(x0)
x−x0= f (x0). Entsprechend zeigt man F′(x0)− = f (x0),
wenn x0 ∈ (a, b]. q
8.4.6 Bemerkung. Mit den Voraussetzungen von Satz 8.4.5 gilt für
G(x) :=∫ b
xf (t) dt =
∫ b
af (t) dt −
∫ x
af (t) dt
G′(x) = − f (x). Setzen wir allgemein für a ≤ u ≤ v ≤ b∫ u
vf (t) dt := −
∫ v
uf (t) dt ,
7 Die Existenz dieses Integrals für alle x ∈ [a, b] folgt aus Lemma 8.4.1.8 Ist x0 gleich a oder b, so meinen wir die links- bzw. rechtsseitige Differenzierbarkeit bzw. Ableitung.9 Wir sehen, dass diese Funktion sogar Lipschitz stetig ist, also dass |F(y) − F(x)| ≤ M · |y − x| für alle
x, y ∈ [a, b] mit einer festen Konstanten M ≥ 0 gilt.

8.4 Differential und Integralrechnung 277
so folgt für jedes feste c ∈ [a, b]( ∫ x
cf (t) dt
)′= f (x)
egal, ob x ≥ c oder x ≤ c.
Folgendes Korollar ist die Grundlage, Integrale mit Hilfe von Stammfunktionen berechnenzu können.
8.4.7 Korollar. Ist f : [a, b]→ R (C) stetig, und ist H : [a, b]→ R (C) eine Stammfunk-tion von f , also H ist auf [a, b] differenzierbar mit H′(x) = f (x) für alle x ∈ [a, b], danngilt ∫ b
af (t) dt = H(b) − H(a) .
Beweis. Nach Satz 8.4.5 ist die Funktion F(x) =∫ x
af (t) dt ebenfalls eine Stammfunktion
von f auf [a, b]. Somit unterscheiden sich H und F nur um eine Konstante, F ≡ H + c auf[a, b]; vgl. Bemerkung 7.5.2. Wegen 0 = F(a) = H(a) + c ist H(a) = −c, und somit
∫ b
af (t) dt = F(b) = H(b) + c = H(b) − H(a) . q
8.4.8 Beispiel. Wir wollen das Integral der Funktion ln x über das Intervall [1, 3] berechnen.Eine Stammfunktion von ln x auf (0,+∞) ist x(ln(x) − 1). Also folgt mit der Konvention,dass g(x)|ba = g(b) − g(a),
∫ 3
1ln t dt = x(ln(x) − 1)|31 = 3(ln 3 − 1) − (−1) = 3 ln 3 − 2 .
8.4.9 Beispiel. Um das bestimmte Integral∫ π
0te2it dt zu berechnen, nehmen wir die Stamm-
funktion x2ie
2ix − 1(2i)2 e2ix von xe2ix und erhalten
∫ π
0te2it dt =
(x2i
e2ix − 1(2i)2 e2ix
)∣∣∣∣∣∣π
0
=π
2i.
8.4.10 Bemerkung. Aus dem Hauptsatz sieht man insbesondere, dass für eine überall auf
[a, b] stetige Funktion f die Funktion F(x) =x∫
af (t) dt eine stetig differenzierbare Funktion
ist, die F′(x) = f (x) und F(a) = 0 erfüllt.Ist umgekehrt F(x) eine stetig differenzierbare Funktion auf [a, b] mit F(a) = 0, so ist ihre
Ableitung f stetig und wegen Satz 8.3.4 integrierbar. Die Funktion x 7→x∫
af (t) dt hat nach
dem Hauptsatz dieselbe Ableitung wie F. Außerdem verschwinden sie beide bei a, womit
F(x) =x∫
af (t) dt für alle x ∈ [a, b]; vgl. Korollar 8.4.7.
Also wird C[a, b] durch den Integraloperator bijektiv auf {F ∈ C1[a, b] : F(a) = 0}abgebildet. Die Umkehrabbildung ist dabei das Differenzieren. Man sieht auch leicht, dassdiese beiden Mengen Vektorräume sind, und dass dieser Integraloperator linear ist.

278 8 Das Riemannsche Integral
8.4.11 Korollar. Ist f : [a, b] → R stetig mit f (x) ≥ 0 für alle x ∈ [a, b], und gilt∫ b
af (x) dx = 0, so verschwindet f identisch auf [a, b].
Beweis. Die Funktion F(x) =x∫
af (t) dt, x ∈ [a, b] liegt in C1[a, b], erfüllt F(a) = F(b) = 0
und hat für x ∈ (a, b) die Ableitung F′(x) = f (x) ≥ 0. Also ist F(x) monoton wachsend,und somit 0 = F(a) ≤ F(x) ≤ F(b) = 0. Mit F verschwindet auch F′ = f identisch. q
Die in Lemma 7.5.4 kennengelernten Regeln zur Auffindung von Stammfunktionen führenauf entsprechende Regeln zur Berechnung von Integralen.
8.4.12 Lemma (Substitutionsregel). Sei f reell- oder komplexwertig und stetig auf [a, b],und g ∈ C1[α, β] reellwertig mit g([α, β]) ⊆ [a, b]. Dann gilt
∫ g(β)
g(α)f (x) dx =
∫ β
α
f (g(t))g′(t) dt .
Beweis. Nach Lemma 7.5.4 ist (∫
f )◦g eine Stammfunktion von f (g(t))g′(t). Aus Korollar8.4.7 folgt daher die behauptete Gleichheit. q
Ähnlich beweist man folgendes Lemma.
8.4.13 Lemma (Partielle Integration). Seien f , g ∈ C1[a, b]. Dann gilt
b∫
a
f ′g dx = f (b)g(b) − f (a)g(a) −b∫
a
f g′ dx .
Für f (b)g(b) − f (a)g(a) schreibt man auch f g|ba.
Folgender Satz wird ebenfalls Hauptsatz der Differential-Integralrechnung genannt. Dieserist dem Satz 8.4.5 zwar sehr ähnlich, aber auf den zweiten Blick unterscheiden sie sichdoch durch die Voraussetzungen wesentlich.
8.4.14 Satz (*). Sei f : [a, b]→ R Riemann-integrierbar über [a, b], sodass es eine stetigeFunktion F : [a, b] → R gibt, die auf (a, b) differenzierbar ist und die dort F′(x) = f (x)erfüllt. Dann gilt
b∫
a
f (x) dx = F(b) − F(a) .
Beweis. Sei {ξ j : j = 0, . . . , n} eine Zerlegung von [a, b]. Dann existieren nach demMittelwertsatz der Differentialrechnung Satz 7.2.6 Zwischenstellen αi, ξi−1 ≤ αi ≤ ξi,sodass
F(ξi) − F(ξi−1) = (ξi − ξi−1) f (αi) .

8.5 Weitere Eigenschaften des Integrals* 279
Somit ist R =((ξ j)
n(R)j=0 ; (α j)
n(R)j=1
)eine Riemann-Zerlegung von [a, b]. Es folgt
F(b) − F(a) =
n∑
i=1
(F(ξi) − F(ξi−1)
)=
n∑
i=1
(ξi − ξi−1) f (αi) = S (R) .
Für |R| → 0 strebt die rechte Seite gegenb∫
af (x) dx. q
Man beachte, dass Satz 8.4.14 nur auf reellwertige Funktionen anwendbar ist, da im Beweisder Mittelwertsatz der Differentialrechnung verwendet wird, der ja nur für reellwertigeFunktionen gilt.
8.5 Weitere Eigenschaften des Integrals*Sind f und g im folgenden Satz stetig, so ist die Aussage des Satzes eine einfache Konse-quenz aus der Tatsache, dass stetige Funktionen integrierbar sind.
8.5.1 Satz. Sind f , g reellwertig und über [a, b] Riemann-integrierbar, so sind es auch| f |, f 2, f g und
∣∣∣b∫
a
f dx∣∣∣ ≤
b∫
a
| f | dx .
Beweis. Zu einem ε > 0 existiert nach Satz 8.2.5 eine ZerlegungZ = {ξi : i = 0, . . . , n(Z)}von [a, b], sodass O( f ,Z) − U( f ,Z) < ε. Setze für i = 0, . . . , n(Z)
Mi = supx∈[ξi−1,ξi]
f (x), mi = infx∈[ξi−1,ξi]
f (x),
M∗i = sup
x∈[ξi−1,ξi]| f (x)|, m∗i = inf
x∈[ξi−1,ξi]| f (x)| .
Für x, y ∈ [ξi−1, ξi] folgt | f (x)| − | f (y)| ≤ | f (x)− f (y)| ≤ Mi −mi, und mit Hilfe von Lemma2.9.11
M∗i − m∗i = sup
x∈[ξi−1,ξi]| f (x)| + sup
x∈[ξi−1,ξi](−| f (x)|) = sup
x,y∈[ξi−1,ξi](| f (x)| − | f (y)|) ≤ Mi − mi .
Wir erhalten
O(| f |,Z) − U(| f |,Z) =
n(Z)∑
i=1
(M∗i − m∗i )(ξi − ξi−1)
≤n(Z)∑
i=1
(Mi − mi)(ξi − ξi−1) = O( f ,Z) − U( f ,Z) < ε .
Gemäß (8.3) und (8.4) ist somit | f | integrierbar. Die behauptete Ungleichung folgt ausLemma 8.2.9, (ii).

280 8 Das Riemannsche Integral
IstZ wie oben, so folgt aus der Tatsache, dass x 7→ x2 monoton wachsend auf R+ ∪ {0} ist,
supx∈[ξi−1,ξi]
f (x)2 − infx∈[ξi−1,ξi]
f (x)2 = (M∗i )2 − (m∗i )2 = (M∗
i + m∗i )(M∗i − m∗i )
≤ 2‖ f ‖∞ · (M∗i − m∗i ) .
Nun erhalten wir aus
O( f 2,Z) − U( f 2,Z) =
n(Z)∑
i=1
(sup
x∈[ξi−1,ξi]f (x)2 − inf
x∈[ξi−1,ξi]f (x)2
)(ξi − ξi−1)
≤ 2‖ f ‖∞n(Z)∑
i=1
(M∗i − m∗i )(ξi − ξi−1)
= 2‖ f ‖∞(O(| f |,Z) − U(| f |,Z))< 2‖ f ‖∞ · ε
wieder wegen (8.3) und (8.4) die Integrierbarkeit von f 2. Die Behauptung für f g folgt ausder Beziehung
f g =12
(( f + g)2 − f 2 − g2
). q
8.5.2 Bemerkung. Sind die Funktionen in Satz 8.5.1 komplexwertig, so sind mit f , gauch Re f , Im f ,Re g, Im g Riemann-integrierbar. Da man | f |2,Re f g, Im f g als Summevon Produkten von Re f , Im f ,Re g, Im g darstellen kann, sind auch | f |2, f g Riemann-integrierbar.Man zeigt auch ähnlich wie im Beweis von Satz 8.5.1, dass mit | f |2 auch
√| f |2 = | f |Riemann-integrierbar ist.
8.6 Uneigentliche IntegraleAngenommen, eine Funktion f : [a, b)→ R (C) lässt sich zu einer Riemann-integrierbarenFunktion f̃ : [a, b]→ R (C) fortsetzen, dann folgt aus der Stetigkeit von F(x) in Satz 8.4.5,dass
limx→b
∫ x
af (t) dt =
∫ b
af̃ (t) dt . (8.11)
Hat die Funktion f : [a, b)→ R (C) nicht die Eigenschaft, dass sie sich auf [a, b] zu einerRiemann-integrierbaren Funktion fortsetzen lässt, so kann man immer noch versuchen, fürx ∈ [a, b) das Integral
∫ x
af (t) dt zu berechnen, und dann x gegen b streben zu lassen.
8.6.1 Definition. Sei f : [a, b) → R (C), wobei a < b ≤ +∞, und sei f |[a,x] für allex ∈ [a, b) Riemann-integrierbar. Dann heißt f uneigentlich integrierbar, falls
∫ b
af (t) dt := lim
β→b−
∫ β
af (t) dt
existiert. Dazu sagen wir auch, dass∫ b
af (t) dt konvergiert. Entsprechend definiert man
uneigentliche Integrale für Funktionen f : (a, b]→ R (C), wenn −∞ ≤ a < b.

8.6 Uneigentliche Integrale 281
Ist f : (a, b)→ R (C), so definiert man mit einem beliebigen c ∈ (a, b)∫ b
af (t) dt := lim
β→b−
∫ β
cf (t) dt + lim
α→a+
∫ c
α
f (t) dt , (8.12)
falls die Grenzwerte existieren.Eine reell- bzw. komplexwertige Funktion f heißt absolut uneigentlich integrierbar, falls| f | uneigentlich integrierbar ist. Dazu sagt man auch, dass
∫ b
af (t) dt absolut konvergiert.
Man sieht leicht, dass (8.12) nicht von der Wahl von c ∈ (a, b) abhängt.
8.6.2 Beispiel.
(i) Für a ∈ R rechnet man∫ +∞
ae−t dt = lim
β→+∞
∫ β
ae−t dt = lim
β→+∞−(e−β − e−a) = e−a .
(ii) Mit der Regel von de l’Hospital erhält man für ein b > 0∫ b
0ln t dt = lim
α→0+
∫ b
α
ln t dt = b(ln(b) − 1) − limα→0+
α(ln(α) − 1) = b(ln(b) − 1) .
(iii) Bei der Berechnung von ∫ +∞
1
sin πtt
dt (8.13)
sieht man, dass bei uneigentlichen Integralen ähnliche Phänomene auftreten, wie beiReihen. In der Tat gilt
∫ β
1
sin πtt
dt =
∫ [β]
1
sin πtt
dt +
∫ β
[β]
sin πtt
dt
=
[β]−1∑
n=1
(−1)n∫ n+1
n
| sin πt |t
dt +
∫ β
[β]
sin πtt
dt .
Man erkennt unschwer, dass∫ n+1
n| sin πt |
t dt monoton gegen Null für n → ∞ konver-giert. Nach dem Leibnizschen Kriterium, Korollar 3.10.7, und wegen
∣∣∣∣∣∣
∫ β
[β]
sin πtt
dt
∣∣∣∣∣∣ ≤1
[β]
∫ [β]+1
[β]| sin πt | dt =
2π[β]
β→+∞−→ 0
konvergiert (8.13).
Das Integral ist aber nicht absolut konvergent in dem Sinne, dass auchlimβ→+∞
∫ β
1
∣∣∣ sin πtt
∣∣∣ dt existiert, da
∫ β
1
∣∣∣∣∣sin t
t
∣∣∣∣∣ dt ≥[β]−1∑
n=1
∫ n+1
n
| sin πt|n + 1
dt =
∫ 1
0| sin πt, | dt ·
[β]−1∑
n=1
1n + 1
für β→ +∞ divergiert.

282 8 Das Riemannsche Integral
8.6.3 Lemma. Seien f , g : [a, b)→ R (C), wobei a < b ≤ +∞, und seien f |[a,x] und g|[a,x]
sowie die Beträge dieser Funktionen für alle x ∈ [a, b) Riemann-integrierbar.Ist das uneigentliche Integral
∫ b
ag(x) dx absolut konvergent, so ist es auch konvergent. Gilt
obendrein die Ungleichung |g(x)| ≥ | f (x)| für alle x ∈ [c, b) mit einem c ∈ [a, b), so istauch
∫ b
af (x) dx absolut konvergent und infolge auch konvergent.
Entsprechende Aussagen gelten für Funktionen, die auf Intervallen der Bauart (a, b] bzw.(a, b) definiert sind.
Beweis. Wegen (c ≤ x1 ≤ x2)∣∣∣∣∣∣
∫ x2
x1
g(t) dt
∣∣∣∣∣∣ ≤∫ x2
x1
|g(t)| dt,∫ x2
x1
| f (t)| dt ≤∫ x2
x1
|g(t)| dt ,
vererbt sich die Eigenschaft, dass(∫ x
a|g(t)| dt
)x≥a
ein Cauchy-Netz ist auch auf(∫ x
ag(t) dt
)x≥a
bzw.(∫ x
a| f (t)| dt
)x≥a
. Die behauptete Konvergenz folgt dann aus Lemma5.3.11. q
8.6.4 Bemerkung. Man kann Lemma 8.6.3 anwenden, um aus der Divergenz eines unei-gentlichen Integrales
∫ b
a| f (x)| dx auf die Divergenz von
∫ b
a|g(x)| dx zu schließen, wenn
|g(x)| ≥ | f (x)| für alle x ∈ [c, b) mit einem c ∈ [a, b).
8.6.5 Beispiel. Man betrachte das uneigentliche Integral
∫ +∞
0
x ln x(x2 + 1)3 dx := lim
α→0+
∫ 1
α
x ln x(x2 + 1)3 dx + lim
β→+∞
∫ β
1
x ln x(x2 + 1)3 dx .
Da die Funktion h(x) := x ln x nur für x ∈ (0,+∞) definiert ist, ist dieses Integral uneigent-lich an beiden Integrationsgrenzen. Die Funktion h(x) lässt sich aber stetig auf [0,+∞)durch h(x) = 0 stetig fortsetzen. Somit bleibt nur die Uneigentlichkeit bei der Stelle +∞;vgl. (8.11).Für x ≥ 1 ist der Integrand nicht negativ, wodurch
∣∣∣∣∣x ln x
(x2 + 1)3
∣∣∣∣∣ =x ln x
(x2 + 1)3 ≤x2
(x2 + 1)3 ≤x2
(x2)3 =1x4 .
Wegen ∫ ∞
1
1x4 dx = − 1
3x3
∣∣∣∣∞
1=
13
folgt aus Lemma 8.6.3 die absolute Konvergenz unseres Integrals.
8.6.6 Beispiel. Man betrachte das uneigentliche Integral
∫ 1
0
ln xe2x − ex dx . (8.14)

8.7 Vertauschung von Integralen mit Grenzwerten 283
Dieses ist nur uneigentlich bei 0. Für x ∈ (0, 1] gilt∣∣∣∣∣
ln xe2x − ex
∣∣∣∣∣ =− ln x
e2x − ex .
Wegen e−x ≥ 1e für alle x ∈ [0, 1] folgt
− ln xe2x − ex = e−x − ln x
ex − 1≥ 1
e− ln xex − 1
.
Weiters gilt − ln x ≥ 1 für alle x ∈ (0, 1e ] und infolge (x ∈ (0, 1])
− ln xe2x − ex ≥ 1(0, 1
e ](x) · 1e
1ex − 1
≥ 0 .
Dabei ist 1(0, 1e ] die Charakteristische Funktion des Intervalls (0, 1
e ]. Für alle ε ∈ (0, 1e )
erhalten wir mit der Monotonie des Integrals
Iε :=∫ 1
ε
∣∣∣∣∣ln x
e2x − ex
∣∣∣∣∣ dx ≥ 1e
∫ 1e
ε
1ex − 1
dx =1e
∫ 1e
ε
e−x
1 − e−x dx .
Nun steht im Zähler die Ableitung des Nenners. Also ist ln(1 − e−x) eine Stammfunktiondes Integranden. (Wegen x > 0 ist das Argument des Logarithmus positiv.) Daraus ergibtsich
Iε ≥ 1e
ln(1 − e−x)∣∣∣∣
1e
ε=
1e
ln1 − e−
1e
1 − e−ε.
Für ε → 0+ konvergiert die rechte Seite und damit auch die linke Seite gegen +∞.Insbesondere divergiert das uneigentliche Integral
∫ 1
0
∣∣∣∣∣ln x
e2x − ex
∣∣∣∣∣ dx ,
und infolge auch (8.14).
8.7 Vertauschung von Integralen mit GrenzwertenDas folgende Lemma ist eine Verallgemeinerung von Lemma 6.6.12.
8.7.1 Lemma. Seien (I,�I) und (J,�J) zwei gerichtete Mengen, und sei 〈Y, d〉 ein vollstän-dig metrischer Raum. Weiters seien H : I × J → Y und h : I → Y Funktionen, sodass füralle j ∈ J die Funktion H j : I → Y, i 7→ H(i, j) beschränkt ist, und sodass
h(i) = limj∈J
H(i, j)
gleichmäßig auf I, also
∀ε > 0 ∃ j0 ∈ J : d(H(i, j), h(i)) ≤ ε für alle j � j0 und alle i ∈ I ,

284 8 Das Riemannsche Integral
bzw. äquivalent dazu h = lim j∈J H j in 〈B(I,Y), d∞〉10.Schließlich existiere für alle j ∈ J der Limes A j := limi∈I H(i, j). Unter diesen Vorausset-zungen ist sowohl (A j) j∈J als auch (h(i))i∈I in Y konvergent, wobei
limj∈J
A j = limi∈I
h(i) ; (8.15)
also giltlimj∈J
limi∈I
H(i, j) = limi∈I
limj∈J
H(i, j) .
Beweis. Sei ε > 0 gegeben. Wegen der vorausgesetzten gleichmäßigen Konvergenz ist(H j
)j∈J in B(I,Y) ein Cauchy-Netz. Es existiert also ein j0 ∈ J, sodass für j, k � j0 und
alle i ∈ I giltdY(H(i, j),H(i, k)) ≤ d∞(H j,Hk) ≤ ε .
Hält man j und k fest, so folgt dY(A j, Ak) = limi∈I dY(H(i, j),H(i, k)) ≤ ε. Damit ist (A j) j∈J
ein Cauchy-Netz, und wegen Lemma 5.3.11 konvergent. Setzen wir lim j∈J A j =: A, so gilt
dY(h(i), A) ≤ dY(h(i),H(i, j)) + dY(H(i, j), A j) + dY(A j, A) .
Wähle j nach der vorausgesetzten gleichmäßigen Konvergenz, sodass für alle i ∈ I giltdY(h(i),H(i, j)) ≤ d∞(h,H j) < ε und sodass dY(A j, A) < ε. Für dieses j existiert ein i0 ∈ I,sodass aus i � i0, die Ungleichung dY(H(i, j), A j) < ε folgt. Insgesamt erhalten wir
dY(h(i), A) < 3ε für i ∈ I mit i � i0 . q
Aus diesem Lemma folgen nun eine Reihe wichtiger Ergebnisse.
8.7.2 Satz. Sei ( fn)n∈N eine Folge von Riemann-integrierbaren Funktionen auf [a, b] mitWerten in R oder C. Gilt limn→∞ fn = f gleichmäßig auf [a, b], so ist auch f Riemann-integrierbar, wobei
limn→∞
b∫
a
fn dx =
b∫
a
f dx .
Entsprechendes gilt für gleichmäßig konvergente Netze von Funktionen.
Beweis. Um das letzte Lemma anwenden zu können, sei I = R die Menge aller Riemann-Zerlegungen von [a, b] versehen mit der durch die Feinheit induzierte Ordnung und(J,�J) = (N,≤). Weiters sei Y = R (C), versehen mit der Euklidischen Metrik, je nachdem,wo die Funktionen hinein abbilden.Wir setzen H(R, n) := S ( fn,R), h(R) = S ( f ,R). Wegen Lemma 8.2.9, (ii), gilt
|H(R, n) − h(R)| = |S ( fn − f ,R)| ≤ ‖ fn − f ‖∞ · (b − a) = d∞( fn, f ) · (b − a) . (8.16)
10 Wegen Satz 6.6.11 und Lemma 5.3.11 ist diese Tatsache, dass lim j∈J H j in 〈B(I,Y), d∞〉 existiertäquivalent dazu, dass (H j) j∈J in 〈B(I,Y), d∞〉 ein Cauchy-Netz ist.

8.7 Vertauschung von Integralen mit Grenzwerten 285
Also konvergiert H(., n) gleichmäßig gegen h. Nach Lemma 8.7.1 folgt
limn→∞
b∫
a
fn dx = limn→∞
lim|R|→0
S ( fn,R)
= lim|R|→0
limn→∞
S ( fn,R) = lim|R|→0
S ( f ,R) =
b∫
a
f dx ,
wobei limn→∞ S ( fn,R) = S ( f ,R) für ein festes R ∈ R aus (8.16) folgt.Der Beweis für Netze verläuft fast identisch. q
8.7.3 Beispiel. Sei∑∞
n=0 anxn eine Potenzreihe mit positivem Konvergenzradius R. Danngilt für [a, b] ⊆ {x ∈ R : |x| < R}
b∫
a
∞∑
n=0
anxn
dx =
∞∑
n=0
an
∫ b
axn dx =
∞∑
n=0
an
n + 1xn+1
∣∣∣∣b
x=a.
Somit haben wir eine weitere Möglichkeit, Stammfunktionen auszurechnen. So ist etwadie Stammfunktion von e−x2
nicht als Summe von Produkten von Funktionen wie Poly-nome, e hoch Polynomen, oder dergleichen darstellbar. Aber zumindest lässt sich eineStammfunktion F(x) als
F(x) =
∫ x
0e−t2 dt =
∫ x
0
∞∑
j=0
(−1) j
j!t2 j dt =
∞∑
j=0
(−1) j
( j!)(2 j + 1)x2 j+1 ,
anschreiben.
Mit Hilfe des Hauptsatzes, Satz 8.4.5, können wir auch Differentiation und Limes vertau-schen.
8.7.4 Korollar. Sei ( fn)n∈N eine Folge von reell- bzw. komplexwertigen und stetig differen-zierbaren Funktionen definiert auf [a, b].Existiert ein Punkt x0 ∈ [a, b], sodass ( fn(x0))n∈N konvergiert, und ist die Folge ( f ′n)n∈Ngleichmäßig konvergent auf [a, b], so ist auch die Folge ( fn)n∈N gleichmäßig konvergentauf [a, b], und es gilt
ddx
limn→∞
fn(x) = limn→∞
ddx
fn(x) für alle x ∈ [a, b] .
Entsprechendes gilt für Netze von Funktionen.
Beweis. Nach Satz 8.4.5 bzw. Bemerkung 8.4.6 gilt fn(x) =∫ x
x0f ′n(t) dt + fn(x0) für alle
x ∈ [a, b]. Setzen wir g := limn→∞ f ′n und A := limn→∞ fn(x0), so ist g wegen Korollar6.6.14 stetig. Außerdem folgt für x ∈ [a, b] aus Satz 8.7.2
f (x) :=∫ x
x0
g(t) dt + A = limn→∞
(∫ x
x0
f ′n(t) dt + fn(x0))
= limn→∞
fn(x) ,

286 8 Das Riemannsche Integral
womit ( fn)n∈N zumindest punktweise gegen f (x) konvergiert. Nach Satz 8.4.5 ist die linkeSeite differenzierbar mit f ′(x) = g(x) = limn→∞ f ′n(x).Die Gleichmäßigkeit der Konvergenz folgt aus
‖ fn − f ‖∞ = supx∈[a,b]
| fn(x) − f (x)| = supx∈[a,b]
∣∣∣∣∣∣
∫ x
x0
( f ′n(t) − g(t)) dt + fn(x0) − A
∣∣∣∣∣∣
≤ (b − a) · ‖ f ′n − g‖∞ + | fn(x0) − A | n→∞−→ 0 .
Der Beweis für Netze verläuft fast identisch. q
Dass man aus der gleichmäßigen Konvergenz einer Funktionenfolge im Allgemeinen nichtdie gleichmäßige Konvergenz der Folge der Ableitungen erhält, zeigt
8.7.5 Beispiel. Sei fn(x) = sin nx√n für x ∈ R. Offensichtlich gilt
limn→∞
fn(x) = 0 ,
und zwar gleichmäßig auf ganz R. Wegen
f ′n(x) =√
n cos nx
gilt aber etwa limn→∞ f ′n(0) = +∞.
Wenden wir Korollar 8.7.4 auf Potenzreihen an, so erhalten wir folgendes Resultat. Dieseszeigt insbesondere, dass die Taylorreihe zur Grenzfunktion einer Potenzreihe mit dergegebenen Potenzreihe übereinstimmt; vgl. Fakta 7.4.5, 6.
8.7.6 Proposition. Sei∑∞
k=0 akzk eine Potenzreihe mit Konvergenzradius R > 0. Dann hatdie Potenzreihe
∑∞k=0(k + 1)ak+1zk denselben Konvergenzradius R. Die Funktion
f : (−R,R)→ C, f (t) =
∞∑
k=0
aktk
ist auf (−R,R) differenzierbar mit der Ableitung
f ′(x) =
∞∑
k=0
(k + 1) ak+1xk .
Sie ist sogar beliebig oft differenzierbar mit (l ∈ N)
f (l)(x) =
∞∑
k=0
(k + l) · · · (k + 1) ak+lxk , (8.17)
wobei auch diese Potenzreihe Konvergenzradius R hat. Insbesondere gilt
f (l)(0) = l! al .

8.7 Vertauschung von Integralen mit Grenzwerten 287
Beweis. Dass der Konvergenzradius von∑∞
k=0(k + 1)ak+1zk auch R ist, prüft man entwedermit Hilfe des Majorantenkriteriums durch einen Vergleich mit
∑∞k=0 |anzk| nach, oder man
zeigt, dass11
1lim supk→∞
k√|(k + 1)ak+1|=
1lim supk→∞
k+1√|ak+1|= R ,
vgl. Satz 6.8.7.Für jedes feste r ∈ (0,R) konvergiert wegen Satz 6.8.7 die Funktionenfolge (
∑nk=0 aktk)n∈N
auf [−r, r] gleichmäßig gegen f . Analog konvergiert die Funktionenfolge (∑n−1
k=0(k +
1)ak+1tk)n∈N auf [−r, r] gleichmäßig und zwar wegen Korollar 8.7.4 gegen f ′. Da r < Rbeliebig war, folgt die Behauptung.Die Verallgemeinerung in (8.17) folgt nun leicht durch vollständige Induktion. q
8.7.7 Beispiel. Für x ∈ (−1, 1) ist die Funktion x 7→ ln(1 − x) beliebig oft differenzierbar.Da ln(1 − x)′ = − 1
1−x = −∑∞n=0 xn nach Proposition 8.7.6 mit der Ableitung von x 7→
−∑∞n=1
xn
n , x ∈ (−1, 1) übereinstimmt, und da ln(1 − x) und −∑∞n=1
xn
n für x = 0 beide denWert Null annehmen, folgt aus Korollar 7.2.9, dass
ln(1 − x) = −∞∑
n=1
xn
nfür alle x ∈ (−1, 1) .
Da diese Reihe auch für x = −1 (bedingt) konvergiert, folgt aus Satz 6.12.1, dass−∑∞
n=1(−1)n
n = ln(2).
Als Vorspiel zum nächsten Ergebnis wollen wir uns kurz mit dem Produkt zweier metrischerRäume beschäftigen.
8.7.8 Fakta.
1. Seien 〈X, dX〉 und 〈Y, dY〉 zwei metrische Räume. Ist X×Y die Menge aller geordnetenPaare, und definiert man
d((a, b), (x, y)
):= max(dX(a, x), dY(b, y)) , (8.18)
so sieht man unmittelbar, dass (X×Y, d) ein metrischer Raum ist, und dass (xn, yn)→(x, y) genau dann, wenn xn → x und yn → y.
2. Sind K1 ⊆ X und K2 ⊆ Y jeweils kompakt, so ist es auch K1×K2, denn ist((xn, yn)
)n∈N
eine Folge in K1 × K2, so gibt es eine Teilfolge (xn(k))k∈N, sodass xn(k) → x ∈ K1 undweiter eine Teilfolge (yn(k( j))) j∈N mit yn(k( j)) → y ∈ K2, also (xn(k( j)), yn(k( j)))→ (x, y).
3. Die offene Kugel Uε(a, b) um ein (a, b) ∈ X × Y ist nichts anderes als Uε(a) ×Uε(b),da
d((a, b), (x, y)
)= max(dX(a, x), dY(b, y)) < ε ⇔ dX(a, x) < ε ∧ dY(b, y) < ε .
11 Um diese Gleichheit einzusehen, verwendet man am besten die Charakterisierung des Limes Superiorals größter Häufungspunkt; vgl. Proposition 5.2.3.

288 8 Das Riemannsche Integral
4. Sind O1 ⊆ X, O2 ⊆ Y offen, so auch O1×O2 ⊆ X×Y , da es zu (a, b) ∈ X×Y sicherlichein ε > 0 mit Uε(a) ⊆ O1 und Uε(b) ⊆ O2 gibt, und dann Uε(a, b) ⊆ O1 × O2.
5. Die Definition von d∞ auf Rp passt genau in dieses Bild, denn haben wir p1 + p2 = p,und sind sowohl Rp1 als auch Rp2 versehen mit d∞, so stimmt die Metrik (8.18) aufRp = Rp1 × Rp2 mit d∞ überein.
8.7.9 Korollar. Sei K eine kompakte Teilmenge eines metrischen Raumes (Y, dY), undf : [a, b] × K → R (C) stetig. Dann ist auch die Funktion R : K → R (C) definiert durch12
R(t) =
∫ b
af (s, t) ds ,
stetig.
Beweis. Es gilt, limt→t0 R(t) = limt∈K\{t0} R(t) = R(t0) für ein beliebiges t0 ∈ K zu zeigen.Dabei ist K \ {t0} geordnet durch
t1 � t2 ⇔ dY(t0, t1) ≥ dY(t0, t2) .
Wegen der Kompaktheit von [a, b] × K ist die Funktion f sogar gleichmäßig stetig; vgl.Satz 6.3.3. Zu gegebenem ε > 0 gibt es somit ein δ > 0, sodass
d((s, t), (s′, t′)
)< δ⇒ | f (s, t) − f (s′, t′)| < ε .
Insbesondere folgt aus dY(t, t0) < δ wegen d((s, t), (s, t0)
)= dY(t, t0) die Ungleichung
| f (s, t) − f (s, t0)| < ε für alle s ∈ [a, b] und somit
‖ f (., t) − f (., t0)‖∞ = sups∈[a,b]
| f (s, t) − f (s, t0)| ≤ ε .
Also konvergiert das Netz ( f (., t))t∈K\{t0} gleichmäßig gegen die Funktion f (., t0) : [a, b]→R (C). Wegen Satz 8.7.2 gilt dann
limt→t0
R(t) = limt→t0
∫ b
af (s, t) ds =
∫ b
alimt→t0
f (s, t) ds =
∫ b
af (s, t0) ds = R(t0) . q
Mit Lemma 8.7.1 lässt sich auch die Vertauschbarkeit der Integrationsreihenfolge zeigen.
8.7.10 Satz (Satz von Fubini). Ist f : [a, b] × [c, d]→ R (C) stetig, so gilt
∫ b
a
(∫ d
cf (s, t) dt
)ds =
∫ d
c
(∫ b
af (s, t) ds
)dt . (8.19)
12 Eine derartige Funktion heißt Parameterintegral.

8.7 Vertauschung von Integralen mit Grenzwerten 289
Beweis. Die Existenz der inneren Integrale wird durch Satz 8.3.4 und der äußeren Integraledurch Korollar 8.7.9 gewährleistet.Sei I = R die Menge aller Riemann-Zerlegungen von [a, b] und sei J = P die Menge allerRiemann-Zerlegungen von [c, d] beide gerichtet mit der durch die Feinheit induziertenOrdnung. Wir definieren für R =
((ξ j)
n(R)j=0 ; (α j)
n(R)j=1
)und P =
((η j)
n(P)j=0 ; (β j)
n(P)j=1
)
H(R,P) :=n(R)∑
j=1
n(P)∑
k=1
(ξ j − ξ j−1)(ηk − ηk−1) f (α j, βk) , (8.20)
und bemerken, dass
H(R,P) =
n(P)∑
k=1
(ηk − ηk−1)
n(R)∑
j=1
(ξ j − ξ j−1) f (α j, βk)
︸ ︷︷ ︸
=S ( f1,R)(βk)
= S (S ( f1,R),P) ,
wobei f1(s) := f (s, t), s ∈ [a, b], die Funktion f mit festgehaltener zweiten Variablet ∈ [c, d] ist, und S ( f1,R)(t) als Funktion eben dieser Variable betrachtet wird. Wegen (8.9)gilt
|H(R,P1) − H(R,P2)| = |S (S ( f1,R),P1) − S (S ( f1,R),P2)|≤ 2(d − c) · ρ( max(|P1|, |P2|)) , (8.21)
wobei ρ die Oszillation der Funktion t 7→ S ( f1,R)(t) ist; vgl. (8.8). Wegen Lemma 8.2.9,(ii), gilt
|S ( f1,R)(t) − S ( f1,R)(t′)| =∣∣∣∣S
((f (, t) − f (., t′)
),R
)∣∣∣∣ ≤ (b − a) · sups∈[a,b]
| f (s, t) − f (s, t′)| ,
und damit
ρ(
max(|P1|, |P2|)) = sup|t−t′ |≤max(|P1 |,|P2 |)
|S ( f1,R)(t) − S ( f1,R)(t′)|
≤ (b − a) · ρ f (max(|P1|, |P2|)) .Hier ist ρ f (γ) = sup{ | f (s′, t′) − f (s, t)| : max(|s − s′|, |t − t′|) ≤ γ } die Oszillation derFunktion (s, t) 7→ f (s, t). Also erhalten wir zusammen mit (8.21)
‖H(.,P1)−H(.,P2)‖∞ = supR∈R|H(R,P1)−H(R,P2)| ≤ 2 (b− a) (d − c) ρ f (max(|P1|, |P2|)) .
Wegen der Kompaktheit von [a, b] × [c, d] ist f gleichmäßig stetig; vgl. Satz 6.3.3. Wie inBemerkung 8.3.2 festgestellt, bedeutet das limγ→0+ ρ f (γ) = 0. Somit ist
(H(.,P)
)P∈J ein
Cauchy-Netz in B(I,C)13 und konvergiert wegen Lemma 5.3.11 daher in B(I,C) bzgl. d∞ –also gleichmäßig – gegen eine Funktion h : I → C.
13 Das ist der vollständig metrische Raum aller auf I beschränkten C-wertigen Funktionen versehen mitd∞, vgl. Definition 6.6.3.

290 8 Das Riemannsche Integral
Aus Symmetriegründen konvergiert auch(H(R, .))R∈I in B(J,C) gleichmäßig gegen eine
Funktion g : J → C. Insbesondere sind alle Voraussetzungen von Lemma 8.7.1 erfüllt, undwir erhalten
lim|R|→0
lim|P|→0
H(R,P) = lim|P|→0
lim|R|→0
H(R,P) ,
wobei
lim|P|→0
lim|R|→0
H(R,P) = lim|P|→0
n(P)∑
k=1
(ηk − ηk−1) lim|R|→0
n(R)∑
j=1
(ξ j − ξ j−1) f (α j, βk)
= lim|P|→0
S (∫ b
af (s, .) ds,R),P)
=
∫ d
c
(∫ b
af (s, t) ds
)dt .
Entsprechend gilt lim|R|→0 lim|P|→0 H(R,P) =∫ b
a
(∫ d
cf (s, t) dt
)ds und damit (8.19). q
8.7.11 Bemerkung. Ist eine stetige reell- oder komplexwertige Funktion f auf einemQuader
∏pj=1[a j, b j] = [a1, b1] × · · · × [ap, bp] ⊆ Rp definiert, so ist wegen Korollar 8.7.9
die Funktion (t j)p−1j=1 7→
∫ bp
apf (t1, . . . , tp−1, s) ds auf
∏p−1j=1 [a j, b j] ⊆ Rp−1 stetig.
Nun kann man nach der vorletzten Variablen integrieren, dann nach der vorvorletzten, undso weiter. Schließlich erhält man
∫ b1
a1
. . .
∫ bp
ap
f (t1, . . . , tp) dtp . . . dt1 . (8.22)
Wendet man Satz 8.7.10 mehrere Male an, so sieht man, dass es hier nicht auf die Integrati-onsreihenfolge ankommt.Man kann das als Ausgangspunkt für die Integrationstheorie für Funktionen, die auf einemRechteck oder allgemeiner über einem Quader Q =
∏pj=1[a j, b j] ⊆ Rp definiert sind,
nehmen, indem man ∫
Qf (t) dt
als (8.22) definiert. Dieser Ausdruck hängt zumindest für stetige f nicht von der Integrati-onsreihenfolge ab, ist also in einem gewissen Sinne sinnvoll definiert.Größere Probleme tauchen auf, wenn man etwa das Integral einer stetigen Funktion übereinen Kreis definieren will.
Als Folgerung erhält man unmittelbar eine Aussage über die Differenzierbarkeit vonParameterintegralen.
8.7.12 Korollar. Sei f : [a, b]× [c, d]→ R(C) stetig, sodass die Ableitung nach der erstenVariablen für alle (s, t) ∈ [a, b] × [c, d] existiert, und dass
(s, t) 7→ dds
f (s, t)14 ,
14 Dafür werden wir später ∂∂s f (s, t) schreiben.

8.7 Vertauschung von Integralen mit Grenzwerten 291
ebenfalls auf [a, b] × [c, d] stetig ist. Dann ist die Funktion s 7→∫ d
cf (s, t) dt für s ∈ [a, b]
stetig differenzierbar mit der Ableitung
dds
∫ d
cf (s, t) dt =
∫ d
c
dds
f (s, t) dt . (8.23)
Beweis. Wegen Satz 8.7.10 und dem zweiten Hauptsatz gilt∫ x
a
∫ d
c
dds
f (s, t) dt ds =
∫ d
c
∫ x
a
dds
f (s, t) ds dt =
∫ d
c( f (x, t) − f (a, t)) dt .
Differenziert man diese Gleichung nach der Variablen x, so erhält man (8.23). Dass (8.23)stetig von s ∈ [a, b] abhängt, folgt aus Korollar 8.7.9. q
8.7.13 Beispiel. Als Anwendung der Grenzwertvertauschungen wollen wir folgende be-sonders in der Statistik und Wahrscheinlichkeitstheorie wichtige Tatsache zeigen:
∫ +∞
−∞e−t2 dt =
√π . (8.24)
Dazu betrachte man (x ∈ [0,C] mit C > 0 beliebig)
F(x) =π
4−
∫ 1
0
e−x2(t2+1)
t2 + 1dt . (8.25)
Die Ableitung des Integranden nach x ist −2xe−x2(t2+1). Somit ist diese und offensichtlichder Integrand selber auf [0,C] × [0, 1] stetig. Aus Korollar 8.7.12 schließen wir
F′(x) = 2xe−x2∫ 1
0e−x2t2 dt .
Außerdem gilt
F(0) =π
4−
∫ 1
0
1t2 + 1
dt =π
4− arctan(x)
∣∣∣10
= 0 .
Ist andererseits G(x) =(∫ x
0e−t2 dt
)2, so gilt G′(x) = 2e−x2 ∫ x
0e−t2 dt, und aus der Substituti-
onsregel folgt F′(x) = G′(x). Wegen G(0) = 0 = F(0) folgt F(x) = G(x) und zwar für allex ≥ 0, da ja C > 0 beliebig war.Wegen e−x2(t2+1)
t2+1 ≤ e−x2konvergiert der Integrand in (8.25) für x→ +∞ gleichmäßig gegen
die Nullfunktion, und mit Satz 8.7.2 erhält man
limx→+∞
G(x) = limx→+∞
F(x) =π
4.
Aus der Stetigkeit der Wurzelfunktion folgt
limx→+∞
∫ x
0e−t2 dt =
√π
2,
und damit (8.24).

292 8 Das Riemannsche Integral
8.7.14 Beispiel. Wir betrachten die Funktion
F(t) :=∫ +∞
0
sin xx· e−xt dx = lim
γ→0+
∫ 1
γ
sin xx· e−xt dx + lim
β→+∞
∫ β
1
sin xx· e−xt dx .
Diese ist wohldefiniert für t ∈ [0,+∞), da obiges uneigentliches Integral für alle t ≥ 0konvergiert, wobei es aber nur für t > 0 absolut konvergiert.Man beachte dabei auch, dass 0 nicht wirklich eine Uneigentlichkeitsstelle obigen In-tegrales ist, da sich die Funktion g(x) := sin x
x von (0,+∞) stetig auf [0,+∞) durchg(0) := 1 = limx→0+
sin xx fortsetzen lässt. Also gilt nach dem Hauptsatz der Differential-
und Integralrechnung
limδ→0+
∫ 1
δ
sin xx· e−xt dx =
∫ 1
0g(x) · e−xt dx .
Man betrachte für α > 1 die Funktion
Fα(t) =
∫ α
1α
sin xx· e−xt dx
definiert auf [0,+∞). Offenbar konvergiert Fα(t) für α→ +∞ punktweise gegen F(t).Wir bemerken, dass
∣∣∣ sin xx
∣∣∣ ≤ 1 für x , 0. In der Tat verschwindet die Funktion sin x − x beiNull, und auf [0,+∞) hat sie eine Ableitung kleiner gleich Null. Somit ist sie monotonfallend. Also gilt sin x − x ≤ 0 und daher
∣∣∣ sin xx
∣∣∣ ≤ 1 für x ∈ (0,+∞). Für x < 0 gilt dieseUngleichung wegen
∣∣∣ sin xx
∣∣∣ =∣∣∣ sin(−x)−x
∣∣∣.Wir wollen nun limt→+∞ F(t) berechnen. Dazu betrachten wir F(t) für t ∈ [δ,+∞) für einfestes δ > 0, und bemerken, dass für t ≥ δ
|F(t) − Fα(t)| =∣∣∣∣∣∣∣limγ→0+
∫ 1α
γ
sin xx· e−xt dx + lim
β→+∞
∫ β
α
sin xx· e−xt dx
∣∣∣∣∣∣∣
≤ limγ→0+
∫ 1α
γ
e−δx dx + limβ→+∞
∫ β
α
e−δx dx
=
∫ 1α
0e−δx dx +
∫ +∞
α
e−δx dx =1 − e−
1α + e−α
δ.
Der Ausdruck rechts konvergiert für α → +∞ gegen 0 und zwar unabhängig von t ∈[δ,+∞). Also konvergiert Fα gegen F gleichmäßig auf [δ,+∞).Andererseits gilt nach Satz 8.7.2 für ein festes α > 1
limt→+∞
Fα(t) = limt→+∞
∫ α
1α
sin xx· e−xt dx
=
∫ α
1α
limt→+∞
sin xx· e−xt dx =
∫ α
1α
0 dx = 0 ,

8.7 Vertauschung von Integralen mit Grenzwerten 293
da wegen∣∣∣ sin x
x · e−xt∣∣∣ ≤ e−t 1
α das Netz von Funktionen x 7→ sin xx ·e−xt, x ∈ [ 1
α, α] für t → +∞
gleichmäßig gegen 0 konvergiert.Setzen wir also H(t, α) := Fα(t) für (t, α) ∈ [δ,+∞) × (1,+∞), wobei diese Intervallejeweils gegen +∞ gereichtet sind, so folgt aus Lemma 8.7.1
limt→+∞
F(t) = limt→+∞
limα→+∞
Fα(t) = limα→+∞
limt→+∞
Fα(t) = limα→+∞
0 = 0 .
Nun wollen wir F′(t) für t > 0 berechnen. Dazu halten wir wieder δ > 0 fest und betrachtent ∈ [δ,+∞). Wir wissen schon, dass Fα → F und zwar gleichmäßig auf dieser Menge.Betrachten wir für ein festes α > 1 das Integral
Fα(t) =
∫ α
1α
sin xx· e−xt dx ,
so ist der Integrand stetig in (x, t) ∈ [ 1α, α] × [δ,+∞), und auch die Ableitung
∂
∂tsin x
x· e−xt = − sin x · e−xt
des Integranden nach t ∈ [δ,+∞) ist stetig in (x, t) ∈ [ 1α, α] × [δ,+∞). Also gilt nach
Korollar 8.7.12F′α(t) =
∫ α
1α
− sin x · e−xt dx .
Wegen (t ∈ [δ,+∞))∣∣∣∣∣∣
∫ +∞
0− sin x · e−xt dx −
∫ α
1α
− sin x · e−xt dx
∣∣∣∣∣∣ ≤∫ 1
α
0e−δx dx +
∫ +∞
α
e−δx dx
=1 − e−
1α + e−α
δ
konvergiert F′α(t) für α → +∞ unabhängig von t ≥ δ, daher gleichmäßig in t ∈ [δ,+∞),gegen ∫ +∞
0− sin x · e−xt dx .
Gemäß Korollar 8.7.4 ist das somit genau F′(t) und zwar für t ∈ (0,+∞), da ja das festeδ > 0 beliebig war. Wegen
∫ +∞
0− sin x · e−xt dx =
11 + t2 (t sin x + cos x)e−xt
∣∣∣∣+∞
0= − 1
1 + t2 , für t > 0 ,
folgt F(t) = C − arctan t für t ∈ (0,+∞) mit einem festen reellen C. Lässt man t gegen +∞streben, so erhält man C = π
2 .Schließlich gilt für t ≥ 015
F(t) =
∫ 1
0
sin xx· e−xt dx +
∫ +∞
1
1x· e−xt sin x dx .
15 Man denke sich wieder sin xx bei x = 0 stetig fortgesetzt mit dem Wert 1.

294 8 Das Riemannsche Integral
Das erste Integral ist gemäß Korollar 8.7.9 stetig in t ∈ [0,+∞). Das zweite stimmt nacheiner partiellen Integration überein mit
limβ→+∞
[−1
xt sin x + cos x
1 + t2 e−xt
]β
1− lim
β→+∞
∫ β
1
1x2
t sin x + cos x1 + t2 e−xt dx . (8.26)
Man beachte, dass der erste Grenzwert genau
t sin 1 + cos 11 + t2 e−t
ist, und somit auch stetig in t ∈ [0,+∞) ist. Wegen∣∣∣ t sin x+cos x
1+t2 e−xt∣∣∣ ≤ 1 gilt für t ≥ 0
∣∣∣∣∣∣
∫ +∞
1
1x2
t sin x + cos x1 + t2 e−xt dx −
∫ β
1
1x2
t sin x + cos x1 + t2 e−xt dx
∣∣∣∣∣∣ ≤∫ +∞
β
1x2 dx .
Also konvergiert das Netz∫ β
1
1x2
t sin x + cos x1 + t2 e−xt dx
von stetigen (siehe Korollar 8.7.9) Funktion in t ∈ [0,+∞) gleichmäßig gegen den zweitenGrenzwert aus (8.26). Somit ist auch dieser stetig (vgl. Korollar 6.6.14), und wir haben dieStetigkeit von F(t) auf ganz [0,+∞) nachgewiesen. Insbesondere gilt
∫ +∞
0
sin xx
dx = F(0) = limt→0+
F(t) = limt→0+
(π2− arctan t
)=π
2.
8.8 MittelwertsatzIn Analogie zu den Mittelwertsätzen der Differentialrechnung, Satz 7.2.6 und Satz 7.2.7,gilt der
8.8.1 Satz (Mittelwertsatz der Integralrechnung). Seien f , g : [a, b] → R derart, dass gund f · g Riemann-integrierbar sind und dass g(t) ≥ 0 für alle t ∈ [a, b]. Dann existiert einµ ∈ [inft∈[a,b] f (t), supt∈[a,b] f (t)] mit
b∫
a
f (t)g(t) dt = µ
b∫
a
g(t) dt . (8.27)
Ist f stetig, so gibt es dabei ein x ∈ [a, b], sodass µ = f (x).
Beweis. Man betrachte die Ungleichung
g(s) inft∈[a,b]
f (t) ≤ g(s) f (s) ≤ g(s) supt∈[a,b]
f (t) ,
und integriere alle Funktionen nach s. Nach Lemma 8.2.9 erfüllen die Integrale diesel-be Ungleichungskette. Daraus folgt unmittelbar (8.27). Für ein stetiges f ist nach demZwischenwertsatz f (x) = µ für ein x ∈ [a, b]. q

8.8 Mittelwertsatz 295
Für g(t) = 1 erhalten wir aus Satz 8.8.1 unmittelbar, dass für ein Riemann-integrierbaresf : [a, b]→ R
b∫
a
f (t) dt = µ(b − a) , (8.28)
wobei im Falle der Stetigkeit von f gilt, dass µ = f (x) für ein gewisses x ∈ [a, b].Als Anwendung können wir mit Satz 8.8.1 die Darstellung des Restgliedes im Satzvon Taylor, Satz 7.4.2, unter etwas stärkeren Voraussetzungen nochmals ableiten. Dazubenötigen wir zunächst eine Darstellung dieses Restgliedes in Integralform, die auch fürkomplexwertige Funktion gültig ist.
8.8.2 Proposition. Sei I ⊆ R ein Intervall, n ∈ N ∪ {0} und f : I → R (C) aus Cn+1(I).Dann gilt für x, y ∈ I
f (x) = f (y) +f ′(y)1!
(x − y) +f ′′(y)
2!(x − y)2 + · · · + f (n)(y)
n!(x − y)n
+
x∫
y
f (n+1)(t)(x − t)n
n!dt .
Beweis. Um diese Formel einzusehen, starten wir mit
f (x) − f (y) =
x∫
y
f ′(t) dt ,
und integrieren partiell:
f (x) − f (y) =
x∫
y
f ′(t) · 1 dt = f ′(y)(x − y) +
x∫
y
f ′′(t) · (x − t) dt
= f ′(y)(x − y) + f ′′(y)(x − y)2
2+
x∫
y
f ′′′(t) · (x − t)2
2dt
= · · · =n∑
k=1
f (k)(y)(x − y)k
k!+
x∫
y
f (n+1)(t) · (x − t)n
n!dt . q
8.8.3 Bemerkung. Ist f reellwertig, so folgt aus Satz 8.8.1, dass sich das Restglied in derForm f (n+1)(ξ) (x−y)n+1
(n+1)! für ein geeignetes ξ ∈ [min(x, y),max(x, y)] schreiben lässt; vgl. Satz7.4.2.

296 8 Das Riemannsche Integral
8.9 Übungsaufgaben
8.1 Man betrachte die Funktion f (x) = x3 + 1 : [0, 1] → R. Wählen Sie n + 1 äquidistanteStützstellen, und berechnen Sie zur entsprechenden ZerlegungZn von [0, 1] die Ober- und dieUntersummen, sowie limn→∞O(Zn), limn→∞U(Zn).
Hinweis: 4∑n
k=1 k3 = n2(n + 1)2.
8.2 Berechnen Sie das Integral aus dem vorherigen Beispiel mit Hilfe von Riemann-Summen mitn + 1 äquidistanten Stützstellen, und Zwischenstellen an den Intervallmittelpunkten.
8.3 Seien a, b ∈ R, a < b und bezeichne R die Menge aller Riemann-Zerlegungen von [a, b]gerichtet durch die Feinheit. Zeigen Sie, dass dass für ein Netz ( f (R))R∈R mit Werten in einemmetrischen Raum folgende Aussagen äquivalent sind:
limR∈R
f (R) = y, also ∀ε > 0 ∃R0 ∈ R : ∀R � R0 ⇒ d( f (R), y) < ε .
∀ε > 0 ∃δ > 0 : ∀|R| < δ⇒ d( f (R), y) < ε .
∀(Rn)n∈N mit limn→∞ |Rn| = 0 gilt lim
n→∞ f (Rn) = y .
8.4 Seien a, b ∈ R, a < b und f : [a, b]→ C stetig. Weiters bezeichne R die Menge aller Riemann-Zerlegungen von [a, b] gerichtet durch die Feinheit. Zu jedem R = ((ξ j)
n(R)j=0 , (α j)
n(R)j=1 ) ∈ R sei
F(R) die Funktion auf [a, b] definiert durch
F(R)(x) = f (α j) ,
wenn x ∈ [ξ j−1, ξ j), und F(R)(b) = f (αn(R)).
Man zeige, dass dann limR∈R F(R) = f und zwar in B([a, b],C) bezüglich der Metrik d∞, alsogleichmäßig.
8.5 Man berechne folgende Integrale:
e∫
1
ln xdxx,
∫ 2
1
dxx3 + x
.
8.6 Man berechne folgende Integrale:
∫ 0
−1
xx2 − 3x + 2
dx,∫ 3
4
14
x + 1x4 − x
dx .
8.7 Man berechne durch geeignete Substitutionen folgende Integrale:
∫ 1
−45
ex − 1ex + 1
dx,∫ 5
1
x − √xx +√
xdx .

8.9 Übungsaufgaben 297
8.8 Man berechne folgende Integrale:
∫ 9
5
x3
4x − 1dx,
∫ −2
−3
1x2 − 1
dx .
8.9 Man berechne die Integrale:
∫ π2
π8
1sin x
dx,∫ π
4
π8
1sin2 x cos4 x
dx .
8.10 Man berechne ∫ π4
0
2 sin x + tan x1 + cos x
dx .
8.11 Zeigen Sie mit Hilfe der Integralrechnung (Ober-, Unter-, Riemann-Summen), dass
limn→∞
1k + 2k + . . . + nk
nk+1 =1
k + 1(k, n ∈ N) .
Hinweis: xk+1
k+1 ist eine Stammfunktion von xk und es gilt∫ b
a f (x) dx = F(b) − F(a), wenn Feine Stammfunktion von f ist.
8.12 Für m, n ∈ Z berechnen Sie ∫ 2π
0exp(int) · exp(−imt) dt ,
sowie∫ 2π
0sin(nt) · sin(mt) dt,
∫ 2π
0cos(nt) · cos(mt) dt,
∫ 2π
0sin(nt) · cos(mt) dt .
Hinweis: Es gilt∫ b
a f (x) dx = F(b) − F(a), wenn F eine Stammfunktion von f ist. Unterschei-den Sie dabei den Fall m = n und m , n. Um Rechenarbeit zu sparen, kann man die letztendrei Integrale auf das erste zurück führen.
8.13 Man zeige:
Dn(t) :=12
+
n∑
m=1
cos mt =12
n∑
k=−n
eikt =sin(n + 1
2 )t
2 sin t2
=12
(cos nt + cott2· sin nt) ,
sowie∫ π
−π Dn(t) dt = π.
8.14 Sei f (x) eine auf ganz R definierte Funktion. Wir nehmen an, dass f (x) stetig und 1-periodischist, also dass f (x) = f (x + 1) für alle x ∈ R. Man zeige, dass f (x) auf R beschränkt ist. Weitersbeweise man, dass für beliebiges α ∈ R folgende Gleichheit gilt:
∫ 1
0f (x) dx =
∫ α+1
αf (x) dx .

298 8 Das Riemannsche Integral
8.15 Sind folgende uneigentliche Integrale absolut konvergent oder nicht?∫ π
2
0ln(sin x) dx,
∫ 1
0
ln xe2x − ex dx,
∫ +∞
0
x3 sin 1x
(x2 + 1)3 dx .
Hinweis zur Divergenz: Wenn ein uneigentliches Integral∫ b
a | f (x)| dx divergiert, und wenn
|g(x)| ≥ | f (x)|, dann divergiert auch∫ b
a |g(x)| dx (Divergente Minorante).
8.16 Man bestimme die Fläche unter der Kurve 14x2−12x+13 , wenn x in [−1, 2] läuft.
8.17 Man berechne mit Hilfe eines Riemann-Integrals den Flächeninhalt eines Kreises mit demRadius r > 0.
Weiters berechne den Flächeninhalt folgender Teilmenge der Ebene:
{(x, y) ∈ R2 : x2 + y2 ≤ 1, y ≥ x2} .
8.18 Welche folgender Integrale sind eigentliche bzw. uneigentliche Riemann-Integrale? Weitersberechne man diese (r > 0):
∫ 1
0
1√9x − 4x2
dx,∫ r
−r
√r2 − x2 dx,
∫ 3
1
√x2 + 4x + 5
2 + x +√
x2 + 4x + 5dx .
Hinweis: Zum letzten Integral: Substituieren Sie zuerst, sodass x2 +4x+5 = (x+2)2 +1 = t2 +1.
8.19 Für welche α ∈ R \ {0} existieren die (uneigentlichen) Integrale:∫ 1
0xα dx,
∫ +∞
1xα dx,
∫ +∞
0xα dx .
Im Falle der Existenz berechne man diese! Weiters berechne man (falls existent)∫ +∞
1
ln tt2 dt .
8.20 Man berechne ∫ +∞
−∞(t2 − 2t + 2) exp(−|t| · (2 + iπ)) dt .
Weiters betrachte man den Betrag f (x) des Integranden als Funktion von R nach R. Man be-stimme lokal und globale Extrema, limx→+∞ f (x), limx→−∞ f (x). Wo ist f monoton wachsend,fallend, wo konvex und wo konkav?
8.21 Überprüfe, ob folgende Integrale absolut konvergieren:∫ ∞
0
ln x1 + x2 dx,
∫ π2
0
13√x sin x
dx .
8.22 Man berechne (a > 0, b ∈ R, w = −a + ib):∫ ∞
0ewt dt ,
sowie ∫ ∞
0ewt cos bt dt,
∫ ∞
0ewt sin bt dt .

8.9 Übungsaufgaben 299
8.23 Man berechne das uneigentliche Integral∫ +∞
0 (t2 + 2t) exp(wt) sin t dt mit w ∈ C, Re w < 0.
8.24 Man berechne ∫ 1
−1
xx6 + i
dx,∫ 1
0xm(log x)n dx, n,m ∈ N .
8.25 Sei α ≥ 0, und Iα sei definiert als
Iα =
∫ π2
0sinα x dx .
Man finde durch partielle Integration eine Relation zwischen Iα und Iα+2. Man zeige mit Hilfedieser Rekursionsformel, dass für k ∈ N folgende zwei Formeln gelten:
I2k =2k − 1
2k· 2k − 3
2k − 2· · · · · 3
4· 1
2· π
2,
I2k+1 =2k
2k + 1· 2k − 2
2k − 1· · · · · 4
5· 2
3.
8.26 Für x ∈ [0, π2 ] und k ∈ N zeige man
sin2k+1 x ≤ sin2k x ≤ sin2k−1 x .
Daraus und aus dem vorherigen Beispiel leite man folgende Ungleichungen her:
2 · 4 · · · · · (2k)3 · 5 · · · · · (2k + 1)
≤ 1 · 3 · · · · · (2k − 1) · π2 · 4 · · · · · (2k) · 2 ≤ 2 · 4 · · · · · (2k − 2)
3 · 5 · · · · · (2k − 1).
Nun forme man diese Ungleichung so um, sodass in der Mitte nur noch π2 steht, und man leite
daraus die Wallische Produktformel her:
π
2= lim
k→∞22 · 42 · · · · · (2k)2
32 · 52 · · · · · (2k − 1)2 ·12k
.
8.27 Sei f (x) auf [0, n] stetig differenzierbar. Man zeige durch eine Zerlegung von∫ n
0 in∑n
j=1
∫ jj−1
und unter Verwendung der partiellen Integration, dass sich die Differenz von∑n
k=1 f (k) und∫ n0 f (x) dx berechnen lässt durch
n∑
k=1
f (k) −∫ n
0f (x) dx =
∫ n
0(x − bxc) f ′(x) dx .
Außerdem zeige man:
n∑
k=0
f (k) =
∫ n
0f (x) dx +
f (0) + f (n)2
+
∫ n
0(x − bxc − 1
2) f ′(x) dx .

300 8 Das Riemannsche Integral
8.28 Man zeige mit Hilfe des vorherigen Beispiels, dass der Limes
γ := limn→∞
n∑
k=1
1k− ln n
existiert.
Anmerkung: Durch die Existenz dieses Grenzwertes lässt sich angeben, wie schnell die Reihe∑∞k=1
1k gegen +∞ konvergiert, nämlich genauso schnell wie ln n es für n→ ∞ tut. Die Zahl γ
wird Euler-Mascharonische Konstante genannt; ihr ungefährer Wert ist 0, 577215....
8.29 Sei f (x) auf [0, n] zweimal stetig differenzierbar. Man zeige, dass sich die Differenz von∑nk=1 f (k) und
∫ n0 f (x) dx berechnen lässt durch
n∑
k=1
f (k) −∫ n
0f (x) dx =
f (n) − f (0)2
−∫ n
0φ(x) f ′′(x) dx ,
wobei φ(x) =(x−bxc)2−(x−bxc)
2 .
8.30 Man wende voriges Beispiel auf f (x) = ln(x + 1) an, und zeige, dass das uneigentliche Integral
a := −∫ ∞
0φ(x) f ′′(x) dx + 1
existiert. Man zeige weiters, dass
a = limn→∞ ln((n + 1)!) − (n +
32
) ln(n + 1) + n + 1 = limn→∞ ln(n!) − (n +
12
) ln n + n .
8.31 Man zeige, dass für den Grenzwert a aus dem vorherigen Beispiel
ea = limn→∞
n!en
nn √n
gilt. Man setze b := ea, und zeige weiters, dass b =√
2π.
Hinweis: Man zeige mit Hilfe des Wallischen Produkts
limn→∞
b2n
b2n
=1√2π
,
wobei bn = n!en
nn √n. Man verwende dabei auch die Tatsache, dass
(2kk
)
22k =1 · 3 . . . (2k − 1)
2 · 4 . . . (2k).
Anmerkung: Mit diesem Beispiel erhält man die Stirlingsche Formel
limn→∞
n!en
nn√
2πn= 1 .
Es gilt somit die asymptotische Gleichung n! � nne−n√
2πn.

8.9 Übungsaufgaben 301
8.32 Sei Q[a, b] die Menge alle stückweise stetigen, reellwertigen Funktionen auf [a, b]. Weiters seiN die Menge aller f : [a, b]→ R, sodass f (t) , 0 für nur endlich viele t.
Zeigen Sie, dass Q[a, b] (versehen mit punktweiser Addition und Multiplikation) ein Vektor-raum über R und N ein Unterraum davon ist. Weiters zeige man, dass (c, f +N) 7→ F, wobeiF(x) = c +
∫ xa f (t) dt eine wohldefinierte, lineare und bijektive Abbildung von R × Q[a, b]/N
auf{F ∈ C[a, b] : F ist stückweise stetig differenzierbar auf [a, b]} .
Für die Definition von stückweise stetig differenzierbar siehe Definition 11.1.9. BestimmenSie auch die Umkehrfunktion von (c, f +N) 7→ F!
8.33 Geben Sie eine Riemann-integrierbare aber nicht stückweise stetige Funktion f an und führenSie aus, warum f diese Eigenschaft hat!
Hinweis: Betrachten Sie etwa f : [0, 1] → R mit f (t) = 1 auf [ 12 , 1], f (t) = 1
2 auf [ 14 ,
12 ),
f (t) = 14 auf [ 1
8 ,14 ), usw. . Bauen Sie zu jedem ε > 0 eine Zerlegung von [0, 1], sodass die
Differenz von Ober- und Untersumme kleiner als ε wird.
8.34 Man berechne
lima→0
∫ 1
0
11 + a sin2(x)
dx .
8.35 Man berechne
limx→0+
∫ +∞
0
e−xt
1 + t2 dt .
Hinweis: Zeigen Sie zunächst, dass limx→0+
∫ R0 .. =
∫ R0 limx→0+ .. für jedes feste reelle R ≥ 0.
Dann definiere man H : [0,+∞) × (0, 1]→ R mit H(R, x) :=∫ R
0e−xt
1+t2 dt, wobei [0,+∞) durch≤ und (0, 1] durch ≥ gerichtet sind. Nun weise man nach, dass sich Lemma 8.7.1 anwendenlässt.
8.36 Man betrachte die Funktionenfolge
S N(x) =
N∑
k=−N
1x − k
.
für x ∈ R \ Z. Man zeige, dass S N(x) auf jedem kompakten Teilintervall [a, b] ⊆ R \ Zgleichmäßig gegen eine Funktion h(x) konvergiert.
Man berechne h(k + 12 ) für k ∈ Z.
Schließlich zeige man h(x) = π cot(πx), x ∈ R \ Z, indem man ihre Ableitungen vergleicht.Man verwende dazu Beispiel 6.29 und 6.30.
Hinweis: Es gilt S N(x) = 1x + 2x
∑Nk=1
1x2−k2 . Begründung für Vertauschen von Limes und
Differenzieren!
8.37 Durch Betrachtung der Ableitung leite man die Taylorreihe zur Funktion arctan mit Anschluss-stelle x0 = 0 her.
Anmerkung: Zusammen mit dem Abelschen Grenzwertsatz, Satz 6.12.1, folgt∞∑
k=0
(−1)k
2k + 1=π
4.

302 8 Das Riemannsche Integral
8.38 Durch Betrachtung der Ableitung leite man die Taylorreihe zur Funktion areatanh mit An-schlussstelle x0 = 0 her.
8.39 Man berechne ∫ 1
0
(∫ 2
1
(∫ 2
1zx+y dx
)dy
)dz ,
und begründe alle vorgenommenen Vertauschungen.
8.40 Für x ∈ (0,+∞) zeige man, dass folgendes uneigentliche Integral absolut konvergiert:
Γ(x) :=∫ ∞
0e−ttx−1 dt .
Weiters zeige man, dass Γ(x) stetig von x abhängt.
Hinweis: Sei [a, b] ⊆ (0,+∞) fest. Man zeige, dass fn(x) :=∫ n
1n
e−ttx−1 dt eine Folge steti-ger Funktionen auf [a, b] ist, die auf [a, b] gleichmäßig gegen Γ(x) konvergiert. Dazu zeigeman, dass |e−ttx−1| ≤ K1ta−1, t ∈ (0, 1] und |e−ttx−1| ≤ K2
1t2 , t ∈ [1,+∞) mit irgendwelche
Konstanten K1,K2.
Allgemeiner Tipp, wie man f (t) ≤ Cg(t) mit irgendeinem C > 0 für reellwertige, nicht negativeund stetige Funktionen f , g auf einem Intervall [a, b) mit g(t) , 0 herleitet:
Gilt limt→b−f (t)g(t) = 0, so gibt es insbesondere zu ε = 1 ein t0 ∈ [a, b), sodass t ≥ t0 ⇒ f (t)
g(t) ≤ 1.
Da die Funktion f (t)g(t) auf dem kompakten Intervall [a, t0] stetig ist, ist sie dort beschränkt, d.h.
f (t)g(t) ≤ C für ein C > 0, das ohne Beschränkung der Allgemeinheit auch C ≥ 1 erfüllt. Also giltf (t)g(t) ≤ C auf ganz [a, b).
8.41 Man zeige, dass für x > 0, n ∈ N:
Γ(x + 1) = xΓ(x), Γ(n) = (n − 1)! .
8.42 Für x ∈ (0,+∞) zeige man, dass folgendes uneigentliche Integral absolut konvergiert:
gk(x) :=∫ ∞
0e−t(ln t)ktx−1 dt .
Weiters zeige man, dass die gk stetig sind, dass∫ y
1 gk(t) dt = gk−1(y) − gk−1(1), und dass dahergk die k-te Ableitung der Gammafunktion ist.
Hinweis: Sei [a, b] ⊆ (0,+∞) beliebig. Man zeige, dass (α ∈ (1,+∞), x ∈ [a, b]) F(α, x) :=∫ α1α
e−t(ln t)ktx−1 dt gleichmäßig auf [a, b] konvergiert, wenn α→ +∞. Dazu zeige man, dass
|e−t(ln t)ktx−1| ≤ K1t34 a−1, t ∈ (0, 1] und |e−t(ln t)ktx−1| ≤ K2
1t2 , t ∈ (1,+∞) mit irgendwelchen
Konstanten K1,K2.
8.43 Sei x nun nicht nur in (0,+∞), sondern allgemeiner in {z ∈ C : Re z > 0}. Man zeige, dassdann Γ(x) ebenfalls konvergiert, und zwar in {z ∈ C : Re z > 0}, dass diese Funktion stetig aufganz {z ∈ C : Re z > 0} ist, und dass Γ(z + 1) = zΓ(z) gilt.
Schließlich stelle man Re Γ(z) und Im Γ(z) getrennt dar.
8.44 Man berechne Γ( 12 )!














![Das Riemannsche Integral - TU Dortmundls4- · Das Riemannsche Integral Es soll die von von dem unktionsgraphF einer unktionF f und der x-Achse in den Intervallgrenzen [a;b] eingeschlossene](https://static.fdokument.com/doc/165x107/5d49ebc188c99393708b6a83/das-riemannsche-integral-tu-dortmundls4-das-riemannsche-integral-es-soll.jpg)