Odometrie bei Laufrobotern nach Vorbild der Entfernungs- und … › servlets › ... ·...
9
Odometrie bei Laufrobotern nach Vorbild der Entfernungs- und Steigungsmessung von Wüstenameisen Cataglyphis spec. Schlögl, Barbara; Seidl, Tobias; Wöhrl, Toni; Bruckmann, Tobias; Schramm, Dieter In: IFToMM D-A-CH Konferenz / Vierte IFToMM D-A-CH Konferenz 2018 Dieser Text wird über DuEPublico, dem Dokumenten- und Publikationsserver der Universität Duisburg-Essen, zur Verfügung gestellt. Die hier veröffentlichte Version der E-Publikation kann von einer eventuell ebenfalls veröffentlichten Verlagsversion abweichen. DOI: https://doi.org/10.17185/duepublico/45300 URN: urn:nbn:de:hbz:464-20180213-103632-7 Link: http://duepublico.uni-duisburg-essen.de/servlets/DocumentServlet?id=45300
Transcript of Odometrie bei Laufrobotern nach Vorbild der Entfernungs- und … › servlets › ... ·...

Odometrie bei Laufrobotern nach Vorbild der Entfernungs- und Steigungsmessung von Wüstenameisen Cataglyphis spec.
Schlögl, Barbara; Seidl, Tobias; Wöhrl, Toni; Bruckmann, Tobias; Schramm, Dieter
In: IFToMM D-A-CH Konferenz / Vierte IFToMM D-A-CH Konferenz 2018
Dieser Text wird über DuEPublico, dem Dokumenten- und Publikationsserver der UniversitätDuisburg-Essen, zur Verfügung gestellt.
Die hier veröffentlichte Version der E-Publikation kann von einer eventuell ebenfallsveröffentlichten Verlagsversion abweichen.
DOI: https://doi.org/10.17185/duepublico/45300
URN: urn:nbn:de:hbz:464-20180213-103632-7
Link: http://duepublico.uni-duisburg-essen.de/servlets/DocumentServlet?id=45300

Odometrie bei Laufrobotern nach Vorbild der Entfernungs- und Stei-gungsmessung von Wüstenameisen Cataglyphis spec.Odometry in legged robots based on the measuring capabilities of de-sert ants Cataglyphis spec. regarding distance and inclinationBarbara Schlögl 1, Tobias Seidl 1, Toni Wöhrl 2, Tobias Bruckmann 3, Dieter Schramm 3
1 Westfälische Hochschule, Westfälisches Institut für Bionik, 46397 Bocholt, Deutschland2 Friedrich-Schiller-Universität Jena, Bewegungswissenschaft/Biomechanik, 07749 Jena, Deutschland3 Universität Duisburg-Essen, Lehrstuhl für Mechatronik, 47057 Duisburg, DeutschlandEmail: [email protected]
KurzfassungAmeisen der Gattung Cataglyphis sind in der Lage, auf Basis propriozeptiver Signale zu navigieren. Dabei werden Odo-metrie und der Neigungswinkel des Untergrunds über die Beinbewegung ermittelt. Das System ist robust und funktioniertmit geringem rechnerischen Aufwand. Dadurch eignet es sich als Vorbild für die Navigation von Laufrobotern in schwie-rigem Gelände. Ziel ist die Entwicklung eines breit anwendbaren generischen Systems, das über ein bionisch inspiriertesOdometer verfügt. Im Speziellen wird untersucht, ob die charakterisierende Größe in der Neigungsbestimmung die in denBeinen wirkenden Kräfte sind. Die Positionierung der Kraftsensoren im Ameisenbein legt eine weitere Vereinfachungauf die in den Gelenken auftretenden Drehmomente nahe. Die Implementierung des Odometers wird in einer Simulationsowie an einer robotischen Einzelbeinplattform validiert. Vorteile dieses Systems sind die kostengünstige und kompakteImplementierung, die im besten Fall keine zusätzlichen Sensoren benötigt und eine Positionsbestimmung in Echtzeit ohneexterne Infrastruktur ermöglicht.
AbstractDesert ants Cataglyphis are able to navigate on proprioceptive signals. Their approach is robust and needs little compu-tational effort, therefore it can be used to develop a navigation system for legged robots in difficult terrain. The goal isto develop a generic system with a wide range of applications, that uses a bionically inspired odometer. In the animal,odometry and the substrate’s inclination are measured from leg movement. After ruling out other sources of information,the research now focuses on the forces acting on the ant’s legs. The position of the force sensors suggests these can besimplified to only consider the joint torques. The odometer’s implementation will be validated in simulation as well ason a robotic single leg platform. The systems benefits include cheap and compact packaging, ideally without additionalsensors, that allow real time positioning without relying on external infrastructure.
Einleitung - MotivationIm Gegensatz zu heimischen Ameisenarten, die in der Re-gel die Futtersuche über die bekannten Ameisenstraßen ko-ordinieren, müssen Vertreter der Gattung Cataglyphis for-tis große individuelle Navigationsleistungen vollbringen.Da sie in Wüstengebieten heimisch sind, ist die Orientie-rung via volatiler Pheromone gar nicht und mit visuellenLandmarken nur eingeschränkt möglich. Trotzdem vermö-gen die Tiere ihr Nest auch nach ausgedehnter Futtersu-che, welche sie in Entfernungen bis zu mehreren zehn-tausend Einheiten Körperlänge bringen kann, zuverlässigwiederzufinden. Diese herausragende Navigationsleistung,welche unter schwierigsten Bedingungen mit beschränktenneuronalen Fähigkeiten durchgeführt wird, macht sie zu ei-nem geeigneten Vorbild für die Odometrie in Laufrobotern.Aktuelle technische Umsetzungen der Positionsbestim-mung von Robotern sind meist auf externe Infrastruktur an-gewiesen, wie GPS, Beacons oder andere Referenzsigna-le [1]. Im Gegensatz dazu beruht das Funktionsprinzip derAmeisenodometrie auf rein idiothetischen Signalen. Eine
Übertragung des Prinzips würde also den Einsatz in Gebäu-den, in unerforschtem oder schwer zugänglichem Gelände,wie bei der Höhlenforschung, Unterwassereinsätzen sowierobotischen Weltraummissionen oder bei Zusammenbruchder Infrastruktur, beispielsweise nach Naturkatastrophen,zulassen.Weitere Vorteile liegen in der Robustheit des Systems ge-gen äußere Störungen, des kompakten Designs und des ge-ringen Rechenaufwands, wodurch schnell und dynamischdie kontinuierliche Bestimmung der aktuellen Position er-möglicht wird.In Anwendungen, in denen externe Sensoren oder vorhan-dene Odometer verfügbar sind, stellt die auf der Ameise-nodometrie basierende Methode eine zusätzliche Möglich-keit der Positionsbestimmung in Echtzeit dar. Dies erhöhtdie Redundanz des Systems und ist im besten Fall ohne zu-sätzliche Sensoren implementierbar.

Bild 1 Strukturplan des Projekts. Farben markieren die Themenfelder des bionischen Entwicklungsprozesses. dunkelgrün - Analysedes biologischen Vorbilds grün - Abstraktion des Wirkprinzips blau - Technische Umsetzung dunkelblau - Implementierung undValidierung des Produkts
Strukturplan des ProjektsDie Übertragung der Ameisenodometrie auf eine techni-sche Umsetzung folgt dem bionischen Entwicklungspro-zess [2]. Die notwendigen Schritte umfassen die Analysedes biologischen Vorbilds, die Abstraktion des Wirkprin-zips, bis zur technischen Umsetzung, in diesem Fall in Ro-botik und Simulation (Bild 1). Vorteil dieser Vorgehens-weise ist, dass drei Ziele gleichzeitig erreicht werden kön-nen. Zum Einen ermöglicht sie die Validierung von Hypo-thesen darüber, wie die Odometrie in Wüstenameisen funk-tioniert sowie das Ableiten weiterer verhaltensbiologischerExperimente, die weiteren Aufschluss über das biologischeVorbild geben können. Darüber hinaus kann ein Produktentwickelt werden, welches die Anwendung auf einer tech-nischen Plattform zulässt.Biologisches Vorbild Zunächst muss das zugrundeliegen-den Funktionsprinzip des biologischen Vorbilds analysiertwerden. Hierzu sind bereits grundlegende Mechanismenmit Hilfe der Verhaltensbiologie erforscht worden. Diesewerden in Kapitel 3 im Detail erläutert. Die Wüstenamei-sen Cataglyphis spec. betreiben Wegintegration, so dasssie zu jeder Zeit über einen aktuellen Heimvektor verfü-gen, welcher Entfernung und Richtung zum Nest umfasst.Die Informationen, die das Tier prinzipiell über seine Um-gebung sammeln kann, bilden die Grundlage der Positi-onsbestimmung und legen somit Wirkprinzip und Designdes Ameisenodometers fest. Die notwendige Kompassin-formation wird aus dem Sonnenstand extrahiert [3]. In Ver-haltensexperimenten wurde nachgewiesen, dass die Odo-metrie und der Neigungswinkel des Untergrundes über dieBeinbewegung ermittelt werden, indem weitere Hypothe-sen über die Wirkungsweise widerlegt werden konnten. Sokann ausgeschlossen werden, dass die Haarfelder, welcheInformationen über die Stellung der Beine übertragen, fürdie Odometrie ausschlaggebend sind. Selbst wenn dieseunbrauchbar gemacht werden, sind die Tiere immer noch inder Lage zuverlässig zum Nest zurück zu finden. Ebenso ist
die zeitliche Dauer und Abfolge von Stand- und Schwung-phase nicht mit dem Neigungswinkel korreliert, kann al-so zur Bestimmung desselben nicht herangezogen werden[4]. Optische Signale werden aus lateraler Richtung über-haupt nicht und aus ventraler Richtung nur zu weniger als10% verarbeitet [5,6]. Energieverbrauch als Indikator wur-de ebenfalls ausgeschlossen, da die Entfernungsmessungnicht von der zusätzlichen Last beim Futtertransport be-einflusst wird [7]. Als Kandidat bleiben die sogenanntencampaniformen Sensillen, welche Verformungen des Exo-skeletts messen und somit die im Bein auftretenden Kräfteerfassen.Abstraktion des Wirkprinzips Für die Implementierungdes Odometers in einem technischen System wie einemLaufroboter ist die Abstraktion und Übertragung der Funk-tionsweisen des biologischen Systems notwendig. Aus denVerhaltensexperimenten folgt, dass die Beinbewegung ent-scheidend für die Navigationsleistung ist. Dementspre-chend wird untersucht, welche Informationen zur Bestim-mung der Schrittlänge und des Untergrundneigungswin-kels notwendig und hinreichend sind. Die Untersuchun-gen umfassen die Analyse der Kinematik und die Loka-lisation der am Ameisenbein vorhandenen Kraftsensoren.Dieser Aspekt wird in Kapitel 4 behandelt. Aus den dortvorgestellten Ergebnissen ergibt sich die Näherung, nurdie Drehmomente in den Gelenken zu betrachten. Diesemüssen mit dem Neigungswinkel des Untergrunds korre-liert werden, um diesen Zusammenhang in der Anwendungnutzen zu können. Dabei ist zu beachten, dass die Kraft-profile von weiteren Faktoren in ihrer Ausprägung verän-dert werden können. Diese umfassen beispielsweise Stick-Slip-Effekte, Beladung, Geschwindigkeit, Beinproportio-nierung und Skalierung. Die Korrelation der Kraftprofil-Rohdaten mit der Schrittlänge und dem Neigungswinkelwird über eine Modellierung in einer Mehrkörpersimulati-on realisiert. Ein paralleler Ansatz, welcher sich näher ambiologischen Vorbild orientiert, ist die Verknüpfung überKünstliche Neuronale Netze. Auf diesem Gebiet sind be-

reits vielversprechende Konzepte implementiert [8], derenErweiterung zusätzliche Erkenntnisse über das biologischeVorbild hervorbringen könnte.Untersuchungen an einem robotischen Einzelbein ermög-lichen die Anpassung und Übertragung des Konzepts aufeine technische Anwendung.Technische Umsetzung Richtung, Schrittlänge und Nei-gungswinkel sind ausreichend, um eine Wegintegration(PI) durchzuführen. Die Richtung wird als gegeben ange-nommen, da der von den Ameisen verwendete Sonnen-kompass nicht steigungsabhängig ist [3]. Somit kann esals von der Odometrie unabhängiges System implementiertwerden und beeinflusst das Konzept des Projekts nicht. Mitden drei genannten Parametern kann durch die Integrati-on jedes Schrittes zu jedem Zeitpunkt die aktuelle Positionals Abstand vom Ausgangspunkt und Polarwinkel zur Aus-gangsorientierung angegeben werden. Dies ermöglicht dieerfolgreiche Navigation zurück zum Ausgangspunkt. DieValidität der getroffenen Annahmen kann durch die Imple-mentierung des Odometers auf einer technischen Plattformgetestet werden. Zusätzlich werden die Hypothesen in ei-ner Simulation getestet. Diese ist zunächst niederschwel-liger umzusetzen als die mechanische Lösung und lässtzudem eine Modellierung näher am biologischen Vorbildzu, da sie nicht durch bauliche Beschränkungen begrenztwird. Perspektivisch ist darüber hinaus die Umsetzung ei-nes vollständigen Wegintegrationssystems auf einem robo-tischen Hexapod geplant. Dadurch zeigt sich die Praktika-bilität der Übertragung der Ameisennavigation auf techni-sche Systeme.Erkenntnisse über das biologische Vorbild Wenn esmöglich ist mit den getroffenen Annahmen ein funktio-nierendes Wegintegrationssystem zu implementieren, gibtdas Hinweise darauf, wie die Wegintegration bei den Wüs-tenameisen funktioniert. Daraus können wieder neue Ver-haltensexperimente entwickelt werden, welche weitere Er-kenntnisse über die Wüstenameisen Cataglyphis spec. zu-lassen.
Navigationsleistung WüstenameiseDie grundlegende Navigation der Wüstenameise Cata-glyphis spec. ist durch Verhaltensexperimente gut belegt[3, 9, 10]. Die Tiere verlassen das Nest in der Mittagshit-ze auf der Suche nach anderen Lebewesen, welche an äu-ßeren Einflüssen verendet sind. Dazu beginnen Sie in ei-nem gewissen Abstand vom Nest mit einem Suchlauf (Bild2, schwarze Linie). Findet das Tier Futter, transportiert esdieses auf direktem Wege zum Nest zurück (Bild 2, blaueLinie) [10]. Um diese Navigationsleistung zu erbringen,muss die Ameise jederzeit die Informationen über Rich-tung und Entfernung zum Nest besitzen. Die notwendigeRichtung wird aus dem Sonnenkompass gewonnen [3]. Beijedem Schritt wird dann die Länge integriert und der aktu-elle Heimvektor aktualisiert [9, 11]. Dabei wird die Nei-gung des Untergrunds ebenfalls berücksichtigt. Die Arbeitvon Wohlgemuth et al. [12] zeigt, dass vermutlich eine ebe-ne Projektion des Schrittes und damit die Luftlinie zumNest zur erfolgreichen Navigation ausreicht. Es ist aber
noch offen, wie diese Projektion stattfindet, im Speziellen,wie der benötigte Neigungswinkel ermittelt wird. Seidl [4]formuliert die Hypothese, dass die Steigungsbestimmungüber die Kraftverläufe im Bein möglich ist. In den Arbei-ten von Reinhardt [13] und Wöhrl [14] wird sie als zutref-fend beschrieben und soll nun technisch implementiert undvalidiert werden.
Bild 2 Route einer einzelnen Wüstenameise bei der Futtersu-che. Hinweg schwarz, Rückweg blau, N bezeichnet das Nest, Fdie Futterstelle. Nach [10]
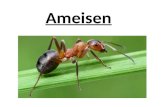
Analyse biologisches SensorsystemDurch die vorhandenen Kraftsensoren wird festgelegt, anwelchen Stellen im Bein die wirkenden Kräfte wahrgenom-men werden können, wohingegen Kinematik und Beinmor-phologie die Größe und Richtung der auftretenden Kräftebeeinflussen.Sensoren Wüstenameisen der Gattung Cataglyphis spec.verfügen über sogenannte campaniforme Sensillen, welchedie auftretenden Beinkräfte messen. Die Beine zweier In-dividuen wurden mit Hilfe eines Rasterelektronenmikro-skops (REM) (TM 3030, Hitachi, Japan) nach diesen Sen-sillen abgesucht. Die Beine wurden einzeln abpräpariertund die sechs Beine eines Individuums auf jeweils einenProbenteller aufgebracht. Die Teller wurden in einem Sput-ter Coater (Cressington 108auto, Cressington Scientific In-struments, England) 60 Sekunden lang bei 30 mA mit Goldbedampft. Das hintere linke Bein eines Exemplars wur-de bei 1500-facher Vergrößerung in mehreren Einzelbil-

dern erfasst, welche anschließend zu einem vollständigenhochauflösenden Bild zusammengefügt wurden. Dadurchwurde gewährleistet, dass die vorhandenen Sensillen auf-gefunden werden können. Diese sind von ovaler Form mitden Achsenlägen (8,3 ± 1,5) µm und (2,3±0,3) µm. An-schließend wurden mit dem Vorwissen dieser Positionendie anderen Beine mit besonderem Augenmerk auf die be-reits identifizierten Stellen abgesucht. Die Sensillen kom-men vereinzelt vor, die Mehrzahl ist aber zu Sensorfeldernangeordnet. Diese Sensorfelder sind auf allen untersuchtenBeinen aufzufinden und kartographiert worden. Die über-wiegende Anzahl ist in der Nähe der Gelenke, insbesondereder Coxa, dem körpernähesten Gelenk, zu finden (Bild 3).
Bild 3 Oben: Rasterelektronenmikroskopische Aufnahme einesBeins einer Cataglyphis fortis. Beschriftung der Anatomie desBeins: Die Coxa ist die Verbindung zum Ameisenkörper, Coxaund Trochanter entsprechen dem Hüftgelenk, Femur dem Ober-schenkel, Tibia dem Unterschenkel und Tarsus dem Fuß. RoterRahmen markiert den vergrößerten Ausschnitt.Unten: Vergrößerter Ausschnitt des Trochanters. Rote Kreisemarkieren Felder von Kraftsensoren (campaniforme Sensillen).’es’ markiert vereinzelte Sensoren, ’do’ das dorsale Feld. In wei-teren Perspektiven (nicht dargestellt) sind weitere charakteristi-sche Felder erkennbar, welche auf allen untersuchten Beinen zufinden sind.
Kinematik Zur Untersuchung der Kinematik und der auf-
tretenden Bodenreaktionskräfte stehen Hochgeschwindig-keitsaufnahmen des Laufs von Wüstenameisen zur Ver-fügung. Diese umfassen Sequenzen von Cataglyphis for-tis auf verschiedenen Steigungen mit gleichzeitiger Erfas-sung der Bodenreaktionskräfte mittels eigens konstruierterKraftmessplatte [13]. Die Position von Schwerpunkt, Hüft-gelenk (Coxa-Trochanter Gelenk), Knie (Femur-Tibia Ge-lenk) und Fußspitze (Tarsus) wird erfasst und zur weiterenAuswertung digitalisiert (Bild 4, Kapitel 6.2). Aus Vorar-beiten an diesen Daten ist ersichtlich, dass die Bodenreak-tionskräfte des biologischen Systems mit der Untergrund-neigung korreliert sind (Bild 5). So wandeln sich die Kräf-te der Vorder- und Hinterbeine in Abhängigkeit des Stei-gungswinkels von Schub- zu Zugkräften, außerdem wech-selt die Aufgabe des primären Antriebs von den Vorder- zuden Hinterbeinen [14].
Bild 4 Einzelbild einer Wüstenameise Cataglyphis fortis aufebenem Untergrund (Neigungswinkel 0°). Blick von oben, Sei-tansicht über einen Spiegel im 45° Winkel. Das schwarze Vier-eck markiert die Position der Kraftmessplatte. Gelbe Punkte zei-gen die nachverfolgten Punkte im Schwerpunkt (a), am Coxa-Trochanter Gelenk (b), Femur-Tibia Gelenk (c) und Spitze desTarsus (d) über alle Frames des Videos.
Die Untersuchungen der auftretenden Beinkräfte und dervorhandenen Sensoren geben Aufschluss darüber, welchecharakteristischen Messwerte für die Odometrie von Be-deutung sind. Im weiteren Verlauf wird in Hinblick aufdie Sensorik insoweit vom biologischen Vorbild abgewi-chen, als dass der explizite Nachbau der campaniformenSensillen nicht angestrebt wird, sondern technische Senso-ren zum Einsatz kommen sollen. Darüber hinaus wird auf-grund der Positionierung der Sensorfelder in Gelenknähe inerster Näherung angenommen, dass die Messung der Dreh-momente in den Gelenken ausreichend ist für die Bestim-mung des Neigungswinkels.
Technisches SystemIn dem Mehrkörpersimulator ADAMS 2014(MSC.Software Corporation, USA) wird zunächst ein ein-faches geometrisches Modell der Ameise erstellt, um dieKorrelation zwischen Belastung der Gelenke und Nei-

Bild 5 Mittlere Bodenreaktionskraftvektoren und mittlere Schrittmuster einer Wüstenameise Cataglyphis fortis auf unterschiedlichgeneigten Untergründen. (A) Steile Abwärtsneigung (B) Leichte Abwärtsneigung (C) Ebene (D) Leichte Aufwärtsneigung (E) SteileAufwärtsneigung. Laufrichtung ist in x-Richtung von links nach rechts. Rote, grüne und blaue Pfeile bezeichnen die mittleren Boden-reaktionskraftvektoren von jeweils Hinter-, Mittel- und Vorderbein. [14]
gungswinkel des Untergrundes herzustellen. Der soge-nannte Tripod-Gang, in dem im Wechsel immer drei Bei-ne gleichzeitig Bodenkontakt haben, ist die bevorzugteGangart der Ameisen. Deshalb wird das System zunächstvereinfacht als quasistatischer Tripod angenommen. DieLängen und Winkel der Konfiguration werden aus denHochgeschwindigkeitsvideos ermittelt. Die Beine werdenals Zylinder ohne Eigengewicht genähert. Durch das Ein-leiten der Bodenreaktionskräfte können die Drehmomentein den Gelenken ermittelt und den entsprechenden Nei-gungswinkeln zugeordnet werden.
ValidierungDie Validierung der aufgestellten Hypothesen wird in derSimulation und an einem technischen System vorgenom-men. Zunächst wird die Zulässigkeit der Vereinfachungauf Drehmomente an einer robotischen Einzelbeinplatt-form überprüft.
Robotische Einzelbeinplattform
Die Überprüfung der Simulationsergebnisse wird an einerEinzelbeinplattform vorgenommen. Diese besteht aus ei-nem einzelnen Bein, welches sich auf einer Schiene trans-latorisch in horizontaler Richtung bewegen kann. Drei Ser-vomotoren (Dynamixel MX-64AT, ROBOTIS, Korea) sinddurch im 3D-Druckverfahren gefertigte, dem Ameisen-bein proportionale Verbindungsstücke (MakerBot Replica-tor 2, MakerBot Industries, USA, renkforce PLA Filament1.75 mm) verbunden (Bild 6). Die Servomotoren werdenüber eine ROS-Schnittstelle (Open Source Robotics Foun-dation, rosdistro kinetic, rosversion 1.12.12, http://ros.org)angesteuert und sind mit internen Sensoren zur Bestim-mung des Drehmoments über die Stromaufnahme ausge-stattet. Der Aufbau ist modular gehalten, so dass ein leich-
ter Austausch möglich ist und zudem der Einfluss des Desi-gns auf die Kraftverteilung evaluiert werden kann. In einerersten Messung war die prinzipielle Fortbewegung in Rich-tung der Schiene mit gleichzeitiger Aufnahme der Last inden Servos möglich. Für belastbare Ergebnisse sind nachder Feineinstellung der Komponenten weitere Messreihennotwendig.
Bild 6 Robotischer Einzelbeinaufbau. Die modularen Verbin-dungsstücke (3D-Druck MakerBot Replicator 2, MakerBot In-dustries, USA, renkforce PLA Filament) (orange) zwischen dendrei Servomotoren (Dynamixel MX-64AT, ROBOTIS, Korea)(schwarz) sind in der Länge proportional zum Ameisenbein. DieBewegung ist über einen Holzschlitten auf einer Schiene in trans-latorischer Richtung möglich. Bewegungsrichtung ist von rechtsnach links

Robotersimulation GazeboDie Simulation der Einzelbeinplattform und des naturähn-lichen Hexapods wird in dem quelloffenen Robotersimu-lator Gazebo (version 7.0.0, Open Source Robotics Foun-dation, http://gazebosim.org/) durchgeführt, da dieser si-multan zur Roboterplattform über eine ROS Schnittstel-le angesprochen werden kann. Die Beinbewegung wirdaus den Hochgeschwindigkeitssequenzen extrahiert. Da-zu wird die Bewegung von Hüftgelenk (Coxa-TrochanterGelenk), Knie (Femur-Tibia Gelenk) und Fußspitze (Tar-sus) relativ zur Bewegung des Schwerpunkts in allen dreiRaumrichtungen vermessen und digitalisiert (Bild 4). Ausdiesen Daten ergibt sich die Kinematik der Gelenkwinkelüber die Zeit, sowie eine einfache Geometrie des Ameisen-beins. Die Geometrie wird in das Unified Robot Descrip-tion Format (URDF) überführt und das Modell in Gazeboimportiert (Bild 7). Anschließend werden über die Schnitt-stelle zu ROS die Gelenkwinkel gesteuert.
Bild 7 Vereinfachtes Modell einer Wüstenameise im Robo-tersimulator Gazebo. Grauer Kasten: Körper mit Masse verei-nigt im Schwerpunkt, weiße Zylinder: virtuelle Verbindungenvom Schwerpunkt zu den jeweiligen Hüftgelenken, grüne Zylin-der: vereinfachte Oberschenkel (Verbindung von Hüfte (Coxa) zuKniegelenk (Femur-Tibia Gelenk) ), daran anschließende weißeZylinder: Vereinigung von Unterschenkel (Tibia) und Fuß (Tar-sus). Die Bewegungsrichtung ist von rechts nach links auf ebenemUntergrund.
Durch rein kinematisches Nachfahren der Bewegung istdas Modell in der Lage sich vorwärts zu bewegen. Rei-bungskoeffizienten, Stick-Slip-Effekte und weitere Ein-flussfaktoren sind im aktuellen Stand des Modells nochnicht vollständig implementiert. Dadurch rutscht das Mo-dell in der Stemmphase unkontrolliert weg. Folglich sinddie Kraftprofile des Modells noch nicht deckungsgleichmit den experimentell ermittelten Kraftprofilen der Wüs-tenameise.Im Simulationsmodell können die getroffenen Hypothe-sen bestätigt oder notwendige Anpassungen identifiziertwerden. Es werden weitere Messreihen kostengünstig er-zeugt, welche zur Optimierung des Odometerdesigns ge-nutzt werden.
Status des ProjektsDie Navigationsleistung der Wüstenameise Cataglyphisspec. stellt einen guten Ausgangspunkt für eine bionische
Übertragung auf die Positionsbestimmung von Laufrobo-tern dar (Bild 8). Dabei sind durch Verhaltensexperimentedie Grundlagen des Funktionsprinzips bekannt. Untersuchtwird, wie die Schrittlänge und der Neigungswinkel über dieauftretenden Beinkräfte propriozeptorisch ermittelt werdenkönnen. Dabei wird das in der Bionik übliche Bottom-up-Verfahren angewendet. Die Untersuchungsmöglichkei-ten am biologischen Vorbild sind durch die geringe Größeder Tiere und die Komplexität des biologischen Organis-mus begrenzt. Die grundlegenden Prinzipien konnten aberermittelt werden und dienen als Grundlage für die Übertra-gung auf ein technisches System.
Die Auswertung der Hochgeschwindigkeitsvideos ermög-licht die Analyse der Kinematik der Wüstenameise beiverschiedenen Neigungswinkeln. Die Bewegung bei ebe-ner Fortbewegung ist bereits für alle relevanten Punkte di-gitalisiert und wird zur weiteren Untersuchung verwendet.Zu weiteren Neigungswinkeln stehen die Rohdaten undteilweise die Digitalisierung einiger Punkte zur Verfügung.
Untersuchungen der Morphologie des Ameisenbeins erge-ben, dass die Kraftsensoren hauptsächlich in der Nähe derGelenke, insbesondere des Hüftgelenks anzutreffen sind.Damit wird begründet, dass in erster Näherung nur dieDrehmomente in den Gelenken berücksichtigt werden. Be-stätigt sich diese These, so kann in der technischen Umset-zung, soweit verfügbar, auf interne Sensoren in den Mo-toren zurückgegriffen werden. Hierdurch ist das Systemsehr kostengünstig zu implementieren, da keine zusätzli-che Sensorik notwendig ist.
Die Untersuchung der Kraftprofile steht noch am Anfang.Die Messungen am Tier sind zur Auswertung und zur Vali-dierung verfügbar. Messungen am robotischen Einzelbeinund der Simulation sind aktuell in der Durchführung. Ef-fekte wie Stick-Slip, Beladung, Geschwindigkeit und wei-tere sind noch nicht berücksichtigt, sind aber für die tat-sächliche Implementierung nicht zu vernachlässigen.
Der Ansatz über Neuronale Netze hat in einem ersten Testzufriedenstellende Ergebnisse erzielt. Es werden noch um-fangreichere Messreihen benötigt, um belastbare Aussagentreffen zu können.
In der Mehrkörpersimulation wurde ein einfaches geo-metrisches Modell erstellt, allerdings sind wichtige Para-meter noch nicht implementiert, so dass noch keine vorläu-figen Ergebnisse erzielt werden konnten.
Von den Eingangsgrößen des Wegintegrationssystems wirddie Richtung, die über den Sonnenkompass ermittelt wird,als gegeben angenommen und nicht als Teil des Projektsaufgefasst.
Die Extraktion von Schrittlänge und Neigungswinkelwird umgesetzt, sobald die Ergebnisse der Mehrkörpersi-mulation zur Verfügung stehen.
Der prinzipielle Aufbau des Wegintegrators ist bekannt,

Bild 8 Strukturplan des Projekts. Hintergrundfüllung gibt den ungefähren Bearbeitungsstand des jeweiligen Themenfelds an.
die tatsächliche Implementierung erfolgt zu einem späte-ren Zeitpunkt.
Die Validierung der Ergebnisse an einer Einbein-Roboterplattform ist möglich. Das Einzelbein kann sichin translatorischer Richtung bewegen. Weitere Verbesse-rungen sind in Arbeit. Perspektivisch ist die Validierungan einer vollständigen sechsbeinigen Roboterplattform ge-plant.
In einer Simulation ist ein einfaches geometrisches Mo-dell, proportional zu den Extremitäten der Ameise imple-mentiert. Ebenso eine Simulation der robotischen Einzel-beinplattform. Das Modell ist in der Lage sich vorwärts zubewegen, allerdings ist die Bewegung noch nicht vollkom-men naturgetreu.
Insgesamt stützen die Zwischenergebnisse bislang die auf-gestellten Hypothesen und den veranschlagten Struktur-plan des Projekts.
Nächste SchritteDer aktuelle Bearbeitungsstand der Themenfelder ist imvorigen Kapitel dargelegt. Daraus ergeben sich die nächs-ten Arbeitspakete.
Vervollständigung der KraftprofileEin zentraler Punkt des Projekts ist die Simulation undAuswertung von Laufmustern, sowohl des biologischenVorbilds, als auch einer technischen Umsetzung. Diese lie-fern Kraftprofile unter Berücksichtigung von positiver undnegativer Steigung, Stick-Slip-Effekten, Beladung, Bewe-gungsgeschwindigkeit, Beinproportionen und Skalierung.Zum aktuellen Bearbeitungsstand muss die Modellierungum diese Effekte erweitert werden, damit die Korrelationvon Drehmomenten zu Neigungswinkel des Untergrundeshergestellt werden kann.
Verfeinerung der ModellierungBislang ist die Modellierung des Ameisenbeins sehr grobdurch gerade Verbindungsstücke zwischen den Gelenkenimplementiert. Diese Abstraktion schränkt die Aussage-kraft des Modells ein, weshalb eine 3D-Rekonstruktion desAmeisenbeins angefertigt wird. Dadurch werden präzise-re Aussagen über die Kraftverläufe möglich. Mittels Pho-togrammetrie wird aus rasterelektronen- und lichtmikro-skopischen Bildern ein 3D-Modell eines Ameisenbeins er-stellt. Das Ergebnis wird in der Güte mit einer Mikro-CT-Rekonstruktion verglichen werden.Das 3D-Modell wird in eine FEM-Simulation übersetzt,um die Kraftverläufe im Bein zu analysieren. Es wird ge-prüft, welche Kräfte an den Stellen auftreten, an denen imAmeisenbein Sensorfelder zu finden sind und durch welchespeziellen Charakteristika sich diese auszeichnen. Es wer-den zudem die Drehmomente in den Gelenken modelliertund geprüft, ob bei einer technischen Umsetzung die Ver-einfachung auf diese Momente zulässig ist oder zusätzlicheSensoren benötigt werden.
Erweiterung der RoboterplattformFür die bestehende einbeinige Roboterplattform wird einLaufband konstruiert, welches neigungsverstellbar ist undso die Kraftverhältnisse auf unterschiedlichen Steigungenannähert. An diesem Aufbau werden die auftretenden Kräf-te und Momente ermittelt, mit den biologischen Daten ver-glichen und in das Odometer eingespeist. Die Kräfte wer-den zum Einen über die internen Drehmomentssensorengemessen, zusätzlich kommen Dehnmessstreifen zum Ein-satz. Dies ermöglicht das Überprüfen der Hypothese, ob ei-ne Vereinfachung auf die internen Sensoren zulässig ist. Istdies der Fall, hat die technische Umsetzung der Ameisen-odometrie den Vorteil, dass sie ohne zusätzliche Sensorenauf bestehende Systeme implementierbar ist.
FinanzierungshinweisDeutsche Forschungsgemeinschaft [BL 236/20-1 to R.B.]

Literatur[1] Talluri, R.; Aggarwal, J.K.: Position estimation tech-
niques for an autonomous mobile robot?A review. In:Handbook of Pattern Recognition and Computer Vi-sion. World Scientific, 2011 S. 765-796.
[2] VDI Verein Deutscher Ingenieure (Hrsg.): BionikKonzeption und Strategie Abgrenzung zwischen
bionischen und konventionellen Verfahren/ProduktenVDI 6220 Blatt 1. (2012)
[3] Wehner, R.: Himmelsnavigation bei Insekten: Neu-rophysiologie und Verhalten. Neurophysiologie undVerhalten. na, 1982.
[4] Seidl, T.; Wehner, R.: Walking on inclines: how do de-sert ants monitor slope and step length. FRONTIERSIN ZOOLOGY 5.1 (2008): 8.
[5] Ronacher, B.; Gallizzi, K.; Wohlgemuth S.; Weh-ner R.: Lateral optic flow does not influence di-stance estimation in the desert ant, Cataglyphis for-tis. JOURNAL OF EXPERIMENTAL BIOLOGY(2000): 203:1113-1121
[6] Ronacher B.; Wehner, R.: Desert ants Cataglyphisfortis use selfinduced optic flow to measure distan-ces travelled. JOURNAL OF COMPARATIVE PHY-SIOLOGY (1995): 177:21-27. 16.
[7] Wehner, R.: Taxonomie, Funktionsmorphologie undZoogeographie der saharischen Wüstenameise Cata-glyphis fortis (Forel 1902) stat. nov. SENCKENBER-GIANA BIOLOGICA (1983): 64:89-132. 2.
[8] Goldschmidt, D.; Manoonpong, P.; Dasgupta, S.: ANeurocomputational Model of Goal-Directed Navi-gation in Insect-Inspired Artificial Agents. FRON-TIERS IN NEUROROBOTICS 11 (2017).
[9] Seidl, T.: Insect navigation and path finding. ActaFutura 4 (2008): 102-106.
[10] Müller, M.; Wehner, R.: Path integration in desertants, Cataglyphis fortis NEUROBIOLOGY (1988)
[11] Wittlinger, M.; Wehner, R.; Wolf, H.: The ant odo-meter: stepping on stilts and stumps. SCIENCE312.5782 (2006): 1965-1967.
[12] Wohlgemuth, S.; Ronacher, B.; Wehner, R.: Distan-ce estimation in the third dimension in desert ants.JOURNAL OF COMPARATIVE PHYSIOLOGY A188.4 (2002): 273-281.
[13] Reinhardt, L.: Dynamik und Kinematik der Loko-motion von Formica polyctena. Diss. Jena, Friedrich-Schiller-Universität Jena, Diss., 2014, 2014.
[14] Wöhrl, T.; Reinhardt, L.; Blickhan, R.: Propulsion inhexapod locomotion: how do desert ants traverse slo-pes? JOURNAL OF EXPERIMENTAL BIOLOGY220.9 (2017): 1618-1625.