Kombinierte Topologie- und Parameteroptimierung des ... · kombinierten Topologie- und...
10
KOMBINIERTE TOPOLOGIE- UND PARAMETEROPTIMIERUNG DES AUFHÄNGUNGSSYSTEMS VON HECKINSTALLIERTEN TURBOFANTRIEBWERKEN A. Zuchlinski 1 , A. Kühhorn 1 , M. Kober 1 L. Wehrenpfennig 2 1 Lehrstuhl für Strukturmechanik und Fahrzeugschwingungen, Brandenburgische Technische Universität Cottbus (BTU), D-03046 Cottbus, Germany 2 Rolls-Royce Deutschland Ltd. & Co KG, D-15827 Blankenfelde-Mahlow, Germany Zusammenfassung Im Rahmen eines vom Land Brandenburg (BBG) geförderten Forschungsprojektes wurden am Lehrstuhl für Strukturmechanik und Fahrzeugschwingungen (SMF) der Brandenburgischen Tech- nischen Universität Cottbus (BTU) die nachfolgend gezeigten Optimierungen des Aufhängungssys- tems von heckinstallierten Turbofantriebwerken durchgeführt. Der vorliegende Beitrag zeigt einen kombinierten Topologie- und Parameteroptimierungsprozess, welcher im Bereich der Antriebsin- tegration für Langstrecken-Geschäftsreiseflugzeuge, in Zusammenarbeit mit dem deutschen Ge- samttriebwerkshersteller Rolls-Royce Deutschland Ltd. & Co KG (RRD), entwickelt werden konnte. Hierbei wurden die Komponenten der Triebwerksaufhängung strukturmechanisch analysiert und optimiert, d.h. bei geringstem Gewicht sollten hohe Steifigkeiten und niedrige Materialbeanspru- chungen erreicht werden. Als Grundlage für die Modellerstellung diente ein validiertes und voll parametrisiertes generisches Gesamttriebwerksmodell, wobei sich dieses auf wesentliche Struk- turbauteile konzentriert. Zusätzlich dazu wurden weitere benötigte Strukturmodelle, wie z.B. der Flugzeugrumpf, nachgebildet und Ziel- bzw. Randbedingungen der Optimierung definiert. Nach In- terpretation und Auswertung der Topologieoptimierungsergebnisse konnten diese in Balkenstruktu- ren überführt werden. Innerhalb einer sich anschließenden Parameteroptimierung wurden dann Bauteileigenschaften gefunden, welche eine Auslegung bzw. Dimensionierung nahe der optimalen Lösung widerspiegeln. 1. EINFÜHRUNG Große Geschäftsreiseflugzeuge stellen beson- dere Anforderungen an die Leistungsfähigkeit des Antriebssystems bzgl. Reichweite (bis über 13000 km), Flughöhe (über 15 km), Reiseflug- geschwindigkeit (bis Mach 0,9) und Kabinen- komfort (Lärm, Vibrationen). Auch die Vorgaben hinsichtlich der Geräuschemissionen werden immer strenger und anspruchsvoller. Die Triebwerke dieser Flugzeuge haben ein ver- gleichsweise geringes Nebenstromverhältnis Deutscher Luft- und Raumfahrtkongress 2012 1 DocumentID: 281168
Transcript of Kombinierte Topologie- und Parameteroptimierung des ... · kombinierten Topologie- und...

KOMBINIERTE TOPOLOGIE- UND PARAMETEROPTIMIERUNG DES AUFHÄNGUNGSSYSTEMS VON HECKINSTALLIERTEN
TURBOFANTRIEBWERKEN
A. Zuchlinski1, A. Kühhorn1, M. Kober1
L. Wehrenpfennig2
1Lehrstuhl für Strukturmechanik und Fahrzeugschwingungen, Brandenburgische
Technische Universität Cottbus (BTU), D-03046 Cottbus, Germany 2Rolls-Royce Deutschland Ltd. & Co KG, D-15827 Blankenfelde-Mahlow, Germany
Zusammenfassung
Im Rahmen eines vom Land Brandenburg (BBG) geförderten Forschungsprojektes wurden am Lehrstuhl für Strukturmechanik und Fahrzeugschwingungen (SMF) der Brandenburgischen Tech-nischen Universität Cottbus (BTU) die nachfolgend gezeigten Optimierungen des Aufhängungssys-tems von heckinstallierten Turbofantriebwerken durchgeführt. Der vorliegende Beitrag zeigt einen kombinierten Topologie- und Parameteroptimierungsprozess, welcher im Bereich der Antriebsin-tegration für Langstrecken-Geschäftsreiseflugzeuge, in Zusammenarbeit mit dem deutschen Ge-samttriebwerkshersteller Rolls-Royce Deutschland Ltd. & Co KG (RRD), entwickelt werden konnte. Hierbei wurden die Komponenten der Triebwerksaufhängung strukturmechanisch analysiert und optimiert, d.h. bei geringstem Gewicht sollten hohe Steifigkeiten und niedrige Materialbeanspru-chungen erreicht werden. Als Grundlage für die Modellerstellung diente ein validiertes und voll parametrisiertes generisches Gesamttriebwerksmodell, wobei sich dieses auf wesentliche Struk-turbauteile konzentriert. Zusätzlich dazu wurden weitere benötigte Strukturmodelle, wie z.B. der Flugzeugrumpf, nachgebildet und Ziel- bzw. Randbedingungen der Optimierung definiert. Nach In-terpretation und Auswertung der Topologieoptimierungsergebnisse konnten diese in Balkenstruktu-ren überführt werden. Innerhalb einer sich anschließenden Parameteroptimierung wurden dann Bauteileigenschaften gefunden, welche eine Auslegung bzw. Dimensionierung nahe der optimalen Lösung widerspiegeln.
1. EINFÜHRUNG
Große Geschäftsreiseflugzeuge stellen beson-dere Anforderungen an die Leistungsfähigkeit des Antriebssystems bzgl. Reichweite (bis über 13000 km), Flughöhe (über 15 km), Reiseflug-
geschwindigkeit (bis Mach 0,9) und Kabinen-komfort (Lärm, Vibrationen). Auch die Vorgaben hinsichtlich der Geräuschemissionen werden immer strenger und anspruchsvoller. Die Triebwerke dieser Flugzeuge haben ein ver-gleichsweise geringes Nebenstromverhältnis
Deutscher Luft- und Raumfahrtkongress 2012
1
DocumentID: 281168

(Verhältnis zwischen dem Luder außen am Kerntriebwerk vorund dem Luftmassenstrom, welckammer passiert) und sind typiRumpfheck installiert (BILD 1).
Diese Installation bedingt eine tegration und Interaktion des dem Flugzeug. Hierzu wurden inArbeit für eine realistische AntrieAuslegungsmethoden angewenziert. Eine Auslegung hinsichtlicfestigkeit der Aufhängung unterten Belastungen bei gleichzeitGewicht und verbesserter Fundurch die Anwendung der Torung gewährleistet. Das Verfahrgieoptimierung für Strukturen ersAuslegungsprozess die bisherigven Methoden zur Generierungmetrie für ein Bauteil, die in der durch die Intuition und Erfahrungteurs geprägt waren. Hierbei webene Lasten und RandbedingLasteinleitungspunkten bzw. LaTriebwerks definiert. Zur Modellferenzantriebes wurde das amStrukturmechanik und Fahrzeugder BTU Cottbus entwickelte Gesamttriebwerksmodell ausgewchem grundlegende strukturelledes Triebwerks mit einer ausrnauigkeit wiedergegeben werdeses parametrisierte Turbofantrwurde über einen maximalen Ddie Aufhängungsstruktur) mit d
BILD 1: Heckinstallation des AntriebssGeschäftsreiseflugzeug (GulfRolls-Royce BR710) (Quelle:
ftmassenstrom, beigeführt wird, cher die Brenn-scherweise am
spezifische In-Triebwerks mit nnerhalb dieser
ebskonfiguration det und verifi-
ch der Struktur-r verschiedens-ig minimiertem
nktionalität wird opologieoptimie-ren der Topolo-setzt hierbei im gen zeitintensi-g der Erstgeo-Vergangenheit
g des Konstruk-erden vorgege-ungen an den agerstellen des ierung des Re-
m Lehrstuhl für gschwingungen
parametrische wählt, mit wel- Eigenschaften eichenden Ge-n können. Die-iebwerksmodell
Designraum (für dem Flugzeug-
rumpf verbunden. Ausschhen innerhalb der Topologteroptimierung werden inteln vorgestellt.
2. VEREINFACHTES GESAMTTRIEBWERK– GENERIC WHOLE E
Moderne Flugzeugtriebweund bestehen aus einer schiedlicher Komponenteenthalten auch detailreichmodelle der HerstellerfirmVereinfachungen im Bezuguration.
Daher wurde innerhalb prozesses auf das am Lmechanik und FahrzeugscCottbus entwickelte partriebwerksmodell (siehe B
systems an einem fstream G550 mit RRD)
BILD 2: Detailliertes GesamttTriebwerksherstellersLtd. & Co KG (Quelle
BILD 3: Vereinfachtes gener(gWEM)
hnitte aus dem Vorge-gie- als auch Parame- den folgenden Kapi-
KSMODELL (GWEM ENGINE MODEL)
erke sind hochkomplex großen Anzahl unter-en. Im Allgemeinen he Gesamttriebwerks-
men (siehe Bild 2) viele ug auf die reale Konfi-
dieses Optimierungs-Lehrstuhl für Struktur-chwingungen der BTU rametrische Gesamt-ild 3) zurückgegriffen.
triebwerksmodell des s Rolls-Royce Deutschland e: RRD)
isches Triebwerksmodell
Deutscher Luft- und Raumfahrtkongress 2012
2
Der Grad der Vereinfachung degeneric whole engine model) wmessen angesehen um eine zufLösung des Randwertproblems Verschiebungen, Kräfte und Eizu gewährleisten, wie sich in voStudien zeigte [4]. Die verwendelen Elemente des vereinfachtenSchalen und Balken sowie diskrsen und Federn (siehe Bild 4).
BILD 4: Vereinfachte Triebwerksgeom
Berücksichtigung findet lediglich Äußere Verkleidungen (engl. n(engl. intake) und Schubumkehrreverser) werden lediglich über massen (engl. non-structural Triebwerk abgebildet, um das und den Massenschwerpunkt rzubilden. Die Geometrie jedesüber einen eindeutigen Paramsentiert und durch festgelegte Basowie geometrische AbhängigkeDieses sorgt für eine schnelleModelldefinition und verringert Parameter drastisch gegenübertreuen WEMM (engl. whole engmodel) des Triebwerksherstellers
3. IMPLEMENTIERUNG UND VDES REFERENZTRIEBWER-AUFHÄNGUNG
Die Implementierung der Referedie Abaqus-Umgebung erfolgte der Konzeptpläne (engl. generaldes Triebwerksherstellers. Es wnötigten Bauteileigenschaften, wdaten und Materialien (siehe Bilder gWEM Benutzeroberfläche
es gWEM (engl. wird als ange-friedenstellende hinsichtlich der genfrequenzen orhergehenden eten strukturel-n Modells sind ete Einzelmas-
metrie [4]
das Triebwerk. acelle), Einlauf rer (engl. thrust
verteilte Ring-masses) am
Gesamtgewicht realitätsnah ab-s Bauteils wird etersatz reprä-auteilpositionen eiten bestimmt.
e und einfache die Anzahl der r dem detailge-ine mechanical s.
VALIDIERUNG RKS UND
enztriebwerke in auf Grundlage
arrangements) wurden alle be-wie Geometrie-d 5.), innerhalb
e implementiert
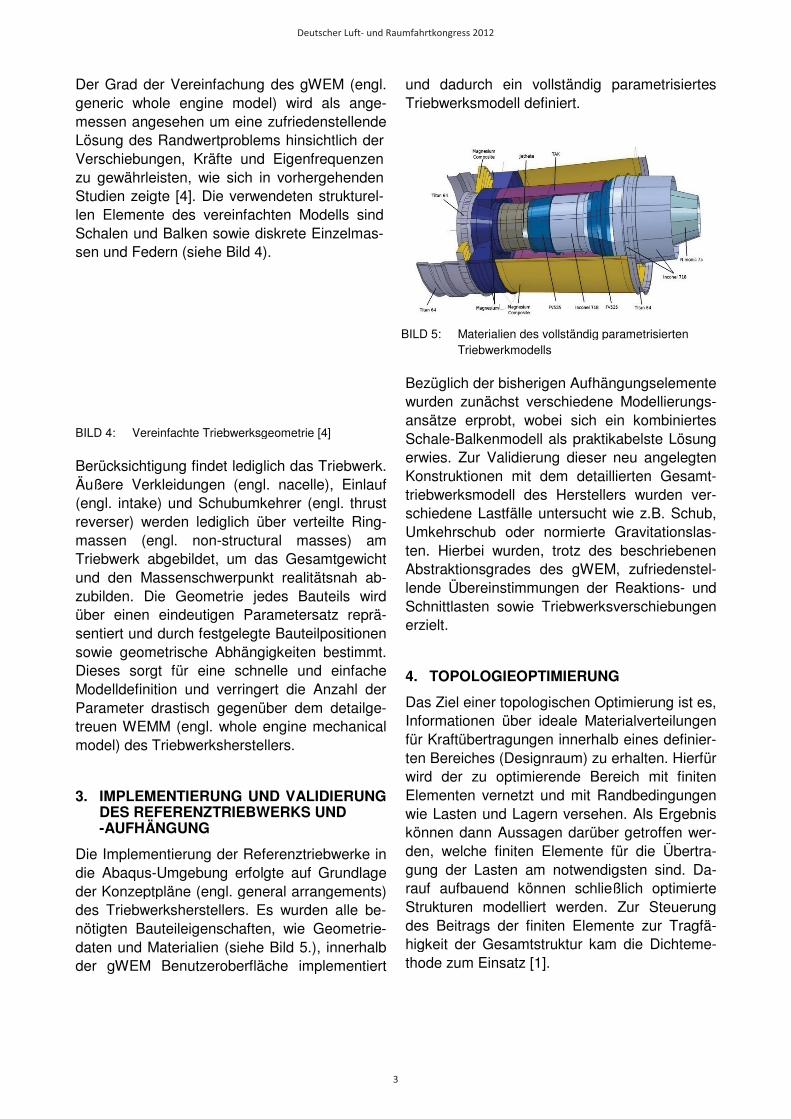
und dadurch ein vollstäTriebwerksmodell definier
Bezüglich der bisherigen Awurden zunächst verschiansätze erprobt, wobei sSchale-Balkenmodell als erwies. Zur Validierung dKonstruktionen mit dem triebwerksmodell des Heschiedene Lastfälle untersUmkehrschub oder normten. Hierbei wurden, trotAbstraktionsgrades des glende ÜbereinstimmungenSchnittlasten sowie Trieberzielt.
4. TOPOLOGIEOPTIMIE
Das Ziel einer topologischInformationen über idealefür Kraftübertragungen innten Bereiches (Designraumwird der zu optimierendElementen vernetzt und mwie Lasten und Lagern vekönnen dann Aussagen dden, welche finiten Elemgung der Lasten am notrauf aufbauend können Strukturen modelliert wedes Beitrags der finiten higkeit der Gesamtstruktuthode zum Einsatz [1].
BILD 5: Materialien des vollstäTriebwerkmodells
ändig parametrisiertes t.
Aufhängungselemente edene Modellierungs-sich ein kombiniertes praktikabelste Lösung
dieser neu angelegten detaillierten Gesamt-
erstellers wurden ver-sucht wie z.B. Schub,
mierte Gravitationslas-tz des beschriebenen gWEM, zufriedenstel-n der Reaktions- und
bwerksverschiebungen
ERUNG
hen Optimierung ist es, e Materialverteilungen nerhalb eines definier-m) zu erhalten. Hierfür e Bereich mit finiten mit Randbedingungen ersehen. Als Ergebnis darüber getroffen wer-
mente für die Übertra-twendigsten sind. Da-schließlich optimierte
erden. Zur Steuerung Elemente zur Tragfä-ur kam die Dichteme-
ändig parametrisierten
Deutscher Luft- und Raumfahrtkongress 2012
3
4.1. Optimierung mit Altair OptiStruct
OptiStruct ist speziell für die Optimierung von Strukturen und mechanischen Systemen aus-gelegt. Es besitzt Kapazitäten für Topologie-, Topografie-, Parameter- und Form-Optimierung [1]. Bei der in dieser Arbeit beschriebenen To-pologieoptimierung der Aufhängungsstruktur greift die verwendete Software zur Modifikation der Elementsteifigkeit u. a. auf die Dichteme-thode (engl. density method) zurück.
4.1.1. Dichtemethode
In der Dichtemethode werden die Materialei-genschaften direkt anhand einer dimensionslo-sen Dichte skaliert, um den Einfluss der einzel-nen Elemente auf das Tragverhalten der Ge-samtstruktur zu ermitteln und darzustellen. Ein Element mit der Dichte 1 repräsentiert einen Bereich des Modells mit den vom Benutzer an-gegebenen Materialeigenschaften (Steifigkeit �����). Hat ein Element einen sehr geringen Dich-tefaktor (z.B. �=0,01), so hat es auch eine ent-sprechend geringe Steifigkeit, jedoch noch sein ursprüngliches Volumen. Elemente mit Dichten zwischen 0 (aus numerischen Gründen immer �>0) und 1 repräsentieren Bereiche fiktiven Ma-terials, deren Steifigkeiten ����� als linear abhän-gig von ihrer Dichte � angenommen werden.
��� � ��
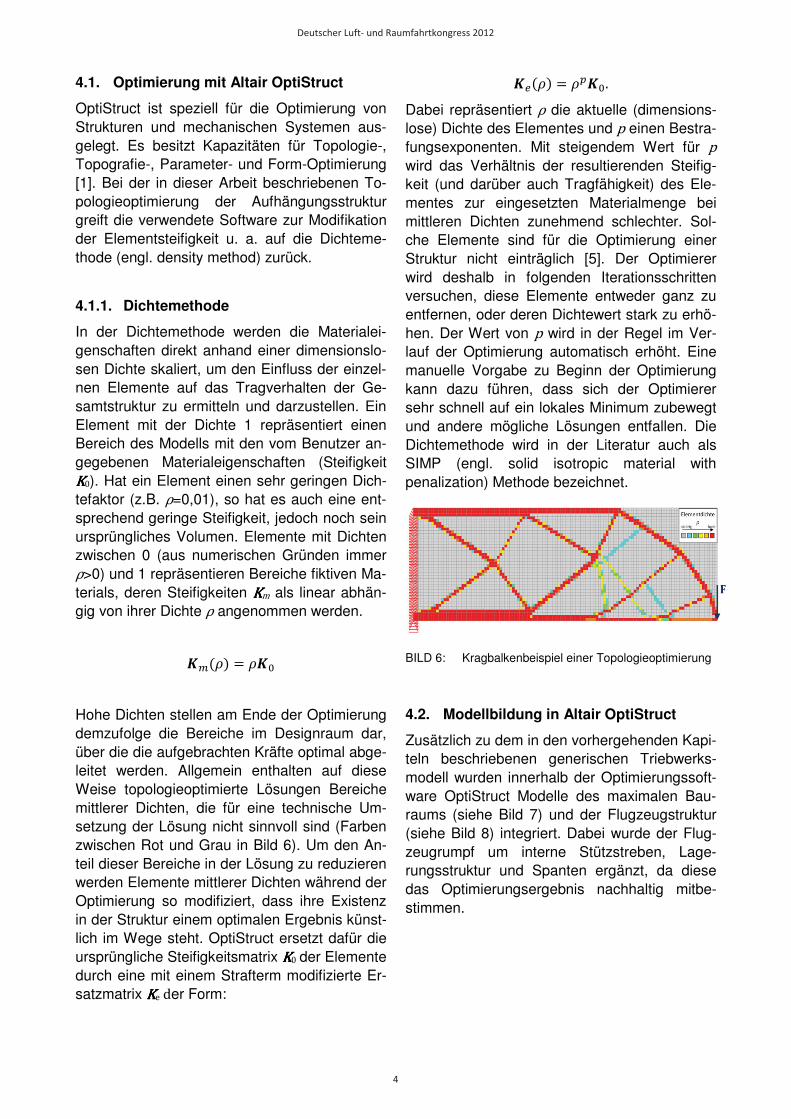
Hohe Dichten stellen am Ende der Optimierung demzufolge die Bereiche im Designraum dar, über die die aufgebrachten Kräfte optimal abge-leitet werden. Allgemein enthalten auf diese Weise topologieoptimierte Lösungen Bereiche mittlerer Dichten, die für eine technische Um-setzung der Lösung nicht sinnvoll sind (Farben zwischen Rot und Grau in Bild 6). Um den An-teil dieser Bereiche in der Lösung zu reduzieren werden Elemente mittlerer Dichten während der Optimierung so modifiziert, dass ihre Existenz in der Struktur einem optimalen Ergebnis künst-lich im Wege steht. OptiStruct ersetzt dafür die ursprüngliche Steifigkeitsmatrix ����� der Elemente durch eine mit einem Strafterm modifizierte Er-satzmatrix ����� �er Form:
��� � ����
Dabei repräsentiert � die aktuelle (dimensions-lose) Dichte des Elementes und � einen Bestra-fungsexponenten. Mit steigendem Wert für � wird das Verhältnis der resultierenden Steifig-keit (und darüber auch Tragfähigkeit) des Ele-mentes zur eingesetzten Materialmenge bei mittleren Dichten zunehmend schlechter. Sol-che Elemente sind für die Optimierung einer Struktur nicht einträglich [5]. Der Optimierer wird deshalb in folgenden Iterationsschritten versuchen, diese Elemente entweder ganz zu entfernen, oder deren Dichtewert stark zu erhö-hen. Der Wert von � wird in der Regel im Ver-lauf der Optimierung automatisch erhöht. Eine manuelle Vorgabe zu Beginn der Optimierung kann dazu führen, dass sich der Optimierer sehr schnell auf ein lokales Minimum zubewegt und andere mögliche Lösungen entfallen. Die Dichtemethode wird in der Literatur auch als SIMP (engl. solid isotropic material with penalization) Methode bezeichnet.
BILD 6: Kragbalkenbeispiel einer Topologieoptimierung
4.2. Modellbildung in Altair OptiStruct
Zusätzlich zu dem in den vorhergehenden Kapi-teln beschriebenen generischen Triebwerks-modell wurden innerhalb der Optimierungssoft-ware OptiStruct Modelle des maximalen Bau-raums (siehe Bild 7) und der Flugzeugstruktur (siehe Bild 8) integriert. Dabei wurde der Flug-zeugrumpf um interne Stützstreben, Lage-rungsstruktur und Spanten ergänzt, da diese das Optimierungsergebnis nachhaltig mitbe-stimmen.
Deutscher Luft- und Raumfahrtkongress 2012
4
Insgesamt wurden 12 Lastfälle aufgetragen, welche sich unterfolgenden Einzellasten zusamme
• Trägheitslasten (g-LasteRaumrichtungen
• Trägheitslasten durch schleunigungen in den tungen
• Schub- und Umkehrschub• Drehmoment des Trie
plötzlichen Rotorstillstand
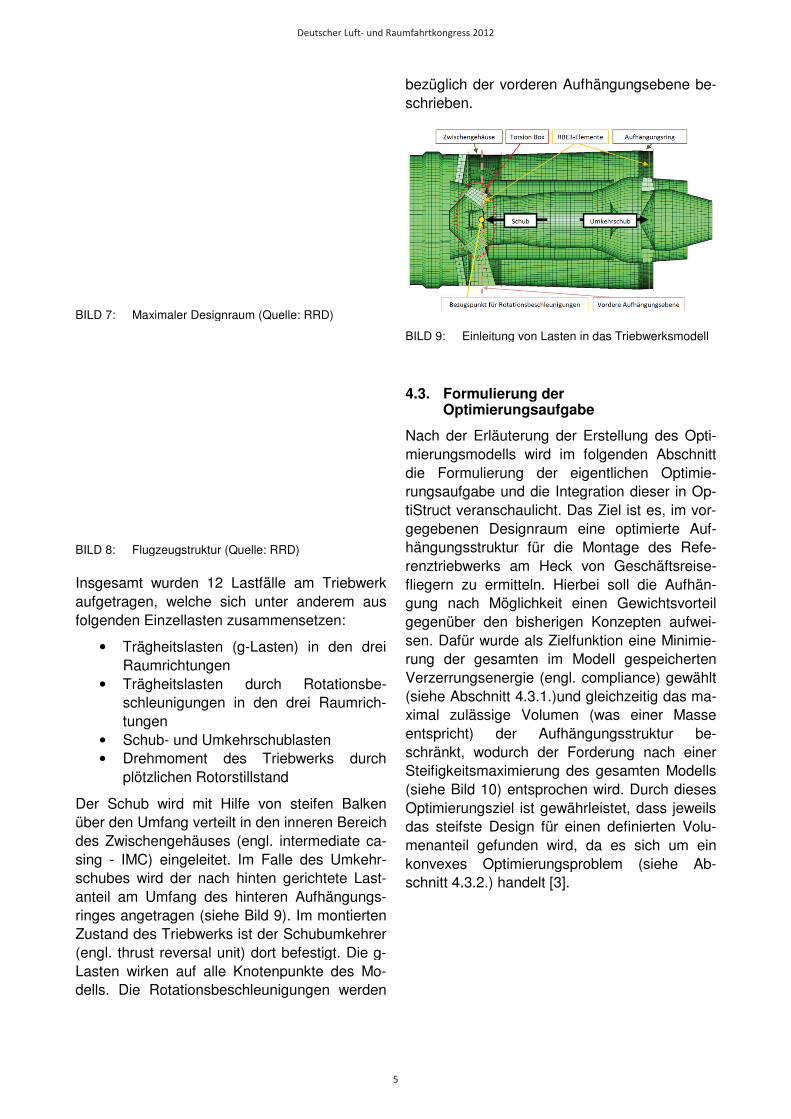
Der Schub wird mit Hilfe von über den Umfang verteilt in den ides Zwischengehäuses (engl. insing - IMC) eingeleitet. Im Falleschubes wird der nach hinten ganteil am Umfang des hinterenringes angetragen (siehe Bild 9)Zustand des Triebwerks ist der S(engl. thrust reversal unit) dort bLasten wirken auf alle Knotenpdells. Die Rotationsbeschleunig
BILD 7: Maximaler Designraum (Quel
BILD 8: Flugzeugstruktur (Quelle: RR
am Triebwerk r anderem aus ensetzen:
n) in den drei
Rotationsbe-drei Raumrich-
blasten ebwerks durch d
steifen Balken inneren Bereich ntermediate ca-e des Umkehr-gerichtete Last-n Aufhängungs-. Im montierten Schubumkehrer befestigt. Die g-punkte des Mo-gungen werden
bezüglich der vorderen Aschrieben.
BILD 9: Einleitung von Lasten
4.3. Formulierung der Optimierungsaufga
Nach der Erläuterung demierungsmodells wird imdie Formulierung der erungsaufgabe und die IntetiStruct veranschaulicht. Dgegebenen Designraum hängungsstruktur für dierenztriebwerks am Heckfliegern zu ermitteln. Hiegung nach Möglichkeit gegenüber den bisherigesen. Dafür wurde als Zielfrung der gesamten im Verzerrungsenergie (engl(siehe Abschnitt 4.3.1.)unximal zulässige Volumenentspricht) der Aufhäschränkt, wodurch der FSteifigkeitsmaximierung d(siehe Bild 10) entsprocheOptimierungsziel ist gewädas steifste Design für emenanteil gefunden wirdkonvexes Optimierungspschnitt 4.3.2.) handelt [3].
lle: RRD)
RD)
Aufhängungsebene be-
n in das Triebwerksmodell
abe
r Erstellung des Opti-m folgenden Abschnitt eigentlichen Optimie-egration dieser in Op-
Das Ziel ist es, im vor-eine optimierte Auf-
e Montage des Refe-k von Geschäftsreise-erbei soll die Aufhän-einen Gewichtsvorteil
en Konzepten aufwei-funktion eine Minimie-Modell gespeicherten . compliance) gewählt d gleichzeitig das ma-n (was einer Masse ängungsstruktur be-Forderung nach einer des gesamten Modells en wird. Durch dieses
ährleistet, dass jeweils inen definierten Volu-
d, da es sich um ein problem (siehe Ab-
Deutscher Luft- und Raumfahrtkongress 2012
5
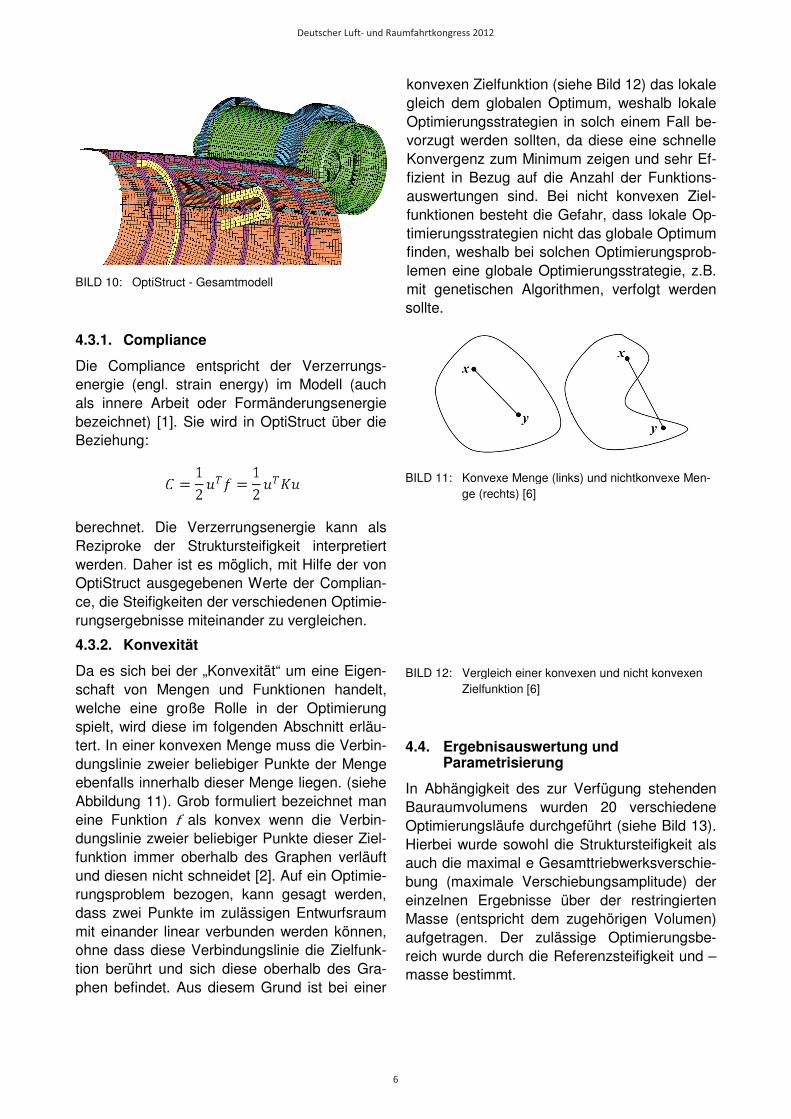
4.3.1. Compliance
Die Compliance entspricht deenergie (engl. strain energy) imals innere Arbeit oder Formändbezeichnet) [1]. Sie wird in OptiBeziehung:
berechnet. Die VerzerrungseneReziproke der Struktursteifigkewerden. Daher ist es möglich, mOptiStruct ausgegebenen Wertece, die Steifigkeiten der verschierungsergebnisse miteinander zu
4.3.2. Konvexität
Da es sich bei der „Konvexität“ schaft von Mengen und Funktwelche eine große Rolle in despielt, wird diese im folgenden Atert. In einer konvexen Menge mdungslinie zweier beliebiger Punebenfalls innerhalb dieser MengeAbbildung 11). Grob formuliert beine Funktion � als konvex wedungslinie zweier beliebiger Punfunktion immer oberhalb des Gund diesen nicht schneidet [2]. Arungsproblem bezogen, kann gdass zwei Punkte im zulässigenmit einander linear verbunden wohne dass diese Verbindungslintion berührt und sich diese obephen befindet. Aus diesem Gru
BILD 10: OptiStruct - Gesamtmodell
r Verzerrungs-m Modell (auch derungsenergie iStruct über die
ergie kann als eit interpretiert
mit Hilfe der von e der Complian-denen Optimie-vergleichen.
um eine Eigen-tionen handelt, er Optimierung Abschnitt erläu-
muss die Verbin-nkte der Menge e liegen. (siehe bezeichnet man enn die Verbin-nkte dieser Ziel-raphen verläuft
Auf ein Optimie-gesagt werden, n Entwurfsraum werden können, nie die Zielfunk-erhalb des Gra-nd ist bei einer
konvexen Zielfunktion (siegleich dem globalen OptOptimierungsstrategien invorzugt werden sollten, dKonvergenz zum Minimumfizient in Bezug auf die Aauswertungen sind. Bei funktionen besteht die Getimierungsstrategien nichtfinden, weshalb bei solchlemen eine globale Optimmit genetischen Algorithsollte.
BILD 11: Konvexe Menge (linkge (rechts) [6]
BILD 12: Vergleich einer konveZielfunktion [6]
4.4. ErgebnisauswertunParametrisierung
In Abhängigkeit des zur Bauraumvolumens wurdeOptimierungsläufe durchgHierbei wurde sowohl dieauch die maximal e Gesabung (maximale Verschieeinzelnen Ergebnisse übMasse (entspricht dem zaufgetragen. Der zulässreich wurde durch die Refmasse bestimmt.
ehe Bild 12) das lokale imum, weshalb lokale
n solch einem Fall be-da diese eine schnelle m zeigen und sehr Ef-Anzahl der Funktions-nicht konvexen Ziel-
efahr, dass lokale Op-t das globale Optimum hen Optimierungsprob-mierungsstrategie, z.B. men, verfolgt werden
ks) und nichtkonvexe Men-
exen und nicht konvexen
ng und
Verfügung stehenden en 20 verschiedene
geführt (siehe Bild 13). e Struktursteifigkeit als amttriebwerksverschie-ebungsamplitude) der ber der restringierten zugehörigen Volumen) sige Optimierungsbe-ferenzsteifigkeit und –
Deutscher Luft- und Raumfahrtkongress 2012
6
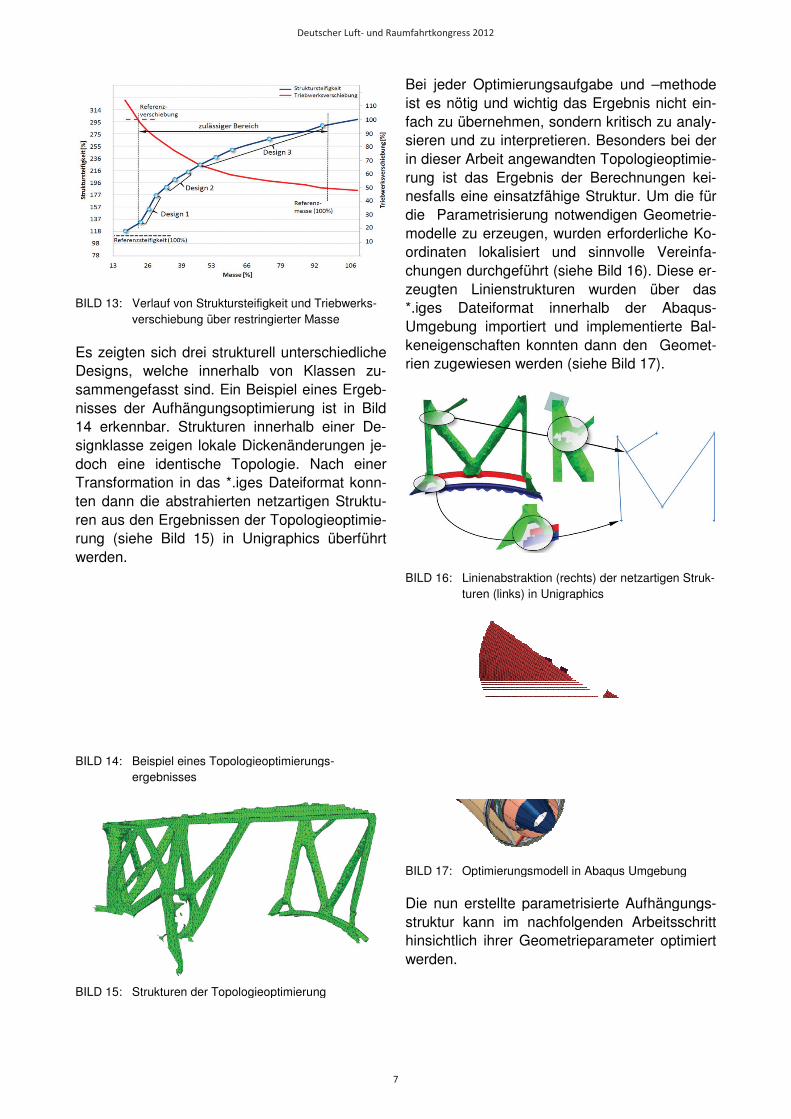
BILD 13: Verlauf von Struktursteifigkeitverschiebung über restringier
Es zeigten sich drei strukturell uDesigns, welche innerhalb vonsammengefasst sind. Ein Beispinisses der Aufhängungsoptimie14 erkennbar. Strukturen innersignklasse zeigen lokale Dickendoch eine identische TopologiTransformation in das *.iges Daten dann die abstrahierten netzaren aus den Ergebnissen der Torung (siehe Bild 15) in Unigrawerden.
BILD 14: Beispiel eines Topologieoptimergebnisses
BILD 15: Strukturen der Topologieoptim
t und Triebwerks-rter Masse
unterschiedliche n Klassen zu-el eines Ergeb-rung ist in Bild halb einer De-änderungen je-ie. Nach einer
ateiformat konn-artigen Struktu-
opologieoptimie-phics überführt
Bei jeder Optimierungsauist es nötig und wichtig dafach zu übernehmen, sonsieren und zu interpretierein dieser Arbeit angewandrung ist das Ergebnis denesfalls eine einsatzfähigdie Parametrisierung notmodelle zu erzeugen, wuordinaten lokalisiert undchungen durchgeführt (siezeugten Linienstrukturen*.iges Dateiformat inneUmgebung importiert undkeneigenschaften konntenrien zugewiesen werden (
BILD 16: Linienabstraktion (recturen (links) in Unigra
BILD 17: Optimierungsmodell
Die nun erstellte parametstruktur kann im nachfolhinsichtlich ihrer Geometrwerden.
mierungs-
mierung
ufgabe und –methode as Ergebnis nicht ein-dern kritisch zu analy-en. Besonders bei der dten Topologieoptimie-er Berechnungen kei-e Struktur. Um die für twendigen Geometrie-rden erforderliche Ko-
d sinnvolle Vereinfa-ehe Bild 16). Diese er-n wurden über das erhalb der Abaqus-d implementierte Bal-n dann den Geomet-siehe Bild 17).
chts) der netzartigen Struk-aphics
in Abaqus Umgebung
trisierte Aufhängungs-lgenden Arbeitsschritt rieparameter optimiert
Deutscher Luft- und Raumfahrtkongress 2012
7
5. PARAMETEROPTIMIERUNG
Die Parameteroptimierung ist die Basis fast al-ler Optimierungsverfahren. Es existieren aller-dings einige wenige spezialisierte Optimie-rungsverfahren, die ohne Parameter auskom-men [6]. Die Zielfunktion ist bei der Paramete-roptimierung von einer definierten Anzahl von Variablen (den Optimierungs-Parametern) ab-hängig, die variiert werden können. Diese kön-nen Beschränkungen unterliegen. Das vorge-stellte Optimierungsproblem ist charakterisiert durch viele Designparameter, Zwangsbedin-gungen und verschiedene Zielfunktionen.
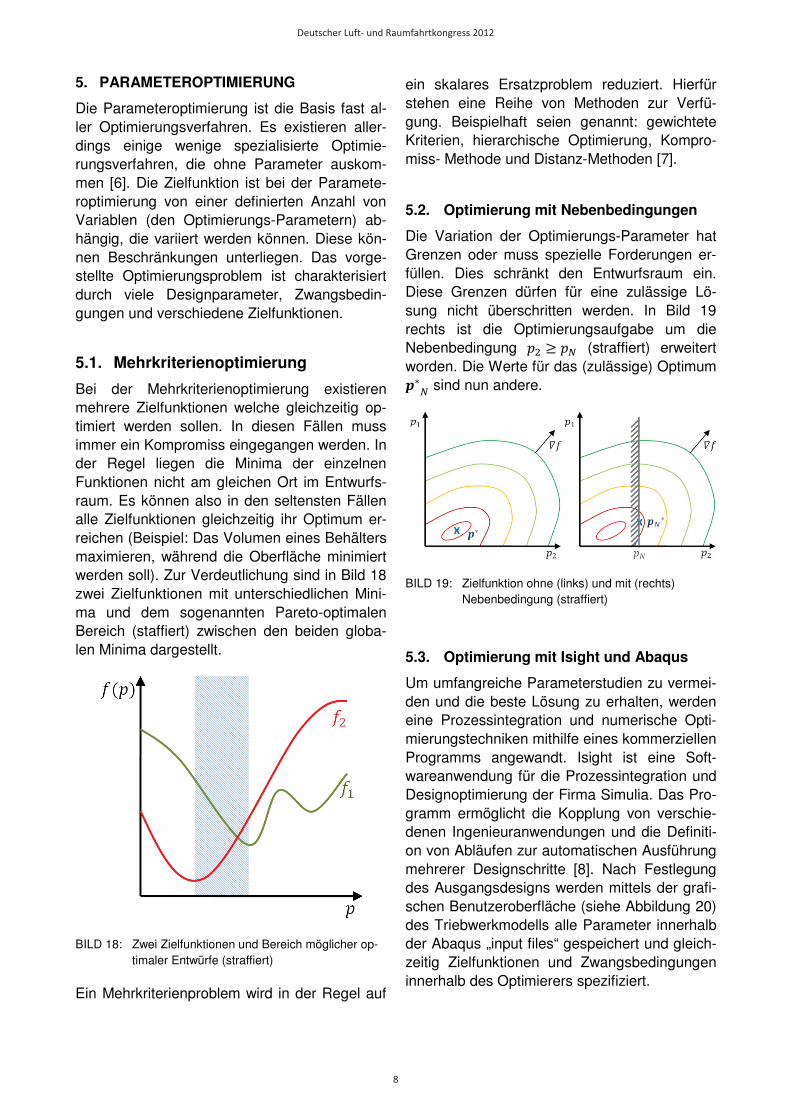
5.1. Mehrkriterienoptimierung
Bei der Mehrkriterienoptimierung existieren mehrere Zielfunktionen welche gleichzeitig op-timiert werden sollen. In diesen Fällen muss immer ein Kompromiss eingegangen werden. In der Regel liegen die Minima der einzelnen Funktionen nicht am gleichen Ort im Entwurfs-raum. Es können also in den seltensten Fällen alle Zielfunktionen gleichzeitig ihr Optimum er-reichen (Beispiel: Das Volumen eines Behälters maximieren, während die Oberfläche minimiert werden soll). Zur Verdeutlichung sind in Bild 18 zwei Zielfunktionen mit unterschiedlichen Mini-ma und dem sogenannten Pareto-optimalen Bereich (staffiert) zwischen den beiden globa-len Minima dargestellt.
BILD 18: Zwei Zielfunktionen und Bereich möglicher op-timaler Entwürfe (straffiert)
Ein Mehrkriterienproblem wird in der Regel auf
ein skalares Ersatzproblem reduziert. Hierfür stehen eine Reihe von Methoden zur Verfü-gung. Beispielhaft seien genannt: gewichtete Kriterien, hierarchische Optimierung, Kompro-miss- Methode und Distanz-Methoden [7].
5.2. Optimierung mit Nebenbedingungen
Die Variation der Optimierungs-Parameter hat Grenzen oder muss spezielle Forderungen er-füllen. Dies schränkt den Entwurfsraum ein. Diese Grenzen dürfen für eine zulässige Lö-sung nicht überschritten werden. In Bild 19 rechts ist die Optimierungsaufgabe um die Nebenbedingung �� � �� (straffiert) erweitert worden. Die Werte für das (zulässige) Optimum ��
� sind nun andere.
BILD 19: Zielfunktion ohne (links) und mit (rechts) Nebenbedingung (straffiert)
5.3. Optimierung mit Isight und Abaqus
Um umfangreiche Parameterstudien zu vermei-den und die beste Lösung zu erhalten, werden eine Prozessintegration und numerische Opti-mierungstechniken mithilfe eines kommerziellen Programms angewandt. Isight ist eine Soft-wareanwendung für die Prozessintegration und Designoptimierung der Firma Simulia. Das Pro-gramm ermöglicht die Kopplung von verschie-denen Ingenieuranwendungen und die Definiti-on von Abläufen zur automatischen Ausführung mehrerer Designschritte [8]. Nach Festlegung des Ausgangsdesigns werden mittels der grafi-schen Benutzeroberfläche (siehe Abbildung 20) des Triebwerkmodells alle Parameter innerhalb der Abaqus „input files“ gespeichert und gleich-zeitig Zielfunktionen und Zwangsbedingungen innerhalb des Optimierers spezifiziert.
Deutscher Luft- und Raumfahrtkongress 2012
8
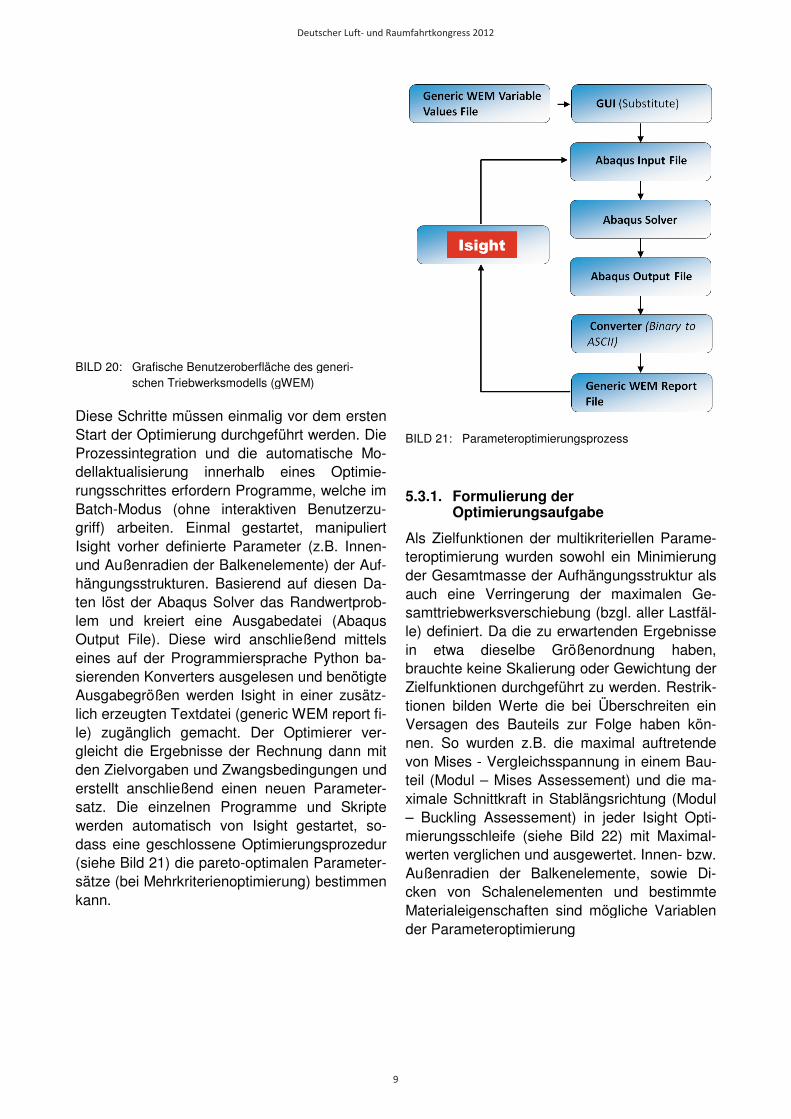
Diese Schritte müssen einmalig Start der Optimierung durchgefüProzessintegration und die autdellaktualisierung innerhalb erungsschrittes erfordern ProgramBatch-Modus (ohne interaktivegriff) arbeiten. Einmal gestartIsight vorher definierte Parametund Außenradien der Balkenelemhängungsstrukturen. Basierend ten löst der Abaqus Solver das lem und kreiert eine AusgabeOutput File). Diese wird anscheines auf der Programmierspracsierenden Konverters ausgeleseAusgabegrößen werden Isight ilich erzeugten Textdatei (genericle) zugänglich gemacht. Der Ogleicht die Ergebnisse der Rechden Zielvorgaben und Zwangsbeerstellt anschließend einen neusatz. Die einzelnen Programmwerden automatisch von Isightdass eine geschlossene Optimie(siehe Bild 21) die pareto-optimasätze (bei Mehrkriterienoptimierukann.
BILD 20: Grafische Benutzeroberflächeschen Triebwerksmodells (gW
vor dem ersten hrt werden. Die omatische Mo-
eines Optimie-mme, welche im en Benutzerzu-tet, manipuliert ter (z.B. Innen- mente) der Auf-auf diesen Da-Randwertprob-
edatei (Abaqus hließend mittels che Python ba-n und benötigte n einer zusätz-
c WEM report fi-Optimierer ver-hnung dann mit edingungen und uen Parameter-
me und Skripte t gestartet, so-erungsprozedur alen Parameter-ung) bestimmen
BILD 21: Parameteroptimierun
5.3.1. Formulierung derOptimierungsaufg
Als Zielfunktionen der muteroptimierung wurden soder Gesamtmasse der Auauch eine Verringerung samttriebwerksverschiebule) definiert. Da die zu erwin etwa dieselbe Gröbrauchte keine SkalierungZielfunktionen durchgefühtionen bilden Werte die Versagen des Bauteils znen. So wurden z.B. dievon Mises - Vergleichsspateil (Modul – Mises Assesximale Schnittkraft in Stab– Buckling Assessement)mierungsschleife (siehe Bwerten verglichen und ausAußenradien der Balkencken von SchalenelemeMaterialeigenschaften sinder Parameteroptimierung
e des generi-WEM)
ngsprozess
r gabe
ultikriteriellen Parame-owohl ein Minimierung ufhängungsstruktur als
der maximalen Ge-ung (bzgl. aller Lastfäl-wartenden Ergebnisse ößenordnung haben, g oder Gewichtung der hrt zu werden. Restrik-bei Überschreiten ein
zur Folge haben kön-e maximal auftretende annung in einem Bau-ssement) und die ma-blängsrichtung (Modul ) in jeder Isight Opti-Bild 22) mit Maximal-sgewertet. Innen- bzw. nelemente, sowie Di-enten und bestimmte nd mögliche Variablen g
Deutscher Luft- und Raumfahrtkongress 2012
9
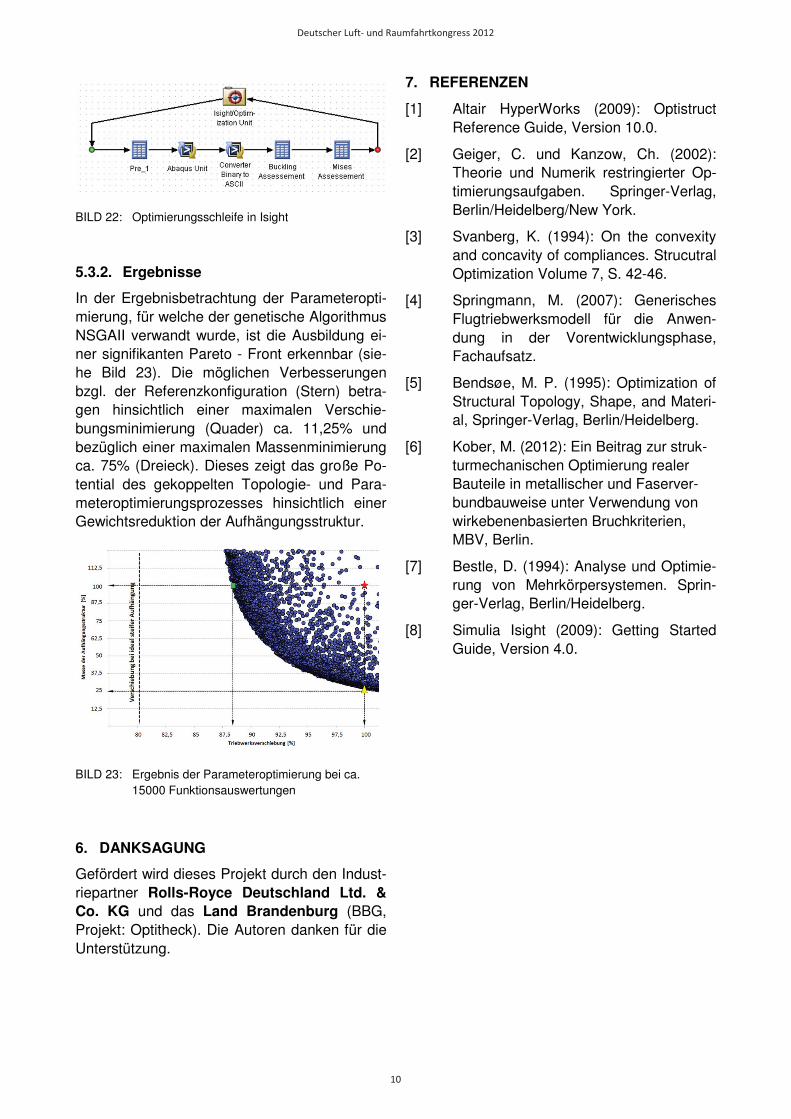
BILD 22: Optimierungsschleife in Isight
5.3.2. Ergebnisse
In der Ergebnisbetrachtung der Parameteropti-mierung, für welche der genetische Algorithmus NSGAII verwandt wurde, ist die Ausbildung ei-ner signifikanten Pareto - Front erkennbar (sie-he Bild 23). Die möglichen Verbesserungen bzgl. der Referenzkonfiguration (Stern) betra-gen hinsichtlich einer maximalen Verschie-bungsminimierung (Quader) ca. 11,25% und bezüglich einer maximalen Massenminimierung ca. 75% (Dreieck). Dieses zeigt das große Po-tential des gekoppelten Topologie- und Para-meteroptimierungsprozesses hinsichtlich einer Gewichtsreduktion der Aufhängungsstruktur.
BILD 23: Ergebnis der Parameteroptimierung bei ca. 15000 Funktionsauswertungen
6. DANKSAGUNG
Gefördert wird dieses Projekt durch den Indust-riepartner Rolls-Royce Deutschland Ltd. & Co. KG und das Land Brandenburg (BBG, Projekt: Optitheck). Die Autoren danken für die Unterstützung.
7. REFERENZEN
[1] Altair HyperWorks (2009): Optistruct Reference Guide, Version 10.0.
[2] Geiger, C. und Kanzow, Ch. (2002): Theorie und Numerik restringierter Op-timierungsaufgaben. Springer-Verlag, Berlin/Heidelberg/New York.
[3] Svanberg, K. (1994): On the convexity and concavity of compliances. Strucutral Optimization Volume 7, S. 42-46.
[4] Springmann, M. (2007): Generisches Flugtriebwerksmodell für die Anwen-dung in der Vorentwicklungsphase, Fachaufsatz.
[5] Bendsøe, M. P. (1995): Optimization of Structural Topology, Shape, and Materi-al, Springer-Verlag, Berlin/Heidelberg.
[6] Kober, M. (2012): Ein Beitrag zur struk-turmechanischen Optimierung realer Bauteile in metallischer und Faserver-bundbauweise unter Verwendung von wirkebenenbasierten Bruchkriterien, MBV, Berlin.
[7] Bestle, D. (1994): Analyse und Optimie-rung von Mehrkörpersystemen. Sprin-ger-Verlag, Berlin/Heidelberg.
[8] Simulia Isight (2009): Getting Started Guide, Version 4.0.
Deutscher Luft- und Raumfahrtkongress 2012
10