Labor Nachrichtentechnik Prof. Dr.-Ing. Ralph Urbansky...
14
Lehrstuhl f¨ ur Nachrichtentechnik Prof. Dr.-Ing. Ralph Urbansky Labor Nachrichtentechnik Versuchsanleitung Frequenzmodulation Der Versuch zur Frequenzmodulation (FM) umfasst den Teil I Frequenzmodulierte Signale sowie den Teil II Phase-Locked Loop (PLL) mit der Demodulation von FM als Anwendung dieses Phasen-Regelkreises. Teil I Frequenzmodulierte Signale 1 Frequenzmodulation Phasen- und Frequenzmodulation z¨ ahlen zu den st¨ orsichersten kontinuierlichen Modulationsverfahren. Eben- so wie bei der Pulscodemodulation (PCM) wird hier ein Austausch zwischen ben¨ otigter ¨ Ubertragungsband- breite und dem Signal-St¨ orabstand erm¨ oglicht. Frequenzmodulation ist neben der Amplitudenmodulation eine der verbreitetesten ¨ Ubertragungsverfahren und kommt beispielsweise im UKW-Rundfunk zum Einsatz. 1.1 Allgemeines Eine sinusf¨ ormige Tr¨ agerspannung u(t)= ˆ U 0 sin(Ω 0 t + φ) (1) ist beschrieben durch die Amplitude ˆ U 0 , die Kreisfrequenz Ω 0 und den Nullphasenwinkel φ. Beeinflusst man das Argument ψ(t)=Ω 0 t + φ (2) dieser Tr¨ agerspannung zeitlich durch eine prim¨ are Zeichenschwingung, so spricht man von einer Winkel- modulation. Hierbei unterscheidet man zwei F¨ alle, n¨ amlich die zeitliche ¨ Anderung des Nullphasenwinkels φ und die zeitliche ¨ Anderung der Momentanfrequenz Ω(t)= dψ(t) dt . (3) Im ersten Fall handelt es sich um Phasenmodulation, im zweiten Fall um Frequenzmodulation (FM). 1.2 Definitionsgleichungen der Frequenzmodulation Die prim¨ are Zeichenschwingung sei u 1 (t)= ˆ U 1 sin(ω 1 t), (4) und sie lenkt bei FM die Momentanfrequenz Ω(t) aus Gl. 3 proportional zur Mittenfrequenz Ω 0 aus. Mit Gl. 4 ist die Momentanfrequenz demnach Ω(t)= dψ(t) dt =Ω 0 + a 1 ˆ U 1 sin(ω 1 t)=Ω 0 1+ ΔΩ Ω 0 sin(ω 1 t) (5) mit ΔΩ = a 1 ˆ U 1 , wobei a 1 die Modulatorkonstante ist. Ferner definiert man den ΔΩ 2π =: ΔF b =Frequenzhub (6) ΔΩ Ω 0 =: m b =Modulationsgrad der FM (7) 1
Transcript of Labor Nachrichtentechnik Prof. Dr.-Ing. Ralph Urbansky...

Lehrstuhl fur NachrichtentechnikProf. Dr.-Ing. Ralph Urbansky
Labor NachrichtentechnikVersuchsanleitung
FrequenzmodulationDer Versuch zur Frequenzmodulation (FM) umfasst den Teil I Frequenzmodulierte Signale sowie den TeilII Phase-Locked Loop (PLL) mit der Demodulation von FM als Anwendung dieses Phasen-Regelkreises.
Teil I
Frequenzmodulierte Signale
1 Frequenzmodulation
Phasen- und Frequenzmodulation zahlen zu den storsichersten kontinuierlichen Modulationsverfahren. Eben-so wie bei der Pulscodemodulation (PCM) wird hier ein Austausch zwischen benotigter Ubertragungsband-breite und dem Signal-Storabstand ermoglicht. Frequenzmodulation ist neben der Amplitudenmodulationeine der verbreitetesten Ubertragungsverfahren und kommt beispielsweise im UKW-Rundfunk zum Einsatz.
1.1 Allgemeines
Eine sinusformige Tragerspannungu(t) = U0 sin(Ω0t+ φ) (1)
ist beschrieben durch die Amplitude U0 , die Kreisfrequenz Ω0 und den Nullphasenwinkel φ. Beeinflusst mandas Argument
ψ(t) = Ω0t+ φ (2)
dieser Tragerspannung zeitlich durch eine primare Zeichenschwingung, so spricht man von einer Winkel-modulation. Hierbei unterscheidet man zwei Falle, namlich die zeitliche Anderung des Nullphasenwinkels φund die zeitliche Anderung der Momentanfrequenz
Ω(t) =dψ(t)
dt. (3)
Im ersten Fall handelt es sich um Phasenmodulation, im zweiten Fall um Frequenzmodulation (FM).
1.2 Definitionsgleichungen der Frequenzmodulation
Die primare Zeichenschwingung seiu1(t) = U1 sin(ω1t), (4)
und sie lenkt bei FM die Momentanfrequenz Ω(t) aus Gl. 3 proportional zur Mittenfrequenz Ω0 aus. MitGl. 4 ist die Momentanfrequenz demnach
Ω(t) =dψ(t)
dt= Ω0 + a1U1 sin(ω1t) = Ω0
(1 +
∆Ω
Ω0sin(ω1t)
)(5)
mit ∆Ω = a1U1, wobei a1 die Modulatorkonstante ist.Ferner definiert man den
∆Ω
2π=: ∆F =Frequenzhub (6)
∆Ω
Ω0=: m=Modulationsgrad der FM (7)
1

FREQUENZMODULATION Labor Nachrichtentechnik
Das Argument ψ(t) gewinnt man aus Gl. 5 durch Integration
ψ(t) = Ω0t−∆Ω
ω1cos(ω1t). (8)
Hierbei definiert man∆Ω
ω1=a1U1
ω1=: η=Modulationsindex. (9)
Die vollstandige Zeitfunktion der FM-Schwingung fur eine sinusformige primare Zeichenschwingung lasstsich schließlich mit dem Modulationsindex η beschreiben durch
u(t) = U0 sin
[Ω0t−
∆Ω
ω1cos(ω1t)
](10)
= U0 sin [Ω0t− η cos(ω1t)] (11)
Gl. 11 sagt außerdem aus, dass die effektive Ausgangsspannung des FM-Modulators fur jeden Modulations-index konstant ist.
1.3 Spektrum von FM-Signalen
Durch Reihenentwicklung und trigonometrische Umrechnungsformeln gelangt man ausgehend von Gl. 11zum Spektrum von FM-Signalen fur eine primare Zeichenschwingung der Frequenz ω1/2π. Der Rechengangist in [1] ausfuhrlich dargestellt. Es ergibt sich die mit U0 normierte Zeitfunktion der FM-Schwingung
u0(t) =u(t)
U0
=J0(η) sin(Ω0t)−
− J1(η) [cos ((Ω0 + ω1)t) + cos ((Ω0 − ω1)t)]−− J2(η) [sin ((Ω0 + 2ω1)t) + sin ((Ω0 − 2ω1)t)] +
+ J3(η) [cos ((Ω0 + 3ω1)t) + cos ((Ω0 − 3ω1)t)]−−+ . . . .
(12)
Jn(η) sind Zylinder- oder Besselfunktionen 1. Art und der Ordnung n. Gleichung 12 lasst die Zusammen-setzung des FM-Spektrums erkennen. Es enthalt die zu der Tragerkreisfrequenz Ω0 symmetrisch verteiltenSeitenschwingungen der Kreisfrequenzen Ω0±nω1 und der Amplituden Jn(η). Dabei sei darauf hingewiesen,dass die effektive Gesamtspannung des FM-Signals bei einem idealen Modulator konstant bleibt, d.h. imGegensatz zur Amplitudenmodulation beinhaltet die Hullkurve keinerlei Information.Wird bei konstanter Frequenz ω1 der primaren Zeichenschwingung die Amplitude U1 geandert, so bleibt derAbstand der Spektrallinien auf der Frequenzachse erhalten, wahrend sich die Amplitudenverteilung andert.
Abbildung 1: Beispiel eines FM-Spektrums
2

FREQUENZMODULATION Labor Nachrichtentechnik
Bei konstanter Amplitude U1 und veranderlicher Kreisfrequenz ω1 der primaren Zeichenschwingung andertsich im FM-Spektrum sowohl die Amplitudenverteilung als auch der Abstand der Spektrallinien.Zur Abschatzung der benotigten FM-Bandbreite kann man Gleichung 13 heranziehen:
BHF ≈
2BNF fur η < 1
2(∆F +BNF ) fur η > 1(13)
Ein Beispiel fur ein FM-Spektrum ist in Abb. 1 dargestellt.Die zuvor aufgestellten Definitionsgleichungen fur die FM-Modulation gelten nur fur sinusformige primareZeichenschwingungen. Die Berechnung des FM-Spektrums bei nicht-sinusformigen Zeichenschwingungen istkompliziert, da der Zusammenhang zwischen primarer Zeichenschwingung und dem FM-Spektrum nichtli-near ist und daher das Superpositionsprinzip nicht gilt.
3

FREQUENZMODULATION Labor Nachrichtentechnik
2 Versuchsdurchfuhrung
2.1 Gerate zur Versuchsdurchfuhrung
• FM-Modulator
• Frequenzanalysator
• Funktionsgenerator
2.2 Geratebeschreibung FM-Modulator
Der FM-Modulator ist ein Voltage Controlled Oscillator (VCO), dessen Frequenz durch die primare Zei-chenschwingung geandert und damit die Tragerschwingung frequenzmoduliert wird. Die technischen Datendieses Modulators lauten:
Tragerfrequenz (unmoduliert) 4 kHzTemperaturdrift ±100 HzEffektivwert der Ausgangsspannung (modulationsabhangig) 0.51 VKonstante des Modulators a1 2π · 400 Hz V−1
Spitzenwert der primaren Zeichenschwingung U1 10 V
Anmerkung
Beschriften Sie jedes aufgenommene Diagramm sofort mit folgenden Daten:
1. Lage der Frequenzmarken
2. Effektivspannung der primaren Zeichenschwingung
3. Frequenz der primaren Zeichenschwingung
4. Modulationsindex
2.3 Vorbereitende Aufgaben, vor Versuchsbeginn zu losen!
1. Erstellen Sie ein MATLAB-Skript, mit dem Sie die Besselfunktionen erster Art Jn(η) fur 0 ≤ n ≤ 4und 0 ≤ η ≤ 10 berechnen konnen, und stellen Sie deren Verlaufe in einem gemeinsamen Diagrammdar.
2. Fur einen FM-Modulator mit der Empfindlichkeit α1 = 2π · 400 Hz V−1 ist die Frequenz der primarenZeichenschwingung f1 so zu wahlen, dass der Effektivwert der Zeichenschwingung (in V) dem Mo-dulationsindex η entspricht. Wie konnen Sie die korrekte Wahl mit Hilfe eines Frequenzanalysatorsuberprufen?
2.4 Versuchsaufgaben
1. Bestimmen Sie mit dem Frequenzanalysator Ausgangsspannung und Ausgangsfrequenz des unmodu-lierten FM-Modulators.
2. Der Frequenzmodulator ist jeweils mit den nachstehenden sinusformigen Spannungen zu modulieren,wobei jeweils die Ausgangsspannung zu analysieren ist. Plotten Sie die Diagramme aus Versuch 3aund 3b mit zwei verschiedenen Farben ubereinander.
4

FREQUENZMODULATION Labor Nachrichtentechnik
Versuch FrequenzEffektivspannung derprimaren Zeichenschwingung
zu analysierenderFrequenzbereich
2a f1 = 60 Hz U1 = 0.0106 V 3 – 5 kHz2b f1 = 60 Hz U1 = 0.530 V 3 – 5 kHz2c f1 = 60 Hz U1 = 1.061 V 3 – 5 kHz2d f1 = 60 Hz U1 = 2.121 V 1.5 – 10 kHz
3. Berechnen Sie fur die in Versuchsaufgabe 2 angegeben primaren Zeichenschwingungen den Modulati-onsindex sowie den Frequenzhub. Tragen Sie in die entsprechenden Spektrogramme den Frequenzhubder Tragerschwingung ein, und beschriften Sie einige hervorstechenden Seitenbander mit den Datender zugehorigen Besselfunktion.
4. Gemaß den Versuchsaufgaben 2 und 3 sind der FM-Modulator mit den Modulationsspannungen
(a) f1 = 120 Hz, U1 = 1.061 V
(b) f1 = 240 Hz, U1 = 1.061 V
zu beschalten und entsprechende Spektrogramme anzufertigen. Der zu analysierende Frequenzbereichliegt zwischen 3 kHz und 5 kHz.
5. Diskutieren Sie die Unterschiede der Diagramme aus Versuch 2c und Versuch 4. Uberprufen Sie dieBandbreite der aufgezeichneten Spektren nach Gleichung 13.
6. Entsprechend der vorhergehenden Versuchsaufgaben wird der FM-Modulator nun mit der Spannungf1 = 240 Hz, U1 = 2.121 V moduliert und das Spektrum im Frequenzbereich 2 – 6 kHz aufgezeichnet.Diskutieren Sie das Resultat bezuglich Aufgabe 2b und 2d.
7. Nun sollen die Betrage der Besselfunktion J0(η) und J1(η) im Bereich 0 ≤ η ≤ 10 mittels FM-Modulator und Frequenzanalysator ausgemessen und in Form einer Kurve aufgezeichnet werden. NachGleichung 12 ist η eine lineare Funktion der Modulationsspannung. Bei einer geschickten Wahl von ω1
ist der Effektivwert der primaren Zeichenschwingung ein unmittelbares Maß fur den Modulationsindexη, siehe Vorbereitende Aufgabe 2.
8. Verwenden Sie das MATLAB-Skript aus der vorbereitenden Aufgabe 1, um die in Aufgabe 7 gemes-senen Verlaufe mit denen der entsprechenden Besselfunktionen zu vergleichen.
5

FREQUENZMODULATION Labor Nachrichtentechnik
Teil II
Phase-Locked Loop (PLL)
3 Theorie
3.1 Prinzip
Die Funktion eines Phasenregelkreises (Phase-Locked Loop, PLL) nach Abbildung 2 besteht in der Syn-chronisation eines Signals u2(t) in Frequenz und Phase mit dem Eingangssignal u1(t). Er lasst sich in dreiFunktionsblocke aufteilen:
1. Phasendetektor (PD)
2. Schleifenfilter (Loop Filter, LF)
3. Oszillator (Voltage Controlled Oscillator, VCO)
Abbildung 2: Blockschema des PLL
Der Phasendetektor (PD) vergleicht die Phasenlage Θ1 des Eingangssignals u1(t) mit der des VCO-SignalsΘ2 und gibt eine Ausgangsspannung ud(t) ab, die dem Fehlwinkel Θ0 = Θ1 −Θ2 proportional ist:
ud(t) = kd ·Θ0 = kd · (Θ1 −Θ2) (14)
wobei kd = const gilt. Das Signal ud(t) gelangt auf das Loop-Filter (LF), dem eigentlichen Regler in derSchleife. Dieser besteht in vielen Anwendungsfallen aus einem Tiefpass (TP). Dessen Ausgangssignal uf (t)wird dem VCO als Steuerspannung zugefuhrt, wodurch er so beeinflusst wird, dass Frequenz und Phase vonu1(t) und u2(t) ubereinstimmen.Die Ausgangsfrequenz des VCO wird somit beschrieben durch:
ω2 = ω0 + k0 · uf (t) (15)
mit ω0 als Ruhefrequenz bei uf (t) = 0V und einer differentiellen Steuerkonstante k0.Der Tiefpass dient zum Einen als Regelverstarker und filtert zum Anderen die unerwunschten hochfrequentenAnteile aus dem Phasenkomparator-Ausgangssignal eines realen PD heraus. Das Verzogerungsverhalten desTiefpasses bewirkt u.a., dass der Regelkreis nicht außer Tritt fallt, falls er durch einen kurzen Storimpulsam Phasendetektor auszurasten droht (z.B.: Ausfall des Signals u1(t)). Der Tiefpass soll so ausgelegt sein,dass der Regelkreis moglichst schnell wieder einrastet, falls sich die Frequenz von u1(t) andert.
6

FREQUENZMODULATION Labor Nachrichtentechnik
3.2 PLL-Terminologie
Eingerastet Der PLL ist eingerastet, wenn ω1 = ω2 und er imstande war, die Phase Θ2 desVCO-Signals derjenigen des Eingangssignals Θ1 nachzuregeln.
Haltebereich ωH Bereich, innerhalb dessen der PLL bei langsamen Veranderungen von ω1 eingerastetbleibt (= statische Stabilitatsgrenze)
Fangbereich ∆ωL Bereich, innerhalb dem der PLL nach hochstens einer Schwebung einrastetFangzeit Zeit, die der PLL zum Einrasten benotigtZiehbereich ∆ωp Bereich, innerhalb dem der PLL nach einer endlich langen Anzahl von Schwebungen
einrastetPull-out-range∆ωp0
Maximaler Frequenzsprung am Eingang des PLL, ohne dass das System ausrastet(= dynamische Stabilitatsgrenze)
Jitter unerwunschte zeitlich flukuierende Verstimmung des VCO in Frequenz und Phase,verursacht durch das dem Eingangssignal uberlagerte Rauschen oder durch das nichtideale Verhalten der gesamten PLL-Schaltung.
Abbildung 3 veranschaulicht statische und dynamische Stabilitatsgrenze.
Abbildung 3: Statische und dynamische Stabilitatsgrenzen des PLL
3.3 Phasendetektoren
Prinzipiell kann man zwischen linearen (bzw. analogen) und digitalen PLL unterscheiden. Bei den linea-ren (analogen) PLL mit ublicherweise sinusformigen Signalen ist ein 4-Quadranten-Analogmultiplizierer alsPhasendetektor am gebrauchlichsten, wahrend bei den digitalen PLL mit Binarsignalen ein PD mit zweiRS-Flip-Flops ublich ist. Eine Erweiterung dieses Konzeptes besteht darin, bei Phasengleichheit den Aus-gang des PD hochohmig zu schalten, so dass ein nachgeschalteter RC-Tiefpass dann als Integrierer wirkt(”Phase Comparator II”). Der einfachste Phasendetektor besteht aus einer Exklusiv-ODER-Verknupfungder binar quantisierten Signale u1 und u2 (”Phase Comparator I”).
3.3.1 Exklusiv-ODER-PD
Das Exklusiv-ODER-Gatter als Phasendetektor ist zwar außerst einfach, hat jedoch ein sehr ungunstigesVerhalten bei unsymmetrischen Rechtecksignalen, und es ist nicht frequenzselektiv. Die Ausgangsspannungdes PDs ud ist der Mittelwert des Exklusiv-ODER-Signals, wobei fur binare Werte noch ein Offset von 50 %
7
FREQUENZMODULATION Labor Nachrichtentechnik
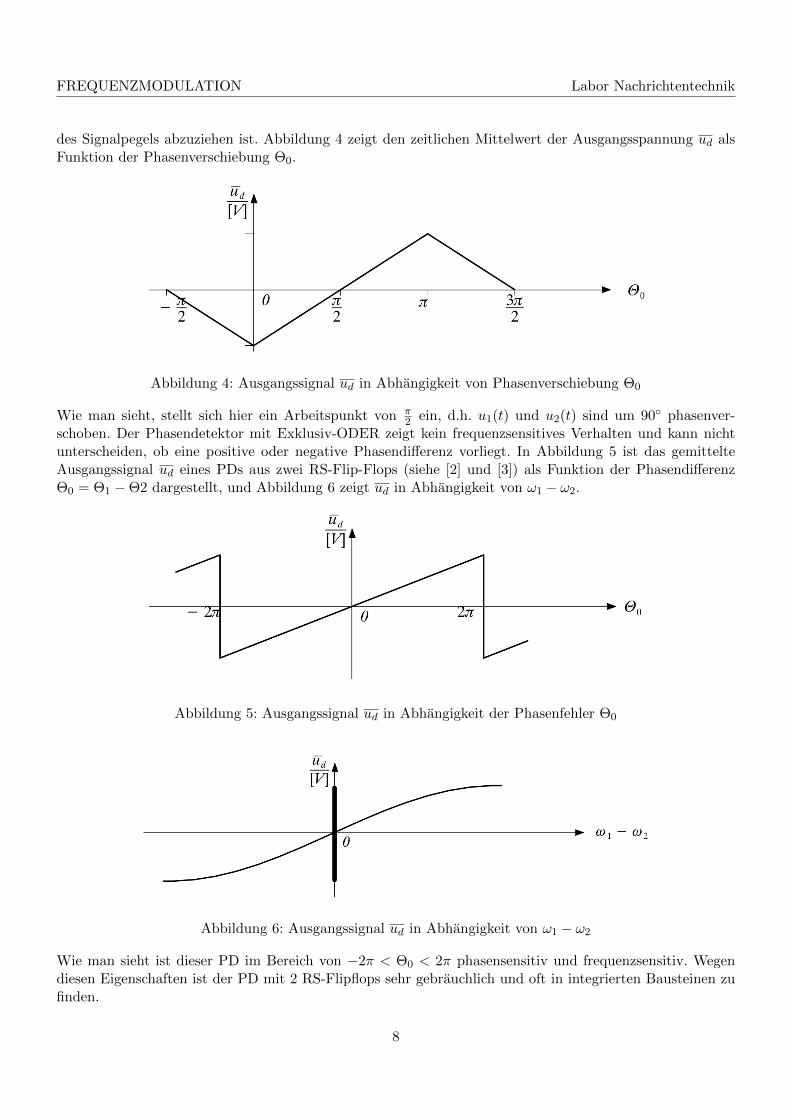
des Signalpegels abzuziehen ist. Abbildung 4 zeigt den zeitlichen Mittelwert der Ausgangsspannung ud alsFunktion der Phasenverschiebung Θ0.
Abbildung 4: Ausgangssignal ud in Abhangigkeit von Phasenverschiebung Θ0
Wie man sieht, stellt sich hier ein Arbeitspunkt von π2 ein, d.h. u1(t) und u2(t) sind um 90 phasenver-
schoben. Der Phasendetektor mit Exklusiv-ODER zeigt kein frequenzsensitives Verhalten und kann nichtunterscheiden, ob eine positive oder negative Phasendifferenz vorliegt. In Abbildung 5 ist das gemittelteAusgangssignal ud eines PDs aus zwei RS-Flip-Flops (siehe [2] und [3]) als Funktion der PhasendifferenzΘ0 = Θ1 −Θ2 dargestellt, und Abbildung 6 zeigt ud in Abhangigkeit von ω1 − ω2.
Abbildung 5: Ausgangssignal ud in Abhangigkeit der Phasenfehler Θ0
Abbildung 6: Ausgangssignal ud in Abhangigkeit von ω1 − ω2
Wie man sieht ist dieser PD im Bereich von −2π < Θ0 < 2π phasensensitiv und frequenzsensitiv. Wegendiesen Eigenschaften ist der PD mit 2 RS-Flipflops sehr gebrauchlich und oft in integrierten Bausteinen zufinden.
8

FREQUENZMODULATION Labor Nachrichtentechnik
3.4 Regelverhalten der PLL und TP-Eckfrequenz
Man unterscheidet beim PLL zwei Zustande:
1. Im eingerasteten Zustand beschreibt das Tracking-Verhalten, wie dieser eingerastete Zustand erhaltenbleibt.
2. Das Akquisitionsverhalten beschreibt, wie ein ausgerasteter PLL in den eingerasteten Zustand gelangt.
Das Akquisitions- und Trackingverhalten wird durch die in Abschnitt 3.2 definierten Frequenzbereiche unddie Fangzeit beeinflusst. Ihre quantitative Berechnung ist aufwandig oder nicht moglich. Teilweise auf Si-mulationen beruhende Dimensionierungsformeln findet man in [2]. In grober Naherung verhalt sich derRegelkreis wie ein System 2. Ordnung, das durch den Dampfungsfaktor ξ und die Resonanzfrequenz fncharakterisiert ist, siehe Abschnitt 4.3.Einen entscheidenden Einfluss auf das Verhalten des PLL hat die Zeitkonstante τ bzw. die Eckfrequenzωg = 1
τ = 1RC des Schleifenfilters (hier TP 1. Ordnung). Ein Verringern der Eckfrequenz hat zur Folge, dass
Storungen, wie z.B. der Phasenjitter oder der Wechselanteil des PD-Ausgangssignals besser unterdrucktwerden. Allerdings werden dadurch der Fangbereich kleiner, die Fangzeit großer, der Ziehbereich kleinerund der Regelkreis folgt verzogert den Anderungen der Eingangsfrequenz (im Einrastzustand). Man mussalso bei der Dimensionierung des Tiefpasses immer einen Kompromiss zwischen Ziehbereich und Fangzeitschließen.Die Phasendifferenz zwischen u1 und u2 kann nicht auf Null ausgeregelt werden, wenn das Loop-Filter auseinem Tiefpass besteht (P-Regler, PT-Regler). Um diese stationare Genauigkeit zu gewahrleisten, muss derRegler integrierendes Verhalten (z.B. PI-Regler) besitzen. Dies kann vom Ansatz her durch einen PD mit”Phase Comparator IIerreicht werden.
Qualitativ lasst sich das PLL-Verhalten an zwei Beispielen im zunachst eingerasteten Zustand erlautern:
1. Das Eingangssignal schwingt mit der Kreisfrequenz ω1 = ω0, welche der VCO-Ruhefrequenz entspricht.Ist dann die Phasendifferenz ungleich Null, so sind auch ud und uf ungleich Null. Das Signal uf steuertnun den VCO so, dass er solange langsamer oder schneller schwingt, bis der Phasenfehler abgebautist.
2. Die Kreisfrequenz ω1 des Eingangssignals wird zur Zeit t0 um ∆ω erhoht. Dadurch entsteht zwischen u1
und u2 ein Phasenfehler, der zunehmend großer wird. Der PD gibt ein Signal ab, durch das am Ausgangdes Tiefpasses ein Korrekturwert entsteht, welcher den VCO veranlasst schneller zu schwingen. DerPhasenfehler wird so allmahlich wieder abgebaut. Der VCO schwingt nun mit der Frequenz ω2 =ω0 + ∆ω d.h. mit Gleichung 15 ω0 + ∆ω = ω0 + k0uf (t). Daraus folgt fur die VCO-Eingangsspannung:
uf (t) =∆ω
k0(16)
Wie man erkennt, ist die Spannung uf (t) bei frequenzmoduliertem Eingangssignal proportional der ur-sprunglichen Zeichenschwingung (vgl. Abschnitt 4.1).
4 Anwendung der PLL
4.1 Frequenzdemodulation
Unter Demodulation versteht man die Ruckgewinnung der Zeichenschwingung aus einem modulierten Signal.Bei einem FM-Signal der Form
u1(t) = U0 · sin [(ω0 + a · uz(t)) · t+ φ0] (17)
9

FREQUENZMODULATION Labor Nachrichtentechnik
bedeutet dies, dass man die primare Zeichenschwingung uz(t) wiedergewinnt.Dies gelingt mit den klassischen Verfahren der FM-Demodulation wie zum Beispiel mit einem Phasendiskri-minator oder dem Ratiodetektor [4]. Nachteilig hierbei ist ein relativ großer Aufwand zum Abgleich und zurUnterdruckung des Temperaturdrifts. Außerdem sind beide kaum geeignet fur eine vollstandige Realisierungals integrierte Schaltung.Fur die Demodulation einer FM-Schwingung kann aber auch eine PLL-Schaltung eingesetzt werden. Liegtam Eingang der eingerasteten PLL eine unmodulierte Tragerschwingung
u1(t) = U1 · sin(ω0 · t+ θ0) (18)
mit der Frequenz ω0 an, so sind laut den Gleichungen 14 und 15 ud(t) = uf (t) = 0.Andert man nun die Frequenz von u1(t) um ∆ω, so muss sich auch die des VCO-Ausgangssignals um ∆ωandern (siehe Abschnitt 3.4). Es gilt also mit 15:
ω2 = ω0 + ∆ω = ω0 + k0 · uf (t) (19)
mit uf (t) = ∆ωk0
, d.h. die PD-Ausgangsspannung ist der Frequenzanderung proportional. Andert man nundie Eingangsfrequenz nach Gleichung 17 sinusformig mit Uz · sin(ωz · t) = uz(t), so muss sich auch dasPD-Ausgangssignal sinusformig andern:
ω2 = ω0 + k · sin(ωz · t) = ω0 + k0 · uf (t) (20)
uf (t) =k
k0· sin(ωz · t) (21)
Wie der Vergleich zeigt, entspricht 20 bis auf einen konstanten Faktor genau der Zeichenschwingung. In derPraxis weicht die VCO-Mittenfrequenz von der des Tragers ab, so dass uf (t) noch ein Gleichanteil uberlagertist.Der PLL eignet sich demnach als FM-Demodulator. Allerdings mussen die Mittenfrequenz sowie der Halte-und Fangbereich auf die Tragerfrequenz und die Bandbreite der Zeichenschwingung abgestimmt werden. Einweiterer Nachteil liegt in der Welligkeit des Phasendetektor-Ausgangssignals, welche man aber großtenteilsausfiltern kann. Ebenso muss der unvermeidliche Gleichanteil durch einen Hochpass abgetrennt werden.Damit ergibt sich eine Begrenzung der ubertragbaren Bandbreite der Zeichenschwingung auf 0 < ωz <ω1 ω0.
4.2 Frequenzsynthese
Eine der wichtigsten Anwendungen des PLLs in der Praxis ist die Frequenzsynthese. Sie wird uberall dorteingesetzt, wo man viele verschiedene quarzgenaue Frequenzen in einem festen Frequenzraster benotigt (z.B.Mehrkanalsendeanlagen, UKW-Tuner bei 88 MHz – 108 MHz im 25 kHz-Raster). Um dies ohne Quarze furjede Frequenz zu realisieren, kann man die PLL-Anordnung nach Abbildung 7 benutzen.Mit Hilfe des Quarzoszillators und des Teilers 1 wird die Rasterfrequenz f1 =
fQM erzeugt. Teiler 2 teilt die
VCO-Frequenz auf f2N herunter. Im eingerasteten Zustand mussen f1 und f2
N ubereinstimmen, d.h. es muss
gelten f2N = f1 und damit
f2 = N ·fQM
(22)
Allerdings bewirkt der Teiler im Ruckkopplungszweig eine Totzeit innerhalb der Regelschleife, was bei unge-eigneter Dimensionierung des PLL- Kreises zur Instabilitat (stabile Grenzzyklen) und damit zu einem Jitterim Ausgangssignal der PLL-Frequenzsynthese fuhren kann [5].
10

FREQUENZMODULATION Labor Nachrichtentechnik
Abbildung 7: Frequenzsynthese mit Hilfe der PLL-Schaltung
4.3 Messtechnische Bestimmung der Regelkreisparameter
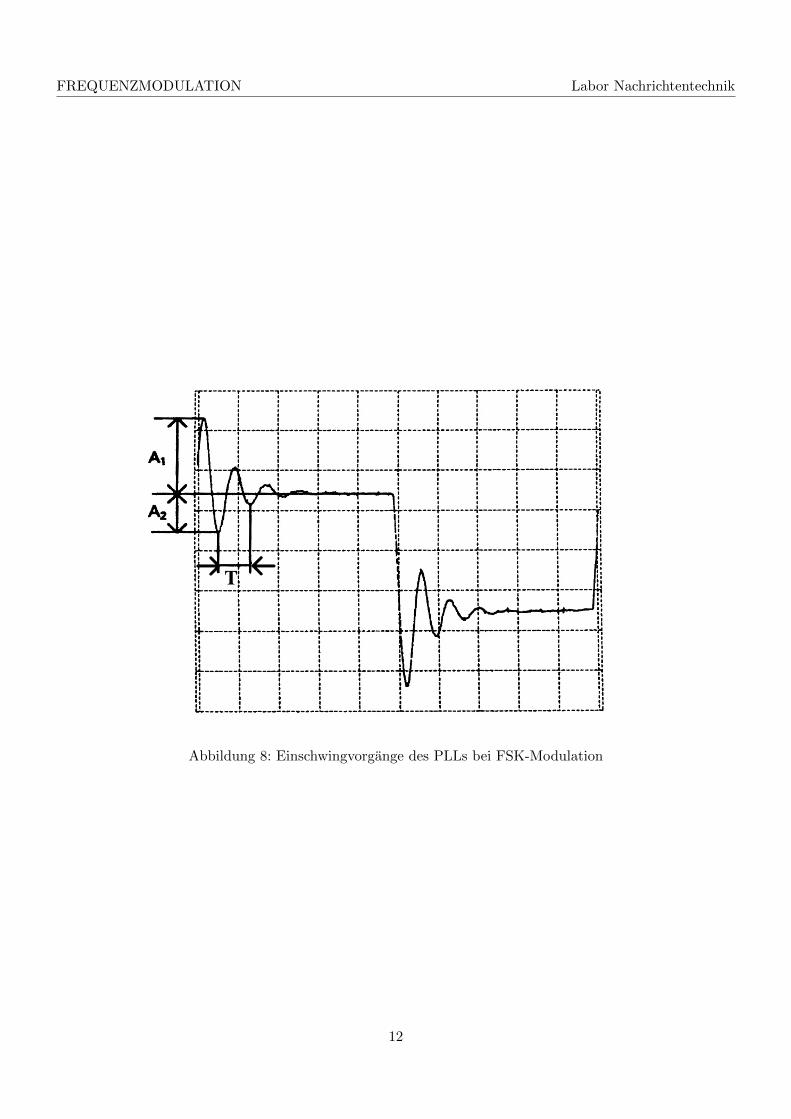
Im Abschnitt 3.4 wurden die Grundzuge des Regelverhaltens eines PLL skizziert. Bei der Versuchsdurchfuhrungmussen messtechnisch der Dampfungfaktor ξ und die Resonanzfrequenz fn des geschlossenen Regelkreisesbestimmt werden.Der Dampfungsfaktor und die Resonanzfrequenz lassen sich nach folgenden Gleichungen errechnen:
ξ =ln A1
A2√π2 +
(ln A1
A2
)2(23)
fn =1
T√
1− ξ2, (24)
wobei die Amplituden A1 und A2 sowie die Zeit T wie in Abbildung 8 gezeigt gemessen werden. ZurHerleitung sei auf [2] und [5] verwiesen.Abbildung 8 zeigt zwar eine Periode, fur die Messung ist es naturlich sinnvoller, die Zeitauflosung desOszilloskops geeignet zu erhohen.Die beiden Gleichungen setzen fur die Messung den Schwingungsfall voraus. Um dieses Messprinzip beibe-halten zu konnen, muss bei Dampfungsfaktoren ξ ≥ 1 der Teilerfaktor des PLL vergroßert werden, um denRegelkreis wieder zu entdampfen.
Literatur
[1] K. Steinbuch and W. Rupprecht, Nachrichtentechnik Band I. Springer Verlag, 3. auflage ed., 1982.
[2] R. Best, Theorie und Anwendungen des Phase-Locked Loops. AT-Verlag, Aarau, 1987.
[3] U. Tietze and C. Schenk, Halbleiterschaltungstechnik. Springer Verlag, 6. auflage ed., 1986.
[4] K. Steinbuch and W. Rupprecht, Nachrichtentechnik Band II. Springer Verlag, 3. auflage ed., 1983.
[5] F. Gardner, Phaselock Techniques. John Wiley, 1966.
[6] H. Fricke and L. Pungs, Messtechnik der kontinuierlichen Modulationsverfahren. Verlag G. Braun, Karls-ruhe, 1969.
[7] K. Kupfmuller, Die Systemtheorie der elektrischen Nachrichtenubertragung. Hirzel-Verlag, 1974.
11
FREQUENZMODULATION Labor Nachrichtentechnik
Abbildung 8: Einschwingvorgange des PLLs bei FSK-Modulation
12

FREQUENZMODULATION Labor Nachrichtentechnik
5 Versuchsdurchfuhrung
5.1 Gerate zur Versuchsdurchfuhrung
• Multimeter (analog)
• Zweikanal-Oszilloskop
• Funktionsgenerator
• FM/FSK-Sender NAT27
• PLL-Laboraufbau
5.2 Vorbereitende Aufgaben, vor Versuchsbeginn zu losen!
1. Welcher Teilerfaktor muss im Ruckkopplungspfad der PLL bei deren Verwendung zur Frequenzver-vielfachung eingestellt werden, wenn an Ux ein 1 kHz-Signal anliegt und an Uν 50 kHz anstehen sollen?
5.3 Versuchsaufgaben
1. Stellen Sie am Laboraufbau das Loop-Filter Nr. 1 ein und wahlen Sie den Frequenzteilerfaktor 0001.Um unnotige Larmbelastigung und Schreckmomente zu vermeiden, schalten Sie den Lautsprecherstumm.
2. Legen Sie an der BNC-Buchse Ux des PLL-Laborgerat ein 50 kHz-SignaI an. (Zulassig sind alle peri-odischen Signale mit 0.2 – 10 V). Stellen Sie die Eingange des Phasendetektors (Buchsen Ui und Uo)mit einem Zweikanaloszilloskop dar und beobachten Sie die Signalverlaufe. Skizzieren Sie die Phasen-verlaufe der beiden Signale Ui und Uo bei Verwendung des Phasendetektors PD1 (rote LED leuchtet)und des Phasendetektors PD2 (grune LED leuchtet).
3. Variieren Sie die Eingangsfrequenz an Ux von 10 kHz bis 90 kHz. Beobachten Sie wieder die Phasen-verlaufe bei Verwendung von PD1 und PD2, und achten Sie auch auf die rote LED mit der Bezeichnung” 6= 0”.Skizzieren/Fotografieren und erklaren Sie die Signalverlaufe von Ui und Uo bei 30 kHz, 50 kHz und70 kHz. Warum sollten die Messungen auch bei bei 30 kHz und 70 kHz immer von 50 kHz aus begin-nen? Was zeigt die rote LED mit der Bezeichnung ” 6= 0” an?Hinweis: Beachten Sie, dass bei Zeitvergleichsmessungen von zwei Signalverlaufen am Analog-Oszillo-skop ”chop.” eingestellt werden muss.
4. Wahrend Sie in der vorangegangenen Aufgabe das Frequenzverhalten des PLL qualitativ analysierthaben, sollen Sie dieses nun quantitativ erfassen. Verbinden Sie hierzu die BNC-Buchse Uν mit einemFrequenzzahler oder Oszilloskop und Uf mit einem Analog-Multimeter.Bestimmen Sie den Haltebereich der PLL, und ermitteln Sie die Bereiche der roten LEDs im Achsen-kreuz (f, u) quantitativ.
5. In diesem Aufgabenteil sollen die Phasendetektoren als eine Komponente des PLL naher untersuchtwerden.Beobachten Sie die Signale d1 und d2 mit einem Analog-Multimeter. Verbinden Sie weiterhin diebeiden BNC-Buchsen 1 kHz ± 180 des Sendegerates NAT-27 mit den BNC-Buchsen ei und eo desPLL-Aufbaus und oszilloskopieren Sie diese zusatzlich. Sollte sich bei der Variation der Phase dieAusgangsspannung des PD2 nicht andern, so mussen Sie die Anschlusse vertauschen.
13
FREQUENZMODULATION Labor Nachrichtentechnik
Stellen Sie die Phasendifferenzen der Eingangssignale ei und eo ein: 0, 45, 90, 180, 270, 315 und360.Warum mussen Sie die Messungen nicht bei den negativen Phasenwinkeln durchfuhren?Skizzieren Sie beim PD1 fur eine Phasenverschiebung von 0, 45 und 90 die Signalverlaufe von ei,eO und d1 untereinander, um so das Verhalten des Phasendetektors gut erlautern zu konnen.Tragen Sie beim PD2 die Spannungsverlaufe uber der Phase im Bereich ±360 auf, indem Sie diegemessenen Werte symmetrisch erganzen. PD1 besitzt kein TP-Filter, welches das Ausgangssignal d1
glattet. Schatzen Sie aus den Oszillogrammen und der Messung mit dem Multimeter den Gleichspan-nungsanteil und tragen Sie dies in obiges Phasendiagramm ein.
6. Verbinden Sie die Eingangs-Buchse ei mit der unteren BNC-Buchse ”1 kHz± 180” und die Eingangs-Buchse eo mit der oberen BNC-Buchse ”500 Hz ± 90”. Beobachten Sie die Phasendetektorausganged1 und d2, wahrend Sie die Phasenverschiebung andern.Welcher Phasendetektor ist phasen-, welcher frequenzselektiv? Hat einer beide Eigenschaften? WelcheFunktion hat die grune LED im Achsenkreuz?
7. (Freiwillige Aufgabe) Stellen Sie den Frequenzteiler auf 0001 und speisen Sie an Ux ein Signal ein,dessen Frequenz langsam zwischen 50 kHz und 150 kHz variiert. Schalten Sie abwechselnd auf PD1und PD2. Erklaren Sie Ihre Beobachtung. Warum kann der PLL-Regelkreis mit PD1 auf ungeradenVielfachen der Referenzfrequenz Ux einrasten?
8. Der PLL soll zur Frequenzvervielfachung genutzt werden. Wahlen Sie PD2 und oszilloskopieren Sie Uound Uν . Welcher Teilerfaktor muss eingestellt werden, wenn an Ux ein 1 kHz-Signal anliegt und an Uν50 kHz gemessen werden soll? (Vgl. Vorbereitende Aufgabe 1.) Warum sollten Sie den PD2 verwenden?Welches Frequenzraster ist an Uν verfugbar, und wie hangt die Frequenz an Uν vom Teilerfaktor ab?
9. Das Einschwingverhalten des PLL im eingerasteten Zustand soll untersucht werden. Dazu wird am Ein-gang Ux ein FSK(Frequency Shift Keying)-moduliertes Signal angelegt. (FSK dient zur Datenubertra-gung mittels frequenzumgetasteter Signale). Der Frequenzteiler wird wieder auf 0001 gestellt. Verbin-den Sie die BNC-Buchse FM-OUT/FSK des Senders mit Ux des PLL-Laboraufbaus. Stellen Sie denSchalter auf Hub-FSK. Mit dem roten Poti konnen Sie den Hub des Frequenzsprungs verandern, mitden BCD-Codierschaltern stellen Sie die Wiederholungsrate ein. Beobachten Sie an Uf den Einschwing-vorgang mit einem Oszilloskop. Verwenden Sie zu dessen externer Triggerung das an der BNC-Buchseunterhalb des Multiplikationsfaktors ”1” abgreifbare Dreiecksignal.Beobachten Sie das Einschwingverhalten fur alle Kombinationen von Phasendetektoren und Schalter-stellungen des Loop-Filters. Welche der Kombinationen besitzt die kleinste Einschwingzeit, welche dasgeringste Uberschwingen?Nehmen Sie die Oszillogramme auf und kommentieren Sie das Einschwingverhalten fur
(a) Loop-Filter auf Stellung 3 und PD1 bei 600 Hz Wiederholrate
(b) Loop-Filter auf Stellung 2 und PD2 und 200 Hz Wiederholrate
10. Berechnen Sie die Dampfungswerte und Resonanzfrequenzen des geschlossenen PLL-Regelkreises an-hand der gemessenen Oszillogramme aus der Aufgabe 9.
11. Stellen Sie das Loop-Filter auf Stellung 1 mit PD1, und verbinden Sie den Eingang Ux mit demAusgang ”FM-OUT/FSK”des NAT27, dessen Wahlschalter auf ”Hub-FM” zu stellen ist. In die BNC-Buchse ”Mod-In” konnen Sie das Sinus-Signal eines Signalgenerators einspeisen. Beobachten Sie dasdemodulierte Signal an Uy mit einem Oszilloskop. Ermitteln Sie, bis zu welcher Frequenz und bis zuwelcher Amplitude dieses FM-Ubertragungssystem betrieben werden kann.
14