Lehrveranstaltung Statik der Baukonstruktionen III ... · – 1 – Inhaltsverzeichnis Seite...
231
Prof. Dr.–Ing. Rudolf Harbord Fachgebiet Statik der Baukonstruktionen Technische Universität Berlin Lehrveranstaltung Statik der Baukonstruktionen III – Rechnerorientierte und nichtlineare Statik von Stabtragwerken – Berlin ⋅ März 2004
Transcript of Lehrveranstaltung Statik der Baukonstruktionen III ... · – 1 – Inhaltsverzeichnis Seite...
Prof. Dr.–Ing. Rudolf HarbordFachgebiet Statik der BaukonstruktionenTechnische Universität Berlin
Lehrveranstaltung
Statik der Baukonstruktionen III
– Rechnerorientierte und nichtlineare
Statik von Stabtragwerken –
Berlin ⋅ März 2004
– 1 –
Inhaltsverzeichnis Seite
Einführung 6Literatur 8
Teil 1: Verfahren der Stabsteifigkeiten 1 / 1
1.1 Allgemeines 1 / 1
1.2 Topologische und geometrische Systembeschreibung 1 / 1
1.3 Lokale Stab– bzw. Elementbeschreibung 1 / 9
1.3.1 Problemformulierung mit Differentialgleichungen 1 / 9
1.3.2 Problemformulierung mit Arbeitsgleichungen 1 / 16
1.3.3 Näherungsansätze und Diskretisierung 1 / 24
1.3.4 Matrizendarstellung des PvW 1 / 29
1.4 Baustatische Systembeschreibung 1 / 36
1.4.1 Systemgleichung 1 / 36
1.4.2 Berechnung der Weg– und Lagergrößen 1 / 41
1.5 Nachlaufberechnung zur Berechnung der Schnittgrößen 1 / 44
1.6 Beispiel 1 / 47
1.7 Abschätzung der Genauigkeit 1 / 59
1.8 Elastisch gebettete Stabtragwerke 1 / 66
1.9 Lastfall Temperatureinwirkungen 1 / 77
– 2 –
Seite
Teil 2: Theorie II. Ordnung 2 / 1
2.1 Einführung in die Problematik 2 / 1
2.1.1 Allgemeines 2 / 1
2.1.2 Einführungsbeispiel 2 / 3
2.1.3 Berechnung als Spannungsproblem 2 / 4
2.1.3.1 Iteration mit verändertem 0– Zustand 2 / 8
2.1.3.2 Iteration mit veränderten m– Zuständen 2 / 11
2.1.4 Kontrolle der Stabilität 2 / 15
2.1.5 Vergleichsberechnung mit einem Programm 2 / 17
2.1.6 Erkenntnisse und weitere Vorgehensweiseund Literatur 2 / 19
2.2 DGL Theorie II. Ordnung 2 / 22
2.2.1 Nichtlineare Kinematik 2 / 23
2.2.2 Materialverhalten 2 / 27
2.2.3 Elastische Verträglichkeit 2 / 27
2.2.4 Gleichgewicht am verformten System 2 / 28
2.2.5 Ableitung der DGL Theorie II. Ordnung 2 / 31
2.2.6 Superposition von Lösungen 2 / 32
2.3 DWV für Theorie II. Ordnung 2 / 33
2.3.1 Lokales Tragverhalten 2 / 34
2.3.2 Globales Tragverhalten 2 / 43
2.3.3 Bewertung der unterschiedlichen Einflüsse 2 / 45
2.3.4 Zugbeanspruchte Grundstäbe 2 / 45
2.3.5 Zahlenbeispiel zum DWV 2 / 48
– 3 –
Seite
2.4 VdS für Theorie II. Ordnung 2 / 60
2.4.1 PvW für Theorie II. Ordnung 2 / 60
2.4.2 Näherungsansätze für Theorie II. Ordnung 2 / 63
2.4.3 Vergleich zwischen DWV und VdS 2 / 66
2.4.4 Iterative Berechnung auf Systemebene 2 / 68
2.4.5 Zahlenbeispiel zum VdS 2 / 70
2.5 Stabilität von Gleichgewichtszuständen 2 / 73
2.5.1 Grundlagen der Stabilitätstheorie I. Ordnung 2 / 75
2.5.2 Bewertung der Stabilitätskontrolle 2 / 79
2.5.3 Stabilitätskontrolle beim DWV 2 / 81
2.5.3.1 Determinanten–Iteration 2 / 81
2.5.3.2 Zahlenbeispiel zur Determinanten–Iteration 2 / 82
2.5.4 Stabilitätskontrolle beim VdS 2 / 84
2.5.4.1 Rayleigh–Quotient und allgemeinesEigenwertproblem 2 / 84
2.5.4.2 Zahlenbeispiel zum Eigenwertproblem 2 / 85
2.6 Einfluß von Imperfektionen 2 / 87
2.6.1 Grundlage der Berechnung von imperfektenTragwerken 2 / 89
2.6.2 Erfassung von Imperfektionen mit dem DWV 2 / 92
2.6.2.1 Vorgehensweise 2 / 92
2.6.2.2 Zahlenbeispiel 2 / 95
2.6.3 Erfassung von Imperfektionen mit dem VdS 2 / 99
2.6.3.1 Lastspalte des Lastfalls Imperfektionen 2 / 99
2.6.3.2 Zahlenbeispiel zum VdS 2 /102
– 4 –
Seite
Teil 3: Fließgelenktheorie 3 / 1
3.1 Allgemeines 3 / 1
3.2 Voraussetzungen 3 / 7
3.3 Plastischer Erschöpfungszustand von statischen Systemen 3 / 8
3.4 Verfahren der stetigen Laststeigerung 3 / 9
3.5 Statischer Traglastsatz 3 / 13
3.6 Kinematischer Traglastsatz 3 / 13
3.7 Einschließungssatz 3 / 14
3.8 Anwendung des statischen Traglastsatzes 3 / 15
3.9 Anwendung des kinematischen Traglastsatzes 3 / 16
3.10 Vergleich zwischen Elastizitäts– und Plastizitätstheorie 3 / 17
3.11 Anwendungsbeispiel 3 / 18
3.11.1 Aufgabenstellung 3 / 18
3.11.2 Berechnungssystem 3 / 19
3.11.3 Ergebnisse und Diskussion 3 / 21
3.12 Bewertung der Verfahren 3 / 30
3.13 Schlußbemerkung 3 / 31
– 1 –
Teil 4: Anwendungsbeispiel aus demKonstruktiven Ingenieurbau
Bei Bedarf im Institut Statik der Baukonstruktionen der TU BerlinSekr. TIB1–B5Gustav–Meyer–Allee 2513 355 BerlinTel. 030/314 72 320Fax 030/314 72 321E–mail statik@tu–berlin.de
erhältlich.

– 6 –
Einführung
Die 4–std. integrierte Lehrveranstaltung Statik der Baukonstruktionen III – kurz Statik III–beendet im Studiengang Bauingenieurwesen die Statikausbildung des Grundfachstudi-ums. Das Angebot richtet sich daher vorrangig an Bauingenieurstudenten. Sie müssen dieVeranstaltung als Pflichtkurs absolvieren. Interessierten Studentinnen und Studenten ausverwandten Ingenieurdisziplinen können aber ebenfalls teilnehmen, um ihre Kenntnisseim Fach Statik zu vertiefen.
Voraussetzung zur erfolgreichen Teilnahme sind Vorkenntnisse aus den Lehrveranstal-tungen Statik I und II. Gegenstand der Betrachtung sind wie schon in Statik I und II aus-schließlich ebene Stabtragwerke. Drei Ziele sollen im Verlauf der Durchführung erreichtwerden.
Das erste Ziel von Statik III ist eine Einführung in die Grundlagen der rechnerorientiertenStabstatik, um die Handhabung und Anwendungssicherheit von Statik–Programmendurch fundierte Theoriekenntnisse zu unterstützen. Dies geschieht im ersten Teil der Ver-anstaltung, der sich mit dem Verfahren der Stabsteifigkeiten beschäftigt, einem speziellenVerfahren der Methode der finiten Elemente für Stabtragwerke, das sich aus dem Weg–größenverfahren der Baustatik entwickelt hat. Es repräsentiert den Stand der Technik undist durch eine Vielzahl von Programmvarianten in der Ingenieurpraxis vertreten. Es gilt alsStandardverfahren zur rechnergestützten Bearbeitung von statisch–konstruktiven Auf–gaben und ist als unabdingbarer Bestandteil der Statikausbildung im Grundfachstudiumanzusehen, zumal es auch aus theoretischer Sicht eine sinnvolle Ergänzung zu denhandrechnungsorientierten Kraft– und Drehwinkelverfahren aus Statik II darstellt.
Das zweite Ziel von Statik III ist eine Einführung in die Grundlagen der Theorie II. Ordnung.Dies geschieht im zweiten Teil der Veranstaltung. Die ganze bisherige Betrachtungsweiseberuht auf der Annahme, daß zwischen Einwirkung und Beanspruchung von Stabtragwer-ken ein linearer Zusammenhang besteht. Diese Annahme begründet u.a. das Superposi–tionsprinzip. Ohne dieses Prinzip wäre z.B. der in Statik II vorgestellte methodische Auf-bau des Kraftgrößen– und Drehwinkelverfahrens gar nicht vorstellbar. Aus physikalischerSicht ist die Linearität natürlich nur als Näherung zu werten, die umso genauer zutrifft, jekleiner die Verformungen im Vergleich zu repräsentativen Stababmessungen ausfallen.Nur dann ist es zulässig, den verformten Zustand beim Aufstellen der Gleichgewichtsbe-dingungen zu vernachlässigen und die Schnittgrößen unmittelbar am unverformten Sy-stem zu ermitteln. Dieses Vorgehen wird auch als Theorie I. Ordnung bezeichnet. Tretendagegen größere Verformungen auf, ist es ggf. erforderlich, den Einfluß der Verformungenzu berücksichtigen und das Gleichgewicht in physikalisch zutreffender Weise direkt amverformten System zu erfüllen. Die Verformungen sind zunächst noch unbekannt. Daherist zwangsläufig ein iterativer Prozeß erforderlich, der als Theorie II. Ordnung bezeichnetwird. Der Übergang zwischen den Berechnungstheorien ist fließend und läßt sich i.a. nurdurch eine sorgfältige ingenieurmäßige Bewertung abschätzen. Dies ist von besondererWichtigkeit, wenn im betrachteten Stabtragwerk große Druckkräfte auftreten und derÜbergang schlagartig erfolgen kann, so daß als Sonderfall der Theorie II. Ordnung ein
– 7 –
Stabilitätsproblem vorliegt. Vor allem Maßnahmen, die dazu beitragen, Gefährdungspo-tentiale zu erkennen, die zum Stabilitätsverlust führen, sind Gegenstand der Betrachtung.Sie erfordern zwangsläufig eine fundierte Kenntnis der Theorie II. Ordnung und setzen zu-sätzlich auch eine gewisse Fähigkeit zur Anwendung von nichtlinearen Theorien voraus.Nur auf dieser Grundlage ist die Standsicherheit von Tragwerken unter allen Umständenzu gewährleisten. Zumindest eine erste Einführung in die Problematik ist daher alsunabdingbarer Bestandteil der Statikausbildung im Grundfachstudium anzusehen. Eineweitergehende Beschäftigung mit der übergeordneten geometrisch nichtlinearen Berech-nungstheorie von Tragwerken ist dagegen Aufgabe des Vertiefungsstudiums.
Das dritte Ziel von Statik III ist eine Einführung in die Grundlagen der Fließgelenktheorie.Dies geschieht im dritten Teil der Veranstaltung. Die bisherigen Betrachtungen auf denGrundlagen der Theorien I. und II. Ordnung beruhen auf der fundamentalen Annahme,daß sich das verwendete Material uneingeschränkt elastisch verhält. Die physikalischeWirklichkeit zeigt aber, daß elastisches Materialverhalten nur bis zu einer speziellen Ein-wirkungsgrenze zu beobachten ist und danach inelastisches Verhalten auftritt. Die Grenzezwischen Elastizität und Inelastizität ist materialabhängig und wird z.B. bei Beton unterZugeinwirkung durch das Reißen sehr früh erreicht, während sie sich unter Druckeinwir-kung erst wesentlich später einstellt. Stahl verhält sich gegenüber Zug und Druck gleichund verfügt in der Regel über hohe inelastische Tragreserven. Will man sie nutzen, ist einrechnerischer Nachweis erforderlich. Dies ist nur möglich, wenn die baustatische Be-schreibung neben dem elastischen auch das inelastische Verhalten von Materialien erfas-sen kann. Mit der Fließgelenktheorie ist z.B. ein spezieller ingenieurmäßiger Ansatz be-kannt, um dies für Stabtragwerke in anschaulicher Weise zu tun. Eine erste Einführung indiese Theorie ist daher als notwendiger Bestandteil der Statikausbildung im Grundfachstu-dium anzusehen. Vor allem auch deswegen, um abschätzen zu können, wie sich das in–elastische Materialverhalten auf das Tragvermögen von statischen Systemen auswirkt.Eine weitergehende Beschäftigung mit der übergeordneten Plastizitätstheorie ist dagegenAufgabe des Vertiefungsstudiums.
Der vierte Teil, der die Lehrveranstaltung Statik III abschließt, liegt als separates Ma–nuskript vor. Es wird die praxisnahe Bearbeitung eines Anwendungsbeispiels aus demKonstruktiven Ingenieurbau geübt. Ziel ist es, baustatische Methoden im Zusammenhanganzuwenden. Gegenstand der Betrachtung ist eine Fußgängerbrücke. Es soll vor allemgezeigt werden, wie man aus Zeichnungen statische Systeme entwickelt und wie man vor-zugehen hat, um ingenieurmäßig interpretierbare Ergebnisse zu erhalten. Die Durchfüh-rung der Berechnungen erfolgt rechnergestützt mit einem Programm.
– 8 –
Literatur
/ 1 / Hees, G., Pohlmann, G.: Baustatik. Hütte: Bautechnik IV,Konstruktiver Ingenieurbau 1, S. 14–359.29. Auflage, Springer Verlag (1988).
/ 2 / Ahrens, H., Duddeck, H.: Berechnung von Stabtragwerken.Betonkalender II, S. 511–618.Ernst & Sohn Verlag (1980).
/ 3 / Krätzig, W. B.: Tragwerke 2 – Theorie und Berechnungs–methoden statisch unbestimmter Stabtragwerke –2. Auflage, Springer–Lehrbuch (1994).
/ 4 / Lawo, M., Thierauf, G.: Stabtragwerke.Matrizenmethoden der Statik und Dynamik,Teil 1: Statik,Verlag Vieweg & Sohn (1980).
/ 5 / Harbord, R.: Handbuch zum FE–Stabwerks–ProgrammFEMAS.TU Berlin (1996).
/ 6 / Zurmühl, R., Falk, S.: Matrizen und ihre Anwendungen, Teil 1 und 2.Springer Verlag (1994).
/ 7 / Rothert, H., Genischen, V.: Nichtlineare Stabstatik.Springer Verlag (1987).
/ 8 / Duddeck, H.: Traglasttheorie der Stabtragwerke.Betonkalender II, S. 1007–1095,Ernst & Sohn Verlag (1980).
– 1 / 1 –
Teil 1: Verfahren der Stabsteifigkeiten
1.1 Allgemeines
Das Verfahren der Stabsteifigkeiten (VdS) stellt die rechnerorientierte Variante desWeggrößenverfahrens für Stabtragwerke dar. Es bildet somit eine wichtige Schnittstellezwischen der klassischen, anschauungsorientierten Baustatik und der modernen, rech-nerorientierten Methode der finiten Elemente, kurz Finite–Elemente–Methode (FEM).In der heutigen Praxis des konstruktiven Ingenieurbaus ist die FEM und speziell dasVdS weit verbreitet, da es Anschauung und Rechnerkomfort in idealer Weise mit–einander verknüpft, so daß man es als Standardverfahren der modernen Stab–statik bezeichnen kann. Neben der in Statik III verwendeten Bezeichnung VdS sindauch die Bezeichnungen Verschiebungsgrößenverfahren /1/, verallgemeinertes Weg–größenverfahren /2/, direkte Steifigkeitsmethode /3/, Deformationsmethode bzw.Formänderungsgrößenverfahren /3/ und Matrizenmethode /4/ bekannt.
Im Rahmen der Vorlesungen und Übungen, die zum Teil 1 von Statik III stattfinden, wirddie grundsätzliche Vorgehensweise mit dem VdS anhand ebener Stabtragwerke vor-gestellt und als Beispiele schubstarre, aber dehn– und biegesteife Stabtragwerke be-rechnet. Zur Berechnung kommt speziell das Programm FEMAS (Finite–Elemente–Methode zur Analyse von Stabtragwerken /5/) zum Einsatz. Man kann natürlich auchjedes andere Stabwerks–Programm einsetzen, das die erforderlichen Optionen anbie-tet, um Vergleichsberechnungen durchzuführen. Weitere Anwendungen des Verfah-rens und des FEMAS–Programms erfolgen im zweiten bis vierten Teil von Statik III.In den weiterführenden, jeweils 4–std. Lehrveranstaltungen Vertiefung I und II wird dasVdS auf räumliche und dynamische Probleme erweitert und es werden spezielle Einwir-kungen, nämlich die Lastfälle Vorspannung und Erdbeben behandelt.
1.2 Topologische und geometrische Systembeschreibung
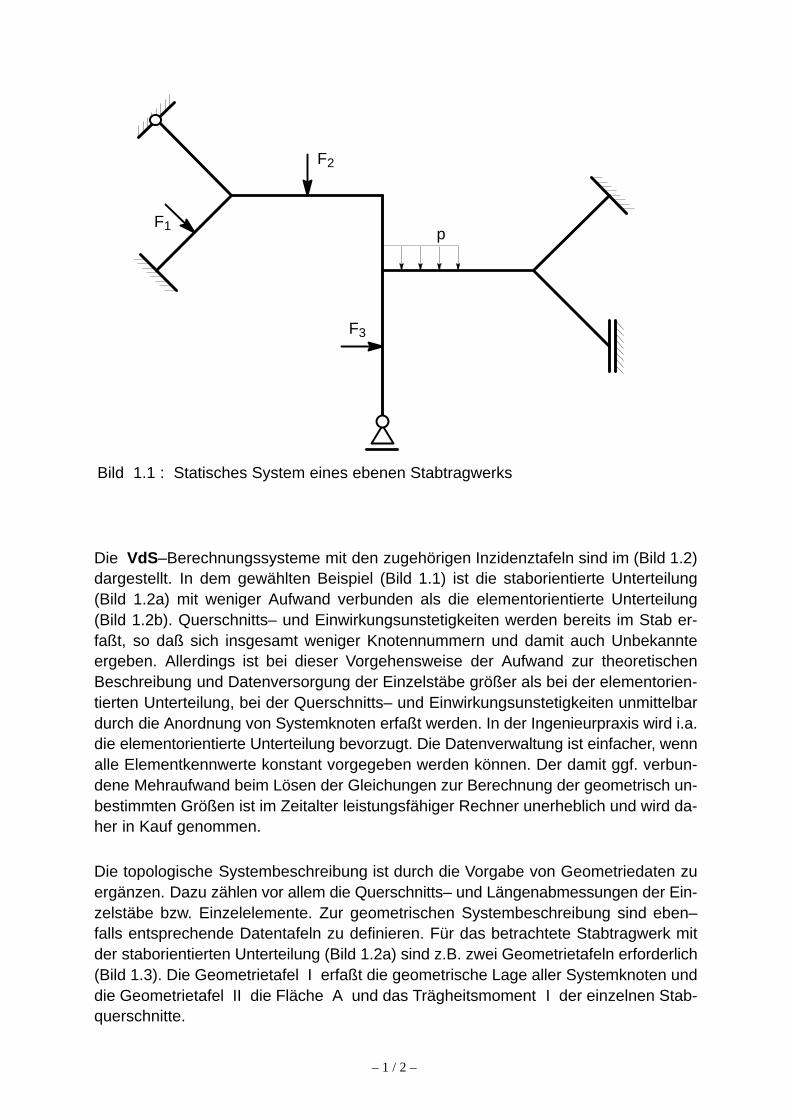
Das VdS unterscheidet zwischen zwei Betrachtungsebenen, die als System– undStab– bzw. Elementebenen bezeichnet werden. Die Systembetrachtung ist im wesentli-chen eine topologische Beschreibung und daher problemunabhängig. Sie bestehtdarin, ein Stabtragwerk gedanklich in Einzelstäbe oder noch weitergehend, in eine Viel-zahl von finiten (endlichen) Elementen zu unterteilen. Die topologische Zuordnung zurWiederverknüpfung ist durch die unabhängige Definition von Stab– bzw. Elementnum-mern einerseits und Knotennummern andererseits in eindeutiger Weise möglich. Siekann vom Betrachter mit Hilfe einer Inzidenztafel festgelegt werden und muß alsBasisinformation enthalten, welche Knotennummern zu welchem Stab bzw. Elementgehören. Für das statische System eines ebenen Stabtragwerks (Bild 1.1) ist z.B. einestaborientierte oder eine elementorientierte Unterteilung möglich, ohne irgendwelchenEinschränkungen zu unterliegen.
– 1 / 2 –
F3
Bild 1.1 : Statisches System eines ebenen Stabtragwerks
p
F2
F1
Die VdS–Berechnungssysteme mit den zugehörigen Inzidenztafeln sind im (Bild 1.2)dargestellt. In dem gewählten Beispiel (Bild 1.1) ist die staborientierte Unterteilung(Bild 1.2a) mit weniger Aufwand verbunden als die elementorientierte Unterteilung(Bild 1.2b). Querschnitts– und Einwirkungsunstetigkeiten werden bereits im Stab er-faßt, so daß sich insgesamt weniger Knotennummern und damit auch Unbekannteergeben. Allerdings ist bei dieser Vorgehensweise der Aufwand zur theoretischenBeschreibung und Datenversorgung der Einzelstäbe größer als bei der elementorien-tierten Unterteilung, bei der Querschnitts– und Einwirkungsunstetigkeiten unmittelbardurch die Anordnung von Systemknoten erfaßt werden. In der Ingenieurpraxis wird i.a.die elementorientierte Unterteilung bevorzugt. Die Datenverwaltung ist einfacher, wennalle Elementkennwerte konstant vorgegeben werden können. Der damit ggf. verbun-dene Mehraufwand beim Lösen der Gleichungen zur Berechnung der geometrisch un-bestimmten Größen ist im Zeitalter leistungsfähiger Rechner unerheblich und wird da-her in Kauf genommen.
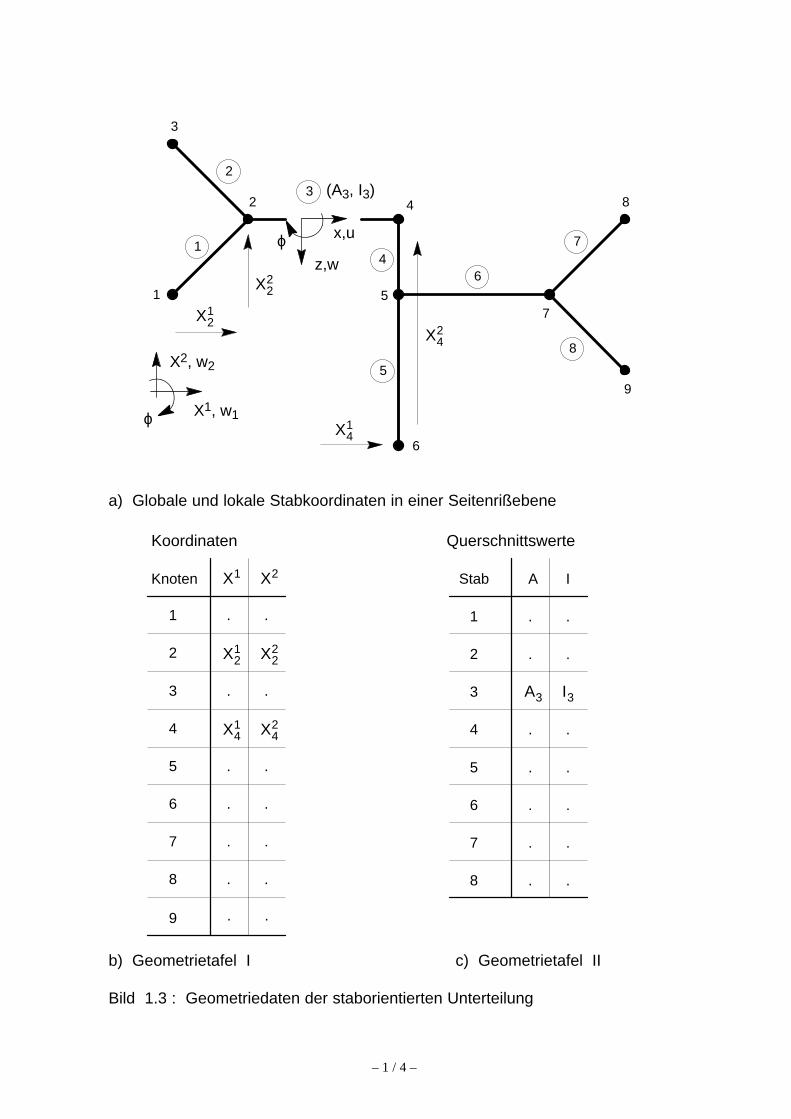
Die topologische Systembeschreibung ist durch die Vorgabe von Geometriedaten zuergänzen. Dazu zählen vor allem die Querschnitts– und Längenabmessungen der Ein-zelstäbe bzw. Einzelelemente. Zur geometrischen Systembeschreibung sind eben–falls entsprechende Datentafeln zu definieren. Für das betrachtete Stabtragwerk mitder staborientierten Unterteilung (Bild 1.2a) sind z.B. zwei Geometrietafeln erforderlich(Bild 1.3). Die Geometrietafel I erfaßt die geometrische Lage aller Systemknoten unddie Geometrietafel II die Fläche A und das Trägheitsmoment I der einzelnen Stab-querschnitte.
– 1 / 3 –
1
2
5
6
7
8
3
4
ElementElement–
knoten
1
2
3
4
5
6
7
8
1
3
2
4
5
5
7
7
2
2
4
5
6
7
8
9
a) Staborientierte Unterteilung
Stab Stab–
knoten
1
2
3
4
5
6
7
8
1
2
4
3
5
6
7
8
2
3
3
5
6
7
8
9
b) Elementorientierte Unterteilung
Bild 1.2 : VdS–Berechnungssysteme mit zugehörigen Inzidenztafeln
10
11
12
9
10
11
11
7
11
12
13
10
1
2
3
4
5
6
7
8
9
10 11
12
13
1
2
3
4
5
6
7
8
9
Stabnummer
Knotennummer
1
2
5
6
7
8
3
4
9 10
11
12
Elementnummer
Knotennummer
– 1 / 4 –
1
2
3
4
5
6
7
8
.
.
.
.
.
.
.
.
.
.
.
.
Knoten I
1
2
3
4
5
6
7
8
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Stab A
a) Globale und lokale Stabkoordinaten in einer Seitenrißebene
b) Geometrietafel I
Bild 1.3 : Geometriedaten der staborientierten Unterteilung
c) Geometrietafel II
9
Koordinaten
X12 X2
2
X14 X2
4
. .
X1 X2
Querschnittswerte
A3 I3
ϕ x,u
z,w1
2
3
4
5
6
7
8
1
2
3
4
5
6
7
8
9
X12
X22
X14
X24
ϕ
X2, w2
X1, w1
(A3, I3)
– 1 / 5 –
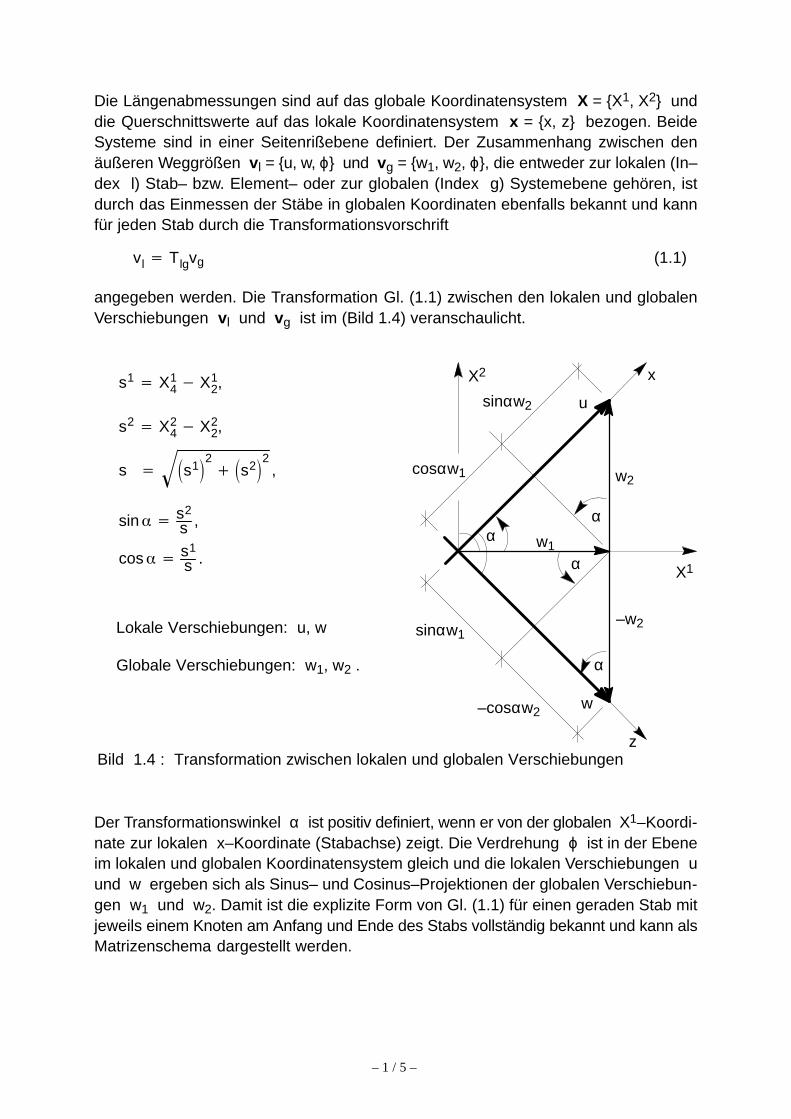
Die Längenabmessungen sind auf das globale Koordinatensystem X = {X1, X2} unddie Querschnittswerte auf das lokale Koordinatensystem x = {x, z} bezogen. BeideSysteme sind in einer Seitenrißebene definiert. Der Zusammenhang zwischen denäußeren Weggrößen vl = {u, w, ϕ} und vg = {w1, w2, ϕ}, die entweder zur lokalen (In–dex l) Stab– bzw. Element– oder zur globalen (Index g) Systemebene gehören, istdurch das Einmessen der Stäbe in globalen Koordinaten ebenfalls bekannt und kannfür jeden Stab durch die Transformationsvorschrift
vl � Tlgvg (1.1)
angegeben werden. Die Transformation Gl. (1.1) zwischen den lokalen und globalenVerschiebungen vl und vg ist im (Bild 1.4) veranschaulicht.
Bild 1.4 : Transformation zwischen lokalen und globalen Verschiebungen
s1 � X14 � X1
2,
s2 � X24 � X2
2,
s � �s1�2 � �s2�2� ,
sin� � s2
s ,
cos� � s1
s .
Lokale Verschiebungen: u, w
Globale Verschiebungen: w1, w2 .
sinαw2
sinαw1
w
u
cosαw1
–cosαw2
X2 x
z
X1
w1
w2
–w2
α
α
αα
Der Transformationswinkel α ist positiv definiert, wenn er von der globalen X1–Koordi-nate zur lokalen x–Koordinate (Stabachse) zeigt. Die Verdrehung ϕ ist in der Ebeneim lokalen und globalen Koordinatensystem gleich und die lokalen Verschiebungen uund w ergeben sich als Sinus– und Cosinus–Projektionen der globalen Verschiebun-gen w1 und w2. Damit ist die explizite Form von Gl. (1.1) für einen geraden Stab mitjeweils einem Knoten am Anfang und Ende des Stabs vollständig bekannt und kann alsMatrizenschema dargestellt werden.
– 1 / 6 –
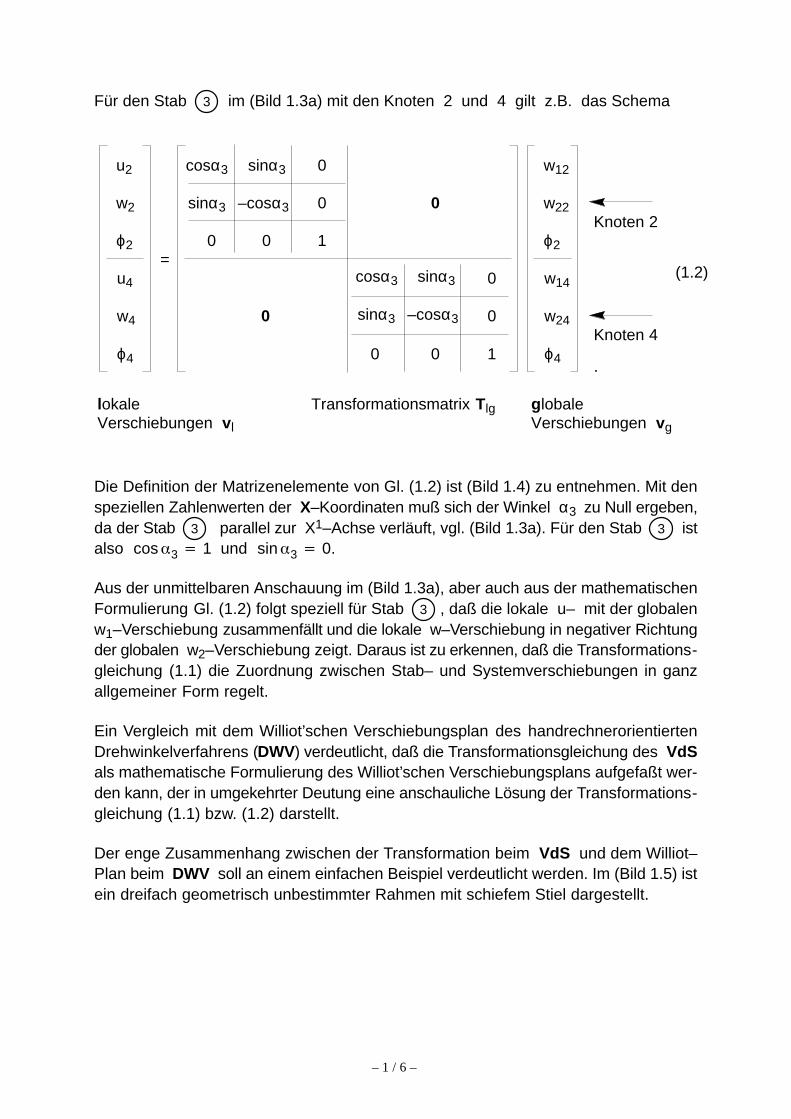
Für den Stab 3 im (Bild 1.3a) mit den Knoten 2 und 4 gilt z.B. das Schema
u2
w2
ϕ2
u4
w4
ϕ4
w12
w22
ϕ2
w14
w24
ϕ4
cosα3
sinα3
=0
sinα3
–cosα3
0
0
0
1
0
0
0
10
0
0
Knoten 2
Knoten 4
(1.2)
lokaleVerschiebungen vl
Transformationsmatrix Tlg globaleVerschiebungen vg
.
cosα3 sinα3
sinα3 –cosα3
Die Definition der Matrizenelemente von Gl. (1.2) ist (Bild 1.4) zu entnehmen. Mit denspeziellen Zahlenwerten der X–Koordinaten muß sich der Winkel α3 zu Null ergeben,da der Stab 3 parallel zur X1–Achse verläuft, vgl. (Bild 1.3a). Für den Stab 3 istalso cos�3 � 1 und sin�3 � 0.
Aus der unmittelbaren Anschauung im (Bild 1.3a), aber auch aus der mathematischenFormulierung Gl. (1.2) folgt speziell für Stab 3 , daß die lokale u– mit der globalenw1–Verschiebung zusammenfällt und die lokale w–Verschiebung in negativer Richtungder globalen w2–Verschiebung zeigt. Daraus ist zu erkennen, daß die Transformations-gleichung (1.1) die Zuordnung zwischen Stab– und Systemverschiebungen in ganzallgemeiner Form regelt.
Ein Vergleich mit dem Williot’schen Verschiebungsplan des handrechnerorientiertenDrehwinkelverfahrens (DWV) verdeutlicht, daß die Transformationsgleichung des VdSals mathematische Formulierung des Williot’schen Verschiebungsplans aufgefaßt wer-den kann, der in umgekehrter Deutung eine anschauliche Lösung der Transformations-gleichung (1.1) bzw. (1.2) darstellt.
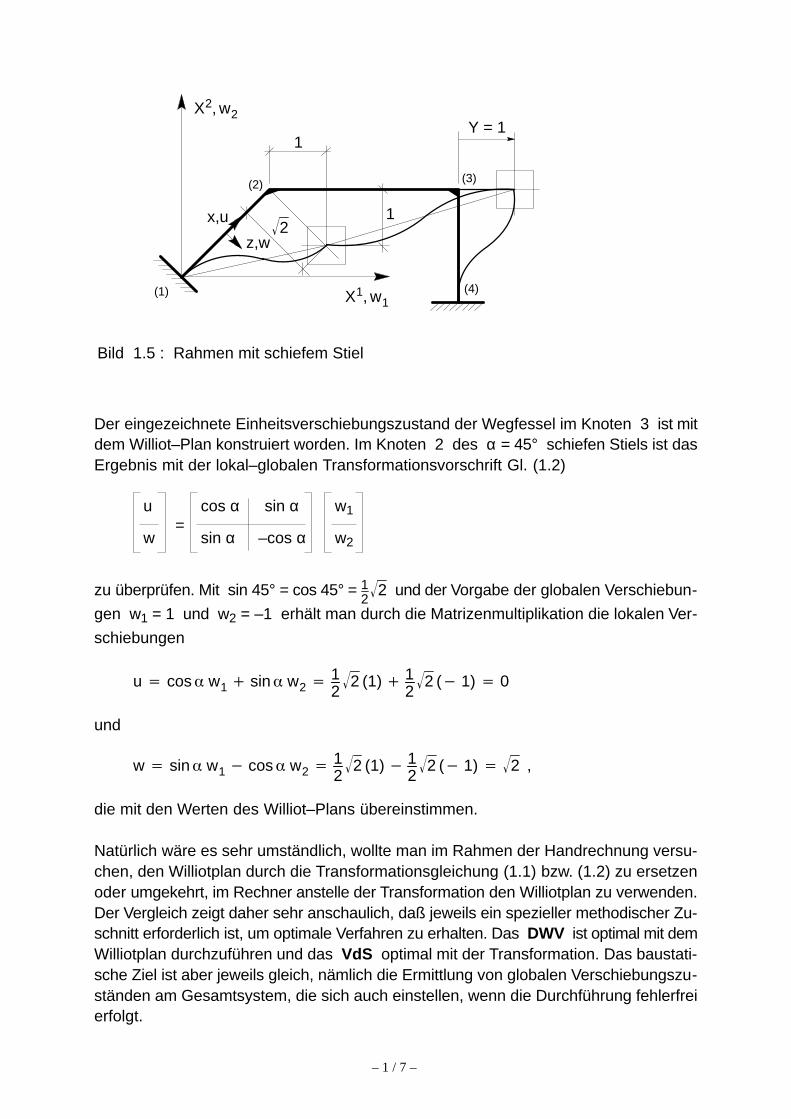
Der enge Zusammenhang zwischen der Transformation beim VdS und dem Williot–Plan beim DWV soll an einem einfachen Beispiel verdeutlicht werden. Im (Bild 1.5) istein dreifach geometrisch unbestimmter Rahmen mit schiefem Stiel dargestellt.
– 1 / 7 –
Bild 1.5 : Rahmen mit schiefem Stiel
(1)
(2) (3)
(4)
Y = 1
1
1
X1, w1
X2, w2
x,u
z,w2�
Der eingezeichnete Einheitsverschiebungszustand der Wegfessel im Knoten 3 ist mitdem Williot–Plan konstruiert worden. Im Knoten 2 des α = 45° schiefen Stiels ist dasErgebnis mit der lokal–globalen Transformationsvorschrift Gl. (1.2)
u
w=
cos α w1
w2sin α –cos α
sin α
zu überprüfen. Mit sin 45° = cos 45° = 12
2� und der Vorgabe der globalen Verschiebun-
gen w1 = 1 und w2 = –1 erhält man durch die Matrizenmultiplikation die lokalen Ver-
schiebungen
u � cos� w1 � sin� w2 � 12
2� (1) � 12
2� (� 1) � 0
und
w � sin� w1 � cos� w2 � 12
2� (1) � 12
2� (� 1) � 2� ,
die mit den Werten des Williot–Plans übereinstimmen.
Natürlich wäre es sehr umständlich, wollte man im Rahmen der Handrechnung versu-chen, den Williotplan durch die Transformationsgleichung (1.1) bzw. (1.2) zu ersetzenoder umgekehrt, im Rechner anstelle der Transformation den Williotplan zu verwenden.Der Vergleich zeigt daher sehr anschaulich, daß jeweils ein spezieller methodischer Zu-schnitt erforderlich ist, um optimale Verfahren zu erhalten. Das DWV ist optimal mit demWilliotplan durchzuführen und das VdS optimal mit der Transformation. Das baustati-sche Ziel ist aber jeweils gleich, nämlich die Ermittlung von globalen Verschiebungszu-ständen am Gesamtsystem, die sich auch einstellen, wenn die Durchführung fehlerfreierfolgt.

– 1 / 8 –
Beim VdS wird im weiteren Verlauf der Betrachtung Gl. (1.1) bzw. Gl. (1.2) auch alsUntermatrizenschema benötigt, um die Knoten eines Stabes matriziell miteinander zuverknüpfen. Das Schema für den Stab 3 mit den Knoten 2 und 4 ist in Gl. (1.3)dargestellt.
vl, 2=
Knoten 2
vl, 4
Tlg, 22
Tlg, 440
0 vg, 2
vg, 4 Knoten 4 (1.3).
Die Vorgehensweise zur topologischen und geometrischen Systembeschreibung istunabhängig vom speziellen Stabtragwerk, das aktuell untersucht werden soll. Sie läßtsich in allgemeingültiger Form für beliebige Stab– bzw. Elementvarianten programmie-ren. Aus fachlicher Sicht ist diese Aufgabenstellung der Bauinformatik zuzuordnen. Diemit komfortablen Oberflächen verbundene Freiheit der Modellbildung von statischenSystemen ist als ein entscheidender Vorteil des VdS oder ganz allgemein der FEManzusehen. Die Bereitstellung der zugehörigen Daten ist immer als erster Schritt derBerechnung durchzuführen.
Die nachfolgende rein baustatische Problembeschreibung kann sich zunächst auf dieErfassung der Stab– bzw. Elementeigenschaften beschränken, die infolge ihres lokalenCharakters viel einfacher zu übersehen sind als das komplexe Gesamtverhalten desglobalen Systems. Dieser zweite Schritt bildet den theoretischen Schwerpunkt des VdSund wird daher im Rahmen der Statikausbildung vorrangig behandelt. Er ist zwar für dieunmittelbare Programmanwendung entbehrlich, muß aber trotzdem voll verstandenwerden. Einerseits um das Verfahren in den Gesamtrahmen der Baustatik einordnenzu können und andererseits, um die erzielten Ergebnisse bewerten zu können.
Die sich daran anschließende Übertragung der speziellen Stab–bzw. Elementeigen-schaften auf den gesamten Stab– bzw. Elementverband des betrachteten statischenSystems kann dann wiederum in allgemeingültiger Form erfolgen. Dieser dritte Schrittdes VdS kann auch als gemischte bauinfomatische und baustatische Systembe–schreibung bezeichnet werden. Er beruht auf der konsequenten Verarbeitung der topo-logischen und geometrischen Informationen, um die zunächst rein lokal betrachtetenEinzelstäbe bzw. Einzelelemente zu globalisieren und in das Gesamtsystem einzubin-den. Dieser Berechnungsschritt ist ebenfalls problemunabhängig programmierbar undkann daher einheitlich gestaltet werden.
– 1 / 9 –
1.3 Lokale Stab– bzw. Elementbeschreibung
1.3.1 Problemformulierung mit Differentialgleichungen
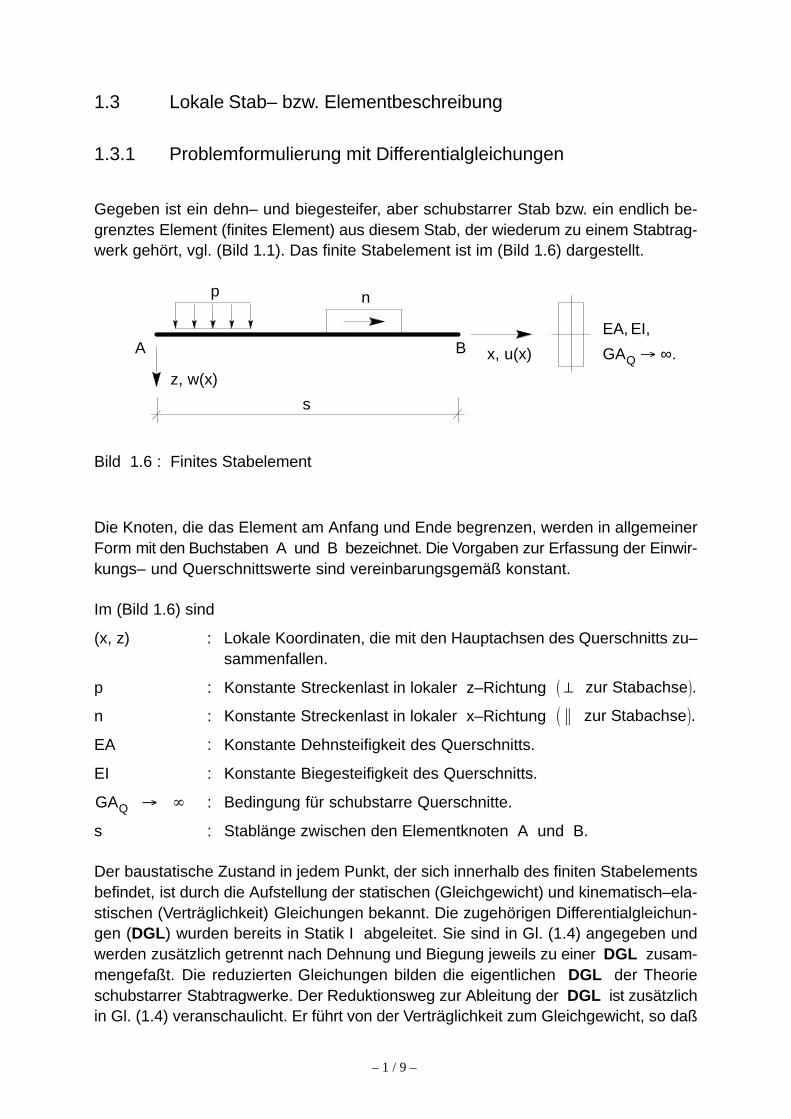
Gegeben ist ein dehn– und biegesteifer, aber schubstarrer Stab bzw. ein endlich be-grenztes Element (finites Element) aus diesem Stab, der wiederum zu einem Stabtrag-werk gehört, vgl. (Bild 1.1). Das finite Stabelement ist im (Bild 1.6) dargestellt.
Bild 1.6 : Finites Stabelement
A
ÇÇÇÇÇÇÇÇÇÇ
p n
EA, EI,
GAQ � ∞.B x, u(x)
z, w(x)
s
Die Knoten, die das Element am Anfang und Ende begrenzen, werden in allgemeinerForm mit den Buchstaben A und B bezeichnet. Die Vorgaben zur Erfassung der Einwir-kungs– und Querschnittswerte sind vereinbarungsgemäß konstant.
Im (Bild 1.6) sind
(x, z) : Lokale Koordinaten, die mit den Hauptachsen des Querschnitts zu–sammenfallen.
p : Konstante Streckenlast in lokaler z–Richtung �� zur Stabachse�.
n : Konstante Streckenlast in lokaler x–Richtung � zur Stabachse�.
EA : Konstante Dehnsteifigkeit des Querschnitts.
EI : Konstante Biegesteifigkeit des Querschnitts.
GAQ � : Bedingung für schubstarre Querschnitte.
s : Stablänge zwischen den Elementknoten A und B.
Der baustatische Zustand in jedem Punkt, der sich innerhalb des finiten Stabelementsbefindet, ist durch die Aufstellung der statischen (Gleichgewicht) und kinematisch–ela-stischen (Verträglichkeit) Gleichungen bekannt. Die zugehörigen Differentialgleichun-gen (DGL) wurden bereits in Statik I abgeleitet. Sie sind in Gl. (1.4) angegeben undwerden zusätzlich getrennt nach Dehnung und Biegung jeweils zu einer DGL zusam-mengefaßt. Die reduzierten Gleichungen bilden die eigentlichen DGL der Theorieschubstarrer Stabtragwerke. Der Reduktionsweg zur Ableitung der DGL ist zusätzlichin Gl. (1.4) veranschaulicht. Er führt von der Verträglichkeit zum Gleichgewicht, so daß
– 1 / 10 –
die Stabgleichungen Gleichgewichtsaussagen darstellen. Dies ist u.a. auch daran zuerkennen, daß als Unbekannte nur Weggrößen auftreten. Trotzdem müssen die Lösun-gen von Gl. (1.4) beide, nämlich die statischen und die geometrischen, Randbedingun-gen erfüllen, die für ein speziell betrachtetes statisches System gelten.
(1.4.1)
Reduktionsweg
Gleichgewicht Verträglichkeit DGL
Dehnung
Biegung
u�(x) �N(x)EA
� 0
M’’(x) + p = 0
N’(x) + n = 0
w��(x) �M(x)EI
� 0
EA u’’(x) + n = 0
EI w’’’’(x) – p = 0 (1.4.2)
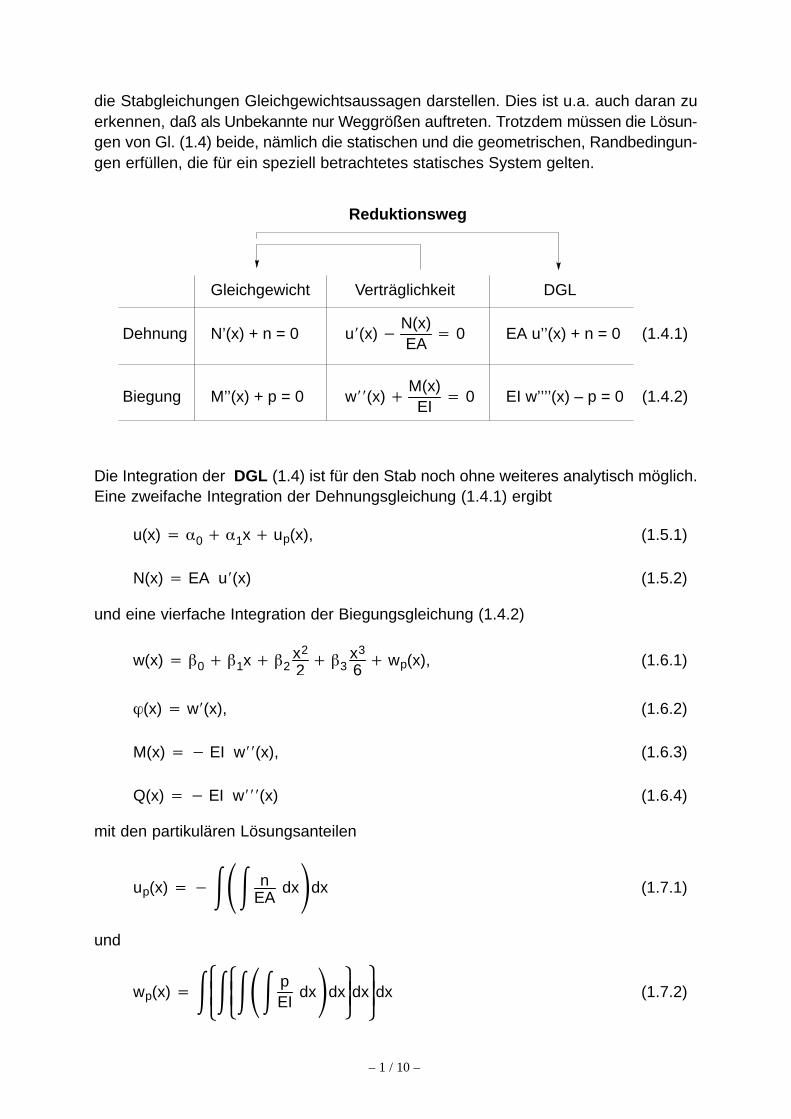
Die Integration der DGL (1.4) ist für den Stab noch ohne weiteres analytisch möglich.Eine zweifache Integration der Dehnungsgleichung (1.4.1) ergibt
u(x) � �0 � �1x � up(x), (1.5.1)
N(x) � EA u�(x) (1.5.2)
und eine vierfache Integration der Biegungsgleichung (1.4.2)
w(x) � �0 � �1x � �2x2
2� �3
x3
6� wp(x), (1.6.1)
�(x) � w�(x), (1.6.2)
M(x) � � EI w��(x), (1.6.3)
Q(x) � � EI w���(x) (1.6.4)
mit den partikulären Lösungsanteilen
up(x) � ���� nEA
dx�dx (1.7.1)
und
wp(x) � � ��� ����� p
EIdx�dx
��dx ��dx (1.7.2)
– 1 / 11 –
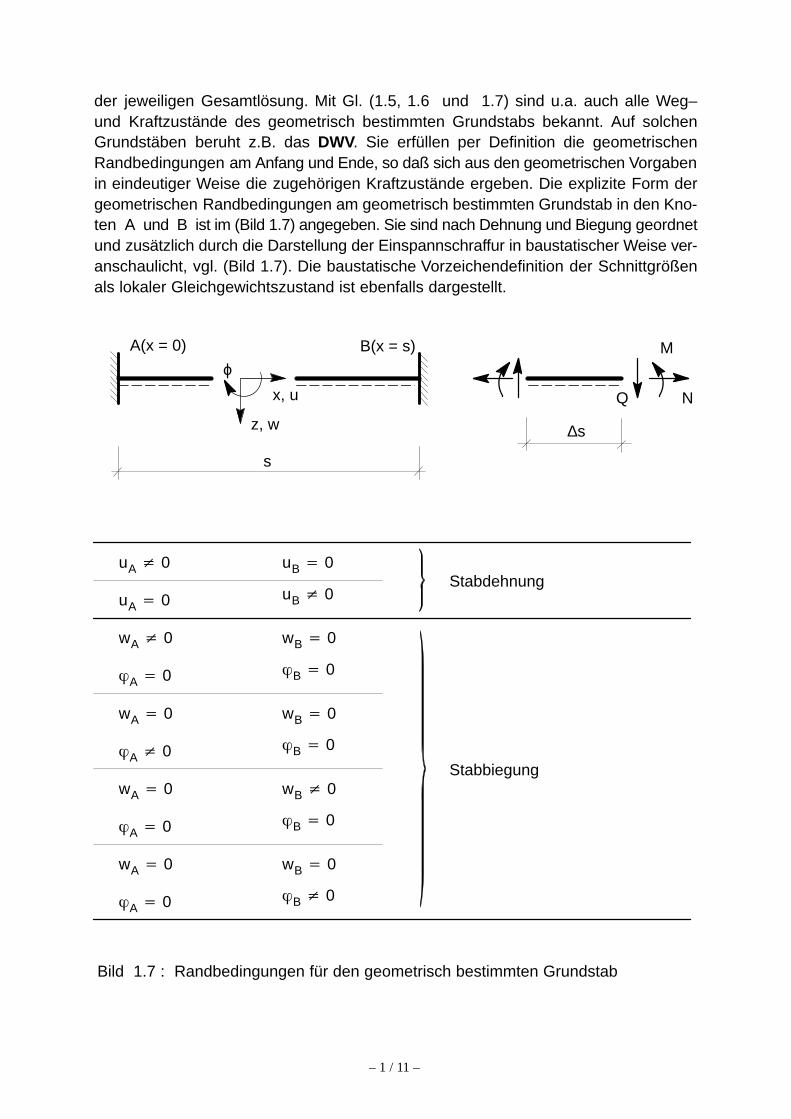
der jeweiligen Gesamtlösung. Mit Gl. (1.5, 1.6 und 1.7) sind u.a. auch alle Weg–und Kraftzustände des geometrisch bestimmten Grundstabs bekannt. Auf solchenGrundstäben beruht z.B. das DWV. Sie erfüllen per Definition die geometrischenRandbedingungen am Anfang und Ende, so daß sich aus den geometrischen Vorgabenin eindeutiger Weise die zugehörigen Kraftzustände ergeben. Die explizite Form dergeometrischen Randbedingungen am geometrisch bestimmten Grundstab in den Kno-ten A und B ist im (Bild 1.7) angegeben. Sie sind nach Dehnung und Biegung geordnetund zusätzlich durch die Darstellung der Einspannschraffur in baustatischer Weise ver-anschaulicht, vgl. (Bild 1.7). Die baustatische Vorzeichendefinition der Schnittgrößenals lokaler Gleichgewichtszustand ist ebenfalls dargestellt.
Bild 1.7 : Randbedingungen für den geometrisch bestimmten Grundstab
A(x = 0) B(x = s)
s
ϕx, u
z, w
M
NQ
∆s
uA � 0
uB � 0uA � 0
uB � 0
wA � 0
�B � 0�A � 0
wB � 0
wA � 0
�B � 0�A � 0
wB � 0
wA � 0
�B � 0�A � 0
wB � 0
wA � 0
�B � 0�A � 0
wB � 0
Stabbiegung
Stabdehnung

– 1 / 12 –
Die Auswertung der homogenen Lösungen Gl. (1.5 und 1.6) der DGL (1.4), mit denim (Bild 1.7) definierten geometrischen Randbedingungen, führt auf Schnittgrößen, dieresultierende Spannungsgrößen darstellen. Am herausgeschnittenen Stabelement0 � �s � s bilden Schnittgrößen eine Gleichgewichtsgruppe, vgl. (Bild 1.7). Das Vor-zeichen ergibt sich aus der Lage der Bezugfaser, die im Rahmen der Baustatik das lo-kale Koordinatensystem x = [x, z] ersetzt. Die formelmäßige Auswertung von Gl. (1.5.1)für den Fall uA � u(x � 0) � 0 im Knoten A und uB � u(x � s) � 0 im Knoten Bliefert die Gleichungen
x � 0 � u � uA � �0 � �1·0
und
x � s � u � 0 � �0 � �1·s,
aus denen
�0 � uA und �1 � ��0s � �
uAs
und damit auch
u(x) � �1 � xs �·uA
folgt. Eingesetzt in Gl. (1.5.2) und ausgewertet im Knoten A und B ergibt die Längs-kräfte
NA � N(x � 0) � EA u�(x � 0) � � EAs ·uA
und
NB � N(x � s) � EA u�(x � s) � � EAs ·uA.
Für uA � 0 in positiver x–Richtung stellt sich also erwartungsgemäß eine konstanteDruckkraft im Stab ein. Für den Fall uA � u(x � 0) � 0 im Knoten A unduB � u(x � s) � 0 im Knoten B folgt in gleicher Weise aus Gl. (1.5.1)
u(x) � xs ·uB
und aus Gl. (1.5.2)
NA � EAs ·uB
und
NB � EAs ·uB.
– 1 / 13 –
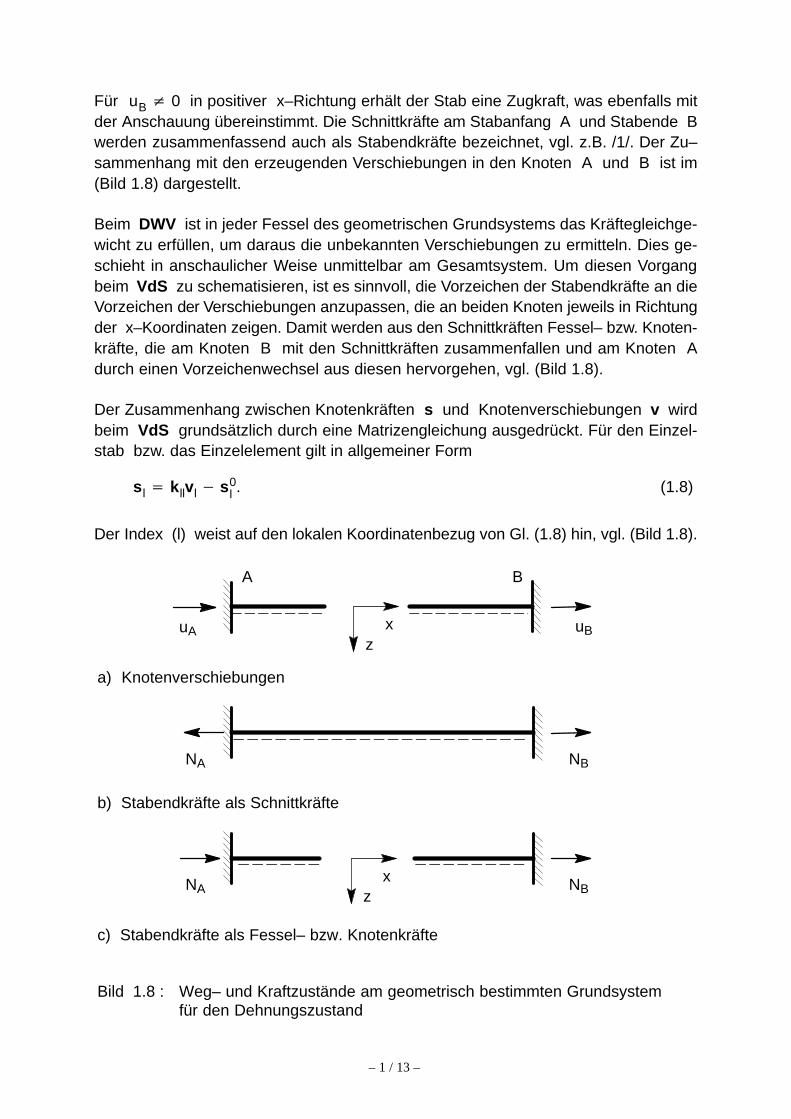
Für uB � 0 in positiver x–Richtung erhält der Stab eine Zugkraft, was ebenfalls mitder Anschauung übereinstimmt. Die Schnittkräfte am Stabanfang A und Stabende Bwerden zusammenfassend auch als Stabendkräfte bezeichnet, vgl. z.B. /1/. Der Zu–sammenhang mit den erzeugenden Verschiebungen in den Knoten A und B ist im(Bild 1.8) dargestellt.
Beim DWV ist in jeder Fessel des geometrischen Grundsystems das Kräftegleichge-wicht zu erfüllen, um daraus die unbekannten Verschiebungen zu ermitteln. Dies ge-schieht in anschaulicher Weise unmittelbar am Gesamtsystem. Um diesen Vorgangbeim VdS zu schematisieren, ist es sinnvoll, die Vorzeichen der Stabendkräfte an dieVorzeichen der Verschiebungen anzupassen, die an beiden Knoten jeweils in Richtungder x–Koordinaten zeigen. Damit werden aus den Schnittkräften Fessel– bzw. Knoten-kräfte, die am Knoten B mit den Schnittkräften zusammenfallen und am Knoten Adurch einen Vorzeichenwechsel aus diesen hervorgehen, vgl. (Bild 1.8).
Der Zusammenhang zwischen Knotenkräften s und Knotenverschiebungen v wirdbeim VdS grundsätzlich durch eine Matrizengleichung ausgedrückt. Für den Einzel-stab bzw. das Einzelelement gilt in allgemeiner Form
sl � kllvl � s0l . (1.8)
Der Index (l) weist auf den lokalen Koordinatenbezug von Gl. (1.8) hin, vgl. (Bild 1.8).
Bild 1.8 :
A B
uBuA xz
NA NB
a) Knotenverschiebungen
b) Stabendkräfte als Schnittkräfte
NA NBx
z
c) Stabendkräfte als Fessel– bzw. Knotenkräfte
Weg– und Kraftzustände am geometrisch bestimmten Grundsystemfür den Dehnungszustand

– 1 / 14 –
Die Matrix k wird als Steifigkeitsmatrix bezeichnet. Die Multiplikation der Matrix mitVerschiebungen führt auf Kräfte, so daß die Matrizenelemente aus physikalischer SichtSteifigkeiten darstellen, womit sich auch die Namensnennung des Verfahrens erklärt.Die Lastspalte s0 enthält die partikulären Lösungsanteile, die sich aus Gl. (1.7) erge-ben.
Für den Dehnstab ist durch die bereits ermittelte Lösung von Gl. (1.5) der homogeneAnteil von Gl. (1.8) explizit bekannt.
sl =NA
NB
� EAs
1
–1
–1
1
uA
uB
= kll vl .
Der zugehörige partikuläre Lösungsanteil hängt vom speziellen Belastungszustand desbetrachteten Stabes bzw. Elementes ab. Für eine konstante Streckenlast n ergibt sichz.B. aus Gl. (1.7.1) ein partikulärer Verschiebungsanteil von
up � � n·x2
2 EA
und damit aus Gl. (1.5.1) die Gesamtverschiebung der Belastung zu
u0(x) � �0 � �1·x � n·x2
2 EA.
Die Knoten des Stabes sind gefesselt, vgl. (Bild 1.7). Die Konstanten α0 und α1 könnendamit eindeutig bestimmt werden. Am Knoten A errechnen sie sich aus der Bedingung
uA � u(x � 0) � �0 � 0
und am Knoten B aus der Bedingung
uB � u(x � s) � �0 � �1·s � n·s2
2 EA� 0.
Die Auflösung nach α0 und α1 liefert
�0 � 0
und
�1 � � n·s2 EA
.
Das Einsetzen der Konstanten in die allgemeine Verschiebungslösung ergibt ab–schließend die spezielle Lösung für eine konstante Streckenlast
u0(x) � n·s2 EA�x
s � �xs�2�·s.

– 1 / 15 –
Mit der Lösung selbst ist auch die Ableitung bekannt.
u0(x) � n·s2 EA
�1 � 2 xs�,
so daß sich aus Gl. (1.5.2) die zugehörigen Schnittgrößen ergeben
N0(x) � n·s2�1 � 2 x
s�.
Die Auswertung an den Knotenpunkten A und B liefern die Stabendkräfte zunächstals Schnittgrößen. Am Knoten A gilt
N0A � N0(x � 0) � n·s
2
und am Knoten B
N0B � N0(x � s) � � n·s
2.
Durch das Anpassen der Vorzeichen am Knoten A, vgl. (Bild 1.8), folgen daraus wie-derum die Knotenkräfte
N0A � � n·s
2
und
N0B � � n·s
2
und durch den Vergleich mit Gl. (1.8) die Lastspalte
N0A
=s0l �
N0B
n·s2
n·s2
.
Das Ergebnis ist unmittelbar plausibel. Bei konstanter Streckenlast beträgt die resultie-rende Kraft R � n·s , die sich je zur Hälfte auf die Knoten A und B verteilt. Das ne–gative Vorzeichen von N0
A und N0B ist herausgezogen und erscheint unmittelbar in
Gl. (1.8). Natürlich besteht die Möglichkeit, auf diesem Wege auch veränderlicheStreckenlasten zu erfassen. Hiervon wird aber beim VdS kein Gebrauch gemacht, umden Vorteil einer einfachen Stab– bzw. Elementbeschreibung nicht aufzugeben. Sindin Beispielen z.B. veränderliche Streckenlasten zu berücksichtigen, so ist die Element-folge in diesem Bereich solange zu verdichten, bis sich eine akzeptable Übereinstim-mung zwischen der Vorgabe und der elementweise konstanten Approximation einstellt.
– 1 / 16 –
1.3.2 Problemformulierung mit Arbeitsgleichungen
Für den Biegestab kann die explizite Form der Matrizengleichung (1.8) in gleicher Artund Weise wie für den Dehnstab ermittelt werden. Dazu ist lediglich der Satz der Biege-randbedingungen im (Bild 1.7) an die allgemeine Biegelösung Gl. (1.6) anzupassen,die partikuläre Biegelösung Gl. (1.7.1) auszuwerten und die daraus resultierendenStabendschnittgrößen in die entsprechenden Stabendknotengrößen umzuwandeln. ImRahmen der Baustatik ist diese Vorgehensweise der gängige Weg, um das VdS abzu-leiten, vgl. z.B. /2/ und /3/. Er beruht im wesentlichen auf der Betragsgleichheit vonSchnitt– und Knotenkräften, die in dieser Form aber nur bei Stabtragwerken auftritt unddamit den gravierenden physikalischen Unterschied zwischen Schnitt– und Knotenkräf-ten verwischt.
Knotenkräfte sind Auflagerkräfte, die als Reaktion entstehen, wenn gefesselte Knotenverschoben werden. Sie sind daher als äußere Kraftzustände anzusehen, die mit denerzeugenden Knotenverschiebungen arbeitskonforme Paare bilden, so daß sich als Er-gebnis äußere Arbeitsausdrücke ergeben. Schnittkräfte sind dagegen als innere Kraft-zustände definiert. Sie stellen resultierende Spannungsgrößen dar und bilden mit inne-ren Weggrößen, also den Verzerrungen, arbeitskonforme Paare, die daher auch alsinnere Arbeitsausdrücke bezeichnet werden.
Bei Flächentragwerken ist die Betragsgleichheit zwischen Schnitt– und Knotenkräftennicht mehr gegeben. Daher ist die Ermittlung von Steifigkeitsmatrizen und Lastspaltenunmittelbar aus der Lösung der DGL nicht mehr so einfach möglich. Dies gelingt in all-gemeiner Form nur noch durch eine konsequente Anwendung der virtuellen Arbeits-prinzipien, die sich ja bereits in der klassischen Baustatik als ein sehr leistungsfähigesWerkzeug erwiesen haben. Die Anwendung von PvW und PvK in Statik I und II erfolgtin der Regel nur punktweise, um spezielle Einzelgrößen zu ermitteln. Entweder geht esdarum, mit Hilfe von virtuellen Weggrößen wirkliche Kraftgrößen zu berechnen oder mitHilfe von virtuellen Kraftgrößen wirkliche Weggrößen. Das PvW stellt eine gleichwer-tige Formulierung der Gleichgewichtsbedingungen dar und ersetzt sie vollständig. Ingleicher Weise ist das PvK als eine gleichwertige Formulierung der Verträglichkeitsbe-dingungen anzusehen, da es diese Bedingung ebenfalls vollständig ersetzen kann.
Im Rahmen einer rechnerorientierten Baustatik müssen die Arbeitsprinzipien dagegenin einer analytischen Formulierung zur Anwendung kommen, da es nun vorrangig umFunktionsverläufe von Weg– und Kraftzuständen geht und nicht um Einzelgrößen. Zielist es, mit Hilfe der Arbeitsprinzipien die DGL (1.4) in ganz allgemeiner Form zu integrie-ren und die Lösung erst danach in speziellen Knoten von Stäben bzw. Elementen zuparametrisieren bzw. zu diskretisieren. Der Übergang zum Rechnen mit Einzelgrößenerfolgt also erst am Ende des Lösungsweges, der sich damit deutlich von den aus derklassischen Baustatik bekannten Vorgehensweisen unterscheidet.
– 1 / 17 –
Das VdS ist ein Weggrößenverfahren, das auf dem PvW beruht. Mit diesem Prinzipwird zunächst das lokale Gleichgewicht auf der Stab– bzw. Elementebene erfüllt. DasErgebnis führt auf eine Steifigkeitsbeziehung zwischen den Kraft– und Wegzuständender Stab– bzw. Elementknoten, die sich wiederum in Form einer Matrizengleichung(1.8) darstellen läßt.
Ausgangspunkt der Elementbetrachtung mit dem PvW ist das finite Stabelement(Bild 1.6) und die DGL (1.4), die den Anfang der kausalen Kette: Punkt � Element� System bilden. Die Formulierung beginnt im Punkt. Durch die DGL (1.4) sind hierdie wirklichen Kräftesummen bzw. Kräftedifferenzen bekannt. In Richtung der Stab-achse gilt
fu(x) � N�(x) � n(x) � EA u��(x) � n
und senkrecht dazu
fw(x) � M��(x) � p(x) � EI w����(x) � p.
Daß es sich dabei um Kräfte handeln muß, ist an den Streckenlasten n und p zuerkennen. Die Summen– bzw. Differenzbildung in fu(x) und fw(x) setzt die Dimen-sionsgleichheit der Ausdrücke voraus. N’(x) = EA u’’(x) und M’’(x) = –EI w’’’’(x) kön–nen daher als innere Streckenlasten des Dehn– und Biegestabs aufgefaßt werden. Siemüssen mit den äußeren Streckenlasten n und p einen Gleichgewichtszustand bil-den. In den DGL (1.4) stehen daher auf der rechten Seite Nullen, um die lokale Gleich-heit punktweise auszudrücken. Beim PvW sind dagegen Arbeitsausdrücke zu bilden.Dies geschieht mit Hilfe der arbeitskonformen virtuellen Verschiebungen uv(x) undwv(x), so daß sich zunächst punktweise die virtuellen Arbeitsausdrücke
uv(x) fu(x) � uv(x) ( EA u��(x) � n )
und
wv(x) fw(x) � wv(x) ( EI w����(x) � p )
ergeben. Durch Summation, d.h. durch Integration über die Stablänge s zwischen denElementknoten A und B folgen die virtuellen Arbeitsausdrücke am Element, die nachdem PvW verschwinden müssen, wenn der lokale Gleichgewichtszustand bereichs-weise erfüllt sein soll.
Für den Dehnstab erhält man
Wv(uv, u) � �uv(x) [ EA u��(x) � n ] dx � 0 (1.9.1)
und für den Biegestab
Wv(wv, w) � �wv(x) [ EI w����(x) � p ] dx � 0. (1.9.2)
– 1 / 18 –
Die Integralausdrücke Gl. (1.9) werden auch als schwache Form der DGL bezeichnet,da sie die DGL (1.4) im Gebiet zwischen den Knoten A und B gleichwertig ersetzen.Die virtuellen Verschiebungen sind definitionsgemäß beliebig und linear unabhängig,so daß in der Regel nicht über sie verfügt werden kann. Daher muß zwangsläufig derKlammerausdruck in den Integralen Null werden, um das PvW (1.9) zu erfüllen. DieKlammerausdrücke sind aber die DGL (1.4) selbst. Der Zusammenhang zwischenDGL (1.4) und PvW (1.9) ist damit unmittelbar erkennbar.
Der Vorteil der schwachen Formen ist immer dann evident, wenn die analytische Inte-gration einer DGL nicht gelingt und daher eine Näherungslösung angestrebt wird. Zu-lässige Näherungslösungen sind z.B. alle Lösungen, die zwar nicht die DGL selbst,wohl aber deren schwache Form erfüllen. Die schwachen Formen von DGL, die ausphysikalischer Sicht das PvW und ggf. das PvK repräsentieren, sind daher als einhervorragendes Instrument anzusehen, um Näherungslösungen von DGL zu konstru-ieren. Zusammen mit der lokalen Betrachtungsweise bilden sie die Grundlage der FEM,das modernste Berechnungsverfahren, über das Ingenieure und Mathematiker heuteverfügen.
Zur schwachen Form Gl. (1.9), in denen die Arbeitsausdrücke Gl. (1.9.1) und Gl. (1.9.2)durch Produkte aus
Virtuellen Verschiebungen × Wirklichen Kräften
gebildet werden, gehören insgesamt sechs Randbedingungen. Für den DehnstabGl. (1.9.1) sind das jeweils eine statische (N) und eine geometrische Bedingung (u)und für den Biegestab Gl. (1.9.2) jeweils zwei statische (Q, M) und zwei geometrischeBedingungen (w, ϕ). Die Anzahl der Randbedingungen muß mit der Anzahl der Ablei-tungen in den Arbeitsgleichungen korrespondieren. Beim Dehnstab Gl. (1.9.1) tretenzwei und beim Biegestab Gl. (1.9.2) vier Ableitungen auf, so daß sich ein eindeutigerZusammenhang zwischen der Anzahl der Randbedingungen und der Anzahl der Ablei-tungen ergibt. Hinsichtlich der Randbedingungen ist also kein Formulierungsunter-schied zwischen DGL (1.4) und PvW (1.9) festzustellen. Dies ist auch nicht weiterverwunderlich, da ja Gl. (1.9) lediglich die schwache Form von Gl. (1.4) darstellt.
In Anlehnung an die Skalarproduktbildung von Vektoren werden die Arbeitsausdrücke(1.9.1) und (1.9.2) auch als orthogonale Formen bezeichnet, da die Arbeiten nur dannverschwinden, wenn die virtuellen Verschiebungsfunktionen und die wirklichen Kräfte-funktionen im verallgemeinerten Sinne senkrecht zueinander stehen. Die weitere Vor-gehensweise besteht nun darin, die schwachen Orthogonalformen für die numerischeBerechnung in zweckmäßiger Weise aufzubereiten, um die praktische Anwendung desPvW zu erleichtern.
– 1 / 19 –
Die Suche nach optimalen Lösungswegen ist nicht neu. Dieses Problem tritt auch beiden handrechnungsorientierten Berechnungsvarianten der klassischen Baustatik aufund ist dort ebenfalls von zentraler Bedeutung. Vor allem die Wahl von optimalen Grund-systemen ist als ein typisches Beispiel anzusehen. Unterschiedliche, statisch oder geo-metrisch bestimmte Grundsysteme beeinflussen zwar nicht die Lösung, haben abergroßen Einfluß auf den Lösungsweg und damit auf den numerischen Aufwand. Der istbei günstiger Wahl gering, kann aber bei ungünstiger Wahl sehr groß werden, so daßes sich immer auszahlt, vorab über diese Zusammenhänge nachzudenken, wenn mandas Kraftgrößenverfahren (KGV) oder das DWV anwendet.
Das gilt natürlich auch für das VdS, wo sich die Überlegungen von der anschaulichenzur analytischen Problemformulierung verlagern. Im Mittelpunkt des Interesses stehtdie Suche nach einer optimalen Form der Arbeitsausdrücke Gl. (1.9.1 und 1.9.2). Umsie zu finden, werden mit Hilfe der partiellen Integration
[ u(x) v(x) ]R � �u�(x) v(x)dx ��u(x) v�(x)dx
des Produktausdrucks
( u(x) v(x) )� � u�(x) v(x) � u(x) v�(x)
Umformungen in den Ableitungen von Gl. (1.9) vorgenommen. Sie führen dazu, daßim PvW neben veränderten Gebietsausdrücken zusätzlich auch Randausdrücke auf-treten. Sie sind in den Knoten R = (A, B) definiert, die das Integrationsgebiet des Pro-duktausdrucks begrenzen.
Für den Dehnstab Gl. (1.9.1) ist eine Umformung erforderlich, um eine von zwei Ablei-tungen, die bei den wirklichen Verschiebungen u(x) stehen, auf die virtuelle Verschie-bung uv(x) zu übertragen, so daß sich eine hinsichtlich der Verschiebungsableitungensymmetrische Form des Arbeitsausdrucks (1.9.1) ergibt.
�uv(x) EA u��(x) dx � [uv(x) EA u�(x)]R ��u�v(x) EA u�(x) dx.
N(x)
(1.10.1)N(x)
Beim Biegestab sind dagegen zwei von vier Ableitungen, die bei der wirklichen Durch-biegung w(x) stehen, auf die virtuelle Durchbiegung wv(x) zu übertragen, um einenhinsichtlich der Ableitungsverteilung symmetrischen Ausdruck von Gl. (1.9.2) zu erhal-ten. Dazu sind zwei Umformungen erforderlich.
– 1 / 20 –
�wv(x) EI w����(x) dx � [wv(x) EI w���(x)]R ��w�v(x) EI w���(x) dx
–Q(x)
(1.10.2)
�w�v(x) EI w���(x) dx � [w�v(x) EI w��(x)]R ��w��v(x) EI w��(x) dx.
–M(x)ϕv(x)
und
–Q(x)
–M(x)
Die Umformung Gl. (1.10.1) wird in die Ausgangsgleichung (1.9.1) eingesetzt. Nach ei-nem Vorzeichenwechsel folgt daraus das umgeformte PvW für den Dehnstab.
Wv(uv, u) � �u�v(x) EA u�(x) dx �� uv(x) n dx � [ uv(x) N(x) ]R � 0.
N(x)
εv(x) (1.11.1)
Wird die Umformung Gl. (1.10.2) in die Ausgangsgleichung (1.9.2) eingesetzt, ergibtsich daraus das umgeformte PvW für den Biegestab.
Wv(wv, w) � �w��v(x) EI w��(x) dx ��wv(x) p dx
(1.11.2)
–M(x)
� �v(x)
� [ wv(x) Q(x) ]R � [ �v(x) M(x) ]R � 0.
Die unterschiedlichen Formulierungen der Arbeitsausdrücke haben die baustatischeAussage des PvW nicht verändert. Sowohl Gl. (1.9) als auch Gl. (1.11) stellen Gleich-gewichtsbedingungen dar. Die symmetrischen Formen der umgeformten Ausdrückelassen aber hinsichtlich der numerischen Anwendung Vorteile erwarten, da sich durchdie Absenkung der Ableitungsordnung die erforderliche Ansatzhöhe deutlich verringert.
Die umgeformten Gleichungen (1.11.1 und 1.11.2) müssen in der vorliegenden Formnur noch die geometrischen Randbedingungen der virtuellen und wirklichen Weg–größen erfüllen. Die wirklichen Kraftzustände sind ableitungsfrei, so daß die statischenRandbedingungen entfallen. Die Randausdrücke R = (A, B) aus der partiellen Integra-tion (1.10.1 und 1.10.2), die auch in den umgeformten Gleichungen (1.11.1 und 1.11.2)auftreten, sind i.a. ungleich Null. Es ist daher zunächst zu überprüfen, unter welchenBedingungen die Randausdrücke ggf. entfallen.
– 1 / 21 –
An einem Rand treten entweder nur geometrische oder nur statische Randbedingun-gen auf oder es liegen gemischte Randbedingungen vor, die sich aus geometrischenund statischen Einzelbedingungen zusammensetzen. Die Randausdrücke sind also inden Stab– bzw. Elementknoten R = A und R = B jeweils in einen geometrischen undeinen statischen Anteil aufzuspalten.
R � RW � RK (1.5.1)
Auf RW = (A, B) sind mit Weggrößen (Index W) geometrische Randbedingungen zuerfüllen und auf RK mit Kraftgrößen (Index K) statische Randbedingungen.
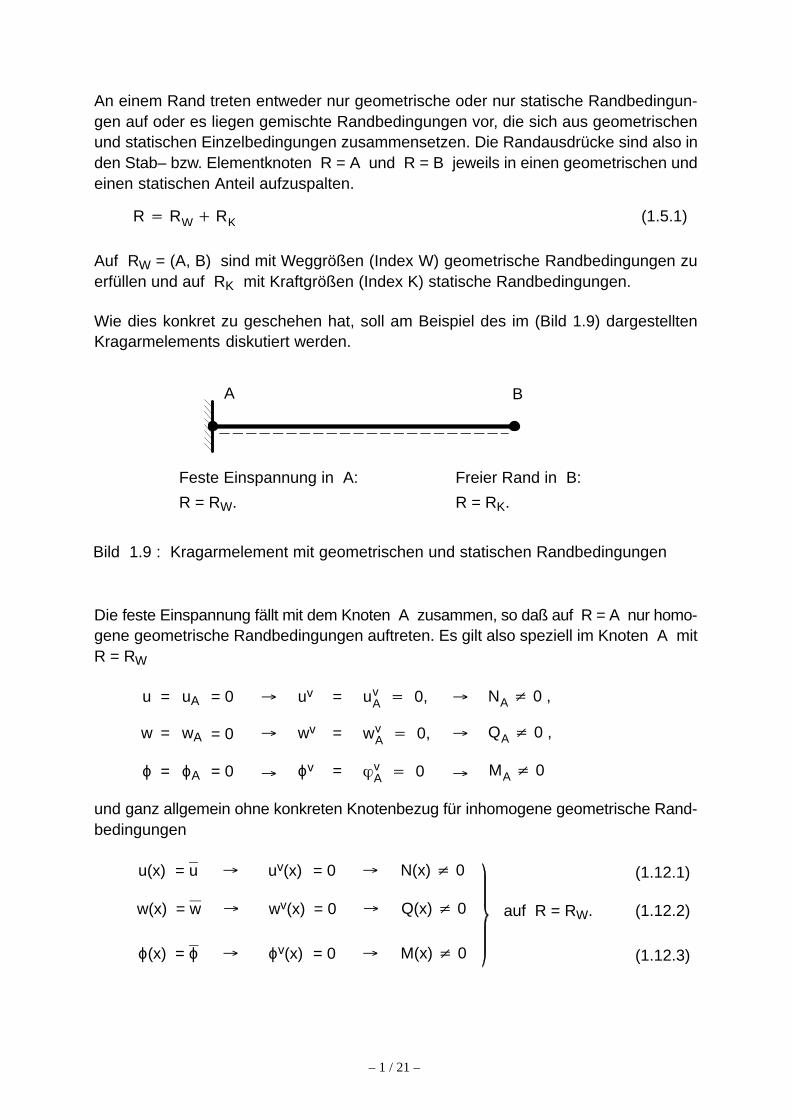
Wie dies konkret zu geschehen hat, soll am Beispiel des im (Bild 1.9) dargestelltenKragarmelements diskutiert werden.
Bild 1.9 : Kragarmelement mit geometrischen und statischen Randbedingungen
A B
Feste Einspannung in A:
R = RW.
Freier Rand in B:
R = RK.
Die feste Einspannung fällt mit dem Knoten A zusammen, so daß auf R = A nur homo-gene geometrische Randbedingungen auftreten. Es gilt also speziell im Knoten A mitR = RW
�= 0u = uA uv =
�= 0w = wA wv =
�= 0ϕ = ϕA ϕv =
uvA � 0,
wvA � 0,
�vA � 0
�
�
�
NA � 0 ,
QA � 0 ,
MA � 0
und ganz allgemein ohne konkreten Knotenbezug für inhomogene geometrische Rand-bedingungen
�= uu(x) uv(x)
�= ww(x) wv(x)
�= ϕϕ(x) ϕv(x)
N(x) � 0
Q(x) � 0
M(x) � 0
= 0
= 0
= 0
�
�
�
auf R = RW.
(1.12.1)
(1.12.2)
(1.12.3)
– 1 / 22 –
Unter diesen, und nur unter diesen Voraussetzungen sind die Ausdrücke von RW–Rän-dern in den Gl. (1.11.1 und 1.11.2) Null und entfallen aus der numerischen Berechnung.Das Verschwinden der RW–Randausdrücke ist also an das Verschwinden der virtuellenRandverschiebungen und der virtuellen Randverdrehungen auf den Stab– bzw.Elementrändern gekoppelt, die bei Stabtragwerken mit den diskreten Knotengrößenzusammenfallen. Für die virtuellen Wege sind dies Zwangsbedingungen, so daß diegeometrischen Randbedingungen auch als wesentliche Randbedingungen des umge-formten PvW bezeichnet werden. In der Baustatik hat sich dafür die Bezeichnung zu-lässige virtuelle Wege etabliert. Eine anschauliche Deutung dieser Aussage ist in derDefinition des geometrisch bestimmten Grundsystems des DWV zu finden, das durchFesseln die geometrischen Randbedingungen erfüllt, vgl. z.B. (Bild 1.7).
Der freie Rand fällt mit dem Knoten B zusammen, so daß auf R = B nur homogenestatische Randbedingungen auftreten. Es gilt also speziell im Knoten B mit R = RK
�= 0NB uB
�= 0QB wB
�= 0MB ϕB
uvB � 0,
wvB � 0,
�vB � 0
� 0
� 0
� 0
�
�
�
und ganz allgemein ohne konkreten Knotenbezug für inhomogene statische Randbe-dingungen
�= NN(x) uv(x)
�= QQ(x) wv(x)
�= MM(x) ϕv(x)
u(x) � 0
w(x) � 0
�(x) � 0
�
�
�
auf R = RK.
(1.13.1)
(1.13.2)
(1.13.3)
� 0
� 0
� 0
Diese Bedingungen sind ohne besondere Anforderungen an die virtuellen Weggrößenvon vornherein erfüllt. Die statischen Randbedingungen werden daher auch als natür–liche Randbedingungen des umgeformten PvW bezeichnet, da sie als Gleichgewichts-bedingungen unmittelbar durch die schwache Form Gl. (1.11) erfaßt werden. Im Fall vonhomogenen statischen Randbedingungen entfallen die Randausdrücke auf RK–Rän-dern und im Fall von inhomogenen Bedingungen haben sie die Qualität von Einwirkun-gen.
Die Aufteilung in wesentliche und natürliche Randbedingungen ist mathematisch auchan der Reduzierung der Ableitungsordnung erkennbar, die sich infolge der Umformungim Dehnungsanteil von zwei auf eins und im Biegungsanteil von vier auf zwei verringern.Mit den Bedingungen Gl. (1.12.1 und 1.13.1) folgt aus Gl. (1.11.1) eine neue Arbeits-gleichung für den Dehnstab und mit den Bedingungen Gl. (1.12.2, 1.12.3 und 1.13.2,1.13.3) aus Gl. (1.11.2) eine neue Arbeitsgleichung für den Biegestab.

– 1 / 23 –
(1.14.1)Wv(uv, u) � �(u�v(x) EA u�(x) � uv(x) n)dx � 0Dehnstab:
Wv(wv, w) � �(w��v(x) EI w��(x) � wv(x) p)dx � 0.
N(x)
�v(x)und
Biegestab:
� M(x)
� �v(x)
(1.14.2)
Die Schnittgrößen N(x) und M(x) in Gl. (1.14) sind ableitungsfrei. Statische Rand–bedingungen sind daher explizit nicht zu erfüllen (natürliche Randbedingungen). Ab–zuleiten sind nur die virtuellen und wirklichen Weggrößen. Für sie sind daher die geome-trischen Randbedingungen explizit zu erfüllen (wesentliche Randbedingungen). DieArbeitsausdrücke Gl. (1.14.1 und 1.14.2) des umgeformten PvW werden nun durchProdukte aus
Virtuellen Verzerrungen x Wirklichen Schnittgrößen
gebildet. Für den dehn– und biegesteifen aber schubstarren Stab sind das die Produkteaus der virtuellen Dehnung �v(x) mal der wirklichen Längskraft N(x) sowie der virtuel-len Verkrümmung �v(x) mal dem wirklichen Schnittmoment M(x). Das Produkt aus dervirtuellen Gleitung �v(x) mal der wirklichen Querkraft Q(x) entfällt für schubstarreQuerschnitte, da �(x) � 0 und damit auch �v(x) � 0 gilt. Werden die virtuellen Ver–zerrungen
�v(x) �� ��K(x) � u�(x)�
� u�(x)�u�(x) � �u�(x) � ��K(x)
und
�v(x) �� ��K(x) � � w��(x)�
� w��(x)�w��(x) � � �w��(x) � ��K(x)
speziell als Änderung der kinematischen Verzerrungen (Index K) definiert, so erhältman nach der Integration über das differentielle Änderungssysmbol δ (Differentialeiner Funktion) das z.B. aus der Mechanik bekannte Prinzip vom Minimum der Form–änderungsenergie
(u, w) � 12��EA(u�(x))2 � EI(w��(x))2�dx ��[u(x)n � w(x)p]dx � Minimum,
(1.15)
vielfach auch als Prinzip vom Minimum der potentiellen Energie bezeichnet. Aus bau-statischer Sicht ist Gl. (1.15) ebenfalls als Gleichgewichtsaussage zu interpretieren.Notwendige Bedingung dafür, daß Gl. (1.15) einen minimalen Wert annimmt, ist die Er-füllung des PvW, also der Gl. (1.14.1 und 1.14.2), die ja Gleichgewichtsaussagen dar-stellen.
– 1 / 24 –
1.3.3 Näherungsansätze und Diskretisierung
Die durch die partielle Integration (1.10) entstandene Form des PvW (1.14) wird durchdie enge Verwandtschaft mit Gl. (1.15) auch als energetische Form des Prinzips be-zeichnet. Gegenüber dem orthogonalen Prinzip (1.9) weist das energetische Prinzip(1.14) zwei entscheidene Vorteile auf:
1. Durch die symmetrische Verteilung der Ableitungen auf virtuelle und wirklicheWeggrößenfunktionen halbiert sich die Ableitungsordnung des PvW im Dehn–und Biegeanteil.
2. Im Zusammenhang mit der Reduzierung der Ableitungsordnung verringert sichauch die Anzahl der wesentlichen Randbedingungen. Zum energetischen PvW(1.14) gehören lediglich die geometrischen Randbedingungen (1.12), währenddas orthogonale PvW (1.9) bzw. die DGL (1.4) zusätzlich auch die statischenRandbedingungen (1.13) als Zwangsbedingungen erfüllen muß.
Diese Vorteile kommen unmittelbar zum Tragen, wenn es um die praktische Anwen-dung der bislang nur analytisch formulierten Arbeitsgleichungen geht. Dazu müssen dievirtuellen Arbeitsgleichungen (1.14.1) und (1.14.2) oder die Formänderungsenergie(1.15) numerisch ausgewertet werden. Zur Konkurrenz sind alle Funktionen zugelas-sen, die u(x) und uv(x) sowie w(x) und wv(x) in der Weise erfassen, daß sie min–destens einen konstanten Arbeitsanteil pro Stab bzw. Element liefern und die geometri-schen Randbedingungen Gl. (1.12.1 bis 1.12.3) auf R = RW erfüllen.
In der Baustatik ist es üblich, das PvW (1.14) und nicht das Prinzip vom Minimum derFormänderungsenergie (1.15) als Berechnungsgrundlage zu verwenden. Daher ist zu-nächst darüber zu entscheiden, wie die virtuellen Verschiebungen in Gl. (1.14) zu kon-struieren sind, um eine eindeutige Zuordnung zwischen der Anzahl der Unbekanntenund der Anzahl der verfügbaren Gleichungen zu erhalten. In Gl. (1.14.1) sind uv(x) undu(x) unbekannt und in Gl. (1.14.2) wv(x) und w(x). Das Verhältnis beträgt demnach4 : 2. Es ist also über uv(x) und wv(x) zu verfügen, um u(x) mit Gl. (1.14.1) und w(x)mit Gl. (1.14.2) berechnen zu können. Als virtuelle Größen sind sie an sich vollkommenfrei wählbar. Durch die Umformung des PvW von Gl. (1.9) nach Gl. (1.14) liegen aberbereits Einschränkungen vor. Gl. (1.12) setzt nämlich voraus, daß neben den wirklichenauch die virtuellen Weggrößen die geometrischen Randbedingungen zu erfüllen ha-ben. Dies ist im vorliegenden Fall am einfachsten zu erreichen, wenn in Gl. (1.14.1) undGl. (1.14.2) die virtuellen und die wirklichen Verschiebungen in der Weise voneinanderabhängen, daß sich die virtuellen Verschiebungen als Änderungen (Variation) der wirk–lichen Verschiebungen ergeben.
Für den Dehnstab gilt
uv(x) � �u(x) � u(x)� � 0
�� u(x)� u(x)
1
(1.16.1)� u(x)
– 1 / 25 –
und für den Biegestab
wv(x) � �w(x) � w(x)� � 0
�� w(x)� w(x)
1
(1.16.2)� w(x).
Alle benachbarten Verschiebungsfunktionen u(x) und w(x), die im Wertebereich desη–Parameters liegen, sind als Vergleichsfunktionen zur Konkurrenz zugelassen. DasÄnderungssymbol δ drückt im Fall der Grenzwertbildung � 0 mit δu(x) und δw(x)die Abweichungen zum wirklichen Verlauf der Verschiebungsfunktionen u(x) und w(x)aus.
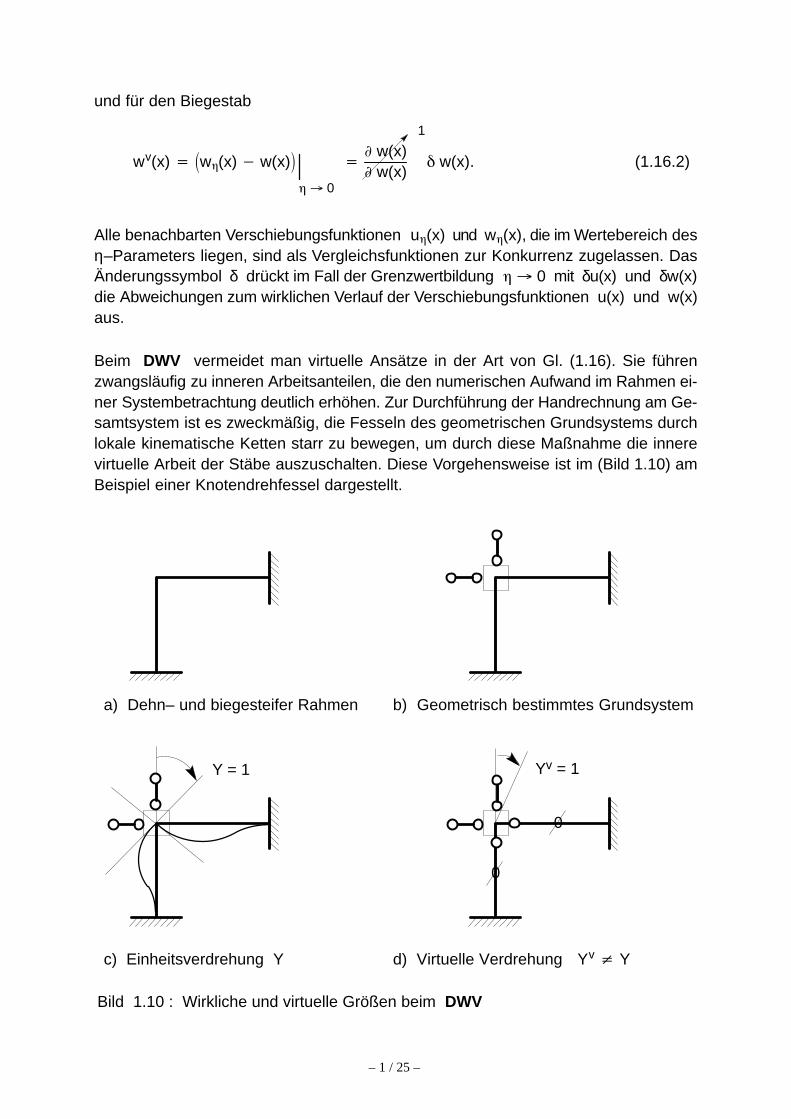
Beim DWV vermeidet man virtuelle Ansätze in der Art von Gl. (1.16). Sie führenzwangsläufig zu inneren Arbeitsanteilen, die den numerischen Aufwand im Rahmen ei-ner Systembetrachtung deutlich erhöhen. Zur Durchführung der Handrechnung am Ge-samtsystem ist es zweckmäßig, die Fesseln des geometrischen Grundsystems durchlokale kinematische Ketten starr zu bewegen, um durch diese Maßnahme die innerevirtuelle Arbeit der Stäbe auszuschalten. Diese Vorgehensweise ist im (Bild 1.10) amBeispiel einer Knotendrehfessel dargestellt.
ÇÇÇÇ
ÇÇÇÇ
ÇÇÇÇ
Bild 1.10 : Wirkliche und virtuelle Größen beim DWV
a) Dehn– und biegesteifer Rahmen b) Geometrisch bestimmtes Grundsystem
c) Einheitsverdrehung Y d) Virtuelle Verdrehung Yv � Y
0
0
Yv = 1Y = 1
– 1 / 26 –
Dagegen ist beim VdS lediglich die stab– bzw. elementbezogene Auswertung deszuvor analytisch formulierten PvW durchzuführen. Dafür erweist sich wiederumGl. (1.16) als optimal. Der Vergleich verdeutlicht, daß virtuelle Ansätze zwar sehr unter-schiedlich gestaltet werden können, daß sie letztendlich aber doch auf identische Er-gebnisse führen.
Beim PvW des Dehnstabs Gl. (1.14.1) sind u(x) und uv(x) jeweils einmal abzu–leiten, so daß mindestens ein linearer Verlauf zwischen den Knoten A und B erforder-lich ist, um einen konstanten Arbeitsanteil pro Stab bzw. Element zu erhalten. Ein linea-rer Funktionsverlauf ist mit zwei Freiwerten verknüpft. Sie reichen aus, um in den Kno-ten A und B eines Stabs bzw. Elements die geometrischen Randbedingungen (1.12.1)zu formulieren. Für den Dehnanteil des PvW ist daher ein linearer Näherungsansatzfür u(x) und uv(x) als zulässig anzusehen, da er die Minimalbedingungen erfüllt.
Es erweist sich als zweckmäßig, die gewählten Näherungsansätze für u(x) und uv(x)auf die dimensionslose Koordinate � � �(x, s) zu beziehen, vgl. (Bild 1.11a) und dieAnsatzfreiwerte auf die Stützwerte von u(x) und uv(x) in den Knoten A und B zunormieren, vgl. (Bild 1.11b).
u(�) � 12
(1 � �)uA � 12
(1 � �)uB (1.17.1)
und
uv(�) � 12
(1 � �)uvA � 1
2(1 � �)uv
B. (1.17.2)
Die Ansätze für die wirklichen Gl. (1.17.1) und virtuellen Verschiebungen Gl. (1.17.2)unterscheiden sich nur durch die unterschiedliche Bedeutung der Stützwerte voneinan-der. Der Verlauf zwischen den Knoten A und B stimmt dagegen vollständig überein.
Die Verträglichkeit zwischen unmittelbar benachbarten Stäben bzw. Elementen ist beimVdS durch das Gleichsetzen der Knotenwerte in einfacher Weise zu erfüllen. Dermathematische Prozeß des Gleichsetzens von Knotenwerten zur Erzwingung einerdehnsteifen Verbindung ist beim DWV mit dem Einführen einer Fessel vergleichbar(Bild 1.10), so daß sich wiederum eine vollständige Analogie zwischen beiden Verfah-ren ergibt.
Das Biegeproblem ist von zweiter Ordnung. Zur Auswertung von Gl. (1.14.2) sind w(x)und wv(x) jeweils zweimal abzuleiten. Es ist daher mindestens eine quadratische Nähe-rung für beide Funktionen erforderlich, um konstante Stab– bzw. Elementarbeiten zuerhalten. Eine quadratische Funktion ist mit drei Freiwerten verknüpft. Die geometri-schen Randbedingungen des Biegeproblems sind durch zwei Gleichungen definiert,nämlich Gl. (1.12.2) und Gl. (1.12.3). Da sich die wirklichen und virtuellen Verdrehungenϕ(x) und ϕv(x) aus den Ableitungen der wirklichen und virtuellen Verschiebung w(x)und wv(x) ergeben, ist in den Knoten A und B jeweils das Gleichsetzen von wirklichenund virtuellen Verschiebungen und Verdrehungen erforderlich, um benachbarte Ele-mente biegesteif miteinander zu verbinden. Dazu sind aber vier und nicht drei Freiwertein der Näherungsfunktion von w(x) und wv(x) notwendig. Es ist daher ein kubischerAnsatz erforderlich, um die Verträglichkeit zu erfüllen.

– 1 / 27 –
Auch beim Biegestab ist es zweckmäßig, für w(x) und wv(x) gleichwertige Näherungs-ansätze zu wählen, sie auf die dimensionslose Koordinate ξ = ξ(x, s) zu beziehen, vgl.(Bild 1.11a) und die Ansatzfreiwerte auf die Knotenstützwerte der wirklichen und virtuel-len Verschiebungen sowie deren Ableitungen zu normieren, vgl. (Bild 1.11c).
Bild 1.11 : Näherungsansätze
a) Stabgeometrie
A (� � � 1)
s2
s2
s
B (� � 1)
x, �
ϕu
w
b) Dehnstab
�uA, uvA� 1
1�uB, uv
B�
12
(1 � �)
12
(1 � �)
�wA, wvA� 1
14
(1 � �)2(2 � �)
c) Biegestab
1
��B, �vB�
�wB, wvB�
1
1
s8
(1 � �)2(1 � �)
14
(1 � �)2(2 � �)
� s8
(1 � �)2(1 � �)
��A, �vA�

– 1 / 28 –
w(�) � 14
(1 � �)2(2 � �) wA � s8
(1 � �)2(1 � �) �A(1.18.1)
� 14
(1 � �)2(2 � �) wB � s8
(1 � �)2(1 � �) �B
und
wv(�) � 14
(1 � �)2(2 � �) wvA � s
8(1 � �)2(1 � �) �v
A(1.18.2)
� 14
(1 � �)2(2 � �) wvB � s
8(1 � �)2(1 � �) �v
B.
Die im (Bild 1.11b und 1.11c) dargestellten und durch die Gleichungen (1.17 und 1.18)analytisch formulierten Weggrößenansätze erfüllen zwei wichtige Voraussetzungen,um das PvW praktisch anwenden zu können.
1. Zwischen den Knoten von Einzelstäben bzw. Einzelelementen erfassen sie denVerlauf der unbekannten Verschiebungsfunktionen ggf. genau, zumindest abernäherungsweise, so daß die Integration der Arbeitsausdrücke (1.14.1 und 1.14.2)explizit durchgeführt werden kann.
2. Die Freiwerte der Ansätze sind als Stütz– bzw. Ableitungswerte der Verschie-bungsfunktionen direkt auf die Knoten bezogen. Es sind unbekannte Knoten–größen, die sich nach der Durchführung der Integration mit dem nun diskretisier-ten PvW berechnen lassen und unmittelbar baustatische Ergebnisse darstellen.
Mit Hilfe der Näherungsansätze Gl. (1.17 und 1.18) wird beim VdS der Übergang vomanalytischen zum diskreten und damit numerisch berechenbaren Problem vollzogen.Für die Rechneranwendung erweist sich als zweckmäßig, diesen Prozeß in Form einerMatrizengleichung darzustellen. Daher wird das VdS vielfach auch als Matrizenstatikbezeichnet. Dies ist aber höchst überflüssig und zudem auch irreführend, da die modi-sche Namensgebung andeutet, daß eine neue und damit ggf. auch andere Statik vor-liegt. Dies ist aber in keiner Weise der Fall. Das VdS beruht nach wie vor auf den glei-chen theoretischen Grundlagen wie die klassischen Verfahren KGV und DWV.Lediglich die methodische Vorgehensweise ist stärker auf Rechner zugeschnitten, sodaß sich als Formulierungshilfe zwangsläufig die Matrizendarstellung anbietet. Deswe-gen aber den eigenständigen Begriff Matrizenstatik zu bemühen, ist höchst überflüs-sig und ohne jeden Erkenntnisgewinn.
– 1 / 29 –
1.3.4 Matrizendarstellung des PvW
Die Auswertung des PvW (1.14) mit den Ansätzen (1.17 und 1.18) ist ein rein techni-scher Vorgang. Die Durchführung kann für den Dehn– und Biegestab in getrennterForm erfolgen, da die Berechnungstheorien durch den Hauptachsenbezug in entkop–pelter Form vorliegen. Die Ansatzkoordinate ξ hat ihren Ursprung in der Mitte einesStabs bzw. Elements. Sie ist mit der x–Koordinate durch die halbe Elementlänge ver-knüpft, vgl. (Bild 1.11a). Es gilt
x � s2�, (1.19.1)
dx � s2
d� (1.19.2)
und
d�dx
� 2s . (1.19.3)
Die Integration von Gl. (1.14.1) und Gl. (1.14.2) über den Weg dx ist mit Hilfe vonGl. (1.19.2) zwischen den Grenzen � � � 1 (Knoten B) und � � � 1 (Knoten A)durchzuführen. Bei der Ableitung der Integranden, die sich auf die x–Koordinaten be-zieht, ist mit Hilfe von Gl. (1.19.3) die Kettenregel zu beachten.
Die Auswertung beginnt mit dem Arbeitsausdruck Gl. (1.14.1) des Dehnstabs. Dazuwird Gl. (1.17) einmal abgeleitet. Man erhält
u�(x) �du(�)
d�·d�dx
(1.20.1)� �� 12
uA � 12
uB�· 2s � �
uAs �
uBs
und
u�v(x) �duv(�)
d�·d�dx
(1.20.2)� �� 12
uvA � 1
2uv
B�· 2
s � �uv
As �
uvB
s .
Die Verläufe der Dehnsteifigkeit EA und der Streckenlast n sind vereinbarungsgemäßals konstant anzunehmen. Nach dem Einsetzen von Gl. (1.17 und 1.20) kann daherdie Integration von Gl. (1.14.1) analytisch durchgeführt werden.
Diese Vorgehensweise ist für den Biegestab zu wiederholen. Zur Auswertung des Ar-beitsausdrucks Gl. (1.14.2) ist Gl. (1.18) zweimal abzuleiten. Man erhält
w��(x) �d2w(x)
d�2·�d�
dx�2
(1.21.1)
� 6�s2
wA ��� 1 � 3�s ��A ��� 6�
s2�wB ��1 � 3�
s ��B

– 1 / 30 –
und
w��v(x) �d2wv(x)
d�2·�d�
dx�2
(1.21.2)
� 6�s2
wvA ��� 1 � 3�
s ��vA ��� 6�
s2�wv
B ��1 � 3�s ��v
B.
Da auch die Verläufe der Biegesteifigkeit EI und der Streckenlast p vereinbarungsge-mäß als konstant anzunehmen sind, kann nach dem Einsetzen von Gl. (1.18 und 1.21)die Integration von Gl. (1.14.1) ebenfalls analytisch durchgeführt werden.
Das PvW bilanziert virtuelle Arbeiten, die einzeln und in der Summe verschwinden, umden Gleichgewichtszustand von zunächst einem Stab bzw. Element zu erfüllen. Die In-tegration von Gl. (1.14.1 und 1.14.2) führt daher zwangsläufig auf skalare Größen. Die-ser Sachverhalt muß sich demnach auch im Schema einer Matrizendarstellung desPvW widerspiegeln. Die Struktur der Matrizengleichung ist also eindeutig vorgeschrie-ben. Um skalare Größen zu erhalten, sind die inneren Arbeitsausdrücke als quadrati-sche Formen zu gestalten und die äußeren Arbeitsausdrücke als Skalarprodukte.
Dies gelingt in einfacher Weise, wenn man die virtuellen Weggrößen der Knoten A
und B in einer Matrizenzeile �vvl�T und die wirklichen Weggrößen in einer Matrizen-
spalte vl zusammenfaßt. Obwohl sie aus physikalischer Sicht keine Vektoren darstel-
len, werden sie aber trotzdem vielfach als Vektoren bezeichnet. Zwischen dem Zeilen–
und Spaltenvektor muß dann eine quadratische Matrix, nämlich die Steifigkeitsma–
trix kll stehen, um nach der Matrizen–Produktregel eine quadratische Form aus–
drücken zu können. Werden zusätzlich noch die auf die Knoten A und B reduzierten
Streckenlastanteile in einer Matrizenspalte s0l zusammengefaßt, ist die Matrizenglei-
chung des PvW bekannt.
Wv�vvl , vl
� � �vvl�T·�kllvl � s0
l� � 0 (1.22.1)
oder in kurzer Schreibweise
Wv�vvl , sl
� � �vvl�T·sl � 0 (1.22.2)
mit
sl � kll·vl � s0l . (1.22.3)
Der Index (l) verdeutlicht den lokalen Bezug der diskretisierten Arbeitsgleichung (1.22),
die das statische Verhalten eines Stabs bzw. Elements beschreibt. Die diskrete Form
ist in der Kurzschreibweise Gl. (1.22.2) besonders deutlich zu erkennen. Durch die For-
derung, daß der aus virtuellen Weggrößen �vvl�T und wirklichen Kraftgrößen sl gebil-
– 1 / 31 –
dete virtuelle Arbeitsausdruck Wv in den Knoten A und B verschwinden muß, wird
der lokale Gleichgewichtszustand zwischen den “inneren und äußeren Streckenlasten”
erfüllt, die im Bereich des betrachteten Stabs bzw. Elements wirken. Diejenigen Knoten-
größen von sl , die sich unmittelbar aus der Einwirkung von äußeren Streckenlasten
ergeben, sind durch s0l bekannt. Sie bilden den partikulären Anteil von Gl. (1.22.3). Die
“inneren Streckenlasten”, die in den DGL (1.4) als Änderung der Schnittgrößen auftre-
ten, bilden den homogenen Anteil von Gl. (1.22.3). Sie lassen sich ebenfalls durch Kno-
tengrößen ausdrücken. Im Rahmen des VdS geschieht dies durch den Produktansatz
aus Steifigkeitsmatrix kll mal wirklichen Knotenweggrößen vl , der in Gl. (1.22.3) die
“inneren Knotenlastanteile” in Form einer Weggrößenformulierung erfaßt.
Beim Zusammenbau der Einzelstäbe bzw. Einzelelemente zu einem statischen Berech-nungssystem können in einem Systemknoten ein oder mehrere Stäbe bzw. Elementezusammentreffen, vgl. Abschnitt 1.2. Es ist daher zweckmäßig, die Stab– bzw. Element-gleichungen (1.22.1 bis 1.22.3) in ein knotenbezogenes Untermatrizenschema aufzu-lösen, um beim Zusammenbau unmittelbar auf die Knotenanteile der Steifigkeitsmatrixund der Knotenbelastung zugreifen zu können. Anstelle der Gl. (1.22.1 bis 1.23.3) gel-ten daher auch die Matrizengleichungen
Wv�vvl , vl
�A, B
�
(1.23.1)
Wv�vvl , sl
�A, B
�
�vvl, A�T �vv
l, B�T
kll, AA
kll, BA
kll, AB
kll, BB
vl, A
vl, B
s0l, A
–s0
l, B
= 0,
�vvl, A�T �vv
l, B�T
sl, A
sl, B
= 0 (1.23.2)
und
(1.23.3)sl, A
sl, B
s0l, A
s0l, B
=kll, AA
kll, BA
kll, AB
kll, BB
vl, A
vl, B
.–
Die Matrizen kll, AA und kll, AB geben z.B. den Einfluß an, den die Weggrößen vl, Aam Knoten A und vl, B am Knoten B auf die Kraftgröße sl, A am Knoten A ausüben.Die Untermatrizen des VdS sind mit den Zwangsgrößen Zij des DWV vergleichbar,die ebenfalls wechselseitige Einflüsse von Weg– auf Kraftgrößen erfassen, nämlich denEinfluß von Einheitsweggrößen Yj = 1 auf Kräfte und Momente in den (i)–Fesseln vongeometrischen Grundsystemen. Der Einfluß von Einwirkungen, der beim DWV zuZi0–Größen führt, wird beim VdS durch die Untermatrizen s0
l, A bzw. s0l, B erfaßt.
– 1 / 32 –
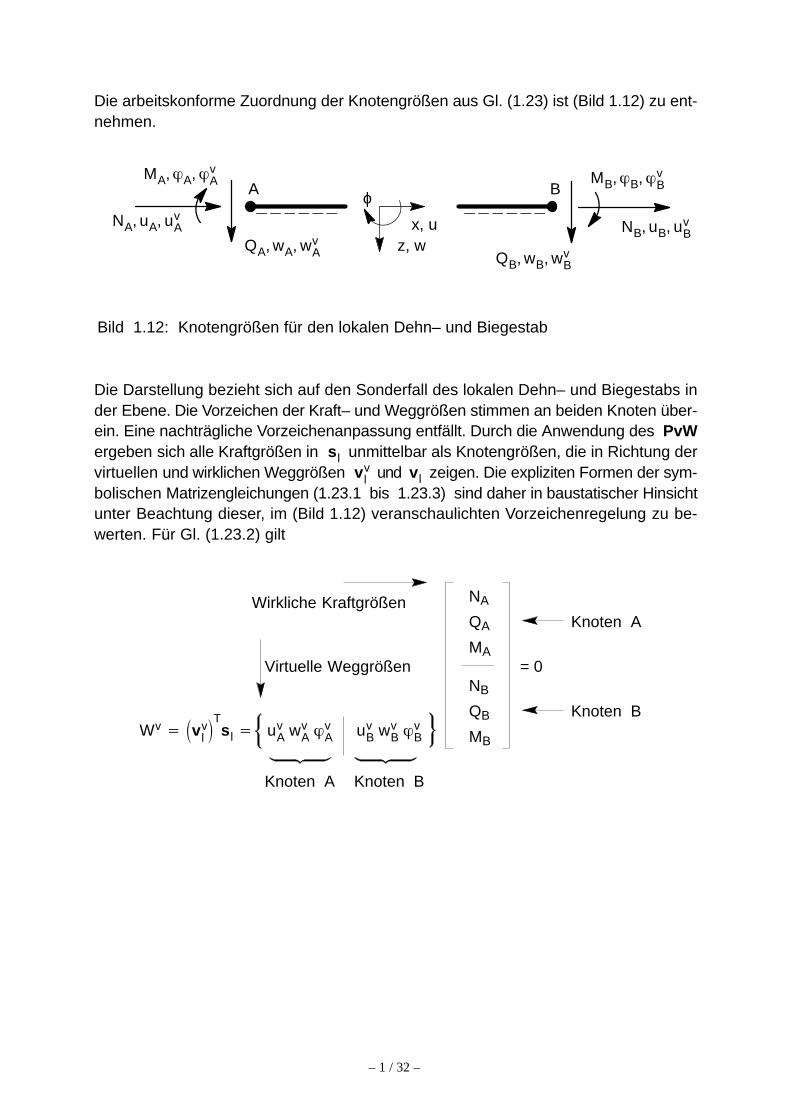
Die arbeitskonforme Zuordnung der Knotengrößen aus Gl. (1.23) ist (Bild 1.12) zu ent-nehmen.
Bild 1.12: Knotengrößen für den lokalen Dehn– und Biegestab
A Bϕ
x, uz, w
MA,�A,�vA
NA, uA, uvA
QA, wA, wvA
MB,�B,�vB
NB, uB, uvB
QB, wB, wvB
Die Darstellung bezieht sich auf den Sonderfall des lokalen Dehn– und Biegestabs inder Ebene. Die Vorzeichen der Kraft– und Weggrößen stimmen an beiden Knoten über-ein. Eine nachträgliche Vorzeichenanpassung entfällt. Durch die Anwendung des PvWergeben sich alle Kraftgrößen in sl unmittelbar als Knotengrößen, die in Richtung dervirtuellen und wirklichen Weggrößen vv
l und vl zeigen. Die expliziten Formen der sym-bolischen Matrizengleichungen (1.23.1 bis 1.23.3) sind daher in baustatischer Hinsichtunter Beachtung dieser, im (Bild 1.12) veranschaulichten Vorzeichenregelung zu be-werten. Für Gl. (1.23.2) gilt
Wv � �vvl�Tsl � uv
A wvA �v
A
= 0
uvB wv
B �vB
NA
QA
MA
NB
QB
MB
Knoten A
Knoten B
Knoten A Knoten B
Wirkliche Kraftgrößen
Virtuelle Weggrößen
– 1 / 33 –
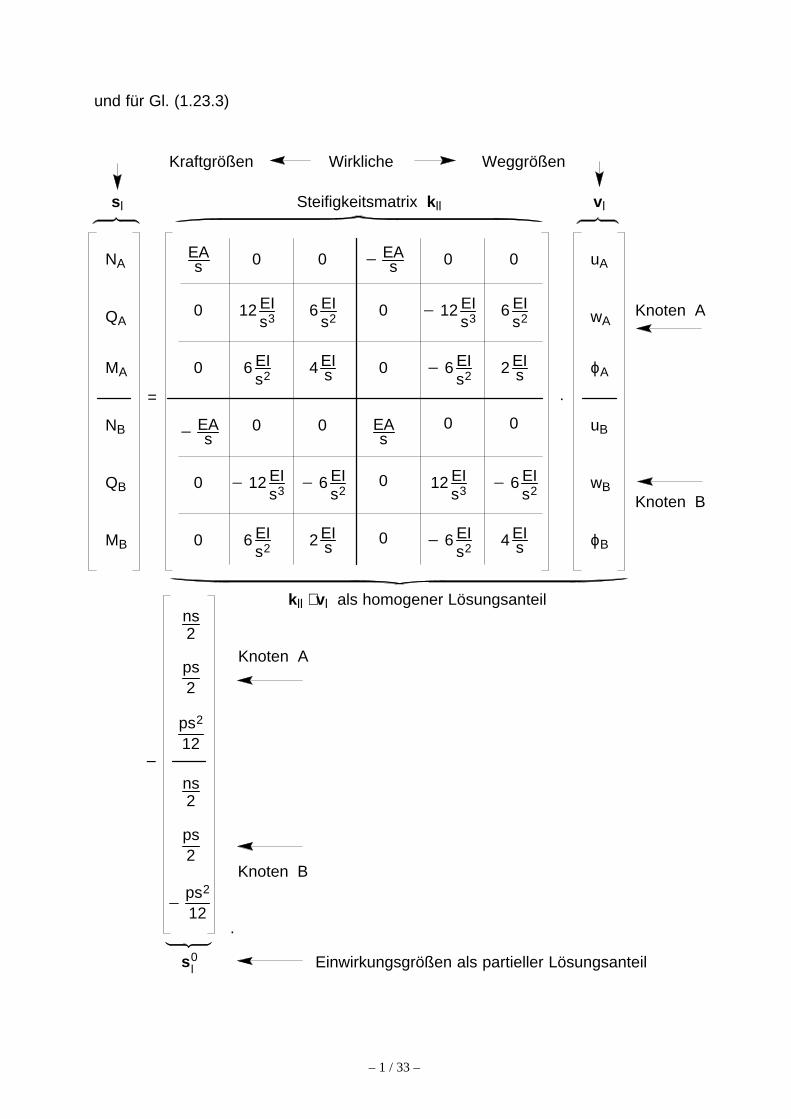
und für Gl. (1.23.3)
EAs � EA
sNA
QA
MA
NB
QB
MB
Knoten A
Knoten A
kll ⋅ vl als homogener Lösungsanteil
Knoten B
Wirkliche WeggrößenKraftgrößen
12 EIs3
6 EIs2
=
6 EIs2
� 12 EIs3
� 6 EIs2
6 EIs2
.
uA
wA
ϕA
uB
wB
ϕB
� EAs
0 0
0
0
� 12 EIs3
0
0 6 EIs2
0 0
0 0
0
4 EIs 0 2 EI
s
0 0 EAs
� 6 EIs2
0
0
12 EIs3
� 6 EIs2
2 EIs � 6 EI
s24 EI
s
Steifigkeitsmatrix kllsl vl
s0l
Knoten B
ns2
ps2
ps2
12
ns2
ps2
�ps2
12.
Einwirkungsgrößen als partieller Lösungsanteil
–
– 1 / 34 –
Die knotenbezogenen Kraftgrößen im Biegeanteil von Gl. (1.23.3) stimmen betrags–mäßig mit den Stabendgrößen von geometrisch bestimmten Grundsystemen überein,die u.a. beim DWV zur Anwendung gelangen. Sie ergeben sich, wenn in den Knoten-drehfesseln Einheitsverdrehungen, vgl. z.B. (Bild 1.10c), in den Knotenwegfesseln Ein-heitsverschiebungen und im Stabbereich zusätzlich konstante Streckenlasten wirken.Die Absolutwerte von Gl. (1.23.3) sind daher bereits aus Statik II bekannt. Es sind aberUnterschiede hinsichtlich der Vorzeichen zu beachten. Sie werden beim DWV durchdie Anschauung festgelegt, beim VdS dagegen durch eine strenge arbeitskonformeZuordnung.
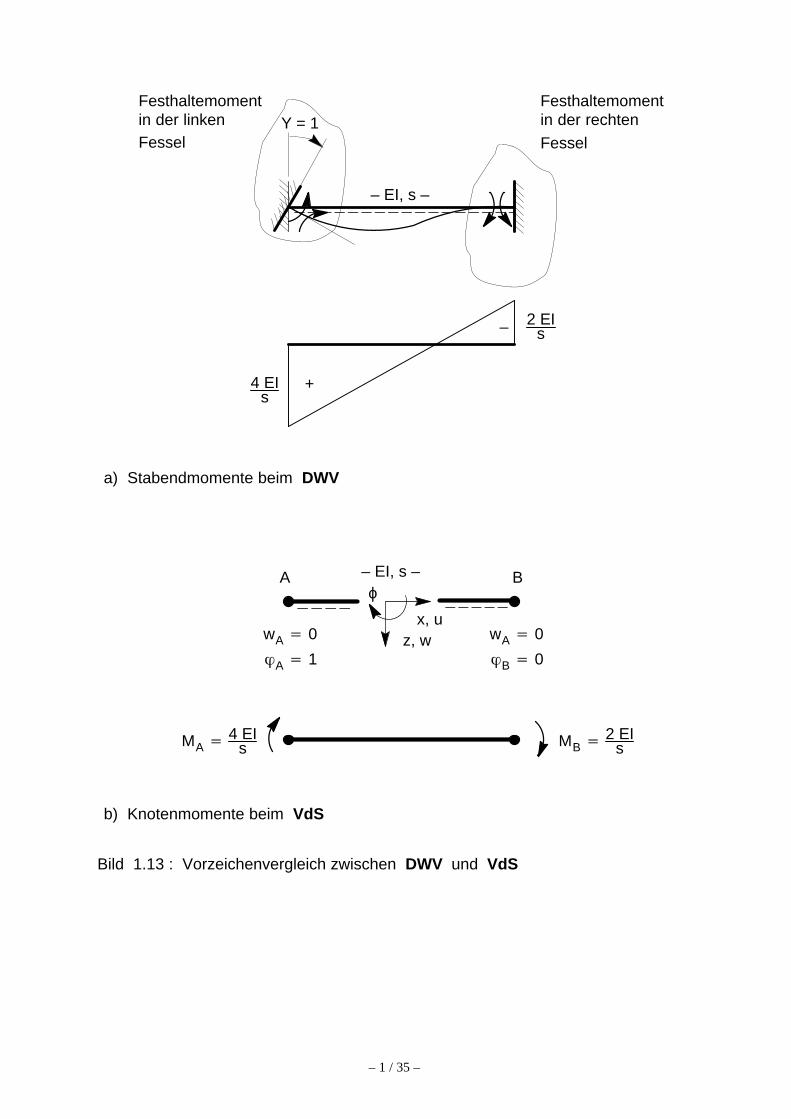
Dieser Unterschied ist im (Bild 1.13) verdeutlicht. (Bild 1.13a) zeigt die Stabendmo-mente infolge einer Einheitsverdrehung Y = 1 am linken Knoten des Stabes. Die Vorzei-chen zur Ermittlung der Festhaltemomente in den Fesseln ergeben sich mit Hilfe derBezugsfaser unmittelbar aus der Anschauung und werden jeweils durch Drehpfeilpaaregekennzeichnet. Die Knotenmomente, die sich mit ϕA = Y = 1 und (wA, wB, ϕB) ≡ 0aus Gl. (1.23.3) ergeben, sind dagegen eindeutig auf den Drehsinn der erzeugendenDrehung bezogen. Sie sind im (Bild 1.13b) dargestellt.
Interessant ist nun, daß die Richtung der Momentenpfeile, die im (Bild 1.13a) auf derjeweiligen Stabseite wirken, mit der Drehrichtung der Knotenmomente im (Bild 1.13b)übereinstimmt. Diese Gleichheit wird beim DWV vielfach genutzt, um eine einheitlicheDrehrichtung der Stabendmomente zu definieren, die sich beim VdS durch die Verwen-dung des PvW in natürlicher Weise von allein einstellt. Nur hier ist sie deshalb auchsinnvoll. Beim DWV ist diese Vorgehensweise dagegen mehr oder weniger als künst-lich anzusehen, da sie ohne Theorieverständnis erfolgt. Das Arbeiten mit lokalen Dreh-pfeilen erweist sich beim DWV i.a. als zweckmäßiger. U.a. auch deswegen, weil danndie Richtung der Einheitsverschiebungszustände vollkommen frei bleibt und keinenRestriktionen unterliegt.
– 1 / 35 –
Bild 1.13 : Vorzeichenvergleich zwischen DWV und VdS
a) Stabendmomente beim DWV
b) Knotenmomente beim VdS
2 EIs
4 EIs
Y = 1
– EI, s –
Festhaltemomentin der linkenFessel
Festhaltemomentin der rechten
Fessel
–
+
A Bϕ
x, uz, wwA � 0
– EI, s –
wA � 0
�A � 1 �B � 0
MA � 4 EIs MB � 2 EI
s
– 1 / 36 –
1.4 Baustatische Systembeschreibung
1.4.1 Systemgleichung
Der Zusammenbau von einzelnen Stäben bzw. Elementen zu einem statischen Systemist unabhängig vom speziell zu untersuchenden Tragwerk und kann daher in allgemein-gültiger Form durchgeführt werden.
Beim VdS wird das baustatische Verhalten durch die Summation der virtuellen Arbeits-anteile all derjenigen Stäbe bzw. Elemente erfaßt, die zum konstruktiven Bestand desbetrachteten Gesamtsystems gehören, vgl. z.B. (Bild 1.2). Für n = 1, 2, 3 ... m Stäbebzw. Elemente ergibt sich die Systemgleichung zu
WvS � �m
�
Wvn � 0. (1.24)
Wvn ist die virtuelle Arbeit Gl. (1.22 bzw. 1.23) des n–ten Stabs bzw. Elements und
WvS die virtuelle Arbeit des Gesamtsystems (Index S). Nach den Regeln des PvW ist
jeder Knoten des diskreten Gesamtsystems im Gleichgewicht, wenn WvS verschwindet.
Die Durchführung der Summationsvorschrift Gl. (1.24) setzt voraus, daß sich alle betei-ligten Weggrößen auf ein gemeinsames Koordinatensystem beziehen, um die Verträg-lichkeit zu erfüllen. Die Arbeitsanteile der einzelnen Stäbe bzw. Elemente sind daher mitGl. (1.1) auf globale Systemkoordinaten zu transformieren. Gl. (1.1) in Gl. (1.22) einge-setzt ergibt
Wv�vvg, vg� � �vv
g�T·sg � �vv
g�T�kggvg � s0
g� (1.25.1)
mit
kgg � Tgl kll Tlg (1.25.2)
als globaler Stab– bzw. Elementsteifigkeitsmatrix und
s0g � Tgl s0
l (1.25.3)
als globaler Stab– bzw. Elementeinwirkungsmatrix, die zusammen den globalen Kraft-größenvektor sg eines Stabs bzw. Elements bilden. Nach der Transformation sind dieSteifigkeits– und Einwirkungsmatrizen Gl. (1.25.2 und 1.25.3) immer auf globaleSystemkoordinaten bezogen, so daß im weiteren Verlauf der Betrachtung die Kenn-zeichnung mit dem Index (g) in der Regel entfallen kann. Gl. (1.25.2) und Gl. (1.25.3)sind explizit in (Tabelle 1.1) angegeben.

– 1 / 37 –
a � EAs cos2 �� 12 EI
s3sin2 �, b � EA
s sin2 �� 12 EIs3
cos2 �,
s0g �
kg, AA kg, AB
kg, BA kg, BB
=kgg =
a
bd
e –f c
–a –d –e a
–d –b f d b
e –f g –e f c,
Symmetrisch
c � 4 EIs , d � �EA
s � 12 EIs3� sin � · cos�,
e � 6 EIs2
sin �, f � 6 EIs2
cos �, g � 2 EIs .
a) Globale Steifigkeitsmatrix
s0g, A
s0g, B
h
i
j
h
i
–j
=
,
h � s2
(n· cos �� p· sin �), i � s2
(n· sin �� p· cos �), j �p·s2
12.
b) Globale Einwirkungsmatrix
Tabelle 1.1 :
Einzelelementen
Globale Steifikeiten und Einwirkungen von Einzelstäben bzw.
– 1 / 38 –
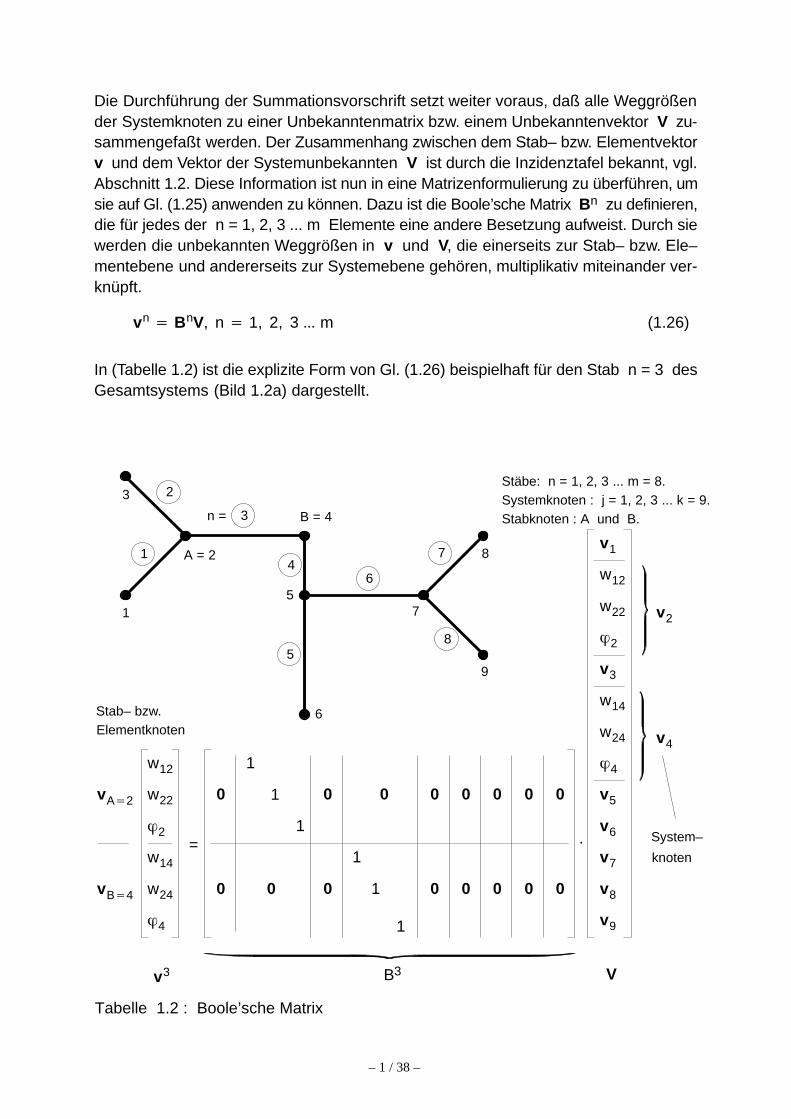
Die Durchführung der Summationsvorschrift setzt weiter voraus, daß alle Weggrößender Systemknoten zu einer Unbekanntenmatrix bzw. einem Unbekanntenvektor V zu-sammengefaßt werden. Der Zusammenhang zwischen dem Stab– bzw. Elementvektorv und dem Vektor der Systemunbekannten V ist durch die Inzidenztafel bekannt, vgl.Abschnitt 1.2. Diese Information ist nun in eine Matrizenformulierung zu überführen, umsie auf Gl. (1.25) anwenden zu können. Dazu ist die Boole’sche Matrix Bn zu definieren,die für jedes der n = 1, 2, 3 ... m Elemente eine andere Besetzung aufweist. Durch siewerden die unbekannten Weggrößen in v und V, die einerseits zur Stab– bzw. Ele–mentebene und andererseits zur Systemebene gehören, multiplikativ miteinander ver-knüpft.
vn � BnV, n � 1, 2, 3 ��� m (1.26)
In (Tabelle 1.2) ist die explizite Form von Gl. (1.26) beispielhaft für den Stab n = 3 desGesamtsystems (Bild 1.2a) dargestellt.
1
2
5
6
7
8
3
4
Tabelle 1.2 : Boole’sche Matrix
1
A = 2
3
B = 4
5
6
7
8
9
n =
Stäbe: n = 1, 2, 3 ... m = 8.Systemknoten : j = 1, 2, 3 ... k = 9.Stabknoten : A und B.
v1
w12
w22
�2
v3
w14
w24
�4
v5
v6
v7
v8
v9
v2
v4
System–
vA�2 0
w12
w22
�2
w14
w24
�4
vB�4
=
1
1
1
0
1
1
1
0 0 0 0
0 0 0 0 0
0
00
0
0
.knoten
v3 VB3
Stab– bzw.Elementknoten
– 1 / 39 –
Das ebene System besteht aus m = 8 Stäben und k = 9 Knoten. V enthält demnach3 ⋅9 = 27 Weggrößen, da sich jeder der j = 1, 2, 3 ... k Systemknoten mit zwei Verschie-bungen und einer Verdrehung an V beteiligt.
V � V�vj � �w1j, w2j,�j��, j � 1, 2, 3 ��� k (1.27)
Der Elementvektor
vn � vn�vL � �w1L, w2L,�L��, L � A, B (1.28)
enthält die Weggrößen der Stabknoten L = A und B, die speziell für den n = 3–ten Stabmit den Systemknoten A = 2 und B = 4 zusammenfallen, vgl. (Bild 1.2a). Immer, wenndie Nummern von Stab– bzw. Elementknoten und Systemknoten übereinstimmen, istBn an diesen Stellen mit Einheitsmatrizen besetzt, ansonsten mit Nullmatrizen.
Wird Gl. (1.26) unter Beachtung von Gl. (1.27 und 1.28) in Gl. (1.25) eingesetzt unddie Summation gemäß Gl. (1.24) gebildet, erhält man die explizite Form von Gl. (1.24).In der Matrizengleichung
WvS � (Vv)T S � (Vv)T�KV � S0� � 0 (1.29.1)
wird
K � �m�
�BTkB�n (1.29.2)
als globale Systemsteifigkeitsmatrix und
S0 � �m�
�BTs0�n (1.29.3)
als globale Systemeinwirkungsmatrix bezeichnet.
In (Tabelle 1.3) ist für den Stab n = 3 des Gesamtsystems (Bild 1.2a) der Aufbau vonGl. (1.29.2 und 1.29.3) dargestellt. Durch die Links– und Rechts– bzw. nur Links–Mul-tiplikation mit der Boole’schen Matrix werden die Stab– bzw. Elementmatrizen kGl. (1.25.2) und s0 Gl. (1.25.3) in Untermatrizen gemäß Gl. (1.23) bzw. (Tabelle 1.1)zerlegt und die knotenbezogenen Untermatrizen so adressiert, daß sie in den System-matrizen Gl. (1.29.2 und 1.29.3) den durch die topologische Beschreibung festgelegtenPlatz einnehmen. Die Beschreibung mit Matrizen veranschaulicht vor allem den Aufbauder Systemgleichung. Zur praktischen Durchführung im Rechner ist diese Vorgehens-weise aber nicht geeignet, da Produktbildung mit Boole’schen Matrizen eine Vielzahlvon Null–Operationen enthalten. Bei der Programmgestaltung sind sie daher durch ge-eignete Listenoperationen zu ersetzen.
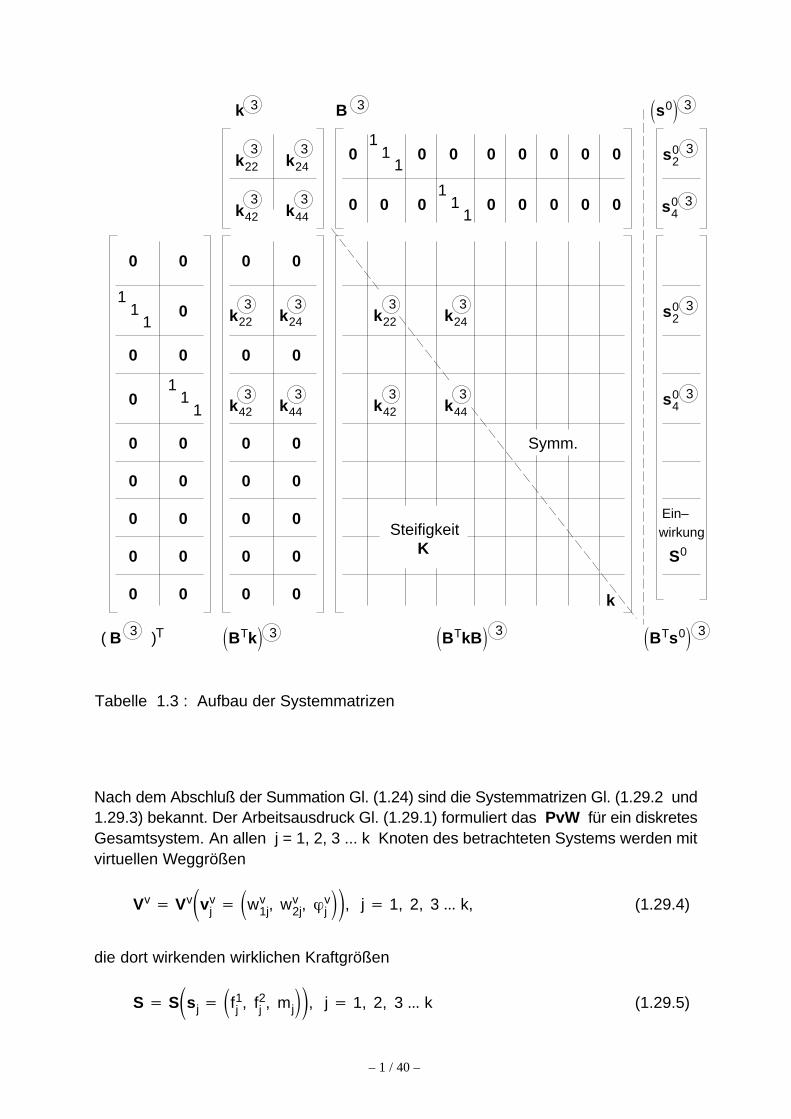
– 1 / 40 –
3
Tabelle 1.3 : Aufbau der Systemmatrizen
s020
11
10 0 0 0 0
0 0 0 0 0
0
00
0
0
k
B
k22
�s0�B
3k24
3k42
3k44
3
3k22
11
1
3k22
3k24
3 3
3
s04
3
0
0
11
1
11
10
0
0
0
0
0
0
0
0
0
0
0
0
0
0 0
0 0
3k42
3k44
0
0
0
0
0
0
0
0
00
3k42
3k24
3k44
Steifigkeit
Symm.
K
k
s02
3
s04
3
Ein–wirkung
S0
( )3 T �BTk� 3 �BTkB� 3�BTs0�3
Nach dem Abschluß der Summation Gl. (1.24) sind die Systemmatrizen Gl. (1.29.2 und1.29.3) bekannt. Der Arbeitsausdruck Gl. (1.29.1) formuliert das PvW für ein diskretesGesamtsystem. An allen j = 1, 2, 3 ... k Knoten des betrachteten Systems werden mitvirtuellen Weggrößen
Vv � Vv�vvj � �wv
1j, wv2j, �v
j��, j � 1, 2, 3 ��� k, (1.29.4)
die dort wirkenden wirklichen Kraftgrößen
S � S�sj � �f1j , f2j , mj��, j � 1, 2, 3 ��� k (1.29.5)
– 1 / 41 –
bilanziert und durch die Forderung, daß die virtuelle Gesamtarbeiten verschwindenmuß, ins Gleichgewicht gesetzt. Sowohl die Weggrößen Gl. (1.27 und 1.29.4) als auchdie Kraftgrößen Gl. (1.29.5) sind auf globale Systemkoordinaten bezogen. Sie stellendaher im Sinne des PvW arbeitskonforme Knotenpaare dar, so daß Gl. (1.29.1) denGleichgewichtszustand von geometrisch bestimmten, also verträglichen Grundsyste-men ausdrückt.
Die Belegung mit Steifigkeiten und Einwirkungen, die sich aus der Systemgleichung(1.24 bzw. 1.29.1) für alle Stäbe des Gesamtsystems (Bild 1.2a) ergibt, ist in (Ta–belle 1.4) dargestellt. Immer, wenn zwei und mehr Stäbe in einem Systemknoten zu-sammentreffen, sind die anteiligen Steifigkeiten bzw. Einwirkungen aus allen Stäben zuüberlagern. Ein direkter Vergleich mit dem DWV verdeutlicht, daß die KnotengrößenGl. (1.29.5) den Zwangsgrößen entsprechen, die sich in den Fesseln von geometri-schen Grundsystemen des DWV einstellen, wenn Lasten und Einheitswegzuständeam Gesamtsystem wirken.
1.4.2 Berechnung der Weg– und Lagergrößen
Der Arbeitsausdruck Gl. (1.29) enthält alle erforderlichen Gleichgewichtsaussagen desdiskreten Gesamtsystems, um die unbekannten Knotenweggrößen Gl. (1.27) und Kno-tenkraftgrößen Gl. (1.29.5) berechnen zu können. Damit keine kinematischen Verschie-bungen auftreten, sind von den j = 1, 2, 3 ... k Knoten speziell (r) Knoten durch geome-trische Randbedingungen ganz oder teilweise zu lagern.
Die Knotengrößen beim VdS sind im (Bild 1.13) dargestellt. In allen Knoten sind zu-nächst die Weggrößen Vv und V und die Kraftgrößen S definiert (Bild 1.13a). Dievirtuellen und wirklichen Weggrößen der ganz oder teilweise gelagerten (r) Knoten sindbekannt. Die wirklichen Weggrößen sind entweder Null (homogene Randbedingung)oder nehmen einen von Null verschiedenen, aber vorgeschriebenen Wert an (inhomo-gene Randbedingung). Die virtuellen Weggrößen sind in beiden Fällen Null. Sie sinddurch Gl. (1.16) als Änderung der wirklichen Weggrößen definiert. Da diese bei derLagerung durch Randbedingungen aber feste Werte annehmen und sich daher nichtverändern können, müssen die virtuellen Weggrößen zwangsläufig Null werden.
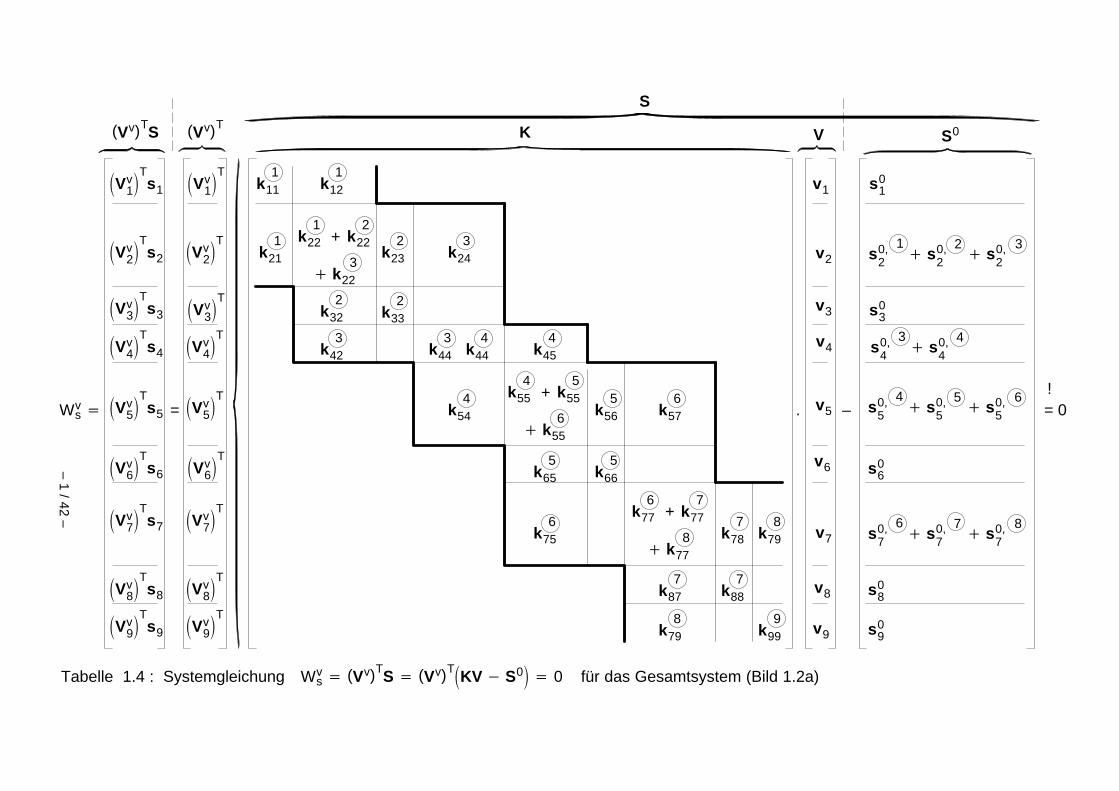
(Vv)TS
1k22
�Vv1�Ts1
Wvs �
3� k22
�Vv1�T 1
k11
2k22+
4k55
6� k55
5k55+
1k12 v1
–
s01
= = 0.
K V S0(Vv)T
!
1k21
2k23
3k24
5k56
2k32
3k42
2k33
3k44
4k44
4k45
6k57
4k54
5k65
5k66
6k77
8� k77
7k77+
7k78
8k79
6k75
7k87
7k88
8k79
9k99
�Vv2�Ts2
�Vv3�Ts3
�Vv5�Ts5
�Vv6�Ts6
�Vv7�Ts7
�Vv8�Ts8
�Vv9�Ts9
�Vv4�Ts4
�Vv2�T
�Vv3�T
�Vv4�T
�Vv5�T
�Vv6�T
�Vv7�T
�Vv9�T
�Vv8�T
v2
v3
v4
v5
v6
v7
v9
v8
s0,2
1� s0,
2
2� s0,
2
3
s03
s0,4
3� s0,
4
4
s0,5
4� s0,
5
5� s0,
5
6
s06
s0,7
6� s0,
7
7� s0,
7
8
s08
s09
Tabelle 1.4 : Systemgleichung Wvs � (Vv)TS � (Vv)T�KV � S0� � 0 für das Gesamtsystem (Bild 1.2a)
S
– 1 / 42 –
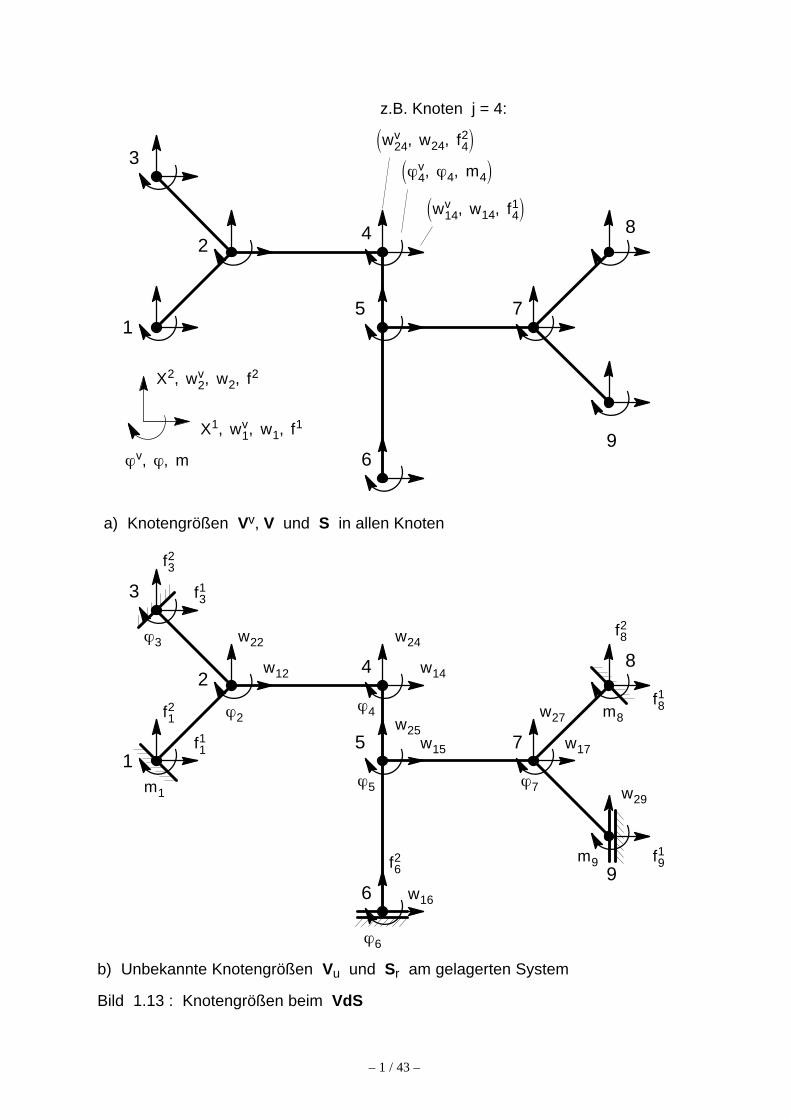
– 1 / 43 –
Bild 1.13 : Knotengrößen beim VdS
1
�3
2
3
4
5
6
7
8
9
1
2
3
4
5
6
7
8
9
a) Knotengrößen Vv, V und S in allen Knoten
b) Unbekannte Knotengrößen Vu und Sr am gelagerten System
X2, wv2, w2, f2
X1, wv1, w1, f1
�v, �, m
z.B. Knoten j = 4:
�wv24, w24, f24���v
4, �4, m4�
�wv14, w14, f14�
f23
f13
w22
w12
�2
m1
f21
f11
w24
w14
�4
w15
�5
w25
�6
f26
w16
w27
w17
�7
f28
f18m8
f19
w29
m9
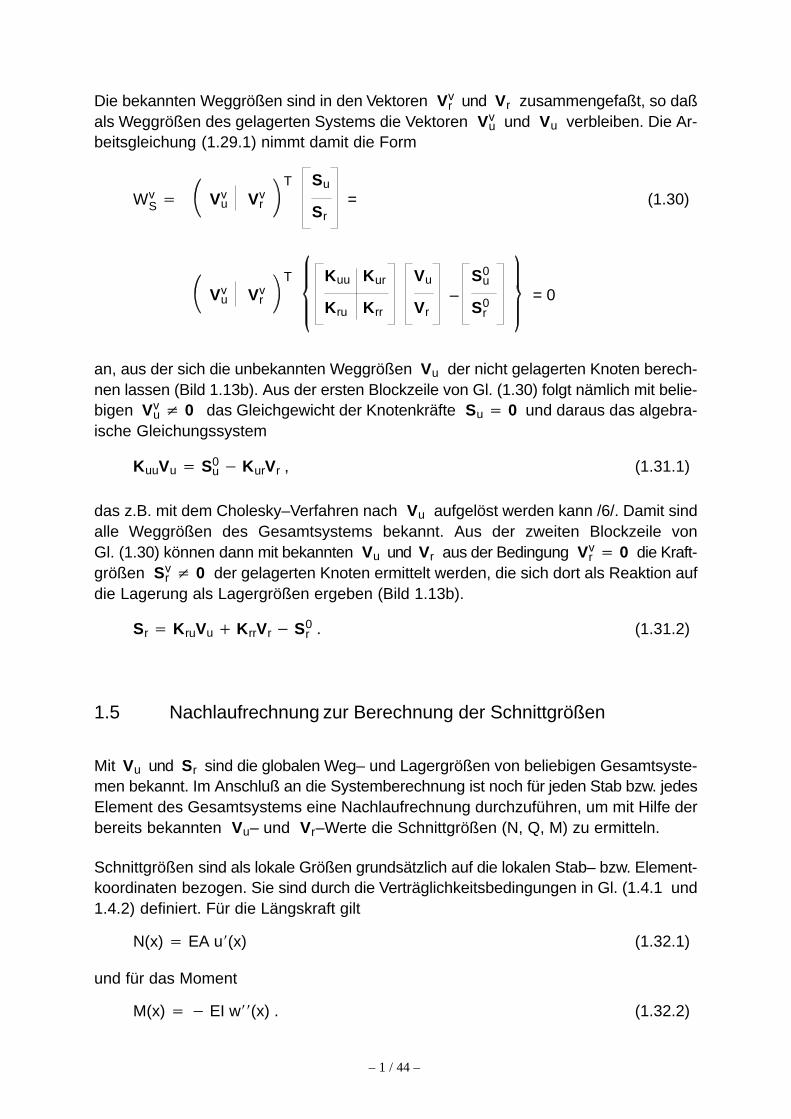
– 1 / 44 –
Die bekannten Weggrößen sind in den Vektoren Vvr und Vr zusammengefaßt, so daß
als Weggrößen des gelagerten Systems die Vektoren Vvu und Vu verbleiben. Die Ar-
beitsgleichung (1.29.1) nimmt damit die Form
WvS � (1.30)Vv
u Vvr
T Su
Sr=
Vvu Vv
r
T Kuu
Kru
Kur
Krr
Vu
Vr–
S0u
S0r
= 0
an, aus der sich die unbekannten Weggrößen Vu der nicht gelagerten Knoten berech-nen lassen (Bild 1.13b). Aus der ersten Blockzeile von Gl. (1.30) folgt nämlich mit belie-bigen Vv
u � 0 das Gleichgewicht der Knotenkräfte Su � 0 und daraus das algebra-ische Gleichungssystem
(1.31.1)KuuVu � S0u � KurVr ,
das z.B. mit dem Cholesky–Verfahren nach Vu aufgelöst werden kann /6/. Damit sindalle Weggrößen des Gesamtsystems bekannt. Aus der zweiten Blockzeile vonGl. (1.30) können dann mit bekannten Vu und Vr aus der Bedingung Vv
r � 0 die Kraft-größen Sv
r � 0 der gelagerten Knoten ermittelt werden, die sich dort als Reaktion aufdie Lagerung als Lagergrößen ergeben (Bild 1.13b).
(1.31.2)Sr � KruVu � KrrVr � S0r .
1.5 Nachlaufrechnung zur Berechnung der Schnittgrößen
Mit Vu und Sr sind die globalen Weg– und Lagergrößen von beliebigen Gesamtsyste-men bekannt. Im Anschluß an die Systemberechnung ist noch für jeden Stab bzw. jedesElement des Gesamtsystems eine Nachlaufrechnung durchzuführen, um mit Hilfe derbereits bekannten Vu– und Vr–Werte die Schnittgrößen (N, Q, M) zu ermitteln.
Schnittgrößen sind als lokale Größen grundsätzlich auf die lokalen Stab– bzw. Element-koordinaten bezogen. Sie sind durch die Verträglichkeitsbedingungen in Gl. (1.4.1 und1.4.2) definiert. Für die Längskraft gilt
(1.32.1)N(x) � EA u�(x)
und für das Moment
(1.32.2)M(x) � � EI w��(x) .
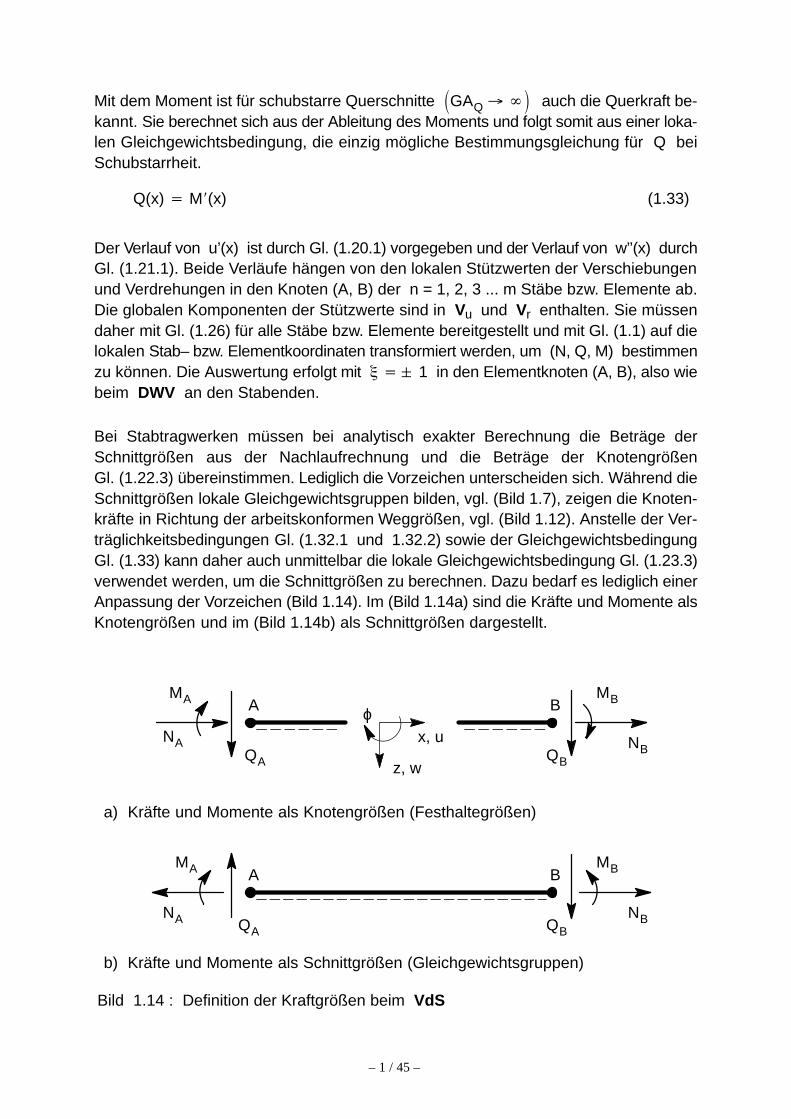
– 1 / 45 –
Mit dem Moment ist für schubstarre Querschnitte �GAQ � � auch die Querkraft be-kannt. Sie berechnet sich aus der Ableitung des Moments und folgt somit aus einer loka-len Gleichgewichtsbedingung, die einzig mögliche Bestimmungsgleichung für Q beiSchubstarrheit.
(1.33)Q(x) � M�(x)
Der Verlauf von u’(x) ist durch Gl. (1.20.1) vorgegeben und der Verlauf von w’’(x) durchGl. (1.21.1). Beide Verläufe hängen von den lokalen Stützwerten der Verschiebungenund Verdrehungen in den Knoten (A, B) der n = 1, 2, 3 ... m Stäbe bzw. Elemente ab.Die globalen Komponenten der Stützwerte sind in Vu und Vr enthalten. Sie müssendaher mit Gl. (1.26) für alle Stäbe bzw. Elemente bereitgestellt und mit Gl. (1.1) auf dielokalen Stab– bzw. Elementkoordinaten transformiert werden, um (N, Q, M) bestimmenzu können. Die Auswertung erfolgt mit � �� 1 in den Elementknoten (A, B), also wiebeim DWV an den Stabenden.
Bei Stabtragwerken müssen bei analytisch exakter Berechnung die Beträge derSchnittgrößen aus der Nachlaufrechnung und die Beträge der KnotengrößenGl. (1.22.3) übereinstimmen. Lediglich die Vorzeichen unterscheiden sich. Während dieSchnittgrößen lokale Gleichgewichtsgruppen bilden, vgl. (Bild 1.7), zeigen die Knoten-kräfte in Richtung der arbeitskonformen Weggrößen, vgl. (Bild 1.12). Anstelle der Ver-träglichkeitsbedingungen Gl. (1.32.1 und 1.32.2) sowie der GleichgewichtsbedingungGl. (1.33) kann daher auch unmittelbar die lokale Gleichgewichtsbedingung Gl. (1.23.3)verwendet werden, um die Schnittgrößen zu berechnen. Dazu bedarf es lediglich einerAnpassung der Vorzeichen (Bild 1.14). Im (Bild 1.14a) sind die Kräfte und Momente alsKnotengrößen und im (Bild 1.14b) als Schnittgrößen dargestellt.
Bild 1.14 : Definition der Kraftgrößen beim VdS
A Bϕx, u
z, w
MA
NAQA
MB
NBQB
a) Kräfte und Momente als Knotengrößen (Festhaltegrößen)
A BMA
NA QA
MB
NBQB
b) Kräfte und Momente als Schnittgrößen (Gleichgewichtsgruppen)
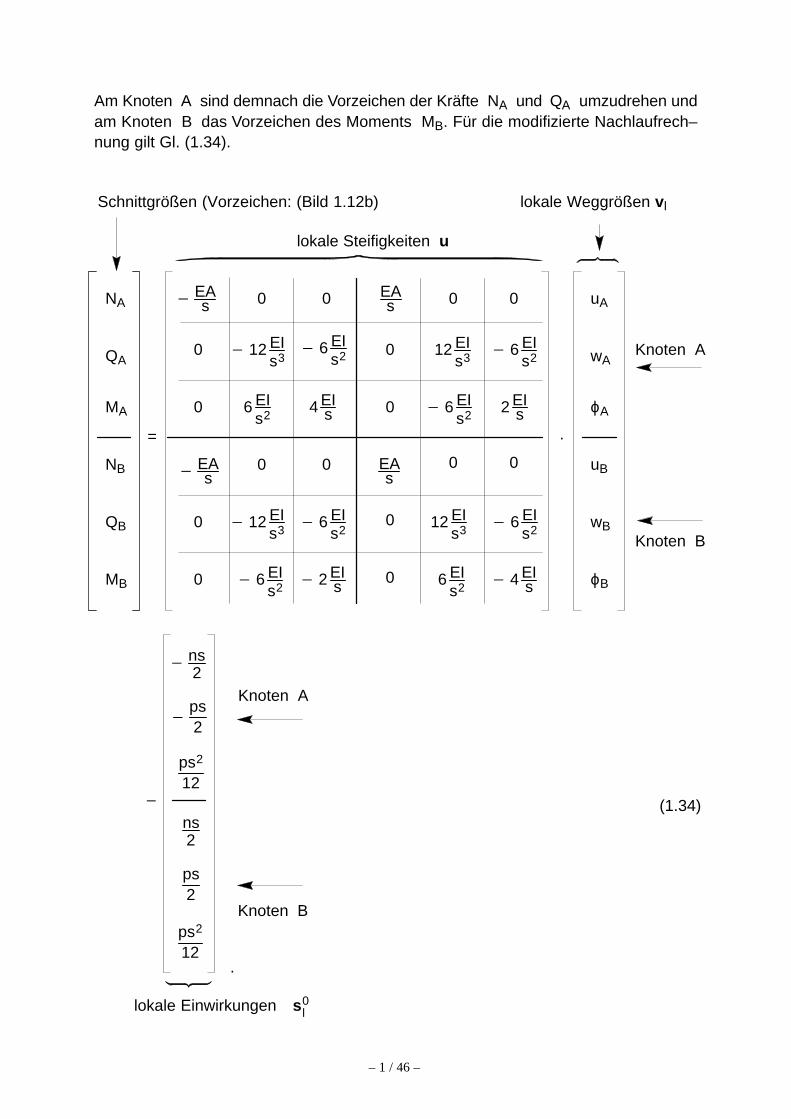
– 1 / 46 –
Am Knoten A sind demnach die Vorzeichen der Kräfte NA und QA umzudrehen undam Knoten B das Vorzeichen des Moments MB. Für die modifizierte Nachlaufrech–nung gilt Gl. (1.34).
� EAs
EAsNA
QA
MA
NB
QB
MB
Knoten A
Knoten A
Knoten B
lokale Weggrößen vlSchnittgrößen (Vorzeichen: (Bild 1.12b)
� 12 EIs3
6 EIs2
=
� 6 EIs2 12 EI
s3
� 6 EIs2
� 6 EIs2
.
uA
wA
ϕA
uB
wB
ϕB
� EAs
0 0
0
0
� 12 EIs3
0
0 � 6 EIs2
0 0
0 0
0
4 EIs 0 2 EI
s
0 0 EAs
� 6 EIs2
0
0
12 EIs3
� 6 EIs2
� 2 EIs 6 EI
s2� 4 EI
s
lokale Steifigkeiten u
s0l
Knoten B
� ns2
�ps2
ps2
12
ns2
ps2
ps2
12.
–
lokale Einwirkungen
(1.34)
– 1 / 47 –
Im Rahmen des VdS wird das PvW mit zulässigen Ansätzen ausgewertet. Sie sindbeim Dehnstab linear und beim Biegestab kubisch im Stab bzw. Element verteilt.Dies führt auf konstante Längs– und Querkräfte und linear verteilte Momente, wenndie Nachlaufrechnung auf Gl. (1.32 und 1.33) beruht. Die Ergebnisse von numeri–schen und analytischen Berechnungen stimmen daher nur dann überein, wenn keineStreckenlasten auftreten (n = 0, p = 0). Erfolgt die Nachlaufrechnung dagegen mit Hilfevon Gl. (1.34), werden zumindest konstante Streckenlasten bei der Berechnung derKnotenkräfte erfaßt, so daß sich auch genauere Lösungen für die zugehörigen Schnitt-größen einstellen, vgl. (Abschnitt 1.7).
1.6 Beispiel
Auf die Durchführung von Programmierschritten, die anstehen, um das VdS auf Rech-nern zu implementieren, wird verzichtet. Sie gehören zum Aufgabenbereich vonLehrveranstaltungen der Bauinformatik, auf die in diesem Zusammenhang verwie–sen wird. Vielmehr soll der Berechnungsablauf des VdS anhand eines einfachenBeispiels veranschaulicht und geübt werden. Zusätzlich wird mit einem Programm(Hier: FEMAS /5/) eine Vergleichsberechnung durchgeführt, um bei Anwendern dasVertrauen in eine zwangsläufig abstrakte Programmierung zu stärken. Ein weiteres Bei-spiel wird im Abschnitt 1.8 berechnet.
Alle wesentlichen Angaben zum betrachteten Beispiel sind im (Bild 1.15) zusammenge-stellt. (Bild 1.15a) enthält die Aufgabenstellung und im (Bild 1.15b) ist das VdS–Berech-nungssystem dargestellt. Das ebene Rahmensystem aus Stahlbeton besteht aus ei-nem senkrecht angeordneten Stiel und einem waagerecht verlaufenden Riegel. Stielund Riegel sind biegesteif miteinander verbunden und der Stiel am Anfang und der Rie-gel am Ende fest eingespannt. An der biegesteifen Verbindungsecke greift das Lastmo-ment M an. Dieses Moment kann sich als Einzelgröße nur linear im Stiel und Riegelverteilen. Es reicht daher aus, das Gesamtsystem (Bild 1.15a) lediglich in zwei Stäbe
zu unterteilen, einen für den Stiel mit der Kennzeichnung n = 1 und einen für den Rie-
gel mit der Kennzeichnung n = 2 . Das VdS beruht auf stab– bzw. elementweise kubi-
schen Durchbiegungsverläufen und kann somit eine lineare Momentenverteilung stab–bzw. elementweise exakt erfassen. Eine feinere Unterteilung würde daher keine neuenErkenntnisse ergeben.
Stiel und Riegel weisen unterschiedliche lokale Koordinatensysteme auf, vgl.(Bild 1.15b). Es ist daher eine Transformation auf das globale X–Koordinatensystemerforderlich. Die topologische, geometrische und baustatische Beschreibung der Ein-zelstäbe 1 und 2 ist unter Beachtung der Randbedingungen in den (Bildern 1.16 bis1.19) dargestellt. Im Stiel ist nur der Knoten B = 2 aktiv und im Riegel nur der KnotenA = 2. Die Knoten A = 1 im Stiel und B = 3 im Riegel fallen jeweils mit der Stiel– bzw.Riegeleinspannung zusammen und entfallen damit vollständig aus der Systembetrach-tung. Elementeinwirkungsmatrizen s0
g treten in beiden Stäben nicht auf. Das Lastmo-ment M wird als Größe des Systemknotens 2 direkt der dort wirkenden arbeitskonfor-men virtuellen Verdrehung �v
2 zugeordnet und an entsprechender Stelle in derSystemeinwirkungsmatrix S0 plaziert (Tabelle 1.5).
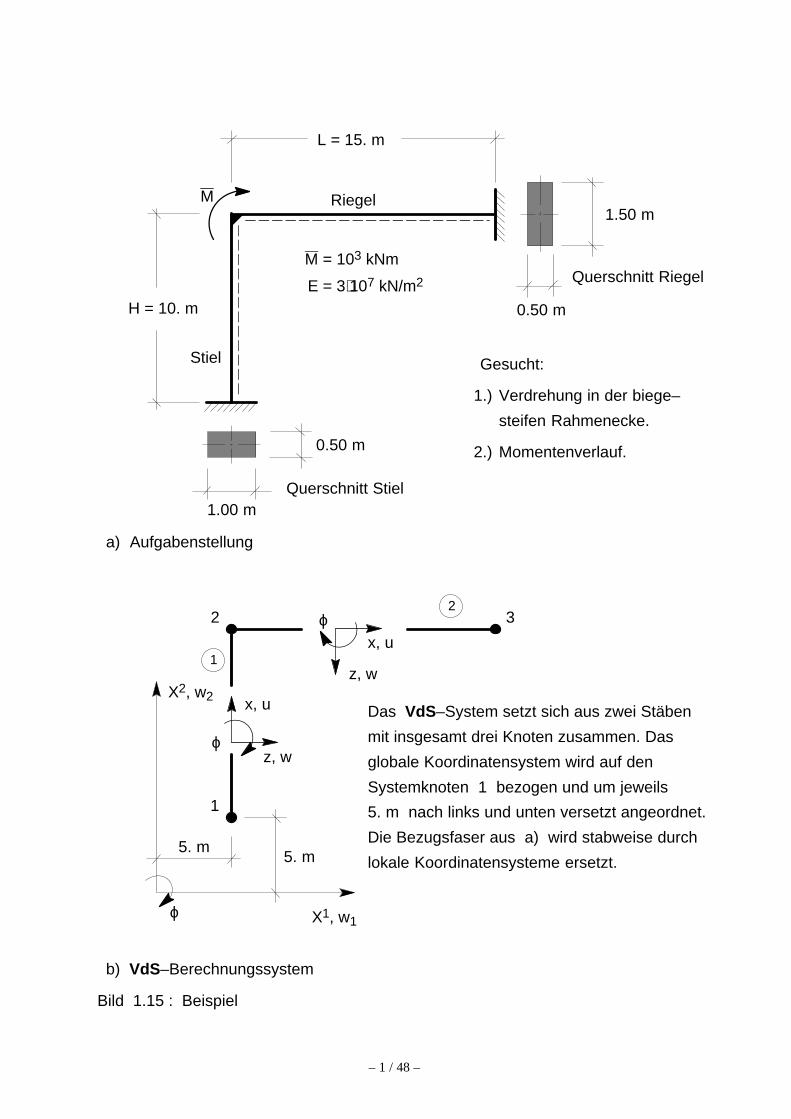
– 1 / 48 –
Bild 1.15 : Beispiel
b) VdS–Berechnungssystem
L = 15. m
H = 10. m
Stiel
RiegelM
M = 103 kNm
E = 3⋅107 kN/m2
1.50 m
0.50 m
0.50 m
1.00 mQuerschnitt Stiel
Querschnitt Riegel
a) Aufgabenstellung
ϕx, u
z, w
22 3
1
ϕ
x, u
z, w
5. m5. m
ϕ X1, w1
X2, w2Das VdS–System setzt sich aus zwei Stäben
mit insgesamt drei Knoten zusammen. Das
globale Koordinatensystem wird auf den
Systemknoten 1 bezogen und um jeweils
5. m nach links und unten versetzt angeordnet.
Die Bezugsfaser aus a) wird stabweise durch
lokale Koordinatensysteme ersetzt.
Gesucht:
1.) Verdrehung in der biege–
steifen Rahmenecke.
2.) Momentenverlauf.
1
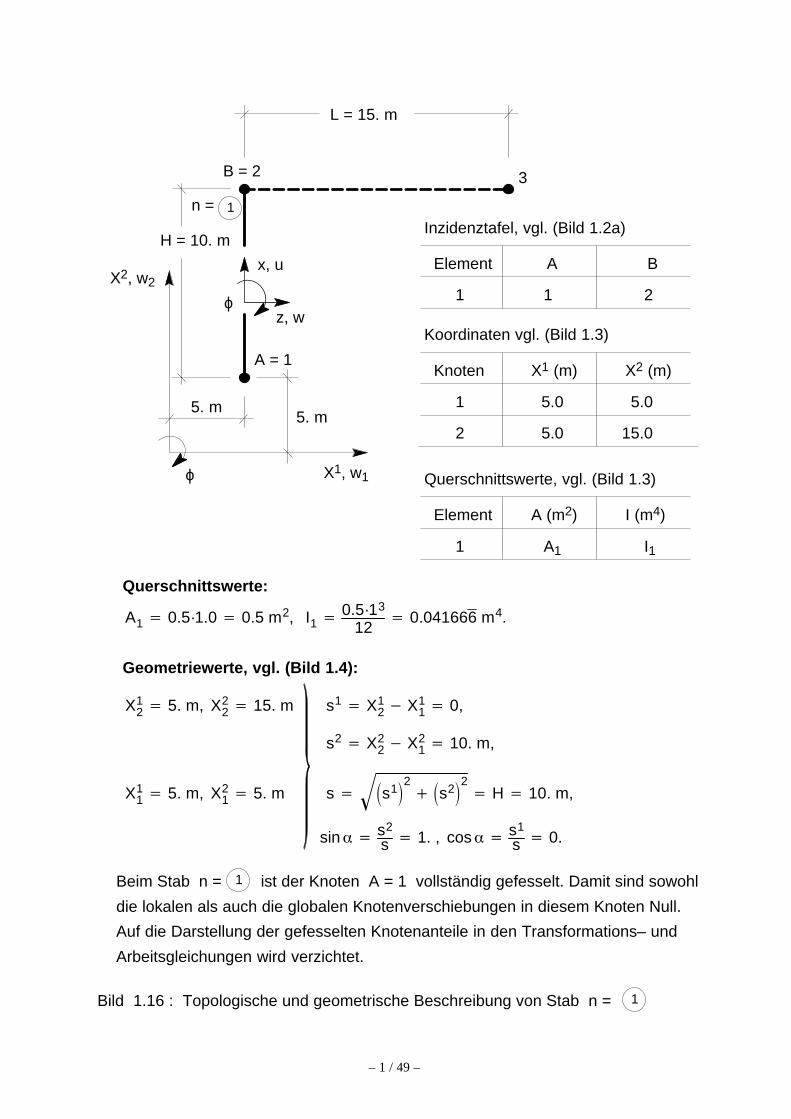
– 1 / 49 –
Bild 1.16 : Topologische und geometrische Beschreibung von Stab n =
B = 2 3
A = 1
ϕ
x, u
z, w
5. m5. m
ϕ X1, w1
X2, w2
1
L = 15. m
H = 10. m
1
Inzidenztafel, vgl. (Bild 1.2a)
Element A B
1 1 2
Koordinaten vgl. (Bild 1.3)
Knoten X1 (m) X2 (m)
1 5.0 5.0
Querschnittswerte, vgl. (Bild 1.3)
Element A (m2) I (m4)
1 A1 I1
2 5.0 15.0
n =
Querschnittswerte:
A1 � 0.5·1.0 � 0.5 m2, I1 � 0.5·13
12� 0.041666 m4.
Geometriewerte, vgl. (Bild 1.4):
X12 � 5. m, X2
2 � 15. m s1 � X12 � X1
1 � 0,
X11 � 5. m, X2
1 � 5. m
s2 � X22 � X2
1 � 10. m,
s � �s1�2 � �s2�2� � H � 10. m,
sin� � s2
s � 1. , cos� � s1
s � 0.
Beim Stab n = 1 ist der Knoten A = 1 vollständig gefesselt. Damit sind sowohl
die lokalen als auch die globalen Knotenverschiebungen in diesem Knoten Null.
Auf die Darstellung der gefesselten Knotenanteile in den Transformations– und
Arbeitsgleichungen wird verzichtet.
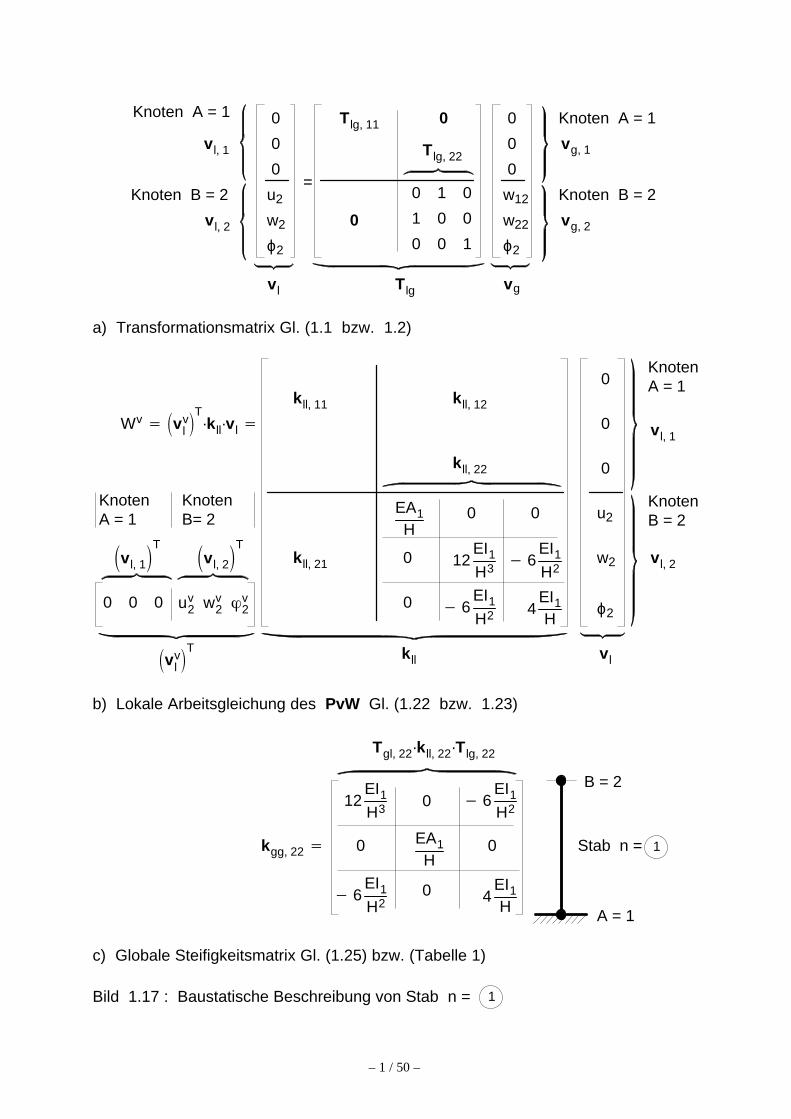
– 1 / 50 –
u2
w2
ϕ2
Knoten A = 1
u2
w2
ϕ2
0
0
0
0
0 0EA1H
0
0
12EI1H3
� 6EI1H2
� 6EI1H2 4
EI1H
Bild 1.17 : Baustatische Beschreibung von Stab n = 1
0
0=
0
Tlg, 11
0
1
0
1
0
0
0
0
1
Tlg, 22
0
w12
w22
ϕ2
0
0
0
Knoten A = 1
vl Tlg vg
vg, 1
Knoten B = 2
vg, 2
vl, 1
Knoten B = 2
vl, 2
a) Transformationsmatrix Gl. (1.1 bzw. 1.2)
kll, 11 kll, 12
kll, 22
kll, 21
KnotenA = 1
vl, 1
KnotenB = 2
vl, 2
vlkll
0
0EA1H
0
0
12EI1H3
� 6EI1H2
� 6EI1H2 4
EI1H
c) Globale Steifigkeitsmatrix Gl. (1.25) bzw. (Tabelle 1)
b) Lokale Arbeitsgleichung des PvW Gl. (1.22 bzw. 1.23)
kgg, 22 �
Wv � �vvl�T·kll·vl �
KnotenA = 1
�vl, 1�T
0 0 0 uv2 wv
2 �v2
�vvl�T
KnotenB= 2
�vl, 2�T
B = 2
A = 1
Stab n = 1
Tgl, 22·kll, 22·Tlg, 22
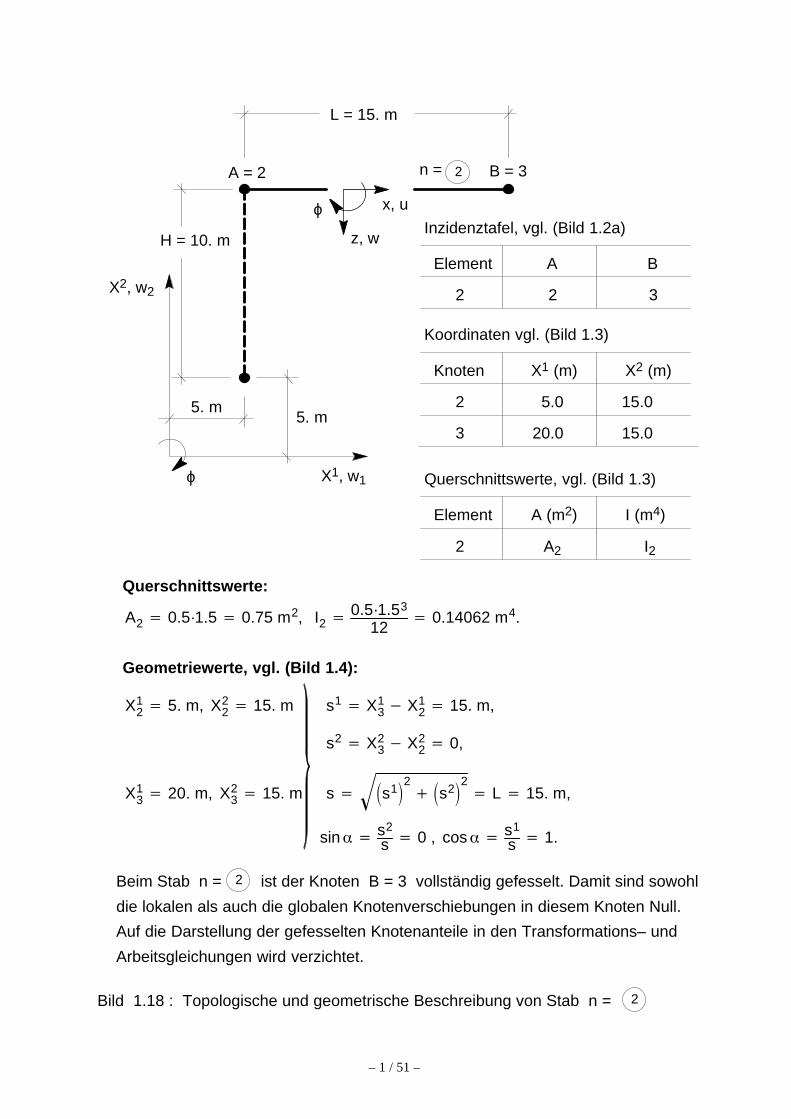
– 1 / 51 –
Bild 1.18 : Topologische und geometrische Beschreibung von Stab n =
B = 3A = 2
ϕ x, u
z, w
5. m5. m
ϕ X1, w1
X2, w2
2
L = 15. m
H = 10. m
2
Inzidenztafel, vgl. (Bild 1.2a)
Element A B
2 2 3
Koordinaten vgl. (Bild 1.3)
Knoten X1 (m) X2 (m)
2 5.0 15.0
Querschnittswerte, vgl. (Bild 1.3)
Element A (m2) I (m4)
2 A2 I2
3 20.0 15.0
n =
Querschnittswerte:
A2 � 0.5·1.5 � 0.75 m2, I2 � 0.5·1.53
12� 0.14062 m4.
Geometriewerte, vgl. (Bild 1.4):
X12 � 5. m, X2
2 � 15. m s1 � X13 � X1
2 � 15. m,
X13 � 20. m, X2
3 � 15. m
s2 � X23 � X2
2 � 0,
s � �s1�2 � �s2�2� � L � 15. m,
sin� � s2
s � 0 , cos� � s1
s � 1.
Beim Stab n = 2 ist der Knoten B = 3 vollständig gefesselt. Damit sind sowohl
die lokalen als auch die globalen Knotenverschiebungen in diesem Knoten Null.
Auf die Darstellung der gefesselten Knotenanteile in den Transformations– und
Arbeitsgleichungen wird verzichtet.
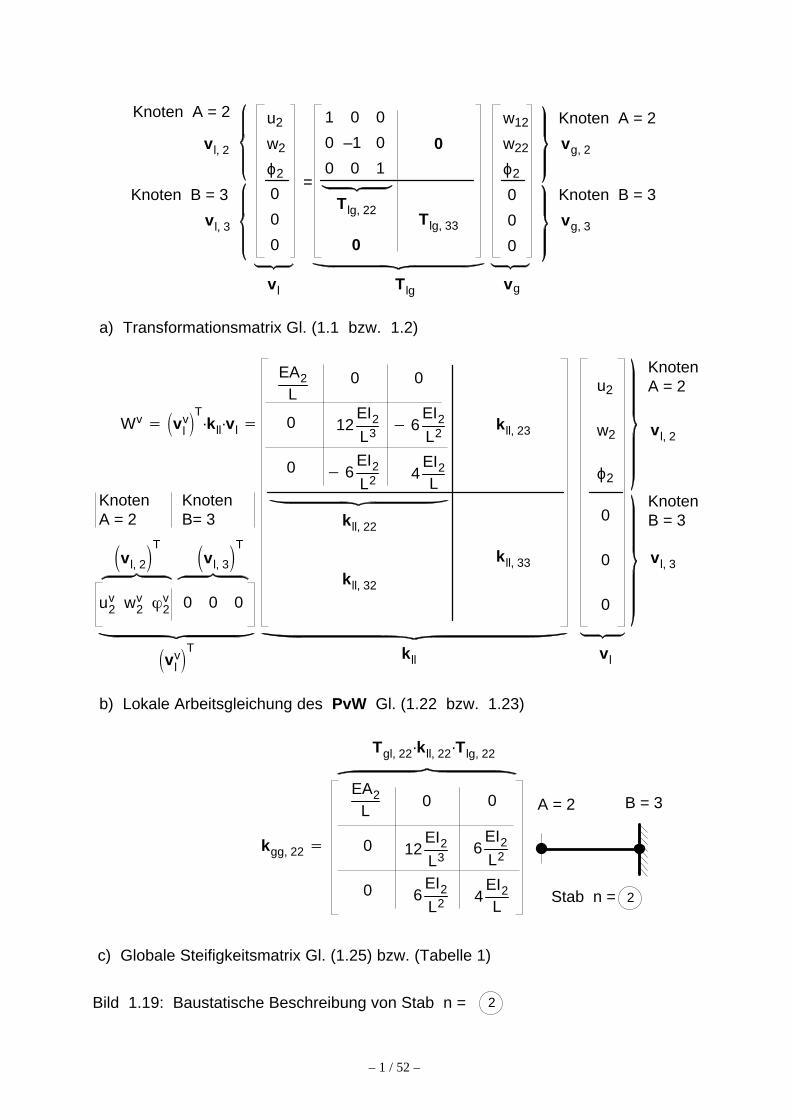
– 1 / 52 –
u2
w2
ϕ2
Knoten A = 2
u2
w2
ϕ2
0
0
0
0
0 0EA2L
0
0
12EI2L3
� 6EI2L2
� 6EI2L2 4
EI2L
Bild 1.19: Baustatische Beschreibung von Stab n = 2
0
0
=
0
Tlg, 33
1
0
0
0
–1
0
0
0
1
Tlg, 22
0
w12
w22
ϕ2
0
0
0
Knoten A = 2
vl Tlg vg
vg, 2
Knoten B = 3
vg, 3
vl, 2
Knoten B = 3
vl, 3
a) Transformationsmatrix Gl. (1.1 bzw. 1.2)
kll, 33
kll, 22
kll, 32
kll, 23
KnotenA = 2
vl, 2
KnotenB = 3
vl, 3
vlkll
0 0EA2
L
0
0
12EI2L3
6EI2L2
6EI2L2 4
EI2L
c) Globale Steifigkeitsmatrix Gl. (1.25) bzw. (Tabelle 1)
b) Lokale Arbeitsgleichung des PvW Gl. (1.22 bzw. 1.23)
kgg, 22 �
Wv � �vvl�T·kll·vl �
KnotenA = 2
�vl, 2�T
0 0 0uv2 wv
2 �v2
�vvl�T
KnotenB= 3
�vl, 3�T
B = 3A = 2
Stab n = 2
Tgl, 22·kll, 22·Tlg, 22
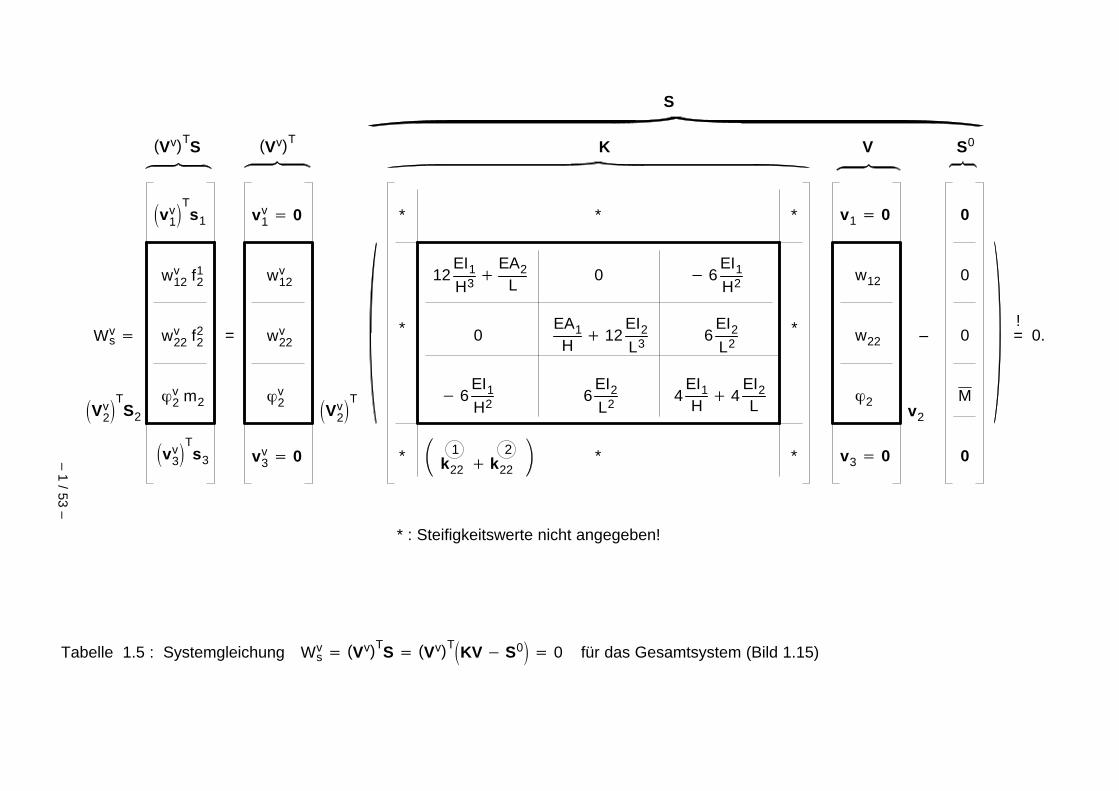
(Vv)TS
�vv1�Ts1
Wvs �
vv1 � 0
= = 0.
K V S0(Vv)T
12EI1H3
�EA2
L
1k22
wv12 f12
�Vv2�TS2
�Vv2�T
0
Tabelle 1.5 : Systemgleichung Wvs � (Vv)TS � (Vv)T�KV � S0� � 0 für das Gesamtsystem (Bild 1.15)
wv22 f22
�v2 m2
wv12
wv22
�v2
vv3 � 0
*
*
*
EA1H
� 12EI2L3
4EI1H
� 4EI2L
6EI2L2
6EI2L2
0 � 6EI1H2
0
� 6EI1H2
*
*
*
*
v1 � 0
w12
w22
�2
v3 � 0
–!
v2
2� k22
M
0
0
0
S
* : Steifigkeitswerte nicht angegeben!
*
�vv3�Ts3– 1 / 53 –
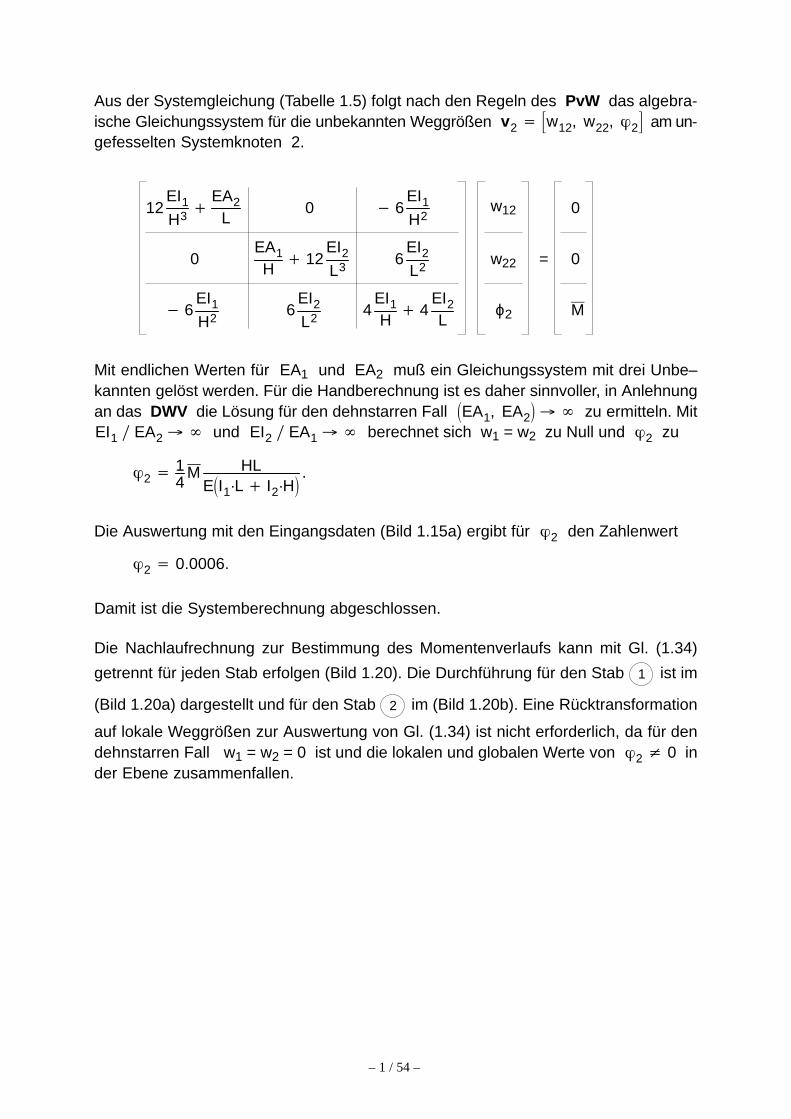
– 1 / 54 –
Aus der Systemgleichung (Tabelle 1.5) folgt nach den Regeln des PvW das algebra-ische Gleichungssystem für die unbekannten Weggrößen v2 � �w12, w22, �2
� am un-gefesselten Systemknoten 2.
12EI1H3
�EA2
L
0
0
EA1H
� 12EI2L3
� 6EI1H2
6EI2L2
� 6EI1H2
6EI2L2
4EI1H
� 4EI2L
w12
w22
ϕ2
=
0
0
M
Mit endlichen Werten für EA1 und EA2 muß ein Gleichungssystem mit drei Unbe–kannten gelöst werden. Für die Handberechnung ist es daher sinnvoller, in Anlehnungan das DWV die Lösung für den dehnstarren Fall �EA1, EA2
� � zu ermitteln. MitEI1 � EA2 � und EI2 � EA1 � berechnet sich w1 = w2 zu Null und �2 zu
�2 � 14
M HLE�I1·L � I2·H�
.
Die Auswertung mit den Eingangsdaten (Bild 1.15a) ergibt für �2 den Zahlenwert
�2 � 0.0006.
Damit ist die Systemberechnung abgeschlossen.
Die Nachlaufrechnung zur Bestimmung des Momentenverlaufs kann mit Gl. (1.34)
getrennt für jeden Stab erfolgen (Bild 1.20). Die Durchführung für den Stab 1 ist im
(Bild 1.20a) dargestellt und für den Stab 2 im (Bild 1.20b). Eine Rücktransformation
auf lokale Weggrößen zur Auswertung von Gl. (1.34) ist nicht erforderlich, da für dendehnstarren Fall w1 = w2 = 0 ist und die lokalen und globalen Werte von �2 � 0 inder Ebene zusammenfallen.
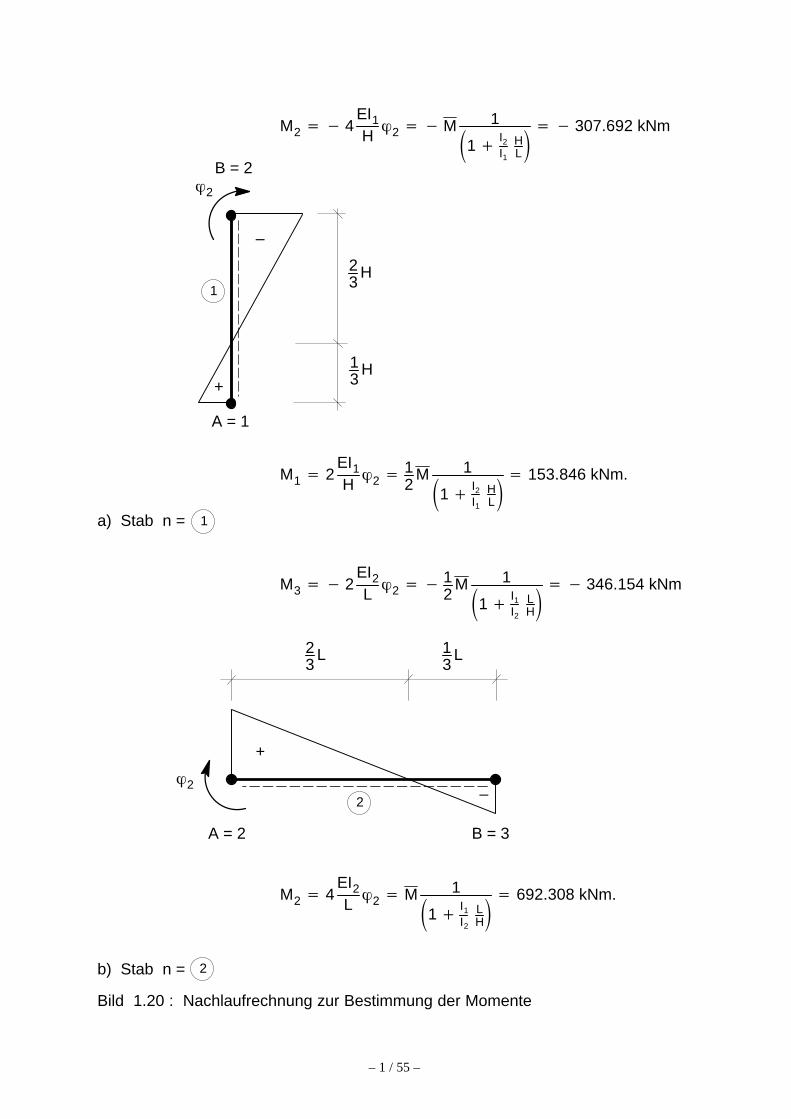
– 1 / 55 –
Bild 1.20 : Nachlaufrechnung zur Bestimmung der Momente
b) Stab n =
�2
a) Stab n =
2
A = 2 B = 3
1
+
–
23
H
13
H
A = 1
B = 2
M2 � � 4EI1H
�2 � � M 1
�1 � I2I1
HL� � � 307.692 kNm
M1 � 2EI1H
�2 � 12
M 1
�1 � I2I1
HL� � 153.846 kNm.
1
�2
13
L23
L
2
M3 � � 2EI2L
�2 � � 12
M 1
�1 � I1I2
LH� � � 346.154 kNm
M2 � 4EI2L
�2 � M 1
�1 � I1
I2
LH� � 692.308 kNm.
+
–
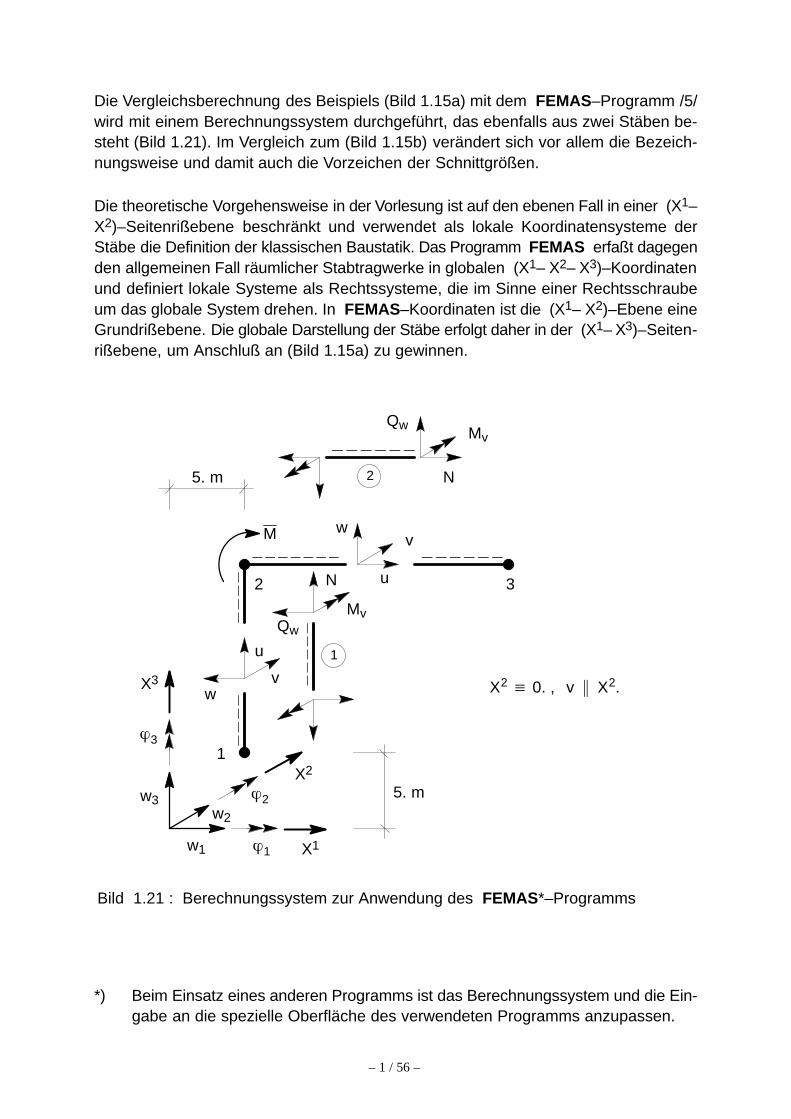
– 1 / 56 –
Die Vergleichsberechnung des Beispiels (Bild 1.15a) mit dem FEMAS–Programm /5/wird mit einem Berechnungssystem durchgeführt, das ebenfalls aus zwei Stäben be-steht (Bild 1.21). Im Vergleich zum (Bild 1.15b) verändert sich vor allem die Bezeich-nungsweise und damit auch die Vorzeichen der Schnittgrößen.
Die theoretische Vorgehensweise in der Vorlesung ist auf den ebenen Fall in einer (X1–X2)–Seitenrißebene beschränkt und verwendet als lokale Koordinatensysteme derStäbe die Definition der klassischen Baustatik. Das Programm FEMAS erfaßt dagegenden allgemeinen Fall räumlicher Stabtragwerke in globalen (X1– X2– X3)–Koordinatenund definiert lokale Systeme als Rechtssysteme, die im Sinne einer Rechtsschraubeum das globale System drehen. In FEMAS–Koordinaten ist die (X1– X2)–Ebene eineGrundrißebene. Die globale Darstellung der Stäbe erfolgt daher in der (X1– X3)–Seiten-rißebene, um Anschluß an (Bild 1.15a) zu gewinnen.
Bild 1.21 : Berechnungssystem zur Anwendung des FEMAS*–Programms
32
5. m
5. m
X1
X3
2
1
X2 � 0. , v X2.
M
QwMv
N
wv
u
wv
u
Qw
Mv
N
�3
w3 �2
�1w1
1
X2
w2
*) Beim Einsatz eines anderen Programms ist das Berechnungssystem und die Ein-gabe an die spezielle Oberfläche des verwendeten Programms anzupassen.
– 1 / 57 –
Im Berechnungssystem zur Programmanwendung sind die Koordinatenwerte derglobalen X2–Koordinate identisch Null, vgl. (Bild1.21). Im Vergleich zur Darstellung im(Bild 1.15b) zeigt die lokale w–Hauptachse der Stäbe nun in entgegengesetzter Rich-tung, so daß sich auch die Lage der Bezugsfaser von der Unter– zur Oberkante derQuerschnitte verschiebt. Die senkrecht auf den ebenen (u– w)–Hauptachsen stehendev–Hauptachse verläuft parallel zur globalen X2–Koordinate. Das Lastmoment wirkt inder (X1– X3)–Ebene und dreht in positiver Richtung um die globale X2–Koordinate. AlsSchnittgrößen stellen sich M = Mv–Momente, Q = Qw–Querkräfte und N–Längskräfteein, vgl. (Bild 1.21).
Die erzielten Ergebnisse der Programmberechnung werden im (Bild 1.22) grafisch aus-gewertet. Der Verlauf der Verformung ist im (Bild 1.22a) und der Verlauf des Momentsim (Bild 1.22b) dargestellt.
Die Handberechnung wurde dehnstarr, die Programmberechnung dagegen mit denrealen Flächen der Stabquerschnitte dehnsteif durchgeführt. Die Abweichungen zwi-schen den Ergebnissen betragen sowohl bei den Weg– als auch bei den Kraftgrößennicht mehr als 1%. Für baupraktische Anwendungen ist der Einfluß der Dehnsteifigkeiti.a. ohne Bedeutung und kann daher zumindest im Rahmen einer Handberechnung ver-nachlässigt werden.
Im Rahmen einer Programmanwendung ist es dagegen sinnvoll, mit den real vorliegen-den Querschnittsflächen zu rechnen, da hierdurch kein Mehraufwand entsteht. DieDehnstarrheit kann aber auch durch die Vorgabe großer Querschnittsflächen simuliertwerden. Mit A1 = A2 = 1.E8 stellen sich z.B. beim vorliegenden Beispiel identische Zah-lenwerte zur Handrechnung ein. Durch eine falsche Einschätzung der Größenordnungkönnen sich aber auch vollständig verfälschte Ergebnisse ergeben, so daß es immerratsam ist, bei Anwendung von Programmen dehnsteif zu rechnen. Der geringe Ein–fluß der Dehnsteifigkeit auf den Verformungszustand des Systems ist z.B. deutlich im(Bild 1.22a) zu erkennen.
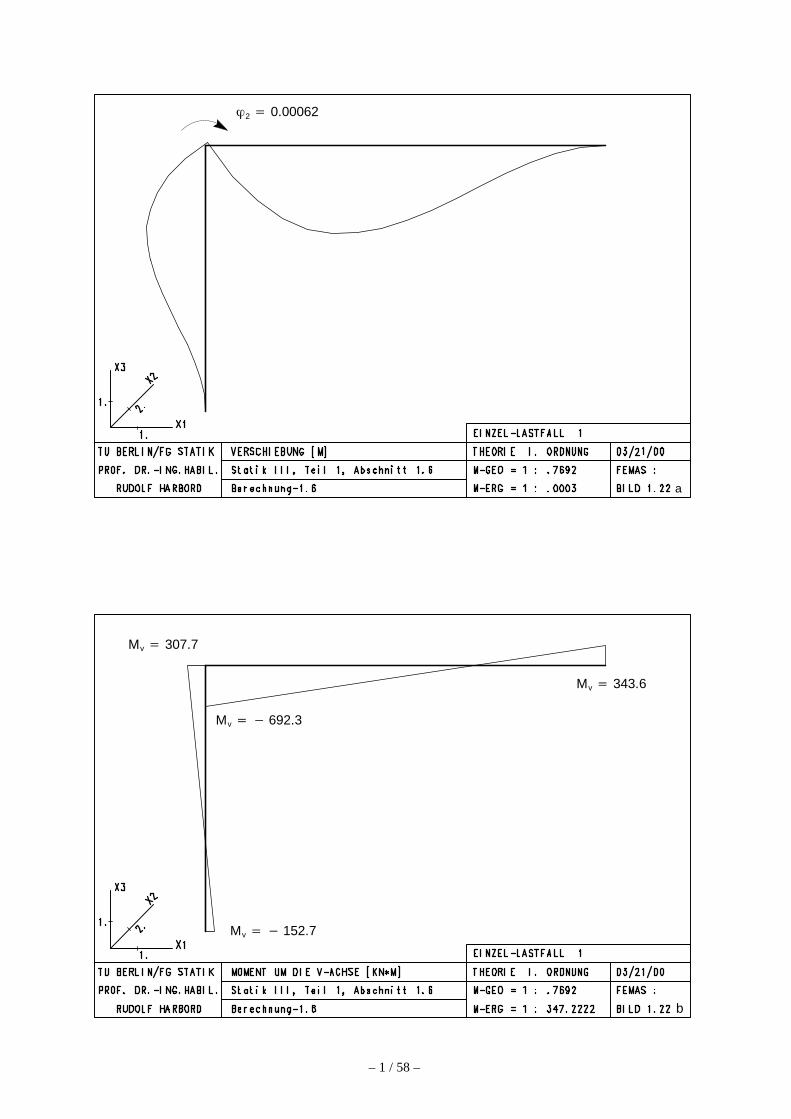
– 1 / 58 –
a
�2 � 0.00062
Mv � 307.7
b
Mv � 343.6
Mv � � 692.3
Mv � � 152.7
– 1 / 59 –
1.7 Abschätzung der Genauigkeit
Die gewählten Ansätze für u(x) Gl. (1.17.1) und w(x) Gl. (1.18.1) erfüllen die homoge-nen DGL Gl. (1.4.1 und 1.4.2) der Stabtheorie I. Ordnung. Das VdS antwortet daheranalytisch exakt, wenn n(x) = 0 und p(x) = 0 gilt, also nur Einzelkräfte und Einzelmo-mente aber keine Streckenlasten im betrachteten System angreifen. Es ist daher zu ver-muten, daß Lösungen mit n(x) ≠ 0 und p(x) ≠ 0 immer nur Näherungslösungen darstel-len, deren Güte bei gleicher Elementierung abnimmt, wenn die Ordnung von n(x) bzw.p(x) anwächst. Dieses Verhalten ist ggf. durch eine Verfeinerung der Elementierungauszugleichen.
Im Rahmen der hier verfolgten Strategie, alle Elementkenngrößen und Einwirkungenelementweise konstant zu erfassen, ist dies auch in einfacher Weise möglich. Das führtzwar u.U. zu einer erheblichen Aufweitung der Datenbasis und erhöht den rechneri-schen Aufwand. Gemessen an den heutigen Möglichkeiten von Arbeitsplatzrechnernin Verbindung mit Vor– und Nachbereitungsprogrammen ist dieser Mehraufwand aberunerheblich und steht in keinem Verhältnis zu den Vorzügen einer einheitlichen Vorge-hensweise mit elementweise konstanten Vorgaben.
Die rechnerunterstützte statisch–konstruktive Bearbeitung von Tragwerken mit starkenVeränderlichkeiten im System sollte daher immer mit einer groben Elementierung be-ginnen, um einen ersten Überblick über das Tragverhalten zu gewinnen. Im Anschlußdaran sollte eine systematische Verfeinerung der Elementierung erfolgen und zwar so-lange, bis der Einfluß der Systemparameter abgeklungen ist, sich also ein stationärerZustand der statischen Ergebnisse einstellt. Darüber hinaus sollten auch alle Möglich-keiten genutzt werden, die das VdS bietet, um durch systematische Parameterva–riation den Einfluß wichtiger Systemparamter aufzudecken und ggf. durch konstruktiveUmgestaltung des betrachteten Bauteils das Tragverhalten zu verbessern.
An einem einfachen Kragarm–Beispiel mit einem Element (Bild 1.23) soll gezeigt wer-den, welcher Fehler sich ggf. einstellt, wenn
– im Lastfall 1 (LF1) eine Einzellast am Ende,
– im Lastfall 2 (LF2) eine konstante Streckenlast und
– im Lastfall 3 (LF3) eine linear veränderliche Streckenlast
auf den Kragarm einwirkt. Die Berechnung der Weggrößen ist im (Bild 1.24) dargestelltund die Berechnung der Kraftgrößen im (Bild 1.25). Die Durchführung erfolgt in lokalenKoordinaten des Biegestabs. Der Dehnstab entfällt.
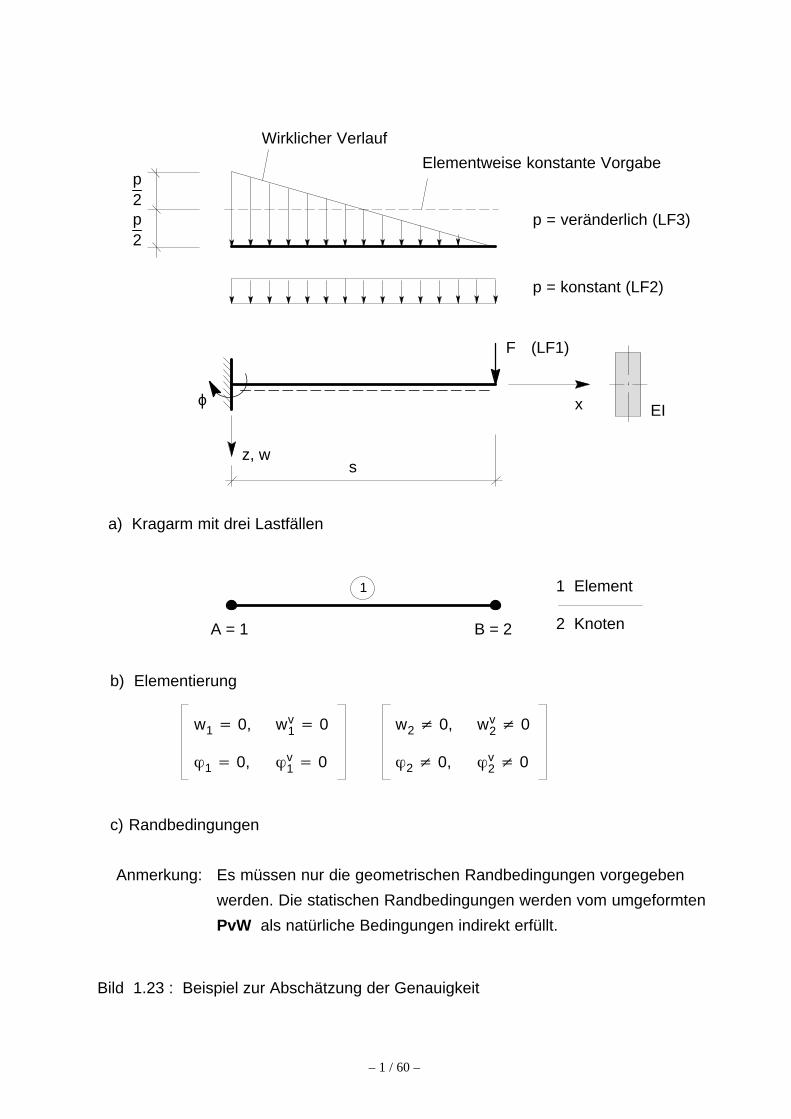
– 1 / 60 –
Bild 1.23 : Beispiel zur Abschätzung der Genauigkeit
b) Elementierung
F
a) Kragarm mit drei Lastfällen
ϕ
A = 1 B = 2
1
(LF1)
EIx
sz, w
p2
p2
Wirklicher Verlauf
Elementweise konstante Vorgabe
p = veränderlich (LF3)
p = konstant (LF2)
1 Element
2 Knoten
c) Randbedingungen
Anmerkung: Es müssen nur die geometrischen Randbedingungen vorgegeben
werden. Die statischen Randbedingungen werden vom umgeformten
PvW als natürliche Bedingungen indirekt erfüllt.
w1 � 0,
�1 � 0,
wv1 � 0
�v1 � 0
w2 � 0,
�2 � 0,
wv2 � 0
�v2 � 0
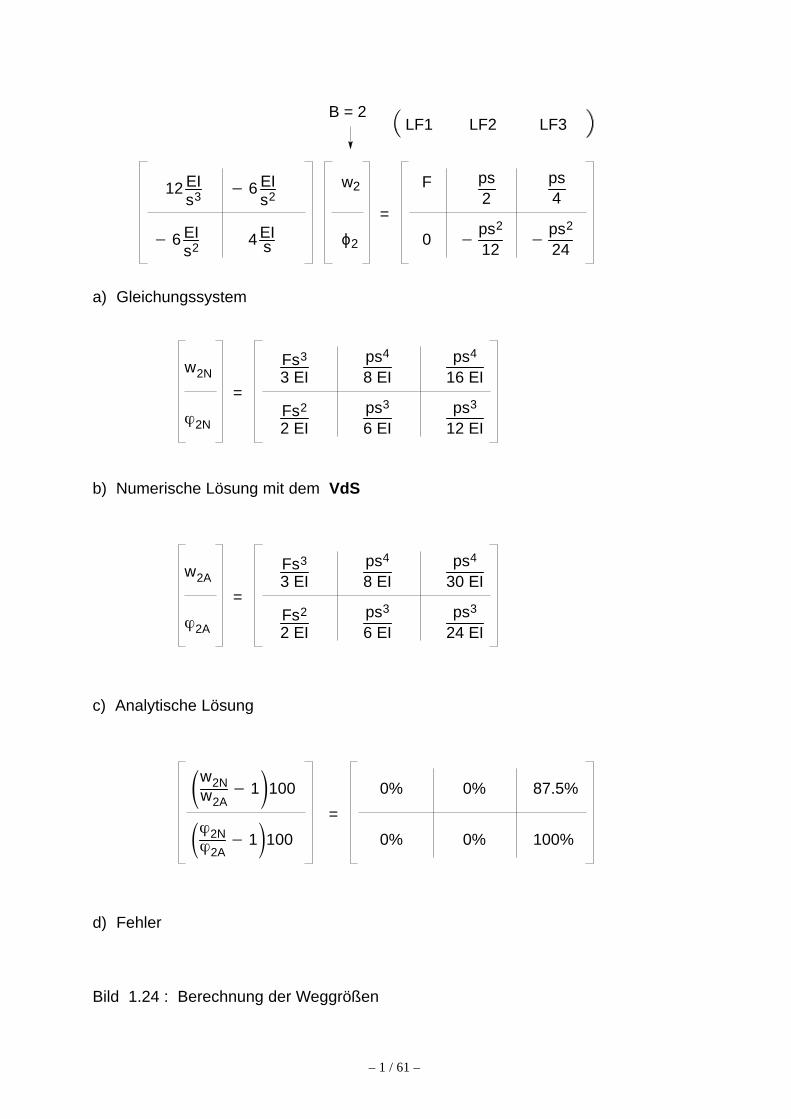
– 1 / 61 –
w2
ϕ2 0
F12 EIs3
� 6 EIs2
� 6 EIs2
4 EIs
Bild 1.24 : Berechnung der Weggrößen
a) Gleichungssystem
d) Fehler
c) Analytische Lösung
ps2
�ps2
12
=
ps4
�ps2
24
B = 2LF1 LF2 LF3
Fs3
3 EIps4
8 EI=
b) Numerische Lösung mit dem VdS
w2N
�2NFs2
2 EIps3
6 EI
ps4
16 EI
ps3
12 EI
Fs3
3 EIps4
8 EI=
w2A
�2AFs2
2 EIps3
6 EI
ps4
30 EI
ps3
24 EI
�w2Nw2A
� 1�100
=
��2N�2A
� 1�100
0% 87.5%
100%0%
0%
0%
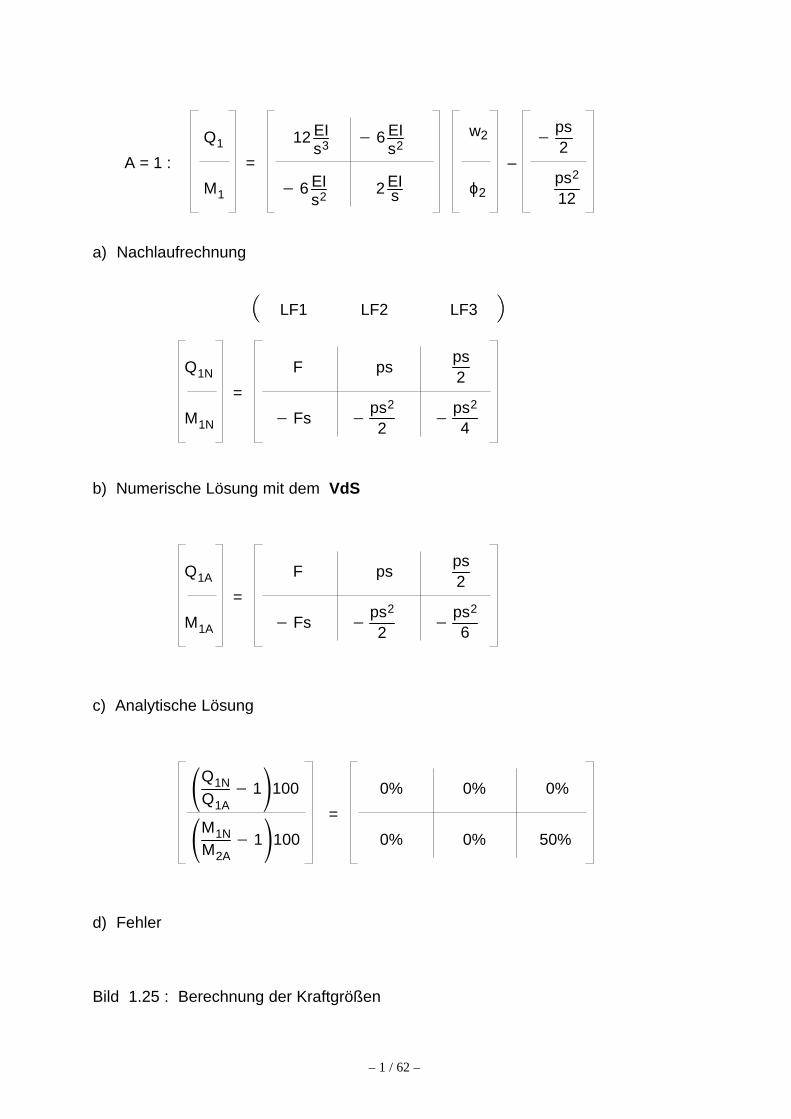
– 1 / 62 –
w2
ϕ2
12 EIs3
� 6 EIs2
� 6 EIs2
2 EIs
Bild 1.25 : Berechnung der Kraftgrößen
a) Nachlaufrechnung
d) Fehler
c) Analytische Lösung
ps2
12
–
�ps2
F ps
=
b) Numerische Lösung mit dem VdS
Q1N
M1N � Fs �ps2
2
ps2
�ps2
4
=
Q1A
M1A
�Q1N
Q1A� 1�100
=�M1NM2A
� 1�100
0%
50%0%
0%
0%
A = 1 : =
Q1
M1
LF1 LF2 LF3
F ps
� Fs �ps2
2
ps2
�ps2
6
0%
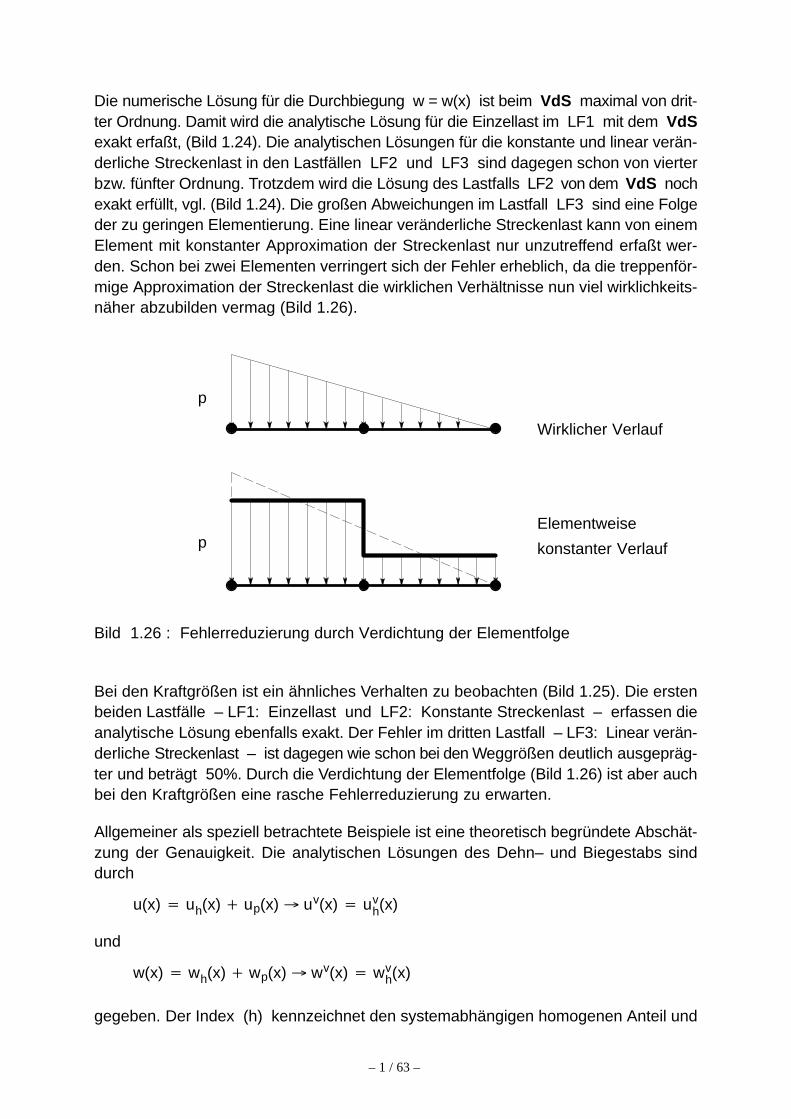
– 1 / 63 –
Die numerische Lösung für die Durchbiegung w = w(x) ist beim VdS maximal von drit-ter Ordnung. Damit wird die analytische Lösung für die Einzellast im LF1 mit dem VdSexakt erfaßt, (Bild 1.24). Die analytischen Lösungen für die konstante und linear verän-derliche Streckenlast in den Lastfällen LF2 und LF3 sind dagegen schon von vierterbzw. fünfter Ordnung. Trotzdem wird die Lösung des Lastfalls LF2 von dem VdS nochexakt erfüllt, vgl. (Bild 1.24). Die großen Abweichungen im Lastfall LF3 sind eine Folgeder zu geringen Elementierung. Eine linear veränderliche Streckenlast kann von einemElement mit konstanter Approximation der Streckenlast nur unzutreffend erfaßt wer-den. Schon bei zwei Elementen verringert sich der Fehler erheblich, da die treppenför-mige Approximation der Streckenlast die wirklichen Verhältnisse nun viel wirklichkeits-näher abzubilden vermag (Bild 1.26).
Bild 1.26 : Fehlerreduzierung durch Verdichtung der Elementfolge
Wirklicher Verlauf
Elementweise
p
konstanter Verlaufp
Bei den Kraftgrößen ist ein ähnliches Verhalten zu beobachten (Bild 1.25). Die erstenbeiden Lastfälle – LF1: Einzellast und LF2: Konstante Streckenlast – erfassen dieanalytische Lösung ebenfalls exakt. Der Fehler im dritten Lastfall – LF3: Linear verän-derliche Streckenlast – ist dagegen wie schon bei den Weggrößen deutlich ausgepräg-ter und beträgt 50%. Durch die Verdichtung der Elementfolge (Bild 1.26) ist aber auchbei den Kraftgrößen eine rasche Fehlerreduzierung zu erwarten.
Allgemeiner als speziell betrachtete Beispiele ist eine theoretisch begründete Abschät-zung der Genauigkeit. Die analytischen Lösungen des Dehn– und Biegestabs sinddurch
u(x) � uh(x) � up(x) � uv(x) � uvh(x)
und
w(x) � wh(x) � wp(x) � wv(x) � wvh(x)
gegeben. Der Index (h) kennzeichnet den systemabhängigen homogenen Anteil und

– 1 / 64 –
der Index (p) den lastabhängigen partikulären Anteil der Lösung. In den virtuellenGrößen entfallen wegen der Festlegung, daß sie als Änderungen der wirklichen Größendefiniert sind, die lastabhängigen partikulären Anteile (Lasten sind Vorgaben und keineveränderlichen Größen). Wird die analytische Lösung in das PvW (Gl. 1.14) eingesetzt,erhält man für den Dehn– und Biegestab die Ausdrücke
Wv � ��u�vh(x) EA u�h(x) � uvh(x) n � u�vh(x) EA u�p(x)�dx � 0
und
Wv � ��w��vh(x) EI w��h(x) � wvh(x) p � w��vh(x) EI w��p(x)�dx � 0.
Die gewählten Ansätze Gl. (1.17) und Gl. (1.18) zur Auswertung der Arbeitsausdrückestimmen mit den homogenen Lösungsanteilen der analytischen Lösung überein. Unter-schiede zwischen analytischer und numerischer Lösung sind daher auf die unterstriche-nen partikulären Lösungsanteile zurückzuführen, die beim VdS fehlen. Mit den Be-zeichnungen
Nvh(x) � u�vh(x)EA
und
Mvh(x) � � w��vh(x)EI
kann man sie auch in der Form
�u�vh(x) EA u�p(x)dx � �Nvh(x) u�p(x)dx
und
�w��vh(x) EI w��p(x)dx � ��Mvh(x) w��p(x)dx
schreiben. Formt man sie mit Hilfe der partiellen Integration um, so erhält man die Aus-drücke
�Nvh(x) u�p(x)dx � �Nv
h(x) up(x)�R��N�vh(x)up(x)dx
und
��Mvh(x) w��p(x)dx � � �Qv
h(x) wp(x)�R� �Mv
h(x)�p(x)�R��M��vh(x)wp(x) dx.
– 1 / 65 –
Auf den Rändern R = Rw + Rk der Stäbe bzw. Elemente ist die Gesamtlösung durchdie homogene Lösung eindeutig bestimmt, weil die Konstanten zum Anpassen derRandbedingungen nur in der homogenen Lösung auftreten. Die partikulären Lösungs-anteile der Gesamtverschiebung sind deshalb auf den Rändern Null. Es gilt: up(x) ≡ 0und wp(x) ≡ 0. Es sei in diesem Zusammenhang auch auf das DWV verwiesen. Dortsind beim 0–Zustand, der die Einwirkungen erfaßt, die geometrischen Unbestimmtenin den Fesseln ebenfalls Null (angespannte Fesseln). Im Inneren der Stäbe bzw. Ele-mente erfüllen die virtuellen Schnittgrößen Nv
h(x) und Mvh(x) wegen der exakten homo-
genen Ansätze die homogenen Gleichgewichtsbedingungen
N�vp(x) � 0
und
M��v � 0.
Damit entfallen die partikulären Lösungsanteile vollständig im PvW. Die Systemantwortdes VdS in den Knoten von diskretisierten statischen Systemen ist also bereits exakt,wenn man nur die homogene Lösung der DGL als Ansatz zur Auswertung des PvWheranzieht. Dies setzt aber voraus, daß man die Streckenlasten n und p durch dieIntegrale
�uv(x) n dx � �uvh(x) n dx
und
�wv(x) p dx � �wvh(x) p dx
statisch gleichwertig als Einzelgrößen in die Knoten überträgt. Durch die Vorgabe,n und p elementweise nur konstant zuzulassen, ist dies für konstante Streckenlastennoch exakt erfüllt, so daß das VdS in diesem Fall noch exakt antwortet, vgl. (Bilder 1.24und 1.25, LF2). Im LF3: Linear veränderliche Streckenlast ist dies wegen der Vorgabeelementweise konstanter Streckenlasten nicht mehr der Fall. Die Reduzierung derStreckenlasten auf äquivalenten Knotengrößen ist falsch gewichtet und stellt ledig–lich eine Näherung dar. Das VdS muß daher zwangsläufig falsch antworten, vgl.(Bilder 1.24 und 1.25, LF3). Würde man das Integral
�wv(x) p dx � �wvh(x) p dx
anstelle des konstanten mit einem linearen p–Ansatz auswerten, so würde man eben-falls eine exakte VdS–Antwort in den Knoten erhalten. Da man dies nicht tut, sonderndie Auswertung aus Gründen der Zweckmäßigkeit auf konstante p–Ansätze be-schränkt, stellen sich Fehler ein, die man dann durch eine Erhöhung der Elementanzahlkompensieren muß.
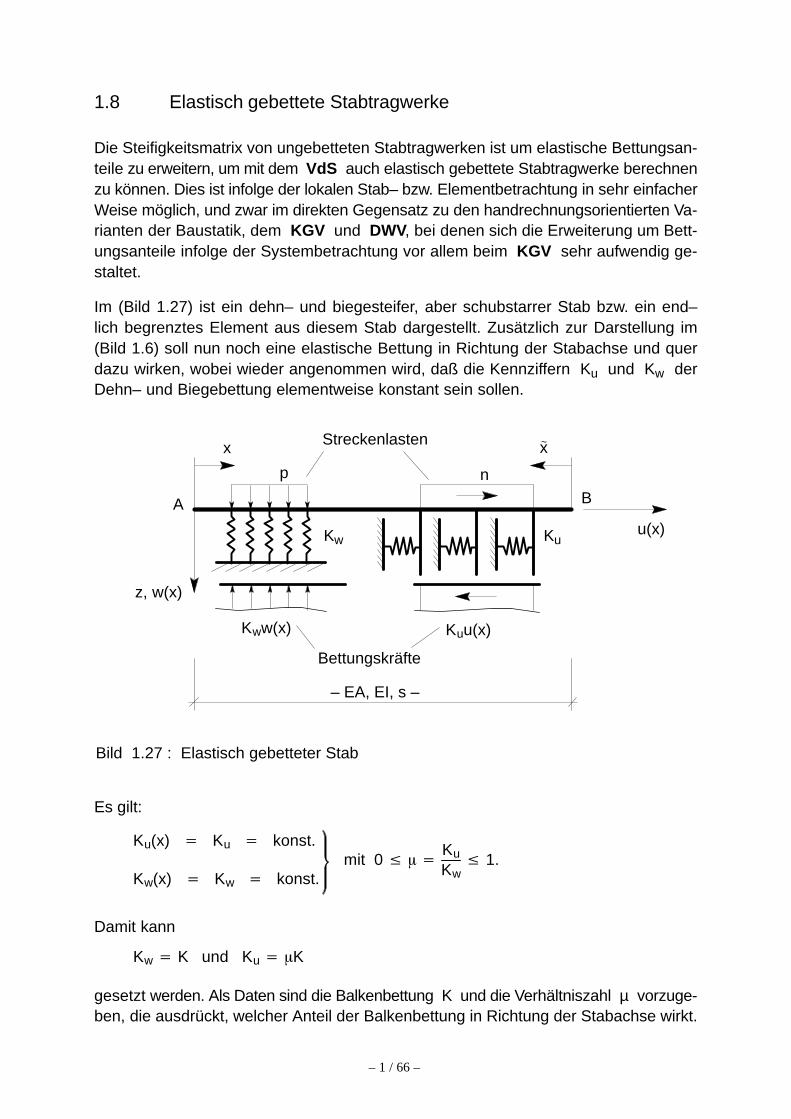
– 1 / 66 –
1.8 Elastisch gebettete Stabtragwerke
Die Steifigkeitsmatrix von ungebetteten Stabtragwerken ist um elastische Bettungsan-teile zu erweitern, um mit dem VdS auch elastisch gebettete Stabtragwerke berechnenzu können. Dies ist infolge der lokalen Stab– bzw. Elementbetrachtung in sehr einfacherWeise möglich, und zwar im direkten Gegensatz zu den handrechnungsorientierten Va-rianten der Baustatik, dem KGV und DWV, bei denen sich die Erweiterung um Bett-ungsanteile infolge der Systembetrachtung vor allem beim KGV sehr aufwendig ge-staltet.
Im (Bild 1.27) ist ein dehn– und biegesteifer, aber schubstarrer Stab bzw. ein end–lich begrenztes Element aus diesem Stab dargestellt. Zusätzlich zur Darstellung im(Bild 1.6) soll nun noch eine elastische Bettung in Richtung der Stabachse und querdazu wirken, wobei wieder angenommen wird, daß die Kennziffern Ku und Kw derDehn– und Biegebettung elementweise konstant sein sollen.
Bild 1.27 : Elastisch gebetteter Stab
p
x Streckenlasten
n
x~
A B
Kww(x)
Kw
z, w(x)
Ku
Kuu(x)
– EA, EI, s –
Bettungskräfte
u(x)
Es gilt:
Ku(x) � Ku � konst.
Kw(x) � Kw � konst.mit 0 � � � Ku
Kw� 1.
Damit kann
Kw � K und Ku � �K
gesetzt werden. Als Daten sind die Balkenbettung K und die Verhältniszahl µ vorzuge-ben, die ausdrückt, welcher Anteil der Balkenbettung in Richtung der Stabachse wirkt.

– 1 / 67 –
Die elastische Bettung beeinflußt den Gleichgewichtszustand von Stäben. Wie aus(Bild 1.27) zu ersehen ist, wirken die Kräfte in der Bettung den äußeren Streckenlastenentgegen. Das einfachste statische Modell, um sie zu erfassen, ist das Bettungsmodul-verfahren, vgl. z.B. Statik II. Es beruht auf der Annahme, daß sich die Bettungskräfteproportional zu den Verschiebungen des elastisch gebetteten Stabs einstellen. Propor-tionalfaktoren sind die Kennziffern der Dehn– und Biegebettung. Die DGL (1.4.1 und1.4.2) von ungebetteten Stäben sind daher lediglich um diese Bettungskräfte zu erwei-tern. Für den gebetteten Dehnstab gilt
EA u��(x) � �n � �K·u(x)� � 0 (1.35.1)
und für den gebetteten Biegestab
EI w����(x) � �p � K·w(x)� � 0. (1.35.2)
Die Ergänzungen in den DGL (1.35.1 und 1.35.2) sind unterstrichen und zusätzlichim (Bild 1.27) dargestellt. Charakteristische Kennwerte für die Wirkung der Bettung sinddie Abklingzahlen
u � s�K
2 EA� (1.36.1)
und
(1.36.2) w � s K4 EI
4� ,
Gl. (1.36.1) bezieht sich auf die Dehnbettung und Gl. (1.36.2) auf die Biegebettung vonStäben. Sie geben an, wie stark und wie schnell die Lösungen der Bettung in Richtungder Stabachse und quer dazu abklingen.
Die analytischen Lösungen der DGL (1.35.1 und 1.35.2) von gebetteten Stäben sindbekannt, vgl. z.B. Statik II. Für den Biegeanteil Gl. (1.35.2) ergibt sich mit p = 0 als ho-mogene Lösung eine Funktion mit zwei abklingenden Teillösungen, die jeweils am An-fang und Ende eines Stabes bzw. Elementes beginnen.
w�x, x~� � e � s x �C1 cos s x � C2 sin
s x�(1.37)
� e � s x~ �C3 cos s x~ � C4 sin
s x~� .
Grundsätzlich besteht natürlich die Möglichkeit, das PvW Gl. (1.14) und die zusätz–lichen Arbeitsanteile der Dehnbettung
�B
uv(x) (�K) u(x) dx (1.38.1)
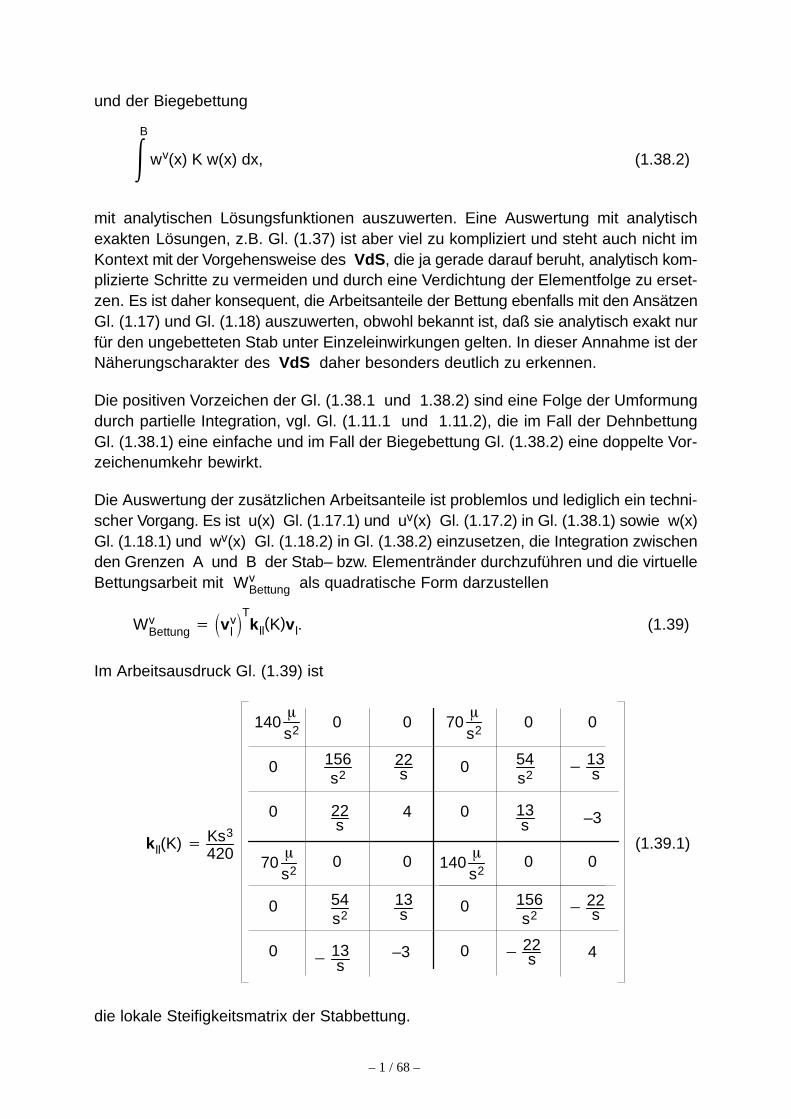
– 1 / 68 –
und der Biegebettung
�B
wv(x) K w(x) dx, (1.38.2)
mit analytischen Lösungsfunktionen auszuwerten. Eine Auswertung mit analytischexakten Lösungen, z.B. Gl. (1.37) ist aber viel zu kompliziert und steht auch nicht imKontext mit der Vorgehensweise des VdS, die ja gerade darauf beruht, analytisch kom-plizierte Schritte zu vermeiden und durch eine Verdichtung der Elementfolge zu erset-zen. Es ist daher konsequent, die Arbeitsanteile der Bettung ebenfalls mit den AnsätzenGl. (1.17) und Gl. (1.18) auszuwerten, obwohl bekannt ist, daß sie analytisch exakt nurfür den ungebetteten Stab unter Einzeleinwirkungen gelten. In dieser Annahme ist derNäherungscharakter des VdS daher besonders deutlich zu erkennen.
Die positiven Vorzeichen der Gl. (1.38.1 und 1.38.2) sind eine Folge der Umformungdurch partielle Integration, vgl. Gl. (1.11.1 und 1.11.2), die im Fall der DehnbettungGl. (1.38.1) eine einfache und im Fall der Biegebettung Gl. (1.38.2) eine doppelte Vor-zeichenumkehr bewirkt.
Die Auswertung der zusätzlichen Arbeitsanteile ist problemlos und lediglich ein techni-scher Vorgang. Es ist u(x) Gl. (1.17.1) und uv(x) Gl. (1.17.2) in Gl. (1.38.1) sowie w(x)Gl. (1.18.1) und wv(x) Gl. (1.18.2) in Gl. (1.38.2) einzusetzen, die Integration zwischenden Grenzen A und B der Stab– bzw. Elementränder durchzuführen und die virtuelleBettungsarbeit mit Wv
Bettung als quadratische Form darzustellen
WvBettung � �vv
l�Tkll(K)vl. (1.39)
Im Arbeitsausdruck Gl. (1.39) ist
0 0
0
0
kll(K) � Ks3
420
0 0
0
0
0 0
0
0
0 0140�
s2
0
0
156s2
22s
70�
s2
54s2
� 13s
22s
4 13s –3
70�
s2140
�
s2
54s2
13s
156s2
� 22s
� 13s
–3 � 22s 4
(1.39.1)
die lokale Steifigkeitsmatrix der Stabbettung.
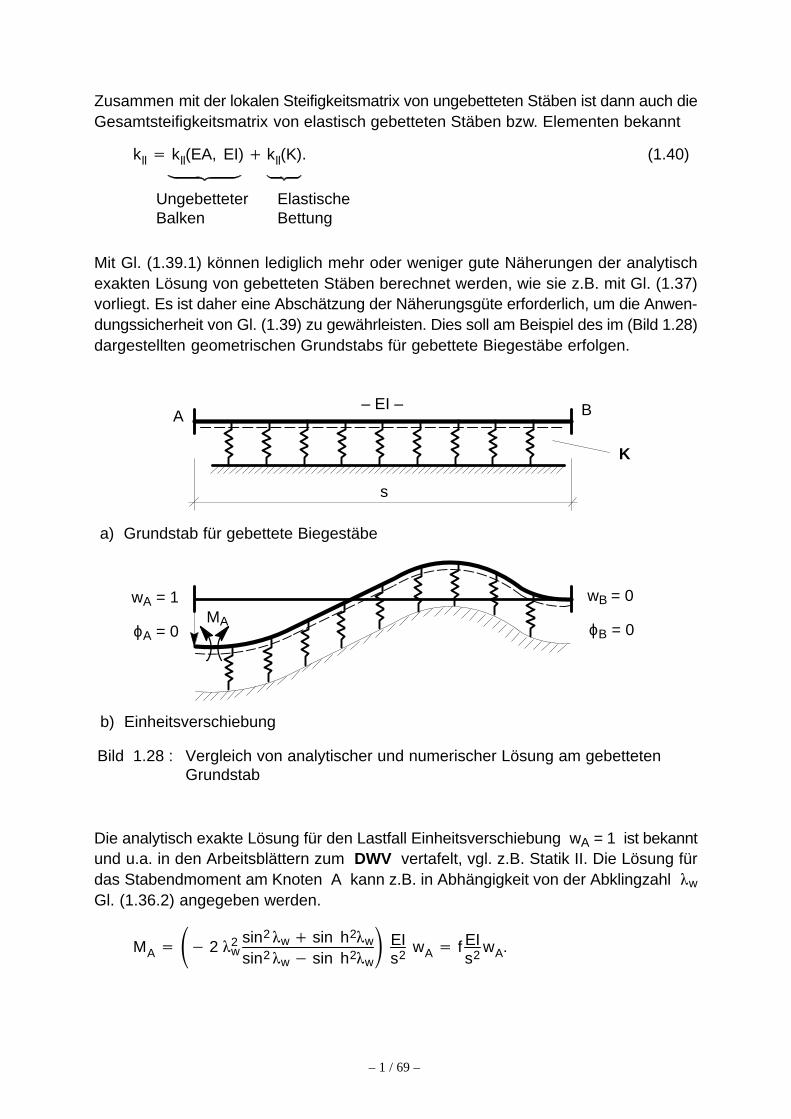
– 1 / 69 –
Zusammen mit der lokalen Steifigkeitsmatrix von ungebetteten Stäben ist dann auch dieGesamtsteifigkeitsmatrix von elastisch gebetteten Stäben bzw. Elementen bekannt
kll � kll(EA, EI) � kll(K). (1.40)
UngebetteterBalken
ElastischeBettung
Mit Gl. (1.39.1) können lediglich mehr oder weniger gute Näherungen der analytischexakten Lösung von gebetteten Stäben berechnet werden, wie sie z.B. mit Gl. (1.37)vorliegt. Es ist daher eine Abschätzung der Näherungsgüte erforderlich, um die Anwen-dungssicherheit von Gl. (1.39) zu gewährleisten. Dies soll am Beispiel des im (Bild 1.28)dargestellten geometrischen Grundstabs für gebettete Biegestäbe erfolgen.
Bild 1.28 :
– EI –A B
s
Vergleich von analytischer und numerischer Lösung am gebettetenGrundstab
K
a) Grundstab für gebettete Biegestäbe
b) Einheitsverschiebung
wA = 1
ϕA = 0
wB = 0
ϕB = 0MA
Die analytisch exakte Lösung für den Lastfall Einheitsverschiebung wA = 1 ist bekanntund u.a. in den Arbeitsblättern zum DWV vertafelt, vgl. z.B. Statik II. Die Lösung fürdas Stabendmoment am Knoten A kann z.B. in Abhängigkeit von der Abklingzahl w
Gl. (1.36.2) angegeben werden.
MA � �� 2 2w
sin2 w � sin h2 w
sin2 w � sin h2 w� EI
s2wA � f EI
s2wA.
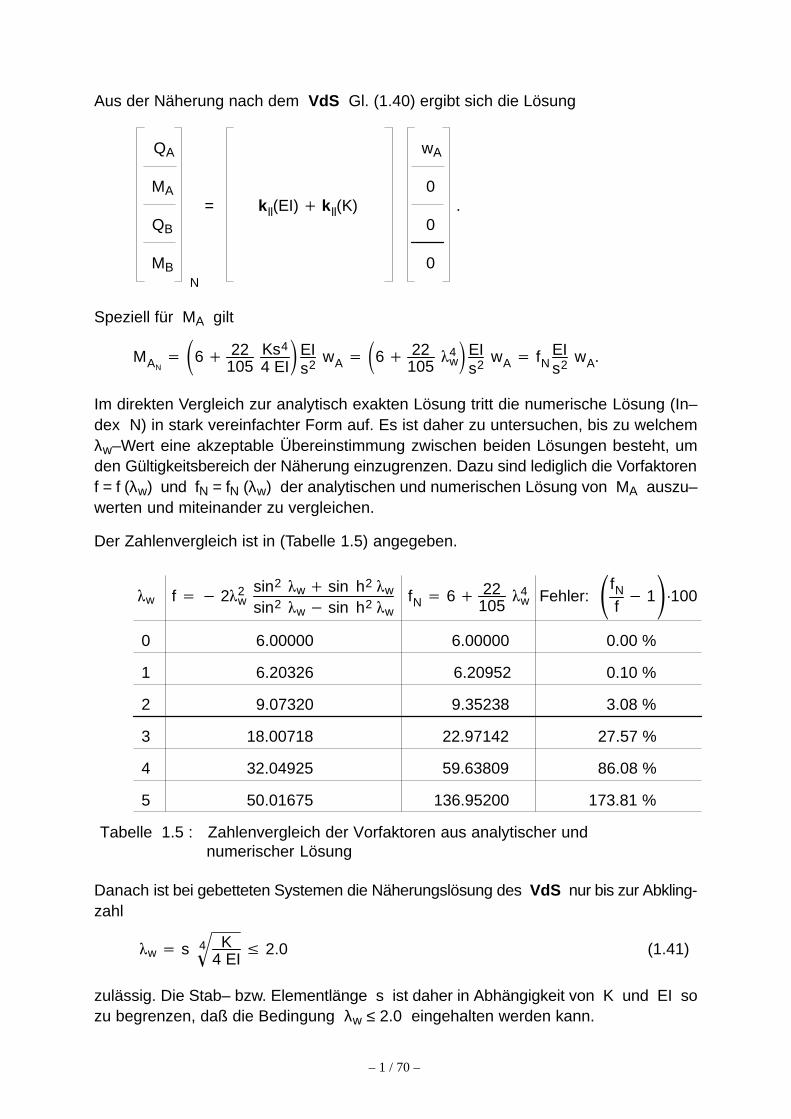
– 1 / 70 –
Aus der Näherung nach dem VdS Gl. (1.40) ergibt sich die Lösung
wA
0
0
0kll(EI) � kll(K)
QA
=
MB
MA
QB
N
.
Speziell für MA gilt
MAN� �6 � 22
105Ks4
4 EI�EI
s2wA � �6 � 22
105 4
w�EIs2
wA � fNEIs2
wA.
Im direkten Vergleich zur analytisch exakten Lösung tritt die numerische Lösung (In–dex N) in stark vereinfachter Form auf. Es ist daher zu untersuchen, bis zu welchemλw–Wert eine akzeptable Übereinstimmung zwischen beiden Lösungen besteht, umden Gültigkeitsbereich der Näherung einzugrenzen. Dazu sind lediglich die Vorfaktorenf = f (λw) und fN = fN (λw) der analytischen und numerischen Lösung von MA auszu–werten und miteinander zu vergleichen.
Der Zahlenvergleich ist in (Tabelle 1.5) angegeben.
0.00 %
f � � 2 2w
sin2 w � sin h2 w
sin2 w � sin h2 w w
0
1
2
3
4
5
fN � 6 � 22105
4w Fehler: �fN
f� 1�·100
0.10 %
3.08 %
27.57 %
86.08 %
173.81 %
6.00000
6.20952
9.35238
22.97142
59.63809
136.95200
6.00000
6.20326
9.07320
18.00718
32.04925
50.01675
Tabelle 1.5 : Zahlenvergleich der Vorfaktoren aus analytischer undnumerischer Lösung
Danach ist bei gebetteten Systemen die Näherungslösung des VdS nur bis zur Abkling-zahl
w � s K4 EI
4� � 2.0 (1.41)
zulässig. Die Stab– bzw. Elementlänge s ist daher in Abhängigkeit von K und EI sozu begrenzen, daß die Bedingung λw ≤ 2.0 eingehalten werden kann.
– 1 / 71 –
Die Vergleichslänge
sVgl. � 4 EIK
4� (Maßeinheit nach Vorgabe von EI und K) (1.42)
drückt das Verhältnis zwischen Biege– und Bettungssteifigkeit aus. Mit Gl. (1.41) istdann auch die maximale geometrische Stab– bzw. Elementlänge bekannt.
s � 2·sVgl. (1.43)
Bei konstanter Biegesteifigkeit EI wächst mit abnehmender Bettungssteifigkeit K dieVergleichslänge sVgl. und damit auch die zulässige geometrische Länge s der Stäbebzw. Elemente an. Mit zunehmender Bettungssteifigkeit K verkürzt sie sich. So ist z.B.für K = 4 EI eine Stab– bzw. Elementlänge von s = 2 zulässig und für K = EI eine Längevon s = 2.83, wobei sich die Dimension aus den verwendeten Maßeinheiten ergibt.
Die Begrenzung der Stab– bzw. Elementlänge Gl. (1.43) gilt streng genommen nur fürdie Biegebettung von Stabtragwerken. Sie kann aber voll auf die Dehnbettung übertra-gen werden, die mit Gl. (1.36.1) i.a. langwelligere Lösungsanteile aufweist als die Biege-bettung mit Gl. (1.36.2), so daß auch für die Dehnbettung Gl. (1.43) gilt.
Mit der Erfassung der Bettung auf Stab– bzw. Elementebene ist das Problem gebetteterStabtragwerke vollständig gelöst. Auf Systemebene sind keine grundsätzlich neuenÜberlegungen wie beim KGV oder DWV erforderlich, da der Zusammenbau vonelastisch gebetteten Stäben bzw. Elementen in gleicher Weise erfolgt wie für ungebet-tete Stäbe bzw. Elemente. In Bereichen mit Bettung ist lediglich eine feinere Elementie-rung vorzusehen, um Gl. (1.43) zu erfüllen und zusätzlich die Bettungsmatrix Gl. (1.39)auszuwerten.
Wegen Gl. (1.43) ist von einer staborientierten Unterteilung elastisch gebetteter Stäbeabzuraten und immer die elementorientierte Vorgehensweise anzuwenden, vgl. auch(Bild 1.2). Dabei ist die Anzahl der erforderlichen Elemente pro Stab durch Gl. (1.43)bekannt. Wird allerdings beim Elementieren von gebetteten Stäben gegen diese ein–fache Grundregel verstoßen, ist zu erwarten, daß sich mit dem VdS falsche Ergebnisseergeben.
Daß dies auch wirklich so ist, soll an einem Beispiel aus der Baupraxis verdeutlicht wer-den. Im (Bild 1.29) ist ein Tunnelbauwerk dargestellt, um zwei Bahntrassen kreuzungs-frei trassieren zu können. Der sehr lange Tunnel aus Stahlbeton ist im Endzustand voll-ständig im Baugrund eingebunden (Bild 1.29a). Für den rechnerischen Nachweis derTunnelkonstruktion ist es ausreichend, nur die Querrichtung des Tunnels in der (X1–X3)–Ebene anhand eines B = 1.00 m breiten Ausschnitts der X2–Längsrichtung zu be-trachten, so daß als statisches System in der (X1, X3)–Ebene eine biegesteife Rahmen-zelle vorliegt (Bild 1.29b). Im Bauzustand liegt der Tunnel frei. Im statischen System istdaher nur die Bodenplatte als elastisch gebettet anzunehmen. Nach der Verfüllung sindzwar auch die Seitenwände im Baugrund eingebettet. Der Bettungseffekt ist aber ge-ring, so daß es ausreicht, die seitliche Verfüllung als Lastfall Erddruck auf die rechte undlinke Seitenwand zu erfassen.
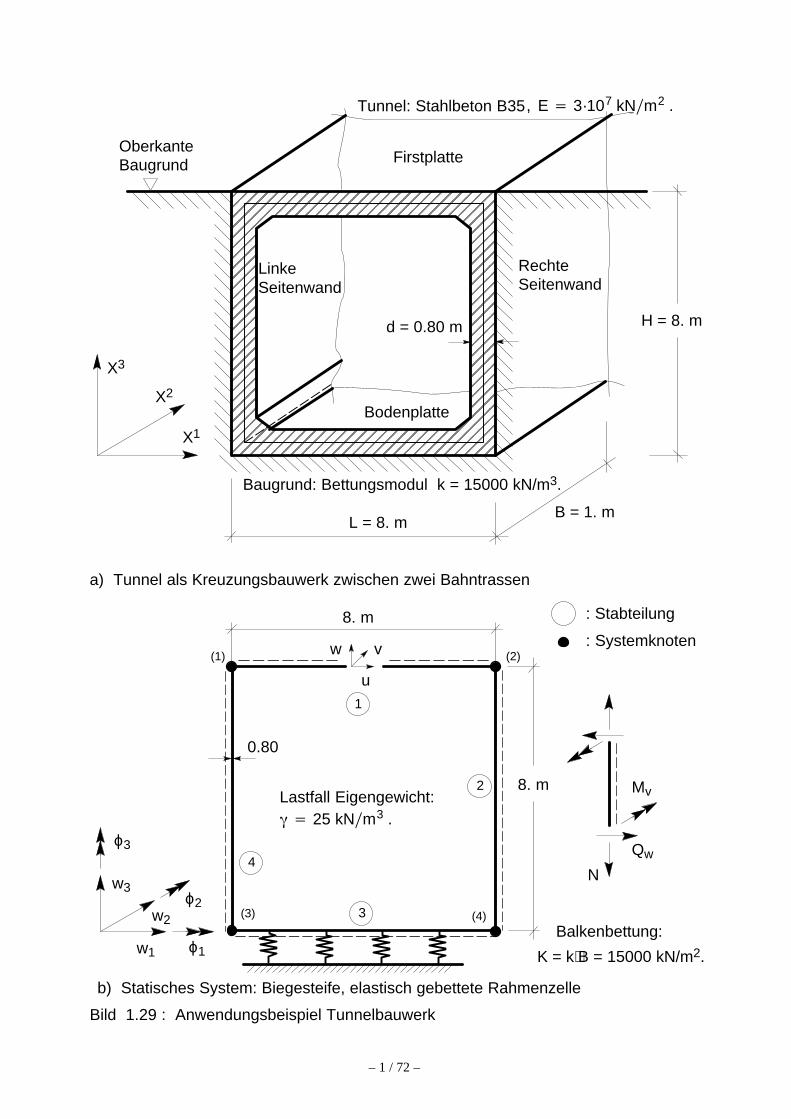
– 1 / 72 –
ÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉÉ
Bild 1.29 : Anwendungsbeispiel Tunnelbauwerk
b) Statisches System: Biegesteife, elastisch gebettete Rahmenzelle
a) Tunnel als Kreuzungsbauwerk zwischen zwei Bahntrassen
H = 8. m
RechteSeitenwand
LinkeSeitenwand
OberkanteBaugrund
Tunnel: Stahlbeton B35
Firstplatte
d = 0.80 m
Bodenplatte
L = 8. mB = 1. m
Baugrund: Bettungsmodul k = 15000 kN/m3.
X3
X2
X1
1
w v
u
8. m
(1) (2)
(3) (4)
8. m
: Stabteilung
: Systemknoten
0.80
3
2
4
ϕ3
ϕ1
ϕ2
w3
w1
w2
Lastfall Eigengewicht:
Balkenbettung:
K = k⋅B = 15000 kN/m2.
Mv
Qw
N
, E � 3·107 kN�m2 .
� � 25 kN�m3 .
– 1 / 73 –
Aus der Vielzahl von Lastfällen soll hier nur der Lastfall Eigengewicht betrachtet werden.
Die Grobelementierung sieht zunächst nur vier Stabelemente vor: 1 � Firstplatte,
2 � rechte Seitenwand, 3 � Bodenplatte und 4 � linke Seitenwand. Die verti-
kalen Seitenwände erhalten beim Lastfall Eigengewicht eine Einwirkung in Richtung derStabachsen. Die Momente aus der Einspannung in die First– und Bodenplatte verlaufenlinear, so daß die Elementierung mit einem Stabelement ausreicht. Auf die waagerechteFirst– und die waagerechte Bodenplatte wirkt als Eigengewicht die konstante Strecken-last g = γ⋅d⋅B ein, vgl. (Bild 1.29). Das VdS erfaßt diesen Zustand mit einem Elementnoch ausreichend genau, vgl. Abschnitt 1.7, so daß auch bei diesen Bauteilen dieElementierung mit jeweils einem Stabelement ausreicht, wenn die Bodenplatte nichtgebettet wäre. Es ist daher zu überprüfen, ob Gl. (1.43) ggf. eine zusätzliche Zwischen-teilung der Bodenplatte erfordert. Das Bodengutachten gibt als Bettungsmodul denWert k =15000 kN/m3 an. Daraus errechnet sich die Balkenbettung zu K =15000 kN/m2,vgl. (Bild 1.29b). Die Länge der Bettungselemente ist daher auf
sBettung � 2 4 EIK
4� � 24·3·107 · 1·0.83
12
1.5·1044� � 8.60 m
zu begrenzen. Die Stablänge aller Tunnelbauteile beträgt dagegen nur 8.00 m , vgl.(Bild 1.29b). Die Elementierung mit einem Stabelement ist demnach als ausreichendanzusehen. Trotzdem werden für die First– und Bodenplatte jeweils 10 Zwischenteilun-gen vorgegeben. Nicht aus Gründen der numerischen Genauigkeit, sondern um diegrafische Ausgabe der Momentenverläufe zu ermöglichen, da das hier verwendete Pro-gramm nur eine lineare Darstellung pro Element erlaubt.
Der Verschiebungs– und Momentenverlauf, der sich aus einer Berechnung mit der Bal-kenbettung K = 15000 kN/m2 ergibt, ist in den (Bildern 1.30a und b) dargestellt. DerTunnel ist im Vergleich zum Baugrund sehr steif (E/K = 2 ⋅ 103). Die Verschiebungender Bodenplatte werden dem Baugrund aufgezwungen (Bild 1.30a). Der Sohldruck un-ter der Bodenplatte ist daher wie eine mehr oder weniger konstante Streckenlast ver-teilt, so daß sich aus baustatischer Sicht ein plausibler Momentenverlauf (Bild 1.30b)einstellt. Eine Kontrollberechnung mit nur zwei Elementen in der First– und Bodenplatteergibt die gleichen Feld– und Eckmomente und bestätigt damit die vorgenommene Ab-schätzung der Elementierung.
Der Tragwerksplaner, der die Planungsunterlagen zum Bau des Tunnelbauwerks(Bild 1.29) erstellt hat, hat zur Durchführung von statischen Berechnungen ein Pro-gramm benutzt, das die Eingabe der Balkenbettung in der Dimension kN/cm2 verlangt.Demnach hätte man K = 1.5 kN/cm2 eingeben müssen. Eingegeben wurde aber unmit-telbar der Zahlenwert aus dem Bodengutachten, nämlich K = 15000, nun aber in derDimension kN/cm2 , so daß die Eingabe der Bettung wegen der fehlenden Umrechnungder Dimension um den Faktor 104 zu groß erfolgte. Statt des wirklich vorliegenden rela-tiv weichen Baugrunds wurde im statischen System mit (E/K = 2 ⋅ 10–1) nun ein sehrsteifer Baugrund abgebildet. Daraus ergeben sich Folgen, die das baustatische und nu-merische Verhalten des statischen Systems stark beeinflussen.
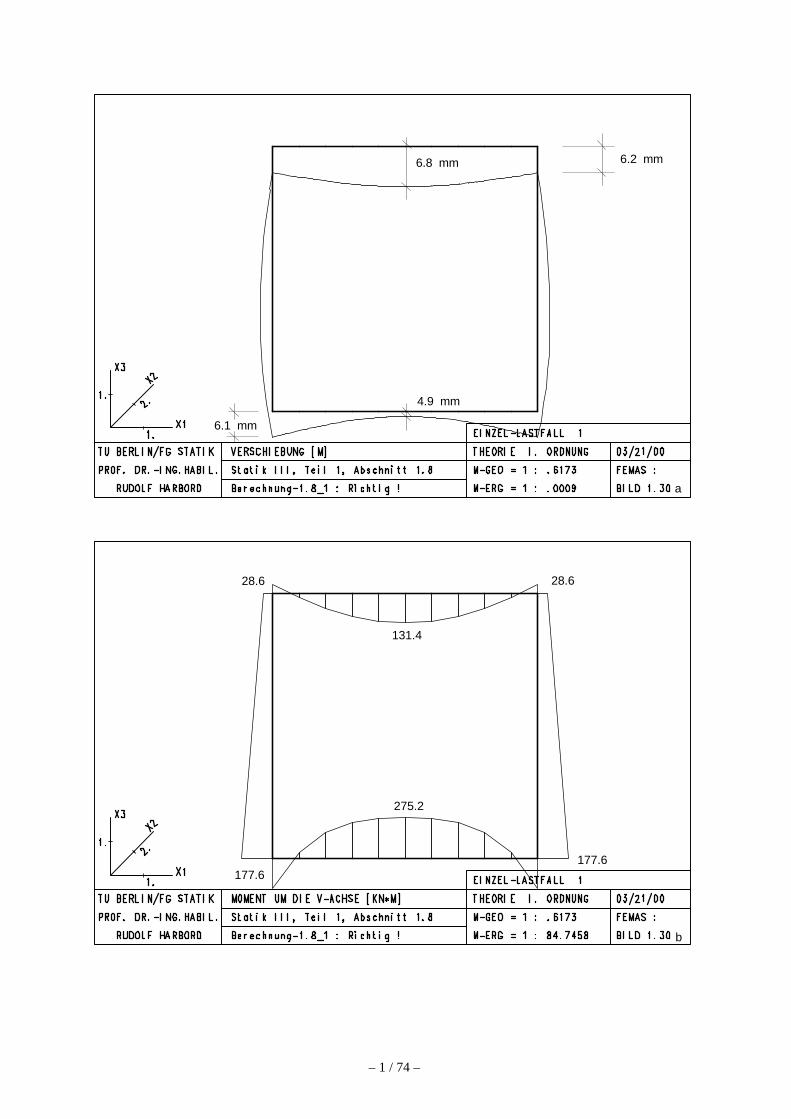
– 1 / 74 –
6.2 mm6.8 mm
4.9 mm
6.1 mm
a
131.4
28.628.6
275.2
177.6177.6
b
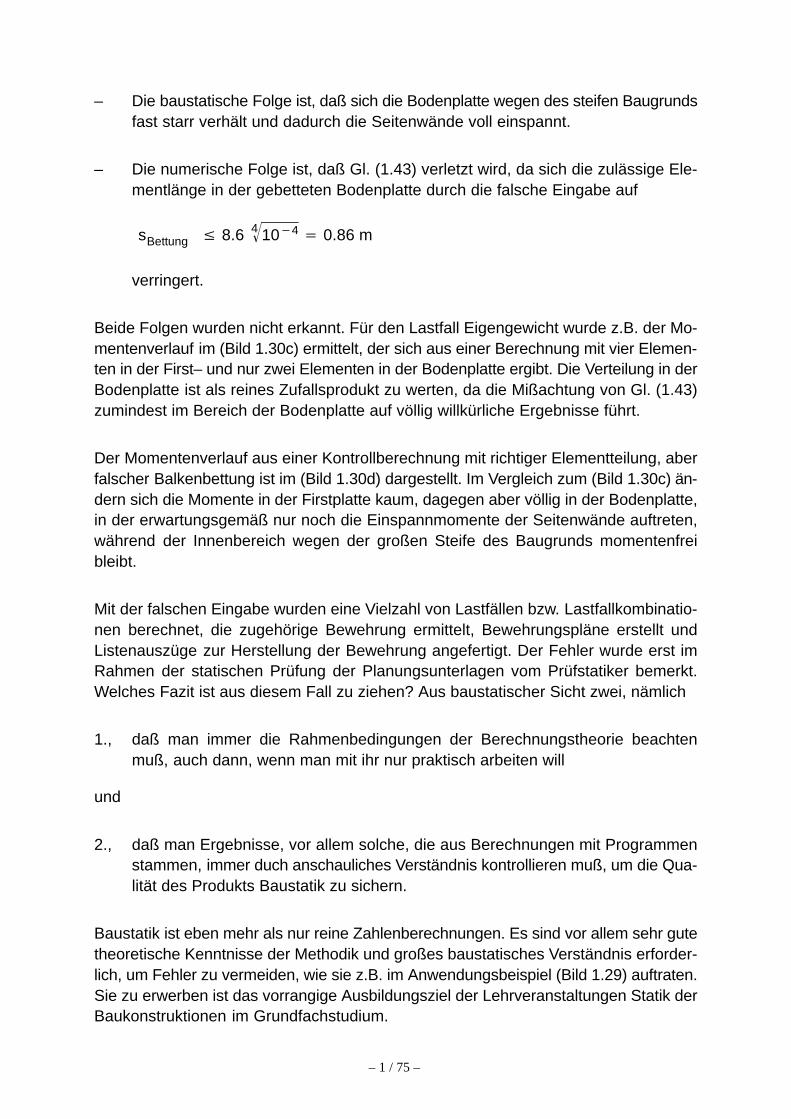
– 1 / 75 –
– Die baustatische Folge ist, daß sich die Bodenplatte wegen des steifen Baugrundsfast starr verhält und dadurch die Seitenwände voll einspannt.
– Die numerische Folge ist, daß Gl. (1.43) verletzt wird, da sich die zulässige Ele-mentlänge in der gebetteten Bodenplatte durch die falsche Eingabe auf
sBettung � 8.6 10�44� � 0.86 m
verringert.
Beide Folgen wurden nicht erkannt. Für den Lastfall Eigengewicht wurde z.B. der Mo-mentenverlauf im (Bild 1.30c) ermittelt, der sich aus einer Berechnung mit vier Elemen-ten in der First– und nur zwei Elementen in der Bodenplatte ergibt. Die Verteilung in derBodenplatte ist als reines Zufallsprodukt zu werten, da die Mißachtung von Gl. (1.43)zumindest im Bereich der Bodenplatte auf völlig willkürliche Ergebnisse führt.
Der Momentenverlauf aus einer Kontrollberechnung mit richtiger Elementteilung, aberfalscher Balkenbettung ist im (Bild 1.30d) dargestellt. Im Vergleich zum (Bild 1.30c) än-dern sich die Momente in der Firstplatte kaum, dagegen aber völlig in der Bodenplatte,in der erwartungsgemäß nur noch die Einspannmomente der Seitenwände auftreten,während der Innenbereich wegen der großen Steife des Baugrunds momentenfreibleibt.
Mit der falschen Eingabe wurden eine Vielzahl von Lastfällen bzw. Lastfallkombinatio-nen berechnet, die zugehörige Bewehrung ermittelt, Bewehrungspläne erstellt undListenauszüge zur Herstellung der Bewehrung angefertigt. Der Fehler wurde erst imRahmen der statischen Prüfung der Planungsunterlagen vom Prüfstatiker bemerkt.Welches Fazit ist aus diesem Fall zu ziehen? Aus baustatischer Sicht zwei, nämlich
1., daß man immer die Rahmenbedingungen der Berechnungstheorie beachtenmuß, auch dann, wenn man mit ihr nur praktisch arbeiten will
und
2., daß man Ergebnisse, vor allem solche, die aus Berechnungen mit Programmenstammen, immer duch anschauliches Verständnis kontrollieren muß, um die Qua-lität des Produkts Baustatik zu sichern.
Baustatik ist eben mehr als nur reine Zahlenberechnungen. Es sind vor allem sehr gutetheoretische Kenntnisse der Methodik und großes baustatisches Verständnis erforder-lich, um Fehler zu vermeiden, wie sie z.B. im Anwendungsbeispiel (Bild 1.29) auftraten.Sie zu erwerben ist das vorrangige Ausbildungsziel der Lehrveranstaltungen Statik derBaukonstruktionen im Grundfachstudium.
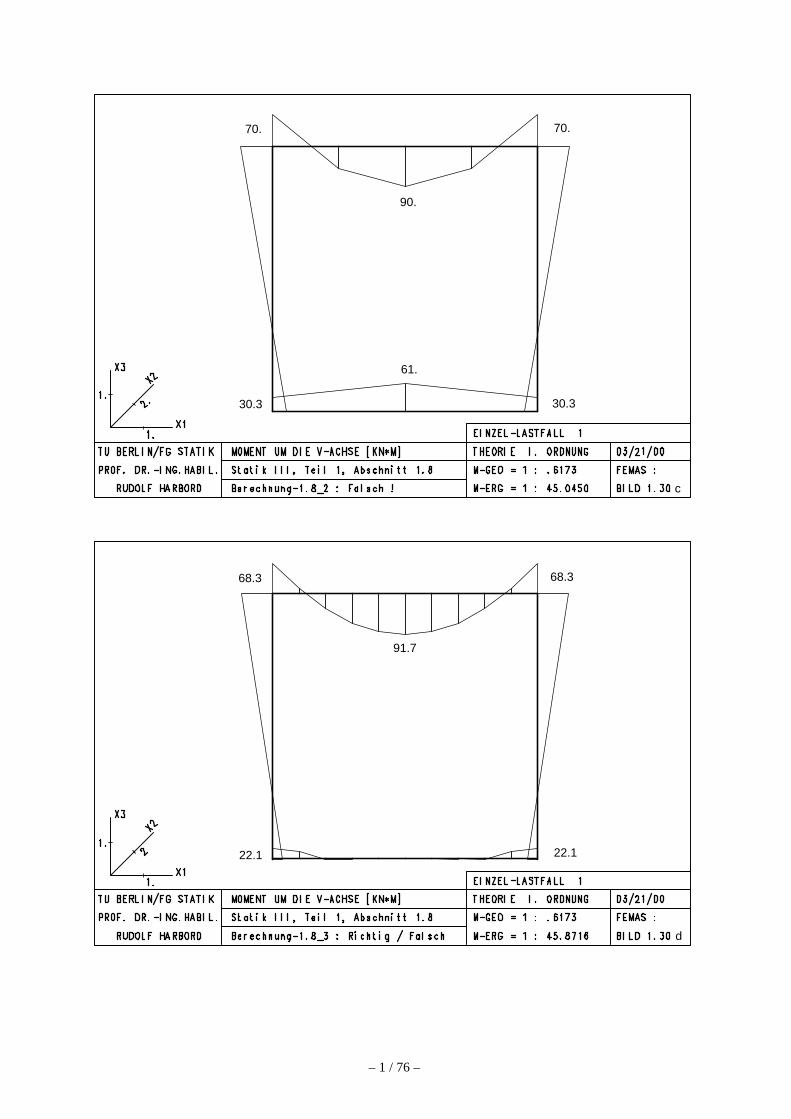
– 1 / 76 –
70.70.
90.
61.
30.330.3
c
68.368.3
91.7
22.1 22.1
d
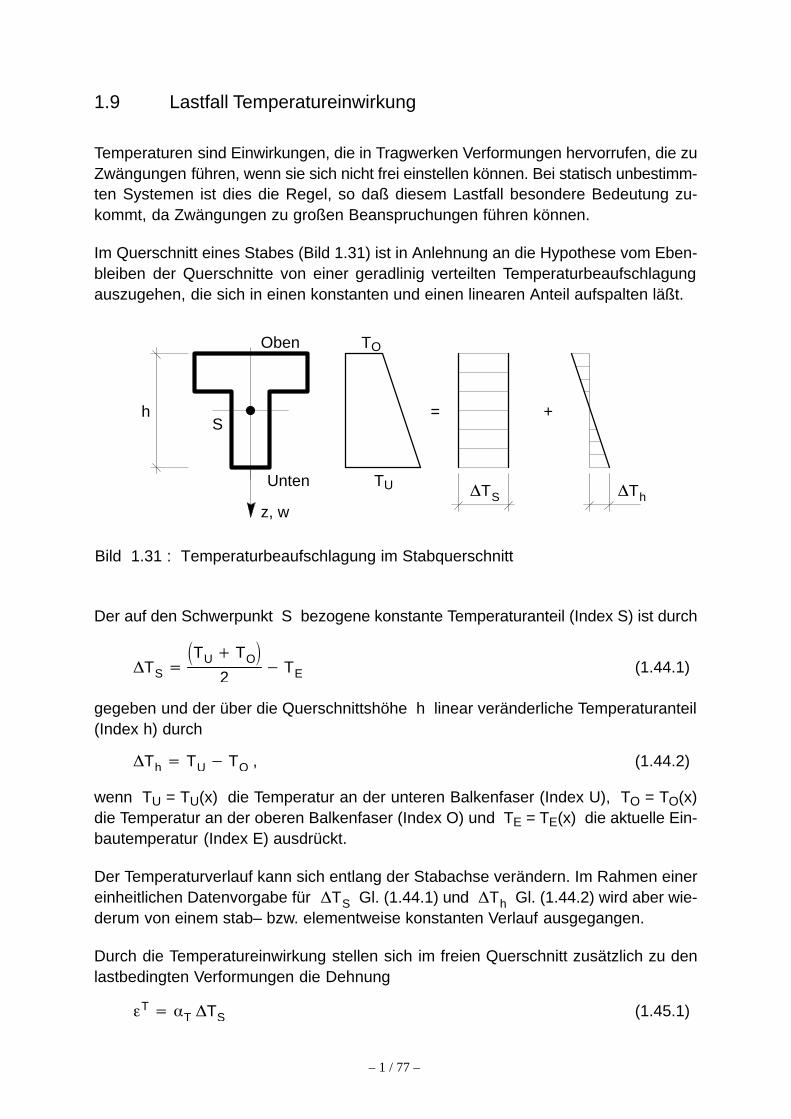
– 1 / 77 –
1.9 Lastfall Temperatureinwirkung
Temperaturen sind Einwirkungen, die in Tragwerken Verformungen hervorrufen, die zuZwängungen führen, wenn sie sich nicht frei einstellen können. Bei statisch unbestimm-ten Systemen ist dies die Regel, so daß diesem Lastfall besondere Bedeutung zu-kommt, da Zwängungen zu großen Beanspruchungen führen können.
Im Querschnitt eines Stabes (Bild 1.31) ist in Anlehnung an die Hypothese vom Eben-bleiben der Querschnitte von einer geradlinig verteilten Temperaturbeaufschlagungauszugehen, die sich in einen konstanten und einen linearen Anteil aufspalten läßt.
Bild 1.31 : Temperaturbeaufschlagung im Stabquerschnitt
h
Oben
Unten�Th
TU
TO
z, w
= +
�TS
S
Der auf den Schwerpunkt S bezogene konstante Temperaturanteil (Index S) ist durch
�TS ��TU � TO
�2
� TE (1.44.1)
gegeben und der über die Querschnittshöhe h linear veränderliche Temperaturanteil(Index h) durch
�Th � TU � TO , (1.44.2)
wenn TU = TU(x) die Temperatur an der unteren Balkenfaser (Index U), TO = TO(x)die Temperatur an der oberen Balkenfaser (Index O) und TE = TE(x) die aktuelle Ein-bautemperatur (Index E) ausdrückt.
Der Temperaturverlauf kann sich entlang der Stabachse verändern. Im Rahmen einereinheitlichen Datenvorgabe für �TS Gl. (1.44.1) und �Th Gl. (1.44.2) wird aber wie-derum von einem stab– bzw. elementweise konstanten Verlauf ausgegangen.
Durch die Temperatureinwirkung stellen sich im freien Querschnitt zusätzlich zu denlastbedingten Verformungen die Dehnung
�T � �T �TS (1.45.1)
– 1 / 78 –
und die Krümmung
�T � �T
�Thh
(1.45.2)
ein. Der Temperaturausdehnungskoeffizient �T ist ein Werkstoffkennwert und damitbekannt. Der Index (T) kennzeichnet den Einwirkungsfall Temperatur.
Temperaturbedingte Verformungen beeinflussen das statische Verhalten eines Stabesdurch die Verträglichkeitsaussage. Für die Dehnung in Richtung der Stabachse gilt dieerweiterte Aussage
�K � �E � �T. (1.46)
Danach muß die kinematische Dehnung (Index K), also die tragwerksabhängige Ge-samtdehnung �K � u�(x) nicht nur wie gehabt mit der elastischen Dehnung (Index E)�E � N(x) � EA des verwendeten Materials verträglich sein, sondern nun auchnoch, bedingt durch die zusätzliche Temperatureinwirkung mit der Dehnung �T . MitGl. (1.45.1) ergibt sich daraus als Bestimmungsgleichung für die Längskraft der Aus-druck
N(x) � EA�u�(x) � �T �TS�. (1.47)
Lediglich die Differenz zwischen kinematischen und temperaturbedingten Dehnungs-anteilen �E � �K � �T führt demnach zu einer elastischen Reaktion des verwendetenMaterials, die bei gleichzeitiger Einwirkung von Lasten und Temperaturen die Schnitt-kraft Gl. (1.47) hervorruft.
Für die Krümmung der Stabachse ist die Verträglichkeitsaussage ebenfalls zu erwei-tern.
�K � �E � �T (1.48)
Mit �K � � w��(x), �E � M(x) � EI und Gl. (1.45.2) ergibt sich daraus als Bestim-mungsgleichung für das Biegemoment der Ausdruck
M(x) � � EI�w��(x) � �T
�Thh� (1.49)
Auch im Fall der Krümmung gilt, daß lediglich die Differenz zwischen kinematischen undtemperaturbedingten Krümmungsanteilen �E � �K � �T eine elastische Reaktion desverwendeten Materials hervorruft, aus der das Moment Gl. (1.49) resultiert.
– 1 / 79 –
Das Einsetzen der Bestimmungsgleichungen (1.47 und 1.49) in das bereits umge-formte PvW (Gl. 1.14.1 und 1.14.2) führt unmittelbar auf die zusätzlichen Arbeitsan-teile
��B
A
u�v(x) EA��T �TS�dx (1.50.1)
NT
�v(x)
und
��B
A
w��v(x) EI��T
�Thh�dx. (1.50.2)
MT
� �v(x)
Sie sind zusätzlich auszuwerten, um mit dem VdS den Lastfall Temperatureinwirkungerfassen zu können. Die virtuellen Temperaturarbeiten Gl. (1.50.1 und 1.50.2) werdendurch Produkte aus virtuellen Verzerrungen und wirklichen Schnittgrößen gebildet undsind daher den inneren Arbeiten zuzurechnen. Sie überführen die temperaturbedingteDehnung und Krümmung in äquivalente Kraftgrößen, nämlich die Längskraft NT unddas Biegemoment MT, die als bekannte Größen zur rechten Seite des Gleichungs–systems Gl. (1.31.1) gehören, aus dem sich die unbekannten Weggrößen berechnen.
Zur numerischen Auswertung von Gl. (1.50) muß wiederum der Verlauf der Integrandenzwischen den Grenzen A und B der Stab– bzw. Elementränder bekannt sein. DieKennwerte EA, EI, αT, ∆TS, und ∆Th sind vereinbarungsgemäß konstant. Sie könnendaher vor das Integral gezogen werden, während die Abschätzung des Verlaufs der vir-tuellen Verzerrungen, nämlich der Dehnung �v(x) � u�v(x) und der Krümmung� �v(x) � w��v(x) mit den Ansätzen nach Gl. (1.20.2 und 1.21.2) erfolgt. Die Durch–führung der Integration und die Einordnung der Ergebnisse in die lokale Matrizenglei-chung (1.22 bzw. 1.23) ergibt dann zusätzlich die Matrix der Knotenbelastung Ts0
linfolge der Temperatureinwirkung �TS und �Th.
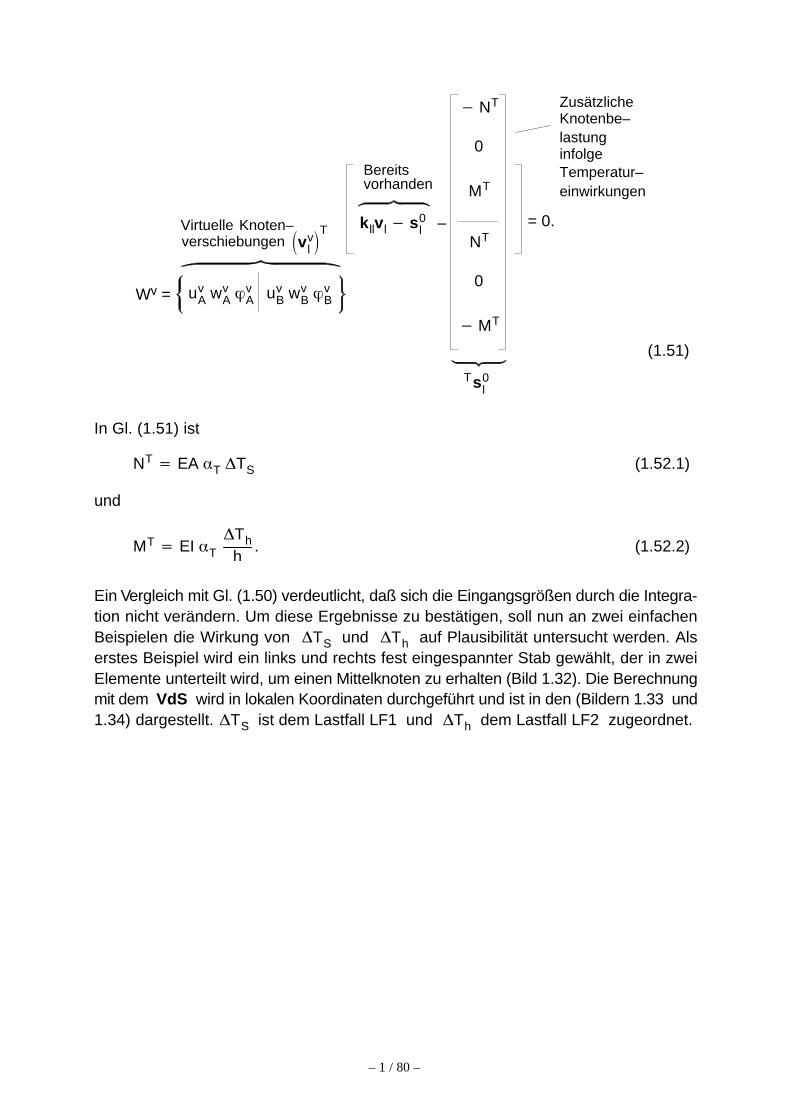
– 1 / 80 –
uvA wv
A �vA
= 0.
uvB wv
B �vB
Virtuelle Knoten–
Bereits
� NT
0
MT
NT
0
� MT
kllvl � s0l
verschiebungen �vvl�T
vorhanden
–
ZusätzlicheKnotenbe–lastunginfolgeTemperatur–einwirkungen
(1.51)
s0l
T
Wv =
In Gl. (1.51) ist
NT � EA �T �TS (1.52.1)
und
MT � EI �T
�Thh
. (1.52.2)
Ein Vergleich mit Gl. (1.50) verdeutlicht, daß sich die Eingangsgrößen durch die Integra-tion nicht verändern. Um diese Ergebnisse zu bestätigen, soll nun an zwei einfachenBeispielen die Wirkung von �TS und �Th auf Plausibilität untersucht werden. Alserstes Beispiel wird ein links und rechts fest eingespannter Stab gewählt, der in zweiElemente unterteilt wird, um einen Mittelknoten zu erhalten (Bild 1.32). Die Berechnungmit dem VdS wird in lokalen Koordinaten durchgeführt und ist in den (Bildern 1.33 und1.34) dargestellt. �TS ist dem Lastfall LF1 und �Th dem Lastfall LF2 zugeordnet.
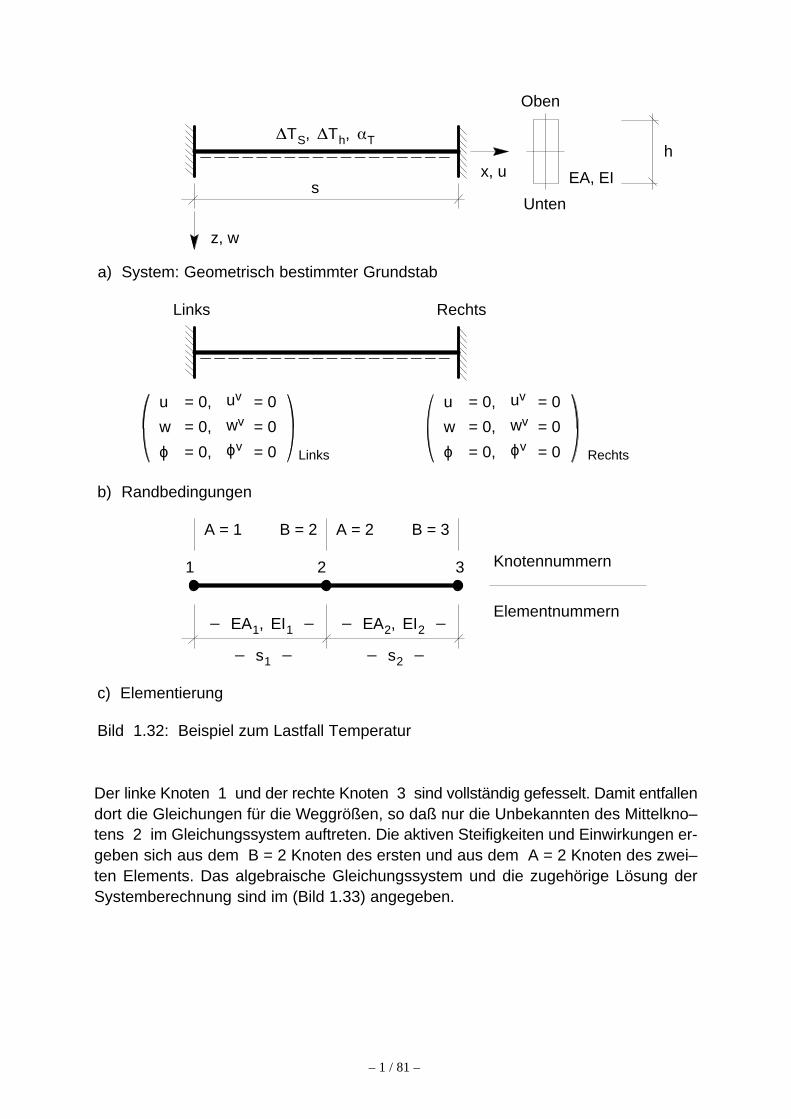
– 1 / 81 –
Bild 1.32: Beispiel zum Lastfall Temperatur
s
�TS, �Th, �T
z, w
x, u EA, EI
h
Oben
Unten
a) System: Geometrisch bestimmter Grundstab
Links Rechts
u = 0,
w
ϕ = 0,
= 0,
uv
wv
ϕv
= 0
= 0
= 0
u = 0,
w
ϕ = 0,
= 0,
uv
wv
ϕv
= 0
= 0
= 0
Links Rechts
b) Randbedingungen
1 2 3
A = 1 B = 2 A = 2 B = 3
� EA1, EI1 � � EA2, EI2 �
� s1 � � s2 �
c) Elementierung
Knotennummern
Elementnummern
Der linke Knoten 1 und der rechte Knoten 3 sind vollständig gefesselt. Damit entfallendort die Gleichungen für die Weggrößen, so daß nur die Unbekannten des Mittelkno–tens 2 im Gleichungssystem auftreten. Die aktiven Steifigkeiten und Einwirkungen er-geben sich aus dem B = 2 Knoten des ersten und aus dem A = 2 Knoten des zwei–ten Elements. Das algebraische Gleichungssystem und die zugehörige Lösung derSystemberechnung sind im (Bild 1.33) angegeben.
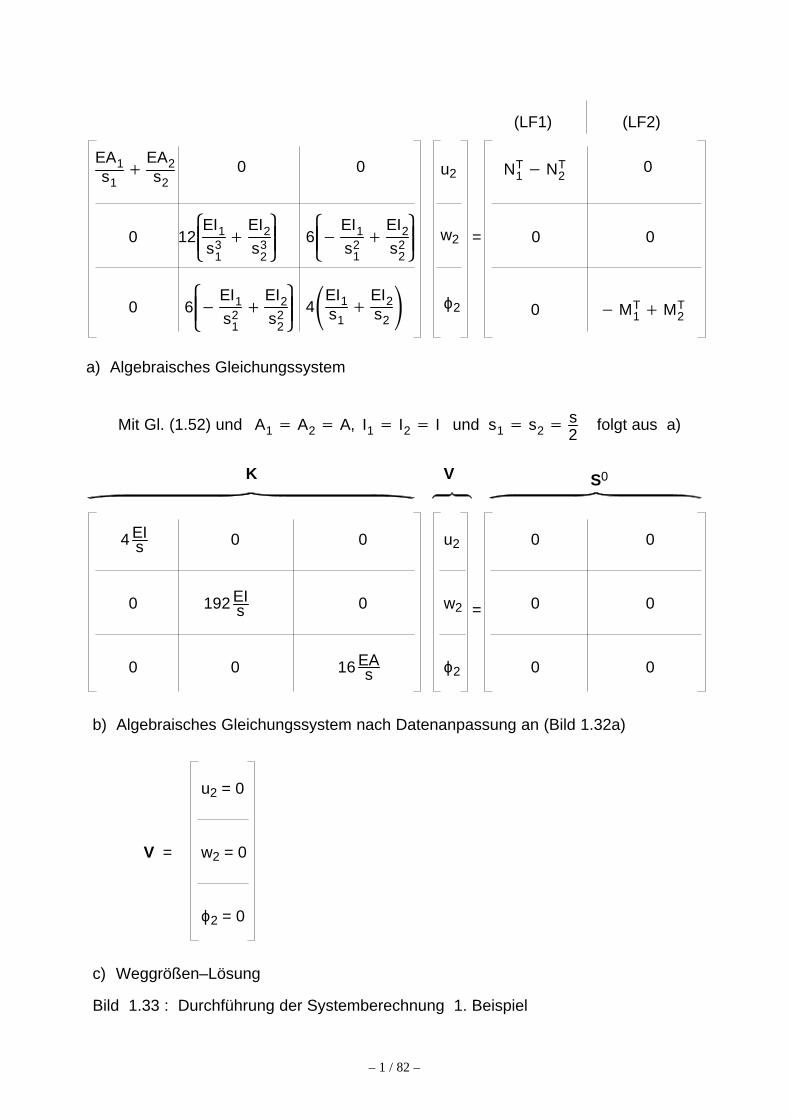
– 1 / 82 –
EA1s1
�EA2s2
(LF1)
12 ��EI1s3
1
�EI2s3
2 ��
u2
w2
ϕ2
0 0
0
0 0
0
0 0
A1 � A2 � A, I1 � I2 � I
04 EIs
Bild 1.33 : Durchführung der Systemberechnung 1. Beispiel
6 ���EI1s2
1
�EI2s2
2 ��
6 ���EI1s2
1
�EI2s2
2 �� 4�EI1
s1�
EI2s2�
(LF2)
=
NT1 � NT
2
� MT1 � MT
2
a) Algebraisches Gleichungssystem
und s1 � s2 � s2
folgt aus a)
K V S0
192 EIs
16 EAs
0
0 0
00
u2
w2
ϕ2 0
0
0 0=
0
0
u2 = 0
w2 = 0
ϕ2 = 0
b) Algebraisches Gleichungssystem nach Datenanpassung an (Bild 1.32a)
V =
c) Weggrößen–Lösung
Mit Gl. (1.52) und
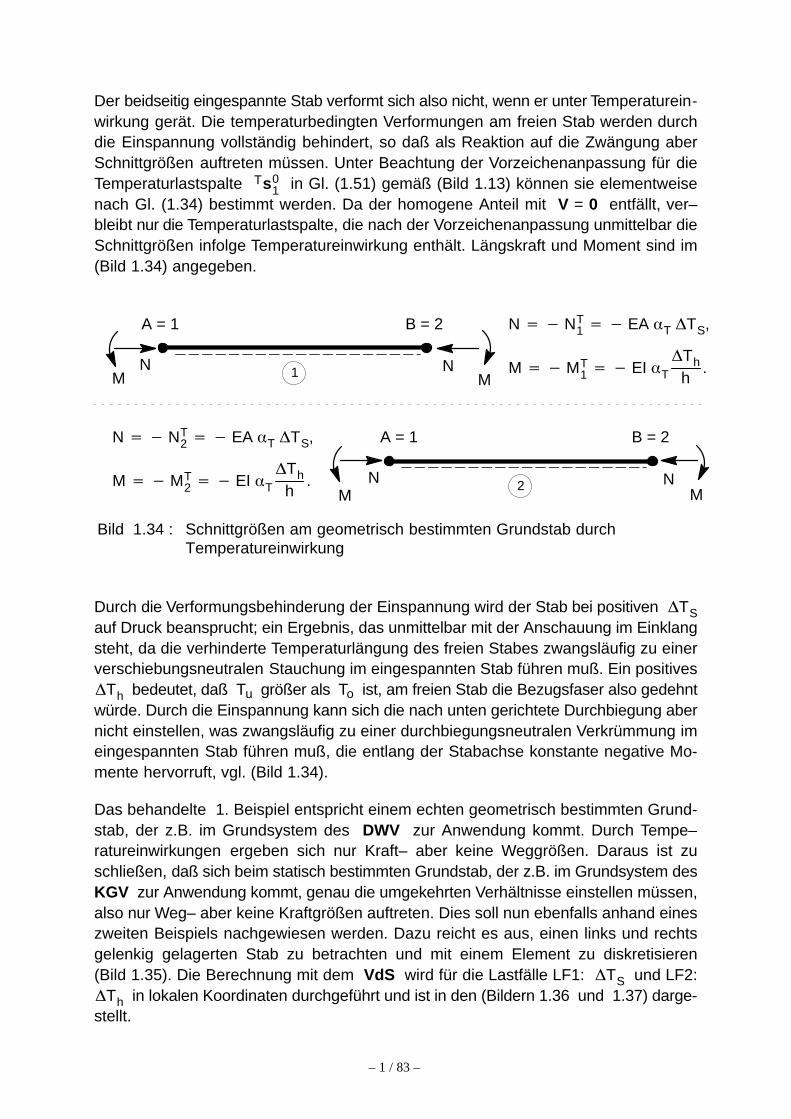
– 1 / 83 –
Der beidseitig eingespannte Stab verformt sich also nicht, wenn er unter Temperaturein-wirkung gerät. Die temperaturbedingten Verformungen am freien Stab werden durchdie Einspannung vollständig behindert, so daß als Reaktion auf die Zwängung aberSchnittgrößen auftreten müssen. Unter Beachtung der Vorzeichenanpassung für dieTemperaturlastspalte Ts0
1 in Gl. (1.51) gemäß (Bild 1.13) können sie elementweisenach Gl. (1.34) bestimmt werden. Da der homogene Anteil mit V = 0 entfällt, ver–bleibt nur die Temperaturlastspalte, die nach der Vorzeichenanpassung unmittelbar dieSchnittgrößen infolge Temperatureinwirkung enthält. Längskraft und Moment sind im(Bild 1.34) angegeben.
Bild 1.34 :
A = 1 B = 2 N � � NT1 � � EA �T �TS,
M � � MT1 � � EI �T
�Thh
.NM
NM 1
N � � NT2 � � EA �T �TS,
M � � MT2 � � EI �T
�Thh
.
A = 1 B = 2
NM
NM
2
Schnittgrößen am geometrisch bestimmten Grundstab durchTemperatureinwirkung
Durch die Verformungsbehinderung der Einspannung wird der Stab bei positiven �TSauf Druck beansprucht; ein Ergebnis, das unmittelbar mit der Anschauung im Einklangsteht, da die verhinderte Temperaturlängung des freien Stabes zwangsläufig zu einerverschiebungsneutralen Stauchung im eingespannten Stab führen muß. Ein positives�Th bedeutet, daß Tu größer als To ist, am freien Stab die Bezugsfaser also gedehntwürde. Durch die Einspannung kann sich die nach unten gerichtete Durchbiegung abernicht einstellen, was zwangsläufig zu einer durchbiegungsneutralen Verkrümmung imeingespannten Stab führen muß, die entlang der Stabachse konstante negative Mo-mente hervorruft, vgl. (Bild 1.34).
Das behandelte 1. Beispiel entspricht einem echten geometrisch bestimmten Grund-stab, der z.B. im Grundsystem des DWV zur Anwendung kommt. Durch Tempe–ratureinwirkungen ergeben sich nur Kraft– aber keine Weggrößen. Daraus ist zuschließen, daß sich beim statisch bestimmten Grundstab, der z.B. im Grundsystem desKGV zur Anwendung kommt, genau die umgekehrten Verhältnisse einstellen müssen,also nur Weg– aber keine Kraftgrößen auftreten. Dies soll nun ebenfalls anhand eineszweiten Beispiels nachgewiesen werden. Dazu reicht es aus, einen links und rechtsgelenkig gelagerten Stab zu betrachten und mit einem Element zu diskretisieren(Bild 1.35). Die Berechnung mit dem VdS wird für die Lastfälle LF1: �TS und LF2:�Th in lokalen Koordinaten durchgeführt und ist in den (Bildern 1.36 und 1.37) darge-stellt.
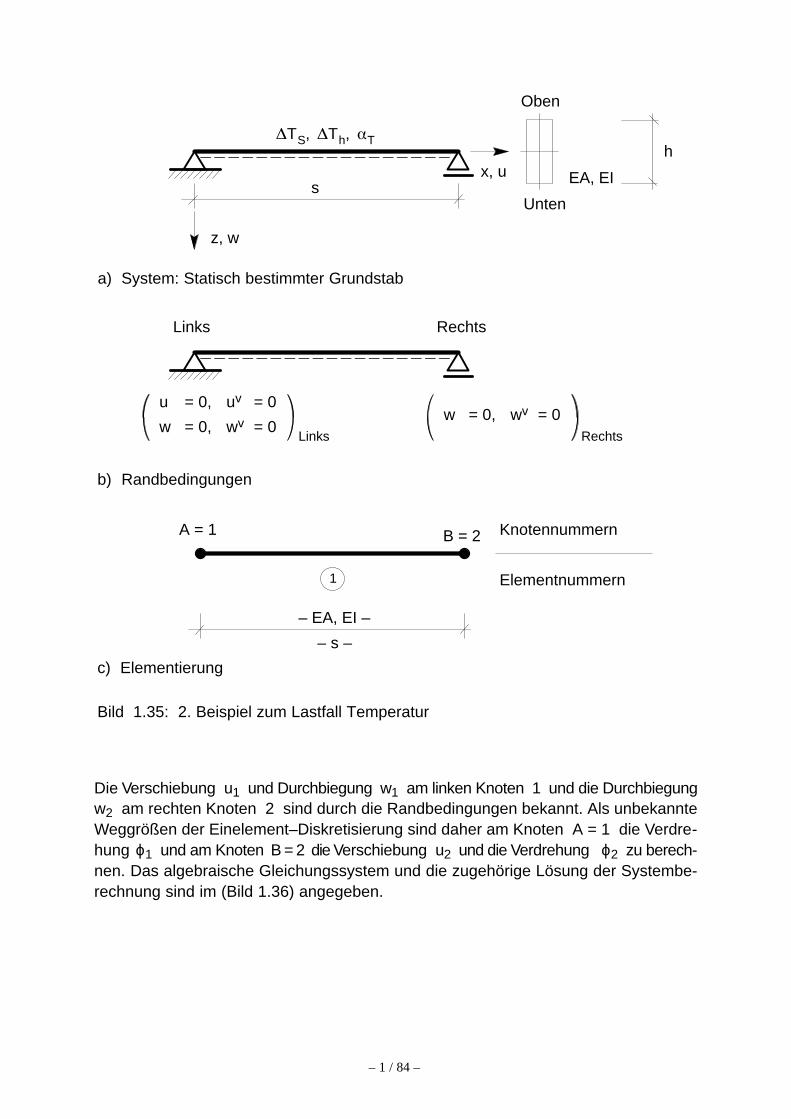
– 1 / 84 –
Bild 1.35: 2. Beispiel zum Lastfall Temperatur
s
�TS, �Th, �T
z, w
x, u EA, EI
h
Oben
Unten
a) System: Statisch bestimmter Grundstab
Links Rechts
u = 0,
w = 0,
uv
wv
= 0
= 0w = 0, wv = 0
Links Rechts
b) Randbedingungen
A = 1 B = 2
c) Elementierung
Knotennummern
Elementnummern1
– s –
– EA, EI –
Die Verschiebung u1 und Durchbiegung w1 am linken Knoten 1 und die Durchbiegungw2 am rechten Knoten 2 sind durch die Randbedingungen bekannt. Als unbekannteWeggrößen der Einelement–Diskretisierung sind daher am Knoten A = 1 die Verdre-hung ϕ1 und am Knoten B = 2 die Verschiebung u2 und die Verdrehung ϕ2 zu berech-nen. Das algebraische Gleichungssystem und die zugehörige Lösung der Systembe-rechnung sind im (Bild 1.36) angegeben.
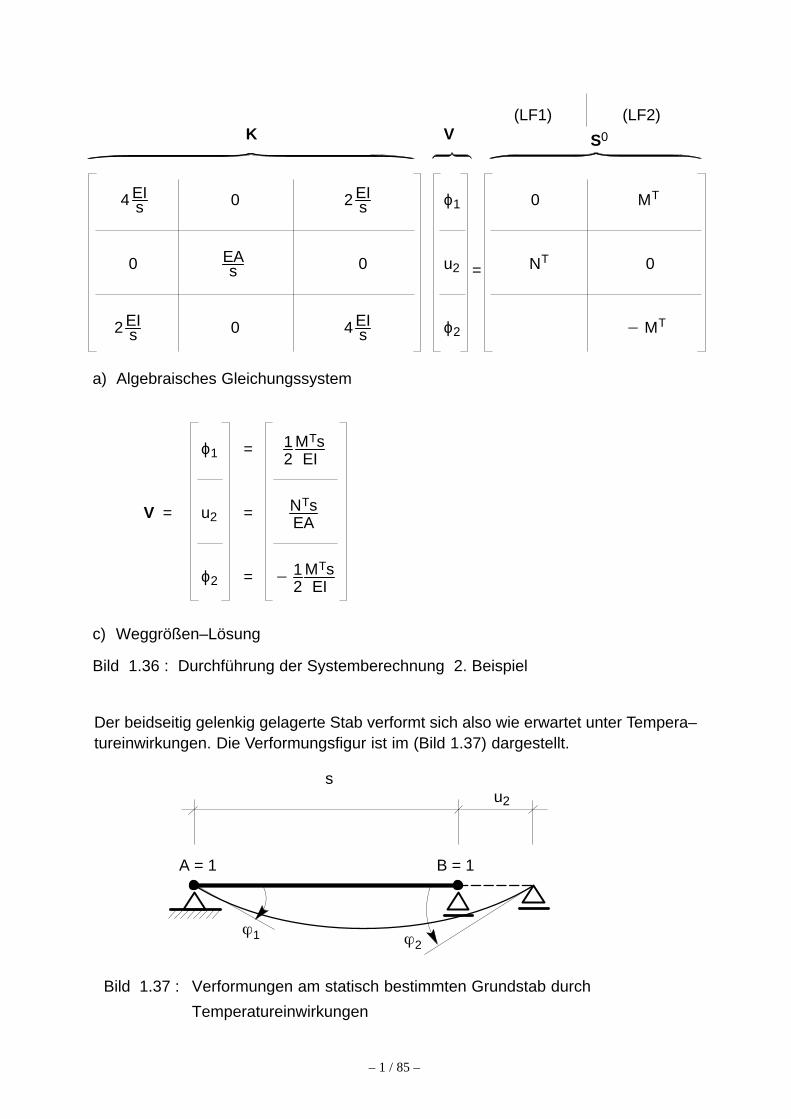
– 1 / 85 –
(LF1)
04 EIs
Bild 1.36 : Durchführung der Systemberechnung 2. Beispiel
(LF2)
NT
MT
a) Algebraisches Gleichungssystem
K V S0
EAs0 0
0
ϕ1
u2
ϕ2
0=
0
ϕ1
u2
ϕ2
V =
c) Weggrößen–Lösung
2 EIs
2 EIs 4 EI
s � MT
=
=
=
12
MTsEI
� 12
MTsEI
NTsEA
Der beidseitig gelenkig gelagerte Stab verformt sich also wie erwartet unter Tempera–tureinwirkungen. Die Verformungsfigur ist im (Bild 1.37) dargestellt.
s
�1
Bild 1.37 :
A = 1 B = 1
�2
u2
Verformungen am statisch bestimmten Grundstab durch
Temperatureinwirkungen
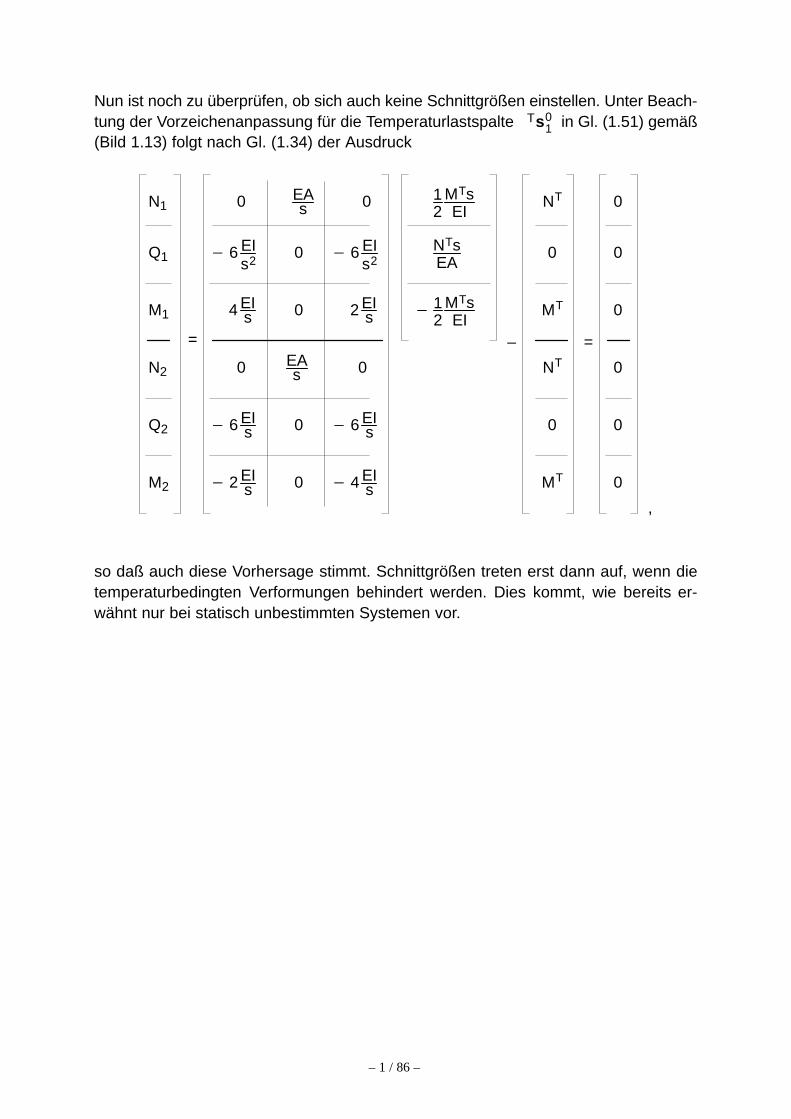
– 1 / 86 –
Nun ist noch zu überprüfen, ob sich auch keine Schnittgrößen einstellen. Unter Beach-tung der Vorzeichenanpassung für die Temperaturlastspalte Ts0
1 in Gl. (1.51) gemäß(Bild 1.13) folgt nach Gl. (1.34) der Ausdruck
EAsN1
Q1
M1
N2
Q2
M2
NTsEA
=
NT
� 6 EIs2
12
MTsEI
0 0
0
0 0
0
0
04 EIs
00
0
EAs
� 6 EIs
0
0
2 EIs
� 2 EIs
� 6 EIs2
� 6 EIs
� 4 EIs
� 12
MTsEI
– =
0
0
MT
0
NT
MT
,
so daß auch diese Vorhersage stimmt. Schnittgrößen treten erst dann auf, wenn dietemperaturbedingten Verformungen behindert werden. Dies kommt, wie bereits er-wähnt nur bei statisch unbestimmten Systemen vor.

– 2 / 1 –
Teil 2 : Theorie II. Ordnung
2.1 Einführung in die Problematik
2.1.1 Allgemeines
Der prinzipielle Ablauf einer statischen Berechnung von Tragwerken auf der Grundlageder Theorie II. Ordnung wird am Beispiel eines kombinierten Spannungs– und Stabili–tätsproblems vorgestellt. Im Mittelpunkt des Interesses steht nicht die Durchführung derZahlenrechnung, sondern die Einführung in eine neue Methodik, die es erlaubt, den ver-formten Zustand des Tragwerks in die Berechnung mit einzubeziehen. Vor der eigent–lichen Zahlenrechnung sind zunächst die wichtigsten Begriffe zur Definition von Span-nungs– und Stabilitätsproblemen in allgemeiner Form zu erläutern. Dies ist erforderlich,um Ergebnisse beurteilen zu können, die sich ergeben, wenn man das Gleichgewichtam verformten System erfüllt.
Ein Spannungsproblem liegt vor, wenn zu jedem bekannten Kraftzustand ein eindeuti-ger Wegzustand gehört. Dies ist z.B. bei den Kraft–Weg–Diagrammen bzw. Last–Ver-schiebungs–Kurven (LVK) A und B im (Bild 2.1) der Fall. Zum Lastfaktor ρ1 gehörtdie Verschiebung v1 bzw. v~1 , zum Lastfaktor ρ2 die Verschiebung v2 bzw. v~2 , u.s.w.Alle Kurvenpunkte sind durch eindeutige Schnitte von Kräften und Wegen definiert.
ϕ X, vx
Z, vz
v, v~� ⋅ FZ
� ⋅ FX
A: Theorie I. OrdnungB: Theorie II. Ordnung
C: Verzweigung, FX = 0.
Spannungs–problem
Stabilitäts–problem
v1
v~1
Verschiebungen v und v~
v2
v~2
Lastfaktoren
�1
�2
�k
A
C
B
Bild 2.1 : Last–Verschiebungs–Kurven
�
– 2 / 2 –
Spezielle Lastfaktoren sind technischen Regelwerken zu entnehmen, z.B. DIN 18 800,Teil 1. Dort sind sie als Teilsicherheitsbeiwerte der Einwirkungen definiert und werdenmit γF bezeichnet. Die charakteristischen Einwirkungen eines Tragwerks sind durchMultiplikation mit γF zu erhöhen, um Einwirkungen zu erhalten, die als Grundlage derBemessung dienen.
Die LVK A mit den Verschiebungen v resultiert aus einer Berechnung nach der Span-nungstheorie I. Ordnung, bei der Kräfte und Wege linear voneinander abhängen. Beider LVK B mit den Verschiebungen v~ , die auf einer Berechnung nach der Spannungs-theorie II. Ordnung beruht, stellt sich dagegen ein nichtlinearer Zusammenhang zwi-schen Kräften und Wegen ein. Das Kräftegleichgewicht wird nun in physikalisch zutref-fender Weise für den verformten Zustand des Tragwerks ermittelt und nicht wie bei derTheorie I. Ordnung, näherungsweise am unverformten Tragwerk. Je größer die Ver-schiebungsunterschiede zwischen v und v~ ausfallen, um so stärker weichen die LVKA und B voneinander ab. Im Ursprung des Diagramms ist die LVK A Tangente derLVK B. Sie kann daher nur im Bereich kleiner Verschiebungen mit dieser übereinstim-men, die das Tragverhalten genauer erfaßt. Die Abweichung zwischen beiden Kurvenist demnach als ein Maß zu werten, welches den Anwendungsbereich der Spannungs-theorie I. Ordnung begrenzt und damit den Näherungscharakter dieser Theorie ver-deutlicht.
Die LVK C ist dagegen einem Stabilitätsproblem zugeordnet, da sich nun Mehrdeutig-keiten zwischen Kräften und Wegen ergeben. Der im (Bild 2.1) dargestellte Verlaufgehört zu einem Verzweigungsproblem. Von einer Gleichgewichtslage, die zu einemreinen Dehnungszustand ohne Verschiebungen v gehört, kann bei Erreichen eineskritischen Lastniveaus (Index k) schlagartig ein Biegezustand mit großen Verschie–bungen v~ abzweigen. Dieser als Knicken bezeichnete Übergang darf bei realenTragwerken natürlich nicht auftreten, da er unmittelbar zum Einsturz von Teilen einesBauwerks oder sogar des Gesamtbauwerks führt. Die Kenntnis des kritischen Last–faktors ρk , in der DIN 18 800, Teil 2 z.B. als Verzweigungslastfaktor ηKi bezeichnet,ist daher von elementarer Bedeutung, um die Stabilität eines Tragwerks zu beurteilen.
Liegen die Lastfaktoren ρ1 und ρ2 unter dem kritischen Lastfaktor ρk der Knicklast,kann der erforderliche Stabilitätsnachweis mit dem Spannungsproblem nach TheorieII. Ordnung erfolgen. Als Ergebnis erhält man Kräfte und Wege, z.B. die SchnittgrößenN, Q und M sowie die Verschiebungen vx und vz und die Verdrehung ϕ. Diese Vor–gehensweise ist durch technische Regelwerke u.a. der DIN 1045, Abschnitt 17.4.4oder der DIN 18 800, Teil 2 vorgeschrieben.
Sie ist aber nur erlaubt, wenn eindeutig feststeht, daß das nachzuweisende Lastniveauunter der Knicklast des betrachteten Tragwerks liegt, wobei das nachzuweisende Last-niveau und das angestrebte Sicherheitsniveau i.a. zusammenfallen. Ist die Eingangs-last des Spannungsnachweises nach Theorie II. Ordnung dagegen größer als dieKnicklast, geht der Nachweis der Stabilität nach dieser Methode völlig fehl. Zum voll-ständigen Nachweis sollte daher auch immer die Bestimmung der Knicklast und Knick-form gehören, um die Ergebnisse der Spannungsberechnung nach Theorie II. Ordnungabzusichern.
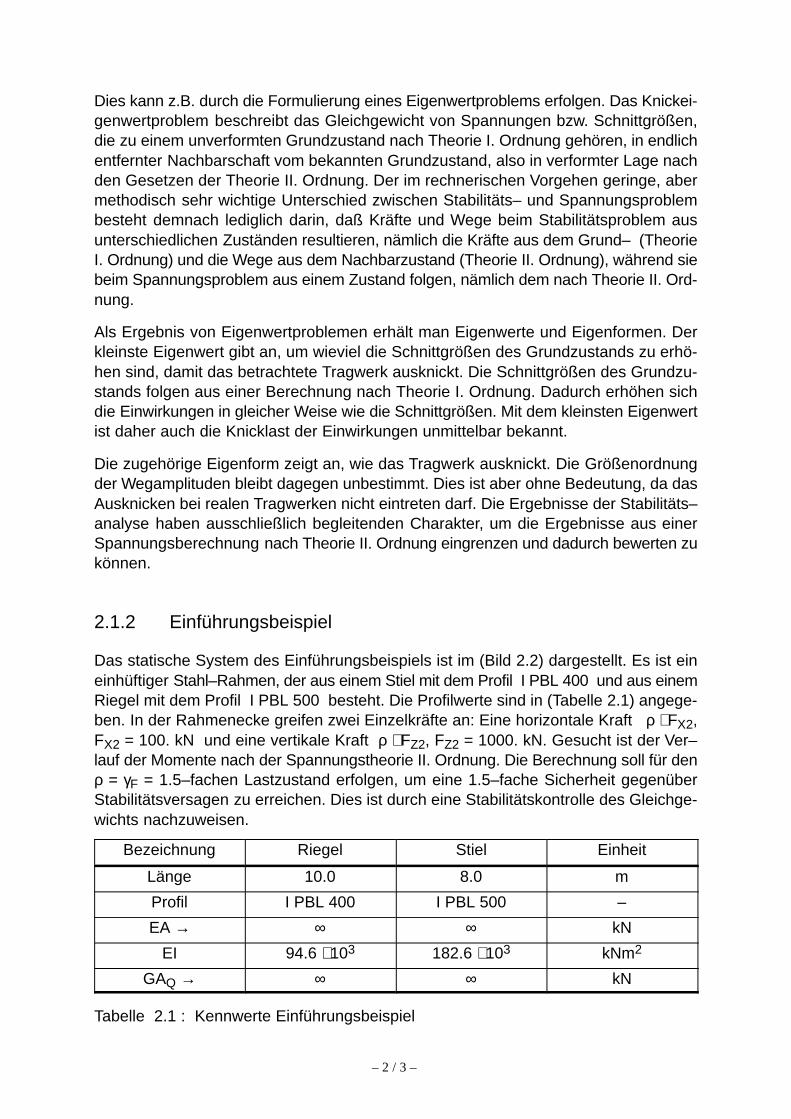
– 2 / 3 –
Dies kann z.B. durch die Formulierung eines Eigenwertproblems erfolgen. Das Knickei-genwertproblem beschreibt das Gleichgewicht von Spannungen bzw. Schnittgrößen,die zu einem unverformten Grundzustand nach Theorie I. Ordnung gehören, in endlichentfernter Nachbarschaft vom bekannten Grundzustand, also in verformter Lage nachden Gesetzen der Theorie II. Ordnung. Der im rechnerischen Vorgehen geringe, abermethodisch sehr wichtige Unterschied zwischen Stabilitäts– und Spannungsproblembesteht demnach lediglich darin, daß Kräfte und Wege beim Stabilitätsproblem ausunterschiedlichen Zuständen resultieren, nämlich die Kräfte aus dem Grund– (TheorieI. Ordnung) und die Wege aus dem Nachbarzustand (Theorie II. Ordnung), während siebeim Spannungsproblem aus einem Zustand folgen, nämlich dem nach Theorie II. Ord-nung.
Als Ergebnis von Eigenwertproblemen erhält man Eigenwerte und Eigenformen. Derkleinste Eigenwert gibt an, um wieviel die Schnittgrößen des Grundzustands zu erhö-hen sind, damit das betrachtete Tragwerk ausknickt. Die Schnittgrößen des Grundzu-stands folgen aus einer Berechnung nach Theorie I. Ordnung. Dadurch erhöhen sichdie Einwirkungen in gleicher Weise wie die Schnittgrößen. Mit dem kleinsten Eigenwertist daher auch die Knicklast der Einwirkungen unmittelbar bekannt.
Die zugehörige Eigenform zeigt an, wie das Tragwerk ausknickt. Die Größenordnungder Wegamplituden bleibt dagegen unbestimmt. Dies ist aber ohne Bedeutung, da dasAusknicken bei realen Tragwerken nicht eintreten darf. Die Ergebnisse der Stabilitäts–analyse haben ausschließlich begleitenden Charakter, um die Ergebnisse aus einerSpannungsberechnung nach Theorie II. Ordnung eingrenzen und dadurch bewerten zukönnen.
2.1.2 Einführungsbeispiel
Das statische System des Einführungsbeispiels ist im (Bild 2.2) dargestellt. Es ist eineinhüftiger Stahl–Rahmen, der aus einem Stiel mit dem Profil I PBL 400 und aus einemRiegel mit dem Profil I PBL 500 besteht. Die Profilwerte sind in (Tabelle 2.1) angege-ben. In der Rahmenecke greifen zwei Einzelkräfte an: Eine horizontale Kraft ρ ⋅ FX2,FX2 = 100. kN und eine vertikale Kraft ρ ⋅ FZ2, FZ2 = 1000. kN. Gesucht ist der Ver–lauf der Momente nach der Spannungstheorie II. Ordnung. Die Berechnung soll für denρ = γF = 1.5–fachen Lastzustand erfolgen, um eine 1.5–fache Sicherheit gegenüberStabilitätsversagen zu erreichen. Dies ist durch eine Stabilitätskontrolle des Gleichge-wichts nachzuweisen.
Bezeichnung Riegel Stiel Einheit
Länge 10.0 8.0 m
Profil I PBL 400 I PBL 500 –
EA → ∞ ∞ kN
EI 94.6 ⋅ 103 182.6 ⋅ 103 kNm2
GAQ → ∞ ∞ kN
Tabelle 2.1 : Kennwerte Einführungsbeispiel
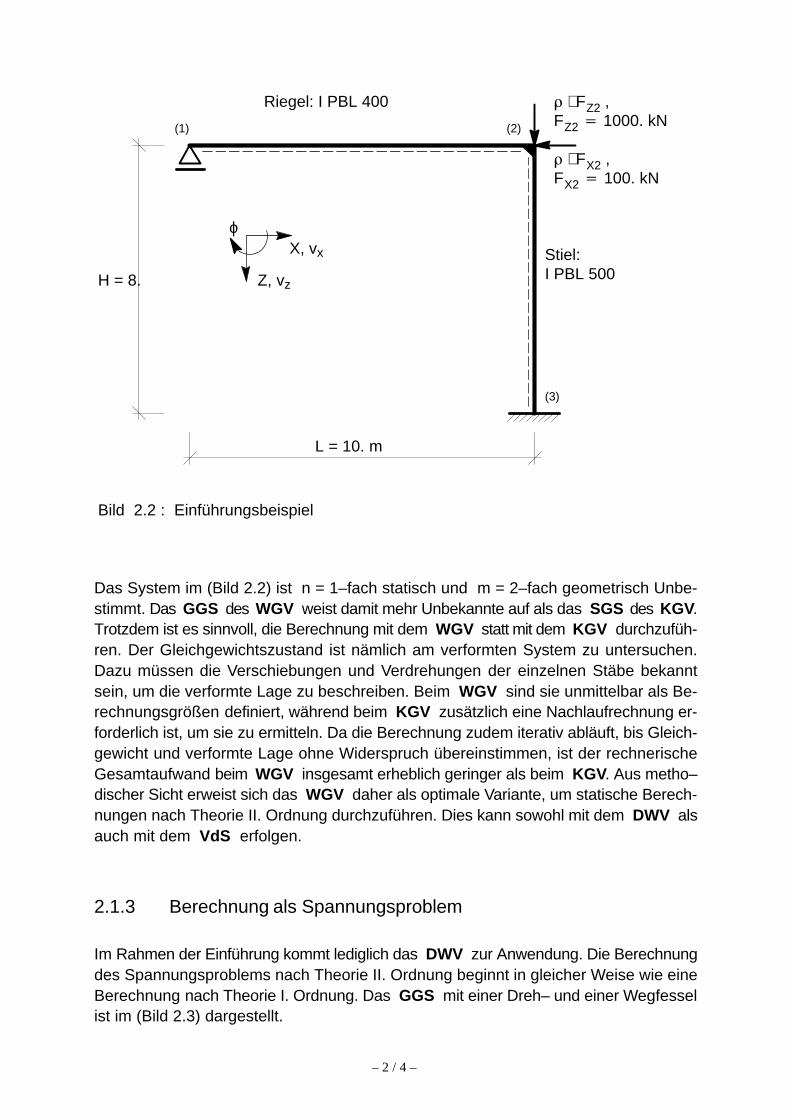
– 2 / 4 –
Bild 2.2 : Einführungsbeispiel
ϕX, vx
Z, vz
(3)
L = 10. m
H = 8.
(1) (2)
Riegel: I PBL 400
Stiel:I PBL 500
� ⋅ FZ2 ,FZ2 � 1000. kN
� ⋅ FX2 ,FX2 � 100. kN
Das System im (Bild 2.2) ist n = 1–fach statisch und m = 2–fach geometrisch Unbe-stimmt. Das GGS des WGV weist damit mehr Unbekannte auf als das SGS des KGV.Trotzdem ist es sinnvoll, die Berechnung mit dem WGV statt mit dem KGV durchzufüh-ren. Der Gleichgewichtszustand ist nämlich am verformten System zu untersuchen.Dazu müssen die Verschiebungen und Verdrehungen der einzelnen Stäbe bekanntsein, um die verformte Lage zu beschreiben. Beim WGV sind sie unmittelbar als Be-rechnungsgrößen definiert, während beim KGV zusätzlich eine Nachlaufrechnung er-forderlich ist, um sie zu ermitteln. Da die Berechnung zudem iterativ abläuft, bis Gleich-gewicht und verformte Lage ohne Widerspruch übereinstimmen, ist der rechnerischeGesamtaufwand beim WGV insgesamt erheblich geringer als beim KGV. Aus metho–discher Sicht erweist sich das WGV daher als optimale Variante, um statische Berech-nungen nach Theorie II. Ordnung durchzuführen. Dies kann sowohl mit dem DWV alsauch mit dem VdS erfolgen.
2.1.3 Berechnung als Spannungsproblem
Im Rahmen der Einführung kommt lediglich das DWV zur Anwendung. Die Berechnungdes Spannungsproblems nach Theorie II. Ordnung beginnt in gleicher Weise wie eineBerechnung nach Theorie I. Ordnung. Das GGS mit einer Dreh– und einer Wegfesselist im (Bild 2.3) dargestellt.
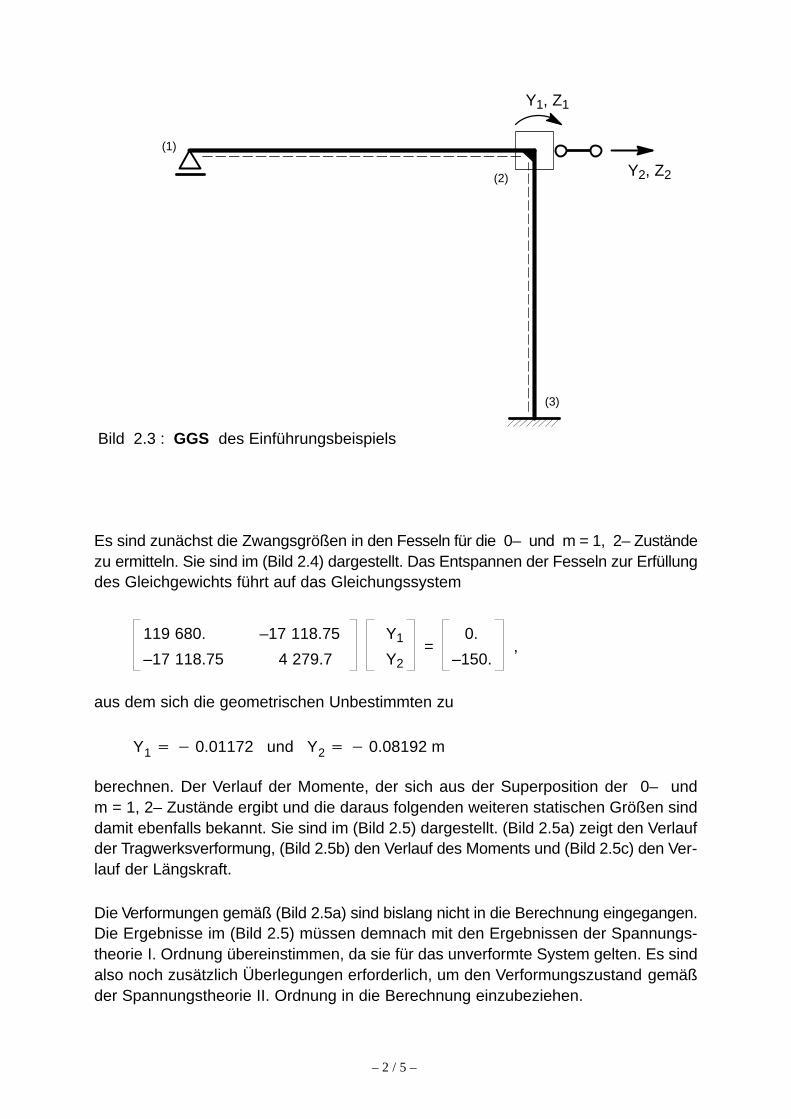
– 2 / 5 –
Bild 2.3 : GGS des Einführungsbeispiels
Y2, Z2
Y1, Z1
(1)
(2)
(3)
Es sind zunächst die Zwangsgrößen in den Fesseln für die 0– und m = 1, 2– Zuständezu ermitteln. Sie sind im (Bild 2.4) dargestellt. Das Entspannen der Fesseln zur Erfüllungdes Gleichgewichts führt auf das Gleichungssystem
119 680.
–17 118.75
–17 118.75
4 279.7
Y1
Y2
0.
–150.= ,
aus dem sich die geometrischen Unbestimmten zu
Y1 � � 0.01172 und Y2 � � 0.08192 m
berechnen. Der Verlauf der Momente, der sich aus der Superposition der 0– undm = 1, 2– Zustände ergibt und die daraus folgenden weiteren statischen Größen sinddamit ebenfalls bekannt. Sie sind im (Bild 2.5) dargestellt. (Bild 2.5a) zeigt den Verlaufder Tragwerksverformung, (Bild 2.5b) den Verlauf des Moments und (Bild 2.5c) den Ver-lauf der Längskraft.
Die Verformungen gemäß (Bild 2.5a) sind bislang nicht in die Berechnung eingegangen.Die Ergebnisse im (Bild 2.5) müssen demnach mit den Ergebnissen der Spannungs-theorie I. Ordnung übereinstimmen, da sie für das unverformte System gelten. Es sindalso noch zusätzlich Überlegungen erforderlich, um den Verformungszustand gemäßder Spannungstheorie II. Ordnung in die Berechnung einzubeziehen.
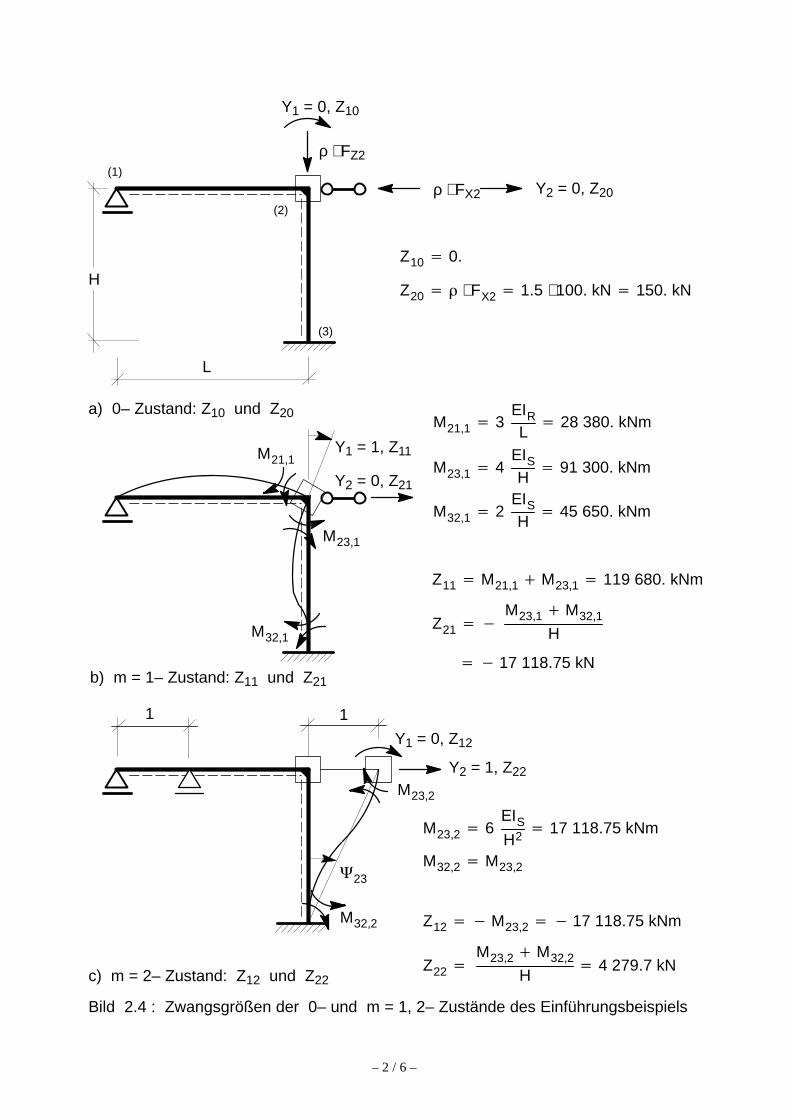
– 2 / 6 –
Bild 2.4 : Zwangsgrößen der 0– und m = 1, 2– Zustände des Einführungsbeispiels
Y2 = 0, Z20
Y1 = 0, Z10
(1)
(2)
(3)
ρ ⋅ FX2
c) m = 2– Zustand: Z12 und Z22
�23
M23,2
M32,2
Y1 = 0, Z12
1
M23,2 � 6EISH2
� 17 118.75 kNm
M32,2 � M23,2
Z12 � � M23,2 � � 17 118.75 kNm
Z22 �M23,2 � M32,2
H� 4 279.7 kN
M23,1
M21,1
Y2 = 0, Z21
Y1 = 1, Z11
M32,1
b) m = 1– Zustand: Z11 und Z21
M23,1 � 4EISH
� 91 300. kNm
Z11 � M21,1 � M23,1 � 119 680. kNm
Z21 � �M23,1 � M32,1
H
a) 0– Zustand: Z10 und Z20M21,1 � 3
EIRL
� 28 380. kNm
� � 17 118.75 kN
M32,1 � 2EISH
� 45 650. kNm
Z10 � 0.
Z20 � � ⋅ FX2 � 1.5 ⋅ 100. kN � 150. kN
ρ ⋅ FZ2
H
L
Y2 = 1, Z22
1
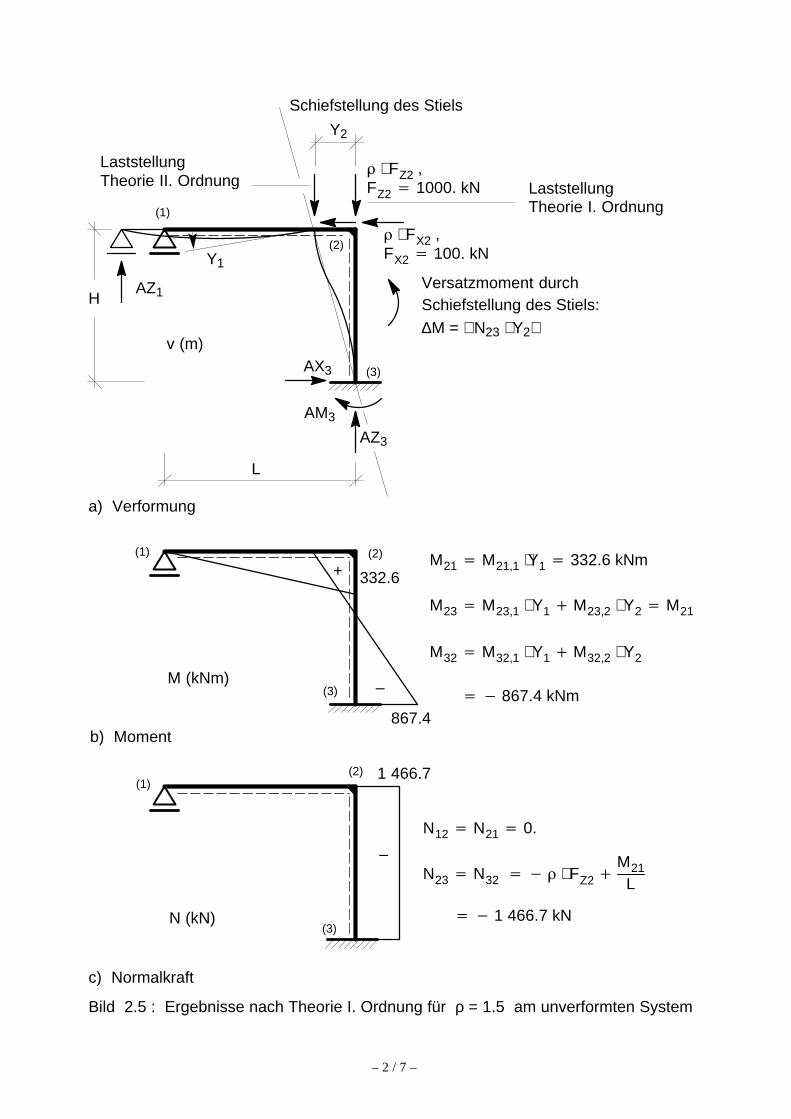
– 2 / 7 –
Bild 2.5 : Ergebnisse nach Theorie I. Ordnung für ρ = 1.5 am unverformten System
(1)
(2)
(3)
c) Normalkraft
N12 � N21 � 0.
N23 � N32 � � � ⋅ FZ2 �M21
L
b) Moment
M23 � M23,1 ⋅ Y1 � M23,2 ⋅ Y2 � M21
a) Verformung
M21 � M21,1 ⋅Y1 � 332.6 kNm
� � 867.4 kNm
M32 � M32,1 ⋅ Y1 � M32,2 ⋅ Y2
H
L
Y2
LaststellungTheorie II. Ordnung Laststellung
Theorie I. Ordnung
Schiefstellung des Stiels
AZ1
AX3
AZ3
AM3
Y1
v (m)
Versatzmoment durchSchiefstellung des Stiels:∆M = N23 ⋅ Y2
+
–M (kNm)
(1) (2)
(3)
332.6
867.4
–
(1)(2)
(3)
1 466.7
N (kN) � � 1 466.7 kN
� ⋅ FZ2 ,FZ2 � 1000. kN
� ⋅ FX2 ,FX2 � 100. kN
– 2 / 8 –
Im (Bild 2.5a) ist zu erkennen, daß sich durch die Verschiebung des Tragwerks der An-griffspunkt (2) der Einwirkungen in horizontaler Richtung um das Maß Y2 = –0.082 mverschiebt. Die Einleitung der Vertikalkraft
(–ρ ⋅ FZ2 + AZ1) = AZ3 = N23 = N32 = – 1 466.7 kN
in das fest eingespannte Lager des Stiels erfolgt durch die Schiefstellung des Stiels aufgegeneinander versetzten Wirkungslinien, so daß auf dem Stiel zusätzlich das Versatz-moment
∆M = N23 ⋅ Y2 = 1 466.7 ⋅ 0.082 = 120.3 kNm
einwirkt. Dieses Moment ist bei einer Berechnung nach Theorie II. Ordnung zu berück-sichtigen, während es bei einer Berechnung am unverformten System nach TheorieI. Ordnung entfällt. Die Wirkung des Versatzmoments hängt von zwei Einflußgrößen ab:
1. Größe und Richtung der Normalkraft im Stiel.
2. Größe und Richtung der Schiefstellung des Stiels.
Bei großen Normalkräften reichen schon relativ kleine Schiefstellungen aus, um großeVersatzmomente zu erzeugen. Diese Konstellation ist als baustatischer Regelfall zu be-trachten. Im entgegengesetzten Fall kann es bei relativ kleinen Normalkräften durchgroße Schiefstellungen ebenfalls zu großen Versatzmomenten kommen. Diese Kon-stellation ist aber aus baupraktischer Sicht von geringer Bedeutung. Treten die Normal-kräfte wie im Einführungsbeispiel als Druckkräfte auf, verstärkt das Versatzmoment dieWirkung der äußeren Lasten (Bild 2.5a). Zugkräfte müssen dagegen zu einer Verringe-rung führen, da Versatzmomente und äußere Lasten dann in entgegengesetzter Rich-tung wirken.
2.1.3.1 Iteration mit verändertem 0– Zustand
Die be– oder entlastende Wirkung des Versatzmoments nach Theorie II. Ordnung wirdbesonders deutlich, wenn man das Versatzmoment durch ein statisch gleichwertigesKräftepaar ersetzt, das sich auf die unverformte Tragwerkkonfiguration bezieht. DieKräfte des Kräftepaares werden als fiktive Kräfte bezeichnet, um eine Verwechselungmit vorgegebenen Einwirkungen zu vermeiden. Die Umsetzung des Versatzmomentsin ein Kräftepaar mit fiktiven Kräften ist im (Bild 2.6) dargestellt.
Die obere fiktive Kraft greift im Systempunkt (2) in Richtung der dort wirkenden horizon-talen Last ρ ⋅ FX2 an. Das hat zur Folge, daß sich die Wirkung der äußeren Last umdas Maß der fiktiven Kraft
Ffiktiv = ∆M / H = 120.3 kNm / 8. m = 15. kN
erhöht. Die untere fiktive Kraft spielt dagegen keine Rolle, da sie unmittelbar im Fest–lager (3) des Stiels angreift. Da die fiktiven Kräfte definitionsgemäß am unverformten
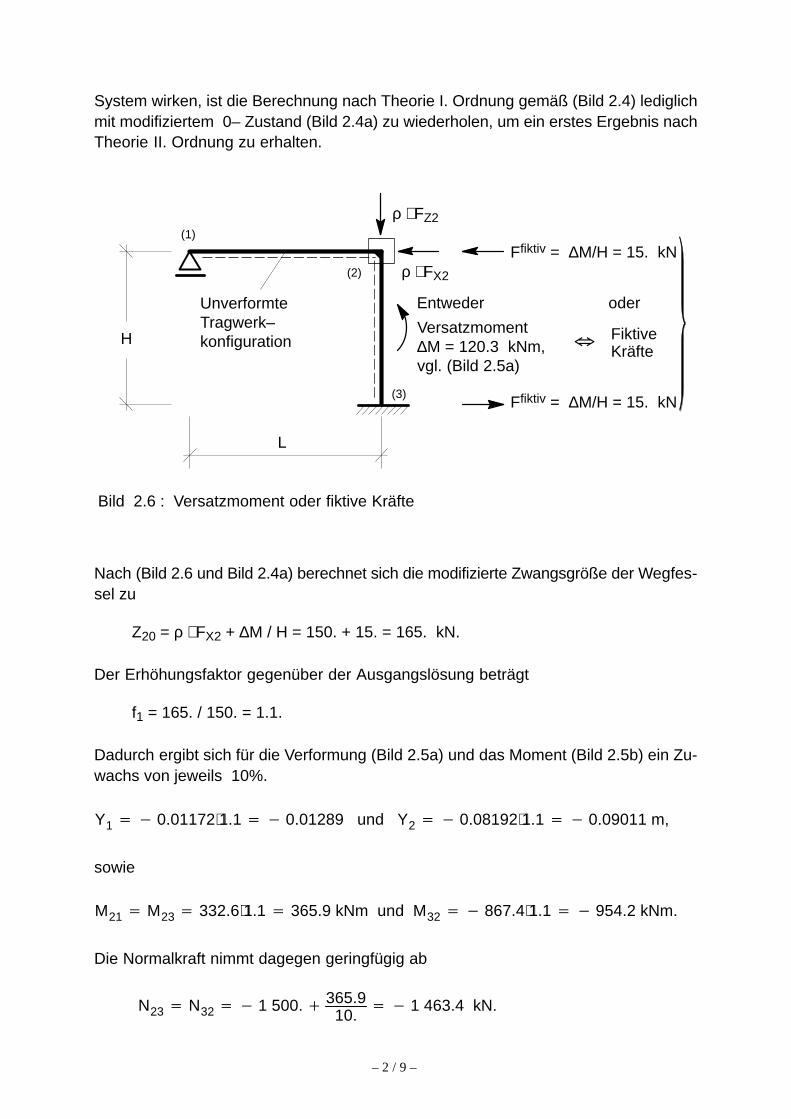
– 2 / 9 –
System wirken, ist die Berechnung nach Theorie I. Ordnung gemäß (Bild 2.4) lediglichmit modifiziertem 0– Zustand (Bild 2.4a) zu wiederholen, um ein erstes Ergebnis nachTheorie II. Ordnung zu erhalten.
Bild 2.6 : Versatzmoment oder fiktive Kräfte
(1)
(2)
(3)
ρ ⋅ FX2
ρ ⋅ FZ2
L
H
UnverformteTragwerk–konfiguration
Versatzmoment∆M = 120.3 kNm,vgl. (Bild 2.5a)
∆M/H = 15. kN
� FiktiveKräfte
∆M/H = 15. kN
Ffiktiv =
Entweder oder
Ffiktiv =
Nach (Bild 2.6 und Bild 2.4a) berechnet sich die modifizierte Zwangsgröße der Wegfes-sel zu
Z20 = ρ ⋅ FX2 + ∆M / H = 150. + 15. = 165. kN.
Der Erhöhungsfaktor gegenüber der Ausgangslösung beträgt
f1 = 165. / 150. = 1.1.
Dadurch ergibt sich für die Verformung (Bild 2.5a) und das Moment (Bild 2.5b) ein Zu-wachs von jeweils 10%.
Y1 � � 0.01172⋅1.1 � � 0.01289 und Y2 � � 0.08192⋅1.1 � � 0.09011 m,
sowie
M21 � M23 � 332.6⋅1.1 � 365.9 kNm und M32 � � 867.4⋅1.1 � � 954.2 kNm.
Die Normalkraft nimmt dagegen geringfügig ab
N23 � N32 � � 1 500. � 365.910.
� � 1 463.4 kN.
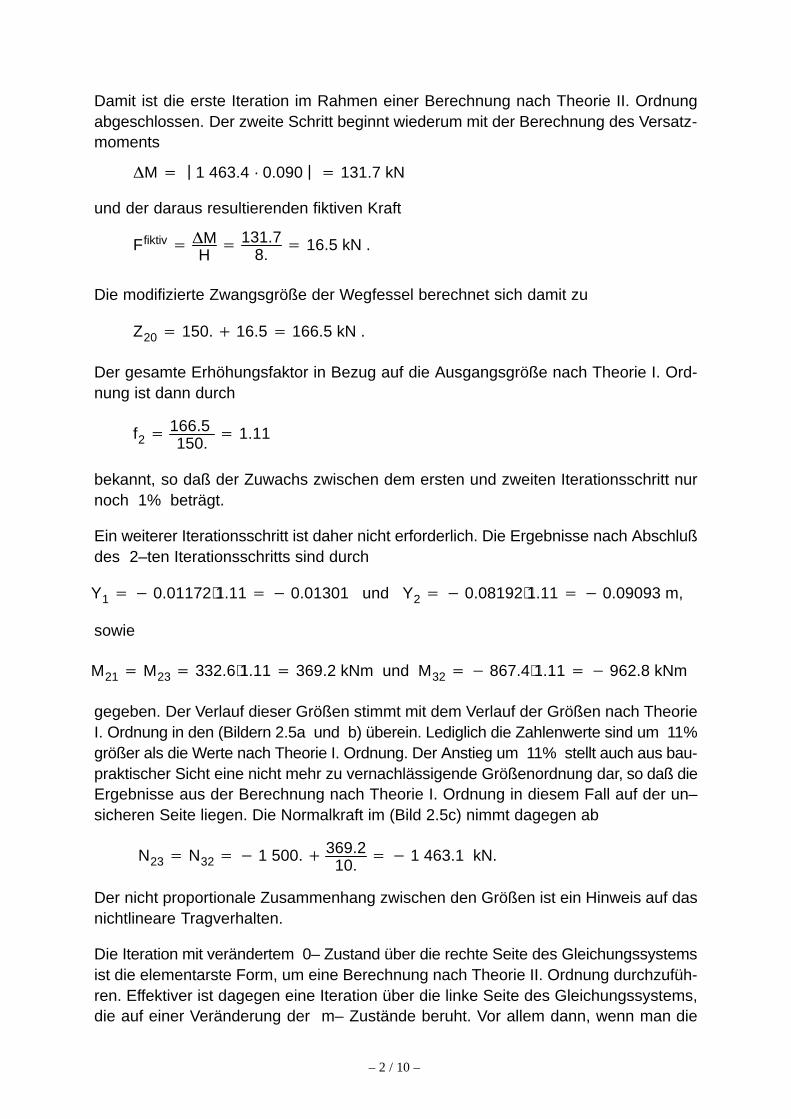
– 2 / 10 –
Damit ist die erste Iteration im Rahmen einer Berechnung nach Theorie II. Ordnungabgeschlossen. Der zweite Schritt beginnt wiederum mit der Berechnung des Versatz-moments
�M � | 1 463.4 · 0.090 | � 131.7 kN
und der daraus resultierenden fiktiven Kraft
Ffiktiv � �MH
� 131.78.
� 16.5 kN .
Die modifizierte Zwangsgröße der Wegfessel berechnet sich damit zu
Z20 � 150. � 16.5 � 166.5 kN .
Der gesamte Erhöhungsfaktor in Bezug auf die Ausgangsgröße nach Theorie I. Ord-nung ist dann durch
f2 � 166.5150.
� 1.11
bekannt, so daß der Zuwachs zwischen dem ersten und zweiten Iterationsschritt nurnoch 1% beträgt.
Ein weiterer Iterationsschritt ist daher nicht erforderlich. Die Ergebnisse nach Abschlußdes 2–ten Iterationsschritts sind durch
Y1 � � 0.01172⋅1.11 � � 0.01301 und Y2 � � 0.08192⋅1.11 � � 0.09093 m,
sowie
M21 � M23 � 332.6⋅1.11 � 369.2 kNm und M32 � � 867.4⋅1.11 � � 962.8 kNm
gegeben. Der Verlauf dieser Größen stimmt mit dem Verlauf der Größen nach TheorieI. Ordnung in den (Bildern 2.5a und b) überein. Lediglich die Zahlenwerte sind um 11%größer als die Werte nach Theorie I. Ordnung. Der Anstieg um 11% stellt auch aus bau-praktischer Sicht eine nicht mehr zu vernachlässigende Größenordnung dar, so daß dieErgebnisse aus der Berechnung nach Theorie I. Ordnung in diesem Fall auf der un–sicheren Seite liegen. Die Normalkraft im (Bild 2.5c) nimmt dagegen ab
N23 � N32 � � 1 500. � 369.210.
� � 1 463.1 kN.
Der nicht proportionale Zusammenhang zwischen den Größen ist ein Hinweis auf dasnichtlineare Tragverhalten.
Die Iteration mit verändertem 0– Zustand über die rechte Seite des Gleichungssystemsist die elementarste Form, um eine Berechnung nach Theorie II. Ordnung durchzufüh-ren. Effektiver ist dagegen eine Iteration über die linke Seite des Gleichungssystems,die auf einer Veränderung der m– Zustände beruht. Vor allem dann, wenn man die

– 2 / 11 –
Iteration mit vorgeschätzten Normalkräften startet. Im Rahmen dieser Methode ist i.a.nur ein Berechnungsschritt erforderlich, um hinreichend genaue Ergebnisse nachTheorie II. Ordnung zu erhalten. Zusätzlich bietet diese Methode die Möglichkeit, auchdas Stabilitätsproblem zu lösen.
2.1.3.2 Iteration mit veränderlichen m– Zuständen
Ausgangspunkt der Betrachtung sind die m = 1– und m = 2– Zustände im (Bild 2.4).Der m = 1– Zustand (Bild 2.4b) spielt keine Rolle. Schiefstellungen der Stäbe treten beider Einheitsverdrehung der Drehfessel nicht auf und damit auch keine globalen, auf diejeweiligen Stäbe bezogenen Versatzmomente. Die lokalen Verschiebungsdifferenzeninnerhalb der Stäbe führen zwar ebenfalls zu Versatzmomenten, wenn in den StäbenNormalkräfte wirken. Sie sind aber, wenn überhaupt, den lokalen Stabendmomentenzuzuschlagen und werden bei der Berechnung des Einführungsbeispiels ersatzlos ver-nachlässigt.
Der m = 2– Zustand (Bild 2.4c) ist dagegen im Rahmen einer Theorie II. Ordnung–Be-rechnung von grundsätzlicher Bedeutung. Die Einheitsverschiebung der Wegfesselführt zu einer Schiefstellung des Stiels und damit zu einem Versatzmoment, das direktvom bekannten Weg der Einheitsverschiebung Y2 = 1 abhängt, wenn man die Normal-kraft N23 im Stiel vorschätzt.
Die Zusammenhänge sind im (Bild 2.7) dargestellt. Ziel ist es, eine Iteration mit verän-derlichen Z22– Zwangsgrößen aufzubauen. Das Versatzmoment der Schiefstellung istdurch
∆M = N23 ⋅ Y2
bekannt. Es kann bei der Berechnung von Z22 entweder unmittelbar als Momentoder wiederum als fiktive Kraft berücksichtigt werden. Der virtuelle Zustand zur Berech-nung von Z22 ist durch die Schlußlinie des m = 2– Zustands (Bild 2.4c oder Bild 2.7)gegeben. Die Schlußlinie stimmt mit der kinematischen Verschiebung einer Rahmen-kette überein, die vom unverformten System aus erfolgt.
Im ersten Fall gilt
Yv2 Z22 ��v
23�M23, 2 � M32, 2
� ��v23 ⋅ �M � 0
und im zweiten Fall
Yv2 Z22 ��v
23�M23, 2 � M32, 2
� � Yv2 ⋅ Ffiktiv � 0.
Mit
Y2 � 1 und Yv2 � 1,
�23 �Y2H
und �v23 �
Yv2
H,
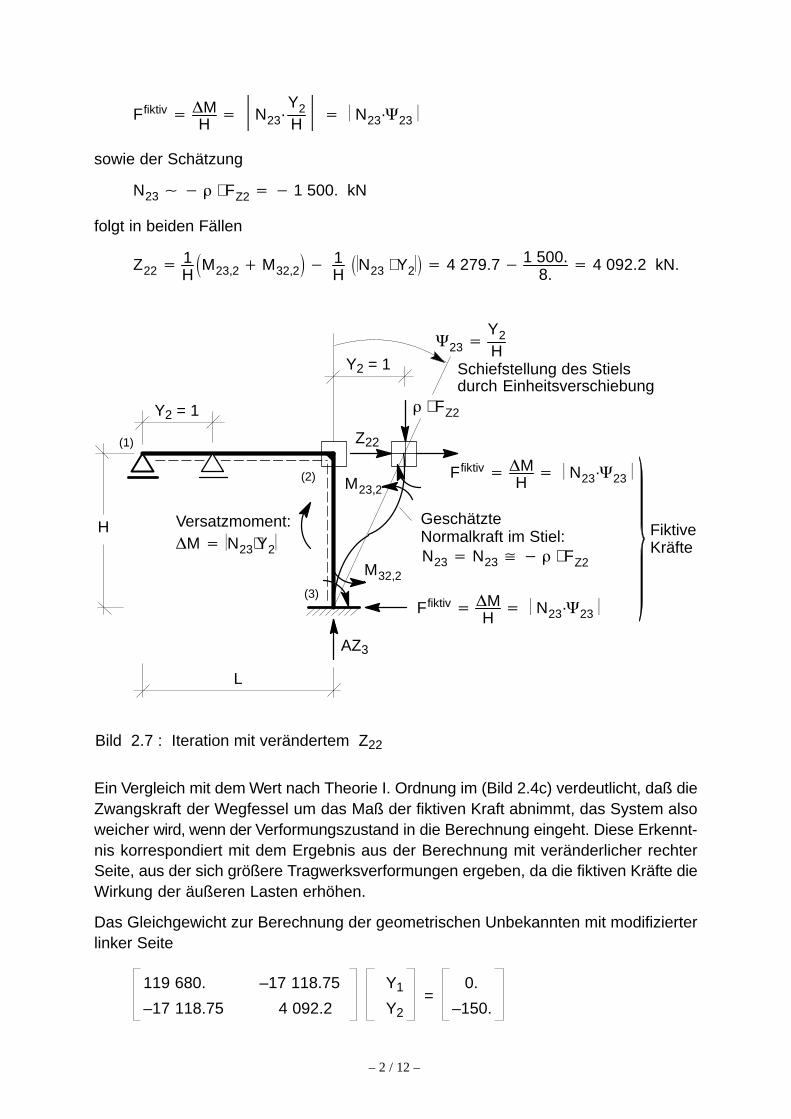
– 2 / 12 –
Ffiktiv � �MH
� � N23·Y2H� � � N23·�23
�
sowie der Schätzung
N23 � � � ⋅ FZ2 � � 1 500. kN
folgt in beiden Fällen
Z22 � 1H�M23,2 � M32,2
� � 1H
��N23 ⋅ Y2�� � 4 279.7 � 1 500.
8.� 4 092.2 kN.
Bild 2.7 : Iteration mit verändertem Z22
M23,2
M32,2
Y2 = 1
N23 � N23 � � ⋅ FZ2
H
L
Y2 = 1
(1)
(2)
(3)
Z22
FiktiveKräfte
GeschätzteNormalkraft im Stiel:
Versatzmoment:�M � �N23⋅Y2
�
� ⋅ FZ2
AZ3
Schiefstellung des Stielsdurch Einheitsverschiebung
Ffiktiv � �MH
� � N23·�23�
Ffiktiv � �MH
� � N23·�23�
�23 �Y2H
Ein Vergleich mit dem Wert nach Theorie I. Ordnung im (Bild 2.4c) verdeutlicht, daß dieZwangskraft der Wegfessel um das Maß der fiktiven Kraft abnimmt, das System alsoweicher wird, wenn der Verformungszustand in die Berechnung eingeht. Diese Erkennt-nis korrespondiert mit dem Ergebnis aus der Berechnung mit veränderlicher rechterSeite, aus der sich größere Tragwerksverformungen ergeben, da die fiktiven Kräfte dieWirkung der äußeren Lasten erhöhen.
Das Gleichgewicht zur Berechnung der geometrischen Unbekannten mit modifizierterlinker Seite
119 680.
–17 118.75
–17 118.75
4 092.2
Y1
Y2
0.
–150.=
– 2 / 13 –
ist nun zu lösen, um die Zahlenwerte von Y1 und Y2 nach Theorie II. Ordnung zu erhal-ten
Y1 = –0.01305 und Y2 = –0.09127 m.
Zur Kontrolle der geschätzten Normalkraft im Stiel ist zunächst das Moment M21 = M23in der biegesteifen Ecke zwischen Riegel und Stiel zu ermitteln.
M21 = M21,1 ⋅ Y1 = 370.4 kNm.
Die Normalkraft N23 = N32 errechnet sich dann zu
N23 � � � ⋅ FZ2 �M21
L� � 1 500. � 370.4
10.� � 1 463.0 kN.
Der Einfluß der genauer ermittelten Normalkraft auf die Zwangskraft der Wegfessel
Z22 � 4 279.7 � 1 463.8.
� 4 096.8 kN
ist gering, so daß die Berechnung beendet werden kann. Die Übereinstimmung mit denWerten aus der Iteration über die rechte Seite des Gleichungssystems ist sehr gut. Daszeigt auch der Vergleich mit dem Einspannmoment des Stiels, das sich zu
M32 = M32,1 ⋅ Y1 + M32,2 ⋅ Y2 = –966.7 kNm
berechnet.
Die Iteration über die linke Seite gilt als Standardverfahren der Baustatik, wenn Unter–suchungen zur Spannungstheorie II. Ordnung anstehen. Es ist Bestandteil vieler praxis-relevanter Programme, die auf dem VdS beruhen. Liegt dagegen eine Programm–version mit der Option nach Theorie II. Ordnung nicht vor und soll trotzdem eine Unter-suchung mit Einschluß der Tragwerksverformungen durchgeführt werden, empfiehlt essich, die Iteration über die rechte Seite anzuwenden. Sie ist in einfacher Weise vonaußen durch den Benutzer zu steuern, ohne in den internen Programmablauf eingreifenzu müssen.
Größe und Verlauf der Schnittgrößen (N, Q, M), die sich aus der Iteration über die linkeSeite ergeben, sind im (Bild 2.8) dargestellt. Sie repräsentieren den Gleichgewichts–zustand nach der Spannungstheorie II. Ordnung. Der Einfluß der Tragwerksverformun-gen gemäß (Bild 2.5a) ist durch die Iteration voll erfaßt. Die Richtungen von Normalkraft(Bild 2.8a) und Querkraft (Bild 2.8b) am verformten System sind noch auf die unverform-ten Stabachsen bezogen. Es wäre also noch eine zusätzliche Transformation in Rich-tung der verformten Stabachsen erforderlich, um physikalisch zutreffende Kräfte zuerhalten. Der Einfluß des Richtungsunterschieds ist allerdings gering, so daß die Um-rechnung in der Regel entfallen kann. Das Moment ist dagegen auch richtungsmäßigauf die verformten Stabachsen bezogen. Im (Bild 2.8) ist der Verlauf der Schnittgrößenvereinfachend am unverformten Tragwerk dargestellt.
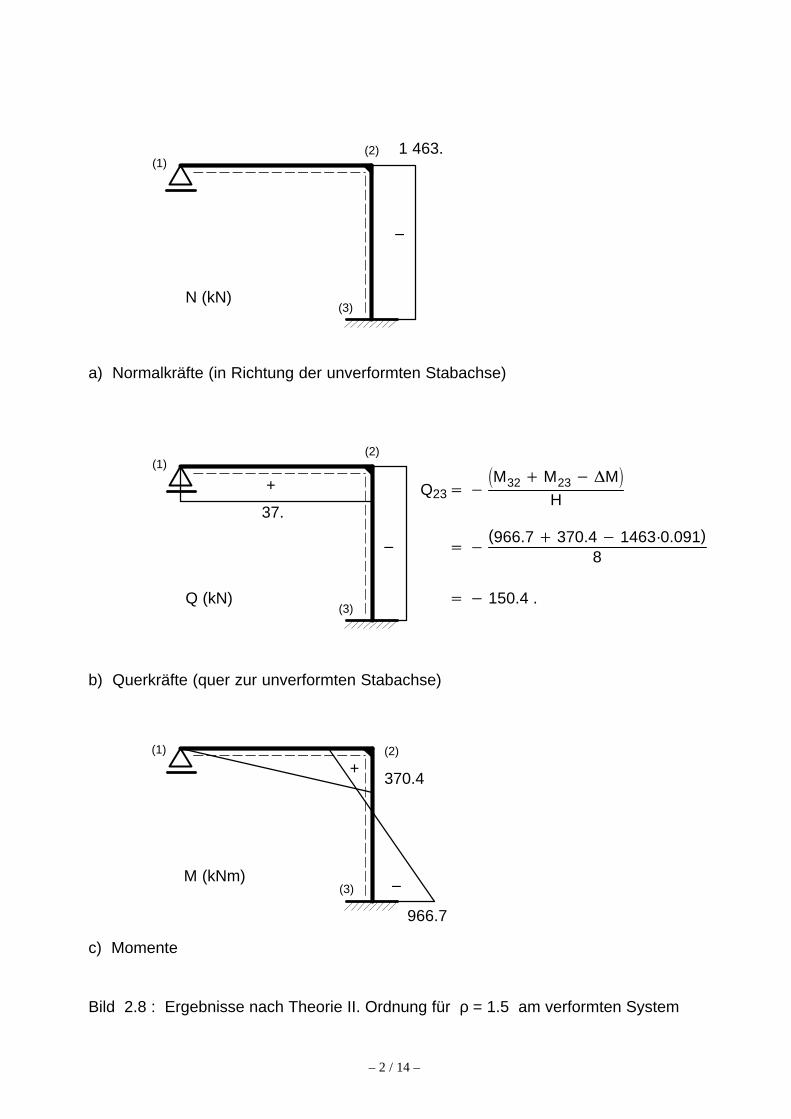
– 2 / 14 –
Bild 2.8 : Ergebnisse nach Theorie II. Ordnung für ρ = 1.5 am verformten System
c) Momente
a) Normalkräfte (in Richtung der unverformten Stabachse)
+
–M (kNm)
(1) (2)
(3)
370.4
966.7
–
(1)(2)
(3)Q (kN)
–
(1)(2)
(3)N (kN)
1 463.
+
b) Querkräfte (quer zur unverformten Stabachse)
37.� �
�M32 � M23 � �M�H
Q23
� �(966.7 � 370.4 � 1463·0.091)
8
� � 150.4 .
– 2 / 15 –
2.1.4 Kontrolle der Stabilität
Die Ergebnisse der Spannungsberechnung nach Theorie II. Ordnung lassen nicht un-mittelbar erkennen, ob ein stabiler oder ein instabiler Gleichgewichtszustand vorliegt.Eine eindeutige Entscheidung ist nur möglich, wenn der innere Spannungszustand be-kannt ist, bei dem das Tragwerk versagt. Einflußparameter ist die Normalkraft N23 = N32des Stiels. Im Grundzustand nach Theorie I. Ordnung ist sie durch
N23 � � � ⋅ FZ2 �M21
�� ⋅ FX2�
L
gegeben. Im Rahmen von Spannungsproblemen ist ρ als fest vorzugebender Lastfak-tor definiert und damit bekannt. Ein üblicher Richtwert ist das angestrebte Sicherheits–niveau, so daß ρ = γF gilt.
Im Rahmen einer Stabilitätskontrolle ist dagegen zu ermitteln, um welchen Faktor λdie Normalkraft N23 anwachsen muß, bis sich durch Ausknicken ein endlich benach-barter Gleichgewichtszustand nach Theorie II. Ordnung einstellt, der zum Versagen desTragwerks führt. Der Übergang zum Nachbarzustand erfolgt ohne Einwirkungen. Diessoll allein durch die Steigerung der Normalkraft N23 des Grundzustands erreicht wer-den. Um λ zu bestimmen, ist ein homogenes Gleichungssystem zu lösen, zu dem dieZwangskraft der Wegfessel
Z22 � 1H�M23,2 � M32,2
� � 1H� � � N23 Y2
� �
gehört. Im Grundzustand nach Theorie I. Ordnung hängen N23 und ρ linear vonein–ander ab. λ ist der lineare Steigerungsfaktor von N23 bis zum Nachbarzustand nachTheorie II. Ordnung. Mit λ ist daher auch ρ bekannt, wenn N23 für ρ = 1 ermitteltwird und dieser Wert in die Stabilitätsuntersuchung eingeht. Es gilt
� � �.
Für ρ = 1. nimmt die Normalkraft im Stiel den Wert
N23 (� � 1) � � 1 000. �332.6
1.510.
� � 977.8 kN
an und die durch Y2 = 1 ausgelöste Zwangskraft in der Wegfessel den Wert
Z22 � 4 279.7 � �977.8
8.� 4 279.7 � 122.3 ⋅ �.
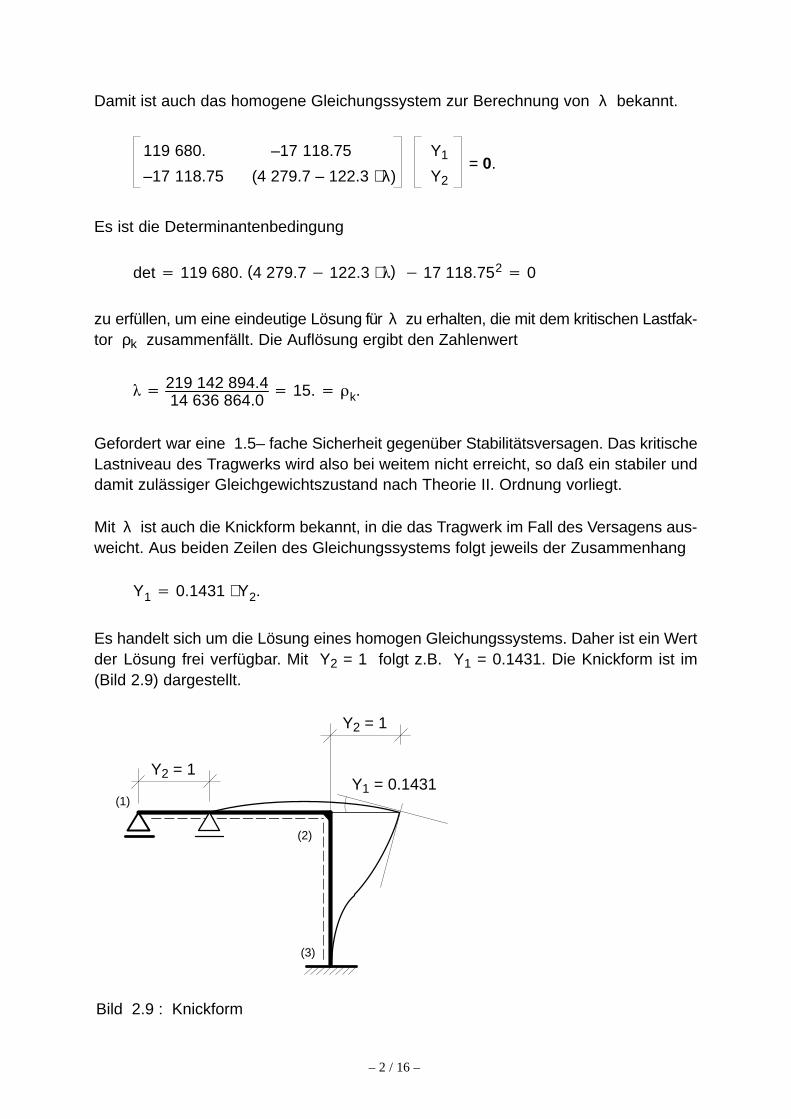
– 2 / 16 –
Damit ist auch das homogene Gleichungssystem zur Berechnung von λ bekannt.
119 680.
–17 118.75
–17 118.75
(4 279.7 – 122.3 ⋅ λ)
Y1
Y2= 0.
Es ist die Determinantenbedingung
det � 119 680. (4 279.7 � 122.3 ⋅ �) � 17 118.752 � 0
zu erfüllen, um eine eindeutige Lösung für λ zu erhalten, die mit dem kritischen Lastfak-tor ρk zusammenfällt. Die Auflösung ergibt den Zahlenwert
� � 219 142 894.414 636 864.0
� 15. � �k.
Gefordert war eine 1.5– fache Sicherheit gegenüber Stabilitätsversagen. Das kritischeLastniveau des Tragwerks wird also bei weitem nicht erreicht, so daß ein stabiler unddamit zulässiger Gleichgewichtszustand nach Theorie II. Ordnung vorliegt.
Mit λ ist auch die Knickform bekannt, in die das Tragwerk im Fall des Versagens aus-weicht. Aus beiden Zeilen des Gleichungssystems folgt jeweils der Zusammenhang
Y1 � 0.1431 ⋅ Y2.
Es handelt sich um die Lösung eines homogen Gleichungssystems. Daher ist ein Wertder Lösung frei verfügbar. Mit Y2 = 1 folgt z.B. Y1 = 0.1431. Die Knickform ist im(Bild 2.9) dargestellt.
Bild 2.9 : Knickform
Y2 = 1
Y2 = 1
(1)
(2)
(3)
Y1 = 0.1431
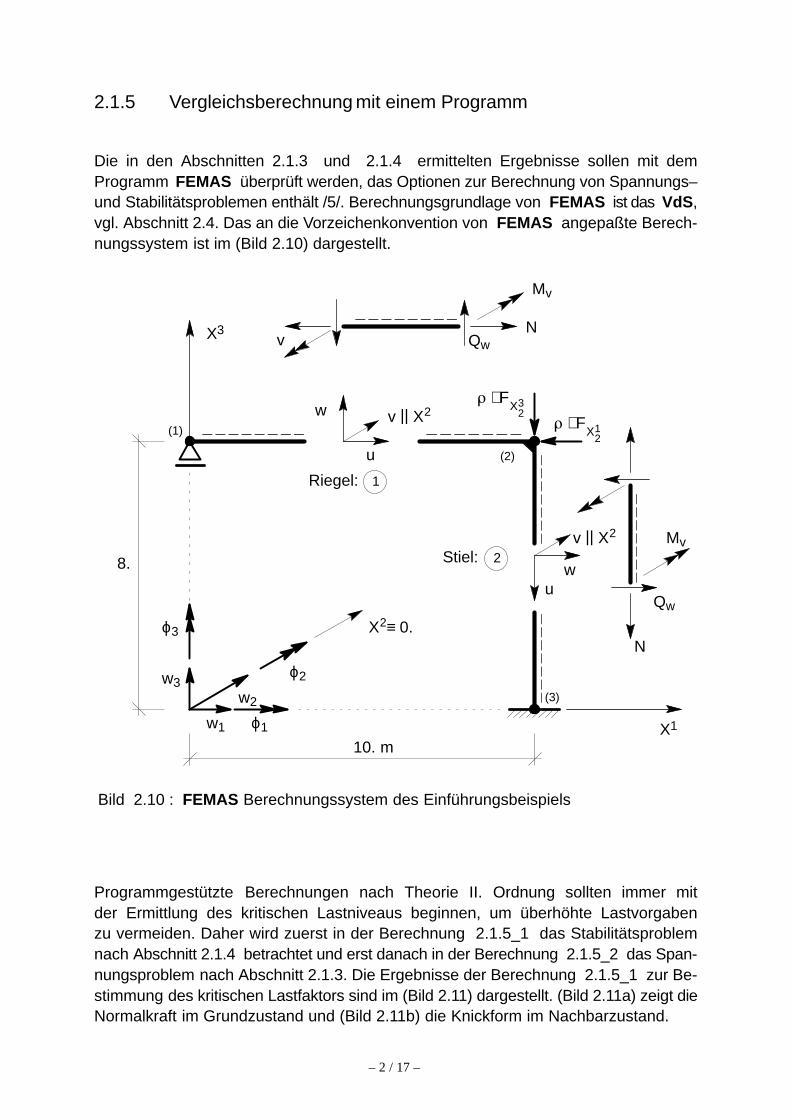
– 2 / 17 –
2.1.5 Vergleichsberechnung mit einem Programm
Die in den Abschnitten 2.1.3 und 2.1.4 ermittelten Ergebnisse sollen mit demProgramm FEMAS überprüft werden, das Optionen zur Berechnung von Spannungs–und Stabilitätsproblemen enthält /5/. Berechnungsgrundlage von FEMAS ist das VdS,vgl. Abschnitt 2.4. Das an die Vorzeichenkonvention von FEMAS angepaßte Berech-nungssystem ist im (Bild 2.10) dargestellt.
Bild 2.10 : FEMAS Berechnungssystem des Einführungsbeispiels
(3)
10. m
8.
(1)
(2)
� ⋅ FX3
2
X1
w2
X3
X2≡ 0.
ϕ2
ϕ1w1
ϕ3
w3
1
2
u
w
Riegel:
Stiel:
� ⋅ FX1
2
uw
v
Mv
Qw
Mv
N
Qw
N
v || X2
v || X2
Programmgestützte Berechnungen nach Theorie II. Ordnung sollten immer mitder Ermittlung des kritischen Lastniveaus beginnen, um überhöhte Lastvorgabenzu vermeiden. Daher wird zuerst in der Berechnung 2.1.5_1 das Stabilitätsproblemnach Abschnitt 2.1.4 betrachtet und erst danach in der Berechnung 2.1.5_2 das Span-nungsproblem nach Abschnitt 2.1.3. Die Ergebnisse der Berechnung 2.1.5_1 zur Be-stimmung des kritischen Lastfaktors sind im (Bild 2.11) dargestellt. (Bild 2.11a) zeigt dieNormalkraft im Grundzustand und (Bild 2.11b) die Knickform im Nachbarzustand.
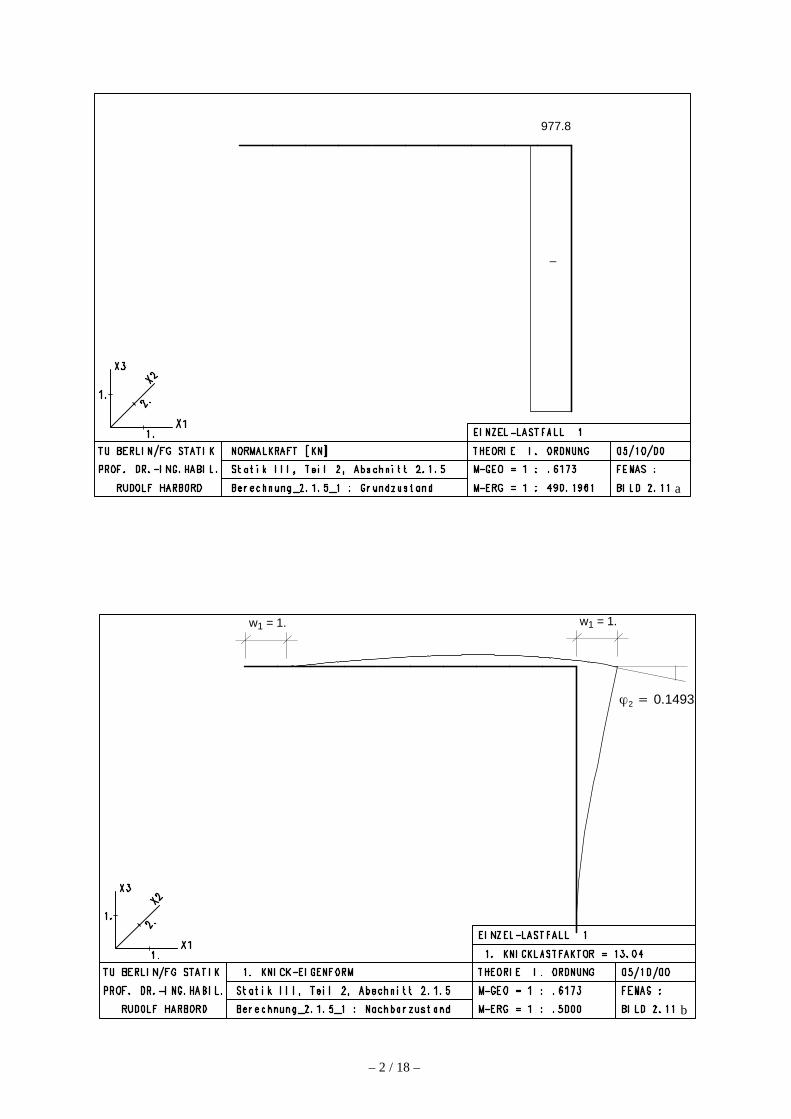
– 2 / 18 –
a
977.8
–
b
�2 � 0.1493
w1 = 1. w1 = 1.
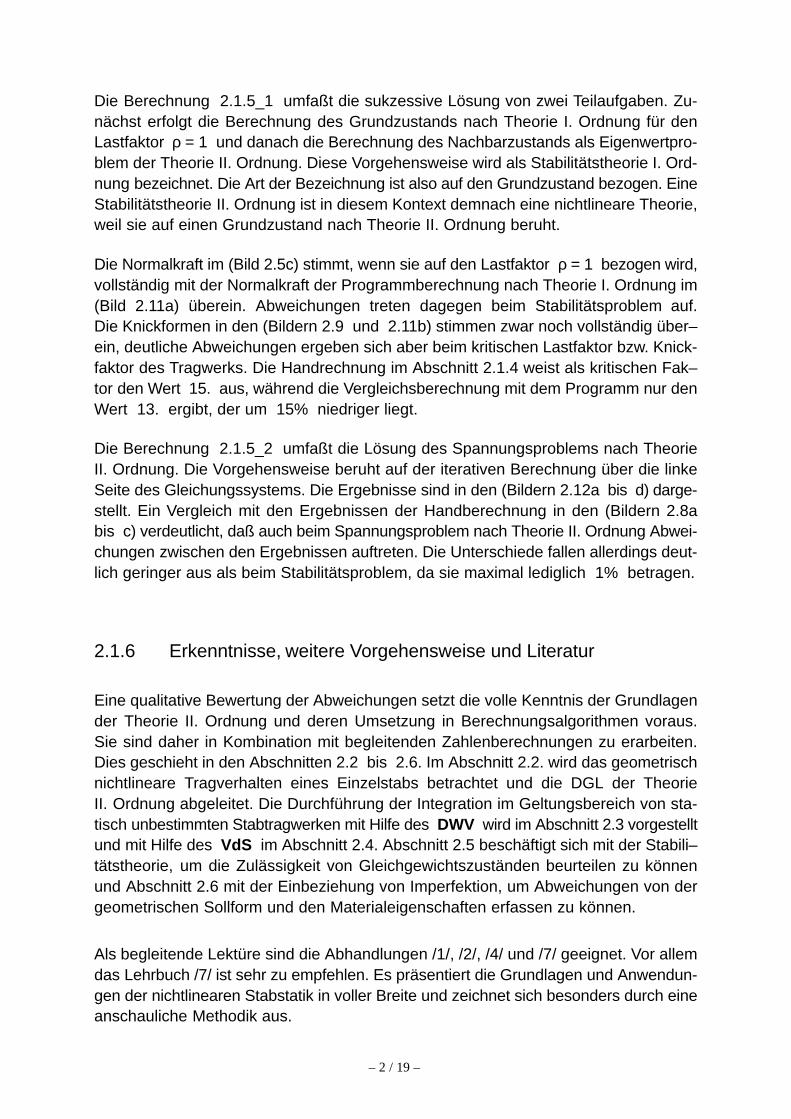
– 2 / 19 –
Die Berechnung 2.1.5_1 umfaßt die sukzessive Lösung von zwei Teilaufgaben. Zu-nächst erfolgt die Berechnung des Grundzustands nach Theorie I. Ordnung für denLastfaktor ρ = 1 und danach die Berechnung des Nachbarzustands als Eigenwertpro-blem der Theorie II. Ordnung. Diese Vorgehensweise wird als Stabilitätstheorie I. Ord-nung bezeichnet. Die Art der Bezeichnung ist also auf den Grundzustand bezogen. EineStabilitätstheorie II. Ordnung ist in diesem Kontext demnach eine nichtlineare Theorie,weil sie auf einen Grundzustand nach Theorie II. Ordnung beruht.
Die Normalkraft im (Bild 2.5c) stimmt, wenn sie auf den Lastfaktor ρ = 1 bezogen wird,vollständig mit der Normalkraft der Programmberechnung nach Theorie I. Ordnung im(Bild 2.11a) überein. Abweichungen treten dagegen beim Stabilitätsproblem auf.Die Knickformen in den (Bildern 2.9 und 2.11b) stimmen zwar noch vollständig über–ein, deutliche Abweichungen ergeben sich aber beim kritischen Lastfaktor bzw. Knick-faktor des Tragwerks. Die Handrechnung im Abschnitt 2.1.4 weist als kritischen Fak–tor den Wert 15. aus, während die Vergleichsberechnung mit dem Programm nur denWert 13. ergibt, der um 15% niedriger liegt.
Die Berechnung 2.1.5_2 umfaßt die Lösung des Spannungsproblems nach TheorieII. Ordnung. Die Vorgehensweise beruht auf der iterativen Berechnung über die linkeSeite des Gleichungssystems. Die Ergebnisse sind in den (Bildern 2.12a bis d) darge-stellt. Ein Vergleich mit den Ergebnissen der Handberechnung in den (Bildern 2.8abis c) verdeutlicht, daß auch beim Spannungsproblem nach Theorie II. Ordnung Abwei-chungen zwischen den Ergebnissen auftreten. Die Unterschiede fallen allerdings deut-lich geringer aus als beim Stabilitätsproblem, da sie maximal lediglich 1% betragen.
2.1.6 Erkenntnisse, weitere Vorgehensweise und Literatur
Eine qualitative Bewertung der Abweichungen setzt die volle Kenntnis der Grundlagender Theorie II. Ordnung und deren Umsetzung in Berechnungsalgorithmen voraus.Sie sind daher in Kombination mit begleitenden Zahlenberechnungen zu erarbeiten.Dies geschieht in den Abschnitten 2.2 bis 2.6. Im Abschnitt 2.2. wird das geometrischnichtlineare Tragverhalten eines Einzelstabs betrachtet und die DGL der TheorieII. Ordnung abgeleitet. Die Durchführung der Integration im Geltungsbereich von sta-tisch unbestimmten Stabtragwerken mit Hilfe des DWV wird im Abschnitt 2.3 vorgestelltund mit Hilfe des VdS im Abschnitt 2.4. Abschnitt 2.5 beschäftigt sich mit der Stabili–tätstheorie, um die Zulässigkeit von Gleichgewichtszuständen beurteilen zu könnenund Abschnitt 2.6 mit der Einbeziehung von Imperfektion, um Abweichungen von dergeometrischen Sollform und den Materialeigenschaften erfassen zu können.
Als begleitende Lektüre sind die Abhandlungen /1/, /2/, /4/ und /7/ geeignet. Vor allemdas Lehrbuch /7/ ist sehr zu empfehlen. Es präsentiert die Grundlagen und Anwendun-gen der nichtlinearen Stabstatik in voller Breite und zeichnet sich besonders durch eineanschauliche Methodik aus.
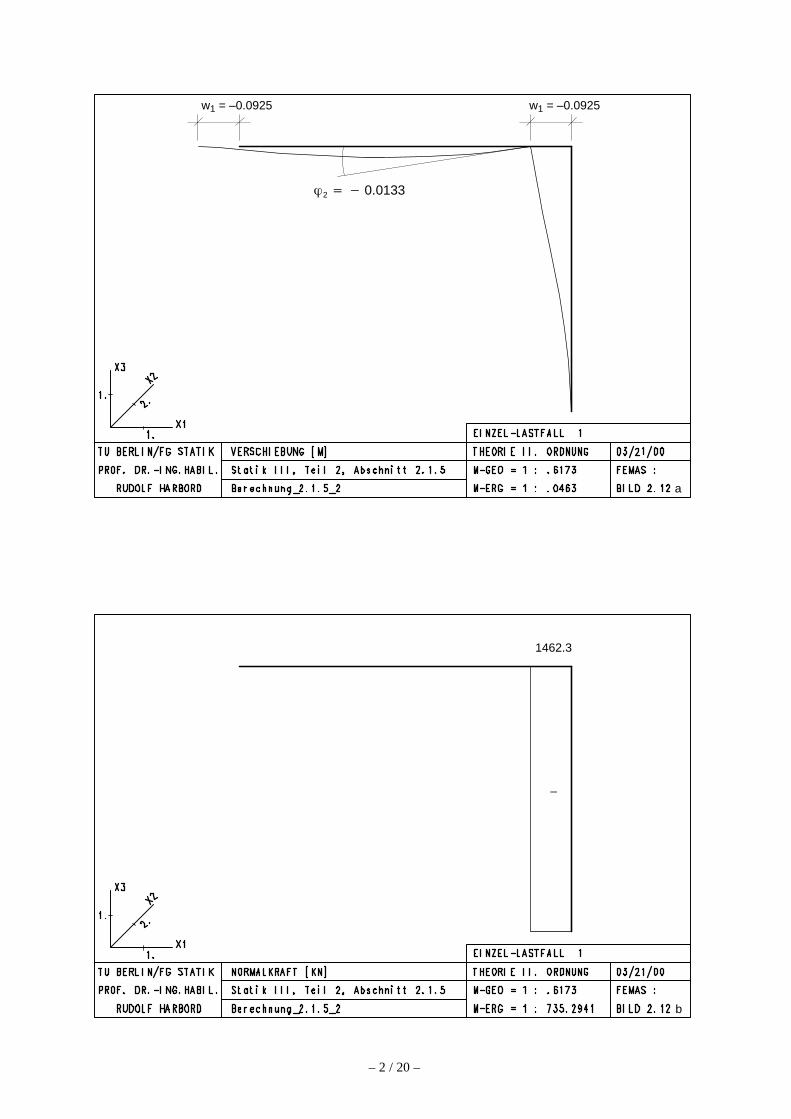
– 2 / 20 –
w1 = –0.0925
�2 � � 0.0133
w1 = –0.0925
a
1462.3
–
b
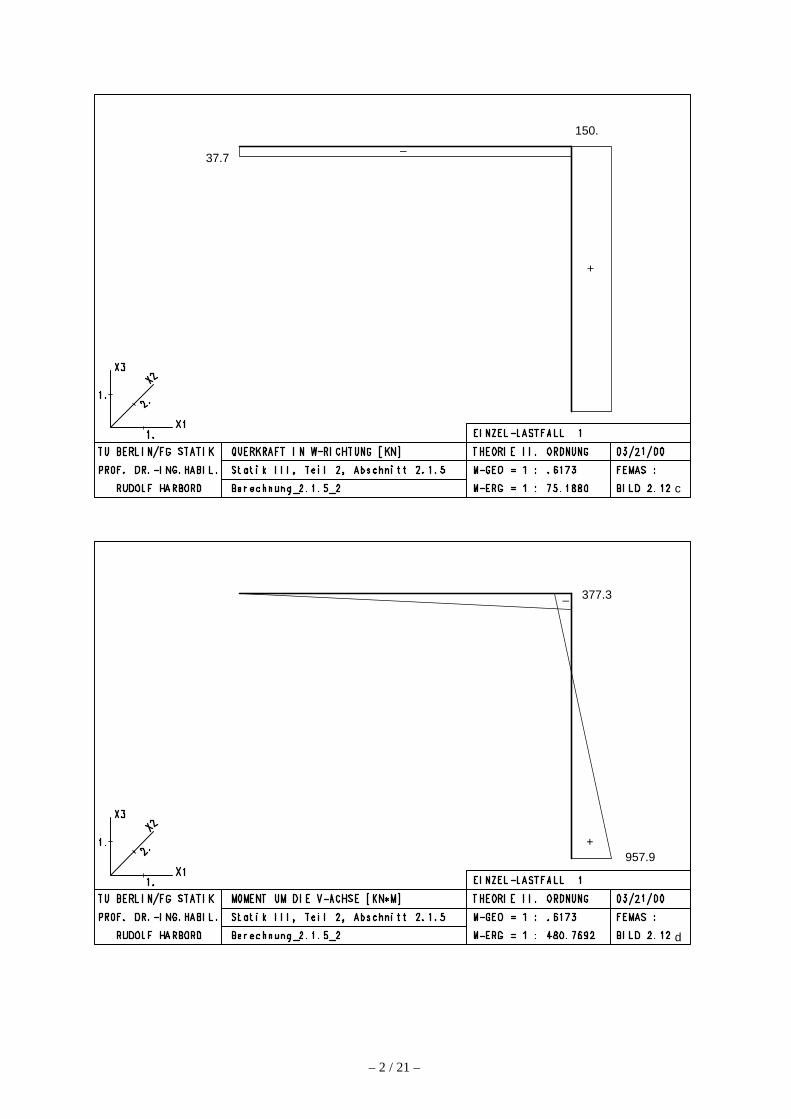
– 2 / 21 –
150.
–
+
37.7
c
377.3–
+957.9
d
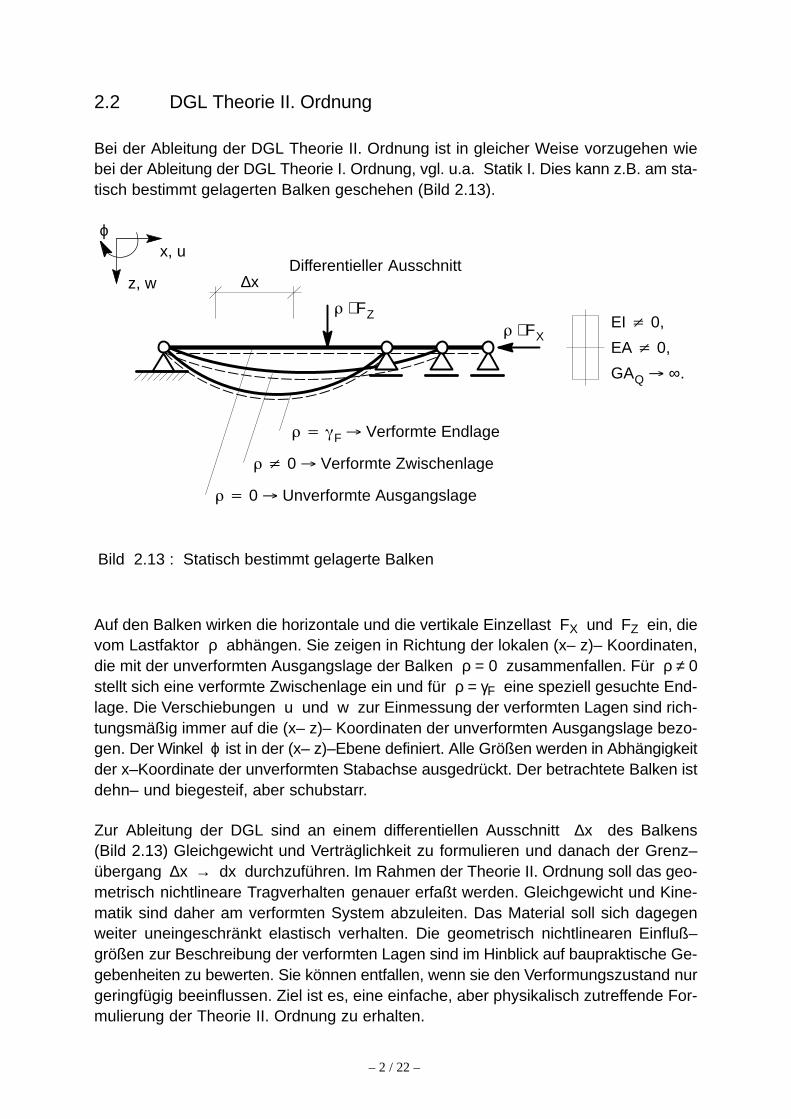
– 2 / 22 –
2.2 DGL Theorie II. Ordnung
Bei der Ableitung der DGL Theorie II. Ordnung ist in gleicher Weise vorzugehen wiebei der Ableitung der DGL Theorie I. Ordnung, vgl. u.a. Statik I. Dies kann z.B. am sta-tisch bestimmt gelagerten Balken geschehen (Bild 2.13).
Bild 2.13 : Statisch bestimmt gelagerte Balken
ϕx, u
z, w ∆x
� ⋅ FX
� � �F � Verformte Endlage
� ⋅ FZ
� � 0 � Verformte Zwischenlage
� � 0 � Unverformte Ausgangslage
Differentieller Ausschnitt
EI � 0,
EA � 0,
GAQ � ∞.
Auf den Balken wirken die horizontale und die vertikale Einzellast FX und FZ ein, dievom Lastfaktor ρ abhängen. Sie zeigen in Richtung der lokalen (x– z)– Koordinaten,die mit der unverformten Ausgangslage der Balken ρ = 0 zusammenfallen. Für ρ ≠ 0stellt sich eine verformte Zwischenlage ein und für ρ = γF eine speziell gesuchte End-lage. Die Verschiebungen u und w zur Einmessung der verformten Lagen sind rich-tungsmäßig immer auf die (x– z)– Koordinaten der unverformten Ausgangslage bezo-gen. Der Winkel ϕ ist in der (x– z)–Ebene definiert. Alle Größen werden in Abhängigkeitder x–Koordinate der unverformten Stabachse ausgedrückt. Der betrachtete Balken istdehn– und biegesteif, aber schubstarr.
Zur Ableitung der DGL sind an einem differentiellen Ausschnitt ∆x des Balkens(Bild 2.13) Gleichgewicht und Verträglichkeit zu formulieren und danach der Grenz–übergang ∆x → dx durchzuführen. Im Rahmen der Theorie II. Ordnung soll das geo-metrisch nichtlineare Tragverhalten genauer erfaßt werden. Gleichgewicht und Kine-matik sind daher am verformten System abzuleiten. Das Material soll sich dagegenweiter uneingeschränkt elastisch verhalten. Die geometrisch nichtlinearen Einfluß–größen zur Beschreibung der verformten Lagen sind im Hinblick auf baupraktische Ge-gebenheiten zu bewerten. Sie können entfallen, wenn sie den Verformungszustand nurgeringfügig beeinflussen. Ziel ist es, eine einfache, aber physikalisch zutreffende For-mulierung der Theorie II. Ordnung zu erhalten.
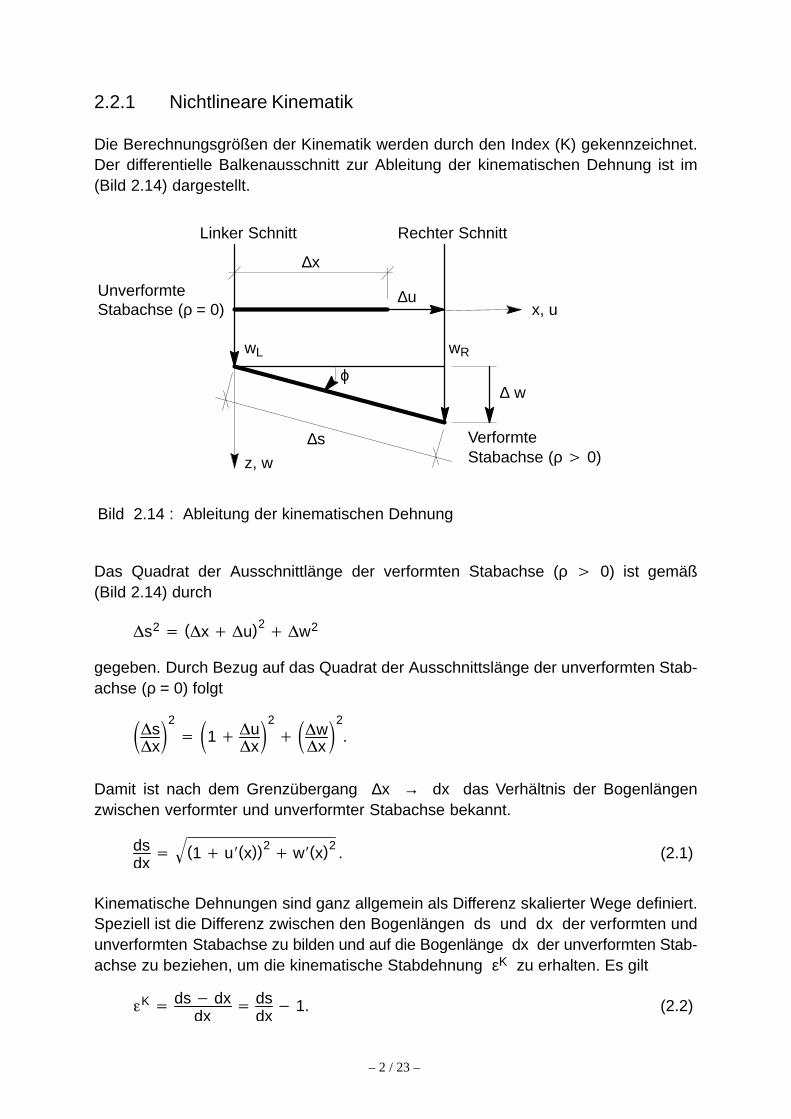
– 2 / 23 –
2.2.1 Nichtlineare Kinematik
Die Berechnungsgrößen der Kinematik werden durch den Index (K) gekennzeichnet.Der differentielle Balkenausschnitt zur Ableitung der kinematischen Dehnung ist im(Bild 2.14) dargestellt.
Bild 2.14 : Ableitung der kinematischen Dehnung
ϕ
x, u
z, w
∆x
∆u
∆s
∆ w
wL wR
Linker Schnitt Rechter Schnitt
UnverformteStabachse (ρ = 0)
VerformteStabachse (ρ � 0)
Das Quadrat der Ausschnittlänge der verformten Stabachse (ρ � 0) ist gemäß(Bild 2.14) durch
�s2 � (�x � �u)2 � �w2
gegeben. Durch Bezug auf das Quadrat der Ausschnittslänge der unverformten Stab-achse (ρ = 0) folgt
��s�x�2
� �1 � �u�x�2
���w�x�2
.
Damit ist nach dem Grenzübergang ∆x → dx das Verhältnis der Bogenlängenzwischen verformter und unverformter Stabachse bekannt.
dsdx
� (1 � u�(x))2 � w�(x)2 . (2.1)
Kinematische Dehnungen sind ganz allgemein als Differenz skalierter Wege definiert.Speziell ist die Differenz zwischen den Bogenlängen ds und dx der verformten undunverformten Stabachse zu bilden und auf die Bogenlänge dx der unverformten Stab-achse zu beziehen, um die kinematische Stabdehnung εK zu erhalten. Es gilt
�K � ds dxdx
� dsdx
1. (2.2)
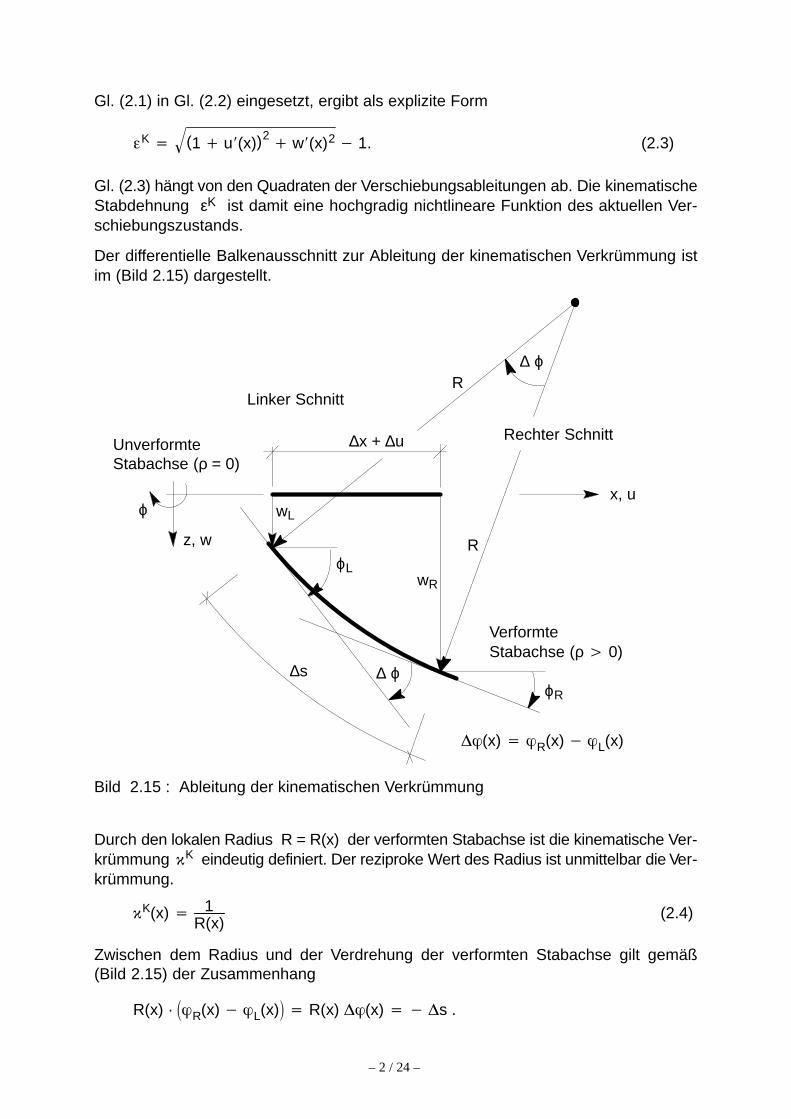
– 2 / 24 –
Gl. (2.1) in Gl. (2.2) eingesetzt, ergibt als explizite Form
�K � (1 � u�(x))2 � w�(x)2 1. (2.3)
Gl. (2.3) hängt von den Quadraten der Verschiebungsableitungen ab. Die kinematischeStabdehnung εK ist damit eine hochgradig nichtlineare Funktion des aktuellen Ver-schiebungszustands.
Der differentielle Balkenausschnitt zur Ableitung der kinematischen Verkrümmung istim (Bild 2.15) dargestellt.
Bild 2.15 : Ableitung der kinematischen Verkrümmung
x, u
∆x + ∆u
∆ ϕ
Linker Schnitt
Rechter SchnittUnverformteStabachse (ρ = 0)
VerformteStabachse (ρ � 0)
ϕ
z, w
R
R
ϕR
ϕL
∆ ϕ∆s
wR
wL
��(x) � �R(x) �L(x)
Durch den lokalen Radius R = R(x) der verformten Stabachse ist die kinematische Ver-krümmung �K eindeutig definiert. Der reziproke Wert des Radius ist unmittelbar die Ver-krümmung.
�K(x) � 1R(x)
(2.4)
Zwischen dem Radius und der Verdrehung der verformten Stabachse gilt gemäß(Bild 2.15) der Zusammenhang
R(x) · ��R(x) �L(x)� � R(x) ��(x) � �s .
– 2 / 25 –
Die Durchführung des Grenzübergangs ∆s → ds ergibt
1R(x)
� dϕ(x)
ds�
dϕ(x)dx
⋅ dxds
,
so daß Gl. (2.4) mit Gl. (2.1) die Form
�K � 1
(1 � u�(x))2 � w�(x)2 ⋅dϕ(x)
dx(2.5)
annimmt. Der Tangens der Verdrehung ist gemäß (Bild 2.14) durch
tan ϕ � �w�x � �u
��x�dx
�w�(x)
1 � u�(x)
definiert. Damit ist auch die explizite Form von ϕ bekannt, für die sich ebenfalls einhochgradig nichtlinearer Ausdruck ergibt
ϕ � arctan � w�(x)1 � u�(x)
�. (2.6)
Mit Gl. (2.6) kann die Ableitung
d�(x)dx
�w��(x)(1 � u�(x)) w�(x)u��(x)
(1 � u�(x))2 � w�(x)2
gebildet und in Gl. (2.5) eingesetzt werden. Als Ergebnis erhält man die explizite Formder kinematischen Stabverkrümmung zu
�K � w��(x) (1 � u�(x)) w�(x) u��(x)
�(1 � u�(x))2 � w�(x)2�3 , (2.7)
ein Ausdruck, der ebenfalls hochgradig nichtlinear vom aktuellen Verschiebungszu-stand abhängt.
Mit den Gl. (2.3, 2.6 und 2.7) ist die nichtlineare Kinematik ebener und schubstarrerStabtragwerke vollständig beschrieben. Alle Ausdrücke hängen hochgradig nichtlinearvon den Ableitungen der Verschiebungen ab. Eine exakte Lösung im Rahmen vonpraxisorientierten baustatischen Methoden erweist sich daher als nicht durchführbarbzw. als zu aufwendig. Es ist also zunächst abzuklären, ob und wenn ja, welche Mög-lichkeiten bestehen, um im Rahmen einer Theorie II. Ordnung geeignete Vereinfachun-gen einzuführen.
– 2 / 26 –
In den Tragwerken der Baupraxis treten in der Regel Verschiebungsableitungen in derGrößenordnung von
u�(x) � 103 (2.8.1)
und
w�(x) � 102 (2.8.2)
auf. Die Abschätzung Gl. (2.8.1) bedeutet z.B., daß durch die Vorgabe von u’(x) = 10–3
ein 5. m langer Stab in Richtung der Stabachse um 5. mm gestaucht bzw. gedehntwerden kann, ein Fall, der sich real wohl kaum einstellen dürfte. Auch Gl. (2.8.2) ist alseine Abschätzung zu interpretieren, die alle unwahrscheinlichen Fälle ausgrenzt. Be-deutet sie doch, daß z.B. am Ende eines 5. m langen Stabes senkrecht zur Stabachseeine 50. mm große Verschiebung auftreten müßte, wenn sich der Stab mit dem Maßw’(x) = 10–2 starr um den Anfang dreht. Dies ist genausowenig real wie eine 5. mmgroße Stauchung bzw. Dehnung. Gl. (2.8) ist daher als eine Abschätzung zur sicherenSeite zu betrachten.
Mit Gl. (2.8.2) kann man in Gl. (2.3) den Vergleich
(1 � u�(x))2 �� w�(x)2
vornehmen. Gl. (2.3) vereinfacht sich dadurch erheblich. Es gilt
�K � u�(x). (2.9)
Gl. (2.9) nimmt eine Form an, die vollständig mit der kinematischen Stabdehnung nachTheorie I. Ordnung übereinstimmt. Mit der Gl. (2.8) gelten in Gl. (2.6) die Abschätzun-gen
u’(x) << 1 und tan ϕ ϕ.
Das hat zur Folge, daß sich Gl. (2.6) zu
ϕ(x) � w�(x) (2.10)
vereinfacht und nun vollständig mit der Bestimmungsgleichung der Verdrehung nachTheorie I. Ordnung übereinstimmt. Mit Gl. (2.9) geht die Näherung ds dx einher. Ausden Gl. (2.5 und 2.10) folgt daher unmittelbar die vereinfachte Bestimmungsgleichungder kinematischen Stabverkrümmung zu
�K � w��(x), (2.11)
die nun ebenfalls mit der Stabverkrümmung nach Theorie I. Ordnung übereinstimmt.Alternativ läßt sich Gl. (2.11) auch direkt aus Gl. (2.7) entwickeln, wenn man die Größen-ordnungen der Verschiebungsableitungen mit Hilfe von Gl. (2.8) abschätzt.
– 2 / 27 –
Wie auch immer, als Resümee ist ein wichtiger Sachverhalt festzuhalten: Im Rahmeneiner anwendungsorientierten Theorie II. Ordnung kann die nichtlineare Kinematik ins-gesamt durch die lineare Kinematik nach Theorie I. Ordnung ersetzt werden, ohne daßsich Defizite im Hinblick auf eine vollständige Formulierung ergeben.
2.2.2 Materialverhalten
Es wird, wie bereits erwähnt, vereinbart, daß sich das Material in den nach TheorieII. Ordnung zu berechnenden Tragwerken weiterhin uneingeschränkt elastisch verhält.Es gelten daher die gleichen Stoffgesetze wie bei der Theorie I. Ordnung. Die Berech-nungsgrößen des Materials werden mit dem Index (M) gekennzeichnet.
Für einen durch ein Normal– bzw. Längskraftpaar N auf Zug beanspruchten stabförmi-gen Prüfkörper ist die Materialdehnung durch
�M � NEA
(2.12)
gegeben. E ist der Elastizitätsmodul und A die Querschnittsfläche des Prüfkörpers.
Bei einer Beanspruchung durch ein Momentenpaar stellt sich entlang der Höhe desPrüfkörpers eine Dehnungsänderung des Materials ein, die als Verkrümmung der Stab-achse gemessen werden kann
�M � MEI
. (2.13)
E ist wiederum der Elastizitätsmodul des Prüfkörpers und I das Flächenträgheitsmo-ment des Querschnitts.
Die Formulierung eines Stoffgesetzes für die Querkraft Q entfällt. Es gilt die grundsätz-liche Annahme der Schubstarrheit. Die Querkraft ist daher mit Hilfe einer Gleichge-wichtsbedingung zu ermitteln. Ein elastisches Gesetz ist nicht definiert.
2.2.3 Elastische Verträglichkeit
Mit den Formulierungen für die Kinematik, Abschnitt 2.2.1 und das Materialverhalten,Abschnitt 2.2.2 ist auch die elastische Verträglichkeit bekannt.
�K � �M (2.14.1)
und
�K � �M. (2.14.2)
– 2 / 28 –
In jedem Punkt eines Tragwerks müssen die kinematischen und die materiellenDehnungen und Verkrümmungen übereinstimmen. Mit Gl. (2.9) und Gl. (2.12) folgt ausGl. (2.14.1) die Bestimmungsgleichung für die Normalkraft
N(x) � EA u�(x) (2.15.1)
und mit Gl. (2.11) und Gl. (2.13) aus Gl. (2.14.2) die Bestimmungsgleichung für dasMoment
M(x) � EI w��(x). (2.15.2)
Aus Gl. (2.15) ist zu erkennen, daß die baustatische Formulierung der elastischen Ver-träglichkeit für die Berechnungstheorien I. und II. Ordnung vollständig übereinstimmen.
2.2.4 Gleichgewicht am verformten System
Dehnungen und Krümmungen von Stäben in Tragwerken der Baupraxis sind i.a.sehr klein. Wie in Abschnitt 2.2.2 nachgewiesen, kann man sie in der Regel in lineari–sierter und damit stark vereinfachter Form angeben. Für das Material gilt gemäß Ab-schnitt 2.2.3 uneingeschränkt elastisches Verhalten. Es ist daher vorrangig der Einflußvon endlich großen Verschiebungen zu untersuchen, die auch bei kleinen Dehnungenund Krümmungen auftreten. Es sind vor allem die Anteile der Starrkörperbewegungenim Verschiebungsfeld von Interesse, die sich bei eindeutig gelagerten Stabverbändenauch zwischen den Lagern einstellen können. Dies kann zu großen Hebelarmen derSchnittkräfte führen, so daß ggf. große Versatzmomente auftreten, die das Tragwerkzusätzlich beanspruchen oder entlasten.
Die Auswertung von Gl. (2.8) ergibt die Abschätzung
�u � �w10
. (2.16)
Die Verschiebung in Richtung der Stabachse ist im Vergleich zur Verschiebungsenkrecht zur Stabachse von untergeordneter Bedeutung. Sie kann daher im weiterenVerlauf der Betrachtung ersatzlos entfallen. Weiter ist zu beachten, daß bei kleinenStabdehnungen die Näherung ∆s ∆x gilt.
Der differentielle Balkenausschnitt zur Aufstellung des Gleichgewichts am verformtenSystem ist im (Bild 2.16) dargestellt. Die Wahl der Bezugsrichtung der Schnittkräfte istfreigestellt. Sie kann durch die unverformte (Bild 2.16a) oder durch die verformte Lage(Bild 2.16b) gegeben sein. Die Drehrichtung der Momente ist in beiden Fällen gleich.
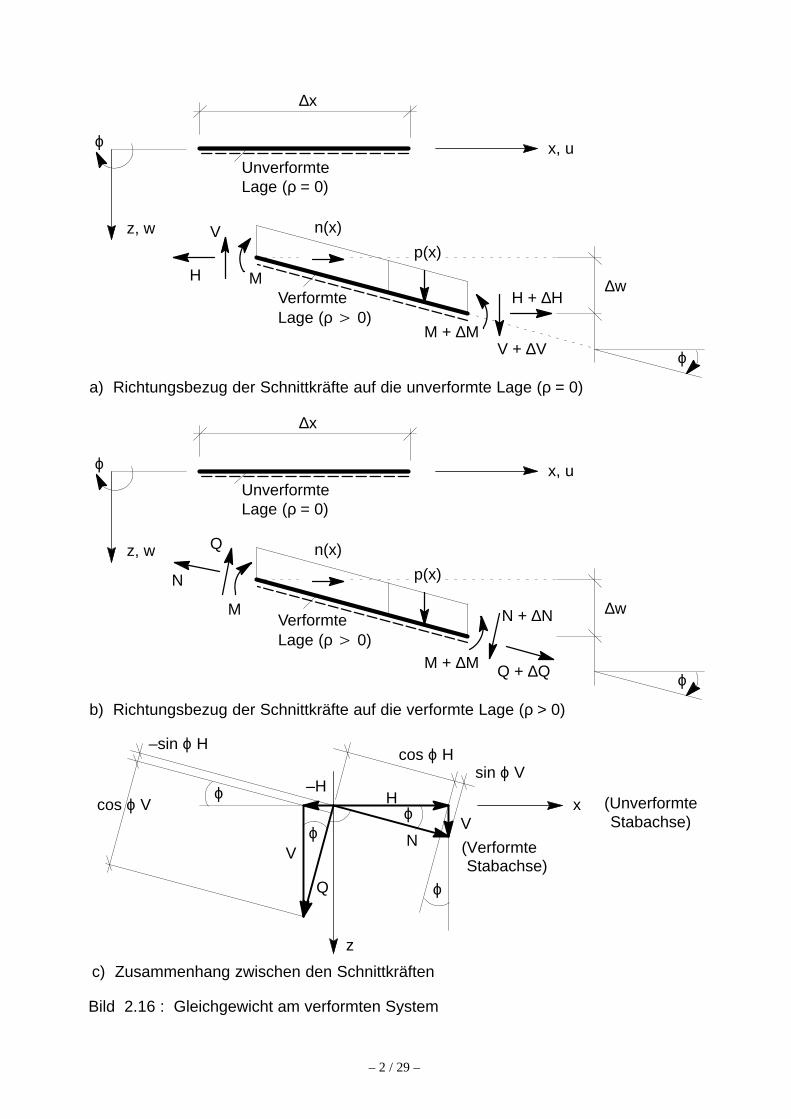
– 2 / 29 –
Bild 2.16 : Gleichgewicht am verformten System
ϕ
x, u
z, w
∆x
∆w
UnverformteLage (ρ = 0)
VerformteLage (ρ � 0)
ϕ
H + ∆H
V + ∆VM + ∆M
H
V
M
n(x)
p(x)
a) Richtungsbezug der Schnittkräfte auf die unverformte Lage (ρ = 0)
ϕ
x, u
z, w
∆x
∆w
UnverformteLage (ρ = 0)
VerformteLage (ρ � 0)
ϕ
N + ∆N
Q + ∆QM + ∆M
Q
N
M
n(x)
p(x)
b) Richtungsbezug der Schnittkräfte auf die verformte Lage (ρ > 0)
c) Zusammenhang zwischen den Schnittkräften
H x (UnverformteStabachse)
z
(VerformteStabachse)
ϕ
ϕϕ
ϕ
cos ϕ Hsin ϕ V
VN
–H
V
Q
cos ϕ V
–sin ϕ H
– 2 / 30 –
Die physikalischen Schnittkräfte N und Q sind durch (Bild 2.16b) definiert, da sie inRichtung und senkrecht zur Richtung der verformten Stabachse wirken. Trotzdem er-weist es sich als zweckmäßig, die im (Bild 2.16a) definierten rechnerischen Schnitt-kräfte H und V zu verwenden, um das Gleichgewicht am verformten System aufzustel-len. Zwischen den Schnittkräften besteht mit
cos ϕ 1 und sin ϕ ϕ � w�
gemäß (Bild 2.16c) der Zusammenhang
N � cos ϕ H � sin ϕ V H � w� V (2.17.1)
und
Q � sin ϕ H � cos ϕ V Hw� � V. (2.17.2)
Eine ggf. erforderliche Umrechnung ist daher bei bekanntem Verformungszustand ineindeutiger Weise möglich. Der Vorteil der (H– V)–Formulierung liegt im Richtungsbe-zug der Kräfte auf die unverformte Ausgangslage. Sie ist durch die Geometrie der be-trachteten Tragwerke bekannt, so daß sich die praktische Durchführung von Berech-nungen sehr einfach gestaltet, vgl. Einführungsbeispiel Abschnitt 2.1.
Die Bildung des Gleichgewichts gemäß (Bild 2.16a) in Richtung der horizontalen undvertikalen Kräfte und für das Moment ergibt unter Beachtung des Mittelwertansatzesder Integralrechnung:
�H � (H � �H) H � n(x) �x � �H�x
� n(x) ��x�dx
� H�(x) � n(x) � 0, (2.18.1)
�V � (V � �V) V � p(x) �x � �V�x
� p(x) ��x�dx
� V�(x) � p(x) � 0 (2.18.2)
und
�M � (M � �M) M V �x � H �w � 12
p(x) �x2
(2.18.3)� �M�x
V � H �w�x��x�dx � M�(x) V(x) � H(x) w�(x) � 0.
Klein von 2–ter Ordnung
Lediglich das Versatzmoment H ⋅ ∆w in Gl. (2.18.3) tritt zusätzlich auf. Ansonsten sindbis auf die Bezeichnung der Kräfte keine Abweichungen zu den Gleichgewichtsbedin-gungen nach Theorie I. Ordnung festzustellen. Mit Gl. (2.17.2) folgt aus Gl. (2.18.3) dieMomentengleichgewichtsbedingung
�M � M�(x) Q(x) � 0, (2.18.4)
– 2 / 31 –
die nun ebenfalls vollständig mit der Bedingung nach Theorie I. Ordnung übereinstimmt.Die formale Gleichheit darf aber nicht über die unterschiedliche physikalische Be–deutung hinwegtäuschen. Im Rahmen der Theorie II. Ordnung beschreibt Gl. (2.18.4)den Momentengleichgewichtszustand am verformten System. Der Verformungszu-stand gemäß (Bild 2.16b) ist implizit in der Querkraft Gl. (2.17.2) enthalten. Im Rahmender Theorie I. Ordnung gilt Gl. (2.18.4) dagegen nur unter Vernachlässigung der Verfor-mungen, ist also als Näherung der wirklichen Gegebenheiten aufzufassen.
Die drei unabhängigen Gleichgewichtsbedingungen Gl. (2.18.1 bis 3) können zu einerGleichung zusammengefaßt werden. Dazu ist Gl. (2.18.3) nach der x–Koordinate abzu-leiten und zusammen mit Gl. (2.18.1) in Gl. (2.18.2) einzusetzen. Als Ergebnis erhältman eine Gleichgewichtsbedingung in Richtung der Vertikalkraft, die das Gleichgewichtin Richtung der Horizontalkraft und für das Moment in impliziter Form enthält
�V � M��(x) � H(x) w��(x) n(x) w�(x) � p(x) � 0. (2.19)
2.2.5 Ableitung der DGL Theorie II. Ordnung
Mit der Verträglichkeitsbedingung Gl. (2.15.2) und der GleichgewichtsbedingungGl. (2.19) ist die differentielle Formulierung der Theorie II. Ordnung vollständig bekannt.Für den baustatischen Regelfall erweist es sich als sinnvoll, weitere Vereinfachungeneinzuführen, indem man den Verlauf der Biegesteifigkeit EI, der Stabkraft H und derStreckenlast p als stabweise konstant annimmt. Damit vereinfacht sich Gl. (2.19) zu
M��(x) � H w��(x) � p � 0 (2.20)
und das zweimalige Ableiten von Gl. (2.15.2) ergibt
M��(x) � EI w����(x). (2.21)
Aus Gl. (2.20) läßt sich nun durch Einsetzen von Gl. (2.21) die DGL der Theorie II. Ord-nung ableiten
EI w����(x) H w��(x) p � 0. (2.22)
Für die weitere Betrachtung ist vor allem der Druckfall H < 0 von Interesse. Mit demnegativen Vorzeichen von H und der Abkürzung
��s�2 �
|H|EI
ergibt sich die DGL für druckbeanspruchte Stäbe in der Form

– 2 / 32 –
w����(x) � ��s�2w��(x) � P
EI. (2.23)
Die Größe
(2.24)� � s|H|EI
wird als Stabkennzahl bezeichnet. Sie ist von entscheidender Bedeutung, um die analy-tische Lösung der DGL (2.23) bewerten zu können. In Gl. (2.24) ist s die Stablänge,EI die Biegesteifigkeit des Stabes und H der Betrag der Druckkraft, die im Stab wirkt.
Die Lösung der DGL (2.23) setzt sich aus einem homogenen und einem partikulärenAnteil zusammen.
w(x) � wh(x) � wp(x) (2.25.1)
mit
wh(x) � C1 � C2 x � C3 sin �s x � C4 cos �
s x (2.25.2)
und
wp(x) � 12
PEI�s��2 x2. (2.25.3)
Der homogene Anteil Gl. (2.25.2) enthält vier freie Konstanten. Sie dienen zur Anpas-sung der Lösung an die statischen und geometrischen Randbedingungen, die am An-fang und Ende von Stäben auftreten. Der partikuläre Anteil Gl. (2.25.3) erfaßt speziellden Lastfall konstante Streckenlast im Stab.
2.2.6 Superposition von Lösungen
Die DGL (2.23) beschreibt zwar eine geometrisch nichtlineare Theorie, ist selbst aberlinear, da die Verschiebungsableitungen nur in linearer Form auftreten. Dies ist auf diestarken Vereinfachungen zurückzuführen, die sich in natürlicher Weise ergeben, wennman die geometrisch nichtlinearen Zusammenhänge an die praktischen Gegeben–heiten einer anwendungsorientierten Theorie II. Ordnung anpaßt.
Homogene Lösungsanteile nach Gl. (2.25.2) lassen sich wegen der Linearität der DGL(2.23) in beliebiger Weise superponieren, wenn für alle Anteile gleiche StabkennzahlenGl. (2.24) gelten. Dies bedeutet, daß u.a. auch die Einheitszustände der klassischenbaustatischen Verfahren (KGV, DWV) superponierbar bleiben, da sich während einesIterationsschritts die Normalkräfte in den Stäben des betrachteten Tragwerks nicht än-dern. Dies ist nur zwischen den Iterationsschritten der Fall, so daß man z.B. das DWVuneingeschränkt verwenden darf, solange ein fester Einwirkungszustand vorliegt.
– 2 / 33 –
Unterschiedliche Einwirkungszustände führen dagegen in der Regel zu unterschied–lichen Normalkräften und damit zu unterschiedlichen Stabkennzahlen. Eine Superpo–sition von partikulären Lösungsanteilen nach Gl. (2.25.3) ist daher nicht mehr möglich.Dies muß vorab auf der Ebene der Lastfälle geschehen, indem man aus beliebig vielenEinzellastfällen durch Überlagerung geeignete Bemessungslastfälle bildet und dieseeinzeln nach der Methodik der Theorie II. Ordnung untersucht.
2.3 DWV für Theorie II. Ordnung
Das DWV ist besonders gut geeignet, wenn es darum geht, Tragwerke per Hand nachTheorie II. Ordnung zu berechnen. Dem Einführungsbeispiel im Abschnitt 2.1 ist zuentnehmen, daß die Schiefstellung der Stäbe das geometrisch nichtlineare Tragverhal-ten besonders stark beeinflußt. Aus der Schiefstellung resultieren nämlich Versatz–momente, die bei Druckbeanspruchung zu einer Vergrößerung des Beanspruchungs-zustandes führen.
Der Zusammenhang zwischen Schiefstellung und Anwachsen der Beanspruchung istunmittelbar durch baustatische Anschauung zu erkennen, ohne daß es besondererKenntnisse hinsichtlich der Theorie bedarf, vgl. Abschnitt 2.1. Ableitung und Lösung derDGL im Abschnitt 2.2 verdeutlichen aber, daß die analytische Lösung zur TheorieII. Ordnung erheblich komplizierter ausfällt als die analytische Lösung zur TheorieI. Ordnung. Anstelle von einfachen Polynomfunktionen sind nun tranzendente Funktio-nen auszuwerten. Im Rahmen des DWV ist dies erforderlich, um Tabellenwerte bereit-stellen zu können, die es erlauben, Kraftzustände am Anfang und Ende von geometri-schen Grundstäben zu ermitteln, die speziell zur Berechnung von Tragwerken nachTheorie II. Ordnung gelten.
Beim Einführungsbeispiel wurde ohne großes Nachdenken ganz einfach auf die be-kannten Stabendgrößen der Theorie I. Ordnung zurückgegriffen. Erkennbare Defizitein der Qualität der Lösung haben sich dadurch nicht ergeben. Von entscheidender Be-deutung ist zumindest im Einführungsbeispiel das anschaulich eingeführte Versatz–moment, das sich aus der globalen Schiefstellung des Stiels ergibt. Der lokale Einflußder Stabendgrößen spielt in diesem Fall ganz offensichtlich keine große Rolle.
Die DGL enthält natürlich die volle Information über beide Anteile. Das DWV ist einspezielles Verfahren zur Integration dieser Differentialgleichung im Geltungs–bereich von statisch unbestimmten Stabtragwerken. Die Vorgehensweise zur Durch-führung von Berechnungen nach Theorie I. Ordnung (ε = 0 in Gl. 2.23) ist ausStatik II bekannt. Die Anpassung an die Gegebenheiten der Theorie II. Ordnung(ε ≠ 0 in Gl. 2.23) soll in der Weise erfolgen, daß man das lokale und globale Tragver–halten unabhängig voneinander erfaßt, ohne die grundsätzliche Methodik des DWVzu verändern.
– 2 / 34 –
2.3.1 Lokales Tragverhalten
Die Stabendgrößen der Theorie II. Ordnung für den druckbeanspruchten 1–ten und2–ten Grundstab sind in den (Bildern 2.17 bis 2.20) dargestellt. Die Berechnung dieserGrößen orientiert sich an der Vorgehensweise der Theorie I. Ordnung. Sie ist im Ab-schnitt 3.2, von Statik II ausführlich beschrieben. Ausgangspunkt der Betrachtung sinddie Lösungen (Gl. 2.51 bis 2.53). Da die Durchführung ohne besonderen Erkenntnis-wert ist, reicht es aus, nur die Ergebnisse mitzuteilen.
In den (Bildern 2.17 und 2.18) sind die Stabendmomente infolge von Knoten– und Stab-drehungen dargestellt. Mit der Stabdrehung ist die Schiefstellung der Grundstäbe be-kannt und damit auch der globale Versatz der Wirkungslinie der Druckkraft H, die anden Grundstäben angreift (Bilder 2.17a1 und 2.18a1). Die Knotendrehungen sind aufdiese Schiefstellung zu beziehen, da nur durch die Verformungsdifferenz zwischenKnoten– und Stabdrehungen (Bilder 2.17a2 und 2.18a2) elastische Stabendmomenteauftreten, die im Rahmen der Theorie II. Ordnung am verformten System angreifen. Fürdas Stabendmoment im Knoten (K) des 1–ten Grundstabs (Bild 2.17a3) gilt
MKL � A EIs (ϕK �KL) � B EI
s (ϕL �KL) (2.26.1)
und für das Stabendmoment im Knoten (L)
MLK � B EIs (ϕK �KL) A EI
s (ϕL �KL). (2.26.2)
Für das Stabendmoment im Knoten (K) des 2–ten Grundstabs (Bild 2.18a3) gilt
MKL � C EIs (ϕK �KL). (2.27.1)
Das Moment MLK im Knoten (L) entfällt. Hier ist ein Momentengelenk angeordnet, dasdie Bedingung
MLK � 0 (2.27.2)
erfüllt. Der Momentenverlauf zwischen den Stabendmomenten Gl. (2.26 und 2.27) istwegen der tranzendenten Lösung Gl. (2.25.2) nicht mehr geradlinig sondern gekrümmt.Die Abweichungen vom geraden Verlauf sind allerdings gering. Es ist daher aus–reichend genau, von einer geradlinigen Verbindung auszugehen, wenn keine Lastenzwischen den Stabendmomenten angreifen.
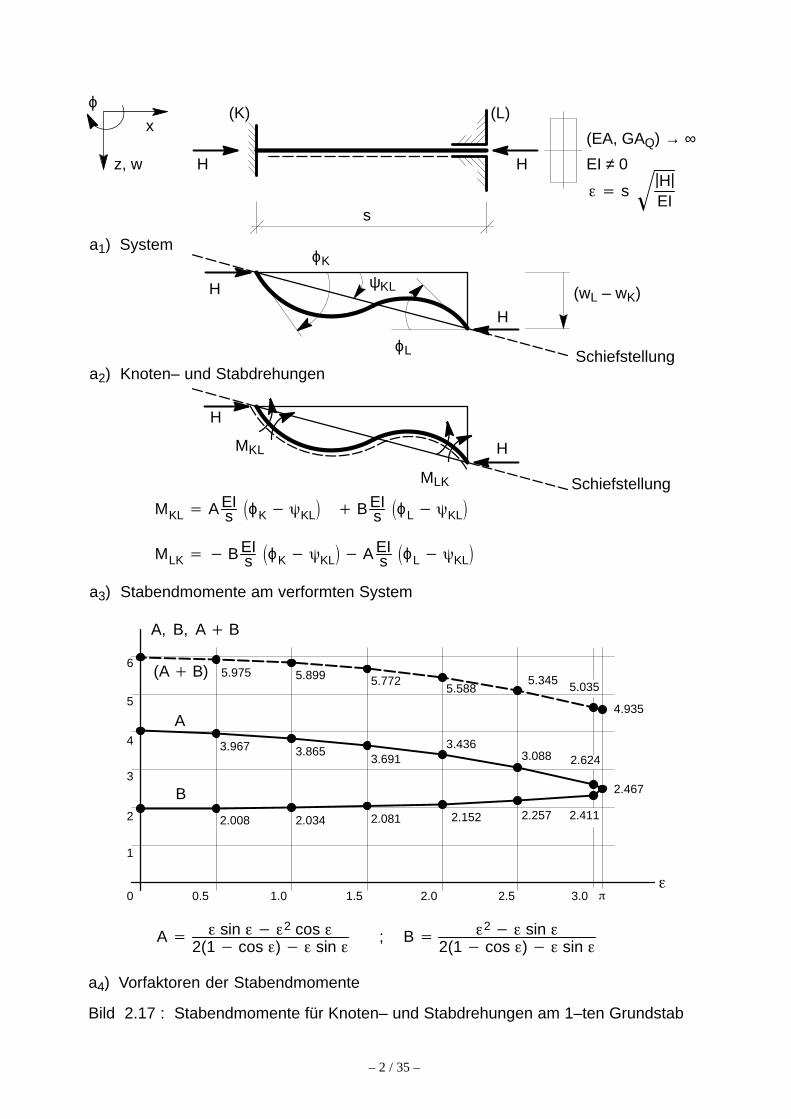
– 2 / 35 –
Bild 2.17 : Stabendmomente für Knoten– und Stabdrehungen am 1–ten Grundstab
x
z, w
s
ϕ
a1) SystemϕK
(EA, GAQ) → ∞(K) (L)
EI ≠ 0
(wL – wK)
H
MKL
H
H
ϕL
ψKL
a2) Knoten– und Stabdrehungen
MLK
MKL � A EIs�ϕK �KL
� � B EIs�ϕL �KL
�
a3) Stabendmomente am verformten System
a4) Vorfaktoren der Stabendmomente
A � � sin � �2 cos �2(1 cos �) � sin �
0
1
2
3
4
5
6
A, B, A � B
�0.5 1.0 1.5 2.0 2.5 3.0
3.967 3.8653.691
3.4363.088 2.624
2.467
2.008 2.034 2.081 2.152 2.257 2.411
A
B
(A � B)
B � �2 � sin �2(1 cos �) � sin �
;
�
H
� � s|H|EI
Schiefstellung
H
H
5.975 5.899 5.7725.588
5.345
4.935
MLK � B EIs�ϕK �KL
� A EIs�ϕL �KL
�
Schiefstellung
5.035
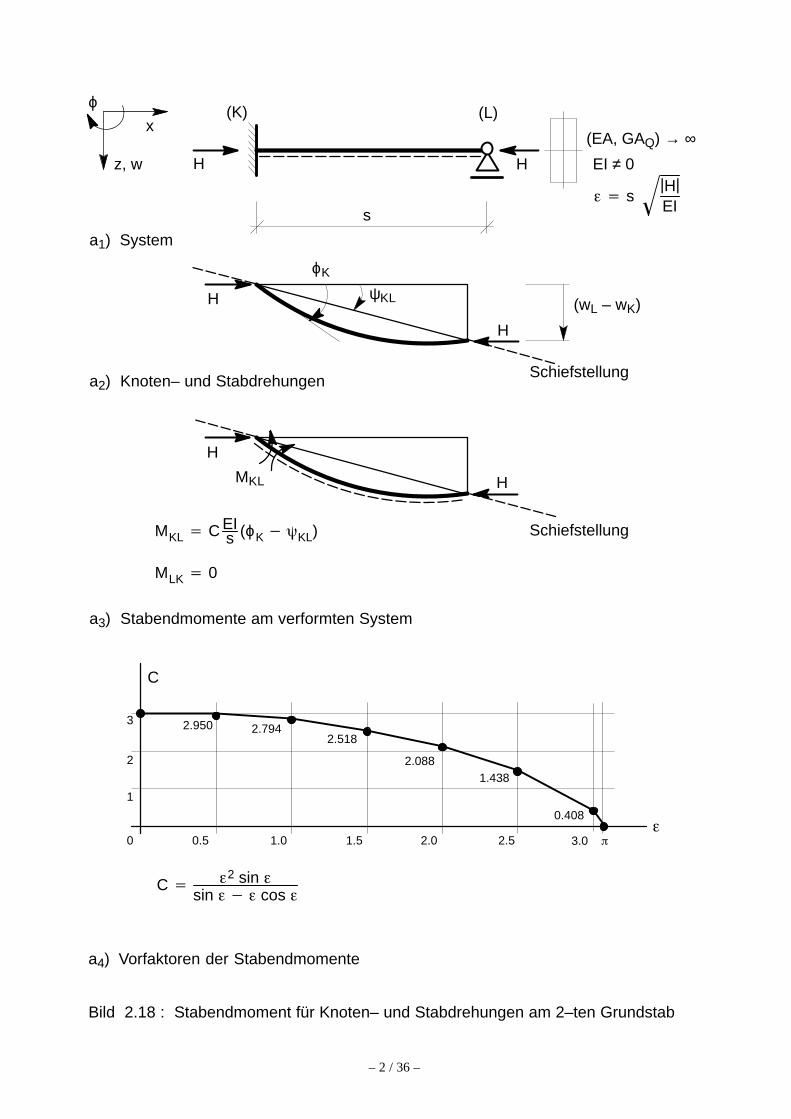
– 2 / 36 –
Bild 2.18 : Stabendmoment für Knoten– und Stabdrehungen am 2–ten Grundstab
x
z, w
s
ϕ
a1) System
ϕK
(EA, GAQ) → ∞
(K) (L)
EI ≠ 0
(wL – wK)
H
MKL
H
ψKL
a2) Knoten– und Stabdrehungen
MKL � C EIs (ϕK �KL)
a3) Stabendmomente am verformten System
a4) Vorfaktoren der Stabendmomente
C � �2 sin �sin � � cos �
0
1
2
3
C
�0.5 1.0 1.5 2.0 2.5 3.0
H
H
2.950 2.7942.518
2.0881.438
0.408
�
� � s|H|EI
H
H
Schiefstellung
MLK � 0
Schiefstellung
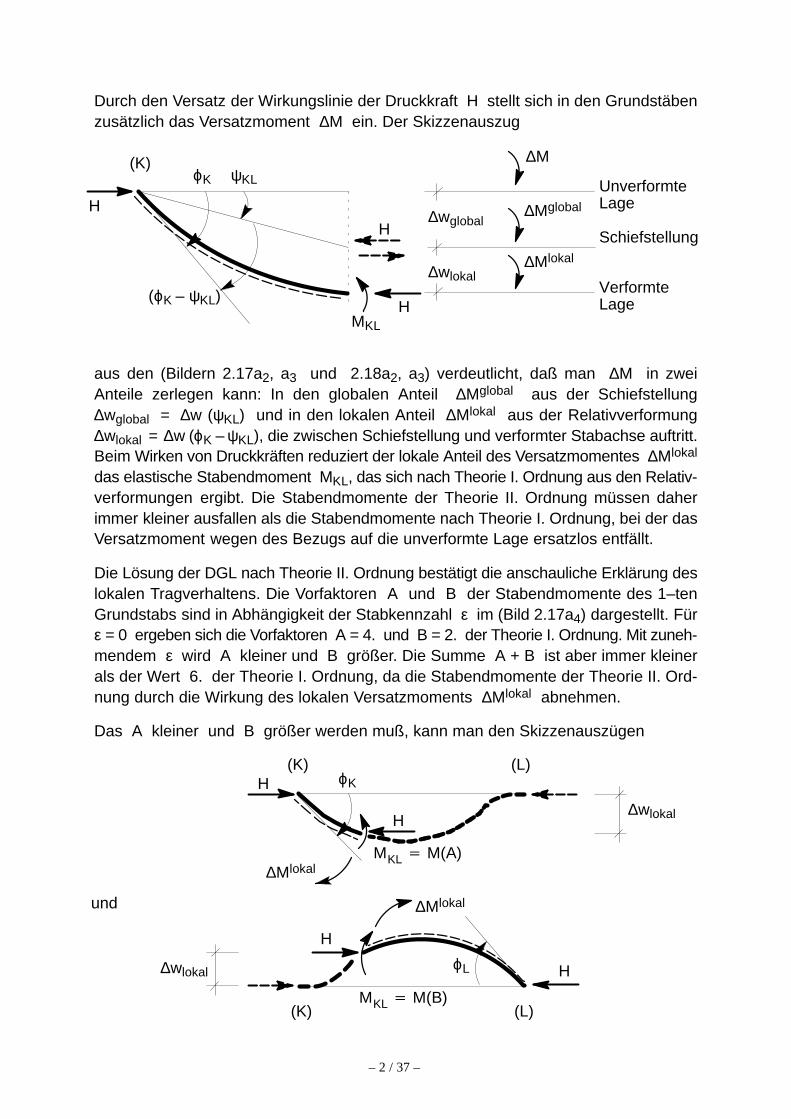
– 2 / 37 –
Durch den Versatz der Wirkungslinie der Druckkraft H stellt sich in den Grundstäbenzusätzlich das Versatzmoment ∆M ein. Der Skizzenauszug
ϕK
H
ψKL
H
Schiefstellung
(ϕK – ψKL)
∆wglobal
∆wlokal
∆M
∆Mglobal
∆Mlokal
UnverformteLage
VerformteLageH
MKL
(K)
aus den (Bildern 2.17a2, a3 und 2.18a2, a3) verdeutlicht, daß man ∆M in zweiAnteile zerlegen kann: In den globalen Anteil ∆Mglobal aus der Schiefstellung∆wglobal = ∆w (ψKL) und in den lokalen Anteil ∆Mlokal aus der Relativverformung∆wlokal = ∆w (ϕK – ψKL), die zwischen Schiefstellung und verformter Stabachse auftritt.Beim Wirken von Druckkräften reduziert der lokale Anteil des Versatzmomentes ∆Mlokal
das elastische Stabendmoment MKL, das sich nach Theorie I. Ordnung aus den Relativ-verformungen ergibt. Die Stabendmomente der Theorie II. Ordnung müssen daherimmer kleiner ausfallen als die Stabendmomente nach Theorie I. Ordnung, bei der dasVersatzmoment wegen des Bezugs auf die unverformte Lage ersatzlos entfällt.
Die Lösung der DGL nach Theorie II. Ordnung bestätigt die anschauliche Erklärung deslokalen Tragverhaltens. Die Vorfaktoren A und B der Stabendmomente des 1–tenGrundstabs sind in Abhängigkeit der Stabkennzahl ε im (Bild 2.17a4) dargestellt. Fürε = 0 ergeben sich die Vorfaktoren A = 4. und B = 2. der Theorie I. Ordnung. Mit zuneh-mendem ε wird A kleiner und B größer. Die Summe A + B ist aber immer kleinerals der Wert 6. der Theorie I. Ordnung, da die Stabendmomente der Theorie II. Ord-nung durch die Wirkung des lokalen Versatzmoments ∆Mlokal abnehmen.
Das A kleiner und B größer werden muß, kann man den Skizzenauszügen
H
∆wlokal
∆Mlokal
H
MKL � M(B)(K) (L)
HϕL
und
∆wlokal
(K) (L)
∆MlokalMKL � M(A)
ϕKH
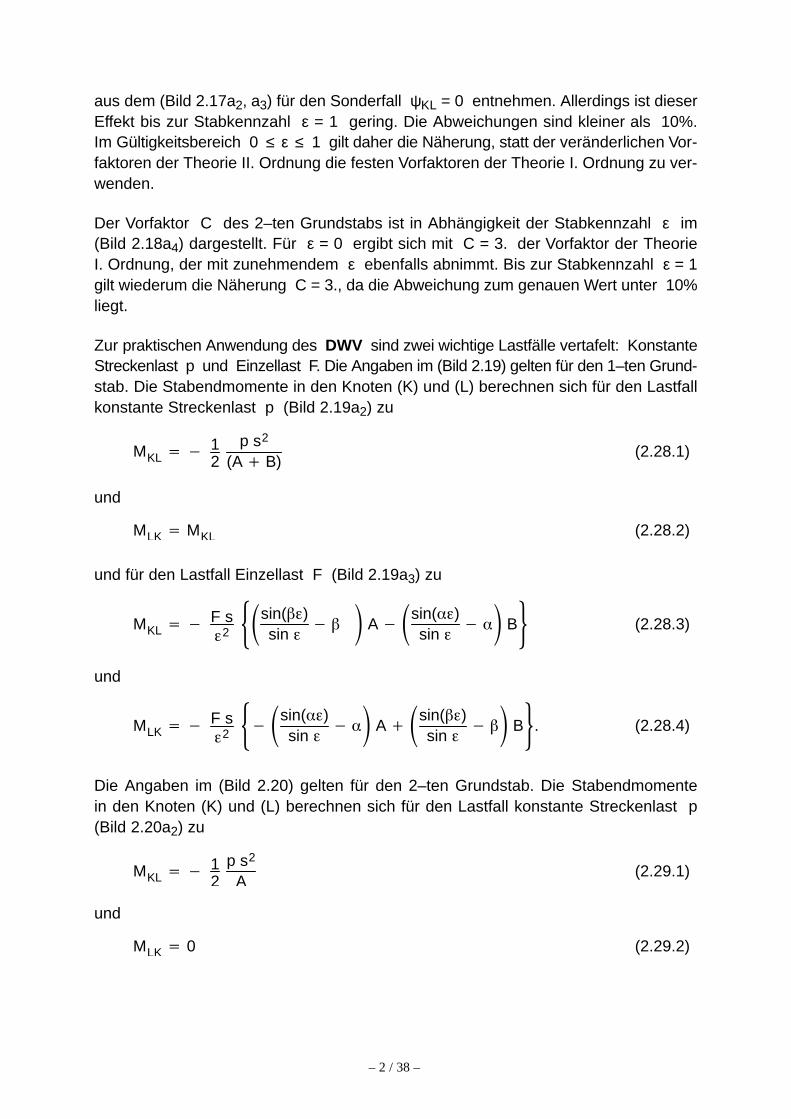
– 2 / 38 –
aus dem (Bild 2.17a2, a3) für den Sonderfall ψKL = 0 entnehmen. Allerdings ist dieserEffekt bis zur Stabkennzahl ε = 1 gering. Die Abweichungen sind kleiner als 10%.Im Gültigkeitsbereich 0 ≤ ε ≤ 1 gilt daher die Näherung, statt der veränderlichen Vor-faktoren der Theorie II. Ordnung die festen Vorfaktoren der Theorie I. Ordnung zu ver-wenden.
Der Vorfaktor C des 2–ten Grundstabs ist in Abhängigkeit der Stabkennzahl ε im(Bild 2.18a4) dargestellt. Für ε = 0 ergibt sich mit C = 3. der Vorfaktor der TheorieI. Ordnung, der mit zunehmendem ε ebenfalls abnimmt. Bis zur Stabkennzahl ε = 1gilt wiederum die Näherung C = 3., da die Abweichung zum genauen Wert unter 10%liegt.
Zur praktischen Anwendung des DWV sind zwei wichtige Lastfälle vertafelt: KonstanteStreckenlast p und Einzellast F. Die Angaben im (Bild 2.19) gelten für den 1–ten Grund-stab. Die Stabendmomente in den Knoten (K) und (L) berechnen sich für den Lastfallkonstante Streckenlast p (Bild 2.19a2) zu
MKL � 12
p s2
(A � B)(2.28.1)
und
MLK � MKL (2.28.2)
und für den Lastfall Einzellast F (Bild 2.19a3) zu
MKL � F s�2��sin(�)
sin � � A �sin(�)
sin � � B� (2.28.3)
und
MLK � F s�2� �sin(�)
sin � � A ��sin(�)
sin � � B�. (2.28.4)
Die Angaben im (Bild 2.20) gelten für den 2–ten Grundstab. Die Stabendmomentein den Knoten (K) und (L) berechnen sich für den Lastfall konstante Streckenlast p(Bild 2.20a2) zu
MKL � 12
p s2
A(2.29.1)
und
MLK � 0 (2.29.2)
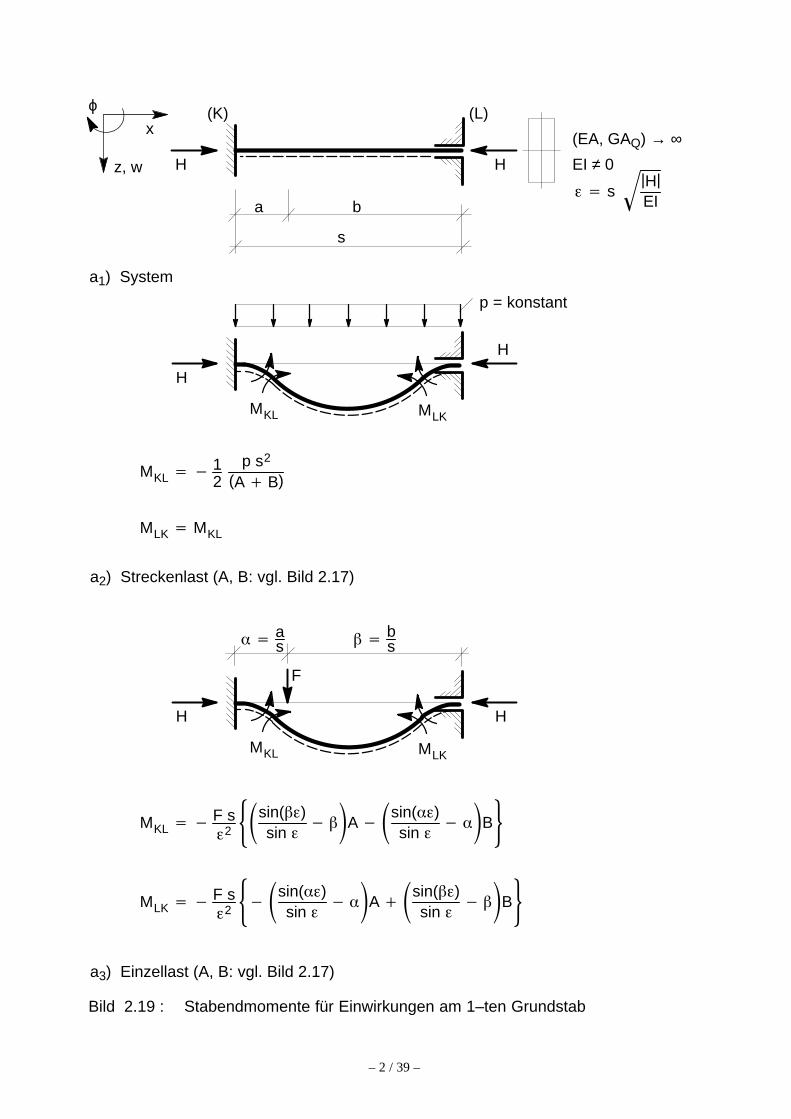
– 2 / 39 –
Bild 2.19 : Stabendmomente für Einwirkungen am 1–ten Grundstab
� as � b
s
F
x
z, w
s
ϕ
a1) System
(EA, GAQ) → ∞(K) (L)
EI ≠ 0HH
� � s|H|EI
a b
H
H
p = konstant
MKL MLK
a2) Streckenlast (A, B: vgl. Bild 2.17)
HH
MKL MLK
a3) Einzellast (A, B: vgl. Bild 2.17)
MKL � F s�2��sin(�)
sin � �A �sin(�)
sin � �B�
MLK � F s�2� �sin(�)
sin � �A ��sin(�)
sin � �B�
MKL � 12
p s2
(A � B)
MLK � MKL
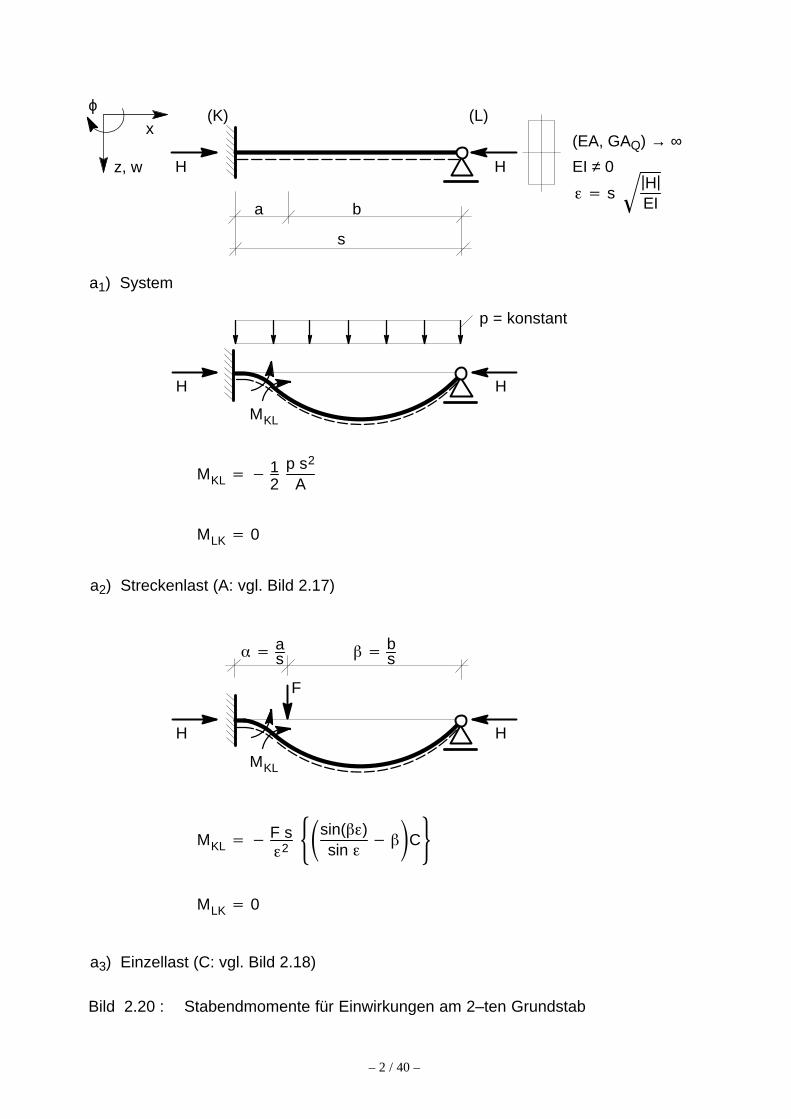
– 2 / 40 –
Bild 2.20 : Stabendmomente für Einwirkungen am 2–ten Grundstab
� as � b
s
F
x
z, w
s
ϕ
a1) System
(EA, GAQ) → ∞(K) (L)
EI ≠ 0HH
� � s|H|EI
a b
HH
p = konstant
MKL
a2) Streckenlast (A: vgl. Bild 2.17)
a3) Einzellast (C: vgl. Bild 2.18)
MKL � 12
p s2
A
HH
MKL
MKL � F s�2��sin(�)
sin � �C�
MLK � 0
MLK � 0
– 2 / 41 –
und für den Lastfall Einzellast F (Bild 2.20a3) zu
MKL � F s�2��sin(�)
sin � � C� (2.29.3)
und
MLK � 0. (2.29.4)
Ggf. benötigte Stabendmomente für weitere Lastfälle sind der gängigen Literatur, z.B./1/, /2/ oder /6/ zu entnehmen.
Im GGS werden die Einspannungen der Grundstäbe durch Drehfesseln erfaßt. DieZwangsmomente (ZM), die sich in den Drehfesseln durch die Zwangsfesselung einstel-len, sind aus den Stabendmomenten zu berechnen (Bild 2.21). Dies kann mit dem PvWgeschehen, indem man die betrachteten Drehfesseln mit Hilfe von Knotenketten virtuellverdreht und die Arbeiten bilanziert. Im Rahmen der Theorie II. Ordnung wirken dieStabendmomente am verformten System. Die Knotenketten sind daher ebenfalls amverformten System anzubringen. Im (Bild 2.21a1) ist dies beispielhaft für den Knoten (L)des 1–ten Grundstabs (Bild 2.17a1) veranschaulicht. Die virtuelle Verdrehung der Kno-tenkette (L) am verformten System ist im (Bild 2.21a2) dargestellt. Die Anwendung desPvW ergibt mit Wv
i � 0
Wva � ϕv
L ZM ϕvL MLK � 0, (2.30.1)
woraus sich das Zwangsmoment
ZM � MLK (2.30.2)
berechnet. Das Ergebnis ist unmittelbar einsichtig und läßt sich in einfacher Weisedurch einen Knotenschnitt am verformten System bestätigen.
Die Druckkraft H hat keinen direkten Einfluß auf die Zwangsmomente der Drehfesseln,da die virtuelle Verdrehung des Knotens am verformten System ohne Verschiebung vonH erfolgt, vgl. (Bild 2.21a2). Der Einfluß von H auf die Zwangsmomente der Drehfes-seln ist ausschließlich in den Stabendmomenten enthalten, und der ist durch dieBerechnung der Zahlenwerte gemäß den (Bildern 2.17 bis 2.20) bereits voll erfaßt. DieKnotenketten zur Ermittlung der Zwangsmomente in den Drehfesseln können daherohne Verlust an Information wie bei der Theorie I. Ordnung am unverformten Systemangebracht werden, da sich für diese, im (Bild 2.21a3), dargestellte Konfiguration eben-falls Gl. (2.30) ergibt.
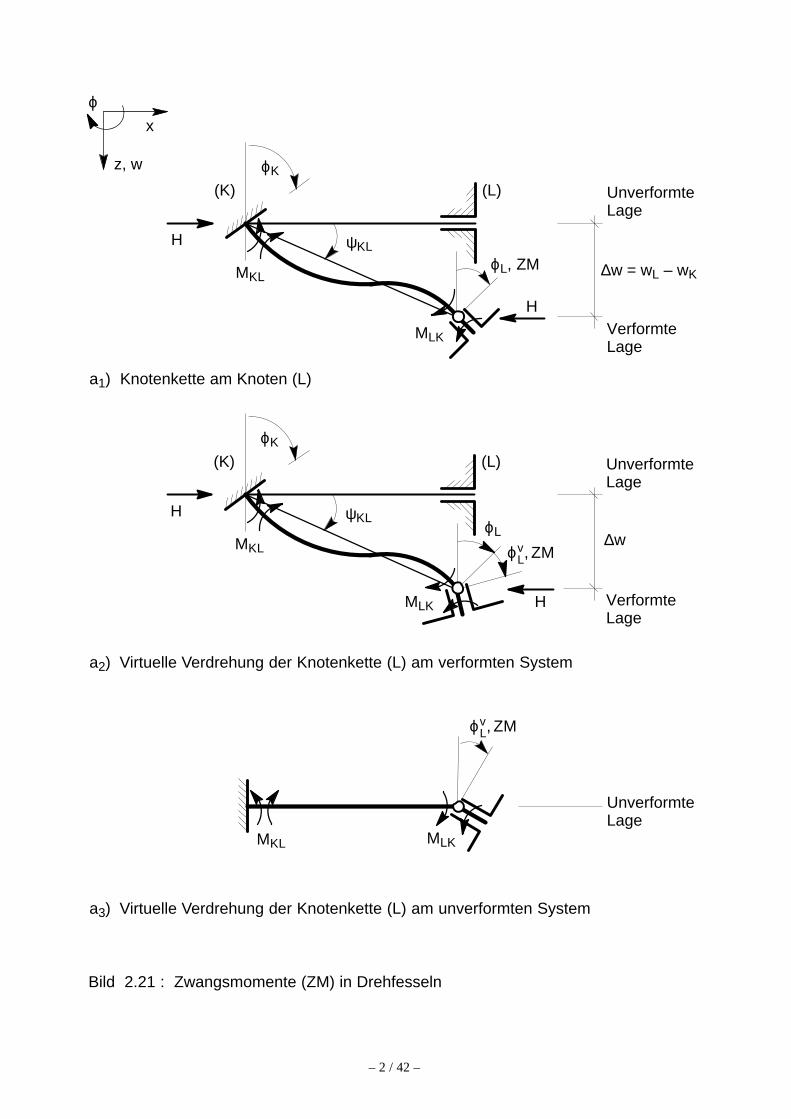
– 2 / 42 –
ϕvL, ZM
Bild 2.21 : Zwangsmomente (ZM) in Drehfesseln
x
z, w
ϕ
a1) Knotenkette am Knoten (L)
ϕK
∆w = wL – wK
H
ϕL, ZMψKL
a2) Virtuelle Verdrehung der Knotenkette (L) am verformten System
a3) Virtuelle Verdrehung der Knotenkette (L) am unverformten System
H
MKL
(K) (L)
MLK
UnverformteLage
VerformteLage
ϕL ∆wϕv
L, ZM
MLK
UnverformteLage
MKL
ϕK
H
ψKLH
MKL
(K) (L)
MLK
UnverformteLage
VerformteLage
– 2 / 43 –
2.3.2 Globales Tragverhalten
Die unverformte Lage von statischen Systemen ist durch die Geometrievorgabe ein-deutig bekannt. Der Rückbezug auf diese Lage stellt im Rahmen der Theorie I. Ordnungeine physikalische Näherung dar, im Rahmen der Theorie II. Ordnung dagegen einesinnvolle Vereinfachung einer genauer durchzuführenden Berechnung, die das Ziel hat,das Gleichgewicht an der verformten, also noch unbekannten Lage zu erfüllen.
Die Stabendmomente sind freie Momente. Die Knotenketten sind mit diesen Momentenbehaftet. Das Verschieben der Knotenketten von der verformten zur unverformten Lageist daher problemlos möglich. Das Verschieben von kräftebehafteten Rahmenketten istdagegen wegen der Linienflüchtigkeit von Kräften mit dem Auftreten von Versatzmo-menten verbunden, die als fiktive Kräfte in die Berechnung eingehen (Bild 2.22).
Rahmenketten sind erforderlich, um Zwangskräfte (ZK) in Wegfesseln von GGS mitdem PvW zu berechnen (Bild 2.22). Im (Bild 2.22a1) ist die Rahmenkette der Grund-stäbe (Bilder 2.17a1 und 2.18a1) dargestellt. Im Rahmen der Theorie II. Ordnung ist dievirtuelle Verschiebung zwischen den Knoten (K) und (L) am verformten System anzu-bringen (Bild 2.22a2). Die geometrischen Zusammenhänge sind durch die Polplankine-matik bekannt. Die Anwendung des PvW ergibt mit Wv
i � 0
Wva � �wv ZK � ��wv �KL
� H � �wv
s�MKL � MLK
� � 0, (2.31.1)
woraus sich die Zwangskraft
ZK � �MKL � MLK� 1
s H �KL (2.31.2)
berechnet.
Der erste Term von Gl. (2.31.2) ist bekannt. Er tritt auch bei Berechnungen auf, die nachdem Schema der Theorie I. Ordnung ablaufen, die das Gleichgewicht also näherungs-weise am unverformten System erfüllen. Der zweite Term von Gl. (2.31.2) ist dagegenneu. Er kommt nur bei Berechnungen vor, die nach dem Schema der Theorie II. Ord-nung ablaufen. Ursache für das Auftreten sind virtuelle Verschiebungsanteile, die sichin Richtung der Druckkraft H einstellen, wenn man, wie bei Theorie II. Ordnung erfor-derlich, den virtuellen Wegzustand am verformten System entwickelt. Dies gestaltetsich in der Regel schon bei einfachen Systemen relativ kompliziert. Zur Durchführungder praktischen Berechnung ist es daher sinnvoll, die virtuellen Verschiebungen von derunverformten Lage aus vorzugeben. Dazu ist die Rahmenkette (K, L) von der verform-ten zur unverformten Lage zu verschieben (Bild 2.22a3). Durch die Verschiebung ent-steht das Versatzmoment ∆M = H ∆w, das man entlang der Stablänge s in ein Kräfte-paar auflösen kann. Die fiktiven Kräfte
FfiktivKL � �M
s � H �ws � H �KL (2.32)
greifen senkrecht zur unverformten Stabachse an. Bei der Auswertung des PvW amunverformten System sind sie zusätzlich zu berücksichtigen, so daß man auch am un-verformten System die Arbeitsgleichung (2.31.1) erhält, aus der wiederum die gesuchteZwangskraft Gl. (2.31.2) folgt.
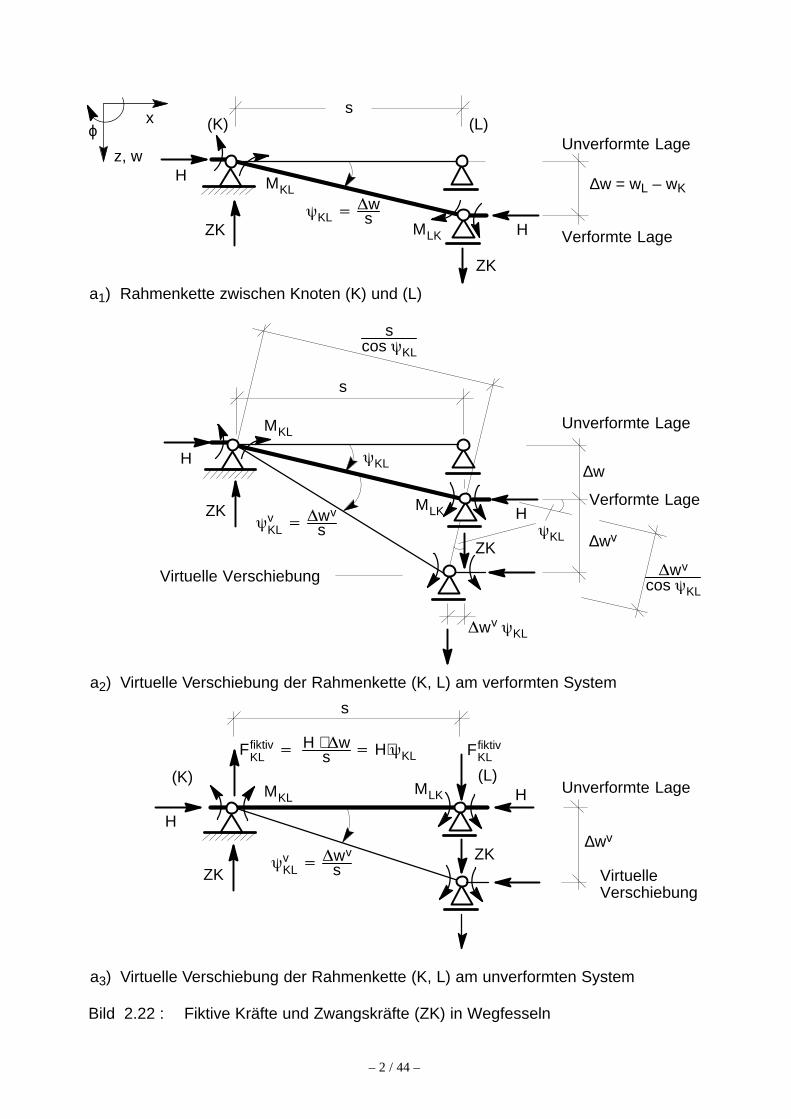
– 2 / 44 –
Bild 2.22 : Fiktive Kräfte und Zwangskräfte (ZK) in Wegfesseln
x
z, w
s
ϕ
a1) Rahmenkette zwischen Knoten (K) und (L)
(K) (L)
H
H
a2) Virtuelle Verschiebung der Rahmenkette (K, L) am verformten System
a3) Virtuelle Verschiebung der Rahmenkette (K, L) am unverformten System
ZK
MKL
MLK
Unverformte Lage
Verformte Lage
∆w = wL – wK
s
Unverformte Lage
Verformte Lage
�KL
scos �KL
∆w
∆wv
�wv
cos �KL
�vKL � �wv
s
�wv �KL
Virtuelle Verschiebung
�KL
s
(K) (L)H
H
MKLMLK Unverformte Lage
Virtuelle�v
KL � �wv
s
∆wv
FfiktivKL � H ⋅ �w
s � H⋅�KL FfiktivKL
ZK�KL � �w
s
MKL
H
ZK H
ZK
MLK
ZKZK
Verschiebung
– 2 / 45 –
In Gl. (2.31) treten die Anteile aus den Stabendmomenten und dem Versatzmoment vor-zeichengleich auf. Dies ist eine Folge der kombinierten Darstellung mit Knoten– undStabdrehungen. Im konkreten Fall von Wegfesseln gilt dagegen ϕK und ggf. auch ϕLgleich Null. Die Stabendmomenten für den homogenen Fall ergeben sich dann alleinaus den Stabdrehungen. Dadurch drehen sich in den Gl. (2.26 und 2.27) und damit auchin Gl. (2.31) die Vorzeichen der Stabendmomente um. Ganz allgemein gilt, daß die fik–tiven Kräfte des Versatzmoments bei Druck die Zwangskräfte in Wegfesseln vermin-dern, so daß im Vergleich zur Theorie I. Ordnung die Steifigkeit des statischen Systemsabnimmt.
2.3.3 Bewertung der unterschiedlichen Einflüsse
Der Zugang zur Theorie II. Ordnung über die globale Wirkung der fiktiven Kräfte amunverformten System ist sehr elementar und unübertroffen einprägsam, wenn esdarum geht, den grundsätzlichen Unterschied zwischen Theorie I. und II. Ordnung zuverdeutlichen. Dies bestätigt u.a. auch die Berechnung des Einführungsbeispiels im Ab-schnitt 2.1. Sie erfolgte ohne vertiefte Kenntnisse der Theorie. Es zeigte sich, daß diebaustatische Anschauung ausreicht, um den Haupteinfluß der Theorie II. Ordnung zuerfassen, indem man die fiktiven Kräfte von druckbeanspruchten Stäben in die Berech-nung einbezieht. Die Diskussion der Theorie hat diese Vorgehensweise abgesichert.
Die Anpassung der Stabendmomente an die Gegebenheiten der Theorie II. Ordnungist dagegen nur mit Hilfe genauer theoretischer Betrachtungen möglich, die auf derstrengen Lösung Gl. (2.25) der DGL (2.23) der Theorie II. Ordnung beruhen. Dieser Ein-fluß ist für die meisten baupraktischen Anwendungen aber von untergeordneter Bedeu-tung und kann ab der Stabkennzahl ε ≤ 1 ganz vernachlässigt werden.
2.3.4 Zugbeanspruchte Grundstäbe
Druck verstärkt und Zug verringert die Beanspruchung. Die Anwendung der TheorieII. Ordnung ist daher aus Gründen der Sicherheit zwingend notwendig, wenn in denStäben von Tragwerken überwiegend Druck auftritt. Das Niveau der maßgeblichenBemessungsgrößen kann in diesem Fall deutlich über dem Niveau der Berechnungs-größen der Theorie I. Ordnung liegen. Tritt dagegen in den Stäben überwiegend Zugauf, werden die Berechnungsgrößen der Theorie I. Ordnung in der Regel unterschritten.Es stellt sich daher die Frage, ob man den positiven Effekt der Zugentlastung nutzenwill, oder ob man die Ergebnisse aus einer Berechnung nach Theorie I. Ordnung als un-tere Grenze ansetzt, die grundsätzlich nicht unterschritten werden soll. Wenn ja, dannsind die Zugentlastungen in den betroffenen Stäben zu vernachlässigen und die An-sätze der Theorie I. Ordnung zu verwenden.
– 2 / 46 –
Bei den üblicherweise im Hochbau vorkommenden Stabtragwerken wäre eine solcheVorgehensweise durchaus vorstellbar, um zu erreichen, daß die Ergebnisse immer aufder sicheren Seite liegen. Bei seilverspannten Bauwerken führt diese Art der Berech-nung dagegen auf unwirtschaftliche, vielfach sogar auf technisch nicht mehr zu realisie-rende Lösungen. Seilnetze zur Überdachung von großen Hallengrundrissen, Schräg-seilbrücken oder Hängebrücken sind ohne Nutzung der Zugkraftentlastung nicht zuerrichten. Die Berechnung solcher Systeme erfolgt in der Regel mit Programmen, dieauf der Methodik des VdS beruhen, vgl. Abschnitt 2.4. Trotzdem ist es sinnvoll auchdas DWV für diesen Anwendungsfall zumindest so weit zu entwickeln, um ggf. einfacheÜberschlags– bzw. Kontrollberechnungen elementar ’per Hand’ durchführen zu kön-nen.
Maßgeblicher Effekt der Theorie II. Ordnung ist die Schiefstellung der Stäbe. Dies giltauch dann, wenn in den Stäben Zug H > 0 auftritt. Im (Bild 2.22a3) ist daher lediglichdie Richtung der fiktiven Kräfte umzudrehen, um die entlastende Wirkung der Zugkräftezu erfassen. Die Zwangskraft Gl. (2.31.2) in den Wegfesseln von GGS wird dadurchgrößer, so daß die Steifigkeit des betrachteten statischen Systems zu– und nicht wiebei Druck abnimmt.
Der Einfluß der Stabendmomente ist wie bei Druck gering. Bis ε ≤ 1 gelten näherungs-weise die Werte der Theorie I. Ordnung. Sollen sie dagegen genauer erfaßt werden, istanstelle von Gl. (2.23) die DGL
w���� ��s�2w��(x) �
pEI
(2.33)
zu lösen, die sich nur durch ein Vorzeichen von der Druckgleichung (2.23) unterschei-det. Die Gesamtlösung von Gl. (2.33) setzt sich nach Gl. (2.25.1) aus einem homogenenund einen partikulären Anteil zusammen. Anstelle von Gl. (2.25.2) gilt für Zug die homo-gene Lösung
wh(x) � C1 � C2x � C3 sinh �s x � C4 cosh �
s x (2.34.1)
und anstelle von Gl. (2.25.3) die partikuläre Lösung
wp(x) � 12
pEI�s��2 x2. (2.34.2)
Für die Stabendmomente Gl. (2.26 und 2.27) der Grundstäbe (Bilder 2.17 und 2.18) er-geben sich durch die homogene Lösung Gl. (2.34.1) lediglich neue Werte für die Vorfak-toren A, B und C. Sie sind im (Bild 2.23) dargestellt.
Im Vergleich zum Druckfall sind nun umgekehrte Modalitäten zu beachten: A und Csteigen an, wenn ε zunimmt, während B abnimmt. (A + B) und C sind aber immergrößer als die festen Werte nach Theorie I. Ordnung (ε = 0).
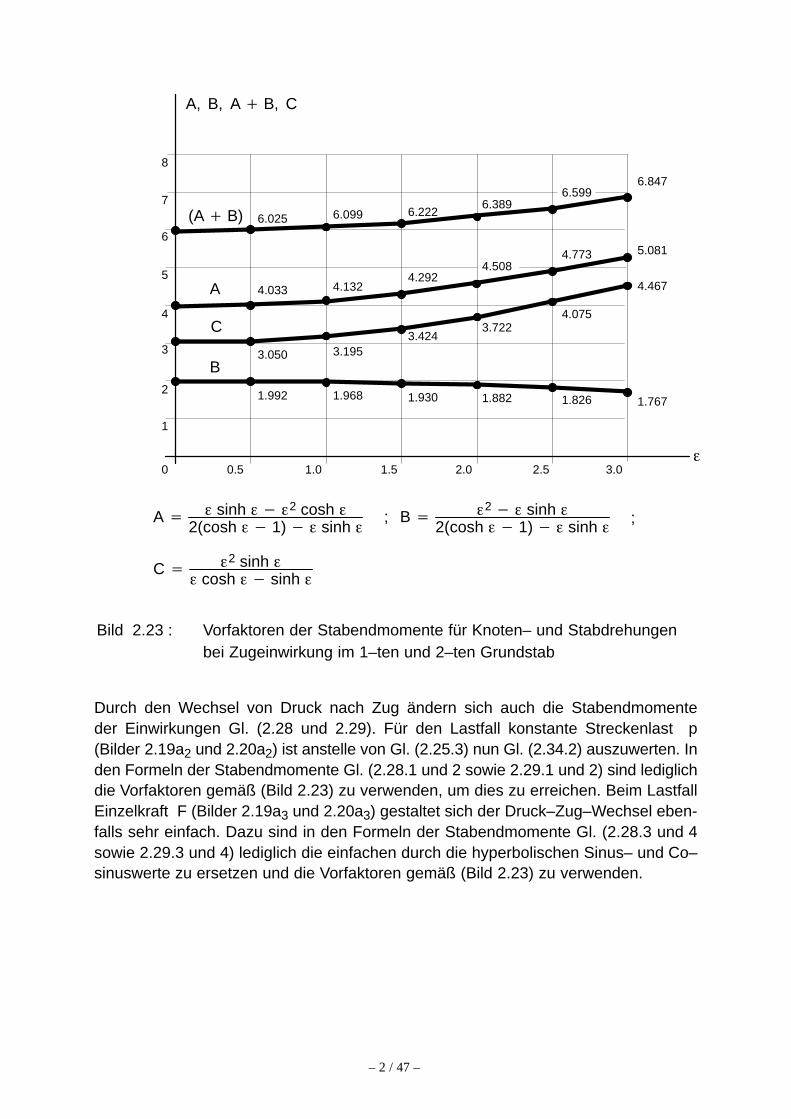
– 2 / 47 –
Bild 2.23 :
A � � sinh � �2 cosh �2(cosh � 1) � sinh �
B � �2 � sinh �2(cosh � 1) � sinh �
;
0
1
2
3
4
5
6
A, B, A � B, C
�0.5 1.0 1.5 2.0 2.5 3.0
4.033 4.1324.292
4.5084.773 5.081
1.992 1.968 1.930 1.882 1.826 1.767
A
B
(A � B) 6.025 6.099 6.2226.389
6.5996.847
7
8
C
3.050 3.1953.424
3.7224.075
4.467
C � �2 sinh �� cosh � sinh �
;
Vorfaktoren der Stabendmomente für Knoten– und Stabdrehungenbei Zugeinwirkung im 1–ten und 2–ten Grundstab
Durch den Wechsel von Druck nach Zug ändern sich auch die Stabendmomenteder Einwirkungen Gl. (2.28 und 2.29). Für den Lastfall konstante Streckenlast p(Bilder 2.19a2 und 2.20a2) ist anstelle von Gl. (2.25.3) nun Gl. (2.34.2) auszuwerten. Inden Formeln der Stabendmomente Gl. (2.28.1 und 2 sowie 2.29.1 und 2) sind lediglichdie Vorfaktoren gemäß (Bild 2.23) zu verwenden, um dies zu erreichen. Beim LastfallEinzelkraft F (Bilder 2.19a3 und 2.20a3) gestaltet sich der Druck–Zug–Wechsel eben-falls sehr einfach. Dazu sind in den Formeln der Stabendmomente Gl. (2.28.3 und 4sowie 2.29.3 und 4) lediglich die einfachen durch die hyperbolischen Sinus– und Co–sinuswerte zu ersetzen und die Vorfaktoren gemäß (Bild 2.23) zu verwenden.
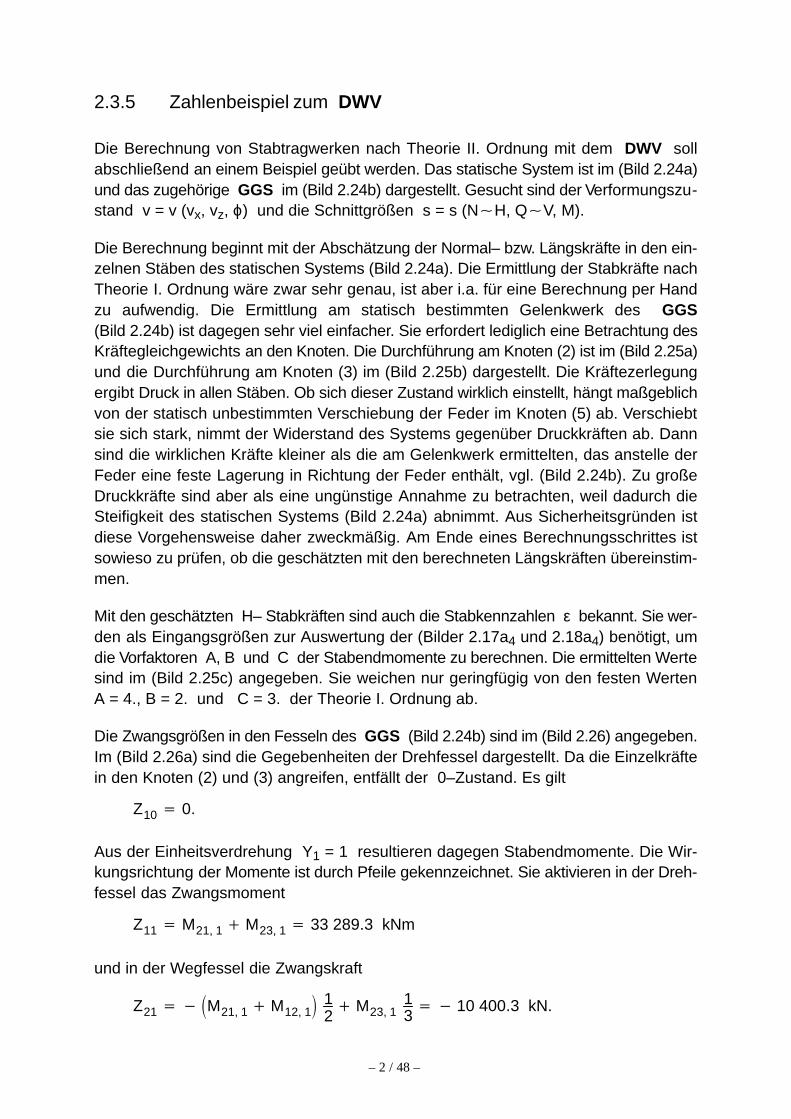
– 2 / 48 –
2.3.5 Zahlenbeispiel zum DWV
Die Berechnung von Stabtragwerken nach Theorie II. Ordnung mit dem DWV sollabschließend an einem Beispiel geübt werden. Das statische System ist im (Bild 2.24a)und das zugehörige GGS im (Bild 2.24b) dargestellt. Gesucht sind der Verformungszu-stand v = v (vx, vz, ϕ) und die Schnittgrößen s = s (N H, Q V, M).
Die Berechnung beginnt mit der Abschätzung der Normal– bzw. Längskräfte in den ein-zelnen Stäben des statischen Systems (Bild 2.24a). Die Ermittlung der Stabkräfte nachTheorie I. Ordnung wäre zwar sehr genau, ist aber i.a. für eine Berechnung per Handzu aufwendig. Die Ermittlung am statisch bestimmten Gelenkwerk des GGS(Bild 2.24b) ist dagegen sehr viel einfacher. Sie erfordert lediglich eine Betrachtung desKräftegleichgewichts an den Knoten. Die Durchführung am Knoten (2) ist im (Bild 2.25a)und die Durchführung am Knoten (3) im (Bild 2.25b) dargestellt. Die Kräftezerlegungergibt Druck in allen Stäben. Ob sich dieser Zustand wirklich einstellt, hängt maßgeblichvon der statisch unbestimmten Verschiebung der Feder im Knoten (5) ab. Verschiebtsie sich stark, nimmt der Widerstand des Systems gegenüber Druckkräften ab. Dannsind die wirklichen Kräfte kleiner als die am Gelenkwerk ermittelten, das anstelle derFeder eine feste Lagerung in Richtung der Feder enthält, vgl. (Bild 2.24b). Zu großeDruckkräfte sind aber als eine ungünstige Annahme zu betrachten, weil dadurch dieSteifigkeit des statischen Systems (Bild 2.24a) abnimmt. Aus Sicherheitsgründen istdiese Vorgehensweise daher zweckmäßig. Am Ende eines Berechnungsschrittes istsowieso zu prüfen, ob die geschätzten mit den berechneten Längskräften übereinstim-men.
Mit den geschätzten H– Stabkräften sind auch die Stabkennzahlen ε bekannt. Sie wer-den als Eingangsgrößen zur Auswertung der (Bilder 2.17a4 und 2.18a4) benötigt, umdie Vorfaktoren A, B und C der Stabendmomente zu berechnen. Die ermittelten Wertesind im (Bild 2.25c) angegeben. Sie weichen nur geringfügig von den festen WertenA = 4., B = 2. und C = 3. der Theorie I. Ordnung ab.
Die Zwangsgrößen in den Fesseln des GGS (Bild 2.24b) sind im (Bild 2.26) angegeben.Im (Bild 2.26a) sind die Gegebenheiten der Drehfessel dargestellt. Da die Einzelkräftein den Knoten (2) und (3) angreifen, entfällt der 0–Zustand. Es gilt
Z10 � 0.
Aus der Einheitsverdrehung Y1 = 1 resultieren dagegen Stabendmomente. Die Wir-kungsrichtung der Momente ist durch Pfeile gekennzeichnet. Sie aktivieren in der Dreh-fessel das Zwangsmoment
Z11 � M21, 1 � M23, 1 � 33 289.3 kNm
und in der Wegfessel die Zwangskraft
Z21 � �M21, 1 � M12, 1� 1
2� M23, 1
13� 10 400.3 kN.
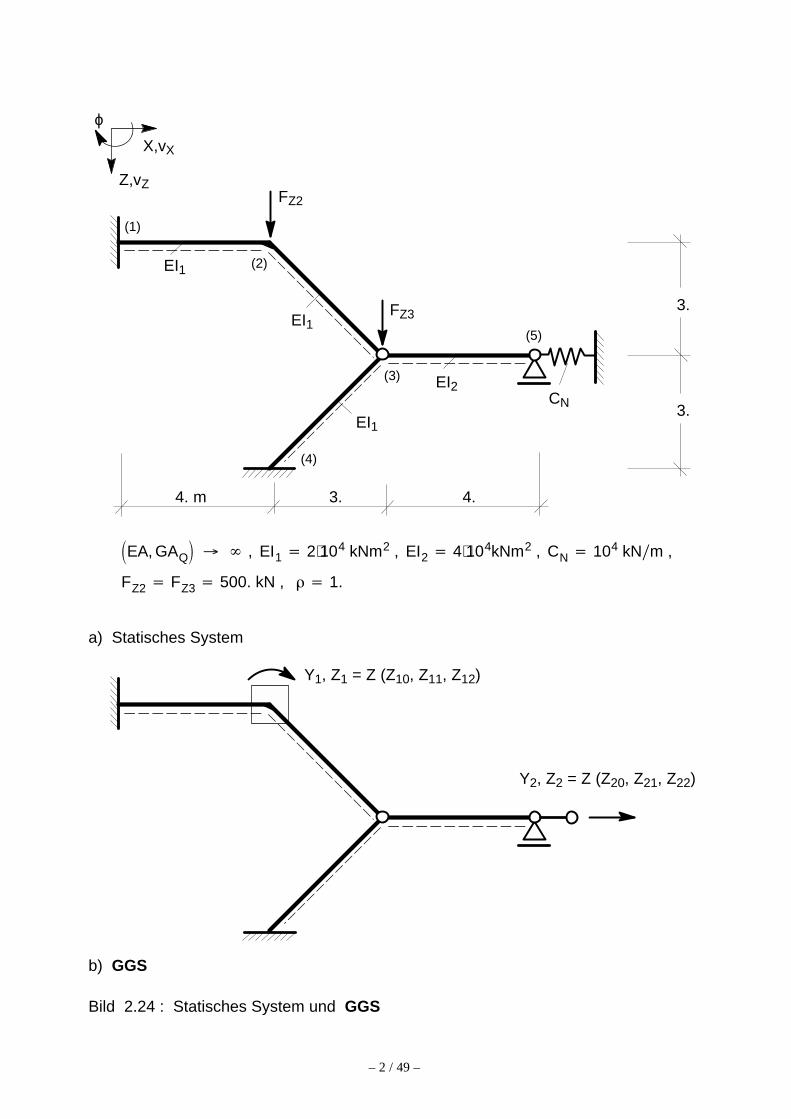
– 2 / 49 –
ÇÇÇÇÇÇÇÇÇ
(1)
�EA, GAQ� � � , EI1 � 2⋅104 kNm2 , EI2 � 4⋅104kNm2 , CN � 104 kN�m ,
FZ2
ϕ
X,vX
Z,vZ
CN
3.
3.
(5)
(2)
(3)
(4)
FZ3
EI1
EI1
EI1
EI2
4. m 3. 4.
FZ2 � FZ3 � 500. kN , � � 1.
a) Statisches System
Y2, Z2 = Z (Z20, Z21, Z22)
b) GGS
Bild 2.24 : Statisches System und GGS
Y1, Z1 = Z (Z10, Z11, Z12)
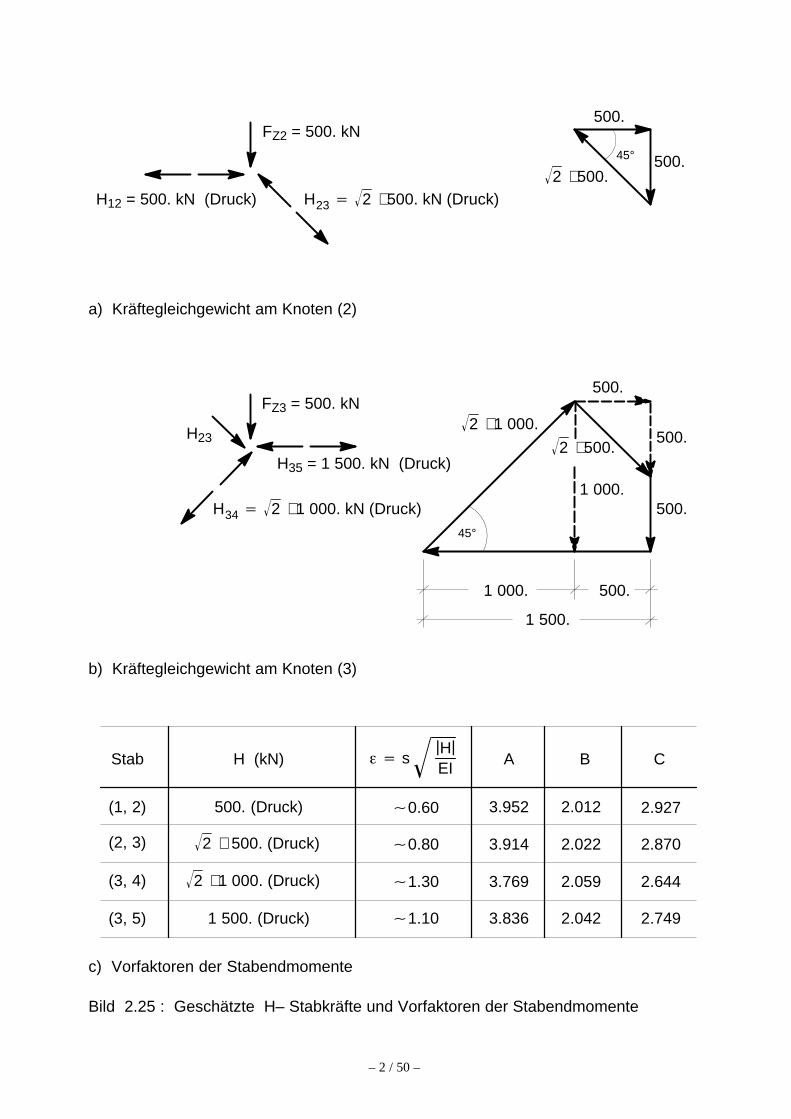
– 2 / 50 –
FZ2 = 500. kN
a) Kräftegleichgewicht am Knoten (2)
c) Vorfaktoren der Stabendmomente
Bild 2.25 : Geschätzte H– Stabkräfte und Vorfaktoren der Stabendmomente
H23 � 2 ⋅ 500. kN (Druck)H12 = 500. kN (Druck)
45°
2 ⋅ 500.
500.
500.
H34 � 2 ⋅ 1 000. kN (Druck)
H35 = 1 500. kN (Druck)
FZ3 = 500. kN
H23
1 500.
1 000. 500.
45°
500.
500.
500.
1 000.
2 ⋅ 500.
2 ⋅ 1 000.
b) Kräftegleichgewicht am Knoten (3)
Stab H (kN) � � s|H|EI
A B C
(1, 2)
2 ⋅ 500. (Druck)
2 ⋅ 1 000. (Druck)
500. (Druck)
1 500. (Druck)
3.952
3.914
3.769
3.836
2.012
2.022
2.059
2.042
2.927
2.870
2.644
2.749
(2, 3)
(3, 4)
(3, 5)
1.30
0.60
0.80
1.10
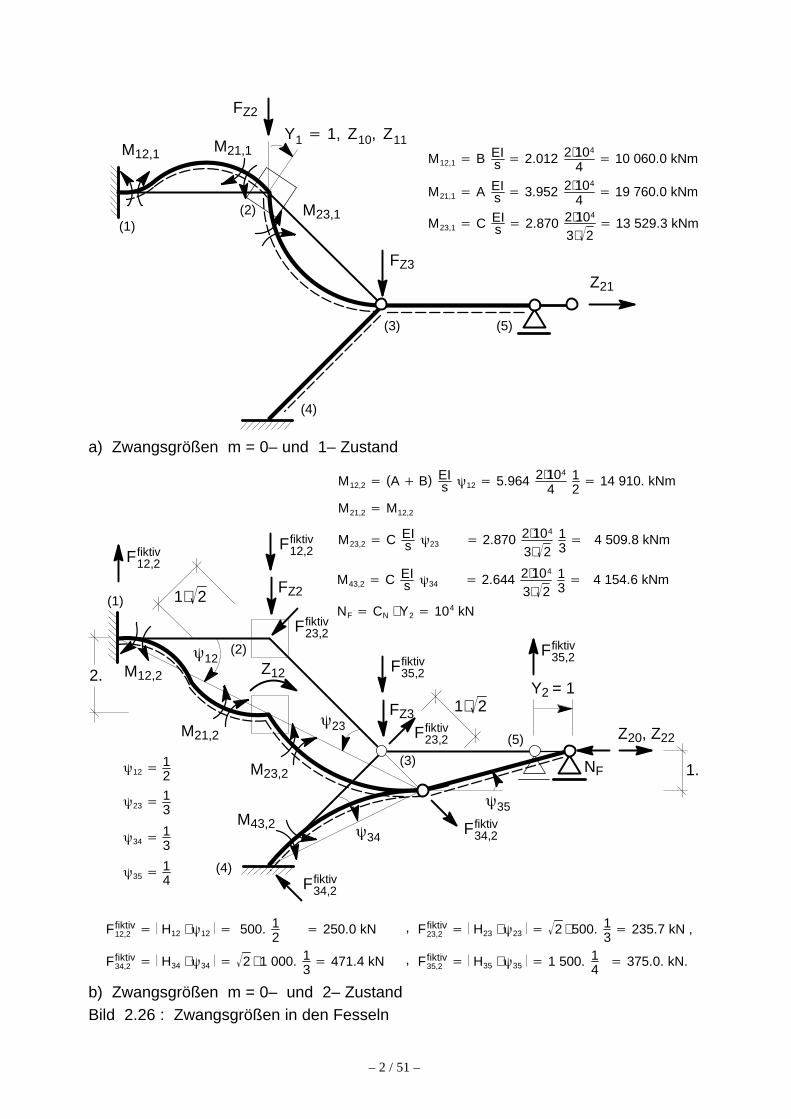
– 2 / 51 –
Ffiktiv34,2 � � H34 ⋅ �34
� � 2 ⋅ 1 000. 13� 471.4 kN
ÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇ
ÇÇÇÇÇÇÇÇÇ
(1)
FZ2
(5)
(2)
(3)
(4)
FZ3
a) Zwangsgrößen m = 0– und 1– Zustand
Y2 = 1
b) Zwangsgrößen m = 0– und 2– ZustandBild 2.26 : Zwangsgrößen in den Fesseln
Y1 � 1, Z10, Z11M12,1 M21,1
Z21
M12,1 � B EIs � 2.012 2⋅104
4� 10 060.0 kNm
M23,1 � C EIs � 2.870 2⋅104
3⋅ 2� 13 529.3 kNm
M21,1 � A EIs � 3.952 2⋅104
4� 19 760.0 kNm
M23,1
M12,2 � (A � B) EIs �12 � 5.964 2⋅104
412� 14 910. kNm
M21,2 � M12,2
M23,2 � C EIs �23 � 2.870 2⋅104
3⋅ 213� 4 509.8 kNm
NF � CN ⋅ Y2 � 104 kN
Ffiktiv12,2 � � H12 ⋅ �12
� � 500. 12
� 250.0 kN
FZ3
Ffiktiv35,2
Z20, Z22
1.NF
(5)
2.
1⋅ 2
Ffiktiv23,2
Ffiktiv35,2
�35
Ffiktiv34,2
(1)
(2)
(3)
(4)
Z12
FZ2
Ffiktiv12,2Ffiktiv
12,2
M12,2
�12
M21,2
M23,2
M43,2
Ffiktiv34,2
�34
�23
1⋅ 2
M43,2 � C EIs �34 � 2.644 2⋅104
3⋅ 213� 4 154.6 kNm
�12 �12
�23 �13
�34 �13
�35 �14
Ffiktiv23,2 � � H23 ⋅ �23
� � 2 ⋅ 500. 13� 235.7 kN ,
Ffiktiv35,2 � � H35 ⋅ �35
� � 1 500. 14
� 375.0. kN.,
,
Ffiktiv23,2

– 2 / 52 –
Das Zwangsmoment Z11 folgt unmittelbar aus einem Knotenschnitt um die Drehfessel.Zur Berechnung der Zwangskraft Z21 kommt dagegen das PvW zur Anwendung, wo-bei der virtuelle Verschiebungszustand mit der Schlußlinie des Einheitsverschiebungs-zustands der Wegfessel übereinstimmt. Die Arbeitsgleichung, aus der sich Z21 berech-net, ist daher durch die Bilanzierung der äußeren Arbeiten
Wva � Z211v � �M12,1 � M21,1
� �v12 M23,1 �v
23 � 0
gegeben.
Der Verlauf der Einheitsverschiebung Y2 = 1 ist im (Bild 2.26b) dargestellt. Die Ver-schiebungswege sind durch den Williotplan und die Stabdrehwinkel durch die Polplan–kinematik bekannt. Die Einwirkungen, die aus den Verformungen resultierendenStabendmomente und die durch die Verschiebung der Feder auftretende Federkraftsind ebenfalls angegeben. Zusätzlich sind noch die fiktiven Kräfte der einzelnen Stäbeeingetragen, die sich aus der Schiefstellung der Stäbe ergeben. Sie sind erforderlich,um die Berechnung mit Bezug auf die unverformte Ausgangslage durchführen zu kön-nen. Für den 0– Zustand gilt nach dem PvW die Arbeitsgleichung
Wva � Z20⋅1v � FZ2⋅2v � FZ3⋅1v � 0,
aus der sich Z20 zu
Z20 � FZ2⋅2 FZ3 � 1 500. kN
berechnet. Die Arbeitsgleichung zur Ermittlung der Zwangskraft Z22 ist durch die Bilan-zierung der äußeren Arbeiten
Wva � Z22⋅1v �M12,2 � M21,2
� �v12 � Ffiktiv
12,2 ⋅2v
�M23,2� �v
23 � Ffiktiv23,2 ⋅ 2
v
� M43,2� �v
34 � Ffiktiv34,2 ⋅ 2
v
� Ffiktiv35,2 ⋅1v
NF ⋅1v � 0
gegeben, aus der sich Z22 zu
Z22 � �M12,2 � M21,2� 1
2� M23,2
13� M43,2
13
Ffiktiv12,2 ⋅2 Ffiktiv
23,2 ⋅ 2 Ffiktiv34,2 ⋅ 2 Ffiktiv
35,2 ⋅1
� NF � 17 798.1 1 875. � 10 000. � 25 923.1 kN
berechnet. Das Zwangsmoment Z12 in der Drehfessel muß betragsmäßig mit derZwangskraft Z21 in der Wegfessel übereinstimmen. Der Knotenschnitt um die Drehfes-sel ergibt
Z12 � M21,2 � M23,2 � 10 400.2 kNm
und bestätigt damit den Wert der Zwangskraft Z21 .
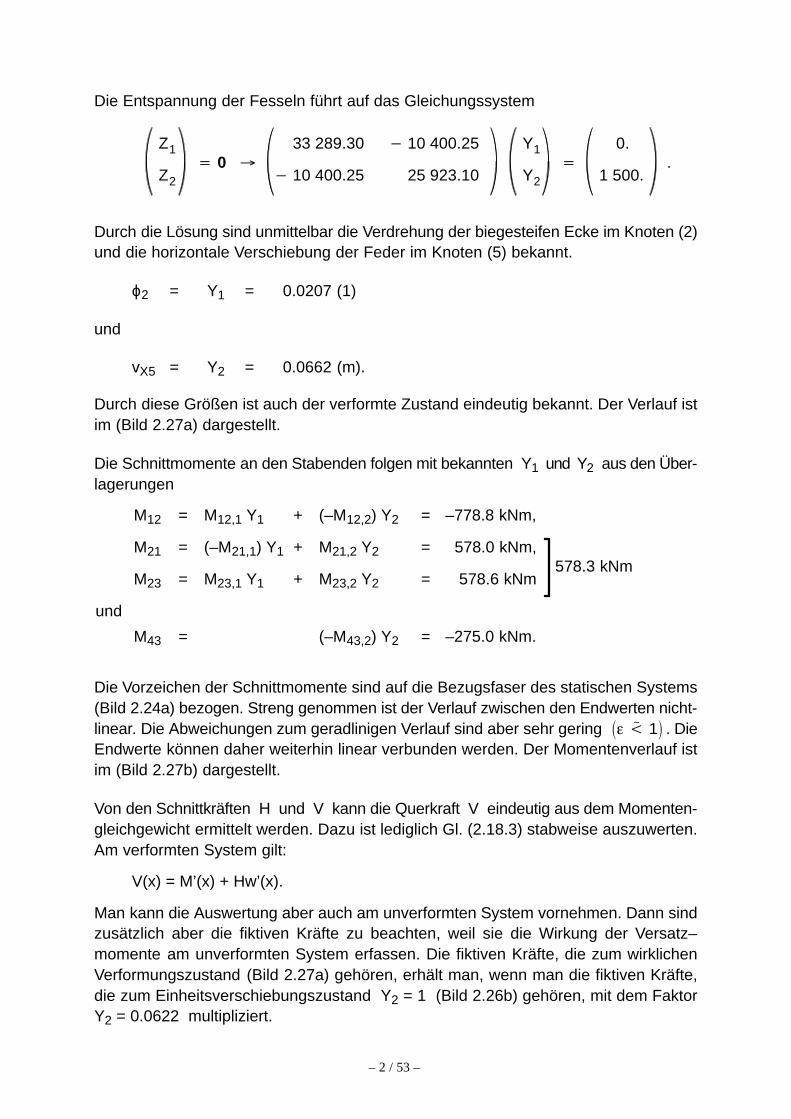
– 2 / 53 –
Die Entspannung der Fesseln führt auf das Gleichungssystem
Z1
Z2
� 0 �33 289.30
10 400.25
10 400.25
25 923.10
Y1
Y2
�0.
1 500..
Durch die Lösung sind unmittelbar die Verdrehung der biegesteifen Ecke im Knoten (2)und die horizontale Verschiebung der Feder im Knoten (5) bekannt.
ϕ2 = Y1 = 0.0207 (1)
und
vX5 = Y2 = 0.0662 (m).
Durch diese Größen ist auch der verformte Zustand eindeutig bekannt. Der Verlauf istim (Bild 2.27a) dargestellt.
Die Schnittmomente an den Stabenden folgen mit bekannten Y1 und Y2 aus den Über-lagerungen
M12 + (–M12,2) Y2 = –778.8 kNm,
M21 =
=
(–M21,1) Y1 + M21,2 Y2 = 578.0 kNm,
M23 =
M12,1 Y1
M23,1 Y1 + M23,2 Y2 = 578.6 kNm
und
M43 = (–M43,2) Y2 = –275.0 kNm.
578.3 kNm
Die Vorzeichen der Schnittmomente sind auf die Bezugsfaser des statischen Systems(Bild 2.24a) bezogen. Streng genommen ist der Verlauf zwischen den Endwerten nicht-linear. Die Abweichungen zum geradlinigen Verlauf sind aber sehr gering �� �~ 1� . DieEndwerte können daher weiterhin linear verbunden werden. Der Momentenverlauf istim (Bild 2.27b) dargestellt.
Von den Schnittkräften H und V kann die Querkraft V eindeutig aus dem Momenten-gleichgewicht ermittelt werden. Dazu ist lediglich Gl. (2.18.3) stabweise auszuwerten.Am verformten System gilt:
V(x) = M’(x) + Hw’(x).
Man kann die Auswertung aber auch am unverformten System vornehmen. Dann sindzusätzlich aber die fiktiven Kräfte zu beachten, weil sie die Wirkung der Versatz–momente am unverformten System erfassen. Die fiktiven Kräfte, die zum wirklichenVerformungszustand (Bild 2.27a) gehören, erhält man, wenn man die fiktiven Kräfte,die zum Einheitsverschiebungszustand Y2 = 1 (Bild 2.26b) gehören, mit dem FaktorY2 = 0.0622 multipliziert.
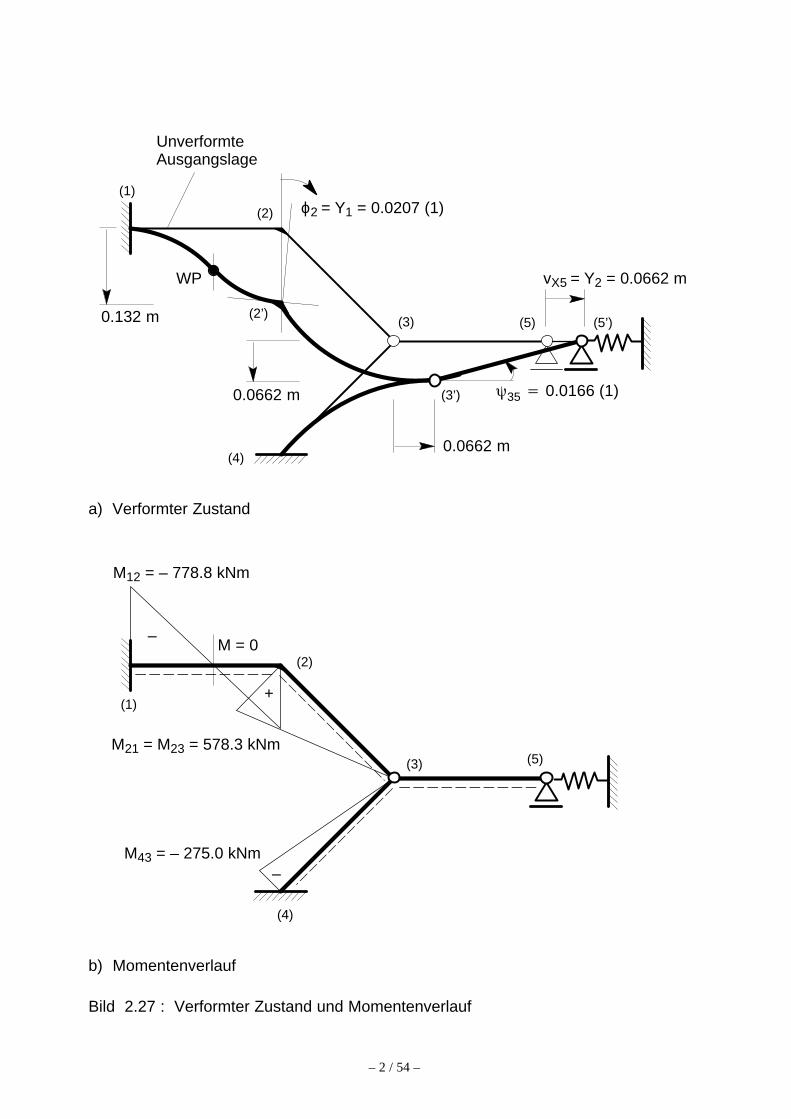
– 2 / 54 –
a) Verformter Zustand
b) Momentenverlauf
Bild 2.27 : Verformter Zustand und Momentenverlauf
vX5 = Y2 = 0.0662 m
(5)
(1)
(2)
(3)
(4)
(5’)(2’)
(3’)
WP
UnverformteAusgangslage
0.132 m
0.0662 m
0.0662 m
ϕ2 = Y1 = 0.0207 (1)
(5)
(1)
(2)
(3)
(4)
M12 = – 778.8 kNm
M21 = M23 = 578.3 kNm
M43 = – 275.0 kNm–
+
–M = 0
�35 � 0.0166 (1)
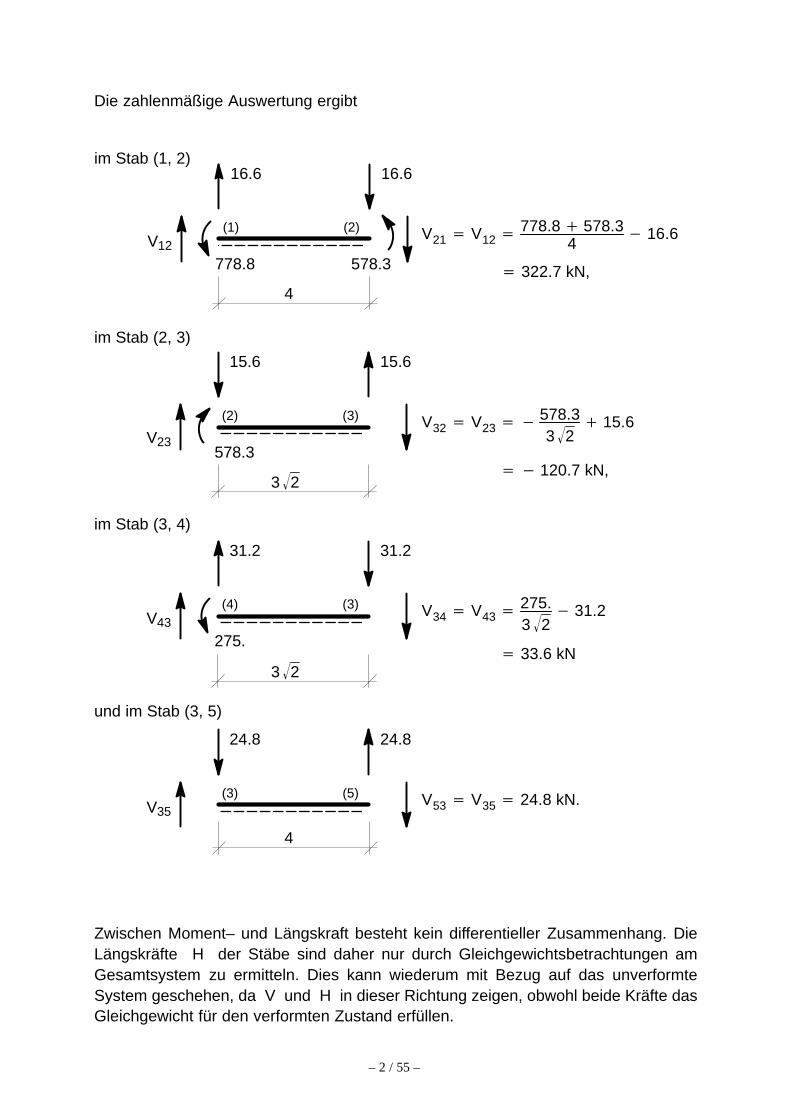
– 2 / 55 –
Die zahlenmäßige Auswertung ergibt
4
im Stab (3, 4)
V12
16.6
778.8
(1) (2)
578.3
V21 � V12 � 778.8 � 578.34
16.6
� 322.7 kN,
im Stab (1, 2)16.6
V43
31.2
275.
(4) (3) V34 � V43 � 275.3 2
31.2
� 33.6 kN
31.2
im Stab (2, 3)
V23
15.6
578.3
(2) (3) V32 � V23 � 578.33 2
� 15.6
� 120.7 kN,
15.6
und im Stab (3, 5)
V35
24.8
(3) (5) V53 � V35 � 24.8 kN.
24.8
3 2
3 2
4
Zwischen Moment– und Längskraft besteht kein differentieller Zusammenhang. DieLängskräfte H der Stäbe sind daher nur durch Gleichgewichtsbetrachtungen amGesamtsystem zu ermitteln. Dies kann wiederum mit Bezug auf das unverformteSystem geschehen, da V und H in dieser Richtung zeigen, obwohl beide Kräfte dasGleichgewicht für den verformten Zustand erfüllen.
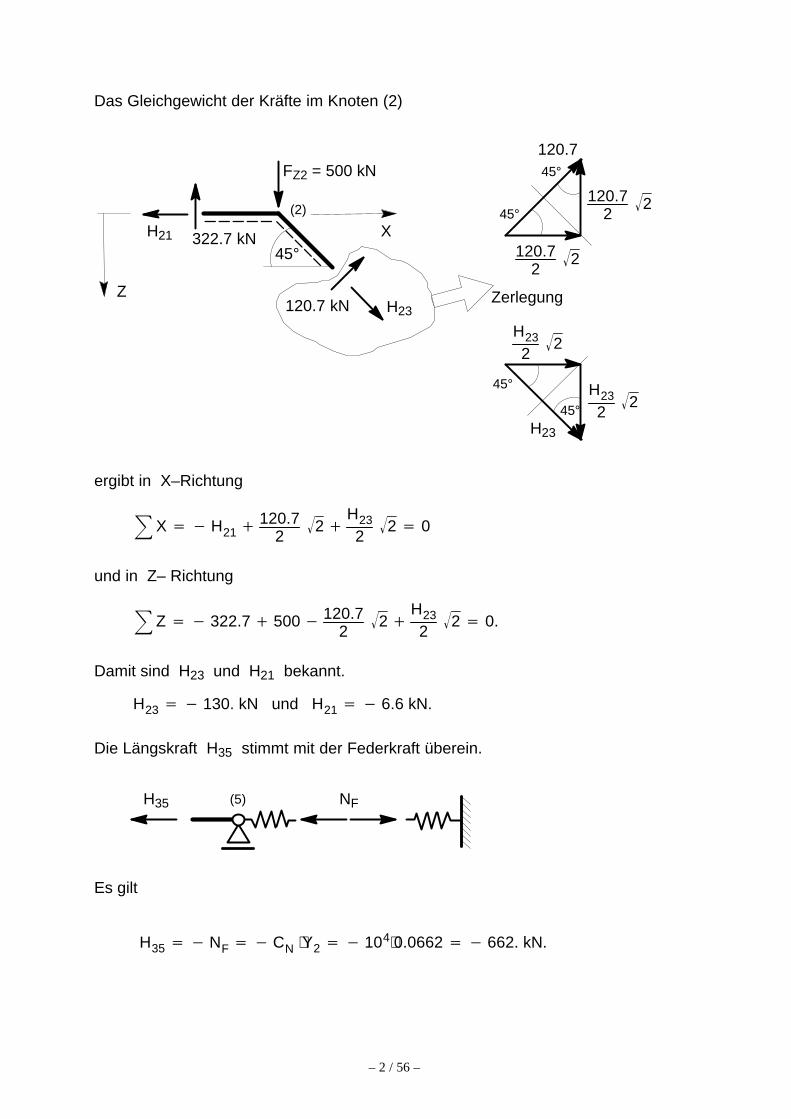
– 2 / 56 –
Das Gleichgewicht der Kräfte im Knoten (2)
45°
(2)
H21 322.7 kN
FZ2 = 500 kN
Z
X
H23120.7 kN
120.72
245°
45°120.7
120.72
2
H23
22
H23
2245°
45°
H23
Zerlegung
ergibt in X–Richtung
�X � H21 �120.7
22 �
H23
22 � 0
und in Z– Richtung
�Z � 322.7 � 500 120.72
2 �H23
22 � 0.
Damit sind H23 und H21 bekannt.
H23 � 130. kN und H21 � 6.6 kN.
Die Längskraft H35 stimmt mit der Federkraft überein.
H35 (5) NF
Es gilt
H35 � NF � CN ⋅Y2 � 104⋅0.0662 � 662. kN.
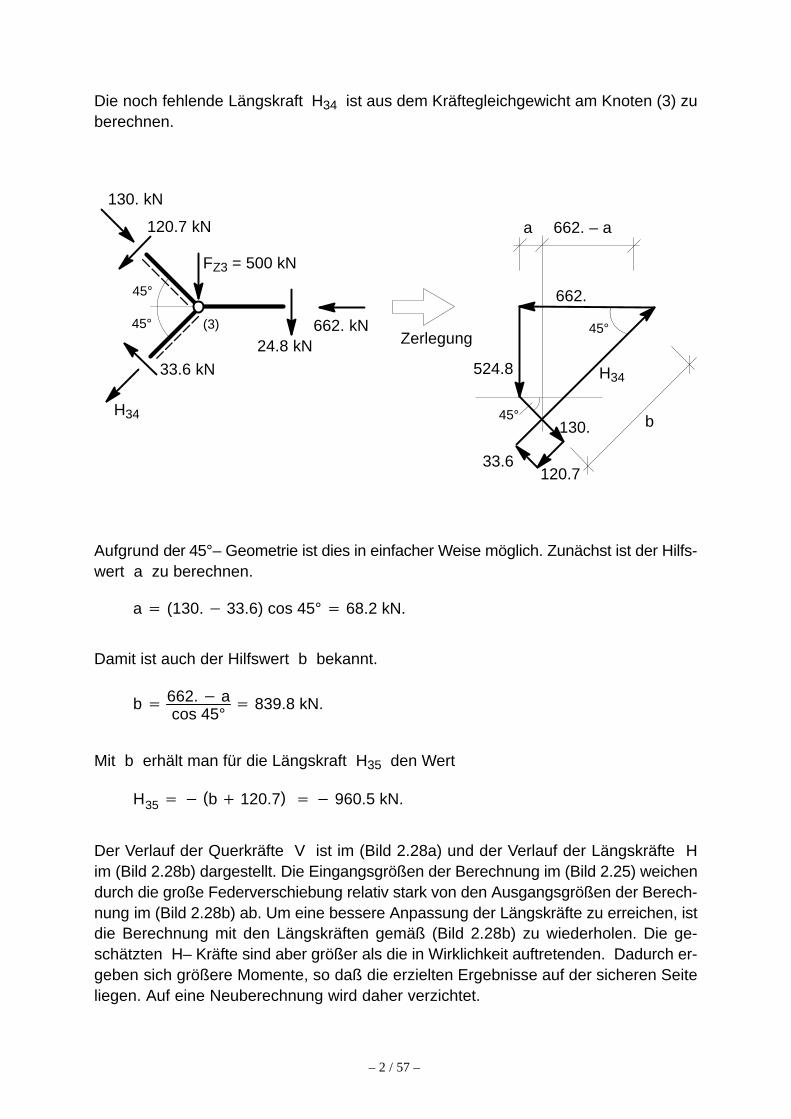
– 2 / 57 –
Die noch fehlende Längskraft H34 ist aus dem Kräftegleichgewicht am Knoten (3) zuberechnen.
662. kN
130. kN
33.6 kN
(3)
120.7 kN
45°
45°
H34
120.733.6
662. – a
662.
524.8
Zerlegung
45°
FZ3 = 500 kN
24.8 kN
a
45°
H34
b130.
Aufgrund der 45°– Geometrie ist dies in einfacher Weise möglich. Zunächst ist der Hilfs-wert a zu berechnen.
a � (130. 33.6) cos 45° � 68.2 kN.
Damit ist auch der Hilfswert b bekannt.
b � 662. acos 45° � 839.8 kN.
Mit b erhält man für die Längskraft H35 den Wert
H35 � (b � 120.7) � 960.5 kN.
Der Verlauf der Querkräfte V ist im (Bild 2.28a) und der Verlauf der Längskräfte Him (Bild 2.28b) dargestellt. Die Eingangsgrößen der Berechnung im (Bild 2.25) weichendurch die große Federverschiebung relativ stark von den Ausgangsgrößen der Berech-nung im (Bild 2.28b) ab. Um eine bessere Anpassung der Längskräfte zu erreichen, istdie Berechnung mit den Längskräften gemäß (Bild 2.28b) zu wiederholen. Die ge-schätzten H– Kräfte sind aber größer als die in Wirklichkeit auftretenden. Dadurch er-geben sich größere Momente, so daß die erzielten Ergebnisse auf der sicheren Seiteliegen. Auf eine Neuberechnung wird daher verzichtet.
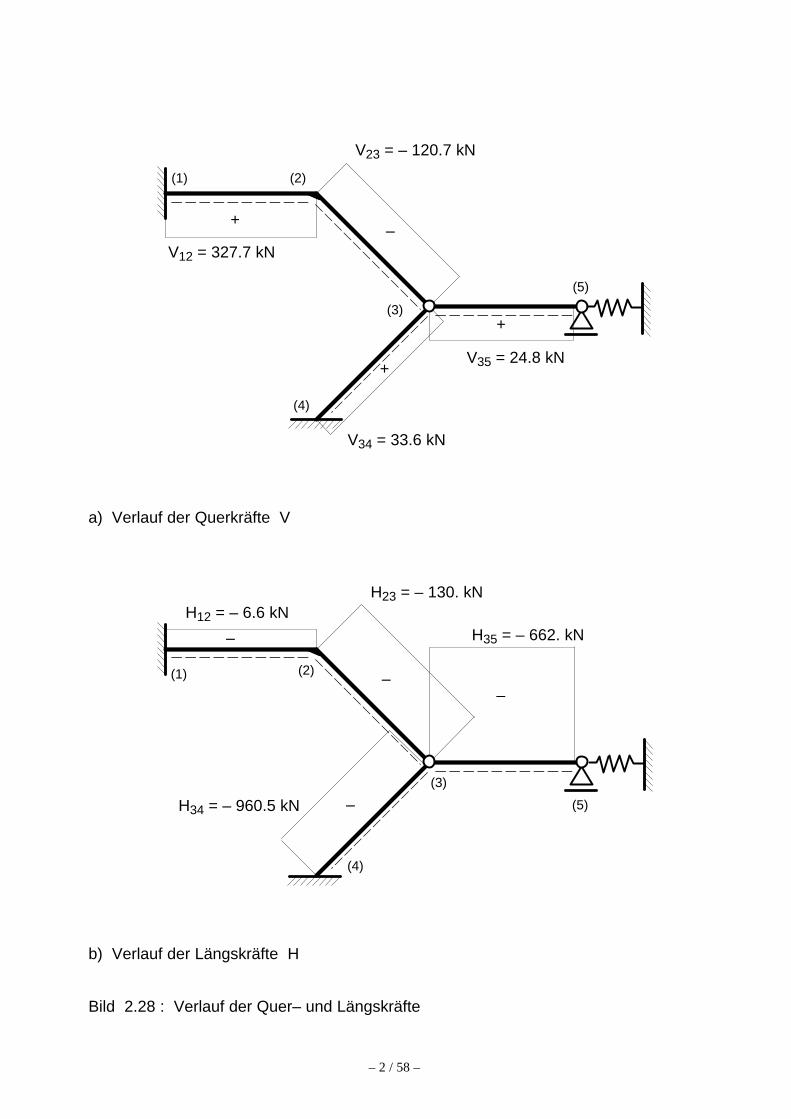
– 2 / 58 –
(1)
(5)
(2)
(3)
(4)
V23 = – 120.7 kN
a) Verlauf der Querkräfte V
b) Verlauf der Längskräfte H
Bild 2.28 : Verlauf der Quer– und Längskräfte
(1)
(5)
(2)
(3)
(4)
+–
+
+
V12 = 327.7 kN
V34 = 33.6 kN
V35 = 24.8 kN
H12 = – 6.6 kNH23 = – 130. kN
H35 = – 662. kN
H34 = – 960.5 kN
–
––
–
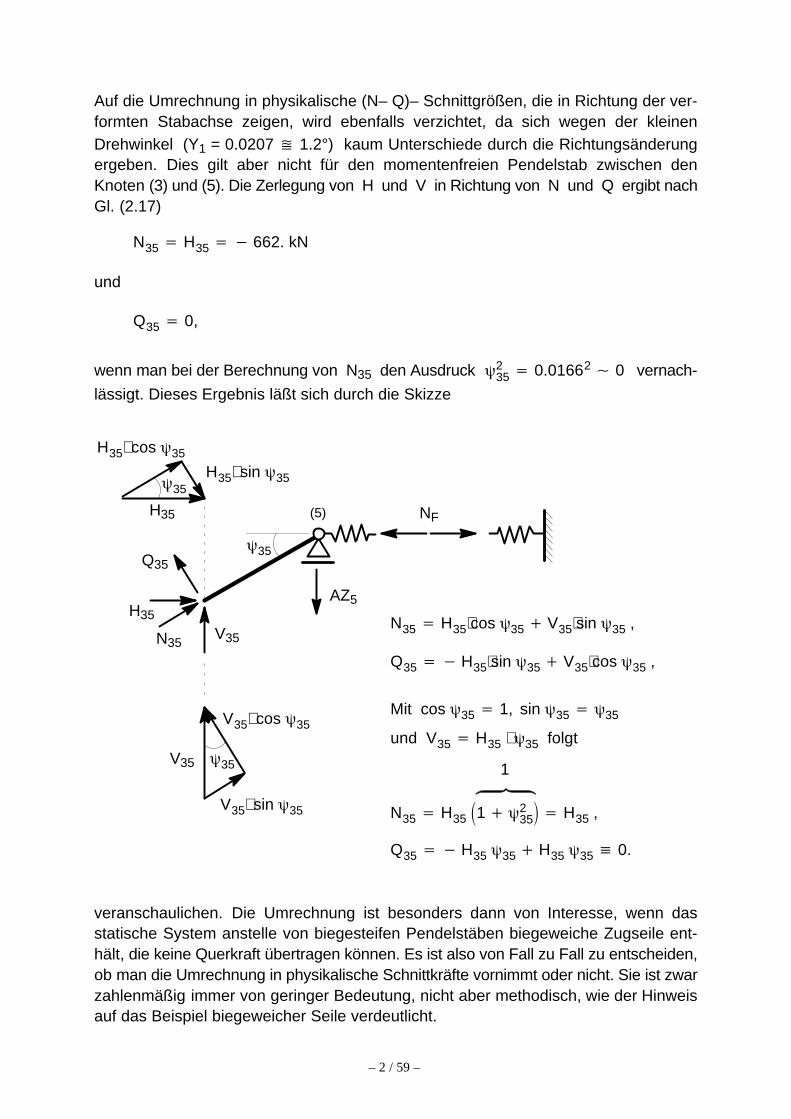
– 2 / 59 –
Auf die Umrechnung in physikalische (N– Q)– Schnittgrößen, die in Richtung der ver-formten Stabachse zeigen, wird ebenfalls verzichtet, da sich wegen der kleinenDrehwinkel (Y1 = 0.0207 � 1.2°) kaum Unterschiede durch die Richtungsänderungergeben. Dies gilt aber nicht für den momentenfreien Pendelstab zwischen denKnoten (3) und (5). Die Zerlegung von H und V in Richtung von N und Q ergibt nachGl. (2.17)
N35 � H35 � 662. kN
und
Q35 � 0,
wenn man bei der Berechnung von N35 den Ausdruck �235 � 0.01662 0 vernach-
lässigt. Dieses Ergebnis läßt sich durch die Skizze
N35 � H35�1 � �2
35� � H35 ,
N35 � H35⋅cos �35 � V35⋅sin �35 ,H35
(5) NF
�35
�35
V35⋅ cos �35
�35
AZ5
V35
H35⋅ sin �35
H35⋅ cos �35
H35
Q35
N35
Q35 � H35⋅sin �35 � V35⋅cos �35 ,
Mit cos �35 � 1, sin �35 � �35
und V35 � H35 ⋅ �35 folgt
Q35 � H35 �35 � H35 �35 � 0.
V35
V35⋅ sin �35
1
veranschaulichen. Die Umrechnung ist besonders dann von Interesse, wenn dasstatische System anstelle von biegesteifen Pendelstäben biegeweiche Zugseile ent-hält, die keine Querkraft übertragen können. Es ist also von Fall zu Fall zu entscheiden,ob man die Umrechnung in physikalische Schnittkräfte vornimmt oder nicht. Sie ist zwarzahlenmäßig immer von geringer Bedeutung, nicht aber methodisch, wie der Hinweisauf das Beispiel biegeweicher Seile verdeutlicht.
– 2 / 60 –
2.4 VdS für Theorie II. Ordnung
Beim VdS ist nur die lokale Situation der Elemente bzw. Stäbe neu zu betrachten, wennes darum geht, die Theorie II. Ordnung in das Verfahren einzubeziehen. Die globaleSituation des Tragwerks wird weiterhin durch eine baustatische Systembeschreibungerfaßt, die vollständig mit der Vorgehensweise der Theorie I. Ordnung übereinstimmt.Es ist lediglich eine Iterationsschleife zusätzlich zu konzipieren, um die geschätztenBerechnungseingänge an die aktuell ermittelten Berechnungsausgänge anzupassen.Dies bedeutet aber nur, daß die Systemberechnung mehrmals zu durchlaufen ist, ohnedaß sich methodische Änderungen in der Art der Durchführung ergeben. Die Implemen-tierung der Iteration ist programmtechnisch sehr einfach zu verwirklichen, so daß sichdas VdS als ein ideales Verfahren erweist, um die Theorie II. Ordnung praxisgerechtanwenden zu können, ohne am rechnerischen Aufwand zu scheitern.
Die lokale Formulierung des VdS im Teil 1, Abschnitt 1.3 beruht auf der DGL (1.4),die das Tragverhalten von dehn– und biegesteifen Stäben auf der Grundlage der Theo-rie I. Ordnung beschreibt. Die DGL (1.4.1), die den Anteil von Dehnstäben erfaßt, giltfür beide Theorien. Die DGL (1.4.2), die den Anteil von Biegestäben erfaßt, ist dagegendurch die DGL (2.22) zu ersetzen, um den Einfluß der Theorie II. Ordnung zu berück-sichtigen. Die Einbindung dieser DGL in die Methodik des VdS erfolgt in Anlehnungan die Abschnitte 1.3.2, 1.3.3 und 1.3.4. Im einzelnen ist die Arbeitsgleichung des PvWneu zu formulieren und zu diskretisieren, um eine Matrizenformulierung zu erhalten, diemit Stabsteifigkeiten das Tragverhalten von Elementen bzw. Stäben mit Einschlußder Theorie II. Ordnung beschreibt. Die Stabsteifigkeiten setzen sich aus zwei Anteilenzusammen:
1. Den elastischen Stabsteifigkeiten nach Theorie I. Ordnung.
2. Den geometrischen Stabsteifigkeiten nach Theorie II. Ordnung.
Die elastischen Stabsteifigkeiten sind bereits bekannt und in einer Steifigkeitsmatrix zu-sammengefaßt. Die weitere Betrachtung kann sich daher auf die Ermittlung der geome-trischen Stabsteifigkeiten beschränken, die in zusammengefaßter Form eine geome–trische Steifigkeitsmatrix bilden.
2.4.1 PvW für Theorie II. Ordnung
Aus dem Balken (Bild 2.13) wird ein endlich begrenztes (finites) Stabelement herausge-schnitten. Es ist in verformter Lage zu betrachten, um die Arbeitsgleichung des PvWfür den Fall der Theorie II. Ordnung abzuleiten. Der betrachtete Ausschnitt ist im(Bild 2.29) dargestellt.
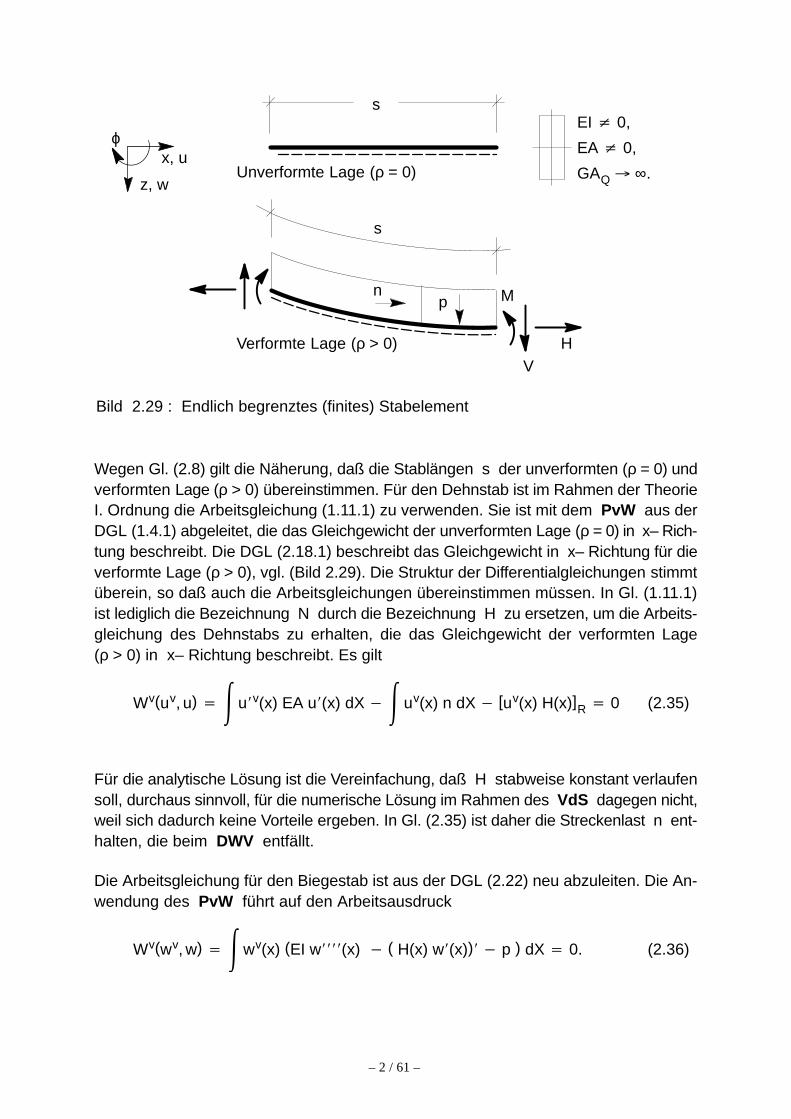
– 2 / 61 –
s
np
ϕx, u
z, w
s
Unverformte Lage (ρ = 0)
Verformte Lage (ρ > 0)V
H
M
Bild 2.29 : Endlich begrenztes (finites) Stabelement
EI � 0,
EA � 0,
GAQ � ∞.
Wegen Gl. (2.8) gilt die Näherung, daß die Stablängen s der unverformten (ρ = 0) undverformten Lage (ρ > 0) übereinstimmen. Für den Dehnstab ist im Rahmen der TheorieI. Ordnung die Arbeitsgleichung (1.11.1) zu verwenden. Sie ist mit dem PvW aus derDGL (1.4.1) abgeleitet, die das Gleichgewicht der unverformten Lage (ρ = 0) in x– Rich-tung beschreibt. Die DGL (2.18.1) beschreibt das Gleichgewicht in x– Richtung für dieverformte Lage (ρ > 0), vgl. (Bild 2.29). Die Struktur der Differentialgleichungen stimmtüberein, so daß auch die Arbeitsgleichungen übereinstimmen müssen. In Gl. (1.11.1)ist lediglich die Bezeichnung N durch die Bezeichnung H zu ersetzen, um die Arbeits-gleichung des Dehnstabs zu erhalten, die das Gleichgewicht der verformten Lage(ρ > 0) in x– Richtung beschreibt. Es gilt
Wv(uv, u) � �u�v(x) EA u�(x) dX � uv(x) n dX [uv(x) H(x)]R � 0 (2.35)
Für die analytische Lösung ist die Vereinfachung, daß H stabweise konstant verlaufensoll, durchaus sinnvoll, für die numerische Lösung im Rahmen des VdS dagegen nicht,weil sich dadurch keine Vorteile ergeben. In Gl. (2.35) ist daher die Streckenlast n ent-halten, die beim DWV entfällt.
Die Arbeitsgleichung für den Biegestab ist aus der DGL (2.22) neu abzuleiten. Die An-wendung des PvW führt auf den Arbeitsausdruck
Wv(wv, w) � �wv(x) (EI w����(x) ( H(x) w�(x))� p ) dX � 0. (2.36)
– 2 / 62 –
Die DGL (2.22) beschreibt das Gleichgewicht in z– Richtung für die verformte Lage(ρ > 0), vgl. (Bild 2.29). Das PvW wird aber wie bei Gl. (2.35) mit Bezug auf die un–verformte Lage (ρ = 0) formuliert. Es ist also auch beim VdS streng zwischen baustati-schem Bezug (unverformte Lage) und baustatischem Zustand (Gleichgewicht derverformten Lage) zu unterscheiden, vgl. DWV Abschnitt 2.3.2. Im Unterschied zuGl. (2.22) ist in Gl. (2.36) die Veränderlichkeit von H = H(x) wieder berücksichtigt.Die Umformung des ersten Terms von Gl. (2.36) durch partielle Integration ergibt
�wv(x) EI w����(x) dX � �w��v(x) EI w��(x) dX
(2.37) [ wv(x) M�(x) ]R � [ ϕv(x) M(x) ]R.
Gl. (2.37) stimmt bis auf den Randausdruck – [ wv(x) M’(x) ]R mit Gl. (1.10.2) überein.In Gl. (1.10.2) steht anstelle von M’(x) die Querkraft Q(x). Sie ist im Rahmen der Theo-rie I. Ordnung durch die erste Ableitung des Moments definiert, so daß sich die Zuord-nung als richtig erweist. Sie ist aber nicht auf die Theorie II. Ordnung übertragbar, daGl. (2.18.3) und nicht Gl. (2.18.4) gilt, wenn die Formulierung in H– und V– Schnitt–größen erfolgt. Die Ergänzung von M’(x) um H(x) ⋅ w’(x), damit sich gemäß Gl. (2.18.3)V(x) ergibt, resultiert aus der Umformung des zweiten Terms von Gl. (2.36). Es gilt
�wv(x) ( H(x) w�(x) )� dX � (2.38)
[ wv(x) H(x) w�(x) ]R ��w�v H(x) w�(x) dX.
Die Umformungen Gl. (2.37) und Gl. (2.38) sind in Gl. (2.36) einzusetzen, um dieArbeitsgleichung des Biegestabs zu erhalten, die mit der Arbeitsgleichung (2.35) desDehnstabs korrespondiert.
Wv(wv, w) � �w��v(x) EI w��(x) dX ��w�v H(x) w�(x) dX �wv p dX
(2.39) [ wv(x) V(x) ]R � [ ϕv(x) M(x) ]R � 0.
Die statischen Randbedingungen für H, V und M sind als natürliche Bedingungen im-mer erfüllt. Daher entfallen die Randausdrücke in Gl. (2.35) und Gl. (2.39), wenn die vir-tuellen Verschiebungen uv und wv und die virtuelle Verdrehung ϕv die geometrischenRandbedingungen erfüllen. Es verbleiben die Arbeitsausdrücke
Wv(uv, u) � �u�v(x) EA u�(x) dX � uv n dX � 0 (2.40.1)
und
Wv(wv, w) � �w��v(x) EI w��(x) dX ��w�v(X) H(x) w�(x) dX �wv p dX � 0.
(2.40.2)
– 2 / 63 –
Die Arbeitsgleichung (2.40) ist als Diskretisierungsgrundlage zu verwenden, um dasVdS an die Bedingungen der Theorie II. Ordnung anzupassen. Die AusdrückeGl. (2.40.1) und Gl. (2.40.2) stimmen bis auf den unterstrichenen Term mit den Aus–drücken Gl. (1.14.1) und Gl. (1.14.2) überein, die für den Fall der Theorie I. Ordnunggelten. Der Unterschied zwischen beiden Theorien besteht also lediglich in der zusätz–lichen Auswertung des Arbeitsausdrucks
WvTheorie II. Ordnung � �w�v(x) H(x) w�(x) dX. (2.41)
Gl. (2.41) ergänzt die elastischen Stabsteifigkeiten der Theorie I. Ordnung durch geo-metrische Stabsteifigkeiten, um im Rahmen der Theorie II. Ordnung das Gleichgewichtam verformten System zu erfüllen.
2.4.2 Näherungsansätze für Theorie II. Ordnung
Die Näherungsansätze Gl. (1.17) und Gl. (1.18), die bei der Auswertung der TheorieI. Ordnung–Arbeitsgleichungen (1.14.1) und Gl. (1.14.2) zur Anwendung kommen, er-fassen die homogenen Lösungen der zugehörigen DGL (1.41 und 1.42) in analytischexakter Form. Zur Auswertung von Gl. (2.40.1) gilt daher uneingeschränkt Gl. (1.17).Bei der Auswertung von Gl. (2.40.2) sind dagegen Abweichungen von der analytischenLösung zu beachten.
Abweichungen von der DGL–Lösung können beim VdS aber in einfacher Weise durcheine Verfeinerung der Elementunterteilung egalisiert werden. Dieses Prinzip hat sichbereits bei gebetteten Stäben sehr gut bewährt, vgl. Abschnitt 1.8. Obwohl erheblicheUnterschiede zwischen der tranzendenten Lösung von gebetteten Stäben und der alge-braischen Näherungslösung Gl. (1.17) und Gl. (1.18) bestehen, sind mit dem VdS sehrgenaue Ergebnisse zu erzielen, wenn man die Beschränkung der ElementlängeGl. (1.43) beachtet.
Die homogene Biegelösung der Theorie II. Ordnung setzt sich aus algebraischen undtranzendenten Anteilen zusammen. Bei Druck Gl. (2.25.2) treten als tranzendenter An-teil einfache und bei Zug Gl. (2.34.1) hyperbolische Sinus– und Cosinusterme auf.Beide Lösungen werden einheitlich durch die algebraische Funktion Gl. (1.18) ange–nähert, um den Arbeitsausdruck Gl. (2.41) auszuwerten. Die Durchführung der Integra-tion und das Einordnen in ein Matrizenschema ergibt
WvTheorie II. Ordnung � �vv
l�T kll(H) vl . (2.42)
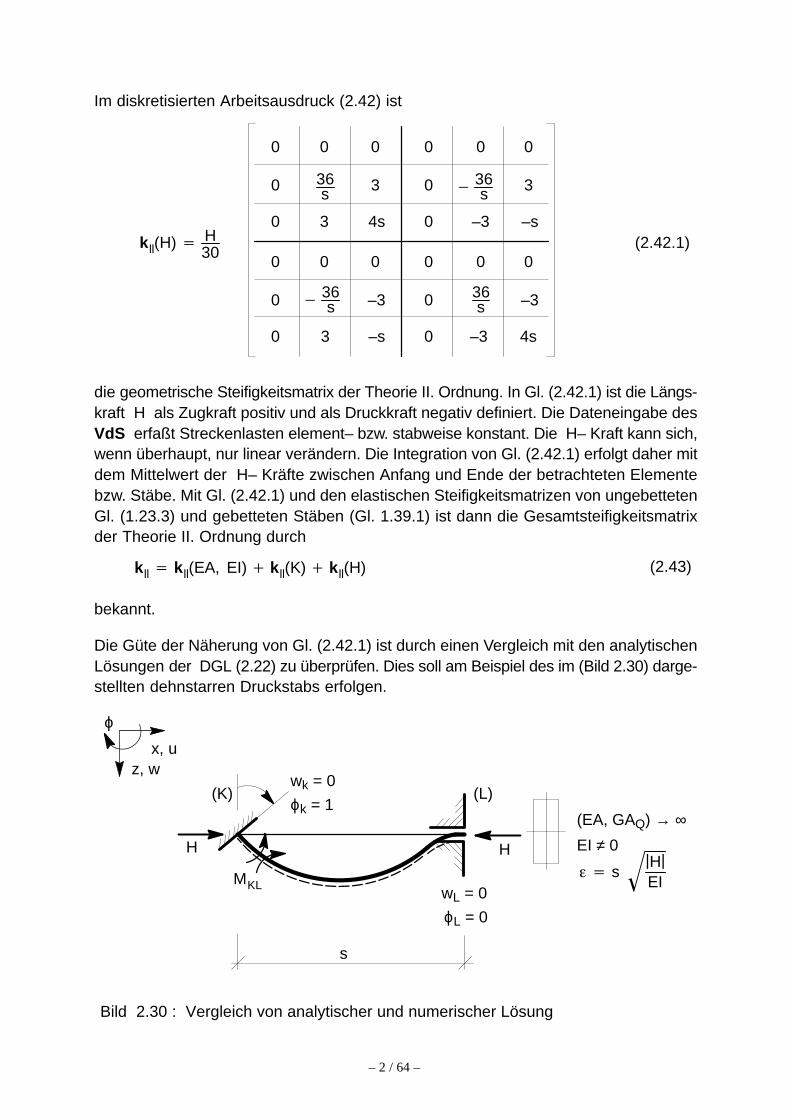
– 2 / 64 –
Im diskretisierten Arbeitsausdruck (2.42) ist
(2.42.1)
36s
36s
3
4s
–3
3
3 –s
36s
36s
3
–s
–3
–3
–3 4s
kll(H) � H30
0 0 0 0 0 0
0 0
0 0
0 0 0 0 0 0
0 0
0 0
die geometrische Steifigkeitsmatrix der Theorie II. Ordnung. In Gl. (2.42.1) ist die Längs-kraft H als Zugkraft positiv und als Druckkraft negativ definiert. Die Dateneingabe desVdS erfaßt Streckenlasten element– bzw. stabweise konstant. Die H– Kraft kann sich,wenn überhaupt, nur linear verändern. Die Integration von Gl. (2.42.1) erfolgt daher mitdem Mittelwert der H– Kräfte zwischen Anfang und Ende der betrachteten Elementebzw. Stäbe. Mit Gl. (2.42.1) und den elastischen Steifigkeitsmatrizen von ungebettetenGl. (1.23.3) und gebetteten Stäben (Gl. 1.39.1) ist dann die Gesamtsteifigkeitsmatrixder Theorie II. Ordnung durch
kll � kll(EA, EI) � kll(K) � kll(H) (2.43)
bekannt.
Die Güte der Näherung von Gl. (2.42.1) ist durch einen Vergleich mit den analytischenLösungen der DGL (2.22) zu überprüfen. Dies soll am Beispiel des im (Bild 2.30) darge-stellten dehnstarren Druckstabs erfolgen.
ϕ
x, uz, w
s
H
MKL
(EA, GAQ) → ∞
(L)
EI ≠ 0H� � s
|H|EI
(K)
wL = 0
ϕL = 0
wk = 0
ϕk = 1
Bild 2.30 : Vergleich von analytischer und numerischer Lösung
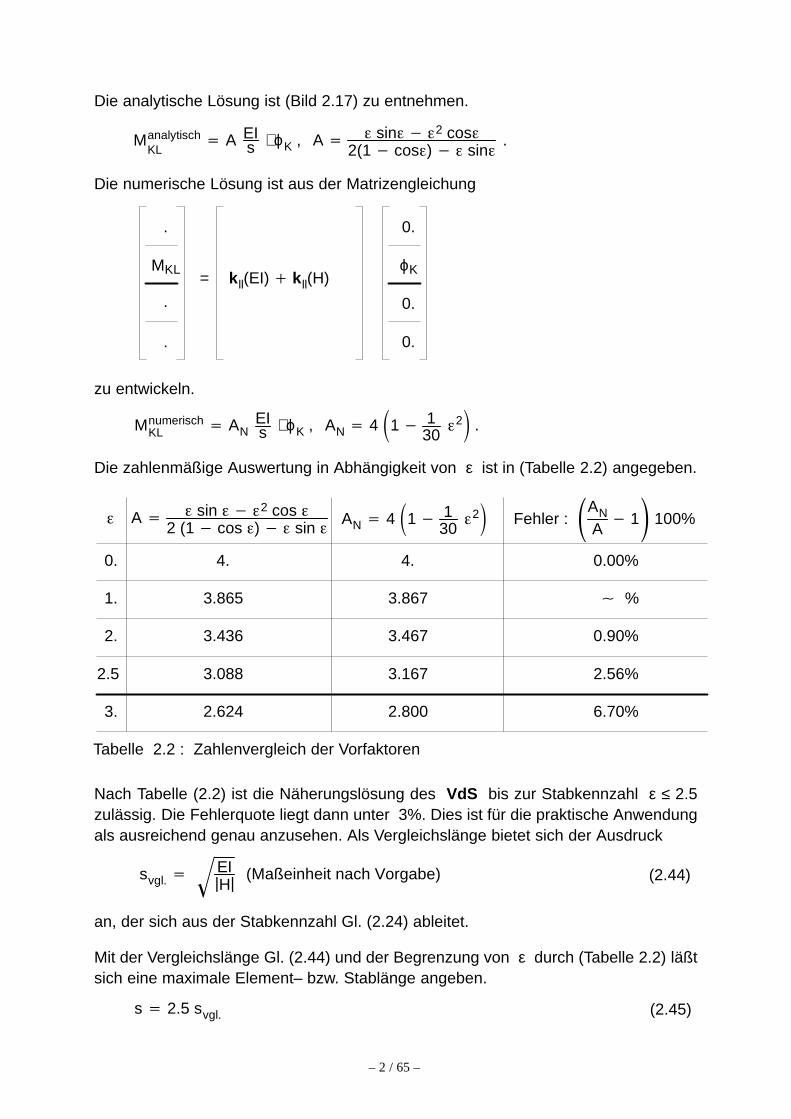
– 2 / 65 –
Die analytische Lösung ist (Bild 2.17) zu entnehmen.
ManalytischKL
� A EIs ⋅ ϕK , A � � sin� �2 cos�
2(1 cos�) � sin�.
Die numerische Lösung ist aus der Matrizengleichung
.
kll(EI) � kll(H)MKL
.
.
ϕK
0.
0.
=
0.
zu entwickeln.
MnumerischKL � AN
EIs ⋅ ϕK , AN � 4 �1 1
30�2� .
Die zahlenmäßige Auswertung in Abhängigkeit von ε ist in (Tabelle 2.2) angegeben.
A � � sin � �2 cos �2 (1 cos �) � sin �
� AN � 4 �1 130
�2�
2.5
Fehler : �ANA
1� 100%
0.
1.
2.
3.
4. 4. 0.00%
3.865 3.867 %
3.436 3.467 0.90%
3.088 3.167 2.56%
2.624 2.800 6.70%
Tabelle 2.2 : Zahlenvergleich der Vorfaktoren
Nach Tabelle (2.2) ist die Näherungslösung des VdS bis zur Stabkennzahl ε ≤ 2.5zulässig. Die Fehlerquote liegt dann unter 3%. Dies ist für die praktische Anwendungals ausreichend genau anzusehen. Als Vergleichslänge bietet sich der Ausdruck
svgl. �EI|H| (Maßeinheit nach Vorgabe) (2.44)
an, der sich aus der Stabkennzahl Gl. (2.24) ableitet.
Mit der Vergleichslänge Gl. (2.44) und der Begrenzung von ε durch (Tabelle 2.2) läßtsich eine maximale Element– bzw. Stablänge angeben.
s � 2.5 svgl. (2.45)
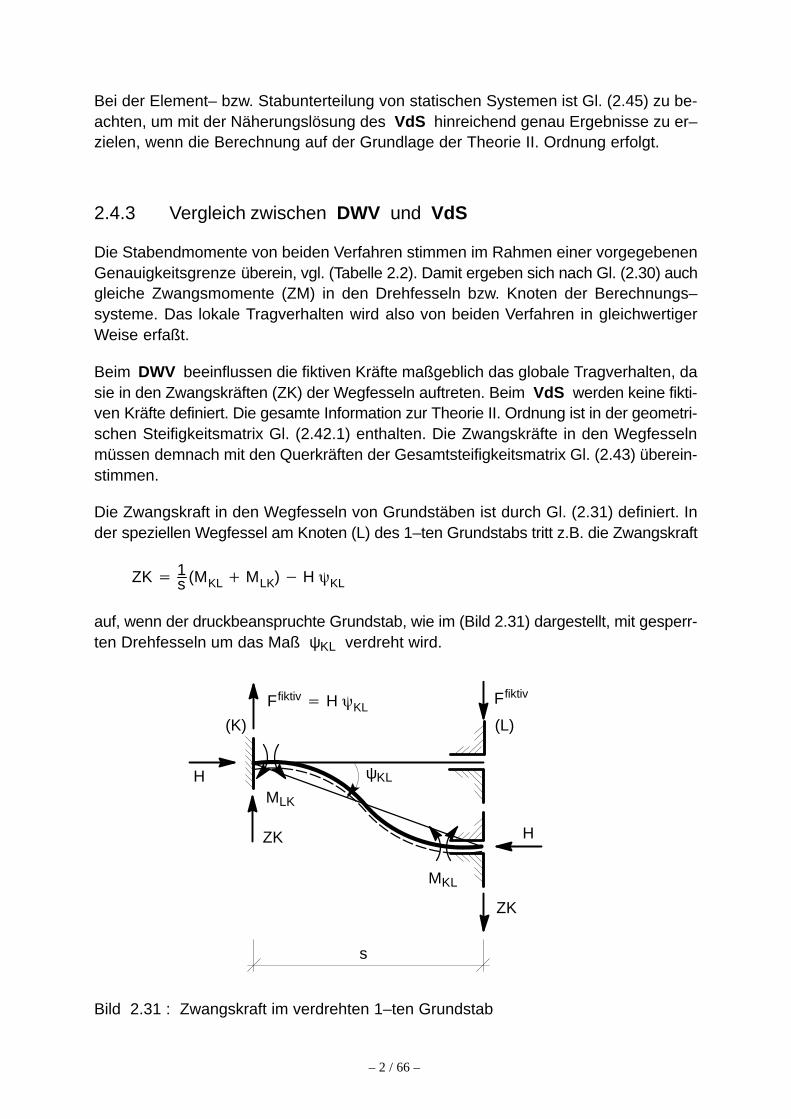
– 2 / 66 –
Bei der Element– bzw. Stabunterteilung von statischen Systemen ist Gl. (2.45) zu be-achten, um mit der Näherungslösung des VdS hinreichend genau Ergebnisse zu er–zielen, wenn die Berechnung auf der Grundlage der Theorie II. Ordnung erfolgt.
2.4.3 Vergleich zwischen DWV und VdS
Die Stabendmomente von beiden Verfahren stimmen im Rahmen einer vorgegebenenGenauigkeitsgrenze überein, vgl. (Tabelle 2.2). Damit ergeben sich nach Gl. (2.30) auchgleiche Zwangsmomente (ZM) in den Drehfesseln bzw. Knoten der Berechnungs–systeme. Das lokale Tragverhalten wird also von beiden Verfahren in gleichwertigerWeise erfaßt.
Beim DWV beeinflussen die fiktiven Kräfte maßgeblich das globale Tragverhalten, dasie in den Zwangskräften (ZK) der Wegfesseln auftreten. Beim VdS werden keine fikti-ven Kräfte definiert. Die gesamte Information zur Theorie II. Ordnung ist in der geometri-schen Steifigkeitsmatrix Gl. (2.42.1) enthalten. Die Zwangskräfte in den Wegfesselnmüssen demnach mit den Querkräften der Gesamtsteifigkeitsmatrix Gl. (2.43) überein-stimmen.
Die Zwangskraft in den Wegfesseln von Grundstäben ist durch Gl. (2.31) definiert. Inder speziellen Wegfessel am Knoten (L) des 1–ten Grundstabs tritt z.B. die Zwangskraft
ZK � 1s (MKL � MLK) H �KL
auf, wenn der druckbeanspruchte Grundstab, wie im (Bild 2.31) dargestellt, mit gesperr-ten Drehfesseln um das Maß ψKL verdreht wird.
Bild 2.31 : Zwangskraft im verdrehten 1–ten Grundstab
s
(K) (L)
MKL
H
H
ψKL
MLK
ZK
ZK
Ffiktiv � H �KLFfiktiv
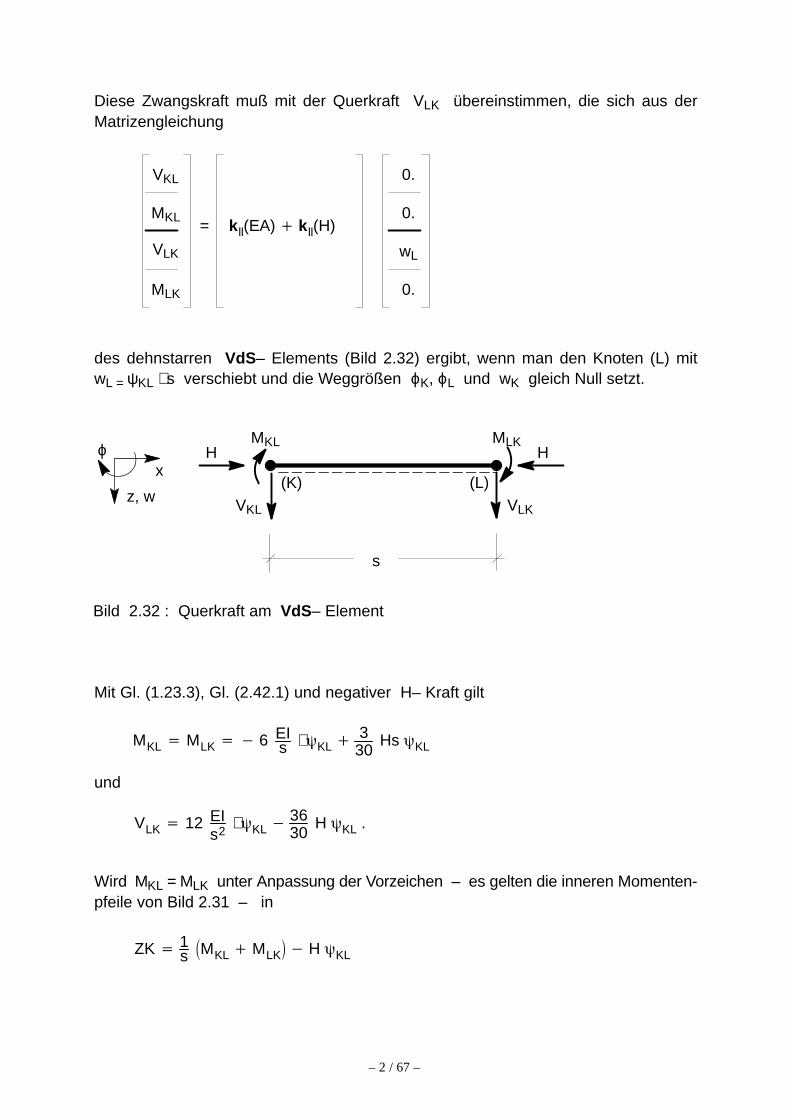
– 2 / 67 –
Diese Zwangskraft muß mit der Querkraft VLK übereinstimmen, die sich aus derMatrizengleichung
VLK
kll(EA) � kll(H)MKL
VKL
MLK
wL
0.
0.
=0.
des dehnstarren VdS– Elements (Bild 2.32) ergibt, wenn man den Knoten (L) mitwL = ψKL ⋅ s verschiebt und die Weggrößen ϕK, ϕL und wK gleich Null setzt.
ϕx
z, w
s
VLK
HMKL
H
(K) (L)
MLK
VKL
Bild 2.32 : Querkraft am VdS– Element
Mit Gl. (1.23.3), Gl. (2.42.1) und negativer H– Kraft gilt
MKL � MLK � 6 EIs ⋅ �KL �
330
Hs �KL
und
VLK � 12 EIs2
⋅ �KL 3630
H �KL .
Wird MKL = MLK unter Anpassung der Vorzeichen – es gelten die inneren Momenten-pfeile von Bild 2.31 – in
ZK � 1s�MKL � MLK
� H �KL
– 2 / 68 –
eingesetzt, erhält man
ZK � 1s �12 EI
s �KL 6
30Hs �KL� H �KL
� 12 EIs2
�KL 3630
H �KL � VLK .
Das DWV und das VdS stimmen also trotz unterschiedlicher Methodik vollständigüberein, wenn man von gleichen Voraussetzungen ausgeht. Methodische Unter-schiede sind in zwei Punkten zu beachten:
1. Das VdS erfaßt in allgemeiner Form dehnsteife, das DWV dagegen nur denSonderfall dehnstarrer Tragwerke.
2. Das VdS beruht auf einer Näherungslösung, das DWV dagegen auf eineranalytisch exakten Lösung.
Im konstruktiven Ingenieurbau ist der Sonderfall dehnstarrer Tragwerke die Regel unddie Güte der VdS– Lösung läßt sich durch die Elementunterteilung bis zur analytischexakten Lösung steigern. Im Hinblick auf die praktische Anwendung haben die Unter-schiede daher keine Bedeutung. In der Praxis dominiert wegen der Rechnerunterstüt-zung das VdS. Das DWV kommt vor allem dann zum Einsatz, wenn es um Kontrollenvon VdS– Ergebnissen geht oder wenn Vorbemessungen im Rahmen der Entwurfsge-staltung anstehen.
2.4.4 Iterative Berechnung auf Systemebene
Beim DWV begnügt man sich in der Regel mit einem Iterationsschritt, um den rechneri-schen Aufwand der Handberechnung in Grenzen zu halten. Eingangsgrößen der Be-rechnung sind die Längskräfte der Stäbe, die vorab zur ungünstigen Seite hin abge-schätzt werden. Diese rein manuelle Beschränkung entfällt beim VdS durch denRechnereinsatz. Die Berechnung wird erst dann beendet, wenn Eingangs– und Aus-gangsgrößen übereinstimmen.
Die Anpassung erfolgt mit Hilfe einer Iterationsschleife. Sie ist auf der Systemebene desVdS zu durchlaufen. Die Systemgleichung der Theorie II. Ordnung, auf der die Iterationberuht, ergibt sich in gleicher Weise wie Gl. (1.29) bzw. Gl. (1.30) der Theorie I. Ord-nung. Beim Aufbau ist in der Arbeitsgleichung (1.25) der Elemente bzw. Stäbe lediglichGl. (2.42.1) zusätzlich zu berücksichtigen. Als Ergebnis erhält man das Gleichungs–system
(K � K(H)) V � S0(�), (2.46)
das von zwei Parametern abhängt, nämlich den Stabkräften H und dem Lastfaktor ρ.
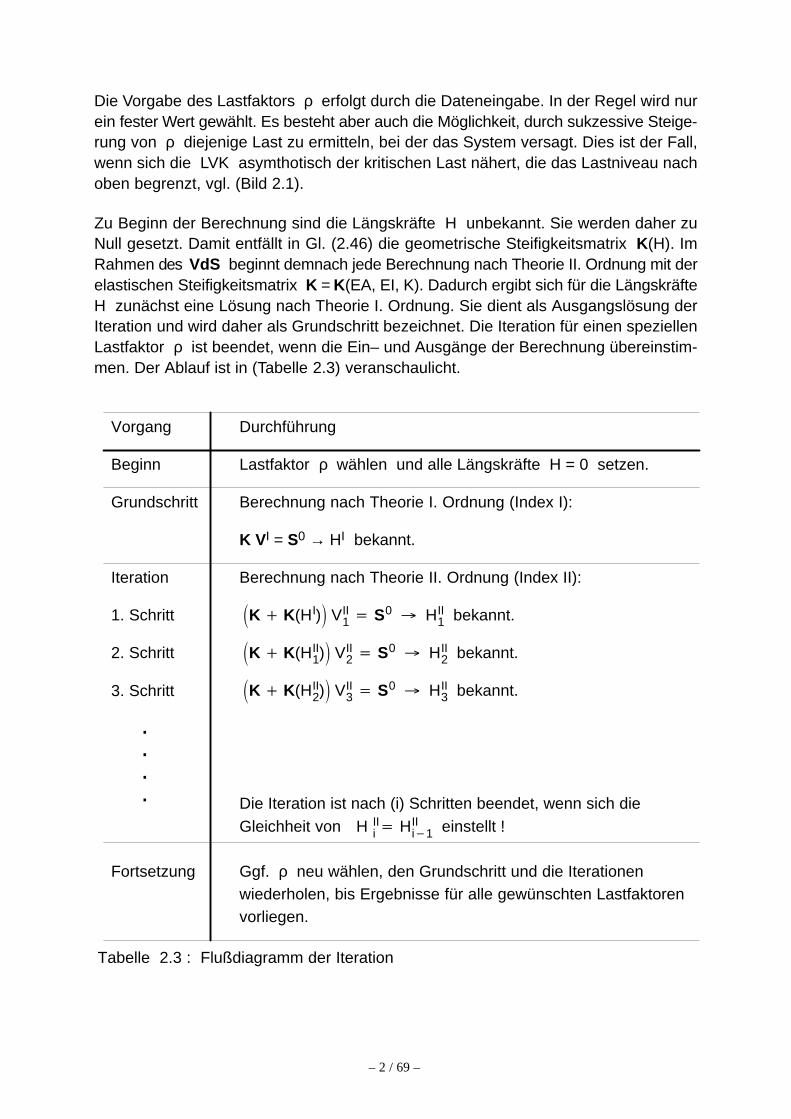
– 2 / 69 –
Die Vorgabe des Lastfaktors ρ erfolgt durch die Dateneingabe. In der Regel wird nurein fester Wert gewählt. Es besteht aber auch die Möglichkeit, durch sukzessive Steige-rung von ρ diejenige Last zu ermitteln, bei der das System versagt. Dies ist der Fall,wenn sich die LVK asymthotisch der kritischen Last nähert, die das Lastniveau nachoben begrenzt, vgl. (Bild 2.1).
Zu Beginn der Berechnung sind die Längskräfte H unbekannt. Sie werden daher zuNull gesetzt. Damit entfällt in Gl. (2.46) die geometrische Steifigkeitsmatrix K(H). ImRahmen des VdS beginnt demnach jede Berechnung nach Theorie II. Ordnung mit derelastischen Steifigkeitsmatrix K = K(EA, EI, K). Dadurch ergibt sich für die LängskräfteH zunächst eine Lösung nach Theorie I. Ordnung. Sie dient als Ausgangslösung derIteration und wird daher als Grundschritt bezeichnet. Die Iteration für einen speziellenLastfaktor ρ ist beendet, wenn die Ein– und Ausgänge der Berechnung übereinstim-men. Der Ablauf ist in (Tabelle 2.3) veranschaulicht.
.
�K � K(HI)� VII1 � S0 � HII
1 bekannt.
Grundschritt
1. Schritt
2. Schritt
3. Schritt
Beginn
Iteration
Berechnung nach Theorie I. Ordnung (Index I):
K VI = S0 → HI bekannt.
Berechnung nach Theorie II. Ordnung (Index II):
Lastfaktor ρ wählen und alle Längskräfte H = 0 setzen.
�K � K(HII1)� VII
2 � S0 � HII2 bekannt.
�K � K(HII2)� VII
3 � S0 � HII3 bekannt.
.
Die Iteration ist nach (i) Schritten beendet, wenn sich dieGleichheit von H II
i � HIIi1 einstellt !
. .
Fortsetzung Ggf. ρ neu wählen, den Grundschritt und die Iterationenwiederholen, bis Ergebnisse für alle gewünschten Lastfaktorenvorliegen.
Vorgang Durchführung
Tabelle 2.3 : Flußdiagramm der Iteration
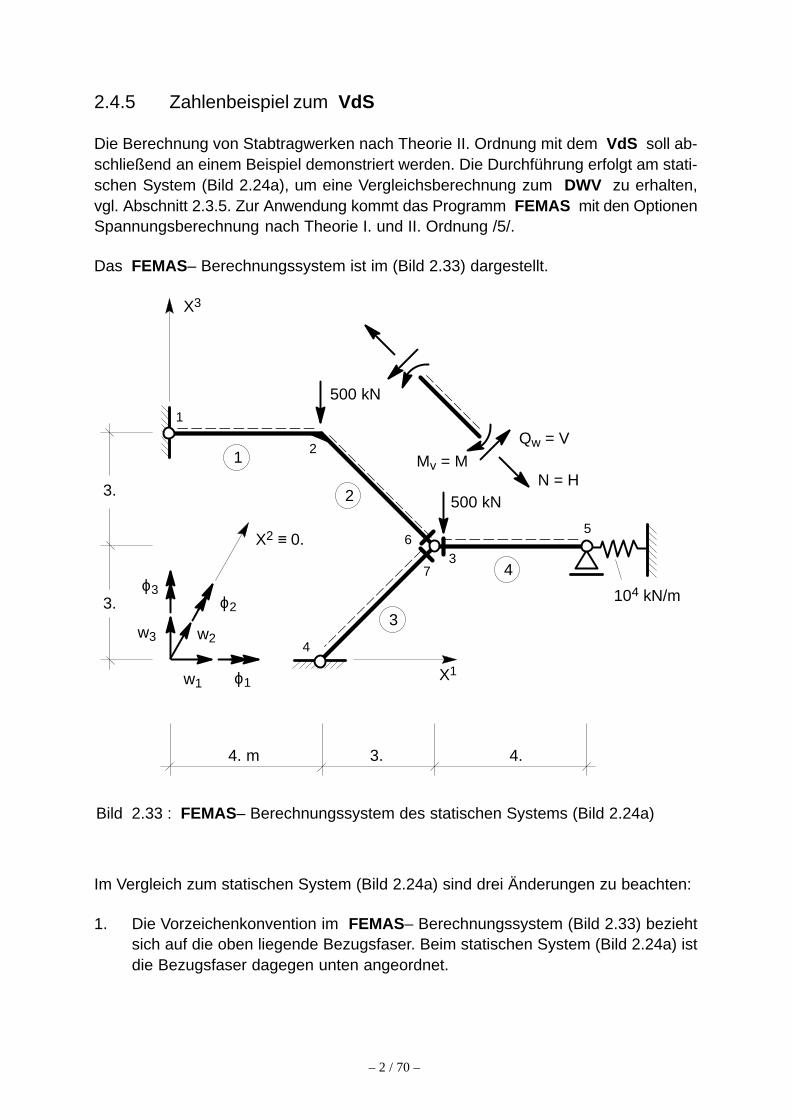
– 2 / 70 –
2.4.5 Zahlenbeispiel zum VdS
Die Berechnung von Stabtragwerken nach Theorie II. Ordnung mit dem VdS soll ab-schließend an einem Beispiel demonstriert werden. Die Durchführung erfolgt am stati-schen System (Bild 2.24a), um eine Vergleichsberechnung zum DWV zu erhalten,vgl. Abschnitt 2.3.5. Zur Anwendung kommt das Programm FEMAS mit den OptionenSpannungsberechnung nach Theorie I. und II. Ordnung /5/.
Das FEMAS– Berechnungssystem ist im (Bild 2.33) dargestellt.
1
5
2
3
4
Bild 2.33 : FEMAS– Berechnungssystem des statischen Systems (Bild 2.24a)
3
2
1
4
500 kN
500 kN
7
6
104 kN/m
X3
X1
3.
3.
4. m 4.3.
X2 ≡ 0.
ϕ3
ϕ1
ϕ2
w2w3
w1
Qw = V
N = HMv = M
Im Vergleich zum statischen System (Bild 2.24a) sind drei Änderungen zu beachten:
1. Die Vorzeichenkonvention im FEMAS– Berechnungssystem (Bild 2.33) beziehtsich auf die oben liegende Bezugsfaser. Beim statischen System (Bild 2.24a) istdie Bezugsfaser dagegen unten angeordnet.
– 2 / 71 –
2. Die Schnittkräfte in den FEMAS–Ergebnissen sind mit N und Q bezeichnet. Be–rechnet und angegeben werden aber die (H und V)– Schnittkräfte der TheorieII. Ordnung und nicht die physikalischen (N und Q)– Schnittkräfte.
3. Vom Momentengelenk im Knoten (3) des statischen Systems (Bild 2.24a) zweigendrei Stäbe ab. Im FEMAS–Berechnungssystem (Bild 2.33) ist an dieser Stelle eine3–fache Knotennummerierung erforderlich, um das Gelenk als Vollgelenk ausbil-den zu können. Die Knotennummern 6 und 7 sind daher zusätzlich zu beachten.Die Knoten 3, 6 und 7 bezeichnen aber ein und denselben geometrischen Ort,nämlich den Knoten (3) des statischen Systems (Bild 2.24a).
Es werden drei Berechnungsläufe mit FEMAS durchgeführt. In der ersten Programm-berechnung erfolgt eine Kontrolle der am statisch bestimmten Gelenkwerk ermitteltenH–Kräfte, die als Eingangsgrößen dienen, um die Handberechnung mit dem DWV zustarten. Die Ergebnisse der Programmberechnung stimmen vollständig mit der Kräfte-zerlegung im (Bild 2.25a und b) überein.
Die zweite Programmberechnung erfolgt auf der Grundlage der Theorie I. Ordnung. EinVergleich der Ergebnisse zwischen erster und zweiter Berechnung verdeutlicht, daß dieLängskräfte nach Theorie I. Ordnung deutlich von den Längskräften der Schätzung amGelenkwerk abweichen. Daher gelten beim Start der Berechnung nach Theorie II. Ord-nung beim VdS andere Eingangsbedingungen als beim DWV. In der Regel unterbleibtdie iterative Anpassung der Längskräfte beim DWV, wenn die Eingangsgrößen auf dersicheren Seite liegen. Zwischen den Verfahren müssen sich daher zwangsläufig Unter-schiede ergeben, wenn man die Ergebnisse nach Theorie II. Ordnung vergleicht.
Die dritte Programmberechnung nach Theorie II. Ordnung ist nach fünf Iterationsschrit-ten beendet. Wie ein Vergleich der Ergebnisse aus den VdS–Berechnungen mit demSystem (Bild 2.33) sowie der Berechnung mit dem DWV (Bild 2.24) zeigt, ist der Einflußder Verformungen auf das Gleichgewicht gering. Für die horizontale Verschiebung derFeder im Knoten (5) (Bild 2.27a) erhält man die Werte
Y2 = vX5 = w15 = 0.0599 (m) → Theorie I. Ordnung VdS,
= 0.0618 (m) → Theorie II. Ordnung VdS,
= 0.0662 (m) → Theorie II. Ordnung DWV.
Für die Verdrehung in der biegesteifen Ecke des Knotens (2) (Bild 2.27a) ergeben sichdie Werte
Y1 = ϕ2 = ϕ22 = 0.0181 (1) → Theorie I. Ordnung VdS,
= 0.0187 (1) → Theorie II. Ordnung VdS,
= 0.0221 (1) → Theorie II. Ordnung DWV.
Der Unterschied zwischen Theorie I. und II. Ordnung beträgt lediglich 3%. Die Wertenach dem DWV fallen erwartungsgemäß größer aus als die Werte nach dem VdS.
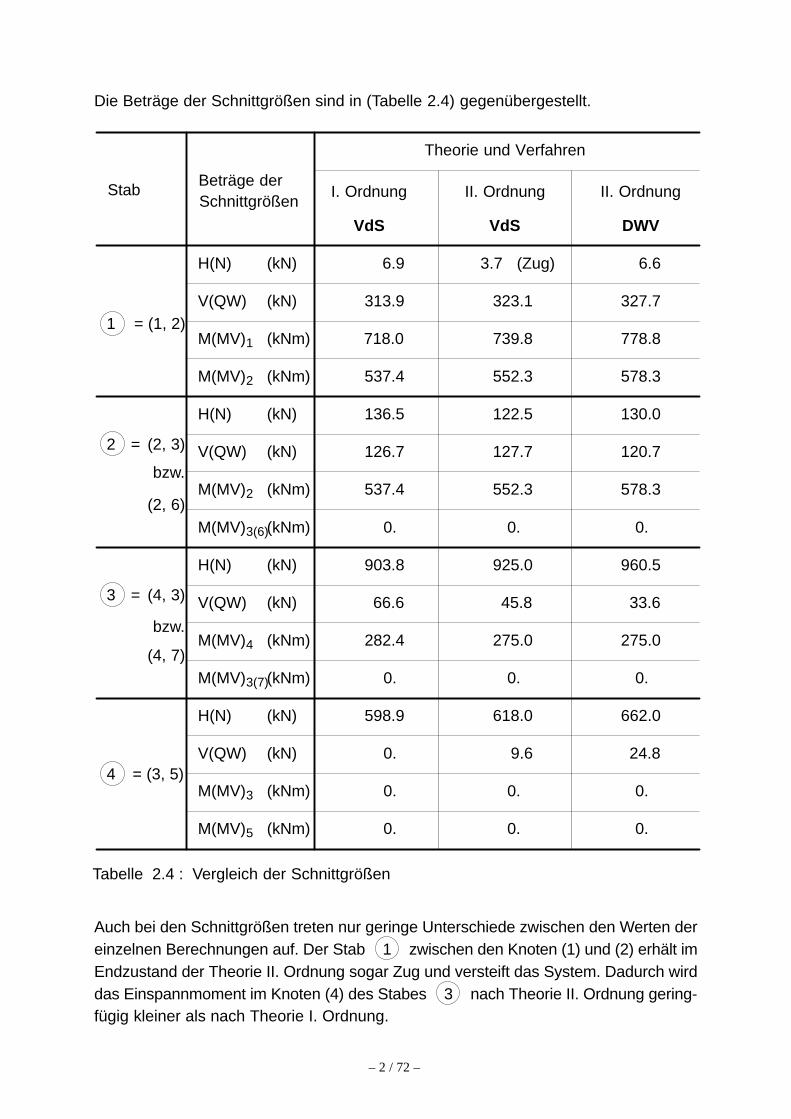
– 2 / 72 –
Die Beträge der Schnittgrößen sind in (Tabelle 2.4) gegenübergestellt.
1
Tabelle 2.4 : Vergleich der Schnittgrößen
Stab
= (1, 2)
2 =
3 =
4 = (3, 5)
Beträge derSchnittgrößen
Theorie und Verfahren
I. Ordnung II. Ordnung II. Ordnung
VdS VdS DWV
(2, 3)
bzw.
(2, 6)
(4, 3)
bzw.
(4, 7)
H(N) (kN)
V(QW) (kN)
M(MV)1 (kNm)
M(MV)2 (kNm)
H(N) (kN)
V(QW) (kN)
M(MV)2 (kNm)
M(MV)3(6)(kNm)
H(N) (kN)
V(QW) (kN)
M(MV)4 (kNm)
M(MV)3(7)(kNm)
H(N) (kN)
V(QW) (kN)
M(MV)3 (kNm)
M(MV)5 (kNm)
6.9
313.9
718.0
537.4
136.5
126.7
537.4
0.
903.8
66.6
282.4
0.
598.9
0.
0.
0.
3.7
323.1
739.8
552.3
122.5
127.7
552.3
0.
925.0
45.8
275.0
0.
618.0
9.6
0.
0.
6.6
327.7
778.8
578.3
130.0
120.7
578.3
0.
960.5
33.6
275.0
0.
662.0
24.8
0.
0.
(Zug)
Auch bei den Schnittgrößen treten nur geringe Unterschiede zwischen den Werten dereinzelnen Berechnungen auf. Der Stab 1 zwischen den Knoten (1) und (2) erhält imEndzustand der Theorie II. Ordnung sogar Zug und versteift das System. Dadurch wirddas Einspannmoment im Knoten (4) des Stabes 3 nach Theorie II. Ordnung gering-fügig kleiner als nach Theorie I. Ordnung.
– 2 / 73 –
Die Elementierung des VdS–Berechnungssystems (Bild 2.33) besteht aus einem Ele-ment pro Stab. Eine Überprüfung der Elementlänge im Stab 3 , der mit |H| � 925. kNdie größte Längskraft aufweist, ergibt eine minimale Elementlänge, die mit
s � 2.5 EI|H|� � 2.5 20 000.
925.� � 11.65 m
deutlich größer ausfällt als die wirkliche Elementlänge, die lediglich
s � 3 2� � 4.25 m
beträgt. Die Elementierung ist also ausreichend fein gewählt, um der Genauigkeitsan-forderung nach Gl. (2.45) zu genügen. Eine Kontrollberechnung mit 20 Unterteilungenpro Stab bestätigt die Ergebnisse der Berechnung ohne Unterteilung. Der Momenten-verlauf aus den Berechnungen mit unterschiedlichen Elementunterteilungen ist im(Bild 2.34) dargestellt. (Bild 2.34a) zeigt den Verlauf mit einem Element pro Stab und(Bild 2.34b) den Verlauf mit 20 Elementen.
2.5 Stabilität von Gleichgewichtszuständen
Der Nachweis der Standsicherheit von Tragwerken des konstruktiven Ingenieurbaus istnach den allgemein anerkannten Regeln der Bautechnik zu führen. Sie sind in Abhän-gigkeit von der speziellen Problemstellung in technischen Regelwerken zusammenge-faßt. Details zur Stabilität sind z.B. DIN 1045, DIN 18 800 oder vergleichbaren Werkenzu entnehmen.
Für druckbeanspruchte Tragwerke ist der Nachweis der Standsicherheit erbracht, wennsich das tragende System im stabilen Gleichgewicht befindet. Das Adjektiv stabil istdabei von besonderer Bedeutung. Erfolgt der Nachweis durch eine Spannungsberech-nung auf der Grundlage der Theorie II. Ordnung, ist zusätzlich die Stabilität des Gleich-gewichts zu überprüfen. Es reicht nicht aus, lediglich die Weg– und Kraftgrößen der ver-formten Gleichgewichtslage zu berechnen und mit Grenzwerten der Regelwerke zuvergleichen. Diese Lage ist nämlich nur dann als uneingeschränkt stabil anzusehen,wenn eindeutig bekannt ist, daß das Lastniveau, für das der Spannungsnachweis er-bracht wird, unterhalb des kritischen Lastniveaus des speziell betrachteten Tragwerksliegt.
Der vollständige Nachweis der Standsicherheit von druckbeanspruchten Tragwerkenbesteht daher immer aus zwei voneinander unabhängigen Berechnungsschritten:
1. Der Berechnung von Weg– und Kraftgrößen der verformten Gleichgewichtslagedurch die Lösung des Spannungsproblems nach Theorie II. Ordnung.
2. Die Überprüfung der Stabilität durch die Lösung des begleitenden Stabilitäts–problems.
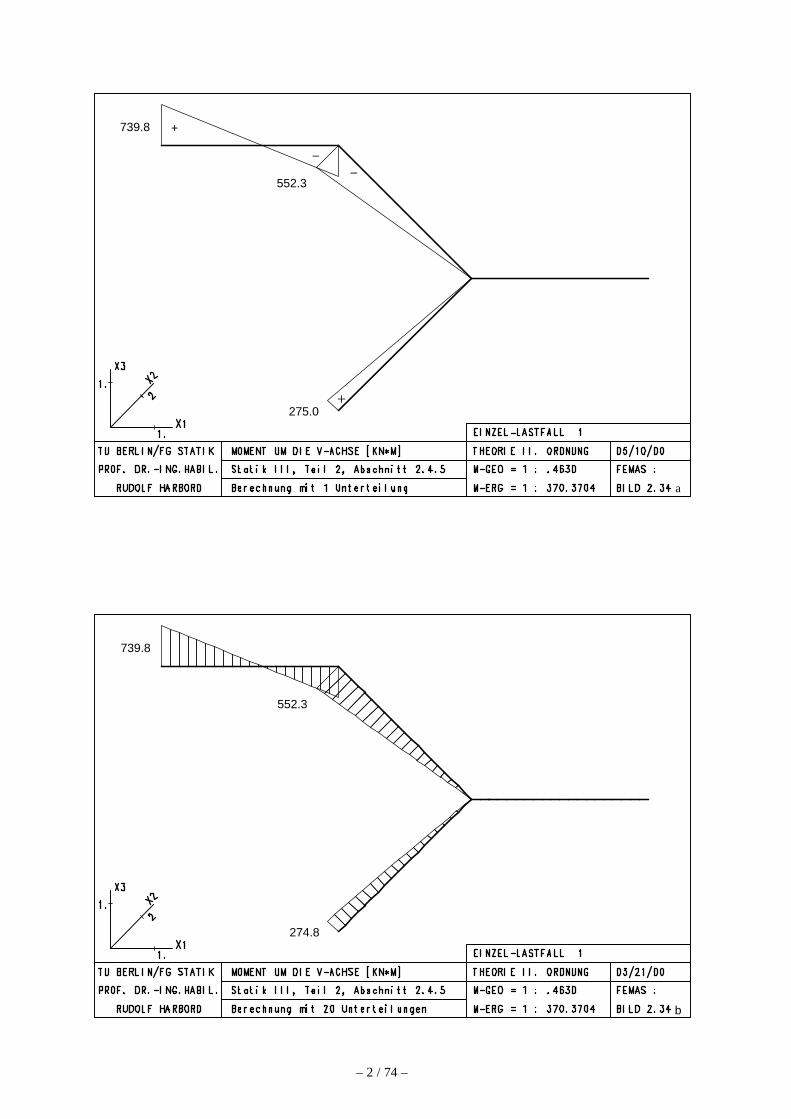
– 2 / 74 –
a
552.3
739.8
275.0
+
––
+
552.3
739.8
274.8
b
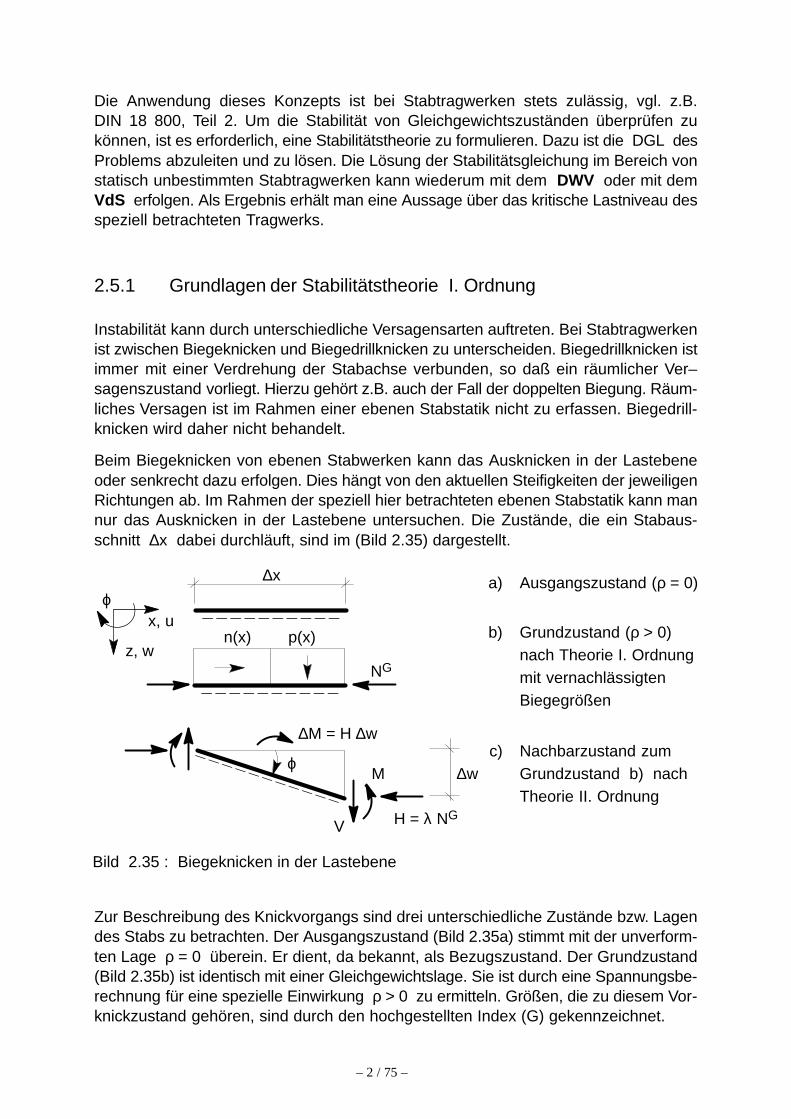
– 2 / 75 –
Die Anwendung dieses Konzepts ist bei Stabtragwerken stets zulässig, vgl. z.B.DIN 18 800, Teil 2. Um die Stabilität von Gleichgewichtszuständen überprüfen zukönnen, ist es erforderlich, eine Stabilitätstheorie zu formulieren. Dazu ist die DGL desProblems abzuleiten und zu lösen. Die Lösung der Stabilitätsgleichung im Bereich vonstatisch unbestimmten Stabtragwerken kann wiederum mit dem DWV oder mit demVdS erfolgen. Als Ergebnis erhält man eine Aussage über das kritische Lastniveau desspeziell betrachteten Tragwerks.
2.5.1 Grundlagen der Stabilitätstheorie I. Ordnung
Instabilität kann durch unterschiedliche Versagensarten auftreten. Bei Stabtragwerkenist zwischen Biegeknicken und Biegedrillknicken zu unterscheiden. Biegedrillknicken istimmer mit einer Verdrehung der Stabachse verbunden, so daß ein räumlicher Ver–sagenszustand vorliegt. Hierzu gehört z.B. auch der Fall der doppelten Biegung. Räum-liches Versagen ist im Rahmen einer ebenen Stabstatik nicht zu erfassen. Biegedrill-knicken wird daher nicht behandelt.
Beim Biegeknicken von ebenen Stabwerken kann das Ausknicken in der Lastebeneoder senkrecht dazu erfolgen. Dies hängt von den aktuellen Steifigkeiten der jeweiligenRichtungen ab. Im Rahmen der speziell hier betrachteten ebenen Stabstatik kann mannur das Ausknicken in der Lastebene untersuchen. Die Zustände, die ein Stabaus-schnitt ∆x dabei durchläuft, sind im (Bild 2.35) dargestellt.
Bild 2.35 : Biegeknicken in der Lastebene
∆x
ϕ
x, u
z, wn(x) p(x)
NG
∆M = H ∆w
a) Ausgangszustand (ρ = 0)
b) Grundzustand (ρ > 0)nach Theorie I. Ordnungmit vernachlässigtenBiegegrößen
c) Nachbarzustand zumGrundzustand b) nachTheorie II. Ordnung
M
H = λ NG
∆w
V
ϕ
Zur Beschreibung des Knickvorgangs sind drei unterschiedliche Zustände bzw. Lagendes Stabs zu betrachten. Der Ausgangszustand (Bild 2.35a) stimmt mit der unverform-ten Lage ρ = 0 überein. Er dient, da bekannt, als Bezugszustand. Der Grundzustand(Bild 2.35b) ist identisch mit einer Gleichgewichtslage. Sie ist durch eine Spannungsbe-rechnung für eine spezielle Einwirkung ρ > 0 zu ermitteln. Größen, die zu diesem Vor-knickzustand gehören, sind durch den hochgestellten Index (G) gekennzeichnet.
– 2 / 76 –
Ziel der Stabilitätsbetrachtung ist es, zur Überprüfung der Stabilität von Gleichge–wichtszuständen ein deterministisches Kriterium zu entwickeln. Dazu ist die Gleichge-wichtslage des Grundzustands noch genauer zu definieren. Sie kann sich aus einerBerechnung nach Theorie I. oder nach Theorie II. Ordnung ergeben. Da der Tragfähig-keitsnachweis aber bereits nach Theorie II. Ordnung erfolgt, reicht es aus, als Grundzu-stand der Stabilitätstheorie den Gleichgewichtszustand ρ = 1 nach Theorie I. Ordnungzu wählen, um mit dem so definierten Spannungszustand die Knicklast zu berechnen.Ist das kritische Lastniveau bekannt, läßt sich das tatsächliche Lastniveau, daß derSpannungsberechnung nach Theorie II. Ordnung zugrunde liegt, in einfacher Weisenach oben begrenzen. Es gilt
FTheorie II. Ordnung � FKnicken. (2.47)
Das tatsächliche Lastniveau ist als Vorgabe der Berechnung bekannt. In Anlehnung antechnische Regelwerke sind Bemessungslastfälle zu bilden, die aus Kombinationenvon Einwirkungen bestehen. Bei der Zusammenstellung der Lastkombinationen sinddie Einwirkungen um spezielle Teilsicherheitsfaktoren zu erhöhen, um im Hinblick aufdie Sicherheit das ungünstigste Verhalten jeder Einwirkungsart zu erfassen.
Das kritische Lastniveau hängt dagegen vom Verhalten des Tragwerks ab. Die Knick-last ist diejenige Einwirkung, bei der ein Tragwerk in eine zum Grundzustand benach-barte Gleichgewichtslage ausknickt. Das Knicken ist demnach als ein Verzweigen vonGleichgewichtszuständen zu interpretieren. Die ausgeknickte Lage wird als Nachbar-zustand bezeichnet (Bild 2.35c).
Das Ausknicken erfolgt schlagartig, wenn die Druckkraft NG des Grundzustands denWert λ NG erreicht. Beim Grundzustand nach Theorie I. Ordnung besteht zwischen derDruckkraft NG und der erzeugenden Einwirkung FG = ρ F, ρ = 1 ein linearer Zusammen-hang. Mit dem Steigerungsfaktor λ der Druckkraft NG ist daher auch der Steigerungs-faktor ρ der Einwirkung FG bekannt. Dieser Faktor wird als kritischer Lastfaktor be-zeichnet. Er ist durch den Index (k) markiert, so daß
�k � � (2.48)
gilt. Mit Gl. (2.48) berechnet sich die in Gl. (2.47) eingeführte Knicklast zu
FKnicken � �k FG � �k F � � F . (2.49)
Mit der Kenntnis von λ ist das durch Gl. (2.47) eingeführte Kontrollkriterium eindeutigdefiniert. Die DGL der Stabilitätstheorie ist daher als Bestimmungsgleichung für λ zukonzipieren, um λ als Zahlenwert berechnen zu können.
Druckkräfte in Stäben von Tragwerken können in unterschiedlicher Form ohne und mitBiegung auftreten (Bild 2.36). Die Lastkonfiguration des Grundzustands im (Bild 2.36a)wird vielfach als Stabilitätsproblem bezeichnet, weil keine Biege– sondern eine reineDruckkraftbeanspruchung vorliegt (Bilder 2.36a1 bis a3). Für diesen Fall ergibt eine
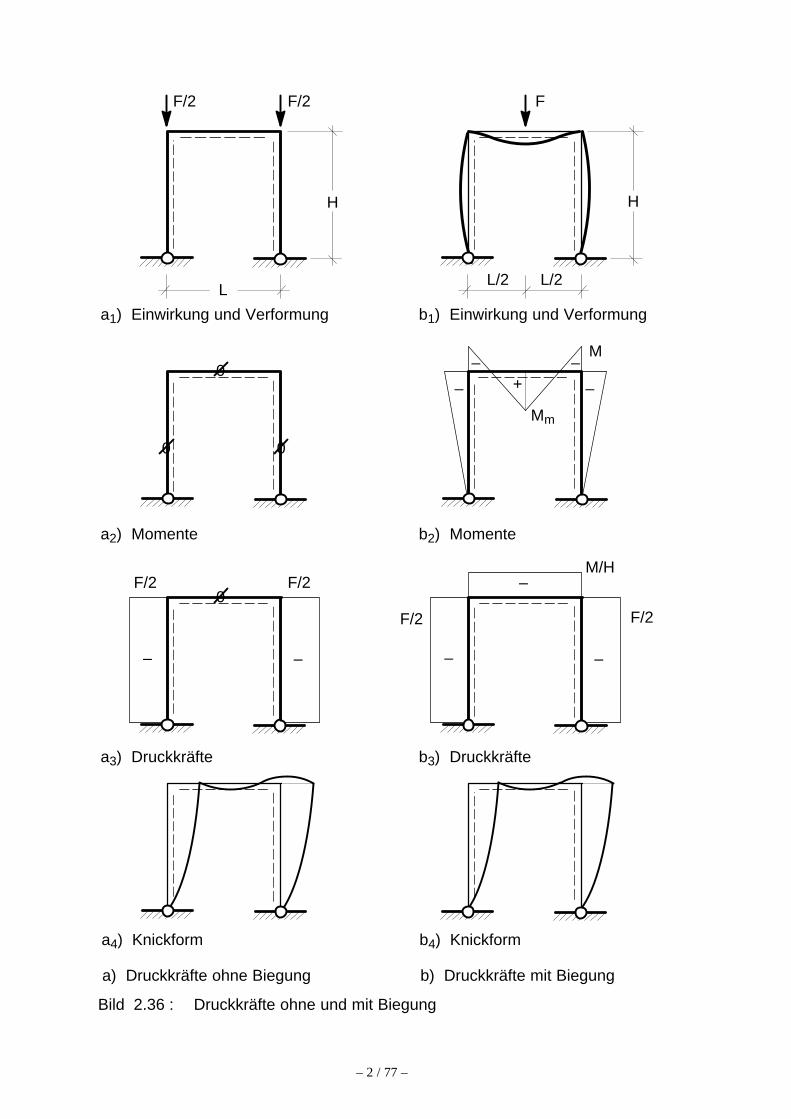
– 2 / 77 –
Bild 2.36 : Druckkräfte ohne und mit Biegung
a1) Einwirkung und Verformung
+
b1) Einwirkung und Verformung
––
H
L
F/2F/2
H
L/2
F
L/2
a2) Momente b2) Momente
0
0
0
a3) Druckkräfte b3) Druckkräfte
0
M
Mm
––
– –
F/2F/2 –
––
F/2 F/2
M/H
a4) Knickform b4) Knickform
a) Druckkräfte ohne Biegung b) Druckkräfte mit Biegung
– 2 / 78 –
Spannungsberechnung nach Theorie II. Ordnung keinen Sinn. Das zulässige Last–niveau hängt ausschließlich von der Ausknickgefahr ab. Infolge der Steifigkeitsverhält-nisse stellt sich eine antimetrische Knickform ein (Bild 2.36a4), da ein Tragwerk immerin Richtung der geringsten Steifigkeit ausknickt. Nach Gl. (2.47) ist die Knicklast, die zudieser Form gehört, als Grenzzustand der Einwirkungen zu beachten.
Die Lastkonfiguration im (Bild 2.36b) führt dagegen zu einer kombinierten Beanspru-chung aus Biegung und Druckkräften (Bilder 2.36b1 bis b3). Durch die Biegung tretennun auch im Riegel Druckkräfte auf. Im Vergleich zur Lastkonfiguration (Bild 2.36a) mußdie Knicklast daher geringfügig abnehmen. Da sich die Steifigkeitsverhältnisse desSystems aber nicht geändert haben, muß wiederum eine antimetrische Knickform auf-treten (Bild 2.36b4). Ein Tragfähigkeitsnachweis nach Theorie II. Ordnung folgt aber dersymmetrischen Verschiebungsform im (Bild 2.36b1). Er würde damit die antimetrischeKnickform (Bild 2.36b4) überlaufen, wenn eine Kontrolle des Lastniveaus durch dieKnicklast nach Gl. (2.47) und Gl. (2.49) unterbleibt.
Der Nachbarzustand (Bild 2.35c) ist ein Biegezustand nach Theorie II. Ordnung. Beider Aufstellung der Gleichgewichtsbedingung ist daher zusätzlich das Versatzmoment∆M = H ⋅ ∆w zu berücksichtigen, das sich im Augenblick des Ausknickens durch dieWirkung der um λ erhöhten Druckkraft
H � � ⋅ NG (2.50)
des Grundzustands einstellt. Die Biegegrößen (wG, ϕG, QG und MG) des Grundzu-stands beeinflussen das Ausknicken dagegen kaum und werden ersatzlos vernach–lässigt. Das Spannungsniveau unmittelbar vor dem Ausknicken ist durch Gl. (2.50)fixiert. Damit ist nach Gl. (2.48) auch das zugehörige Lastniveau bekannt. Der Über-gang in den ausgeknickten Zustand erfolgt ohne zusätzliche Laststeigerung. Es ist da-her lediglich der homogene Anteil
w����(x) ����s �2
w��(x) � 0 (2.51)
der DGL (2.23) zu lösen, um den Knickfaktor λ zu erhalten. Die zugehörige analytischeLösung Gl. (2.25.2) läßt sich in Abhängigkeit von der Stabkennzahl
�� � s�� NG�
EI� (2.52)
auswerten, die nun ihrerseits vom Knickfaktor λ abhängt.
Die Berechnung mit dem DWV beruht auf der im Abschnitt 2.3 entwickelten Vorgehens-weise. Änderungen gegenüber der Vorgehensweise beim Spannungsproblem ergebensich nicht. Es ist die Determinantenbedingung
det�w����(x) ����s �2
w��(x)� � det (�) � 0 (2.53)
zu erfüllen, um λ als kleinsten Wert der DGL (2.51) explizit berechnen zu können. Diesist nur auf iterativem Weg möglich. Einzelheiten werden im Abschnitt 2.5.3 angegeben.
– 2 / 79 –
Die Berechnung mit dem VdS beruht auf der im Abschnitt 2.4 entwickelten Vorgehens-weise. Der homogene Anteil des PvW Gl. (2.40) ersetzt in statisch gleichwertiger Weisedie DGL (2.51). Die Arbeitsgleichung (2.40.2) ist mit der Druckkraft Gl. (2.50) auszuwer-ten und als Eigenwertproblem für λ zu formulieren. Es ist der Rayleigh–Quotient
� �
�w��v(x) EI w��(x) dx
�w�v(x) NG w�(x) dx
(2.54)
zu erfüllen, um λ als kleinsten Wert der DGL (2.51) explizit berechnen zu können. Diesist auf iterativem Weg oder durch die Lösung eines allgemeinen Eigenwertproblemsmöglich. Einzelheiten werden im Abschnitt 2.5.4 angegeben.
2.5.2 Bewertung der Stabilitätskontrolle
Die Determinantenbedingung Gl. (2.53) bzw. der Rayleigh–Quotient Gl. (2.54) be-schreiben das Verhalten am Verzweigungspunkt (Bild 2.37). Durch diesen Punkt ist derBeginn des Ausknickens festgelegt. Für Einzelstäbe und Stabtragwerke ist damit einhinreichendes Kriterium bekannt, um die Stabilität von Gleichgewichtszuständen zukontrollieren. Der gesamte Nachknickbereich wird nach Gl. (2.47) durch die Angabe derKnicklast begrenzt. Auch wenn die Spannungsberechnung nach Theorie II. Ordnungüber diesen Wert hinausführt, greift die Kontrolle durch Gl. (2.47). Im (Bild 2.37a) ist die-ser Fall am Beispiel der Lastkonfiguration (Bild 2.36b) dargestellt.
Die Spannungsberechnung nach Theorie II. Ordnung konvergiert gegen eine zur Ver-formungsfigur affine Knickform. Dies ist aber eine höhere Knickform, im vorliegendenFall eine symmetrische, nämlich die zweite, zu der eine wesentlich höhere Verzwei-gungslast als die Knicklast gehört. Diese Last kann in Wirklichkeit nicht erreicht werden,da das System schon beim Erreichen des kritischen Lastniveaus versagt, nämlich derKnicklast, die zur antimetrischen ersten und damit kritischen Knickform gehört, vgl.(Bild 2.37a).
Der Tragfähigkeitsnachweis nach Thorie II. Ordnung geht fehl, da er aus dem stabilenTragbereich hinaus in den labilen Tragbereich führt, vgl. (Bild 2.37a). Die Kontrolle nachGl. (2.47) ist daher unabdingbar, um diesen Sachverhalt zu erkennen.
Knicklasten begrenzen mit ρ = ρk das Tragvermögen von Einzelstäben und Stabtrag-werken. Diese Aussage läßt sich aber nicht uneingeschränkt auf Flächentragwerkeübertragen (Bild 2.37b). Das Tragvermögen von Platten ist bei weitem noch nicht er-schöpft, wenn die Platte ausknickt; ein Vorgang, der bei Flächentragwerken ausbeulenheißt. Platten verfügen mit ρ > ρk über einen hohen überkritischen Tragbereich, wäh-rend bei Schalen mit ρ < ρk das Tragvermögen nach dem Ausbeulen stark abnimmt.Beullasten sind daher ungeeignet, um Gleichgewichtszustände von Flächentrag–werken im Grenzbereich der Stabilität in eindeutiger Weise kontrollieren zu können.
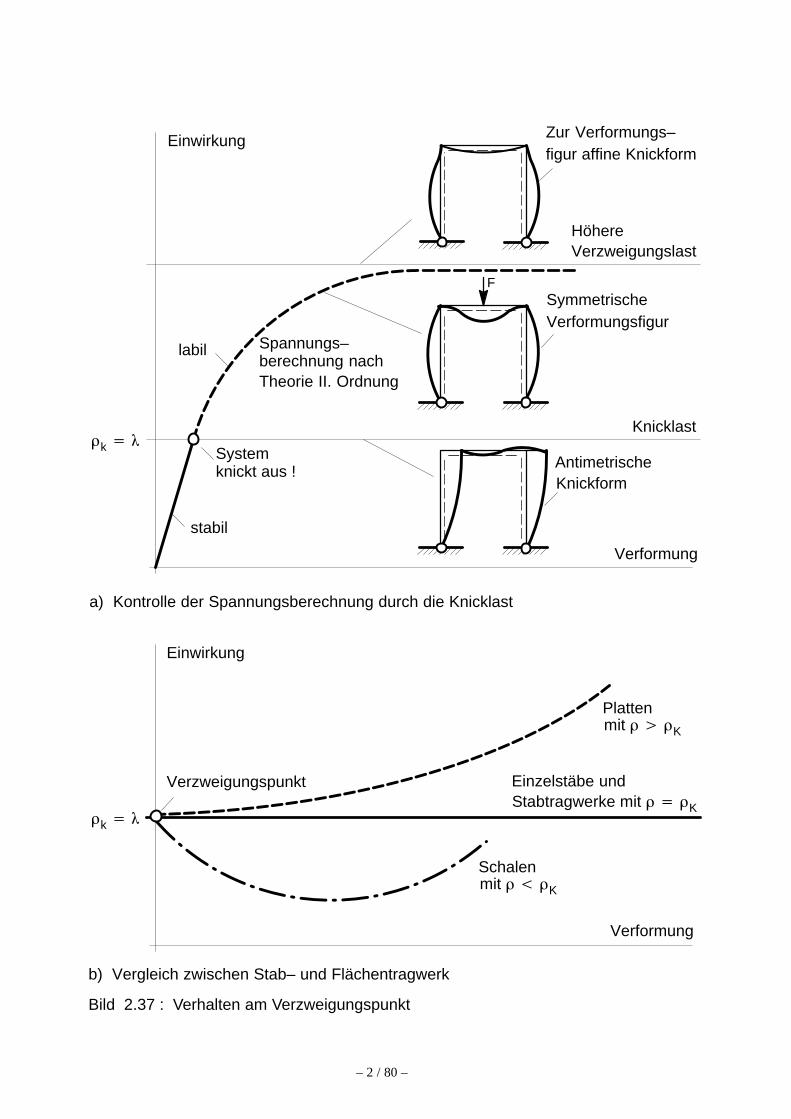
– 2 / 80 –
Einwirkung
�k � �
Bild 2.37 : Verhalten am Verzweigungspunkt
Verformung
Verformungsfigur
F
Knicklast
HöhereVerzweigungslast
Zur Verformungs–figur affine Knickform
Knickform
Spannungs–berechnung nachTheorie II. Ordnung
labil
stabil
Systemknickt aus !
a) Kontrolle der Spannungsberechnung durch die Knicklast
�k � �
Einwirkung
Verformung
b) Vergleich zwischen Stab– und Flächentragwerk
Verzweigungspunkt Einzelstäbe und
Platten
Schalen
Symmetrische
Antimetrische
mit � � �K
Stabtragwerke mit � � �K
mit � � �K
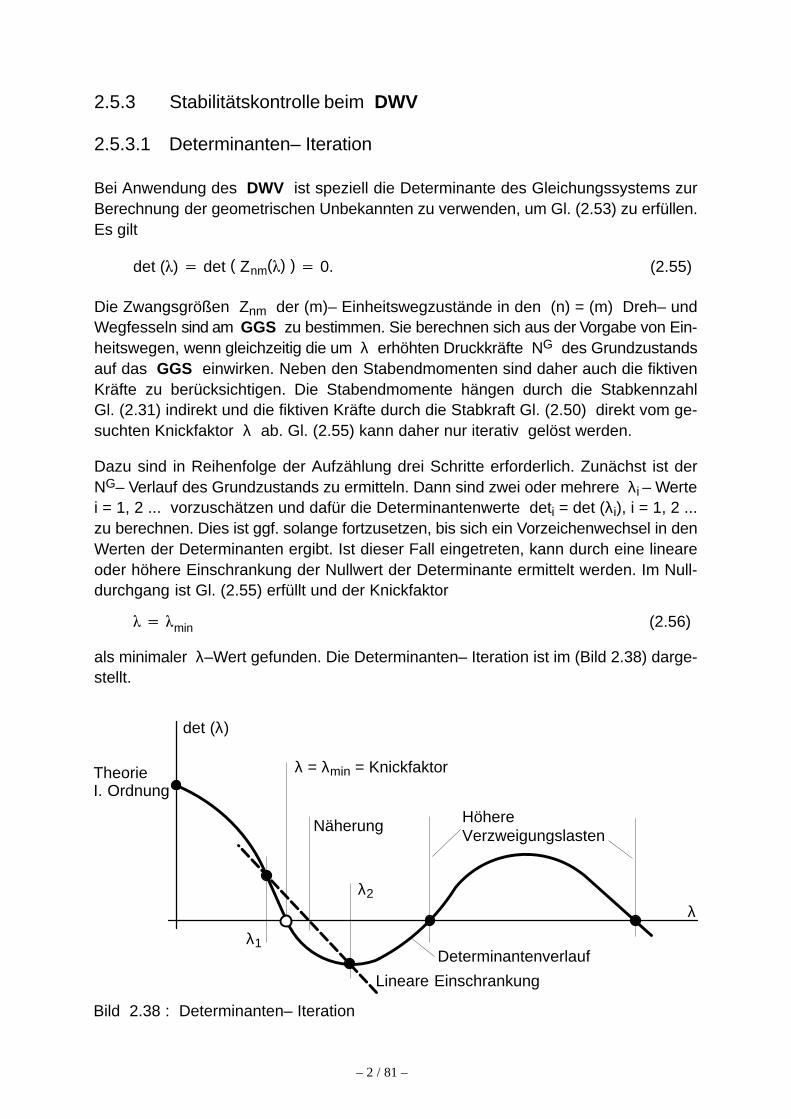
– 2 / 81 –
2.5.3 Stabilitätskontrolle beim DWV
2.5.3.1 Determinanten– Iteration
Bei Anwendung des DWV ist speziell die Determinante des Gleichungssystems zurBerechnung der geometrischen Unbekannten zu verwenden, um Gl. (2.53) zu erfüllen.Es gilt
det (�) � det ( Znm(�) ) � 0. (2.55)
Die Zwangsgrößen Znm der (m)– Einheitswegzustände in den (n) = (m) Dreh– undWegfesseln sind am GGS zu bestimmen. Sie berechnen sich aus der Vorgabe von Ein-heitswegen, wenn gleichzeitig die um λ erhöhten Druckkräfte NG des Grundzustandsauf das GGS einwirken. Neben den Stabendmomenten sind daher auch die fiktivenKräfte zu berücksichtigen. Die Stabendmomente hängen durch die StabkennzahlGl. (2.31) indirekt und die fiktiven Kräfte durch die Stabkraft Gl. (2.50) direkt vom ge-suchten Knickfaktor λ ab. Gl. (2.55) kann daher nur iterativ gelöst werden.
Dazu sind in Reihenfolge der Aufzählung drei Schritte erforderlich. Zunächst ist derNG– Verlauf des Grundzustands zu ermitteln. Dann sind zwei oder mehrere λi – Wertei = 1, 2 ... vorzuschätzen und dafür die Determinantenwerte deti = det (λi), i = 1, 2 ...zu berechnen. Dies ist ggf. solange fortzusetzen, bis sich ein Vorzeichenwechsel in denWerten der Determinanten ergibt. Ist dieser Fall eingetreten, kann durch eine lineareoder höhere Einschrankung der Nullwert der Determinante ermittelt werden. Im Null-durchgang ist Gl. (2.55) erfüllt und der Knickfaktor
� � �min (2.56)
als minimaler λ–Wert gefunden. Die Determinanten– Iteration ist im (Bild 2.38) darge-stellt.
Bild 2.38 : Determinanten– Iteration
HöhereVerzweigungslasten
λ
det (λ)
λ2
λ1
Näherung
λ = λmin = KnickfaktorTheorieI. Ordnung
Determinantenverlauf
Lineare Einschrankung
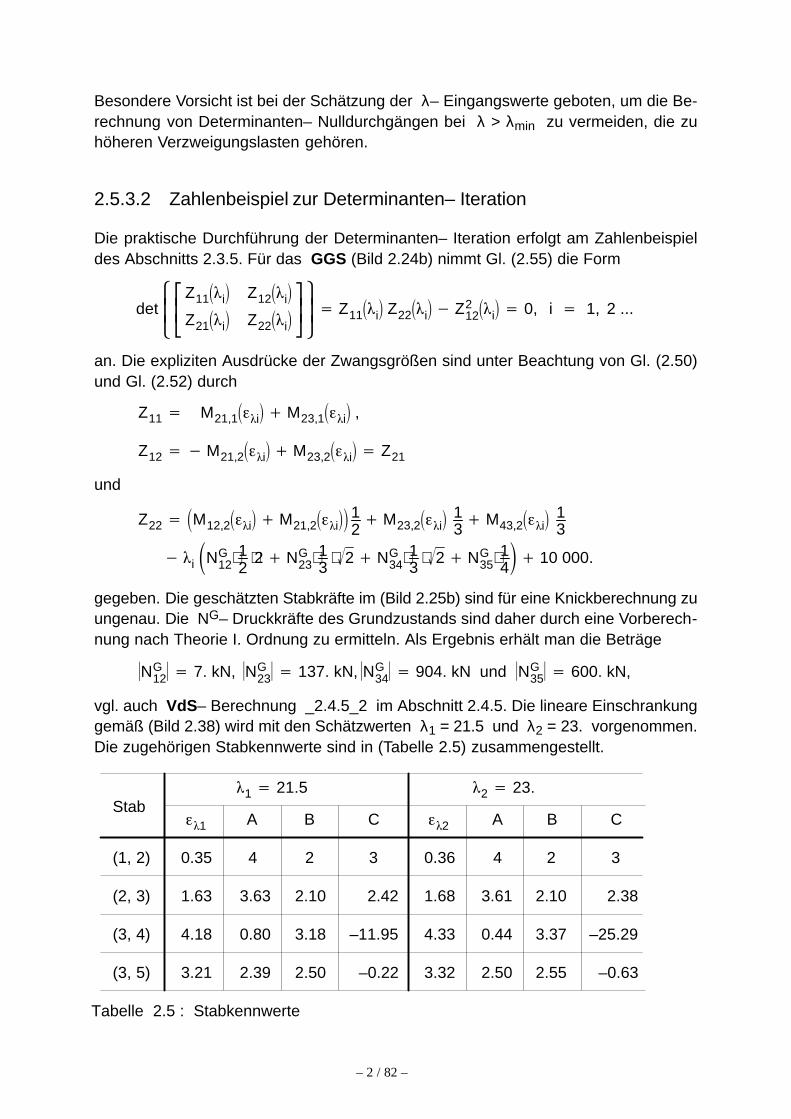
– 2 / 82 –
Besondere Vorsicht ist bei der Schätzung der λ– Eingangswerte geboten, um die Be-rechnung von Determinanten– Nulldurchgängen bei λ > λmin zu vermeiden, die zuhöheren Verzweigungslasten gehören.
2.5.3.2 Zahlenbeispiel zur Determinanten– Iteration
Die praktische Durchführung der Determinanten– Iteration erfolgt am Zahlenbeispieldes Abschnitts 2.3.5. Für das GGS (Bild 2.24b) nimmt Gl. (2.55) die Form
det���
Z11��i� Z12
��i�
Z21��i� Z22
��i� ��� � Z11
��i� Z22
��i� � Z2
12��i� � 0, i � 1, 2 ...
an. Die expliziten Ausdrücke der Zwangsgrößen sind unter Beachtung von Gl. (2.50)und Gl. (2.52) durch
Z11 � M21,1���i
� � M23,1���i
� ,
Z12 � � M21,2���i
� � M23,2���i
� � Z21
und
Z22 � �M12,2���i
� � M21,2���i
��12� M23,2
���i� 1
3� M43,2
���i� 1
3
� �i �NG12⋅ 1
2⋅2 � NG
23⋅ 13
⋅ 2� � NG34⋅ 1
3⋅ 2� � NG
35⋅ 14�� 10 000.
gegeben. Die geschätzten Stabkräfte im (Bild 2.25b) sind für eine Knickberechnung zuungenau. Die NG– Druckkräfte des Grundzustands sind daher durch eine Vorberech-nung nach Theorie I. Ordnung zu ermitteln. Als Ergebnis erhält man die Beträge
�NG12� � 7. kN, �NG
23� � 137. kN, �NG
34� � 904. kN und �NG
35� � 600. kN,
vgl. auch VdS– Berechnung _2.4.5_2 im Abschnitt 2.4.5. Die lineare Einschrankunggemäß (Bild 2.38) wird mit den Schätzwerten λ1 = 21.5 und λ2 = 23. vorgenommen.Die zugehörigen Stabkennwerte sind in (Tabelle 2.5) zusammengestellt.
��1
Stab�1 � 21.5 �2 � 23.
(1, 2)
(2, 3)
(3, 4)
(3, 5) 3.21 2.39 2.50 –0.22 3.32 2.50 2.55 –0.63
A B C ��2 A B C
4.18 0.80 3.18 –11.95 4.33 0.44 3.37 –25.29
1.63 3.63 2.10 2.42 1.68 3.61 2.10 2.38
0.35 4 2 3 0.36 4 2 3
Tabelle 2.5 : Stabkennwerte
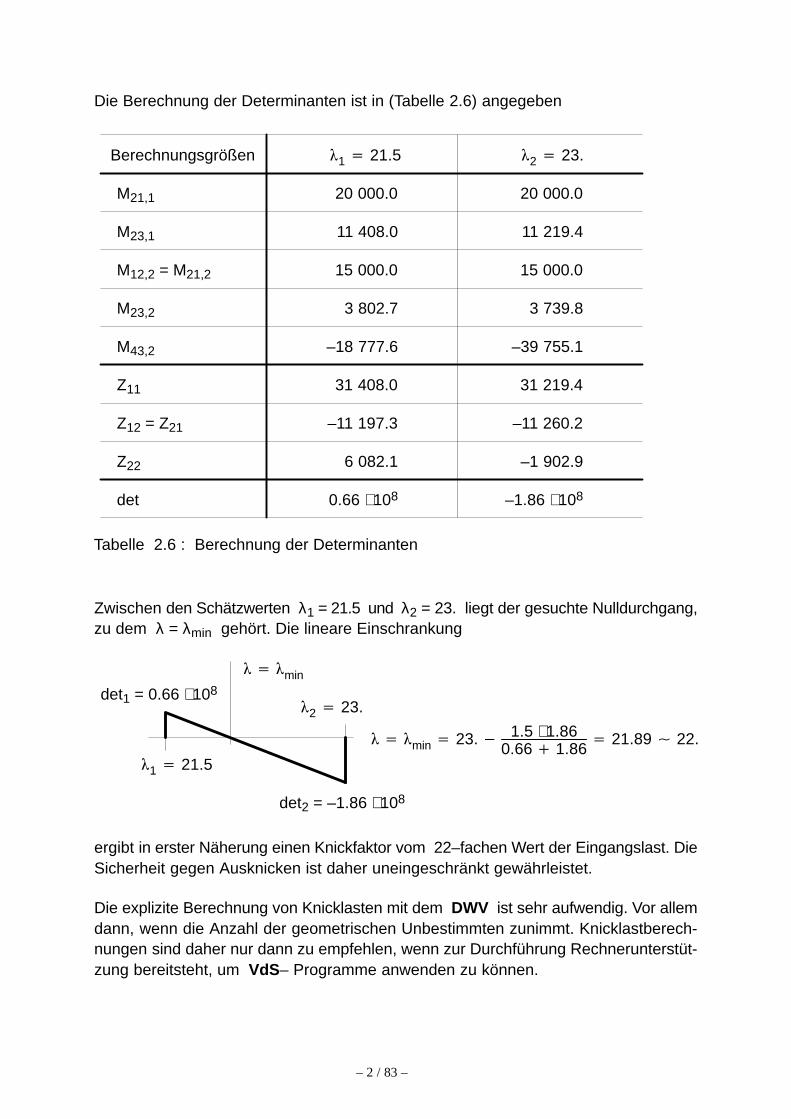
– 2 / 83 –
Die Berechnung der Determinanten ist in (Tabelle 2.6) angegeben
�1 � 21.5
Tabelle 2.6 : Berechnung der Determinanten
Berechnungsgrößen �2 � 23.
M21,1
M23,1
M12,2 = M21,2
M23,2
M43,2
Z11
Z12 = Z21
Z22
det
20 000.0
11 408.0
15 000.0
3 802.7
–18 777.6
31 408.0
–11 197.3
6 082.1
0.66 ⋅ 108
20 000.0
11 219.4
15 000.0
3 739.8
–39 755.1
31 219.4
–11 260.2
–1 902.9
–1.86 ⋅ 108
Zwischen den Schätzwerten λ1 = 21.5 und λ2 = 23. liegt der gesuchte Nulldurchgang,zu dem λ = λmin gehört. Die lineare Einschrankung
� � �min
det1 = 0.66 ⋅ 108�2 � 23.
�1 � 21.5
det2 = –1.86 ⋅ 108
� � �min � 23. � 1.5 ⋅ 1.860.66 � 1.86
� 21.89 � 22.
ergibt in erster Näherung einen Knickfaktor vom 22–fachen Wert der Eingangslast. DieSicherheit gegen Ausknicken ist daher uneingeschränkt gewährleistet.
Die explizite Berechnung von Knicklasten mit dem DWV ist sehr aufwendig. Vor allemdann, wenn die Anzahl der geometrischen Unbestimmten zunimmt. Knicklastberech-nungen sind daher nur dann zu empfehlen, wenn zur Durchführung Rechnerunterstüt-zung bereitsteht, um VdS– Programme anwenden zu können.
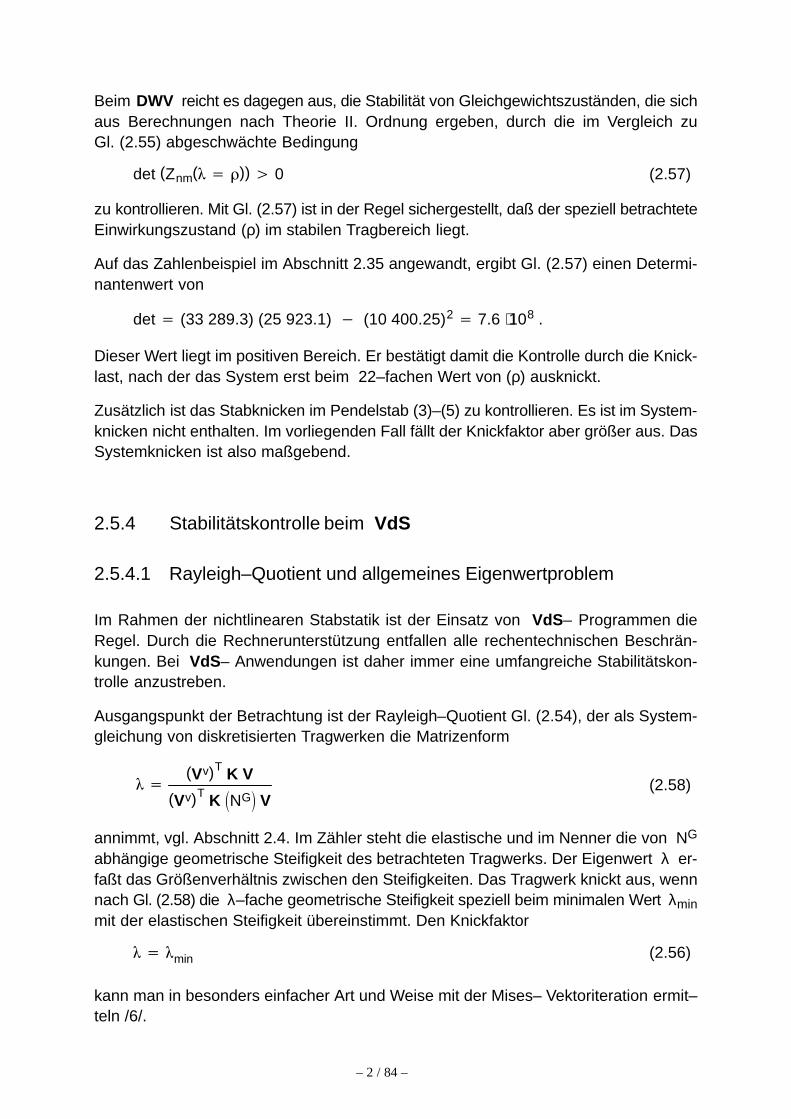
– 2 / 84 –
Beim DWV reicht es dagegen aus, die Stabilität von Gleichgewichtszuständen, die sichaus Berechnungen nach Theorie II. Ordnung ergeben, durch die im Vergleich zuGl. (2.55) abgeschwächte Bedingung
det (Znm(� � �)) � 0 (2.57)
zu kontrollieren. Mit Gl. (2.57) ist in der Regel sichergestellt, daß der speziell betrachteteEinwirkungszustand (ρ) im stabilen Tragbereich liegt.
Auf das Zahlenbeispiel im Abschnitt 2.35 angewandt, ergibt Gl. (2.57) einen Determi-nantenwert von
det � (33 289.3) (25 923.1) � (10 400.25)2 � 7.6 ⋅108 .
Dieser Wert liegt im positiven Bereich. Er bestätigt damit die Kontrolle durch die Knick-last, nach der das System erst beim 22–fachen Wert von (ρ) ausknickt.
Zusätzlich ist das Stabknicken im Pendelstab (3)–(5) zu kontrollieren. Es ist im System-knicken nicht enthalten. Im vorliegenden Fall fällt der Knickfaktor aber größer aus. DasSystemknicken ist also maßgebend.
2.5.4 Stabilitätskontrolle beim VdS
2.5.4.1 Rayleigh–Quotient und allgemeines Eigenwertproblem
Im Rahmen der nichtlinearen Stabstatik ist der Einsatz von VdS– Programmen dieRegel. Durch die Rechnerunterstützung entfallen alle rechentechnischen Beschrän-kungen. Bei VdS– Anwendungen ist daher immer eine umfangreiche Stabilitätskon-trolle anzustreben.
Ausgangspunkt der Betrachtung ist der Rayleigh–Quotient Gl. (2.54), der als System-gleichung von diskretisierten Tragwerken die Matrizenform
(2.58)� �(Vv)T K V
(Vv)T K �NG� V
annimmt, vgl. Abschnitt 2.4. Im Zähler steht die elastische und im Nenner die von NG
abhängige geometrische Steifigkeit des betrachteten Tragwerks. Der Eigenwert λ er-faßt das Größenverhältnis zwischen den Steifigkeiten. Das Tragwerk knickt aus, wennnach Gl. (2.58) die λ–fache geometrische Steifigkeit speziell beim minimalen Wert λminmit der elastischen Steifigkeit übereinstimmt. Den Knickfaktor
� � �min (2.56)
kann man in besonders einfacher Art und Weise mit der Mises– Vektoriteration ermit–teln /6/.
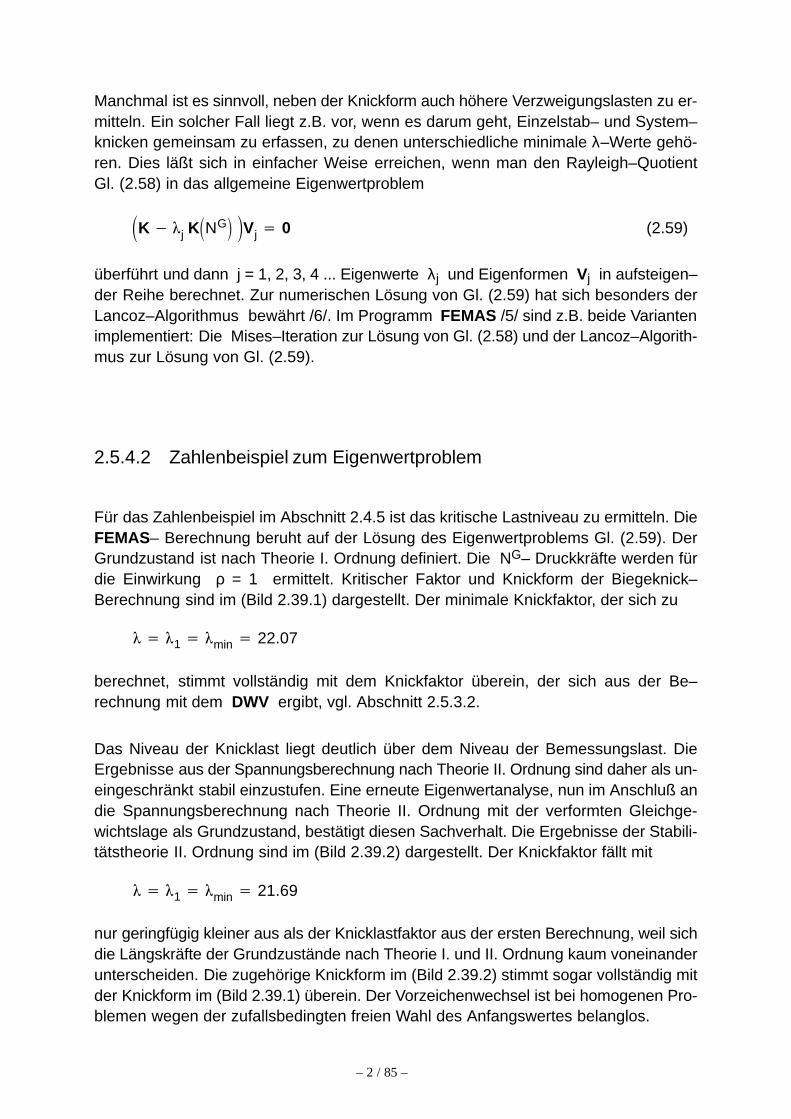
– 2 / 85 –
Manchmal ist es sinnvoll, neben der Knickform auch höhere Verzweigungslasten zu er-mitteln. Ein solcher Fall liegt z.B. vor, wenn es darum geht, Einzelstab– und System–knicken gemeinsam zu erfassen, zu denen unterschiedliche minimale λ–Werte gehö-ren. Dies läßt sich in einfacher Weise erreichen, wenn man den Rayleigh–QuotientGl. (2.58) in das allgemeine Eigenwertproblem
�K � �j K�NG� �Vj � 0 (2.59)
überführt und dann j = 1, 2, 3, 4 ... Eigenwerte λj und Eigenformen Vj in aufsteigen–der Reihe berechnet. Zur numerischen Lösung von Gl. (2.59) hat sich besonders derLancoz–Algorithmus bewährt /6/. Im Programm FEMAS /5/ sind z.B. beide Variantenimplementiert: Die Mises–Iteration zur Lösung von Gl. (2.58) und der Lancoz–Algorith-mus zur Lösung von Gl. (2.59).
2.5.4.2 Zahlenbeispiel zum Eigenwertproblem
Für das Zahlenbeispiel im Abschnitt 2.4.5 ist das kritische Lastniveau zu ermitteln. DieFEMAS– Berechnung beruht auf der Lösung des Eigenwertproblems Gl. (2.59). DerGrundzustand ist nach Theorie I. Ordnung definiert. Die NG– Druckkräfte werden fürdie Einwirkung ρ = 1 ermittelt. Kritischer Faktor und Knickform der Biegeknick–Berechnung sind im (Bild 2.39.1) dargestellt. Der minimale Knickfaktor, der sich zu
� � �1 � �min � 22.07
berechnet, stimmt vollständig mit dem Knickfaktor überein, der sich aus der Be–rechnung mit dem DWV ergibt, vgl. Abschnitt 2.5.3.2.
Das Niveau der Knicklast liegt deutlich über dem Niveau der Bemessungslast. DieErgebnisse aus der Spannungsberechnung nach Theorie II. Ordnung sind daher als un-eingeschränkt stabil einzustufen. Eine erneute Eigenwertanalyse, nun im Anschluß andie Spannungsberechnung nach Theorie II. Ordnung mit der verformten Gleichge-wichtslage als Grundzustand, bestätigt diesen Sachverhalt. Die Ergebnisse der Stabili-tätstheorie II. Ordnung sind im (Bild 2.39.2) dargestellt. Der Knickfaktor fällt mit
� � �1 � �min � 21.69
nur geringfügig kleiner aus als der Knicklastfaktor aus der ersten Berechnung, weil sichdie Längskräfte der Grundzustände nach Theorie I. und II. Ordnung kaum voneinanderunterscheiden. Die zugehörige Knickform im (Bild 2.39.2) stimmt sogar vollständig mitder Knickform im (Bild 2.39.1) überein. Der Vorzeichenwechsel ist bei homogenen Pro-blemen wegen der zufallsbedingten freien Wahl des Anfangswertes belanglos.
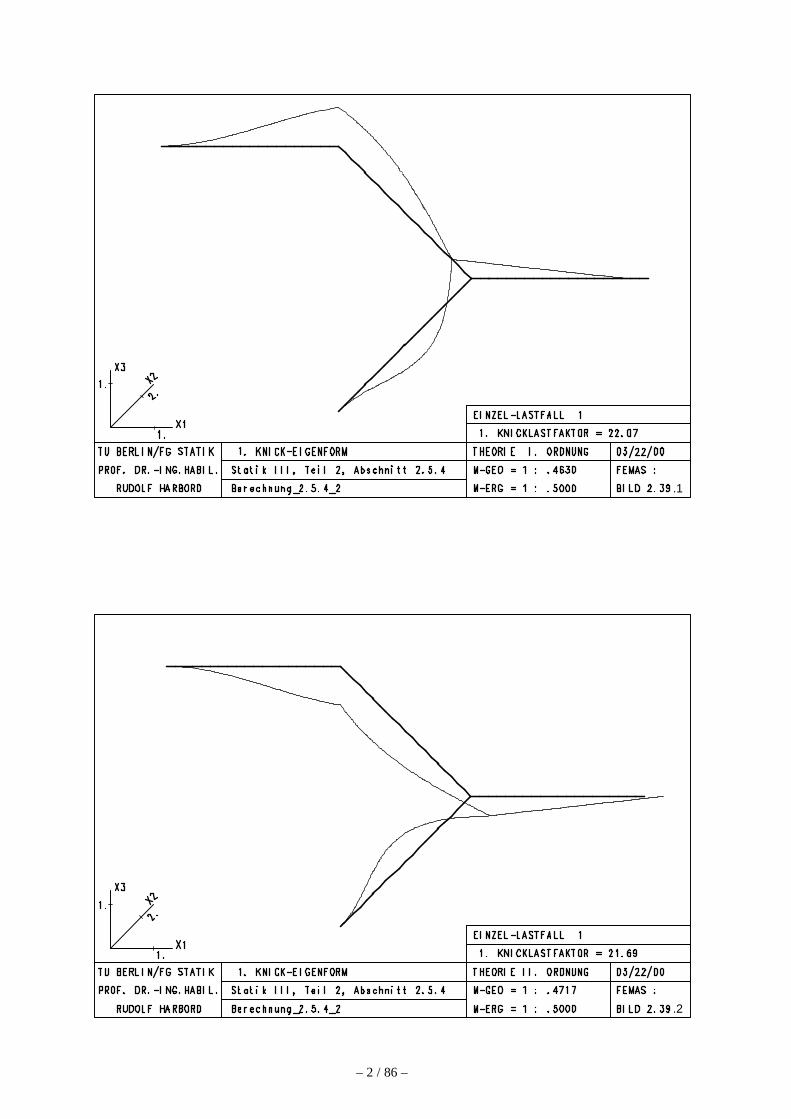
– 2 / 86 –
.1
.2
– 2 / 87 –
2.6 Einfluß von Imperfektionen
Die bisherigen baustatischen Betrachtungen beruhen ausnahmslos auf der Vorstel-lung, daß die Geometrie und das Material von Tragwerken im Entwurf und im Bauwerkvollständig übereinstimmen. Durch den Prozess des Bauens sind aber Abweichungenvon den perfekten Planungsvorgaben nicht zu vermeiden. Daher ist es erforderlich, imRahmen der baustatischen Bearbeitung eine Bewertung dieser Abweichungen vorzu-nehmen. Es ist also zu hinterfragen, ob und wenn ja, wie sich die imperfekten Daten aufdas Tragverhalten auswirken. Dies hat selbstverständlich bereits im Planungsstadiumzu geschehen. Da zu diesem Zeitpunkt das Bauwerk aber noch gar nicht existiert, sindnatürlich auch die Abweichungen von den Geometrie– und Materialvorgaben noch un-bekannt, die sich nach dem Zufallsprinzip ja erst beim Bauen ergeben.
Die baustatische Modellbildung ist daher um den Ansatz von Imperfektionen zu erwei-tern, um die zufallsbedingten Geometrie– und Materialabweichungen in geeigneterWeise zu berücksichtigen. Unter dem Begriff Imperfektionen sind demnach all dieje–nigen Einflüsse zusammengefaßt, die dazu beitragen, daß sich die Beanspruchungs-größen von perfekten Tragwerken in ungünstigster Weise vergrößern, um damit diewirklichen Zustände in imperfekten Tragwerken zur sicheren Seite hin abzuschätzen.
Mit geometrischen Imperfektionen werden Abweichungen von der Sollgeometrie er-faßt. Dies sind u.a. ungewollte Schiefstellungen von Stäben, z.B. Lotabweichungen vonStützen, Lastaußermittigkeiten oder Vorkrümmungen von Stäben. Strukturelle Imper-fektionen berücksichtigen Abweichungen von den definierten Materialeigenschaften.Dies können z.B. Streuungen in den Kennwerten sein. Aber auch Eigenspannungen,die sich durch die Bearbeitung während des Bauens ergeben, zählen dazu. Baustati-sche Berechnungen mit voneinander unabhängigen geometrischen und strukturellenImperfektionen sind sehr aufwendig. Die Regelwerke erlauben daher den Ansatz vongeometrischen Ersatzimperfektionen, die neben den rein geometrischen, also span-nungsfreien Imperfektionen auch den ungünstigen Einfluß von strukturellen, also span-nungsbehafteten Imperfektionen durch spannungsfreie Ersatzimperfektionen abdek-ken.
Geometrische Ersatzimperfektionen sind immer in Richtung der ungünstigsten Tragwir-kung anzusetzen. Dies ist am einfachsten dadurch zu erreichen, indem man die Eigen-form der Knicklast als Imperfektionsform verwendet. Daß die Knickform das Tragver–halten am ungünstigsten beeinflußt, ergibt sich unmittelbar aus der Anschauung. Im(Bild 2.37a) ist dargestellt, daß die Theorie II. Ordnung– Berechnung eines perfektenTragwerks die Knicklastgrenze ignoriert, wenn die Verformungsfigur der Einwirkungkeine Anteile aus der Knickform enthält. Das Verhalten eines imperfekten Tragwerksunter sonst gleichen Voraussetzungen ist im (Bild 2.40) dargestellt. Die Ausgangsver-formung der Theorie II. Ordnung– Berechnung ist nun durch die Knickform vorgegeben.Im Verlauf der Spannungsberechnung kommt es zur Überlagerung mit der Verschie-bungsfigur der Einwirkung. In der resultierenden Verschiebungsfigur sind daher immerAnteile der Knickform enthalten. Die Spannungsberechnung konvergiert nun gegen dieKnickform und nicht mehr wie beim perfekten Tragwerk gegen die höhere Verzwei-gungslast, vgl. (Bild 2.40).
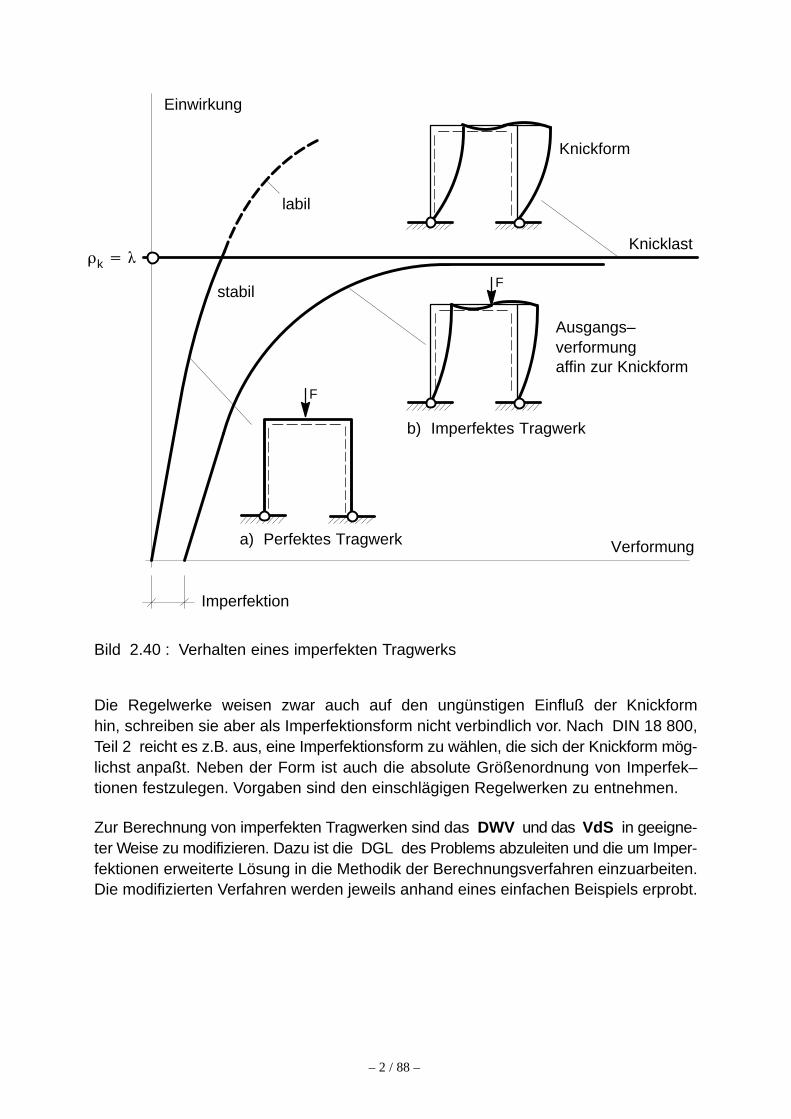
– 2 / 88 –
Einwirkung
�k � �
Bild 2.40 : Verhalten eines imperfekten Tragwerks
Verformung
Knicklast
Ausgangs–
labil
stabil
verformung
F
F
Knickform
b) Imperfektes Tragwerk
a) Perfektes Tragwerk
Imperfektion
affin zur Knickform
Die Regelwerke weisen zwar auch auf den ungünstigen Einfluß der Knickformhin, schreiben sie aber als Imperfektionsform nicht verbindlich vor. Nach DIN 18 800,Teil 2 reicht es z.B. aus, eine Imperfektionsform zu wählen, die sich der Knickform mög-lichst anpaßt. Neben der Form ist auch die absolute Größenordnung von Imperfek–tionen festzulegen. Vorgaben sind den einschlägigen Regelwerken zu entnehmen.
Zur Berechnung von imperfekten Tragwerken sind das DWV und das VdS in geeigne-ter Weise zu modifizieren. Dazu ist die DGL des Problems abzuleiten und die um Imper-fektionen erweiterte Lösung in die Methodik der Berechnungsverfahren einzuarbeiten.Die modifizierten Verfahren werden jeweils anhand eines einfachen Beispiels erprobt.
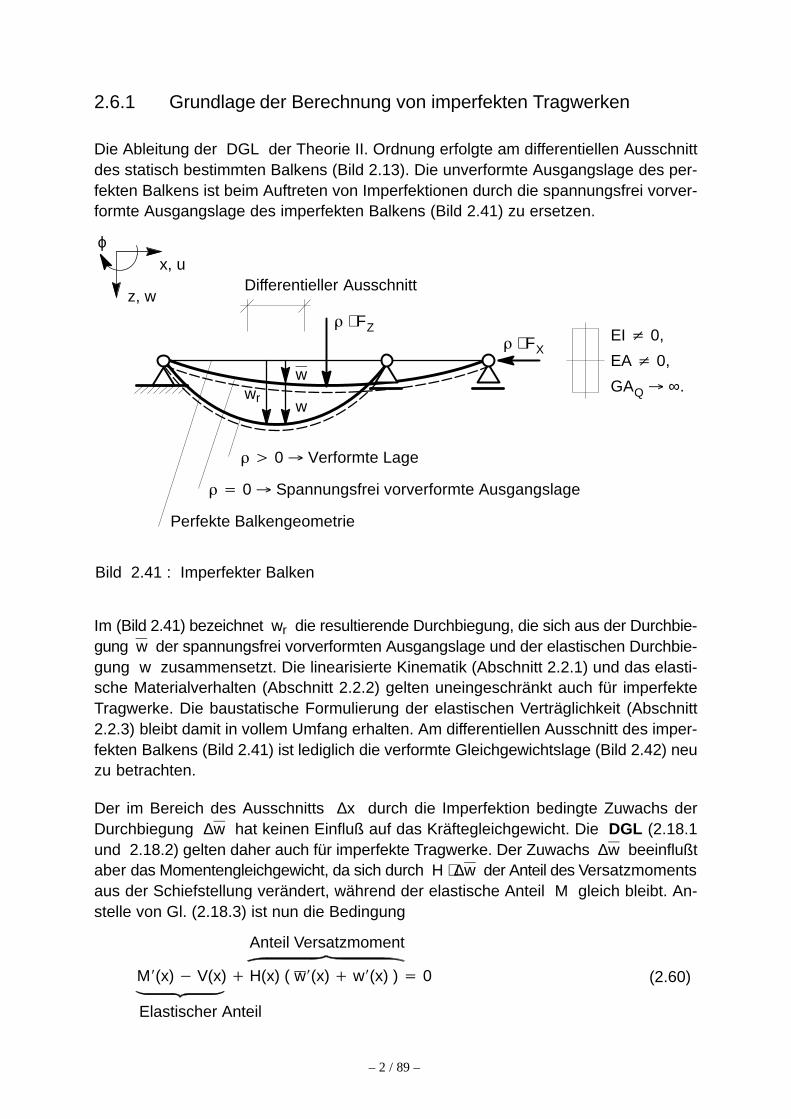
– 2 / 89 –
2.6.1 Grundlage der Berechnung von imperfekten Tragwerken
Die Ableitung der DGL der Theorie II. Ordnung erfolgte am differentiellen Ausschnittdes statisch bestimmten Balkens (Bild 2.13). Die unverformte Ausgangslage des per-fekten Balkens ist beim Auftreten von Imperfektionen durch die spannungsfrei vorver-formte Ausgangslage des imperfekten Balkens (Bild 2.41) zu ersetzen.
Bild 2.41 : Imperfekter Balken
ϕx, u
z, w
� ⋅ FX
� � 0 � Verformte Lage
� ⋅ FZ
� � 0 � Spannungsfrei vorverformte Ausgangslage
Perfekte Balkengeometrie
Differentieller Ausschnitt
w
wwr
EI � 0,
EA � 0,
GAQ � ∞.
Im (Bild 2.41) bezeichnet wr die resultierende Durchbiegung, die sich aus der Durchbie-gung w der spannungsfrei vorverformten Ausgangslage und der elastischen Durchbie-gung w zusammensetzt. Die linearisierte Kinematik (Abschnitt 2.2.1) und das elasti-sche Materialverhalten (Abschnitt 2.2.2) gelten uneingeschränkt auch für imperfekteTragwerke. Die baustatische Formulierung der elastischen Verträglichkeit (Abschnitt2.2.3) bleibt damit in vollem Umfang erhalten. Am differentiellen Ausschnitt des imper-fekten Balkens (Bild 2.41) ist lediglich die verformte Gleichgewichtslage (Bild 2.42) neuzu betrachten.
Der im Bereich des Ausschnitts ∆x durch die Imperfektion bedingte Zuwachs derDurchbiegung ∆w hat keinen Einfluß auf das Kräftegleichgewicht. Die DGL (2.18.1und 2.18.2) gelten daher auch für imperfekte Tragwerke. Der Zuwachs ∆w beeinflußtaber das Momentengleichgewicht, da sich durch H ⋅ ∆w der Anteil des Versatzmomentsaus der Schiefstellung verändert, während der elastische Anteil M gleich bleibt. An-stelle von Gl. (2.18.3) ist nun die Bedingung
M�(x) � V(x) � H(x) ( w�(x) � w�(x) ) � 0 (2.60)
Anteil Versatzmoment
Elastischer Anteil
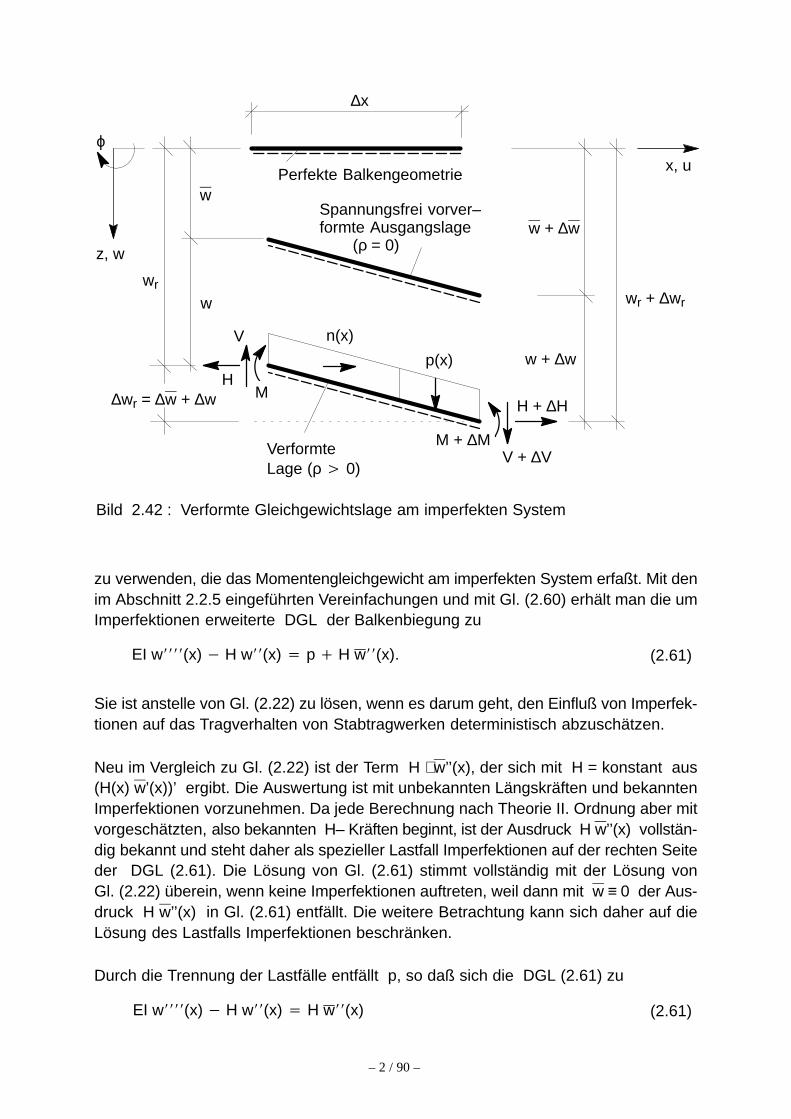
– 2 / 90 –
Bild 2.42 : Verformte Gleichgewichtslage am imperfekten System
x, u
z, w
∆x
wr + ∆wr
Perfekte Balkengeometrie
VerformteLage (ρ � 0)
ϕ
H + ∆H
V + ∆VM + ∆M
H
V
M
n(x)
p(x) w + ∆w
w + ∆wSpannungsfrei vorver–formte Ausgangslage
(ρ = 0)
wr
w
w
∆wr = ∆w + ∆w
zu verwenden, die das Momentengleichgewicht am imperfekten System erfaßt. Mit denim Abschnitt 2.2.5 eingeführten Vereinfachungen und mit Gl. (2.60) erhält man die umImperfektionen erweiterte DGL der Balkenbiegung zu
EI w����(x) � H w��(x) � p � H w��(x). (2.61)
Sie ist anstelle von Gl. (2.22) zu lösen, wenn es darum geht, den Einfluß von Imperfek-tionen auf das Tragverhalten von Stabtragwerken deterministisch abzuschätzen.
Neu im Vergleich zu Gl. (2.22) ist der Term H ⋅ w’’(x), der sich mit H = konstant aus(H(x) w’(x))’ ergibt. Die Auswertung ist mit unbekannten Längskräften und bekanntenImperfektionen vorzunehmen. Da jede Berechnung nach Theorie II. Ordnung aber mitvorgeschätzten, also bekannten H– Kräften beginnt, ist der Ausdruck H w’’(x) vollstän-dig bekannt und steht daher als spezieller Lastfall Imperfektionen auf der rechten Seiteder DGL (2.61). Die Lösung von Gl. (2.61) stimmt vollständig mit der Lösung vonGl. (2.22) überein, wenn keine Imperfektionen auftreten, weil dann mit w ≡ 0 der Aus-druck H w’’(x) in Gl. (2.61) entfällt. Die weitere Betrachtung kann sich daher auf dieLösung des Lastfalls Imperfektionen beschränken.
Durch die Trennung der Lastfälle entfällt p, so daß sich die DGL (2.61) zu
EI w����(x) � H w��(x) � H w��(x) (2.61)
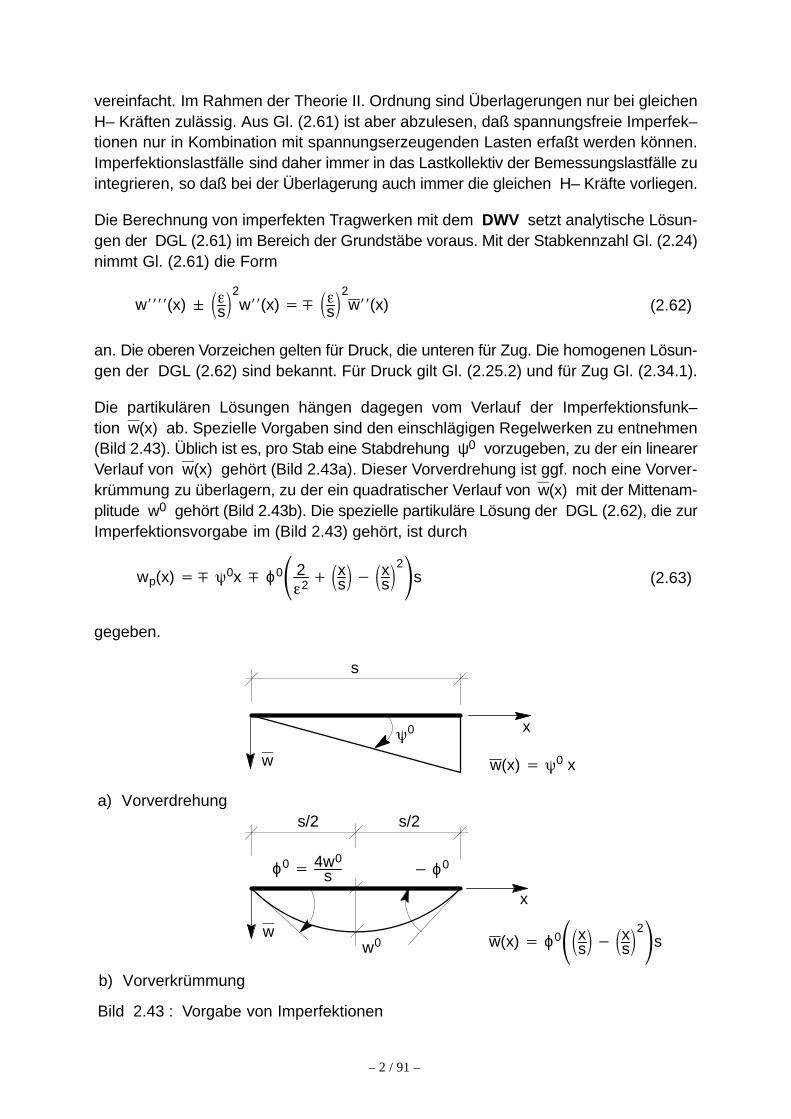
– 2 / 91 –
vereinfacht. Im Rahmen der Theorie II. Ordnung sind Überlagerungen nur bei gleichenH– Kräften zulässig. Aus Gl. (2.61) ist aber abzulesen, daß spannungsfreie Imperfek–tionen nur in Kombination mit spannungserzeugenden Lasten erfaßt werden können.Imperfektionslastfälle sind daher immer in das Lastkollektiv der Bemessungslastfälle zuintegrieren, so daß bei der Überlagerung auch immer die gleichen H– Kräfte vorliegen.
Die Berechnung von imperfekten Tragwerken mit dem DWV setzt analytische Lösun-gen der DGL (2.61) im Bereich der Grundstäbe voraus. Mit der Stabkennzahl Gl. (2.24)nimmt Gl. (2.61) die Form
w����(x) � �s2w��(x) �� �
s2w��(x) (2.62)
an. Die oberen Vorzeichen gelten für Druck, die unteren für Zug. Die homogenen Lösun-gen der DGL (2.62) sind bekannt. Für Druck gilt Gl. (2.25.2) und für Zug Gl. (2.34.1).
Die partikulären Lösungen hängen dagegen vom Verlauf der Imperfektionsfunk–tion w(x) ab. Spezielle Vorgaben sind den einschlägigen Regelwerken zu entnehmen(Bild 2.43). Üblich ist es, pro Stab eine Stabdrehung ψ0 vorzugeben, zu der ein linearerVerlauf von w(x) gehört (Bild 2.43a). Dieser Vorverdrehung ist ggf. noch eine Vorver-krümmung zu überlagern, zu der ein quadratischer Verlauf von w(x) mit der Mittenam-plitude w0 gehört (Bild 2.43b). Die spezielle partikuläre Lösung der DGL (2.62), die zurImperfektionsvorgabe im (Bild 2.43) gehört, ist durch
wp(x) �� �0x � ϕ0 2�2
� xs � x
s2s (2.63)
gegeben.
Bild 2.43 : Vorgabe von Imperfektionen
x
w
s
�0
w(x) � �0 x
a) Vorverdrehungs/2 s/2
w0
ϕ0 � 4w0
s
w
� ϕ0
x
b) Vorverkrümmung
w(x) � ϕ0xs � xs2s
– 2 / 92 –
Zur Berechnung von imperfekten Tragwerken mit dem VdS ist die Arbeitsgleichung(2.40) um den Anteil der Imperfektionen zu erweitern. Dazu ist der Term (H(x) w’(x))’,der in der DGL (2.61) bei veränderlicher Längskraft auftritt, im PvW Gl. (2.36) zu be-rücksichtigen und gemäß Gl. (2.38) umzuformen. Mit Gl. (2.60) folgt daraus wiederumGl. (2.39), in der nun zusätzlich der Arbeitsausdruck
WvImperfektionen � �w�v(x) H(x) w(x) dx (2.64)
auftritt, der als Lastterm des Lastfalls Imperfektionen mit positiven Vorzeichen in dieArbeitsgleichung (2.40) eingeht.
2.6.2 Erfassung von Imperfektionen mit dem DWV
2.6.2.1 Vorgehensweise
Die Berechnung von imperfekten Tragwerken läuft beim DWV in gleicher Weise ab wieeine Berechnung von perfekten Tragwerken. Bei der Berechnung der Zn0– Zwangs–größen der 0– Einwirkungszustände in den (n) Dreh– und Wegfesseln von GGSist lediglich der Lastfall Imperfektionen zusätzlich zu berücksichtigen, während dieZnm– Zwangsgrößen der m– Einheitswegzustände sich durch das Auftreten von Imper-fektionen nicht verändern.
Zur Durchführung von Zahlenberechnungen sind für den 1–ten und 2–ten Grundstabdie Stabendmomente infolge der partikulären Lösung Gl. (2.63) bereitzustellen. Dabeiist zu beachten, daß die Anpassung der homogenen Druck– und ZuglösungenGl. (2.25.2 und 2.34.1) an die geometrischen Fesselbedingungen der Grundstäbe nurfür die elastischen Verschiebungs– und Verdrehungsanteile gilt. Die Knotendrehungenaus der Vorkrümmung (Bild 2.43b) und die Stabdrehung aus der Vorverdrehung(Bild 2.43a) sind beliebig, da sie als Lastfallgrößen keine Systemrandbedingungen er-füllen müssen.
Die Stabendmomente des Lastfalls Imperfektionen sind im (Bild 2.44) dargestellt. Am1–ten und 2–ten Grundstab (Bild 2.44a1) sind jeweils die imperfekten Knoten– undStabdrehungen (Bild 2.44a2) vorzugeben. Zwischen den Relativdrehungen der Knoten(K) und (L) besteht wegen des quadratischen Verlaufs der Vorverkrümmung (Bild 2.43b)die Beziehung
ϕ0L � �0
KL � � ϕ0
K � �0KL. (2.65)
Mit Gl. (2.65) vereinfachen sich die Bestimmungsgleichungen für die Stabendmomenteerheblich. Für die Stabendmomente der Knoten (K) und (L) des 1–ten Grundstabs(Bild 2.44a3) gilt
MKL,0 � MLK,0 � (A � B � 2) EIsϕ0
K � �0KL. (2.66)
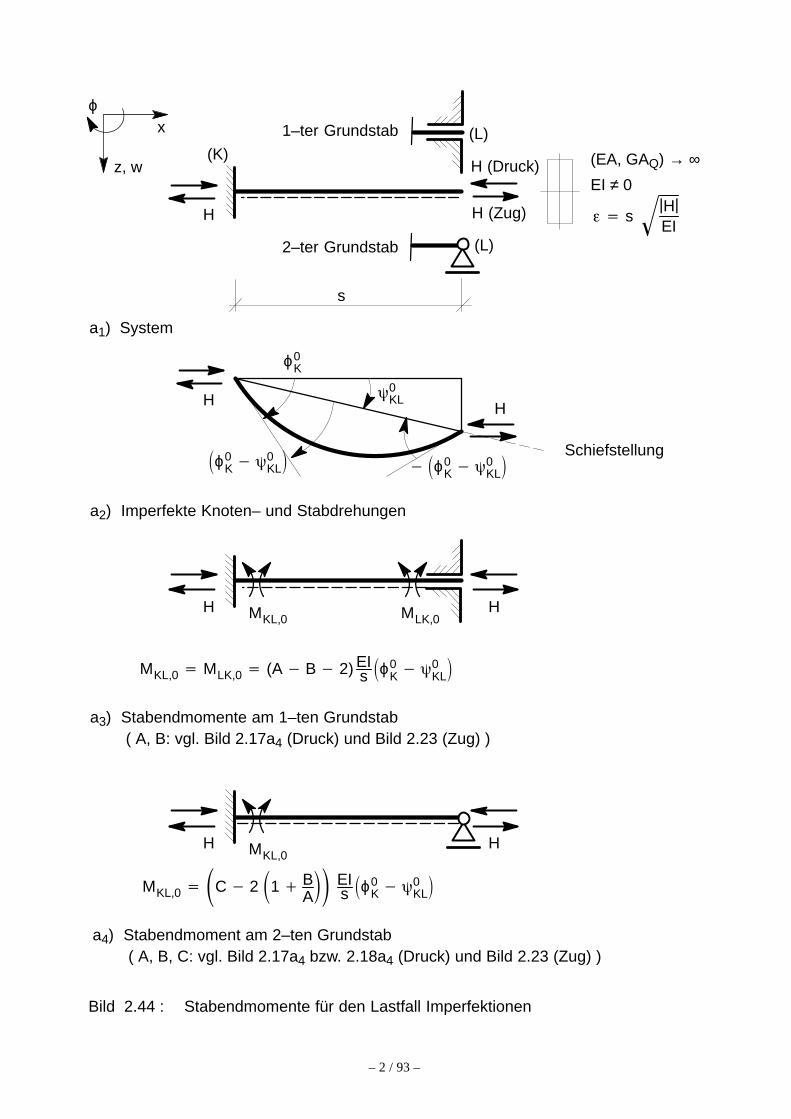
– 2 / 93 –
Bild 2.44 : Stabendmomente für den Lastfall Imperfektionen
x
z, w
s
ϕ
a1) System
(EA, GAQ) → ∞(K)(L)
EI ≠ 0H (Druck)
H � � s|H|EI
a2) Imperfekte Knoten– und Stabdrehungen
H (Zug)
a3) Stabendmomente am 1–ten Grundstab
MKL,0 � MLK,0 � (A � B � 2) EIsϕ0
K � �0KL
1–ter Grundstab
2–ter Grundstab (L)
�0KL
ϕ0K
H H
Schiefstellungϕ0K � �0
KL � ϕ0
K � �0KL
H H
H H
MKL,0 MLK,0
( A, B: vgl. Bild 2.17a4 (Druck) und Bild 2.23 (Zug) )
MKL,0
a4) Stabendmoment am 2–ten Grundstab
MKL,0 � C � 2 1 � BA EI
sϕ0
K � �0KL
( A, B, C: vgl. Bild 2.17a4 bzw. 2.18a4 (Druck) und Bild 2.23 (Zug) )
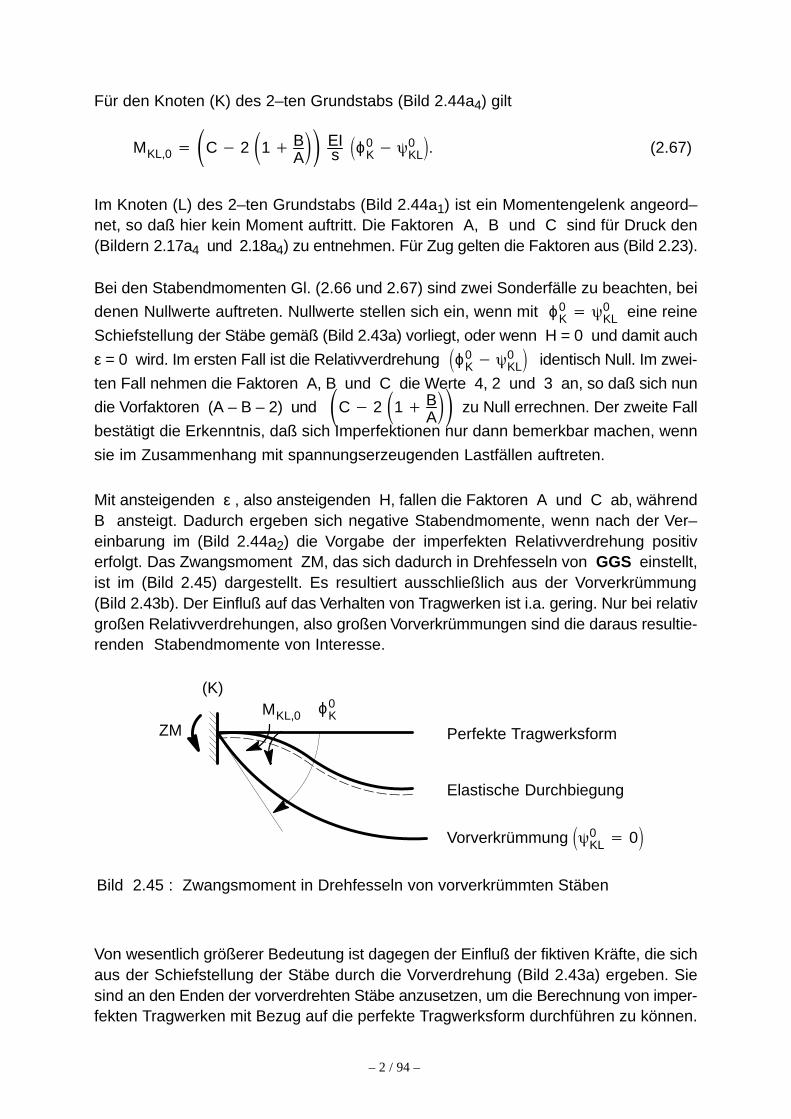
– 2 / 94 –
Für den Knoten (K) des 2–ten Grundstabs (Bild 2.44a4) gilt
MKL,0 � C � 2 1 � BA EI
sϕ0
K � �0KL. (2.67)
Im Knoten (L) des 2–ten Grundstabs (Bild 2.44a1) ist ein Momentengelenk angeord–net, so daß hier kein Moment auftritt. Die Faktoren A, B und C sind für Druck den(Bildern 2.17a4 und 2.18a4) zu entnehmen. Für Zug gelten die Faktoren aus (Bild 2.23).
Bei den Stabendmomenten Gl. (2.66 und 2.67) sind zwei Sonderfälle zu beachten, bei
denen Nullwerte auftreten. Nullwerte stellen sich ein, wenn mit ϕ0K � �0
KL eine reine
Schiefstellung der Stäbe gemäß (Bild 2.43a) vorliegt, oder wenn H = 0 und damit auch
ε = 0 wird. Im ersten Fall ist die Relativverdrehung ϕ0K � �0
KL identisch Null. Im zwei-
ten Fall nehmen die Faktoren A, B und C die Werte 4, 2 und 3 an, so daß sich nun
die Vorfaktoren (A – B – 2) und C � 2 1 � BA zu Null errechnen. Der zweite Fall
bestätigt die Erkenntnis, daß sich Imperfektionen nur dann bemerkbar machen, wenn
sie im Zusammenhang mit spannungserzeugenden Lastfällen auftreten.
Mit ansteigenden ε , also ansteigenden H, fallen die Faktoren A und C ab, währendB ansteigt. Dadurch ergeben sich negative Stabendmomente, wenn nach der Ver–einbarung im (Bild 2.44a2) die Vorgabe der imperfekten Relativverdrehung positiverfolgt. Das Zwangsmoment ZM, das sich dadurch in Drehfesseln von GGS einstellt,ist im (Bild 2.45) dargestellt. Es resultiert ausschließlich aus der Vorverkrümmung(Bild 2.43b). Der Einfluß auf das Verhalten von Tragwerken ist i.a. gering. Nur bei relativgroßen Relativverdrehungen, also großen Vorverkrümmungen sind die daraus resultie-renden Stabendmomente von Interesse.
Bild 2.45 : Zwangsmoment in Drehfesseln von vorverkrümmten Stäben
MKL,0
(K)ϕ0
KZM Perfekte Tragwerksform
Elastische Durchbiegung
Vorverkrümmung �0KL � 0
Von wesentlich größerer Bedeutung ist dagegen der Einfluß der fiktiven Kräfte, die sichaus der Schiefstellung der Stäbe durch die Vorverdrehung (Bild 2.43a) ergeben. Siesind an den Enden der vorverdrehten Stäbe anzusetzen, um die Berechnung von imper-fekten Tragwerken mit Bezug auf die perfekte Tragwerksform durchführen zu können.

– 2 / 95 –
2.6.2.2 Zahlenbeispiel DWV
Das Zahlenbeispiel zum DWV im Abschnitt 2.3.5 ist um den Lastfall Imperfektionen zuerweitern. Für jeden Stab sind in Richtung der ungünstigsten Wirkung Vorverdrehungenund Vorverkrümmungen gemäß (Bild 2.43) anzusetzen. Die Winkel der Vorverdrehun-gen und die Mittendurchbiegungen der Vorverkrümmungen sind in allen Stäben alsgleich groß anzunehmen. Nach DIN 18 800, Teil 2, Abschnitt 2 betragen sie
�0 � 1200.
und w0 � s200.
.
Die ungünstigste Wirkung stellt sich ein, wenn die Imperfektionen zur Vergrößerung derelastischen Verformungen (Bild 2.27a) beitragen. Dies wird i.a. erreicht, wenn die Vor-gabe in Richtung der Knickform (Bild 2.38) erfolgt.
Die Vorverdrehungen der Stäbe des Lastfalls Imperfektionen sind im (Bild 2.46) darge-stellt. Sie sind nicht verträglich mit den geometrischen Randbedingungen des Systems(Bild 2.46a). Die fiktiven Kräfte, die sich aus den angenommenen Schiefstellungen undden H– Kräften der Schätzung (Bild 2.25) ergeben, sind (Bild 2.46b) zu entnehmen.
Die Vorverkrümmungen der Stäbe des Lastfalls Imperfektionen sind im (Bild 2.47) dar-gestellt. Sie sind ebenfalls unverträglich mit den geometrischen Randbedingungen desSystems (Bild 2.47a). Die Stabendmomente, die sich aus den angenommenen Vorver-krümmungen und den H– Kräften der Schätzung (Bild 2.25) ergeben, sind (Bild 2.47b)zu entnehmen.
Die globale Wirkungsrichtung der Kräfte und Momente ist durch Pfeile gekennzeichnet.Sie sind bei der Berechnung der Zwangsgrößen des 0– Zustands des Lastfalls Imper-fektionen zu beachten. Für das Zwangsmoment Z10 der Drehfessel ergibt ein Knoten-schnitt um die Drehfessel den Wert
Z10 = M21,0 – M23,0 = 6. – 15.4 = –9.4 kNm.
Die Zwangskraft Z20 der Wegfessel wird dagegen mit dem PvW berechnet. Dies hatmit Bezug auf die perfekte Tragwerksgeometrie zu geschehen. Der virtuelle Verschie-bungszustand der Wegfessel an der zugehörigen Rahmenkette stimmt daher mit derSchlußlinie des 2– Zustands (Bild 2.26b) überein. Die Bilanzierung der äußeren Arbei-ten ergibt den Wert
Z20 � M12,0 � M21,0 ⋅ 1
2� M23,0 ⋅ 1
3� M23,0 ⋅ 1
3
� Ffiktiv12,0 ⋅ 2 � Ffiktiv
23,0 ⋅ 2 � Ffiktiv23,0 ⋅ 2 � Ffiktiv
35,0 ⋅ 1
� 0 ⋅ 2 � 15.4 ⋅ 13
� 42.3 ⋅ 13
� 2.5 ⋅ 2 � 3.4 ⋅ 2 � 7.07 ⋅ 2 � 7.5 ⋅ 1 � � 46.7 kN.
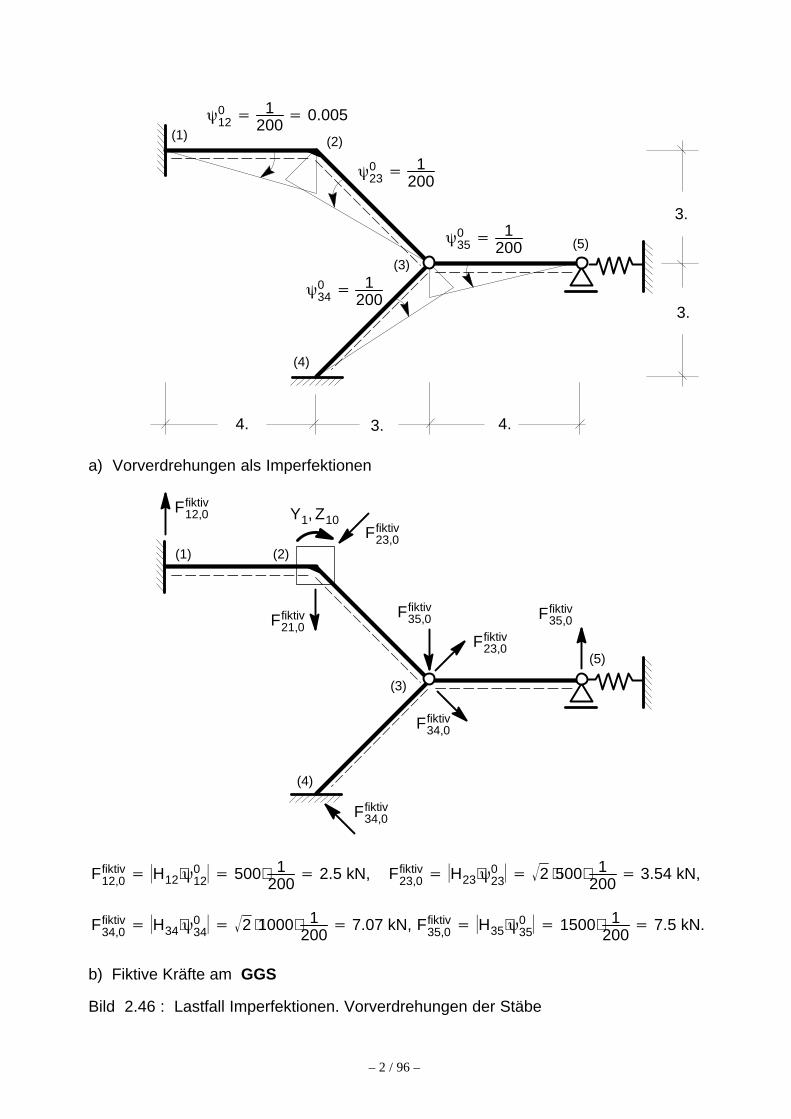
– 2 / 96 –
(1)
(5)
(2)
(3)
(4)
a) Vorverdrehungen als Imperfektionen
b) Fiktive Kräfte am GGS
Bild 2.46 : Lastfall Imperfektionen. Vorverdrehungen der Stäbe
�012 � 1
200� 0.005
�023 � 1
200
�035 � 1
200
�034 � 1
200
3.
3.
3.
4.4.
(1)
(5)
(2)
(3)
(4)
Ffiktiv12,0
Ffiktiv23,0
Ffiktiv21,0
Ffiktiv34,0
Ffiktiv34,0
Ffiktiv23,0
Ffiktiv35,0 Ffiktiv
35,0
Y1, Z10
Ffiktiv12,0 � �H12⋅�0
12� � 500⋅ 1
200� 2.5 kN, Ffiktiv
23,0 � �H23⋅�023� � 2 ⋅500⋅ 1
200� 3.54 kN,
Ffiktiv34,0 � �H34⋅�0
34� � 2 ⋅1000⋅ 1
200� 7.07 kN, Ffiktiv
35,0 � �H35⋅�035� � 1500⋅ 1
200� 7.5 kN.
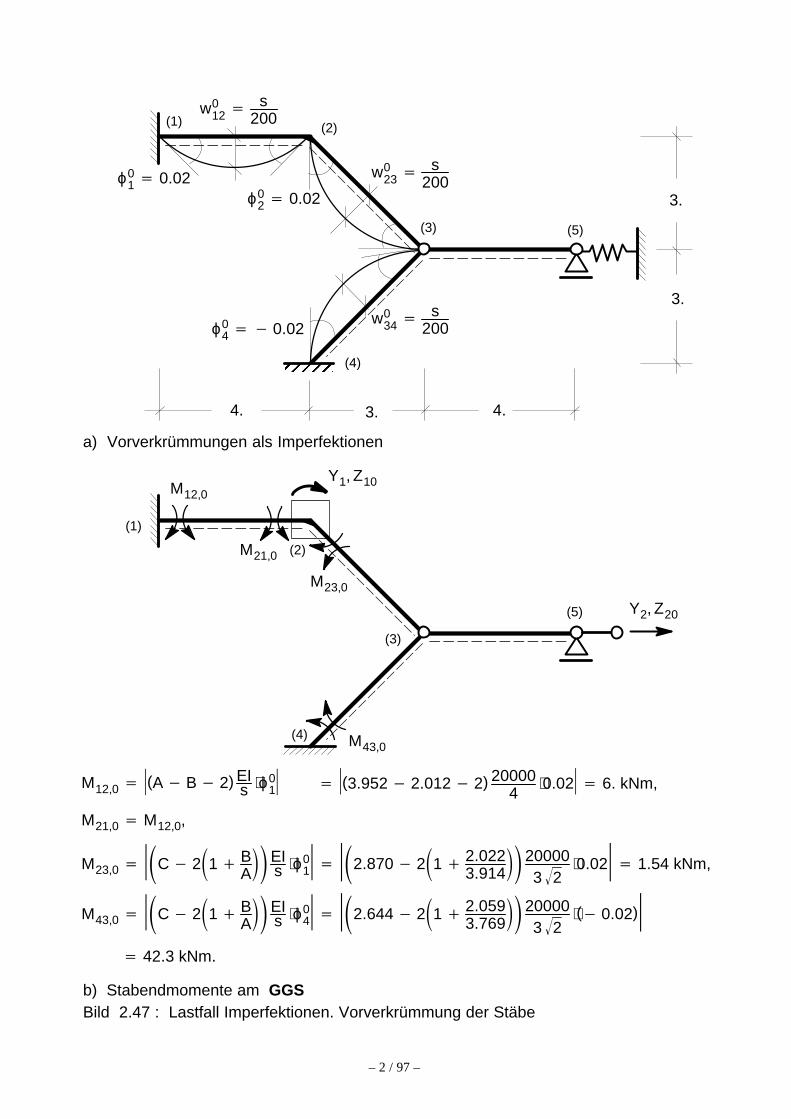
– 2 / 97 –
(1)
ÉÉÉÉÉÉÉÉ
(5)
(2)
(3)
(4)
a) Vorverkrümmungen als Imperfektionen
b) Stabendmomente am GGSBild 2.47 : Lastfall Imperfektionen. Vorverkrümmung der Stäbe
w012 � s
200
w023 � s
200
w034 � s
200
3.
3.
3.
4.4.
(1)
(5)
(2)
(3)
(4) M43,0
Y1, Z10
M12,0 � �(A � B � 2) EIs ⋅ϕ0
1�
ϕ04 � � 0.02
ϕ01 � 0.02
ϕ02 � 0.02
Y2, Z20
M21,0
M23,0
M12,0
M21,0 � M12,0,
M23,0 � �C � 21 � BAEI
s ⋅ϕ01� � �2.870 � 21 � 2.022
3.91420000
3 2 ⋅0.02� � 1.54 kNm,
M43,0 � �C � 21 � BAEI
s ⋅ϕ04� � �2.644 � 21 � 2.059
3.76920000
3 2 ⋅(� 0.02)�
� 42.3 kNm.
� �(3.952 � 2.012 � 2) 200004
⋅0.02� � 6. kNm,
– 2 / 98 –
Die Zwangsgrößen des Lastfalls Imperfektionen sind mit den Zwangsgrößen des span-nungserzeugenden Lastfalls Einzellasten zu überlagern.
b � �Z10 = 0. + 9.4 = 9.4
Z20 = 1 500. + 46.7 = 1 546.7.
Die linke Seite des Gleichungssystems bleibt unverändert.
33 289.3
– 10 400.25.
– 10 400.25
25 923.1
Y1
Y2=
9.4
1 546.7
Als Lösung erhält man für Y1 und Y2 die Werte
Y1 = ϕ2 = 0.0216 (1)und
Y2 = vX5 = 0.0683 (m).
Sie sind 4.3% bzw. 3.1% größer als die Werte ohne Einfluß von Imperfektionen. Beider Überlagerung zur Ermittlung der Schnittmomente an den Stabenden sind nun zu-sätzlich die Stabendmomente der Imperfektionen zu berücksichtigen. Es gelten die lo-kalen Vorzeichen der Bezugsfaser.
M12 + (–M12,2) Y2 = –807.0 kNm,
M21 =
=
(–M21,0) + M21,2 Y2 = 585.5 kNm,
M23 =
(–M12,0)
(–M23,0) + M23,2 Y2 = 584.9 kNm
und
M43 = (–M43,2) Y2 = –241.5 kNm.
585.2 kNm
M12,0
M12,1 Y1
(–M21,1) Y1
M23,1 Y1
+
+
+
+
Die Momente in den Knoten (1) und (2) nehmen zwar zu, das Moment im Knoten (4)nimmt dagegen aber deutlich ab. Die im (Bild 2.47a) angesetzte Vorverkrümmung imStab (3, 4) stellt daher noch nicht den ungünstigsten Fall dar. Es sind in der Regel eineVielzahl von Variationen zu untersuchen, um Imperfektionen zu finden, die das Tragver-halten am ungünstigsten beeinflussen. Im vorliegenden Fall geschieht dies mit Rech-nerunterstützung, also im Rahmen der Anwendung des VdS.
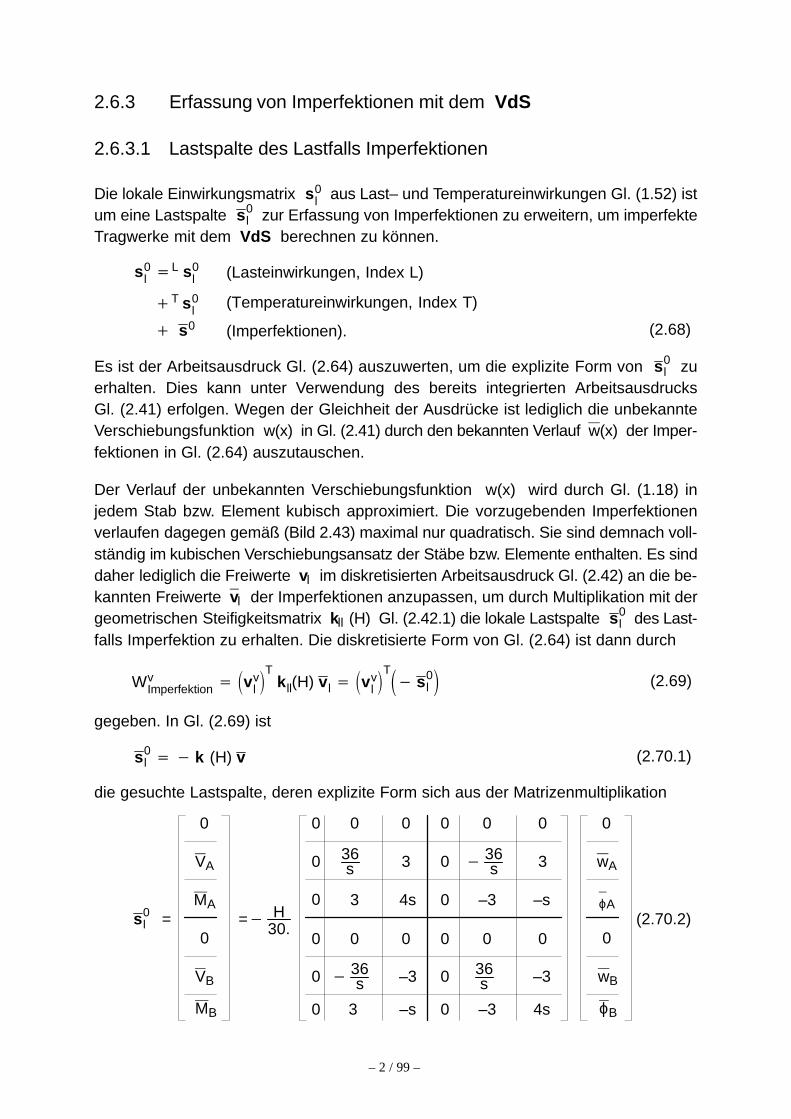
– 2 / 99 –
2.6.3 Erfassung von Imperfektionen mit dem VdS
2.6.3.1 Lastspalte des Lastfalls Imperfektionen
Die lokale Einwirkungsmatrix s0l aus Last– und Temperatureinwirkungen Gl. (1.52) ist
um eine Lastspalte s0l zur Erfassung von Imperfektionen zu erweitern, um imperfekte
Tragwerke mit dem VdS berechnen zu können.
(2.68)
s0l �L s0
l
�T s0l
� s0
(Lasteinwirkungen, Index L)
(Temperatureinwirkungen, Index T)
(Imperfektionen).
Es ist der Arbeitsausdruck Gl. (2.64) auszuwerten, um die explizite Form von s0l zu
erhalten. Dies kann unter Verwendung des bereits integrierten ArbeitsausdrucksGl. (2.41) erfolgen. Wegen der Gleichheit der Ausdrücke ist lediglich die unbekannteVerschiebungsfunktion w(x) in Gl. (2.41) durch den bekannten Verlauf w(x) der Imper-fektionen in Gl. (2.64) auszutauschen.
Der Verlauf der unbekannten Verschiebungsfunktion w(x) wird durch Gl. (1.18) injedem Stab bzw. Element kubisch approximiert. Die vorzugebenden Imperfektionenverlaufen dagegen gemäß (Bild 2.43) maximal nur quadratisch. Sie sind demnach voll-ständig im kubischen Verschiebungsansatz der Stäbe bzw. Elemente enthalten. Es sinddaher lediglich die Freiwerte vl im diskretisierten Arbeitsausdruck Gl. (2.42) an die be-kannten Freiwerte vl der Imperfektionen anzupassen, um durch Multiplikation mit dergeometrischen Steifigkeitsmatrix kll (H) Gl. (2.42.1) die lokale Lastspalte s0
l des Last-falls Imperfektion zu erhalten. Die diskretisierte Form von Gl. (2.64) ist dann durch
WvImperfektion � vv
lT kll(H) vl � vv
lT� s0
l (2.69)
gegeben. In Gl. (2.69) ist
s0l � � k (H) v (2.70.1)
die gesuchte Lastspalte, deren explizite Form sich aus der Matrizenmultiplikation
0
MA
VA
VB
=
0
MB
s0l = � H
30.
36s
� 36s
3
3
3
4s
–3
–s
� 36s
36s
–3
–3
3
–s
–3
4s
0
ϕA
wA
0
ϕB
(2.70.2)
wB
0 0 0 0 00
00
00
0 0 0 0 00
00
00
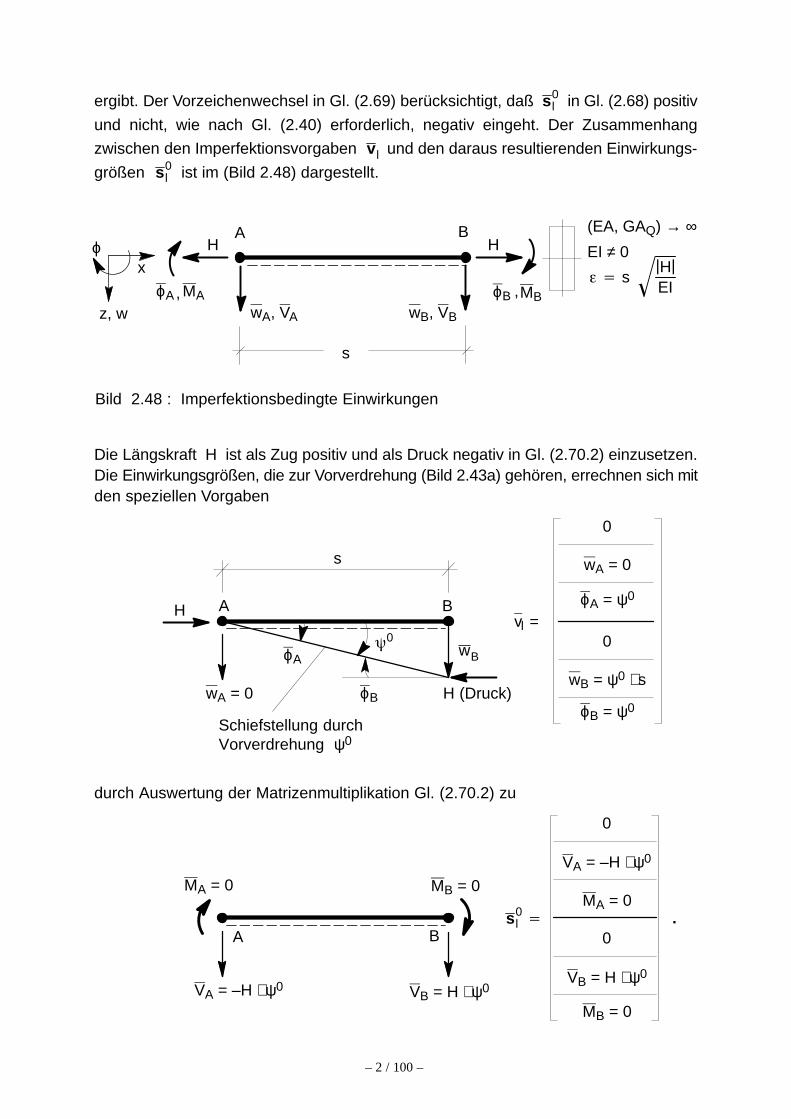
– 2 / 100 –
ergibt. Der Vorzeichenwechsel in Gl. (2.69) berücksichtigt, daß s0l in Gl. (2.68) positiv
und nicht, wie nach Gl. (2.40) erforderlich, negativ eingeht. Der Zusammenhang
zwischen den Imperfektionsvorgaben vl und den daraus resultierenden Einwirkungs-
größen s0l ist im (Bild 2.48) dargestellt.
ϕx
z, w
s
H
MA
H
wA, VA
Bild 2.48 : Imperfektionsbedingte Einwirkungen
MBwB, VB
(EA, GAQ) → ∞EI ≠ 0
� � s|H|EI
ϕA ϕB, ,
A B
Die Längskraft H ist als Zug positiv und als Druck negativ in Gl. (2.70.2) einzusetzen.Die Einwirkungsgrößen, die zur Vorverdrehung (Bild 2.43a) gehören, errechnen sich mitden speziellen Vorgaben
wA = 0
s
�0wB
Schiefstellung durch
H
ϕB
ϕA
H (Druck)
A B
Vorverdrehung ψ0
0
wA = 0
wB = ψ0 ⋅ s
0
ϕB = ψ0
ϕA = ψ0
vl =
durch Auswertung der Matrizenmultiplikation Gl. (2.70.2) zu
VA = –H ⋅ ψ0
A B 0
0
s0l �
VB = H ⋅ ψ0
MA = 0 MB = 0
VA = –H ⋅ ψ0
VB = H ⋅ ψ0
MB = 0
MA = 0.
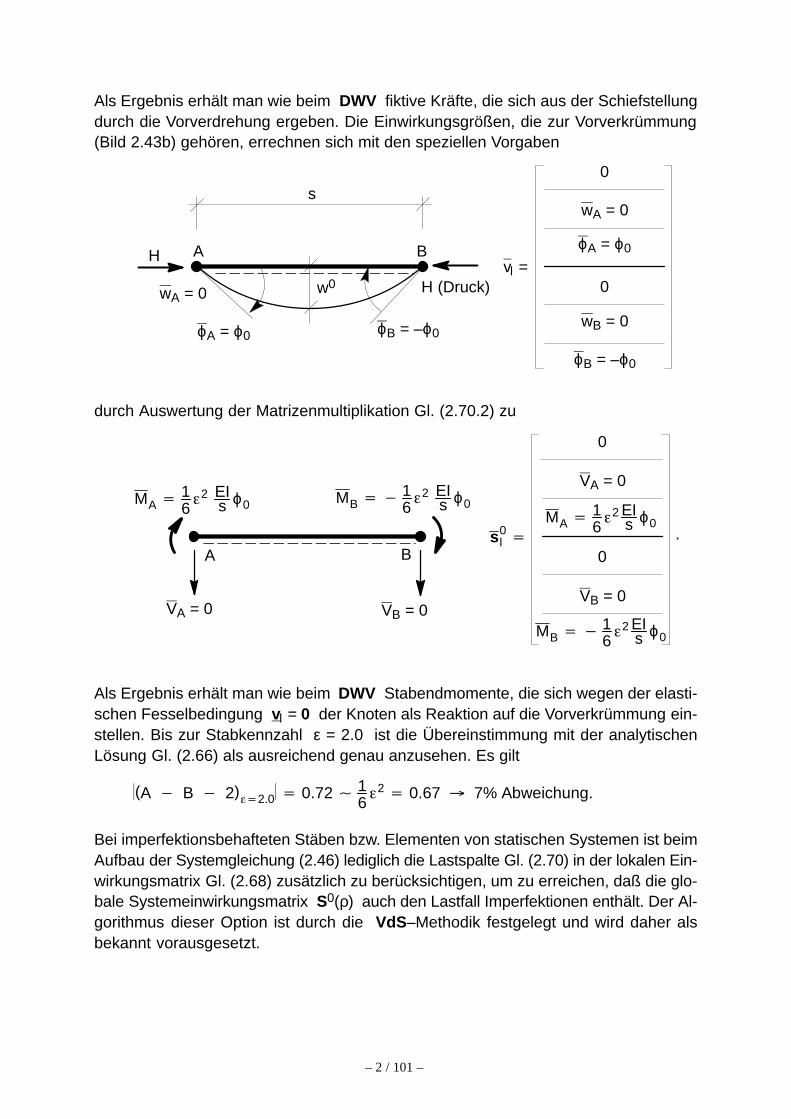
– 2 / 101 –
Als Ergebnis erhält man wie beim DWV fiktive Kräfte, die sich aus der Schiefstellungdurch die Vorverdrehung ergeben. Die Einwirkungsgrößen, die zur Vorverkrümmung(Bild 2.43b) gehören, errechnen sich mit den speziellen Vorgaben
wA = 0
s
H
H (Druck)
A B
0
wA = 0
0
vl =
ϕA = ϕ0 ϕB = –ϕ0
ϕA = ϕ0
wB = 0
ϕB = –ϕ0
w0
durch Auswertung der Matrizenmultiplikation Gl. (2.70.2) zu
VA = 0
A B 0
0
s0l �
VB = 0
VA = 0
VB = 0
MA � 16�2 EI
s ϕ0
.
MB � � 16�2 EI
s ϕ0MA � 1
6�2 EI
s ϕ0
MB � � 16�2 EI
s ϕ0
Als Ergebnis erhält man wie beim DWV Stabendmomente, die sich wegen der elasti-schen Fesselbedingung vl = 0 der Knoten als Reaktion auf die Vorverkrümmung ein-stellen. Bis zur Stabkennzahl ε = 2.0 ist die Übereinstimmung mit der analytischenLösung Gl. (2.66) als ausreichend genau anzusehen. Es gilt
�(A � B � 2)��2.0
� � 0.72 � 16�2 � 0.67 � 7% Abweichung.
Bei imperfektionsbehafteten Stäben bzw. Elementen von statischen Systemen ist beimAufbau der Systemgleichung (2.46) lediglich die Lastspalte Gl. (2.70) in der lokalen Ein-wirkungsmatrix Gl. (2.68) zusätzlich zu berücksichtigen, um zu erreichen, daß die glo-bale Systemeinwirkungsmatrix S0(ρ) auch den Lastfall Imperfektionen enthält. Der Al-gorithmus dieser Option ist durch die VdS–Methodik festgelegt und wird daher alsbekannt vorausgesetzt.
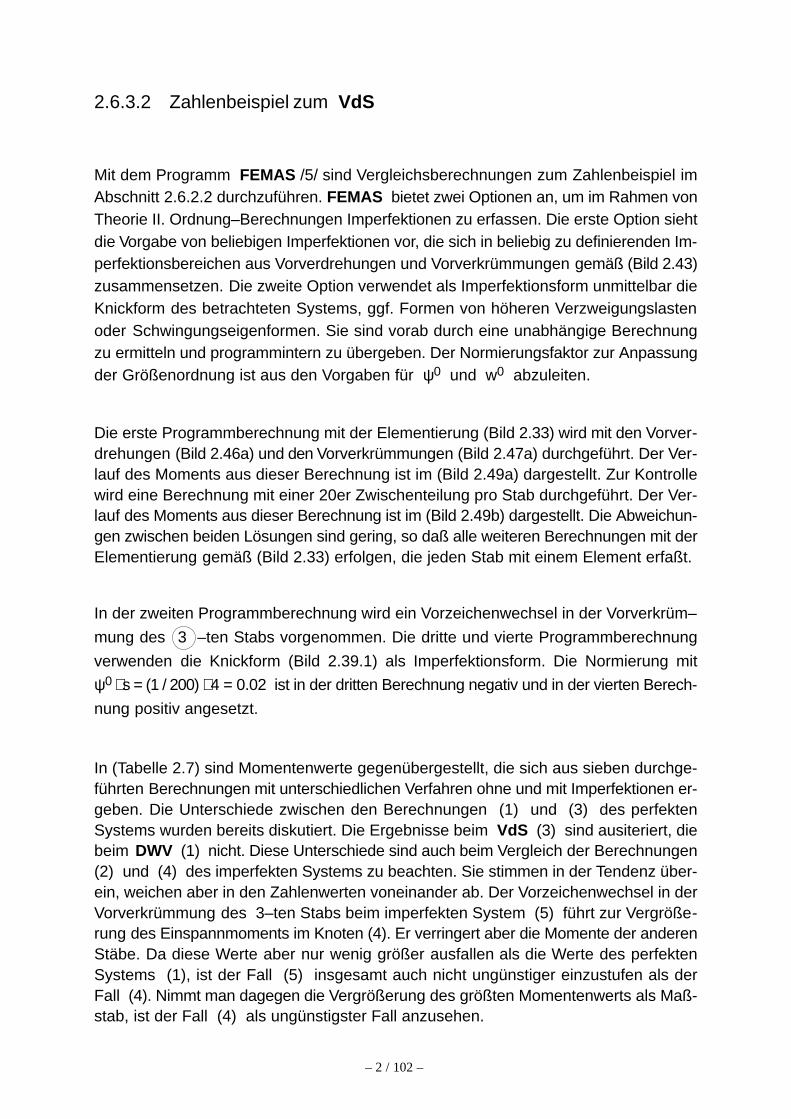
– 2 / 102 –
2.6.3.2 Zahlenbeispiel zum VdS
Mit dem Programm FEMAS /5/ sind Vergleichsberechnungen zum Zahlenbeispiel imAbschnitt 2.6.2.2 durchzuführen. FEMAS bietet zwei Optionen an, um im Rahmen vonTheorie II. Ordnung–Berechnungen Imperfektionen zu erfassen. Die erste Option siehtdie Vorgabe von beliebigen Imperfektionen vor, die sich in beliebig zu definierenden Im-perfektionsbereichen aus Vorverdrehungen und Vorverkrümmungen gemäß (Bild 2.43)zusammensetzen. Die zweite Option verwendet als Imperfektionsform unmittelbar dieKnickform des betrachteten Systems, ggf. Formen von höheren Verzweigungslastenoder Schwingungseigenformen. Sie sind vorab durch eine unabhängige Berechnungzu ermitteln und programmintern zu übergeben. Der Normierungsfaktor zur Anpassungder Größenordnung ist aus den Vorgaben für ψ0 und w0 abzuleiten.
Die erste Programmberechnung mit der Elementierung (Bild 2.33) wird mit den Vorver-drehungen (Bild 2.46a) und den Vorverkrümmungen (Bild 2.47a) durchgeführt. Der Ver-lauf des Moments aus dieser Berechnung ist im (Bild 2.49a) dargestellt. Zur Kontrollewird eine Berechnung mit einer 20er Zwischenteilung pro Stab durchgeführt. Der Ver-lauf des Moments aus dieser Berechnung ist im (Bild 2.49b) dargestellt. Die Abweichun-gen zwischen beiden Lösungen sind gering, so daß alle weiteren Berechnungen mit derElementierung gemäß (Bild 2.33) erfolgen, die jeden Stab mit einem Element erfaßt.
In der zweiten Programmberechnung wird ein Vorzeichenwechsel in der Vorverkrüm–
mung des 3 –ten Stabs vorgenommen. Die dritte und vierte Programmberechnung
verwenden die Knickform (Bild 2.39.1) als Imperfektionsform. Die Normierung mit
ψ0 ⋅ s = (1 / 200) ⋅ 4 = 0.02 ist in der dritten Berechnung negativ und in der vierten Berech-
nung positiv angesetzt.
In (Tabelle 2.7) sind Momentenwerte gegenübergestellt, die sich aus sieben durchge-führten Berechnungen mit unterschiedlichen Verfahren ohne und mit Imperfektionen er-geben. Die Unterschiede zwischen den Berechnungen (1) und (3) des perfektenSystems wurden bereits diskutiert. Die Ergebnisse beim VdS (3) sind ausiteriert, diebeim DWV (1) nicht. Diese Unterschiede sind auch beim Vergleich der Berechnungen(2) und (4) des imperfekten Systems zu beachten. Sie stimmen in der Tendenz über-ein, weichen aber in den Zahlenwerten voneinander ab. Der Vorzeichenwechsel in derVorverkrümmung des 3–ten Stabs beim imperfekten System (5) führt zur Vergröße-rung des Einspannmoments im Knoten (4). Er verringert aber die Momente der anderenStäbe. Da diese Werte aber nur wenig größer ausfallen als die Werte des perfektenSystems (1), ist der Fall (5) insgesamt auch nicht ungünstiger einzustufen als derFall (4). Nimmt man dagegen die Vergrößerung des größten Momentenwerts als Maß-stab, ist der Fall (4) als ungünstigster Fall anzusehen.
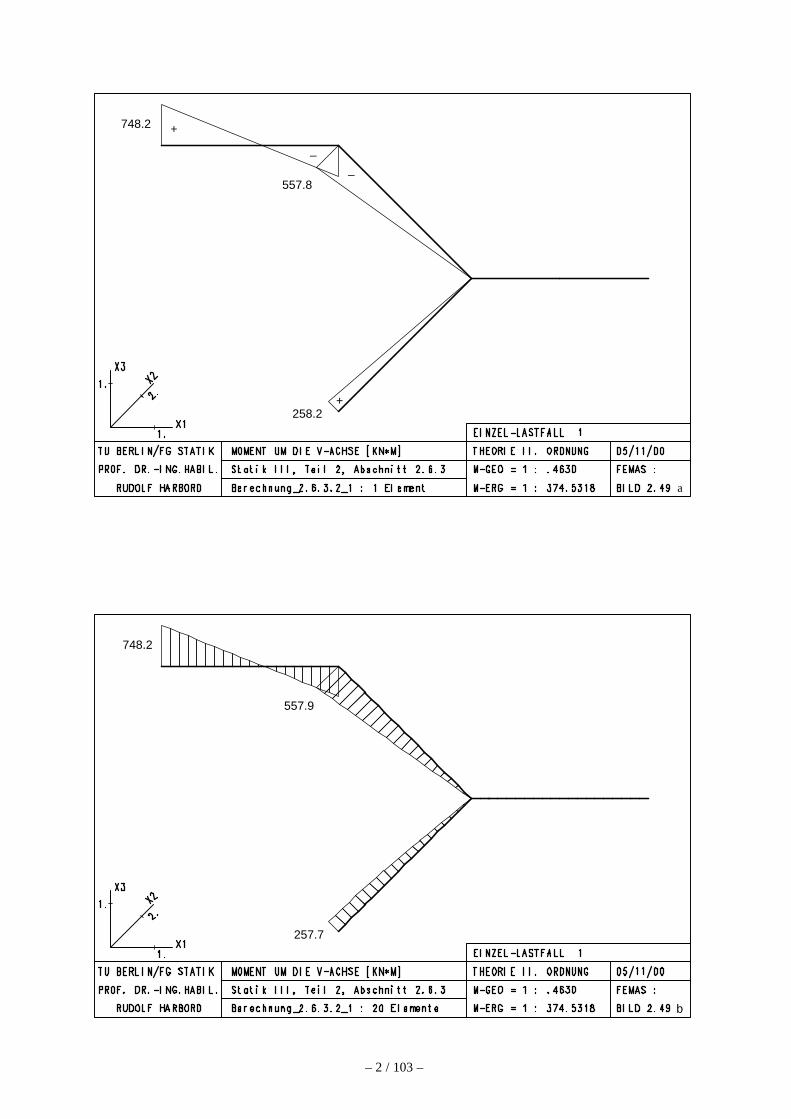
– 2 / 103 –
a
748.2
557.8
258.2
+
–
+
–
748.2
557.9
257.7
b
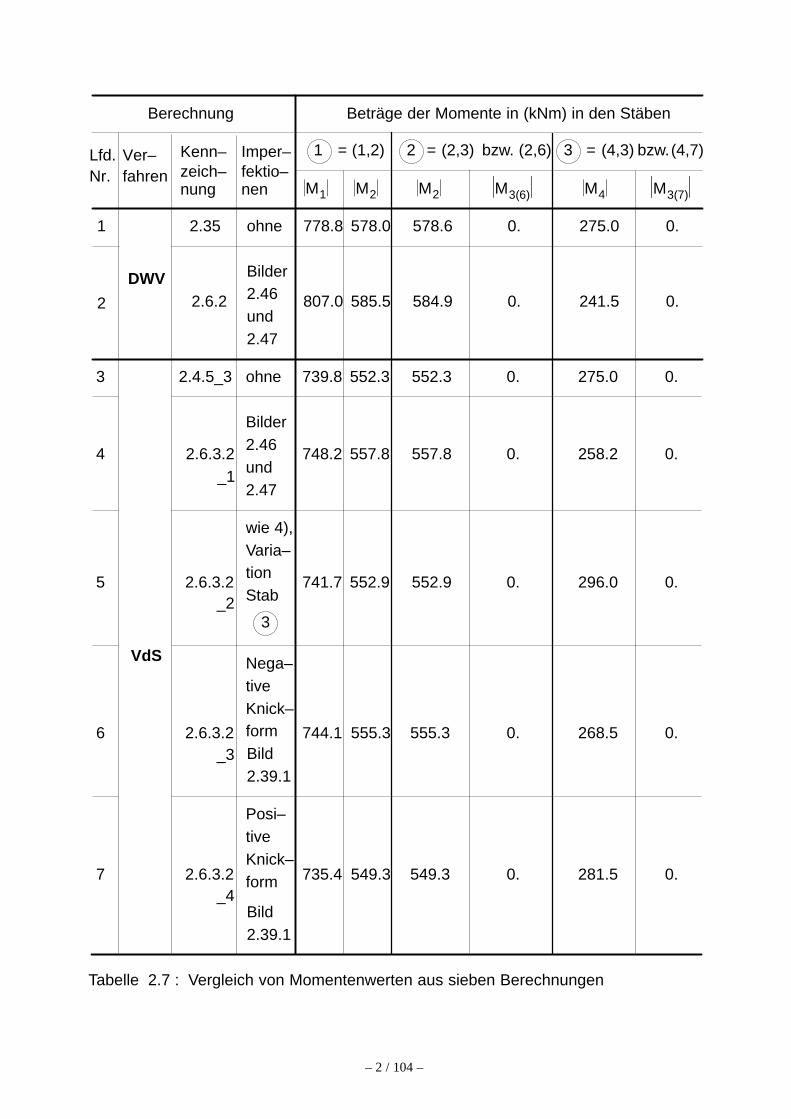
– 2 / 104 –
1
Tabelle 2.7 : Vergleich von Momentenwerten aus sieben Berechnungen
Lfd. = (1,2) 2 = 3 =Ver–fahren
Beträge der Momente in (kNm) in den Stäben
VdS
DWV
(2,3) bzw. (2,6) (4,3) bzw.(4,7)
2.35 ohne
Bilder
578.0778.8 0. 275.0 0.
�M1� �M2
� �M2� �M3(6)
� �M4� �M3(7)
�Nr.
Berechnung
Kenn–zeich–nung
Imper–fektio–nen
1
2
578.6
2.46und2.47
585.5807.0 0. 241.5 0.584.92.6.2
2.4.5_3 ohne
Bilder
552.3739.8 0. 275.0 0.3
4
552.3
2.46und2.47
557.8748.2 0. 258.2 0.557.82.6.3.2
wie 4),
5
Varia–tionStab
552.9741.7 0. 296.0 0.552.92.6.3.2
Nega–
6
tiveKnick–form 555.3744.1 0. 268.5 0.555.32.6.3.2
Knick–7 form
Posi–tive
549.3735.4 0. 281.5 0.549.32.6.3.2
3
Bild2.39.1
Bild2.39.1
_1
_2
_3
_4
– 2 / 105 –
Der direkte Ansatz der Knickform (Bild 2.39.1) als Imperfektionsform läßt ebenfallskeine eindeutige Tendenzen in Richtung der ungünstigsten Wirkung erkennen. Die Nor-mierung in der 6–ten Berechnung mit dem negativen Faktor –ψ0⋅s = –4/200 = –0.02 (m)ist vergleichbar mit der Vorgabe in der 4–ten Berechnung, so daß sich fast die gleichenErgebnisse ergeben. Dies trifft auch für die 7–te Berechnung mit positivem Normie-rungsfaktor ψ0 ⋅ s = 4 / 200 = 0.02 (m) zu, die zumindest in der Tendenz mit der 5–tenBerechnung übereinstimmt.
Der Vergleich in (Tabelle 2.7) verdeutlicht die Schwierigkeit, Imperfektionen in derWeise anzusetzen, daß sie sich lokal und global gleich ungünstig auswirken. Es ist da-her eine ingenieurmäßige Entscheidung zu treffen, um den ungünstigsten Fall zu defi-nieren. Für den globalen Tragfähigkeitsnachweis gibt es nur eine Möglichkeit, um dieszu erreichen, nämlich die Verwendung der Knickform. Die Bemessung an diskretenPunkten kann dagegen zusätzliche Kombinationen erfordern, um am betrachteten Ortden ungünstigsten Einfluß zu erfassen. Der Lastfall Imperfektionen ist daher immer alsWechsellastfall zu behandeln.
Der quadratische Verlauf der angesetzten Vorverkrümmungen (Bild 2.47a) ergibtStabendmomente (Bild 2.47b), die zwischen den Stabenden ebenfalls quadratischverlaufen. Dieser Einfluß ist am quadratischen Verlauf der Schnittmomente (Bild 2.49b)erkennbar. Die Abweichung vom linearen Verlauf (Bild 2.49a) ist zwar insgesamtnur schwach ausgebildet, tritt aber deutlich hervor. Dies gilt besonders für den 3–tenStab. Hier ist der Einfluß der Vorverkrümmungen auf die Momente am größten, vgl.(Tabelle 2.7). Es ist daher von Fall zu Fall zu entscheiden, mit welcher Elementteilungdie Berechnungen nach Theorie II. Ordnung durchzuführen sind, um alle wesentlichenEffekte zu erfassen. Die Unterteilungen nach Theorie I. und II. Ordnung stimmen zwari.a. überein, aber eben nicht immer.
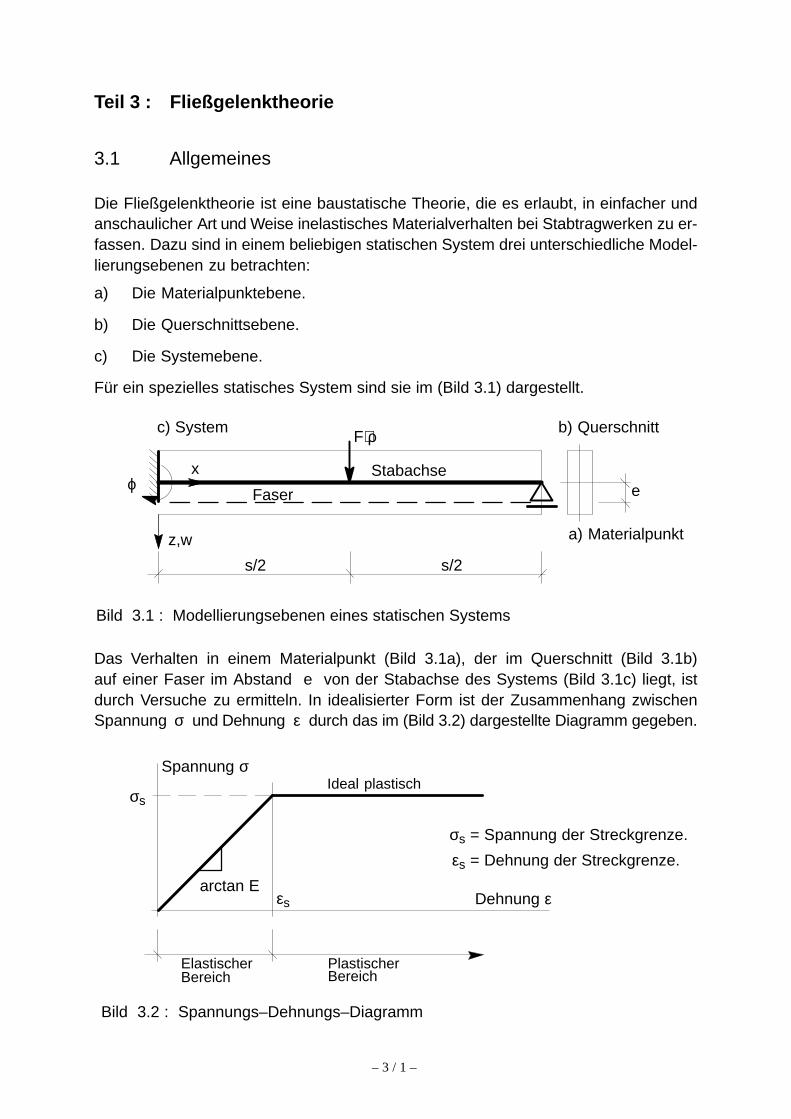
– 3 / 1 –
Teil 3 : Fließgelenktheorie
3.1 Allgemeines
Die Fließgelenktheorie ist eine baustatische Theorie, die es erlaubt, in einfacher undanschaulicher Art und Weise inelastisches Materialverhalten bei Stabtragwerken zu er-fassen. Dazu sind in einem beliebigen statischen System drei unterschiedliche Model-lierungsebenen zu betrachten:
a) Die Materialpunktebene.
b) Die Querschnittsebene.
c) Die Systemebene.
Für ein spezielles statisches System sind sie im (Bild 3.1) dargestellt.
ϕ
F⋅ρ b) Querschnitt
e
a) Materialpunkt
s/2 s/2
Stabachse
Faser
z,w
x
c) System
Bild 3.1 : Modellierungsebenen eines statischen Systems
Das Verhalten in einem Materialpunkt (Bild 3.1a), der im Querschnitt (Bild 3.1b)auf einer Faser im Abstand e von der Stabachse des Systems (Bild 3.1c) liegt, istdurch Versuche zu ermitteln. In idealisierter Form ist der Zusammenhang zwischenSpannung σ und Dehnung ε durch das im (Bild 3.2) dargestellte Diagramm gegeben.
Dehnung εarctan E
Spannung σ
σs
ElastischerBereich
PlastischerBereich
σs = Spannung der Streckgrenze.
εs = Dehnung der Streckgrenze.
εs
Ideal plastisch
Bild 3.2 : Spannungs–Dehnungs–Diagramm
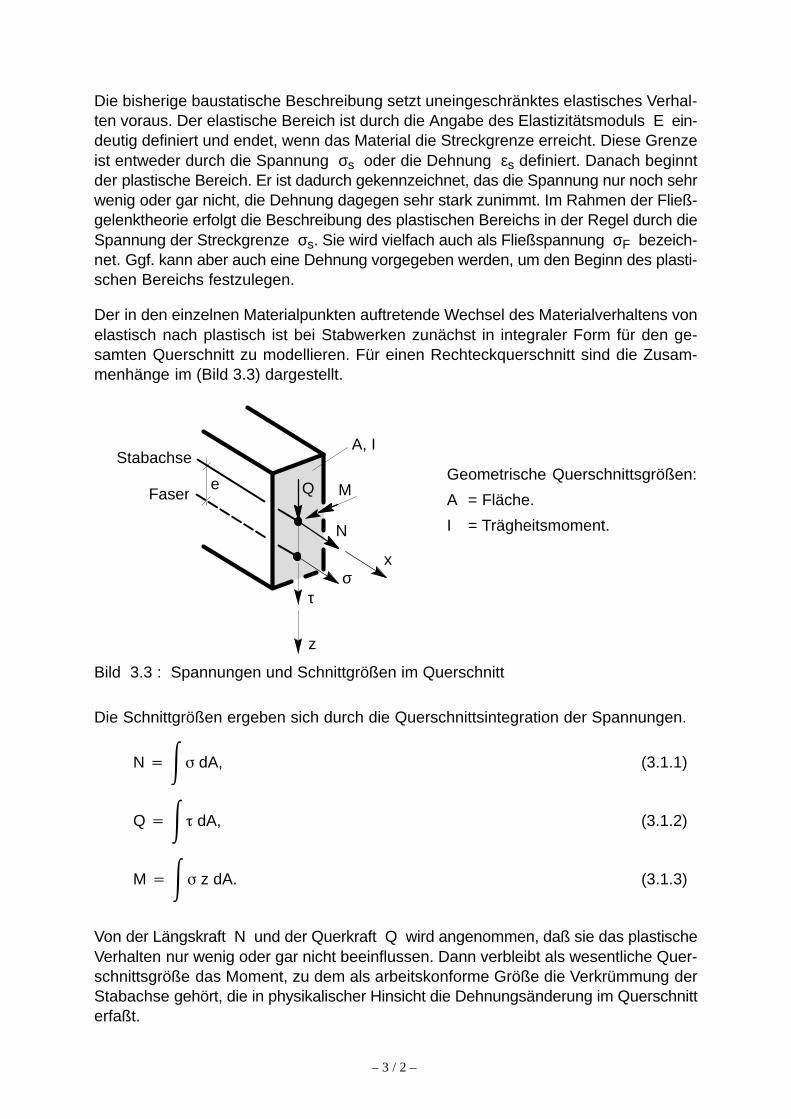
– 3 / 2 –
Die bisherige baustatische Beschreibung setzt uneingeschränktes elastisches Verhal-ten voraus. Der elastische Bereich ist durch die Angabe des Elastizitätsmoduls E ein-deutig definiert und endet, wenn das Material die Streckgrenze erreicht. Diese Grenzeist entweder durch die Spannung σs oder die Dehnung εs definiert. Danach beginntder plastische Bereich. Er ist dadurch gekennzeichnet, das die Spannung nur noch sehrwenig oder gar nicht, die Dehnung dagegen sehr stark zunimmt. Im Rahmen der Fließ-gelenktheorie erfolgt die Beschreibung des plastischen Bereichs in der Regel durch dieSpannung der Streckgrenze σs. Sie wird vielfach auch als Fließspannung σF bezeich-net. Ggf. kann aber auch eine Dehnung vorgegeben werden, um den Beginn des plasti-schen Bereichs festzulegen.
Der in den einzelnen Materialpunkten auftretende Wechsel des Materialverhaltens vonelastisch nach plastisch ist bei Stabwerken zunächst in integraler Form für den ge-samten Querschnitt zu modellieren. Für einen Rechteckquerschnitt sind die Zusam-menhänge im (Bild 3.3) dargestellt.
σ
eFaser
x
Stabachse
z
N
MQ
τ
A, I
Geometrische Querschnittsgrößen:
A = Fläche.
I = Trägheitsmoment.
Bild 3.3 : Spannungen und Schnittgrößen im Querschnitt
Die Schnittgrößen ergeben sich durch die Querschnittsintegration der Spannungen.
N � �� dA, (3.1.1)
Q � � � dA, (3.1.2)
M � �� z dA. (3.1.3)
Von der Längskraft N und der Querkraft Q wird angenommen, daß sie das plastischeVerhalten nur wenig oder gar nicht beeinflussen. Dann verbleibt als wesentliche Quer-schnittsgröße das Moment, zu dem als arbeitskonforme Größe die Verkrümmung derStabachse gehört, die in physikalischer Hinsicht die Dehnungsänderung im Querschnitterfaßt.
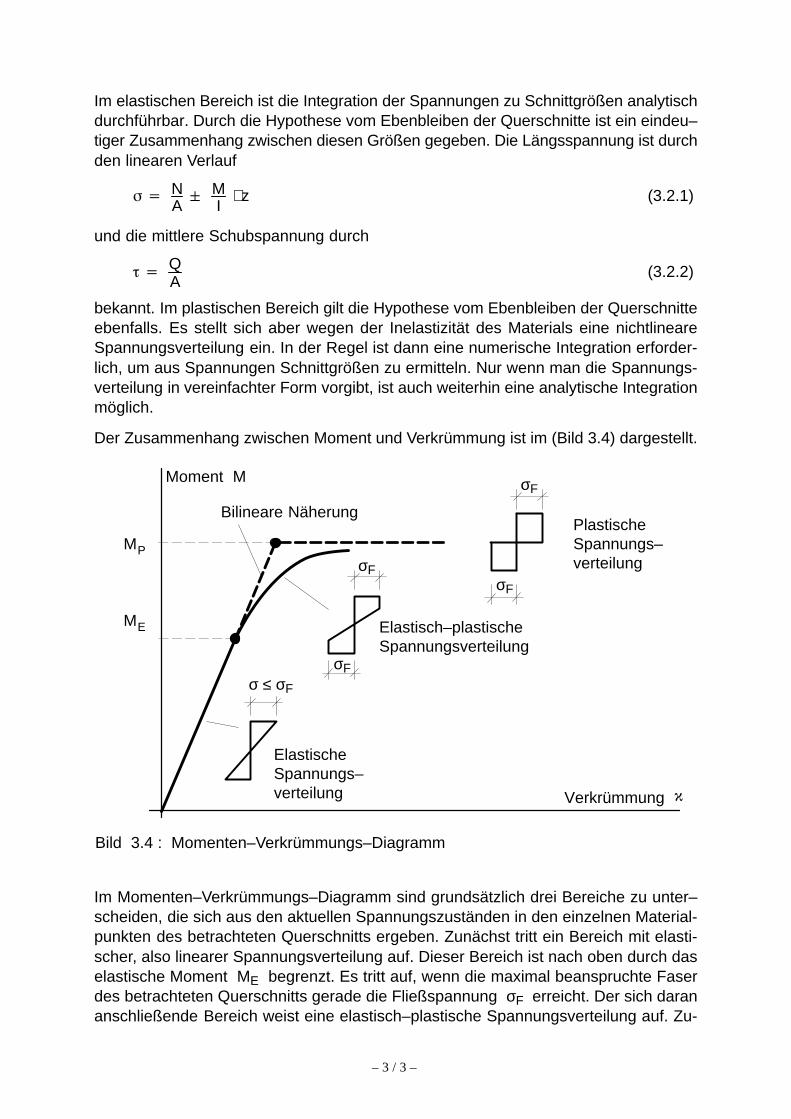
– 3 / 3 –
Im elastischen Bereich ist die Integration der Spannungen zu Schnittgrößen analytischdurchführbar. Durch die Hypothese vom Ebenbleiben der Querschnitte ist ein eindeu–tiger Zusammenhang zwischen diesen Größen gegeben. Die Längsspannung ist durchden linearen Verlauf
� � NA� M
I⋅ z (3.2.1)
und die mittlere Schubspannung durch
� � QA
(3.2.2)
bekannt. Im plastischen Bereich gilt die Hypothese vom Ebenbleiben der Querschnitteebenfalls. Es stellt sich aber wegen der Inelastizität des Materials eine nichtlineareSpannungsverteilung ein. In der Regel ist dann eine numerische Integration erforder-lich, um aus Spannungen Schnittgrößen zu ermitteln. Nur wenn man die Spannungs-verteilung in vereinfachter Form vorgibt, ist auch weiterhin eine analytische Integrationmöglich.
Der Zusammenhang zwischen Moment und Verkrümmung ist im (Bild 3.4) dargestellt.
Moment M
MP
ME
Verkrümmung
σF
σF
PlastischeSpannungs–verteilung
σF
σF
σ ≤ σF
ElastischeSpannungs–verteilung
Elastisch–plastischeSpannungsverteilung
Bild 3.4 : Momenten–Verkrümmungs–Diagramm
Bilineare Näherung
�
Im Momenten–Verkrümmungs–Diagramm sind grundsätzlich drei Bereiche zu unter–scheiden, die sich aus den aktuellen Spannungszuständen in den einzelnen Material-punkten des betrachteten Querschnitts ergeben. Zunächst tritt ein Bereich mit elasti-scher, also linearer Spannungsverteilung auf. Dieser Bereich ist nach oben durch daselastische Moment ME begrenzt. Es tritt auf, wenn die maximal beanspruchte Faserdes betrachteten Querschnitts gerade die Fließspannung σF erreicht. Der sich darananschließende Bereich weist eine elastisch–plastische Spannungsverteilung auf. Zu-
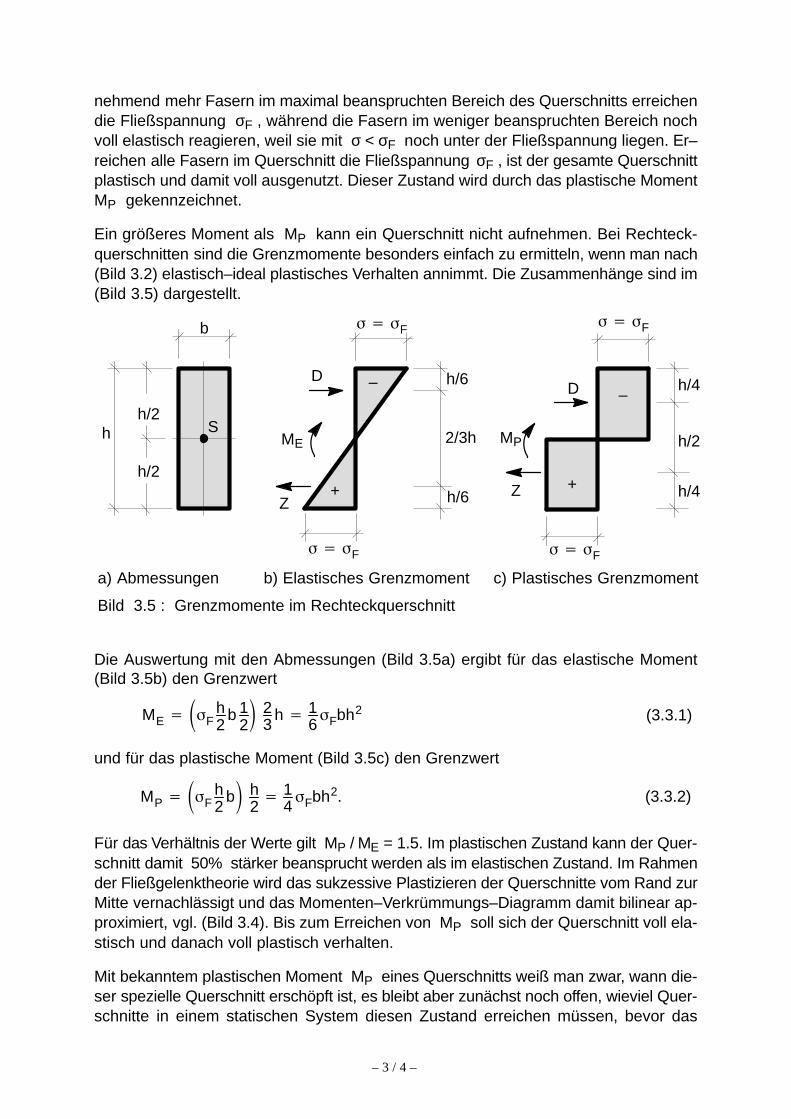
– 3 / 4 –
nehmend mehr Fasern im maximal beanspruchten Bereich des Querschnitts erreichendie Fließspannung σF , während die Fasern im weniger beanspruchten Bereich nochvoll elastisch reagieren, weil sie mit σ < σF noch unter der Fließspannung liegen. Er–reichen alle Fasern im Querschnitt die Fließspannung σF , ist der gesamte Querschnittplastisch und damit voll ausgenutzt. Dieser Zustand wird durch das plastische MomentMP gekennzeichnet.
Ein größeres Moment als MP kann ein Querschnitt nicht aufnehmen. Bei Rechteck-querschnitten sind die Grenzmomente besonders einfach zu ermitteln, wenn man nach(Bild 3.2) elastisch–ideal plastisches Verhalten annimmt. Die Zusammenhänge sind im(Bild 3.5) dargestellt.
b
Shh/2
h/2
ME MP
D
ZZ
D–
+
–
+
� � �F� � �F
� � �F � � �F
h/6
2/3h
h/4
h/4
h/2
h/6
a) Abmessungen b) Elastisches Grenzmoment c) Plastisches Grenzmoment
Bild 3.5 : Grenzmomente im Rechteckquerschnitt
Die Auswertung mit den Abmessungen (Bild 3.5a) ergibt für das elastische Moment(Bild 3.5b) den Grenzwert
ME � ��Fh2
b 12� 2
3h � 1
6�Fbh2 (3.3.1)
und für das plastische Moment (Bild 3.5c) den Grenzwert
MP � ��Fh2
b� h2� 1
4�Fbh2. (3.3.2)
Für das Verhältnis der Werte gilt MP / ME = 1.5. Im plastischen Zustand kann der Quer-schnitt damit 50% stärker beansprucht werden als im elastischen Zustand. Im Rahmender Fließgelenktheorie wird das sukzessive Plastizieren der Querschnitte vom Rand zurMitte vernachlässigt und das Momenten–Verkrümmungs–Diagramm damit bilinear ap-proximiert, vgl. (Bild 3.4). Bis zum Erreichen von MP soll sich der Querschnitt voll ela-stisch und danach voll plastisch verhalten.
Mit bekanntem plastischen Moment MP eines Querschnitts weiß man zwar, wann die-ser spezielle Querschnitt erschöpft ist, es bleibt aber zunächst noch offen, wieviel Quer-schnitte in einem statischen System diesen Zustand erreichen müssen, bevor das
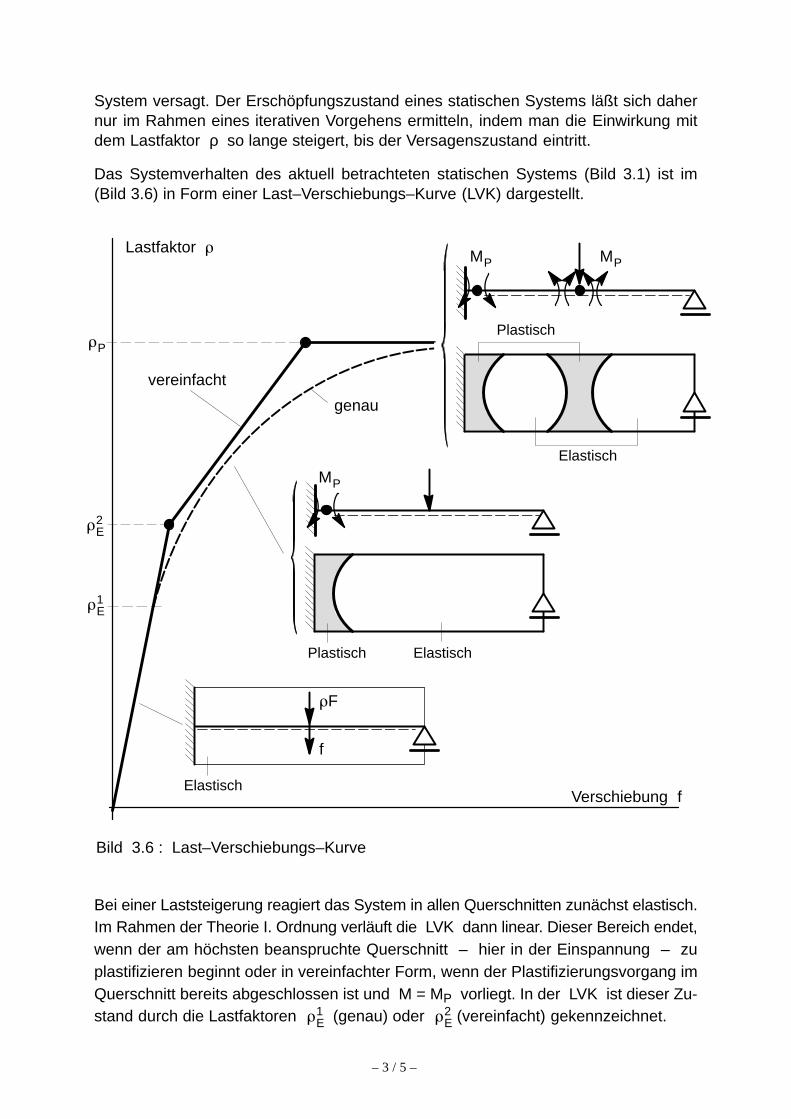
– 3 / 5 –
System versagt. Der Erschöpfungszustand eines statischen Systems läßt sich dahernur im Rahmen eines iterativen Vorgehens ermitteln, indem man die Einwirkung mitdem Lastfaktor ρ so lange steigert, bis der Versagenszustand eintritt.
Das Systemverhalten des aktuell betrachteten statischen Systems (Bild 3.1) ist im(Bild 3.6) in Form einer Last–Verschiebungs–Kurve (LVK) dargestellt.
f
Verschiebung f
�2E
�P
�1E
Lastfaktor �MP MP
Plastisch
Elastisch
genau
vereinfacht
MP
Plastisch Elastisch
Elastisch
�F
Bild 3.6 : Last–Verschiebungs–Kurve
Bei einer Laststeigerung reagiert das System in allen Querschnitten zunächst elastisch.Im Rahmen der Theorie I. Ordnung verläuft die LVK dann linear. Dieser Bereich endet,wenn der am höchsten beanspruchte Querschnitt – hier in der Einspannung – zuplastifizieren beginnt oder in vereinfachter Form, wenn der Plastifizierungsvorgang imQuerschnitt bereits abgeschlossen ist und M = MP vorliegt. In der LVK ist dieser Zu-stand durch die Lastfaktoren �1
E (genau) oder �2E (vereinfacht) gekennzeichnet.
– 3 / 6 –
Mit dem Erreichen von MP ist der Querschnitt in der Einspannung voll ausgenutzt. Erkann daher bei einer weiteren Laststeigerung kein zusätzliches Moment aufnehmen,weil an dieser Stelle des Systems kein Biegewiderstand mehr besteht. Im statischenSystem ist somit eine Modifizierung erforderlich, um die durch das Plastifizieren einge-tretene Änderung im Tragverhalten zu erfassen.
Dies ist in sehr einfacher Weise durch das Einfügen eines Momentengelenks zu er–reichen. Im Unterschied zu einem konstruktiven Gelenk, in dem immer M = 0 und∆ϕ ≠ 0 gilt, ist in dem durch Plastifizieren oder Fließen entstandenen Momentengelenkdie Bedingung
M = MP + ∆M mit ∆M = 0 und ∆ϕ → �P � 0 (3.4)
zu erfüllen. In dem durch Gl. (3.4) definierten Gelenk kann zwar ein Moment, näm–lich MP , auftreten. Nach dem Erreichen von MP ist aber ein weiterer Zuwachs nichtmöglich. Es kann dann nur noch die plastische Verkrümmung �P anwachsen, die sichim statischen System durch das Auftreten eines Winkelsprungs ∆ϕ bemerkbar macht.Gelenke mit diesen Eigenschaften werden als Fließgelenke bezeichnet, was unmittel-bar den Namen der Fließgelenktheorie erklärt. Sie werden durch das Symbol ( ) ge-kennzeichnet.
Die Konzentration der plastischen Bereiche in Fließgelenken Gl. (3.4) ist zwar eine sehreinfache, aber nicht die einzige Möglichkeit, um die Wirkung von plastischen Material-punkten zu erfassen. Natürlich kann man auch unmittelbar die flächige Ausbreitung derplastischen Bereiche bzw. Zonen, in denen die Materialpunkte liegen, in ein bausta–tisches Modell einbeziehen. Diese Vorgehensweise, auch Fließzonentheorie genannt,ist grundsätzlich genauer, aber auch sehr viel aufwendiger. In der Baustatik kommt siedaher kaum zur Anwendung. Hier dominiert ganz eindeutig die Fließgelenktheorie.
Das statische Ausgangssystem (Bild 3.1) ist n = 1–fach unbestimmt. Dieser Zustandgilt im Bereich der Laststeigerungen zwischen � � 0 und � � �2
E. Nach der Modifizie-rung durch ein Fließgelenk in der Einspannung ist das System statisch bestimmt. Andiesem System kann die Last weiter gesteigert werden, bis der Querschnitt in der Mittedurchplastifiziert ist und ein zweites Fließgelenk entsteht. Mit zwei Fließgelenken ist dasSystem kinematisch. Bei einer weiteren Laststeigerung versagt es, weil nun auch daszweite Fließgelenk anfängt, sich plastisch zu verdrehen. In der LVK ist der Erschöp-fungszustand durch den Lastfaktor ρP gekennzeichnet. Er definiert, bezogen auf dieAusgangslast, die plastische Grenzlast eines Systems. In der praktischen Anwendungstimmt die Ausgangslast mit der Gebrauchslast überein.
Die Entwicklung der Verformungen bis zur Kinematik des Systems hängt davon ab, obman das stetige Durchplastifizieren des Querschnitts und die stetige Ausbreitung derplastifizierten Querschnitte in Richtung der Stabachse erfaßt oder vernachlässigt. Imersten Fall ist die Fließzonentheorie anzuwenden, im zweiten Fall reicht es aus, die Be-rechnung mit der Fließgelenktheorie durchzuführen. Die Verformungen, die man durchdie Anwendung der Fließgelenktheorie erhält, fallen zwar kleiner aus, sind in der Regelaber noch genau genug, um das Verformungsverhalten von Tragwerken mit plasti-schem Materialverhalten abschätzen zu können. Die plastische Grenzlast stimmt dage-gen in beiden Fällen weitgehend überein.
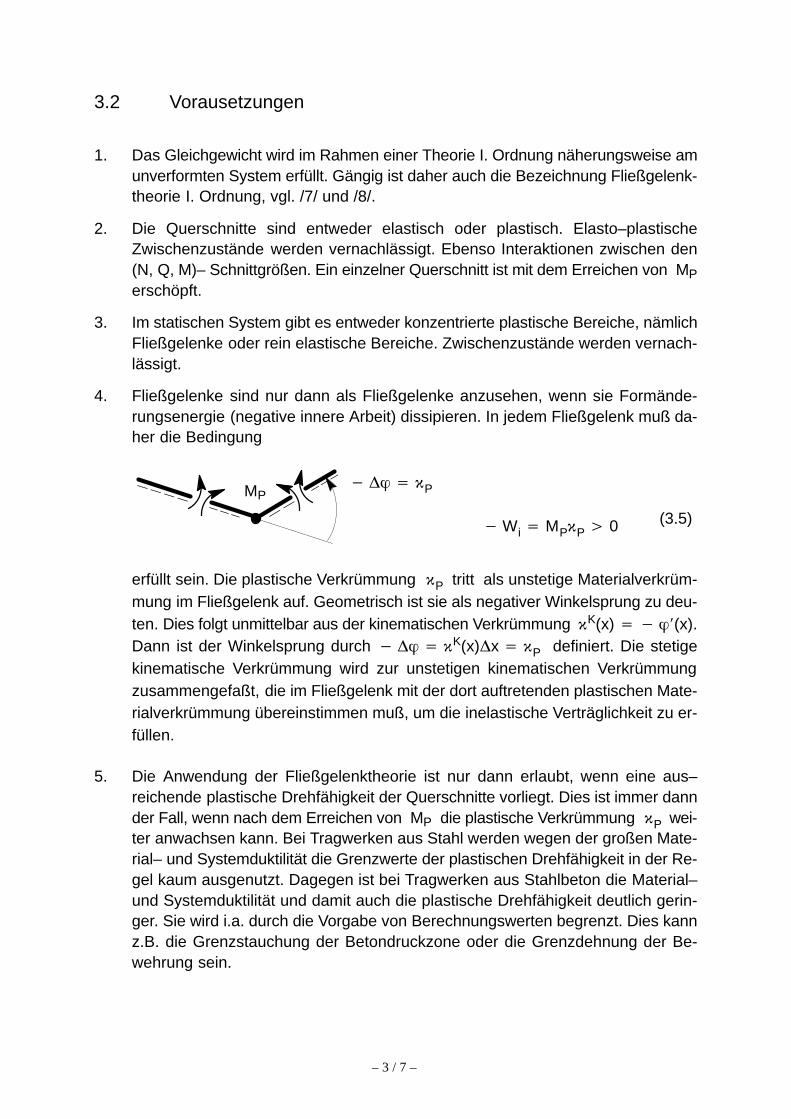
– 3 / 7 –
3.2 Vorausetzungen
1. Das Gleichgewicht wird im Rahmen einer Theorie I. Ordnung näherungsweise amunverformten System erfüllt. Gängig ist daher auch die Bezeichnung Fließgelenk-theorie I. Ordnung, vgl. /7/ und /8/.
2. Die Querschnitte sind entweder elastisch oder plastisch. Elasto–plastischeZwischenzustände werden vernachlässigt. Ebenso Interaktionen zwischen den(N, Q, M)– Schnittgrößen. Ein einzelner Querschnitt ist mit dem Erreichen von MPerschöpft.
3. Im statischen System gibt es entweder konzentrierte plastische Bereiche, nämlichFließgelenke oder rein elastische Bereiche. Zwischenzustände werden vernach-lässigt.
4. Fließgelenke sind nur dann als Fließgelenke anzusehen, wenn sie Formände-rungsenergie (negative innere Arbeit) dissipieren. In jedem Fließgelenk muß da-her die Bedingung
MP
(3.5)
� �� � �P
� Wi � MP�P � 0
erfüllt sein. Die plastische Verkrümmung �P tritt als unstetige Materialverkrüm-mung im Fließgelenk auf. Geometrisch ist sie als negativer Winkelsprung zu deu-ten. Dies folgt unmittelbar aus der kinematischen Verkrümmung �K(x) � � �(x).Dann ist der Winkelsprung durch � �� � �K(x)�x � �P definiert. Die stetigekinematische Verkrümmung wird zur unstetigen kinematischen Verkrümmungzusammengefaßt, die im Fließgelenk mit der dort auftretenden plastischen Mate-rialverkrümmung übereinstimmen muß, um die inelastische Verträglichkeit zu er-füllen.
5. Die Anwendung der Fließgelenktheorie ist nur dann erlaubt, wenn eine aus–reichende plastische Drehfähigkeit der Querschnitte vorliegt. Dies ist immer dannder Fall, wenn nach dem Erreichen von MP die plastische Verkrümmung �P wei-ter anwachsen kann. Bei Tragwerken aus Stahl werden wegen der großen Mate-rial– und Systemduktilität die Grenzwerte der plastischen Drehfähigkeit in der Re-gel kaum ausgenutzt. Dagegen ist bei Tragwerken aus Stahlbeton die Material–und Systemduktilität und damit auch die plastische Drehfähigkeit deutlich gerin-ger. Sie wird i.a. durch die Vorgabe von Berechnungswerten begrenzt. Dies kannz.B. die Grenzstauchung der Betondruckzone oder die Grenzdehnung der Be-wehrung sein.
– 3 / 8 –
3.3 Plastischer Erschöpfungszustand von statischen Systemen
Der plastische Erschöpfungszustand eines statischen Systems ist durch vier Bedingun-gen definiert. Davon gehören zwei zum Gleichgewicht und zwei zur Verträglichkeit.
a) Gleichgewicht
1. Bedingung : Es muß ein statisch zulässiger Kraftzustand vorliegen, der das Gleichgewicht erfüllt. Die elastische Verträglichkeit kann, muß aber nicht erfüllt sein.
3. Bedingung : Der Kräftezustand (1. Bedingung) muß die statische Plastizitäts–bedingung M ≤ MP an jedem Ort im System erfüllen.
b) Verträglichkeit
2. Bedingung : Es muß ein kinematisch zulässiger Wegzustand vorliegen, dermit einer kinematischen Kette übereinstimmt, die den Grenz–zustand des Tragvermögens erfaßt.
4. Bedingung : Der Wegzustand (2. Bedingung) muß die kinematische Plastizi–tätsbedingung (MP�P) � 0 in jedem Fließgelenk des Systems erfüllen.
c) Erschöpfungszustand
Sind alle vier Bedingungen erfüllt, ist die plastische Grenzlast
FP � �P F (3.6.1)
eines statischen Systems erreicht. ρP ist der Laststeigerungsfaktor, der die Ge-brauchslast F auf die plastische Grenzlast anhebt. Die zulässige Bemessungslast Fd,die unterhalb der plastischen Grenzlast Gl. (3.6.1) liegen muß, ergibt sich aus der mitTeilsicherheitsfaktoren γF erhöhten Gebrauchslast. Für die Bemessung im Grenzzu-stand der Tragfähigkeit gilt
Fd � �F F FP . (3.6.2)
Zur plastischen Grenzlast ist zusätzlich die Verteilung der Schnittgrößen und Verfor-mungen zu ermitteln. Fallen einzelne Verformungen δP sehr groß aus, ist die Bemes-sungslast ggf. durch die Vorgabe einer Grenzverformung δd festzulegen, um nebender Tragfähigkeit auch die Gebrauchstauglichkeit zu gewährleisten. Für die Bemes-sung im Grenzzustand der Gebrauchstauglichkeit gilt
�P �d . (3.6.3)
d) Berechnungsverfahren
Es sind drei baustatische Verfahren bekannt, um die Grenzlast, Schnittgrößen und Ver-formungen des plastischen Erschöpfungszustands zu ermitteln :
� Das Verfahren der stetigen Laststeigerung.� Der statische Traglastsatz.� Der kinematische Traglastsatz.
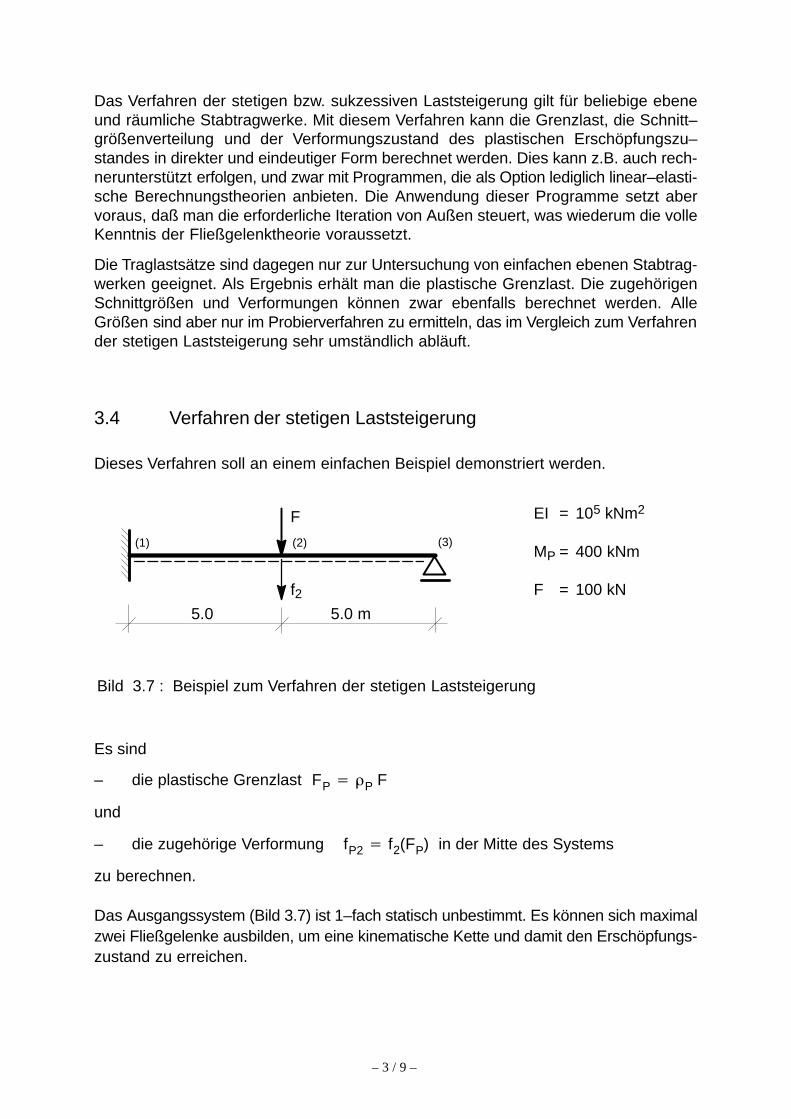
– 3 / 9 –
Das Verfahren der stetigen bzw. sukzessiven Laststeigerung gilt für beliebige ebeneund räumliche Stabtragwerke. Mit diesem Verfahren kann die Grenzlast, die Schnitt–größenverteilung und der Verformungszustand des plastischen Erschöpfungszu–standes in direkter und eindeutiger Form berechnet werden. Dies kann z.B. auch rech-nerunterstützt erfolgen, und zwar mit Programmen, die als Option lediglich linear–elasti-sche Berechnungstheorien anbieten. Die Anwendung dieser Programme setzt abervoraus, daß man die erforderliche Iteration von Außen steuert, was wiederum die volleKenntnis der Fließgelenktheorie voraussetzt.
Die Traglastsätze sind dagegen nur zur Untersuchung von einfachen ebenen Stabtrag-werken geeignet. Als Ergebnis erhält man die plastische Grenzlast. Die zugehörigenSchnittgrößen und Verformungen können zwar ebenfalls berechnet werden. AlleGrößen sind aber nur im Probierverfahren zu ermitteln, das im Vergleich zum Verfahrender stetigen Laststeigerung sehr umständlich abläuft.
3.4 Verfahren der stetigen Laststeigerung
Dieses Verfahren soll an einem einfachen Beispiel demonstriert werden.
f25.0 m5.0
F EI = 105 kNm2
MP = 400 kNm
F = 100 kN
Bild 3.7 : Beispiel zum Verfahren der stetigen Laststeigerung
(1) (2) (3)
Es sind
– die plastische Grenzlast FP � �P F
und
– die zugehörige Verformung fP2 � f2(FP) in der Mitte des Systems
zu berechnen.
Das Ausgangssystem (Bild 3.7) ist 1–fach statisch unbestimmt. Es können sich maximalzwei Fließgelenke ausbilden, um eine kinematische Kette und damit den Erschöpfungs-zustand zu erreichen.
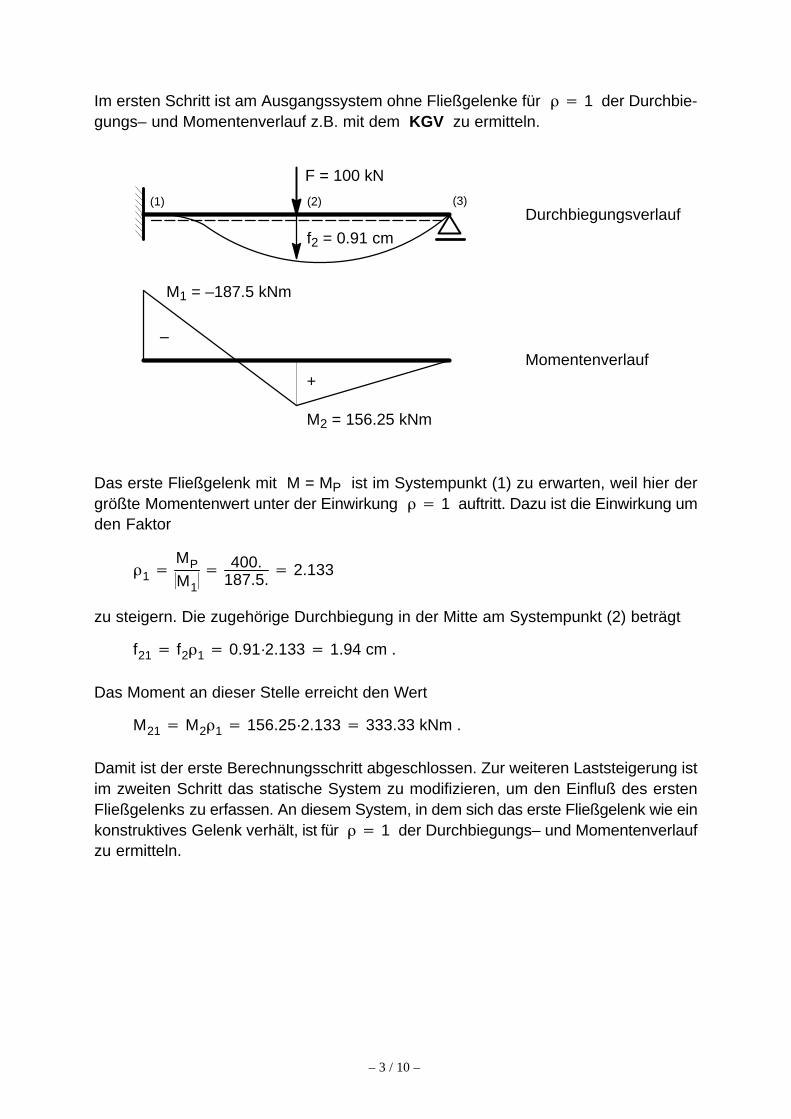
– 3 / 10 –
Im ersten Schritt ist am Ausgangssystem ohne Fließgelenke für � � 1 der Durchbie-gungs– und Momentenverlauf z.B. mit dem KGV zu ermitteln.
F = 100 kN
(1) (2) (3)
M1 = –187.5 kNm
M2 = 156.25 kNm
+
–
f2 = 0.91 cm
Durchbiegungsverlauf
Momentenverlauf
Das erste Fließgelenk mit M = MP ist im Systempunkt (1) zu erwarten, weil hier dergrößte Momentenwert unter der Einwirkung � � 1 auftritt. Dazu ist die Einwirkung umden Faktor
�1 �MP�M1
� �400.
187.5.� 2.133
zu steigern. Die zugehörige Durchbiegung in der Mitte am Systempunkt (2) beträgt
f21 � f2�1 � 0.91·2.133 � 1.94 cm .
Das Moment an dieser Stelle erreicht den Wert
M21 � M2�1 � 156.25·2.133 � 333.33 kNm .
Damit ist der erste Berechnungsschritt abgeschlossen. Zur weiteren Laststeigerung istim zweiten Schritt das statische System zu modifizieren, um den Einfluß des erstenFließgelenks zu erfassen. An diesem System, in dem sich das erste Fließgelenk wie einkonstruktives Gelenk verhält, ist für � � 1 der Durchbiegungs– und Momentenverlaufzu ermitteln.
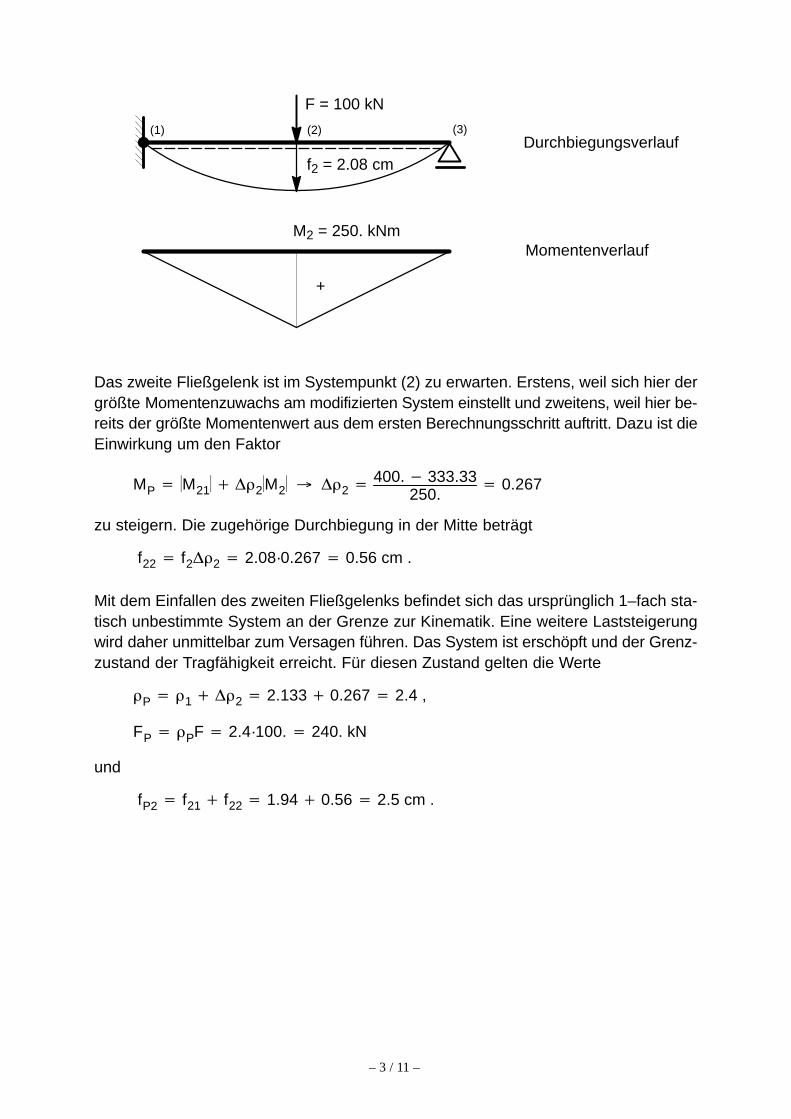
– 3 / 11 –
F = 100 kN
(1) (2) (3)
M2 = 250. kNm
+
f2 = 2.08 cmDurchbiegungsverlauf
Momentenverlauf
Das zweite Fließgelenk ist im Systempunkt (2) zu erwarten. Erstens, weil sich hier dergrößte Momentenzuwachs am modifizierten System einstellt und zweitens, weil hier be-reits der größte Momentenwert aus dem ersten Berechnungsschritt auftritt. Dazu ist dieEinwirkung um den Faktor
MP � �M21� � ��2
�M2� ��2 � 400. � 333.33
250.� 0.267
zu steigern. Die zugehörige Durchbiegung in der Mitte beträgt
f22 � f2��2 � 2.08·0.267 � 0.56 cm .
Mit dem Einfallen des zweiten Fließgelenks befindet sich das ursprünglich 1–fach sta-tisch unbestimmte System an der Grenze zur Kinematik. Eine weitere Laststeigerungwird daher unmittelbar zum Versagen führen. Das System ist erschöpft und der Grenz-zustand der Tragfähigkeit erreicht. Für diesen Zustand gelten die Werte
�P � �1 � ��2 � 2.133 � 0.267 � 2.4 ,
FP � �PF � 2.4·100. � 240. kN
und
fP2 � f21 � f22 � 1.94 � 0.56 � 2.5 cm .
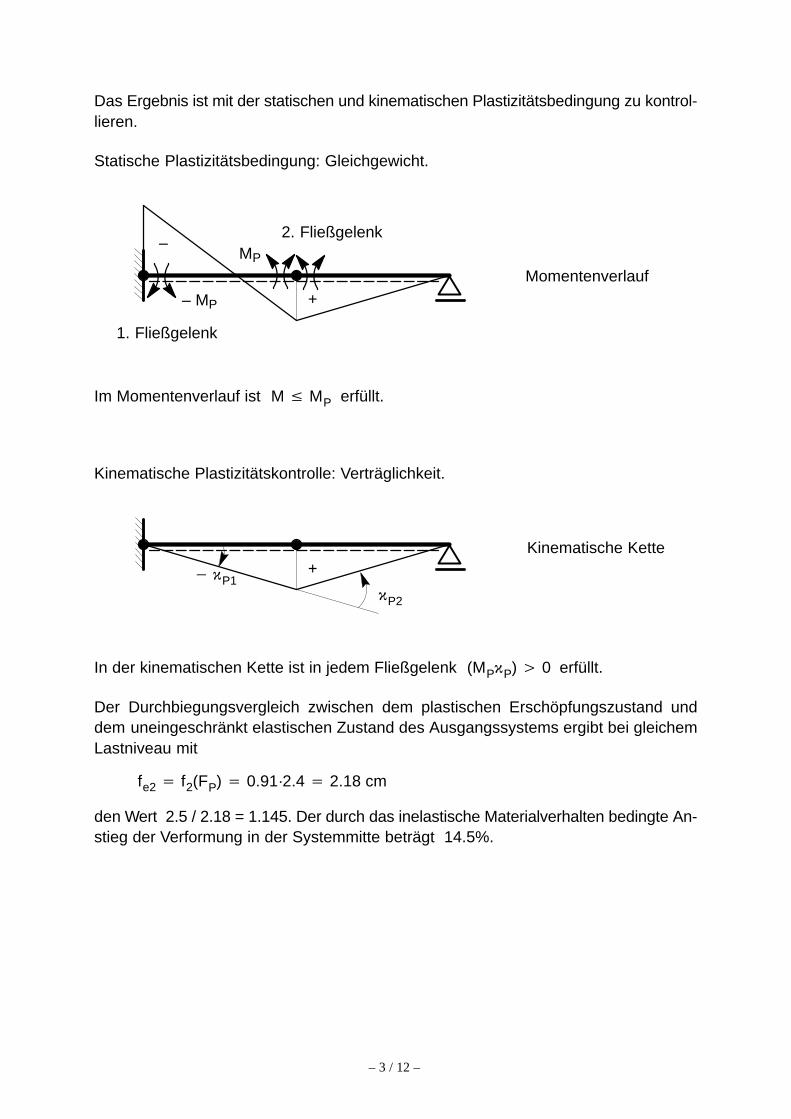
– 3 / 12 –
Das Ergebnis ist mit der statischen und kinematischen Plastizitätsbedingung zu kontrol-lieren.
Statische Plastizitätsbedingung: Gleichgewicht.
MP
+
–2. Fließgelenk
– MP
1. Fließgelenk
Momentenverlauf
Im Momentenverlauf ist M MP erfüllt.
Kinematische Plastizitätskontrolle: Verträglichkeit.
+� �P1�P2
Kinematische Kette
In der kinematischen Kette ist in jedem Fließgelenk (MP�P) � 0 erfüllt.
Der Durchbiegungsvergleich zwischen dem plastischen Erschöpfungszustand unddem uneingeschränkt elastischen Zustand des Ausgangssystems ergibt bei gleichemLastniveau mit
fe2 � f2(FP) � 0.91·2.4 � 2.18 cm
den Wert 2.5 / 2.18 = 1.145. Der durch das inelastische Materialverhalten bedingte An-stieg der Verformung in der Systemmitte beträgt 14.5%.
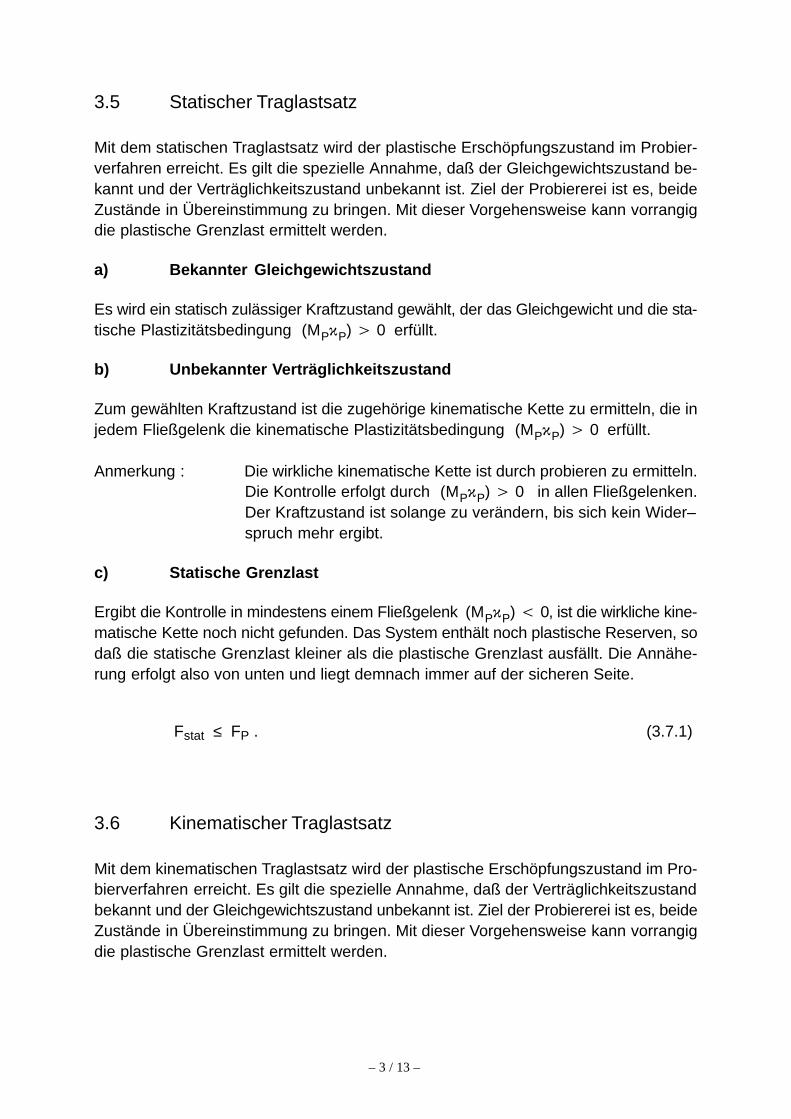
– 3 / 13 –
3.5 Statischer Traglastsatz
Mit dem statischen Traglastsatz wird der plastische Erschöpfungszustand im Probier-verfahren erreicht. Es gilt die spezielle Annahme, daß der Gleichgewichtszustand be-kannt und der Verträglichkeitszustand unbekannt ist. Ziel der Probiererei ist es, beideZustände in Übereinstimmung zu bringen. Mit dieser Vorgehensweise kann vorrangigdie plastische Grenzlast ermittelt werden.
a) Bekannter Gleichgewichtszustand
Es wird ein statisch zulässiger Kraftzustand gewählt, der das Gleichgewicht und die sta-tische Plastizitätsbedingung (MP�P) � 0 erfüllt.
b) Unbekannter Verträglichkeitszustand
Zum gewählten Kraftzustand ist die zugehörige kinematische Kette zu ermitteln, die injedem Fließgelenk die kinematische Plastizitätsbedingung (MP�P) � 0 erfüllt.
Anmerkung : Die wirkliche kinematische Kette ist durch probieren zu ermitteln.Die Kontrolle erfolgt durch (MP�P) � 0 in allen Fließgelenken.Der Kraftzustand ist solange zu verändern, bis sich kein Wider–spruch mehr ergibt.
c) Statische Grenzlast
Ergibt die Kontrolle in mindestens einem Fließgelenk (MP�P) � 0, ist die wirkliche kine-matische Kette noch nicht gefunden. Das System enthält noch plastische Reserven, sodaß die statische Grenzlast kleiner als die plastische Grenzlast ausfällt. Die Annähe-rung erfolgt also von unten und liegt demnach immer auf der sicheren Seite.
Fstat ≤ FP . (3.7.1)
3.6 Kinematischer Traglastsatz
Mit dem kinematischen Traglastsatz wird der plastische Erschöpfungszustand im Pro-bierverfahren erreicht. Es gilt die spezielle Annahme, daß der Verträglichkeitszustandbekannt und der Gleichgewichtszustand unbekannt ist. Ziel der Probiererei ist es, beideZustände in Übereinstimmung zu bringen. Mit dieser Vorgehensweise kann vorrangigdie plastische Grenzlast ermittelt werden.
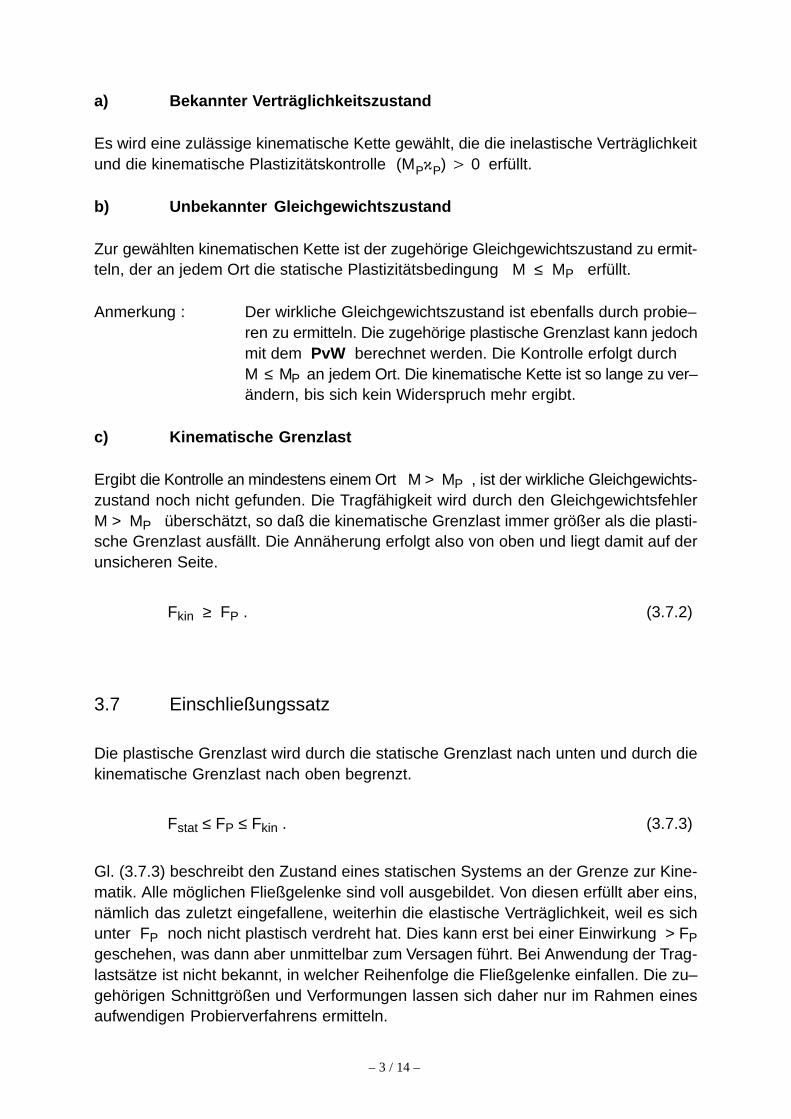
– 3 / 14 –
a) Bekannter Verträglichkeitszustand
Es wird eine zulässige kinematische Kette gewählt, die die inelastische Verträglichkeitund die kinematische Plastizitätskontrolle (MP�P) � 0 erfüllt.
b) Unbekannter Gleichgewichtszustand
Zur gewählten kinematischen Kette ist der zugehörige Gleichgewichtszustand zu ermit-teln, der an jedem Ort die statische Plastizitätsbedingung M ≤ MP erfüllt.
Anmerkung : Der wirkliche Gleichgewichtszustand ist ebenfalls durch probie–ren zu ermitteln. Die zugehörige plastische Grenzlast kann jedochmit dem PvW berechnet werden. Die Kontrolle erfolgt durch M ≤ MP an jedem Ort. Die kinematische Kette ist so lange zu ver–ändern, bis sich kein Widerspruch mehr ergibt.
c) Kinematische Grenzlast
Ergibt die Kontrolle an mindestens einem Ort M > MP , ist der wirkliche Gleichgewichts-zustand noch nicht gefunden. Die Tragfähigkeit wird durch den GleichgewichtsfehlerM > MP überschätzt, so daß die kinematische Grenzlast immer größer als die plasti-sche Grenzlast ausfällt. Die Annäherung erfolgt also von oben und liegt damit auf derunsicheren Seite.
Fkin ≥ FP . (3.7.2)
3.7 Einschließungssatz
Die plastische Grenzlast wird durch die statische Grenzlast nach unten und durch diekinematische Grenzlast nach oben begrenzt.
Fstat ≤ FP ≤ Fkin . (3.7.3)
Gl. (3.7.3) beschreibt den Zustand eines statischen Systems an der Grenze zur Kine-matik. Alle möglichen Fließgelenke sind voll ausgebildet. Von diesen erfüllt aber eins,nämlich das zuletzt eingefallene, weiterhin die elastische Verträglichkeit, weil es sichunter FP noch nicht plastisch verdreht hat. Dies kann erst bei einer Einwirkung > FPgeschehen, was dann aber unmittelbar zum Versagen führt. Bei Anwendung der Trag-lastsätze ist nicht bekannt, in welcher Reihenfolge die Fließgelenke einfallen. Die zu–gehörigen Schnittgrößen und Verformungen lassen sich daher nur im Rahmen einesaufwendigen Probierverfahrens ermitteln.
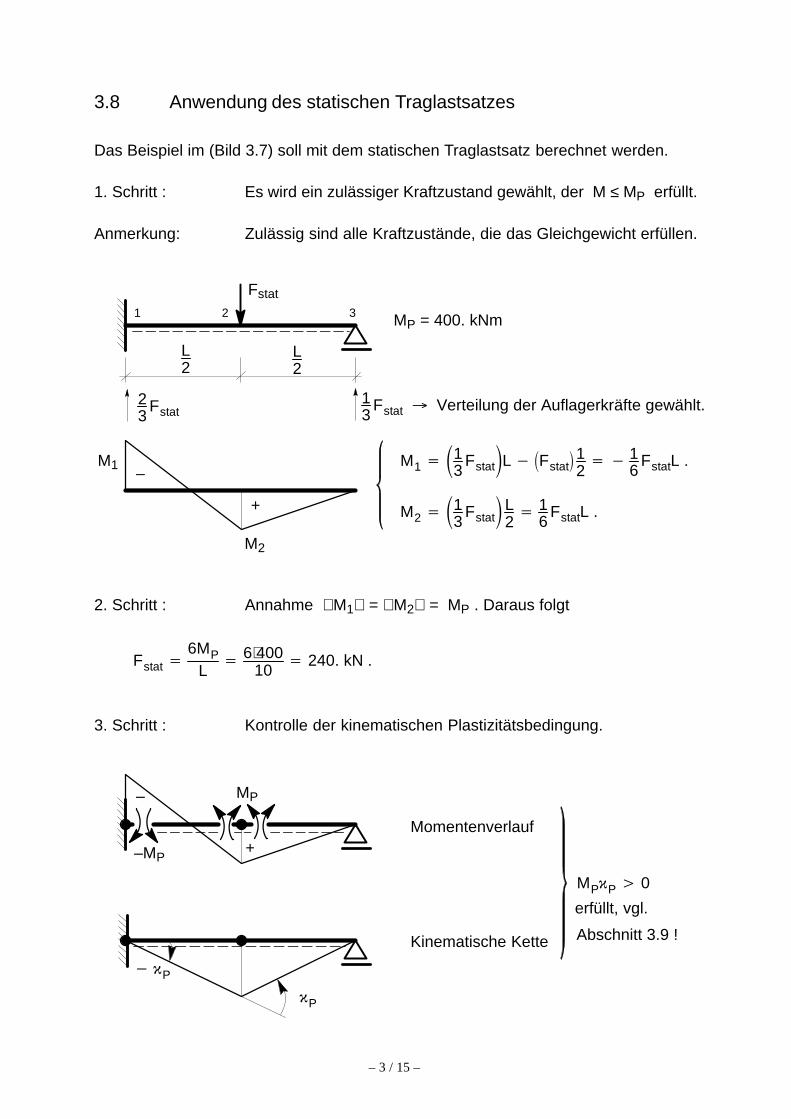
– 3 / 15 –
3.8 Anwendung des statischen Traglastsatzes
Das Beispiel im (Bild 3.7) soll mit dem statischen Traglastsatz berechnet werden.
1. Schritt : Es wird ein zulässiger Kraftzustand gewählt, der M ≤ MP erfüllt.
Anmerkung: Zulässig sind alle Kraftzustände, die das Gleichgewicht erfüllen.
–
+
M1
MP = 400. kNm2
L2
1 3
Fstat
L2
23
Fstat13
Fstat Verteilung der Auflagerkräfte gewählt.
M2
M2 � �13
Fstat�L2� 1
6FstatL .
M1 � �13
Fstat�L � �Fstat�12� � 1
6FstatL .
2. Schritt : Annahme M1 = M2 = MP . Daraus folgt
Fstat �6MP
L� 6⋅400
10� 240. kN .
3. Schritt : Kontrolle der kinematischen Plastizitätsbedingung.
–
+
MP
–MP
Momentenverlauf
Kinematische Kette
erfüllt, vgl.
Abschnitt 3.9 !
MP�P � 0
� �P
�P
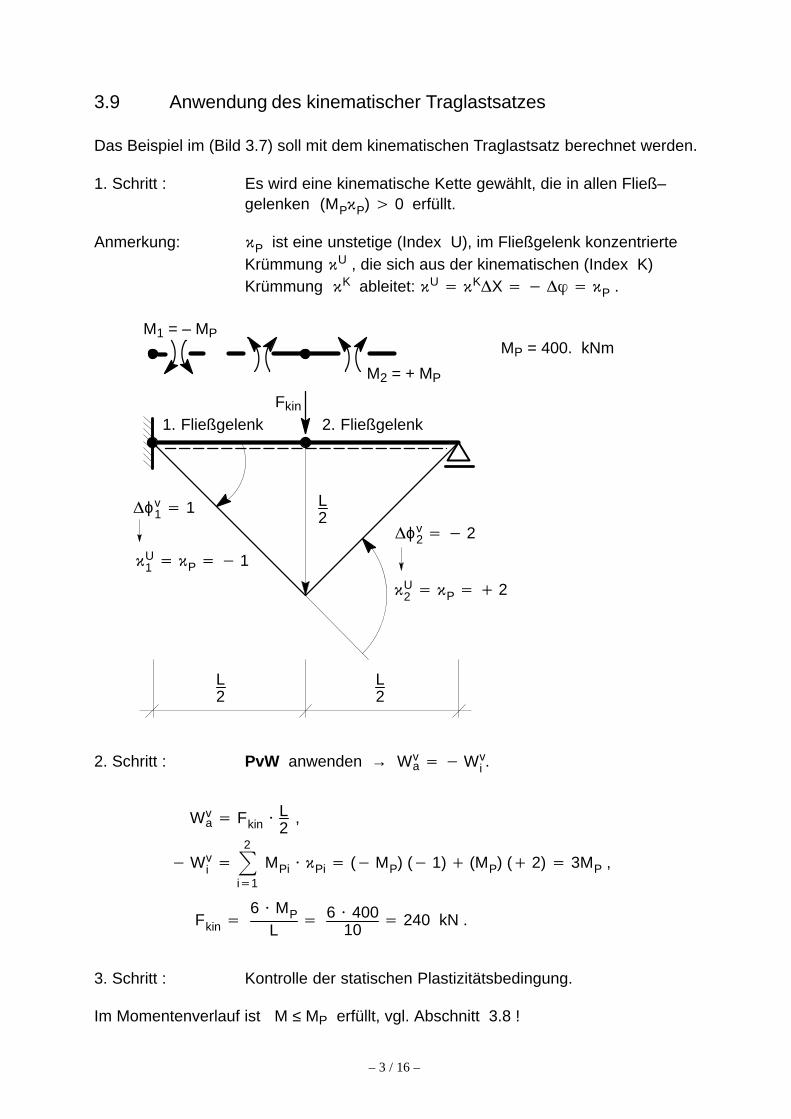
– 3 / 16 –
3.9 Anwendung des kinematischer Traglastsatzes
Das Beispiel im (Bild 3.7) soll mit dem kinematischen Traglastsatz berechnet werden.
1. Schritt : Es wird eine kinematische Kette gewählt, die in allen Fließ–gelenken (MP�P) � 0 erfüllt.
Anmerkung: �P ist eine unstetige (Index U), im Fließgelenk konzentrierte Krümmung �U , die sich aus der kinematischen (Index K) Krümmung �K ableitet: �U � �K�X � � �� � �P .
M2 = + MP
2. Fließgelenk1. FließgelenkFkin
M1 = – MP
�ϕv1 � 1
�ϕv2 � � 2
L2
L2
L2
MP = 400. kNm
�U1 � �P � � 1
�U2 � �P � � 2
2. Schritt : PvW anwenden → Wva � � Wv
i .
Wva � Fkin �
L2
,
Fkin �6 � MP
L� 6 � 400
10� 240 kN .
� Wvi ��
2
i�1
MPi � �Pi � (� MP) (� 1) � (MP) (� 2) � 3MP ,
3. Schritt : Kontrolle der statischen Plastizitätsbedingung.
Im Momentenverlauf ist M ≤ MP erfüllt, vgl. Abschnitt 3.8 !
– 3 / 17 –
3.10 Vergleich zwischen Elastizitäts– und Plastizitätstheorie
Die Elastizitätstheorie I. Ordnung ist konsequent linear. Die Weg– und Kraftzuständeverhalten sich daher proportional zur Einwirkung. Das hat den Vorteil, daß man Lastfälleeinzeln berechnen kann. Erst danach ist eine Superposition erforderlich, um Bemes-sungslastfälle zu bilden. Die Bemessung erfolgt gegen zulässige Spannungen(Elastisch–Elastisch) oder plastische Querschnittsgrößen (Elastisch–Plastisch).
Im Fall der Elastizitätstheorie II. Ordnung ist der Zusammenhang zwischen Einwirkun-gen und Verformungen zwar nichtlinear, das Materialverhalten aber uneingeschränktelastisch. Die Möglichkeit der Superposition entfällt. Bemessungslastfälle sind mit Teil-sicherheitsfaktoren vor der Berechnung zu bilden. Die Bemessung erfolgt gegen zuläs-sige Spannungen oder plastische Querschnittsgrößen unter besonderer Beachtung derStabilität.
Die Elastizitätstheorie vernachlässigt den Einfluß des inelastischen Materialverhaltens.Die auf dieser Grundlage ermittelte Schnittgrößenverteilung ist daher vor allem in derNähe der Belastbarkeitsgrenze allenfalls ein möglicher, keineswegs aber der tatsäch–liche Gleichgewichtszustand / 8 /. Trotzdem wird sie bevorzugt in der Baupraxis ange-wandt. Zum einen, weil sich damit der rechnerische Aufwand stark verringern läßt. Zumanderen, weil die erfolgreiche Anwendung der nichtlinearen Plastizitätstheorie ein deut-lich größeres theoretisches Hintergrundwissen voraussetzt als die Anwendung der li-nearen Elastizitätstheorie.
Die Fließgelenktheorie ist als ein erster Schritt zu werten, um den Theoriesprung zwi-schen Elastizitäts– und Plastizitätstheorie zu überbrücken. Sie vereinigt in optimalerForm zwei Vorteile: Die Einfachheit der baustatischen Anwendung mit der wirklichkeits-nahen Erfassung des Materialverhaltens. Wegen der materiellen Nichtlinearität entfälltdie Möglichkeit der Superposition. Bemessungslastfälle sind mit Teilsicherheitsfaktorenvor der Berechnung zu bilden. Die Bemessung erfolgt entweder gegen die plastischeGrenzlast, die sich aus der Berechnung mit der Fließgelenktheorie ergibt oder gegeneinzelne Schnitt– oder Verformungsgrößen aus dieser Berechnung, die vorgegebeneGrenzwerte nicht überschreiten dürfen (Plastisch–Plastisch).
Die Plastizitätstheorie ist im Regelwerk DIN 18 800 gleichberechtigt zur Elastizi–tätstheorie eingeführt, das weitgehend mit dem Eurocode 3 übereinstimmt. Stahl–bauten dürfen daher mit der Fließgelenktheorie berechnet werden. Für Stahlbeton–bauten war dies zumindest in Deutschland lange nicht zulässig, weil die DIN 1045 dieAnwendung einer inelastischen Theorie auf Systemebene ausdrücklich ausschloß. ImEurocode 2, dem europäischen Regelwerk für Stahlbetonbauten, ist die Plastizi–tätstheorie gleichberechtigt zur Elastizitätstheorie eingeführt. Die Fließgelenktheoriewird daher stark an Bedeutung gewinnen, wenn es um den Nachweis der Tragfähigkeitund Gebrauchstauglichkeit von Stahlbetonbauten geht. Mit der neuen DIN 1045–1 istdies ab dem Jahr 2002 auch in Deutschland der Fall.
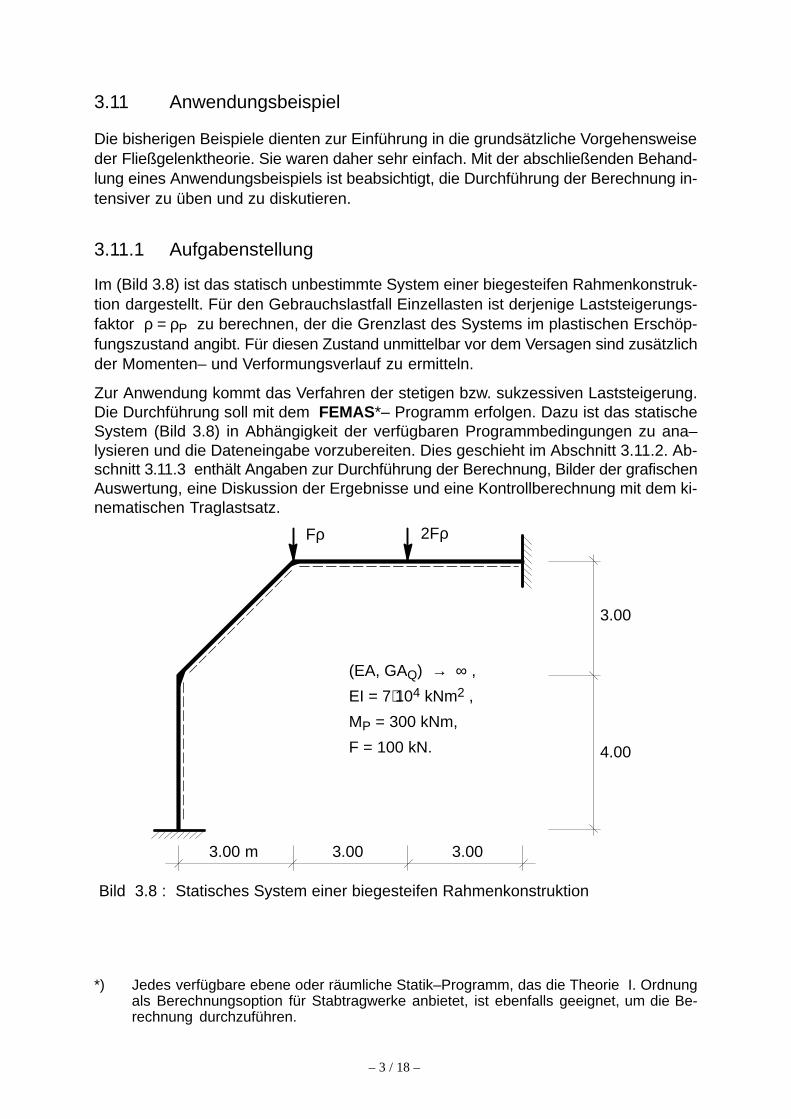
– 3 / 18 –
3.11 Anwendungsbeispiel
Die bisherigen Beispiele dienten zur Einführung in die grundsätzliche Vorgehensweiseder Fließgelenktheorie. Sie waren daher sehr einfach. Mit der abschließenden Behand-lung eines Anwendungsbeispiels ist beabsichtigt, die Durchführung der Berechnung in-tensiver zu üben und zu diskutieren.
3.11.1 Aufgabenstellung
Im (Bild 3.8) ist das statisch unbestimmte System einer biegesteifen Rahmenkonstruk-tion dargestellt. Für den Gebrauchslastfall Einzellasten ist derjenige Laststeigerungs-faktor ρ = ρP zu berechnen, der die Grenzlast des Systems im plastischen Erschöp-fungszustand angibt. Für diesen Zustand unmittelbar vor dem Versagen sind zusätzlichder Momenten– und Verformungsverlauf zu ermitteln.
Zur Anwendung kommt das Verfahren der stetigen bzw. sukzessiven Laststeigerung.Die Durchführung soll mit dem FEMAS*– Programm erfolgen. Dazu ist das statischeSystem (Bild 3.8) in Abhängigkeit der verfügbaren Programmbedingungen zu ana–lysieren und die Dateneingabe vorzubereiten. Dies geschieht im Abschnitt 3.11.2. Ab-schnitt 3.11.3 enthält Angaben zur Durchführung der Berechnung, Bilder der grafischenAuswertung, eine Diskussion der Ergebnisse und eine Kontrollberechnung mit dem ki-nematischen Traglastsatz.
Fρ 2Fρ
3.00
4.00
3.00 m 3.00
3.00
MP = 300 kNm,
F = 100 kN.
Bild 3.8 : Statisches System einer biegesteifen Rahmenkonstruktion
EI = 7⋅104 kNm2 ,
(EA, GAQ) → ∞ ,
*) Jedes verfügbare ebene oder räumliche Statik–Programm, das die Theorie I. Ordnungals Berechnungsoption für Stabtragwerke anbietet, ist ebenfalls geeignet, um die Be-rechnung durchzuführen.
– 3 / 19 –
3.11.2 Berechnungssystem
System und Einwirkung des Beispiels (Bild 3.8) weisen keine Symmetrieeigenschaftenauf. Daher ist von vornherein das gesamte Stabwerk zu elementieren. Das Systemselbst ist dreifach statisch unbestimmt. Der Erschöpfungszustand ist erreicht, wenn sichim Grenzfall vier Fließgelenke einstellen und dadurch ein kinematisches System ent-steht.
Fließgelenke bilden sich in der Regel in markanten Orten des statischen Systems aus,z.B. in biegesteifen Ecken, Randeinspannungen und unter Einzellasten. Unbekannt ist,an welchen speziellen System– und Lastunstetigkeiten sie auftreten und in welcher Rei-henfolge sie einfallen.
Beim Verfahren der stetigen Laststeigerung wird daher die Last schrittweise gesteigertbis sich in allen markanten Orten, die M = Mmax = MP erfüllen, Fließgelenke aus-bilden. Fällt im Verlauf der Berechnung ein spezielles Fließgelenk ein, kann in diesemQuerschnitt das Moment nicht weiter anwachsen. Eine Fortsetzung der Laststeigerungist nur mit einem modifizierten System möglich, das die Bedingung Gl. (3.4) durch dasEinfügen eines Momentengelenks erfüllt. Nach dem Einfallen des vierten Fließgelenksbefindet sich das statische System (Bild 3.8) an der Grenze zur Kinematik und der ge-suchte Erschöpfungszustand ist erreicht. Es sind daher vier Berechnungen mit vier un-terschiedlichen Systemen durchzuführen. Die Laststeigerungsfaktoren, die sich an deneinzelnen Systemen ergeben, sind zu addieren, um den Laststeigerungsfaktor ρ = ρPzu erhalten, der zum Erschöpfungszustand gehört.
Die Elementierung des Ausgangssystems (Bild 3.8) ist so vorzunehmen, daß dasschrittweise Einfügen von Momentengelenken zwangslos erfolgen kann. Bei denRandeinspannungen ist dies in einfacher Weise durch die Änderung der Randbedin-gungen möglich. In den biegesteifen Ecken und unter den Einzellasten ist es dagegenzweckmäßig, von vornherein Federelemente vorzusehen. Die Federsteifigkeit dieserElemente kann dann bei Bedarf in geeigneter Weise geschwächt werden, um die Wir-kung von Momentengelenken zu simulieren.
Die Grobelementierung des an FEMAS orientierten Berechnungssystems ist im(Bild 3.9) dargestellt. Der Stiel und die Schräge werden jeweils durch ein biegesteifesMakroelement und der Riegel durch zwei biegesteife Makroelemente erfaßt. EineZwischenteilung der Makroelemente ist nicht erforderlich, da nur Einzelkräfte angreifen.Der lineare Momentenverlauf wird mit dem VDS stabweise exakt erfaßt. Die Anpas-sung der Vorzeichen zwischen klassischer und rechnerorientierter Statik erfolgt durchdie Verlegung der Bezugsfaser von innen nach außen. Von den räumlichen Stabgrößentreten im ebenen Fall nur die Schnittgrößen (N, Q = Qw, M = Mv) und die äußeren Weg-größen (w1, w3, ϕ2) auf.
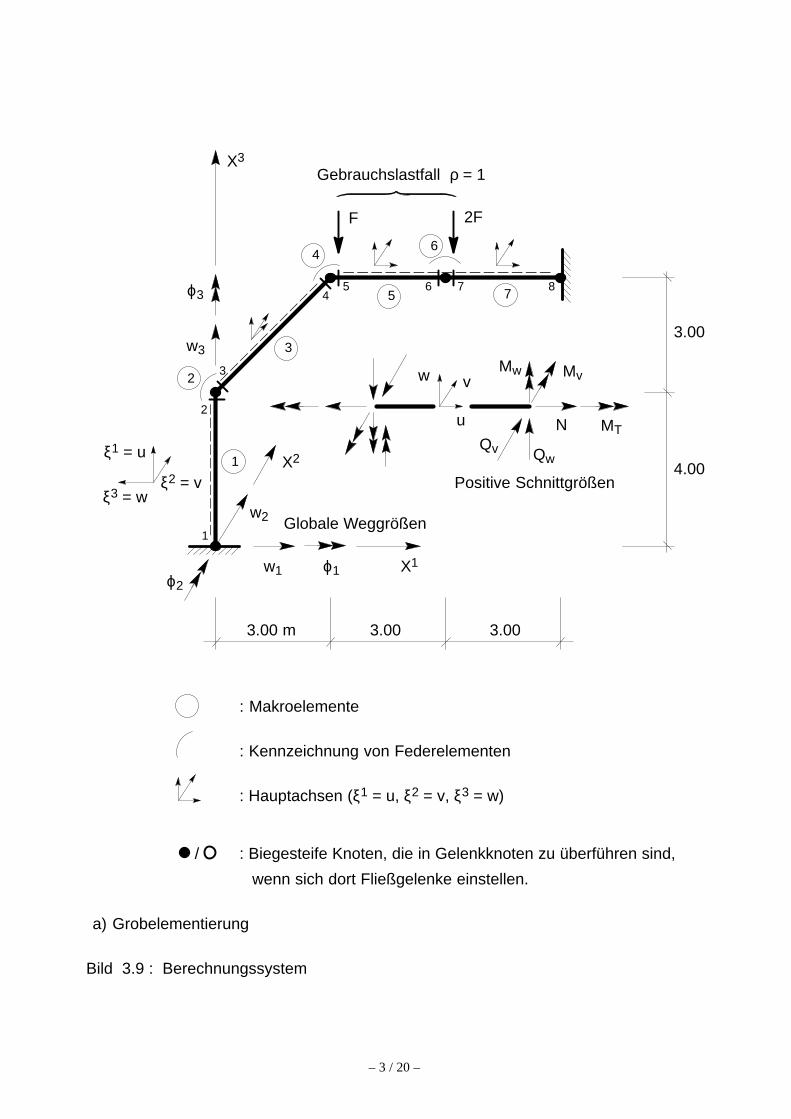
– 3 / 20 –
X3
X2
X1
F 2F
3.00
4.00
3.00 m 3.00
3.00
a) Grobelementierung
Bild 3.9 : Berechnungssystem
2
1
3
45 6 7 8
1
2
3
5 7
64
ϕ1
ϕ3
ϕ2w1
w2
w3
ξ3 = wξ2 = v
ξ1 = u
: Makroelemente
: Kennzeichnung von Federelementen
: Hauptachsen (ξ1 = u, ξ2 = v, ξ3 = w)
/ : Biegesteife Knoten, die in Gelenkknoten zu überführen sind,
wenn sich dort Fließgelenke einstellen.
w v
u
Gebrauchslastfall ρ = 1
Mw Mv
MTQv Qw
N
Globale Weggrößen
Positive Schnittgrößen
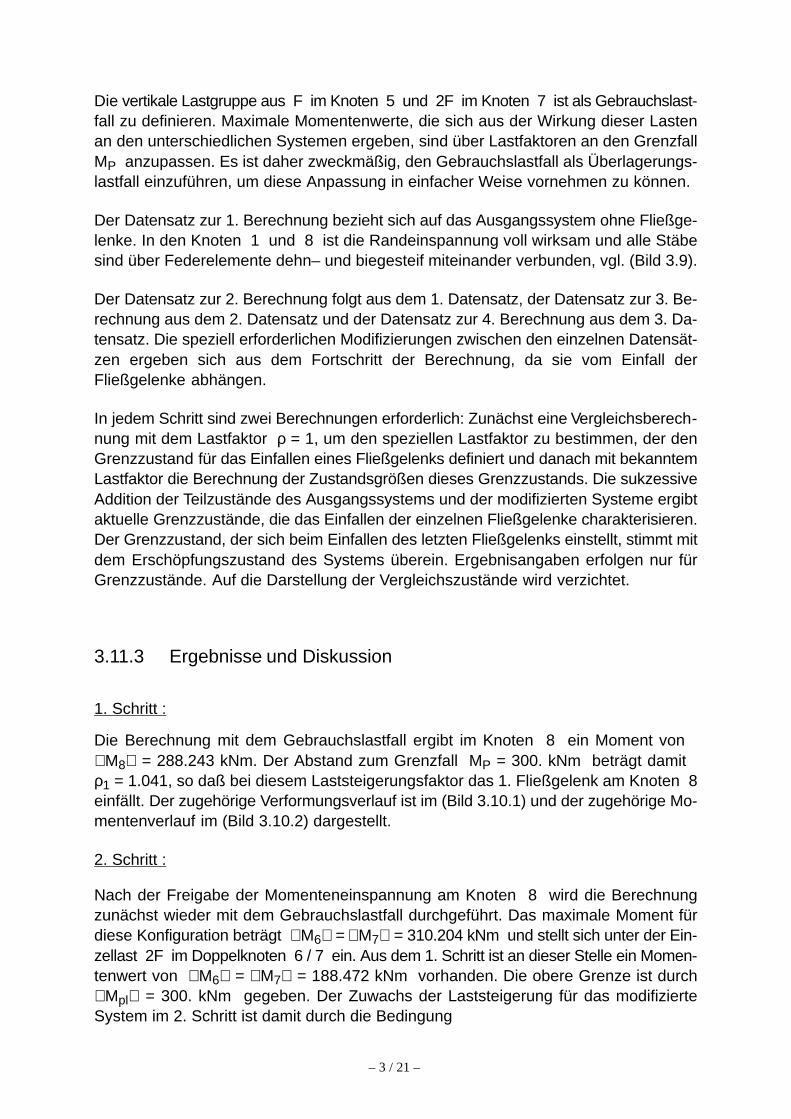
– 3 / 21 –
Die vertikale Lastgruppe aus F im Knoten 5 und 2F im Knoten 7 ist als Gebrauchslast-fall zu definieren. Maximale Momentenwerte, die sich aus der Wirkung dieser Lastenan den unterschiedlichen Systemen ergeben, sind über Lastfaktoren an den GrenzfallMP anzupassen. Es ist daher zweckmäßig, den Gebrauchslastfall als Überlagerungs-lastfall einzuführen, um diese Anpassung in einfacher Weise vornehmen zu können.
Der Datensatz zur 1. Berechnung bezieht sich auf das Ausgangssystem ohne Fließge-lenke. In den Knoten 1 und 8 ist die Randeinspannung voll wirksam und alle Stäbesind über Federelemente dehn– und biegesteif miteinander verbunden, vgl. (Bild 3.9).
Der Datensatz zur 2. Berechnung folgt aus dem 1. Datensatz, der Datensatz zur 3. Be-rechnung aus dem 2. Datensatz und der Datensatz zur 4. Berechnung aus dem 3. Da-tensatz. Die speziell erforderlichen Modifizierungen zwischen den einzelnen Datensät-zen ergeben sich aus dem Fortschritt der Berechnung, da sie vom Einfall derFließgelenke abhängen.
In jedem Schritt sind zwei Berechnungen erforderlich: Zunächst eine Vergleichsberech-nung mit dem Lastfaktor ρ = 1, um den speziellen Lastfaktor zu bestimmen, der denGrenzzustand für das Einfallen eines Fließgelenks definiert und danach mit bekanntemLastfaktor die Berechnung der Zustandsgrößen dieses Grenzzustands. Die sukzessiveAddition der Teilzustände des Ausgangssystems und der modifizierten Systeme ergibtaktuelle Grenzzustände, die das Einfallen der einzelnen Fließgelenke charakterisieren.Der Grenzzustand, der sich beim Einfallen des letzten Fließgelenks einstellt, stimmt mitdem Erschöpfungszustand des Systems überein. Ergebnisangaben erfolgen nur fürGrenzzustände. Auf die Darstellung der Vergleichszustände wird verzichtet.
3.11.3 Ergebnisse und Diskussion
1. Schritt :
Die Berechnung mit dem Gebrauchslastfall ergibt im Knoten 8 ein Moment von M8 = 288.243 kNm. Der Abstand zum Grenzfall MP = 300. kNm beträgt damit ρ1 = 1.041, so daß bei diesem Laststeigerungsfaktor das 1. Fließgelenk am Knoten 8einfällt. Der zugehörige Verformungsverlauf ist im (Bild 3.10.1) und der zugehörige Mo-mentenverlauf im (Bild 3.10.2) dargestellt.
2. Schritt :
Nach der Freigabe der Momenteneinspannung am Knoten 8 wird die Berechnungzunächst wieder mit dem Gebrauchslastfall durchgeführt. Das maximale Moment fürdiese Konfiguration beträgt M6 = M7 = 310.204 kNm und stellt sich unter der Ein-zellast 2F im Doppelknoten 6 / 7 ein. Aus dem 1. Schritt ist an dieser Stelle ein Momen-tenwert von M6 = M7 = 188.472 kNm vorhanden. Die obere Grenze ist durch Mpl = 300. kNm gegeben. Der Zuwachs der Laststeigerung für das modifizierteSystem im 2. Schritt ist damit durch die Bedingung
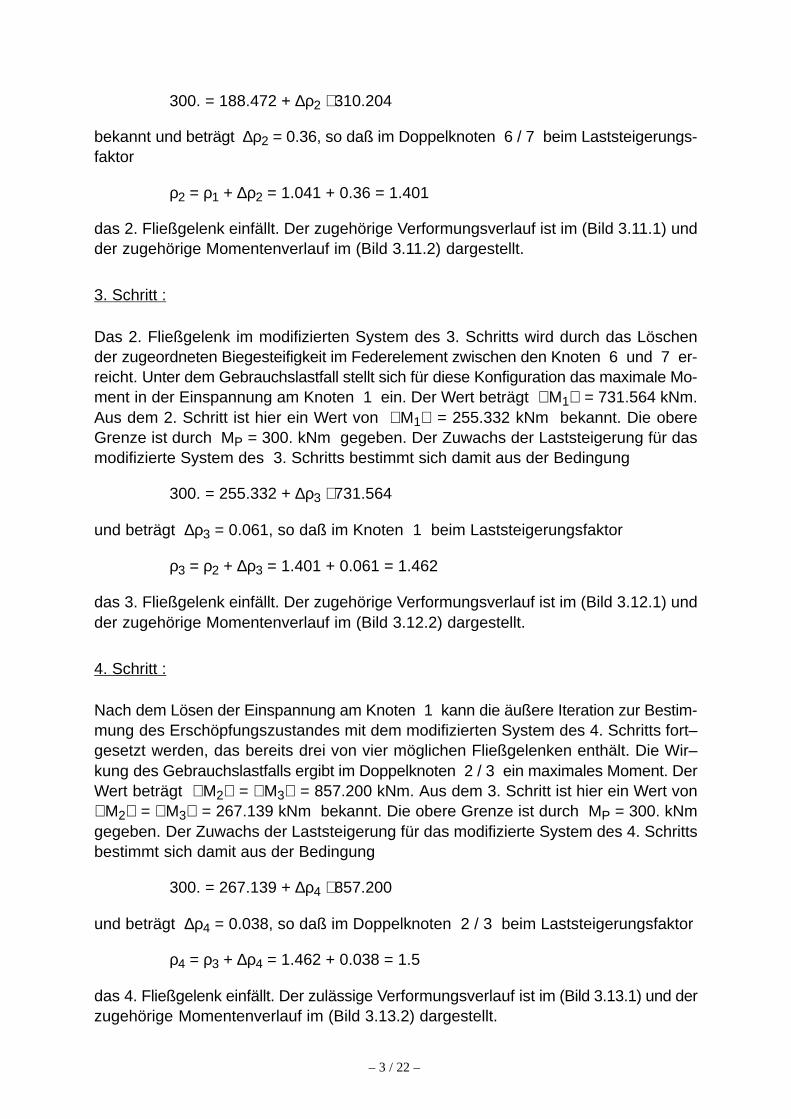
– 3 / 22 –
300. = 188.472 + ∆ρ2 ⋅ 310.204
bekannt und beträgt ∆ρ2 = 0.36, so daß im Doppelknoten 6 / 7 beim Laststeigerungs-faktor
ρ2 = ρ1 + ∆ρ2 = 1.041 + 0.36 = 1.401
das 2. Fließgelenk einfällt. Der zugehörige Verformungsverlauf ist im (Bild 3.11.1) undder zugehörige Momentenverlauf im (Bild 3.11.2) dargestellt.
3. Schritt :
Das 2. Fließgelenk im modifizierten System des 3. Schritts wird durch das Löschender zugeordneten Biegesteifigkeit im Federelement zwischen den Knoten 6 und 7 er-reicht. Unter dem Gebrauchslastfall stellt sich für diese Konfiguration das maximale Mo-ment in der Einspannung am Knoten 1 ein. Der Wert beträgt M1 = 731.564 kNm.Aus dem 2. Schritt ist hier ein Wert von M1 = 255.332 kNm bekannt. Die obereGrenze ist durch MP = 300. kNm gegeben. Der Zuwachs der Laststeigerung für dasmodifizierte System des 3. Schritts bestimmt sich damit aus der Bedingung
300. = 255.332 + ∆ρ3 ⋅ 731.564
und beträgt ∆ρ3 = 0.061, so daß im Knoten 1 beim Laststeigerungsfaktor
ρ3 = ρ2 + ∆ρ3 = 1.401 + 0.061 = 1.462
das 3. Fließgelenk einfällt. Der zugehörige Verformungsverlauf ist im (Bild 3.12.1) undder zugehörige Momentenverlauf im (Bild 3.12.2) dargestellt.
4. Schritt :
Nach dem Lösen der Einspannung am Knoten 1 kann die äußere Iteration zur Bestim-mung des Erschöpfungszustandes mit dem modifizierten System des 4. Schritts fort–gesetzt werden, das bereits drei von vier möglichen Fließgelenken enthält. Die Wir–kung des Gebrauchslastfalls ergibt im Doppelknoten 2 / 3 ein maximales Moment. DerWert beträgt M2 = M3 = 857.200 kNm. Aus dem 3. Schritt ist hier ein Wert von M2 = M3 = 267.139 kNm bekannt. Die obere Grenze ist durch MP = 300. kNmgegeben. Der Zuwachs der Laststeigerung für das modifizierte System des 4. Schrittsbestimmt sich damit aus der Bedingung
300. = 267.139 + ∆ρ4 ⋅ 857.200
und beträgt ∆ρ4 = 0.038, so daß im Doppelknoten 2 / 3 beim Laststeigerungsfaktor
ρ4 = ρ3 + ∆ρ4 = 1.462 + 0.038 = 1.5
das 4. Fließgelenk einfällt. Der zulässige Verformungsverlauf ist im (Bild 3.13.1) und derzugehörige Momentenverlauf im (Bild 3.13.2) dargestellt.
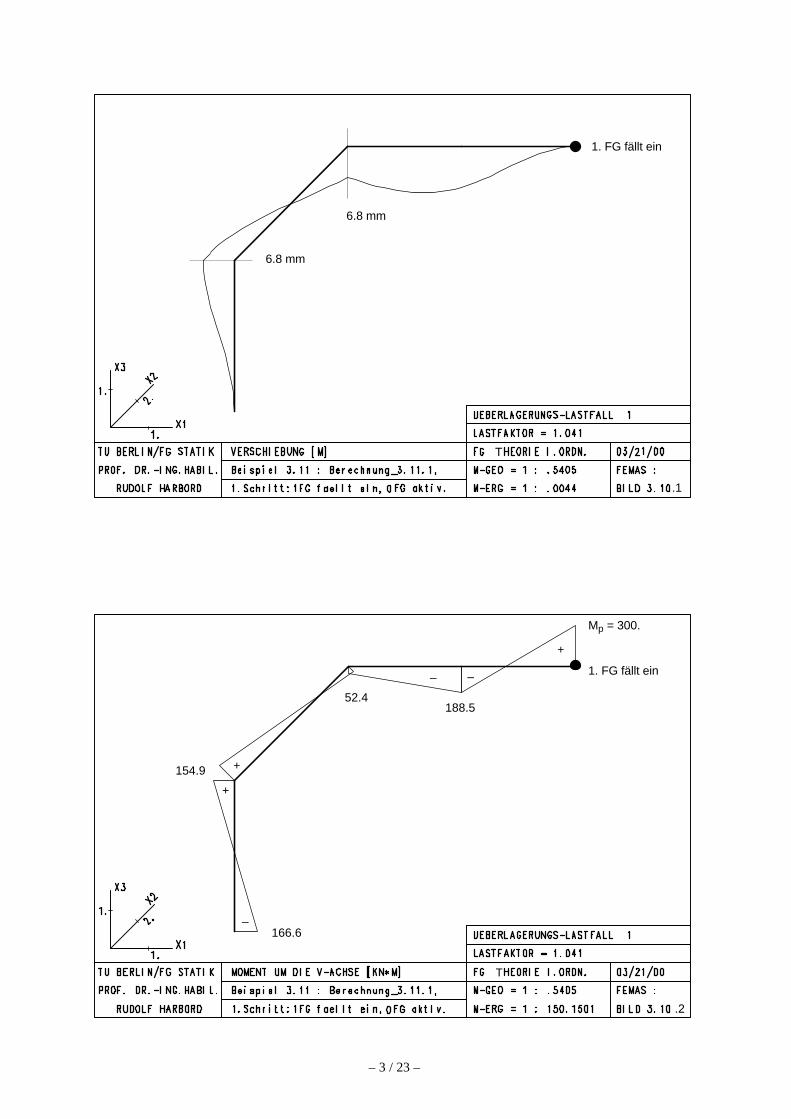
– 3 / 23 –
1. FG fällt ein
6.8 mm
6.8 mm
.1
T
1. FG fällt ein
Mp = 300.
188.5
– –
+
+
–166.6
154.9
52.4
+
.2
T
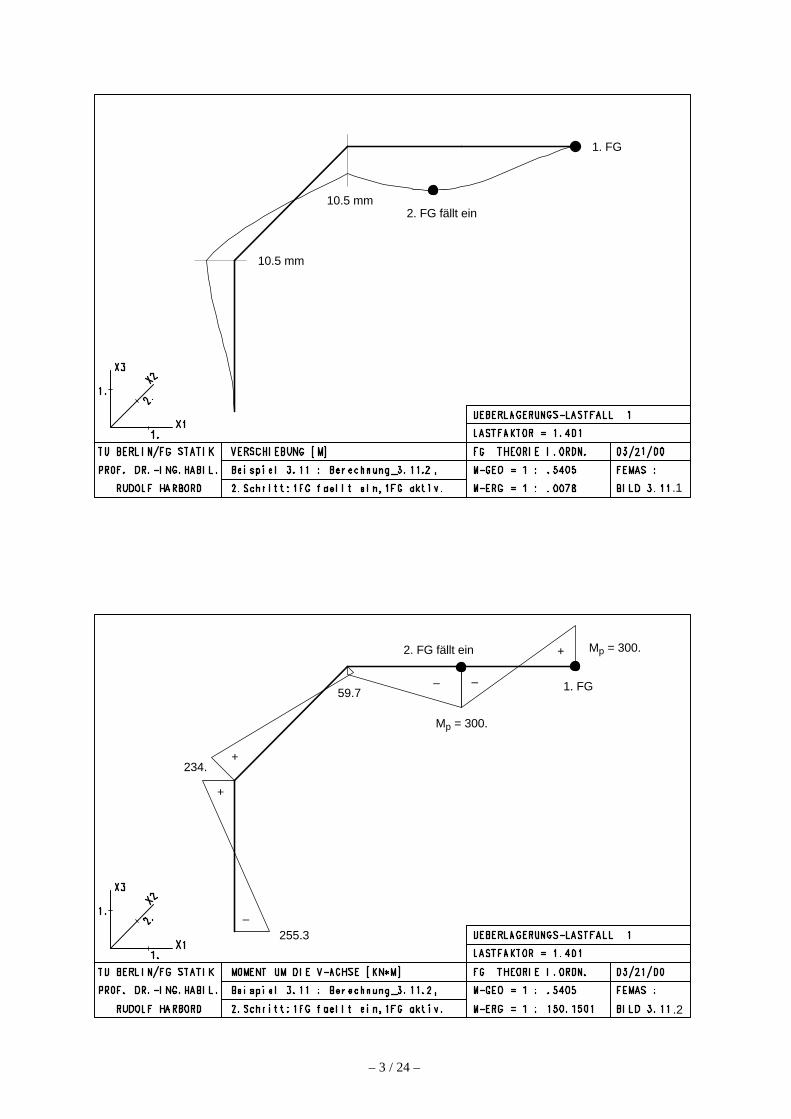
– 3 / 24 –
.1
2. FG fällt ein
1. FG
10.5 mm
10.5 mm
.2
Mp = 300.
1. FG
Mp = 300.
2. FG fällt ein
59.7
234.
255.3
– –
–
+
+
+
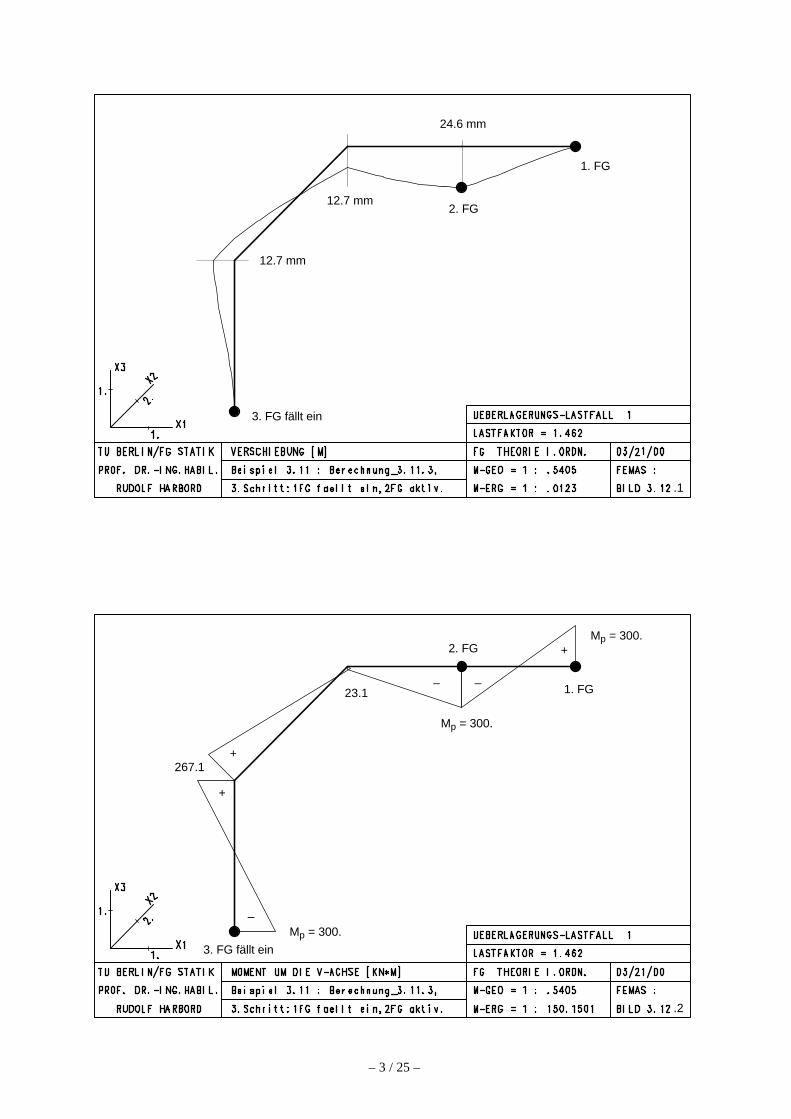
– 3 / 25 –
1. FG
2. FG
24.6 mm
12.7 mm
12.7 mm
3. FG fällt ein
.1
1. FG
2. FG
3. FG fällt ein
Mp = 300.
267.1
23.1
.2
Mp = 300.
Mp = 300.
– –
+
+
–
+
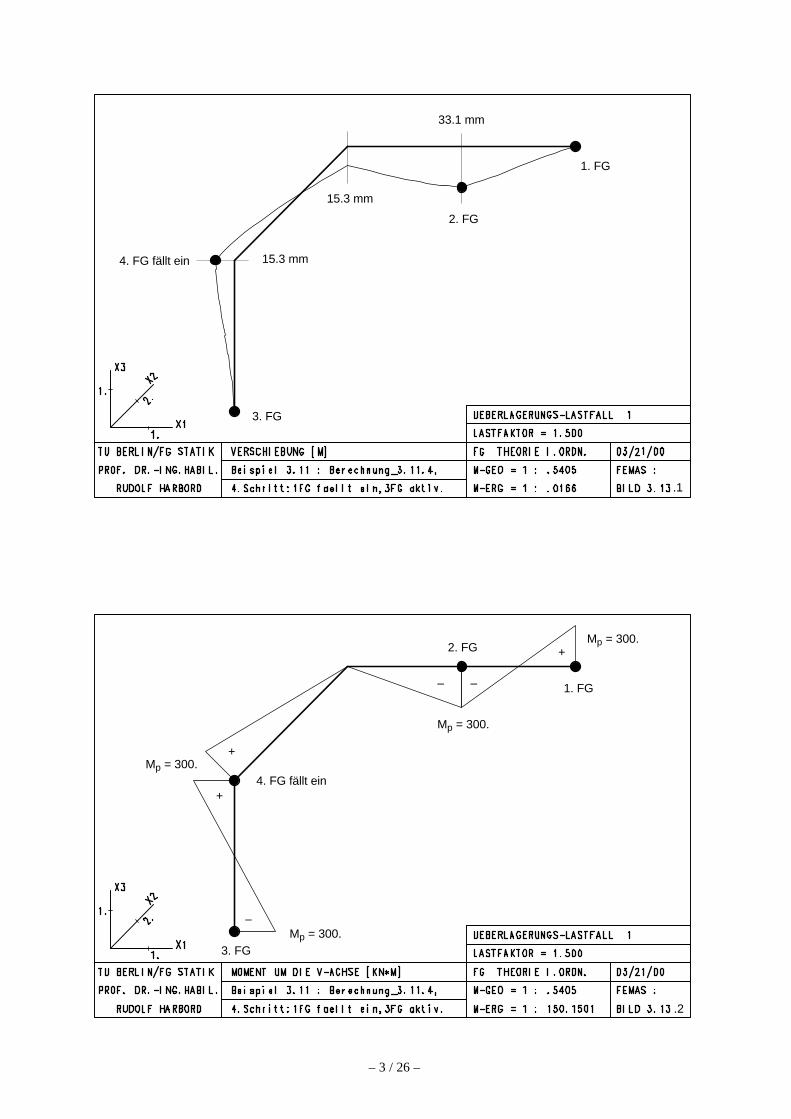
– 3 / 26 –
1. FG
2. FG
3. FG
15.3 mm
33.1 mm
15.3 mm4. FG fällt ein
.1
1. FG
2. FG
3. FGMp = 300.
Mp = 300.
Mp = 300.
Mp = 300.
4. FG fällt ein
+
–
– –
+
+
.2
– 3 / 27 –
Mit dem Einfallen des 4. Fließgelenks im Doppelknoten 2 / 3 wird das statische System(Bild 3.8) kinematisch. Der dadurch definierte Erschöpfungszustand ist abschließendauf seine statische und kinematische Zulässigkeit zu überprüfen. Geeignete Kontrollda-ten sind Momente und plastische Verdrehungen bzw. plastische Verkrümmungen. IhreEntwicklung in Abhängigkeit von der Laststeigerung ist in (Tabelle 3.1) zusammenge-stellt.
Die Summation der Zuwüchse der Laststeigerungen aus den vier Einzelberechnun–gen ergibt den Laststeigerungsfaktor der plastischen Grenzlast. Er beträgt ρP = 1.5.Eine unabhängige Vergleichsberechnung mit dem kinematischen Traglastsatz ist im(Bild 3.14) angegeben. Sie bestätigt den erreichten Wert.
Die statische Plastizitätsbedingung ist in einfacher Weise durch die Bedingung M ≤ Mplzu kontrollieren. Sie ist für das gesamte System erfüllt, wenn man von kleinen Fehlernin der Zahlenberechnung absieht. Der Momentenverlauf im Erschöpfungszu–stand stimmt mit dem Momentenverlauf des 4. Berechnungsschritts überein, der im(Bild 3.13.2) dargestellt ist, vgl. auch (Bild 3.14c).
Die Verschiebungsamplituden im Grenzübergang zur Kinematik fallen insgesamtmoderat aus. Im Doppelknoten 6 / 7 in der Riegelmitte erreicht die Durchbiegung mitw = w3 = 3.3 cm einen Wert, der noch im Bereich von L / 200. liegt. Von einer Ein-schränkung der Gebrauchstauglichkeit durch unzulässig große inelastische Verfor-mungsanteile ist daher nicht auszugehen, so daß sich eine Bemessung gegen die pla-stische Grenzlast nach Gl. (3.6.2) anbietet.
Mit dem Einfallen der Fließgelenke ändert sich der Verlauf der Verschiebung. In den(Bildern 3.10.1 und 3.11.1) mit keinem bzw. einem aktiven Fließgelenk ist der Einflußder elastischen Steifigkeit noch deutlich zu erkennen. Ab dem zweiten Fließ–gelenk überwiegt dagegen der kinematische Verschiebungsanteil, der sich durchdie plastische Verdrehung der Fließgelenke einstellt. Die Verkrümmung, die sich in den(Bildern 3.12.1 und 3.13.1) zwischen aktiven Fließgelenken einstellt, ist auf die lokaleWirkung von MP zurückzuführen.
Die Verschiebungsfigur des erreichten Erschöpfungszustands stimmt mit dem Verlaufim (Bild 3.13.1) überein. Die plastischen Verdrehungen bzw. Verkrümmungen der Fließ-gelenke sind in (Tabelle 3.1) angegeben. Der maximale Wert der plastischen Verdre-hung im Grenzzustand zur Kinematik beträgt 10.6 o/oo. Er tritt im 2. Fließgelenk auf, dasim Doppelknoten 6 / 7 in der Riegelmitte einfällt. Die Größenordnung liegt im Bereichzulässiger plastischer Verdrehungen von Stahl– und Stahlbetonquerschnitten /8/.
Die Vorzeichen der plastischen Verkrümmungen und Momente lassen erkennen, daßin allen aktiven Fließgelenken eine positive Dissipation auftritt. Damit ist auch die ki–nematische Plastizitätsbedingung erfüllt. Der erreichte Erschöpfungszustand ist als zu-lässiger und damit als wirklicher zu betrachten. Eine weitere Laststeigerung ist nichtmöglich, weil das System unmittelbar versagt, wenn sich das vierte Fließgelenk im Dop-pelknoten 2 / 3 plastisch verdreht.
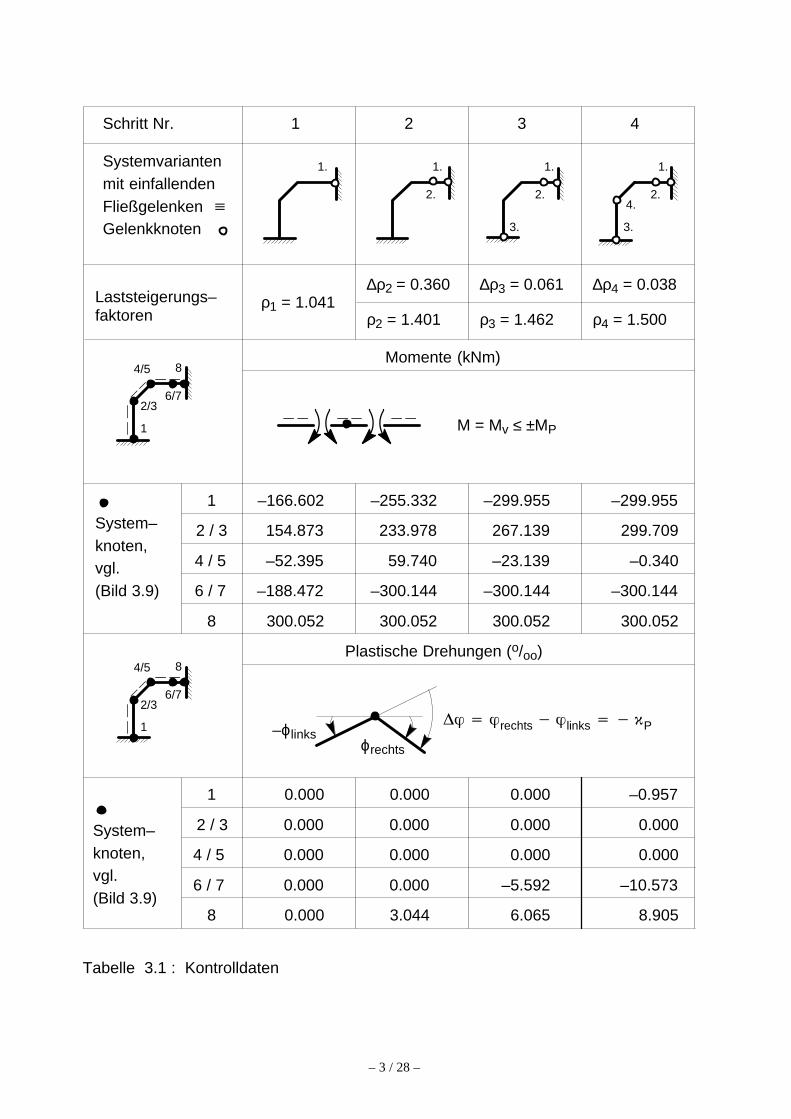
– 3 / 28 –
1.
Schritt Nr.
Systemvariantenmit einfallendenFließgelenken
Laststeigerungs–faktoren
1.
2.
1.
2.
3.
1.
2.
3.
4.
1 2 3 4
ρ1 = 1.041∆ρ2 = 0.360 ∆ρ3 = 0.061 ∆ρ4 = 0.038
8
6/7
1
2/3
4/5
M = Mv ≤ ±MP
System–knoten,vgl.
1
2 / 3
4 / 5
6 / 7
8
(Bild 3.9)
–166.602 –255.332 –299.955 –299.955
154.873
–52.395
–188.472
300.052
233.978
59.740
–300.144
300.052
267.139
–23.139
–300.144
300.052
–300.144
300.052
–0.340
299.709
1
2 / 3
4 / 5
6 / 7
8
System–knoten,vgl.(Bild 3.9)
Tabelle 3.1 : Kontrolldaten
ρ2 = 1.401 ρ3 = 1.462 ρ4 = 1.500
Momente (kNm)
8
6/7
1
2/3
4/5Plastische Drehungen (o/oo)
ϕrechts
–ϕlinks
0.000 0.000 –0.957
0.000
0.000
0.000
0.000
–5.592
6.065
–10.573
8.905
0.000
0.000
0.000
0.000
0.000
0.000
3.044
0.000
0.000
�� � �rechts � �links � � �P
�Gelenkknoten
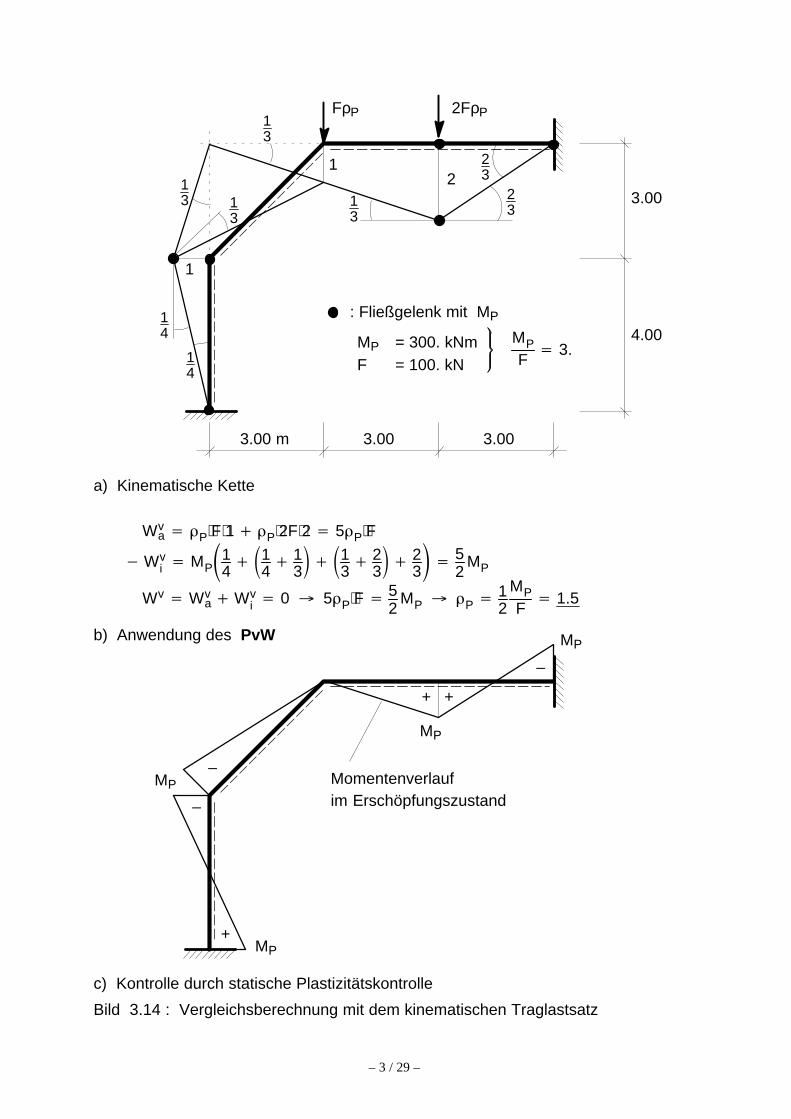
– 3 / 29 –
FρP 2FρP
3.00
4.00
3.00 m 3.00
3.00
Bild 3.14 : Vergleichsberechnung mit dem kinematischen Traglastsatz
13
13
13 1
3
14
14
23
23
2
1
1
: Fließgelenk mit MP
MP = 300. kNmF = 100. kN
MPF
� 3.
a) Kinematische Kette
b) Anwendung des PvW
c) Kontrolle durch statische Plastizitätskontrolle
Wva � �P⋅F⋅1 � �P⋅2F⋅2 � 5�P⋅F
� Wvi � MP�14 ��1
4� 1
3�� �1
3� 2
3�� 2
3� � 5
2MP
Wv � Wva � Wv
i � 0 5�P⋅F � 52
MP �P � 12
MPF
� 1.5
+
–
–
+ +
–
MP
MP
MP
MP
Momentenverlaufim Erschöpfungszustand
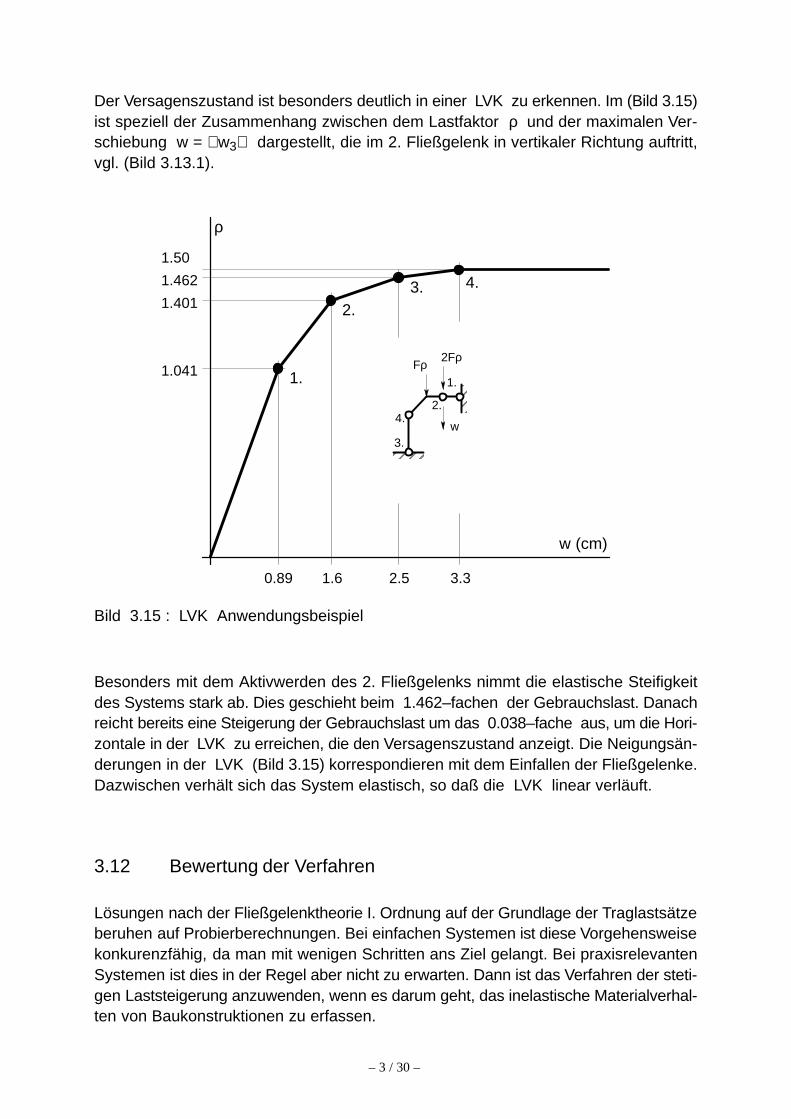
– 3 / 30 –
Der Versagenszustand ist besonders deutlich in einer LVK zu erkennen. Im (Bild 3.15)ist speziell der Zusammenhang zwischen dem Lastfaktor ρ und der maximalen Ver-schiebung w = w3 dargestellt, die im 2. Fließgelenk in vertikaler Richtung auftritt,vgl. (Bild 3.13.1).
1.50
Bild 3.15 : LVK Anwendungsbeispiel
1.462
1.401
1.041
ρ
1.
2.3. 4.
w (cm)
0.89 1.6 2.5 3.3
ÉÉ
ÉÉÉ
1.
2.
3.
4.
2FρFρ
w
Besonders mit dem Aktivwerden des 2. Fließgelenks nimmt die elastische Steifigkeitdes Systems stark ab. Dies geschieht beim 1.462–fachen der Gebrauchslast. Danachreicht bereits eine Steigerung der Gebrauchslast um das 0.038–fache aus, um die Hori-zontale in der LVK zu erreichen, die den Versagenszustand anzeigt. Die Neigungsän-derungen in der LVK (Bild 3.15) korrespondieren mit dem Einfallen der Fließgelenke.Dazwischen verhält sich das System elastisch, so daß die LVK linear verläuft.
3.12 Bewertung der Verfahren
Lösungen nach der Fließgelenktheorie I. Ordnung auf der Grundlage der Traglastsätzeberuhen auf Probierberechnungen. Bei einfachen Systemen ist diese Vorgehensweisekonkurenzfähig, da man mit wenigen Schritten ans Ziel gelangt. Bei praxisrelevantenSystemen ist dies in der Regel aber nicht zu erwarten. Dann ist das Verfahren der steti-gen Laststeigerung anzuwenden, wenn es darum geht, das inelastische Materialverhal-ten von Baukonstruktionen zu erfassen.
– 3 / 31 –
Ablauf und Auswertung der Berechnung ist im Abschnitt 3.11: Anwendungsbeispiel vor-gestellt. Die Durchführung der einzelnen Berechnungsschritte kann natürlich auch mitden Verfahren der klassischen Baustatik erfolgen. Als optimale Variante bietet sich dasKGV an. Bei der Annäherung an den Erschöpfungszustand nimmt die Anzahl der Fließ-gelenke zu und dadurch der Grad der statischen Unbestimmtheit ab. Mit jedem Berech-nungsschritt verringert sich daher die Anzahl der unbekannten Berechnungsgrößen. ImRahmen einer Handrechnung stellt dies einen deutlichen Vorteil gegenüber dem DWVdar, bei dem die Anzahl der geometrischen Unbestimmten durch das Anwachsen derGelenke ständig zunimmt.
In der Baupraxis dominiert die Anwendung von Programmen. Es gibt z.B. nichtlineareProgramme, die die Fließgelenktheorie in vollständiger Form intern abarbeiten. Bei ei-nem von außen gesteuerten Iterationsablauf, der z.B. in Anlehnung an die Bearbeitungdes Anwendungsbeispiels im Abschnitt 3.11 erfolgen kann, genügt dagegen der Einsatzeiner in der Regel immer verfügbaren linearen Programmvariante.
Aus der Sicht des konstruktiv tätigen Bauingenieurs ist das in Eigenregie von außen zusteuernde Verfahren der stetigen Laststeigerung zu bevorzugen. Drei Vorteile sind zunennen:
1. Das Tragverhalten von inelastischen Systemen ist durch das schrittweise Vorge-hen einfacher zu überschauen.
2. Vielfach ist nicht der Erschöpfungszustand gesucht, sondern lediglich derjenigeZustand, der zur Bemessungslast oder zu einer Grenzverformung gehört. Ist ererreicht, kann die Berechnung beendet werden.
3. Die sichere Handhabung von nichtlinearen Programmen erfordert vertiefte Theo-riekenntnisse, die in der Ingenieurpraxis vielfach nicht vorliegen. Die sichereHandhabung von linearen Programmen ist dagegen als Stand der Technik anzu-sehen.
3.13 Schlußbemerkung
Die Fließgelenktheorie ist als eine erste Einführung in die Berechnung inelastischerSysteme zu betrachten. Die Einführung ist auf die Theorie I. Ordnung beschränkt. Eineweitergehende Beschäftigung mit dem Thema sollte u.a. Verfahren der Fließgelenk-theorie II. Ordnung und der Fließzonentheorie einschließen. Dies ist aber nur im Rah-men von vertieften Lehrveranstaltungen sinnvoll.
















![Vorlesungsskript zur Lehrveranstaltung „Grundlagen der ... · Vorlesungsskript zur Lehrveranstaltung „Grundlagen der Hydrologie und Hydrogeologie“ 97 mit RF - Formfaktor [ ]](https://static.fdokument.com/doc/165x107/5d4f5f8d88c9937a2b8bb7e4/vorlesungsskript-zur-lehrveranstaltung-grundlagen-der-vorlesungsskript.jpg)