
Linear-Modul mit integriertem Planetengetriebe und … · 30 1,75 1,4 10 8 MLF 52155 ZR-AR...
20
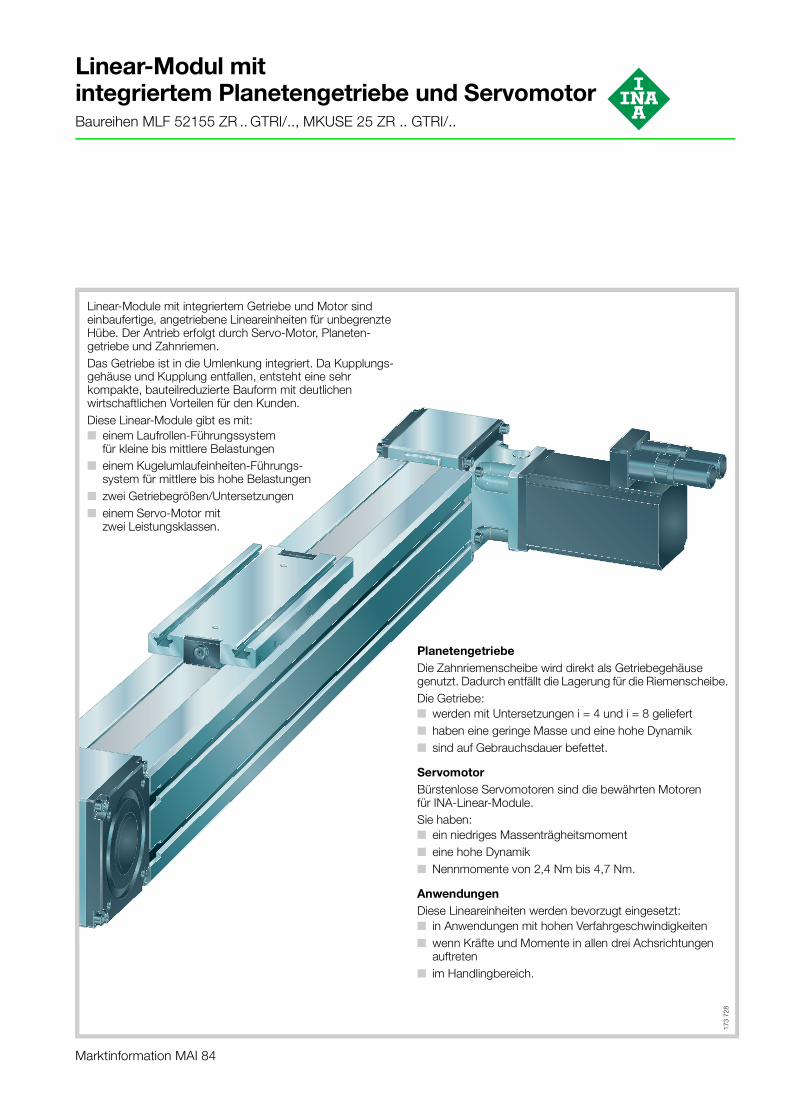
Marktinformation MAI 84 z weirei h ig! Linear-Modul mit integriertem Planetengetriebe und Servomotor Baureihen MLF 52155 ZR .. GTRI/.., MKUSE 25 ZR .. GTRI/.. Linear-Module mit integriertem Getriebe und Motor sind einbaufertige, angetriebene Lineareinheiten für unbegrenzte Hübe. Der Antrieb erfolgt durch Servo-Motor, Planeten- getriebe und Zahnriemen. Das Getriebe ist in die Umlenkung integriert. Da Kupplungs- gehäuse und Kupplung entfallen, entsteht eine sehr kompakte, bauteilreduzierte Bauform mit deutlichen wirtschaftlichen Vorteilen für den Kunden. Diese Linear-Module gibt es mit: ■ einem Laufrollen-Führungssystem für kleine bis mittlere Belastungen ■ einem Kugelumlaufeinheiten-Führungs- system für mittlere bis hohe Belastungen ■ zwei Getriebegrößen/Untersetzungen ■ einem Servo-Motor mit zwei Leistungsklassen. 173 728 Planetengetriebe Die Zahnriemenscheibe wird direkt als Getriebegehäuse genutzt. Dadurch entfällt die Lagerung für die Riemenscheibe. Die Getriebe: ■ werden mit Untersetzungen i = 4 und i = 8 geliefert ■ haben eine geringe Masse und eine hohe Dynamik ■ sind auf Gebrauchsdauer befettet. Servomotor Bürstenlose Servomotoren sind die bewährten Motoren für INA-Linear-Module. Sie haben: ■ ein niedriges Massenträgheitsmoment ■ eine hohe Dynamik ■ Nennmomente von 2,4 Nm bis 4,7 Nm. Anwendungen Diese Lineareinheiten werden bevorzugt eingesetzt: ■ in Anwendungen mit hohen Verfahrgeschwindigkeiten ■ wenn Kräfte und Momente in allen drei Achsrichtungen auftreten ■ im Handlingbereich.
Transcript of Linear-Modul mit integriertem Planetengetriebe und … · 30 1,75 1,4 10 8 MLF 52155 ZR-AR...
Marktinformation MAI 84
zweireihig!
Linear-Modul mit integriertem Planetengetriebe und ServomotorBaureihen MLF 52155 ZR .. GTRI/.., MKUSE 25 ZR .. GTRI/..
Linear-Module mit integriertem Getriebe und Motor sind einbaufertige, angetriebene Lineareinheiten für unbegrenzte Hübe. Der Antrieb erfolgt durch Servo-Motor, Planeten-getriebe und Zahnriemen.Das Getriebe ist in die Umlenkung integriert. Da Kupplungs-gehäuse und Kupplung entfallen, entsteht eine sehr kompakte, bauteilreduzierte Bauform mit deutlichen wirtschaftlichen Vorteilen für den Kunden.Diese Linear-Module gibt es mit:■ einem Laufrollen-Führungssystem
für kleine bis mittlere Belastungen■ einem Kugelumlaufeinheiten-Führungs-
system für mittlere bis hohe Belastungen■ zwei Getriebegrößen/Untersetzungen■ einem Servo-Motor mit
zwei Leistungsklassen.
173
728
PlanetengetriebeDie Zahnriemenscheibe wird direkt als Getriebegehäuse genutzt. Dadurch entfällt die Lagerung für die Riemenscheibe.Die Getriebe:■ werden mit Untersetzungen i = 4 und i = 8 geliefert■ haben eine geringe Masse und eine hohe Dynamik■ sind auf Gebrauchsdauer befettet.
ServomotorBürstenlose Servomotoren sind die bewährten Motoren für INA-Linear-Module. Sie haben:■ ein niedriges Massenträgheitsmoment■ eine hohe Dynamik■ Nennmomente von 2,4 Nm bis 4,7 Nm.
AnwendungenDiese Lineareinheiten werden bevorzugt eingesetzt:■ in Anwendungen mit hohen Verfahrgeschwindigkeiten■ wenn Kräfte und Momente in allen drei Achsrichtungen
auftreten■ im Handlingbereich.
2
Linear-Modul mit Laufrollenführung, Planetengetriebe und Servomotor
Seite
Konstruktions- und Sicherheitshinweise ............. 4
Bestellbeispiel und Bestellbezeichnung .............. 5
Elektrische Antriebstechnik ................................. 14
+0,5V
–0,5V
Merkmale
Linear-Module mit Laufrollenführung■ sind Baueinheiten, bestehend aus:
– einer Tragschiene – Aluminium-Trägerprofil mit eingewalzten Stahlwellen
– einem auf der Tragschiene geführten Laufwagen– einem Zahnriemen-Antrieb mit Umlenkeinheiten– einem Planetengetriebe– einem Servomotor mit zwei Leistungsklassen
■ nehmen Kräfte und Momente um alle Achsen auf■ sind geeignet für kleine bis mittlere Belastungen■ haben zum Schutz der Laufbahnen Schmier- und
Abstreifeinheiten an den Laufwagen■ haben Laufrollen, die auf Gebrauchsdauer befettet sind.
Die Laufbahnen der Tragschienen können durch vier Schmiernippel an den Stirnseiten der Laufwagen geschmiert werden
■ sind geeignet für:– Beschleunigungen bis 40 m/s2
– Geschwindigkeiten bis 8 m/s– Betriebstemperaturen von –20 °C bis +80 °C.
Planetengetriebe■ sind so aufgebaut, dass die Zahnriemenscheibe als
Getriebegehäuse genutzt wird■ sind nicht an bestimmte Einbaulagen gebunden■ werden mit Fettschmierung geliefert■ sind einstufig■ gibt es mit der Untersetzung i = 4:1 und i = 8:1■ haben ein Verdrehflankenspiel � 3 Winkelminuten.
Servomotoren■ haben ein niedriges Massenträgheitsmoment und eine
hohe Dynamik■ haben einen Resolver-Feedback■ können mit Festhaltebremse geliefert werden■ haben eine Nenndrehzahl von 3 000 min–1 bis
3 300 min–1 – abhängig von der Motorgröße.
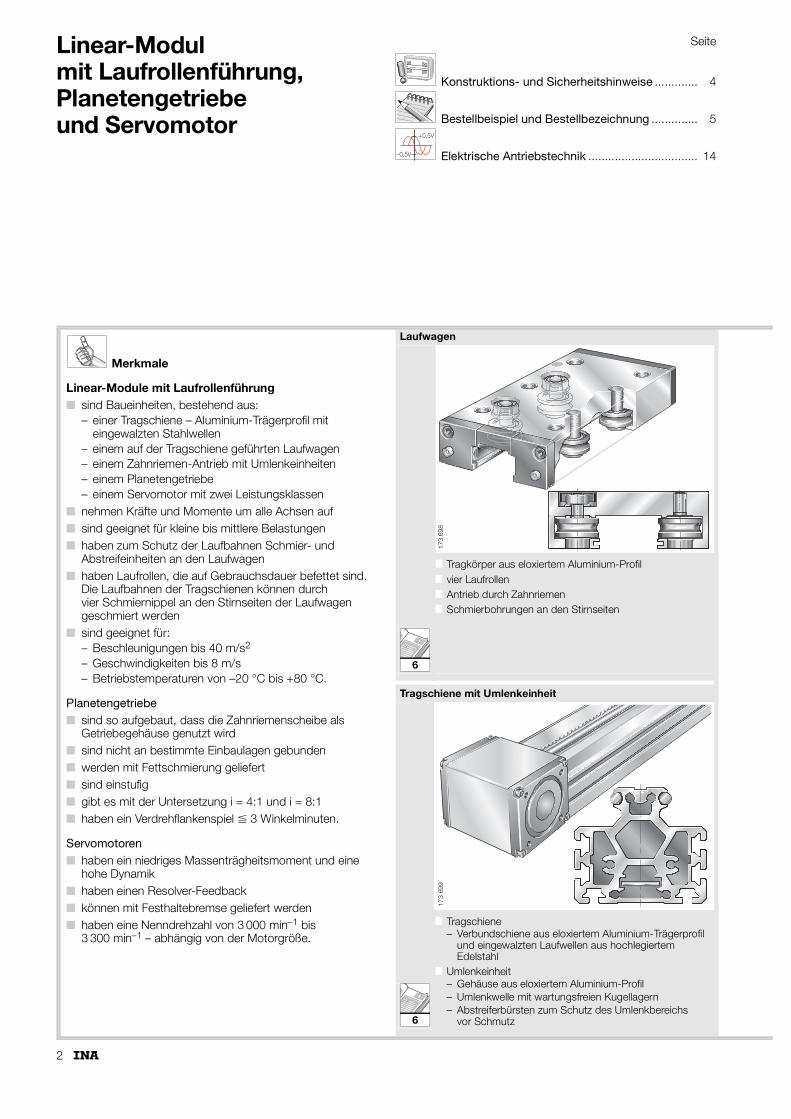
Laufwagen
■ Tragkörper aus eloxiertem Aluminium-Profil■ vier Laufrollen■ Antrieb durch Zahnriemen■ Schmierbohrungen an den Stirnseiten
Tragschiene mit Umlenkeinheit
■ Tragschiene– Verbundschiene aus eloxiertem Aluminium-Trägerprofil
und eingewalzten Laufwellen aus hochlegiertem Edelstahl
■ Umlenkeinheit– Gehäuse aus eloxiertem Aluminium-Profil– Umlenkwelle mit wartungsfreien Kugellagern– Abstreiferbürsten zum Schutz des Umlenkbereichs
vor Schmutz
173
698
173
699
6
6
3
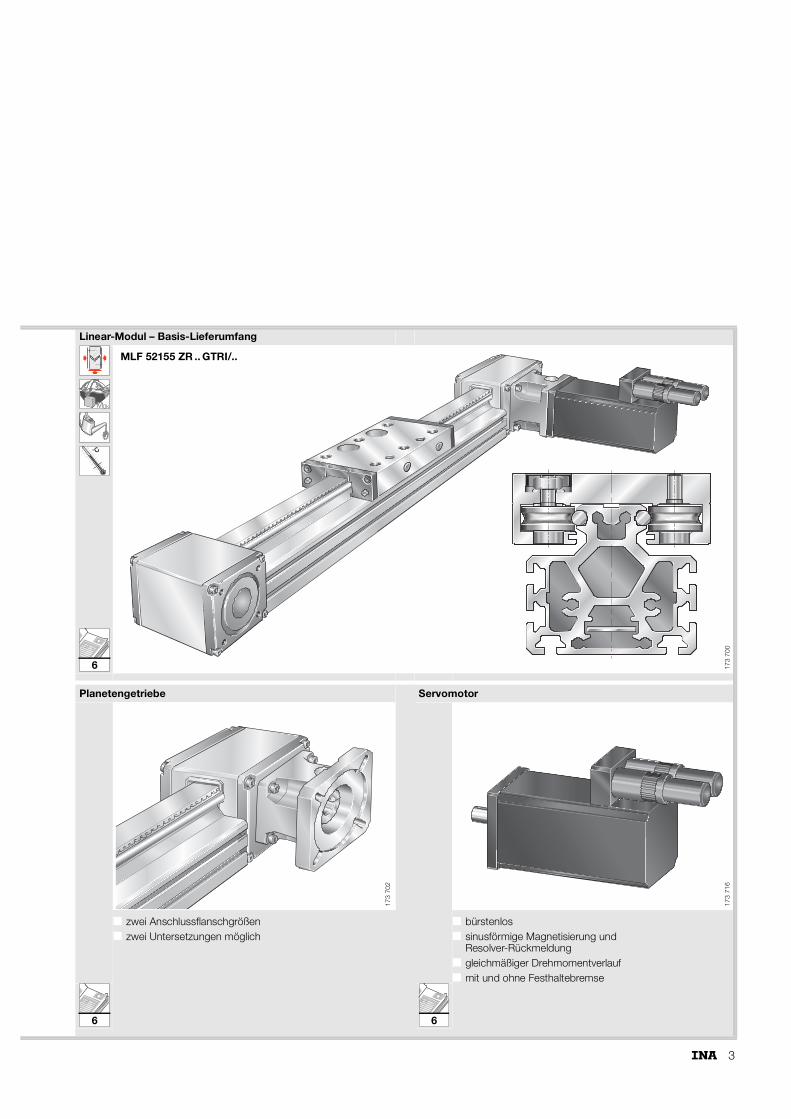
Linear-Modul – Basis-Lieferumfang
k0M
˚C
■ ■Planetengetriebe Servomotor
■ zwei Anschlussflanschgrößen■ zwei Untersetzungen möglich
■ bürstenlos■ sinusförmige Magnetisierung und
Resolver-Rückmeldung■ gleichmäßiger Drehmomentverlauf ■ mit und ohne Festhaltebremse
MLF 52155 ZR .. GTRI/..
173
700
173
702
173
716
6
6 6
4
Linear-Modul mit Laufrollenführung, Planetengetriebe und Servomotor
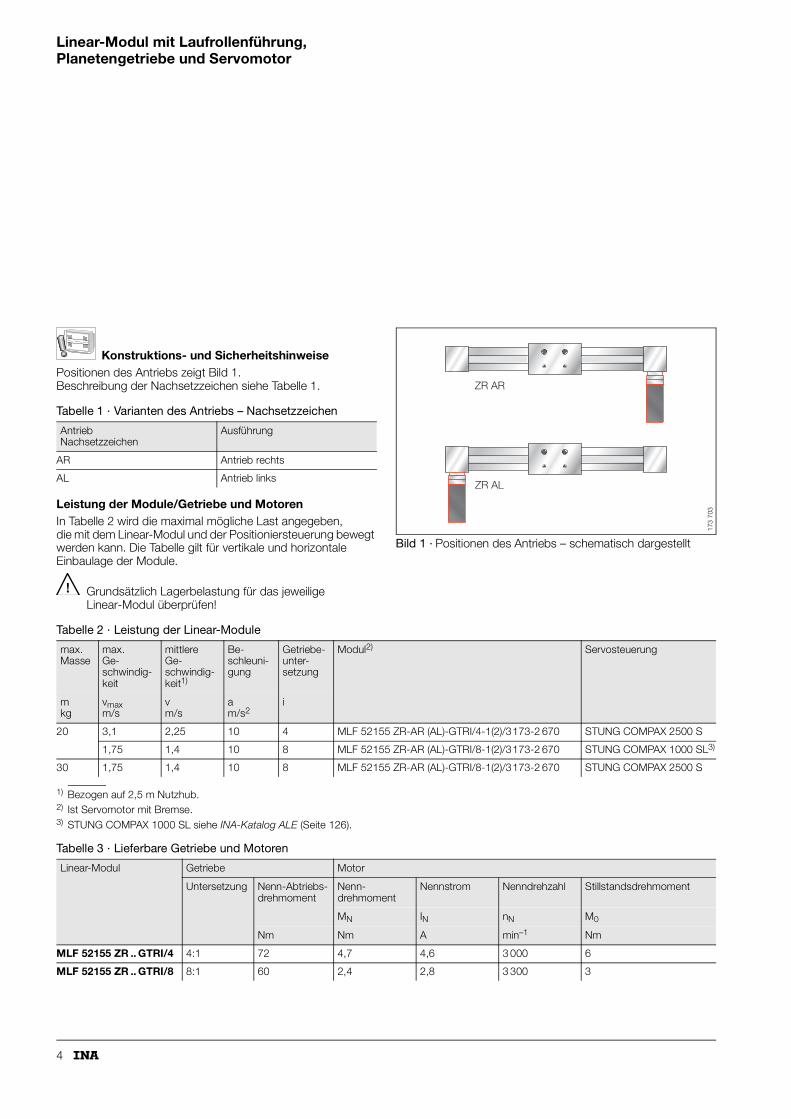
Konstruktions- und SicherheitshinweisePositionen des Antriebs zeigt Bild 1. Beschreibung der Nachsetzzeichen siehe Tabelle 1.
Leistung der Module/Getriebe und MotorenIn Tabelle 2 wird die maximal mögliche Last angegeben, die mit dem Linear-Modul und der Positioniersteuerung bewegt werden kann. Die Tabelle gilt für vertikale und horizontale Einbaulage der Module.
Grundsätzlich Lagerbelastung für das jeweilige Linear-Modul überprüfen!
Bild 1 · Positionen des Antriebs – schematisch dargestellt
1) Bezogen auf 2,5 m Nutzhub.2) Ist Servomotor mit Bremse.3) STUNG COMPAX 1000 SL siehe INA-Katalog ALE (Seite 126).
Tabelle 1 · Varianten des Antriebs – Nachsetzzeichen
AntriebNachsetzzeichen
Ausführung
AR Antrieb rechts
AL Antrieb links
ZR AR
ZR AL
173
703
Tabelle 2 · Leistung der Linear-Module
max. Masse
max. Ge-schwindig-keit
mittlere Ge-schwindig-keit1)
Be-schleuni-gung
Getriebe-unter-setzung
Modul2) Servosteuerung
mkg
vmaxm/s
vm/s
am/s2
i
20 3,1 2,25 10 4 MLF 52155 ZR-AR (AL)-GTRI/4-1(2)/3173-2 670 STUNG COMPAX 2500 S
1,75 1,4 10 8 MLF 52155 ZR-AR (AL)-GTRI/8-1(2)/3173-2 670 STUNG COMPAX 1000 SL3)
30 1,75 1,4 10 8 MLF 52155 ZR-AR (AL)-GTRI/8-1(2)/3173-2 670 STUNG COMPAX 2500 S
Tabelle 3 · Lieferbare Getriebe und Motoren
Linear-Modul Getriebe Motor
Untersetzung Nenn-Abtriebs-drehmoment
Nenn-drehmoment
Nennstrom Nenndrehzahl Stillstandsdrehmoment
MN IN nN M0
Nm Nm A min–1 Nm
MLF 52155 ZR .. GTRI/4 4:1 72 4,7 4,6 3 000 6
MLF 52155 ZR .. GTRI/8 8:1 60 2,4 2,8 3 300 3

5
Bestellbeispiel und Bestellbezeichnung
Bestellbeispiel
Bestellbezeichnung:MLF 52155 ZR AR GTRI/8-2/3 003-2 500 (Bild 2).
Bild 2 · Bestellbeispiel und Bestellbezeichnung – Linear-Modul MLF 52155 ZR AR GTRI/8-2/3 003-2 500
Linear-Modul mit Laufrollenführung MLFGrößenkennziffer 52Breite des Laufwagens 155 mmZahnriemenantrieb ZRAntriebswelle rechts ARintegriertes Getriebe GTRIUntersetzung i = 8Motor mit Festhaltebremse -2Geamtlänge Lges 3 003 mmGesamthub (Nutzhub + 2�S) 2 500 mm
MLF 52155 ZR AR GTRI/8-2/3003-2500
2500
3003
173
704
6
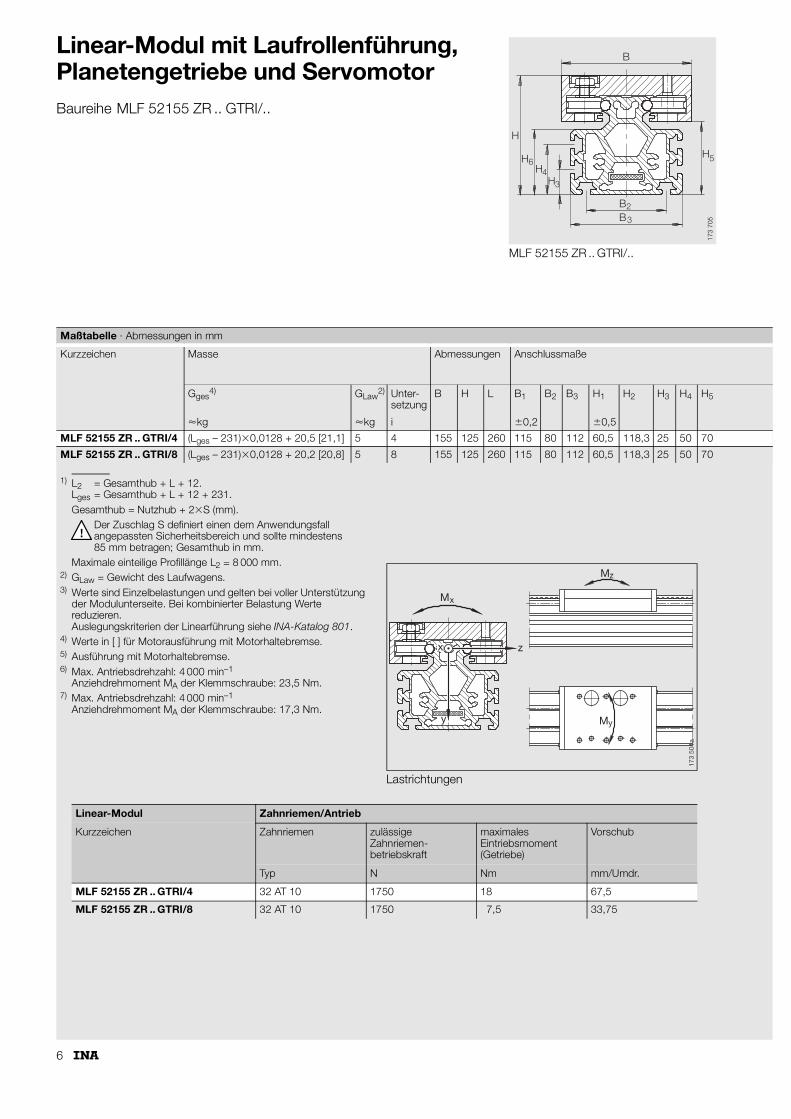
Linear-Modul mit Laufrollenführung, Planetengetriebe und ServomotorBaureihe MLF 52155 ZR .. GTRI/..
MLF 52155 ZR .. GTRI/..
B
HH
H
H
BB
4
2
3
3
56
H
173
705
Maßtabelle · Abmessungen in mm
Kurzzeichen Masse Abmessungen Anschlussmaße
Gges4) GLaw
2) Unter-setzung
B H L B1 B2 B3 H1 H2 H3 H4 H5
�kg �kg i �0,2 �0,5
MLF 52155 ZR .. GTRI/4 (Lges – 231)�0,0128 + 20,5 [21,1] 5 4 155 125 260 115 80 112 60,5 118,3 25 50 70
MLF 52155 ZR .. GTRI/8 (Lges – 231)�0,0128 + 20,2 [20,8] 5 8 155 125 260 115 80 112 60,5 118,3 25 50 70
1) L2 = Gesamthub + L + 12.Lges = Gesamthub + L + 12 + 231.Gesamthub = Nutzhub + 2�S (mm).
Der Zuschlag S definiert einen dem Anwendungsfall angepassten Sicherheitsbereich und sollte mindestens 85 mm betragen; Gesamthub in mm.
Maximale einteilige Profillänge L2 = 8 000 mm.2) GLaw = Gewicht des Laufwagens.3) Werte sind Einzelbelastungen und gelten bei voller Unterstützung
der Modulunterseite. Bei kombinierter Belastung Werte reduzieren. Auslegungskriterien der Linearführung siehe INA-Katalog 801.
4) Werte in [ ] für Motorausführung mit Motorhaltebremse.5) Ausführung mit Motorhaltebremse.6) Max. Antriebsdrehzahl: 4 000 min–1
Anziehdrehmoment MA der Klemmschraube: 23,5 Nm.7) Max. Antriebsdrehzahl: 4 000 min–1
Anziehdrehmoment MA der Klemmschraube: 17,3 Nm.
Lastrichtungen
My
Mx
Mz
x z
y
173
501a
Linear-Modul Zahnriemen/Antrieb
Kurzzeichen Zahnriemen zulässigeZahnriemen-betriebskraft
maximalesEintriebsmoment(Getriebe)
Vorschub
Typ N Nm mm/Umdr.
MLF 52155 ZR .. GTRI/4 32 AT 10 1750 18 67,5
MLF 52155 ZR .. GTRI/8 32 AT 10 1750 7,5 33,75
7
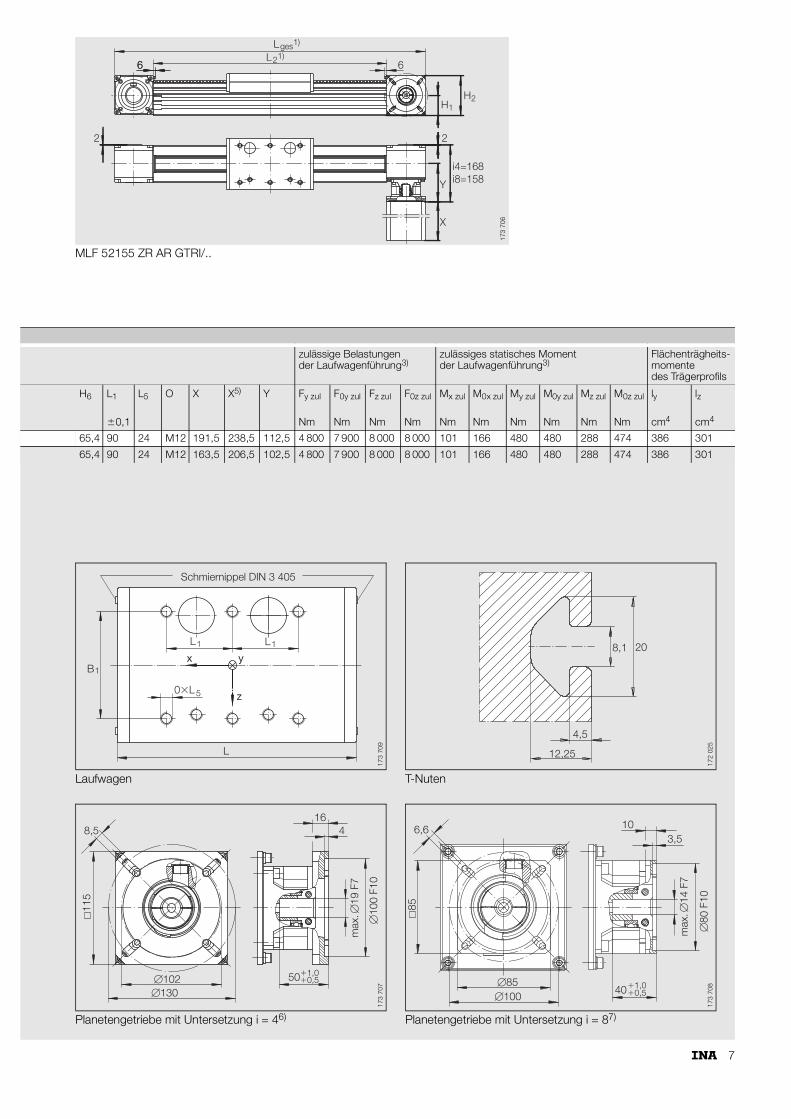
MLF 52155 ZR AR GTRI/..
Y
LL
ges
2
X
22
i4=168 i8=158
H1H2
66 6
1)
1)
173
706
zulässige Belastungender Laufwagenführung3)
zulässiges statisches Momentder Laufwagenführung3)
Flächenträgheits-momentedes Trägerprofils
H6 L1 L5 O X X5) Y Fy zul F0y zul Fz zul F0z zul Mx zul M0x zul My zul M0y zul Mz zul M0z zul ly lz
�0,1 Nm Nm Nm Nm Nm Nm Nm Nm Nm Nm cm4 cm4
65,4 90 24 M12 191,5 238,5 112,5 4 800 7 900 8 000 8 000 101 166 480 480 288 474 386 301
65,4 90 24 M12 163,5 206,5 102,5 4 800 7 900 8 000 8 000 101 166 480 480 288 474 386 301
Laufwagen
Planetengetriebe mit Untersetzung i = 46)
T-Nuten
Planetengetriebe mit Untersetzung i = 87)
Schmiernippel DIN 3 405
B1
0�L5
L1 L1
x y
z
L
173
709
�102�130
50
115
8,5 416
max
. �19
F7
�10
0 F1
0
�1,0 �0,5
173
707
8,1 20
4,5
12,25
172
025
�85�100
40
85
6,63,5
10
max
. �14
F7
�80
F10
�1,0 �0,5
173
708
8
Linear-Modul mit Kugelumlaufführung, Planetengetriebe und Servomotor
Seite
Konstruktions- und Sicherheitshinweise ............. 10
Bestellbeispiel und Bestellbezeichnung .............. 11
Elektrische Antriebstechnik ................................. 14
+0,5V
–0,5V
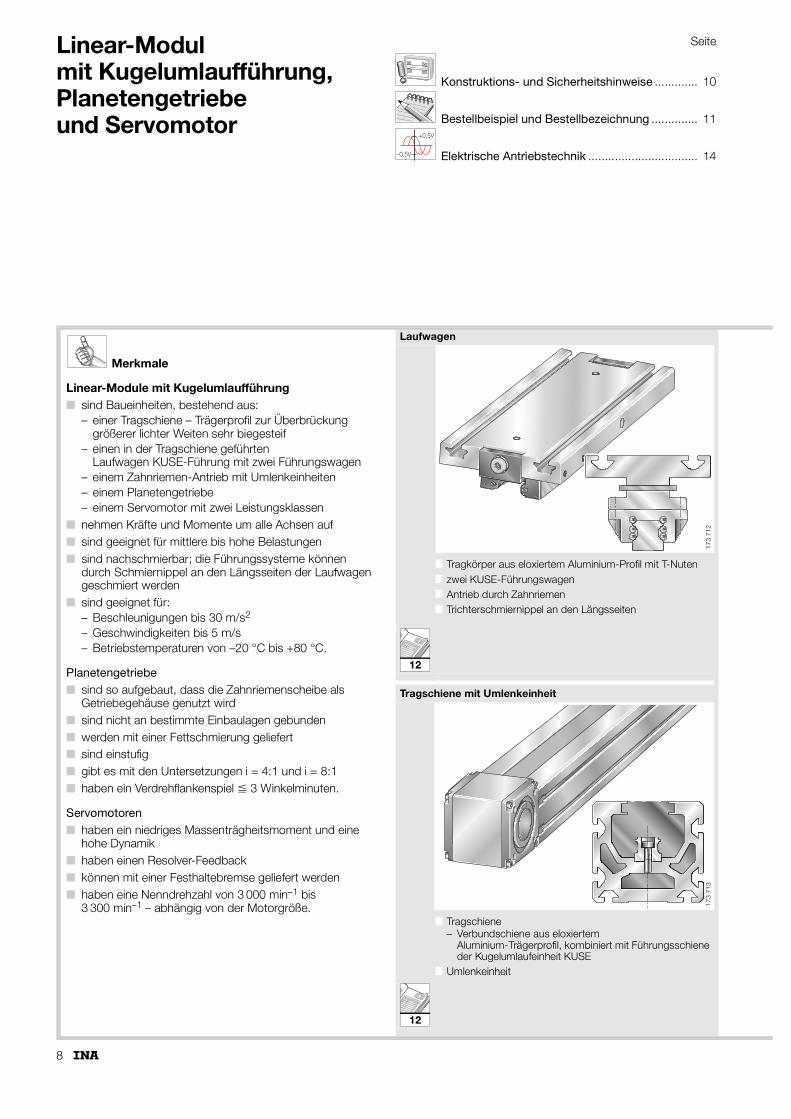
Merkmale
Linear-Module mit Kugelumlaufführung■ sind Baueinheiten, bestehend aus:
– einer Tragschiene – Trägerprofil zur Überbrückung größerer lichter Weiten sehr biegesteif
– einen in der Tragschiene geführten Laufwagen KUSE-Führung mit zwei Führungswagen
– einem Zahnriemen-Antrieb mit Umlenkeinheiten– einem Planetengetriebe– einem Servomotor mit zwei Leistungsklassen
■ nehmen Kräfte und Momente um alle Achsen auf■ sind geeignet für mittlere bis hohe Belastungen■ sind nachschmierbar; die Führungssysteme können
durch Schmiernippel an den Längsseiten der Laufwagen geschmiert werden
■ sind geeignet für:– Beschleunigungen bis 30 m/s2
– Geschwindigkeiten bis 5 m/s– Betriebstemperaturen von –20 °C bis +80 °C.
Planetengetriebe■ sind so aufgebaut, dass die Zahnriemenscheibe als
Getriebegehäuse genutzt wird■ sind nicht an bestimmte Einbaulagen gebunden■ werden mit einer Fettschmierung geliefert■ sind einstufig■ gibt es mit den Untersetzungen i = 4:1 und i = 8:1■ haben ein Verdrehflankenspiel � 3 Winkelminuten.
Servomotoren■ haben ein niedriges Massenträgheitsmoment und eine
hohe Dynamik■ haben einen Resolver-Feedback■ können mit einer Festhaltebremse geliefert werden■ haben eine Nenndrehzahl von 3 000 min–1 bis
3 300 min–1 – abhängig von der Motorgröße.
Laufwagen
■ Tragkörper aus eloxiertem Aluminium-Profil mit T-Nuten■ zwei KUSE-Führungswagen■ Antrieb durch Zahnriemen■ Trichterschmiernippel an den Längsseiten
Tragschiene mit Umlenkeinheit
■ Tragschiene– Verbundschiene aus eloxiertem
Aluminium-Trägerprofil, kombiniert mit Führungsschiene der Kugelumlaufeinheit KUSE
■ Umlenkeinheit
173
712
173
713
12
12
9
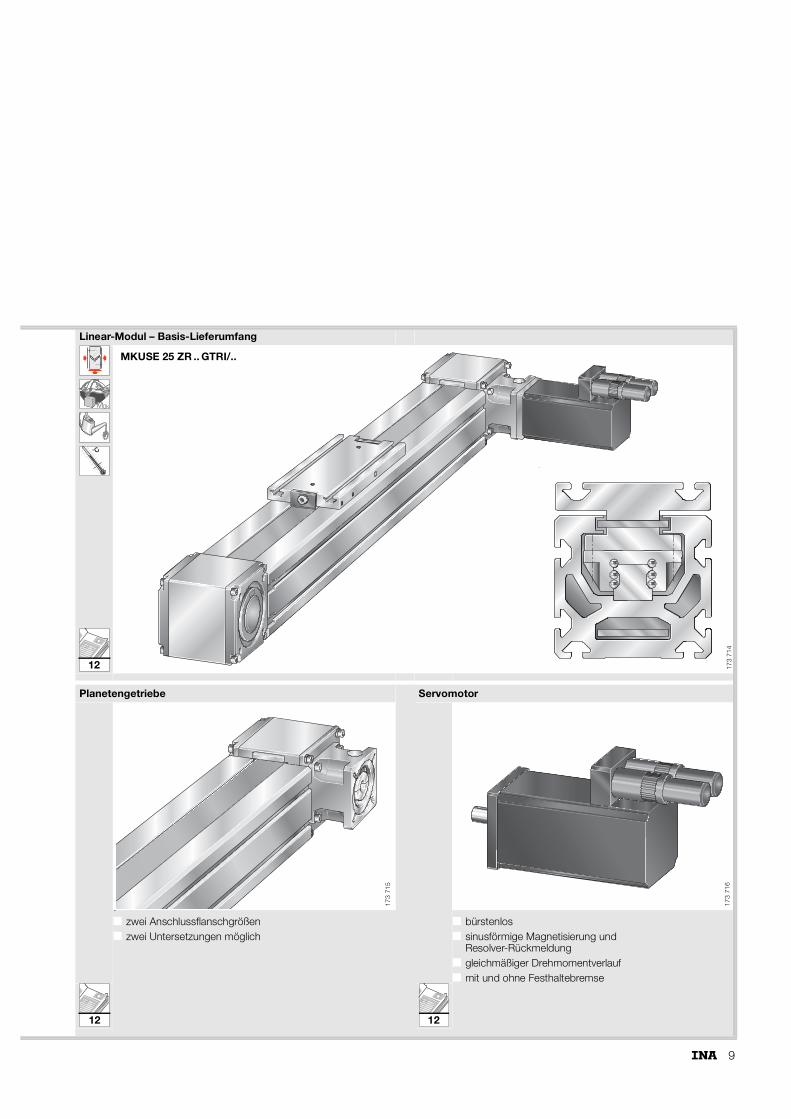
Linear-Modul – Basis-Lieferumfang
k0M
˚C
■ ■Planetengetriebe Servomotor
■ zwei Anschlussflanschgrößen■ zwei Untersetzungen möglich
■ bürstenlos■ sinusförmige Magnetisierung und
Resolver-Rückmeldung■ gleichmäßiger Drehmomentverlauf ■ mit und ohne Festhaltebremse
MKUSE 25 ZR .. GTRI/..
173
714
173
715
173
716
12
12 12
10
Linear-Modul mit Kugelumlaufführung, Planetengetriebe und Servomotor
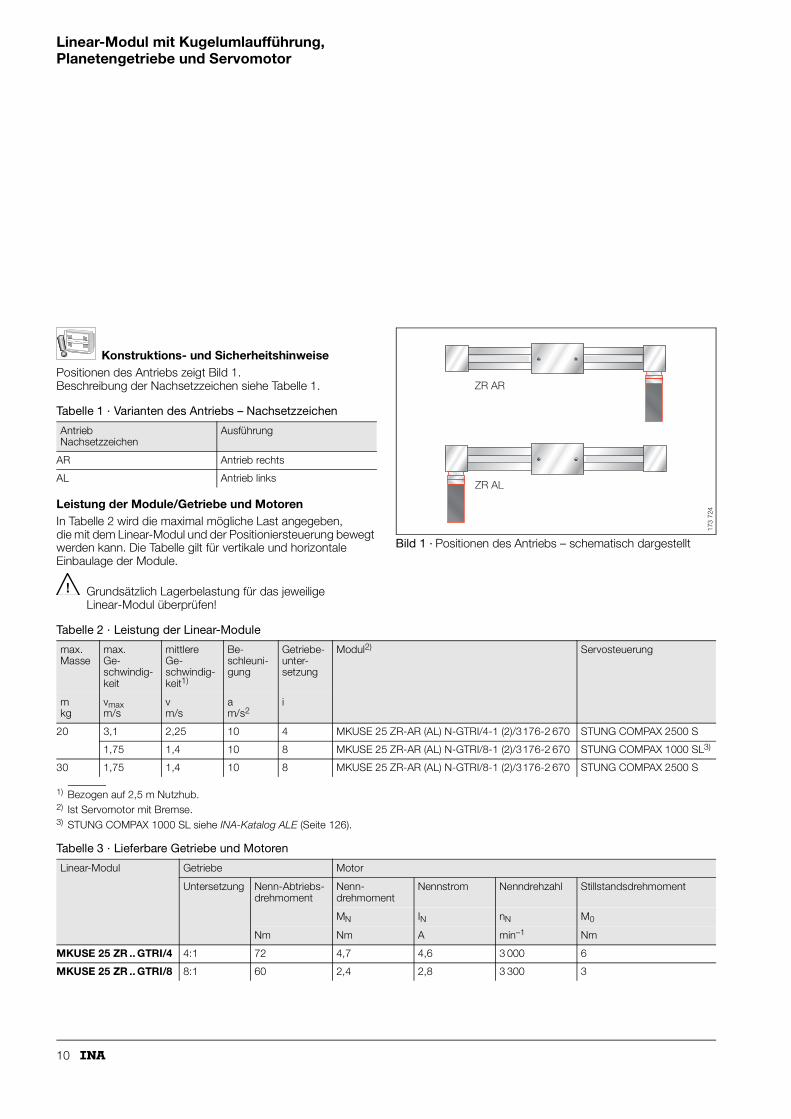
Konstruktions- und SicherheitshinweisePositionen des Antriebs zeigt Bild 1. Beschreibung der Nachsetzzeichen siehe Tabelle 1.
Leistung der Module/Getriebe und MotorenIn Tabelle 2 wird die maximal mögliche Last angegeben, die mit dem Linear-Modul und der Positioniersteuerung bewegt werden kann. Die Tabelle gilt für vertikale und horizontale Einbaulage der Module.
Grundsätzlich Lagerbelastung für das jeweilige Linear-Modul überprüfen!
Bild 1 · Positionen des Antriebs – schematisch dargestellt
1) Bezogen auf 2,5 m Nutzhub.2) Ist Servomotor mit Bremse.3) STUNG COMPAX 1000 SL siehe INA-Katalog ALE (Seite 126).
Tabelle 1 · Varianten des Antriebs – Nachsetzzeichen
AntriebNachsetzzeichen
Ausführung
AR Antrieb rechts
AL Antrieb links
ZR AR
ZR AL
173
724
Tabelle 2 · Leistung der Linear-Module
max. Masse
max. Ge-schwindig-keit
mittlere Ge-schwindig-keit1)
Be-schleuni-gung
Getriebe-unter-setzung
Modul2) Servosteuerung
mkg
vmaxm/s
vm/s
am/s2
i
20 3,1 2,25 10 4 MKUSE 25 ZR-AR (AL) N-GTRI/4-1 (2)/3176-2 670 STUNG COMPAX 2500 S
1,75 1,4 10 8 MKUSE 25 ZR-AR (AL) N-GTRI/8-1 (2)/3176-2 670 STUNG COMPAX 1000 SL3)
30 1,75 1,4 10 8 MKUSE 25 ZR-AR (AL) N-GTRI/8-1 (2)/3176-2 670 STUNG COMPAX 2500 S
Tabelle 3 · Lieferbare Getriebe und Motoren
Linear-Modul Getriebe Motor
Untersetzung Nenn-Abtriebs-drehmoment
Nenn-drehmoment
Nennstrom Nenndrehzahl Stillstandsdrehmoment
MN IN nN M0
Nm Nm A min–1 Nm
MKUSE 25 ZR .. GTRI/4 4:1 72 4,7 4,6 3 000 6
MKUSE 25 ZR .. GTRI/8 8:1 60 2,4 2,8 3 300 3
11
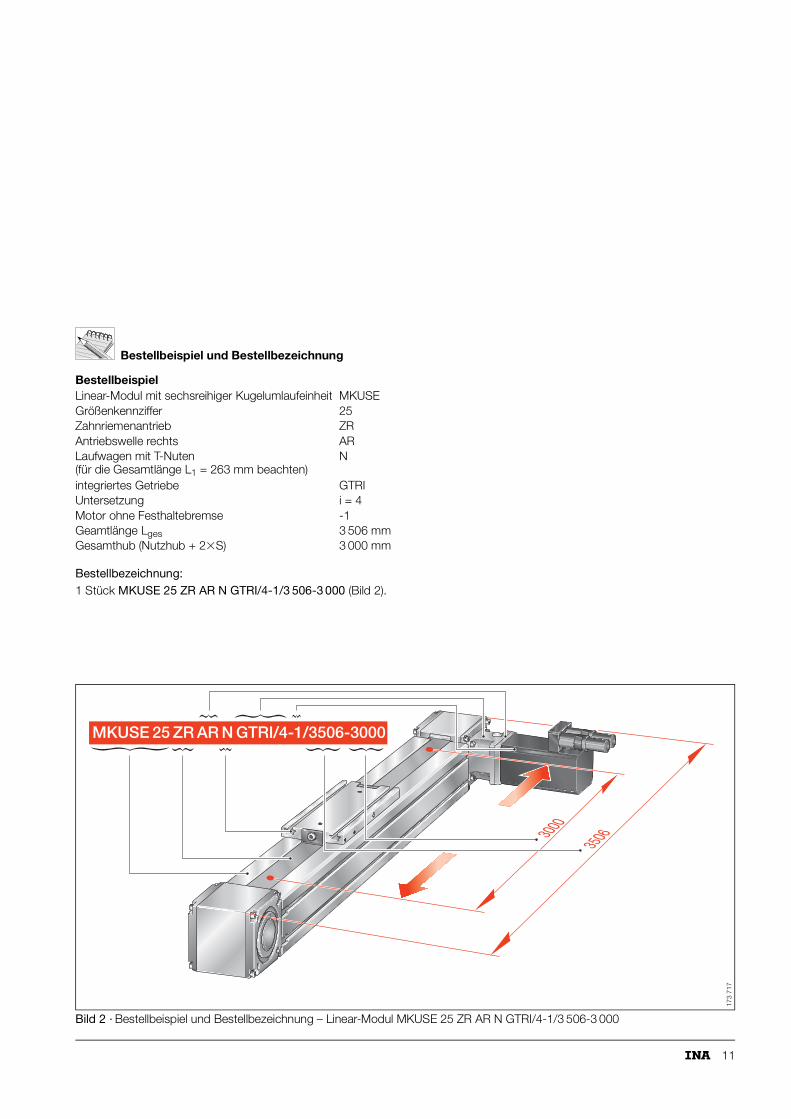
Bestellbeispiel und Bestellbezeichnung
Bestellbeispiel
Bestellbezeichnung:1 Stück MKUSE 25 ZR AR N GTRI/4-1/3 506-3 000 (Bild 2).
Bild 2 · Bestellbeispiel und Bestellbezeichnung – Linear-Modul MKUSE 25 ZR AR N GTRI/4-1/3 506-3 000
Linear-Modul mit sechsreihiger Kugelumlaufeinheit MKUSEGrößenkennziffer 25Zahnriemenantrieb ZRAntriebswelle rechts ARLaufwagen mit T-Nuten(für die Gesamtlänge L1 = 263 mm beachten)
N
integriertes Getriebe GTRIUntersetzung i = 4Motor ohne Festhaltebremse -1Geamtlänge Lges 3 506 mmGesamthub (Nutzhub + 2�S) 3 000 mm
3000
3506
MKUSE 25 ZR AR N GTRI/4-1/3506-300017
3 71
7
12
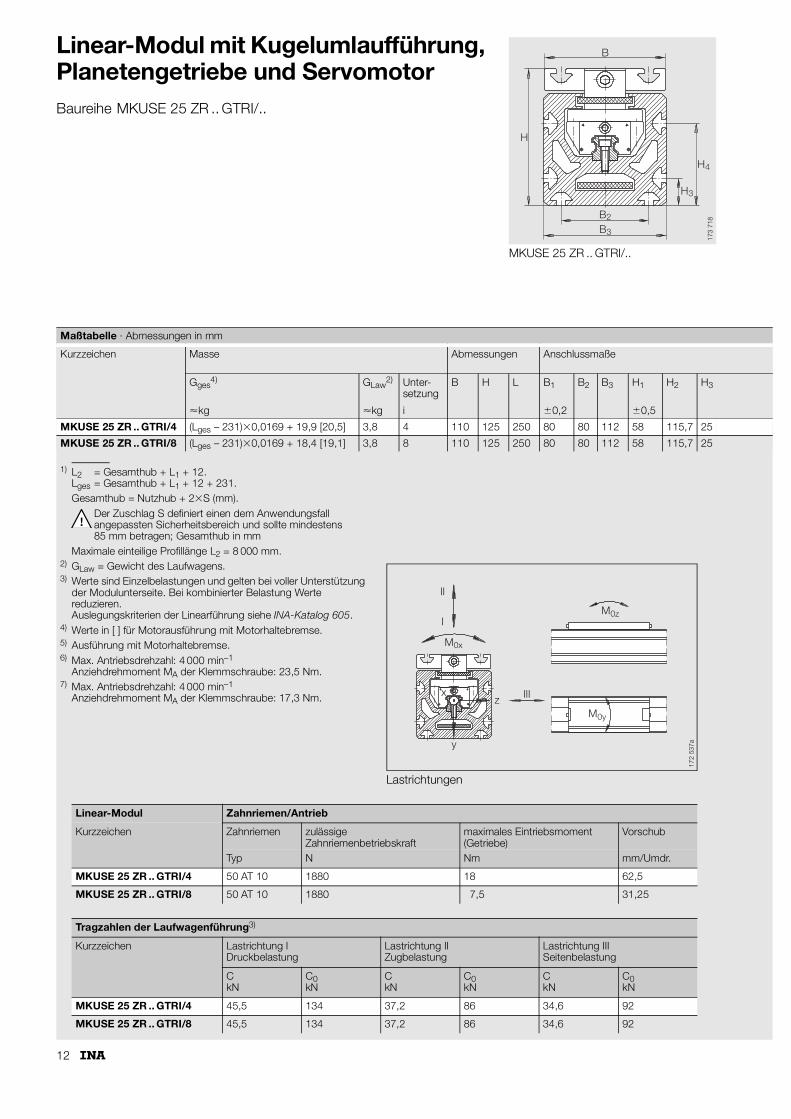
Linear-Modul mit Kugelumlaufführung, Planetengetriebe und ServomotorBaureihe MKUSE 25 ZR .. GTRI/..
MKUSE 25 ZR .. GTRI/..
B
H
H
BB
H
2
3
3
4
173
718
Maßtabelle · Abmessungen in mm
Kurzzeichen Masse Abmessungen Anschlussmaße
Gges4) GLaw
2) Unter-setzung
B H L B1 B2 B3 H1 H2 H3
�kg �kg i �0,2 �0,5
MKUSE 25 ZR .. GTRI/4 (Lges – 231)�0,0169 + 19,9 [20,5] 3,8 4 110 125 250 80 80 112 58 115,7 25
MKUSE 25 ZR .. GTRI/8 (Lges – 231)�0,0169 + 18,4 [19,1] 3,8 8 110 125 250 80 80 112 58 115,7 25
1) L2 = Gesamthub + L1 + 12.Lges = Gesamthub + L1 + 12 + 231.Gesamthub = Nutzhub + 2�S (mm).
Der Zuschlag S definiert einen dem Anwendungsfall angepassten Sicherheitsbereich und sollte mindestens 85 mm betragen; Gesamthub in mm
Maximale einteilige Profillänge L2 = 8 000 mm.2) GLaw = Gewicht des Laufwagens.3) Werte sind Einzelbelastungen und gelten bei voller Unterstützung
der Modulunterseite. Bei kombinierter Belastung Werte reduzieren. Auslegungskriterien der Linearführung siehe INA-Katalog 605.
4) Werte in [ ] für Motorausführung mit Motorhaltebremse.5) Ausführung mit Motorhaltebremse.6) Max. Antriebsdrehzahl: 4 000 min–1
Anziehdrehmoment MA der Klemmschraube: 23,5 Nm.7) Max. Antriebsdrehzahl: 4 000 min–1
Anziehdrehmoment MA der Klemmschraube: 17,3 Nm.
Lastrichtungen
II
I
III
M
M
M
y
xz
0x
0z
0y
172
537a
Linear-Modul Zahnriemen/Antrieb
Kurzzeichen Zahnriemen zulässigeZahnriemenbetriebskraft
maximales Eintriebsmoment(Getriebe)
Vorschub
Typ N Nm mm/Umdr.
MKUSE 25 ZR .. GTRI/4 50 AT 10 1880 18 62,5
MKUSE 25 ZR .. GTRI/8 50 AT 10 1880 7,5 31,25
Tragzahlen der Laufwagenführung3)
Kurzzeichen Lastrichtung IDruckbelastung
Lastrichtung IIZugbelastung
Lastrichtung IIISeitenbelastung
CkN
C0kN
CkN
C0kN
CkN
C0kN
MKUSE 25 ZR .. GTRI/4 45,5 134 37,2 86 34,6 92
MKUSE 25 ZR .. GTRI/8 45,5 134 37,2 86 34,6 92
13
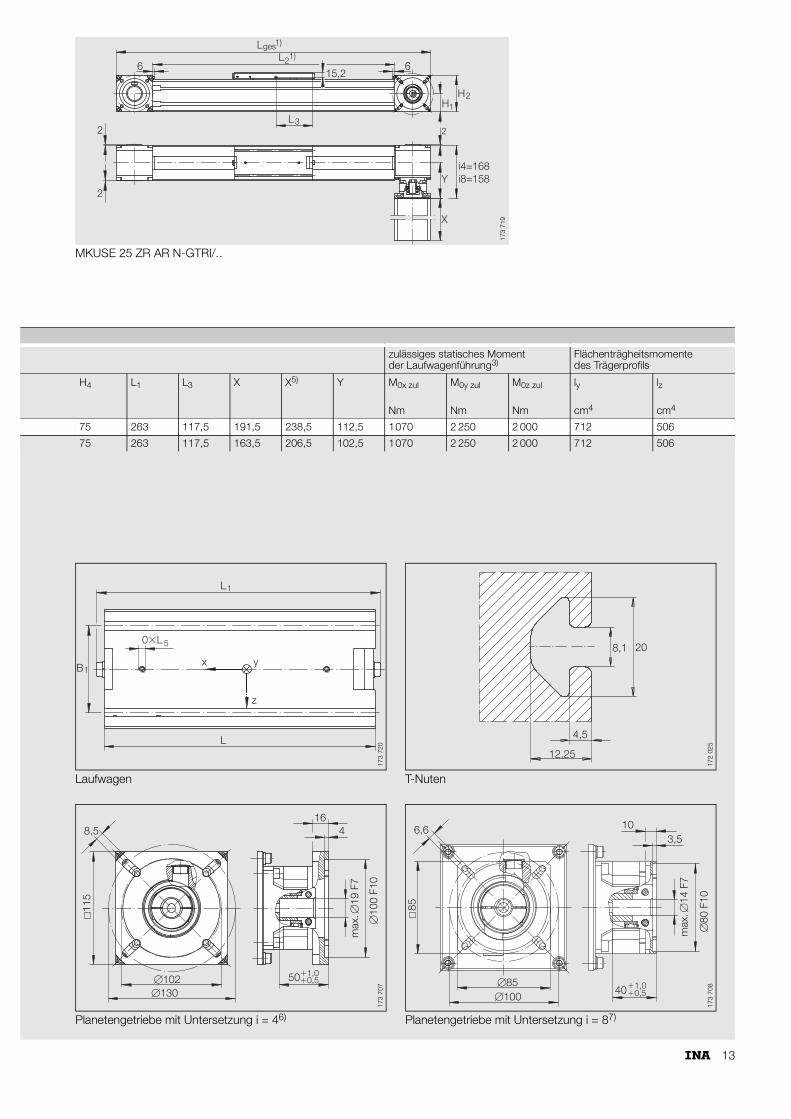
MKUSE 25 ZR AR N-GTRI/..
HH
12
X
2
i4=168 i8=158
LL
ges
2
2
2Y
1)
1)6 6
L3
15,2
173
719
zulässiges statisches Momentder Laufwagenführung3)
Flächenträgheitsmomentedes Trägerprofils
H4 L1 L3 X X5) Y M0x zul M0y zul M0z zul ly lz
Nm Nm Nm cm4 cm4
75 263 117,5 191,5 238,5 112,5 1070 2 250 2 000 712 506
75 263 117,5 163,5 206,5 102,5 1070 2 250 2 000 712 506
Laufwagen
Planetengetriebe mit Untersetzung i = 46)
T-Nuten
Planetengetriebe mit Untersetzung i = 87)
B1
0�L5
x y
z
L
L1
173
720
�102�130
50
115
8,5 416
max
. �19
F7
�10
0 F1
0
�1,0 �0,5
173
707
8,1 20
4,5
12,25
172
025
�85�100
40
85
6,63,5
10
max
. �14
F7
�80
F10
�1,0 �0,5
173
708

14
Elektrische Antriebstechnik
Elektrische Antriebstechnik
ServomotorenZum Antreiben der INA-Linear-Module haben sich bürstenlose Servomotoren seit langem bewährt. Diese Motoren erreichen mit Neodym-Magneten eine hohe Leistungsdichte.Durch die sinusförmige Magnetisierung und Resolverrück-meldung wird in Verbindung mit den digitalen Positionier-steuerungen ein absolut gleichmäßiger Drehmomentverlauf auch bei niedrigen Drehzahlen sichergestellt. Die Motoren können mit oder ohne integrierter Festhaltebremse geliefert werden. Mit Festhaltebremse ist der Motor etwas länger.Diese Motoren haben:■ ein geringes Massenträgheitsmoment■ eine hohe Dynamik■ Nennmomente von 2,4 Nm bis 4,7 Nm■ eine Überlastsicherung■ Steckanschlüsse für Leistung und Resolver■ ein dreifaches Nennmoment zum Beschleunigen.Für alle Antriebe gibt es abgeschirmte, konfektionierte Leistungs- und Resolverkabel in abgestuften Längen bis 30 m.
Bild 1 · Servomotor MOT SMH..
+0,5V
–0,5V
173
730
15
Elektrische AntriebstechnikServomotoren
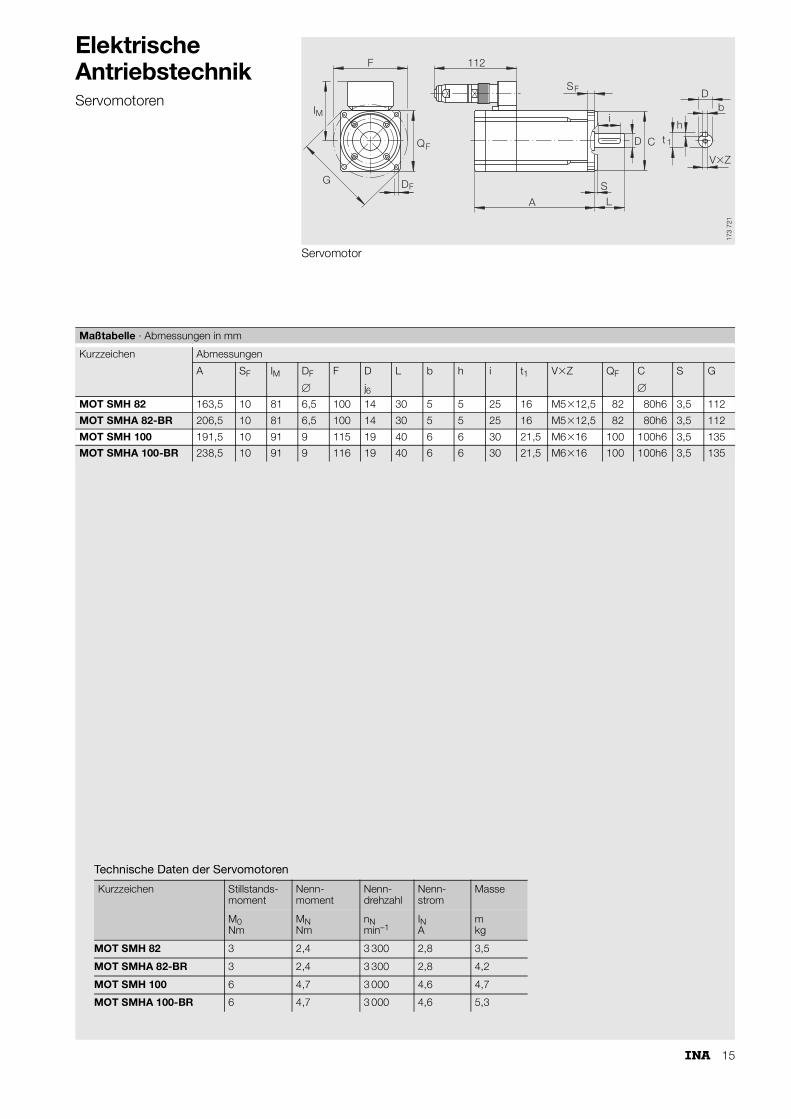
Servomotor
F 112
I
A
S
D
D
L
G
Q
S
C th
bD
V�Z
1
iM
F
F
F
173
721
Maßtabelle · Abmessungen in mm
Kurzzeichen Abmessungen
A SF IM DF F D L b h i t1 V�Z QF C S G
� j6 �
MOT SMH 82 163,5 10 81 6,5 100 14 30 5 5 25 16 M5�12,5 82 80h6 3,5 112
MOT SMHA 82-BR 206,5 10 81 6,5 100 14 30 5 5 25 16 M5�12,5 82 80h6 3,5 112
MOT SMH 100 191,5 10 91 9 115 19 40 6 6 30 21,5 M6�16 100 100h6 3,5 135
MOT SMHA 100-BR 238,5 10 91 9 116 19 40 6 6 30 21,5 M6�16 100 100h6 3,5 135
Technische Daten der Servomotoren
Kurzzeichen Stillstands-moment
Nenn-moment
Nenn-drehzahl
Nenn-strom
Masse
M0Nm
MNNm
nNmin–1
INA
mkg
MOT SMH 82 3 2,4 3 300 2,8 3,5
MOT SMHA 82-BR 3 2,4 3 300 2,8 4,2
MOT SMH 100 6 4,7 3 000 4,6 4,7
MOT SMHA 100-BR 6 4,7 3 000 4,6 5,3
16
Elektrische Antriebstechnik
Digitale Servosteuerung STUNG COMPAX 2500 S
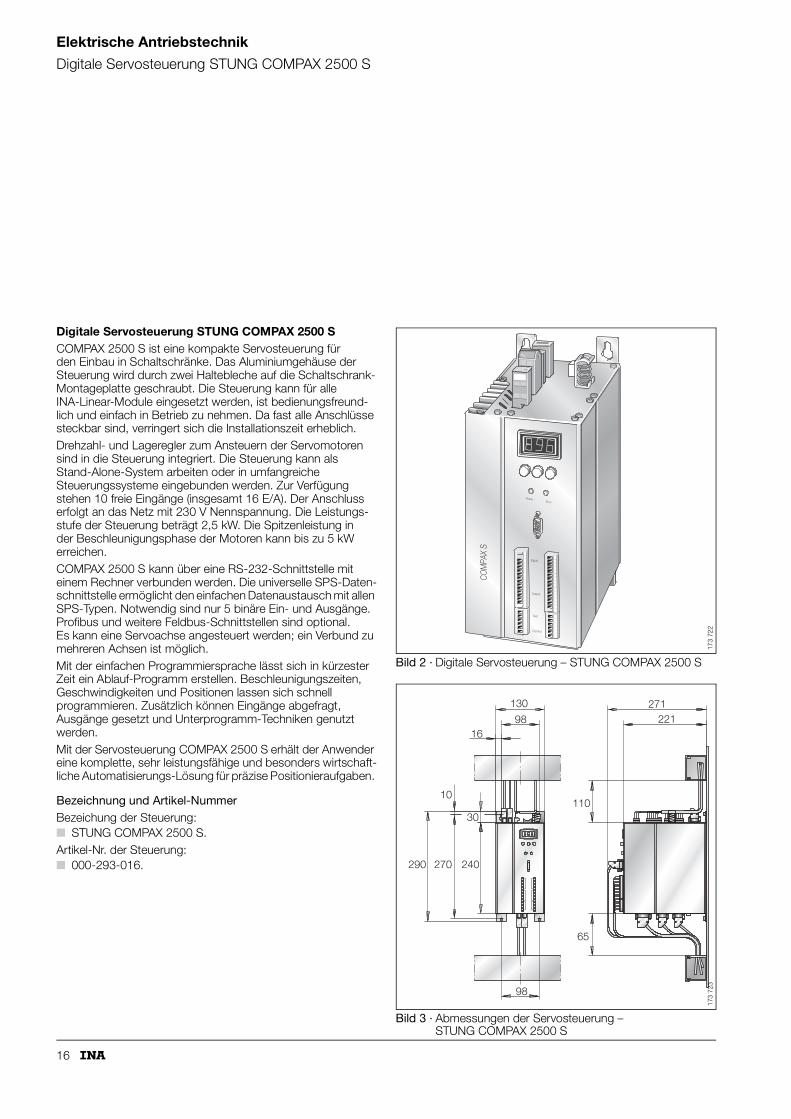
Digitale Servosteuerung STUNG COMPAX 2500 SCOMPAX 2500 S ist eine kompakte Servosteuerung für den Einbau in Schaltschränke. Das Aluminiumgehäuse der Steuerung wird durch zwei Haltebleche auf die Schaltschrank-Montageplatte geschraubt. Die Steuerung kann für alle INA-Linear-Module eingesetzt werden, ist bedienungsfreund-lich und einfach in Betrieb zu nehmen. Da fast alle Anschlüsse steckbar sind, verringert sich die Installationszeit erheblich.Drehzahl- und Lageregler zum Ansteuern der Servomotoren sind in die Steuerung integriert. Die Steuerung kann als Stand-Alone-System arbeiten oder in umfangreiche Steuerungssysteme eingebunden werden. Zur Verfügung stehen 10 freie Eingänge (insgesamt 16 E/A). Der Anschluss erfolgt an das Netz mit 230 V Nennspannung. Die Leistungs-stufe der Steuerung beträgt 2,5 kW. Die Spitzenleistung in der Beschleunigungsphase der Motoren kann bis zu 5 kW erreichen.COMPAX 2500 S kann über eine RS-232-Schnittstelle mit einem Rechner verbunden werden. Die universelle SPS-Daten-schnittstelle ermöglicht den einfachen Datenaustausch mit allen SPS-Typen. Notwendig sind nur 5 binäre Ein- und Ausgänge. Profibus und weitere Feldbus-Schnittstellen sind optional. Es kann eine Servoachse angesteuert werden; ein Verbund zu mehreren Achsen ist möglich.Mit der einfachen Programmiersprache lässt sich in kürzester Zeit ein Ablauf-Programm erstellen. Beschleunigungszeiten, Geschwindigkeiten und Positionen lassen sich schnell programmieren. Zusätzlich können Eingänge abgefragt, Ausgänge gesetzt und Unterprogramm-Techniken genutzt werden.Mit der Servosteuerung COMPAX 2500 S erhält der Anwender eine komplette, sehr leistungsfähige und besonders wirtschaft-liche Automatisierungs-Lösung für präzise Positionieraufgaben.
Bezeichnung und Artikel-NummerBezeichung der Steuerung:■ STUNG COMPAX 2500 S.Artikel-Nr. der Steuerung:■ 000-293-016.
Bild 2 · Digitale Servosteuerung – STUNG COMPAX 2500 S
Bild 3 · Abmessungen der Servosteuerung – STUNG COMPAX 2500 S
ReadyError
COM
PAX
S
Input
Output
Test
Control
173
722
130
9816
10
30
290 270 240
98
65
110
221271
173
723
17
Elektrische Antriebstechnik
Technische Daten für STUNG COMPAX 2500 S
LeistungsmerkmaleFunktionsumfang■ Lage-, Drehzahl- und Stromregler■ kurz-/erdschlusssichere IGBT-Endstufe■ digitale Positioniersteuerung■ Bewegungssteuerung.
Versorgungsspannung■ 1*230 V AC + 10% – 15% 45 – 65 Hz.
Netzseitige Absicherung■ 16 A■ K-Automat oder Neozed-Schmelzeinsatz.
Leistungsspannung■ 300 V DC.
Steuerspannung■ 24 V DC �10%, Welligkeit � 1 VSS
(muss vom Kunden bereitgestellt werden)
Strombedarf■ 0,8 A für das Gerät■ digitale Ausgänge je 100 mA■ für Motorhaltebremse (0,5 – 0,67 A).
Genauigkeit■ Positionierung an der Motorwelle■ Auflösung 16 Bit (= 0,3 Winkelminuten)■ Absolutgenauigkeit: �15 Winkelminuten.
Maximale Verlustleistung■ 80 W.
Satzspeicher■ 250 Sätze, netzausfallsicher.
Satzfunktionen■ Positionierbefehle, E-/A-Anweisungen,
Programmbefehle ACCEL, SPEED, POSA, POSR, WAIT, GOTO, GOSUB, IF, OUTPUT, REPEAT, RETURN, END, WAIT START, GOTO EXT, GOSUB EXT, SPEED SYNC, OUTPUT A0, GOTO, POSR SPEED, POSR OUTPUT, +, –, *, /.
Sollwertgenerator■ Rampenform linear, quadratisch, ruckfrei■ Wegangabe in mm, inch und Inkrementen■ variabel durch Skalierungsfaktor.
Überwachungsfunktionen■ Leistungs-/Hilfsspannungsbereich■ Motor-Endstufentemperatur/Blockierschutz■ Schleppfehlerüberwachung.
CE-Konformität■ EMV-Störfestigkeit/Emmission nach EN 61800-3.
Sicherheit■ VDE 0160/EN 50178.
Ausgangsströme
Gerät Nenn-strom
Spitzen-strom
Leistung
Aeff Aeff� 5 s
kVA
COMPAX 2500 S 6,3 12,6 2,5

18
Elektrische Antriebstechnik
Technische Daten für STUNG COMPAX 2500 S
SchnittstellenSteuereingänge■ 16■ 24 VDC/10 kOhm.
Steuerausgänge■ 16■ Spannungspegel 24 V/100 mA■ aktiv HIGH■ kurzschlussfest.
RS 232■ 9600 Baud, fest eingestellt■ Wortbreite 8 BIT, 1 Start-, 1 Stoppbit■ Softwarehandshake XON, XOFF.
Encoder – Interface (Option)■ Encodernachbildung: 512/1024 Inkr./Umdrehung■ Encodereingang: RS-422-Schnittstelle■ Versorgung: 5 V 120-10 000 Inkr./Umdrehung.
HEDA – Schnittstelle (Option)■ synchron, serielle Echtzeitschnittstelle.
Busanschlüsse (wahlweise)Profibus (Option)■ 1,5 Mbaud, Sinec L2-DP und FMS.
RS 485 (Option)
Interbus-S (Option)
CAN-Bus
BedienungParametereingabe/Statusabfrage■ über COMPAX-Handterminal BDF 2■ über RS-232-Schnittstelle■ über Bus-Schnittstelle.
GerätetechnikGehäuse■ geschlossenes Metallgehäuse■ Isolation nach VDE 0160■ Schutzklasse IP 20.
Anschlüsse■ Motor, Leistung, Steuer-Ein-/Ausgänge über Steck-
klemmen, Geberkabel, Schnittstellen über Stecker.
Standardlieferung■ COMPAX mit Produkthandbuch■ Gegenstecker von X8, X9, X10, X11■ Software Servomanager.

19

INA-Schaeffler KGGeschäftsbereich Lineartechnik66406 Homburg (Saar)Internet www.ina.comE-Mail [email protected] Deutschland:Telefon 0180 /5 00 38 72Telefax 0180 /5 00 38 73Aus anderen Ländern:Telefon +49 / 68 41/ 7 01-0Telefax +49 / 68 41/ 7 01-6 25 S
ach-
Nr.
012-
207-
888/
MA
I 84
D-D
090
35
· Prin
ted
in G
erm
any







![IMG 3172 [SCB-30-30-300].jpg IMG 3173 [SB-30-30-300]kijkenenzien.nl/wordpress/wp-content/uploads/2017/...IMG_3197 [B-30-30-300].jpg IMG_3202 [B-30-30-300].jpg IMG_3213 [CB-30-30-300].jpg](https://static.fdokument.com/doc/165x107/604c041650ec45293d29d2bb/img-3172-scb-30-30-300jpg-img-3173-sb-30-30-300-img3197-b-30-30-300jpg.jpg)










