
Pow 01 2013 s38 39 titelstory sensortechnik wiedemann
3
Das Magazin für mobile Antriebs- technik und Energiemanagement 1. Ausgabe ISSN-Nr. 1860-0913 März 2013 9. Jahrgang Thermische Antriebstechnik Neue Motorenfamilie als Weltpremiere Seite 14-15 Elektrische/Elektronische Antriebstechnik Steuerungen, Komponenten: Funktionale Sicherheit Ab Seite 38
-
Upload
powerworld -
Category
Documents
-
view
212 -
download
0
description
Â
Transcript of Pow 01 2013 s38 39 titelstory sensortechnik wiedemann

Das Magazin für mobile Antriebs-technik und Energiemanagement
1. Ausgabe ISSN-Nr. 1860-0913
März 2013 9. Jahrgang
Thermische Antr iebstechnik
Neue Motorenfamilie als Weltpremiere Seite 14-15
Elektr ische/Elektronische Antr iebstechnik
Steuerungen, Komponenten: Funktionale Sicherheit Ab Seite 38

POW
ERW
ORL
D 0
1-20
13 Ele
ktr
ische / E
lektr
onis
che A
ntr
iebste
chnik
Geschwindigkeitsüberwachung für Flurförderfahrzeuge
ben diesen Varianten auch zahlreiche kun-denspezifische Wünsche unterstützt. Mit der Steuergerätefamilie ESX bietet Sen-sor-Technik Wiedemann seit Jahren schnell und einfach anpassbare Lösungen an, wel-che sich in vielen Anwendungen insbeson-dere im Land- und Baumaschinenbereich bewährt haben. Das Steuergerät ESX-3XL mit 32-Bit-Technologie bietet sechs interne Steckplätze für Erweiterungsmodule, womit sich 84 von den 162 Anschlusspins mit un-
terschiedlichsten Funktionen belegen lassen, angefangen bei einfachen In/Out-Erweite-rungen (beispielsweise Drehencoder) bis hin zu Spezial-IOs, Datenspeichern oder Kom-munikationsschnittstellen. Das Mainboard der ESX-3XL wartet mit zahlreichen Soft-ware-konfigurierbaren Eingängen auf, zur Erfassung von Spannungen bzw. Strömen mit entsprechenden Tiefpassfiltern oder auch digitalen Signalen und Drehzahlen mit einstellbaren Prellzeiten. Alle Ausgänge können pulsweitenmodulierte (PWM) Sig-
Wird ein derartiges Rad angetrieben, ent-stehen zwei Kraftkomponenten, welche para - llel und senkrecht zur Antriebsachse wirken. Durch unterschiedliche Drehrichtungen der Räder lässt sich erreichen, dass sich Teilkompo- nenten der Kräfte an den verschiedenen Rä-dern über dem Fahrzeugrahmen kompensie-ren und andere die Bewegung des Gefährts bewirken. Entsprechend sind neben Gerade-aus-, Seitwärts- und Diagonalfahrt auch belie- bige Kurvenfahrten und Rotationen um ei-nen frei bestimmbaren Mittelpunkt möglich. In [Abb. 3] ist das Prinzip für die translatori-schen Bewegungen schematisch dargestellt.
Dabei sind Konfigurationen von minimal 4 bis über 20 angetriebenen Rädern sowie zahlreichen zusätzlichen Tragrädern mög-lich, um auch sehr große, unüberschauba-re Bauteile mit bis zu 100 Tonnen Gewicht zu transportieren.
Steuerung ESX-3XL
Für diese vielen, unterschiedlichen Varian-ten an Fahrzeugen war KUKA auf der Suche nach einem Steuerungssystem, welches ne-
Tonnenschwere Lasten in Bereichen mit Per-sonenverkehr mit Hilfe einer Funkfernsteu-erung zu befördern, ist immer mit Risiken verbunden. In diesem Beitrag wird eine Me-thode beschrieben, wie die Sicherheit durch eine Safety-Applikation in einer sicherheits-gerichteten, frei programmierbaren Steue-rung erfüllt werden kann. Die Firmen KUKA und Sensor-Technik Wiedemann (STW) ha-ben in einem gemeinsamen Projekt eine neue Art der Überwachung für ein Flurför-derzeug mit Funkfernsteuerung entwickelt.
KUKA omniMove
KUKA omniMove ist die Bezeichnung für eine extrem wendige Antriebsart für Flur-förderzeuge. KUKA omniMove mit seinen elektrischen Antrieben ermöglicht die un-eingeschränkte Manövrierbarkeit in beliebi - ge Richtungen sowie die Rotation um sich selbst. Durch seine omnidirektional fahren-den Räder lässt sich das Fahrzeug ohne Umorientierung der Räder frei navigieren und per Fernbedienung in alle Richtungen steuern – selbst in den engsten Räumen und dies mit einer Positioniergenauigkeit bis zu ± 1 mm.
Das omniMove-Rad besteht aus einer spezi-ellen Felge, an deren Umfang unter 45° ge-wölbte Laufrollen lose montiert sind [Abb. 2].
Abb. 2: omniMove Rad mit Walzen am Umfang.
Abb. 3: Prinzipdarstellung omniMove Fortbewegung.
Abb. 1: Kuka omniMove in Aktion.
38 39
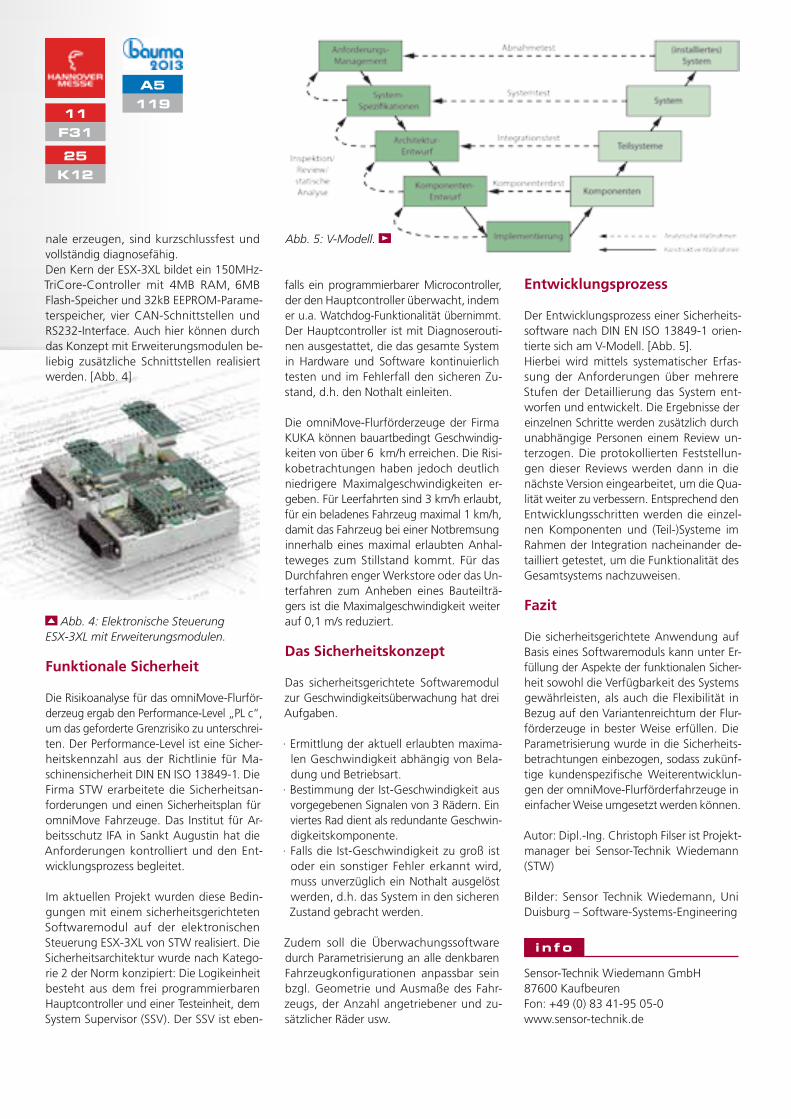
Entwicklungsprozess
Der Entwicklungsprozess einer Sicherheits-software nach DIN EN ISO 13849-1 orien-tierte sich am V-Modell. [Abb. 5].Hierbei wird mittels systematischer Erfas-sung der Anforderungen über mehrere Stufen der Detaillierung das System ent-worfen und entwickelt. Die Ergebnisse der einzelnen Schritte werden zusätzlich durch unabhängige Personen einem Review un-terzogen. Die protokollierten Feststellun-gen dieser Reviews werden dann in die nächste Version eingearbeitet, um die Qua-lität weiter zu verbessern. Entsprechend den Entwicklungsschritten werden die einzel-nen Komponenten und (Teil-)Systeme im Rahmen der Integration nacheinander de-tailliert getestet, um die Funktionalität des Gesamtsystems nachzuweisen.
Fazit
Die sicherheitsgerichtete Anwendung auf Basis eines Softwaremoduls kann unter Er-füllung der Aspekte der funktionalen Sicher - heit sowohl die Verfügbarkeit des Systems gewährleisten, als auch die Flexibilität in Bezug auf den Variantenreichtum der Flur-förderzeuge in bester Weise erfüllen. Die Parametrisierung wurde in die Sicherheits-betrachtungen einbezogen, sodass zukünf- tige kundenspezifische Weiterentwicklun-gen der omniMove-Flurförderfahrzeuge in einfacher Weise umgesetzt werden können.
Autor: Dipl.-Ing. Christoph Filser ist Projekt-manager bei Sensor-Technik Wiedemann (STW)
Bilder: Sensor Technik Wiedemann, Uni Duisburg – Software-Systems-Engineering
falls ein programmierbarer Microcontroller, der den Hauptcontroller überwacht, indem er u.a. Watchdog-Funktionalität übernimmt. Der Hauptcontroller ist mit Diagnoserouti-nen ausgestattet, die das gesamte System in Hardware und Software kontinuierlich testen und im Fehlerfall den sicheren Zu-stand, d.h. den Nothalt einleiten.
Die omniMove-Flurförderzeuge der Firma KUKA können bauartbedingt Geschwindig-keiten von über 6 km/h erreichen. Die Risi-kobetrachtungen haben jedoch deutlich niedrigere Maximalgeschwindigkeiten er-geben. Für Leerfahrten sind 3 km/h erlaubt, für ein beladenes Fahrzeug maximal 1 km/h, damit das Fahrzeug bei einer Notbremsung innerhalb eines maximal erlaubten Anhal-teweges zum Stillstand kommt. Für das Durchfahren enger Werkstore oder das Un-terfahren zum Anheben eines Bauteilträ-gers ist die Maximalgeschwindigkeit weiter auf 0,1 m/s reduziert.
Das Sicherheitskonzept
Das sicherheitsgerichtete Softwaremodul zur Geschwindigkeitsüberwachung hat drei Aufgaben.
· Ermittlung der aktuell erlaubten maxima-len Geschwindigkeit abhängig von Bela-dung und Betriebsart.
· Bestimmung der Ist-Geschwindigkeit aus vorgegebenen Signalen von 3 Rädern. Ein viertes Rad dient als redundante Geschwin - digkeitskomponente.
· Falls die Ist-Geschwindigkeit zu groß ist oder ein sonstiger Fehler erkannt wird, muss unverzüglich ein Nothalt ausgelöst werden, d.h. das System in den sicheren Zustand gebracht werden.
Zudem soll die Überwachungssoftware durch Parametrisierung an alle denkbaren Fahrzeugkonfigurationen anpassbar sein bzgl. Geometrie und Ausmaße des Fahr-zeugs, der Anzahl angetriebener und zu-sätzlicher Räder usw.
nale erzeugen, sind kurzschlussfest und vollständig diagnosefähig.Den Kern der ESX-3XL bildet ein 150MHz-TriCore-Controller mit 4MB RAM, 6MB Flash-Speicher und 32kB EEPROM-Parame-terspeicher, vier CAN-Schnittstellen und RS232-Interface. Auch hier können durch das Konzept mit Erweiterungsmodulen be-liebig zusätzliche Schnittstellen realisiert werden. [Abb. 4]
Funktionale Sicherheit
Die Risikoanalyse für das omniMove-Flurför - derzeug ergab den Performance-Level „PL c“, um das geforderte Grenzrisiko zu unterschrei- ten. Der Performance-Level ist eine Sicher-heitskennzahl aus der Richtlinie für Ma-schinensicherheit DIN EN ISO 13849-1. Die Firma STW erarbeitete die Sicherheitsan-forderungen und einen Sicherheitsplan für omniMove Fahrzeuge. Das Institut für Ar-beitsschutz IFA in Sankt Augustin hat die Anforderungen kontrolliert und den Ent-wicklungsprozess begleitet.
Im aktuellen Projekt wurden diese Bedin-gungen mit einem sicherheitsgerichteten Softwaremodul auf der elektronischen Steuerung ESX-3XL von STW realisiert. Die Sicherheitsarchitektur wurde nach Katego-rie 2 der Norm konzipiert: Die Logikeinheit besteht aus dem frei programmierbaren Hauptcontroller und einer Testeinheit, dem System Supervisor (SSV). Der SSV ist eben-
i n fo
Sensor-Technik Wiedemann GmbH87600 KaufbeurenFon: +49 (0) 83 41-95 05-0 www.sensor-technik.de
Abb. 4: Elektronische Steuerung ESX-3XL mit Erweiterungsmodulen.
Abb. 5: V-Modell.
A5119
11F31
25K12


















