
MASCHINENPARAMETER MANUAL · diese Signale an das DM02-Modul angeschlossen werden müssen. ......
217
Delem V1101, 0.1 MASCHINENPARAMETER MANUAL DA-65 (V5) DA-69 (V5)
Transcript of MASCHINENPARAMETER MANUAL · diese Signale an das DM02-Modul angeschlossen werden müssen. ......

Delem
V1101, 0.1
MASCHINENPARAMETERMANUAL
DA-65 (V5)DA-69 (V5)
Delem
V1101, 0.2
ALLGEMEINE EINFÜHRUNG
In dieser Gebrauchsanweisung für Maschinenparameter finden Sie Erläuterungen zu denfolgenden Punkten:
• die Eingangs- und Ausgangssignale (X- und Y-Achse und allgemein);• die Wahlmöglichkeiten des Maschinenparametermenüs;• den Wert und die Funktion der Maschinenparameter der X- und Y-Achse;• die Hilfsachsen mit den entsprechenden Parametern.
Im ersten Kapitel wird die Funktion der allgemeinen Eingangs- und Ausgangssignale und derEingangs- und Ausgangssignale der X- und Y-Achse behandelt, sowie die Art und Weise, wiediese Signale an das DM02-Modul angeschlossen werden müssen. Eine Steuerung aus der SerieDA-60 mit einem DM02 bietet die grundlegende Maschinenkonfiguration.
Der Hochgeschwindigkeitsbus (High Speed Bus, HSB) sorgt für die Kommunikation zwischender Steuerung und den Modulen. Über die HSB-Verbindung werden die Module mit denentsprechenden Maschinenparameterwerten zur Steuerung der Achsen programmiert. Dieprogrammierten Achsenwerte werden mit den aktuellen Achsenpositionen und den Einstellungender Maschinenparameter verglichen. Wenn die "neuen" Werte im Bereich liegen, werden die"neuen" Werte die aktuellen Werte.Die Maschinenparameter (einschließlich aller Achsenparameter) werden imMaschinenparametermenü der Steuerung programmiert. Außer der Programmierung derMaschinenparameter gibt es noch einige andere Wahlmöglichkeiten in diesemMaschinenparametermenü. Diese Wahlmöglichkeiten werden in Kapitel 2 erläutert.
Die grundlegenden Maschinenparameter steuern die Y-Achse. In Kapitel 3 werden dieseMaschinenparameter erläutert. Die Erläuterung umfaßt den Parameterbereich, denAusgangswert, die Parameterfunktion und eine Beschreibung.
In den Kapiteln 4 bis 10 werden die Parameter der Hilfsachsen sowie Spezialfunktionen nähererläutert. Die Hilfsachsen werden per Achsentyp aufgeführt. Folgende Achsentypen undSpezialfunktionen werden erläutert:
• Hilfsachsen (Kapitel 4);• Achsentypen und parameter (Kapitel 5);• Bombierung (Kapitel 6);• Digitale Ausgänge (Kapitel 7);• I-Achsen (Kapitel 8);• Biegehilfe (Kapitel 9);
Diese Gebrauchsanweisung bezieht sich auf die Delem-Steuerungstypen DA-65 und DA-69, diemit der Softwareversion 5 oder höher ausgerüstet sind.
Delem
V1101, 0.3
MASCHINEN PARAMETERS MANUAL
Inhaltsverzeichnis
PAGINAALLGEMEINE EINFÜHRUNG ......................................................................................... 0.2
Inhaltsverzeichnis .................................................................................................................. 0.3
1. EINGANGS- UND AUSGANGSSIGNALE ......................................................... 1.11.1. Einführung..................................................................................................... 1.11.2. Y-Achse Eingangssignale.............................................................................. 1.11.3. Y-Achse Ausgangssignale............................................................................. 1.21.4. X-Achse Signale ............................................................................................ 1.41.5. Achsen Signale .............................................................................................. 1.41.6. Verschiedene Eingangs- und Ausgangssignale ............................................. 1.5
2. MASCHINENPARAMETERMENÜ .................................................................... 2.12.1. Einführung..................................................................................................... 2.12.2. Wahlverfahren für das Maschinenparametermenü........................................ 2.12.3. Y-Achsen und allgemeine Parameter ............................................................ 2.22.4. Hilfsachsen .................................................................................................... 2.22.5. Modulenkonfiguration ................................................................................... 2.32.6. Steuerungsaktualisierung............................................................................... 2.42.7. Sicherung der Maschinenparameter .............................................................. 2.82.8. Änderung des Menünamens .......................................................................... 2.82.9. Änderung des Zugriffskodes ......................................................................... 2.82.10. Optionen ........................................................................................................ 2.92.11. Das Maschinenparametermenü verlassen...................................................... 2.10
3. Y-ACHSEN UND ALLGEMEINE PARAMETER ............................................. 3.0
Parameter: 1Service-zeile 1/0........................................................................................................3.1
Parameter: 2Y-max........................................................................................................................3.2
Parameter: 3Y-min ........................................................................................................................3.3
Parameter: 4Y-Richtung +/- (1/0).................................................................................................3.4
Parameter: 5Linealreferenz links (Y1) ........................................................................................3.5
Parameter: 6Linealreferenz rechts (Y2) ......................................................................................3.6
Parameter: 7Werkzeug-Referenz .............................................................................................. 3.7.a
Parameter: TRWerkzeug Referenzkorrektur .............................................................................3.7.b
Delem
V1101, 0.4
Parameter: 8Lineare maßstäbe-richtung Y1 (0/1)......................................................................3.8
Parameter: 9Lineare Maßstäbe-richtung Y2 (0/1) .....................................................................3.9
Parameter: 10Tandem 1/0 .............................................................................................................3.10
Parameter: 11Parallel-Schalter 1/0 ..............................................................................................3.11
Parameter: 12Max. Paralellität ....................................................................................................3.12
Parameter: 13Init. Y-Öffnung ......................................................................................................3.13
Parameter: 14Bremszeit maximal ................................................................................................3.14
Parameter: 15Ventile kalibrieren 1/0...........................................................................................3.15
Parameter: 16 -19nicht gebraucht ......................................................................................................3.16
Parameter: 20Steifheit ...................................................................................................................3.20
Parameter: 21Steifheit der Presse ................................................................................................3.21
Parameter: 22Kalibrierung 1/0.....................................................................................................3.22
Parameter: 23Druck max. .............................................................................................................3.23
Parameter: 24Druck min...............................................................................................................3.24
Parameter: FMDruck mitte ............................................................................................................3.24
Parameter: 25Ausgang max. .........................................................................................................3.25
Parameter: 26Ausgang min...........................................................................................................3.26
Parameter: OMAusgang mitte ........................................................................................................3.26
Parameter: 27Initielle Druckstärke..............................................................................................3.27
Parameter: 28nicht gebraucht ......................................................................................................3.28
Parameter: 29nicht gebraucht ......................................................................................................3.29
Parameter: 30Schließgeschwindigkeit .........................................................................................3.30
Parameter: 31Inkrement-Schließgeschwindigkeit ......................................................................3.31
Parameter: 32Schließung ramp offset..........................................................................................3.32
Parameter: 33Wartezeit vor Schließen ........................................................................................3.33
Delem
V1101, 0.5
Parameter: 34Öffnungsgeschwindigkeit ......................................................................................3.34
Parameter: 35Öffnung ramp offset ..............................................................................................3.35
Parameter: 36Wartezeit vor Öffnen.............................................................................................3.36
Parameter: 37Max presse geschwindigkeit .................................................................................3.37
Parameter: 38Wartezeit vor pressen............................................................................................3.38
Parameter: 39Wartezeit vor Pressdruck .....................................................................................3.39
Parameter: 40 - 45nicht gebraucht ......................................................................................................3.40
Parameter: 46Schliessen Bremsanlaufzeiteinstellung ................................................................3.46
Parameter: 47Schliessen Verstärkungseinstellung .....................................................................3.47
Parameter: 48Öffnen Verstärkungseinstellung ..........................................................................3.48
Parameter: 49Pressen Verstärkungseinstellung .........................................................................3.49
Parameter: 50Maschinen länge zwischen zylinder .....................................................................3.50
Parameter: 51Inertia untertisch ...................................................................................................3.51
Parameter: 52Inertia oberwange..................................................................................................3.52
Parameter: 53nicht gebraucht ......................................................................................................3.53
Parameter: 54Gesamte Maschinen länge.....................................................................................3.54
Parameter: 55Stempelklemmendruck .........................................................................................3.55
Parameter: 56Matrizenklemmendruck .......................................................................................3.56
Parameter: 57Ventilrampe schliessen ..........................................................................................3.57
Parameter: 58nicht gebraucht ......................................................................................................3.58
Parameter: 59Öffnungsdruck .......................................................................................................3.59
Parameter: 60-119nicht gebraucht ......................................................................................................3.60
Parameter: 120KO-Tabelle von Diskette ein/aus 1/0..................................................................3.120
Parameter: 121Sequenzer von Diskette ein/aus 1/0 ....................................................................3.121
Parameter: 122Sequenzer debug ein/aus 1/0...............................................................................3.122
Delem
V1101, 0.6
Parameter: 123 - 130Sequenzer Option ................................................................................................3.123
Parameter: 131UAP von Diskette ein/aus 1/0..............................................................................3.131
4. HILFSACHSEN ...................................................................................................... 4.14.1. Einführung..................................................................................................... 4.14.2. Configurationen des Achsen.......................................................................... 4.14.3. Spezifische Parameter der R-Achse .............................................................. 4.54.4. Spezifische Parameter der Z-Achse............................................................... 4.74.5. Eine zweite X-Achse ..................................................................................... 4.9
Parameter: XXX1 relativ zu X2 .....................................................................................................4.10
Parameter: 7Max. X1X2 Abstand ..............................................................................................4.11
Parameter: 8Hinteranschlag-Typ...............................................................................................4.12
Parameter: 9-12Abstand A-D...........................................................................................................4.14
4.6. X1/X2 Abstandsprogrammierung(Option).................................................... 4.154.7. Die Spindelkorrekturtabelle........................................................................... 4.18
5. HILFSACHSENPARAMETER............................................................................. 5.15.1. Einführung..................................................................................................... 5.15.2. Standard-Achsenparameter............................................................................ 5.1
Parameter: 7Min. Position ............................................................................................................5.2
Parameter: 8Max. Position............................................................................................................5.3
Parameter: 28Positionsmessungsystem..........................................................................................5.4
Parameter: SLAnzahl Sklaven ........................................................................................................5.5
Parameter: 9Vorteilung.................................................................................................................5.6
Parameter: 5Referenz-position .....................................................................................................5.7
Parameter: 6Referenz-such-richtung...........................................................................................5.8
Parameter: 17Ref Schalter angeschlossen .....................................................................................5.9
Parameter: 21Referenzsuchgeschwindigkeit...............................................................................5.12
Parameter: 29AD-min ...................................................................................................................5.13
Parameter: 30AD-max...................................................................................................................5.14
Delem
V1101, 0.7
Parameter: 24Codierer Zählrichtung ..........................................................................................5.15
Parameter: 14Voreinstellungswert...............................................................................................5.16
Parameter: 13Beschleunigungsrampe..........................................................................................5.17
Parameter: 15Kommastellen.........................................................................................................5.18
Parameter: 27Korrektur (X).........................................................................................................5.19
Parameter: 27Korrektur (X).........................................................................................................5.20
Parameter: 25Korrektur (Z) .........................................................................................................5.21
Parameter: 25Korrektur (Z) .........................................................................................................5.22
Parameter: 26Korrektur (R).........................................................................................................5.23
Parameter: 26Korrektur (R).........................................................................................................5.24
Parameter: 122Achsenrückbewegung programmierbar..............................................................5.24
5.2. Parameter für Servoachsen ............................................................................ 5.26
Parameter: 2Verstárkung ...........................................................................................................5.27
Parameter: 3Übergang ................................................................................................................5.28
Parameter: 4Bremsung................................................................................................................5.29
Parameter: 11Handgeschwindigkeit groß ...................................................................................5.30
Parameter: 12In-position Toleranz ..............................................................................................5.31
Parameter: SPAchsengeschwindigkeit programmierbar 0/1 .....................................................5.32
5.2. AC-Achsenparameter .................................................................................... 5.33
Parameter: 78Drive-Typ ...............................................................................................................5.35
Parameter: 80Positioniertoleranz.................................................................................................5.36
Parameter: LSLS FD-Ausgang......................................................................................................5.37
Parameter: FGUmschaltungspunkt der hohe geschwindigkeit (BFS)> .....................................5.38
Delem
V1101, 0.8
Parameter: SGUmschaltungspunkt der niedrigen geschwindigkeit (BSS)> .............................5.39
Parameter: FSUmschaltungspunkt der hohe geschwindigkeit (BFS)< .....................................5.40
Parameter: SSUmschaltungspunkt der niedrigen geschwindigkeit (BSS)< .............................5.41
Parameter: 76Spindelzulassung....................................................................................................5.42
Parameter: 84Überlaufweg ...........................................................................................................5.43
Parameter: 85Überlauf Wartezeit ................................................................................................5.44
Parameter: 83Stopzeit (T) .............................................................................................................5.45
Parameter: 86DC niedrige geschwindigkeit ................................................................................5.46
Parameter: 87DC hohe geschwindigkeit ......................................................................................5.47
Parameter: 88DC niedrige geschwindigkeit ................................................................................5.48
Parameter: 89DC hohe geschwindigkeit ......................................................................................5.49
6. BOMBIERUNG....................................................................................................... 6.16.1 Einführung..................................................................................................... 6.16.2. Installation der Bombiervorrichtung ............................................................. 6.26.3. Programmierung und Einstellung der Bombiervorrichtung .......................... 6.36.5. Bombierungsparameter.................................................................................. 6.5
Parameter: 7Min. Position ............................................................................................................6.6
Parameter: 8Max. Position............................................................................................................6.7
Parameter: 31Standard- / hohe Auflösung (0/1) ...........................................................................6.8
Parameter: 18DA-min .....................................................................................................................6.9
Parameter: 19DA-max...................................................................................................................6.10
Parameter: 22DA-aus linear/tabell. (0/1) .....................................................................................6.11
Parameter: 23Hysterese.................................................................................................................6.12
Parameter: 14Voreinstellungswert...............................................................................................6.13
Parameter: 15Kommastellen.........................................................................................................6.14
7. DIGITALE AUSGÄNGE ....................................................................................... 7.17.1. Einführung..................................................................................................... 7.1
Delem
V1101, 0.9
7.2. Digitale R-Achse ........................................................................................... 7.1
Parameter: 14Voreinstellungswert.................................................................................................7.4
7.3. Ein-/Aus-Ausgänge ....................................................................................... 7.5
Parameter: AOAnzahl FD-Ausgänge...............................................................................................7.6
Parameter: LSLS FD-Ausgang........................................................................................................7.7
Parameter: 14Voreinstellungswert.................................................................................................7.8
8. I-ACHSEN ............................................................................................................... 8.18.1. Einführung..................................................................................................... 8.18.2. I-Achse mit 1 Geschw. AC-Motor mit Potentiometerrück-meldung ............ 8.28.3. Digitale I-Achsenparameter........................................................................... 8.3
Parameter: APAnzahl Positionen ....................................................................................................8.4
Parameter: LSLS FD-Ausgang........................................................................................................8.5
Parameter: PZPositionierungszeit...................................................................................................8.6
Parameter: P1-P4Position 1...4 .............................................................................................................8.7
9. BIEGEHILFE.......................................................................................................... 9.19.1. Einführung..................................................................................................... 9.19.2. Digitale Biegehilfe......................................................................................... 9.29.2.1. Parameter der Digitale Biegehilfe ................................................................. 9.2
Parameter: 7Min. Winkel..............................................................................................................9.4
Parameter: 8Max. Winkel .............................................................................................................9.4
Parameter: 18Min AD-Wert ...........................................................................................................9.5
Parameter: 19Max AD-Wert ..........................................................................................................9.5
Parameter: RFWartezeit öffnen Faktor..........................................................................................9.6
Parameter: SlAnzahl Sklaven ........................................................................................................9.7
Parameter: 14Voreinstellungswert.................................................................................................9.8
Parameter: SASicherheitsstop Winkel............................................................................................9.9
Delem
V1101, 0.10
Parameter: MSMax. Winkelgeschwindigkeit................................................................................9.10
Parameter: MLMittl. Winkelgeschwindigkeit min. ......................................................................9.11
Parameter: MHMittl. Winkelgeschwindigkeit min. ......................................................................9.11
Parameter: PXProportionalverstärkung min...............................................................................9.12
Parameter: PNProportionalverstärkung min...............................................................................9.12
Parameter: FXVorschubverstärkung min. ...................................................................................9.13
Parameter: FNVorschubverstärkung min. ...................................................................................9.13
Parameter: PXDifferentialverstärkung min. ................................................................................9.14
Parameter: PNDifferentialverstärkung min. ................................................................................9.14
Parameter: AMEinstellungsmodus .................................................................................................9.15
Parameter: PNInpositionstoleranz ................................................................................................9.16
9.2.1. Einstellung ..................................................................................................... 9.169.3. Zusatzliche Biegehilfeachsen ........................................................................ 9.189.4. Analoge Biegehilfe ........................................................................................ 9.209.4.1. Introduktion ................................................................................................... 9.209.4.2. Installation und Einsellung der DBT01-Steuerungskarte .............................. 9.209.4.3. Parameter der analoge Biegehilfe.................................................................. 9.23
Parameter: 7Mindestwert ...........................................................................................................9.23
Parameter: 8Hochstwert .............................................................................................................9.23
Parameter: 18DA-Min ...................................................................................................................9.23
Parameter: 19DA-Max ..................................................................................................................9.24
Parameter: RFVerzogerung vor Ruckfaktor ...............................................................................9.25
Parameter: NRAnzahl Maßeinheiten ............................................................................................9.25
Parameter: 14Default.....................................................................................................................9.26
Parameter: SASicherheitshaltwinkel ............................................................................................9.27
Parameter: MSMax. Winkelgeschwindigkeit................................................................................9.27
Delem
V1101, 1.1
1. EINGANGS- UND AUSGANGSSIGNALE
1.1. Einführung
Alle Eingangs- und Ausgangssignale werden mit LEDs am Bedienfeld an der Vorderseite derE/A-Module angegeben. Bei aktivem Eingangs- oder Ausgangssignal ist die entsprechendeLED eingeschaltet. Es gibt drei Arten von Signalen: Y-Achsensignale, X-Achsensignale undallgemeine Signale. In den folgenden Abschnitten dieses Kapitels werden diese Eingangs- undAusgangssignale erläutert.Es gibt eine ausgeprägte Beziehung zwischen den Y-Achsensignalen. Diese Beziehung wurdeim Zeitdiagramm des Preßzyklus festgehalten.Das Zeitdiagramm des CNC-RDY-Signals gehört ebenfalls hierzu. Das numerische Bereit-Signal der Steuerung gibt an, daß das aktive Biegeprogramm ausgeführt werden kann. DasCNC-RDY Signal hängt vom Stand der Start-Taste, der Position der Y-Achse und derPosition der X-Achse ab.
1.2. Y-Achse Eingangssignale
Symbol Funktion
Öffnungssignal. Dieser Eingang soll aktiv sein wenn die Wange sich in dieÖffnungsrichtung bewegen soll.
Pressesignal. Dieser Eingang soll aktiv sein um die Wange während der Pressephase zu bewegen. Dieser Eingang soll auch aktiv sein während Haltezeit ander Biegeposition und während Dekompression.Schnell-schliessen-Signal. Dieser Eingang soll aktiv sein wenn sich die Wangemit hoher Geschwindigkeit in Schliessrichtung bewegen soll.
Hand (Einrichten). Dieser Eingang soll aktiv sein wenn die Wange mit denHandrad bewegt wird.Dies ist nur möglich wenn Handmode auf die Steuerung aktiv ist und dieWange sich unter Mute befindet.Wenn dieser Eingang aktiv ist, wird dies gezeigt auf dem Bildschirm derSteuerung.
= Parallelschalter Eingang. Siehe Beschreibung von der Y-Achse MaschinenParameter "Parallelschalter".
Delem
V1101, 1.2
1.3. Y-Achse Ausgangssignale
Symbol Funktion
Obertotpunkt. Dieser Ausgang ist aktiv wenn die Wange am programmiertenObertotpunkt ist oder höher.
ER Ende der Dekompression. Dieser Ausgang wird aktiv wenn die Wange dieBiegeposition erreicht hat, die Haltezeit abgelaufen und die Dekompressionbeendet ist. Es geht wieder aus wenn der Öffnungseingang (����)aktiv wird.Mute Ausgang. Dieser Ausgang wird aktiv wenn die Wange den Muting Punkterreicht hat. (Geschwindigkeitsübergang), und die Wange sich unter dem MutePunkt befindet.CNC-gestartet. Dieser Ausgang ist aktiv wenn die Starttaste der DA-Steuerungeingedrückt worden ist.
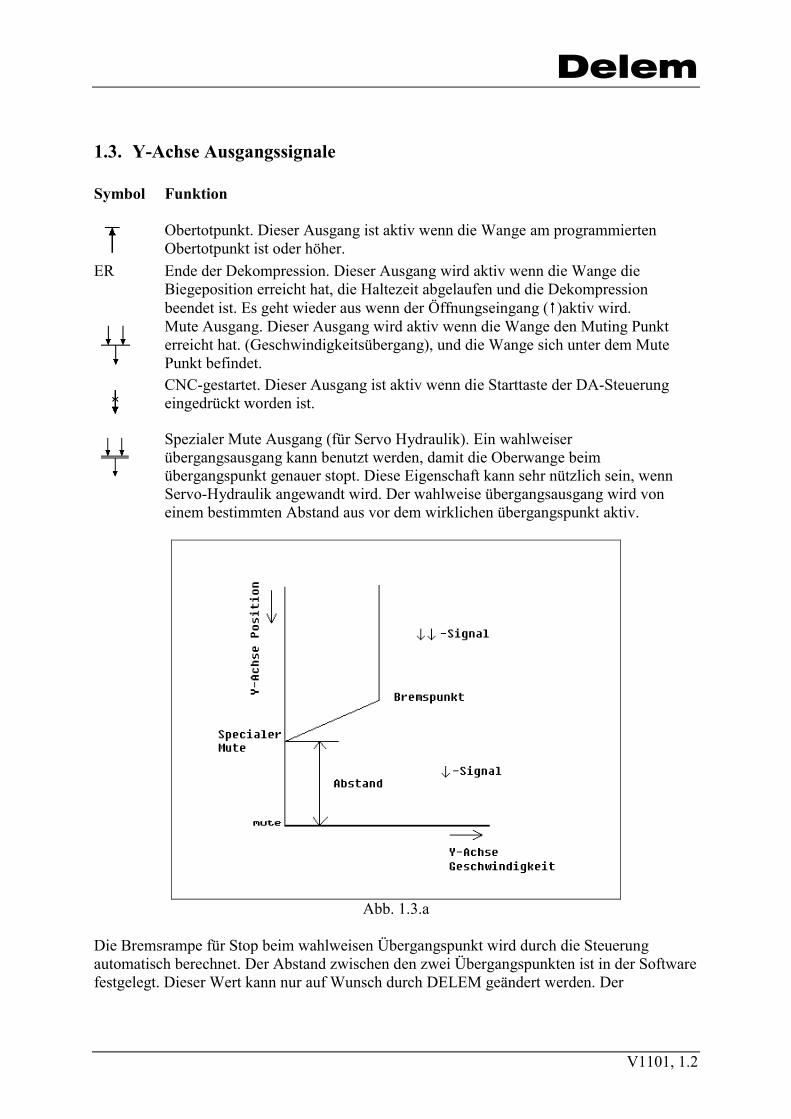
Spezialer Mute Ausgang (für Servo Hydraulik). Ein wahlweiserübergangsausgang kann benutzt werden, damit die Oberwange beimübergangspunkt genauer stopt. Diese Eigenschaft kann sehr nützlich sein, wennServo-Hydraulik angewandt wird. Der wahlweise übergangsausgang wird voneinem bestimmten Abstand aus vor dem wirklichen übergangspunkt aktiv.
Abb. 1.3.a
Die Bremsrampe für Stop beim wahlweisen Übergangspunkt wird durch die Steuerungautomatisch berechnet. Der Abstand zwischen den zwei Übergangspunkten ist in der Softwarefestgelegt. Dieser Wert kann nur auf Wunsch durch DELEM geändert werden. Der
Delem
V1101, 1.3
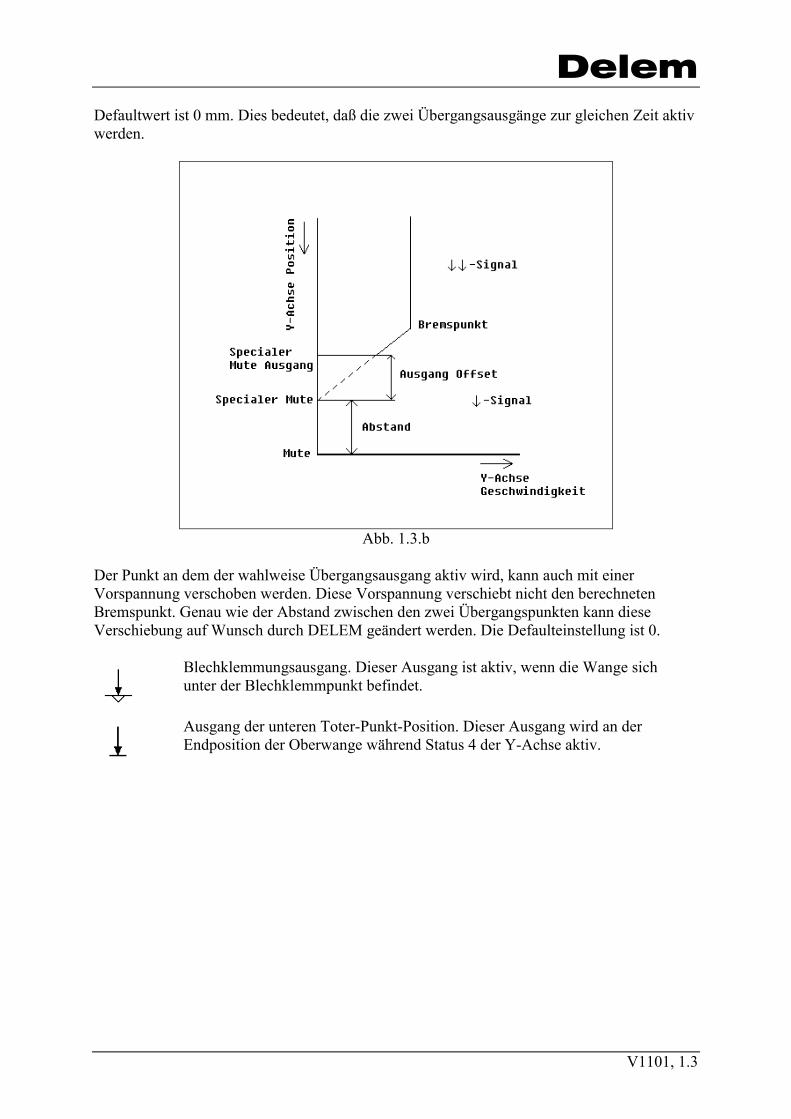
Defaultwert ist 0 mm. Dies bedeutet, daß die zwei Übergangsausgänge zur gleichen Zeit aktivwerden.
Abb. 1.3.b
Der Punkt an dem der wahlweise Übergangsausgang aktiv wird, kann auch mit einerVorspannung verschoben werden. Diese Vorspannung verschiebt nicht den berechnetenBremspunkt. Genau wie der Abstand zwischen den zwei Übergangspunkten kann dieseVerschiebung auf Wunsch durch DELEM geändert werden. Die Defaulteinstellung ist 0.
Blechklemmungsausgang. Dieser Ausgang ist aktiv, wenn die Wange sichunter der Blechklemmpunkt befindet.
Ausgang der unteren Toter-Punkt-Position. Dieser Ausgang wird an derEndposition der Oberwange während Status 4 der Y-Achse aktiv.
Delem
V1101, 1.4
1.4. X-Achse Signale
Symbol Function
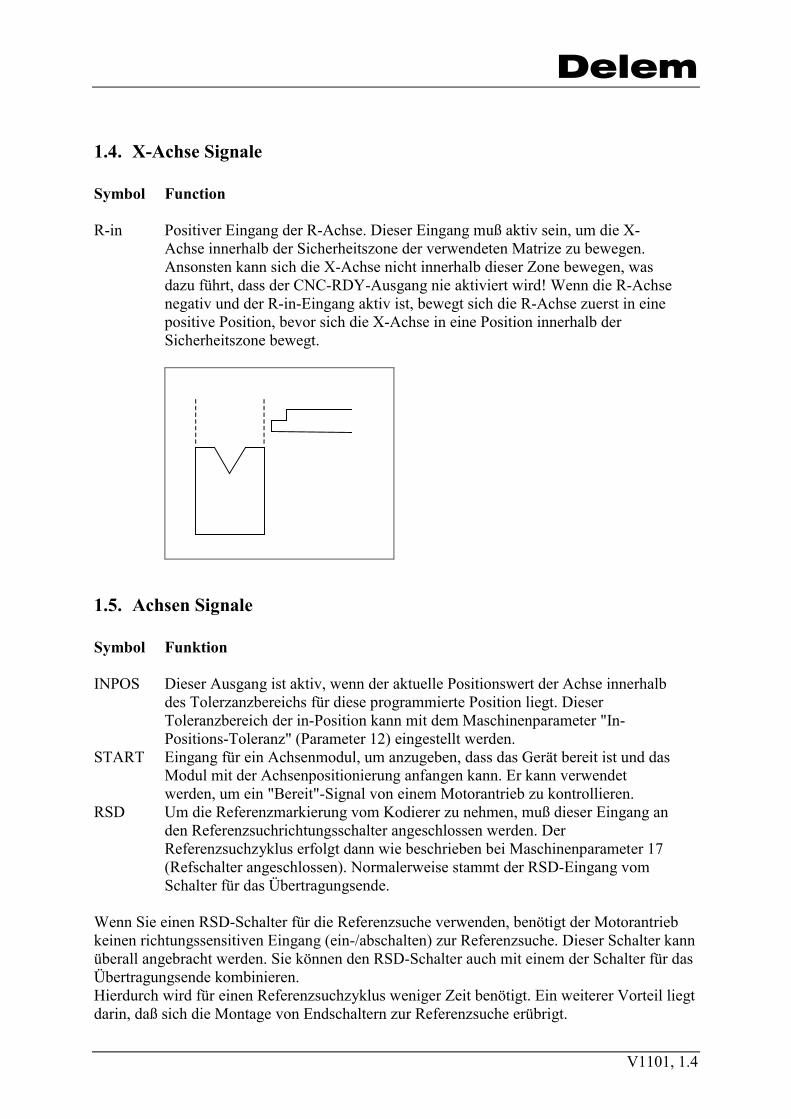
R-in Positiver Eingang der R-Achse. Dieser Eingang muß aktiv sein, um die X-Achse innerhalb der Sicherheitszone der verwendeten Matrize zu bewegen.Ansonsten kann sich die X-Achse nicht innerhalb dieser Zone bewegen, wasdazu führt, dass der CNC-RDY-Ausgang nie aktiviert wird! Wenn die R-Achsenegativ und der R-in-Eingang aktiv ist, bewegt sich die R-Achse zuerst in einepositive Position, bevor sich die X-Achse in eine Position innerhalb derSicherheitszone bewegt.
1.5. Achsen Signale
Symbol Funktion
INPOS Dieser Ausgang ist aktiv, wenn der aktuelle Positionswert der Achse innerhalbdes Tolerzanzbereichs für diese programmierte Position liegt. DieserToleranzbereich der in-Position kann mit dem Maschinenparameter "In-Positions-Toleranz" (Parameter 12) eingestellt werden.
START Eingang für ein Achsenmodul, um anzugeben, dass das Gerät bereit ist und dasModul mit der Achsenpositionierung anfangen kann. Er kann verwendetwerden, um ein "Bereit"-Signal von einem Motorantrieb zu kontrollieren.
RSD Um die Referenzmarkierung vom Kodierer zu nehmen, muß dieser Eingang anden Referenzsuchrichtungsschalter angeschlossen werden. DerReferenzsuchzyklus erfolgt dann wie beschrieben bei Maschinenparameter 17(Refschalter angeschlossen). Normalerweise stammt der RSD-Eingang vomSchalter für das Übertragungsende.
Wenn Sie einen RSD-Schalter für die Referenzsuche verwenden, benötigt der Motorantriebkeinen richtungssensitiven Eingang (ein-/abschalten) zur Referenzsuche. Dieser Schalter kannüberall angebracht werden. Sie können den RSD-Schalter auch mit einem der Schalter für dasÜbertragungsende kombinieren.Hierdurch wird für einen Referenzsuchzyklus weniger Zeit benötigt. Ein weiterer Vorteil liegtdarin, daß sich die Montage von Endschaltern zur Referenzsuche erübrigt.
Delem
V1101, 1.5
1.6. Verschiedene Eingangs- und Ausgangssignale
Pumpegestartet.
Dieser Eingang muß zur Betätigung der Start-Taste auf der DA-Steuerung aktiv sein. Wenn dieser Eingang nicht aktiv ist, wirddie Betätigung der Start-Taste nicht akzeptiert. In der Steuerungerscheint die Meldung **Maschine nicht gestartet**.
T Tandemeingang Ein Tandemeingang für Tandem- oder Roboteranwendungen.Schlagen Sie in der Beschreibung des Parameters 10 vom X- undY-Achsenparametermenü nach. Für Roboteranwendungen könnenSie das spezielle Roboterfunktionshandbuch anfordern.
C Zykluseingang. Dieser Eingang kann zur Durchführung eines externenSchrittwechsels verwendet werden. Dies geschieht durch dieProgrammierung des programmspezifischen CX-Kodeparametersin den Programmen.
CNC-START. Der Startbefehl für die Steuerung. Dieser Ausgang kann nur aktivsein (Start-Taste auf der Steuerung), wenn der Eingang für denPumpenstart aktiv ist.
FUNKTIONSAUSGANGF1, F2, F3 und F4 sind allgemeine Mehrzweckausgänge. Wenn Sie ein motorisiertesBombierungsgerät benutzen, wird Ausgang F3 als Standard für "A<" und Ausgang F4für "A>" verwendet. In diesem Falle müssen Sie ebenfalls das motorisierteBombierungspotentiometer zwischen "REF", "0V" und "AI1" verbinden.
CNC-RDYNumerische Steuerung bereit. Dieser Ausgang ist immer ausgeschaltet, wenn sich dieDA-Steuerung im Stopp-Betrieb befindet (gleich nach dem Einschalten des Stromsoder nach Betätigung der Stopp-Taste). Dieser Ausgang kann nur aktiviert werden,wenn sich die Steuerung in folgenden Betriebsarten befindet:• Im Handbetrieb. Die Start-Taste ist eingedrückt und die X-Achse ist an der
programmierten Position.• Im Automatik oder Schritt-für-Schritt-Betrieb. Die folgenden Bedingungen
müssen erfüllt sein:- Die Start-Taste wurde betätigt und- die X-Achse ist in der programmierten Position und- die Oberwange ist in der oberen Toter-Punkt-Position.
Wenn diese Bedingungen erfüllt sind, wird der CNC-RDY-Zyklus durch dasZeitdiagramm bestimmt.
OK Initialisierungdes Modulsabgeschlossen.
Dies ist das Ausgangssignal eines Moduls, mit dem angezeigtwird, dass das Modul ordnungsgemäß initialisiert wurde undbetriebsbereit ist. Es kann verwendet werden, um ein Signal z.B.an einen Motorantrieb freizugeben.
Delem
V1101, 1.6
Abb. 1.6.a
Delem
V1101, 1.7
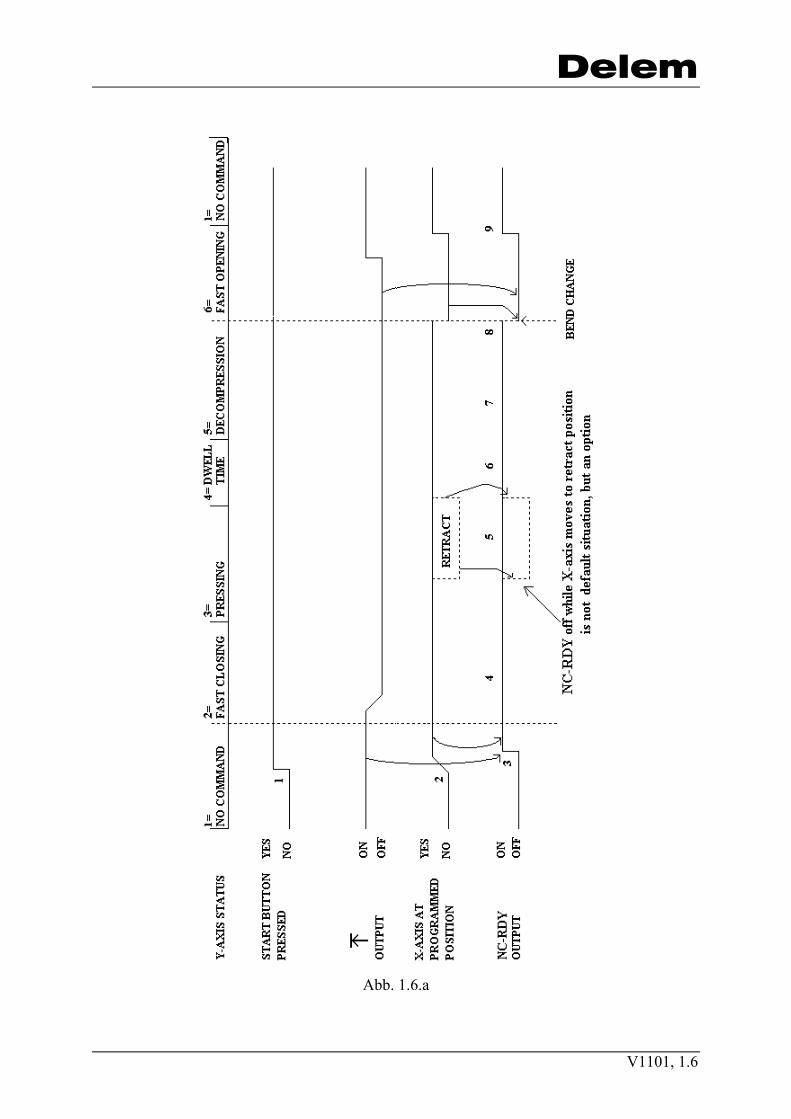
Erläuterung des CNC-RDY-Zeitdiagramms (abb. 1.6.a):
• Status der Y-Achse. Der Status der Y-Achse ist die Zahl des Y-Achsensteuerungsprogramms, die von den Steuerungseingängen der Y-Achse abhängt.Die Zahl erscheint in der Servicezeile (wenn diese aktiviert ist) im Kopf des Bildschirms.
• Oberer Toter-Punkt. Der Ausgang der Y-Achse, der anzeigt, daß die Oberwange sich inder oberen Toter-Punkt-Position befindet.
• X-Achse an der programmierten Position. Diese Linie zeigt die aktuelle X-Achsen-Position. Dies entspricht der programmierten Position.
Die Start-Taste muß betätigt werden (1). Wenn sich die Oberwange in diesem Fall in deroberen Toter-Punkt-Position befindet (Ausgang aktiv) und die X-Achse die programmiertePosition erreicht (2), dann wird der CNC-RDY-Ausgang aktiviert (3). Der CNC-RDY-Ausgang bleibt während des schnellen Schließens der Oberwange (4), während des Pressens(5) (wenn kein Rückzug der X-Achse programmiert ist), der Haltezeit (6) und derDekompression (7) aktiv.Das CNC-RDY wird nach der Dekompression der Oberwange (ER Ausgang aktiv) an derSchrittwechselposition, bei der sich die X-Achse in die nächste programmierte Positionbewegt, inaktiv. In Abhängigkeit vom X-Achsenkode kann dies an folgenden Punktenerfolgen:• am Ende der Dekompression;• am Übergangspunkt (Mute); vorbei in Öffnungsrichtung;• am oberen Toten-Punkt.Das CNC-RDY-Signal wird wieder aktiv (9), wenn sich die X-Achse an ihrer programmiertenPosition und die Y- Achse in ihrer oberen Toter-Punkt-Position befindet.
Das CNC-RDY-Signal beim Pressen mit programmiertem RückzugEs gibt während des Pressens zwei Situationen mit programmiertem Rückzug (Punkt 5 desCNC-RDY-Zyklus).• Die Oberwange wartet am Klemmpunkt nicht auf den vollständigen Rückzug der X-Achse
(X-Achsenkode < 10). Der CNC-RDY-Ausgang bleibt aktiv, während sich die X-Achse inihre Rückzugsposition bewegt.
• Die Oberwange hält am Klemmpunkt und wartet, bis die X-Achse vollständig ausgezogenist (X-Achsenkode > 10). Der CNC-RDY-Ausgang bleibt aktiv, während sich die X-Achse in ihre herausgezogene Position bewegt. Die Oberwange bewegt sich wieder, wennsich die X-Achse in der herausgezogenen Position befindet.
Es gibt auch eine dritte Situation, dies ist aber eine Option.• Die Oberwange hält am Klemmpunkt und wartet, bis die X-Achse vollständig ausgezogen
ist (X-Achsenkode > 10). Der CNC-RDY-Ausgang ist ausgeschaltet, während sich die X-Achse in ihre herausgezogene Position bewegt. Der CNC-RDY-Ausgang wird wiederaktiv, wenn die X-Achse ihre herausgezogene Position erreicht.
Delem
V1101, 2.1
2. MASCHINENPARAMETERMENÜ
2.1. Einführung
In diesem Kapitel werden die Wahlmöglichkeiten im Maschinenparametermenü erläutert. Diewählbaren Einstellungen hängen vom Steuerungstyp ab. Die folgenden Wahlmöglichkeitenwerden dargestellt:• das Wahlverfahren des Maschinenparametermenüs (Abschnitt 2.2);• eine kurze Einführung für die Y-Achsenparameter (Abschnitt 2.3);• eine kurze Einführung für die Hilfsachsen (Abschnitt 2.4);• eine Methode zur Modulaktualisierung (Abschnitt 2.5);• eine Methode zur Steuerungsaktualisierung (Abschnitt 2.6);• eine Methode zur Sicherung von Maschinenparametern (Abschnitt 2.7);• eine Änderung des Menünamens (Abschnitt 2.8);• eine Änderung des Zugriffskodes (Abschnitt 2.9);• Optionen für das Zu- und Abschalten (Abschnitt 2.10).
2.2. Wahlverfahren für das Maschinenparametermenü
Das Wahlverfahren für das Maschinenparametermenü ist bei allen Steuerungstypen aus derSerie DA-60 identisch.
Sie können auf das Maschinenparametermenü wie folgt zugreifen:1. Wählen Sie die Programmierart.2. Geben Sie 19 ein, um das Maschinenparametermenü zu wählen.3. Geben Sie den Zugriffskode ein.
Der Standardzugriffscode lautet 14753. Hiermit kann eine Ausgangsgruppe vonMaschinenparametern geändert werden. Die Maschinenparameter mit einer (2) könnenmit diesem Kode nicht geändert werden. Wenn Sie alle Maschinenparameter ändernmöchten, benötigen Sie den speziellen Fabrikskode. Dieser Kode darf nur von befugtemPersonal verwendet werden.
4. Drücken Sie auf die Enter-Taste.
Im Hauptmenü für Maschinenparameter finden Sie auch die aktuelle Fassung der KO-Tabelleund die Sequenzerdatei. Setzen Sie sich bitte mit Delem in Verbindung, wenn Sie mehrInformationen über die KO-Tabelle und die Sequenzerdateiversion wünschen.
Delem
V1101, 2.2
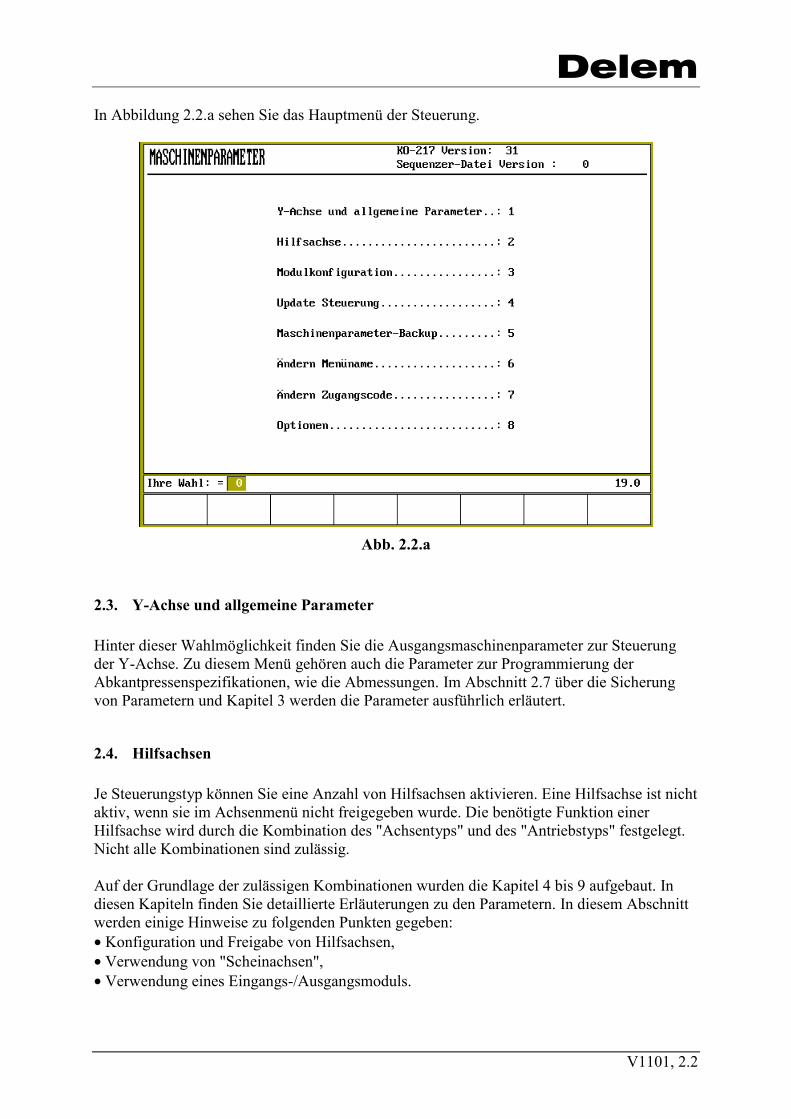
In Abbildung 2.2.a sehen Sie das Hauptmenü der Steuerung.
Abb. 2.2.a
2.3. Y-Achse und allgemeine Parameter
Hinter dieser Wahlmöglichkeit finden Sie die Ausgangsmaschinenparameter zur Steuerungder Y-Achse. Zu diesem Menü gehören auch die Parameter zur Programmierung derAbkantpressenspezifikationen, wie die Abmessungen. Im Abschnitt 2.7 über die Sicherungvon Parametern und Kapitel 3 werden die Parameter ausführlich erläutert.
2.4. Hilfsachsen
Je Steuerungstyp können Sie eine Anzahl von Hilfsachsen aktivieren. Eine Hilfsachse ist nichtaktiv, wenn sie im Achsenmenü nicht freigegeben wurde. Die benötigte Funktion einerHilfsachse wird durch die Kombination des "Achsentyps" und des "Antriebstyps" festgelegt.Nicht alle Kombinationen sind zulässig.
Auf der Grundlage der zulässigen Kombinationen wurden die Kapitel 4 bis 9 aufgebaut. Indiesen Kapiteln finden Sie detaillierte Erläuterungen zu den Parametern. In diesem Abschnittwerden einige Hinweise zu folgenden Punkten gegeben:• Konfiguration und Freigabe von Hilfsachsen,• Verwendung von "Scheinachsen",• Verwendung eines Eingangs-/Ausgangsmoduls.
Delem
V1101, 2.3
Konfiguration von AchsenDie Achsen werden in zwei Schritten konfiguriert:1. Wählen und konfigurieren Sie das richtige Modul für eine Achse,2. Geben Sie eine Achse frei und programmieren Sie ihre Parameter.
"Scheinachsen"Im Hilfsachsenmenü können die Hilfsachsen, die angesteuert werden sollen, programmiertwerden. Dies sind "echte" Achsen.Es gibt eine Situation, in der Sie das Hilfsmenü verwenden müssen, auch wenn keine "echte"Achse angesteuert werden muss. Dies ist dann eine so genannte "Scheinachse".Simulation einer Achse, z.B. bei einer mechanischen Z-Achse, bei der die Steuerung dieAchse nicht automatisch steuern kann. Trotzdem soll die Steuerung die Z-Achsenpositionenberechnen. Dann kann eine Z-Achse simuliert werden. Die Steuerung berechnet diePositionen und Sie können die Z-Achse von Hand anpassen.Hierzu müssen Sie die Achse freigeben und "Keine Steuerung" im Achsenmenü wählen. Fürso eine Scheinachse muss kein Modul konfiguriert werden.
Verwendung eines E/A-ModulsBei einigen Anwendungen ist es ausschließlich erforderlich, zusätzliche E/As zu haben, auchwenn keine Achse angesteuert werden soll. Diese zusätzlichen E/As sind über eine DM04verfügbar. Sie können Ihrer Konfiguration eine DM04 hinzufügen, indem Sie dasStandardverfahren einer Modulkonfiguration befolgen und eine Achse im Hilfsachsenmenüauswählen. Wählen Sie den Achsentyp "EA".Da die DM04 keine Achse steuert, werden keine Parameter in den Benutzermenüs desProgrammierbetriebs und des Ausführungsbetriebs wiedergegeben.
2.5. Modulkonfiguration
Diese Funktion dient dem Zweck, die verbundenen Module im System auszuwählen unddiesen Modulen die richtigen Achsen zuzuweisen.Kapitel 4 enthält eine detaillierte Beschreibung der Achsenkonfiguration. Sie sollte zuersterstellt werden, da ansonsten keine Achse gesteuert werden kann.
Darüber hinaus kann eine neue Softwareversion für die Module über die Steuerung direkt vonder Diskette geladen werden. Von Delem können Sie eine Diskette mit der aktuellenModulsoftware erhalten. Wenn Sie sich im Menü "Modulkonfiguration" befinden, müssen Siedie folgenden Schritte vornehmen:Schritt 1: Betätigen Sie die Funktionstaste "Softwareaktualiserung".Schritt 2: Die Steuerung überprüft die Dateien auf der Diskette. Nachdem die Dateien
gelesen wurden, werden sie im Bildschirm der Steuerung wiedergegeben. EinBeispiel dieses Schirms sieht wie folgt aus:
VERFÜGBARE DATEIEN AUF DER DISKETTEDM05 V2.2
MODUL ID Boot FlashDM05 200766 V1.2 V1.8
Delem
V1101, 2.4
Schritt 3: Überprüfen Sie, ob die Versionsnummern der Dateien auf der Diskette dierichtigen Versionsnummern haben.
Schritt 4: Wählen Sie mit den Cursortasten das Modul, das Sie aktualisieren möchten unddrücken Sie auf S1. Wählen Sie S2, um alle Module auf einmal zu aktualisieren.
Schritt 5: Die Steuerung zeigt die Meldung "Sind Sie sicher? 1/0". Drücken Sie zurBestätigung auf 1.
Schritt 6: Der Aktualisierungsvorgang beginnt. Wenn der Aktualisierungsvorgang beendetist, erscheint die Meldung "Erfolgreiche Aktualisierung".
Unzulässige DM-AnwendungWenn aus irgendeinem Grund eine unzulässige DM-Anwendungssoftware in einem der DM-Module vorliegt (d.h. mit dem Modul kann nicht gearbeitet werden), müssen Sie wie folgtvorgehen:Schritt 1: Legen Sie eine Diskette mit der Anwendungsdatei in das Laufwerk.Schritt 2: Öffnen Sie das Maschinenparametermenü und wählen Sie Aktualisierung der DM-
Module (Möglichkeit 3).Schritt 3: Stellen Sie die Module neu ein, indem Sie die Stromzufuhr der Module entfernen
und wieder anschließen.Schritt 4: Wählen Sie das Modul, das aktualisiert werden soll, und drücken Sie auf S1
"Modulaktualisierung".
Es gibt folgende Gründe für mögliche unzulässige DM-Anwendungssoftware im DM-Modul:• Ausschalten der Stromzufuhr während der Aktualisierung der Software.• Beschädigte Datei mit einer richtigen Kontrollsumme.
2.6. Steuerungsaktualisierung
Eine neue Softwareversion für diese Steuerungen kann direkt von einer Diskette geladenwerden.Wenn eine neue Softwareversion geladen wird, werden die Sprachdateien automatischmitgeladen. Jede Anwenderdiskette enthält zehn europäische und vier asiatische Sprachen.Welche Sprachdateien tatsächlich geladen werden, hängt von den Kopierbefehlen in der Dateiappl.cmd ab. Diese Datei finden Sie auf der Anwenderdiskette. Die folgenden Punkte werdenin diesem Abschnitt behandelt:• Steuerungsaktualisierung;• Notverfahren bei der Softwareinstallation;• Die Dateien auf der Anwenderdiskette;• Sprachgruppen laden (europäisch, asiatisch).
Methode zur SteuerungsaktualisierungSchritt 1: Sie erhalten von DELEM eine Diskette mit der neuesten Steuerungs-(Anwender-
)software.Schritt 2: Schalten Sie die Steuerung EIN.Schritt 3: Legen Sie die Diskette ins Laufwerk Ihrer Steuerung.Schritt 4: Öffnen Sie das Maschinenparametermenü (Menü 19).Schritt 5: Geben Sie den Zugriffskode 14753 ein. Das Hauptfenster des
Maschinenparametermenü erscheint.Schritt 6: Wählen Sie "4" im Maschinenparametermenü. Der nächste Bildschirm erscheint.

Delem
V1101, 2.5
Abb. 2.6.a
Sichern Sie die aktuelle Steuerungssoftware durch "Sicherungsdatei erstellen". Es ist sehrwichtig, eine Sicherungsdatei zu erstellen, da die neue Software die heutige Softwareüberschreibt. Ohne eine Sicherungsdatei könnten wichtige Informationen verloren gehen.
HinweisWenn eine neue Softwareversion geladen wird, wird die neue Software erst einmal überprüft.Wenn der Umfang der Dateien auf der Diskette nicht korrekt ist, erscheint folgende Meldung:**Neue Software zu groß für den Arbeitsspeicher**.
HinweisWenn Sie die Steuerung nach der Aktualisierung starten, erscheint die folgende Meldung:** Die Parameter im Handbetrieb wurden auf Ausgangswerte eingestellt **.Somit sind die programmierten Daten im Handbetrieb verlorengegangen. Das heißt auch, daßdas vorher gewählte Programm im Automatikbetrieb nicht mehr aktiv ist.
Notverfahren bei der SoftwareinstallationWenn die oben beschriebene Methode zur Aktualisierung der Steuerungssoftware nichterfolgreich war, können Sie die neue Software jederzeit noch folgendermaßen installieren.Der Hauptunterschied liegt darin, daß keine Überprüfung durchgeführt wird und keineSicherungsdatei erstellt wird.
Schritt 1: Legen Sie die Diskette ins Laufwerk Ihrer Steuerung.Schritt 2: Schalten Sie die Stromzufuhr AUS.Schritt 3: Schalten Sie die Stromzufuhr AN.
Delem
V1101, 2.6
Schritt 4: Drücken Sie sofort auf "7", nachdem Sie die Steuerung eingeschaltet haben. DieSoftware wird automatisch geladen.
Die Dateien auf der Anwenderdiskette
APPL.CMD Stapeldatei zur Installation, die Informationen über dieInstallationsweise der in dieser Datei befindlichen Dateien für dieSteuerung enthält. Sie können diese Datei mit einem DOS-Editor odereinem ASCII-Editor aufbereiten.
D*.A00 Anwendung der Programmdatei: Enthält die Anwendung für dieSteuerung.
KO-NNN.BIN KO-Tabellendatei (die Zahl NNN ist bei jedem Maschinenlieferantenanders). Sie enthält die Spezifikation für die besonderen Parameter derMaschine, zum Beispiel den Typ des Hydraulikventils.
PRESS.DEF Textdatei mit Textdefinitionen der Nummern in der Sequenzerdatei.Enthält Definitionsmakros für die Verwendung in der Sequenzerquelle.
SEQ_INP.TXT Sequenzerdatei: Enthält Informationen zur Lokalisierung des internenE/A der Steuerung zur externen E/A (PLC-Funktion).
TXT_NNN.BIN Sprachtextdatei (eine eigene Datei für jede Sprache): Enthält dieTextfolgen der Menüs der Steuerung per Sprache. Zum Beispiel: NNN= GB, also ist die Sprachdatei englisch; NNN = I, dann ist dieSprachdatei italienisch usw.
Laden von SprachenDie Diskette mit der Steuerungsanwendung enthält Sprachtextdateien. 16 verschiedeneSprachen sind verfügbar: zwölf europäische und vier asiatische Sprachen. Diese Sprachenkönnen in zwei Sprachgruppen eingeteilt werden. Die europäische Sprachgruppe umfaßt:• TXT_GB.BIN (englisch, Standard)• TXT_D.BIN (deutsch)• TXT_F.BIN (französisch)• TXT_I.BIN (italienisch)• TXT_DK.BIN (dänisch)• TXT_NL.BIN (niederländisch)• TXT_S.BIN (schwedisch)• TXT_CS.BIN (tschechisch, slowakisch)• TXT_ESP.BIN (spanisch)• TXT_FI.BIN (finnisch)• TXT_PL.BIN (polnish)• TXT_LI.BIN (litauisch)
Die asiatische Sprachgruppe umfaßt:• TXT_GB.BIN (englisch, Standard)• TXT_CHI.BIN (chinesisch)• TXT_CHT.BIN (chinesisch, traditionell)• TXT_JAP.BIN (japanisch)• TXT_KO.BIN (koreanisch)
Um eine Sprache zu laden, muß die Datei appl.cmd folgenden Befehl enthalten:COPY A:\TXT_NNN.BIN C:\TXT_NNN.BIN
Delem
V1101, 2.7
Dieser Befehl ist für jede zu ladende Sprache erforderlich.
Wenn Sie eine oder mehrere asiatische Sprachen laden möchten, müssen Sie auch denfolgenden Befehl ergänzen: COPY A:\ASIA.IMG C:\ASIA.IMG. Diese Datei ist für dasLaden der speziellen asiatischen Schriftarten erforderlich.
Sie können diese Strings der Datei appl.cmd mit Hilfe des DOS-Editors hinzufügen.- Geben Sie den Befehlseintrag appl.cmd hinter das DOS-Aufforderungszeichen ein.- Fügen Sie die benötigten Sprachdateien hinzu (und, wenn nötig, die Datei asia.img).- Speichern Sie die Änderungen.- Laden Sie die Anwendung.
Es ist zwar möglich, alle Sprachdateien auf einmal zu laden, aber es wird davon abgeraten.Wenn Sie alle Sprachen laden, benötigen Sie zu viel Speicherplatz. Es wird empfohlen, dieeuropäische (Standard) oder die asiatische Sprachgruppe zu laden.
Mögliche Probleme- Nach dem Laden der Anwendung erscheint keine Textfolge auf dem Bildschirm. Sie
haben versäumt, der Datei appl.cmd die Datei TXT_GB.BIN (in englischer Sprache)hinzuzufügen. Die Steuerung fängt immer mit der englischen Sprache an.
- Die asiatischen Sprachen wurden geladen, aber es fehlen die asiatischen Buchstaben. Siehaben versäumt, der Datei appl.cmd die Datei asian.img hinzuzufügen.
KorrekturtabellenEine Korrekturtabelle wird verwendet, um die Achsensollwerte zu definieren, die vomBenutzer benötigt werden. Auf diese Weise können Ungenauigkeiten bei der Positionierungoder mechanische Fehler behoben werden.Es gibt zwei Tabellentypen, die von den DA-65/DA-69 Steuerungen unterstützt werden:- Spindelkorrekturtabellen,- Biegetoleranztabellen.Die Spindelkorrekturtabelle wird in Abschnitt 4.7 und die Biegetoleranztabelle in einereigenen Gebrauchsanweisung [1] beschrieben.
Eine Spindelkorrekturtabelle ladenJede Achse kann über eine eigene Spindelkorrekturdatei verfügen. Es gibt drei Möglichkeiten,um die Spindelkorrekturtabellen in der Steuerung zu laden:• Kopieren Sie die Datei in "appl.cmd" während der Installation. Die betreffenden Dateien
müssen in b:\tools\mpsupp kopiert werden.• Verwenden Sie die Funktionstaste "load cor. table" beim Maschinenparametermenü im
Fenster der betreffenden Achse.• Stellen Sie die Maschinenparameter mit Hilfe der Diskette wieder her.
Wenn solch eine Tabelle für eine bestimmte Achse geladen wurde, wird dies imMaschinenparametermenü angegeben. Bei einer Sicherung der Maschinenparameter werdenauch die Korrekturdateien gesichert.
Delem
V1101, 2.8
2.7. Sicherung der Maschinenparameter
Es ist sehr wichtig, von allen Maschinenparametern eine Sicherungsdatei zu erstellen, wennsie verändert wurden.
- Speichern (S1) Um die Maschinenparameter auf einer Diskette zu speichern.- Lesen (S2) Um die Maschinenparameter von einer Diskette zu laden.- Diskette formatieren (S4) Eine Diskette kann mit der Steuerung formatiert werden, um
zu gewährleisten, daß jederzeit von einer Diskette gelesenwerden und auf dieser abgespeichert werden kann. HebenSie die mit der Steuerung formatierten Disketten getrenntvon den mit dem PC formatierten Disketten auf. VerwendenSie ausschließlich 3,5" 1.44Mb Disketten.
2.8. Änderung des Menünamens
Der Text des Menünamens wird in der Kopfzeile im Hauptmenü des Programmierbetriebswiedergegeben. Sie können diesen Namen unter Verwendung der numerischen Tasten amBedienfeld an der Vorderseite und den Funktionstasten ("alphanumerisch") ändern. BetätigenSie die Enter-Taste und bestätigen Sie den neuen Wert oder Namen. Die Höchstlänge desMenünamens beträgt 20 Zeichen.
Nach "Speicher init" im Diagnosebetrieb erscheint wieder die originale Textfolge (DELEM).Siehe auch Abschnitt 2.9 "Ändern Zugriffscode".
2.9. Änderung des Zugriffskodes
Sie können den Zugriffskode des Maschinenparametermenüs ändern. Gehen Sie hierzu wiefolgt vor:- Geben Sie den alten Kode ein;- Geben Sie den neuen Kode ein;- Geben Sie den neuen Kode (nochmals) ein;- Betätigen Sie die Enter-Taste und bestätigen Sie den neuen Wert.
Ohne den richtigen Zugriffskode ist es unmöglich, auf das Maschineparametermenüzuzugreifen. Ändern Sie den Standardzugriffskode (14753) daher nur, wenn Sie sich ganzsicher sind. Es gibt eine Möglichkeit, den Zugriffskode wieder auf den Standardkodeeinzustellen. Nach "Speicher initialisieren" im Diagnosebetrieb wird der Zugriffskode wiederauf den Standardkode eingestellt.
Delem
V1101, 2.9
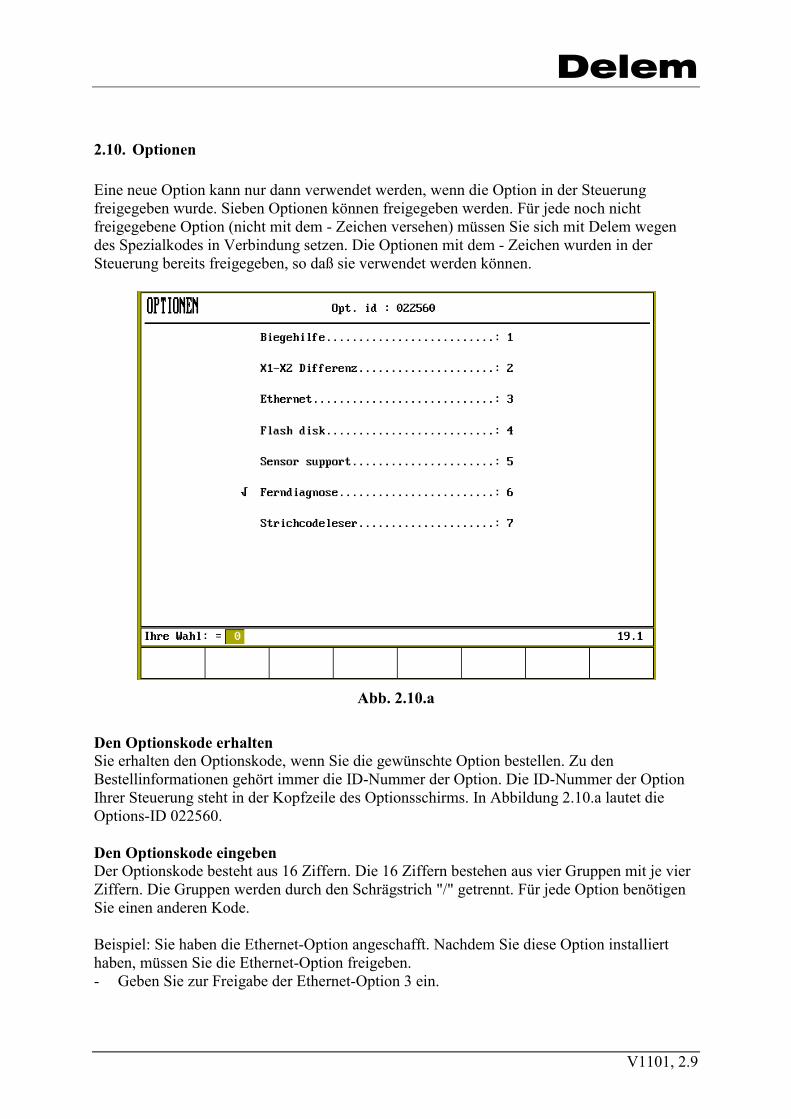
2.10. Optionen
Eine neue Option kann nur dann verwendet werden, wenn die Option in der Steuerungfreigegeben wurde. Sieben Optionen können freigegeben werden. Für jede noch nichtfreigegebene Option (nicht mit dem - Zeichen versehen) müssen Sie sich mit Delem wegendes Spezialkodes in Verbindung setzen. Die Optionen mit dem - Zeichen wurden in derSteuerung bereits freigegeben, so daß sie verwendet werden können.
Abb. 2.10.a
Den Optionskode erhaltenSie erhalten den Optionskode, wenn Sie die gewünschte Option bestellen. Zu denBestellinformationen gehört immer die ID-Nummer der Option. Die ID-Nummer der OptionIhrer Steuerung steht in der Kopfzeile des Optionsschirms. In Abbildung 2.10.a lautet dieOptions-ID 022560.
Den Optionskode eingebenDer Optionskode besteht aus 16 Ziffern. Die 16 Ziffern bestehen aus vier Gruppen mit je vierZiffern. Die Gruppen werden durch den Schrägstrich "/" getrennt. Für jede Option benötigenSie einen anderen Kode.
Beispiel: Sie haben die Ethernet-Option angeschafft. Nachdem Sie diese Option installierthaben, müssen Sie die Ethernet-Option freigeben.- Geben Sie zur Freigabe der Ethernet-Option 3 ein.
Delem
V1101, 2.10
- Geben Sie den Delem-Kode ein. Ein Beispiel für einen Kode ist: 1234/5678/9012/3456.Vergessen Sie die erforderlichen Schrägstriche nicht. Sie können einen Schrägstricheinfügen, indem Sie die Taste auf dem Bedienfeld an der Vorderseite mit dem "."-Zeichenbetätigen.
Softwareoptionen ausschaltenDie Softwareoption kann einfach ausgeschaltet werden, indem Sie die Optionsnummer derSoftware wählen und den Optionskode eingeben. Dieser Kode ist der gleiche, den Sie für dieFreigabe der Softwareoption verwendet haben. Das ‘√’-Zeichen erscheint.
2.11. Das Maschinenparametermenü verlassen
Wenn Sie das Maschinenparametermenü verlassen, müssen Sie auf zwei Dinge achten.• Die Steuerung prüft, ob alle programmierten Achsen den DM-Modulen korrekt
zugewiesen worden sind. Wenn dies nicht der Fall ist, erzeugt die Steuerung eineWarnmeldung. Siehe auch Kapitel 4.
• Wenn kein Maschinenparameter geändert worden ist, kehrt die Steuerung zum Hauptmenüzurück. Wenn ein Parameter geändert worden ist, setzt sich die Steuerung zurück. Wenn"Enter" betätigt worden ist, während sich der Cursor an einem Maschinenparameterbefindet, geht die Steuerung davon aus, dass dieser Parameter geändert wurde und wirdzurückgesetzt, wenn Sie das Menü verlassen.
Delem
V1101, 3.0
3. Y-ACHSE UND ALLGEMEINE PARAMETER
In diesem Kapitel werden die allgemeinen Maschinenparameter und die Parameter der Y-Achse beschrieben. Jede Erläuterung zu einem Parameter umfaßt die folgenden Punkte:
• Parameternummer. Jeder Parameter hat eine besondere Nummer oder einen eigenenKode.
• Parametername. Jeder Parameter hat einen besonderen Namen.• Bereich. Der Mindest- und der Höchstwert, der programmiert werden kann.• Standardwert. Der Ausgangswert dieses Parameters. Dies ist auch der Wert nach einer
Initialisierung.• Maßeinheiten. Die Maßeinheit des Parameters (s, mm, kg, DA-Punkte, usw.).• Funktion. Die Funktion des Parameters.• Beschreibung. Eine umfassende Beschreibung der Verwendung und Bedeutung des
Parameters.
Als Standard werden alle Parameter für alle Steuerungen aus der Serie DA-60 verwendet. BeiAusnahmen wird dies deutlich angegeben.
Delem
V1101, 3.1.a
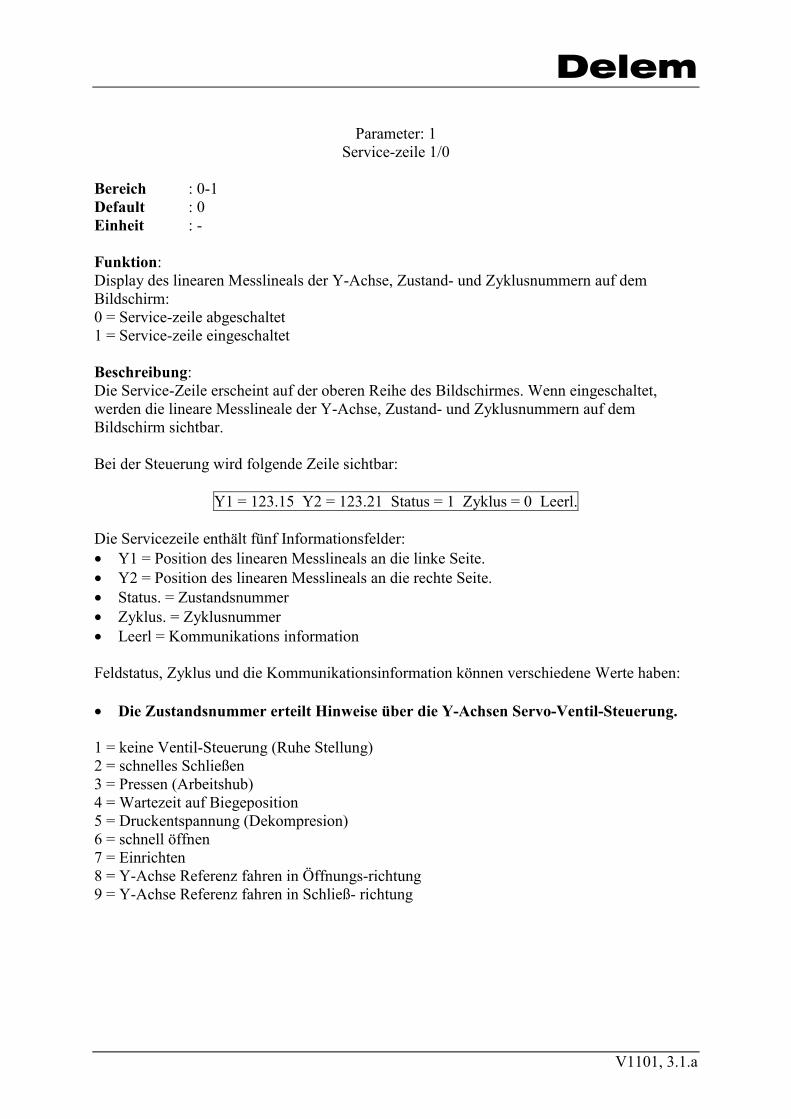
Parameter: 1Service-zeile 1/0
Bereich : 0-1Default : 0Einheit : -
Funktion:Display des linearen Messlineals der Y-Achse, Zustand- und Zyklusnummern auf demBildschirm:0 = Service-zeile abgeschaltet1 = Service-zeile eingeschaltet
Beschreibung:Die Service-Zeile erscheint auf der oberen Reihe des Bildschirmes. Wenn eingeschaltet,werden die lineare Messlineale der Y-Achse, Zustand- und Zyklusnummern auf demBildschirm sichtbar.
Bei der Steuerung wird folgende Zeile sichtbar:
Y1 = 123.15 Y2 = 123.21 Status = 1 Zyklus = 0 Leerl.
Die Servicezeile enthält fünf Informationsfelder:• Y1 = Position des linearen Messlineals an die linke Seite.• Y2 = Position des linearen Messlineals an die rechte Seite.• Status. = Zustandsnummer• Zyklus. = Zyklusnummer• Leerl = Kommunikations information
Feldstatus, Zyklus und die Kommunikationsinformation können verschiedene Werte haben:
• Die Zustandsnummer erteilt Hinweise über die Y-Achsen Servo-Ventil-Steuerung.
1 = keine Ventil-Steuerung (Ruhe Stellung)2 = schnelles Schließen3 = Pressen (Arbeitshub)4 = Wartezeit auf Biegeposition5 = Druckentspannung (Dekompresion)6 = schnell öffnen7 = Einrichten8 = Y-Achse Referenz fahren in Öffnungs-richtung9 = Y-Achse Referenz fahren in Schließ- richtung
Delem
V1101, 3.1.b
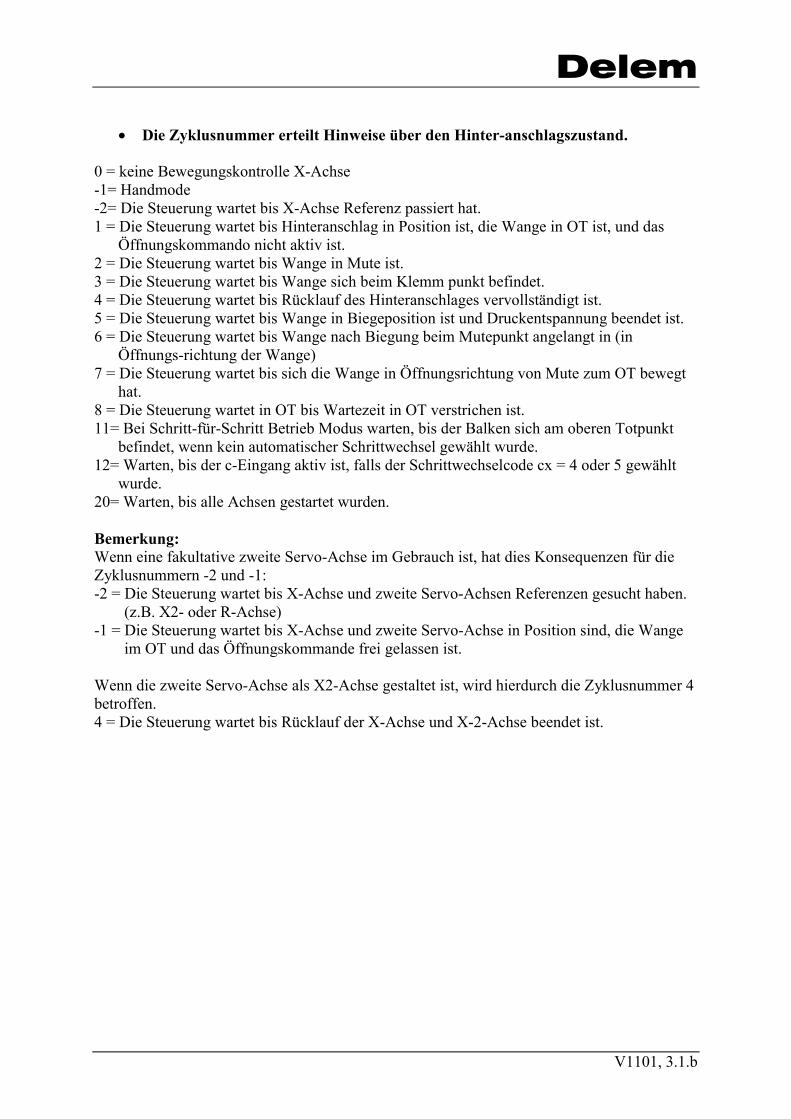
• Die Zyklusnummer erteilt Hinweise über den Hinter-anschlagszustand.
0 = keine Bewegungskontrolle X-Achse-1= Handmode-2= Die Steuerung wartet bis X-Achse Referenz passiert hat.1 = Die Steuerung wartet bis Hinteranschlag in Position ist, die Wange in OT ist, und das
Öffnungskommando nicht aktiv ist.2 = Die Steuerung wartet bis Wange in Mute ist.3 = Die Steuerung wartet bis Wange sich beim Klemm punkt befindet.4 = Die Steuerung wartet bis Rücklauf des Hinteranschlages vervollständigt ist.5 = Die Steuerung wartet bis Wange in Biegeposition ist und Druckentspannung beendet ist.6 = Die Steuerung wartet bis Wange nach Biegung beim Mutepunkt angelangt in (in
Öffnungs-richtung der Wange)7 = Die Steuerung wartet bis sich die Wange in Öffnungsrichtung von Mute zum OT bewegt
hat.8 = Die Steuerung wartet in OT bis Wartezeit in OT verstrichen ist.11= Bei Schritt-für-Schritt Betrieb Modus warten, bis der Balken sich am oberen Totpunkt
befindet, wenn kein automatischer Schrittwechsel gewählt wurde.12= Warten, bis der c-Eingang aktiv ist, falls der Schrittwechselcode cx = 4 oder 5 gewählt
wurde.20= Warten, bis alle Achsen gestartet wurden.
Bemerkung:Wenn eine fakultative zweite Servo-Achse im Gebrauch ist, hat dies Konsequenzen für dieZyklusnummern -2 und -1:-2 = Die Steuerung wartet bis X-Achse und zweite Servo-Achsen Referenzen gesucht haben.
(z.B. X2- oder R-Achse)-1 = Die Steuerung wartet bis X-Achse und zweite Servo-Achse in Position sind, die Wange
im OT und das Öffnungskommande frei gelassen ist.
Wenn die zweite Servo-Achse als X2-Achse gestaltet ist, wird hierdurch die Zyklusnummer 4betroffen.4 = Die Steuerung wartet bis Rücklauf der X-Achse und X-2-Achse beendet ist.
Delem
V1101, 3.1.c
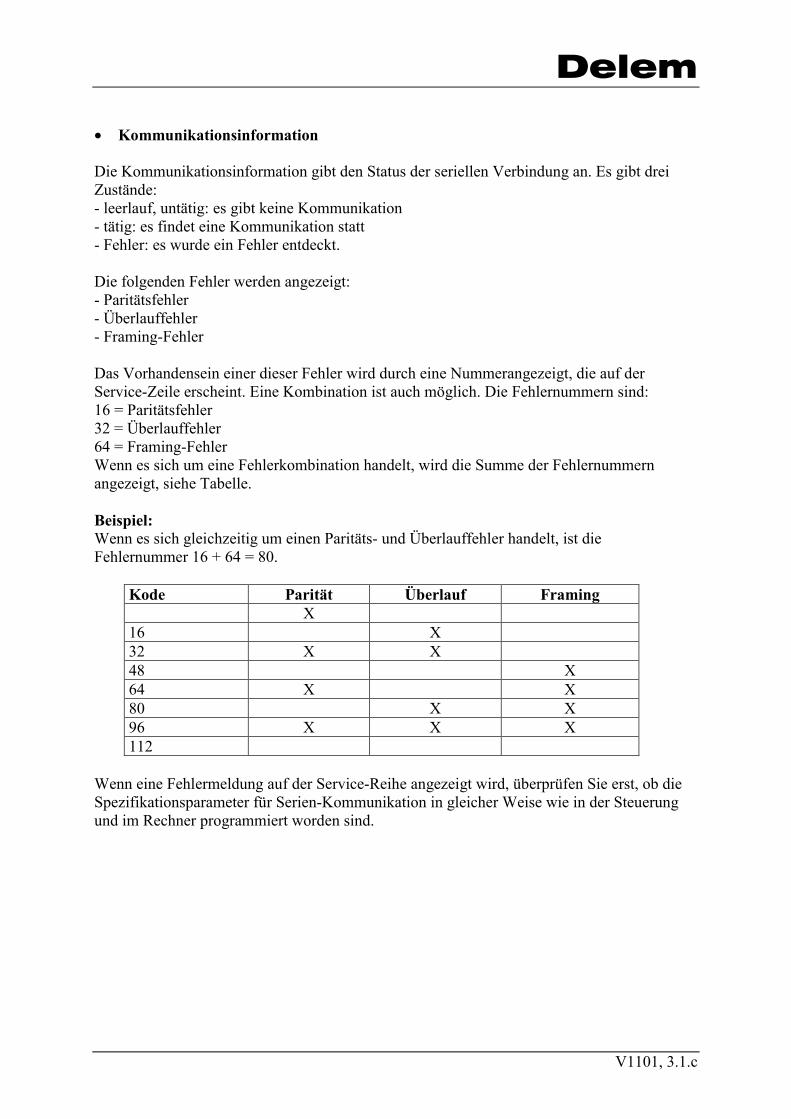
• Kommunikationsinformation
Die Kommunikationsinformation gibt den Status der seriellen Verbindung an. Es gibt dreiZustände:- leerlauf, untätig: es gibt keine Kommunikation- tätig: es findet eine Kommunikation statt- Fehler: es wurde ein Fehler entdeckt.
Die folgenden Fehler werden angezeigt:- Paritätsfehler- Überlauffehler- Framing-Fehler
Das Vorhandensein einer dieser Fehler wird durch eine Nummerangezeigt, die auf derService-Zeile erscheint. Eine Kombination ist auch möglich. Die Fehlernummern sind:16 = Paritätsfehler32 = Überlauffehler64 = Framing-FehlerWenn es sich um eine Fehlerkombination handelt, wird die Summe der Fehlernummernangezeigt, siehe Tabelle.
Beispiel:Wenn es sich gleichzeitig um einen Paritäts- und Überlauffehler handelt, ist dieFehlernummer 16 + 64 = 80.
Kode Parität Überlauf FramingX
16 X32 X X48 X64 X X80 X X96 X X X112
Wenn eine Fehlermeldung auf der Service-Reihe angezeigt wird, überprüfen Sie erst, ob dieSpezifikationsparameter für Serien-Kommunikation in gleicher Weise wie in der Steuerungund im Rechner programmiert worden sind.
Delem
V1101, 3.2
Parameter: 2Y-max
Bereich : 0.00-9999.99Default : 150.00Einheit : mm
FunktionMaximaler Y-Achsen-Wert
Beschreibung:Die maximale Position in die die Wange bewegt werden kann. Dieser Wert wird als SoftwareGrenze benutzt.Wenn der Startknopf der Steuerung ge-drückt wird, prüft die Steuerung alle Y-Achsen-Parameter, die programmiert oder berechnet sind. Falls der programmierte oder berechnete Y-Achsenwert größer als der Y-max ist, wird der Wert auf den Y-max Wert begrenzt undfolgende Fehlermeldung erscheint auf dem Bildschirm:
** Y-Achse >> limit **
Nachstehende Gründe für diese Fehlermeldung sind möglich:- programmierte oder berechnete Biegeposition > Y-max- programmierte oder berechnete Mute > Y-max- berechnete Klemmpunkt > Y-max
Delem
V1101, 3.3
Parameter: 3Y-min
Bereich : 0.00-9999.99Default : 10.00Einheit : mm
Funktionminimaler Y-Achsen-Wert
BeschreibungDie minimale Position in die die Wange bewegt werden kann. Dieser Wert wird als SoftwareGrenze benutzt.Wenn der Startknopf der Steuerung bedient wird, prüft die Steuerung alle Y-Achsen-Parameter, die programmiert oder berechnet sind.Falls der programmierte oder berechnete Y-Achsen-Wert kleiner als der Y-min Wert ist, istder Wert auf den Y-min Wert begrenzt und nachstehende Fehlermeldung erscheint auf demBildschirm.
** Y-Achse << limit **
Nachstehend sind einige Gründe für diese Fehlermeldung angegeben:- programmierte oder berechnete Biegeposition < Y-min- programmierte oder berechnete Mute < Y-min- berechnete Klemmpunt < Y-min.
Bemerkung:Die Wange muß diese Y-min Position immer erreichen können. z.B. Mechanische OT ist 5mm. Dann soll der Y-min großer sein als 5 mm.
Delem
V1101, 3.4
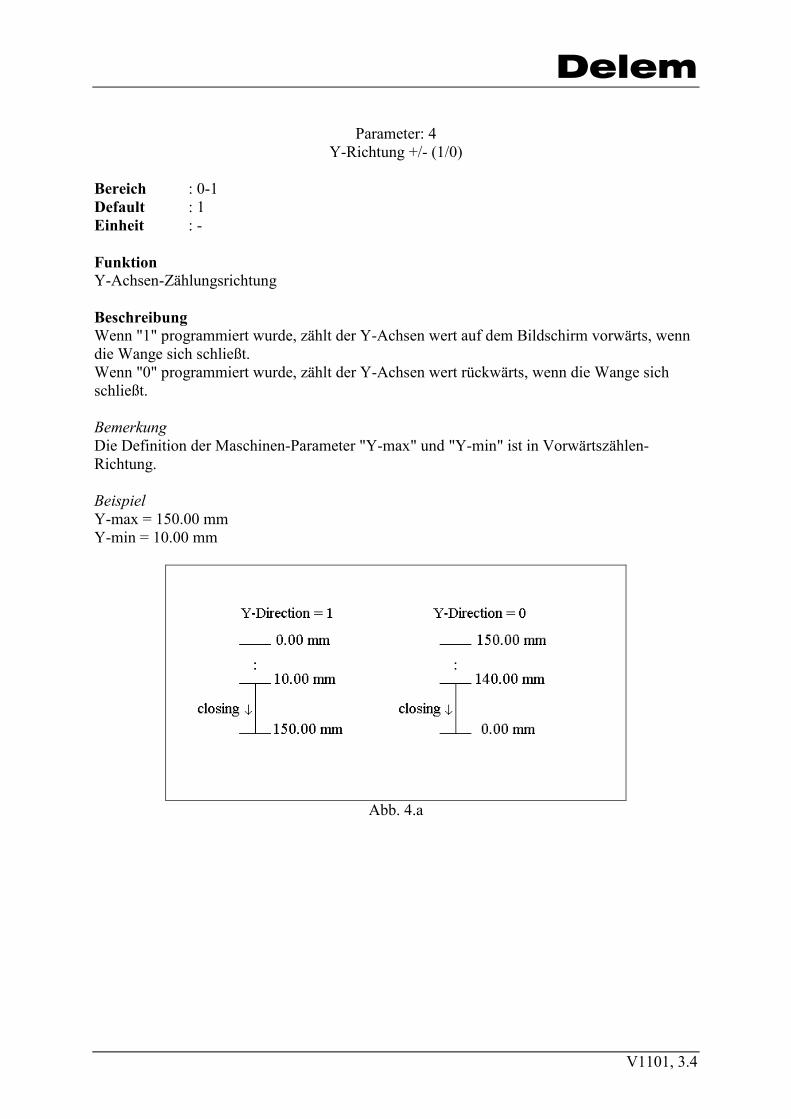
Parameter: 4Y-Richtung +/- (1/0)
Bereich : 0-1Default : 1Einheit : -
FunktionY-Achsen-Zählungsrichtung
BeschreibungWenn "1" programmiert wurde, zählt der Y-Achsen wert auf dem Bildschirm vorwärts, wenndie Wange sich schließt.Wenn "0" programmiert wurde, zählt der Y-Achsen wert rückwärts, wenn die Wange sichschließt.
BemerkungDie Definition der Maschinen-Parameter "Y-max" und "Y-min" ist in Vorwärtszählen-Richtung.
BeispielY-max = 150.00 mmY-min = 10.00 mm
Abb. 4.a
Delem
V1101, 3.5
Parameter: 5Linealreferenz links (Y1)
Bereich : 0.00-999.99Default : 25.00Einheit : mm
FunktionLinke Seite der linearen Messlinealreferenz-Position der Y-Achse und ParallelitätAbgleichung.
BeschreibungDieser Wert ist auf dem Bildschirm sichtbar, wenn die Referenz von der Messlinealeinkommt.Wenn die Referenz auf dem Messlineal passiert ist, wird ein Referenzimpuls an dieElektronik gegeben.(Um die rechte und linke Seite getrennt zu sehen, muß die Service-Zeile eingeschaltetwerden).
BemerkungDieser Wert muß größer als die mechanische Hub von der Messlineal vonReferenzpunktposition zum Lineal-Ende sein.Auch muß diese Hub größer sein als die mechanische Hub des Zylinders von derReferenzposition zum oberen Totpunkt.Achten Sie darauf, daß wenn der Zylinder sich im mechanischen oberen Totpunkt befindet,der Y- Achsenwert auf dem Bildschirm zwischen 5 und 10 mm liegt.
Delem
V1101, 3.6
Parameter: 6Linealreferenz rechts (Y2)
Bereich : 0.00-999.99Default : 25.00Einheit : mm
FunktionRechte Seite der Messlinealreferenz-Position und Parallelität-Abgleichung.
BeschreibungSiehe "Linealreferenz links".
Delem
V1101, 3.7.a
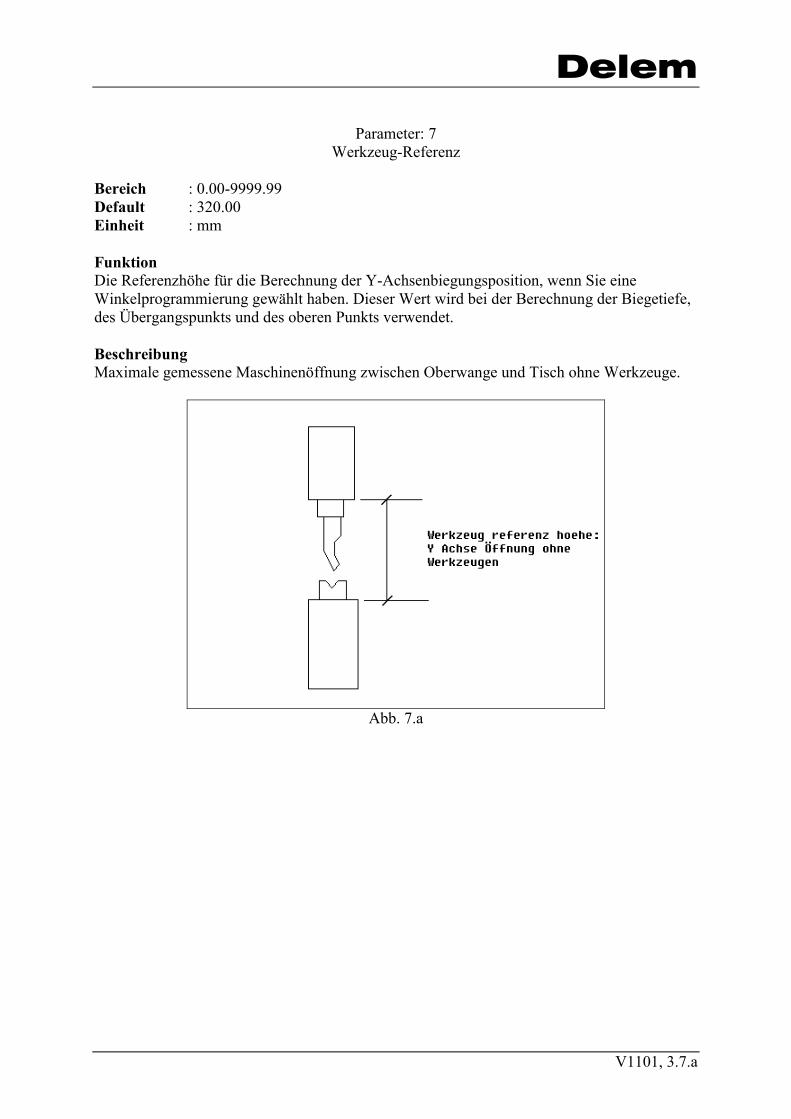
Parameter: 7Werkzeug-Referenz
Bereich : 0.00-9999.99Default : 320.00Einheit : mm
FunktionDie Referenzhöhe für die Berechnung der Y-Achsenbiegungsposition, wenn Sie eineWinkelprogrammierung gewählt haben. Dieser Wert wird bei der Berechnung der Biegetiefe,des Übergangspunkts und des oberen Punkts verwendet.
BeschreibungMaximale gemessene Maschinenöffnung zwischen Oberwange und Tisch ohne Werkzeuge.
Abb. 7.a
Delem
V1101, 3.7.b
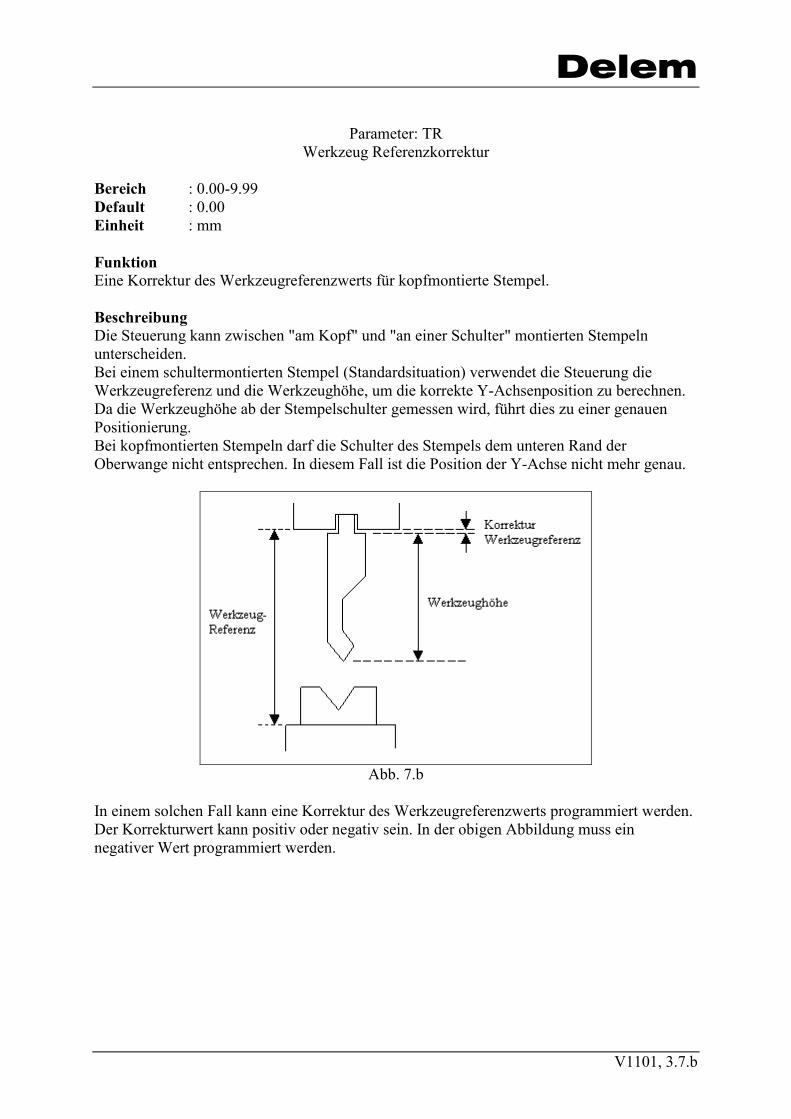
Parameter: TRWerkzeug Referenzkorrektur
Bereich : 0.00-9.99Default : 0.00Einheit : mm
FunktionEine Korrektur des Werkzeugreferenzwerts für kopfmontierte Stempel.
BeschreibungDie Steuerung kann zwischen "am Kopf" und "an einer Schulter" montierten Stempelnunterscheiden.Bei einem schultermontierten Stempel (Standardsituation) verwendet die Steuerung dieWerkzeugreferenz und die Werkzeughöhe, um die korrekte Y-Achsenposition zu berechnen.Da die Werkzeughöhe ab der Stempelschulter gemessen wird, führt dies zu einer genauenPositionierung.Bei kopfmontierten Stempeln darf die Schulter des Stempels dem unteren Rand derOberwange nicht entsprechen. In diesem Fall ist die Position der Y-Achse nicht mehr genau.
Abb. 7.b
In einem solchen Fall kann eine Korrektur des Werkzeugreferenzwerts programmiert werden.Der Korrekturwert kann positiv oder negativ sein. In der obigen Abbildung muss einnegativer Wert programmiert werden.
Delem
V1101, 3.7.c
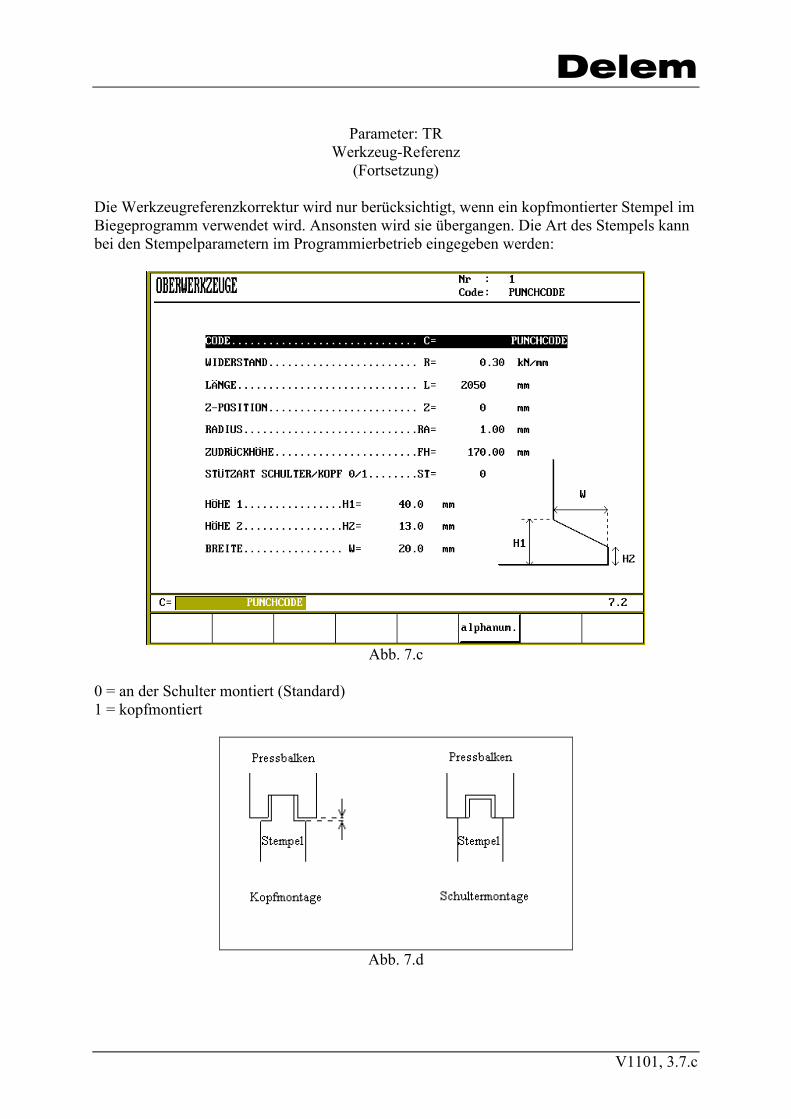
Parameter: TRWerkzeug-Referenz
(Fortsetzung)
Die Werkzeugreferenzkorrektur wird nur berücksichtigt, wenn ein kopfmontierter Stempel imBiegeprogramm verwendet wird. Ansonsten wird sie übergangen. Die Art des Stempels kannbei den Stempelparametern im Programmierbetrieb eingegeben werden:
Abb. 7.c
0 = an der Schulter montiert (Standard)1 = kopfmontiert
Abb. 7.d
Delem
V1101, 3.8
Parameter: 8Lineare maßstäbe-richtung Y1 (0/1)
Bereich : 0-1Default : 0Einheit : -
FunktionUm die Zählrichtung der Codiererimpulse der linearen Maßstäbe von Y1 zu verändern.
BeschreibungIm allgemeinen sollte die Positionszählung von Y1 in aufsteigender Zählrichtung erfolgen,wenn der Balken sich nach unten bewegt.Mit diesem Parameter kann die Zählrichtung umgekehrt werden, um sie korrekt einzustellen.
Delem
V1101, 3.9
Parameter: 9Lineare Maßstäbe-richtung Y2 (0/1)
Bereich : 0-1Default : 0Einheit : -
FunktionUm die Zählrichtung der Codiererimpulse der linearen Maßstäbe von Y2 zu verändern
BeschreibungIm allgemeinen sollte die Positionszählung von Y2 in aufsteigender Zählrichtung erfolgen,wenn der Balken sich nach unten bewegt.Mit diesem Parameter kann die Zählrichtung umgekehrt werden, um sie korrekt einzustellen.
Delem
V1101, 3.10
Parameter: 10Tandem 1/0
Bereich : 0-2Default : 0Einheit : -
FunktionGeschwindigkeitsregelung, falls Tandem-Option installiert ist. Wenn Sie diesen Parameter aufden Wert "2" programmieren, können Sie den Tandem-Eingang benutzen, um den Balken füreine Schnittstellenverbindung zu einem Roboter anzuhalten.
Beschreibung1. Einer der Optionskarten-Ausgänge der bei "Tandem" benutzt wird, muß an die
Tandemeingang der Steuerung verbunden werden.Wenn T-Eingang aktiv ist, gibt es keine Y-Achsen-geschwindig-keitsvorgabe.Programmieren Sie diesen Parameter "1" falls Tandem-Option installiert ist.
2. Der gleiche "Tandem" T-Eingang kann benutzt werden, wenn Sie Ihre Maschine mit einerRoboteranwendung benutzen.In diesem Fall wird der Balken in der Preßphase so lange angehalten, wie der T-Eingangaktiviert ist. Wenn der t-Eingang nicht mehr aktiviert ist, wird die Preßbewegungfortgesetzt. Durch die Programmierung dieses Parameters auf den Wert "2" wird derKlemmausgang sowohl an der Klemmposition als auch an der Biegeposition aktiv, wenndie Haltezeit verstrichen ist. Mit Hilfe des Klemm-Ausgangssignals können Sie ein T-Eingangssignal erzeugen, damit der Balken an der Biegeposition bleibt, bis dieHandhabung durch den Roboter beendet ist.Wenn Sie die Schnittstellenverbindung zu einem Roboter verwenden möchten, fragen Siebitte nach unserer allgemeinen Beschreibung für eine solche Verbindung.
Delem
V1101, 3.11
Parameter: 11Parallel-Schalter 1/0
Bereich : 0-2Default : 0Einheit : -
FunktionMontierter Parallelitäts-Indikations-Schalter wird benutzt zur Parallelregelung bevor die Y-Achsenreferenzen passiert worden sind.
BeschreibungProgrammieren Sie "1" falls Parallelitäts-Optionsschalter benutzt werden soll. DerParallelitätsschalter muß mit dem "=" Eingang der Steuerung verbunden sein. Mit diesemEingang hat die Steuerung eine Indikation der Parallelität des Oberwanges.Wenn dieser Eingang aktiv ist (Schalter geschlos-sen), ist der linkseitige Zylinder höher alsder rechtseitige Zylinder. Wenn dieser Eingang nicht aktiv ist (Schalter geöffnet) ist derrechtseitige Zylinder höher als der linkseitige Zylinder.Wenn die Steuerung ein Öffnungs- oder schnelles Schließkommando zum ersten Malnachdem der Strom eingeschaltet wurde erhält, wird sich nur ein Zylinder bewegen bis der"=" Eingang sich von geöffnet auf geschlossen verändert oder vice versa.Wenn der Parallelitäts-Schalter nicht montiert wurde (Programm 0) wird die Steuerung dieParallelität des Wanges relative regeln, bevor die Referenzen passiert sind.Nachdem ein schnelles Öffnungs- oder Schließungs-Kommando gegeben wurde, bleibt dierelative Parallelität der linken und rechten Zylinder aufrechterhalten bis die Referenzen beiderLinealen passiert sind.Siehe beiliegende Zeichnung.
Delem
V1101, 3.12
Parameter: 12Max. Paralellität
Bereich : 0.00-50.00Default : 2.00Einheit : mm
FunktionMaximal erlaubte totale Oberwangen-Parallelität
BeschreibungDie Parallelität ist der Unterschied zwischen dem linken Zylinder (Y1) und dem rechtenZylinder (Y2). Bei der Steuerungen gibt es zwei Parameter die die Oberwangen-Parallelitätbeeinflussen können:1. Programmierbare Parallelität unter Programm-parameter. Dieser Wert hat einen Effekt auf
den ganzen Hub der Oberwange.2. Programmierbare Parallelität bei Programm-eingabe, Programmänderung und
Handbetrieb.Dieser Wert wird berücksichtigt, wenn die Oberwange den Klemmpunkt erreicht undaktiv bleibt bis das Öffnungskommando ( ) aktiv wird.
Die totale Parallelität ist die Summe der unter 1 und 2 beschriebenen Werte. Wenn beiAutomatik-betrieb eine totale Parallelität die größer als die maximale Parallelität ist entdecktwird, begibt sich die Steuerung auf stop und nach-stehende Warnung erscheint auf demBildschirm.
** Parallelität > max.Parallelität **
Delem
V1101, 3.13
Parameter: 13Init. Y-Öffnung
Bereich : -999.9-+999.9Default : 20.0Einheit : mm
FunktionDefault YachseÖffnungswert. (Vorwahl-Wert für die Y-Achse Öffnung)
BeschreibungDer hier programmierte Wert wird als Anfangswert für den Parameter "Y-Achsen-Öffnung"bei dem Menuü der Programmeingabe benutzt.
Delem
V1101, 3.14
Parameter: 14Bremszeit maximal
Bereich : 0-200Default : 0Einheit : 5ms
FunktionMaximal erlaubte Bremszeit der Oberwange. (Nachlaufweg)
BeschreibungJedesmal wenn die Steuerung eingeschaltet wird, kann die Oberwangenbrems-zeit gemessenwerden. Diese Messung wird initialisiert sowie ein Schließ-kommando aktiv wird, nachdemder Strom eingeschaltet wurde. Die Ober-wange bewegt sich in Schließrichtung. DieSteuerung stellt 4 mm, nachdem an beiden Referenzpunkten vorbeigefahren wurde, auf Stopp.Der Startausgang der CNC wird niedrig.
Dies bedeutet, daß die Oberwange stoppen muß. Der Startausgang der CNC ist soanzuschließen, daß der schnelle Schließbefehl ausgeschaltet wird und dieHöhensicherungsventile geschlossen sind. Wenn die "max.Bremszeit" ver-strichen ist, mußdie Oberwangengeschwindigkeit 2 mm/Sek. oder weniger sein.
Wenn die Oberwangengeschwindigkeit niedrigerals 2 mm/Sek.innerhalb der erlaubten Zeitist, erscheint nachstehende Meldung auf dem Bildschirm:
* BREMSENTFERNUNG OK, START DRÜCKEN ZUR FORTSETZUNG *
Nachdem der Startknopf wieder gedrückt worden ist, kann die Biegung fortgesetzt werden.
Wenn die Oberwange nicht innerhalb der erlaubten Zeitspanne stopt, erscheint nachstehendeMeldung auf dem Bildschirm:
* BREMSENTFERNUNG ZU GROß, KEINE FORTSETZUNG *
In dieser Situation ist es nicht möglich die Biegung fortzusetzen. Wenn Sie versuchen denStartknopf nochmals zu drücken, erscheint nachstehende Meldung auf dem Bildschirm:
** NICHT MÖGLICH, BREMSENTFERNUNG ZU GROß **
BemerkungWenn dieser Parameter auf null programmiert wurde, wird die Nachlaufweg-messungabgeschaltet.
Delem
V1101, 3.15
Parameter: 15Ventile kalibrieren 1/0
Bereich : 0-1Default : 0Einheit : -
FunktionUm den Ventil-Offset der Servoventile im Handbetrieb einzustellen (nicht bei hydraulischerAnwendung von Hoerbiger).
BeschreibungFür Ventiltypen, die den ±10V-Ausgang des DM02 verwenden, kann der Offset auf zweiArten eingestellt werden:• Im Diagnosebetrieb (ohne Verwendung dieses Parameters).
Es ist möglich, den Offset dieser Ventile auf der Ventilbombierungsseite des Testmenüsfür das DM02-Modul einzustellen. Wenn der Cursor auf dem Bildschirm auf einen derOffsets eingestellt ist, kann dieser mit dem Handrad eingestellt werden. Der Bereich liegtzwischen -127 und +127, was einem Offset im Bereich von -600 und +600 mV entspricht.
• Im Handbetrieb.Es ist auch möglich, die Position der Oberwange im Handbetrieb mit dem Handradeinzustellen. Dies kann am besten während der Haltezeit (Status 4) durchgeführt werden.Programmieren Sie deshalb eine lange Haltezeit. Dieser Einstellungsbetrieb muß durchdiesen Maschinenparameter freigegeben werden.
Wenn dieser Parameter auf 1 programmiert wurde, erscheint die Funktionstaste "Y1/Y2 cal.select" im Handbetrieb. Mit dieser Funktionstaste kann Y1 bzw. Y2 für die Offseteinstellunggewählt werden. Die gewählte Seite wird in der Servicezeile farblich markiert. Die gewählteSeite kann jetzt mit dem Handrad eingestellt werden. Der entsprechende Ventil-Offset wirdim DM02 gespeichert, wenn die andere Seite gewählt oder der Handbetrieb abgeschlossenwird.
Nach der Einstellung des Offsets, muß dieser Parameter wieder auf Null gestellt werden.
Bemerkung 1Die Einstellung des Offsets für Hoerbiger-Ventile muß immer im Diagnoseprogrammerfolgen[2]. Sie können nicht im Handbetrieb eingestellt werden.

Delem
V1101, 3.16
Parameter: 16 -19nicht gebraucht
Delem
V1101, 3.20
Parameter: 20Steifheit
Bereich : 0.000-99.900Default : 0.300Einheit : µm/kN
FunktionSteifheit der Presse wird zur Berechnung der Druckentspannung benutzt.
BeschreibungDieser Wert wird mit berechneter Tonnage multipliziert, um die Druckent spannungs-Längezu erhalten (Dekompression).
Delem
V1101, 3.21
Parameter: 21Steifheit der Presse
Bereich : 0.0-100.0Default : 0.0Einheit : %
FunktionSteifheit der Presse wird zur Korrektur der Berechnung der Y-Achsen-Tiefe benutzt.
BeschreibungWenn ein Biegewinkel programmiert worden ist, wird die entsprechende Biege-Tiefeautomatisch berechnet. Steifheit der Presse wird benutzt, um eine Korrektion für diese Biege-Tiefe zu berechnen, die durch das Ausbiegen der Presse entsteht.Der Ausbiege-Kompensationsarm wird das Ausbiegen der Seitenständer nicht ganz und garkompensieren, um die Y-Achsen-Biegeposition kompensieren zu können.Wann gleichwertiges Metall, das 0,5 m lang ist gebogen wird, müssen Sie den gleichenWinkel haben wie bei einer Biegung von 1 m oder länger.Der Unterschied zwischen den beiden Biegungen ist die Tonnage. Wenn es um eine Längevon 1 m geht, wird die Presse mehr ausbiegen, da sie mehr Tonnage nötig hat als bei 0,5 m.
Der programmierte Wert für diesen Parameter muß das Ausbiegen der Seitenständer sein,welches nicht durch den Kompensationsarm ausgeglichen wird.Dieser Parameter muss programmiert werden wie ein Prozentsatz des Parameters "Steifheit".
Delem
V1101, 3.22.a
Parameter: 22Kalibrierung 1/0
Bereich : 0-1Default : 0Einheit : -
FunktionDruckventil-Kalibrierungsverfahren
BeschreibungGeben Sie "1" ein, wenn Sie die proportionale Druckventilsteuerung kalibrieren möchten. DieMaßeinheiten der Kraftparameter im Handbetrieb werden in Punkten von 0 bis max. 255 stattin Tonnen angegeben. (0 = 0 mA, 255 = 800 mA)
Kalibrierungsvorgang:1. Erstellen Sie Parameter "Kalibrierung" "1"2. Verlassen Sie das Maschinenparameter-Menu3. Schalten Sie die DA-Steuerung auf Handmode4. Programmieren Sie z.B. 200 Stellen bei Tonnage Parameter5. Wählen Sie Prägen6. Montieren Sie ein Manometer auf den hydraulischen Block (Pumpendruck)7. Programmieren Sie Haltezeit = 5 Sek.8. Erstellen sie einen Hub mit der Presse. Die Werkzeuge werden jetzt zusammen-gedrückt
(Stempel in Matrize)(Bemerkung: benutzen Sie Stempel und Matrize die bei maximalem Druck arbeitenmöchten).
9. Beim Zusammendrücken der Werkzeuge, lesen Sie den Manometer. Falls der Druck fürdie max. Tonnage nichtaus-reichend ist, programmieren Sie noch einmal den DA-Ausgang (max. 255) bei Tonnage-Parameter. Wiederholen Sie dies bis Ihre max. Tonnageerreicht ist. Be-halten Sie den Ausgangswert. Der Wert muß bei Maschinenparameter"Max.-Ausgang" programmiert werden.
10. Programmieren Sie einen kleinen Wert beim Tonnage-Parameter, z.B. 30 Stellen. Jetztmüssen Sie den min. Wert finden bei dem die Wange anfängt sich zu bewegen. NotierenSie diesen mini-malen Wert. Dieser Wert muß beim Maschinen-Parameter "Min.-Ausgang" programmiert werden.
11. Wählen Sie noch einmal das Maschinenparameter-Menu.12. Jetzt müssen Sie bei den Maschinen-Parametern "Max.Tonnage" und "Min.Tonnage", die
maximale und minimale Tonnage Ihrer Presse program-mieren, die denAusgangseinheiten (0-255) bei Maschinenparametern "Max.- Ausgang" und "Min.-Ausgang" entsprechen.
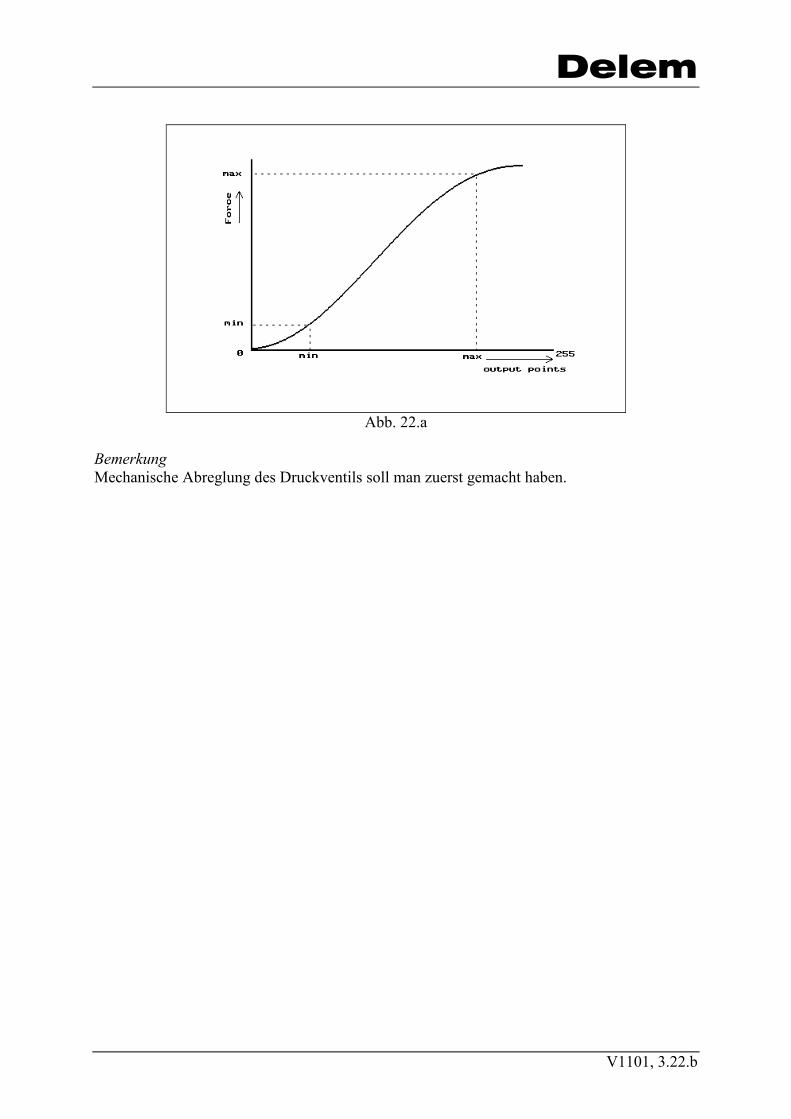
Delem
V1101, 3.22.b
Abb. 22.a
BemerkungMechanische Abreglung des Druckventils soll man zuerst gemacht haben.
Delem
V1101, 3.23
Parameter: 23Druck max.
Bereich : 0-9999Default : 1100Einheit : kN
FunktionMaximale mögliche Ansteuer-Tonnage der Presse.
BeschreibungDiese maximale Tonnage der Presse wird benutzt, um den Druckventil-Ausgang zuberechnen. Außerdem wird sie benutzt, um die programmierten und berechneten Werte fürdie Tonnage zu prüfen. Wenn die berechnete Tonnage größer als die maximale Tonnage ist,erscheint nachstehende Fehlermeldung auf dem Bildschirm.
** berechneter Wert > Max. Tonnage **
Diese Warnung kann auch dann erscheinen, wenn die Druckentspannungs-Länge berechnetwird, da die Steuerung erst die Tonnage berechnen muß, bevor sie die Druckent-spannungberechnet. Wenn das Betrieb "Hand" oder automatische Betriebsart ist und die programmierteTonnage > Max. Tonnage ist, erscheint nachstehende Fehlermeldung auf dem Bildschirm.
** programmierte Tonnage > Max. Tonnage **
Der programmierte Wert für Tonnage ist auf die Max. Tonnage begrenzt. Beachten Sie auchden Kalibrierungsprozeß, der bei dem Maschinenparameter "Kalibrierung" beschrieben wird(parameter 22).
Delem
V1101, 3.24
Parameter: 24Druck min.
Bereich : 9999Default : 100Einheit : kN
FunktionMinimale Ansteuer Tonnage der Presse.
BeschreibungMinimale Tonnage der Presse wird benutzt, um den Druckventil-Ausgang zu berechnen. Siewird auch benutzt, um die programmierte Tonnage zu prüfen. Wenn der Startknopf bedientwurde und die programmierte Tonnage ist weniger als die minimale Tonnage,ist die Tonnageauf die minimale Tonnage begrenzt. Beachten Sie auch den Kalibrierungsprozeß, der bei demMaschinenparameter "Kalibrierung" beschrieben ist.
Parameter: FMDruck mitte
Bereich : 0-9999Default : ___Einheit : kN
Verbesserung beim Kalibrieren des DruckventilsWenn das Verhältnis zwischen der Ausgangsbombierung und dem Druck linear ist, brauchenSie nur die Höchst- und Mindestkraft einzugeben. Ist das Verhältnis zwischen derAusgangsbombierung und dem Druck nicht linear, können Sie den Durchschnittswert derKraft eingeben.Der Ausgangswert für diesen Durchschnittsparameter ist "___", d.h., daß dieser Parameternicht aktiv ist. Dies ist ebenfalls der Ausgangswert, wenn eine Reihe vonMaschinenparameter einer älteren Softwareversion eingelesen wird.
Delem
V1101, 3.25
Parameter: 25Ausgang max.
Bereich : 0-255Default : 255Einheit : DA-Punkten
FunktionDruckventilansteuerung für maximal Druck.
BeschreibungDruckventilansteuerung in DA-Punkten für die maximal Druck.Es gibt zwei Bereiche von Druckventilen:• 800 mA. Diese Ventile können auf maximal 136 DA-Punkten programmiert werden.• 1500 mA. Diese Ventile können auf maximal 255 DA-Punkten programmiert werden.
Achten Sie auch den Kalibrierungsprozeß, der bei dem Maschinenparameter "Kalibrierung"beschrieben ist.
Delem
V1101, 3.26
Parameter: 26Ausgang min.
Bereich : 0-255Default : 48Einheit : DA-Punkten
FunktionDruckventilansteuerung für minimal Druck.
BeschreibungDruckventilansteuerung in DA-Punkten für die minimal Druck.Es gibt zwei Bereiche von Druckventilen:• 800 mA. Diese Ventile können auf maximal 136 DA-Punkten programmiert werden.• 1500 mA. Diese Ventile können auf maximal 255 DA-Punkten programmiert werden.Achten Sie auch den Kalibrierungsprozeß, der bei dem Maschinenparameter "Kalibrierung"beschrieben ist.
Parameter: OMAusgang mitte
Bereich : 0-255Default : ___Einheit : DA-Punkten
Verbesserung beim Kalibrieren des DruckventilsWenn das Verhältnis zwischen der Ausgangsbombierung und dem Druck linear ist, brauchenSie nur den Höchst- und Mindesteingang einzugeben. Ist das Verhältnis zwischen derAusgangsbombierung und dem Druck nicht linear, können Sie den Durchschnittswert desAusgangs eingeben.Der Ausgangswert für diesen Durchschnittsparameter ist "___", d.h., daß dieser Parameternicht aktiv ist. Dies ist ebenfalls der Ausgangswert, wenn eine Reihe vonMaschinenparameter einer älteren Softwareversion eingelesen wird.
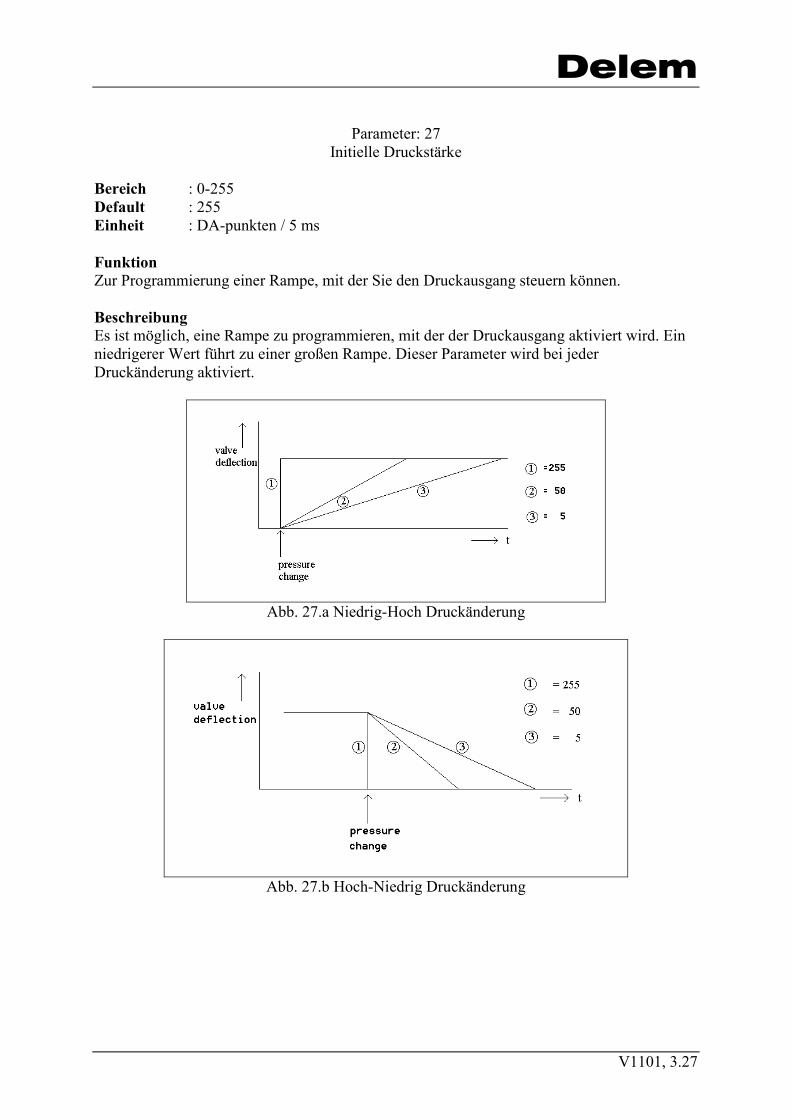
Delem
V1101, 3.27
Parameter: 27Initielle Druckstärke
Bereich : 0-255Default : 255Einheit : DA-punkten / 5 ms
FunktionZur Programmierung einer Rampe, mit der Sie den Druckausgang steuern können.
BeschreibungEs ist möglich, eine Rampe zu programmieren, mit der der Druckausgang aktiviert wird. Einniedrigerer Wert führt zu einer großen Rampe. Dieser Parameter wird bei jederDruckänderung aktiviert.
Abb. 27.a Niedrig-Hoch Druckänderung
Abb. 27.b Hoch-Niedrig Druckänderung

Delem
V1101, 3.28
Parameter: 28nicht gebraucht

Delem
V1101, 3.29
Parameter: 29nicht gebraucht
Delem
V1101, 3.30
Parameter: 30Schließgeschwindigkeit
Bereich : 0-200Default : 80Einheit : mm/s.
FunktionSchnell-ab Schließgeschwindigkeit
BeschreibungY-Achsen-Geschwindigkeit während schnell-ab (Status = 2, siehe "Service-Zeile")Die Steuerung reguliert die Schließ-geschwindigkeit gemäß dem Wert dieses Parameters.
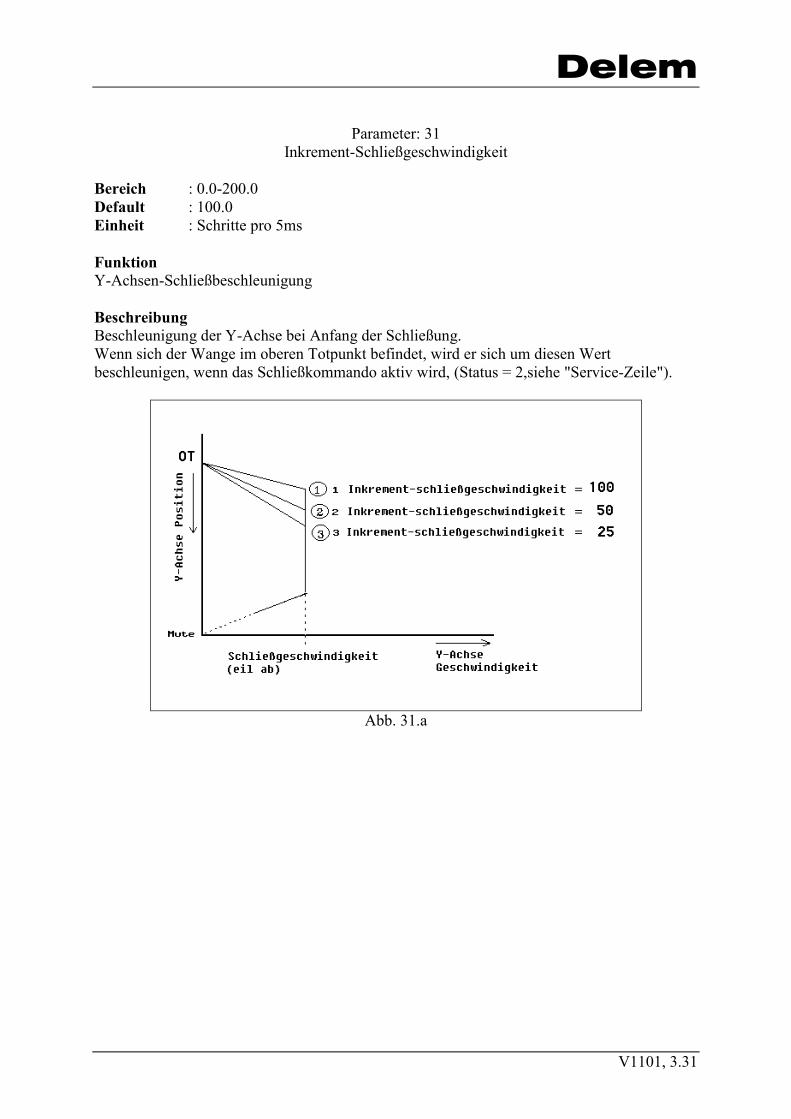
Delem
V1101, 3.31
Parameter: 31Inkrement-Schließgeschwindigkeit
Bereich : 0.0-200.0Default : 100.0Einheit : Schritte pro 5ms
FunktionY-Achsen-Schließbeschleunigung
BeschreibungBeschleunigung der Y-Achse bei Anfang der Schließung.Wenn sich der Wange im oberen Totpunkt befindet, wird er sich um diesen Wertbeschleunigen, wenn das Schließkommando aktiv wird, (Status = 2,siehe "Service-Zeile").
Abb. 31.a
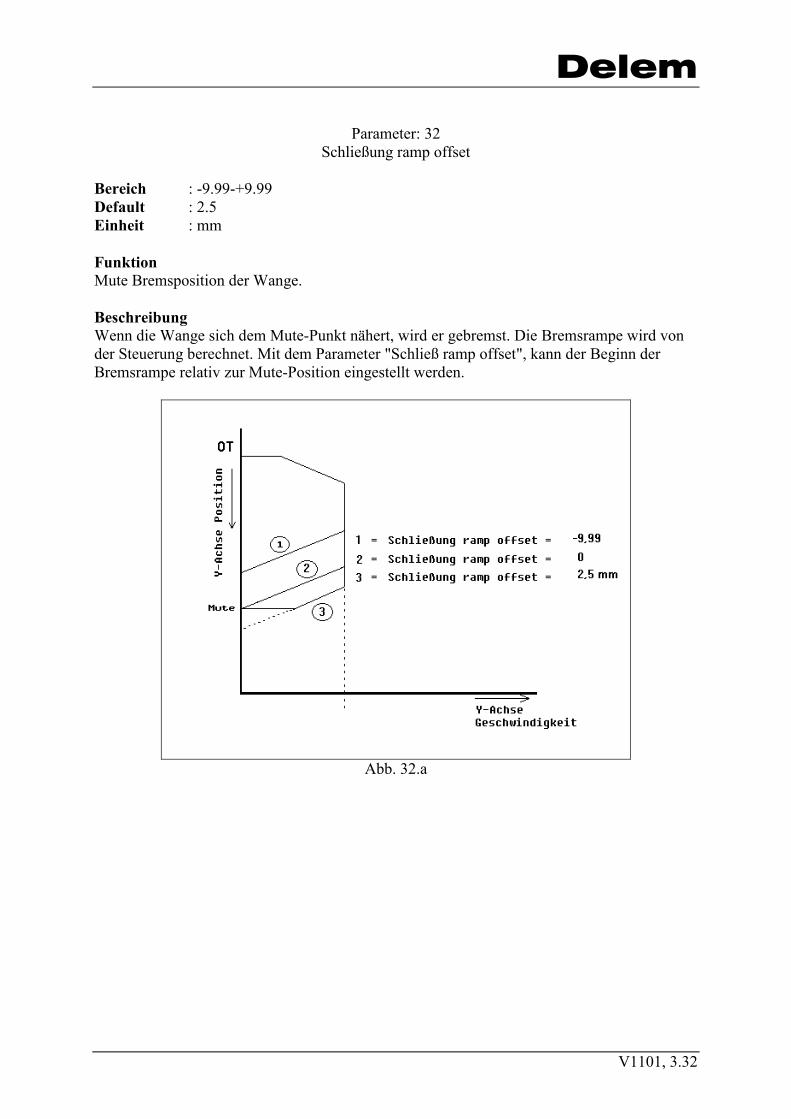
Delem
V1101, 3.32
Parameter: 32Schließung ramp offset
Bereich : -9.99-+9.99Default : 2.5Einheit : mm
FunktionMute Bremsposition der Wange.
BeschreibungWenn die Wange sich dem Mute-Punkt nähert, wird er gebremst. Die Bremsrampe wird vonder Steuerung berechnet. Mit dem Parameter "Schließ ramp offset", kann der Beginn derBremsrampe relativ zur Mute-Position eingestellt werden.
Abb. 32.a
Delem
V1101, 3.33
Parameter: 33Wartezeit vor Schließen
Bereich : 0-200Default : 0Einheit : 5ms
FunktionSynchronisierter Start der Wangegeschwindigkeit.
BeschreibungWenn das schnelle Schließkommande aktiv wird, werden die proportionalen Ventile nichtgeöffnet bis daß die Wartezeit verstrichen ist.
Diese Zeit ist nötig, um die Hochhalte-einheiten zu öffnen, bevor die proportionalen Ventilegeöffnet werden.
Delem
V1101, 3.34
Parameter: 34Öffnungsgeschwindigkeit
Bereich : 0-200Default : 0Einheit : mm/s.
FunktionÖffnungsgeschwindigkeit der Wange.
BeschreibungY-Achsen-Geschwindigkeit während schneller Öffnung (Status = 6, siehe "Service-Zeile").
Die Steuerung regelt die Wangege-schwindigkeit während Öffnung der Wange.
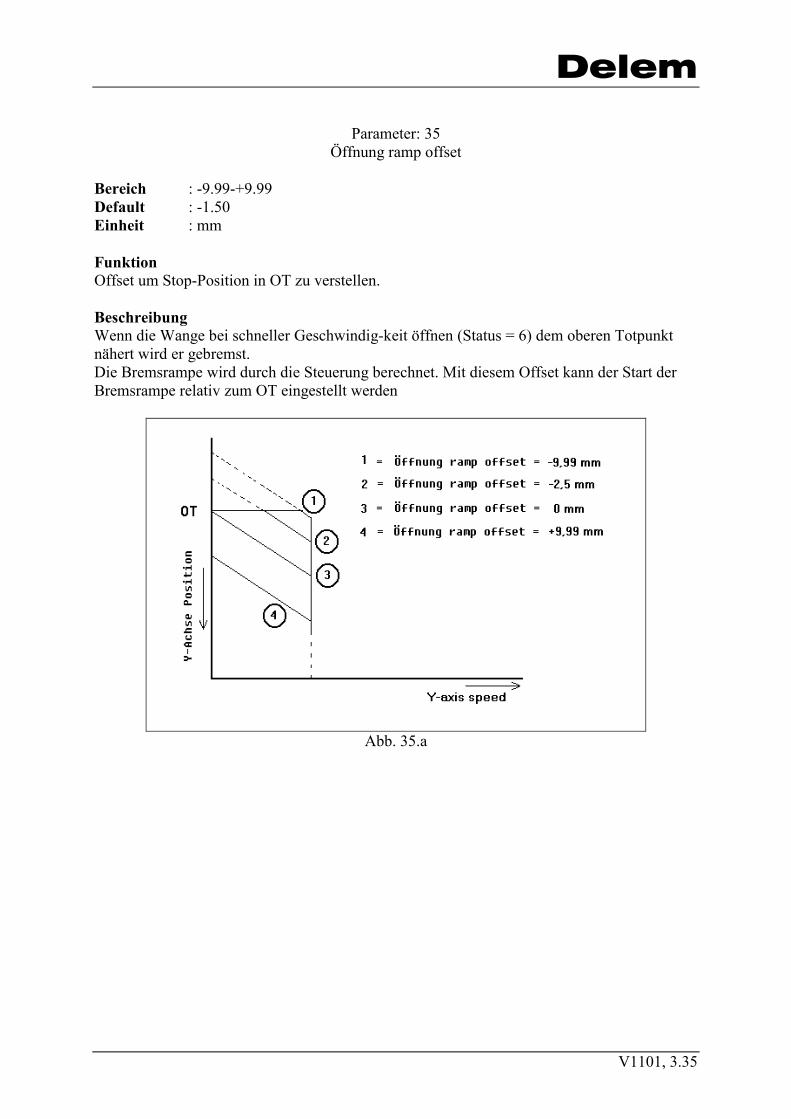
Delem
V1101, 3.35
Parameter: 35Öffnung ramp offset
Bereich : -9.99-+9.99Default : -1.50Einheit : mm
FunktionOffset um Stop-Position in OT zu verstellen.
BeschreibungWenn die Wange bei schneller Geschwindig-keit öffnen (Status = 6) dem oberen Totpunktnähert wird er gebremst.Die Bremsrampe wird durch die Steuerung berechnet. Mit diesem Offset kann der Start derBremsrampe relativ zum OT eingestellt werden
Abb. 35.a
Delem
V1101, 3.36
Parameter: 36Wartezeit vor Öffnen
Bereich : 0-200Default : 10Einheit : 5ms
FunktionSynchronisierter Start der Wangege-schwindigkeit.
BeschreibungWenn das Öffnungskommando aktiv wird,werden die proportionalen Ventile nicht geöffnet,bis diese Wartezeit verstrichen ist.Während dieser Wartezeit müssen die Nachsäugeven tile geöffnet werden und/oder dieHochhalteventile geschlossen werden.
Delem
V1101, 3.37
Parameter: 37Max presse geschwindigkeit
Bereich : 0.0-30.0Default : 30.0Einheit : mm/s
FunktionMaximale Arbeitsgeschwindigkeit, die vom Bediener programmiert werden kann.
BeschreibungMaximale programmierbare Arbeitsgeschwindigkeit bei Programmeingabe,Programmänderung und Handbetrieb.
Delem
V1101, 3.38
Parameter: 38Wartezeit vor pressen
Bereich : 0-200Default : 40Einheit : 5 ms
FunktionSynchronisierter Start der Pressegeschwindigkeit.
BeschreibungWenn sich die Wange beim Mute-Punkt befindet und das Pressekommando (↓) aktiv wird,werden die proportionalen Ventile nicht geöffnet bis die Warezeit verstrichen ist. Währenddieser Wartezeit müssen die Nachsaugeventile geschlossen werden.
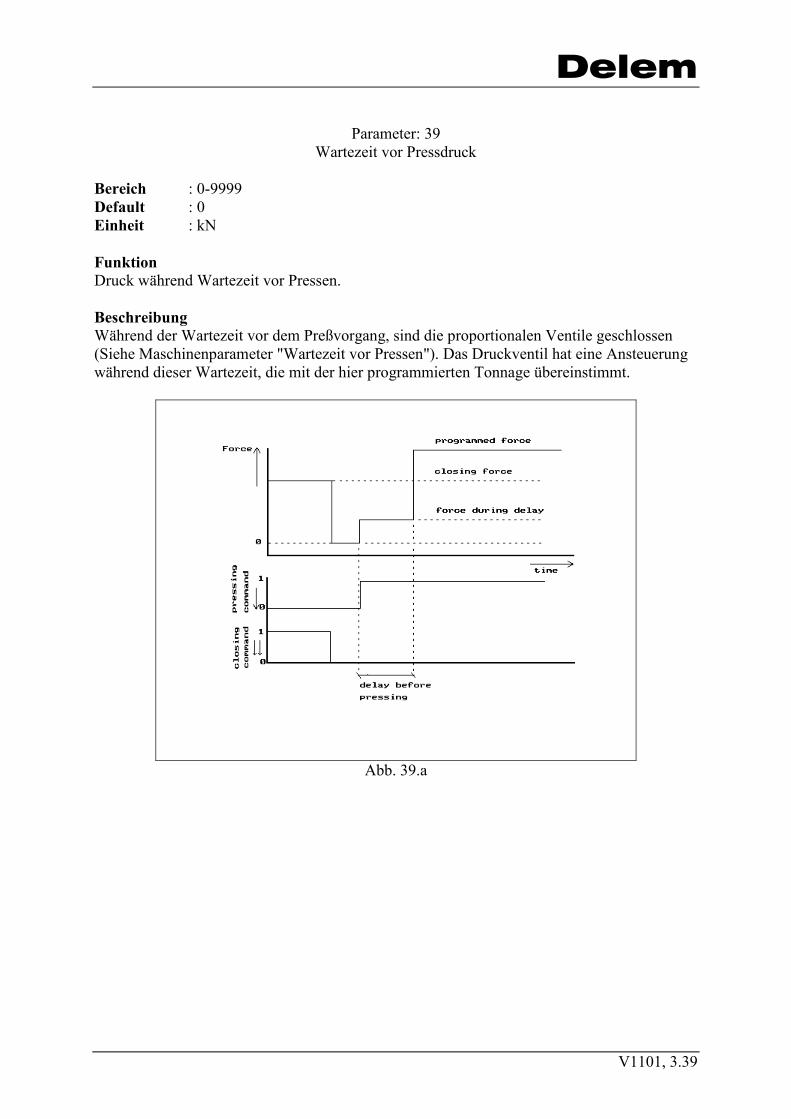
Delem
V1101, 3.39
Parameter: 39Wartezeit vor Pressdruck
Bereich : 0-9999Default : 0Einheit : kN
FunktionDruck während Wartezeit vor Pressen.
BeschreibungWährend der Wartezeit vor dem Preßvorgang, sind die proportionalen Ventile geschlossen(Siehe Maschinenparameter "Wartezeit vor Pressen"). Das Druckventil hat eine Ansteuerungwährend dieser Wartezeit, die mit der hier programmierten Tonnage übereinstimmt.
Abb. 39.a

Delem
V1101, 3.40
Parameter: 40 - 45nicht gebraucht
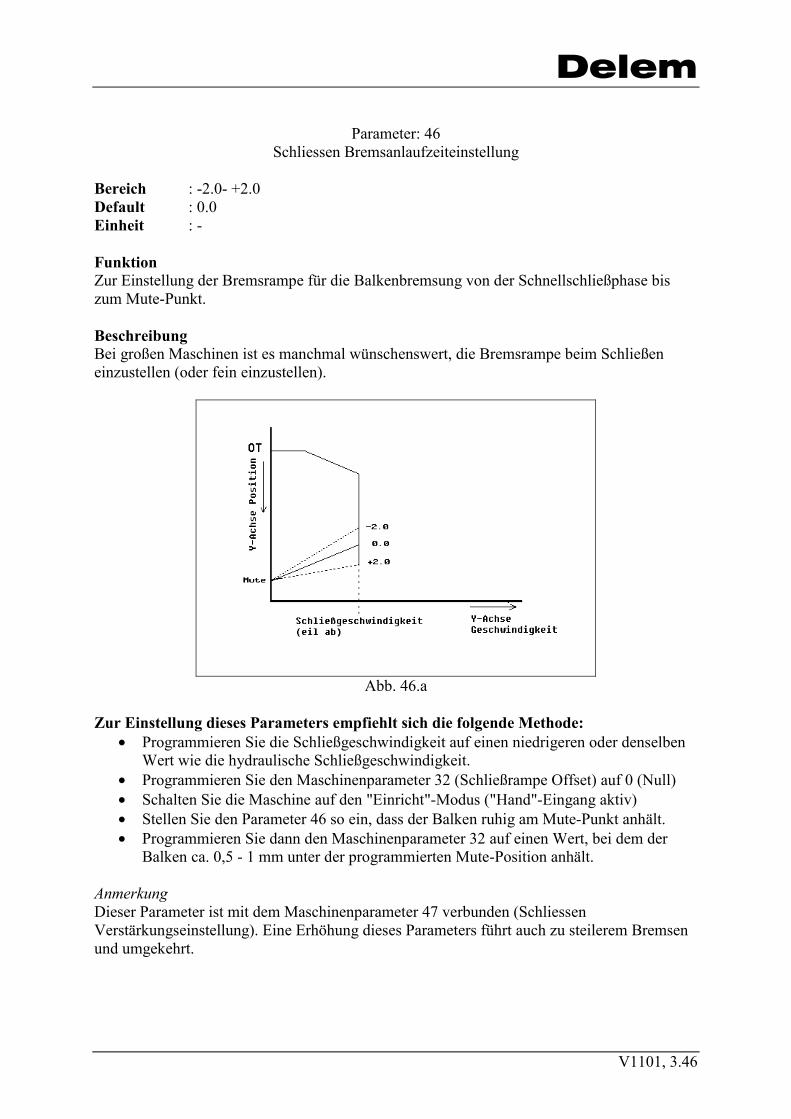
Delem
V1101, 3.46
Parameter: 46Schliessen Bremsanlaufzeiteinstellung
Bereich : -2.0- +2.0Default : 0.0Einheit : -
FunktionZur Einstellung der Bremsrampe für die Balkenbremsung von der Schnellschließphase biszum Mute-Punkt.
BeschreibungBei großen Maschinen ist es manchmal wünschenswert, die Bremsrampe beim Schließeneinzustellen (oder fein einzustellen).
Abb. 46.a
Zur Einstellung dieses Parameters empfiehlt sich die folgende Methode:• Programmieren Sie die Schließgeschwindigkeit auf einen niedrigeren oder denselben
Wert wie die hydraulische Schließgeschwindigkeit.• Programmieren Sie den Maschinenparameter 32 (Schließrampe Offset) auf 0 (Null)• Schalten Sie die Maschine auf den "Einricht"-Modus ("Hand"-Eingang aktiv)• Stellen Sie den Parameter 46 so ein, dass der Balken ruhig am Mute-Punkt anhält.• Programmieren Sie dann den Maschinenparameter 32 auf einen Wert, bei dem der
Balken ca. 0,5 - 1 mm unter der programmierten Mute-Position anhält.
AnmerkungDieser Parameter ist mit dem Maschinenparameter 47 verbunden (SchliessenVerstärkungseinstellung). Eine Erhöhung dieses Parameters führt auch zu steilerem Bremsenund umgekehrt.
Delem
V1101, 3.47
Parameter: 47Schliessen Verstärkungseinstellung
Bereich : -1.0- +1.0Default : 0.0Einheit : -
FunktionZur Einstellung der Verstärkung in der Schnellschließphase des Balkens.
BeschreibungManchmal ist es wünschenswert, die voreingestellte Verstärkung derAbkantpressenbewegung in der Schließphase einzustellen (fein einzustellen). Vor allem wennin der Schließphase Vibrationen festgestellt werden, können Sie die Verstärkung verringern.Durch die Programmierung auf 0.0 erhalten Sie den voreingestellten Standardwert für dieVerstärkung.
Delem
V1101, 3.48
Parameter: 48Öffnen Verstärkungseinstellung
Bereich : -1.0- +1.0Default : 0.0Einheit : -
FunktionZur Einstellung der Verstärkung in der Öffnungsphase des Balkens.
BeschreibungManchmal ist es wünschenswert, die voreingestellte Verstärkung derAbkantpressenbewegung in der Öffnungsphase einzustellen (fein einzustellen). Vor allemwenn in der Öffnungsphase Vibrationen festgestellt werden, können Sie die Verstärkungverringern.Durch die Programmierung auf 0.0 erhalten Sie den voreingestellten Standardwert für dieVerstärkung.
Delem
V1101, 3.49
Parameter: 49Pressen Verstärkungseinstellung
Bereich : -1.0- +1.0Default : 0.0Einheit : -
FunktionZur Einstellung der Verstärkung in der Preßphase des Balkens.
BeschreibungManchmal ist es wünschenswert, die voreingestellte Verstärkung derAbkantpressenbewegung in der Preß- und Dekompressionsphase einzustellen (feineinzustellen). Vor allem wenn in der Preßphase Vibrationen festgestellt werden, können Siedie Verstärkung verringern. Aber auch die Positionierung an der programmierten Positionmuß korrekt sein.Durch die Programmierung auf 0.0 erhalten Sie den voreingestellten Standardwert für dieVerstärkung.
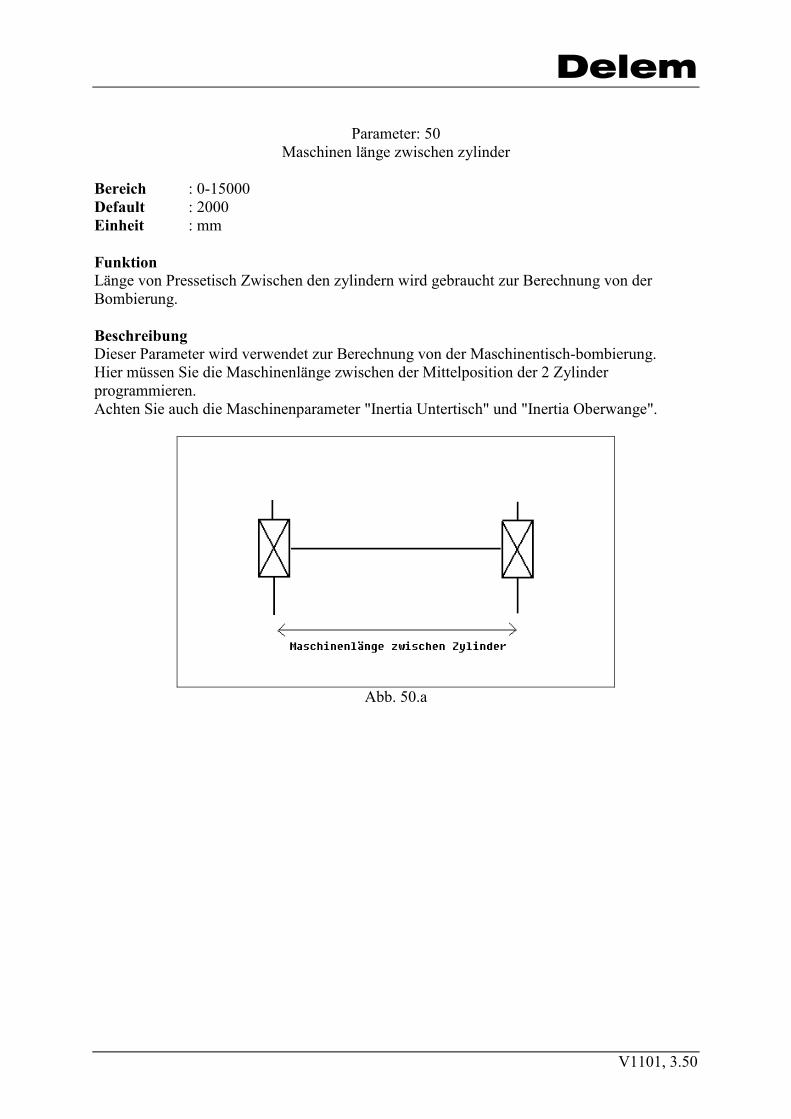
Delem
V1101, 3.50
Parameter: 50Maschinen länge zwischen zylinder
Bereich : 0-15000Default : 2000Einheit : mm
FunktionLänge von Pressetisch Zwischen den zylindern wird gebraucht zur Berechnung von derBombierung.
BeschreibungDieser Parameter wird verwendet zur Berechnung von der Maschinentisch-bombierung.Hier müssen Sie die Maschinenlänge zwischen der Mittelposition der 2 Zylinderprogrammieren.Achten Sie auch die Maschinenparameter "Inertia Untertisch" und "Inertia Oberwange".
Abb. 50.a
Delem
V1101, 3.51
Parameter: 51Inertia untertisch
Bereich : 0 - 99999Default : 624Einheit : 1000 cm4
FunktionInertia Maschinentisch wird gebraucht zur Berechnung von Tafelbombierung.
BeschreibungDieser Parameter wird gebraucht zur Berech-nung von Maschinentisch-bombierung. DieTischbombierung wird nur berechnet wenn ein Bombiergerät angeschlossen ist (Siehe Kapitel6).
Siehe auch Maschineparameter "Maschine Länge" und "Inertia Oberwange".
BeispielInertia = 1349000Programmiert wird 1349
Delem
V1101, 3.52
Parameter: 52Inertia oberwange
Bereich : 0 - 99999Default : 776Einheit : 1000 cm4
FunktionInertia Maschine Oberwange wird gebraucht zur Berechnung von Oberwangebombierung.
BeschreibungDieser Parameter wird gebraucht zur Berechnung von Maschine Oberwange-bombierung. DieTischbombierung wird nur berechnet wenn das Bombiergerät angeschlossen ist (Siehe Kapitel6).Siehe auch Maschine Parameter "Inertia Untertisch" und "Maschine Länge".
BeispielInertia = 1349000Programmiert wird 1349

Delem
V1101, 3.53
Parameter: 53nicht gebraucht
Delem
V1101, 3.54
Parameter: 54Gesamte Maschinen länge
Bereich : 0 - 15000Default : 2000Einheit : mm
FunktionTotale länge von Pressetisch zur Kontrolle mit Biegelänge eines Produktes
BeschreibungWenn die Bediener eine Biegelänge für ein Produkt eingibt die länger ist als die hierprogrammierte Maschinenlänge wird eine Meldung auf dem Bildschirm erscheinen.
Delem
V1101, 3.55
Parameter: 55Stempelklemmendruck
Bereich : 0-255Default : 0Einheit : DA-points
FunktionDruckeinstellung für korrekte Stempelklemmung.
BeschreibungEs ist möglich, den Ausgang zur Druckventil für das hydraulische System zu steuern, dies istvor allem für die Verwendung der Stempelklemmung gedacht. Dies kann nur mit derSequenzerdatei durchgeführt werden.
Delem
V1101, 3.56
Parameter: 56Matrizenklemmendruck
Bereich : 0-255Default : 0Einheit : DA-points
FunktionDruckeinstellung für korrekte Matrizenklemmung.
BeschreibungEs ist möglich, den Ausgang zur Druckventil für das hydraulische System zu steuern, dies istvor allem für die Verwendung der Matrizenklemmung gedacht. Dies kann nur mit derSequenzerdatei durchgeführt werden.
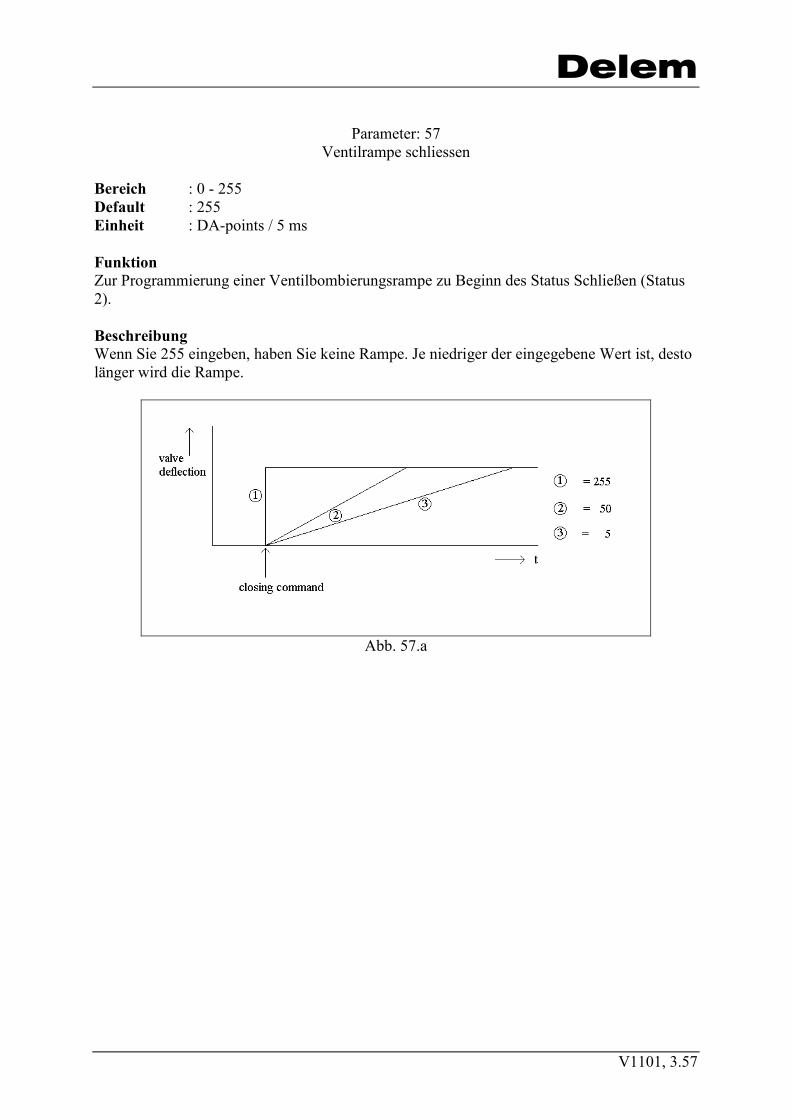
Delem
V1101, 3.57
Parameter: 57Ventilrampe schliessen
Bereich : 0 - 255Default : 255Einheit : DA-points / 5 ms
FunktionZur Programmierung einer Ventilbombierungsrampe zu Beginn des Status Schließen (Status2).
BeschreibungWenn Sie 255 eingeben, haben Sie keine Rampe. Je niedriger der eingegebene Wert ist, destolänger wird die Rampe.
Abb. 57.a

Delem
V1101, 3.58
Parameter: 58nicht gebraucht
Delem
V1101, 3.59
Parameter: 59Öffnungsdruck
Bereich : 35 - 100Default : 100Einheit : %
FunktionDruckeinstellung während der Öffnungsphase
BeschreibungSie können den Druck während der Öffnungsbewegung des Balkens einstellen. Dieser Wertist ein Prozentsatz des maximalen Drucks (Maschinenparameter 25).
AnmerkungVergewissern Sie sich, daß der Wert für diesen Parameter hoch genug ist! Wenn der Wert zuniedrig ist, bewegt sich der Balken nicht. Das ist eine gefährliche Situation. Wenn der Balkensich nach dem Einschalten der Pumpe nicht nach oben bewegt, aktiviert die Steuerung dasAusgangssignal OT (oberer Totpunkt).Wenn der Balken sich unter seinem Referenzpunkt befindet, fährt er ab, ohne bei einesSchließbefehls seine Referenz zu finden. Dadurch können die Werkzeuge beschädigt werden!
Daher wurde der Mindestwert auf 35% eingestellt.

Delem
V1101, 3.60
Parameter: 60 - 119nicht gebraucht
Delem
V1101, 3.120
Parameter: 120KO-Tabelle von Diskette ein/aus 1/0
Bereich : 0 - 1Default : 0Einheit : -
FunktionZum Einlesen der KO-Tabelle von der Diskette.
BeschreibungWährend der Entwicklung und der Testreihen der KO-Tabellen kann es sinnvoll sein, dieseDatei von der Diskette einzulesen, anstatt eine ganz neue Anwendung zu laden.0 = Verwendung der KO-Tabelle von der internen Anwendung;1 = KO-Tabelle von der Diskette laden.
Wenn dieser Parameter auf 1 eingestellt ist, kann die KO-Tabelle nur beim Starten von derDiskette eingelesen werden.
Nachdem die KO-Tabellen getestet wurden, sollten Sie diesen Parameter wieder auf 0einstellen. Überzeugen Sie sich davon, daß die benötigte KO-Tabelle mit den anderen Dateienauf der Anwenderdiskette ist. Laden Sie die Anwendung dann normal.
Delem
V1101, 3.121
Parameter: 121Sequenzer von Diskette ein/aus 1/0
Bereich : 0 - 1Default : 0Einheit : -
FunktionDie Sequenzerdatei von der Diskette einlesen.
BeschreibungWährend der Entwicklung und der Testreihen der Sequenzerdateien kann es sinnvoll sein,diese Datei von der Diskette einzulesen, anstatt eine ganz neue Anwendung zu laden.0 = Verwendung der Sequenzerdatei von der internen Anwendung1 = Die Sequenzerdatei von der Diskette laden
Wenn dieser Parameter auf 1 eingestellt ist, kann die Sequenzerdatei nur beim Starten von derDiskette eingelesen werden.
Nachdem die Sequenzerdatei getestet wurden, sollten Sie diesen Parameter wieder auf 0einstellen. Überzeugen Sie sich davon, daß die benötigte Sequenzerdatei mit den anderenDateien auf der Anwenderdiskette ist. Laden Sie die Anwendung dann normal.
BemerkungSchlagen Sie in der Gebrauchsanweisung des Sequenzers nach[3], wenn Sie mehrInformationen über die Arbeit mit der Sequenzerdatei wünschen. Diese Gebrauchsanweisungkann bei Delem angefordert werden.
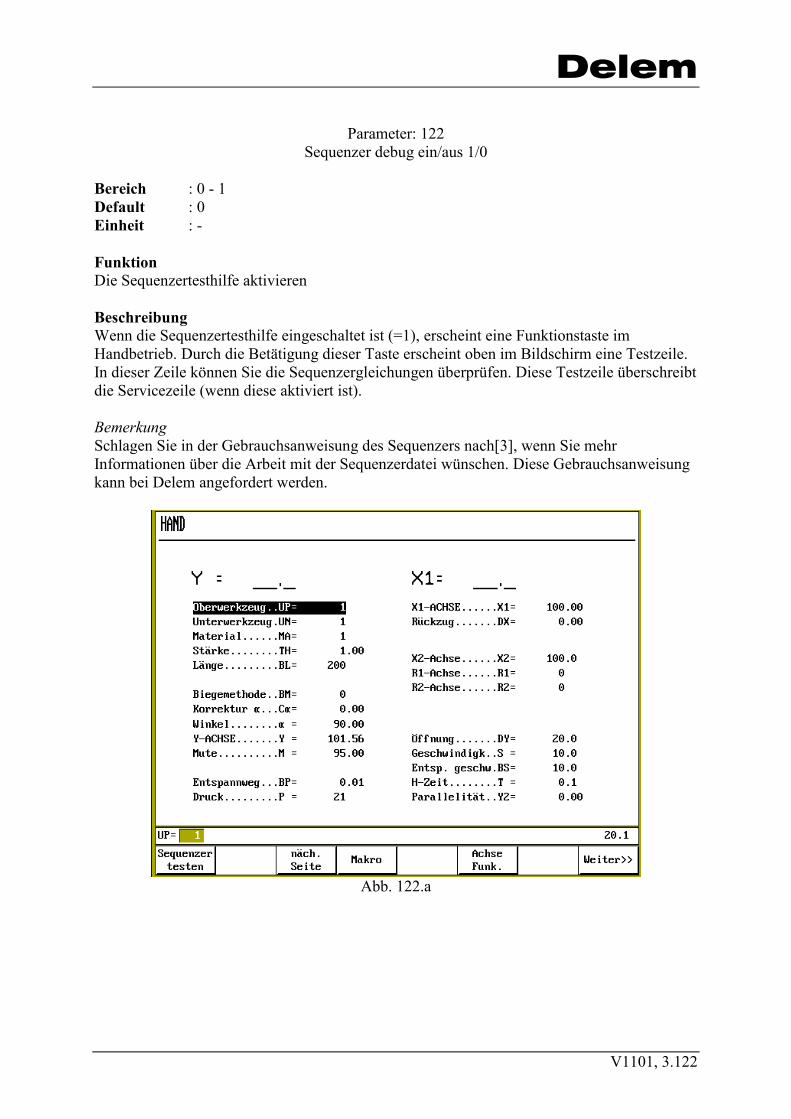
Delem
V1101, 3.122
Parameter: 122Sequenzer debug ein/aus 1/0
Bereich : 0 - 1Default : 0Einheit : -
FunktionDie Sequenzertesthilfe aktivieren
BeschreibungWenn die Sequenzertesthilfe eingeschaltet ist (=1), erscheint eine Funktionstaste imHandbetrieb. Durch die Betätigung dieser Taste erscheint oben im Bildschirm eine Testzeile.In dieser Zeile können Sie die Sequenzergleichungen überprüfen. Diese Testzeile überschreibtdie Servicezeile (wenn diese aktiviert ist).
BemerkungSchlagen Sie in der Gebrauchsanweisung des Sequenzers nach[3], wenn Sie mehrInformationen über die Arbeit mit der Sequenzerdatei wünschen. Diese Gebrauchsanweisungkann bei Delem angefordert werden.
Abb. 122.a
Delem
V1101, 3.123
Parameter: 123 - 130Sequenzer Option
Bereich : 0000 - 1111Default : 0000Einheit : -
FunktionAllgemeine Sequenzeroptionskennzeichen einstellen
BeschreibungEs können vier Kennzeichen je Sequenzeroptionsparameter eingestellt werden. JedesKennzeichen hat den Wert 0 oder 1.- Sequenzeroptionskennzeichen 4..1 123 = 0000- Sequenzeroptionskennzeichen 8..5 124 = 0000- Sequenzeroptionskennzeichen 12..9 125 = 0000- Sequenzeroptionskennzeichen 16..13 126 = 0000- Sequenzeroptionskennzeichen 20..17 127 = 0000- Sequenzeroptionskennzeichen 24..21 128 = 0000- Sequenzeroptionskennzeichen 28..25 129 = 0000- Sequenzeroptionskennzeichen 32..29 130 = 0000
Um die Optionskennzeichen 1 und 2 einzustellen, müssen Sie den Parameter 123 als 0011programmieren. Achten Sie darauf, daß Sie von rechts nach links zählen. Das niedrigsteKennzeichen jedes Parameters ist die Ziffer ganz rechts.
Diese Optionskennzeichen sind auf den Kennzeichen 7664 - 7695 registriert. DieseKennzeichen wurden ebenfalls der Datei press.def hinzugefügt. Daher werden dieKennzeichen 7664 und 7665 auf 1 eingestellt, wenn der Parameter 123 auf 0011 eingestelltist.
Variable KennzeichenM-OPTION1 7664M-OPTION2 7665... ...M-OPTION32 7695
Bemerkung 1Wenn Sie einen Standardsequenzer von Delem verwenden und nicht Ihren eigenen Sequenzeranfertigen, haben diese Parameter keine Funktion.
Bemerkung 2Schlagen Sie in der Gebrauchsanweisung des Sequenzers nach[3], wenn Sie mehrInformationen über die Arbeit mit der Sequenzerdatei wünschen. Diese Gebrauchsanweisungkann bei Delem angefordert werden.
Delem
V1101, 3.124
Parameter: 131UAP von Diskette ein/aus 1/0
Bereich : 0 - 1Default : 0Einheit : -
FunktionDie UAP.CMD Datei von der Diskette einlesen
BeschreibungWährend der Entwicklung und der Testreihen kann es sinnvoll sein, die UAP.CMD-Datei vonder Diskette einzulesen, anstatt eine ganz neue Anwendung zu laden.0 = Verwendung der internen Datei UAP.cmd, wenn verfügbar.1 = UAP.CMD von der Diskette laden
Wenn dieser Parameter auf 1 eingestellt ist, kann die Datei UAP.cmd nur beim Starten vonder Diskette eingelesen werden.Die Datei UAP.CMD kann mit der Datei APPL.CMD verglichen werden: Es handelt sichhierbei um eine kurze Textdatei mit Anweisungen für die Steuerung, um UAP-Dateien(Benutzeranwendungsdateien) von der Diskette in die Steuerung zu laden. Achten Sie darauf,dass die gewünschte Benutzeranwendungsdatei tatsächlich auf der Diskette vorhanden ist.
Nachdem die Datei UAP.CMD getestet wurden, sollten Sie diese Parameter wieder auf 0einstellen. Sobald die Benutzeranwendungsdatei getestet und akzeptiert worden ist, werdendie Anweisungen der UAP.CMD-Datei in den normalen Ladevorgang der Anwendungintegriert. Daher sollten Sie die Datei APPL.CMD auf der Anwenderdiskette anpassen.Überzeugen Sie sich davon, daß die benötigte uap Datei mit den anderen Dateien auf derAnwenderdiskette ist.Für weitere Informationen über UAP (Benutzeranwendungsdateien) können Sie sich jederzeitmit Delem in Verbindung setzen.
Delem
V1101, 4.1
4. HILFSACHSEN
4.1. Einführung
In diesem Kapitel wird das Verfahren zur Konfiguration der Achsen erläutert. DiesesVerfahren gilt für alle Achsen außer der Y-Achse.
Typische Parameter für Servo- oder Wechselstromantriebe werden in Kapitel 5 erläutert.Spezialachsen und deren Parameter werden in den Kapiteln 6 bis 9 beschrieben.
Die folgenden Achsentypen können in einer Steuerung programmiert werden:
• X-Achse• X2-Achse• R-Achse• R1-Achse• R2-Achse• Z-Achse• Z1-Achse• Z2-Achse• I-Achse (Kapitel 8)• allgemeiner Zweck, X3-Achse• allgemeiner Zweck, X4-Achse• allgemeiner Zweck, X1-Achse• allgemeiner Zweck, X2-Achse• R3-Achse• R4-Achse• Bombierung (Kapitel 6)• Digitale Achse (Kapitel 7)• Biegehilfe und zusätzliche Achsen (Kapitel 9)
4.2. Konfiguration der Achsen
Die Achsen werden in zwei Schritten konfiguriert:
1. Wählen und konfigurieren Sie das richtige Modul für eine Achse,2. Geben Sie eine Achse frei und programmieren Sie ihre Parameter.
Die einzige Ausnahme zu dieser Regel ist die Y-Achse. Wenn einmal ein Modul zurSteuerung der Y-Achse konfiguriert ist, können die Parameter für die Y-Achse mit der Option1 (Y-Achse und allgemeine Parameter) sofort programmiert werden.
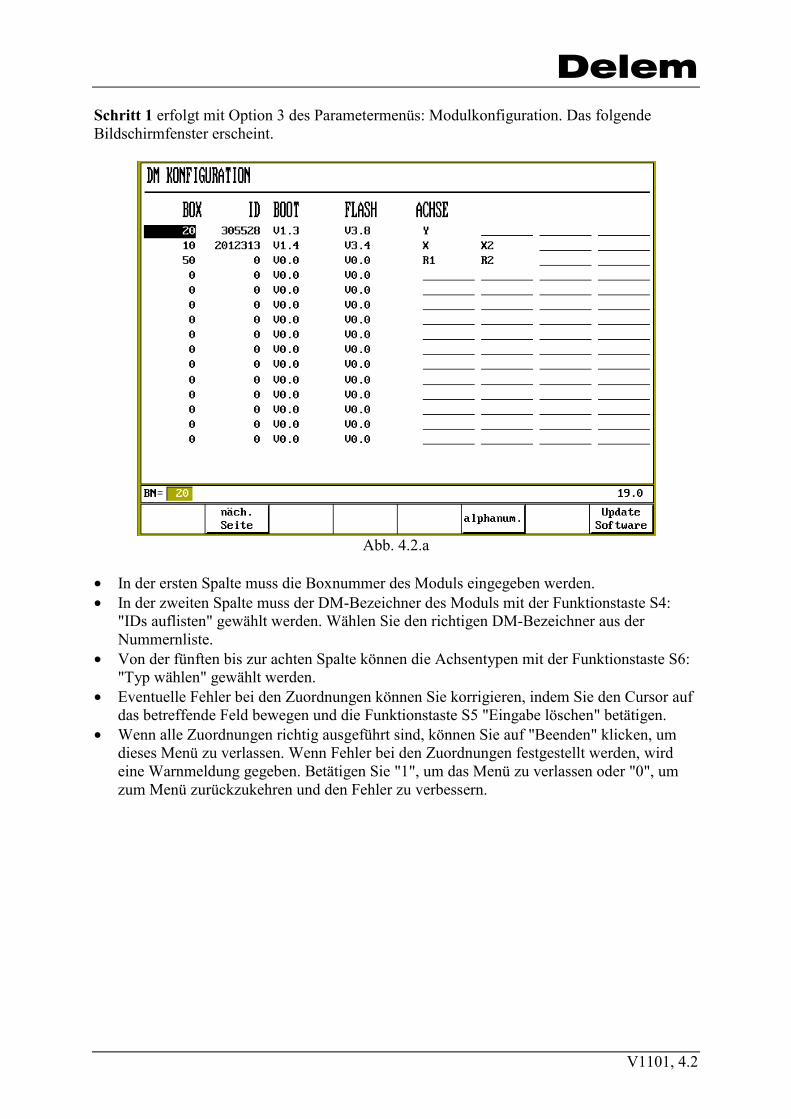
Delem
V1101, 4.2
Schritt 1 erfolgt mit Option 3 des Parametermenüs: Modulkonfiguration. Das folgendeBildschirmfenster erscheint.
Abb. 4.2.a
• In der ersten Spalte muss die Boxnummer des Moduls eingegeben werden.• In der zweiten Spalte muss der DM-Bezeichner des Moduls mit der Funktionstaste S4:
"IDs auflisten" gewählt werden. Wählen Sie den richtigen DM-Bezeichner aus derNummernliste.
• Von der fünften bis zur achten Spalte können die Achsentypen mit der Funktionstaste S6:"Typ wählen" gewählt werden.
• Eventuelle Fehler bei den Zuordnungen können Sie korrigieren, indem Sie den Cursor aufdas betreffende Feld bewegen und die Funktionstaste S5 "Eingabe löschen" betätigen.
• Wenn alle Zuordnungen richtig ausgeführt sind, können Sie auf "Beenden" klicken, umdieses Menü zu verlassen. Wenn Fehler bei den Zuordnungen festgestellt werden, wirdeine Warnmeldung gegeben. Betätigen Sie "1", um das Menü zu verlassen oder "0", umzum Menü zurückzukehren und den Fehler zu verbessern.
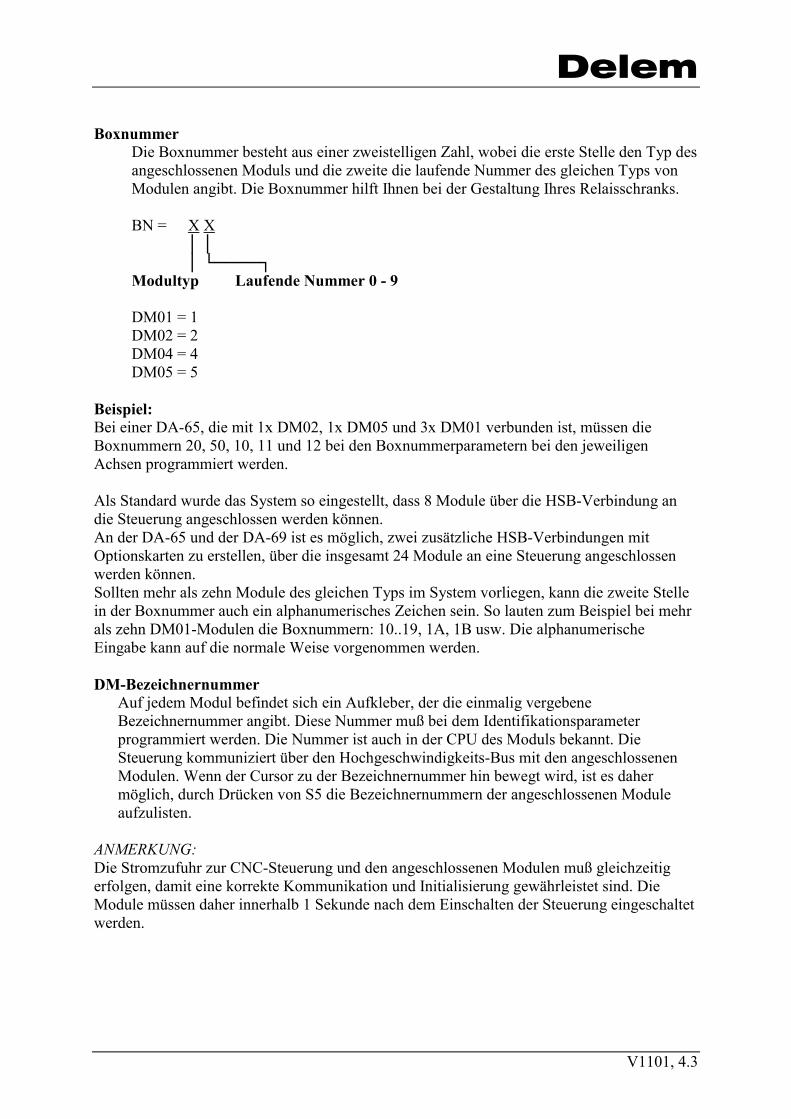
Delem
V1101, 4.3
BoxnummerDie Boxnummer besteht aus einer zweistelligen Zahl, wobei die erste Stelle den Typ desangeschlossenen Moduls und die zweite die laufende Nummer des gleichen Typs vonModulen angibt. Die Boxnummer hilft Ihnen bei der Gestaltung Ihres Relaisschranks.
BN = X X│ ││ └────┐
Modultyp Laufende Nummer 0 - 9
DM01 = 1DM02 = 2DM04 = 4DM05 = 5
Beispiel:Bei einer DA-65, die mit 1x DM02, 1x DM05 und 3x DM01 verbunden ist, müssen dieBoxnummern 20, 50, 10, 11 und 12 bei den Boxnummerparametern bei den jeweiligenAchsen programmiert werden.
Als Standard wurde das System so eingestellt, dass 8 Module über die HSB-Verbindung andie Steuerung angeschlossen werden können.An der DA-65 und der DA-69 ist es möglich, zwei zusätzliche HSB-Verbindungen mitOptionskarten zu erstellen, über die insgesamt 24 Module an eine Steuerung angeschlossenwerden können.Sollten mehr als zehn Module des gleichen Typs im System vorliegen, kann die zweite Stellein der Boxnummer auch ein alphanumerisches Zeichen sein. So lauten zum Beispiel bei mehrals zehn DM01-Modulen die Boxnummern: 10..19, 1A, 1B usw. Die alphanumerischeEingabe kann auf die normale Weise vorgenommen werden.
DM-BezeichnernummerAuf jedem Modul befindet sich ein Aufkleber, der die einmalig vergebeneBezeichnernummer angibt. Diese Nummer muß bei dem Identifikationsparameterprogrammiert werden. Die Nummer ist auch in der CPU des Moduls bekannt. DieSteuerung kommuniziert über den Hochgeschwindigkeits-Bus mit den angeschlossenenModulen. Wenn der Cursor zu der Bezeichnernummer hin bewegt wird, ist es dahermöglich, durch Drücken von S5 die Bezeichnernummern der angeschlossenen Moduleaufzulisten.
ANMERKUNG:Die Stromzufuhr zur CNC-Steuerung und den angeschlossenen Modulen muß gleichzeitigerfolgen, damit eine korrekte Kommunikation und Initialisierung gewährleistet sind. DieModule müssen daher innerhalb 1 Sekunde nach dem Einschalten der Steuerung eingeschaltetwerden.
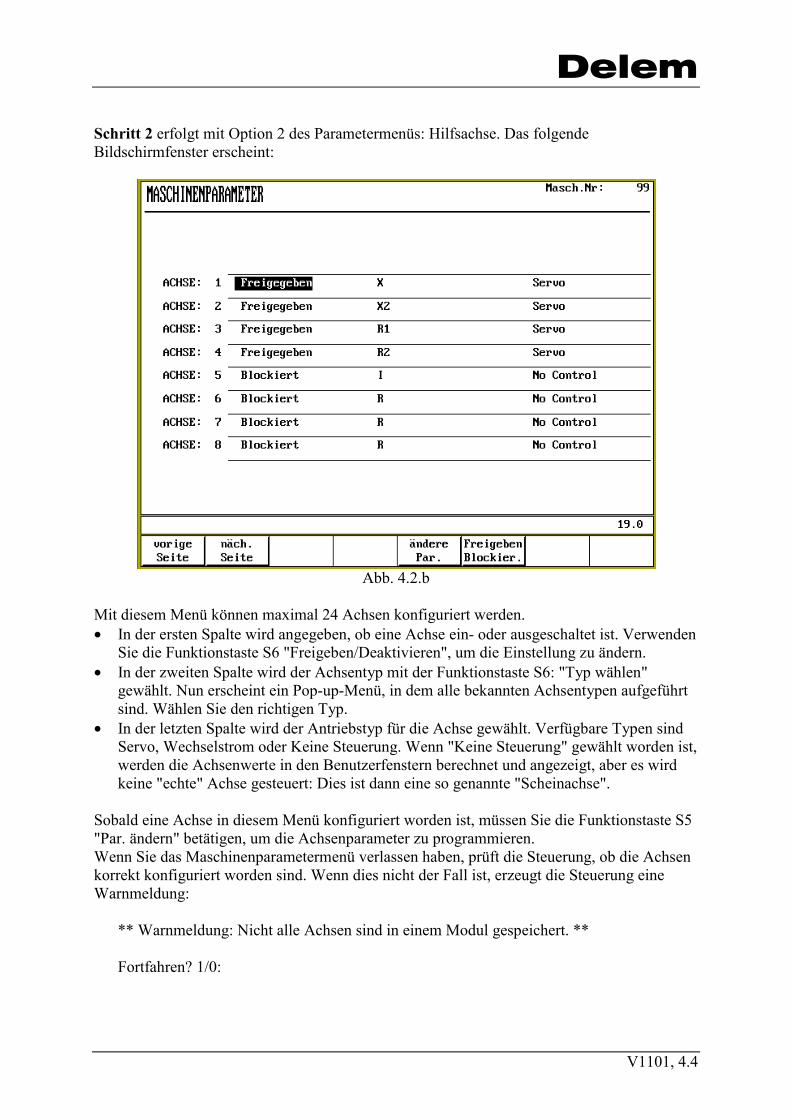
Delem
V1101, 4.4
Schritt 2 erfolgt mit Option 2 des Parametermenüs: Hilfsachse. Das folgendeBildschirmfenster erscheint:
Abb. 4.2.b
Mit diesem Menü können maximal 24 Achsen konfiguriert werden.• In der ersten Spalte wird angegeben, ob eine Achse ein- oder ausgeschaltet ist. Verwenden
Sie die Funktionstaste S6 "Freigeben/Deaktivieren", um die Einstellung zu ändern.• In der zweiten Spalte wird der Achsentyp mit der Funktionstaste S6: "Typ wählen"
gewählt. Nun erscheint ein Pop-up-Menü, in dem alle bekannten Achsentypen aufgeführtsind. Wählen Sie den richtigen Typ.
• In der letzten Spalte wird der Antriebstyp für die Achse gewählt. Verfügbare Typen sindServo, Wechselstrom oder Keine Steuerung. Wenn "Keine Steuerung" gewählt worden ist,werden die Achsenwerte in den Benutzerfenstern berechnet und angezeigt, aber es wirdkeine "echte" Achse gesteuert: Dies ist dann eine so genannte "Scheinachse".
Sobald eine Achse in diesem Menü konfiguriert worden ist, müssen Sie die Funktionstaste S5"Par. ändern" betätigen, um die Achsenparameter zu programmieren.Wenn Sie das Maschinenparametermenü verlassen haben, prüft die Steuerung, ob die Achsenkorrekt konfiguriert worden sind. Wenn dies nicht der Fall ist, erzeugt die Steuerung eineWarnmeldung:
** Warnmeldung: Nicht alle Achsen sind in einem Modul gespeichert. **
Fortfahren? 1/0:
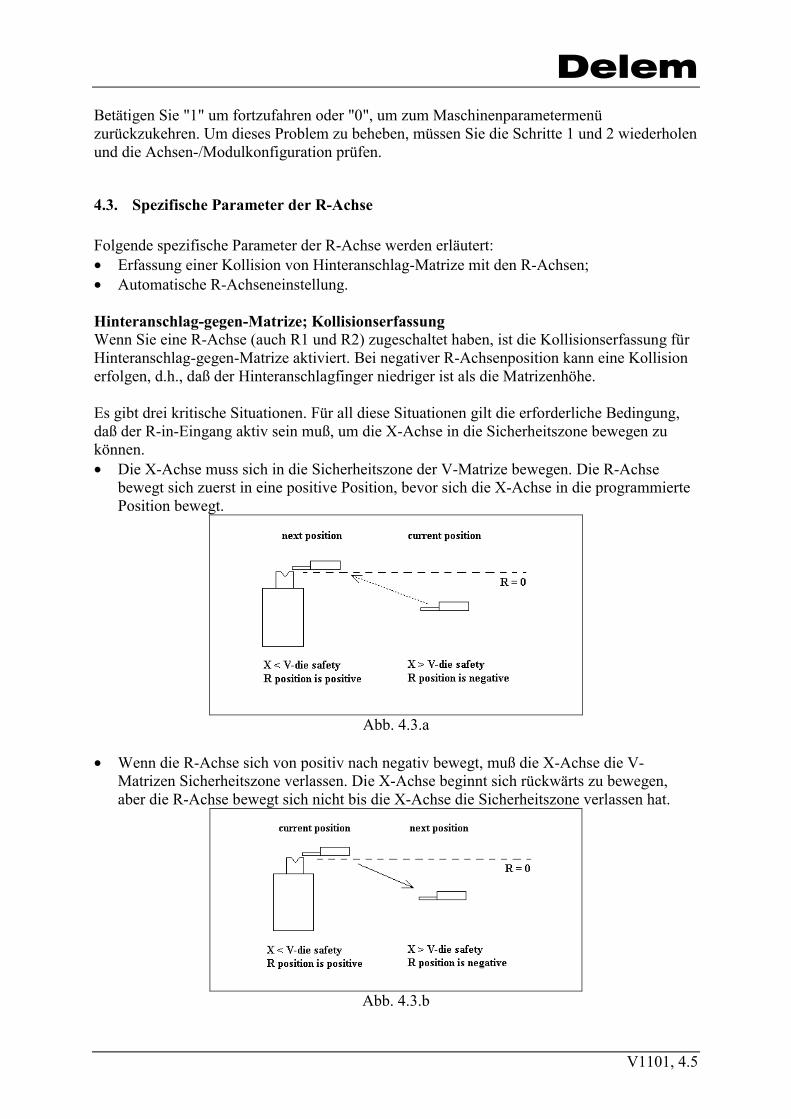
Delem
V1101, 4.5
Betätigen Sie "1" um fortzufahren oder "0", um zum Maschinenparametermenüzurückzukehren. Um dieses Problem zu beheben, müssen Sie die Schritte 1 und 2 wiederholenund die Achsen-/Modulkonfiguration prüfen.
4.3. Spezifische Parameter der R-Achse
Folgende spezifische Parameter der R-Achse werden erläutert:• Erfassung einer Kollision von Hinteranschlag-Matrize mit den R-Achsen;• Automatische R-Achseneinstellung.
Hinteranschlag-gegen-Matrize; KollisionserfassungWenn Sie eine R-Achse (auch R1 und R2) zugeschaltet haben, ist die Kollisionserfassung fürHinteranschlag-gegen-Matrize aktiviert. Bei negativer R-Achsenposition kann eine Kollisionerfolgen, d.h., daß der Hinteranschlagfinger niedriger ist als die Matrizenhöhe.
Es gibt drei kritische Situationen. Für all diese Situationen gilt die erforderliche Bedingung,daß der R-in-Eingang aktiv sein muß, um die X-Achse in die Sicherheitszone bewegen zukönnen.• Die X-Achse muss sich in die Sicherheitszone der V-Matrize bewegen. Die R-Achse
bewegt sich zuerst in eine positive Position, bevor sich die X-Achse in die programmiertePosition bewegt.
Abb. 4.3.a
• Wenn die R-Achse sich von positiv nach negativ bewegt, muß die X-Achse die V-Matrizen Sicherheitszone verlassen. Die X-Achse beginnt sich rückwärts zu bewegen,aber die R-Achse bewegt sich nicht bis die X-Achse die Sicherheitszone verlassen hat.
Abb. 4.3.b
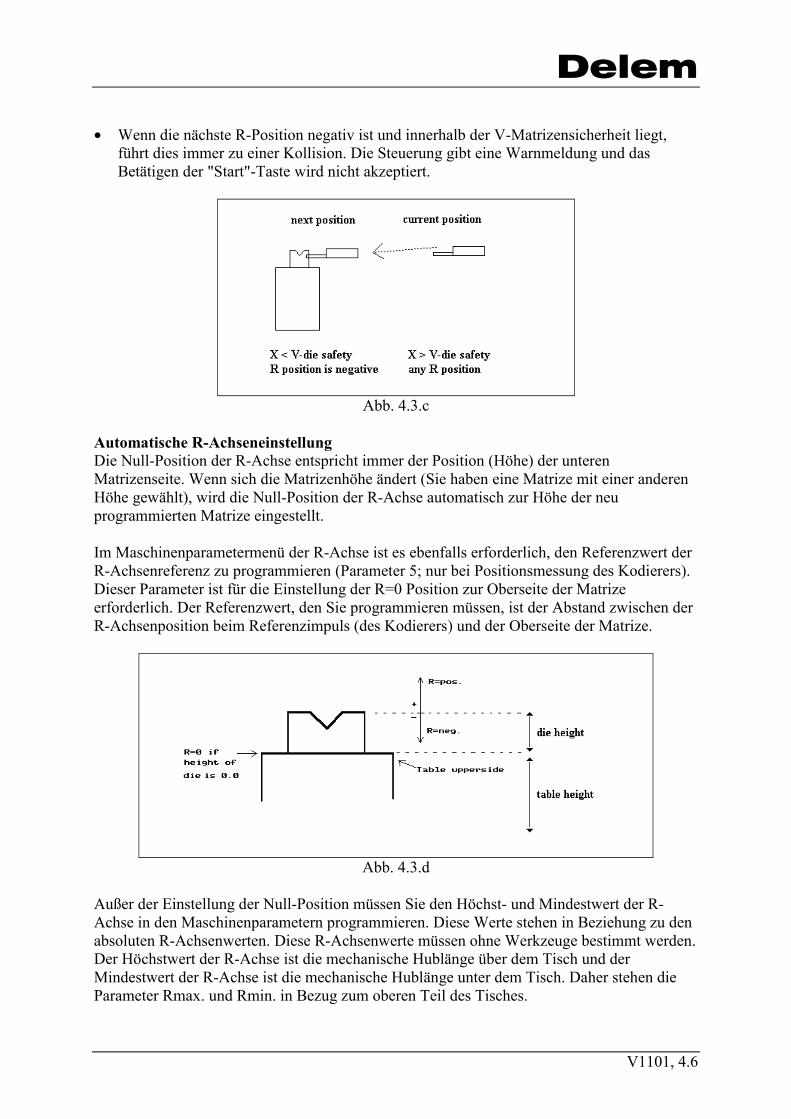
Delem
V1101, 4.6
• Wenn die nächste R-Position negativ ist und innerhalb der V-Matrizensicherheit liegt,führt dies immer zu einer Kollision. Die Steuerung gibt eine Warnmeldung und dasBetätigen der "Start"-Taste wird nicht akzeptiert.
Abb. 4.3.c
Automatische R-AchseneinstellungDie Null-Position der R-Achse entspricht immer der Position (Höhe) der unterenMatrizenseite. Wenn sich die Matrizenhöhe ändert (Sie haben eine Matrize mit einer anderenHöhe gewählt), wird die Null-Position der R-Achse automatisch zur Höhe der neuprogrammierten Matrize eingestellt.
Im Maschinenparametermenü der R-Achse ist es ebenfalls erforderlich, den Referenzwert derR-Achsenreferenz zu programmieren (Parameter 5; nur bei Positionsmessung des Kodierers).Dieser Parameter ist für die Einstellung der R=0 Position zur Oberseite der Matrizeerforderlich. Der Referenzwert, den Sie programmieren müssen, ist der Abstand zwischen derR-Achsenposition beim Referenzimpuls (des Kodierers) und der Oberseite der Matrize.
Abb. 4.3.d
Außer der Einstellung der Null-Position müssen Sie den Höchst- und Mindestwert der R-Achse in den Maschinenparametern programmieren. Diese Werte stehen in Beziehung zu denabsoluten R-Achsenwerten. Diese R-Achsenwerte müssen ohne Werkzeuge bestimmt werden.Der Höchstwert der R-Achse ist die mechanische Hublänge über dem Tisch und derMindestwert der R-Achse ist die mechanische Hublänge unter dem Tisch. Daher stehen dieParameter Rmax. und Rmin. in Bezug zum oberen Teil des Tisches.
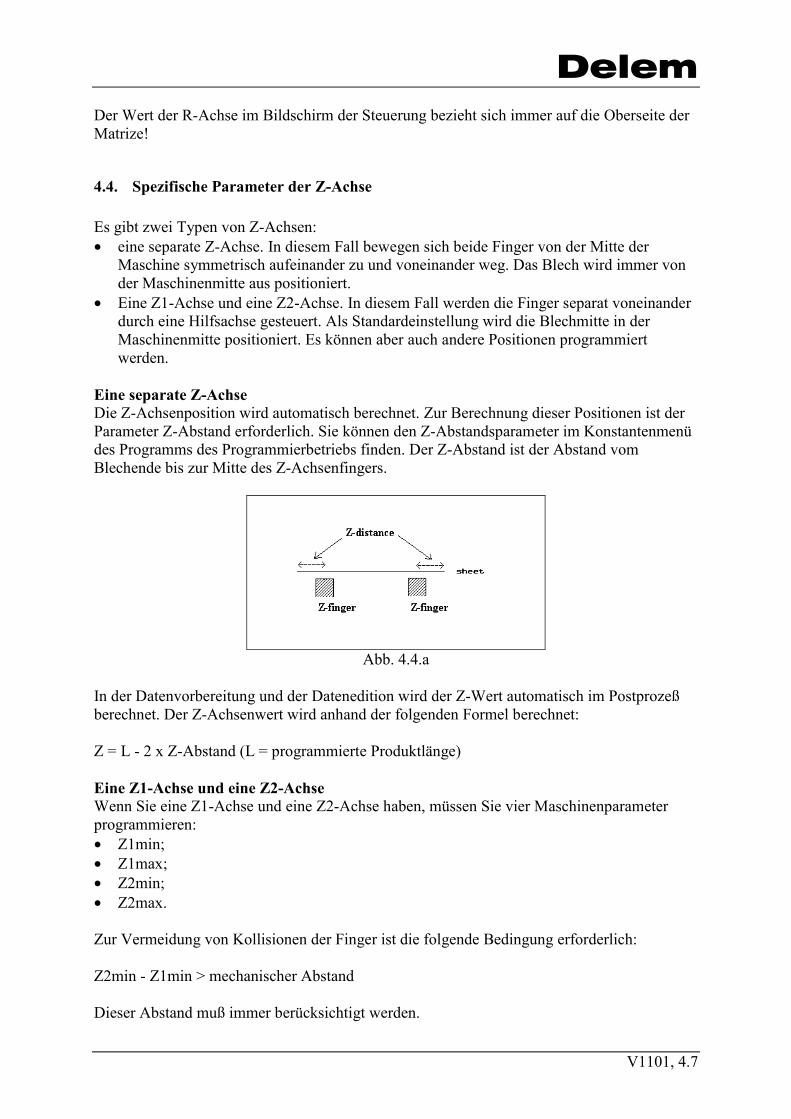
Delem
V1101, 4.7
Der Wert der R-Achse im Bildschirm der Steuerung bezieht sich immer auf die Oberseite derMatrize!
4.4. Spezifische Parameter der Z-Achse
Es gibt zwei Typen von Z-Achsen:• eine separate Z-Achse. In diesem Fall bewegen sich beide Finger von der Mitte der
Maschine symmetrisch aufeinander zu und voneinander weg. Das Blech wird immer vonder Maschinenmitte aus positioniert.
• Eine Z1-Achse und eine Z2-Achse. In diesem Fall werden die Finger separat voneinanderdurch eine Hilfsachse gesteuert. Als Standardeinstellung wird die Blechmitte in derMaschinenmitte positioniert. Es können aber auch andere Positionen programmiertwerden.
Eine separate Z-AchseDie Z-Achsenposition wird automatisch berechnet. Zur Berechnung dieser Positionen ist derParameter Z-Abstand erforderlich. Sie können den Z-Abstandsparameter im Konstantenmenüdes Programms des Programmierbetriebs finden. Der Z-Abstand ist der Abstand vomBlechende bis zur Mitte des Z-Achsenfingers.
Abb. 4.4.a
In der Datenvorbereitung und der Datenedition wird der Z-Wert automatisch im Postprozeßberechnet. Der Z-Achsenwert wird anhand der folgenden Formel berechnet:
Z = L - 2 x Z-Abstand (L = programmierte Produktlänge)
Eine Z1-Achse und eine Z2-AchseWenn Sie eine Z1-Achse und eine Z2-Achse haben, müssen Sie vier Maschinenparameterprogrammieren:• Z1min;• Z1max;• Z2min;• Z2max.
Zur Vermeidung von Kollisionen der Finger ist die folgende Bedingung erforderlich:
Z2min - Z1min > mechanischer Abstand
Dieser Abstand muß immer berücksichtigt werden.
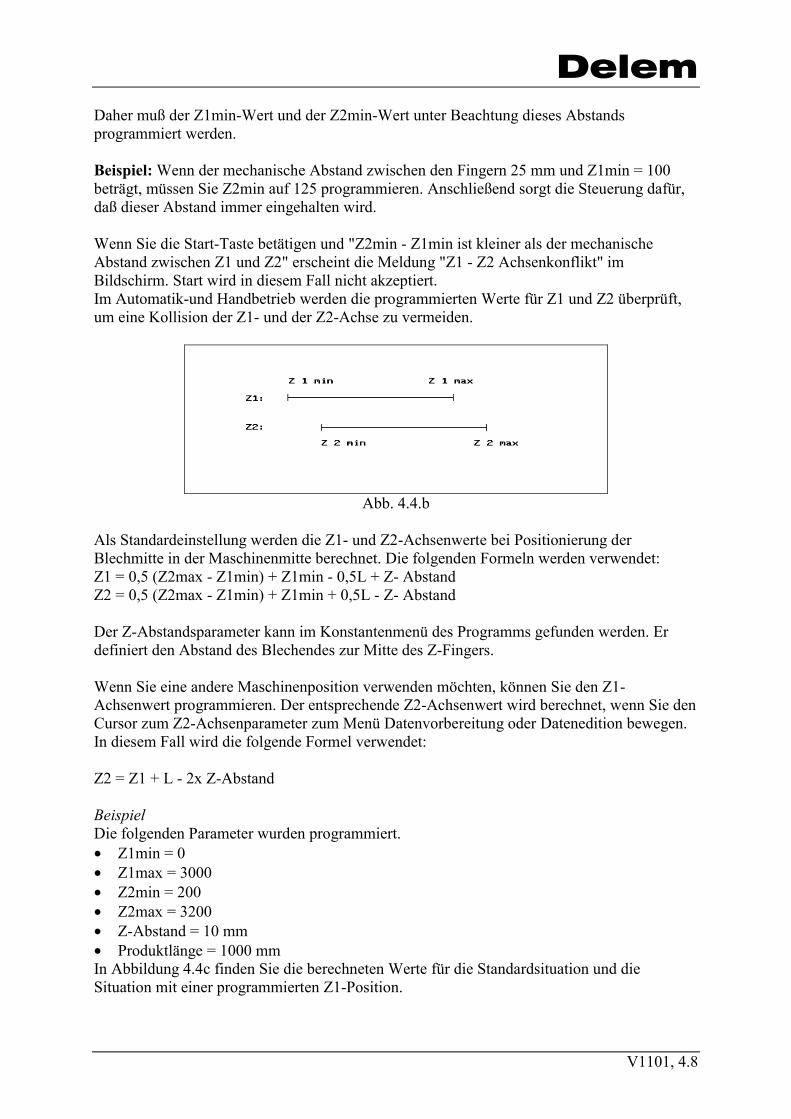
Delem
V1101, 4.8
Daher muß der Z1min-Wert und der Z2min-Wert unter Beachtung dieses Abstandsprogrammiert werden.
Beispiel: Wenn der mechanische Abstand zwischen den Fingern 25 mm und Z1min = 100beträgt, müssen Sie Z2min auf 125 programmieren. Anschließend sorgt die Steuerung dafür,daß dieser Abstand immer eingehalten wird.
Wenn Sie die Start-Taste betätigen und "Z2min - Z1min ist kleiner als der mechanischeAbstand zwischen Z1 und Z2" erscheint die Meldung "Z1 - Z2 Achsenkonflikt" imBildschirm. Start wird in diesem Fall nicht akzeptiert.Im Automatik-und Handbetrieb werden die programmierten Werte für Z1 und Z2 überprüft,um eine Kollision der Z1- und der Z2-Achse zu vermeiden.
Abb. 4.4.b
Als Standardeinstellung werden die Z1- und Z2-Achsenwerte bei Positionierung derBlechmitte in der Maschinenmitte berechnet. Die folgenden Formeln werden verwendet:Z1 = 0,5 (Z2max - Z1min) + Z1min - 0,5L + Z- AbstandZ2 = 0,5 (Z2max - Z1min) + Z1min + 0,5L - Z- Abstand
Der Z-Abstandsparameter kann im Konstantenmenü des Programms gefunden werden. Erdefiniert den Abstand des Blechendes zur Mitte des Z-Fingers.
Wenn Sie eine andere Maschinenposition verwenden möchten, können Sie den Z1-Achsenwert programmieren. Der entsprechende Z2-Achsenwert wird berechnet, wenn Sie denCursor zum Z2-Achsenparameter zum Menü Datenvorbereitung oder Datenedition bewegen.In diesem Fall wird die folgende Formel verwendet:
Z2 = Z1 + L - 2x Z-Abstand
BeispielDie folgenden Parameter wurden programmiert.• Z1min = 0• Z1max = 3000• Z2min = 200• Z2max = 3200• Z-Abstand = 10 mm• Produktlänge = 1000 mmIn Abbildung 4.4c finden Sie die berechneten Werte für die Standardsituation und dieSituation mit einer programmierten Z1-Position.
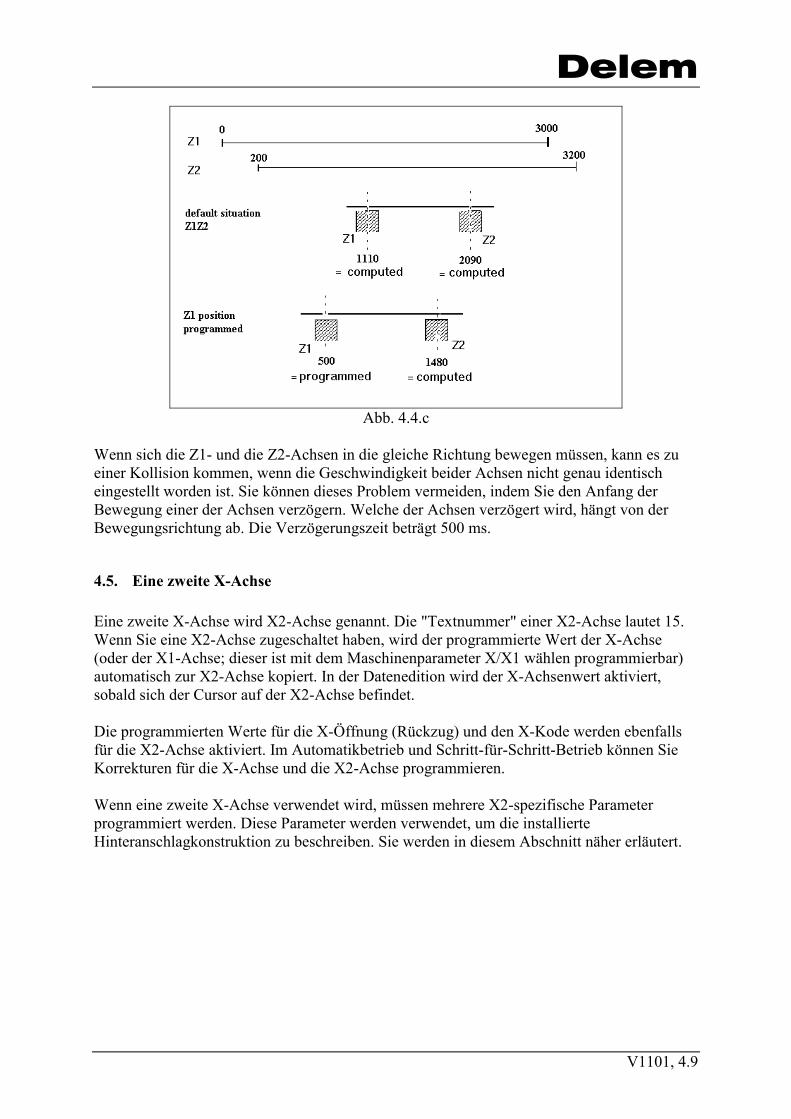
Delem
V1101, 4.9
Abb. 4.4.c
Wenn sich die Z1- und die Z2-Achsen in die gleiche Richtung bewegen müssen, kann es zueiner Kollision kommen, wenn die Geschwindigkeit beider Achsen nicht genau identischeingestellt worden ist. Sie können dieses Problem vermeiden, indem Sie den Anfang derBewegung einer der Achsen verzögern. Welche der Achsen verzögert wird, hängt von derBewegungsrichtung ab. Die Verzögerungszeit beträgt 500 ms.
4.5. Eine zweite X-Achse
Eine zweite X-Achse wird X2-Achse genannt. Die "Textnummer" einer X2-Achse lautet 15.Wenn Sie eine X2-Achse zugeschaltet haben, wird der programmierte Wert der X-Achse(oder der X1-Achse; dieser ist mit dem Maschinenparameter X/X1 wählen programmierbar)automatisch zur X2-Achse kopiert. In der Datenedition wird der X-Achsenwert aktiviert,sobald sich der Cursor auf der X2-Achse befindet.
Die programmierten Werte für die X-Öffnung (Rückzug) und den X-Kode werden ebenfallsfür die X2-Achse aktiviert. Im Automatikbetrieb und Schritt-für-Schritt-Betrieb können SieKorrekturen für die X-Achse und die X2-Achse programmieren.
Wenn eine zweite X-Achse verwendet wird, müssen mehrere X2-spezifische Parameterprogrammiert werden. Diese Parameter werden verwendet, um die installierteHinteranschlagkonstruktion zu beschreiben. Sie werden in diesem Abschnitt näher erläutert.
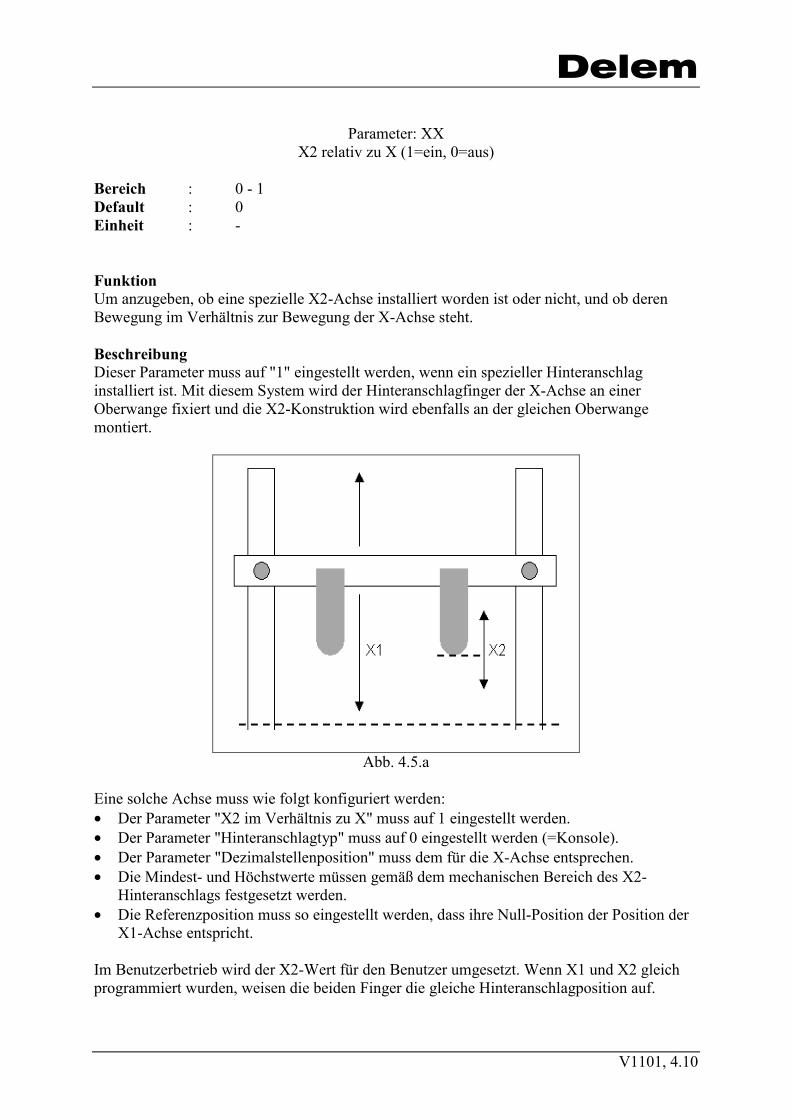
Delem
V1101, 4.10
Parameter: XXX2 relativ zu X (1=ein, 0=aus)
Bereich : 0 - 1Default : 0Einheit : -
FunktionUm anzugeben, ob eine spezielle X2-Achse installiert worden ist oder nicht, und ob derenBewegung im Verhältnis zur Bewegung der X-Achse steht.
BeschreibungDieser Parameter muss auf "1" eingestellt werden, wenn ein spezieller Hinteranschlaginstalliert ist. Mit diesem System wird der Hinteranschlagfinger der X-Achse an einerOberwange fixiert und die X2-Konstruktion wird ebenfalls an der gleichen Oberwangemontiert.
Abb. 4.5.a
Eine solche Achse muss wie folgt konfiguriert werden:• Der Parameter "X2 im Verhältnis zu X" muss auf 1 eingestellt werden.• Der Parameter "Hinteranschlagtyp" muss auf 0 eingestellt werden (=Konsole).• Der Parameter "Dezimalstellenposition" muss dem für die X-Achse entsprechen.• Die Mindest- und Höchstwerte müssen gemäß dem mechanischen Bereich des X2-
Hinteranschlags festgesetzt werden.• Die Referenzposition muss so eingestellt werden, dass ihre Null-Position der Position der
X1-Achse entspricht.
Im Benutzerbetrieb wird der X2-Wert für den Benutzer umgesetzt. Wenn X1 und X2 gleichprogrammiert wurden, weisen die beiden Finger die gleiche Hinteranschlagposition auf.
Delem
V1101, 4.11
Parameter: 7Max. X1/X2 Abstand
Bereich : 0 - 9999Default : 0Einheit : mm
FunktionUm den maximal zulässigen Abstand zwischen den beiden X-Achsen zu programmieren.
BeschreibungMit diesem Parameter kann der maximal zulässige Wert für den Abstand zwischen der X1-und der X2-Achse programmiert werden.
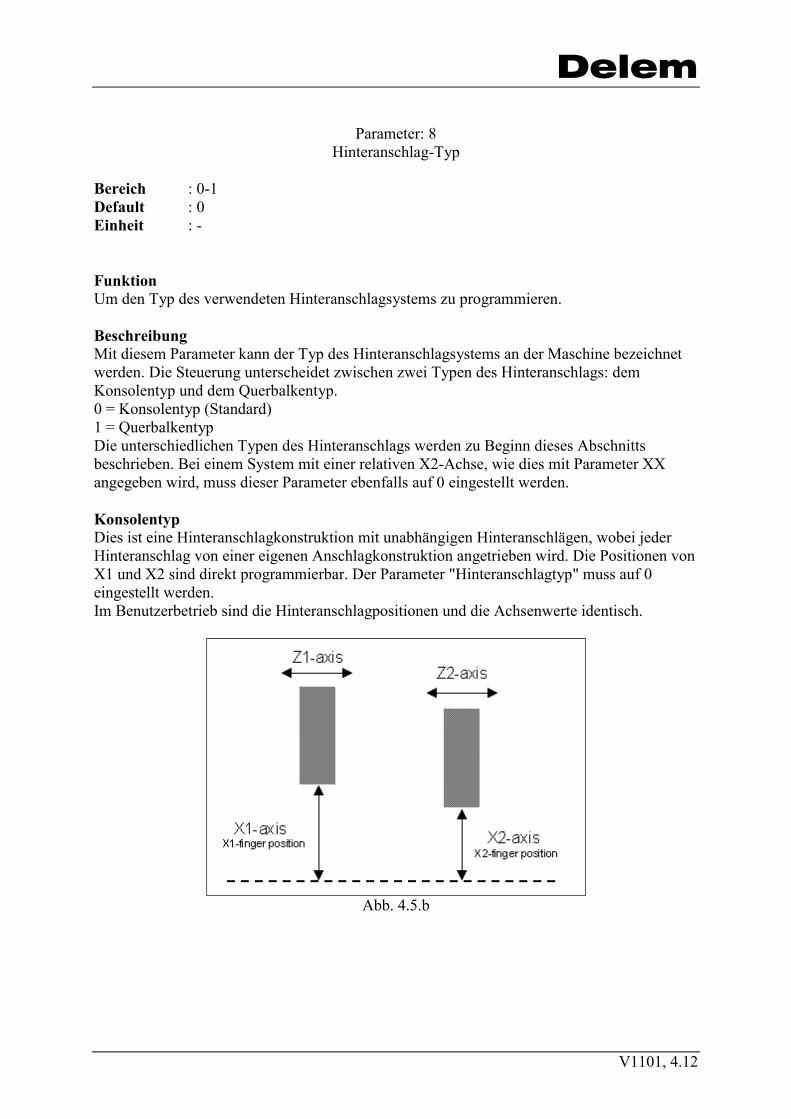
Delem
V1101, 4.12
Parameter: 8Hinteranschlag-Typ
Bereich : 0-1Default : 0Einheit : -
FunktionUm den Typ des verwendeten Hinteranschlagsystems zu programmieren.
BeschreibungMit diesem Parameter kann der Typ des Hinteranschlagsystems an der Maschine bezeichnetwerden. Die Steuerung unterscheidet zwischen zwei Typen des Hinteranschlags: demKonsolentyp und dem Querbalkentyp.0 = Konsolentyp (Standard)1 = QuerbalkentypDie unterschiedlichen Typen des Hinteranschlags werden zu Beginn dieses Abschnittsbeschrieben. Bei einem System mit einer relativen X2-Achse, wie dies mit Parameter XXangegeben wird, muss dieser Parameter ebenfalls auf 0 eingestellt werden.
KonsolentypDies ist eine Hinteranschlagkonstruktion mit unabhängigen Hinteranschlägen, wobei jederHinteranschlag von einer eigenen Anschlagkonstruktion angetrieben wird. Die Positionen vonX1 und X2 sind direkt programmierbar. Der Parameter "Hinteranschlagtyp" muss auf 0eingestellt werden.Im Benutzerbetrieb sind die Hinteranschlagpositionen und die Achsenwerte identisch.
Abb. 4.5.b
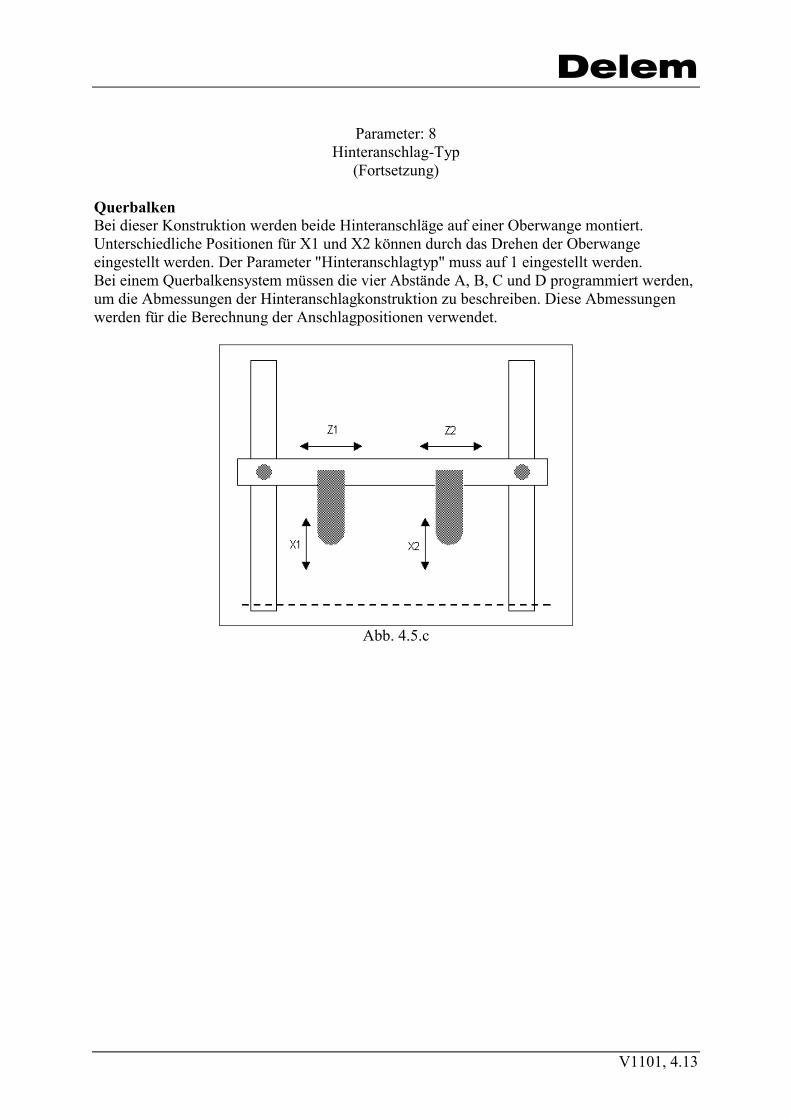
Delem
V1101, 4.13
Parameter: 8Hinteranschlag-Typ
(Fortsetzung)
QuerbalkenBei dieser Konstruktion werden beide Hinteranschläge auf einer Oberwange montiert.Unterschiedliche Positionen für X1 und X2 können durch das Drehen der Oberwangeeingestellt werden. Der Parameter "Hinteranschlagtyp" muss auf 1 eingestellt werden.Bei einem Querbalkensystem müssen die vier Abstände A, B, C und D programmiert werden,um die Abmessungen der Hinteranschlagkonstruktion zu beschreiben. Diese Abmessungenwerden für die Berechnung der Anschlagpositionen verwendet.
Abb. 4.5.c
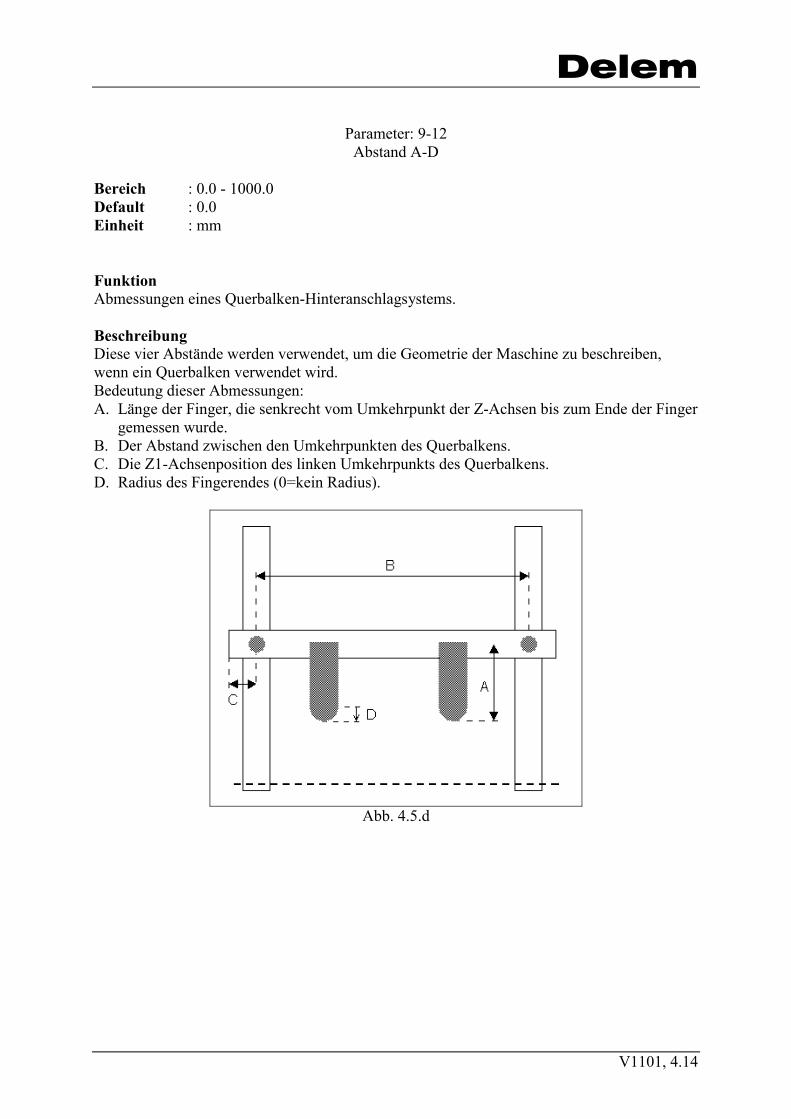
Delem
V1101, 4.14
Parameter: 9-12Abstand A-D
Bereich : 0.0 - 1000.0Default : 0.0Einheit : mm
FunktionAbmessungen eines Querbalken-Hinteranschlagsystems.
BeschreibungDiese vier Abstände werden verwendet, um die Geometrie der Maschine zu beschreiben,wenn ein Querbalken verwendet wird.Bedeutung dieser Abmessungen:A. Länge der Finger, die senkrecht vom Umkehrpunkt der Z-Achsen bis zum Ende der Finger
gemessen wurde.B. Der Abstand zwischen den Umkehrpunkten des Querbalkens.C. Die Z1-Achsenposition des linken Umkehrpunkts des Querbalkens.D. Radius des Fingerendes (0=kein Radius).
Abb. 4.5.d
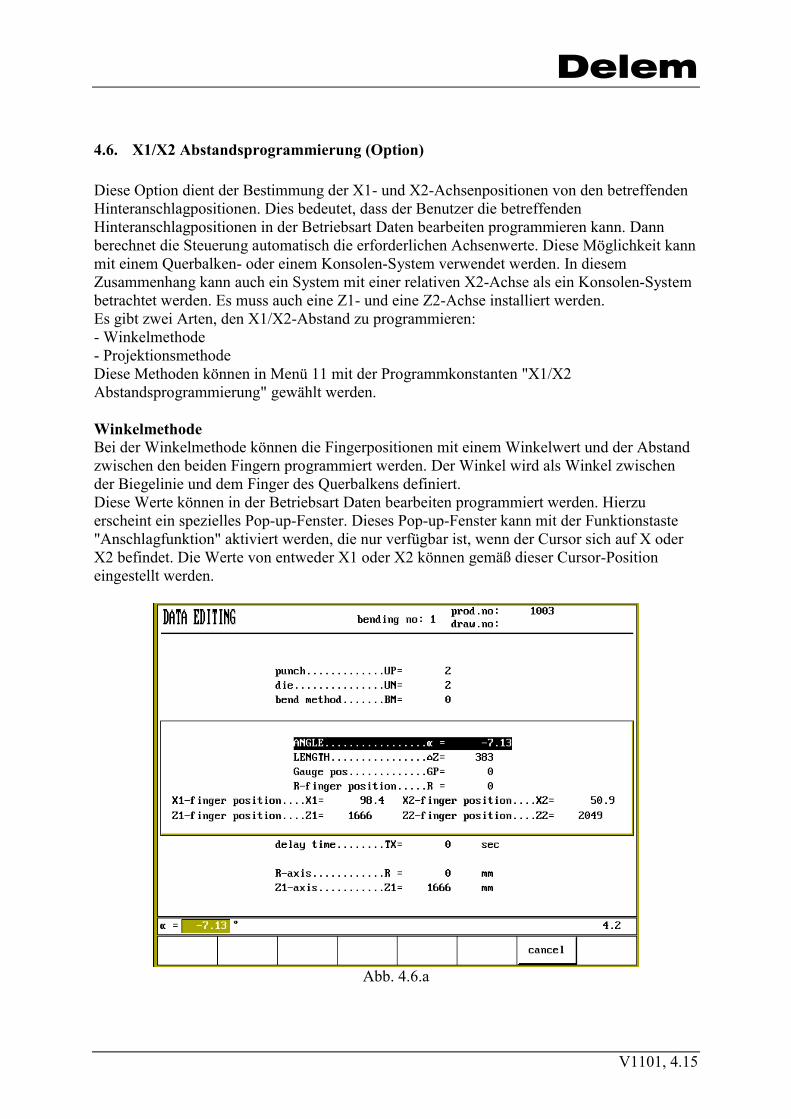
Delem
V1101, 4.15
4.6. X1/X2 Abstandsprogrammierung (Option)
Diese Option dient der Bestimmung der X1- und X2-Achsenpositionen von den betreffendenHinteranschlagpositionen. Dies bedeutet, dass der Benutzer die betreffendenHinteranschlagpositionen in der Betriebsart Daten bearbeiten programmieren kann. Dannberechnet die Steuerung automatisch die erforderlichen Achsenwerte. Diese Möglichkeit kannmit einem Querbalken- oder einem Konsolen-System verwendet werden. In diesemZusammenhang kann auch ein System mit einer relativen X2-Achse als ein Konsolen-Systembetrachtet werden. Es muss auch eine Z1- und eine Z2-Achse installiert werden.Es gibt zwei Arten, den X1/X2-Abstand zu programmieren:- Winkelmethode- ProjektionsmethodeDiese Methoden können in Menü 11 mit der Programmkonstanten "X1/X2Abstandsprogrammierung" gewählt werden.
WinkelmethodeBei der Winkelmethode können die Fingerpositionen mit einem Winkelwert und der Abstandzwischen den beiden Fingern programmiert werden. Der Winkel wird als Winkel zwischender Biegelinie und dem Finger des Querbalkens definiert.Diese Werte können in der Betriebsart Daten bearbeiten programmiert werden. Hierzuerscheint ein spezielles Pop-up-Fenster. Dieses Pop-up-Fenster kann mit der Funktionstaste"Anschlagfunktion" aktiviert werden, die nur verfügbar ist, wenn der Cursor sich auf X oderX2 befindet. Die Werte von entweder X1 oder X2 können gemäß dieser Cursor-Positioneingestellt werden.
Abb. 4.6.a
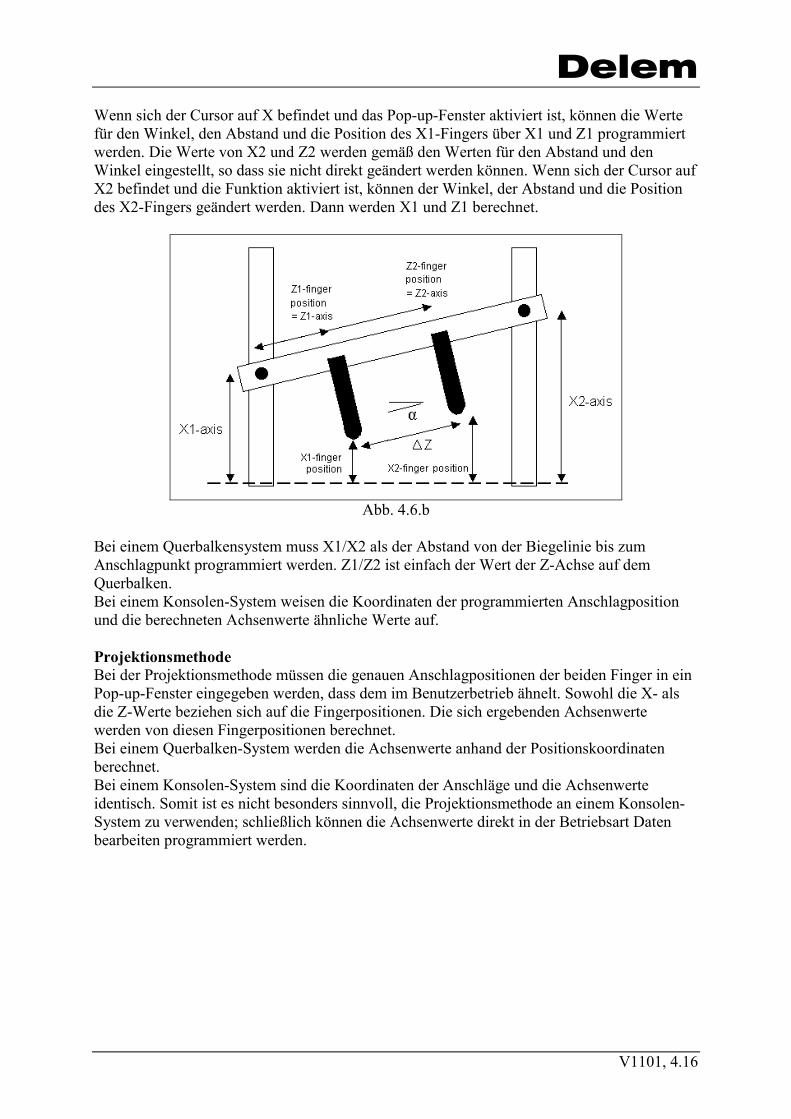
Delem
V1101, 4.16
Wenn sich der Cursor auf X befindet und das Pop-up-Fenster aktiviert ist, können die Wertefür den Winkel, den Abstand und die Position des X1-Fingers über X1 und Z1 programmiertwerden. Die Werte von X2 und Z2 werden gemäß den Werten für den Abstand und denWinkel eingestellt, so dass sie nicht direkt geändert werden können. Wenn sich der Cursor aufX2 befindet und die Funktion aktiviert ist, können der Winkel, der Abstand und die Positiondes X2-Fingers geändert werden. Dann werden X1 und Z1 berechnet.
Abb. 4.6.b
Bei einem Querbalkensystem muss X1/X2 als der Abstand von der Biegelinie bis zumAnschlagpunkt programmiert werden. Z1/Z2 ist einfach der Wert der Z-Achse auf demQuerbalken.Bei einem Konsolen-System weisen die Koordinaten der programmierten Anschlagpositionund die berechneten Achsenwerte ähnliche Werte auf.
ProjektionsmethodeBei der Projektionsmethode müssen die genauen Anschlagpositionen der beiden Finger in einPop-up-Fenster eingegeben werden, dass dem im Benutzerbetrieb ähnelt. Sowohl die X- alsdie Z-Werte beziehen sich auf die Fingerpositionen. Die sich ergebenden Achsenwertewerden von diesen Fingerpositionen berechnet.Bei einem Querbalken-System werden die Achsenwerte anhand der Positionskoordinatenberechnet.Bei einem Konsolen-System sind die Koordinaten der Anschläge und die Achsenwerteidentisch. Somit ist es nicht besonders sinnvoll, die Projektionsmethode an einem Konsolen-System zu verwenden; schließlich können die Achsenwerte direkt in der Betriebsart Datenbearbeiten programmiert werden.
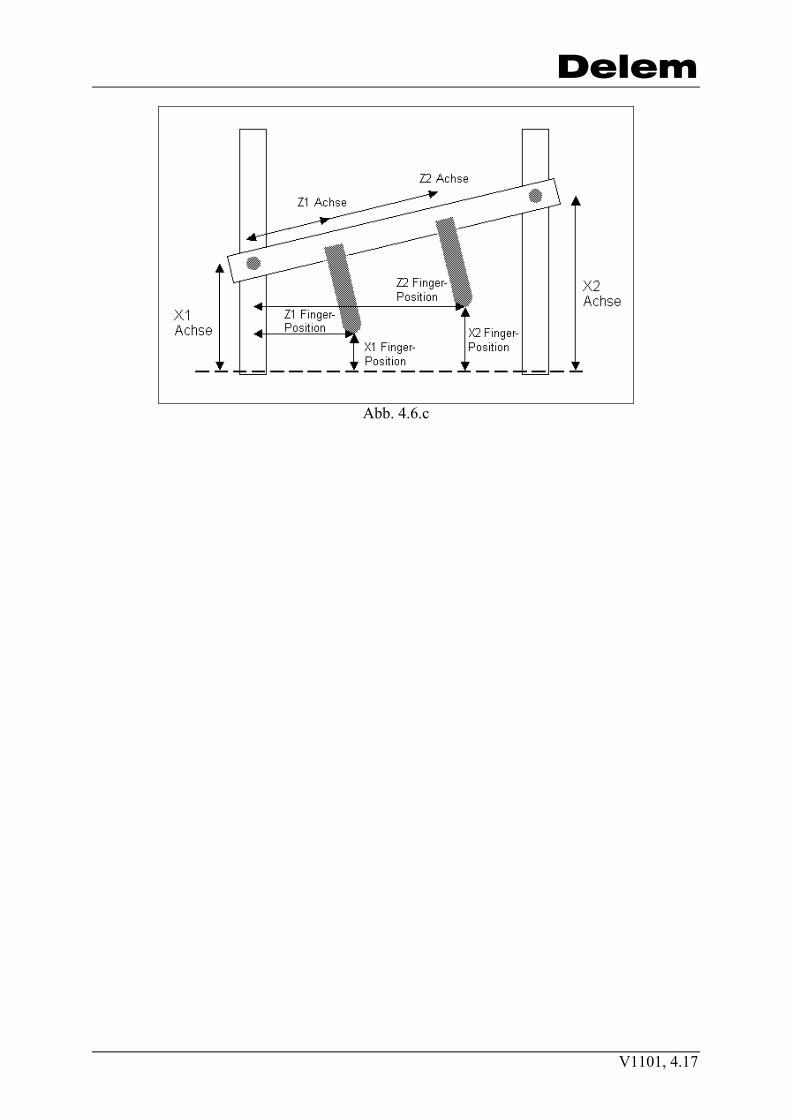
Delem
V1101, 4.17
Abb. 4.6.c
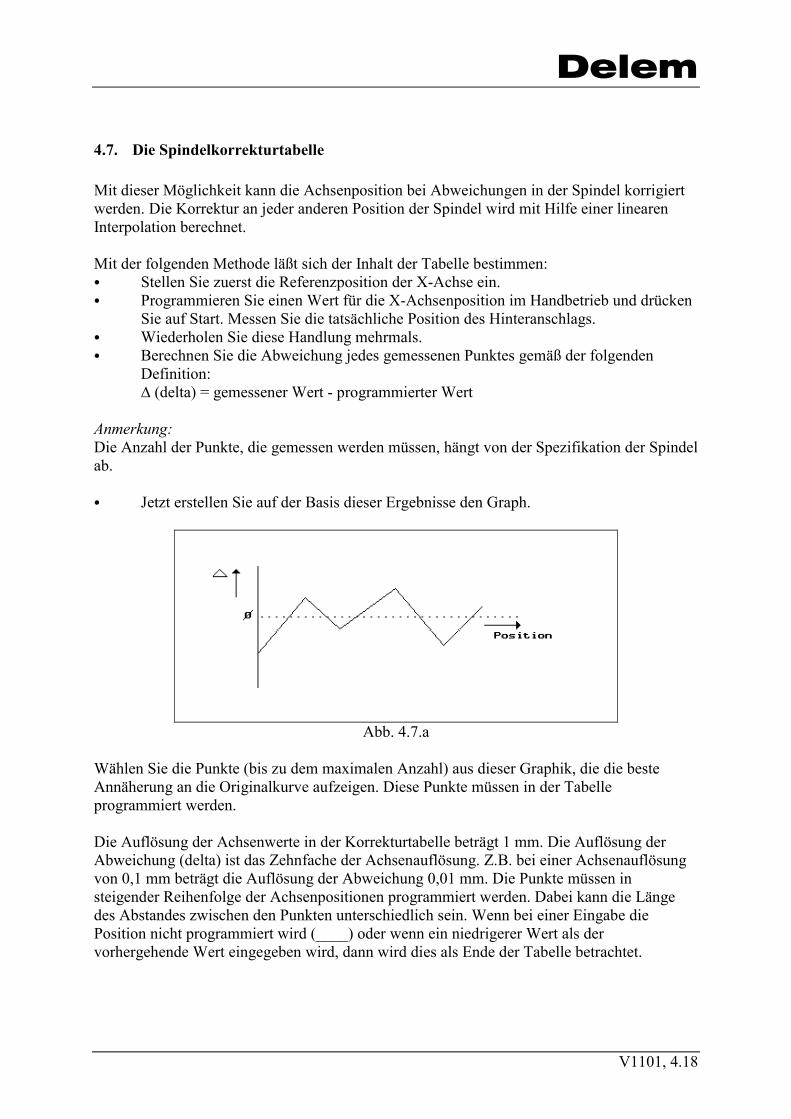
Delem
V1101, 4.18
4.7. Die Spindelkorrekturtabelle
Mit dieser Möglichkeit kann die Achsenposition bei Abweichungen in der Spindel korrigiertwerden. Die Korrektur an jeder anderen Position der Spindel wird mit Hilfe einer linearenInterpolation berechnet.
Mit der folgenden Methode läßt sich der Inhalt der Tabelle bestimmen:� Stellen Sie zuerst die Referenzposition der X-Achse ein.� Programmieren Sie einen Wert für die X-Achsenposition im Handbetrieb und drücken
Sie auf Start. Messen Sie die tatsächliche Position des Hinteranschlags.� Wiederholen Sie diese Handlung mehrmals.� Berechnen Sie die Abweichung jedes gemessenen Punktes gemäß der folgenden
Definition:∆ (delta) = gemessener Wert - programmierter Wert
Anmerkung:Die Anzahl der Punkte, die gemessen werden müssen, hängt von der Spezifikation der Spindelab.
� Jetzt erstellen Sie auf der Basis dieser Ergebnisse den Graph.
Abb. 4.7.a
Wählen Sie die Punkte (bis zu dem maximalen Anzahl) aus dieser Graphik, die die besteAnnäherung an die Originalkurve aufzeigen. Diese Punkte müssen in der Tabelleprogrammiert werden.
Die Auflösung der Achsenwerte in der Korrekturtabelle beträgt 1 mm. Die Auflösung derAbweichung (delta) ist das Zehnfache der Achsenauflösung. Z.B. bei einer Achsenauflösungvon 0,1 mm beträgt die Auflösung der Abweichung 0,01 mm. Die Punkte müssen insteigender Reihenfolge der Achsenpositionen programmiert werden. Dabei kann die Längedes Abstandes zwischen den Punkten unterschiedlich sein. Wenn bei einer Eingabe diePosition nicht programmiert wird (____) oder wenn ein niedrigerer Wert als dervorhergehende Wert eingegeben wird, dann wird dies als Ende der Tabelle betrachtet.
Delem
V1101, 4.19
Um eine Spindelkorrekturtabelle zu erstellen, muss eine einfache ASCII-Textdatei mit denfolgenden Tabellenwerten angelegt werden:
;VERSION: Beispiel-X;CONFIG: X: CX10 C0.5X500 C1.0X1000 C2.6
In diesem Beispiel werden drei Sollwerte für die X-Achse definiert. Die Angabe "VERSION"in der ersten Zeile kann verwendet werden, um der Tabelle einen Namen oder eineFassungsnummer zu geben, dies ist jedoch nicht erforderlich.Die Angabe "CONFIG" muss verwendet werden, um das Format der Tabelleneingabenanzugeben. Auf den folgenden Zeilen stehen die tatsächlichen Tabelleneingaben.
Eine Spindelkorrekturtabelle kann von einer Diskette geladen werden. Um eine Tabelle füreine bestimmte Achse zu erkennen, erhält jede Tabelle einen speziellen Dateinamen,"spcorXX.tab". In diesem Namen muss "XX" durch die Indexnummer der betreffenden Achseersetzt werden.Die folgenden Achsennummer können in Dateinamen für Tabellen verwendet werden:
00 X-Achse01 R-Achse02 R1-Achse03 R2-Achse06 Z-Achse09 Z1-Achse10 Z2-Achse13 I-Achse15 X2-Achse17 allgemeiner Einsatz, X3-Achse18 allgemeiner Einsatz, X4-Achse19 allgemeiner Einsatz, X1-Achse20 allgemeiner Einsatz, X2-Achse21 Biegehilfe40 R3-Achse41 R4-Achse
Eine solche Tabelle kann im Parametermenü der Achse geladen werden. In diesem Menü istdie Funktionstaste "load cor. table" verfügbar. Wird sie betätigt, sucht die Steuerung einegültige Datei im Laufwerk. Wenn das Laden erfolgreich verlaufen ist, erscheint dieZeichenfolge "SpCor.:" in der obersten Zeile. Dahinter steht der Name oder die Version derTabelle, wenn dies in der Textdatei angegeben ist. Sollte der Ladevorgang nicht erfolgreichverlaufen sein, erscheint die Meldung "Datei ist nicht vorhanden".Eine geladene Korrekturtabelle kann mit der Funktionstaste "Kor.tabelle löschen" gelöschtwerden. Diese Funktionstaste erscheint automatisch, nachdem eine Tabelle geladen wordenist.
Delem
V1101, 4.20
Der Inhalt der Spindelkorrekturtabellen kann in der DA-Steuerung bearbeitet werden. Wenneine Spindelkorrekturtabelle für eine Servoachse installiert worden ist, erscheint die folgendeFunktionstaste im Hilfsachsenfenster:
S6: Tabelle bearbeiten
Wenn S6 gewählt worden ist, wird ein Submenü geöffnet. Die aktuellen Inhalte der Tabellewerden in diesem Fenster angezeigt.
Es erscheinen zwei Spalten mit den folgenden Bezeichnungen:
X = AchsenpositionC= Korrekturwert
Die Bezeichnungen, die im Fenster erscheinen, müssen mit den in der Tabellendateiangeführten Bezeichnungen übereinstimmen.
Mit den Funktionstasten sind die folgenden Funktionen verfügbar:
S3 Eintrag anpassen Die Angaben auf dieser mit dem Cursor gewählten Zeilekönnen angepasst werden.
S4 Neuer Eintrag Eine neue Zeile in die Tabelle einfügen.S5 Eintrag löschen Die mit dem Cursor gewählte Zeile kann gelöscht
werden.S6 Tabelle speichern Die in diesem Fenster gezeigte Datei wird intern
gespeichert.
Delem
V1101, 5.1
5. HILFSACHSENPARAMETER
5.1. Einführung
In diesem Kapitel werden die Maschinenparameter für die einzelnen Achsentypen erläutert.In Paragraph 5.2 finden sich die Standardparameter für die Achsen.In Paragraph 5.3 finden sich die Parameter für die Servoachsen.In Paragraph 5.4 finden sich alle Parameter für die Achsen mit Wechselstromantrieben.
Die Parameter für Spezialachsen werden in den Kapiteln 6 bis 9 erläutert.
5.2. Standard-Achsenparameter
Auf den folgenden Seiten werden die Standard-Achsenparameter erläutert.
Diese Standardparameter liegen für nahezu alle Achsen vor, ganz gleich, ob es sich um eineServosteuerung oder eine Wechselstromsteuerung handelt.
Delem
V1101, 5.2
Parameter: 7Min. Position
Bereich : -999999 - +999999Default : -9999Einheit : mm
Hinweis : Bei einer R-Achse (R, R1 und R2) siehe auch Abschnitt 4.3.
FunktionMinimaler Hilfsachsenwert in den Anzeigewerten. Wenn die Achse von Hand bewegt wird,wird die Position auch auf diesen Wert begrenzt.
Delem
V1101, 5.3
Parameter: 8Max. Position
Bereich : -999999 - +999999Default : 9999Einheit : mm
Hinweis : Bei einer R-Achse (R, R1 und R2) siehe auch Abschnitt 4.3.
FunktionMaximaler Hilfsachsenwert in den Anzeigewerten. Wenn die Achse von Hand bewegt wird,wird die Position auch auf diesen Wert begrenzt.
Delem
V1101, 5.4
Parameter: 28Positionsmessungsystem
Bereich : 0 - 1Default : 0Einheit : -
Hinweis : Nicht für die X2-Achse
FunktionZur Wahl des Positionsmeßssystems der Achse.
BeschreibungFür jede Achse können zwei Typen des Positionsmeßsystems gewählt werden.0 = Kodierer1 = Potentiometer
Messung der KodiererpositionDieser Parameterwert beeinflußt die Verwendung anderer Parameter.Wenn Sie die Messung der Kodiererposition durchgeführt haben, können Sie die folgendenParameter programmieren:• Pre scaling.................................... 9• Reference position........................ 5• Ref. search direction..................... 6• RSD switch mounted.................... 17• Reference search speed................. 21
Messung der PotentiometerpositionWenn Sie die Messung der Potentiometerposition durchgeführt haben, erhalten Sie statt derParameter 9, 5, 6, 17 und 21 die folgenden Parameter zur Programmierung:• AD-min......................................... 29• AD-max........................................ 30
Delem
V1101, 5.5
Parameter: SLAnzahl Sklaven
Bereich : 0 - 4Default : 0Einheit : -
Hinweis : Nicht für X- oder X2-Achse
FunktionZur Programmierung der Anzahl Nebenachsen.
BeschreibungEs ist möglich, mehrere Module für eine Achsenfunktion zu installieren. Nun wird ein Modulstandardmäßig für die Achse konfiguriert und andere Module werden als Nebensysteme dergleichen Achse betrachtet. Somit können bis zu fünf R-Achsen auf den gleichen Wertgebracht werden, der für eine einzige R-Achse in der Steuerung programmiert wurde. JedeNebenachse wird unabhängig von einem DM-Modul gesteuert.
Sie brauchen nur die Hauptachsenposition zu programmieren. Die Nebenachsen passen sichentsprechend an. Die Positionen der Nebenachsen erscheinen nicht in derBenutzerschnittstelle. Wenn Sie die Anzahl der Nebenachsen definiert haben, erscheint dieFunktionstaste "Nebenachsen zeigen". Mit dieser Funktionstaste erhalten Sie Zugang zu denNebenachsenparametern. Für jede Nebenachse werden die folgenden Parameter benötigt:• Referenzposition;• Zählrichtung des Kodierers.
Alle anderen Einstellungen der Maschinenparameter werden automatisch von der Hauptachseverwendet bzw. kopiert.
Delem
V1101, 5.6
Parameter: 9Vorteilung
Bereich : 1.000 - 999.999Default : 1.000Einheit : -
Hinweis : Nur in Kombination mit dem Positionsmeßsystem des Kodierers.
FunktionFür die Einstellung der Normierung für die korrekte Funktion des Kodierers. Anzahl derZählimpulse (des Kodierers) je Anzeigeeinheit.
BeschreibungDieser Parameter definiert die Beziehung zwischen den Zählimpulsen und den in derSteuerung programmierten und angezeigten Werten.
Eine Anzeigeeinheit entspricht der kleinsten programmierbaren Einheit. MöglicheMaßeinheiten sind: 1, 0,1, 0,01 und 0,001. Dies hängt von Parameter 15"Dezimalstellenposition" ab.
BeispielDie Anzeigenwerte erscheinen in 0,1 mm. Eine Achse mit Spindel mit einerAchsengewindesteigung von 5,0 mm und einem Kodierer mit 50 Impulsen pro Umdrehung.Dies bedeutet 50 Impulse/5,0 mm Verschiebung.
50 Impulse/5,0 mm = 1 Impuls/0,1 mm
Die Kodiererimpulse sind mit vier zu multiplizieren, weil alle vier Zustände einer Periode vonder Steuerung gezählt werden.
Vorskalierung = 1 * 4 = 4
Delem
V1101, 5.7
Parameter: 5Referenz-position
Bereich : -999999 - +999999Default : 0Einheit : mm
Hinweis : Nur in Kombination mit dem Positionsmeßsystem des Kodierers.
FunktionHilfsachsen-Referenzposition
BeschreibungDies ist die Position des Referenzkoders auf der Hilfs-Servo-Achse.Bei Handbetrieb der Steuerung, können Sie eine Hilfsachse wählen, damit ihre Positionsichtbar wird (Manuelle Positionierung). Wenn die Hilfsachse ihre Referenz noch nichtpassiert hat, wird dies wie folgt sichtbar: -.-Die Hilfsachse wird den Referenz-Such-Zyklus beginnen, sowie sie die erste Positionentfangen hat von der Steuerung.
Der Referenz-Such-Zyklus ist wie folgt:1. Betätigen Sie die Start-taste auf die Steuerung.2. Der Achse bewegt sich auf eine Seite, bis eine "Ende Hub Schalter" erreicht ist.
Die Richtung in welche sich die Achse bewegt, wird durch den Parameter "Referenz-Such-Richtung" bestimmt.Referenzimpulse werden während dieser Bewegung ignoriert.
3. Nach ungefähr 2 Sekunden Stillstand bewegt sich die Achse in die entgegengesetzteRichtung bis die Referenz passiert ist.
4. Achse bewegt sich auf die programmierte Position.
Delem
V1101, 5.8
Parameter: 6Referenz-such-richtung
Bereich : 0 - 1Default : 0Einheit : -
Hinweis : Nur in Kombination mit dem Positionsmeßsystem des Kodierers.
FunktionHilfs-Servo-Achsen-Referenz-Such-Richtung
BeschreibungWenn der Startknopf der Steuerung betätigt wird, nachdem zum ersten Mal eingeschaltetwurde, beginnen alle Achsen mit ihrem Referenz-Such-Zyklus. Dies schließt auch die Hilfs-Servo-Achsen ein.
Dieser Parameter beschreibt die Richtung in die sich die Servo-Achse bewegt um dieReferenz zu suchen:0 = Suche in rückwärtszählen Richtung1 = Suche in vorwärtszählen Richtung
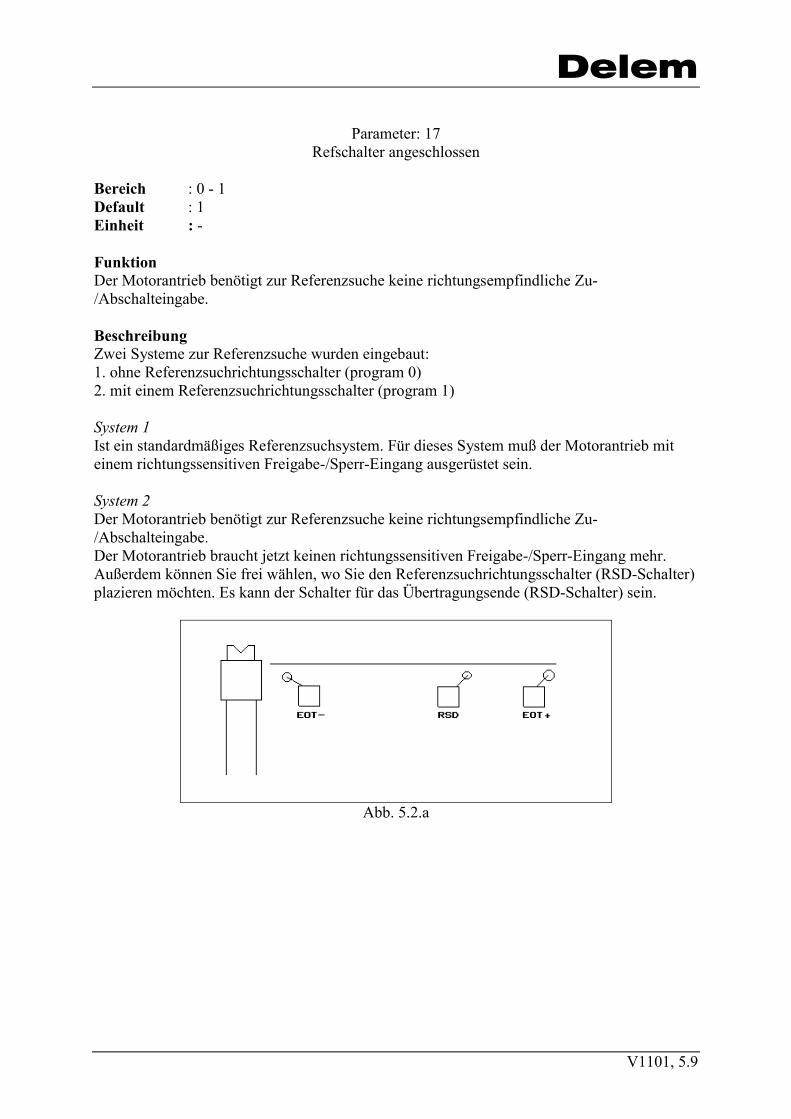
Delem
V1101, 5.9
Parameter: 17Refschalter angeschlossen
Bereich : 0 - 1Default : 1Einheit : -
FunktionDer Motorantrieb benötigt zur Referenzsuche keine richtungsempfindliche Zu-/Abschalteingabe.
BeschreibungZwei Systeme zur Referenzsuche wurden eingebaut:1. ohne Referenzsuchrichtungsschalter (program 0)2. mit einem Referenzsuchrichtungsschalter (program 1)
System 1Ist ein standardmäßiges Referenzsuchsystem. Für dieses System muß der Motorantrieb miteinem richtungssensitiven Freigabe-/Sperr-Eingang ausgerüstet sein.
System 2Der Motorantrieb benötigt zur Referenzsuche keine richtungsempfindliche Zu-/Abschalteingabe.Der Motorantrieb braucht jetzt keinen richtungssensitiven Freigabe-/Sperr-Eingang mehr.Außerdem können Sie frei wählen, wo Sie den Referenzsuchrichtungsschalter (RSD-Schalter)plazieren möchten. Es kann der Schalter für das Übertragungsende (RSD-Schalter) sein.
Abb. 5.2.a
Delem
V1101, 5.10
Parameter: 17Refschalter angeschlossen
(Fortsetzung)
Der Vorteil des Referenzsuchzyklusses System 2 liegt darin, daß wenn der RSD-Schalter inder Mitte des Achse-Streifens montiert ist, die Steuerung den Status dieses Schalters feststellt.Wenn sich die Achse zwischen der Matrize und dem RSD-Schalter befindet, wird einnormaler Referenzsuchzyklus gestartet.Wenn die Achse sich zwischen dem RSD-Schalter und dem EOT+ Schalter befindet, gibt derStatus des RSD-Schalters an, daß die Referenzsuche in die Richtung des RSD-Schalters(vorwärts) beginnen kann. Im allgemeinen verkürzt sich die Dauer desReferenzsuchzyklusses. Ein weiterer Vorteil besteht darin, daß es nicht nötig ist, die Ende-Wegschaltern für die Referenzsuche einzubauen.
Anmerkung 1Aktivierung des Referenzschalters bedeutet, daß der Eingang auf dem Achse-Konnektorniedrig ist.Wenn der Referenzschalter nicht aktiviert ist, bedeutet das, daß der Eingang hoch ist (+24V).
Anmerkung 2Um sicher zu sein, daß der Referenzsuchrichtungsschalter (RSD) montiert ist, bewegt dieSteuerung zur Referenzfindung nur den Hinteranschlag über den folgenden Abstand, undzwar in dem Fall, wenn der RSD-Schaltereingang beim Start des Referenzsuchzyklussesaktiviert ist (niedrig).A) Referenzsuchrichtung rückwärts: 1.5 X (max. Position - Ref. Position)B) Referenzsuchrichtung vorwärts: 1.5 X (Ref. Position - min. Position)
Die Sequenz der Referenzsuche in Verbindung mit R- und Z-AchsenWenn die Start-Taste, nachdem der Strom zum ersten Mal eingeschaltet wurde, betätigt wird,wird an allen Achsen zuerst die Referenzsuche durchgeführt. Während der Referenzsuchewird der folgende Zyklus eingehalten:1. Die X- und die X2-Achse bewegen sich zum Referenzsuchrichtungsschalter (RSD). Wenn
der RSD eingeschaltet ist, sind X und X2 gestoppt.2. Starten Sie den Referenzsuchzyklus für die Z- und R-Achsen.3. Bei Z1 Z2 halten sie bei ihrer Referenzposition.4. Wenn die R-Achsen ihre Referenz gefunden haben, bewegen sie sich sofort in ihre
programmierten Positionen.5. Wenn die Z-Achsen in ihrer Referenzposition und die R-Achsen in ihrer programmierten
Position sind, bewegen sich die Achsen in ihre eigene Referenzposition. Gleichzeitigfangen alle anderen Achsen, außer den R-Achsen an, sich zu bewegen.
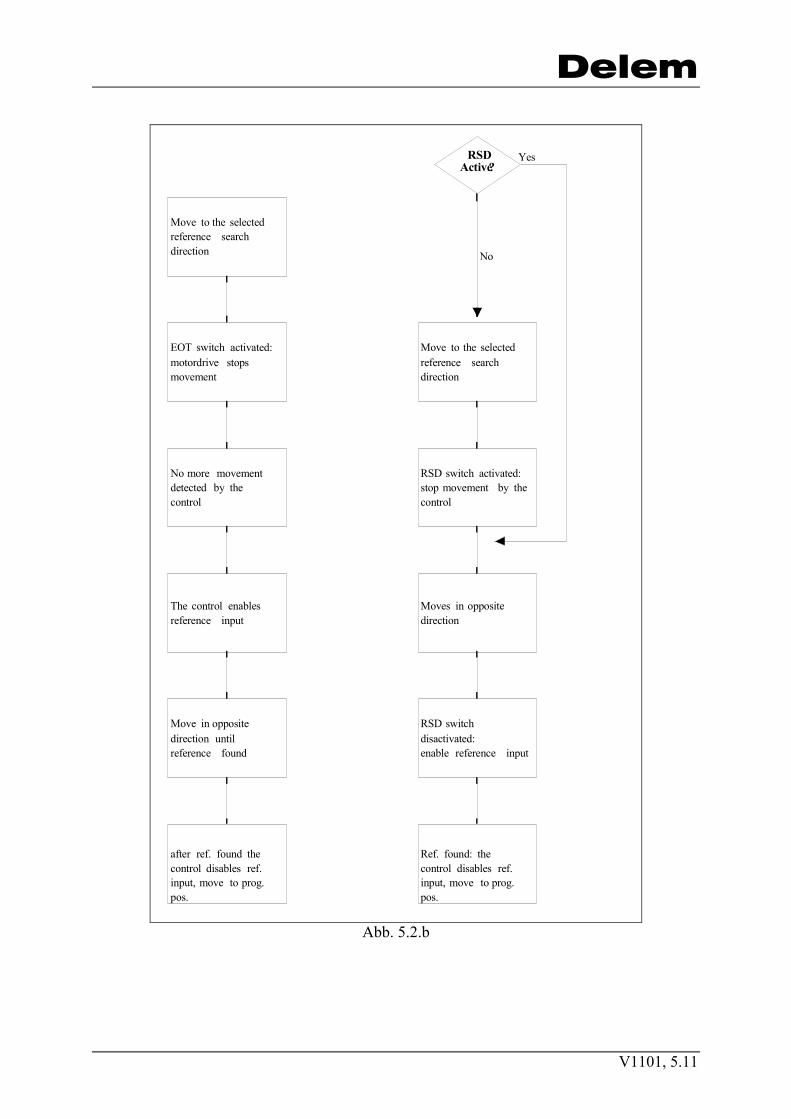
Delem
V1101, 5.11
No more movementdetected by thecontrol
The control enablesreference input
Move in oppositedirection untilreference found
after ref. found thecontrol disables ref.input, move to prog.pos.
RSDActive?
Ref. found: thecontrol disables ref.input, move to prog.pos.
RSD switchdisactivated:enable reference input
Moves in oppositedirection
Move to the selectedreference searchdirection
Move to the selectedreference searchdirection
RSD switch activated:stop movement by thecontrol
EOT switch activated:motordrive stopsmovement
Yes
No
Abb. 5.2.b
Delem
V1101, 5.12
Parameter: 21Referenzsuchgeschwindigkeit
Bereich: 1 - 100Default: 50Einheit: %
Bemerkung : Nur in Kombination mit dem Positionsmeßsystem des Kodierers.
FunktionEinstellung der Achsen-Geschwindigkeit während Referenzsuche.
BeschreibungDie Suchgeschwindigkeit für die Referenz-markierung kann durch Programmierung einesProzentsatzes der maximalen Ausgangsspannung (10V) verstellt werden.
Delem
V1101, 5.13
Parameter: 29AD-min
Bereich : 0 - 1023 (10 bits)Default : 0Einheit : AD-Punkte
Bemerkung : Nur in Kombination mit dem Positionsmeßsystem des Potentiometers.
FunktionWert in AD (analog-digital)-Punkten entsprechend der minimalen Achsenposition.
BeschreibungDa in diesem Fall kein Kodierer vorliegt und daher kein Referenzimpuls zur Bestimmung derAchsenposition vorliegt, müssen Sie die Position messen. Wenn die Steuerung weiß, welcheSpannung zu welcher Mindest- und Höchstposition gehört, kann jede zwischenliegendePosition bestimmt werden.
Der Wert der Analogeingangs des Moduls liegt zwischen 0 V und 10 V. Die Genauigkeit derAnalogeingänge liegt bei 10 Bit, d.h., daß die 10 V in 1024 Schritte oder AD-Punkte eingeteiltwerden können. Somit entspricht 1 V 102.4 AD-Punkte.Bewegen Sie die Achse in die minimale mechanische Position (entspricht demprogrammierten Mindestwert), messen Sie die Spannung zwischen dem Analogeingang und 0V, und berechnen Sie dann die entsprechenden AD-Punkte. Dieser Wert sollte eingegebenwerden.
Delem
V1101, 5.14
Parameter: 30AD-max
Bereich : 0 - 1023 (10 bits)Default : 0Einheit : AD-Punkte
Bemerkung : Nur in Kombination mit dem Positionsmeßsystem des Potentiometers.
FunktionHöchstwert in AD-Punkten der Achsenposition.
BeschreibungSiehe Beschreibung: AD-min.
Delem
V1101, 5.15
Parameter: 24Codierer Zählrichtung
Bereich : 0 - 1Default : 0Einheit : -
FunktionUm die Zählrichtung der Achsen-Codiererimpulse zu verändern.
BeschreibungDie Positionszählung des Achses sollte bei der Bewegung nach hinten in aufsteigenderZählrichtung erfolgen. Wenn die Zählung nicht korrekt ist, kann sie mit diesem Parameterverändert werden.
Delem
V1101, 5.16
Parameter: 14Voreinstellungswert
Bereich : -999999 - +999999Default : 0Einheit : Display-Einheiten
FunktionHilfsachsen Default-Wert
BeschreibungDieser Wert ist bei der Steuerung als Intitalwert dargestellt, wenn ein neues Programm bei derProgrammeingabe erstellt wird. Dieser Wert ist auch im Handbetrieb darge-stellt, nachdemdie Steuerung initialisiert ist.
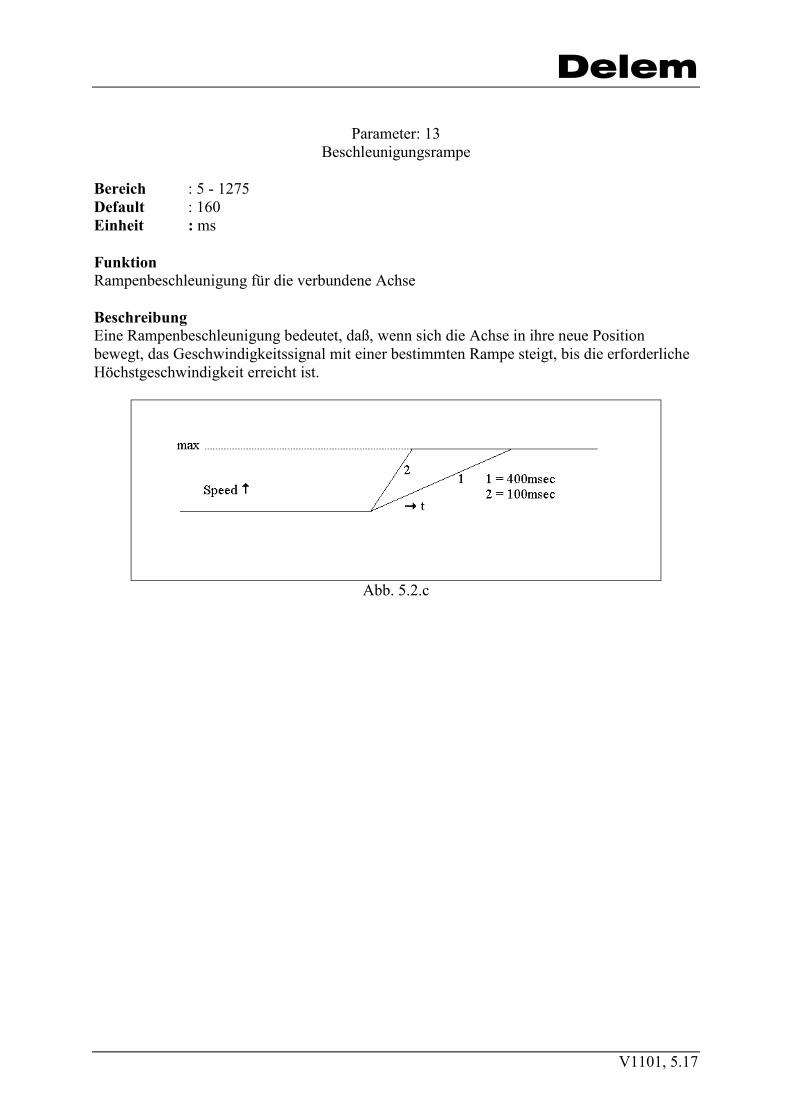
Delem
V1101, 5.17
Parameter: 13Beschleunigungsrampe
Bereich : 5 - 1275Default : 160Einheit : ms
FunktionRampenbeschleunigung für die verbundene Achse
BeschreibungEine Rampenbeschleunigung bedeutet, daß, wenn sich die Achse in ihre neue Positionbewegt, das Geschwindigkeitssignal mit einer bestimmten Rampe steigt, bis die erforderlicheHöchstgeschwindigkeit erreicht ist.
Abb. 5.2.c
Delem
V1101, 5.18
Parameter: 15Kommastellen
Bereich : 0 - 3Default : 0Einheit : -
FunktionDezimalstellen-Position des Hilfsachsen-Wertes.
BeschreibungDieser Parameter definiert die Resolution in der die Hilfsachsen-Werte bei der Steuerungprogrammiert und dargestellt sind.0 = kein resolution, wert in mm1 =0.1 Einheit2 = 0.01 Einheit3 = 0.001 Einheit
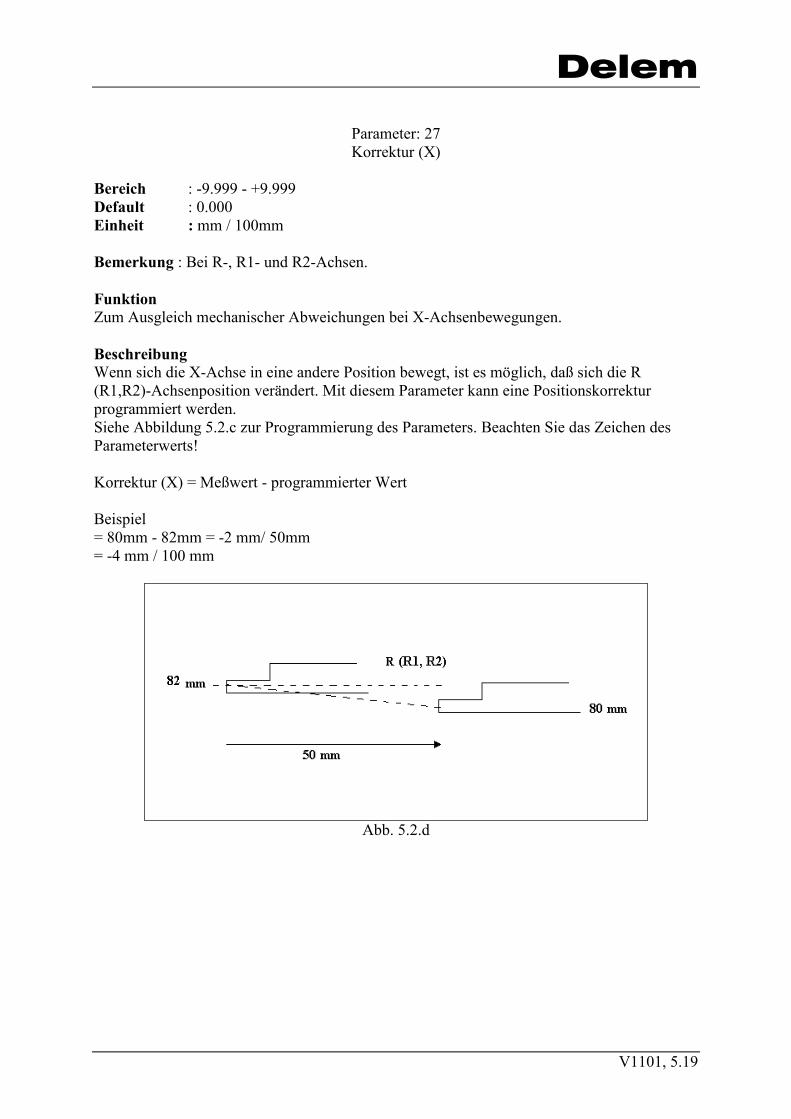
Delem
V1101, 5.19
Parameter: 27Korrektur (X)
Bereich : -9.999 - +9.999Default : 0.000Einheit : mm / 100mm
Bemerkung : Bei R-, R1- und R2-Achsen.
FunktionZum Ausgleich mechanischer Abweichungen bei X-Achsenbewegungen.
BeschreibungWenn sich die X-Achse in eine andere Position bewegt, ist es möglich, daß sich die R(R1,R2)-Achsenposition verändert. Mit diesem Parameter kann eine Positionskorrekturprogrammiert werden.Siehe Abbildung 5.2.c zur Programmierung des Parameters. Beachten Sie das Zeichen desParameterwerts!
Korrektur (X) = Meßwert - programmierter Wert
Beispiel= 80mm - 82mm = -2 mm/ 50mm= -4 mm / 100 mm
Abb. 5.2.d
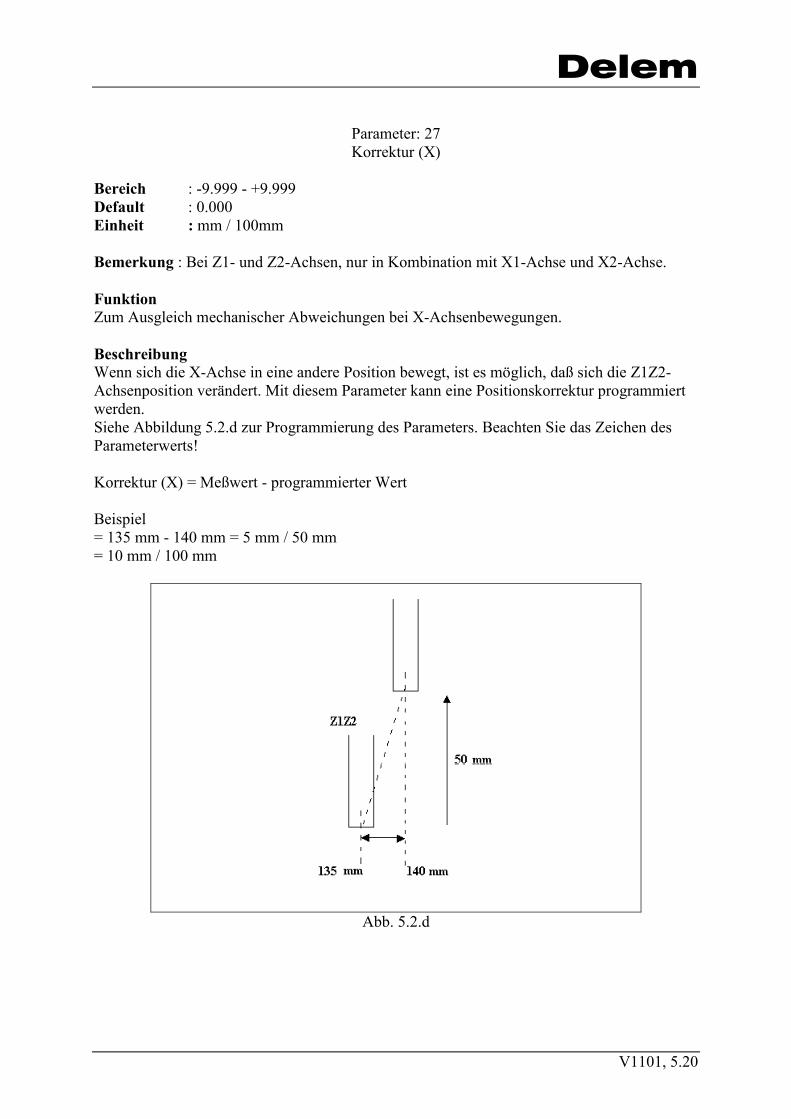
Delem
V1101, 5.20
Parameter: 27Korrektur (X)
Bereich : -9.999 - +9.999Default : 0.000Einheit : mm / 100mm
Bemerkung : Bei Z1- und Z2-Achsen, nur in Kombination mit X1-Achse und X2-Achse.
FunktionZum Ausgleich mechanischer Abweichungen bei X-Achsenbewegungen.
BeschreibungWenn sich die X-Achse in eine andere Position bewegt, ist es möglich, daß sich die Z1Z2-Achsenposition verändert. Mit diesem Parameter kann eine Positionskorrektur programmiertwerden.Siehe Abbildung 5.2.d zur Programmierung des Parameters. Beachten Sie das Zeichen desParameterwerts!
Korrektur (X) = Meßwert - programmierter Wert
Beispiel= 135 mm - 140 mm = 5 mm / 50 mm= 10 mm / 100 mm
Abb. 5.2.d
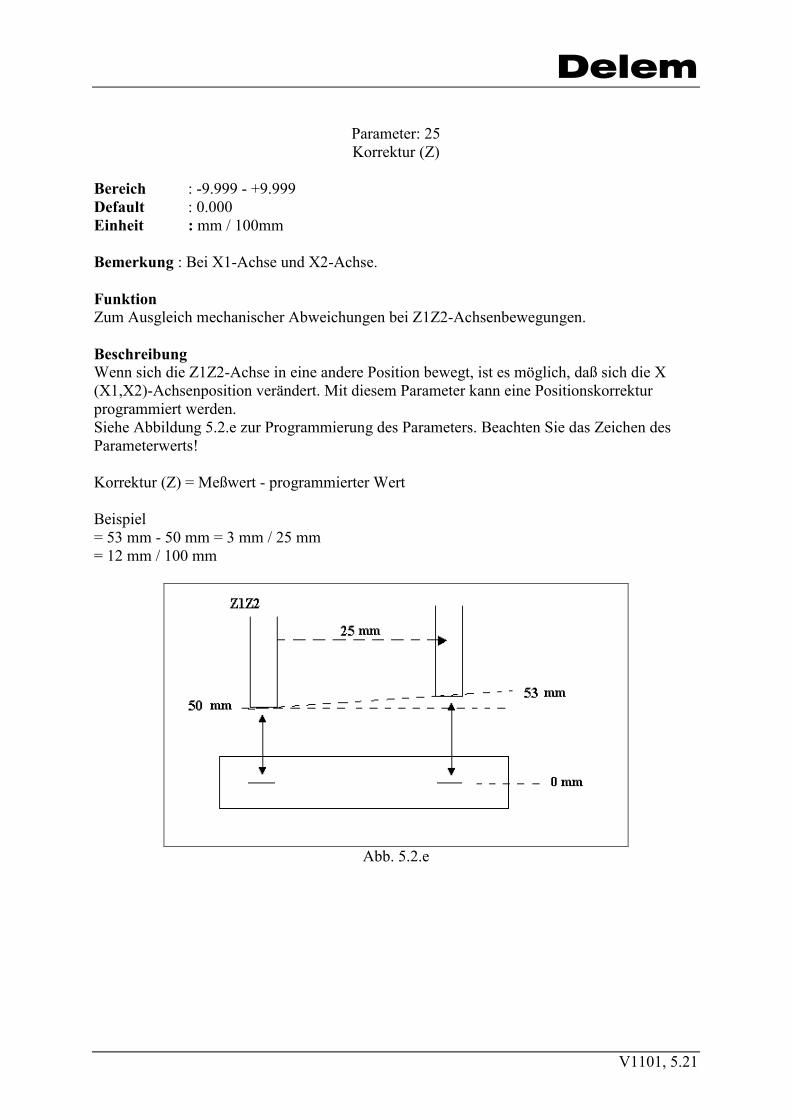
Delem
V1101, 5.21
Parameter: 25Korrektur (Z)
Bereich : -9.999 - +9.999Default : 0.000Einheit : mm / 100mm
Bemerkung : Bei X1-Achse und X2-Achse.
FunktionZum Ausgleich mechanischer Abweichungen bei Z1Z2-Achsenbewegungen.
BeschreibungWenn sich die Z1Z2-Achse in eine andere Position bewegt, ist es möglich, daß sich die X(X1,X2)-Achsenposition verändert. Mit diesem Parameter kann eine Positionskorrekturprogrammiert werden.Siehe Abbildung 5.2.e zur Programmierung des Parameters. Beachten Sie das Zeichen desParameterwerts!
Korrektur (Z) = Meßwert - programmierter Wert
Beispiel= 53 mm - 50 mm = 3 mm / 25 mm= 12 mm / 100 mm
Abb. 5.2.e
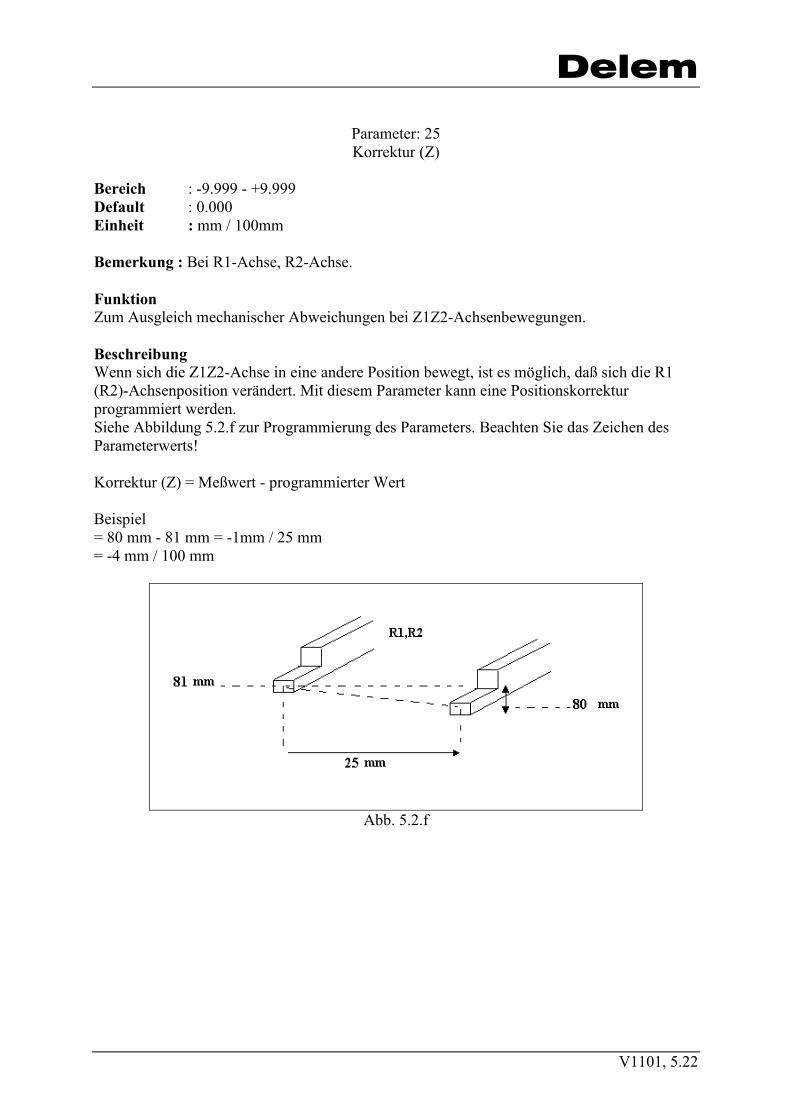
Delem
V1101, 5.22
Parameter: 25Korrektur (Z)
Bereich : -9.999 - +9.999Default : 0.000Einheit : mm / 100mm
Bemerkung : Bei R1-Achse, R2-Achse.
FunktionZum Ausgleich mechanischer Abweichungen bei Z1Z2-Achsenbewegungen.
BeschreibungWenn sich die Z1Z2-Achse in eine andere Position bewegt, ist es möglich, daß sich die R1(R2)-Achsenposition verändert. Mit diesem Parameter kann eine Positionskorrekturprogrammiert werden.Siehe Abbildung 5.2.f zur Programmierung des Parameters. Beachten Sie das Zeichen desParameterwerts!
Korrektur (Z) = Meßwert - programmierter Wert
Beispiel= 80 mm - 81 mm = -1mm / 25 mm= -4 mm / 100 mm
Abb. 5.2.f
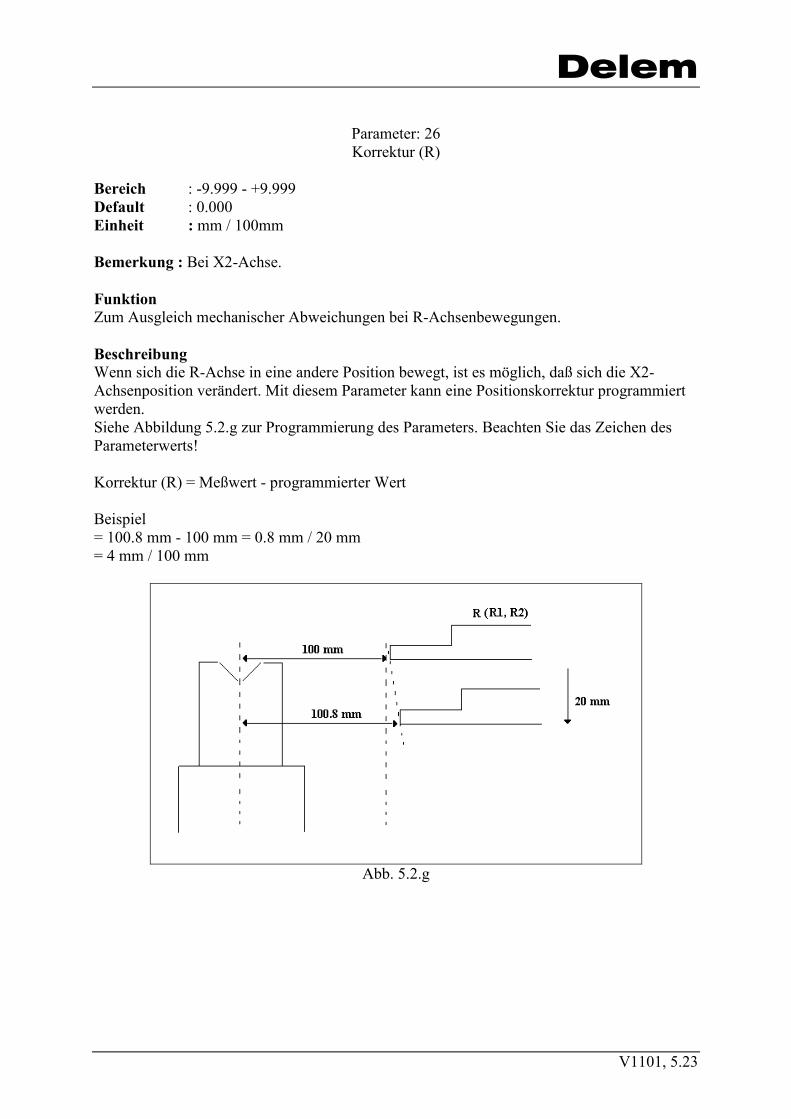
Delem
V1101, 5.23
Parameter: 26Korrektur (R)
Bereich : -9.999 - +9.999Default : 0.000Einheit : mm / 100mm
Bemerkung : Bei X2-Achse.
FunktionZum Ausgleich mechanischer Abweichungen bei R-Achsenbewegungen.
BeschreibungWenn sich die R-Achse in eine andere Position bewegt, ist es möglich, daß sich die X2-Achsenposition verändert. Mit diesem Parameter kann eine Positionskorrektur programmiertwerden.Siehe Abbildung 5.2.g zur Programmierung des Parameters. Beachten Sie das Zeichen desParameterwerts!
Korrektur (R) = Meßwert - programmierter Wert
Beispiel= 100.8 mm - 100 mm = 0.8 mm / 20 mm= 4 mm / 100 mm
Abb. 5.2.g
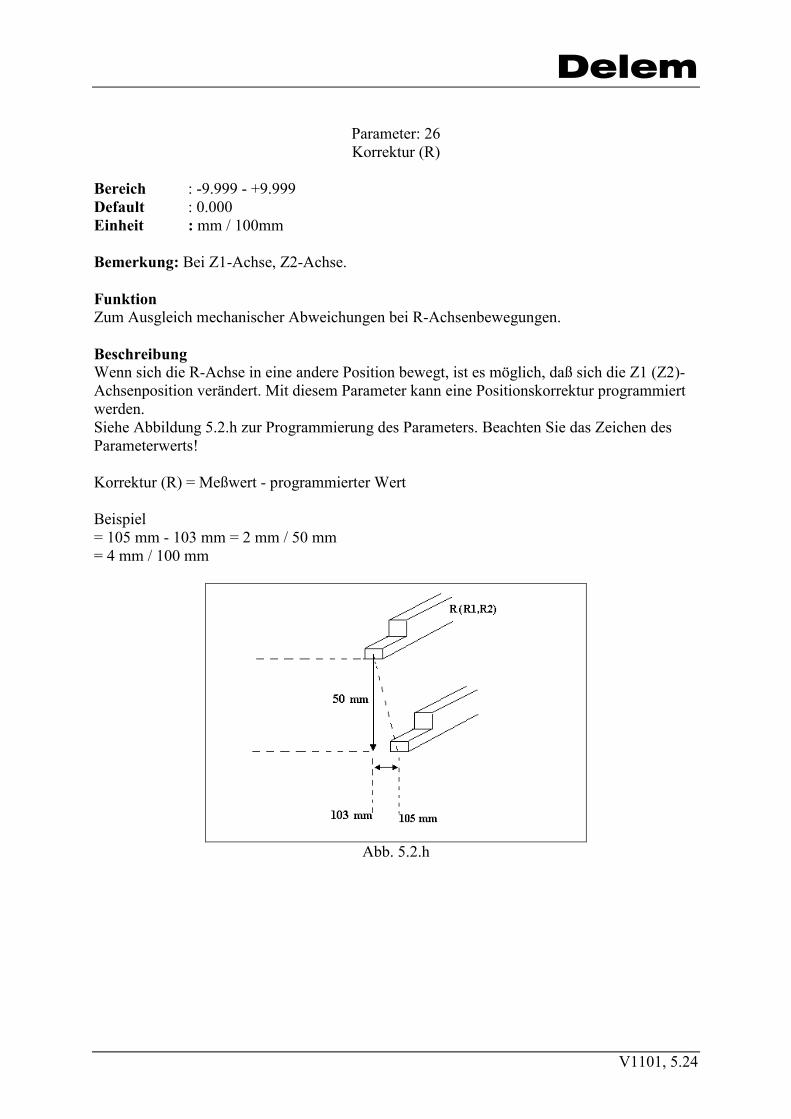
Delem
V1101, 5.24
Parameter: 26Korrektur (R)
Bereich : -9.999 - +9.999Default : 0.000Einheit : mm / 100mm
Bemerkung: Bei Z1-Achse, Z2-Achse.
FunktionZum Ausgleich mechanischer Abweichungen bei R-Achsenbewegungen.
BeschreibungWenn sich die R-Achse in eine andere Position bewegt, ist es möglich, daß sich die Z1 (Z2)-Achsenposition verändert. Mit diesem Parameter kann eine Positionskorrektur programmiertwerden.Siehe Abbildung 5.2.h zur Programmierung des Parameters. Beachten Sie das Zeichen desParameterwerts!
Korrektur (R) = Meßwert - programmierter Wert
Beispiel= 105 mm - 103 mm = 2 mm / 50 mm= 4 mm / 100 mm
Abb. 5.2.h

Delem
V1101, 5.25
Parameter: 122Achsenrückbewegung programmierbar 0/1
Bereich : 0 - 1Default : 0Einheit : -
FunktionUm die Rückbewegung für die gewählte Achse freizugeben oder nicht.
BeschreibungEine Rückbewegung kann vom Bediener für jede Achse in jedem Schritt einesBiegeprogramms programmiert werden. Dem Bediener steht dann eine Funktionstaste zurVerfügung, mit der der Rückbewegungsabstand für einen bestimmten Schritt programmiertwerden kann.Um diese Funktion freizuschalten, müssen Sie diesen Parameter auf "1" einstellen.
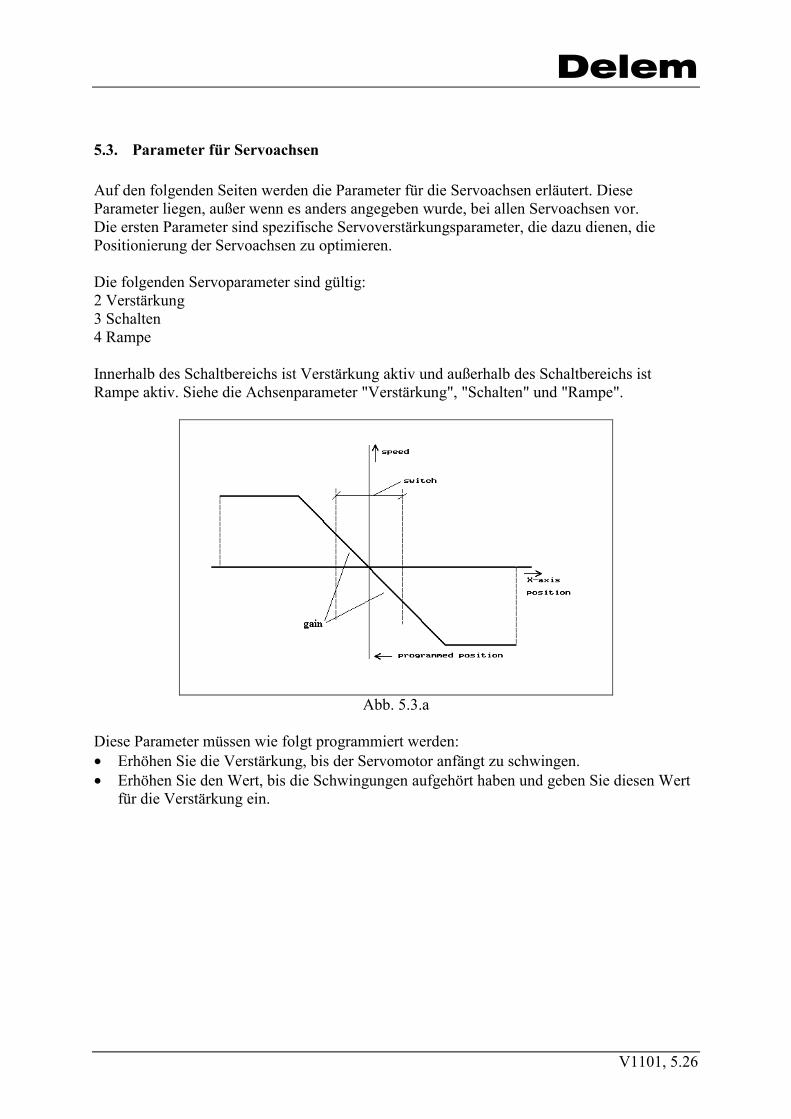
Delem
V1101, 5.26
5.3. Parameter für Servoachsen
Auf den folgenden Seiten werden die Parameter für die Servoachsen erläutert. DieseParameter liegen, außer wenn es anders angegeben wurde, bei allen Servoachsen vor.Die ersten Parameter sind spezifische Servoverstärkungsparameter, die dazu dienen, diePositionierung der Servoachsen zu optimieren.
Die folgenden Servoparameter sind gültig:2 Verstärkung3 Schalten4 Rampe
Innerhalb des Schaltbereichs ist Verstärkung aktiv und außerhalb des Schaltbereichs istRampe aktiv. Siehe die Achsenparameter "Verstärkung", "Schalten" und "Rampe".
Abb. 5.3.a
Diese Parameter müssen wie folgt programmiert werden:• Erhöhen Sie die Verstärkung, bis der Servomotor anfängt zu schwingen.• Erhöhen Sie den Wert, bis die Schwingungen aufgehört haben und geben Sie diesen Wert
für die Verstärkung ein.
Delem
V1101, 5.27
Parameter: 2Verstárkung
Bereich : 1.0 - 15.0Default : 9.0Einheit : -
FunktionServo-Achsen-Bremsfaktor
BeschreibungFür die genaue Positionierung der Servoachse werden drei Parameter verwendet: "Rampe","Schalter" und "Verstärkung".Wenn die aktuelle Position nahe der programmierten Position liegt, wird der Faktor"Verstärkung" verwendet. Der Verstärkungsfaktor ist innerhalb der programmierten"Schalter"-Zone gültig.
Delem
V1101, 5.28
Parameter: 3Übergang
Bereich : 1 - 100Default : 3Einheit : mm
FunktionFür eine genaue Servo-Achsen-Positionierung, werden zwei Faktoren benutzt: "Bremsung"und "Verstärkung". Bei (wirkliche Position - programmierte Position) > Uebergang wird derBremsfaktor "Bremsung" benutzt, sonst wird "Verstärkung" benutzt.In der Schalterzone ist somit die Verstärkung aktiv, und außerhalb der Schalterzone ist dieRampe aktiv. Siehe auch Hilfs-Achsen-Parameter "Verstärkung" und "Bremsung".
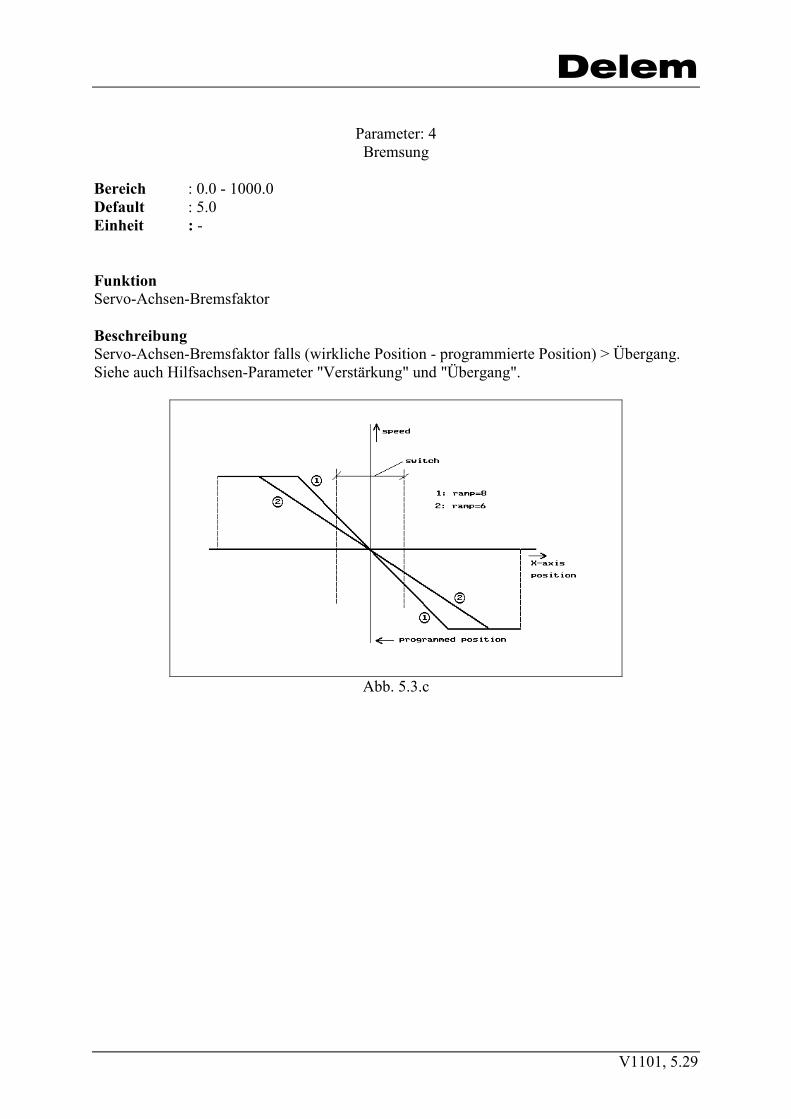
Delem
V1101, 5.29
Parameter: 4Bremsung
Bereich : 0.0 - 1000.0Default : 5.0Einheit : -
FunktionServo-Achsen-Bremsfaktor
BeschreibungServo-Achsen-Bremsfaktor falls (wirkliche Position - programmierte Position) > Übergang.Siehe auch Hilfsachsen-Parameter "Verstärkung" und "Übergang".
Abb. 5.3.c
Delem
V1101, 5.30
Parameter: 11Handgeschwindigkeit groß
Bereich : 1 - 100Default : 10Einheit : %
FunktionManuelle Bewegung der Hilfsachse bei hoher Geschwindigkeit.
BeschreibungWenn die DA-Steuerung auf Handbetrieb eingeschaltet ist, kann eine gewählte Hilfsachse mitden Handrad bewegt werden. Diese Parameterwert bestimmt die Höchst möglicheGeschwindigkeit durch Drehen des Handrads.
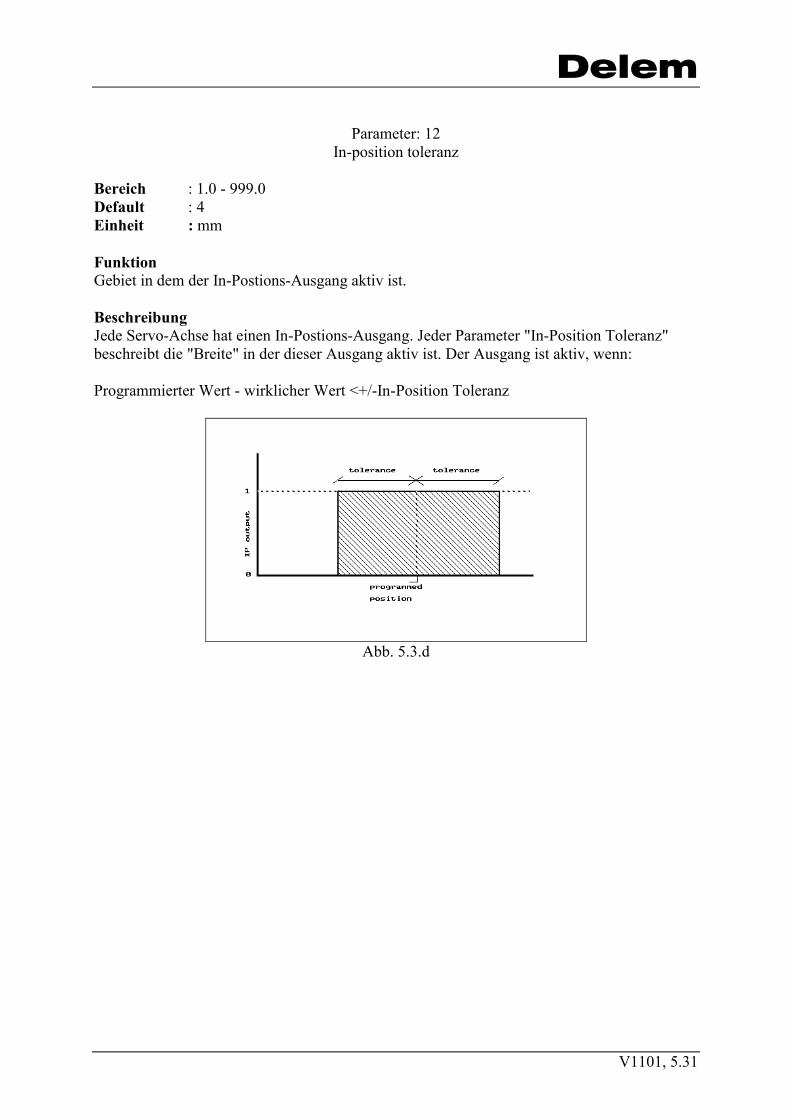
Delem
V1101, 5.31
Parameter: 12In-position toleranz
Bereich : 1.0 - 999.0Default : 4Einheit : mm
FunktionGebiet in dem der In-Postions-Ausgang aktiv ist.
BeschreibungJede Servo-Achse hat einen In-Postions-Ausgang. Jeder Parameter "In-Position Toleranz"beschreibt die "Breite" in der dieser Ausgang aktiv ist. Der Ausgang ist aktiv, wenn:
Programmierter Wert - wirklicher Wert <+/-In-Position Toleranz
Abb. 5.3.d
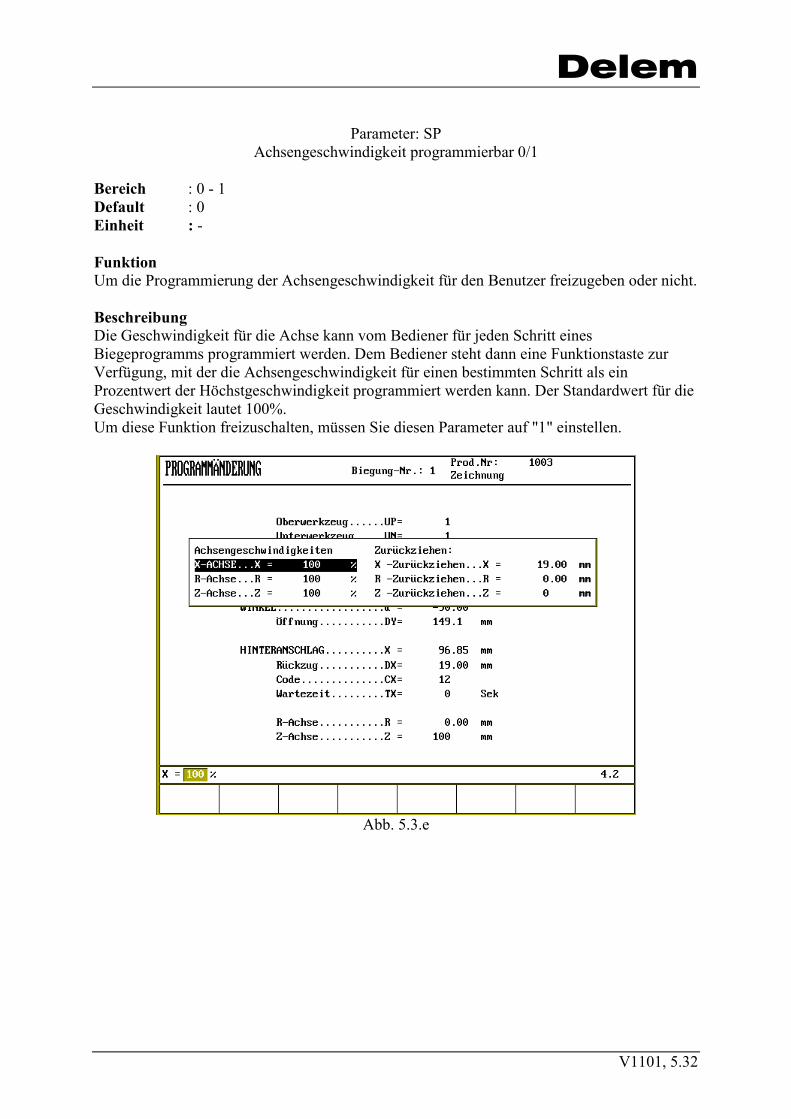
Delem
V1101, 5.32
Parameter: SPAchsengeschwindigkeit programmierbar 0/1
Bereich : 0 - 1Default : 0Einheit : -
FunktionUm die Programmierung der Achsengeschwindigkeit für den Benutzer freizugeben oder nicht.
BeschreibungDie Geschwindigkeit für die Achse kann vom Bediener für jeden Schritt einesBiegeprogramms programmiert werden. Dem Bediener steht dann eine Funktionstaste zurVerfügung, mit der die Achsengeschwindigkeit für einen bestimmten Schritt als einProzentwert der Höchstgeschwindigkeit programmiert werden kann. Der Standardwert für dieGeschwindigkeit lautet 100%.Um diese Funktion freizuschalten, müssen Sie diesen Parameter auf "1" einstellen.
Abb. 5.3.e
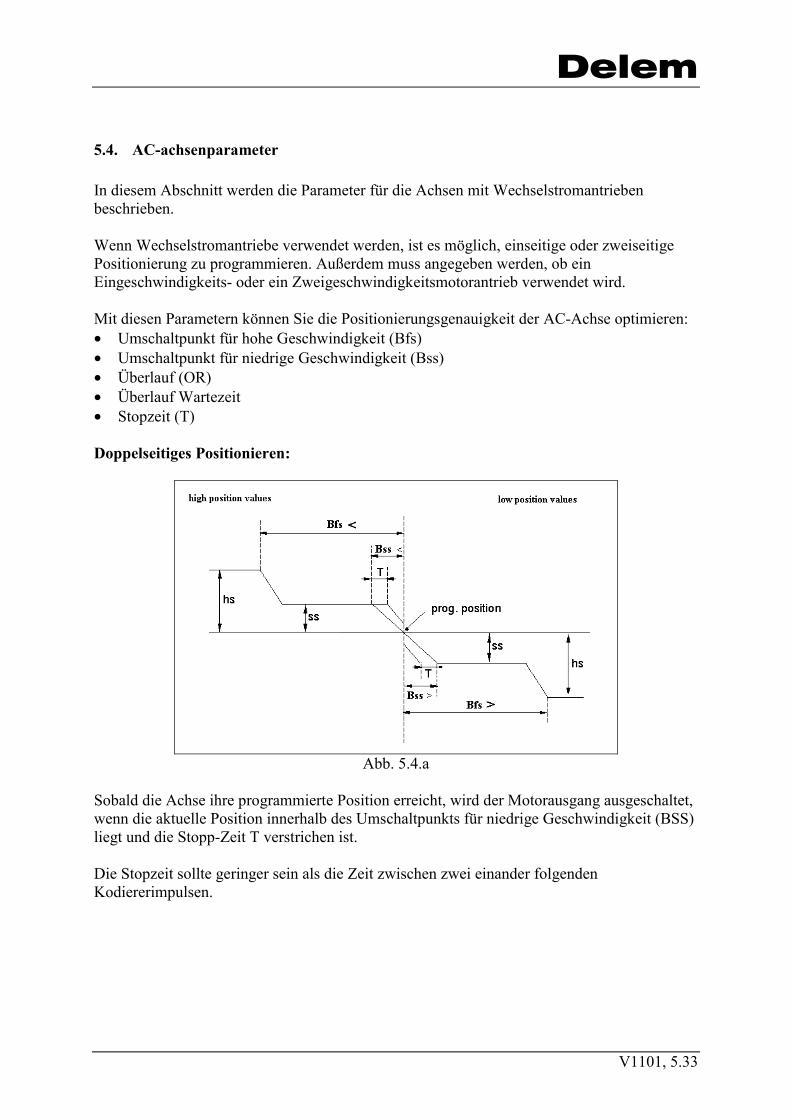
Delem
V1101, 5.33
5.4. AC-achsenparameter
In diesem Abschnitt werden die Parameter für die Achsen mit Wechselstromantriebenbeschrieben.
Wenn Wechselstromantriebe verwendet werden, ist es möglich, einseitige oder zweiseitigePositionierung zu programmieren. Außerdem muss angegeben werden, ob einEingeschwindigkeits- oder ein Zweigeschwindigkeitsmotorantrieb verwendet wird.
Mit diesen Parametern können Sie die Positionierungsgenauigkeit der AC-Achse optimieren:• Umschaltpunkt für hohe Geschwindigkeit (Bfs)• Umschaltpunkt für niedrige Geschwindigkeit (Bss)• Überlauf (OR)• Überlauf Wartezeit• Stopzeit (T)
Doppelseitiges Positionieren:
Abb. 5.4.a
Sobald die Achse ihre programmierte Position erreicht, wird der Motorausgang ausgeschaltet,wenn die aktuelle Position innerhalb des Umschaltpunkts für niedrige Geschwindigkeit (BSS)liegt und die Stopp-Zeit T verstrichen ist.
Die Stopzeit sollte geringer sein als die Zeit zwischen zwei einander folgendenKodiererimpulsen.
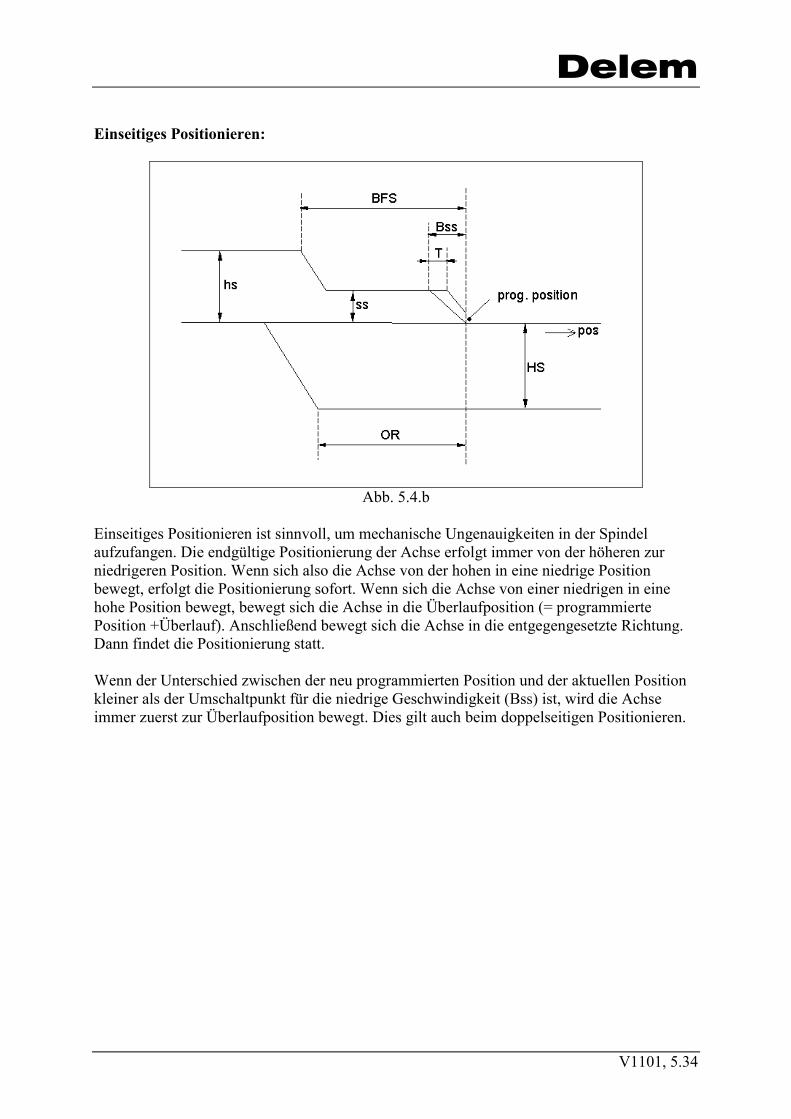
Delem
V1101, 5.34
Einseitiges Positionieren:
Abb. 5.4.b
Einseitiges Positionieren ist sinnvoll, um mechanische Ungenauigkeiten in der Spindelaufzufangen. Die endgültige Positionierung der Achse erfolgt immer von der höheren zurniedrigeren Position. Wenn sich also die Achse von der hohen in eine niedrige Positionbewegt, erfolgt die Positionierung sofort. Wenn sich die Achse von einer niedrigen in einehohe Position bewegt, bewegt sich die Achse in die Überlaufposition (= programmiertePosition +Überlauf). Anschließend bewegt sich die Achse in die entgegengesetzte Richtung.Dann findet die Positionierung statt.
Wenn der Unterschied zwischen der neu programmierten Position und der aktuellen Positionkleiner als der Umschaltpunkt für die niedrige Geschwindigkeit (Bss) ist, wird die Achseimmer zuerst zur Überlaufposition bewegt. Dies gilt auch beim doppelseitigen Positionieren.
Delem
V1101, 5.35
Parameter: 78Drive-Typ
Bereich : 1 - 2Default : 2Einheit : -
FunktionWahl von Achse Antrieb
Beschreibung1 = 1 - Geschwindigkeit AC oder DC (digitale ausgänge)2 = 2 - Geschwindigkeiten AC oder DC (digitale ausgänge)
Delem
V1101, 5.36
Parameter: 80Positioniertoleranz
Bereich : 0.0 - 99.9Default : 0.0Einheit : mm
FunktionEinstellung eines Bereiches indem keine neue Positionierung vorgenommen wird.
BeschreibungDie Achse wird auf die neu-programmierte Position gebracht, wenn der Unterschied zwischender tatsächlichen Position und der neuen größer als diese Toleranz ist. Wenn der Unterschiedkleiner ist, wird die Achse auf seiner wirklichen Position bleiben.Dieser Parameter wird nur in Kombination mit Ein-oder Zwei-Geschwindigkeitsantrieben(Typ 1 oder 2) angewandt.
Delem
V1101, 5.37
Parameter: LSLS FD Ausgang
Bereich : 1 - 5Default : 3Einheit : -
FunktionZur Festlegung des unwesentlichsten digitalen Ausgangs.
BeschreibungZur Festlegung des unwesentlichsten digitalen Ausgangs. Der Standardwert ist F3, weil F2und F1 bei einer digitalen R-Achse bereits verwendet werden. Die Numerierung des digitalenAusgangs verläuft von rechts nach links, vom unwesentlichsten bis zum wichtigsten (LeastSignificant).
Delem
V1101, 5.38
Parameter: FGUmschaltungspunkt der hohe geschwindigkeit (BFS)>
Bereich : 0 - 9999Default : 100Einheit : Anzahl der Zählimpulse des Kodierers
Bemerkung : Nur bei doppelseitiger Positionierung
FunktionUmschaltungspunkt von hohe auf niedrige Geschwindigkeit.
BeschreibungDies ist der Umschaltungspunkt für Ein- und Zwei-Geschwindigkeitsantriebe.
Delem
V1101, 5.39
Parameter: SGUmschaltungspunkt der niedrigen geschwindigkeit (BSS)>
Bereich : 0 - 9999Default : 100Einheit : Anzahl der Zählimpulse des Kodierers
Bemerkung : Nur bei doppelseitiger Positionierung
FunktionUmschaltungspunkt von niedrige Geschwindigkeit auf Abschaltung.
BeschreibungDies ist der Umschaltungspunkt wobei die niedrige Geschwindigkeit abgeschaltet wird.
Delem
V1101, 5.40
Parameter: FSUmschaltungspunkt der hohe geschwindigkeit (BFS)<
Bereich : 0 - 9999Default : 100Einheit : Anzahl der Zählimpulse des Kodierers
Bemerkung : Nur bei einseitigem Positionieren.
FunktionUmschaltungspunkt von hohe auf niedrige Geschwindigkeit.
BeschreibungDies ist der Umschaltungspunkt für Ein- und Zwei-Geschwindigkeitsantriebe.
Delem
V1101, 5.41
Parameter: SSUmschaltungspunkt der niedrigen geschwindigkeit (BSS)<
Bereich : 0 - 9999Default : 10Einheit : Anzahl der Zählimpulse des Kodierers
Bemerkung : Nur bei einseitiger Positionierung.
FunktionUmschaltungspunkt von niedrige Geschwindigkeit auf Abschaltung.
BeschreibungDies ist der Umschaltungspunkt wobei die niedrige Geschwindigkeit abgeschaltet wird.
Delem
V1101, 5.42
Parameter: 76Spindelzulassung
Bereich : 0-1Default : 1Einheit : -
FunktionEin- oder zweiseitige Positionierungswahl.0 = einseitige Positionierung1 = zweiseitige Positionierung
BeschreibungDie ein- oder zweiseitige Positionierung kann gewählt werden, um mechanische Toleranzenmit 2-seitiger Positionierung zu überwinden. Im Falle einer einseitigen Positionierung ist diePositions-Direktion von groß nach klein.
Delem
V1101, 5.43
Parameter: 84Überlaufweg
Bereich : 0 - 9999Default : 50Einheit : Anzahl der Zählimpulse des Kodierers
FunktionÜberlaufabstand bei einseitiger Positionierung.
BeschreibungDer Überlaufwert ist immer in aufwärtszählen Richtung und ist nur mit einseitigerPositionierung gültig.
Delem
V1101, 5.44
Parameter: 85Überlauf Wartezeit
Bereich : 0 - 999Default : 500Einheit : 5 ms
FunktionWartezeit bei Überlaufposition (siehe Parameter 84) bevor die Achse anfängt sich inentgegengesetzte Richtung zu bewegen.
BeschreibungDieser Parameter kann dazu benutzt werden eine Wartezeit zu programmieren, bevor derMotor in die entgegengesetzte Richtung gesteuert wird.
Delem
V1101, 5.45
Parameter: 83Stopzeit (T)
Bereich : 0 - 999Default : 0Einheit : 5 ms
FunktionWartezeit für korrekte Positionierung
BeschreibungDies ist die Wartezeit, bevor die niedrige Geschwindigkeit abgeschaltet wird, nachdem"Umschaltungspunkt niedrige Geschwindigkeit" (BSS) erreicht worden ist.
Delem
V1101, 5.46
Parameter: 86DC niedrige geschwindigkeit
Bereich : 1 - 100Default : 4Einheit: : %
FunktionFür die Programmierung der niedrigen Geschwindigkeit, wenn ein 2-Geschwindigkeits-DC-Motor benutzt worden ist.
BeschreibungEs ist möglich, einen Motorantrieb mit 2 Geschwindigkeiten über einen analogen Ausgangdes DM-Moduls zu steuern. In diesem Fall werden die hohe und niedrige Geschwindigkeitüber zwei Spannungszustände erkannt, die in den Maschinenparametern programmiert werdenmüssen. Sie müssen einen Prozentsatz der maximalen Ausgangssteuerungsspannungprogrammieren, die +/- 10V ist.Dieser Parameter bezieht sich auf die niedrige Geschwindigkeit der positivenBewegungsrichtung.
Delem
V1101, 5.47
Parameter: 87DC hohe geschwindigkeit
Bereich : 1 - 100Default : 80Einheit : %
FunktionFür die Programmierung der hohen Geschwindigkeit, wenn ein 2- Geschwindigkeits-DC-Motor benutzt worden ist.
BeschreibungSie müssen einen Prozentsatz von der maximalen Ausgangssteuerungsspannungprogrammieren, die +/- 10V ist. Dieser Parameter bezieht sich auf die hohe Geschwindigkeitder positiven Bewegungsrichtung.Siehe auch Parameter 86 für weitere Informationen.
Delem
V1101, 5.48
Parameter: 88DC niedrige geschwindigkeit
Bereich : 1 - 100Default : 4Einheit : %
FunktionFür die Programmierung der niedrigen Geschwindigkeit, wenn ein 2-Geschwindigkeits-DC-Motor benutzt worden ist.
BeschreibungSie müssen einen Prozentsatz der maximalen Ausgangssteuerungsspannung programmieren,die +/- 10V ist. Dieser Parameter bezieht sich auf die niedrige Geschwindigkeit der negativenBewegungsrichtung.Siehe auch Parameter 86 für weitere Informationen.
Delem
V1101, 5.49
Parameter: 89DC hohe geschwindigkeit
Bereich : 1 - 100Default : 80Einheit : %
FunktionFür die Programmierung der hohen Geschwindigkeit, wenn ein 2- Geschwindigkeits-DC-Motor benutzt worden ist.
BeschreibungSie müssen einen Prozentsatz von der maximalen Ausgangssteuerungsspannungprogrammieren, die +/- 10V ist. Dieser Parameter bezieht sich auf die hohe Geschwindigkeitder negativen Bewegungsrichtung.Siehe auch Parameter 86 für weitere Informationen.

Delem
V1101, 6.1
6. BOMBIERUNG
6.1. Einführung
Im Hilfsachsenmenü können Sie die benötigten Achsen programmieren. Die Zahl derprogrammierbaren Achsen hängt vom Steuerungstypen ab.
Die folgenden Achsenkombinationen können programmiert werden:• Berechneter Bombierungswert: Wählen Sie den Achsentyp "CROWNa".• Nicht-berechneter Bombierungswert: Wählen Sie den Achsentyp "CROWN".
Beide Achsentypen können für AC-Bombierung und hydraulische Bombierung verwendetwerden. In Abschnitt 6.3 werden die Parameter in der Reihenfolge ihres Auftretens behandelt.Der Anschluß und die Einstellung einer AC-Bombiervorrichtung ist anders als beim Anschlußeiner hydraulischen Bombiervorrichtung. Ein weiterer Unterschied liegt in der Tatsache, daßes bei der AC-Bombierung eine Positionsrückmeldung gibt und bei der hydraulischenBombierung nicht.Wenn Sie den benötigten "Achsentyp" programmiert haben, können Sie die entsprechendenParameter nach Betätigung der Funktionstaste "Parameter ändern" programmieren.
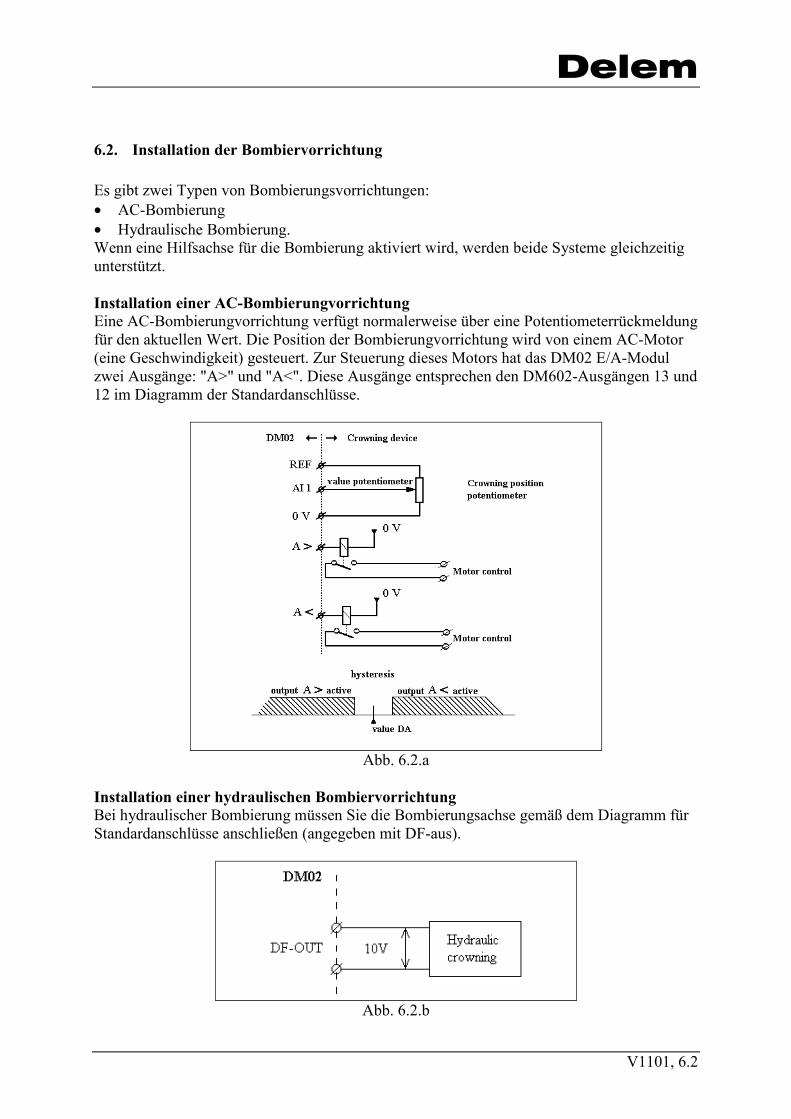
Delem
V1101, 6.2
6.2. Installation der Bombiervorrichtung
Es gibt zwei Typen von Bombierungsvorrichtungen:• AC-Bombierung• Hydraulische Bombierung.Wenn eine Hilfsachse für die Bombierung aktiviert wird, werden beide Systeme gleichzeitigunterstützt.
Installation einer AC-BombierungvorrichtungEine AC-Bombierungvorrichtung verfügt normalerweise über eine Potentiometerrückmeldungfür den aktuellen Wert. Die Position der Bombierungvorrichtung wird von einem AC-Motor(eine Geschwindigkeit) gesteuert. Zur Steuerung dieses Motors hat das DM02 E/A-Modulzwei Ausgänge: "A>" und "A<". Diese Ausgänge entsprechen den DM602-Ausgängen 13 und12 im Diagramm der Standardanschlüsse.
Abb. 6.2.a
Installation einer hydraulischen BombiervorrichtungBei hydraulischer Bombierung müssen Sie die Bombierungsachse gemäß dem Diagramm fürStandardanschlüsse anschließen (angegeben mit DF-aus).
Abb. 6.2.b
Delem
V1101, 6.3
6.3. Programmierung und Einstellung der Bombiervorrichtung
Die Position und Einstellung der Bombiervorrichtung sind erforderlich, um korrekt mit derBombiervorrichtung arbeiten zu können.
Position der Bombiervorrichtung und Einstellung für berechnete ZweckeWenn Sie die berechnete Bombiervorrichtung verwenden (CROWNa), beruht die benötigteBombierung auf den programmierten Werten der drei Maschinenparameter. Die folgendenMaschinenparameter müssen deshalb programmiert werden (siehe auch Y-Achsenparameterin Kapitel 3):• Trägheit der Oberseite der Oberwange;• Trägheit der Unterseite der Oberwange;• Maschinenlänge zwischen Zylinder.Die benötigte Bombierung wird berechnet (errechneter Wert in der Datenvorbereitung und derDatenedition). Somit wird gewährleistet, daß die Bombiervorrichtung in der berechnetenPosition eingestellt ist. Die Bombiervorrichtung sollte wie folgt eingestellt werden:- Zum Hilfsmenü gehen und die Achse ‘CROWNa’ programmieren.- "Parameter ändern" wählen.- Mindestwert und DA-min 0 programmieren.- Höchstwert und DA-max 255 (Standardauflösung) oder 1023 (hohe Auflösung)
programmieren.- Die Bombiervorrichtung mit dem Handrad in ihre mechanisch minimale Position
bewegen.- Die Bombierung in Hundertstel mm messen. Merken Sie sich diesen Wert und
programmieren Sie ihn am Ende der Einstellung für den Parameter Mindestwert. Derprogrammierte Mindestwert ist dann der gemessene Wert mal hundert. Ist der gemesseneWert 1,05, ist der programmierte Wert 105 (meistens liegt dieser Wert bei Null).
- Den Bombierungswert im Bildschirm ablesen (Handbetrieb, manuelle Positionierung).Dieser Wert entspricht der Zahl der DA-Punkte. Merken Sie sich diesen Wert undprogrammieren Sie ihn am Ende der Einstellung beim Parameter DA-min.
- Die Bombiervorrichtung jetzt in ihre mechanisch maximale Position bewegen.- Die Bombierung in Hundertstel mm messen. Merken Sie sich diesen Wert und
programmieren Sie ihn am Ende der Einstellung für den Parameter Höchstwert. Derprogrammierte Höchstwert ist der gemessene Wert mal hundert.
- Den Bombierungswert im Bildschirm ablesen (Handbetrieb, manuelle Positionierung).Dieser Wert entspricht der Zahl der DA-Punkte. Merken Sie sich diesen Wert undprogrammieren Sie ihn am Ende der Einstellung beim Parameter DA-max.
- Die gefundenen Werte jetzt bei den entsprechenden Maschinenparameternprogrammieren.
BeispielDie Position der Bombiervorrichtung muß immer in Einheiten von 0,01 mm programmiertwerden und der Ausgangswert und die Dezimalstelle muß 0 sein.• Die Mindestbombierung = 0 mm bei 25 DA-Punkten• Die Höchstbombierung = 1,20 mm bei 185 DA-Punkten.In diesem Beispiel müssen die Parameter der Bombiervorrichtung wie folgt programmiertwerden:
Delem
V1101, 6.4
DA-min. = 25Mindestwert = 0Höchstwert = 120DA-max. = 185
Hinweis: Die Angabe der Maßeinheit "mm" erscheint nicht im Bildschirm (Datenvorbereitungund Datenedition) der Steuerung.
Position der Bombiervorrichtung und Einstellung für nicht-berechnete ZweckeWenn Sie die nicht-berechnete Bombiervorrichtung verwenden (CROWN), beruht diebenötigte Bombierung nicht auf den drei Maschinenparametern wie oben beschrieben. Siemüssen den benötigten Wert programmieren.
Somit wird gewährleistet, daß die Bombiervorrichtung in der programmierten Positioneingestellt ist. Die Bombiervorrichtung sollte wie folgt eingestellt werden:- Zum Hilfsmenü gehen und die Achse ‘CROWN’ programmieren.- "Parameter ändern" wählen.- Mindestwert und DA-min 0 programmieren.- Höchstwert und DA-max 255 (Standardauflösung) und 1023 (hohe Auflösung)
programmieren.- Die Bombiervorrichtung mit dem Handrad in die mechanische Mindestposition oder in die
einer Bombierung von 0% entsprechenden Position bewegen.- Den Bombierungswert im Bildschirm ablesen (Handbetrieb, manuelle Positionierung).
Dieser Wert entspricht der Zahl der DA-Punkte. Merken Sie sich diesen Wert undprogrammieren Sie ihn am Ende der Einstellung beim Parameter DA-min.
- Die Bombiervorrichtung jetzt in die mechanische Höchstposition oder in die einerBombierung von 100% entsprechenden Position bewegen.
- Den Bombierungswert im Bildschirm ablesen (Handbetrieb, manuelle Positionierung).Dieser Wert entspricht der Zahl der DA-Punkte. Merken Sie sich diesen Wert undprogrammieren Sie ihn am Ende der Einstellung beim Parameter DA-max.
- Die gefundenen DA-Werte in die entsprechenden Maschinenparameter programmierenund den Mindestwert auf 0 (zu lesen 0 %) und den Höchstwert auf 100 (zu lesen 100 %)programmieren.
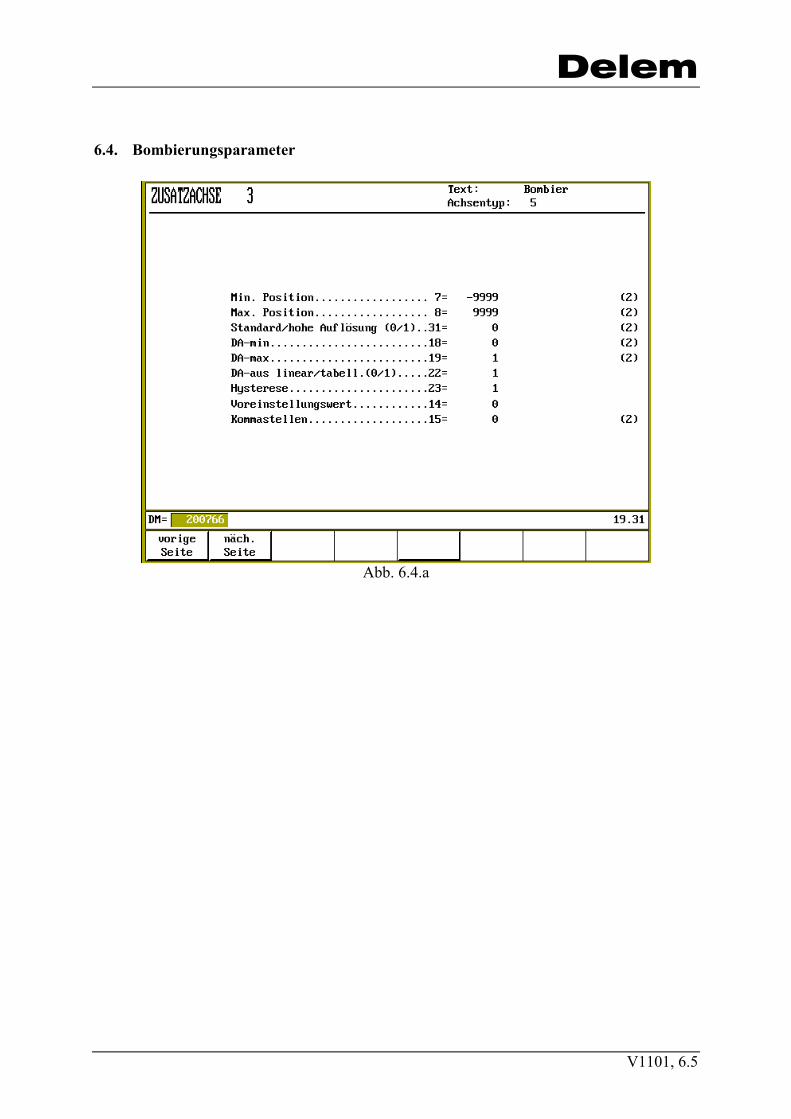
Delem
V1101, 6.5
6.4. Bombierungsparameter
Abb. 6.4.a
Delem
V1101, 6.6
Parameter: 7Min. Position
Bereich : -999999 - +999999Default : -9999Einheit : Anzeigewerte
FunktionMinimaler Wert der Hilfsachse in den definierten Anzeigewerten. Wenn die Achse von Handbewegt wird, wird die Position auch auf diesen Wert begrenzt.
BeschreibungDieser Parameterwert hängt von der Genauigkeit ab, die Sie für Ihre Achse wünschen. Fürberechnete Bombierung (CROWNa) muß die Auflösung immer in Hundertstel angegebenwerden (0,01).Der Parameter "Dezimalstellenposition" muß in diesem Falle 0 (Ausgangswert) bleiben. SieheParameter 15.
BeispielDie Achse muß mit einer Auflösung von 0,01 mm programmiert werden. Wenn derMindestwert der Achse 10,00 beträgt, müssen Sie 1000 programmieren.
Bei nicht-berechneter Bombierung (CROWN) ist der Mindestwert normalerweise 0 (0%). Jenach Parameter "Dezimalstellenposition" kann dieser Wert auch 0,0 oder 0,00 oder 0,000lauten.
Delem
V1101, 6.7
Parameter: 8Max. Position
Bereich : -999999 - +999999Default : 9999Einheit : Anzeigewerte
FunktionHöchstwert der Hilfsachse in den definierten Anzeigewerten. Wenn die Achse von Handbewegt wird, wird die Position auch auf diesen Wert begrenzt.
BeschreibungSiehe Beschreibung Mindestwert
Delem
V1101, 6.8
Parameter: 31Standard- / hohe Auflösung (0/1)
Bereich : 0 - 1Default : 0Einheit : -
FunktionZur Bestimmung der Auflösung des Potentiometers
Beschreibung0 = Standardauflösung des Potentiometers, 8 Bit (Werte 0 - 255)1 = hohe Auflösung des Potentiometers, 10 Bit (Werte 0 -1023)Siehe auch Parameter DA-min, DA-max und Hysterese.
Delem
V1101, 6.9
Parameter: 18DA-min
Bereich : 0.00 - 100.00Default : 0Einheit : %
FunktionWert in % entsprechend der minimalen Achsenposition.
Delem
V1101, 6.10
Parameter: 19DA-max
Bereich : 0.00 - 100.00Default : 0Einheit : %
FunktionHöchstwert in % der Achsenposition.
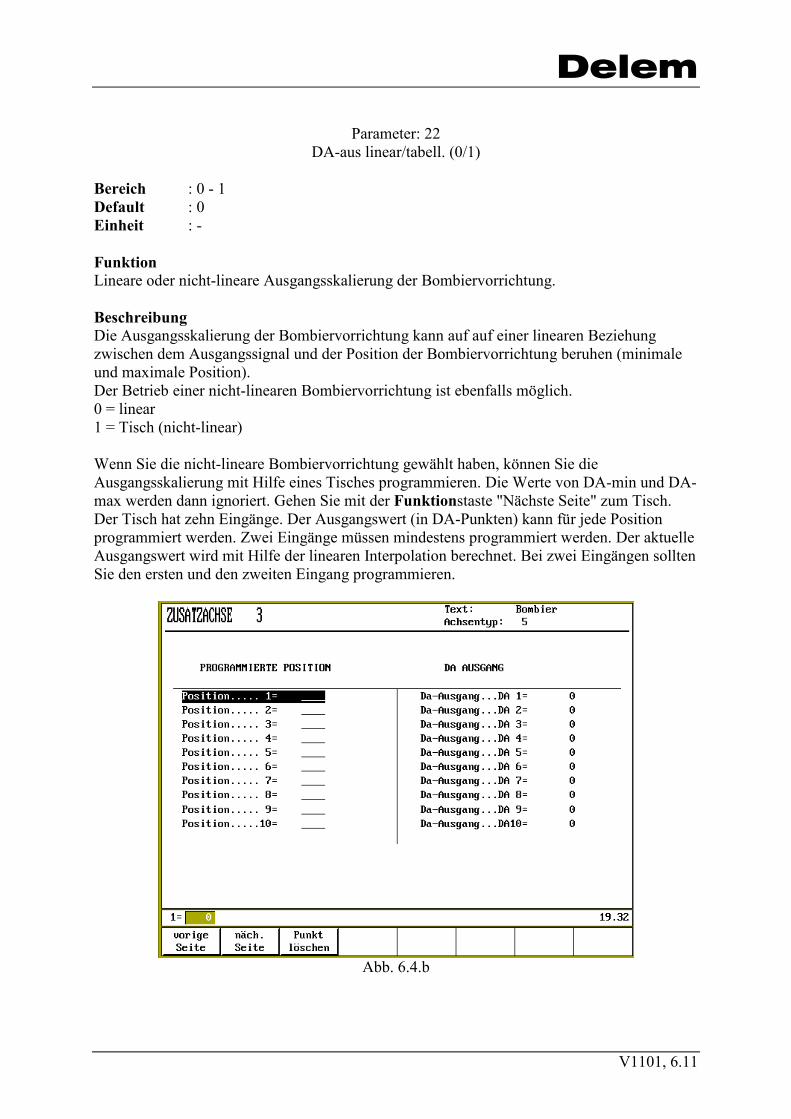
Delem
V1101, 6.11
Parameter: 22DA-aus linear/tabell. (0/1)
Bereich : 0 - 1Default : 0Einheit : -
FunktionLineare oder nicht-lineare Ausgangsskalierung der Bombiervorrichtung.
BeschreibungDie Ausgangsskalierung der Bombiervorrichtung kann auf auf einer linearen Beziehungzwischen dem Ausgangssignal und der Position der Bombiervorrichtung beruhen (minimaleund maximale Position).Der Betrieb einer nicht-linearen Bombiervorrichtung ist ebenfalls möglich.0 = linear1 = Tisch (nicht-linear)
Wenn Sie die nicht-lineare Bombiervorrichtung gewählt haben, können Sie dieAusgangsskalierung mit Hilfe eines Tisches programmieren. Die Werte von DA-min und DA-max werden dann ignoriert. Gehen Sie mit der Funktionstaste "Nächste Seite" zum Tisch.Der Tisch hat zehn Eingänge. Der Ausgangswert (in DA-Punkten) kann für jede Positionprogrammiert werden. Zwei Eingänge müssen mindestens programmiert werden. Der aktuelleAusgangswert wird mit Hilfe der linearen Interpolation berechnet. Bei zwei Eingängen solltenSie den ersten und den zweiten Eingang programmieren.
Abb. 6.4.b
Delem
V1101, 6.12
Parameter: 23Hysterese
Bereich : 0 - 1023Default : 1Einheit : DA-Punkte
FunktionZur Bestimmung des Ausschaltpunkts (Ausschaltzone) für den programmierten DA-Wert.Siehe auch Abbildung 6.2a.
BeschreibungDer Hysteresewert bestimmt die Ausschaltzone um den DA-Wert in der AnwendungRückmeldung. Der Wert der Hysterese hängt von der verwendeten Bombiervorrichtung ab.Eine Hysterese kann erforderlich sein, um die Bombiervorrichtung aufgrund ihrer Trägheit ander richtigen Stelle anzuhalten.
Delem
V1101, 6.13
Parameter: 14Voreinstellungswert
Bereich : -999999 - +999999Default : 0Einheit : Anzeigewerte
FunktionAusgangswert in Anzeigewerten
BeschreibungDer Ausgangswert wird bei einem neuen numerischen Programm (Datenvorbereitungsmenü)als Anfangswert für die Achse verwendet.
Delem
V1101, 6.14
Parameter: 15Kommastellen
Bereich : 0 - 3Default : 0Einheit : -
FunktionDezimalstellen des Hilfsachsenwerts.
BeschreibungDieser Parameter sollte bei einer berechneten Bombierungsachsenfunktion immer den Wert 0haben.
Bei der nicht-berechneten Bombierung ist es möglich, die Dezimalstelle wie benötigteinzustellen.0 = keine Auflösung1 = 0,1 Auflösung2 = 0,01 Auflösung3 = 0,001 Auflösung

Delem
V1101, 7.1
7. DIGITALE AUSGÄNGE
7.1. Einführung
Digitale Ausgangsachsen sind "Achsen" mit dem Parameter "Achsentyp" E/A. Die Zahl derprogrammierbaren Achsen hängt vom Steuerungstypen ab.
Die folgenden digitalen Ausgangsachsen können programmiert werden:• R-digital• ein / aus
Die Parameter werden in der Reihenfolge ihres Auftretens behandelt. Wenn Sie denbenötigten "Achsentyp" programmiert haben, können Sie die entsprechenden Parameter nachBetätigung der Funktionstaste "Parameter ändern" programmieren.Die Parameter von R-digital werden in Abschnitt 7.2 behandelt und die Parameter Ein/Aus inAbschnitt 7.3.
7.2. Digitale R-Achse
Eine digitale R-Achse kann anstatt einer vollständig motorgetriebenen R-Achse (Servo-R-Achse oder AC-R-Achse) verwendet werden. Dieser Achsentyp wird mit digitalen Ausgängenangetrieben. Diese digitalen Ausgänge - F1 und F2 im beigelegtenStandardanschlußdiagramm - bestimmen die möglichen Situationen oder Positionen derdigitalen R-Achse.
Da nur zwei digitale Ausgänge verfügbar sind, können höchstens vier verschiedene Positionender digitalen R-Achse programmiert werden. Es gibt sieben verschiedene R-Achsensituationen. Daher müssen manche Situationen als identische Achsenpositionbetrachtet werden.
Für jede Situation muß ein Parameter programmiert werden. Jeder Parameter besteht aus dreiZiffern. Mit der rechten Ziffer wird angegeben, ob diese R-Achsensituation zulässig ist. Wenneine Situation nicht zulässig ist (A = 0), werden die Werte von F1 und F2 ignoriert. DieKonstruktion Ihrer digitalen R-Achse entscheidet darüber, welche Situationen als gleichePosition betrachtet werden sollten (mit dem gleichen F1- und F2-Wert programmiert).
Im Menü Datenvorbereitung muß der dreistellige Ziffernkode, der der benötigten R-Achsenposition entspricht, eingegeben werden. Wenn Sie ein graphisches Produktprogrammieren, werden die Positionen automatisch beim Postprozeß berechnet. In Abbildung7.2a werden die möglichen Situationen dargestellt.
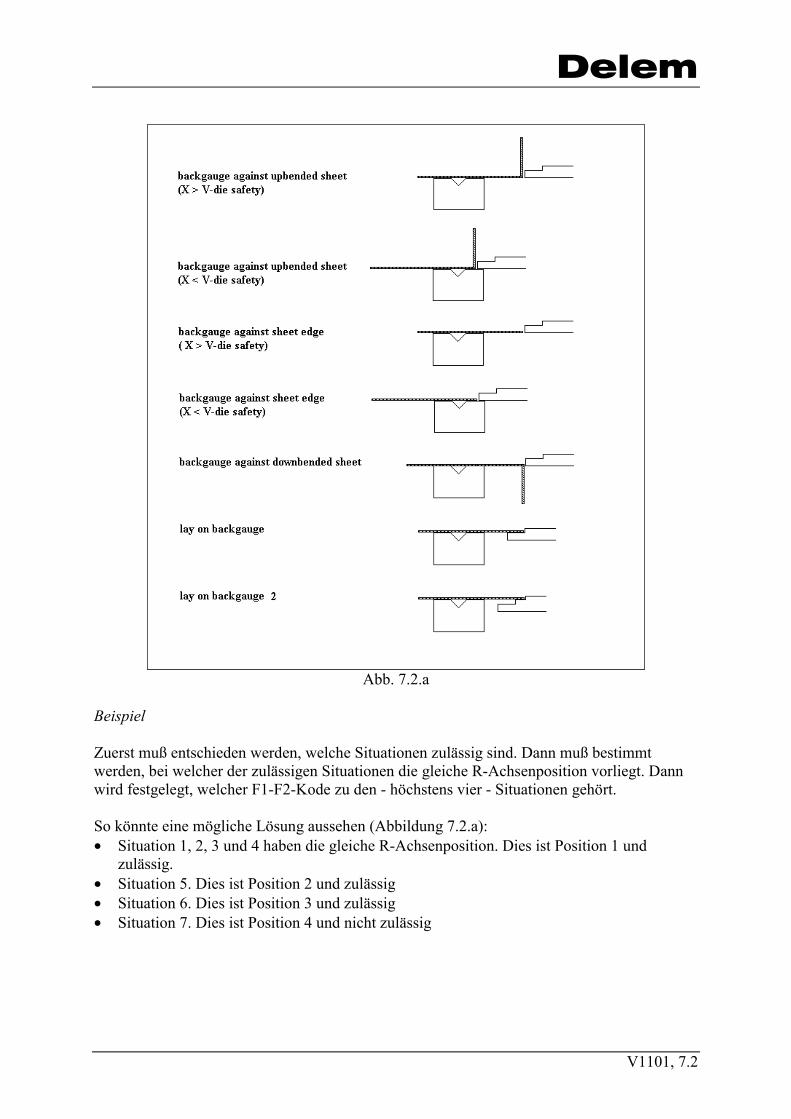
Delem
V1101, 7.2
Abb. 7.2.a
Beispiel
Zuerst muß entschieden werden, welche Situationen zulässig sind. Dann muß bestimmtwerden, bei welcher der zulässigen Situationen die gleiche R-Achsenposition vorliegt. Dannwird festgelegt, welcher F1-F2-Kode zu den - höchstens vier - Situationen gehört.
So könnte eine mögliche Lösung aussehen (Abbildung 7.2.a):• Situation 1, 2, 3 und 4 haben die gleiche R-Achsenposition. Dies ist Position 1 und
zulässig.• Situation 5. Dies ist Position 2 und zulässig• Situation 6. Dies ist Position 3 und zulässig• Situation 7. Dies ist Position 4 und nicht zulässig
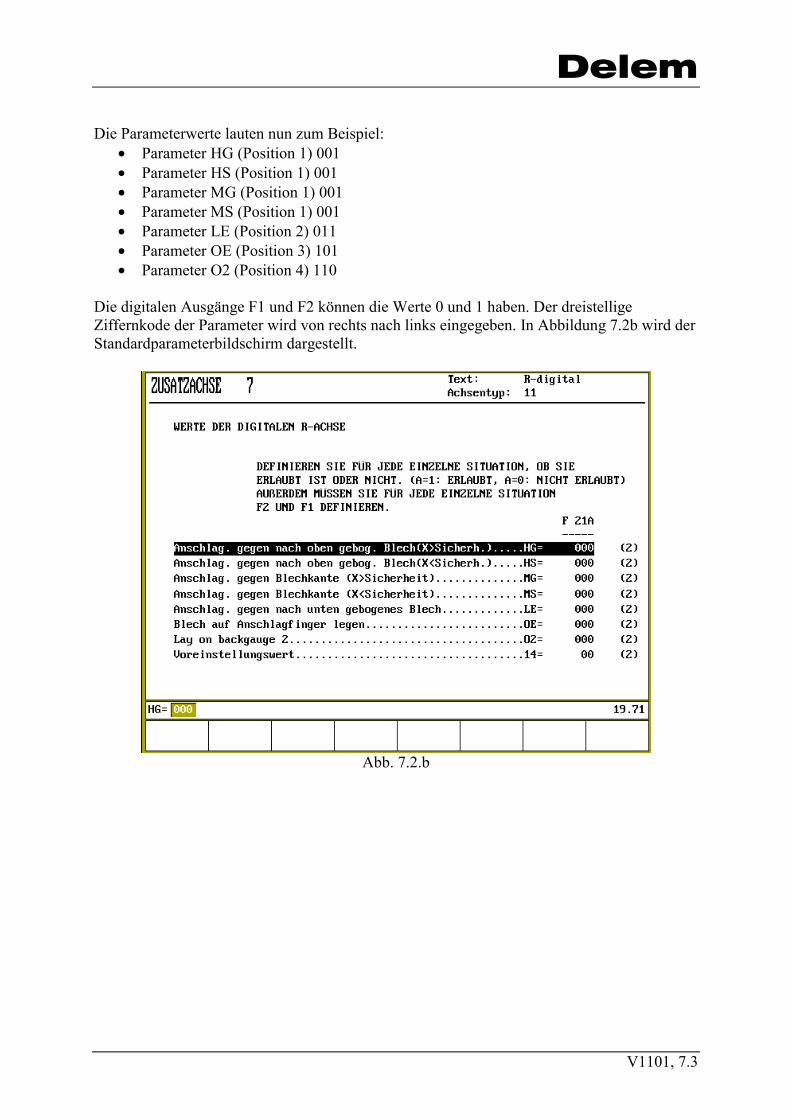
Delem
V1101, 7.3
Die Parameterwerte lauten nun zum Beispiel:• Parameter HG (Position 1) 001• Parameter HS (Position 1) 001• Parameter MG (Position 1) 001• Parameter MS (Position 1) 001• Parameter LE (Position 2) 011• Parameter OE (Position 3) 101• Parameter O2 (Position 4) 110
Die digitalen Ausgänge F1 und F2 können die Werte 0 und 1 haben. Der dreistelligeZiffernkode der Parameter wird von rechts nach links eingegeben. In Abbildung 7.2b wird derStandardparameterbildschirm dargestellt.
Abb. 7.2.b
Delem
V1101, 7.4
Parameter: 14Voreinstellungswert
Bereich : 00 - 11Default : 00Einheit : Anzeigewerte
FunktionVoreinstellungswert der Hilfsachse.
BeschreibungDieser Wert wird in der Steuerung als Voreinstellungswert angezeigt, wenn ein neuesProgramm in der Datenvorbereitung angelegt wird. Dieser Wert wird auch im Handbetriebnach der Initialisierung der Steuerung angezeigt.
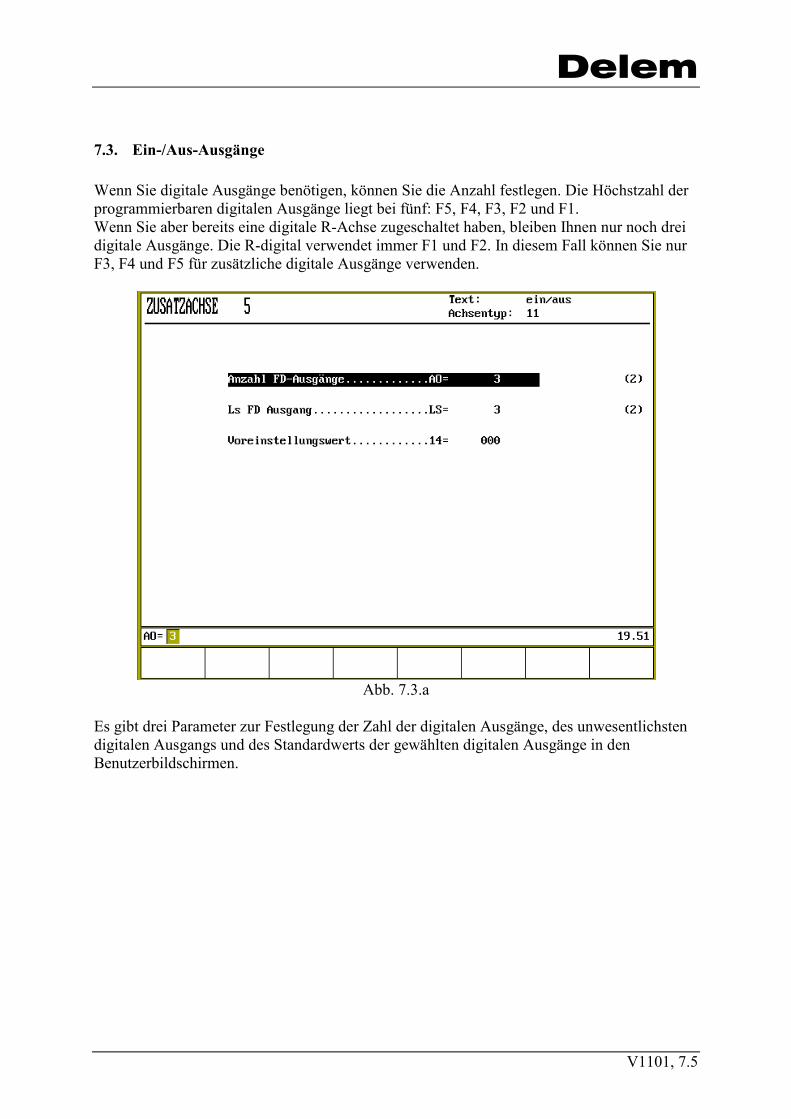
Delem
V1101, 7.5
7.3. Ein-/Aus-Ausgänge
Wenn Sie digitale Ausgänge benötigen, können Sie die Anzahl festlegen. Die Höchstzahl derprogrammierbaren digitalen Ausgänge liegt bei fünf: F5, F4, F3, F2 und F1.Wenn Sie aber bereits eine digitale R-Achse zugeschaltet haben, bleiben Ihnen nur noch dreidigitale Ausgänge. Die R-digital verwendet immer F1 und F2. In diesem Fall können Sie nurF3, F4 und F5 für zusätzliche digitale Ausgänge verwenden.
Abb. 7.3.a
Es gibt drei Parameter zur Festlegung der Zahl der digitalen Ausgänge, des unwesentlichstendigitalen Ausgangs und des Standardwerts der gewählten digitalen Ausgänge in denBenutzerbildschirmen.
Delem
V1101, 7.6
Parameter: AOAnzahl FD-Ausgänge
Bereich : 1 - 5Default : 5Einheit : -
FunktionDie Anzahl der digitalen Ausgänge, die Sie verwenden möchten. Die Zahl, die Sie verwendenkönnen, hängt immer von der Verwendung einer digitalen R-Achse ab. Die digitalenAusgänge, die Sie verwenden, sind immer in einer Folge.
Delem
V1101, 7.7
Parameter: LSLS FD-Ausgang
Bereich : 1 - 5Default : 3Einheit : -
FunktionZur Festlegung des unwesentlichsten digitalen Ausgangs. Der Standardwert ist F3, weil F2und F1 bei einer digitalen R-Achse bereits verwendet werden. Die Numerierung des digitalenAusgangs verläuft von rechts nach links, vom unwesentlichsten bis zum wichtigsten (LeastSignificant).
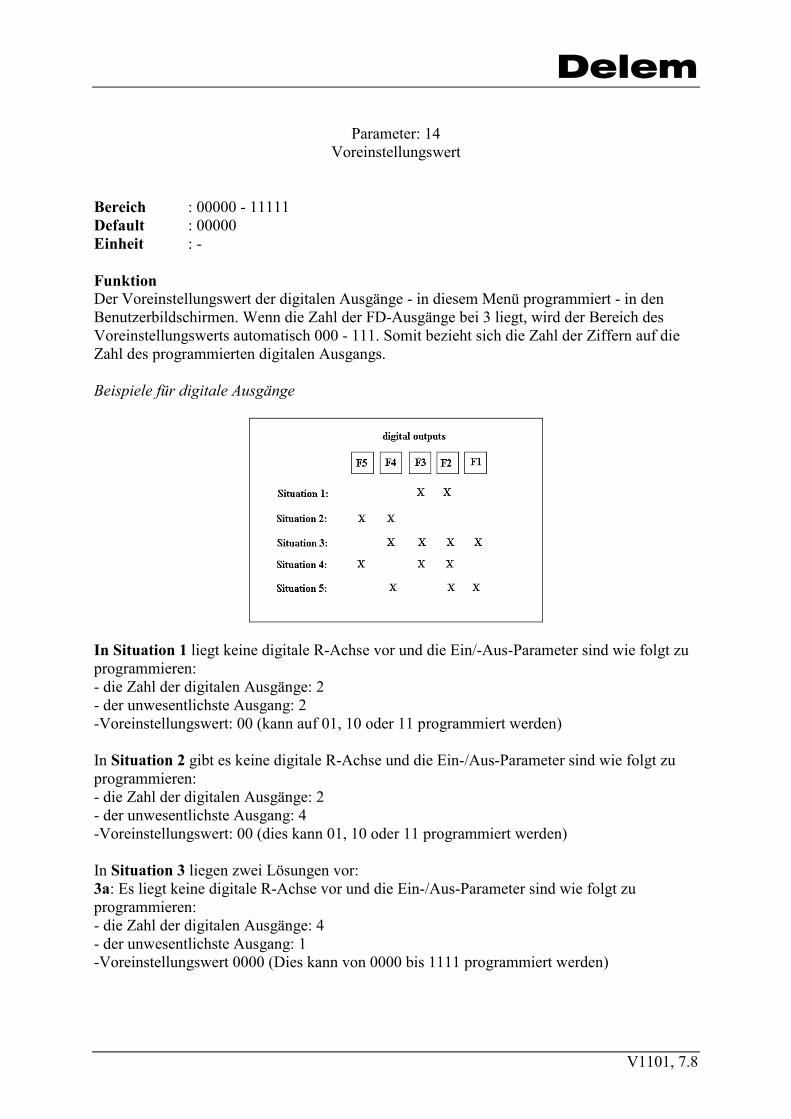
Delem
V1101, 7.8
Parameter: 14Voreinstellungswert
Bereich : 00000 - 11111Default : 00000Einheit : -
FunktionDer Voreinstellungswert der digitalen Ausgänge - in diesem Menü programmiert - in denBenutzerbildschirmen. Wenn die Zahl der FD-Ausgänge bei 3 liegt, wird der Bereich desVoreinstellungswerts automatisch 000 - 111. Somit bezieht sich die Zahl der Ziffern auf dieZahl des programmierten digitalen Ausgangs.
Beispiele für digitale Ausgänge
In Situation 1 liegt keine digitale R-Achse vor und die Ein/-Aus-Parameter sind wie folgt zuprogrammieren:- die Zahl der digitalen Ausgänge: 2- der unwesentlichste Ausgang: 2-Voreinstellungswert: 00 (kann auf 01, 10 oder 11 programmiert werden)
In Situation 2 gibt es keine digitale R-Achse und die Ein-/Aus-Parameter sind wie folgt zuprogrammieren:- die Zahl der digitalen Ausgänge: 2- der unwesentlichste Ausgang: 4-Voreinstellungswert: 00 (dies kann 01, 10 oder 11 programmiert werden)
In Situation 3 liegen zwei Lösungen vor:3a: Es liegt keine digitale R-Achse vor und die Ein-/Aus-Parameter sind wie folgt zuprogrammieren:- die Zahl der digitalen Ausgänge: 4- der unwesentlichste Ausgang: 1-Voreinstellungswert 0000 (Dies kann von 0000 bis 1111 programmiert werden)

Delem
V1101, 7.9
3b: Es liegt eine digitale R-Achse vor und die Ein-/Aus-Parameter sind wie folgt zuprogrammieren:- die Zahl der digitalen Ausgänge: 2- der unwesentlichste Ausgang: 3-Voreinstellungswert: 00 (Dies kann auf 01, 10 oder 11 programmiert werden)
Situation 4 ist nicht zulässig, weil die digitalen Ausgänge nicht in Folge sind.
In Situation 5 besteht die einzige Lösung aus folgendem: es liegt eine digitale R-Achse vor,und:- die Zahl der digitalen Ausgänge: 1- der unwesentlichste Ausgang: 4-Voreinstellungswert: 0 (oder 1)
Delem
V1101, 8.1
8. I-ACHSEN
8.1. Einführung
Im Hilfsachsenmenü können Sie die benötigten Achsen programmieren. Mit den Parametern"Achsentyp" und "Textnummer" können Sie die Achse definieren. Es gibt drei verschiedene I-Achsentypen zur Steuerung der Matrizenbewegung. Die Zahl der programmierbaren Achsenhängt vom Steuerungstypen ab.
Die folgenden I-Achsentypen können programmiert werden:• Servo I-Achse• AC I-Achse• I-Achse mit 1-Geschwindigkeits-AC-Motor mit Potentiometerrückmeldung• Digitale I-Achse
Die Parameter werden in der Reihenfolge ihres Auftretens behandelt.• Die Servo I-Achse und die AC I-Achse haben die gleichen Parameter; behandelt in
Kapitel 5.• Die I-Achse mit 1 Geschwindigkeits-AC-Motor wird in Abschnitt 8.2 behandelt. Dieser
Achsentyp kann mit den Bombierungsachsen (Kapitel 6) verglichen werden.• Die digitale I-Achse wird in Abschnitt 8.3 behandelt.
Wenn Sie den benötigten "Achsentyp" programmiert haben, können Sie die entsprechendenParameter nach Betätigung der Funktionstaste "Parameter ändern" programmieren.
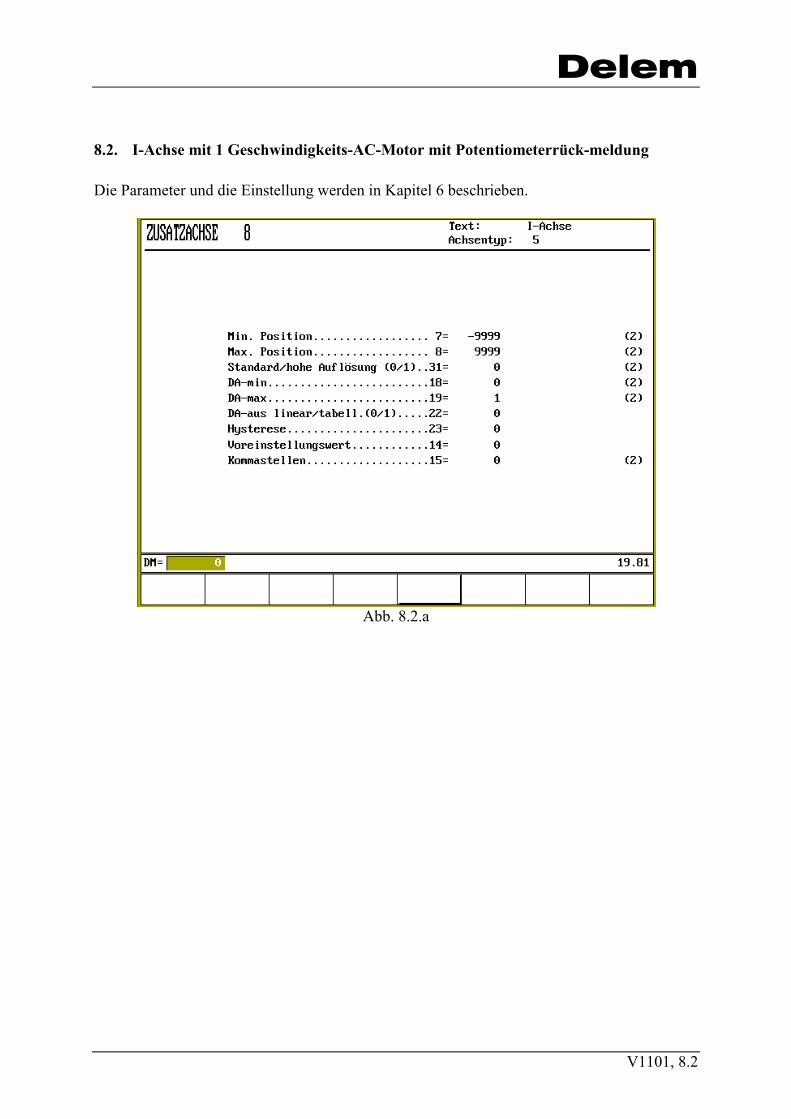
Delem
V1101, 8.2
8.2. I-Achse mit 1 Geschwindigkeits-AC-Motor mit Potentiometerrück-meldung
Die Parameter und die Einstellung werden in Kapitel 6 beschrieben.
Abb. 8.2.a
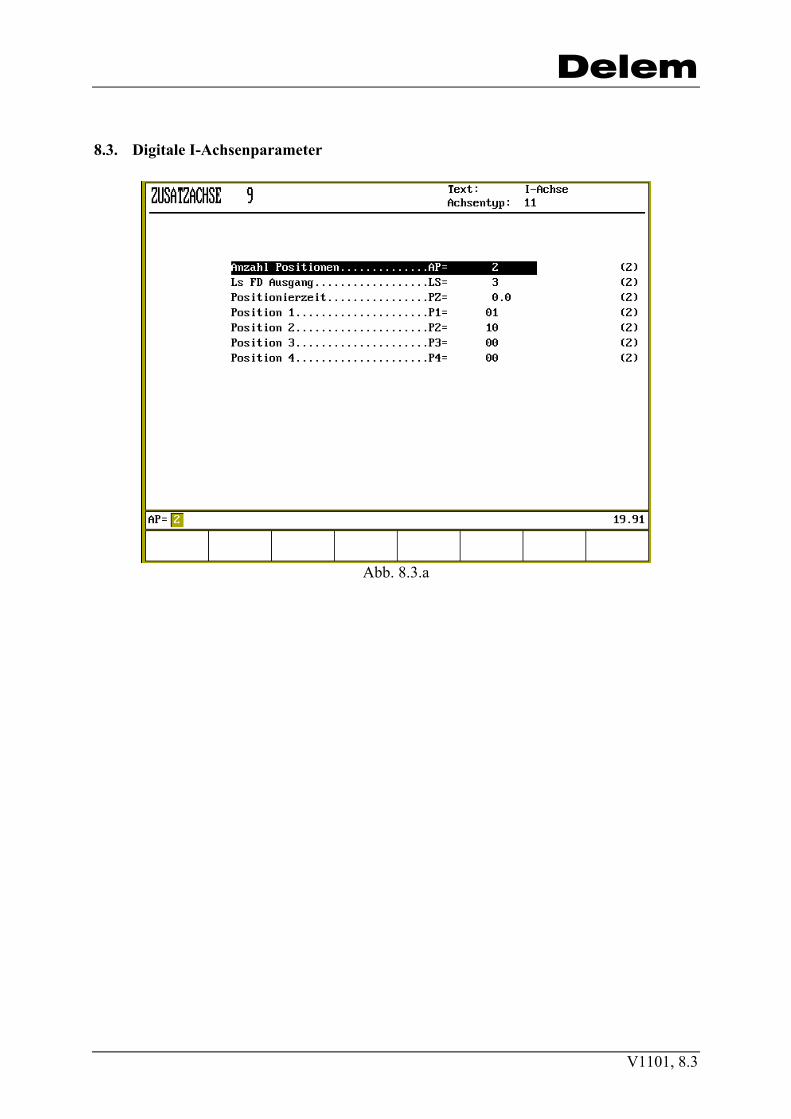
Delem
V1101, 8.3
8.3. Digitale I-Achsenparameter
Abb. 8.3.a
Delem
V1101, 8.4
Parameter: APAnzahl Positionen
Bereich : 2 - 4Default : 2Einheit : -
FunktionZur Bestimmung der Positionenzahl der I-Achse.
Delem
V1101, 8.5
Parameter: LSLS FD-Ausgang
Bereich : 1 - 5Default : 3Einheit : -
FunktionZur Festlegung des unwesentlichsten (Least Significant) digitalen Funktions-ausgangs. Es gibtfünf digitale Funktionsausgänge. F1 und F2 werden von der digitalen R-Achse verwendet(wenn verfügbar). Somit ist der Standardwert 3 (=F3). Je nach der Positionszahl der digitalenI-Achse werden ein oder zwei digitale Ausgänge benötigt.Wenn Sie zwei digitale Ausgänge benötigen, müssen diese digitalen Ausgänge in Folge sein.In diesem Fall kann der Wert des unwesentlichsten FD-Ausgangs nie 5 sein.
Delem
V1101, 8.6
Parameter: PZPositionierungszeit
Bereich : 0,0 - 99,0Default : 0,0Einheit : s
FunktionZur Bestimmung der Wartezeit der X-Achse, bevor sie sich in ihre neue Position bewegenkann. In der Zwischenzeit bewegt sich die I-Achse in ihre neue Position.
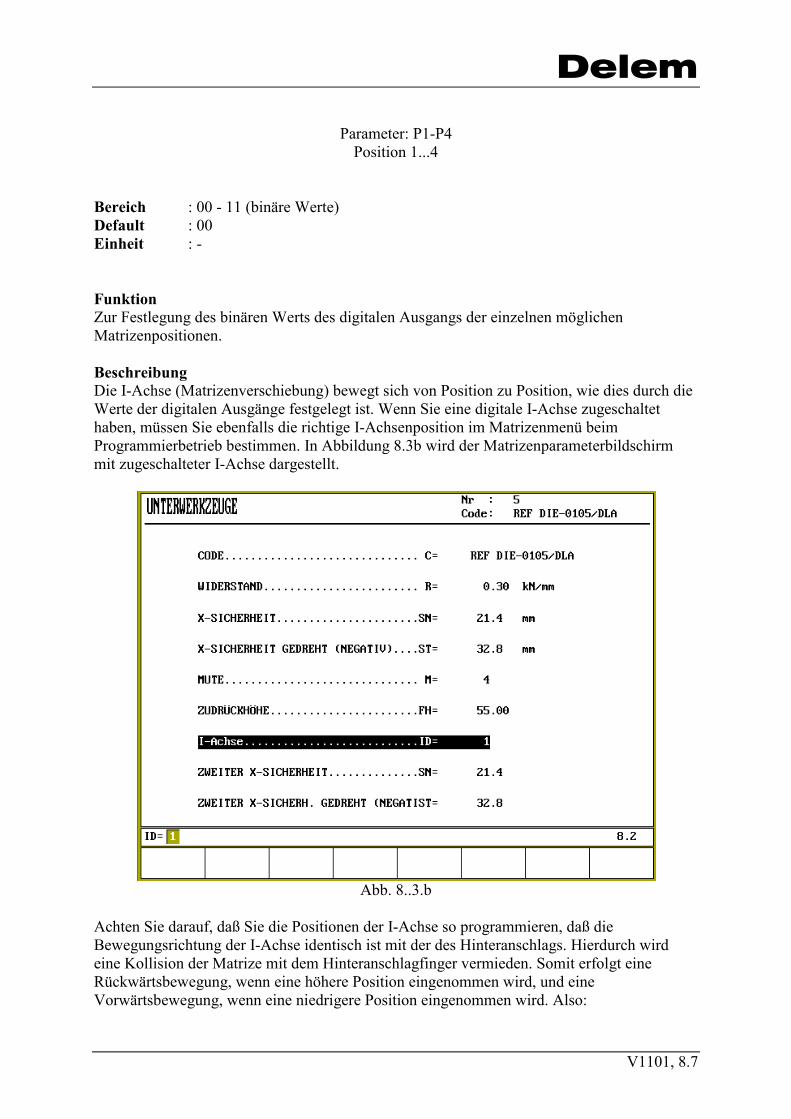
Delem
V1101, 8.7
Parameter: P1-P4Position 1...4
Bereich : 00 - 11 (binäre Werte)Default : 00Einheit : -
FunktionZur Festlegung des binären Werts des digitalen Ausgangs der einzelnen möglichenMatrizenpositionen.
BeschreibungDie I-Achse (Matrizenverschiebung) bewegt sich von Position zu Position, wie dies durch dieWerte der digitalen Ausgänge festgelegt ist. Wenn Sie eine digitale I-Achse zugeschaltethaben, müssen Sie ebenfalls die richtige I-Achsenposition im Matrizenmenü beimProgrammierbetrieb bestimmen. In Abbildung 8.3b wird der Matrizenparameterbildschirmmit zugeschalteter I-Achse dargestellt.
Abb. 8..3.b
Achten Sie darauf, daß Sie die Positionen der I-Achse so programmieren, daß dieBewegungsrichtung der I-Achse identisch ist mit der des Hinteranschlags. Hierdurch wirdeine Kollision der Matrize mit dem Hinteranschlagfinger vermieden. Somit erfolgt eineRückwärtsbewegung, wenn eine höhere Position eingenommen wird, und eineVorwärtsbewegung, wenn eine niedrigere Position eingenommen wird. Also:
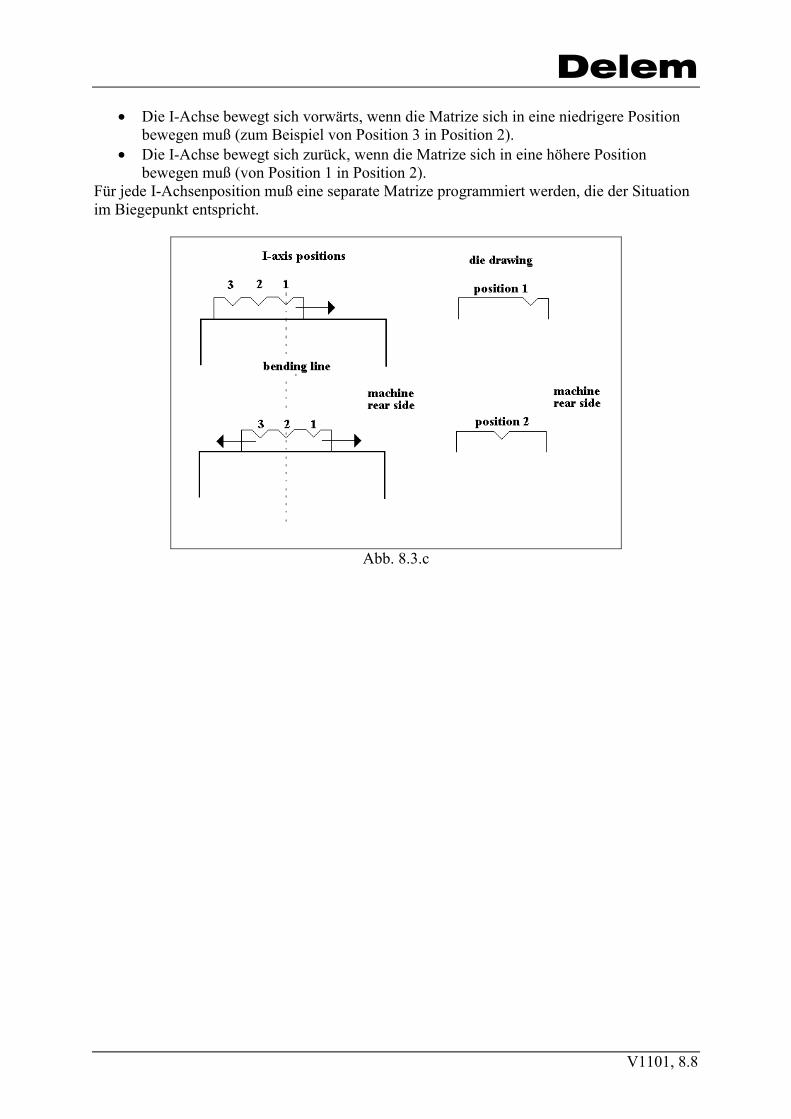
Delem
V1101, 8.8
• Die I-Achse bewegt sich vorwärts, wenn die Matrize sich in eine niedrigere Positionbewegen muß (zum Beispiel von Position 3 in Position 2).
• Die I-Achse bewegt sich zurück, wenn die Matrize sich in eine höhere Positionbewegen muß (von Position 1 in Position 2).
Für jede I-Achsenposition muß eine separate Matrize programmiert werden, die der Situationim Biegepunkt entspricht.
Abb. 8.3.c
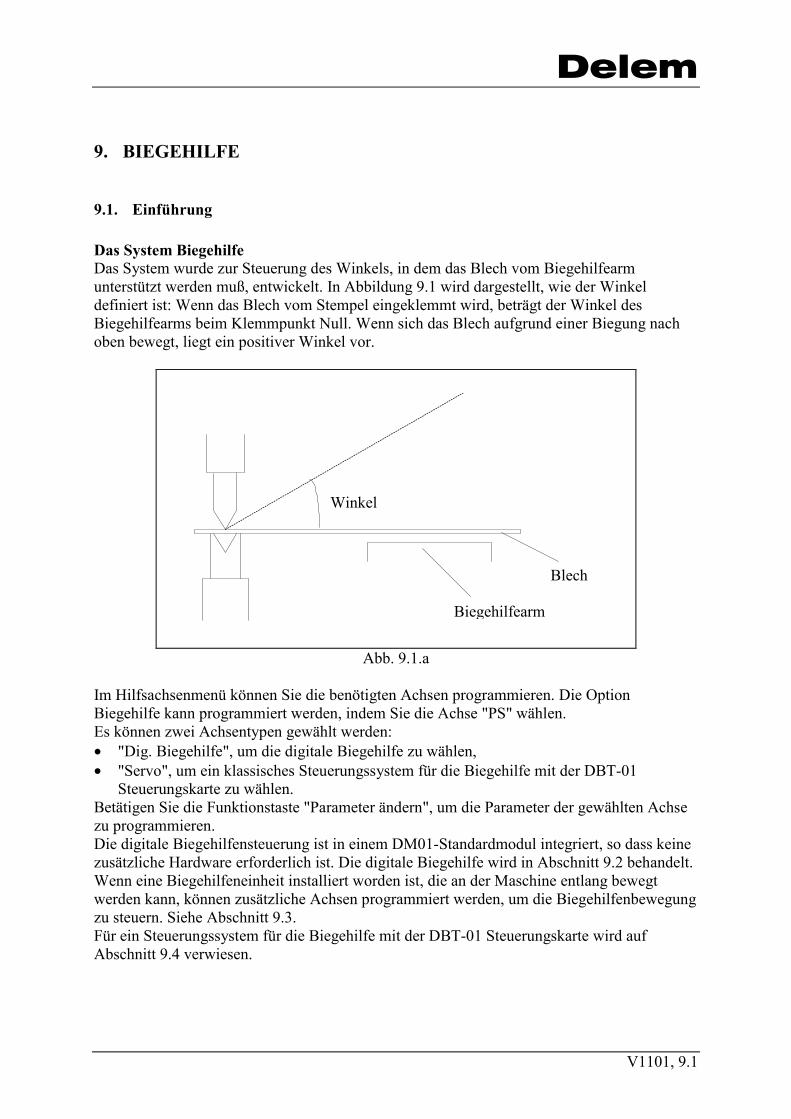
Delem
V1101, 9.1
9. BIEGEHILFE
9.1. Einführung
Das System BiegehilfeDas System wurde zur Steuerung des Winkels, in dem das Blech vom Biegehilfearmunterstützt werden muß, entwickelt. In Abbildung 9.1 wird dargestellt, wie der Winkeldefiniert ist: Wenn das Blech vom Stempel eingeklemmt wird, beträgt der Winkel desBiegehilfearms beim Klemmpunkt Null. Wenn sich das Blech aufgrund einer Biegung nachoben bewegt, liegt ein positiver Winkel vor.
Winkel
Biegehilfearm
Blech
Abb. 9.1.a
Im Hilfsachsenmenü können Sie die benötigten Achsen programmieren. Die OptionBiegehilfe kann programmiert werden, indem Sie die Achse "PS" wählen.Es können zwei Achsentypen gewählt werden:• "Dig. Biegehilfe", um die digitale Biegehilfe zu wählen,• "Servo", um ein klassisches Steuerungssystem für die Biegehilfe mit der DBT-01
Steuerungskarte zu wählen.Betätigen Sie die Funktionstaste "Parameter ändern", um die Parameter der gewählten Achsezu programmieren.Die digitale Biegehilfensteuerung ist in einem DM01-Standardmodul integriert, so dass keinezusätzliche Hardware erforderlich ist. Die digitale Biegehilfe wird in Abschnitt 9.2 behandelt.Wenn eine Biegehilfeneinheit installiert worden ist, die an der Maschine entlang bewegtwerden kann, können zusätzliche Achsen programmiert werden, um die Biegehilfenbewegungzu steuern. Siehe Abschnitt 9.3.Für ein Steuerungssystem für die Biegehilfe mit der DBT-01 Steuerungskarte wird aufAbschnitt 9.4 verwiesen.
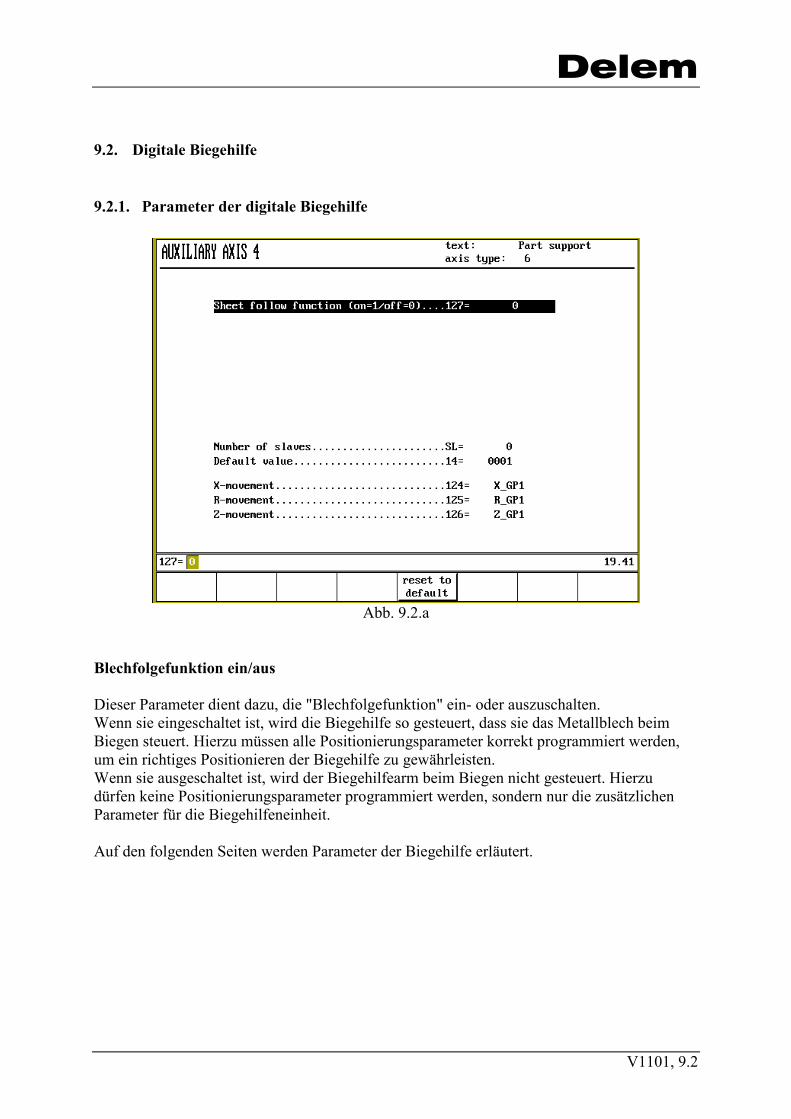
Delem
V1101, 9.2
9.2. Digitale Biegehilfe
9.2.1. Parameter der digitale Biegehilfe
Abb. 9.2.a
Blechfolgefunktion ein/aus
Dieser Parameter dient dazu, die "Blechfolgefunktion" ein- oder auszuschalten.Wenn sie eingeschaltet ist, wird die Biegehilfe so gesteuert, dass sie das Metallblech beimBiegen steuert. Hierzu müssen alle Positionierungsparameter korrekt programmiert werden,um ein richtiges Positionieren der Biegehilfe zu gewährleisten.Wenn sie ausgeschaltet ist, wird der Biegehilfearm beim Biegen nicht gesteuert. Hierzudürfen keine Positionierungsparameter programmiert werden, sondern nur die zusätzlichenParameter für die Biegehilfeneinheit.
Auf den folgenden Seiten werden Parameter der Biegehilfe erläutert.
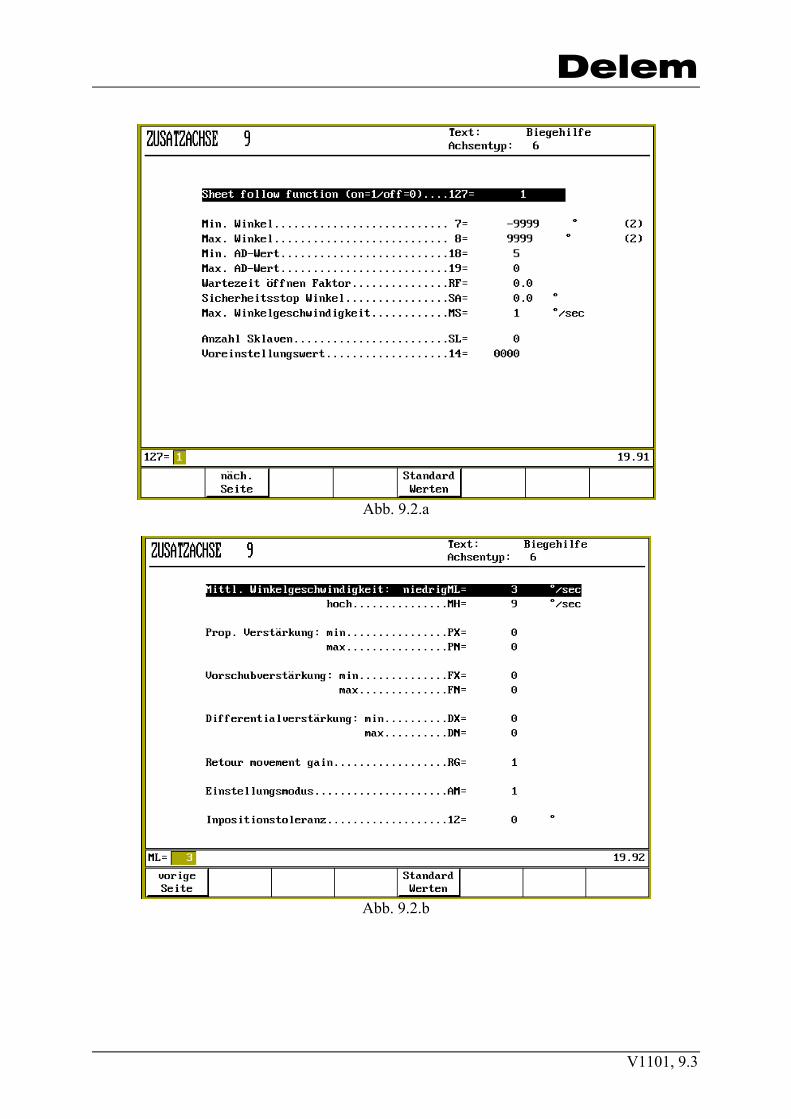
Delem
V1101, 9.3
Abb. 9.2.a
Abb. 9.2.b
Delem
V1101, 9.4
Parameter: 7Min. Winkel
Bereich : 0.0 - 90.0Einheit : °Default : 0.0
FunktionDer minimale Winkel, in dem der Stützarm positioniert werden kann. Dies ist ein durch dieSoftware bedingter Grenzwert.
Parameter: 8Max. Winkel
Bereich : 0.0 - 90.0Einheit : °Default : 0.0
FunktionDer maximale Winkel, in dem der Stützarm positioniert werden kann. Dies ist ein durch dieSoftware bedingter Grenzwert.
Delem
V1101, 9.5
Parameter: 18Min. AD-Wert
Bereich : 0 - 1023Einheit : -Default : 0
FunktionDer Mindestwert der AD-umgeformten Potentiometerspannung. Dieser Wert entspricht demminimalen Winkel, in dem der Biegehilfearm positioniert werden kann.
Parameter: 19Max. AD-Wert
Bereich : 0 - 1023Einheit : -Default : 1023
FunktionDer Höchstwert der AD-umgeformten Potentiometerspannung. Dieser Wert entspricht demminimalen Winkel, in dem der Biegehilfearm positioniert werden kann.
Delem
V1101, 9.6
Parameter: RFWartezeit öffnen Faktor
Bereich : 0.0 - 9.9Einheit : -Default : 1.0
FunktionEin Multiplikationsfaktor, der zur Programmierung der Zeit, die der Biegehilfearm in seinerdefinitiven Position bleiben muß, verwendet wird. Der Parameter "Wartezeit vor Öffnen" wirdmit "Wartezeit öffnen Faktor" multipliziert, um zu programmieren, wie lange derBiegehilfearm in dieser Situation bleiben muß. Wenn "Wartezeit öffnen Faktor" auf 1,0eingestellt ist, bewegen sich die Oberwange und der Biegehilfearm gleichzeitig zurück.
Delem
V1101, 9.7
Parameter: SLAnzahl Sklaven
Bereich : 0 - 4Units : -Default : 0
FunktionDie Zahl der außer der Haupteinheit installierten zusätzlichen Biegehilfeeinheiten (Sklaven)ist zu beachten. Es können maximal 4 Einheiten kontrolliert werden.
Delem
V1101, 9.8
Parameter: 14Voreinstellungswert
Bereich : 0000 - 1111 (binary values)Einheit : -Default : 0000
FunktionEin/Aus-Umschaltfunktion für jede Biegehilfeeinheit. Eine "1" bedeutet, daß sie eingeschaltetist, bei "0" ist sie ausgeschaltet. So bedeutet beispielsweise 1000, daß eine Biegehilfeachse inder ersten Position zugeschaltet wurde.
Delem
V1101, 9.9
Parameter: SASicherheitsstop winkel
Bereich : 0.0 - 90.0Einheit : °Default : 0.0
FunktionEin Winkel, bei dem der Biegehilfearm in der Rückbewegung angehalten wird.
Der Biegehilfearm kann in seine Mindestposition zurück bewegt werden, wenn Sie dasKennzeichen 8128 im Delem-Sequenzer einstellen. Siehe auch die Gebrauchsanweisung"Programmiersprache für Delem-Sequenzer" in bezug auf mehr Informationen über dieProgrammierung des Sequenzers.Wenn kein Sequenzer verwendet wird, bleibt der Parameter bei 0.0.
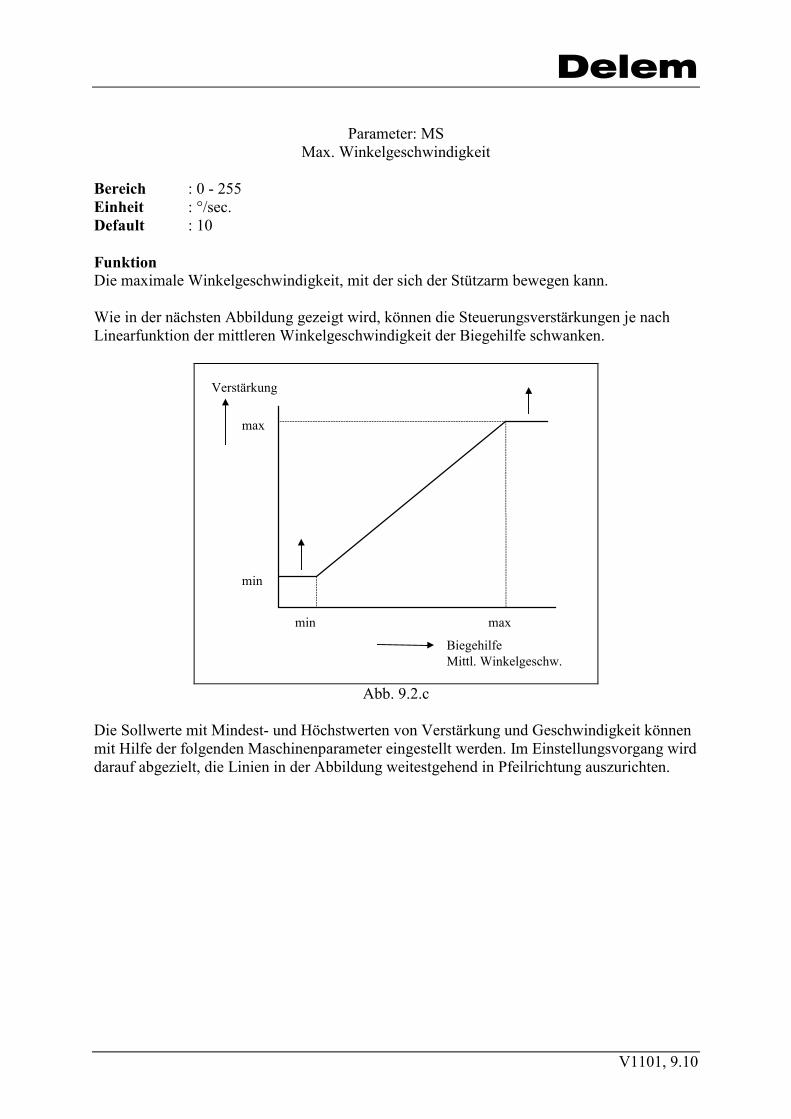
Delem
V1101, 9.10
Parameter: MSMax. Winkelgeschwindigkeit
Bereich : 0 - 255Einheit : °/sec.Default : 10
FunktionDie maximale Winkelgeschwindigkeit, mit der sich der Stützarm bewegen kann.
Wie in der nächsten Abbildung gezeigt wird, können die Steuerungsverstärkungen je nachLinearfunktion der mittleren Winkelgeschwindigkeit der Biegehilfe schwanken.
min
min
max
max
BiegehilfeMittl. Winkelgeschw.
Verstärkung
Abb. 9.2.c
Die Sollwerte mit Mindest- und Höchstwerten von Verstärkung und Geschwindigkeit könnenmit Hilfe der folgenden Maschinenparameter eingestellt werden. Im Einstellungsvorgang wirddarauf abgezielt, die Linien in der Abbildung weitestgehend in Pfeilrichtung auszurichten.
Delem
V1101, 9.11
Parameter: MLMittl. Winkelgeschwindigkeit min.
Bereich : 0.0 - 999.9Einheit : °/sec.Default : 1.0
FunktionGeringster Wert der Winkelgeschwindigkeit, der zum ersten Sollwert in der FunktionGeschwindigkeit/Verstärkung gehört.
Parameter: MHMittl. Winkelgeschwindigkeit max.
Bereich : 0.0 - 999.9Einheit : °/secDefault : 1.0
FunktionHöchstwert der Winkelgeschwindigkeit, der zum ersten Sollwert in der FunktionGeschwindigkeit/Verstärkung gehört.
Delem
V1101, 9.12
Parameter: PXProportionalverstärkung min
Bereich : 0 - 9999Einheit : -Default : 0
FunktionVerstärkung des Referenzeingangssignals. Dieser Wert ist für den ersten Sollwert derFunktion Geschwindigkeit/Verstärkung.
Parameter: PNProportionalverstärkung max
Bereich : 0 - 9999Einheit : -Default : 0
FunktionVerstärkung des Referenzeingangssignals. Dieser Wert ist für den zweiten Sollwert derFunktion Geschwindigkeit/Verstärkung.
Delem
V1101, 9.13
Die nächsten vier Parameter für Mindest- und Höchstwerte der Vorschubverstärkung und derDifferentialverstärkung sind Optionen. Sie können bei der Senkung der maximalen Fehler derBiegehilfe hilfreich sein; dies hängt jedoch von der erforderlichen Genauigkeit ab. Im Anhangfinden Sie mehr Informationen zu diesen Parametern.
Parameter: FXVorschubverstärkung min.
Bereich : 0 - 255Einheit : -Default : 0
FunktionAls Option eine Verstärkung des Referenzeingangssignals, um den maximalen Fehler zusenken.
Parameter: FNVorschubverstärkung max.
Bereich : 0 - 255Einheit : -Default : 0
FunktionAls Option eine Verstärkung des Referenzeingangssignals, um den maximalen Fehler zusenken.
Delem
V1101, 9.14
Parameter: DXDifferentialverstärkung min.
Bereich : 0 - 255Einheit : -Default : 0
FunktionAls Option eine Verstärkung des Fehlersignals, um den maximalen Fehler im System zusenken.
Parameter: DNDifferentialverstärkung max.
Bereich : 0 - 255Einheit : -Default : 0
FunktionAls Option eine Verstärkung des Fehlersignals, um den maximalen Fehler im System zusenken.
Delem
V1101, 9.15
Parameter: AMEinstellungsmodus
Bereich : 0 - 6Einheit : -Default : 0
FunktionWenn die Biegehilfe im Handbetrieb zugeschaltet ist, kann der Benutzer einen Wert im Menü"Zoomwerte" beobachten. Mit diesem Parameter kann programmiert werden, welcher Wertim Menü gezeigt werden soll. Hierfür gibt es sieben Möglichkeiten:0: Aktueller Biegehilfenwinkel [°]. Dies ist die Standardeinstellung.1: Aktueller Fehler [°]2: Maximaler Fehler je Biegung [°]3: Minimaler Fehler je Biegung [°]4: Aktuelle Winkelgeschwindigkeit der Biegehilfe [°/Sek]5: Maximale Winkelgeschwindigkeit der Biegehilfe je Biegung [°/Sek]6: Mittlere Referenzwinkelgeschwindigkeit je Biegung [°/Sek]
Beim Betrieb steht dieser Parameter normalerweise auf 0, aber bei einer Einstellung ist essinnvoll, das Verhalten der Biegehilfe mit Hilfe der Werte 1-6 zu beobachten.
Delem
V1101, 9.16
Parameter: 12Inpositionstoleranz
Bereich : 0.0 - 90.0Einheit : °Default : 2.0
FunktionFehlertoleranz des Biegehilfenwinkels. Wenn der Biegehilfenwinkel innerhalb derToleranzwerte liegt, ist im Handbetrieb der Wert hinter "PS= .." im Menü "Zoomwerte"farblich markiert. Dadurch wird angegeben, daß die Biegehilfe "in Position" ist. Wenn derFehler im Biegehilfenwinkel größer als die Toleranz ist, wird der Wert im Handbetrieb nichtfarblich markiert.
Delem
V1101, 9.17
9.2.2. Einstellung
Es gibt unterschiedliche Einstellmethoden, um die Biegehilfe zu programmieren. Diefolgenden Einstellungsmethoden können verwendet werden:• Bestimmung des max. AD- und min. AD-Werts,• Bestimmung der maximalen Winkelgeschwindigkeit der Biegehilfe,• Einstellung für die Steuerungsverstärkungen:
- Einstellung der proportionalen Verstärkung, max.,- Einstellung der proportionalen Verstärkung, min.,- Einstellung der Vorschubverstärkungen,- Einstellung der Differentialverstärkungen.
Für weitere Informationen zur Biegehilfe und zur Einstellung des Biegehilfearms verweisenwir auf die Gebrauchsanweisung der "Biegehilfe".
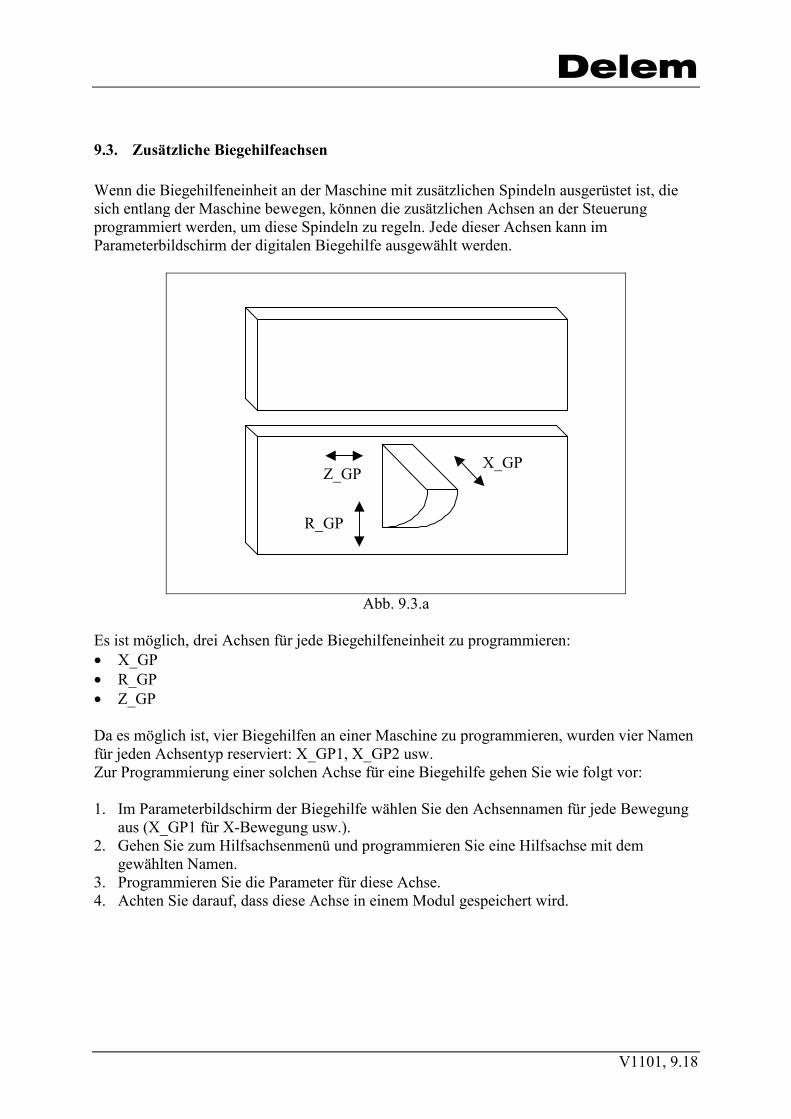
Delem
V1101, 9.18
9.3. Zusätzliche Biegehilfeachsen
Wenn die Biegehilfeneinheit an der Maschine mit zusätzlichen Spindeln ausgerüstet ist, diesich entlang der Maschine bewegen, können die zusätzlichen Achsen an der Steuerungprogrammiert werden, um diese Spindeln zu regeln. Jede dieser Achsen kann imParameterbildschirm der digitalen Biegehilfe ausgewählt werden.
X_GP
R_GP
Z_GP
Abb. 9.3.a
Es ist möglich, drei Achsen für jede Biegehilfeneinheit zu programmieren:• X_GP• R_GP• Z_GP
Da es möglich ist, vier Biegehilfen an einer Maschine zu programmieren, wurden vier Namenfür jeden Achsentyp reserviert: X_GP1, X_GP2 usw.Zur Programmierung einer solchen Achse für eine Biegehilfe gehen Sie wie folgt vor:
1. Im Parameterbildschirm der Biegehilfe wählen Sie den Achsennamen für jede Bewegungaus (X_GP1 für X-Bewegung usw.).
2. Gehen Sie zum Hilfsachsenmenü und programmieren Sie eine Hilfsachse mit demgewählten Namen.
3. Programmieren Sie die Parameter für diese Achse.4. Achten Sie darauf, dass diese Achse in einem Modul gespeichert wird.
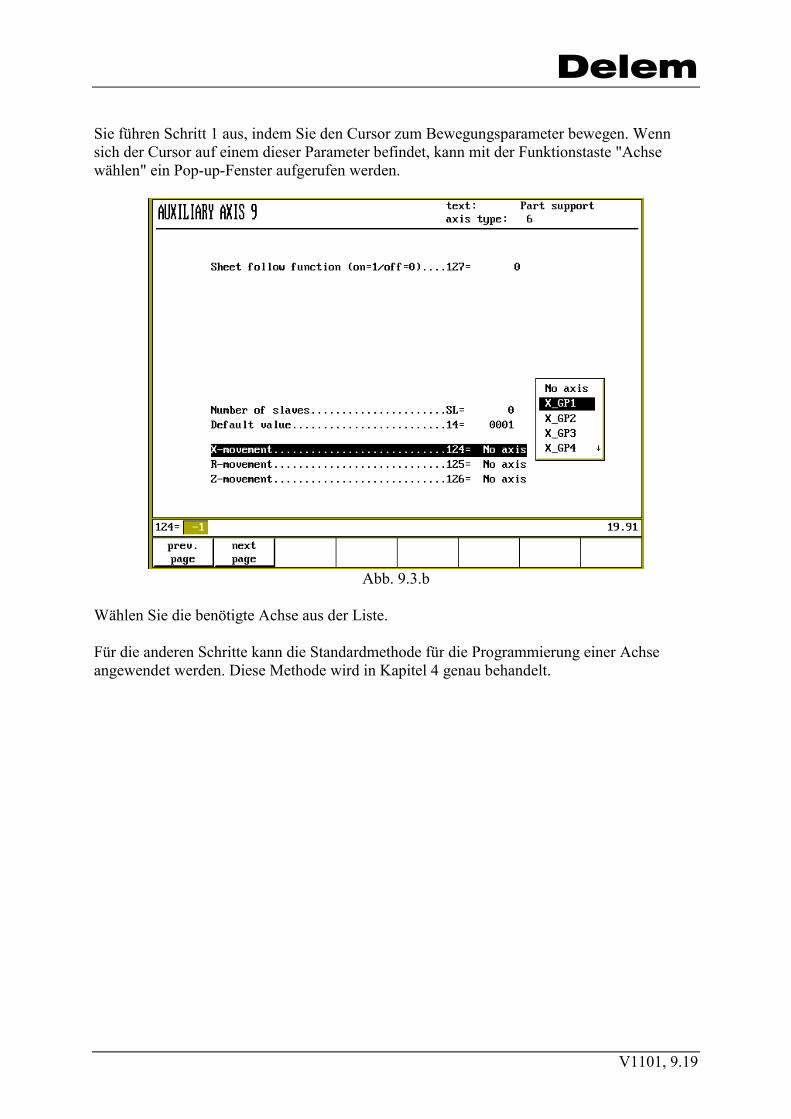
Delem
V1101, 9.19
Sie führen Schritt 1 aus, indem Sie den Cursor zum Bewegungsparameter bewegen. Wennsich der Cursor auf einem dieser Parameter befindet, kann mit der Funktionstaste "Achsewählen" ein Pop-up-Fenster aufgerufen werden.
Abb. 9.3.b
Wählen Sie die benötigte Achse aus der Liste.
Für die anderen Schritte kann die Standardmethode für die Programmierung einer Achseangewendet werden. Diese Methode wird in Kapitel 4 genau behandelt.
Delem
V1101, 9.20
9.4. Analoge Biegehilfe
9.4.1. Introduktion
Der Biegehilfe kann auch per DBT01 Karte gesteuert werden. Deswegen Mussen SieAchsentyp Servo wählen.
Zu Beginn der Biegung beschleunigt das Metallblech sehr schnell, während dieWinkeländerung sich nicht mit der gleichen Geschwindigkeit ändert. Eine hohe Genauigkeitbei der Steuerung der Biegehilfe erfordert eine geschlossene Schleife, eine regulierteGeschwindigkeit und eine Winkelsteuerung von einem oder mehreren Stützarmen. Daher istDBT01 mit einem Verstärker für die Winkelsteuerung und einem Geschwindigkeitsreglerausgerüstet.Mit dem Pm-Potentiometer (oder dem Winkelbombierungspotentiometer) wird der Winkeldes Biegehilfearms gemessen (Diagramm Biegehilfesteuerung). Das Signal diesesPotentiometers wird mit dem 0 - 10V Winkelausgangssignals des DM01-Moduls verglichen.Der Unterschied dieser Signale steuert zum Beispiel die Ausgangsspannung an einenhydraulisch Ventilverstärker (AL und AR im Diagramm Biegehilfesteuerung. DiesesDiagramm stellt ein duales System zur Biegehilfe dar). Danach wird das hydraulische Ventilangesteuert, um den Biegehilfearm zu bewegen. (Statt eines hydraulischen Ventils kann derBiegehilfearm auch per Motorantrieb gesteuert werden).
Zur gleichen Zeit wird die Geschwindigkeit des Arms gemessen (Winkelveränderung proZeiteinheit). Die Ausgangsspannungsveränderung der DA-Steuerung und die Geschwindig-keitsveränderung des Winkelpotentiometers (PM) werden miteinander verglichen. DieDifferenz zwischen diesen Signalen wird dazu benutzt, die Geschwindigkeit desSteuerungsarms zu beschleunigen.
Falls die für die Armbewegung nötige Beschleunigung für den Biegehilfearm zu hoch ist, umder Blechplatte folgen zu können, wird ein PWM-Signal (Pulsbreite Modulation) generiert,um die Geschwindigkeit der Y-Achse der Abkantpresse zu reduzieren (T/C-Eingang).Wenn die Y-Achse sich langsamer bewegt, wird auch die Winkelveränderung pro Zeiteinheitlangsamer.
Bei der Verwendung von zwei Stützarmen wird die Geschwindigkeit beider Arme verglichen.Der langsamere Arm bestimmt dann die Geschwindigkeit der Y-Achse (Duale Biegehilfe).
9.4.2. Installation und Einstellung der DBT01-Steuerungskarte
Die DBT01-Steuerungskarte wird für die Biegehilfe verwendet. Zuerst wird die DBT01-Karteinstalliert und dann wird der Biegehilfearm eingestellt. Beide Schritte werden besprochen.
Installation Prozedur� Verbinden Sie die Steuerungsplatine DBT-01 für die Biegehilfe gemäß dem
Anschlussplan.� Bringen Sie die Biegehilfearme in eine horizontale Position.
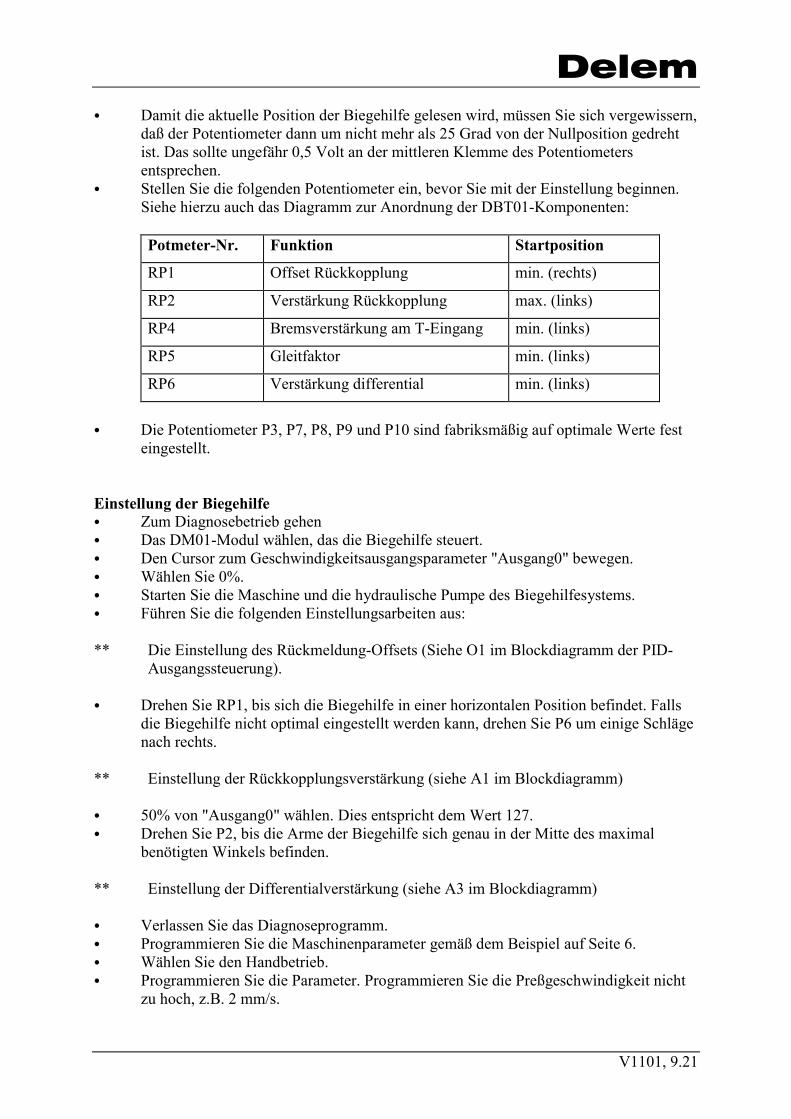
Delem
V1101, 9.21
� Damit die aktuelle Position der Biegehilfe gelesen wird, müssen Sie sich vergewissern,daß der Potentiometer dann um nicht mehr als 25 Grad von der Nullposition gedrehtist. Das sollte ungefähr 0,5 Volt an der mittleren Klemme des Potentiometersentsprechen.
� Stellen Sie die folgenden Potentiometer ein, bevor Sie mit der Einstellung beginnen.Siehe hierzu auch das Diagramm zur Anordnung der DBT01-Komponenten:
Potmeter-Nr. Funktion Startposition
RP1 Offset Rückkopplung min. (rechts)
RP2 Verstärkung Rückkopplung max. (links)
RP4 Bremsverstärkung am T-Eingang min. (links)
RP5 Gleitfaktor min. (links)
RP6 Verstärkung differential min. (links)
� Die Potentiometer P3, P7, P8, P9 und P10 sind fabriksmäßig auf optimale Werte festeingestellt.
Einstellung der Biegehilfe� Zum Diagnosebetrieb gehen� Das DM01-Modul wählen, das die Biegehilfe steuert.� Den Cursor zum Geschwindigkeitsausgangsparameter "Ausgang0" bewegen.� Wählen Sie 0%.� Starten Sie die Maschine und die hydraulische Pumpe des Biegehilfesystems.� Führen Sie die folgenden Einstellungsarbeiten aus:
** Die Einstellung des Rückmeldung-Offsets (Siehe O1 im Blockdiagramm der PID-Ausgangssteuerung).
� Drehen Sie RP1, bis sich die Biegehilfe in einer horizontalen Position befindet. Fallsdie Biegehilfe nicht optimal eingestellt werden kann, drehen Sie P6 um einige Schlägenach rechts.
** Einstellung der Rückkopplungsverstärkung (siehe A1 im Blockdiagramm)
� 50% von "Ausgang0" wählen. Dies entspricht dem Wert 127.� Drehen Sie P2, bis die Arme der Biegehilfe sich genau in der Mitte des maximal
benötigten Winkels befinden.
** Einstellung der Differentialverstärkung (siehe A3 im Blockdiagramm)
� Verlassen Sie das Diagnoseprogramm.� Programmieren Sie die Maschinenparameter gemäß dem Beispiel auf Seite 6.� Wählen Sie den Handbetrieb.� Programmieren Sie die Parameter. Programmieren Sie die Preßgeschwindigkeit nicht
zu hoch, z.B. 2 mm/s.
Delem
V1101, 9.22
� Führen Sie einige Preßbewegungen durch und drehen Sie P6 während der Preßphaseso, daß die Biegehilfe nicht schwingt und den Preßbewegungen fließend folgt.
** Einstellung des Gleitfaktors (Differenzierungsverstärkung D im Blockdiagramm)
� Führen Sie noch ein paar Preßbewegungen durch und drehen Sie P5 so, daß dieBiegehilfe der Produktbiegung optimal folgt und nicht schneller ist als dieBalkenbewegung.
** Einstellung der Verstärkung bei der Verlangsamung des Balkens (siehe O2 imBlockdiagramm) Biegehilfearme können der Platte nicht folgen, z.B.Y-Achse zuschnell).
Der Balken kann durch die Aktivierung des T-Eingangs der CNC-Steuerungverlangsamt werden.
� Lösen Sie während des Biegearbeitshubs den Preßbefehl aus, so daß die Biegehilfesich in einer angehobenen Position befindet.
� Drehen Sie RP4 so, daß der T-Eingang gerade beginnt aufzuleuchten (Aktiviert).
� Jetzt können Sie überprüfen, ob die Biegehilfe dem Produkt auch folgt, wenn mithöheren Preßgeschwindigkeiten gebogen wird. Je größer der Unterschied zwischendem erforderlichen Biegehilfewinkel und dem gemessenen Winkel ist, um so stärkerwird der T-Eingang aktiviert, so daß der Balken öfter gebremst wird.
� Bei dualer Biegehilfe müssen Sie zuerst jede Biegehilfe einzeln einstellen, da sieeinzelne Biegehilfen sind. Schließen Sie die Teile dann wieder gemäß demAnschlußdiagramm an. Die Y-Bremse wird aktiviert, wenn einer der beiden Stützarmeein zu großes Fehlersignal gibt. Der Potentiometer RP4 muß nur bei der DBT01-Karte,bei der der Ausgang T (Siehe Standard Anschlußdiagramm) an den Moduleingang Y-Bremse angeschlossen ist, eingestellt werden.
Delem
V1101, 9.23
9.4.3. Parameter der analoge Biegehilfe
Parameter: 7Mindestwert
Bereich : 0,0 - 90,0Default : 90,0Einheit : Grad (�)
FunktionDer minimale Winkel, in dem der Stützarm positioniert werden kann. Dies ist ein durch dieSoftware bedingter Grenzwert. Siehe auch Einstellung der Biegehilfeparameter.
Parameter: 8Höchstwert
Bereich : 0,0 - 90,0Default : 90,0Einheit : Grad (�)
FunktionDer maximale Winkel, in dem der Stützarm positioniert werden kann. Dies ist ein durch dieSoftware bedingter Grenzwert. Siehe auch Einstellung der Biegehilfeparameter.
Parameter: 18DA-min
Bereich : 0 - 255Default : 0Einheit : -
FunktionDer Mindestwert der AD-umgeformten Potentiometerspannung. Dieser Wert entspricht demminimalen Winkel, in dem der Biegehilfearm positioniert werden kann. Siehe auchEinstellung der Biegehilfeparameter.
Delem
V1101, 9.24
Parameter: 19DA-max
Bereich : 0 - 255Default : 1Einheit : -
FunktionDer Höchstwert der AD-umgeformten Potentiometerspannung. Dieser Wert entspricht demmaximalen Winkel, in dem der Biegehilfearm positioniert werden kann. Siehe auchEinstellung der Biegehilfeparameter.
Einstellung der BiegehilfeparameterZur Gewährleistung, daß die Biegehilfe dem Blech gleichmäßig folgt. Die Biegehilfe solltewie folgt eingestellt werden:- Zum Hilfsmenü gehen und die Achsen 1, 21 programmieren.- "Parameter ändern" wählen und die DM-Identifikation und die Boxnummer
programmieren.- Mindestwert und DA-min 0 programmieren.- Höchstwert und DA-max 255 programmieren.- Nach Handbetrieb gehen.- Die Biegehilfearm mit dem Handrad in ihre mechanisch minimale Position bewegen.
Merken Sie sich diesen Wert und programmieren Sie ihn am Ende der Einstellung fürden Parameter Mindestwert.
- Den Biegehilfewert im Bildschirm ablesen (Handbetrieb, manuelle Positionierung).Dieser Wert entspricht der Zahl der DA-Punkte. Merken Sie sich diesen Wert undprogrammieren Sie ihn am Ende der Einstellung beim Parameter DA-min.
- Die Biegehilfearm jetzt in ihre mechanisch maximale Position bewegen. Merken Siesich diesen Wert und programmieren Sie ihn am Ende der Einstellung für denParameter Höchstwert.
- Den Biegehilfewert im Bildschirm ablesen (Handbetrieb, manuelle Positionierung).Dieser Wert entspricht der Zahl der DA-Punkte. Merken Sie sich diesen Wert undprogrammieren Sie ihn am Ende der Einstellung beim Parameter DA-max.
- Die gefundenen Werte jetzt bei den entsprechenden Maschinenparameternprogrammieren.
Delem
V1101, 9.25
Parameter: RFVerzögerung vor Rückfaktor
Bereich : 0,0 - 9,9Default : 1,0Einheit : -
FunktionMultiplikationsfaktor, der zur Programmierung der Zeit, die der Biegehilfearm in seinerdefinitiven Position bleiben muß, verwendet wird. Der Parameter "Verzögerung vor Öffnen"(Kapitel 3, Parameter 36) wird mit "Verzögerung vor Rückfaktor" multipliziert, um zuprogrammieren, wie lange der Biegehilfearm in dieser Situation bleiben muß.
Wenn "Verzögerung vor Rückfaktor" auf 1,0 eingestellt ist, bewegen sich die Oberwange undder Biegehilfearm gleichzeitig zurück.
Parameter: NR (ME)Anzahl Maßeinheiten
Bereich : 1 - 4Default : 1Einheit : -
FunktionDie Zahl der Biegehilfearme, die gesteuert werden können.
BeschreibungIn der Standardsituation benötigen Sie eine DBT01-Karte, mit der ein Biegehilfearm mit Y-Bremsenrückmeldung an das DM01-Modul gesteuert wird.
Für jede zusätzliche Biegehilfeachse benötigen Sie eine separate DBT01-Steuerungskarte.Zwei oder mehr Biegehilfearme können auf zwei Arten gesteuert werden:� Synchron. In diesem Fall werden alle Biegehilfearme verwendet oder nicht
verwendet: Zusammen "Ein" oder zusammen "Aus". Die Y-Bremsenrückmeldung derneuesten DBT01 ist an das DM01-Modul angeschlossen. Siehe auch dasAnschlußdiagramm für duale Biegehilfe als Beispiel für zwei synchronisierteBiegehilfearme.
Bei "Anzahl Einheiten" für synchronisierte Steuerung immer den Wert 1programmieren.
� Separat. In diesem Fall können Sie angeben, welche Biegehilfearme verwendet odernicht verwendet werden sollen. Zur getrennten Steuerung der Biegehilfearme müssenSie einige Kennzeichen im Sequenzerprogramm programmieren. DieSteuerungsdaten für jeden Biegehilfearm müssen einem digitalen Ausgang des DM01
Delem
V1101, 9.26
angepaßt werden. Diese digitalen Ausgänge müssen an den DBT01-Ausgangangeschlossen werden (C18), so daß die Steuerung der Ventilkarte oder derMotorantrieb ausgeschaltet wird. Die Y-Bremsenrückmeldung darf in diesem Fallnicht angeschlossen sein!
Siehe auch die Gebrauchsanweisung "Programmiersprache für Delem-Sequenzer" inbezug auf mehr Informationen über die Programmierung des Sequenzers zum Antriebseparater Biegehilfearme.
Die "Anzahl Einheiten" für separate Steuerung entsprechend der Zahl derBiegehilfearme programmieren.
Parameter: 14Default
Bereich : 0000 - 1111 (binäre Werte)Default : 0000Einheit : -
FunktionEin/Aus-Umschaltfunktion für jede Biegehilfeeinheit.
BeschreibungEine “1” bedeutet, daß die Biegehilfeachse für die aktive Biegung verwendet wird (EIN), “0”bedeutet, daß die Biegehilfeachse nicht verwendet wird (AUS).
Beispiel1000 bedeutet, daß eine Biegehilfeachse für eine spezifische Biegung zugeschaltet wird, d.h.die Biegehilfeachse in der ersten Position.
Parameter: SASicherheitshaltwinkel
Bereich : 0,0 - 90,0Default : 0,0Einheit : Grad (�)
FunktionEin Winkel, bei dem der Biegehilfearm in der Rückbewegung angehalten wird.
Delem
V1101, 9.27
Parameter: MSMax. Winkelgeschwindigkeit
Bereich : 0 - 255Default : 1Einheit : Grad pro Sekunde (�/s)
FunktionDie maximale Winkelgeschwindigkeit, mit der sich der Stützarm bewegen kann.


















