Modular DHT - its-mobility.de · 21. – 22. Februar 2017 BS Hybridsymposium Dipl.-Ing. Andreas...
31
21. – 22. Februar 2017 BS Hybridsymposium Dipl.-Ing. Andreas Lange Modular DHT Ein modulares Konzept für elektrifizierte Antriebe
Transcript of Modular DHT - its-mobility.de · 21. – 22. Februar 2017 BS Hybridsymposium Dipl.-Ing. Andreas...

21. – 22. Februar 2017
BS Hybridsymposium Dipl.-Ing. Andreas Lange
Modular DHT Ein modulares Konzept für elektrifizierte Antriebe
1. Einleitung & Motivation
2. Fahrzeugparameter und Antriebsbedarf
3. Modularer DHT Baukasten
4. Modulares 3G DHT
5. Zusammenfassung
2
Gliederung
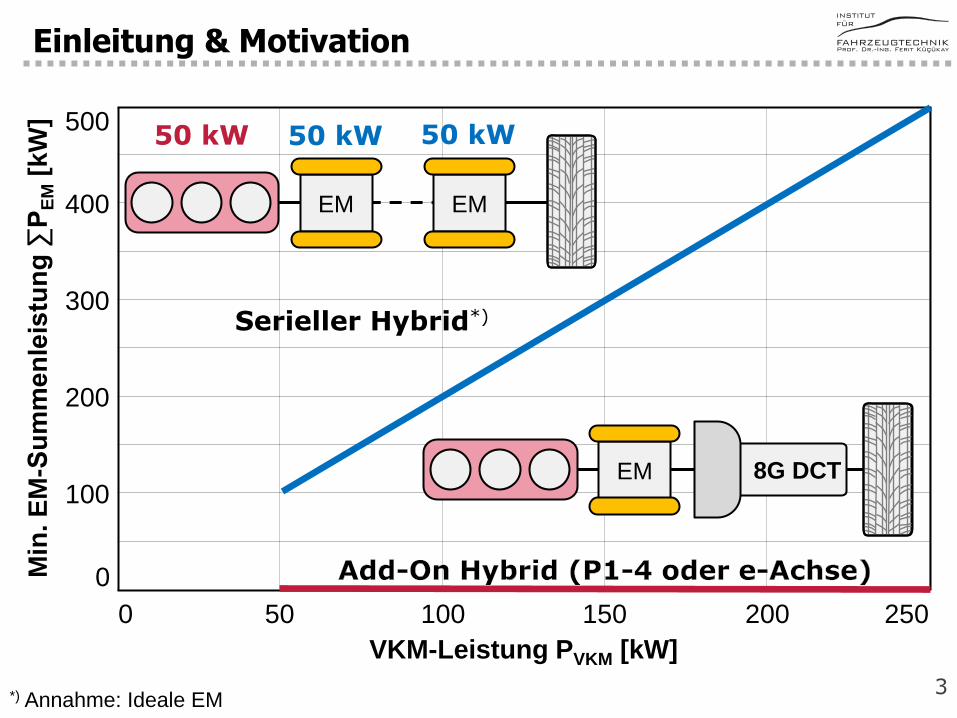
Einleitung & Motivation
3
Min
. E
M-S
um
me
nle
istu
ng
∑P
EM
[k
W]
0 50 100 150 200 250
100
200
300
400
500
VKM-Leistung PVKM [kW]
0
Serieller Hybrid*)
*) Annahme: Ideale EM
EM
50 kW
EM
50 kW 50 kW
8G DCT EM
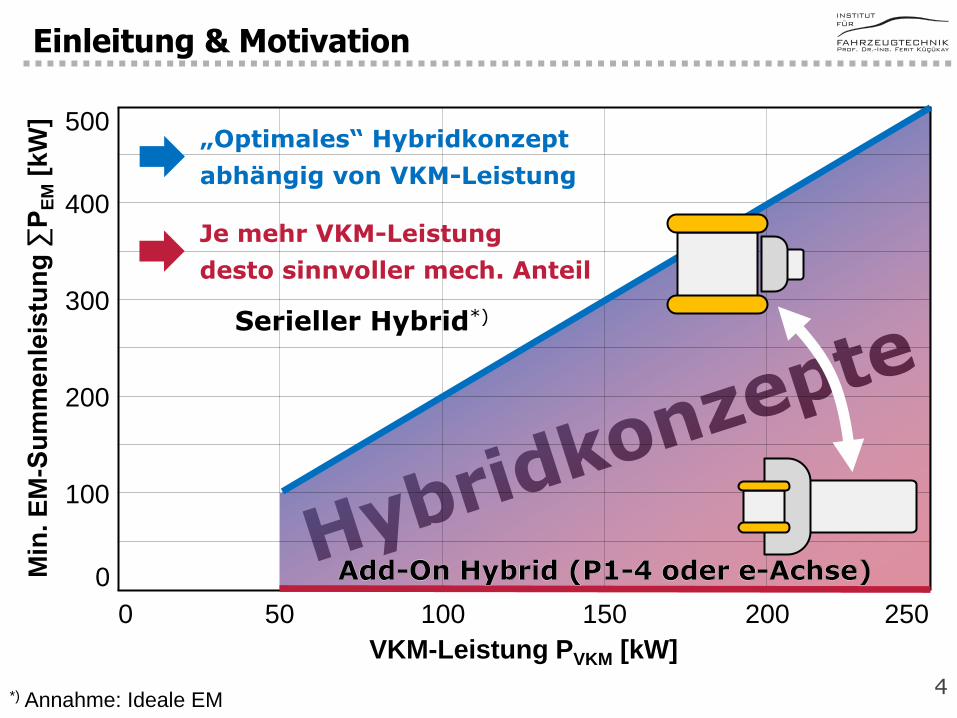
Einleitung & Motivation
4
Min
. E
M-S
um
me
nle
istu
ng
∑P
EM
[k
W]
0 50 100 150 200 250
100
200
300
400
500
VKM-Leistung PVKM [kW]
0
*) Annahme: Ideale EM
„Optimales“ Hybridkonzept
abhängig von VKM-Leistung
Serieller Hybrid*)
Je mehr VKM-Leistung
desto sinnvoller mech. Anteil

Einleitung & Motivation
5
EM2 EM1
S
P
H
EM1
EM2
EM1 8G DCT
€ Viele verschiedene
Einzelentwürfe
? Baukastenstruktur
⇒ Synergien

1. Einleitung & Motivation
2. Fahrzeugparameter und Antriebsbedarf
3. Modularer DHT Baukasten
4. Modulares 3G DHT
5. Zusammenfassung
6
Gliederung
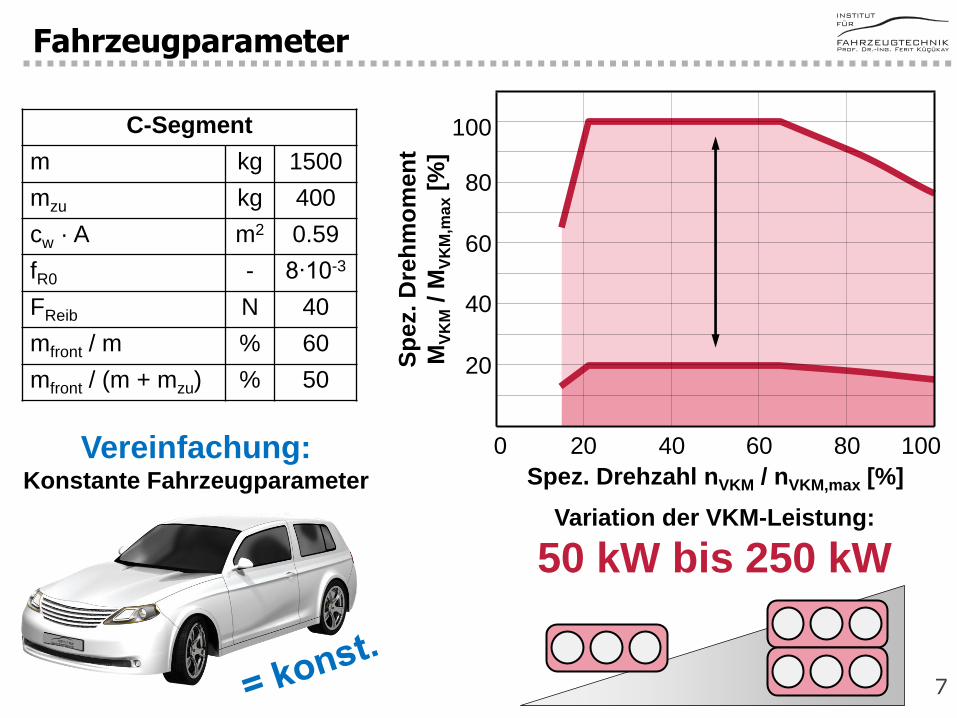
Fahrzeugparameter
7
C-Segment
m kg 1500
mzu kg 400
cw · A m2 0.59
fR0 - 8∙10-3
FReib N 40
mfront / m % 60
mfront / (m + mzu) % 50
0 20 40 60 80 100
20
40
60
80
100
Sp
ez. D
reh
mo
men
t
MV
KM /
MV
KM
,ma
x [
%]
Spez. Drehzahl nVKM / nVKM,max [%] Vereinfachung:
Konstante Fahrzeugparameter
Variation der VKM-Leistung:
50 kW bis 250 kW
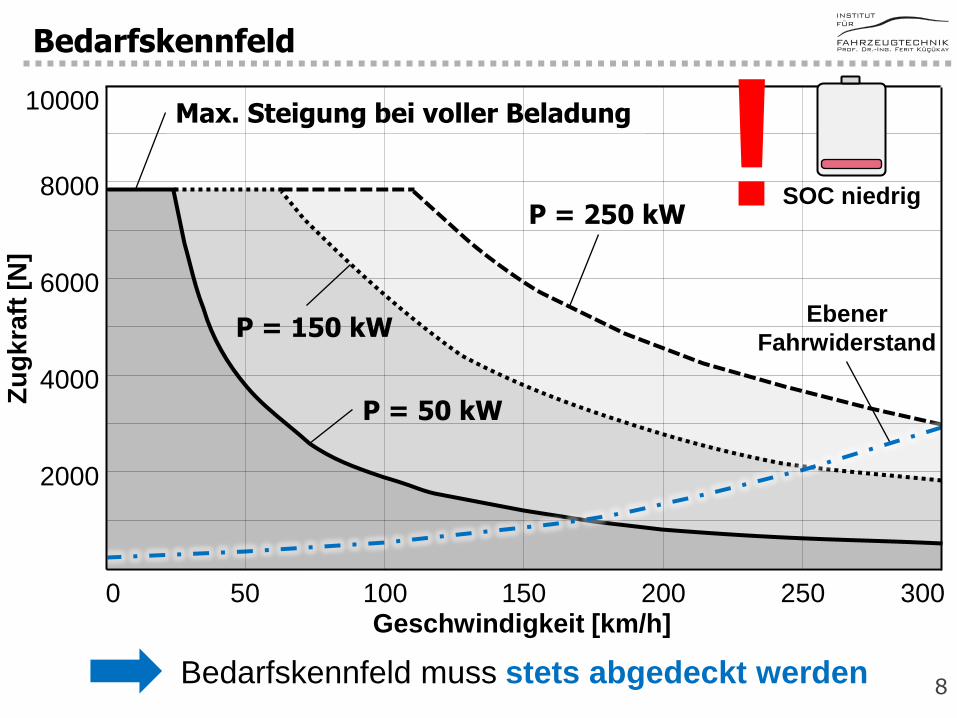
Bedarfskennfeld
8
0 50 100 150 200 250
2000
4000
6000
8000
10000
Zu
gk
raft
[N
]
Geschwindigkeit [km/h]
Max. Steigung bei voller Beladung
300
P = 250 kW
P = 50 kW
P = 150 kW Ebener
Fahrwiderstand
Bedarfskennfeld muss stets abgedeckt werden
SOC niedrig !

1. Einleitung & Motivation
2. Fahrzeugparameter und Antriebsbedarf
3. Modularer DHT Baukasten
4. Modulares 3G DHT
5. Zusammenfassung
9
Gliederung
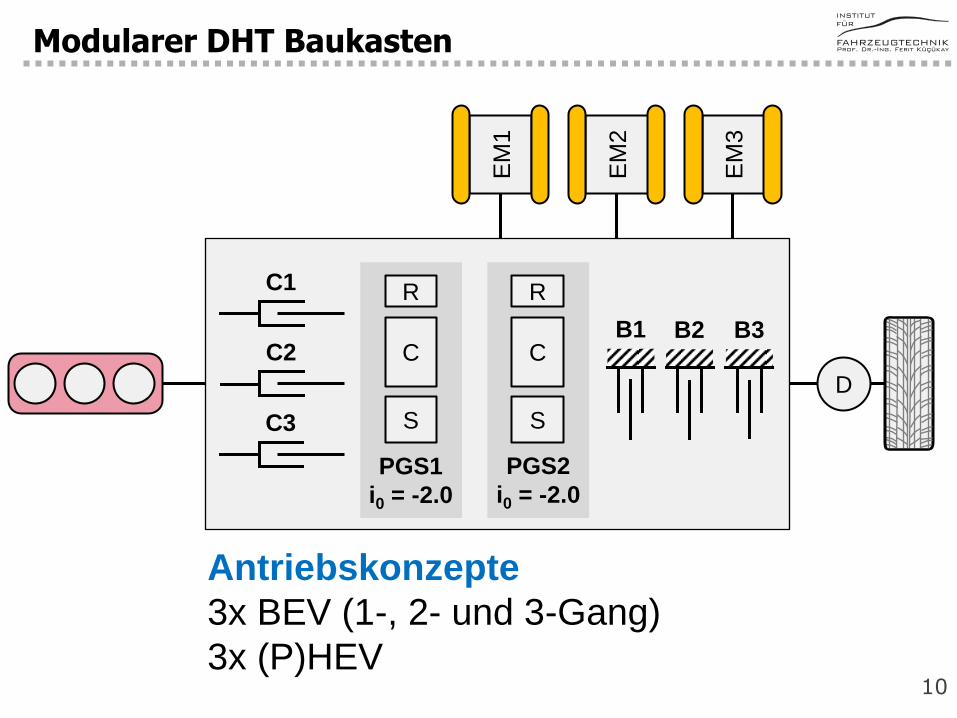
Modularer DHT Baukasten
10
S
R
C
S
C
R
D
C1
PGS1
i0 = -2.0
PGS2
i0 = -2.0
B2 B1 B3
EM
1
EM
2
EM
3
C2
C3
Antriebskonzepte
3x BEV (1-, 2- und 3-Gang)
3x (P)HEV
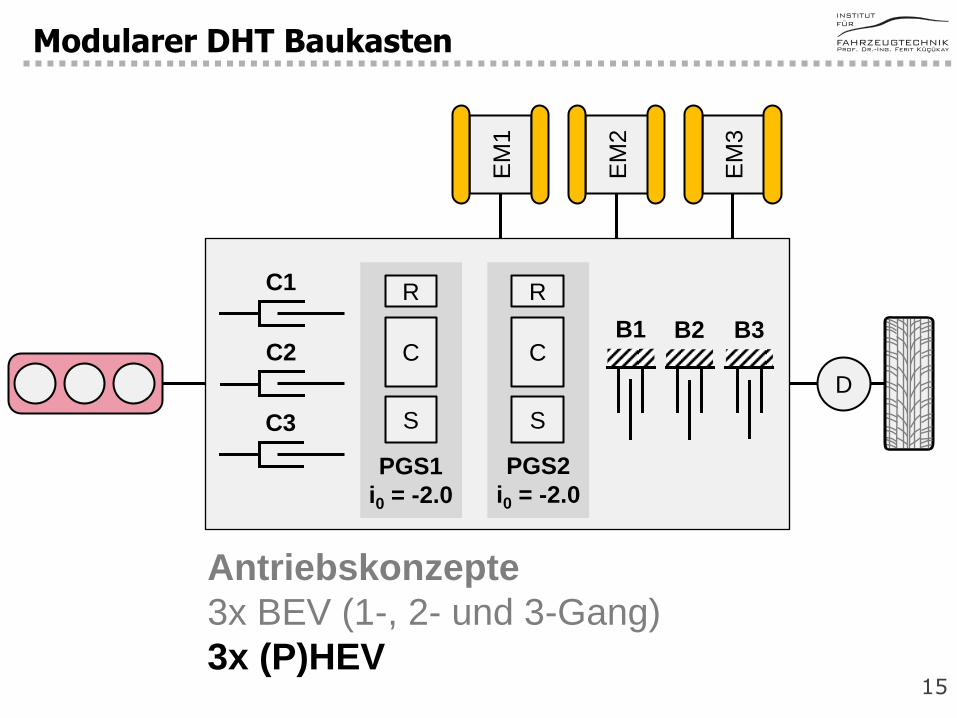
Modularer DHT Baukasten
15
S
R
C
S
C
R
D
C1
PGS1
i0 = -2.0
PGS2
i0 = -2.0
B2 B1 B3
EM
1
EM
2
EM
3
C2
C3
Antriebskonzepte
3x BEV (1-, 2- und 3-Gang)
3x (P)HEV
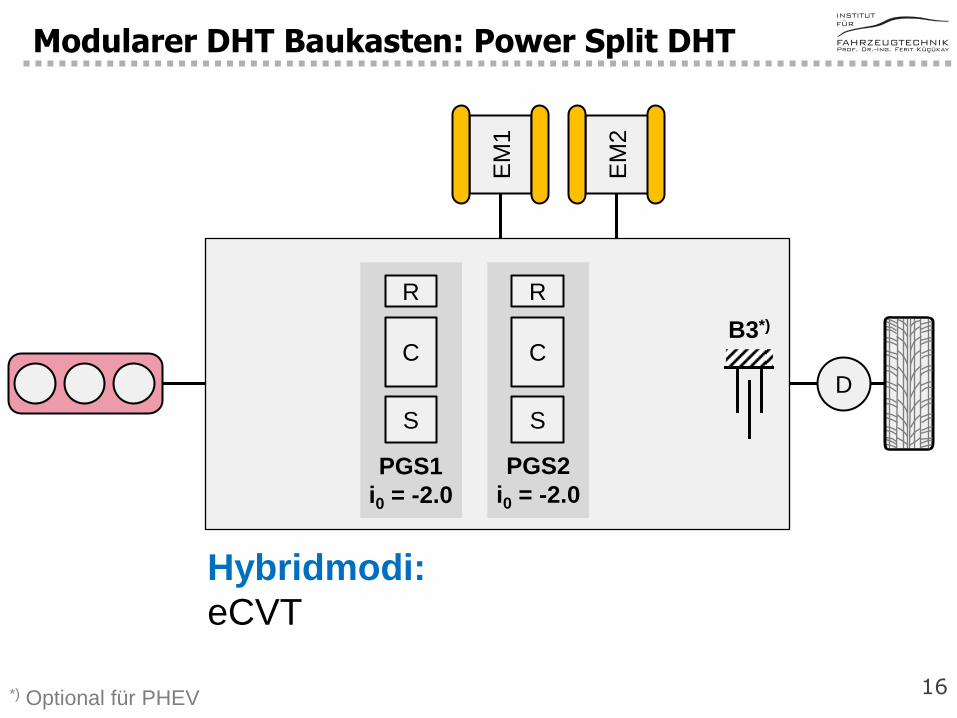
Modularer DHT Baukasten: Power Split DHT
16
S
R
C
S
C
R
D
PGS1
i0 = -2.0
PGS2
i0 = -2.0
B3*)
EM
1
EM
2
*) Optional für PHEV
Hybridmodi:
eCVT
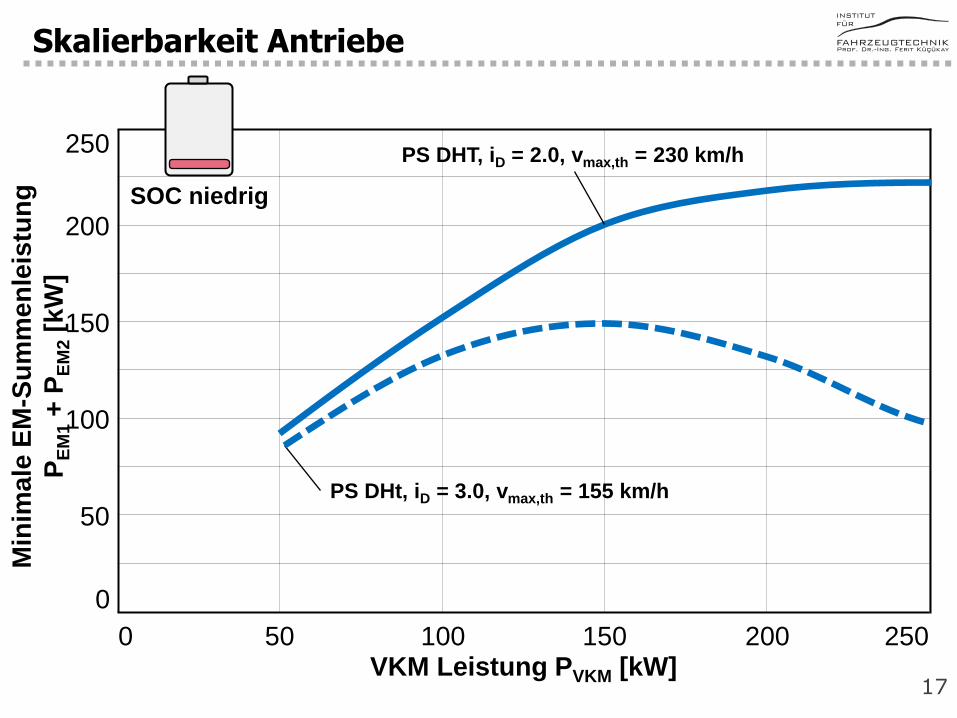
Skalierbarkeit Antriebe
17
0 50 100 150 200 250
50
100
150
200
250
Min
ima
le E
M-S
um
me
nle
istu
ng
PE
M1 +
PE
M2 [
kW
]
VKM Leistung PVKM [kW]
0
PS DHT, iD = 2.0, vmax,th = 230 km/h
SOC niedrig
PS DHt, iD = 3.0, vmax,th = 155 km/h
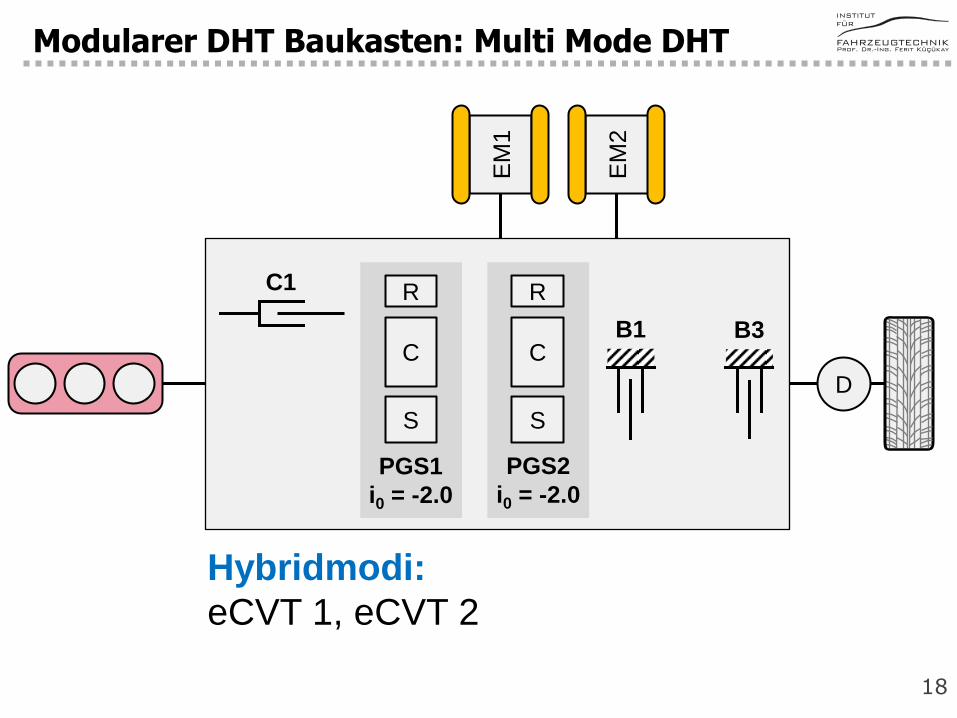
Modularer DHT Baukasten: Multi Mode DHT
18
S
R
C
S
C
R
D
C1
PGS1
i0 = -2.0
PGS2
i0 = -2.0
B1 B3
EM
1
EM
2
Hybridmodi:
eCVT 1, eCVT 2
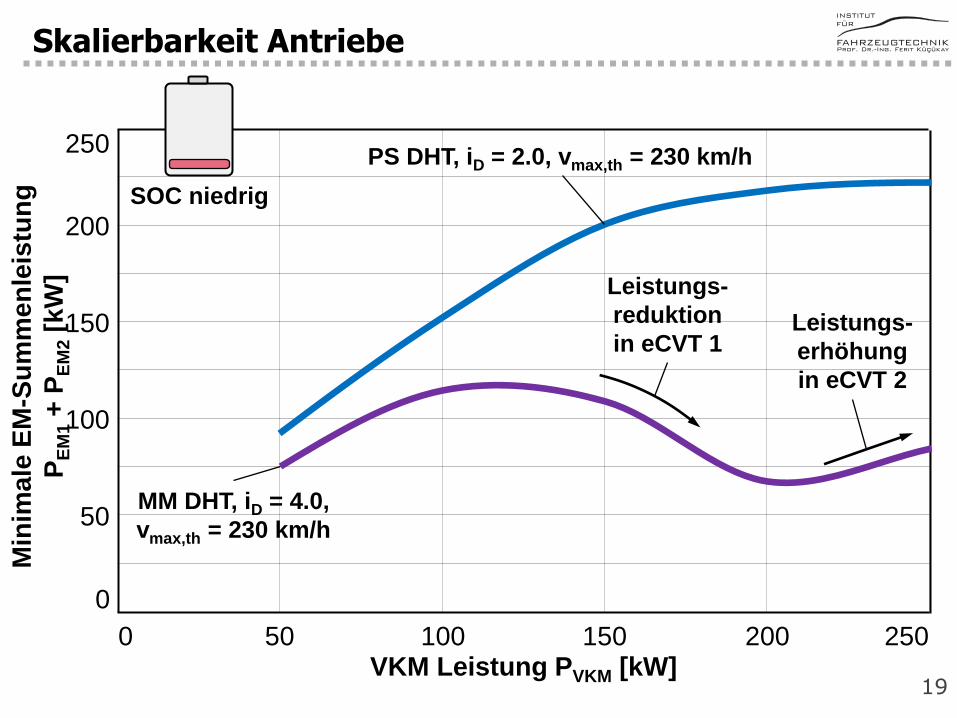
Skalierbarkeit Antriebe
19
0 50 100 150 200 250
50
100
150
200
250
0
MM DHT, iD = 4.0,
vmax,th = 230 km/h
SOC niedrig
PS DHT, iD = 2.0, vmax,th = 230 km/h
Leistungs-
reduktion
in eCVT 1 Leistungs-
erhöhung
in eCVT 2
Min
ima
le E
M-S
um
me
nle
istu
ng
PE
M1 +
PE
M2 [
kW
]
VKM Leistung PVKM [kW]
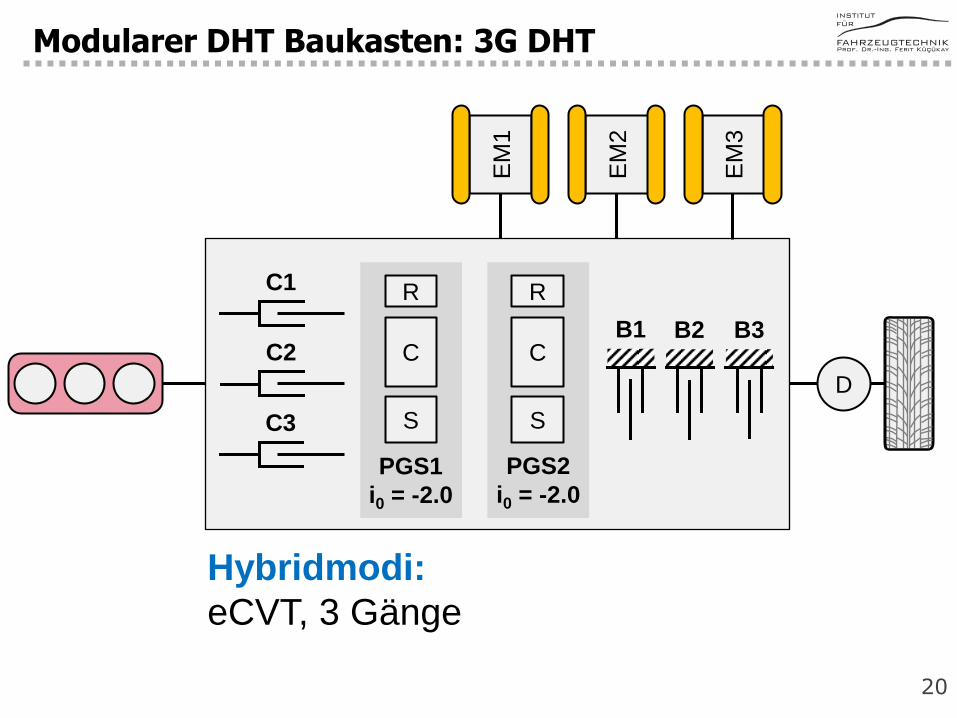
Modularer DHT Baukasten: 3G DHT
20
S
R
C
S
C
R
D
PGS1
i0 = -2.0
PGS2
i0 = -2.0
B2 B1 C2
C3
EM
3
EM
1
EM
2
B3
C1
Hybridmodi:
eCVT, 3 Gänge

Skalierbarkeit Antriebe
21
0 50 100 150 200 250
50
100
150
200
250
0 3G DHT, iD = 4.0, vmax,th = 230 km/h
SOC niedrig
MM DHT, iD = 4.0,
vmax,th = 230 km/h
Leistungs-
reduktion
in eCVT 1 Leistungs-
erhöhung
in eCVT 2
PS DHT, iD = 2.0, vmax,th = 230 km/h
Min
ima
le E
M-S
um
me
nle
istu
ng
PE
M1 +
PE
M2 +
PE
M3 [
kW
]
VKM Leistung PVKM [kW]
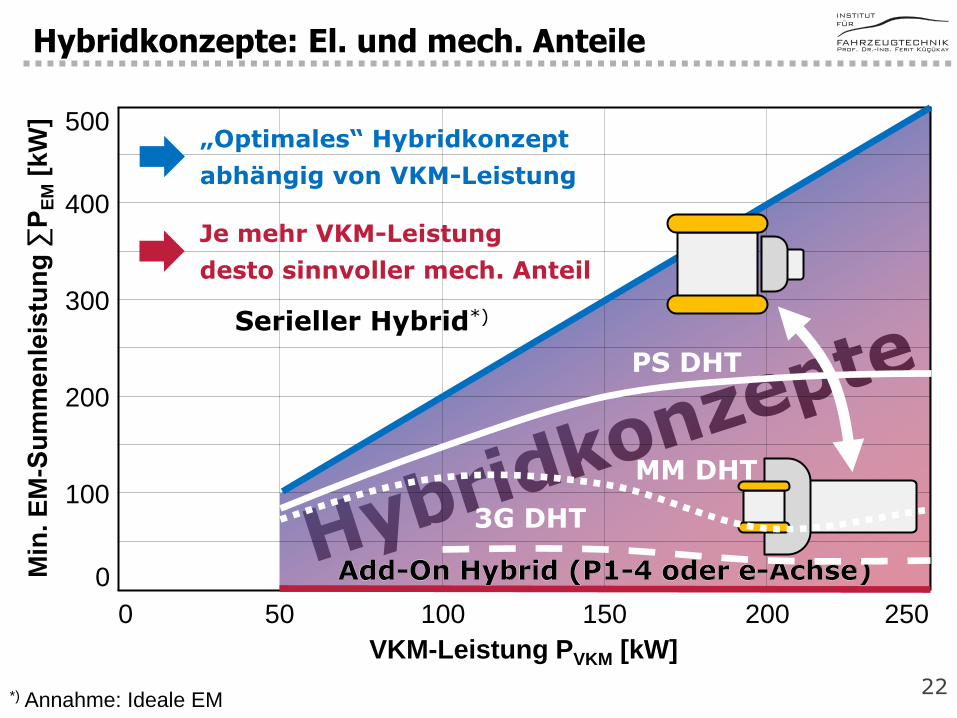
Hybridkonzepte: El. und mech. Anteile
22
Min
. E
M-S
um
me
nle
istu
ng
∑P
EM
[k
W]
0 50 100 150 200 250
100
200
300
400
500
VKM-Leistung PVKM [kW]
0
*) Annahme: Ideale EM
„Optimales“ Hybridkonzept
abhängig von VKM-Leistung
Serieller Hybrid*)
Je mehr VKM-Leistung
desto sinnvoller mech. Anteil
PS DHT
MM DHT
3G DHT
1. Einleitung & Motivation
2. Fahrzeugparameter und Antriebsbedarf
3. Modularer DHT Baukasten
4. Modulares 3G DHT
5. Zusammenfassung
23
Gliederung

Lieferkennfeld 3G DHT, PVKM = 200 kW
24
0 50 100 150 200 250
2000
4000
6000
8000
10000
Zu
gk
raft
[N
]
Geschwindigkeit [km/h]
Max. Steigung bei voller Beladung
300
P = 200 kW eCVT
1. Gang
2. Gang 3. Gang
Zugkraftlücke SOC niedrig
200 kW
0 30 60 90 120 150
0
Dre
hza
hl [1
/min
]
Geschwindigkeit [km/h]
180
1000
2000
3000
-1000
4000
5000
6000
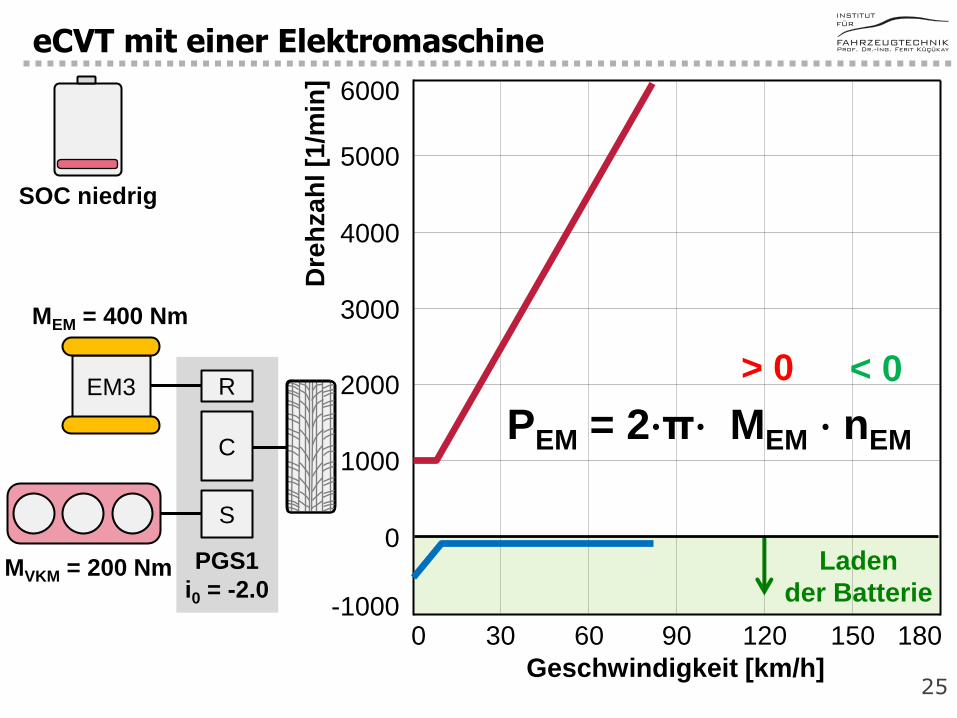
eCVT mit einer Elektromaschine
25
PGS1
i0 = -2.0
EM3
MVKM = 200 Nm
MEM = 400 Nm
Laden
der Batterie
PEM = 2⋅π⋅ MEM ⋅ nEM
> 0 < 0
SOC niedrig
S
R
C
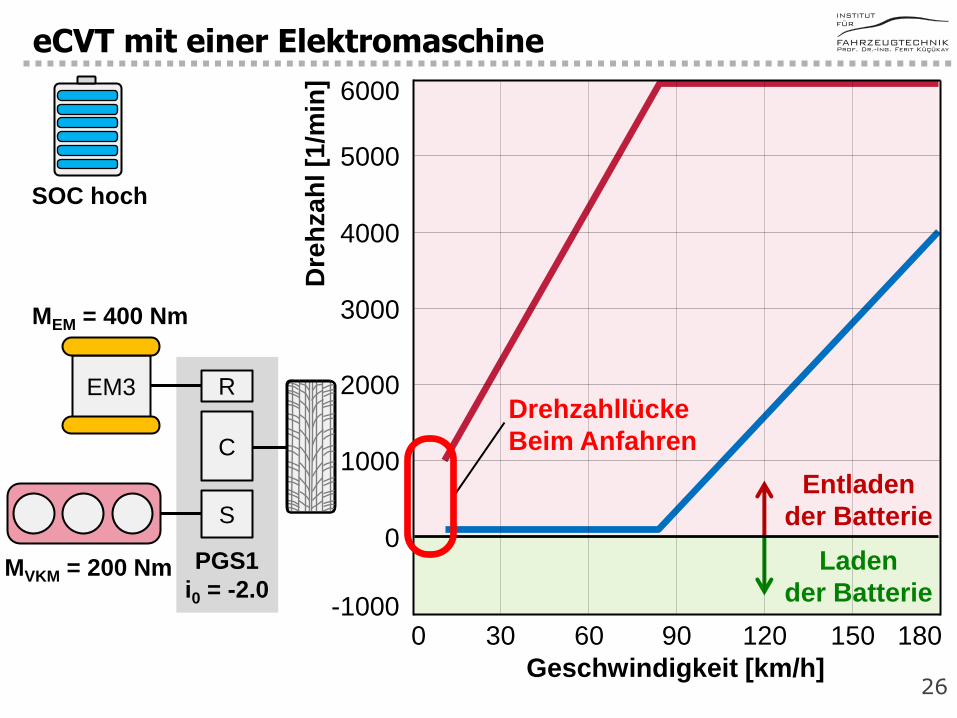
eCVT mit einer Elektromaschine
26
SOC hoch
0 30 60 90 120 150
0
Dre
hza
hl [1
/min
]
Geschwindigkeit [km/h]
180
1000
2000
3000
-1000
4000
5000
6000
PGS1
i0 = -2.0
EM3
MVKM = 200 Nm
MEM = 400 Nm
S
R
C
Entladen
der Batterie
Drehzahllücke
Beim Anfahren
Laden
der Batterie
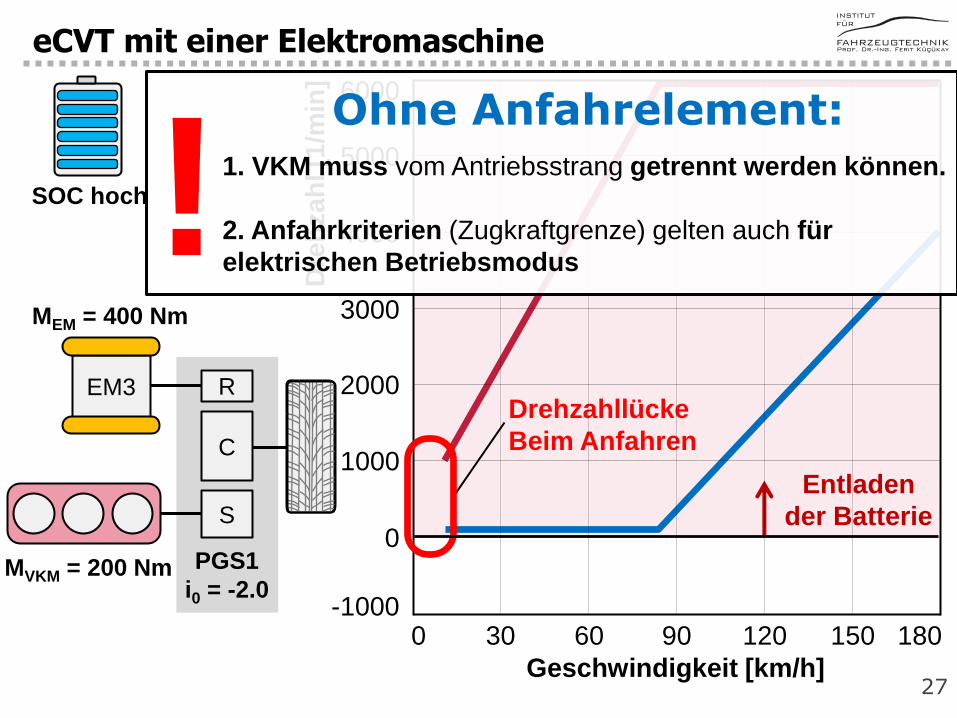
eCVT mit einer Elektromaschine
27
Drehzahllücke
Beim Anfahren
SOC hoch
0 30 60 90 120 150
0
Dre
hza
hl [1
/min
]
Geschwindigkeit [km/h]
180
1000
2000
3000
-1000
4000
5000
6000
PGS1
i0 = -2.0
EM3
MVKM = 200 Nm
MEM = 400 Nm
S
R
C
Entladen
der Batterie
Ohne Anfahrelement: 1. VKM muss vom Antriebsstrang getrennt werden können.
2. Anfahrkriterien (Zugkraftgrenze) gelten auch für
elektrischen Betriebsmodus !
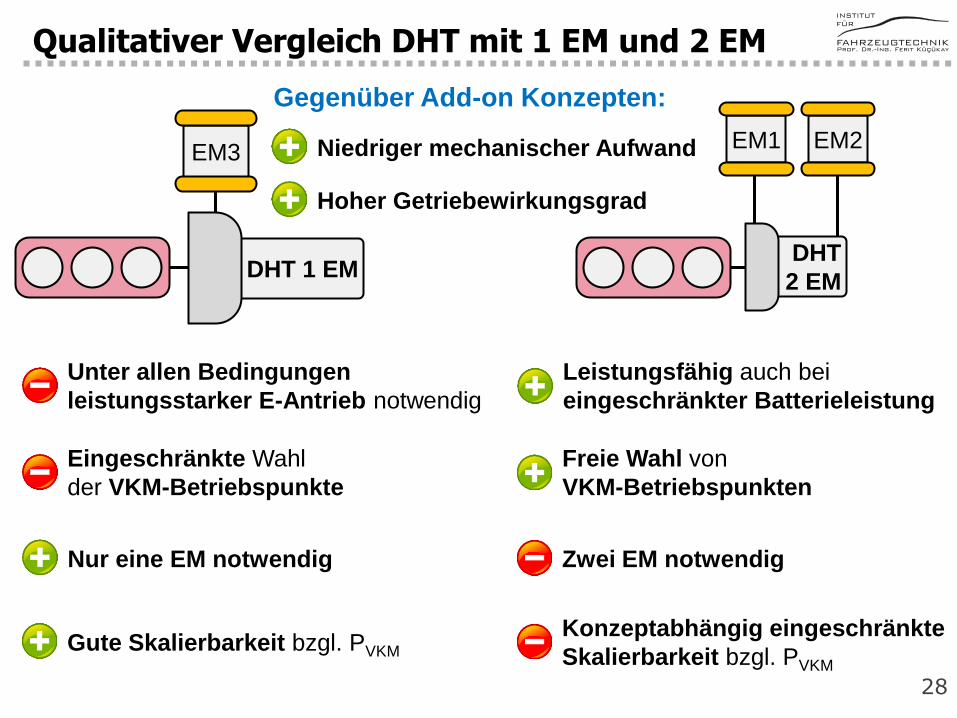
Qualitativer Vergleich DHT mit 1 EM und 2 EM
28
DHT 1 EM DHT
2 EM
Unter allen Bedingungen
leistungsstarker E-Antrieb notwendig
Nur eine EM notwendig
Gute Skalierbarkeit bzgl. PVKM
Eingeschränkte Wahl
der VKM-Betriebspunkte
Zwei EM notwendig
Freie Wahl von
VKM-Betriebspunkten
Leistungsfähig auch bei
eingeschränkter Batterieleistung
Konzeptabhängig eingeschränkte
Skalierbarkeit bzgl. PVKM
Niedriger mechanischer Aufwand
Hoher Getriebewirkungsgrad
Gegenüber Add-on Konzepten:
EM3 EM1 EM2
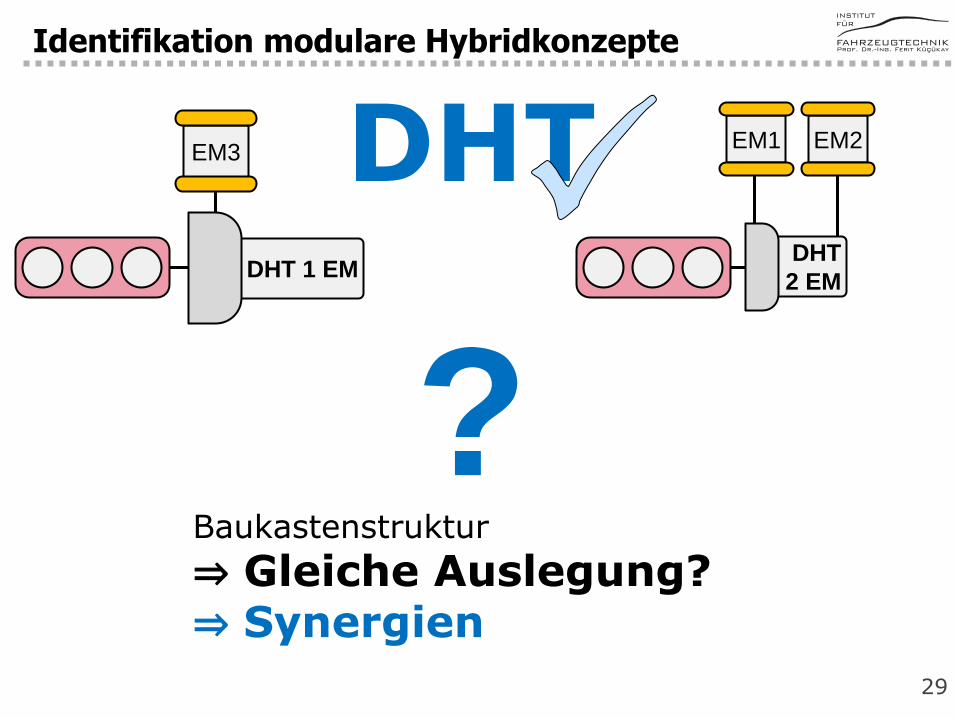
Identifikation modulare Hybridkonzepte
29
DHT 1 EM DHT
2 EM
EM3 EM1 EM2
? Baukastenstruktur
⇒ Gleiche Auslegung? ⇒ Synergien
DHT
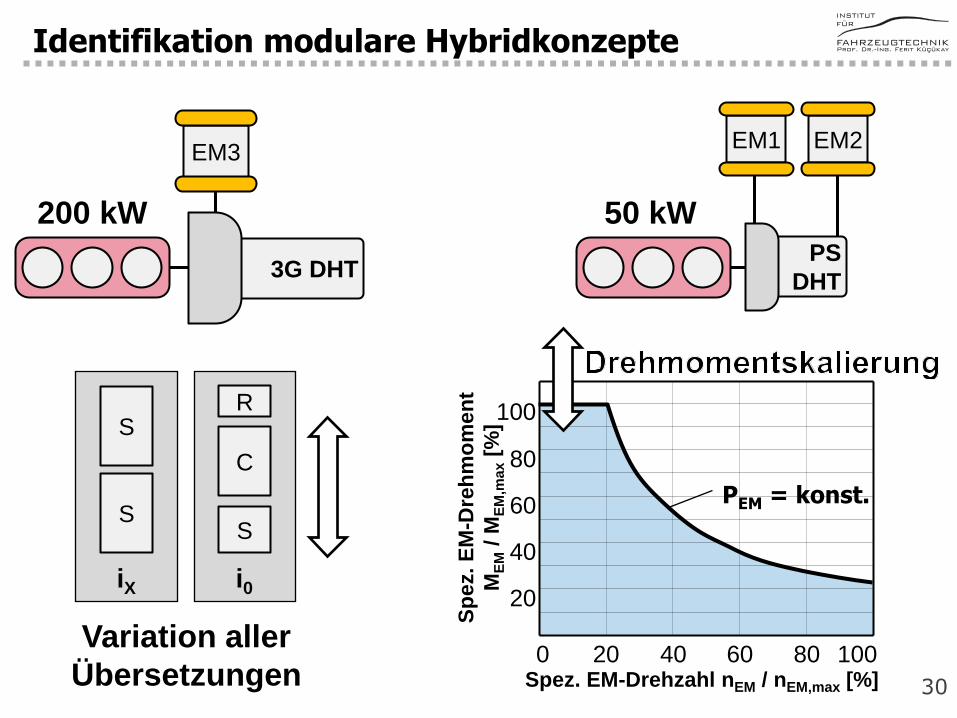
Identifikation modulare Hybridkonzepte
30
Variation aller
Übersetzungen
3G DHT
EM3
200 kW
0 20 40 60 80 100
20
40
60
80
100
Sp
ez.
EM
-Dre
hm
om
en
t
ME
M /
ME
M,m
ax [
%]
Spez. EM-Drehzahl nEM / nEM,max [%]
PEM = konst.
S
R
C
i0
S
S
iX
PS
DHT
EM1 EM2
50 kW
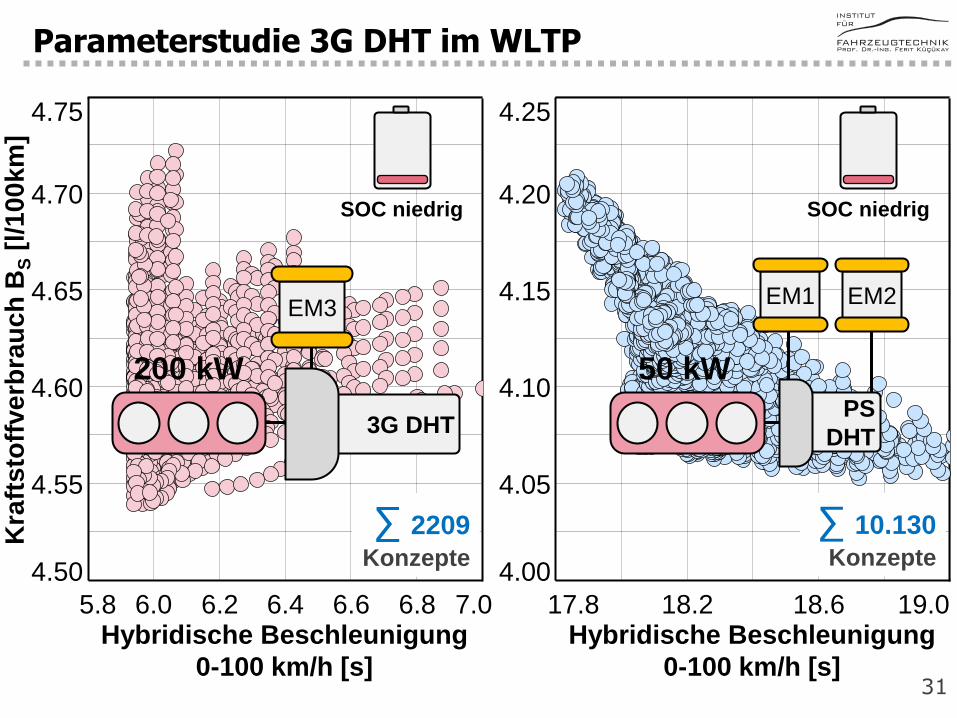
Parameterstudie 3G DHT im WLTP
31
5.8 6.0 6.2 6.4 6.6 6.8
4.55
4.60
4.65
4.70
4.75
Hybridische Beschleunigung
0-100 km/h [s]
7.0
4.50
Kra
fts
toff
ve
rbra
uc
h B
S [
l/1
00
km
]
17.8 18.2 18.6
4.05
4.10
4.15
4.20
4.25
Hybridische Beschleunigung
0-100 km/h [s]
19.0
4.00
SOC niedrig
∑ 2209
Konzepte
∑ 10.130
Konzepte
SOC niedrig
3G DHT
EM3
200 kW PS
DHT
EM1 EM2
50 kW
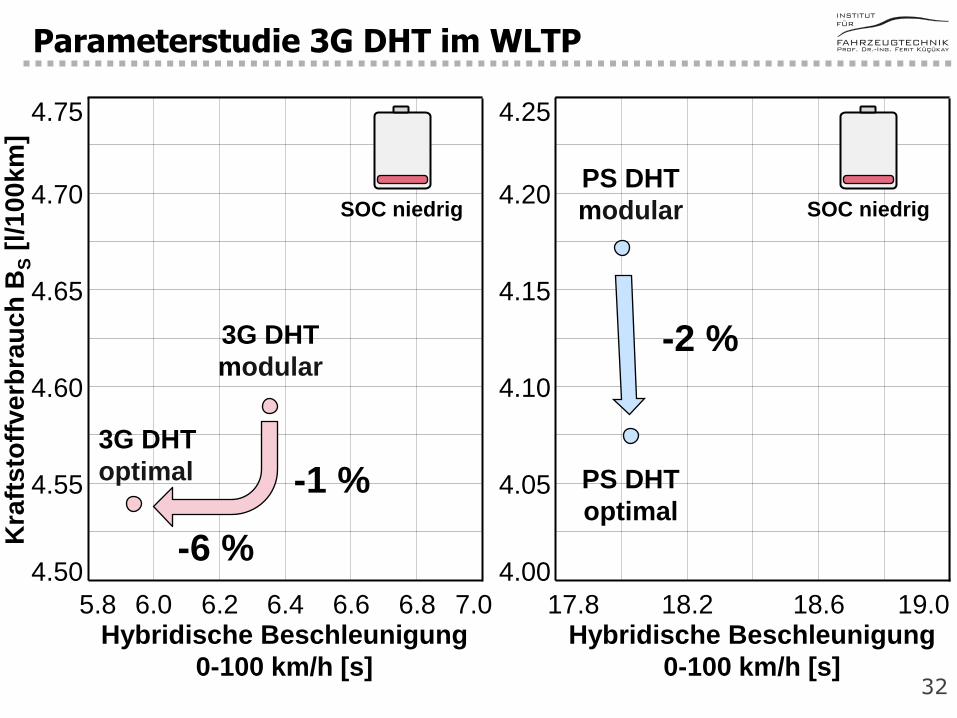
Parameterstudie 3G DHT im WLTP
32
5.8 6.0 6.2 6.4 6.6 6.8
4.55
4.60
4.65
4.70
4.75
Hybridische Beschleunigung
0-100 km/h [s]
7.0
4.50
Kra
fts
toff
ve
rbra
uc
h B
S [
l/1
00
km
]
17.8 18.2 18.6
4.05
4.10
4.15
4.20
4.25
Hybridische Beschleunigung
0-100 km/h [s]
19.0
4.00
3G DHT
modular
3G DHT
optimal -1 %
-6 %
-2 %
PS DHT
modular
PS DHT
optimal
SOC niedrig SOC niedrig
1. Einleitung & Motivation
2. Fahrzeugparameter und Antriebsbedarf
3. Modularer DHT Baukasten
4. Modulares 3G DHT
5. Zusammenfassung
33
Gliederung

Zusammenfassung
34

Kontakt
35
Vielen Dank für
Ihre Aufmerksamkeit!
Dipl.-Ing. Andreas Lange
Institut für Fahrzeugtechnik
TU Braunschweig
Hans-Sommer-Str. 4
38106 Braunschweig
Tel.: +49 (0)531 391-7790
http://www.iff.tu-bs.de