Mechatronische Mehrkörpersimulation Ansatz zur · PDF fileKopplung von Struktur und...
27
Mechatronische Mehrkörpersimulation - Ansatz zur Behandlung wandernder Koppelstellen im FEM Daniel Spescha Hop Nguyen 23.01.2014 VPE Swiss Workshop Kopplung von Struktur und Steuerung/Regelung
Transcript of Mechatronische Mehrkörpersimulation Ansatz zur · PDF fileKopplung von Struktur und...
Mechatronische Mehrkörpersimulation -
Ansatz zur Behandlung wandernder Koppelstellen im FEM
Daniel Spescha
Hop Nguyen
23.01.2014
VPE Swiss Workshop
Kopplung von Struktur und Steuerung/Regelung

Inhalt
Mechatronische Mehrkörpersimulation (H. Nguyen)
– Einleitung/Grundlagen
– Modellbildung
– Simulationsbeispiele
– Fazit und Ausblick
Ansatz zur Behandlung wandernder Koppelstellen im FEM (D. Spescha)
– Stand der Technik
– Ansatz über Fourier-Reihenentwicklung einer Kraftdichtefunktion
– Diskretisierung der Kraftdichtefunktion
– Positionsabhängigkeit der resultierenden Kraft und des Kraftschwerpunktsfehlers
– Umsetzung in Finite-Elemente-Modell
– Versuchsergebnisse
– Fazit und Ausblick
Spescha © 01/2014 inspire AG 2
Einleitung
Mechatronische Mehrköpersimulation (MKS)
– Kopplung von Antrieben, Regelung und mechanischer Struktur für
dynamische Analysen wie beispielsweise:
– Frequenzantworten
– Modalanalysen
– Transiente Simulationen
– Vergleich mit Finite Elemente Modellen
– Geringere Modellordnung und somit geringere Rechendauer bei MKS
– MKS nur dann zulässig, wenn die dominierende Nachgiebigkeit in den
Koppelstellen liegt
Spescha © 01/2014 inspire AG 3
Grundlagen
Spescha © 01/2014 inspire AG 4
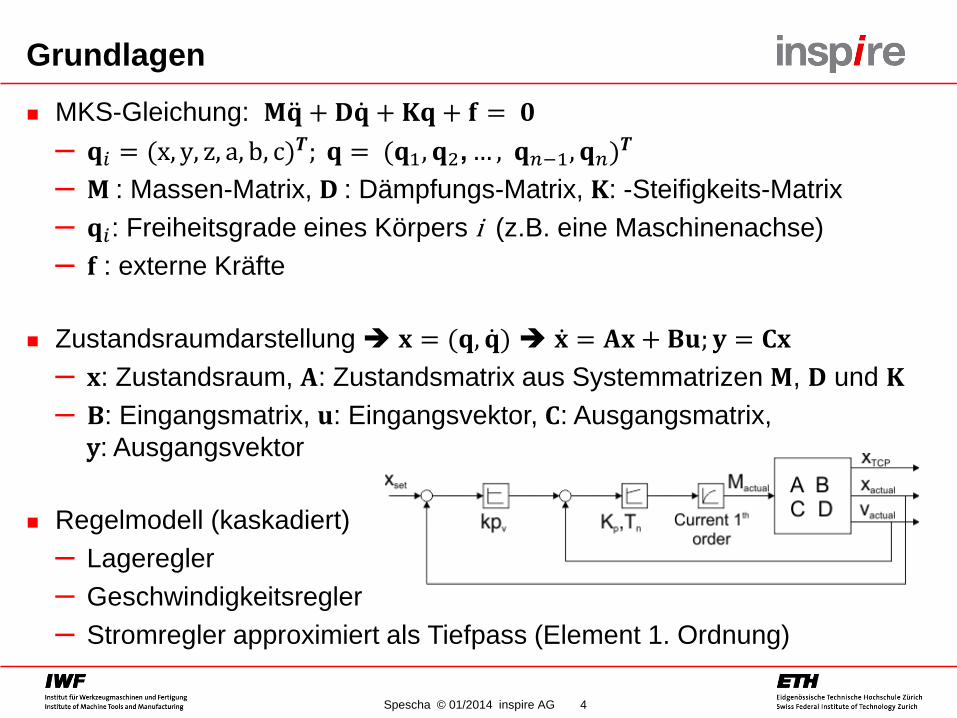
MKS-Gleichung: 𝐌𝐪 + 𝐃𝐪 + 𝐊𝐪 + 𝐟 = 𝟎
– 𝐪𝑖 = (x, y, z, a, b, c)𝑻; 𝐪 = (𝐪1, 𝐪2,… , 𝐪𝑛−1, 𝐪𝑛)𝑻
– 𝐌 : Massen-Matrix, 𝐃 : Dämpfungs-Matrix, 𝐊: -Steifigkeits-Matrix
– 𝐪𝑖: Freiheitsgrade eines Körpers i (z.B. eine Maschinenachse)
– 𝐟 : externe Kräfte
Zustandsraumdarstellung 𝐱 = (𝐪, 𝐪 ) 𝐱 = 𝐀𝐱 + 𝐁𝐮; 𝐲 = 𝐂𝐱
– 𝐱: Zustandsraum, 𝐀: Zustandsmatrix aus Systemmatrizen 𝐌, 𝐃 und 𝐊
– 𝐁: Eingangsmatrix, 𝐮: Eingangsvektor, 𝐂: Ausgangsmatrix,
y: Ausgangsvektor
Regelmodell (kaskadiert)
– Lageregler
– Geschwindigkeitsregler
– Stromregler approximiert als Tiefpass (Element 1. Ordnung)
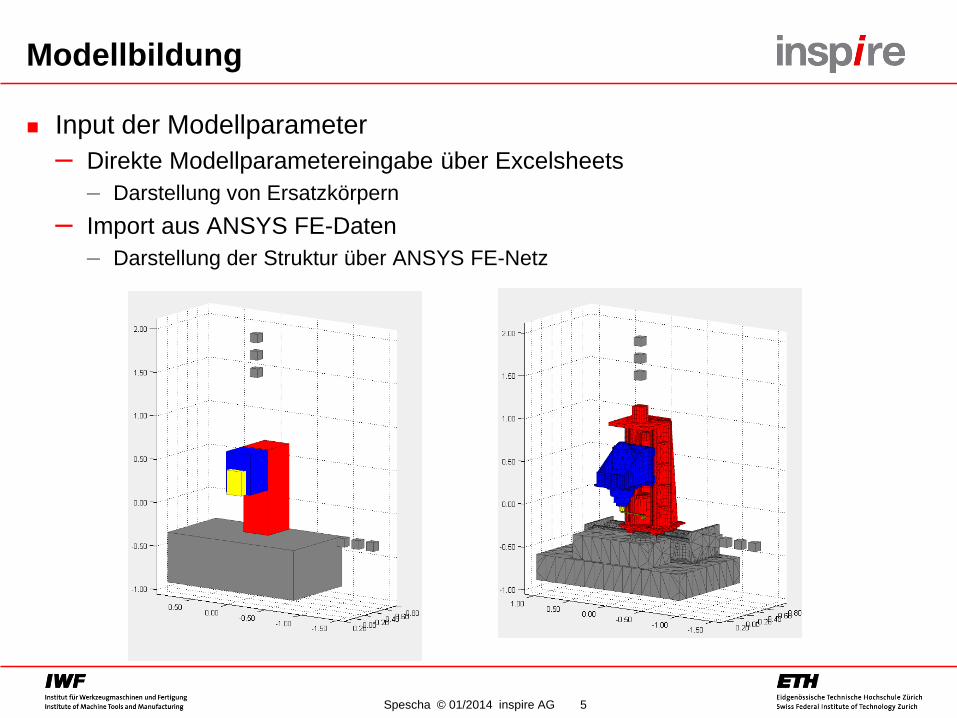
Modellbildung
Input der Modellparameter
– Direkte Modellparametereingabe über Excelsheets
– Darstellung von Ersatzkörpern
– Import aus ANSYS FE-Daten
– Darstellung der Struktur über ANSYS FE-Netz
Spescha © 01/2014 inspire AG 5

Simulationsbeispiel I
GUI für positionsabhängige Strukturanalysen
Spescha © 01/2014 inspire AG 6
Bsp: Modalanalyse und Darstellung der Eigenform
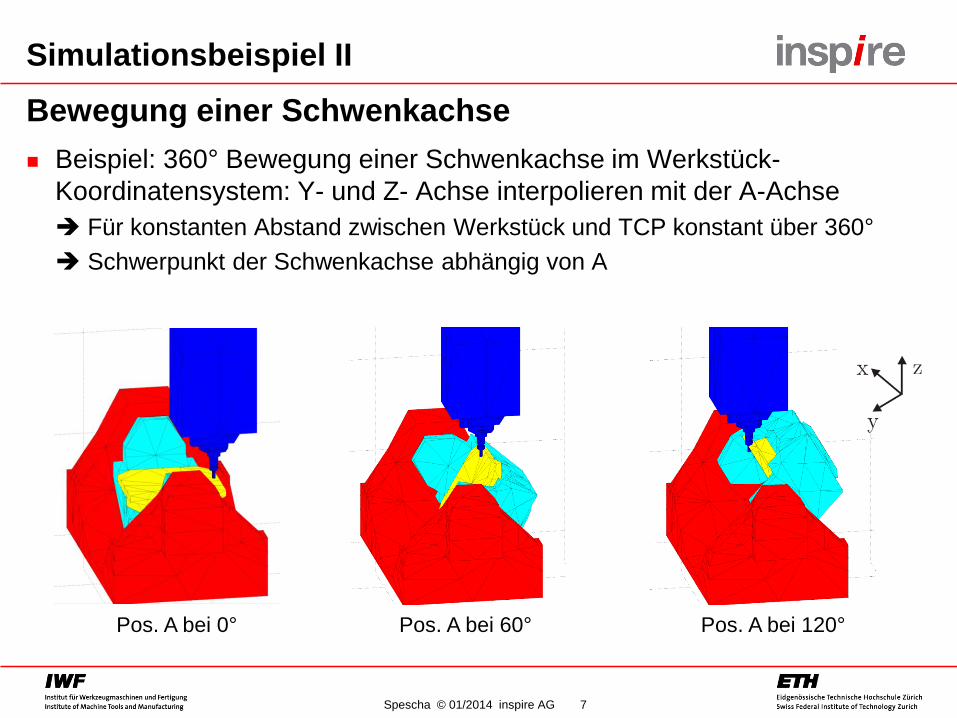
Simulationsbeispiel II
Beispiel: 360° Bewegung einer Schwenkachse im Werkstück-
Koordinatensystem: Y- und Z- Achse interpolieren mit der A-Achse
Für konstanten Abstand zwischen Werkstück und TCP konstant über 360°
Schwerpunkt der Schwenkachse abhängig von A
Bewegung einer Schwenkachse
Spescha © 01/2014 inspire AG 7
Pos. A bei 0° Pos. A bei 60° Pos. A bei 120°
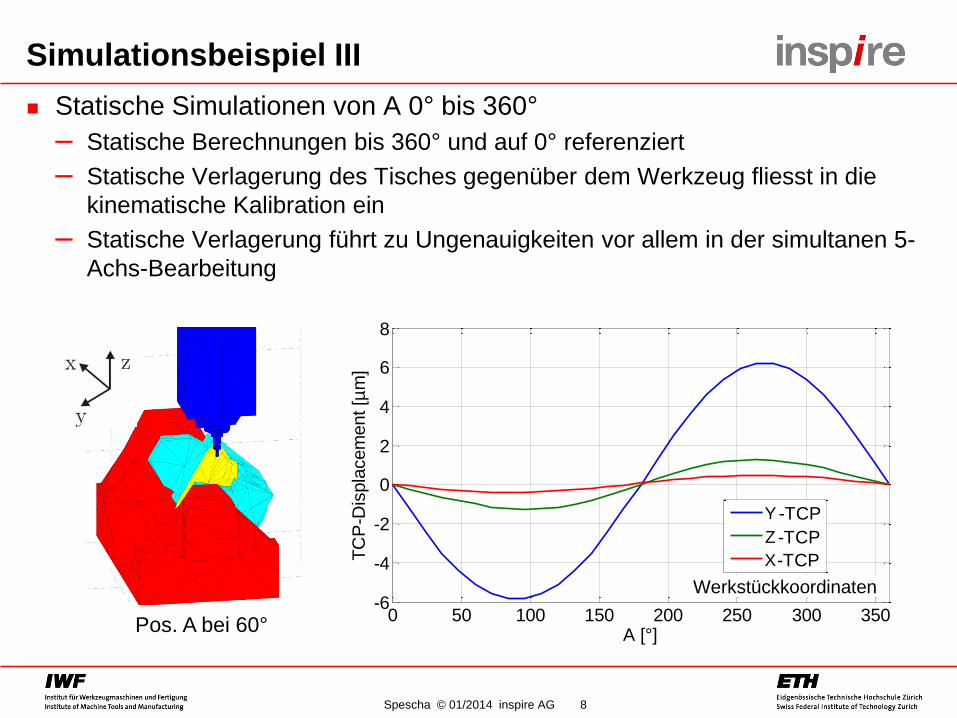
Simulationsbeispiel III
8 Spescha © 01/2014 inspire AG
Statische Simulationen von A 0° bis 360°
– Statische Berechnungen bis 360° und auf 0° referenziert
– Statische Verlagerung des Tisches gegenüber dem Werkzeug fliesst in die
kinematische Kalibration ein
– Statische Verlagerung führt zu Ungenauigkeiten vor allem in der simultanen 5-
Achs-Bearbeitung
Pos. A bei 60° 0 50 100 150 200 250 300 350
-6
-4
-2
0
2
4
6
8
A [°]
TC
P-D
ispla
cem
ent [µ
m]
X-TCP
Y-TCP
Z-TCP
Y
Z
X
Werkstückkoordinaten
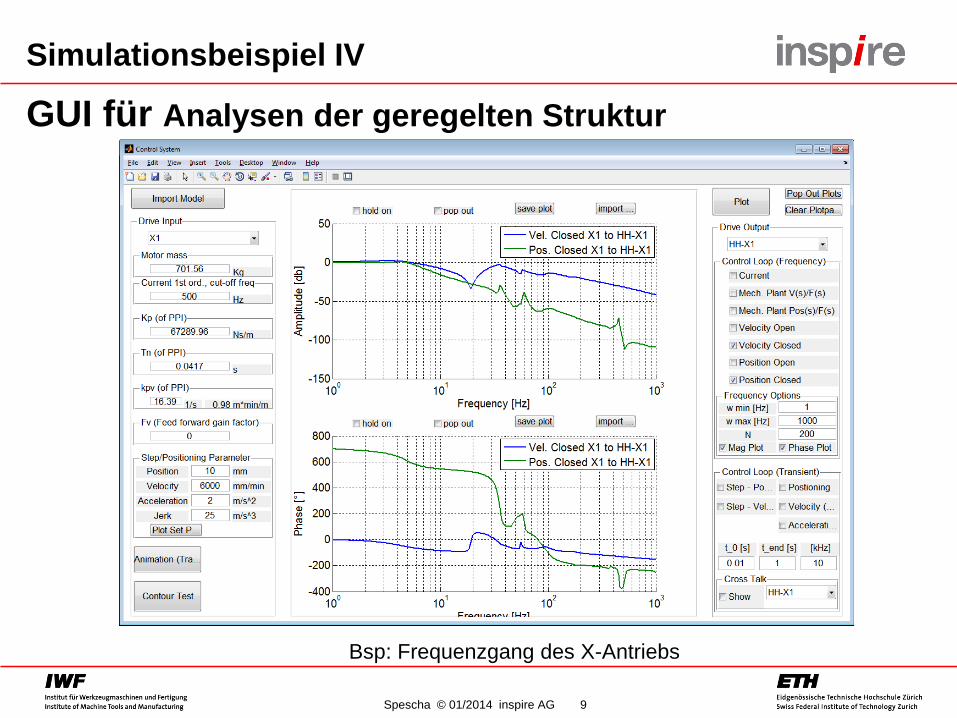
Simulationsbeispiel IV
GUI für Analysen der geregelten Struktur
Spescha © 01/2014 inspire AG 9
Bsp: Frequenzgang des X-Antriebs
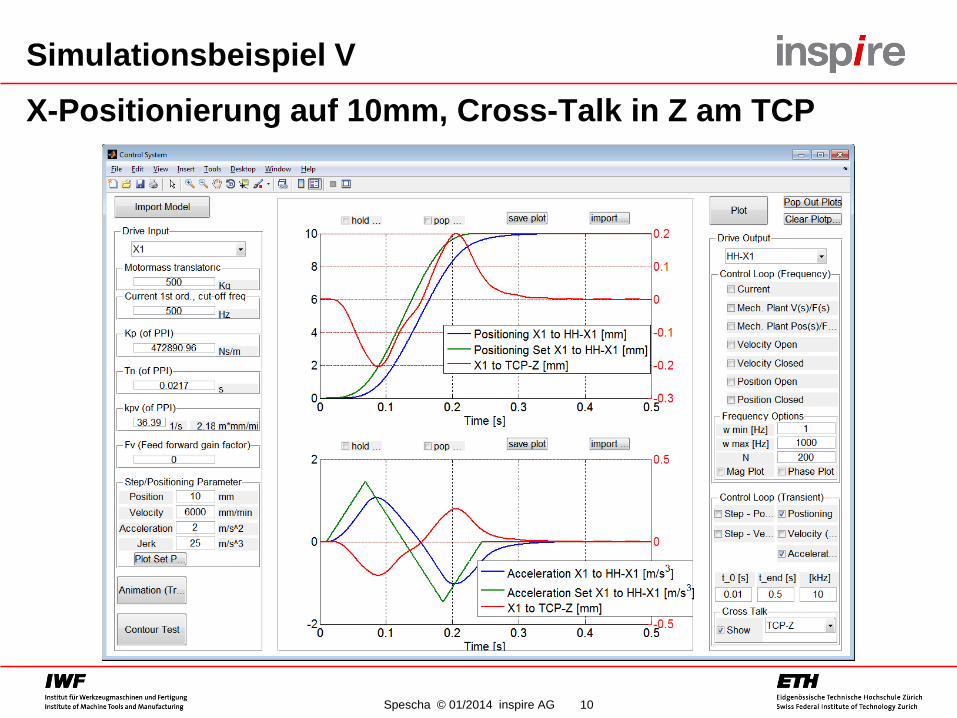
Simulationsbeispiel V
X-Positionierung auf 10mm, Cross-Talk in Z am TCP
Spescha © 01/2014 inspire AG 10
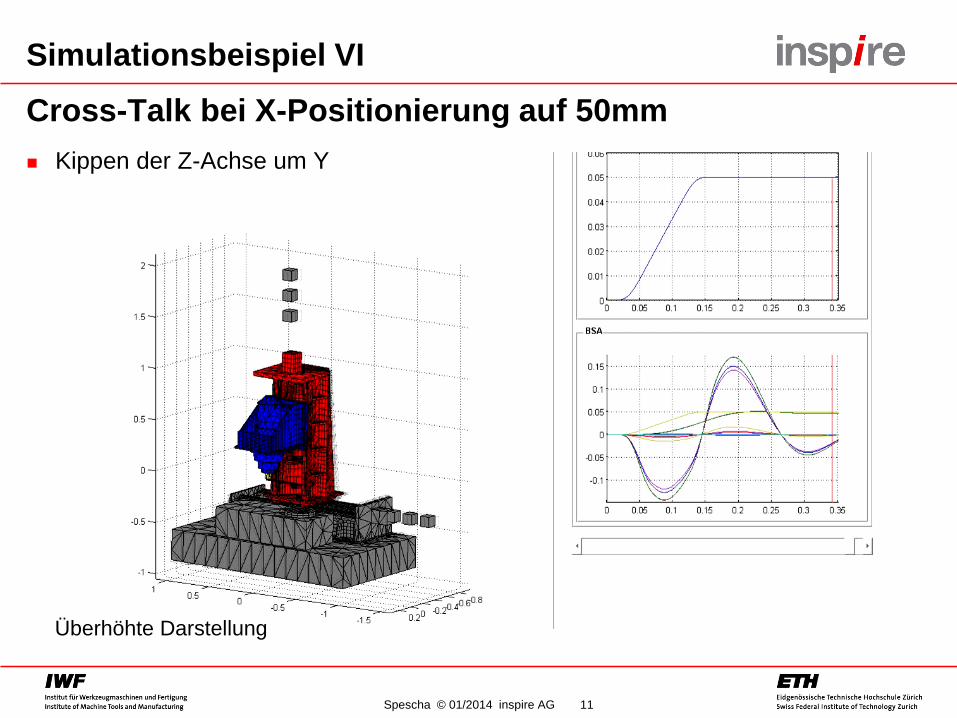
Simulationsbeispiel VI
Cross-Talk bei X-Positionierung auf 50mm
Spescha © 01/2014 inspire AG 11
Kippen der Z-Achse um Y
Überhöhte Darstellung

Mehrkörpersimulation - Fazit und Ausblick
12 Spescha © 01/2014 inspire AG
Fazit: MKS mit Antriebsankopplung
– Grundlegende, dynamische Effekte aufgrund von Offsets zwischen
Schwerpunkten, Koppelstellen, Antrieben und Messsystemen können
dynamisch simuliert werden
– Positionsabhängige Maschinenkonfigurationen und erforderliche Regel- und
Antriebsparameter sind mit geringem Rechenaufwand abschätzbar
– Elastizitäten innerhalb der Achskörper sind mit Segmentierung der Körper
approximierbar (Finite Differenzen Methode)
Ausblick
– Flexible Mehrkörpersimulation (MKS mit flexiblen Körpern)
– Einbindung flexibler Körper durch Finite Elemente Modellierung und
Modellordnungsreduktion
Flexible Mehrkörpersimulation
Motivation
– Nicht vernachlässigbare Nachgiebigkeiten von Körpern in der MKS abbilden
– Abbildung von grossen Bewegungen
– Abbildung von grossen Rotationen
Abbildung flexibler Strukturteile
– Lineare Finite Elemente Modelle
– Modellordnungsreduktion (Krylov Unterraum, Balanced Truncation, Modale
Kondensation etc.)
Eine wichtige Fragestellung für die Realisierung:
– Abbildung bewegter Lasten/Koppelstellen auf elastischen Körpern
– Abbildung von Führungsschienen, Kugelgewindetrieben, Umlauflasten etc.
– Identifizieren von Positionsabhängigkeiten
– Transiente Simulation von Bewegungen
Spescha © 01/2014 inspire AG 13

Bewegte Lasten auf elastischen Körpern
Nachteile
– Äquidistantes Netz nötig
– Knoteninformationen müssen zur
Simulationszeit vorhanden sein
– Jeder Knoten muss ansprechbar sein
(ungünstig für Modellreduktion)
– Die resultierende Kraft variiert leicht abhängig von der Position
(Rel. Fehler bei 5 Knoten im Eingriff ca. 10−5)
Stand der Technik
Spescha © 01/2014 inspire AG 14
Gewichtung mehrerer Knoten über
quadratische Gewichtungsfunktion
[Siedl, 2008] Daniel Siedl, Simulation des dynamischen Verhaltens von Werkzeugmaschinen während Verfahrbewegungen,
Institut für Werkzeugmaschinen und Fertigung, Technische Universität München, 2008
[Siedl, 2008]
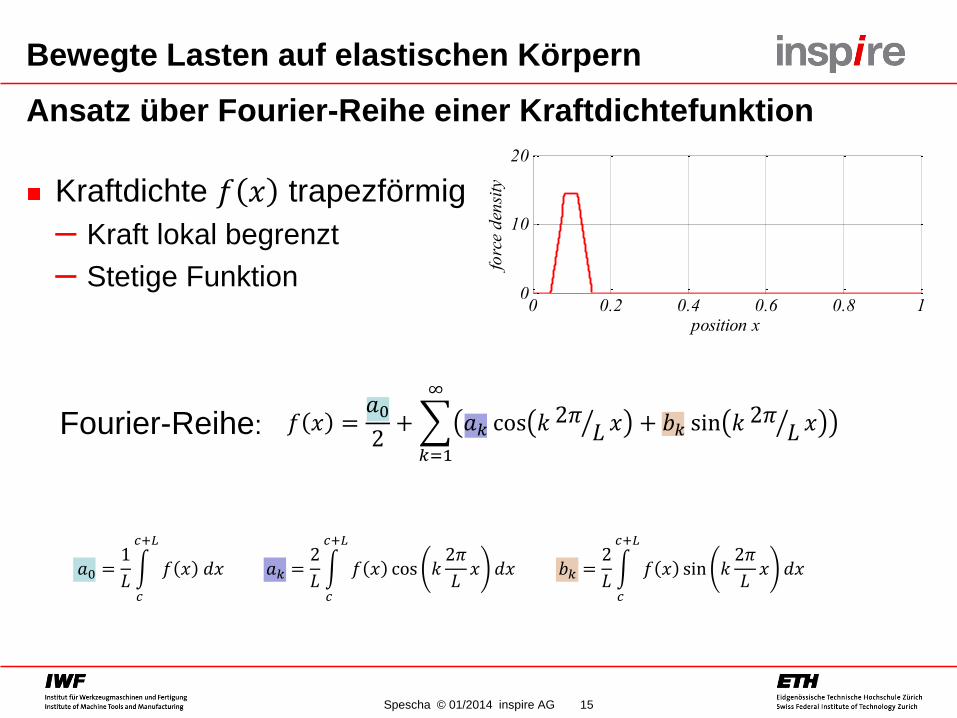
Bewegte Lasten auf elastischen Körpern
Kraftdichte 𝑓 𝑥 trapezförmig
– Kraft lokal begrenzt
– Stetige Funktion
Ansatz über Fourier-Reihe einer Kraftdichtefunktion
Spescha © 01/2014 inspire AG 15
0 0.2 0.4 0.6 0.8 10
10
20
position x
forc
e d
ensi
ty
𝑓 𝑥 =𝑎02+ 𝑎𝑘 cos 𝑘
2𝜋𝐿 𝑥 + 𝑏𝑘 sin 𝑘 2𝜋 𝐿 𝑥
∞
𝑘=1
Fourier-Reihe:
𝑎𝑘 =2
𝐿 𝑓 𝑥 cos 𝑘
2𝜋
𝐿𝑥 𝑑𝑥
𝑐+𝐿
𝑐
𝑏𝑘 =2
𝐿 𝑓 𝑥 sin 𝑘
2𝜋
𝐿𝑥 𝑑𝑥
𝑐+𝐿
𝑐
𝑎0 =1
𝐿 𝑓 𝑥 𝑑𝑥
𝑐+𝐿
𝑐

Fourier-Reihe einer Trapezfunktion
Reihenentwicklung
Spescha © 01/2014 inspire AG 16
Anzahl Harmonische: 30
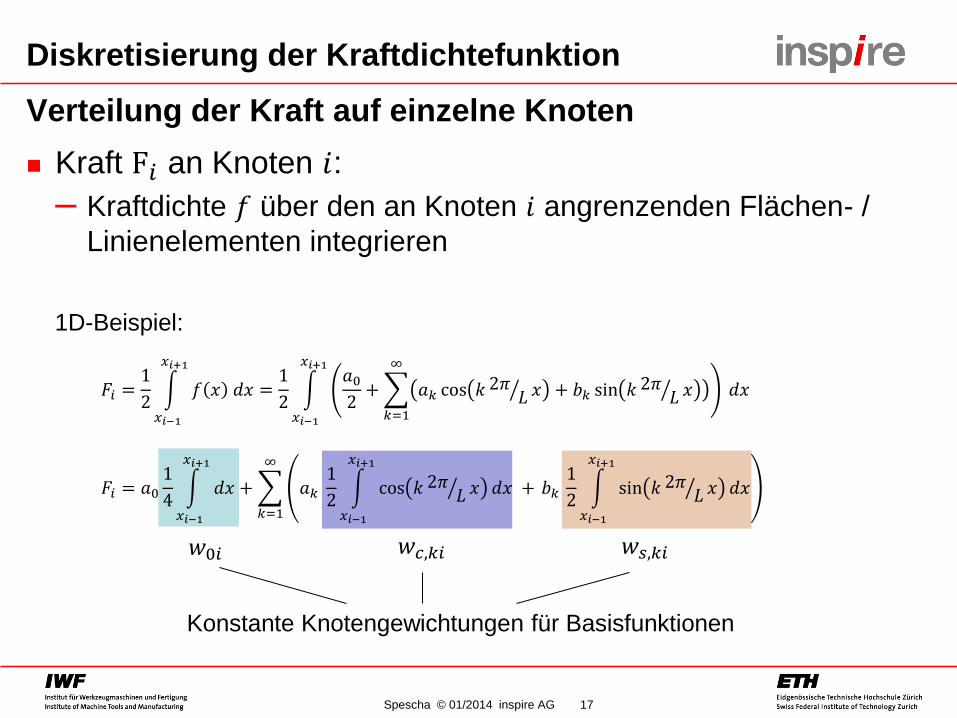
Konstante Knotengewichtungen für Basisfunktionen
𝑤0𝑖 𝑤𝑐,𝑘𝑖 𝑤𝑠,𝑘𝑖
Diskretisierung der Kraftdichtefunktion
Kraft F𝑖 an Knoten 𝑖:
– Kraftdichte 𝑓 über den an Knoten 𝑖 angrenzenden Flächen- /
Linienelementen integrieren
Verteilung der Kraft auf einzelne Knoten
Spescha © 01/2014 inspire AG 17
𝐹𝑖 =1
2 𝑓 𝑥 𝑑𝑥
𝑥𝑖+1
𝑥𝑖−1
=1
2
𝑎02+ 𝑎𝑘 cos 𝑘
2𝜋𝐿 𝑥 + 𝑏𝑘 sin 𝑘 2𝜋 𝐿 𝑥
∞
𝑘=1
𝑑𝑥
𝑥𝑖+1
𝑥𝑖−1
𝐹𝑖 = 𝑎01
4 𝑑𝑥
𝑥𝑖+1
𝑥𝑖−1
+ 𝑎𝑘 1
2 cos 𝑘 2𝜋 𝐿 𝑥 𝑑𝑥
𝑥𝑖+1
𝑥𝑖−1
+ 𝑏𝑘 1
2 sin 𝑘 2𝜋 𝐿 𝑥 𝑑𝑥
𝑥𝑖+1
𝑥𝑖−1
∞
𝑘=1
1D-Beispiel:
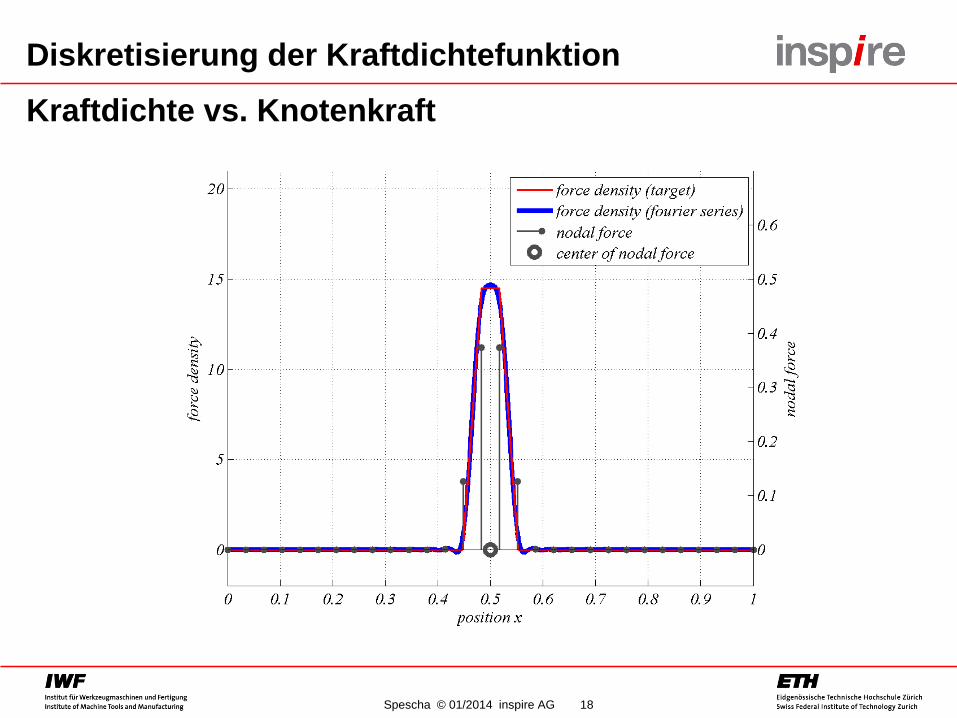
Diskretisierung der Kraftdichtefunktion
Kraftdichte vs. Knotenkraft
Spescha © 01/2014 inspire AG 18

Positionsabhängigkeit der Kraft
Kraftvariation der Kraftsumme über alle Knoten
Spescha © 01/2014 inspire AG 19
Konstante resultierende Kraft bei beliebiger Knotenverteilung
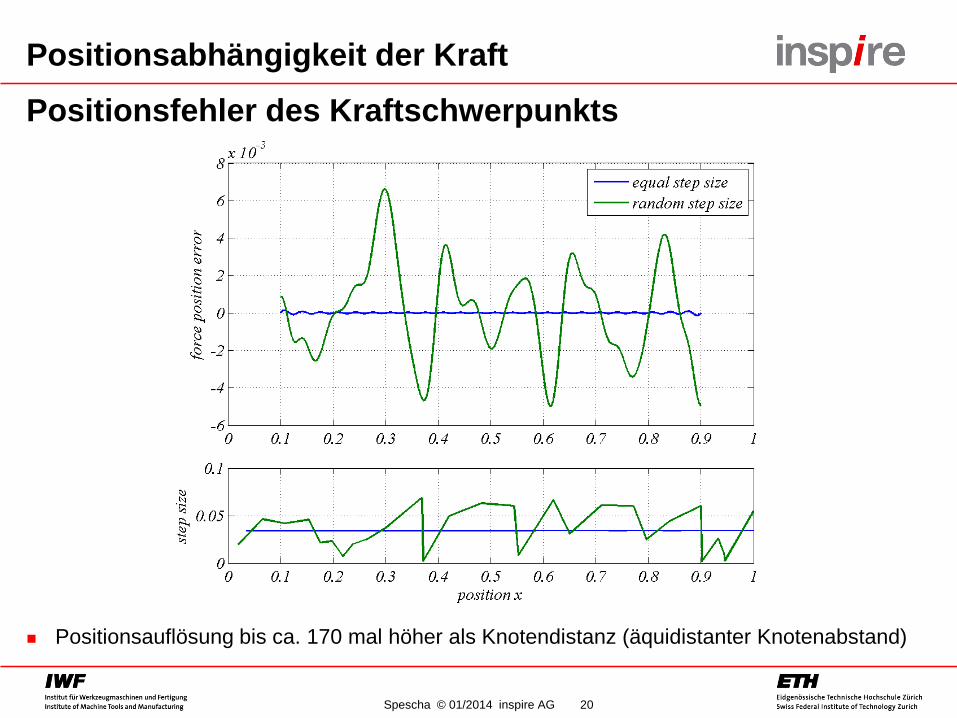
Positionsabhängigkeit der Kraft
Positionsfehler des Kraftschwerpunkts
Spescha © 01/2014 inspire AG 20
Positionsauflösung bis ca. 170 mal höher als Knotendistanz (äquidistanter Knotenabstand)
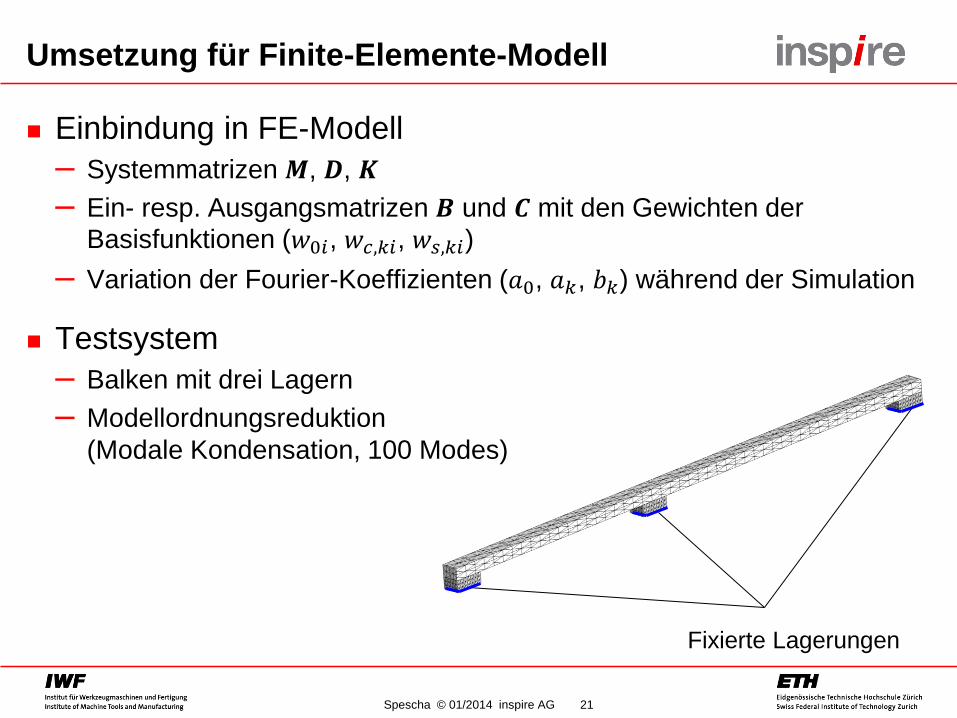
Umsetzung für Finite-Elemente-Modell
Spescha © 01/2014 inspire AG 21
Fixierte Lagerungen
Einbindung in FE-Modell
– Systemmatrizen 𝑴, 𝑫, 𝑲
– Ein- resp. Ausgangsmatrizen 𝑩 und 𝑪 mit den Gewichten der
Basisfunktionen (𝑤0𝑖, 𝑤𝑐,𝑘𝑖, 𝑤𝑠,𝑘𝑖)
– Variation der Fourier-Koeffizienten (𝑎0, 𝑎𝑘, 𝑏𝑘) während der Simulation
Testsystem
– Balken mit drei Lagern
– Modellordnungsreduktion
(Modale Kondensation, 100 Modes)
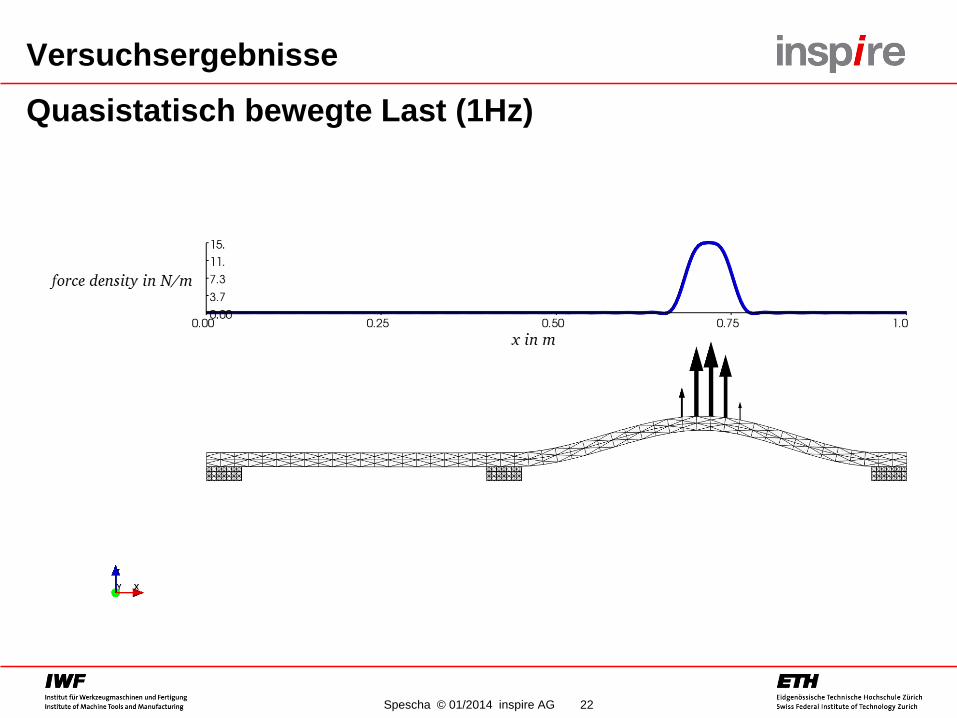
Versuchsergebnisse
Quasistatisch bewegte Last (1Hz)
Spescha © 01/2014 inspire AG 22
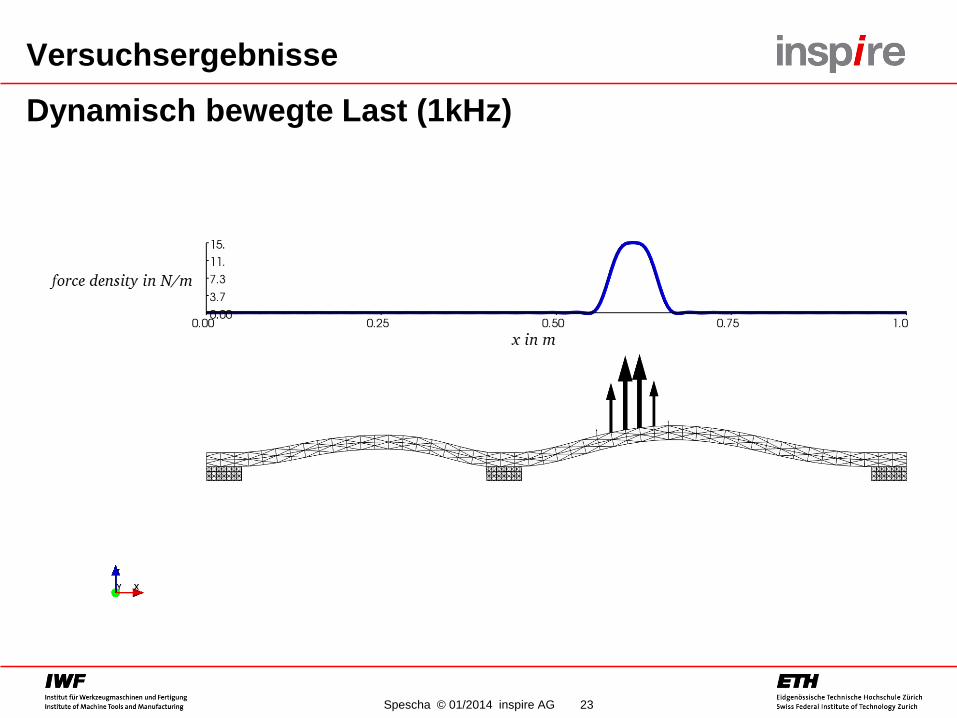
Versuchsergebnisse
Dynamisch bewegte Last (1kHz)
Spescha © 01/2014 inspire AG 23
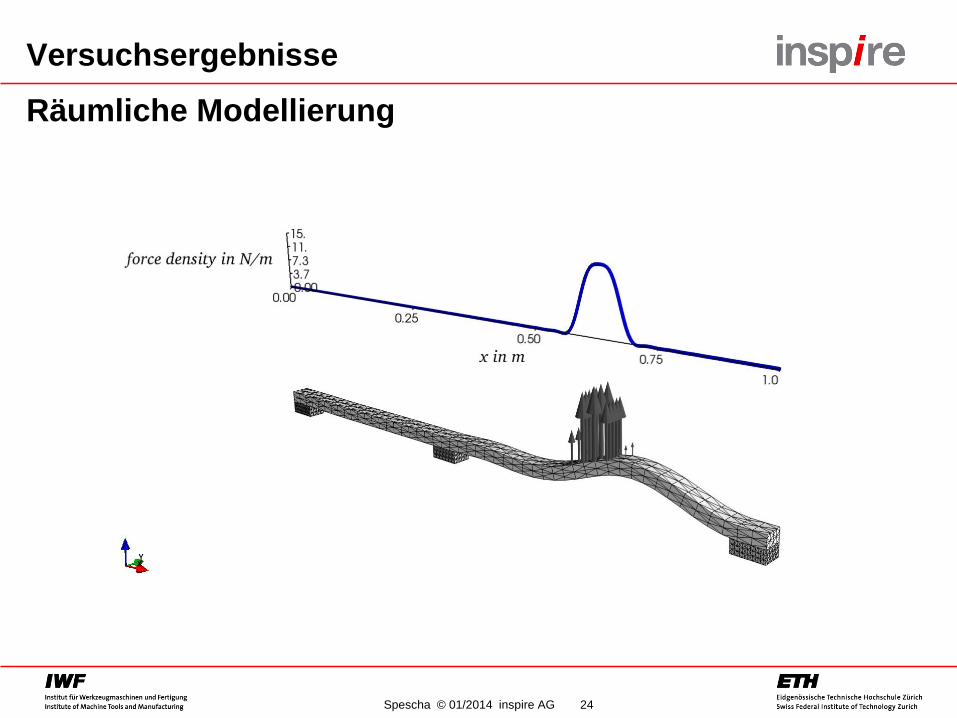
Versuchsergebnisse
Räumliche Modellierung
Spescha © 01/2014 inspire AG 24
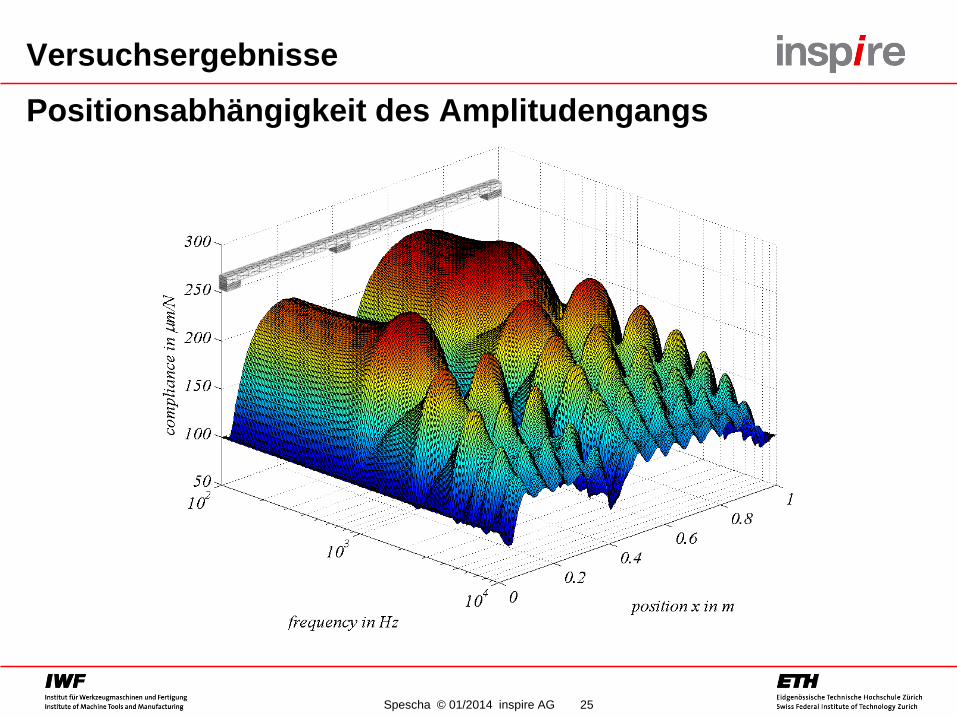
Versuchsergebnisse
Positionsabhängigkeit des Amplitudengangs
Spescha © 01/2014 inspire AG 25
Kraftdichtefunktionen - Fazit und Ausblick
Eigenschaften des Ansatzes «Fourier-Reihe einer Kraftdichtefunktion»
– Keine Kraftoszillation aufgrund der Diskretisierung während der Bewegung
(keine parameterinduzierte Schwingungen)
– Hohe Positionsauflösung (bis ca. 170-fach höher als Knotenabstand)
– Superposition mehrerer Kraft-, Auswerteverteilungen möglich
– Drehmomente über Kräftepaare realisierbar
– Zweidimensionale Verteilungen über 2D-Fourierreihen möglich
(Bsp. flächig geführte Systeme)
– Positionsabhängige Verlagerungsauswertung möglich
Ausblick
– Untersuchung der Methode unter Einsatz von Krylov-Unterraum-basierten
Reduktionsmethoden
– Einsatz der Methode in der flexiblen Mehrkörpersimulation mit reduzierten FE-
Modellen
Spescha © 01/2014 inspire AG 26
Spescha © 01/2014 inspire AG 27
Vielen Dank für Ihre Aufmerksamkeit...